conception optimale d’une micro pompe par la … · par la méthode des algorithmes génétiques...
TRANSCRIPT
UNIVERSITE KASDI MERBAH OUARGLA
Faculté des Sciences Appliquées
Département de Génie Electrique
Mémoire
MASTER ACADEMIQUE
Domaine : Sciences et technologies
Filière : Génie électrique
Spécialité : Electrotechnique Industrielle
Présenté par :
KOCHEIDA ADEL
Thème:
Soutenu publiquement
Le : 01/06/2016
Devant le jury :
Année universitaire 2015/2016
Mr Soraya Zehani MC (A) Président UKM Ouargla
Mr Khadidja BOUALI MC (B) Encadreur/rapporteur UKM Ouargla
Mr Ahmed Nour El Islam Ayad MA (A) Examinateur UKM Ouargla
Conception optimale d’une micro pompe
par la méthode des algorithmes
génétiques (AG)
REMERCIEMENTS
I
Remerciement
Mes premiers remerciements vont au Docteur Bouali
Khadidja qui a dirigé mon travail en m’accordant toute sa
confiance. J’ai la chance d’avoir été encadré par une
personne toujours disponible, qui m’a fait partager sa
curiosité et sa rigueur scientifique.
J’ai bénéficié de son soutien même dans les moments
difficiles. Pour tout cela, je tiens à lui exprimer ma sincère
reconnaissance.
Je remercie vivement Madame S. Zehani, qui m’a fait
l'honneur de présider mon jury de mémoire et juger mon
travail.
Mes remerciements vont de même à Monsieur A. Ayad, jury
examinateur qui m’a fait l’honneur de participer au jury de
mon mémoire.
Mes remerciements vont spécialement à tous les membres de
ma petite famille pour leurs patience et encouragements.

Sommaire
Sommaire
II
Sommaire
Liste des figures ............................................................................................................ II
Introduction générale ................................................................................................... 1
Chapitre 1 : Généralités sur les pompes Magnétohydrodynamiques MHD ........... 3
1.1 Introduction ........................................................................................................................ 3
1.2 Principe physique ............................................................................................................... 3
1.3 Pompe MHD à conduction ................................................................................................. 4
1.3.1 Classification de la MHD à conduction ....................................................................... 5 1.3.1.1 Pompe MHD à conduction à courant continu .............................................................. 5
1.3.1.2 Les Pompes MHD à conduction à courant alternatif .................................................... 6
1.4 Pompe MHD à induction .................................................................................................... 7
1.4.1 Principe physique ......................................................................................................... 7
1.4.2 Classification de la MHD à induction ......................................................................... 8 1.4.2.1 Pompes plates ............................................................................................................... 8
1.4.2.2 Pompes annulaires ........................................................................................................ 9
1.4.2.3 Pompes hélicoïdales ................................................................................................... 10
1.5 Comparaison entre les pompes à conduction et à induction ............................................. 10
1.6 Application des pompes magnétohydrodynamiques ........................................................ 11
1.7 Avantages et inconvénients des pompes MHD ............................................................... 12
1.8 Conclusion ........................................................................................................................ 13
Chapitre 2 : Modélisation en 2D d’une pompe MHD à conduction ....................... 14
2.1 Introduction ...................................................................................................................... 14
2.2 Méthodes numériques ....................................................................................................... 14
2.2.1 Méthodes des différences finies ................................................................................ 14
2.2.2 Méthodes des éléments finis ....................................................................................... 15
2.2.3 Méthodes des intégrales de frontières (MIF) .............................................................. 15
2.2.4 Méthodes des volumes finis (MVF) ........................................................................... 15
2.3 Phénomènes électromagnétiques ..................................................................................... 16
2.4 Equations de Maxwell ...................................................................................................... 16
2.4.1 Conditions aux limites et conditions d’interfaces ....................................................... 17 2.4.1.1 Conditions aux limites ................................................................................................ 18
2.4.1.2 Conditions d’interfaces ............................................................................................... 18
2.4.2 Formulation du probleme électromagnétique .......................................................... 18
2.4.3 Formulation en coordonnées cylindriques axisymétriques ....................................... 20
2.5 Mise en œuvre de la méthode des volumes finis ............................................................. 21
2.6 Etude du modèle électromagnétique par volume finis .................................................... 22
2.7 Description du prototype MHD à conduction ................................................................. 24
2.8 Application et résultats de la modélisation numérique (volumes finis) ......................... 25
2.8.1 Potentiel vecteur magnétique ...................................................................................... 27
2.8.2 Présentation de l’induction magnétique ..................................................................... 28
2.8.3 Distribution de la force électromagnétique ................................................................ 28
2.9 Conclusion ........................................................................................................................ 29
Sommaire
III
Chapitre 3 : Etat de l’art des méthodes d’optimisation .......................................... 30
2.1 Introduction ...................................................................................................................... 30
3.2 Formulation mathématique d’un problème d’optimisation .............................................. 30
3.3 Problèmes d’optimisation sans contraintes ....................................................................... 31
3.4 Problèmes d’optimisation contraints ................................................................................ 31
3.5 Traitement des contraintes ................................................................................................ 32
3.6 Classification des méthodes d'optimisation ...................................................................... 33
3.6.1 Méthodes d’optimisation déterministes ...................................................................... 33
3.6.2 Méthodes d’optimisation stochastiques ...................................................................... 34 3.6.2.1 Définition ................................................................................................................... 34
3.6.2.2 Principe d'un algorithme stochastique ....................................................................... 34
3.6.3 Les algorithmes génétiques (AG) ............................................................................... 35 3.6.3.1 Introduction ................................................................................................................ 35
3.6.3.2 Terminologie et principe des algorithmes génétiques ................................................ 36
3.6.3.3 Mise en œuvre de la procédure des Algorithmes Génétiques .................................... 39
3.7 Conclusion ..................................................................................................................... 41
Chapitre 4 : Conception de la pompe MHD à conduction par la méthode des AG ...... 42
4.1 Introduction ...................................................................................................................... 42
4.2 Le mécanisme d’algorithme génétique ............................................................................. 42
4.3 Démarche de conception par optimisation ....................................................................... 42
4.4 Formulation d'un problème d’optimisation d'une pompe MHD par AG .......................... 42
4.4.1 Calcul de la masse totale de la pompe ........................................................................ 44
4.5 Conception par algorithme génétique de la pompe MHD à conduction .......................... 46
4.6 Application et résultats ..................................................................................................... 46
4.7 Etude des performance de la pome à conduction par la MVF .......................................... 47
4.7.1 Potentiel vecteur magnétique ...................................................................................... 47
4.7.2 Présentation de l’induction magnétique ..................................................................... 48
4.7.3 Distribution de la force électromagnétique ................................................................ 49
4.8 Conclusion ........................................................................................................................ 49
Conclusion générale ................................................................................................... 50
Références bibliographiques ..................................................................................... 51
Liste des Figures
Liste des figures
IV
Liste des figures
Figure 1.1 : Principe du pompage MHD dans les liquides ........................................................ 4
Figure 1.2 : Schéma d'une pompe MHD à conduction .............................................................. 4
Figure 1.3 : Schéma d’une machine MHD à conduction à courant continu. ............................. 6
Figure 1.4 : Schéma d’une machine MHD à conduction à courant alternatif. .......................... 7
Figure 1.5 : Lignes de courant dans une pompe MHD à induction ........................................... 8
Figure 1.6 : Pompe MHD à induction plate ............................................................................... 9
Figure 1.7 : Pompe MHD à induction annulaire........................................................................ 9
Figure 1.8 : Schéma d’une pompe MHD hélicoïdale .............................................................. 10
Figure 1.9 : Générateur MHD à gaz ionisé. ............................................................................. 11
Figure 1.10 : Structure d’un TOKAMAK. .............................................................................. 12
Figure 2.1 : Maillage du domaine d’étude. ..................................................................... 22
Figure 2.2 : Discrétisation dans la méthode des volumes finis. ............................................ 22
Figure 2.3 : Géométrie de la pompe MHD à conduction ........................................................ 25
Figure 2.4 : Algorithme du modèle électromagnétique par la méthode des volumes
finis 26
Figure 2.5a : Lignes équipotentielles dans la pompe MHD .................................................... 27
Figure 2.5b : Distribution du potentiel vecteur magnétique dans la pompe en 3D ................. 27
Figure 2.6 : Induction magnétique dans la pompe MHD en 3D .............................................. 28
Figure 2.7 : Distribution de la Force électromagnétique dans le canal de la pompe MHD..... 28
Figure 3.1 : Méthodes déterministes multidimensionnelles .................................................... 34
Figure 3.2 : Principales méthodes stochastiques ..................................................................... 35
Figure 3.3 : Représentation des trois niveaux d'organisation de l'AG ..................................... 36
Figure 3.4 : Processus d’optimisation par les algorithmes génétiques .................................... 38
Figure 3.5 : Représentation d'un individu ................................................................................ 39
Figure 3.6 : Processus de croisement ....................................................................................... 41
Liste des figures
V
Figure 4.1 : La structure de la pompe utilisée dans l’optimisation .......................................... 43
Figure 4.2 : Résultats d’optimisation par la méthode des algorithmes génétiques ................ 47
Figure 4.3a : Lignes équipotentielles dans la pompe MHD optimisée ................................... 48
Figure 4.3b : Le potentiel vecteur magnétique dans la pompe MHD optimisée en 3D ........... 48
Figure 4.4 : Induction magnétique dans la pompe MHD optimisée en 3D ........................... 49
Figure 4.5 : La force électromagnétique dans le canal de la pompe MHD optimisée .......... 49
Introduction Générale
Introduction générale
1
La magnétohydrodynamique (MHD) est à la frontière de deux sciences, la mécanique
des fluides et l’électromagnétisme. Elle consiste en l’étude de l’interaction entre un écoulement
de fluide conducteur et des champs magnétiques et électriques. Sa naissance remontre au 19éme
siècle, lorsque Faraday écrivit les lois de l’induction magnétique (1831). Elles montrent
l’existence d’une force électromotrice induite dans un écoulement soumis à un champ
magnétique. Cette force est susceptible de créer des courants qui peuvent agir avec le champ
magnétique pour donner naissance à des forces de Laplace. Le convertisseur MHD concerne la
conversion de l’énergie mécanique du mouvement d’un fluide conducteur en énergie électrique.
Ce mécanisme permet de transformer directement le mouvement de fluide en électricité sans
passer par des turbines comme dans le cas des centrales classiques. Elle peut également
s’effectuer en sens inverse, c’est à dire qu’il est possible d’utiliser l’énergie électrique pour
mettre un fluide conducteur en mouvement. On obtient ainsi des pompes
magnétohydrodynamiques [2], [25].
Les applications des pompes électromagnétiques sont très larges et dans des domaines très
variées, tels que le pompage du sodium pour le refroidissement des réacteurs nucléaires, le
pompage des métaux liquides à haute température comme le zinc et l’aluminium. Aujourd’hui
elles sont utilisées dans d’autres domaines comme le domaine médical ou la microélectronique
(électrolytes, plasmas) (Baker et Tessier 1987) [10].
Les applications de la magnétohydrodynamique sont très larges et dans des domaines très
variées, tels que l’industrie métallurgique, le transport ou le pompage des métaux liquides en
fusion, ….
Les dispositifs électromécaniques sont dimensionnés à partir d’équations analytiques classiques
avec des hypothèses simplificatrices.
Depuis quelques années, les recherches dans le domaine de conception des dispositifs
électromagnétiques s’orientent vers l’optimisation par le biais de différentes approches.
Ces dernières sont plus ou moins contraignantes et précises. En effet, les paramètres à optimiser
sont souvent interdépendants et il est difficile de trouver la solution optimale prenant en compte
les différentes interactions. En fait, trouver la solution optimale d’un problème dans un espace
complexe implique un compromis entre deux objectifs : l’exploitation des meilleures solutions et
l’exploration robuste de l’espace de recherche.
Les méthodes d’optimisation de type grimpeur procèdent itérativement en tentant, à chaque pas,
de trouver localement une solution intermédiaire meilleure que la solution courante ; ce genre de
Introduction générale
2
méthodes est pénalisé par son incapacité à traiter des problèmes représentant des reliefs de
solutions multimodales (systèmes possédant plusieurs optimums locaux) [1].
L’objectif de ce mémoire est d’étudier les phénomènes électromagnétiques dans une pompe à
conduction basée sur la mise en mouvement d’un fluide conducteur, et concevoir par
optimisation de cette pompe.
Des résultats de simulation à base de la méthode des volumes finis en 2D.
Ensuite, le problème de conception par optimisation de la pompe considérée sera abordé par
l’application des algorithmes génétiques.
Pour se faire, le présent mémoire à été réparti en quatre chapitres :
Le premier chapitre, consiste en une présentation générale des convertisseurs
magnétohydrodynamiques (MHD) et leurs différentes applications.
Le deuxième chapitre est consacré à la modélisation des phénomènes électromagnétiques.
Il s’agit de développer un modèle en 2D par la méthode des volumes finis.
Le troisième chapitre, présent l’état de l’art des méthodes d’optimisation.
Le dernier chapitre est dédié à l’optimisation de pompe MHD par les Algorithmes
génétiques sous environnement MTLAB.
Le mémoire est clôturé par une conclusion générale où des suggestions et de perspectives
sont proposées.
Chapitre un
Généralités sur les pompes
Magnétohydrodynamiques
MHD
Chapitre deux
Modélisation en 2D de la
MHD à Conduction
Chapitre 1 Généralités sur les pompes Magnétohydrodynamiques MHD
3
1.1 Introduction
La magnétohydrodynamique (MHD) est un domaine vaste de la physique lié à l’interaction
entre un champ magnétique et un fluide conducteur d’électricité. La notion de la conversion
MHD remonte à l’époque de FARADAY qui en plaçant des électrodes dans une rivière d’eau,
convenablement orientées par rapport au champ magnétique terrestre, recueillit un faible
courant électrique induit [34].
La MHD a étendu son domaine à la métallurgie et d’autres dispositifs industriels (pompes
électromagnétiques, propulsion), ces pompes ont l’avantage par rapport aux pompes
mécaniques de n’avoir aucune pièce mobile et aucun contact avec le fluide puisque ce dernier
est simplement connecté par un champ magnétique [2].
Le but de ce chapitre est de donné des généralités sur les pompes MHD.
1.2 Principe physique
Le principe général de fonctionnement des pompes électromagnétiques réside dans
l’application d’une induction magnétique B non colinéaire à un courant I traversant le fluide.
Ceci donne naissance à une force de Laplace qui entraine la circulation du fluide conducteur
dans le canal. Les pompes électromagnétiques sont classées en fonction de la nature du
courant qui les traverse (continu ou alternatif), de la manière dont est crée le champ
magnétique (continu ou alternatif) et de l’origine du courant (induction ou conduction). Nous
trouvons aujourd’hui deux catégories principales de pompes électromagnétiques, les pompes
à conduction et les pompes à induction [3], [4].
Nous parlons de pompes à conduction lorsque le courant est injecté dans le canal de pompage
par l’intermédiaire d’électrodes. Dans le cas des pompes à induction, le courant est induit à
l’intérieur du canal de pompage par la présence d’un champ magnétique glissant [5].
Chapitre 1 Généralités sur les pompes Magnétohydrodynamiques MHD
4
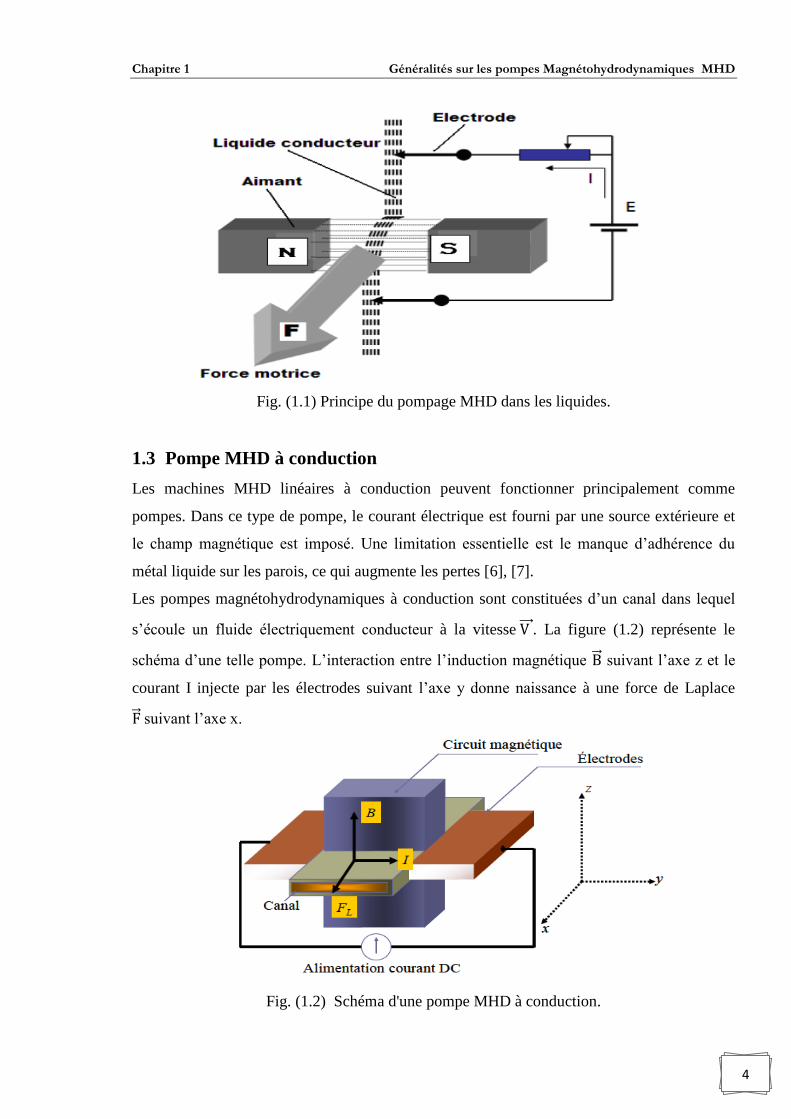
Fig. (1.1) Principe du pompage MHD dans les liquides.
1.3 Pompe MHD à conduction
Les machines MHD linéaires à conduction peuvent fonctionner principalement comme
pompes. Dans ce type de pompe, le courant électrique est fourni par une source extérieure et
le champ magnétique est imposé. Une limitation essentielle est le manque d’adhérence du
métal liquide sur les parois, ce qui augmente les pertes [6], [7].
Les pompes magnétohydrodynamiques à conduction sont constituées d’un canal dans lequel
s’écoule un fluide électriquement conducteur à la vitesse V . La figure (1.2) représente le
schéma d’une telle pompe. L’interaction entre l’induction magnétique B suivant l’axe z et le
courant I injecte par les électrodes suivant l’axe y donne naissance à une force de Laplace
F suivant l’axe x.
Fig. (1.2) Schéma d'une pompe MHD à conduction.
Chapitre 1 Généralités sur les pompes Magnétohydrodynamiques MHD
5
Les différentes parties qui constituent la pompe magnétohydrodynamique à conduction sont :
- le circuit magnétique : il est destiné à créer et canaliser les lignes de champ magnétique dans
le canal ;
- le canal dans lequel s’écoule le fluide électriquement conducteur ;
- le fluide conducteur : dans notre cas, c’est un fluide métallique de très grande conductivité
électrique;
Les deux électrodes en contact avec le fluide conducteur : elles servent à injecter le courant I à
l’intérieur du canal. Elles sont réalisées avec un matériau bon conducteur électrique.
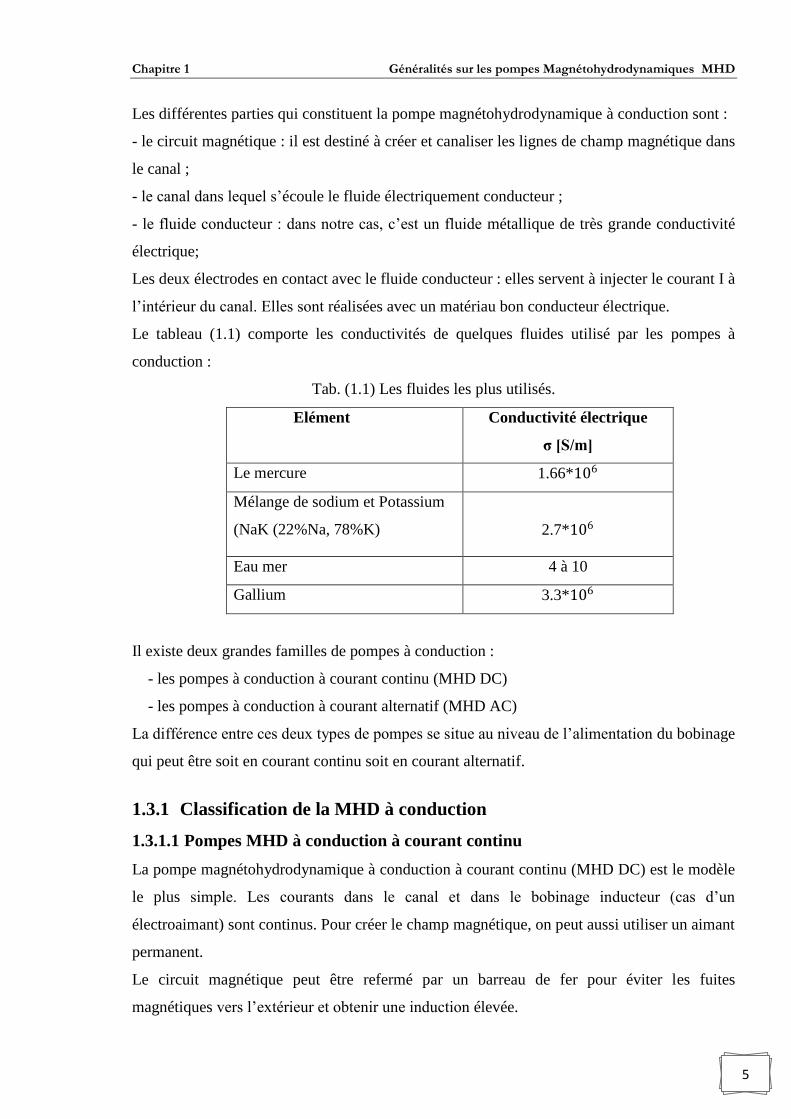
Le tableau (1.1) comporte les conductivités de quelques fluides utilisé par les pompes à
conduction :
Tab. (1.1) Les fluides les plus utilisés.
