comportement des poids lourds et sécurité...
TRANSCRIPT

IFSTTAR CETE de Lyon 1
Comportement des poids lourds et sécurité routière
M. Bouteldja, H. Imine, V. Cerezo, F. Bernardin, H. Badi
Auteurs
Opération de Recherche : PLINFRA
IFSTTAR CETE de Lyon 2
Plan
Problématique et objectifs Approche retenue
Prévention des renversements et sorties de voie
Prévention de la mise en portefeuille
Évaluation probabiliste du risque
Conclusions et perspectives

IFSTTAR CETE de Lyon 3
⇒ développement d’un système d’aide à la conduite
⇒ rendre la route plus sûre
⇒ réduire le nombre de tués
Contexte et objectifs
Constat 55% des PLs de trafic en France sont de type articulé.
18% d’accidents mortels en cas d’implication d’un PL (contre 7% sans PL) 80% des véhicules PL impliqués sont de type articulé 20% des accidents sont des renversements 17% des accidents PL sont des mises en portefeuille 11% sont des sorties de route
Objectifs

IFSTTAR CETE de Lyon 4
Principaux risques liés aux poids lourds
Renversement
Sortie de route
Mise en portefeuille
20%
11%
17%
Accidents PL
PL multi corps PL mono-corps
Renversement
Sortie de route
2% 2%
Source BDD Renault VI
Types d’accidents

IFSTTAR CETE de Lyon 5
Approche retenue
Connaissance de l’état
dynamique Capteur logiciel
État dynamique
Critères de risques
Génération d’alertes
Traitement de données
Module d’évaluation de risque
Identification et détection des situations à risque
Variables non mesurées
Variables mesurées
Modèle et capteurs embarqués
IFSTTAR CETE de Lyon 6
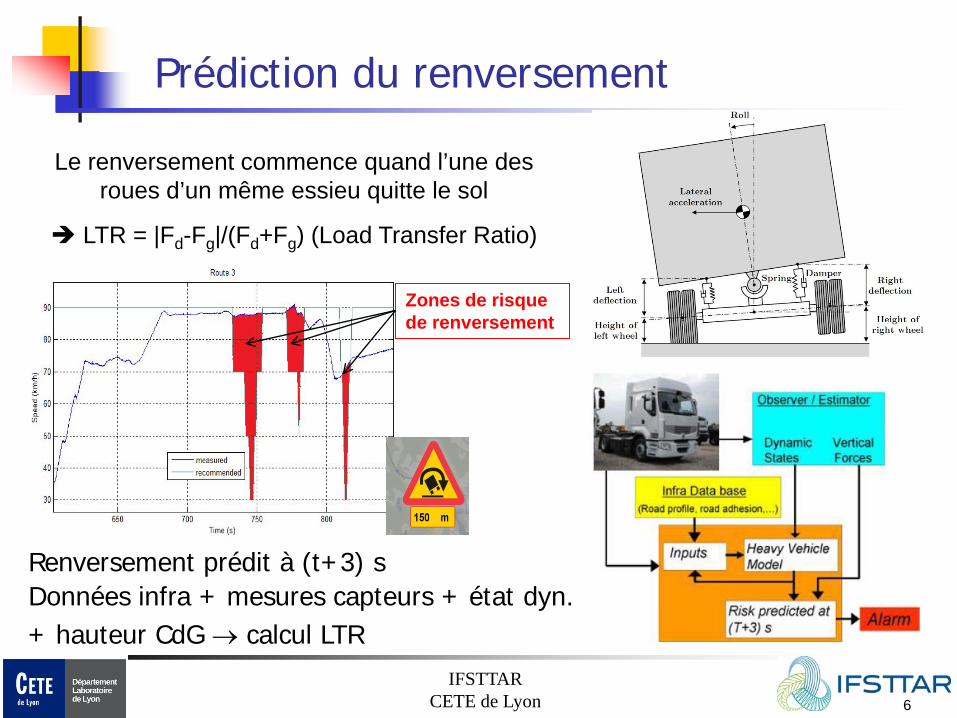
Prédiction du renversement
Le renversement commence quand l’une des roues d’un même essieu quitte le sol
LTR = |Fd-Fg|/(Fd+Fg) (Load Transfer Ratio)
Zones de risque de renversement
Renversement prédit à (t+3) s Données infra + mesures capteurs + état dyn. + hauteur CdG → calcul LTR

