mémoire de s insa spécialité...
TRANSCRIPT
Institut National des Sciences Appliquées de Strasbourg
Mémoire de Soutenance de Diplôme d’Ingénieur INSA
Spécialité TOPOGRAPHIE
Optimisation des techniques de guidage d’engins 2D/3D (niveleuse) par projet MNT sur le chantier de l’autoroute à péage Pikine –
Diamniado (Sénégal) par le système ScanLaser et DPS (Driving Positionning System)
Présenté en Septembre 2011 par Bastien EVON Réalisé au sein de l’entreprise : EIFFAGE Sénégal BP 737 Dakar (Sénégal) Directeur de PFE : Correcteurs :
M. Gallo Seck M. LEDIG Ingénieur Chef de projet M. GRUSSENMEYER
Projet de Fin d’Etudes Eiffage Sénégal Page 1
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
Remerciements
Je tenais à remercier avant tout l’ensemble des personnes qui ont participé au bon déroulement de mon Projet de Fin d’Etudes, et qui m’ont permis de réaliser ce mémoire.
Je témoigne donc toute ma reconnaissance à Messieurs Gallo Seck et Dubois, responsables de mon travail et qui m’ont accueilli au sein de l’entreprise EIFFAGE Sénégal, sur le chantier de l’autoroute à péage Pikine-Diamniado.
Mes remerciements s’adressent également aux correcteurs de mon PFE, à savoir, Mr Ledig et Mr Grussenmeyer.
Remerciement spécial à la direction de l’école INSA de Strasbourg, et à l’ensemble du corps enseignant. De plus, je remercie l’ensemble du personnel avec lesquels j’ai travaillé pour m’avoir intégré dans leur équipe et m'avoir fait partager leurs savoirs faire.
Enfin, je remercie les divers services de l’agence qui m’ont accueilli avec attention et pour la bonne ambiance qui régnait au sein de l’agence, condition nécessaire au bon déroulement d’un chantier.

Projet de Fin d’Etudes Eiffage Sénégal Page 2
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
Introduction
Présent dans le secteur des Travaux Publics, Génie Civil, le groupe EIFFAGE est le 3 ème groupe de BTP de France avec un chiffre d’affaire de 13 milliard d’euros en 2010 pour un effectif d’environ 70 000 personnes. Principalement implanté en France, l’entreprise EIFFAGE a quelques filiales à l’étranger, notamment en Espagne et au Sénégal. C’est sur le chantier de l’autoroute à Péage Pikine-Diamnado (Sénégal) que j’ai réalisé mon Projet de Fin d’Etudes portant sur le guidage des niveleuses par les systèmes ScanLaser et DPS. Ces nouveaux systèmes permettent d’améliorer les rendements donc la rentabilité des chantiers de terrassement. En effet, les méthodes de guidage des engins de chantier connaissent un essor considérable. Les pratiques traditionnelles (par exemple le dispositif des fils) sont souvent remplacées par des techniques moins complexes à organiser, plus performantes et plus sécurisantes. Les données théoriques relatives aux projets à concevoir sont introduites sous format informatique dans un ordinateur portable et traitées de sorte à accomplir un guidage 3D de l’engin en temps réel. La notion de temps réel signifie que l’information doit être disponible, sous forme d’un signal, au moment et à l’endroit où le travail est exécuté, et non pas à posteriori. Le guidage sera donc l’exploitation de données de localisation, dans le but de commander la machine et son outil par rapport à des consignes de référence, de manière instantanée. La transition des systèmes tout optiques vers les stations totales motorisées ou vers le positionnement par GPS génère donc de nouvelles activités pour lesquelles le géomètre topographe occupe un rôle primordial. En effet, les opérations récentes lui demandent des connaissances beaucoup plus larges qu’auparavant, puisque son intervention ne se limite plus à la seule implantation des références, mais s’étend à la maintenance de tout le dispositif de guidage. Sur le chantier, l’entreprise EIFFAGE utilisait déjà avant mon arrivée une niveleuse équipée du système ScanLaser qui avait pour fonction de régler les différentes couches qui constituent les chaussées. Au cours de mon Projet de Fin d’Etudes, une nouvelle niveleuse équipée du système DPS (Driving and Positioning System) développé par la société D&PS, en collaboration avec Leica Geosystems est arrivée sur le chantier. Toutefois, si les résultats obtenus, notamment concernant le réglage des différentes couches par les deux niveleuses par rapport aux exigences requises dans le Cahier des Clauses Techniques Particulières, EIFFAGE doit toujours essayer d’innover pour améliorer encore davantage ses rendements. En effet, les stations motorisées sont en effet encore sujettes à de nombreux désagréments : la visibilité doit être permanente entre le prisme et la station pour un suivi valable, la station est utilisée pour un unique engin, la portée maximale comprise entre 200 et 400 mètres induit des déplacements fréquents de la station… C’est dans ce contexte que s’inscrit le thème de mon mémoire : “ Optimisation des techniques de guidage d’engins 2D/3D (niveleuse) par projet MNT sur le chantier de l’autoroute à péage Pikine-Diamniado (Sénégal) par le système ScanLaser et DPS (Driving Positionning System).

Projet de Fin d’Etudes Eiffage Sénégal Page 3
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
Le sujet qui m’est proposé me place donc dans le rôle bien défini de l’ingénieur géomètre topographe, évoluant au sein d’une entreprise de Travaux Publics. A travers ce sujet, je serai amené à appréhender le milieu des travaux routiers, à faire le point sur les différentes techniques de guidage d’engins qui existent, à acquérir les savoirs propres au système de guidage DPS et ScanLaser afin d’être en mesure de former et manager le personnel du service topographique à ces techniques notamment au travers de formations qui nécessitent la rédaction de fiche procédure. De plus, une étude sur les systèmes de guidage par GPS/GNNS sera réalisée afin de voir s’il peut être intéressant d’équiper une niveleuse de ce système sur le chantier.
Projet de Fin d’Etudes Eiffage Sénégal Page 4
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
Sommaire Remerciements .................................................................................................................... 1
Introduction ......................................................................................................................... 2
Chapitre I : ........................................................................................................................... 6
Application des systèmes de guidage 2D/3D pour niveleuse sur un chantier
d’autoroute .......................................................................................................................... 6
I. Appréhension des travaux de terrassements .................................................................. 6
I.1. Caractéristique d’un chantier linéaire ...................................................................... 6
I.2. Les différents phases de travaux et leurs tolérances ............................................... 6
I.3. Les acteurs et engins d’un chantier de terrassement ............................................... 7
II. Eléments topographiques utiles ...................................................................................... 8
II.1. Système de référence ............................................................................................. 8
II.2. La polygonale .......................................................................................................... 8
II.3. Le matériel .............................................................................................................. 8
Conclusion ....................................................................................................................... 9
Chapitre II ............................................................................................................................10
Le guidage des niveleuses ................................................................................................10
I. Développement du guidage des niveleuses ..................................................................10
II. Système de guidage traditionnelles ...............................................................................11
II.1. Méthodes de guidage manuel ................................................................................11
II.2. Méthode de guidage en 2D par l’utilisation de capteurs lasers ou de palpers
ultrasons ...........................................................................................................................11
III. Système de guidage 3D pour niveleuse ....................................................................14
Conclusion ......................................................................................................................18
Chapitre III ...........................................................................................................................19
Etude des systèmes de guidage 3D pour niveleuse utilisant des stations totales
motorisées ..........................................................................................................................19
I. Le système DPS............................................................................................................19
I.1. Présentation des différentes composantes et caractéristiques du système ............21
I.2. Mise en place de ce système .................................................................................23
I.2.1. Saisie des données .........................................................................................23
I.2.2. Mise en place de la station totale ....................................................................25
I.2.3. Mise en route de la niveleuse ..........................................................................28
I.3. Performances de ce système de guidage ...............................................................33
II. Le système ScanLaser ..................................................................................................33
II.1. Présentation des différentes composantes et caractéristiques du système ............34
Projet de Fin d’Etudes Eiffage Sénégal Page 5
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
II.2. Mise en place de ce système .................................................................................36
II.2.1. Saisie des données .........................................................................................36
II.2.2. Mise en place de la station totale ....................................................................36
II.2.3. Mise en route de la niveleuse ..........................................................................39
II.3. Performances de ce système de guidage ...............................................................42
III. Comparaison système DPS et ScanLaser .................................................................42
Conclusion ......................................................................................................................43
Chapitre IV ..........................................................................................................................43
Etude en vue de l’adaptation d’un système de guidage 3D pour niveleuse par
GPS/GNSS ..........................................................................................................................43
I. Principe général de fonctionnement ..............................................................................44
II. Les différentes propositions des constructeurs ..............................................................45
III. La solution retenue ....................................................................................................47
Conclusion ......................................................................................................................47
Chapitre V ...........................................................................................................................48
Le Management ..................................................................................................................48
I. Organisation du Service de Topographie ......................................................................48
II. Gestion du temps ..........................................................................................................49
II.1. Technique ..............................................................................................................49
II.2. Autre ......................................................................................................................49
III. Planification ...............................................................................................................50
III.1. Planification à court terme ......................................................................................50
III.2. Planification à long terme .......................................................................................50
IV. Décisions et objectifs .................................................................................................51
IV.1. Décisions ...............................................................................................................51
IV.2. Objectifs .................................................................................................................51
V. Formation du personnel .................................................................................................52
Conclusion ......................................................................................................................52
Conclusion générale ..........................................................................................................53
Table des illustrations ........................................................................................................55
Bibliographie ......................................................................................................................58
Annexes ..............................................................................................................................59
Projet de Fin d’Etudes Eiffage Sénégal Page 6
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
Chapitre I :
Application des systèmes de guidage 2D/3D pour niveleuse sur un chantier d’autoroute
I. Appréhension des travaux de terrassements
I.1. Caractéristique d’un chantier linéaire
La géométrie d’un projet linéaire comme une route ou une voie ferroviaire est définie par trois types d’éléments caractéristiques simples : - L’axe en plan - Le profil en long - Les profils en travers L’axe en plan correspond à la projection du projet sur un plan horizontal. Le mode de projection retenu correspond généralement à la représentation associée au système légal. L’axe en plan est constitué d’une succession d’alignements droits reliés entre eux par des arcs de cercles ou des clothoïdes. Le profil en long peut être défini comme la projection de l’axe du projet sur la « nappe » verticale qui suit l’axe en plan. Si l’axe en plan correspond à un segment droit, le profil en long est alors la projection du projet sur un plan vertical défini par ce segment. Il est constitué de rampes (déclivité positive) et de pentes (déclivité négative) raccordées par des arcs de cercles ou des paraboles. Les profils en travers représentent la coupe du projet suivant un plan perpendiculaire à l’axe. L’ensemble de ces éléments est défini dans un système de référence qui permet aux topographes d’implanter sur le chantier le projet.
I.2. Les différents phases de travaux et leurs tolérances
Sur le chantier de l’autoroute à péage Pikine-Diamnado, les niveleuses sont utilisées sur différentes phases de travaux. Pour chaque phase s de travaux, le maître d’ouvrage a défini des tolérances en fonction des matériaux utilisés selon les différentes couches que l’entreprise EIFFAGE devra respecter.
Projet de Fin d’Etudes Eiffage Sénégal Page 7
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
Phase de travaux Tolérance définies par Maître d’ouvrage
Arase terrassement (+/-) 5 cm en précision altimétrique
(+) 15 cm en planimétrie
Partie supérieure terrassement 1 (+/-) 5 cm en précision altimétrique
(+) 10 cm en planimétrie
Partie supérieure terrassement 2 (+/-) 5 cm en précision altimétrique
(+) 10 cm en planimétrie
Couche de Forme (-) 3 cm à (+) 2 cm en précision altimétrique
(+) 10 cm en planimétrie
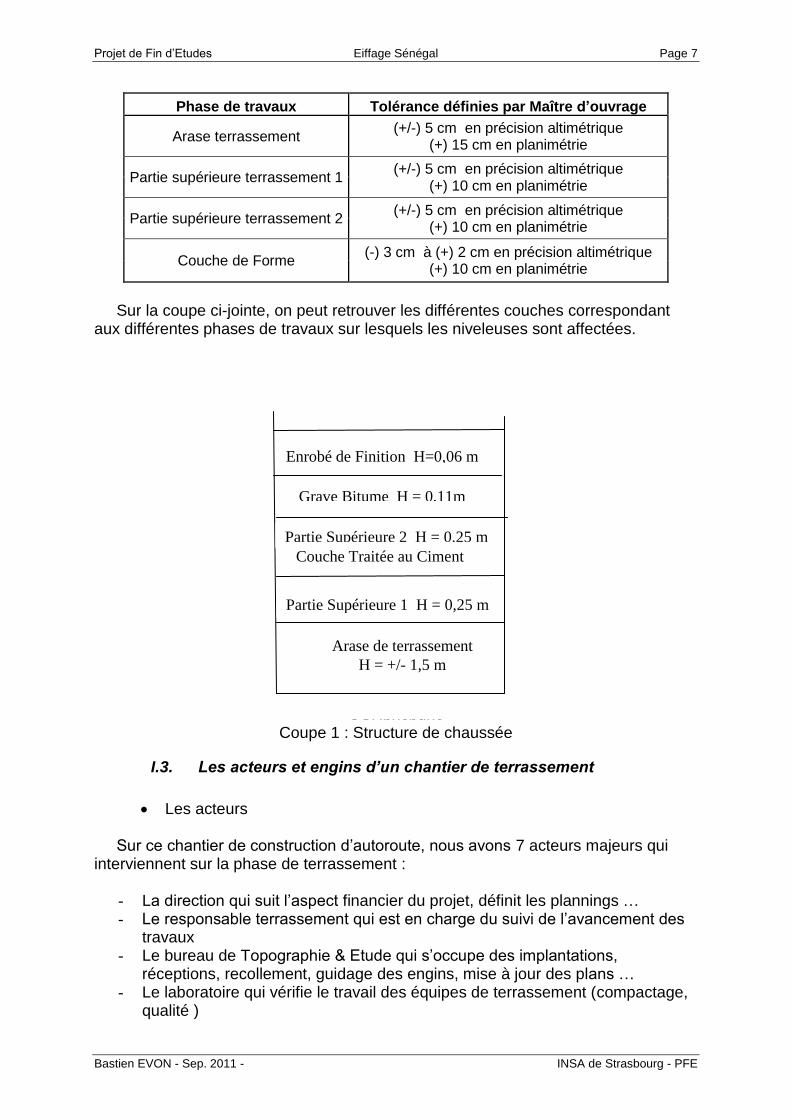
Sur la coupe ci-jointe, on peut retrouver les différentes couches correspondant aux différentes phases de travaux sur lesquels les niveleuses sont affectées.
CCHbhcbdhc Coupe 1 : Structure de chaussée
I.3. Les acteurs et engins d’un chantier de terrassement
Les acteurs
Sur ce chantier de construction d’autoroute, nous avons 7 acteurs majeurs qui interviennent sur la phase de terrassement :
- La direction qui suit l’aspect financier du projet, définit les plannings … - Le responsable terrassement qui est en charge du suivi de l’avancement des
travaux - Le bureau de Topographie & Etude qui s’occupe des implantations,
réceptions, recollement, guidage des engins, mise à jour des plans … - Le laboratoire qui vérifie le travail des équipes de terrassement (compactage,
qualité )
Arase de terrassement
H = +/- 1,5 m
Partie Supérieure 1 H = 0,25 m
Partie Supérieure 2 H = 0,25 m
Couche Traitée au Ciment
Grave Bitume H = 0,11m
Enrobé de Finition H=0,06 m
Projet de Fin d’Etudes Eiffage Sénégal Page 8
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
- La sécurité qui a pour mission de vérifier que le travail se fait dans des conditions de sécurité optimale.
- L’atelier mécanique qui gère le parc matériel du chantier (entretien, réparation)
- Le maître d’œuvre qui suit l’avancement du chantier et qui vérifie que le travail est réalisé dans les conditions définies dans les divers cahiers des charges.
Les engins Le chantier dispose des engins de terrassement suivant :
- Pelles hydrauliques de tonnage différent - Niveleuses - Bulldozers - Camions et Citernes - Chargeurs - Véhicules utilitaires
II. Eléments topographiques utiles
II.1. Système de référence
Le système 3D de référence utilisé sur ce chantier au Sénégal est le W.G.S 84 (World Géodétic System). Il est associé à l’ellipsoïde de révolution WGS 84. Ses caractéristiques sont les suivantes : a = 6 378 137 m 1 / f = 298,25722357 Méridien origine : Greenwich
II.2. La polygonale
La polygonale de base est constituée de borne en béton qui ont été mises en place sur l’ensemble du chantier à l’aide d’un théodolite par les équipes de topographie de l’agence EIFFAGE Sénégal. Ces bornes sont connues avec une précision millimétrique en planimétrie ainsi qu’en altimétrie. Néanmoins, ces bornes étant distantes de l’ordre de 400m, il est parfois nécessaire de créer de nouvelles bornes pour des besoins spécifiques. Sachant que la précision planimétrique demandée est généralement de l’ordre de 10 cm, les coordonnées planimétriques de ces nouvelles bornes sont déterminées en planimétrie à l’aide du GPS et en altimétrie à partir d’un nivellement direct encadré entre deux repères connus afin de conserver la précision millimétrique en Z.
II.3. Le matériel
Le service de topographie dispose du matériel suivant :
- 2 GPS Leica GS 10 qui sont utilisés pour effectuer les implantations, état des lieux, réceptions topographiques …
Projet de Fin d’Etudes Eiffage Sénégal Page 9
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
- 3 Stations Totales Leica qui sont affectées à une équipe en charge des travaux de génie civil, une équipe pour les réceptions des enrobés et à une équipe en charge des réceptions couche de forme
- 2 Stations totales Leica associées à chacun des systèmes de guidage d’engins DPS et ScanLaser
- 1 niveau de chantier Leica pour effectuer les travaux de nivellement - 4 postes informatiques pour les projeteurs du service de topographie
Conclusion
L’opportunité qui m’a été donnée de pouvoir réaliser mon Projet de Fin d’études sur un chantier de construction d’autoroute m’a permis de découvrir le milieu des travaux routiers et tout particulièrement les spécificités des travaux de terrassement. Depuis les matériaux mis en œuvre en passant par les structures de chaussée et les engins utilisés sur le chantier, j’ai pu acquérir de nouveaux savoir liés à ce secteur d’activité. De plus, l’intégration du service de topographie m’a permis de découvrir de nouveaux matériels et méthodes de travail relatifs à des chantiers importants mais également liés au pays où se situe ce chantier à savoir le Sénégal
Projet de Fin d’Etudes Eiffage Sénégal Page 10
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
Chapitre II
Le guidage des niveleuses
- Froissard, C., [2001], Guidage d’une niveleuse et d’un finisseur / Evolution
d’un système par station robotisée vers un procédé par GPS, Mémoire d'ingénieur de l'ESGT, spécialité Topographie, 68 p.
- JOURDAN, O., [2000], La topographie moderne au service des chantiers de terrassement, Mémoire d'ingénieur de l'ESGT, spécialité Topographie, 59 p.
I. Développement du guidage des niveleuses
Sur les chantiers de terrassement, les niveleuses sont utilisées afin d’effectuer le réglage de plate-forme. Ce réglage doit être réalisé en respectant aux tolérances prés, les cotes définies par le projet. Ces tolérances sont de l’ordre du centimètre (Exemple, pour la couche de forme, le réglage doit être effectué avec une tolérance de -3/+2 en cm) Différentes méthodes ont été mises en œuvre afin d’assister les niveleuses dans leur travail. Tout d’abord, une méthode consiste à implanter des piquets d’axes et de bords de chaussée, puis des manœuvres indiquent au gradériste la cote à tenir. L’idée de localiser et de guider la niveleuse sur les chantiers de terrassement pour les automatiser à terme, a commencé à prendre forme en 1980. Pour pouvoir guider un engin, il faut tout d’abord disposer d’un système de localisation suffisamment précis et qui puisse travailler en temps réel. De nombreux capteurs ont alors été utilisés comme les palpeurs à ultrasons et les lasers. Ce type de guidage a permis de faire un grand pas en avant car il impose à la lame de se caler parfaitement au projet et en tout point. Cependant les limites de ces capteurs qui ne permettent que du guidage en « pseudo 3D » ont amené les constructeurs à utiliser les stations totales motorisées et tout récemment le GPS afin de proposer de véritables systèmes de guidage en 3D. On peut raisonnablement penser que ces nouveaux systèmes sont amenés à révolutionner le guidage des machines sur les chantiers. De plus, une attention doit être portée à la formation des différents utilisateurs du système. Les entreprises de travaux publics ont bien compris l’intérêt représenté par l’utilisation d’un tel système. C’est dans ce sens qu’ils souhaitent optimiser l’emploi de ces systèmes sur leurs chantiers.
