contrôleur de mouvement nextmove pci-2 · paramétrage, de programmation, de débogage et de...
TRANSCRIPT
Contrôleur de mouvement NextMove PCI-2


Table des matièresTable des matières
1 Informations générales
2 Introduction2.1 Fonctions et caractéristiques du NextMove PCI-2. . . . . . . . . . . . . 2-1
2.2 Réception et inspection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-32.2.1 Identification du numéro de référence. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-3
2.3 Unités de mesure et abréviations . . . . . . . . . . . . . . . . . . . . . . . . . 2-4
3 Installation de base3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-1
3.1.1 Exigences liées à l’emplacement d’installation . . . . . . . . . . . . . . . . . . . . . . . 3-13.1.2 Autres exigences liées à l’installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-2
3.2 Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-33.2.1 Installation de la carte NextMove PCI-2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-3
4 Entrée/sortie4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-1
4.2 Connecteur de bord à 100 broches . . . . . . . . . . . . . . . . . . . . . . . . 4-14.2.1 Brochage du connecteur de bord à 100 broches . . . . . . . . . . . . . . . . . . . . . 4-2
4.3 E/S analogique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-44.3.1 Entrées analogiques - X6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-44.3.2 Sorties analogiques (commandes) - X7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-6
4.4 E/S TOR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-84.4.1 Entrées TOR - vue d'ensemble . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-84.4.2 Entrées TOR - X1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-104.4.3 Entrées TOR - X2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-114.4.4 Entrées TOR - X3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-124.4.5 Sorties TOR - vue d'ensemble . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-144.4.6 Sorties TOR - X4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-144.4.7 Sorties TOR - X5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-16
4.5 Autres E/S . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-174.5.1 Entrées d'encodeur - X12, X13, X14, X15, X16 . . . . . . . . . . . . . . . . . . . . . 4-174.5.2 Puissance - X9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-194.5.3 Relais et alimentation CAN - X8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-204.5.4 Sorties de commande de moteur pas à pas - X10, X11 . . . . . . . . . . . . . . . 4-214.5.5 Connexion de l'émulateur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-21
4.6 CAN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-224.6.1 Connecteur CANopen - X17 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-234.6.2 CANopen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-234.6.3 Connecteur Baldor CAN - X18 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-254.6.4 Baldor CAN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-254.6.5 Câblage CAN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-27
MN1933WFR Table des matières i

4.7 États de réinitialisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-284.7.1 Système « chien de garde » . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-28
4.8 Résumé des connexions - câblage système minimum . . . . . . . . .4-29
5 Mode d’emploi5.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-1
5.1.1 Installation du pilote logiciel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-15.1.2 Installation de Mint WorkBench . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-1
5.2 Mint Machine Center . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-25.2.1 Démarrage du MMC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-3
5.3 Mint WorkBench . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-55.3.1 Fichier d'aide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-65.3.2 Démarrage de Mint WorkBench. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-7
5.4 Configuration d’un axe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-105.4.1 Sélection du type d’axe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-105.4.2 Sélection d’une échelle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-115.4.3 Définition de la sortie d’activation du variateur. . . . . . . . . . . . . . . . . . . . . . .5-125.4.4 Test de la sortie d’activation du variateur. . . . . . . . . . . . . . . . . . . . . . . . . . .5-13
5.5 Axe de servomoteur – test et réglage . . . . . . . . . . . . . . . . . . . . . .5-145.5.1 Test de la sortie de demande. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-145.5.2 Présentation de la commande en boucle fermée. . . . . . . . . . . . . . . . . . . . .5-15
5.6 Axe de servomoteur – réglage de la commande de courant. . . . .5-185.6.1 Sélection des gains de la boucle d'asservissement . . . . . . . . . . . . . . . . . . .5-185.6.2 Réponse sous-amortie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-205.6.3 Réponse suramortie. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-215.6.4 Réponse critiquement amortie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-22
5.7 Axe de servomoteur – élimination des erreurs d’état stationnaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-23
5.8 Axe de servomoteur – réglage de la commande de vitesse . . . . .5-245.8.1 Calcul de KVELFF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-245.8.2 Réglage de KPROP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-27
5.9 Axe de moteur pas à pas - test . . . . . . . . . . . . . . . . . . . . . . . . . . .5-295.9.1 Test de la sortie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-29
5.10 Configuration d’entrée/sortie TOR. . . . . . . . . . . . . . . . . . . . . . . . .5-305.10.1 Configuration d’entrée TOR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-305.10.2 Configuration de sortie TOR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-32
5.11 Enregistrement des informations de configuration . . . . . . . . . . . .5-335.11.1 Chargement des informations enregistrées . . . . . . . . . . . . . . . . . . . . . . . . .5-34
6 Dépannage6.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-1
6.1.1 Diagnostic de problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-16.1.2 Fonction SupportMe. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-1
ii Table des matières MN1933WFR

6.2 Voyants du NextMove PCI-2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-26.2.1 Voyants d'état . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-26.2.2 VOYANTS CAN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-26.2.3 Voyant de réinitialisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-2
6.3 Diagnostic de problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-36.3.1 Communication . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-36.3.2 Commande du moteur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-3
7 Caractéristiques techniques7.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-1
7.1.1 Caractéristiques d'alimentation d'entrée et mécaniques. . . . . . . . . . . . . . . . 7-17.1.2 Entrées analogiques (X6) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-17.1.3 Sorties analogiques (X7). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-27.1.4 Entrées TOR (X1 et X2) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-27.1.5 Entrées TOR (X3) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-37.1.6 Sorties TOR (X4). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-37.1.7 Sortie de relais (X8) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-37.1.8 Entrées d'encodeur (X12 à X16) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-47.1.9 Sorties de commande de moteur pas à pas - (X10 et X11) . . . . . . . . . . . . . 7-47.1.10 Interface CANopen (X17) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-47.1.11 Connecteur Baldor CAN (X18) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-47.1.12 Conditions ambiantes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-5
Annexes
A AccessoiresA.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-1
A.1.1 Module de dérivation NextMove PCI-2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-1A.1.2 Adaptateur système NextMove PC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-3A.1.3 Carte répartiteur/tampon de l'encodeur. . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-3A.1.4 Pièces détachées . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-3A.1.5 Câbles de retour . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-4A.1.6 Nœuds Baldor CAN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-5A.1.7 Panels HMI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-6A.1.8 Mint NC (logiciel de CAO-mouvement) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-6
B Récapitulatif des mots clés MintB.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-1
B.1.1 Liste de mots clés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-1
MN1933WFR Table des matières iii

iv Table des matières MN1933WFR

Informations générales1 Informations générales
LT0226A05FR Copyright ABB (c) 2012. Tous droits réservés.
Ce manuel est protégé par copyright et tous les droits sont réservés. Ce document et le logiciel ci-joint ne peuvent pas être copiés ou reproduits, en tout ou partie et sous quelque forme que ce soit,sans l’autorisation écrite d'ABB.ABB ne fait aucune déclaration et ne donne aucune garantie quant au contenu de ce manuel etdécline tout particulièrement toute garantie tacite d’adaptation à un but particulier. Les informationsfigurant dans ce document sont sujettes à modification sans préavis. ABB n’endosse aucuneresponsabilité pour des erreurs pouvant apparaître dans ce document.
Mint™ est une marque déposée de Baldor, société du groupe ABB.Windows XP, Windows Vista et Windows 7 sont des marques déposées de Microsoft Corporation.
ABB LtdMotion Control6 Bristol Distribution ParkHawkley DriveBristol, BS32 0BFTéléphone : +44 (0) 1454 850000Télécopieur : +44 (0) 1454 859001Courriel : [email protected] Web : www.abbmotion.com
Voir la dernière de couverture pour les autres bureaux dans le monde.
1
MN1933WFR Informations générales 1-1

Consignes de sécuritéSeul un personnel qualifié doit se charger du démarrage, de la programmation et du dépannage decet équipement. Cet équipement pourra être branché sur d’autres machines qui possèdent descomposants rotatifs ou entraînés par celui-ci. Son utilisation impropre peut causer des blessuresgraves, voire mortelles.
Précautions
Ne touchez aucune carte de circuits imprimés ni aucun dispositif d’alimentation oubranchement électrique avant de vous être assuré qu’aucune tension n’est présente auniveau de cet équipement ou d’un autre équipement sur lequel il est branché. Unedécharge électrique peut causer des blessures graves, voire mortelles. Seul unpersonnel qualifié doit se charger du démarrage, de la programmation et du dépannagede cet équipement.
Veillez à vous familiariser complètement avec les consignes de sécurité concernantl’utilisation et la programmation de cet équipement. Cet équipement pourra être branchésur d’autres machines qui possèdent des composants rotatifs ou entraînés par celui-ci.Son utilisation impropre peut causer des blessures graves, voire mortelles.
DANGER RELATIF AUX STIMULATEURS CARDIAQUES / APPAREILS MÉDICAUX :Les champs magnétiques et électromagnétiques à proximité de conducteurs transportantdu courant et de moteurs industriels à aimants permanents peuvent présenter un gravedanger pour la santé de personnes porteuses d’un stimulateur cardiaque, d’undéfibrillateur infra-cardiaque, d'un neurostimulateur, d'implants métalliques, d'implantscochléaires et de prothèses auditives ou autres appareils médicaux. Pour éviter toutrisque à cet égard, restez à l'écart de la zone environnante du moteur et de sesconducteurs transportant du courant.
L’entrée « arrêt » de cet équipement ne doit pas être utilisée comme seul moyend’exécution d’un arrêt critique de sécurité. La désactivation du variateur, la déconnexiondu moteur, le frein moteur et d’autres moyens doivent être utilisés le cas échéant.
Une utilisation ou une programmation incorrecte risque de causer le mouvementbrusque du rotor et de l’équipement entraîné. Assurez-vous que le mouvement imprévudu rotor ne pourra pas causer de blessures au personnel, ni endommager l’équipement.Un couple de pointe correspondant à plusieurs fois le couple nominal du moteur peut seproduire durant une panne de commande.
L’intégration sûre de cet équipement à un système de machines est la responsabilité duconcepteur de la machine. Veillez à vous conformer aux exigences locales de sécuritédu lieu où la machine va être utilisée. En Europe, il s’agit de la directive sur lesmachines, de la directive sur la compatibilité électromagnétique (CEM) et de la directivesur les basses tensions. Aux États-Unis, il s’agit du National Electrical Code et descodes locaux.
Les composants électriques peuvent être endommagés par l’électricité statique. Utilisezles procédures de décharge électrostatique pour manipuler cet équipement.
!AVERTISSEMENT
!AVERTISSEMENT
!AVERTISSEMENT
!ATTENTION
!ATTENTION
iCONSIGNE
iCONSIGNE
1-2 Informations générales MN1933WFR

Introduction2 Introduction
2.1 Fonctions et caractéristiques du NextMove PCI-2Le NextMove PCI-2 est un contrôleur de mouvement multi-axe intelligent et haute vitessedestiné à l'utilisation sur des PC à bus PCI.
Le NextMove PCI-2 utilise le langage de commande de mouvement Mint. Mint est une formestructurée du langage Basic, conçue sur mesure pour les applications de commande demouvements des servomoteurs et moteurs pas à pas. Ce langage permet une mise en routetrès rapide avec des programmes simples de commande du mouvement. En outre, Mintcomprend un large éventail de commandes puissantes pour des applications complexes.
Les fonctions standard comprennent :
Commande de huit axes (au maximum).
Déplacements point à point, cames et engrenages commandés par logiciel
20 entrées TOR opto-isolées, configurables par le logiciel pour un déclenchement parfront d’impulsion ou par niveau.
12 sorties TOR opto-isolées. Des modèles à sorties PNP ou NPN sont disponibles.
4 entrées analogiques différentielles, résolution 12 bits
4 sorties analogiques monofilaires de commande de variateur, résolution 16 bits
2
MN1933WFR Introduction 2-1

Protocole CANopen ou Baldor CAN propriétaire pour la communication avec lescontrôleurs Mint et autres périphériques tiers
Programmable dans Mint.
Vous pouvez installer le logiciel Mint WorkBench à partir du CD Mint (OPT-SW-001), ou letélécharger en allant sur le site www.abbmotion.com. Mint WorkBench propose :
Mint WorkBenchFournit tout ce qu'il faut pour l'installation et la mise en service de votre NextMove PCI-2.Mint WorkBench est doté de capacités de configuration, de mise en service, deparamétrage, de programmation, de débogage et de surveillance.
Mint Machine CenterPermet de visualiser le réseau de contrôleurs connectés et donne au périphérique devotre choix l'accès rapide à Mint WorkBench.
Contrôle ActiveXLe contrôle ActiveX permet aux applications sur le PC de communiquer avec leNextMove PCI-2.
Ce manuel vous expliquera l’installation du NextMove PCI-2.
Lisez ses chapitres dans l’ordre.
Le chapitre Installation de base décrit l’installation mécanique du NextMove PCI-2.Les chapitres suivants nécessitent des connaissances relatives aux exigences d’entrée/sortie de base de l’installation et une bonne compréhension de l’installation du logiciel del’ordinateur. Si vous n’êtes pas qualifié dans ces domaines, sollicitez de l’aide avant depoursuivre.
2-2 Introduction MN1933WFR

2.2 Réception et inspectionLorsque vous recevez votre NextMove PCI-2, nous vous conseillons de vérifierimmédiatement ce qui suit :
1. Inspectez l’état de l’emballage et signalez tout dommage immédiatement autransporteur qui vous a livré votre NextMove PCI-2.
2. Retirez le NextMove PCI-2 de son carton d'emballage mais laissez-le dans son sacantistatique ; sortez-le du sac antistatique au moment de l'installer. Conservez lesmatériaux d’emballage au cas où vous en auriez besoin pour une expédition future.
3. Assurez-vous que le numéro de référence du NextMove PCI-2 que vous avez reçucorrespond à celui indiqué sur votre bon de commande. Le numéro de référence estdécrit à la section suivante.
4. Inspectez l’état extérieur du NextMove PCI-2 pour vous assurer qu’il n’a pas été abîméen cours de transport et signalez tout dommage au transporteur qui l’a livré.
5. Si le NextMove PCI-2 doit être stocké pendant plusieurs semaines avant usage, veillez àle ranger à un endroit conforme aux spécifications d’humidité et de température destockage indiquées à la section 3.1.1.
2.2.1 Identification du numéro de référence
Les cartes NextMove PCI-2 sont disponibles en plusieurs versions dotées decaractéristiques techniques différentes. Pour vous rappeler facilement quelle carte a étéinstallée, nous vous conseillons de noter le numéro de référence dans l’espace prévu à ceteffet ci-dessous.
Un numéro de référence est décrit ci-dessous, en utilisant l'exemple PCI201-504:
N° deréférence
Signification
PCI201 Famille NextMove PCI-2
50 sorties TOR PNP ; 51 signifie des sorties TOR NPN.
4 Nombre d'axes physiques (8 au maximum).
Numéro de référence : PCI201- _____________________________
Installé dans : ______________________________________ Date : _____________
MN1933WFR Introduction 2-3

2.3 Unités de mesure et abréviationsLes unités de mesure et abréviations suivantes apparaissent dans ce manuel :
V. . . . . . . . . . . . . . . . Volt (également V c.a. et V c.c.)W . . . . . . . . . . . . . . . WattA. . . . . . . . . . . . . . . . AmpèreΩ . . . . . . . . . . . . . . . OhmmΩ . . . . . . . . . . . . . . milliohmµF. . . . . . . . . . . . . . . microfaradpF. . . . . . . . . . . . . . . picofaradmH . . . . . . . . . . . . . . millihenry
Φ . . . . . . . . . . . . . . . phasems . . . . . . . . . . . . . . millisecondeµs . . . . . . . . . . . . . . . microsecondens . . . . . . . . . . . . . . . nanoseconde
mm. . . . . . . . . . . . . . millimètrem . . . . . . . . . . . . . . . mètrein . . . . . . . . . . . . . . . pouceft . . . . . . . . . . . . . . . . piedlbf-in . . . . . . . . . . . . . livre-force-pouce (couple)N·m . . . . . . . . . . . . . Newton-mètre (couple)
ADC . . . . . . . . . . . . . Convertisseur analogique-numériqueASCII . . . . . . . . . . . . Code américain normalisé pour l'échange d'informationAWG . . . . . . . . . . . . Diamètre de fil (norme américaine)CAL . . . . . . . . . . . . . Couche d'application CANCAN . . . . . . . . . . . . . Technologie de réseau local de commandeCD-ROM . . . . . . . . . Disque compact à lecture seuleCiA . . . . . . . . . . . . . . CAN in Automation International Users and Manufacturers Group e.V.CTRL+E . . . . . . . . . . sur le clavier du, appuyez sur la touche Ctrl, puis sur E en même
temps.DAC . . . . . . . . . . . . . Convertisseur numérique-analogiqueDS301 . . . . . . . . . . . Profil de communication et couche d’application CiA CANopenDS401 . . . . . . . . . . . Profil de périphérique CiA pour périphériques E/S génériques DS403 . . . . . . . . . . . Profil de périphérique CiA pour interfaces homme-machine (IHM) EDS . . . . . . . . . . . . . Fiche de données électronique CEM. . . . . . . . . . . . . Compatibilité électromagnétique IHM . . . . . . . . . . . . . Interface homme-machineISO. . . . . . . . . . . . . . International Standards OrganizationKbaud. . . . . . . . . . . . kilobaud (identique à Kbit/s dans la plupart des applications)LCD . . . . . . . . . . . . . Écran à cristaux liquidesMo . . . . . . . . . . . . . . méga-octets Mbps . . . . . . . . . . . . mégabits/s (NC) . . . . . . . . . . . . . Non connectéRF . . . . . . . . . . . . . . Radiofréquence
2-4 Introduction MN1933WFR

Installation de base3 Installation de base
3.1 IntroductionVous devez lire toutes les sections du chapitre Installation de base.Il importe de respecter scrupuleusement les différentes étapes d'installation duNextMove PCI-2. Ce chapitre décrit l'installation mécanique et électrique du NextMove PCI-2.
3.1.1 Exigences liées à l’emplacement d’installationVous devez impérativement lire et comprendre ce chapitre avant de commencerl’installation.
Pour éviter d’endommager l’équipement, vérifiez que les signaux d’entrée et desortie sont alimentés et correctement désignés.
Pour garantir la performance fiable de l’équipement assurez-vous que tous lessignaux à destination ou provenant du NextMove PCI-2 sont correctementblindés.
Évitez de placer le NextMove PCI-2 ou le PC hôte juste au-dessus ou à côtéd’un équipement qui produit de la chaleur, ou juste sous des tuyaux d’adductionde vapeur d’eau.
Évitez de placer le NextMove PCI-2 ou le PC hôte à proximité de substances oude vapeurs corrosives, de particules métalliques et de poussière.
Le fonctionnement sûr de cet équipement dépend de son utilisation dans un cadreapproprié. Gardez les points suivants à l’esprit :
Le NextMove PCI-2 doit être installé à l'intérieur d'une armoire fermée, qui doit êtrelocalisée de sorte à n'être accessible que par des techniciens de maintenance munisd'outils.
L'altitude maximale d'exploitation suggérée est de 2000 m (6560 ft).
Le NextMove PCI-2 doit être installé dans un local à température ambiante compriseentre 0 °C et 45 °C (32 °F et 113 °F).
Le NextMove PCI-2 doit être installé dans une humidité relative inférieure à 93 % à unetempérature maximale de 31 °C (87 °F), avec diminution linéaire jusqu’à une humiditérelative de 50 % à 45 °C (113 °F), sans condensation.
Le NextMove PCI-2 doit être installé là où le niveau de pollution, conformément à lanorme IEC664, ne dépasse pas 2.
La carte est alimentée par le bus d'alimentation du PC hôte.
L'atmosphère ne doit en aucun cas contenir des gaz ou vapeurs inflammables.
Il ne doit pas y avoir de niveaux anormaux de rayonnement nucléaire ou de rayons X.
iCONSIGNE
iCONSIGNE
iCONSIGNE
iCONSIGNE
3
MN1933WFR Installation de base 3-1

3.1.2 Autres exigences liées à l’installationLes composants requis pour mener à bien l'installation de base sont les suivants :
Un PC présentant les caractéristiques techniques suivantes :
Caractéristique technique minimum
Processeur 1 GHz
RAM 512 Mo
Disque dur 2 Go
CD-ROM Un lecteur de CD-ROM
Logement PCI Un logement PCI disponible
Écran 1024 x 768, couleurs 16 bits
Souris Une souris ou un dispositif de pointage similaire
Systèmed’exploitation
Windows XP ou version ultérieure, 32 bits ou 64 bits
3-2 Installation de base MN1933WFR

3.2 InstallationLe NextMove PCI-2 peut être installé sur un ordinateur personnel de type AT disposant d'unlogement 7 pouces libre pour carte PCI. Pour installer la carte, un petit tournevis cruciformeest nécessaire.
3.2.1 Installation de la carte NextMove PCI-2Avant de toucher la carte, assurez-vous de décharger l’électricité statique devotre corps et de vos vêtements en touchant une surface métallique mise à laterre. Ou bien portez une tresse métallique de mise à la masse pour manipuler lacarte.
1. Quittez toutes les applications en cours d'exécution et fermez les fenêtres. ArrêtezWindows.
2. Mettez hors tension l'ordinateur (si Windows ne le fait pas automatiquement) etdébranchez tous les câbles d'alimentation.
3. Retirez le couvercle de l'ordinateur.
4. Localisez un logement PCI inutilisé.
5. Retirez le cache du logement PCI et mettez la vis de côté pour pouvoir vous en servirultérieurement.
6. Déchargez l'électricité statique de votre corps et de vos vêtements.
7. Retirez la carte de son emballage. Ne touchez pas les contacts dorés qui sont visiblesau bas de la carte.
8. Alignez le bas de la carte (contacts dorés) sur le logement et enfoncez la cartefermement dans la prise. Si vous l'installez correctement, la carte doit se mettre en placeautomatiquement.
9. Assurez-vous que le haut de la carte apparaît bien aligné (qu'elle n'est pas dans uneposition oblique) et que l'encoche au sommet du support métallique de la carte est bienalignée avec le trou destiné à la vis dans le boîtier du PC.
10. Posez la vis et serrez-la pour maintenir la carte en place.
11. Reposez le capot de l'ordinateur et les vis.
12. Rebranchez les câbles et cordons d'alimentation que vous aviez débranchés.
13. Raccordez le câble à 100 broches (en option) au NextMove PCI-2. Il est conseillé deprévoir un support pour le câble afin d'éviter l'action de forces mécaniques sur leconnecteur.
iCONSIGNE
MN1933WFR Installation de base 3-3

