méthodes numériques pour un problème inverse · 1 introduction un problème inverse est une...
TRANSCRIPT
Méthodes numériques pour un problèmeinverse
par Maxime Mogé
Projet de Master supervisé par Philippe Caussignac
Janvier 2011
Section de MathématiquesEPFLSUISSE
1

Table des matières
1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2 Eléments finis discontinus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1 Notations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32.2 Formulation du problème . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.2.1 Définitions et introduction du formalisme de Friedrichs . . . . . . . . . . . . . . . . 32.2.2 Approximation par éléments finis (discontinus) . . . . . . . . . . . . . . . . . . . . . 52.2.3 Application à un problème inverse 1D . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.3 Etude de 3 situations en 1D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.3.1 Cas général . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.3.2 Problème 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.3.3 Problème 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.3.4 Problème 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.4 Données avec bruit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202.4.1 Tentatives d’application des mêmes méthodes . . . . . . . . . . . . . . . . . . . . . 212.4.2 Problème 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212.4.3 Problème 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222.4.4 Problème 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242.4.5 Idée de solution : Interpolation par splines cubiques avec contraintes de convexité. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3 Méthode OLS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.1 Formulation du problème . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303.2 Tentative de résolution du problème approché . . . . . . . . . . . . . . . . . . . . . . . . 313.3 Modification de la méthode de résolution du problème approché . . . . . . . . . . . . . 32
3.3.1 Méthode de la plus grande pente hybride . . . . . . . . . . . . . . . . . . . . . . . . 323.3.2 Calcul du gradient . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 333.3.3 Résolution du problème approché . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.4 Application à un problème 1D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 353.4.1 Application au problème 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 363.4.2 Application au problème 2bis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4 MOLS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
4.1 Formulation du problème . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 414.2 Discrétisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 424.3 Résolution du problème discrétisé . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 424.4 Application à un problème 1D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
4.4.1 Application au problème 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Bibliographie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
2 Section

1 Introduction
Un problème inverse est une situation dans laquelle on tente de déterminer les paramètres d’unmodèle à partir de mesures expérimentales.Ce projet a pour objet l’estimation d’un coefficient dans une équation aux dérivées partielleselliptique à partir de mesures de la solution d’un problème aux limites associé.Par exemple pour une équation
−∇ · (a∇u)=f sur Ω+Conditions aux Limites sur ∂Ω,
(1)
le problème direct consiste à trouver u avec a et f donnés, et le problème inverse consiste àtrouver a à partir de mesures de u et f .Afin de résoudre le problème inverse, nous nous intéressons à trois méthodes numériques : pourla première on réduit le problème à un système de Friedrichs positif, la deuxième est uneméthode de type OLS (Output Least Squares), et la troisième une méthode MOLS (ModifiedOLS).Les méthodes étudiées le sont pour un problème 1D, mais se généralisent pour des problèmes2D, voire 3D.
2 Eléments finis discontinus
Dans une équation aux dérivées partielles de la forme (1), on peut voir le problème inversecomme une équation différentielle pour a. On considère alors l’équation obtenue comme un sys-tème différentiel du premier ordre symétrique au sens de Friedrichs. Ceci permet d’assurer l’exis-tence et l’unicité d’une solution sous certaines conditions, et on peut alors résoudre numérique-ment le problème à l’aide de méthodes d’éléments finis. La méthode pour les systèmes différen-tiels du premier ordre symétriques au sens de Friedrichs décrite dans cette partie est tirée deP.Lesaint [6].
2.1 Notations
Soit Ω un ouvert de Rp de frontière ∂Ω, C1 par morceaux.
On considère l’espace (L2(Ω))p (noté L2)) muni du produit scalaire
(u, v)L2 =
∫
Ω
(u(x), v(x))dx,
où (., .) désigne le produit scalaire dans Rp.L’opérateur A est donné par
Au(x)=∑
i=1
n
Ai(x)∂u
∂xi(x)+A0(x)u(x).
Les matrices Ai ∈L(Rp) sont symétriques à coefficients lipschitziens en x.La matrice A0∈L(Rp) n’est pas nécessairement symétrique et a ses coefficients dans L
∞
(Ω).
2.2 Formulation du problème
2.2.1 Définitions et introduction du formalisme de Friedrichs
Le problème (P) consiste à trouver une fonction u solution de
Au= f. (2)
Eléments finis discontinus 3

Définition 1. u est une solution faible de ( 2) si u∈L2 et u satisfait le système au sens des dis-tributions.
Définition 2. On dit que l’opérateur A défini sur un sous-espace W de (C1(Ω))p est coercif s’ilexiste une constante α> 0 telle que
(Av, v)L2≥α‖v‖L2
2, ∀v ∈W.
On a
2(Av, v)L2 = 2
∫
Ω
(A(x)v(x), v(x))dx
= 2
∫
Ω
(
∑
i=1
n (
Ai(x)∂v
∂xi(x), v(x)
)
+(A0(x)v(x), v(x))
)
dx
=
∫
Ω
(Cv, v)dx+
∫
∂Ω
(Bv, v)ds, (3)
où
C(x)=A0(x)+A0(x)T −
∑
i=1
n∂Ai
∂xi(x) ∀x∈Ω,
B(x) =∑
i=1
n
νi(x)∂Ai
∂xi(x) ∀x∈ ∂Ω,
νi(x) désignant les composantes de la normale extérieure unitaire à ∂Ω.
Définition 3. On dit que l’opérateur A est positif au sens de Friedrichs s’il existe γ > 0 tel que
xTC(x)x≥ 2γxTx , ∀x∈R.
Proposition 4. Si l’opérateur A est positif au sens de Friedrichs, on a∫
Ω
(Cv, v)dx≥ 2γ‖v‖L2
2, ∀v ∈C1(Ω).
Donc si l’opérateur A est positif au sens de Friedrichs avec constante de positivité γ, il suffitd’avoir
∫
∂Ω(Bv, v)ds≥ 0 , ∀v ∈W sous− espace deC1(Ω) pour avoir A coercif sur W . De plus,
γ est alors une constante de coercivité de A.
Proposition 5. Pour
W =
v ∈C1(Ω);B(x)v(x)=M(x)v(x), pourx∈ ∂Ω
(4)
avec M ∈ L(Rp) à coefficients continus pour x ∈ ∂Ω et telle que M +MT est semi-définie posi-tive, on a
∫
∂Ω
(Bv, v)ds≥ 0 , ∀v ∈W .
Définition 6. Les conditions aux limites exprimées dans ( 4) sont dites semi-admissibles si lamatrice M +MT est semi-définie positive.
Donc si l’opérateur A est positif au sens de Friedrichs et que le sous-espace W est défini commedans la proposition 5, on peut déduire de (3) que l’opérateur A est coercif.
On pose alors le problème
Trouveru tel queAu= f dansΩ(B −M)u= 0 sur ∂Ω
(5)
4 Section 2

Définition 7. u est appelée solution faible du problème ( 5) si u∈L2 et si on a
(u,A∗ϕ)L2 =(f , ϕ)L2 , ∀ϕ∈C1(Ω) avec (B+MT)ϕ= 0 sur ∂Ω.
Théorème 8. Si l’opérateur A est positif au sens de Friedrichs et que les conditions aux limitesexprimées dans ( 4) sont semi-admissibles, alors pour toute fonction f ∈ L2, le problème ( 5) aau moins une solution faible qui vérifie
‖u‖L2≤
1
γ‖f ‖
L2,
où γ est la constante de positivité de l’opérateur A.
Définition 9. u est appelée solution forte du problème ( 5) si u ∈ (L2(Ω))p et si il existe unesuite uj de fonctions de (C1(Ω))p, telles que (B −M)uj = 0 sur ∂Ω et
limj→+∞
(
‖uj − u‖L2 + ‖Auj − f ‖
L2
)
=0.
Lemme 10. Toute solution forte est aussi solution faible
Définition 11. Si la condition aux limites (B −M)u= 0 est semi-admissibles et que la matriceM vérifie
Im(B −M)∩ Im(B+M) = 0ou
Ker(B+MT)+Ker(B −MT )=Rp.
Alors la condition aux limites est dite admissible.
Théorème 12. Soit A un opérateur positif au sens de Friedrichs. Supposons que ∂Ω est declasse C2, que les conditions aux limites sont admissibles et que Ker(B −M) varie continuementsur ∂Ω, alors pour toute fonction f ∈L2, le problème ( 5) a au moins une unique solution forte.Cette solution forte vérifie
‖u‖L2≤
1
γ‖f ‖
L2,
où γ est la constante de positivité de l’opérateur A.
2.2.2 Approximation par éléments finis (discontinus)
Méthode de Rayleigh Ritz Galerkin
Soit Vh un sous-espace de dimension finie inclus dans(
H1(Ω))p, où h est un paramètre destiné à
tendre vers zéro.
On définit une solution approchée uh du problème (5), avec A positif au sens de Friedrichs et Wdéfini comme dans la proposition 5, comme une solution du problème approché
Trouveruh∈Vh tel que
(Auh, vh)L2− 1
2
∫
∂Ω((B −M)uh, vh)ds= (f , vh)L2, ∀vh∈ Vh.
(6)
Soit Th un maillage de Ω de type éléments finis.
∀K ∈Th, on pose hK =diam(K). h=max hK ,K ⊂ Ω.On considère l’espace d’éléments finis Xh
r = vh ∈ C0(Ω); vh
∣
∣
K∈ Pr ∀K ∈ Th, où Pr désigne
l’espace des polynôme de degré ≤ r.
Eléments finis discontinus 5

On définit Vh =Xhr.
Alors on a le résultat suivant concernant la convergence
Théorème 13. On suppose que la solution du problème ( 5) appartient à Hr+1(Ω).Alors si la solution du problème ( 6) est construite à partir de l’espace Vh décrit ci-dessus, on apour r≥ 1
‖u− uh‖L2 =O(hr)
Methodes d’éléments finis discontinues
Pour les méthodes discontinues, on généralise à chaque maille K le traitement des conditionsaux limites décrit par la formule (6).
Soit Wh = vh∈(
L2(Ω))p
; vh
∣
∣
∣
K∈Pr ∀K ∈ Th
On considère le problème
Trouver uh∈Wh tel que ∀vh∈Wh∑
K⊂Ω
(Auh − f , vh)L2(K)−∫
∂K
(
BK −MK
2(uh
int− uhext), vh
int)
ds
= 0(7)
où BK(x) =∑
i=1n
Ai(x)νi,K(x) pour x ∈ ∂K, avec νK = (ν1,K , , νn,K) la normale extérieure
unitaire à ∂K.
Les fonctions uhint et uh
ext désignent les valeurs de uh le long de ∂K à l’intérieur et à l’extérieurrespectivement de K. Pour une face S ⊂ ∂Ω on impose uh
ext = 0 s’il s’agit d’un problème homo-gène.
Pour les faces incluses dans ∂Ω, on a MK =M donné par les conditions aux limites.
Les autres matrices MK sont à choisir en respectant pour toutes les faces S intérieures audomaine Ω
MK1,S =MK2,S =MS , avecMS +MST semi-définie positive
si K1 etK2 sont deux éléments adjacents le long d’une face S.
Théorème 14. Si les matrices MK sont définies en satisfaisant les conditions décrites ci-dessus, alors le problème ( 7) admet une solution unique uh∈Wh et on a
α‖uh‖L2≤‖f ‖L2
où α est la constante de positivité de l’opérateur A.
Théorème 15. Si MS +MST est définie positive (uniformément en h) pour tout S face d’un élé-
ment K, S⊂∂Ω, et que Wh est construit avec des éléments simpliciaux et des polynômes dedegré 6 k, on a
‖u− uh‖L2(Ω)=O(hk+1/2)
2.2.3 Application à un problème inverse 1D
Pour une équation
− (au′)′=f sur Ω+Conditions aux Limites sur ∂Ω
avec Ω = (x0, x1), en supposant connues les fonctions u et f . En pratique, on a des mesures de uet f , et on obtient des approximations de ces fonctions par interpolation (par exemple avec dessplines, afin de pouvoir imposer une certaine régularité).
6 Section 2

Le problème inverse peut donc s’écrire
Trouver a tel queAa= f surΩ+ conditions aux limites sur ∂Ω
avec
Aa(x)=A1(x)a′(x) +A0(x)a(x), ∀x∈Ω,
A1(x)= u′(x), A0(x)= u′′(x), ∀x∈Ω,
C(x)= 2A0(x)−A1′ (x)= u′′(x), ∀x∈Ω,
B(x)= ν(x)A1(x), ∀x∈ ∂Ω, avec ν(0)=− 1 et ν(1)= 1.
On définit
M(x)= |A1(x)|= |u′(x)|, ∀x∈Ω,
W =
v ∈C1(Ω);B(x)v(x)=M(x)v(x), pourx∈ ∂Ω
.
On remarque que M est semi-définie positive, donc si ∃α > 0; C(x) = u′′(x) ≥ α, ∀x ∈ Ω, alorsl’opérateur A est positif au sens de Friedrichs, et donc A est coercif sur W d’après la Proposi-tion 5.
L’existence d’une solution faible au problème inverse est alors donnée par le Théorème 7.
On applique alors une méthode d’éléments finis discontinus afin d’obtenir une solution appro-chée.
On choisit un maillage Th de Ω, et MK(x) = |A1(x)| = |u′(x)|, ∀x ∈K, ∀K ∈ Th , ce qui garantitl’existence et l’unicité de la solution au problème approché (7).
2.3 Etude de 3 situations en 1D
2.3.1 Cas général
Pour les trois problèmes suivants, on définit
Ω = (0, 1),
h=1
N, avecN ∈N etN ≥ 2,
Pour i=0, , N , xi = i h,
Th=Ki, i=0, , N − 1, avecKi = [xi, xi+1],
Wh = vh∈L2(Ω); vh
∣
∣
K∈Pr ∀K ∈Th, avec r= 0 ou r= 1.
On a alors le problème approché
Trouver ah∈Wh tel que ∀vh∈Wh
∑
i=0N−1
∫
xi
xi+1 (Aah(x)− f(x))vh(x)dx−[
νKi(x)A1(x)− |A1(x)|
2(ah
int(x)− ahext(x)), vh
int(x)]
∂Ki
= 0,
avec νKi(xi)=− 1 et νKi
(xi+1) =1.
En prenant ϕj , j= 0, ,M une base de Wh, le problème approché s’écrit
Trouver ah∈Wh tel que ∀j= 0, ,M∑
i=0N−1
∫
xi
xi+1 (Aah(x)− f(x))ϕj(x)dx−[
νKi(x)A1(x)− |A1(x)|
2(ah
int(x)− ahext(x)), ϕj
int(x)]
∂Ki
=0,
et ah s’écrit ah =∑
j=0M
ajϕj(x).
Eléments finis discontinus 7

Pour r=0
On prend comme base de Wh l’ensemble
ϕj =1Kj, j= 0, , N − 1
où
1Kj(x)=
1 six∈Kj
0 sinon.
Le problème revient alors à
Trouver ah∈Wh tel que ∀j= 0, , N − 1∑
i=0N−1
∫
xi
xi+1 (Aah(x)− f(x))ϕj(x)dx−(
−A1(xi)− |A1(xi)|
2(a
i+1
2
− ai−
1
2
)ϕjint(xi)
)
−(
A1(xi+1)− |A1(xi+1)|
2(a
i+1
2
− ai+
3
2
))
ϕjint(xi+1)
= 0
⇔
Trouver (ai+
1
2
)i=0, ,N−1⊂R tel que ∀i= 0, , N − 1
ai+
1
2
∫
xi
xi+1 u′′(x)dx−(
−A1(xi)− |A1(xi)|
2(a
i+1
2
− ai−
1
2
))
−(
A1(xi+1)− |A1(xi+1)|
2(a
i+1
2
− ai+
3
2
))
=∫
xi
xi+1 f(x)dx
⇔ Mat0 · aK = fK ,avec
aK =
a1
2
a3
2a
N−1
2
,
fK =
∫
x0
x1 f(x)dx− A1(x0)+ |A1(x0)|
2a− 1
2∫
x1
x2 f(x)dx∫
xN −1
xN f(x)dx− A1(xN)− |A1(xN)|
2a
N+1
2
,
où ai+
1
2
désigne la valeur de la fonction ah sur l’intervalle Ki pour i= 0, , N − 1.
a− 1
2
et aN+
1
2
sont donnés (si nécessaire, c’est-à-dire siA1(x0)+ |A1(x0)|
2 0,
A1(xN)− |A1(xN)|
2 0)
par les conditions aux limites en 0 et en 1.
MAT0∈RN×N est la matrice tridiagonale correspondant à l’équation.
Il suffit alors de résoudre le système linéaire pour obtenir la solution approchée du problèmeinverse.
Pour calculer les coefficients de la matrice MAT0 et du vecteur fK , on approche les intégrales àl’aide de la méthode de Simpson. Pour cela on a besoin des valeurs de u et u′ aux points xi etxi + xi+1
2. On obtient des valeurs approchées en interpolant la fonction u avec des splines cubi-
ques à partir des mesures données. On dérive et on évalue ensuite le polynôme par morceauxobtenu pour trouver les valeurs désirées.
Pour r=1
On prend comme base de Wh l’ensemble
ϕj,1, ϕj,2, j= 0, , N − 1,
8 Section 2

où
ϕj,1(x) =
x −xj
hsix∈Kj
0 sinon,
ϕj,2(x) =
1− x − xj
hsix∈Kj
0 sinon.
On écrit alors
ah =∑
j=0
N−1
(aj,1ϕj,1(x)+ aj,2ϕj,2(x)),
et le problème revient à
Trouver (aj,k)j=0, ,N−1;k=1,2⊂R tel que ∀i=0, , N − 1∫
xi
xi+1 Aah(x)ϕi,1(x)dx− A1(xi+1)− |A1(xi+1)|
2(ai,1− ai+1,2)
=∫
xi
xi+1 f(x)ϕi,1(x)dx∫
xi
xi+1Aah(x)ϕi,2(x)dx+
A1(xi)+ |A1(xi)|
2(ai,2− ai−1,1)
=∫
xi
xi+1f(x)ϕi,2(x)dx
⇔
Trouver (aj,k)j=0, ,N−1;k=1,2⊂R tel que ∀i= 0, , N − 1(
∫
xi
xi+1Aϕi,1(x)ϕi,1(x)dx
)
ai,1 +(
∫
xi
xi+1Aϕi,2(x)ϕi,1(x)dx
)
ai,2
− A1(xi+1)− |A1(xi+1)|
2(ai,1− ai+1,2)
=∫
xi
xi+1f(x)ϕi,1(x)dx
(
∫
xi
xi+1 Aϕi,1(x)ϕi,2(x)dx)
ai,1 +(
∫
xi
xi+1 Aϕi,2(x)ϕi,2(x)dx)
ai,2
+A1(xi)+ |A1(xi)|
2(ai,2− ai−1,1)
=∫
xi
xi+1f(x)ϕi,2(x)dx
⇔ MAT1 · aK = fK ,avec
aK =
a0,1
a0,2
a1,1
a1,2aN−2,1
aN−2,2
aN−1,1
aN−2,2
,
fK =
∫
x0
x1 f(x)ϕi,1(x)dx∫
x0
x1 f(x)ϕi,2(x)dx+A1(x0) + |A1(x0)|
2a−1,1
∫
x1
x2f(x)ϕi,1(x)dx
∫
x1
x2f(x)ϕi,2(x)dx
∫
xN−2
xN −1 f(x)ϕi,1(x)dx∫
xN−2
xN −1f(x)ϕi,2(x)dx
∫
xN−1
xNf(x)ϕi,1(x)dx− A1(xN)− |A1(xN)|
2aN,2
∫
xN−1
xN f(x)ϕi,2(x)dx
,
où a−1,1 et aN,2 sont donnés (si nécessaire, c’est-à-dire siA1(x0)+ |A1(x0)|
2 0,
A1(xN)− |A1(xN)|
2
0) par les conditions aux limites en 0 et en 1.
MAT1∈R2N×2N est la matrice correspondant à l’équation, et à une structure du type
Eléments finis discontinus 9

