filtrage actif - commande de moteurs - conférences irccyn · université de haute alsace – n.k....
TRANSCRIPT
1
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
Laboratoires MIPS – Université de Haute Alsace
http://www.trop.mips.uha.fr/
GREEN – INSA de Strasbourg
http://www.insa-strasbourg.fr/fr/erge/
Filtrage actif - commande de moteurs
Présentée par Ngac Ky NGUYEN
Damien FLIELLER
Jean MERCKLÉ
Patrice WIRA
Djaffar OULD ABDESLAM
2
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
Ngac Ky NGUYEN
2000-2005: Ecole Polytechnique Nationale de Ho Chi Minh Ville, VietnamSpécialité: Génie Electrique
2005-2006: Cours de français à Grenoble
2006-2007: M2R à l’Ecole Polytechnique de l’Université de NantesSpécialité: Génie Electrique
2007-2010: Doctorant de l’Université de Haute AlsaceLaboratoire MIPS – TROP
Intitulé de la thèse: Commande neuromimétique des systèmes électriques. Application au filtrage actif et
à la commande de moteur.Directeur: Prof. Jean Mercklé
Doctorant de l’Université de Haute Alsace Laboratoire MIPS-TROP
Parcours personnel

3
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
Sommaire
-Sommaire-
A. PLL neuronaleB. Méthodes d’identification des harmoniques
1. Méthode P-Q2. Méthode P-Q modifiée3. Méthode des courants actifs4. Méthode des courants diphasés5. Méthode par synchronisation6. Discussion
C. Commandes neuronales appliquées au FAP1. Commande directe par un modèle inverse2. Commande indirecte par un modèle de référence3. Commande basée sur un modèle d’état
D. Conclusion

4
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
Le Filtre Actif Parallèle
Charge non-linéaire
Source
Algorithme d’identification des
harmoniques+CommandeOnduleur et filtre
de sortie
-iref
C
Partie commande
Partie puissance
vsis
U
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
-6
-4
-2
0
2
4
6
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04
-6
-4
-2
0
2
4
6
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04
-6
-4
-2
0
2
4
6
Labciinji
abcvPLL
Moteur MSAP et sa commande
Partie exploitation/utilisation
Filtre actif parallèle
5
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
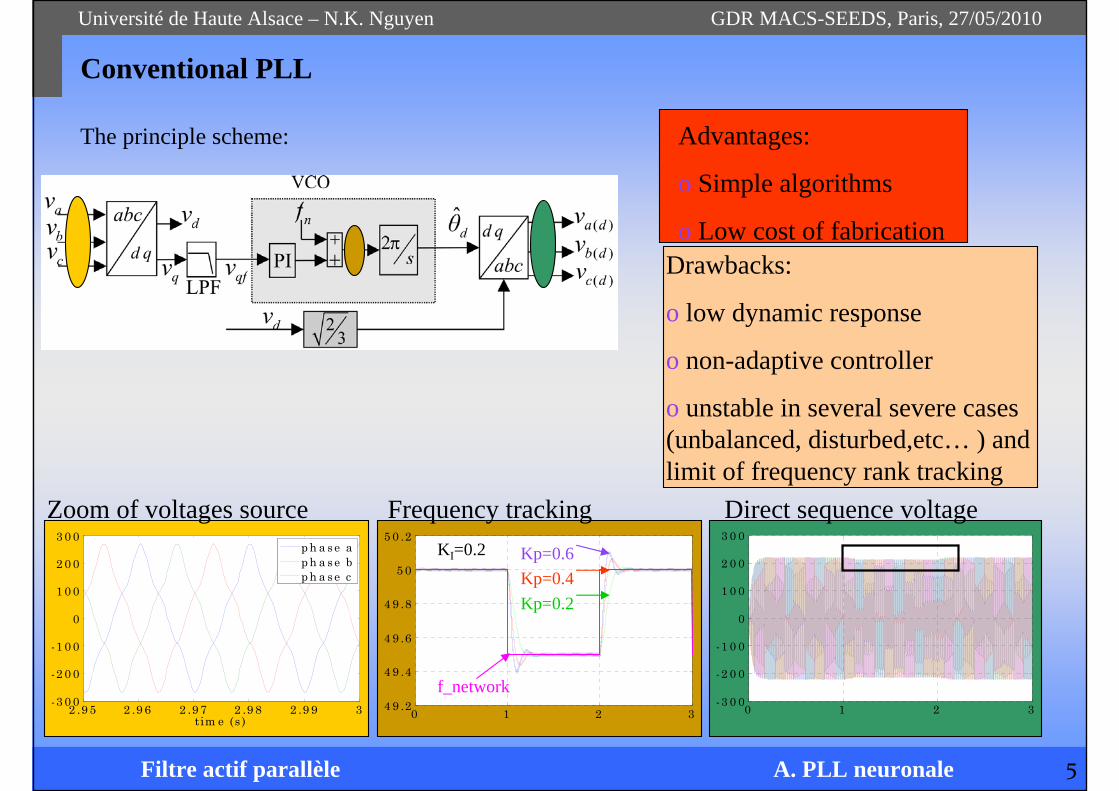
The principle scheme: Advantages:
o Simple algorithms
o Low cost of fabricationDrawbacks:
o low dynamic response
o non-adaptive controller
o unstable in several severe cases (unbalanced, disturbed,etc… ) and limit of frequency rank tracking
Conventional PLL
Zoom of voltages source Frequency tracking Direct sequence voltage
2 .9 5 2 .9 6 2 .9 7 2 .9 8 2 .9 9 3-3 0 0
-2 0 0
-1 0 0
0
1 0 0
2 0 0
3 0 0
tim e (s )
p h a se ap h a se bp h a se c
0 1 2 34 9 .2
4 9 .4
4 9 .6
4 9 .8
5 0
5 0 .2
Kp=0.6Kp=0.4Kp=0.2
0 1 2 3-3 0 0
-2 0 0
-1 0 0
0
1 0 0
2 0 0
3 0 0
f_network
KI=0.2
Filtre actif parallèle A. PLL neuronale
6
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
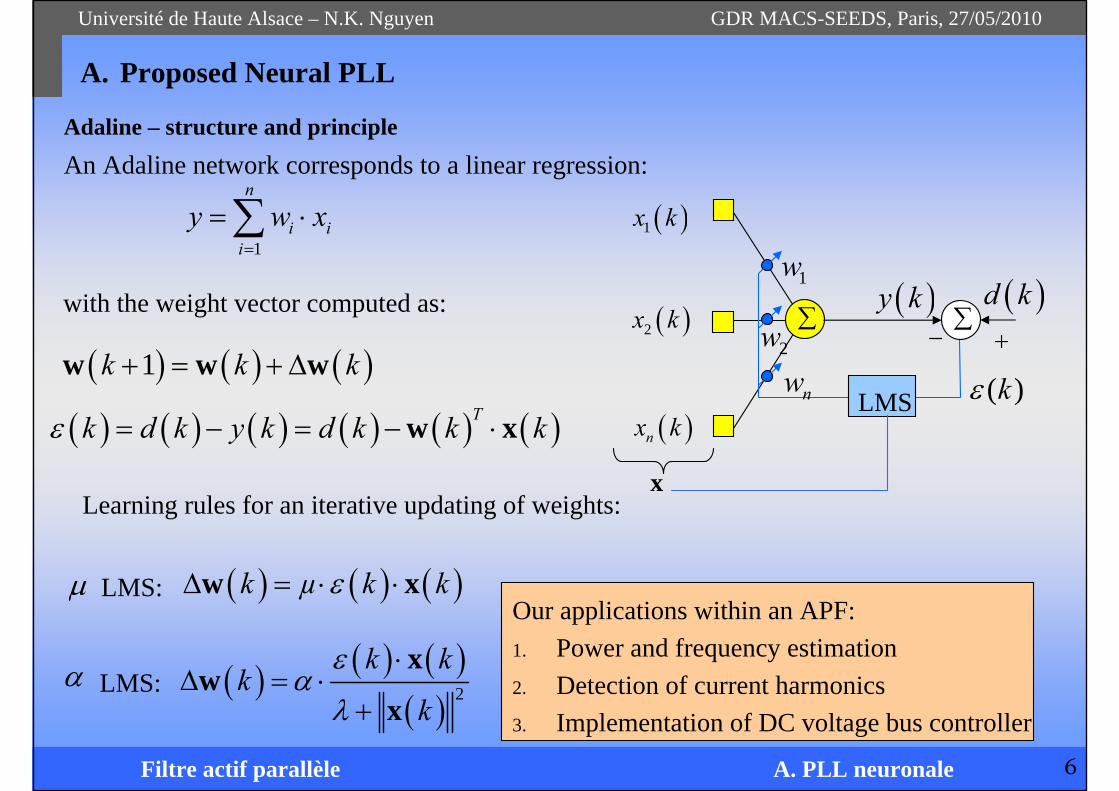
An Adaline network corresponds to a linear regression:
k µ k k w x
1k k k w w w
Tk d k y k d k k k w x
LMS:
LMS: 2
k kk
k
xw
x
Learning rules for an iterative updating of weights:
1
n
i ii
y w x
with the weight vector computed as:
Our applications within an APF:1. Power and frequency estimation2. Detection of current harmonics3. Implementation of DC voltage bus controller
1w
2w
nwLMS
y k d k
1x k
nx k
2x k
( )k
x
A. Proposed Neural PLL
Adaline – structure and principle
Filtre actif parallèle A. PLL neuronale
7
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
av
bv
cv
( )abc dv
( )abc iv d̂θinstantaneous
phase detection
symmetricalcomponentsextraction
Block 1 Block 2
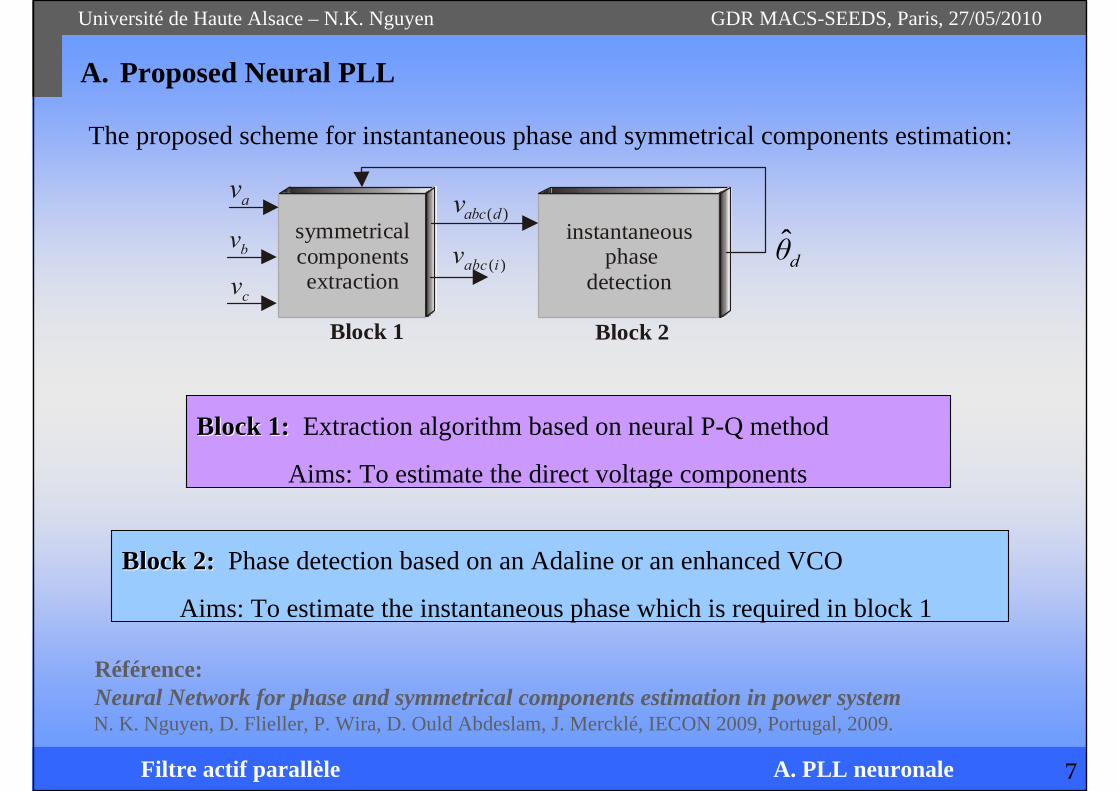
The proposed scheme for instantaneous phase and symmetrical components estimation:
Block 1:Block 1: Extraction algorithm based on neural P-Q method
Aims: To estimate the direct voltage components
Block 2: Block 2: Phase detection based on an Adaline or an enhanced VCO
Aims: To estimate the instantaneous phase which is required in block 1
Référence: Neural Network for phase and symmetrical components estimation in power systemN. K. Nguyen, D. Flieller, P. Wira, D. Ould Abdeslam, J. Mercklé, IECON 2009, Portugal, 2009.
A. Proposed Neural PLL
Filtre actif parallèle A. PLL neuronale
8
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
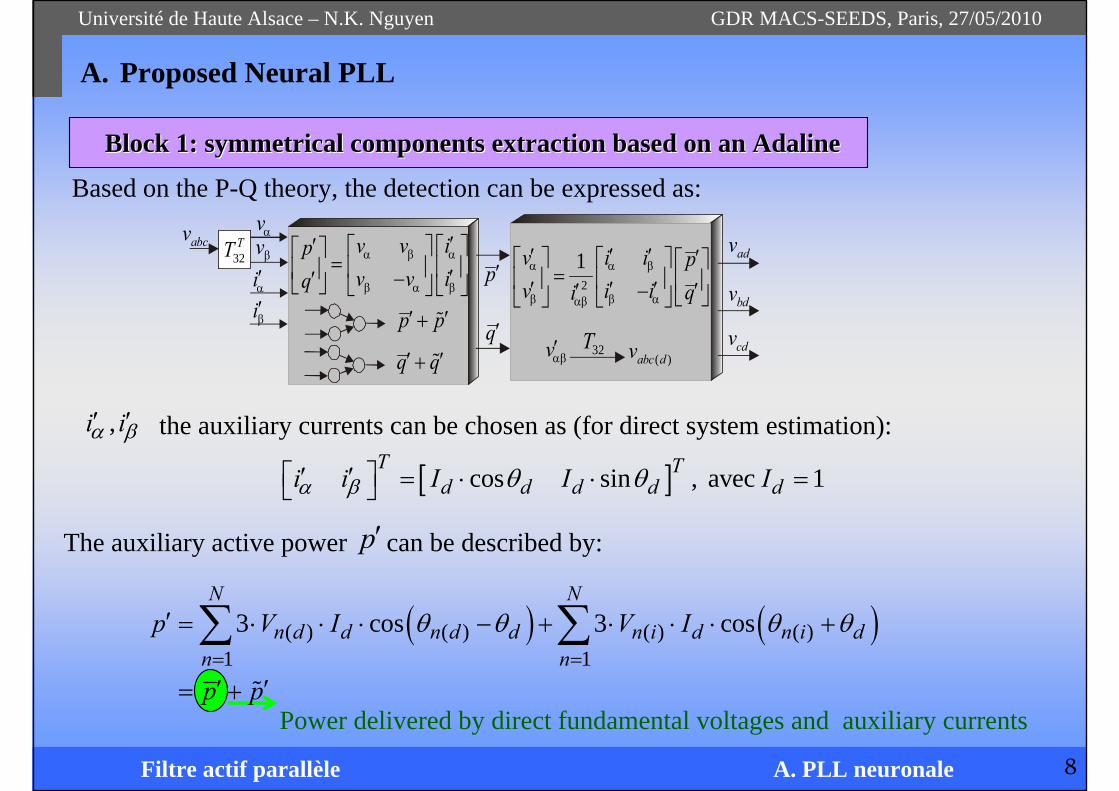
The auxiliary active power can be described by:
v v ipv v iq
v
p p i
v
i32TTabcv
q q
2
1v i i pv i i qi
p
q32Tv ( )abc dv
adv
bdv
cdv
Based on the P-Q theory, the detection can be expressed as:
the auxiliary currents can be chosen as (for direct system estimation):
p
cos sin , avec 1T T
d d d d di i I I I
,i i
Power delivered by direct fundamental voltages and auxiliary currents
Block 1: symmetrical components extraction based on an AdalineBlock 1: symmetrical components extraction based on an Adaline
( ) ( ) ( ) ( )1 13 cos 3 cos
N N
n d d n d d n i d n i dn n
V I Vp I
p p
A. Proposed Neural PLL
Filtre actif parallèle A. PLL neuronale