Projet de Fin d’Etudes Eiffage Sénégal Page 11
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
II. Système de guidage traditionnelles
II.1. Méthodes de guidage manuel
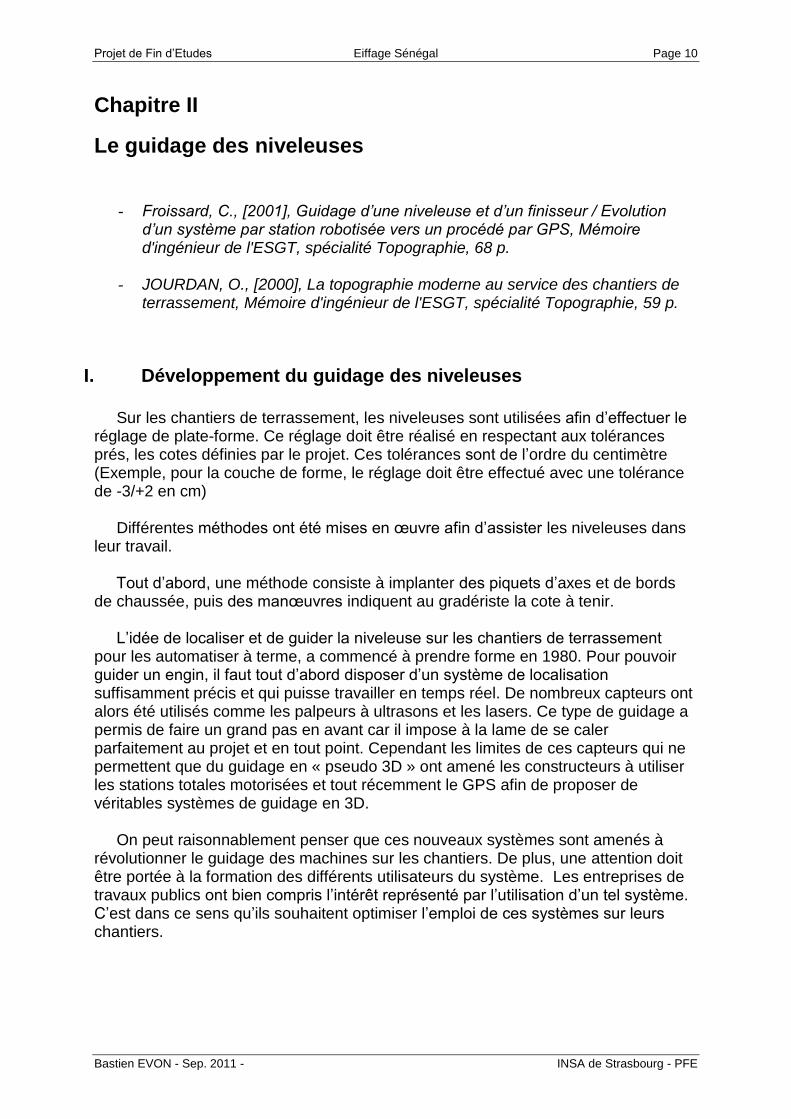
Les premières méthodes utilisées pour le guidage intégraient l’aide de manœuvres qui indiquaient au gradériste l’écart entre le projet et la zone réglée en prenant comme référence les piquets d’axe et des bords de chaussée implantées par les géomètres. Afin de calculer cet écart, l’une des méthodes est celle des nivelettes. Pour la méthode des nivelettes, trois manœuvres sont nécessaires. Le premier place la nivelle mère (1) sur un des piquets, le deuxième se place sur l’autre piquet avec une nivelette fille (2) et le troisième pose l’autre nivelette fille (3) sur le terrain et de façon visuelle à l’aide d’une graduation, on connaît la cote à descendre ou à monter pour atteindre le projet. Cette cote est indiquée au gradériste.
Figure 1 : Principe fonctionnement méthode des nivelettes
II.2. Méthode de guidage en 2D par l’utilisation de capteurs lasers ou de palpers ultrasons
Ces méthodes de guidage ont permis une grande avancée dans le réglage par niveleuse. Elles permettent de se passer des indications des manœuvres car le gradériste les obtient grâce à un contrôleur installée dans sa machine. De plus elles permettent un asservissement de la niveleuse. Ce sont les constructeurs AGTEK (aujourd’hui filiale de Topcon) et son système « System Four Plus » et Spectra Precision et son système « Blade Pro » qui ont développé ces méthodes de guidage.
Palpeurs ultrasons
Cette méthode consiste à utiliser une surface comme référence altimétrique et planimétrique pour la niveleuse qui est munie de capteurs ultrasons. Cette surface peut être une bordure de trottoir, mais le plus souvent c’est un fil en kevlar (Fibre légère et résistante) qui est utilisé.
Les fils sont installés parallèlement à l’axe de la voie de part et d’autre de la chaussée. Ils sont tendus entre deux piquets qui sont implantés par les géomètres. Afin de limiter les effets de chaînette et de facettes, les piquets doivent être distants de 10 m maximum.
Projet de Fin d’Etudes Eiffage Sénégal Page 12
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
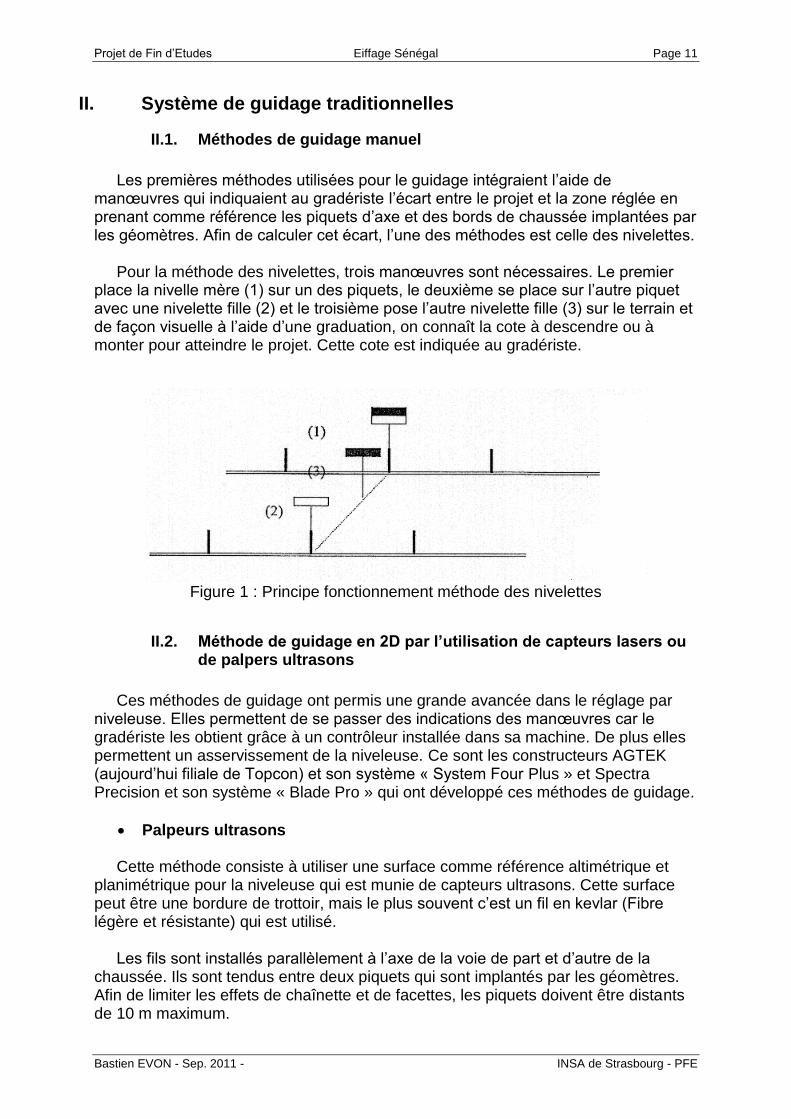
La mise en place de cette méthode s’effectue comme ceci : 1) Implantation des piquets en altimétrie 2) Pose d’un tube qui sert de support au fil 3) Nivellement des piquets 4) Mise en place du fil en le tendant à une tension suffisante Cette méthode demande un travail préparatoire important
Figure 2 : Principe de fonctionnement des palpeurs ultrasons
En mesurant le temps mis par l’écho pour revenir, le système connait la distance entre le palpeur ultrason et le fil.
Capteurs lasers
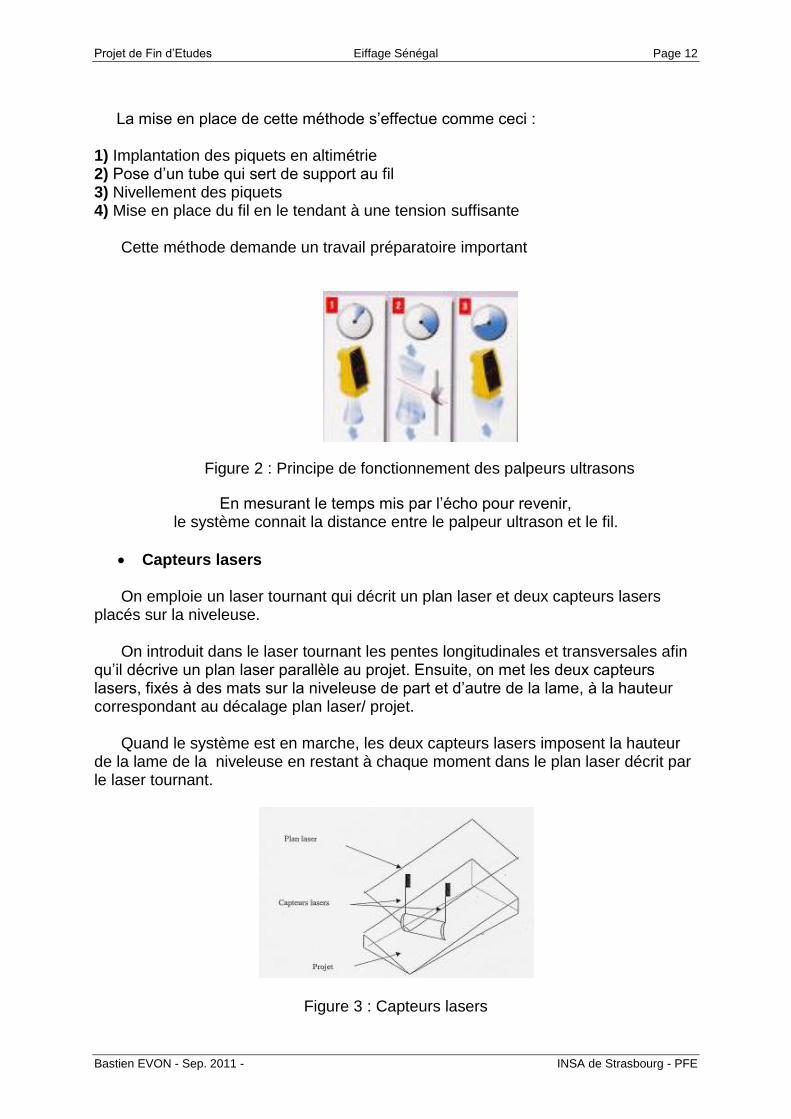
On emploie un laser tournant qui décrit un plan laser et deux capteurs lasers placés sur la niveleuse. On introduit dans le laser tournant les pentes longitudinales et transversales afin qu’il décrive un plan laser parallèle au projet. Ensuite, on met les deux capteurs lasers, fixés à des mats sur la niveleuse de part et d’autre de la lame, à la hauteur correspondant au décalage plan laser/ projet. Quand le système est en marche, les deux capteurs lasers imposent la hauteur de la lame de la niveleuse en restant à chaque moment dans le plan laser décrit par le laser tournant.
Figure 3 : Capteurs lasers
Projet de Fin d’Etudes Eiffage Sénégal Page 13
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
Un grand soin doit être apporté lors du calage de l’orientation du laser tournant. Ce calage se fait sur des points connus. Le laser peut permettre des portées de 200 m. Cependant, cette méthode n’est pas parfaite car pour les projets où le changement de pente est fréquent (dans des paraboles, des courbes) le laser tournant doit être souvent déplacé puisque les plans lasers changent fréquemment. De plus il est difficile de travailler avec un laser tournant en cas de forts vents car ils y sont très sensibles.
Méthode de guidage en «pseudo 3D »
C’est le constructeur Topo Laser System et son système de guidage RCS (Road Control System) qui a développé cette méthode. Ce système utilise, en plus du laser, une roue codeuse et plus récemment un GPS afin de connaître la position planimétrique de la machine, l’information altimétrique étant toujours obtenue par le laser. Pour collecter ces informations, c’est le boîtier « Blade Pro » de chez Spectra Précision qui a été choisi. La niveleuse est guidée automatiquement en comparant par le biais d’un calculateur la différence entre les informations récoltées par le boîtier « Blade Pro » et celles rentrées préalablement. Le travail de préparation consiste donc à calculer les écarts tous les mètres entre les plans lasers de référence et les cotes de la couche à réaliser. Il convient aussi d’implanter les stations lasers et les points nécessaires à son orientation. Pour cette méthode, il est conseillé d’utiliser trois lasers tournants pour que l’atelier réglage travaille en continu : un en fonctionnement, un en attente et l’autre en déplacement. Ce système est le premier qui prend en compte les variations du profil en long en permettant un positionnement planimétrique de la machine. Par contre, les inconvénients sont ceux que nous avons vus précédemment pour la méthode de guidage en 2D utilisant le laser. Les changements de pente fréquents imposent des portées lasers réduites et donc des stations lasers rapprochées. Dans le cas où ce système utilise une roue codeuse, l’inconvénient majeur est que la machine doit avoir le projet comme axe de progression. Il est difficile d’utiliser une roue codeuse pour une niveleuse qui opère en plusieurs passes avec des mouvements de va-et-vient. De plus le système ne prend pas en compte les défauts d’adhérence où la roue tourne dans le vide en entraînant des décalages dans le profil en long. Il convient donc de faire des contrôles fréquents pour vérifier qu’il n’y a pas de décalage.
Projet de Fin d’Etudes Eiffage Sénégal Page 14
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
III. Système de guidage 3D pour niveleuse
Ces systèmes utilisent des stations totales motorisées et plus récemment le GPS comme capteurs. Ces instruments topographiques modernes permettent de localiser en temps réel la lame de la niveleuse. Cette localisation est bien entendue réalisée en altimétrie et en planimétrie. A partir de ces données, les systèmes sont capables de guider la niveleuse en comparant instantanément la position réelle de la lame et sa position théorique définie par le projet. L’idée directrice de ces systèmes est de tendre vers une intégration de la chaîne projet – réalisation - contrôle, en dotant les niveleuses d’une « mémoire » contenant le projet et les asservissant, ou du moins renseignant les conducteurs sur la situation de l’engin par rapport au projet. L’asservissement de la lame de la niveleuse en 3D est réalisé de telle façon qu’elle soit positionnée altimétriquement à la cote du projet quelque soit sa position planimétrique. La station totale motorisée ou le GPS mesure en temps réel la position d’un coin de lame. Des capteurs montés sur la machine (capteurs de rotation, de dévers, de profil en long, d’inclinaison de lame et d’articulation) permettent de localiser l’autre extrémité de la lame.
Détermination de la position de la lame dans l’espace :
Les données à connaître pour son asservissement sont la position d’un point de la lame, la pente transversale et l’angle de rotation planimétrique. Ces données sont suffisantes pour positionner la lame, mais on peut avoir besoin également de connaître l’inclinaison de la lame (pas nécessaire si le gradériste utilise toujours le même angle d’attaque), la variation de profil en long (pour prévoir les variations de hauteur et les perturbations altimétriques) et l’angle d’articulation de la poutre (si la niveleuse ne marche pas en ligne mais en crabe ou en articulation).
Pour collecter ces données, des capteurs sont montés sur la machine :

Projet de Fin d’Etudes Eiffage Sénégal Page 15
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
Figure 4 : Les différents capteurs d’une niveleuse
La position du coin de la lame est déterminée par le GPS ou la station totale. A partir de là, on calcule la position de la lame : - En planimétrie : avec le capteur de rotation et le capteur de dévers. - En altimétrie : avec le capteur de dévers. Si le gradériste utilise un angle d’attaque variable, le capteur d’inclinaison intervient pour la position altimétrique de la lame.
Projet de Fin d’Etudes Eiffage Sénégal Page 16
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
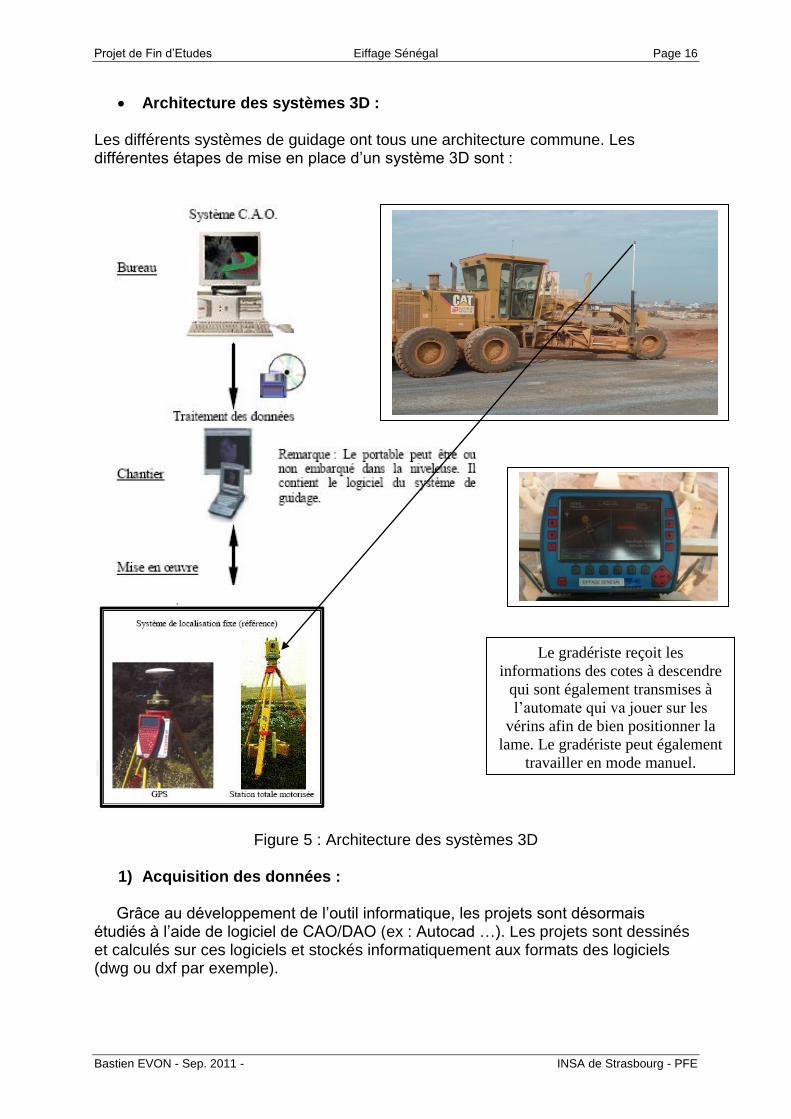
Architecture des systèmes 3D :
Les différents systèmes de guidage ont tous une architecture commune. Les différentes étapes de mise en place d’un système 3D sont :
Figure 5 : Architecture des systèmes 3D
1) Acquisition des données :
Grâce au développement de l’outil informatique, les projets sont désormais étudiés à l’aide de logiciel de CAO/DAO (ex : Autocad …). Les projets sont dessinés et calculés sur ces logiciels et stockés informatiquement aux formats des logiciels (dwg ou dxf par exemple).
Le gradériste reçoit les
informations des cotes à descendre
qui sont également transmises à
l’automate qui va jouer sur les
vérins afin de bien positionner la
lame. Le gradériste peut également
travailler en mode manuel.