Elément Conductivité électrique
σ [S/m]
Le mercure 1.66*106
Mélange de sodium et Potassium
(NaK (22%Na, 78%K)
2.7*106
Eau mer 4 à 10
Gallium 3.3*106
Il existe deux grandes familles de pompes à conduction :
- les pompes à conduction à courant continu (MHD DC)
- les pompes à conduction à courant alternatif (MHD AC)
La différence entre ces deux types de pompes se situe au niveau de l’alimentation du bobinage
qui peut être soit en courant continu soit en courant alternatif.
1.3.1 Classification de la MHD à conduction
1.3.1.1 Pompes MHD à conduction à courant continu
La pompe magnétohydrodynamique à conduction à courant continu (MHD DC) est le modèle
le plus simple. Les courants dans le canal et dans le bobinage inducteur (cas d’un
électroaimant) sont continus. Pour créer le champ magnétique, on peut aussi utiliser un aimant
permanent.
Le circuit magnétique peut être refermé par un barreau de fer pour éviter les fuites
magnétiques vers l’extérieur et obtenir une induction élevée.
Chapitre 1 Généralités sur les pompes Magnétohydrodynamiques MHD
6
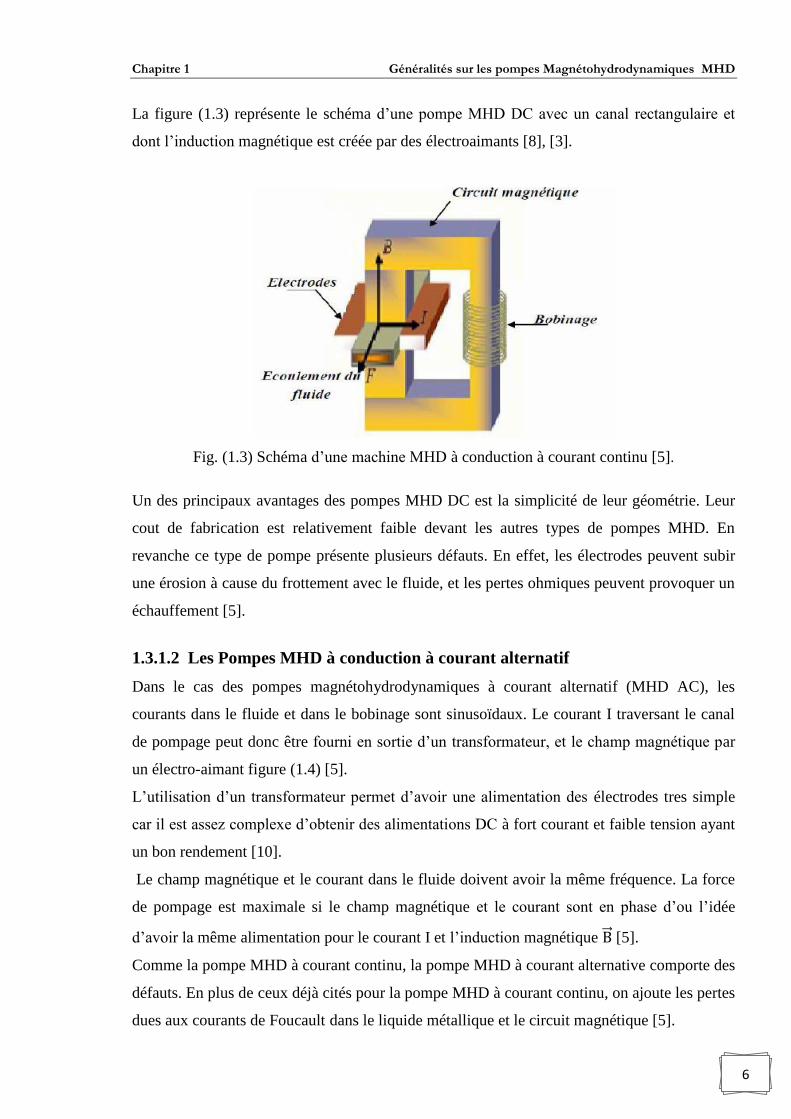
La figure (1.3) représente le schéma d’une pompe MHD DC avec un canal rectangulaire et
dont l’induction magnétique est créée par des électroaimants [8], [3].
Fig. (1.3) Schéma d’une machine MHD à conduction à courant continu [5].
Un des principaux avantages des pompes MHD DC est la simplicité de leur géométrie. Leur
cout de fabrication est relativement faible devant les autres types de pompes MHD. En
revanche ce type de pompe présente plusieurs défauts. En effet, les électrodes peuvent subir
une érosion à cause du frottement avec le fluide, et les pertes ohmiques peuvent provoquer un
échauffement [5].
1.3.1.2 Les Pompes MHD à conduction à courant alternatif
Dans le cas des pompes magnétohydrodynamiques à courant alternatif (MHD AC), les
courants dans le fluide et dans le bobinage sont sinusoïdaux. Le courant I traversant le canal
de pompage peut donc être fourni en sortie d’un transformateur, et le champ magnétique par
un électro-aimant figure (1.4) [5].
L’utilisation d’un transformateur permet d’avoir une alimentation des électrodes tres simple
car il est assez complexe d’obtenir des alimentations DC à fort courant et faible tension ayant
un bon rendement [10].
Le champ magnétique et le courant dans le fluide doivent avoir la même fréquence. La force
de pompage est maximale si le champ magnétique et le courant sont en phase d’ou l’idée
d’avoir la même alimentation pour le courant I et l’induction magnétique B [5].
Comme la pompe MHD à courant continu, la pompe MHD à courant alternative comporte des
défauts. En plus de ceux déjà cités pour la pompe MHD à courant continu, on ajoute les pertes
dues aux courants de Foucault dans le liquide métallique et le circuit magnétique [5].
Chapitre 1 Généralités sur les pompes Magnétohydrodynamiques MHD
7
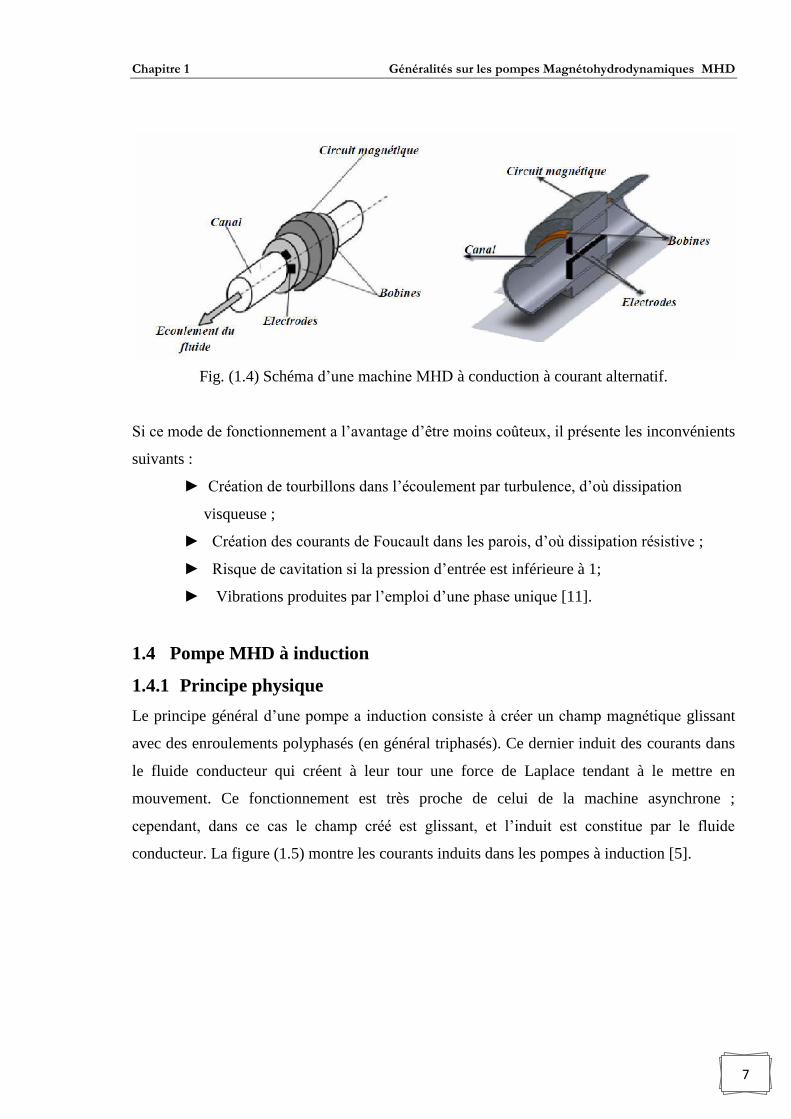
Fig. (1.4) Schéma d’une machine MHD à conduction à courant alternatif.
Si ce mode de fonctionnement a l’avantage d’être moins coûteux, il présente les inconvénients
suivants :
Création de tourbillons dans l’écoulement par turbulence, d’où dissipation
visqueuse ;
Création des courants de Foucault dans les parois, d’où dissipation résistive ;
Risque de cavitation si la pression d’entrée est inférieure à 1;
Vibrations produites par l’emploi d’une phase unique [11].
1.4 Pompe MHD à induction
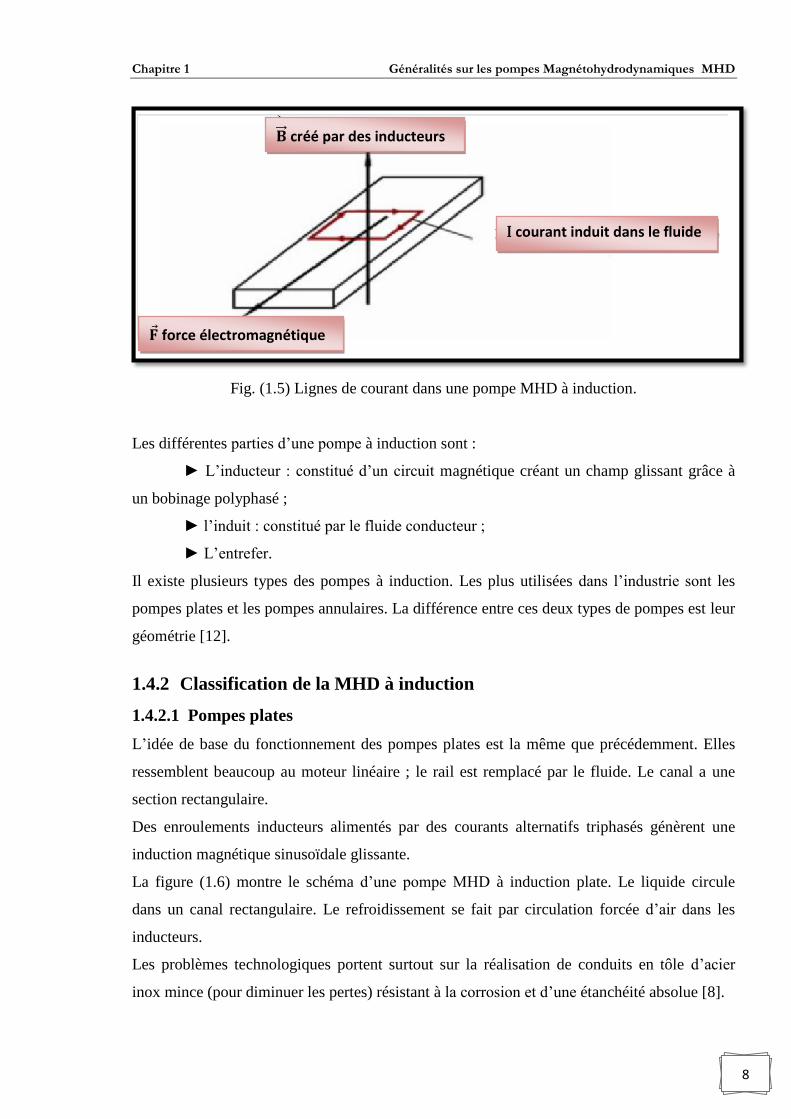
1.4.1 Principe physique
Le principe général d’une pompe a induction consiste à créer un champ magnétique glissant
avec des enroulements polyphasés (en général triphasés). Ce dernier induit des courants dans
le fluide conducteur qui créent à leur tour une force de Laplace tendant à le mettre en
mouvement. Ce fonctionnement est très proche de celui de la machine asynchrone ;
cependant, dans ce cas le champ créé est glissant, et l’induit est constitue par le fluide
conducteur. La figure (1.5) montre les courants induits dans les pompes à induction [5].
Chapitre 1 Généralités sur les pompes Magnétohydrodynamiques MHD
8
Fig. (1.5) Lignes de courant dans une pompe MHD à induction.
Les différentes parties d’une pompe à induction sont :
L’inducteur : constitué d’un circuit magnétique créant un champ glissant grâce à
un bobinage polyphasé ;
l’induit : constitué par le fluide conducteur ;
L’entrefer.
Il existe plusieurs types des pompes à induction. Les plus utilisées dans l’industrie sont les
pompes plates et les pompes annulaires. La différence entre ces deux types de pompes est leur
géométrie [12].
1.4.2 Classification de la MHD à induction
1.4.2.1 Pompes plates
L’idée de base du fonctionnement des pompes plates est la même que précédemment. Elles
ressemblent beaucoup au moteur linéaire ; le rail est remplacé par le fluide. Le canal a une
section rectangulaire.
Des enroulements inducteurs alimentés par des courants alternatifs triphasés génèrent une
induction magnétique sinusoïdale glissante.
La figure (1.6) montre le schéma d’une pompe MHD à induction plate. Le liquide circule
dans un canal rectangulaire. Le refroidissement se fait par circulation forcée d’air dans les
inducteurs.
Les problèmes technologiques portent surtout sur la réalisation de conduits en tôle d’acier
inox mince (pour diminuer les pertes) résistant à la corrosion et d’une étanchéité absolue [8].
I courant induit dans le fluide
créé par des inducteurs
créé par des inducteurs
𝐁 créé par des inducteurs
𝐅 force électromagnétique
Chapitre 1 Généralités sur les pompes Magnétohydrodynamiques MHD
9
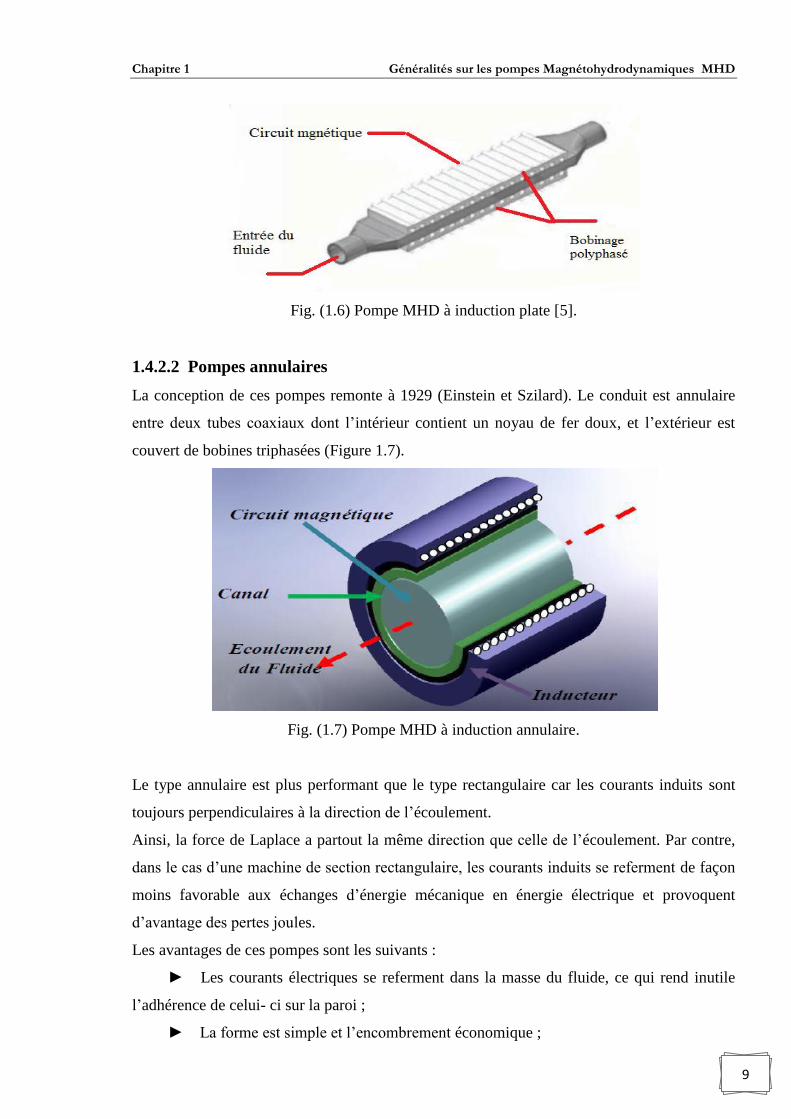
Fig. (1.6) Pompe MHD à induction plate [5].
1.4.2.2 Pompes annulaires
La conception de ces pompes remonte à 1929 (Einstein et Szilard). Le conduit est annulaire
entre deux tubes coaxiaux dont l’intérieur contient un noyau de fer doux, et l’extérieur est
couvert de bobines triphasées (Figure 1.7).
Fig. (1.7) Pompe MHD à induction annulaire.
Le type annulaire est plus performant que le type rectangulaire car les courants induits sont
toujours perpendiculaires à la direction de l’écoulement.
Ainsi, la force de Laplace a partout la même direction que celle de l’écoulement. Par contre,
dans le cas d’une machine de section rectangulaire, les courants induits se referment de façon
moins favorable aux échanges d’énergie mécanique en énergie électrique et provoquent
d’avantage des pertes joules.
Les avantages de ces pompes sont les suivants :
Les courants électriques se referment dans la masse du fluide, ce qui rend inutile
l’adhérence de celui- ci sur la paroi ;
La forme est simple et l’encombrement économique ;
Chapitre 1 Généralités sur les pompes Magnétohydrodynamiques MHD
10
Le démontage est facile [8].
Le courant des enroulements primaires produit un champ magnétique de déplacement qui
produit à son tour un courant induit dans le métal liquide.
