gestion des inondations: deux approches utilisant la théorie de la viabilité
DESCRIPTION
Gestion des inondations: deux approches utilisant la théorie de la viabilité Xavier Litrico, Katrin Erdlenbruch, Sophie Martin UMR G-EAU, Montpellier LISC, Clermont-Ferrand. 11 juin 2009. Plan de la présentation. Introduction Théorie de la viabilité : concepts, intérêts et limitations - PowerPoint PPT PresentationTRANSCRIPT
Gestion des inondations: deux approches utilisant la théorie de la viabilité
Xavier Litrico, Katrin Erdlenbruch, Sophie Martin
UMR G-EAU, Montpellier
LISC, Clermont-Ferrand
11 juin 2009
Plan de la présentation
Introduction Théorie de la viabilité : concepts, intérêts et
limitations Gestion en temps réel des barrages-réservoirs Gestion des zones inondables Notion de résilience Conclusion
Introduction: le risque inondation
Concerne une commune sur trois
Représente 80% du montant des dommages imputables aux risques naturels
460 millions € par an
Introduction
Politiques de gestion des inondations Aménagements de lutte contre les inondations, Réglementation de l’urbanisation des zones inondables, Incitation à la réduction de la vulnérabilité des enjeux
exposés Prévision des événements Organisation de la « gestion de crise » Système de compensation des sinistrés.
Evolution liée au changement climatique et à l’évolution de l’occupation du sol hors zone inondable (intensification du ruissellement) ou en zone inondable (expansion des enjeux exposés)
Viabilité?
Objectifs de cette présentation
Présenter les concepts de la viabilité Proposer deux approches possibles pour
appliquer ces concepts à la gestion des inondations: Gestion en temps réel de barrages-réservoirs Gestion de zones inondables
Pas (encore) de résultats à présenter, mais une première approche de modélisation
Théorie de la viabilité
Nécessite de représenter le système étudié par : Une dynamique Un ensemble de contraintes
Fournit ensuite des outils pour caractériser L’ensemble des états viables (noyau de viabilité), L’ensemble des états à partir desquels on peut
rejoindre une cible/ un objectif (bassin de capture) La résilience du système (capacité à revenir dans un
état viable)
Théorie de la viabilité
Système dynamique contrôlé
Ensemble des contraintes K sur l’état x(t) Ensemble des contraintes U(x(t)) sur la
commande u(t) applicable au système lorsqu’il est dans l’état x
Ensemble cible C
Théorie de la viabilité
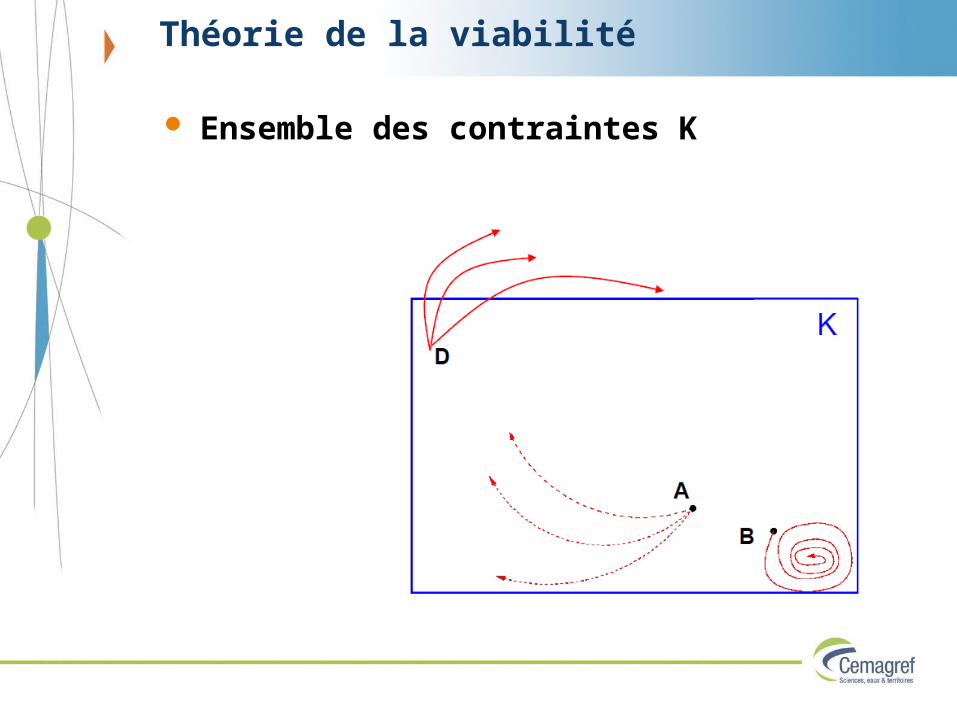
Ensemble des contraintes K

Noyau de viabilité
Noyau de viabilité: ensemble des points P tels qu’il existe une trajectoire partant de P et restant dans K.

