
IFPEK Institut de Formation en Pédicurie-podologie, Ergothérapie, Masso-kinésithérapie
12 rue Jean-Louis Bertrand, 35000 Rennes
Locomotion du sujet trisomique 21 : intérêt du traitement podologique
LE SÉAC’H Ewenn
Mémoire d’initiation à la recherche en pédicurie-podologie
Formation en pédicurie-podologie
Sous la direction de Mme PUIL Carole
Promotion 2018-2021 Session juin 2021

PRÉFET DE LA RÉGION BRETAGNE DIRECTION REGIONALE DE LA JEUNESSE, DES SPORTS ET DE LA COHÉSION SOCIALE Pôle formation-certification-métier
Diplôme d’État de Pédicurie-Podologie
Travaux de fin d’études : Mémoire d’initiation à la démarche de recherche
Conformément à l’article L 122-4 du code de la propriété intellectuelle du 3 juillet 1992 : « toute représentation ou reproduction intégrale ou partielle faite sans le consentement de l’auteur ou de ses ayants droit ou ayants cause est illicite. Il en est de même pour la traduction, l’adaptation ou la transformation, l’arrangement ou la reproduction par un art ou un procédé quelconque ». J’atteste sur l’honneur que la rédaction des travaux de fin d’études, réalisée en vue de l’obtention du diplôme d’État de Pédicurie-Podologie est uniquement la transcription de mes réflexions et de mon travail personnel. Et, si pour mon argumentation, je copie, j’emprunte un extrait, une partie ou la totalité de pages d’un texte, je certifie avoir précisé les sources bibliographiques. Le………16/05/2021………. Signature de l’étudiant :
Fraudes aux examens :
CODE PENAL, TITRE IV DES ATTEINTES A LA CONFIANCE PUBLIQUE
CHAPITRE PREMIER : DES FAUX
Art. 441-1 : Constitue un faux toute altération frauduleuse de la vérité, de nature à causer un préjudice et accomplie par
quelque moyen que ce soit, dans un écrit ou tout autre support d’expression de la pensée qui a pour objet ou qui peut avoir
pour effet d’établir la preuve d’un droit ou d’un fait ayant des conséquences juridiques.
Le faux et l’usage de faux sont punis de trois ans d’emprisonnement et de 45 000 € d’amende.
Loi du 23 décembre 1901, réprimant les fraudes dans les examens et concours publics.
Art. 1er : Toute fraude commise dans les examens et les concours publics qui ont pour objet l’entrée dans une administration
publique ou l’acquisition d’un diplôme délivré par l’Etat constitue un délit.

NOM : LE SEAC’H PRÉNOM : Ewenn TITLE : Locomotion of Down Syndrome : interest of foot insole. ABSTRACT : Background Walking is the movement that humans use the most to move around. However, considering an audience with a disharmonic gait such as Down’s Syndrome, moving around can be problematic. In this context I decided to study the walking of Down Syndrome’s children in order to understand their system. I first questioned myself about : How to improve the locomotor capacity of Down syndrome patients ? Several researches and works led me to the following problematic : Does medial arch support with a foot orthosis have an impact on the gait of young Down's syndrome patients in the long term? Methods The aim of the present study was to investigate the influence of foot insole for a down syndrome patient with flat foot. The objective is to compare, thanks to a quantification of the kinematics parameters of the walk, a population with insoles and other without. Results A literature review was conducted and an experimental protocol was proposed. If the study shows significant results, we will understand that the system of children with Down's syndrome integrates the information given by the insole and corrects the walk. However, if there are no results, the idea of a treatment becomes a point of interest. Conclusion Understanding the postural and balancing system of people with Down's syndrome when walking will allow the podiatrist to provide better management with evidence-based clinical decisions. Keywords : Gait, Down Syndrome, Children, Postural Control, Foot Orthoses, Kinematics. TITRE : Locomotion du sujet trisomique 21 : intérêt du traitement orthopédique. RÉSUMÉ : Généralité La marche est le mode de locomotion des humains. Cependant, pour une population présentant une marche disharmonieuse, cela peut être problématique. C’est pourquoi j’ai décidé d’étudier la marche des enfants trisomiques 21 et ainsi comprendre leur système. Je me suis donc demandé : comment les capacités locomotrices des jeunes trisomiques 21 sont-elles touchées ?. Les recherches m’ont permis d’arriver à cette problématique : Le soutien d’arche médial par orthèse plantaire a-t-il un impact sur la marche du jeune trisomique 21 sur le long terme ? Méthode Une revue de littérature a été réalisée et un protocole expérimental a été proposé. Le but de cette étude est de comprendre l’influence d’une semelle orthopédique sur le long terme chez des enfants trisomiques 21. L’objectif serait de comparer, grâce à la quantification des paramètres cinématiques de la marche, au sein de cette population un groupe avec des semelles orthopédiques et un groupe sans. Résultats Si l’étude montre des résultats significatifs, nous comprendrons que le système des trisomiques 21 intègre l’information proposée par la semelle orthopédique et améliore ainsi leur marche. Cependant, s’il n’y a pas de résultats concluants, l’idée de la mise en place d’un traitement est à discuter. Conclusion Comprendre le système postural et d’équilibration des sujets trisomiques 21 lors de la marche, va permettre au pédicure-podologue de proposer une meilleure prise en charge avec des décisions cliniques basées sur des données probantes. Mots clés : Marche, Trisomie 21, Enfant, Contrôle postural, Orthèse plantaire, Cinématique.
INSTITUT DE FORMATION EN PEDICURIE-PODOLOGIE 12 RUE JEAN-LOUIS BERTRAND 35000 RENNES

Remerciements Je tiens à remercier ma directrice de mémoire, Mme Puil, pour son aide, son implication, son soutien et
sa patience lors de la réalisation de ce travail.
Je souhaite également remercier l’ensemble de l’équipe pédagogique de l’institut pour ces trois années
passées. Ils m’ont permis d’évoluer grâce à leur transmission de savoir et savoir-faire. Cela me rend
plus serein pour démarrer ma vie professionnelle.
Je tiens sincèrement à remercier mes proches pour leur soutien et leurs encouragements durant cette
formation. Un grand merci à mes parents pour leur aide et leur motivation qui m’ont permis d’en arriver
là aujourd’hui.
Mes remerciements s’adressent bien sûr à Valentin, mon binôme de choc durant ces trois années, qui a
été très présent durant toute la formation et qui le sera encore pour la suite.
Enfin, je souhaite remercier les copains pédologues avec qui j’ai passé de super moments qui resteront
gravés dans ma mémoire.
Sommaire
Introduction ............................................................................................................................................ 1
1. La physiologie de la marche ......................................................................................................... 2
1.1. Définition ............................................................................................................................... 2
1.2. L’acquisition de la marche ................................................................................................... 3
1.3. Les paramètres quantifiables de la marche bipède ........................................................... 3 1.3.1. La cinématique ................................................................................................................................ 3 1.3.2. La cinétique ..................................................................................................................................... 4 1.3.3. Caractéristiques spatio-temporelles .............................................................................................. 6
2. Le contrôle moteur ........................................................................................................................ 8
2.1. Description du contrôle moteur ........................................................................................... 8 2.1.1. Les entrées sensorielles ................................................................................................................... 9 2.1.2. Les voies et l’intégration .............................................................................................................. 11 2.1.3. Les effecteurs musculaires ........................................................................................................... 11
2.2. Contrôle moteur dans la locomotion ...................................................................................... 11
3. La trisomie 21 .............................................................................................................................. 12
3.1. Définition de la maladie en général ................................................................................... 12
3.2. Impact sur le système moteur ............................................................................................ 13 3.2.1. Impact sur la transmission de l’information .............................................................................. 14 3.2.2. Impact sur les muscles .................................................................................................................. 15 3.2.3. Impact sur la locomotion .............................................................................................................. 15
4. Le pied plat valgus, trouble statique majeur du trisomique 21 .............................................. 17
4.1. Son impact sur la locomotion ............................................................................................ 17
4.2. Les tests cliniques ................................................................................................................ 18 4.2.1. Le Foot Posture Index .................................................................................................................. 18 4.2.2. Le Naviculaire Drop Test ............................................................................................................. 19
4.3. Le traitement par semelles orthopédiques ....................................................................... 19
5. Synthèse / problématisation ........................................................................................................ 20
6. Protocole d’analyse quantitative de la marche de jeunes trisomiques 21 .............................. 22
6.1. Public ................................................................................................................................... 22
6.2. Considérations éthiques ..................................................................................................... 23
6.3. Les outils d’analyses ........................................................................................................... 23
6.4. Environnement .................................................................................................................... 24
6.5. Variables mesurées ............................................................................................................. 24
6.6. Protocole .............................................................................................................................. 25
6.7. Résultats attendus ............................................................................................................... 27
Discussion .............................................................................................................................................. 27
Conclusion ............................................................................................................................................. 30
Bibliographie ........................................................................................................................................ 32
Annexes ................................................................................................................................................... I
Table des figures
FIGURE 1 CYCLE DE MARCHE SELON VIEL & AL. (2000). ........................................................................ 2 FIGURE 2 TRAJECTOIRE SINUSOÏDALE DU CENTRE DE MASSE AU COUR DU CYCLE DE MARCHE
(SAUNDERS, INMAN ET EBERHART, 1953). ............................................................................. 5 FIGURE 3 BAROPODOMETRIE DYNAMIQUE REPRESENTANT LA DISTRIBUTION DES PRESSIONS ET LA
GAIT LINE A GAUCHE ; REPARTITION SELON L’INDEX M/L A DROIT (JANIN MARC, 2009). ......... 6 FIGURE 4 SCHEMATISATION DES CARACTERISTIQUES SPATIO-TEMPORELLES DE LA MARCHE SELON
HUXHAM ET AL. (2006) MODIFIE PAR MARIN, A, (2015). ........................................................... 7 FIGURE 5 CONTROLE POSTURAL CHEZ L’HOMME SELON PAILLARD (PAILLARD, 2016). ..................... 8 FIGURE 6 TYPES DE MECANORECEPTEURS CUTANES PLANTAIRES (FOISY, 2016). .............................. 10 FIGURE 7 CORRELATIONS ENTRE L'AMPLITUDE DISTALE ET PROXIMALE DES MUSCLES AINSI QUE LES
TEMPS DE LATENCE CHEZ LES ADULTES, LES ENFANTS NORMAUX ET LES ENFANTS ATTEINTS DU SYNDROME DE DOWN (SHUMWAY-COOK ET WOOLLACOTT, 1985) .................................... 13
FIGURE 8 PHOTO D’UN PIED PLAT VALGUS D’UN ENFANT TRISOMIQUE 21 (WEIJERMAN ET DE WINTER, 2010) ....................................................................................................................... 14
FIGURE 9 COURBES COMPARATIVES DU DEPLACEMENT DU CDM DANS LE PLAN MEDIO-LATERAL DURANT UNE FOULEE ENTRE DS ET NON-DS (AGIOVLASITIS ET AL., 2009). ............................ 16
FIGURE 10 ÉTUDE DE LA VARIATION D’ANGULATION DE L’ARCHE INTERNE DURANT LE CYCLE DE MARCHE (CARAVAGGI ET AL., 2018). ........................................................................................ 18
FIGURE 11 MODELISATION SEGMENTAIRE ET POINTS D’APPLICATIONS DES MARQUEURS CUTANES SELON WINTER (WINTER, 2004). ................................................................................................. 23
FIGURE 12 SCHEMA RECAPITULATIF DU PROTOCOLE EXPERIMENTAL .................................................. 26
Table des tableaux TABLEAU 1 : PARAMETRES SPATIO-TEMPORELS D’ENFANTS PHYSIOLOGIQUES SELON (POTHRAT, 2015). .. 7

Table des abréviations DoP : direction de progression.
SO : semelle orthopédique.
CoM : centre de masse.
DS : Down Syndrome.
CdP : centre de pression.
Mm : millimètre.
SNC : système nerveux central.

