el6 : fonction de transfert · 2 h(j ) = us ue z2zu z2+zu. 1 z1+ z2zu z2+zu = z2zu z2zu+z1zu+z2z1...
TRANSCRIPT

1
EL6 : Fonction de transfert
. Fonctions de transfert d’un système linéaire.
.1. Filtres ou quadripôles de transfert. Les réseaux seront étudiés dans ce chapitre de la façon suivante :
→ On injecte un signal de « commande » à l’entrée du système.
→ On recueille en sortie un signal dont on étudie les caractéristiques. D’où la schématisation suivante du système : Remarque : Tout ce qui est à gauche de (E1, E2) sera modélisé par un générateur de Thevenin ou de Norton, même si le dipôle linéaire est complexe. Exemple de quadripôle : Ici c’est aussi un tripôle puisque E2 = S2.
.2. Fonctions de transfert.
Hypothèses : → Le générateur de commande a une f.é.m sinusoïdale.
→ Le générateur, le filtre et la charge sont linéaires.
Toutes les ddp et tous les courants seront sinusoïdaux. La grandeur d’entrée privilégiée (tension appliquée ou courant) est désignée par :
xe(t) = Xe √2 cos(t) → Xe = Xe La grandeur de sortie privilégiée (tension appliquée ou courant) est désignée par :
xs(t) = Xs √2 cos(t + ) → Xs = Xs ej
La fonction de transfert du quadripôle : H(j) = Xs
Xe=
Xs
Xe ej
. Propriétés d’une fonction de transfert.
• Exemple:
S2
S1
C
E1
E2
R
Q
E1
E2
S1
S2
ve vs
ie is
Dipôle de commande
Quadripôle de transfert (filtre)
Charge Dipôle recepteur
Z1
Zu Z2
Zg
Eg

2
H(j) = Us
Ue =
Z2Zu
Z2+Zu.
1
Z1+ Z2Zu
Z2+Zu
= Z2Zu
Z2Zu+Z1Zu+Z2Z1
Cas particulier : Si Zu est infinie (filtre à vide) H(j) = Us
Ue =
Z2
Z2+Z1
H dépend de la charge. Le transfert ne dépend pas que du filtre mais il dépend aussi de la charge.
• Cas des filtres en cascade : On dit que des quadripôles sont branchés en cascade si la sortie de l’un est directement reliée à l’entrée du suivant.
H(j) = Us
Ue =
Us
U2.U2
U1.U1
Ue
H = H3. H2.H1 Chaque filtre charge le précédent : Pour calculer H2 il faut tenir compte de la présence de Q3 et de Zu. Pour calculer H1 il faut tenir compte de la présence de Q2, de Q3 et de Zu.
. Les caractéristiques de H(j) : module et argument.
H(j) est une fonction complexe de module H() et d’argument (), elle peut donc s’écrire sous la forme :
H(j) = H() exp[j()]
Si H(j) représente l’amplification en tension alors
Le module H() représente le rapport des valeurs efficaces Us /Ue
L’argument () représente le déphasage de Us par rapport à Ue.
D’où si ue(t) = Ue√2 cos( t + ) alors us(t) = H()Ue√2cos( t + + ()).
•Cas des filtres en cascade : H = H1. H2.H3 = H exp(j). Les propriétés de la multiplication des complexes permettent de dire :
H = H=H1.H2.H3= H1.H2.H3
= Arg(H) = Arg(H1)+ Arg(H2)+ Arg(H3)= 1 + 2 + 3 V. Réponse fréquentielle d’un filtre linéaire.
V.1. Définition.
C’est l’étude du comportement en fréquence de la fonction de transfert H(j) du quadripôle. On se
place en régime sinusoïdal forcé pour une pulsation de commande choisie comme paramètre. Cette étude se ramène à l’étude des fonctions réelles :
→ Le module H().
→ L’argument (). Il y a plusieurs types de représentations graphiques.
V.2. Les caractéristiques H() et (). Elles sont tracées en échelles linéaires et sont usuellement appelées « courbes de réponses ». Les deux courbes sont tracées en regard, les abscisses étant en correspondance, de façon à avoir les résultats en regard.
H
Q1 Q2 Q3 Zu Ue U1 U2 US

