GELE2511 Chapitre 1 :Signaux et systemes
Gabriel Cormier, Ph.D.,ing.
Universite de Moncton
Hiver 2013
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 1 / 75
Introduction
Contenu
Contenu
Revision des concepts de base : periode, dephasage
Signaux communs
Caracterisation
Classification
Operations sur les signaux
Systemes : definitions et proprietes
Convolution
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 2 / 75
Revision des concepts de signaux Signal sinusoıdal
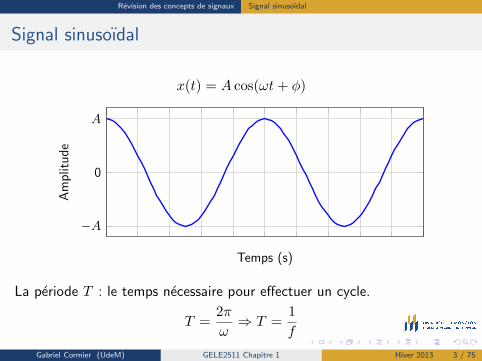
Signal sinusoıdal
x(t) = A cos(ωt+ φ)
−A
0
A
Temps (s)
Am
plit
ud
e
La periode T : le temps necessaire pour effectuer un cycle.
T =2π
ω⇒ T =
1
f
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 3 / 75
Revision des concepts de signaux Forme complexe
Forme complexe
La forme generale pour representer un signal x(t) = A cos(2πf0t+ φ) est :
x(t) = Aej(2πf0t+φ)
ou on utilise la relation d’Euler pour changer d’une forme a l’autre.
Rappel : la relation d’Euler est :
e±jθ = 1∠± θ = cos(θ) + j sin(θ)
avec les equivalences suivantes :
cos(θ) = 0.5(ejθ + e−jθ) sin(θ) = −j0.5(ejθ − e−jθ)
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 4 / 75
Revision des concepts de signaux Forme complexe
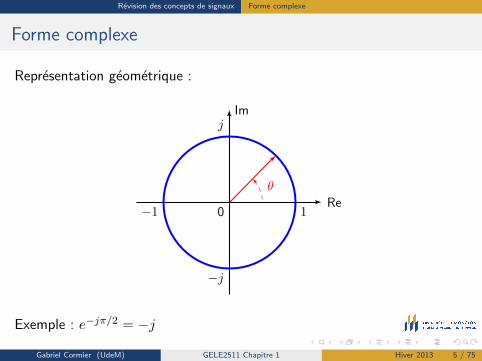
Forme complexe
Representation geometrique :
Re0
Imj
−j
1−1
θ
Exemple : e−jπ/2 = −j
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 5 / 75
Revision des concepts de signaux Combinaison de signaux periodiques
Periode commune de signaux
Pour un signal contenant plusieurs sinusoıdes,
La periode commune T est le plus petit commun multiple (PPCM)des periodes individuelles.
La frequence fondamentale f0 = 1/T et est egale au plus granddiviseur commun des frequences.
Le rapport entre les periodes doit etre un nombre rationnel.
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 6 / 75
Revision des concepts de signaux Combinaison de signaux periodiques
Exemple
Trouver la periode commune du signalx(t) = 2 sin(23 t) + 4 cos(12 t) + 4 cos(13 t−
15π).
On a ω1 = 23 . La periode est :
T1 =2π
ω1= 3π
On a ω2 = 12 . La periode est :
T2 =2π
ω2= 4π
On a ω3 = 13 . La periode est :
T3 =2π
ω3= 6π
Le PPCM de 3π,4π et 6π est 12π.
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 7 / 75
Revision des concepts de signaux Combinaison de signaux periodiques
Exemple
Trouver la periode commune du signalx(t) = 2 sin(23 t) + 4 cos(12 t) + 4 cos(13 t−
15π).
On a ω1 = 23 . La periode est :
T1 =2π
ω1= 3π
On a ω2 = 12 . La periode est :
T2 =2π
ω2= 4π
On a ω3 = 13 . La periode est :
T3 =2π
ω3= 6π
Le PPCM de 3π,4π et 6π est 12π.
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 7 / 75

Signaux analogiques communs
Signaux analogiques communs
Fonction echelon
Fonction signe
Impulsion
Fonction rectangulaire
Fonction triangulaire
Sinus cardinal (sinc)
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 8 / 75
Signaux analogiques communs Echelon u(t)
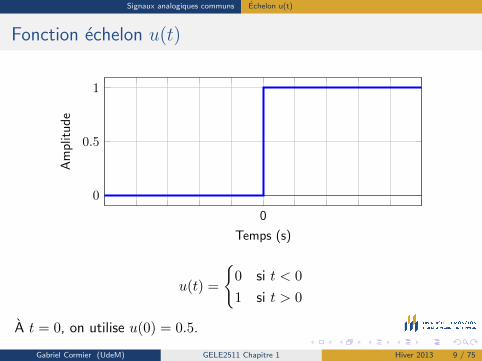
Fonction echelon u(t)
0
0
0.5
1
Temps (s)
Am
plit
ud
e
u(t) =
{0 si t < 0
1 si t > 0
A t = 0, on utilise u(0) = 0.5.
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 9 / 75
Signaux analogiques communs Echelon u(t)
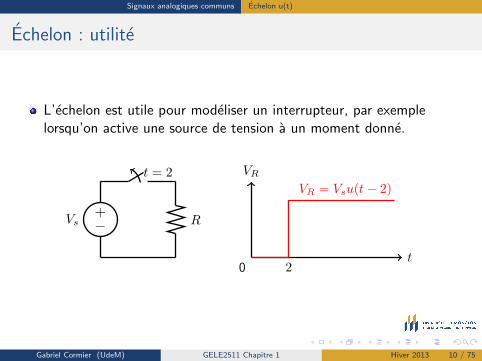
Echelon : utilite
L’echelon est utile pour modeliser un interrupteur, par exemplelorsqu’on active une source de tension a un moment donne.
+−Vs R
t = 2
0t
VR
2
VR = Vsu(t− 2)
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 10 / 75
Signaux analogiques communs Echelon u(t)
Echelon : exemple
L’echelon peut etre utilise pour creer un pulse :
1
u(t− 1)
3
−u(t− 3)
1 3
x(t)
Le pulse est :x(t) =
u(t− 1)− u(t− 3)
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 11 / 75

Signaux analogiques communs Echelon u(t)
Echelon : exemple
L’echelon peut etre utilise pour creer un pulse :
1
u(t− 1)
3
−u(t− 3)
1 3
x(t)
Le pulse est :x(t) = u(t− 1)
− u(t− 3)
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 11 / 75
Signaux analogiques communs Echelon u(t)
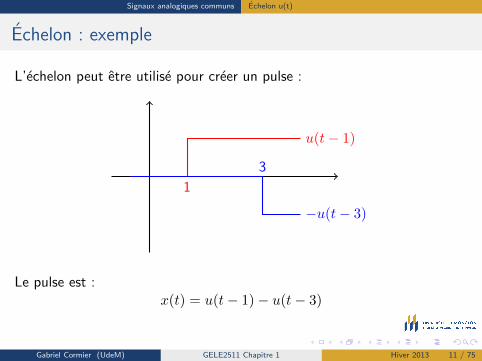
Echelon : exemple
L’echelon peut etre utilise pour creer un pulse :
1
u(t− 1)
3
−u(t− 3)
1 3
x(t)
Le pulse est :x(t) = u(t− 1)− u(t− 3)
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 11 / 75

Signaux analogiques communs Echelon u(t)
Echelon : exemple
L’echelon peut etre utilise pour creer un pulse :
1
u(t− 1)
3
−u(t− 3)
1 3
x(t)
Le pulse est :x(t) = u(t− 1)− u(t− 3)
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 11 / 75
Signaux analogiques communs Echelon u(t)
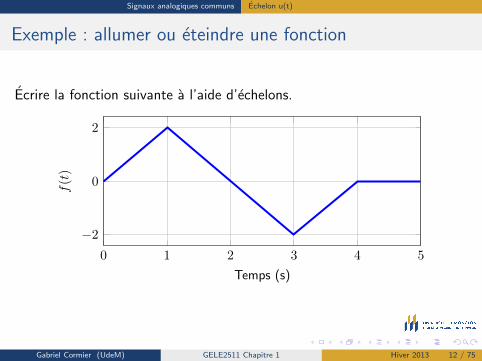
Exemple : allumer ou eteindre une fonction
Ecrire la fonction suivante a l’aide d’echelons.
