m289eme17 d’81 52jecile da16 1 cham3 de pesanteur...
TRANSCRIPT

Filière : Physique-chimie CRMEF –Fès- 2012-2013
Encadré par : Pr. L. KADIRA 1
MouveMent d’un projectile dans un chaMp de
pesanteur uniforme
Objectifs :
Savoir appliquer la 2ème loi de Newton.
Etablir l’équation de la trajectoire d’un projectile dans un champ de pesanteur.
Visualiser la trajectoire d’un projectile dans le champ de pesanteur terrestre. Comparer
les résultats des mesures réalisées à partir d’un enregistrement vidéo du mouvement
avec les paramètres déterminés par étude théorique.
Modéliser une trajectoire et les vecteurs-vitesse et accélération au cours du mouvement.
Matériel
Balle de tennis
Règle et niveau
Webcam et logiciels AVIMECA2, REGRESSI
Logiciel de simulation numérique Maple
I- Etude théorique
On étudie le lancer d’un projectile, de masse m et de centre d’inertie G avec une vitesse
initiale 0V
dans un champ de pesanteur uniforme (lancer au voisinage de la terre).

Filière : Physique-chimie CRMEF –Fès- 2012-2013
Encadré par : Pr. L. KADIRA 2
1- Appliquer la 2 éme loi de Newton à la balle dans le champ de pesanteur terrestre uniforme
en supposant que la poussée d’Archimède et les forces de frottement sont négligeables par
rapport au poids.
2- Montrer que le mouvement est plan et que l’on obtient pour :
le vecteur-accélération
0
0
x
G y
z
a
a a
a g
Le vecteur- vitesse
Le vecteur- position
3- Etablir l’équation y = f(x) de la trajectoire à partir des équations horaires paramétriques.
4- La flèche de la trajectoire est l’altitude maximale atteinte par rapport au point de
lancement. Elle correspond donc ici à z(tF). montrer que :
5- La portée est la distance entre le point de lancement O et le point d’impact P sur le plan
horizontal contenant O. Elle correspond donc ici à xP. montrer que :
6-Calculer toutes les valeurs numériques (des questions 2, 3, 4 et 5) pour la valeur de
V0=6,07m.s-1 et de α=68,03° à fin de les comparer à celles obtenues par modélisation.

