manuel algébre 2 (s4)
TRANSCRIPT
7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 1/57
Cours d’Algebre II
Pr. Khatmi samira
Fevrier 2012

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 2/57
7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 3/57
Table des matieres
1 Resolution des systemes lineaires 1
1.1 Preliminaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.1 Definitions . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.1.2 Operations elementaires sur les lignes d’un systeme . . . . 2
1.2 Resolution par la methode de Gauss . . . . . . . . . . . . . . . . . 2
1.2.1 Principe de la methode de Gauss . . . . . . . . . . . . . . 2
1.2.2 Exemples . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Resolution par la methode de Cramer . . . . . . . . . . . . . . . . 6
1.3.1 Determinant d’une matrice carree d’ordre 2 . . . . . . . . 6
1.3.2 Determinant d’une matrice carree d’ordre 3 par la methodede Sarrus . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.3.3 Determinant d’une matrice carree d’ordre n > 2 par la
methode de cofacteurs . . . . . . . . . . . . . . . . . . . . 81.3.4 Proprietes des determinants . . . . . . . . . . . . . . . . . 10
1.3.5 Principe de la resolution par la methode de CRAMER . . 11
1.3.6 Exemples . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.4 EXERCICES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2 Produit scalaire et Espace euclidien 17
2.1 Produit scalaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.1.1 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.1.2 Norme euclidienne . . . . . . . . . . . . . . . . . . . . . . 20
2.2 Orthogonalite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222.2.1 Vecteurs orthogonaux . . . . . . . . . . . . . . . . . . . . . 23
2.2.2 Familles orthogonales - Familles orthonormales . . . . . . . 23
2.2.3 Sous-espace orthogonaux . . . . . . . . . . . . . . . . . . . 24
2.3 Espaces euclidiens . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.3.1 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.3.2 Bases orthonormales . . . . . . . . . . . . . . . . . . . . . 26
2.4 Supplementaire orthogonale . . . . . . . . . . . . . . . . . . . . . 27
2.5 EXERCICES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
i

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 4/57
7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 5/57
Chapitre 1
Resolution des systemes lineaires
1.1 Preliminaires
1.1.1 Definitions
Definition 1.1.1.• On appelle equation lineaire a p inconnues toute equation de la
forme :a1x1 + a2x2 + ...... + a px p = b
x1, x2......x p sont les inconnuesa1, a2, .......a p, b sont des coefficients numeriques appartenant a R
• Un p-uplet (c1, c2, .....c p) d’elements de R verifie l’equation ou estsolution de l’equation si l’egalite : a1c1 + a2c2 + .... + a pc p = b estverifie.
• L’equation 0x1+0x2+...+0x p = β est impossible si β = 0 indeterminesi β = 0.
Remarque 1.1.1. Lorsque l’equation comporte peu d’inconnue, on les notes par commodite : x, y, z, t,....
Definition 1.1.2.• On appelle systeme de n equations lineaires a p inconnues le n-
uplet d’equations :
(S )
a11x1 + ... + a1 jx j + .... + a1 px p, = b1
a21x1 + ... + a2 jx j + .... + a2 px p, = b2...ai1x1 + ... + aijx j + .... + aipx p, = bi...an1x1 + ... + anjx j + .... + anpx p, = bn
1
7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 6/57
Resolution des systemes lineaires
Ou les coefficients aij et bi (1 ≤ i ≤ n, 1 ≤ j ≤ p) sont des elemetsde R et ou les inconnues sont x1, ....x p.
•
La ie
equation : a11x1 + ... + a1 jx j + .... + a1 px p, = b1 est notee Li etappelee ie ligne de (S).• On appelle systeme homogene un systeme dont tous les seconds
membres sont nuls ∀ 1 ≤ i ≤ n, bi = 0.• Un p-uplet (c1, c2, .....c p) est solution du systeme (S) s’il est solution
des n equations composants le systeme.• Resoudre le systeme (S) consiste a trouver l’ensemble des solu-
tions de (S).• Un systeme n’ayant aucune solution est dit impossible.• Un systeme ayant plusieurs solutions est dit indetermine.
Remarque 1.1.2. Un systeme homogene admet toujours la solution nulle (0, 0...., 0).
Definition 1.1.3. Deux systemes S et S’ sont equivalents s’ils ont memeensemble de solutions.
1.1.2 Operations elementaires sur les lignes d’un systeme
Soit (S) un systeme de n equations lineaires a p inconnues.
Definition 1.1.4. On appelle operation elementaire sur les lignes d’un systeme :
• Le fait d’echanger deux lignes, Li ↔ L j , (i = j)• Le fait de multiplier une ligne par un reel non nul, Li ↔ αLi, (α = 0)• Le fait d’ajouter a une ligne le multiple d’une autre ligne, Li ↔ Li + αL j,
(i = j)
Proposition 1.1.1. En effectuant une operation elementaire sur les lignes d’un systeme (S), on obtient un systeme (S’) qui lui est equivalent.
Remarque 1.1.3. Il faut faire bien attention a ne faire qu’une operation ele-mentaire a la fois.
1.2 Resolution par la methode de Gauss
L’objet de cette section est de presenter une methode systematique permettantde transformer un systeme quelconque en un systeme equivalent facile a resoudre.
1.2.1 Principe de la methode de Gauss
Soit S un systeme de n equations lineaires a p inconnues.
2 Algebre II

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 7/57
1.2 Resolution par la methode de Gauss
1. On echange les lignes de 1 a n de telle sorte que le coefficient en x1, dansla premiere ligne soit non nul. C’est notre pivot a11.
2. On soustrait a la ie
ligne un multiple de la premiere ligne de telle sorte quele coefficient en x1 de la ie ligne soit nul,
Li ↔ Li − ai1a11
L1 (2 ≤ i ≤ n)
Le systeme (S) est transforme en le systeme equivalent
L1
(S 1)
Ou (S 1) est un systeme de (n−1) equations a ( p−1) inconnues : x2, x3,....,x p
3. On applique la methode decrite dans 1. et 2. a (S 1) qui va etre transforme
a son tour en un systeme equivalent L2
(S 2)
Ou (S 2) est un systeme de (n−2) equations a ( p−2) inconnues : x3, x4,....,x p
4. Le processus s’arrete car a chaque etape, le nombre d’equations et le nombred’inconues diminuent
5. On trouve a la fin un systeme triangulaire, il suffit alors de ”remonter” :
Remarque 1.2.1.
1. Choix des pivots : a chaque etape, si cest possible, on a interet achoisir un pivot simple ( 1 est souvent le meilleur choix ) et le casecheant, independant de parametres.
2. Si lors d’une etape apparait une equation de la forme 0 = β
• Si β = 0 le processus s’arrete car (S) est impossible.• Si β = 0 on peut supprimer l’equation (0=0).
1.2.2 Exemples
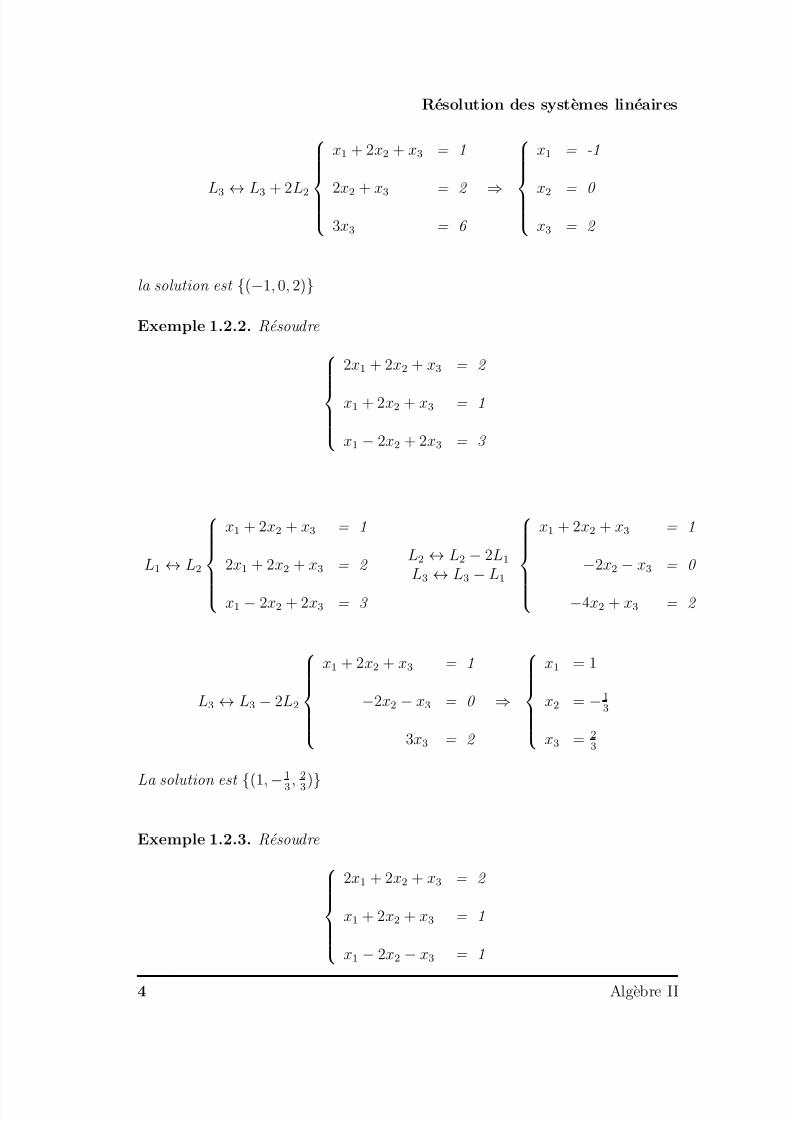
Exemple 1.2.1. Resoudre
2x2 + x3 = 2
x1 + 2x2 + x3 = 1
x1 − 2x2 + 2x3 = 3
L1 ↔ L2
x1 + 2x2 + x3 = 1
2x2 + x3 = 2
x1 − 2x2 + 2x3 = 3
L3 ↔ L3 − L1
x1 + 2x2 + x3 = 1
2x2 + x3 = 2
−4x2 + x3 = 2
Pr.Khatmi 3
7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 8/57
7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 9/57
1.2 Resolution par la methode de Gauss
L1 ↔ L2
x1 + 2x2 + x3 = 1
2x1 + 2x2 + x3 = 2
x1 − 2x2 − x3 = 1
L2 ↔ L2 − 2L1
L3 ↔ L3 − L1
x1 + 2x2 + x3 = 1
−2x2 − x3 = 0
−4x2 − 2x3 = 0
L3 ↔ L3 − −4−2L2
x1 + 2x2 + x3 = 1
−2x2 − x3 = 0
0 = 0
⇒
x1 + 2x2 + x3 = 1
−2x2 − x3 = 0
x1 = 1
x2 = −12
x3⇒
x1 = 1
x2 = −12
λ
x3 = λ
λ ∈ R
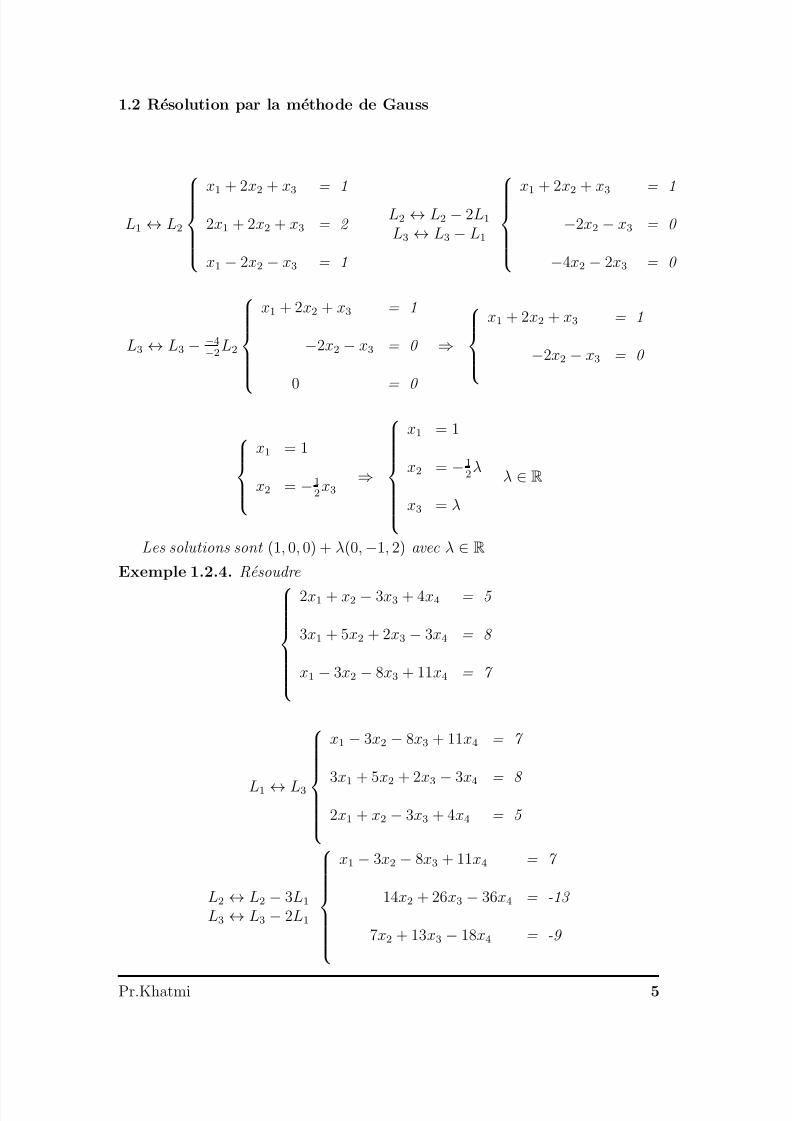
Les solutions sont (1, 0, 0) + λ(0, −1, 2) avec λ ∈ RExemple 1.2.4. Resoudre
2x1 + x2 − 3x3 + 4x4 = 5
3x1 + 5x2 + 2x3 − 3x4 = 8
x1 − 3x2 − 8x3 + 11x4 = 7
L1 ↔ L3
x1 − 3x2 − 8x3 + 11x4 = 7
3x1 + 5x2 + 2x3 − 3x4 = 8
2x1 + x2 − 3x3 + 4x4 = 5
L2 ↔ L2 − 3L1
L3 ↔ L3 − 2L1
x1 − 3x2 − 8x3 + 11x4 = 7
14x2 + 26x3 − 36x4 = -13
7x2 + 13x3 − 18x4 = -9
Pr.Khatmi 5