Projet de Fin d’Etudes Eiffage Sénégal Page 17
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
2) Traitement des données :
Les données dont dispose le chantier sont transformées à l’aide du logiciel du système de manière à les mettre au bon format. Le projet est aussi découpé pour des raisons de stockage en plusieurs fichiers correspondant à différentes zones de réglage. Ces zones sont d’environ 3 km de long et disposent d’une bande de recouvrement de 200m. A partir de ces données, le logiciel va créer des modèles numériques de terrain. Le logiciel des systèmes 3D est le centre nerveux du système. Il doit non seulement comparer en temps réel les coordonnées du projet et celles obtenues par le système de localisation, mais aussi traiter ces informations et les retransmettre pour le guidage.
3) Mise en route du système :
Sur le terrain, il faut charger dans le logiciel le fichier correspondant à la zone que l’on souhaite régler. Ensuite, il faut mettre en station le système de localisation (GPS ou station totale) et bien paramétrer les différents éléments dans le logiciel : paramétrage de l’automate, des constantes de la niveleuse (hauteur de mat et largeur de lame), et son sens de progression. A partir de là, le gradériste peut commencer son réglage. Les avantages de ces systèmes sont nombreux. Au niveau économique, ils permettent des rendements et une qualité de travail accrus, d’éviter les erreurs, et d’augmenter la productivité. Au niveau de la sécurité sur les chantiers, ils évitent la lassitude des travaux répétitifs, limitent le nombre de personnes impliqués sur le chantier et facilitent le contrôle et la gestion des engins. Au niveau des systèmes de localisation, il faut noter que l’utilisation du GPS n’est pas encore généralisée. Les stations totales motorisées sont elles bien adaptées à ces systèmes. La limitation de leurs vitesses angulaires maximales nécessite de se tenir à une distance minimale, dépendant des caractéristiques de la station, pour ne pas perdre le signal. Leurs précisions angulaires et de leurs distancemètres permettent des portées de 300 mètres de chaque côté de la station. Afin d’optimiser la zone de réglage, il convient donc de se mettre en station, quand on le peut, à 30 mètres du bord de la zone de réglage dans un endroit qui permet de couvrir une zone de 600m. Tous les logiciels utilisés par ces systèmes permettent de faire des stations libres, c’est à dire de calculer les coordonnées d’une station à partir d’au minimum deux points connus. Cela permet une plus grande liberté dans le choix de la station car on n’est pas obligé de faire une station sur un point connu.
Projet de Fin d’Etudes Eiffage Sénégal Page 18
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
Conclusion
Les systèmes de guidage d’engin ont fortement évolué durant ces 20 dernières années. En effet, avant de parvenir à des systèmes de guidage d’engin 3D, des systèmes de guidage plus traditionnels ont été utilisés notamment basés sur la méthode des nivelettes ainsi que des systèmes 2D qui fonctionnent soit à partir de capteur laser ou de palpeur à ultrason. L’utilisation des systèmes 3D est associée à un asservissement de la lame de la niveleuse rendu possible par un contrôle des vérins hydrauliques de la lame. A partir d’un projet réaliser sur ordinateur et en intégrant ce projet à la niveleuse, le conducteur dispose de l’ensemble des éléments, à savoir hauteur de remblais ou déblais par rapport au projet à régler. Ceci lui permet d’accroître la rapidité et la qualité de son travail par rapport au système plus ancien.
Projet de Fin d’Etudes Eiffage Sénégal Page 19
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
Chapitre III
Etude des systèmes de guidage 3D pour niveleuse utilisant des stations totales motorisées
- Leica, [ - ], Leica Power Tracker Manuel de l’utilisateur, France
- Leica, [2008], UMC 3D , France
- D&P Systems SARL, [ - ], Manuel de l’utilisateur DPS Projet, France
I. Le système DPS
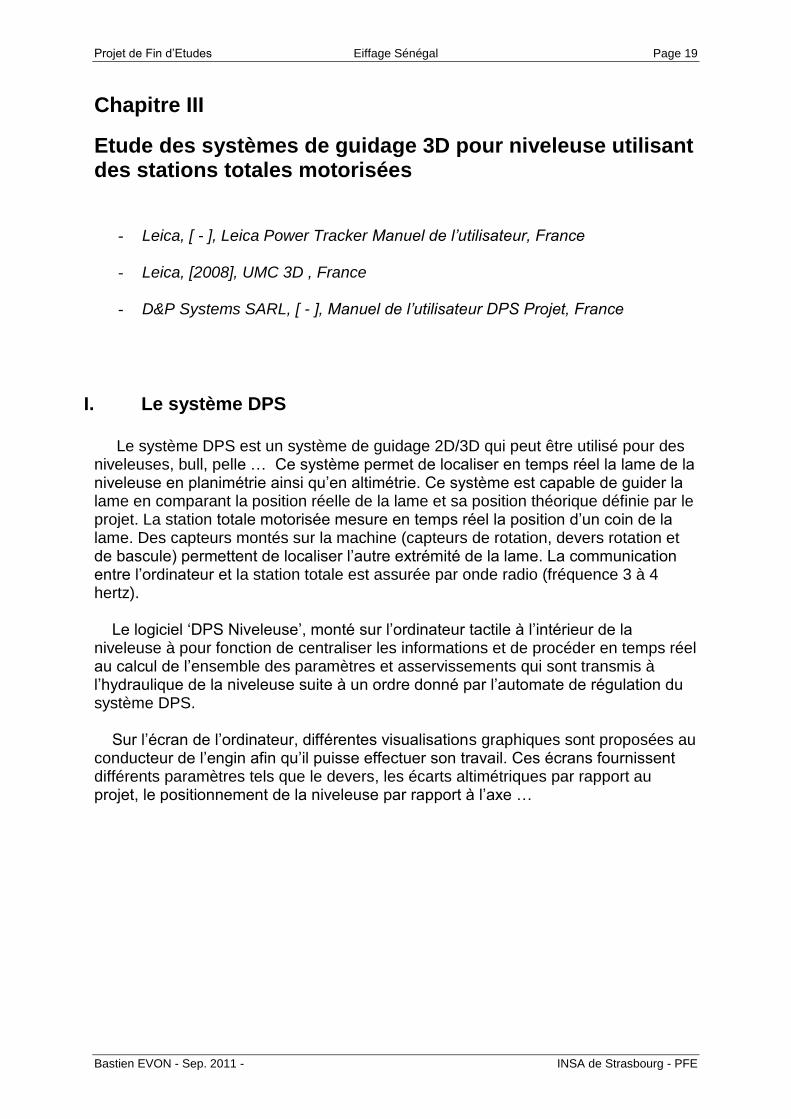
Le système DPS est un système de guidage 2D/3D qui peut être utilisé pour des niveleuses, bull, pelle … Ce système permet de localiser en temps réel la lame de la niveleuse en planimétrie ainsi qu’en altimétrie. Ce système est capable de guider la lame en comparant la position réelle de la lame et sa position théorique définie par le projet. La station totale motorisée mesure en temps réel la position d’un coin de la lame. Des capteurs montés sur la machine (capteurs de rotation, devers rotation et de bascule) permettent de localiser l’autre extrémité de la lame. La communication entre l’ordinateur et la station totale est assurée par onde radio (fréquence 3 à 4 hertz). Le logiciel ‘DPS Niveleuse’, monté sur l’ordinateur tactile à l’intérieur de la niveleuse à pour fonction de centraliser les informations et de procéder en temps réel au calcul de l’ensemble des paramètres et asservissements qui sont transmis à l’hydraulique de la niveleuse suite à un ordre donné par l’automate de régulation du système DPS. Sur l’écran de l’ordinateur, différentes visualisations graphiques sont proposées au conducteur de l’engin afin qu’il puisse effectuer son travail. Ces écrans fournissent différents paramètres tels que le devers, les écarts altimétriques par rapport au projet, le positionnement de la niveleuse par rapport à l’axe …
Projet de Fin d’Etudes Eiffage Sénégal Page 20
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
Photo1 : Ecran ordinateur de la niveleuse en mode travail avec système DPS
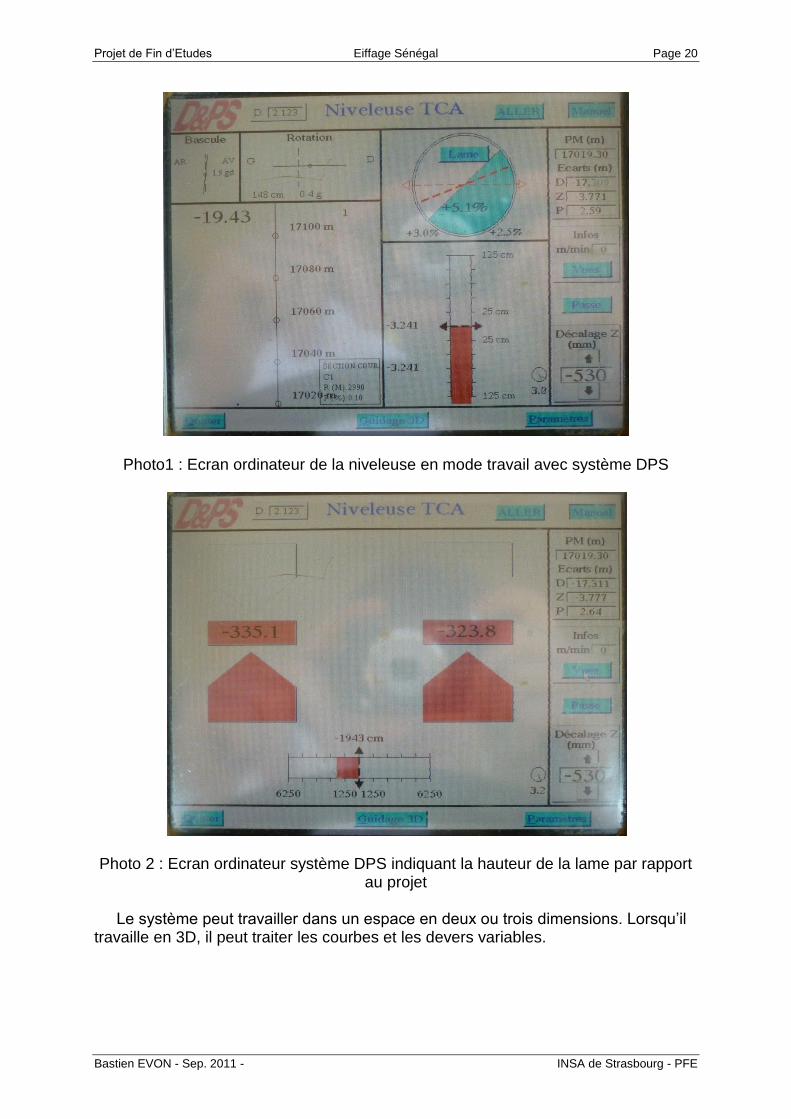
Photo 2 : Ecran ordinateur système DPS indiquant la hauteur de la lame par rapport
au projet
Le système peut travailler dans un espace en deux ou trois dimensions. Lorsqu’il travaille en 3D, il peut traiter les courbes et les devers variables.
Projet de Fin d’Etudes Eiffage Sénégal Page 21
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
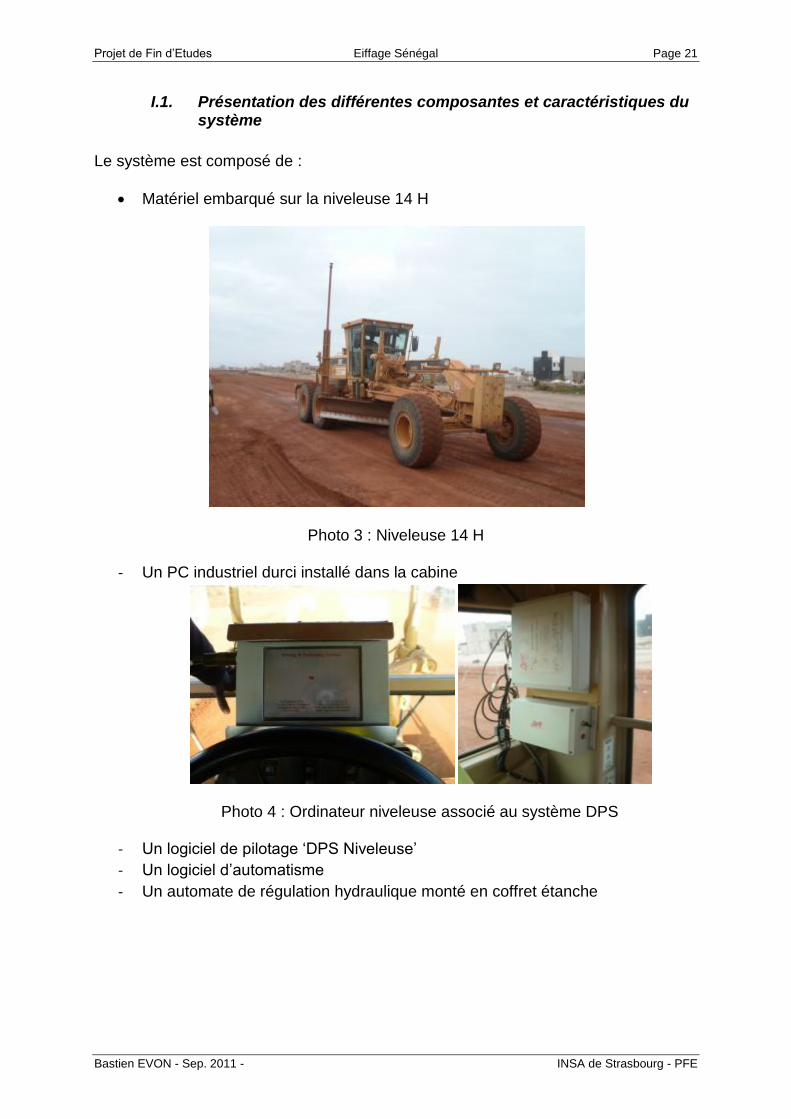
I.1. Présentation des différentes composantes et caractéristiques du système
Le système est composé de :
Matériel embarqué sur la niveleuse 14 H
Photo 3 : Niveleuse 14 H
- Un PC industriel durci installé dans la cabine
Photo 4 : Ordinateur niveleuse associé au système DPS
- Un logiciel de pilotage ‘DPS Niveleuse’
- Un logiciel d’automatisme
- Un automate de régulation hydraulique monté en coffret étanche
Projet de Fin d’Etudes Eiffage Sénégal Page 22
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
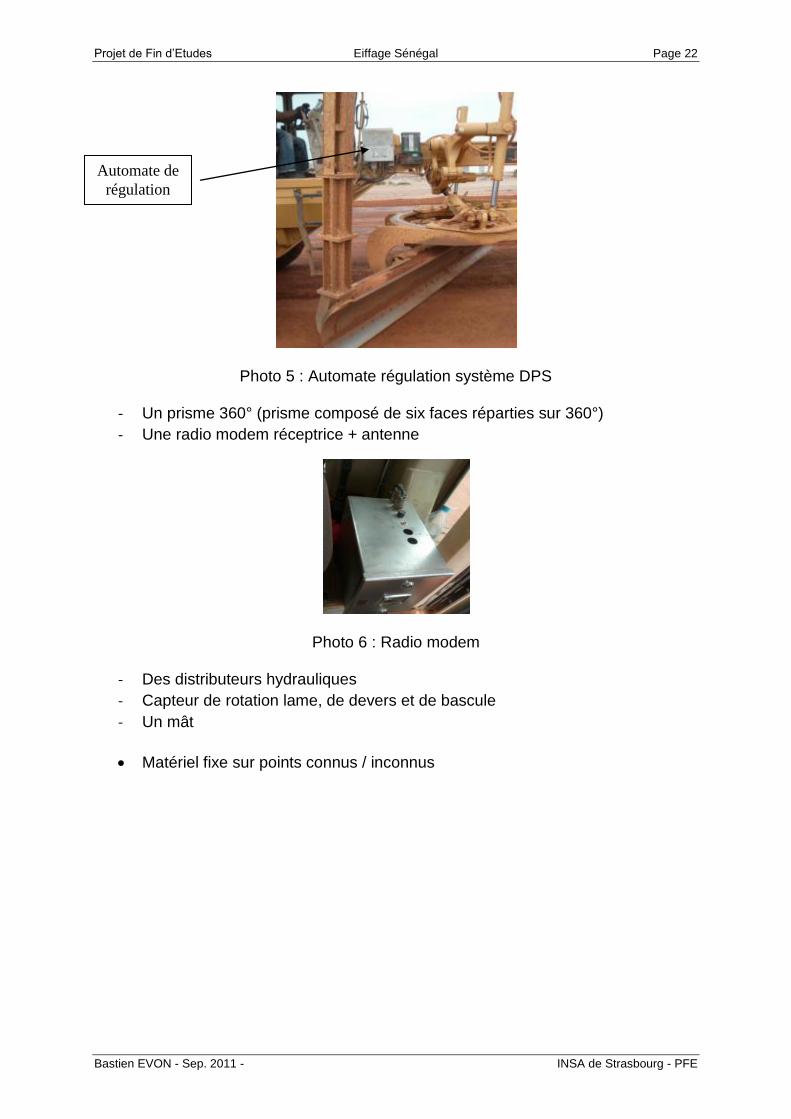
Photo 5 : Automate régulation système DPS
- Un prisme 360° (prisme composé de six faces réparties sur 360°)
- Une radio modem réceptrice + antenne
Photo 6 : Radio modem
- Des distributeurs hydrauliques
- Capteur de rotation lame, de devers et de bascule
- Un mât
Matériel fixe sur points connus / inconnus
Automate de
régulation
Projet de Fin d’Etudes Eiffage Sénégal Page 23
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
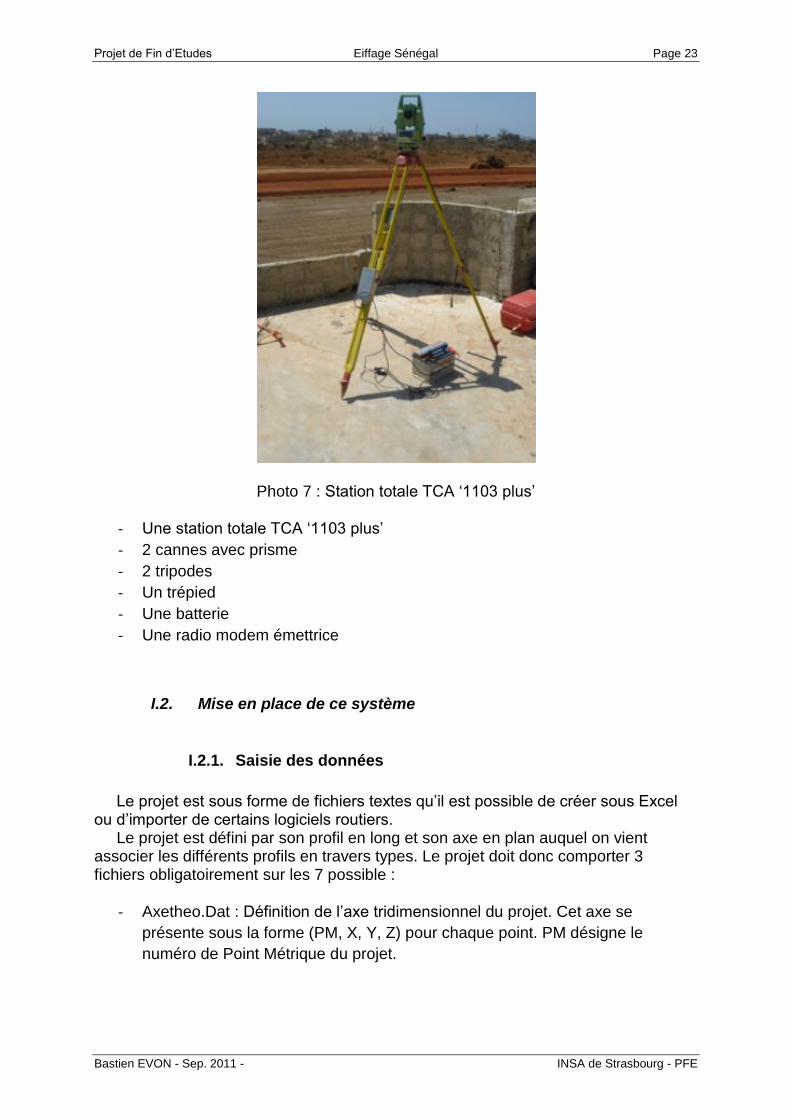
Photo 7 : Station totale TCA ‘1103 plus’
- Une station totale TCA ‘1103 plus’
- 2 cannes avec prisme
- 2 tripodes
- Un trépied
- Une batterie
- Une radio modem émettrice
I.2. Mise en place de ce système
I.2.1. Saisie des données
Le projet est sous forme de fichiers textes qu’il est possible de créer sous Excel ou d’importer de certains logiciels routiers. Le projet est défini par son profil en long et son axe en plan auquel on vient associer les différents profils en travers types. Le projet doit donc comporter 3 fichiers obligatoirement sur les 7 possible :
- Axetheo.Dat : Définition de l’axe tridimensionnel du projet. Cet axe se
présente sous la forme (PM, X, Y, Z) pour chaque point. PM désigne le
numéro de Point Métrique du projet.