Filière : Physique-chimie CRMEF –Fès- 2012-2013
Encadré par : Pr. L. KADIRA 3
II. Etude Expérimentale
II.1. Etude via les logiciels AVIMECA2, REGRESSI
II.1.1 Pointage vidéo
A l’aide d’une webcam , réaliser l’enregistrement d’une balle de tennis lancée
obliquement. On dispose alors d’un fichier vidéo numérique au format avi et on exploite cet
enregistrement avec le logiciel Aviméca, A défaut, on utilisera une vidéo déjà prête.
Lancer Aviméca. Puis faire Fichier, Ouvrir… Aller chercher le fichier .avi désiré
Agrandir l’image en cliquant sur Adapter
Aller dans l’onglet Etalonnage
- cliquer sur l’onglet Etalonnage, sélectionner un système d’axe,
- Choisir échelles identiques : entrer une distance connue entre deux points
donnés.
Aller dans l’onglet Mesure
- pointer les positions successives de la balle.
Une fois le pointage achevé, lancer Régressi depuis Aviméca
II.1.2. Modélisations
II.1.2.a. Equations horaires paramétriques
1- Tracer x(t). Quelle est l’allure de la courbe ? Relever le modèle proposé par le logiciel
(type et valeurs numériques). A quoi correspond le coefficient directeur de la fonction linéaire
x(t) ?
2- Tracer y(t). Quelle est l’allure de la courbe ? Relever le modèle proposé par le logiciel
(type et valeurs numériques).
II.1.2.b. Coordonnées du vecteur-vitesse
1- Tracer vx(t). Quelle est l’allure de la courbe ? Relever le modèle proposé par le logiciel
(type et valeurs numériques). Comparer la valeur au coefficient directeur de la fonction x(t).
Que vaut l’accélération suivant l’horizontale ? Qualifier le mouvement suivant l’horizontale.
2- Tracer vy(t). Quelle est l’allure de la courbe ? Relever le modèle proposé par le logiciel
(type et valeurs numériques). A quoi correspond le coefficient directeur de la fonction linéaire
vy(t) ? Quelle valeur devrait-on retrouver ? Qualifier le mouvement suivant la verticale.
Filière : Physique-chimie CRMEF –Fès- 2012-2013
Encadré par : Pr. L. KADIRA 4
3- A quelle date a-t-on vy = 0 m.s-1 ? Comparer le sens des vecteurs a
et v
(en fait, il suffit de
comparer ici les signes de ay et vy) et en déduire la nature du mouvement avant et après cette
date.
II.1.2.c. Equation de la trajectoire
1- Tracer y(x). Quelle est l’allure de la courbe ? Relever le modèle proposé par le logiciel
(type et valeurs numériques).
2- A l’aide du curseur réticule relever sur la trajectoire modélisée la valeur de ymax