3-4 Installation de base MN1933WFR

Entrée/sortie4 Entrée/sortie
4.1 IntroductionCe chapitre décrit les capacités d’entrée / sortie TOR et analogiques du NextMove PCI-2.
Les conventions suivantes seront utilisées pour désigner les entrées et les sorties :I/O . . . . . . . . . . . . . . Entrée/sortie (E/S)DIN . . . . . . . . . . . . . Entrée TORDOUT . . . . . . . . . . . Sortie TORAIN . . . . . . . . . . . . . Entrée analogiqueAOUT . . . . . . . . . . . Sortie analogique
Les branchements à la carte NextMove PCI-2 sont réalisés via le le câble à 100broches et le module de dérivation NextMove PCI-2 monté sur le rail DIN (fournis enoption, voir l'Annexe A). Les numéros de connecteur mentionnés dans les sectionssuivantes font référence au module de dérivation. Il est conseillé d'installer un autresupport pour le câble afin d'éviter l'action de forces mécaniques sur le connecteur.
4.2 Connecteur de bord à 100 broches
51 1
100 50
Le brochage du connecteur type D à 100 broches est fourni dans le Tableau 1.
4
MN1933WFR Entrée/sortie 4-1
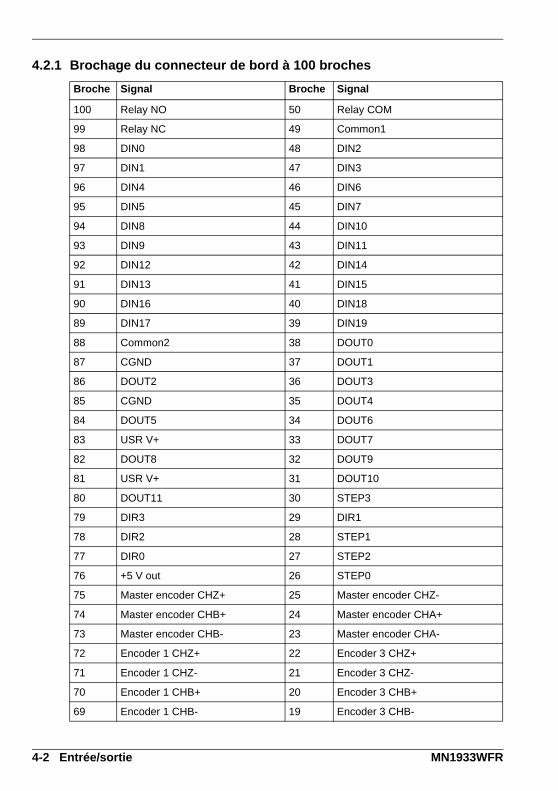
4.2.1 Brochage du connecteur de bord à 100 broches
Broche Signal Broche Signal
100 Relay NO 50 Relay COM
99 Relay NC 49 Common1
98 DIN0 48 DIN2
97 DIN1 47 DIN3
96 DIN4 46 DIN6
95 DIN5 45 DIN7
94 DIN8 44 DIN10
93 DIN9 43 DIN11
92 DIN12 42 DIN14
91 DIN13 41 DIN15
90 DIN16 40 DIN18
89 DIN17 39 DIN19
88 Common2 38 DOUT0
87 CGND 37 DOUT1
86 DOUT2 36 DOUT3
85 CGND 35 DOUT4
84 DOUT5 34 DOUT6
83 USR V+ 33 DOUT7
82 DOUT8 32 DOUT9
81 USR V+ 31 DOUT10
80 DOUT11 30 STEP3
79 DIR3 29 DIR1
78 DIR2 28 STEP1
77 DIR0 27 STEP2
76 +5 V out 26 STEP0
75 Master encoder CHZ+ 25 Master encoder CHZ-
74 Master encoder CHB+ 24 Master encoder CHA+
73 Master encoder CHB- 23 Master encoder CHA-
72 Encoder 1 CHZ+ 22 Encoder 3 CHZ+
71 Encoder 1 CHZ- 21 Encoder 3 CHZ-
70 Encoder 1 CHB+ 20 Encoder 3 CHB+
69 Encoder 1 CHB- 19 Encoder 3 CHB-
4-2 Entrée/sortie MN1933WFR

Tableau 1: Brochage du connecteur de bord à 100 broches
Broche Signal Broche Signal
68 Encoder 1 CHA+ 18 Encoder 3 CHA+
67 Encoder 1 CHA- 17 Encoder 3 CHA-
66 Encoder 0 CHZ+ 16 Encoder 2 CHZ+
65 Encoder 0 CHZ- 15 Encoder 2 CHZ-
64 Encoder 0 CHB+ 14 Encoder 2 CHB+
63 Encoder 0 CHB- 13 Encoder 2 CHB-
62 Encoder 0 CHA+ 12 Encoder 2 CHA+
61 Encoder 0 CHA- 11 Encoder 2 CHA-
60 CAN2 receive 10 CAN1 receive
59 CAN2 transmit 9 CAN1 transmit
58 +5 V out 8 GND
57 GND 7 Terre analogique
56 Demand3 6 Demand2
55 Demand1 5 Demand0
54 AIN3- 4 AIN2-
53 AIN3+ 3 AIN2+
52 AIN1- 2 AIN0-
51 AIN1+ 1 AIN0+
MN1933WFR Entrée/sortie 4-3
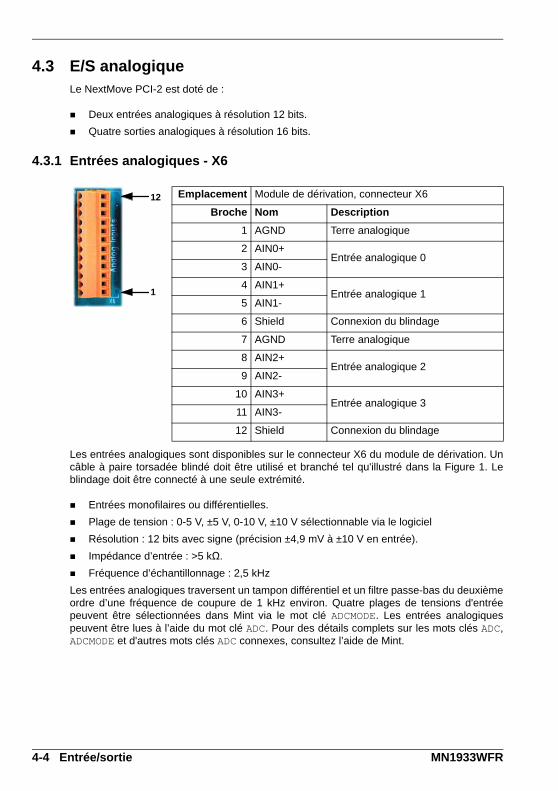
4.3 E/S analogiqueLe NextMove PCI-2 est doté de :
Deux entrées analogiques à résolution 12 bits.
Quatre sorties analogiques à résolution 16 bits.
4.3.1 Entrées analogiques - X6
Les entrées analogiques sont disponibles sur le connecteur X6 du module de dérivation. Uncâble à paire torsadée blindé doit être utilisé et branché tel qu'illustré dans la Figure 1. Leblindage doit être connecté à une seule extrémité.
Entrées monofilaires ou différentielles.
Plage de tension : 0-5 V, ±5 V, 0-10 V, ±10 V sélectionnable via le logiciel
Résolution : 12 bits avec signe (précision ±4,9 mV à ±10 V en entrée).
Impédance d’entrée : >5 kΩ.
Fréquence d’échantillonnage : 2,5 kHz
Les entrées analogiques traversent un tampon différentiel et un filtre passe-bas du deuxièmeordre d’une fréquence de coupure de 1 kHz environ. Quatre plages de tensions d'entréepeuvent être sélectionnées dans Mint via le mot clé ADCMODE. Les entrées analogiquespeuvent être lues à l’aide du mot clé ADC. Pour des détails complets sur les mots clés ADC,ADCMODE et d'autres mots clés ADC connexes, consultez l’aide de Mint.
Emplacement Module de dérivation, connecteur X6
Broche Nom Description
1 AGND Terre analogique
2 AIN0+Entrée analogique 0
3 AIN0-
4 AIN1+Entrée analogique 1
5 AIN1-
6 Shield Connexion du blindage
7 AGND Terre analogique
8 AIN2+Entrée analogique 2
9 AIN2-
10 AIN3+Entrée analogique 3
11 AIN3-
12 Shield Connexion du blindage
1
12
4-4 Entrée/sortie MN1933WFR

Figure 1: Câblage d'entrée analogique, AIN0 illustrée
Pour les entrées différentielles, connectez les lignes d’entrée à AIN+ et AIN-. Laissez AGNDnon connecté. Pour les entrées monofilaires, connectez le signal à AIN+. Connectez la terredu signal à AIN- et AGND.
Figure 2: Circuit d’entrée typique fournissant une entrée de 0-10 V (approx.) à partir d’une alimentation 24 V
NextMove PCI-2
-
+
-
+
120k
120k
+12V
-12V
10k
10k TL084
3
1
2
‘X6’
AIN0+
AIN0-
AGND
MintADC(0)
Câble à 100
broches
Module de
dérivation
3
2
X6
0 V
+24 V DC
1
AIN0(ADC(0)
1,5 kΩ, 0,25 W
1 kΩ, 0,25 Wpotentiomètre
MN1933WFR Entrée/sortie 4-5

4.3.2 Sorties analogiques (commandes) - X7
Les sorties analogiques sont disponibles sur le connecteur X7 du module de dérivation.
Quatre sorties de commande indépendantes.
Plage de sortie : ±10 V c.c. (±0,1 %).
Résolution : 12 bits, 14 bits ou 16 bits (sélectionnable via le logiciel).
Courant de sortie : 1 mA maximum.
Fréquence de rafraîchissement : 200 µs - 2000 ms (déterminé par LOOPTIME).
Mint utilise les sorties analogiques Demand0 à Demand3 pour commander les variateurs.L'assistant de configuration des axes de Mint WorkBench (ou les mots clés Mint CONFIG etAXISCHANNEL) permettent d'assigner les sorties aux axes ; voir la section 5.4.1). Larésolution en sortie peut être réglée sur 12 bits, 14 bits ou 16 bits via le mot clé MintDACMODE. Les sorties analogiques pourront servir à entraîner des charges de 10 kΩ ou plus.Les sorties sont référencées à la terre du PC.
Un câble blindé à paires torsadées doit être utilisé. La connexion blindée doit être effectuéeà une seule extrémité.
Emplacement Module de dérivation, connecteur X7
Broche Nom Description
1 Demand0 Signal de sortie de commande 0
2 AGND Terre analogique
3 Shield Connexion du blindage
4 Demand1 Signal de sortie de commande 1
5 AGND Terre analogique
6 Shield Connexion du blindage
7 Demand2 Signal de sortie de commande 2
8 AGND Terre analogique
9 Shield Connexion du blindage
10 Demand3 Signal de sortie de commande 3
11 AGND Terre analogique
12 Shield Connexion du blindage
1
12
4-6 Entrée/sortie MN1933WFR

Figure 3: Circuit de sortie analogique - Demand0 illustrée
Figure 4: Sortie analogique – branchement typique sur un ABB MicroFlex
Figure 5: Sortie analogique - branchement typique sur un Baldor FlexDriveII, Flex+DriveII ou
MintDriveII
NextMove PCI-2
-
+TL084
47R
+12 V
-12 V
Demand0
AGND2
1
‘X7’
Commande±100 %
Module de dérivation
Câble à 100
broches
Demand0
AGND 2
1
‘X7’
13
12
AIN0+
AIN0-
‘X3’
3Connectez le blindage
global à une seule extrémité
Entrée de commande ±10 V c.c. du variateur
MicroFlex / variateur
Câble à 100
broches
Module de dérivation
Shield
Demand0
AGND 2
1
‘X7’
1
2
AIN0+
AIN0-
‘X1’
3Connectez le blindage
global à une seule extrémité
Entrée de commande ±10 V c.c. du variateur
FlexDriveII / variateur
Câble à 100
broches
Module de dérivation
Shield
MN1933WFR Entrée/sortie 4-7

4.4 E/S TORLe NextMovePCI-2 est doté de :
20 entrées TOR polyvalentes
12 sorties TOR polyvalentes.
4.4.1 Entrées TOR - vue d'ensembleAu total, 20 entrées TOR polyvalentes sont présentes. Les entrées sont configurables dansMint pour remplir les fonctions suivantes :
Entrée de fin de course avant sur n'importe quel axe.
Entrée de fin de course arrière sur n'importe quel axe.
Entrée de position de départ sur n'importe quel axe.
Entrée d'erreur de variateur sur n'importe quel axe.
Les entrées sont partagées entre les axes et programmables dans Mint (via les mots clés INPUTACTIVELEVEL, INPUTDEBOUNCE, INPUTMODE, INPUTNEGTRIGGER et INPUTPOSTRIGGER) pour déterminer leur niveau actif et si elles doivent être déclenchées par front d’impulsion. Quatre entrées - DIN0 à DIN3 - sont des entrées rapides à verrouillage de position.
Les entrées utilisent deux connexions communes distinctes. Ceci s'avère utile pour séparer les entrées « actives hautes » d'autres entrées « actives basses ». Si toutes les entrées sont identiques, les connexions communes peuvent être connectées ensemble pour en former une seule. L'agencement des entrées, leur connexion commune d'alimentation et les connecteurs sur lesquels elles sont disponibles sont décrits dans le Tableau 2 :
4-8 Entrée/sortie MN1933WFR

Entrée Commune Connecteur du module de dérivation
DIN0
Common1
X3 - Entrées rapides de positionDIN1
DIN2
DIN3
DIN4
X2 - Entrées polyvalentes
DIN5
DIN6
DIN7
DIN8
Common2
DIN9
DIN10
DIN11
DIN12
X1 - Entrées polyvalentes
DIN13
DIN14
DIN15
DIN16
DIN17
DIN18
DIN19
Tableau 2: Agencement d'entrée TOR
MN1933WFR Entrée/sortie 4-9

4.4.2 Entrées TOR - X1
Les entrées TOR DIN12 à DIN19 ont des caractéristiques techniques identiques :
Entrées TOR polyvalentes opto-isolées.
Fréquence d'échantillonnage 1 kHz.
Les entrées sont conditionnées à l'aide de filtres RC passe-bas et de tampons à bascule deSchmitt. Si une entrée est configurée pour un déclenchement par front d’impulsion, la duréeminimale de l’impulsion de déclenchement doit être de 1 ms (un cycle logiciel) pour garantirson acceptation par Mint. Les tensions inférieures à 2 V sont considérées équivalentes à 0 V.L'utilisation de câble blindé pour les entrées est recommandée.
Actives hautes: Les entrées TOR seront actives lorsqu'une tension de +24 V c.c. (±20 %)leur est appliquée ; elles écouleront chacune au maximum 8 mA.
Actives basses: Les entrées TOR seront actives lorsqu'elles sont raccordées à la terre (< 2 V) ; elles émettront chacune au maximum 8 mA.
Remarque : Des tensions en entrée prolongées endommageront les entrées si ellessont supérieures à 30 V.
Emplace-ment
Module de dérivation, connecteur X1
Broche Nom Mot clé Mint / description Commune
1 Shield Connexion du blindage
2 DIN12 INX(12)
Common2
3 DIN13 INX(13)
4 DIN14 INX(14)
5 DIN15 INX(15)
6 DIN16 INX(16)
7 DIN17 INX(17)
8 DIN18 INX(18)
9 DIN19 INX(19)
10 Shield Connexion du blindage
11 - (NC)
12 Common2 Connexion commune
1
12
4-10 Entrée/sortie MN1933WFR
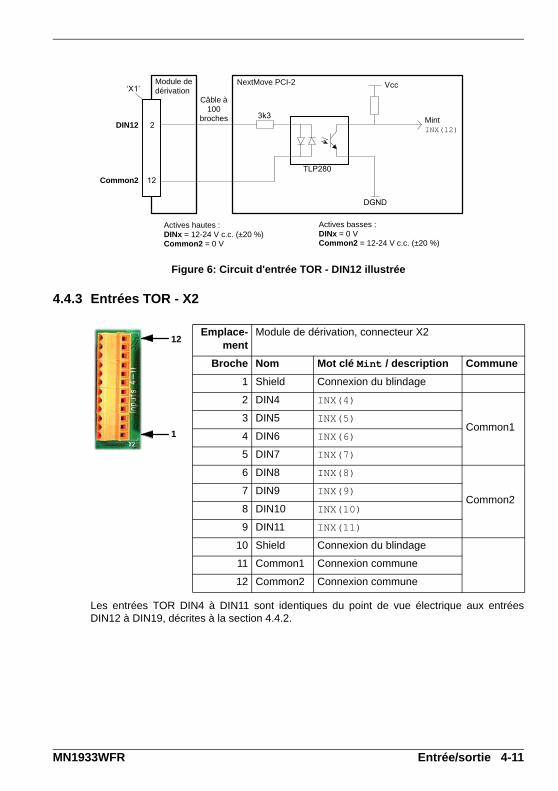
Figure 6: Circuit d'entrée TOR - DIN12 illustrée
4.4.3 Entrées TOR - X2
Les entrées TOR DIN4 à DIN11 sont identiques du point de vue électrique aux entréesDIN12 à DIN19, décrites à la section 4.4.2.
Emplace-ment
Module de dérivation, connecteur X2
Broche Nom Mot clé Mint / description Commune
1 Shield Connexion du blindage
2 DIN4 INX(4)
Common13 DIN5 INX(5)
4 DIN6 INX(6)
5 DIN7 INX(7)
6 DIN8 INX(8)
Common27 DIN9 INX(9)
8 DIN10 INX(10)
9 DIN11 INX(11)
10 Shield Connexion du blindage
11 Common1 Connexion commune
12 Common2 Connexion commune
3k3
TLP280
DGND
Vcc
Common2
DIN12 2
12
‘X1’
MintINX(12)
Module de dérivation
NextMove PCI-2
Actives hautes :DINx = 12-24 V c.c. (±20 %)Common2 = 0 V
Actives basses :DINx = 0 VCommon2 = 12-24 V c.c. (±20 %)
Câble à 100
broches
1
12
MN1933WFR Entrée/sortie 4-11

4.4.4 Entrées TOR - X3
Les entrées TOR DIN0 à DIN3 ont des caractéristiques techniques identiques :
Entrées TOR rapides opto-isolées.
Fréquence d'échantillonnage 1 kHz.
Remarque : Les entrées TOR DIN0 à DIN3 étant particulièrement sensibles au bruit,elles doivent utiliser un câble blindé à paires torsadées.
Les entrées TOR DIN0 à DIN3 peuvent servir d'entrées rapides à verrouillage de position.Une entrée rapide de position permet la capture de la position (via le matériel) de n'importequelle combinaison d'axes à ±1 µs. Des mots clés Mint spécifiques (commençant parFAST...) permettent de réaliser certaines fonctions suite à l'activation d'entrées rapides deposition.
Actives hautes: Les entrées TOR rapides seront actives lorsqu'une tension de +24 V c.c.(±20 %) leur est appliquée ; elles consommeront chacune au maximum 7 mA.
Actives basses: Les entrées TOR seront actives lorsqu'elles sont raccordées à la terre (< 2 V) ; elles émettront chacune au maximum 7 mA.
Remarque : Des tensions en entrée prolongées endommageront les entrées si ellessont supérieures à 30 V.
Emplacement Module de dérivation, connecteur X3
Broche Nom Mot clé Mint / description
1 DIN0 INX(0)
2 Common1 Connexion commune
3 Shield Connexion du blindage
4 DIN1 INX(1)
5 Common1 Connexion commune
6 Shield Connexion du blindage
7 DIN2 INX(2)
8 Common1 Connexion commune
9 Shield Connexion du blindage
10 DIN3 INX(3)
11 Common1 Connexion commune
12 Shield Connexion du blindage
1
12
4-12 Entrée/sortie MN1933WFR

Figure 7: Circuit d'entrée TOR - interruptions rapides - DIN0 illustrée
3k3
TLP115A
DGND
Vcc
DIN0 1
2
‘X3’
Common1
MintINX(0)
Module de dérivation
NextMove PCI-2
Actives hautes :DINx = 12-24 V c.c. (±20 %)Common1 = 0 V
Actives basses :DINx = 0 VCommon1 = 12-24 V c.c. (±20 %)
Câble à 100
broches
MN1933WFR Entrée/sortie 4-13

4.4.5 Sorties TOR - vue d'ensembleAu total, 12 sorties TOR polyvalentes sont présentes. Dans Mint, vous pouvez configurer une sortie à titre de sortie polyvalente, de sortie d’activation de variateur ou de sortie d’erreur globale. Les sorties peuvent être partagées entre les axes et sont programmables, via le mot clé Mint OUTPUTACTIVELEVEL, afin de déterminer leur niveau actif.
Deux types de sortie sont disponibles, en fonction du modèle de NextMove PCI-2 :
Sortie PNP (sourçage de courant, PCI201-50x).
Sortie NPN (écoulement de courant, PCI201-51x).
Quel que soit le modèle, le groupe de sorties est entièrement protégé par un fusibleautonome de 1,5 A. Le fusible mettra quelques secondes pour se réinitialiser, une fois lacharge éliminée.
Les broches de sortie d'impulsion et de direction des voies inutilisées de moteur pas à paspeuvent être utilisées comme sorties. Voir les mots clés Mint CONFIG et STEPPERIO.
4.4.6 Sorties TOR - X4
Les sorties TOR DOUT6 à DOUT11 ont les mêmes caractéristiques techniques :
Sorties TOR polyvalentes opto-isolées.
Courant de sortie : 50 mA au maximum à chaque sortie.
Fréquence de rafraîchissement : Immédiate.
Emplacement Module de dérivation, connecteur X4
Broche Nom Mot clé Mint / description
1 Shield Connexion du blindage
2 DOUT6 OUTX(6)
3 DOUT7 OUTX(7)
4 DOUT8 OUTX(8)
5 DOUT9 OUTX(9)
6 DOUT10 OUTX(10)
7 DOUT11 OUTX(11)
8 - (NC)
9 - (NC)
10 Shield Connexion du blindage
11 USR V+ Alimentation client
12 CGND Alimentation client, terre
1
12
4-14 Entrée/sortie MN1933WFR

Chaque sortie opto-isolée est conçue pour alimentation extérieure 12-24 V (USR V+) telqu'illustré à la Figure 8. L’utilisation d’un câble blindé est recommandée. CGND doit êtrereliée à GND sur le PC hôte. Voir la section 4.5.2 pour des détails sur le branchementd'alimentation USR V+.
Figure 8: Circuit de sortie TOR avec sorties standard de sourçage de courant PNP - DOUT6 illustrée
Figure 9: Circuit de sortie TOR avec sorties standard d'écoulement de courant NPN - DOUT6 illustrée
TLP281
NextMove PCI-2
UDN2982
1.5 A
USR V+
DOUT6
CGND
2
11
12
‘X4’
Alimentation utilisateur 24 V
Alimentation utilisateur GND
Charge de sortie
MintOUTX(6)
Module de dérivation
Câble à 100
broches
Régulateur de tension
Fusible
DOUT6
CGND
2
11
12
‘X4’
TLP281
NextMove PCI-2
1.5 A
ULN2003
USR V+
Alimentation utilisateur 24 V
Alimentation utilisateur GND
Charge de sortie
MintOUTX(6)
Module de dérivation
Câble à 100
brochesRégulateur de tension
Fusible
MN1933WFR Entrée/sortie 4-15

4.4.7 Sorties TOR - X5
Les sorties TOR DOUT0 à DOUT5 sont identiques du point de vue électrique aux sortiesDOUT6 à DOUT11, décrites à la section 4.4.6.
Emplacement Module de dérivation, connecteur X5
Broche Nom Mot clé Mint / description
1 Shield Connexion du blindage
2 DOUT0 OUTX(0)
3 DOUT1 OUTX(1)
4 DOUT2 OUTX(2)
5 DOUT3 OUTX(3)
6 DOUT4 OUTX(4)
7 DOUT5 OUTX(5)
8 - (NC)
9 - (NC)
10 Shield Connexion du blindage
11 USR V+ Alimentation client
12 CGND Alimentation client, terre
1
12
4-16 Entrée/sortie MN1933WFR

4.5 Autres E/S
4.5.1 Entrées d'encodeur - X12, X13, X14, X15, X16
Vous pouvez raccorder jusqu'à cinq encodeurs incrémentaux sur le NextMove PCI-2.Chaque entrée d'encodeur comprend des entrées complémentaires de voie A, B et Z sur unconnecteur type D à 9 broches (femelle). Chaque voie utilise un récepteur de lignedifférentiel MAX3096 avec des résistances de polarisation à l’alimentation et desterminaisons. Les encodeurs doivent fournir soit des signaux différentiels de 5 V, soit dessignaux différentiels RS422/RS485. La fréquence d'entrée maximale est de 10 millions dequadratures dénombrées par seconde. Ceci équivaut à une fréquence maximum de 2,5 MHzpour les signaux A et B. La coque du connecteur est reliée à la broche 4. L’utilisation d’uncâble à paires torsadées individuellement blindé est recommandée. Voir la section 4.5.2pour des détails sur l'alimentation de l'encodeur.
Figure 10: Circuit d'entrée de voie d'encodeur - Encodeur C, voie A illustrée
Emplace-ment
Module de dérivation, connecteurs X12, X13, X14, X15, X16
Broche Nom Description
1 Encoder V+ Alimentation vers encodeur
2 CHZ+ Signal de voie d’index
3 CHB- Complément de signal de voie B
4 Shield Connexion du blindage
5 CHA+ Signal de voie A
6 CHZ- Complément de signal de voie d’index
7 GND Terre de l'alimentation
8 CHB+ Signal de voie B
9 CHA- Complément de signal de voie A
15
69
CHA-
CHA+
Vcc
MAX3096150R 3k3
3k3
5
9
‘X12’
Circuit d'entrée d'encodeur
Module de dérivation
Câble à 100
broches
NextMove PCI-2
MN1933WFR Entrée/sortie 4-17