9
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
3
2
1
cos( 1)sin( 1)
,cos( 1)sin( 1)
d
d
d
d
m
m
m
m
wn
w
n
n
wn w
x w
ˆ Tp x w
sin( 1)n ωt
cos( 1)n ωt
sin( 1)n ωt 2mw
mw
cos( 1)n ωt 3mw ˆ ( 1)p n
p̂
4m n
1mw
The auxiliary active power can be represented by :
and learned by
0 .9 5 1 1 .0 5 1 .1 1 .1 5 1 .21 0 0
1 2 0
1 4 0
1 6 0
1 8 0
2 0 0
2 2 0
tim e (s )
p 'm esu re dp 'estim edp 'D C
and estimationˆˆ p p
The same principle is used for and ˆˆ q q
0 .9 5 1 1 .0 5 1 .1 1 .1 5 1 .21 6 0
1 8 0
2 0 0
2 2 0
2 4 0
2 6 0
2 8 0
3 0 0
t im e ( s )
q 'm e s u r e dq 'e s t im e dq 'D C
The auxiliary active power estimation
A. Proposed Neural PLL
Filtre actif parallèle A. PLL neuronale
10
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
(1)1 arccos2sT
s
w
1z
( )a dv1z
+-
d
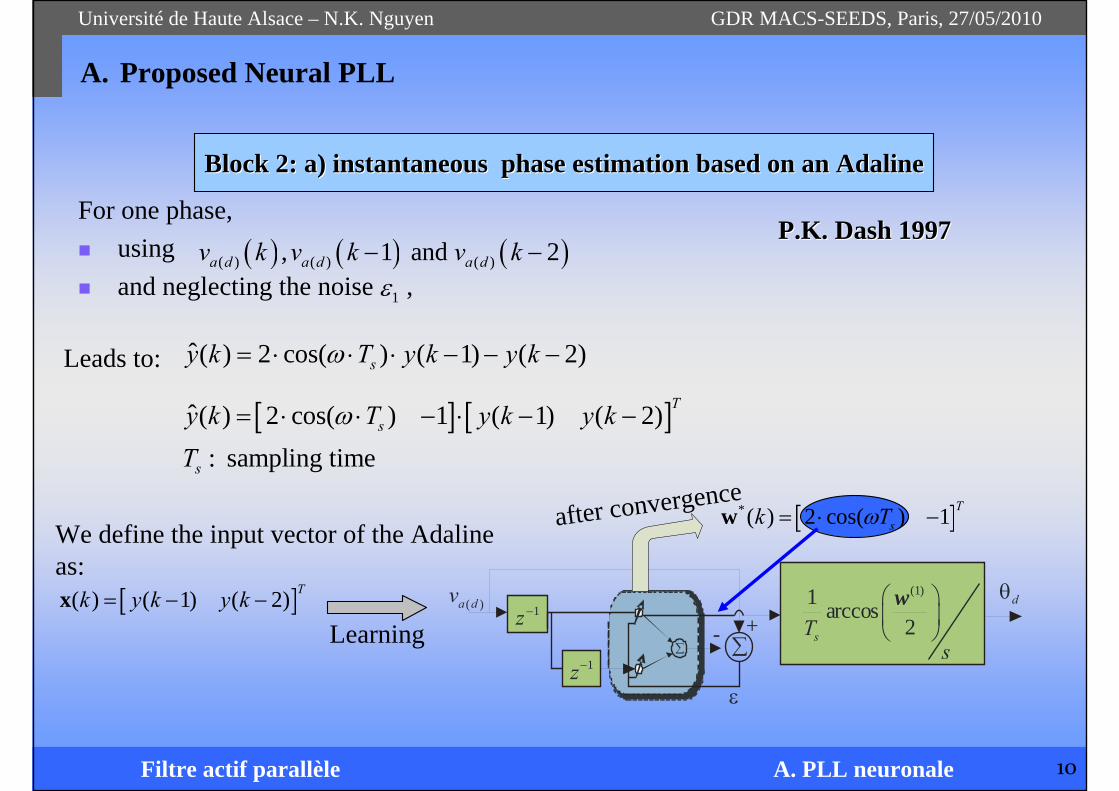
For one phase, using and neglecting the noise ,
( ) ( ) ( ), 1 and 2a d a d a dv k v k v k
1
ˆ( ) 2 cos( ) ( 1) ( 2)sy k T y k y k
( ) ( 1) ( 2) Tk y k y k x
*( ) 2 cos( ) 1 Tsk T w
Leads to:
We define the input vector of the Adaline as:
Block 2: a) instantaneous phase estimation based on an AdalineBlock 2: a) instantaneous phase estimation based on an Adaline
ˆ( ) 2 cos( ) 1 ( 1) ( 2): sampling time
Ts
s
y k T y k y kT
after convergence
Learning
P.K. P.K. DashDash 19971997
A. Proposed Neural PLL
Filtre actif parallèle A. PLL neuronale
11
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
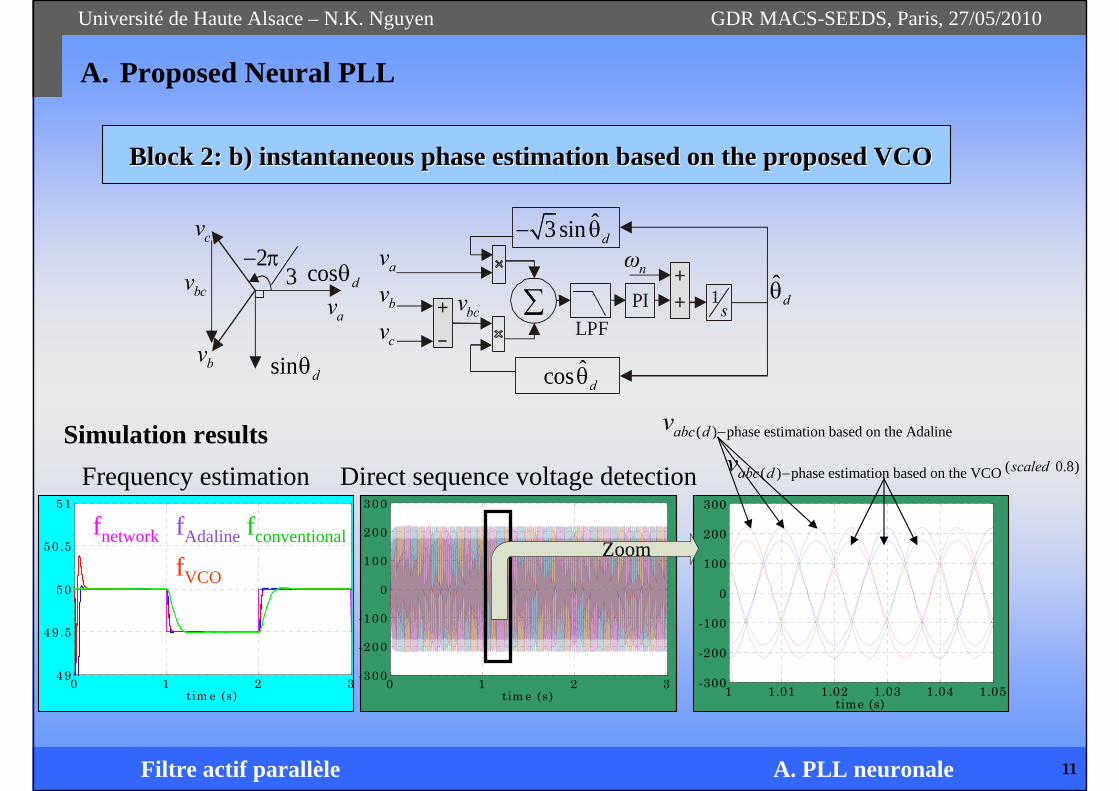
Block 2: b) instantaneous phase estimation based on the proposedBlock 2: b) instantaneous phase estimation based on the proposed VCO VCO
a
b
c
vvv
+ bcv PI
nω ++ 1
s
ˆ3 sin d
ˆcos d
LPF
ˆd
av
bv
cv2
3
bcv
sin d
cos d
1 1.01 1.02 1.03 1.04 1.05-300
-200
-100
0
100
200
300
time (s)
0 1 2 3-3 0 0
-2 0 0
-1 0 0
0
1 0 0
2 0 0
3 0 0
tim e (s )
Simulation resultsFrequency estimation Direct sequence voltage detection
Zoom
( ) phase estimation based on the Adalineabc dv
( 0.8)( ) phase estimation based on the VCO scaledabc dv
0 1 2 34 9
4 9 .5
5 0
5 0 .5
5 1
tim e (s )
fnetwork fconventional
fVCO
fAdaline
A. Proposed Neural PLL
Filtre actif parallèle A. PLL neuronale