0 10 20 30 40
0
5
10
15
20
25
30
35
40
nz = 118
Figure 1. Structure de la matrice MAT pour N = 20
Il ne reste alors plus qu’à résoudre le système linéaire MAT1 · aK = fK pour obtenir la solutionapprochée du problème inverse.
Pour calculer les coefficients de la matrice MAT1 et du vecteur fK , on approche les intégrales àl’aide de la méthode de Simpson. Pour cela on a besoin des valeurs de u, u′ et u′′ aux points xi
etxi + xi+1
2. On obtient des valeurs approchées en interpolant la fonction u avec des splines cubi-
ques à partir des mesures données. On dérive et on évalue ensuite le polynôme par morceauxobtenu pour trouver les valeurs désirées.
Nous allons maintenant étudier et résoudre numériquement trois exemples de problèmesinverses, et tenter de résoudre les problèmes qui surviennent.
Les programmes ont été écrit en MATLAB.
2.3.2 Problème 1
Posons
u(x) = x2− x,
f(x) = 1.
Alors le problème inverse défini par (1) se résout facilement, et la solution exacte est donnée par
a(x) =1
2. Cela nous permettra de calculer l’erreur de la méthode numérique.
On a
C(x) =2A0(x)−A1′ (x)= u′′(x)= 2, ∀x∈ (0, 1),
donc
∃α> 0;C(x)≥α, ∀x∈Ω.
Donc d’après la partie 2.2.3, le problème approché admet une unique solution. On applique doncla méthode d’éléments finis discontinus P0 décrites ci-dessus pour la résolution numérique de ceproblème avec N = 2, , 50 et M points de mesure (Xmesi,Ymesi) avec pour i=0, ,M − 1,
Xmesi =i
M − 1,
Ymesi = u(Xmesi).
On évaluera ensuite l’erreur par rapport à la solution exacte en prenant
err= ‖a− ah‖L2
où ah est la solution approchée.
10 Section 2
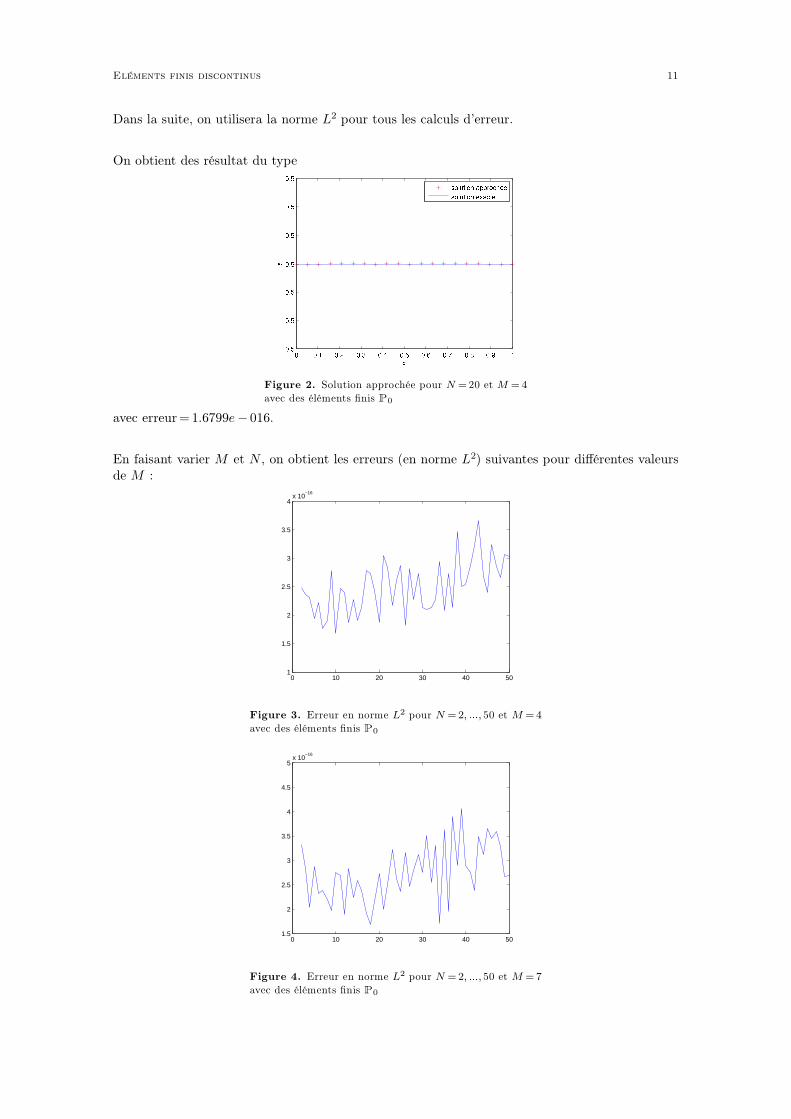
Dans la suite, on utilisera la norme L2 pour tous les calculs d’erreur.
On obtient des résultat du type
Figure 2. Solution approchée pour N = 20 et M = 4
avec des éléments finis P0
avec erreur= 1.6799e− 016.
En faisant varier M et N , on obtient les erreurs (en norme L2) suivantes pour différentes valeursde M :
0 10 20 30 40 501
1.5
2
2.5
3
3.5
4x 10
−16
Figure 3. Erreur en norme L2 pour N = 2, , 50 et M = 4
avec des éléments finis P0
0 10 20 30 40 501.5
2
2.5
3
3.5
4
4.5
5x 10
−16
Figure 4. Erreur en norme L2 pour N = 2, , 50 et M = 7
avec des éléments finis P0
Eléments finis discontinus 11

0 10 20 30 40 501
2
3
4
5
6
7x 10
−16
Figure 5. Erreur en norme L2 pour N = 2, , 50 et M = 10
avec des éléments finis P0
On voit que l’erreur est négligeable pour toutes les valeurs de N et de M observées.
En fait, pour ce problème, la méthode d’éléments finis discontinus donne la solution exacte.En effet :
− la solution exacte a appartient à l’espace d’approximation Wh
− l’interpolation de u et f à partir des points de mesure est faite par splines cubiques, cequi donne un résultat exact car u et f sont des polynômes de degré 6 2.
De plus, les méthodes numériques utilisées pour l’intégration (méthode de Simpson) et la dériva-tion (dérivation formelle des polynômes par morceaux) sont exacte pour les fonctions interve-nant dans ce problème.Donc l’erreur obtenue est due à la précision de la machine.
2.3.3 Problème 2
Posons
u(x) =x4
6− x3
6+ x,
f(x) = − 8x3 +13x2
2− x− 3.
La solution exacte du problème inverse défini par (1) est donnée par a(x) =3x− 1.
On a
C(x) =2A0(x)−A1′ (x)=u′′(x)= 2x2− x, ∀x∈ (0, 1),
donc
∃x∈Ω;C(x)< 0.
Donc les conditions des théorèmes de convergence ne sont pas vérifiées.On introduit alors la fonction
ψ(x) =u′(x)e−αx, ∀x∈Ω, avecα> 0,
et le problème modifié
ψAa= ψf dansΩ
⇔ ψ(x)(A1(x)a′(x) +A0(x)a(x))= ψ(x)f(x)∀x∈Ω
⇔ A1(x)a′(x)+A0(x)a(x)= f (x)∀x∈Ω,
avec
A1(x) = ψ(x)A1(x) = ψ(x)u′(x),
A0(x) = ψ(x)A0(x) = ψ(x)u′′(x),
f (x) = ψ(x)f(x).
12 Section 2
On a alors
C (x) = 2A0(x)−A1′(x)
= u′′(x)ψ(x)− u′(x)ψ ′(x)
= α(u′(x))2e−αx ∀x∈Ω,
On remarque que si
u′(x) 0, ∀x∈Ω,
alors
∃ε> 0; C (x)≥ ε, ∀x∈Ω,
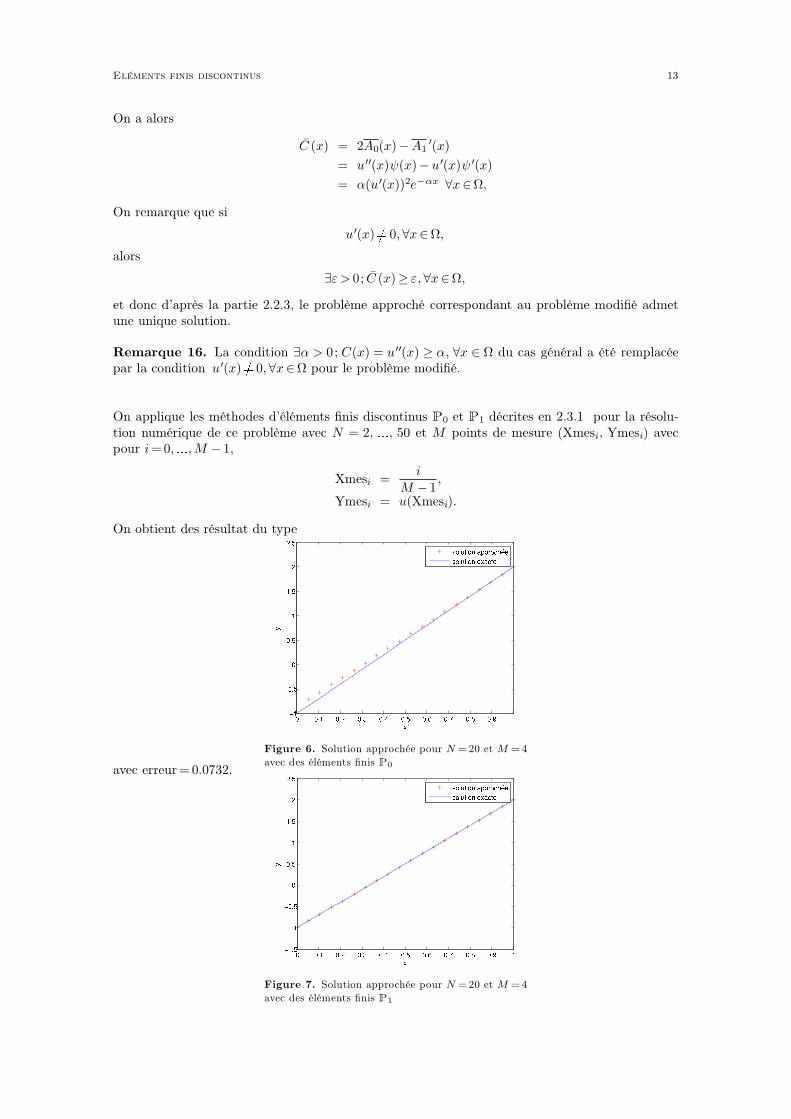
et donc d’après la partie 2.2.3, le problème approché correspondant au problème modifié admetune unique solution.
Remarque 16. La condition ∃α > 0; C(x) = u′′(x) ≥ α, ∀x ∈ Ω du cas général a été remplacéepar la condition u′(x) 0, ∀x∈Ω pour le problème modifié.
On applique les méthodes d’éléments finis discontinus P0 et P1 décrites en 2.3.1 pour la résolu-tion numérique de ce problème avec N = 2, , 50 et M points de mesure (Xmesi, Ymesi) avecpour i=0, ,M − 1,
Xmesi =i
M − 1,
Ymesi = u(Xmesi).
On obtient des résultat du type
Figure 6. Solution approchée pour N = 20 et M = 4
avec des éléments finis P0
avec erreur= 0.0732.
Figure 7. Solution approchée pour N = 20 et M = 4
avec des éléments finis P1
Eléments finis discontinus 13
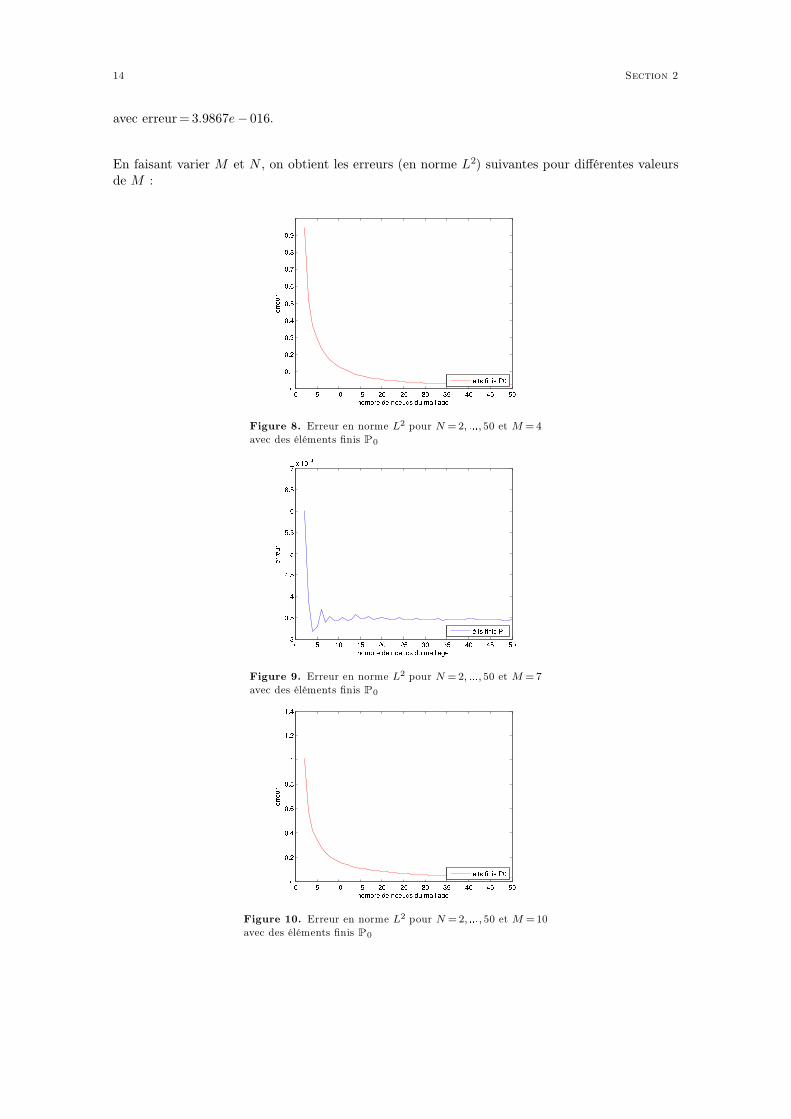
avec erreur= 3.9867e− 016.
En faisant varier M et N , on obtient les erreurs (en norme L2) suivantes pour différentes valeursde M :
Figure 8. Erreur en norme L2 pour N = 2, , 50 et M = 4
avec des éléments finis P0
Figure 9. Erreur en norme L2 pour N = 2, , 50 et M = 7
avec des éléments finis P0
Figure 10. Erreur en norme L2 pour N = 2, , 50 et M = 10
avec des éléments finis P0
14 Section 2
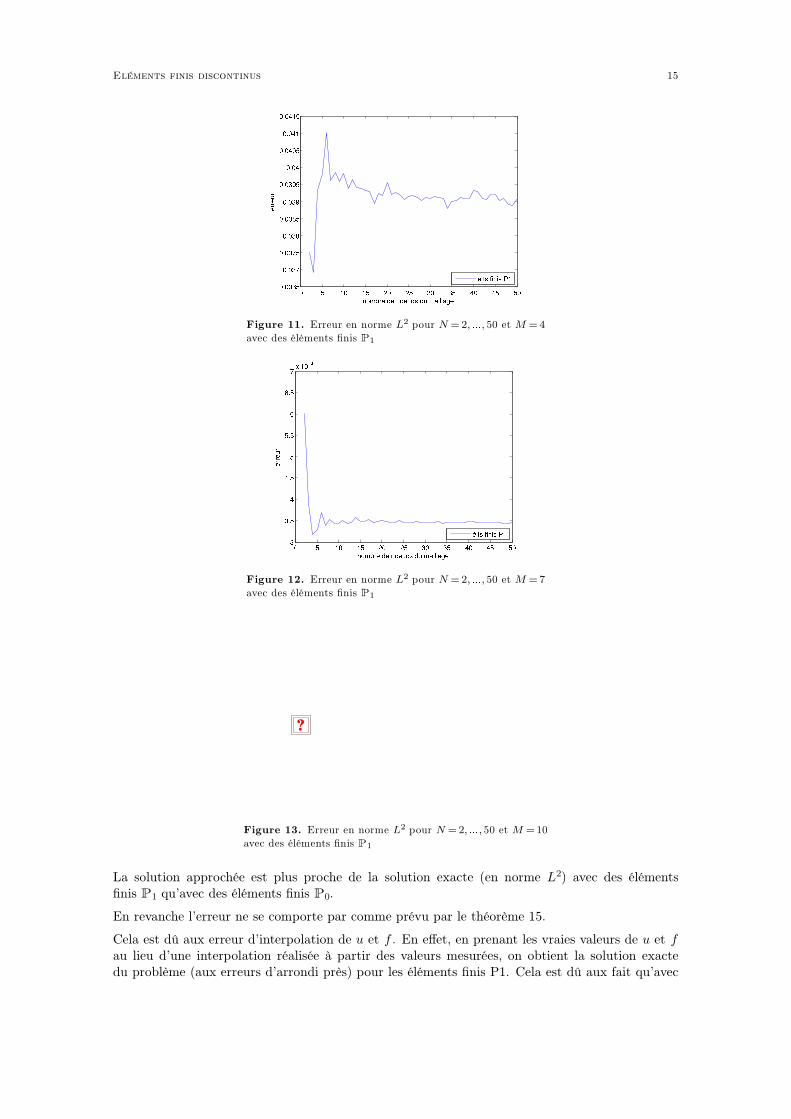
Figure 11. Erreur en norme L2 pour N = 2, , 50 et M = 4
avec des éléments finis P1
Figure 12. Erreur en norme L2 pour N = 2, , 50 et M = 7
avec des éléments finis P1
?
Figure 13. Erreur en norme L2 pour N = 2, , 50 et M = 10
avec des éléments finis P1
La solution approchée est plus proche de la solution exacte (en norme L2) avec des élémentsfinis P1 qu’avec des éléments finis P0.
En revanche l’erreur ne se comporte par comme prévu par le théorème 15.
Cela est dû aux erreur d’interpolation de u et f . En effet, en prenant les vraies valeurs de u et fau lieu d’une interpolation réalisée à partir des valeurs mesurées, on obtient la solution exactedu problème (aux erreurs d’arrondi près) pour les éléments finis P1. Cela est dû aux fait qu’avec
Eléments finis discontinus 15
l’interpolation, on modifie le problème, et donc la solution qu’on n’obtient ne converge pas forcé-ment vers la solution exacte.
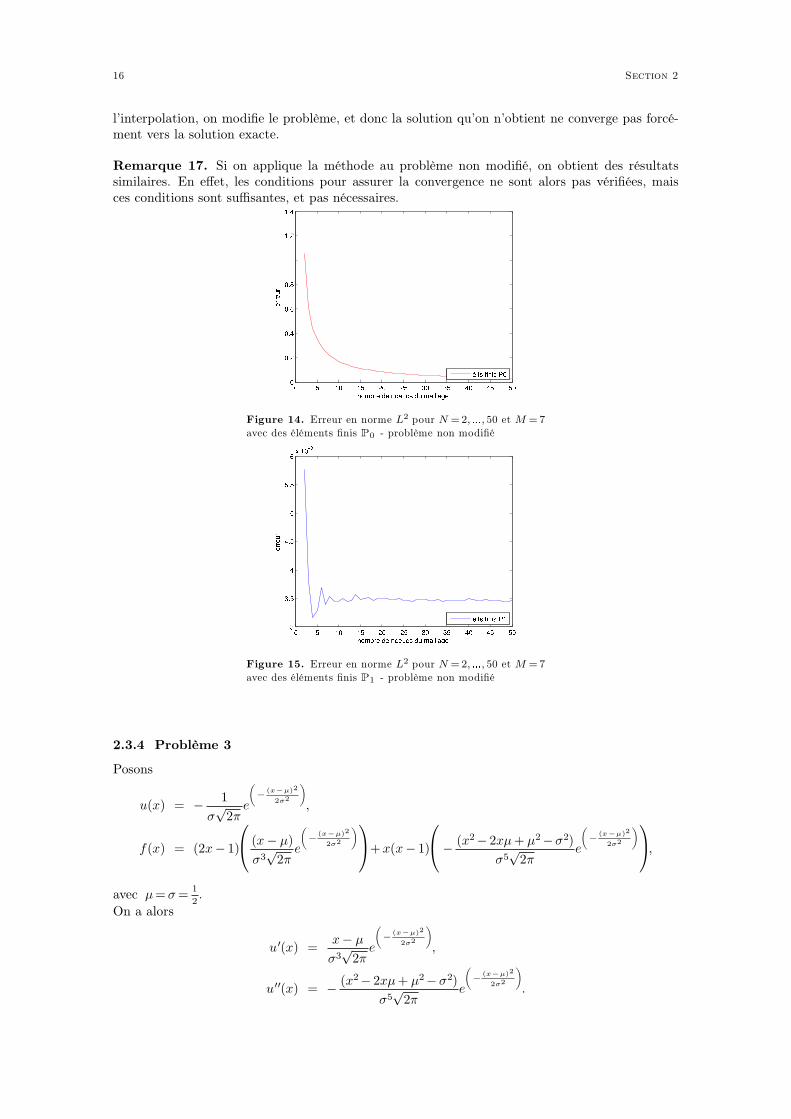
Remarque 17. Si on applique la méthode au problème non modifié, on obtient des résultatssimilaires. En effet, les conditions pour assurer la convergence ne sont alors pas vérifiées, maisces conditions sont suffisantes, et pas nécessaires.
Figure 14. Erreur en norme L2 pour N = 2, , 50 et M = 7
avec des éléments finis P0 - problème non modifié
Figure 15. Erreur en norme L2 pour N = 2, , 50 et M = 7
avec des éléments finis P1 - problème non modifié
2.3.4 Problème 3
Posons
u(x) = − 1
σ 2π√ e
(
−(x−µ)2
2σ2
)
,
f(x) = (2x− 1)
(x− µ)
σ3 2π√ e
(
−(x−µ)2
2σ2
)
+ x(x− 1)
− (x2− 2xµ+ µ2−σ2)
σ5 2π√ e
(
−(x−µ)2
2σ2
)
,
avec µ= σ=1
2.
On a alors
u′(x) =x− µ
σ3 2π√ e
(
−(x−µ)2
2σ2
)
,
u′′(x) = − (x2− 2xµ+ µ2− σ2)
σ5 2π√ e
(
−(x−µ)2
2σ2
)
.
16 Section 2

