etude de quelques propriétés élémentaires du … · exercice 1 b. le comportement ... en...
TRANSCRIPT

Etude de quelques propriétés élémentaires du
comportement des matériaux par simulation
numérique
Ces quelques notes constituent des rappels de notions probablement déjà assimilées au niveau de la première
année de Master. Elles essayent de mettre en lumière quelques propriétés fondamentales du comportement
mécanique d’un solide par la réalisation d’un certain nombre de petites expériences. On survole en particulier
les problèmes d’identification de paramètres rhéologiques, les phénomènes de relaxation, de fluage et de
localisation de la déformation. Ces expériences seront réalisées sur ordinateur grâce à un outil de modélisation
numérique (code de calcul ADELI).
On passe en revue les trois comportements idéaux d’un solide déformable en se limitant aux cas des
déformations infiniment petites. On donne pour chacun d’eux un modèle analogique intuitif avant d’exprimer la
loi de comportement correspondante dans le cas tridimensionnel et de traiter quelques problèmes élémentaires
en vue d’en étudier certaines propriétés.
Sommaire
A. Le comportement élastique
A.1. Exemple 1D ! A.2. Généralisation 3D ! A.3. Essai uniaxial
A.4. Réalisation d’une expérience en déformations planes
A.5. Exercice 1
B. Le comportement plastique
B.1. Exemple 1D ! B.2. Généralisation 3D ! B.3. Exemples de
critères de plasticité ! B.4. L’élastoplasticité ! B.4.1. Exemple 1D
B.4.2. Généralisation 3D ! B.4.3. Essai uniaxial
B.4.4. Exercice 2 ! B.4.5. Le phénomène de localisation de la
déformation ! B.4.6. Exercice 3
C. Le comportement visqueux
C.1. Exemple 1D ! C.2. Généralisation 3D ! C.3. La
viscoélasticité : le modèle de Maxwell ! C.3.1. Modèle 1D
C.3.2. Généralisation 3D ! C.3.3. Le phénomène de relaxation
C.3.3.1. Exercice 4 ! C.3.3.2. Exercice 5 ! C.3.3.3. Explication
sur un essai élémentaire ! C.3.3.4. Exercice 5 (suite) ! C.3.4. Le
phénomène de fluage ! C.3.4.1. Exercice 6 ! C.3.4.2. Explication
sur un essai élémentaire ! C.3.4.3. Exercice 6 (suite) ! C.4. Autre
loi de comportement viscoélastique : le modèle de Kelvin – Voigt
D. Quelques problèmes invoquant le chargement gravitaire
D.1. contrainte d’origine gravitaire dans la croûte
D.1.1. Exercice 7 ! D.1.2. Explication ! D.2. Bloc reposant sans
frottement sur un plan ! D.2.1. Exercice 8 ! D.3. Champ de
contrainte autour d’un tunnel ! D.3.1. Exercice 9
D.3.2. Exercice 10

