communication technique et initiation à la conceptiona.2.p.free.fr/communication technique +...
TRANSCRIPT

Communication technique et initiation à la conception
Caractérisation des liaisons
2
A. Présentation
Solution constructive associée à la liaisonLiaison
• Modèle cinématique :• Degrés de liberté• Représentation normalisée • Schéma cinématique et graphe des liaisons• Solides parfaits• Contacts parfaits
• Efforts transmissibles
• Caractéristiques techniques :• Permanence• Déformabilité• Possibilité de réglage• Existence de degré de liberté
• Surfaces de contact • Matériaux
3
S2
S1
X
Y
Z
Tx
Ty
Tz
Rx
Ry
Rz
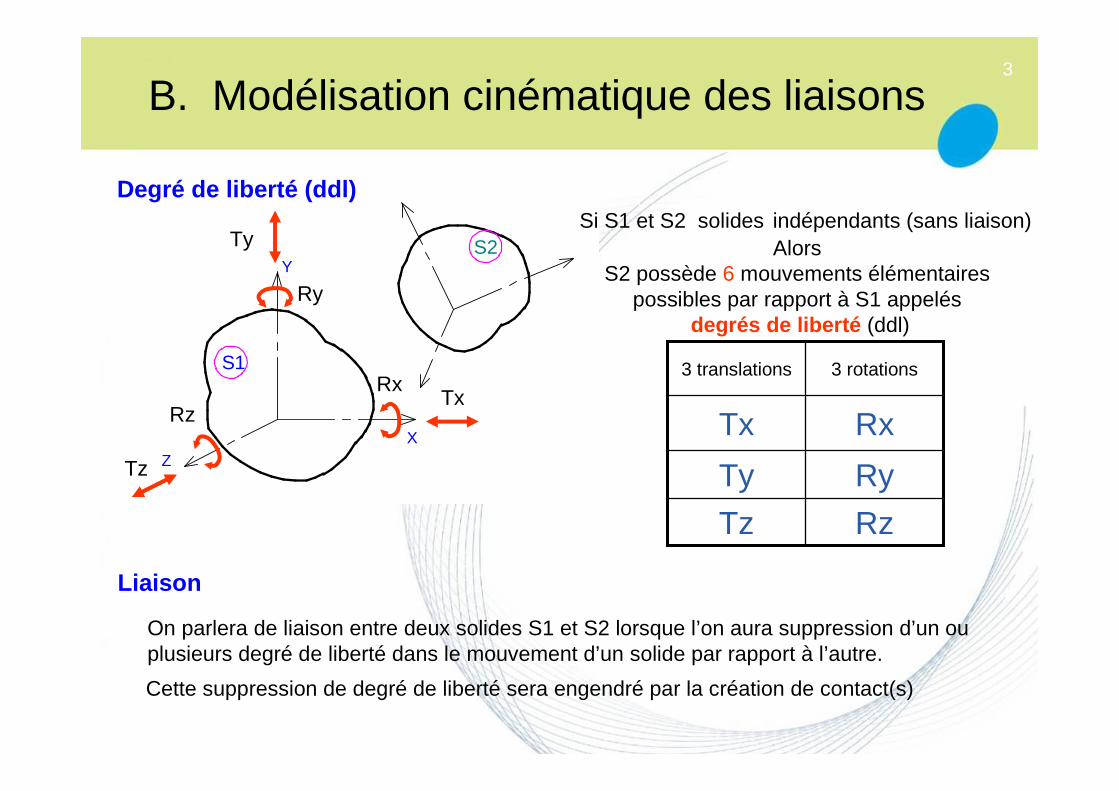
B. Modélisation cinématique des liaisons
Degré de liberté (ddl)Si S1 et S2 solides indépendants (sans liaison)
AlorsS2 possède 6 mouvements élémentaires
possibles par rapport à S1 appelésdegrés de liberté (ddl)
3 rotations3 translations
RzTz
RyTy
RxTx
On parlera de liaison entre deux solides S1 et S2 lorsque l’on aura suppression d’un ou plusieurs degré de liberté dans le mouvement d’un solide par rapport à l’autre.
