etude exp´erimentale de la focalisation spatio … · ces sondes a vagues sont situ´ees a...
TRANSCRIPT

Etude experimentale de la focalisationspatio-temporelle des vagues en profondeur finie
M2 Sciences de la Matiere - Physique Hors Equilibre - ENS Lyon
Stage 2008-2009
PETITOT Kevin
Resume : Le travail effectue lors de ce stage concerne l’etude experimentale de lafocalisation spatio-temporelle des vagues en profondeur finie. Le phenomene de focali-sation spatio-temporelle est entre autres lie a la formation de vagues extremes dont lacomprehension est encore limitee a ce jour. De plus, l’impact de ce genre de vagues sur desnavires par exemple, peut causer des degats considerables. Il est donc interessant d’etudierla focalisation spatio-temporelle des vagues d’un point de vue experimental. L’objectif dece stage est de savoir s’il y a ou non un accord entre des donnees experimentales recueilliesa une petite echelle et a une grande echelle. Le rapport entre ces deux echelles etant as-socie aux lois de similitude de Froude.
Mots-cles : Vagues, mecanique des fluides, physique non-lineaire, analyse spectrale, fo-calisation spatio-temporelle, similitude de Froude, dispersion, deferlement, impact, ricker.
Stage effectue a l’Ecole Centrale de Marseille du 15/09/08 au 16/01/09 sous la directionde :
Olivier KIMMOUN
Adresse du stage : Ecole Centrale Marseille, Technopole de Chateau-Gombert 38, rueFrederic Joliot Curie, 13451 Marseille Cedex 20.

Remerciements
Je tiens a remercier toutes les personnes qui m’ont aide lors de ce stage et qui ont permis dele rendre agreable et enrichissant dans de nombreux domaines.
Je remercie tout particulierement Olivier Kimmoun, responsable de mon stage, pour m’avoiraccueilli, pour avoir suivi mon travail tout au long du stage et pour m’avoir aide concernant laprogrammation informatique sans se decourager. Il a su me donner les bons conseils pour unemeilleure approche des problemes et il m’a permis de beaucoup progresser dans de nombreuxdomaines.
Enfin, je remercie tous les chercheurs et thesards de l’Ecole Centrale de Marseille pour leurdisponibilite et leur bonne humeur.
1

Table des matieres
1 Introduction 3
2 Partie theorique 4
2.1 Generalites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.1.1 Notion de vague . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.1.2 Analyse spectrale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.2 Focalisation spatio-temporelle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.2.1 Generation de groupes de vagues dispersives . . . . . . . . . . . . . . . . . 52.2.2 Reversibilite et irreversibilite des groupes de vagues . . . . . . . . . . . . 62.2.3 Generation de vagues deferlantes . . . . . . . . . . . . . . . . . . . . . . . 9
2.3 Similitude de Froude . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3 Partie experimentale 13
3.1 Etude des signaux temporels des sondes a vagues et des spectres associes . . . . . 143.1.1 Description de l’experience . . . . . . . . . . . . . . . . . . . . . . . . . . 143.1.2 Objectifs et motivations . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.1.3 Etude des signaux temporels des sondes a vagues . . . . . . . . . . . . . . 153.1.4 Etude des spectres et des energies associees . . . . . . . . . . . . . . . . . 17
3.2 Etude des profils des surfaces libres des vagues et des deflexions . . . . . . . . . . 193.2.1 Description de l’experience . . . . . . . . . . . . . . . . . . . . . . . . . . 193.2.2 Objectifs et motivations . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223.2.3 Etude des profils des surfaces libres des vagues . . . . . . . . . . . . . . . 233.2.4 Etude des deflexions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4 Conclusion 32
A Complement sur l’analyse spectrale 33
B Complement sur le ricker 35
References 36
2

1 Introduction
Je vais presenter dans ce rapport les travaux effectues dans le cadre de mon stage de Master2 du departement des Sciences de la Matiere de l’ENS Lyon. J’ai effectue ce stage au sein del’equipe de recherche Structures Atmosphere Ocean de l’Ecole Centrale de Marseille (ECM)pendant quatre mois, de Septembre 2008 a Janvier 2009, sous la tutelle d’Olivier Kimmoun(Enseignant-Chercheur a l’ECM).
Le sujet du stage porte sur l’etude experimentale de la focalisation spatio-temporelle desvagues en profondeur finie. Tout au long de notre etude, nous travaillerons a fond constant etnous tiendrons compte de l’effet du fond. Les experiences ont ete realisees au sein du canala houle de l’ECM et s’integrent dans le cadre du projet MINISLO 2008 de l’entreprise GTT(Gaz Transport et Technigaz) dans le but d’etudier le phenomene de � sloshing �(impact) [4, 5].En mer extreme, les cuves partiellement remplies des methaniers transportant du gaz naturelliquide (GNL transporte a -174 C) peuvent subir, par effet de ballotement, des impacts auxparois importants. Ces chocs peuvent meme provoquer des deformations plastiques des paroisqu’il faut toujours eviter. L’etude des impacts de vagues est donc necessaire pour essayer decomprendre ce phenomene, mais la complexite des phenomenes rencontres dans une cuve, nousamene a elaborer un modele experimental simplifie. Nous y reviendrons au cours de la partieexperimentale de ce rapport.
Nous avons realise des experiences sur la focalisation spatio-temporelle des vagues [8] a uneechelle 1/2, que nous appellerons petite echelle, puis a une echelle 1, que nous appellerons grandeechelle. Il s’agit de savoir s’il y a ou non un accord entre les donnees experimentales recueilliesa la petite echelle et a la grande echelle.Alors que les architectes navales de l’epoque s’entendaient pour affirmer que seule l’experience surle reel pouvait donner des resultats applicables pour les problemes a surface libre, et consideraientles experiences sur les modeles comme � de gentilles petites experiences amusantes �, WilliamFroude a eu l’idee de developper des lois de similitude [1]. Grace a ces lois, des resultats ob-tenus a une echelle quelconque determinee pourront etre appliques a une echelle superieure ouinferieure en tenant compte bien sur de certains facteurs d’echelle. Ces lois servent notammenta la conception de modeles reduits et vont nous servir, par la suite, a comparer entre eux lesresultats experimentaux obtenus a la petite echelle et a la grande echelle. Nous pourrons ainsiconclure sur leur accord. Nous expliquerons ces lois de similitude de Froude au cours de la partietheorique de ce rapport.
La premiere partie du stage a consiste a savoir s’il y avait ou non un accord entre les donneesexperimentales recueillies a la petite echelle et a la grande echelle concernant les signaux tempo-rels des sondes a vagues, les spectres associes et les energies des vagues associees a ces spectres.Ces sondes a vagues sont situees a differentes positions a l’interieur du canal a houle et nousdonnent des informations sur les profils des vagues.
La deuxieme partie du stage, quant a elle, a consiste en un traitement d’images, dans le butcette fois-ci de savoir s’il y avait ou non un accord entre la petite echelle et la grande echellepour les profils des surfaces libres des vagues a differents instants (images), et au niveau desdeflexions produites sur une plaque rigide en PVC, situee dans le canal, par les vagues d’impact.En particulier, nous avons etudie les profils des surfaces libres des vagues d’impact pour nousmettre en relation avec le phenomene de � sloshing �decrit plus haut.
Ce rapport est avant tout un document technique qui retrace tout le travail effectue durantces quatre mois de stage dans un laboratoire de recherche.
3

2 Partie theorique
2.1 Generalites
2.1.1 Notion de vague
On considere un enregistrement η(t) de l’elevation de la surface libre du type represente ci-dessus. On suppose η(t) a moyenne temporelle nulle (processus centre). Cet enregistrementpresente des maximas positifs et des minimas negatifs.
Par convention, on definit une vague comme la portion de signal limitee par deux passages azero successifs en montant (zero up-crossing).Une vague est caracterisee par son amplitude a, sa hauteur crete a creux H comme etant ladistance verticale entre son plus bas minimum et son plus haut maximum, et par sa periodetemporelle T . On definit egalement la cambrure de la vague comme etant le produit ak, avec kle nombre d’onde.
Il est d’usage de reordonner les vagues par hauteurs (respectivement periodes) croissantes, etd’en eliminer une certaine fraction en commencant par les premieres. On definit ainsi des valeurs� au tiers �comme :
– H1/3 : hauteur moyenne du tiers des vagues les plus hautes– T1/3 : periode moyenne du tiers des vagues les plus longues
2.1.2 Analyse spectrale
Au signal η(t) que l’on suppose toujours centre, on associe la fonction d’autocorrelation ρ(τ)definie par :
ρ(τ) = η(t)η(t + τ)
ou la barre definie une operation de moyenne statistique. Pratiquement, la fonction d’auto-correlation est estimee par moyennage en temps (ergodicite). Le processus η(t) etant station-naire, ou du moins suppose tel, elle ne depend que de τ .
A la fonction d’autocorrelation ρ(τ), on fait correspondre la densite spectrale d’energie S(f)egale a sa transformee de Fourier :
S(f) =1
2π
∫
τρ(τ)e−2iπτfdτ
S(f) represente la repartition de l’energie des vagues dans le domaine frequentiel.La densite spectrale d’energie peut-etre egalement calculee comme etant le produit de la trans-formee de Fourier de l’elevation de la surface libre η(t) et de son conjugue :
S(f) = H(f)H(f)∗
avec
H(f) =1
2π
∫
τη(τ)e−2iπτfdτ
4

H(f) est egalement appelee fonction de transfert.
Remarque : S(f) ∝ a2.
Un spectre de vagues est defini comme etant la variation de la densite spectrale d’energie S(f)en fonction de la frequence f . Dans le cas general (houle irreguliere, aleatoire et reelle) [1, 2], unspectre de vagues a cette allure :
Ce spectre represente l’energie vehiculee par un groupe de vagues. Il est caracterise par un picprincipal associe a une frequence fp appelee frequence de pic.
Dans le cas d’un spectre etroit (∆f/fp � 1), on a HS w H1/3 w 4√
∫ +∞
0 S(f)df w 4ση, avec
HS la hauteur significative des vagues et ση l’ecart-type de l’elevation de la surface libre η (cf.annexe A).
Remarque : Pour une vague extreme (� scelerate �) [3] et dans le cas d’un spectre etroit, onaura Hmax > 2HS , c’est-a-dire Hmax > 8ση !
2.2 Focalisation spatio-temporelle
D’une facon generale, une vague focalisee est obtenue a partir d’un groupe de vagues dispersivesqui evolue dans l’espace et au cours du temps, par augmentation de la longueur d’onde, en uneseule vague ou est concentree un maximum d’energie. Cette vague focalisee peut ou non deferler.Dans notre cas, elle sera deferlante.
2.2.1 Generation de groupes de vagues dispersives
Une formule analytique issue de la theorie lineaire a ete utilisee pour creer des signaux degroupes de vagues convergentes. Cette formule a pour origine la resolution du probleme suivant :predire en d’autres points de l’espace, la forme de l’elevation de la surface libre decrite a l’originespatiale du systeme de coordonnees (x, t) par :
η(0, t) = E(t)sin(ωot) en x = 0 (1)
ou ωo, la pulsation, et E(t), l’enveloppe de cette perturbation sont definies par :
{
ωo = 2πT
E(t) = Aexp(−B2t2) avec A et B deux constantes
5

