fabio morbidi - home.mis.u-picardie.frfabio/eng/documenti/teaching/parm... · • utilisés dans...
TRANSCRIPT

UPJV, Département EEA
Master 2 EEAII Parcours ViRob
Fabio MORBIDI
Laboratoire MIS Équipe Perception et Robotique
E-mail: [email protected]
Semestre 9, AU 2016-2017
Mercredi 14h00-16h30, Jeudi 10h00-12h30 Salle TP101
2
Plan du cours
Chapitre 1: Perception pour la robotique [F. Morbidi]
Chapitre 2: Modélisation d’incertitudes [D. Kachi]
1. Introduction
3. Typologies de capteur
2. Classification des capteurs
1. Introduction
3. Représentation statistique
2. Représentation de l’incertitude
4. Propagation de l’erreur: fusion des mesures de l’incertitude
Chapitre 3: Traitement des mesures [D. Kachi]
1. Réseau multi-capteurs
2. Fusion des mesures
Partie I : Perception Avancée

3
Capteurs proprioceptifs
• Odométrie (du grec odos, qui signifie "route", et metron, qui signifie "mesure")
Chapitre 1: Perception pour la robotique
3. Typologies de capteur
Odométrie: utilisation des mesures des capteurs de mouvement d’un robot pour estimer la variation de position au fil du temps

4
Odometrie
Encodeur rotatif
Robots à roues: on « intègre » les révolutions des roues du robot pour avoir une estimation du parcours effectué (voir le cours de « Localisation et Navigation de Robots » dans le 2ème semestre)
• Inconvénients de l’odometrie • Dérive sur des longs parcours • Glissement des roues
?

5
Exemple sur le terrain …
Trajectoire de 25 m estimée grâce à l’odometrie d’un robot Pioneer 3-AT (« Bois Bonvallet », Amiens, août 2016)

6
Un encodeur rotatif est un dispositif qui convertit la position angulaire d’un axe ou d’un arbre en code analogique ou binaire
Encodeurs rotatifs
• Encodeurs mecaniques et optiques (les plus utilisés en robotique, ex. pour l’odométrie)
• Deux types d’encodeurs:
• Absolus: la sortie de l’encodeur indique la position courante de l’axe (transducteur d’angle). L’information n’est pas perdue lorsque l'alimentation est coupée: elle est disponible à nouveau lorsque l’alimentation est rétablie.
• Incrémentaux (ou relatifs): la sortie de l’encodeur nous informe du mouvement de l’axe. Cette information est typiquement traitée ultérieurement pour obtenir des mesures de vitesse, distance ou position.
Encodeur optique incrémental

7