La solution exacte du problème inverse défini par (1) est donnée par
a(x)= x(x− 1).
On a
C(x)= 2A0(x)−A1′ (x)= u′′(x) =− (x2− 2xµ+ µ2−σ2)
σ5 2π√ e
(
−(x−µ)2
2σ2
)
, ∀x∈ (0, 1),
donc
∃x∈Ω;C(x)< 0.
Donc les conditions des théorèmes de convergence ne sont pas vérifiées.
On introduit alors les fonctions ψ et b telles que
ψ(x)= eu(x), ∀x∈Ω,
b(x)= ψ−1(x)a(x), ∀x∈Ω.
Alors on a
a = bψ,
a′ = b′ψ+ bψ ′,
et on introduit le problème modifié
Ab= f dansΩ
⇔ (ψ(x)u′(x))b′(x) + (ψ ′(x)u′(x)+ ψ(x)u′′(x))b(x)= f(x)∀x∈Ω
⇔ A1(x)b′(x)+A0(x)b(x)= f(x)∀x∈Ω,
avec
A1(x)= u′(x)ψ(x),
A0(x)= u′(x)ψ ′(x)+ u′′(x)ψ(x),
donc on a
B (x) = ν(x)A1(x),
M (x) = |A1(x)|,
C (x) = 2A0(x)−A1′(x)
= u′(x)ψ ′(x)+ u′′(x)ψ(x)
= eu(x)(u′′(x) + (u′(x))2).
On remarque que si
infx∈Ω
(
u′′(x)+ (u′(x))2)
> 0,
Eléments finis discontinus 17
alors
∃ε> 0; C (x)≥ ε, ∀x∈Ω,
et donc d’après la partie 2.2.3, le problème approché correspondant au problème modifié admetune unique solution.
On obtient alors une solution approchée bh du problème modifié.
Pour avoir une solution approchée ah du problème de départ, il suffit alors de multiplier bh parψ.
Remarque 18. La condition ∃α > 0; C(x) = u′′(x) ≥ α, ∀x ∈ Ω du cas général a été remplacée
par la condition infx∈Ω
(
u′′(x)+ (u′(x))2)
> 0 pour le problème modifié.
On applique les méthodes d’éléments finis discontinus P0 et P1 décrites en 2.3.1 pour la résolu-tion numérique de ce problème avec N = 2, , 50 et M points de mesure (Xmesi, Ymesi) avecpour i=0, ,M − 1,
Xmesi =i
M − 1,
Ymesi = u(Xmesi).
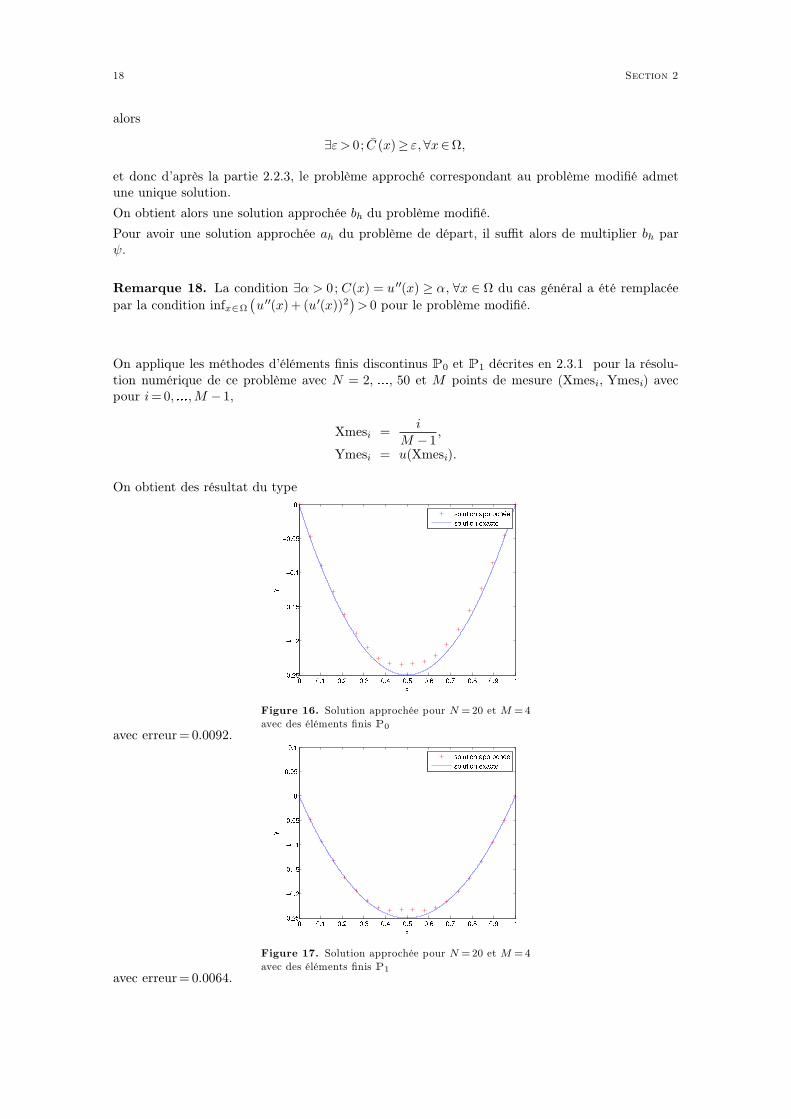
On obtient des résultat du type
Figure 16. Solution approchée pour N = 20 et M = 4
avec des éléments finis P0
avec erreur= 0.0092.
Figure 17. Solution approchée pour N = 20 et M = 4
avec des éléments finis P1
avec erreur= 0.0064.
18 Section 2
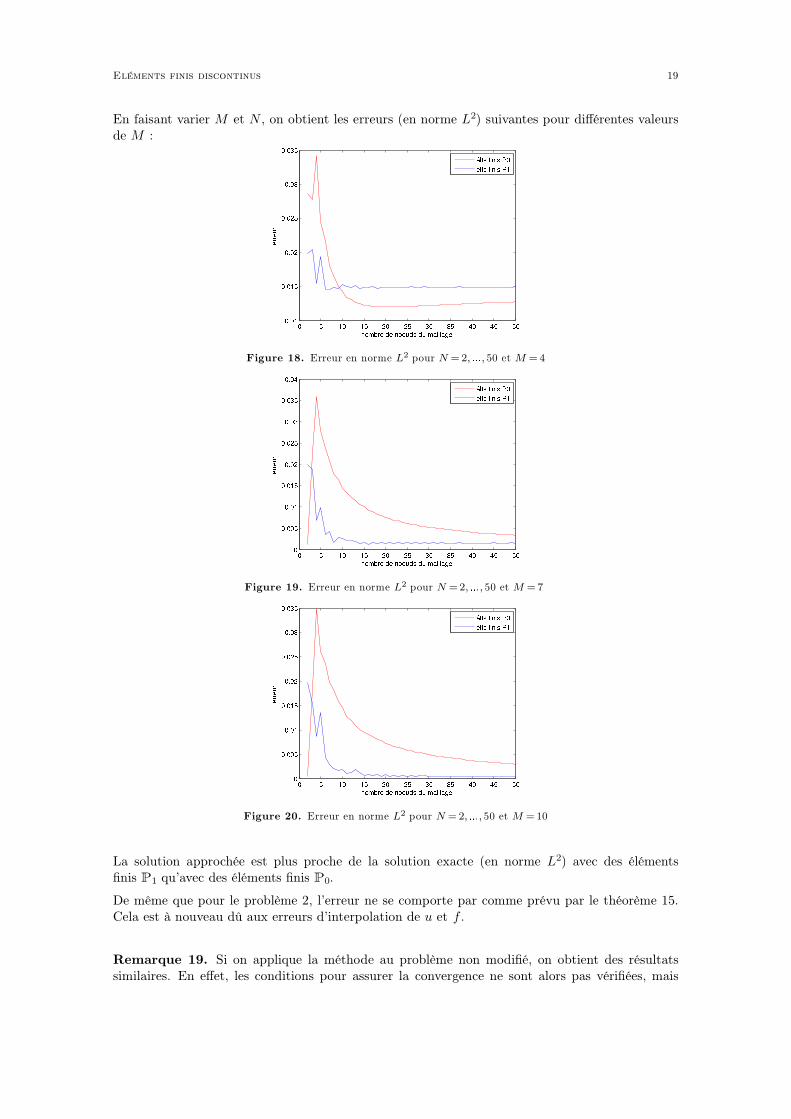
En faisant varier M et N , on obtient les erreurs (en norme L2) suivantes pour différentes valeursde M :
Figure 18. Erreur en norme L2 pour N = 2, , 50 et M = 4
Figure 19. Erreur en norme L2 pour N =2, , 50 et M = 7
Figure 20. Erreur en norme L2 pour N = 2, , 50 et M = 10
La solution approchée est plus proche de la solution exacte (en norme L2) avec des élémentsfinis P1 qu’avec des éléments finis P0.
De même que pour le problème 2, l’erreur ne se comporte par comme prévu par le théorème 15.Cela est à nouveau dû aux erreurs d’interpolation de u et f .
Remarque 19. Si on applique la méthode au problème non modifié, on obtient des résultatssimilaires. En effet, les conditions pour assurer la convergence ne sont alors pas vérifiées, mais
Eléments finis discontinus 19
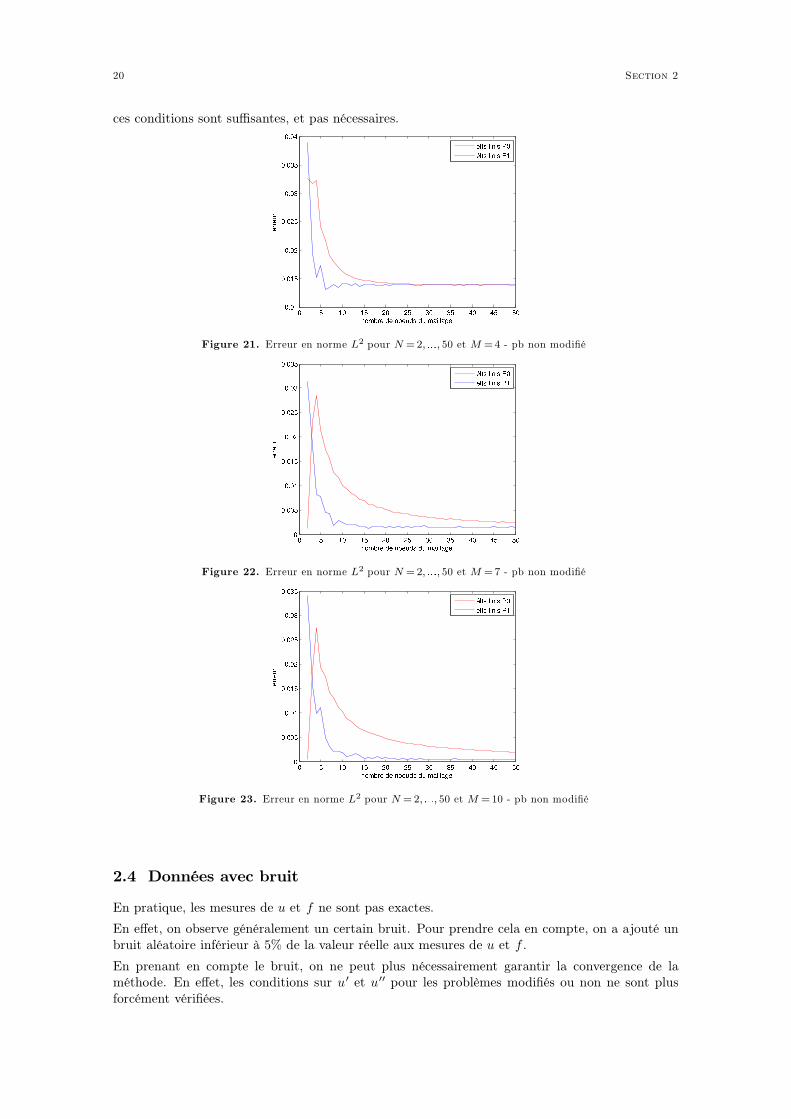
ces conditions sont suffisantes, et pas nécessaires.
Figure 21. Erreur en norme L2 pour N = 2, , 50 et M =4 - pb non modifié
Figure 22. Erreur en norme L2 pour N = 2, , 50 et M =7 - pb non modifié
Figure 23. Erreur en norme L2 pour N = 2, , 50 et M = 10 - pb non modifié
2.4 Données avec bruit
En pratique, les mesures de u et f ne sont pas exactes.
En effet, on observe généralement un certain bruit. Pour prendre cela en compte, on a ajouté unbruit aléatoire inférieur à 5% de la valeur réelle aux mesures de u et f .
En prenant en compte le bruit, on ne peut plus nécessairement garantir la convergence de laméthode. En effet, les conditions sur u′ et u′′ pour les problèmes modifiés ou non ne sont plusforcément vérifiées.
20 Section 2
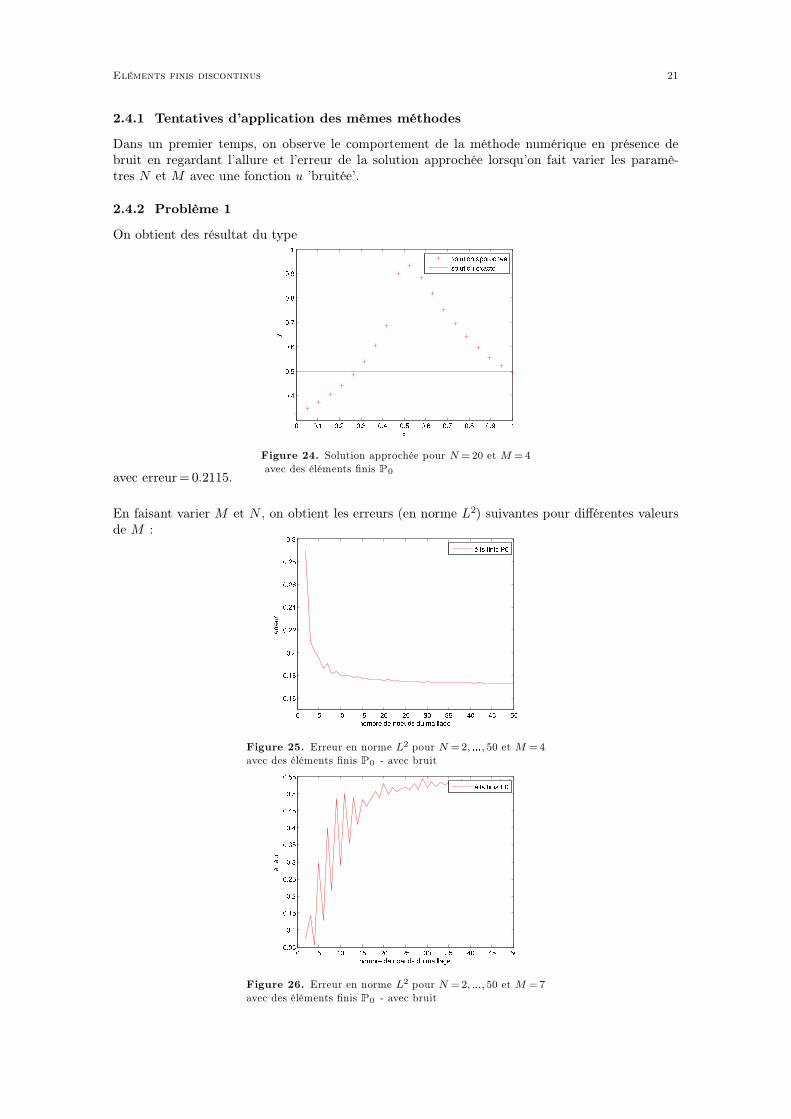
2.4.1 Tentatives d’application des mêmes méthodes
Dans un premier temps, on observe le comportement de la méthode numérique en présence debruit en regardant l’allure et l’erreur de la solution approchée lorsqu’on fait varier les paramè-tres N et M avec une fonction u ’bruitée’.
2.4.2 Problème 1
On obtient des résultat du type
Figure 24. Solution approchée pour N = 20 et M = 4
avec des éléments finis P0
avec erreur= 0.2115.
En faisant varier M et N , on obtient les erreurs (en norme L2) suivantes pour différentes valeursde M :
Figure 25. Erreur en norme L2 pour N = 2, , 50 et M = 4
avec des éléments finis P0 - avec bruit
Figure 26. Erreur en norme L2 pour N = 2, , 50 et M = 7
avec des éléments finis P0 - avec bruit
Eléments finis discontinus 21
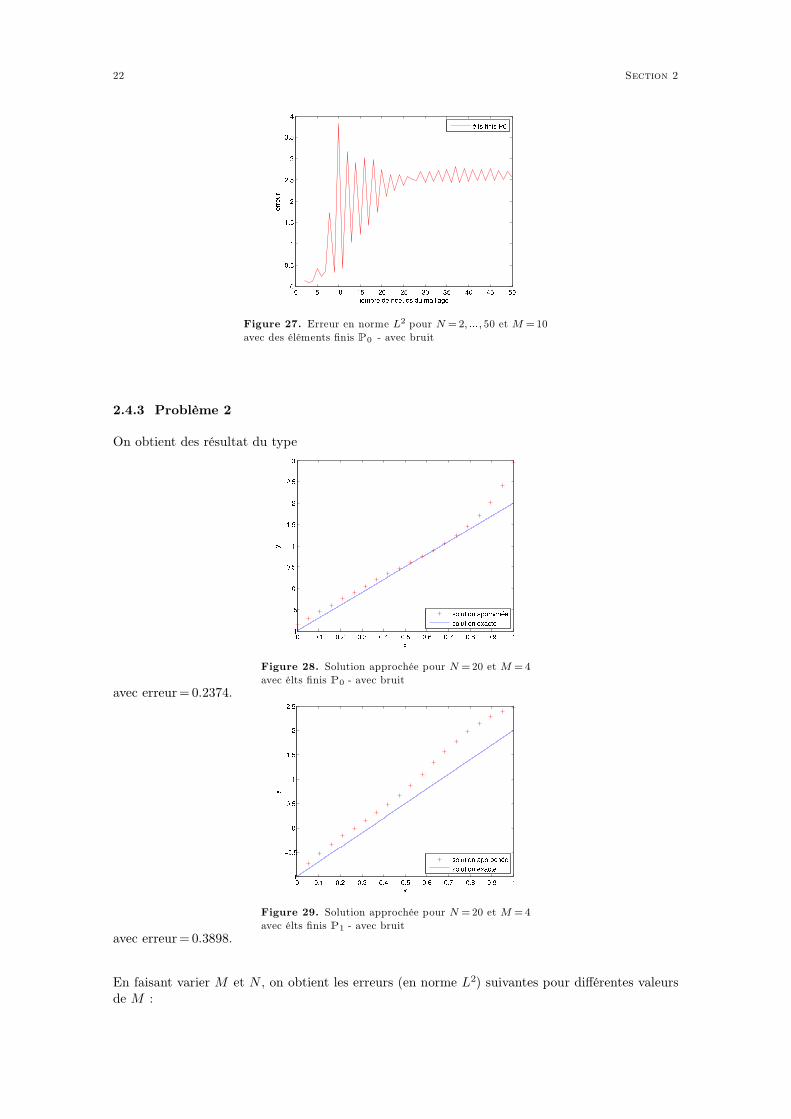
Figure 27. Erreur en norme L2 pour N = 2, , 50 et M = 10
avec des éléments finis P0 - avec bruit
2.4.3 Problème 2
On obtient des résultat du type
Figure 28. Solution approchée pour N = 20 et M = 4
avec élts finis P0 - avec bruit
avec erreur= 0.2374.
Figure 29. Solution approchée pour N = 20 et M = 4
avec élts finis P1 - avec bruit
avec erreur= 0.3898.
En faisant varier M et N , on obtient les erreurs (en norme L2) suivantes pour différentes valeursde M :
22 Section 2
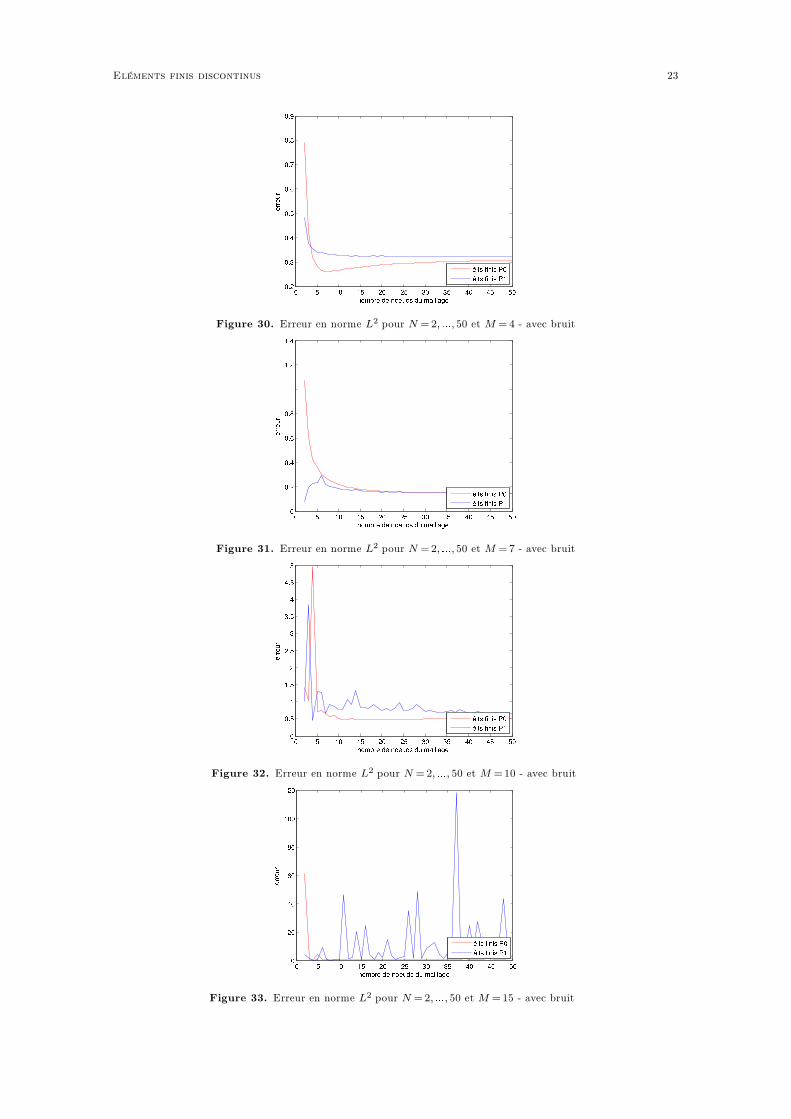
Figure 30. Erreur en norme L2 pour N =2, , 50 et M = 4 - avec bruit
Figure 31. Erreur en norme L2 pour N =2, , 50 et M = 7 - avec bruit
Figure 32. Erreur en norme L2 pour N = 2, , 50 et M = 10 - avec bruit
Figure 33. Erreur en norme L2 pour N = 2, , 50 et M = 15 - avec bruit
Eléments finis discontinus 23
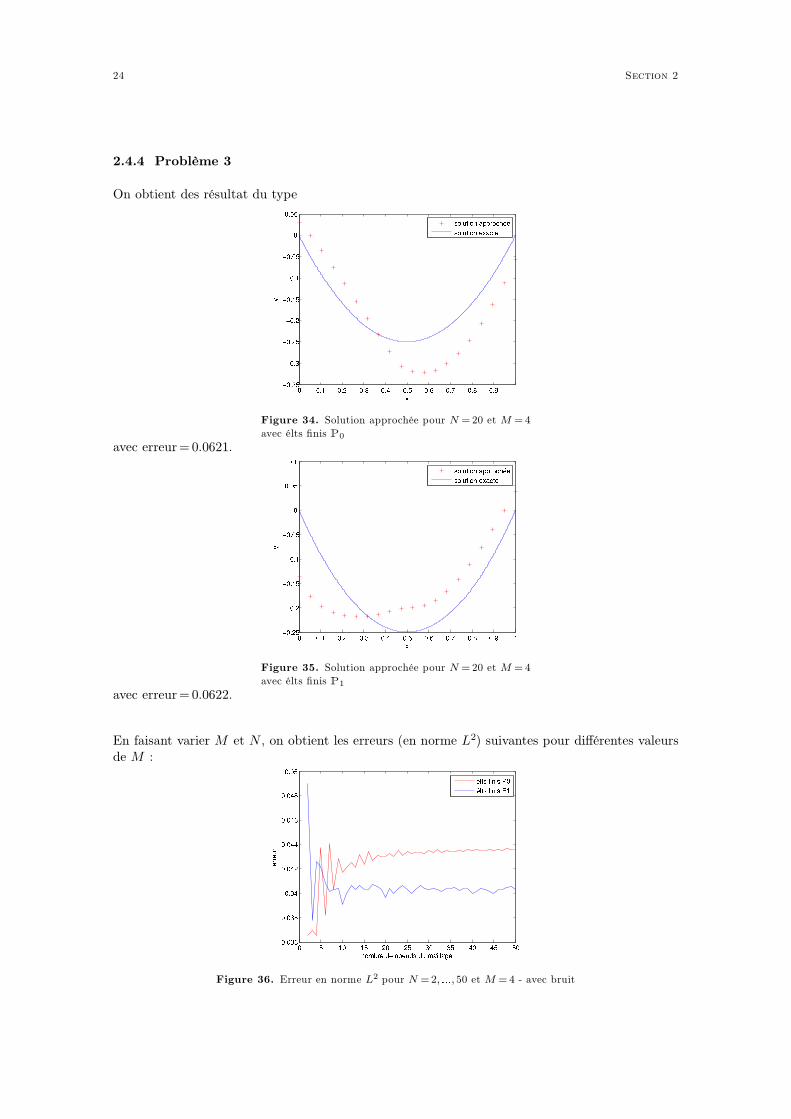
2.4.4 Problème 3
On obtient des résultat du type
Figure 34. Solution approchée pour N = 20 et M = 4
avec élts finis P0
avec erreur= 0.0621.
Figure 35. Solution approchée pour N = 20 et M = 4
avec élts finis P1
avec erreur= 0.0622.
En faisant varier M et N , on obtient les erreurs (en norme L2) suivantes pour différentes valeursde M :
Figure 36. Erreur en norme L2 pour N =2, , 50 et M = 4 - avec bruit
24 Section 2