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 10/57
Resolution des systemes lineaires
L3 ↔ L3 − 714
L2x1 − 3x2 − 8x3 + 11x4 = 7
14x2 + 26x3 − 36x4 = -13
0 = −52
La derniere ligne est impossible, donc le systeme n’a aucune solution.
1.3 Resolution par la methode de Cramer
Dans La suite, nous presentons une methode alternative a celle de pivot deGauss pour resoudre les systemes lineaires de n equations a n inconnues.C’est la
methode de Cramer dite aussi methode des determinants. C est une methode quiest simple dans son application, mais qui peut devenir tres fastidieuse lorsque lenombre de variables devient eleve puisqu’elle repose uniquement sur le calcul desdeterminants.
1.3.1 Determinant d’une matrice carree d’ordre 2
Definition 1.3.1. Soit :
A =
a11 a12
a21 a22
Une matrice carree d’ordre 2, alors le determinant de A est defini par l’egalite :
|A| =
a11 a12a21 a22
= a11a22 − a21a12
Exemple 1.3.1. Trouver le determinant de la matrice :
A =
3 −21 4
Solution
Le determinant est :
|A| = 3 −21 4
= (3 ∗ 4) − (1 ∗ (−2)) = 12 + 2 = 14
1.3.2 Determinant d’une matrice carree d’ordre 3 par lamethode de Sarrus
Soit
A =
a11 a12 a13
a21 a22 a23
a31 a32 a33
6 Algebre II

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 11/57
1.3 Resolution par la methode de Cramer
une matrice carree d’ordre 3La regle de Sarrus consiste a ecrire les trois colonnes de la matrice A et a
repeter dans l’ordre :• Soit les deux premieres lignes en dessous de la matrice A pour obtenir lamatrice augmentee en ligne suivante :
AL =
a11 a12 a13
a21 a22 a23
a31 a32 a33
a11 a12 a13
a21 a22 a23
.
Il suffit alors d’effectuer les produits des coefficients de chaque diagonaleet d’en faire la somme si la diagonale est descendante ou la difference si ladiagonale est ascendante.
|A| = a11a22a33 + a21a32a13 + a31a12a23 − a21a12a33 − a11a32a23 − a31a22a13
• Soit les deux premieres colonnes a droite de la matrice A pour obtenir lamatrice augmentee en colonne suivante :
AC =
a11 a12 a13 a11 a12
a21 a22 a23 a21 a22
a31 a32 a33 a31 a32
.
et effectuer les produits des coefficients de chaque diagonale et d’en faire la
somme si la diagonale est descendante ou la difference si la diagonale estascendante.
|A| = a11a22a33 + a12a23a31 + a13a21a32 − a33a21a12 − a32a23a11 − a31a22a13
Remarque 1.3.1.ATTENTION : La methode de Sarrus ne marche que pour les matrices
carres d’ordre 3
Exemple 1.3.2. Calculer le determinant de la matrice
A = 2 −3 1
3 2 −35 4 −2 Solution
AL =
2 −3 13 2 −35 4 −22 −3 13 2 −3
Pr.Khatmi 7

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 12/57
Resolution des systemes lineaires
|A| = 2 ∗ 2 ∗ (−2) + 3 ∗ 4 ∗ 1 + 5 ∗ (−3) ∗ (−3) − 3 ∗ (−3) ∗ (−2) − 2 ∗ 4 ∗ (−3) − 5 ∗ 2 ∗ 1)
= −8 + 12 + 45 − 18 + 24 − 10 = 45
de meme si on considere la matrice
AC =
2 −3 1 2 −33 2 −3 3 25 4 −2 5 4
|A| = 2 ∗ 2 ∗ (−2) + (−3) ∗ (−3) ∗ 5 + 1 ∗ 3 ∗ 4 − (−2) ∗ 3 ∗ (−3) − 4 ∗ (−3) ∗ 2 − 5 ∗ 2 ∗ 1)
= −8 + 45 + 12 − 18 + 24 − 10 = 45
dans les deux cas on trouve la meme valeur pour le determinant.
1.3.3 Determinant d’une matrice carree d’ordre n > 2 parla methode de cofacteurs
Pour calculer le determinant d’une matrice d’ordre n > 2, nous allons intro-duire les notions de sous matrice et de cofacteur qui vont permettre de ramenerle calcul du determinant d’ordre n au calcul de determinant d’ordre 2.
Definition 1.3.2.
1. Soit A une matrice carree d’ordre n, on appelle sous-matrice Aij la ma-trice d’ordre (n − 1) obtenue en supprimant la i eme ligne et la j eme
colonne de la matrice A.
2. Le determinant d’une sous-matrice Aij est appele mineur de l’element aij.
3. La signature d’un element aij est donnee par (−1)i+ j.
4. Le cofacteur d’un element aij est le produit de soin mineur par sa signa-ture, soit :
(−1)i+ j|Aij|.
Exemple 1.3.3. Trouver la sous-matrice A23, le mineur de a12 et le cofacteur de a32 de la matrice : 5 2 −3
−6 4 78 −1 −4
Solution
La sous matrice
A23 =
5 28 −1
8 Algebre II

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 13/57
1.3 Resolution par la methode de Cramer
Elle est obtenue en eliminant la ligne 2 et la colonne 3 de la matrice A.Le mineur de a12 est le determinant de la sous matrice A12 soit :
|A12| = −6 7
8 −4 = 24 − 56 = −32
Le cofacteur de l’element a32 est le produit du mineur de a32 par sa signature,soit :
(−1)3+2|A32| = (−1)5 5 −3
−6 7
= −1(35 − 18) = −17
Remarque 1.3.2. La signature est positive lorsque (i + j) est pair et negative lorsque (i+ j) est impair. En pratique, lorsque la signature d’element est negative,on change le signe de son mineur pour obtenir le cofacteur et si la signature
est positive, on conserve le meme signe. La signature des elements alterne d’un element a l’autre.la signature d’une matrice carree d’ordre n est :
+ . . . (−1)1+ j . . . (−1)1+n
......
......
...(−1)i+1 . . . (−1)i+ j . . . (−1)i+n
......
......
...(−1)n+1 . . . (−1)n+ j . . . +
Definition 1.3.3. Le determinant d’une matrice carree d’ordre n est obtenue en
effectuant la somme des produits de chaque element d’une ligne (ou colonne) par son cofacteur respective.
Exemple 1.3.4. Calculer le determinant de la matrice : 3 −2 12 −3 45 −1 2
Solution
Developpons le determinant a partir de la premiere ligne :3 −2 12 −3 45 −1 2
= 3
−3 4−1 2
+ 2
2 45 2
+ 1
2 −35 −1
Donc
3 −2 12 −3 45 −1 2
= 3(−6 + 4) + 2(4 − 20) + 1(−2 + 15) = −6 − 32 + 13 = −25
Pr.Khatmi 9

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 14/57
Resolution des systemes lineaires
Exemple 1.3.5. Calculer le determinant de la matrice :
A = 3 −2 1 02 −3 4 0
5 −1 2 04 3 1 9
Solution
Developpons le determinant a partir de la quatrieme colonne :
|A
|= (
−1)4+4
∗9
3 −2 12
−3 4
5 −1 2 = 9
∗(
−25) =
−225
1.3.4 Proprietes des determinants
Les proprietes des determinants permettent de simplifier le calcul des deter-minants, surtout pour un determinant d’ordre eleve.
Theoreme 1.3.1. Soit A une matrice carree d’ordre n.
1. Si tous les elements d’une ligne ( ou d’une colonne ) de A sont nuls alors
|A
|= 0
2. Si deux lignes ou deux colonnes de A sont proportionnelles alors |A| = 0a11 a12 a13a21 a22 a23
ka11 ka12 ka13
= 0
3. Si on fait une permutation de deux lignes ou de deux colonnes, il faut mul-tiplier le determinant par (-1).
a11 a12 a13
a21 a22 a23a31 a32 a33 = −
a21 a22 a23
a11 a12 a13a31 a32 a33
4. Si chaque element d’une ligne ( ou de colonne) d’une matrice A est la
somme de deux quantites, alors le determinant de A peut etre ecrit comme une somme de deux determinants.
a11 a12 a13a21 a22 a23
a31 + b31 a32 + b32 a33 + b33
=
a11 a12 a13a21 a22 a23a31 a32 a33
+
a11 a12 a13
a21 a22 a23
b31 b32 b33
10 Algebre II

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 15/57
1.3 Resolution par la methode de Cramer
5. Si on a une ligne (resp. une colonne) combinaison lineaires des autres lignes (resp.des autres colonnes) alors |A| = 0
a11 a12 a13
a21 a22 a23
αa11 + βa21 αa12 + βa22 αa13 + βa23
= 0
6. Le determinant ne change pas si l’on ajoute a une ligne (resp.a une colonne)une combinaison lineaire des autres lignes (resp. des autres colonnes).
a11 a12 a13
a21 + ka11 a22 + ka12 a23 + ka13
a31 a32 a33
=
a11 a12 a13
a21 a22 a23
a31 a32 a33
7. Soit A et B deux matrices qui ne different que par le fait que les elements d’une ligne (ou d’une colonne) de la matrice B sont obtenus en multipliants par k les elements de meme adresse de A. alors
|A| = k|B|
a11 a12 a13ka21 ka22 ka23
a31 a32 a33
= k
a11 a12 a13
a21 a22 a23
a31 a32 a33
1.3.5 Principe de la resolution par la methode de CRA-MER
Soit le systeme d’equations lineaires
(S )
a11x1 + ... + a1 jx j + .... + a1nxn, = b1
a21x1 + ... + a2 jx j + .... + a2 pxn, = b2...
ai1x1 + ... + aijx j + .... + aipxn, = bi...an1x1 + ... + anjx j + .... + anpxn, = bn
Definition 1.3.4. On dit qu’un systeme lineaire (S ) de n equations a n incon-nues est de Cramer s’il admet une solution unique.
Proposition 1.3.1. Un systeme est de Cramer si et seulement le determinant de la matrice associe est non nul.
Pr.Khatmi 11