Projet de Fin d’Etudes Eiffage Sénégal Page 24
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
- Coupx.Dat : Définition dans un repère ’profil en travers’ des couches du projet.
Contient les données déterminant une coupe type de la chaussée avec x le
nom de cette couche. Il est composé au maximum de 4 lignes correspondant
à 4 couches.
-
- Correl.Dat : Application des coupes sur l’axe tridimensionnel du projet. Il
associe les profils en travers type et les points métriques du projet. Il est utile
de rentrer seulement les Pm de changements de profil en travers, le DPS
calculant la variation de dévers.
En plus de ces trois fichiers indispensables afin de faire fonctionner le système, il
est possible de rajouter quatre fichiers facultatifs qui aide à la compréhension du
fichier global. Ces autres fichiers sont :
- Polygo.dat : désignation et coordonnées cartésiennes des points d’appuis
- Titre.dat : Description de l’ouvrage
- Couches.dat : Désignation explicite des couches de travail
- Leve.dat : Description des quatre couches
Suite à l’introduction du projet au sein de l’ordinateur de la niveleuse, il faut
procéder au paramétrage de l’ensemble du système. Ces paramètres peuvent être
répartis en trois catégories :
- Paramètres topographiques définis par le service de topographie (Tolérance
planimétrique et altimétrique sur la référence …)
- Paramètres du système (canal radio, nom du projet, numéro de couche …)
- Paramètres de la machine (Hauteur de mat, constantes capteur …)
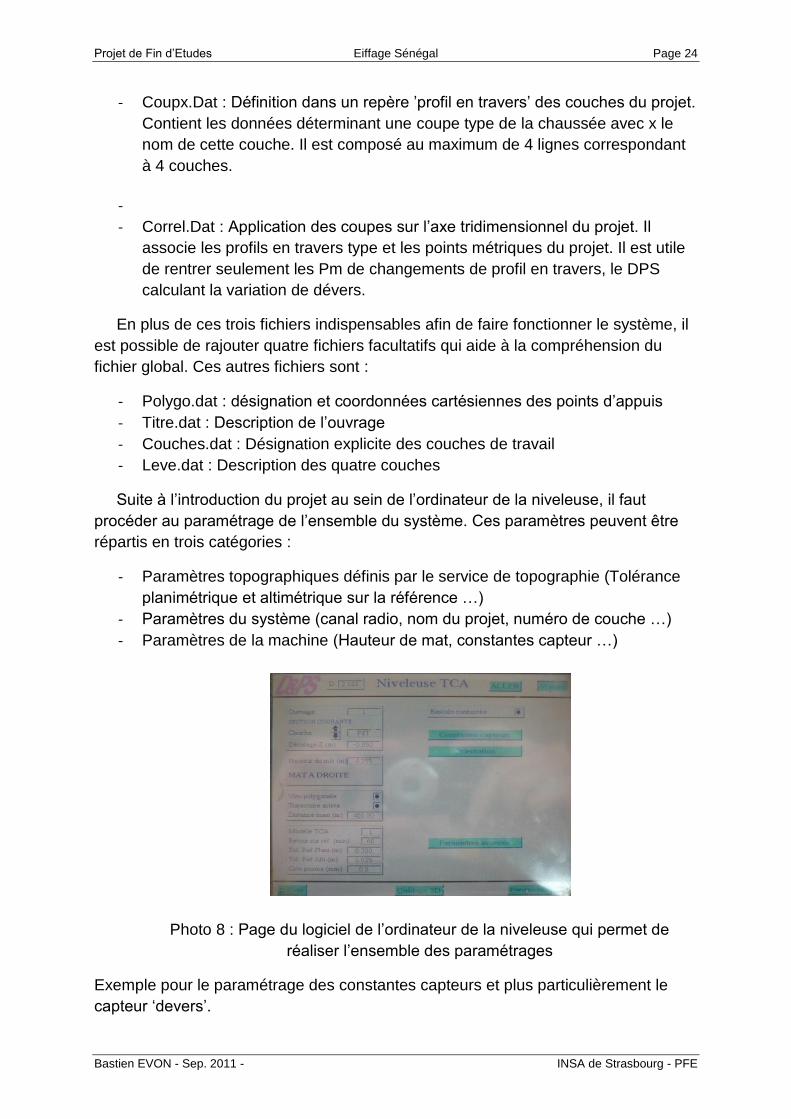
Photo 8 : Page du logiciel de l’ordinateur de la niveleuse qui permet de
réaliser l’ensemble des paramétrages
Exemple pour le paramétrage des constantes capteurs et plus particulièrement le
capteur ‘devers’.
Projet de Fin d’Etudes Eiffage Sénégal Page 25
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
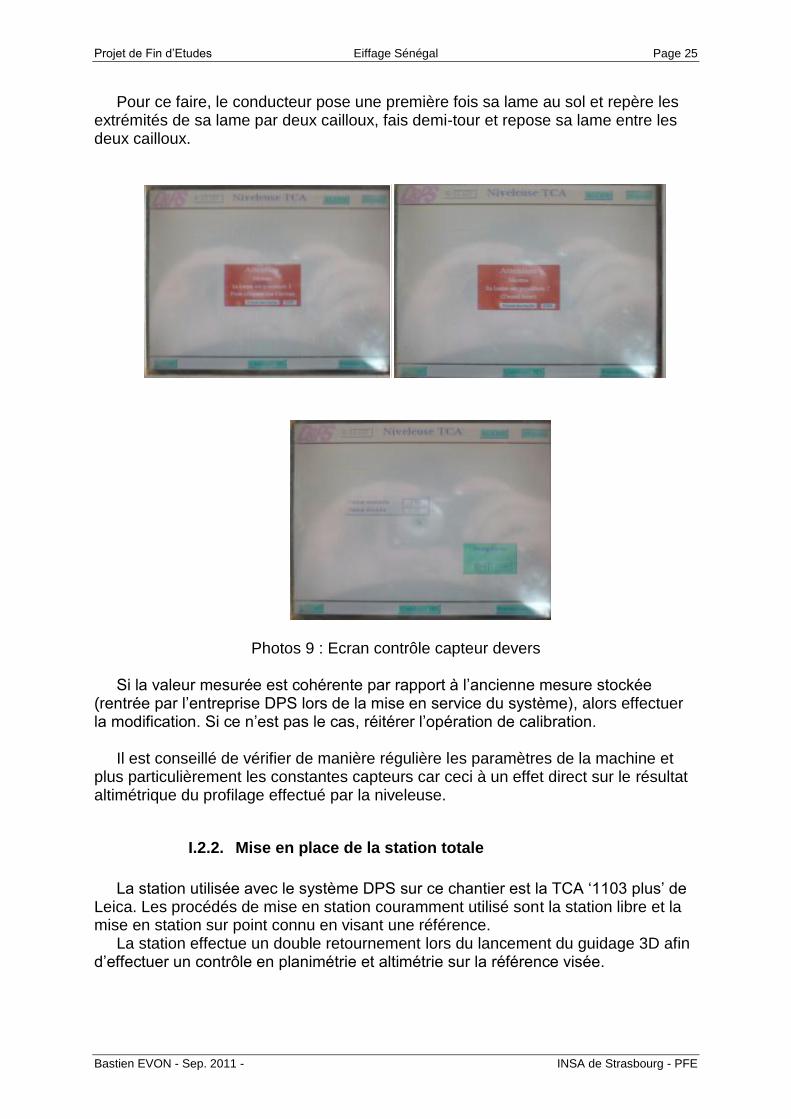
Pour ce faire, le conducteur pose une première fois sa lame au sol et repère les extrémités de sa lame par deux cailloux, fais demi-tour et repose sa lame entre les deux cailloux.
Photos 9 : Ecran contrôle capteur devers
Si la valeur mesurée est cohérente par rapport à l’ancienne mesure stockée (rentrée par l’entreprise DPS lors de la mise en service du système), alors effectuer la modification. Si ce n’est pas le cas, réitérer l’opération de calibration. Il est conseillé de vérifier de manière régulière les paramètres de la machine et plus particulièrement les constantes capteurs car ceci à un effet direct sur le résultat altimétrique du profilage effectué par la niveleuse.
I.2.2. Mise en place de la station totale
La station utilisée avec le système DPS sur ce chantier est la TCA ‘1103 plus’ de Leica. Les procédés de mise en station couramment utilisé sont la station libre et la mise en station sur point connu en visant une référence. La station effectue un double retournement lors du lancement du guidage 3D afin d’effectuer un contrôle en planimétrie et altimétrie sur la référence visée.
Projet de Fin d’Etudes Eiffage Sénégal Page 26
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
D’un point de vue pratique, c’est le mode station libre qui est le plus souvent utilisé et qui est présenté ci dessous Dans le cas d’une station libre, on a besoin de connaître les coordonnées de deux points qui nous servirons de référence.
1) Installation de l’instrument sur le trépied, branchement de la radio ainsi que
de la batterie et calage de l’instrument.
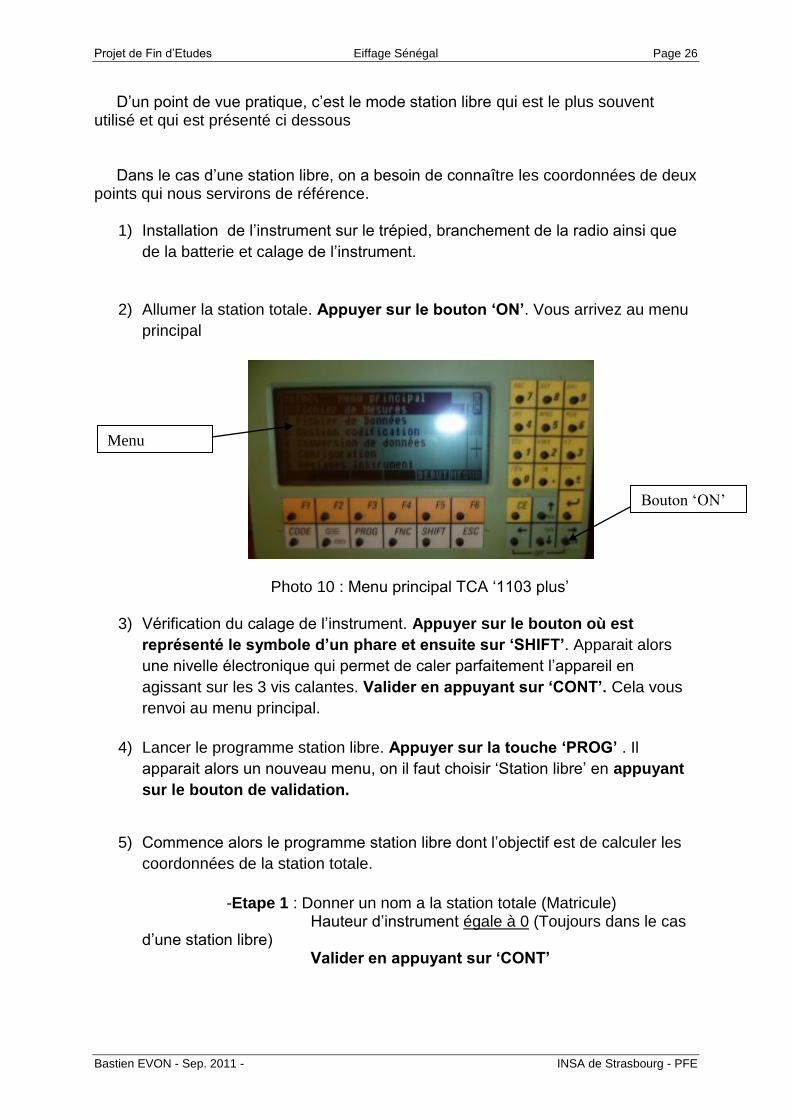
2) Allumer la station totale. Appuyer sur le bouton ‘ON’. Vous arrivez au menu
principal
Photo 10 : Menu principal TCA ‘1103 plus’
3) Vérification du calage de l’instrument. Appuyer sur le bouton où est
représenté le symbole d’un phare et ensuite sur ‘SHIFT’. Apparait alors
une nivelle électronique qui permet de caler parfaitement l’appareil en
agissant sur les 3 vis calantes. Valider en appuyant sur ‘CONT’. Cela vous
renvoi au menu principal.
4) Lancer le programme station libre. Appuyer sur la touche ‘PROG’ . Il
apparait alors un nouveau menu, on il faut choisir ‘Station libre’ en appuyant
sur le bouton de validation.
5) Commence alors le programme station libre dont l’objectif est de calculer les
coordonnées de la station totale.
-Etape 1 : Donner un nom a la station totale (Matricule) Hauteur d’instrument égale à 0 (Toujours dans le cas d’une station libre) Valider en appuyant sur ‘CONT’
Menu
principal
Bouton ‘ON’
Projet de Fin d’Etudes Eiffage Sénégal Page 27
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
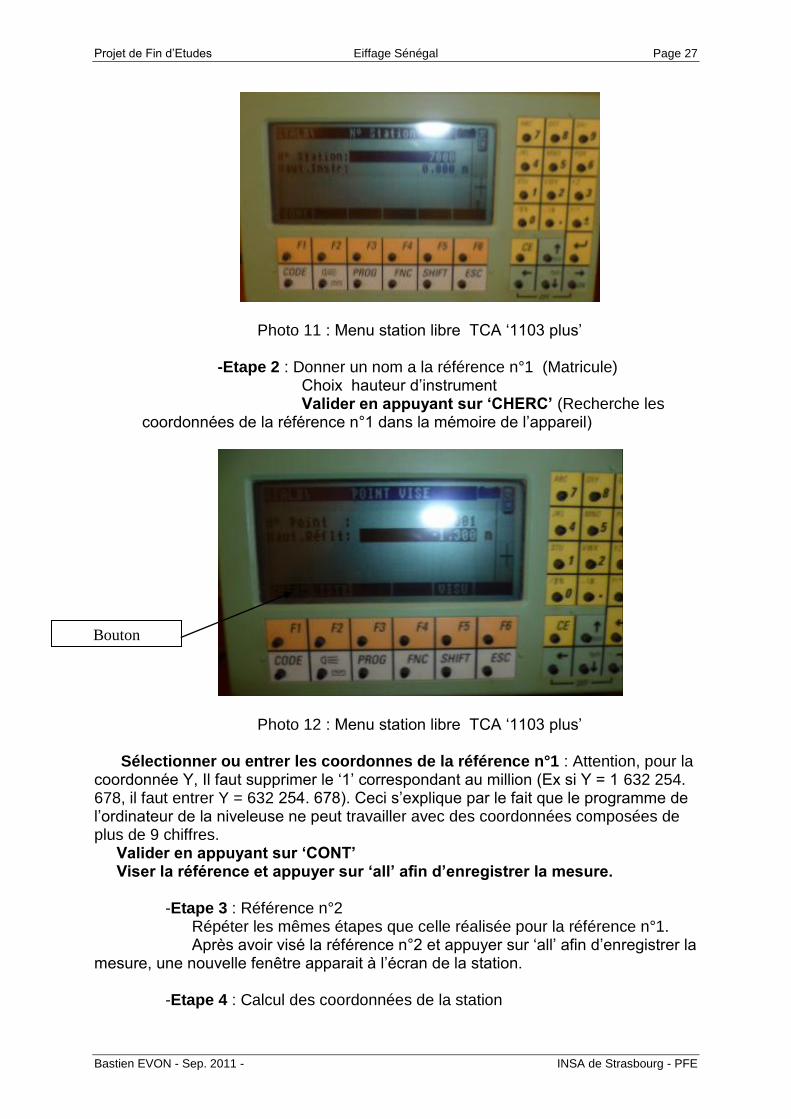
Photo 11 : Menu station libre TCA ‘1103 plus’ -Etape 2 : Donner un nom a la référence n°1 (Matricule) Choix hauteur d’instrument Valider en appuyant sur ‘CHERC’ (Recherche les coordonnées de la référence n°1 dans la mémoire de l’appareil)
Photo 12 : Menu station libre TCA ‘1103 plus’ Sélectionner ou entrer les coordonnes de la référence n°1 : Attention, pour la coordonnée Y, Il faut supprimer le ‘1’ correspondant au million (Ex si Y = 1 632 254. 678, il faut entrer Y = 632 254. 678). Ceci s’explique par le fait que le programme de l’ordinateur de la niveleuse ne peut travailler avec des coordonnées composées de plus de 9 chiffres. Valider en appuyant sur ‘CONT’ Viser la référence et appuyer sur ‘all’ afin d’enregistrer la mesure. -Etape 3 : Référence n°2 Répéter les mêmes étapes que celle réalisée pour la référence n°1. Après avoir visé la référence n°2 et appuyer sur ‘all’ afin d’enregistrer la mesure, une nouvelle fenêtre apparait à l’écran de la station. -Etape 4 : Calcul des coordonnées de la station
Bouton
‘CHERC’
Projet de Fin d’Etudes Eiffage Sénégal Page 28
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
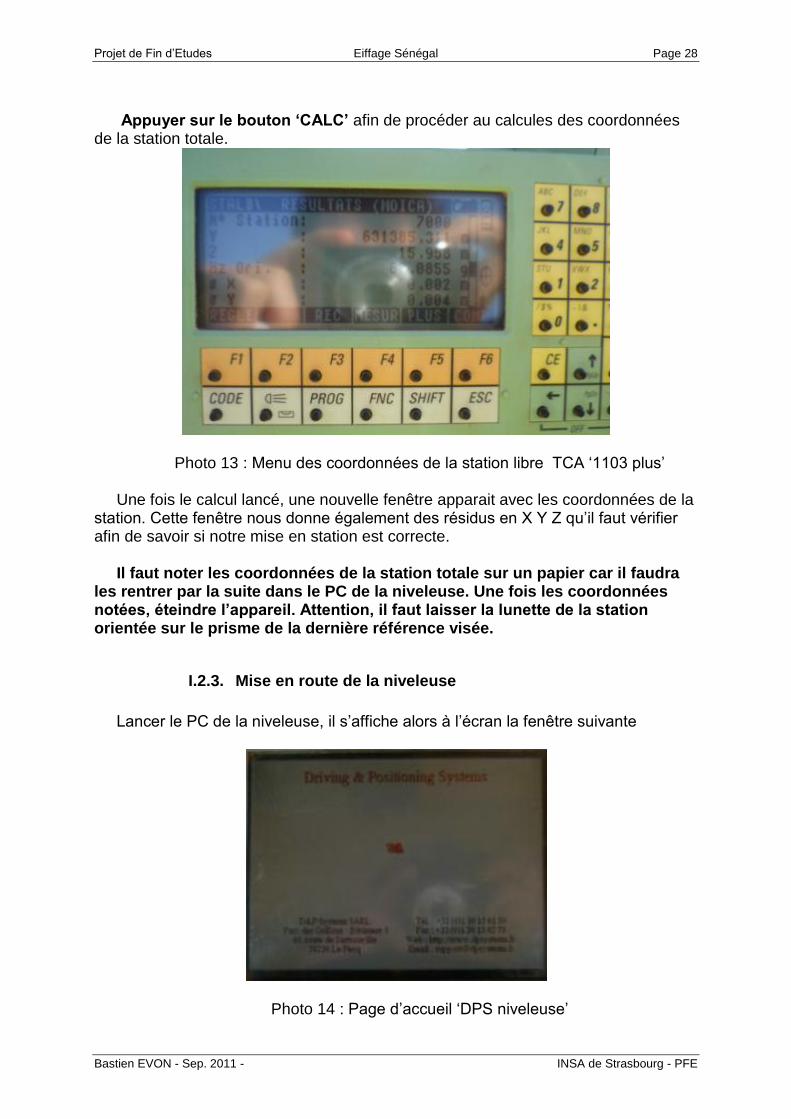
Appuyer sur le bouton ‘CALC’ afin de procéder au calcules des coordonnées de la station totale.