1
Introduction La locomotion est le moyen de déplacement préférentiel de l’homme bipède. Ses caractéristiques sont
conditionnées par cet état de bipédie. Tache quasi-automatique, elle représente pourtant une interaction
complexe du système moteur. En effet, de nombreux organes entrent en jeu pour permettre le
mouvement et ce mouvement particulièrement. La vue est un des exemples les plus probants : si vous
réalisez une trajectoire définie les yeux fermés, elle sera plus imprécise que si vous la réalisez les yeux
ouverts (HICHEUR et al., 2007). Cet exemple montre la conséquence de la modification d’un des
capteurs d’information : le capteur visuel. Le système est donc complexe et permet une multitude
d’adaptations et de gestes.
Mais que se passe-t-il lorsqu’une partie du système dysfonctionne ? Nous allons nous intéresser à une
population présentant un dysfonctionnement locomoteur : les personnes atteintes de trisomie 21,
autrement nommé syndrome de Down.. L’observation de patients jeunes souffrant de cette anomalie
chromosomique a mis en évidence une marche disharmonieuse. En effet, le mouvement se fait, mais sa
fluidité n’est pas présente sur la totalité de la trajectoire. Les capacités motrices fonctionnelles limitées
des enfants atteints du Syndrome de Down seraient principalement liées au retard d’acquisition des
capacités motrices plutôt qu’au retard mental (VOLMAN, VISSER et LENSVELT-MULDERS, 2007).
Il est donc intéressant de comprendre comment cette trisomie impacte le système locomoteur pour
ensuite envisager une prise en charge éventuelle adaptée. Le pédicure-podologue corrige certains
troubles statiques à l’aide d’orthèses plantaires. L’objectif du traitement orthétique est de
trouver/retrouver un système moteur fonctionnel et stable (GOLDCHER, 2014). Un grand nombre de
questions émergent alors quant au rôle du pédicure-podologue dans la prise en charge de cette
population.
Quels sont les systèmes impactés et quel est l’effet de cette modification sur le mouvement locomoteur?
Le pédicure-podologue a-t-il un rôle dans la correction de la marche du jeune sujet trisomique 21 ?
Pour mieux comprendre cette incidence, nous allons dans une première partie développer la marche
physiologique et les paramètres permettant sa quantification et sa qualification. Puis nous présenterons
le système de contrôle moteur et particulièrement les éléments actifs lors de la marche. Ensuite un
tableau clinique des différents patterns de la marche du sujet trisomique 21 sera établi avec un lien plus
précis sur la cause des anomalies locomotrices, bien qu’on sache déjà que c’est le 3ème chromosome
surnuméraire sur la paire 21. Enfin, une fois la littérature étudiée, nous proposerons un protocole visant
à évaluer l’intérêt d’une prise en charge orthétique pour les patients atteints du syndrome de Down.
2
1. La physiologie de la marche
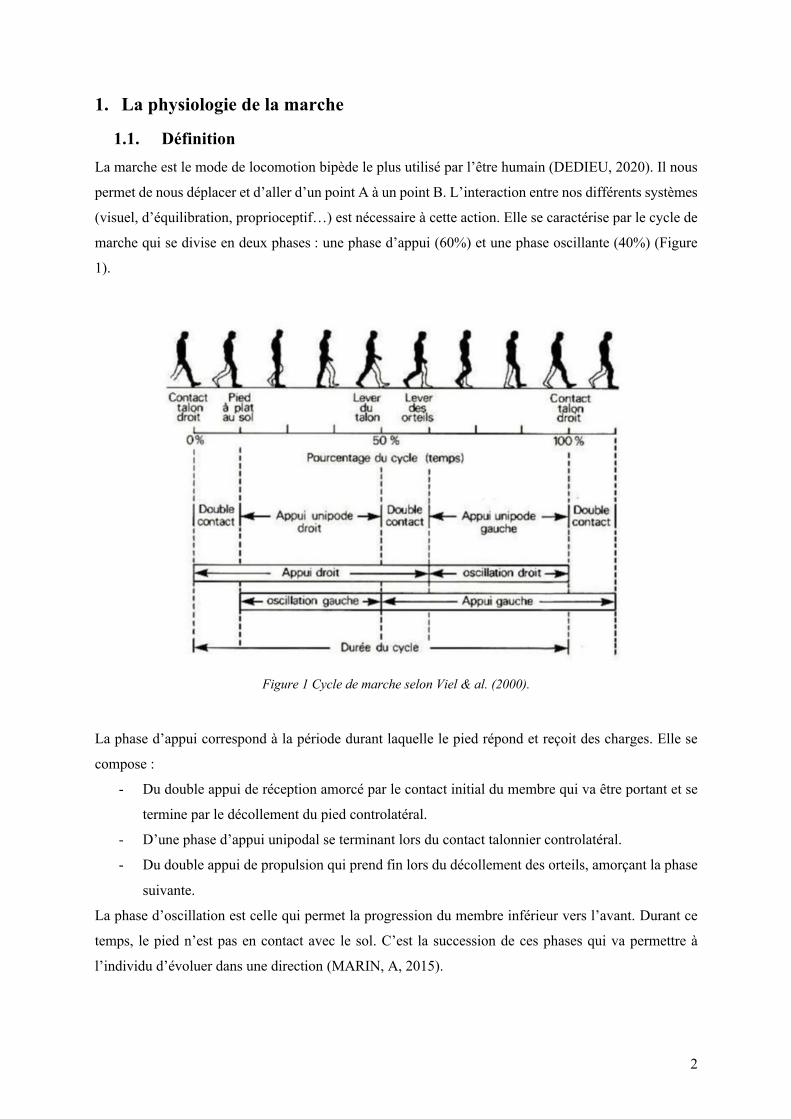
1.1. Définition La marche est le mode de locomotion bipède le plus utilisé par l’être humain (DEDIEU, 2020). Il nous
permet de nous déplacer et d’aller d’un point A à un point B. L’interaction entre nos différents systèmes
(visuel, d’équilibration, proprioceptif…) est nécessaire à cette action. Elle se caractérise par le cycle de
marche qui se divise en deux phases : une phase d’appui (60%) et une phase oscillante (40%) (Figure
1).
Figure 1 Cycle de marche selon Viel & al. (2000).
La phase d’appui correspond à la période durant laquelle le pied répond et reçoit des charges. Elle se
compose :
- Du double appui de réception amorcé par le contact initial du membre qui va être portant et se
termine par le décollement du pied controlatéral.
- D’une phase d’appui unipodal se terminant lors du contact talonnier controlatéral.
- Du double appui de propulsion qui prend fin lors du décollement des orteils, amorçant la phase
suivante.
La phase d’oscillation est celle qui permet la progression du membre inférieur vers l’avant. Durant ce
temps, le pied n’est pas en contact avec le sol. C’est la succession de ces phases qui va permettre à
l’individu d’évoluer dans une direction (MARIN, A, 2015).
3
1.2. L’acquisition de la marche L’acquisition de la marche se fait par étapes successives. C’est par le plat ventre que l’enfant commence
à se déplacer. Puis apparaît le « quatre-pattes » précédant la station bipède. Peu à peu, l’enfant démarre
une verticalisation visible par le passage du déplacement en quadrupédie à un déplacement en bipédie.
La bipédie apparaît entre 11 et 15 mois (MALINA, 2004). Ces différentes étapes sont liées à
l’acquisition du contrôle des segments du corps les uns par rapport aux autres ainsi qu’à l’utilisation des
différents capteurs (visuels, vestibulaires, proprioceptifs) intervenant dans le contrôle moteur
(DIMEGLIO, HERISSON et L, 2002). Le processus de maturation du système nerveux est également
responsable de l’acquisition de la marche. On remarque que tant que le contrôle de l’équilibre n’est pas
acquis, l’enfant sera déstabilisé par son polygone de sustentation trop étroit pour lui et chutera. C’est
pour cette raison que la marche du débutant est caractérisée par une allure lente ainsi qu’un écartement
important des membres inférieurs. Cela va se réduire avec le temps lorsque le système d’équilibration
sera mature.
Selon Bril, l’acquisition de la marche serait synonyme de l’acquisition du contrôle moteur. Différentes
étapes sont donc nécessaires comme énoncé précédemment et une réelle acquisition serait visible vers
6 ans par des phases de propulsions similaires à celles de l’adultes, des ajustements posturaux
anticipateurs et d’autres stratégies (BRIL et LEDEBT, 1994). Lorsque la station debout est acquise, le
système musculaire intervient également. Chez l’enfant, c’est principalement grâce à une co-contraction
du triceps sural ainsi que des muscles tibiaux (postérieur et antérieur) que la stabilisation se fait. Cela
permet de comprendre qu’un trouble du contrôle moteur ou du système musculaire affectera
obligatoirement la locomotion.
1.3. Les paramètres quantifiables de la marche bipède La marche de l’homme est un sujet particulièrement documenté. Lorsque l’on effectue une étude
qualitative de celle-ci, un certain nombre de paramètres sont étudiés (la cinétique, la cinématique et les
caractéristiques spatio-temporelles). Différents outils comme les caméras, les plateformes de force et de
pression ainsi que des systèmes optoélectroniques (permettant l’analyse 3D) sont utilisés. Une analyse
cinématique et cinétique de la marche est alors utile et réalisée à différents niveaux du membre inférieur :
la hanche, le genou et la cheville.
1.3.1. La cinématique La cinématique est une « Partie de la mécanique qui étudie les mouvements en fonction du temps, sans
se préoccuper de leurs causes.» (LAROUSSE). Dans la cinématique de la marche, on retrouve l’étude
des mouvements articulaires de la cheville, du genou et de la hanche dans les différents plans du corps
humains : le plan frontal, sagittal et transversal. C’est grâce à ces observations qu’une physiologie de la

4
marche de l’homme a été établie permettant de déceler, dans un second temps, les paramètres
cinématiques d’une marche pathologique.
Dans le plan sagittal, la cheville réalise une légère flexion plantaire lors du contact initial puis vient
réaliser une flexion dorsale lors de la mise en charge. Ce mouvement est réalisé par l’avancée du segment
jambier sur le pied lorsque celui-ci est entièrement en contact avec le sol. Ce mouvement correspond à
l’absorption du choc et est principalement contrôlé par les muscles fléchisseurs du pied. Une nouvelle
flexion plantaire de la cheville est visible lorsque le talon quitte le sol. La cheville est en position neutre
durant la phase oscillante du membre controlatéral.
Dans le plan frontal et horizontal aucun mouvement significatif n’est constaté hormis des résultats sur
une activité musculaire (des muscles intrinsèques, extrinsèques du pied et de ceux de la jambe) visant à
maintenir une stabilité du pied.
Le genou présente deux phases de flexion importante dans le plan sagittal. En effet on retrouve une 1ère
flexion du genou portant lors du contact initial, suivit d’une pleine extension lorsque le pied est en charge
totale. La seconde période de flexion apparaît lors de la fin de l’appui unipodal et atteint son apogée lors
du milieu de la phase oscillante.
Dans le plan sagittal, la hanche se trouve elle aussi en flexion lors du contact initial puis en extension
durant la quasi-totalité de l’avancée dans le cycle. Elle réalise une nouvelle flexion lors du décollement
du pied (DEDIEU et BARTHÉS, 2011).
La hanche entre dans un moment de flexion lors du contact initial du pas. Cette flexion, dans le plan
sagittal va diminuer pour tendre vers une extension lorsque la phase de plein appui sera passée. L’activité
musculaire des ischio-jambiers et des muscles abducteurs et adducteurs est importante pour un déroulé
stable de la marche.
1.3.2. La cinétique La cinétique représente l’étude des forces qui génèrent le mouvement. Trois composantes ressortent
principalement dans la cinétique : la centre de gravité, le centre de masse et le centre de pression.
Le centre de gravité peut être qualifié comme le point résultant de l’application de l’ensemble des forces
sur le corps humain. Selon DEDIEU et BARTHÉS (2011) : « Le centre de gravité et le centre de masse
sont des points conceptuels qui n’ont pas d’existence propre. Ils représentent la répartition du poids ou
de la masse du corps. ». Durant la marche physiologique, le centre de masse du sujet se déplace dans
l’espace tridimensionnel selon le plan antéro-postérieur et médial-latéral. Il peut être représenté par une
courbe sinusoïdale. Le sommet (Figure 2) de l’oscillation représente la phase d’appui unipodal tandis
que la position la plus basse de la courbe reflète le moment de la phase de double appui. Les sommets
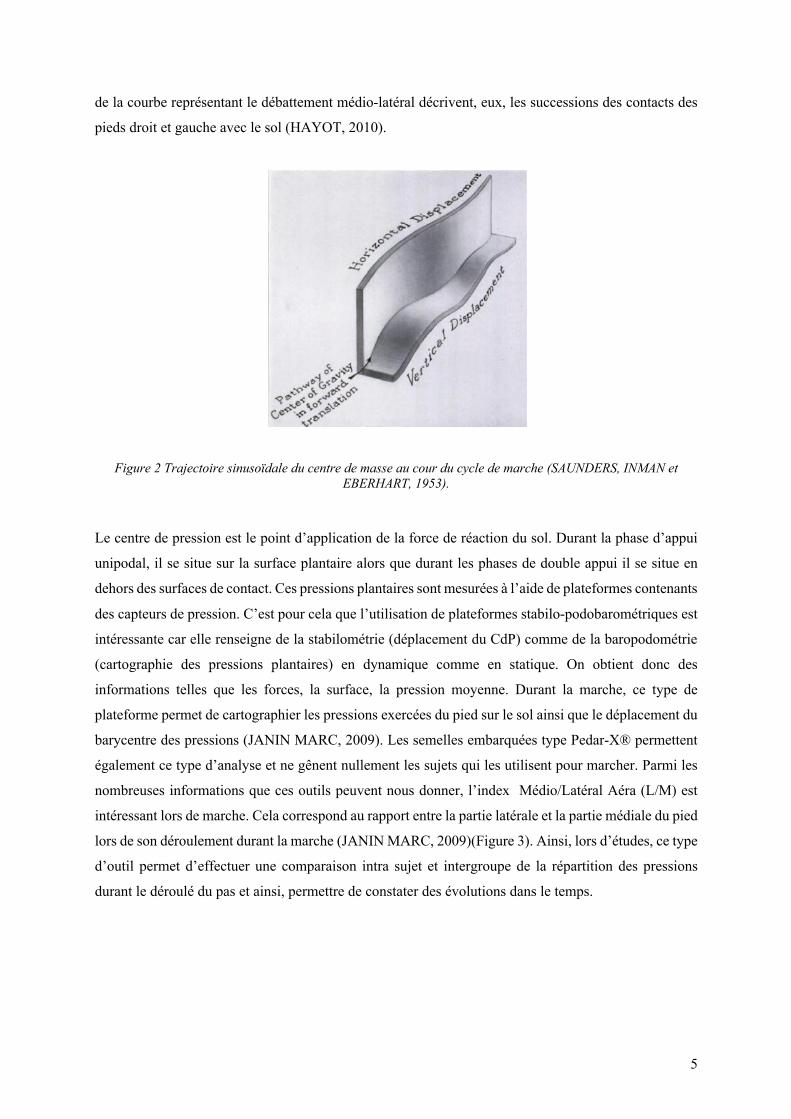
5
de la courbe représentant le débattement médio-latéral décrivent, eux, les successions des contacts des
pieds droit et gauche avec le sol (HAYOT, 2010).
Figure 2 Trajectoire sinusoïdale du centre de masse au cour du cycle de marche (SAUNDERS, INMAN et EBERHART, 1953).
Le centre de pression est le point d’application de la force de réaction du sol. Durant la phase d’appui
unipodal, il se situe sur la surface plantaire alors que durant les phases de double appui il se situe en
dehors des surfaces de contact. Ces pressions plantaires sont mesurées à l’aide de plateformes contenants
des capteurs de pression. C’est pour cela que l’utilisation de plateformes stabilo-podobarométriques est
intéressante car elle renseigne de la stabilométrie (déplacement du CdP) comme de la baropodométrie
(cartographie des pressions plantaires) en dynamique comme en statique. On obtient donc des
informations telles que les forces, la surface, la pression moyenne. Durant la marche, ce type de
plateforme permet de cartographier les pressions exercées du pied sur le sol ainsi que le déplacement du
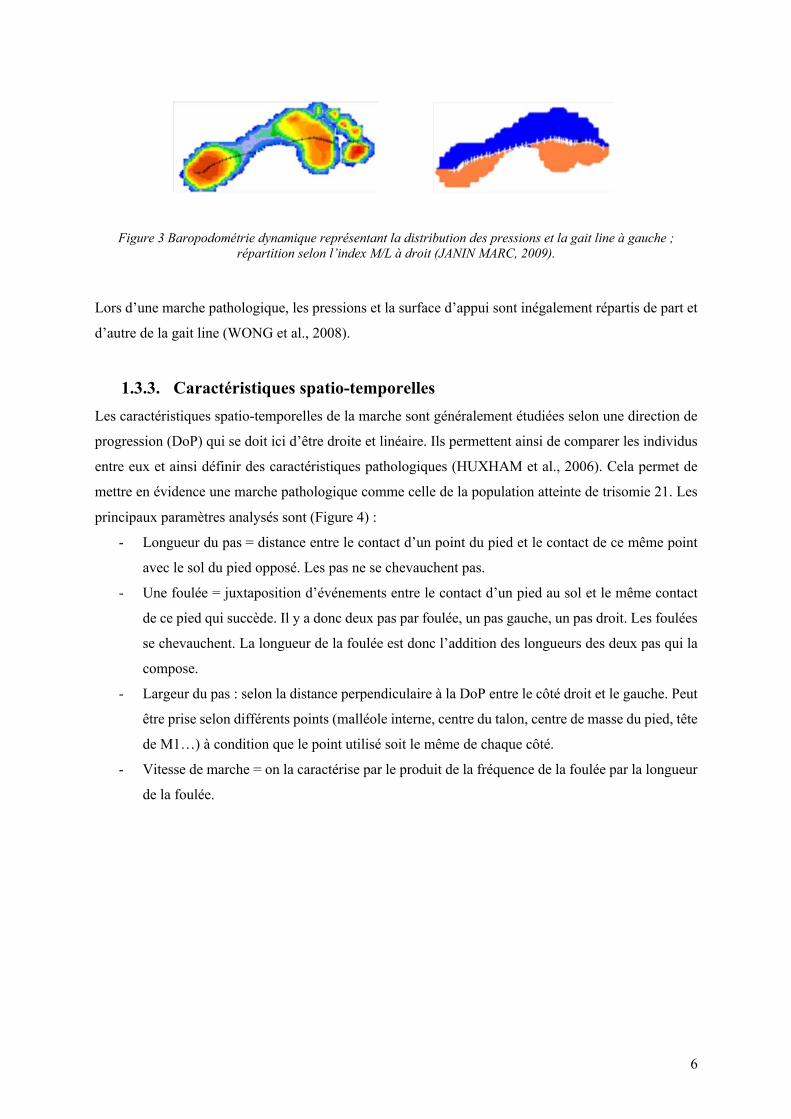
barycentre des pressions (JANIN MARC, 2009). Les semelles embarquées type Pedar-X® permettent
également ce type d’analyse et ne gênent nullement les sujets qui les utilisent pour marcher. Parmi les
nombreuses informations que ces outils peuvent nous donner, l’index Médio/Latéral Aéra (L/M) est
intéressant lors de marche. Cela correspond au rapport entre la partie latérale et la partie médiale du pied
lors de son déroulement durant la marche (JANIN MARC, 2009)(Figure 3). Ainsi, lors d’études, ce type
d’outil permet d’effectuer une comparaison intra sujet et intergroupe de la répartition des pressions
durant le déroulé du pas et ainsi, permettre de constater des évolutions dans le temps.
6
Figure 3 Baropodométrie dynamique représentant la distribution des pressions et la gait line à gauche ;
répartition selon l’index M/L à droit (JANIN MARC, 2009).
Lors d’une marche pathologique, les pressions et la surface d’appui sont inégalement répartis de part et
d’autre de la gait line (WONG et al., 2008).
1.3.3. Caractéristiques spatio-temporelles Les caractéristiques spatio-temporelles de la marche sont généralement étudiées selon une direction de
progression (DoP) qui se doit ici d’être droite et linéaire. Ils permettent ainsi de comparer les individus
entre eux et ainsi définir des caractéristiques pathologiques (HUXHAM et al., 2006). Cela permet de
mettre en évidence une marche pathologique comme celle de la population atteinte de trisomie 21. Les
principaux paramètres analysés sont (Figure 4) :
- Longueur du pas = distance entre le contact d’un point du pied et le contact de ce même point
avec le sol du pied opposé. Les pas ne se chevauchent pas.
- Une foulée = juxtaposition d’événements entre le contact d’un pied au sol et le même contact
de ce pied qui succède. Il y a donc deux pas par foulée, un pas gauche, un pas droit. Les foulées
se chevauchent. La longueur de la foulée est donc l’addition des longueurs des deux pas qui la
compose.
- Largeur du pas : selon la distance perpendiculaire à la DoP entre le côté droit et le gauche. Peut
être prise selon différents points (malléole interne, centre du talon, centre de masse du pied, tête
de M1…) à condition que le point utilisé soit le même de chaque côté.
- Vitesse de marche = on la caractérise par le produit de la fréquence de la foulée par la longueur
de la foulée.