Figure 37. Erreur en norme L2 pour N =2, , 50 et M = 7 - avec bruit
Figure 38. Erreur en norme L2 pour N = 2, , 50 et M = 10 - avec bruit
On remarque que la méthode ne converge pas, ou s’éloigne énormément de la solution, lorsque lenombre de points de mesures augmente. En effet, u n’est alors plus assez régulière pour que laméthode converge.
2.4.5 Idée de solution : Interpolation par splines cubiques avec contraintes de con-vexité
Idée
On essaye de résoudre ce problème dans le cas 1
u(x) = x2− x,
f(x) = 1.
Les problèmes observés plus haut proviennent de perturbations dans les données, qui entraînentune interpolation faussée des fonctions u et f . En effet, de faibles variations des valeurs de lafonction obtenue par interpolation uinterp entraînent une erreur conséquente sur la dérivée et ladérivée seconde de cette fontion, et la condition
∃α> 0;u′′(x)>α ∀x∈Ω
n’est alors plus forcément satisfaite, et donc les conditions des théorèmes assurant l’existenced’une solution du problème approché non plus.
Une solution consiste à réaliser une interpolation avec des contraintes sur le signe de la dérivéeseconde. On s’intéresse donc à une méthode d’interpolation à l’aide de splines avec des con-traintes de convexité.
Eléments finis discontinus 25