(correspondant à la flèche), et celle de xmax (correspondant à la portée).
II.2. Etude via Logiciel de simulation numérique Maple.
1- Déclarer tous les paramètres du problème comme des variables globales.
2- Déclarer trois variables eqx, eqy et eqz et leur affecter respectivement les équations du
mouvement selon xe
, ye
,ze
.
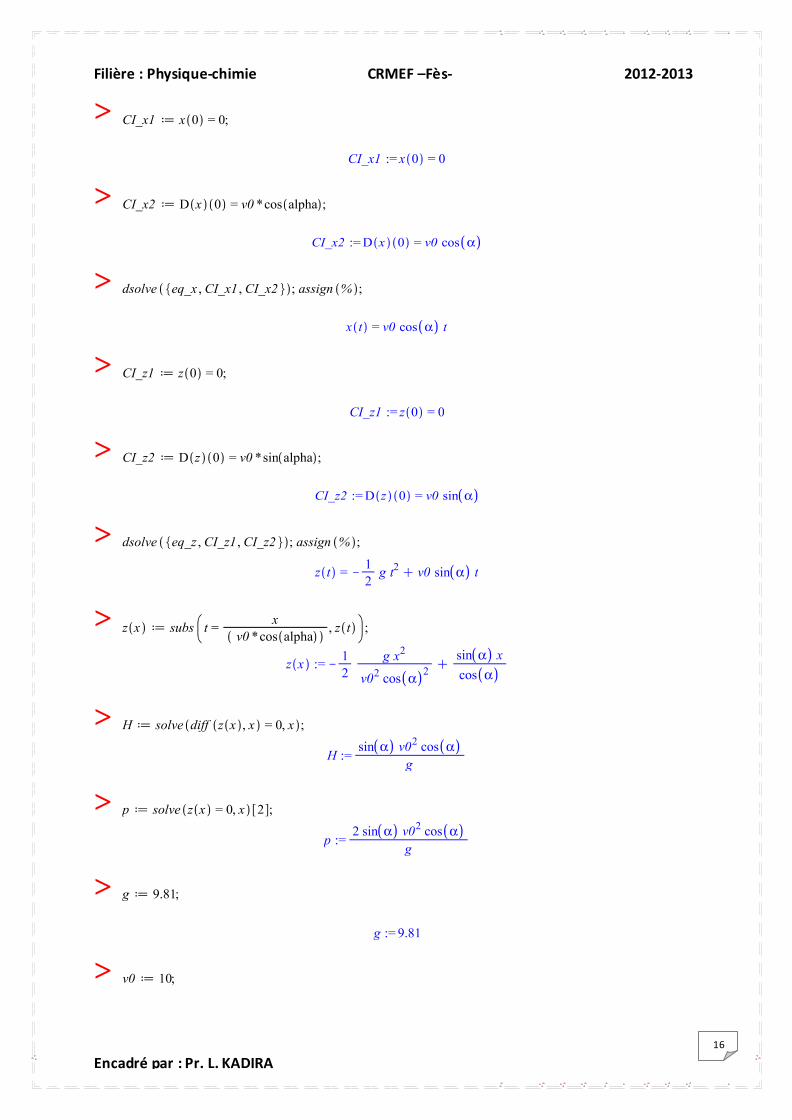
3- Déclarer les conditions initiales CIx, CIy et CIz associées aux équations précédentes.
4- Résoudre les équations différentielles du mouvement et extraire les expressions de x(t), y(t)
et z(t).
5- Transformer les expressions x, y et z en fonction afin de pouvoir les manipuler
6- Affecter des valeurs numériques aux paramètres du problème
7- Déterminer via Maple l’instant tF d’impact du projectile sur le sol.Faire calculer alors la
portée xP du tir.
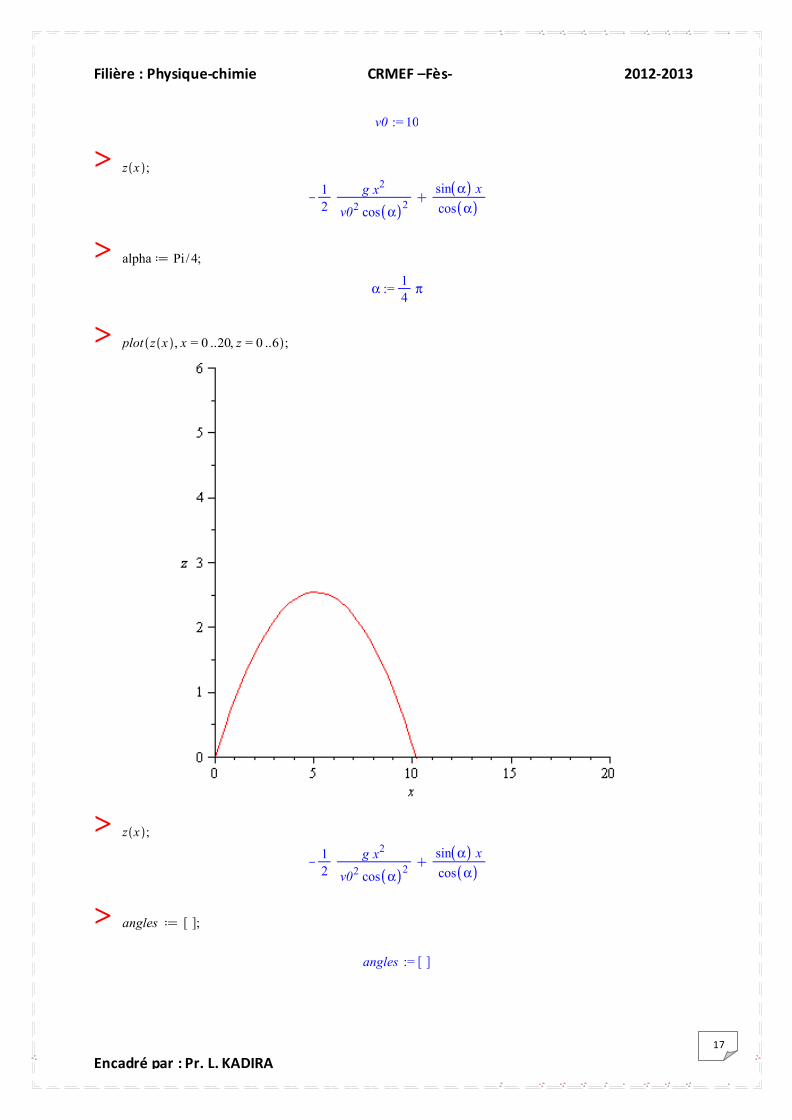
8- Tracer la trajectoire z = f(x) entre la position initiale et le point d’impact.se fait avec la
commande odeplot et se charge via l’instruction with(plots).
9-déclarer plusieurs valeurs d’angle de tir. Observer son influence sur la portée et la flèche.
Filière : Physique-chimie CRMEF –Fès- 2012-2013
Encadré par : Pr. L. KADIRA 5
Correction I- Etude théorique
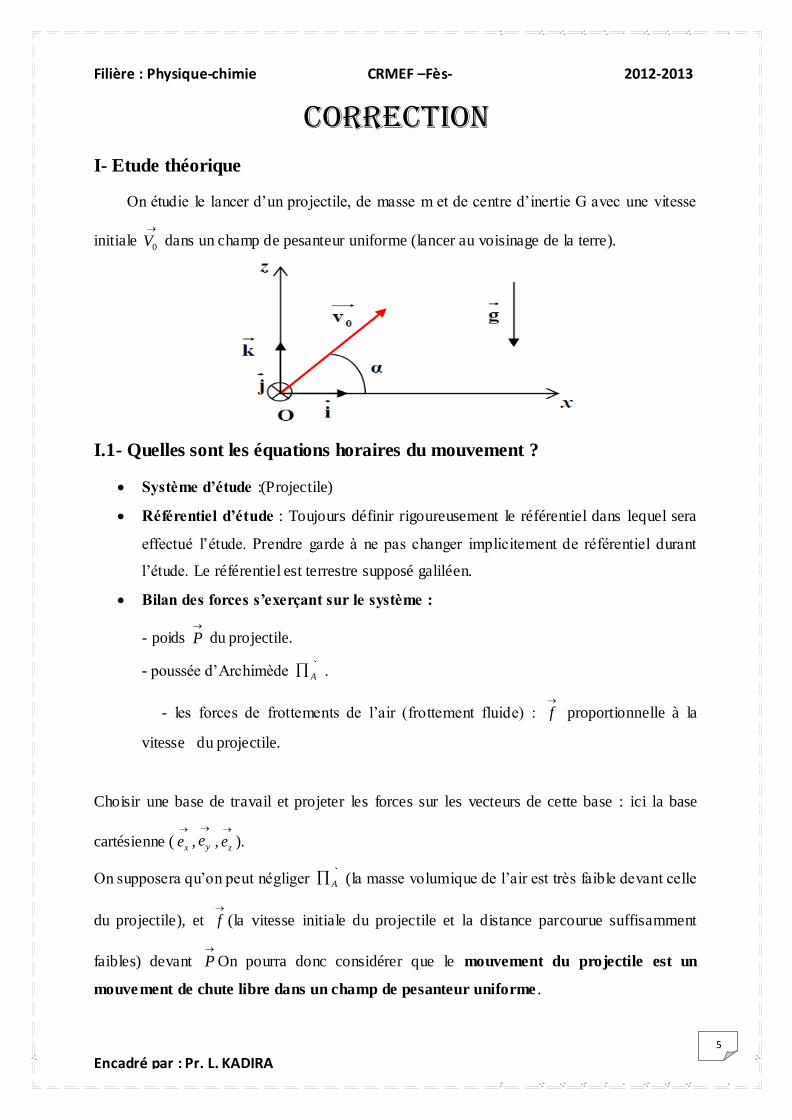
On étudie le lancer d’un projectile, de masse m et de centre d’inertie G avec une vitesse
initiale 0V
dans un champ de pesanteur uniforme (lancer au voisinage de la terre).
I.1- Quelles sont les équations horaires du mouvement ?
Système d’étude :(Projectile)
Référentiel d’étude : Toujours définir rigoureusement le référentiel dans lequel sera
effectué l’étude. Prendre garde à ne pas changer implicitement de référentiel durant
l’étude. Le référentiel est terrestre supposé galiléen.
Bilan des forces s’exerçant sur le système :
- poids P
du projectile.
- poussée d’Archimède A .
- les forces de frottements de l’air (frottement fluide) : f
proportionnelle à la
vitesse du projectile.
Choisir une base de travail et projeter les forces sur les vecteurs de cette base : ici la base
cartésienne ( xe
, ye
, ze
).
On supposera qu’on peut négliger A (la masse volumique de l’air est très faible devant celle
du projectile), et f
(la vitesse initiale du projectile et la distance parcourue suffisamment
faibles) devant P
On pourra donc considérer que le mouvement du projectile est un
mouvement de chute libre dans un champ de pesanteur uniforme .