4.5.1.1 Fréquence d’entrée de l'encodeur
La fréquence d'entrée maximale de l'encodeur est d'environ 10 millions de quadraturesdénombrées par seconde. Ceci équivaut à une fréquence de 2,5 MHz pour les signaux A etB. Cependant, la fréquence maximale possible est affectée par la longueur des câbles del'encodeur, comme indiqué dans le Tableau 3 :
La longueur maximale de câble recommandée est de 30 m (100 ft).
Figure 11: Entrée d'encodeur C – branchement typique à partir d’un variateur
(ABB MicroFlex, FlexDriveII, Flex+DriveII, ou MintDriveII, par exemple)
FréquenceLongueur maximale de câble
mètres pieds
1,3 MHz 2 6.56
500 kHz 10 32.8
250 kHz 20 65.6
100 kHz 50 164.0
50 kHz 100 328.1
20 kHz 300 984.2
10 kHz 700 2296.6
7 kHz 1000 3280.8
Tableau 3: Effet de la longueur du câble sur la fréquence maximale de l'encodeur
CHA-
CHA+5
9
4
7 DGND
CHA-
CHA+ 1
6
‘X7’
CHB-
CHB+8
3CHB-
CHB+ 2
7
CHZ-
CHZ+2
6CHZ-
CHZ+ 3
8
‘X12’ NextMove PCI-2
Paire torsadée
Paire torsadée
Paire torsadée
MicroFlexFlexDriveII
Flex+DriveII
MintDriveII
sortie d'encodeur
Connectez le blindage global aux boîtiers de
connecteur/connecteurs blindés
Shield
Module de dérivation
Câble à 100 broches
Connectez le blindage interne à DGND. Ne connectez pas l’autre extrémité.
4-18 Entrée/sortie MN1933WFR

4.5.2 Puissance - X9
Le connecteur d'alimentation X9 fournit un seul point de connexion pour alimentationsexternes. L'accès à l'alimentation 5 V du PC hôte est également fourni. Pour optimiser lacapacité de câblage, deux broches sont assignées à chaque connexion sur le connecteurX9. Utilisez des câbles de liaison pour les branchements d'alimentation, selon les besoins.
Les connexions Encoder V+ et GND sur X9 sont reliées en interne aux broches Encoder V+et GND des connecteurs X12 à X16. L'alimentation +5 V du PC hôte peut servir à alimenterles encodeurs, en branchant la broche 1 ou 2 à la broche 3 ou 4. Une liaison est prévue à ceteffet. Les exigences totales en courant des encodeurs ne doivent pas dépasser 500 mA.Vérifiez que l'alimentation du PC est capable de fournir ce courant supplémentaire.
Si ce n'est pas le cas, vous pouvez connecter une autre alimentation externe (oul'alimentation USR V+, voir ci-dessous) à la broche 3 ou 4. Supprimez toute liaison existantesur la broche 1 ou 2 avant de brancher une alimentation externe. Cette alimentation ne doitpas dépasser la valeur nominale de piste du CI du module de dérivation, c'est-à-dire 3 A à30 V. Vérifiez que les encodeurs ont une tension nominale appropriée avant de lesconnecter à USR V+ ou à une autre alimentation externe.
L'alimentation de l'encodeur doit être branchée avant de mettre en route lesystème. Si le système est mis en route alors que les encodeurs ne sont pasalimentés, il n'y aura aucun retour de position, ce qui pourrait entraîner unmouvement violent du rotor.
L'alimentation client USR V+ sert à alimenter les sorties TOR (voir les sections 4.4.6 et4.4.7). Les connexions USR V+ et CGND sur le connecteur X9 sont reliées en interne auxbroches USR V+ et CGND des connecteurs X4, X5 et X8.
Remarque : CGND (broche 9 ou 10) doit être connectée à GND du PC hôte (broche 5ou 6).
Emplace-ment
Module de dérivation, connecteur X9
Broche Nom Description
1 Vcc Source d'alimentation +5 V provenant du PC hôte2 Vcc
3 Encoder V+ Puissance vers les connecteurs de l'encodeur4 Encoder V+
5 GNDTerre numérique provenant du PC hôte
6 GND
7 USR V+Alimentation client
8 USR V+
9 CGNDAlimentation client, terre
10 CGND
1
10
!ATTENTION
MN1933WFR Entrée/sortie 4-19

4.5.3 Relais et alimentation CAN - X8
Le connecteur X8 fournit un point de connexion pour l'alimentation CAN et les contacts derelais. La voie CANopen (CAN1) est isolée et nécessite une alimentation 12-24 V c.c.,60 mA (broches 1 et 2). Ces broches sont reliées en interne aux broches 9 et 3 duconnecteur X17 (voir la section 4.6.1).
La voie Baldor CAN (CAN2), normalement non isolée, n'a donc pas besoin d'unealimentation. Cependant, certains nœuds Baldor CAN pourraient avoir besoin d'unealimentation 12-24 V via le câble CAN. X8 fournit dans ce cas un point pratique deconnexion de l'alimentation (broches 3 et 4). Ces broches sont reliées en interne auxbroches 5 et 4 du connecteur X18 (voir la section 4.6.3).
Les broches du relais sont isolées des circuits internes du NextMove PCI-2. Le relais estcontrôlé par un verrouillage, qui est éliminé à la réinitialisation du NextMove PCI-2. Laréinitialisation peut se produire du fait d'une coupure de courant, d'une erreur watchdog oud'une opération délibérée sur le PC hôte. En mode de fonctionnement normal, le contactRelay NO est connecté à Relay COM. Le relais est déclenché en mode de fonctionnementnormal et c'est la voie de sortie d'erreur globale (préréglage usine). En cas d’erreur ou deperte de puissance de la carte, le relais est désenclenché et le contact Relay NC estconnecté à Relay common.
Figure 12: Connexions de relais
Emplace-ment
Module de dérivation, connecteur X8
Broche Nom Description
1 CAN1 V+ Entrée d'alimentation pour réseauCAN1 (CANopen) (12-24 V c.c.)
2 CAN1 GND Terre du réseau CAN1 (CANopen)
3 CAN2 V+ Entrée d'alimentation pour réseauCAN2 (Baldor CAN) (12-24 V c.c.)
4 CAN2 GND Terre du réseau CAN2 (Baldor CAN)
5 Relay NC Connexion de relais normalement fermé
6 Relay NO Connexion de relais normalement ouvert
7 Relay COM Connexion commune de relais
8 USR V+ Alimentation client
9 CGND Alimentation client, terre
10 Shield Connexion du blindage
1
10
Mint
NextMove PCI-2
5
7
6
‘X4’
Relais
Module de dérivation
Relay NC
Relay NO
Relay COM
4-20 Entrée/sortie MN1933WFR

4.5.4 Sorties de commande de moteur pas à pas - X10, X11
Quatre groupes de sorties de commande de moteur pas à pas sont fournis sur les deuxconnecteurs type D à 9 broches (femelles). Les sorties de commande de moteur pas à paspeuvent fonctionner jusqu'à 3 MHz. Les connecteurs type D à 9 broches fournissent unblindage 360° en cas d'utilisation de fréquences de pas élevées.
Les signaux provenant du NextMove PCI-2 sont à des niveaux TTL, mais sont convertis ensignaux différentiels 5 V de variateur par un circuit imprimé installé sur le module dedérivation. Les sorties peuvent être connectées directement aux variateurs par des entréesmonofilaires logiques, en connectant au variateur uniquement les sorties positives (STEPx+,DIRx+) et GND. Les sorties complémentaires (STEPx-, DIRx-) doivent rester nonconnectées. Vous pouvez programmer les sorties dans Mint pour qu'elles remplissent lesfonctions suivantes :
Commande de pas et de direction de variateurs de moteur pas à pas. L'assistant deconfiguration des axes de Mint WorkBench (ou les mots clés Mint CONFIG etAXISCHANNEL) permet d'assigner les voies de moteur pas à pas à des axes.
Sorties TOR polyvalentes. Pour des détails, reportez-vous au mot clé Mint STEPPERIO.
Le mot clé FREQ permet de contrôler directement la fréquence de sortie – voir le fichierd’aide de Mint.
4.5.5 Connexion de l'émulateurUne empreinte de 11 broches à l'arrière de la carte, libellée « ICE », donne accès auprocesseur pour l'émulation de balayage limite. Pour brancher le module émulateur TexasInstruments, une fixation d'embase à double rangée 12 broches au pas de 0,1 po. à montageen surface doit être installée, avec la broche 8 manquante. Ces connexions sont spécifiéespar Texas Instruments. Voir le « Guide de programmation intégrée MintMT » pour des détailssur le débogage du système à base d'émulateur.
Empla-cement
Module de dérivation, connecteur X8
BrocheNom sur X10
Nom sur X11
Description
1 STEP0+ STEP2+ Signal de pas
2 DIR0+ DIR2+ Signal de direction
3 GND GND Terre du signal
4 DIR1+ DIR3+ Signal de direction
5 STEP1+ STEP3+ Signal de pas
6 STEP0- STEP2- Complément de signal de pas
7 DIR0- DIR2- Complément de signal de direction
8 DIR1- DIR3- Complément de signal de direction
9 STEP1- STEP3- Complément de signal de pas
1 5
6 9
MN1933WFR Entrée/sortie 4-21

4.6 CANDéveloppé à l'origine pour les applications automobiles, le bus CAN est un réseau série qui,de nos jours, est exploité dans un large éventail d'applications industrielles. Il offre descommunications série à bas coût et très haute fiabilité dans un environnement industriel ; la
probabilité d'une erreur non détectée est de 4,7 x 10-11. Comme il est optimisé pour latransmission de petits paquets de données, il permet la mise à jour rapide des périphériquesE/S connectés au bus.
Le protocole CAN définit uniquement les attributs physiques du réseau, c.-à-d. lesparamètres électriques, mécaniques, fonctionnels et la procédure de connexion physiqueentre périphériques. Les fonctionnalités réseau de haut niveau sont définies par un certainnombre de normes et de protocoles propriétaires ; CANopen est l'une des normes les plusutilisées pour la commande de machine dans les secteurs industriels tels que l'imprimerie etl'emballage.
Outre la prise en charge de CANopen, Baldor a développé un protocole propriétaire qu'il abaptisé Baldor CAN. Bien que les deux protocoles soient pris en charge par le NextMovePCI-2, ce n'est pas possible simultanément. En effet, le NextMove PCI-2 n'a qu'une seulevoie matérielle CAN. Des versions distinctes du firmware sont disponibles pour la prise encharge de ces deux protocoles.
Pour déterminer quel firmware est installé actuellement, démarrez Mint WorkBench etconnectez-vous au NextMove PCI-2 (voir la section 5). Au bas de la fenêtre MintWorkBench, la barre d'état affiche le nom du contrôleur, suivi de « CANopen » ou « BaldorCAN ». Si l'option souhaitée n'est pas affichée, il sera nécessaire de télécharger l'autrefirmware, via les options de menu Install System File (Installer fichiers système) et/ouDownload Firmware (Télécharger firmware) dans Mint WorkBench. Le fichier du firmware setrouve sur le CD Mint (OPT-SW-001) ; vous pouvez également le télécharger en allant surwww.abbmotion.com. Pour des détails sur le téléchargement de firmware, reportez-vous aufichier d’aide de Mint.
4-22 Entrée/sortie MN1933WFR

4.6.1 Connecteur CANopen - X17
Les connexions CANopen sont réalisées via le connecteur X17 du module de dérivation. Ils'agit d'un connecteur type D à 9 broches (mâle), à configuration de broches standardDS102 CiA. Le débit maximal (par défaut) sur le NextMove PCI-2 est de 500Kbit/s.
4.6.2 CANopenPour pouvoir utiliser le protocole CANopen, le firmware CANopen doit être chargé sur leNextMove PCI-2.
Baldor a mis en œuvre un protocole CANopen dans Mint (basé sur le « profil decommunication » CiA DS-301) qui prend en charge à la fois l'accès direct aux paramètres dupériphérique et la communication des données de process stratégiques. La conception duNextMove PCI-2 n'est pas conforme à un profil spécifique de périphérique CANopen(DS4xx), mais il est capable de prendre en charge et de communiquer avec lespériphériques suivants :
N'importe quel périphérique d'E/S TOR et analogique conforme au « Profil depériphérique pour modules génériques E/S » (CiA DS-401).
Les panels IHM (Interface homme-machine) Baldor, qui sont basés sur le « Profil depériphérique pour interfaces homme-machine » (DS403).
Les autres contrôleurs ABB avec prise en charge CANopen pour l'accès entrehomologues par le biais d'extensions des spécifications CiA (DS301 et DS302).
La fonctionnalité et les caractéristiques de tous les périphériques Baldor CANopen sontdéfinies dans des fiches de données électroniques individuelles (EDS) standardisées(format ASCII) se trouvant sur le CD Mint (OPT-SW-001), ou qu'on peut télécharger en allantsur www.abbmotion.com.
La Figure 13 illustre un réseau CANopen typique comprenant deux appareils NextMovePCI-2 et un panel IHM Baldor :
Emplace-ment
Module de dérivation, connecteur X17
Broche Nom Description
1 Shield Blindage du câble
2 CAN1_L Voie CAN 1 négative
3 CAN1 GND Référence 0 V pour CAN1
4 - (NC)
5 - (NC)
6 - (NC)
7 CAN1_H Voie CAN 1 positive
8 - (NC)
9 CAN1 V+ Alimentation CAN1 (12-24 V c.c.)
1 5
6 9
MN1933WFR Entrée/sortie 4-23

Figure 13: Branchements typiques d'un réseau CANopen
Remarque : La voie CAN du NextMove PCI-2 est opto-isolée ; une tension dans laplage 12-24 V c.c. doit donc être appliquée à la broche 5 du connecteurCAN.
La configuration et la gestion d'un réseau CANopen doivent se faire par le biais d'un seulnœud jouant le rôle de périphérique-maître du réseau. Ce rôle peut être assumé par leNextMove PCI-2 s'il est configuré en tant que nœud Network Manager (ID de nœud1), oupar un autre périphérique-maître CANopen.
Jusqu'à 126 nœuds CANopen (ID de nœud 2 à 127) peuvent être ajoutés sur le réseau parun nœud Manager NextMove PCI-2 via le mot clé Mint NODESCAN. Si la procédure aboutit, laconnexion aux nœuds peut ensuite être établie via le mot clé Mint CONNECT. Vous pouvezalors surveiller n'importe quel événement concernant le réseau ou les nœuds vial'événement Mint BUS1.
Remarque : Tous les mots clés MINT liés à CAN sont référencés soit à CANopen, soit àBaldor CAN, en utilisant le paramètre dot « bus ». Le NextMove PCI-2 aune voie physique de bus CAN qui permet de transporter l'un ou l'autreprotocole, mais Mint fait la distinction entre les protocoles grâce auparamètre « bus ». Pour CANopen, le paramètre « bus » doit être régléà 1.
Reportez-vous au fichier d'aide de Mint pour d'autres détails concernant CANopen, les motsclés Mint et les paramètres dot.
7
2
3
9
7
2TR TR
7
2
3
9
7
2
3
924V
0V6
5
1
2
24V
0V
CAN1_H
CAN1_L
Module de dérivation X17
Module de dérivation X17
Nœud d'extrémité
Paires torsadéesPaires
torsadées
Panel IHM Baldor
Bornier d'alimen-
tation
CANopen type D
4-24 Entrée/sortie MN1933WFR

4.6.3 Connecteur Baldor CAN - X18
Les connexions Baldor CAN sont réalisées via le connecteur RJ45 X18 du module dedérivation. Si le NextMove PCI-2 se trouve en bout de réseau Baldor CAN, une résistance determinaison doit être branchée en posant le cavalier de terminaison J7, libellé « BC Term »,sur le module de dérivation.
4.6.4 Baldor CANPour pouvoir utiliser ce protocole, le firmware Baldor CAN doit être chargé sur le NextMovePCI-2.
Baldor CAN est un protocole CAN propriétaire basé sur CAL. Il prend en charge uniquementune gamme spécifique de nœuds E/S et de panels IHM Baldor CAN, comme suit :
InputNode 8 (référence ION001-503) - nœud CAN à 8 entrées TOR.
OutputNode 8 (référence ION003-503) - nœud CAN à 8 sorties TOR.
RelayNode 8 (référence ION002-503) - nœud CAN à 8 relais.
IoNode 24/24 (référence ION004-503) - nœud CAN à 24 entrées TOR et 24 sorties TOR.
KeypadNode (référence KPD002-501) - nœud CAN de panel IHM avec affichage àcristaux liquides 4 x 20 et 27 touches à membranes libellées pour la commande de3 axes (X, Y, Z).
KeypadNode 4 (référence KPD002-505) - nœud CAN de panel IHM avec affichage àcristaux liquides 4 x 20 et 41 touches à membranes libellées pour la commande de4 axes (1, 2, 3, 4).
Un réseau Baldor CAN typique comprenant un NextMove PCI-2 et un panel IHM Baldor CANest illustré à la Figure 18.
Emplace-ment
Module de dérivation, connecteur X18
Broche Nom Description
1 - (NC)
2 - (NC)
3 - (NC)
4 CAN2 0V Référence 0 V pour le signal CAN
5 CAN2 V+ Alimentation CAN du nœud distant V+ (12-24 V c.c.)
6 - (NC)
7 CAN2_H Voie CAN 2 positive
8 CAN2_L Voie CAN 2 négative
1 8
MN1933WFR Entrée/sortie 4-25

Figure 14: Connexions du panel IHM Baldor CAN
La voie CAN du NextMove PCI-2 est opto-isolée ; une tension dans la plage 12-24 V c.c. doitdonc être appliquée à la broche 5 du connecteur CAN. À partir de cette alimentation, unrégulateur de tension interne fournit les 5 V c.c. requis pour le circuit isolé CAN. Les12-24 V c.c. requis peuvent être émis par le nœud E/S Baldor CAN ou l'alimentation dupanel IHM, qui est connectée en interne au connecteur CAN, tel qu'illustré à la Figure 14.
Sur les nœuds E/S Baldor CAN et les panels IHM, les cavaliers JP1 et JP2 doivent êtreréglés en position « 1 » (position basse) pour que le réseau fonctionne correctement. Ceciconfigure la voie CAN du nœud pour fonctionner sur les broches 1 et 2 des connecteursRJ45. Sur le nœud Baldor CAN, le cavalier JP3 permet de connecter une résistance determinaison interne de 120 Ω, à condition que le nœud se trouve en bout de réseau. Lescavaliers JP4 et JP5 permettent de configurer l'ID de nœud et le débit.
Jusqu'à 63 nœuds E/S Baldor (incluant 4 panels IHM au maximum) peuvent être ajoutés auréseau par le NextMove PCI-2 à l'aide du mot clé Mint NODETYPE. Vous pouvez alorssurveiller n'importe quel événement concernant le réseau ou les nœuds à l'aide del'événement Mint BUS2.
Remarque : Tous les mots clés MINT liés à CAN sont référencés soit à CANopen, soit àBaldor CAN, en utilisant le paramètre « bus ». Le NextMove PCI-2 a uneseule voie physique de bus CAN qui permet de transporter l'un ou l'autreprotocole, mais Mint fait la distinction entre les protocoles grâce auparamètre « bus ». Pour Baldor CAN, le paramètre « bus » doit être régléà 2.
Reportez-vous au fichier d'aide de Mint pour d'autres détails concernant Baldor CAN, lesmots clés Mint et les paramètres.
J1 / J2
24V
0VTR
24V
0V
J3
CAN2_L
CAN2_H1
2
4
5
4
3
2
1
7
8
4
5
JP3 TR
‘X18’Module de dérivation
Paire torsadée
Panel IHM Baldor CAN
Alimentationdu panel
IHM
4-26 Entrée/sortie MN1933WFR

4.6.5 Câblage CANComme un taux d'erreur de bit très faible via CAN n'est possible qu'avec un programme decâblage approprié, les conditions suivantes doivent être respectées : La ligne bifilaire du bus de données pourra être acheminée en configuration parallèle,
torsadée et/ou blindée, en fonction des exigences de la directive CEM. ABBrecommande l'utilisation d'un câble à paires torsadées en reliant le blindage au boîtier duconnecteur, dans le but de réduire les émissions RF et d'assurer l'immunité auxinterférences magnétiques.
Le bus doit être terminé aux deux extrémités (et non pas à des points intermédiaires)avec des résistances de valeur nominale de 120 Ω, afin de réduire les réflexions dessignaux électriques sur le bus, ce qui aidera les nœuds à interpréter correctement lestensions du bus. Si le NextMove PCI-2 se trouve en bout de réseau, assurez-vous que lecavalier approprié est posé sur la carte de dérivation. Ceci connectera une résistance determinaison interne. Pour le bus CANopen, le cavalier J8 libellé « CO Term » doit êtreinstallé. Pour le bus Baldor CAN, le cavalier J7 libellé « BC Term » doit être installé.
Tous les câbles et connecteurs doivent avoir une impédance nominale de 120 Ω. Lescâbles doivent avoir une résistance en longueur de 70 mΩ/m et un temps de lignenominal de 5 ns/m. Un éventail de câbles CAN appropriés, dont les numéros deréférence commencent par CBL004-5..., sont fournis par ABB.
La longueur maximale du bus dépend de la configurationbit-timing (débit). Le tableau ci-contre montre la longueurmaximale approximative du bus (au pire), en supposant untemps de propagation de 5 ns/m et un temps total efficaced'entrée-sortie interne de périphérique de 210 ns à 1 Mbit/s,de 300 ns à 500 - 250 Kbit/s, de 450 ns à 125 Kbit/s et de1,5 ms à 50 - 10 Kbit/s.
(1) Débit CAN non pris en charge sur Baldor CAN.
(2) Pour les longueurs de bus supérieures à environ1 000 m, des ponts ou répéteurs seront éventuellementrequis.
Le compromis entre la longueur du bus et le débit CAN doit être résolu au cas par caspour chaque application. Le débit CAN est paramétré via le mot clé BUSBAUD. Il importeque tous les nœuds du réseau soient configurés pour fonctionner au même débit.
La topologie de câblage d'un réseau CAN doit se rapprocher autant que possible decelle d'une structure à ligne/bus unique. Les lignes de liaison sont toutefois autorisées àcondition qu'elles soient limitées (<0,3 m à 1 Mbit/s).
Les connexions 0 V de tous les noeuds du réseau doivent être reliées ensemble via lecâblage CAN. Ceci permet de s'assurer que les signaux CAN transmis par le NextMovePCI-2 ou les périphériques CAN soient dans la plage de mode commun du circuit deréception d'autres nœuds présents sur le réseau.
4.6.5.1 Opto-isolation
Sur la carte de dérivation du NextMove PCI-2, la voie CAN est opto-isolée. Une tension dansla plage 12-24 V doit être appliquée sur la broche 5 du connecteur CAN. À partir de cettealimentation, un régulateur de tension interne fournit les 5 V c.c. à 100 mA requis pour lecircuit isolé CAN. Les câbles CAN fournis par ABB sont de « catégorie 5 », à courantnominal maximal de 1 A ; le nombre d'appareils NextMove PCI-2 pouvant être utilisés sur unmême réseau se limite donc à 10 au maximum. Le fonctionnement de la voie CAN est limitéen pratique à 500 Kbit/s du fait du temps de propagation des opto-isolateurs.
CANDébit
MaximumLongueur
1 Mbit/s500 Kbit/s250 Kbit/s125 Kbit/s100 Kbit/s(1)
50 Kbit/s20 Kbit/s10 Kbit/s
25 m100 m250 m500 m600 m1000 m2500 m(2)
5000 m(2)
du BUS
MN1933WFR Entrée/sortie 4-27