2
A. Le comportement élastique
C’est le plus simple des comportements. Il est complètement réversible, c'est à dire que si les actions extérieures
engendrant la déformation sont supprimées le solide retrouve sa forme initiale. Il n'y a donc pas de déformation
résiduelle. Ce comportement est instantané et on le qualifie de linéaire si la mesure de la déformation est
proportionnelle à la mesure des actions. La grande majorité des solides se comportent de façon élastique, au
moins jusqu’à un certain niveau de contrainte. D’un point de vue physique, ce sont les forces de cohésion entre
les particules matérielles (forces électriques) qui sont à l’origine du comportement élastique.
A.1. Exemple 1D
Le modèle analogique 1D est celui du ressort de raideur E
La relation contrainte – déformation s’écrit simplement
! = E "
A.2. Généralisation 3D
En élasticité linéaire, homogène et isotrope, la relation ! " # se généralise en 3D sous la forme suivante (loi de
Hooke)
où # et µ sont des constantes matérielles (coefficients de Lamé). µ s’interprète facilement dans un essai de
cisaillement simple : c’est le rapport de la contrainte de cisaillement à l’angle de glissement engendré. On
l’appelle pour cette raison le module de cisaillement.
On peut aussi inverser cette relation en introduisant deux autres constantes, le module de Young et le coefficient
de Poisson
Pour un matériau donné, ces diverses constantes élastiques peuvent être identifiées à partir d’expériences
élémentaires (essai uniaxial, essai de cisaillement, …).
A.3. Essai uniaxial
Réalisons une expérience où l’état de contrainte est uniaxial (traction suivant Ox par exemple). La matrice du
tenseur des contraintes et celle du tenseur des déformations sont donc de la forme
est ici la contrainte de traction, est la déformation longitudinale et et sont les déformations
transversales.
En appliquant la loi de Hooke on a en particulier
ce qui montre que :
3
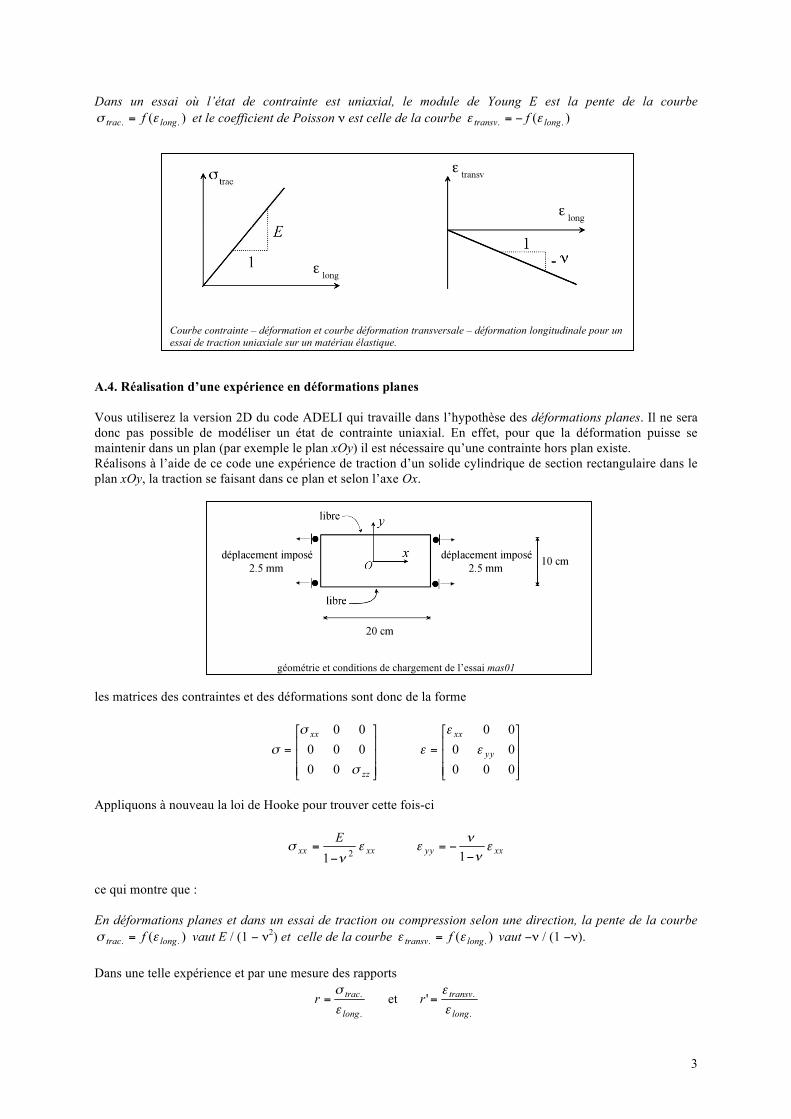
Dans un essai où l’état de contrainte est uniaxial, le module de Young E est la pente de la courbe
et le coefficient de Poisson ! est celle de la courbe
Courbe contrainte – déformation et courbe déformation transversale – déformation longitudinale pour un
essai de traction uniaxiale sur un matériau élastique.
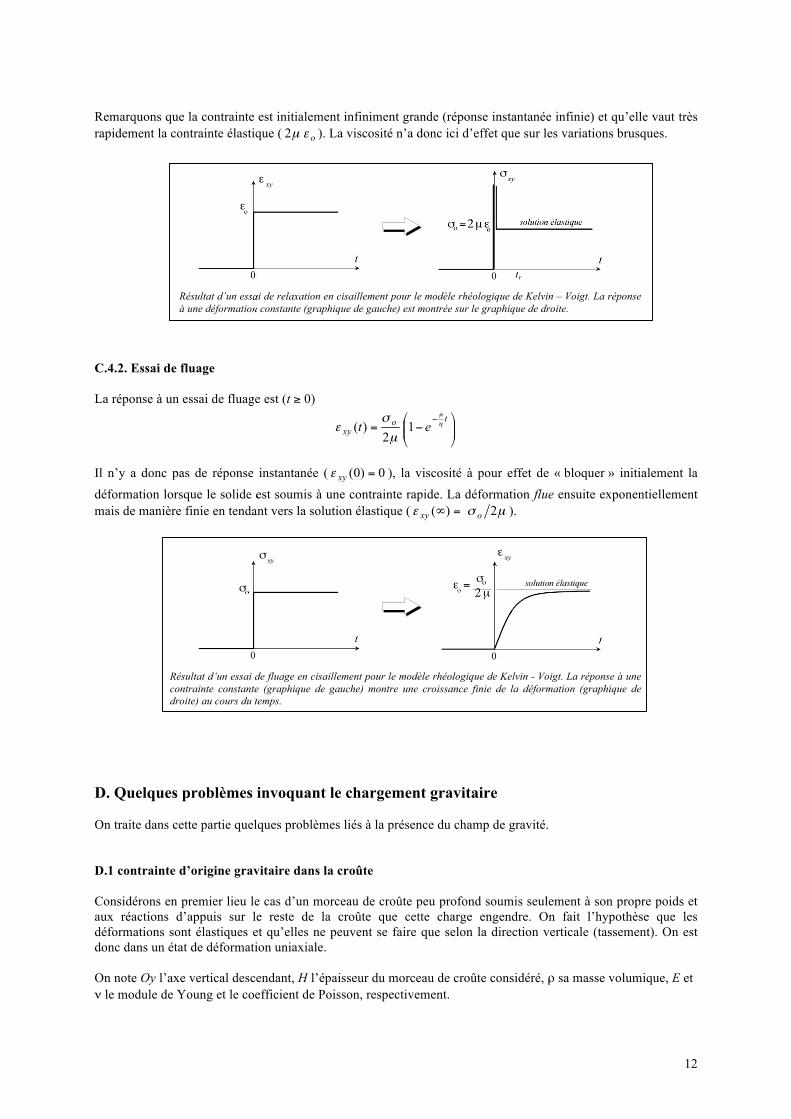
A.4. Réalisation d’une expérience en déformations planes
Vous utiliserez la version 2D du code ADELI qui travaille dans l’hypothèse des déformations planes. Il ne sera
donc pas possible de modéliser un état de contrainte uniaxial. En effet, pour que la déformation puisse se
maintenir dans un plan (par exemple le plan xOy) il est nécessaire qu’une contrainte hors plan existe.
Réalisons à l’aide de ce code une expérience de traction d’un solide cylindrique de section rectangulaire dans le
plan xOy, la traction se faisant dans ce plan et selon l’axe Ox.
géométrie et conditions de chargement de l’essai mas01
les matrices des contraintes et des déformations sont donc de la forme
Appliquons à nouveau la loi de Hooke pour trouver cette fois-ci
ce qui montre que :
En déformations planes et dans un essai de traction ou compression selon une direction, la pente de la courbe
vaut E / (1 " !2) et celle de la courbe vaut "! / (1 "!).
Dans une telle expérience et par une mesure des rapports
et