Cette perturbation est un groupe de vagues module d’enveloppe Gaussienne, mais d’autresenveloppes peuvent etre utilisees, comme nous le verrons par la suite notamment avec le ricker.Si l’on suppose que cette perturbation est infiniment longue dans la direction y et qu’elle sepropage uniquement dans la direction x, alors, une analyse de Fourier peut-etre appliquee pourpredire la forme de cette perturbation en d’autres valeurs de x.
Apres calcul du spectre de Fourier b(ω) du signal transitoire η(0, t) :
b(ω) =1
π
∫ +∞
−∞
E(t)sin(ωot)sin(ωt)dt
et en utilisant les proprietes des formules integrales de Fourier, de maniere generale, en x, nousobtenons :
η(x, t) =
∫ +∞
−∞
−b(ω)sin(kx − ωt)dω (2)
Puisque certaines hypotheses physiques ont ete posees en definissant l’integrale de Fourier b(ω)de −∞ a +∞ (qui permettent notamment a la plus part de l’energie spectrale de se propagerdans la direction x), dans le cas profondeur infinie (ω2 = gk avec g l’acceleration de la pesanteur),l’integrale (2) peut-etre evaluee et le resultat du calcul en fonction de x et de t est donne par :
{
η(x, t) = − AD1/4 e
−
[
16π2B2
g2T2D(x−gT/4π)2
]
sin
(
4π2xDgT 2 − 2πt
DT − 4B4t2xDg + 1
2tan−1
(
4B2xg
))
avec D = 1 + (16B4x2b/g
2) et xb le point de focalisation
(3)
La perturbation representee par la solution (3) se propage dans la direction x positive.Des calculs bases sur l’equation (3) montrent que le groupe arrive au point d’observation x au
bout d’un temps predit par la vitesse de groupe cg (t ∼ x/cg = 2ωox/g). Ainsi, le groupe metdeux fois plus de temps pour atteindre x que ne le mettrait une vague de pulsation ωo. De plus,puisque ce groupe est compose de nombreuses frequences differentes, ces dernieres se propagenta des vitesses inegales. Ainsi, les frequences les plus basses depassent les hautes frequences. Lesperiodes les plus grandes arrivent donc les premieres et les periodes les plus courtes arriventplus tard : les vagues se dispersent et le groupe diverge. Ce resultat analytique issu de la theorielineaire ainsi que des considerations sur la reversibilite de tels groupes divergents va nous aidera creer un groupe de vagues convergentes et par consequent, une vague deferlante dans le canal.
2.2.2 Reversibilite et irreversibilite des groupes de vagues
Si on transmet un signal specifique a un batteur, du type η(0, t), certains groupes de vaguessont generes. Il est clair que les signaux temporels de l’elevation de la surface mesures a uneposition tres proche du batteur ne seront pas exactement equivalents aux mouvements verticauximposes au batteur. Mais pour des mouvements de faibles amplitudes, on peut supposer qu’ilsle soient. Dans les autres cas, une correction peut-etre effectuee sur les signaux de generation sil’on connait la fonction de transfert du batteur. Cette correction a ete utilisee au cours de notreetude.
L’evolution des groupes de vagues de pente infinitesimale a une propriete interessante : lareversibilite. Ainsi, en injectant au batteur un signal η(0, t), on obtient au point d’observationxb, un signal η(xb, t), dont nous pouvons predire la forme analytiquement par la techniqueprecedente. Imposons maintenant au batteur, donc en x = 0, un mouvement decrit par l’equationsuivante :
η
(
xb,−(
t − xb
cg
))
ou cg est la vitesse de groupe pour ωo. Cela revient a renverser le temps de telle maniere a ceque les ondes courtes du groupe decrit par l’equation (3) soient generees avant les ondes longues.Si la propagation des ondes est purement lineaire, alors, en xb, on doit s’attendre a retrouver
6

exactement le signal η(0, t). Cela revient a injecter au batteur le signal donne par la formuleanalytique suivante :
{
η′
(0, t) = − AD1/4 e
−B2t2
D sin
(
− 64B4π2x3b
Dg3T 2 +
(
1D +
16B4x2b
Dg2
)
2πtT − 4B4xbt
2
Dg + 12 tan−1
(
4B2xbg
))
avec D = 1 + (16B4x2b/g
2)(4)
A l’aide de ce resultat theorique, on peut tester experimentalement la capacite de reversibilitetemporelle de tels groupes et donc la linearite du systeme experimental. Pour cela, il suffitd’injecter η
′
(0, t) au batteur et de comparer en xb la forme de l’elevation de la surface mesureeavec celle donnee par la formule analytique η(0, t) de l’equation (1).
Pierson, Donelan et Hui (1992) ont etudie experimentalement la reversibilite temporelle detels groupes de vagues. Leurs resultats montrent que les groupes ne sont reversibles que lorsquel’amplitude de l’excursion donnee au batteur est faible et que par consequent les effets nonlineaires restent negligeables lors de la propagation des groupes. Les figures 1, 2 et 3 illustrentces resultats.
La figure 1 montre la dispersion mesuree d’un groupe de vagues defini a l’origine x = 0 parη(0, t) = E(t)sin(ωot). Si on reinjecte au niveau du batteur un signal defini par η
(
xb,−(
t− xbcg
))
calcule en xb = 62.13 m, alors on doit s’attendre a observer en xb = 62.13 m la forme du signal−E(t)sin(ωot) observe en x = 0 sur la figure 1 en raison de la coalescence lineaire des vagues etdu principe de reversibilite.
Figure 1 – Tiree de [8]. Dispersion mesuree d’un groupe de vagues defini en x = 0 par η(0, t). [D’apres
Pierson et al. (1992)]
7

Figure 2 – Tiree de [8]. Coalescence mesuree d’un groupe de vagues defini a l’origine x = 0 par
η(
xb,−(
t − xb
cg
))
calculee en xb = 62.13 m. [D’apres Pierson et al. (1992)]
C’est effectivement le cas lorsque l’amplitude du mouvement donne au batteur est suffisamentfaible, comme le montre la figure 2. Les auteurs ont verifie que la vague la plus haute sousl’enveloppe mettait bien un temps determine par xb, confirmant par ce calcul la validite dela theorie lineaire. Cependant, meme si la similitude des elevations de surface mesurees estexcellente, elle n’est pas parfaite en raison de la faible non-linearite du systeme canal/batteur.Maintenant, si on augmente l’amplitude de la perturbation injectee par deux, le groupe n’estplus reversible et les phenomenes gagnent en non-linearite comme l’illustre la figure 3.
Figure 3 – Tiree de [8]. Coalescence mesuree d’un groupe defini en x = 0 de la meme maniere que
dans le cas de la figure 2, excepte que dans ce cas, l’amplitude initiale a ete doublee. [D’apres Pierson et
al. (1992)]
Dans ce cas, le signal mesure en x = 62.13 m n’est plus identique a celui injecte en x = 0m visible sur la figure 1. L’elevation de la surface montre une vague tres cambree qui deferleentre x = 62.13 m et x = 80.2 m. Ce phenomene peut s’expliquer par un taux de croissance del’amplitude de l’enveloppe du groupe beaucoup plus important au point de coalescence dans lescas de fortes amplitudes initiales que dans les cas de faibles amplitudes initiales. Par consequent,les effets non lineaires deviennent de plus en plus prononces. Cependant, cette forte non-linearite
8

est locale et la vague deferlante observee est reproductible spatialement et temporellement avecune bonne precision.La vague la plus haute du groupe croıt en amplitude de 12 cm en x = 21.47 m jusqu’a 30 cmen x = 62.13 m sur une duree de 30 s. Une similitude d’echelles effectuee avec un nombre deFroude dont l’echelle temporelle caracteristique est multipliee par 10 conduit a des augmentationsd’amplitude de l’ordre de 12 m a 30 m en 5 minutes. L’apparition soudaine de telles vagues treshautes a ete constatee en mer (Draper, (1964) ; Buckley, (1990)). Cette technique peut donc etreutilisee pour creer des deferlements instationnaires a une position predeterminee dans le canalet modelisant des processus naturels observes en mer.
2.2.3 Generation de vagues deferlantes
Le groupe de vagues defini par l’equation suivante :
η(0, t) = Aexp(−B2t2)sin(ωot) en x = 0
evolue de la maniere illustree par la figure 4 pour A = 1, T = 1.5 s et lorsque B prend desvaleurs variant de 1/20 a 6s−1.
Figure 4 – Tiree de [8]. Effet du parametre B de l’enveloppe sur la forme du groupe η(0, t).
Ainsi, plus B est grand a T fixee, moins il y a de vagues a l’interieur de l’enveloppe Gaussienneet moins le groupe est module. Cette propriete est interessante puisque la construction precedentedes groupes produira une unique vague au point de coalescence (focalisation) xb. Ainsi, si oneffectue le calcul analytique d’inversion temporelle donne precedemment par la formule (4), avecA = 1, T = 1.5 s et B = 6s−1, on obtient le schema de propagation theorique du groupe illustrepar la figure 5 pour un point de convergence theorique fixe pour exemple a xlineaire
b = 3.55 m.
9

Figure 5 – Tiree de [8]. Coalescence theorique du groupe de vagues d’equation η′
(0, t) avec A = 1,
T = 1.5 s et B = 6s−1.
D’apres les resultats de Pierson et al.(1992) detailles precedemment, ce resultat ne sera obtenuexperimentalement que dans des cas de faibles amplitudes donnees au groupe. Pour de fortesamplitudes, la position de coalescence reelle du groupe et donc du deferlement, denotee xreel
b ,sera differente du point de convergence predit par la theorie lineaire. En effet, dans ces cas, legroupe evoluera de maniere non-lineaire a l’approche du point de convergence.
D’un point de vue experimental, on realise la focalisation spatio-temporelle au sein d’un canala houle muni d’un batteur a piston ou a volet. Dans notre cas, le batteur sera de type volet.Sur les premiers instants de l’experience, le batteur va generer, a haute frequence, des ondescourtes (longueurs d’ondes et amplitudes faibles), de faibles vitesses. Au fur et a mesure que lalongueur d’onde va augmenter, le batteur va generer, a basse frequence, des ondes de plus enplus longues (longueurs d’ondes et amplitudes de plus en plus grandes), qui verront leur vitessecroıtre de plus en plus dans l’espace et au cours du temps. Par consequent, ces ondes longues degrandes vitesses vont au fur et a mesure rattraper les ondes courtes de faibles vitesses, genereesprecedemment, pour se rejoindre en un seul point a un instant t. Ce point ou toutes les ondesgenerees par le batteur se rejoignent est appele point de focalisation. En ce point, on obtient uneseule vague, appelee vague focalisee, qui peut-etre de tres grande amplitude et dont son energieest concentree dans une petite zone autour de ce point.Comme nous nous servons de la difference des vitesses des ondes generees par le batteur, c’est-a-dire du caractere dispersif des ondes, la focalisation spatio-temporelle est aussi appelee foca-lisation dispersive.La figure 6 resume ce qui a ete dit precedemment.
10

Figure 6 – Le cadre du haut est tire de [4]. Il represente, au cours de trois instants differents, les etapes
principales de la generation d’une vague focalisee, au sein d’un canal a houle, par focalisation spatio-
temporelle. ηmax etant l’elevation de la surface libre maximale, h la hauteur d’eau et c la celerite des
ondes. La position du point de focalisation sur l’axe des x est reperee par les pointilles. Le cadre du bas
represente le signal genere par le batteur. De haut en bas et de gauche a droite respectivement : variation
de l’angle, de l’acceleration, de la vitesse et de l’elevation de la surface libre du batteur en fonction du
temps. Xmax, Vmax et amax sont respectivement l’avancement, la vitesse et l’acceleration maximale du
verin qui actionne le batteur.
La figure 7, egalement tiree de [4], quant a elle, represente la propagation de l’energie d’ungroupe de vagues dans un diagramme x-t, via la vitesse de groupe cg. On peut voir que le batteurcommence a operer au temps tbegin et s’arrete au temps tlast.
11

