contribution à l’étude des retours haptique et pseudo...
TRANSCRIPT
Contribution à l’étude des retours haptique et pseudo-haptique et de leur
impact sur les simulations d’opérations de montage/démontage en aéronautique
Thèse Anatole Lécuyer
Université Paris XIMercredi 5 décembre 2001
Plan
• Introduction sur le retour haptique en réalité virtuelle • Le retour « pseudo-haptique »• Intégration du retour haptique dans un « démonstrateur haptique » de montage / démontage• Évaluation de l’apport du retour haptique• Conclusion• Perspectives
Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 3/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Introduction
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 4/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
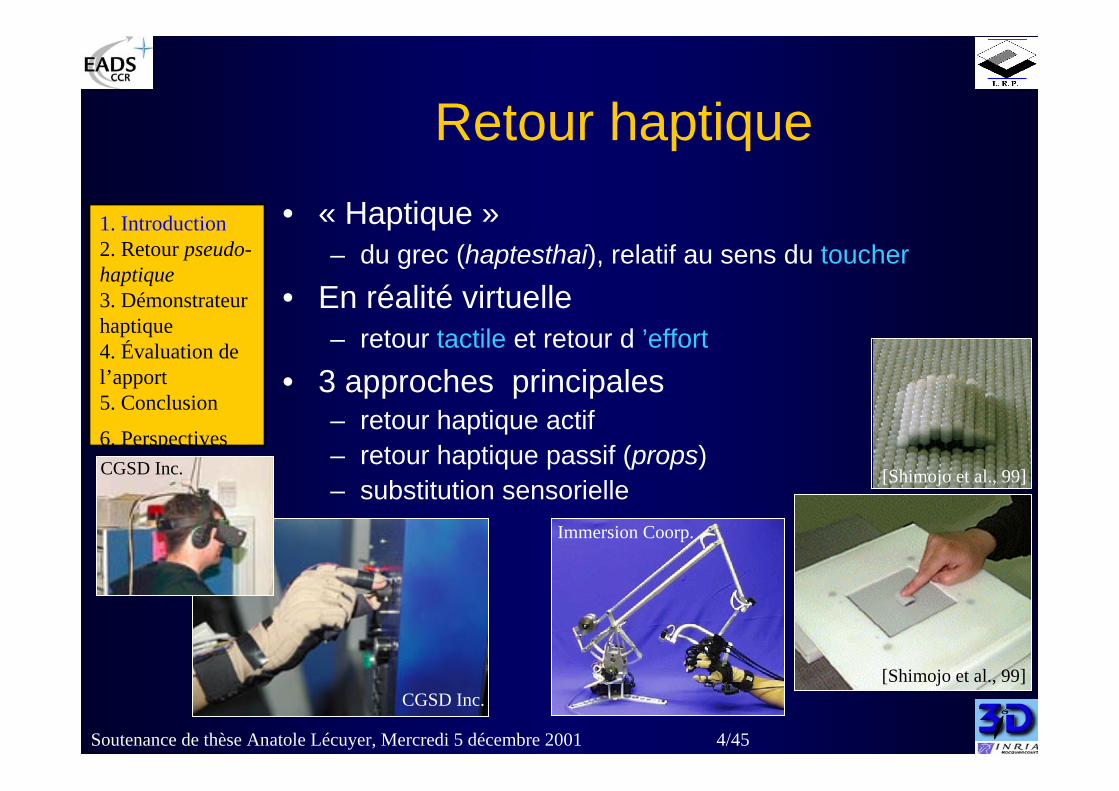
Retour haptique• « Haptique »
– du grec (haptesthai), relatif au sens du toucher
• En réalité virtuelle– retour tactile et retour d ’effort
• 3 approches principales– retour haptique actif– retour haptique passif (props)– substitution sensorielle
Immersion Coorp.
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
CGSD Inc.
[Shimojo et al., 99]
[Shimojo et al., 99]
CGSD Inc.
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 5/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Le retour pseudo-haptique
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 6/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
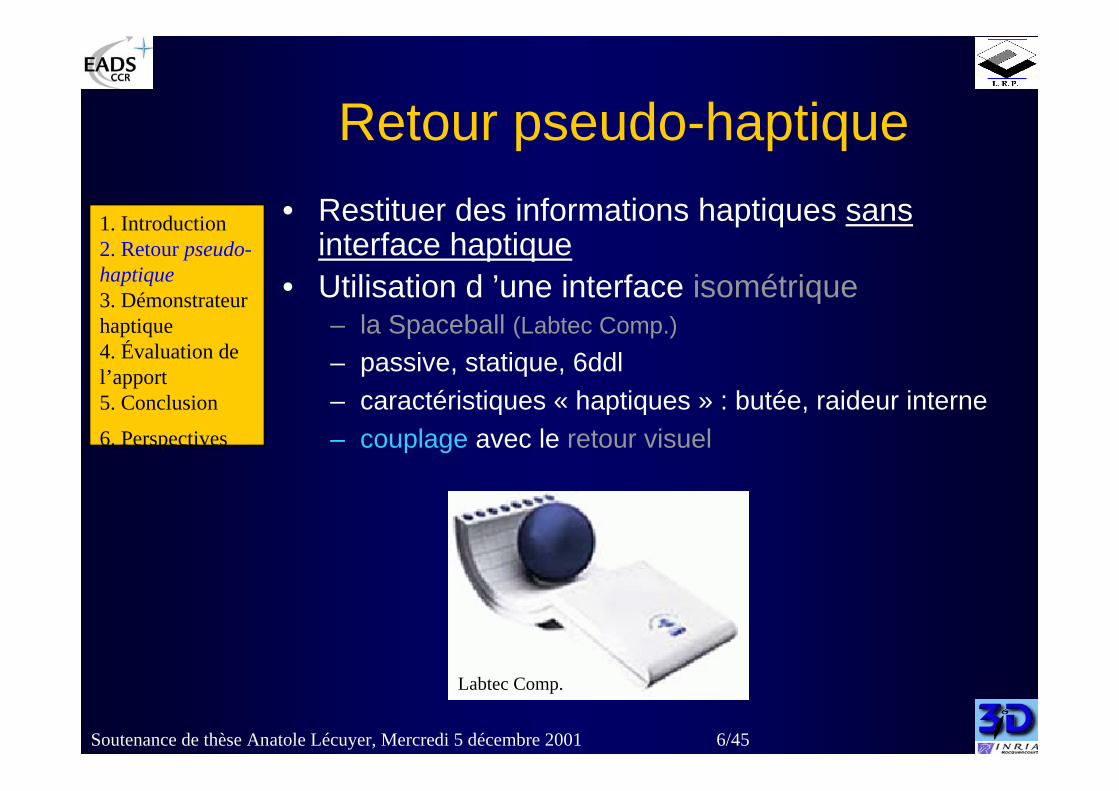
Retour pseudo-haptique• Restituer des informations haptiques sans
interface haptique• Utilisation d ’une interface isométrique
– la Spaceball (Labtec Comp.)– passive, statique, 6ddl– caractéristiques « haptiques » : butée, raideur interne– couplage avec le retour visuel
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Labtec Comp.