Néanmoins, cela suppose qu’on connaît à priori la convexité de la fonction mesurée u, ce quin’est pas forcément le cas en pratique.
Généralités à propos des splines
Définition 20. Étant donnés n+ 2 points ti dans un intervalle [a,b] avec a= t0< t1< t2< <
tn< tn+1 = b, la fonction s: [a, b]→R est appelée spline cubique si
i. s∈C2([a, b])
ii. la restriction de s sur chaque intervalle [ti−1, ti], i = 1, 2, , n + 1 est un polynôme dedegré 3 ou moins.
Définition 21. Étant donnés n+ 2 points ti dans un intervalle [a,b] avec a= t0< t1< t2< <
tn< tn+1 = b, on appelle fonctions B-splines normalisées les fonctions données par
Nj(x)= (tj+4− tj)∆t4(tj , tj+1, , tj+4)g(t;x),
où
g(t;x) = (t− x)+3 =
(t− x)3 si t≥ x
0 si t <x,
et ∆t4(zj , zj+1, , zj+4)f(t) désigne la différence divisée d’ordre 4 de la fonction f(t) aux points
zj,zj+1,...,zj+4.
Remarque 22. Pour évaluer les fonctions B-splines normalisées, nous utilisons pour les besoinsde ce projet l’algorithme donné par De Boor [1].
On introduit des noeuds
t−3≤ t−2≤ t−1≤ to = a et tn+4≥ tn+3≥ tn+2≥ tn+1 = b,
afin d’avoir une base de B-splines.Ces noeuds sont arbitraires, et on choisit pour ce projet
t−3 = t−2 = t−1 = to = a,
tn+4 = tn+3 = tn+2 = tn+1 = b.
On a alors une unique représentation de la fonction s, spline cubique avec pour noeuds t0, t1,t2, , tn, tn+1, sous la forme
s(x) =∑
j=−3
n
cjNj(x), a≤ x≤ b, (8)
avec cj ∈R, j=− 3, , n.Description de la méthode d’interpolation
L’algorithme décrit dans ce paragraphe est celui présenté par Dierckx [3].
Etant donnés des points (xi, yi) et des poids wi, i = 1, , m ainsi que des noeuds a = t0 < t1 <
t2 < < tn < tn+1 = b, on cherche à obtenir une spline cubique s avec pour noeuds les tj telleque
i.∑
i=1m
wi(yi − s(xi))2 est minimale
ii. à chaque noeud tj , j = 0, 1, , n + 1 s(x) est localement convexe, concave ou sans con-trainte,
où on choisit les contraintes sur le signe de s′′ aux noeuds (car s′′ est un polynôme de degré ≤1).Dans les applications, on prendra wi = 1 pour i=1, ,m.
26 Section 2

Avec la représentation (8), on trouve
s′′(tl) =∑
j=−3
n
dj,lcj , (9)
avec
dj,l = 0 si j ≤ l− 4 ou j ≥ l,
dl−3,l =6
(tl+1− tl−2)(tl+1− tl−1),
dl−1,l =6
(tl+2− tl−1)(tl+1− tl−1),
dl−2,l =− (dl−3,l + dl−1,l).
Donc pour trouver s vérifiant les conditions énoncées plus haut, il suffit de calculer les coefficientcj , j=− 3,− 2, , n en résolvant le problème de programmation quadratique
Minimiser∑
i=1
m(
yi −∑
j=−3
n
cjNj(xi)
)2
tel que el
∑
j=−3
n
dj,lcj ≤ 0, l= 0, 1, , n+ 1,
(10)
où el =− 1, 1 ou 0 selon les contraintes de convexité que l’on veut imposer à s.
Il est possible de choisir les noeuds tj automatiquement de façon à obtenir une erreur d’interpo-lation
∑
i=1m wi(yi-s(xi))
2 aussi faible qu’on le désire en utilisant l’algorithme décrit par Dierckx
[3]. Il consiste à commencer avec n = 0 et à ajouter d’autres noeuds en fonction des contraintesimposées sur le signe de s′′ jusqu’à ce qu’on arrive à l’erreur désirée.
Application au Problème 1
En appliquant cette méthode d’interpolation, en imposant que l’erreur d’interpolation soit infé-rieure à 0.01, au lieu de l’interpolation par splines cubiques classique, on obtient les résultatssuivant :
Remarque 23. Pour chaque valeur de M , on s’intéresse à l’erreur de la solution approchée enutilisant l’interpolation par splines cubiques classique et la méthode d’interpolation par splinesavec contraintes de convexité en utilisant les mêmes mesures bruitées de u et f . On peut donccomparer directement les courbes.
Figure 39. Solution approchée pour N = 20 et M = 4
avec élts finis P0
On a ici erreur = 0.1923 pour la solution approchée classique, et erreur = 0.0609 pour la solutionapprochée obtenue avec les B-splines.
Eléments finis discontinus 27
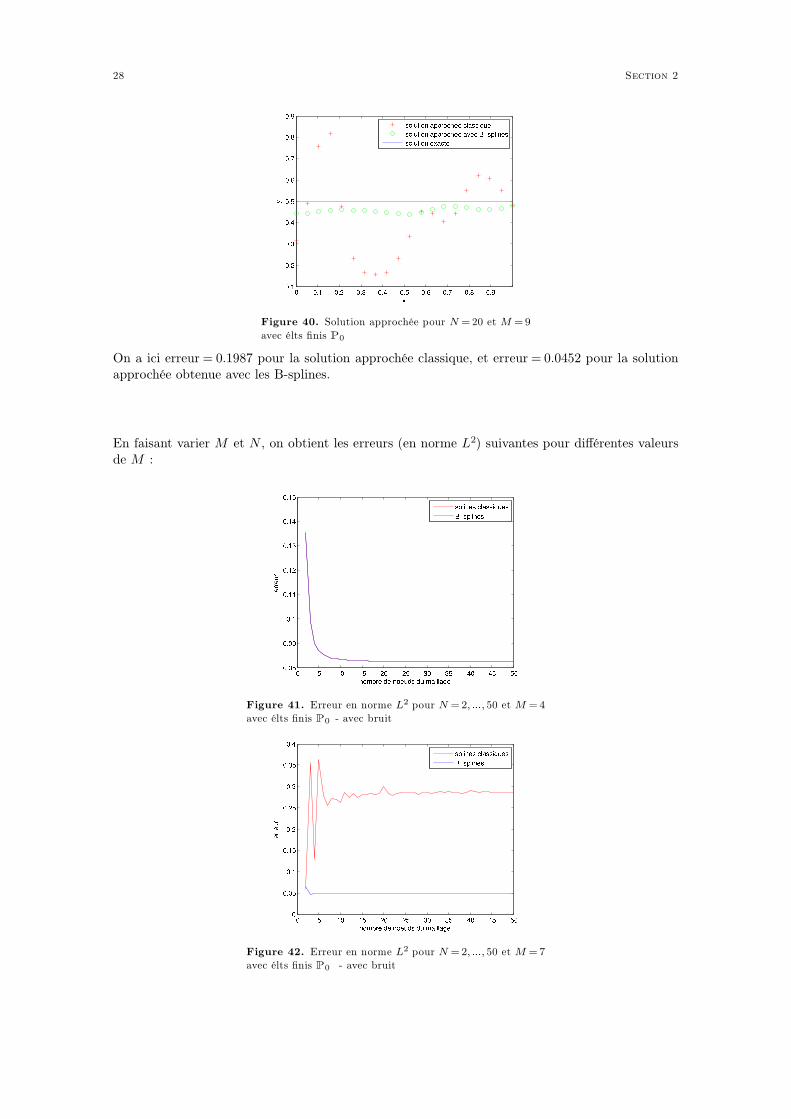
Figure 40. Solution approchée pour N = 20 et M = 9
avec élts finis P0
On a ici erreur = 0.1987 pour la solution approchée classique, et erreur = 0.0452 pour la solutionapprochée obtenue avec les B-splines.
En faisant varier M et N , on obtient les erreurs (en norme L2) suivantes pour différentes valeursde M :
Figure 41. Erreur en norme L2 pour N = 2, , 50 et M = 4
avec élts finis P0 - avec bruit
Figure 42. Erreur en norme L2 pour N = 2, , 50 et M = 7
avec élts finis P0 - avec bruit
28 Section 2
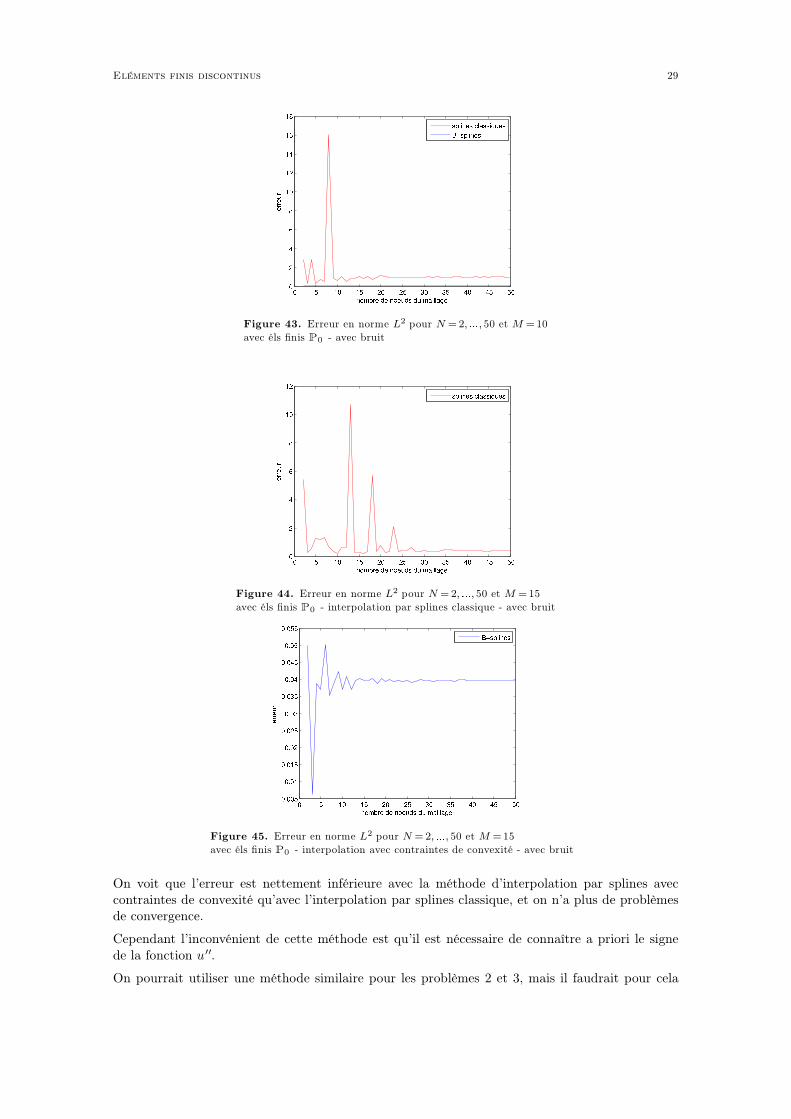
Figure 43. Erreur en norme L2 pour N = 2, , 50 et M = 10
avec éls finis P0 - avec bruit
Figure 44. Erreur en norme L2 pour N = 2, , 50 et M = 15
avec éls finis P0 - interpolation par splines classique - avec bruit
Figure 45. Erreur en norme L2 pour N = 2, , 50 et M = 15
avec éls finis P0 - interpolation avec contraintes de convexité - avec bruit
On voit que l’erreur est nettement inférieure avec la méthode d’interpolation par splines aveccontraintes de convexité qu’avec l’interpolation par splines classique, et on n’a plus de problèmesde convergence.
Cependant l’inconvénient de cette méthode est qu’il est nécessaire de connaître a priori le signede la fonction u′′.
On pourrait utiliser une méthode similaire pour les problèmes 2 et 3, mais il faudrait pour cela
Eléments finis discontinus 29

faire une étude préliminaire des conditions à imposer sur u pour assurer l’existence d’une solu-tion au problème approché.
3 Méthode OLS
Nous allons maintenant nous intéresser à une autre approche, basée sur la minimisation de fonc-tionnelles, pour résoudre le même type de problèmes inverses : la méthode Output Least Squares(OLS).
3.1 Formulation du problème
Dans une équation aux dérivées partielles de la forme (1)
−∇ · (a∇u)=f sur Ω+Conditions aux Limites sur ∂Ω
on suppose que f est donnée, que a ne peut pas être mesuré directement, mais que l’on peutobtenir des valeurs de u en certains points de mesure de manière à obtenir une approximation z.On suppose de plus qu’on peut simuler les données observables (c’est-à-dire u) pour toute esti-mation raisonnable a des paramètres a. On obtient alors une estimation u(a ) des données u.Cette estimation peut être obtenue par la méthode des éléments finis, et on a alors uh(ah), où uh
et ah sont des polynômes par morceaux.On peut alors approcher le coefficient a par la fonction ah telle que les données simulées uh(ah)soient aussi proches que possible des données mesurée z, c’est-à-dire en résolvant le problèmeapproché
Trouver ah∈Kh tel que J(ah) = infb∈Kh
J(b ), (11)
où
J(b ) =∥
∥uh(b )− z∥
∥
L2(Ω)
2,
Kh =
b ∈Th ; 0<α≤ b ≤ β
, α, β ∈R>0,
et uh(b )∈Sh est donné par
−∫
Ω
b ∇uh(b )) · ∇vhdx=
∫
Ω
fvh dx , ∀vh∈S
h = w∈Sh ;w(x)= 0∀x∈ ∂Ω,
avec Th⊂L2(Ω) et Sh⊂H1(Ω) sous-espaces de dimension finie.uh est polynomiale par morceaux, donc le gradient de uh(b ) est bien défini (par morceaux).
On définit l’espace Kh ainsi afin de pouvoir calculer uh(b ) à partir de cette équation. En effet,
si on avait par exemple b =0, on ne pourrait pas trouver uh(b ) de cette façon.
Le théorème suivant [5] nous permet d’obtenir une estimation de l’erreur :
Théorème 24. Supposons que a et u sont représentés par des polynômes par morceaux dedegrés r et r+ 1 respectivement.Supposons de plus que a ∈Hr+1(Ω) et qu’il existe γ > 0 et un vecteur unitaire constant ν tel que∇u · ν ≥ γ dans Ω.Alors il existe une constante C > 0 telle que ∀ah qui minimise J,
‖ah − a‖L2(Ω)
≤C
(
hr +‖z − u‖
L2(Ω)
h2
)
,
pour h suffisamment petit.
30 Section 3

Remarque 25. Si z est un interpolant de u par polynômes de degré r + 1, alors ‖z − u‖L2(Ω)
=O(hr+2)
Corollaire 26. Si les hypothèses du théorème sont vérifiées et que z est un interpolant de u parpolynômes de degré r+ 1, alors
‖ah − a‖L2(Ω)
=O(hr).
3.2 Tentative de résolution du problème approché
Soit ∆h une triangulation régulière et quasi-uniforme de Ω.On choisit
Th =
v ∈C0(Ω); v |T ∈Pr ∀T ∈∆h
,
Sh =
v ∈C0(Ω); v |T ∈Pr+1 ∀T ∈∆h
.
Soient ϕii=1, ,met ψii=1, ,n
des bases de Sh et Th respectivement.
On prend z ∈Sh approximation de u.
Calcul de uh
On peut alors écrire uh(b )=∑
i=1m
uiϕi.
Alors on a ∀vh∈S
h∫
Ω
b ∇uh(b ) · ∇vhdx=
∫
Ω
fvh dx
⇔∑
i=1
m ∫
Ω
bui∇ϕi · ∇ϕjdx=
∫
Ω
fϕj dx, ∀j= 1, ,m⇔ A(b )uh(b )= fK , (12)
avec
Ai,j(b ) =
∫
Ω
b ∇ϕi · ∇ϕjdx,
uh(b )=
u1um
,
fK =
∫
Ωfϕ1 dx
∫
Ωfϕm dx
.
On peut alors obtenir uh(b ), pour b ∈Kh =
b ∈ Th ; 0<α≤ b ≤ β
donné, en résolvant le sys-tème 12.
Minimisation de J(
b)
On cherche maintenant à résoudre le problème (11).Pour cela, on veut utiliser la méthode de la plus grande pente pour minimiser la fonctionnelleJ :
• On choisit b0∈Kh, k4 0
• On calcule ∇J(bk)
• Tant que∥
∥∇J(bk)∥
∥> tol,
1. On minimise la fonction s: R≥0 R≥0 définie par s(x) = J(
bk − x∇J(bk))
. Leminimum est atteint en xk
2. On définit bk+1 = bk − xk∇J(bk)
Méthode OLS 31

3. k= k+ 1
4. On calcule ∇J(bk)
• a = bk
Soit a =
a1an
la solution obtenue.
Alors une solution de (11) sera donnée par
ah =∑
i=1
n
aiψi.
Cependant la méthode de la plus grande pente présentée ci-dessus ne garantit pas que la solu-tion ah soit dans Kh. Il nous faut donc adapter la méthode de manière à prendre en compte lescontraintes, nous nous intéressons alors à la méthode de la plus grande pente hybride décrite parM.Gerard, B.De Schutter et M.Verhaegen [7].
De plus le calcul du gradient ∇J(bk) peut être réalisé efficacement en suivant la méthode décritepar R.Falk [4] et G.Chavent [2].
3.3 Modification de la méthode de résolution du problème approché
3.3.1 Méthode de la plus grande pente hybride
Considérons un problème d’optimisation convexe
minx∈Rm
J(x) (13)
tel que g(x)≤ 0,
où J : Rm →R est une fonction différentiable convexe, et g: Rm →Rn, g(x) =
g1(x)gm(x)
, est telle
que chaque gi est une fonction différentiable convexe.On suppose
1. ∃xf tel que g(xf)≤ 0, et on définit c∗=minx J(x); g(x)≤ 0.2. c∗ est fini.
On cherche alors une fonction f :Rm→Rm telle qu’une solution du système
x(t)= f(x(t)) (14)
ait les propriétés suivantes :
• Si ∃t ; g(x(t ))> 0, alors ∃tf > t ; g(x(tf))≤ 0.
• Si g(x(tf))≤ 0, alors ∀t > tf , g(x(t))≤ 0.
• ∀t2>t1≥ tf, J(a(t1))>J(a(t2))>c∗ et limt→∞ J(x(t))= c∗.
M.Gerard, B.De Schutter et M.Verhaegen [7] ont montré le résultat suivant
Proposition 27. Si l’on choisit
f(x)=
−∇J(x) si gj(x)≤ 0∀j−∑
i∈L(x)∇gi(x) si ∃j ; gj(x)> 0 , (15)
où L(x) = i ; gi(x)≥ 0, une solution x(t) du système ( 14) est telle que limt→∞ J(x(t)) = c∗, oùc∗ est solution du problème ( 13), si ce problème admet une solution.
32 Section 3

