la vision artificielle est une méthode d’avenir pour la ... · reconnaissance automatisée des...
TRANSCRIPT

BASE Biotechnol. Agron. Soc. Environ.201115(4),623-634 Le Point sur :
Lavisionartificielleestuneméthoded’avenirpourlareconnaissanceautomatiséedesplantesadventicesAlexisPiron,BenjaminDumont,Marie-FranceDestainUniv.Liège-GemblouxAgro-BioTech.UnitédeMécaniqueetConstruction.PassagedesDéportés,2.B-5030Gembloux(Belgium).E-mail:[email protected]
Reçule24septembre2010,acceptéle8février2011.
Lesadventicesentrentencompétitionavec lesculturespour la lumière, l’eau, lesnutrimentset l’espace.Decefait,ellesréduisentlesrendements,peuventrendrelarécoltedifficileetrisquentd’affecterlaqualitédesproduits.Ellessontdétruitesàl’aidedeméthodeschimiques,nonchimiquesetintégrées.Pourréaliserunedestructionlocalisée,ilestpossibledecouplercestechniquesàunsystèmedevisionartificiellepourassurerlareconnaissanceautomatiquedesadventicesparrapportauxplantescultivées.Lesproblèmeslespluscompliquésserencontrentlorsquelesadventicessontmélangéesauxplantescultivées.Danslamiseaupointd’unsystèmedevision,ilfautsélectionnerlesattributslespluspertinentspourréaliserladiscrimination.Laréflectanceetlesparamètresdeformedoiventêtreanalysésaucasparcas,enfonctiondesvariétésd’adventicessusceptiblesd’êtreprésentesdansuneculturedonnée.Lamesurede lahauteurdesplantesestuneméthodeefficiente,puisqu’à faibleéchelle spatiale, la vitesse de croissancedes plantes cultivées est plus uniformeque celle d’adventices appartenant à desespècesdifférentes.Cettevitessedecroissanceestfonctiondelahauteuretd’untempscaractéristique(parexemple,lenombredejoursaprèssemis).Lamiseenœuvredecetteméthodepeutêtrebaséesurl’utilisationd’uneméthodedestéréoscopieactivecombinéeàladéterminationprécisedumicroreliefdusol.Mots-clés.Mauvaiseherbe,imagerie,réflectance,morphologievégétale,stéréoscopie.
Machine vision is a method for the future to automatically recognize weeds from plants.Weeds competewith cropplantsforsunlight,moistureandnutrientsandcanhaveadetrimentalimpactoncropyieldsandqualityifuncontrolled.Theyaredestroyedbychemical,non-chemicalandintegratedmethods.Toperformasite-specificweedsdestruction,combinationofthesetechniqueswithground-basedmachinevisiontechnologyhashighpotential.Severalmethodsexisttodifferentiateweedsfromsoil,betweentherows.Themorecomplicatedproblemisencounteredwhenweedsaremixedtocropswithintherows.Algorithmsbasedoncolorimetricorshapefeaturesarewidelydependentonthevariabilityofweedsandcropsandaredifficulttotransposefromonesituationtoanother.Measurementofplantheightisapromisingmethod,sinceatlowspatialscale,thegrowingspeedismoreuniformfortheplantsthanfortheweeds.Thisgrowingspeedisfunctionoftheheightandofacharacteristictime,suchasthenumberofdaysaftersowing.Toimplementthismethod,activestereoscopycombinedtoanaccuratemeasurementofthesoilmicroreliefisrequired.Keywords.Weeds,imageanalysis,reflectance,vegetalmorphology,stereoscopy.
1. Contexte général
Lesadventicessontdesplantesindésirablesprésentesdans les champs cultivés. Ces «mauvaises herbes»sont considérées comme nuisibles parce qu’ellesentrent en compétition avec les cultures pour lalumière, l’eau, les nutriments et l’espace.De ce fait,elles réduisent les rendements, peuvent rendre larécolte difficile et risquent d’affecter la qualité desproduits.Mêmeàfaibledensité,lesadventicespeuventêtrenuisibles,enproduisantdessemencesquiserontàl’origined’infestationsultérieures.Oncherchedoncàlesdétruiremêmesiellesparticipentàlabiodiversité.
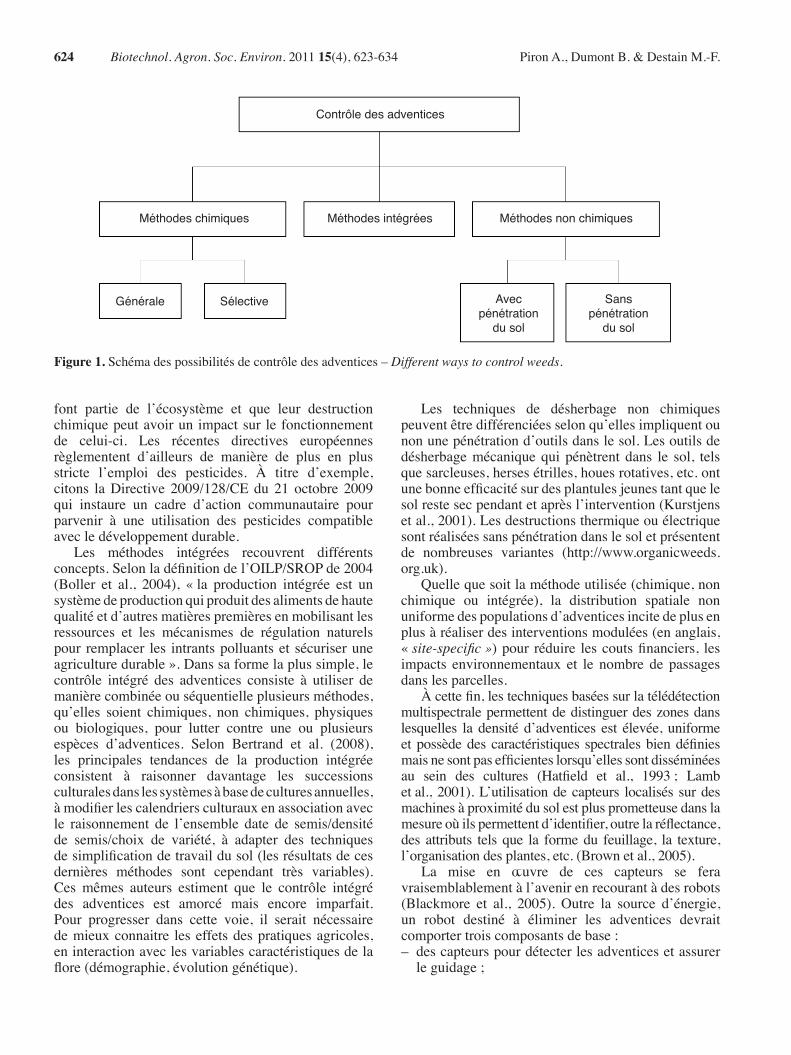
Lestechniquesdedésherbagepeuventêtreclasséesen méthodes chimiques, non chimiques et intégrées(Figure 1).
Les méthodes chimiques, en recourant àl’utilisationd’herbicides,sontd’uneutilisationaiséeetpossèdentunebonneefficacité(engénéralsupérieureà95%).Cependant,l’emploirépétéd’herbicidespeutconduireàl’apparitionderésistancesetleurutilisationprésenteuncoutélevé.Commec’estlecaspourtousles pesticides, les herbicides présentent des risquespour l’environnement et l’utilisateur. À l’avenir, lesapplications d’herbicides devront vraisemblablementêtredavantagecibléesdanslamesureoùlesadventices
624 Biotechnol. Agron. Soc. Environ. 201115(4),623-634 PironA.,DumontB.&DestainM.-F.
font partie de l’écosystème et que leur destructionchimiquepeutavoirunimpactsur lefonctionnementde celui-ci. Les récentes directives européennesrèglementent d’ailleurs de manière de plus en plusstricte l’emploi des pesticides. À titre d’exemple,citons laDirective 2009/128/CEdu21 octobre 2009qui instaure un cadre d’action communautaire pourparvenir à une utilisation des pesticides compatibleavecledéveloppementdurable.
Les méthodes intégrées recouvrent différentsconcepts.Selonladéfinitiondel’OILP/SROPde2004(Boller et al., 2004), «la production intégrée est unsystèmedeproductionquiproduitdesalimentsdehautequalitéetd’autresmatièrespremièresenmobilisantlesressources et les mécanismes de régulation naturelspour remplacer les intrantspolluantset sécuriseruneagriculturedurable».Danssaformelaplussimple,lecontrôle intégré des adventices consiste à utiliser demanièrecombinéeouséquentielleplusieursméthodes,qu’elles soient chimiques, non chimiques, physiquesou biologiques, pour lutter contre une ou plusieursespèces d’adventices. Selon Bertrand et al. (2008),les principales tendances de la production intégréeconsistent à raisonner davantage les successionsculturalesdanslessystèmesàbasedeculturesannuelles,àmodifierlescalendriersculturauxenassociationavecle raisonnement de l’ensemble date de semis/densitéde semis/choix de variété, à adapter des techniquesdesimplificationdetravaildusol(lesrésultatsdecesdernières méthodes sont cependant très variables).Ces mêmes auteurs estiment que le contrôle intégrédes adventices est amorcé mais encore imparfait.Pour progresser dans cette voie, il serait nécessairedemieuxconnaitre leseffetsdespratiquesagricoles,eninteractionaveclesvariablescaractéristiquesdelaflore(démographie,évolutiongénétique).