• Encodeur optique absolu avec codage binaire (3 bits; noir 1, blanc 0)
• Une paire émetteur/récepteur par bit
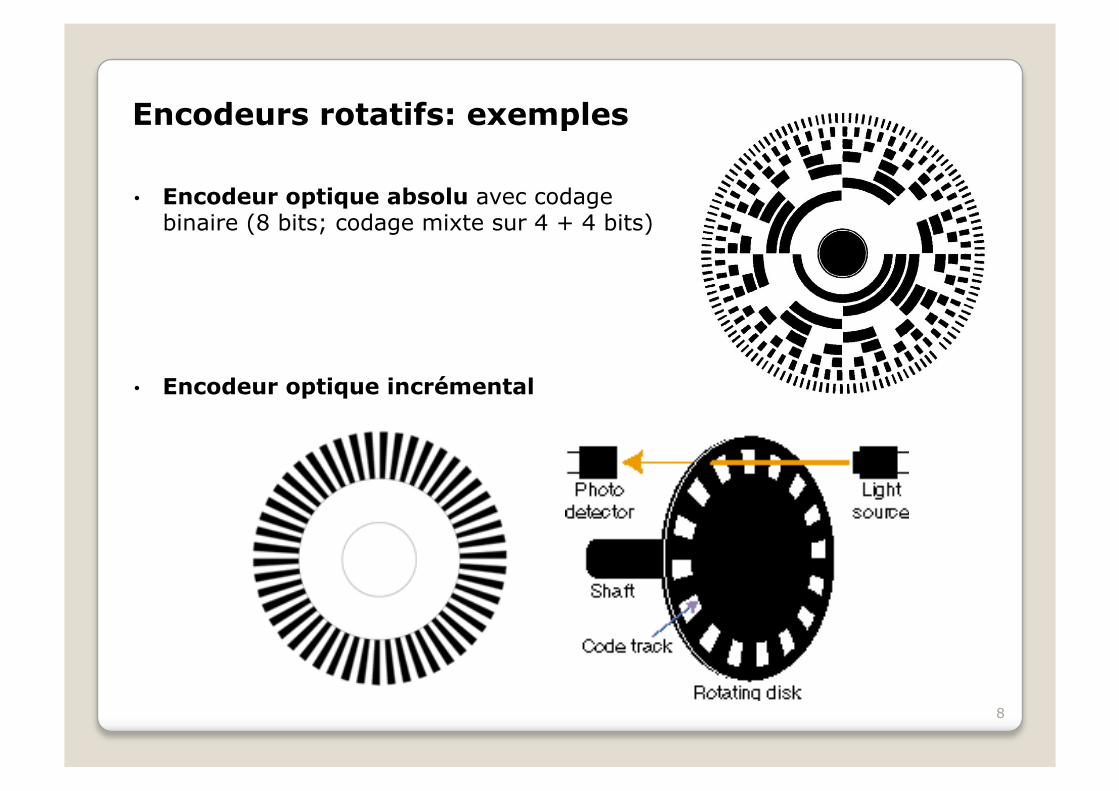
Encodeurs rotatifs: exemples
• Encodeur optique absolu avec codage Gray (BRGC: binary-reflected
Gray code), (3 bits; noir 1, blanc 0)
0 0 0
8
• Encodeur optique absolu avec codage binaire (8 bits; codage mixte sur 4 + 4 bits)
Encodeurs rotatifs: exemples
• Encodeur optique incrémental
9
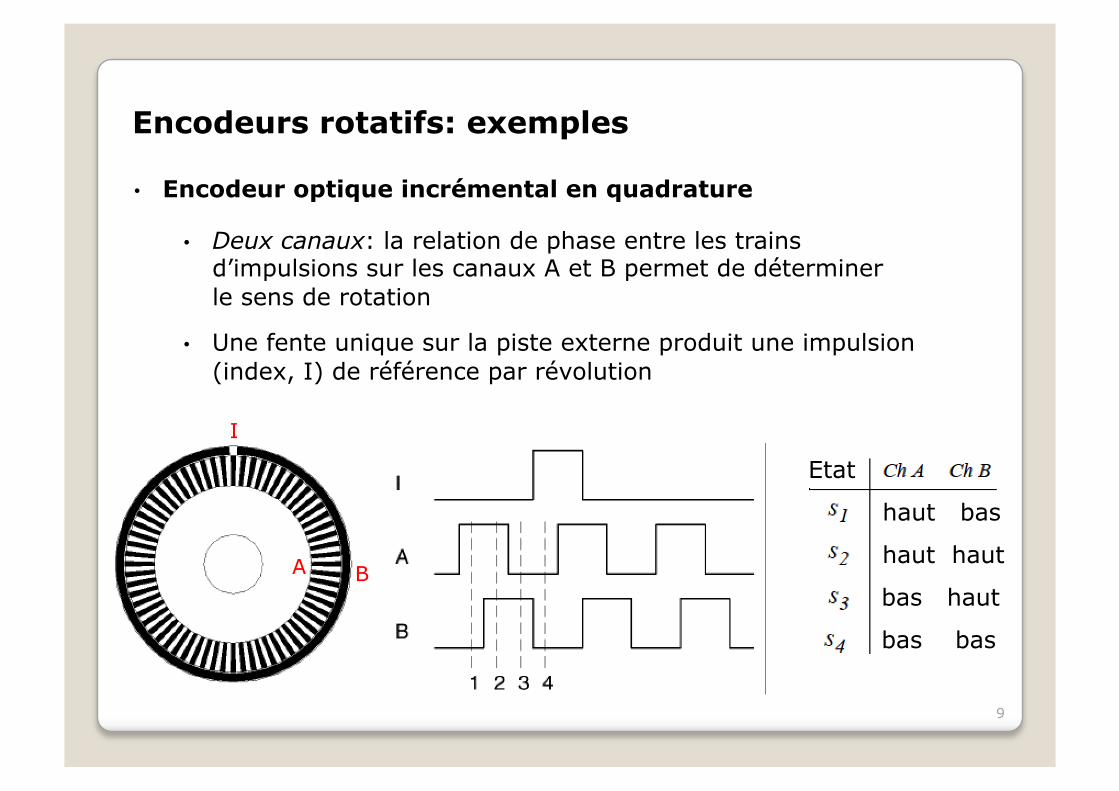
• Encodeur optique incrémental en quadrature
Encodeurs rotatifs: exemples
• Deux canaux: la relation de phase entre les trains d’impulsions sur les canaux A et B permet de déterminer le sens de rotation
• Une fente unique sur la piste externe produit une impulsion (index, I) de référence par révolution
haut bas
haut haut
bas haut
bas bas
A B
I
Etat
10
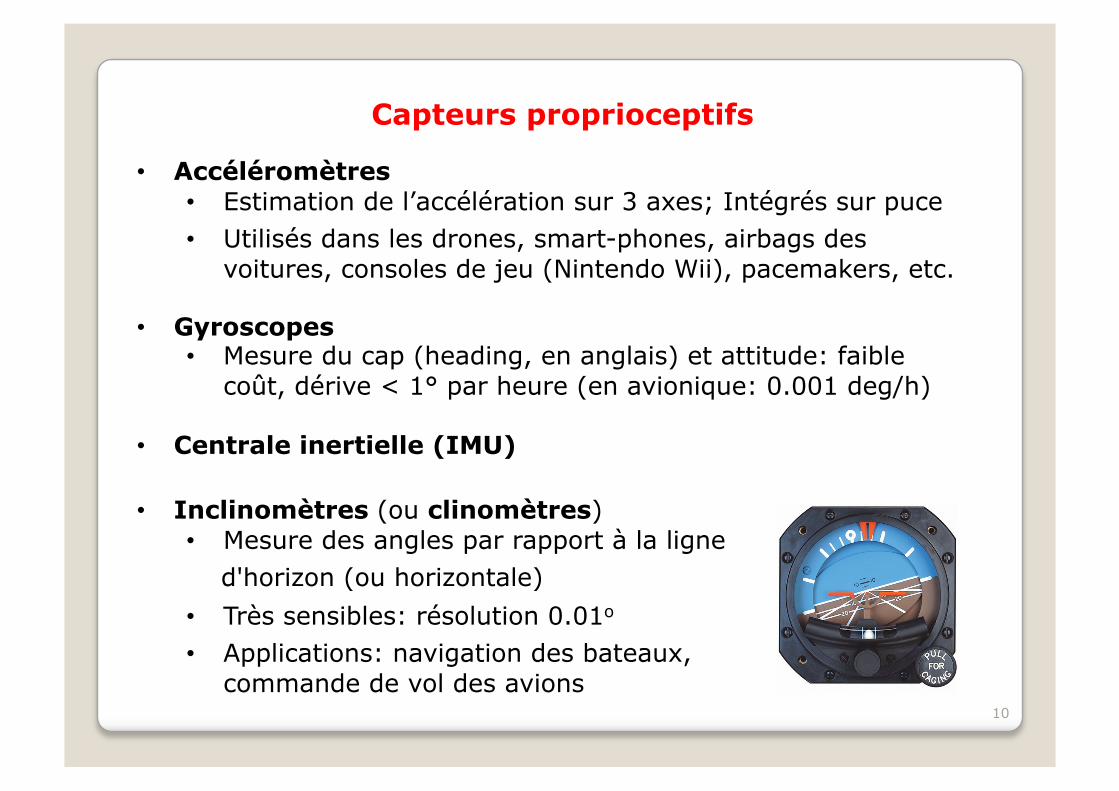
Capteurs proprioceptifs
• Accéléromètres • Estimation de l’accélération sur 3 axes; Intégrés sur puce • Utilisés dans les drones, smart-phones, airbags des
voitures, consoles de jeu (Nintendo Wii), pacemakers, etc.
• Gyroscopes • Mesure du cap (heading, en anglais) et attitude: faible
coût, dérive < 1° par heure (en avionique: 0.001 deg/h)
• Centrale inertielle (IMU)
• Inclinomètres (ou clinomètres) • Mesure des angles par rapport à la ligne d'horizon (ou horizontale) • Très sensibles: résolution 0.01o
• Applications: navigation des bateaux, commande de vol des avions
! Mesure de changement d’orientation ! Trois principes de fonctionnement: ◦ Mécanique (il repose sur le principe de conservation
du moment angulaire) ◦ Optique (il repose sur l’effet de Sagnac) ◦ MEMS (systèmes micro-électromécaniques)
! Deux catégories ◦ Mesure directe d’angles (rare) ◦ Gyroscopes fréquentiels: mesure de vitesse de rotation
! Inconvénient: dérive ◦ Nécessité d’un recalage fréquent ◦ Dérive parfois supérieure à l’exactitude requise
Gyroscopes (Gyros)
11
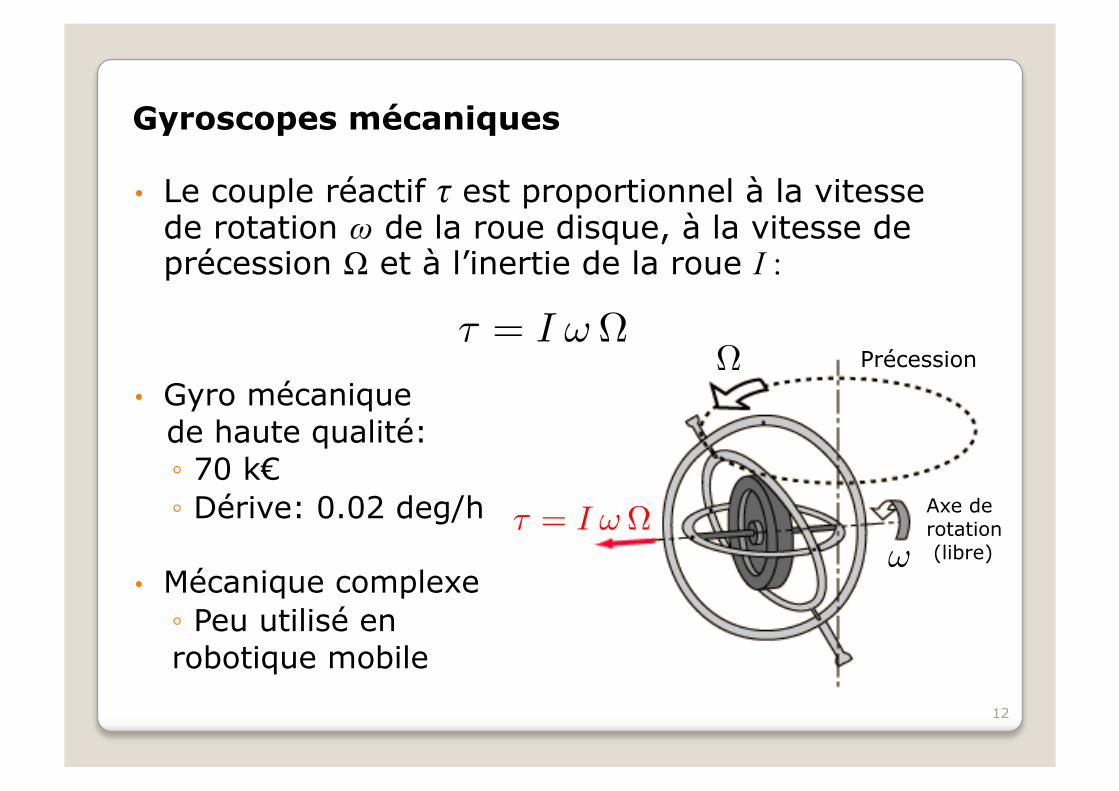
Gyroscopes mécaniques
• Le couple réactif τ est proportionnel à la vitesse de rotation ω de la roue disque, à la vitesse de précession Ω et à l’inertie de la roue I :
• Gyro mécanique de haute qualité: ◦ 70 k€ ◦ Dérive: 0.02 deg/h
• Mécanique complexe ◦ Peu utilisé en robotique mobile
⌧ = I !⌦Précession
⌧ = I !⌦
⌦
!