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 7/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
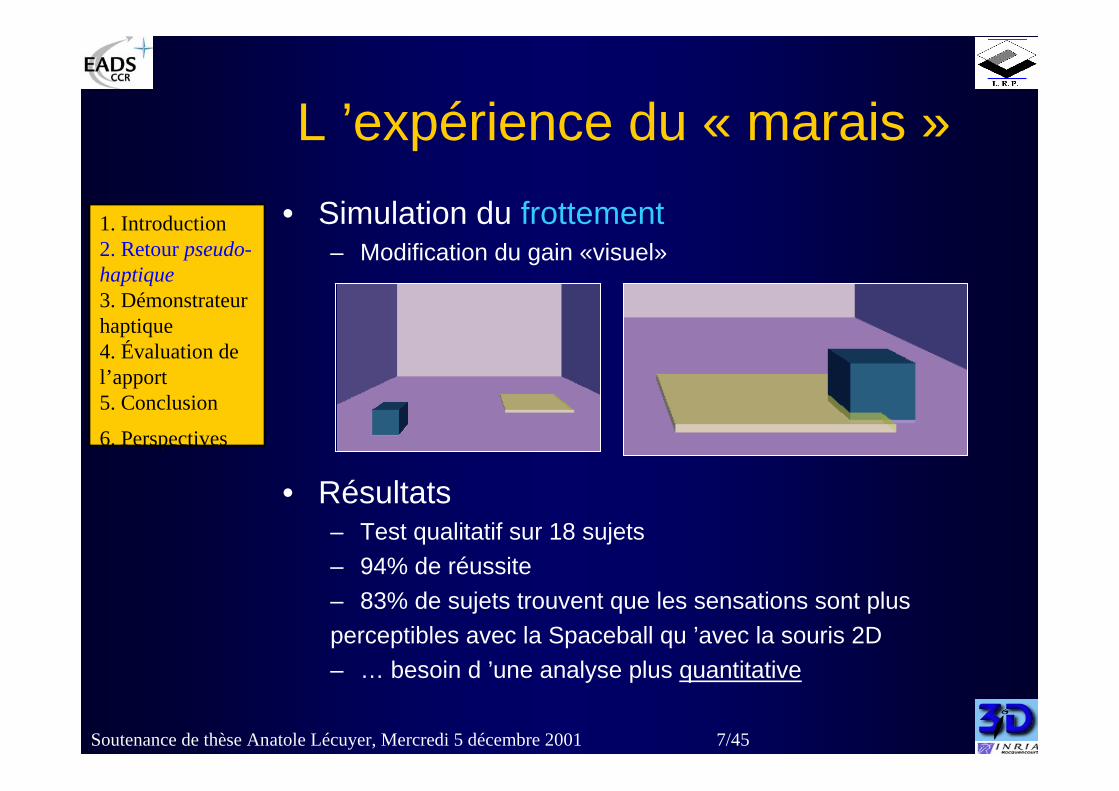
L ’expérience du « marais »• Simulation du frottement
– Modification du gain «visuel»
• Résultats– Test qualitatif sur 18 sujets– 94% de réussite– 83% de sujets trouvent que les sensations sont plus perceptibles avec la Spaceball qu ’avec la souris 2D– … besoin d ’une analyse plus quantitative
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 8/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
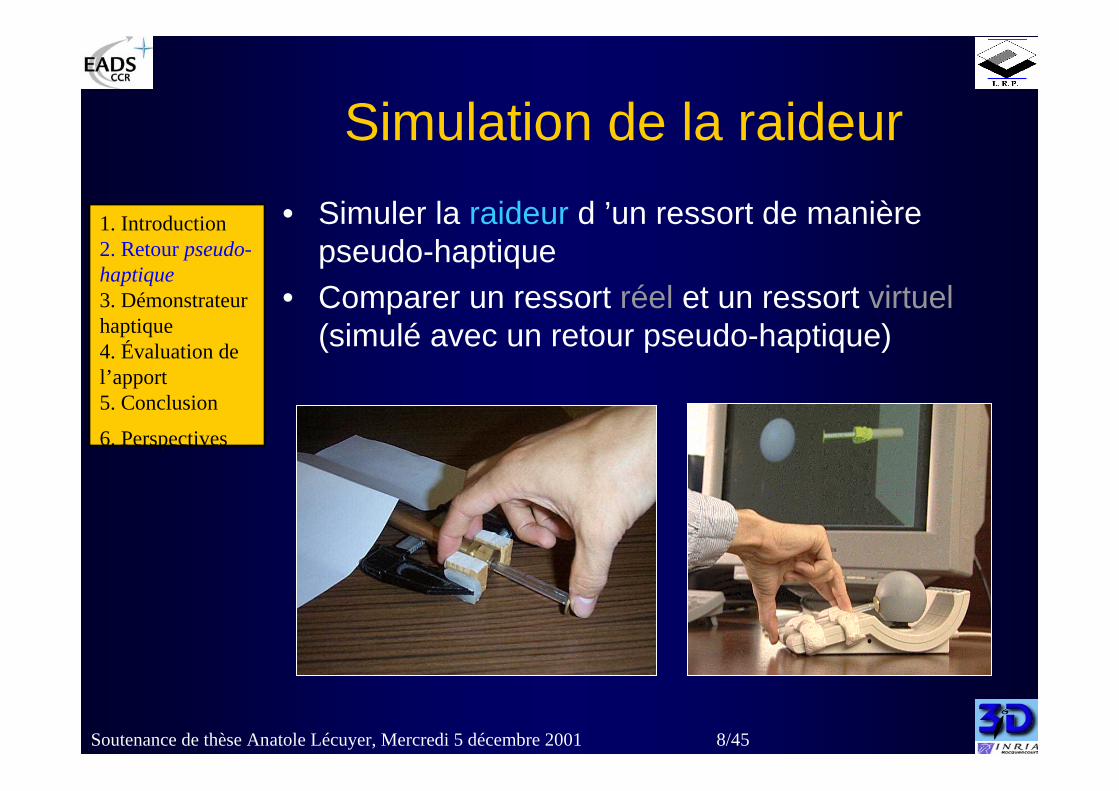
Simulation de la raideur• Simuler la raideur d ’un ressort de manière
pseudo-haptique• Comparer un ressort réel et un ressort virtuel
(simulé avec un retour pseudo-haptique)
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives

Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 9/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Raideur virtuelle
Force exercéeKv =
Déplacement visuel
Force exercéeKv =
Déplacement du doigt
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Force Déplacement visuel
Loi de Hooke : FF = K.= K.∆∆x x
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 10/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Analyse psychophysique
• Méthode « constante » de détermination de seuil de discrimination [Bonnet, 86] [Gescheider, 85]
• Obtention de paramètres classiques– le JND (Seuil relatif de perception / Fraction de Weber)
• Variation perceptible (incrément/décrément) pour un stimulus donné
• Valeurs théoriques : 8% - 22% [Tan et al., 95] [Jones et Hunter, 92]
– le PSE (Point d ’Égalisation Subjective) • Valeur du stimulus de comparaison perçue comme égale
au stimulus de référence
• Si les valeurs trouvées sont proches des valeurs théoriques, notre simulation est « réaliste »
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 11/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
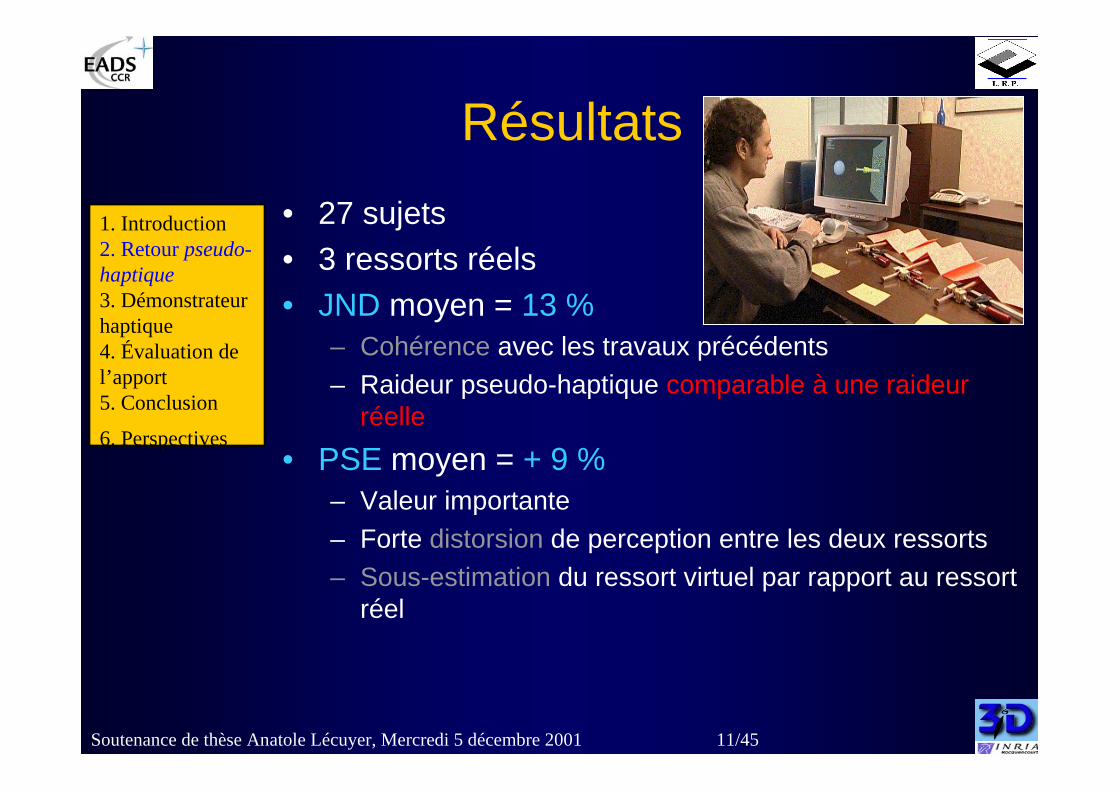
Résultats g • 27 sujets• 3 ressorts réels• JND moyen = 13 %
– Cohérence avec les travaux précédents– Raideur pseudo-haptique comparable à une raideur
réelle
• PSE moyen = + 9 %– Valeur importante– Forte distorsion de perception entre les deux ressorts– Sous-estimation du ressort virtuel par rapport au ressort
réel
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 12/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
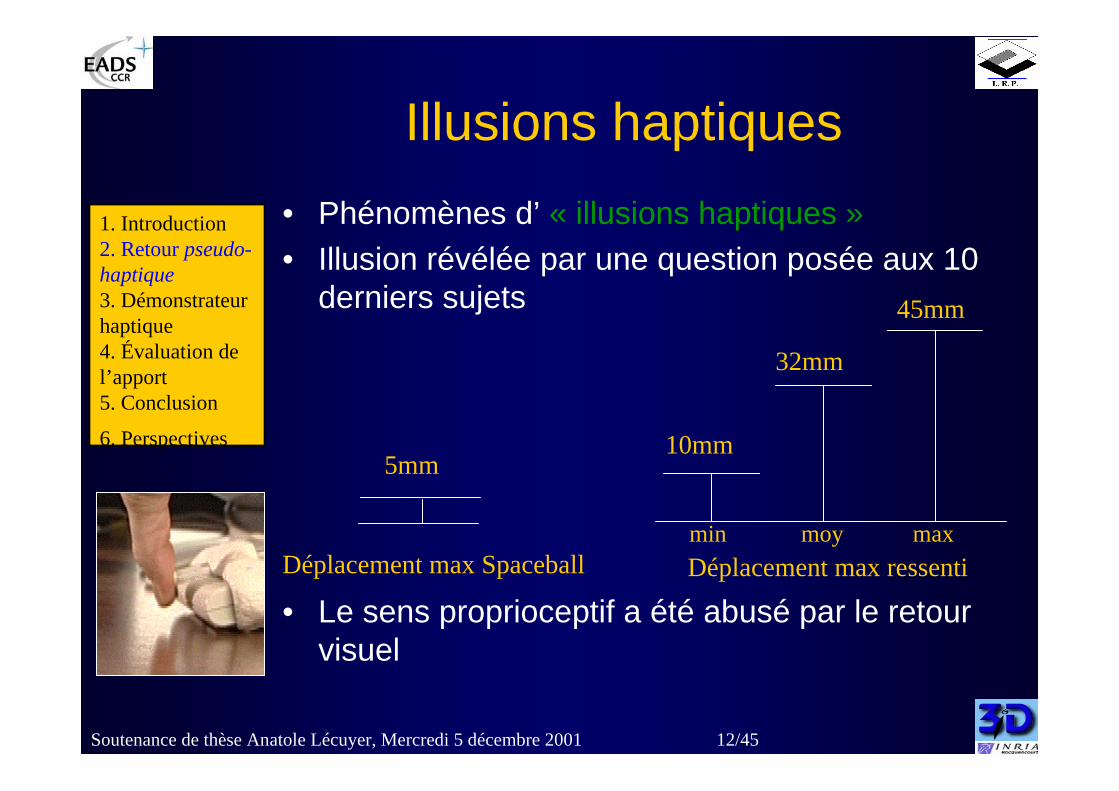
Illusions haptiques• Phénomènes d’ « illusions haptiques »• Illusion révélée par une question posée aux 10
derniers sujets