Photo 13 : Menu des coordonnées de la station libre TCA ‘1103 plus’ Une fois le calcul lancé, une nouvelle fenêtre apparait avec les coordonnées de la station. Cette fenêtre nous donne également des résidus en X Y Z qu’il faut vérifier afin de savoir si notre mise en station est correcte. Il faut noter les coordonnées de la station totale sur un papier car il faudra les rentrer par la suite dans le PC de la niveleuse. Une fois les coordonnées notées, éteindre l’appareil. Attention, il faut laisser la lunette de la station orientée sur le prisme de la dernière référence visée.
I.2.3. Mise en route de la niveleuse
Lancer le PC de la niveleuse, il s’affiche alors à l’écran la fenêtre suivante
Photo 14 : Page d’accueil ‘DPS niveleuse’
Projet de Fin d’Etudes Eiffage Sénégal Page 29
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
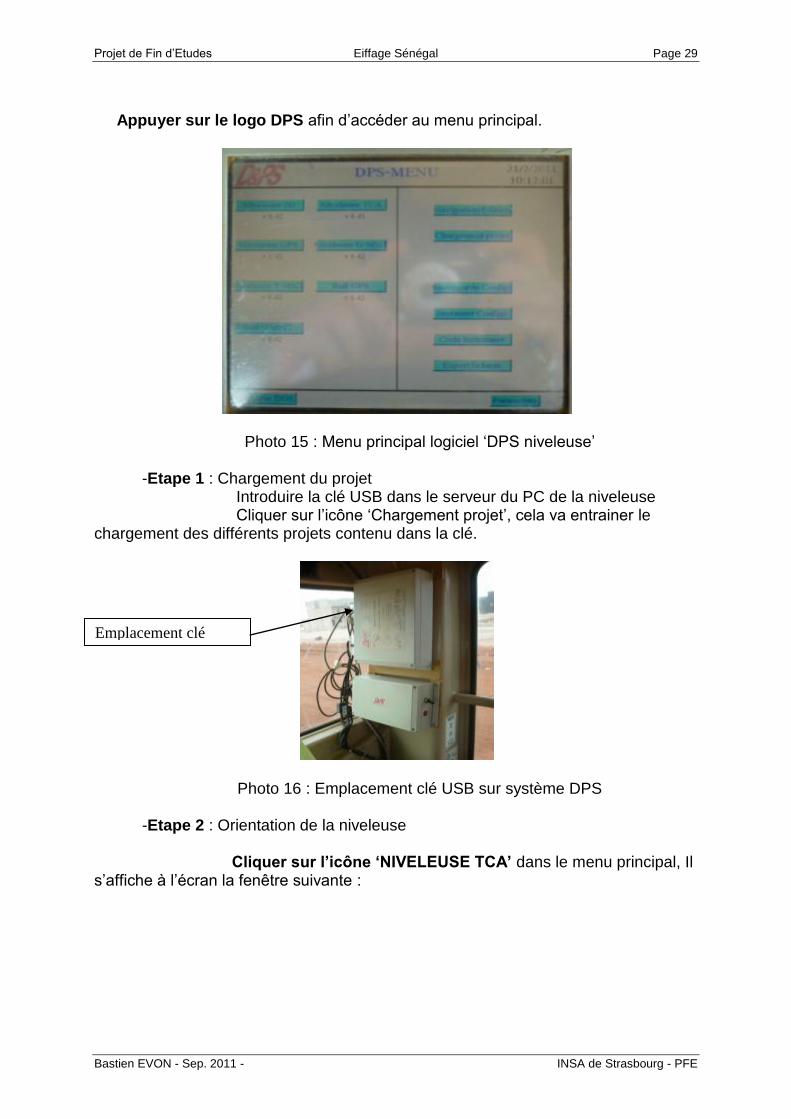
Appuyer sur le logo DPS afin d’accéder au menu principal.
Photo 15 : Menu principal logiciel ‘DPS niveleuse’
-Etape 1 : Chargement du projet Introduire la clé USB dans le serveur du PC de la niveleuse Cliquer sur l’icône ‘Chargement projet’, cela va entrainer le chargement des différents projets contenu dans la clé.
Photo 16 : Emplacement clé USB sur système DPS
-Etape 2 : Orientation de la niveleuse
Cliquer sur l’icône ‘NIVELEUSE TCA’ dans le menu principal, Il s’affiche à l’écran la fenêtre suivante :
Emplacement clé
USB
Projet de Fin d’Etudes Eiffage Sénégal Page 30
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
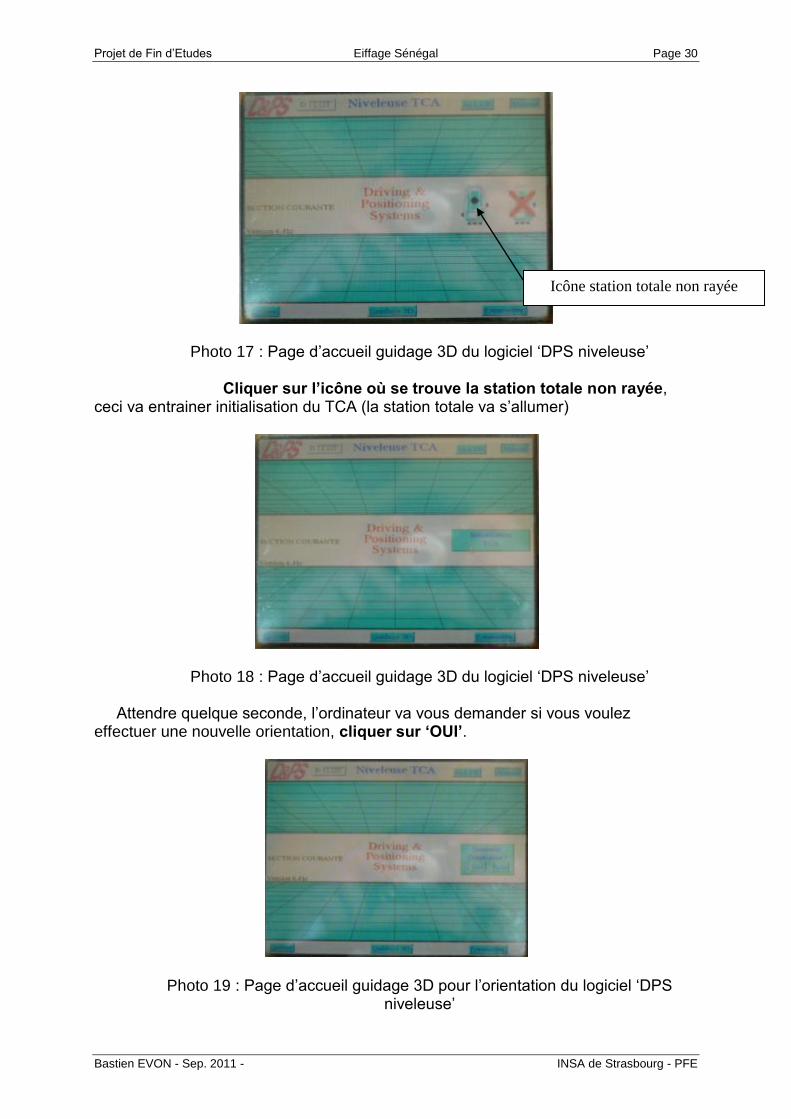
Photo 17 : Page d’accueil guidage 3D du logiciel ‘DPS niveleuse’
Cliquer sur l’icône où se trouve la station totale non rayée, ceci va entrainer initialisation du TCA (la station totale va s’allumer)
Photo 18 : Page d’accueil guidage 3D du logiciel ‘DPS niveleuse’
Attendre quelque seconde, l’ordinateur va vous demander si vous voulez effectuer une nouvelle orientation, cliquer sur ‘OUI’.
Photo 19 : Page d’accueil guidage 3D pour l’orientation du logiciel ‘DPS niveleuse’
Icône station totale non rayée
Projet de Fin d’Etudes Eiffage Sénégal Page 31
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
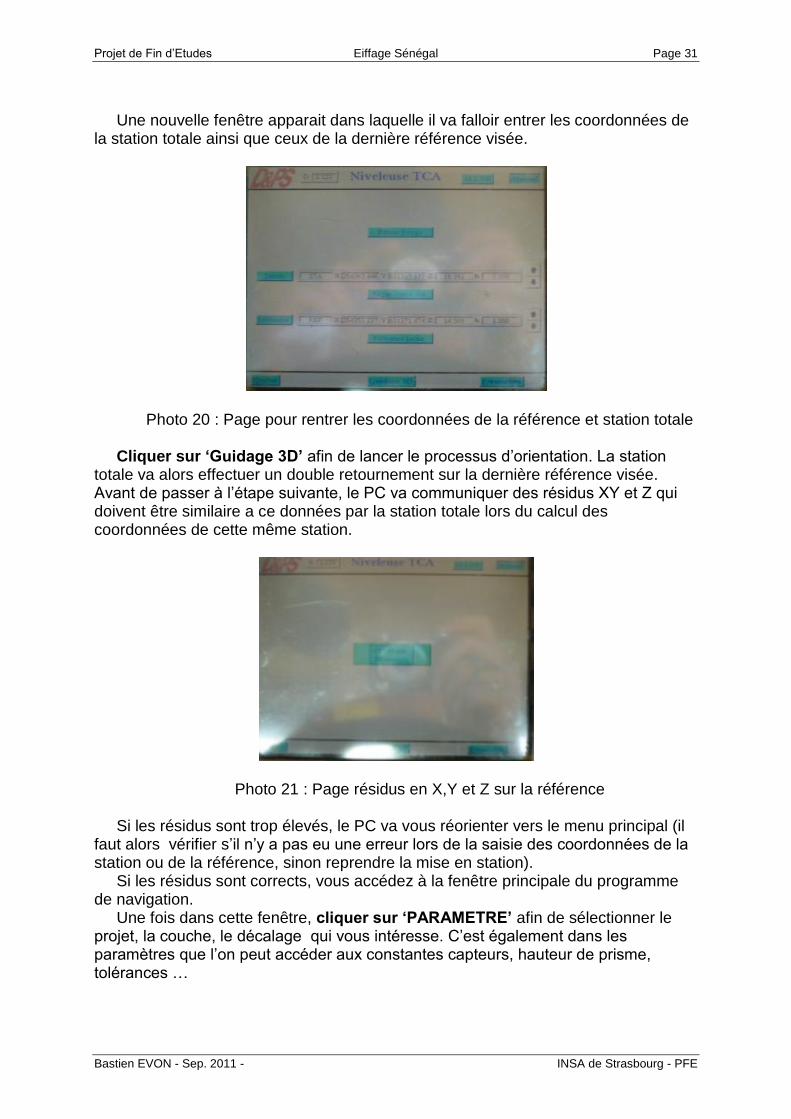
Une nouvelle fenêtre apparait dans laquelle il va falloir entrer les coordonnées de la station totale ainsi que ceux de la dernière référence visée.
Photo 20 : Page pour rentrer les coordonnées de la référence et station totale
Cliquer sur ‘Guidage 3D’ afin de lancer le processus d’orientation. La station totale va alors effectuer un double retournement sur la dernière référence visée. Avant de passer à l’étape suivante, le PC va communiquer des résidus XY et Z qui doivent être similaire a ce données par la station totale lors du calcul des coordonnées de cette même station.
Photo 21 : Page résidus en X,Y et Z sur la référence
Si les résidus sont trop élevés, le PC va vous réorienter vers le menu principal (il faut alors vérifier s’il n’y a pas eu une erreur lors de la saisie des coordonnées de la station ou de la référence, sinon reprendre la mise en station). Si les résidus sont corrects, vous accédez à la fenêtre principale du programme de navigation. Une fois dans cette fenêtre, cliquer sur ‘PARAMETRE’ afin de sélectionner le projet, la couche, le décalage qui vous intéresse. C’est également dans les paramètres que l’on peut accéder aux constantes capteurs, hauteur de prisme, tolérances …
Projet de Fin d’Etudes Eiffage Sénégal Page 32
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
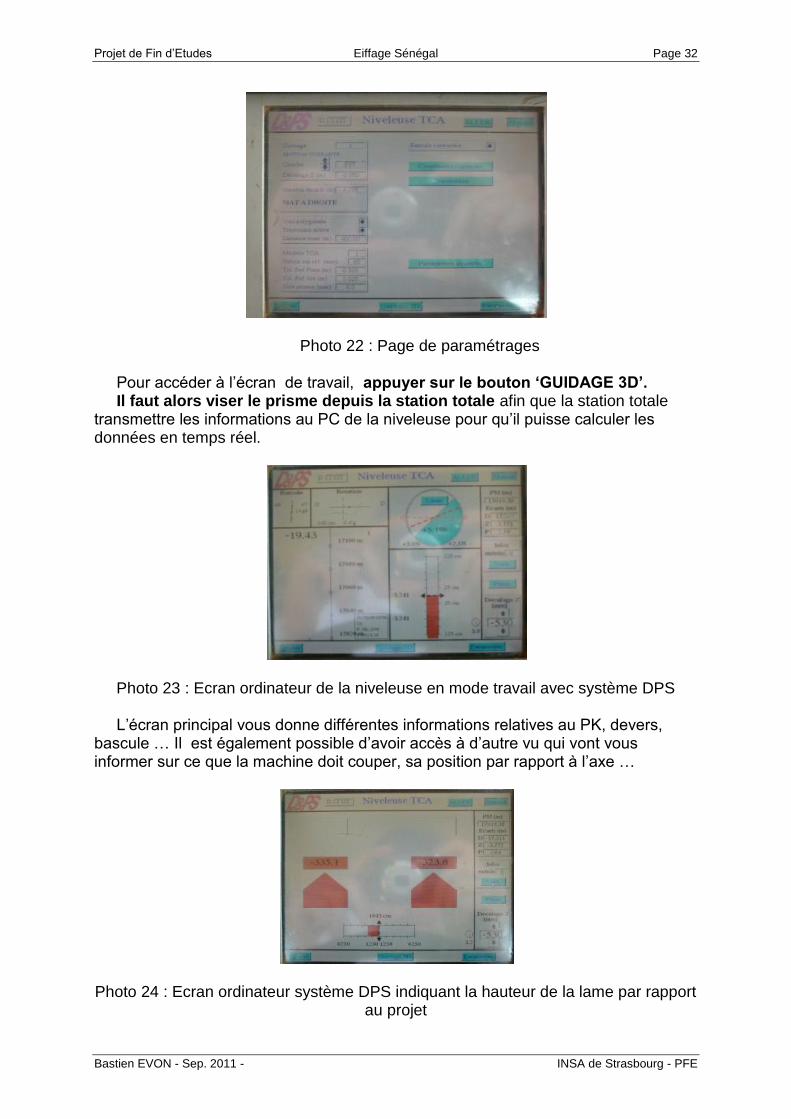
Photo 22 : Page de paramétrages Pour accéder à l’écran de travail, appuyer sur le bouton ‘GUIDAGE 3D’. Il faut alors viser le prisme depuis la station totale afin que la station totale transmettre les informations au PC de la niveleuse pour qu’il puisse calculer les données en temps réel.
Photo 23 : Ecran ordinateur de la niveleuse en mode travail avec système DPS
L’écran principal vous donne différentes informations relatives au PK, devers, bascule … Il est également possible d’avoir accès à d’autre vu qui vont vous informer sur ce que la machine doit couper, sa position par rapport à l’axe …
Photo 24 : Ecran ordinateur système DPS indiquant la hauteur de la lame par rapport au projet

Projet de Fin d’Etudes Eiffage Sénégal Page 33
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
I.3. Performances de ce système de guidage
Le système DPS permet d’obtenir une précision de +/- 2 cm en altimétrie et de +/- 5 cm en planimétrie. Cette précision est étroitement liée à la précision des bornes que l’on utilise afin de stationner la station totale. La portée de la station totale sur le prisme de la niveleuse est de 200 à 300 m. Le constructeur annonce pour son système de guidage des rendements compris entre 8 000 et 16 000 m²/J en fonction du matériau à régler et de l’approvisionnement qui a été fait sur la zone de travail. En effet, l’approvisionnement doit être réalisé de manière sérieuse afin que e travail de la niveleuse ce limite à couper une épaisseur de 3 à 6 cm. Pour des épaisseurs supérieures, la niveleuse devra faire plusieurs passes afin de couper progressivement le surplus. Il a été constaté une relative faiblesse dans la réponse de l’hydraulique du système, cela entraine un déplacement de la lame relativement lent. Bien que la visualisation graphique de l’écran de l’ordinateur de la niveleuse soit conviviale et permette au conducteur de posséder un grand nombre d’informations, ce système ne fournit pas l’altitude du coin de la lame où se trouve le mât ce qui peut être intéressant pour pouvoir effectuer des contrôles par rapport au projet théorique.