Les techniques de désherbage non chimiquespeuventêtredifférenciéesselonqu’ellesimpliquentounonunepénétrationd’outilsdanslesol.Lesoutilsdedésherbagemécaniquequi pénètrent dans le sol, telsquesarcleuses,hersesétrilles,houesrotatives,etc.ontunebonneefficacitésurdesplantulesjeunestantquelesolrestesecpendantetaprèsl’intervention(Kurstjensetal.,2001).Lesdestructionsthermiqueouélectriquesontréaliséessanspénétrationdanslesoletprésententde nombreuses variantes (http://www.organicweeds.org.uk).
Quellequesoitlaméthodeutilisée(chimique,nonchimique ou intégrée), la distribution spatiale nonuniformedespopulationsd’adventicesincitedeplusenplusàréaliserdesinterventionsmodulées(enanglais,«site-specific »)pour réduire lescoutsfinanciers, lesimpacts environnementaux et le nombre de passagesdanslesparcelles.
Àcettefin,lestechniquesbaséessurlatélédétectionmultispectralepermettentdedistinguerdeszonesdanslesquelles la densité d’adventices est élevée, uniformeetpossèdedescaractéristiques spectralesbiendéfiniesmaisnesontpasefficienteslorsqu’ellessontdisséminéesau sein des cultures (Hatfield et al., 1993; Lambetal.,2001).L’utilisationdecapteurs localisés surdesmachinesàproximitédusolestplusprometteusedanslamesureoùilspermettentd’identifier,outrelaréflectance,des attributs telsque la formedu feuillage, la texture,l’organisationdesplantes,etc.(Brownetal.,2005).
La mise en œuvre de ces capteurs se feravraisemblablementàl’avenirenrecourantàdesrobots(Blackmore et al., 2005). Outre la source d’énergie,un robot destiné à éliminer les adventices devraitcomportertroiscomposantsdebase:– descapteurspourdétecterlesadventicesetassurer leguidage;
Contrôle des adventices
Méthodes chimiques Méthodes intégrées Méthodes non chimiques
Générale Avec pénétration
du sol
Sélective Sans pénétration
du sol
Figure 1.Schémadespossibilitésdecontrôledesadventices–Different ways to control weeds.

625
– un système d’aide à la décision pour traiter l’informationissuedescapteursetdéfinirlesactions àexercer;– des actionneurs pour éliminer les adventices de manièrechimique,mécanique,électrique,thermique, etc.etassurerlaprogressiondelamachine.
Leguidaged’unrobotréalisésoitdemanièrelocaleparrapportauxrangs,soitdemanièrelocaleavecunsystèmedepositionnementdetypeRTKS,neconstitueplus un problème aujourd’hui. Des robots existentdéjà pour détruire les adventices, soit sous forme deprototype (Lee et al., 1999; Astrand et al., 2002;VanEvertetal.,2006),soitsousformecommerciale.Parexemple, le robotRobotcrop InRow (http://www.garford.com) détruit les adventices situées entredes plantes maraichères dont l’espacement entre leslignes et dans la ligne est connu (persil, céleri, etc.)(Figure 2).SelonSlaughteretal.(2008),leproblèmemajeurdans ledéveloppementderobotsdestructeursd’adventices reste lemanque de techniques robustesassurantlareconnaissanced’adventices.
L’objectifdel’articleestdoncdefairelepointsurlespotentialitésdelavisionartificielleentantqu’outilde différenciation des adventices par rapport auxplantes cultivées. Les caractéristiques mesurées sontlaréflectancedesvégétaux,laforme,latextureoulahauteur,prisisolémentouencombinaison.
2. la vision artiFiCielle et la reConnaissanCe des adventiCes
Leproblèmeestcompliquédufaitquel’onestamenéà différencier des objets naturels à haute variabilité,parrapportàunarrière-planquipossèdelui-mêmedescaractéristiqueshautementaléatoires.Lesnombreuses
étudesconsacréesà la reconnaissancedesadventicesvarient en fonction de la complexité de la scèneexaminée: la différenciation de plantes individuellespeut s’effectuer par rapport à un arrière-planfortementcontrastéenlaboratoire,ellepeutconcernerla reconnaissance d’adventices à partir d’imagessynthétiques(Vioixetal.,2002;Jonesetal.,2009)oubien la reconnaissance d’adventices en plein champ.Lacomplexitéestégalementliéeaunombredeplantesétudiées(reconnaissanced’uneoudeplusieursespècesd’adventices),aunombredevariablesnoncontrôlées(soldetextureuniformeousolsdedifférentestextures),auxconditionsd’acquisitiond’images(statiquesouenmouvement), aux potentialités d’utilisation en tempsréel,etc.
Si on souhaite reconnaitre des adventices situésentrelesrangsdeplantescultivées,lapremièreétapeconsiste à identifier les lignes. La transformée deHoughestuneméthoderobustepourcefaire(Astrandet al., 2005),d’autantplusqu’il estpossiblede tenircomptedel’existenced’unpointdeconvergencedeslignesperçuesparlacaméra(Leemansetal.,2006).Ilrestealorsàdifférencierlesadventicesparrapportausol.Parcontre,silesadventicessontsituéesdansleslignesetmélangéesauxplantescultivées,leproblèmeestnettementpluscomplexe(Figure 3).Lesméthodes
Figure 2.RobotcropInRow—Robotcrop InRow (GarfordFarmMachinery,http://www.Garford.com).
Figure 3. Adventices dans des lignes de carottesbiologiques–Weeds infestation in a carrot line.
626 Biotechnol. Agron. Soc. Environ. 201115(4),623-634 PironA.,DumontB.&DestainM.-F.
utilisées se basent sur la mesure d’attributs tels quela réflectance, lamorphologie, la texture, la hauteur,pris isolémentouencombinaison.Unefoismesurés,cesattributssontintroduitsdansunclassifieurdetypeanalyse discriminante, maximum de vraisemblance,réseaudeneurones,SVM(Support VectorMachine),logiquefloue,etc.(Marchantetal.,2003).
3. la réFleCtanCe
Lorsqu’unêtrehumaindifférenciedesplantescultivéesd’adventices, ladifférencedecouleurestunélémentdéterminant.Or,lacouleurCRGBperçueparunsystèmeoptique, comme une caméra RGB, est le résultat del’intégrationduproduitduspectredel’illuminantE(λ)parlaréflectancedesobjetsdanslascèner(l)etparlescaractéristiquesspectralesdusystèmeoptiques(λ),létantlalongueurd'onde(Onyangoetal.,2001):
CRGB=∫s(l)r(l)E(l)d(l) (1)
Pour un système optique donné et un objet deréflectance déterminée, une modification du contenuspectraldel'illuminationchangedonclacouleurdelascène.
La réflectance du feuillage a été étudiée par denombreux auteurs (Parish, 1990; Thill et al., 1991;Thompson et al., 1991; Hatfield et al., 1993). Laréflectance étant directement liée à l'absorptionspectrale,ilfautrappelerquelesvégétauxcontiennentdes pigments dont les bandes d'absorption sontbien définies (tableau 1), les plus connus étant leschlorophyllescontenuesdansleschloroplastes.Seuleunepartiedel’énergieabsorbéeparleschlorophyllesestutiliséepourlaphotosynthèse,leresteestrestituéaumilieusousformedefluorescence,àdeslongueursd’ondeplusélevéesquecelledelalumièreabsorbée.
Danslazoneduprocheinfrarouge(NIR),lesvégétauxprésentent une réflectance importante, fortementinfluencéeparl’organisationcellulaire.Eneffet,quandla radiationNIR pénètre les cellules dumésophylle,de multiples réflections et réfractions se produisententrelescelluleshydratéesetlespochesd’airquilesséparentetpeud’énergieestabsorbéeparlaplantesousformedeNIR.Au-delàde1300nm,laréflectanceestfortementdépendantedelateneureneaudelaplante.Unfeuillageconvenablementhydratéprésentedespicsderéflectancedanslazonede1300à2500nm.Cespicsn’apparaissentpassilefeuillageestdéshydraté(Thorpetal.,2004).Dufaitdel’ensembledeceséléments,laréflectancesubitdesvariationstemporellesencoursdesaisonculturale,dues auxmodificationsde tailledescellules,decompositionchimique,deteneureneauetd’unemanièreplusgénérale,enraisondelaprésencedefacteursdestress(Zwiggelaar,1998).