• Le sens proprioceptif a été abusé par le retour visuel
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives5mm
10mm
32mm
45mm
Déplacement max Spaceball Déplacement max ressentimin maxmoy
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 13/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Conclusion 1• Nouveau concept de retour haptique : le retour
pseudo-haptique• Il permet de simuler des informations haptiques
(frottement, raideur) avec une interface d ’entrée passive
• Approche axée sur la perception• Combiner le retour visuel avec une information
haptique passive liée à une action de l ’utilisateur• S ’accompagne d ’illusions haptiques• Les sujets ont globalement évalué la raideur de
ressorts simulés par un retour pseudo-haptique en se basant sur le retour visuel
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 14/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Nouvelle expérience• Le PSE trouvé exprime une forte distorsion de
perception• Étudier et compléter ces résultats • Lié à la Spaceball ?• ⇒ simulation de plusieurs Spaceball avec une
interface haptique
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 15/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
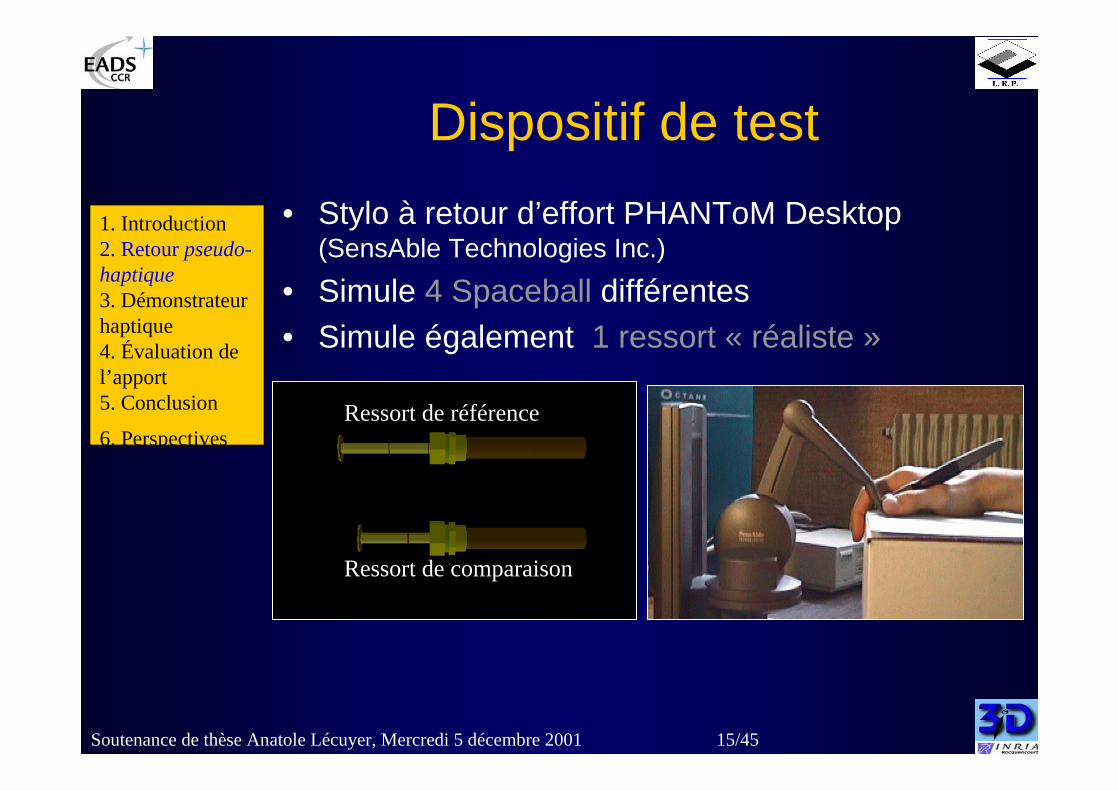
Dispositif de test• Stylo à retour d’effort PHANToM Desktop
(SensAble Technologies Inc.)
• Simule 4 Spaceball différentes • Simule également 1 ressort « réaliste »
Ressort de référence
Ressort de comparaison
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 16/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
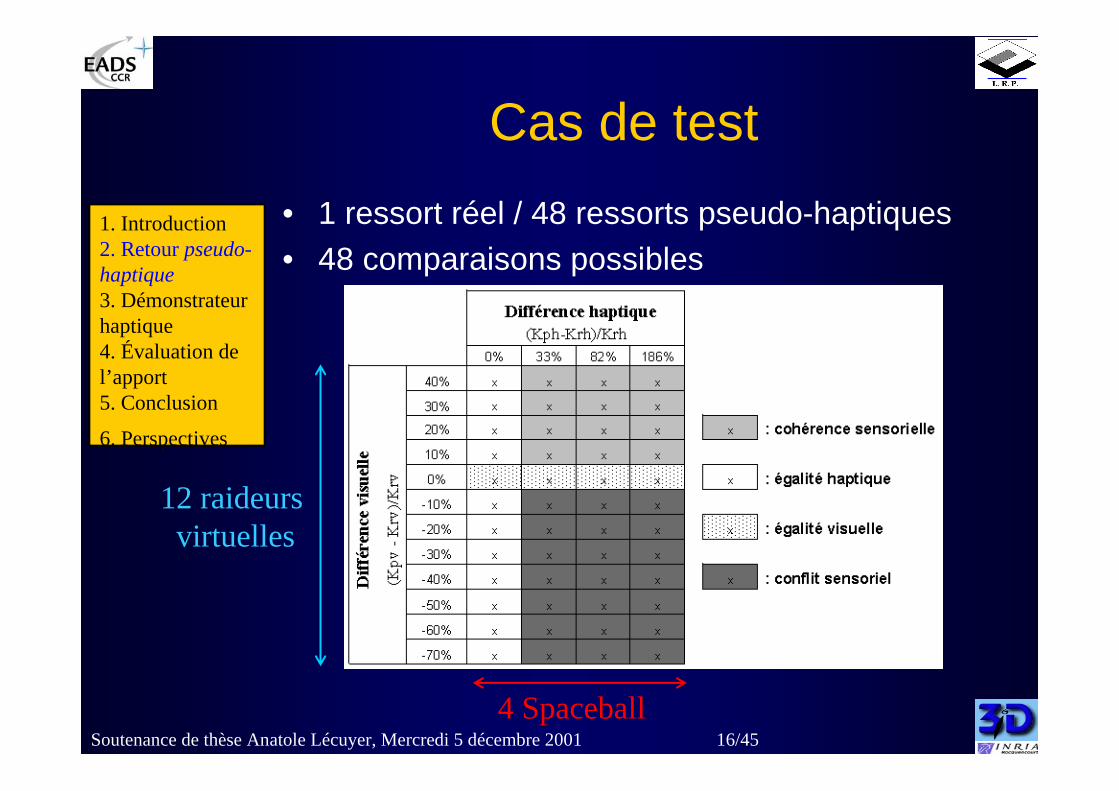
Cas de test• 1 ressort réel / 48 ressorts pseudo-haptiques• 48 comparaisons possibles
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
4 Spaceball
12 raideurs virtuelles
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives

Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 17/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
ANOVA
• 31 sujets• Analyse de variance (anova) sur les
réponses des sujets en fonction des cas• En situation de conflit sensoriel, le retour
haptique continue d ’influencer les réponses
• Atténue la notion de dominance sensorielle [Srinivasan et al., 96]
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
conflitsensoriel
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 18/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Variabilité des résultats
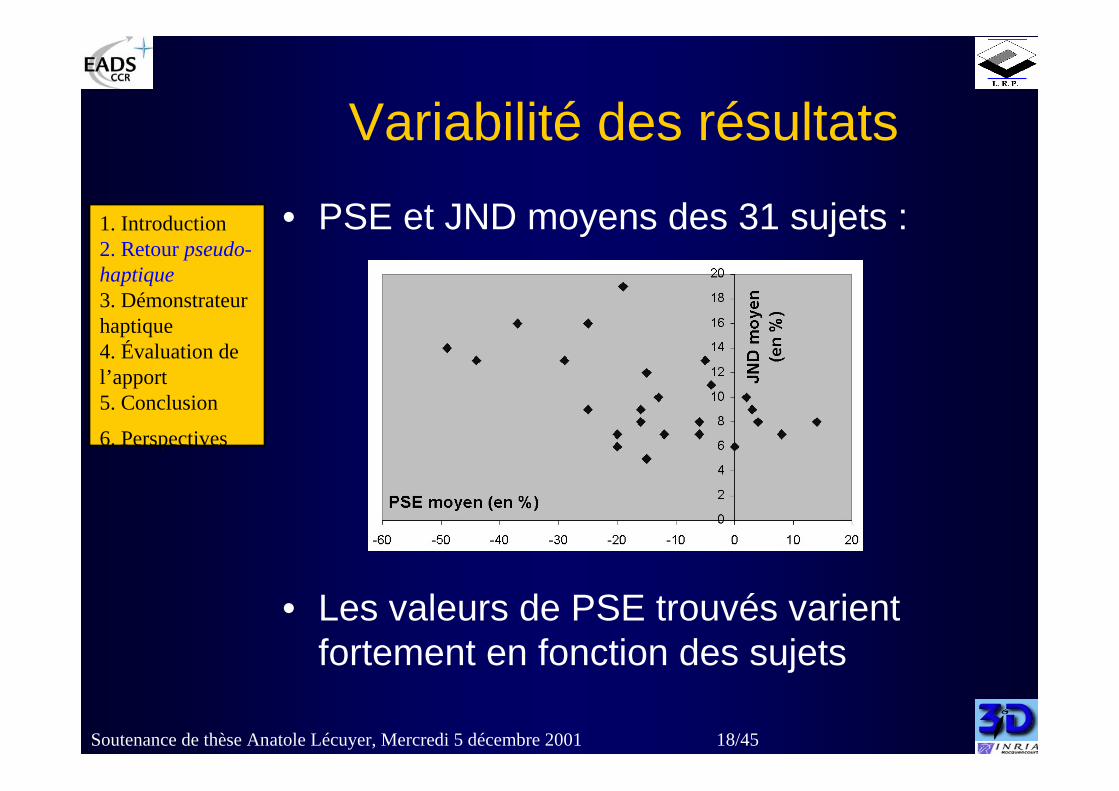
• PSE et JND moyens des 31 sujets :
• Les valeurs de PSE trouvés varient fortement en fonction des sujets