0 1 2 3 4 5
−2
0
2
Temps (s)
f(t
)
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 12 / 75
Signaux analogiques communs Echelon u(t)
Exemple
On a trois segments :
1 A t = 0, on allume la fonction 2t, et on l’eteint a t = 1.
2 A t = 1, on allume la fonction −2t+ 4, et on l’eteint a t = 3.
3 A t = 3, on allume la fonction 2t− 8, et on l’eteint a t = 4.
Ce qui donne :
f(t) = 2t[u(t)− u(t− 1)]
+ (−2t+ 4)[u(t− 1)− u(t− 3)]
+ (2t− 8)[u(t− 3)− u(t− 4)]
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 13 / 75
Signaux analogiques communs Signe sgn(t)
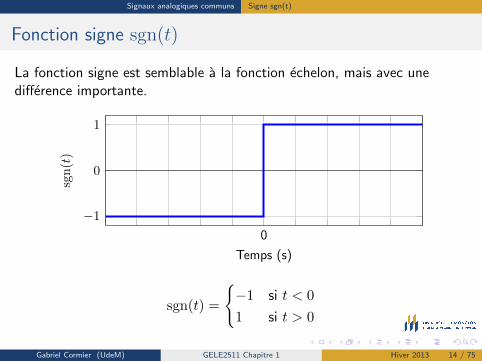
Fonction signe sgn(t)
La fonction signe est semblable a la fonction echelon, mais avec unedifference importante.
0
−1
0
1
Temps (s)
sgn
(t)
sgn(t) =
{−1 si t < 0
1 si t > 0
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 14 / 75
Signaux analogiques communs Signe sgn(t)
Fonction signe sgn(t)
On peut ecrire la fonction signe en fonction de l’echelon selon l’equationsuivante :
sgn(t) = u(t)− u(−t)
Autrement, la fonction echelon peut etre exprimee avec la fonction signe :
u(t) = 0.5 + 0.5 sgn(t)
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 15 / 75
Signaux analogiques communs Fonction impulsion
Fonction impulsion δ(t)
1 La fonction impulsion est utilisee pour representer des pulses ayantune duree tres courte.
2 C’est un outil mathematique, tres utile pour analyser des systemes.
3 On va donc developper une definition d’une impulsion.
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 16 / 75
Signaux analogiques communs Fonction impulsion
Fonction impulsion δ(t)
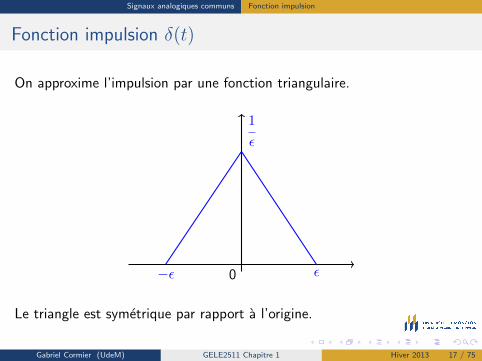
On approxime l’impulsion par une fonction triangulaire.
0−ε
1
ε
ε
Le triangle est symetrique par rapport a l’origine.
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 17 / 75
Signaux analogiques communs Fonction impulsion
Fonction impulsion δ(t)
Quelques observations :
La superficie de cette fonction est :
A =1
2(2ε)
1
ε= 1
Pour obtenir une impulsion ideale, il faut que ε→ 0. Et alors :
L’amplitude tend vers ∞.La largeur tend vers 0.La superficie est constante et egale a 1.
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 18 / 75
Signaux analogiques communs Fonction impulsion
Fonction impulsion δ(t)
On utilise la notation δ(t) pour representer l’impulsion. La definition est :
δ(t)⇒
{∫δ(t)dt = 1 si t = 0
0 si t 6= 0
On appelle aussi ceci la fonction de Dirac.
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 19 / 75
Signaux analogiques communs Fonction impulsion
Fonction impulsion δ(t)
Une propriete importante :∫ ∞−∞
f(t)δ(t− a)dt = f(t)∣∣∣t=a
= f(a)
si f(t) est continue au point a.
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 20 / 75
Signaux analogiques communs Fonction impulsion
Exemple
Evaluer la fonction∫ 120 (5t+ 3)δ(t− 2) dt.
On applique la definition :∫ 12
0(5t+ 3)δ(t− 2) dt = 5t+ 3
∣∣∣t=2
= 5(2) + 3 = 13
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 21 / 75
Signaux analogiques communs Fonction impulsion
Fonction impulsion δ(t) : Representation graphique
On represente graphiquement une impulsion par une fleche verticale.
Exemple :
t0 2
δ(t− 2)
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 22 / 75
Signaux analogiques communs Fonction rectangulaire
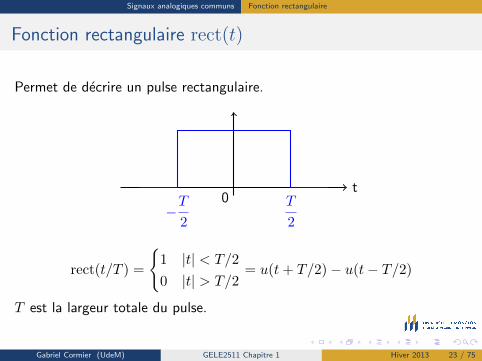
Fonction rectangulaire rect(t)
Permet de decrire un pulse rectangulaire.
t0
−T
2
T
2
rect(t/T ) =
{1 |t| < T/2
0 |t| > T/2= u(t+ T/2)− u(t− T/2)
T est la largeur totale du pulse.
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 23 / 75
Signaux analogiques communs Fonction triangulaire
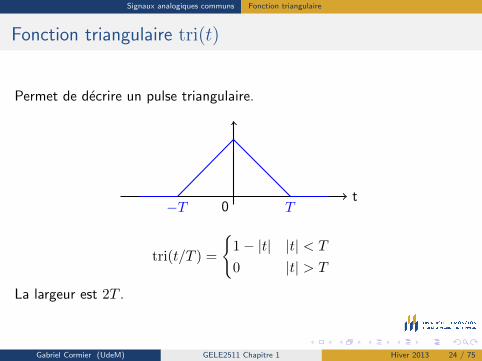
Fonction triangulaire tri(t)
Permet de decrire un pulse triangulaire.
t0−T T
tri(t/T ) =
{1− |t| |t| < T
0 |t| > T
La largeur est 2T .
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 24 / 75
Signaux analogiques communs Sinus cardinal
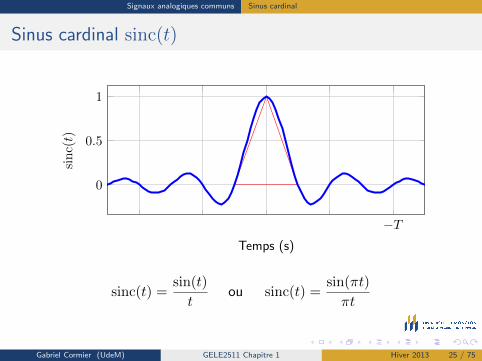
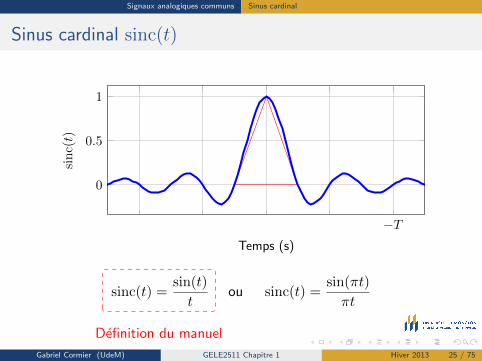
Sinus cardinal sinc(t)
−T
0
0.5
1
Temps (s)
sin
c(t)
sinc(t) =sin(t)
tou sinc(t) =
sin(πt)
πt
Definition du manuel
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 25 / 75
Signaux analogiques communs Sinus cardinal
Sinus cardinal sinc(t)
−T
0
0.5
1
Temps (s)
sin
c(t)
sinc(t) =sin(t)
tou sinc(t) =
sin(πt)
πt
Definition du manuel
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 25 / 75
Caracterisation des signaux Valeur moyenne
Caracteristiques des signaux
Quelques methodes communes pour caracteriser des signaux :
Valeur moyenne
Valeur rms
Energie
Puissance
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 26 / 75
Caracterisation des signaux Valeur moyenne
Valeur moyenne
La valeur moyenne d’un signal x(t) periodique est obtenue selon :
x =1
T
∫ T
0x(t)dt
On appelle parfois la valeur moyenne la valeur DC.