Filière : Physique-chimie CRMEF –Fès- 2012-2013
Encadré par : Pr. L. KADIRA 6
L’axe vertical Oz est ascendant !
À l’instant initial t = 0 s on a :
x(0) = y (0) = z (0) = 0
le vecteur vitesse est c
l’angle de tir est noté α (par rapport à l’axe horizontal Ox)
I.1.1- Coordonnées du vecteur accélération
D’après la deuxième loi de Newton on a : . GP m a
soit . . Gm g m a
d’où Gg a
⇒ Le vecteur accélération aura la même direction, le même sens et la même valeur que
le vecteur champ de pesanteur !
En projetant cette relation selon les trois axes du repère on obtient les coordonnées du
vecteur accélération :
0
0
x
G y
z
a
a a
a g
I.1.2- Coordonnées du vecteur vitesse
Les coordonnées du vecteur vitesse V
du centre d’inertie du projectile en intégrant les
coordonnées du vecteur accélération on obtient alors :
D’après les conditions initiales :
L’expression du vecteur vitesse est donc :

Filière : Physique-chimie CRMEF –Fès- 2012-2013
Encadré par : Pr. L. KADIRA 7
la composante horizontale du vecteur vitesse est constante et vaut
0 0.cos( )x xV V V
la composante verticale du vecteur vitesse est une fonction affine décroissante
du temps.
I.1.3- Équations horaires du mouvement
Les coordonnées du vecteur position ( )OG t
du centre d’inertie du projectile en intégrant
les coordonnées du vecteur vitesse on obtient alors les équations horaires du mouvement :
D’après les conditions initiales :
L’expression du vecteur position (= équations horaires du mouvement) est donc :