II. Le système ScanLaser
Le système ScanLaser est un système de guidage 2D/3D qui peut être utilisé pour des niveleuses, bull, pelle … C’est la dernière génération de système de guidage d’engin du constructeur Leica qui est venu succéder au système DPS (La société D&PS ayant été racheté par Leica). Ce système permet de localiser en temps réel la lame de la niveleuse en planimétrie ainsi qu’en altimétrie. Ce système est capable de guider la lame en comparant la position réelle de la lame et sa position théorique définie par le projet. La station totale motorisée mesure en temps réel la position d’un coin de la lame. Des capteurs montés sur la machine (capteurs de rotation, devers rotation et de bascule) permettent de localiser l’autre extrémité de la lame. La communication entre l’ordinateur et la station totale est assurée par onde radio (fréquence 3 à 4 hertz). Le logiciel ‘UMC 3D’, monté sur l’ordinateur tactile (CB16) à l’intérieur de la niveleuse à pour fonction de centraliser les informations et de procéder en temps réel au calcul de l’ensemble des paramètres et asservissements qui sont transmis à l’hydraulique de la niveleuse suite à un ordre donné par l’automate de régulation du système ScanLaser. Sur l’écran de l’ordinateur, différentes visualisation graphique sont proposées aux conducteurs de l’engin afin qu’il puisse effectuer son travail. Ces écrans fournissent différents paramètres tels que le devers, les écarts altimétriques par rapport au projet, le positionnement de la niveleuse par rapport à l’axe …
Projet de Fin d’Etudes Eiffage Sénégal Page 34
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
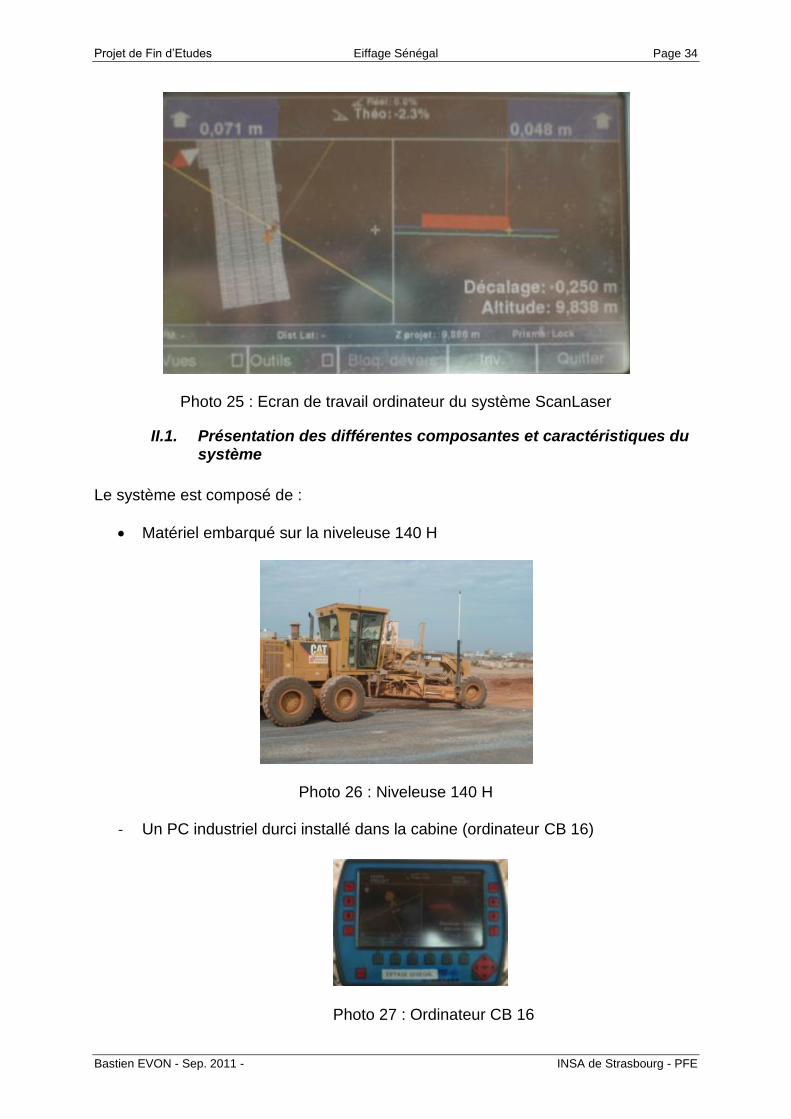
Photo 25 : Ecran de travail ordinateur du système ScanLaser
II.1. Présentation des différentes composantes et caractéristiques du système
Le système est composé de :
Matériel embarqué sur la niveleuse 140 H
Photo 26 : Niveleuse 140 H
- Un PC industriel durci installé dans la cabine (ordinateur CB 16)
Photo 27 : Ordinateur CB 16
Projet de Fin d’Etudes Eiffage Sénégal Page 35
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
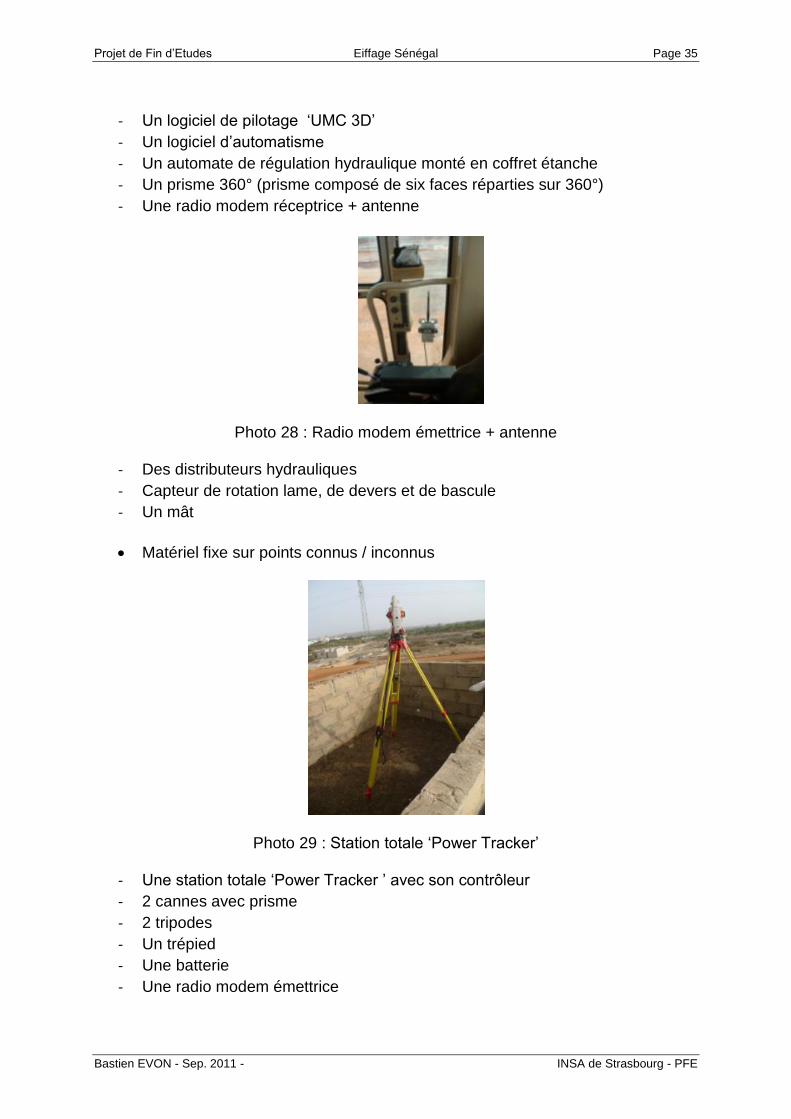
- Un logiciel de pilotage ‘UMC 3D’
- Un logiciel d’automatisme
- Un automate de régulation hydraulique monté en coffret étanche
- Un prisme 360° (prisme composé de six faces réparties sur 360°)
- Une radio modem réceptrice + antenne
Photo 28 : Radio modem émettrice + antenne
- Des distributeurs hydrauliques
- Capteur de rotation lame, de devers et de bascule
- Un mât
Matériel fixe sur points connus / inconnus
Photo 29 : Station totale ‘Power Tracker’
- Une station totale ‘Power Tracker ’ avec son contrôleur
- 2 cannes avec prisme
- 2 tripodes
- Un trépied
- Une batterie
- Une radio modem émettrice

Projet de Fin d’Etudes Eiffage Sénégal Page 36
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
II.2. Mise en place de ce système
II.2.1. Saisie des données
Le projet que l’on souhaite introduire dans la niveleuse doit reposer sur un MNT. Suite à l’introduction du projet au sein de l’ordinateur de la niveleuse, il faut
procéder au paramétrage de l’ensemble du système. Ces paramètres peuvent être
répartis en trois catégories :
- Paramètres topographiques définis par le service de topographie (Tolérance
planimétrique et altimétrique sur la référence …)
- Paramètres du système (canal radio, nom du projet, numéro de couche …)
- Paramètres de la machine (Hauteur de mat, constantes capteur …)
II.2.2. Mise en place de la station totale
La station utilisée avec le système ScanLaser sur ce chantier est le Power Tracker de Leica. Les procédés de mise en station couramment utilisé sont la station libre et la mise en station sur point connu en visant une référence. D’un point de vue pratique, c’est le mode station libre qui est le plus souvent utilisé et qui est présenté ci dessous Dans le cas d’une station libre, on a besoin de connaitre les coordonnées de deux points qui nous servirons de référence.
1) Installation de l’instrument sur le trépied, branchement de la batterie et
calage de l’instrument.
2) Allumer la station totale. Allumer également le contrôleur. La liaison entre le
contrôleur et la station totale ce fait par Bluetooth. Vérifier que les LED BT,
PWR et TRK situées sur le Power Tracker sont allumées. Sur le contrôleur,
vous arrivez au menu principal à partir du quel il faut lancer le logiciel Geo-pad
permettant de réaliser la mise en station.
Vous arrivez sur la page d’accueil du logiciel Geo-pad, appuyer sur ‘station totale’ et ensuite sur l’icône ‘mise en station’.
Figure 6 : Page d’accueil logiciel Geo-pad
Projet de Fin d’Etudes Eiffage Sénégal Page 37
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
3) Calage de l’instrument à l’aide de la nivelle électronique qui apparait sur
l’écran du contrôleur. Agir sur les 3 vis calantes.
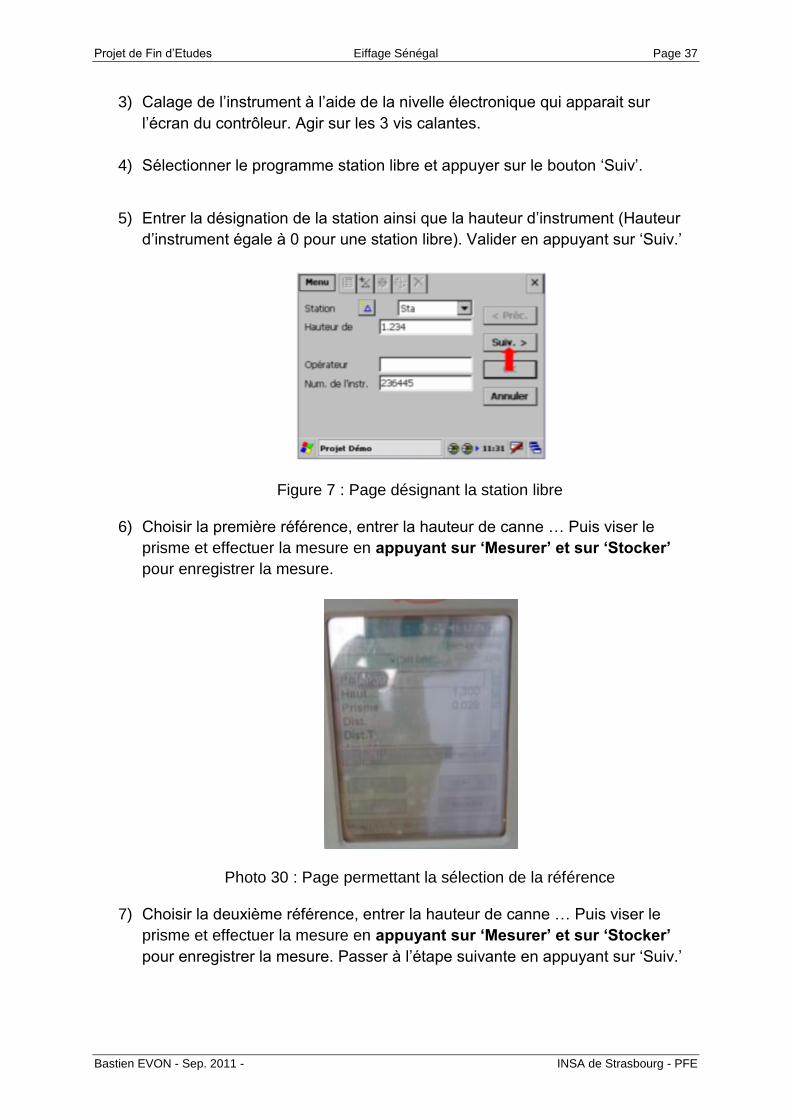
4) Sélectionner le programme station libre et appuyer sur le bouton ‘Suiv’.
5) Entrer la désignation de la station ainsi que la hauteur d’instrument (Hauteur
d’instrument égale à 0 pour une station libre). Valider en appuyant sur ‘Suiv.’
Figure 7 : Page désignant la station libre
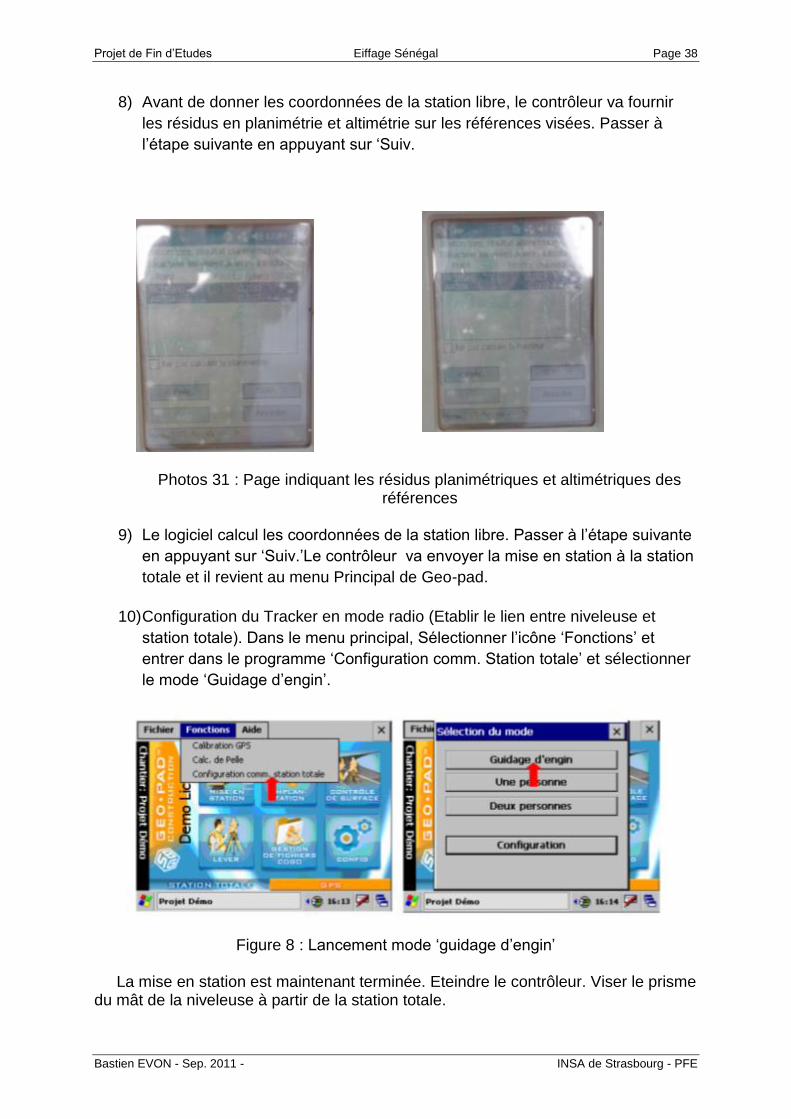
6) Choisir la première référence, entrer la hauteur de canne … Puis viser le
prisme et effectuer la mesure en appuyant sur ‘Mesurer’ et sur ‘Stocker’
pour enregistrer la mesure.
Photo 30 : Page permettant la sélection de la référence
7) Choisir la deuxième référence, entrer la hauteur de canne … Puis viser le
prisme et effectuer la mesure en appuyant sur ‘Mesurer’ et sur ‘Stocker’
pour enregistrer la mesure. Passer à l’étape suivante en appuyant sur ‘Suiv.’
Projet de Fin d’Etudes Eiffage Sénégal Page 38
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
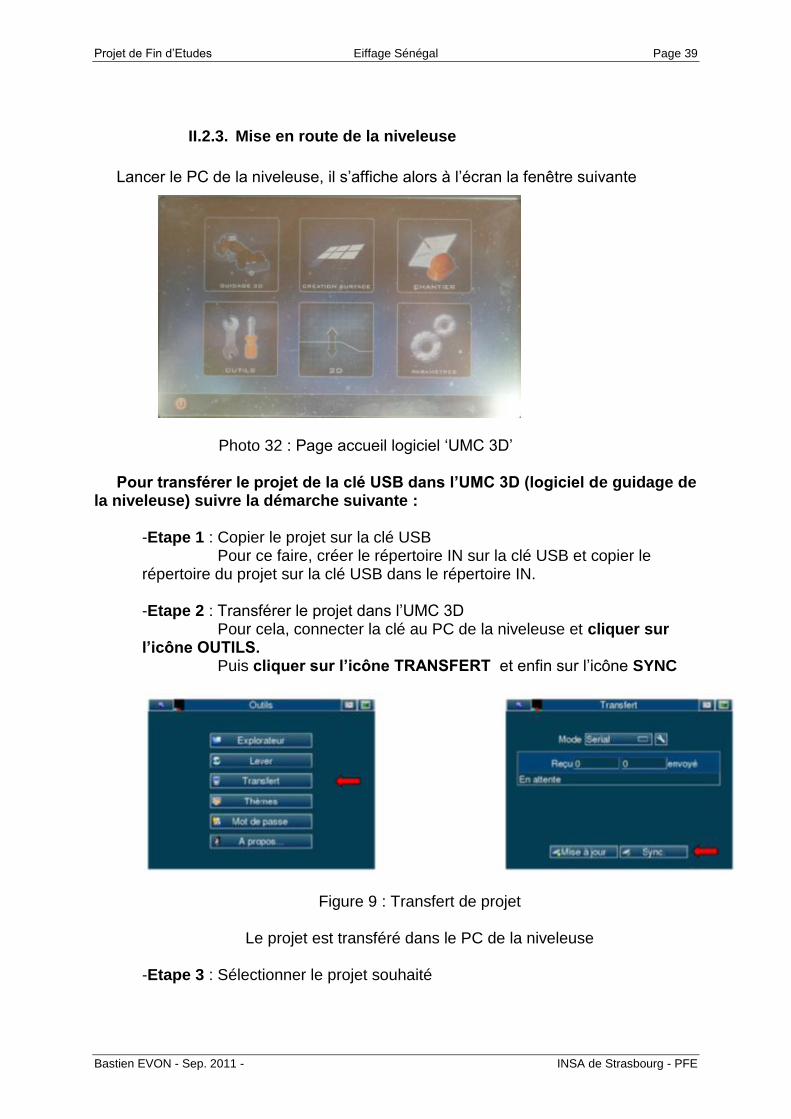
8) Avant de donner les coordonnées de la station libre, le contrôleur va fournir
les résidus en planimétrie et altimétrie sur les références visées. Passer à
l’étape suivante en appuyant sur ‘Suiv.
Photos 31 : Page indiquant les résidus planimétriques et altimétriques des
références
9) Le logiciel calcul les coordonnées de la station libre. Passer à l’étape suivante
en appuyant sur ‘Suiv.’Le contrôleur va envoyer la mise en station à la station
totale et il revient au menu Principal de Geo-pad.
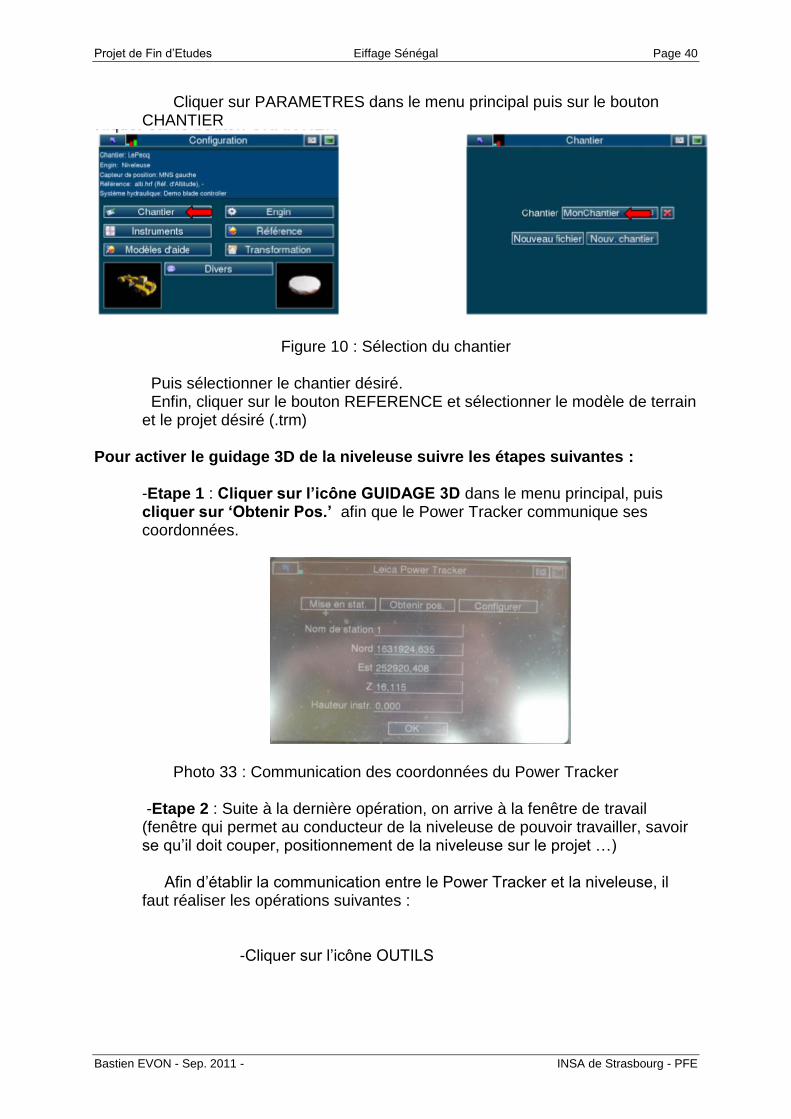
10) Configuration du Tracker en mode radio (Etablir le lien entre niveleuse et
station totale). Dans le menu principal, Sélectionner l’icône ‘Fonctions’ et
entrer dans le programme ‘Configuration comm. Station totale’ et sélectionner
le mode ‘Guidage d’engin’.
Figure 8 : Lancement mode ‘guidage d’engin’
La mise en station est maintenant terminée. Eteindre le contrôleur. Viser le prisme du mât de la niveleuse à partir de la station totale.