7
Figure 4 Schématisation des caractéristiques spatio-temporelles de la marche selon HUXHAM et al. (2006) modifié par MARIN, A, (2015).
Une étude réalisée sur la marche d’enfants d’âge moyen de 8 ans a permis de recenser les valeurs
moyennes des paramètres spatio-temporels observés (POTHRAT et al., 2013) (Tableau 1) :
Variables Sujet physiologique
Cadence (pas/min) 116,5 ± 6,27
Appui monopodal (seconde) 0,26 ± 0,13
Double appui (seconde) 0,20 ± 0,08
Longueur de la foulée (mètre) 1,01 ± 0,12
Longueur du pas (mètre) 0,50 ± 0,06
Vitesse de marche (m/s) 0,98 ± 0,12
Tableau 1 : Paramètres spatio-temporels d’enfants physiologiques selon (POTHRAT, 2015).
Les analyses cinétique et cinématique de la locomotion permettent donc d’obtenir des données de la
physiologie de cette tâche de la vie quotidienne. Mais comment l’individu fait-il pour réaliser cette
tâche ?
8
2. Le contrôle moteur
Pour que l’homme puisse marcher comme décrit précédemment, il faut comprendre comment il fait pour
s’adapter aux contraintes qui lui sont infligées. C’est grâce au contrôle moteur : celui-ci correspond à
l’ensemble des processus nerveux qui s’accomplissent pour obtenir en finalité une exécution d’un
mouvement ou d’une action contrôlée volontaire ou automatique (KERLIRZIN, DIETRICH et
VIEILLEDENT, 2009). Le système du contrôle moteur possède alors deux fonctions principales qui
sont de lutter contre la gravité tout en assurant un maintien de l’équilibre ainsi que de permettre à
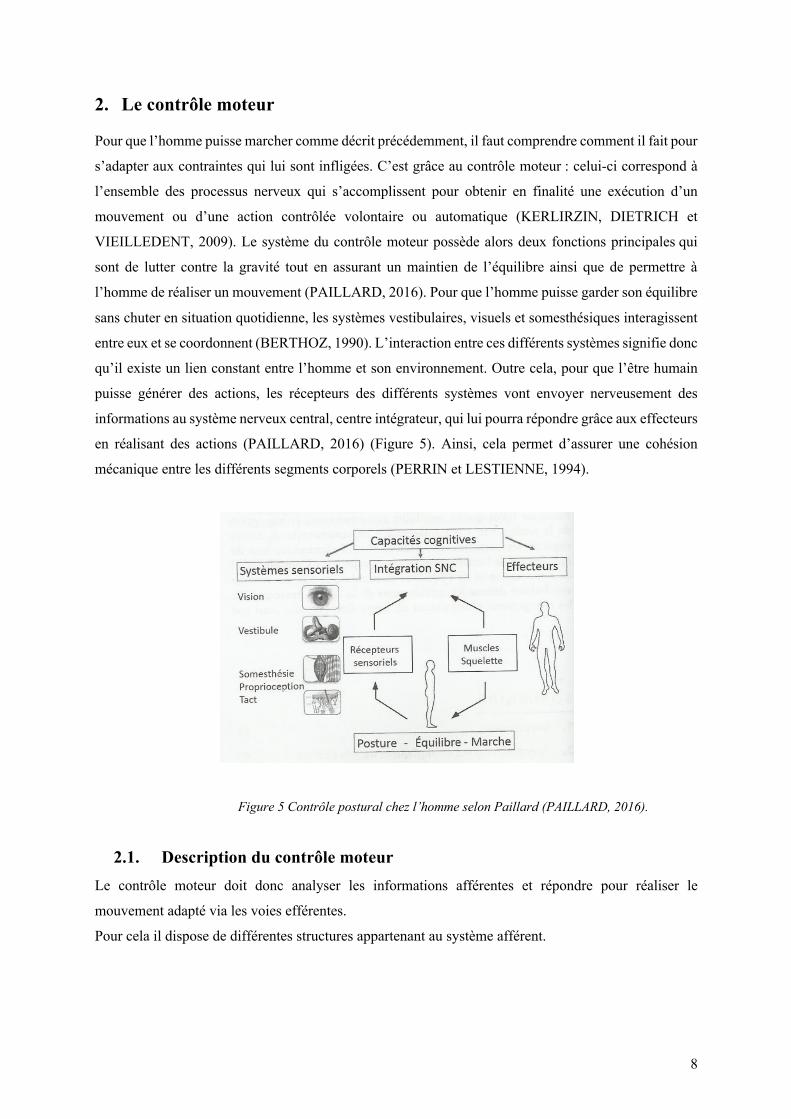
l’homme de réaliser un mouvement (PAILLARD, 2016). Pour que l’homme puisse garder son équilibre
sans chuter en situation quotidienne, les systèmes vestibulaires, visuels et somesthésiques interagissent
entre eux et se coordonnent (BERTHOZ, 1990). L’interaction entre ces différents systèmes signifie donc
qu’il existe un lien constant entre l’homme et son environnement. Outre cela, pour que l’être humain
puisse générer des actions, les récepteurs des différents systèmes vont envoyer nerveusement des
informations au système nerveux central, centre intégrateur, qui lui pourra répondre grâce aux effecteurs
en réalisant des actions (PAILLARD, 2016) (Figure 5). Ainsi, cela permet d’assurer une cohésion
mécanique entre les différents segments corporels (PERRIN et LESTIENNE, 1994).
Figure 5 Contrôle postural chez l’homme selon Paillard (PAILLARD, 2016).
2.1. Description du contrôle moteur
Le contrôle moteur doit donc analyser les informations afférentes et répondre pour réaliser le
mouvement adapté via les voies efférentes.
Pour cela il dispose de différentes structures appartenant au système afférent.

9
2.1.1. Les entrées sensorielles
2.1.1.1. Le système somesthésique Dans le contrôle des activités posturo-cinétiques, la somesthésie est caractérisée par les différents
capteurs de la proprioception comprenant les capteurs cutanés.
a. La proprioception
Les récepteurs de la proprioception se retrouvent principalement au niveau des muscles et de leurs
tendons ainsi que dans les articulations. Ils renseignent sur l’étirement de ces derniers ou sur la
contraction du muscle et permettent de rendre compte au système nerveux central de la posture et du
mouvement des segments dans l’espace. Ils interviennent dans le contrôle des activités posturo-
cinétiques. Les fuseaux-neuromusculaires sont les récepteurs majoritairement présents dans les corps
musculaires et permettent de capter l’allongement des fibres musculaires. Les organes tendineux de
Golgi se retrouvent au niveau des jonctions myotendineuses et sont des récepteurs sensibles à la tension
au vu de leur localisation. Les corpuscules de Pacini (sensibles à l’accélération de l’articulation) et de
Ruffini (présents dans les ligaments, renseignent sur la position des articulations dans l’espace) sont eux
les capteurs présents au niveau des articulations (GRIGG, 1994).
D’autres capteurs renseignent le système nerveux central comme les capteurs cutanés plantaires.
b. Capteurs cutanés plantaires
Le pied, partie du corps humain exclusivement en contact avec le sol est l’outil permettant de
communiquer un maximum, grâce à la multitude de capteurs qu’il contient, avec le système nerveux
central afin d’intégrer et avoir une réponse motrice à une situation tout en conservant les lois mécaniques
des forces mises en jeux (JANIN MARC, 2009). Cela se fait grâce à la proprioception décrite ci-dessus
mais aussi grâce aux extérocepteurs et aux nocicepteurs. Les extérocepteurs sont majoritairement des
mécanorécepteurs répondant à des stimuli concernant la pression, le contact, tandis que les nocicepteurs
informent sur la douleur (ROUDAUT et al., 2012). Il existe des récepteurs phasiques ayant une
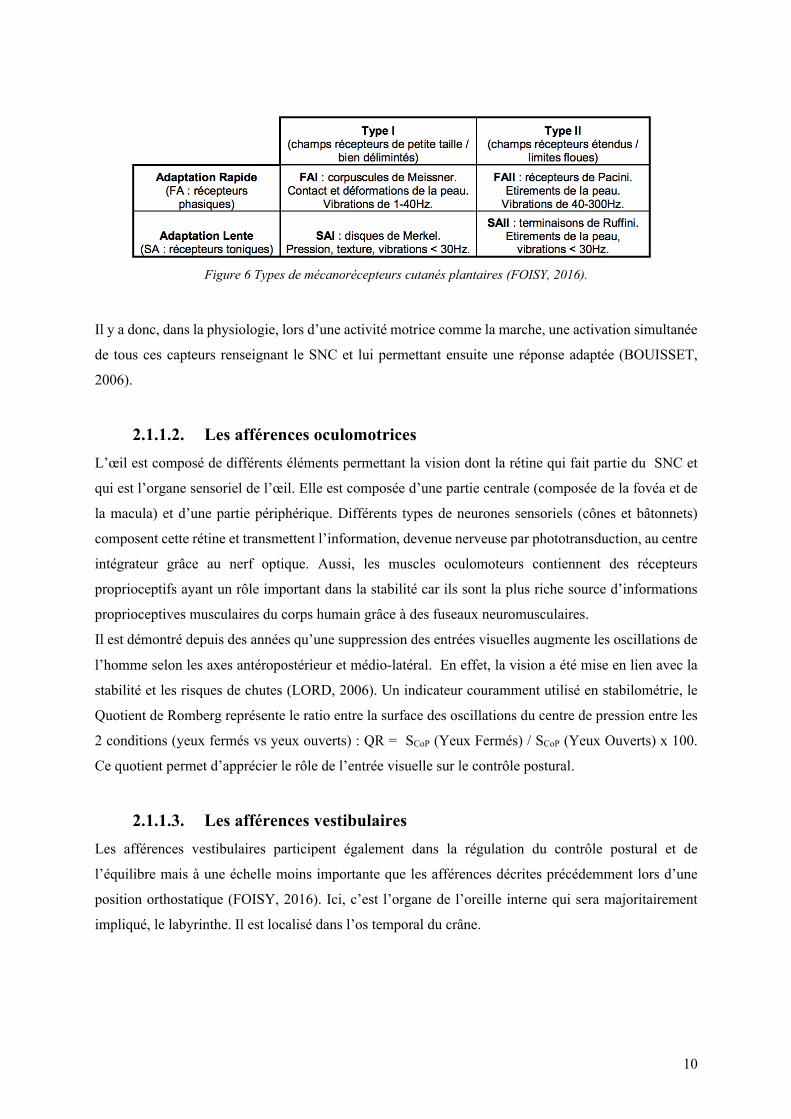
adaptation rapide ainsi que des récepteurs toniques ayant une adaptation plus lente. Les
mécanorécepteurs cutanés sont de deux types : les types I (corpuscule de Meissner/ disques de Merkel)
ou les types II (corpuscule de Pacini/ terminaisons de Ruffini). (Figure 6). On retrouve les corpuscules
de Meissner en superficie dans l’épiderme, ils ont un petit champ récepteur ainsi qu’un seuil d’activation
assez bas. Ils permettent, par exemple, de détecter un contact de la peau avec autre chose. Les récepteurs
de type II sont quant à eux localisés dans le derme, en profondeur et ont un champ récepteur plus grand.
Eux détectent plutôt l’étirement de la peau et les vibrations plus hautes.
10
Figure 6 Types de mécanorécepteurs cutanés plantaires (FOISY, 2016).
Il y a donc, dans la physiologie, lors d’une activité motrice comme la marche, une activation simultanée
de tous ces capteurs renseignant le SNC et lui permettant ensuite une réponse adaptée (BOUISSET,
2006).
2.1.1.2. Les afférences oculomotrices L’œil est composé de différents éléments permettant la vision dont la rétine qui fait partie du SNC et
qui est l’organe sensoriel de l’œil. Elle est composée d’une partie centrale (composée de la fovéa et de
la macula) et d’une partie périphérique. Différents types de neurones sensoriels (cônes et bâtonnets)
composent cette rétine et transmettent l’information, devenue nerveuse par phototransduction, au centre
intégrateur grâce au nerf optique. Aussi, les muscles oculomoteurs contiennent des récepteurs
proprioceptifs ayant un rôle important dans la stabilité car ils sont la plus riche source d’informations
proprioceptives musculaires du corps humain grâce à des fuseaux neuromusculaires.
Il est démontré depuis des années qu’une suppression des entrées visuelles augmente les oscillations de
l’homme selon les axes antéropostérieur et médio-latéral. En effet, la vision a été mise en lien avec la
stabilité et les risques de chutes (LORD, 2006). Un indicateur couramment utilisé en stabilométrie, le
Quotient de Romberg représente le ratio entre la surface des oscillations du centre de pression entre les
2 conditions (yeux fermés vs yeux ouverts) : QR = SCoP (Yeux Fermés) / SCoP (Yeux Ouverts) x 100.
Ce quotient permet d’apprécier le rôle de l’entrée visuelle sur le contrôle postural.
2.1.1.3. Les afférences vestibulaires Les afférences vestibulaires participent également dans la régulation du contrôle postural et de
l’équilibre mais à une échelle moins importante que les afférences décrites précédemment lors d’une
position orthostatique (FOISY, 2016). Ici, c’est l’organe de l’oreille interne qui sera majoritairement
impliqué, le labyrinthe. Il est localisé dans l’os temporal du crâne.