Filière : Physique-chimie CRMEF –Fès- 2012-2013
Encadré par : Pr. L. KADIRA 8
Les coordonnées du vecteur position ( = équations horaires du mouvement) nous
montrent que le mouvement du projectile est plan, la trajectoire est contenue dans le
plan xOz.
La fonction x(t) est une fonction linéaire de coefficient directeur :
La fonction z(t) est une parabole.
I.2- Quelle est la trajectoire du centre d’inertie du projectile ?
I.2.1- Equation de la trajectoire
À l’aide des équations horaires on peut déterminer l’équation de la trajectoire z = f (x).
D’après l’équation 0.cos( ).x V t on trouve 0.cos( )
xt
V
On remplaçant t dans l’équation horaire de z(t) on obtient :
Donc l’équation de trajectoire du projectile est donné par :
L’équation de la trajectoire est celle d’une parabole (dont la concavité est vers le bas).

Filière : Physique-chimie CRMEF –Fès- 2012-2013
Encadré par : Pr. L. KADIRA 9
L’équation de la trajectoire dépend des conditions initiales V0 et α !
I.2.2- Notions de flèche et de portée
La flèche correspond à la hauteur maximale que peut atteindre le projectile, on la note
F. elle correspond au sommet de la parabole z(x).
Lorsque le projectile atteint la flèche alors la composante verticale de la vitesse en ce point est
nulle donc Vz(F) = 0 m·s−1.
Soit l’instant tF où le projectile est à sa hauteur maximale est :
et donc la hauteur maximale zF (flèche) aura pour expression :
ce qui donne après simplification :
La portée correspond à la distance maximale que peut atteindre le projectile, on la note P.
C’est le point d’intersection du projectile avec l’axe horizontal Ox qui correspond souvent
au sol.
Lorsque le projectile atteint le point P alors z(xp ) = 0.

Filière : Physique-chimie CRMEF –Fès- 2012-2013
Encadré par : Pr. L. KADIRA 10
Les deux solutions analytiques sont :
- XP=0 mais cela n’a aucun intérêt physique !!!
- ce qui donne par simplification :
I.2.3- Influence des paramètres initiaux (V0 et α) sur la trajectoire du projectile
I.2.3.a- Influence de l’angle de tir sur la trajectoire du projectile
Pour une même valeur de vitesse initiale V0, l’angle de tir α a une importance sur la flèche et
la portée.
La portée sera maximale lorsque l’angle de tir est α = 45°, car cos(2α)=1 et donc
I.2.3.a- Influence de la vitesse initiale sur la trajectoire du projectile
Pour une même direction (même angle de tir), plus v0 est grand, plus la flèche et la portée
seront importantes.
Attention, dans ce cas on ne pourra plus négliger les frottements de l’air.