Figure 7 – Focalisation de l’energie. Le groupe de vagues genere par le batteur est situe dans la zone
sombre du diagramme x-t.
2.3 Similitude de Froude
Le nombre de Froude Fr est un nombre sans dimension defini par :
Fr =V√gL
avec V une vitesse caracteristique et L une longueur caracteristique. Ce nombre peut traduirele rapport entre les forces d’inertie et les forces de gravite. Au cours de notre etude, noustravaillerons a Froude constant.
La similitude de Froude s’applique aux problemes ou les phenomenes de gravite sontpreponderants, comme les problemes a surface libre.
Dans notre cas, la similitude de Froude entre la petite echelle 1/2 et la grande echelle 1 nousamene a ecrire :
F per = F ge
r
ou F per et F ge
r sont respectivement les nombres de Froude de la petite echelle et de la grandeechelle.
A partir de cette similitude, nous pouvons definir respectivement le facteur d’echelle des lon-gueurs et des temps par α et
√α, tels que : α = Lge
Lpe et√
α = T ge
T pe ou Lpe, Lge, T pe et T ge sontrespectivement les longueurs et les temps caracteristiques de la petite echelle et de la grandeechelle.
Les forces etant difficiles a evaluer dans notre etude, nous nous contenterons de definir lefacteur d’echelle des forces par α2, tel que :
α2∝
F ge
F pe
ou F pe et F ge sont respectivement les forces caracteristiques de la petite echelle et de la grandeechelle.
Dans notre cas, α = 2. Pour appliquer par la suite les resultats experimentaux de la petiteechelle a la grande echelle, il faudra donc multiplier les longueurs par 2, les temps par
√2 et les
forces exercees sur une surface (forces de pression) par 4.
12
3 Partie experimentale
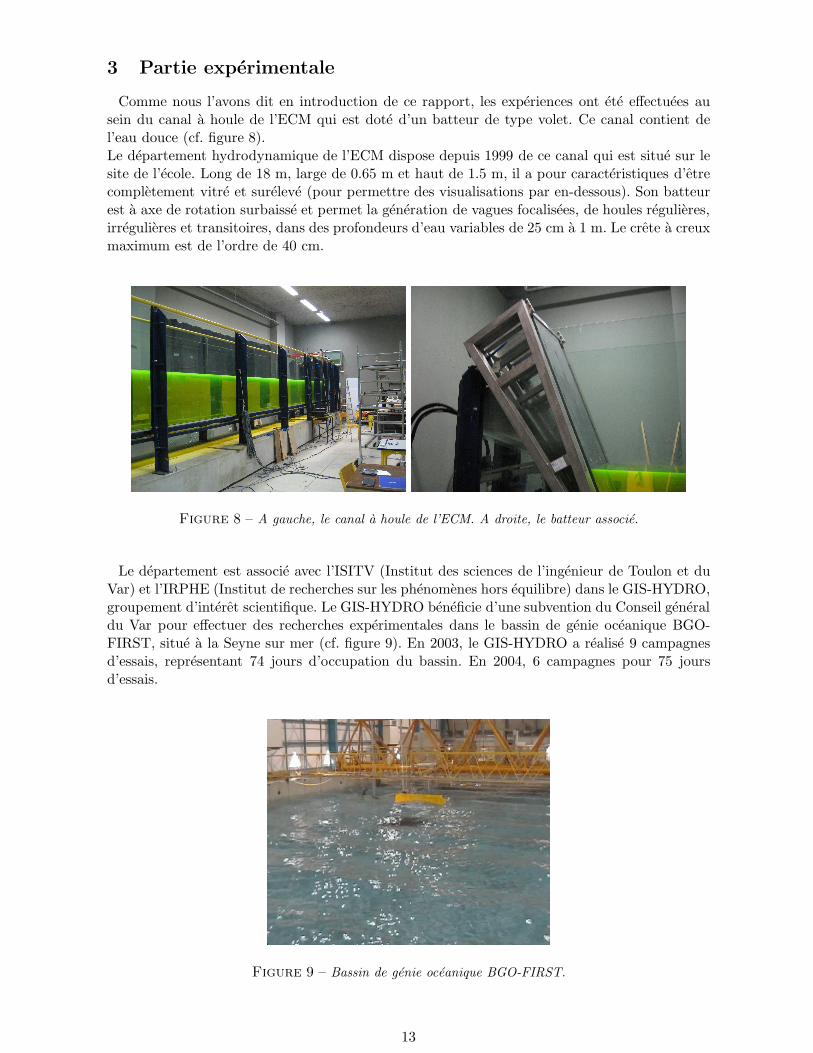
Comme nous l’avons dit en introduction de ce rapport, les experiences ont ete effectuees ausein du canal a houle de l’ECM qui est dote d’un batteur de type volet. Ce canal contient del’eau douce (cf. figure 8).Le departement hydrodynamique de l’ECM dispose depuis 1999 de ce canal qui est situe sur lesite de l’ecole. Long de 18 m, large de 0.65 m et haut de 1.5 m, il a pour caracteristiques d’etrecompletement vitre et sureleve (pour permettre des visualisations par en-dessous). Son batteurest a axe de rotation surbaisse et permet la generation de vagues focalisees, de houles regulieres,irregulieres et transitoires, dans des profondeurs d’eau variables de 25 cm a 1 m. Le crete a creuxmaximum est de l’ordre de 40 cm.
Figure 8 – A gauche, le canal a houle de l’ECM. A droite, le batteur associe.
Le departement est associe avec l’ISITV (Institut des sciences de l’ingenieur de Toulon et duVar) et l’IRPHE (Institut de recherches sur les phenomenes hors equilibre) dans le GIS-HYDRO,groupement d’interet scientifique. Le GIS-HYDRO beneficie d’une subvention du Conseil generaldu Var pour effectuer des recherches experimentales dans le bassin de genie oceanique BGO-FIRST, situe a la Seyne sur mer (cf. figure 9). En 2003, le GIS-HYDRO a realise 9 campagnesd’essais, representant 74 jours d’occupation du bassin. En 2004, 6 campagnes pour 75 joursd’essais.
Figure 9 – Bassin de genie oceanique BGO-FIRST.
13
L’etude se scinde en une partie experimentale dont j’etais en charge et une partie numeriquea la charge de mon maıtre de stage. La partie numerique comprends la generation du signalbatteur a partir du spectre et la simulation de l’essai avec un code de type Boussinesq [6, 7]. Lecode Boussinesq est un code numerique non-lineaire. Les hypotheses sont :
– fluide parfait incompressible pour un ecoulement irrotationnel– variations verticales du potentiel scalaire des vitesses approximees par un polynome (dans
notre cas d’ordre 9)
Les fichiers batteurs sont inseres dans le logiciel PITALUGUE d’un ordinateur qui commandele batteur du canal. Le nom des fichiers fait apparaıtre l’amplitude theorique a′ en mm du signalgenere par le batteur, sa distance de focalisation xb en m et la profondeur d’eau du canal h enm.
Pour la propagation des ondes du spectre, on utilise la relation de dispersion lineaire des vaguesen profondeur finie : ω2 = gktanh(kh) et on neglige l’effet de la tension superficielle de l’eau.
Remarque : Avant chaque manipulation, pour limiter les incertitudes sur nos resultatsexperimentaux, nous avons realise un essai a vide, de facon a mettre en chauffe la centralehydraulique du batteur. Nous avons egalement realise plusieurs fois les memes types d’essaispour s’assurer de la bonne repetabilite des essais entre eux.
3.1 Etude des signaux temporels des sondes a vagues et des spectres associes
Cette partie du rapport de stage constitue la premiere partie de mon travail effectue.
3.1.1 Description de l’experience
Dans un premier temps, nous nous sommes interesses a la petite echelle 1/2. Pour respectercette echelle, la moitie du canal a ete utilisee dans le sens de sa longueur et une plaque rigideen PVC, d’epaisseur 1.5 cm et faisant office de mur, a ete placee et collee dans le canal ax = 8.38 m. La profondeur d’eau du canal etait h = 0.35 m. Les sondes a vagues 1, 2, 3, 4, 5et 6 ont ete placees respectivement a x = 0.835 m, x = 6.545 m, x = 6.915 m, x = 7.479 m,x = 7.765 m et x = 8.115 m. Les donnees experimentales recueillies ont ete echantillonnees parune frequence d’echantillonnage fe = 200 Hz et la frequence du pic principal du spectre utilisepour la commande du batteur etait fp = 0.54 Hz.
Dans un deuxieme temps, nous nous sommes interesses a la grande echelle 1. Pour respectercette echelle et la similitude de Froude entre les deux echelles, toute la longueur du canal a eteutilisee et le mur correspondant a la fin du canal etait situe a x = 16.77 m. La profondeur d’eaudu canal etait h = 0.70 m. Les sondes a vagues 1, 2, 3, 4, 5 et 6 ont ete placees respectivement ax = 1.68 m, x = 13.10 m, x = 13.84 m, x = 14.97 m, x = 15.54 m et x = 16.24 m. La frequenced’echantillonnage, quant a elle, n’a pas change, elle est toujours de 200 Hz et la frequence dupic principal du spectre utilise pour la commande du batteur etait fp = 0.54/
√2 = 0.38 Hz.
Pour cette premiere partie, nous disposions d’un signal batteur utilise pour une campagneexperimentale SLOSHEL realisee dans le bassin de MARIN (societe hollandaise). Ce bassinpossede un batteur de type piston. Pour pouvoir l’adapter a notre batteur, l’elevation theoriqueau droit du batteur a ete calculee en simulant le bassin hollandais avec un code potentiel linearise.Ceci nous a permis de recuperer l’elevation de la surface libre a x = 0 : η(0, t), c’est-a-dire auniveau du batteur.
La figure 10 nous montre le type de signal batteur utilise et son spectre associe pour larealisation des essais a la petite echelle.
14
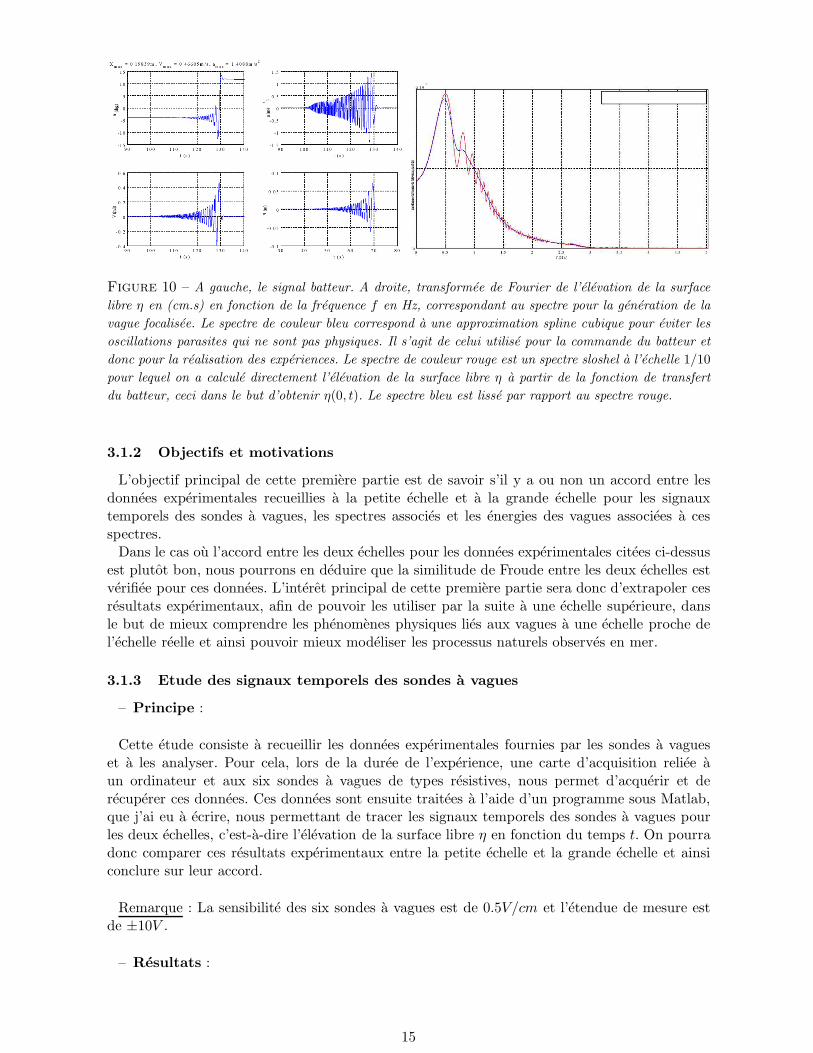
Figure 10 – A gauche, le signal batteur. A droite, transformee de Fourier de l’elevation de la surface
libre η en (cm.s) en fonction de la frequence f en Hz, correspondant au spectre pour la generation de la
vague focalisee. Le spectre de couleur bleu correspond a une approximation spline cubique pour eviter les
oscillations parasites qui ne sont pas physiques. Il s’agit de celui utilise pour la commande du batteur et
donc pour la realisation des experiences. Le spectre de couleur rouge est un spectre sloshel a l’echelle 1/10
pour lequel on a calcule directement l’elevation de la surface libre η a partir de la fonction de transfert
du batteur, ceci dans le but d’obtenir η(0, t). Le spectre bleu est lisse par rapport au spectre rouge.
3.1.2 Objectifs et motivations
L’objectif principal de cette premiere partie est de savoir s’il y a ou non un accord entre lesdonnees experimentales recueillies a la petite echelle et a la grande echelle pour les signauxtemporels des sondes a vagues, les spectres associes et les energies des vagues associees a cesspectres.
Dans le cas ou l’accord entre les deux echelles pour les donnees experimentales citees ci-dessusest plutot bon, nous pourrons en deduire que la similitude de Froude entre les deux echelles estverifiee pour ces donnees. L’interet principal de cette premiere partie sera donc d’extrapoler cesresultats experimentaux, afin de pouvoir les utiliser par la suite a une echelle superieure, dansle but de mieux comprendre les phenomenes physiques lies aux vagues a une echelle proche del’echelle reelle et ainsi pouvoir mieux modeliser les processus naturels observes en mer.
3.1.3 Etude des signaux temporels des sondes a vagues
– Principe :
Cette etude consiste a recueillir les donnees experimentales fournies par les sondes a vagueset a les analyser. Pour cela, lors de la duree de l’experience, une carte d’acquisition reliee aun ordinateur et aux six sondes a vagues de types resistives, nous permet d’acquerir et derecuperer ces donnees. Ces donnees sont ensuite traitees a l’aide d’un programme sous Matlab,que j’ai eu a ecrire, nous permettant de tracer les signaux temporels des sondes a vagues pourles deux echelles, c’est-a-dire l’elevation de la surface libre η en fonction du temps t. On pourradonc comparer ces resultats experimentaux entre la petite echelle et la grande echelle et ainsiconclure sur leur accord.
Remarque : La sensibilite des six sondes a vagues est de 0.5V/cm et l’etendue de mesure estde ±10V .
– Resultats :
15