4
il est donc possible de trouver E et ! :
A.5. Exercice 1
Faîtes tourner l’essai mas01, visualisez (en utilisant le programme pgraph3) les courbes et
pour déterminer graphiquement r et r’ puis les valeurs de E et ! qui ont été utilisées dans cet essai.
Vérifiez vos calculs en éditant le fichier imas01 contenant les données de cet essai.
B. Le comportement plastique
Au delà d’un certain seuil de contrainte (appelé seuil de plasticité ; yield point en anglais), un solide commence à
subir une déformation irréversible ; après déchargement complet, le corps ne retrouve donc pas la forme qu’il
possédait avant la mise en charge. On ne considère ici que les déformations indépendantes du temps : le
comportement du corps est toujours le même, qu’on le déforme rapidement ou lentement. Cette déformation
permanente porte le nom de déformation plastique. D’un point de vue physique, les déformations plastiques
peuvent être dues soit aux mouvements relatifs des grains (cas des sols) qui le constitue soit à des glissements de
rangées atomiques dans le réseau cristallin (propagation de dislocations dans l’arrangement régulier du réseau).
B.1. Exemple 1D
Le modèle analogique est celui du patin à frottement sec. Pour pouvoir déplacer le patin il faut vaincre la force
de frottement ("o) existante entre le patin et le plan de glissement. Une fois atteint ce seuil, le patin peut glisser.
Si l’on supprime la force de traction alors que le patin glissait, il s’arrête sans bien sûr revenir à sa position
initiale ; il y a donc irréversibilité.
on a donc
(le patin n’avance pas si le seuil n’est pas atteint)
et
(lorsque le patin avance la contrainte ne peut dépasser le seuil)
Le seuil peut aussi évoluer en fonction du glissement. On appelle écrouissage cette propriété. Un écrouissage
négatif correspond à une chute de la contrainte durant le glissement. On qualifie les matériaux ayant ce type de
comportement d’adoucissants et on parle d’adoucissement (softening en anglais). Le cas contraire (écrouissage
positif) correspond aux matériaux dits durcissants et on parle de durcissement (hardening en anglais).
L’inéquation
vérifiée à tout instant par l’état de contrainte, se nomme le critère de plasticité.
B.2. Généralisation 3D
On utilise de la même façon une quantité scalaire f dépendante de l’état de contrainte. Cette quantité devant être
invariante par changement de référentiel, elle doit dépendre uniquement des contraintes principales, ou, ce qui
revient au même, des invariants de " :

5
B.3. Exemples de critères de plasticité
! critère de Von Mises :
où est le second invariant du déviateur des contraintes qui s’écrit en fonction des contraintes
principales
où p est la pression moyenne
! critère de Tresca :
où classiquement on a ordonné les contraintes principales. Ce critère indique donc que le plus grand des
cercles de Mohr ne peut avoir un rayon dépassant une certaine valeur R.
Ces deux critères sont indépendants de la pression moyenne (ils ne dépendent que du déviateur). Les matériaux
obéissants à ce type de critères ne peuvent plastifier dans un état de contrainte hydrostatique et ceci quelle que
soit la valeur de la pression à laquelle ils sont soumis. Ils sont pour cette raison peu adaptés aux roches et aux
sols. Ils conviennent par contre très bien aux métaux.
! critère de Mohr!Coulomb
où ! et "n sont respectivement la contrainte tangentielle et la contrainte normale sur n’importe quelle
facette, # est l’angle de friction interne et c est la cohésion. Pour # = 0 on retrouve le critère de Tresca.
Ce critère est à l’origine un critère de rupture (le plan sur lequel l’égalité est obtenue est un plan de rupture
potentiel) mais il est souvent utilisé, dans le domaine des déformations ductiles, comme critère de plasticité
pour les sols et les roches. Dans un diagramme de Mohr, ce critère délimite un domaine compris entre les
deux droites d’équations à l’intérieur duquel aucune irréversibilité ne peut avoir lieu.
Pour qu’il y ait plastification il faut que le plus grand cercle de Mohr soit tangent à ces droites.
B.4. L’élastoplasticité
Le modèle du patin précédent représente ce que l’on appelle un comportement rigide-plastique : il n’y a pas de
déformation (corps rigide) tant que le seuil de plasticité n’est pas atteint ; une fois ce seuil atteint toute la
déformation engendrée est irréversible.
Un comportement plus réaliste pour un solide est le comportement élastoplastique : le comportement est
élastique mais une déformation irréversible se développe si le seuil est atteint.
B.4.1. Modèle 1D
Le plus simple des modèles analogiques du comportement élastoplastique est celui du patin et du ressort mis en
série :
En tirant progressivement sur le ressort la contrainte augmente (le ressort se tend) et finit par atteindre le seuil.
Le patin peut alors glisser de manière irréversible.
La déformation totale est la somme de la déformation du ressort (déformation élastique) et du patin (déformation
plastique) ; quant à la contrainte elle reste proportionnelle à la déformation du ressort :