12
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
PLL: Experimental results
real-time process forthe control of the shunt
active power filter
inverter + low-pass
filter
currentsensors
nonlinear load
design of the control law
Ds1104 board
- Matlab/Simulink - C/C++ programs- Real-Time Toolbox (RTT)
LL
LRinji
si Li
Lv,L inji i
ACDC
DC Motor
SGVdc2
Vdc1 Rdc
mw
three-phase source100 ,50
50s
s
V V VARf Hz
0 0.1 0.2-150
0
150
time (s)
Load voltage measured
A. Proposed Neural PLL
Filtre actif parallèle A. PLL neuronale

13
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
Direct sequence estimationDirect sequence estimation
upper and lower bounds of va
upper and lower bounds of v
a(d)-neural PLLupper and lower bounds of v
50 100 15049.5
50
50.5
51 fAdalinefclassical PLLf pro. VCO
0
50 100 1500
65
130
-65
-130
0 a(d)-classical PLL
Time (s)
b)
a)
0 20 40 60 80 100 120 140 160 180 200-130
-65
0
65
130
49.5
50
50.5 fneuralfclassical PLLfpro. VCO
0 20 40 60 80 100 120 140 160 180 200
Time (s)
upper and lower bound of vaupper and lower bound of va(d)-classical PLLupper and lower bound of va(d)-neural PLL
a)
b)
Direct voltages variationDirect voltages variation
0
2 0
4 0
6 0
8 0
1 0 0
Harmonic rank0 1 3 5 7 9 1 1 1 3
vava(d)-conventional PLLva(d)-neural PLL
va
va(d)-conventional PLL
va(d)-neural PLL
Harmonic rank
0
2 0
4 0
6 0
8 0
1 0 0
0 1 3 5 7 9
Résultats expérimentaux
Filtre actif parallèle A. PLL neuronale
A. Proposed Neural PLL
14
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
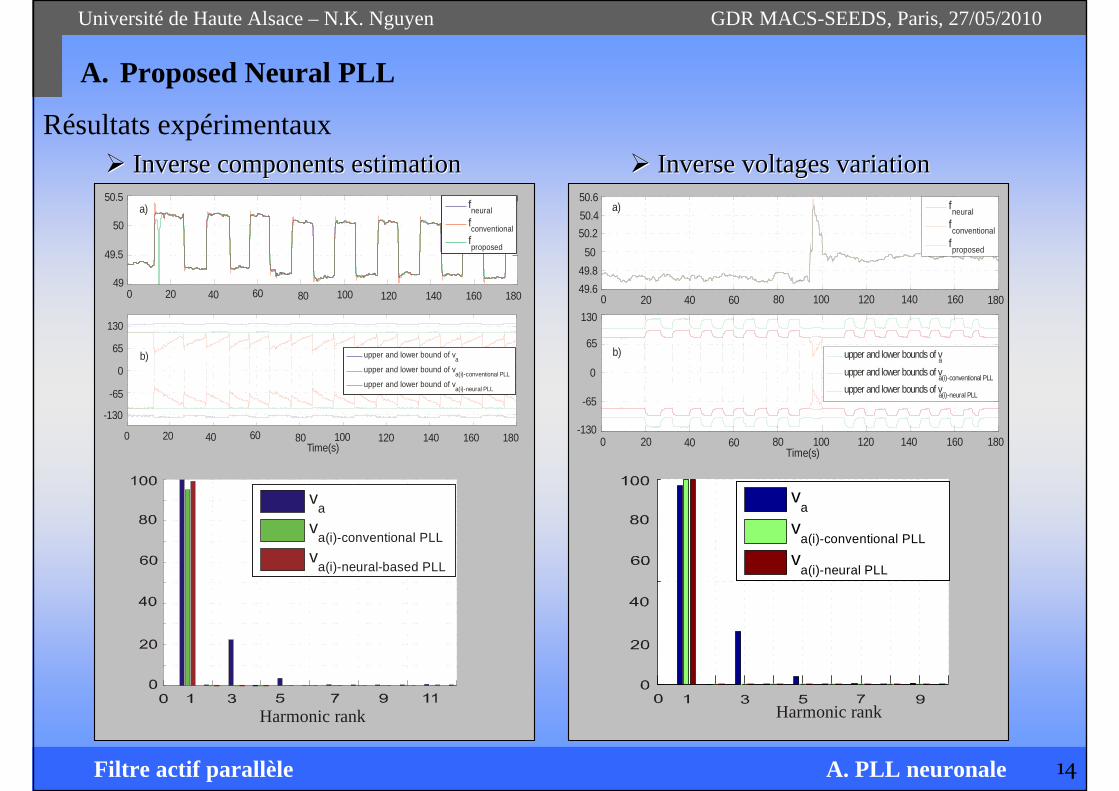
Inverse components estimationInverse components estimation Inverse voltages variationInverse voltages variation
-130
-65
0
65
130
upper and lower bound of vaupper and lower bound of va(i)-conventional PLLupper and lower bound of va(i)-neural PLL
49.5
49
50
50.5
0 20 40 60 80 100 120 140 160 180
fneuralfconventionalfproposed
0 20 40 60 80 100 120 140 160 180Time(s)
a)
b)
va
va(i)-conventional PLL
va(i)-neural-based PLL
Harmonic rank
0 20 40 60 80 100 120 140 160 180-130
-65
0
65
130
upper and lower bounds of vaupper and lower bounds of va(i)-conventional PLL
upper and lower bounds of va(i)-neural PLL
49.850
50.250.450.6
49.60 20 40 60 80 100 120 140 160 180
Time(s)
a)
b)
fneuralfconventionalfproposed
va
va(i)-conventional PLL
va(i)-neural PLL
Harmonic rank
Résultats expérimentaux
A. Proposed Neural PLL
Filtre actif parallèle A. PLL neuronale

