mouvement plan (2d)d'un projectile dans le champ de...
TRANSCRIPT
Mouvement plan (2d)d'un projectile dans le champ de
pesanteur uniforme
Plan
● Dans le manuel
● Bases de l'étude
● Démonstration logicielle, observation.
Etude mécanique
● L'équation différentielle vectorielle
● Le système d'équations différentielles
● Les solutions : un système paramétrique
● L'équation de la trajectoire
Dans le manuel
● Chapitre 13 page 235
● Essentiel page 241
● Exercices 1,2,3, 11,13 p245, 248
g�
g�
Bases de l’étude
Le système, son environement
● L’accélération de la pesanteur est uniforme, on travaille près de la surface terrestre.
● Le vecteur définit la verticale (Le signe de sa coordonnée dépend du choix du vecteur unitaire vertical).
● Pas de frottements, pas de poussée d’Archimède, seule force : le poids.
● Le système, l’objet en mouvement est donc petit et dense : une bille, une balle lourde.
g�
g�
Référentiel
● Le référentiel d’étude est le référentiel terrestre, il est galiléen, les lois de Newton s’appliquent.
g�
Comparaison avec les
chutes freinées.
● Deux dimensions au lieu d’une.
● En l’absence de frottement, la vitesse initiale; la position de départ déterminent toute la suite.
Simulation

Observation de la
simulation
● Il faut viser : La position initiale X0et
Y0, de vitesse V
0(VX0, VY0)
déterminent fortement la trajectoire
● L'absence de frottements fait que le système n'oublie pas les conditions initiales.
● On peut prévoir la trajectoire avec des calculs de TS.
Etude mécanique
Force
● Bilan des forces : le poids de l’objet
Vertical(e)
Vers le bas
Norme
Ecriture vectorielle
P�
P mg=�
______P j=� �
Deuxième loi de Newton
● Rappel
● Quand l’appliquer?
orces appliquées
dm F
dt⋅ =∑
V�
�
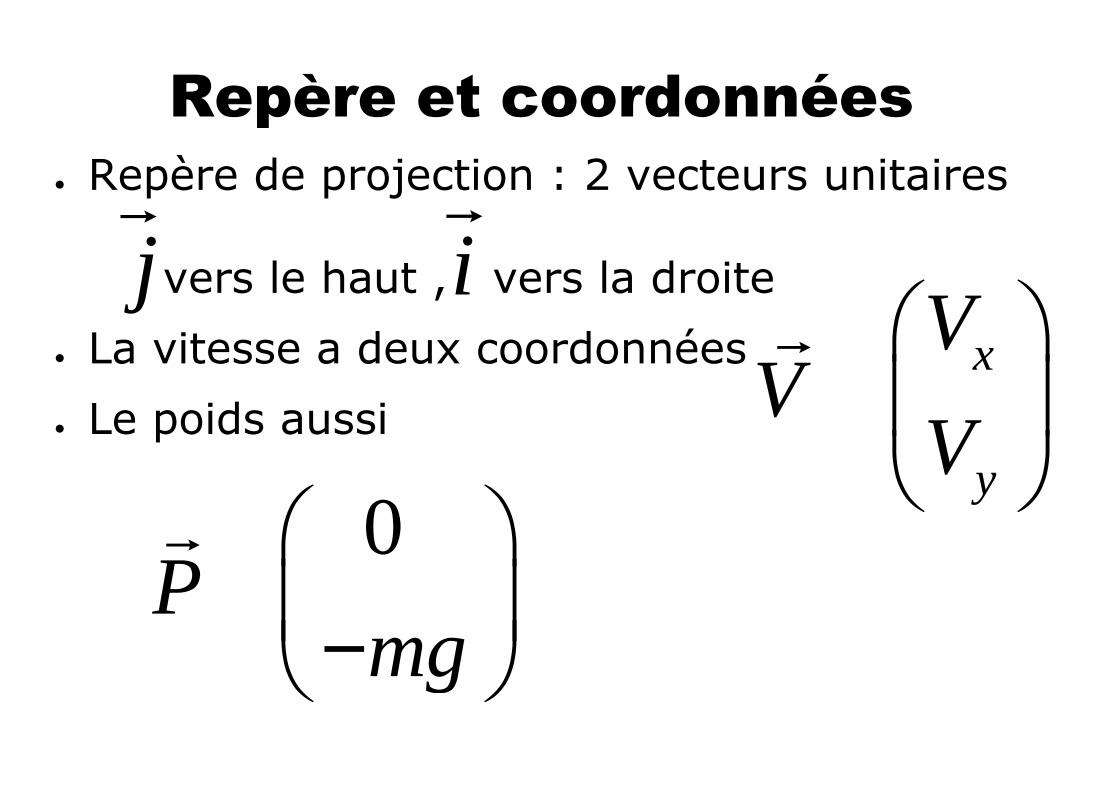
Repère et coordonnées
● Repère de projection : 2 vecteurs unitaires
vers le haut , vers la droite
● La vitesse a deux coordonnées
● Le poids aussi
x
y
VV
V
�
i�
j�
0P
mg
−
�
Newton 2 : équation
vectorielle
d P
dt m=V� �
Le système différentiel
● Projection dans le repère
0.