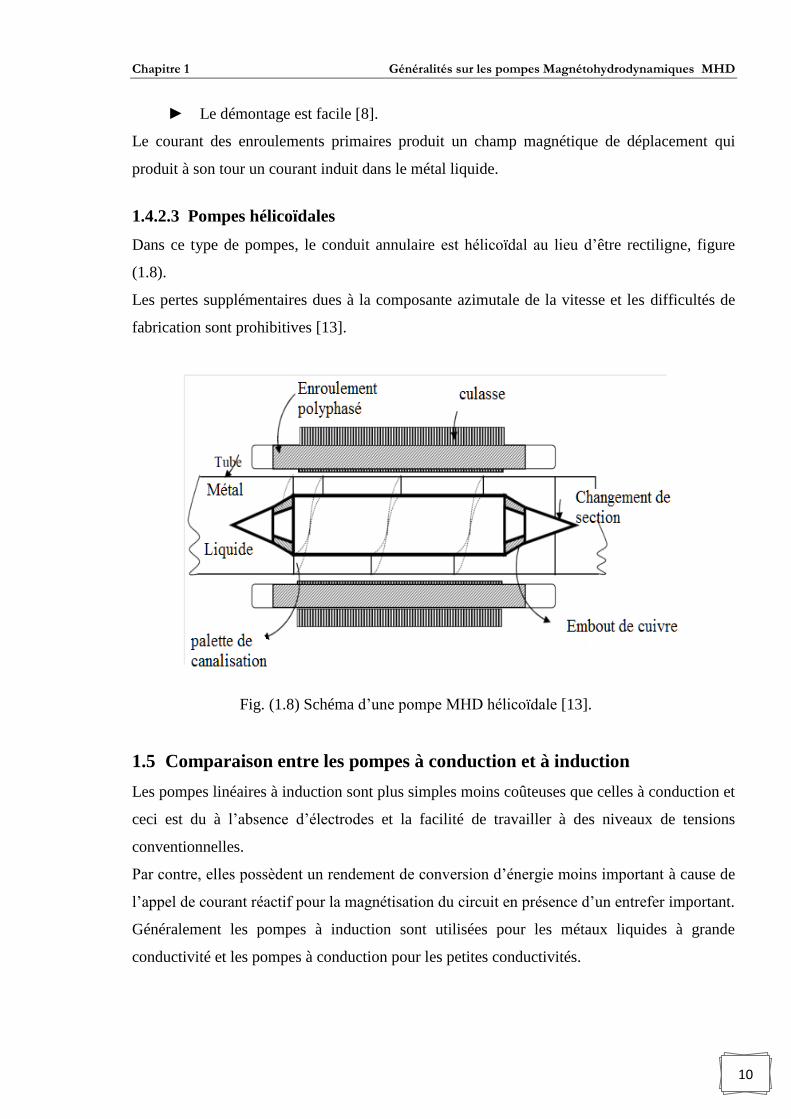
1.4.2.3 Pompes hélicoïdales
Dans ce type de pompes, le conduit annulaire est hélicoïdal au lieu d’être rectiligne, figure
(1.8).
Les pertes supplémentaires dues à la composante azimutale de la vitesse et les difficultés de
fabrication sont prohibitives [13].
Fig. (1.8) Schéma d’une pompe MHD hélicoïdale [13].
1.5 Comparaison entre les pompes à conduction et à induction
Les pompes linéaires à induction sont plus simples moins coûteuses que celles à conduction et
ceci est du à l’absence d’électrodes et la facilité de travailler à des niveaux de tensions
conventionnelles.
Par contre, elles possèdent un rendement de conversion d’énergie moins important à cause de
l’appel de courant réactif pour la magnétisation du circuit en présence d’un entrefer important.
Généralement les pompes à induction sont utilisées pour les métaux liquides à grande
conductivité et les pompes à conduction pour les petites conductivités.
Chapitre 1 Généralités sur les pompes Magnétohydrodynamiques MHD
11
La présence des électrodes dans les machines à conduction est un inconvénient majeur par
rapport aux machines à induction, elles subissent une érosion au contact avec le fluide dont la
température est généralement élevée [14].
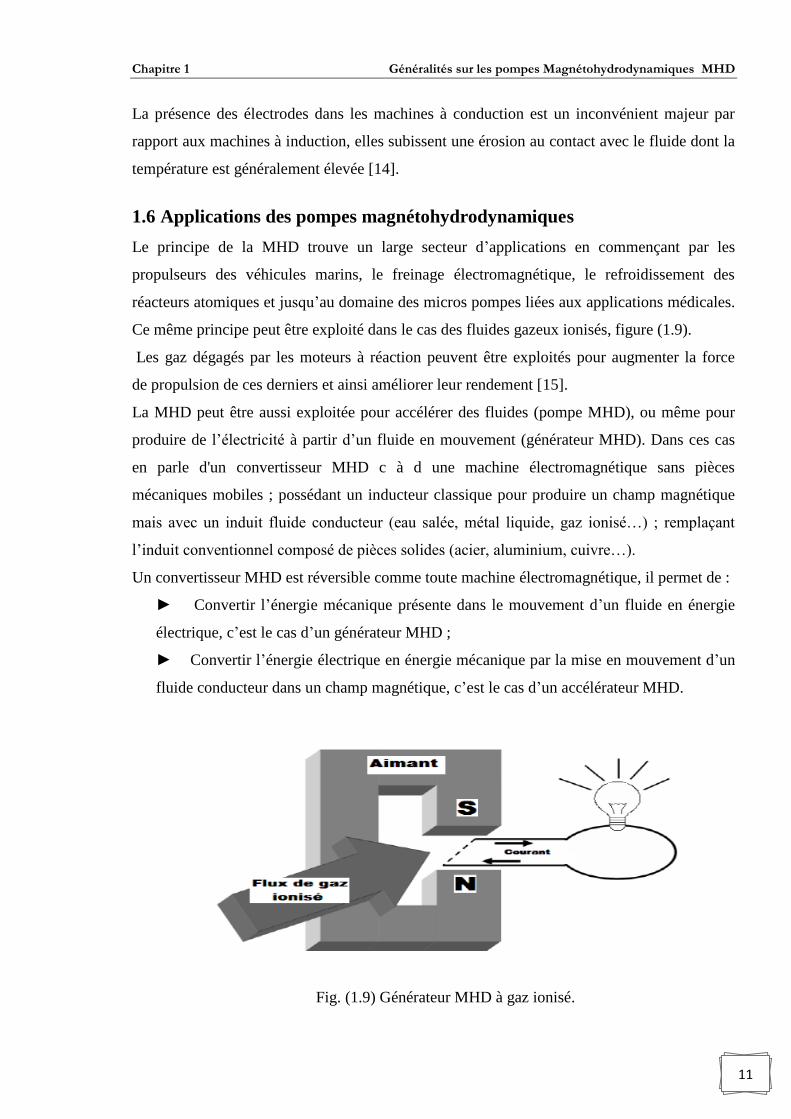
1.6 Applications des pompes magnétohydrodynamiques
Le principe de la MHD trouve un large secteur d’applications en commençant par les
propulseurs des véhicules marins, le freinage électromagnétique, le refroidissement des
réacteurs atomiques et jusqu’au domaine des micros pompes liées aux applications médicales.
Ce même principe peut être exploité dans le cas des fluides gazeux ionisés, figure (1.9).
Les gaz dégagés par les moteurs à réaction peuvent être exploités pour augmenter la force
de propulsion de ces derniers et ainsi améliorer leur rendement [15].
La MHD peut être aussi exploitée pour accélérer des fluides (pompe MHD), ou même pour
produire de l’électricité à partir d’un fluide en mouvement (générateur MHD). Dans ces cas
en parle d'un convertisseur MHD c à d une machine électromagnétique sans pièces
mécaniques mobiles ; possédant un inducteur classique pour produire un champ magnétique
mais avec un induit fluide conducteur (eau salée, métal liquide, gaz ionisé…) ; remplaçant
l’induit conventionnel composé de pièces solides (acier, aluminium, cuivre…).
Un convertisseur MHD est réversible comme toute machine électromagnétique, il permet de :
Convertir l’énergie mécanique présente dans le mouvement d’un fluide en énergie
électrique, c’est le cas d’un générateur MHD ;
Convertir l’énergie électrique en énergie mécanique par la mise en mouvement d’un
fluide conducteur dans un champ magnétique, c’est le cas d’un accélérateur MHD.
Fig. (1.9) Générateur MHD à gaz ionisé.
Chapitre 1 Généralités sur les pompes Magnétohydrodynamiques MHD
12
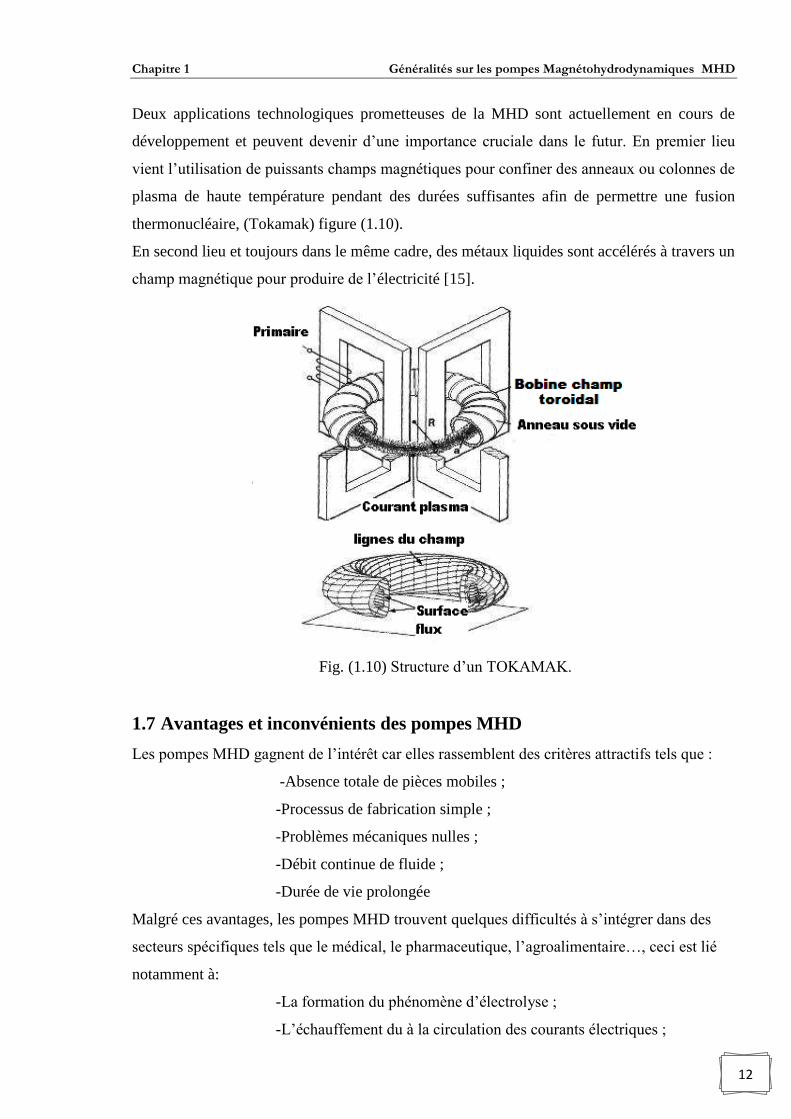
Deux applications technologiques prometteuses de la MHD sont actuellement en cours de
développement et peuvent devenir d’une importance cruciale dans le futur. En premier lieu
vient l’utilisation de puissants champs magnétiques pour confiner des anneaux ou colonnes de
plasma de haute température pendant des durées suffisantes afin de permettre une fusion
thermonucléaire, (Tokamak) figure (1.10).
En second lieu et toujours dans le même cadre, des métaux liquides sont accélérés à travers un
champ magnétique pour produire de l’électricité [15].
Fig. (1.10) Structure d’un TOKAMAK.
1.7 Avantages et inconvénients des pompes MHD
Les pompes MHD gagnent de l’intérêt car elles rassemblent des critères attractifs tels que :
-Absence totale de pièces mobiles ;
-Processus de fabrication simple ;
-Problèmes mécaniques nulles ;
-Débit continue de fluide ;
-Durée de vie prolongée
Malgré ces avantages, les pompes MHD trouvent quelques difficultés à s’intégrer dans des
secteurs spécifiques tels que le médical, le pharmaceutique, l’agroalimentaire…, ceci est lié
notamment à:
-La formation du phénomène d’électrolyse ;
-L’échauffement du à la circulation des courants électriques ;
Chapitre 1 Généralités sur les pompes Magnétohydrodynamiques MHD
13
-La présence des courants électriques n’est pas toujours commode ;
-Le pompage MHD n’est possible qu’en présence d’un liquide et qui
doit être conducteur [15].
1.8 Conclusion
Nous avons donné des généralités sur les pompes MHD. Aussi nous avons décrit les familles
des pompes MHD à conduction et à induction, dont l’objectif d’étudier une pompe MHD à
conduction.
Dans le prochain chapitre, on présentera la modélisation des phénomènes électromagnétique
dans les pompes magnétodynamique à conduction.
Chapitre 2 Modélisation en 2D d’une Pompe MHD à Conduction
14
2.1 Introduction
Dans ce chapitre, est partant des lois de base caractérisant les phénomènes électromagnétiques
présents dans la pompe MHD à conduction, des modèles mathématiques ont été établis dans
leurs formes générales est aussi le traitement de la modélisation des phénomènes
électromagnétiques. Pour cela deux manières de résoudre ce système sont possibles : la
première consiste en une résolution analytique ; la deuxième consiste à adopter un programme
numérique de calcul ; c.à.d. méthodes numériques telles que volumes finis, élément finis….).
Chacune de ces voies a des avantages et des inconvénients [24].
Mais généralement, quand les problèmes sont complexes, les solutions analytiques sont
difficiles à trouver et dans ce cas une solution numérique est nécessaire.
L’étude de ces phénomènes est assurée par la méthode des volumes finis. Le choix de cette
méthode repose sur sa simplicité à développer et moins coûteuse que les autres méthodes telle
que la méthode des éléments finis.
2.2 Méthodes numériques
Les méthodes numériques de discrétisation utilisables pour la résolution des équations
mathématiques établies, consistent à ramener la résolution des équations aux dérivées
partielles dans le domaine d’étude, compte tenu des conditions aux limites, à celle d’un
système d’équations algébriques dont la solution conduit à la distribution des champs
(potentiel vecteur magnétique, mécanique des fluides : vitesse, pression,…). La plus ancienne
méthode numérique, c’est celle aux différences finies (MDF), elle consiste à discrétiser les
équations continues aux nœuds d’un maillage prédéfini en calculant chaque dérivée partielle à
l’aide de séries de Taylor pour obtenir des équations linéaires reliant la valeur des inconnues
aux nœuds voisins [16].
2.2.1 Méthodes des différences finies
La MDF consiste à transformer par un développement en série de Taylor l’opérateur
différentiel en un opérateur aux différences. Ces méthodes sont très utilisées car elles allient
une grande simplicité à la possibilité d’obtenir plusieurs schémas de discrétisation selon la
précision ou la stabilité désirée [17].
Chapitre 2 Modélisation en 2D d’une Pompe MHD à Conduction
15
2.2.2 Méthodes des éléments finis
La méthode des éléments finis est l’une des méthodes les plus adaptées à la résolution
numérique des équations aux dérivées partielles. Elle s’applique à la majorité des problèmes
pratiques (linéaires ou non linéaires, stationnaires ou dépendant du temps) définis dans un
domaine géométrique quelconque à une, deux ou trois dimensions. Appliquée tout d’abord, il
y a environ 50 ans, à des problèmes de mécanique de structure, cette méthode a connu des
développements importants dans différents domaines scientifiques et industriels.
La méthode des éléments finis consiste à rechercher une fonction globale représentant les
phénomènes étudiés, sur un domaine de résolution préalablement subdivisé en parties finies
adjacentes appelées éléments finis [18].
Parmi les avantages de cette méthode, on peut citer le traitement possible des géométries
complexes ; cependant elle présente une complexité de mise en œuvre et un grand coût en
temps de calcul et en mémoire.
2.2.3 Méthodes des intégrales de frontières (MIF)
Son principe, comme l’indique son nom, est de transformer les équations aux dérivées
partielles à résoudre dans tout le domaine de calcul en équations intégrales définies
uniquement sur les frontières du domaine. L’intérêt premier de la MIF est donc de ne pas être
pénalisé par des frontières qui se déforment au cours du temps.
2.2.4 Méthodes des volumes finis (MVF)
La méthode des volumes finis (MVF) est très appliquée pour les problèmes de la mécanique
des fluides. La discrétisation des équations aux dérivées partielles s’opère à partir d’une
forme conservative pour chaque volume de contrôle par une technique qui ressemble à la
méthode des différences finies. Donc le principe de conservation est imposé au niveau de
chaque volume de contrôle contrairement à la méthode des éléments finis où les principes de
conservation sont vérifiés uniquement de manière globale. Cette méthode est simple à
développer et moins coûteuse que la méthode des éléments finis [17].
Le domaine d’étude dans cette méthode est subdivisé en volumes élémentaires de telle
manière que chaque volume entoure un nœud du maillage. L’équation est intégrée sur chacun
des volumes élémentaires. Pour calculer l’intégrale dans ce volume élémentaire, la fonction
inconnue est représentée à l’aide d’une fonction d’approximation entre deux nœuds
Chapitre 2 Modélisation en 2D d’une Pompe MHD à Conduction
16
consécutifs. Ensuite, la forme intégrale est discrétisée dans le domaine d’étude. Cela conduit à
une solution plus précise que la méthode des différences finis (MDF). Ces méthodes sont
particulièrement bien adaptées à la discrétisation spatiale des lois de conservation [17], [19].
2.3 Phénomènes électromagnétiques
L’effet du champ électrique ou magnétique (ou de leur combinaison) détermine le
fonctionnement des machines tournantes, des pompes et des transformateurs.
En effet, on peut déduire du champ magnétique les valeurs des flux, des forces
électromotrices (dans les générateurs), des couples d’entrainement (dans les moteurs) et des
forces d’évacuation du fluide dans les pompes [19].
2.4 Equations de Maxwell
Grâce à James Clerk Maxwell nous possédons, depuis plus d’un siècle, les expressions des
équations qui régissent les phénomènes électromagnétiques. Ces équations doivent être prises
en compte en combinaison avec les expressions des lois constitutives des matériaux utilisés.
Quatre grandeurs vectorielles caractérisent le champ électromagnétique [20].
div D = ρ (équation de Maxwell-Gauss) (2.1)
Une charge électrique est source d’un champ électrique ; autrement dit, les lignes de champs
électriques commencent et se terminent autour des charges électriques.
divB = 0 (Equation de conservation du flux magnétique) (2.2)
Cette relation traduit mathématiquement le fait que les seules sources de champ magnétique
sont les courants électriques et il n’existe pas de charge magnétique ; c’est pourquoi les lignes
du champ sont toujours fermées sur elles-mêmes. Elles forment des boucles. Ces boucles
n’ont ni point de départ, ni point d’arrivée, ni point de convergence, d’où la nomination
d’induction conservative (champ conservatif) [21].
rot E = −∂B
∂t (Equation de Maxwell-Faraday) (2.3)
Cette équation exprime le couplage électrique- magnétique en régime dynamique et la
variation temporelle de B .
rot H = J C +∂D
∂t (Equation de Maxwell-Ampère) (2.4)
En tenant compte des relations constitutives de milieu B = μH et D = εE dans ces équations,
nous pouvons leur ajouter la loi d’Ohm:

Chapitre 2 Modélisation en 2D d’une Pompe MHD à Conduction
17
J = Jin + Jex
(2.5)
avec :
Jin = σE + σ v B˄ (2.6)
Dans cette dernière équation, le premier terme représente la densité de courant induit par
conduction tandis que le second terme représente la densité de courant induit par les vitesses
dans la décharge.
avec :
Jin : la densité de courant induit et
exJ la densité de courant source [A/m2] ;
B : l’induction magnétique [T] ;
ρ : la densité volumique de la charge électrique [C/m3] ;
D : le déplacement électrique ou l’induction électrique [A.s/m2] ;
μ : la perméabilité magnétique (dans le vide µ=µ0=4π.10-7
[H/m]) ;
ε : la permittivité électrique (dans le vide ε=ε0= 8.8544*10-12
[F/m]);
v : le vecteur vitesse aux points considérés [m/s];
σE : la densité des courants induits par variation du champ électrique [A/m2];
σ v B˄ : la densité des courants induits par mouvement [A/m2].
Dans l’équation (2.4), le terme ∂D
∂t est appelé terme des courants de déplacement.
L’équation (2.4) peut ainsi se simplifier pour donner le théorème d’Ampère :
rot H = J (2.7)
L’équation (2.7) exprime que la circulation du champ magnétique sur un contour fermé sur
lequel s’appuie une surface est égale à la somme des courants qui traversent cette même
surface.
On déduit de l’équation (2.7) que la densité de courant J est à flux conservatif :
div J = 0 (2.8)
2.4.1 Conditions aux limites et conditions d’interface
Pour que le problème soit complètement défini, il faut déterminer les conditions aux limites
sur les frontières du domaine, ainsi que les conditions de passage entre les différents milieux
constituant ce domaine.
Chapitre 2 Modélisation en 2D d’une Pompe MHD à Conduction
18
2.4.1.1 Conditions aux limites
Il existe deux façons d’introduire les conditions aux limites:
Conditions aux limites de Dirichlet (A=A0) : dans ce cas, le vecteur potentiel
magnétique A est constant sur la frontière, ce qui veut dire que l’induction magnétique
est parallèle à ce contour qui présente alors une équipotentielle. Cette condition aux
limites peut se présenter aussi sur les plans ou les axes polaires (dans ce cas on se limite à
mailler une partie du domaine).
Elle est utilisée dans le cas où le système à étudier présente des plans de symétrie. La
Condition de Neumann homogène (∂A/∂n=0) : on la trouve sur les plans où les axes de
symétrie magnétique (axes inter polaires par exemple). Sur cette frontière, les lignes de
l’induction magnétique sont normales. De même, lorsque ce type de conditions aux
limites apparait sur des axes d’antisymétrie, le maillage est limité à une portion du
domaine [22].