Bassin de capture
On ajoute une cible C
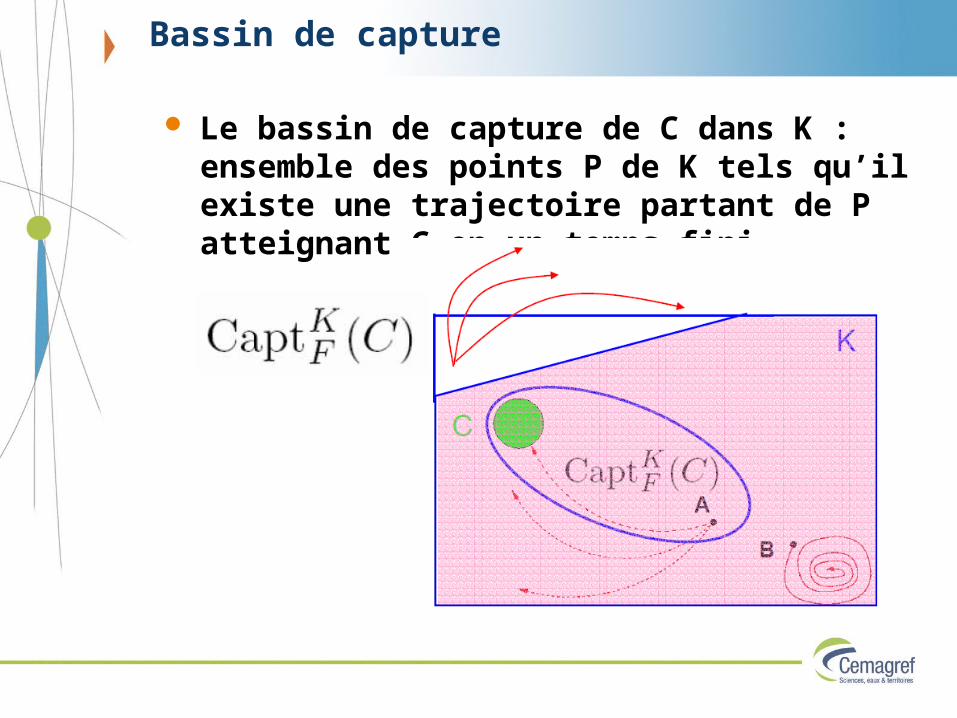
Bassin de capture
Le bassin de capture de C dans K : ensemble des points P de K tels qu’il existe une trajectoire partant de P atteignant C en un temps fini
Pour le contrôle de systèmes environnementaux: Aller plus loin que le contrôle linéaire « classique » (prise
en compte de dynamiques non linéaires, de contraintes) Élargir le concept de « commande optimale » au concept
de « commande viable », permettant de rester dans un domaine de viabilité donné
Permet de définir la notion de résilience
L’intérêt de la théorie de la viabilité
Pour le contrôle de systèmes environnementaux: Algorithmes actuels limités à des systèmes de faibles
dimensions (<8) Comment obtenir des modèles pour la commande?
(réduction de modèle?) Comment définir le domaine viable?
Les limites de la théorie de la viabilité
Séminaire défi 3 - 12 mars 2009 N°
Gestion en temps réel des barrages-réservoirs
Contexte: barrages-réservoirs en amont à objectifs multiples: Protection contre les crues Soutien d’étiage Activités nautiques, Etc.
Gestion en temps réel des lâchures pour satisfaire les objectifs,
En respectant un ensemble de contraintes

Barrages-réservoirs du Bassin de la Seine
Source: www.iibrbs.fr
Problématique
Gestion en temps réel des barrages-réservoirs pour minimiser l’impact d’une crue en aval (région parisienne)
Ce problème a déjà été considéré: Gestion optimale stochastique Courbes objectifs de remplissage-vidange
Quel pourrait être l’apport de la théorie de la viabilité? Élargir le concept de « gestion optimale » (unique) à
un ensemble de gestions viables, parmi lequel on peut choisir une gestion particulière
Fournir un cadre de discussion pour la définition du domaine de viabilité (contraintes à définir)
Commande de barrages: modèle dynamique
Différentes possibilités: Équations de l’hydraulique (Saint-Venant complet)
pour représenter l’écoulement dans un cours d’eau• EDP non linéaires• Complexes à traiter avec le formalisme « viabilité »
Modèles simplifiés : onde diffusante, onde cinématique
• Linéaire ou non linéaire• Fonctions de transfert (distribuées ou non)
Commande de barrages: contraintes
Contraintes sur l’état: QK KRn , Vmin<V<Vmax
Qmin<Q<Qmax
Zmin<Z<Zmax
Contraintes sur la commande Umin<U<Umax
Première approche
Dynamique=retard pur N barrages Cible = ensemble d’états viables à atteindre en
un temps tf
On cherche l’existence d’un « tube de viabilité » (ensemble viable à conserver autour au cours du temps)
« Tube de viabilité »
Si l’état initial appartient à ce tube, il existe au moins une stratégie de contrôle qui garantisse qu’on reste dans le tube
S’il y en a plusieurs, on peut choisir parmi ces stratégies celle minimisant un critère (nombre de manœuvres par ex.)
Si l’état initial n’appartient pas au tube, la contrainte de débit aval ne sera pas respectée. On peut alors chercher à minimiser le temps pendant lequel cette contrainte sera violée.