IFSTTAR CETE de Lyon 7
Renversement: expérimentation Tracteur instrumenté: Capteurs installés dans le PL
- accéléromètres, LVDT, gyromètre, GPS, lasers - base de données infrastructure (uni, rayon de courbure, pente, dévers et adhérence) - algorithme de prédiction du risque
Site de la Valbonne (Renault Trucks)
• Tests en ligne droite à plusieurs vitesses • Test sur toute la piste • Test de freinage et en chicane

IFSTTAR CETE de Lyon 8
Essai en chicane
Forces verticales estimées
Hauteur du CdG estimée Angle de braquage

IFSTTAR CETE de Lyon 9
Renversement: résultats expérimentaux
Load Transfer Ratio (LTR)
Essai sur la piste de la Valbonne (Renault Trucks)

IFSTTAR CETE de Lyon 10
Contrôle actif: résultats renversement et sortie de voie
Prévention renversement lors d’un test de chicane avec/sans contrôle actif
Prévention sortie de voie en courbe avec contrôle actif

IFSTTAR CETE de Lyon 11
Mise en portefeuille
Roues de la semi-remorque glissent
Roues arrières du tracteur glissent
Dérapage du tracteur
Dérapage de la remorque
Perte de stabilité en lacet des ensembles articulés Angle entre le tracteur et la semi-remorque devient ≥ 90°,

IFSTTAR CETE de Lyon 12
Cause et indicateur de mise en portefeuille
Indicateur de mise en portefeuille:
Causes: - lors de manœuvres brusques avec freinage - par une défaillance du système de freinage (mauvaise distribution des couples de freinage entre les roues du même essieu ou ceux de chaque unité)
- conditions météorologiques défavorables (chaussée humide ou glacée)
x
Xn
Yn
X
Y ψf |CM| > 0, stable |CM| = 0, limite de stabilité |CM| < 0, instabilité
( )ZXCM ⋅= ⇒ avec Z=(X-Y)
Utilisation d’un modèle dynamique de véhicule articulé, validé par PROSPER et ARCSIM

IFSTTAR CETE de Lyon 13
Observateurs / Estimateur États dynamique + Hauteur de CG
.
ALERTE
PL réel
Base de Données Routes
Caractéristiques infrastructure
Modèle PL Commande
Critères de risque
Module d’évaluation de risque
Principe de génération d’alerte

IFSTTAR CETE de Lyon 14
Observateur/estimateur
Capteur logiciel Observateur& Estimateur
Principe :
Actions conducteur Infrastructure

IFSTTAR CETE de Lyon 15
Indicateur et évaluation du risque Mise en portefeuille ou dérapage
Équilibre transversal n’est plus garanti. La force centrifuge devient prépondérante
Adhérence mobilisable pour la dynamique transversale très faible
Principe de prédiction de mise en portefeuille
Calcul du temps avant l’accident Prédiction de l’état
Prédiction sur critère de risque
⇒

IFSTTAR CETE de Lyon 16
Résultats
0 2 4 6 8 10 12 14
-seuil
0
seuil
Traitement de données
Génération d’alertes
Mise en portefeuille
- Le simulateur PROSPER est utilisé comme un émulateur de poids lourd - La détection de mise en portefeuille est prédite à un temps de 2,14 s
Adhérence mobilisée > adhérence disponible ⇒ début de dérapage
Détection cohérente avec celle fournis par l’angle de lacet et la vitesse.

IFSTTAR CETE de Lyon 17
Evaluation probabiliste: motivations
Limites de l’approche déterministe: risque de type 0/1 (tout ou rien), et donc alertes aussi les paramètres (poids lourd, route, conducteur) sont déterministes, connus ou non
Avantages de l’approche probabiliste : Prise en compte des grandeurs aléatoires (état route et véhicule,
conducteur…)
Prise en compte des variances des variables aléatoires et de la
sensibilité de chaque défaillance vis-à-vis des variables
Calcul de probabilités de défaillance entre 0 et 1.

IFSTTAR CETE de Lyon 18
Modèle probabiliste
Conducteur : angle volant modélisé par un processus stochastique et vitesse initiale par une variable aléatoire
Poids lourd : chaque paramètre modélisé par une variable aléatoire : uniforme ou normale/ lognormale tronquée Paramètres : masses, dimensions, amortissements,…
Route: adhérence modélisée par variable aléatoire : uniforme ou normale/ lognormale tronquée
BRUIT
Q = vecteur d’état aléatoire = (X1, X2,…Xr) Z = G(Q) marge de sécurité, dépend de l’instabilité (renversement, mise en portefeuille)