Mêmesilaréflectanced’unefeuilleenestl’élémentdéterminant, l’énergie réfléchie par la canopée estfonction de plusieurs variables: le LAI (indicefoliaire),laréflectancedusol(quivarieenfonctiondelateneureneau,delaprésencedematièreorganique,etc.),l’angledesfeuilles,etc.Laréflectanceestaussiinfluencéeparlateneurenazoteet l’étatsanitairedela canopée.Dans les étudesmesurant les différencesde réflectancequi existent entre les adventices et lesplantes cultivées, l’acquisition d’images est réaliséeavecdescamérasconventionnellesRGB,desdispositifsmultispectrauxouhyperspectraux.Parmicesderniers,ontrouvedesspectrographesoucamérasspectralesetdesspectromètres.Lesavantagesetinconvénientsdesdifférentestechniquessontrésumésdansletableau 2.
Par ailleurs, plusieurs auteurs font état de ladifficulté de reconnaitre des végétaux dans unenvironnement extérieur (Tian et al., 1993; Stewardet al., 1999). L’illumination directe provoqued’importantes différences d’intensités dans lesimages,selonquel’onestenprésenced’ombresouderéflexions spéculaires dues à des feuillages brillants.Parailleurs,l’illuminationextérieureestnonuniforme,enintensitéetencontenuspectral.Ilsemblepossibled’obtenirdemeilleursrésultatsenmilieuextérieur,encontrôlantl’illumination,enrecourantàunalgorithmedesegmentationadaptative(Tianetal.,1998)oubienencoreenutilisantdeuxcamérasmuniesdefiltres,l’uncorrespondantàunezoned’absorptiondelalumière,l’autreàunezonederéflexionimportante(NIR)etensoustrayant les deux images (Gerhards et al., 2003;Astrand et al., 2005). Slaughter et al. (2008) fontremarquerquecettedernièreméthodeestpeuefficacedans des régions d’Europe du Sud ou laCaliformie,dans lesquelles le rapport entre l’illuminationdiffuseet l’illumination globale (illumination directe +diffuse)est faible,alorsqu’ilestélevéenEuropeduNord. Pour pouvoir faire abstraction des variations
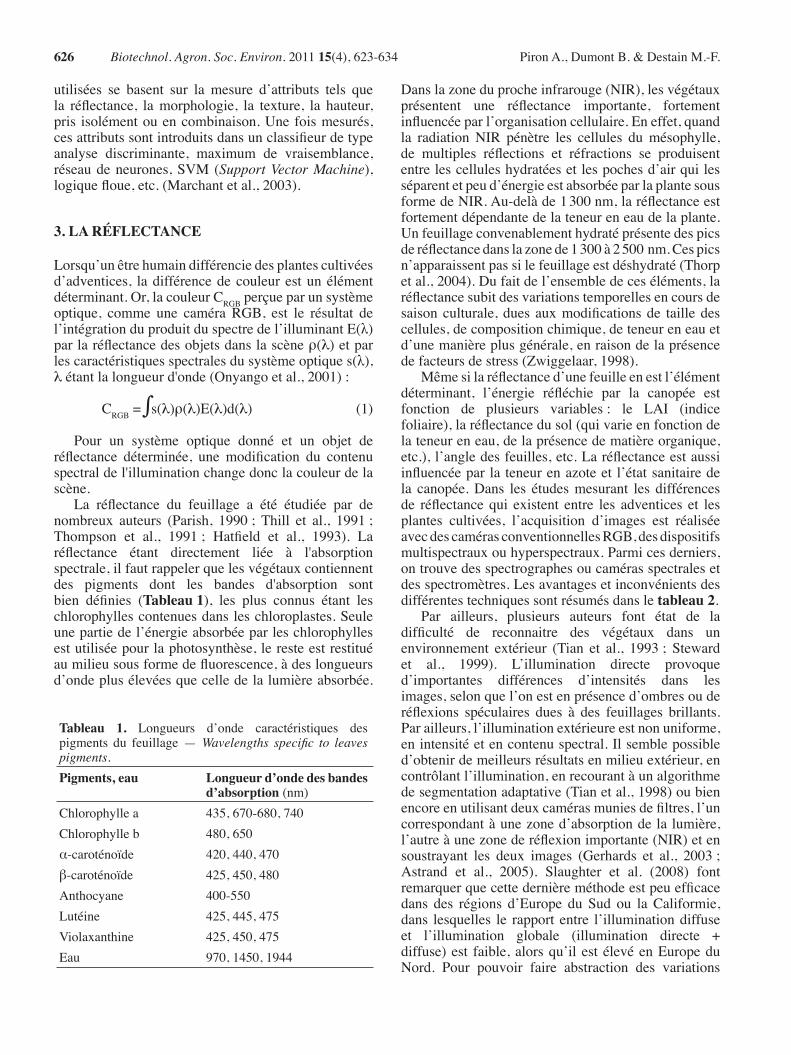
tableau 1. Longueurs d’onde caractéristiques despigments du feuillage—Wavelengths specific to leaves pigments.Pigments, eau longueur d’onde des bandes
d’absorption (nm)Chlorophyllea 435,670-680,740Chlorophylleb 480,650α-caroténoïde 420,440,470β-caroténoïde 425,450,480Anthocyane 400-550Lutéine 425,445,475Violaxanthine 425,450,475Eau 970,1450,1944

627
de l’illumination,unéclairagecontrôléestutilisésurdifférents prototypes (Lee et al., 1999; Hemmingetal.,2001;Pironetal.,2008a).
3.1. acquisition d’images par caméras
Plusieurs auteurs utilisent des caméras RGB pourdifférencier les végétaux du sol. Trois catégories deméthodes sont utilisées. Les premières consistent àsynthétiserl’informationcontenuedanslesimagesencalculantdesindicesdechromaticitéetendéfinissantunseuilséparantlesvégétauxdusol.Woebbeckeetal.(1995)utilisentlesindicesdechromaticitédéfinisdelamanièresuivante:
r=R g=G b=B (1)R+G+B R+G+B R+G+B
Dans cette expression, R, G et B sont les variablesrouge, verte et bleue mesurées par la caméra etnormaliséescommesuit:
R=RcG=
GcB=Bc(2)
RmGmBm
Rc,Gc,Bc sont respectivement les valeursmoyennesdesréflectancesdanslescanauxrouge,vertetbleuetRm,Gm,Bmsontrespectivementlesvaleursmaximalescorrespondantes. Puisque r+g+b=1, seuls deuxindicesdechromaticitésontindépendants.Lesauteursmontrent que la meilleure séparation est obtenue enutilisant l’indice ExG (Excessive Green) qui est unecombinaisonlinéaireder,getb:
ExG=2*g-r-b (3)
Cetindiceserévèleinefficacepourdifférencierlesmonocotylées des dicotyléesmais est souvent utilisépourdifférencierlavégétationdusol(Sogaard,2005;Nieuwenhuizen et al., 2007; Burgos-Artizzu et al.,2010).D’autres indices sont proposés avec lemêmeobjectif:– l’indiceExR(Excess Red Index)(Meyeretal.,1998):
ExR=1,4R-G (4)
– l’indicedechromaticitévert(Astrandetal.,2002):
g=G/(R+G+B) (5)
tableau 2.Comparaisondessystèmesd’acquisitiond’images—Comparison of images acquisition systems.description avantages inconvénients
CaméraRGB 3bandesspectralesRGB(rouge,vert,bleu)
Peucouteux GammespectralelimitéeauvisibleFaiblerésolutionspectraleRecouvrementdesbandesspectrales
Caméraspectrale(spectrographe)
Dispositifformantuneimage,regroupantlesdonnéesspatialessurunaxeetlesdonnéesspectralessurl’autreUneimagespectralecomplèteestobtenueenbalayantl’objetligneparlignedansunedirectionspatiale
RésolutionspectraleélevéeRésolutionspatialeliéeaucapteurCCDPossibilitéd’utiliserdesbandesdansl’infrarouge
Tempsd’intégrationidentiquepourtouteslesbandesspectralesGammespectralelimitéeCalibrationdélicate
Caméraavecrouesdefiltres
Caméramonochromemunied’unesériedefiltrespasse-bandes
RésolutionspectralefonctiondunombredefiltresTempsd’intégrationoptimalpourchaquebandePossibilitéd’utiliserdesbandesdansl’infrarouge
Nombrelimitédebandes
Spectromètre Balayagedelongueursd’ondes Résolutionspectraleélevée(typiquementdel’ordrede10nm)Possibilitéd’utiliserdesbandesdansl’infrarouge
CoutélevédescapteursInGaAs(900-1700nm)etPbS(1-3,3µm)