Pour obtenir une solution du problème (13), on peut utiliser une méthode d’Euler explicite : ondéfinit la suite xii≥0 telle que
x0 =λ fixé,
xk+1 = xk + ∆tf(xk),
avec ∆t suffisamment petit pour avoir convergence.On a alors
limk→+∞
J(xk) = c∗ ,
où c∗ est solution du problème (13).
Remarque 28. Si la fonction J n’est pas convexe, le minimum obtenu par la méthode de laplus grande pente hybride peut n’être qu’un minimum local.
3.3.2 Calcul du gradient
Nous nous intéressons maintenant à une méthode efficace pour le calcul du gradient ∇J(bk), quiest décrite par R.Falk [4] et G.Chavent [2].
On conserve les même notations que dans la partie 3.2.On a
J(b)= ‖uh(b)− z‖L2(Ω)
2 = (uh(b)− z, uh(b)− z)L2.
Notons U(b) la dérivée de uh(b).Alors on a
uh(b+ δb) =uh(b)+U(b)δb+O(‖δb‖2)
,
et
J(b+ δb) =J(b)+ 2(U(b)δb, uh(b)− z)L2 +O(‖δb‖2
)
,
donc
∇J(b)δb=2 (U(b)δb, uh(b)− z)L2. (16)
Tout vh∈Sh peut s’écrire
∑
i=1m
viϕi, où ϕii=1, ,mest une base de Sh.
On définit formellement l’opérateur A qui à b∈ Th associe A(b) tel que pour tout vh, wh∈Sh,
(
A(b)vh, wh
)
=∑
j=1
m(
∑
i=1
m
wiAi,j(b)vi
)
où A(b) est la matrice définie dans la partie 3.2.On a alors en particulier pour tout b∈ Th,
A(b)uh(b) = f
et donc
A(b+ δb) = A(b)+ A(δb),
A(b+ δb)uh(b+ δb) = A(b)uh(b)+ A(b)U(b)δb+ A(δb)uh(b)+O(
‖δb‖2)
.
Donc
A(b)U(b)δb+ A(δb)uh(b) =(
∇A(b)uh(b))
δb
= (∇f)δb
= 0.
Donc
U(b)δb=− A(b)−1A(δb)uh(b). (17)
Méthode OLS 33

On peut alors déduire de (16) et (17) que
∇J(a)δa = − 2(
A(b)−1A(δb)uh(b), uh(b)− z)
L2
= − 2
(
A(δb)uh(b),(
A(b)−1)T
(uh(b)− z)
)
L2
.
Notons p(b) la solution de
A(b)T =2(uh(b)− z). (18)
On obtient alors
∇J(a)δa=−(
A(δb)uh(b), p(b))
L2. (19)
uh(b) et p(b) sont dans Sh, donc on peut écrire
uh(b) =∑
i=1
m
uiϕi,
p(b) =∑
i=1
m
piϕi.
b∈Th, donc on peut écrire
b=∑
i=1
n
biψi.
On peut alors obtenir ∇J(b) pour tout b∈Kh en calculant pour k=1n∂J(b)
∂bk= ∇J(b) · ψk
= − (A(ψk)uh(b), p(b))L2
= −∑
i,j=1
m
uipj
∫
Ω(A(ψk)ϕi) · ϕj dx, (20)
et
∇J(b)=
∂J(b)
∂b1∂J(b)
∂bn
. (21)
Remarque 29. On peut démontrer ce résultat rigoureusement en supposant que z ∈ Sh, alorson peut écrire z=
∑
i=1m
ziϕi et uh(b)=∑
i=1m
ui(b)ϕi, et en utilisant la norme l2 pour J
J(b)= ‖uh(b)− zK ‖l2
2= (uh(b)− zK )
T(uh(b)− zK ),
où
uh(b) =
u1(b)um(b)
,
zK =
z1zm
.
3.3.3 Résolution du problème approché
On a le problème d’optimisation (11). On introduit donc le problème de minimisation suivant :
minb∈Rn
J(b ) (22)
tel que 0<α≤ bi ≤ β, ∀i=1, , n
34 Section 3

Soit g:Rn→R2n définie par g(b )=
α − a1α − am
a1− βam − β
.
On a
0<α≤ bi ≤ β, ∀i= 1, ,m ⇔ g(b )6 0
Pour trouver une solution du problème (22) on applique la méthode de la plus grande pentehybride, en calculant le gradient de J comme décrit plus haut.
On obtient alors l’agorithme suivant :
• On choisit b0∈Kh, k4 0
• On calcule ∇J(bk) en utilisant la méthode décrite en 3.3.2.
• Tant que∥
∥∇J(bk)∥
∥> tol,
1. On définit bk+1 = bk +∆tf(bk), où f est la fonction définie en (15).
2. k= k+ 1
3. On calcule ∇J(bk) en utilisant la méthode décrite en 3.3.2.
• a = bk
Soit a =
a1an
la solution obtenue, alors une solution de (11) sera donnée par ah =∑
i=1n
aiψi.
3.4 Application à un problème 1D
Par souci de simplicité, on choisit Ω =(0, 1), et on considère l’équation
− (au′)′=f sur (0, 1)u(0)= µ0
u(1)= µ1
, (23)
on suppose connue la fonction f , et on définit le maillage
∆h = Ki = [Xi, Xi+1], i=0, , N − 1,
avec Xi = (i− 1) h pour i= 1, , N , h=1
N.
On choisit
Th =
v ∈C0(Ω); v |T ∈Pr ∀T ∈∆h
,
Sh =
v ∈C0(Ω); v |T ∈Pr+1 ∀T ∈∆h
.
Soient ϕii=1, ,met ψii=1, ,n
des bases de Sh et Th respectivement.
Pour r=1, on définit
x2i = Xi pour i= 0, , N ,x2i+1 =
Xi +Xi+1
2pour i=0, , N -1,
Méthode OLS 35