6
! "! o # 0
! = E$e
$ = $e +$ p et ˙ $ p = 0 si (! "! o < 0) ou (si ! "! o = 0 et ˙ ! % sign(! ) < 0)
&
' (
) (
B.4.2. Généralisation 3D
ce comportement se généralise directement
f (! ) " 0
! = 2µ#e + $ tr(#e ) I
# = #e +# p et ˙ # p = 0 si ( f (! ) < 0) ou si ( f (! ) = 0 et ˙ f (! ) < 0)
%
& '
( '
Sans rentrer plus en avant dans la théorie de la plasticité, signalons seulement que le problème ainsi posé n’est
pas complet. Il y manque en effet une relation permettant de déterminer la déformation plastique en fonction de
l’état de contrainte. Cela se fait par la donnée d’une fonction scalaire appelée potentiel plastique dont les
dérivées par rapport aux contraintes donne la loi d’évolution du taux de déformation plastique.
B.4.3. Essai uniaxial
Considérons un essai de traction uniaxiale réalisé sur un matériau élastoplastique obéissant au critère de Von
Mises
L’état de contrainte doit vérifier le critère
c’est à dire ici
Le matériau rentrera en plasticité lorsque la contrainte de traction atteindra la valeur k. Si le matériau est
écrouissable, la courbe contrainte ! déformation aura alors l’allure suivante
Essai uniaxial pour un matériau élastoplastique écrouissable. La courbe en gras est celle
obtenue lors du chargement. Le trajet 0A correspond à la mise en charge élastique. Lors du
trajet AB des déformations plastiques apparaissent. Si une décharge est réalisée après
plastification la courbe (en trait fin) est parallèle à celle du trajet 0A (décharge élastique). Notez
la déformation résiduelle après décharge complète. La pente H est le module d’écrouissage.
B.4.4. Exercice 2
Editez le fichier imas01. A la ligne 39 changez la valeur du paramètre ityp qui est à 1 (élasticité) en la mettant
à 4. Sauvez ce fichier puis lancez le programme ADELI. Visualisez l’évolution du deuxième invariant du
déviateur des contraintes ( ) en fonction de !xx ou du temps. Que remarquez-vous ? Sachant que c’est un
matériau de Von Mises que vaut le seuil initial k ?

7
B.4.5. Le phénomène de localisation de la déformation
La déformation élastoplastique reste rarement homogène même lorsque les conditions de chargement le sont. En
réalisant par exemple un essai uniaxial avec un chargement progressif, on peut passer d’une déformation
initialement homogène à une déformation fortement localisée (bifurcation plastique) sans même avoir modifié
les conditions de chargement. Cela survient lorsque le matériau est adoucissant (chute du seuil en fonction de la
déformation cumulée) ou lorsqu’il est à friction interne (ex. Mohr-Coulomb).
B.4.6. Exercice 3
Reprenez l’essai précédent mais en maillant plus finement le domaine (prendre par exemple NELEM = 4000).
Utilisez le post-processeur « xadeli » pour visualiser le résultat. Observez en particulier la distribution de la
déformation plastique cumulée.
Utilisez aussi le programme « pgraph3 » pour visualisez l’évolution du sur un élément. Que remarquez-
vous ?
C. Le comportement visqueux
On aborde maintenant les comportements pour lesquels la vitesse du chargement intervient. Intuitivement, il est
clair qu’un corps réagira différemment selon la vitesse à laquelle on le déforme : sa résistance sera, par exemple,
d’autant plus grande que la vitesse de déformation sera importante. On parle alors de viscosité pour désigner
cette propriété du type frottement interne. La viscosité des solides est à rapprocher de celle des fluides, mais les
lois de comportement sont plus complexes dans le cas des corps solides. On se limitera ici à décrire de manière
élémentaire la notion de solide visqueux linéaire.
C.1. Modèle 1D
Le modèle analogique correspondant à un élément visqueux linéaire est celui de l’amortisseur de viscosité !
Pour pouvoir le déformer à un taux de déformation constant il faut lui appliquer une contrainte
Plus la viscosité sera grande, plus il sera difficile de le déformer. Une viscosité infinie correspondra à un
matériau indéformable.
L’unité de la viscosité dans le S.I est le Pa s.
C.2. Généralisation 3D
Si l’on suppose que les forces de viscosité sont dues aux distorsions et non aux variations de volume (hypothèse
de Stokes) ou si l’on considère que le milieu est incompressible, la relation constitutive s’écrit alors
C.3. La viscoélasticité : le modèle de Maxwell
De manière générale, le comportement visqueux se superpose aux comportements élastique et plastique. On
parle alors de viscoélasticité, de viscoplasticité ou plus généralement de élasto-viscoplasticité. Limitons-nous à la
viscoélasticité linéaire.