Axe de rotation (libre)
12
Gyroscopes optiques
• Basés sur le comportement d’une onde optique dans un repère en rotation (effet de Sagnac)
• Détection de rotation mécanique basée interférence lumineuse:
• Deux rayons lumineux en directions opposées • Le rayon voguant contre la rotation est plus court • Décalage de phase • Intensité combinée dépend de la fréquence de rotation
• Résolution de l’ordre du 0.0001 deg/s
13
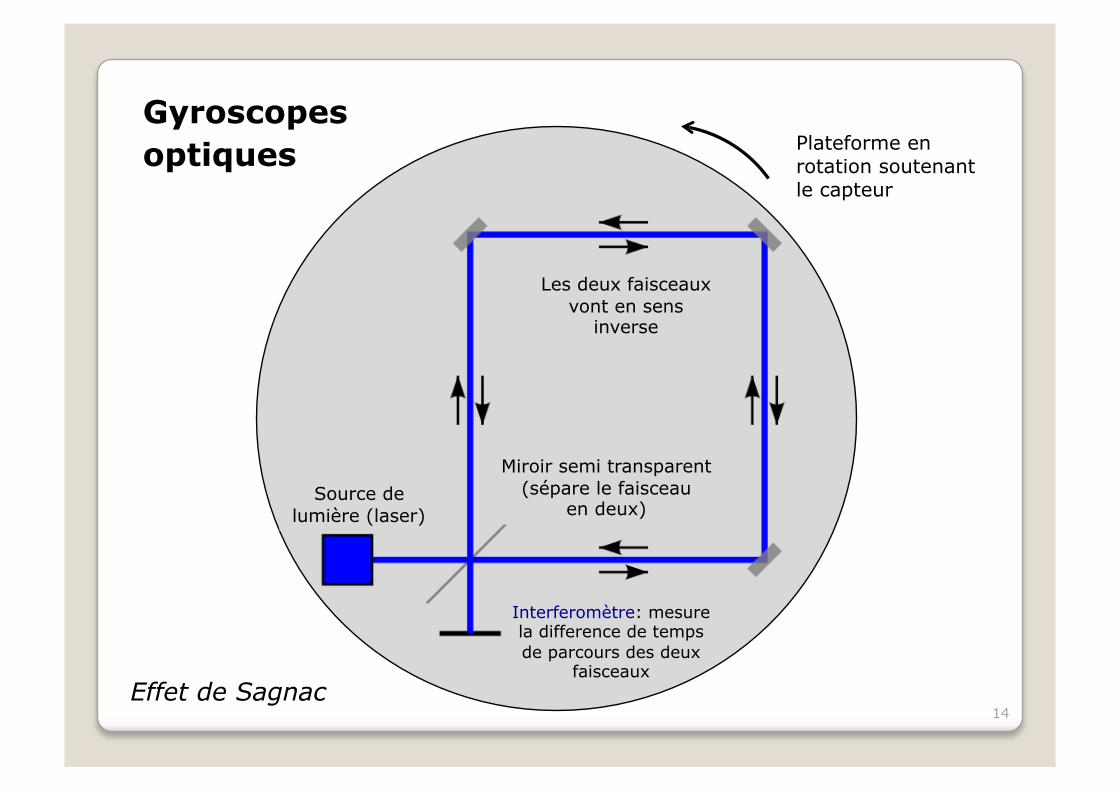
Gyroscopes optiques Plateforme en
rotation soutenant le capteur
Source de lumière (laser)
Miroir semi transparent (sépare le faisceau
en deux)
Les deux faisceaux vont en sens
inverse
Interferomètre: mesure la difference de temps de parcours des deux
faisceaux
14 Effet de Sagnac
Gyroscopes fréquentiels MEMS
! Eléments mécaniques vibrants ◦ Perception de l’accélération de Coriolis ◦ Accélération apparente d’un repère en rotation
! Plusieurs structures possibles ◦ Roue vibrante ◦ Résonateur hémisphérique
! Pas d’élément en rotation
! Consommation et taille très réduite ! Excellents pour la robotique
15
Centrale inertielle (ou IMU = “Inertial Measurement Unit")
16
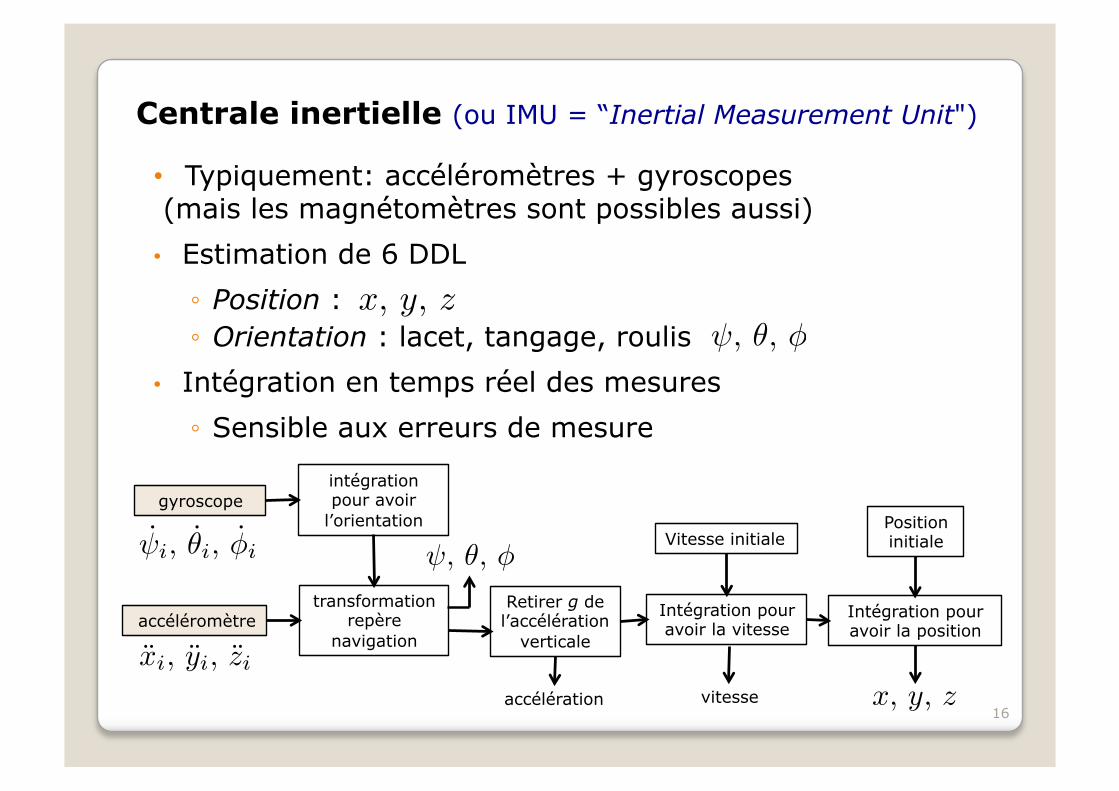
• Typiquement: accéléromètres + gyroscopes (mais les magnétomètres sont possibles aussi)
• Estimation de 6 DDL
◦ Position : ◦ Orientation : lacet, tangage, roulis
• Intégration en temps réel des mesures
◦ Sensible aux erreurs de mesure
, ✓, �
gyroscope
accéléromètre
intégration pour avoir
l’orientation
transformation repère
navigation
Retirer g de l’accélération
verticale
Vitesse initiale
Intégration pour avoir la vitesse
Position initiale
Intégration pour avoir la position