11
On trouve dans le labyrinthe deux types de récepteurs :
- Les canaux semi-circulaires : ils sont tapissés de cellules ciliées qui détectent les mouvements
selon X, Y et Z de l’endolymphe, fluide qui remplit ces canaux. C’est grâce à la position des
cils qu’un influx nerveux est envoyé au système nerveux central pour interpréter la position du
sujet dans l’espace.
- Les organes otolithiques (utricule, saccule) : elles sont composées de cristaux de carbonate de
calcium appelés otoconies. Lors de mouvements de la tête, ces otoconies glissent sur la
membrane otolithique venant créer un message nerveux.
Ces organes sensoriels sont responsables de la détection des accélérations angulaires pour les canaux
semi-circulaires (rotations) et de l’accélération linéaire pour les organes otolitiques (translation) (GRAF
et KLAM, 2006). Lors de la locomotion, les organes otolitiques sont majoritairement mis à contribution.
2.1.2. Les voies et l’intégration Les voies lemniscales et spinothalamiques, encore appelées voies ascendantes assurent la transmission
des influx des capteurs périphériques (décris ci-dessus) jusqu’au centre intégrateur pour être décodés et
intégrés. Le système nerveux central composé de l’encéphale (cerveau, cervelet, tronc cérébral) et de
la moelle épinière somatise les informations recueillies par les différents capteurs. Plus particulièrement,
le cervelet est responsable de la coordination sensori-motrice du mouvement en cours de réalisation. Il
est donc sollicité lors de la marche (PINTER et al., 2001; FOISY, 2016).
Afin de réaliser une action motrice, le système nerveux central envoie des informations vers les
effecteurs via les systèmes pyramidaux et extrapyramidaux. Ces deux systèmes sont appelés voies
motrices.
2.1.3. Les effecteurs musculaires Pour que le mouvement puisse se réaliser, le système nerveux central envoie l’information jusqu’aux
effecteurs par l’intermédiaire de fibres nerveuses que l’on nomme les motoneurones. L’intégrité des
cellules est importante pour que l’information soit la plus précise possible et puisse donc rendre le
mouvement fin et physiologique. C’est en partie grâce à l’isolant des axones appelé myéline, composé
d’oligodendrocytes, que l’influx nerveux passe de façon rapide et physiologique dans le système
nerveux (SIMONS et NAVE, 2015).
2.2. Contrôle moteur dans la locomotion Le contrôle moteur permet la réalisation d’actions simples en statique mais également des actions plus
complexes comme la marche en offrant un cadre de stabilité nécessaire au déroulé du mouvement grâce
à des boucles de régulation (PÉRENNOU, 2012). La marche nécessite alors la mise en place de
stratégies d’équilibration par des ajustements posturaux car chaque mouvement effectué est qualifié de

12
source de déséquilibre. Selon MASSION (1992), il y a donc une nécessité d’adopter des ajustements
avant, pendant et après chaque mouvement pour maintenir un équilibre.
Les muscles des membres inférieurs ont une grande importance car ce sont eux qui permettent la
locomotion (MASSION, 1994). Un déficit de ces derniers aurait un impact sur la marche.
Il faut ici retenir qu’un défaut à n’importe quel étage (que ce soit au niveau visuel comme au niveau
axonal) du système constituant le contrôle moteur entraine un possible déficit d’une action motrice. Afin
de mieux comprendre comment la locomotion d’une personne atteinte de trisomie 21 est modifiée, nous
allons décrire l’atteinte en elle-même et ses répercussions sur le contrôle moteur.
3. La trisomie 21
3.1. Définition de la maladie en général La trisomie 21 ou Syndrome de Down était, dans les années 1860, décrite comme « Mongolisme »
(RONDAL, 2010). Cette période correspond aux prémices de la recherche sur cette anomalie. Ce n’est
qu’en 1956 que Lejeune travaille sur la génétique des personnes « Mongoles », « Idiotes ». Il a publié
en collaboration avec Turpin et Gauthier, sur la trisomie 21 et notamment son étiologie non héréditaire
(RONDAL, 2013). Cette pathologie est une aberration génétique indépendante. Il ne s’agit donc pas
d’une maladie ou encore d’une dégénérescence neurologique mais bien d’une condition organique
particulière qui se met en place lors des phases de la fécondation. C’est l’aneuploïdie qui est responsable
de la présence de 3 chromosomes homologues sur une paire donnée. Cependant certains facteurs avancés
comme l’âge de la mère ou du père favorisent le déplacement de ce chromosome sur la 21ème paire. Le
risque d’aneuploïdie est d’autant plus important que le chromosome est petit, comme le 21. Il existe de
grandes variabilités individuelles dans les manifestations phénotypiques et/ou clinique des personnes
porteuses de cette anomalie chromosomiques considérée comme l’une des causes principales de déficits
mentaux (WEIJERMAN et DE WINTER, 2010). De nombreuses études ont vu le jour depuis la moitié
du 20ème et ont permis de mieux comprendre et catégoriser la trisomie 21.
En effet on retrouve trois formes de trisomie 21 :
- La trisomie 21 libre (92% des cas) qui signifie que les trois chromosomes 21 sont séparés les
uns des autres, que l’anomalie est présente sur l’ensemble du chromosome 21 de toutes les
cellules du corps humain.
- La trisomie 21 par translocation (4,8% des cas) correspond à la présence de deux chromosomes
21 libres et un troisième qui est transloqué sur un autre chromosome.
- La trisomie 21 par mosaïque (3%) est la plus rare et signifie que le sujet présente deux types de
cellules. Certaines physiologiques avec 46 chromosomes, d’autres avec 47 dont le 3ème
chromosome sur la 21ème paire.

13
A l’échelle mondiale, la prévalence de l’apparition de cette anomalie est d’environ 10 cas pour 10000
naissances vivantes et le sex-ratio serait de l’ordre de 0,6 ; les garçons seraient plus touchés
(WEIJERMAN et DE WINTER, 2010). L’espérance de vie des personnes présentant une trisomie 21
est d’environ 60 ans.
3.2. Impact sur le système moteur Le système moteur nécessite la coordination de plusieurs structures pour réussir l’accomplissement
d’une tâche. Cependant, le sujet porteur de cette anomalie chromosomique est touché à plusieurs étages
de l’organisme : système locomoteur, système digestif, système oculaire ou encore le système auditif.
Ces différents systèmes coordonnés et intègres sont nécessaires à l’accomplissement d’une tâche. Le
morphotype atypique des sujets présentant une trisomie 21 permet de reconnaître leur anomalie
génétique (la plus présente au monde). Ce morphotype regroupe les signes suivants : petite taille, cou
très peu marqué, yeux écartés et nez aplati. La tête est ronde et de petite taille, les pieds sont petits,
larges et très plats. On remarque également qu’ils ont tendance à être en surpoids. L’étude de
SHUMWAY-COOK et WOOLLACOTT, (1985) comparant des enfants trisomiques 21 et des enfants
sains lors d’épreuves de motricité globale a montré des résultats nettement inférieurs pour les enfants
possédant un chromosome surnuméraire. Cela principalement sur les tests d’équilibre statique et
dynamique.
De surcroit ils présentent une hypotonie musculaire très marquée dès la naissance, à l’origine de leur
lenteur motrice relevée dans plusieurs études, ainsi qu’une hyper-laxité ligamentaire. Les latences de
déclenchement de leur muscles posturaux sont ainsi significativement plus lente tout comme les
contractions corrélées en réponse à une perturbation extérieure (SHUMWAY-COOK et
WOOLLACOTT, 1985; PARKER, BRONKS et SNYDER, 2008) (Figure 7).
Figure 7 Corrélations entre l'amplitude distale et proximale des muscles ainsi que les temps de latence chez les adultes, les enfants normaux et les enfants atteints du syndrome de Down (SHUMWAY-COOK et
WOOLLACOTT, 1985)
14
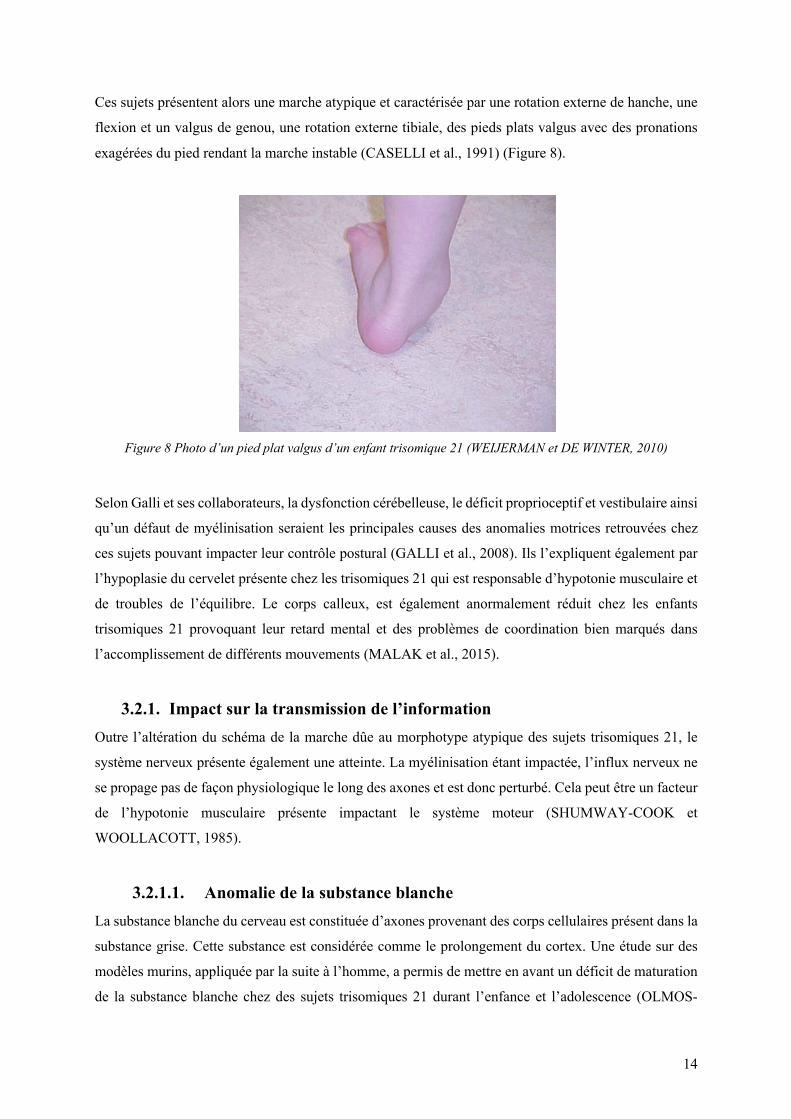
Ces sujets présentent alors une marche atypique et caractérisée par une rotation externe de hanche, une
flexion et un valgus de genou, une rotation externe tibiale, des pieds plats valgus avec des pronations
exagérées du pied rendant la marche instable (CASELLI et al., 1991) (Figure 8).
Figure 8 Photo d’un pied plat valgus d’un enfant trisomique 21 (WEIJERMAN et DE WINTER, 2010)
Selon Galli et ses collaborateurs, la dysfonction cérébelleuse, le déficit proprioceptif et vestibulaire ainsi
qu’un défaut de myélinisation seraient les principales causes des anomalies motrices retrouvées chez
ces sujets pouvant impacter leur contrôle postural (GALLI et al., 2008). Ils l’expliquent également par
l’hypoplasie du cervelet présente chez les trisomiques 21 qui est responsable d’hypotonie musculaire et
de troubles de l’équilibre. Le corps calleux, est également anormalement réduit chez les enfants
trisomiques 21 provoquant leur retard mental et des problèmes de coordination bien marqués dans
l’accomplissement de différents mouvements (MALAK et al., 2015).
3.2.1. Impact sur la transmission de l’information Outre l’altération du schéma de la marche dûe au morphotype atypique des sujets trisomiques 21, le
système nerveux présente également une atteinte. La myélinisation étant impactée, l’influx nerveux ne
se propage pas de façon physiologique le long des axones et est donc perturbé. Cela peut être un facteur
de l’hypotonie musculaire présente impactant le système moteur (SHUMWAY-COOK et
WOOLLACOTT, 1985).
3.2.1.1. Anomalie de la substance blanche La substance blanche du cerveau est constituée d’axones provenant des corps cellulaires présent dans la
substance grise. Cette substance est considérée comme le prolongement du cortex. Une étude sur des
modèles murins, appliquée par la suite à l’homme, a permis de mettre en avant un déficit de maturation
de la substance blanche chez des sujets trisomiques 21 durant l’enfance et l’adolescence (OLMOS-