.
x
y
dVm i i
dtdV
m j mg jdt
= = −
��
��
),( ji�
−=
=
.
0
mgdt
dVm
dt
dVm
y
x
Les coordonnées de la vitesse
● Les solutions sont : constante sur x etaffine sur y
=+−====
)0(.)(
)0(
tVtgtV
tVcteV
yy
xx
−=
=
.
0
gdt
dVdt
dV
y
x

Etape suivante
● Pour passer de la vitesse à la position, on fait l’opération inverse de la dérivation.
( 0)
. ( 0)
x
y
dxV t constante
dtdy
g t V tdt
= = = − + =
Les solutions en x(t),y(t)
● Les expressions de x(t) et y(t) sont appelées lois horaires, au sens de fonctions du temps.
=+=+−=
+==+==
)0().0(2
²)(
.)0().0()( 00
tyttVt
gty
xtVtxttVtx
y
x
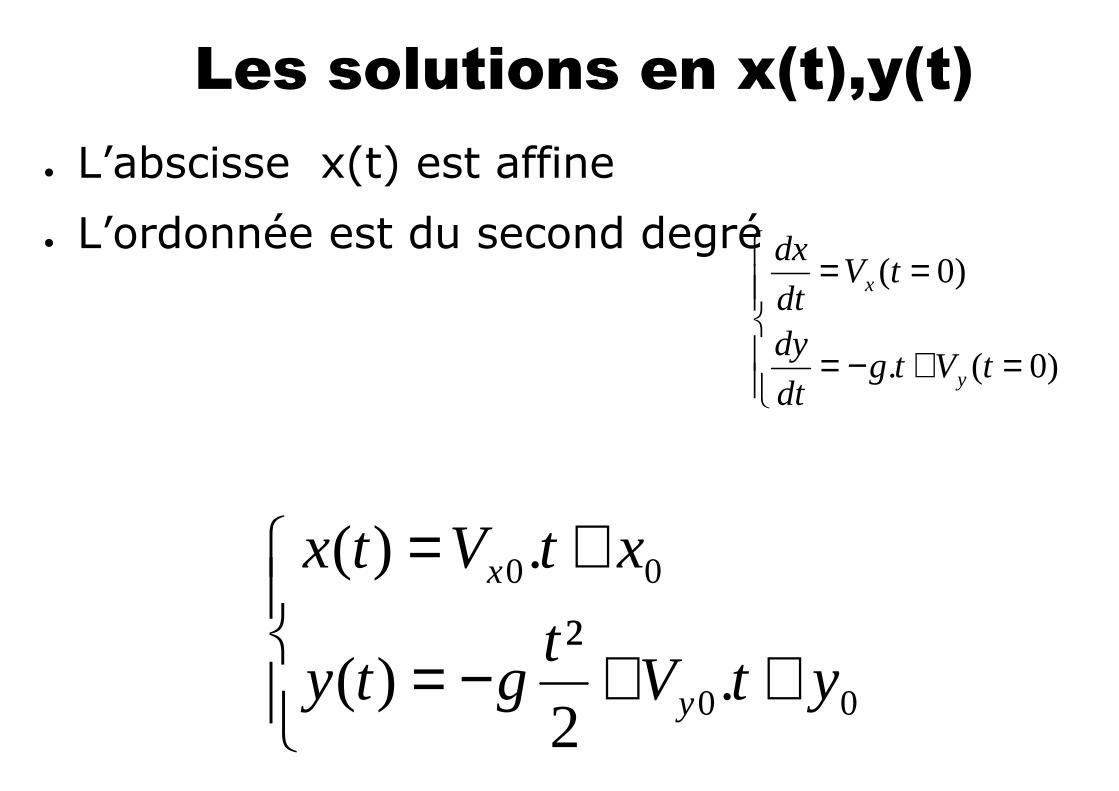
Les solutions en x(t),y(t)
● L’abscisse x(t) est affine
● L’ordonnée est du second degré
=+−=
==
)0(.
)0(
tVtgdt
dy
tVdt
dx
y
x
++−=
+=
00
00
.2
²)(
.)(
ytVt
gty
xtVtx
y
x
La trajectoire
● La trajectoire a pour équation la fonction y=f(x)
● Cette fonction ne contient plus la variable t.
● On passe d’un système paramétrique à une unique équation du second degré avec le terme en x² négatif.