accélération vitesse
, ✓, �
xi, yi, zi
x, y, z
i, ✓i, �i
x, y, z
17
Capteurs extéroceptifs
Passifs • Capteurs de contact (bumpers, capteurs d’effort) • Magnetomètres • Capteurs de vision
• Technologies: linéaire, matrice CCD, CMOS, etc. • Plusieurs configurations (capteur single ou
multiple, ex. stéréo) et « accessoires » (optique « fisheye », miroirs, etc.)
Actifs • Systèmes basés balises (localisation dans un repère fixe) • Sonars (ultrasons) • Télémètres laser • Capteurs IR (infra-rouge) • Radars (ondes radio)

18
« Bumper » : plot de contact tout ou rien (fonctionnement basé sur la pression)
• Avantages: coût, calcul, vitesse, robustesse, sécurité
• Inconvénients: information pauvre, contrainte sur l’environnement
Trois « bumpers »
Capteurs de contact
Ils informent si le robot est en contact avec un objet (obstacle)
19
Capteurs de contact
Capteur d’effort
• Permet de mesurer les efforts en force et/ou en couple (ex. sur un effecteur)
• Capteur actif : il traduit une variation de sa structure interne (en raison d’une force/couple) en signal électrique
• Inconvénients : • Coût élevé • Etalonnage • Fragilité • Plages de mesures faibles

20
Capteurs de contact
Torseur d’effort (Fx, Fy, Fz, Mx, My, Mz), ou wrench en anglais, dans la base du capteur à 6 DDL
Capteur d’effort à 6 DDL
Fx
Fz Mz
Mx
Fy
My
Force Couple
21
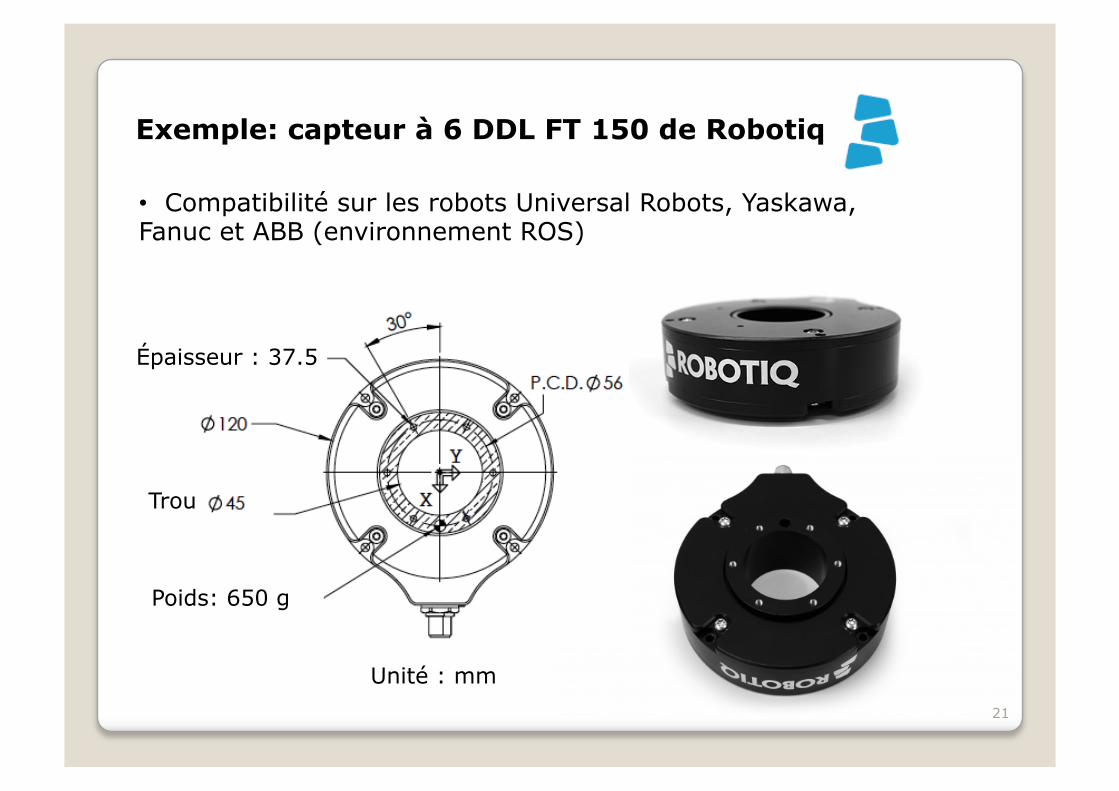
• Compatibilité sur les robots Universal Robots, Yaskawa, Fanuc et ABB (environnement ROS)
Unité : mm
Épaisseur : 37.5
Poids: 650 g
Trou
Exemple: capteur à 6 DDL FT 150 de Robotiq

22
Guidage de mains robotisées
Assemblage Finition
Applications
