mouvements et liaisons - technologie - collège de la...
TRANSCRIPT
6è
me
S
. Pa
squ
ier –
R. B
ou
rgin
– C
. Po
ug
et
L’an
aly
se e
t la co
nce
ptio
n d
e l’o
bje
t
tech
niq
ue
Mouvem
ents et liaisons
1
Ce que je vais apprendre
Co
nn
aissa
nce
s C
om
pé
ten
ces
Acq
uis
En
cou
rs N
on
acq
uis
Fo
nctio
ns te
chn
iqu
es
Ide
ntifie
r de
s solu
tion
s tech
niq
ue
s qu
i assu
ren
t un
e
fon
ction
tech
niq
ue
.
Mouvements et liaisons
Ca
pa
cité(s) co
nn
aissa
nce
(s) :
- Ide
ntifie
r de
s solu
tion
s tech
niq
ue
s qu
i assu
ren
t un
e fo
nctio
n te
chn
iqu
e.
Situ
atio
n d
écle
nch
an
te :
Tu
do
is ap
pre
nd
re q
ue
les o
bje
ts réa
lisen
t de
s mo
uv
em
en
ts et q
u’il e
xiste d
es lia
ison
s afin
de
réa
liser d
es
fon
ction
s tech
niq
ue
s.
Situ
atio
n(s) P
rob
lèm
e(s) :
�
Qu
’est-ce
qu
’un
mo
uve
me
nt ?
�
Qu
elle
s son
t les d
iffére
nte
s liaiso
ns ?
VO
TRE TR
AV
AIL
�
Co
nsu
lter
les
an
ima
tion
s «
le
s m
éca
nism
es »
p
lacé
s d
an
s le
s
an
ne
xes
�
Ré
po
nd
re a
ux q
ue
stion
s de
s feu
illes ci-a
prè
s
6è
me
S
. Pa
squ
ier –
R. B
ou
rgin
– C
. Po
ug
et
L’an
aly
se e
t la co
nce
ptio
n d
e l’o
bje
t
tech
niq
ue
Mouvem
ents et liaisons
2
Co
nsu
lter
les
an
ima
tion
s «
le
s m
éca
nism
es
»
pla
cés
da
ns
les
an
ne
xes
et
cho
isir la
p
artie
«
Les
mo
uve
me
nts »
1.
Do
nn
er la
dé
finitio
n d
’un
mo
uve
me
nt.
_
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
_
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
2.
Do
nn
er la
dé
finitio
n d
e la
« ro
tatio
n »
ain
si qu
’un
exe
mp
le
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
_
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
_
3.
Do
nn
er la
dé
finitio
n d
e la
« tra
nsla
tion
rectilig
ne
» a
insi q
u’u
n e
xem
ple
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
_
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
_
4.
Do
nn
er la
dé
finitio
n d
u m
ou
ve
me
nt «
hé
licoïd
al »
ain
si qu
’un
exe
mp
le
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
_
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
_
5.
Do
nn
er la
dé
finitio
n d
u m
ou
ve
me
nt d
e «
tran
sform
atio
n cu
rvilig
ne
» a
insi q
u’u
n e
xem
ple
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
_
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
_
6.
En
fon
ction
de
s mo
uve
me
nts q
ue
tu a
s vu
s pré
céd
em
me
nt, co
mp
léte
r le ta
ble
au
ci-
con
tre :
�
En
rep
rése
nta
nt le
typ
e d
e m
ou
ve
me
nt d
e l’é
lém
en
t :
o
Tra
nsla
tion
o
Ro
tatio
n
�
En
ind
iqu
an
t le m
ou
ve
me
nt d
e d
ép
art (ca
use
) et le
mo
uve
me
nt d
’arriv
ée
(résu
ltat)
�
En
coch
an
t les m
ou
ve
me
nts tra
nsm
is (do
nt le
mo
uve
me
nt e
st le m
êm
e a
u d
ép
art e
t à
l’arriv
ée
) ou
tran
smis e
t tran
sform
és (d
on
t le m
ou
ve
me
nt e
st diffé
ren
t en
tre le
dé
pa
rt et
l’arriv
ée
)
6è
me
S
. Pa
squ
ier –
R. B
ou
rgin
– C
. Po
ug
et
L’an
aly
se e
t la co
nce
ptio
n d
e l’o
bje
t
tech
niq
ue
Mouvem
ents et liaisons
3
Ima
ge
s E
lém
en
ts T
yp
e d
e
mo
uve
me
nt
Ca
use
ou
résu
ltat
Tra
nsm
ission
T
ran
smissio
n e
t
tran
sform
atio
n
Se
au
Ré
sulta
t
X
Ma
niv
elle
Ca
use
Se
rrure
Clé
Fo
ret
Mo
teu
r
To
urn
evis
Vis
Vo
iture
Ro
ue
s
6è
me
S
. Pa
squ
ier –
R. B
ou
rgin
– C
. Po
ug
et
L’an
aly
se e
t la co
nce
ptio
n d
e l’o
bje
t
tech
niq
ue
Mouvem
ents et liaisons
4
Co
nsu
lter le
s an
ima
tion
s « le
s mé
can
isme
s » p
lacé
s da
ns le
s an
ne
xes
et ch
oisir la
pa
rtie «
Liaiso
n »
7.
Do
nn
er la
dé
finitio
n d
’un
e lia
ison
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
_
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
_
8.
Do
nn
er u
n e
xem
ple
de
liaiso
n d
ém
on
tab
le
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
_
9.