3
V.3. Diagramme de Bode.
On trace en regard et G = 20 Log(H). L’abscisse est en échelle logarithmique. L’intérêt d’une telle représentation est que l’on peut étendre les résultats sur un plus grand intervalle de pulsations, de plus les courbes sont plus proches des asymptotes, ces dernières se traçant facilement. V. Notion sur les échelles logarithmiques.
V.1.Rappels sur les échelles linéaires
Définition :
Soit u un vecteur unitaire de l'axe (Ox).
-Le point M de l'axe est l'image du réel x :OM =xu -L'origine O est l'image du nombre 0. Symétries : -Deux points M et M' symétriques par rapport à O sont les images des réels x et -x. -Deux points M1 et M2 sont symétriques par rapport à M si :
OM =OM1 +OM2
2 x=
x1+x2
2
V.2.Echelles logarithmiques.
Définition :
On désigne encore par u un vecteur unitaire de l'axe (Ox).
- Le point M est l'image du réel positif x : OM =log(x)u - L’origine est l'image du nombre 1. Symétries : - Deux points M et M' symétriques par rapport à O sont les images des réels x et 1/x - Deux points M1 et M2 sont symétriques par rapport à M si :
log(x)=log(x1)+log(x2)
2 x = √x1.x2
Echelle à n modules : - On dispose sur une telle échelle de n u . - On peut donc repérer des valeurs de x comprises entre 10p et 10p+n
(Log)
(Log)
G
0
1 1 1 1 12 2 2 2x (log)
1 10 10 10 10
10 10 1 10 10
10 10 10 10 10
2
2
3
3
4
4 5 6 7
-1-2
5 5 5 5
u O M
x x
O M
x x
M1
x1
M2
x2
u O M
log(x) x(log)
O M
log(x) x(log)
M1
log(x1)
M2
log(x2)
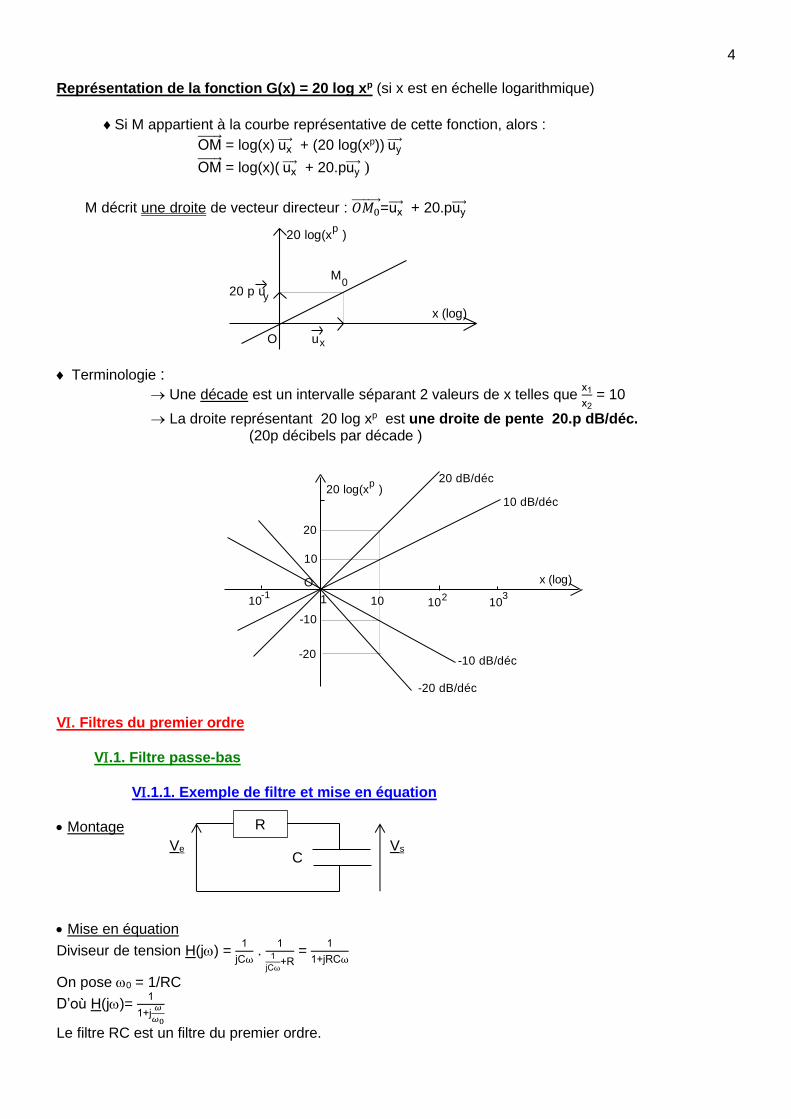
4 Représentation de la fonction G(x) = 20 log xp (si x est en échelle logarithmique) Si M appartient à la courbe représentative de cette fonction, alors :
OM = log(x) ux + (20 log(xp)) uy
OM = log(x)( ux + 20.puy )
M décrit une droite de vecteur directeur : 𝑂𝑀0 =ux + 20.puy
Terminologie :
→ Une décade est un intervalle séparant 2 valeurs de x telles que x1
x2 = 10
→ La droite représentant 20 log xp est une droite de pente 20.p dB/déc. (20p décibels par décade )
V. Filtres du premier ordre
V.1. Filtre passe-bas
V.1.1. Exemple de filtre et mise en équation
• Montage
• Mise en équation
Diviseur de tension H(j) = 1
jCω .
11
jCω+R
= 1
1+jRCω
On pose 0 = 1/RC
D’où H(j)= 1
1+j𝜔
𝜔0
Le filtre RC est un filtre du premier ordre.
O
M
x (log)
20 log(x )p
20 p uy
xu
0
O x (log)
20 log(x )p
20
10
10 10 1010 1 2 3-1
20 dB/déc
10 dB/déc
-10
-20-10 dB/déc
-20 dB/déc
Ve
R
C Vs