Filière : Physique-chimie CRMEF –Fès- 2012-2013
Encadré par : Pr. L. KADIRA 11
Etude avec Logiciels REGRESSI, AVIMECA2
II.4. Modélisations
II.4.1.Equations horaires paramétriques
1- La courbe x=f(t) :
La fonction x(t) est une fonction linéaire
Le modèle proposé par le logiciel : x= 2,27*t
Le coefficient directeur de la fonction linéaire x(t) correspond à la vitesse initiale VOX.
V0x = V0 cos(α)
2- La courbe y=f(t) :

Filière : Physique-chimie CRMEF –Fès- 2012-2013
Encadré par : Pr. L. KADIRA 12
On observe que la trajectoire est curviligne, le mouvement étant ralenti puis accéléré.
Le modèle proposé par le logiciel : y(t)= a+ b*t + c* t^2 avec a=-0,00345 et
b=5,63 et c=-5,09.
D’après le modèle théorique on a :
Donc -1/(2g) = - 5,09 et V0* sin(α)=5,63
Donc g= 10,18 et d’après l’équation x=f(t) on a V0 cos(α)=2,27
Donc tan(α)= 2,48 alors α=68,03° donc V0=6,07m.s-1

Filière : Physique-chimie CRMEF –Fès- 2012-2013
Encadré par : Pr. L. KADIRA 13
II.4.2. Coordonnées du vecteur-vitesse
1- la courbe obtenue :
La vitesse a une valeur constante et l’accélération est nulle on a donc un mouvement
rectiligne uniforme.
Le modèle proposé par le logiciel Vx=2,25 m/s.
2- on trace Vy(t) :

Filière : Physique-chimie CRMEF –Fès- 2012-2013
Encadré par : Pr. L. KADIRA 14
Le modèle proposé par le logiciel : Vy(t)= -10,1*t + 5,59
Le coefficient directeur de la fonction linéaireVy(t) correspond à l’accélération
vertical. d’après le modèle théorique Vy(t)= -g*t + V0 *sin(α)
Donc g=10,1m/s^2. Et V0 sin(α)=5,59.
la composante verticale du vecteur vitesse est une fonction affine décroissante du
temps.
3- Vy=0m/s à tc=550ms.
On comparer les signes de ay et vy :
Vy positive entre 0 et tc car la bille monte. à partir de tc elle est négative car
la bille descend.
ay(t) = dVy
dt = -10m.s-2 vecteur vertical dirigé vers le bas
donc Dans l'intervalle de temps [0; tC] le mouvement parabolique uniformément ralenti, et
Dans l'intervalle de temps entre tc et la fin le mouvement est parabolique uniformément
accéléré.
II.4.3. Equation de la trajectoire
On observe que la trajectoire est curviligne, le mouvement étant ralenti puis accéléré.

Filière : Physique-chimie CRMEF –Fès- 2012-2013
Encadré par : Pr. L. KADIRA 15
Le modèle proposé par le logiciel : z(x)= -0,95 x2 + 2.42 x + 0,019. C’est l’équation
d’un parabole.
D’après le modèle théorique on a :
Donc : -0,95=-g/(2*(V0*cos(α))^2)) et tan(α)=2,42
La valeur de la pente est 2,42
la valeur de ymax (correspondant à la flèche) est 1,55m.
la valeur de x max (correspondant à la portée) est 2,55m.
Confrontation et validation
Comme nous ne connaissons pas les valeurs v0z et v0x de la vitesse initiale, nous avons
tracé la courbe théorique en prenant des valeurs arbitraires. Bien évidemment, ces
valeurs ne correspondent pas aux valeurs réelles donc les deux courbes,
expérimentales et théoriques, ne se superposent pas.
Une fois les deux courbes z = f(x) tracées sur le même système d’axes, il reste donc à
affiner les coordonnées de la vitesse initiale. En prenant la valeur de la vitesse initiale
V0=6,07m.s-1 et angle de tir α=68,03°, nous observons que les deux courbes se
superposent avec une grande précision.
Au final, si la prévision théorique correspond donc à l’observation expérimentale, on dit notre
modèle est valide : l’hypothèse des frottements de l’air négligeables est donc vérifiée.
Etude avec Logiciel de simulation numérique Maple
>
>
>
Filière : Physique-chimie CRMEF –Fès- 2012-2013
Encadré par : Pr. L. KADIRA 16
>
>
>
>
>
>
>
>
>
>
>
Filière : Physique-chimie CRMEF –Fès- 2012-2013
Encadré par : Pr. L. KADIRA 17
>
>
>
>
>

Filière : Physique-chimie CRMEF –Fès- 2012-2013
Encadré par : Pr. L. KADIRA 18
>
>
>