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 27 / 75
Caracterisation des signaux Valeur RMS
Valeur RMS
La valeur efficace (ou RMS en anglais, Root Mean Square) est une mesurede l’amplitude d’un signal variable. La definition est :
xrms =
√1
T
∫ T
0x(t)2dt
C’est la racine carree de la valeur moyenne du signal au carre.
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 28 / 75
Caracterisation des signaux Valeur RMS
Exemple
Calculer la valeur efficace du signal x(t) = A cos(ωt).
On applique la definition :
x2rms =1
T
∫ T
0x(t)2dt =
1
T
∫ T
0A2 cos2(ωt)dt
=A2
T
∫ T
0
1
2(1 + cos(2ωt)) dt =
A2
2
La valeur efficace est :
xrms =A√2
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 29 / 75
Caracterisation des signaux Puissance et energie
Puissance et energie
Pour calculer la puissance, on suppose que le signal x(t) est une tensionappliquee a une resistance :
p(t) =x(t)2
R
puis l’energie totale du signal est :
E =
∫ ∞−∞
p(t)dt =1
R
∫ ∞−∞
v2(t)dt
On normalise en utilisant R = 1 :
E =
∫ ∞−∞|x(t)|2dt
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 30 / 75
Caracterisation des signaux Puissance et energie
Puissance et energie
La puissance d’un signal est l’energie normalisee sur une periode :
P =1
T
∫T|x(t)|2
Pour un signal non periodique :
P = limT0→∞
1
T0
∫T0
|x(t)|2dt
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 31 / 75

Caracterisation des signaux Puissance et energie
Puissance et energie
Un signal ou
E =
∫ ∞−∞|x(t)|2dt <∞
est un signal d’energie.
Un signal ou
P = limT0→∞
1
T0
∫T0
|x(t)|2dt <∞
est un signal de puissance.
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 32 / 75
Classification des signaux
Classification des signaux
On peut classifier les signaux selon certaines proprietes.
Symetrie
PaireImpaireDemi-onde et quart d’onde
Causal
Deterministe
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 33 / 75
Classification des signaux Symetrie
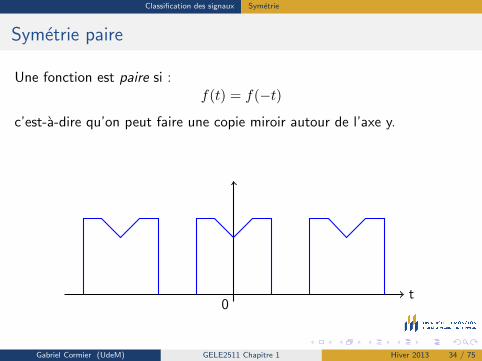
Symetrie paire
Une fonction est paire si :f(t) = f(−t)
c’est-a-dire qu’on peut faire une copie miroir autour de l’axe y.
t0
copie miroir
autour de y
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 34 / 75
Classification des signaux Symetrie
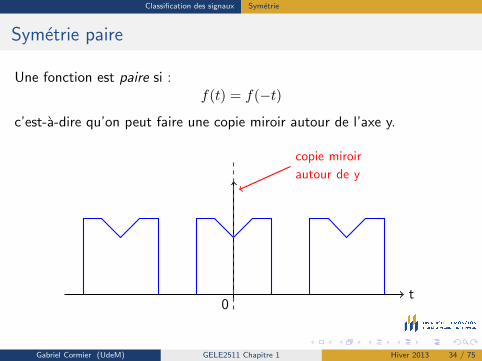
Symetrie paire
Une fonction est paire si :f(t) = f(−t)
c’est-a-dire qu’on peut faire une copie miroir autour de l’axe y.
t0
copie miroir
autour de y
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 34 / 75
Classification des signaux Symetrie
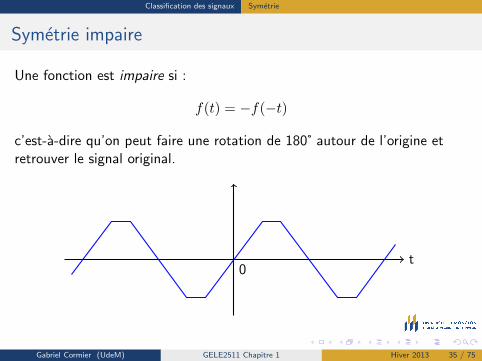
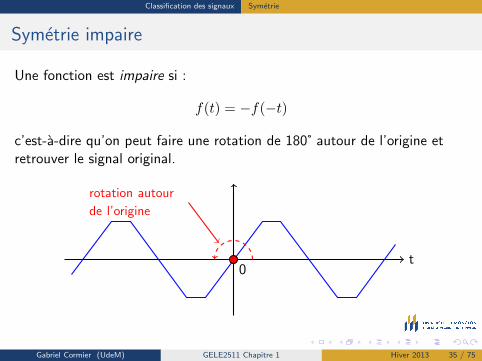
Symetrie impaire
Une fonction est impaire si :
f(t) = −f(−t)
c’est-a-dire qu’on peut faire une rotation de 180 autour de l’origine etretrouver le signal original.
t0
rotation autour
de l’origine
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 35 / 75
Classification des signaux Symetrie
Symetrie impaire
Une fonction est impaire si :
f(t) = −f(−t)
c’est-a-dire qu’on peut faire une rotation de 180 autour de l’origine etretrouver le signal original.
t0
rotation autour
de l’origine
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 35 / 75
Classification des signaux Symetrie
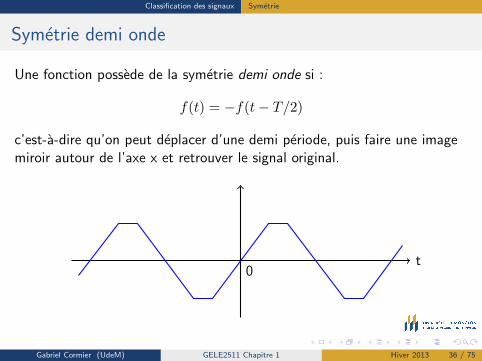
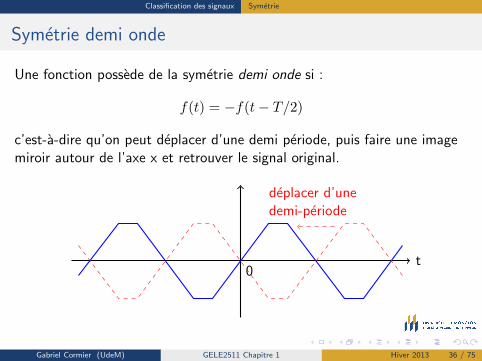
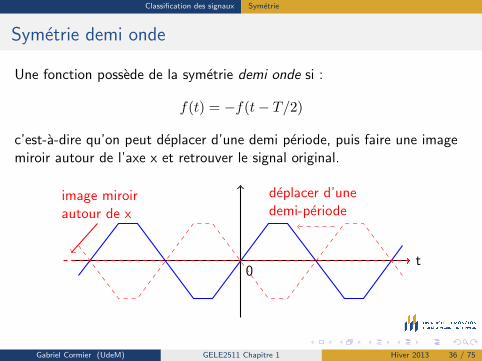
Symetrie demi onde
Une fonction possede de la symetrie demi onde si :
f(t) = −f(t− T/2)
c’est-a-dire qu’on peut deplacer d’une demi periode, puis faire une imagemiroir autour de l’axe x et retrouver le signal original.