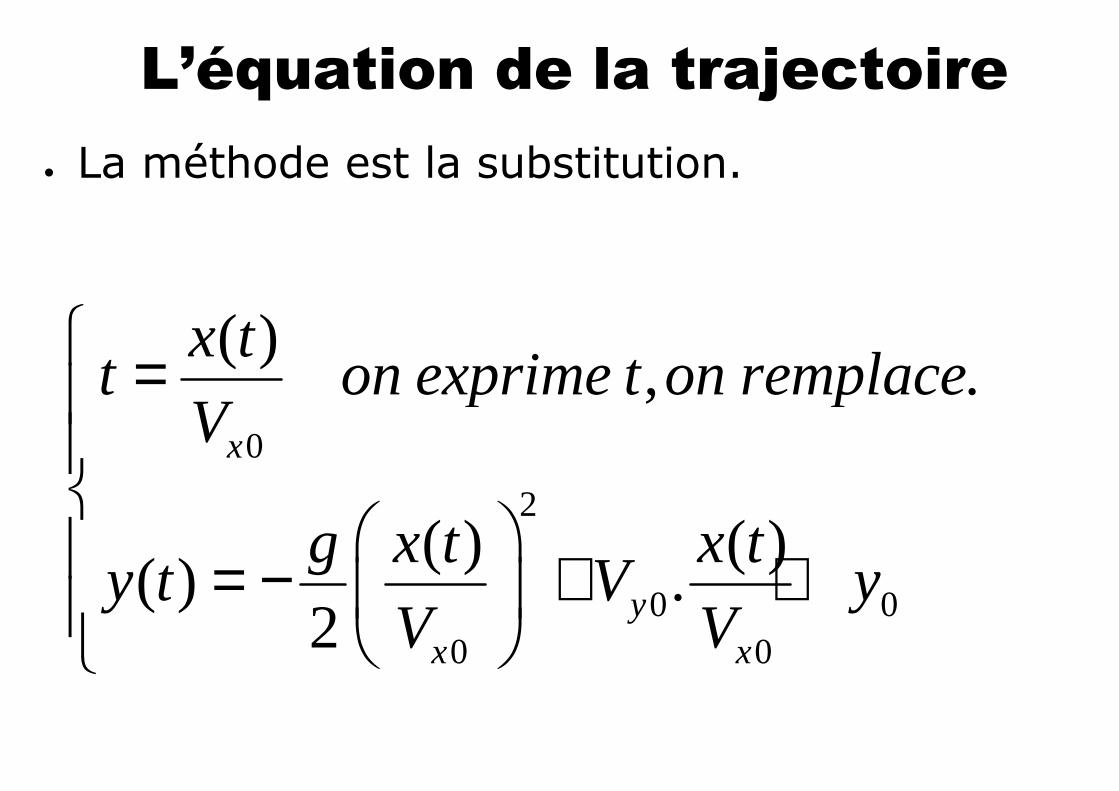
L’équation de la trajectoire
● La méthode est la substitution.
0
2
0 00 0
( ), .
( ) ( )( ) .
2
x
yx x
x tt on exprime t on remplace
V
g x t x ty t V y
V V
=
= − + +
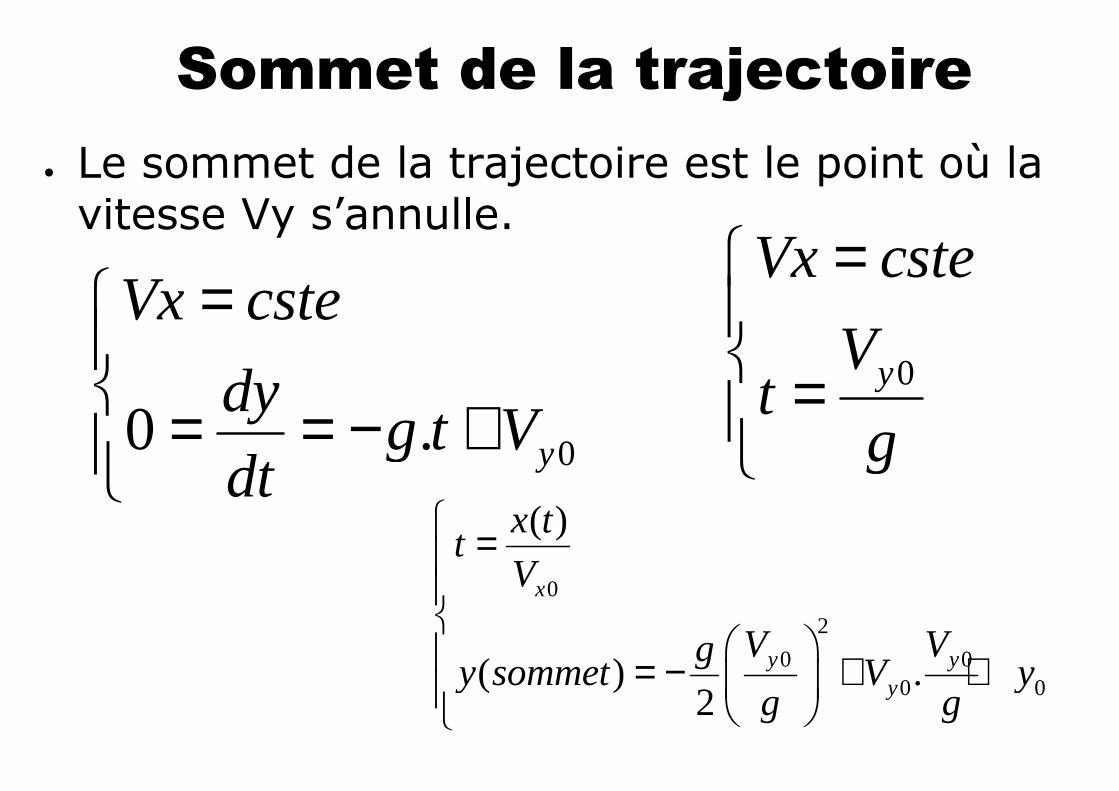
Sommet de la trajectoire
● Le sommet de la trajectoire est le point où la vitesse Vy s’annulle.