Deux possibilités
Imposer des contraintes statiques Imposer des contraintes variant dans le temps
Les barrages sont généralement gérés selon des courbes-types de remplissage/vidange
Conclusions
Limitations de la commande optimale: Pas de prise en compte explicite des contraintes Dynamique linéaire Une seule solution « optimale »
Intérêts d’une approche de type viabilité Prise en compte des contraintes Dynamique non linéaire Un ensemble de solutions viables
Gestion de zones inondables
Contexte: Urbanisation croissante Nombreuses implantations en zones inondables Dommages pris en charge par un fonds « CatNat »
Question: Quelle est la dynamique de peuplement des zones
inondables ou non? Quelle est la viabilité du fonds « CatNat »?
Approche: Modélisation déterministe Comparaison avec une approche de type « contrôle
optimal »
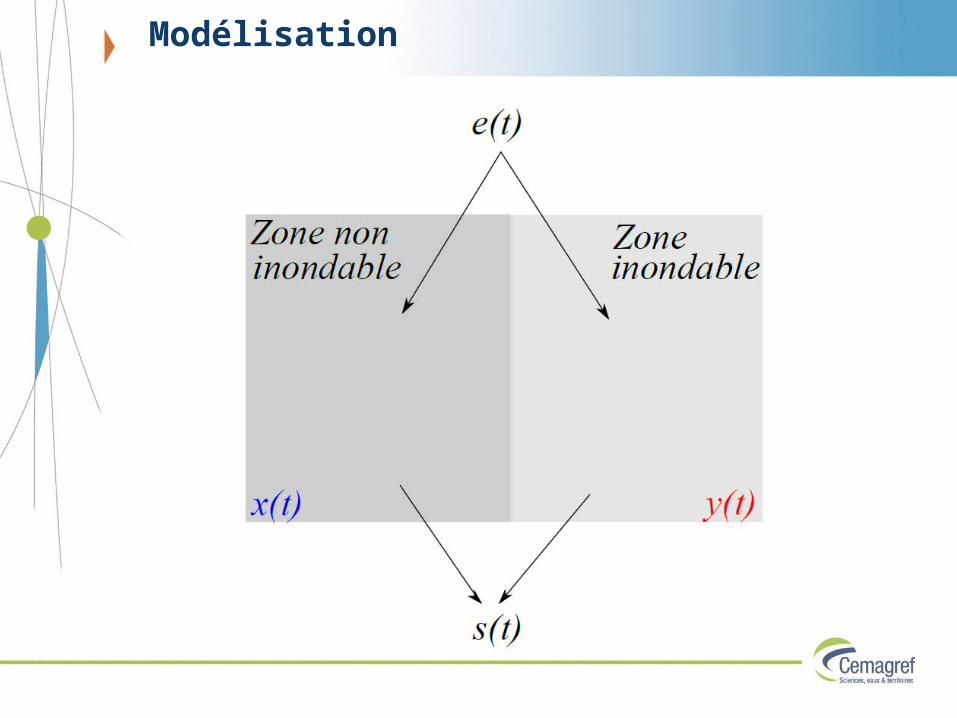
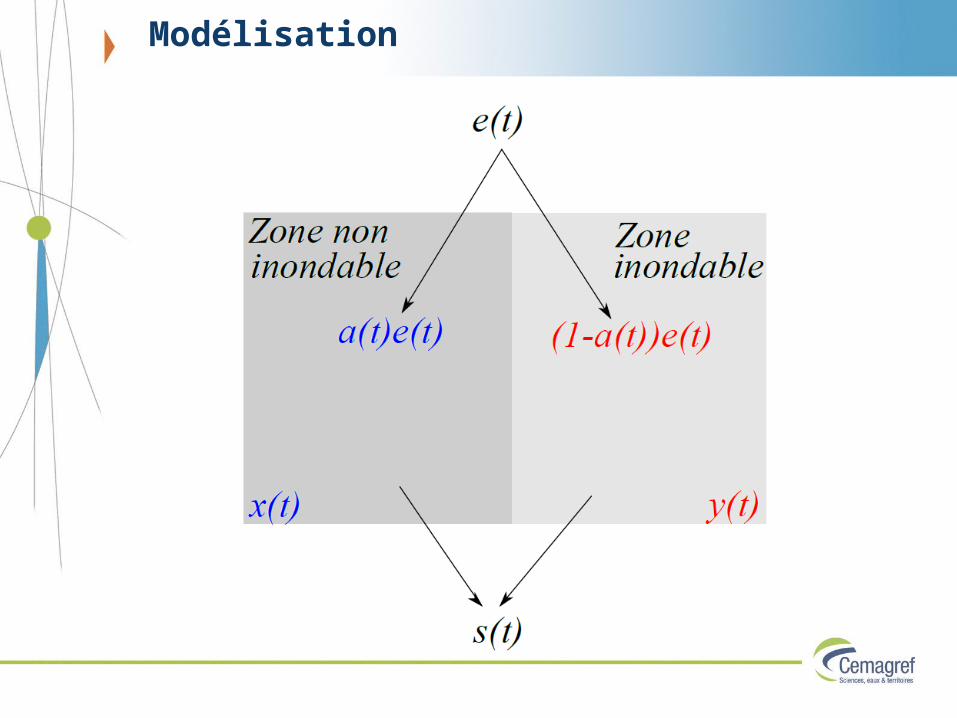
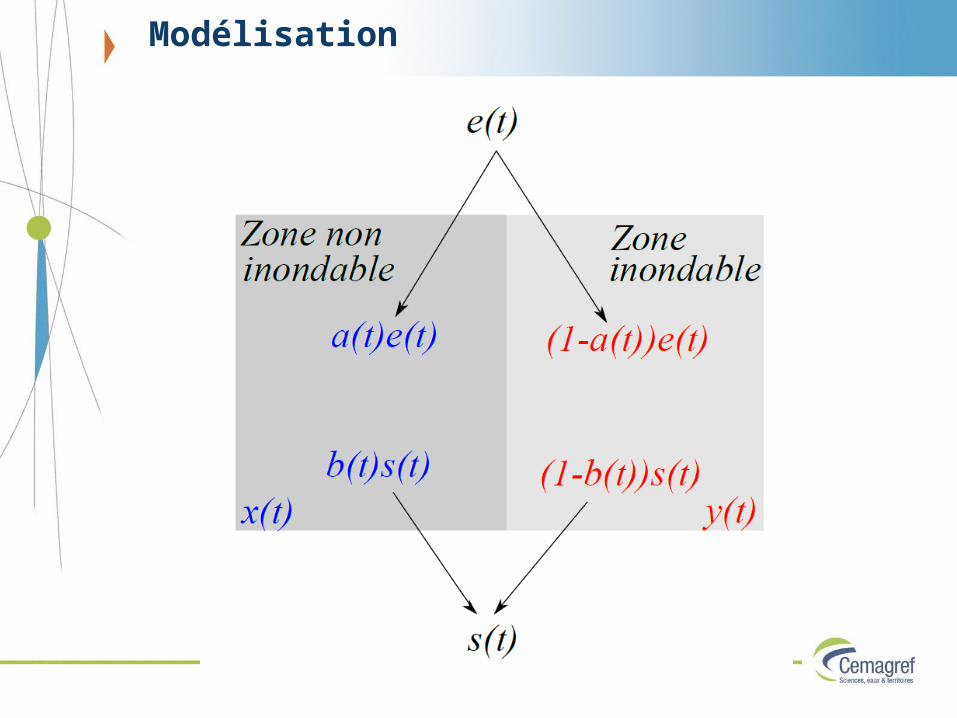
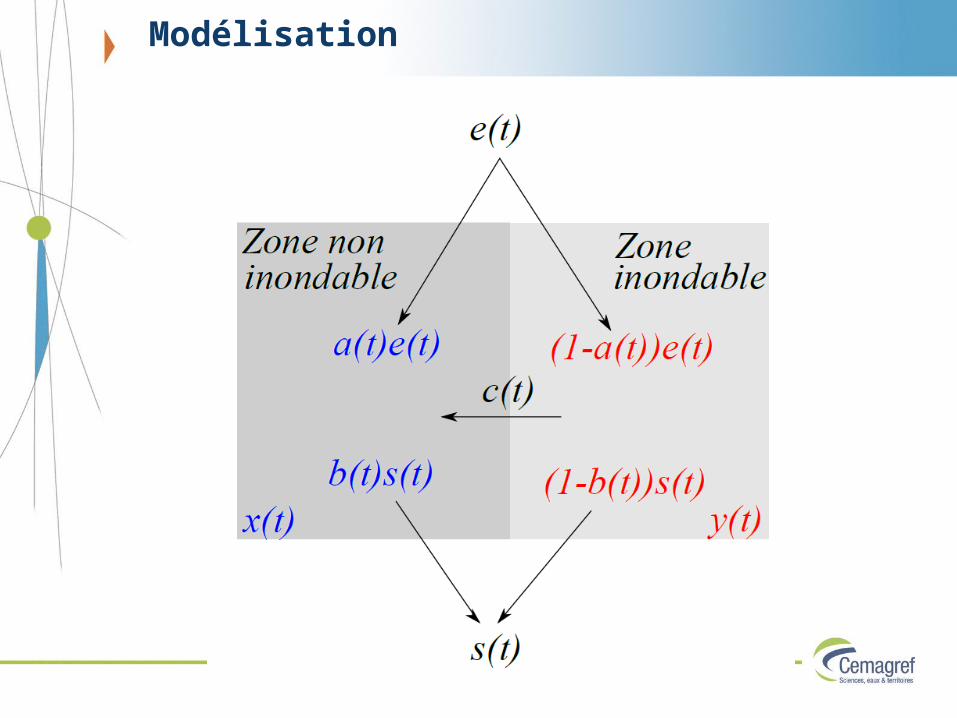