628 Biotechnol. Agron. Soc. Environ. 201115(4),623-634 PironA.,DumontB.&DestainM.-F.
3.2. acquisition d’images par dispositif hyperspectral
Considérant qu’une caméra RGB fournit uneinformationspatialedétailléemaiscomporteseulementtrois bandes (rouge, vert, bleu) de faible résolutionspectrale, plusieurs auteurs utilisent un dispositifhyperspectral oumultispectral. Pour différencier desbetteraves (Beta vulgaris L.) de plantes adventices,telles que Poa annua L., Plantago lanceolata L.,Stellaria media L.,Chenopodium album L., Feyaertsetal.(2001)conçoiventunspectrographe(aussiappelécaméra spectrale) qui décompose la lumière reçueen ses composantes spectrales et les projette sur lamatricedecapteursd’unecaméramonochrome.L’undes axes se comporte comme un axe spatial, tandisqueledeuxièmeaxeestunaxespectralpossédantunerésolutionde35nmdansunegammede435à1000nm.Le proche infrarouge étant accessible, la végétationestd’abord segmentéepar rapport à l’arrière-planenutilisantl’indiceNDVI:
NDVI=RNIR-RRED
(8) RNIR+RRED
Ensuite, différents classifieurs sont testés, lesmeilleurs résultats étant obtenus avec un MLNLM(multi-layer neural network with non linear mapping).En utilisant les longueurs d’onde de 441, 446, 459,883,924et988nm,un tauxdeclassificationcorrectallantjusqu’à83%estobtenu.
Le même principe est mis en œuvre par Vrindtset al. (2002) qui utilisent un dispositif hyperspectralcommercial fonctionnant dans une gamme de 480à 820nm.Avec ce dispositif, les auteurs arrivent àclasser correctement 93% des spectres avec neufbandesspectralesenbetteraveset91%avec8bandesen maïs. Ces résultats favorables ne sont toutefoisobtenus que lorsque les conditions d’illuminationextérieuresrestentinchangées.
Okamoto et al. (2007) utilisent un dispositifhyperspectraldans labandede400à1000nm,avecunerésolutionde10nm.Lesimagesacquisessurdeuxsites,enconditionsensoleilléesetnuageuses,ontpourobjectif de séparer des betteraves de quatre espècesd’adventices: Fallopia convolvulus L., Equisetum arvense L.,Setaria viridis L.,Stellaria media L.Pourréduire les effets dus aux fluctuations spectrales del’illuminant, lesdonnéessontnormalisées(l’intensitéminimum est ramenée à 0, tandis que l’intensitémoyenneestramenéeà1).Laséparationdespixelsdevégétaux(plantescultivéesetadventices)deceuxdusolestbaséesur lecalculde ladistanceeuclidienne.Dans une deuxième étape, les pixels des plantessont séparés de ceux d’adventices en utilisant une
Cedernier indiceestutilisépour reconnaitre lesadventices situées dans l’inter-rang de betteraves(Astrand et al., 2002). Le système d’identificationdesadventicesestmontésurunrobot,conjointementà un système de vision noir et blanc qui assure leguidagedelamachineviaunetransforméedeHough.Surbased’essaisréalisésenserre,laprécisiondelaclassificationatteint91%.
Les méthodes de la deuxième catégorie sontdes méthodes de segmentation dynamique, commela méthode d’Otsu (Shrestha et al., 2004) ou uneméthode hybride combinant l’algorithme «mean shift » proposé par Comaniciu et al. (2002) et uneanalysediscriminantelinéaire(Zhengetal.,2010).
Dans la troisième catégorie, on trouve desméthodesquiconsistentàopérerdestransformationsde l’espace couleur. La transformation utilisée parStewartetal.(1999)etVioixetal.(2002):
-1 1 0 √2 √2 V1 R V2=-
1-1 2 G(6) I√6 √6 √6 B
1 1 1 √3 √3 √3
a pour but de séparer l’information intensité del’information couleur. Il s’agit d’une rotation durepèreRGBde tellesorteque l’axeIcoïncideavecl’axe des intensités et que V1 et V2 définissent unplan perpendiculaire à I et parallèle au triangledes couleurs. La transformation proposée parNieuwenhuizen et al. (2007) poursuit les mêmesobjectifs:
1 2 1 √6 √6 √6 ExG R RB=1 0 1G (7) I √2 √2B
1 1 1 √3 √3 √3
RB est la différence R-B. Cette transformationest utilisée pour reconnaitre des pommes de terrevolontaires dans un champ de betteraves sucrières.En fonction du type de champ, des conditionsd’ensoleillement, du stade des végétaux, le taux dereconnaissancecorrectvariede49à97%.
629
transformationenondelettesdetypeDaubechiesavantdeprocéderàuneanalysediscriminantelinéaire.Lestauxdeclassificationcorrectssontcomprisentre75et80%.
Slaughter et al. (2004) montrent l’intérêt detravailler dans des bandes du proche infrarouge,avec une haute résolution spectrale pour séparer desplantesdontlesspectressonttrèsprocheslesunsdesautres.Ilsutilisentunspectromètredontlagammedelongueursd’ondesestcompriseentre400et2500nmpourdifférencierdesfeuillesdevégétauxappartenanttous deux à la famille des Solanacées (des tomates,Lycopersicum esculentum L.etdelabelladone,Atropa belladonna L.), matures et en bon état, prélevéessur les plantes. Les meilleurs résultats sont obtenusdans les bandes d’absorption situées entre 1700 et1900nmet2120et2320nmenutilisantunmodèlediscriminant multivarié. Malgré les bons résultatsobtenus,laméthodesembledifficilementtransposableà l’étude de la végétation située en champ du faitquel’angledemesureinfluencelesrésultats,quedeslongueurs d’onde émises sur le feuillage peuvent sesituerdansdesbandesconcernéesparlafluorescence,quelespectrepeutvarierdufaitdelanon-uniformitédufeuillage,etc.
3.3. acquisition d’images par dispositif multispectral
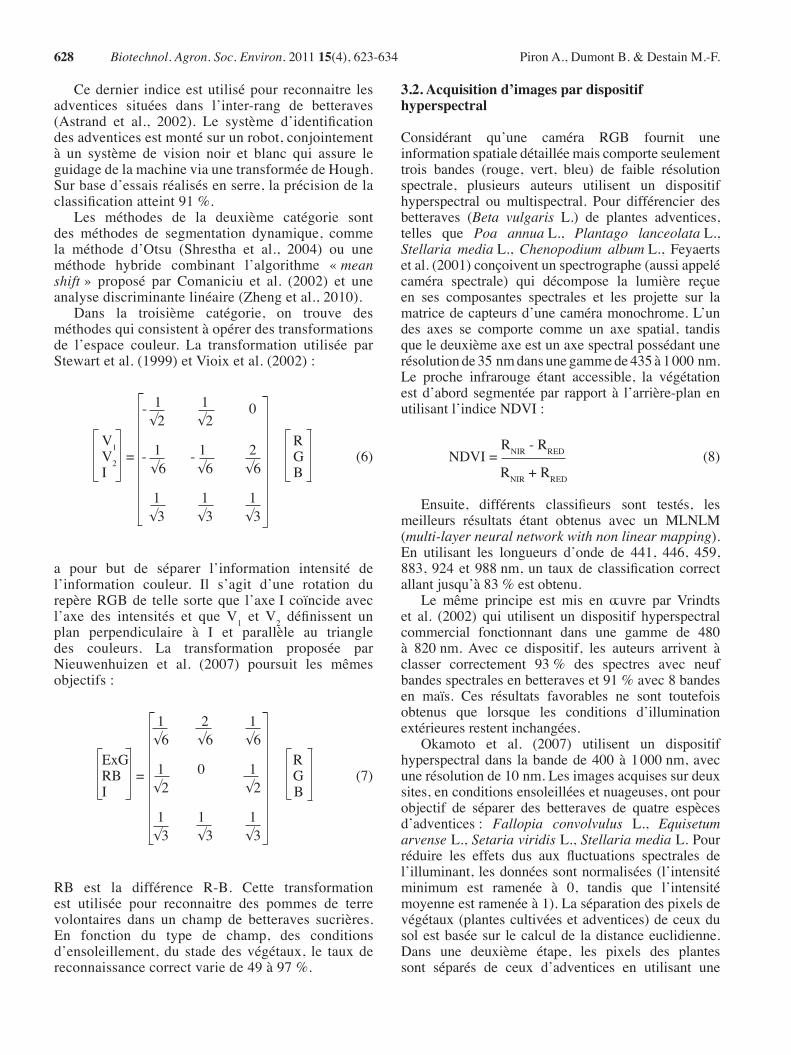
Vioixetal.(2004)réalisentundispositifmultispectralcomportantquatrefiltresmontéssuruncarrouseldevantl’objectifd’unecaméraembarquéedansunaviondontl’altitudevariede10à100m.Lescaractéristiquesdesfiltresnesontcependantpasspécifiées.Pourdétecterdes adventices (Sonchus asper L., Chenopodium L.,