Exemple: capteur à 6 DDL FT 150 de Robotiq
23
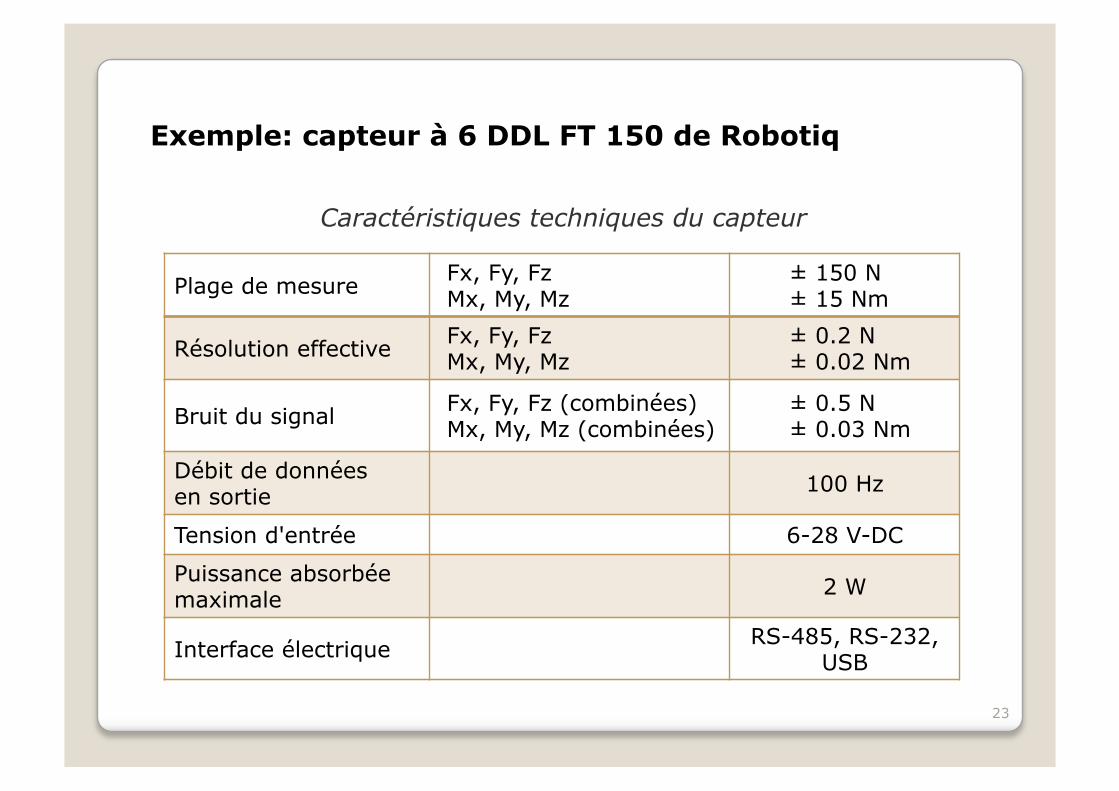
Plage de mesure Fx, Fy, Fz Mx, My, Mz
± 150 N ± 15 Nm
Résolution effective Fx, Fy, Fz Mx, My, Mz
± 0.2 N ± 0.02 Nm
Bruit du signal Fx, Fy, Fz (combinées) Mx, My, Mz (combinées)
± 0.5 N ± 0.03 Nm
Débit de données en sortie 100 Hz
Tension d'entrée 6-28 V-DC
Puissance absorbée maximale 2 W
Interface électrique RS-485, RS-232, USB
Caractéristiques techniques du capteur
Exemple: capteur à 6 DDL FT 150 de Robotiq
24
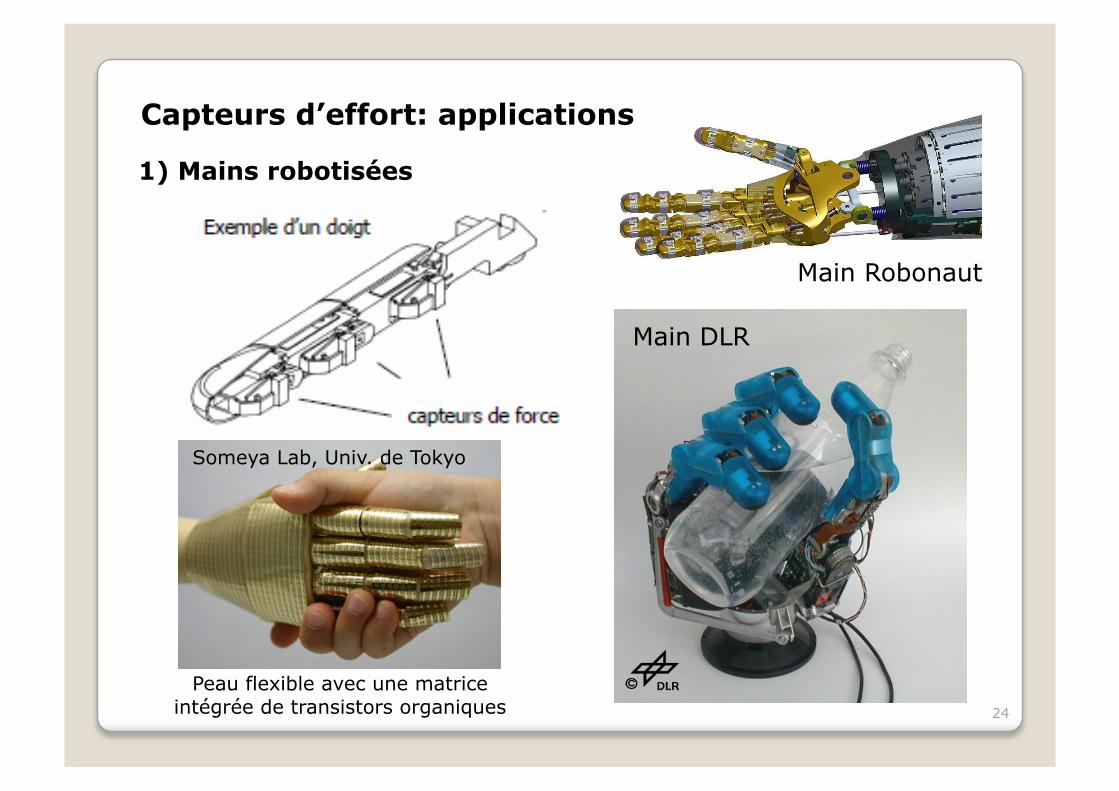
1) Mains robotisées
Main Robonaut
Main DLR
Someya Lab, Univ. de Tokyo
Peau flexible avec une matrice intégrée de transistors organiques
Capteurs d’effort: applications
25
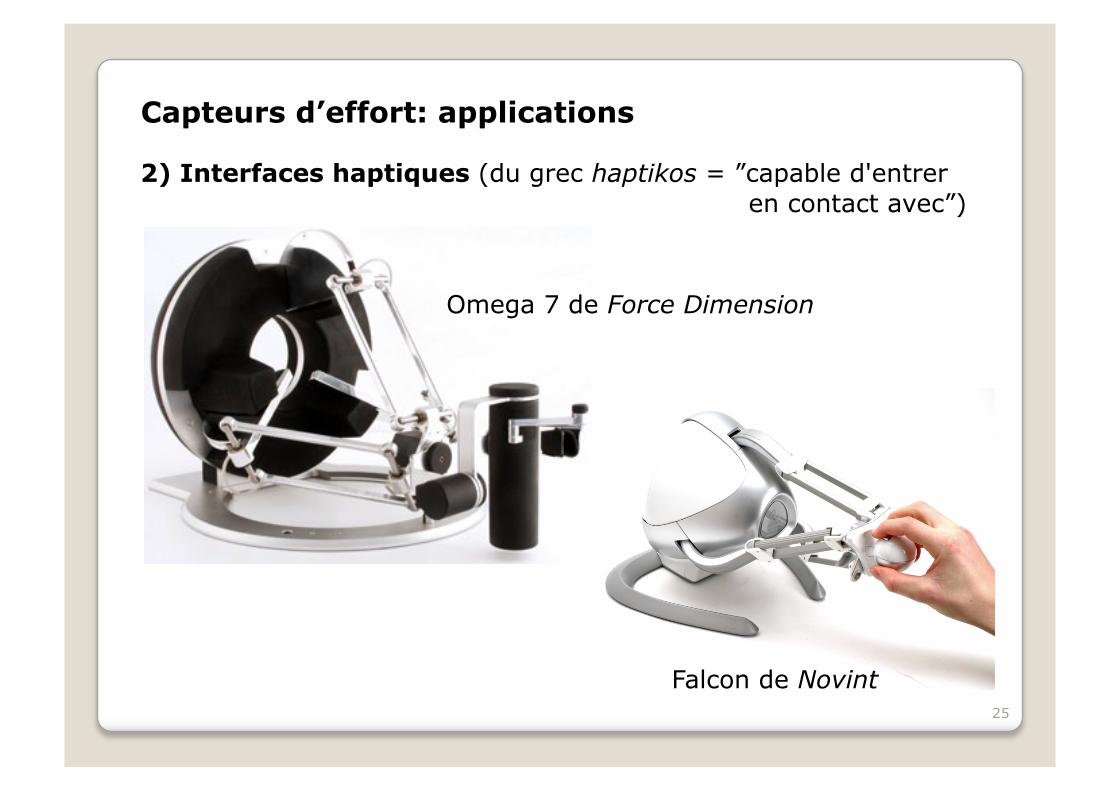
2) Interfaces haptiques (du grec haptikos = ”capable d'entrer en contact avec”)
Omega 7 de Force Dimension
Falcon de Novint
Capteurs d’effort: applications
26
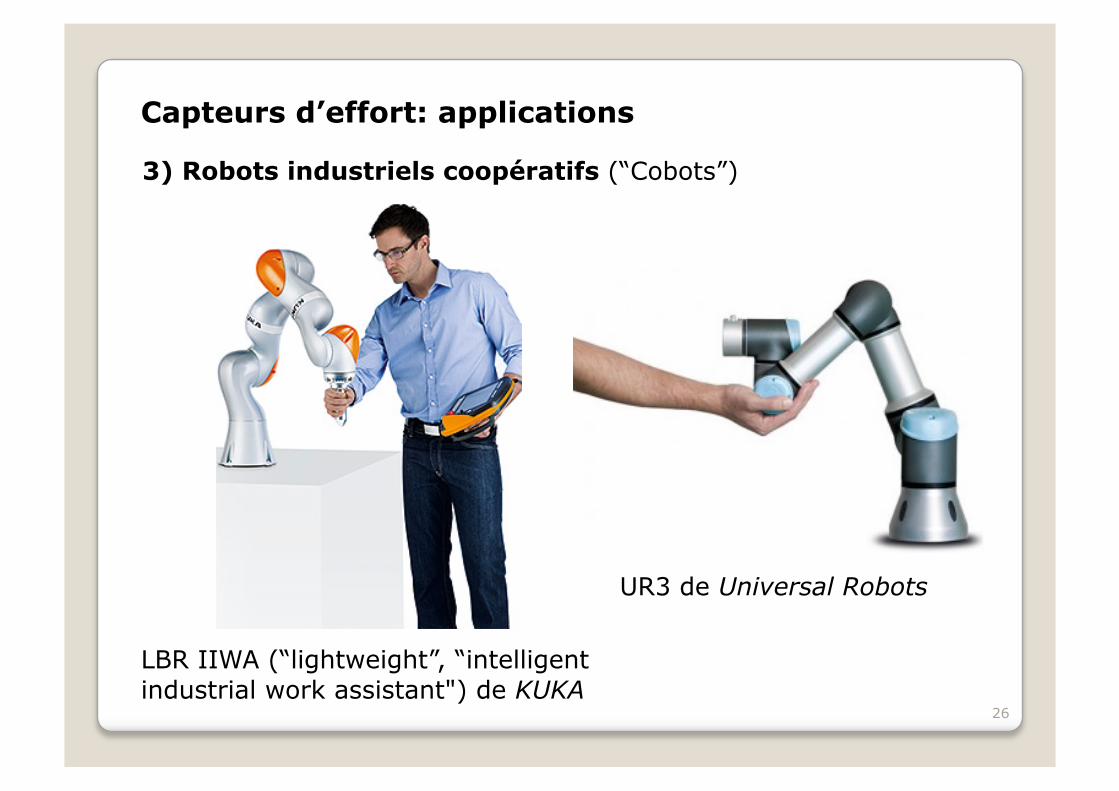
3) Robots industriels coopératifs (“Cobots”)
LBR IIWA (“lightweight”, “intelligent industrial work assistant") de KUKA
UR3 de Universal Robots
Capteurs d’effort: applications
27
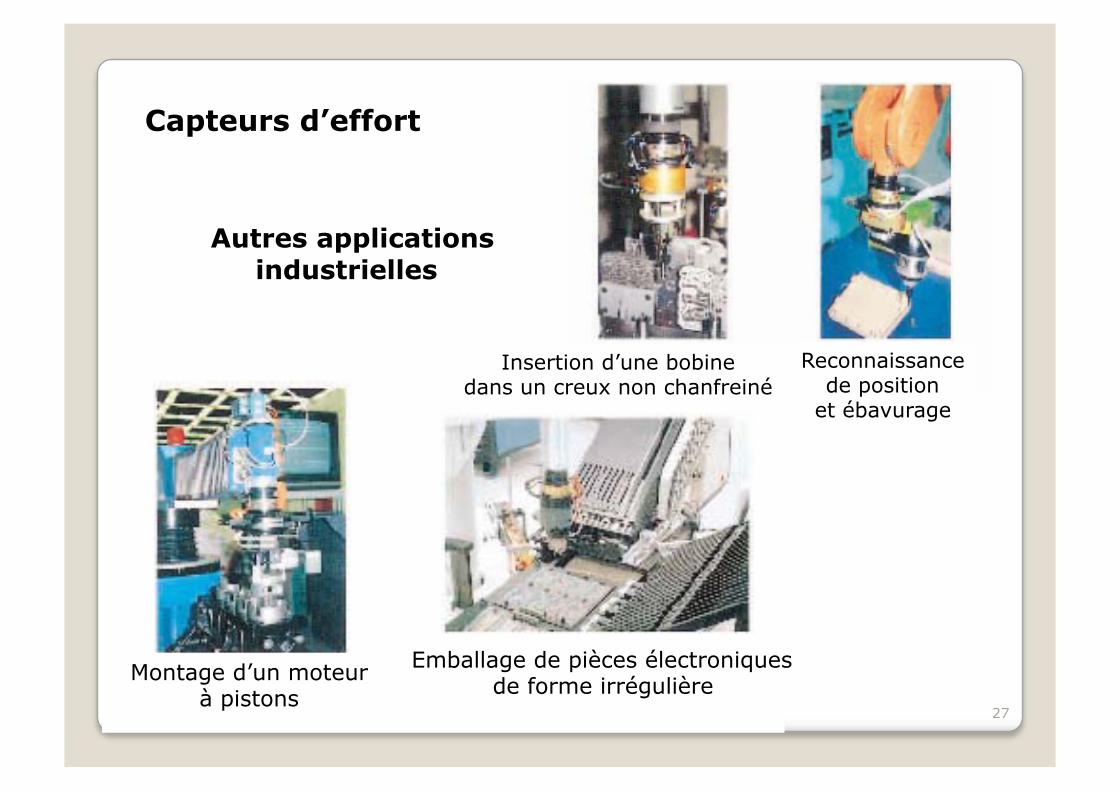
Montage d’un moteur à pistons
Insertion d’une bobine dans un creux non chanfreiné
Reconnaissance de position
et ébavurage
Autres applications industrielles
Emballage de pièces électroniques de forme irrégulière
Capteurs d’effort
28
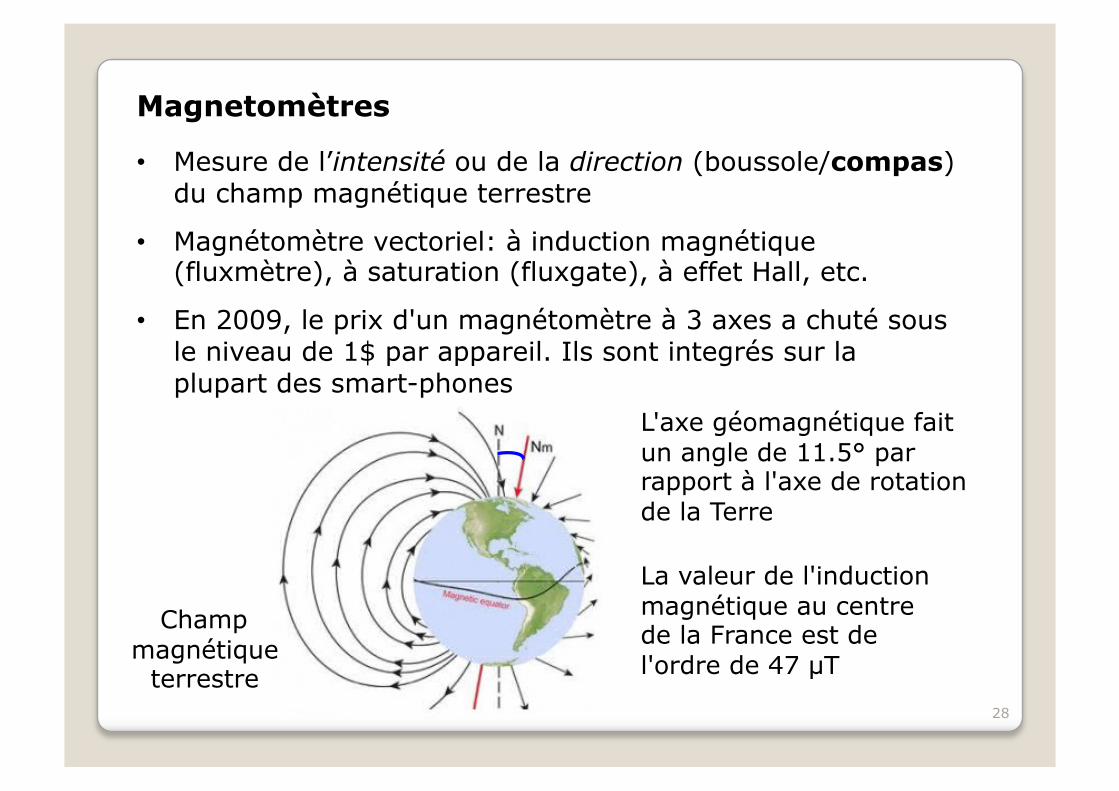
• Mesure de l’intensité ou de la direction (boussole/compas) du champ magnétique terrestre
• Magnétomètre vectoriel: à induction magnétique (fluxmètre), à saturation (fluxgate), à effet Hall, etc.