65 70 75 80 85 90 95 100 105 110−10
−5
0
5
10
15
t (s)
η (c
m)
95 100 105 110
−15
−10
−5
0
5
10
15
20
25
30
t (s)
η (c
m)
95 100 105 110
−15
−10
−5
0
5
10
15
20
25
30
t (s)
η (c
m)
95 100 105 110
−15
−10
−5
0
5
10
15
20
25
30
t (s)
η (c
m)
Figure 11 – Variation de l’elevation de la surface libre η en cm en fonction du temps t en s pour
quatre sondes a vagues. De haut en bas et de gauche a droite respectivement : sondes 1, 2, 5 et 6. En
rouge : essai a la petite echelle : a′ = 96 mm, xb = 7.80 m et h = 0.35 m. En bleu : essai a la grande
echelle : a′ = 152 mm, xb = 15.69 m et h = 0.70 m. Les signaux temporels de la petite echelle et de la
grande echelle sont compares entre eux. Pour la comparaison, le signal temporel de la petite echelle a ete
converti a la grande echelle, via la similitude de Froude entre les deux echelles. Nous avons donc utilise
le facteur d’echelle des longueurs pour η et des temps pour t. Ces signaux ont ete filtres pour eliminer
le bruit eventuel. Le filtre utilise etait un filtre passe-bas de Butterworth avec une frequence de coupure
fc = 7fp.
– Interpretations :
D’une facon generale, on remarque que l’accord entre les deux echelles est plutot bon pour lessignaux temporels des sondes a vagues etudiees. Les faibles ecarts observes pour les sondes 1,2, 5 et 6 au niveau de η et de t sont principalement dus aux non linearites de la fonction detransfert du batteur.
Nous pouvons en conclure qu’il y a bien un accord entre la petite echelle et la grande echellepour les signaux temporels des sondes a vagues etudiees. La similitude de Froude entre les deuxechelles est donc verifiee pour ces donnees.
Apres avoir etudie les signaux temporels des sondes a vagues, nous allons voir maintenant cequ’il en est au niveau des spectres et des energies associees.
16

3.1.4 Etude des spectres et des energies associees
– Principe :
Cette etude consiste a tracer les spectres des sondes a vagues etudiees precedemment et acalculer les energies associees. Pour cela, j’ai eu a developper un programme sous Matlab nouspermettant de tracer les spectres, et les energies associees ont ete calculees a l’aide de la methodedes trapezes, egalement sous Matlab. Deux methodes ont ete utilisees pour tracer ces spectres.La premiere methode a consiste a tracer la densite spectrale d’energie S(f) en fonction de lafrequence f , autrement dit, le spectre en puissance ou en energie. Cette methode est basee surun moyennage des donnees lors du calcul du spectre et est adaptee pour des enregistrementstemporels longs. On a remarque quelques petits problemes au niveau de l’allure des spectresen utilisant cette methode. Notre duree d’enregistrement lors des experiences etant de troisminutes environ, il convient donc d’utiliser une deuxieme methode de representation de spectresadaptee pour des enregistrements temporels courts. Contrairement a la methode precedente,cette deuxieme methode n’utilise pas de moyennage des donnees experimentales lors du calculdu spectre. Elle a consiste a tracer, via la methode de FFT sous Matlab, la transformee deFourier (TF) de l’elevation de la surface libre η en fonction de la frequence f , c’est-a-dire lespectre en amplitude. Pour chaque frequence, cette deuxieme methode calcule la TF de η, etnous pouvons choisir l’intervalle de frequence ∆f que nous voulons sur le signal a analyser. Enutilisant cette methode, l’allure des spectres s’est amelioree et ainsi, par la suite, nous avons doncutilise cette deuxieme methode pour tracer les spectres des sondes a vagues aux deux echelles.On pourra donc comparer ces resultats experimentaux entre la petite echelle et la grande echelle,et par consequent conclure sur leur accord.
Remarque : Concernant le calcul des energies des vagues associees a ces differents spectres,nous avons calcule, pour chaque sonde etudiee, l’aire sous le spectre, puis nous avons eleve aucarre la valeur de cette aire. Ces valeurs d’energies sont numeriques, exprimees en cm2 et noteesE. En effet, E ∝ |
∫ +∞
0 TF (η)df |2. Dans notre cas, nous avons utilise la formule suivante pour
le calcul des energies : E = |∫ +∞
0 TF (η)df |2.
– Resultats :
Au vue des resultats de la figure 12, concernant le spectre associe a la sonde 1, qui corresponda une bonne approximation au spectre du batteur, nous obtenons f exp
p = 0.40 Hz pour les deuxechelles. Cette valeur a ete determinee graphiquement sur ce spectre. Elle est donc a comparera la valeur theorique precedente de la grande echelle : f the
p = 0.38 Hz. L’ecart relatif entre cesdeux valeurs est de l’ordre de 5%.
Le tableau suivant nous montre les valeurs des energies obtenues a la petite echelle et a lagrande echelle pour les quatre sondes a vagues etudiees, ainsi que les ecarts relatifs associes.Emoy etant la moyenne arithmetique de E entre les deux echelles et pour chacune des quatresondes a vagues.
17

Sonde Petite echelle Grande echelle Ecart relatif δEEmoy
en %
1 E = 22.92cm2 E = 22.40cm2 2
2 E = 24.15cm2 E = 28.71cm2 17
5 E = 30.40cm2 E = 33.35cm2 9
6 E = 34.48cm2 E = 34.81cm2 1
0 0.5 1 1.5 2 2.5 3 3.50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
f (Hz)
TF
(η)
(cm
.s)
0 0.5 1 1.5 2 2.5 3 3.50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
f (Hz)
TF
(η)
(cm
.s)
0 0.5 1 1.5 2 2.5 3 3.50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
f (Hz)
TF
(η)
(cm
.s)
0 0.5 1 1.5 2 2.5 3 3.50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
f (Hz)
TF
(η)
(cm
.s)
Figure 12 – Transformee de Fourier de l’elevation de la surface libre η en (cm.s) en fonction de la
frequence f en Hz pour quatre sondes a vagues. De haut en bas et de gauche a droite respectivement :
sondes 1, 2, 5 et 6. En rouge : essai a la petite echelle : a′ = 96 mm, xb = 7.80 m et h = 0.35 m. En bleu :
essai a la grande echelle : a′ = 152 mm, xb = 15.69 m et h = 0.70 m. Les spectres de la petite echelle
et de la grande echelle sont compares entre eux. Pour la comparaison, le spectre de la petite echelle a ete
converti a la grande echelle, via la similitude de Froude entre les deux echelles. Nous avons donc utilise
le facteur d’echelle des longueurs et des temps pour TF (η), et l’inverse du facteur d’echelle des temps
pour f . Ces spectres ont ete filtres pour eliminer le bruit eventuel.
– Interpretations :
Comme pour les signaux temporels des sondes a vagues, on constate, d’une facon generale,que l’accord entre les deux echelles est plutot satisfaisant pour les spectres des sondes a vagues
18