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 16/57
Resolution des systemes lineaires
Definition 1.3.5 (Principe de la methode de Cramer).La methode de cramer permet de calculer les valeurs des inconnues en suivant
trois etapes successives :1. Calculer le determinant de la matrice A associee au systeme S . Ce resultat
doit etre different de 0 sinon le systeme n’a pas de solution.
2. Calculer le determinant de la matrice Ai obtenue en remplacant la i eme colonne par les elements du vecteur colonne du second membre b
3. Ces deux operations prealables permettent d’obtenir les solutions du systeme S en posant
xi =|Ai||A|
1.3.6 Exemples
Exemple 1.3.6. Resoudre par la methode de CRAMER le systeme d’equations suivant :
2x1 − 3x2 + 5x3, =-8;4x1 − 2x2 + x3, =12;x1 + 5x2 − x3, =-3.
Solution
Le determinant de la matrice des coefficients est :2 −3 54 −2 11 5 −1
= 89
Le determinant etant different de zero, la solution est unique est donnee par :
x1 =
−8 −3 512 −2 1−3 5 −1
89= 3 x2 =
2 −8 54 12 11 −3 −1
89=
−2 x3 =
2 −3 −84 −2 121 5 −3
89=
−4
1.4 EXERCICES
Exercice 1.4.1. Resoudre par la methode de Gauss le systeme suivant :
x1 − 3x2 + x3 = 102x1 + 4x2 − 3x3 = −103x1 − 2x2 + 2x3 = 19x1 + 10x2 − 8x3 = −39
12 Algebre II

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 17/57
1.4 EXERCICES
Exercice 1.4.2. En utilisant la methode de Sarrus, calculer le determinant sui-vant :
= 2 1 46 2 0
−1 3 6
Exercice 1.4.3. Calculer le determinant suivant :
=
2 0 34 −2 13 1 6
En decomposant selon les cofacteurs de :
1. La premiere ligne.
2. La premiere colonne.
3. La troisieme colonne.
4. La deuxieme ligne.
Exercice 1.4.4. Calculer le determinant suivant :
1 =
1 0 01 1 11 2 4
En deduire la valeur du determinant :
1 =
2 0 03 3 37 14 28
Exercice 1.4.5. Resoudre par la regle de Cramer le systeme suivant :
2x + y + z = 3x − y + z = 04x + 3y − 2z −4
Exercice 1.4.6. Vous projeter de passer un concours de recrutement l’an pro-chain. Vous avez sous les yeux le tableau suivant :
Candidat A B C Mathematique 7 11 11
Anglais 12 6 16 Informatique 6 10 14
Moyenne 8 9 14
Retrouver le coefficient de chaque epreuve.
Pr.Khatmi 13

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 18/57
Resolution des systemes lineaires
Exercice 1.4.7. Dans une usine de meubles non peint, le travail a ete decompose en trois etapes : sciage, assemblage et sablage. On a constate que dans chacun de
ces departements, il y avait regulierement des ouvrıers qui n’avaient pas de travail a effectuer et qu’il se perdait, mensuellement, l’equivalent de 109 heures-homme a l’atelier de sciage, 164 heures-homme a l’atelier d’assemplage et 273 heures-homme a l’atelier de sablage. Pour eliminer ces pertes de temps, la direction a decide de fabriquer trois nouveaux modeles de chaise. La direction a fait deter-miner le temps necessaire a la realisation de ces modeles et les donnees obtenues sont celles du tableau suivant :
M 1 M 2 M 3 Temps libres dans chaque atelier Sciage 1 2 2 109
Assemblage 2 2 3 164
Sablage 3 4 5 273
1. Determiner le nombre de chaises de chaque modele qu’il faut produire pour eliminer les temps morts.
2. La chaise de type M 3 etant la plus dispendieuse a cause de son temps de realisation, la demande pour ce modele est assez faible et on prevoit ne pouvoir en vendre plus de 10 par mois ; pour les autres modeles, on prevoit ne pouvoir suffire a la demande. En tenant compte de ces contraintes de marche, determiner les solutions realisables du probleme et les representer sous forme de tableaux.
Exercice 1.4.8. Une entreprise fabrique deux types de lames de rasoir de qualites differentes. Pour fabriquer 100 lames de premiere qualite, il faut 5 unites d’acier ordinaire et 7 unites d’acier special. Pour fabriquer 100 lames de deuxieme qua-lite, il faut 9 unites d’acier ordinaire et 3 unites d’acier special.
1. Sachant que l’entreprise a en reserve 195 unites d’acier ordinaire et 129 unites d’acier special, determiner le nombre de paquets de 100 lames de chaque qualite qui peuvent etre produites.
2. Combien seront produites si l’entreprise recoit une livraison d’acier portant ses reserves a 833 unites d’acier ordinaire et 523 unites d’acier special
Exercice 1.4.9. En utilisant les proprietes des determinants, calculer
D =
4 5 1 6
83
13
1 2
12 3 0 9
−4 2 1 3
.
14 Algebre II

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 19/57
1.4 EXERCICES
Exercice 1.4.10. En le remplacant par un deteminant de forme triangulaire superieur, calculer
D =
0 2 1 −10 6 3 21 1 −1 02 1 1 1
.
Exercice 1.4.11. Resoudre dans Z, le systeme (S )
(S )
2x + y = 3x + 2y = 2
Exercice 1.4.12. Une usine de meubles fabrique trois modeles de bureaux. La
fabrication de chacun de ces modeles de bureaux necessite des quantites differentes de bois, de contreplaque et de panneaux particules. Ces quantites appoaraissent dans le tableau suivant.
M 1 M 2 M 3Bois 12 16 14
Contreplaque 1,5 2 1,8 Panneau particule 0,8 0,6 1,2
Le bois est en unites de longueur alors que la mesure pour le contreplaque et le panneau particule est en unite de superficie.
1. La compagnie a en reserve les quantites suivantes, 530 unites de bois, 66,9 unites de contreplaque et 31,8 unites de panneau particule. Combien de bureaux de chaque modele peut-elle fabriquer avec ses reserves ?
2. la compagnie ayant des commandes pour 29 bureaux du modele 1, 55 bureaux du modele 2 et 43 bureaux du modele 3, quel les quantites supplementaires de chaque materiau doit-elle commander pour remplir ces commandes ?
3. Le temps de realisation de ces bureaux en minutes de travail par un homme ainsi que les temps disponibles par semaine dans les differents ateliers sont donnes dans le tableau suivant.
M 1 M 2 M 3 Temps disponibles par atelier Sciage 75 90 85 5010
Assemblage 45 50 65 3170 Sablage 50 65 90 4050
Combien la compagnie peut-elle fabriquer de bureaux de chaque modele par semaine?
Pr.Khatmi 15

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 20/57
7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 21/57
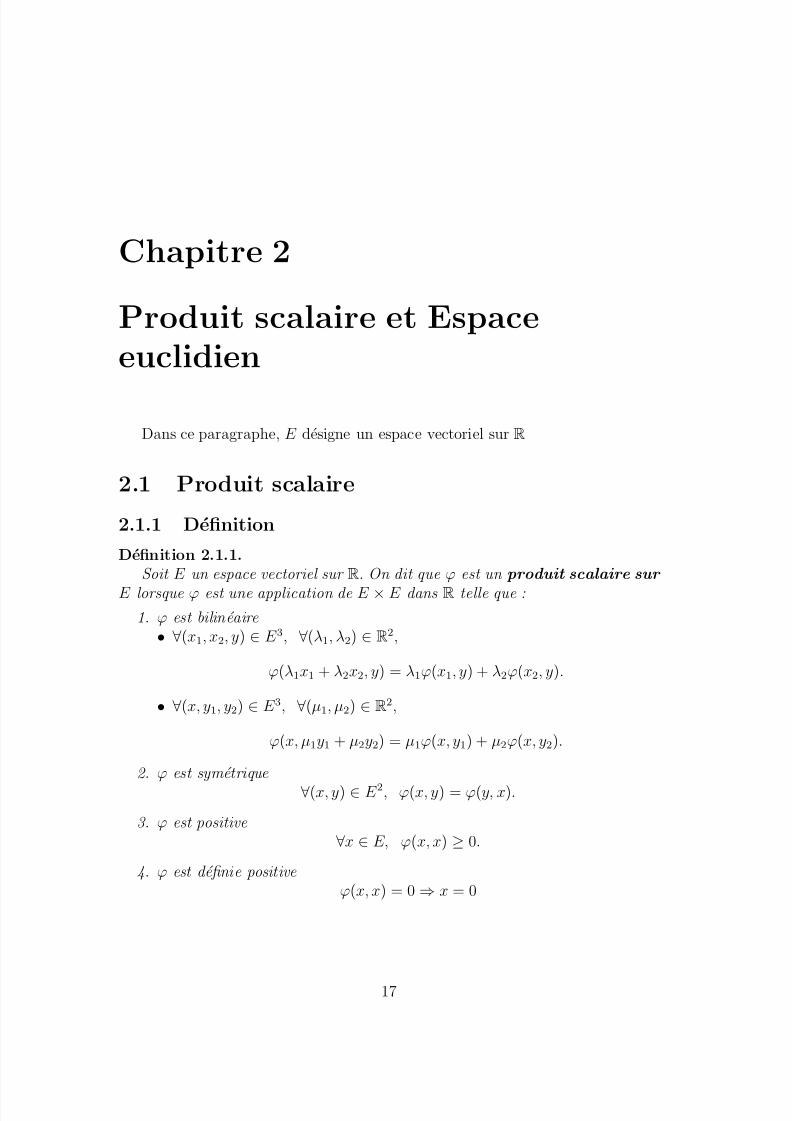
Chapitre 2
Produit scalaire et Espaceeuclidien
Dans ce paragraphe, E designe un espace vectoriel sur R
2.1 Produit scalaire
2.1.1 Definition
Definition 2.1.1.Soit E un espace vectoriel sur R. On dit que ϕ est un produit scalaire sur
E lorsque ϕ est une application de E × E dans R telle que :
1. ϕ est bilineaire • ∀(x1, x2, y) ∈ E 3, ∀(λ1, λ2) ∈ R2,
ϕ(λ1x1 + λ2x2, y) = λ1ϕ(x1, y) + λ2ϕ(x2, y).
• ∀(x, y1, y2) ∈ E 3, ∀(µ1, µ2) ∈ R2,
ϕ(x, µ1y1 + µ2y2) = µ1ϕ(x, y1) + µ2ϕ(x, y2).
2. ϕ est symetrique ∀(x, y) ∈ E 2, ϕ(x, y) = ϕ(y, x).
3. ϕ est positive ∀x ∈ E, ϕ(x, x) ≥ 0.
4. ϕ est definie positive ϕ(x, x) = 0 ⇒ x = 0
17