15
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
Symmetrical components extraction with a default on one phaseSymmetrical components extraction with a default on one phase
14.2 14.3 14.4-0.2
-0.1
0
0.1
0.2source voltages
time (s)
-0.2
-0.1
0
0.1
0.2
14.2 14.3 14.4
direct sequence voltages
time (s)
inverse sequence voltages
time (s)
neuralf
conventionalf
estimed frequency
time (s)
balanced imbalanced 0iv
Résultats expérimentaux
A. Proposed Neural PLL
Filtre actif parallèle A. PLL neuronale

16
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
Conclusion
1. Performance
2. Adaptive
3. Applicable à la commande de moteurs sans capteur mécanique
Filtre actif parallèle A. PLL neuronale
A. Proposed Neural PLL

17
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
-Sommaire-
Sommaire
A. PLL neuronaleB. Méthodes d’identification des harmoniques
1. Méthode P-Q2. Méthode P-Q modifiée3. Méthode des courants actifs4. Méthode des courants diphasés5. Méthode par synchronisation6. Discussion
C. Commandes neuronales appliquées au FAP1. Commande directe par un modèle inverse2. Commande indirecte par un modèle de référence3. Commande basée sur un modèle d’état
D. Conclusion

18
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
0 0( )p t p p p p p p p ( )q t q q q q q
Remarques
La méthode P-Q donne un courant homopolaire nul après la compensation.
1. Méthode des puissances instantanées P-Q
Filtre actif parallèle B. Méthodes d’identification des harmoniques

19
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
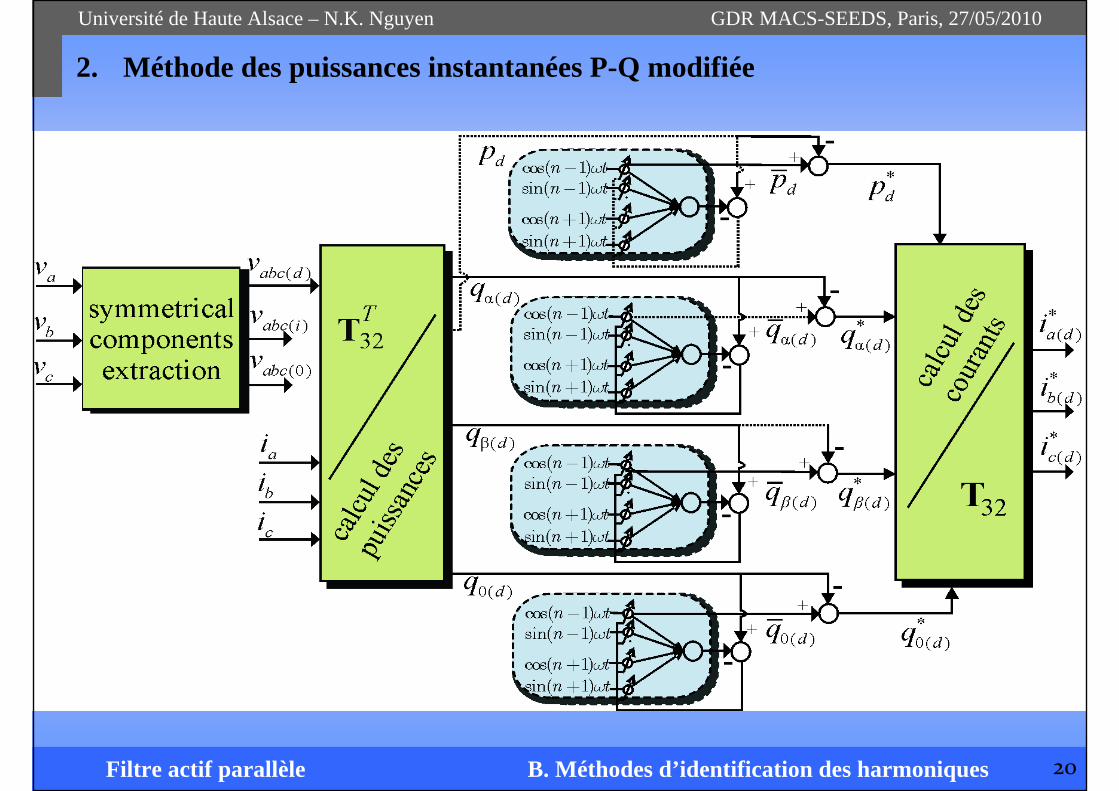
2. Méthode des puissances instantanées P-Q modifiée
0 0 0v i q q q q0 0p v i
0
0
00
0
0
0
0
p v v vi
q v vi
q v vi
q v v
a ba
a bb
b a
b a
é ù é ùê ú ê ú é ùê ú ê ú ê ú-ê ú ê ú ê ú=ê ú ê ú ê ú-ê ú ê ú ê úê ú ê ú ê úë û-ê ú ê úë û ë û
0
020
0 00
01 0
0
pi v v v
qi v v v
qvi v v v
q
Remarques
La méthode P-Q modifiée traite ensemble des composants symétriques des tensions et des courants.
En présence de la tension homopolaire, la méthode P-Q modifiée donne un courant homopolaire après la compensation, il n’est pas le cas dans la méthode P-Q.
Filtre actif parallèle B. Méthodes d’identification des harmoniques
20
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
2. Méthode des puissances instantanées P-Q modifiée
Filtre actif parallèle B. Méthodes d’identification des harmoniques