etudiees. Les ecarts observes pour les sondes 1, 2, 5 et 6 au niveau de TF (η) et de f sontaussi dus principalement aux non linearites de la fonction de transfert du batteur. Une autresource possible de desaccords pour ces resultats concerne la methode utilisee pour calculer ettracer ces spectres. En effet, le fait que cette methode n’utilise pas de moyennage des donneesexperimentales lors du calcul des spectres peut-etre egalement responsable des ecarts observessur les differents spectres.
Au niveau des frequences experimentales et theoriques du pic principal du spectre associe ala sonde 1, la faiblesse de l’ecart relatif determine precedemment entre ces deux valeurs nouspermet de dire que l’accord entre f exp
p et f thep est bon.
Dans l’ensemble, les ecarts relatifs observes au niveau des energies des vagues associees auxspectres des sondes a vagues etudiees sont assez faibles. Par consequent, nous pouvons en deduireque l’accord entre les deux echelles est correct pour les energies des vagues associees aux differentsspectres etudies. On remarque tout de meme un ecart relatif plus prononce pour les sondes2 et 5. Les sources possibles d’incertitudes ont ete evoquees precedemment. Au vue de cesvaleurs d’energies, le plus frappant est que l’energie des vagues ne se conserve pas de la sonde1 a la sonde 6 pour les deux echelles, alors que normalement, elle devrait se conserver, caril n’y a pas d’apport d’energie exterieur autre que celui fourni par le batteur. En effet, onconstate que E augmente de la sonde 1 a la sonde 6 pour les deux echelles. Il y a donc creationd’energie. Cette creation d’energie peut s’expliquer par le fait que lors de l’acquisition des donneesdurant les premiers instants de l’experience, le mouvement du batteur peut-etre a l’origine d’unevariation de la profondeur d’eau du canal, ce qui a pour effet de creer de l’energie a bassefrequence dans le spectre. Les reflexions des ondes sur le mur peuvent aussi expliquer cettecreation d’energie. Bien sur, ces reflexions ne peuvent pas etre supprimees experimentalement.Par contre, numeriquement, nous pourrions y remedier en simulant un canal infiniment longdans le sens de sa longueur et de sa largeur, ce qui aurait pour effet de negliger les effets debords.
En conclusion de cette premiere partie de mon travail effectue, nous pouvons dire que l’accordentre la petite echelle et la grande echelle est satisfaisant pour les signaux temporels des sondesa vagues, les spectres des sondes a vagues et les energies des vagues associees a ces spectres. Lasimilitude de Froude est ainsi verifiee entre les deux echelles pour ces donnees.
Apres avoir etudie cette premiere partie, nous allons maintenant etudier la seconde partie demon travail effectue qui concerne le traitement d’images.
3.2 Etude des profils des surfaces libres des vagues et des deflexions
Cette partie du rapport de stage constitue la deuxieme partie de mon travail effectue.
3.2.1 Description de l’experience
Pour cette nouvelle experience, nous avons mis de la fluoresceine a l’interieur du canal. Cecolorant est excite par une source d’ions laser (458-514 nm) (cf. figure 13, image de gauche).L’eclairage laser se compose d’une source et d’une fibre optique munie a son extremite d’unelentille permettant d’obtenir une tranche laser. La tranche eclairee est situee au niveau de laplaque, longitudinalement a la vitre et a quelques centimetres de celle-ci. Cette technique vadonc nous permettre de reperer les surfaces libres des vagues lors des manipulations.
Pour l’etude des deflexions, une plaque rigide en PVC, d’epaisseur 1.5 cm et faisant office demur, a ete placee et collee au sein du canal. Un proximetre laser, situe derriere la plaque et au
19

niveau de l’impact sur cette plaque, va nous permettre de mesurer les deflexions (µm) produitespar les vagues d’impact.
Une camera rapide, de marque PHANTOM, va nous permettre de realiser et d’enregistrer unfilm pour chaque essai effectue, representant l’evolution de la vague focalisee quelques instantsavant l’impact et au moment de l’impact. Dans notre cas, la frequence sera fixee a 1000 images/s.Suivant les essais experimentaux realises, les films seront constitues de 500 a 2000 images environ.
La sonde a vague 6 est reliee a une centrale d’acquisition (cf. figure 13, image de droite).Cette centrale genere un signal TTL permettant de declencher l’acquisition camera. Ce signalest declenche par un seuil de la sonde 6 (8 V w 16 cm). L’enregistrement des images de la cameras’effectue sur un ordinateur dedie a cet effet. Enfin, une regle graduee, collee sur une des vitreslaterales du canal, nous permettra, entre autres, d’obtenir des informations sur l’amplitude dela vague focalisee.
Figure 13 – A gauche, le coupleur a fibre optique. A droite, la centrale d’acquisition.
Concernant la petite echelle 1/2. La plaque rigide en PVC a ete placee et collee dans le canala x = 7.75 m. La profondeur d’eau du canal etait h = 0.35 m. Les sondes 1, 2, 3, 4, 5 et6 ont ete placees respectivement a x = 0.85 m, x = 6.425 m, x = 6.605 m, x = 6.785 m,x = 7.35 m et x = 7.65 m. Les donnees experimentales recueillies ont ete echantillonnees parune frequence d’echantillonnage fe = 200 Hz et la frequence du pic principal du spectre utilisepour la commande du batteur etait fp = 0.54 Hz.
Concernant la grande echelle 1. La plaque rigide en PVC a ete placee et collee dans le canal ax = 15.50 m. La profondeur d’eau du canal etait h = 0.70 m. Les sondes 1, 2, 3, 4, 5 et 6 ontete placees respectivement a x = 1.7 m, x = 12.85 m, x = 13.21 m, x = 13.57 m, x = 14.7 met x = 15.30 m. La frequence d’echantillonnage, quant a elle, n’a pas change, elle est toujoursde 200 Hz et la frequence du pic principal du spectre utilise pour la commande du batteur etaitfp = 0.38 Hz.
20

Figure 14 – A gauche, dispositif experimental de la petite echelle. A droite, dispositif experimental de
la grande echelle.
Cette experience a comporte plusieurs etapes.
Tout d’abord, nous nous sommes places a la petite echelle. Nous avons realise plusieurs essaisdans le but d’avoir une idee du profil de la surface libre de la vague qui produira l’impactle plus fort sur la plaque. Pour cela, deux series d’essais ont ete realisees. Une premiere seried’essais concernee ceux pour lesquels on imposait la commande du batteur dans un code potentiellineaire avec un batteur de type piston. Une deuxieme serie d’essais concernee ceux pour lesquelson calculait directement l’elevation de la surface libre η a partir de la fonction de transfertd’un batteur piston (essais de type sloshel). Ces deux series d’essais ayant pour point commund’obtenir η(0, t). Pour chacune des deux series d’essais, l’analyse des films des essais realises, al’aide d’une premiere methode de traitement d’images que nous decrirons par la suite, nous apermis de reperer et de selectionner les essais que nous trouvions les plus interessants a etudier.Nous avons ensuite compare ces essais entre eux au niveau du profil de la surface libre de lavague aux instants de la focalisation et de l’impact, et au niveau de la deflexion produite par lavague d’impact. Cette comparaison nous a donc permis de garder, pour chacune des deux seriesd’essais, l’essai dont le profil de la surface libre de la vague correspondait a notre but. Cettepremiere etape etait assez qualitative et topologique.
La deuxieme etape a consiste a comparer entre les deux echelles, pour les essais de type sloshel,les profils des surfaces libres des vagues a differents pas de temps et les deflexions produites parles vagues d’impact sur la plaque. Ceci dans le but de savoir s’il y avait ou non un accord entrela petite echelle et la grande echelle pour ces donnees. Concernant les profils des surfaces libresdes vagues, contrairement a la premiere etape, nous avons utilise une deuxieme methode detraitement d’images que nous decrirons egalement par la suite.
La troisieme et derniere etape a consiste, quant a elle, a faire la meme demarche que la deuxiemeetape, mais pour des essais de type ricker. Nous pourrons donc, par la suite, savoir lequel de cesdeux types d’essais (sloshel ou ricker), donne les meilleurs resultats concernant l’accord entre lesdeux echelles.
Les figures 15 et 16 illustrent la comparaison entre les essais de type sloshel et ricker au niveaude leur spectre, de leur onde focalisee, de leur signal batteur et au niveau de l’elevation de lasurface libre au niveau du batteur.
21
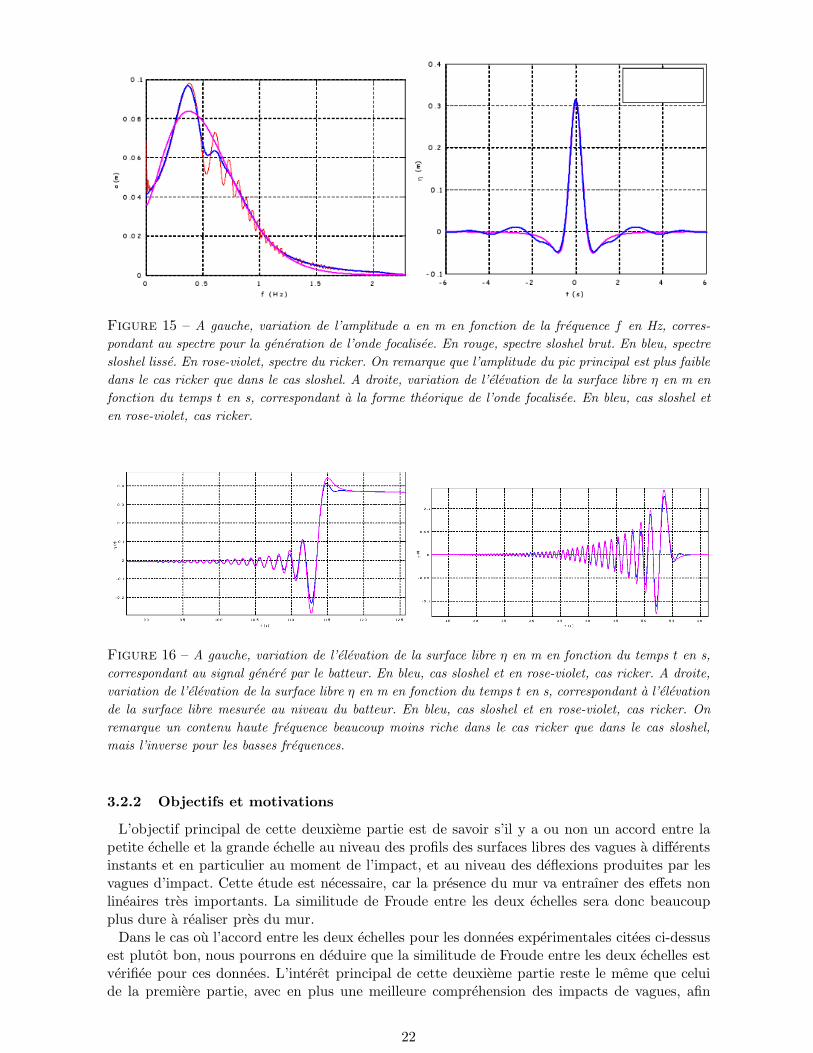
Figure 15 – A gauche, variation de l’amplitude a en m en fonction de la frequence f en Hz, corres-
pondant au spectre pour la generation de l’onde focalisee. En rouge, spectre sloshel brut. En bleu, spectre
sloshel lisse. En rose-violet, spectre du ricker. On remarque que l’amplitude du pic principal est plus faible
dans le cas ricker que dans le cas sloshel. A droite, variation de l’elevation de la surface libre η en m en
fonction du temps t en s, correspondant a la forme theorique de l’onde focalisee. En bleu, cas sloshel et
en rose-violet, cas ricker.
Figure 16 – A gauche, variation de l’elevation de la surface libre η en m en fonction du temps t en s,
correspondant au signal genere par le batteur. En bleu, cas sloshel et en rose-violet, cas ricker. A droite,
variation de l’elevation de la surface libre η en m en fonction du temps t en s, correspondant a l’elevation
de la surface libre mesuree au niveau du batteur. En bleu, cas sloshel et en rose-violet, cas ricker. On
remarque un contenu haute frequence beaucoup moins riche dans le cas ricker que dans le cas sloshel,
mais l’inverse pour les basses frequences.
3.2.2 Objectifs et motivations
L’objectif principal de cette deuxieme partie est de savoir s’il y a ou non un accord entre lapetite echelle et la grande echelle au niveau des profils des surfaces libres des vagues a differentsinstants et en particulier au moment de l’impact, et au niveau des deflexions produites par lesvagues d’impact. Cette etude est necessaire, car la presence du mur va entraıner des effets nonlineaires tres importants. La similitude de Froude entre les deux echelles sera donc beaucoupplus dure a realiser pres du mur.
Dans le cas ou l’accord entre les deux echelles pour les donnees experimentales citees ci-dessusest plutot bon, nous pourrons en deduire que la similitude de Froude entre les deux echelles estverifiee pour ces donnees. L’interet principal de cette deuxieme partie reste le meme que celuide la premiere partie, avec en plus une meilleure comprehension des impacts de vagues, afin
22