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 22/57
Produit scalaire et Espace euclidien
Remarque 2.1.1.• Une application ϕ de E × E dans R verifiant les points (1) et(2) est dite
forme bilineaire symetrique.• Un produit scalaire est une forme bilineaire symetrique definie po-
sitive.
• ∀x ∈ E, ϕ(x, 0) = 0• Un produit scalaire, ϕ(x, y) est souvent note < x, y > ou < x|y > ou (x|y)
ou x.y.
Dans toute la suite nous utiliserons la notation < x, y >.
Proposition 2.1.1. ϕ est un produit scalaire sur E si et seulement si :
1.
∀(x1, x2, y)
∈E 3,
ϕ(x1 + x2, y) = ϕ(x1, y) + ϕ(x2, y).
2. ∀(x, y) ∈ E 2, ∀λ ∈ R,ϕ(λx,y) = λϕ(x, y).
3. ∀(x, y) ∈ E 2, ϕ(x, y) = ϕ(y, x).
4. ∀x ∈ E, ϕ(x, x) ≥ 0.
5. ϕ(x, x) = 0 ⇒ x = 0.
Demonstration
• ⇒ Evident.• ⇐ Il suffit de montrer que ∀(x, y1, y2) ∈ E 3, ∀(µ1, µ2) ∈ R2,
ϕ(x, µ1y1 + µ2y2) = µ1ϕ(x, y1) + µ2ϕ(x, y2).
On a
ϕ(x, µ1y1 + µ2y2) = ϕ(µ1y1 + µ2y2, x) d’apres le point (3)
ϕ(µ1y1 + µ2y2, x) = ϕ(µ1y1, x) + ϕ(µ2y2, x) d’apres le point (1)
ϕ(µ1y1, x) + ϕ(µ2y2, x) = µ1ϕ(y1, x) + µ2ϕ(y2, x) d’apres le point (2)
Exemple 2.1.1.
1. E = R2
Soit x = (x1, x2) et y = (y1, y2) deux elements de E .L’application ϕ(x, y) = x1y1 + x2y2 est un produit scalaire sur E .
18 Algebre II

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 23/57
2.1 Produit scalaire
En effet : ϕ est une application de E × E vers R telle que • ∀(x,y,z ) ∈ E 3, on a x + y = (x1 + y1, x2 + y2)
ϕ(x + y, z ) = (x1 + y1)z 1 + (x2 + y2)z 2
= x1z 1 + y1z 1 + x2z 2 + y2z 2
= (x1z 1 + x2z 2) + (y1z 1 + y2z 2)
= ϕ(x, z ) + ϕ(y, z ).
• ∀(x, y) ∈ E 2 et ∀µ ∈ R, on a µx = (µx1, µx2)
ϕ(µx,y) = (µx1.y1) + (µx2.y2)
= µ(x1.y1 + x2.y2)
= µϕ(x, y).
• ϕ(x, y) = x1y1 + x2y2 = y1x1 + y2x2 = ϕ(y, x).• ϕ(x, x) = x2
1 + x22 ≥ 0.
• ϕ(x, x) = 0 ⇒ x21 + x2
2 = 0 ⇒ x21 = 0 et x2
2 = 0 ⇒ x = 0.
2. De meme si E = Rn, x = (x1, x2, .....xn) et y = (y1, y2, ......yn).
L’application ϕ(x, y) =i=ni=1
xiyi est un produit scalaire sur E .On l’appelle
Produit scalaire canonique
3. Plus generalement si E est un R espace vectoriel de base (e1, e2, ....en).
∀x ∈ E, x =i=ni=1
xiei et ∀y ∈ E, y =i=ni=1
yiei.
L’application ϕ definie par ϕ(x, y) =i=ni=1
xiyi est un produit scalaire sur E .
Exercice 2.1.1. Soit l’espace E = R2 et ϕ le produit scalaire definie sur E.ϕ(x, y) = x1y1 + x2y2, ∀(x, y) ∈ E avec x = (x1, x2) et y = (y1, y2).Calculer ϕ(t, z ), pour les t et z suivant :
1. t = (1, 2) et z = (o, 5)2. t = (4, 5) et z = (3, 7)
Exercice 2.1.2. Soit E = C ([a, b],R) l’ensemble des fonctions continues de [a, b]vers R. Montrer que l’application ϕ definie de E vers R par
ϕ(f, g) =
ba
f (t)g(t)dt
est un produit scalaire sur E .
Pr.Khatmi 19

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 24/57
Produit scalaire et Espace euclidien
Proposition 2.1.2. Soit (xi)1≤i≤r et (y j)1≤ j≤s deux familles de vecteurs de E et (λi)1≤i≤r et (µ j)1≤ j≤s deux famil les de nombres reels
<r
i=1
λixi,s
j=1
µ jy j >=r
i=1
s j=1
λiµ j < xi, y j >
Demonstration
Posons Y =s
j=1
µ jy j
<r
i=1
λixi, Y >=r
i=1
λi < xi, Y >
< xi, Y >=< xi,s
j=1
µ jy j >=s
j=1
µ j < xi, y j >
<r
i=1
λixi, Y >=r
i=1
λi
s j=1
µ j < xi, y j >=r
i=1
s j=1
λiµ j < xi, y j >
2.1.2 Norme euclidienne
Definition 2.1.2.On appelle norme euclidienne associee au produit scalaire ϕ,
l’application N de E dans R definie par N (x) = ϕ(x, x).N (x) est generalement notee xExemple 2.1.2.
La norme associe au produit canonique sur Rn est x =
ni=1
x2i
Definition 2.1.3. Soit x un vecteur de E .x est dit norme ou unitaire lorsque sa norme x = 1.
Remarque 2.1.2. Si x est un vecteur non nul, alors le vecteur 1
xx est un
vecteur norme colineaire a x.
Proposition 2.1.3. ∀(x, y) ∈ E 2 et ∀λ ∈ R on :
1. x ≥ 0.
2. x = 0 ⇔ x = 0.
3. λx = |λ|x.
4. x + y2 = x2 + y2 + 2 < x, y > .
5. < x, y >= 12
[x + y2 − x2 − y2].
20 Algebre II

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 25/57
2.1 Produit scalaire
Demonstration
1. x = √ < x, x > ≥ 0.
2. x = 0 ⇔< x, x >= 0 ⇔ x = 0.
3. λx =√
< λx, λx > =
λ2 < x, x > = |λ|x.
4.
x + y2 = < x + y, x + y >
= < x, x > + < x, y > + < y, x > + < y, y >
= x2 + 2 < x, y > +y2.
Donc < x, y >= 12 [x + y2 − x2 − y2]
Theoreme 2.1.1 (Inegalite de cauchy-Schwwarz).∀(x, y) ∈ E 2
1. | < x, y > | ≤ xy ou encore < x, y >2≤ x2y2.
2. | < x, y > | = xy ⇔ (x, y)est une famil le lie .
Demonstration∀t ∈ R, x + ty2 = x2 + 2t < x, y > +y2.
1.•
Si y= 0, on a un trinome du second degre en t qui est toujours positif
ou nul, donc son discriminant ∆ est negatif ou nul.
∆ = 4 < x, y >2 −4x2y2.
Donc ∆ ≤ 0 ⇒ | < x, y > | ≤ xy.• Si y = 0, < x, 0 >= 0 et 0 = 0, donc l’inegalite est verifiee.
2.
| < x, y > | = xy ⇔ (y = 0) ou (y = 0 et ∆ = 0)
⇔(y = 0) ou (
∃t∈R tel que
x + ty
2 = 0)
⇔ (y = 0) ou (∃t ∈ R tel que x + ty = 0)
⇔ (x, y) liee.
Proposition 2.1.4.
1. Pour tous (x1,...xn) ∈ Rn et (y1, ...yn) ∈ Rn
(ni=1
xiyi)2 ≤ (
ni=1
x2i )(
ni=1
y2i )
Pr.Khatmi 21

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 26/57
Produit scalaire et Espace euclidien
2. pour tous (f, g) ∈ C ([a, b],R)2
| ba
(f (x)g(x)dx| ≤ ( ba
f (x)2dx) 12 .( b
a
g(x)2dx) 12
DemonstrationApplication directe de l’inegalite de Cauchy-Schwarz dans les cas
1. E = Rn et < x, y >=ni=1
xiyi.
2. E = C ([a, b],R) et < f, g >=
b
a
f (x)g(x)dx.
Proposition 2.1.5 (Inegalite triangulaire).
Pour tout (x, y) ∈ E 2,
x + y ≤ x + y.
Demonstration
x + y2 = x2 + 2 < x, y > +y2.
D’apres l’inegalite de Cauchy-Schwarz, on
x + y2 ≤ (x2 + 2x.y + y2.
Donc
x + y2 ≤ (x + y)2 et x + y ≤ x + y
Exercice 2.1.3. Soit E = R2. Pour tout x = (x1, x2) ∈ E, on pose
N (x) = 2x2
1+ 5x2
2 −2x
1x2.
Montrer que N est la norme euclidienne associee a un produit scalaire ϕ que l’on definera.
2.2 Orthogonalite
Dans ce paragraphe, E designe un espace vectoriel sur R muni d’un produitscalaire, note < ., . >.
22 Algebre II

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 27/57
2.2 Orthogonalite
2.2.1 Vecteurs orthogonaux
Definition 2.2.1.
Soit x et y deux elements de E .On dit que x et y sont orthogonaux lorsque < x, y >= 0. On note alors x⊥y.
Theoreme 2.2.1 (Theoreme de Pythagore).
x⊥y ⇔ x + y2 = x2 + y2
DemonstrationOn sait que x + y2 = x2 + 2 < x, y > +y2, donc :
x
⊥y
⇔< x, y >= 0
⇔ x + y
2 =
x
2 +
y
2
2.2.2 Familles orthogonales - Familles orthonormales
Definition 2.2.2.Soit S = (xi)i∈I une famille de vecteurs de E .• S est orthogonale lorsque pour tout (i, j) ∈ I 2 tel que i = j, xi⊥x j.• S est orthonormale lorsque S est orthogonole et ∀i ∈ I , xi = 1.
Proposition 2.2.1.• Toute famille finie orthogonale de vecteurs non nuls est libre.
• Toute famille finie orthonormale est libre.Demonstration
• Soit {x1, · · · , xn} une famille orthogonale de vecteurs non nuls, donc
< xi, x j >= 0 pour i = j
Montrons que cette famille est libre, c’est a dire pour tous scalaires a1, · · · , an
tels quen
i=1aixi = 0 alors on a ai = 0, ∀i ∈ {1, · · · , n}
ni=1
aixi = 0 ⇒ ∀ j ∈ [1, n], ni=1
aixi, x j = 0
Or
ni=1
aixi, x j =ni=1
aixi, x j a cause de la linearite du produit scalaire
= a jx j2
Pr.Khatmi 23

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 28/57
Produit scalaire et Espace euclidien
Doncni=1
aixi = 0 ⇒ a jx j2 = 0 ∀ j ∈ [1, n]
Or
(a jx j2 = 0 ∀ j ∈ [1, n]) ⇒ (∀ j ∈ [1, n], a j = 0 ou x j2 = 0)
Or ∀ j ∈ [1, n] x j est un vecteur non nul,donc ∀ j ∈ [1, n], x j2 = 0,on obtient alors a j = 0 ∀ j ∈ [1, n]. Donc (x1, · · · , xn) est une famille libre.
• Si une famille de vecteurs est orthonormale, alors c’est une famille ortho-gonale de vecteurs non nuls, d’ou le resultat d’apres le premier point.
2.2.3 Sous-espace orthogonaux
Definition 2.2.3.Soit F et G deux sous-espaces vectoriels de E .
On dit que F et G sont orthogonaux lorsque pour tous x ∈ F , et y ∈ G,on a x⊥y. on note alors F ⊥G.
Proposition 2.2.2.
1. Si F ⊥G alors F ∩ G = {0}2. Si F = vect(x1, · · · xn) et G = vect(y1, · · · y p)
F ⊥G ⇔ ∀i ∈ [1, · · · , n] et ∀ j ∈ [1, · · · , p], xi⊥y j
Demonstration
1. On a {0} ⊂ (F ∩ G), car F et G sont deux sous-espaces vectoriels de E . Ilreste ‘montrer que (F ∩ G) ⊂ {0}.En effet soit x ∈ (F ∩ G) donc x ∈ F et x ∈ G et comme F ⊥G alorsx, x = 0, donc x = 0. Par suite (F ∩ G) = {0}
2. • Par definition, si F ⊥G, alors ∀i ∈ [i, · · · , n] et ∀ j ∈ [i, · · · , p] xi⊥y j carxi
∈E et y j
∈G.
• Reciproquement si ∀i ∈ [i, · · · , n] et ∀ j ∈ [i, · · · , p] xi⊥y jSoit x ∈ F et y ∈ G,
x =ni=1
λixi et y =
p j=1
µ jy j
x, y = ni=1
λixi,
p j=1
µ jy j =ni=1
λi
p j=1
µ jxi, y j = 0
Donc x⊥y
24 Algebre II