Modélisation
Modélisation
Modélisation
Modélisation
Modélisation
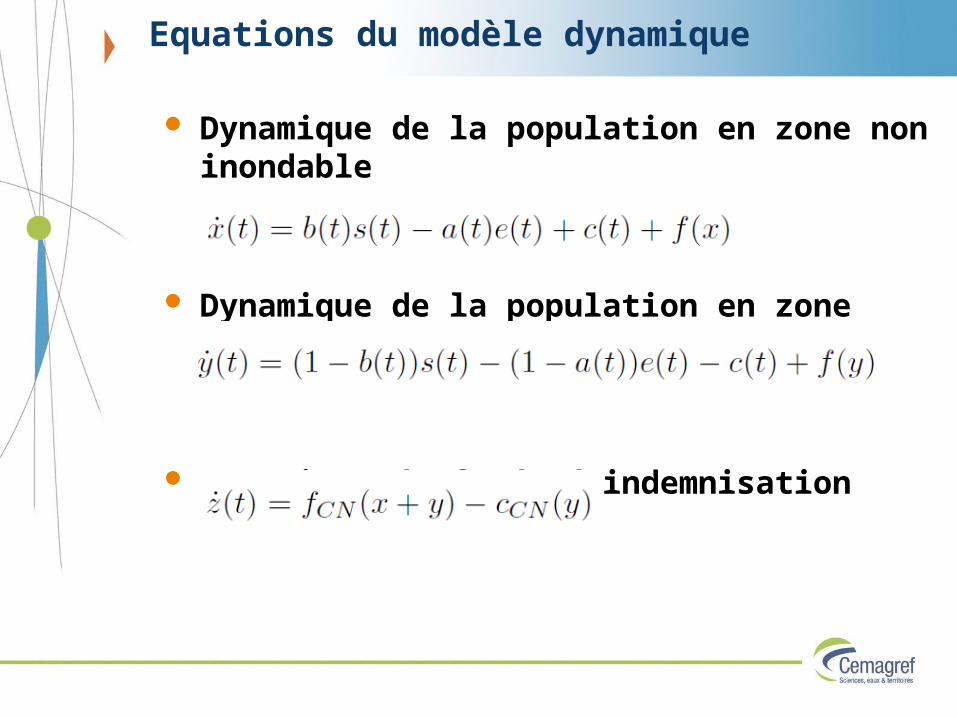
Dynamique de la population en zone non inondable
Dynamique de la population en zone inondable
Dynamique du fonds d’indemnisation
Equations du modèle dynamique
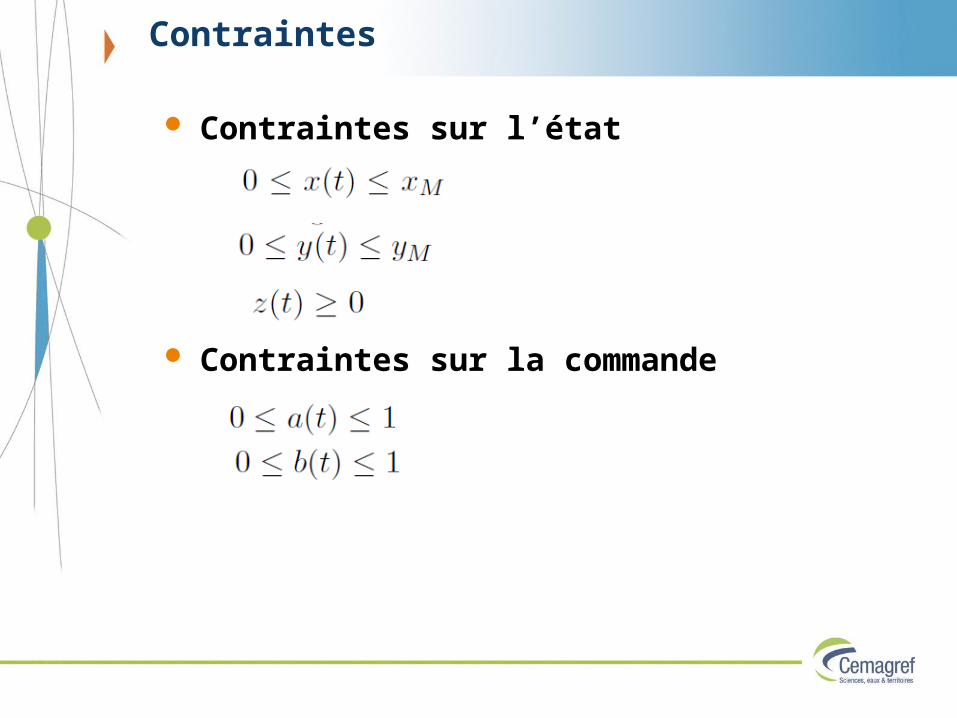
Contraintes
Contraintes sur l’état
Contraintes sur la commande
Contrôle optimal
On suppose que les personnes cherchent à maximiser une fonction d’utilité
Cette fonction d'utilité doit représenter le fait que: Habiter en zone inondable est parfois plus agréable
qu'habiter en zone non inondable (environnement naturel, proximité de la rivière...)
Habiter en zone inondable coûte un peu plus cher tous les ans (intégration du coût moyen annuel dû aux inondations). On pourra tester l'effet de la présence ou non de ce coût dans le calcul.
L'utilité marginale diminue si la population augmente (fonction concave).
L'assurance aux dommages est prise en compte

Contrôle optimal
Maximisation d’une fonction d’utilité
avec BI>BNI, pour représenter le fait que s'installer en zone inondable apporte un avantage,
cI<cNI, pour représenter le fait que cela a un coût inférieur
cMA représente un coût moyen annualisé des dommages suite aux inondations.
x(t) et y(t) sont solutions d’un problème de contrôle optimal
Approche par la viabilité
Trouver l’ensemble des états initiaux, et les commandes tels que le système reste viable, i.e. que le fonds CatNat z(t) ne périclite pas
Quantifier la résilience du système

Notion de résilience
Le calcul du noyau de viabilité permet de répondre à la question : les contraintes peuvent elles être satisfaites? Si l’état considéré appartient au noyau de viabilité, la
réponse est oui L’algorithme de viabilité donne les commandes à effectuer
pour satisfaire effectivement ces contraintes. Il peut y avoir plusieurs commandes viables. Pour choisir
on peut rajouter une fonction de coût sur les commandes viables.