t0
deplacer d’unedemi-periode
image miroirautour de x
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 36 / 75
Classification des signaux Symetrie
Symetrie demi onde
Une fonction possede de la symetrie demi onde si :
f(t) = −f(t− T/2)
c’est-a-dire qu’on peut deplacer d’une demi periode, puis faire une imagemiroir autour de l’axe x et retrouver le signal original.
t0
deplacer d’unedemi-periode
image miroirautour de x
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 36 / 75
Classification des signaux Symetrie
Symetrie demi onde
Une fonction possede de la symetrie demi onde si :
f(t) = −f(t− T/2)
c’est-a-dire qu’on peut deplacer d’une demi periode, puis faire une imagemiroir autour de l’axe x et retrouver le signal original.
t0
deplacer d’unedemi-periode
image miroirautour de x
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 36 / 75
Classification des signaux Symetrie
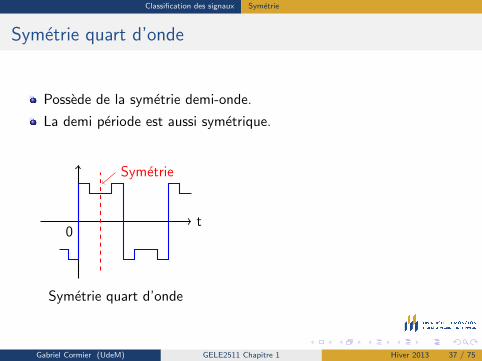
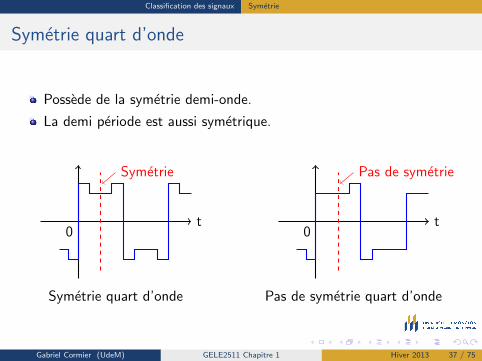
Symetrie quart d’onde
Possede de la symetrie demi-onde.
La demi periode est aussi symetrique.
t0
Symetrie quart d’onde
Symetrie
t0
Pas de symetrie quart d’onde
Pas de symetrie
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 37 / 75
Classification des signaux Symetrie
Symetrie quart d’onde
Possede de la symetrie demi-onde.
La demi periode est aussi symetrique.
t0
Symetrie quart d’onde
Symetrie
t0
Pas de symetrie quart d’onde
Pas de symetrie
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 37 / 75
Classification des signaux Symetrie
Symetrie quart d’onde
Possede de la symetrie demi-onde.
La demi periode est aussi symetrique.
t0
Symetrie quart d’onde
Symetrie
t0
Pas de symetrie quart d’onde
Pas de symetrie
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 37 / 75
Classification des signaux Decomposition symetrique
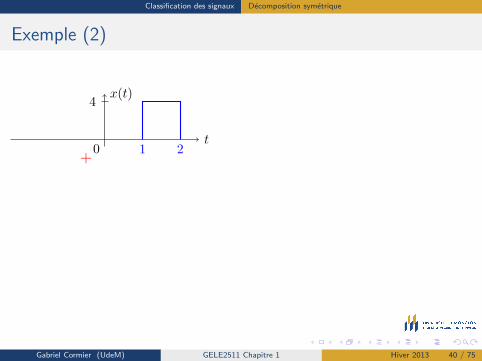
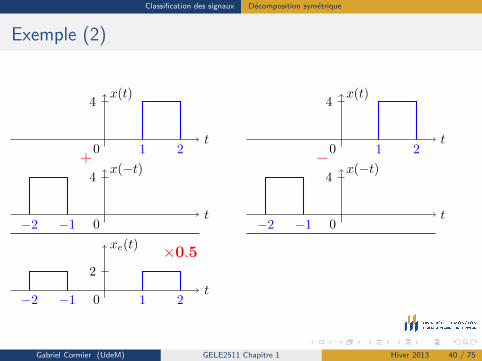
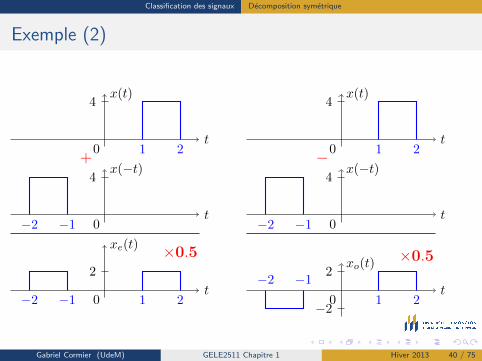
Decomposition symetrique
Tout signal peut etre decompose en une somme d’un signal pair et impair :
x(t) = xe(t) + xo(t)
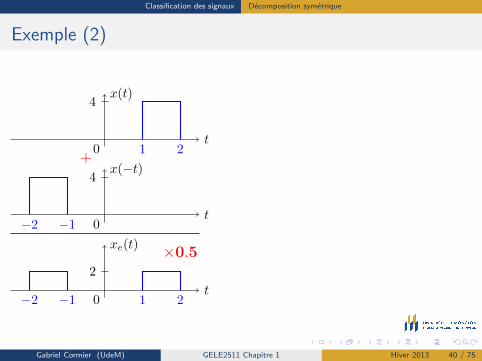
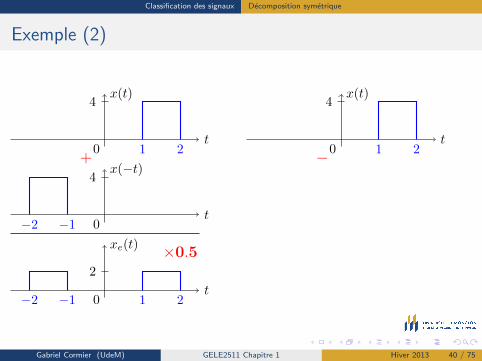
Les composantes sont calculees selon :
xe(t) = 0.5(x(t) + x(−t))xo(t) = 0.5(x(t)− x(−t))
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 38 / 75
Classification des signaux Decomposition symetrique
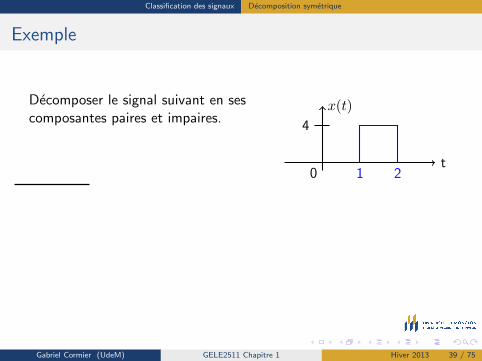
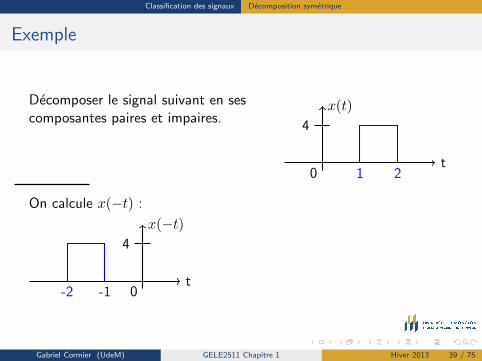
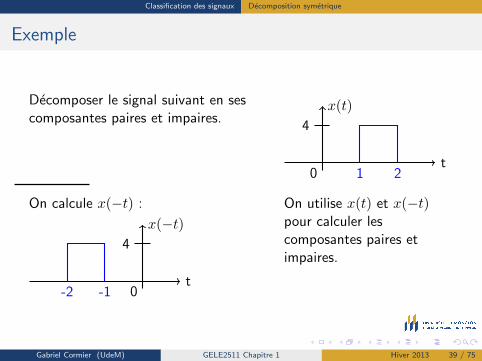
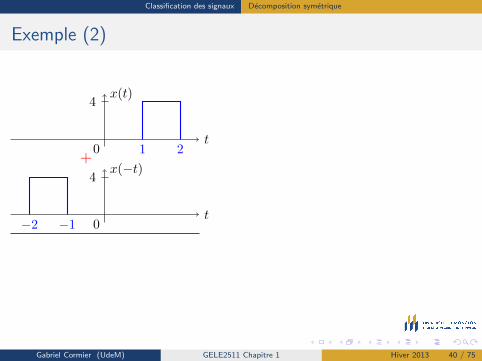
Exemple
Decomposer le signal suivant en sescomposantes paires et impaires.