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 29/57
2.3 Espaces euclidiens
Exemple 2.2.1. Soit E = R3 muni du produit scalaire canonique, et soient F et G deux sous-espaces de E tels-que
F = {(x,y,z ) ∈ E x + y + z = 0} et G = {(x,y,z ) ∈ E x = y = z }
Montrer que F et G sont orthogonaux.
Solution : On peut montrer que F et G sont orthogonaux de deux facons.
1. Trouver des familles generatrices pour les deux sous espaces etutiliser le deuxieme point de la proposition (2.2.2).Soit u = (x,y,z ) ∈ E et v = (x, y, z ) ∈ E
u
∈F
⇔z =
−x
−y
⇔ u = (x,y, −x − y)
⇔ u = x(1, 0, −1) + y(0, 1, −1)
Donc F = vect(u1, u2) avec u1 = (1, 0, −1) et u2 = (0, 1, −1).De meme
v ∈ G ⇔ x = y = z
⇔ v = (x, x, x)
⇔ v = x(1, 1, 1)
Donc G = vect(u3) avec u3 = (1, 1, 1)d’apres la proposition, il suffit de montrer que u1⊥u3 et u2⊥u3
En effet
• u1, u3 = 1.1 + 0.1 + (−1).1 = 0• u2, u3 = 0.1 + 1.1 + (−1).1 = 0et donc F ⊥G
2. Autre methodeSoit u = (x,y,z )
∈F avec x + y + z = 0 et v = (a,a,a)
∈G
Donc u, v = ax + ay + az = a(x + y + z ) Or x + y + z = 0, donc u, v = 0
2.3 Espaces euclidiens
2.3.1 Definition
Definition 2.3.1.Un espace eulidien est un espace vectoriel sur R, de dimension finie muni
d’un produit scalaire.
Pr.Khatmi 25

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 30/57
Produit scalaire et Espace euclidien
Exemple 2.3.1.• Rn muni du produit scalaire canonique est un espace euclidien de dim n.
• C([a, b],R) muni du produit scalaire defini par f, g = ba
f (t)g(t)dt
n’est pas un espace euclidien car il n’est pas de dimension finie.
2.3.2 Bases orthonormales
Definition 2.3.2.
B est une base orthonormale de E si B est une base de E et une famille orthonormale de E .
Exemple 2.3.2.La base canonique de Rn est une base orthonormale pour le produit scalaire
canonique.
Theoreme 2.3.1 (Caracterisation des bases orthonormales).
Soit E un espace euclidien de dimension n.B est une base orthonormale de E si et seulement si B est une famille orthonor-male de n vecteurs de E .
Demonstration
• (⇒) : Si B est une base orthonormale de E , par definition, B est une familleorthonormale de n vecteurs de E .
• (⇐) :Si B est une famille orthonormale de n vecteurs de E , d’apres laproposition (2.2.1) B est une famille libre de n vecteurs de E . Commedim E = n, B est une base de E et donc une base orthonormale de E .
Exercice 2.3.1. Soit E = R2 muni du produit scalaire canonique.Montrer que B = (u, v) est une base orthonormale de R2 avec
u = (−1√ 5
, 2√ 5
) et v = ( 2√ 5
, 1√ 5
)
Theoreme 2.3.2. [Existence de base orthonormale]
• Tout espace euclidien possede une base orthonormale.• Toute famille orthonormale de E peut etre completee en une base orthonor-
male de E .
La demonstration va etre traitee dans le chapitre suivant.
26 Algebre II

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 31/57
2.4 Supplementaire orthogonale
2.4 Supplementaire orthogonale
Definition 2.4.1. Soit F un sous-espace vectoriel de l’espace euclidien E .On appelle orthogonal de F , l’ensemble, note F ⊥, definie par
F ⊥ = {x ∈ E / ∀y ∈ F, x⊥y}
Remarque 2.4.1. F ⊥ est un sous-espace de E .
Exemple 2.4.1. Soit E un espace euclidien
1. {0}⊥ = E
2. E ⊥ = {0}
Solution
1. On sait {0} est un sous-espce de E , donc {0}⊥ est sous espace de E .
Or ∀x ∈ E, x, 0 = 0 ⇒ E ⊂ {0}⊥.
D’ou {0}⊥ = E
2. E est un sous-esapce de E .
Or ∀x ∈ E, x, 0 = 0 ⇒ {0} ⊂ E ⊥
D’autre part ∀x ∈ E ⊥, ∀y ∈ E, x, y = 0 en paticulier pour y = x, onobtient donc x, x = 0
Or x, x = 0 ⇒ x = 0.
D’ou le resultat
Proposition 2.4.1. Soit F = vect(e1, · · · en).
x ∈ F ⊥ ⇔ ∀i ∈ [1, · · · , n], x⊥ei
La demonstration est analogue a celle de la proposition (2.2.2)
Theoreme 2.4.1. Soit E est un espace euclidien, et F un sous-espace de E .
1. F ⊥ et F sont deux sous-espaces supplementaires de E . F ⊥ est encore appele le supplementaire orthogonal de F .En plus on a :
dimF ⊥ = dimE − dimF
2. La reunion d’une base orthonormale de F et d’une base orthonormale de F ⊥ est une base orthonormale de E
Pr.Khatmi 27

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 32/57
Produit scalaire et Espace euclidien
Demonstration
1. • Si F = {0}, F ⊥ = E d’ou le resultat.• Si F = E , F ⊥ = {0} d’ou le resultat.• Si F = {0} et F = E alors F admet une base orthonormale (e1, · · · , e p),
1 ≤ p ≤ n−1. D’apres le theoreme (2.3.2), on peut completer cette familleorthonormale pour obtenir (e1, · · · , e p, e p+1, · · · , en) base orthonormale
de E . Donc ∀x ∈ E, x =ni=1
xiei.
x ∈ F ⊥ ⇔ ∀i ∈ [1, p], x, ei = 0
⇔ ∀i
∈[1, p], xi = 0
⇔ x =n
i= p+1
xiei
Donc F ⊥ = vect(e p+1, · · · , en) et (e p+1, · · · , en) est une base orthonormalede F ⊥. La reunion d’une base orthonormale de F et d’une base ortho-normale de F ⊥ etant une base orthonormale de E , on a E = F ⊕ F ⊥ etpar suite
dimF ⊥ = dimE − dimF
2. soit
B 1 une base de F et
B 2 une base de F ⊥.
F et F ⊥ sont supplementaires, donc la reunion des deux bases B 1 et B 2est une base B de E . Tous les vecteurs de cette base sont normes. Tous lesvecteurs de B 1 (resp B 2) sont deux a deux orthogonaux. Il reste a montrerque les vecteurs de B 1 sont orthogonaux a ceux de B 2.Soit u ∈ B 1 et v ∈ B 2,on a u, v = 0 car u ∈ F et v ∈ F ⊥.Donc tous les vecteurs de B sont deux a deux orthogonaux, et B est unebase orthonormale de E .
Exercice 2.4.1. Determiner les vecteurs de R2 orthogonaux pour le produit sca-laire canonique :
1. au vecteur x = (15, −3).2. conjointement a x = (1, 2) et y = (0, 1).
3. au plan d’equation d’equation x + y = 0
28 Algebre II

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 33/57
2.5 EXERCICES
2.5 EXERCICES
Exercice 2.5.1. Soit E = R3 muni du produit scalaire canonique.Determiner parmi ces vecteurs ceux qui sont orthogonaux.
X 1 = (1, 1, 1), X 2 = (0, 1, −1), X 3 = (1, −5, −5) et X 4 = (1√
3,
1√ 3
,1√
3)
Exercice 2.5.2. Soit E = R2. ∀x = (x1, x2) ∈ E et ∀y = (y1, y2) ∈ E , on pose :
ϕ(x, y) = 2x1y1 + 5x2y2 − x1y2 − x2y1.
• Montrer que ϕ est un produit scalaire sur E .• Montrer que N (x) =
2x2
1 + 5x22 − 2x1x2 est une norme euclidienne.
Exercice 2.5.3. Soit E = R
2
. ∀x = (x1, x2) ∈ E et ∀y = (y1, y2) ∈ E , on pose :ϕ(x, y) = x1y1 + x2y2 − x1y2 − x2y1.
Est-ce que ϕ est un produit scalaire sur E ?
Exercice 2.5.4. Repondre par vrai ou faux en justifiant votre reponse.E designe un espace euclidien, < , > son produit scalaire, x, y, z, t sont des vecteurs de E et α, β des nombres reels.
1. α < x, y > +β < z,x >=< αx + βz,y >
2. < x, y > + < z,t >=< x + z, y + t >
3. < x, y >= 0⇒
x = 0 ou y = 0
4. < x, x >= 0 ⇒ x = 0
5. ∀z ∈ E, < x, z >= 0 ⇒ x = 0
6. ∀(x, y) ∈ E 2, | < x, y > | < x.y7. ∀(x, y) ∈ E 2, x + y = x + y8. Toute famille de vecteurs orthogonaux est libre
Exercice 2.5.5. Determiner les vecteurs de R3 orthogonaux pour le produit sca-laire canonique :
1. au vecteur x = (10, −3, 7).
2. conjointement a x = (1, 2, 3) et y = (0, 1, −1).3. conjointement a x = (1, 2, 3), y = (1, −3, 7) et z = (0, 1, −1).
4. au plan d’equation x + y − 6z = 0
Exercice 2.5.6. Soit B = (e1, · · · , en) une base orthonorme d’un espace euclidien
E , On a ∀x ∈ E, x =ni=1
xiei.
Montrer que ∀i ∈ [1, n], xi = x, ei
Pr.Khatmi 29