15
SERRANO et al., 2016). Ce déficit de la maturation de la substance blanche est en lien avec un contrôle
moteur des trisomiques 21 non physiologique.
3.2.1.2. Altération des oligodendrocytes et des nœuds de Ranvier Une altération d’un grand nombre de gênes qui codent dans la formation des oligodendrocytes est
retrouvée. En effet, cette cellule de la névroglie participe à la myélinisation des axones, fibres nerveuses,
du système nerveux central (ELBAZ et POPKO, 2019).
La ressemblance génétique, protéique et cellulaire entre les humains atteints de la trisomie 21 et les
souris Ts65D permet de suspecter une concordance fonctionnelle entre ces deux groupes. Une étude
réalisée sur ces souris, porteuses de trisomie 21, montre un nombre d’axones myélinisés diminué dans
le corps calleux et une épaisseur de la myéline inférieure. L’étude suspecte également que la formation
des nœuds de Ranvier est altérée (OLMOS-SERRANO et al., 2016). Le système nerveux, au niveau du
centre intégrateur est donc également touché.
3.2.2. Impact sur les muscles L’hypotonie musculaire est une caractéristique principale retrouvée chez les sujets trisomiques 21
affectant leur contrôle postural. Comme cela entraine des problématiques de posture et d’équilibre,
l’utilisation des muscles des membres inférieurs rend la locomotion compliquée et retardée (DUPRE et
WEIDMAN-EVANS, 2017). Selon VAESSEN et al., (2012). « une différence de longueur d’un membre
de 20% en moins, entraine une diminution de résistance de 50% ». Dans le cas de cette population,
présentant des membres plus courts, leur résistance est également touchée. Aussi, lors d’une
stimulation, la réaction musculaire est plus lente car le niveau de relâchement musculaire est plus bas
au départ. Lorsque le sujet touché par le Syndrome de Down marche, il présente une co-activation des
muscles agonistes et antagonistes alors qu’un sujet physiologique, lui, présente une réaction réciproque.
Cela laisse penser que cette co-activation entraine une baisse de résistance et contribue également à
l’hypotonie musculaire présente chez les trisomiques 21 (VAESSEN et al., 2012).
3.2.3. Impact sur la locomotion La locomotion de sujets trisomiques 21 a pu faire émerger les différences significatives par rapport à la
locomotion physiologique. L’acquisition de la marche chez ces enfants est retardée d’environ 12 mois
à cause d’un système nerveux pas assez mature et lent (PARKER, BRONKS et SNYDER, 2008).
De plus, l’étude du cycle de marche de cette population a révélé que leur temps de phase d’appui est
supérieur à la moyenne physiologique et que le déroulé du pas n’est pas physiologique. La longueur de
la foulée est également modifiée. En effet, une étude comparant de jeunes sujets trisomiques 21 (environ
11 ans) et des enfants sains montre une diminution significative de la longueur des pas, ainsi qu’un
écartement majoré des pieds pour la population trisomique (GALLI et al., 2008). Leur vitesse de marche

16
(0,42±0,08 m/s), et leur longueur de foulée (0,29±0,04 mètre) sont inférieures aux résultats de la
population saine.
Cette marche ralentie et saccadée serait en lien direct avec un manque d’équilibration créant une
augmentation de leur polygone de sustentation pour contrecarrer le déséquilibre. Cela permet une
projection de leur centre de gravité dans le polygone de sustentation élargi, favorable à un gain
d’équilibration (CORSI et al., 2019). L’hypotonie musculaire est, quant à elle, responsable des
mouvements exagérés à certains niveaux et trop faibles à d’autres. L’affaissement du pied et sa
déformation est en lien direct avec la laxité ligamentaire présente chez les trisomiques 21.
De plus, l’étude cinématique de CORSI et al., (2019) dans le plan sagittal a permis de mettre en évidence
des amplitudes articulaires différentes chez le jeune trisomique 21. Dans le plan sagittal, lors du contact
initial, la flexion de hanche est plus élevée (37±8,1° contre 29,0±5,2° pour les sujets sains). La flexion
de genou est elle aussi plus grande lors du contact initial (10,3±7,08° contre 10,3±7,08°).
Durant la marche, la trajectoire du centre de masse des sujets trisomiques 21 est également touchée. Un
débattement médio-latéral (Figure 9) et antéro-postérieur est anormalement constaté selon les conditions
de marche (AGIOVLASITIS et al.,2009). La vitesse serait corrélée au débattement antéro-postérieur du
centre de masse. Lorsque le sujet trisomique 21 accélère, le débattement antéro-postérieur augmente
entraînant des instabilités.
Figure 9 Courbes comparatives du déplacement du CdM dans le plan médio-latéral durant une foulée entre DS
et non-DS (AGIOVLASITIS et al., 2009).
Le contrôle moteur de cette population est affecté et impacte directement les paramètres cinétiques et
cinématiques de la marche. La progression vers l’avant nécessite un contrôle musculaire actif et
permanant. Les nombreux troubles observés reflètent une plus grande sollicitation du système du
contrôle postural pour mettre en place des stratégies d’équilibration. Cela leur demande alors une plus
grande dépense énergétique (DEAN, ALEXANDER et KUO, 2007; AGIOVLASITIS et al., 2009).

17
La trisomie 21 touche un public en difficulté lors de la marche, activité de la vie quotidienne. Un trouble
moteur, en lien avec un morphotype atypique peut être corrigé et pris en charge par le pédicure-
podologue. A l’aide d’examens et tests cliniques, le praticien analyse et est en mesure de proposer une
solution pour tenter d’améliorer la locomotion.
4. Le pied plat valgus, trouble statique majeur du trisomique 21 Le pied plat valgus est un trouble statique caractérisé par un affaissement du médio-pied et un angle
calcanéen valgisant. Cet affaissement est directement lié à un déficit des éléments capsulo-ligamentaires
et aponévrotiques qui physiologiquement maintiennent et donnent une tonicité au pied (PIAT et
ALLAIN, 2000). Aussi, une abduction de l’avant pied par rapport à l’arrière pied est notable. On peut
également retrouver, chez les sujets présentant ce trouble, une hypotonie musculaire, notamment du
muscle tibial, favorable à cette déformation.
4.1. Son impact sur la locomotion Le pied étant le segment du corps en contact avec le sol, il joue un rôle majeur dans la locomotion.
Lorsque celui-ci est déformé, par un pied plat par exemple, la marche peut être impactée et modifiée.
Chez les sujets présentant ce trouble statique, les paramètres spatio-temporels de la marche ne montrent
pas de différences significatives exceptées une vitesse plus lente et un mouvement plus instable
(TOULLEC, 2019). La durée de la phase d’appui et de la phase de double appui sont, elles, cependant
plus longues (0,20±0,08s pour les enfants physiologiques contre 0,15±0,08s pour les sujets présentant
des pieds plats) (POTHRAT et al., 2013).
La locomotion de sujets présentant des pieds plats valgus montre plusieurs paramètres modifiés. La
comparaison de 2 populations (saines et avec troubles statiques) via un système optoélectronique montre
les données suivantes : une différence significative sur les articulations médio-tarsiennes et tarso-
métarsiennes, l’effondrement de l’arche médiale durant le cycle de marche chez les sujets avec un pied
plat (angle de Djian-Annonier1 plus important au niveau de l’arche interne) (CARAVAGGI et al., 2018)
(Figure 10).
1 Angle entre la ligne tangente à la surface inférieure du calcanéus et la ligne entre le point inférieur de l’articulation talo-naviculaire et point inférieur de l’os sésamoïde médial de l’hallux.

18
Figure 10 Étude de la variation d’angulation de l’arche interne durant le cycle de marche (CARAVAGGI et al.,
2018).
Le pied plat valgus est une pathologie rencontrée en podologie. Elle peut être analysée via des tests
cliniques.
4.2. Les tests cliniques Certains tests permettent d’apprécier l’affaissement du médio-pied et la position du pied dans son
ensemble (valgisant, varisant). Ils sont utilisés en routine clinique pour ajuster le traitement orthétique
choisi.
4.2.1. Le Foot Posture Index Le Foot Posture Index est un test mesurant le pied dans les 3 plans anatomiques. Celui-ci est réalisé en
position statique, debout et présente sous la forme d’un scoring compris entre -12 et 12. Selon
REDMOND, CROSBIE et OUVRIER, (2006) c’est un test intéressant à effectuer sur des personnes
présentant un trouble de l’équilibre ainsi que des problèmes du contrôle postural. Il y a 6 items à coter,
chacun entre -2 et +2, (les valeurs négatives mettent en avant une supination et les valeurs positives une
pronation). La valeur de zéro est un état neutre. On retrouve :
- la proéminence de la région talo-naviculaire
- l’abduction/adduction de l’avant-pied par rapport à l’arrière-pied
- la courbe supra/infra malléolaire externe
- la palpation de la tête du talus ; congruence de l’arche interne
- le valgus/varus de l’arrière pied
Le scoring final permettra de catégoriser un pied valgisant, très valgisant, varisant ou très varisant.

19
Une étude de l’équipe de Redmond justifie qu’un score de +3,7 en moyenne est physiologique chez les
sujets mineurs (inférieurs à 18 ans). Ce résultat tend à la baisse vers l’âge adulte (+2,4) puis augmente
chez les séniors (+2,9) (REDMOND, CRANE et MENZ, 2008).
4.2.2. Le Naviculaire Drop Test Ce test consiste à quantifier la chute du naviculaire entre la position assise et debout. La mesure se prend
alors entre la tubérosité du naviculaire et le sol. Il est considéré comme indicateur au diagnostic du pied
pronateur et permet d’apprécier l’affaissement de l’arche interne (MUELLER, HOST et NORTON,
1993). Il est important de réaliser ce test sur une population présentant un pied plat. En effet, l’arche
médiale est une structure complexe et un affaissement de celle-ci modifie la répartition des pressions
plantaires et peut altérer la marche. La valeur normale doit être comprise entre 5 et 9 mm. Ce test est
reproductible, simple et validé (ZUIL-ESCOBAR et al., 2018).
D’autres tests existent dans la littérature mais peu sont scientifiquement validés. Le FPI et le NDT sont
les plus utilisés pour quantifier la déformation.
Pour traiter cette déformation, plusieurs solutions thérapeutiques sont possibles (chirurgie,
kinésithérapie, semelles orthopédiques). Nous nous intéressons particulièrement aux traitements
orthétiques et notamment aux semelles orthopédiques dans la prise en charge du pied plat valgus.
4.3. Le traitement par semelles orthopédiques Les traitements sont multiples et varient selon la réductibilité ou non du pied plat valgus. Dans la
majorité des cas il est asymptomatique. Lorsque ce trouble statique est très problématique et douloureux
et que le traitement conservateur par orthèse plantaire sur le long terme ne fonctionne pas, la chirurgie
est proposée (MAYNOU et al., 2009). Le traitement par orthèse plantaire a pour objectif de corriger
l’arche interne. Pour se faire, un soutien de la voûte plantaire relativement rigide est nécessaire.
L’élément cité précédemment modifie l’architecture structurale du pied et permet une amélioration
fonctionnelle durant la marche (DELACROIX et al., 2011 ; MELLOS et al., 2014). Plusieurs études
montrent un réel impact de l’orthèse plantaire sur la biomécanique du sujet mais dépendantes de
conditions.
Un cas clinique sur un sujet trisomique 21 a été réalisé afin d’évaluer l’impact de la semelle orthopédique
sur sa locomotion. Celle-ci est composée d’un soutien d’arche interne (ENDO et al., 2020). Le système
Vicon®, système optoélectronique d’analyse 3D du mouvement est utilisé lors de cette étude. L’analyse
se porte sur le genou, le sujet présente un pied plat valgus ainsi que des genu valgum. La locomotion
avec le traitement orthétique montre une diminution de la flexion de genou (31,76° ± 3,45 sans semelle,

20
26,53° ± 1,95 avec) durant les phases de double appui. Le valgus du genou diminue. Il y a donc une
diminution des angulations mais surtout une diminution de la variabilité. On observe donc une stabilité
augmentée. Il serait intéressant de réaliser cette étude sur un échantillon plus grand et représentatif de
notre population cible afin d’évaluer l’impact de cet élément orthétique.
Un réel impact immédiat de la semelle orthopédique est visible sur la marche grâce à des plateformes
de forces ainsi qu’un système d’analyse 3D de la marche. En effet, une analyse sur quelques semaines
avec des visites espacées relève que les enfants trisomiques 21 présentent une modification du schéma
de la marche avec semelles. L’analyse du calcanéus montre en position statique que l’os présente un
valgus de 11° sans semelles contre 3° avec. Le pied serait alors moins pronateur avec cette correction
(SELBY-SILVERSTEIN, HILLSTROM et PALISANO, 2001).
Cependant une revue systématique montre un manque de preuves sur l’efficacité des traitements non
chirurgicaux des pieds plats sur des durées d’environ 2 ans pour des sujets présentant juste un pied plat
(EVANS et ROME, 2011; CHOI et al., 2020). C’est pourquoi, une étude sur plus long terme pourrait-
elle permettre d’analyser l’impact d’une semelle orthopédique sur la capacité du sujet trisomique 21 à
améliorer sa locomotion ?
5. Synthèse / problématisation Le sujet trisomique 21 présente une démarche spécifique. En effet leur morphotype (pied plat valgus,
genu-valgum) est causatif du trouble. Le contrôle moteur, mobilisé lors de la marche et durant toutes les
actions de la vie quotidienne est alors impacté chez ces sujets. La non physiologie d’une ou plusieurs
afférences pour le système nerveux sera perturbatrice. Le système visuel des sujets trisomiques étant
impacté ainsi que leurs instabilités (dûes à leurs pieds plats valgus, leur hypotonie musculaire et leur
laxité ligamentaire) peuvent être une origine de leurs systèmes moteur et locomoteur déficients.
Les corrections orthétiques permettent de modifier et de corriger certains troubles statiques dont les
angles de déviation des pieds plats (HUANG et al., 2020). Il est alors possible qu’un traitement
orthétique améliore les troubles statiques des personnes atteintes de trisomie 21 et permette une
locomotion plus physiologique. Les études sur l’impact d’un traitement orthétique sur la marche de
sujets trisomiques sont peu nombreuses. Elles ont été réalisées sur un temps court ou une cohorte non
significative (1 sujet). Malgré cela, la mise en place d’un traitement orthétique s’est avéré utile
notamment dans la stabilisation du genou. Cela aurait permis un gain d’équilibre (SELBY-
SILVERSTEIN, HILLSTROM et PALISANO, 2001; ENDO et al., 2020). Évaluer l’impact d’un
traitement orthétique sur la locomotion, et sur un temps assez long, permettra d’évaluer l’effet sur cette
population.