IFSTTAR CETE de Lyon 19
Analyse fiabiliste (1)
pf = P(Z<0) probabilité de défaillance (perte de stabilité) pf = intégrale (dans Rn) de la densité de Q sur le domaine de défaillance généralement pas calculable directement
Simulation de Monte-Carlo: calculs très longs car pf faible (10-n) – au moins 10n+2 appels à la fonction G
Evaluation de pf à bas coût et efficacité: – Méthodes FORM et SORM (utilisées en fiabilité des structures) – FORM : First Order Reliability Method – SORM : Second Order Reliability Method – Transformation des variables (composantes de Q) en variables
indépendantes et gaussiennes (Rosenblatt, Nataf…) – Approximation de la marge de sécurité G par hyperplan (FORM) ou
polynôme du 2e degré (SORM)

IFSTTAR CETE de Lyon 20
Analyse fiabiliste (2)
Indice de fiabilité β = distance à l’origine
de la surface G(Q)=0
Probabilité de défaillance (FORM):
(SORM): où φ et ϕ = densité et fonction de répartition de variable gaussienne centrée réduite et κi les rayons de courbure de G en u* (point de fonctionnement ou de conception)
u*
IFSTTAR CETE de Lyon 21
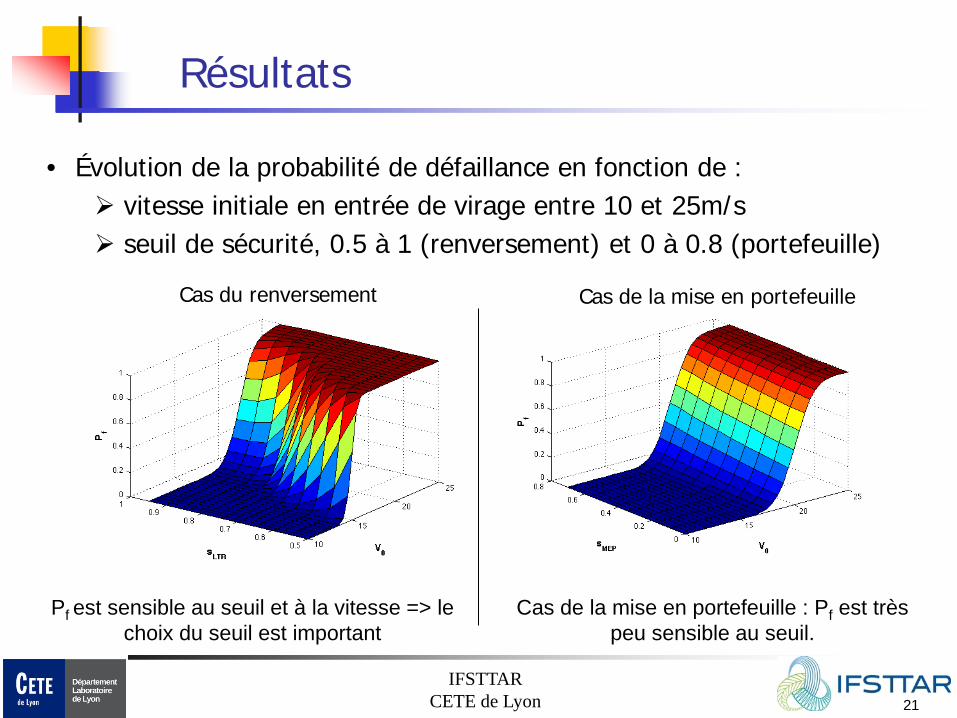
Résultats
• Évolution de la probabilité de défaillance en fonction de : vitesse initiale en entrée de virage entre 10 et 25m/s seuil de sécurité, 0.5 à 1 (renversement) et 0 à 0.8 (portefeuille)
Pf est sensible au seuil et à la vitesse => le choix du seuil est important
Cas de la mise en portefeuille : Pf est très peu sensible au seuil.
Cas du renversement Cas de la mise en portefeuille

IFSTTAR CETE de Lyon 22
Conclusions
Modèle validé de véhicule articulé, alimenté par mesures de capteurs embarqués Outils et méthodes déterministes pour estimation des états dynamiques et identification des paramètres Critères et risques de défaillances (renversement, sortie de route, mise en portefeuille) Approche probabiliste et fiabiliste pour évaluer une proba de défaillance
Perspectives
Amélioration de l’estimation en tenant compte d’autres paramètres Déterminer paramètres les plus influents, contrôle par stabilisation forces vert. Évaluer le concept sur piste d’essai avec tracteur et semi-remorque réels Prévenir les gestionnaires d’infrastructure sur les zones à risque Modulation des alertes par l’approche probabiliste
Conclusions et perspectives