Projet de Fin d’Etudes Eiffage Sénégal Page 39
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
II.2.3. Mise en route de la niveleuse
Lancer le PC de la niveleuse, il s’affiche alors à l’écran la fenêtre suivante
Photo 32 : Page accueil logiciel ‘UMC 3D’
Pour transférer le projet de la clé USB dans l’UMC 3D (logiciel de guidage de la niveleuse) suivre la démarche suivante :
-Etape 1 : Copier le projet sur la clé USB Pour ce faire, créer le répertoire IN sur la clé USB et copier le répertoire du projet sur la clé USB dans le répertoire IN. -Etape 2 : Transférer le projet dans l’UMC 3D Pour cela, connecter la clé au PC de la niveleuse et cliquer sur l’icône OUTILS. Puis cliquer sur l’icône TRANSFERT et enfin sur l’icône SYNC
Figure 9 : Transfert de projet
Le projet est transféré dans le PC de la niveleuse -Etape 3 : Sélectionner le projet souhaité
Projet de Fin d’Etudes Eiffage Sénégal Page 40
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
Cliquer sur PARAMETRES dans le menu principal puis sur le bouton CHANTIER
Figure 10 : Sélection du chantier
Puis sélectionner le chantier désiré. Enfin, cliquer sur le bouton REFERENCE et sélectionner le modèle de terrain et le projet désiré (.trm)
Pour activer le guidage 3D de la niveleuse suivre les étapes suivantes :
-Etape 1 : Cliquer sur l’icône GUIDAGE 3D dans le menu principal, puis cliquer sur ‘Obtenir Pos.’ afin que le Power Tracker communique ses coordonnées.
Photo 33 : Communication des coordonnées du Power Tracker
-Etape 2 : Suite à la dernière opération, on arrive à la fenêtre de travail (fenêtre qui permet au conducteur de la niveleuse de pouvoir travailler, savoir se qu’il doit couper, positionnement de la niveleuse sur le projet …) Afin d’établir la communication entre le Power Tracker et la niveleuse, il faut réaliser les opérations suivantes : -Cliquer sur l’icône OUTILS
Projet de Fin d’Etudes Eiffage Sénégal Page 41
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
Photo 34 : Espace de travail du conducteur de la niveleuse avec système ScanLaser
-Cliquer sur l’icône Recherche de Prisme
Photo 35 : Page permettant établir communication entre niveleuse et Power Tracker Si la fenêtre suivante s’ouvre, cela veut dire que la niveleuse et la station totale sont entrées en communication. Sortir de cette fenêtre en appuyant sur la flèche en haut à gauche.
Photo 36 : Page validant la communication
Le chauffeur de la niveleuse dispose alors de toutes les informations nécessaires afin de pouvoir travailler. Le chauffeur de la niveleuse visualise à l’écran la fenêtre suivante.
Projet de Fin d’Etudes Eiffage Sénégal Page 42
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
Photo 37 : Espace de travail du conducteur de la niveleuse avec système ScanLaser
II.3. Performances de ce système de guidage
Le système ScanLaser permet d’obtenir une précision de +/- 1 cm en altimétrie et de +/- 2 cm en planimétrie. Cette précision est étroitement liée à la précision des bornes que l’on utilise afin de stationner le Power Tracker. La portée de la station totale sur le prisme de la niveleuse est de 300 à 400 m. Le constructeur annonce pour son système de guidage des rendements compris entre 10 000 et 18 000 m²/J en fonction du matériau à régler et de l’approvisionnement qui a été fait sur la zone de travail. En effet, l’approvisionnement doit être réalisé de manière sérieuse afin que e travail de la niveleuse ce limite à couper une épaisseur de 3 à 6 cm. Pour des épaisseurs supérieures, la niveleuse devra faire plusieurs passes afin de couper progressivement le surplus. La visualisation graphique de l’écran de l’ordinateur de la niveleuse est pragmatique et permet au conducteur de posséder l’ensemble des informations nécessaires pour effectuer son travail dans de bonne condition.
III. Comparaison système DPS et ScanLaser
Etablir une comparaison des systèmes DPS et ScanLaser n’est pas forcément interessant, sachant que le système de guidage ScanLaser est une évolution du système DPS développé par la société Leica. Néanmoins, on peut remarquer que les principales améliorations portent sur les points suivants :
- Amélioration de la précision de réglage de 1 cm en altimétrie et de 3 cm en planimétrie sur le nouveau système ScanLaser.
- Amélioration du rendement de travail de la niveleuse. - Possibilité de travailler pour la niveleuse à une distance plus éloignée de la
station totale pour une précision identique de réglage. - Vitesse de rotation angulaire plus élevée pour le ‘Power Tracker’
Projet de Fin d’Etudes Eiffage Sénégal Page 43
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
- Ecran du PC plus pragmatique pour le conducteur de la niveleuse. - Un seul fichier comportant un MNT du projet doit être introduit dans la
niveleuse avec le système ScanLaser versus les 3 fichiers à créer pour le système DPS.
Conclusion
Les systèmes de guidage d’engins par station totale ScanLaser et DPS sont devenus des outils indispensables aux entreprises de travaux publics qui réalisent des travaux de terrassements de grande dimension. En effet, que ce soit avec le système DPS ou le ScanLaser, dernière génération de système de guidage développé par la société Leica, ces outils ont permis d’accroître le rendement de travail des niveleuses tout en permettant d’obtenir des précisions de réglage en adéquation avec les tolérances fixées dans les cahiers des charges des maîtres d’ouvrages. Néanmoins, ce système basé sur l’utilisation d’une station totale est parfois lourd à mettre en place car il nécessite la présence de points d’appuis dans chaque zone où l’on souhaite travailler.
Chapitre IV
Etude en vue de l’adaptation d’un système de guidage 3D pour niveleuse par GPS/GNSS
- Leica, [ - ], Leica Power grade / Intelligent Grading Systems, Suisse
- Leica, [ - ], Leica PowerBox/PowerAntenna Technical Data , Suisse
- Leica, [ - ], Leica PowerBox/PowerAntenna Equipment List , Suisse
- LEIDIG, J.[2010], Global Navigation Satellite System, INSA de Strasbourg,
spécialité Topographie.
- Trimble, [2011], Systèmes Trimble de guidage d’engin, France
- Trimble, [2011], Systèmes de positionnement sur chantier Trimble, France
- SITECH, [2011], GCS 900 Niveleuse, France
Projet de Fin d’Etudes Eiffage Sénégal Page 44
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
Cette étude doit permettre de définir si l’installation d’un système de guidage par GPS se justifie sur ce type de chantier, mais également de voir les solutions techniques proposées par les différents constructeurs et tout particulièrement avec les produits de la marque Leica (ScanLaser) qui équipe traditionnellement le service de topographie de la société EIFFAGE Sénégal. En effet, l’objectif de l’acquisition d’un système de guidage par GPS est de rendre le conducteur de la niveleuse indépendant dans son travail, c'est-à-dire qu’il puisse travailler sur le chantier sans qu’une équipe topographique soit obliger de déplacer la station totale de manière récurrente. Cela permet également de réduire la mise en place de points d’appuis utile pour stationner la station totale dans le cas d’un guidage utilisant ce système.
I. Principe général de fonctionnement
Afin de pouvoir travailler avec un système GPS /GNSS embarqué, il faut disposer, outre le matériel commun que l’on retrouve lorsque que l’on effectue un guidage d’engin par station totale, du matériel suivant :
- Une antenne GPS/GNSS monté sur le mât de la niveleuse - Un récepteur
Ce qui diffère par rapport à un système de guidage par station totale est le moyen d’obtenir les coordonnées du coin de la lame. En ce qui concerne la gestion des commandes hydrauliques, le principe de fonctionnement est identique à celui fonctionnant avec une station totale. L’objectif de la mesure GPS/GNSS va être de déterminer les coordonnées du mât de la niveleuse et par conséquent celui du coin de la lame. Pour ce faire, il faut placer le pivot sur un point connu, ce qui va permettre de déterminer les coordonnées du vecteur entre le pivot et l’antenne de la niveleuse. Le pivot et l’antenne mobile sur le mât de la niveleuse communique par onde radio. Pour pouvoir travailler avec le système GPS/GNSS, il faut être en mesure de capter un minimum de 4 satellites afin de calculer la position de l’antenne du mât de la niveleuse. Le traitement des mesures GPS/GNSS s’effectue en RTK (Real Time Kinematic). Les constructeurs travaillent avec des récepteurs bi-fréquences. La phase d’initialisation a pour but l’estimation des ambiguïtés de phases. En effet, l’évaluation de la distance satellite / antenne se fait par mesure de phase. Cela consiste à mesurer la différence de phase entre le signal provenant du satellite et celui généré par le récepteur. Les satellites émettent en direction de la terre un signal composé de deux fréquences porteuses L1 (19 cm de longueur d’onde) et L2 (24 cm de longueur d’onde). Ces deux porteuses sont modulées en phase par des codes pseudo aléatoires. Il s’agit du code C/A (Coarse/Acquisition) qui module que L1 et du code P (Precise) sur L1 et L2 mais uniquement exploitable par les personnes habilitées. Le conducteur de la niveleuse disposera des coordonnées à l’instant t de l’antenne du mât de la niveleuse.
Projet de Fin d’Etudes Eiffage Sénégal Page 45
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
Cette méthode, reposant sur la mesure de phase, développée par les constructeurs permet d’atteindre une précision centimétrique en planimétrie et altimétrie. Néanmoins, l’utilisation du système GPS /GNSS est soumis à des sources d’erreur liées aux modélisations physiques (les orbites, ionosphère, troposphère, choix des coordonnées de référence), liées au matériel (horloge des satellites, les sauts de cycles, les antennes) et liées à l’environnement (les masques et les multi trajets). Une des erreurs qui pourrait affecter le travail du conducteur de la niveleuse est le saut, c'est-à-dire la présence d’un masque radioélectrique entre le GPS /GNSS et le récepteur, on ne connaîtra alors plus le nombre de cycles qui se produit entre 2 mesures de phases. Il faudra alors procéder à une réinitialisation qui peut prendre un certain temps de l’ordre de 15s à 1min.
II. Les différentes propositions des constructeurs
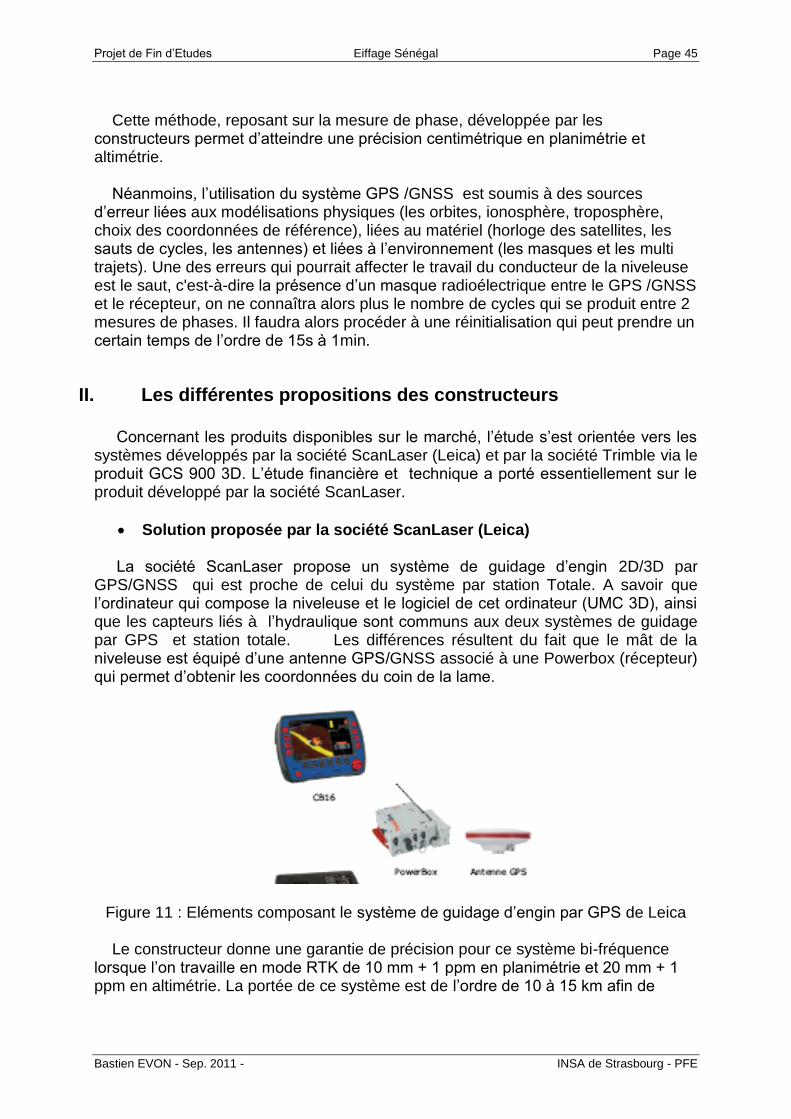
Concernant les produits disponibles sur le marché, l’étude s’est orientée vers les systèmes développés par la société ScanLaser (Leica) et par la société Trimble via le produit GCS 900 3D. L’étude financière et technique a porté essentiellement sur le produit développé par la société ScanLaser.
Solution proposée par la société ScanLaser (Leica) La société ScanLaser propose un système de guidage d’engin 2D/3D par GPS/GNSS qui est proche de celui du système par station Totale. A savoir que l’ordinateur qui compose la niveleuse et le logiciel de cet ordinateur (UMC 3D), ainsi que les capteurs liés à l’hydraulique sont communs aux deux systèmes de guidage par GPS et station totale. Les différences résultent du fait que le mât de la niveleuse est équipé d’une antenne GPS/GNSS associé à une Powerbox (récepteur) qui permet d’obtenir les coordonnées du coin de la lame.
Figure 11 : Eléments composant le système de guidage d’engin par GPS de Leica Le constructeur donne une garantie de précision pour ce système bi-fréquence lorsque l’on travaille en mode RTK de 10 mm + 1 ppm en planimétrie et 20 mm + 1 ppm en altimétrie. La portée de ce système est de l’ordre de 10 à 15 km afin de

Projet de Fin d’Etudes Eiffage Sénégal Page 46
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
travailler avec un GDOP (Geometric Dilution Of Precision) dont la valeur ne devra pas dépasser 8 afin de pouvoir travailler dans les précisions requises. Pour la mise en place de ce système comprenant la fourniture du matériel (capteurs, Powerbox, antenne GPS/GNSS, ordinateur CB 16, logiciel …), l’installation, la mise en route et la formation de deux personnes, un budget de l’ordre de 40 000 euros HT est nécessaire.
Solution proposée par la société Trimble Le système de guidage d’engin 3D par GPS / GNSS proposée par la société Trimble correspond au produit GCS 900 3D (Grade Control System). Ce système permet de travailler en 2D et 3D. Il est composé des capteurs (2 capteurs angulaires et un capteur rotation), un récepteur, une antenne GPS / GNSS monté sur le mât de la niveleuse, une radio, un ordinateur et un logiciel pour permettre la mise en relation des données GPS / GNSS et des capteurs et un boitier de contrôle en cabine qui détermine la position de chaque extrémité de la lame et la compare à l’élévation du projet afin de calculer les remblais et déblais éventuels. On rentre dans l’ordinateur de la machine un projet MNT.
Figure 12 : Ordinateur de la niveleuse du système Trimble
Le conducteur de la niveleuse dispose à partir de l’ordinateur de la niveleuse de l’ensemble des données nécessaires à son travail. Le constructeur donne une garantie de précision pour ce système bi-fréquence lorsque l’on travaille en mode RTK de 10 mm + 1 ppm en planimétrie et 20 mm + 1 ppm en altimétrie. Si l’on souhaite accroître la précision altimétrique, il faut équiper en parallèle la niveleuse d’un smât laser. Cela permet de fournir un guidage de la lame entre 3 à 6 mm. Une des particularités de ce système est de pouvoir équiper la niveleuse de deux antennes ce qui permet de connaître la position et la trajectoire de la lame de manière exacte. La portée de ce système est de l’ordre de 10 à 15 km afin de travailler avec un GDOP (Geometric Dilution Of Precision) dont la valeur ne devra pas dépasser 8 afin de pouvoir travailler dans les précisions requises.

Projet de Fin d’Etudes Eiffage Sénégal Page 47
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
Pour la mise en place de ce système comprenant la fourniture du matériel (capteurs, récepteur, antenne GPS / GNSS, ordinateur, logiciel …), l’installation, la mise en route et la formation de deux personnes, un budget de l’ordre de 35 000 euros HT est nécessaire.
III. La solution retenue
Afin de proposer une solution économique et technique la plus cohérente, le choix du système retenu serait celui proposé par le constructeur LEICA. En effet, l’objectif serait d’acheter l’ensemble du matériel pour équiper la niveleuse (capteurs, ordinateur …) et une antenne GPS/GNSS pour le mât de la niveleuse que l’on associerait au récepteur GPS/GNSS qui fait fonctionner les deux autres antennes mobiles du chantier. Cela permettra de ne pas racheter un nouveau récepteur. Néanmoins, le produit développé par Trimble permet d’obtenir des précisions meilleures si on accepte de l’équiper d’un certain nombre d’options pour un prix de revient plus élevé.
Conclusion
L’étude montre que l’intérêt pour l’entreprise d’investir dans un système de guidage par GPS se trouve limité bien que cette technologie permette de pouvoir régler une surface avec une niveleuse avec une précision verticale de 20 mm + 1 ppm. En effet, un des intérêts majeur de travailler avec un système de guidage par GPS/GNSS est le fait que la niveleuse puisse travailler en tout point du chantier sans attendre qu’une équipe du service de topographie installe la station totale. Donc c’est un gain de temps et financier. Or, au Sénégal du fait que le coût de la main d’œuvre ne soit pas très élevé, à chaque niveleuse est associée une équipe de deux topographes qui est en charge d’installer la station totale et de rester au prés de l’appareil toute la journée en cas de problème. De plus, la niveleuse change de zone de travail généralement pas plus d’une fois dans la journée ce qui limite les conséquences de perte de temps liée à la mise en place de la station totale. Enfin, le projet d’autoroute traverse des zones urbaines et des forêts où l’utilisation du GPS/GNSS pose problème. Donc à ce jour, EIFFAGE Sénégal n’a pas fait le choix de faire équiper une niveleuse d’un système de guidage par GPS/GNSS pour ce chantier.

Projet de Fin d’Etudes Eiffage Sénégal Page 48
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
Chapitre V
Le Management
Au cours de mon Projet de Fin d’Etudes, une partie importante de mon travail a consisté à encadrer et former du personnel du service de topographie aux appareils de guidage d’engins. Dans ce chapitre, je vais exposer la manière dont le management est réalisé au sein du service topographie du chantier de l’autoroute à péage Pikine-Diamniado au Sénégal.