8
C.3.1. Modèles 1D
En combinant des éléments élastiques (ressorts) et des éléments visqueux (amortisseurs) on obtient divers
modèles de viscoélasticité. Le plus utilisé pour décrire le comportement de la lithosphère est le modèle de
Maxwell correspondant à un ressort et à un amortisseur placés en série
La déformation totale est la somme de la déformation du ressort (déformation élastique) et de celle de
l’amortisseur (déformation visqueuse) ; quant à la contrainte elle reste proportionnelle à la déformation du
ressort mais aussi à la vitesse de déformation de l’amortisseur
On a donc
et il s’ensuit que la relation de comportement peut s’écrire pour le modèle de Maxwell
Pour une viscosité infinie on retrouve le modèle élastique.
C.3.2. Généralisation 3D
En suivant la même procédure que pour le modèle 1D et en ayant à l’esprit que la déformation visqueuse est
purement déviatorique ( ), on obtient
d’où l’équation constitutive
que l’on peut aussi inverser pour avoir la vitesse de déformation
Nous allons examiner deux aspects importants du comportement viscoélastique.
C.3.3. Le phénomène de relaxation
Un essai de relaxation consiste à imposer à un instant donné une déformation que l’on maintient constante par la
suite. On observe alors comment évolue la contrainte au cours du temps.
Nous allons réaliser l’expérience suivante

9
Géométrie et conditions de chargement de l’expérience
La durée totale de l’essai est de T = 5 ans ! 15.75 107 s
La phase de mise en charge est de 6 mois (= T / 10)
La durée de la phase de relaxation est donc de 4 ans 6 mois (= 9 T / 10)
La vitesse de charge est v = 1 mm/an ! 3.17 10-11 m/s
La longueur de l’échantillon est L = 20 cm = 0.2 m
La vitesse de déformation lors de la mise en charge est donc de v / L ! 1.5 10-10 s-1
Le module de Young et le coefficient de Poisson sont de 1011 Pa et de 0.25 (" µ = 40 GPa)
La viscosité sera à retrouver à l’exercice suivant
C.3.3.1. Exercice 4
Editez le fichier imas01, remettez le nombre d’éléments à 2 (NELEM=2) et faites évoluer la vitesse de traction de
telle sorte qu’elle s’annule au bout de 0.5 an. La déformation est donc maintenue constante durant le reste du
temps. Lancez un premier essai avec un comportement élastique (ityp = 1) et représentez la contrainte (par
exemple la quantité ! xx "! zz) en fonction du temps. Qu’observez-vous ?
C.3.3.2. Exercice 5
Mettez maintenant la valeur de la variable ityp à 2 (ce qui correspond à un comportement de type Maxwell).
Représentez à nouveau l’évolution de la quantité ! xx "! zz en fonction du temps. Que se passe t-il ?
C.3.3.3. Explication sur un essai élémentaire
Prenons un cas plus élémentaire que l’essai réalisé afin de pouvoir faire des calculs plus simples. Considérons
pour cela un essai de cisaillement simple :
! =
0 ! xy 0
! xy 0 0
0 0 0
"
#
$ $ $
%
&
'''
! =
0 !xy 0
!xy 0 0
0 0 0
"
#
$ $ $
%
&
' ' '
et imposons brusquement à l’instant t = 0 la valeur du glissement que l’on maintient par la suite constante :
où H(t) est la fonction d’Heaviside valant 0 pour t < 0 et 1 sinon. La seule composante de la vitesse de
déformation est donc donnée par
où ! est le dirac.
La loi de comportement de Maxwell permet d’écrire l’équation différentielle vérifiée par la contrainte de
cisaillement

10
Si avant déformation le milieu est vierge de toute contrainte ( ), la solution de notre problème pour
t ! 0 est donnée par
Si le milieu était parfaitement élastique (" = #) la contrainte aurait bien sûr été constante égale à .
Résultat d’un essai de relaxation en cisaillement pour le modèle rhéologique de Maxwell. La réponse à une
déformation constante (graphique de gauche) montre une décroissance exponentielle de la contrainte
(graphique de droite) au cours du temps. C’est le phénomène de relaxation.
Remarques :
- Il y a une réponse instantanée au chargement imposée ( ). Elle est due à l’élasticité du
matériau.
- La relaxation est totale ).
- La quantité tr = ! / µ s’appelle le temps de relaxation. C’est le temps au bout duquel la contrainte a été
divisée par e (e $ 2.71828) par rapport à sa valeur au moment de la mise en charge.
C.3.3.4. Exercice 5 (suite)
Déterminer graphiquement la viscosité de l’essai précédent en visualisant l’évolution de la contrainte
différentielle .
C.3.4. Le phénomène de fluage
Un essai de fluage consiste à maintenir la contrainte constante et à observer l’évolution de la déformation.
Pour réaliser un essai de fluage nous reprenons la géométrie de l’essai précédent et nous remplaçons les
conditions aux limites en vitesse par des conditions aux limites en pression.
C.3.4.1. Exercice 6
Reprenez le fichier imas01, mettre la variable NVFIX0 à 1 (on va maintenir fixe suivant Ox la face de gauche
par exemple) et la variable NPRES0 à 1 (on va appliquer une pression sur la face de droite). Supprimez la ligne
48 et mettez une vitesse nulle sur la face de gauche (ligne 47). Rajoutez une ligne après la ligne 56 pour donner
la valeur de la pression à imposer sur la face de droite (face portant le n° 2). Prendre par exemple une pression de
-8 107 Pa (par convention, le signe «-» indique une traction). Sauvez et lancez adeli. Représentez l’évolution de
la déformation différentielle au cours du temps.
C.3.4.2. Explication sur un essai élémentaire
On reprend le cas du cisaillement simple où cette fois-ci c’est la contrainte qui est maintenue constante au cours
du temps, la déformation étant nulle au départ
La loi de comportement de Maxwell s’écrit alors