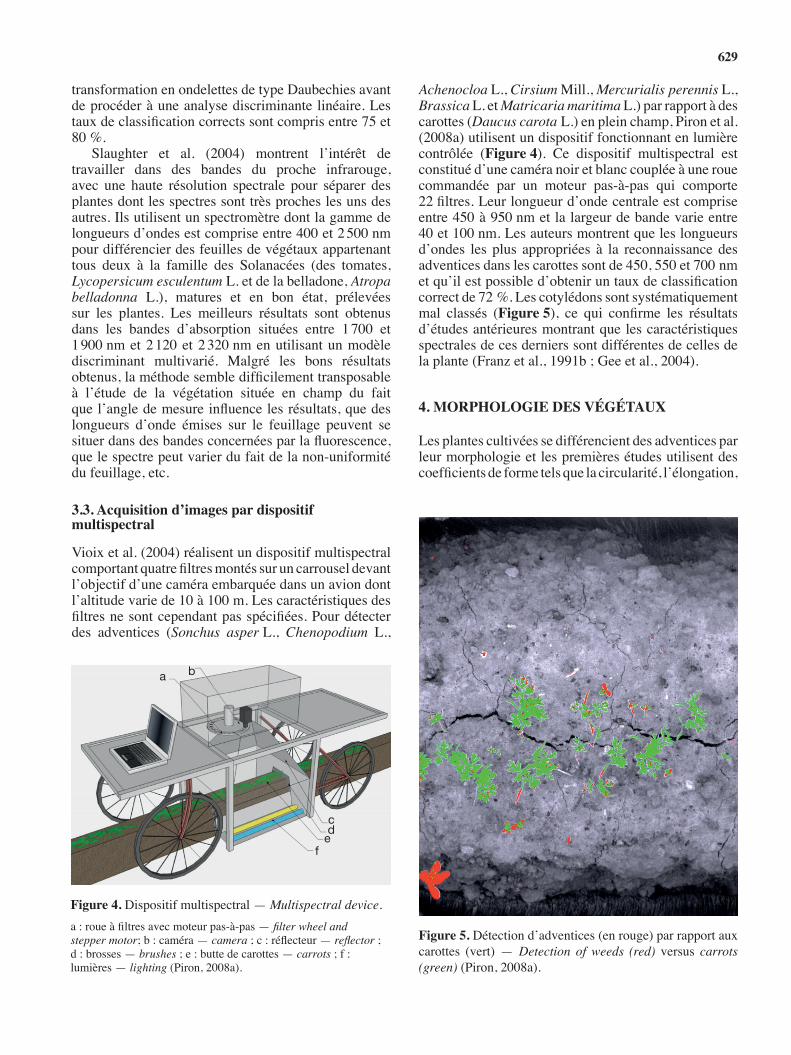
Achenocloa L.,Cirsium Mill.,Mercurialis perennis L.,BrassicaL.etMatricariamaritima L.)parrapportàdescarottes(Daucus carota L.)enpleinchamp,Pironetal.(2008a)utilisentundispositiffonctionnantenlumièrecontrôlée (Figure 4). Ce dispositif multispectral estconstituéd’unecaméranoiretblanccoupléeàunerouecommandée par un moteur pas-à-pas qui comporte22filtres.Leurlongueurd’ondecentraleestcompriseentre450à950nmetlalargeurdebandevarieentre40et100nm.Lesauteursmontrentqueleslongueursd’ondes les plus appropriées à la reconnaissance desadventicesdanslescarottessontde450,550et700nmetqu’ilestpossibled’obteniruntauxdeclassificationcorrectde72%.Lescotylédonssontsystématiquementmal classés (Figure 5), ce qui confirme les résultatsd’étudesantérieuresmontrantquelescaractéristiquesspectralesdecesdernierssontdifférentesdecellesdelaplante(Franzetal.,1991b;Geeetal.,2004).
4. MorPhologie des végétaux
Lesplantescultivéessedifférencientdesadventicesparleurmorphologieetlespremièresétudesutilisentdescoefficientsdeformetelsquelacircularité,l’élongation,
Figure 4.Dispositifmultispectral—Multispectral device.a:roueàfiltresavecmoteurpas-à-pas—filter wheel and stepper motor;b:caméra—camera;c:réflecteur—reflector;d:brosses—brushes;e:buttedecarottes—carrots;f:lumières—lighting(Piron,2008a).
a b
cde
f
Figure 5.Détectiond’adventices(enrouge)parrapportauxcarottes (vert)—Detection of weeds (red) versus carrots (green) (Piron,2008a).
630 Biotechnol. Agron. Soc. Environ. 201115(4),623-634 PironA.,DumontB.&DestainM.-F.
l’excentricité, etc. (Lee et al., 1999).Cependant, cesméthodesseheurtentàdeuxdifficultésmajeures.Pourunemêmeespèce, lavariabilitédu feuillageest tellequedestechniquesclassiquesd’ajustementdepatrons(«patternmaching »)nesontdoncpasadaptées.Parailleurs, vues à partir du capteur optique (caméra,dispositifmultispectralouhyperspectral), les feuillessont souvent superposées; il n’est doncpas possibledepercevoircertainesd’entreellesdansleurentièreté(Franzetal.,1991a).
Pour séparer des feuilles superposées, Lee et al.(2004)partentd’unalgorithmedesegmentationdetype«watershed» qui considère une image en niveau degriscommeunrelieftopographiquesurlequelonpeutdéterminerdeslignesdepartagedeseaux.Constatantquecetalgorithmeconduitàuneséparationexcessiveetdoncunefragmentationtropélevée,ilsluiapportentcertaines modifications, essentiellement constituéesd’opérationsmorphologiques.
Sogaard (2005) constitue une base de donnéesd’imagesbidimensionnellesde19espècesd’adventicesexistant au Danemark, obtenues en conditionsd’illuminationcontrôlée.Lespixelsdesvégétauxsontséparésdeceuxdusolenutilisantl’indiceExG,puistransformés en niveaux de gris. Un algorithme basésur les contours actifs est utilisé pour caractériser laforme moyenne des 19catégories d’adventices. Ils’agitdedéfiniruncontourinitialentourantlaplante,puisdedéplacerlespointsquileconstituentpourlesrapprocher de zones de fort gradient en conservantcertainescaractéristiquescommelacourbure.Àl’aidede cette technique, Sogaard arrive à modéliser laformedes feuilles et la structure de la plante entièrejusqu’austade2feuilles.Laclassificationestbaséesurl’importancedesdéplacementsàappliquerpourobtenirun ajustement parfait. Les taux de reconnaissancecorrectsvarientde65à90%.
5. texture
Latexture,quiseréfèreauxpropriétésdesurfacedesvégétaux,estassezpeuutiliséeentantqueseulattributpourdifférencier lesadventicesdesplantescultivées.Burksetal.(2000)utilisentdesattributsdetexturepourclasser cinq espèces d’adventices produites en pots(Ipomoea hederaceae Jacq., Setaria faberi Herrm.,Digitaria Sanguinalis L.,Abutilon theophrastiMedik.,Chenopodium album L.). Les images acquises dansl’espaceRGBsonttransforméesdansl’espacecouleurHSI et les matrices de co-occurrence, qui analysentla fréquence avec laquelle se répète l’intensité d’unattributcolorimétrique,sontcalculées.Ellespermettentdegénérer33attributsdetexturepourchaqueimage.Les potentialités de trois classifieurs basés surdifférentstypesderéseauxdeneuronessontanalysées
surbasedelaprécisiondelaclassification,dunombred’éléments nécessaires pour l’apprentissage et dutempsdecalcul(Burksetal.,2005).Ilapparaitqu’uneprocédurede type«stepwise» permettantde réduirelaquantitédedonnéesà introduiredans le réseaudeneurones est un élément favorable pour éliminer lesdonnéesredondantesetréduireletempsdecalcul.
6. hauteur
Pourmesurerlahauteur,laméthodelaplusconnueestlastéréoscopiepassivequiconsisteàobserverlascèneà partir d’aumoins deux points de vue et à trouverdescorrespondancesentrelesdifférentesimagespourétablir les coordonnées des pixels par triangulation.C’estainsiqueNielsenetal.(2004)cherchentàdétecterdesadventicesparrapportàdesplantsdetomatesenanalysant des images stéréoscopiques acquises dansuneserreéquipéedepare-soleil,àl’aided’unecamératrinoculaire.Ladistinctionentreplantesetadventicesestbaséesurtroisméthodesdifférentes:– mesurede ladistanceentre lacaméraet lespixels de plantes: cette technique nécessite de connaitre ladistanceentrelacaméraetlesolpourdéfinirune valeur seuil au-delà de laquelle les pixels appartiennent aux plantes cultivées ou aux adventices;– analysedegroupesdepixelsséparéssurbased’un histogramme: avec cette méthode, beaucoup d’objetssontfusionnés.Parexemple,desbranches de plants de tomates proches du sol ne sont pas segmentéscommeappartenantàlaplante;– analysedecesgroupesàl’aided’unalgorithmede type «watershed»: il existe des incertitudes au niveaudespixelssetrouvantàlafrontièreplantes/ adventices.