4.7 États de réinitialisationÀ la mise sous tension, le NextMove PCI-2 est maintenu dans un état non opérationnel desécurité, dit de réinitialisation matérielle. Il passe également à cet état de réinitialisationmatérielle si l'alimentation 5 V c.c. tombe sous 4,75 V c.c. environ, afin d'empêcher unfonctionnement incontrôlé qui serait dû à une perte de puissance de l'électronique. Quand leNextMove PCI-2 est dans l'état de réinitialisation matérielle, quelle que soit la raison, laplupart des interfaces pilotées passent à des états connus. Il est également possible que leNextMove PCI-2 se trouve dans l'état dit de réinitialisation logicielle. Il s'agit d'un étatopérationnel de sécurité, dans lequel seul le firmware bootloader du NextMove PCI-2s'exécute. Il ne faut pas confondre les états de réinitialisation matérielle et logicielle avec lemot clé Mint RESET, qui permet d'effacer les erreurs d'axe.
CommunicationsÀ la mise sous tension, les contrôleurs CAN resteront à l'état de réinitialisation et n'aurontaucun effet sur les bus CAN. Si la réinitialisation se produit pendant la transmission d'unmessage CAN, des erreurs risquent de se produire.La RAM à double accès (DPR) ne contiendra aucune information à la mise sous tension,mais sera accessible par le PC. Si la réinitialisation intervient en cours de fonctionnement, laRAM à double accès (DPR) restera dans son état courant.
Sorties TORToutes les sorties TOR sont inactives à la mise sous tension, quelle que soit la polarité. Ellesrepassent à l'état inactivé dès qu'une réinitialisation se produit.
Sorties analogiquesToutes les sorties analogiques sont réglées sur 0 V par le matériel à la mise sous tension et0 V sera rétabli lors d'une réinitialisation.
Moteur pas à pas / EncodeurLors d'une réinitialisation, les sorties du moteur pas à pas ne génèrent pas d'impulsions demoteur pas à pas et les entrées d'encodeur n'enregistrent pas d'entrée d'encodeur. Sil'appareil se réinitialise, toutes les données de position seront perdues.
4.7.1 Système « chien de garde »Le système « chien de garde » offre une protection matérielle en cas de dysfonctionnementdu firmware ou du programme « C » intégré. Si le système « chien de garde » n'est pas misà jour, le contrôleur passe à l'état de réinitialisation logicielle. Il est possible de le désactiverpendant le développement et le débogage du code intégré.
4-28 Entrée/sortie MN1933WFR

4.8 Résumé des connexions - câblage système minimumPour vous guider, la Figure 15 montre un exemple de câblage minimum typique requis pourpermettre le fonctionnement d'un NextMove PCI-2 avec un variateur à axe unique. Lebrochage du connecteur apparaît au Tableau 4.
Figure 15: Exemple de câblage système minimum
NextMove PCI-2 X7X8
X12
X1
VariateurModule de dérivationPC hôte
Error Out
Demand+Demand-
Enable*Gnd*
*Remarque :Ce diagramme illustre les contacts de relais utilisés en guise de commutateur en travers de l'entrée d'activation du variateur.
Si le variateur nécessite un signal d'activation de 24 V c.c. :
- Connectez Gnd à CGND (X8 broche 9).
- Connectez Enable à un côté du relais (X8 broche 5 pour le fonctionnement normalement fermé).
- Connectez l'autre côté du relais (X8 broche 7) à USR V+ (X broche 8).
Câble de connexion à 100 broches
Sortie d'encodeur venant du variateur ou du moteur
MN1933WFR Entrée/sortie 4-29

Le brochage illustré dans l'exemple est décrit ci-dessous :
Connecteurdu module
dedérivation
Broche Nom dusignal
Fonction Connexion sur variateur(Remarque : les connexions pourront être libellées différemment)
X7 1 Demand0 Signal de sortie de commande
Entrée Demand+
2 AGND Entrée Demand-
X12 - Encodeur Retour de position Sortie d'encodeur (ou provenant directement du moteur)
X1 2 DIN12Entrée d’erreur Sortie d'erreur
12 Common2
X8 7 Relay COM Connexion commune du relais
Entrée d’activation
6 Relay NO Connexion du relaisnormalement ouvert
Terre variateur/numérique
Tableau 4: Détails des connecteurs pour le câblage système minimum apparaissant à la Figure 15
4-30 Entrée/sortie MN1933WFR

Mode d’emploi5 Mode d’emploi
5.1 IntroductionLe logiciel Mint WorkBench contient plusieurs applications et utilitaires qui permettront deconfigurer, de régler et de programmer le NextMove PCI-2. Mint WorkBench et d'autresutilitaires se trouvent sur le CD Mint (OPT-SW-001) ; vous pouvez également les téléchargersur www.abbmotion.com.
5.1.1 Installation du pilote logicielQuand l'ordinateur hôte démarre, Windows détecte automatiquement le NextMove PCI-2 etréclame le pilote.
1. Annulez les messages demandant la recherche du pilote. Installez Mint WorkBenchcomme indiqué à la section 5.1.2 ci-dessous, et redémarrez le PC.
2. Après l'installation de Mint WorkBench, une nouvelle catégorie de Commande dumouvement sera listée dans le Gestionnaire de périphériques Windows.
Le NextMove PCI-2 est désormais prêt à être configuré à l’aide de Mint WorkBench.
5.1.2 Installation de Mint WorkBenchPour pouvoir installer Mint WorkBench, l'utilisateur doit être doté de droits d'accèsd'administrateur Windows. L'installation inclut la dernière version du pilote de périphériquesUSB.
5.1.2.1 Pour installer Mint WorkBench à partir du CD (OPT-SW-001)
1. Insérez le CD dans le lecteur.
2. Au bout de quelques secondes, l’assistant d’installation devrait automatiquementdémarrer. S’il ne s’affiche pas, sélectionnez Exécuter... dans le menu Démarrer deWindows et tapez
d:\start
où d représente la lettre du lecteur de CD.
Suivez les instructions qui s’affichent pour installer Mint WorkBench.
5.1.2.2 Pour installer Mint WorkBench à partir du site Web
Allez sur www.abbmotion.com, téléchargez Mint WorkBench, puis exécutez l'application.
5
MN1933WFR Mode d’emploi 5-1

5.2 Mint Machine CenterLe Mint Machine Center (MMC) est installé en même temps que le logiciel Mint WorkBench.Il permet de visualiser le réseau de contrôleurs connectés au sein d'un système. Lescontrôleurs et variateurs sont configurés individuellement à l'aide de Mint WorkBench.
Remarque : Si vous n'avez connecté qu'un seul NextMove PCI-2 sur le PC, vousn'avez sans doute pas besoin du MMC. Utilisez Mint WorkBench (voir lasection 5.3) pour configurer le NextMove PCI-2.
Figure 16: Logiciel Mint Machine Center
Le Mint Machine Center (MMC) permet d'avoir une vue d'ensemble du réseau de contrôleursauquel le PC a actuellement accès. Le MMC affiche un panneau Contrôleur à gauche, et unpanneau d'information à droite. Dans le panneau Contrôleur, sélectionnez l' objet Host(Hôte), puis cliquez sur Scan (Analyser) dans le panneau d'information. Le MMC procède àl'analyse de tous les contrôleurs connectés. En cliquant une fois sur le nom d'un contrôleur,vous verrez s'afficher diverses options dans le panneau d'information. En cliquant deux foissur le nom d'un contrôleur, vous lancez une instance de Mint WorkBench qui seraautomatiquement connectée à ce contrôleur.
La vue Application permet de modéliser et de décrire à l'écran l'agencement et le moded'organisation des contrôleurs sur votre machine. Vous pouvez faire glisser les contrôleurssur l'icône de la vue Application et les renommer pour leur donner un nom plus parlant :« Courroie 1, Contrôleur de conditionnement », par exemple. Pour les variateurs qui sontcontrôlés par un autre produit, tel que le NextMove PCI-2, vous pouvez les faire glisserdirectement sur l'icône du NextMove PCI-2, pour créer une représentation visible de lamachine. Vous pouvez ajouter un texte de description du système et des fichiers associés etenregistrer l'agencement ainsi obtenu sous forme de « MMC Workspace » (Espace detravail MMC). La prochaine fois que vous devez administrer le système, il suffit de chargerl'espace de travail, qui se connecte automatiquement à tous les contrôleurs requis. Pour desdétails complets sur le MMC, reportez-vous au fichier d’aide de Mint.
Barres d'outils
Panneau Contrôleur
Barre de menus
Panneau d'information
5-2 Mode d’emploi MN1933WFR

5.2.1 Démarrage du MMC1. Dans le menu Démarrer de Windows, sélectionnez Programmes, Mint WorkBench, Mint
Machine Center.
2. Dans le panneau Contrôleur, assurez-vous queHost (Hôte) est sélectionné. Dans le panneaud'information, cliquez sur Scan (Analyser).
3. Une fois la recherche terminée, cliquez sur« NextMove PCI-2 » dans le panneau Contrôleurpour le sélectionner.
MN1933WFR Mode d’emploi 5-3

4. Le NextMove PCI-2 n'exécute pas encore lefirmware ; vous devez l'installer maintenant.
Cliquez sur l'onglet Firmware au bas du panneaud'information.
5. Dans le tableau, cliquez sur la dernière version dufirmware. Si aucun firmware n'est listé, cliquez sur InstallSystem File... (Installer fichier système) et trouvezun fichier .msx correspondant. Ces fichiers sonttéléchargeables en allant sur www.abbmotion.com.
6. Cliquez sur Download to Controller (Téléchargersur Contrôleur).
Une fois le téléchargement du firmware terminé,l'icône verte, en regard de « NextMovePCI-2 Card0 » dans le panneau Contrôleur, s'affiche en vert.
7. Cliquez sur l'onglet Main (Principal) au bas dupanneau d'information, puis cliquez sur LaunchWorkBench (Lancer WorkBench).
Une instance de Mint WorkBench s'ouvre. LeNextMove PCI-2 sera déjà connecté à l'instance deMint WorkBench et prêt à configurer.
5-4 Mode d’emploi MN1933WFR
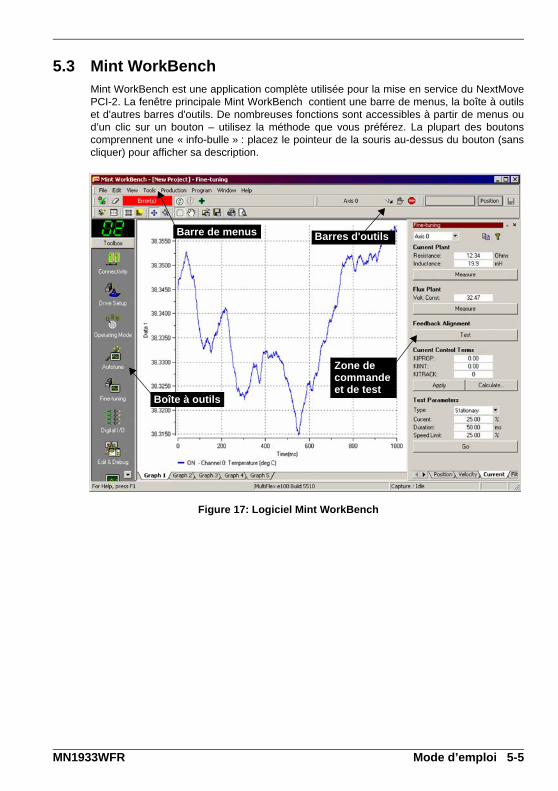
5.3 Mint WorkBenchMint WorkBench est une application complète utilisée pour la mise en service du NextMovePCI-2. La fenêtre principale Mint WorkBench contient une barre de menus, la boîte à outilset d'autres barres d'outils. De nombreuses fonctions sont accessibles à partir de menus oud’un clic sur un bouton – utilisez la méthode que vous préférez. La plupart des boutonscomprennent une « info-bulle » : placez le pointeur de la souris au-dessus du bouton (sanscliquer) pour afficher sa description.
Figure 17: Logiciel Mint WorkBench
Barres d'outilsBarre de menus
Boîte à outils
Zone de commandeet de test
MN1933WFR Mode d’emploi 5-5

5.3.1 Fichier d'aideMint WorkBench comprend un fichier d’aide complet qui renferme des informations surchaque mot clé Mint et sur l'utilisation de Mint WorkBench, de même que des rubriquesd’aide sur la commande du mouvement. Vous pouvez afficher le fichier d’aide à tout momenten appuyant sur F1. Dans la partie gauche de la fenêtre d’aide, l’onglet Contents (Sommaire)
indique l’arborescence du fichier d’aide ; chaque livre contient plusieurs rubriques .L’onglet Index fournit une liste alphabétique de toutes les rubriques du fichier, dans laquellevous pouvez faire une recherche par nom. L’onglet Search (Rechercher) permet derechercher des mots ou des expressions qui apparaissent quelque part dans le fichier d’aide.De nombreux mots et expressions sont soulignés et colorés (en bleu, normalement) pourindiquer qu’il s’agit de liens. Cliquez simplement sur le lien pour accéder à un mot cléassocié. Dans la plupart des rubriques de mot clé, la liste des liens See Also (Voir aussi)pertinents s'affiche en premier.
Figure 18: Fichier d’aide de Mint WorkBench
Pour obtenir de l’aide sur l’utilisation de Mint WorkBench, cliquez sur l’onglet Contents
(Sommaire), puis sur le petit signe plus jouxtant l’icône du livre Mint WorkBench & Mint
Machine Center. Cliquez deux fois sur un nom de rubrique pour en afficher le contenu.
5-6 Mode d’emploi MN1933WFR

5.3.2 Démarrage de Mint WorkBench
Remarque : Si vous avez déjà utilisé le MMC pour installer le firmware et lancé uneinstance de Mint WorkBench, passez directement à la section 5.4 pourcontinuer la configuration.
1. Dans le menu Démarrer de Windows, sélectionnez Programmes, Mint WorkBench, MintWorkBench.
2. Dans la boîte de dialogue d’ouverture, cliquez sur Start New Project... (Démarrer unnouveau projet).
MN1933WFR Mode d’emploi 5-7
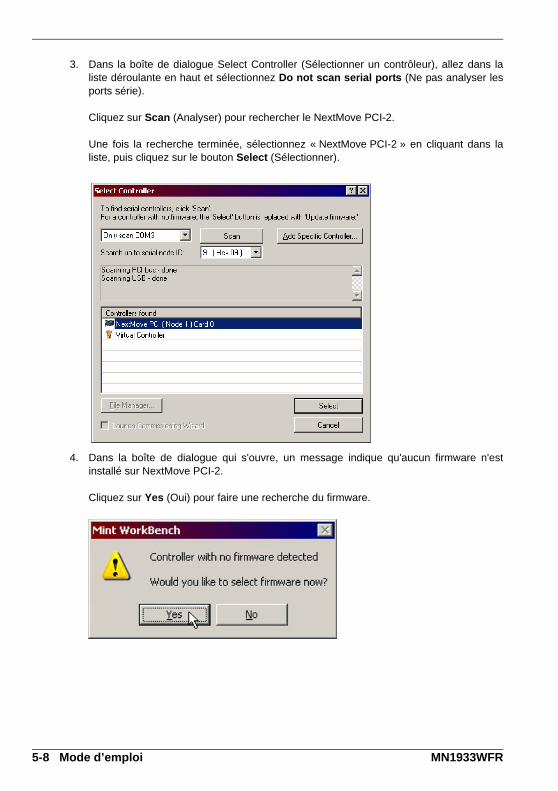
3. Dans la boîte de dialogue Select Controller (Sélectionner un contrôleur), allez dans laliste déroulante en haut et sélectionnez Do not scan serial ports (Ne pas analyser lesports série).
Cliquez sur Scan (Analyser) pour rechercher le NextMove PCI-2.
Une fois la recherche terminée, sélectionnez « NextMove PCI-2 » en cliquant dans laliste, puis cliquez sur le bouton Select (Sélectionner).
4. Dans la boîte de dialogue qui s'ouvre, un message indique qu'aucun firmware n'estinstallé sur NextMove PCI-2.
Cliquez sur Yes (Oui) pour faire une recherche du firmware.
5-8 Mode d’emploi MN1933WFR

5. Dans la boîte de dialogue Choose Firmware (Choisir firmware), cliquez dans la listedéroulante Controller Type (Type de contrôleur) et sélectionnez « NextMove PCI-2 ».
Dans le tableau, cliquez sur la version la plus récente du firmware, puis sur Downloadto Controller (Télécharger sur le contrôleur).
Le firmware sera téléchargé sur le NextMove PCI-2. (Vous verrez éventuellements'afficher un message indiquant que Mint WorkBench a détecté le nouveau firmware.Cliquez sur OK pour continuer).
Mint WorkBench lit les données provenant du NextMove PCI-2. Une fois la lectureterminée, le mode Edit & Debug (Édition et débogage) s’affiche. L’installation du logicielprend fin ici.
MN1933WFR Mode d’emploi 5-9

5.4 Configuration d’un axeLe NextMove PCI-2 est capable de commander des axes de servomoteur et de moteurs pasà pas. Cette section décrit comment configurer ces deux types d’axe.
5.4.1 Sélection du type d’axeUn axe peut être configuré comme un axe de servomoteur ou un axe de moteur pas à pas.Avec la configuration usine, tous les axes sont non assignés (désactivés) ; par conséquent,vous devrez assigner « moteur pas à pas » ou « servomoteur » à un axe avant de pouvoirl’utiliser. Le nombre de canaux de matériel de servomoteur et de moteur pas à pas définit lenombre d’axes pouvant être configuré pour chacun. Dans l’exemple suivant, l’assistant deconfiguration des axes de Mint WorkBench permettra d’assigner des axes :
1. Dans la boîte à outils, cliquez sur l’icôneAxis Config (Config axe).
2. Pour chaque axe requis, cliquez dans lacolonne Configuration et sélectionnezServo (Servomoteur) ou Stepper (Moteurpas à pas) dans la liste déroulante.
L’assistant Axis Config (Config axe)assigne automatiquement un HardwareChannel (Voie de matériel) à l’axe. Parexemple, Servo Channel 0 signifie quel'axe du servomoteur utilisera la sortieDemand0 du contrôleur (connecteur X7du module de dérivation, broche 1) ;Stepper Channel 1 signifie que l'axe dumoteur pas à pas utilisera les sortiesSTEP1 et DIR1 du contrôleur (connecteur X10 du module de dérivation, broches 4, 5, 8et 9). Vous pouvez éventuellement modifier la voie de matériel affectée par défaut encliquant dans la colonne Hardware Channel (Voie de matériel) avant de choisir une autrevoie. Cela signifie que l’axe n’utilisera plus les sorties physiques numérotéescorrespondantes (Demandx ou STEPx et DIRx) ; par conséquent, faites très attentionlors du branchement d'équipement externe.
3. Cliquez sur Finish (Terminer) pourexécuter l’assistant Axis Config (Configaxe). La configuration d’axe seratéléchargée sur le NextMove PCI-2.
5-10 Mode d’emploi MN1933WFR

Remarque : Si le message d’erreur « Hardware channel required is in use » (Voie déjàprise) ou « Hardware not available » (Matériel indisponible) s’affiche, laconfiguration n’est pas téléchargée. Le nombre d'axes de servomoteur oude moteur pas à pas sélectionnés est probablement supérieur au nombred'axes physiques de ce type disponibles sur le NextMove PCI-2. Uneerreur se produit également si la même voie a été sélectionnée pour plusd'un axe de servomoteur ou de moteur pas à pas.
Il est recommandé de toujours désactiver (OFF) les axes inutilisés, dans la mesure où lesaxes disposeront ainsi d’un temps de traitement supérieur. Si l'axe est réglé sur Virtual(Virtuel), cela signifie qu’il peut être utilisé pour simuler le mouvement dans le contrôleur,mais n’utilise aucune sortie physique (voie de matériel). Pour des détails sur les mots clésCONFIG et AXISCHANNEL, reportez-vous au fichier d’aide de Mint.
5.4.2 Sélection d’une échelleMint définit tous les mots clés de mouvement liés à la vitesse et à la position en termes dequadratures d'encodeur dénombrées (pour servomoteurs), ou de pas (pour moteurs pas àpas). Le nombre de quadratures (ou pas) est divisé par la valeur SCALEFACTOR, vouspermettant d’utiliser les unités les mieux adaptées à votre application. L’unité résultant de ladéfinition d'une d’échelle porte le nom d’unité utilisateur (uu).
Prenons l'exemple de l’utilisation d’un moteur doté d’un encodeur 1 000 lignes. Il permettrale dénombrement de 4 000 quadratures par tour. Si un SCALEFACTOR n’est pas défini, unecommande Mint impliquant la distance, la vitesse ou l’accélération pourra être nécessaireafin de permettre l’utilisation d’un nombre élevé indiquant un mouvement significatif. Parexemple MOVER(0)=16000 (Move Relative) tournerait le moteur de 16 000 quadratures –soit 4 tours seulement. En définissant un SCALEFACTOR de 4 000, l’unité utilisateur devientle tour. La commande MOVER(0)=4 plus compréhensible pourrait désormais être utiliséepour donner 4 tours au moteur.
Dans les applications impliquant un mouvement linéaire, une valeur appropriée pourSCALEFACTOR permettrait aux commandes d’exprimer des valeurs en distance linéaire(pouces, pieds ou millimètres, par exemple).
1. Dans la boîte à outils, cliquez sur l’icôneParameters (Paramètres).
2. Cliquez sur l’onglet Scale (Échelle).
3. Cliquez sur la liste déroulante Axis (Axe) poursélectionner l’axe. Chaque axe peut utiliser uneéchelle différente au besoin.
MN1933WFR Mode d’emploi 5-11

4. Entrez une valeur dans le champ Scale (Échelle).
5. Cliquez sur Apply (Appliquer).
Le facteur d’échelle est ainsi immédiatement définipour l’axe sélectionné et il restera dans leNextMove PCI-2 jusqu’à la définition d’une autreéchelle ou la mise hors tension du NextMove PCI-2.
5.4.3 Définition de la sortie d’activation du variateurLa sortie d’activation du variateur permet au NextMove PCI-2 d’activer le variateur externepour permettre le mouvement, ou de le désactiver en cas d’erreur. Chaque axe peut êtreconfiguré avec sa propre sortie d’activation de variateur, ou partager une sortie avec d’autresaxes. Si une sortie est partagée, une erreur sur l’un des axes partageant la sortie entraîneraleur désactivation en bloc.
La sortie d’activation du variateur peut être le relais, ou une sortie TOR.
1. Dans la boîte à outils, cliquez sur l’icôneDigital I/O (E/S TOR).
2. En bas de l’écran Digital I/O (E/S TOR),cliquez sur l’onglet Digital Outputs (SortiesTOR).
Sur la gauche de l’écran, vous verrez unecolonne d’icônes jaunes - High, Low, Rising,Falling et Rise/Fall. Ces icônes décrivent lecomportement de la sortie lorsqu’elle estactivée (pour entraîner l’axe).
3. Si vous comptez utiliser le relais, ignorez cetteétape et passez directement à l’étape 4.
Si vous allez utiliser une sortie TOR, faitesglisser l’icône jaune appropriée au-dessus del’icône OUT (SORTIE) grise, qui servira desortie d’activation du variateur. Sa couleurpasse au bleu clair.
5-12 Mode d’emploi MN1933WFR