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 19/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
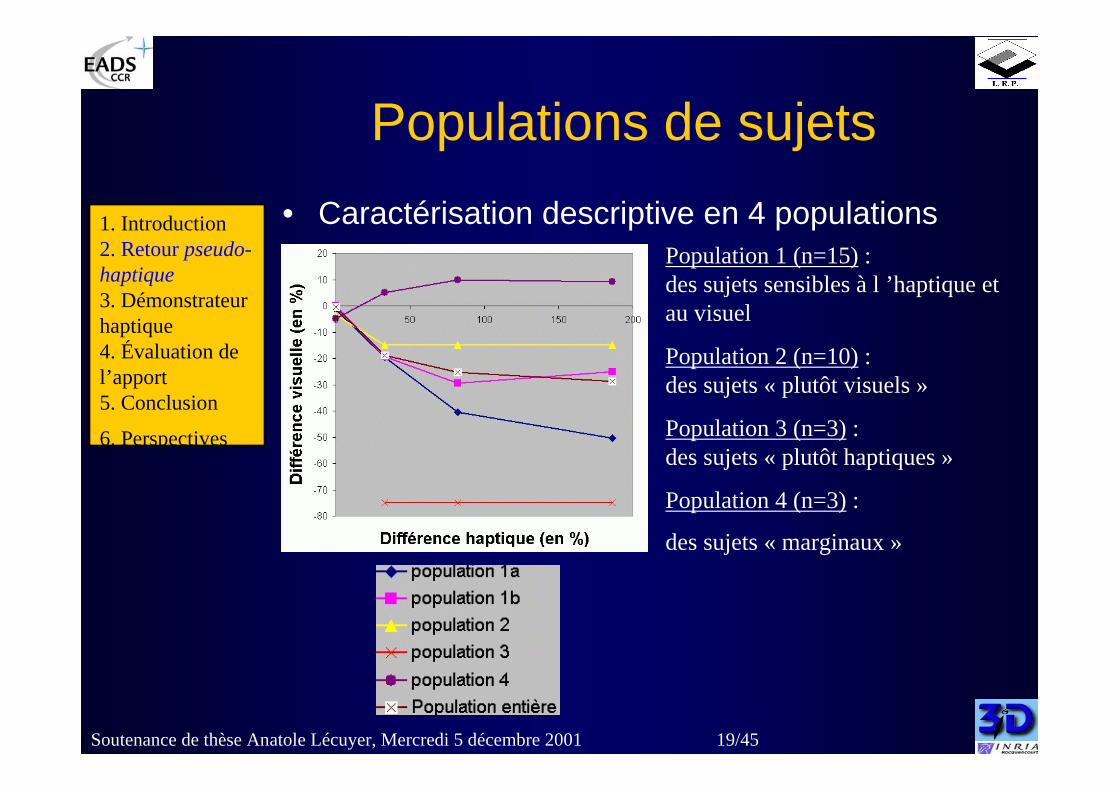
Populations de sujets• Caractérisation descriptive en 4 populations
Population 1 (n=15) : des sujets sensibles à l ’haptique et au visuel
Population 2 (n=10) : des sujets « plutôt visuels »
Population 3 (n=3) : des sujets « plutôt haptiques »
Population 4 (n=3) :
des sujets « marginaux »
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 20/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Conclusion 2• Par rapport à des travaux précédents [Srinivasan
et al., 96] :• En situation de conflit sensoriel, au moment
d ’évaluer des raideurs, le retour haptique continue d ’influencer la perception des sujets
• Le retour pseudo-haptique affecte différemmentles sujets
• Certaines personnes réagissent de manière « plutôt haptique » et d ’autres « plutôt visuelle ».
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives

Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 21/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Intégration du retour haptique dans un
« démonstrateur haptique »de montage/démontage
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 22/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
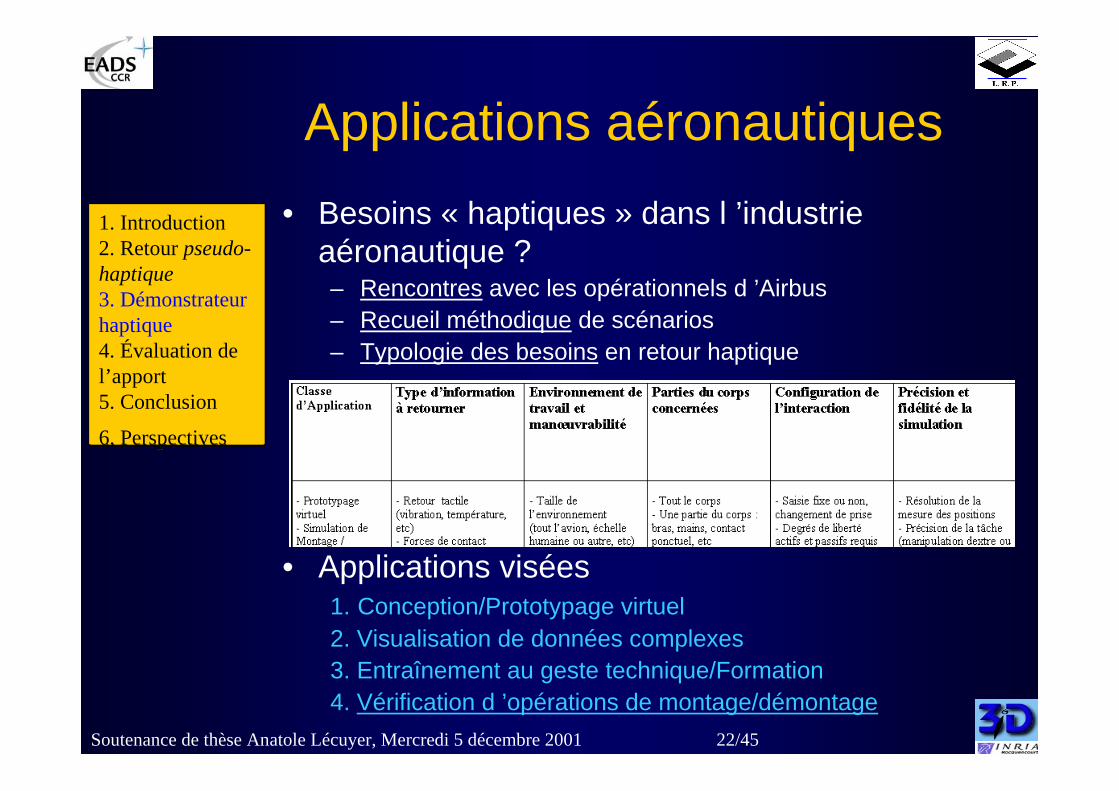
Applications aéronautiques• Besoins « haptiques » dans l ’industrie
aéronautique ?– Rencontres avec les opérationnels d ’Airbus – Recueil méthodique de scénarios– Typologie des besoins en retour haptique
• Applications visées 1. Conception/Prototypage virtuel2. Visualisation de données complexes3. Entraînement au geste technique/Formation4. Vérification d ’opérations de montage/démontage
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 23/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
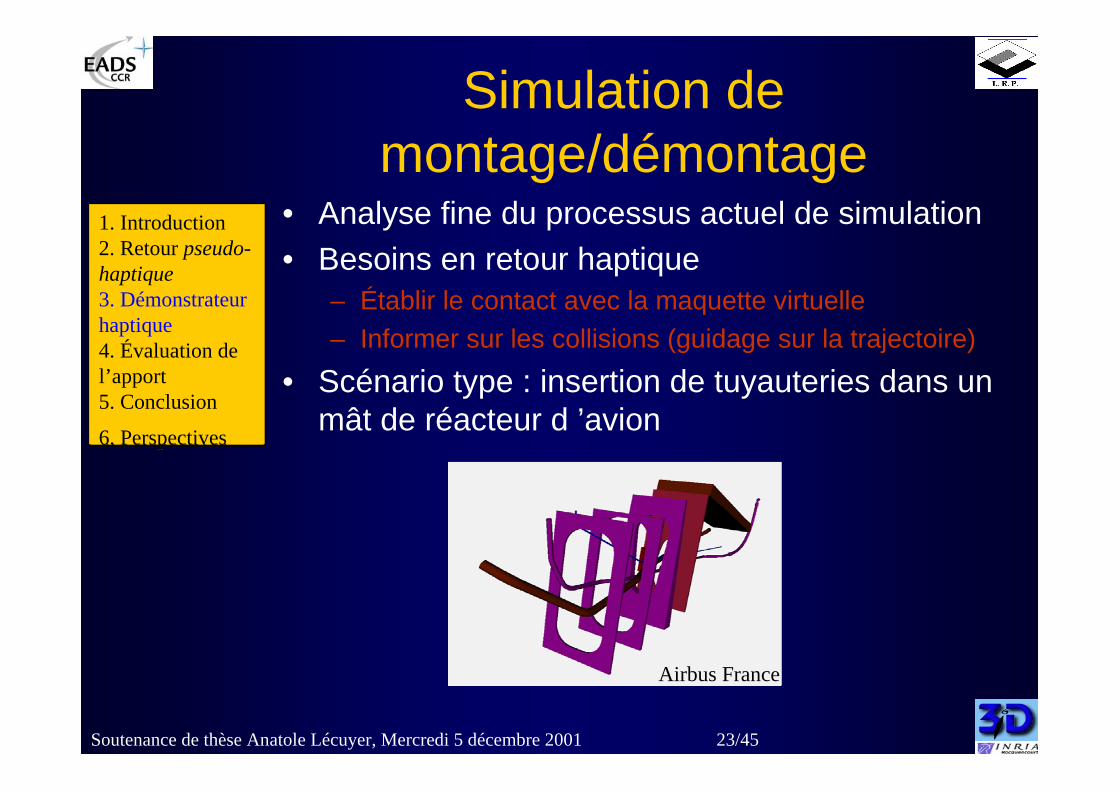
Simulation de montage/démontage
• Analyse fine du processus actuel de simulation• Besoins en retour haptique
– Établir le contact avec la maquette virtuelle– Informer sur les collisions (guidage sur la trajectoire)
• Scénario type : insertion de tuyauteries dans un mât de réacteur d ’avion
Airbus France
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 24/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
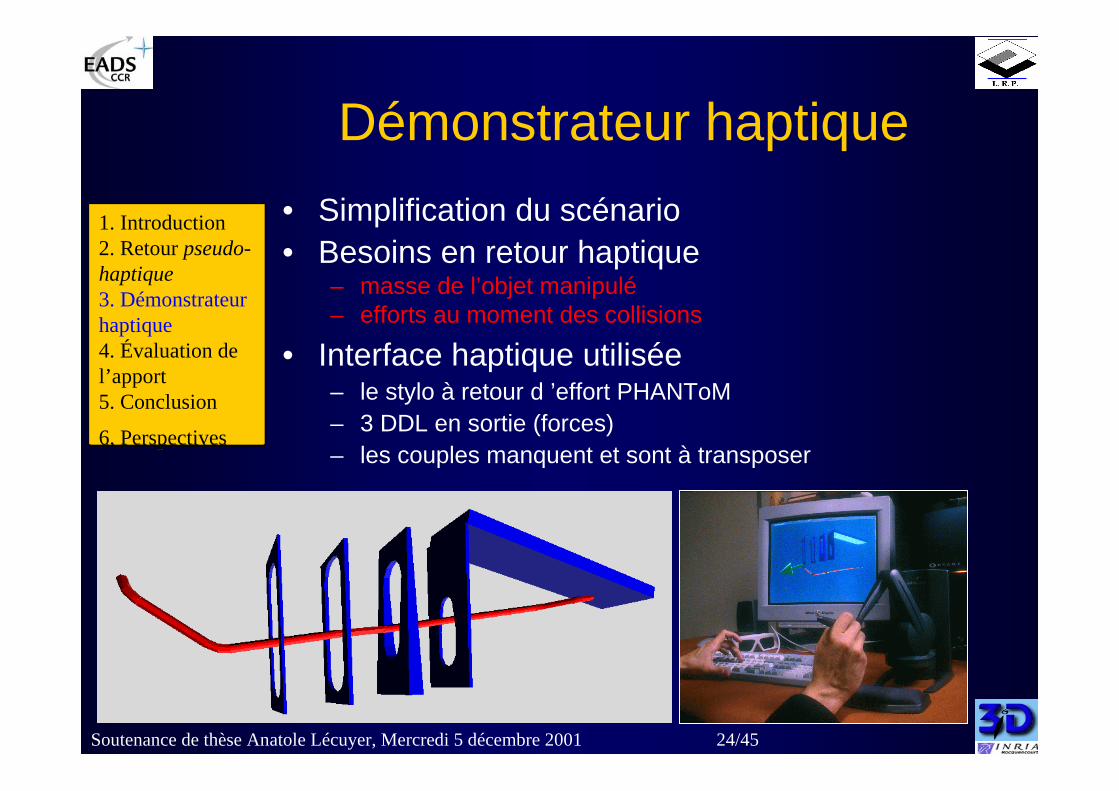
Démonstrateur haptique• Simplification du scénario• Besoins en retour haptique
– masse de l’objet manipulé– efforts au moment des collisions
• Interface haptique utilisée– le stylo à retour d ’effort PHANToM– 3 DDL en sortie (forces)– les couples manquent et sont à transposer