d’essayer de comprendre le phenomene de � sloshing �decrit en introduction de ce rapport.
3.2.3 Etude des profils des surfaces libres des vagues
– Principe :
Cette etude consiste a representer les profils des surfaces libres des vagues a differents pas detemps (images). Pour cela, j’ai eu a developper, sous Matlab, tout un programme de traitementd’images nous permettant de reperer et de tracer les surfaces libres des vagues. On a pu ainsirepresenter l’elevation de la surface libre η de la vague en fonction de la distance x le longdu canal pour les deux echelles. Concernant ce traitement d’images, deux methodes ont eteemployees. La premiere methode a consiste a faire, pour les essais realises que nous trouvionsinteressants a etudier, toute une sequence representant l’evolution de la surface libre de la vagueavant et au moment de l’impact. Pour realiser ceci, apres avoir extrait toutes les images du filmde la camera, un programme, developpe sous Matlab, nous a permis de detecter et de representeren couleur, sur chaque image du film, la surface libre de la vague. Cette detection a ete renduepossible par analyse, egalement sous Matlab, de la repartition de l’intensite lumineuse I dechaque colonne d’une image a analyser, lors de l’eclairage de la fluoresceine par le laser. Unefois ces etapes realisees, nous avons ainsi pu realiser cette sequence tout entiere, constituee detoutes les images du film de la camera, representant l’elevation de la surface libre η de la vagueen fonction de la distance x le long du canal avant et au moment de l’impact. L’image, en pixels,de la regle graduee, nous a permis, pour chaque essai realise, de convertir les pixels en unitede longueur pour l’axe des abcisses, representant x et pour l’axe des ordonnees, representant η.Nous pourrons donc, par la suite, comparer entre les deux echelles les profils des surfaces libresdes vagues aux pas de temps desires et par consequent conclure sur leur accord. Les avantagesde cette premiere methode sont que nous pouvons representer η en fonction de x a l’instant dela sequence que nous voulons etudier, et qu’elle nous permet de traiter automatiquement unetres grande quantite d’images. Par contre, l’inconvenient de cette premiere methode reside dansle fait que, lors du deferlement de la vague focalisee, la surface libre de la vague est mal definie,faute d’un eclairage trop faible, dans la poche d’air de la vague (cf. figure 18, image de gauche).
Les figures 17 et 18 illustrent cette premiere methode de traitement d’images.
Pour resoudre l’inconvenient de la premiere methode de traitement d’images, une deuxiememethode de traitement d’images a ete utilisee. Cette deuxieme methode a consiste a ecrire,sous Matlab, un programme nous permettant de tracer, a la main, la surface libre de la vaguesur chaque image des films des essais a etudier. Cette methode a l’avantage de beaucoup mieuxdefinir la surface libre de la vague que dans le cas de la premiere methode, et ceci pour n’importequels pas de temps de l’essai a etudier (cf. figure 19). L’inconvenient cite ci-dessus est donc resolu.Nous pourrons ainsi, par la suite, comparer entre les deux echelles les profils des surfaces libresdes vagues aux pas de temps desires et par consequent conclure sur leur accord. Pour cela, ilfaudra choisir judicieusement une origine (reference) pour les pas de temps des essais a traiter,de telle sorte que l’on obtienne des profils de surfaces libres de vagues en phases et a peu presidentiques sur les images des films des essais a traiter. Ensuite, il suffira, a partir de cette origineet pour traiter plusieurs pas de temps, d’avancer ou de reculer par intervalle de pas de tempsregulier pour chaque essai a traiter.
La figure 19 illustre cette deuxieme methode de traitement d’images.
Remarque : Nous ne pouvons pas dire qu’une des deux methodes est plus precise que l’autre etreciproquement. Tout depend des travaux que nous voulons faire. Concernant la premiere etapedu travail a effectuer, au vue du but recherche, la premiere methode de traitement d’images
23

a suffi. Par contre, concernant les deuxieme et troisieme etapes du travail a effectuer, le butrecherche nous a impose a utiliser la deuxieme methode de traitement d’images.Pour obtenir un traitement d’images beaucoup plus precis que les premiere et deuxieme methodes,il faudrait developper un algorithme d’analyse d’images sous Matlab.
pixels
pixe
ls
100 200 300 400 500 600 700 800
100
200
300
400
500
600100 150 200 250 300 350 400 450 500
−6
−5
−4
−3
−2
−1
0
1
2
pixels
I
Figure 17 – A gauche, image en pixels (600 × 800) du film d’un essai, de type sloshel, realise a la petite
echelle, ayant pour caracteristiques suivantes : a′ = 109 mm, xb = 7.70 m, h = 0.35 m et sequence de
574 images, ou est representee la surface libre de la vague coloree en rouge au moment de la focalisation
(instant t avant l’impact). La focalisation correspondant a l’instant ou nous observons un front vertical de
la vague. Cette representation de la surface libre de la vague s’arrete au niveau de la plaque en PVC que
nous pouvons apercevoir sur cette image. La zone blanche de la vague correspond a un eclairage maximal
de sa surface libre. A droite, repartition de l’intensite lumineuse I (sans unite) en fonction des pixels en
ordonnees (600) de l’image de gauche. Le maximum de I, correspondant a un eclairage maximal de la
surface libre de la vague, nous permet donc de la reperer et de la tracer sur l’image de gauche.
pixels
pixe
ls
100 200 300 400 500 600 700 800
100
200
300
400
500
600100 150 200 250 300 350 400 450 500
−12
−10
−8
−6
−4
−2
0
2
4
6
8
pixels
I
Figure 18 – Legende identique a celle de la figure 17, mis a part qu’il s’agit du moment de l’impact.
L’impact correspondant a l’instant ou nous observons le front vertical de la vague au niveau de la plaque.
24
pixels
pixe
ls
100 200 300 400 500 600 700 800
100
200
300
400
500
600
pixels
pixe
ls
100 200 300 400 500 600 700 800
100
200
300
400
500
600
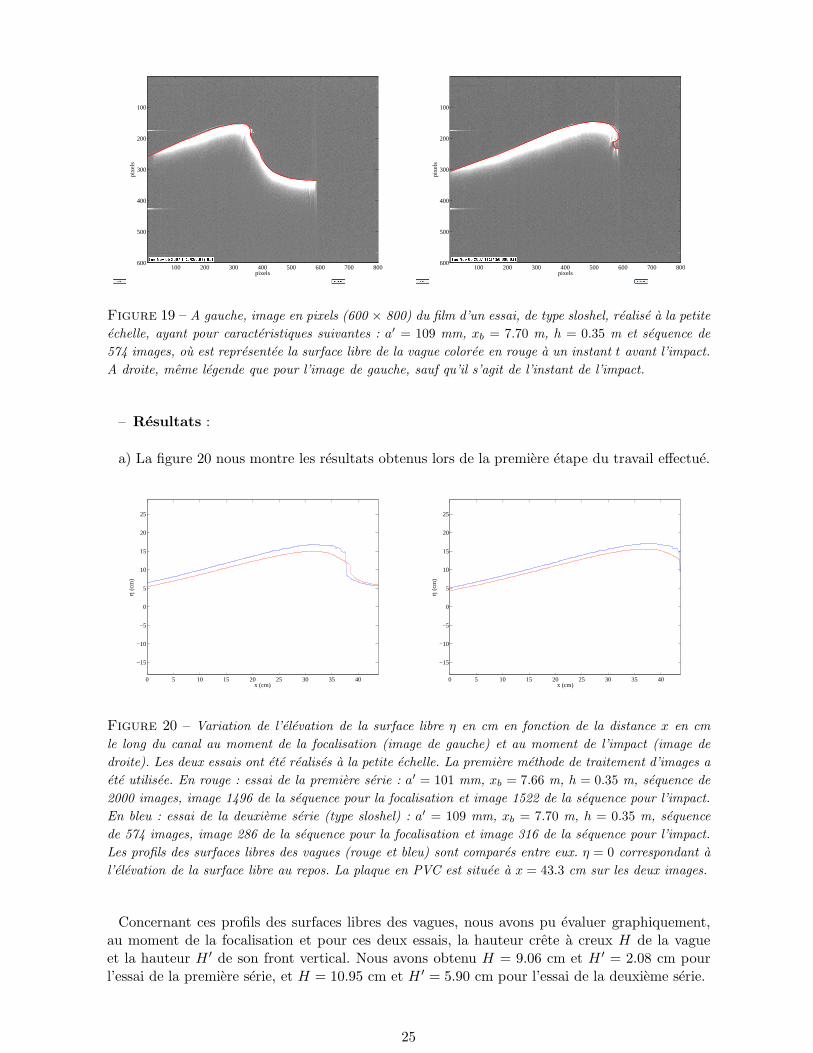
Figure 19 – A gauche, image en pixels (600 × 800) du film d’un essai, de type sloshel, realise a la petite
echelle, ayant pour caracteristiques suivantes : a′ = 109 mm, xb = 7.70 m, h = 0.35 m et sequence de
574 images, ou est representee la surface libre de la vague coloree en rouge a un instant t avant l’impact.
A droite, meme legende que pour l’image de gauche, sauf qu’il s’agit de l’instant de l’impact.
– Resultats :
a) La figure 20 nous montre les resultats obtenus lors de la premiere etape du travail effectue.
0 5 10 15 20 25 30 35 40
−15
−10
−5
0
5
10
15
20
25
x (cm)
η (c
m)
0 5 10 15 20 25 30 35 40
−15
−10
−5
0
5
10
15
20
25
x (cm)
η (c
m)
Figure 20 – Variation de l’elevation de la surface libre η en cm en fonction de la distance x en cm
le long du canal au moment de la focalisation (image de gauche) et au moment de l’impact (image de
droite). Les deux essais ont ete realises a la petite echelle. La premiere methode de traitement d’images a
ete utilisee. En rouge : essai de la premiere serie : a′ = 101 mm, xb = 7.66 m, h = 0.35 m, sequence de
2000 images, image 1496 de la sequence pour la focalisation et image 1522 de la sequence pour l’impact.
En bleu : essai de la deuxieme serie (type sloshel) : a′ = 109 mm, xb = 7.70 m, h = 0.35 m, sequence
de 574 images, image 286 de la sequence pour la focalisation et image 316 de la sequence pour l’impact.
Les profils des surfaces libres des vagues (rouge et bleu) sont compares entre eux. η = 0 correspondant a
l’elevation de la surface libre au repos. La plaque en PVC est situee a x = 43.3 cm sur les deux images.
Concernant ces profils des surfaces libres des vagues, nous avons pu evaluer graphiquement,au moment de la focalisation et pour ces deux essais, la hauteur crete a creux H de la vagueet la hauteur H ′ de son front vertical. Nous avons obtenu H = 9.06 cm et H ′ = 2.08 cm pourl’essai de la premiere serie, et H = 10.95 cm et H ′ = 5.90 cm pour l’essai de la deuxieme serie.
25