Do
nn
er u
n e
xem
ple
de
liaiso
n in
dé
mo
nta
ble
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
__
_
Sa
isir da
ns la
ba
rre d
’ad
resse
de
vo
tre n
avig
ate
ur (F
irefo
x) les site
s
�
http
://ww
w.te
chn
osu
pp
ort.fr/m
ed
ia/to
us/lia
ison
s/ind
ex.h
tm?
09
90
57
0e
8d
a4
30
01
23
8ce
73
a0
15
43
51
5=
74
c20
fa8
04
fae
13
0c7
e8
d7
d9
00
af7
88
1
et
�
http
://tech
no
arg
ia.fre
e.fr/cm
s2/?
Te
chn
o:6
%E
8m
e:S
ch%
E9
ma
tisatio
n_
%2
8lia
ison
s%2
9
pu
is ap
pe
ler v
otre
pro
fesse
ur
6è
me
S
. Pa
squ
ier –
R. B
ou
rgin
– C
. Po
ug
et
L’an
aly
se e
t la co
nce
ptio
n d
e l’o
bje
t
tech
niq
ue
Mouvem
ents et liaisons
5
10
. Co
mp
léte
r le ta
ble
au
ci-de
ssou
s
De
ssin d
e la
liaiso
n
No
m d
e lia
ison
D
escrip
tion
E
xem
ple
s
glissiè
re
Se
uls
les
mo
uve
me
nts
en
tran
slatio
n su
r l’axe
X so
nt a
uto
risés
Tiro
ir de
com
mo
de
,
tiroir d
’un
lecte
ur C
D
6è
me
S
. Pa
squ
ier –
R. B
ou
rgin
– C
. Po
ug
et
L’an
aly
se e
t la co
nce
ptio
n d
e l’o
bje
t
tech
niq
ue
Mouvem
ents et liaisons
6
6è
me
S
. Pa
squ
ier –
R. B
ou
rgin
– C
. Po
ug
et
L’an
aly
se e
t la co
nce
ptio
n d
e l’o
bje
t
tech
niq
ue
Mouvem
ents et liaisons
7
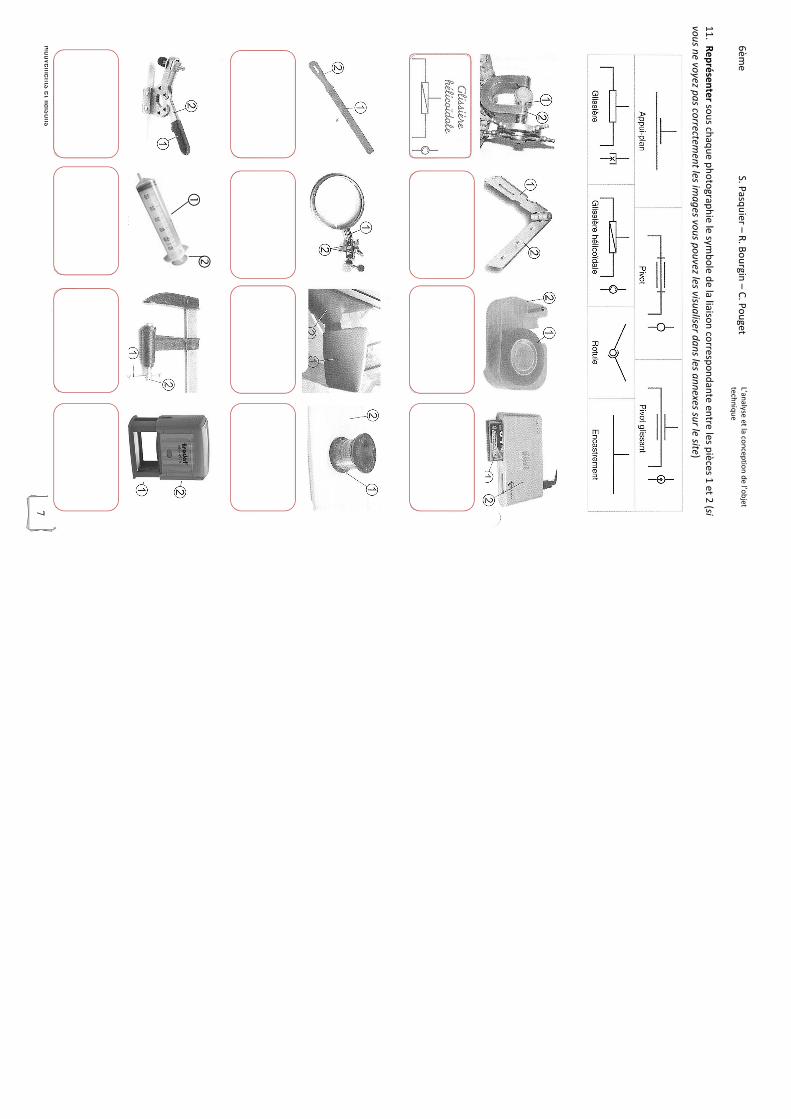
11
. R
ep
rése
nte
r sou
s cha
qu
e p
ho
tog
rap
hie
le sy
mb
ole
de
la lia
ison
corre
spo
nd
an
te e
ntre
les p
ièce
s 1 e
t 2 (si
vo
us n
e v
oye
z pa
s corre
ctem
en
t les im
ag
es v
ou
s po
uve
z les v
isua
liser d
an
s les a
nn
exe
s sur le
site)
�
