électronique - chaîne de...
TRANSCRIPT
RUDIGER Romain IUT de Blois
RETIF Benjamin Année 2004/2005
GTR1E
DOSSIER D’ELECTRONIQUE Réalisation d’une ligne de transmission.
SOMMAIRE
1. Etude fonctionnelle Page 1
2. Les oscillateurs 2.1 Partie théorique
2.1.1 Signal modulant Page 2
2.1.2 Génération de la porteuse Page 4
2.2 Partie pratique
2.2.1 Génération du modulant Page 5
2.2.2 Génération de la porteuse Page 6
3. Modulation d’amplitude 3.1 Partie théorique
3.1.1 Etude de la modulation d’amplitude Page 7
3.1.2 Le circuit intégré AD534 Page 8
3.2 Partie pratique
3.2.1 Modulation par multiplication Page 9
3.2.2 Modulation d’amplitude Page 10
4. Démodulation d’amplitude 4.1 Etude de la démodulation Page 10
4.2 Partie pratique
4.2.1 Caractérisation de la diode Page 12
4.2.2 Démodulation à diode Page 13
5. Filtrage sélectif 5.1 Etude du filtrage autour de la fréquence porteuse Page 14
5.2 Partie pratique Page 15
6. Synthèse Page 16
1. Etude fonctionnelle
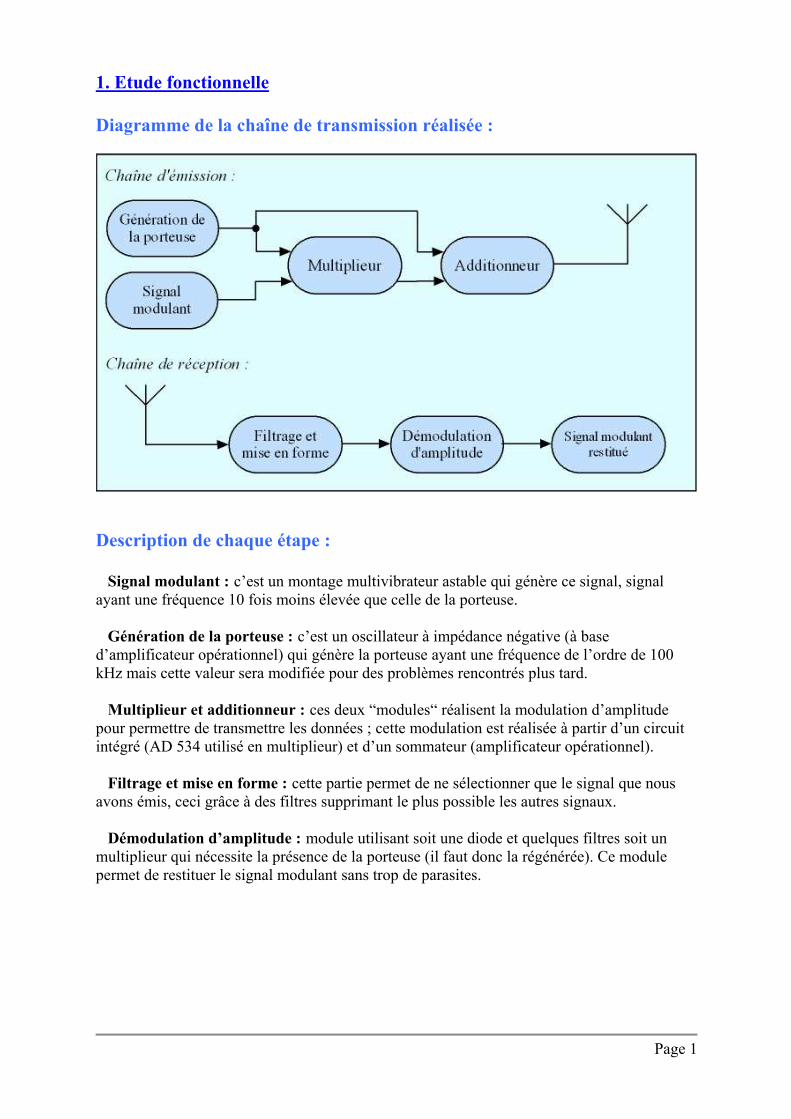
Diagramme de la chaîne de transmission réalisée :
Description de chaque étape :
Signal modulant : c’est un montage multivibrateur astable qui génère ce signal, signal
ayant une fréquence 10 fois moins élevée que celle de la porteuse.
Génération de la porteuse : c’est un oscillateur à impédance négative (à base
d’amplificateur opérationnel) qui génère la porteuse ayant une fréquence de l’ordre de 100
kHz mais cette valeur sera modifiée pour des problèmes rencontrés plus tard.
Multiplieur et additionneur : ces deux “modules“ réalisent la modulation d’amplitude
pour permettre de transmettre les données ; cette modulation est réalisée à partir d’un circuit
intégré (AD 534 utilisé en multiplieur) et d’un sommateur (amplificateur opérationnel).
Filtrage et mise en forme : cette partie permet de ne sélectionner que le signal que nous
avons émis, ceci grâce à des filtres supprimant le plus possible les autres signaux.
Démodulation d’amplitude : module utilisant soit une diode et quelques filtres soit un
multiplieur qui nécessite la présence de la porteuse (il faut donc la régénérée). Ce module
permet de restituer le signal modulant sans trop de parasites.
Page 1
2. Les oscillateurs
2.1 Partie théorique
Problématique : Il s’agit ici de simuler un signal à envoyer, il faut donc réaliser un montage permettant
de générer un signal carré de fréquence variable à l’aide d’un amplificateur opérationnel.
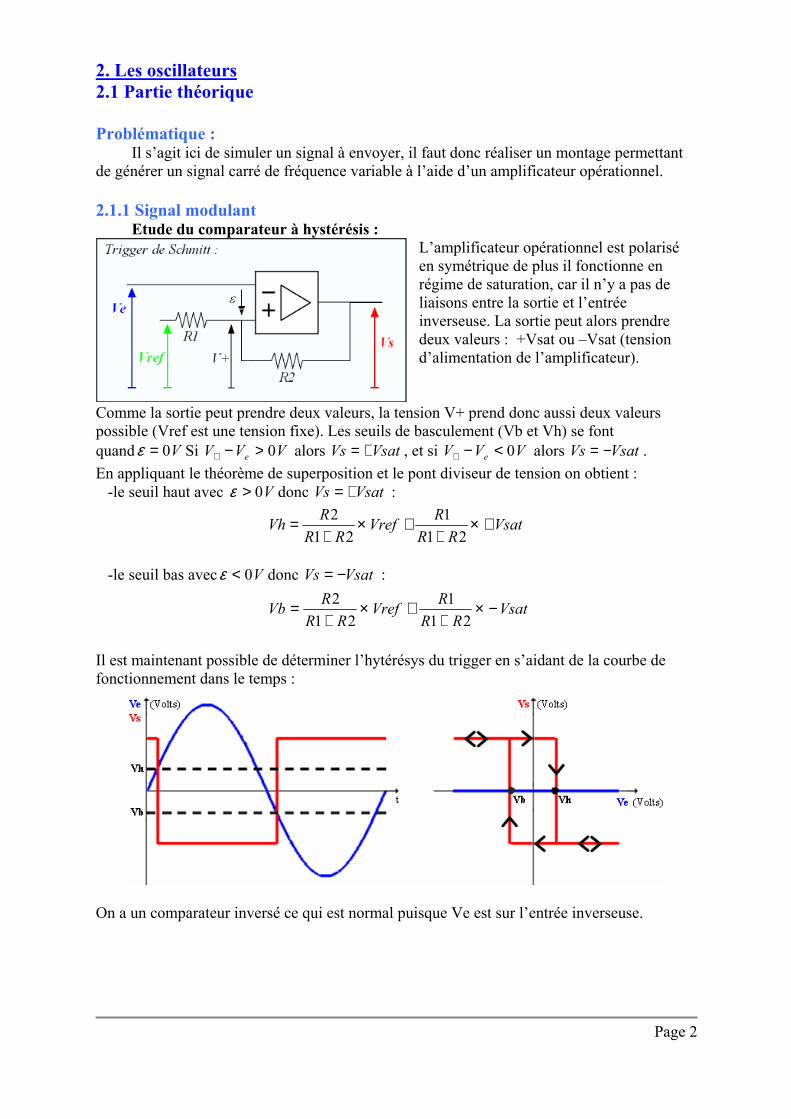
2.1.1 Signal modulant Etude du comparateur à hystérésis :
L’amplificateur opérationnel est polarisé
en symétrique de plus il fonctionne en
régime de saturation, car il n’y a pas de
liaisons entre la sortie et l’entrée
inverseuse. La sortie peut alors prendre
deux valeurs : +Vsat ou –Vsat (tension
d’alimentation de l’amplificateur).
Comme la sortie peut prendre deux valeurs, la tension V+ prend donc aussi deux valeurs
possible (Vref est une tension fixe). Les seuils de basculement (Vb et Vh) se font
quand V0=ε Si VVV e 0>−+ alors VsatVs += , et si VVV e 0<−+ alors VsatVs −= .
En appliquant le théorème de superposition et le pont diviseur de tension on obtient :
-le seuil haut avec V0>ε donc VsatVs += :
-le seuil bas avec V0<ε donc VsatVs −= :
Il est maintenant possible de déterminer l’hytérésys du trigger en s’aidant de la courbe de
fonctionnement dans le temps :
On a un comparateur inversé ce qui est normal puisque Ve est sur l’entrée inverseuse.
Page 2
VsatRR
RVref
RR
RVh +×
++×
+=
21
1
21
2
VsatRR
RVref
RR
RVb −×
++×
+=
21
1
21
2
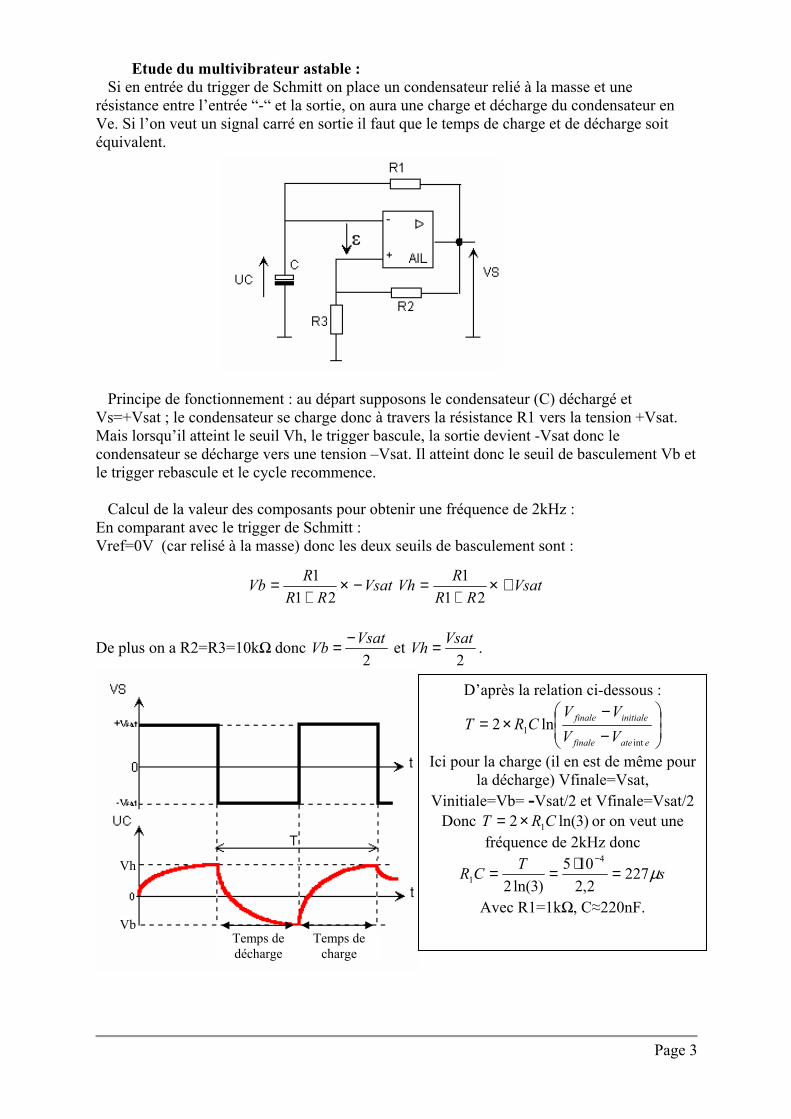
Etude du multivibrateur astable :
Si en entrée du trigger de Schmitt on place un condensateur relié à la masse et une
résistance entre l’entrée “-“ et la sortie, on aura une charge et décharge du condensateur en
Ve. Si l’on veut un signal carré en sortie il faut que le temps de charge et de décharge soit
équivalent.
Principe de fonctionnement : au départ supposons le condensateur (C) déchargé et
Vs=+Vsat ; le condensateur se charge donc à travers la résistance R1 vers la tension +Vsat.
Mais lorsqu’il atteint le seuil Vh, le trigger bascule, la sortie devient -Vsat donc le
condensateur se décharge vers une tension –Vsat. Il atteint donc le seuil de basculement Vb et
le trigger rebascule et le cycle recommence.
Calcul de la valeur des composants pour obtenir une fréquence de 2kHz :
En comparant avec le trigger de Schmitt :
Vref=0V (car relisé à la masse) donc les deux seuils de basculement sont :
De plus on a R2=R3=10kΩ donc 2
VsatVb
−= et 2
VsatVh = .
Page 3
VsatRR
RVh +×
+=
21
1Vsat
RR
RVb −×
+=
21
1
Temps de
décharge
Temps de
charge
Vh
Vb
D’après la relation ci-dessous :
−−
×=eatefinale
initialefinale
VV
VVCRT
int
1 ln2
Ici pour la charge (il en est de même pour
la décharge) Vfinale=Vsat,
Vinitiale=Vb= -Vsat/2 et Vfinale=Vsat/2 Donc )3ln(2 1CRT ×= or on veut une
fréquence de 2kHz donc
sT
CR µ2272,2
105
)3ln(2
4
1 =⋅==−
Avec R1=1kΩ, C≈220nF.
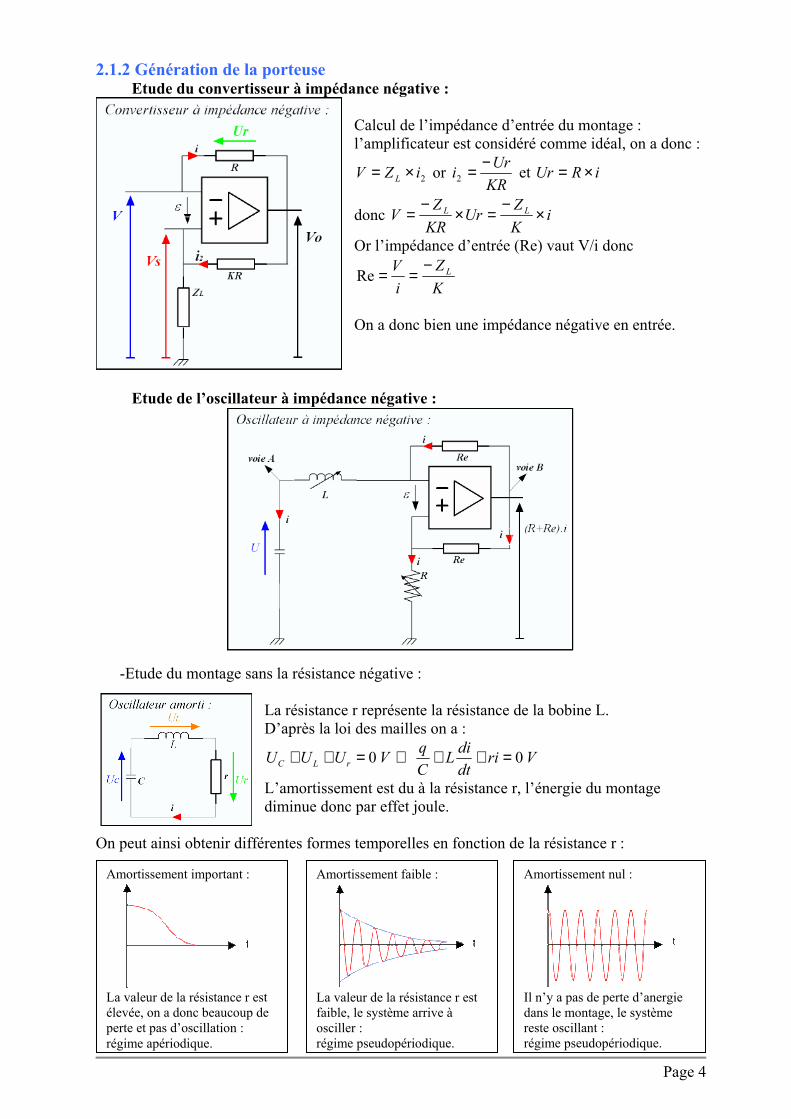
2.1.2 Génération de la porteuse Etude du convertisseur à impédance négative :
Calcul de l’impédance d’entrée du montage :
l’amplificateur est considéré comme idéal, on a donc :
2iZV L ×= or KR
Uri
−=2 et iRUr ×=
donc iK
ZUr
KR
ZV LL ×
−=×
−=
Or l’impédance d’entrée (Re) vaut V/i donc
K
Z
i
V L−==Re
On a donc bien une impédance négative en entrée.
Etude de l’oscillateur à impédance négative :
-Etude du montage sans la résistance négative :
La résistance r représente la résistance de la bobine L.
D’après la loi des mailles on a :
Vridt
diL
C
qVUUU rLC 00 =++⇔=++
L’amortissement est du à la résistance r, l’énergie du montage
diminue donc par effet joule.
On peut ainsi obtenir différentes formes temporelles en fonction de la résistance r :
Page 4
Amortissement important :
La valeur de la résistance r est
élevée, on a donc beaucoup de
perte et pas d’oscillation :
régime apériodique.
Amortissement faible :
La valeur de la résistance r est
faible, le système arrive à
osciller :
régime pseudopériodique.
Amortissement nul :
Il n’y a pas de perte d’anergie
dans le montage, le système
reste oscillant :
régime pseudopériodique.

-Etude du montage avec la résistance négative :
Pour que les oscillations perdurent il faut un coefficient d’amortissement nul, il faut donc
compenser les pertes provoquées principalement par la résistance r. C’est le but du montage à
impédance négative qui fourni l’énergie perdue par r.
Rn étant la résistance négative la relation devient :
ViRnirdt
diL
C
qVUUUU RnrLC 00 =−++⇔=+++
Pour osciller il faut régler R de façon à annuler r, on a ainsi une pulsation qui est :
LC
1=ω
Génération d’un signal de fréquence 10 fois supérieur à celle du signal modulant qui est de
2 kHz. En utilisant un condensateur de 1.8nF voici le calcul de l’inductance :
mHC
LLCLC
3510.8,1)10.202(
111192322
2 ≈××
==→=→= −πωωω
Il faut donc utiliser un condensateur de 1.8nF, une inductance de 35 mH et choisir une
valeur de R de façon à ce que le montage oscille et ait une amplitude convenable.
2.2 Partie pratique
Problématique : Il faut maintenant vérifier toute la partie théorique de façon expérimentale.
2.2.1 Génération du modulant Le comparateur à hystérésis :
L Calcul des seuils du trigger de Schmitt avec les caractéristiques suivantes :
Ω=Ω=Ω= kRkRkR 10,47,2,8 321 ; de plus l’amplificateur est alimenté en V15± .
- VVref 0=
VVsatRR
RVh 63,215
4710
10
23
3 ≈×+
=+×+
=
VVsatRR
RVb 63,215
4710
10
23
3 −≈−×+
=−×+
=
- VVref 5=
VVsatRR
RVref
RR
RVh 75,663,25
1047
47
23
3
32
2 ≈+×+
=+×+
+×+
=
VVsatRR
RVref
RR
RVb 47,163,25
1047
47
23
3
32
2 ≈−×+
=−×+
+×+
=
- VVref 5−=
VVsatRR
RVref
RR
RVh 47,163,25
1047
47
23
3
32
2 −≈+−×+
=+×+
+×+
=
VVsatRR
RVref
RR
RVb 47,163,25
1047
47
23
3
32
2 ≈−−×+
=−×+
+×+
=
L Vérification des seuils en pratique :
VVref 0= VVref 5= VVref 5−=
Résultat théorique pratique théorique pratique théorique pratique
Vh (Volt) 2,63 2,55 6,75 7,05 -1,49 -1,43
Vb (Volt) 2,63 -2,43 1,47 2,02 -6,75 -6,8
Page 5
Les écarts constatés sont relativement faibles, ils peuvent être du à la tolérance des
composants (5% pour les résistances), l’imprécision de l’alimentation et nos mesures.
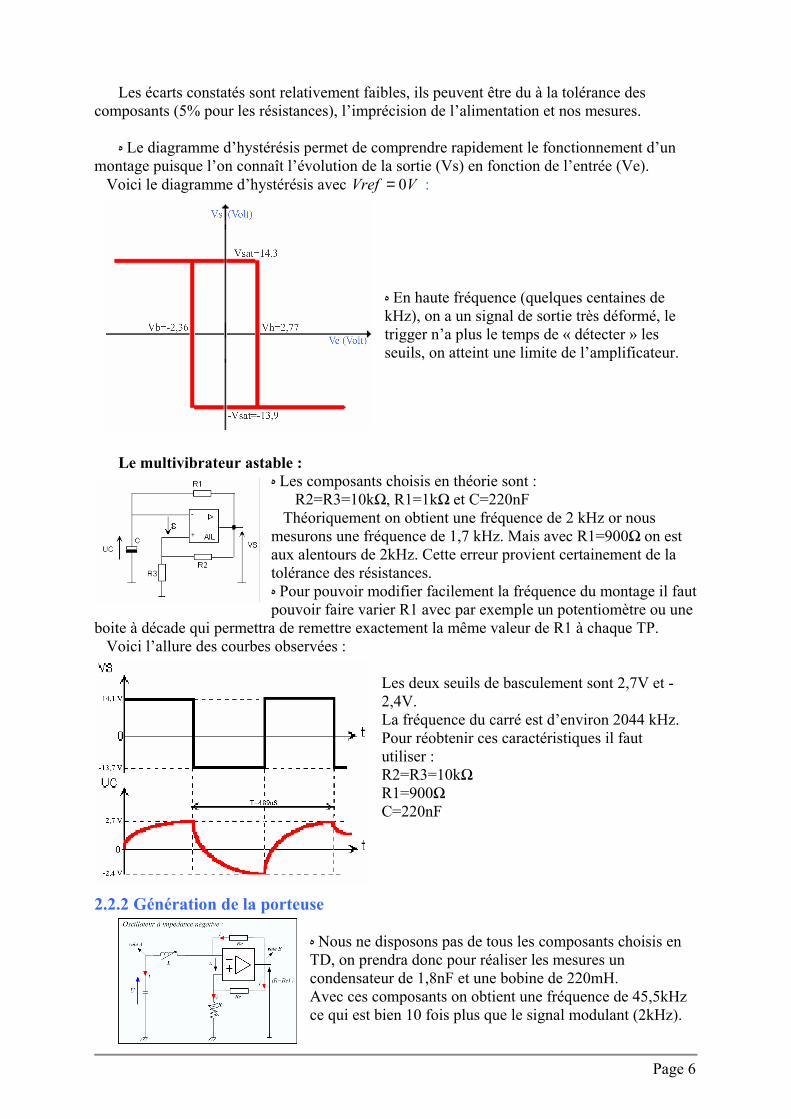
L Le diagramme d’hystérésis permet de comprendre rapidement le fonctionnement d’un
montage puisque l’on connaît l’évolution de la sortie (Vs) en fonction de l’entrée (Ve).
Voici le diagramme d’hystérésis avec VVref 0= :
L En haute fréquence (quelques centaines de
kHz), on a un signal de sortie très déformé, le
trigger n’a plus le temps de « détecter » les
seuils, on atteint une limite de l’amplificateur.
Le multivibrateur astable :
L Les composants choisis en théorie sont :
R2=R3=10kΩ, R1=1kΩ et C=220nF
Théoriquement on obtient une fréquence de 2 kHz or nous
mesurons une fréquence de 1,7 kHz. Mais avec R1=900Ω on est
aux alentours de 2kHz. Cette erreur provient certainement de la
tolérance des résistances.
L Pour pouvoir modifier facilement la fréquence du montage il faut
pouvoir faire varier R1 avec par exemple un potentiomètre ou une
boite à décade qui permettra de remettre exactement la même valeur de R1 à chaque TP.
Voici l’allure des courbes observées :
Les deux seuils de basculement sont 2,7V et -
2,4V.
La fréquence du carré est d’environ 2044 kHz.
Pour réobtenir ces caractéristiques il faut
utiliser :
R2=R3=10kΩ
R1=900Ω
C=220nF
2.2.2 Génération de la porteuse
L Nous ne disposons pas de tous les composants choisis en
TD, on prendra donc pour réaliser les mesures un
condensateur de 1,8nF et une bobine de 220mH.
Avec ces composants on obtient une fréquence de 45,5kHz
ce qui est bien 10 fois plus que le signal modulant (2kHz).
Page 6
L Il faut que le montage à impédance négative compense les pertes dues en grande partie par
la bobine. La valeur de la résistance négative se règle par la résistance variable R, si cette
résistance est trop grande on sature le comparateur tandis que si cette résistance est trop petite
la résistance négative ne compense plus les pertes ; on n’a donc plus d’oscillation.
L Avec une résistance R de 7 Ω on commence à avoir une oscillation et on a une sinusoïde
aux bornes du condensateur (U) mais ce signal est de faible amplitude (de l’ordre des mV).
Cette sinusoïde reste relativement peut déformée jusqu'à R=1kΩ où l’on a une amplitude de
870mV et une fréquence de 46,5kHz. Ce sont ces dernières valeurs que nous réutiliserons
dans la suite du TP.
3. Modulation d’amplitude
3.1 Partie théorique
Problématique : On ne peut pas envoyer directement les données sur un support physique pour parcourir
de longue distance, le signal doit être adapté en fonction du support. C’est la modulation d’un
signal, plusieurs modulations existent : modulation d’amplitude, de fréquence, de phase ; ici
nous allons moduler en amplitude.
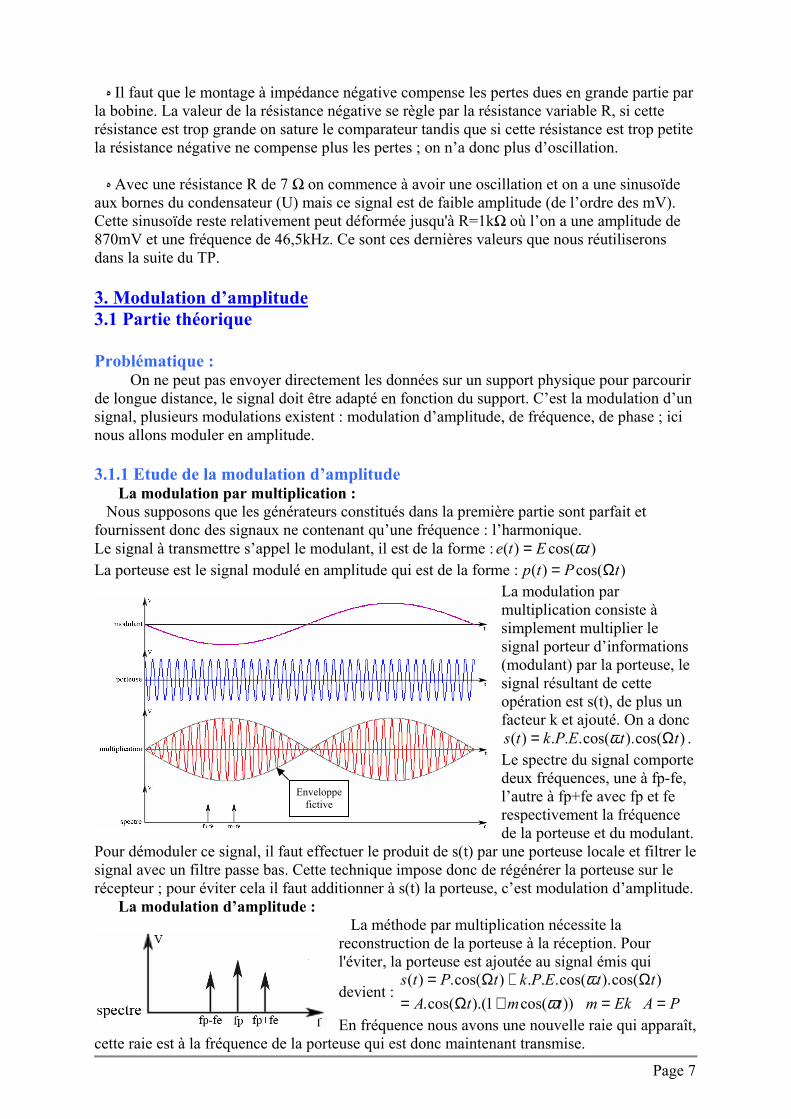
3.1.1 Etude de la modulation d’amplitude La modulation par multiplication :
Nous supposons que les générateurs constitués dans la première partie sont parfait et
fournissent donc des signaux ne contenant qu’une fréquence : l’harmonique.
Le signal à transmettre s’appel le modulant, il est de la forme : )cos()( tEte ω=
La porteuse est le signal modulé en amplitude qui est de la forme : )cos()( tPtp Ω=
La modulation par
multiplication consiste à
simplement multiplier le
signal porteur d’informations
(modulant) par la porteuse, le
signal résultant de cette
opération est s(t), de plus un
facteur k et ajouté. On a donc
)cos().cos(...)( ttEPkts Ω= ω .
Le spectre du signal comporte
deux fréquences, une à fp-fe,
l’autre à fp+fe avec fp et fe
respectivement la fréquence
de la porteuse et du modulant.
Pour démoduler ce signal, il faut effectuer le produit de s(t) par une porteuse locale et filtrer le
signal avec un filtre passe bas. Cette technique impose donc de régénérer la porteuse sur le
récepteur ; pour éviter cela il faut additionner à s(t) la porteuse, c’est modulation d’amplitude.
La modulation d’amplitude : La méthode par multiplication nécessite la
reconstruction de la porteuse à la réception. Pour
l'éviter, la porteuse est ajoutée au signal émis qui
devient : PAEkmtmtA
ttEPktPts
==+Ω=Ω+Ω=
))cos(1).(cos(.
)cos().cos(...)cos(.)(
ωω
En fréquence nous avons une nouvelle raie qui apparaît,
cette raie est à la fréquence de la porteuse qui est donc maintenant transmise.
Page 7
Enveloppe
fictive
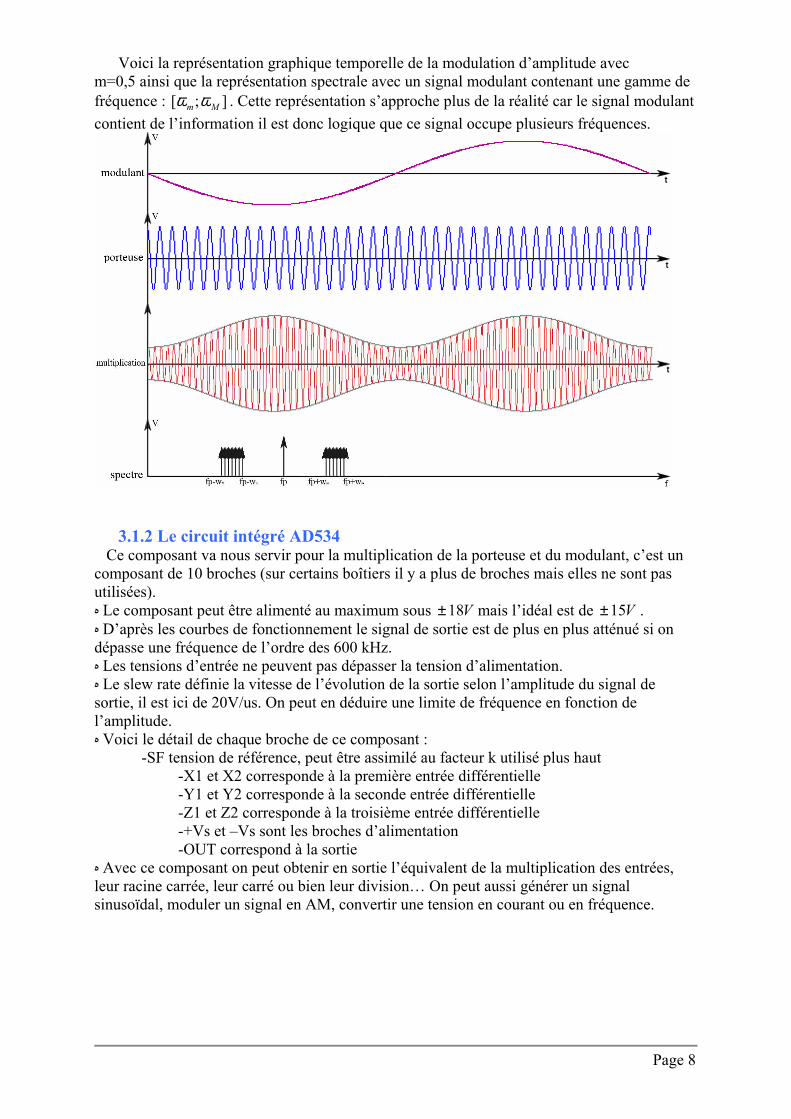
Voici la représentation graphique temporelle de la modulation d’amplitude avec
m=0,5 ainsi que la représentation spectrale avec un signal modulant contenant une gamme de
fréquence : ];[ Mm ωω . Cette représentation s’approche plus de la réalité car le signal modulant
contient de l’information il est donc logique que ce signal occupe plusieurs fréquences.
3.1.2 Le circuit intégré AD534 Ce composant va nous servir pour la multiplication de la porteuse et du modulant, c’est un
composant de 10 broches (sur certains boîtiers il y a plus de broches mais elles ne sont pas
utilisées).
L Le composant peut être alimenté au maximum sous V18± mais l’idéal est de V15± .
L D’après les courbes de fonctionnement le signal de sortie est de plus en plus atténué si on
dépasse une fréquence de l’ordre des 600 kHz.
L Les tensions d’entrée ne peuvent pas dépasser la tension d’alimentation.
L Le slew rate définie la vitesse de l’évolution de la sortie selon l’amplitude du signal de
sortie, il est ici de 20V/us. On peut en déduire une limite de fréquence en fonction de
l’amplitude.
L Voici le détail de chaque broche de ce composant :
-SF tension de référence, peut être assimilé au facteur k utilisé plus haut -X1 et X2 corresponde à la première entrée différentielle
-Y1 et Y2 corresponde à la seconde entrée différentielle
-Z1 et Z2 corresponde à la troisième entrée différentielle
-+Vs et –Vs sont les broches d’alimentation
-OUT correspond à la sortie
L Avec ce composant on peut obtenir en sortie l’équivalent de la multiplication des entrées,
leur racine carrée, leur carré ou bien leur division… On peut aussi générer un signal
sinusoïdal, moduler un signal en AM, convertir une tension en courant ou en fréquence.
Page 8
3.2 Partie pratique
Problématique : Il faut maintenant vérifier toute la partie théorique de façon expérimentale.
3.2.1 Modulation par multiplication La plaquette PLL : Cette plaquette nous permet d’avoir les deux éléments principaux constituant la modulation
d’amplitude qui sont le multiplieur et l’additionneur. Dans les deux parties suivantes nous
testerons ces éléments pour mieux les utiliser lors de la mise en œuvre de la modulation.
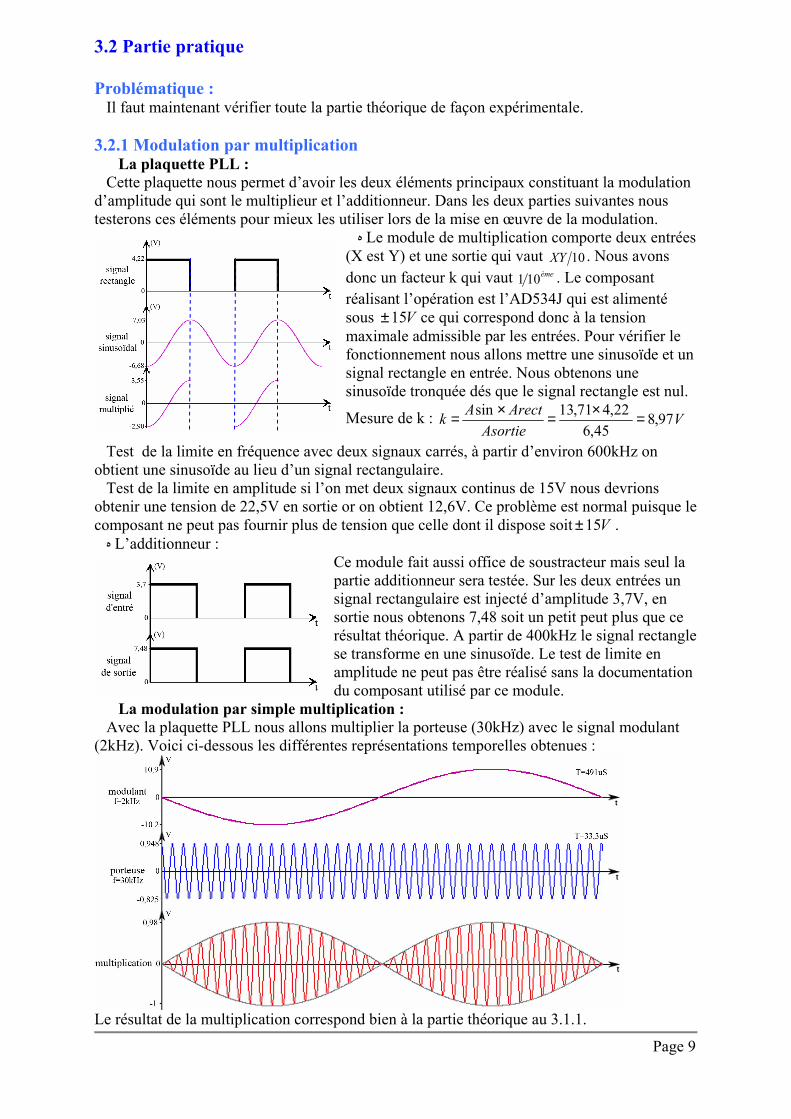
L Le module de multiplication comporte deux entrées
(X est Y) et une sortie qui vaut 10XY . Nous avons
donc un facteur k qui vaut ème101 . Le composant
réalisant l’opération est l’AD534J qui est alimenté
sous V15± ce qui correspond donc à la tension
maximale admissible par les entrées. Pour vérifier le
fonctionnement nous allons mettre une sinusoïde et un
signal rectangle en entrée. Nous obtenons une
sinusoïde tronquée dés que le signal rectangle est nul.
Mesure de k : VAsortie
ArectAk 97,8
45,6
22,471,13sin =×=×=
Test de la limite en fréquence avec deux signaux carrés, à partir d’environ 600kHz on
obtient une sinusoïde au lieu d’un signal rectangulaire.
Test de la limite en amplitude si l’on met deux signaux continus de 15V nous devrions
obtenir une tension de 22,5V en sortie or on obtient 12,6V. Ce problème est normal puisque le
composant ne peut pas fournir plus de tension que celle dont il dispose soit V15± .
L L’additionneur : Ce module fait aussi office de soustracteur mais seul la
partie additionneur sera testée. Sur les deux entrées un
signal rectangulaire est injecté d’amplitude 3,7V, en
sortie nous obtenons 7,48 soit un petit peut plus que ce
résultat théorique. A partir de 400kHz le signal rectangle
se transforme en une sinusoïde. Le test de limite en
amplitude ne peut pas être réalisé sans la documentation
du composant utilisé par ce module.
La modulation par simple multiplication : Avec la plaquette PLL nous allons multiplier la porteuse (30kHz) avec le signal modulant
(2kHz). Voici ci-dessous les différentes représentations temporelles obtenues :
Le résultat de la multiplication correspond bien à la partie théorique au 3.1.1.
Page 9
La multiplication de la porteuse avec un signal carré nous donne une sinusoïde contenant une
inversion de phase à chaque demi période. Voici la courbe de sortie :
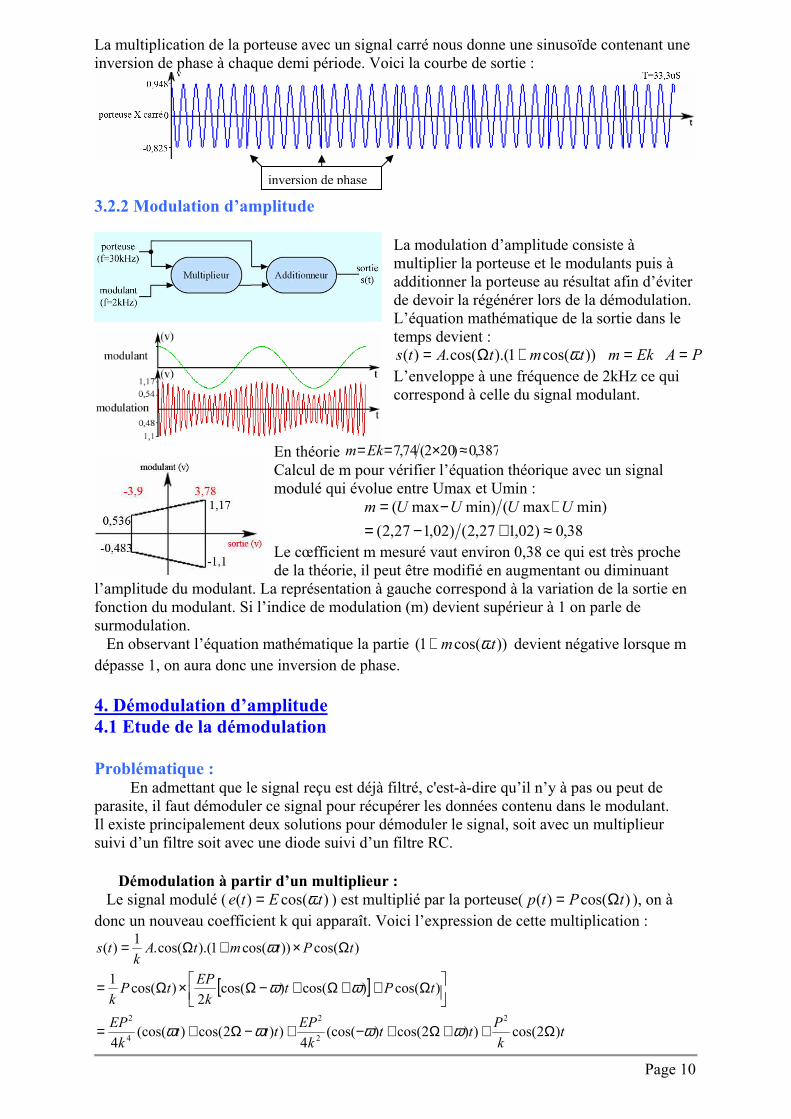
3.2.2 Modulation d’amplitude
La modulation d’amplitude consiste à
multiplier la porteuse et le modulants puis à
additionner la porteuse au résultat afin d’éviter
de devoir la régénérer lors de la démodulation.
L’équation mathématique de la sortie dans le
temps devient :
PAEkmtmtAts ==+Ω= ))cos(1).(cos(.)( ωL’enveloppe à une fréquence de 2kHz ce qui
correspond à celle du signal modulant.
En théorie
Calcul de m pour vérifier l’équation théorique avec un signal
modulé qui évolue entre Umax et Umin :
38,0)02,127,2()02,127,2(
min)max(min)max(
≈+−=+−= UUUUm
Le cœfficient m mesuré vaut environ 0,38 ce qui est très proche
de la théorie, il peut être modifié en augmentant ou diminuant
l’amplitude du modulant. La représentation à gauche correspond à la variation de la sortie en
fonction du modulant. Si l’indice de modulation (m) devient supérieur à 1 on parle de
surmodulation.
En observant l’équation mathématique la partie ))cos(1( tm ω+ devient négative lorsque m
dépasse 1, on aura donc une inversion de phase.
4. Démodulation d’amplitude
4.1 Etude de la démodulation
Problématique : En admettant que le signal reçu est déjà filtré, c'est-à-dire qu’il n’y à pas ou peut de
parasite, il faut démoduler ce signal pour récupérer les données contenu dans le modulant.
Il existe principalement deux solutions pour démoduler le signal, soit avec un multiplieur
suivi d’un filtre soit avec une diode suivi d’un filtre RC. Démodulation à partir d’un multiplieur : Le signal modulé ( )cos()( tEte ω= ) est multiplié par la porteuse( )cos()( tPtp Ω= ), on à
donc un nouveau coefficient k qui apparaît. Voici l’expression de cette multiplication :
[ ]
tk
Ptt
k
EPttt
k
EP
tPtk
EPtP
k
tPtmtAk
ts
)2cos())2cos()(cos(4
))2cos()(cos(4
)cos()cos()cos(2
)cos(1
)cos())cos(1).(cos(.1
)(
2
2
2
4
2
Ω++Ω+−+−Ω+=
Ω++Ω+−Ω×Ω=
Ω×+Ω=
ωωωω
ωω
ω
Page 10
inversion de phase
387,0)202(74,7 ≈×==Ekm
D’après cette équation on peut maintenant tracer le spectre du signal de sortie du multiplieur :
La raie à –w n’existe pas réellement, on voit clairement
que si l’on applique un filtre passe bas avec une
fréquence de coupure comprise entre w et 2Ω nous
obtiendrons le signal modulant. Cette méthode impose
de régénérer la porteuse mais également d’avoir deux
modules de multiplication à notre disposition pour la
chaîne de transmission complète.