b) La figure 21 nous montre les resultats obtenus lors de la deuxieme etape du travail effectue(essais avec signal sloshel).
−55 −50 −45 −40 −35 −30 −25 −20 −15 −10 −5 00
5
10
15
20
25
30
35
40
x (cm)
η (c
m)
−55 −50 −45 −40 −35 −30 −25 −20 −15 −10 −5 00
5
10
15
20
25
30
35
40
x (cm)
η (c
m)
−55 −50 −45 −40 −35 −30 −25 −20 −15 −10 −5 00
5
10
15
20
25
30
35
40
x (cm)
η (c
m)
−55 −50 −45 −40 −35 −30 −25 −20 −15 −10 −5 00
5
10
15
20
25
30
35
40
x (cm)
η (c
m)
Figure 21 – Variation de l’elevation de la surface libre η en cm en fonction de la distance x en cm le
long du canal representant les profils des surfaces libres des vagues pour quatre pas de temps differents.
La deuxieme methode de traitement d’images a ete utilisee. En rouge : essai sloshel a la petite echelle :
a′ = 109 mm, xb = 7.70 m, h = 0.35 m, sequence de 574 images. En bleu : essai sloshel a la grande
echelle : a′ = 177 mm, xb = 15.50 m, h = 0.70 m, sequence de 830 images. De haut en bas et de gauche
a droite respectivement : images 222, 264, 306 et 324 de la sequence pour la petite echelle, et images 58,
118, 178 et 207 de la sequence pour la grande echelle. Les images 222, 264 et 306 de la sequence pour
la petite echelle, et les images 58, 118 et 178 de la sequence pour la grande echelle correspondent a trois
pas de temps quelconques croissants avant l’impact. L’image 324 de la sequence pour la petite echelle et
l’image 207 de la sequence pour la grande echelle correspondent au pas de temps de l’impact sur la plaque
en PVC. Les profils des surfaces libres des vagues de la petite echelle et de la grande echelle sont compares
entre eux. Pour la comparaison, le profil de la surface libre de la vague de la petite echelle a ete converti
a la grande echelle, via la similitude de Froude entre les deux echelles. Nous avons donc utilise le facteur
d’echelle des longueurs pour η et pour x. x = 0 correspondant a la position de la plaque en PVC.
Remarque : Chaque pas de temps etant associe a une image, pour que la comparaison de lafigure 21 entre la petite echelle et la grande echelle au niveau des surfaces libres des vagues soitcoherente, il a fallu tenir compte bien sur du facteur d’echelle des temps
√2 pour les images
etudiees a la petite echelle, dans le but de respecter la similitude de Froude entre les deuxechelles.
c) La figure 22 nous montre les resultats obtenus lors de la troisieme et derniere etape dutravail effectue (essais avec signal ricker).
26

−55 −50 −45 −40 −35 −30 −25 −20 −15 −10 −5 00
5
10
15
20
25
30
35
40
x (cm)
η (c
m)
−55 −50 −45 −40 −35 −30 −25 −20 −15 −10 −5 00
5
10
15
20
25
30
35
40
x (cm)
η (c
m)
−55 −50 −45 −40 −35 −30 −25 −20 −15 −10 −5 00
5
10
15
20
25
30
35
40
x (cm)
η (c
m)
−55 −50 −45 −40 −35 −30 −25 −20 −15 −10 −5 00
5
10
15
20
25
30
35
40
x (cm)
η (c
m)
Figure 22 – Variation de l’elevation de la surface libre η en cm en fonction de la distance x en cm le
long du canal representant les profils des surfaces libres des vagues pour quatre pas de temps differents.
La deuxieme methode de traitement d’images a ete utilisee. En rouge : essai ricker a la petite echelle :
T ′ = 23, m = 146, a′ = 203 mm, xb = 7.68 m, h = 0.35 m, sequence de 718 images. En bleu : essai
ricker a la grande echelle : T ′ = 23, m = 146, a′ = 360 mm, xb = 15.50 m, h = 0.70 m, sequence de 800
images. De haut en bas et de gauche a droite respectivement : images 127, 161, 195 et 212 de la sequence
pour la petite echelle, et images 73, 121, 169 et 193 de la sequence pour la grande echelle. Les images
127, 161 et 195 de la sequence pour la petite echelle, et les images 73, 121 et 169 de la sequence pour
la grande echelle correspondent a trois pas de temps quelconques croissants avant l’impact. L’image 212
de la sequence pour la petite echelle et l’image 193 de la sequence pour la grande echelle correspondent
au pas de temps de l’impact sur la plaque en PVC. Les profils des surfaces libres des vagues de la petite
echelle et de la grande echelle sont compares entre eux. Pour la comparaison, le profil de la surface libre
de la vague de la petite echelle a ete converti a la grande echelle, via la similitude de Froude entre les
deux echelles.
Remarque : T ′ et m sont les coefficients du ricker. Ces coefficients nous permettent de modifierla forme du spectre du ricker et notamment la frequence de son pic principal fp (cf. annexe B).
– Interpretations :
Au vue des resultats obtenus lors de la premiere etape du travail effectue, les deux profils(rouge et bleu) des surfaces libres des vagues au moment de la focalisation et au moment del’impact correspondent au but recherche. Nous rappellons que le but recherche etait d’avoir uneidee du profil de la surface libre de la vague qui produira l’impact le plus fort sur la plaque enPVC. Pour cela, nous nous sommes bases sur plusieurs criteres pour selectionner ces deux profilsparmi les nombreux essais realises. Tout d’abord, nous recherchions les profils pour lesquels H
27

et H ′ etaient assez importantes. Ensuite, la vague focalisee ne devait pas deferler avant l’impact,de facon a ne pas trop dissiper d’energie, necessaire a la creation d’un impact assez fort. Enfin,la deflexion mesuree au proximetre devait etre egalement assez consequente. Nous etudierons lesdonnees experimentales du proximetre de ces deux profils par la suite.Au sujet de la deuxieme etape du travail effectue, le but recherche nous a amene a ne garder, pourla deuxieme etape, que le profil de la surface libre de la vague associe a l’essai de type sloshel,et ceci pour plusieurs raisons. Premierement, H et H ′ de l’essai sloshel etaient superieures acelles de l’autre type d’essai. Deuxiemement, l’allure du profil de la surface libre de la vague, aumoment de la focalisation et au moment de l’impact, nous satisfaisait plus dans le cas sloshelque dans l’autre cas. En effet, au moment de la focalisation et de l’impact, le profil etait � plusimposant �dans le cas sloshel que dans l’autre cas. Troisiemement, les essais, autres que sloshel,etant caracterises par un code potentiel lineaire avec un batteur piston, nous avons remarque,lors du calcul de η(0, t), que le signal et le spectre du batteur etaient bruites par rapport au cassloshel. Quatriemement, la deflexion mesuree dans le cas sloshel etait beaucoup plus importanteque dans l’autre cas, par consequent, l’impact produit par l’essai sloshel etait plus fort que celuiproduit par l’autre type d’essai. Nous verifierons ceci lors de l’etude des deflexions.
Remarque : Au cours de la premiere etape du travail effectue, pour reussir a obtenir ces deuxprofils, il a fallu modifier la forme du spectre du batteur et notamment sa partie basse frequencelors de l’etude de l’impact. D’une facon generale, pour l’etude de l’impact, il est importantd’avoir une bonne resolution aux basses frequences du spectre du batteur.
Concernant les resultats obtenus lors des deuxieme et troisieme etapes du travail effectue, onconstate nettement un meilleur accord entre les deux echelles, pour les essais de type ricker quepour les essais de type sloshel, au niveau des profils des surfaces libres des vagues pour les quatrepas de temps observes. En effet, l’accord observe entre les deux echelles est tres satisfaisant dansle cas ricker, par contre, dans le cas sloshel, on n’observe pas une bonne adequation entre les deuxechelles. Cette difference provient de la forme du signal batteur qui comporte une partie hautefrequence, d’amplitude assez elevee, et a la presence de la derniere onde qui peut s’apparentera un soliton (cf. figure 16). Le batteur, pour la petite echelle, atteint dans ce cas ses limitesmecaniques. Les deflexions de ces deux types d’essais seront etudiees par la suite.
Remarque : Au cours des deuxieme et troisieme etapes du travail effectue, pour reussir a obtenirces resultats, il a fallu modifier la distance de focalisation xb des essais, faire des corrections auniveau frequentiel de la fonction de transfert du batteur, augmenter ou diminuer l’energie dessignaux aux basses frequences du spectre du batteur et modifier les coefficients (T ′, m) du ricker.
Nous pouvons en conclure qu’il y a bien un accord entre la petite echelle et la grande echelle,dans le cas ricker, au niveau des profils des surfaces libres des vagues a differents instants eten particulier au moment de l’impact. La similitude de Froude entre les deux echelles est doncverifiee pour ces donnees.
Apres avoir etudie les profils des surfaces libres des vagues, nous allons voir maintenant cequ’il en est au niveau des deflexions mesurees lors des impacts sur la plaque en PVC.
3.2.4 Etude des deflexions
– Principe :
Cette etude consiste a recueillir les donnees experimentales fournies par le proximetre laseret a les analyser. Pour cela, nous avons relie le proximetre laser a la carte d’acquisition, elle-meme reliee a un ordinateur et aux six sondes a vagues, de facon a acquerir et a recuperer ces
28

donnees. Ces donnees sont ensuite traitees a l’aide d’un programme sous Matlab, que j’ai eu adevelopper, nous permettant de tracer, pour les deux echelles, les deflexions produites, noteesd, par les vagues d’impact sur la plaque, en fonction du temps t. On pourra donc comparerces resultats experimentaux entre la petite echelle et la grande echelle et ainsi conclure sur leuraccord.
Remarque : La sensibilite du proximetre laser est de 0.57V/cm et l’etendue de mesure est de±2V .
– Resultats :
a) La figure 23 nous montre les resultats obtenus lors de la premiere etape du travail effectue.
130 135 140 145−2
−1
0
1
2
3
4
5
6
t (s)
défle
xion
(10
−3 c
m)
Figure 23 – Mesure de la deflexion (10−3 cm) au proximetre laser en fonction du temps t en s. Les
deux essais ont ete realises a la petite echelle. En rouge : essai de la premiere serie : a′ = 101 mm,
xb = 7.66 m et h = 0.35 m. En bleu : essai de la deuxieme serie (type sloshel) : a′ = 109 mm, xb = 7.70
m et h = 0.35 m. Les deflexions relatives a ces deux essais (rouge et bleu) sont comparees entre elles.
Ces signaux ont ete filtres pour eliminer le bruit eventuel.
Concernant ces deflexions, nous obtenons graphiquement, d = 26µm environ pour l’essai de lapremiere serie et d = 55µm environ pour l’essai de la deuxieme serie.
b) La figure 24 nous montre les resultats obtenus lors des deuxieme et troisieme etapes dutravail effectue.
29