11
La déformation est donc pour t ! 0
Si le milieu est élastique (" = #) la solution est bien sûr
Résultat d’un essai de fluage en cisaillement pour le modèle rhéologique de Maxwell. La réponse à une
contrainte constante (graphique de gauche) montre une croissance continue de la déformation (graphique de
droite) au cours du temps. C’est le phénomène de fluage.
Remarques :
- il y a une réponse instantanée ( ) qui est due à l’élasticité.
- la déformation devient infiniment grande ( )
C.3.4.3. Exercice 6 (suite)
Déterminez sur la courbe précédente le module de cisaillement et la viscosité (attention aux unités !).
C.4. Autre loi de comportement viscoélastique : le modèle de Kelvin – Voigt
Donnons à titre d’exemple un autre modèle de comportement aussi simple que le modèle de Maxwell mais dont
les réponses aux essais de relaxation et de fluage sont très différentes. Ce modèle est celui de Kelvin – Voigt
dont le modèle analogique est celui du ressort en parallèle avec l’amortisseur
La contrainte étant la somme de la contrainte dans chacun des deux éléments et la déformation étant celle de
l’ensemble, on a
relation constitutive qui se généralise en 3D par
Reprenons le cas du cisaillement simple et étudions les réponses aux essais de relaxation et de fluage
C.4.1. Essai de relaxation
La réponse à un essai de relaxation est donnée par (t ! 0)
12
Remarquons que la contrainte est initialement infiniment grande (réponse instantanée infinie) et qu’elle vaut très
rapidement la contrainte élastique ( ). La viscosité n’a donc ici d’effet que sur les variations brusques.
Résultat d’un essai de relaxation en cisaillement pour le modèle rhéologique de Kelvin – Voigt. La réponse
à une déformation constante (graphique de gauche) est montrée sur le graphique de droite.
C.4.2. Essai de fluage
La réponse à un essai de fluage est (t ! 0)
Il n’y a donc pas de réponse instantanée ( ), la viscosité à pour effet de « bloquer » initialement la
déformation lorsque le solide est soumis à une contrainte rapide. La déformation flue ensuite exponentiellement
mais de manière finie en tendant vers la solution élastique ( ).
Résultat d’un essai de fluage en cisaillement pour le modèle rhéologique de Kelvin - Voigt. La réponse à une
contrainte constante (graphique de gauche) montre une croissance finie de la déformation (graphique de
droite) au cours du temps.
D. Quelques problèmes invoquant le chargement gravitaire
On traite dans cette partie quelques problèmes liés à la présence du champ de gravité.
D.1 contrainte d’origine gravitaire dans la croûte
Considérons en premier lieu le cas d’un morceau de croûte peu profond soumis seulement à son propre poids et
aux réactions d’appuis sur le reste de la croûte que cette charge engendre. On fait l’hypothèse que les
déformations sont élastiques et qu’elles ne peuvent se faire que selon la direction verticale (tassement). On est
donc dans un état de déformation uniaxiale.
On note Oy l’axe vertical descendant, H l’épaisseur du morceau de croûte considéré, " sa masse volumique, E et
# le module de Young et le coefficient de Poisson, respectivement.

13
Bloc élastique soumis à son poids. Les déplacements normaux des 4 faces
verticales et de la face du bas sont nuls.
D.1.1. Exercice 7
Réalisez l’expérience numérique décrite ci-dessus en maillant une coupe verticale (plan xy). Prenez par exemple
un bloc de 40 m de haut sur 40 m de large de masse volumique ! = 2500 kg m-3. Utilisez des constantes
élastiques courantes pour la croûte : E = 100 GPa, " = 0.25. Bloquez le déplacement normal de toutes les faces
du bloc sauf celle de la surface. Activez la prise en compte de la gravité en mettant la valeur du paramètre
NGRAV à 1. Maillez suffisamment finement le domaine d’étude (NELEM = 2000 par exemple). Visualisez le
champ de pression en utilisant xadeli. Pourquoi la pression moyenne n’est visiblement pas égale à !gy (pourquoi
à la base du bloc, par exemple, n’a t-on pas une pression de 2500#10#40 = 1 MPa) ?
D.1.2. Explication
Notons Oy l’axe vertical descendant. La contrainte verticale à une profondeur y est due au poids des terrains au
dessus de ce point
La seule composante non nulle de la matrice des déformations est la composante $yy (la déformation est uniaxiale
compte tenue des conditions sur les parois verticales et sur la base). La loi de Hooke permet d’écrire
(pour " = ! les contraintes horizontales sont donc égales au tiers de la contrainte verticale)
La pression moyenne est donc
Ce qui montre qu’à moins d’un coefficient de Poisson de 0.5 (corps incompressible) la pression moyenne ne
peut être égale à la pression hydrostatique. Il ne faut donc pas confondre ces deux quantités.
Pour " = !, la pression moyenne à 40 m de profondeur est p = 0.555 MPa.
D.2 Bloc reposant sans frottement sur un plan
D.2.1. Exercice 8
Relancez l’essai précédent en ayant libéré les deux faces verticales. Observez à nouveau le champ de pression et
donnez en une explication.