5
V.1.2. Etude fréquentielle du filtre
• Etude asymptotique
→ Si << 1/RC = 0 dans la pratique < 1/10RC = 0/10
Alors H(j) 1 soit G =20log H(j) = 0
soit = Arg(H(j)) = 0 Ainsi dans sa première partie le diagramme de Bode présente une asymptote horizontale.
→ Si >> 1/RC = 0 dans la pratique > 10/RC = 010
Alors H(j) 1
jRCω=
1
jω
ω0
soit G =20log H(j) = -20.log(RC) = -20.log(ω
ω0)
soit = Arg(H(j)) = -/2 Ainsi dans sa deuxième partie le diagramme de Bode présente une asymptote correspondant à une
droite de pente -20dB/déca pour le gain s’annulant pour 0 et une asymptote à -/2 pour la phase.
Pour =0 G = 0 dB
Pour =100 G = -20 dB
• Résumé
Domaine de pulsation << 1/RC = 0 >> 1/RC = 0
H(j) 1 1
jRCω=
1
jωω0
G =20log H(j) 0 -20.log(RC) = -20.log(ω
ω0)
Asymptote horizontale Asymptote : droite de pente
-20dB/déca s’annulant pour 0
= Arg(H(j)) 0 -/2
Asymptote horizontale Asymptote horizontale à -/2
• Diagramme de Bode
G 10-2 10-
1 1 101 102
x(log)
-20
-40
x(log)
-/4
-/2