et les bases de Sh et Th sont données par ϕii=0, ,2N−1 et ψii=0, ,N
ϕ2i(x) =
(x − x2i−2)(x −x2i−1)
(x2i − x2i−2)(x2i −x2i−1)si i > 0 et x∈ [x2i−2, x2i]
(x − x2i+1)(x −x2i+2)
(x2i − x2i+1)(x2i − x2i+2)si i <N et x∈ [x2i, x2i+2]
0 sinon
,
ϕ2i+1(x) =
(x −x2i)(x −x2i+2)
(x2i+1−x2i)(x2i+1−x2i+2)si x∈ [x2i, x2i+2]
0 sinon,
ψi(x) =
x −Xi
hsi i > 0 etx∈ [Xi−1, Xi]
1− x −Xi
hsi i <N et x∈ [Xi, Xi+1]
0 sinon
.
On obtient une approximation z ∈ Sh de u à partir de M valeurs de u mesurées (par interpola-tion).On définit Kh =
b ∈ Th ; 0<α≤ b ≤ β
Pour trouver la solution du problème inverse en utilisant la méthode OLS, il faut alors résoudrele problème (11).
Pour tout b∈Kh, on peut calculer uh(b) en résolvant le système (12).On obtient alors ∇J(b) en résolvant le système (18), ce qui nous donne p(b), puis en calculantpour k= 1n
∂J(b)
∂bk=−
∑
i,j=0
m
uipj
∫
Ω(A(ψk)ϕi) · ϕj dx,
avec uh(b)=∑
i=0m
uiϕi et p(b)=∑
i=0m
piϕi.
On applique ensuite l’algorithme décrit dans la partie 3.3.3, ce qui nous donne a =
a0an
, et une
solution approchée du problème inverse est alors donnée par
ah =∑
i=0
n
aiψi.
Remarque 30. Si J n’est pas convexe, on peut n’obtenir qu’un minimum local, qui peut êtreéloigné de la solution exacte.Il faut donc prendre des bornes α et β aussi précises que possible pour obtenir une solutionacceptable.
Remarque 31. Pour la méthode OLS, faire varier N pour voir le comportement de l’erreur n’apas beaucoup d’intérêt.En effet, on n’arrête l’algorithme que lorsque que la norme du gradient est inférieure à une tolé-rance fixée tol, et ce quel que soit le nombre de noeuds du maillage. La tolérance tol permet dedéfinir la précision à partir de laquelle on juge que la solution approchée est suffisament prochede la solution du problème d’optimisation, ce qui est est assez similaire à l’erreur en norme L2
de la solution approchée ah.Alors pour une tolérance fixée, pour tout N la solution approchée sera à la même ’distance’ dela solution exacte (si la méthode converge), et dnc l’erreur sera du même ordre.Par conséquent, dans les applications suivantes, on résout pour des valeurs de M et N fixées.
3.4.1 Application au problème 1
On choisit
u(x) = x2− x,
f(x) = 1.
36 Section 3
Alors la solution exacte du problème inverse est donnée par a(x)=1
2.
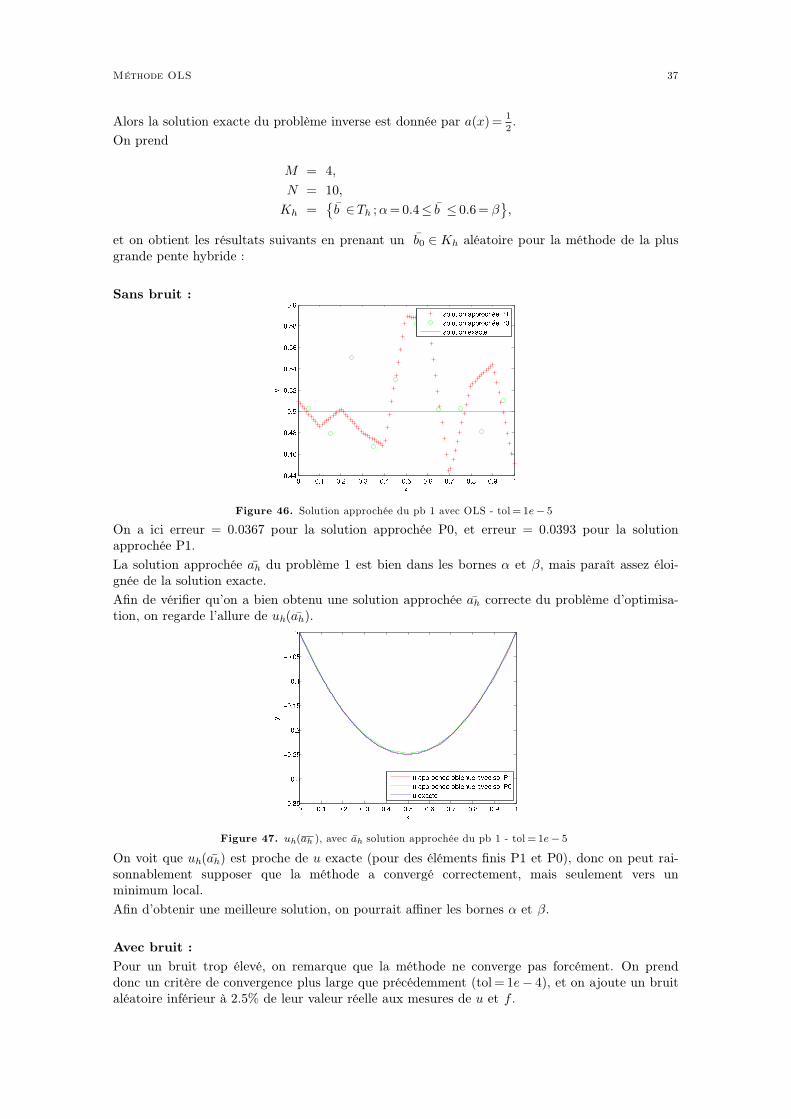
On prend
M = 4,
N = 10,
Kh =
b ∈Th ;α= 0.4≤ b ≤ 0.6= β
,
et on obtient les résultats suivants en prenant un b0 ∈ Kh aléatoire pour la méthode de la plusgrande pente hybride :
Sans bruit :
Figure 46. Solution approchée du pb 1 avec OLS - tol= 1e− 5
On a ici erreur = 0.0367 pour la solution approchée P0, et erreur = 0.0393 pour la solutionapprochée P1.
La solution approchée ah du problème 1 est bien dans les bornes α et β, mais paraît assez éloi-gnée de la solution exacte.
Afin de vérifier qu’on a bien obtenu une solution approchée ah correcte du problème d’optimisa-tion, on regarde l’allure de uh(ah).
Figure 47. uh(ah ), avec ah solution approchée du pb 1 - tol= 1e − 5
On voit que uh(ah) est proche de u exacte (pour des éléments finis P1 et P0), donc on peut rai-sonnablement supposer que la méthode a convergé correctement, mais seulement vers unminimum local.
Afin d’obtenir une meilleure solution, on pourrait affiner les bornes α et β.
Avec bruit :
Pour un bruit trop élevé, on remarque que la méthode ne converge pas forcément. On prenddonc un critère de convergence plus large que précédemment (tol= 1e− 4), et on ajoute un bruitaléatoire inférieur à 2.5% de leur valeur réelle aux mesures de u et f .
Méthode OLS 37
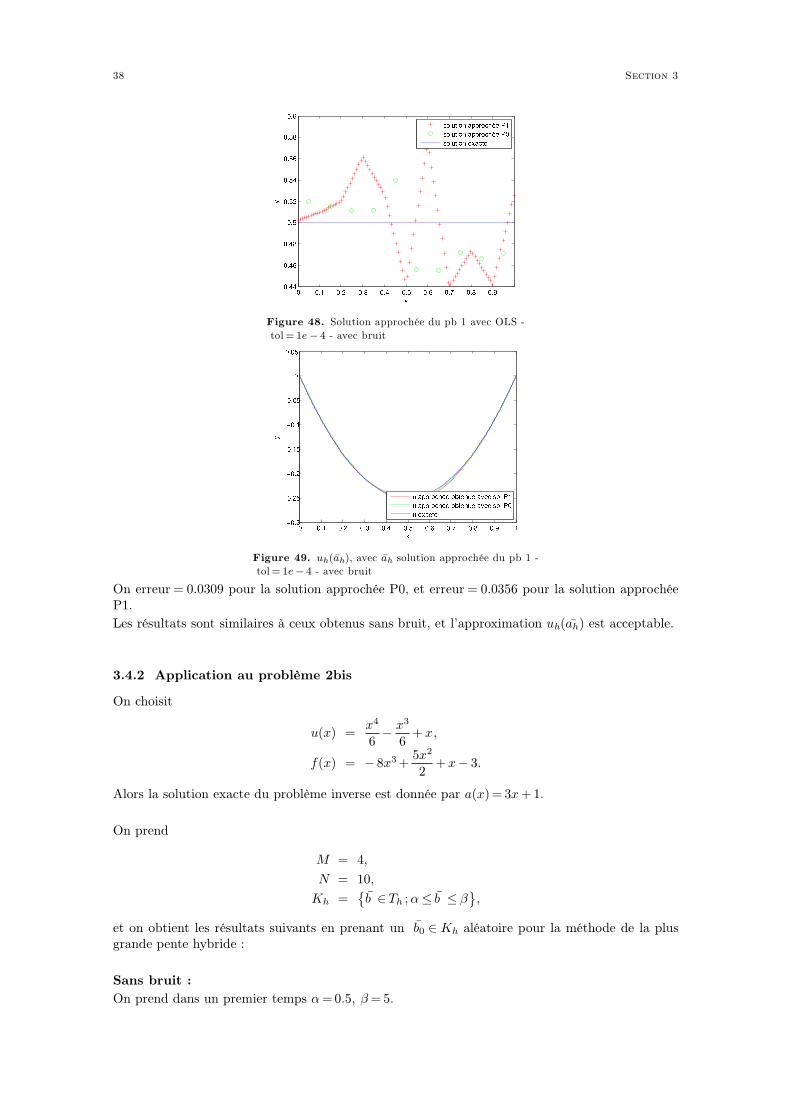
Figure 48. Solution approchée du pb 1 avec OLS -
tol= 1e − 4 - avec bruit
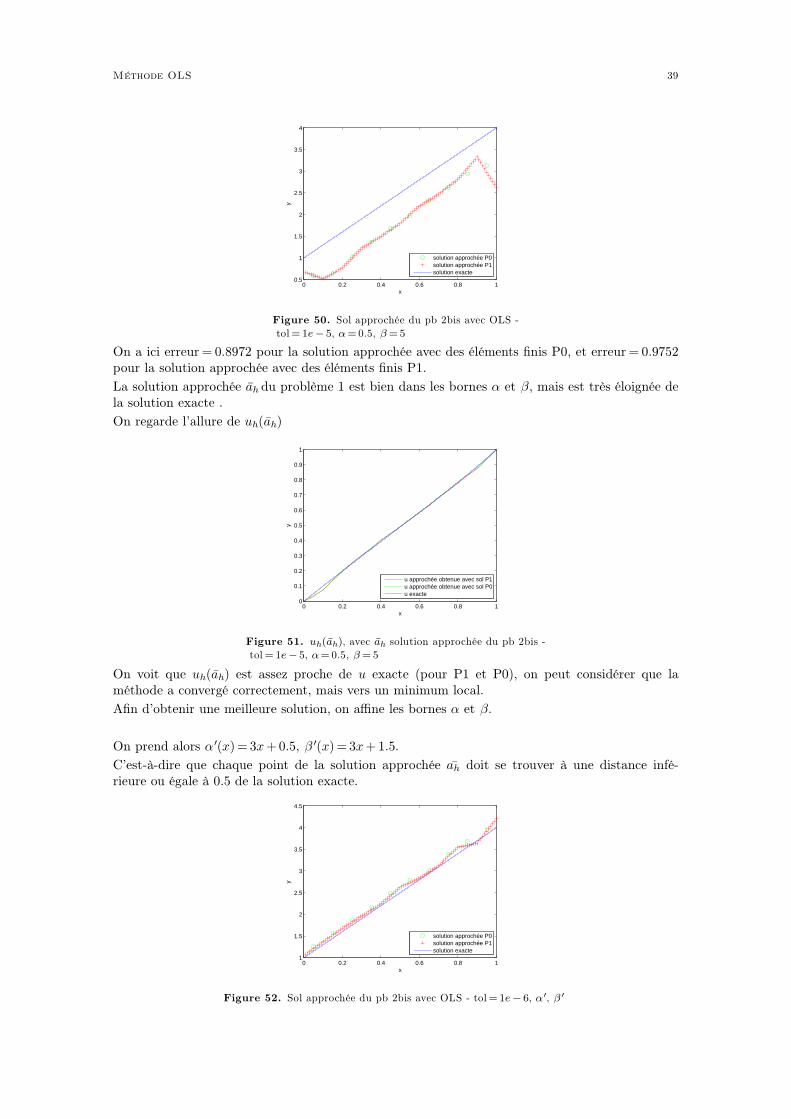
Figure 49. uh(ah), avec ah solution approchée du pb 1 -
tol= 1e− 4 - avec bruit
On erreur = 0.0309 pour la solution approchée P0, et erreur = 0.0356 pour la solution approchéeP1.
Les résultats sont similaires à ceux obtenus sans bruit, et l’approximation uh(ah) est acceptable.
3.4.2 Application au problème 2bis
On choisit
u(x) =x4
6− x3
6+ x,
f(x) = − 8x3 +5x2
2+x− 3.
Alors la solution exacte du problème inverse est donnée par a(x)= 3x+ 1.
On prend
M = 4,
N = 10,
Kh =
b ∈ Th ;α≤ b ≤ β
,
et on obtient les résultats suivants en prenant un b0 ∈ Kh aléatoire pour la méthode de la plusgrande pente hybride :
Sans bruit :
On prend dans un premier temps α= 0.5, β= 5.
38 Section 3
0 0.2 0.4 0.6 0.8 10.5
1
1.5
2
2.5
3
3.5
4
xy
solution approchée P0solution approchée P1solution exacte
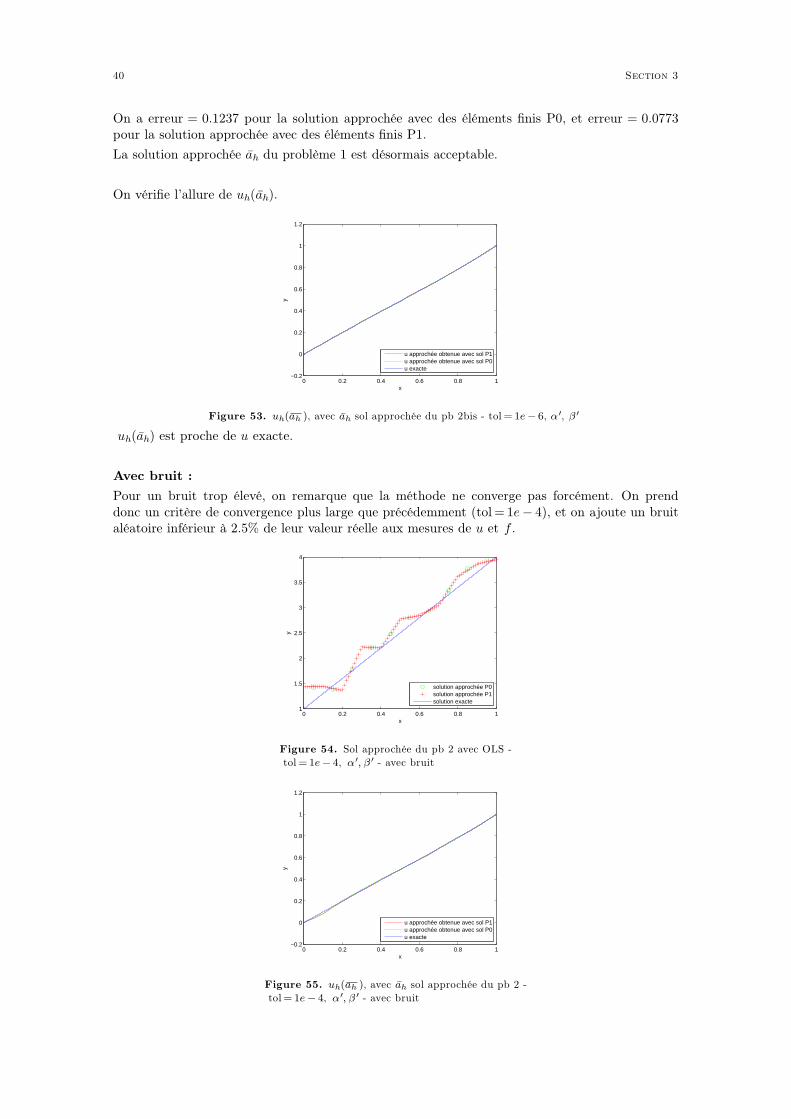
Figure 50. Sol approchée du pb 2bis avec OLS -
tol= 1e− 5, α = 0.5, β = 5
On a ici erreur= 0.8972 pour la solution approchée avec des éléments finis P0, et erreur= 0.9752pour la solution approchée avec des éléments finis P1.
La solution approchée ah du problème 1 est bien dans les bornes α et β, mais est très éloignée dela solution exacte .
On regarde l’allure de uh(ah)
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
x
y
u approchée obtenue avec sol P1u approchée obtenue avec sol P0u exacte
Figure 51. uh(ah), avec ah solution approchée du pb 2bis -
tol= 1e − 5, α = 0.5, β = 5
On voit que uh(ah) est assez proche de u exacte (pour P1 et P0), on peut considérer que laméthode a convergé correctement, mais vers un minimum local.
Afin d’obtenir une meilleure solution, on affine les bornes α et β.
On prend alors α′(x)= 3x+ 0.5, β ′(x)= 3x+ 1.5.
C’est-à-dire que chaque point de la solution approchée ah doit se trouver à une distance infé-rieure ou égale à 0.5 de la solution exacte.
0 0.2 0.4 0.6 0.8 11
1.5
2
2.5
3
3.5
4
4.5
x
y
solution approchée P0solution approchée P1solution exacte
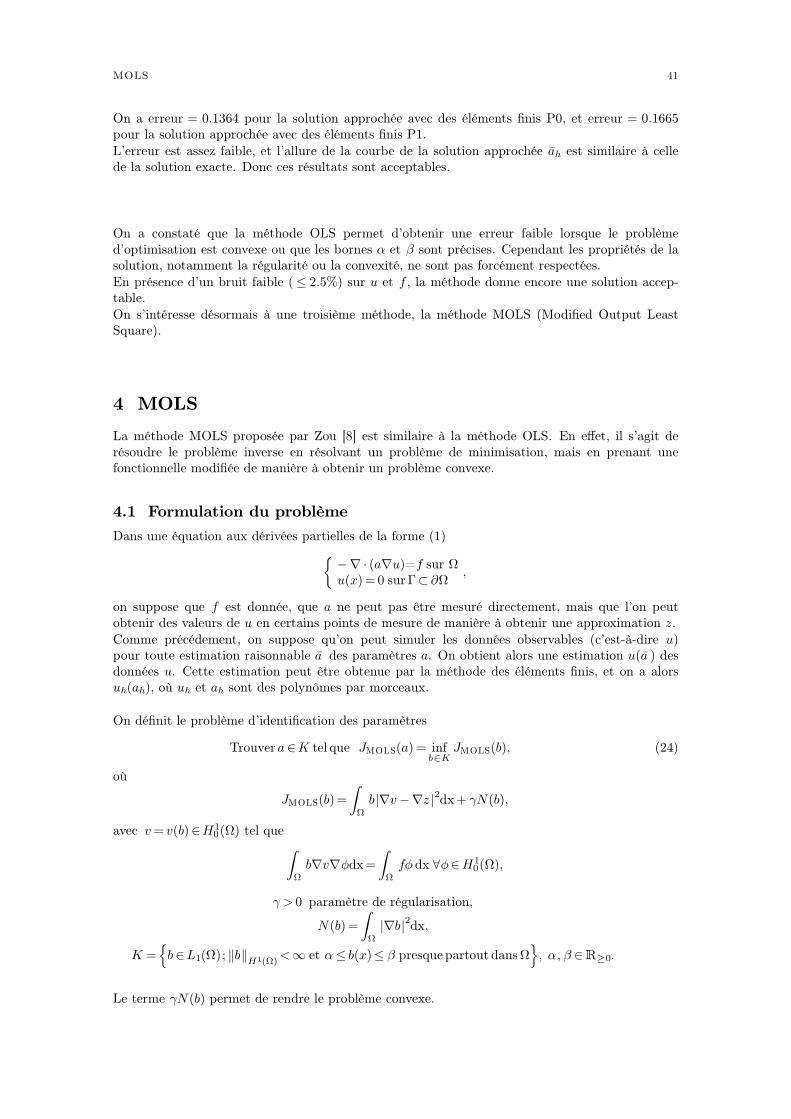
Figure 52. Sol approchée du pb 2bis avec OLS - tol= 1e − 6, α′, β ′
Méthode OLS 39
On a erreur = 0.1237 pour la solution approchée avec des éléments finis P0, et erreur = 0.0773pour la solution approchée avec des éléments finis P1.
La solution approchée ah du problème 1 est désormais acceptable.
On vérifie l’allure de uh(ah).
0 0.2 0.4 0.6 0.8 1−0.2
0
0.2
0.4
0.6
0.8
1
1.2
x
y
u approchée obtenue avec sol P1u approchée obtenue avec sol P0u exacte
Figure 53. uh(ah ), avec ah sol approchée du pb 2bis - tol= 1e− 6, α′, β ′
uh(ah) est proche de u exacte.
Avec bruit :
Pour un bruit trop élevé, on remarque que la méthode ne converge pas forcément. On prenddonc un critère de convergence plus large que précédemment (tol= 1e− 4), et on ajoute un bruitaléatoire inférieur à 2.5% de leur valeur réelle aux mesures de u et f .
0 0.2 0.4 0.6 0.8 11
1.5
2
2.5
3
3.5
4
x
y
solution approchée P0solution approchée P1solution exacte
Figure 54. Sol approchée du pb 2 avec OLS -
tol= 1e− 4, α′, β ′ - avec bruit
0 0.2 0.4 0.6 0.8 1−0.2
0
0.2
0.4
0.6
0.8
1
1.2
x
y
u approchée obtenue avec sol P1u approchée obtenue avec sol P0u exacte
Figure 55. uh(ah ), avec ah sol approchée du pb 2 -
tol= 1e − 4, α′, β ′ - avec bruit
40 Section 3
On a erreur = 0.1364 pour la solution approchée avec des éléments finis P0, et erreur = 0.1665pour la solution approchée avec des éléments finis P1.
L’erreur est assez faible, et l’allure de la courbe de la solution approchée ah est similaire à cellede la solution exacte. Donc ces résultats sont acceptables.
On a constaté que la méthode OLS permet d’obtenir une erreur faible lorsque le problèmed’optimisation est convexe ou que les bornes α et β sont précises. Cependant les propriétés de lasolution, notamment la régularité ou la convexité, ne sont pas forcément respectées.
En présence d’un bruit faible (≤ 2.5%) sur u et f , la méthode donne encore une solution accep-table.
On s’intéresse désormais à une troisième méthode, la méthode MOLS (Modified Output LeastSquare).
4 MOLS
La méthode MOLS proposée par Zou [8] est similaire à la méthode OLS. En effet, il s’agit derésoudre le problème inverse en résolvant un problème de minimisation, mais en prenant unefonctionnelle modifiée de manière à obtenir un problème convexe.
4.1 Formulation du problème
Dans une équation aux dérivées partielles de la forme (1)
−∇ · (a∇u)=f sur Ωu(x) =0 surΓ⊂ ∂Ω
,
on suppose que f est donnée, que a ne peut pas être mesuré directement, mais que l’on peutobtenir des valeurs de u en certains points de mesure de manière à obtenir une approximation z.
Comme précédement, on suppose qu’on peut simuler les données observables (c’est-à-dire u)pour toute estimation raisonnable a des paramètres a. On obtient alors une estimation u(a ) desdonnées u. Cette estimation peut être obtenue par la méthode des éléments finis, et on a alorsuh(ah), où uh et ah sont des polynômes par morceaux.
On définit le problème d’identification des paramètres
Trouver a∈K tel que JMOLS(a)= infb∈K
JMOLS(b), (24)
où
JMOLS(b)=
∫
Ω
b|∇v−∇z |2dx+ γN(b),
avec v= v(b)∈H01(Ω) tel que
∫
Ω
b∇v∇φdx=
∫
Ω
fφ dx ∀φ∈H01(Ω),
γ > 0 paramètre de régularisation,
N(b)=
∫
Ω|∇b|2dx,
K =
b∈L1(Ω); ‖b‖H1(Ω)
<∞ et α≤ b(x)≤ β presque partout dansΩ
, α, β ∈R≥0.
Le terme γN (b) permet de rendre le problème convexe.
MOLS 41

4.2 Discrétisation
On définit
Th une triangulation régulière deΩ par éléments finis simplectiques
Vh espace d ’éléments finis continus et linéaires par morceaux sur Th
V
h sous-espace deVh tel que ∀vh∈V
h, vh|∂Ω = 0,
Kh = vh∈Vh ;α≤ vh(x)≤ β, ∀x∈Ω.
On considère xii=1, ,Nl’ensemble des noeuds de la triangulation Th.
On a alors
Kh = vh∈ Vh ;α≤ vh(xi)≤ β, ∀i=1, , N .
On définit le problème discrétisé :
Trouver ah∈Kh tel que Jh(ah) = infb∈Kh
Jh(b ), (25)
où
Jh(b ) =
∫
Ω
b |∇vh−∇z |2dx+ γNh(b ),
avec vh = vh(b )∈V
h tel que
∫
Ω
b ∇vh∇φdx=
∫
Ω
fφdx ∀φ∈V
h ,
γ > 0 ,
Nh(b )=
∫
Ω
∣
∣∇b∣
∣
2dx.
Zou [8] a montré les résultats suivants :
Proposition 32. Il existe au moins un minimiseur du problème ( 24).
Théorème 33. Soit bhh>0 une suite de minimiseurs du problème discrétisé ( 25).Alors chaque sous-suite de bhh>0 a une sous-suite convergeant vers un minimiseur du pro-blème continu ( 24).
4.3 Résolution du problème discrétisé
On résout le problème discrétisé à l’aide de la méthode de la plus grande pente hybride 3.3.1.Pour cela on a besoin de calculer le gradient de Jh.
On remplace z par son interpolant zh dans la base des éléments finis.On définit
J1(b )=
∫
Ω
b |∇vh −∇zh|2dx,
J2(b )=Nh(b )=
∫
Ω
∣
∣∇b∣
∣
2dx.
On a Jh =J1 + γJ2.On cherche maintenant à calculer le gradient de J1 et J2.
Lemme 34. vh(b ):Vh→V
h satisfait vh′ (b )ph∈V
h et∫
Ω
b ∇(vh′ (b )ph)∇φhdx=−
∫
Ω
ph∇vh(b )∇φh dx ∀φh∈V
h. (26)
42 Section 4

Démonstration. vh(b )∈ V
h est défini comme solution de∫
Ω
b ∇vh(b )∇φ dx=
∫
Ω
fφ dx ∀φ∈V
h .
Donc∫
Ω
b ∇(
vh(b + tph)− vh(b ))
∇φh dx+ t
∫
Ω
ph∇vh(b + tph)∇φhdx=0 ∀φ∈ V
h .
Donc en divisant par t prenant la limite quand t→ 0, on obtient le résultat du lemme.
Lemme 35. J1′(b )ph =−
∫
Ωph
(
∣
∣∇vh(b )∣
∣
2− |∇zh|2)
dx.
Démonstration. ∀0<t< 1, b , ph∈Vh, on a
J1(b + t ph) −J1(b ) =
∫
Ω
(b + tph)∣
∣∇vh(b + tph)−∇zh
∣
∣
2dx−
∫
Ω
b∣
∣∇vh(b )−∇zh
∣
∣
2dx
=
∫
Ω
b ∇(
vh(b + tph) − vh(b ))
· ∇(
vh(b + tph) + vh(b ) − 2zh
)
dx +
t
∫
Ω
ph
∣
∣∇vh(b + tph)−∇zh
∣
∣
2dx.
Donc
J1′(b )ph =
∫
Ω
b ∇(vh′ (b )ph)∇
(
2vh(b )− 2zh
)
dx+
∫
Ω
ph
∣
∣∇vh(b )−∇zh
∣
∣
2dx
= −∫
Ω
ph
(
∣
∣∇vh(b )∣
∣
2− |∇zh|2)
dx.
Lemme 36. J2′(b )ph = 2
∫
Ω∇b ∇phdx.
Démonstration. ∀0<t< 1, b , ph∈Vh, on a
J2(b + tph)− J2(b ) =
∫
Ω
∣
∣∇b + t∇ph
∣
∣
2dx−
∫
Ω
∣
∣∇b∣
∣
2dx
= 2
∫
Ω
∇b ∇phdx+ t2∫
Ω|∇ph|2dx.
Donc
J1′(b )ph = lim
t→0
J2(b + tph)− J2(b )
t
= 2
∫
Ω
∇b ∇phdx.
Et donc si on prend ϕii=0, ,Nune base de Vh, on peut écrire
b =∑
i=0
N
biϕi,
et donc
∂Jh(b )
∂bi=J1
′(b )ϕi + γJ2′(b )ϕi (27)
et donc obtenir le gradient ∇Jh(b ) pour tout b ∈ Vh.
MOLS 43