t0
x(t)
4
1 2
On calcule x(−t) :
t0
x(−t)4
-2 -1
On utilise x(t) et x(−t)pour calculer lescomposantes paires etimpaires.
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 39 / 75
Classification des signaux Decomposition symetrique
Exemple
Decomposer le signal suivant en sescomposantes paires et impaires.
t0
x(t)
4
1 2
On calcule x(−t) :
t0
x(−t)4
-2 -1
On utilise x(t) et x(−t)pour calculer lescomposantes paires etimpaires.
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 39 / 75
Classification des signaux Decomposition symetrique
Exemple
Decomposer le signal suivant en sescomposantes paires et impaires.
t0
x(t)
4
1 2
On calcule x(−t) :
t0
x(−t)4
-2 -1
On utilise x(t) et x(−t)pour calculer lescomposantes paires etimpaires.
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 39 / 75

Classification des signaux Decomposition symetrique
Exemple (2)
t
x(t)
0
4
1 2+
t
x(−t)
0
4
−1−2
t
xe(t)
0
2
1 2−1−2
×0.5
t
x(t)
0
4
1 2−
t
x(−t)
0
4
−1−2
t
xo(t)
0
2
−21 2
−1−2
×0.5
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 40 / 75
Classification des signaux Decomposition symetrique
Exemple (2)
t
x(t)
0
4
1 2+
t
x(−t)
0
4
−1−2
t
xe(t)
0
2
1 2−1−2
×0.5
t
x(t)
0
4
1 2−
t
x(−t)
0
4
−1−2
t
xo(t)
0
2
−21 2
−1−2
×0.5
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 40 / 75
Classification des signaux Decomposition symetrique
Exemple (2)
t
x(t)
0
4
1 2+
t
x(−t)
0
4
−1−2
t
xe(t)
0
2
1 2−1−2
×0.5
t
x(t)
0
4
1 2−
t
x(−t)
0
4
−1−2
t
xo(t)
0
2
−21 2
−1−2
×0.5
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 40 / 75
Classification des signaux Decomposition symetrique
Exemple (2)
t
x(t)
0
4
1 2+
t
x(−t)
0
4
−1−2
t
xe(t)
0
2
1 2−1−2
×0.5
t
x(t)
0
4
1 2−
t
x(−t)
0
4
−1−2
t
xo(t)
0
2
−21 2
−1−2
×0.5
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 40 / 75
Classification des signaux Decomposition symetrique
Exemple (2)
t
x(t)
0
4
1 2+
t
x(−t)
0
4
−1−2
t
xe(t)
0
2
1 2−1−2
×0.5
t
x(t)
0
4
1 2−
t
x(−t)
0
4
−1−2
t
xo(t)
0
2
−21 2
−1−2
×0.5
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 40 / 75
Classification des signaux Decomposition symetrique
Exemple (2)
t
x(t)
0
4
1 2+
t
x(−t)
0
4
−1−2
t
xe(t)
0
2
1 2−1−2
×0.5
t
x(t)
0
4
1 2−
t
x(−t)
0
4
−1−2
t
xo(t)
0
2
−21 2
−1−2
×0.5
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 40 / 75
Classification des signaux Decomposition symetrique
Exemple (2)
t
x(t)
0
4
1 2+
t
x(−t)
0
4
−1−2
t
xe(t)
0
2
1 2−1−2
×0.5
t
x(t)
0
4
1 2−
t
x(−t)
0
4
−1−2
t
xo(t)
0
2
−21 2
−1−2
×0.5
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 40 / 75
Classification des signaux Autres classifications
Autres classifications
1 Un signal est dit causal s’il est non nul pour t > 0 seulement. Unsignal est anti-causal s’il est non nul pour t < 0 seulement.
2 Un signal est dit deterministe si on peut le decrire a l’aide d’uneequation mathematique. Un signal est aleatoire ou stochastique s’ilexiste une incertitude sur sa valeur en fonction du temps.
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 41 / 75
Operations sur les signaux Inversion temporelle
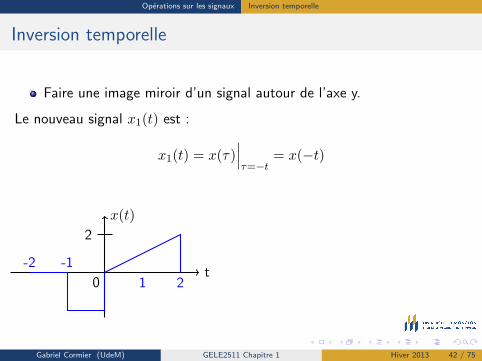
Inversion temporelle
Faire une image miroir d’un signal autour de l’axe y.
Le nouveau signal x1(t) est :
x1(t) = x(τ)∣∣∣τ=−t
= x(−t)
t0
x(t)
2
1
-2 -1
2t
0
x(−t)2
-1-2
1 2
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 42 / 75
Operations sur les signaux Inversion temporelle
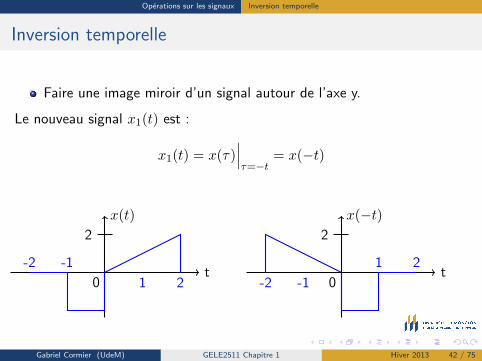
Inversion temporelle
Faire une image miroir d’un signal autour de l’axe y.
Le nouveau signal x1(t) est :
x1(t) = x(τ)∣∣∣τ=−t
= x(−t)
t0
x(t)
2
1
-2 -1
2
t0
x(−t)2
-1-2
1 2
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 42 / 75
Operations sur les signaux Inversion temporelle
Inversion temporelle
Faire une image miroir d’un signal autour de l’axe y.