21
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
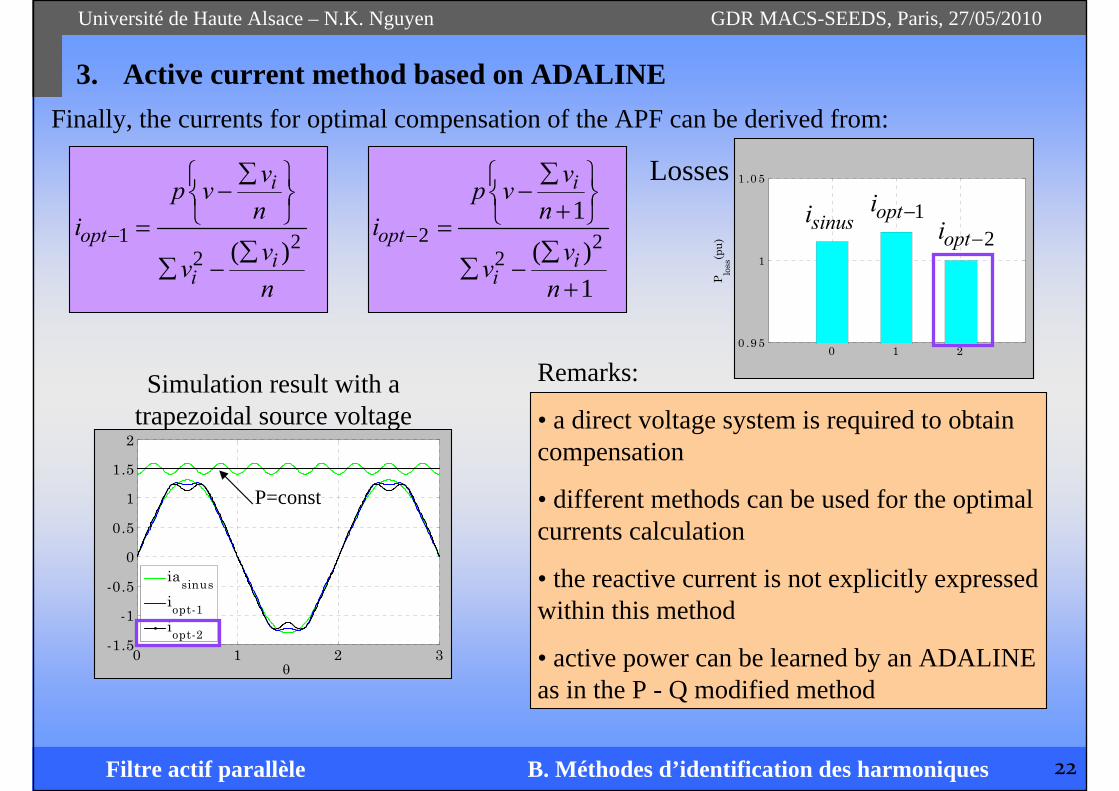
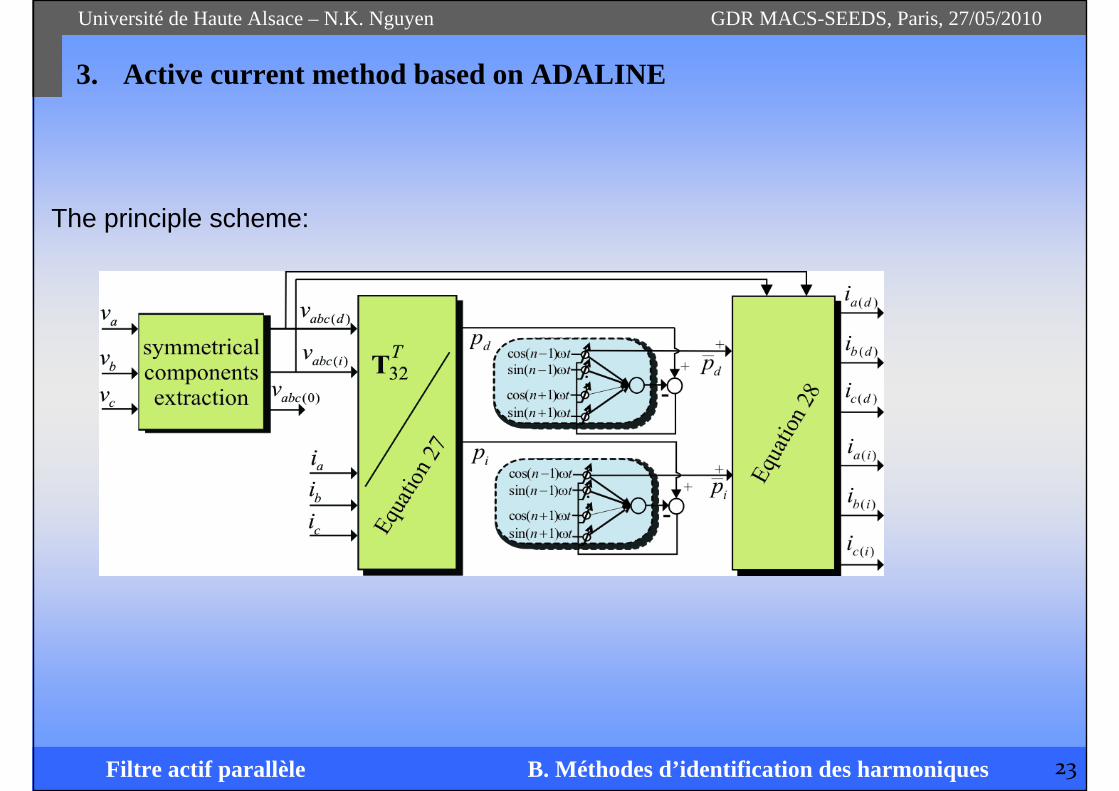
3. Active current method based on ADALINE
The principle of this method is to obtain the optimal active currents which deliver the active power and minimize the losses of the electrical network.
Our method is used to compensate and phase systems.
Load voltage and current vectors are defined as:
and 1 2 ... Tlv v vv
1l
Constrains:
l
21
12
22
1 1
constant power:
minimize the cost function : = (minimize on phase)
(minimze on phase)
T
li
i
l li i
i i
p
L i l
L i i l +1
v i
1 2 ... Tli i ii
Référence: Two Harmonics Identification Schemes Based on Adaline Neural Networks for Active Power FilteringN. K. Nguyen, D. Flieller, P. Wira, D. Ould Abdeslam, J. Mercklé, IFOST 2009, Ho Chi Minh City, Vietnam, 2009
Filtre actif parallèle B. Méthodes d’identification des harmoniques
22
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
1 22 ( )
i
opti
i
vp v
niv
vn
Finally, the currents for optimal compensation of the APF can be derived from:
Simulation result with a trapezoidal source voltage
Remarks:
• a direct voltage system is required to obtain compensation
• different methods can be used for the optimal currents calculation
• the reactive current is not explicitly expressed within this method
• active power can be learned by an ADALINE as in the P - Q modified method
0 1 20 .9 5
1
1 .0 5
P loss
(pu)
0 1 2 3-1.5
-1
-0.5
0
0.5
1
1.5
2
iasinusiopt-1iopt-2
P=const
Losses
sinusi 1opti 2opti 2 2
2
1( )
1
i
opti
i
vp v
niv
vn
Filtre actif parallèle B. Méthodes d’identification des harmoniques
3. Active current method based on ADALINE
23
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
The principle scheme:
3. Active current method based on ADALINE
Filtre actif parallèle B. Méthodes d’identification des harmoniques

24
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
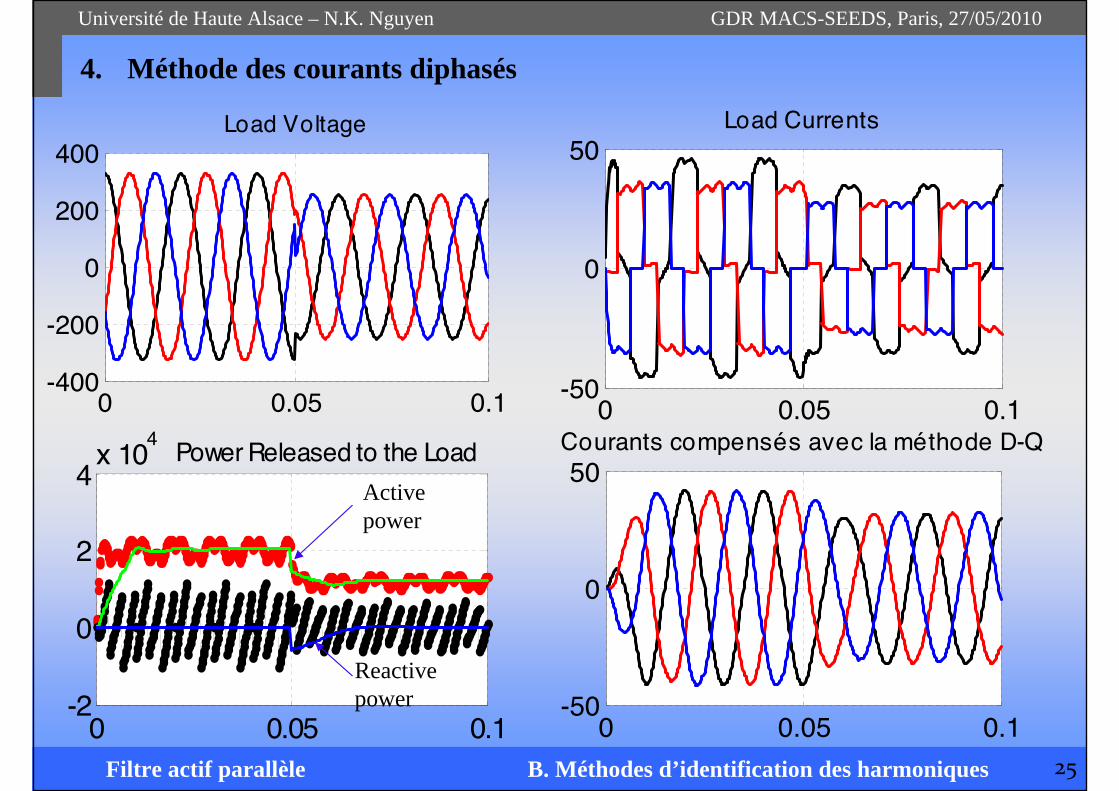
4. Méthode des courants diphasés
Remarques:
1. Nécessite d’une PLL robuste pour pouvoir effectuer des changements de repère.
2. Dans le cas où il existe une composante inverse de tension il faudra en tenir compte, en traitant le système inverse en parallèle du système direct.
Filtre actif parallèle B. Méthodes d’identification des harmoniques
25
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
0 0.05 0.1-400
-200
0
200
400Load Voltage
0 0.05 0.1-50
0
50Load Currents
0 0.05 0.1-50
0
50Courants compensés avec la méthode D-Q
0 0.05 0.1-2
0
2
4x 10
4
Power Released to the Load
Active power
Reactivepower
4. Méthode des courants diphasés
Filtre actif parallèle B. Méthodes d’identification des harmoniques

26
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
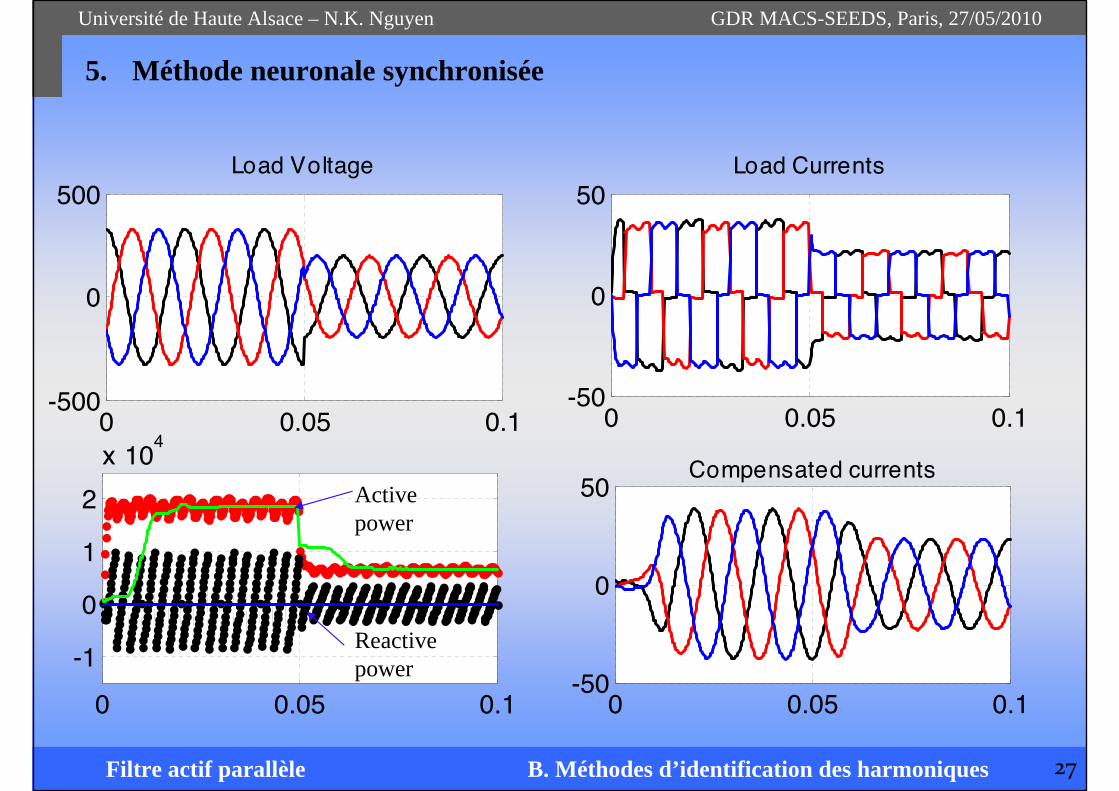
5. Méthode neuronale synchronisée
Rérérence:Artificial Neural Networks for Harmonic Currents Identification in Active Power Filtering SchemesN.K. Nguyen, D. Ould Abdeslam, P. Wira, D. Flieller et J. Mercklé, IECON, Novembre 2008, USA.
Remarques:
1. Spécialement pour un système de courant n’ayant que des harmoniques (pas de composants inverse et homopolaire) et le système de tension doit être direct fondamental
2. Nécessite une PLL robuste pour pouvoir obtenir un bon résultat
Filtre actif parallèle B. Méthodes d’identification des harmoniques
27
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
0 0.05 0.1-500
0
500Load Voltage
0 0.05 0.1
-1
0
1
2
x 104
0 0.05 0.1-50
0
50Load Currents
0 0.05 0.1-50
0
50
Compensated currents
Active power
Reactivepower
5. Méthode neuronale synchronisée
Filtre actif parallèle B. Méthodes d’identification des harmoniques