4. Si vous allez utiliser le relais, faites glisser l’icône grise Relay0 au-dessus de l’icônegrise X axis dans la partie droite de l’écran. Pour que plusieurs axes utilisent le relais,reprenez la procédure pour les autres axes.
Si vous utilisez une sortie TOR, faites glisser l’icône OUT bleu clair au-dessus de l’icôned’axe X axis grise, dans la partie droite de l’écran. Pour que plusieurs axes utilisent lasortie d’activation du variateur, reprenez la procédure pour les autres axes.
5. Cliquez sur Apply (Appliquer) en bas del’écran. La configuration de sortie est ainsienvoyée au NextMove PCI-2.
5.4.4 Test de la sortie d’activation du variateur1. Dans la barre d’outils principale de Mint
WorkBench, cliquez sur le bouton Axis 0-7(Axe 0-7). Dans la boîte de dialogue SelectDefault Axes (Sélection des axes par défaut),sélectionnez les axes devant êtrecommandés. Cliquez sur OK pour fermer laboîte de dialogue.
2. Dans la barre d’outils principale de MintWorkBench, cliquez sur le bouton d’activationdu variateur. Cliquez une deuxième fois sur cebouton. À chaque clic sur ce bouton, la ou lessorties d’activation du variateur correspondantaux axes sélectionnés basculent.
Lorsque le bouton apparaît en positionenfoncée, le variateur devrait être activé.Lorsque le bouton apparaît en positionrelevée, le variateur devrait être désactivé.
Si ce n’est pas le cas ou si l’action du bouton est inversée, vérifiez les branchementsélectriques entre le module de dérivation et le variateur.
Si vous utilisez la sortie de relais, assurez-vous d’utiliser le connecteur normalementouvert, ou normalement fermé qui convient.
Si vous utilisez une sortie TOR, assurez-vous qu’elle utilise la méthode dedéclenchement (high, low, edge ou rise/fall) correcte attendue par le variateur.
MN1933WFR Mode d’emploi 5-13
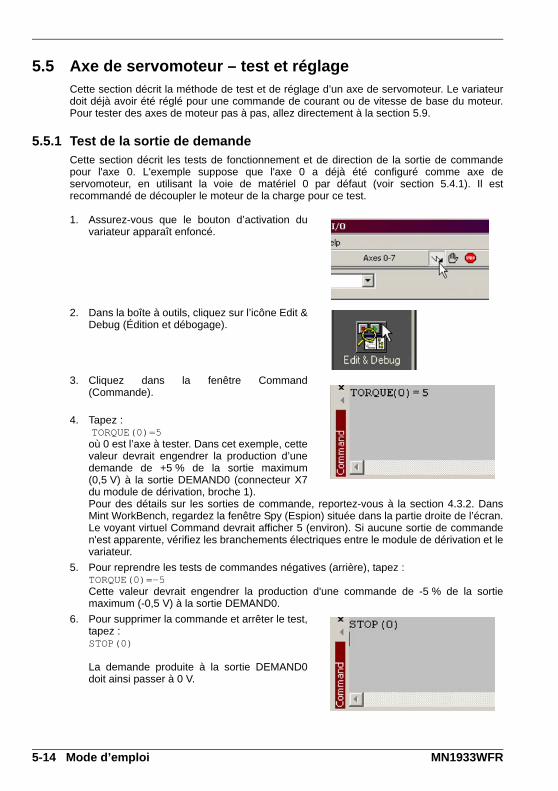
5.5 Axe de servomoteur – test et réglageCette section décrit la méthode de test et de réglage d’un axe de servomoteur. Le variateurdoit déjà avoir été réglé pour une commande de courant ou de vitesse de base du moteur.Pour tester des axes de moteur pas à pas, allez directement à la section 5.9.
5.5.1 Test de la sortie de demandeCette section décrit les tests de fonctionnement et de direction de la sortie de commandepour l'axe 0. L'exemple suppose que l'axe 0 a déjà été configuré comme axe deservomoteur, en utilisant la voie de matériel 0 par défaut (voir section 5.4.1). Il estrecommandé de découpler le moteur de la charge pour ce test.
1. Assurez-vous que le bouton d’activation duvariateur apparaît enfoncé.
2. Dans la boîte à outils, cliquez sur l’icône Edit &Debug (Édition et débogage).
3. Cliquez dans la fenêtre Command(Commande).
4. Tapez : TORQUE(0)=5où 0 est l’axe à tester. Dans cet exemple, cettevaleur devrait engendrer la production d’unedemande de +5 % de la sortie maximum(0,5 V) à la sortie DEMAND0 (connecteur X7du module de dérivation, broche 1).Pour des détails sur les sorties de commande, reportez-vous à la section 4.3.2. DansMint WorkBench, regardez la fenêtre Spy (Espion) située dans la partie droite de l’écran.Le voyant virtuel Command devrait afficher 5 (environ). Si aucune sortie de commanden'est apparente, vérifiez les branchements électriques entre le module de dérivation et levariateur.
5. Pour reprendre les tests de commandes négatives (arrière), tapez :TORQUE(0)=-5Cette valeur devrait engendrer la production d'une commande de -5 % de la sortiemaximum (-0,5 V) à la sortie DEMAND0.
6. Pour supprimer la commande et arrêter le test,tapez :STOP(0)
La demande produite à la sortie DEMAND0doit ainsi passer à 0 V.
5-14 Mode d’emploi MN1933WFR

5.5.2 Présentation de la commande en boucle ferméeCette section décrit les principes de base de la commande en boucle fermée. Si vousconnaissez bien la commande en boucle fermée, passez directement à la section 5.6.1.
Quand le déplacement d’un axe est requis, le logiciel de commande NextMove PCI-2 traduitceci en une tension de sortie demandée. Ceci permet de commander le variateur quialimente le moteur. Un encodeur ou un résolveur sur le moteur mesure la position du moteur.Tous les 1 ms* (valeur réglable à l’aide du mot clé LOOPTIME), le NextMove PCI-2 compareles positions demandées et les positions mesurées. Il calcule ensuite la demandenécessaire pour minimiser la différence entre elles, connue sous le nom d’erreur de suivi.
Ce système de mesure / correction permanente porte le nom de « commande en bouclefermée ». [Pour illustrer ce principe, imaginons que vous vous trouviez arrêté dans votre voiture à uneintersection. Vous allez continuer tout droit quand le feu passera au vert, tout comme lavoiture à côté de vous appelée Demande. Toutefois, vous n’allez pas faire la courseavecDemande - votre travail en tant que contrôleur (NextMove PCI-2) consistant à resterexactement au même niveau que Demande, en regardant par la fenêtre pour mesurer votreposition ].
Le principal outil utilisé par le NextMove PCI-2 pour corriger l’erreur porte le nom de gainproportionnel (KPROP). Un contrôleur proportionnel très simple multiplierait simplement laquantité d’erreur par le gain proportionnel et appliquerait le résultat au moteur [plusDemande prend de l’avance ou du retard sur vous, plus vous appuyez sur/relâchez la pédaled’accélérateur].
Si le gain proportionnel est trop élevé, un dépassement se produira, se traduisant par desvibrations du moteur autour de la position désirée avant stabilisation [Vous appuyez si fortsur la pédale d’accélérateur que vous dépassez Demande. Pour essayer de rester à sonniveau, vous relâchez la pédale d’accélérateur, mais finissez par vous faire dépasser parDemande. Vous continuez à répéter ce cycle et au bout de quelques tentatives, vous finissezau niveau de Demande, en vous déplaçant à vitesse continue. C’est ce que vous cherchiezà faire, mais cela vous a pris du temps pour y arriver.].Si le gain proportionnel est encore augmenté, le système devient instable [vous continuez àappuyer si fort sur la pédale d’accélérateur / la relâcher si brusquement que vous ne vousdéplacez jamais à vitesse constante].
Pour réduire l’instabilité naissante, on fait appel au gain de retour de vitesse (KVEL). Cegain résiste au mouvement rapide du moteur et permet au gain proportionnel d’être régléplus haut avant le commencement des vibrations. Un autre gain - le gain dérivé (KDERIV) -permet également d'obtenir un effet similaire.
Avec un gain proportionnel et un gain de retour de vitesse (ou un gain dérivé), il est possiblequ’un moteur s’arrête avec une petite erreur de suivi (Demande s’est arrêtée et vous vousêtes aussi arrêté, mais pas exactement à son niveau ]. Le NextMove PCI-2 essaie de corriger l’erreur, mais comme elle est infime, le coupledemandé ne suffira peut-être pas à surmonter la friction.
* L’intervalle d’échantillonnage de 1 ms peut être modifié à l’aide du mot clé LOOPTIME à500µs ou 200µs.
Ce problème est résolu par ce qu’on appelle gain intégré (KINT). Le gain intégral totalisel’erreur dans le temps ; ainsi, le couple moteur est progressivement augmenté jusqu’àréduction de l’erreur de positionnelle à zéro (comme si quelqu’un poussait progressivementplus fort votre voiture pour l’amener au niveau de Demande).
MN1933WFR Mode d’emploi 5-15

Toutefois, si la charge imposée au moteur est trop importante (s’il est soumis à une lourdecharge suspendue, par exemple), il est possible que la sortie augmente à 100 % de lademande. Cet effet peut être limité en utilisant le mot clé KINTLIMIT, qui limite l’effet deKINT en le ramenant à un pourcentage donné de la sortie de commande. Un autre mot clé -KINTMODE - peut même désactiver l’action intégrée quand elle est inutile.
La Correction aval de vitesse (KVELFF) et la Correction aval d’accélération (KACCEL),sont les autres gains, décrits ci-dessous.
En résumé, les règles suivantes peuvent servir de guide :
KPROP : l’augmentation de KPROP accélérera la réponse et réduira l’effet desperturbations et des écarts de charge. L’effet secondaire d’une augmentation du KPROPest l’augmentation simultanée du dépassement ; par conséquent, si KPROP est réglétrop haut, le système deviendra instable. L’objectif consiste à régler le gain proportionnelle plus haut possible sans provoquer de dépassement, d’instabilité ou de recherche surun front d’impulsion d'encodeur à l’état stationnaire (le moteur bourdonnera).
KVEL : ce gain a un effet d’amortissement et peut être augmenté pour réduire toutdépassement. Si le KVEL est trop élevé, il amplifiera tout bruit au niveau de la mesurede vitesse et introduira des oscillations.
KINT : ce gain a un effet déstabilisant, mais en petite quantité peut servir à réduire touteerreur d’état stationnaire. Par défaut, KINTMODE est réglé de manière à ce que KINTsoit ignoré, ou appliqué seulement pendant des périodes de vitesse constante.
KINTLIMIT : la limite d’intégration détermine la valeur maximum de l’effet de l’actionintégrée. Elle est indiquée sous la forme d’un pourcentage de la demande à pleineéchelle.
KDERIV : Ce gain a un effet d'amortissement. Le gain dérivé a le même effet que leretour de vitesse, si le retour de vitesse est égal à la correction aval de vitesse.
KVELFF : il s’agit d’un taux de correction aval et, à ce titre, il n'a pas le même effet sur lesystème d’asservissement que les gains précédents. KVELFF se situant en dehors de laboucle fermée, il est sans effet sur la stabilité du système. Ce gain permet une réponseplus rapide à la commande de changement de vitesse avec moins d’erreurs de suivi ;par exemple, vous augmenteriez KVELFF pour réduire l’erreur de suivi à la section derotation d’un déplacement trapézoïdal. Le test de déplacement trapézoïdal peut servir àpréciser ce gain. Il est particulièrement utile avec les systèmes d’asservissementcommandés par la vitesse.
KACCEL : vise à réduire les dépassements de vitesse lors de déplacements à forteaccélération. Du fait de la quantification des données de position et de la vitesse de laboucle d'asservissement, pour que la correction aval d'accélération affecte la boucled'asservissement, l'accélération de l'axe doit dépasser 1 000 000 cycles d'encodeur parseconde.
5-16 Mode d’emploi MN1933WFR

Figure 19: La boucle d'asservissement du NextMove PCI-2
+
-
-
+
++ +
+
++
Acc
élér
atio
nde
ma
ndée V
itess
e d
em
andé
e
Po
sitio
n de
ma
ndée
Vite
sse
me
suré
e
Pos
ition
m
esur
ée
Gén
éra
teur
de
pro
fil
KA
CC
EL
Cor
rect
ion
aval
d'ac
célé
ratio
n
KV
ELF
FC
orre
ctio
n av
alde
vite
sse
KP
RC
PG
ain
KD
ER
IV
KIN
TG
ain
inté
gra
l
KD
ER
VG
ain
KD
ER
IV
DA
CL
IMIT
MA
XR
est
rein
dre
so
rtie
du
co
nve
rtis
seu
r a
na
log
iqu
e
KV
EL
Re
tou
rde
vite
sse
Inte
nsi
té d
e
sort
ie
Ser
vom
ote
ur
MN1933WFR Mode d’emploi 5-17
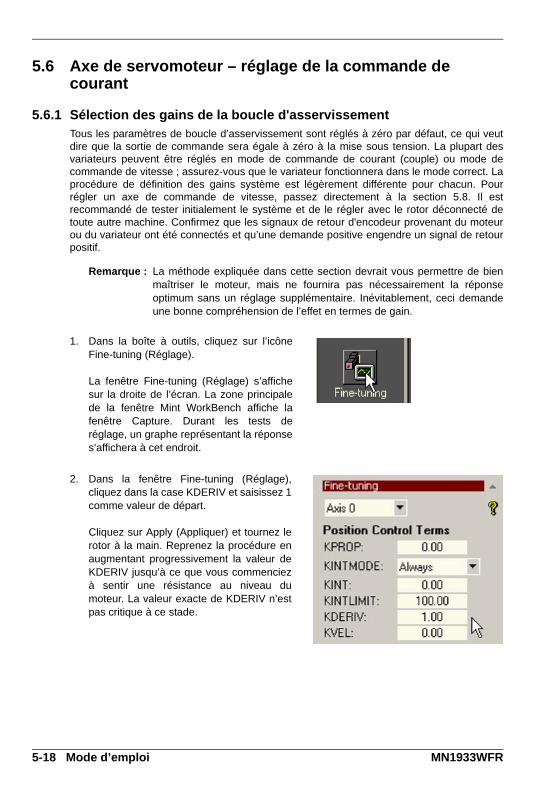
5.6 Axe de servomoteur – réglage de la commande de courant
5.6.1 Sélection des gains de la boucle d'asservissementTous les paramètres de boucle d’asservissement sont réglés à zéro par défaut, ce qui veutdire que la sortie de commande sera égale à zéro à la mise sous tension. La plupart desvariateurs peuvent être réglés en mode de commande de courant (couple) ou mode decommande de vitesse ; assurez-vous que le variateur fonctionnera dans le mode correct. Laprocédure de définition des gains système est légèrement différente pour chacun. Pourrégler un axe de commande de vitesse, passez directement à la section 5.8. Il estrecommandé de tester initialement le système et de le régler avec le rotor déconnecté detoute autre machine. Confirmez que les signaux de retour d'encodeur provenant du moteurou du variateur ont été connectés et qu’une demande positive engendre un signal de retourpositif.
Remarque : La méthode expliquée dans cette section devrait vous permettre de bienmaîtriser le moteur, mais ne fournira pas nécessairement la réponseoptimum sans un réglage supplémentaire. Inévitablement, ceci demandeune bonne compréhension de l’effet en termes de gain.
1. Dans la boîte à outils, cliquez sur l’icôneFine-tuning (Réglage).
La fenêtre Fine-tuning (Réglage) s’affichesur la droite de l’écran. La zone principalede la fenêtre Mint WorkBench affiche lafenêtre Capture. Durant les tests deréglage, un graphe représentant la réponses’affichera à cet endroit.
2. Dans la fenêtre Fine-tuning (Réglage),cliquez dans la case KDERIV et saisissez 1comme valeur de départ.
Cliquez sur Apply (Appliquer) et tournez lerotor à la main. Reprenez la procédure enaugmentant progressivement la valeur deKDERIV jusqu’à ce que vous commenciezà sentir une résistance au niveau dumoteur. La valeur exacte de KDERIV n’estpas critique à ce stade.
5-18 Mode d’emploi MN1933WFR

3. Cliquez sur la liste déroulante KPROP etentrez une valeur qui représente environun quart de la valeur de KDERIV. Si lemoteur commence à vibrer, diminuez lavaleur de KPROP ou augmentez celle deKDERIV jusqu’à ce que les vibrationscessent. De légères modifications suffirontparfois.
4. Dans la liste déroulante Move Type (Typede déplacement), assurez-vous que le typechoisi est Step (Pas).
5. Entrez une distance de mouvementtrapézoïdal dans le champ Distance. Il estrecommandé de choisir une valeur quientraînera la rotation du moteur sur unecourte distance, un tour par exemple.
Remarque : La distance dépend de l’échelle définie à la section 5.4.2. Si vous définissez une échelle utilisant le tour comme unité (ou une autreunité de mesure de votre choix), il s’agira de l’unité utilisée ici. Si vous nedéfinissez pas d’échelle, la valeur entrée ici correspondra aux comptesd'encodeur.
6. Entrez une durée du mouvement ensecondes dans le champ Duration (Durée).Elle doit être courte - 0,15 seconde parexemple.
7. Cliquez sur Go (Aller).
Le NextMove PCI-2 réalise le mouvement et le moteur tourne. Dès que le mouvementest terminé, Mint WorkBench télécharge les données capturées à partir duNextMove PCI-2. Les données s'affichent ensuite dans la fenêtre Capture sous forme degraphe.
Remarque : Les graphes que vous verrez ne correspondront pas exactement auxillustrations ! En effet, chaque moteur produit une réponse différente.
8. En cochant les cases situées sous legraphe, sélectionnez les tracés voulus, parexemple Demand position (Positiondemandée) et Measured position (Positionmesurée).
ON - Axe 0 : Position mesurée (uu)
ON - Axe 0 : Position demandée (uu)
MN1933WFR Mode d’emploi 5-19

5.6.2 Réponse sous-amortieSi le graphe indique que la réponse est sous-amortie (elle dépasse la demande, commeindiqué à la figure 20), la valeur de KDERIV devra être augmentée pour amortir davantage lemouvement. Si le dépassement est excessif ou si une oscillation s’est produite, il vousfaudra peut-être réduire la valeur de KPROP.
Figure 20: Réponse sous-amortie
9. Cliquez dans les champs KDERIV et/ouKPROP et apportez les modificationsrequises. La réponse idéale apparaît à lasection 5.6.4.
Position mesurée
Position demandée
Temps (ms)
5-20 Mode d’emploi MN1933WFR

5.6.3 Réponse suramortieSi le graphe indique que la réponse est suramortie (elle atteint la demande trop lentement,comme indiqué à la figure21), la valeur de KDERIV devra être diminuée pour réduirel’amortissement du mouvement. Si le suramortissement est excessif, il vous faudra peut-êtreaugmenter la valeur de KPROP.
Figure 21: Réponse suramortie
10. Cliquez dans les champs KDERIV et/ouKPROP et apportez les modificationsrequises. La réponse idéale apparaît à lasection 5.6.4.
Temps (ms)
Position mesurée
Position demandée
MN1933WFR Mode d’emploi 5-21

5.6.4 Réponse critiquement amortieSi le graphe indique que la réponse atteint rapidement la demande et ne la dépasse que demanière infime, on peut considérer qu’il s’agit d’une réponse idéale pour la plupart dessystèmes.Voir la figure 22.
Figure 22: Réponse critiquement amortie (idéale)
Temps (ms)
Position mesurée
Position demandée
5-22 Mode d’emploi MN1933WFR

5.7 Axe de servomoteur – élimination des erreurs d’état stationnaireDans les systèmes où l'exactitude du positionnement est requise, il est souvent nécessairede positionner à ±1 compte d'encodeur. Le gain proportionnel (KPROP) n’est normalementpas capable de réaliser un positionnement aussi précis, dans la mesure où une très légèreerreur de suivi produira uniquement une faible demande pour le variateur, qui risque de nepas suffire à surmonter la friction mécanique (ceci est particulièrement vrai dans lessystèmes commandés par courant). Cette erreur peut être surmontée en appliquant un gainintégral. Le gain intégral (KINT) fonctionne par accumulation de l’erreur de suivi dans letemps pour produire une demande suffisante pour déplacer le moteur à la position requisesans erreur de suivi (erreur 0).KINT peut par conséquent surmonter les erreurs causées par les effets gravitationnels telsque les tables linéaires de mouvement vertical. Avec des variateurs commandés parcourant, une sortie de commande non nulle est requise pour maintenir la charge à la positioncorrecte, afin d'obtenir une erreur de suivi nulle.
Faites attention lorsque vous définissez KINT, car une valeur élevée engendrera uneinstabilité durant les déplacements. Une valeur typique de KINT serait de 0,1. L’effet de KINTdevrait également être limité en définissant la limite d’intégration (KINTLIMIT) à la plus petitevaleur possible suffisante pour surmonter la friction ou les charges statiques, par exemple 5.Ceci limitera la contribution du terme intégré à 5 % de la plage complète de sortie duconvertisseur analogique.
1. Entrez 0,1 comme faible valeur de départdans le champ KINT, par exemple.
2. Entrez 5 dans le champ KINTLIMIT.
Avec le NextMove PCI-2, l’action de KINT et deKINTLIMIT peut être définie pour fonctionner dans plusieurs modes :
Never (Jamais) – KINT n’est jamais appliqué
Always (Toujours) – KINT est toujours appliqué
Smart (Intelligent) – KINT est uniquement appliqué lorsque la vitesse demandée estnulle ou constante.
Steady State (État stationnaire) – KINT est uniquement appliqué lorsque la vitessedemandée est nulle.
Cette fonction peut être sélectionnée sur la liste déroulante KINTMODE.
MN1933WFR Mode d’emploi 5-23

5.8 Axe de servomoteur – réglage de la commande de vitesseLes variateurs conçus pour la commande de vitesse incorporent leur propre retour de vitessepour prévoir l’amortissement du système. C’est pourquoi KDERIV (et KVEL) peuventsouvent être réglés à zéro.
Le réglage correct de gain de correction aval de vitesse (KVELFF) est important pour obtenirune réponse optimale du système. Le taux de correction aval de vitesse tire la vitessedemandée instantanée du générateur de profil et l’ajoute au bloc de sortie (Figure 19).KVELFF se situant en dehors de la boucle fermée, il est sans effet sur la stabilité dusystème. Cela signifie qu'on peut l'augmenter au maximum sans causer l’oscillation dumoteur, à condition que les autres termes soient correctement réglés.
Une fois correctement défini, KVELFF engendrera le mouvement du moteur à la vitessedemandée par le générateur de profil. Ceci est vrai sans l’intervention d'autres termes de laboucle fermée, sauf la compensation de légères erreurs de position du moteur. Ainsi, laréponse aux changements de vitesse demandée est-elle plus rapide, avec une erreur desuivi moindre.
Avant de continuer, confirmez que les signaux de retour d'encodeur provenant du moteur oudu variateur ont été connectés et qu’une demande positive engendre un signal de retourpositif.
5.8.1 Calcul de KVELFFPour calculer la valeur correcte de KVELFF, vous devrez connaître :
La vitesse, en tours par minute, produit par le moteur lorsqu’une demande maximum(+10 V) est appliquée au variateur.
Le réglage de LOOPTIME. Le préréglage usine est de 1 ms.
La résolution de l’entrée d'encodeur.
La formule de boucle d’asservissement utilise des valeurs de régime exprimées en nombresde quadrature par boucle d’asservissement. Pour calculer cette valeur :
1. Tout d’abord, divisez la vitesse du moteur, en tours par minute, par 60 pour donner lenombre de tours par seconde. Par exemple, si la vitesse moteur est de 3 000 tr/minlorsqu’une demande maximum (+10 V) est appliquée au variateur :
Tours par seconde = 3 000 ÷ 60
= 502. Ensuite, calculez le nombre de tours qui se produira durant une boucle
d’asservissement. Le préréglage usine de la durée de boucle d’asservissement est de1 ms (0,001 seconde), donc :
Tours par boucle d’asservissement = 50 x 0,001 seconde
= 0.053. Maintenant, calculez le nombre de quadratures encodeur par tour. Le NextMove PCI-2
dénombre les deux fronts des deux trains d’impulsions (CHA et CHB) provenant del'encodeur ; par conséquent, à chaque ligne d'encodeur correspondent 4 quadraturesdénombrées. Avec un encodeur 1 000 lignes :
Nombre de quadratures par tour = 1 000 x 4
= 4000
5-24 Mode d’emploi MN1933WFR

4. Pour finir, calculez le nombre de quadratures par boucle d’asservissement.
Nombre de quadratures par boucle d’asservissement = 4 000 x 0,05
= 200La sortie de commande analogique est commandée par un convertisseur numérique-analogique (DAC) 12 bits, qui peut créer des tensions de sortie comprises dans la plage de -10 V à +10 V. Cela signifie qu'une sortie maximum de +10 V correspond à une valeur deDAC de 2048. La valeur de KVELFF est calculée en divisant 2048 par le nombre dequadratures par boucle d'asservissement, soit :
KVELFF = 2 048 / 200= 10.24
5. Entrez la valeur dans le champ KVELFF.
La valeur calculée devrait donner uneerreur de suivi nulle à vitesse constante.L’utilisation de valeurs supérieures à lavaleur calculée engendrera une erreur desuivi pour le contrôleur, à l’avant de laposition souhaitée. L’utilisation de valeursinférieures à la valeur calculée engendreraune erreur de suivi pour le contrôleur, àl’arrière de la position souhaitée.
6. Dans la liste déroulante Move Type (Typede déplacement), assurez-vous que le typechoisi est Trapezoid (Trapézoïdal).
7. Entrez une distance de mouvementtrapézoïdal dans le champ Distance. Il estrecommandé de choisir une valeur quientraînera quelques tours de moteur, 10 par exemple.
Remarque : La distance dépend de l’échelle définie à la section 5.4.2. Si vousdéfinissez une échelle utilisant le tour comme unité (ou une autre unité devotre choix), il s’agira de l’unité utilisée ici. Si vous ne définissez pasd’échelle, la valeur entrée ici correspondra aux comptes d'encodeur.
8. Cliquez sur Go (Aller).
MN1933WFR Mode d’emploi 5-25