Le nouveau signal x1(t) est :
x1(t) = x(τ)∣∣∣τ=−t
= x(−t)
t0
x(t)
2
1
-2 -1
2t
0
x(−t)2
-1-2
1 2
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 42 / 75
Operations sur les signaux Echelonnage
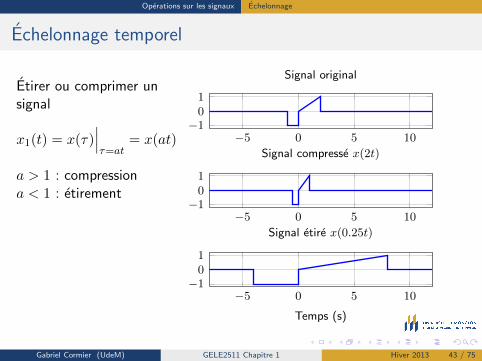
Echelonnage temporel
Etirer ou comprimer unsignal
x1(t) = x(τ)∣∣∣τ=at
= x(at)
a > 1 : compressiona < 1 : etirement
−5 0 5 10−101
Signal original
−5 0 5 10−101
Signal compresse x(2t)
−5 0 5 10−101
Temps (s)
Signal etire x(0.25t)
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 43 / 75
Operations sur les signaux Decalage
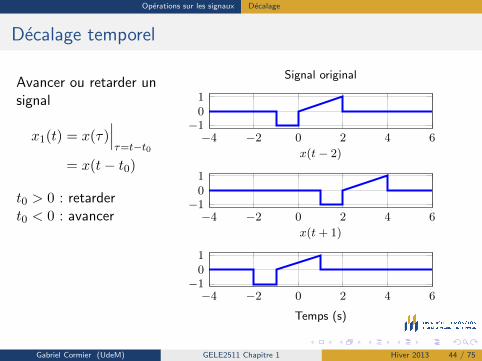
Decalage temporel
Avancer ou retarder unsignal
x1(t) = x(τ)∣∣∣τ=t−t0
= x(t− t0)
t0 > 0 : retardert0 < 0 : avancer
−4 −2 0 2 4 6−101
Signal original
−4 −2 0 2 4 6−101
x(t− 2)
−4 −2 0 2 4 6−101
Temps (s)
x(t+ 1)
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 44 / 75
Operations sur les signaux Methode generale
Methode generale
Pour un signal :y(t) = x(at− b)
On resout pour isoler t :
τ = at− b⇒ t =τ + b
a
L’axe τ est l’axe du signal x(t), et l’axe t devient le nouvel axe pour y(t).
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 45 / 75
Operations sur les signaux Methode generale
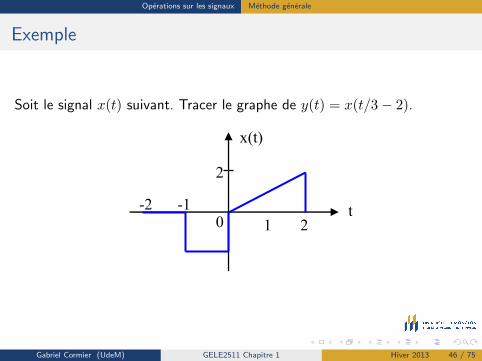
Exemple
Soit le signal x(t) suivant. Tracer le graphe de y(t) = x(t/3− 2).
t 0
2
2 1
x(t)
-1 -2
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 46 / 75
Operations sur les signaux Methode generale
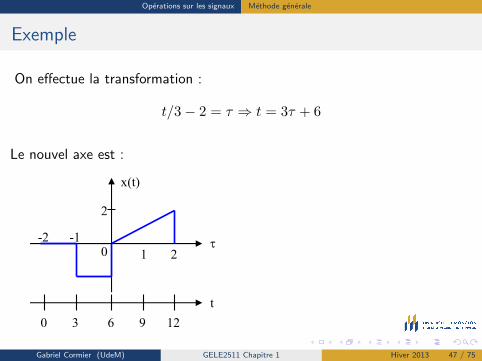
Exemple
On effectue la transformation :
t/3− 2 = τ ⇒ t = 3τ + 6
Le nouvel axe est :
τ 0
2
2 1
x(t)
-1 -2
t
12 9 6 3 0
Le nouveau graphe :
t 6
2
12 9
y(t)
3 0
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 47 / 75

Operations sur les signaux Methode generale
Exemple
On effectue la transformation :
t/3− 2 = τ ⇒ t = 3τ + 6
Le nouvel axe est :
τ 0
2
2 1
x(t)
-1 -2
t
12 9 6 3 0
Le nouveau graphe :
t 6
2
12 9
y(t)
3 0
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 47 / 75
Operations sur les signaux Transformation en amplitude
Transformation en amplitude
De facon generale, un signal x(t) peut etre modifie en amplitude a unsignal x1(t) selon :
x1(t) = Ax(t) +B
ou A et B sont des constantes reelles.
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 48 / 75
Systemes
Systemes
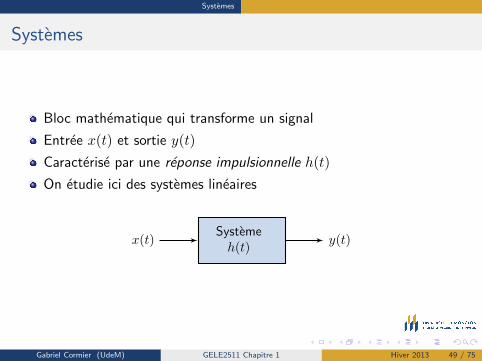
Bloc mathematique qui transforme un signal
Entree x(t) et sortie y(t)
Caracterise par une reponse impulsionnelle h(t)
On etudie ici des systemes lineaires
Systemeh(t)
x(t) y(t)
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 49 / 75
Systemes Linearite
Linearite
Un systeme lineaire possede 2 caracteristiques importantes :
1 Homogeneite
2 Additivite
Aussi, l’invariance dans le temps est importante (pour l’analyse designaux).
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 50 / 75
Systemes Linearite
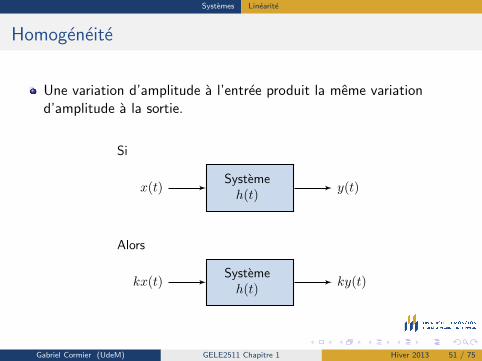
Homogeneite
Une variation d’amplitude a l’entree produit la meme variationd’amplitude a la sortie.
Systemeh(t)
Systemeh(t)
x(t) y(t)
kx(t) ky(t)
Si
Alors
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 51 / 75
Systemes Linearite
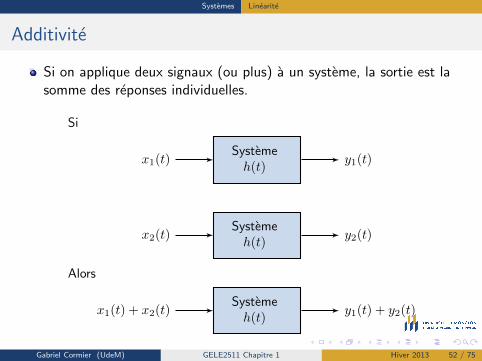
Additivite
Si on applique deux signaux (ou plus) a un systeme, la sortie est lasomme des reponses individuelles.
Systemeh(t)
Systemeh(t)
Systemeh(t)
x1(t) y1(t)
x2(t) y2(t)
Si
Alors
x1(t) + x2(t) y1(t) + y2(t)
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 52 / 75

Systemes Linearite
Autres proprietes
Invariance dans le temps
Linearite statique
Fidelite sinusoıdale
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 53 / 75
Systemes Proprietes des systemes
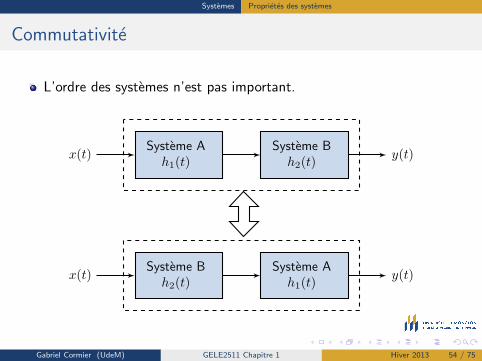
Commutativite
L’ordre des systemes n’est pas important.