Si l’état considéré n’appartient pas au noyau de viabilité, les contraintes seront nécessairement violées, la question qui se pose alors est celle de la résilience,
Les contraintes peuvent-elles être satisfaites à nouveau et à quel prix?
Le concept de résilience
L'idée commune : la capacité du système étudié à retrouver une propriété (caractéristiques d’état,
modes de fonctionnement,…) malgré des bouleversements dus à des perturbations qu’il ne maîtrise pas
L'étude de la résilience induit la définition du triplet dynamique du système propriété de ce système perturbations envisagées
Cadre d’étude de la résilience
Système décrit par un vecteur x de Rn
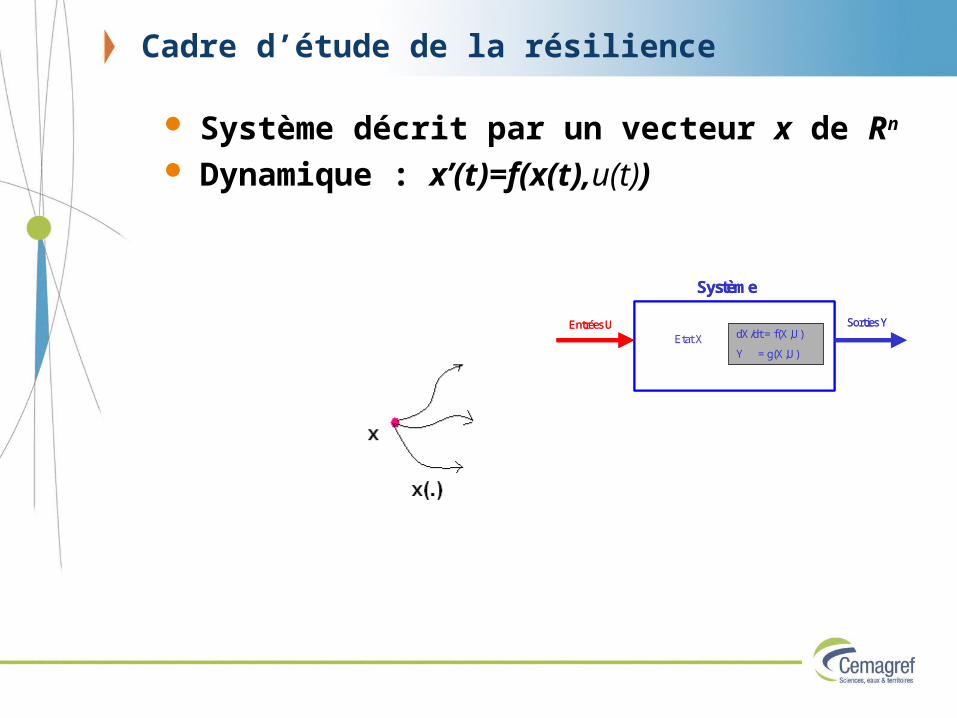
Cadre d’étude de la résilience
Système décrit par un vecteur x de Rn Dynamique : x’(t)=f(x(t),u(t))
Entrées U Sorties Y
Etat X
Système
dX/dt = f(X,U)
Y = g(X,U)
Entrées U Sorties Y
Etat X
Système
dX/dt = f(X,U)
Y = g(X,U)
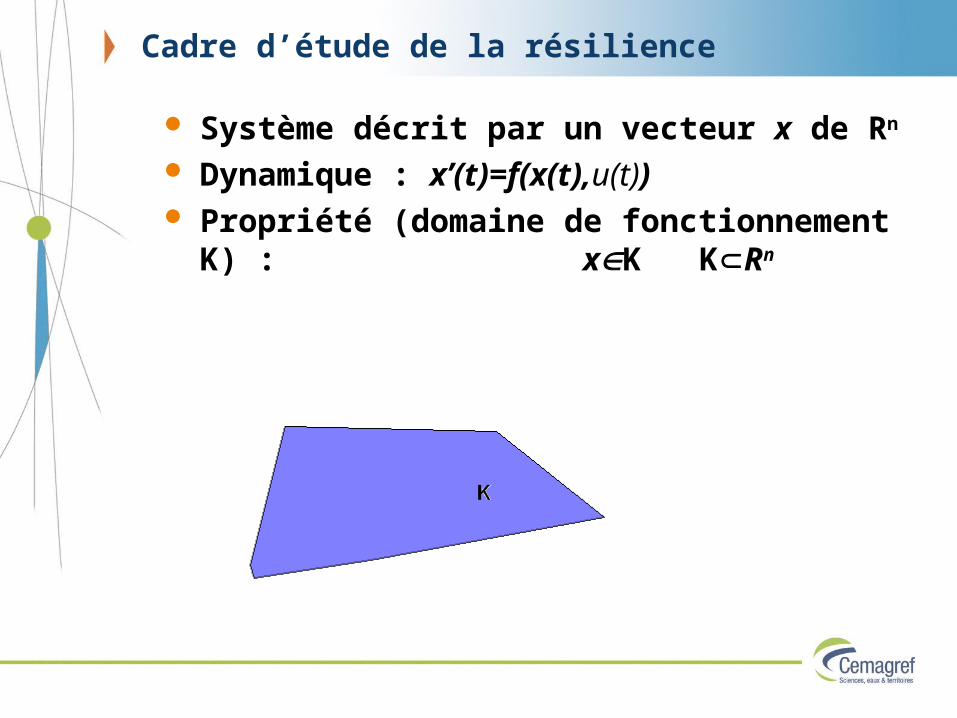
Cadre d’étude de la résilience
Système décrit par un vecteur x de Rn Dynamique : x’(t)=f(x(t),u(t)) Propriété (domaine de fonctionnement K) :
xK KRn
Cadre d’étude de la résilience
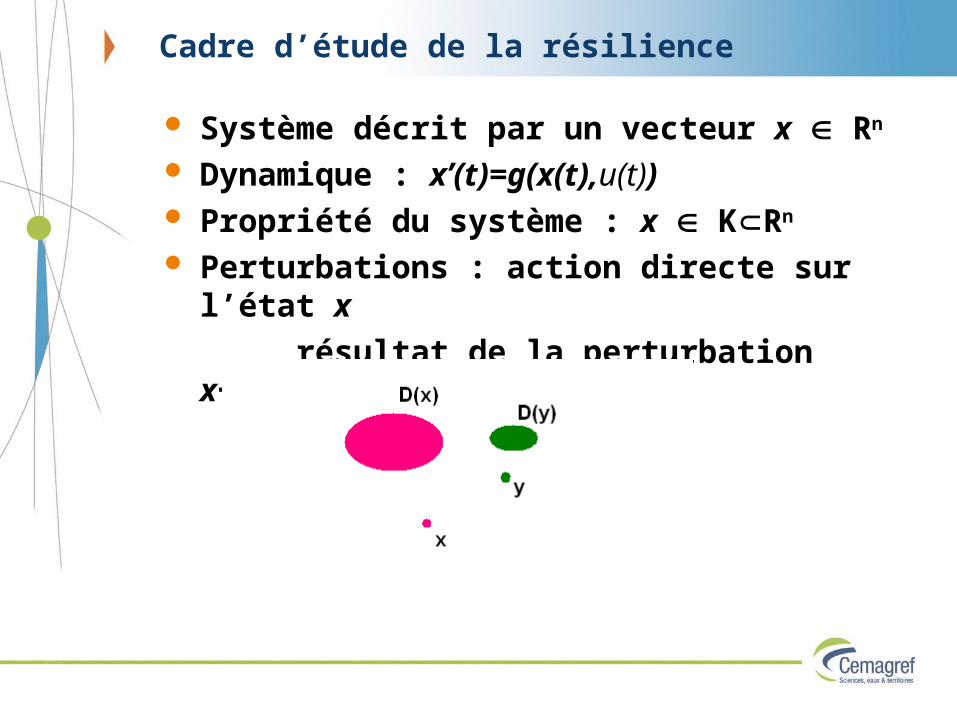
Système décrit par un vecteur x Rn Dynamique : x’(t)=g(x(t),u(t)) Propriété du système : x KRn Perturbations : action directe sur l’état x