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 34/57
7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 35/57
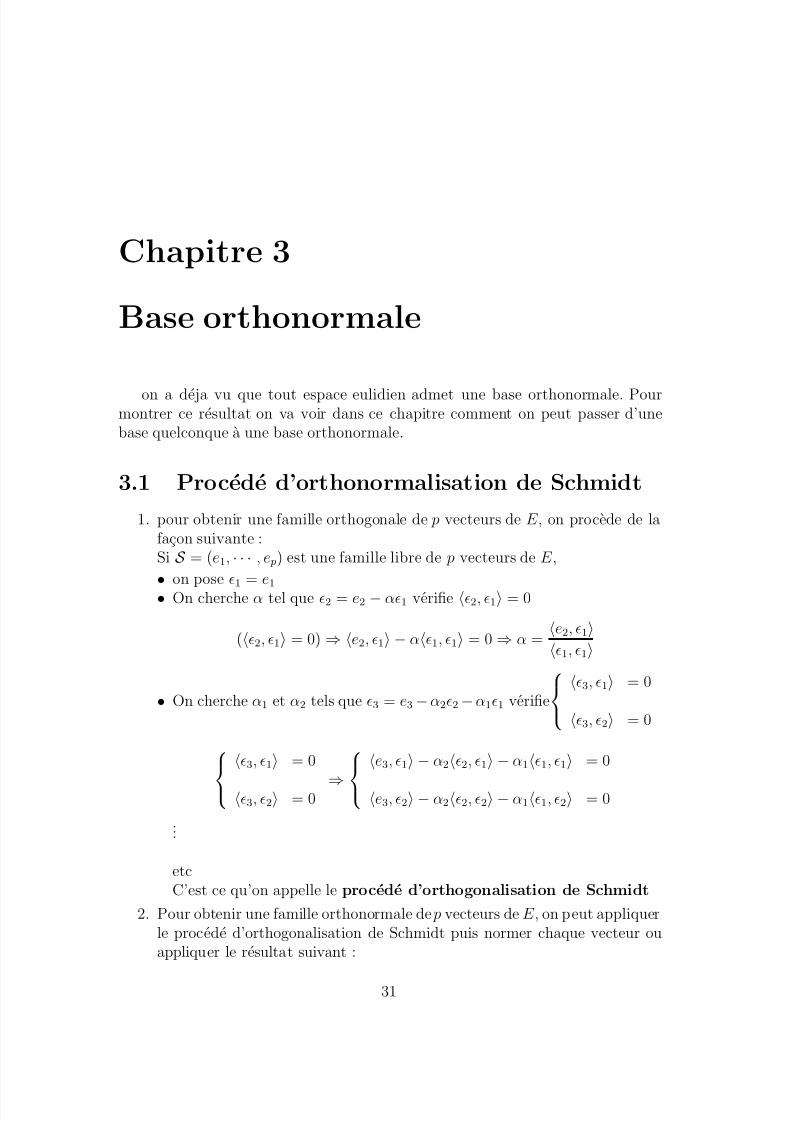
Chapitre 3
Base orthonormale
on a deja vu que tout espace eulidien admet une base orthonormale. Pourmontrer ce resultat on va voir dans ce chapitre comment on peut passer d’unebase quelconque a une base orthonormale.
3.1 Procede d’orthonormalisation de Schmidt
1. pour obtenir une famille orthogonale de p vecteurs de E , on procede de lafacon suivante :Si S = (e1, · · · , e p) est une famille libre de p vecteurs de E ,
• on pose 1 = e1• On cherche α tel que 2 = e2 − α1 verifie 2, 1 = 0
(2, 1 = 0) ⇒ e2, 1 − α1, 1 = 0 ⇒ α =e2, 11, 1
• On cherche α1 et α2 tels que 3 = e3 − α22 − α11 verifie
3, 1 = 0
3, 2 = 0
3, 1 = 0
3, 2 = 0⇒
e3, 1 − α22, 1 − α11, 1 = 0
e3, 2 − α22, 2 − α11, 2 = 0
...
etcC’est ce qu’on appelle le procede d’orthogonalisation de Schmidt
2. Pour obtenir une famille orthonormale de p vecteurs de E , on peut appliquerle procede d’orthogonalisation de Schmidt puis normer chaque vecteur ouappliquer le resultat suivant :
31

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 36/57
Base orthonormale
Theoreme 3.1.1. Soit S = (e1, · · · , en) est une famille libre de vecteurs de E .La famille de vecteurs C = (v1, · · · , vn) definie par :
v1 =e1
e1 et ∀i ∈ [2, n], vi =ui
ui avec ui = ei −i−1 j=1
ei, v jv j
est une famille orthonormale de E telle que :
∀r ∈ [1, n], vect{v1, . . . , vr} = vect{e1, . . . er}On dit que C est deduite de S par le procede d’orthonormalisation de
Schmidt
Demonstration
Soit R[n] la relation :{v1, . . . , vn} est une famille orthonormale de E telle quevect{v1, . . . , vn} = vect{e1, . . . , en}
Montrond par recurrence que R[n] est vraie pour tout n.
• n = 1, on a v1 = e1e1 est un vecteur norme de E et vect{v1} = vect{e1},
donc R[1] est vraie.• Supposons que R[1], . . . , R[n] sont vraies.• Montrons que R[n + 1] est vraie.
un+1 = en+1 − n j=1
en+1, v jv j, et vn+1 =un+1
vn+1Pour tout k ∈ [i, n]
vn+1, vk =1
vn+1un+1, vk
=1
vn+1en+1 −n
j=1
en+1, v jv j, vk
=
1
vn+1 [en+1, vk −n
j=1
en+1, v jv j, vk]
=1
vn+1 [en+1, vk − en+1, vkvk2]
= 0 car R[n] est vraie, donc (si j = k, v j, vk = 0 et vk, vk = vk2 = 1).
Donc vect{v1, . . . , vn+1} est une famille orthogonale de E et orthonormale puisqueles v j sont normes pour j ∈ [1, n + 1]. D’autre part on a,
∀k ∈ [1, n], vk ∈ vect{v1, . . . , vn} ⇒ vk ∈ vect{v1, . . . , vn+1}
32 Algebre II

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 37/57
3.1 Procede d’orthonormalisation de Schmidt
Finalement on obtient
∀k
∈[1, n], vk
∈vect
{v1, . . . , vn+1
}vn+1 ∈ vect{v1, . . . , vn+1} ⇒ vect{v1, . . . , vn+1} ⊂ vect{e1, . . . , en+1}La famille {v1, . . . , vn+1} est une famille orthonormale donc libre donc
dim vect{v1, . . . , vn+1} = n + 1
Par suite on a :
vect{v1, . . . , vn+1} ⊂ vect{e1, . . . , en+1} et dim vect{v1, . . . , vn+1} = dim vect{e1, . . . , en+1}Donc
vect{v1, . . . , vn+1} = vect{e1, . . . , en+1} et par suite Rn+1 est vraie ♣Exemple 3.1.1. Soit E = R2[X ] l’ensemble des polynˆ omes de degre 2 a coefficients reels .L’application ϕ definie par
ϕ(P, Q) =
10
P (t)Q(t)dt
est un produit scalaire sur E .Trouver une base orthonormale de E pour le produit scalaire ϕ.
On sait queB
= (1, X , X 2) est une base de E , appliquons-lui le procede
d’orthonormalisation de Schmidt pour trouver une base B = (Q0, Q1, Q2) ortho-normale pour ϕ.
• Q0 = 11 or 1 =
10
1dt = 1 donc Q0 = 1
• P 1 = X − ϕ(X, Q0)Q0.
ϕ(X, Q0) =
10
tdt =1
2⇒ P 1 = X − 1
2
P 1
2 = ϕ(P 1, P 1) =
1
0
(t
−
1
2
)2dt = [t3
3 −
t2
2
+t
4
]10 =1
12Q1 =
√ 12(X − 1
2) =
√ 3(2X − 1).
• P 2 = X 2 − ϕ(X 2, Q0)Q0 − ϕ(X 2, Q1)Q1
ϕ(X 2, Q0) =
10
t2dt =1
3
ϕ(X 2, Q1) =
10
√ 3t2(2t − 1)dt =
√ 3[
2t4
4− t3
3]10 =
√ 3
6
Pr.Khatmi 33

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 38/57
Base orthonormale
P 2 = X 2 − 1
3−
√ 3
6
√ 3(2X − 1) = X 2 − X +
1
6
P 22 = 10
(t2 − t + 16
)2dt = 10
(t4 − 2t3 + 43
t2 − 13
t + 136
)dt = 1180
Q2 =√
180(X 2 − X +1
6) =
√ 5(6X 2 − 6X + 1)
(Q0, Q1, Q2) est la base orthonormale de R2[X ] deduite de B par le procedede schmidt.
Exercice 3.1.1. Appliquer la methode d’orthonormalisation de Graham-Schmidt pour trouver une base orthonormale de R3 muni du produit scalaire canonique dans le cas suivant :
v1 =
12
−2
v2 =
0−12
v3 =
−131
Theoreme 3.1.2 (Existence de base orthonormale).
1. Tout espace euclidien possede une base orthonormale.
2. Toute famille orthonormale de E peut etre completee en une base orthonor-male de E .
Demonstration
1. Si E est un espace euclidien, donc de dim finie n. E possede donc une baseB = (e1, . . . , en) par le procede d’orthonormalisation de Graham Schmidt,on peut deduire de B une famille orthonormale C de n vecteurs de E , et Cest une base de E Voir Theoreme (3.1) la caracterisation des bases ortho-normales du chapitre 2
2. soit (1, · · · , p) une famille orthonormales de p- vecteurs de E , p ≤ n Si p = n, cette famille est une base orthonormale de E . Si p < n, (1, · · · , p) est une famille libre de p vecteurs de E , donc d’apres
le theoreme de la base incomplete, on peut completer cette famille en unebase C = (1, · · · , p, · · · , n)de E .
Par le procede d’orthonormalisation de Graham Schmidt, on deduit de Cune base orthonormale de E ; (v1, · · · , vn).On a alors v1 = 1, · · · , v p = p car la famille (1, · · · , p) est orthonormale♣
Proposition 3.1.1. Soit B = (e1, · · · , en) une base orthonormale de E .
on considere deux elements x et y de E . Donc x =ni=1
xiei et y =n
j=1
y je j.
34 Algebre II

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 39/57
3.1 Procede d’orthonormalisation de Schmidt
Soit X et Y les matrices colonnes de leurs composantes dans B . On a alors :
x, y =
ni=1
xiyi =t
XY
x2 =ni=1
x2i =t XX
xi = x, ei ∀i ∈ [i, n]
Demonstration
• x, y =n
i=1n
j=1xiy jei, e j =
n
i=1xiyi = (x1 · · · xn).
y1...
yn
=t XY
• x =
x, x =
ni=1
x2i =
√ tXX
• ∀i ∈ [1, n] x, ei = n
j=1
x je j, ei =n
j=1
x je j, ei = xi
♣Proposition 3.1.2. Si P est la matrice de passage d’une base orthonormale B de E a une base orthonormale B de E , on a alors :
t
P P = I n donc
t
P = P −1
Demonstration
Soit B = (e1, · · · , en) et B = (e1, · · · , en) deux bases orthonormales de E.
∀ j ∈ [1, . . . , n], e j =ni=1
P ijei
Soit P la matrice de passage de B a B
P = (P ij) 1≤
i≤
n1 ≤ j ≤ n
et tP = (P ij) 1≤
i≤
n1 ≤ j ≤ n
avec P ij = P ji
tP P = (aij) 1 ≤ i ≤ n1 ≤ j ≤ n
, avec aij =n
k=1
P ikP kj =n
k=1
P kiP kj = ei, e j
donc
aij = 1 si i = j
car B est orthonormaleaij = 0 si i = j
Par suite tP P = I n et tP = P −1 ♣
Pr.Khatmi 35

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 40/57
Base orthonormale
3.2 Projection orthogonale
Definition 3.2.1. Soit F un sous-espace vectoriel de l’espace euclidien E . On appelle projection orthogonale sur F , la projection sur F parallelement a F ⊥.
Proposition 3.2.1.Soit pF la projection orthogonale sur F , et x un vecteur de E .
y = P F (x) ⇔
y ∈ F x − y ∈ F ⊥
Demonstration• ⇒ Evident : Par definition de P F , ∀x ∈ E, x = P F (x) + (x − P F (x)) avec
P F (x) ∈ F
x − P F (x) ∈ F ⊥
• ⇐ On a y ∈ F et y − P F (x) ∈ F ⊥, montrons que y = P F (x).
(E = F ⊕ F ⊥) ⇒ ∀x ∈ E, x = x1 + x2, avec x1 ∈ F et x2 ∈ F ⊥
comme x = y + (x − y), alors on a y = P F (x). ♣Proposition 3.2.2. Soit pF la projection ortogonale sur F .Si (ei)1≤i≤ p est une base orthonormale de F , alors pour tout x ∈ E
P F (x) =
p
i=1 x, eiei
DemonstrationOn complete la famille orthonormale (e1, · · · , e p) en une base orthonormale (e1, · · · , en)de E . (e p+1, · · · , en) est une base orthonormale de F ⊥.Soit x = (x1, · · · , xn) ∈ E on a xi = x, ei pour tout i ∈ [1, n], donc on obtient
x =ni=1
x, eiei
=
p
i=1 x, eiei +
n
i= p+1x, eiei
Si on pose y =
pi=1
x, eiei alors x − y =n
i= p+1
x, eiei, et on obtient alors
y ∈ F x − y ∈ F ⊥
Donc d’apres la proposition 3.2.1 on a P F (x) = y =
pi=1
x, eiei ♣
36 Algebre II