I. Organisation du Service de Topographie
Le service de topographie du chantier, constituée d’environ 18 collaborateurs, est dirigé par un chef de mission qui est directement rattaché au directeur du chantier. Le chef de mission doit à la fois s’occuper de la partie étude du projet, lorsque des modifications sont à apporter, mais également de la partie production en distribuant le travail à ces équipes le matin afin que le chantier puisse tourner. Pour cela, il s’appuie sur trois responsables topographiques, un pour la partie terrassement, un autre pour la partie génie civil et un autre pour la partie enrobée du chantier. Enfin, il s’appuie également sur un responsable étude qui supervise les projeteurs. Les travaux à réaliser sont supervisés par les responsables topographiques qui donnent aux chefs de brigade les moyens humains et techniques nécessaires à la réalisation des travaux demandés. La brigade terrassement est composée en 4 équipes, deux pour tous les travaux d’implantation et de réception à réaliser avec le GPS et deux autres pour s’occuper des systèmes de guidage d’engin. La brigade du génie civil et des enrobées sont composées d’une seul équipe. Le responsable étude supervise une équipe de 5 projeteurs. D’une manière générale, chaque équipe est constituée par un chef de brigade et de deux ou trois manœuvres. Cette organisation type d’une équipe peut varier en fonction des travaux à réaliser. L’ensemble des équipes du service de topographies dispose de trois véhicules avec chauffeurs afin de pouvoir se déplacer sur l’ensemble du chantier. Le service de topographie travaille également avec des entreprises sous traitantes pour des besoins spécifiques (Ex : photographie aérienne de la section courante). Enfin, le service de topographie travaille en étroite collaboration avec les autres services du chantier (Travaux, laboratoire …)

Projet de Fin d’Etudes Eiffage Sénégal Page 49
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
Chef de mission
Responsable Terrassement
Responsable génie civil
Responsable enrobé
Responsable étude
Equipes guidage engins
Equipes GPS
Organigramme 1 : Organisation service de topographie
II. Gestion du temps
II.1. Technique
La notion de gestion de temps est très importante sur un chantier. En effet, l’objectif est que chaque employé soit occupé sur l’ensemble de sa journée de travail. En ce qui concerne le personnel de chantier, à savoir les chefs de brigades et les manœuvres, c’est le responsable topographique qui est responsable de la gestion du temps de travail. Toutefois, il doit respecter les horaires de travail. Les ouvriers sont sous contrats à durée déterminée CDD et travaillent 60 heures par semaine du Lundi au Samedi. A cela s’ajoutent les heures supplémentaires qui ne peuvent dépasser 113 h sur l’ensemble de l’année par ouvrier (législation s’appliquant au Sénégal) De ce fait, l’objectif du responsable topographique est de planifier les journées de travail de manière à ce que chaque équipe soit occupée tout le long de la journée. Pour le personnel de bureau, la gestion du temps est différente. En effet, le chef de mission, responsable étude et les projeteurs sont un peu plus libre dans la gestion de leurs temps car ils ne sont pas directement attachés à la production sauf cas exceptionnel. Donc, ils gèrent leur emploi du temps comme ils le souhaitent afin d’atteindre les objectifs.
II.2. Autre
Une notion importante dans la gestion du temps et qui a des répercutions sur les plannings des chantiers sont les congés du personnels. En effet, il est important d’imposer un équilibre dans la prise des congés du personnel afin d’avoir toujours des personnes compétentes dans chaque secteur d’activité.
Projet de Fin d’Etudes Eiffage Sénégal Page 50
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
L’ensemble du personnel du chantier à droit à 4 semaines de vacances. D’une manière générale le chantier se trouve arrêté de manière discontinue pendant la période des pluies qui a débuté à partir de mi juillet pour se terminer fin septembre. Pour poser des congés, le personnel doit prévenir son responsable qui avertira le chef de mission pour que ce dernier puisse équilibrer les absences afin qu’un nombre suffisant d’équipe puisse continuer à assurer la production sur les chantiers. Par ailleurs, le service fait appel à des journaliers pour pallier à l’absence de personnel ou en cas de forte activité. Néanmoins, ces catégories de personnels étant généralement moins qualifiés, le responsable topographique devra en tenir compte dans sa gestion du temps sur son chantier.
III. Planification
Au sein du service de topographie, deux types de planification sont mises en œuvre, une concernant le planning quotidien des responsables topographiques et une autre planification à plus long terme afin de savoir les besoins topographiques du chantier au cours des prochains mois.
III.1. Planification à court terme
La planification à court terme concerne le planning des différents responsables topographiques du service. En effet, chaque jour, le chef de mission du service de topographie réalise le planning du jour suivant pour ces différents responsables. Pour ce faire, il doit prendre contact avec l’ensemble des responsables des différents corps de métier du chantier, terrassement, génie civil … afin de connaître leurs besoins pour les jours suivants.. A partir de ces informations, il doit satisfaire au mieux les demandes. Néanmoins, il doit être en mesure de définir ce qui est le plus urgent afin de ne pas bloquer le chantier. De plus, il doit être réactif face à la demande des responsables du terrassement et du génie civil afin de pouvoir modifier le planning d’une de ces équipes pour effectuer un travail urgent. Cette planification quotidienne est mise à la disposition du responsable la veille ou le matin afin qu’il puisse lui-même anticiper sur ces besoins en matériel et personnel.
III.2. Planification à long terme
Il existe une planification à long terme au sein du service qui est étroitement liée au planning général du chantier qui reprend les différents objectifs à atteindre pour chaque corps de métier mois par mois. A l’intérieur du service, la planification à long terme se traduit par la mise en place d’un planning définissant le travail à effectuer pour les différentes équipes pour les mois à venir. Pour ce faire, l’ensemble des responsables des différents corps de métier se réunissent une fois tous les quinze jours afin d’établir ce planning. Le
Projet de Fin d’Etudes Eiffage Sénégal Page 51
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
responsable du service de topographie doit alors anticiper sur les besoins en matériel et personnels nécessaires. De plus, il doit faire effectuer des travaux tels que mise en place de borne, nivellement pour contrôle afin que le jour ou une équipe est besoin de bornes par exemple pour installer système de guidage d’engin pour niveleuse afin qu’elle ne soit pas bloqué.
IV. Décisions et objectifs
IV.1. Décisions
D’une manière générale, les décisions concernant le fonctionnement du service de topographie sont prises par le responsable du service directement. Néanmoins pour des décisions importantes, le responsable va demander confirmation à son supérieur afin de valider sa décision. En effet, bien que chaque personnel du service soit amené à prendre des décisions plus ou moins importantes selon son statut au sein de la société, une personne prend rarement une décision sans en avertir son supérieur hiérarchique. Cependant, certaines décisions ne peuvent être validées que par le directeur du chantier. Par exemple, lorsqu’un appareil topographique lié au système de guidage d’engin doit être envoyé en révision, c’est le directeur de chantier qui prend la décision du fait de l’impact que cela a sur l’avancement du chantier. Néanmoins, le directeur de chantier doit déléguer à ses collaborateurs un pouvoir décisionnel afin que des décisions puissent être prises rapidement pour faire avancer le chantier. En effet, les différents responsables topographiques peuvent prendre des décisions sans l’aval du responsable du service topographique dans la limite des responsabilités qui leurs ont été confiées. Au sein du service, de simple décisions peuvent être prises à l’orale mais pour les décisions importantes un document devra être rédigé afin de conserver une trace de cette décision, ainsi que pouvoir communiquer la conséquence de cette décision à l’ensemble des acteurs concernés.
IV.2. Objectifs
Au sein du service, on peut s’apercevoir que chaque employé doit atteindre des objectifs personnels liés à sa fonction mais également participer à la réalisation des objectifs du chantier. En effet, en début d’année, le directeur du chantier va effectuer un bilan économique et social de l’année passée et exprimer les objectifs généraux de l’agence pour l’année à venir. Ces objectifs vont concerner la performance sécurité mais le directeur de chantier peut également fixer des objectifs en termes de réduction de consommation de gasoil … A partir de ces objectifs généraux, chaque employé va avoir des objectifs personnels à atteindre afin que le service puisse atteindre les objectifs fixés. Chaque employé reçoit ses objectifs de son supérieur hiérarchique. Afin de recevoir l’adhésion de l’employé en vu d’atteindre l’objectif, il faut que le supérieur hiérarchique arrive à motiver son employé au moyen de récompense financière ou
Projet de Fin d’Etudes Eiffage Sénégal Page 52
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
d’évolution de carrière mais également lui donner les moyens techniques lui permettant d’atteindre l’objectif. Afin de s’assurer que les objectifs seront atteints, un suivi régulier est fait entre celui qui définit l’objectif et celui qui doit l’atteindre.
V. Formation du personnel
Un des axes important de ce PFE portait sur la formation du personnel au système ScanLaser et DPS de guidage d’engin. La procédure mise en œuvre afin de former 9 personnes du service de topographie a été la suivante :
- Rédaction d’une fiche de procédure pour chacun des systèmes de guidage DPS et Scanlaser. L’objectif de ces fiches procédures était de faire la synthèse des différentes notices proposées par les constructeurs mais surtout de détailler les étapes depuis la mise en place de la station jusqu’au lancement du guidage du projet dans l’ordinateur de la niveleuse pas à pas sachant qu’une grande partie du personnel ne s’est jamais ou peu servi de station totale.
- Chaque personnel du service de topographie a reçu dans un premier temps une notice rédigée par mes soins expliquant le procédé de mise en œuvre des deux systèmes de guidage afin qu’ils puissent prendre connaissance du fonctionnement.
- Puis j’ai effectué par petit groupe une mise en pratique sur le terrain des deux systèmes de guidage d’engin. Le personnel volontaire à l’apprentissage de l’un ou l’autre des systèmes de guidage revenait plusieurs fois afin de pratiquer la mise en place de ces systèmes.
Conclusion
Encadrer et former du personnel de topographie m’a obligé de comprendre le fonctionnement du service topographie. En effet, manager une équipe nécessite de prendre en compte un certain nombre de paramètres tel que la gestion des objectifs, du temps, des imprévus, de la culture du pays… Manager, c’est également être responsable du travail de son équipe face à sa hiérarchie directe.
De plus, cet exercice de formation du personnel a été très enrichissant. D’une part, il nécessite la maîtrise technique des deux systèmes de guidage mais également d’adapter la pédagogie d’enseignement selon le personnel que l’on a en face de soit en tenant compte de ses compétences techniques antérieures et de son souhait d’apprendre.
Projet de Fin d’Etudes Eiffage Sénégal Page 53
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
Conclusion générale
Ce stage Projet de Fin d’Etude de 6 mois réalisés au sein de l’agence EIFFAGE Sénégal, restera une expérience très positive et fort enrichissante tant sur le plan technique qu’humain. Ayant déjà effectué un stage dans un cabinet de géomètre expert, j’ai souhaité effectuer mon Projet de fin d’Etude dans une entreprise de Travaux Public de dimension internationale (EIFFAGE), afin de découvrir d’une part un nouveau secteur d’activité (métiers, opportunités d’évolution...), et d’autre part le fonctionnement d’un chantier de construction d’autoroute, les enjeux économiques, techniques et le management des hommes.
C’est dans ce contexte que s’inscrit le thème de mon mémoire : “ Optimisation des techniques de guidage d’engins 2D/3D (niveleuse) par projet MNT sur le chantier de l’autoroute à péage Pikine-Diamniado (Sénégal) par le système ScanLaser et DPS (Driving Positionning System).
Ce Projet de fin d’étude permet de mettre en avant une réelle avancé des techniques de guidage d’engins durant ces 20 dernières années. En effet, les méthodes traditionnelles de guidage ont peu à peu disparu au profit de méthode de guidage 2D basées sur l’utilisation de capteurs laser ou de palpeurs ultrasons. Ces évolutions sont associées à l’asservissement de la niveleuse par des systèmes de vérins hydrauliques commandés par un automate. Les derniers systèmes de guidage sont des systèmes 3D utilisés soit avec une station totale ou à partir d’antenne GPS/GNSS. En effet, ces systèmes de guidage 3D permettent de rentrer dans l’ordinateur de la niveleuse le projet à réaliser et en comparant les coordonnées du coin de la lame de la niveleuse déterminées à l’aide de la station totale, il est possible de déterminer l’écart entre la cote projet et la cote terrain. A l’aide de capteurs répartis sur la niveleuse et d’un automate qui contrôle les vérins de la lame, la lame de la niveleuse se placera à la cote projet tout en respectant le devers et le profil en long. Les deux systèmes étudiés lors de mon PFE à savoir le DPS et le ScanLaser, sont des systèmes 3D développés par l’entreprise Leica. Le système ScanLaser est la nouvelle génération de système de guidage en remplacement du système DPS. De ce fait, si le système DPS était déjà un outil qui donnait de bon rendement et permettait de travailler avec des précisons altimétriques de l’ordre de quelques cm selon le matériau à régler, le Scanlaser permet d’avoir une précision de réglage et des rendements encore supérieurs, ainsi qu’une plus grande lisibilité dans les programmes de l’ordinateur de la niveleuse et une simplification des fichiers projet à rentrer dans l’ordinateur de la niveleuse. L’étude sur les systèmes de guidage 3D par GPS/GNSS a permis de montrer que cette technologie tend vers des précisions de réglage en planimétrie et altimétrie équivalentes à un système par station totale. En effet, avec une précision de réglage de l’ordre de +/- 2 cm, ces systèmes sont adaptés aux travaux de terrassement
Projet de Fin d’Etudes Eiffage Sénégal Page 54
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
compte tenu des tolérances imposées par les maîtres d’ouvrage. Cette étude s’est limitée aux produits proposés par la marque Leica et Trimble. Néanmoins, c’est le système GPS/GNSS de Leica qui a été envisagé dans le cas d’un achat ultérieur d’un tel système de guidage. En effet, l’agence EIFFAGE Sénégal travaille depuis plusieurs année avec Leica mais également car le chantier de l’autoroute disposant déjà d’un récepteur GPS / GNSS pour des antennes mobiles, l’objectif serait d’ajouter sur une niveleuse une antenne et l’ensemble du matériel propre à la niveleuse afin de diminuer le coût d’achat. A l’heure actuelle, ce projet n’est pas à l’ordre du jour du fait que le chantier va rentrer dans des travaux en milieu urbain et forestier qui ne favorise pas l’usage d’un système GPS/GNSS. Enfin, l’optimisation des systèmes de guidage 2D/3D DPS et ScanLaser fut réalisée par la formation du personnel du service topographie à ces deux systèmes de guidages DPS et ScanLaser. Pour ces formations, deux procédures ont été rédigées afin de permettre au personnel d’avoir un support lors de l’apprentissage en plus de la pratique sur le terrain. La mise en place de ces ateliers de formation a été enrichissante tant sur le plan technique que humain. Suite à cette formation, la supervision des équipes en charge des systèmes de guidage d’engin m’a donné l’opportunité d’appréhender le management des hommes. D’une manière plus générale, réaliser ce Projet de Fin d’Etudes au sein de l’agence EIFFAGE Sénégal sur ce chantier de construction d’autoroute m’a permis d’acquérir de nouveaux savoir faire tant liés aux systèmes de guidages d’engins mais également plus généralement sur les différents acteurs et phases de travaux que l’on est amené à rencontrer lors de la construction d’une autoroute. De plus, réaliser ce PFE de 6 mois au Sénégal m’a permis de découvrir une nouvelle culture, et de m’adapter aux us et coutumes locales afin de tirer le meilleur partie de l’organisation et des hommes qui la compose .
Projet de Fin d’Etudes Eiffage Sénégal Page 55
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
Table des illustrations Coupe
Coupe 1 : Structure de chaussée p 7
Figure
Figure 1 : Principe fonctionnement méthode des nivelettes p 11 Figure 2 : Principe de fonctionnement des palpeurs ultrasons p 12 Figure 3 : Capteurs lasers p 12 Figure 4 : Les différents capteurs d’une niveleuse p 15 Figure 5 : Architecture des systèmes 3D p 16 Figure 6 : Page d’accueil logiciel Geo-pad p 36 Figure 7 : Page désignant la station libre p 37 Figure 8 : Lancement mode ‘guidage d’engin’ p 38 Figure 9 : Transfert de projet p 39 Figure 10 : Sélection du chantier p 40 Figure 11 : Eléments composant le système de guidage d’engin par GPS de Leica p 45 Figure 12 : Ordinateur de la niveleuse du système Trimble p 46
Photo
Photo1 : Ecran ordinateur de la niveleuse en mode travail avec système DPS p 20 Photo 2 : Ecran ordinateur système DPS indiquant la hauteur de la lame par rapport au projet p 20 Photo 3 : Niveleuse 14 H p 21 Photo 4 : Ordinateur niveleuse associé au système DPS p 21 Photo 5 : Automate régulation système DPS p 22 Photo 6 : Radio modem p 22 Photo 7 : Station totale TCA ‘1103 plus’ p 23

Projet de Fin d’Etudes Eiffage Sénégal Page 56
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
Photo 8 : Page du logiciel de l’ordinateur de la niveleuse qui permet de réaliser
l’ensemble des paramétrages
p 24
Photos 9 : Ecran contrôle capteur devers
p 25
Photo 10 : Menu principal TCA ‘1103 plus’ p 26 Photo 11 : Menu station libre TCA ‘1103 plus’ p 27 Photo 12 : Menu station libre TCA ‘1103 plus’ p 27 Photo 13 : Menu des coordonnées de la station libre TCA ‘1103 plus’ p 28 Photo 14 : Page d’accueil ‘DPS niveleuse’ p 28 Photo 15 : Menu principal logiciel ‘DPS niveleuse’ p 29 Photo 16 : Emplacement clé USB sur système DPS p 29 Photo 17 : Page d’accueil guidage 3D du logiciel ‘DPS niveleuse’ p 30 Photo 18 : Page d’accueil guidage 3D du logiciel ‘DPS niveleuse’ p 30 Photo 19 : Page d’accueil guidage 3D pour l’orientation du logiciel ‘DPS niveleuse’ p 30 Photo 20 : Page pour rentrer les coordonnées de la référence et station totale p 31 Photo 21 : Page résidus en X,Y et Z sur la référence p 31 Photo 22 : Page de paramétrages p 32 Photo 23 : Ecran ordinateur de la niveleuse en mode travail avec système DPS p 32 Photo 24 : Ecran ordinateur système DPS indiquant la hauteur de la lame par rapport au projet p 32 Photo 25 : Ecran de travail ordinateur du système ScanLaser p 34 Photo 26 : Niveleuse 140 H p 34 Photo 27 : Ordinateur CB 16 p 34 Photo 28 : Radio modem émettrice + antenne p 35 Photo 29 : Station totale ‘Power Tracker’ p 35 Photo 30 : Page permettant la sélection de la référence p 37 Photos 31 : Page indiquant les résidus planimétriques et altimétriques des références p 38
Projet de Fin d’Etudes Eiffage Sénégal Page 57
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
Photo 32 : Page accueil logiciel ‘UMC 3D’ p 39 Photo 33 : Communication des coordonnées du Power Tracker p 40 Photo 34 : Espace de travail du conducteur de la niveleuse avec système ScanLaser P 41 Photo 35 : Page permettant établir communication entre niveleuse et Power Tracker p 41 Photo 36 : Page validant la communication p 41 Photo 37 : Espace de travail du conducteur de la niveleuse avec système ScanLaser p 42
Organigramme Organigramme 1 : Organisation service de topographie p 49

Projet de Fin d’Etudes Eiffage Sénégal Page 58
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
Bibliographie Ouvrages et revues
- D&P Systems SARL, [ - ], Manuel de l’utilisateur DPS Projet, France
- Froissard, C., [2001], Guidage d’une niveleuse et d’un finisseur / Evolution
d’un système par station robotisée vers un procédé par GPS, Mémoire d'ingénieur de l'ESGT, spécialité Topographie, 68 p.
- JOURDAN, O., [2000], La topographie moderne au service des chantiers de terrassement, Mémoire d'ingénieur de l'ESGT, spécialité Topographie, 59 p.
- Leica, [ - ], Leica Power Tracker Manuel de l’utilisateur, France
- Leica, [2008], UMC 3D , France
- Leica, [ - ], Leica Power grade / Intelligent Grading Systems, Suisse
- Leica, [ - ], Leica PowerBox/PowerAntenna Technical Data , Suisse
- Leica, [ - ], Leica PowerBox/PowerAntenna Equipment List , Suisse
- LEIDIG, J.[2010], Global Navigation Satellite System, INSA de Strasbourg,
spécialité Topographie.
- Trimble, [2011], Systèmes Trimble de guidage d’engin, France
- Trimble, [2011], Systèmes de positionnement sur chantier Trimble, France
- SITECH, [2011], GCS 900 Niveleuse, France
Sites Internet
- Leica Geosystems @[2011], Leica URL http://www.leica-geosystems.fr/fr/Guidage-dengins-de-contruction_4677.htm
- Trimble @[2011], Trimble URL http://www.trimble.com/construction/heavy-and-highway/machine-control/grade-control/
- Topocenter @[2011], Topocenter
URL http://www.topocenter.fr/new_web/catalog/chapitre-guidage-d-engins.html
- SITECH @[2009], Sitech URLhttp://www.sitechfrance.fr/index.php?option=com_content&view=article&id=35&Itemid=154&cacc19dd56f12c9638668bab7a97ce83=735c954615fec3a3ff0a664c7060b814

Projet de Fin d’Etudes Eiffage Sénégal Page 59
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
Annexes Les annexes 1&2 regroupent les deux fiches méthodes que j’ai établies afin d’assurer la formation du personnel au technique de guidage d’engin par ScanLaser et DPS.

Projet de Fin d’Etudes Eiffage Sénégal Page 60
Bastien EVON - Sep. 2011 - INSA de Strasbourg - PFE
Annexe 2 : Fiche procédure ScanLaser