résultat de la perturbation xD(x) Rn
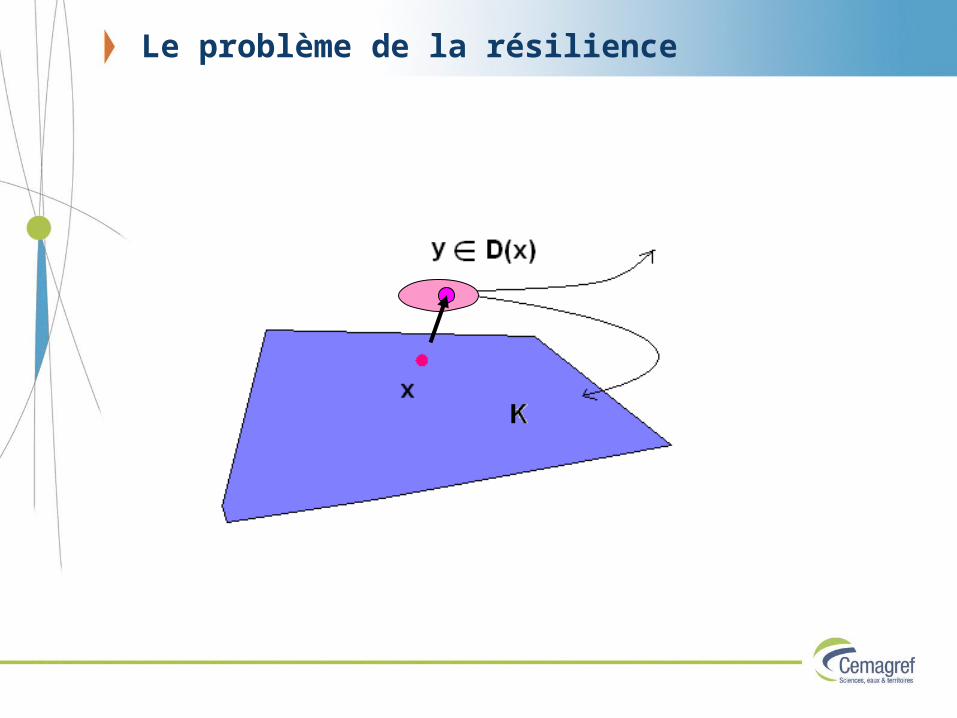
Le problème de la résilience
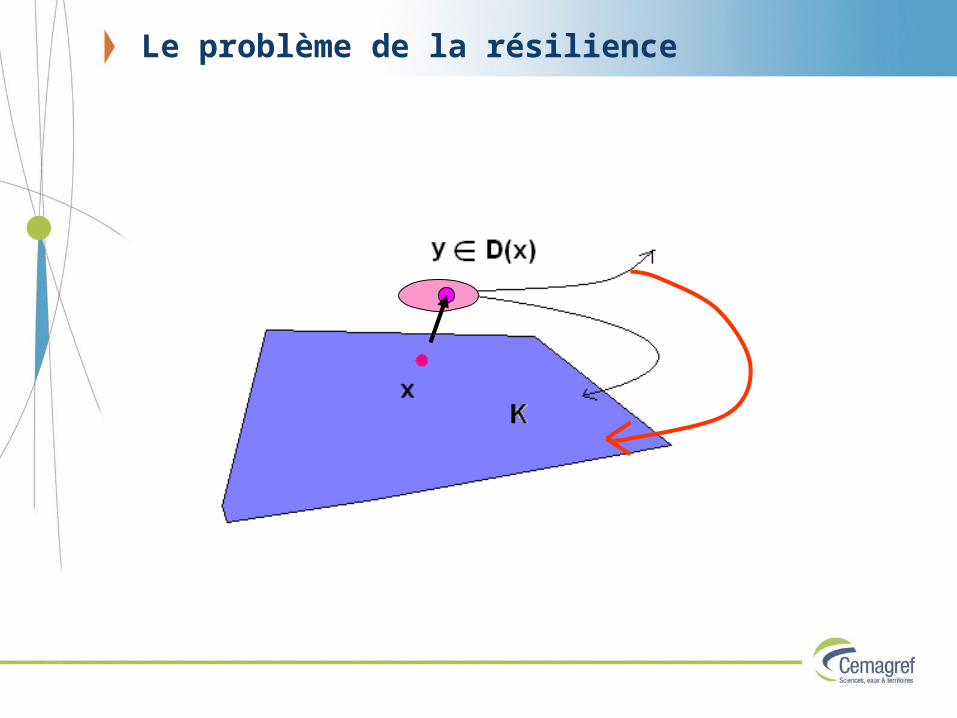
Le problème de la résilience

Résultats: états résilients
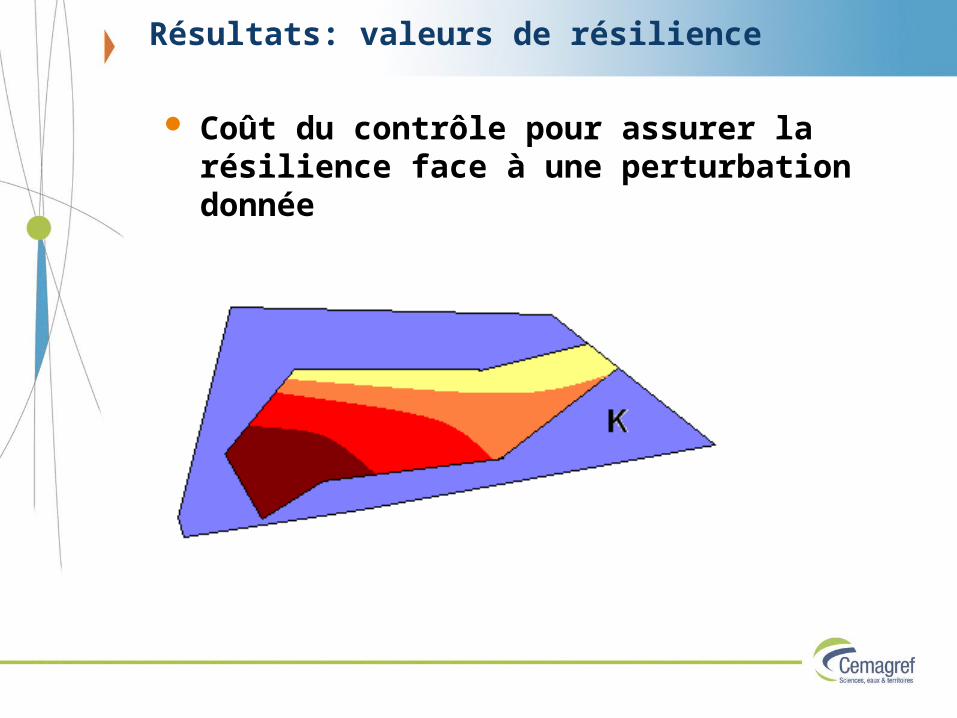
Résultats: valeurs de résilience
Coût du contrôle pour assurer la résilience face à une perturbation donnée
Conclusions
Deux approches pour la gestion des inondations par la viabilité Gestion en temps réel des barrages-réservoirs Gestion des zones inondables et viabilité d’un
système de compensation Modélisation, système dynamique, contraintes Outil utile pour la gestion des systèmes
environnementaux?