Les auteurs reconnaissent que les algorithmesde classification sont perfectibles et que la prise encompte des irrégularités du sol pourrait améliorer laclassification.
Quand la scène ne contient pas d’élémentsparticuliers pour établir une correspondance, commec’est généralement le cas dans les scènes naturelles,la stéréoscopie active basée sur l’utilisation d’unelumièrestructuréeestplusappropriée.
Pourmesurerlahauteurdespixels,Pironetal.(2011)utilisentuneméthodedestéréoscopieactive,quireposesur le principe suivant: un projecteur vidéo projettesurlascèneàanalyserunesériedefrangeslumineusesnoiresetblanchescodées.Lascèneperçuevialecodelumineux par une caméra laisse alors apparaitre desdistorsions de ligne qui contiennent l’information derelief. Les codes projetés ont deux caractéristiques:ilssontaléatoiresettrèsfaiblementcorrélésentreeux.
631
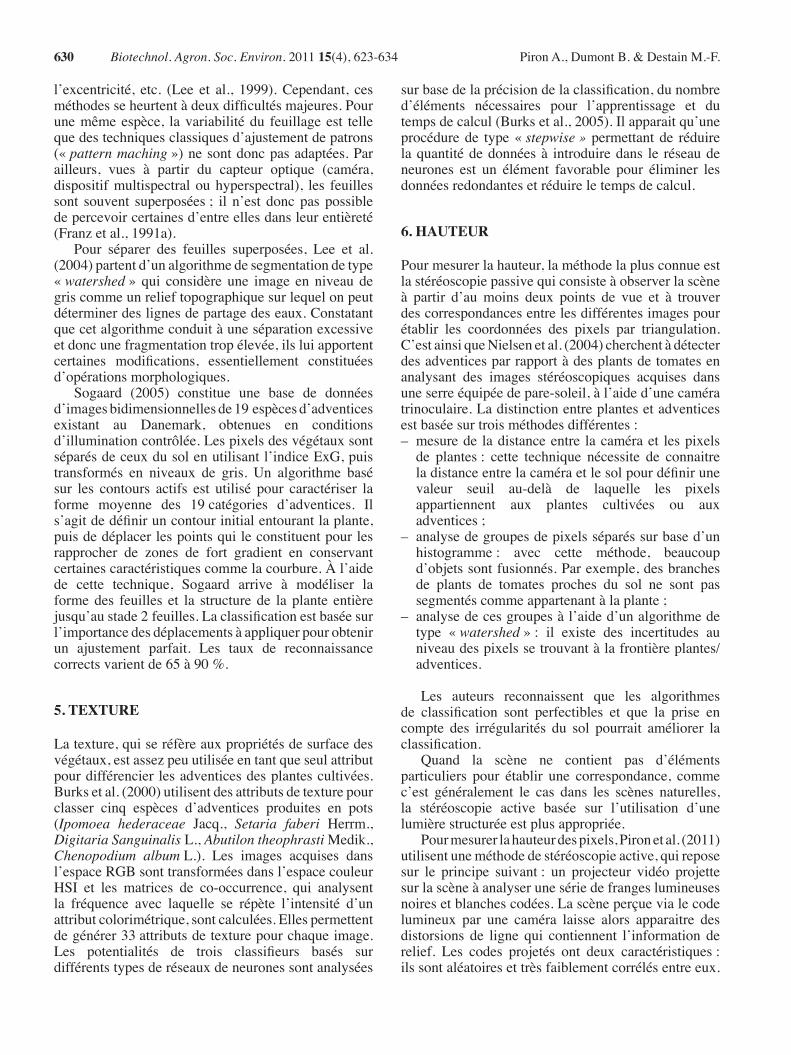
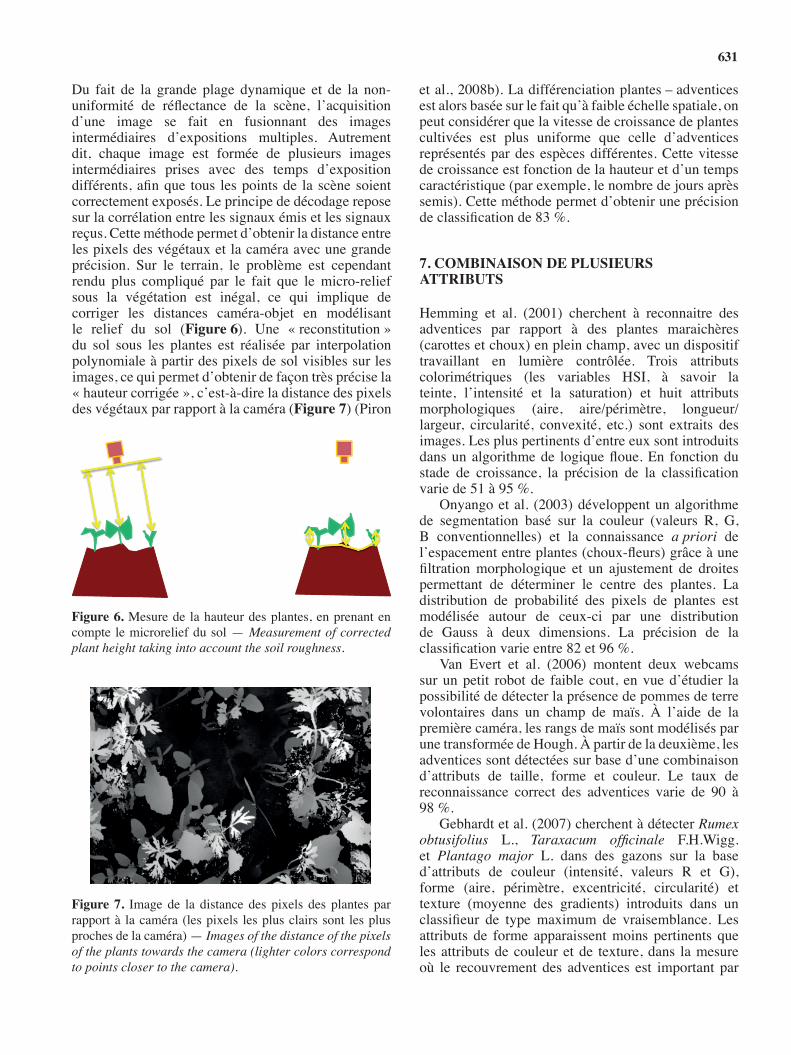
Du fait de la grande plage dynamique et de la non-uniformité de réflectance de la scène, l’acquisitiond’une image se fait en fusionnant des imagesintermédiaires d’expositions multiples. Autrementdit, chaque image est formée de plusieurs imagesintermédiaires prises avec des temps d’expositiondifférents,afinque tous lespointsde lascènesoientcorrectementexposés.Leprincipededécodagereposesurlacorrélationentrelessignauxémisetlessignauxreçus.Cetteméthodepermetd’obtenirladistanceentrelespixelsdesvégétauxetlacaméraavecunegrandeprécision. Sur le terrain, le problème est cependantrendu plus compliqué par le fait que lemicro-reliefsous la végétation est inégal, ce qui implique decorriger les distances caméra-objet en modélisantle relief du sol (Figure 6). Une «reconstitution»du sol sous les plantes est réalisée par interpolationpolynomialeàpartirdespixelsdesolvisiblessurlesimages,cequipermetd’obtenirdefaçontrèsprécisela«hauteurcorrigée»,c’est-à-direladistancedespixelsdesvégétauxparrapportàlacaméra(Figure 7)(Piron
etal.,2008b).Ladifférenciationplantes–adventicesestalorsbaséesurlefaitqu’àfaibleéchellespatiale,onpeutconsidérerquelavitessedecroissancedeplantescultivées est plus uniforme que celle d’adventicesreprésentéspardesespècesdifférentes.Cettevitessedecroissanceestfonctiondelahauteuretd’untempscaractéristique(parexemple,lenombredejoursaprèssemis).Cetteméthodepermetd’obteniruneprécisiondeclassificationde83%.
7. CoMbinaison de Plusieurs attributs
Hemming et al. (2001) cherchent à reconnaitre desadventices par rapport à des plantes maraichères(carottesetchoux)enpleinchamp,avecundispositiftravaillant en lumière contrôlée. Trois attributscolorimétriques (les variables HSI, à savoir lateinte, l’intensité et la saturation) et huit attributsmorphologiques (aire, aire/périmètre, longueur/largeur, circularité, convexité, etc.) sont extraits desimages.Lespluspertinentsd’entreeuxsontintroduitsdansunalgorithmede logiquefloue.En fonctiondustade de croissance, la précision de la classificationvariede51à95%.