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 41/57
3.2 Projection orthogonale
Theoreme 3.2.1. Soit P F la projection orthogonale sur F . Soit x ∈ E .• ∀y ∈ F , x − P F (x) ≤ x − y• P F (x) est l’unique vecteur de F qui rend minimale la quantite x − y avec y ∈ F .
On dit que PF(x) est la meilleure approximation de x dans F .
Demonstration• Soit y ∈ F, x − y = x − P F (x) + P F (x) − y
x − P F (x) ∈ F ⊥
P F (x) − y ∈ F
d’apres le theoreme de pythagore x−y2 = x−P F (x)2+P F (x)−y2
Donc(x−P F (x)2 ≤ x−y2) ⇒ x−P F (x) ≤ x−y car les deux quantites sont positives
• Supposons qu’il existe z ∈ F telle que x − z ≤ x − y, ∀y ∈ F , enparticulier pour y = P F (x) donc x − z ≤ x − P F (x).Or x − z = x − P F (x) + P F (x) − z , avec
x − P F (x) ∈ F ⊥
P F (x) − z ∈ F
d’apres le theoreme de pythagore x−z 2 = x−P F (x)2+P F (x)−z 2
Donc
(x−z ≥ x−P F (x)2) ⇒ x−z ≥ x−P F (x) car les deux quantites sont positives
et par suite x − z = x − P F (x) et P F (x) − z 2 = 0.Finalement on obtient P F (x) = z , d’ou le resultat ♣
Exemple 3.2.1. E = R4 etant muni du produit scalaire canonique, ecrire la ma-trice M de la projection orthogonale P F sur F = vect{u1, u2} ou u1 = (1, 0, 1, 0)et u2 = (0, 1, 1, 0).
Montrons que (u1, u2) est base de F
Soient λ1 et λ2 deux reels tels que λ1u1 + λ2u2 = 0, donc
λ1 = 0
λ2 = 0
λ1 + λ2 = 0
Donc λ1 = λ2 = 0 et donc (u1, u2) est libre et comme dimF est finie alors (u1, u2)est une base.
Pr.Khatmi 37

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 42/57
Base orthonormale
• 1re methode : Application directe
Soit u = (x , y, z, t) ∈ R4
, P F (u) ∈ F , donc
P F (u) = au1+bu2 = (a,b,a+b, 0), et u−P F (u) = (x−a, y−b, z −a−b, t)
Comme (u − P F (u)) ∈ F ⊥, alors (u − P F (u))⊥u1 et (u − P F (u))⊥u2
(u − P F (u))⊥u1
(u − P F (u))⊥u2⇔
x − a + z − a − b = 0y − b + z − a − b = 0
⇔ 2a + b = x + z a + 2b = y + Z
⇔
a = 13
(2x − y + z )b = 1
3(−x + 2y + z )
donc
P F (u) =
13
(2x − y + z )
1
3(−x + 2y + z )13
(x + y + 2z )
0
= 13
2 −1 1 0
−1 2 1 0
1 1 2 0
0 0 0 0
M
.
x
y
z
t
• 2emethode : Application de la proposition 3.2.2
(u1, u2) est une base de F , appliquons-lui le procede de Schmidt pour la
rendre orthonormale.Soit v1 = u1 ⇒ v1 =
√ 2, on pose 1 = 1√
2(1, 0, 1, 0)
Soit v2 = u2 − u2, 11 = u2 − 1√ 2
1 = (−12
, 1, 12
, 0) ⇒ v2 =
32
, on pose
2 = 1√ 6
(−1, 2, 1, 0).
(1, 2) est une base orthonormale de F .Pour tout vecteur u ∈ R4, on a
P F (u) = u, 11 + u, 22 =1√
2(x + z )1 +
1√ 6
(−x + 2y + z )2
38 Algebre II

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 43/57
3.3 Matrice d’une forme bilineaire symetrique dans une base
On en deduit la matrice M de P F dans la base canonique de R4
P F (e1) =1√
21 − 1√
62 =
1
3
2
−110
P F (e2) =2√
62 =
1
3
−1210
P F (e3) =1
√ 21 +
1
√ 62 =
1
3
11
20
P F (e4) =
0000
et on retrouve la matrice M .
3.3 Matrice d’une forme bilineaire symetriquedans une base
Soit B = (e1, e2, · · · , en) une base de E , et soient (x, y) ∈ E 2
x =ni=1
xiei et y =ni=1
yiei
Definition 3.3.1. Soit ψ un produit scalaire sur E . La matrice M ∈ Mn(R) :
M = (ψ(ei, e j))1≤i,j≤n
est appelee matrice de ψ dans la base B . C’est une matrice symetrique. On a alors :
∀(u, v) ∈ E 2, ψ(u, v) =t U MV
avec U et V les matrices colonnes des composantes de u et v.
Exemple 3.3.1. On considere le produit scalaire ϕ sur R2 defini par
ϕ(x, y) = 2x1y1 + x1y2 + x2y1 + 2x2y2
Pr.Khatmi 39

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 44/57
Base orthonormale
la matrice de ϕ dans B = (e1, e2) avec e1 = (1, 0) et e2 = (0, 1) est
M = 2 11 2
tXMY =
x1 x2
2 11 2
y1y2
=
x1 x2
2y1 + y2y1 + 2y2
= 2x1y1+x1y2+x2y1+2x2y2
Exercice 3.3.1. Trouver la matrice d’un produit scalaire dans une base orhonor-mee.
3.4 Endomorphisme orthogonal
Definition 3.4.1. Soit E un espace vectoriel euclidien.Un endomorhisme ϕ est dit orthogonal si et seulement si il conserve le produit scalaire, c’est a dire
∀(u, v) ∈ E 2, ϕ(u), ϕ(v) = u, v
Theoreme 3.4.1. ϕ est orthogonal si et seulement si il conserve la norme, c’est a dire
∀u ∈ E, | ϕ(u) = u.
Preuve
• supposons que ϕ est orthogonal et montrons que ∀u ∈ E ϕ(u) = u
ϕ(u)2 = ϕ(u), ϕ(u)= u, u) puisque ϕ est orthogonal
= u2
• supposons que ∀u ∈ E ϕ(u) = u et montrons que ϕ est orthogonal
On a :(u + v)2 = ϕ(u + v)2 car ∀u ∈ E ϕ(u) = u
= ϕ(u) + ϕ(v)2 ϕ endomorphisme
= ϕ(u)2 + 2ϕ(u), ϕ(v) + ϕ(v)2= u2 + 2ϕ(u), ϕ(v) + v2 car ∀u ∈ E ϕ(u) = u
Or (u + v)2 = u2 + 2u, v + v2, d’ou
ϕ(u), ϕ(v) = u, v♣
40 Algebre II

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 45/57
3.4 Endomorphisme orthogonal
Theoreme 3.4.2. Un endomorphisme ϕ orthogonal est un automorphisme.
PreuveUn automorphisme est un endomorphisme bijective et comme la dimE est finie,il suffit de montrer que : ϕ est injective
ϕ(u) = 0 ⇔ ϕ(u) = 0 ⇔ u = 0 ⇔ u = 0 ♣
Exercice 3.4.1. Montrer qu’un endomorphisme orthogonal conserve l’orthogo-nalite.
Theoreme 3.4.3. Un endomorphisme est orthogonal si et seulement si il trans-
forme une base orthonormale en une base orthonormale
PreuveSoient une base orthonorme (e1, e2, · · · , en) et ϕ un endomorphisme.
• ⇒ Si ϕ est orthogonale alors la base (ϕ(e1), ϕ(e2), · · · , ϕ(en)) est ortho-norme puisque
ϕ(ei), ϕ(e j) = ei, e j et ϕ(ei) = ei
• ⇐ Si (ϕ(e1), ϕ(e2), · · · , ϕ(en)) est orthonorme, montrons que ϕ est ortho-
gonal.Soient u = (u1, u2, · · · , un) et v = (v1, v2, · · · , vn) deux elements de E .
ϕ(u), ϕ(v) = ϕ(ni=1
uiei), ϕ(n
j=1
v je j)
= ni=1
uiϕ(ei),n
j=1
v jϕ(e j)
=n
i=1n
j=1uiv jϕ(ei), ϕ(e j)
=ni=1
uivi
= u, v
♣
Exercice 3.4.2. Montrer que si ϕ et ψ sont deux endomorphismes orthogonaux,alors ϕ ◦ ψ est un endomorphisme orthogonal.
Pr.Khatmi 41

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 46/57
Base orthonormale
3.5 Matrice Orthogonal
Definition 3.5.1. On dit qu’une matrice est orthogonale si elle est la matrice d’un endomorphisme orthogonal dans une base orthonormale
Theoreme 3.5.1.
M est une matrice orthogonale ⇔ les vecteurs colonnes de M sont normes et orthogonaux 2
⇔ les vecteurs lignes de M sont normes et orthogonaux 2 a
⇔ M −1 =t M
⇔ M.tM = tM.M = I (une seule egalite suffit).
Remarque 3.5.1. Une matrice orthogonale s’interprete donc comme la matrice d’un endomorphisme orthogonal dans une base orthonormale ou comme une ma-trice de changement de bases orthonormales.
3.6 Exercices
Exercice 3.6.1.Appliquer la methode d’orthonormalisation de Gram-Schmidt dans les cas sui-
vants :
1. z 1 =
1
−1
, z 2 =
11
dans R2 muni du produit scalaire canonique.
2. z 1 = 2−1
, z 2 = 11 dans R2 muni du produit scalaire canonique.
Exercice 3.6.2.Soit ϕ la forme bilineaire symetrique sur R3 definie par
ϕ(x, y) = (x1 − 2x2)(y − 1 − 2y2) + x2y2 + 9x2 + x3)(y2 + y3)
1. Montrer que ϕ est un produit scalaire sur R3.
2. Soit v =t (1, −1, 2) un element de R3
(a) Trouver v⊥ pour le produit scalaire canonique.
(b) Trouver v⊥ pour le produit scalaire ϕ.3. calculer ϕ(ei, e j) pour i et j appartenant a {1, 2, 3}.
4. A l’aide de la methode d’orthonormalisation de Gram-Schmidt, orthonor-maliser la base canonique de R3 pour le produit scalaire ϕ.
Exercice 3.6.3.Determiner le vecteur V du plan d’equation x + y − z = 0 le plus proche du
vecteur V =
201
et expliciter la matrice de projection eventuel lement utilisee.
42 Algebre II

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 47/57
3.6 Exercices
Exercice 3.6.4.Soient V 1 =t (1, 0, 0) et V 2 =t (1, 1, 0) deux vecteurs de R3. Soit F le sous-
espace engendre par V 1 et V 21. Construire la matrice de projection P F sur F .
2. Calculer la projection de V 3 =t (1, 1, 1) sur F .
3. Quelle est la projection de V 3 sur F ⊥ orthogonale a F ?
Exercice 3.6.5.Soit E = vect(V 1, V 2, V 3, V 4) ⊂ R4 ou
V 1 =
11
11
, V 2 =
10
10
, V 3 =
10
1−1
, V 4 =
01
00
1. Montrer que {V 1, V 2, V 3} est une base de E , puis que
E = {t(x , y, z, t) ∈ R4/(x = z )}
2. Est-ce que la base {V 1, V 2, V 3} est une base orthonormee ?
3. Si non, deduire de {V 1, V 2, V 3} une base orthonormee en utilisant le procede de Graham -Schmidt.
Pr.Khatmi 43

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 48/57
7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 49/57
Chapitre 4
Applications du produit scalaire
Dans ce chapitre le produit scalaire considere est le produit scalaire canonique.
4.1 Equations de droites dans le plan
Definition 4.1.1. Un vecteur normal d’une droite est un vecteur non nul ortho-gonal a tout vecteur directeur de cette droite.
4.1.1 Equation cartesienne d’une droite
Definition 4.1.2. L’ensemble des points M dont les coordonnees verifient
ax + by + c = 0, avec (a, b) = (0, 0)
est une droite D, qui a pour vecteur directeur u =
−ba
.
On dit que ax + by + c = 0 est une equation cartesienne de la droite D.
4.1.2 Equation d’une droite de vecteur normal donne
Theoreme 4.1.1. Soit A un point du plan et −→n un vecteur non nul. L’ensemble
des points M du plan verifiant −−→AM.−→n = 0 est la droite D passant par A et de
direction perpendiculaire a celle de −→n . On dit que −→n est un vecteur normal a D.
PreuveLorsque le plan est muni d’un repere orthonormal , on peut grace au produitscalaire determiner l’equation de la droite passant par A = (xA, yA) de vecteur
normal −→n =
ab
.
45