28
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
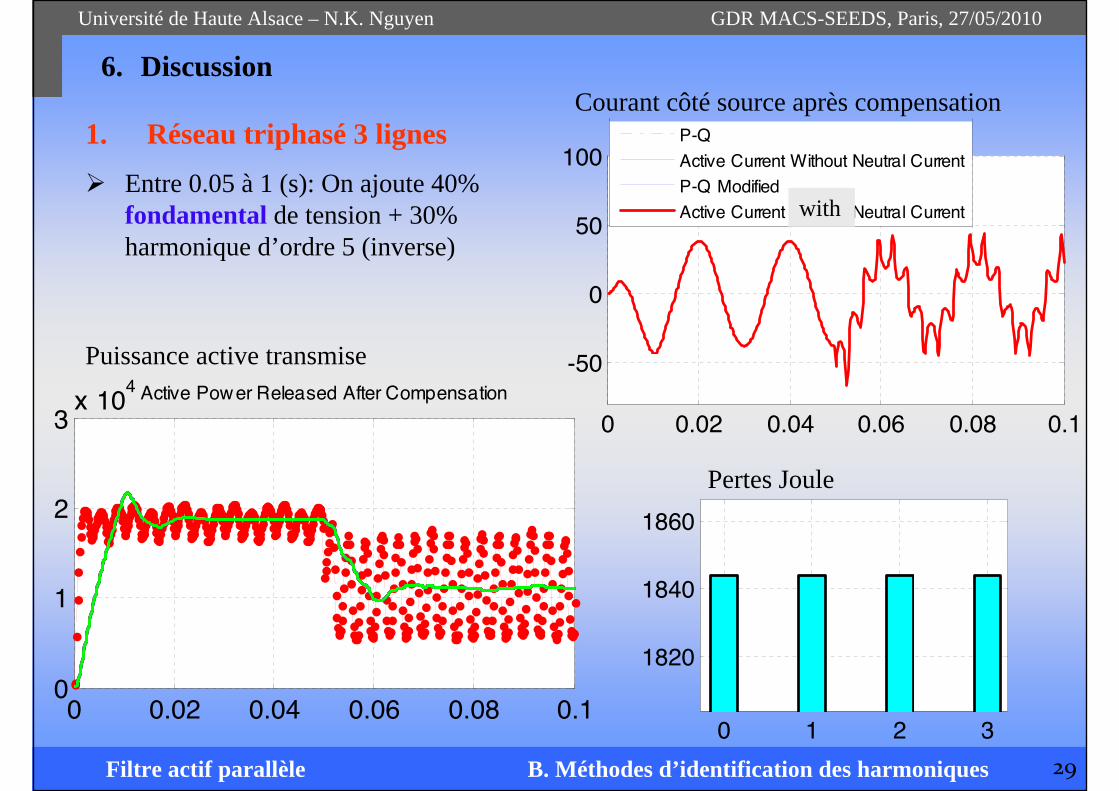
6. Discussion
1. Réseau triphasé 3 lignes
Il n’y a pas de composant homopolaire dans la tension : Tous les méthodes donnent un même résultat
S’il existe un ou des composants homopolaires dans la tension: En utilisant un courant homopolaire « fictif », la méthode P-Q modifiée donne une perte Joule minimale.
2. Réseau triphasé 3 lignes + le neutre
Il n’y a pas de composant homopolaire dans la tension : Tous les méthodes donnent un même résultat
S’il existe un ou des composants homopolaires dans la tension: La méthode des courants actifs donnent une perte Joule minimale, la méthode P-Q modifiée dans ce cas donne une perte Joule élevée.
Objectif de compensation
Pour une puissance transmise constante et les courants sinusoïdaux côté source (nécessite un système direct de tensions) après la compensation
Filtre actif parallèle B. Méthodes d’identification des harmoniques
29
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
1. Réseau triphasé 3 lignes
Entre 0.05 à 1 (s): On ajoute 40% fondamental de tension + 30% harmonique d’ordre 5 (inverse)
0 1 2 3
1820
1840
1860
0 0.02 0.04 0.06 0.08 0.10
1
2
3x 10
4 Active Power Released After Compensation
0 0.02 0.04 0.06 0.08 0.1
-50
0
50
100Current Phase a
P-QActive Current Without Neutral CurrentP-Q ModifiedActive Current Without Neutral Current
Puissance active transmise
Courant côté source après compensation
Pertes Joule
Filtre actif parallèle B. Méthodes d’identification des harmoniques
6. Discussion
with
30
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
0 1 2 3
2000
2200
2400
0 0.02 0.04 0.06 0.08 0.1-100
-50
0
50
100Current Phase a
P-Q
Active Current W ithout Neutral CurrentP-Q Modified
Active Current W ithout Neutral Current
0 0.02 0.04 0.06 0.08 0.10
1
2
3
4x 10
4 Active Power Released After Compensation
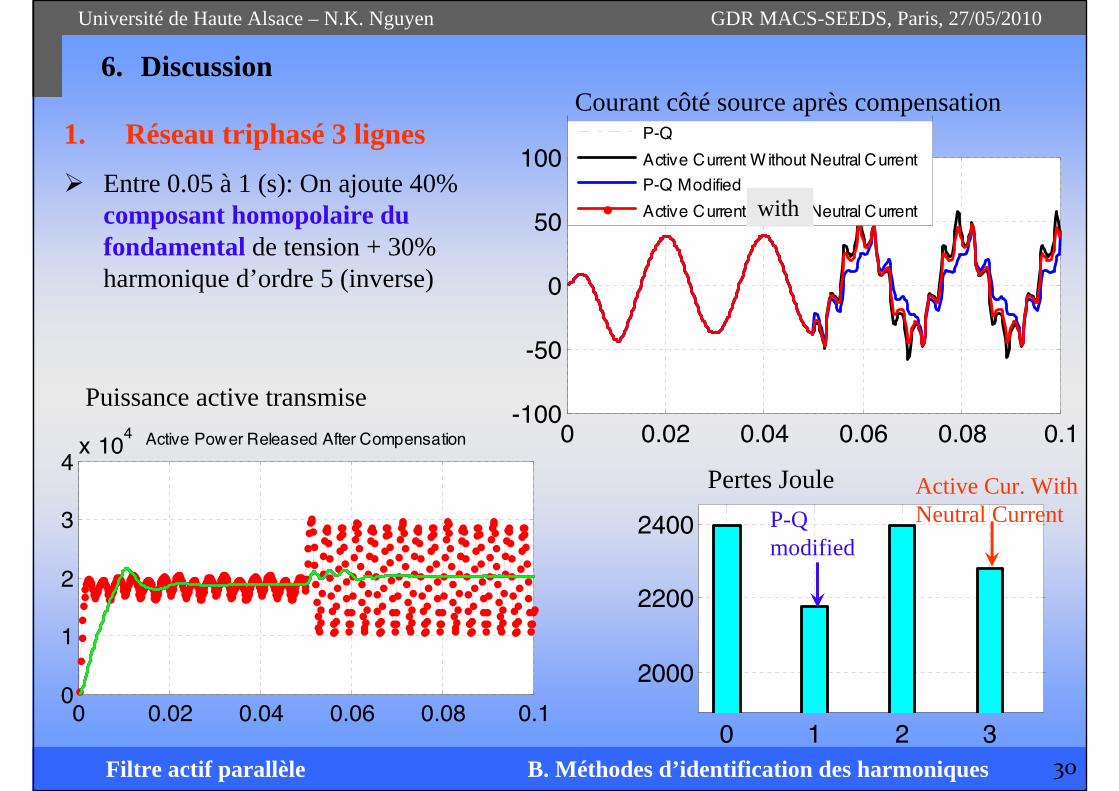
1. Réseau triphasé 3 lignes
Entre 0.05 à 1 (s): On ajoute 40% composant homopolaire du fondamental de tension + 30% harmonique d’ordre 5 (inverse)
Puissance active transmise
Courant côté source après compensation
Pertes Joule
6. Discussion
Filtre actif parallèle B. Méthodes d’identification des harmoniques
P-Q modified
Active Cur. WithNeutral Current
with
31
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
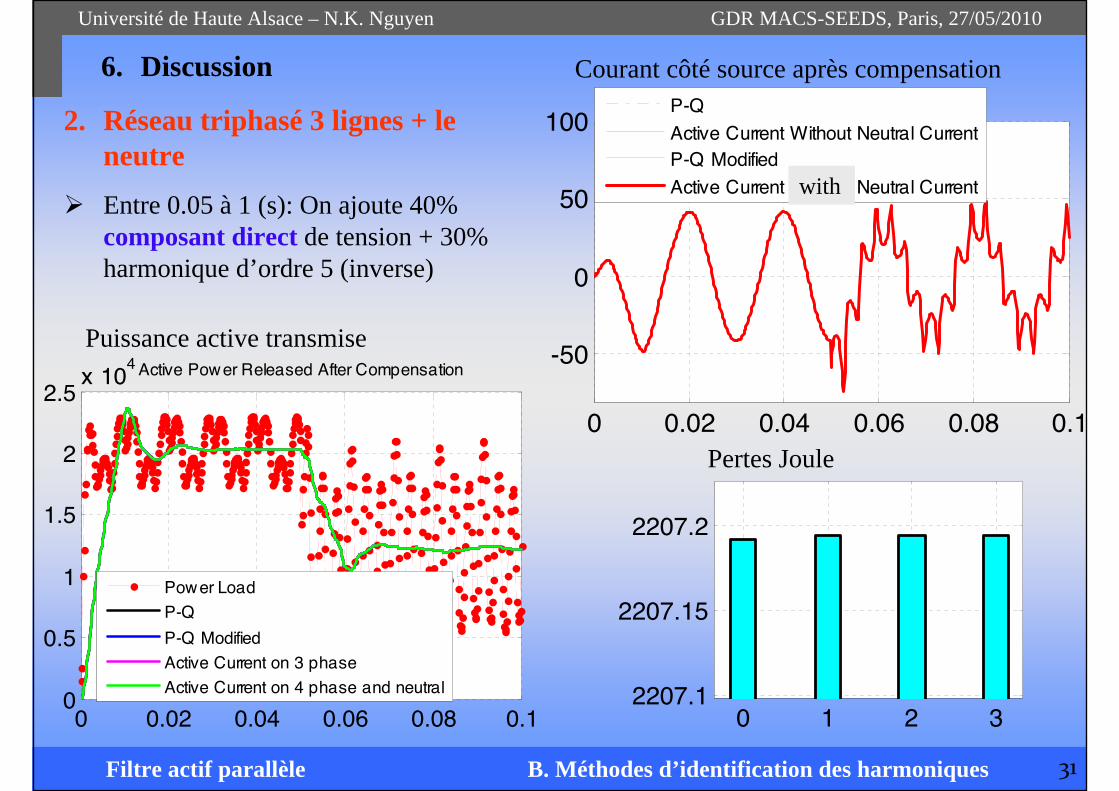
2. Réseau triphasé 3 lignes + le neutre
Entre 0.05 à 1 (s): On ajoute 40% composant direct de tension + 30% harmonique d’ordre 5 (inverse)
0 1 2 32207.1
2207.15
2207.2
0 0.02 0.04 0.06 0.08 0.10
0.5
1
1.5
2
2.5x 10
4 Active Power Released After Compensation
Power LoadP-Q
P-Q ModifiedActive Current on 3 phaseActive Current on 4 phase and neutral
0 0.02 0.04 0.06 0.08 0.1
-50
0
50
100Current Phase a
P-QActive Current Without Neutral CurrentP-Q ModifiedActive Current Without Neutral Current
Puissance active transmise
Courant côté source après compensation
Pertes Joule
6. Discussion
Filtre actif parallèle B. Méthodes d’identification des harmoniques
with