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 25/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
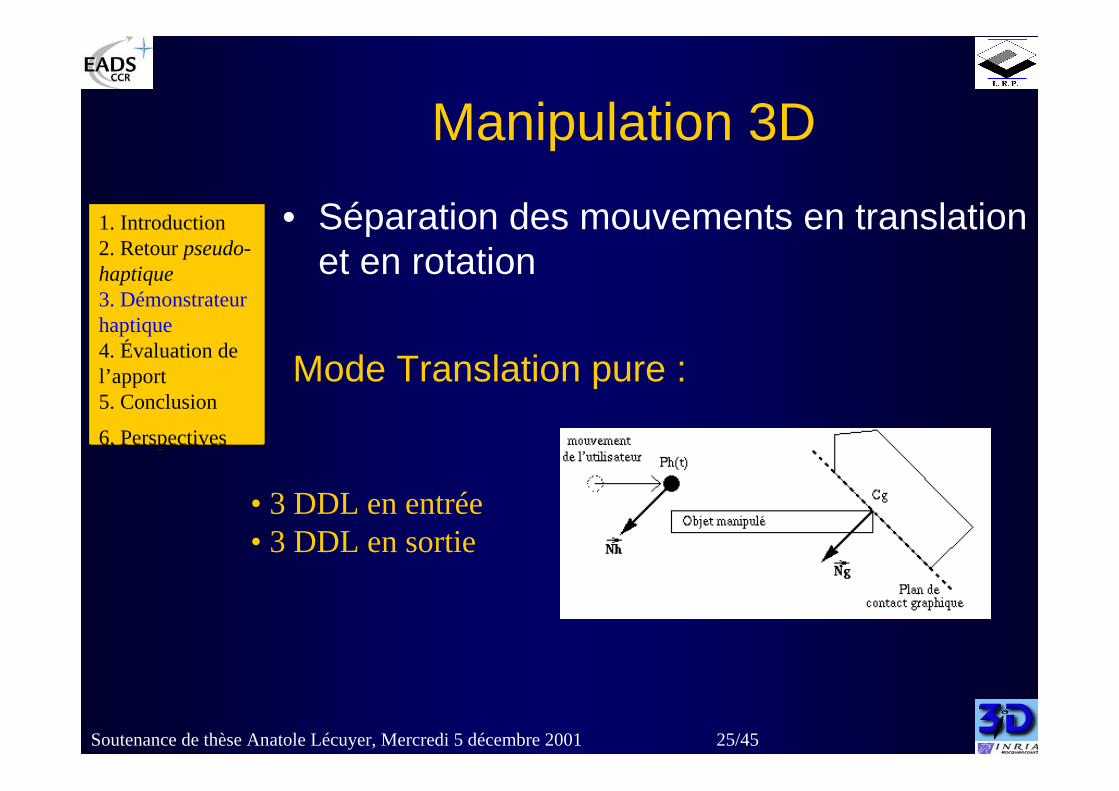
Manipulation 3D
• Séparation des mouvements en translation et en rotation
Mode Translation pure :
• 3 DDL en entrée• 3 DDL en sortie
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 26/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
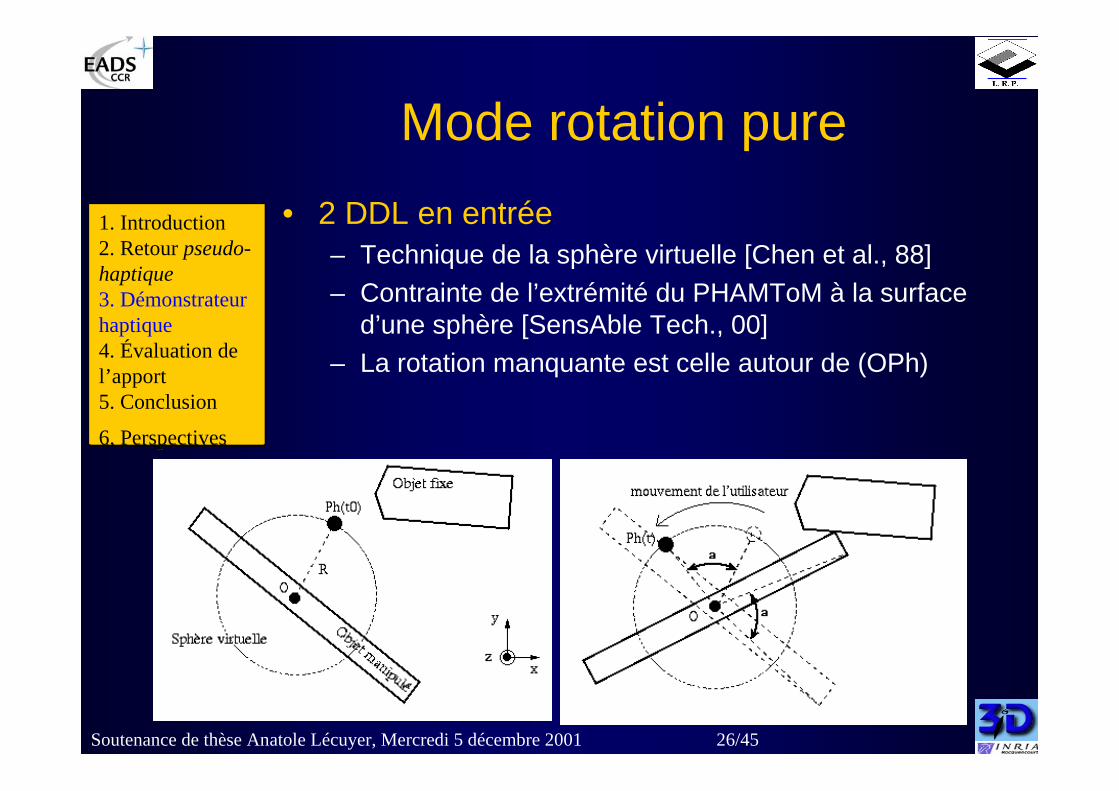
Mode rotation pure• 2 DDL en entrée
– Technique de la sphère virtuelle [Chen et al., 88]– Contrainte de l’extrémité du PHAMToM à la surface
d’une sphère [SensAble Tech., 00]– La rotation manquante est celle autour de (OPh)
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique4. Évaluation de l’apport 5. Conclusion
6. Perspectives

Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 27/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Transposition des couples• 2 DDL en sortie
– Simulation d’une trackball à retour d’effort– En cas de choc, la force est transposée au niveau du
point de manipulation
[Engel et al., 94]
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 28/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
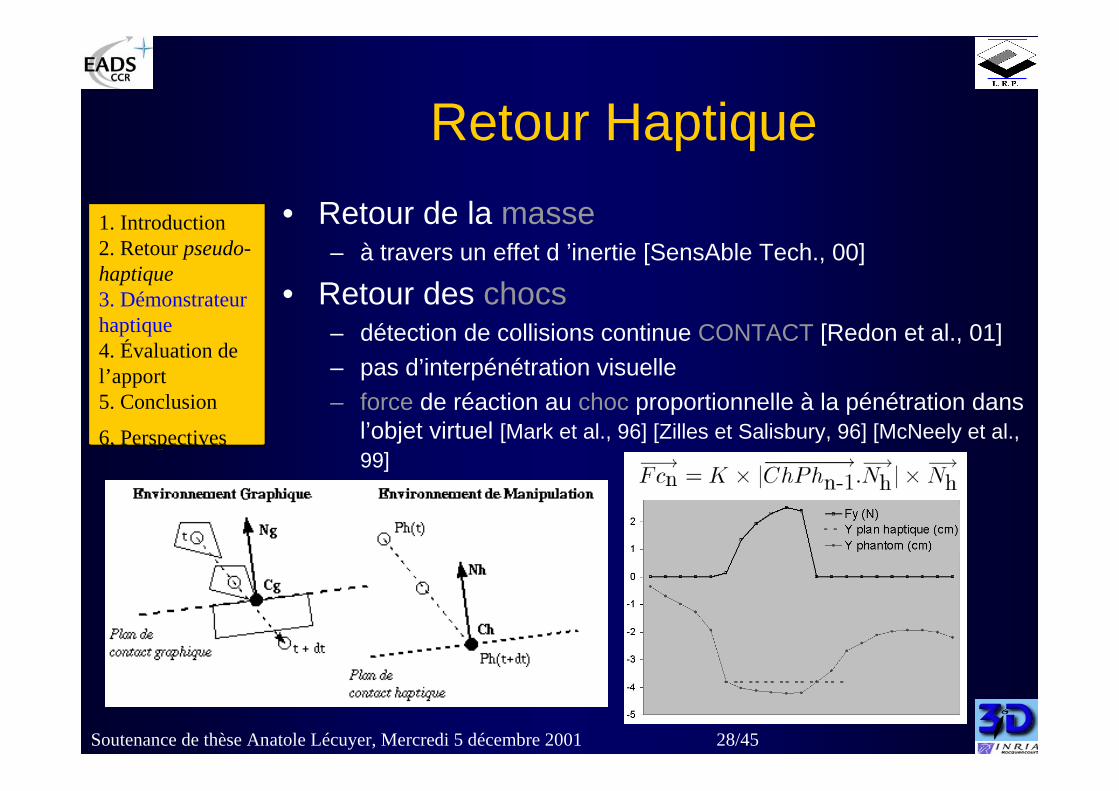
Retour Haptique• Retour de la masse
– à travers un effet d ’inertie [SensAble Tech., 00]
• Retour des chocs– détection de collisions continue CONTACT [Redon et al., 01]– pas d’interpénétration visuelle– force de réaction au choc proportionnelle à la pénétration dans
l’objet virtuel [Mark et al., 96] [Zilles et Salisbury, 96] [McNeely et al., 99]
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique4. Évaluation de l’apport 5. Conclusion
6. Perspectives

Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 29/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Retour visuel• Vision stéréoscopique• Représentations graphiques
– curseur virtuel, collisions, sphère virtuelle
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 30/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Évaluation informelle• Conditions
– 41 personnes d’Airbus France (15 ingénieurs de maintenance aéronautique)
– durée des tests : 10/15 minutes
• Appréciation sur le retour haptique– globalement très satisfaits des retours haptiques– facilite la vérification du montage/démontage (guidage)– la maquette est plus « réelle »
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 31/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Conclusion• Réalisation d’un démonstrateur haptique de
montage/démontage aéronautique• Simulation du retour de couple, avec une
interface haptique ne renvoyant que des forces, en simulant l’utilisation d’une trackball à retour d’effort