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 50/57
Applications du produit scalaire
• Soit un point M (x, y). On a−−→AM =
x − xA
y − yA
M ∈ D ⇔ −−→AM.−→n = 0
⇔ a(x − xA) + b(y − yA) = 0
⇔ ax + by −(axA + byA) c
= 0
⇔ ax + by + c
• Reciproquement on peut demontrer que toute equation de la forme
ax + by + c = 0 avec (a, b)= (0, 0)
est celle d’une droite de vecteur normal −→n . ♣
Exemple 4.1.1. Trouver l’equation cartesienne de la droite D passant par
A = (2, 3) et dont le vecteur normal −→n =
11
Solution
Soit un point M (x, y). On a −−→AM =
x − 2y − 3
M ∈ D ⇔ −−→AM.−→n = 0
⇔ (x − 2) + (y − 3) = 0
⇔ x + y − 2 − 3 = 0
⇔ x + y − 5 = 0
4.2 Equation du plan dans un espace
Definition 4.2.1. un vecteur normal −→n a un plan P est un vecteur non nul dont
la direction est orthogonale au plan P .
4.2.1 Equation cartesienne du plan dans un espace
Definition 4.2.2. Dans un repere orthonorme, tout plan admet une equation de la forme ax + by + cz + d = 0 ou a, b, c et d sont des reels tels que a, b et c ne
sont pas tous nuls. Le vecteur −→n =
abc
est un vecteur normal a ce plan.
46 Algebre II

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 51/57
4.3 Distance d’un point a un sous-espace euclidien
4.2.2 Equation d’un plan de vecteur normal donne
Theoreme 4.2.1. Soit A un point de l’espace et −→n un vecteur non nul. L’en-
semble des points M de l’espace verifiant −−→AM.−→n = 0 est le plan P passant par Aet dont −→n est un vecteur normal a P .
Preuve : similaire a celle de la droite dans un plan
Exemple 4.2.1. Donner une equation cartesienne du plan (P ) passant par le
point A(2, 1, −3) dont un vecteur normal est −→n =
112
Solution
Soit un point M (x,y,z ). On a −−→AM = x − 2
y − 1z + 3 M ∈ P ⇔ −−→
AM.−→n = 0
⇔ (x − 2) + (y − 1) + 2(z + 3) = 0
⇔ x + y + 2z − 2 − 1 + 6 = 0
⇔ x + y + 2z + 3 = 0
4.3 Distance d’un point a un sous-espace eucli-
dienOn considere dans cette section un espace euclidien de dim 3 muni d’une base
orthonormee.
Definition 4.3.1. En geometrie euclidienne, la distance d’un point A a un sous espace est la plus courte distance separant ce point et un point courant du sous-espace. Le theoreme de Pythagore permet d’affirmer que la distance du point Aau sous-espace correspond a la distance separant A de son projete orthogonal sur ce sous-espace.
4.3.1 Distance d’un point a un point
On considere les deux points M 1 et M 2
M 1 =
xyz
et M 2 =
x
y
z
Proposition 4.3.1. La distance entre le point M 1 et le point M 2 est donnee par
d(M 1, M 2) = M 1M 2 = −−−−→M 1M 2 =
(x − x)2 + (y − y)2 + (z − z )2
Pr.Khatmi 47

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 52/57
Applications du produit scalaire
4.3.2 Distance d’un point a une droite
Proposition 4.3.2. La distance d’un point M 0 a une droite D passant par A et
de vecteur normal −→n est donnee par
d(M 0, D) =|−−→AM 0.−→n |−→n
PreuveNotons H le projete orthogonal de M 0 sur D, alors d(M 0, D) = HM 0 = −−−→M 0H .
Comme−−−→M 0H est orthogonal a D alors il est colineaire a −→n c’est a dire
∃t ∈ R,−−−→HM 0 = t−→n ⇒ −−−→HM 0 = |t|−→n ⇒ |t| =
−−−→HM 0
−→n
−−→AM 0.−→n = (
−−→AH +
−−−→HM 0).−→n
=−−−→HM 0.−→n
= t−→n .−→n
= t.−→n 2
Et par suite
|−−→AM 0.−→n | = |t|.−→n 2
=−−−→HM 0−→n .−→n 2
= −−−→HM 0.−→n D’ou le resultat.♣
4.3.3 Distance d’un point a un plan
Proposition 4.3.3. La distance d’un point M 0 a un plan P passant par A et de vecteur normal −→n est donnee par
d(M 0, P ) =|−−→AM 0.−→n |−→n
Preuve : meme principe qu’a la proposition 4.3.2
Exercice 4.3.1. Donner la distance d’un point M 0 = (5, 2, −3) au plan P d’equa-tion x + 4y + 8z + 2 = 0
48 Algebre II

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 53/57
4.4 Probleme de moindres carres
4.4 Probleme de moindres carres
Theoreme 4.4.1. Soit A∈ Mn,p
(R) une matrice de rang p, et B∈ Mn,1
(R).• Il existe une unique matrice X ∈ M p,1(R) rendant minimale AX − B• X est la solution tAAX =t AB
Demonstration• Soit X ∈ M p,1(R)
Soit b le vecteur de Rn, x le vecteur de R p et f l’application lineaire de R p
dans Rn, canoniquement associes respectivement a B, X , et A. AX − B estla matrice colonne de f (x) − b.
min{AX −B,X ∈ M p,1(R)} = min{f (x)−b,x ∈ R p} = min{y−b,y ∈ Im(f )}
D’apres le theoreme (2.1) du chapitre 3, il existe un seul vecteur de Im(f )rendant minimal y − b, c’est le vecteur P Im(f )(b).
P Im(f )(b) ∈ Im(f ) ⇒ ∃x ∈ R pP Im(f )(b) = f (x)
x est unique puisque f est injective (car rang f = rang A = p = dim R p).Donc il existe un unique x rendant minimal f (x) − b et par suite il existeun unique X ∈ M p,1(R) rendant minimal AX − B
• f (x) ∈ Im(f ), donc
f (x) = P Im(f )(b) ⇔ (f (x) − b) ∈ Im(f )⊥
⇔ ∀t ∈ R p, f (x) − b, f (t) = 0
⇔ ∀T ∈ M p,1(R), AX − B,AT ) = 0
⇔ ∀T ∈ M p,1(R), t(AT )(AX − B) = 0
⇔ ∀T ∈ M p,1(R), tT tA(AX − B) = 0
⇔ ∀T ∈ M p,1(R), tT (tAAX −t AB) = 0
⇔ (tAAX −t AB) est orthogonal a R p
⇔ tAAX −t AB = 0
Donc l’unique X ∈ M p,1(R) rendant minimum AX − B est la solutionde tAAX =t AB♣
Pr.Khatmi 49

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 54/57
Applications du produit scalaire
Exemple 4.4.1. Soient
A = 1 11 −12 1
∈ M3,2 et B = 132
∈ M3,1
trouver la matrice X rendant minimum AX − BOn peut verifier facilement que C 1 et C 2 sont libre et par suite rangA = 2, et d’apres le theoreme 4.4.1 l’unique matrice X rendant minimum AX − B est la solution de tAAX =t AB.
tAA = 1 1 2
1 −1 1 .1 11
−1
2 1 = 6 2
2 3 et tAB = 1 1 2
1 −1 1 .132 = 8
0 Donc
tAAX =t AB ⇔
6x + 2y = 8
2x + 3y = 0⇔
x = 127
y = −87
⇔ X =
127
−87
Remarque 4.4.1. Ce resultat est utilise en statistiques pour obtenir l’equation de la droite de regression d’une serie statistique a deux variables : (Voir Probabilites
statistiques).
4.5 Endomorphisme symetrique
Definition 4.5.1. Soient E un espace euclidien de dimension n et f un endo-morphisme de E . On dit que f est symetrique lorsque
∀(x, y) ∈ E 2, f (x), y = x, f (y)
Proposition 4.5.1. Soient (ei)1≤i≤n une base de E et f ∈ L(E ).
f est symetrique ⇔ ∀(i, j) ∈ [1, n]2, f (ei), e j = ei, f (e j).
Demonstration
• ⇒: Supposons que f est symetrique.Pour tout (i, j) ∈ [i, n]2, ei et e j sont des vecteurs de E , donc par definition
f (ei), e j = ei, f (e j).
50 Algebre II

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 55/57
4.5 Endomorphisme symetrique
• ⇐: Supposons que pour tout (i, j) ∈ [i, n]2, f (ei), e j = ei, f (e j).
Soit (x, y)∈
E 2, x =n
i=1 xiei et y =n
j=1 y je j
f (x), y = f (ni=1
xiei),n
j=1
y je j
= ni=1
xif (ei),n
j=1
y je j ( la linearite de f )
=ni=1
xi.n
j=1
y jf (ei), e j ( la linearite du produit scalaire )
=ni=1
xi.n
j=1
y jei, f (e j) ( hypothese f (ei), e j = ei, f (e j).)
= ni=1
xiei,n
j=1
y jf (e j) ( la linearite du produit scalaire )
= ni=1
xiei, f (n
j=1
y je j) ( la linearite de f )
= x, f (y)Donc f est symetrique
♣Theoreme 4.5.1. soit f un endomorphisme de E .
1. Si f est symetrique et si B est une base orthonormale de E , alors la matrice de f dans B , matBf est symetrique reelle.
2. S’il existe une base orthonormale B de E telle que matBf soit symetrique reelle, alors f est symetrique.
Demonstration
Soient B = (ei)1≤i≤n une base orthonormale de E , et A = matBf , avec
A = (aij) 1 ≤ i ≤ n1 ≤ j ≤ n
∈ Mn(R)
aij est la composante sur ei du vecteur f (e j). Donc
aij = f (e j), ei et a ji = f (ei), e j1. si f est symetrique,d’apres la proposition 4.5.1, ∀ (i, j) ∈ [i, n]2 on a
f (e j), ei = e j , f (ei) = f (ei), e j ⇒ aij = a ji
Donc A est symetrique
Pr.Khatmi 51

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 56/57
Applications du produit scalaire
2. S’il existe une base orthonormale B = (ei)1≤i≤n de E telle que matBf soitsymetrique reelle, alors
∀ (i, j) ∈ [i, n]2, aij = a ji ⇒ f (e j), ei = e j , f (ei)
f est donc symetrique ♣.
Remarque 4.5.1. Si la matrice de f dans une base orthonormale de E est symetrique reel le, sa matrice dans toute base orthonormale de E est symetrique reelle.
Exemple 4.5.1. Toute projection orthogonale de E est un endomorphisme sy-metrique de E . En effet on considere la projection orthogonale sur le sous-espace
F de E , P F .On peut choisir une base orthonormale B de E constituee de la reunion d’une base orthonormale de F et une base orthonormale de F ⊥. On a
∀x ∈ F, P F (x) = x
∀x ∈ F ⊥, P F (x) = 0
Donc si on suppose que dimF = p on obtient
matBP F =
I p 0
0 0
C’est une matrice symetrique reelle, donc P F est symetrique de E . ♣
4.6 Exercices
Exercice 4.6.1. On donne les equations cartesiennes de deux plans :
P : x − y + 7 = 0 et Q : x + 2y − z + 1 = 0
1. Calculer d(O, P ) et d(O, Q). avec O = (0, 0, 0)
2. Montrer que ces deux plans ne sont pas paralleles.
3. Determiner tous les points M de R3 qui sont situes a la meme distance des deux plans P et Q.
4. Determiner les plans orthogonaux simultanement aux plans P et Q.
52 Algebre II

7/28/2019 Manuel Algébre 2 (S4)
http://slidepdf.com/reader/full/manuel-algebre-2-s4 57/57