32
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
2. Réseau triphasé 3 lignes + le neutre
Entre 0.05 à 1 (s): On ajoute 40% composant homopolaire du fondamental de tension + 30% harmonique d’ordre 5 (inverse)
Courant de neutre après la compensation
Courant côté source après compensation
Pertes Joule0 0.02 0.04 0.06 0.08 0.1
-50
0
50
100Current Phase a
P-QActive Current Without Neutral CurrentP-Q ModifiedActive Current Without Neutral Current
0 1 2 3
2600
2800
3000
0 0.05 0.1-100
-50
0
50
100Neural Current With P-Q Mod and Opt. 3+1 Phase
P-Q ModifiedActive Current
6. Discussion
Filtre actif parallèle B. Méthodes d’identification des harmoniques
Active Cur. WithNeutral Current
with

33
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
0.050.290.860.890.390.370.280.290.390.410.400.430.340.37Méthode Synchronisée
0.110.470.870.910.400.410.300.330.410.490.430.460.370.42Méthode Courants diphasés
0.160.710.870.910.390.410.290.320.400.430.410.460.350.43Méthode Courants actifs
0.160.710.870.910.390.410.290.310.390.430.410.470.350.43Méthode PQ modifiée
0.160.710.870.910.390.410.290.320.390.430.410.470.350.43Méthode PQ
19.1535.942.204.202.805.602.604.905.209.705.9010.416.531.4Load current
THD (%)h19/h1 (%)h17/h1 (%)h13/h1 (%)h11/h1 (%)h7/h1 (%)h5/h1 (%)Phase a
Performances des méthodes neuronales d’identification
Résultats expérimentaux
5 .1 5 5 .2 5 .2 5 5 .3-4
-2
0
2
4
T e m p s (s )
R e s u lts o f 5 id e n t i f ic a t io n m e tho d s
i fa s ync .i fa p qi fa p q m o di fa d qi fa L a giL av a
Filtre actif parallèle B. Méthodes d’identification des harmoniques

34
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
Bal.Unbal
Bal.Unbal
Bal.Unbal.Nonlinear load
7.764.020.470.460.410.47Neural active cur.
10.15.910.320.30.780.53Neural mod. P-Q
36141362010Load current
THD (%)h7/h1 (%)h5/h1 (%)Phase a
Compensation for the 5th and 7th harmonic currents
Selective compensation : To decrease the rate of APF, a selective compensation can be easily achieved by choosing the appropriate weight vector of ADALINE
Bal.UnbalNonlinear load
42Neural active cur.
84Neural mod. P-Q
3614Load current
THD (%)Phase a
The 5th 7th 11th 13th harmonic currents are eliminated
3.95 3.96 3.97 3.98 3.99 4-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
time (s)
3.95 3.96 3.97 3.98 3.99 4-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
time (s)
Compensation for the 5th and 7th harmonic
Compensation for the 5th 7th 11th 13th harmonic
Filtre actif parallèle B. Méthodes d’identification des harmoniques

35
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
-Sommaire-A. PLL neuronaleB. Méthodes d’identification des harmoniques
1. Méthode P-Q2. Méthode P-Q modifiée3. Méthode des courants actifs4. Méthode des courants diphasés5. Méthode par synchronisation6. Discussion
C. Commandes neuronales appliquées au FAP1. Réseaux de neurones2. Commande directe par un modèle inverse3. Commande indirecte par un modèle de référence4. Commande basée sur un modèle d’état
D. Conclusion
Sommaire
36
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
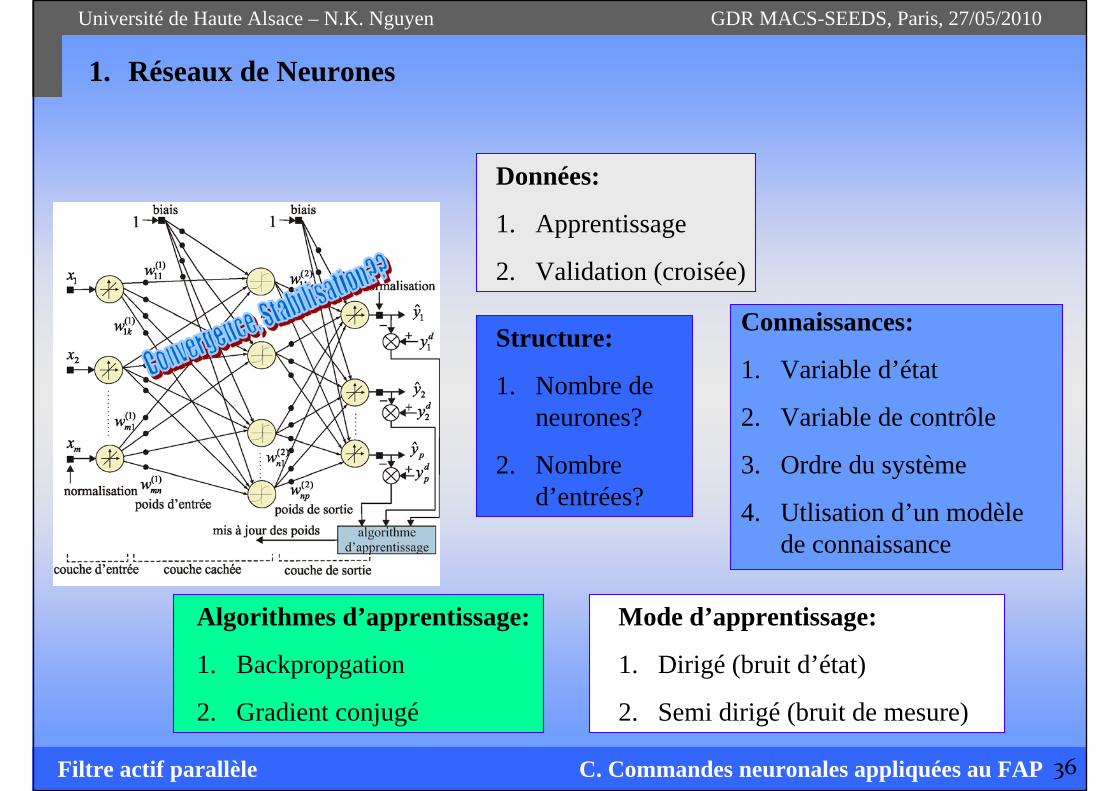
1. Réseaux de Neurones
Données:
1. Apprentissage
2. Validation (croisée)
Connaissances:
1. Variable d’état
2. Variable de contrôle
3. Ordre du système
4. Utlisation d’un modèlede connaissance
Algorithmes d’apprentissage:
1. Backpropgation
2. Gradient conjugé
Mode d’apprentissage:
1. Dirigé (bruit d’état)
2. Semi dirigé (bruit de mesure)
Structure:
1. Nombre de neurones?
2. Nombred’entrées?
Filtre actif parallèle C. Commandes neuronales appliquées au FAP