6
V.1.3. Montage intégrateur
→ Si >> 1/RC = 0 dans la pratique > 10/RC = 010
Alors H(j) 1
jRCω=
1
jω
ω0
Or H(j) = Vs
Ve on obtient alors Ve = j
ω
ω0 Vs
Si on passe en notations temporelles 1
ω0 dvs(t)
dt = ve(t)
Soit encore vs(t) = 0 ∫ ve(t)dt
Conclusion : un filtre passe-bas se comporte comme un montage intégrateur pour tout signal de pulsation très supérieure à la pulsation de caractéristique du filtre.
7
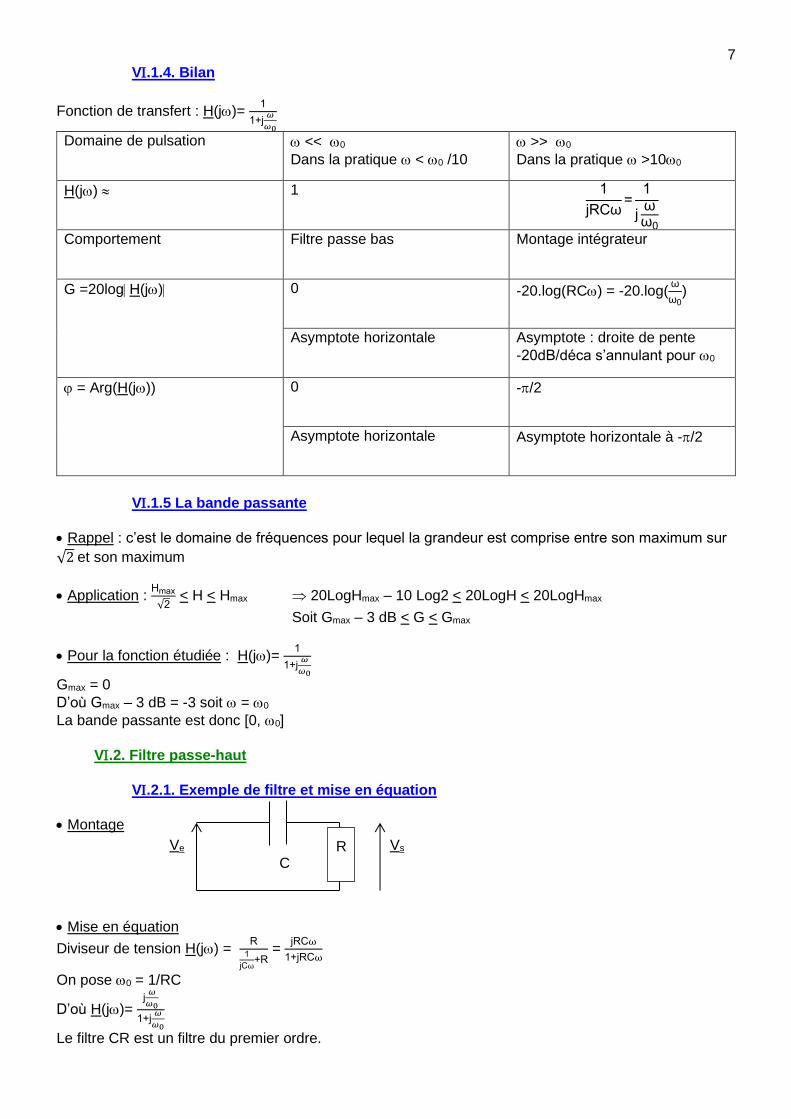
V.1.4. Bilan
Fonction de transfert : H(j)= 1
1+j𝜔
𝜔0
Domaine de pulsation << 0
Dans la pratique < 0 /10
>> 0 Dans la pratique >100
H(j) 1 1
jRCω=
1
jωω0
Comportement Filtre passe bas Montage intégrateur
G =20log H(j) 0 -20.log(RC) = -20.log(ω
ω0)
Asymptote horizontale Asymptote : droite de pente
-20dB/déca s’annulant pour 0
= Arg(H(j)) 0 -/2
Asymptote horizontale Asymptote horizontale à -/2
V.1.5 La bande passante
• Rappel : c’est le domaine de fréquences pour lequel la grandeur est comprise entre son maximum sur
√2 et son maximum
• Application : Hmax
√2 < H < Hmax 20LogHmax – 10 Log2 < 20LogH < 20LogHmax
Soit Gmax – 3 dB < G < Gmax
• Pour la fonction étudiée : H(j)= 1
1+j𝜔
𝜔0
Gmax = 0
D’où Gmax – 3 dB = -3 soit = 0
La bande passante est donc [0, 0]
V.2. Filtre passe-haut
V.2.1. Exemple de filtre et mise en équation
• Montage
• Mise en équation
Diviseur de tension H(j) = R
1
jCω+R
= jRCω
1+jRCω
On pose 0 = 1/RC
D’où H(j)= j𝜔
𝜔0
1+j𝜔
𝜔0
Le filtre CR est un filtre du premier ordre.
Ve R C
Vs