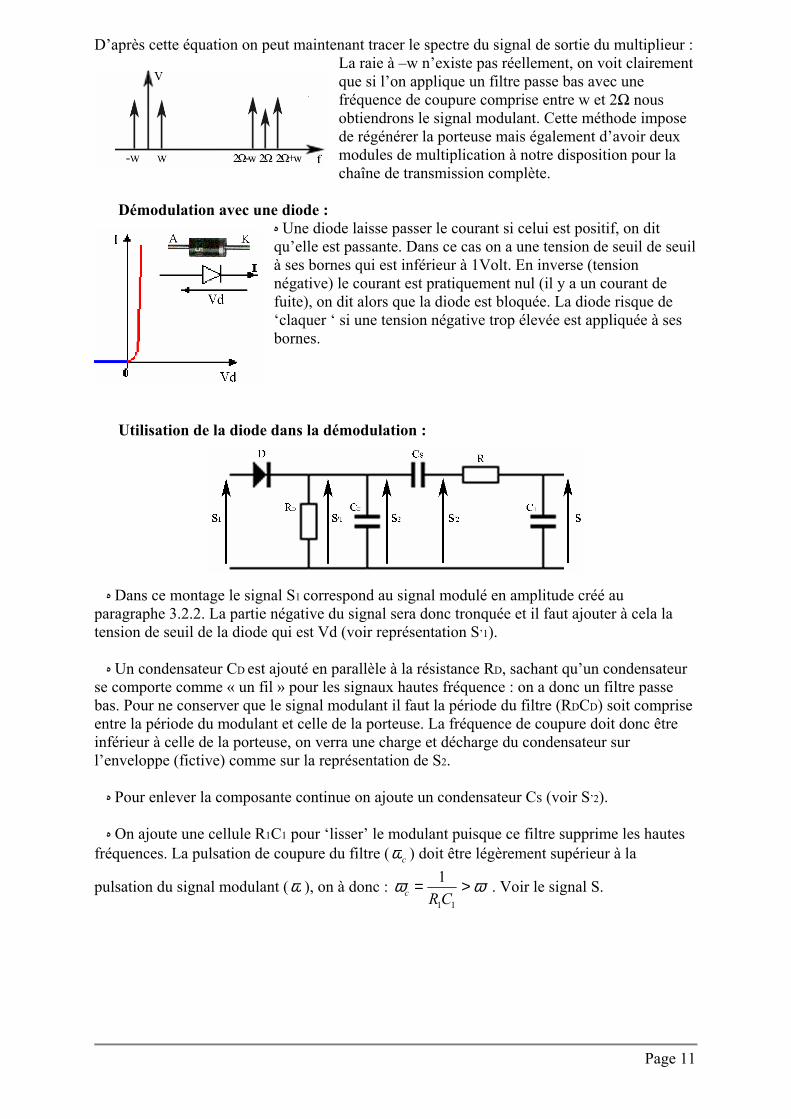
Démodulation avec une diode : L Une diode laisse passer le courant si celui est positif, on dit
qu’elle est passante. Dans ce cas on a une tension de seuil de seuil
à ses bornes qui est inférieur à 1Volt. En inverse (tension
négative) le courant est pratiquement nul (il y a un courant de
fuite), on dit alors que la diode est bloquée. La diode risque de
‘claquer ‘ si une tension négative trop élevée est appliquée à ses
bornes.
Utilisation de la diode dans la démodulation :
L Dans ce montage le signal S1 correspond au signal modulé en amplitude créé au
paragraphe 3.2.2. La partie négative du signal sera donc tronquée et il faut ajouter à cela la
tension de seuil de la diode qui est Vd (voir représentation S’1).
L Un condensateur CD est ajouté en parallèle à la résistance RD, sachant qu’un condensateur
se comporte comme « un fil » pour les signaux hautes fréquence : on a donc un filtre passe
bas. Pour ne conserver que le signal modulant il faut la période du filtre (RDCD) soit comprise
entre la période du modulant et celle de la porteuse. La fréquence de coupure doit donc être
inférieur à celle de la porteuse, on verra une charge et décharge du condensateur sur
l’enveloppe (fictive) comme sur la représentation de S2.
L Pour enlever la composante continue on ajoute un condensateur CS (voir S’2).
L On ajoute une cellule R1C1 pour ‘lisser’ le modulant puisque ce filtre supprime les hautes
fréquences. La pulsation de coupure du filtre ( cω ) doit être légèrement supérieur à la
pulsation du signal modulant (ω ), on à donc : ωω >=11
1
CRc . Voir le signal S.
Page 11
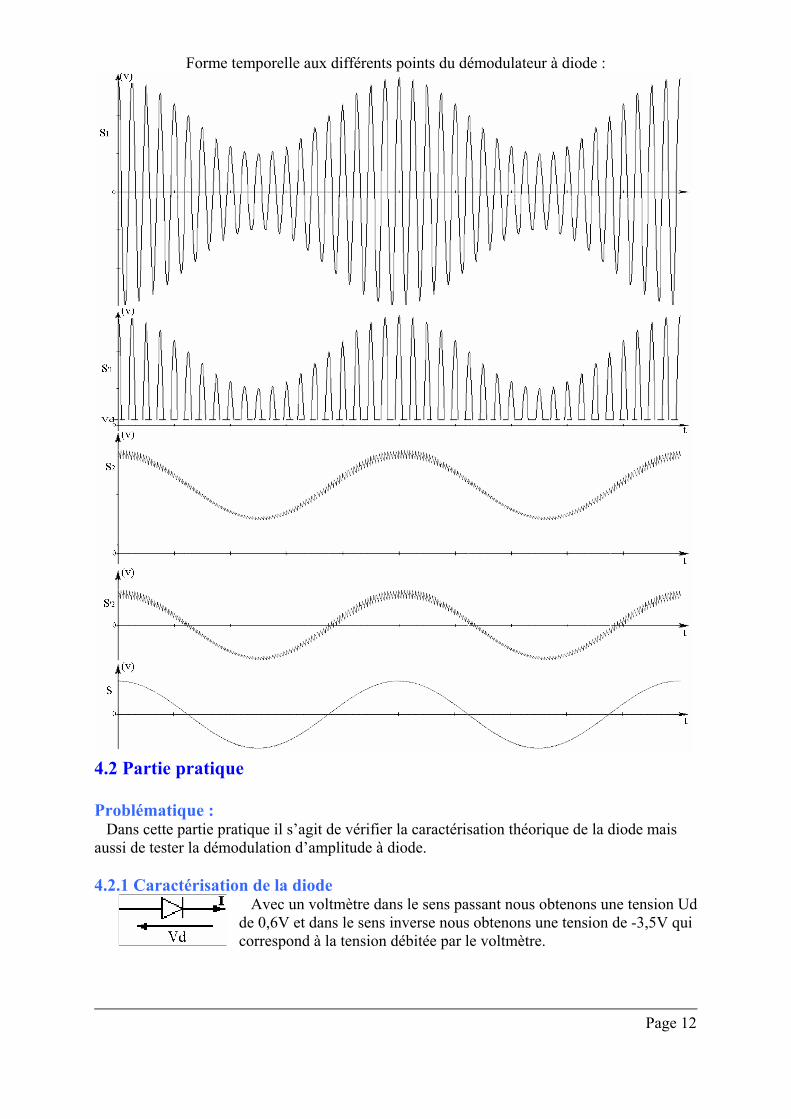
Forme temporelle aux différents points du démodulateur à diode :
4.2 Partie pratique
Problématique : Dans cette partie pratique il s’agit de vérifier la caractérisation théorique de la diode mais
aussi de tester la démodulation d’amplitude à diode.
4.2.1 Caractérisation de la diode Avec un voltmètre dans le sens passant nous obtenons une tension Ud
de 0,6V et dans le sens inverse nous obtenons une tension de -3,5V qui
correspond à la tension débitée par le voltmètre.