37
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
2. Commande directe par le modèle inverse
Problème:
1. Cette technique n’est pas adaptative. Une petite erreur d’estimation affecte forcément la performance du contrôleur.
2. Difficile à réaliser dans les cas où les systèmes est affecté par des perturbation.
Le modèle inverse du système est estimé par un réseau de neurones (MLP). Ce MLP est placé devant pour que le fonction de transfert dans la boucle fermée vaut 1 (idéalement).
Avantage: Dédié pour des systèmes ayant une faible dynamique et des paramètres fixes (pas de perturbation)
Filtre actif parallèle C. Commandes neuronales appliquées au FAP

38
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
3. Commande indirecte par un modèle de référence
Avantage: Adaptative et robuste
Problème: Utilisation un MLP supplémentaire pour l’identification augmente la charge de calcul
Le réseau de neurones d’identification a pour objectif donner le Jacobien (la variation de la sortie y par rapport l’entrée u) pour que contrôleur neuronal corrige l’erreur àtravers le processus.
Filtre actif parallèle C. Commandes neuronales appliquées au FAP
39
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
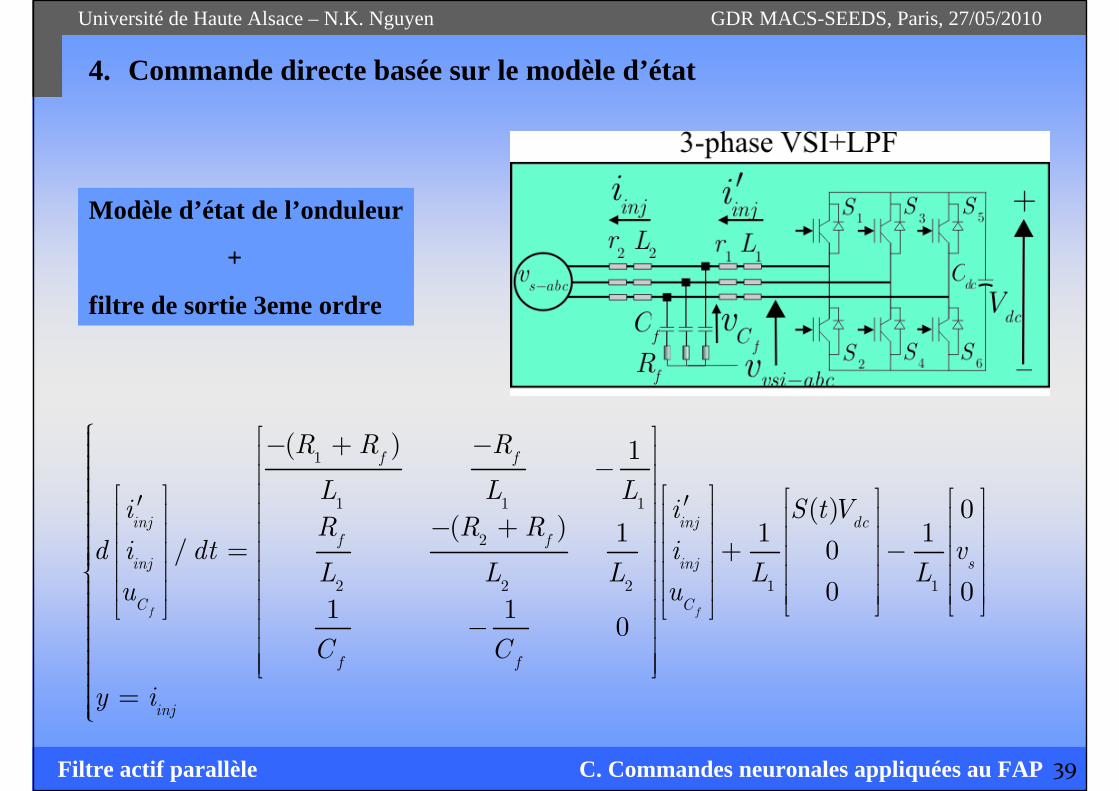
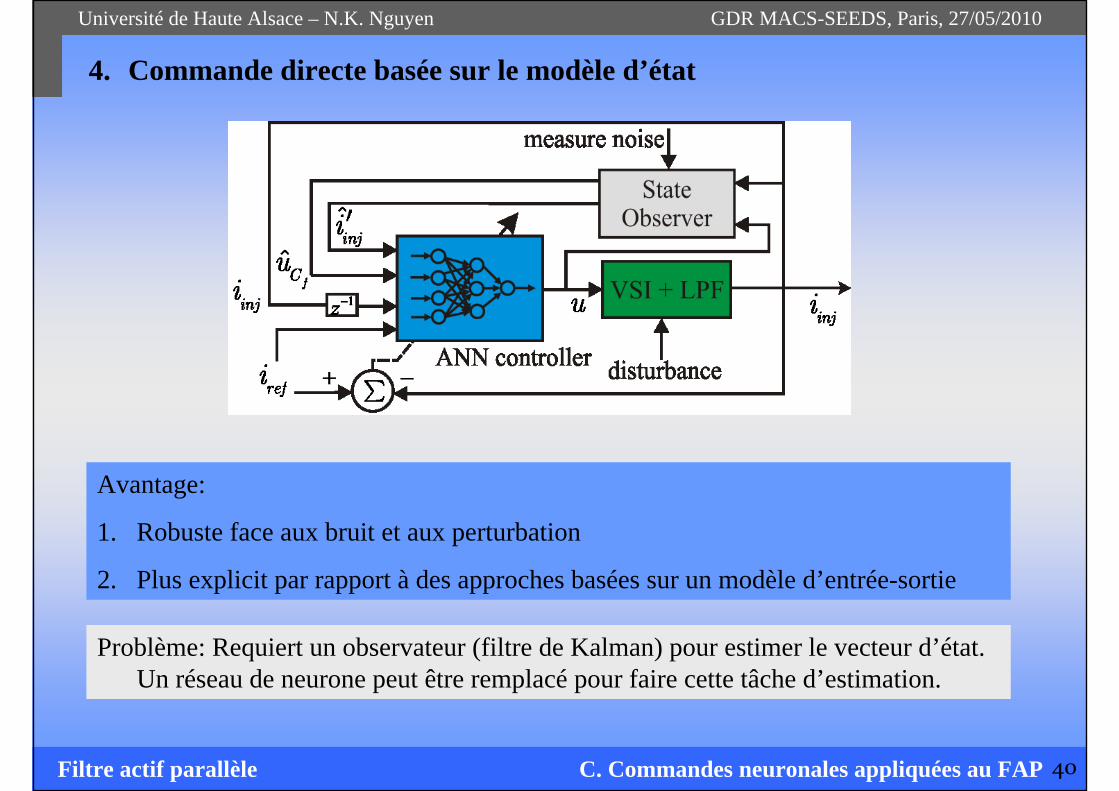
4. Commande directe basée sur le modèle d’état
1
1 1 1
2
2 2 2 1 1
( ) 1
( ) 0( ) 1 1 1
/ 0
0 01 1
0f f
f f
inj inj dcf f
inj inj s
C C
f f
inj
R R R
L L Li i S t V
R R Rd i dt i v
L L L L Lu u
C C
y i
ì é ùï - + -ï ê úï -ï ê úï ê úé ù é ùï é ù é ù¢ ¢ï ê úê ú ê ú ê ú ê úï - +ï ê úê ú ê ú ê ú ê úï = + -ê úê ú ê úï ê ú ê úï ê úê ú ê úí ê ú ê úï ê úê ú ê ú ê ú ê úë û ë ûê úë û ë û-ê úê úê úë û
=î
ïïïïïïïïïïï
Modèle d’état de l’onduleur
+
filtre de sortie 3eme ordre
Filtre actif parallèle C. Commandes neuronales appliquées au FAP
40
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
Avantage:
1. Robuste face aux bruit et aux perturbation
2. Plus explicit par rapport à des approches basées sur un modèle d’entrée-sortie
Problème: Requiert un observateur (filtre de Kalman) pour estimer le vecteur d’état. Un réseau de neurone peut être remplacé pour faire cette tâche d’estimation.
Filtre actif parallèle C. Commandes neuronales appliquées au FAP
4. Commande directe basée sur le modèle d’état

41
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
Résultats
A noter que tous les contrôleurs ont été appris plusieurs fois (5) afin d’arriver à ce résultat
Filtre actif parallèle C. Commandes neuronales appliquées au FAP

42
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
Résultats
0.9992.05 1.86 1.690.15No.3.2
0.9992.95 2.38 1.990.27No.3.1
0.9993.62 2.42 2.390.33No. 2.2
0.9992.58 2.17 1.860.26No. 2.1
0.9992.59 1.95 1.950.73No.1.2
0.9992.06 1.62 1.700.79No.1.1
0.87617.2 12.8 15.3Courant de charge
Facteur de puissance
THD (%) (<5% selon IEEE 512-1992)
Erreur
Performance de différentes méthodes de commande neuronales
No.1: direct inverse control (4 x (5 et 10) x 1)
No.2: indirect control (2 MLP 4 x (5 et 10) x 1)
No.3: state model-based control (4 x (3 et 5) x 1)
Filtre actif parallèle C. Commandes neuronales appliquées au FAP
43
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
-Conclusion-1. Le Filtre Actif Parallèle a été présenté et plusieurs améliorations ont été
proposées :
• 1 PLL triphasée,
• 3 méthodes d’identification des courants de la charge,
• 3 schéma de commande neuronale (de l’onduleur),
2. Les méthodes d’identification travaille dans des espaces de puissances/courants différents
• Avantages des puissances : robustesse aux fluctuations de la phase,
• Avantages des courants : calculs directs,
• Inconvénient des courants : complexité face à des perturbations de tensions
Conclusion
44
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
-Conclusion-3. La commande neuronale (de l’onduleur) montre une bonne performance et
robustesse :
• performances supérieures à une commande classique
• elle est adaptative
Bilan sur le filtrage :
• un filtre actif parallèle qui s’adapte aux charges et aux variations des paramètres du système
• chaque bloc peut être réutilisé en-dehors du schéma d’un filtre actif
Conclusion

45
Université de Haute Alsace – N.K. Nguyen GDR MACS-SEEDS, Paris, 27/05/2010
MERCI
Fin