Systeme Ah1(t)
Systeme Bh2(t)
Systeme Bh2(t)
Systeme Ah1(t)
x(t) y(t)
x(t) y(t)
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 54 / 75
Systemes Proprietes des systemes
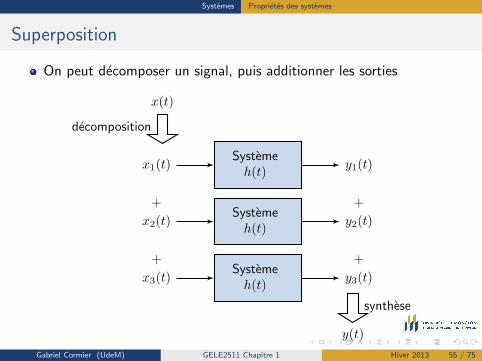
Superposition
On peut decomposer un signal, puis additionner les sorties
Systemeh(t)
Systemeh(t)
Systemeh(t)
x1(t) y1(t)
x2(t) y2(t)
x3(t) y3(t)
+
+
+
+
decomposition
x(t)
y(t)
synthese
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 55 / 75
Systemes Reponse impulsionnelle
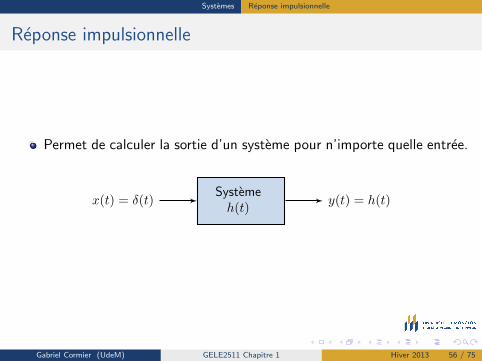
Reponse impulsionnelle
Permet de calculer la sortie d’un systeme pour n’importe quelle entree.
Systemeh(t)
x(t) = δ(t) y(t) = h(t)
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 56 / 75

Systemes Reponse impulsionnelle
Reponse impulsionnelle
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 57 / 75
Convolution
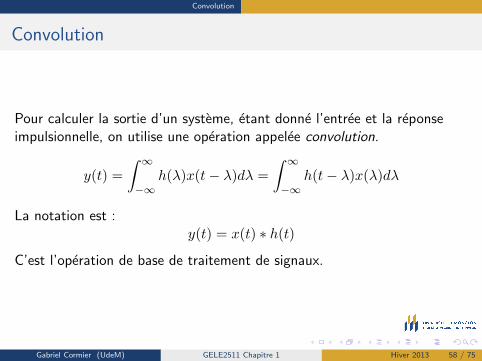
Convolution
Pour calculer la sortie d’un systeme, etant donne l’entree et la reponseimpulsionnelle, on utilise une operation appelee convolution.
y(t) =
∫ ∞−∞
h(λ)x(t− λ)dλ =
∫ ∞−∞
h(t− λ)x(λ)dλ
La notation est :y(t) = x(t) ∗ h(t)
C’est l’operation de base de traitement de signaux.
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 58 / 75
Convolution Explication
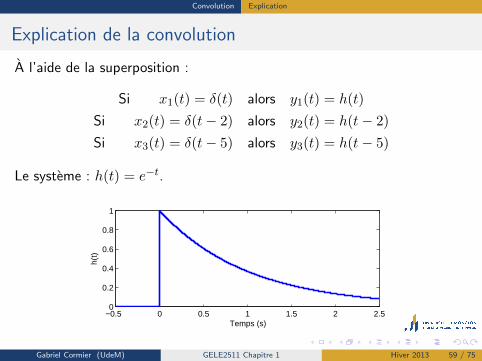
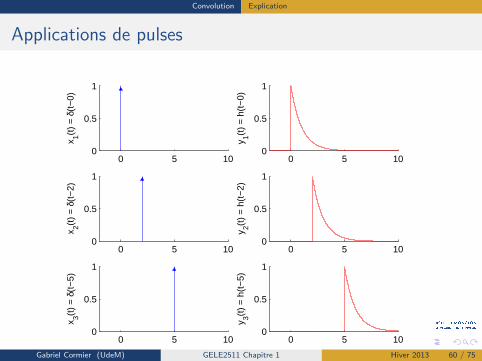
Explication de la convolution
A l’aide de la superposition :
Si x1(t) = δ(t) alors y1(t) = h(t)
Si x2(t) = δ(t− 2) alors y2(t) = h(t− 2)
Si x3(t) = δ(t− 5) alors y3(t) = h(t− 5)
Le systeme : h(t) = e−t.
−0.5 0 0.5 1 1.5 2 2.50
0.2
0.4
0.6
0.8
1
Temps (s)
h(t)
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 59 / 75
Convolution Explication
Applications de pulses
0 5 100
0.5
1
x 1(t)
= δ
(t−
0)
0 5 100
0.5
1
y 1(t)
= h
(t−
0)0 5 10
0
0.5
1
x 2(t)
= δ
(t−
2)
0 5 100
0.5
1
y 2(t)
= h
(t−
2)
0 5 100
0.5
1
x 3(t)
= δ
(t−
5)
0 5 100
0.5
1
y 3(t)
= h
(t−
5)
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 60 / 75

Convolution Explication
Decomposition de l’entree
−0.5 0 0.5 1 1.5 2 2.50
0.5
1Entrée
x(t)
−0.5 0 0.5 1 1.5 2 2.50
0.5
1
w =
0.5
0
−0.5 0 0.5 1 1.5 2 2.50
0.5
1
w =
0.2
5
−0.5 0 0.5 1 1.5 2 2.50
0.5
1
w =
0.1
0
−0.5 0 0.5 1 1.5 2 2.50
0.5
1
w =
0.0
4
Decomposer l’entree enune somme de pulses.
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 61 / 75
Convolution Explication
Decomposition de l’entree
L’entree est decomposee en une somme de pulses :
x(t) =
∞∑k=−∞
w x(kw)u(t− (k − 0.5)w)− u(t− (k + 0.5)w)
w
ou k est l’indice du pulse.
w est la largeur du pulse
x(kw) represente l’amplitude du pulse
On allume a t− (k − 0.5)w par un echelon
On eteint a t− (k + 0.5)w par un echelon
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 62 / 75

Convolution Explication
Decomposition de l’entree
0 1 20
0.5
1
w =
0.5
0
0 1 20
0.5
0 1 20
0.5
1
w =
0.2
5
0 1 20
0.1
0.2
0 1 20
0.5
1
w =
0.1
0
0 1 20
0.05
0.1
0 1 20
0.5
1
w =
0.0
4
0 1 20
0.02
0.04
Des pulses decourte dureepeuvent etreapproximes pardes impulsions.
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 63 / 75
Convolution Explication
Decomposition de l’entree
Un pulse est approxime par une impulsion selon la relation suivante :
δ(t− kw) =du(t− kw)
dt= lim
w→0
u(t− (k − 0.5)w)− u(t− (k + 0.5)w
w
L’entree x(t) est donc approximee par une somme d’impulsions :
x(t) ∼=∞∑
k=−∞w · x(kw) · δ(t− kw)
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 64 / 75
Convolution Explication
Convolution
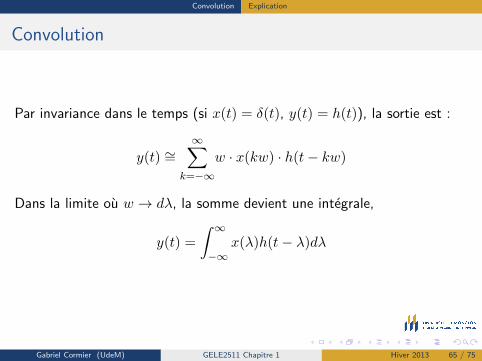
Par invariance dans le temps (si x(t) = δ(t), y(t) = h(t)), la sortie est :
y(t) ∼=∞∑
k=−∞w · x(kw) · h(t− kw)
Dans la limite ou w → dλ, la somme devient une integrale,
y(t) =
∫ ∞−∞
x(λ)h(t− λ)dλ
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 65 / 75
Convolution Explication
Resume
Chaque entree peut etre approximee par une somme de pulses.
Les pulses sont approximes par des impulsions.
Chaque impulsion produit une reponse h(t).
La sortie totale est la somme des sorties.
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 66 / 75
Convolution graphique
Convolution graphique
La convolution peut se faire de facon graphique.
Permet de mieux identifier les intervalles et fonctions.
Methodologie standard a suivre.