2.4.1.2 Conditions d’interfaces
Dans le cas général, un dispositif électrotechnique comporte des milieux différents (fer,
air, cuivre, …etc.). Alors, avant d’aborder la résolution du problème, il est nécessaire de
connaitre le comportement des champs électromagnétiques à travers l’interface entre les
différents milieux. Les conditions de passage aux frontières de l’interface 12 entre deux
milieux de propriétés physiques différentes d’indices 1 et 2 portent sur les continuités et
discontinuités des différentes composantes normales et tangentielles des grandeurs
électromagnétiques.
2.4.2 Formulation du problème électromagnétique
Ce modèle s’applique aux dispositifs électrotechniques dans lesquels les sources de courant
ou de tension varient en fonction du temps. Le terme ∂B
∂t n’est plus nul, les champs électriques
et magnétiques sont alors couplés par la présence des courants induits
[23], [24] Pour représenter l’état électromagnétique en un point, on doit alors faire recourt au
potentiel vecteur A car divB = 0 ; les avantages présentés par ce type de formulation sont
nombreux :

Chapitre 2 Modélisation en 2D d’une Pompe MHD à Conduction
19
La plus utilisée et elle réduit le nombre d’inconnues ;
Elle permet d’imposer des sources électriques par les bobines ;
La connaissance de toute autre grandeur physique peut être déduite [23], [24].
Ecrivons les deux équations de Maxwell qui se présentent sans terme source :
divB = 0 (2.13)
t
BErot
(2.14)
La première équation indique que l’induction magnétique B est un champ rotationnel. Ceci
implique qu’il existe un potentiel vecteur magnétique A , tel que :
ArotB (2.15)
La substitution de (2.14) dans (2.15) donne :
rot E = −∂(rot A )
∂t= −rot
∂A
∂t Ce qui implique que :
rot (E +∂A
∂t) = 0 (2.16)
Le champ (E +∂A
∂t) de l’équation (2.16) est conservatif, donc il dérive d’un potentiel scalaire
U donné par :
E +∂A
∂t= −grad U (2.17)
Par conséquent, le champ magnétique et le champ électrique peuvent s’écrire en termes de ces
deux potentiels A et U en utilisant la relation du milieu comme suit :
E = −∂A
∂t− grad U H =
1
μrot A (2.18)
A partir de l’équation rot H = J et H = B μ , nous avons :
J = rot B μ =1
μ rot rot A (2.19)
En remplaçant (2.18) et (2,19) dans (2,5) et (2,6), on obtient:
J = Jex + σE + σ(V ˄B ) (2.20)
Chapitre 2 Modélisation en 2D d’une Pompe MHD à Conduction
20
rot 1
μrot
A + σ
∂A
∂t+ grad U − σ V ˄B = J ex (2.21)
Les termes σ ∂A
∂t et σ V ˄B représentent les densités des courants induits. Ils traduisent
le caractère dynamique dans le temps et dans l’espace des phénomènes électromagnétiques ;
pour la pompe MHD à conduction proposée, le champ magnétique imposé est constant ; donc
le premier terme s’annule.
Le terme σgrad U décrit la densité du courant imposée à travers les électrodes. U
représente le potentiel scalaire électrique en Volts.
Pour pouvoir résoudre l’équation (2.21), on ajoute une autre équation pour que la solution
soit unique. On fixe la divergence de A :
div A = 0 (2.22)
Dans notre configuration bidimensionnelle (2D), la condition de jauge de Coulomb est
naturellement vérifiée. Le modèle électromagnétique de la pompe sera comme suit :
rot 1
μ rot A + σgrad U + σ V ˄B = Jex
div A = 0 (2.23)
2.4.3 Formulation en coordonnées cylindriques axisymétriques
Une grande partie des problèmes magnétiques peut être traitée en bidimensionnel, ce qui est
le cas pour notre problème ; l’existence des deux types de systèmes bidimensionnels : ceux
infiniment longs alimentés suivant une direction (oz), ceux à symétrie de révolution alimentés
selon la direction (o φ). C’est le deuxième cas qui nous, [25].
Dans une configuration axisymétrique (coordonnées cylindriques (r, φ, z)), la formulation
utilisant le potentiel vecteur offre l’intérêt suivant : Lorsque le courant d’excitation est orienté
suivant la direction φ, le système présente une seule inconnue, la composante ortho radiale
(𝐴φ) du vecteur 𝐴 .
Dans une telle configuration, les courants sont perpendiculaires au plan d’étude [25]
J 0Jφ0
; E 0
Eφ
0
; A 0
Aφ
0
; B Br
0Bz
; H Hr
0Hz
; (2.24)
Chapitre 2 Modélisation en 2D d’une Pompe MHD à Conduction
21
Sachant qu’en coordonnées cylindriques, les coordonnées de 𝑟𝑜𝑡 𝐴 sont :
rot A =
−∂Aφ
∂z
01
r ∂(rAφ )
∂r
(2.25)
Après développements en coordonnées cylindriques, l’équation (2.25) devient :
−1
μ
∂
∂z
∂Aφ
∂z+
∂
∂r(
1
r ∂ rAφ
∂r ) +
σ
rvz
∂(rAφ )
∂z= jex + ja (2.26)
En introduisant la transformation 𝐴 = 𝑟𝐴𝜑 , on obtient :
1
μ
∂
∂z
1
r
∂A
∂z+
∂
∂r(
1
r ∂A
∂r ) −
σ
rvz
∂A
∂z= −jex − ja (2.27)
C’est une équation aux dérivées partielles, décrivant le comportement d’un dispositif
cylindrique axisymétrique. Sous l’hypothèse que les matériaux sont linéaires et que les
sources d’alimentation sont constantes.
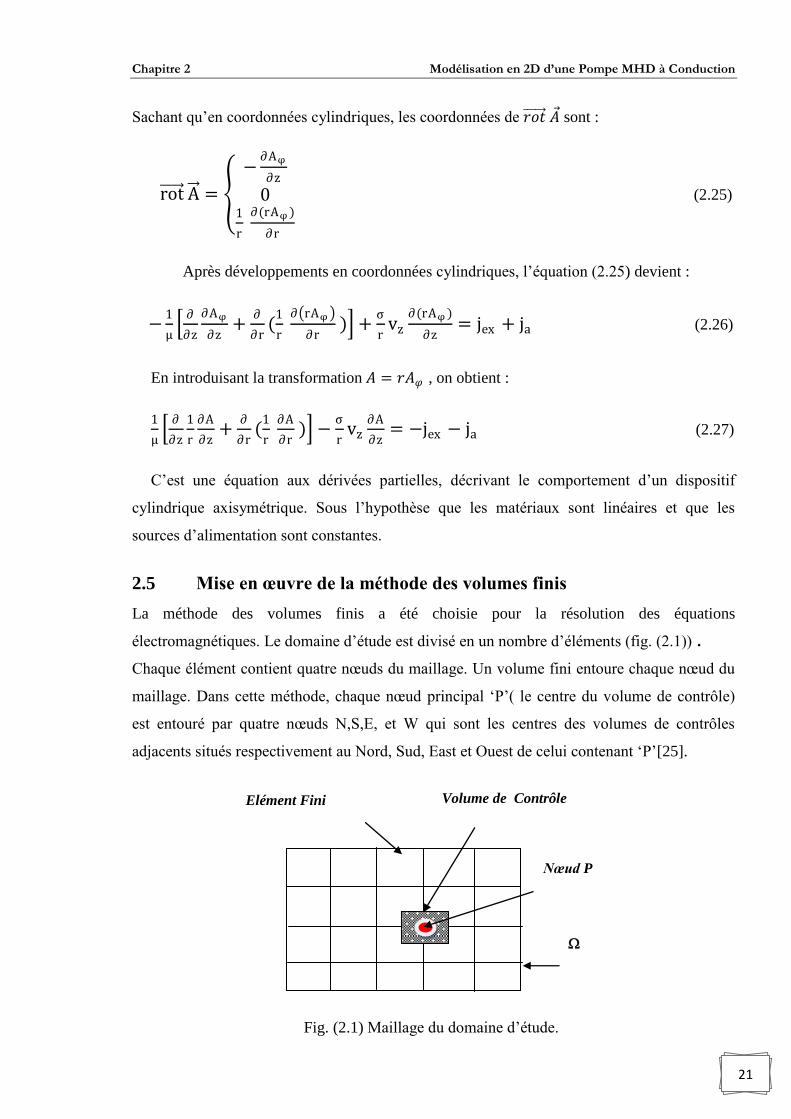
2.5 Mise en œuvre de la méthode des volumes finis
La méthode des volumes finis a été choisie pour la résolution des équations
électromagnétiques. Le domaine d’étude est divisé en un nombre d’éléments (fig. (2.1)) .
Chaque élément contient quatre nœuds du maillage. Un volume fini entoure chaque nœud du
maillage. Dans cette méthode, chaque nœud principal ‘P’( le centre du volume de contrôle)
est entouré par quatre nœuds N,S,E, et W qui sont les centres des volumes de contrôles
adjacents situés respectivement au Nord, Sud, East et Ouest de celui contenant ‘P’[25].
Volume de Contrôle
Elément Fini
Nœud P
Fig. (2.1) Maillage du domaine d’étude.
Chapitre 2 Modélisation en 2D d’une Pompe MHD à Conduction
22
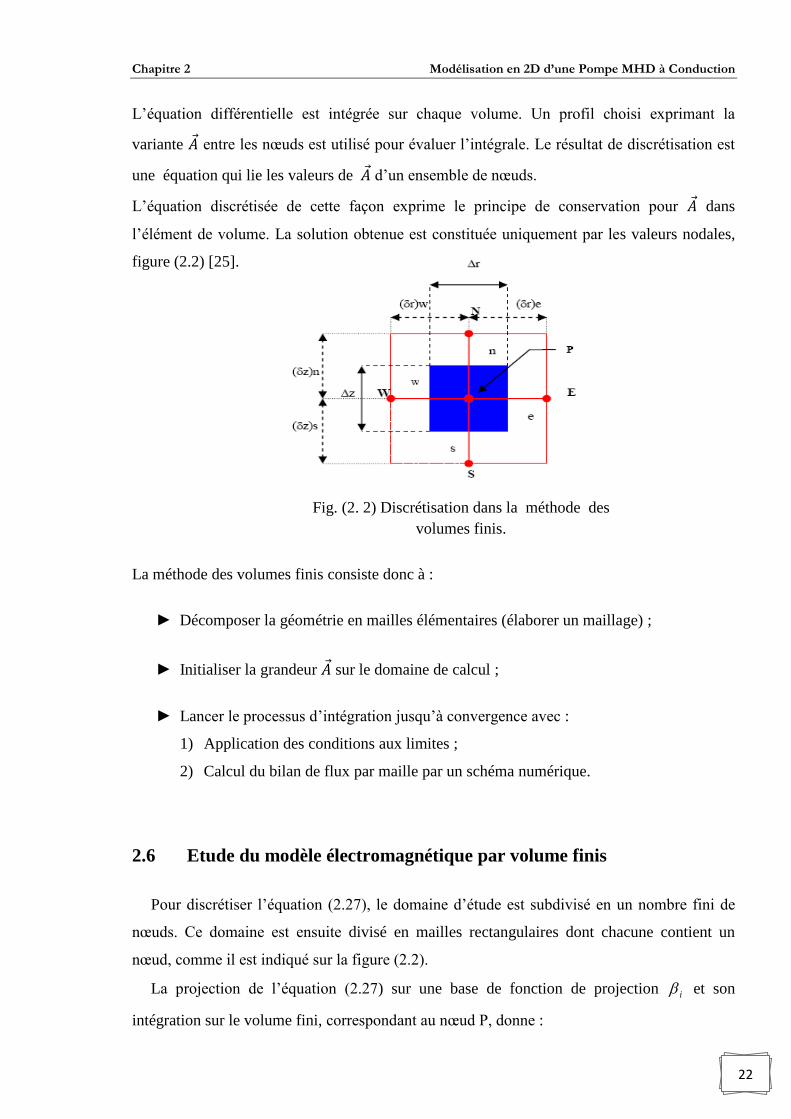
L’équation différentielle est intégrée sur chaque volume. Un profil choisi exprimant la
variante 𝐴 entre les nœuds est utilisé pour évaluer l’intégrale. Le résultat de discrétisation est
une équation qui lie les valeurs de 𝐴 d’un ensemble de nœuds.
L’équation discrétisée de cette façon exprime le principe de conservation pour 𝐴 dans
l’élément de volume. La solution obtenue est constituée uniquement par les valeurs nodales,
figure (2.2) [25].
La méthode des volumes finis consiste donc à :
Décomposer la géométrie en mailles élémentaires (élaborer un maillage) ;
Initialiser la grandeur 𝐴 sur le domaine de calcul ;
Lancer le processus d’intégration jusqu’à convergence avec :
1) Application des conditions aux limites ;
2) Calcul du bilan de flux par maille par un schéma numérique.
2.6 Etude du modèle électromagnétique par volume finis
Pour discrétiser l’équation (2.27), le domaine d’étude est subdivisé en un nombre fini de
nœuds. Ce domaine est ensuite divisé en mailles rectangulaires dont chacune contient un
nœud, comme il est indiqué sur la figure (2.2).
La projection de l’équation (2.27) sur une base de fonction de projection i et son
intégration sur le volume fini, correspondant au nœud P, donne :
Fig. (2. 2) Discrétisation dans la méthode des
volumes finis.

Chapitre 2 Modélisation en 2D d’une Pompe MHD à Conduction
23
rdrdzrdrdzz
A
rrdrdz
r
A
rrz
A
rzz r
iz
z r
i
z r
i )ja +jex()]([)]1
()1
([1
(2.28)
i est la fonction de projection choisie égale à r
1. Après substitution de l’expression de i ,
l’équation (2.28) se présente sous la forme suivante :
drdzjajexdrdzz
A
rdrdz
r
A
rrz
A
rzz r
z
z rz r
)()]([)]1
()1
([1
(2.29)
L’intégrale de l’équation (2.28) sur le volume fini, délimité par les frontières (e, w, n et s) est
drdzjajexdrdzz
A
rrdrdz
r
A
rrz
A
rz
n
s
e
w
z
n
s
e
w
n
s
e
w
)()]([)]1
()1
[(1
(2.30)
Après intégration, et on prenant un profil linéaire, l’équation algébrique finale est de la
forme :
0
'' )( dAaAaAaAaAaAaAaSSNNSsNNWWEEPP (2.31)
avec
SzS
S
NzN
N
WrW
W
ErE
E
z
ra
z
ra
r
za
r
za
)(
)(
)(
)(
(2.32)
SNWEP
aaaaa (2.33)
zrJJdaex
)(0
(2.34)
L’équation obtenue est une équation algébrique reliant l’inconnue au nœud principal
‘P’ aux inconnues aux nœuds voisins «W», «E», «S», «N». Si le problème est linéaire, le
système d’équations peut être résolu par une méthode itérative. La forme matricielle de ce
système d’équation s’écrit sous la forme :
FALM (2.35)
où :
LM : Matrice coefficients,
A : Vecteur inconnu,
Chapitre 2 Modélisation en 2D d’une Pompe MHD à Conduction
24
F : Vecteur source.
L’écoulement d’un fluide est influencé par les phénomènes électromagnétiques via les
forces de Laplace. Ces dernières expriment l’interaction entre les champs magnétiques et des
courants électriques; [25]:
)( BVJJ
BJF
ain
in
(2.36)
En tenant compte des conditions aux limites dont les plus courantes sont les conditions de
Dirichlet et de Neumann données sur les frontières du domaine à étudier. Pour le problème
traité, l’équation électromagnétique est résolue en posant A = 0 sur les frontières du domaine
de résolution et celle de Neumann [25].
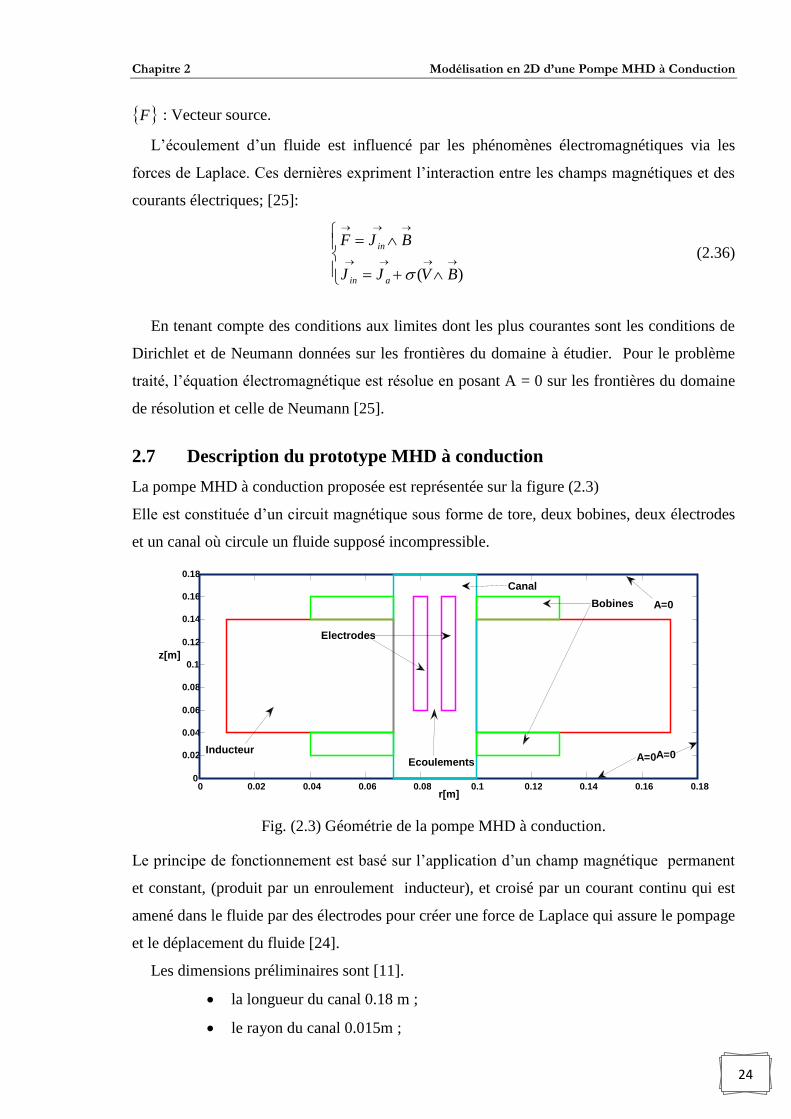
2.7 Description du prototype MHD à conduction
La pompe MHD à conduction proposée est représentée sur la figure (2.3)
Elle est constituée d’un circuit magnétique sous forme de tore, deux bobines, deux électrodes
et un canal où circule un fluide supposé incompressible.
Fig. (2.3) Géométrie de la pompe MHD à conduction.
Le principe de fonctionnement est basé sur l’application d’un champ magnétique permanent
et constant, (produit par un enroulement inducteur), et croisé par un courant continu qui est
amené dans le fluide par des électrodes pour créer une force de Laplace qui assure le pompage
et le déplacement du fluide [24].
Les dimensions préliminaires sont [11].
la longueur du canal 0.18 m ;
le rayon du canal 0.015m ;
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
A=0 A=0
A=0
Electrodes
Ecoulements
Bobines Canal
Inducteur
r[m]
z[m]
Chapitre 2 Modélisation en 2D d’une Pompe MHD à Conduction
25
la largeur de l’électrode 0.01m ;
la longueur du l’inducteur 0.1m ;
la largeur du l’inducteur 0.07m ;
la longueur de la bobine 0.02m;
la largeur de la bobine 0.03m;
le nombre d’électrodes : 2;
le nombre de bobines : 2;
la densité du courant d’excitation J ex = 4.106 A/m
2 ;
la densité du courant injectée par les électrodes J a = 4.106 A/m
2.
Les paramètres caractéristiques du mercure sont :
1- Densité; ρ = 13,6.103
(Kg /m3)
2- Conductivité; σ =1,03.106 (Ω.m)
-1
3- Perméabilité relative ; 1r
.
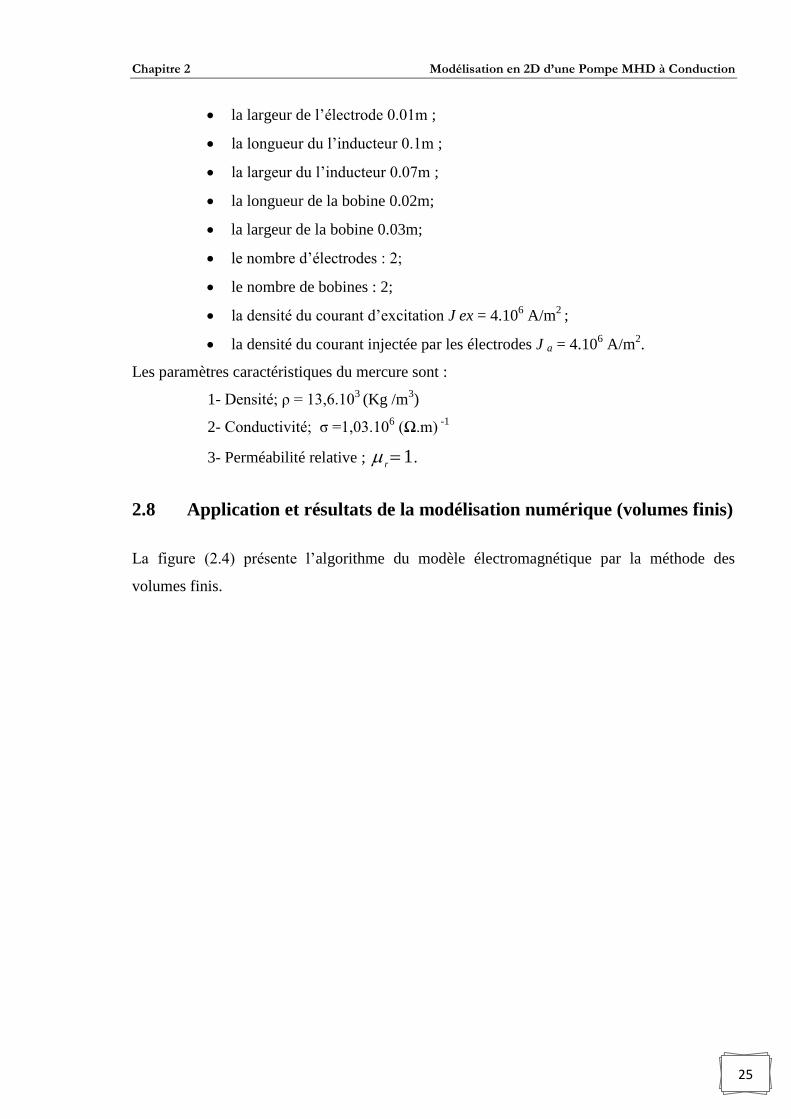
2.8 Application et résultats de la modélisation numérique (volumes finis)
La figure (2.4) présente l’algorithme du modèle électromagnétique par la méthode des
volumes finis.
Chapitre 2 Modélisation en 2D d’une Pompe MHD à Conduction
26
Fig. (2.4) Algorithme du modèle électromagnétique par la méthode des volumes finis.
Données numériques
Pas de discrétisation
Nombres de noeuds
Résolution de l’équation
électromagnétique par la
méthode des volumes finis
Calcul de :
Potentiel vecteur
magnétique
Induction magnétique
Densité de courant
Force électromagnétique
Test de
convergence
non
oui
Fin
Données physiques
Chapitre 2 Modélisation en 2D d’une Pompe MHD à Conduction
27
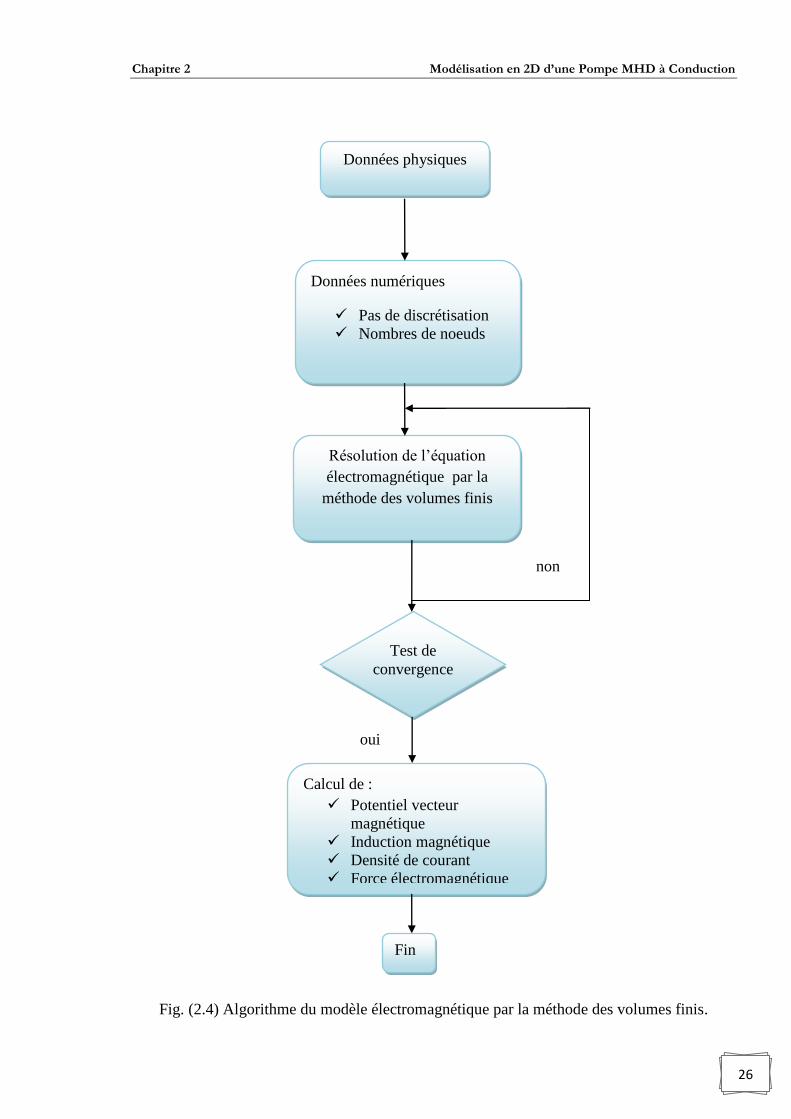
2.8.1 Potentiel vecteur magnétique
Les figures et (2.5a) et (2.5b) montrent le potentiel vecteur magnétique A et sa distribution.
On voit clairement que les valeurs maximales se trouvent aux voisinages des deux bobines
(sources d’excitations).
Fig. (2.5a) Lignes équipotentielles dans la pompe MHD.
Fig. (2.5b) Distribution du potentiel vecteur magnétique dans la pompe en 3D.
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.180
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
r[m]
z[m
]
00.02
0.04 0.060.08
0.10.12
0.14 0.160.18
0
0.05
0.1
0.15
0.2-4
-2
0
2
4
x 10-3
r[m]z[m]
Pote
nti
el vecte
ur M
ag
neti
qu
e A
[A m
]
r[m] z[m]
Chapitre 2 Modélisation en 2D d’une Pompe MHD à Conduction
28
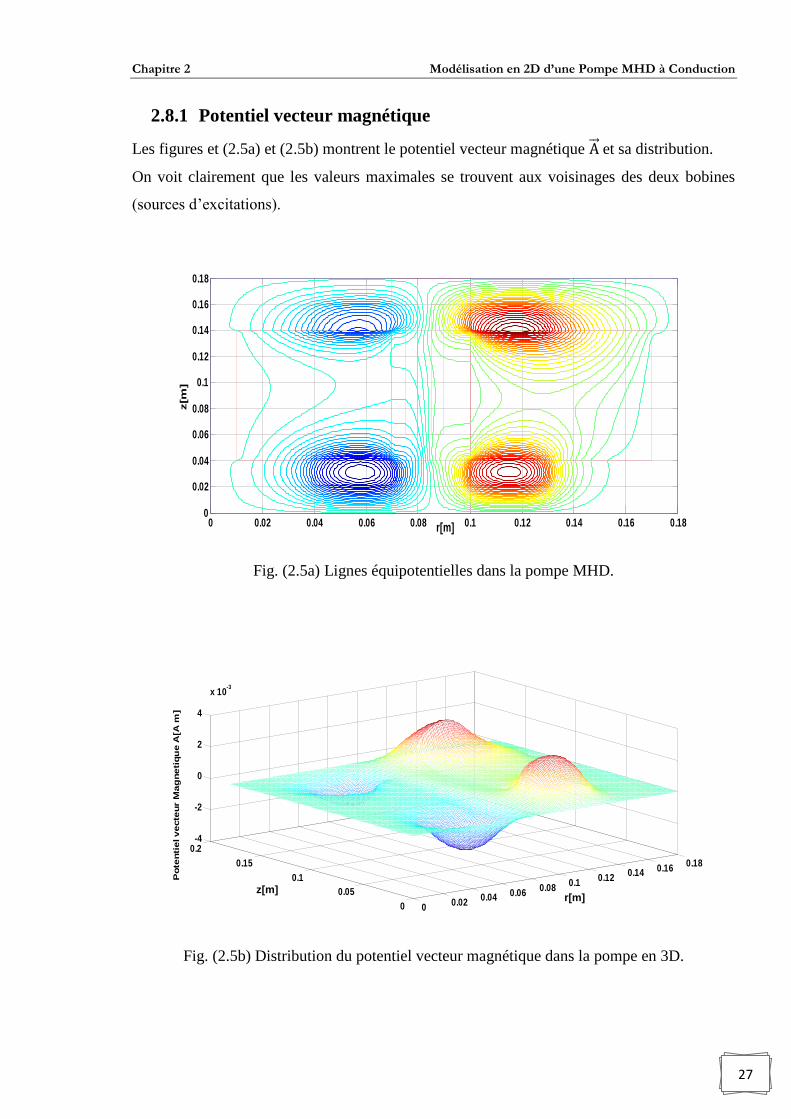
2.8.1 Présentation de l’induction magnétique
La figure (2.6) représente respectivement l’induction magnétique dans la pompe en 3D. Elle
présente des pics aux lieux de disposition des bobines.
Fig. (2.6) Induction magnétique dans la pompe MHD en 3D.
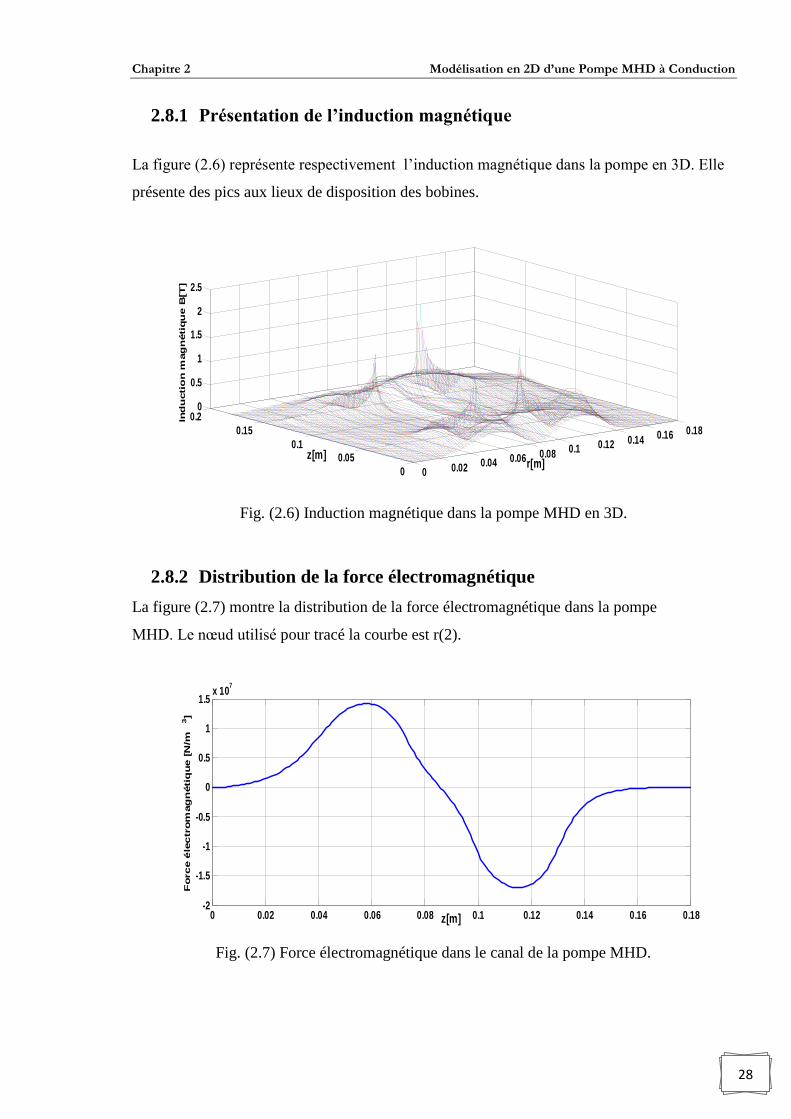
2.8.2 Distribution de la force électromagnétique
La figure (2.7) montre la distribution de la force électromagnétique dans la pompe
MHD. Le nœud utilisé pour tracé la courbe est r(2).
Fig. (2.7) Force électromagnétique dans le canal de la pompe MHD.
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18
0
0.050.1
0.15
0.20
0.5
1
1.5
2
2.5
r[m]z[m]
Ind
ucti
on m
ag
néti
qu
e B
[T]
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18-2
-1.5
-1
-0.5
0
0.5
1
1.5x 10
7
z[m]
Forc
e é
lec
trom
ag
néti
que
[N
/m3]
Chapitre 2 Modélisation en 2D d’une Pompe MHD à Conduction
29
2.9 Conclusion
Une présentation des principales caractéristiques du modèle électromagnétique de la pompe
MHD à conduction proposée, obtenues par simulation par la méthode des volumes finis.
Chapitre trois
Etat de l’Art des
Méthodes d’Optimisation
Chapitre 3 Etat de l’art des méthodes d’optimisation
30
3.1 Introduction
Depuis quelques années, les recherches dans le domaine de la conception de dispositifs
électromagnétiques s’orientent vers l’optimisation par le biais de différentes méthodes. Pour
trouver la solution optimale, il est nécessaire de réaliser un compromis entre deux objectifs :
l’exploration robuste de l’espace de recherche et l’exploitation des meilleures solutions [30].
Dans ce présent chapitre, nous aborderons l’état de l’art des méthodes utilisées dans la
résolution d’un problème d’optimisation. Nous commencerons par la présentation de quelques
définitions nécessaires à l’application de ces méthodes, puis on propose un algorithme
génétique qui nous permettra d’optimiser le poids de la pompe MHD.
3.2 Formulation mathématique d’un problème d’optimisation
Un problème d’optimisation )(P de type " minimisation " de dimension n peut être écrit de
façon générale sous la forme :
nkXXX
qjXh
piXg
RXXfMin
P
kkk
j
i
n
,....,1
,......,10)(
,......,10)(
)(
)(
maxmin
(3.1)
)(Xf est le critère à minimiser appelé fonction objectif ;
X est un vecteur à n variables kX qui représentent les paramètres du problème à optimiser ;
)(Xg i et
)(Xh j représentent respectivement les contraintes d’égalités et d’inégalités ;
minkX et maxkX désignent les contraintes du domaine ;
nR est l’espace de recherche borné par les contraintes du domaine.
La solution d’un problème d’optimisation est alors donnée par un ensemble de paramètres
*X pour lesquels la fonction objectif présente une valeur minimale en respectant les
contraintes d’égalités, d’inégalités et du domaine.

Chapitre 3 Etat de l’art des méthodes d’optimisation
31
3.3 Problèmes d’optimisation sans contraintes
Un problème d’optimisation est dit non contraint, s’il ne contient pas de fonction
contrainte, c’est-à-dire, si les fonctions )(Xg i et )(Xhj du problème )(P ne sont pas définies,
comme dans le cas du problème )( 'P [26], [27] :
nkXXX
RXXfMinP
kkk
n
,....,1
)()(
maxmin
' (3.2)
Une condition suffisante pour que *X soit minimum local d’un problème non contraint est
donnée par (3.3) :
négativenonXH
Xf
)(
0)(
*
*
(3.3)
Où
: L'opérateur nabla;
f est le gradient de la fonction objectif;
fH 2 est la matrice des dérivées secondes partielles de f , appelée matrice Hessienne.
3.4 Problèmes d’optimisation contraints
Un problème d’optimisation )(P est dit problème contraint, s’il contient au moins une
fonction contrainte )(Xg i où )(Xh j , [26], [27].
nkXXX
qjXh
piXg
RXXfMin
P
kkk
j
i
n
,....,1
,......,10)(
,......,10)(
)(
)(
maxmin
(3.4)
Si nous considérons qu’une contrainte d’égalité 0)( Xh j peut être décrite par deux
contraintes d’inégalité 0)( Xh j et 0)( Xh j , le problème (3.4) devient alors égal à celui
donné par (3.5).
Chapitre 3 Etat de l’art des méthodes d’optimisation
32
n
kkk
i
n
RX
nkXXX
qpmiXg
RXXfMin
P,....,1
2,......,10)(
)(
)(maxmin
(3.5)
3.5 Traitement des contraintes
Les contraintes imposées par le cahier des charges comme les contraintes ajoutées par le
concepteur doivent être prises en compte dans le problème. Il y a plusieurs choix pour le
traitement des problèmes avec contraintes. On peut, pour des raisons de robustesse et de
facilité de mise en œuvre transformée un problème contraint en une suite de problème sans
contraintes. Cette transformation s’effectue en ajoutant des pénalités à la fonction objectif
[25].
La méthode de pénalité extérieure
L’intérêt des méthodes de pénalité est la simplicité de leurs principes et leur relative efficacité
pratique.
La fonction objectif f(x) du problème 3.1 est alors remplacé par la fonction suivante à
minimiser
φ(X , r) = f(x) + r. h(x) (3.6)
Ou h(x) est la fonction pénalité, continue, dépendant des contraintes gi(x), r est un cofficient
de pénalité, toujours positif
La fonction h(x) est utilisée afin de défavoriser les positions non admissibles. La fonction de
pénalité doit être continu et à dérivées continues
h x = max2mj=1 (0, gi X ) (3.7)
Le probleme obtenu pourrait etre résolu directement pour une valeur de r suffisament grande
de tell façon que les contraintes soient satisfaites mais ce choix entraine un mauvais
conditionnement de φ(X , r) et donc engendre un problème numérique lors de la résolution.
Chapitre 3 Etat de l’art des méthodes d’optimisation
33
Pour cette raison, les méthodes de pénalités sont en générale résolu de manière itérative : une
suite de valeurs croissantes de r est générer et a chaque itération k du processus, le problème
d’optimisation sans contraintes suivant est résolu :
φ X , r, k = f x + rk (max(0, gi X )2mj=1 (3.8)
L’avantage de cette méthode est que le point de départ n’est pas nécessairement admissible
tout en garantissant que le point final sera dans le domaine admissible ou presque. La fonction
de pénalité extérieure est continue dans tout le domaine d’étude admissible comme non
admissible, mais elle présente l’inconvénient de conduire à un optimum réalisable seulement
quand k tend vers l’infinie et d’approcher ce point par une série de solution non admissible.
Elle est utilisé pour les contraintes non uniquement fonction des variables d’optimisation ou
les contraintes d’égalité.
3.6 Classification des méthodes d'optimisation
Les méthodes d'optimisation sont subdivisées en deux types : les méthodes déterministes et
les méthodes stochastiques.
3.6.1 Méthodes d’optimisation déterministes
Une méthode d’optimisation est dite déterministe lorsque son évolution vers la solution du
problème est toujours la même pour un même point initial donné, ne laissant aucune place au
hasard. Ces méthodes nécessitent des hypothèses sur la fonction f à optimiser, telles que la
continuité et la dérivabilité en tout point du domaine admissible. Ce sont en général des
méthodes efficaces, peu coûteuses, mais qui nécessitent une configuration initiale (point de
départ) pour résoudre le problème. Ce sont souvent des méthodes locales, c’est-à-dire qu’elles
convergent vers l’optimum le plus proche du point de départ, qu’il soit local ou global [30].
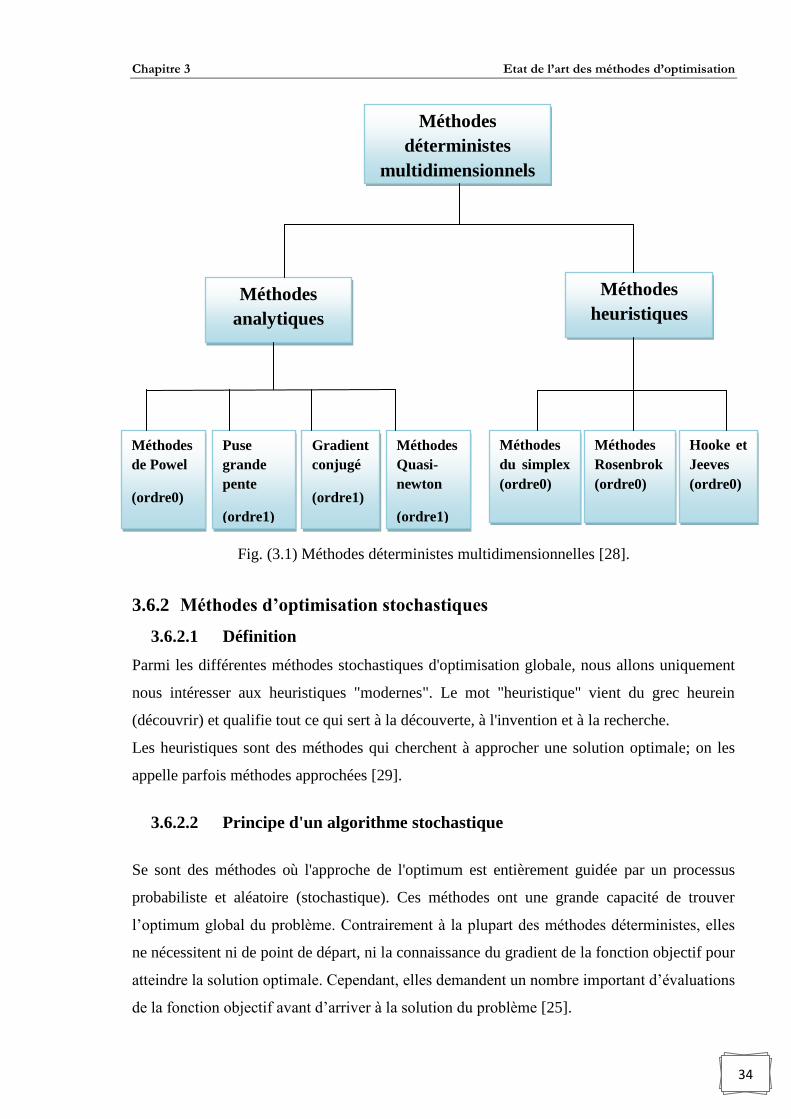
Nous pouvons diviser les méthodes déterministes quelles soient directes ou indirectes en deux
groupes : les méthodes analytiques ou de descente comme la méthode de la Plus Grande
Pente, le Gradient Conjugué, la méthode de Powell et la méthode de Quasi-Newton et les
méthodes géométriques, telles que la méthode du Simplex et la méthode de Rosenbrock figure
(3 .1).