Page 12
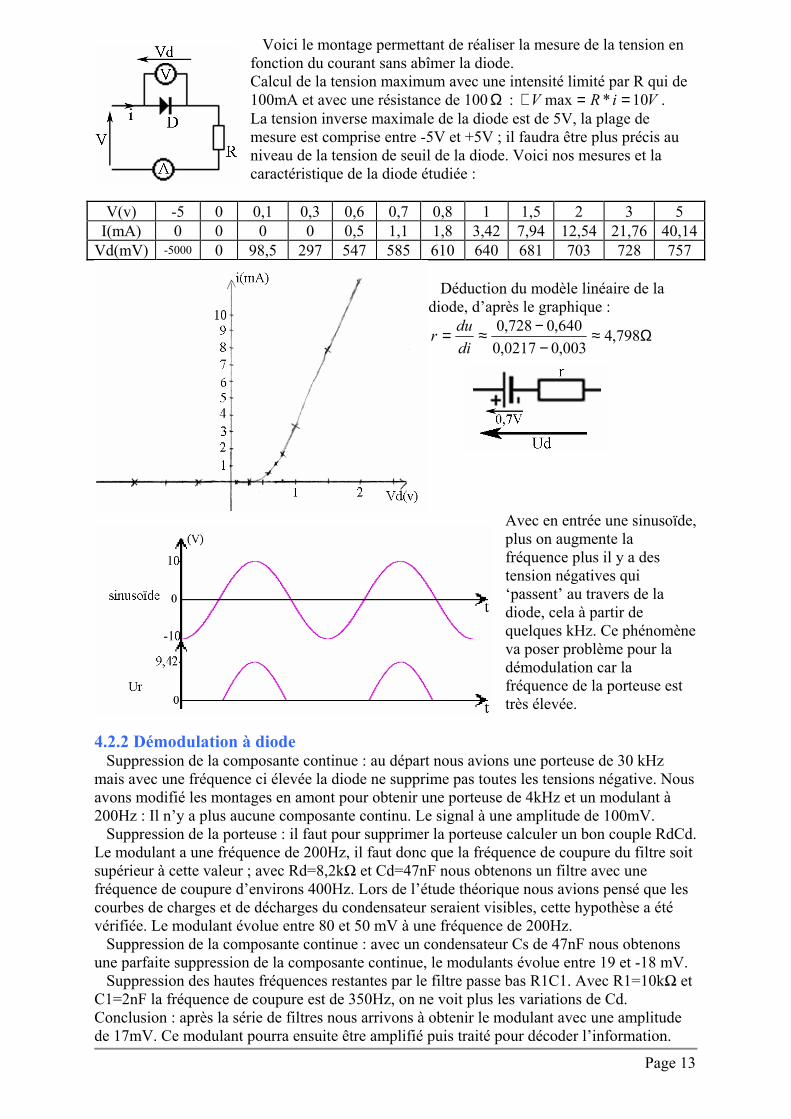
Voici le montage permettant de réaliser la mesure de la tension en
fonction du courant sans abîmer la diode.
Calcul de la tension maximum avec une intensité limité par R qui de
100mA et avec une résistance de 100Ω : ViRV 10*max ==+ .
La tension inverse maximale de la diode est de 5V, la plage de
mesure est comprise entre -5V et +5V ; il faudra être plus précis au
niveau de la tension de seuil de la diode. Voici nos mesures et la
caractéristique de la diode étudiée :
V(v) -5 0 0,1 0,3 0,6 0,7 0,8 1 1,5 2 3 5
I(mA) 0 0 0 0 0,5 1,1 1,8 3,42 7,94 12,54 21,76 40,14
Vd(mV) -5000 0 98,5 297 547 585 610 640 681 703 728 757
Déduction du modèle linéaire de la
diode, d’après le graphique :
Ω≈−
−≈= 798,4003,00217,0
640,0728,0
di
dur
Avec en entrée une sinusoïde,
plus on augmente la
fréquence plus il y a des
tension négatives qui
‘passent’ au travers de la
diode, cela à partir de
quelques kHz. Ce phénomène
va poser problème pour la
démodulation car la
fréquence de la porteuse est
très élevée.
4.2.2 Démodulation à diode Suppression de la composante continue : au départ nous avions une porteuse de 30 kHz
mais avec une fréquence ci élevée la diode ne supprime pas toutes les tensions négative. Nous
avons modifié les montages en amont pour obtenir une porteuse de 4kHz et un modulant à
200Hz : Il n’y a plus aucune composante continu. Le signal à une amplitude de 100mV.
Suppression de la porteuse : il faut pour supprimer la porteuse calculer un bon couple RdCd.
Le modulant a une fréquence de 200Hz, il faut donc que la fréquence de coupure du filtre soit
supérieur à cette valeur ; avec Rd=8,2kΩ et Cd=47nF nous obtenons un filtre avec une
fréquence de coupure d’environs 400Hz. Lors de l’étude théorique nous avions pensé que les
courbes de charges et de décharges du condensateur seraient visibles, cette hypothèse a été
vérifiée. Le modulant évolue entre 80 et 50 mV à une fréquence de 200Hz.
Suppression de la composante continue : avec un condensateur Cs de 47nF nous obtenons
une parfaite suppression de la composante continue, le modulants évolue entre 19 et -18 mV.
Suppression des hautes fréquences restantes par le filtre passe bas R1C1. Avec R1=10kΩ et
C1=2nF la fréquence de coupure est de 350Hz, on ne voit plus les variations de Cd.
Conclusion : après la série de filtres nous arrivons à obtenir le modulant avec une amplitude
de 17mV. Ce modulant pourra ensuite être amplifié puis traité pour décoder l’information.
Page 13
5. Filtrage selectif
5.1 Etude du filtrage autour de la fréquence porteuse
Problématique : Avant de démoduler le signal il faut sélectionner une gamme de fréquences pour n’avoir
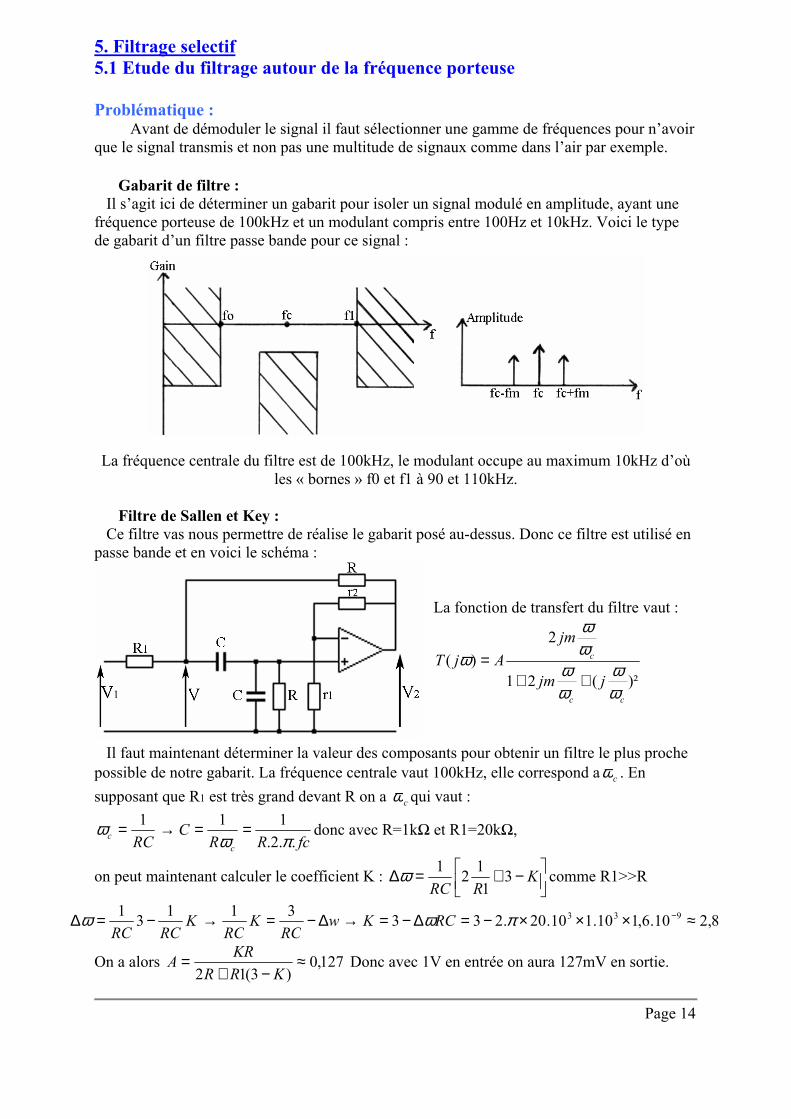
que le signal transmis et non pas une multitude de signaux comme dans l’air par exemple. Gabarit de filtre : Il s’agit ici de déterminer un gabarit pour isoler un signal modulé en amplitude, ayant une
fréquence porteuse de 100kHz et un modulant compris entre 100Hz et 10kHz. Voici le type
de gabarit d’un filtre passe bande pour ce signal :
La fréquence centrale du filtre est de 100kHz, le modulant occupe au maximum 10kHz d’où
les « bornes » f0 et f1 à 90 et 110kHz.
Filtre de Sallen et Key : Ce filtre vas nous permettre de réalise le gabarit posé au-dessus. Donc ce filtre est utilisé en
passe bande et en voici le schéma :
La fonction de transfert du filtre vaut :
)²(21
2
)(
cc
c
jjm
jm
AjT
ωω
ωω
ωω
ω++
=
Il faut maintenant déterminer la valeur des composants pour obtenir un filtre le plus proche
possible de notre gabarit. La fréquence centrale vaut 100kHz, elle correspond a cω . En
supposant que R1 est très grand devant R on a cω qui vaut :
fcRRC
RC c
c..2.
111
πωω ==→= donc avec R=1kΩ et R1=20kΩ,
on peut maintenant calculer le coefficient K :
−+=∆ KRRC
31
12
1ω comme R1>>R
On a alors 127,0)3(12
≈−+
=KRR
KRA Donc avec 1V en entrée on aura 127mV en sortie.