8
V.2.2. Etude fréquentielle du filtre
• Etude asymptotique
→ Si << 1/RC = 0 dans la pratique < 1/10RC = 0/10
Alors H(j) j𝜔
𝜔0 soit G =20log H(j) = 20.log(
ω
ω0)
soit = Arg(H(j)) = +/2 Ainsi dans sa première partie le diagramme de Bode présente une asymptote correspondant à une
droite de pente 20dB/déca pour le gain et une asymptote à /2 pour la phase.
Pour =0 G = 0 dB
Pour =10-10 G = -20 dB
→ Si >> 1/RC = 0 dans la pratique > 10/RC = 010
Alors H(j) 1 soit G =20log H(j) = 0
soit = Arg(H(j)) = 0 Ainsi dans sa deuxième partie le diagramme de Bode présente une asymptote horizontale
• Résumé
Domaine de pulsation << 1/RC = 0 >> 1/RC = 0
H(j) j𝜔
𝜔0 1
G =20log H(j) 20.log(RC) = 20.log(ω
ω0) 0
Asymptote : droite de pente
20dB/déca s’annulant pour 0
Asymptote horizontale
= Arg(H(j)) /2 0
Asymptote horizontale à /2 Asymptote horizontale
• Diagramme de Bode
G 10-2 10-1 1 101 102
x(log)
-20
-40
x(log)
/4
/2

9
V.2.3. Montage dérivateur
→ Si << 1/RC = 0 dans la pratique < 1/10RC = 0/10
Alors H(j) j𝜔
𝜔0
Or H(j) = Vs
Ve on obtient alors Vs = j
ω
ω0 Ve
Si on passe en notations temporelles vs(t)=1
ω0 dve(t)
dt
Conclusion : un filtre passe-haut se comporte comme un montage dérivateur pour tout signal de pulsation très inférieure à la pulsation de caractéristique du filtre.

10
V.2.4. Bilan
Fonction de transfert : H(j)= j
ω
ω0
1+j𝜔
𝜔0
Domaine de pulsation << 1/RC = 0 >> 1/RC = 0
H(j) j𝜔
𝜔0 1
Comportement Montage dérivateur Filtre passe haut
G =20log H(j) 20.log(RC) = 20.log(ω
ω0) 0
Asymptote : droite de pente
20dB/déca s’annulant pour 0
Asymptote horizontale
= Arg(H(j)) /2 0
Asymptote horizontale à /2 Asymptote horizontale
V.3. Analyse rapide du montage Pour une recherche rapide ou une vérification des calculs, il faut raisonner sur les circuits électriques équivalents.
• → 0 alors 1
Cω → le condensateur se comporte comme un interrupteur ouvert
et L → 0 la bobine se comporte comme un fil
• → alors 1
Cω → le condensateur se comporte comme un fil
et L → la bobine se comporte comme un interrupteur ouvert
Ve
R
C Vs Ve
R
C Vs
Vs → Ve
H(j) → 1
G → 0 Ve R
C
Vs Ve R C
Vs
Vs → 0
H(j) → 0
G → -
Ve R C
Vs
Ve R C
Vs
Vs → 0
H(j) → 0
G → -

11
V.4. Autre exemple : démarche pour le diagramme asymptotique
• Montage
• Mise en équation
Diviseur de tension H(j) =
1
jCω+R2
1
jCω+R1+R2
= 1+ jR2Cω
1+j(R1+R2)Cω
• Analyse
Domaine de pulsation << 1
(R1+R2)C
1
(R1+R2)C << <<
1
R2C
1
R2C <<
Numérateur 1 1 jR2C
Dénominateur 1 j(R1 + R2)C j(R1 + R2)C
H (j) 1 1
j(R1+ R2)C
R1
R1+R2
G() 0 -20log((R1 + R2)C) 20log(R1
R1+R2)
Asymptote de pente nulle
Asymptote de pente -20dB/déca
Asymptote de pente nulle
() 0 -/2 0
Ve
R
C Vs Ve
R
C Vs Vs → Ve
H(j) → 1
G → 0
Ve
R1
C Vs
R2

12
• Diagramme de Bode 1
(R1+ R2)C = 20 et
1
R2C=2.103
Vu l’étroitesse de la zone asymptotique à -/2 la phase ne parvient pas à son expression asymptotique