• En 2009, le prix d'un magnétomètre à 3 axes a chuté sous le niveau de 1$ par appareil. Ils sont integrés sur la plupart des smart-phones
Magnetomètres
Champ magnétique
terrestre
La valeur de l'induction magnétique au centre de la France est de l'ordre de 47 µT
L'axe géomagnétique fait un angle de 11.5° par rapport à l'axe de rotation de la Terre

Balises
29
! Balises à position connue précisément ! Navigation basée balises: très ancienne ◦ Balises naturelles: étoiles, montagnes, soleil ◦ Balises artificielles: phares
! Inconvénients des balises à l’intérieur ◦ Équiper l’environnement (cher) ◦ Changements de l’environnement
" Flexibilité et adaptabilité limitées
! GPS ◦ Capteur clé en robotique mobile à l’extérieur ◦ Inutilisable à l’intérieur ou à l’exterieur dans
des environnements fortement encombrés ("canyons urbains”)
( “beacon” ou “landmark” en anglais)
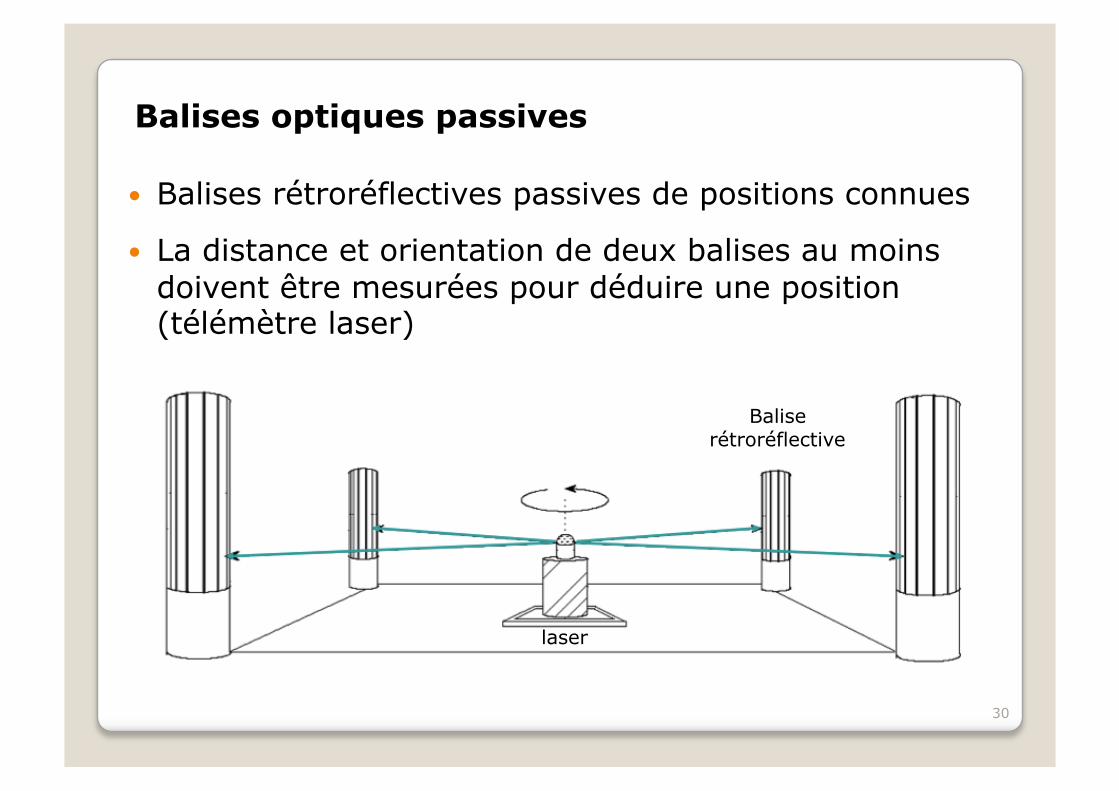
Balises optiques passives
30
! Balises rétroréflectives passives de positions connues
! La distance et orientation de deux balises au moins doivent être mesurées pour déduire une position (télémètre laser)
Balise rétroréflective
laser
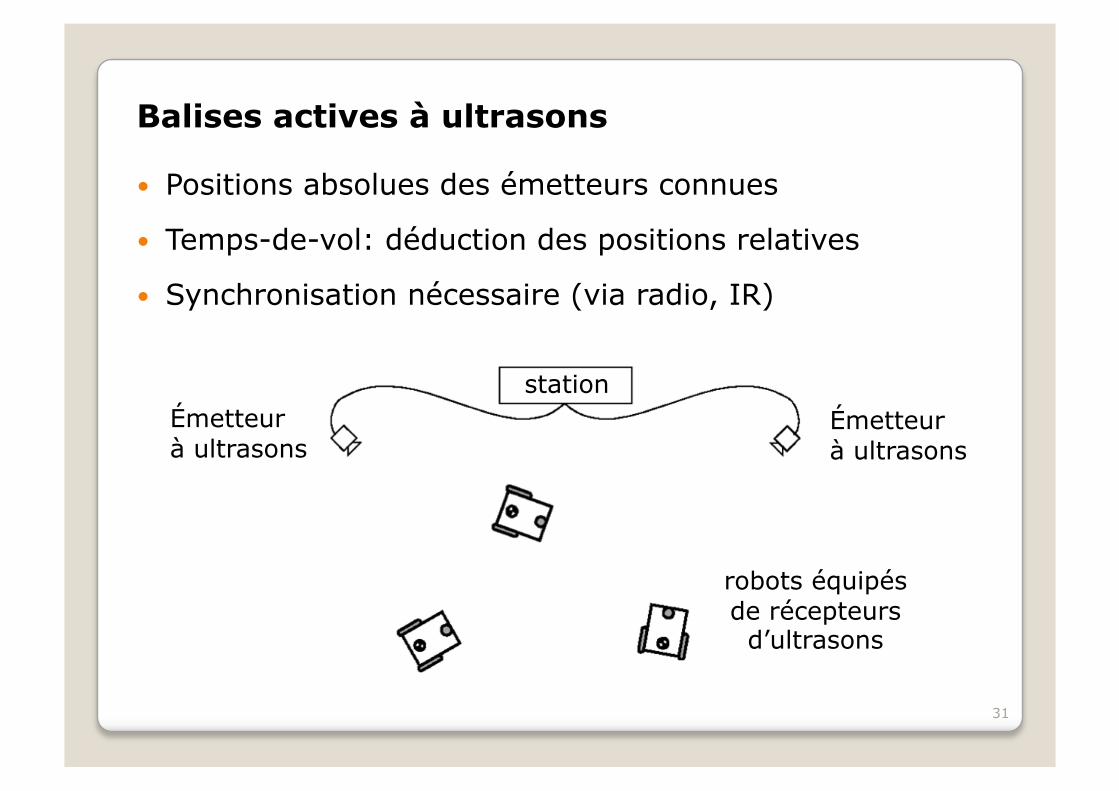
Balises actives à ultrasons
31
! Positions absolues des émetteurs connues
! Temps-de-vol: déduction des positions relatives
! Synchronisation nécessaire (via radio, IR)
Émetteur à ultrasons
station
robots équipés de récepteurs
d’ultrasons
Émetteur à ultrasons
GPS
32
! Origine militaire au É.U. (1er satellite: 1978) ! 31 satellites en orbite à 20180 km ! Garantie d’avoir toujours 6 satellites dans la ligne
de visée d’un dispositif dans le monde entier ! Au moins 4 satellites pour estimer la position (x, y, z) ! Localisation basée GPS: mesure de temps-de-vol
! Difficultés techniques ◦ Synchronisation
" Entre les satellites " Entre les satellites et le récepteur GPS
◦ Mise à jour temps-réel de la position exacte des satellites ◦ Mesure précise du temps-de-vol ◦ Interférences, réflexions du signal, etc.