Onyangoetal. (2003)développentunalgorithmede segmentation basé sur la couleur (valeurs R, G,B conventionnelles) et la connaissance a priori del’espacemententreplantes(choux-fleurs)grâceàunefiltrationmorphologique et un ajustement de droitespermettant de déterminer le centre des plantes. Ladistribution de probabilité des pixels de plantes estmodélisée autour de ceux-ci par une distributionde Gauss à deux dimensions. La précision de laclassificationvarieentre82et96%.
Van Evert et al. (2006) montent deux webcamssurunpetit robotde faible cout, envued’étudier lapossibilitédedétecterlaprésencedepommesdeterrevolontaires dans un champ de maïs. À l’aide de lapremièrecaméra,lesrangsdemaïssontmodélisésparunetransforméedeHough.Àpartirdeladeuxième,lesadventicessontdétectéessurbased’unecombinaisond’attributs de taille, forme et couleur. Le taux dereconnaissance correct des adventices varie de 90 à98%.
Gebhardtetal.(2007)cherchentàdétecterRumex obtusifolius L., Taraxacum officinale F.H.Wigg.et Plantago major L. dans des gazons sur la based’attributs de couleur (intensité, valeurs R et G),forme (aire, périmètre, excentricité, circularité) ettexture (moyenne des gradients) introduits dans unclassifieur de typemaximum de vraisemblance. Lesattributs de forme apparaissentmoins pertinents quelesattributsdecouleuretde texture,dans lamesureoù le recouvrement des adventices est important par
Figure 6.Mesurede lahauteurdesplantes,enprenantencomptelemicroreliefdusol—Measurement of corrected plant height taking into account the soil roughness.
Figure 7. Image de la distance des pixels des plantes parrapportà lacaméra(lespixels lesplusclairssont lesplusprochesdelacaméra)—Images of the distance of the pixels of the plants towards the camera (lighter colors correspond to points closer to the camera).
632 Biotechnol. Agron. Soc. Environ. 201115(4),623-634 PironA.,DumontB.&DestainM.-F.
rapportaugazon,àtouslesstadesdecroissance.Lestaux de classification corrects deRumexobtusifoliussontélevés(95%)maisvarientenfonctiondustadephénologiquedelavégétation.
Combinant la hauteur des pixels et la réflectancepour différencier des plants de carottes de Sonchusasper L., Chenopodium, Achenocloa, Cirsium,M. perennis,Brassica etMatricaria maritima, Pironetal.(2009)observentquelesecondattributn’améliorequetrèspeulaprécisiondelaclassification.Ceciestdûaufaitquelesdeuxvariables,hauteuretréflectance,sontétroitementcorréléesentreelles.
8. systèMes d’aide à la déCision
La qualité des algorithmes de reconnaissances desadventices influence fortement la précision de lapulvérisation:unalgorithmegénérantdesincertitudesauniveaudespixelsà lafrontièreplantes/adventicespourra être utilisé avec une large zone de sécuritépour protéger les plantes cultivées, pour autant quel’on accepte l’existence d’adventices résiduelles;un algorithme de type «watershed» qui fragmenteexagérément les objets risque de conduire à unepulvérisationexcessive;etc.
Au-delà de la mise au point des algorithmes, ilresteàdéterminerleseuild’infestationau-delàduquelil convient d’intervenir. Selon Burgos-Artizzu et al.(2010),un indice telque le«Weed Pressure » (WP)pourraitservirdebasepourdéfinirladosed’herbicideàappliquer:
WP=cw(100-cs) (9)
cc
aveccw:pourcentagedecouvertureparlesadventices;cc:pourcentagedecouvertureparlesplantescultivées;cs:pourcentagedesol.
Si le sol a été au préalable éliminé des images,le critère retenu est un seuil dépassant une certaineproportiondesurfaceadventices/plantes.Leseuilestde 10% chezNielsen et al. (2004), qui cherchent àéliminer les adventices de tomates, et de 20% chezBergeetal.(2008)quitravaillentsurleblé.
Considérant que la segmentation d’adventicespar rapport aux plantes cultivées dépend denombreux éléments, comme l’illumination, le typede végétaux en présence, leur stade de croissance,etc., la décision de traiter est basée sur le calcul delaprobabilitéa posterioriétablieàpartirduthéorèmedeBayes(Tellaecheetal.,2007),parSVM(Support Vector Machine) (Tellaeche et al., 2010) ou à l’aided’un algorithme génétique (Burgos-Artizzu et al.,2010).
9. ConClusion
Dans la mise au point d’un système localisé dedestructiondesadventices,ilyalieudedistinguertroiscas. Dans le premier cas, les adventices sont situéesdans l’interligne. Il est possible de les différencierfacilementdusol,notammentenutilisantunindicedechromaticité.Dansledeuxièmecas,lesadventicessontsituéesdans la lignecultivéemais lesplantes (leplussouventdesplantesmaraichères)ysontrégulièrementespacées:onpossèdedoncuneconnaissancea prioride l’espacement des cultures dans la ligne qu’il estpossible d’exploiter pour détecter les adventices.Desréalisationscommercialesmettantenœuvreceprincipeexistentdéjà.Dansletroisièmecas,lesadventicessontsituées dans une ligne de plantes cultivées possédantune haute densité. Dans cette situation, on constateque les caractéristiques spectrales n’apportent pas desolution robuste pour reconnaitre différents types devégétaux.
Dans les meilleurs des cas, il est possible dedifférencierdesculturesdonnéesparrapportàcertainescatégories d’adventices en utilisant des longueursd’ondeparticulières,maisaucunesolutiongénériquenepeut être dégagée.Utiliser desbandes spectrales sansrecouvrementetàhauterésolutionettravaillerdanslazoned’absorptiondelalumièreparlefeuillage(procheinfrarouge)sontdesélémentsfavorables.
Lesplantescultivéessedifférencientdesadventicesparleurmorphologie.Cependant,vuesàpartirducapteuroptique,lesfeuillessontsouventsuperposées;iln’estdoncpas possible de percevoir certaines d’entre ellesdansleurentièretéetlesalgorithmesdereconnaissancedeformesontsouventpeuefficaces.
À faible échelle spatiale, on peut considérer quela vitesse de croissance des plantes cultivées est plusuniformequecelledesadventicesreprésentéespardesespèces différentes. La mesure précise de la hauteurdesvégétaux, coupléeàun tempscaractéristique (parexemple, le nombre de jours après semis), permet dedifférencier les pixels des plantes cultivées de ceuxdes adventices. La combinaison d’attributs, tels queréflectance et hauteur, ne permet pas d’améliorer laprécision de la classification, dans la mesure où cesattributssontcorrélésentreeux.Lasolutionconsistantàmesureravecprécisionlahauteurdesadventicesparrapportàcelledesplantescultivéesestdoncunesolutiond’avenir,pourautantquelamesuredehauteurprenneencomptelesirrégularitésdumicroreliefdusol.Cetteméthodedevraitêtreimplémentéesurunprototypepourêtreévaluéedansdesconditionsexpérimentalesvariées.
remerciements
CetteétudeaétéréaliséedanslecadreduprojetRECADVEN,financéparlaDGO6.
633
bibliographie
AstrandB.&BaerveldtA.-J.,2002.Anagriculturalmobilerobotwithvision-basedperceptionformechanicalweedcontrol.Auton. Robots,13,21-35.
AstrandB. & BaerveldtA.-J., 2005.A vision based row-following system for agricultural field machinery.Mechatronics,15,251-269.
BergeT.,AastveitA.& FykseH., 2008. Evaluation of analgorithmforautomaticdetectionofboad-leavedweedsinspringcereals.Precis. Agric.,9,391-405.
BertrandM.&DoréT.,2008.Commentintégrerlamaîtrisedelafloreadventicedanslecadregénérald’unsystèmedeproductionintégrée?Innovations Agron.,3,1-13.
BlackmoreS., StoutB., WangM. & RunovB., 2005.Robotic agriculture – the future of agriculturalmechanization? In: Proceedings of the 5th European Conference on Precision Agriculture, 9-12/06/2005, Uppsala, Sweden,621-628.
BollerE.F. et al., 2004. Integrated production: principlesandtechnicalguidelines.IOPC wprs Bull.,27(2).
BrownR.B. & NobleS.D., 2005. Site-specific weedmanagement:sensingrequirements.Whatdoweneedtosee?Weed Sci.,53(2),252-258.
Burgos-ArtizzuX., RibeiroA., TellaecheA. & PajaresG.,2010. Analysis of natural images processing for theextraction of agricultural elements. Image Vision Comput.,28,138-149.
BurksT.F.,ShearerS.A.&PayneF.A.,2000.Classificationof weed species using color texture features anddiscriminantanalysis.Trans. ASAE,43(2),441-448.
BurksT.F., ShearerS.A., HeathJ.R. & DonohueK.D.,2005.Evaluationofneural-networksclassifiersforweedspeciesdiscrimination.Biosystems Eng.,91(3),293-304.