• Rendu haptique simplifié des chocs• Une évaluation informelle du démonstrateur par
des opérationnels d’Airbus France a montré l’intérêt de ces technologies pour les applications aéronautiques
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique4. Évaluation de l’apport 5. Conclusion
6. Perspectives

Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 32/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique4. Évaluation de l’apport5. Conclusion
6. Perspectives
Évaluation de l’apport du retour haptique
Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 33/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
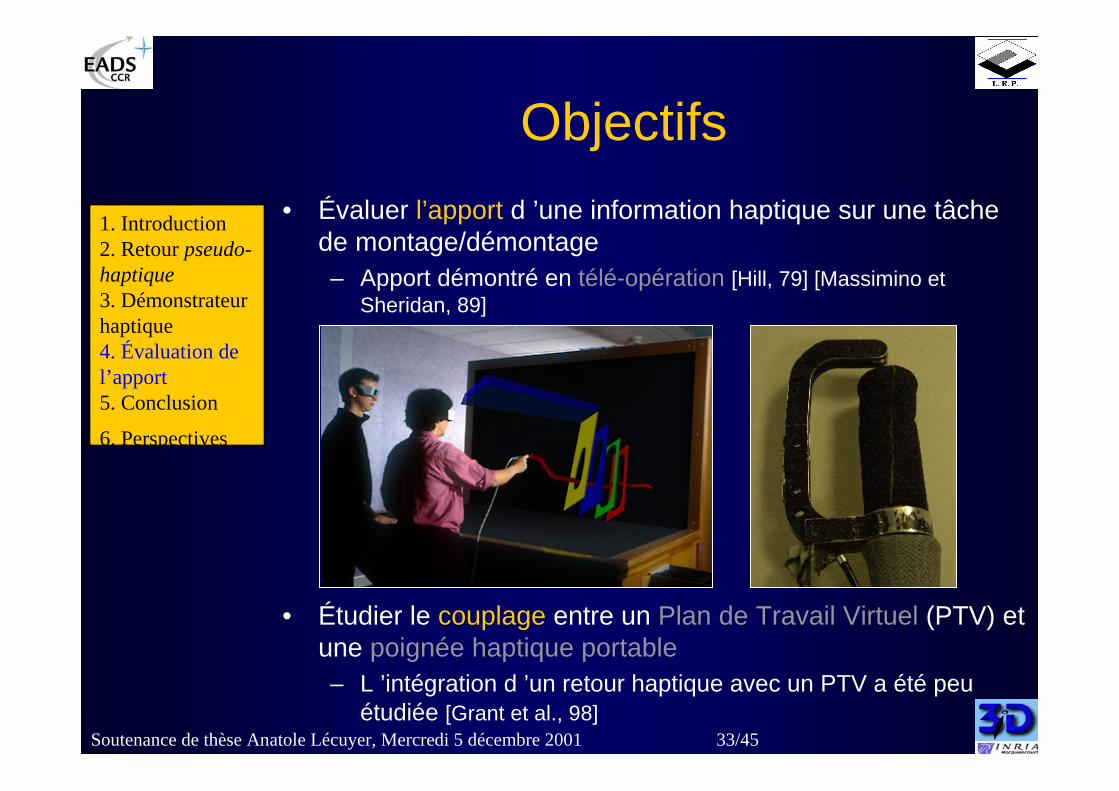
Objectifs• Évaluer l’apport d ’une information haptique sur une tâche
de montage/démontage – Apport démontré en télé-opération [Hill, 79] [Massimino et
Sheridan, 89]
• Étudier le couplage entre un Plan de Travail Virtuel (PTV) et une poignée haptique portable– L ’intégration d ’un retour haptique avec un PTV a été peu
étudiée [Grant et al., 98]
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique4. Évaluation de l’apport5. Conclusion
6. Perspectives
Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 34/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
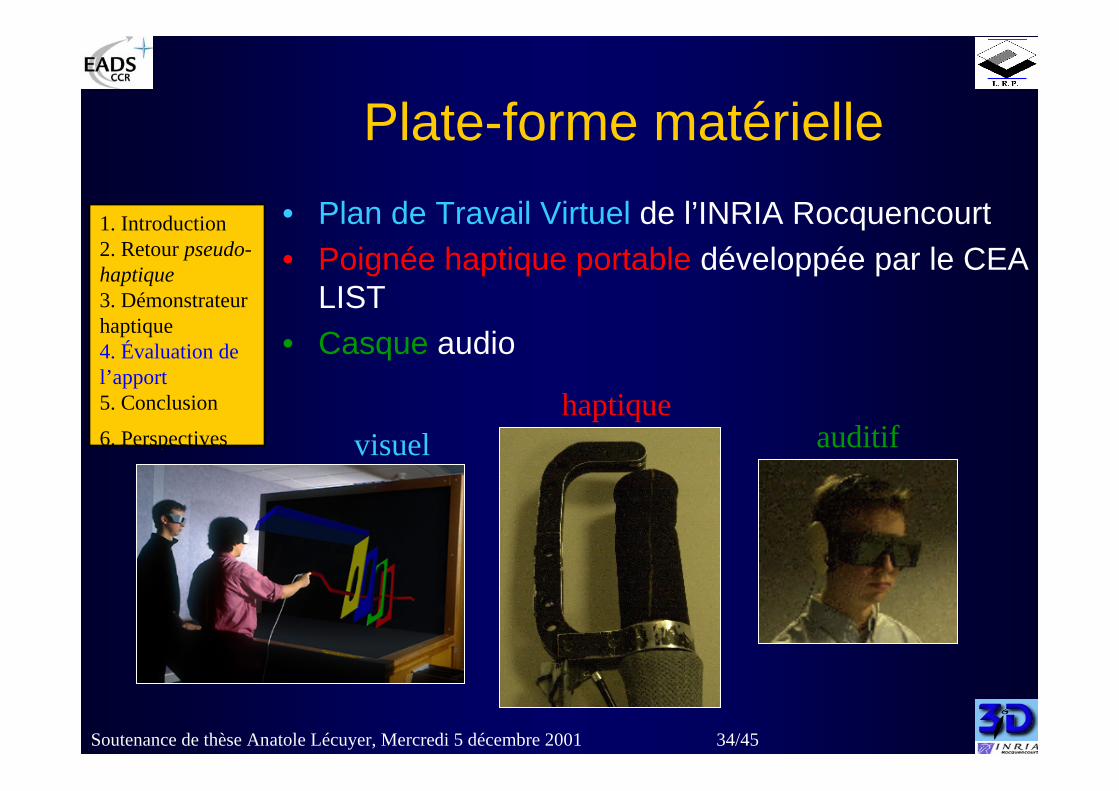
Plate-forme matérielle• Plan de Travail Virtuel de l’INRIA Rocquencourt• Poignée haptique portable développée par le CEA
LIST• Casque audio
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique4. Évaluation de l’apport 5. Conclusion
6. Perspectives visuelhaptique
auditif
Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 35/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
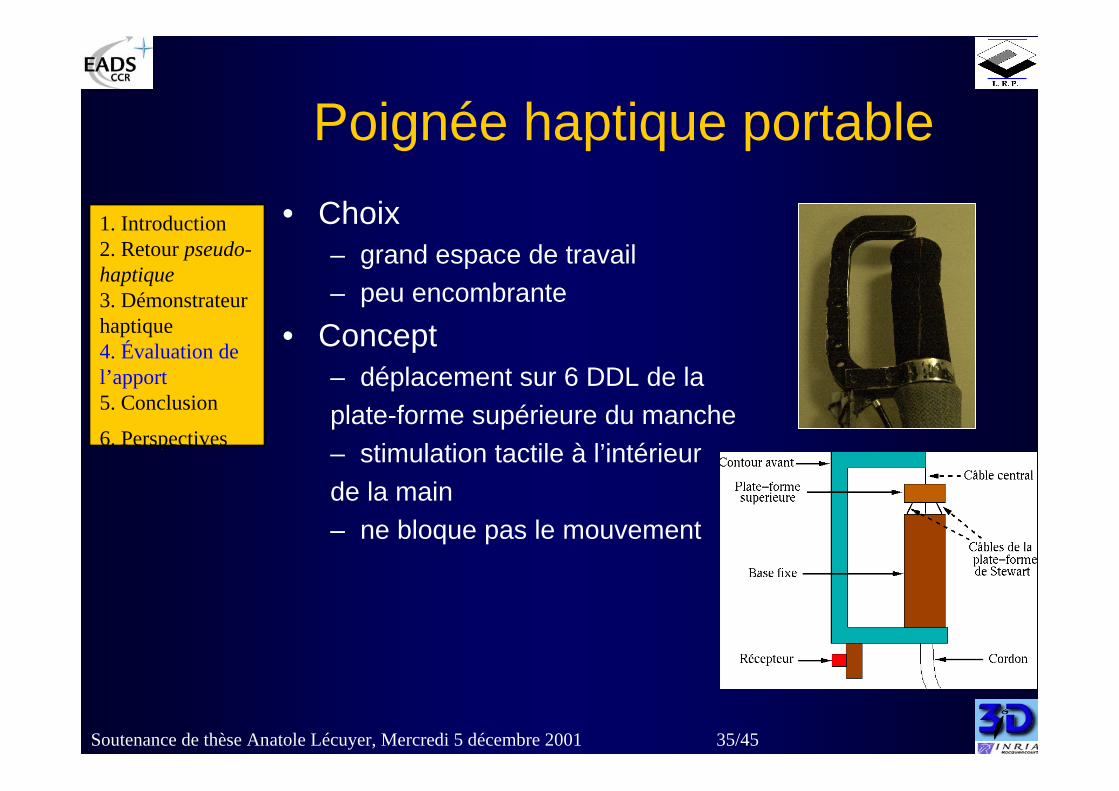
Poignée haptique portable• Choix
– grand espace de travail– peu encombrante
• Concept– déplacement sur 6 DDL de la plate-forme supérieure du manche– stimulation tactile à l’intérieur de la main– ne bloque pas le mouvement
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique4. Évaluation de l’apport 5. Conclusion
6. Perspectives

Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 36/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Tâche retenue
• Simplification du scénario de montage– Insertion d ’une boule à travers une série de cadres– Translation pure– Pas de simulation des couples
• Information de collision – Ajout d ’informations additionnelles (haptiques, visuelles
ou auditives) pour signaler les collisions
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique4. Évaluation de l’apport5. Conclusion
6. Perspectives

Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 37/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Informations additionnelles
1. Situation (condition) de contrôle
Les informations sont ajoutées tant que l’utilisateur ne s’est pas dégagé de la collision
2. Information visuelle de flèche de contact 3. Information auditive de bip sonore4. Information haptique de vibration5. Information haptique mono-directionnelle6. Information haptique multidirectionnelle
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique4. Évaluation de l’apport5. Conclusion
6. Perspectives
Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 38/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
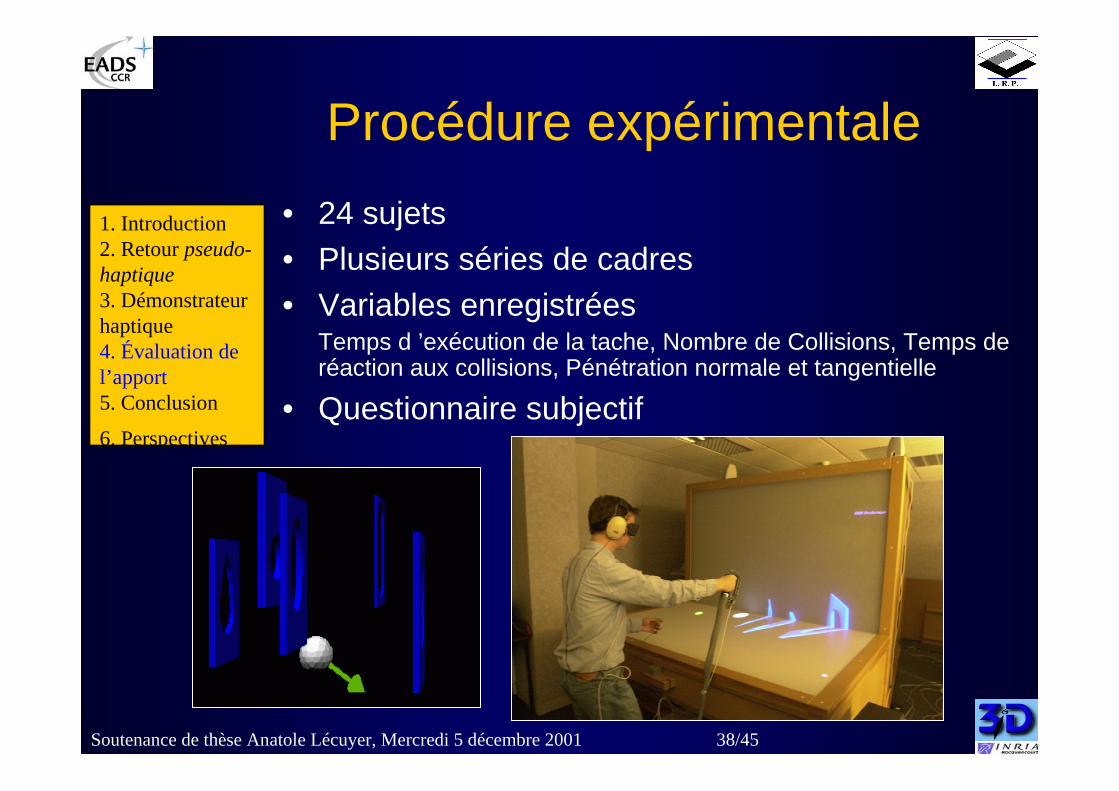
Procédure expérimentale• 24 sujets• Plusieurs séries de cadres• Variables enregistrées
Temps d ’exécution de la tache, Nombre de Collisions, Temps de réaction aux collisions, Pénétration normale et tangentielle
• Questionnaire subjectif
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique4. Évaluation de l’apport5. Conclusion
6. Perspectives
Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 39/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
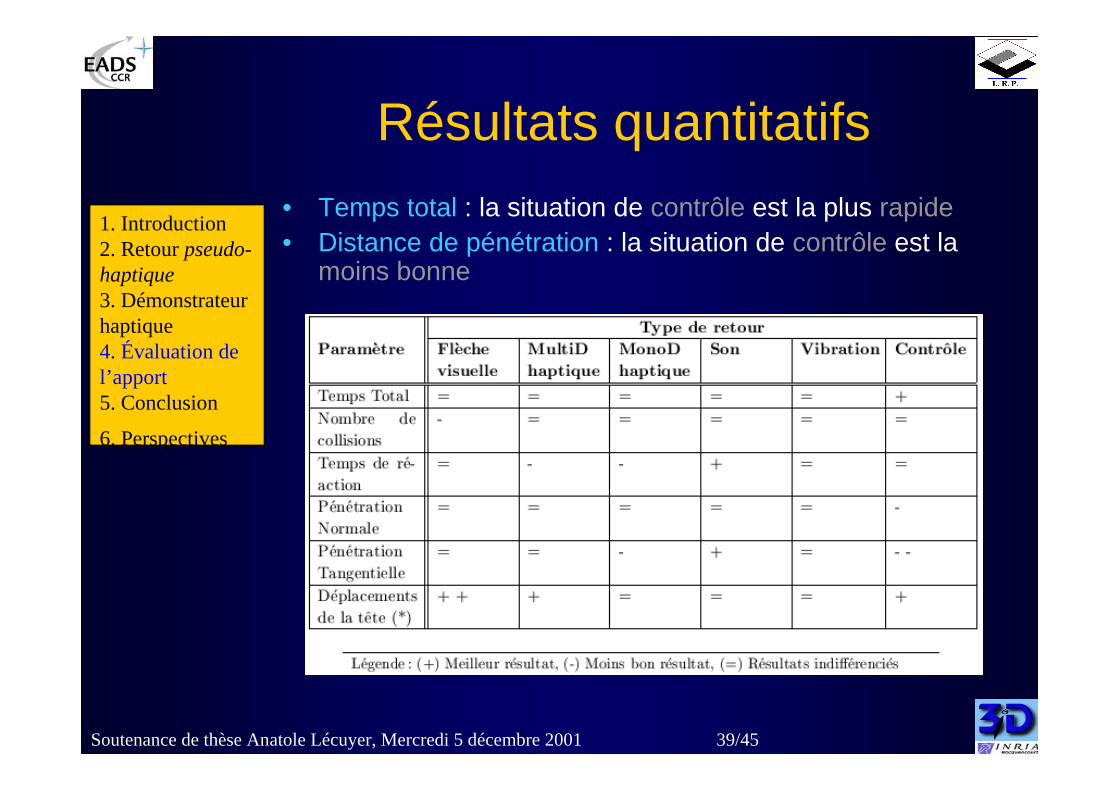
Résultats quantitatifs• Temps total : la situation de contrôle est la plus rapide• Distance de pénétration : la situation de contrôle est la
moins bonne
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique4. Évaluation de l’apport5. Conclusion
6. Perspectives
Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 40/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Résultats subjectifs• Différenciation de l’information haptique de
direction– 65% des sujets ne distinguent aucune différence entre
MultiD et MonoD– 23% des sujets ne savent pas caractériser la différence– Seulement 12% des sujets différencient
• Questionnaire– Les retours haptiques sont jugés comme les plus utiles,
les plus agréables et augmentant le mieux le réalismede la simulation
– Parmi les différents retours additionnels, 88% des sujets choisissent au moins un retour haptique pour une nouvelle expérimentation
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique4. Évaluation de l’apport5. Conclusion
6. Perspectives

Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 41/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Conclusion• Mise en place d ’un banc de test basé sur le
couplage entre un PTV et une poignée haptique• Les performances ne sont pas améliorées par un
retour additionnel(tâche visuelle [Massimino et Sheridan, 94] ? surcharge cognitive ?)