4.4 Application à un problème 1D
On prend Ω = (0, 1), et on définit
0 =x0< <xN = 1,
h=1
N,
Th = [xi, xi+1] triangulation régulière,
Vh =
vh∈C0(Ω); vh|[xi,xi+1]∈P1([xi, xi+1]) ∀i
de base ϕii=0, ,N,
V
h = vh∈Vh ; vh(0) = vh(1)= 0de base ϕii=1, ,N−1,
Kh = vh∈Vh ;α≤ vh(x)≤ β, ∀x∈Ω.
On obtient zh∈ Vh à partir de M mesures de u.
Le problème approché (25) s’écrit
Trouver ah∈Kh tel que Jh(ah) = infb∈Kh
Jh(b ),
où
Jh(b )=
∫
Ω
b∣
∣vh′ (x)− zh
′ (x)∣
∣
2dx+ γNh(b ),
avec γ > 0, vh = vh(b )=∑
i=1N−1
viϕi∈V
h tel que
∫
Ω
bvh′ ϕj
′dx =
∫
Ω
fϕj′dx ∀j=1, , N − 1
⇔∑
i=1
N−1
vi
∫
Ω
b ϕi′ϕj
′dx =
∫
Ω
fϕj′dx ∀j=1, , N − 1
⇔A(b )vK = fK .où
vK =
v1vN−1
,
fK =
∫
Ωfϕ1
′dx∫
ΩfϕN−1
′ dx
,
Ai,j(b ) =
∫
Ω
b ϕi′ϕj
′dx pour i, j=1, , N − 1,
et
Nh(b ) =
∫
Ω
∣
∣ b ′∣
∣
2dx= bK T
BbK ,où b ∈ Vh peut s’écrire b =
∑
i=0N
biϕi, et
bK =
b0bN
,
Bi,j =
∫
Ω
ϕi′ϕj
′dx pour i, j=0, , N.
44 Section 4

Calcul du gradient :
on calcule le gradient ∇Jh(b )pour tout b ∈ Vh en utilisant (27) pour i= 0, , N :
∂Jh(b )
∂βi= J1
′(b )ϕi + γJ2′(b )ϕi
= −∑
k,l=1
N−1
vkvl
∫
Ω
ϕiϕk′ϕl
′dx+∑
k,l=0
N
zkzl
∫
Ω
ϕiϕk′ϕl
′dx+2γ∑
j=0
N
bi
∫
Ω
ϕi′ϕj
′dx
= vK TMati vK + zK TMati zK + 2γ(BbK )i,
avec
(Mati)k,l =
∫
Ω
ϕiϕk+1′ ϕl+1
′ dx pour k, l= 1, , N − 1,
(Mati)k,l =
∫
Ω
ϕiϕk′ϕl
′dx pour k, l=0, , N ,et
∇Jh(b )=
∂Jh(b)
∂β0∂Jh(b)
∂βN
.
Calcul de Jh(b ) :
On a pour tout b ∈ Vh,
Nh(b ) =
∫
Ω
∣
∣ b ′∣
∣
2dx= bK T
BbK ,∫
Ω
b∣
∣vh′ (x)− zh
′ (x)∣
∣
2dx =
∑
k=0
N
bk
(
∑
i,j=0
N
(vi − zi)(vj − zj)
∫
Ω
ϕkϕi′ϕj
′dx
)
= (vK − zK )TA(b )(vK − zK ),
donc
Jh(b )= (vK − zK )TA(b )(vK − zK )+ γbK TBbK .
4.4.1 Application au problème 4
On définit le problème 4 par
Trouver a tel que
− (au′)′= f sur (0, 1)u(0)= u(1)= 0
,
avec
u(x) = sin(2πx),
f(x) = − (4x− 4πcos(2πx))(2πcos(2πx))− (3 +2x2− 2sin(2πx))(− 4π2sin(2πx)),
et la solution exacte est donnée par
a(x) =3 + 2x2− 2sin(2πx).
Les fonctions u et f ne sont pas polynomiales, donc il est nécessaire de prendre plus de pointsde mesures que précédemment afin d’obtenir une interpolation polynomiale acceptable.
On prend
M = 16,
N = 19,
Kh =
b ∈ Th ;α≤ b ≤ β
,
MOLS 45
et on obtient les résultats suivants en prenant un b0 ∈ Kh aléatoire pour la méthode de la plusgrande pente hybride :
Sans bruit :
On prend α= 0.5, β= 7.5 et on regarde les résultats pour différents valeurs de γ.
En effet, en modifiant la valeur du paramètre de régularisation γ, on modifie le problème, et onveut donc observer les effets sur la solution approchée.
Figure 56. Sol approchée du pb 4 avec MOLS -
tol= 1e− 5, γ = 1e − 1
On a erreur = 0.9863. La solution approchée est très éloignée de la solution exacte, on réduitdonc la valeur de γ.
Figure 57. Sol approchée du pb 4 avec MOLS -
tol= 1e− 5, γ = 1e − 2On a erreur= 0.5710.
Figure 58. Sol approchée du pb 4 avec MOLS -
tol= 1e− 5, γ = 1e − 3On a erreur= 0.3361.
46 Section 4
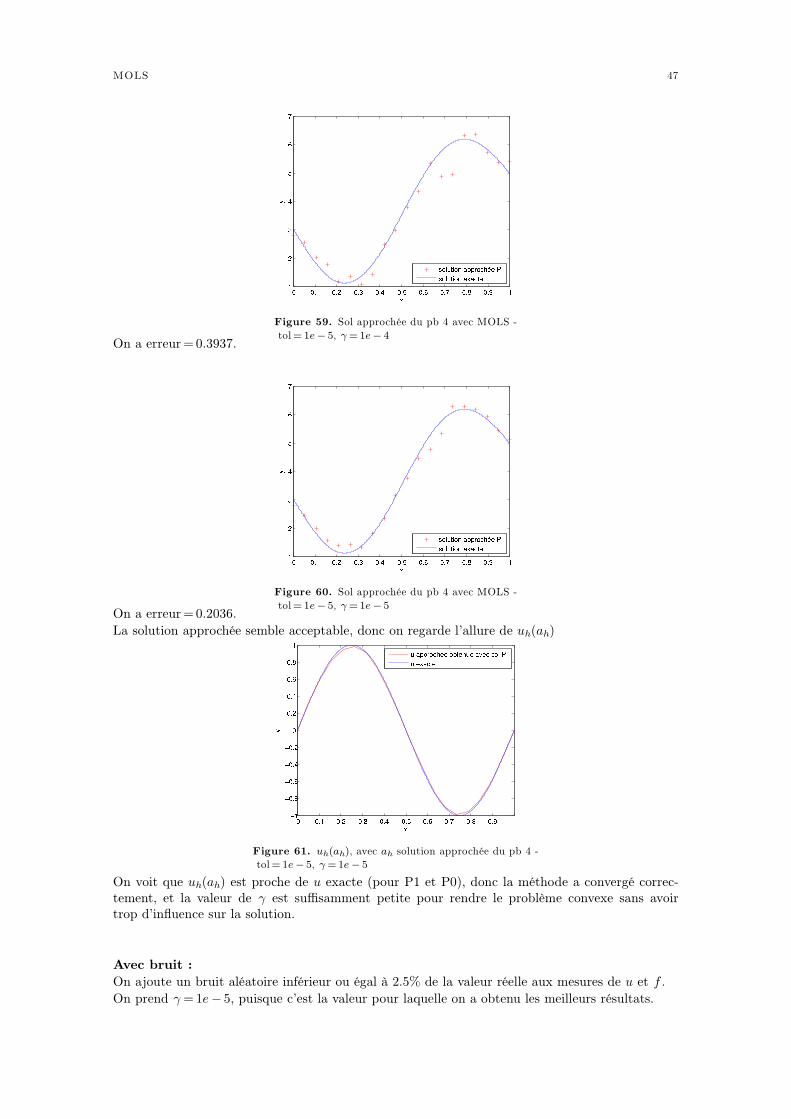
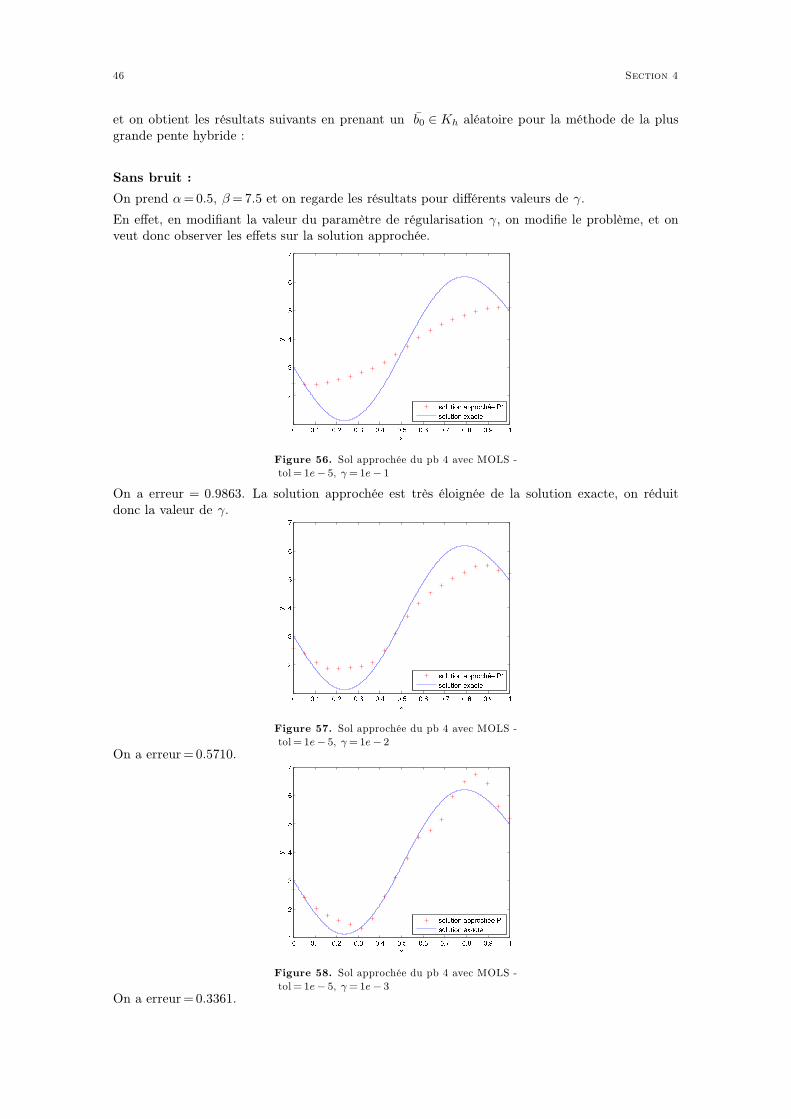
Figure 59. Sol approchée du pb 4 avec MOLS -
tol= 1e− 5, γ = 1e − 4On a erreur= 0.3937.
Figure 60. Sol approchée du pb 4 avec MOLS -
tol= 1e− 5, γ = 1e − 5On a erreur= 0.2036.
La solution approchée semble acceptable, donc on regarde l’allure de uh(ah)
Figure 61. uh(ah), avec ah solution approchée du pb 4 -
tol= 1e− 5, γ = 1e − 5
On voit que uh(ah) est proche de u exacte (pour P1 et P0), donc la méthode a convergé correc-tement, et la valeur de γ est suffisamment petite pour rendre le problème convexe sans avoirtrop d’influence sur la solution.
Avec bruit :
On ajoute un bruit aléatoire inférieur ou égal à 2.5% de la valeur réelle aux mesures de u et f .
On prend γ= 1e− 5, puisque c’est la valeur pour laquelle on a obtenu les meilleurs résultats.
MOLS 47
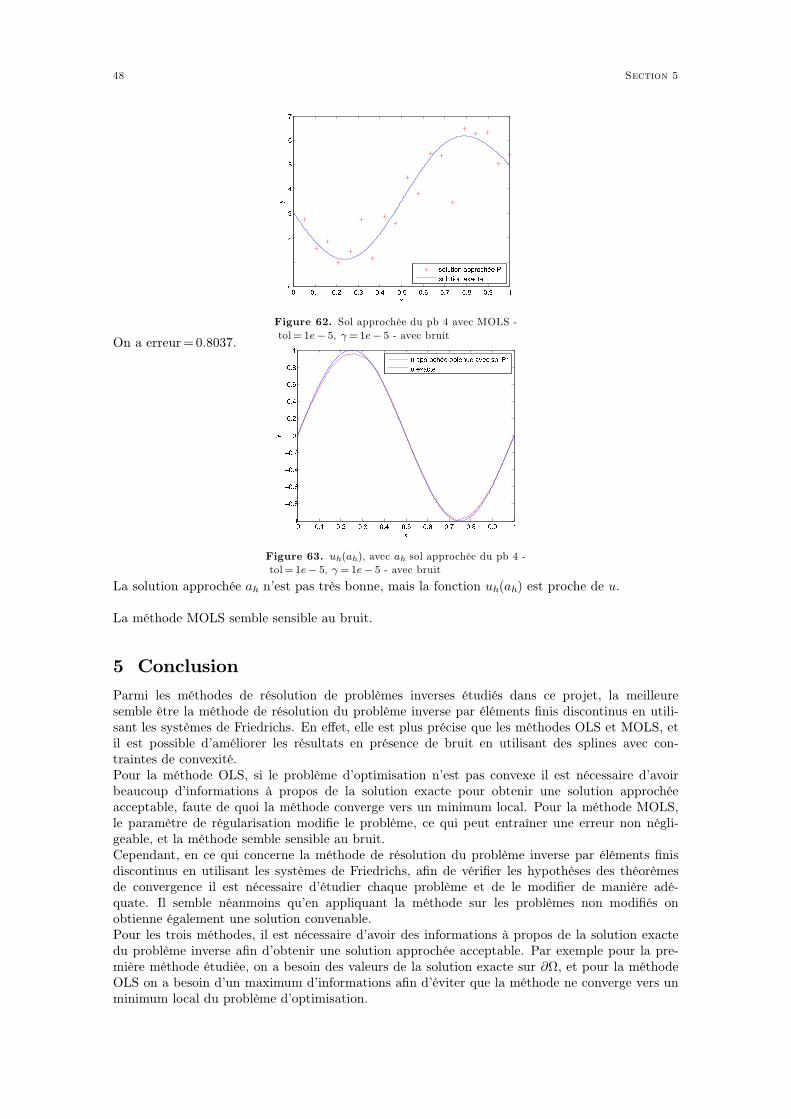
Figure 62. Sol approchée du pb 4 avec MOLS -
tol= 1e− 5, γ = 1e − 5 - avec bruitOn a erreur= 0.8037.
Figure 63. uh(ah), avec ah sol approchée du pb 4 -
tol= 1e − 5, γ = 1e− 5 - avec bruit
La solution approchée ah n’est pas très bonne, mais la fonction uh(ah) est proche de u.
La méthode MOLS semble sensible au bruit.
5 Conclusion
Parmi les méthodes de résolution de problèmes inverses étudiés dans ce projet, la meilleuresemble être la méthode de résolution du problème inverse par éléments finis discontinus en utili-sant les systèmes de Friedrichs. En effet, elle est plus précise que les méthodes OLS et MOLS, etil est possible d’améliorer les résultats en présence de bruit en utilisant des splines avec con-traintes de convexité.Pour la méthode OLS, si le problème d’optimisation n’est pas convexe il est nécessaire d’avoirbeaucoup d’informations à propos de la solution exacte pour obtenir une solution approchéeacceptable, faute de quoi la méthode converge vers un minimum local. Pour la méthode MOLS,le paramètre de régularisation modifie le problème, ce qui peut entraîner une erreur non négli-geable, et la méthode semble sensible au bruit.Cependant, en ce qui concerne la méthode de résolution du problème inverse par éléments finisdiscontinus en utilisant les systèmes de Friedrichs, afin de vérifier les hypothèses des théorèmesde convergence il est nécessaire d’étudier chaque problème et de le modifier de manière adé-quate. Il semble néanmoins qu’en appliquant la méthode sur les problèmes non modifiés onobtienne également une solution convenable.Pour les trois méthodes, il est nécessaire d’avoir des informations à propos de la solution exactedu problème inverse afin d’obtenir une solution approchée acceptable. Par exemple pour la pre-mière méthode étudiée, on a besoin des valeurs de la solution exacte sur ∂Ω, et pour la méthodeOLS on a besoin d’un maximum d’informations afin d’éviter que la méthode ne converge vers unminimum local du problème d’optimisation.
48 Section 5

Bibliographie
[1] C. De Boor. On calculating with b-splines. Journal of Approximation Theory , 1972.
[2] G. Chavent. Identification of distributed parameters. In Proc. 3rd IFAC Sympos. (P.Eykhoff,Ed.),pp.649-660 .
[3] P. Dierckx. An algorithm for cubic spline fitting with convexity constraints. Computing , 1980.
[4] R. Falk. Error estimates for the numerical identification of a variable coefficient. Mathematics of Compu-tation , 1983.
[5] M. S. Gockenbach. Numerical analysis of elliptic inverse problems with interior data. Journal of Physics:Conference Series , 2008.
[6] P. Lesaint. Méthodes d’éléments finis pour les systèmes différentiels du premier ordre symétriques ausens de Friedrichs . EPFL, 1995.
[7] M. Verhaegen M. Gerard, B. De Schutter. A hybrid steepest descent method for constrained convex opti-
mization. Automatica , 2009.
[8] Jun Zou. Numerical methods for elliptic inverse problems. International Journal of Computer Mathema-tics , 1998.
Bibliographie 49