150 152 154 156 158 160 162 164 166 168 170−10
−5
0
5
10
15
20
25
t (s)
défle
xion
(10
−3 c
m)
105 110 115 120 125−3
−2
−1
0
1
2
3
4
5
t (s)
défle
xion
(10
−3 c
m)
Figure 24 – Mesure de la deflexion (10−3 cm) au proximetre laser en fonction du temps t en s. A
gauche, en rouge : essai sloshel a la petite echelle : a′ = 109 mm, xb = 7.70 m, h = 0.35 m, et en bleu :
essai sloshel a la grande echelle : a′ = 177 mm, xb = 15.50 m, h = 0.70 m. A droite, en rouge : essai
ricker a la petite echelle : T ′ = 23, m = 146, a′ = 203 mm, xb = 7.68 m, h = 0.35 m, et en bleu : essai
ricker a la grande echelle : T ′ = 23, m = 146, a′ = 360 mm, xb = 15.50 m, h = 0.70 m. Les deflexions
mesurees a la petite echelle et a la grande echelle sont comparees entre elles. Pour la comparaison, la
deflexion mesuree a la petite echelle a ete convertie a la grande echelle, via la similitude de Froude entre
les deux echelles. Nous avons donc utilise le facteur d’echelle des forces pour d et des temps pour t. La
deflexion etant associee a une force de pression s’exercant sur la surface de la plaque. Ces signaux ont
ete filtres pour eliminer le bruit eventuel.
Au niveau des deflexions, dans le cas sloshel, nous obtenons graphiquement, d = 216µmenviron pour la petite echelle et d = 207µm environ pour la grande echelle. Dans le cas ricker,nous obtenons graphiquement, d = 35µm environ pour la petite echelle et d = 42µm environpour la grande echelle. En termes d’ecarts relatifs entre ces valeurs de la petite echelle et de lagrande echelle, pour les cas sloshel et ricker, nous obtenons : δd
dmoyw 4% pour le cas sloshel et
δddmoy
w 18% pour le cas ricker. dmoy etant la moyenne arithmetique de d entre les deux echelleset pour chacun des deux types d’essais.
– Interpretations :
Concernant les resultats observes sur la figure 23, nous verifions bien ce que nous avons ditprecedemment au sujet des deflexions mesurees pour l’essai sloshel et pour l’essai autre quesloshel. En effet, dans le cas sloshel, nous obtenons bien une deflexion nettement superieure acelle de l’autre cas. Ceci est coherent au vue du profil de la surface libre de la vague d’impactde l’essai sloshel observe sur la figure 20, image de droite. Ces resultats observes sur la figure23 nous ont donc egalement servi de criteres pour ne garder que l’essai de type sloshel pour ladeuxieme etape du travail a effectuer.
Au niveau des resultats observes sur la figure 24, nous constatons que l’ecart relatif, au niveaudes deflexions mesurees, est beaucoup plus important dans le cas ricker que dans le cas sloshel. Lefaible ecart relatif observe dans le cas sloshel nous amene a dire que, dans ce cas, l’accord entreles deux echelles est satisfaisant pour les deflexions produites par les vagues d’impact. Par contre,l’ecart relatif important observe dans le cas ricker ne nous permet pas de faire la meme conclusionque pour le cas sloshel. L’accord entre les deux echelles n’est donc pas satisfaisant, dans le casricker, pour les deflexions produites par les vagues d’impact. Les sources d’explications possiblesde ce desaccord concernent bien entendu les incertitudes evoquees precedemment, mais surtoutles incertitudes sur les mesures de deflexions par le proximetre laser. En effet, nous devons tenir
30

compte de l’influence du temps d’integration du capteur sur les resultats experimentaux (onpeut rater le maximum du signal fourni par le proximetre), et du fait que la plaque en PVCpeut legerement se decoller des vitres et par consequent bouger entre deux essais realises parexemple.
Remarque : D’une facon generale, il est difficile d’obtenir une bonne adequation entre les deuxechelles au niveau des deflexions, a cause des nombreuses incertitudes de mesures du proximetrelaser.
En conclusion de cette deuxieme partie de mon travail effectue, nous pouvons dire que l’accordentre la petite echelle et la grande echelle est satisfaisant, dans le cas ricker, pour les profils dessurfaces libres des vagues a differents pas de temps et en particulier au moment de l’impact.Concernant les deflexions produites par les vagues d’impact, dans le cas sloshel, l’accord entre lesdeux echelles est egalement satisfaisant, mais nous devons tenir compte de la remarque enonceeci-dessus. La similitude de Froude est ainsi verifiee entre les deux echelles pour ces donnees.
31

4 Conclusion
Au cours de ce stage, nous avons pu savoir, par une etude experimentale sur la focalisationspatio-temporelle des vagues, s’il y avait ou non un accord entre des donnees experimentalesrecueillies a une petite echelle et a une grande echelle. Pour cela, il a fallu utiliser une similitudede Froude qui nous a permis de comparer entre eux les resultats experimentaux obtenus a lapetite echelle et a la grande echelle, pour pouvoir ainsi conclure sur leur accord.
La focalisation spatio-temporelle des vagues, utilisant l’aspect dispersif des ondes, a ete realiseeexperimentalement au sein d’un canal a houle contenant de l’eau douce et muni d’un batteur detype volet. Une methode lineaire, a partir de differents spectres, a ete utilisee pour generer desvagues focalisees et deferlantes dans le canal.
Nous avons tout d’abord etudie les signaux des sondes a vagues, les spectres associes et lesenergies des vagues associees a ces spectres pour savoir s’il y avait ou non un accord entre lesdeux echelles au niveau des donnees recueillies. La comparaison des resultats obtenus nous apermis de conclure, aux incertitudes pres, que l’accord entre les deux echelles etait satisfaisantpour ces donnees, et par consequent, que la similitude de Froude etait verifiee entre les deuxechelles concernant ces donnees.
Nous nous sommes ensuite interesses a un traitement d’images qui nous a occupe une bonnepartie du stage. Ce traitement d’images nous a permis d’etudier les profils des surfaces libresdes vagues a differents instants et les deflexions produites, sur une plaque rigide en PVC, par lesvagues d’impact. Ceci dans le but de savoir s’il y avait ou non un accord entre les deux echellesau niveau des donnees recueillies. Apres une premiere etape assez qualitative et topologique quinous a servi a avoir une idee du profil de la vague qui produira l’impact le plus fort sur la plaque,nous avons pu comparer entre les deux echelles et pour deux types d’essais (sloshel et ricker), lesprofils des surfaces libres des vagues et les deflexions. La comparaison des resultats obtenus nousa permis de conclure, aux incertitudes pres, que l’accord entre les deux echelles etait concluant,dans le cas ricker, pour les profils des surfaces libres des vagues a differents pas de temps, etsatisfaisant, mais cette fois-ci dans le cas sloshel, au niveau des deflexions produites par lesvagues d’impact. Nous avons ainsi pu en deduire que la similitude de Froude etait egalementverifiee entre les deux echelles pour ces donnees.
Les resultats experimentaux obtenus durant ce stage ont necessite la realisation de nombreuxessais. Comme nous l’avons dit precedemment en introduction de ce rapport, ces resultats obte-nus font partie du projet MINISLO 2008 de l’entreprise GTT, dans le but d’etudier le phenomenede � sloshing �, qui peut survenir en mer extreme, a l’interieur des cuves de methaniers. L’etudedes impacts de vagues sur la plaque rigide en PVC, modelisant une partie de la paroi interned’une des cuves de methaniers, nous a aide a essayer de comprendre ce phenomene.
La suite de ce travail consistee a faire une etude en pression, afin de savoir s’il y avait ou nonun accord entre les deux echelles, au niveau des pressions s’exercants lors des impacts de vagues,sur une plaque rigide en PVC, d’epaisseur 4 cm et munie d’une centaine de capteurs de pression.Cette nouvelle etude quantitative nous aurait certainement donne de meilleurs resultats quel’etude precedente sur les deflexions, car elle aurait ete beaucoup plus precise que cette derniere.Mais, faute de temps, nous n’avons pas pu la realiser.
Finallement, j’ai pu mieux connaıtre les aspects de la recherche d’aujourd’hui en experimentantet traitant des donnees experimentales grace aux conseils et au suivi regulier d’Olivier Kimmoun.Ce stage a donc ete tres enrichissant a tous les points de vue.
32

A Complement sur l’analyse spectrale
– Distribution statistique des elevations de la surface libre :
On considere un ensemble de vagues elementaires, d’elevations de la surface libre η et defrequences differentes f , superposees aleatoirement. Les phases et les amplitudes des vaguessont supposees etre des variables aleatoires.
Si on neglige les interactions non lineaires entre les vagues et si on applique le theoreme dela limite centrale, la variable aleatoire η est normalement distribuee, de moyenne η et devariance σ
2
η, et sa fonction densite de probabilite (pdf) est donnee par :
f(η) =1√
2πση
e−
(η−η)2
2σ2η
On rappelle que le theoreme de la limite centrale nous dit que lorsque le nombre de realisationsN → +∞, f(η) tend vers une loi normale ou Gaussienne.
La variance σ2
η est calculee a partir de la densite spectrale d’energie S(f), telle que :
σ2
η = η2 =
∫ +∞
0S(f)df
Par consequent, l’ecart-type de l’elevation de la surface libre est donne par :
ση =
√
∫ +∞
0S(f)df
– Distribution statistique des hauteurs dans le cas d’un spectre etroit :
En oceanographie physique, on prefere utiliser la hauteur crete a creux H des vagues au lieude leur amplitude a.
La pdf de la variable aleatoire H est donnee par :
f(H) =H
4σ2η
e−
H2
8σ2η
qui correspond a une distribution de Rayleigh [1] pour H (cf. figure 25).
Si on appelle H∗ une valeur seuil de H, alors la probabilite pour que H > H∗ est donneepar :
P (H > H∗) =
∫ +∞
H∗
f(H)dH = e−
H∗2
8σ2η
– Hauteur significative dans le cas d’un spectre etroit :
Une hauteur specifique est souvent utilisee en oceanographie. Il s’agit de la hauteur signifi-cative HS des vagues qui est definie comme la hauteur moyenne du tiers des vagues les plushautes.
La premiere etape consiste a determiner H∗, telle que :
P (H > H∗) = e−
H∗2
8σ2η =
1
3
33

D’apres la figure 26, cette condition est realisee pour H∗ = (2√
2ln3)ση.
Selon la definition de HS , nous avons :
HS =
∫ +∞
H∗ Hf(H)dH∫ +∞
H∗ f(H)dH∫ +∞
H∗ f(H)dH = 13 , par consequent, nous obtenons :
1
3HS =
∫ +∞
H∗
Hf(H)dH
et finallement :HS w 4ση
Remarque : HS peut-etre mesuree a partir d’une sonde ou d’une bouee en mer.
Figure 25 – Fonction densite de probabilite pour H. La ligne pleine correspond a une distribution de
Rayleigh.
Figure 26 – Determination de la hauteur significative HS.
34
B Complement sur le ricker
Le ricker est utilise en traitement du signal par les geophysiciens et les geologues pour modeliserune onde de type sismique, et sert a la localisation des nappes souterraines (eau, gaz, petrole).
Le spectre du ricker represente precedemment sur la figure 15, image de gauche, est tel que :
a(ω) = A√
T ′e−ωmT ′
(1 − a(ωmT ′ − 1))
avec A l’amplitude de l’onde au lieu de la focalisation et (T ′, m) les coefficients du ricker.Il correspond a la derivee seconde d’une Gaussienne.
La frequence du pic principal du spectre du ricker est donnee par :
fp =1
2πe
1m
ln(
1+2aaT ′
)
35

References
[1] B. Molin. Hydrodynamique des structures offshore. Technip, 2002.
[2] R. Bonnefille. Cours d’hydraulique maritime. Masson, 3e edition, 1992.
[3] C. Kharif, E. Pelinovsky. Extreme Ocean Waves. Springer, 2008.
[4] B. Hofland, A. Van Dongeren. Small scale physical modelling of wave impacts. MARIN workorder : 20355.520 version 3.0, WL | Delft Hydraulics proposal : MCI-9566/H4577/BH/jvs,February, 2006.
[5] M. J. G. Van Den Boomgaard. Thesis Delft University of Technology at the Faculty of CivilEngineering and Geosciences : Wave focussing in a laboratory flume. 2003.
[6] P. A. Madsen, H. B. Bingham, H. Liu. A new Boussinesq method for fully nonlinear wavesfrom shallow to deep water. J. Fluid Mech. (2002), vol. 462, pp. 1-30.
[7] P. A. Madsen, D. R. Fuhrman. Chapter 1 : High-order Boussinesq-type modelling of non-linear wave phenomena in deep and shallow water. World Scientific Review Volume, Sep-tember, 2007.
[8] N. Reul. These de Doctorat de l’Universite d’Aix-Marseille : Etude experimentale del’ecoulement de l’air au dessus de vagues deferlantes. 1997.
36