On utilise un exemple pour demontrer.
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 67 / 75
Convolution graphique
Convolution graphique
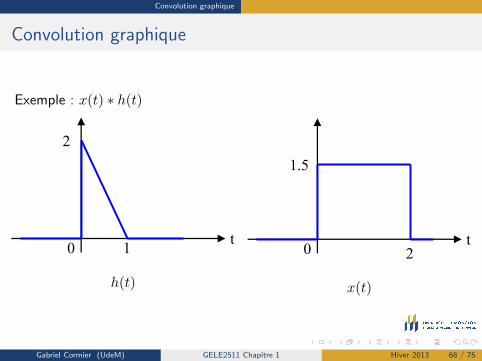
Exemple : x(t) ∗ h(t)
t 0 1
2
h(t)
t 0 2
1.5
x(t)
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 68 / 75
Convolution graphique
Convolution graphique
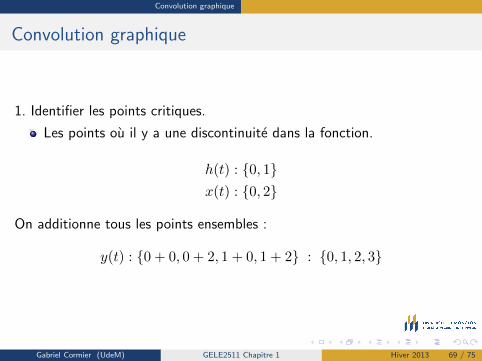
1. Identifier les points critiques.
Les points ou il y a une discontinuite dans la fonction.
h(t) : {0, 1}x(t) : {0, 2}
On additionne tous les points ensembles :
y(t) : {0 + 0, 0 + 2, 1 + 0, 1 + 2} : {0, 1, 2, 3}
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 69 / 75
Convolution graphique
Convolution graphique
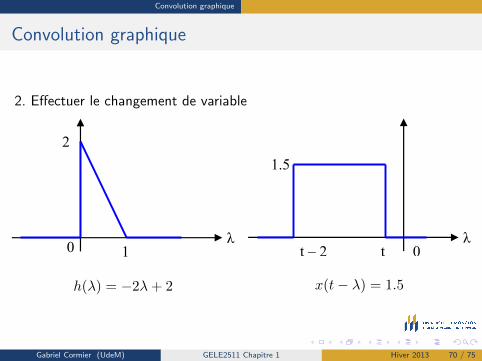
2. Effectuer le changement de variable
λ 0 1
2
h(λ) = −2λ+ 2
λ
0 t
1.5
t – 2
x(t− λ) = 1.5
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 70 / 75
Convolution graphique
Convolution graphique
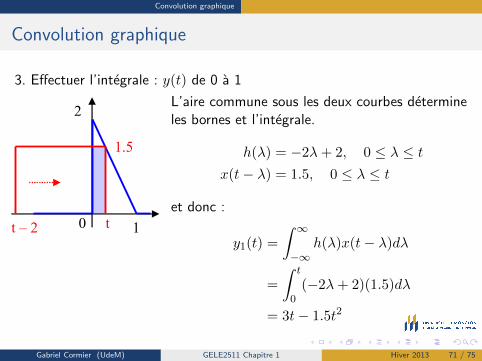
3. Effectuer l’integrale : y(t) de 0 a 1
0 1
2
1.5
t t – 2
L’aire commune sous les deux courbes determineles bornes et l’integrale.
h(λ) = −2λ+ 2, 0 ≤ λ ≤ tx(t− λ) = 1.5, 0 ≤ λ ≤ t
et donc :
y1(t) =
∫ ∞−∞
h(λ)x(t− λ)dλ
=
∫ t
0(−2λ+ 2)(1.5)dλ
= 3t− 1.5t2
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 71 / 75
Convolution graphique
Convolution graphique
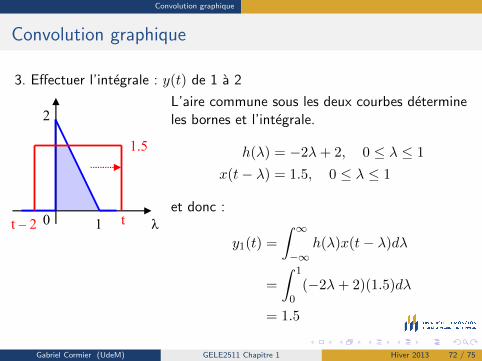
3. Effectuer l’integrale : y(t) de 1 a 2
λ 0 1
1.5
2
t t – 2
L’aire commune sous les deux courbes determineles bornes et l’integrale.
h(λ) = −2λ+ 2, 0 ≤ λ ≤ 1
x(t− λ) = 1.5, 0 ≤ λ ≤ 1
et donc :
y1(t) =
∫ ∞−∞
h(λ)x(t− λ)dλ
=
∫ 1
0(−2λ+ 2)(1.5)dλ
= 1.5
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 72 / 75
Convolution graphique
Convolution graphique
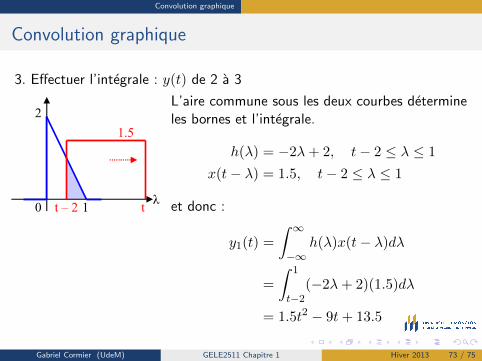
3. Effectuer l’integrale : y(t) de 2 a 3
λ 0 1
1.5
2
t – 2 t
L’aire commune sous les deux courbes determineles bornes et l’integrale.
h(λ) = −2λ+ 2, t− 2 ≤ λ ≤ 1
x(t− λ) = 1.5, t− 2 ≤ λ ≤ 1
et donc :
y1(t) =
∫ ∞−∞
h(λ)x(t− λ)dλ
=
∫ 1
t−2(−2λ+ 2)(1.5)dλ
= 1.5t2 − 9t+ 13.5
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 73 / 75
Convolution graphique
Convolution graphique
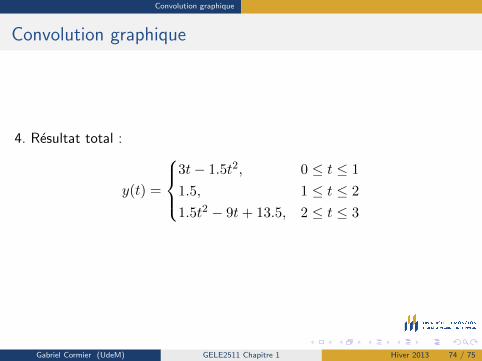
4. Resultat total :
y(t) =
3t− 1.5t2, 0 ≤ t ≤ 1
1.5, 1 ≤ t ≤ 2
1.5t2 − 9t+ 13.5, 2 ≤ t ≤ 3
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 74 / 75
Convolution graphique
Convolution graphique
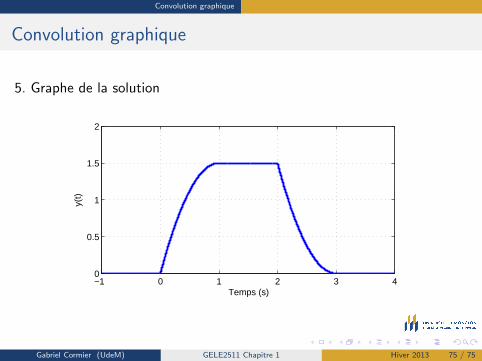
5. Graphe de la solution
−1 0 1 2 3 40
0.5
1
1.5
2
Temps (s)
y(t)
Gabriel Cormier (UdeM) GELE2511 Chapitre 1 Hiver 2013 75 / 75






![Presentation denis cormier[1]](https://cdn.vdocuments.fr/doc/165x107/559586fa1a28ab072a8b45b6/presentation-denis-cormier1.jpg)