14
D.3 champ de contrainte autour d’un tunnel
D.3.1. Exercice 9
Réalisez l’essai décrit ci-dessous. Interprétez le champ de contrainte obtenu (visualisez la pression, l’intensité du
déviateur et les croix des contraintes).
Caractéristiques géométriques et rhéologiques du modèle utilisé pour étudier la
répartition des contraintes due aux effets gravitaires autour d’un tunnel.
D.3.2. Exercice 10
Relancez l’essai précédent en appliquant une vitesse normale constante sur la face du dessus. Utilisez un
comportement élastoplastique (utilisez le critère de Von Mises pour simplifier).

15
Réponses aux exercices
Exercice 1
La courbe contrainte de traction – déformation longitudinale obtenue est représentée ci-dessous
La pente de cette droite vaut approximativement r = 1600 MPa / 1.5 10-2 = 106.66 GPa
La courbe déformation transverse – déformation longitudinale est représentée ci-dessous
La pente de cette droite est r’ = -0.68 / 2.05 = -0.3317.
Le coefficient de Poisson est donc
v = r’ / (r’ – 1) = 0.2491
et le module de Young est
E = (1 – v2) r = 100.043 GPa
Les valeurs réellement utilisées dans le fichier imas01 sont v = 0.25 et E = 100 GPa.

16
Exercice 2
L’essai donne la courbe contrainte – déformation suivante (J2 est le second invariant des contraintes
déviatoriques)
On a affaire à un matériau plastique adoucissant. Le domaine d’élasticité correspond à un J2(!) inférieur à
100 MPa. Sachant que le matériau obéit au critère de Von Mises, le seuil initial est donc de k = 100 MPa. Le
module d’écrouissage H est constant, négatif (chute du seuil de 10%) pour une déformation inférieure à 0.95 %
puis nul au delà.
Exercice 3
Le résultat obtenu en traction sur un matériau adoucissant obéissant au critère de Von Mises (matériau
précédent) montre des zones où la déformation plastique est fortement localisée sous forme de bandes de
cisaillement inclinées à 45° par rapport à l’axe de traction. Notez que l’hypothèse des petites déformations n’est
plus justifiée dans un tel cas même si l’étirement linéaire total n’est que d’environ 5 mm sur 20 cm de longueur
initiale (étirement d’environ 2.5 %). Cet étirement n’est donc pas ici seulement accommodé par un étirement
homogène (et une contraction homogène dans la direction transverse) mais aussi par du cisaillement intense dans
les bandes de localisation. Ce mode de déformation ductile est souvent précurseur de la rupture.
La courbe contrainte – déformation représentée à droite correspond à l’élément du maillage dessiné dans le coin
inférieur gauche. On voit qu’après s’être chargé de façon élastique puis plastique, il subit une décharge élastique,
ce qui témoigne du fait que la grande partie de la déformation permanente est encaissée par les zones de
localisation. Cela souligne aussi le mécanisme de la bifurcation plastique : le chargement étant homogène, tous
les points ont atteint le seuil de plasticité au même moment et la déformation reste homogène un certain temps
jusqu’à ce que le phénomène de localisation se produise. La déformation plastique se poursuit alors dans les
bandes de cisaillement tandis qu’à l’extérieur de celles-ci des décharges élastiques se produisent.

17
Exercice 4
Le matériau étant élastique, les contraintes n’évoluent bien sûr plus lorsque la déformation est maintenue
constante après une phase de chargement de 0.5 an.
Exercice 5
Le même essai réalisé cette fois avec une loi de comportement viscoélastique de Maxwell montre, après la phase
de mise en charge (entre 0 et 0.5 an), une décroissance exponentielle de la contrainte. Notez qu’il y a aussi
relaxation pendant la phase de mise en charge : comparé au cas de l’élasticité, le trajet n’est plus linéaire et la
contrainte différentielle maximale atteinte à la fin de la mise en charge est plus faible (140.3 MPa au lieu de 189
MPa).
Evaluons sur la figure précédente le temps de relaxation, autrement dit le temps qu’il faut à la contrainte pour
que sa valeur maximale soit divisée par e, c’est à dire pour qu’elle ne soit plus que de 140.3 / 2.718 soit environ
51.62 MPa. On lit sur le graphique que le temps correspondant à cette contrainte est approximativement
t = 1.3 an. Le temps de relaxation est donc tr = 1.3 – 0.5 = 0.8 an.
La viscosité est donc
! = µ tr
où µ = E / 2(1+v) est le module de cisaillement valant 40 GPa d’après les valeurs de E et v déduites
précédemment.
On a donc ! = 32 GPa an ou encore (1an = 3.15 107 s) ! = 1.008 1018 Pa s
La valeur effectivement utilisée est de 1018 Pa s (voir le fichier imas01 où c’est la fluidité – inverse du double de
la viscosité – qui est donnée).