21
Le protocole expérimental suivant répondra à cette question : Le soutien d’arche médial par orthèse
plantaire a-t-il un impact sur la marche du jeune trisomique 21 sur le long terme ?
L’hypothèse est que le port de l’orthèse plantaire avec support d’arche interne va améliorer la
locomotion des sujets jeunes trisomiques 21, grâce à la correction du pied plat valgus et l’amélioration
des paramètres quantifiés de la marche (comme l’angulation du genou dans le plan sagittal, le
déplacement du centre de masse).
Le protocole expérimental vise à comprendre si un traitement orthétique peut agir sur un système avec
des capacités motrices diminuées. L’un des troubles sur lesquels les thérapeutes peuvent intervenir est
le pied plat valgus contrairement à leurs troubles neurologiques de la myéline qui sont eux acquis.
L’action testée dans le protocole est donc la correction du pied plat valgus par semelles orthopédiques.
Pour ce faire, nous allons utiliser une hémi-coupole interne. Cette correction, si nous suivons la chaîne
mécanique valgus ainsi que la littérature, viendrait corriger également les genu-valgums de ces patients.
Le pied plat valgus et le genu valgum ont été décrit précédemment comme des perturbateurs de la
locomotion. Leur correction peut donc améliorer les paramètres mesurés.

22
6. Protocole d’analyse quantitative de la marche de jeunes trisomiques 21
L’analyse quantitative de la marche permet de quantifier les paramètres cinétiques et cinématiques de
la marche. Cela est nécessaire pour la mise en place d’un diagnostic permettant un traitement fonctionnel
adapté au sujet étudié. C’est pour cela que l’analyse des jeunes sujets trisomiques 21 est intéressante.
L’objectif est ici de quantifier leur marche grâce à différents outils d’analyse et d’observation et ensuite,
observer ou non l’intérêt de la mise en place d’un traitement orthétique pour corriger certains troubles
statiques qu’ils présentent.
Le protocole va permettre de venir quantifier plusieurs paramètres que nous pourrons ou non mettre en
corrélation. En effet, dans un temps, l’analyse du centre de masse permettra d’observer les déplacements
antéro-postérieur et médial-latéral. Cela va nous renseigner sur la stabilité du sujet. En parallèle,
l’analyse segmentaire va renseigner sur le comportement articulaire.
En effet, une population de trisomiques 21 présente un certain nombre de troubles locomoteurs et celui
sur lequel on va agir est le pied plat valgus. Réaliser cette étude permettra de comprendre si la correction
du trouble locomoteur par une intervention sur le morpho-statique permet un gain sur la marche, dans
le temps. Les résultats d’une telle étude viendront confronter la réalité à la littérature. L’étude sera
contrôlée et randomisée.
L’hypothèse est donc que la semelle contribue à la stabilité. En agissant sur le pied plat avec une hémi-
coupole interne, la modification de l’architecture du pied et les corrections des angulations des genoux
vont venir stabiliser les articulations et donc permettre au sujet d’avoir une marche plus stable.
Mes hypothèses sont :
- pour les paramètres étudiés : une différence significative entre les 2 groupes
- une différence significative entre T0 et Tf (final) sur les paramètres observés, pour le groupe
test, en analyse intra-sujet
-
6.1. Public Le protocole sera réalisé sur une population de 40 enfants de 5 à 8 ans atteint de trisomie 21.
Les critères d’inclusions :
- les enfants étudiés devront présenter des pieds plats et une hyper laxité
Les critères d’exclusions sont les suivants :
- pas de douleurs à la marche, pas de port initial de semelles orthopédiques, pas de chaussures
dégradées. On considère que tous enfants portent des chaussures qui maintiennent bien la
cheville avec un drop de 1cm minimum. Durant l’étude qui se déroule sur deux années, les
sujets devront mentionner si un trouble ou un traumatisme du membre inférieur survient.
L’exclusion d’un participant sera réalisée lorsqu’un traitement orthopédique autre que celui
testé s’avère être nécessaire pour l’enfant, durant la période impartie.

23
Ils seront répartis en deux groupes randomisés :
- 20 sujets avec semelles orthopédiques thermoformées avec une hémi-coupole interne soutenant
l’arche interne.
- 20 sujets sans semelles orthopédiques, qualifiés de groupe contrôle.
6.2. Considérations éthiques En lien avec notre guide de déontologie, le consentement des parents est obligatoire pour la réalisation
de ces analyses. L’étude est faite en intention de traiter. Le groupe contrôle recevra un traitement
identique à celui de l’autre groupe si le protocole en montre une nécessité.
6.3. Les outils d’analyses Pour la réalisation du protocole, plusieurs outils seront nécessaires :
- Un système optoélectronique type Vicon® afin de réaliser une capture 3D et l’analyse du
mouvement. Le système permet de détecter des marqueurs passifs placés sur un sujet via des
caméras infrarouges. Pour cela, on placera des marqueurs sphériques réfléchissants (14mm) sur
l’ensemble du corps (figure 11), suivant un modèle Full body de Winter prenant en
considération 14 segments du corps. Le centre de masse sera ensuite calculé selon des normes
présentes dans des tables anthropométriques2.
Figure 11 Modélisation segmentaire et points d’applications des marqueurs cutanés selon Winter (WINTER,
2004).
2 Voir annexe 6
24
- L’analyse des mouvements articulaires des pieds et des genoux se fera à l’aide des marqueurs
présents sur le membre inférieur. Pour le pied, des marqueurs supplémentaires seront placés sur
la tête du 1er métatarsienne, l’articulation talo-naviculaire, la base du calcanéus, la pointe de
chaque malléole et sur la partie haute du calcanéus.
- Un système de semelles embarquées type Pedar-X® placé dans les chaussures afin de capter les
pressions plantaires. Ce système a une capacité de stockage instantané permettant de lire les
données après la prise de mesure.
- Un ordinateur et un logiciel d’acquisition des données pour pouvoir les traiter.
6.4. Environnement Le protocole sera réalisé en laboratoire de recherche expérimentale. Une piste de marche de 15 mètres
devra être utilisé. Cela permet à l’enfant de s’adapter sur la longueur et éviter les mouvements liés à un
espace trop étroit (piétinement, steppage…). La trajectoire sera une ligne droite.
Les consignes données aux enfants seront les suivantes :
- Marcher comme lorsqu’il marche habituellement
- Effectuer 3 allers/retours, chacun séparé d’une minute de pause
Avant le début de l’enregistrement, l’enfant aura la possibilité de marcher durant 5 minutes sur la piste
de marche afin de s’acclimater à l’environnement et donc fiabiliser nos résultats par la suite. Pour que
les enfants réalisent la tâche dans les meilleures conditions, il serait intéressant de placer son parent ou
son tuteur à l’extrémité de la piste et l’expérimentateur à l’autre. Cela permettra à l’enfant de ne pas
faire attention aux systèmes de mesure qui l’entourent.
6.5. Variables mesurées L’analyse 3D va permettre d’analyser le centre de masse des sujets durant la marche. On va alors être
attentif aux débattements antéro-postérieur et médio-latéral. Les semelles embarquées viendront
analyser les centres de pressions. On appréciera ou non une amélioration de la gait line grâce à l’index
M/L. Grâce à cet outil qui sera installé sous la semelle orthopédique, il sera possible de quantifier le
positionnement médio-latéral de la gait line grâce au calcul de l’indice M/L.
Ensuite, nous allons rechercher si un impact sur le segmentaire est notable avec la semelle. Les capteurs
placés sur des endroits précis du pied vont permettre de mesurer des angles et des débattements sur les
phases de la marche. L’angle de Djian nous intéresse ici tout comme l’angle calcanéen par rapport au
sol dans le plan frontal. Cela évaluera l’affaissement du médio-pied ainsi que le valgus calcanéen. Aussi,
nous chercherons à observer le comportement du genou dans le plan sagittal sur la marche. Toutes ces
mesures seront réalisées à chaque session puis analysées.

25
Le groupe test qui portera des semelles orthopédiques avec une hémi-coupole interne devra réaliser deux
tests supplémentaires permettant d’adapter au mieux l’élément orthétique à leurs pieds. Le Foot Posture
Index et le Naviculaire Drop Test seront les deux tests cliniques qui renseigneront sur la hauteur
d’élément à placer sur la semelle ainsi que la dureté Shore. Sans ces prises de mesures, le traitement
pourrait être mal adapté, néfaste pour les sujets et ainsi fausser les données attendues.
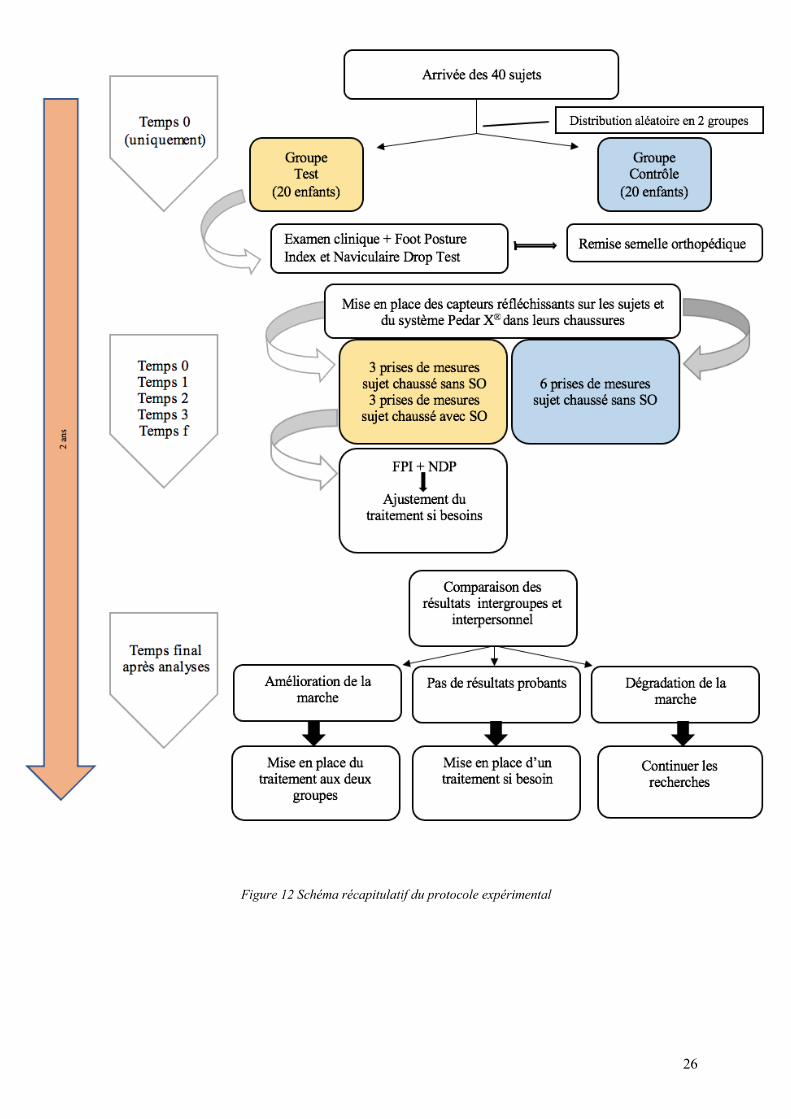
6.6. Protocole Le protocole proposé va se dérouler sur deux années. Tous les 6 mois, les enfants viendront réaliser des
prises de données. Cela permettra d’ajuster le traitement si besoin afin que l’élément orthopédique
proposé à la population test reste placé au bon endroit sous le pied et ne devienne pas pathologique. La
croissance des enfants à cet âge est donc à prendre en compte dans le protocole.
Lors de la première visite, tous les sujets réaliseront 3 essais en situation contrôle.
Après une distribution aléatoire dans les groupes (contrôle et test), le groupe test recevra les semelles
orthopédiques adaptées (après un examen clinique).
Les sujets réaliseront à nouveau 3 essais, mais avec semelles pour le groupe test.
Lors de chaque visite, les enfants seront appareillés avec les marqueurs réfléchissants et le système de
semelles de pression Pedar X®.
Ils réaliseront 6 essais de la trajectoire :
- Le groupe contrôle : avec chaussures uniquement.
- Le groupe test : 3 essais avec semelles et 3 essais avec chaussures uniquement. L’ordre des
essais sera randomisé.
26
Figure 12 Schéma récapitulatif du protocole expérimental

27
6.7. Résultats attendus On s’attend à avoir des résultats non physiologiques et semblables à ceux trouvés dans la littérature.
L’hypothèse basée sur la littérature est un déplacement accentué du centre de masse durant la marche
par rapport aux courbes physiologiques (le débattement latéral et antéro-postérieur du CoM sera
augmenté) . Il aura ainsi des valeurs supérieures à des sujets sains avec un nombre d’oscillation
augmentés et des valeurs au sommet plus élevées . En lien avec cela, le système Pedar-X® analysera la
gait line des enfants. La répartition des pressions plantaires sera également prise en compte dans le
temps. On s’attend à constater, au début de l’expérimentation, un maximum de pression sur la partie
médiale du pied et une répartition plus hétérogène des pressions à la fin de l’expérimentation.
L’angle du genou dans le plan sagittal sera lui aussi supérieur aux enfants physiologiques de cet âge.
Enfin, on sait également que l’angle calcanéus/sol sera synonyme de valgus d’arrière pied tout comme
l’angle de Djian synonyme de pied plat.
Les patients vont tous réaliser le même nombre de passages. Pour chaque condition, une moyenne des
données sur les 3 passages (ou 6 pour le groupe contrôle) sera réalisé afin de permettre ensuite une
comparaison.
Toutes les données recueillies seront ensuite comparées. Le groupe test sera comparé au groupe contrôle
(via un T-test), permettant d’observer ou non une différence significative entre les 2 conditions testées.
Chaque enfant sera également comparé à lui-même avec une analyse intra-sujet (T-test apparié). Leur
venue tous les 6 mois permettra de constater dans le temps si une évolution, une stagnation ou une
dégradation des mesures est notable.
Les résultats espérés du groupe test seraient une amélioration de leur stabilité sur le plan antéro-
postérieur et médio-latéral. De plus, une diminution de leur flexion de genou lors de l’appui unipodal et
de la phase oscillante est attendue tout comme la réduction du valgus d’arrière pied et de la pronation
du médio-pied. On s’attend alors à ce que le groupe test améliore les différents paramètres de la marche
tandis que le groupe contrôle lui garde des paramètres proches de ceux recueillis lors de la 1ère séance.
Discussion Au vu de l’hypotonie musculaire, l’hyper-laxité ligamentaire ainsi que la somatisation non
physiologique, cette correction aura-elle un réel impact sur le schéma locomoteur des trisomiques 21 ?
Est-ce que ce traitement peut permettre une amélioration de leur stabilité antéro-postérieure et médio-
latérale ? Est-ce que l’intégration plantaire avec les semelles orthopédiques tend vers des mouvements
articulaires plus physiologiques permettant une marche plus harmonieuse ?
Le protocole présente des limites. Afin de rendre le protocole le plus juste possible, il faut prendre en
considération plusieurs points pour fiabiliser au maximum les résultats et ainsi espérer obtenir des
données significatives. Tout d’abord, le port des semelles dans la vie quotidienne n’est pas contrôlé