! Autres systèmes analogues: GLONASS (Russie), COMPASS (Chine), Galileo (UE)
(Global Positioning System)
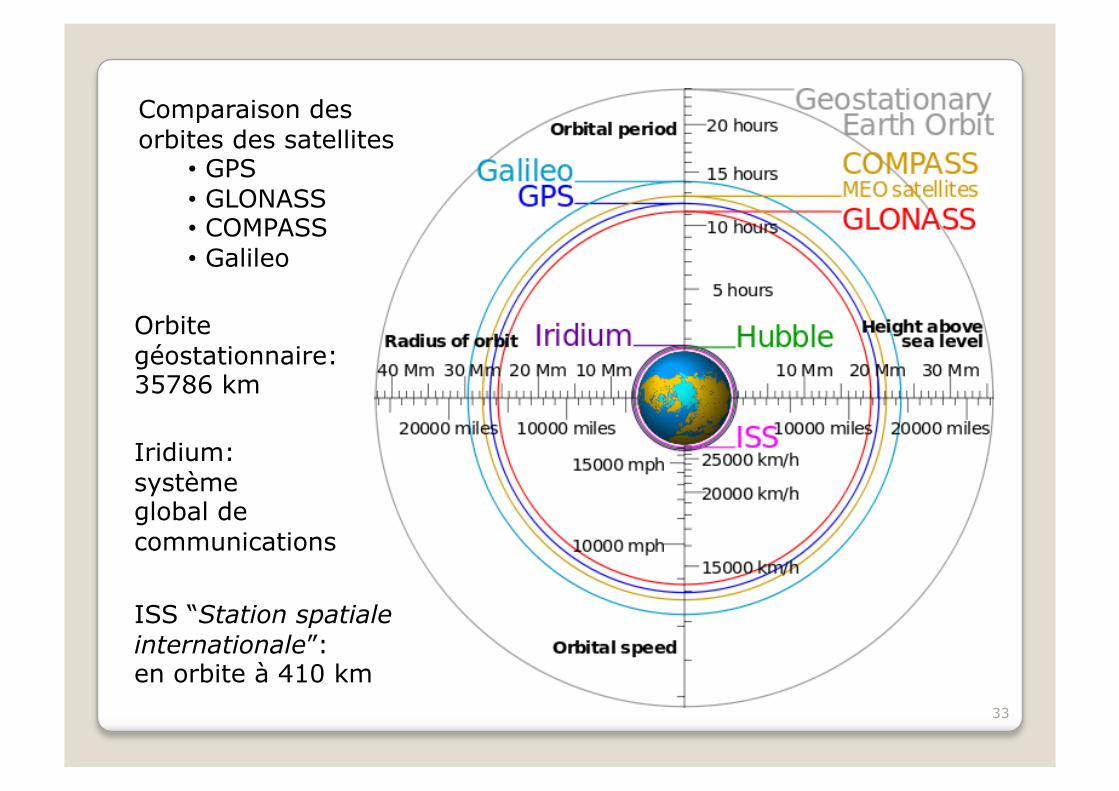
33
Comparaison des orbites des satellites
• GPS • GLONASS • COMPASS • Galileo
ISS “Station spatiale internationale”: en orbite à 410 km
Iridium: système global de communications
Orbite géostationnaire: 35786 km

34
GPS
Triangulation de satellites GPS
(Global Positioning System)
Satellite 2
Satellite 3
Satellite 1
Usager
35
GPS ! Synchronisation ◦ 0.3 m/ns : exactitude de position proportionnelle
à la mesure du temps ◦ Horloge atomique sur chaque satellite
! Mise à jour temps-réel des positions des satellites ◦ Suivi par stations au sol ◦ Station principale analyse les mesures et transmet
les positions courantes à chaque satellite ! Mesure exacte du temps-de-vol ◦ Avec 4 satellites, identification de (x, y, z) et d’un
facteur de correction de délai Δt ! GPS commerciaux ◦ Exactitude en position
" 10 m dans le plan horizontal " 45 m selon la verticale
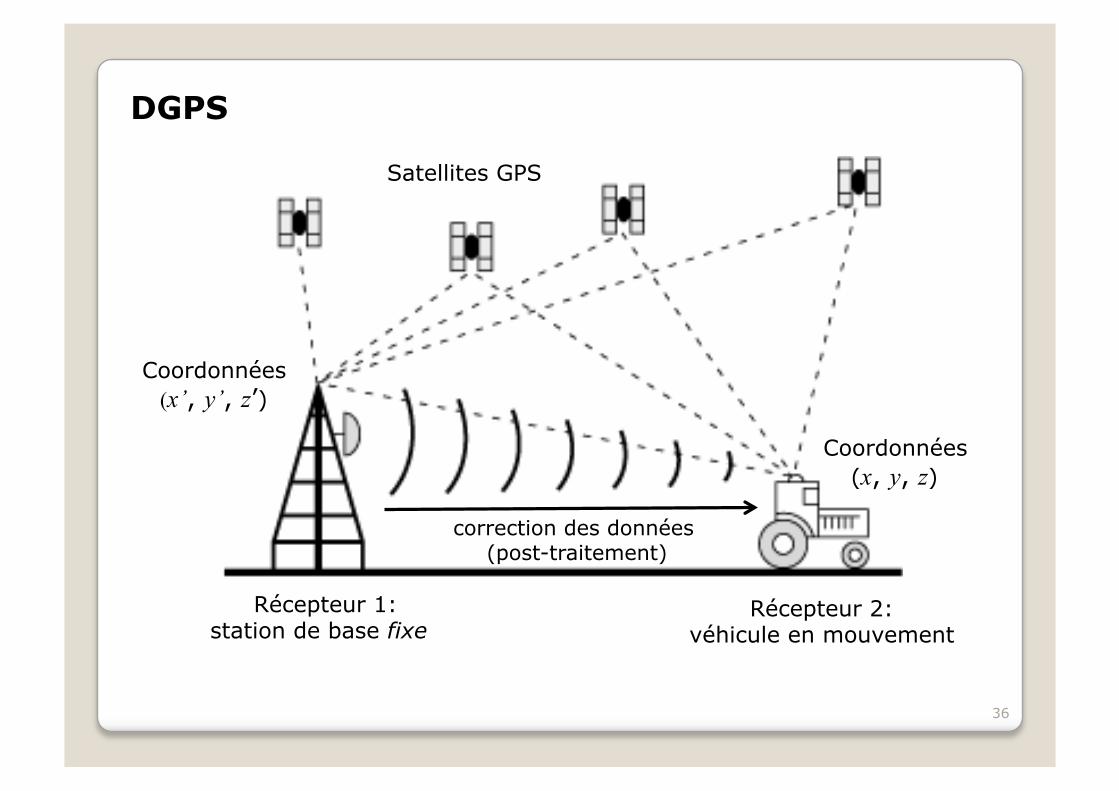
◦ Mise à jour: entre 1 et 4 Hz ! GPS différentiel (DGPS)
• Exactitude en position ~ 10 cm
(Global Positioning System)
36
DGPS
Coordonnées (x, y, z)
Coordonnées (x’, y’, z’)
Récepteur 1: station de base fixe
Récepteur 2: véhicule en mouvement
Satellites GPS
correction des données (post-traitement)

37
Capteurs temps-de-vol
! Information de distance, élément clé ◦ Évitement d’obstacle ◦ Localisation, modélisation d’environnement
! Sonars et télémètres laser ! Exploitation de la vitesse de propagation de l’onde ! Pour une onde harmonique monochromatique:
avec ◦ : vitesse de propagation de l’onde ◦ f , T : fréquence et période de l’onde, respectivement ◦ : longueur d’onde
• : distance parcourue où est le temps-de-vol