00 . y
Vx cste
dyg t V
dt
= = = − +
0y
Vx cste
Vt
g
= =
0
2
0 00 0
( )
( ) .2
x
y yy
x tt
V
V Vgy sommet V y
g g
=
= − + +
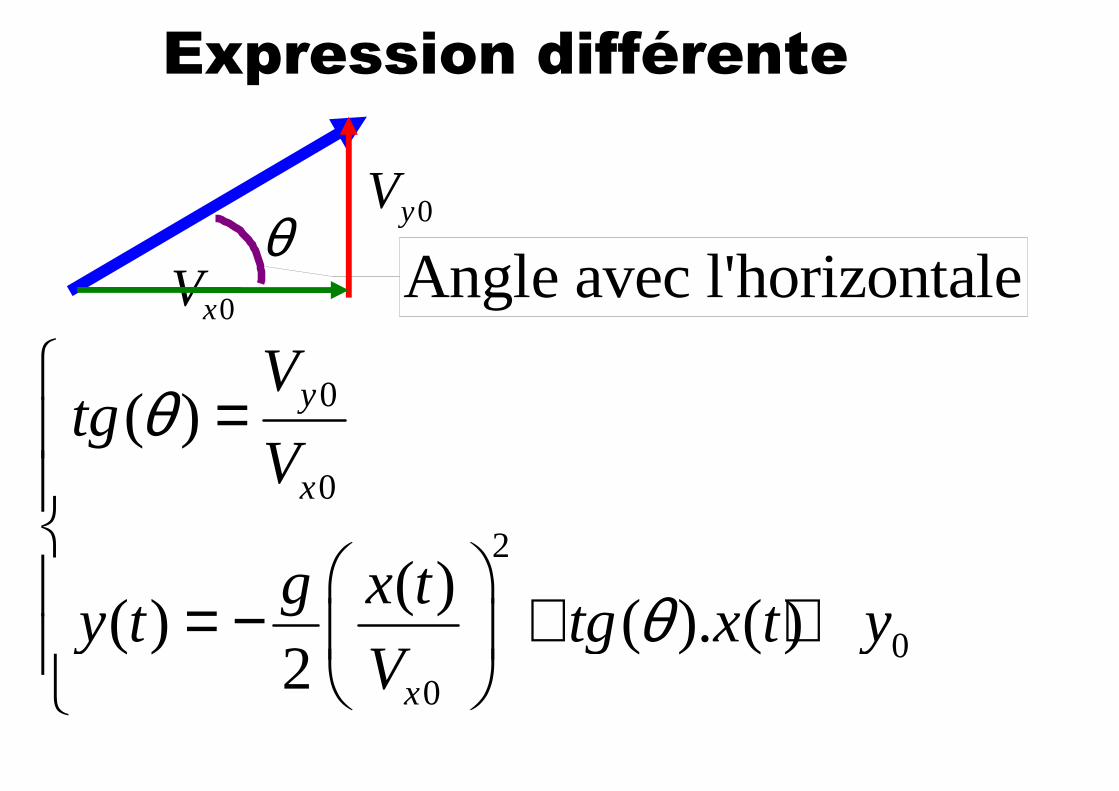
Expression différente
Angle avec l'horizontale
0
0
2
00
( )
( )( ) ( ). ( )
2
y
x
x
Vtg
V
g x ty t tg x t y
V
θ
θ
=
= − + +
θ0xV
0yV