Le NextMove PCI-2 réalise le mouvement et le moteur tourne. Dès que le mouvement estterminé, Mint WorkBench télécharge les données capturées à partir du NextMove PCI-2. Lesdonnées s'affichent ensuite dans la fenêtre Capture sous forme de graphe.
Remarque : Le graphe que vous verrez ne correspondra pas exactement àl'illustration ! En effet, chaque moteur produit une réponse différente.
9. En cochant les cases situées sous legraphe, sélectionnez les tracés Measuredvelocity (Vitesse mesurée) et Demandvelocity (Vitesse demandée).
Figure 23: Valeur correcte de KVELFF
Vous devrez peut-être modifier la valeur de KVELFF calculée. Si le tracé de vitesse mesuréeapparaît au-dessus de celui de vitesse demandée, réduisez la valeur de KVELFF. Si le tracéde vitesse mesurée apparaît au-dessous de celui de vitesse demandée, augmentez lavaleur de KVELFF. Reprenez le test après chaque modification. Une fois que les deux tracésapparaissent l’un sur l’autre (approximativement), la valeur correcte de KVELFF est celleindiquée à la Figure 19.
ON - Axe 0 : Vitesse mesurée (uu/s)
ON - Axe 0 : Vitesse demandée (uu/s)
Temps (ms)
Vitesse mesurée
Vitesse demandée
5-26 Mode d’emploi MN1933WFR

5.8.2 Réglage de KPROPKPROP permet de réduire l’erreur de suivi. Sa valeur sera généralement bien inférieure àcelle utilisée pour un système équivalent commandé par le courant. Une valeur fractionnairecomme 0,1 produira sans doute la réponse optimale.
1. Entrez 0,1 comme valeur de départ dans lechamp KPROP.
2. Cliquez sur Go (Aller).
Le NextMove PCI-2 réalise le mouvement et le moteur tourne. Dès que le mouvement estterminé, Mint WorkBench télécharge les données capturées à partir du NextMove PCI-2. Lesdonnées s'affichent ensuite dans la fenêtre Capture sous forme de graphe.
Remarque : Le graphe que vous verrez ne correspondra pas exactement àl'illustration ! En effet, chaque moteur produit une réponse différente.
3. En cochant les cases situées sous legraphe, sélectionnez les tracés Measuredposition (Position mesurée) et Demandposition (Position demandée).
ON - Axe 0 : Position mesurée (uu)ON - Axe 0 : Position demandée (uu)
MN1933WFR Mode d’emploi 5-27

Figure 24: Valeur correcte de KPROP
Les deux tracés apparaîtront probablement avec un léger décalage l'un par rapport à l'autre.Réglez KPROP par petits incréments jusqu’à ce que les deux tracés apparaissent l’un surl’autre (approximativement), comme indiqué à la figure 24.
Temps (ms)
Position mesurée
Position demandée
5-28 Mode d’emploi MN1933WFR

5.9 Axe de moteur pas à pas - testCette section décrit la méthode de test d’un axe de moteur pas à pas. La commande demoteur pas à pas étant un système à boucle fermée, aucun réglage n’est nécessaire.
5.9.1 Test de la sortieCette section décrit les tests de fonctionnement et de direction de la sortie. Il estrecommandé de tester initialement le système avec le rotor déconnecté de toute autremachine.
1. Assurez-vous que le bouton d’activation duvariateur est enfoncé.
2. Dans la boîte à outils, cliquez sur l’icône Edit &Debug (Édition et débogage).
3. Cliquez dans la fenêtre Command(Commande).
4. Tapez :JOG(0)=2
où 0 représente l’axe (sortie de moteur pas àpas) à tester et 2 la vitesse de rotation.
Remarque : La commande JOG précise une vitesse en unités utilisateur par seconde ;par conséquent, la vitesse est fonction du SCALEFACTOR (section 5.4.2).
Si aucune sortie d'impulsion ou de direction n'est apparente, vérifiez les branchementsélectriques entre le module de dérivation et le variateur.
5. Pour reprendre les tests pour les mouvementsarrière, tapez :JOG(0)=-2
6. Pour supprimer la commande et arrêter le test,tapez :STOP(0)
MN1933WFR Mode d’emploi 5-29

5.10 Configuration d’entrée/sortie TORLa fenêtre Digital I/O (E/S TOR) peut être utilisée pour configurer d’autres entrées et sortiesTOR.
5.10.1Configuration d’entrée TORLes onglets Digital Inputs (Entrées TOR) permettent de définir la manière dont chaqueentrée TOR sera déclenchée et, le cas échéant, si elle doit être assignée à une fonctionspéciale, comme la fin de course avant. Dans l’exemple suivant, l’entrée TOR 1 sera régléepour un déclenchement sur un front descendant et allouée à l’entrée de fin de course avantde l’axe 0 :
1. Dans la boîte à outils, cliquez sur l’icôneDigital I/O (E/S TOR).
2. En bas de l’écran Digital I/O (E/S TOR),cliquez sur l’onglet Digital Inputs (EntréesTOR).
Sur la gauche de l’écran, vous verrez unecolonne d’icônes jaunes - High, Low,Rising, Falling et Rise/Fall. Ces icônesdécrivent la manière dont l’entrée seradéclenchée.
5-30 Mode d’emploi MN1933WFR

3. Faites glisser l'icône Falling (Descendant) sur l'icône IN1 . IN1 sera ainsi réglé
pour répondre à un front descendant.
4. Maintenant, faites glisser l’icône IN1 au-dessus de l’icône Fwd Limit (Fin de course
avant) . IN1 sera ainsi configuré comme entrée de fin de course avant de l’axe 0.
MN1933WFR Mode d’emploi 5-31

5. Cliquez sur Apply (Appliquer) pour envoyer lesmodifications apportées au NextMove PCI-2.
Remarque : Au besoin, plusieurs entrées peuvent être configurées avant de cliquer surApply (Appliquer).
5.10.2Configuration de sortie TORL’onglet Digital Outputs (Sorties TOR) vous permet de définir le fonctionnement de chaquesortie TOR et si elle doit être configurée comme sortie d’activation du variateur (voir lasection 5.4.3). Rappelez-vous de cliquer sur Apply (Appliquer) pour envoyer lesmodifications apportées au NextMove PCI-2.
5-32 Mode d’emploi MN1933WFR

5.11 Enregistrement des informations de configurationLorsque le NextMove PCI-2 est mis hors tension, toutes les données, y compris lesparamètres de configuration et de réglage, sont perdues. Vous devez par conséquentenregistrer ces informations dans un fichier, que vous pourrez charger à la prochaineutilisation de la carte. L'information peut également être incluse dans les fichiers programmedans le bloc Startup (Démarrage).
1. Dans la boîte à outils, cliquez sur l’icôneEdit & Debug (Édition et débogage).
2. Dans le menu principal, choisissez File(Fichier), New File (Nouveau fichier).
Une nouvelle fenêtre d’édition deprogramme s’affiche.
3. Dans le menu principal, choisissezProgram (Programme), GenerateMint Startup Block (Générer blocStartup Mint).
Mint WorkBench lira toutes lesinformations de configuration issuesdu NextMove PCI-2 et les placeradans un bloc Startup (Démarrage).Pour des détails sur le bloc Startup(Démarrage), reportez-vous aufichier d’aide Mint.
MN1933WFR Mode d’emploi 5-33

4. Dans le menu principal, choisissez File (Fichier), Save File (Enregistrer un fichier).Situez un dossier, entrez un nom de fichier et cliquez sur Save (Enregistrer).
5.11.1Chargement des informations enregistrées1. Dans la boîte à outils, cliquez sur l’icône Edit & Debug
(Édition et débogage).
2. Dans le menu principal, choisissez File (Fichier), Open File... (Ouvrir un fichier).Situez le fichier et cliquez sur Open (Ouvrir).
Un bloc Startup (Démarrage) doit être inclus à chaque programme Mint de sorte qu’àchaque chargement et exécution de programme, le NextMove PCI-2 soit correctementconfiguré. Rappelez-vous que chaque combinaison moteur/variateur produit une réponsedifférente. Si le même programme est utilisé sur une installation NextMove PCI-2différente, le bloc Startup (Démarrage) devra être modifié.
5-34 Mode d’emploi MN1933WFR

Dépannage6 Dépannage
6.1 IntroductionCe chapitre décrit des problèmes courants et leurs solutions. Pour connaître la signification des voyants, reportez-vous à la section 6.2.
6.1.1 Diagnostic de problèmesEn cas de problème d'installation du NextMove PCI-2, lisez d'abord ce chapitre. Dans MintWorkBench, utilisez l’outil Error Log (Journal d’erreurs) pour afficher les erreurs récentes,puis consultez le fichier d’aide. Si vous ne pouvez pas résoudre le problème, ou si leproblème persiste, utilisez la fonction SupportMe.
6.1.2 Fonction SupportMeLa fonction SupportMe (dans le menu d'Aide) permet d'envoyer par courriel de l'informationau commercial qui vous a vendu l'équipement. Le cas échéant, vous pouvez y joindre vosfichiers programme. Mint WorkBench lance automatiquement le logiciel de messagerieélectronique et crée un nouveau message qui renferme déjà des informations système etcertaines pièces jointes. Vous pouvez ajouter votre propre message avant d'envoyer lecourriel. Si vous préférez contacter l’assistance technique par téléphone ou par fax, lesnuméros apparaissent à l’avant du manuel. Ayez les informations suivantes à portée de lamain :
Numéro de série de votre NextMove PCI-2 (si vous le connaissez).
Cliquez sur SupportMe dans le menu Help (Aide) de Mint WorkBench pour afficher desdétails sur votre système.
Type de variateur et de moteur utilisé.
Décrivez clairement ce que vous essayez de faire – un réglage, par exemple.
Décrivez clairement les symptômes que vous remarquez - messages d’erreur affichésdans Mint WorkBench ou valeur en cours d’un des mots clés Mint (AXISERROR,AXISSTATUS, INITERROR ou MISCERROR), par exemple.
Type de mouvement produit dans le rotor.
Liste de tous les paramètres que vous avez définis – les paramètres de gain entrés, parexemple.
6
MN1933WFR Dépannage 6-1

6.2 Voyants du NextMove PCI-2
6.2.1 Voyants d'étatDeux voyants S1 et S2, situés sur la plaque arrière du NextMovePCI-2, fournissent des informations d'état générales. Les voyantspeuvent s'allumer en vert ou en rouge ; ils sont fixes ouclignotants.
6.2.2 VOYANTS CANLe bord supérieur du NextMove PCI-2 contient quatre voyants ensaillie - CH1, CH2, Tx et Rx - qui dénotent l'état CAN. Les voyantspeuvent être fixes ou clignotants.
6.2.3 Voyant de réinitialisationÀ proximité des quatre voyants CAN sur le NextMove PCI-2, setrouve un autre voyant D16, qui dénote l'initialisation du FPGA audémarrage. Ce voyant reste allumé jusqu'à ce qu'un fichiersystème (y compris le firmware FPGA) soit téléchargé depuis MintWorkBench.
État des voyants Signification
2 voyants éteints Le NextMove PCI-2 n'est pas alimenté.
2 voyants rouges Réinitialisation matérielle en cours (voir la section 4.7).
2 voyants verts, répétition
Réinitialisation logicielle en cours, pas d'erreurs (voir la section 4.7).
2 voyants rouges, répétition
Réinitialisation logicielle en cours, une erreur Power On Self Test (POST) s'est produite.
S1 vert, clignotant Le firmware s'exécute correctement.
S1 vert, clignote rapidement
Téléchargement du FPGA en cours.
S1 rouge, clignotant Le firmware s'exécute, mais avec une erreur d'initialisation.
S2 rouge, clignote rapidement
Erreur asynchrone - un commutateur de fin de course a été activé, par exemple.
S2 vert, clignote rapidement
Erreurs diverses - le pilote de sortie ne fonctionne pas, par exemple.
2 voyants verts, clignotants
Mise à jour du firmware en cours.
2 voyants rouges, s'éteignent séparément
POST est en cours (suite à une réinitialisation).
État des voyants Signification
CH1 Le firmware téléchargé prend en charge la voie CANopen.
CH2 Le firmware téléchargé prend en charge la voie Baldor CAN.
Tx Des données sont en cours de transmission sur la voie CAN.
Rx Des données sont en cours de réception sur la voie CAN.
S1 S2
6-2 Dépannage MN1933WFR
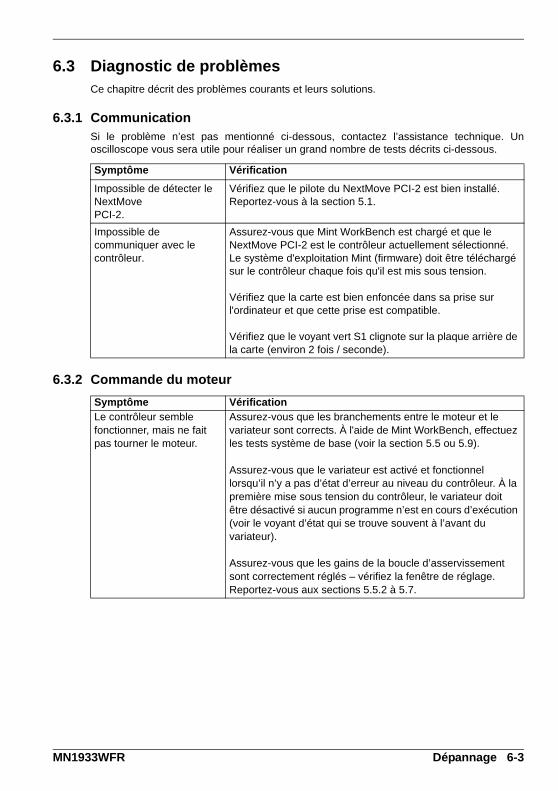
6.3 Diagnostic de problèmesCe chapitre décrit des problèmes courants et leurs solutions.
6.3.1 CommunicationSi le problème n’est pas mentionné ci-dessous, contactez l’assistance technique. Unoscilloscope vous sera utile pour réaliser un grand nombre de tests décrits ci-dessous.
6.3.2 Commande du moteur
Symptôme Vérification
Impossible de détecter le NextMovePCI-2.
Vérifiez que le pilote du NextMove PCI-2 est bien installé. Reportez-vous à la section 5.1.
Impossible de communiquer avec le contrôleur.
Assurez-vous que Mint WorkBench est chargé et que le NextMove PCI-2 est le contrôleur actuellement sélectionné. Le système d'exploitation Mint (firmware) doit être téléchargé sur le contrôleur chaque fois qu'il est mis sous tension.
Vérifiez que la carte est bien enfoncée dans sa prise sur l'ordinateur et que cette prise est compatible.
Vérifiez que le voyant vert S1 clignote sur la plaque arrière de la carte (environ 2 fois / seconde).
Symptôme VérificationLe contrôleur semble fonctionner, mais ne fait pas tourner le moteur.
Assurez-vous que les branchements entre le moteur et le variateur sont corrects. À l'aide de Mint WorkBench, effectuez les tests système de base (voir la section 5.5 ou 5.9).
Assurez-vous que le variateur est activé et fonctionnel lorsqu’il n’y a pas d’état d’erreur au niveau du contrôleur. À la première mise sous tension du contrôleur, le variateur doit être désactivé si aucun programme n’est en cours d’exécution (voir le voyant d’état qui se trouve souvent à l’avant du variateur).
Assurez-vous que les gains de la boucle d’asservissement sont correctement réglés – vérifiez la fenêtre de réglage. Reportez-vous aux sections 5.5.2 à 5.7.
MN1933WFR Dépannage 6-3

Le moteur s’emballe à la mise sous tension du contrôleur.
Vérifiez que les encodeurs sont connectés et alimentés via Encoder V+ (le cas échéant, voir la section 4.5.2) et qu'ils fonctionnent correctement. À l'aide d'un oscilloscope à double trace, affichez simultanément les deux voies de l'encodeur et/ou les signaux complémentaires.
Assurez-vous que le variateur est correctement connecté au module de dérivation et qu’avec une commande nulle, 0 V se trouve à l’entrée de commande du variateur. Reportez-vous à la section 5.5.1.
Assurez-vous que le module de dérivation et le variateur sont correctement raccordés à un point de terre commun.
Le moteur s’emballe à la mise sous tension du contrôleur lorsque des gains de boucle d’asservissement sont appliqués ou lorsqu’un mouvement est en cours. Le moteur s’arrête peu de temps après.
Vérifiez que les signaux correspondants d'encodeur et de commande de l'axe sont connectés aux mêmes axes de mouvement. Assurez-vous que le branchement commande/variateur a été effectué en respectant la bonne polarité.
Assurez-vous qu'un signal de commande positif a pour effet une augmentation positive de la position de l’axe. Le mot clé Mint ENCODERMODE permet de modifier la direction d’entrée de l'encodeur. Le mot clé Mint DACMODE permet d'inverser la polarité de sortie du convertisseur analogique (DAC).
Assurez-vous que l’erreur maximale de suivi est réglée à une valeur raisonnable. Aux fins de configuration, la détection d’erreurs de suivi peut être désactivée en définissant FOLERRORMODE=0.
Le moteur ne s’emballe pas, mais il vibre ou effectue un dépassement durant un mouvement.
Il est possible que les gains de la boucle d'asservissement ne soient pas réglés correctement. Reportez-vous aux sections 5.5.2 à 5.7.
Le moteur ne s’emballe pas, mais quand il est déplacé jusqu’à une position, puis ramené à son point de départ, il ne retourne pas à la même position.
Avec un oscilloscope, vérifiez sur les connecteurs du module de dérivation que :
toutes les voies d'encodeur ont des signaux clairs etdépourvus de bruit électrique ;
ils sont correctement câblés au contrôleur ;
quand le moteur tourne, les deux signaux carrés sontdéphasés de 90 degrés. Vérifiez également les signauxcomplémentaires.
Vérifiez que le câble d'encodeur est un câble à paire torsadée blindé et que le blindage est relié au connecteur blindé seulement du côté du module de dérivation.
Assurez-vous que le module de dérivation et le variateur sont correctement raccordés à un point de terre commun.
Symptôme Vérification
6-4 Dépannage MN1933WFR

Caractéristiques techniques7 Caractéristiques techniques
7.1 IntroductionCe chapitre fournit les caractéristiques techniques du NextMove PCI-2.
7.1.1 Caractéristiques d'alimentation d'entrée et mécaniques
Sur le PC hôte, un logement pour carte PCI 7 pouces doit être disponible. Le PC doit être unordinateur de type AT - la carte ne peut pas être installée dans des machines de type MCA.Les dimensions de la carte sont conformes à la norme PCI, hormis le fait qu'elle ne peut pasêtre installée avec un support Micro Channel.
7.1.2 Entrées analogiques (X6)
Description Valeur
Alimentation d’entrée(depuis le PC hôte)
+3,3 V à 1000 mA+5 V à 350 mA±12 V à 250 mA
Un apport de courant supplémentaire sera requis en cas d'alimentation des encodeurs à partir de l'alimentation +5 V du PC hôte. Reportez-vous à la section 4.5.2.
Alimentation d’entrée(depuis l'alimentation client)
+12 V à +24 V à 1200 mA
Consommation 15 W (carte PCI-2 uniquement)
Poids Environ 305 g (0.67 lb)
Dimensions globalesnominales
Standard 7 pour carte PCI175 mm (6.88 in) de longueur x 106,7 mm (4.20 in) de hauteur.
Description Unité Valeur
Type Entrées monofilaires ou différentielles
Plage de tension de mode commun V ±10
Impédance d’entrée kΩ >5
Résolution d’entrée du convertisseur analogique
bits 12(avec signe)
Résolution équivalente (entrée ±10 V)
mV ±4,9
Intervalle d’échantillonnage µs 400
7
MN1933WFR Caractéristiques techniques 7-1

7.1.3 Sorties analogiques (X7)
7.1.4 Entrées TOR (X1 et X2)
Description Unité Valeur
Type Bipolaire
Plage de tension de sortie V ±10
Courant de sortie (max.) mA 1
Résolution de sortie du convertisseur numérique
bits 12, 14 ou 16(avec signe)
Résolution équivalente±4,9 mV (12 bits)±1,2 mV (14 bits)±305 µV (16 bits)
Intervalle de mise à jourµs 200 - 2000
(identique à LOOPTIME ; par défaut = 1000)
Description Unité Valeur
Type Opto-isolée
Tension en entrée (max.) V +30
Tension en entrée (active haute)Puissance
Minimale
V+24+12
Tension en entrée (active basse)NominaleMaximale
V0
+2
Courant d'entrée (approx., par entrée) mA 8
Intervalle d’échantillonnage ms 1
7-2 Caractéristiques techniques MN1933WFR

7.1.5 Entrées TOR (X3)
7.1.6 Sorties TOR (X4)
7.1.7 Sortie de relais (X8)
Description Unité Valeur
Type Non isolée
Tension en entrée (max.) V +30
Tension en entrée (active haute)Puissance
Minimale
V+24+12
Tension en entrée (active basse)NominaleMaximale
V0
+7
Courant d'entrée (approx., par entrée) mA 7
Intervalle d’échantillonnage ms 1
Description Unité Valeur
Courant de sortie(maximal, à chaque sortie)
mA 50
Intervalle de mise à jour Mise à jour immédiate
Description Unité Valeur
Contacts Normalement ouverts
Pouvoir de coupure (résistif) 1 A à 24 V c.c.ou
0,5 A à 125 V c.a.
Courant transporté au maximum A 2
Puissance de commutation maximale 62,5 VA, 30 W
Tension de commutation maximale 125 V c.a., 60 V c.c.
Courant de commutation maximal A 1
Résistance de contact (maximum) mΩ 100
Intervalle de mise à jour Mise à jour immédiate
MN1933WFR Caractéristiques techniques 7-3

7.1.8 Entrées d'encodeur (X12 à X16)
7.1.9 Sorties de commande de moteur pas à pas - (X10 et X11)
7.1.10 Interface CANopen (X17)
7.1.11 Connecteur Baldor CAN (X18)
Description Unité Valeur
Entrée d'encodeur A/B différentielle, index Z
Fréquence maximale en entrée (voies A et B)
MHz2.5
Alimentation de sortie vers les encodeurs Au total, si alimenté à partir du PC hôte
Au total, si le courant provient del'alimentation utilisateur
5 V, 500 mA max.30 V, 3 A max.
Longueur maximale de câble recommandée
30 m (100 ft)
Description Unité Valeur
Type de sortie Impulsion (pas) et direction
Fréquence de sortie maximale MHz 3
Tension de sortie V +5
Courant de sortie mA 20 au max.
Description Unité Valeur
Signal bifilaire, isolé
Voies 1
Taux de bit Kbit/s 10, 20, 50, 100, 125, 250, 500, 800, 1000
Protocole CANopen
Description Unité Valeur
Signal bifilaire
Voies 2
Taux de bit Kbit/s 10, 20, 50, 125, 250, 500, 800, 1000
Protocole Baldor CAN
7-4 Caractéristiques techniques MN1933WFR

7.1.12 Conditions ambiantes
Reportez-vous également à la section 3.1.1.
Description Unité
Plage de température d’exploitation Min. Max.
°C
°F
0
+32
+45
+113
Plage de température de stockage °C
°F
0
+32
+70
+158
Humidité maximale % 93 % pour les températures jusqu’à 31 °C (87 °F), avec
diminution linéaire jusqu’à une humidité relative de 50 % à 45 °C
(113 °F), sans condensation
Vibrations 1 G, 10-150 Hz
MN1933WFR Caractéristiques techniques 7-5

7-6 Caractéristiques techniques MN1933WFR

AccessoiresA Accessoires
A.1 IntroductionLes modules de dérivation sont utilisables avec la carte NextMove PCI-2.
A.1.1 Module de dérivation NextMove PCI-2Les modules de dérivation sont utilisables avec la carte NextMove PCI-2 ; ils fournissent desborniers à vis (à une ou deux parties) pour les connexions d'E/S, d'alimentation et de relais,avec des connecteurs type D à 9 broches pour les encodeurs et les moteurs pas à pas. Lesconnexions CAN sont acheminées sur un connecteur type D compatible CANopen pourCAN1 (CANopen) et un connecteur RJ45 pour CAN2 (Baldor CAN). Pour de plus amplesdétails sur chaque connecteur, voir la section 4. Le module de dérivation se connecte auNextMove PCI-2 via un câble à 100 broches.
Figure 25: Module de dérivation NextMove PCI-2
Le module de dérivation mesure environ 292 mm (11.50 in) de long sur 70 mm (2.76 in) delarge et 62 mm (2.45 in) de haut. Il est conçu pour être installé soit sur un rail DIN symétrique35 mm (EN 50 022, DIN 46277-3), soit sur un rail à profil G (EN 50 035, DIN46277-1). Descâbles prêts à l'emploi sont disponibles en différentes longueurs pour la connexion entre lemodule de dérivation et le NextMove PCI-2:
Réf. Description
PCI003-501Module de dérivation : bornier à vis monobloc et conditionnement de signal.
PCI003-502Module de dérivation : bornier à vis en 2 parties et conditionnement de signal.
CBL021-501câble de 1 m (3.3 ft) à 100 broches pour rattacher la carte au module de dérivation
CBL021-502câble de 1,5 m (4.9 ft) à 100 broches pour rattacher la carte au module de dérivation
CBL021-503câble de 3 m (9.8 ft) à 100 broches pour rattacher la carte au module de dérivation
A
MN1933WFR Accessoires A-1