13
V. Filtres du deuxième ordre
V.1. Filtre passe-bas
V.1.1. Exemple de filtre
• Montage
• Mise en équation
Diviseur de tension H(j) = 1
jCω .
11
jCω+R+jLω
= 1
1-LC𝜔2+jRCω
On pose 20 = 1/LC ; Q =
Lω0
R =
1
RCω0
D’où H(j)= 1
1-(𝜔
𝜔0)2+j
𝜔
𝑄𝜔0
Le filtre LRC est un filtre du second ordre.
V.1.2. Etude fréquentielle du filtre
• Etude asymptotique
→ Si << 0 dans la pratique < 0/10
Alors H(j) 1 soit G =20log H(j) = 0
soit = Arg(H(j)) = 0 Ainsi dans sa première partie le diagramme de Bode présente une asymptote horizontale
→ Si >> 0 dans la pratique > 010
Alors H(j) - (𝜔
𝜔0)−2
soit G =20log H(j) = -40 log(𝜔
𝜔0)
soit = Arg(H(j)) = - Ainsi dans sa deuxième partie le diagramme de Bode présente une asymptote correspondant à une
droite de pente -40dB/déca s’annulant pour = 0 pour le gain et une asymptote à - pour la phase.
Pour =0 G = 0 dB
Pour =100 G = -40 dB
• Remarques
- On retrouve la possibilité d’une résonance si le système est peu amorti, soit si Q > 1/√2, cette résonance sera d’autant plus aigüe que le facteur de qualité sera grand.
- Si >> 0 dans la pratique > 010
Alors H(j) 1
(𝑗𝜔
𝜔0)²
= 𝜔0
2
(𝑗𝜔)2
H(j) = Vs
Ve on obtient alors 𝜔0
2Ve =(𝑗𝜔)2 Vs
Si on passe en notations temporelles ve(t)=1
𝜔02
d2vs(t)
dt2
Conclusion : un filtre passe-bas se comporte comme un montage doublement intégrateur pour tout signal de pulsation très supérieure à la pulsation de caractéristique du filtre.
Ve
R
C Vs L

14
• Résumé
Domaine de pulsation << 0 >> 0
H(j) 1 1
(𝑗𝜔𝜔0
) ²=
𝜔02
(𝑗𝜔)2
G =20log H(j) 0 -40.log(ω
ω0)
Asymptote horizontale Asymptote : droite de pente
-40dB/déca s’annulant pour 0
= Arg(H(j)) 0 -
Asymptote horizontale Asymptote horizontale à -
• Diagramme de Bode
G 10-2 10-
1 1 101 102
x(log)
-40
-80
x(log)
-/2
-

15
• Influence de Q
Q = 50
Q = 1/√2
Q = 0.1

16
V.2. Filtre passe-bande
V.2.1. Exemple de filtre
• Montage
• Mise en équation
Diviseur de tension H(j) = R
1
jCω+R+jLω
= jRCω
1-LC𝜔2+jRCω
On pose 20 = 1/LC ; Q =
Lω0
R =
1
RCω0
D’où H(j)= j
𝜔
𝑄𝜔0
1-(𝜔
𝜔0)2+j
𝜔
𝑄𝜔0
Le filtre LCR est un filtre du second ordre.
V.2.2. Etude fréquentielle du filtre
• Etude asymptotique
→ Si << 0 dans la pratique < 0/10
Alors H(j) j𝜔
𝑄𝜔0 soit G =20log H(j) = 20log(
𝜔
𝑄𝜔0)
soit = Arg(H(j)) = /2 Ainsi dans sa première partie le diagramme de Bode présente une asymptote correspondant à une
droite de pente 20dB/déca s’annulant pour Q0 pour le gain et une asymptote à /2 pour la phase.
→ Si >> 0 dans la pratique > 010
Alors H(j) 1/𝑄
j𝜔
𝜔0
= 𝜔0
jQ soit G =20log H(j) = -20 log(
𝑄𝜔
𝜔0)
soit = Arg(H(j)) = -/2 Ainsi dans sa deuxième partie le diagramme de Bode présente une asymptote correspondant à une
droite de pente -20dB/déca s’annulant pour 0/Q pour le gain et une asymptote à -/2 pour la phase.
• Remarques
- Pour = 0
On a H (j) = 1 d’où un gain et une phase nulle. Comportement asymptotique : Gasymptotique = -20Log(Q) Moins le filtre est amorti (Q important) et plus les asymptotes se croisent bas sur le diagramme de Bode en gain. Moins le filtre est amorti (Q important) et plus il est sélectif, c’est-à-dire qu’il ne laisse passer qu’une
bande très resserrée autour de 0
- Si << 0 dans la pratique < 0/10
Alors H(j) j𝜔
𝑄𝜔0 on retrouve un montage de type dérivateur
→ Si >> 0 dans la pratique > 010
Alors H(j) 1/𝑄
j𝜔
𝜔0
= 𝜔0
jQ on retrouve un montage de type intégrateur
Ve
R C
Vs L