Chapitre 3 Etat de l’art des méthodes d’optimisation
34
Fig. (3.1) Méthodes déterministes multidimensionnelles [28].
3.6.2 Méthodes d’optimisation stochastiques
3.6.2.1 Définition
Parmi les différentes méthodes stochastiques d'optimisation globale, nous allons uniquement
nous intéresser aux heuristiques "modernes". Le mot "heuristique" vient du grec heurein
(découvrir) et qualifie tout ce qui sert à la découverte, à l'invention et à la recherche.
Les heuristiques sont des méthodes qui cherchent à approcher une solution optimale; on les
appelle parfois méthodes approchées [29].
3.6.2.2 Principe d'un algorithme stochastique
Se sont des méthodes où l'approche de l'optimum est entièrement guidée par un processus
probabiliste et aléatoire (stochastique). Ces méthodes ont une grande capacité de trouver
l’optimum global du problème. Contrairement à la plupart des méthodes déterministes, elles
ne nécessitent ni de point de départ, ni la connaissance du gradient de la fonction objectif pour
atteindre la solution optimale. Cependant, elles demandent un nombre important d’évaluations
de la fonction objectif avant d’arriver à la solution du problème [25].
Méthodes
déterministes
multidimensionnels
Méthodes
heuristiques
Puse
grande
pente
(ordre1)
Méthodes
de Powel
(ordre0)
Méthodes
analytiques
Gradient
conjugé
(ordre1)
Méthodes
du simplex
(ordre0)
Méthodes
Rosenbrok
(ordre0)
Hooke et
Jeeves
(ordre0)
Méthodes
Quasi-
newton
(ordre1)
Chapitre 3 Etat de l’art des méthodes d’optimisation
35
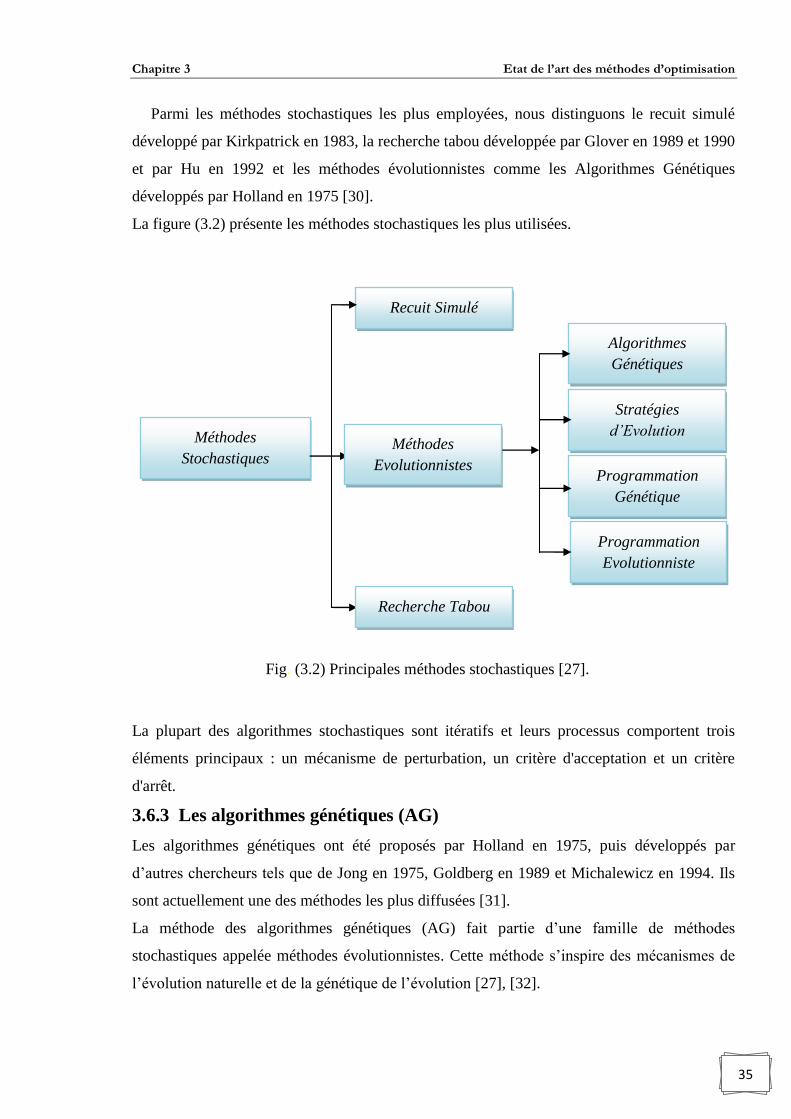
Parmi les méthodes stochastiques les plus employées, nous distinguons le recuit simulé
développé par Kirkpatrick en 1983, la recherche tabou développée par Glover en 1989 et 1990
et par Hu en 1992 et les méthodes évolutionnistes comme les Algorithmes Génétiques
développés par Holland en 1975 [30].
La figure (3.2) présente les méthodes stochastiques les plus utilisées.
La plupart des algorithmes stochastiques sont itératifs et leurs processus comportent trois
éléments principaux : un mécanisme de perturbation, un critère d'acceptation et un critère
d'arrêt.
3.6.3 Les algorithmes génétiques (AG)
Les algorithmes génétiques ont été proposés par Holland en 1975, puis développés par
d’autres chercheurs tels que de Jong en 1975, Goldberg en 1989 et Michalewicz en 1994. Ils
sont actuellement une des méthodes les plus diffusées [31].
La méthode des algorithmes génétiques (AG) fait partie d’une famille de méthodes
stochastiques appelée méthodes évolutionnistes. Cette méthode s’inspire des mécanismes de
l’évolution naturelle et de la génétique de l’évolution [27], [32].
Fig. (3.2) Principales méthodes stochastiques [27].
Méthodes
Stochastiques
Recherche Tabou
Recuit Simulé
Méthodes
Evolutionnistes
Programmation
Génétique
Stratégies
d’Evolution
Algorithmes
Génétiques
Programmation
Evolutionniste
Chapitre 3 Etat de l’art des méthodes d’optimisation
36
3.6.3.2 Terminologie et principe des algorithmes génétiques
Dans les AG, l’ensemble des paramètres du problème à optimiser est défini comme étant
un individu. Un individu représente une solution particulière au problème à optimiser. Un
ensemble d’individus donne naissance à la population. La population représente donc un
ensemble de solutions du problème à optimiser. Elle représente aussi un ensemble de
différentes configurations de paramètres, donc un sous espace de recherche [25].
La figure (3.3), présente les trois niveaux d’organisation de l’algorithme génétique.
Fig. (3.3) Représentation des trois niveaux d'organisation de l'AG [30].
Les algorithmes génétiques se basent sur quatre éléments principaux qui sont : l’évaluation, la
sélection, le croisement et la mutation.
Après l’initialisation aléatoire de la première population d’individus qui définit la première
génération, on répète successivement les quatre étapes suivantes :
Chapitre 3 Etat de l’art des méthodes d’optimisation
37
1. L’évaluation des individus par le calcul de leurs fonctions objectifs (mesure de
l’adaptation).
2. La sélection des individus reproducteurs : théoriquement les individus qui s’adaptent
le mieux à l’environnement défini par la fonction objectif.
3. Application de l’opérateur de croisement. Cet opérateur permet l’exploration de
l’espace de recherche.
4. Application de l’opérateur de mutation. Cet opérateur joue un double rôle : explorer
l’espace de recherche qui n’a pas pu être atteint par l’opérateur de croisement et
réaliser une recherche locale, très proche de la solution en cours.
A la fin de l’étape quatre, nous obtiendrons une nouvelle population. Cette population
constitue l’ensemble d’individus de la génération (itération) qui suit. Ces quatre étapes sont
répétées autant de fois qu’il y a besoin de générations pour satisfaire un critère d’arrêt.
Celui ci est défini avant que le processus commence. La solution est alors représentée par le
meilleur individu de la dernière génération [33].
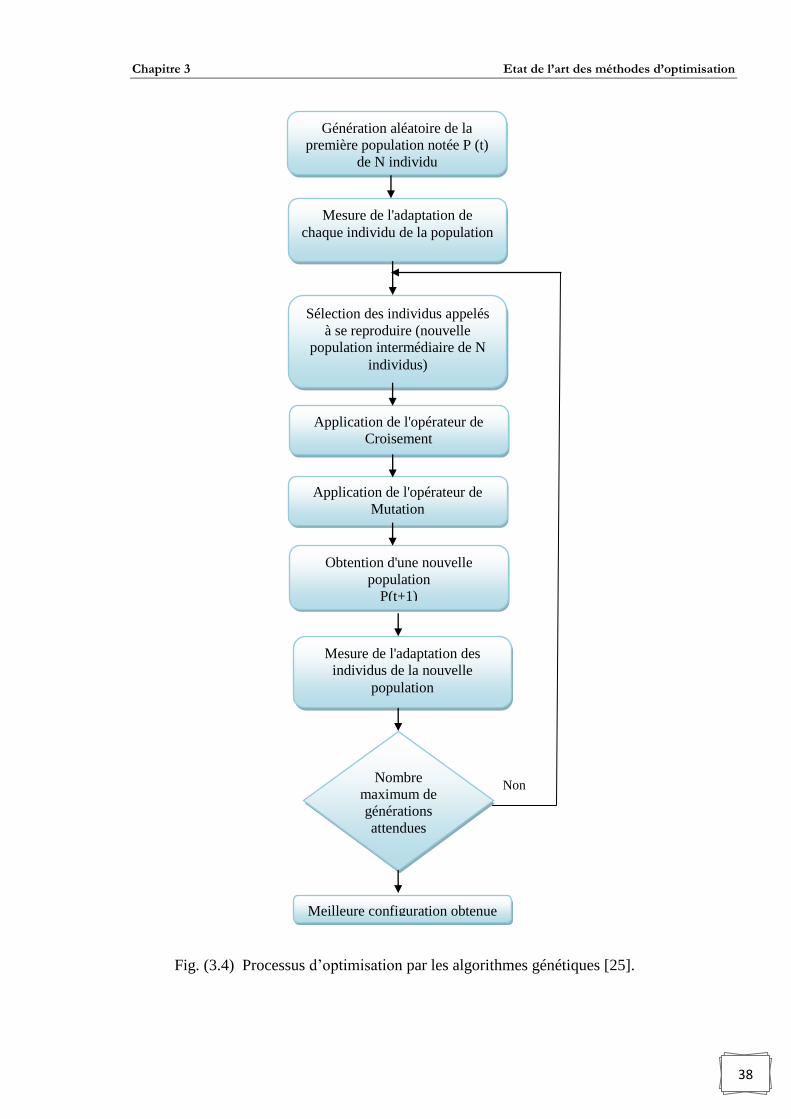
La figure (3.4) illustre les principales étapes des algorithmes génétiques
Chapitre 3 Etat de l’art des méthodes d’optimisation
38
Génération aléatoire de la
première population notée P (t)
de N individu
Mesure de l'adaptation de
chaque individu de la population
Obtention d'une nouvelle
population
P(t+1)
Application de l'opérateur de
Croisement
Mesure de l'adaptation des
individus de la nouvelle
population
Application de l'opérateur de
Mutation
Nombre
maximum de
générations
attendues
Sélection des individus appelés
à se reproduire (nouvelle
population intermédiaire de N
individus)
Meilleure configuration obtenue
Non
Fig. (3.4) Processus d’optimisation par les algorithmes génétiques [25].
Chapitre 3 Etat de l’art des méthodes d’optimisation
39
L’algorithme de résolution commence par :
a) la création d’une population P de taille N >0 constituée par des individus générés
aléatoirement ;
b) la mesure de l’adaptation de chacun des individus de P à partir de la valeur de la
fonction objectif évaluée sur eux ;
c) La prochaine étape du processus consiste à faire évoluer cette population vers une
population plus adaptée à chaque génération, en utilisant trois différents opérateurs: la
sélection, le croisement et la mutation. Lorsque nous n’avons plus d’amélioration dans
l’adaptation des individus de la population, l’algorithme s’arrête.
3.6.3.3 Mise en œuvre de la procédure des Algorithmes Génétiques
La mise en œuvre de la procédure des algorithmes génétiques nécessite en premier lieu la
modélisation de l’ensemble des étapes qui la constituent. C'est-à-dire les étapes qui sont
illustrées par l’organigramme de la figure (3.4). Cette modélisation consiste en la traduction
mathématique des différents passages de la procédure. Dans ce qui suit nous développons les
différents outils permettant la modélisation et la mise en œuvre de la procédure des AG.
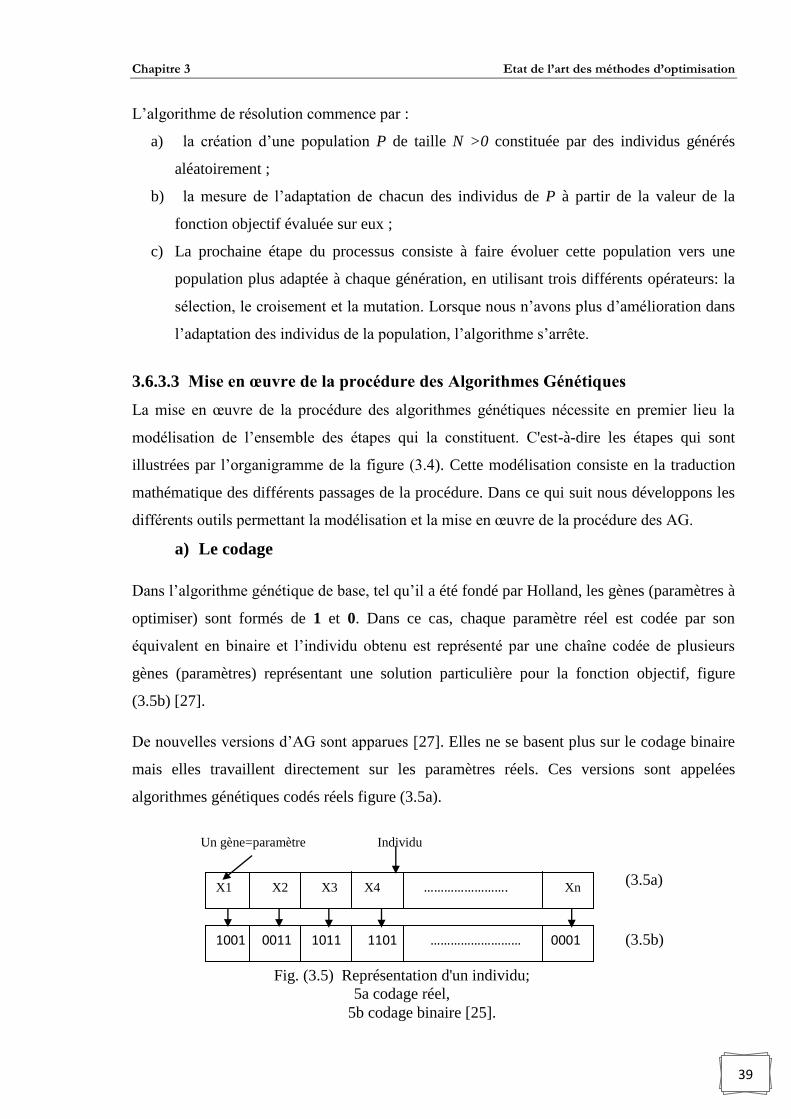
a) Le codage
Dans l’algorithme génétique de base, tel qu’il a été fondé par Holland, les gènes (paramètres à
optimiser) sont formés de 1 et 0. Dans ce cas, chaque paramètre réel est codée par son
équivalent en binaire et l’individu obtenu est représenté par une chaîne codée de plusieurs
gènes (paramètres) représentant une solution particulière pour la fonction objectif, figure
(3.5b) [27].
De nouvelles versions d’AG sont apparues [27]. Elles ne se basent plus sur le codage binaire
mais elles travaillent directement sur les paramètres réels. Ces versions sont appelées
algorithmes génétiques codés réels figure (3.5a).
Fig. (3.5) Représentation d'un individu;
5a codage réel,
5b codage binaire [25].
1001 0011 1011 1101 ……………………… 0001
(3.5a)
(3.5b)
X1 X2 X3 X4 ……………………. Xn
Un gène=paramètre Individu
Chapitre 3 Etat de l’art des méthodes d’optimisation
40
b) Génération de la population initiale
Le choix de la population initiale d’individus conditionne fortement la rapidité de
l’algorithme. Néanmoins, une initialisation aléatoire est plus simple à réaliser : les valeurs des
gènes sont tirées au hasard selon une distribution uniforme. Toutefois, il peut être utile de
guider la génération initiale vers des sous domaines intéressants de l’espace de recherche. Par
exemple lors d’une recherche d’optima dans un problème d’optimisation sous contraintes, il
est préférable de produire des éléments satisfaisant les contraintes. La population initiale doit
être suffisamment diversifiée et de taille assez importante pour que la recherche puisse
parcourir l’espace d’état dans un temps limité [25].
c) L’évaluation
La fonction d’adaptation, évaluation, ou fitness, associe une valeur pour chaque individu.
Cette valeur a pour but d´évaluer si un individu est mieux adapté qu’un autre à son
environnement. Aucune règle n’existe pour définir cette fonction la manière la plus simple est
de poser la fonction d’adaptation comme la formalisation du critère d’optimisation [25].
d) La sélection
L’opérateur de sélection est appliqué sur la population courante de façon à sélectionner les
individus qui iront former la population de la prochaine génération. La sélection de ces
individus est basée sur leur valeur d’adaptation. Ainsi, les individus les plus adaptés sont
généralement sélectionnés pour constituer la génération suivante, alors que les plus faibles
sont exclus sans avoir la possibilité d’avoir des descendants. Il existe différentes façons
d’implémenter un opérateur de sélection, parmi lesquelles nous trouvons : la sélection
uniforme, la sélection par tournoi, proportionnelle et la sélection par rang [27].
e) Le croisement
L’opérateur de croisement est utilisé pour échanger les caractéristiques “génétiques” entre
les différents individus d’une génération quelconque. Cet échange s’effectue en choisissant
deux individus au hasard (parents) qui seront “croisés” avec une certaine probabilité de
croisement pc, de façon à générer deux nouveaux individus (enfants). Les enfants
remplaceront leurs parents et formeront la nouvelle population intermédiaire.