Les connexions blindées sur le module de dérivation sont toutes connectées en interne,notamment :
Les broches « shield » présentes sur de nombreux connecteurs.
Le boîtier métallique de tous les connecteurs type D, des connecteurs CAN et duconnecteur à 100 broches.
Le goujon situé au-dessous des connecteurs X3 et X4.
Si le module de dérivation (version 2) est utilisé en remplacement d'un module de dérivationexistant (version 1), les connexions d'alimentation doivent être modifiées. Les connexionsqui étaient effectuées sur les broches 3, 4, 5 et 6 du connecteur d'alimentation J10 sur lacarte version 1 doivent désormais être connectées seulement aux broches 5 et 6 duconnecteur d'alimentation X9 du module version 2. Le numéro de version de la carte estimprimé au-dessous de son nom, près des connecteurs X5 et X6.
A-2 Accessoires MN1933WFR

A.1.2 Adaptateur système NextMove PC L'adaptateur NextMove PC prend la sortie du connecteur à 100 broches du NextMove PCI-2et la rend compatible avec le câble NextMove PC, ce qui permet la conversion machineNextMove PC/NextMove PCI-2 sans changements majeurs au niveau du câblage physiquede la machine.
Remarque : Si le module de dérivation NextMove PC est également utilisé, lesbanques d'entrée TOR utilisent une connexion commune. L'alimentationUSR V+ sert à déterminer le sens des entrées TOR. En branchant CGNDsur la connexion commune, les entrées seront de type « actives hautes »(actives quand une alimentation de +24 V c.c. est appliquée). Enbranchant USR V+ sur la connexion commune, les entrées seront de type« actives basses » (actives quand 0 V est appliquée). Les cavaliers surl'adaptateur système permettent de sélectionner lequel de USR V+ ouCGND est branché à la connexion commune.
A.1.3 Carte répartiteur/tampon de l'encodeurIl s'agit d'un CI autonome qui, à partir d'un signal d'encodeur, monofilaire ou différentiel,produit des entrées différentielles. Pratique, cette carte permet de configurer en« marguerite » un signal d'encodeur provenant d'un maître, à destination de plusieurscontrôleurs. Le CI mesure 100 mm x 85 mm (3.94 in x 3.35 in). Tel qu'il est fourni dans sonsupport de CI à montage sur rail DIN TS35, le dispositif mesure en tout 110 mm x 90 mm(4.33 in x 3.54 in).
A.1.4 Pièces détachéesCes pièces se trouvent sur le module de dérivation :
Réf. Description
OPT026-506 Permet le branchement du NextMove PCI-2 à un système NextMove PC.
Réf. Description
OPT029-501Répartiteur d'encodeur 4 voies - permet le partage d'un train d'impulsion d'encodeur monofilaire ou différentiel entre quatre dispositifs
OPT029-502Répartiteur d'encodeur 8 voies - permet le partage d'un train d'impulsion d'encodeur monofilaire ou différentiel entre huit dispositifs
Réf. Description
OPT025-501Câble permettant le branchement du NextMove PCI-2 à un système NextMove PC.
OPT025-502Émetteur-récepteur CAN à isolation (module hybride SIL).Prend en charge des vitesses jusqu'à 1 Mbit/s.
OPT025-503Émetteur-récepteur CAN sans isolation (module hybride SIL).Prend en charge des vitesses jusqu'à 500 Kbit/s.
MN1933WFR Accessoires A-3

A.1.5 Câbles de retour
Les câbles répertoriés dans le Tableau 2 relient le signal « Encoder Out » (Sortie
d'encodeur) issu d’un variateur (MicroFlex, FlexDriveII, Flex+DriveII ou MintDriveII, parexemple) aux connecteurs d'entrée de l'encodeur sur la carte de dérivation NextMove PCI-2.Un câble est requis pour chaque axe de servomoteur. Pour la configuration des broches deconnecteur, reportez-vous à la section 4.5.1.1.
Si vous n’utilisez pas l'un des câbles mentionnés ci-dessus, veillez à vous procurer un câble
à paire torsadée blindé de 0,34 mm2 (22 AWG), avec un blindage global. Dans l’idéal, lecâble ne devrait pas dépasser 30 m (100 ft) de longueur. La capacité maximale câble-câbleou câble-blindage est de 50 pF tous les 300 mm (1 ft) de longueur, jusqu’à une valeurmaximum de 5 000 pF pour 30 m (100 ft).
Description du câble Réf.Longueur
m ft
Câble de retour entre le variateur et le module de dérivation
NextMove PCI-2, avec connecteur 9 broches type D à chaque
extrémité (un mâle, un femelle)
CBL005MF-E3ACBL010MF-E3ACBL015MF-E3ACBL020MF-E3ACBL030MF-E3ACBL040MF-E3ACBL050MF-E3A
0.51
1.52.03.04.05.0
1.63.35
6.69.8
13.116.4
Tableau 5: Câbles de retour entre le variateur et le NextMove PCI-2
A-4 Accessoires MN1933WFR
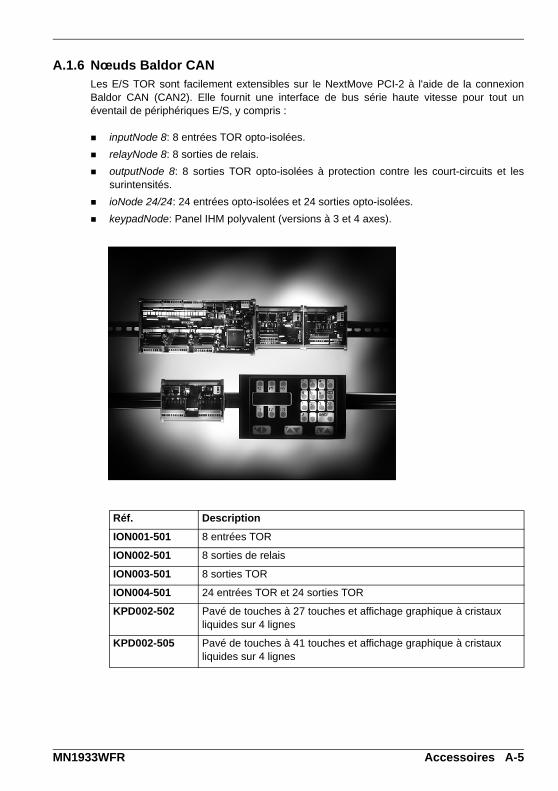
A.1.6 Nœuds Baldor CANLes E/S TOR sont facilement extensibles sur le NextMove PCI-2 à l'aide de la connexionBaldor CAN (CAN2). Elle fournit une interface de bus série haute vitesse pour tout unéventail de périphériques E/S, y compris :
inputNode 8: 8 entrées TOR opto-isolées.
relayNode 8: 8 sorties de relais.
outputNode 8: 8 sorties TOR opto-isolées à protection contre les court-circuits et lessurintensités.
ioNode 24/24: 24 entrées opto-isolées et 24 sorties opto-isolées.
keypadNode: Panel IHM polyvalent (versions à 3 et 4 axes).
Réf. Description
ION001-501 8 entrées TOR
ION002-501 8 sorties de relais
ION003-501 8 sorties TOR
ION004-501 24 entrées TOR et 24 sorties TOR
KPD002-502 Pavé de touches à 27 touches et affichage graphique à cristaux liquides sur 4 lignes
KPD002-505 Pavé de touches à 41 touches et affichage graphique à cristaux liquides sur 4 lignes
MN1933WFR Accessoires A-5

A.1.7 Panels HMIUne gamme de panels IHM (Interface homme-machine) programmables est disponible, àcommunication série ou CANopen. Certains panels ont des capacités d'écran couleur et/outactile et sont programmables via le logiciel dédié HMI Designer.
A.1.8 Mint NC (logiciel de CAO-mouvement)Le logiciel Mint NC fournit aux constructeurs de machine une solution extrêmement rapide etflexible pour la création et l'automatisation de machines de contour et de profil. Mint NC offreun environnement PC permettant importer l'information dans des formats CAO standard telsque G-code, HPGL et DXF et de générer les commandes de mouvement en temps réelrequises.
Pour de plus amples détails, consultez le site www.abbmotion.com.
A-6 Accessoires MN1933WFR

Récapitulatif des mots clés MintB Récapitulatif des mots clés Mint
B.1 IntroductionLe tableau ci-dessous récapitule les mots clés Mint pris en charge par le NextMove PCI-2.Veuillez noter qu'étant donné les développements continus apportés au NextMove PCI-2 etau langage Mint, des modifications significatives de cette liste sont à prévoir. Reportez-vousà la dernière version du fichier d'aide de Mint pour des détails complets sur l'ajout denouveaux mots clés ou les modifications apportées.
B.1.1 Liste de mots clés
Mot clé Description
ABORT Pour abandonner le mouvement sur tous les axes.
ABORTMODE Pour contrôler l'action mise en œuvre en cas d'abandon.
ACCEL Pour définir le temps d'accélération d'un axe.
ACCELDEMAND Pour lire l'accélération instantanée de la commande.
ACCELJERK Pour définir le pas qui sera utilisé dans les périodes d'accélération.
ACCELJERKTIME Pour définir le pas qui sera utilisé dans les périodes d'accélération.
ACCELTIME Pour définir le temps d'accélération d'un axe.
ADC Pour lire une valeur d'entrée analogique.
ADCERROR Pour lire les entrées analogiques ayant actuellement une erreur.
ADCERRORMODE Commande l'action par défaut qui sera prise en cas de dépassement d'une limite ADC sur une voie associée.
ADCGAIN Pour régler le gain à appliquer à une entrée ADC.
ADCMAX Règle la valeur limite analogique supérieure pour l'entrée analogique spécifiée.
ADCMIN Règle la valeur limite analogique inférieure pour l'entrée analogique spécifiée.
ADCMODE Pour régler le mode d'entrée analogique.
ADCMONITOR Spécifie les entrées analogiques qu'un axe surveillera pour le contrôle de limite analogique.
ADCOFFSET Pour régler le décalage à appliquer à une entrée ADC.
ADCTIMECONSTANT Pour régler la constante de temps du filtre passe-bas qui est appliquée à une entrée ADC.
B
MN1933WFR Récapitulatif des mots clés Mint B-1

ASYNCERRORPRESENT Pour déterminer l'éventuelle présence d'une erreur asynchrone.
AUXDAC Pour régler ou lire les sorties auxiliaires DAC.
AUXENCODER Pour régler ou lire l'entrée auxiliaire de l'encodeur.
AUXENCODERMODE Pour apporter diverses modifications aux encodeurs auxiliaires.
AUXENCODERPRESCALE Pour mettre à l'échelle l'entrée de l'encodeur auxiliaire.
AUXENCODERSCALE Pour régler ou lire le facteur d'échelle de l'entrée de l'encodeur auxiliaire.
AUXENCODERVEL Pour lire la vitesse de l'entrée de l'encodeur auxiliaire.
AUXENCODERWRAP Pour régler ou lire la plage d'enroulement d'encodeur de l'entrée d'encodeur auxiliaire.
AUXENCODERZLATCH Pour lire l'état du verrouillage Z de l'encodeur auxiliaire.
AXISCHANNEL Permet à l'utilisateur de cartographier le matériel sur des numéros d'axe.
AXISERROR Pour lire l'erreur de mouvement.
AXISMODE Pour obtenir le mode actuel de mouvement.
AXISSTATUS Pour renvoyer l'état d'erreur courant correspondant à l'axe spécifié.
AXISVELENCODER Pour sélectionner la source du signal de vitesse utilisé dans les systèmes de retour à deux encodeurs.
AXISWARNING Pour lire ou effacer les avertissements actuels relatifs à l'axe.
AXISWARNINGDISABLE Permet d'activer ou de désactiver des avertissements relatifs à l'axe.
BACKLASH Pour régler la taille du jeu des engrenages présents sur un axe.
BACKLASHINTERVAL Pour régler le taux auquel la compensation du jeu d'engrenages sera appliquée.
BACKLASHMODE Commande l'utilisation de la compensation du jeu d'engrenages.
BLEND Pour démarrer la fusion du déplacement actuel avec le déplacement suivant dans le tampon.
BLENDDISTANCE Pour spécifier la distance, avant la fin de trajectoire du vecteur, à laquelle la fusion commencera.
BLENDMODE Pour activer la fusion des déplacements interpolés.
BOOST Pour contrôler les sorties d'appoint du moteur pas à pas.
BUSBAUD Pour spécifier le débit du bus.
BUSEVENT Obtient le prochain événement de la file d'attente d'événements pour un bus.
Mot clé Description
B-2 Récapitulatif des mots clés Mint MN1933WFR

BUSEVENTINFO Obtient l'information supplémentaire associée à un événement de bus.
BUSRESET Réinitialise le contrôleur du bus.
BUSSTATE Obtient l'état du contrôleur du bus.
CAM Réalise un profil de came.
CAMAMPLITUDE Pour modifier l'amplitude d'un profil de came.
CAMBOX Pour démarrer ou arrêter une voie CAMBox.
CAMBOXDATA Pour charger des données associées à une voie CAMBox.
CAMEND Pour définir un point d'extrémité dans le tableau de cames, quand plusieurs cames sont requises.
CAMINDEX Renvoie le numéro de segment de la came en cours d'exécution.
CAMPHASE Permet de faire avancer ou reculer un profil de came d'un certain nombre de segments de came.
CAMPHASESTATUS Pour obtenir l'état de CAMPHASE pour un axe donné.
CAMSTART Pour définir un point de départ dans le tableau de cames, quand plusieurs cames sont requises.
CAMTABLE Pour spécifier les noms de matrice à utiliser dans un profil de came sur l'axe en question.
CANCEL Pour arrêter le mouvement et effacer les erreurs sur un axe.
CANCELALL Pour arrêter le mouvement et effacer les erreurs sur tous les axes.
CAPTURE Commande l'opération de capture.
CAPTURECHANNEL-UPLOAD
Pour permettre le chargement dans une matrice d'une voie entière de valeurs de données capturées.
CAPTUREDURATION Pour définir la durée totale de capture des données.
CAPTUREEVENT Configure la capture pour qu'elle s'arrête sur un événement.
CAPTUREEVENTAXIS Règle l'axe à surveiller pour l'événement de déclenchement de capture.
CAPTUREEVENTDELAY Définit le retard post-déclenchement pour la capture d'événement.
CAPTUREINTERVAL Pour définir l'intervalle entre deux captures de données, par rapport à la fréquence d'asservissement.
CAPTUREMODE Pour régler ou lire le mode d'une capture.
CAPTUREMODE-PARAMETER
Pour spécifier un paramètre associé à CAPTUREMODE.
CAPTURENUMPOINTS Pour lire le nombre de points capturés par voie.
CAPTUREPERIOD Pour définir l'intervalle entre deux captures de données.
Mot clé Description
MN1933WFR Récapitulatif des mots clés Mint B-3

CAPTUREPOINT Pour permettre la lecture individuelle des valeurs de capture.
CHANNELTYPE Pour déterminer quel matériel est disponible pour une voie spécifique.
CIRCLEA Pour réaliser un mouvement circulaire en utilisant des coordonnées absolues.
CIRCLER Pour réaliser un mouvement circulaire en utilisant des coordonnées relatives.
COMMS Accède à la matrice de communication réservée.
COMMSMODE Sélectionne l'utilisation de la communication via soit RS485, soit CANopen.
COMPAREENABLE Active/désactive la commande de comparaison de position d'une sortie TOR spécifique.
COMPARELATCH Pour lire l'état du verrouillage de comparaison de position.
COMPAREMODE Active et désactive la comparaison de position sur un axe.
COMPAREOUTPUT Pour spécifier la sortie TOR utilisée pour la comparaison de position.
COMPAREPOS Pour écrire dans les registres de comparaison de position.
CONFIG Pour régler la configuration d'un axe en fonction de différents types de commande.
CONNECT Pour permettre l'établissement ou la rupture d'une connexion entre deux nœuds distants.
CONNECTSTATUS Obtient l'état de la connexion entre ce nœud et un autre nœud.
CONTOURMODE Pour activer le tracé des contours des déplacements interpolés.
CONTOURPARAMETER Pour régler les paramètres de déplacements avec tracé des contours.
DAC Pour écrire une valeur dans le convertisseur numérique-analogique (DAC), ou lire la valeur actuelle de DAC.
DACLIMITMAX Pour limiter la tension de sortie de DAC à une certaine plage.
DACMODE Pour contrôler l'utilisation du DAC.
DACMONITORAXIS Pour spécifier l'axe à surveiller pendant la surveillance du DAC.
DACMONITORGAIN Pour spécifier un gain à utiliser pendant la surveillance du DAC.
DACMONITORMODE Pour spécifier le paramètre d'axe à surveiller pendant la surveillance du DAC.
DACOFFSET Appliquer un offset à une voie DAC.
Mot clé Description
B-4 Récapitulatif des mots clés Mint MN1933WFR

DACRAMP Pour spécifier le nombre de millisecondes pendant lesquelles la sortie maximum du DAC sera progressivement ramenée à zéro.
DECEL Pour régler le temps de décélération sur l'axe.
DECELJERK Pour définir le pas qui sera utilisé dans les périodes de décélération.
DECELJERKTIME Pour définir le pas qui sera utilisé dans les périodes de décélération.
DECELTIME Pour régler le temps de décélération sur l'axe.
DEFAULT Pour rétablir les variables de mouvement de l'axe à leur état de mise sous tension.
DEFAULTALL Pour rétablir toutes les variables de mouvement de l'axe à leur état de mise sous tension.
DPREVENT Pour interrompre le PC hôte et générer un événement piégeable, en utilisant DPR (Dual Port RAM, RAM à double accès).
DPRFLOAT Pour lire et écrire une valeur de 32 bits à virgule flottante sur la RAM à double accès (DPR).
DPRLONG Pour lire et écrire une valeur de 32 bits de nombre entier sur la RAM à double accès (DPR).
DRIVEENABLE Pour activer ou désactiver le variateur pour l'axe en question.
DRIVEENABLEOUTPUT Pour spécifier une sortie d'activation du variateur.
ENCODER Pour régler ou lire la valeur de l'encodeur de l'axe.
ENCODERMODE Pour apporter diverses modifications aux encodeurs.
ENCODERPRESCALE Pour réduire l'échelle de l'entrée de l'encodeur.
ENCODERSCALE Pour régler ou lire le facteur d'échelle de la voie de l'encodeur.
ENCODERVEL Pour lire la vitesse à partir d'une voie d'encodeur.
ENCODERWRAP Pour régler ou lire la plage d'enroulement pour la voie de l'encodeur.
ENCODERZLATCH Pour obtenir et réinitialiser l'état d'un verrouillage Z de l'encodeur d'axe.
ERRORDECEL Pour régler le taux de décélération sur l'axe en vue d'arrêts pilotés, en cas d'entrée d'erreur ou d'entrée d'arrêt.
ERRORINPUT Pour régler ou obtenir l'entrée TOR qui sera utilisée en guise d'entrée d'erreur pour l'axe en question.
ERRORINPUTMODE Pour contrôler l'action par défaut qui est mise en œuvre en cas d'entrée d'erreur externe.
ERRORMASK Pour empêcher des conditions d'erreur spécifique en appelant l'événement ONERROR.
Mot clé Description
MN1933WFR Récapitulatif des mots clés Mint B-5

EVENTACTIVE Indique si un événement est actuellement activé.
EVENTDISABLE Pour activer et désactiver sélectivement des événements Mint.
EVENTPENDING Pour indiquer si un événement est actuellement en attente.
FACTORYDEFAULTS Pour réinitialiser les paramètres aux valeurs par défaut.
FASTAUXENABLE Pour effacer manuellement le verrouillage de position de l'encodeur auxiliaire.
FASTAUXENCODER Pour retourner à la valeur encodeur enregistrée par l'interruption rapide.
FASTAUXLATCH Pour lire la valeur de l'encodeur sur interruption rapide.
FASTAUXLATCHMODE Configure l'action par défaut lors de la suppression de la position verrouillée de l'encodeur auxiliaire.
FASTAUXSELECT Pour sélectionner quelle entrée rapide capturera la voie de l'encodeur auxiliaire.
FASTENABLE Effacer manuellement la position verrouillée de l'encodeur auxiliaire.
FASTENCODER Pour retourner à la valeur instantanée d'encodeur qui a été enregistrée par l'interruption rapide.
FASTLATCH Pour lire le verrouillage d'interrupteur rapide de l'axe.
FASTLATCHMODE Pour régler l'action par défaut qui sera mise en œuvre pour effacer la position verrouillée de l'encodeur.
FASTPOS Pour retourner à la position instantanée d'axe qui a été enregistrée par l'interruption rapide.
FASTSELECT Pour sélectionner quelle entrée (ou sortie) rapide de capture de position entraînera la capture de la position de l'axe.
FEEDRATE Pour régler la vitesse de rotation d'un déplacement individuel chargé dans le tampon.
FEEDRATEMODE Pour contrôler l'utilisation de la vitesse de rotation, de l'accélération, de la décélération et de l'annulation du taux d'avance.
FEEDRATEOVERRIDE Annule la vitesse actuelle, ou taux d'avance utilisé actuellement.
FEEDRATEPARAMETER Pour régler les paramètres en rapport avec la vitesse, ou taux d'avance utilisés actuellement.
FIRMWARERELEASE Pour lire le numéro de version du firmware.
FLY Pour créer une coupe à la volée en suivant un axe maître, avec accélération et décélération progressives.
FOLERROR Pour obtenir la valeur instantanée d'erreur de suivi.
FOLERRORFATAL Pour régler l'erreur de suivi maximale permise avant qu'une erreur ne soit générée.
Mot clé Description
B-6 Récapitulatif des mots clés Mint MN1933WFR

FOLERRORMODE Pour déterminer l'action à mettre en œuvre sur l'axe en cas d'erreur de suivi.
FOLERRORWARNING Règle le seuil d'erreur de suivi avant qu'un avertissement d'axe ne soit généré.
FOLLOW Pour activer le suivi de l'encodeur avec un rapport de démultiplication donné.
FOLLOWMODE Pour définir le mode de fonctionnement du mot clé FOLLOW.
FREQ Pour régler une sortie à fréquence constante.
GEARING Pour régler le pourcentage de la compensation d'engrenage.
GEARINGMODE Pour activer ou désactiver la compensation d'engrenage.
GLOBALERROROUTPUT Permet à l'utilisateur de spécifier une sortie d'erreur globale qui sera désactivée en cas d'erreur.
GO Pour lancer le mouvement synchronisé.
GROUP Pour régler, ou lire, l'appartenance ou non d'un nœud à un groupe.
GROUPCOMMS Pour écrire dans la matrice de communication de tous les nœuds d'un groupe donné.
GROUPMASTER Pour régler le nœud comme noeud-maître d'un groupe, ou pour renvoyer l'ID du nœud-maître du groupe.
GROUPMASTERSTATUS Pour déterminer si le nœud courant est le nœud-maître du groupe.
GROUPSTATUS Pour déterminer si le nœud courant fait partie du groupe.
HELIXA Pour charger un déplacement hélicoïdal dans le tampon de déplacements.
HELIXR Pour charger un déplacement hélicoïdal dans le tampon de déplacements.
HOME Pour trouver la position de départ sur un axe.
HOMEBACKOFF Pour régler le facteur de vitesse de retour à la position de départ.
HOMECREEPSPEED Pour régler la vitesse pas-à-pas des déplacements vers le point de départ.
HOMEINPUT Pour régler une entrée TOR en guise d'entrée de commutateur de départ pour l'axe donné.
HOMEPHASE Pour trouver la phase de la séquence de retour à la position de départ qui est en cours.
HOMEPOS Pour lire la position de l'axe à la fin de la séquence de retour à la position de départ.
HOMESPEED Pour régler la vitesse de la phase initiale de recherche de séquence de retour à la position de départ.
Mot clé Description
MN1933WFR Récapitulatif des mots clés Mint B-7