v = � f =�
T
�
v
d = v t/2 t
38
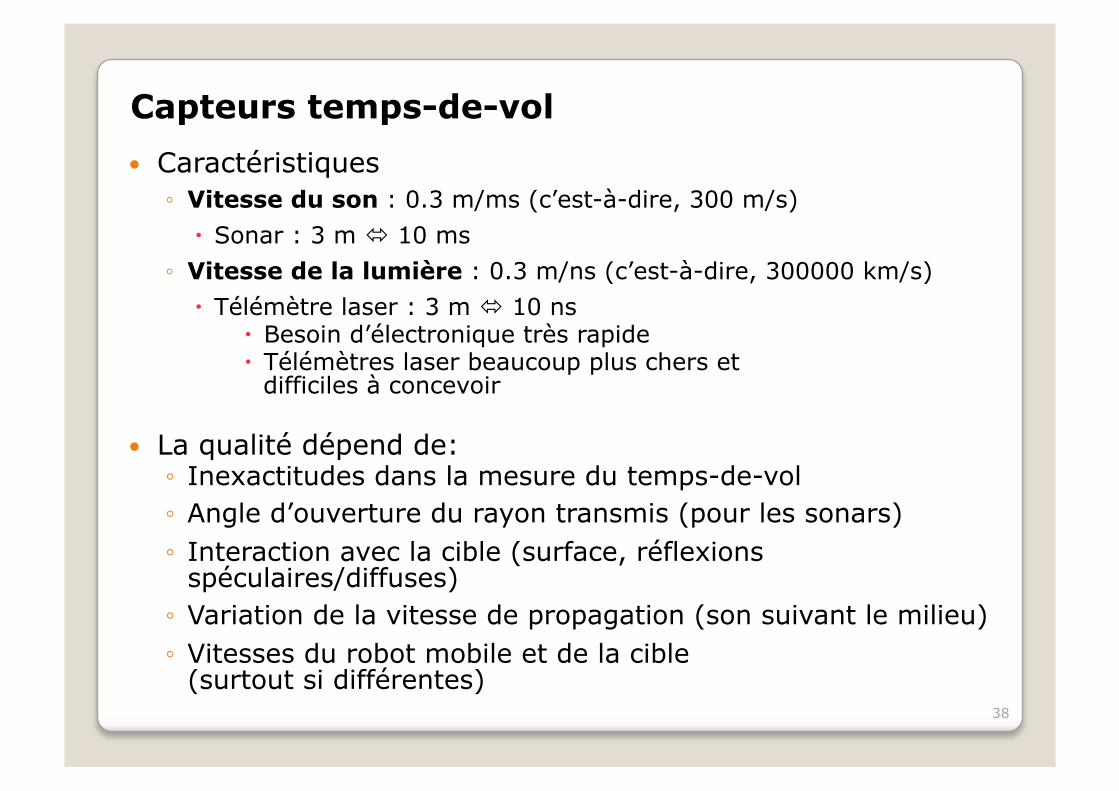
Capteurs temps-de-vol ! Caractéristiques ◦ Vitesse du son : 0.3 m/ms (c’est-à-dire, 300 m/s)
" Sonar : 3 m ! 10 ms ◦ Vitesse de la lumière : 0.3 m/ns (c’est-à-dire, 300000 km/s)
" Télémètre laser : 3 m ! 10 ns " Besoin d’électronique très rapide " Télémètres laser beaucoup plus chers et
difficiles à concevoir
! La qualité dépend de: ◦ Inexactitudes dans la mesure du temps-de-vol ◦ Angle d’ouverture du rayon transmis (pour les sonars) ◦ Interaction avec la cible (surface, réflexions
spéculaires/diffuses) ◦ Variation de la vitesse de propagation (son suivant le milieu) ◦ Vitesses du robot mobile et de la cible
(surtout si différentes)
39
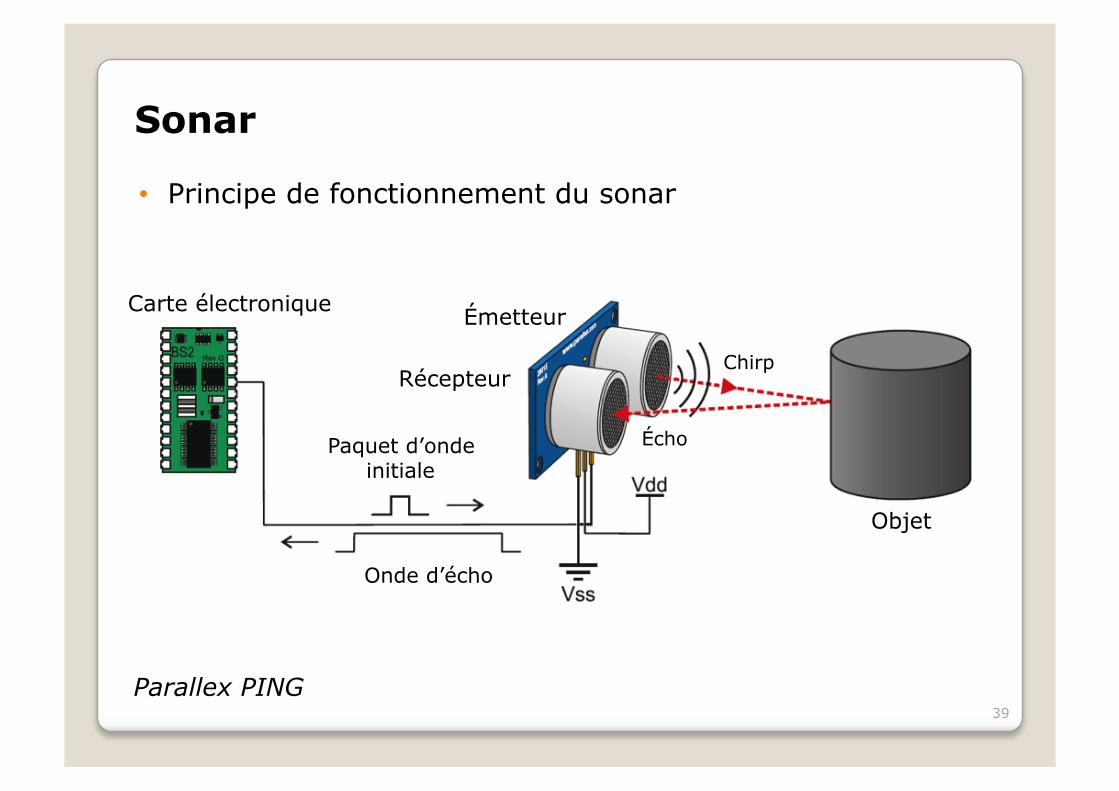
Sonar
• Principe de fonctionnement du sonar
Onde d’écho
Paquet d’onde initiale
Écho
Chirp
Objet
Récepteur
Émetteur Carte électronique
Parallex PING

40
Sonar
! Emet un paquet d’ondes d’ultrasons
! Distance de l’objet faisant écho :
! Vitesse du son :
avec ◦ : index adiabatique (1.402 pour l’air) ◦ R : constante de gaz (287.05 J kg-1 K-1 pour l’air) ◦ Tp : température du gaz en Kelvin
d =1
2v t
v =p
�RTp
E R
temps-de-vol
�

41
Sonar ! Fréquences typiques : 40-180 kHz ! Génération de l’onde sonore ◦ Piézo-transducteur ◦ Émetteur et récepteur séparés ou non
! Le rayon sonore se propage dans un cône ◦ Angles d’ouverture entre 20° et 70° ◦ Portée: 0.1 m - 5 m
41
cône de mesure
Distribution d’intensité
non uniforme
42
Sonar
42
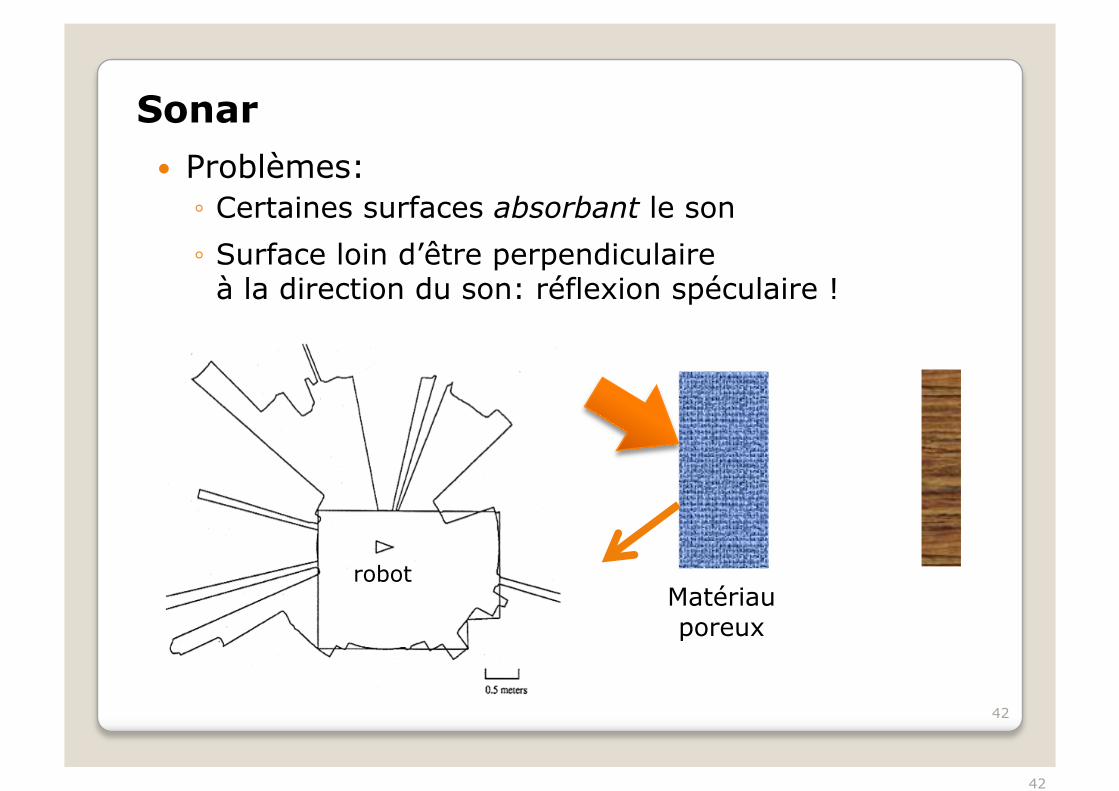
! Problèmes: ◦ Certaines surfaces absorbant le son ◦ Surface loin d’être perpendiculaire
à la direction du son: réflexion spéculaire !
robot Matériau poreux
Matériau dur
ok
porte
fenêtre
?!
0.5 metrès