28
jour par jour. Le non port crée une différence entre les sujets d’un groupe et peut impacter les résultats
obtenus. Inclure les parents dans le dispositif de l’étude est donc nécessaire et important.
Le type de chaussure porté par les enfants peut venir également modifier l’objectif thérapeutique prévu.
En effet une semelle orthopédique placée dans un chaussant sans maintien n’aura pas le même effet que
si elle était placée dans une chaussure avec un drop convenable et qui maintient correctement le pied.
Le chaussant doit donc maintenir la cheville. Idéalement la même paire de chaussure devrait être mise
en place pour tous les sujets, quel que soit leur groupe. Cette option est difficilement réalisable, l’étude
se réalisant sur un temps trop long. Il faudrait de plus changer le chaussant à chaque changement de
pointure. L’intérêt de ne pas utiliser une chaussure type permet de se rapprocher de la réalité.
Nous pouvons imaginer 3 situations à la suite du protocole : une amélioration des paramètres, pas de
changement entre les 2 groupes, ou une détérioration des paramètres de marche avec le traitement
orthétique.
En cas de détérioration, on peut imaginer que le port de semelle serait à proscrire. Pour comprendre ce
résultat, d’autres analyses seraient nécessaires.
Sans résultats probants, nous supposons que l’information transmisse par l’orthèse n’est pas intégrée
correctement. Le système ne serait pas en capacité d’optimiser l’information de correction. Le système
de contrôle d’équilibration étant très complexe, il ne serait pas surprenant que la hiérarchie des
informations impacte le résultat de l’apport orthétique. Comme nous l’avons compris dans la littérature,
l’intégration de la semelle est liée au système et pourrait venir du centre intégrateur, des capteurs, du
système axonal défectueux au niveau de la myéline…
D’autres professionnels de santé auraient peut-être plus d’impact que le pédicure-podologue ou peut-
être qu’un travail synergique serait bénéfique.
Si les paramètres de marche sont améliorés significativement dans le temps sur la population testée avec
semelle, l’intérêt de prescription est alors à discuter.
Un gain d’équilibre lors de la marche sera constaté chez la population testée. Cela va permettre aux
enfants trisomiques 21 de réaliser des déplacements plus facilement sans risques de chutes. On
constatera également que leur démarche est plus harmonieuse. En lien avec le gain d’équilibre, cela leur
permettrait d’adopter une vitesse de marche plus physiologique.
Ainsi, si une amélioration dans le temps est constatée, le pédicure-podologue pourrait intervenir et jouer
son rôle. Cette étude permettrait aux praticiens en cabinet avec moins de moyens d’analyse de quantifier
la marche de cette population et ainsi leur proposer un traitement similaire. En cabinet nous retrouvons

29
généralement des plateformes barométriques qui permettent d’observer la gait line, la répartition des
pressions et ainsi constater une amélioration des conditions de marche avec un traitement. Des outils
comme des rapporteurs, des goniomètres sont couramment utilisés lors d’examens cliniques
podologiques. Cela permettra de quantifier le valgus d’arrière ainsi que la chute du médio-pied à l’aide
des tests cliniques (NDT et FPI) fréquemment utilisés (CALVO-LOBO et al., 2018) et ainsi affiner le
traitement dans le temps.
L’obtention de valeurs significatives à la fin des deux années d’étude permettrait de supposer que
l’instabilité du corps lors de la marche est en lien avec le pied plat valgus de ces patients.
L’étude permet également de vérifier si une amélioration est retrouvée dans le temps, sans semelles.
Cette modification traduit une intégration du message thérapeutique. Peut-on envisager une mise en
place provisoire de traitement par semelles orthopédiques ?
Le protocole proposé renseignerait ainsi sur l’intégration des semelles orthopédiques sur le système de
l’enfant et permettrait de mettre en avant l’avantage d’une semelle orthopédique dans l’équilibration
chez un sujet présentant des troubles du système nerveux (sommation impactée, myéline touchée). La
chirurgie, fréquemment utilisée pour une correction du pied plat lorsque l’orthèse plantaire ne suffit pas,
est un acte invasif mais qui montre de résultats bénéfiques malgré une controverse dans la littérature
(BORDELON, 1983).
Cependant, si nous ne constatons pas d’amélioration significative dans le temps entre les groupes test et
témoins, l’intérêt de la mise en place d’un traitement orthétique peut être à conserver pour répondre à
certaines notions comme le confort ou la douleur.
En effet, le trouble statique est identifié sur cette population. Cependant, aucune étude ne présente de
douleurs associées à ce jeune âge. De plus, les caractéristiques non physiologiques décrites
précédemment traduisent un état non modifiable (hyper laxité, hypotonie). Tout l’intérêt est d’être en
mesure de connaître la présence de douleur ou non chez un enfant atteint de trisomie 21. Ainsi, l’outil
des échelles de douleur comme l’échelle des visages (FPS-R) sera nécessaire chez ce jeune public qui a
une perception de la douleur similaire à celle d’enfants qui ne sont pas atteint de trisomie 21 (ZABALIA
et CORFEC, 2008). D’après la Haute Autorité de Santé, une prise en charge est nécessaire lorsqu’un
patient présente une douleur cotée entre 3-4/10 (HAS, 2020). C’est pourquoi, en cas de douleurs (au
pied notamment ou sur l’arc inférieur), un traitement orthopédique améliorant l’algie et les paramètres
de marche est à envisager. Une semelle pourrait présenter des avantages pour d’autres motifs : le confort
par exemple. Une meilleure répartition des charges et des pressions sous le pied donne du confort à
l’homme lors de la marche et la course (CHE, NIGG et DE KONING, 1994). Le patient gagne alors en
30
confort et en autonomie. C’est pourquoi le pédicure-podologue peut, grâce à ses différents outils,
analyser les pressions et justifier son traitement orthétique comme un confort pour le patient. Ce
traitement n’aurait éventuellement pas d’impact sur les paramètres mais sur le ressenti du patient.
Conclusion La marche est une activité de la vie quotidienne. Cependant, le pédicure-podologue, à travers des
observations cliniques, peut être à même de diagnostiquer des anomalies, particulièrement chez l’enfant
trisomique 21qui présente une marche disharmonieuse.
Nous avons tenté ici de rechercher et de comprendre pourquoi cette marche est affectée et quel pourrait
être le rôle du pédicure-podologue pour une telle population présentant énormément de troubles liés à
un chromosome surnuméraire. C’est pourquoi nous avons essayé de répondre à la problématique : « Le
soutient d’arche médial par orthèse plantaire a-t-il un impact sur la marche du jeune trisomique 21 sur
le long terme ? ».
L’objectif de ce travail était tout d’abord de comprendre le système postural des sujets trisomiques 21
afin de prendre en compte un maximum d’informations pour l’élaboration d’essais cliniques sur cette
population. Le trouble statique du pied plat valgus est connu par le podologue, trouble morpho-statique
qui s’avère être présente chez un grand nombre de trisomiques 21. Il a ainsi été question de comprendre
comment ce trouble pouvait être corrigé sur une population physiologique et ainsi essayer, via un
protocole expérimental, cette correction sur des jeunes trisomiques 21. Des études similaires ont déjà
été réalisées mais avec une cohorte faible et sur une courte durée. Ici, l’idée est alors de réaliser cela sur
un nombre significatif et une durée supérieure à ce qu’on trouve dans la littérature.
Espérons que les avancées scientifiques nous permettent de mieux comprendre cette malformation
congénitale et que ce handicap plurifactoriel puisse profiter des recherches des différents domaines de
la médecine dont la podologie. En lien avec le thème de ce mémoire, on peut supposer que des analyses
précoces chez ces enfants permettraient une prise en charge optimale favorisant une correction des
troubles et permettant une marche plus physiologique le plus tôt possible. Mais ces suppositions sont
basées sur la littérature et nécessiteraient une étude clinique, voire plusieurs.
Ce travail de recherche m’a permis d’approfondir mes connaissances sur des notions abordées durant
notre formation initiale. L’analyse de la marche fait partie intégrante de notre examen clinique et cela
n’est pas toujours simple. Des connaissances théoriques plus solides vont me permettre d’approfondir
mon raisonnement et mon observation clinique dans ma future pratique professionnelle. Aussi, la
compréhension du système du contrôle moteur est très importante pour l’homme en mouvement et grâce
à cet exercice j’ai pu comprendre concrètement son intérêt. Enfin, le fait d’imaginer un protocole

31
expérimental avec des moyens plus importants que dans un cabinet attise la curiosité et suscite un
questionnement : « Pourquoi ne pas continuer à chercher et mettre cela en pratique dans le futur ? ».
Aussi, afin d’affiner la recherche, il serait intéressant de prendre en charge l’ensemble des troubles
morpho-statiques constatés afin d’avoir une prise en charge meilleure. Si nos hypothèses s’avéraient
justes, on pourrait imaginer ce questionnement sur d’autres populations présentant des troubles moteurs
également et ainsi, remettre en avant le rôle de la proprioception pour celles-ci.
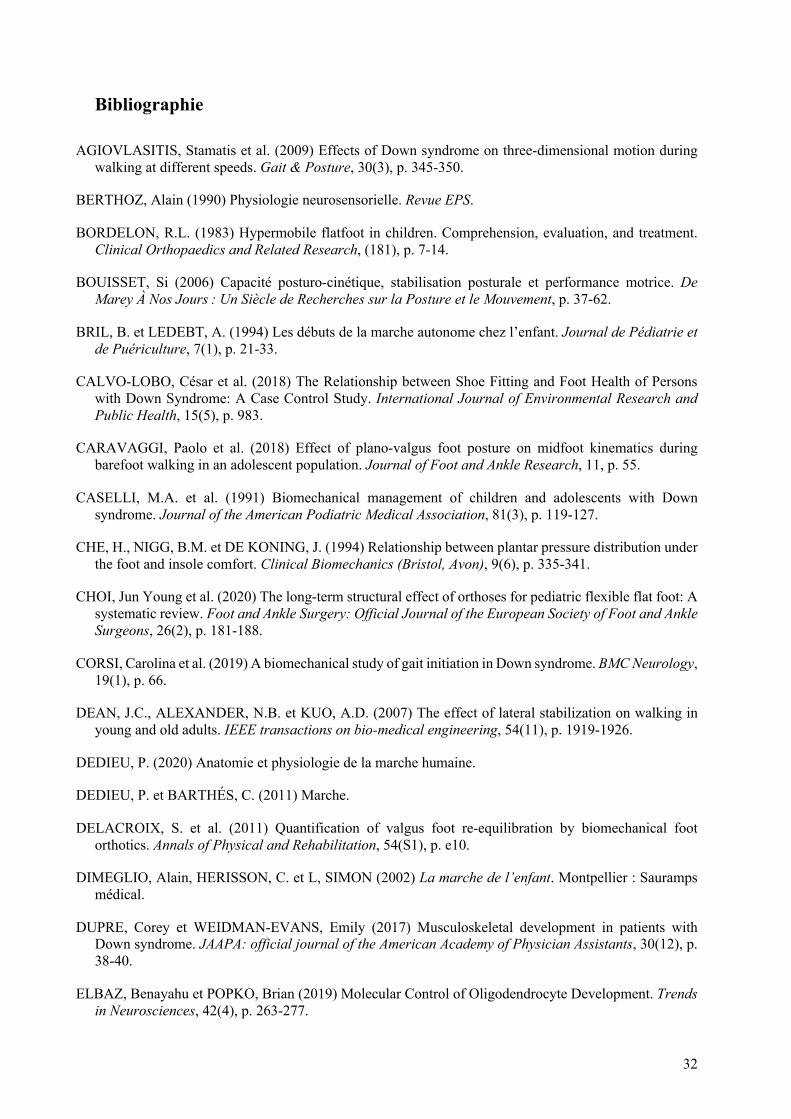
32
Bibliographie
AGIOVLASITIS, Stamatis et al. (2009) Effects of Down syndrome on three-dimensional motion during walking at different speeds. Gait & Posture, 30(3), p. 345‑350.
BERTHOZ, Alain (1990) Physiologie neurosensorielle. Revue EPS.
BORDELON, R.L. (1983) Hypermobile flatfoot in children. Comprehension, evaluation, and treatment. Clinical Orthopaedics and Related Research, (181), p. 7‑14.
BOUISSET, Si (2006) Capacité posturo-cinétique, stabilisation posturale et performance motrice. De Marey À Nos Jours : Un Siècle de Recherches sur la Posture et le Mouvement, p. 37‑62.
BRIL, B. et LEDEBT, A. (1994) Les débuts de la marche autonome chez l’enfant. Journal de Pédiatrie et de Puériculture, 7(1), p. 21‑33.
CALVO-LOBO, César et al. (2018) The Relationship between Shoe Fitting and Foot Health of Persons with Down Syndrome: A Case Control Study. International Journal of Environmental Research and Public Health, 15(5), p. 983.
CARAVAGGI, Paolo et al. (2018) Effect of plano-valgus foot posture on midfoot kinematics during barefoot walking in an adolescent population. Journal of Foot and Ankle Research, 11, p. 55.
CASELLI, M.A. et al. (1991) Biomechanical management of children and adolescents with Down syndrome. Journal of the American Podiatric Medical Association, 81(3), p. 119‑127.
CHE, H., NIGG, B.M. et DE KONING, J. (1994) Relationship between plantar pressure distribution under the foot and insole comfort. Clinical Biomechanics (Bristol, Avon), 9(6), p. 335‑341.
CHOI, Jun Young et al. (2020) The long-term structural effect of orthoses for pediatric flexible flat foot: A systematic review. Foot and Ankle Surgery: Official Journal of the European Society of Foot and Ankle Surgeons, 26(2), p. 181‑188.
CORSI, Carolina et al. (2019) A biomechanical study of gait initiation in Down syndrome. BMC Neurology, 19(1), p. 66.
DEAN, J.C., ALEXANDER, N.B. et KUO, A.D. (2007) The effect of lateral stabilization on walking in young and old adults. IEEE transactions on bio-medical engineering, 54(11), p. 1919‑1926.
DEDIEU, P. (2020) Anatomie et physiologie de la marche humaine.
DEDIEU, P. et BARTHÉS, C. (2011) Marche.
DELACROIX, S. et al. (2011) Quantification of valgus foot re-equilibration by biomechanical foot orthotics. Annals of Physical and Rehabilitation, 54(S1), p. e10.
DIMEGLIO, Alain, HERISSON, C. et L, SIMON (2002) La marche de l’enfant. Montpellier : Sauramps médical.
DUPRE, Corey et WEIDMAN-EVANS, Emily (2017) Musculoskeletal development in patients with Down syndrome. JAAPA: official journal of the American Academy of Physician Assistants, 30(12), p. 38‑40.
ELBAZ, Benayahu et POPKO, Brian (2019) Molecular Control of Oligodendrocyte Development. Trends in Neurosciences, 42(4), p. 263‑277.