Chapitre 3 Etat de l’art des méthodes d’optimisation
41
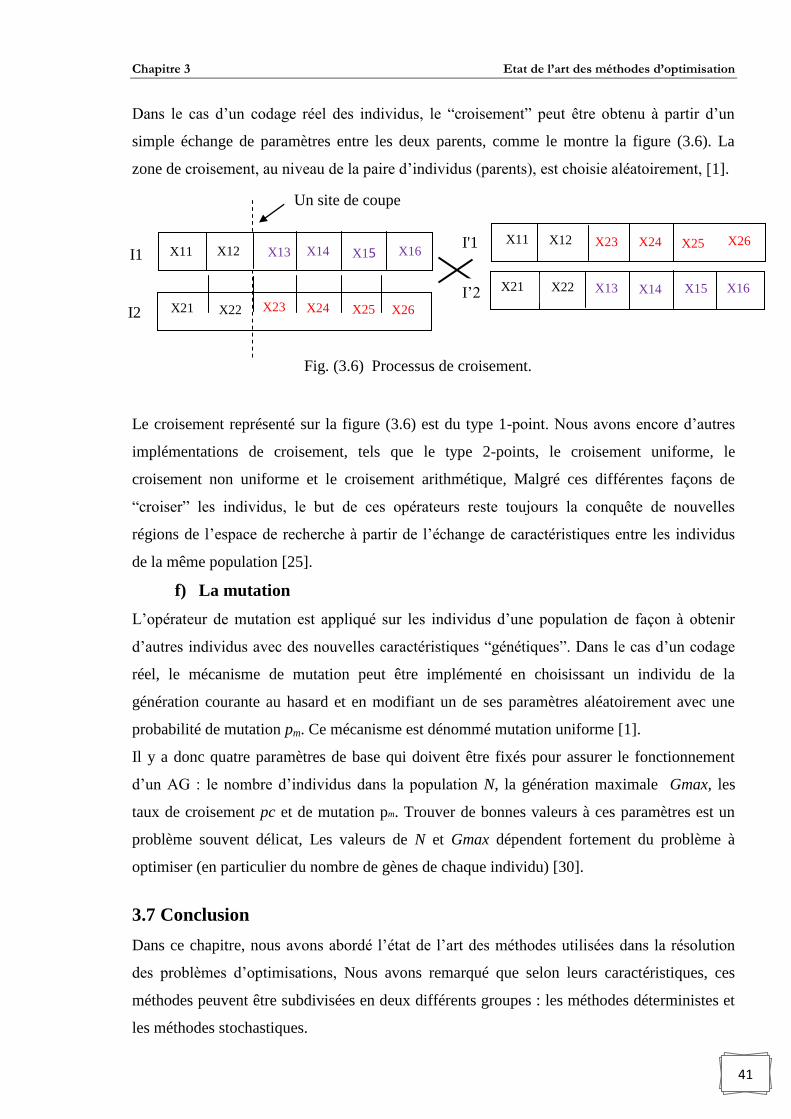
Dans le cas d’un codage réel des individus, le “croisement” peut être obtenu à partir d’un
simple échange de paramètres entre les deux parents, comme le montre la figure (3.6). La
zone de croisement, au niveau de la paire d’individus (parents), est choisie aléatoirement, [1].
Le croisement représenté sur la figure (3.6) est du type 1-point. Nous avons encore d’autres
implémentations de croisement, tels que le type 2-points, le croisement uniforme, le
croisement non uniforme et le croisement arithmétique, Malgré ces différentes façons de
“croiser” les individus, le but de ces opérateurs reste toujours la conquête de nouvelles
régions de l’espace de recherche à partir de l’échange de caractéristiques entre les individus
de la même population [25].
f) La mutation
L’opérateur de mutation est appliqué sur les individus d’une population de façon à obtenir
d’autres individus avec des nouvelles caractéristiques “génétiques”. Dans le cas d’un codage
réel, le mécanisme de mutation peut être implémenté en choisissant un individu de la
génération courante au hasard et en modifiant un de ses paramètres aléatoirement avec une
probabilité de mutation pm. Ce mécanisme est dénommé mutation uniforme [1].
Il y a donc quatre paramètres de base qui doivent être fixés pour assurer le fonctionnement
d’un AG : le nombre d’individus dans la population N, la génération maximale Gmax, les
taux de croisement pc et de mutation pm. Trouver de bonnes valeurs à ces paramètres est un
problème souvent délicat, Les valeurs de N et Gmax dépendent fortement du problème à
optimiser (en particulier du nombre de gènes de chaque individu) [30].
3.7 Conclusion
Dans ce chapitre, nous avons abordé l’état de l’art des méthodes utilisées dans la résolution
des problèmes d’optimisations, Nous avons remarqué que selon leurs caractéristiques, ces
méthodes peuvent être subdivisées en deux différents groupes : les méthodes déterministes et
les méthodes stochastiques.
I’2 X22 X15 X14 X13 X21 X16
Fig. (3.6) Processus de croisement.
X25 X24 X26 I2 X22 X23 X21
Un site de coupe
I1 X12 X15 X14 X13 X11 X16 I'1 X12 X25 X24 X23 X11 X26
Chapitre quatre
Conception de la pompe
MHD à conduction par la
méthode des AG
Chapitre 4 Conception de la pompe MHD à conduction par la méthode des AG
42
4.1 Introduction
L’optimisation est un outil indispensable combinant diverses techniques de la mathématique
discrète et de l’informatique afin de résoudre des problèmes d’optimisation de la vie réelle.
Un problème d’optimisation consiste à trouver la meilleure solution dans un ensemble discret
de solutions appelé ensemble des solutions réalisables. En général, cet ensemble est fini mais
de cardinalité très grande [35].
On peut distinguer deux types de problèmes l’optimisation locale et l'optimisation globale.
L'optimisation locale consiste à rechercher la meilleure solution localement, c'est-à-dire dans
une région restreinte de l'espace de recherche, par contre l'optimisation globale recherche la
meilleure solution sur tout l'espace de recherche [30].
Dans ce chapitre on propose la conception optimale d’une pompe MHD, on utilisant la
méthode des algorithmes génétiques qui nous permettra d’optimiser la masse de la pompe
MHD.
4.2 Le mécanisme des algorithmes génétiques
L’idée de base des algorithmes génétiques est de suivre la loi de l’évolution naturelle. Chaque
solution est représentée comme un individu et l’ensemble de solutions, comme une
population. À chaque itération des opérateurs génétiques (sélection, croisement, mutation)
sont utilisés pour diversifier la population.
4.3 Démarche de conception par optimisation
Apres avoir présenter le modèle électromagnétique au chapitre deux, on définit le
fonctionnement du dispositif à concevoir, et on utilise la méthode des algorithmes génétiques
pour atteindre la solution optimale (minimisant la masse et satisfaisant les contraintes du
cahier de charges).
4.4 Formulation d’un problème d’optimisation d’une pompe MHD par AG
D'une manière générale, les algorithmes génétiques est un algorithme de recherche local, qui
commence à partir des individus initiaux (une population) représentant les solutions possibles
du problème. Chaque individu de la population s'appelle un chromosome, et a une "fitness
fonction" (fonction à optimiser) qui contribue à la génération d’une nouvelle population au
moyen d'opérateurs génétiques. Ces opérateurs génétiques sont : la reproduction, le
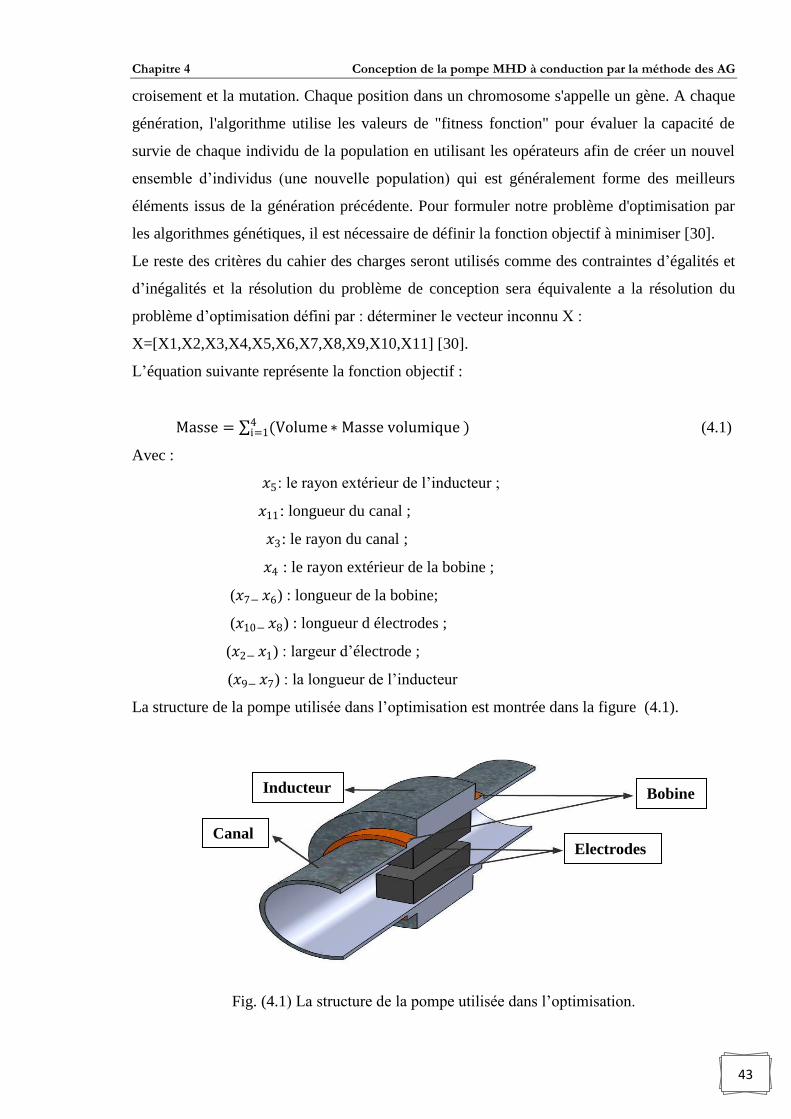
Chapitre 4 Conception de la pompe MHD à conduction par la méthode des AG
43
croisement et la mutation. Chaque position dans un chromosome s'appelle un gène. A chaque
génération, l'algorithme utilise les valeurs de "fitness fonction" pour évaluer la capacité de
survie de chaque individu de la population en utilisant les opérateurs afin de créer un nouvel
ensemble d’individus (une nouvelle population) qui est généralement forme des meilleurs
éléments issus de la génération précédente. Pour formuler notre problème d'optimisation par
les algorithmes génétiques, il est nécessaire de définir la fonction objectif à minimiser [30].
Le reste des critères du cahier des charges seront utilisés comme des contraintes d’égalités et
d’inégalités et la résolution du problème de conception sera équivalente a la résolution du
problème d’optimisation défini par : déterminer le vecteur inconnu X :
X=[X1,X2,X3,X4,X5,X6,X7,X8,X9,X10,X11] [30].
L’équation suivante représente la fonction objectif :
Masse = (Volume ∗ Masse volumique )4i=1 (4.1)
Avec :
𝑥5: le rayon extérieur de l’inducteur ;
𝑥11: longueur du canal ;
𝑥3: le rayon du canal ;
𝑥4 : le rayon extérieur de la bobine ;
(𝑥7− 𝑥6) : longueur de la bobine;
(𝑥10− 𝑥8) : longueur d électrodes ;
(𝑥2− 𝑥1) : largeur d’électrode ;
(𝑥9− 𝑥7) : la longueur de l’inducteur
La structure de la pompe utilisée dans l’optimisation est montrée dans la figure (4.1).
Fig. (4.1) La structure de la pompe utilisée dans l’optimisation.
Inducteur Bobine
s
Electrodes Canal

Chapitre 4 Conception de la pompe MHD à conduction par la méthode des AG
44
Dans notre étude l’objectif est de minimiser la masse totale de la pompe à conduction qui
inclut les masses des matériaux de chaque partie active de la pompe.
4.4.1 Calcul de la masse totale de la pompe
Chaque masse est calculée par le produit de la masse volumique de chaque matériau par le
volume de chaque partie active constituant la pompe.
M𝑡𝑜𝑡𝑎𝑙𝑒 = 𝑀𝑓𝑙𝑢𝑖𝑑𝑒 + 𝑀𝑒𝑙𝑒𝑐𝑡𝑟𝑜𝑑𝑒𝑠 + 𝑀𝑖𝑛𝑑𝑢𝑐𝑡𝑒𝑢𝑟 + 𝑀𝑐𝑢𝑖𝑣𝑟𝑒 (4.2)
Masse du fluide
Le canal est un cylindre creux de rayon 3 x et de longueur 11 x contenant deux électrodes. Le
volume du canal est donné par :
𝑉𝑐𝑎𝑛𝑎𝑙 = Πx32x11 − 2Velectrode (4.3)
Le volume d’électrode donné par :
𝑉𝑒𝑙𝑒𝑐𝑡𝑟𝑜𝑑𝑒 = 𝑥2 − 𝑥1 𝑥10 − 𝑥8 lelectrode (4.4)
Avec :
𝑉𝑒𝑙𝑒𝑐𝑡𝑟𝑜𝑑𝑒 : volume d’électrode
𝑥2 − 𝑥1 : largeur de l’électrode;
𝑥10 − 𝑥8 : longueur de l’électrode;
lelectrode : hauteur de l’électrode.
En utilise le mercure comme fluide le canal de densité volumique ρ𝑚𝑒𝑟
La masse du fluide est donnée par :
𝑀𝑓𝑙𝑢𝑖𝑑𝑒 = 𝑉𝑚𝑒𝑟 ρ𝑚𝑒𝑟 (4.5)
Avec :
𝑀𝑓𝑙𝑢𝑖𝑑𝑒 : masse du fluide (mercure) ;
𝑉𝑚𝑒𝑟 : volume du mercure ;
ρ𝑚𝑒𝑟 : densité volumique du mercure.
Masse du cuivre
La pompe est composée de deux bobines en cuivre de rayon extérieur 𝑥4 et de rayon intérieur
𝑥3 et de longueur (𝑥7 − 𝑥6)
Chapitre 4 Conception de la pompe MHD à conduction par la méthode des AG
45
Le volume d’une bobine :
𝑉𝑐𝑢𝑖 = Π x42 − x3
2 𝑥7 − 𝑥6 (4.6)
La masse d’une bobine
𝑀𝑐𝑢𝑖 = 2𝐾𝑟𝑐𝑉𝑐𝑢𝑖 ρ𝑐𝑢𝑖 (4.7)
Avec :
𝐾𝑟𝑐 ∶ coefficient de remplissage ;
𝑀𝑐𝑢𝑖 : masse du cuivre ;
𝑉𝑐𝑢𝑖 : volume du cuivre ;
ρ𝑐𝑢𝑖 : masse volumique du cuivre
Masse de l’inducteur
Le volume de l’inducteur est donné par :
𝑉𝑖𝑛𝑑 = Π x52 − x3
2 𝑥9 − 𝑥7 (4.8)
La masse de l’inducteur est donnée par :
𝑀𝑖𝑛𝑑 = 𝐾𝑟𝑓𝑉𝑓𝑒𝑟 ρ𝑓𝑒𝑟 (4.9)
Avec :
où :
𝑀𝑖𝑛𝑑 : masse de l’inducteur ;
ρ𝑓𝑒𝑟 : masse volumique du matériau ferromagnétique ;
𝑉𝑓𝑒𝑟 : volume de l’inducteur;
𝐾𝑟𝑓 : coefficient de remplissage des tôles.
Masse des électrodes
L’électrode est de platine La masse de l’électrode est donnée par :
𝑀𝑒𝑙𝑒𝑐 = 2𝑉𝑒𝑙𝑒𝑐 ρ𝑝𝑙𝑎𝑡 (4.10)
Avec :
𝑀𝑒𝑙𝑒𝑐 : masse des deux électrodes ;
𝑉𝑒𝑙𝑒𝑐 : volume de l’électrode donné par (4.3) ;
ρ𝑝𝑙𝑎𝑡 : masse volumique du platine.
Alors la masse totale de la pompe est la somme des masses.
Les masses volumiques des matériaux utilisés sont données dans le tableau (4.1).
Tab. (4.1) Masse volumique des matériaux de la pompe MHD.
Matériau mercure cuivre fer platine
Masses
volumiques [Kg/𝑚3]
13.54*103
8.92*103
7850
13*103
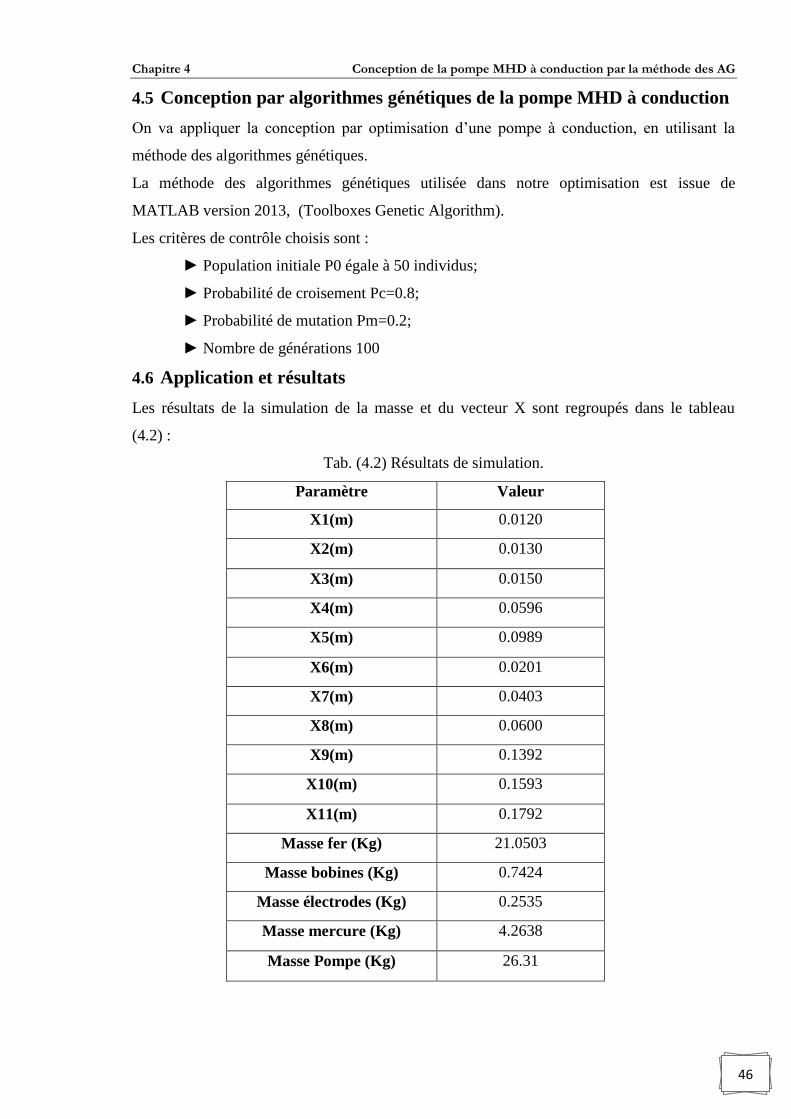
Chapitre 4 Conception de la pompe MHD à conduction par la méthode des AG
46
4.5 Conception par algorithmes génétiques de la pompe MHD à conduction
On va appliquer la conception par optimisation d’une pompe à conduction, en utilisant la
méthode des algorithmes génétiques.
La méthode des algorithmes génétiques utilisée dans notre optimisation est issue de
MATLAB version 2013, (Toolboxes Genetic Algorithm).
Les critères de contrôle choisis sont :
Population initiale P0 égale à 50 individus;
Probabilité de croisement Pc=0.8;
Probabilité de mutation Pm=0.2;
Nombre de générations 100
4.6 Application et résultats
Les résultats de la simulation de la masse et du vecteur X sont regroupés dans le tableau
(4.2) :
Tab. (4.2) Résultats de simulation.
Paramètre Valeur
X1(m) 0.0120
X2(m) 0.0130
X3(m) 0.0150
X4(m) 0.0596
X5(m) 0.0989
X6(m) 0.0201
X7(m) 0.0403
X8(m) 0.0600
X9(m) 0.1392
X10(m) 0.1593
X11(m) 0.1792
Masse fer (Kg) 21.0503
Masse bobines (Kg) 0.7424
Masse électrodes (Kg) 0.2535
Masse mercure (Kg) 4.2638
Masse Pompe (Kg) 26.31
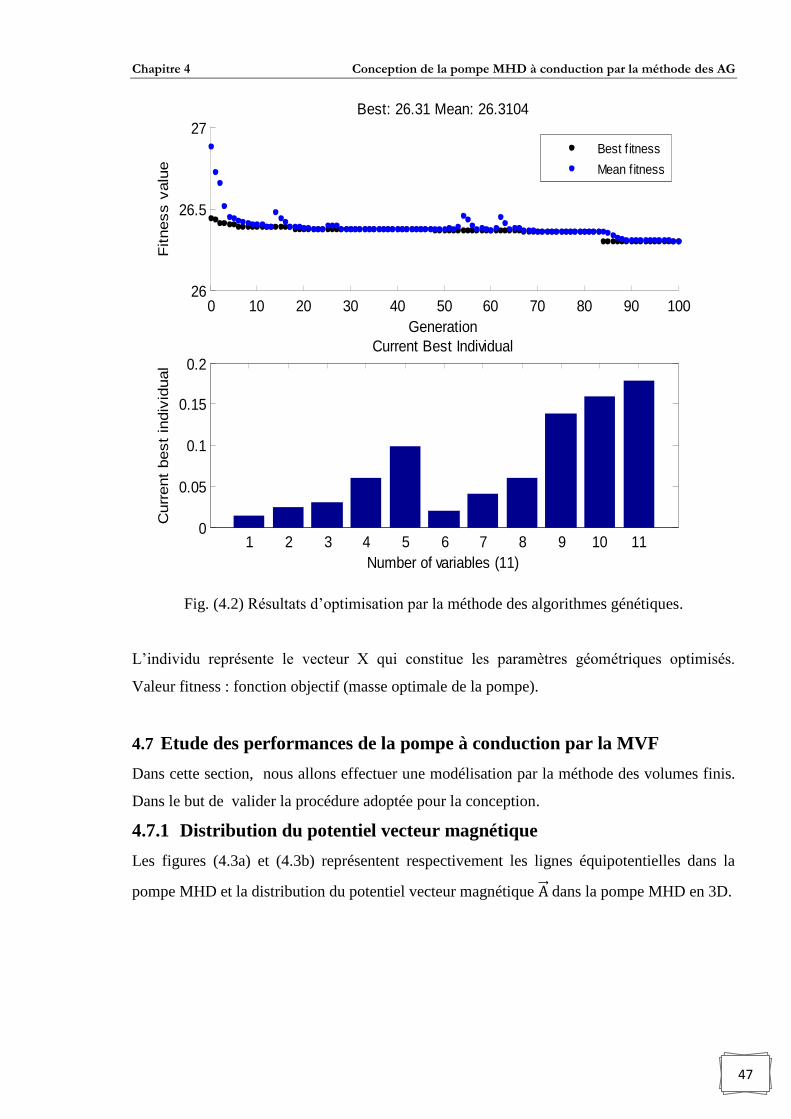
Chapitre 4 Conception de la pompe MHD à conduction par la méthode des AG
47
Fig. (4.2) Résultats d’optimisation par la méthode des algorithmes génétiques.