17
• Résumé
Domaine de pulsation << 0 >> 0
H(j) j𝜔
𝑄𝜔0
1/Q
jωω0
= ω0
jQ
G =20log H(j) 20log(𝜔
𝑄𝜔0) -20 log(
𝜔𝑄
𝜔0)
Asymptote droite de pente
20dB/déca s’annulant pour Q0
Asymptote : droite de pente
20dB/déca s’annulant pour 0 /Q
= Arg(H(j)) /2 -/2
Asymptote horizontale à /2 Asymptote horizontale à /2
• Diagramme de Bode

18
• Influence de Q (0 = 200 rad/s)
Q = 1/4
Q= 2.5
Q = 50

19
V. En résume Pour interpréter systématiquement les zones rectilignes des diagrammes de Bode il suffit : - d’identifier les pulsations caractéristiques du numérateur et du dénominateur - de préciser chaque intervalle de pulsation entre ces pulsations caractéristiques - de simplifier numérateur et dénominateur de la fonction de transfert en ne gardant que le terme prédominant dans l’intervalle de pulsation - d’interpréter l’expression asymptotique ainsi obtenue. Tableau de correspondances :
H asymptotique phase Pente pour le gain Comportement
𝑗𝜔
𝜔0 +/2 +20 dB/déca Dérivateur
1
𝑗𝜔𝜔0
-/2 -20 dB/déca Intégrateur
(𝑗𝜔
𝜔0)² +40 dB/déca
1
(𝑗𝜔𝜔0
)2
- -40 dB/déca
1 0 nulle
-1 - nulle

20
EL6 : Fonction de transfert
. Fonctions de transfert d’un système linéaire. ......................................................................................... 1 .1. Filtres ou quadripôles de transfert. ................................................................................................. 1 .2. Fonctions de transfert. .................................................................................................................... 1
. Propriétés d’une fonction de transfert. .................................................................................................. 1 . Les caractéristiques de H(j) : module et argument. ........................................................................... 2 V. Réponse fréquentielle d’un filtre linéaire. ............................................................................................. 2 V.1. Définition. ..................................................................................................................................... 2 V.2. Les caractéristiques H() et ().................................................................................................. 2 V.3. Diagramme de Bode. .................................................................................................................... 3
V. Notion sur les échelles logarithmiques. ................................................................................................ 3 V.1.Rappels sur les échelles linéaires ................................................................................................... 3 V.2.Echelles logarithmiques. ................................................................................................................. 3
V. Filtres du premier ordre ....................................................................................................................... 4 V.1. Filtre passe-bas ............................................................................................................................ 4
V.1.1. Exemple de filtre et mise en équation .................................................................................... 4 V.1.2. Etude fréquentielle du filtre ..................................................................................................... 5 V.1.3. Montage intégrateur ............................................................................................................... 6 V.1.4. Bilan ....................................................................................................................................... 7 V.1.5 La bande passante ................................................................................................................. 7
V.2. Filtre passe-haut ........................................................................................................................... 7 V.2.1. Exemple de filtre et mise en équation .................................................................................... 7 V.2.2. Etude fréquentielle du filtre ..................................................................................................... 8 V.2.3. Montage dérivateur ................................................................................................................ 9 V.2.4. Bilan ..................................................................................................................................... 10
V.3. Analyse rapide du montage ........................................................................................................ 10 ........................................................................................................................................................... 10 V.4. Autre exemple : démarche pour le diagramme asymptotique ..................................................... 11
V. Filtres du deuxième ordre ................................................................................................................ 13 V.1. Filtre passe-bas ......................................................................................................................... 13
V.1.1. Exemple de filtre ................................................................................................................. 13 V.1.2. Etude fréquentielle du filtre ................................................................................................. 13
V.2. Filtre passe-bande ..................................................................................................................... 16 V.2.1. Exemple de filtre ................................................................................................................. 16 V.2.2. Etude fréquentielle du filtre ................................................................................................. 16
V. En résume ...................................................................................................................................... 19
21
2
3
4
5
6
7
8
9
2
3
4
5
6
7
8
9
2
3
4
5
6
7
8
9
2
3
4
5
6
7
8
9
2
3
4
5
6
7
8
9
1
1
1
1
1
1