HOMESTATUS Pour régler ou lire l'état d'une séquence de retour à la position de départ.
HOMESWITCH Pour obtenir l'état de l'entrée de position de départ.
HTA Lance le mode de mouvement Hold To Analog (Maintien en analogique).
HTACHANNEL Pour spécifier l'entrée analogique à utiliser pour un axe donné en mode Hold To Analog (Maintien en analogique) (HTA).
HTADAMPING Spécifie le terme d'amortissement utilisé dans l'algorithme Hold To Analog (Maintien en analogique) (HTA).
HTADEADBAND Spécifie la zone morte analogique de l'erreur.
HTAFILTER Règle le facteur de filtre pour l'entrée analogique.
HTAKINT Spécifie la valeur de gain intégral utilisée dans la boucle de forçage Hold To Analog (Maintien en analogique).
HTAKPROP Spécifie la valeur de gain proportionnel utilisée dans la boucle de forçage Hold To Analog (Maintien en analogique).
IDLE Indique si l'exécution d'un mouvement et le déplacement de l'axe sont terminés.
IDLEMODE Pour contrôler les vérifications effectuées afin de déterminer si un axe est au repos.
IDLEPOS Pour lire ou régler la limite d'erreur de suivi en mode de repos.
IDLESETTLINGTIME Pour lire le temps nécessaire pour qu'un axe arrive en position de repos.
IDLETIME Pour spécifier la période pendant laquelle l'axe doit remplir ses conditions de repos avant d'être en position de repos.
IDLEVEL Pour lire ou régler la limite de vitesse en mode de repos.
IMASK Pour masquer les événements Mint IN0 .. INx.
IN Pour lire l'état de toutes les entrées d'une banque d'entrées.
INCA Pour régler un mouvement incrémental sur une position absolue.
INCR Pour régler un mouvement incrémental sur une position relative.
INITERROR Pour signaler d'éventuelles erreurs détectées au démarrage.
INITWARNING Renvoie la somme des bits décrivant les avertissements d'initialisation générés au démarrage.
INPUTACTIVELEVEL Pour régler le niveau actif sur les entrées TOR.
INPUTDEBOUNCE Pour régler ou obtenir le nombre d'échantillons utilisés pour « stabiliser » une banque d'entrées TOR.
Mot clé Description
B-8 Récapitulatif des mots clés Mint MN1933WFR

INPUTMODE Pour régler ou obtenir la somme d'un motif de bits décrivant quelles entrées utilisateur TOR doivent être déclenchées par front d'impulsion ou par niveau.
INPUTNEGTRIGGER Pour régler ou obtenir les entrées utilisateur qui deviennent actives sur des fronts descendants.
INPUTPOSTRIGGER Pour régler ou obtenir les entrées utilisateur qui deviennent actives sur des fronts montants.
INSTATE Pour lire l'état de toutes les entrées TOR.
INSTATEX Pour lire l'état individuel d'une entrée TOR.
INX Pour lire l'état individuel d'une entrée TOR.
JOG Pour configurer un axe en commande de vitesse.
KACCEL Pour régler le gain de correction d'accélération de la boucle d'asservissement.
KDERIV Pour régler le gain dérivé de la boucle d'asservissement sur les axes d'un servomoteur.
KEYS Pour réagencer les touches sur un KeypadNode Baldor CAN.
KINT Pour régler le gain intégral de la boucle d'asservissement.
KINTLIMIT Pour limiter l'effet global du gain intégral KINT.
KINTMODE Pour contrôler le moment auquel l'action intégrale sera appliquée dans la boucle d'asservissement.
KNIFE Charge un déplacement de découpe tangentielle sur l'axe donné.
KNIFEAXIS Spécifie l'axe-maître que l'axe du couteau devra suivre.
KNIFEMODE Spécifie le mode de découpe chargé en même temps que les déplacements sur l'axe-maître du couteau.
KNIFESTATUS Pour lire ou régler l'état de l'axe de couteau.
KPROP Pour régler le gain proportionnel du contrôleur de position.
KVEL Pour régler le gain de retour de vitesse de la boucle d'asservissement.
KVELFF Pour régler le taux de correction aval de vitesse du contrôleur de position.
LIMIT Pour obtenir l'état des capteurs de fin de course avant et arrière pour l'axe en question.
LIMITFORWARD Pour obtenir l'état des capteurs de fin de course avant pour l'axe en question.
LIMITFORWARDINPUT Pour régler l'entrée utilisateur TOR configurée comme front montant du capteur de fin de course pour l'axe en question.
Mot clé Description
MN1933WFR Récapitulatif des mots clés Mint B-9

LIMITMODE Pour contrôler l'action par défaut mise en œuvre au cas où un capteur de fin de course avant ou arrière de matériel deviendrait actif.
LIMITREVERSE Pour obtenir l'état du capteur de fin de course arrière pour l'axe en question.
LIMITREVERSEINPUT Pour régler l'entrée utilisateur TOR configurée comme front descendant du capteur de fin de course pour l'axe en question.
LOOPTIME Pour régler l'intervalle de mise à jour de la boucle d'asservissement en microsecondes.
MASTERCHANNEL Pour régler ou lire la voie du périphérique d'entrée utilisée pour l'engrenage
MASTERDISTANCE Pour régler la distance du « segment » de l'axe-maître sur lequel l'esclave se déplacera dans les types de déplacement maître-esclave.
MASTERSOURCE Pour régler ou lire la source du périphérique d'entrée utilisée pour l'engrenage.
MAXSPEED Pour régler une limite de vitesse demandée sur un axe.
MISCERROR Pour lire ou effacer l'indicateur des diverses erreurs.
MISCERRORDISABLE Pour activer ou désactiver les diverses erreurs provoquant l'événement d'erreur.
MOVEA Pour régler un déplacement sur une position absolue.
MOVEBUFFERFREE Pour obtenir le nombre d'espaces libres dans le tampon de déplacements pour l'axe en question.
MOVEBUFFERID Pour joindre, ou lire un identifiant 16 bits depuis le tampon de déplacements.
MOVEBUFFERIDLAST Pour lire un identifiant 16 bits depuis le tampon de déplacements.
MOVEBUFFERLOW Pour régler ou renvoyer le nombre d'espaces libres dans le tampon de déplacements avant qu'un événement « tampon de déplacements bas » ne soit généré.
MOVEBUFFERSIZE Pour régler ou obtenir la taille du tampon de déplacements affecté à l'axe en question.
MOVEBUFFERSTATUS Pour renvoyer l'information concernant le tampon de déplacements.
MOVEDWELL Pour charger un arrêt momentané dans le tampon de déplacements.
MOVEOUT Pour charger un motif de bits de sortie TOR dans le tampon de déplacements.
MOVEOUTX Pour charger un changement d'état correspondant à une sortie TOR spécifique dans le tampon de déplacements.
Mot clé Description
B-10 Récapitulatif des mots clés Mint MN1933WFR

MOVEPULSEOUTX Pour charger une impulsion de changement d'état correspondant à une sortie TOR spécifique dans le tampon de déplacements.
MOVER Pour régler un déplacement sur une position relative.
NODE Pour régler ou lire l'ID utilisée par ce nœud.
NODELIVE Pour déterminer si un nœud CAN est actuellement activé ou désactivé sur le bus.
NODESCAN Pour balayer un nœud CAN spécifique en vue de détecter la présence d'un nœud.
NODETYPE Pour ajouter ou supprimer un nœud CAN au réseau. Peut également être lu pour déterminer le type de nœud.
NUMBEROF Pour obtenir l'information concernant les capacités du contrôleur.
NVFLOAT Pour lire ou écrire une valeur de virgule flottante dans la mémoire non volatile.
NVLONG Pour lire ou écrire une valeur de nombre entier dans la mémoire non volatile.
NVRAMDEFAULT Efface le contenu de la mémoire non volatile RAM (NVRAM).
OFFSET Pour effectuer un décalage.
OFFSETMODE Pour définir le mode de fonctionnement du mot clé OFFSET.
OUT Pour régler ou lire l'état de toutes les sorties d'une banque de sorties.
OUTPUTACTIVELEVEL Pour régler le niveau actif sur les sorties TOR.
OUTX Pour régler ou lire individuellement une sortie TOR.
PLATFORM Pour obtenir le type de plateforme.
POS Pour régler ou lire la position courante de l'axe.
POSDEMAND Pour régler ou lire la position de commande instantanée.
POSREMAINING Pour indiquer la distance de déplacement restante.
POSROLLOVER Pour compter le nombre d'enroulements de la valeur de position de l'axe.
POSROLLOVERDEMAND Pour renvoyer le nombre d'enroulements de position requis par le déplacement actuel.
POSTARGET Pour lire la position cible du déplacement positionnel actuel.
POSTARGETLAST Pour lire la position cible du dernier déplacement dans le tampon de déplacements.
PRECISIONINCREMENT Pour régler ou lire la distance théorique entre chaque valeur des tableaux de compensation de vis.
PRECISIONMODE Commande l'action de la compensation de vis.
Mot clé Description
MN1933WFR Récapitulatif des mots clés Mint B-11

PRECISIONOFFSET Règle la distance entre le début de la vis et la position zéro de l'axe.
PRECISIONTABLE Charge les tableaux de compensation de vis mère.
PRODUCTPOWERCYCLES Pour renvoyer le nombre de mises hors/sous tension du contrôleur.
PRODUCTSERIALNUMBER Pour renvoyer le numéro de série du contrôleur.
PROFILEMODE Pour sélectionner le type de profil de déplacement à utiliser.
PROFILETIME Pour régler le taux de mise à jour du profil.
PULSEOUTX Pour activer une sortie TOR pendant un certain nombre de millisecondes.
RELAY Pour activer ou désactiver le relais.
REMOTEADC Pour lire la valeur d'une entrée analogique distante (ADC).
REMOTEADCDELTA Pour contrôler le taux de changement sur une entrée analogique distante avant l'envoi d'un message REMOTEADC.
REMOTEBAUD Pour spécifier le débit CAN d'un nœud distant Baldor CAN (E/S ou Pavé de touches).
REMOTEDAC Pour contrôler la valeur d'une voie de sortie analogique distante (DAC).
REMOTEDEBOUNCE Pour contrôler le nombre d'échantillons utilisés pour « stabiliser » une entrée sur un nœud distant CAN.
REMOTEEMERGENCY-MESSAGE
Obtient le code d'erreur du dernier message d'urgence en provenance d'un nœud CANopen.
REMOTEERROR Lit l'information du registre d'erreurs CANopen signalée au sein du dernier message d'urgence en provenance d'un nœud.
REMOTEESTOP Pour contrôler l'état d'arrêt d'urgence d'un nœud distant CAN.
REMOTEIN Pour lire l'état de toutes les entrées TOR sur un nœud distant CAN.
REMOTEINBANK Pour lire l'état d'une banque d'entrées TOR sur un nœud distant CAN.
REMOTEINHIBITTIME Pour régler ou lire le temps d'invalidation PDO CANopen.
REMOTEINPUTACTIVELEVEL
Pour contrôler l'état activé des entrées TOR sur un nœud distant CAN.
REMOTEINX Pour lire l'état individuel des entrées TOR à partir d'un nœud distant CAN.
REMOTEMODE Pour contrôler le mode de mise à jour d'un nœud distant.
REMOTENODE Pour spécifier l'ID d'un nœud distant Baldor CAN (E/S ou Pavé de touches).
REMOTEOBJECT Pour accéder à la Librairie d'Objets de n'importe quel nœud CANopen présent sur le réseau.
Mot clé Description
B-12 Récapitulatif des mots clés Mint MN1933WFR

REMOTEOBJECTSTRING Pour accéder aux entrées « Vis-String » de la Librairie d'Objets d'un nœud CANopen présent sur le réseau.
REMOTEOUT Pour contrôler l'état des sorties TOR sur un nœud distant CAN.
REMOTEOUTBANK Pour lire l'état d'une banque de sorties TOR sur un nœud distant CAN.
REMOTEOUTPUTACTIVELEVEL
Pour contrôler l'état activé des sorties TOR sur un nœud distant CAN.
REMOTEOUTPUTERROR Pour lire ou réinitialiser les sorties TOR en erreur sur un nœud distant Baldor CAN.
REMOTEOUTX Pour contrôler l'état individuel des sorties TOR sur un nœud distant CAN.
REMOTEPDOIN Pour demander les données d'un nœud sous forme de message PDO.
REMOTEPDOOUT Pour forcer un nœud de contrôleur à transmettre un message PDO de longueur variable avec une COB-ID spécifique. Le PDO contiendra jusqu'à 64 bits de données pouvant être transmises sous forme de deux valeurs de 32 bits.
REMOTERESET Pour forcer un nœud distant CAN à effectuer une réinitialisation logicielle.
REMOTESTATUS Pour régler ou lire le registre d'état sur un nœud distant CAN.
RESET Pour effacer les erreurs de mouvement, régler la position à zéro et réactiver le variateur.
RESETALL Pour procéder à une réinitialisation de tous les axes.
SCALEFACTOR Pour mettre à l'échelle les cycles de l'encodeur de l'axe, ou les pas, en unités définies par l'utilisateur.
SOFTLIMITFORWARD Pour régler la position de fin de course logicielle avant sur un axe donné.
SOFTLIMITMODE Pour régler ou lire l'action par défaut mise en œuvre si une position de fin de course logicielle avant ou arrière est dépassée.
SOFTLIMITREVERSE Pour régler ou lire la position de fin de course logicielle arrière sur un axe donné.
SPEED Pour régler ou lire la vitesse de rotation des déplacements chargés dans le tampon.
SPLINE Pour effectuer une courbe.
SPLINEEND Pour définir le segment final du tableau de courbe pour un mouvement par courbe.
SPLINEINDEX Pour lire le numéro de segment de courbe en cours d'exécution.
Mot clé Description
MN1933WFR Récapitulatif des mots clés Mint B-13

SPLINESTART Pour définir le segment de départ du tableau de courbe pour une courbe.
SPLINESUSPENDTIME Pour régler la durée de segment pour un arrêt progressif pendant une courbe.
SPLINETABLE Pour spécifier les noms de matrice à utiliser dans une courbe sur l'axe en question.
SPLINETIME Pour régler la durée de segment de tous les segments d'une courbe.
STEPPERIO Pour contrôler manuellement les broches de pas et de direction d'une voie de moteur pas à pas.
STOP Pour procéder à un arrêt progressif pendant le mouvement.
STOPINPUT Pour régler ou lire l'entrée TOR qui sera utilisée en guise d'entrée de commutateur d'arrêt pour l'axe en question.
STOPINPUTMODE Pour régler ou lire l'action qui sera mise en œuvre au cas où une entrée d'arrêt deviendrait active.
STOPSWITCH Pour obtenir l'état actuel de l'entrée d'arrêt pour l'axe.
SUSPEND Pour faire une pause dans le déplacement actuel.
SYSTEMDEFAULTS Pour réinitialiser les entrées du tableau de paramètres aux valeurs par défaut et effacer le programme Mint, la mémoire RAM non-volatile et le journal d'erreurs.
TERMINALADDRESS Pour régler ou lire l'ID d'un nœud CAN associé à un terminal.
TERMINALDEVICE Pour régler ou lire le type de périphérique associé à un terminal.
TERMINALMODE Pour régler ou lire les modes de liaison d'un terminal.
TERMINALPORT Pour régler ou lire le port de communication associé à un terminal.
TIMEREVENT Pour régler ou lire la valeur de l'événement temporisateur.
COUPLE Pour exécuter la commande de couple (courant constant) sur un axe de servomoteur.
TRIGGERCHANNEL Pour spécifier l'entrée utilisée pour le déclenchement, en cas de déclenchement sur une source ou un encodeur d'axe.
TRIGGERINPUT Pour spécifier l'entrée TOR utilisée pour le déclenchement.
TRIGGERMODE Pour contrôler le déclenchement d'un déplacement.
TRIGGERSOURCE Pour spécifier la source quand le déclenchement de l'axe utilise une position d'axe/encodeur.
TRIGGERVALUE Pour spécifier une valeur absolue à laquelle déclencher le mouvement.
VECTORA Pour effectuer un mouvement de vecteur interpolé sur deux ou plusieurs axes, avec des coordonnées absolues.
Mot clé Description
B-14 Récapitulatif des mots clés Mint MN1933WFR

VECTORR Pour effectuer un mouvement de vecteur interpolé sur deux ou plusieurs axes, avec des coordonnées relatives.
VEL Pour obtenir la vitesse instantanée de l'axe.
VELDEMAND Pour lire la vitesse de commande instantanée actuelle.
VELFATAL Pour régler ou lire le seuil de différence maximal entre la vitesse demandée et la vitesse réelle.
VELFATALMODE Pour contrôler l'action mise en œuvre par défaut en cas de dépassement du seuil de vitesse.
Mot clé Description
MN1933WFR Récapitulatif des mots clés Mint B-15

B-16 Récapitulatif des mots clés Mint MN1933WFR

IndexIndex
AAbréviations, 2-4
Accessoires, A-1
Aide, fichier, 5-6
Alimentations, 7-1
CCaractéristiques techniques, 7-1
conditions ambiantes, 7-5entrées analogiques, 7-1entrées d'encodeur, 7-4entrées TOR, 7-2, 7-3Interface CAN, 7-4mécanique, 7-1puissance, 7-1relais, 7-3sortie de relais, 7-3sorties analogiques (demandes), 7-2sorties de moteur pas à pas, 7-4sorties TOR, 7-3
Commande en boucle fermée, introduction, 5-15
Conditions ambiantes, 3-1, 7-5
Configurationaxe pour commande de vitesse, 5-18, 5-24axes, 5-10calcul de KVELFF, 5-24élimination des erreurs d’état
stationnaire, 5-23entrées TOR, 5-30paramétrage de la sortie d’activation du
variateur, 5-12réglage de KPROP, 5-27réponse critiquement amortie, 5-22réponse sous-amortie, 5-20réponse suramortie, 5-21sélection d’une échelle, 5-11sélection de gains de boucle
d’asservissement, 5-18
sélection du type d’axe, 5-10sorties TOR, 5-32test de l’axe de moteur pas à pas, 5-29test de la sortie d’activation du
variateur, 5-12, 5-13test et réglage d’un axe de
servomoteur, 5-14
Connecteurs, connecteur de bord à 100 broches, 4-1
Connexion de l'émulateur, 4-21
Consignes de sécurité, 1-2
DDépannage, 6-1
commande du moteur, 6-3communication, 6-3diagnostic de problèmes, 6-1fichier d’aide, 5-6SupportMe, 6-1voyant de réinitialisation, 6-2VOYANTS CAN, 6-2voyants d'état, 6-2
EE/S analogique, 4-4
entrées analogiques, 4-4sorties analogiques, 4-6
E/S TOR, 4-8configuration, 5-30entrées TOR - vue d'ensemble, 4-8entrées TOR - X1, 4-10entrées TOR - X2, 4-11entrées TOR - X3, 4-12sorties TOR - vue d'ensemble, 4-14sorties TOR - X4, 4-14
Échelle, sélection, 5-11
Encodeurcâbles, A-4entrées, 4-17
MN1933WFR Index

Entrée d'alimentation, 4-19
Entrée de relais, 4-20
Entrée/sortie, 4-1Baldor CAN - X18, 4-25CANopen - X17, 4-23connecteur de bord à 100 broches, 4-1connexion CAN, 4-22connexion de l'émulateur, 4-21entrées analogiques, 4-4, 7-1entrées d'encodeur, 4-17, 7-4entrées TOR, 4-8, 7-2, 7-3entrées TOR - X1, 4-10entrées TOR - X2, 4-11entrées TOR - X3, 4-12puissance - X9, 4-19relais et alimentation CAN - X8, 4-20résumé des connexions, 4-29sorties analogiques, 4-6, 7-2sorties de commande de moteur pas à pas,
7-4sorties de commande de moteur
pas à pas - X10, 4-21sorties TOR, 4-8, 4-14, 7-3sorties TOR - X4, 4-14sorties TOR - X5, 4-16
États de réinitialisation, 4-28
FFonctions, 2-1
IInformations de configuration, enregistrement,
5-33
Informations enregistrées, chargement, 5-34
Installation, 3-1Mint Machine Center, 5-1Mint WorkBench, 5-1
Installation de base, 3-1autres exigences, 3-2carte NextMove PCI-2, 3-3exigences liées à l’emplacement
d’installation, 3-1
Installation du pilote, 5-1
Interface CAN
Baldor CAN, 4-25câblage, 4-27CANopen, 4-23caractéristiques techniques, 7-4connecteur Baldor CAN, 4-25connecteur CANopen, 4-23entrée d'alimentation, 4-20Introduction, 4-22Nœuds Baldor CAN, A-5opto-isolation, 4-27terminaison, 4-27voyants, 6-2
Interface de retour, 4-17, 7-4câbles, A-4
KKVELFF, calcul, 5-24
LLED
voyant de réinitialisation, 6-2VOYANTS CAN, 6-2voyants d'état, 6-2
Logiciel MintNC, A-6
MMint Machine Center (MMC), 5-2
démarrage, 5-3
Mint WorkBench, 5-5chargement des informations enregistrées,
5-34configuration d’entrée/sortie TOR, 5-30démarrage, 5-7enregistrement des informations de
configuration, 5-33fichier d’aide, 5-6
Mode d’emploi, 5-1Installation de Mint WorkBench, 5-1Installation du Mint Machine Center, 5-1
Module de dérivation, A-1
Moteur pas à pas, axe, 5-29sorties de commande - X10, 4-21
Index MN1933WFR

test de la sortie, 5-29
mots clés Mint, récapitulatif, B-1
NNœuds Baldor CAN, A-5
Numéro de référence, identification, 2-3
PPanels IHM, A-6
Précautions, 1-2
Présentation de la commande en boucle fermée, 5-15
RRécapitulatif des mots clés, B-1
Réception et inspection, 2-3
Réponse critiquement amortie, 5-22
Réponse sous-amortie, 5-20
Réponse suramortie, 5-21
SServomoteur, axe, 5-14
élimination des erreurs d’état stationnaire, 5-29
réglage de KPROP, 5-27réglage de la commande de courant, 5-18réglage pour commande de vitesse, 5-24test de la sortie de commande, 5-14
Sortie d’activation du variateurdéfinition, 5-12test, 5-13
Sortie de relais, 7-3
Sorties de commande, 4-6, 5-14
Sorties de commande Reportez-vous à Sorties de demande
TTampon d'encodeur/répartiteur, A-5
Testaxe de moteur pas à pas, 5-29axe de servomoteur, 5-14Voir aussi Réglage
UUnités de mesure et abréviations, 2-4
VVoyants, 6-2
voyant de réinitialisation, 6-2VOYANTS CAN, 6-2voyants d'état, 6-2
Voyants d'état, 6-2
WWatchdog système, 4-28
WorkBench. Reportez-vous à Mint WorkBench
MN1933WFR Index

Index MN1933WFR

Commentaires
Informez-nous de toute suggestion d’amélioration de ce manuel. Notez vos commentairesdans l’espace prévu à cet effet ci-dessous, puis détachez cette page du manuel et envoyez-la à :
ManualsABB LtdMotion Control6 Bristol Distribution ParkHawkley DriveBristolBS32 0BFRoyaume-Uni
Vous pouvez également envoyer vos commentaires à :
Commentaires :
suite...
MN1933WFR Commentaires

Merci d’avoir pris le temps de nous aider.
Commentaires MN1933WFR


Contactez-nous
ABB OyDrivesP.O. Box 184FI-00381 HELSINKIFINLANDETéléphone +358 10 22 11Fax +358 10 22 22681www.abb.com/drives
ABB Inc.Automation TechnologiesDrives & Motors16250 West Glendale DriveNew Berlin, WI 53151États-UnisTéléphone 262 785-3200
1-800-HELP-365Fax 262 780-5135www.abb.com/drives
ABB Beijing Drive Systems Co. Ltd.No. 1, Block D, A-10 Jiuxianqiao BeiluChaoyang DistrictBeijing, Chine, 100015Téléphone +86 10 5821 7788Fax +86 10 5821 7618www.abb.com/drives
Baldor Electric Company(A member of the ABB group)5711 R.S Boreham, Jr. St.P.O. Box 2400Fort Smith, AR 72901États-UnisTéléphone +1 479 646 4711Fax +1 479 648 5792www.baldor.com
ABB LtdMotion Control6 Bristol Distribution ParkHawkley DriveBristol, BS32 0BFRoyaume-UniTéléphone +44 (0) 1454 850000Fax +44 (0) 1454 859001www.abb.com/drives
ABB FranceMoteurs, Machines & DrivesZA La Boisse - BP 90145300, rue des Prés-SeigneursF-01124 Montluel cedex / FranceTél. : +33 (0)4 37 40 40 00Fax : +33 (0)4 37 40 40 72www.abb.fr/drives