• Difficulté de comprendre l’information de directionde la poignée(mauvaise dynamique de la poignée ? apprentissage nécessaire ?propriétés perceptives de la main pour interpréter des stimulations tactiles ?)
• Le retour haptique reste plébiscité(augmente le réalisme, utile, agréable)
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique4. Évaluation de l’apport5. Conclusion
6. Perspectives
Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 42/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique4. Évaluation de l’apport5. Conclusion
6. Perspectives
Conclusion
Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 43/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Réalisations• Proposé et étudié un nouveau concept de retour
haptique : le retour pseudo-haptique• Partis d’une analyse du besoin en retour haptique
dans les applications aéronautiques• Prototypé deux solutions pour étudier l’intégration
du retour haptique dans un environnement virtuel (basé soit sur un stylo à retour d’effort, soit sur une poignée haptique portable et un PTV)
• Évalué l’intérêt du retour haptique sur une simulation de montage/démontage, et son apport, en termes de performances
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique4. Évaluation de l’apport5. Conclusion
6. Perspectives
Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 44/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique4. Évaluation de l’apport5. Conclusion
6. Perspectives
Perspectives
Soutenance de thèse Anatole Lécuyer, Mercredi 5 décembre 2001 45/45
1. Introduction3. Retour pseudo-haptique4. Démonstrateur haptique 5. Évaluation de l’apport 6. Conclusion
7. Perspectives
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique 4. Évaluation de l’apport 5. Conclusion
6. Perspectives
Perspectives• Le concept du retour pseudo-haptique
– modélisation de la stratégie cognitive des populations identifiées
– simulation d ’autres caractéristiques (viscosité, poids)– évaluation sur une tâche industrielle
• Le démonstrateur haptique– développements d ’autres techniques d ’interaction
haptique– amélioration du rendu haptique des chocs
• Évaluation de la poignée haptique portable– étude sur les capacités perceptives humaines – comparaison avec un dispositif à base fixe
1. Introduction2. Retour pseudo-haptique3. Démonstrateur haptique4. Évaluation de l’apport5. Conclusion
6. Perspectives
Contribution à l’étude des retours haptique et pseudo-haptique et de leur
impact sur les simulations d’opérations de montage/démontage en aéronautique
Thèse Anatole Lécuyer
Université Paris XIMercredi 5 décembre 2001