18
Exercice 6
La courbe montre un fluage constant après une réponse instantanée due à l’élasticité et à l’application brutale du
chargement.
La valeur instantanée de la déformation différentielle permet de déterminer le module de cisaillement
connaissant la contrainte imposée :
C’est bien la valeur déduite de l’exercice 1.
La pente de la courbe de fluage permet de trouver la viscosité :
la mesure de la pente a donne
d’où pour la viscosité
! = 3.2 1010 Pa an " 1018 Pa s
Exercice 7
voir les notes de cours

19
Exercice 8
C’est le problème de l’équilibre d’une colonne reposant sans frottement sur un plan, traité ici en déformation
plane. Les bords du domaine étant libres ils ont tendance à se soulever sous l’effet du chargement gravitaire.
Comme l’on impose ici que la colonne reste en contact avec le plan (condition aux limites sur la face inférieure =
déplacement normal nul), ceci crée un champ de pression qui diminue du centre vers les bords, effet qui
s’amplifie du haut vers le bas.
Exercice 9
On représente ci-dessous l’intensité des contraintes déviatoriques (J2) , le champ de pression moyenne et les
croix des contraintes (directions et intensités des contraintes principales).
Sur le premier champ on voit les zones qui sont les plus sollicitées et qui pourront éventuellement être sujettes à
la rupture ou à des phénomènes de plastification. Notez les dépressions à la base et au toit du tunnel ainsi que
l’orientation prise par les directions principales des contraintes (traction horizontale).
20
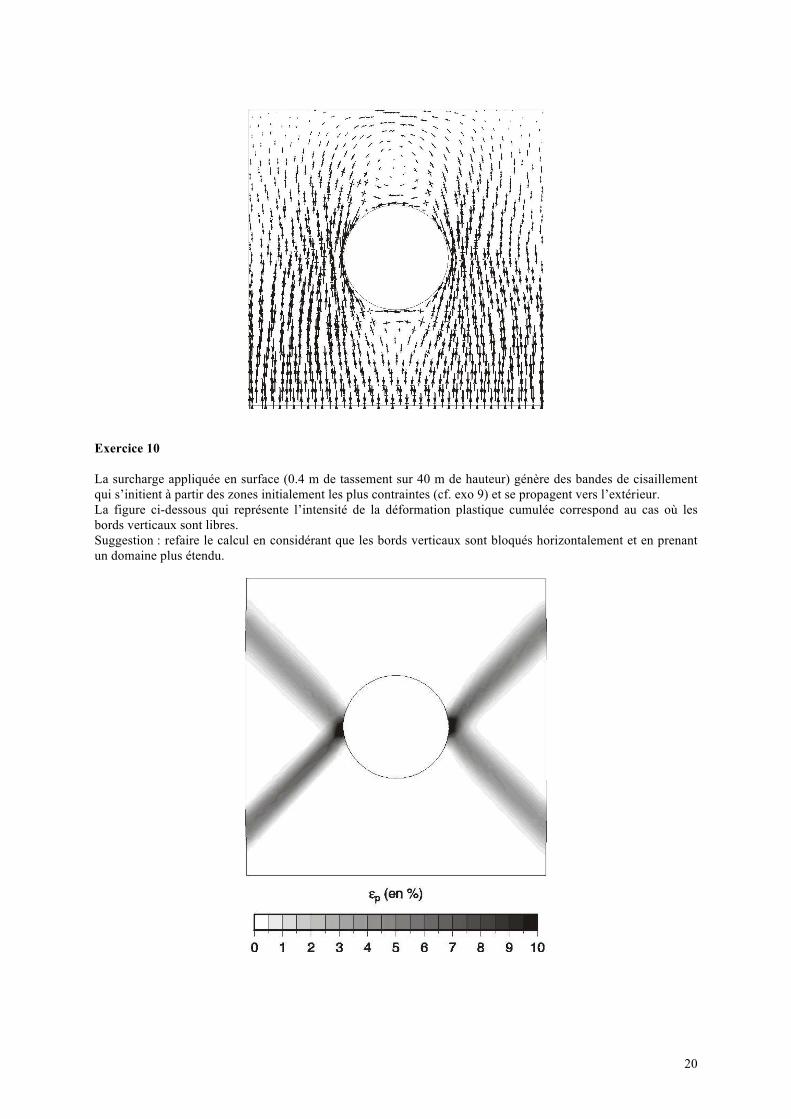
Exercice 10
La surcharge appliquée en surface (0.4 m de tassement sur 40 m de hauteur) génère des bandes de cisaillement
qui s’initient à partir des zones initialement les plus contraintes (cf. exo 9) et se propagent vers l’extérieur.
La figure ci-dessous qui représente l’intensité de la déformation plastique cumulée correspond au cas où les
bords verticaux sont libres.
Suggestion : refaire le calcul en considérant que les bords verticaux sont bloqués horizontalement et en prenant
un domaine plus étendu.