Page 14
8,210.6,110.110.20.233311
31 933 ≈×××−=∆−=→∆−=→−=∆ −πωω RCKw
RCK
RCK
RCRC
Maintenant le signal à filtrer occupe une bande passante de 14,9 à 15,1 kHz et est centré
sur 15kHz, pour être sûr de ne pas trop atténuer le signal on prend f0=14,5 et f1=15,5kHz
(voir le gabarit page 14). Calculons maintenant les nouvelles valeurs des composants :
nFC 1015000..2.1000
1 ≈=π
avec R=1kΩ et C=10nF
94,210.1010.110.1.23 933 ≈×××−≈ −πK dans ce cas 9,0)3(12
≈−+
=KRR
KRA
La bande passante est réglable par le gain K du module amplificateur non inverseur, il suffit
donc de faire varier la résistance r2 pour modifier la sélectivité du filtre.
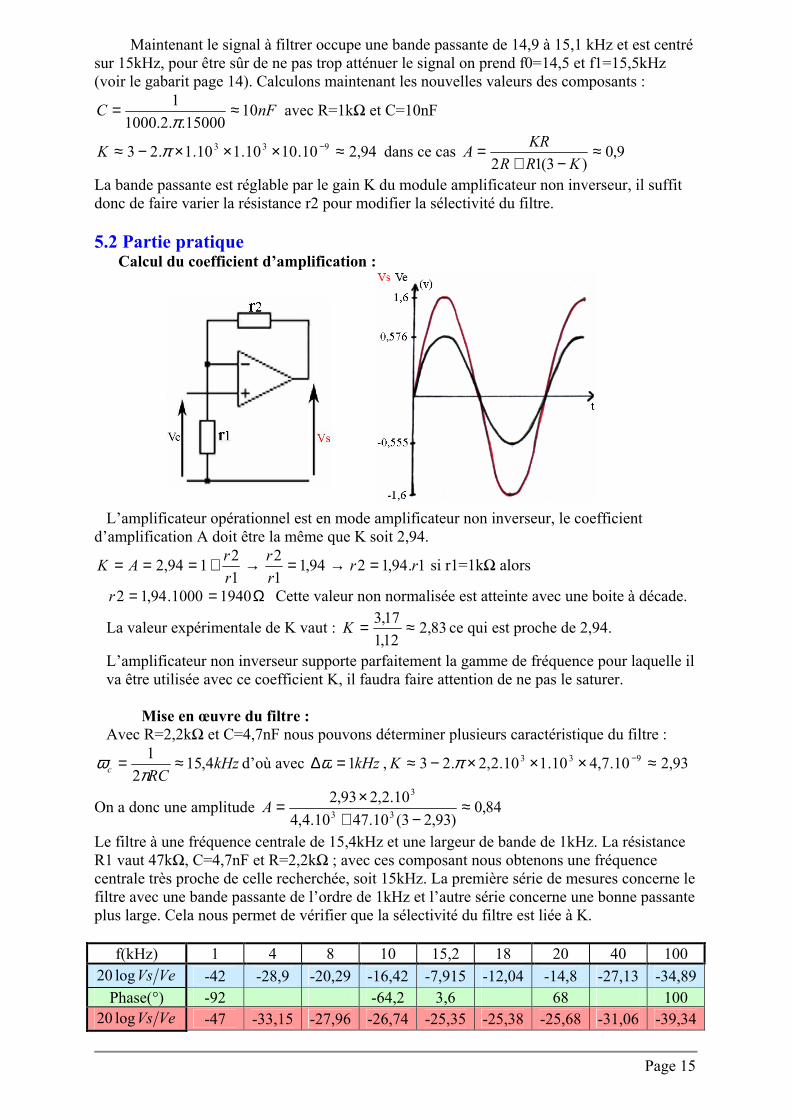
5.2 Partie pratique Calcul du coefficient d’amplification :
L’amplificateur opérationnel est en mode amplificateur non inverseur, le coefficient
d’amplification A doit être la même que K soit 2,94.
1.94,1294,11
2
1
2194,2 rr
r
r
r
rAK =→=→+=== si r1=1kΩ alors
Ω== 19401000.94,12r Cette valeur non normalisée est atteinte avec une boite à décade.
La valeur expérimentale de K vaut : 83,212,1
17,3 ≈=K ce qui est proche de 2,94.
L’amplificateur non inverseur supporte parfaitement la gamme de fréquence pour laquelle il
va être utilisée avec ce coefficient K, il faudra faire attention de ne pas le saturer.
Mise en œuvre du filtre :
Avec R=2,2kΩ et C=4,7nF nous pouvons déterminer plusieurs caractéristique du filtre :
kHzRC
c 4,152
1 ≈=π
ω d’où avec kHz1=∆ω , 93,210.7,410.110.2,2.23 933 ≈×××−≈ −πK
On a donc une amplitude 84,0)93,23(10.4710.4,4
10.2,293,233
3
≈−+
×=A
Le filtre à une fréquence centrale de 15,4kHz et une largeur de bande de 1kHz. La résistance
R1 vaut 47kΩ, C=4,7nF et R=2,2kΩ ; avec ces composant nous obtenons une fréquence
centrale très proche de celle recherchée, soit 15kHz. La première série de mesures concerne le
filtre avec une bande passante de l’ordre de 1kHz et l’autre série concerne une bonne passante
plus large. Cela nous permet de vérifier que la sélectivité du filtre est liée à K.
f(kHz) 1 4 8 10 15,2 18 20 40 100
VeVslog20 -42 -28,9 -20,29 -16,42 -7,915 -12,04 -14,8 -27,13 -34,89
Phase(°) -92 -64,2 3,6 68 100
VeVslog20 -47 -33,15 -27,96 -26,74 -25,35 -25,38 -25,68 -31,06 -39,34
Page 15
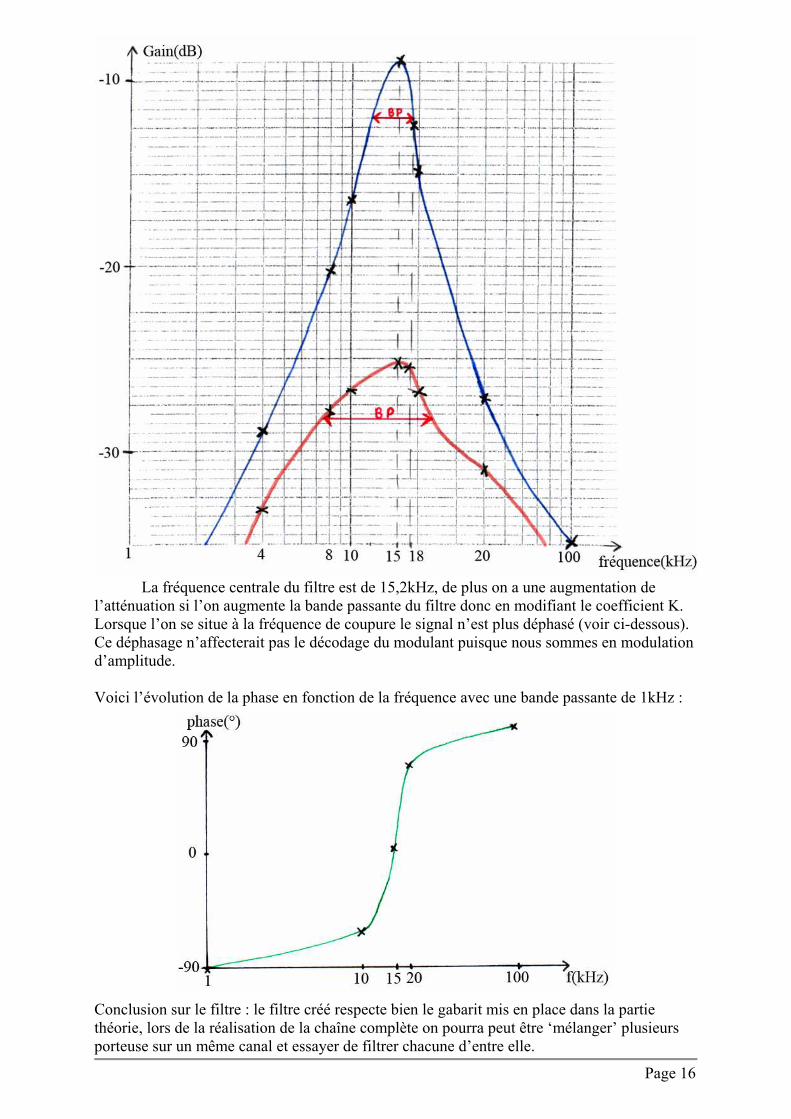
La fréquence centrale du filtre est de 15,2kHz, de plus on a une augmentation de
l’atténuation si l’on augmente la bande passante du filtre donc en modifiant le coefficient K.
Lorsque l’on se situe à la fréquence de coupure le signal n’est plus déphasé (voir ci-dessous).
Ce déphasage n’affecterait pas le décodage du modulant puisque nous sommes en modulation
d’amplitude.
Voici l’évolution de la phase en fonction de la fréquence avec une bande passante de 1kHz :
Conclusion sur le filtre : le filtre créé respecte bien le gabarit mis en place dans la partie
théorie, lors de la réalisation de la chaîne complète on pourra peut être ‘mélanger’ plusieurs
porteuse sur un même canal et essayer de filtrer chacune d’entre elle.
Page 16