33
ENDO, Yusuke et al. (2020) Influence of a Foot Insole for a Down Syndrome Patient with a Flat Foot: A Case Study. Medicina (Kaunas, Lithuania), 56(5).
EVANS, A.M. et ROME, K. (2011) A Cochrane review of the evidence for non-surgical interventions for flexible pediatric flat feet. European Journal of Physical and Rehabilitation Medicine, 47(1), p. 69‑89.
FOISY, Arnaud (2016) Rôle des afférences plantaires dans le contrôle postural et oculomoteur de sujets sains et de sujets avec Inefficience des Afférences Plantaires non symptomatique. p. 322.
GALLI, Manuela et al. (2008) Joint stiffness and gait pattern evaluation in children with Down syndrome. Gait & Posture, 28(3), p. 502‑506.
GOLDCHER, Alain (2014) Indications, principes d’action et de prescription des orthèses plantaires. Revue du Rhumatisme Monographies, 81(3), p. 203‑208.
GRAF, Werner et KLAM, François (2006) Le système vestibulaire : anatomie fonctionnelle et comparée, évolution et développement. Comptes Rendus Palevol, 5(3), p. 637‑655.
GRIGG, P. (1994) Peripheral Neural Mechanisms in Proprioception.
HAS (2020).
HAYOT, Chris (2010) Analyse biomécanique 3D de la marche humaine : comparaison des modèles mécaniques.
HICHEUR, Halim et al. (2007) The formation of trajectories during goal-oriented locomotion in humans. I. A stereotyped behaviour. The European Journal of Neuroscience, 26(8), p. 2376‑2390.
HUANG, Yu-Ping et al. (2020) The arch support insoles show benefits to people with flatfoot on stance time, cadence, plantar pressure and contact area. PloS One, 15(8), p. e0237382.
HUXHAM, F. et al. (2006) Defining spatial parameters for non-linear walking. Gait & Posture, 23(2), p. 159‑163.
JANIN MARC (2009) Sensibilité et motricité podales : leur influence sur le contrôle des activités posturo-cinétiques de sujets sains et pathologiques.
KAMINA, Pierre (2006) Anatomie clinique. Tome 1 : Anatomie générale, membres. 3è édition. Paris : Maloine.
KENNEDY, Paul M. et INGLIS, J. Timothy (2002) Distribution and behaviour of glabrous cutaneous receptors in the human foot sole. The Journal of Physiology, 538(Pt 3), p. 995‑1002.
KERLIRZIN, Yves, DIETRICH, Gilles et VIEILLEDENT, Stéphane (2009) Le contrôle moteur : organisation et contrôle du mouvement. Paris : Presses Universitaires de France - PUF.
LORD, Stephen R. (2006) Visual risk factors for falls in older people. Age and Ageing, 35 Suppl 2, p. ii42‑ii45.
MALAK, Roksana et al. (2015) Delays in Motor Development in Children with Down Syndrome. Medical Science Monitor: International Medical Journal of Experimental and Clinical Research, 21, p. 1904‑1910.
MALINA, Robert M. (2004) Motor Development during Infancy and Early Childhood: Overview and Suggested Directions for Research. International Journal of Sport and Health Science, 2, p. 50‑66.

34
MARIN, A (2015) Le mouvement segmentaire au service du déplacement dans la marche : analyse couplée des deux niveaux.
MASSION, J. (1992) Movement, posture and equilibrium: interaction and coordination. Progress in Neurobiology, 38(1), p. 35‑56.
MASSION, J. (1994) Postural control system. Current Opinion in Neurobiology, 4(6), p. 877‑887.
MAYNOU, C. et al. (2009) Pied plat valgus statique de l’adulte (y compris synostoses congénitales).
MELLOS, G. et al. (2014) Gait changes in patients with valgus and flatfoot deformities after application of foot insoles and special exercise program. Annals of Physical and Rehabilitation, 57(S1), p. E171.
MUELLER, M.J., HOST, J.V. et NORTON, B.J. (1993) Navicular drop as a composite measure of excessive pronation. Journal of the American Podiatric Medical Association, 83(4), p. 198‑202.
OLMOS-SERRANO, Jose Luis et al. (2016) Down Syndrome Developmental Brain Transcriptome Reveals Defective Oligodendrocyte Differentiation and Myelination. Neuron, 89(6), p. 1208‑1222.
PAILLARD, Thierry (2016) Posture et équilibration humaines. De Boeck Superieur.
PARKER, A.W., BRONKS, R. et SNYDER, C.W. (2008) WALKING PATTERNS IN DOWN’S SYNDROME. Journal of Intellectual Disability Research, 30(4), p. 317‑330.
PÉRENNOU, Dominic (2012) Physiologie et physiopathologie du contrôle postural. La Lettre de médecine physique et de réadaptation, 28.
PERRIN, R. et LESTIENNE, F. (1994) Mécanismes de l’équilibration humaine exploration fonctionnelle : application au sport et à la rééducation. Issy-les-Moulineaux : Masson.
PIAT, Christophe et ALLAIN, Jérome (2000) Pied plat valgus.
PINTER, J.D. et al. (2001) Neuroanatomy of Down’s syndrome: a high-resolution MRI study. The American Journal of Psychiatry, 158(10), p. 1659‑1665.
POTHRAT, C. et al. (2013) Multifactorial gait analysis of children with flat foot and hind foot valgus deformity. Computer Methods in Biomechanics and Biomedical Engineering, 16 Suppl 1, p. 80‑81.
POTHRAT, Claude (2015) Effet d’une déformation biomécanique du pied sur la marche : le cas du pied plat dynamique idiopathique de l’enfant. These de doctorat. Aix-Marseille.
REDMOND, Anthony C., CRANE, Yvonne Z. et MENZ, Hylton B. (2008) Normative values for the Foot Posture Index. Journal of Foot and Ankle Research, 1(1), p. 6.
REDMOND, Anthony C., CROSBIE, Jack et OUVRIER, Robert A. (2006) Development and validation of a novel rating system for scoring standing foot posture: The Foot Posture Index. Clinical Biomechanics, 21(1), p. 89‑98.
RONDAL, Jean-Adolphe (2010) Chapitre 2. Les observations de Langdon Down. PSY-Evaluation, mesure, diagnostic, p. 31‑35.
RONDAL, Jean-Adolphe (2013) La trisomie 21: Perspective historique sur son diagnostic et sa compréhension. Primento.
ROUDAUT, Yann et al. (2012) Touch sense: functional organization and molecular determinants of mechanosensitive receptors. Channels (Austin, Tex.), 6(4), p. 234‑245.

35
SAUNDERS, J.B. dec M., INMAN, Verne T. et EBERHART, Howard D. (1953) THE MAJOR DETERMINANTS IN NORMAL AND PATHOLOGICAL GAIT. JBJS, 35(3), p. 543‑558.
SELBY-SILVERSTEIN, L., HILLSTROM, H.J. et PALISANO, R.J. (2001) The effect of foot orthoses on standing foot posture and gait of young children with Down syndrome. NeuroRehabilitation, 16(3), p. 183‑193.
SHUMWAY-COOK, Anne et WOOLLACOTT, Majorie H. (1985) Dynamics of Postural Control in the Child with Down Syndrome. Physical Therapy, 65(9), p. 1315‑1322.
SIMONS, Mikael et NAVE, Klaus-Armin (2015) Oligodendrocytes: Myelination and Axonal Support. Cold Spring Harbor Perspectives in Biology, 8(1), p. a020479.
TOULLEC, E. (2019) Pied plat valgus.
VAESSEN, S. et al. (2012) Aspects neurologiquies associés au Syndrome de Down. Tijdschrift van de Belgische Kinderarts, 14(2).
VOLMAN, Michiel J.M., VISSER, Jacqueline J.W. et LENSVELT-MULDERS, Gerty J.L.M. (2007) Functional status in 5 to 7-year-old children with Down syndrome in relation to motor ability and performance mental ability. Disability and Rehabilitation, 29(1), p. 25‑31.
WEIJERMAN, Michel E. et DE WINTER, J. Peter (2010) Clinical practice. The care of children with Down syndrome. European Journal of Pediatrics, 169(12), p. 1445‑1452.
WINTER, David (2004) Biomechanics and Motor Control of Human Movement. 3e éd. Wiley.
WONG, Lilian et al. (2008) Effect of foot morphology on center-of-pressure excursion during barefoot walking. Journal of the American Podiatric Medical Association, 98(2), p. 112‑117.
ZABALIA, Marc et CORFEC, Sonia (2008) Reconnaissance des émotions et évaluation de la douleur chez des enfants et adolescents porteurs de Trisomie 21. Enfance, Vol. 60(4), p. 357‑369.
ZUIL-ESCOBAR, Juan Carlos et al. (2018) Medial Longitudinal Arch: Accuracy, Reliability, and Correlation Between Navicular Drop Test and Footprint Parameters. Journal of Manipulative and Physiological Therapeutics, 41(8), p. 672‑679.

I
Annexes ANNEXE 1 REFERENTIEL POSITION DANS L’ESPACE SELON KAMINA (2006) ............................... I ANNEXE 2 DESCRIPTION DE L’ŒIL .................................................................................................. I ANNEXE 3 DESCRIPTION DE L’OREILLE INTERNE ......................................................................... II ANNEXE 4 LES MECANORECEPTEURS CUTANES SELON KENNEDY ET INGLIS, (2002) ............ II ANNEXE 6 TABLEAU A COMPLETER LORS DE LA MISE EN PLACE D’UN FPI (REDMOND,
CROSBIE ET OUVRIER, 2006) .......................................................................................... III ANNEXE 7 TABLE ANTHROPOMETRIQUE SELON LE MODELE DE WINTER (WINTER, 2004) ...... III

I
Annexe 1 Référentiel position dans l’espace selon KAMINA (2006)
Annexe 2 Description de l’œil
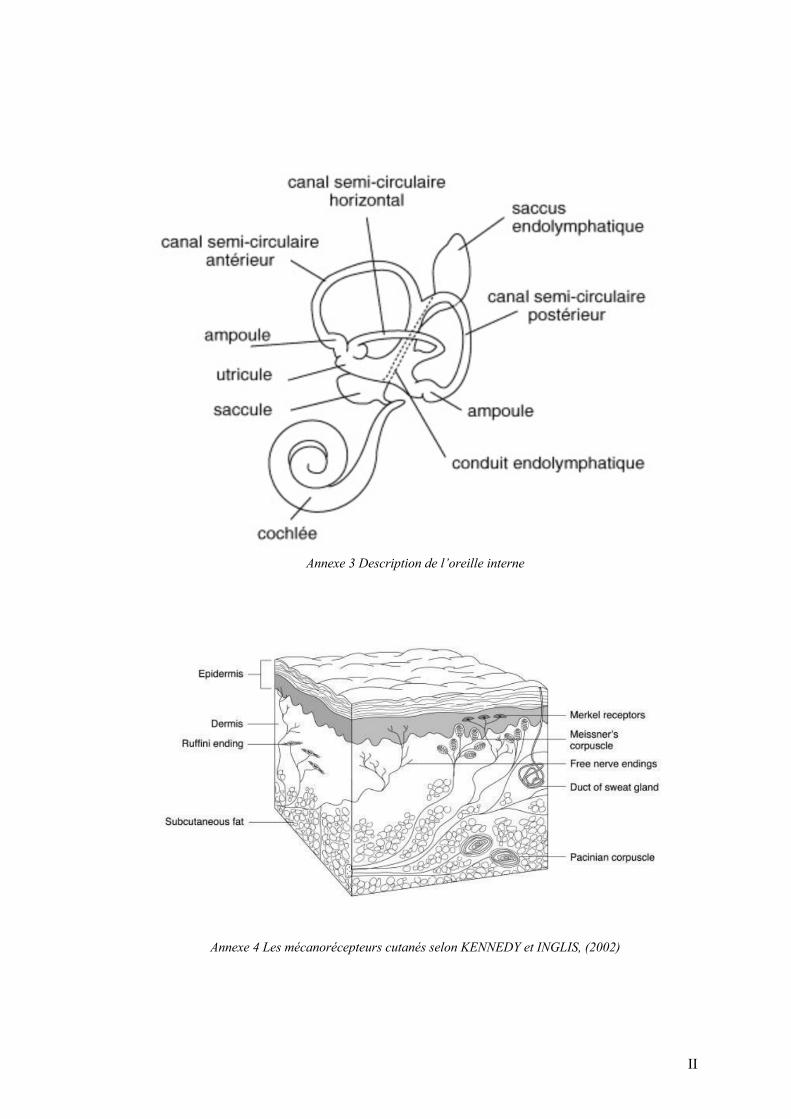
II
Annexe 3 Description de l’oreille interne
Annexe 4 Les mécanorécepteurs cutanés selon KENNEDY et INGLIS, (2002)

III
Annexe 5 Tableau à compléter lors de la mise en place d’un FPI (REDMOND, CROSBIE et OUVRIER,
2006)
Annexe 6 Table anthropométrique selon le modèle de Winter (WINTER, 2004)