L’individu représente le vecteur X qui constitue les paramètres géométriques optimisés.
Valeur fitness : fonction objectif (masse optimale de la pompe).
4.7 Etude des performances de la pompe à conduction par la MVF
Dans cette section, nous allons effectuer une modélisation par la méthode des volumes finis.
Dans le but de valider la procédure adoptée pour la conception.
4.7.1 Distribution du potentiel vecteur magnétique
Les figures (4.3a) et (4.3b) représentent respectivement les lignes équipotentielles dans la
pompe MHD et la distribution du potentiel vecteur magnétique A dans la pompe MHD en 3D.
0 10 20 30 40 50 60 70 80 90 10026
26.5
27
Generation
Fitness v
alu
e
Best: 26.31 Mean: 26.3104
1 2 3 4 5 6 7 8 9 10 110
0.05
0.1
0.15
0.2
Number of variables (11)
Curr
ent
best
indiv
idual
Current Best Individual
Best f itness
Mean fitness
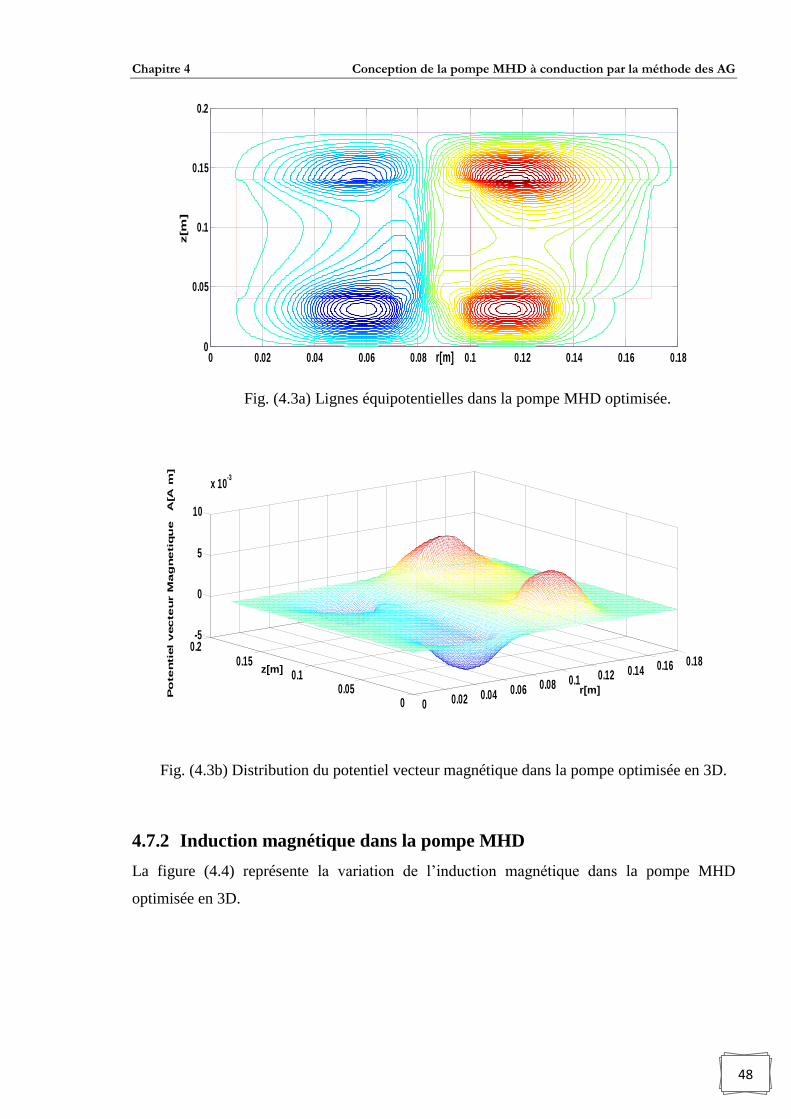
Chapitre 4 Conception de la pompe MHD à conduction par la méthode des AG
48
Fig. (4.3a) Lignes équipotentielles dans la pompe MHD optimisée.
Fig. (4.3b) Distribution du potentiel vecteur magnétique dans la pompe optimisée en 3D.
4.7.2 Induction magnétique dans la pompe MHD
La figure (4.4) représente la variation de l’induction magnétique dans la pompe MHD
optimisée en 3D.
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.180
0.05
0.1
0.15
0.2
r[m]
z[m
]
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18
00.05
0.10.15
0.2-5
0
5
10
x 10-3
Po
tentie
l vecteur M
ag
netiq
ue A
[A m
]
r[m]
z[m]
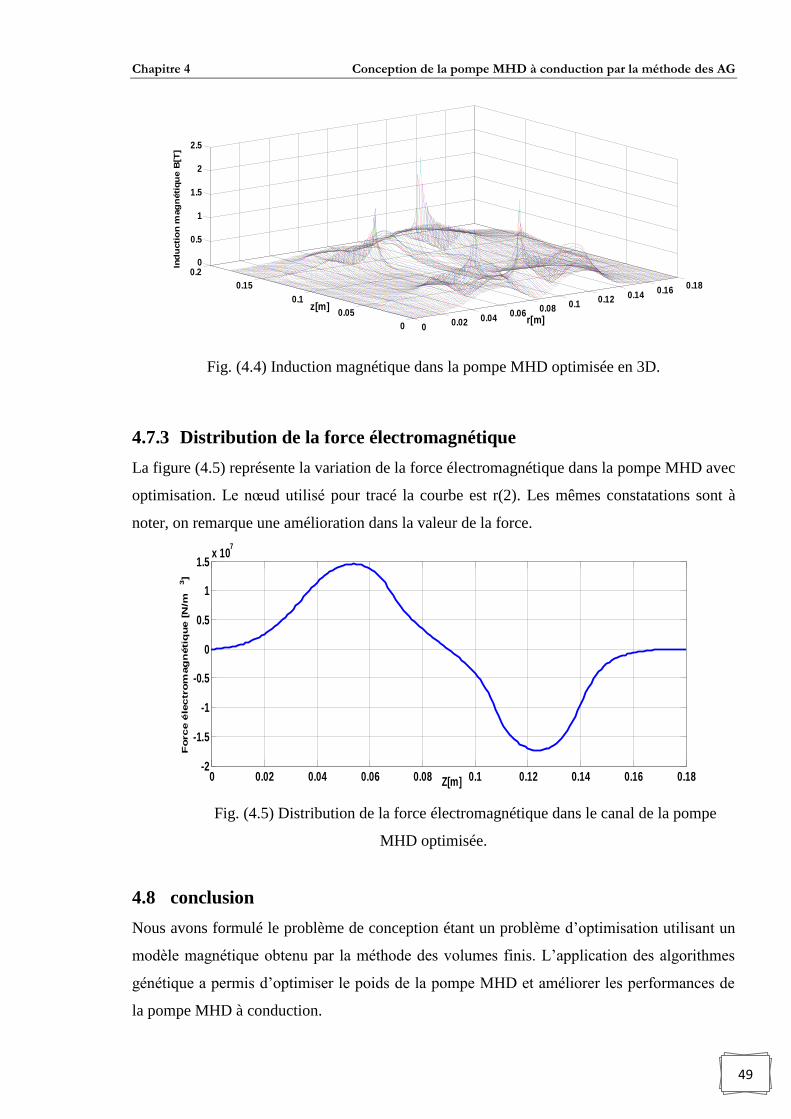
Chapitre 4 Conception de la pompe MHD à conduction par la méthode des AG
49
Fig. (4.4) Induction magnétique dans la pompe MHD optimisée en 3D.
4.7.3 Distribution de la force électromagnétique
La figure (4.5) représente la variation de la force électromagnétique dans la pompe MHD avec
optimisation. Le nœud utilisé pour tracé la courbe est r(2). Les mêmes constatations sont à
noter, on remarque une amélioration dans la valeur de la force.
Fig. (4.5) Distribution de la force électromagnétique dans le canal de la pompe
MHD optimisée.
4.8 conclusion
Nous avons formulé le problème de conception étant un problème d’optimisation utilisant un
modèle magnétique obtenu par la méthode des volumes finis. L’application des algorithmes
génétique a permis d’optimiser le poids de la pompe MHD et améliorer les performances de
la pompe MHD à conduction.
00.02 0.04
0.060.08 0.1
0.12 0.140.16
0.18
0
0.05
0.1
0.15
0.20
0.5
1
1.5
2
2.5
r[m]
z[m]
Ind
ucti
on m
ag
néti
qu
e B
[T]
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18-2
-1.5
-1
-0.5
0
0.5
1
1.5x 10
7
Z[m]
Force é
lectr
om
ag
néti
que [N
/m3]
Conclusion Générale
Conclusion générale
50
Conclusion générale
Dans ce travail, nous avons traité une démarche de dimensionnement d’une pompe
MHD. Le problème de conception est formulé comme étant un problème d'optimisation non
linéaire avec contraintes, pour cela une modélisation numérique a été nécessaire. Au début des
généralités sur les pompes MHD ont été présenté, et on a décrit les pompes MHD à conduction
et induction.
Pour concevoir un dispositif, il est nécessaire d'effectuer sa modélisation. On a effectué
la modélisation par la méthode des volumes finis des phénomènes électromagnétique, un code de
calcul sous environnement Matlab a été élaboré pour modéliser la pompe MHD. L’exploitation
du code de calcul a permis la détermination de principales performances telles que le potentiel
vecteur magnétique, l’induction magnétique et la force électromagnétique. En suite la
formulation mathématique d’un problème d’optimisation avec et sans contraintes et les
différentes méthodes d’optimisation stochastiques et déterministes ont été présentés. Puis nous
avons formulé le problème de conception de la pompe magnétohydrodynamique comme étant
un problème d’optimisation avec contraintes utilisant la méthode des algorithmes génétique.
Les résultats de simulation obtenus sont en concordance qualitativement avec ceux
publiés dans les références indiquées.
Apres la validation de la procédure développée pour la conception, un calcul par
volumes finis est effectué. Les résultats obtenus sont meilleurs que ceux obtenus avant
l’optimisation.
Suggestions et perspectives :
Comme perspectives, on propose l’approche de certains points tels que :
Le couplage électromagnétique-hydrodynamique ;
Le couplage électromagnétique-thermique ;
Le remplacement, dans la procédure de conception par optimisation, du modèle volume
finis par le modèle numérique (MEF) ;
La conception d’un prototype réel de la pompe à induction et faire des essais
expérimentaux.
Références
Bibliographiques
Références bibliographiques
51
Références bibliographiques
[ 1 ] S. Taibi, ‘Contribution à l’Etude, la Conception, de Dimensionnement et l’Optimisation
127 de Machine à Réluctance Variable de Type Vernier’, Thèse de Doctorat, Université
des Sciences et Technologies de Lille, 2002.
[ 2 ] N. Bergoug, ‘Etude de l’influence des matériaux ferromagnétiques sur les performances
d’une machine MHD par la modélisation numérique 2D’, mémoire de magister,
Université de Batna, 2006.
[ 3 ] N. Leprovost, ‘Influence des petites échelles sur la dynamique à grande échelle en
turbulence hydro et magnétohydrodynamique’, thèse de doctorat de l’université Paris,
Novembre 2004.
[ 4 ] A. Alemany, A. Krauze, ‘Générateur thermo acoustique MHD pour la production directe
d’électricité’, Société Française de Thermique et Société Française d’Acoustique, Paris
2010.
[ 5 ] P. Boissonneau, ‘Propulsion Magnétohydrodynamique en eau de mer’, étude des
couplages hydrodynamique, électrochimique, électromagnétisme’, thèse de doctorat
Université Joseph Fourier Grenoble 1997.
[ 6 ] B. Zappoli, ‘La Magnétohydrodynamique, L’état De L’art Premières Expériences
Probatoires D’application Propulsive’, thèse de doctorat Centre National D’études
Spatiales Toulouse, 1981.
[ 7 ] M. Ghassemi, H. Rezaeinezhad et A. Shahidian, ‘Analytical Analysis of Flow in a
Magnetohydrodynamic Pump (MHD)’, IEEE Conference, Speedam 2008.
[ 8 ] F. Z. Kadid, ‘Contribution a l’étude des convertisseurs MHD a induction’, Thèse de
doctorat, Université de Batna, 2004.
[ 9 ] A. Benoudjit, ‘Introduction aux machines électriques, machines a courant continu
’Presses de l’université de Batna, 1995.
[ 1 0 ] M. Tawk, ‘Etude et réalisation d’un system de refroidissement pour l’électronique de
puissance base sur la mise en mouvement d’un fluide conducteur électrique’, Thèse de
doctorat, l’université de Grenoble, 2011.
[ 1 1 ] A. Faussurier, R. Servan, ‘Les matériaux électrotechniques’, Edition Dunod, Paris1971.
[ 1 2 ] C. Trophime, ‘Modélisation numérique du couplage magnétohydrodynamiques (MHD)
fort. Application a la propulsion M.H.D. navale’, Thèse de Doctorat, l’institut national
polytechnique de Grenoble, France, 1995.
Références bibliographiques
52
[ 1 3 ] N. Bennecib, ‘Contribution a l’étude des phénomènes d’écoulement dans les générateurs
MHD’, mémoire de magistère, Université de Batna 2001.
[ 1 4 ] C.A. Borghi, A. Cristofolini, et M. Fabbri, ‘Optimal design of a liquid metal Induction
Pump’, Department of Electrical Engineering, University of Bologna, Viale Risorgimento
2, I-40136 Bologna, Italy, 1997.
[ 1 5 ] M. Lotfi ‘Etude et réalisation d’une diapositive péristaltique pour application médicale’,
mémoire de Magister en Electrotechnique’, Université Hadj Lakhdar Batna, 2010.
[ 1 6 ] M. Capderou, Atlas solaire de l'Algérie, tome 1,2 ; O.P.U. 1986.
[ 1 7 ] N. Piskounov, ‘Calcul Différentiel et Intégral’, Tome 1, Edition MIR, Moscou, 1980.
[ 1 8 ] G. Dahtt, G. Touzault, ‘Une Présentation de La Méthode Des Eléments Finis’, Maloine
S.A. Editeur, Paris, 1984.
[ 1 9 ] F. Shakeri, M. Dehghan, ’A Finite Volume Spectral Element Method for Solving
Magneatohydrodynamic (MHD) Equations’, Applied Numerical Mathematics 6, pp. 1-23,
2011.
[ 2 0 ] K. SRAIRI, ‘Modélisation d’actionneurs électromagnétiques alimentes en régime
transitoire’ Thèse de doctorat, Ecole Doctorale Sciences pour l’Ingénieur de NANTES,
2008.
[ 2 1 ] S. Takezawa, H. Tamam, ‘Operation of the thruster for superconducting electro-
magnetohydrodynamic propulsion ship (YAMATO1)’ Bulletin of the M.E.S.J., Vol.23,
No.1, March 1995.
[ 2 2 ] L. Mokrani, ‘Contribution à la CAO Optimiser des Machines Electriques, Application au
Moteur Linéaire à Induction’, Thèse de Doctorat d’Etat, Université de Batna 2005.
[ 2 3 ] C. Boulbe, ‘Contribution à la résolution des équations de la magnétohydrodynamique et
de la magnétostatique’, Thèse de Doctorat, Université de Pau et des pays de l’Adour,
2007.
[ 2 4 ] N. Bergoug, ‘Contribution à l’Etude d’une Machine MHD Annulaire’, Thèse de Doctorat
en Sciences en Electrotechnique, Université de Batna, 2013.
[ 2 5 ] K. Bouali, ‘contribution à l’étude et l’optimisation des convertisseurs
magnétohydrodynamique (MHD)’, thèse de doctorat Université de Batna, 2015.
[ 2 6 ] D. Hoang, ‘Détermination Simultanée de la Résistivité et de l'Epaisseur des Tôles
Métalliques et d'Alliages non Magnétiques par Méthode Electromagnétique Sans
Contact’, Thèse de Doctorat, Ecole Doctorale Electronique, Electrotechnique,
Automatique, Lyon, 2009.
Références bibliographiques
53
[ 2 7 ] M. Caldora Costa, ‘Optimisation de Dispositifs Electromagnétiques dans un Contexte
d’Analyse par la Méthode des Eléments Finis’, Thèse de Doctorat de L’INPG, en Génie
Electrique, École Doctorale EEATS Grenoble, 28 Juin 2001.
[ 2 8 ] K. Bouali, ‘Étude et conception de structures électromagnétiques utilisant des matériaux
composites fer – résine’, Thèse de Magister, Université de Batna, 2005.
[ 2 9 ] G. Berthiau et P. Siarry, ‘Etat de l’art des méthodes d’optimisation globales’, Septembre
2001.
[ 3 0 ] S. Naseur, ‘Contribution à la Modélisation 2D d’un Convertisseur
Magnétohydrodynamique (MHD) à Conduction’ Thèse de doctorat Université de Batna,
2015.
[ 3 1 ] J. M. Renders, ‘Algorithmes génétiques et réseaux de neurones’. Editions Hermès, Paris,
1995.
[ 3 2 ] P. Robert, ‘Traite d’électricité, volume II, matériaux de l’électrotechnique’, école
polytechnique Fédérale de Lausanne, Presses Polytechnique Romandes, Suisse, 1989.
[ 3 3 ] M. Zeriab, ES-SADEK, ‘Contribution a l’optimisation globale. Approche déterministe et
stochastique et application’, Thèse en cotutelle, Université Mohammed V – Agdal, 2009.
[ 3 4 ] L. Leboucher, ‘optimisation des convertisseurs MHD à induction : problème inverse en
électromagnétisme’ thèse de doctorat, institut national polytechnique de Grenoble,
Grenoble, France, 1992.
[ 3 5 ] A. Layeb, ‘Utilisation des Approches d’Optimisation Combinatoire pour La Vérification
des Applications Temps Réel’. Thèse de Doctorat, Université Mentouri Constantine,
2010.
Résumé
Conception optimale d’une micro pompe par la méthode des
algorithmes génétiques (AG)
RESUMÉ
Dans ce mémoire une conception par optimisation utilisant la méthode des algorithmes génétique
d’une pompe magnétohydrodynamique à conduction a été faite. Le problème de conception est
formulé comme étant un problème d'optimisation. Cette démarche est devenue, aujourd'hui,
possible, grâce à l’accroissement de la puissance de calcul des ordinateurs et aux
développements réalisés dans le domaine de l'optimisation. Pour cela une modélisation
numérique des phénomènes magnétohydrodynamiques par la méthode des volumes finis a été
effectuée. Des résultats de simulation, telles que le potentiel vecteur magnétique, l’induction
magnétique, et la force électromagnétique sont obtenus.
Mots clés
Optimisation
Algorithmes génétique
Conception
ABSTRACT
In this work an optimal design by using genetic algorithms method of conduction
magnetohydrodynamic pump was performed. The design problem is formulated as a nonlinear
optimization problem. This approach is now possible, due to the increase of computers power
and the developments in the optimization field. A numerical modeling of magnetohydrodynamic
phenomena by numerical finite volume method was performed. Simulation results obtained
using a calculation code developed, such as the magnetic vector potential, magnetic induction,
and the electromagnetic force.
Key words
Optimization
Genetic algorithm
Design
Résumé
الملخص
نهارا حى إجشاء اننزجت انعذديت نهظىاهش انهىغاسحيت انجينيت نقذو انخصيى األيثم نضخت يغنطيسيت باسخخذاو طشيقت
انغناطيسيت باسخخذاو طشيقت األحجاو اننخهيت انخي سحج بانشبظ بين يعادالث ياكسىيم، يع األخز بعين االعخباس حشكت
نخائج انحاكاة انخي حى انحصىل عهيها باسخخذاو بشنايج حسابي يبني عهى طشيقت األحجاو اننخهيت يكننا ين انحصىل . انسىائم
قنا بنزجت عذديت بعذ انخصيى األيثم اننخائج . عهى ناقم انحخهت انغناطيسيت، انحث انغناطيسي، وانقىة انكهشويغناطيسيت
.لانخي حى انحصىل عهيها هي أفضم ين حهك انخي حصهنا عهيها قبم األيث
المفتاحية الكلمات
األيثم
انهىغاسحيت انجينيت
حصيى