ComaniciuD. & MeerP., 2002. Mean shift: a robustapproach toward feature space analysis. IEEE Trans. Pattern Anal. Mach. Intell.,24(5),603-619.
Commissioneuropéenne,2009.Directive2009/128/CEduParlement européen et duConseil du21octobre2009instaurant un cadre d’activité communautaire pourparvenir à une utilisation des pesticides compatibleavec le développement durable. J. Off. Union Eur.,24.11.2009,l309,71-85.
FeyaertsF. & Van GoolL., 2001. Multi-spectral visionsystemforweeddetection.Pattern Recognit. Lett.,22,667-674.
FranzE.,GebhardtM.R.&UnklesbayK.B.,1991a.Shapedescriptionofcompletelyvisibleandpartiallyoccludedleaves for identifying plants in digital images. Trans. ASAE,34(2),673-681.
FranzE., GebhardtM.R. & UnklesbayK.B.,1991b. Theuse of local spectral properties of leaves as an aid foridentifying weed seedlings in digital images. Trans. ASAE,34(2),682-687.
GebhardtS. & KühbauchW., 2007.A new algorithm forautomaticRumex obtusifoliusdetectionindigitalimages
using colour and texture features and the influence ofimageresolution.Precis. Agric.,8(1),1-13.
GeeC.,BonvarletL.,Magnin-RobertJ.B.&GuilleminJ.P.,2004.Weeddiscriminationbyreflectancemeasurementsusingneuralnetworks.In: 12e Colloque international sur la biologie des mauvaises herbes, 31.08-02.09, Dijon, France.Paris:AssociationFrançaisedeProtectiondesPlantes(AFPP),487-494.
GerhardsR. & ChristensenS., 2003. Real-time weeddetection,decisionmakingandpatchsprayinginmaize,sugarbeet,winterwheat andwinter barley.Weed Res.,43,385-392.
HatfieldJ.L.&PinterP.J., 1993.Remote sensing for cropprotection.Crop Prot.,12(6),403-413.
HemmingJ.&RathT.,2001.Computer-vision-basedweedidentification under field conditions using controlledlighting.J. Agric. Eng. Res.,78(3),233-243.
JonesG., GeeC. & TruchetetF., 2009.Assessment of aninter-rowweedinfestationrateonsimulatedagronomicimages.Comput. Electron. Agric.,67(1-2),43-50.
KurstjensD.A.G. & KropffM.J., 2001. The impact ofuprootingandsoil-coveringontheeffectivenessofweedharrowing.Weed Res.,41,211-228.
LambD.W. & BrownR.B., 2001. Remote-sensing andmappingofweedsincrops.J. Agric. Eng. Res.,78,117-125.
LeeW.S.,SlaughterD.C.&GilesD.K.,1999.Roboticweedcontrolsystemfortomatoes.Precis.Agric.,1,95-113.
LeeW.S.&SlaughterD.C.,2004.Recognitionofpartiallyoccluded plant leaves using a modified watershedalgorithm.Trans. ASAE,47(4),1269-1280.
LeemansV.&DestainM.-F., 2006.Line cluster detectionusingavariantoftheHoughtransformforculturerowlocalisation.Image Vision Comput.,24,541-550.
MarchantJ.A. & OnyangoC.M., 2003. Comparison ofa Bayesian classifier with a multilayer feed-forwardneural network using the example of plant/weed/soildiscrimination.Comput. Electron.Agric.,39,3-22.
MeyerG.E., HindmanT.W. & LakshmiK., 1998.Machine vision detection parameters for plant species identification.Bellingham,WA,USA:SPIE.
NielsenM., AndersenH., SlaughterD. & GilesD., 2004.Detectingleaffeaturesforautomaticweedcontrolusingtrinocularstereovision.In:International Conference on Precision Agriculture 2004, Minneapolis, MN, USA.
NieuwenhuizenA.T.etal.,2007.Colourbaseddetectionofvolunteer potatoes asweeds in sugar beet fields usingmachinevision.Precis. Agric.,8,267-278.
OkamotoH.,MurataT.,KataokaT.&HataS.,2007.Plantclassification for weeds detection using hyperspectralimaging with wavelet analysis. Weed Biol. Manage.,7(1),31-37.
OnyangoC.M. & MarchantJ.A., 2001. Physics-basedcolour image segmentation for scenes containingvegetation and soil. Image Vision Comput., 19, 523-538.
634 Biotechnol. Agron. Soc. Environ. 201115(4),623-634 PironA.,DumontB.&DestainM.-F.
OnyangoC.M.&MarchantJ.A.,2003.Segmentationofrowcropplants fromweeds using colour andmorphology.Comput. Electron. Agric.,39(3),141-155.
ParishS., 1990. A review of non-chemical weed controltechniques.Biol. Agric. Hortic.,7,117-137.
PironA. et al., 2008a. Selection of the most efficientwavelengthbands fordiscriminatingweeds fromcrop.Comput. Electron. Agric.,62,141-148.
PironA.,LeemansV.,KleynenO.&DestainM.-F.,2008b.Determination of plant height for weed detection instereoscopic images. In: Agricultural Engineering Conference 2008, Hersonissos, Greece.
PironA., LeemansV., LebeauF. & DestainM.-F., 2009.Improving in-row weed detection in multispectralstereoscopic images.Comput. Electron. Agric.,69,73-79.
PironA.,vanderHeijdenF.&DestainM.-F.,2011.Weeddetectionin3Dimages.Precis. Agric.,12(5),607-622.
ShresthaD.S., StewartB.L. & BirrellS.J., 2004. Videoprocessingforearlystagemaizeplantdetection.Biosyst. Eng.,89(2),119-129.
SlaughterD.C., LaniniW.T. & GilesD.K., 2004.Discriminating weeds from processing tomato plantsusing visible and near-infrared spectroscopy. Trans. ASAE,47(6),1907-1911.
SlaughterD.C., GilesD.K. & DowneyD., 2008.Autonomous robotic weed control systems: a review.Comput. Electron. Agric.,61,63-78.
SogaardH.T., 2005. Weed classification by active shapemodels.Biosyst. Eng.,91(3),271-281.
StewardB.&TianL.,1999.Machine-visionweeddensityestimation for real-time, outdoor lighting conditions.Trans. ASAE,42(6),1897-1909.
TellaecheA.,Burgos-ArtizzuX.P.,PajaresG.&RibeiroA.,2007.A vision-based method for weeds identificationthroughtheBayesiandecisiontheory.Pattern Recognit.,41(2),521-530.
TellaecheA.,PajaresG.,Burgos-ArtizzuX.P.&RibeiroA.,2010. A computer vision approach for weedsidentification through SupportVectorMachines.Appl. Soft Comput.,doi:10.1016/j.asoc.2010.01.011.
ThillD.C., LishJ.M., CallihanR.H. & BechinskiE.J.,1991. Integratedweedmanagement – a component ofintegrated pest management: a critical review. Weed Technol.,5,648-656.
ThompsonJ.F., StaffordJ.V. & MillerP.C.H., 1991.Potential for automatic weed detection and selectiveherbicideapplication.Crop Prot.,10,254-259.
ThorpK.R.&TianL.F.,2004.Areviewofremotesensingofweedsinagriculture.Precis. Agric.,5,477-508.
TianL. & SlaughterD.C., 1993. Computer visionidentification of tomato seedlings in natural outdoorscenes.ASAE Paper,N°93-3608.
TianL.&SlaughterD.C.,1998.Environmentallyadaptivesegmentationalgorithmforoutdoorimagesegmentation.Comput. Electron. Agric.,21,153-168.
VanEvertK.K.etal.,2006.Amobilefieldrobotwithvision-baseddetectionofvolounterpotatoplantsinacorncrop.Weed Technol.,20(4),853-861.
VioixJ.-B. et al., 2002. Spatial and spectral methods forweedsdetectionandlocalization.Eurasip J.Appl. Signal Process.,7,679-685.
VioixJ.-B.,DouzalsJ.-P.&TruchetetF.,2004.Developmentof a multispectral imagery device devoted to weeddetection.J. Electron. Imaging,13(3),547-552.
VrindtsE.,DeBaerdemaekerJ.&RamonH.,2002.Weeddetection using canopy reflection.Precis.Agric.,3(1),63-80.
WoebbeckeD.M., MeyerG.E., Von BargenK. &MortensenD.A., 1995. Color indices for weedidentification under various soil, residue, and lightingconditions.Trans. ASAE,38(1),259-264.
ZhengL.,DamingS.&JingtaoZ.,2010.Segmentationofgreenvegetationofcropcanopy imagesonmeanshiftandFisher lineardiscriminant.Pattern Recognit. Lett.,31(9),920-925.
ZwiggelaarR.,1998.Areviewofspectralpropertiesofplantsand theirpotentialuse forcrop/weeddiscrimination inrow-crops.Crop Prot.,17(1),189-206.
(57réf.)