Liaison
Cette suppression de degré de liberté sera engendré par la création de contact(s)
4
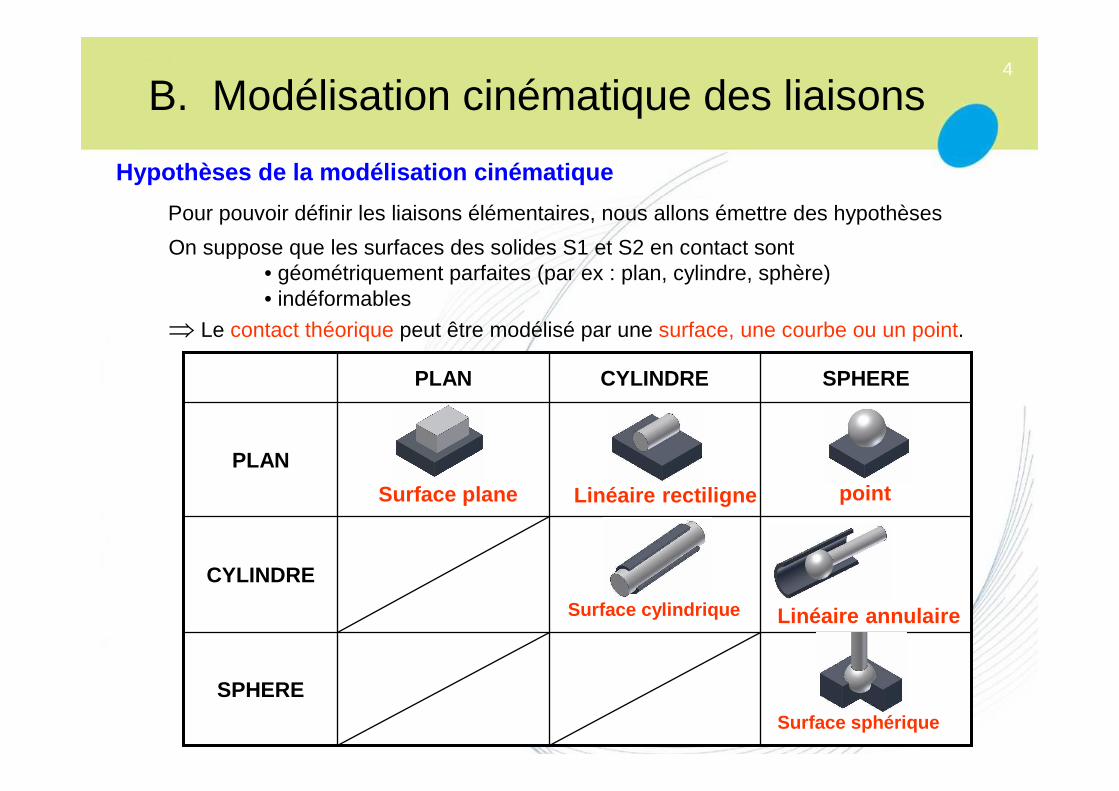
Hypothèses de la modélisation cinématique
On suppose que les surfaces des solides S1 et S2 en contact sont• géométriquement parfaites (par ex : plan, cylindre, sphère)• indéformables
⇒ Le contact théorique peut être modélisé par une surface, une courbe ou un point.
SPHERE
CYLINDRE
PLAN
SPHERECYLINDREPLAN
Surface plane Linéaire rectiligne point
Surface cylindrique Linéaire annulaire
Surface sphérique
Pour pouvoir définir les liaisons élémentaires, nous allons émettre des hypothèses
B. Modélisation cinématique des liaisons
5
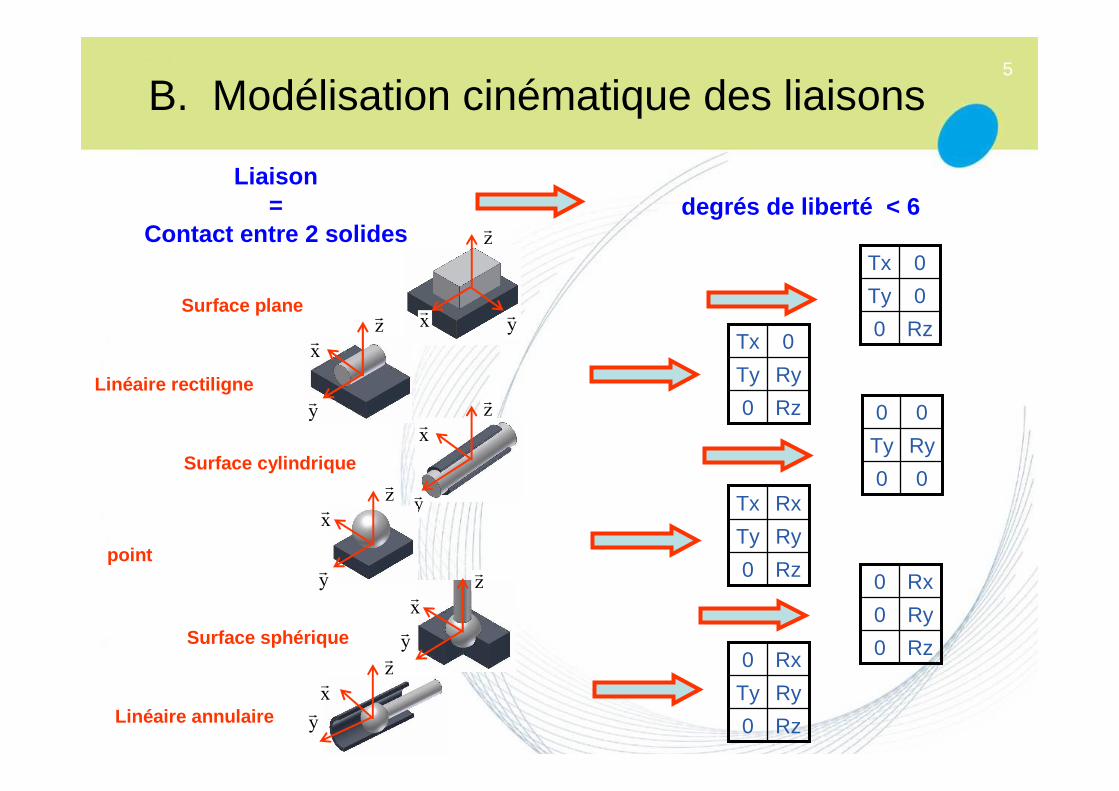
Liaison=
Contact entre 2 solides degrés de liberté < 6
Surface plane
Linéaire rectiligne
point
Surface cylindrique
Surface sphérique
Linéaire annulaire
Rz0
0Ty
0Tx
�
x y�
z�
�
x
y�
z�
�
x
y�
z�
�
x
y�
z�
�
x
y�
z�
�
x
y�
z�
Rz0
RyTy
0Tx
00
RyTy
00
Rz0
Ry0
Rx0Rz0
RyTy
RxTx
Rz0
RyTy
Rx0
B. Modélisation cinématique des liaisons
6
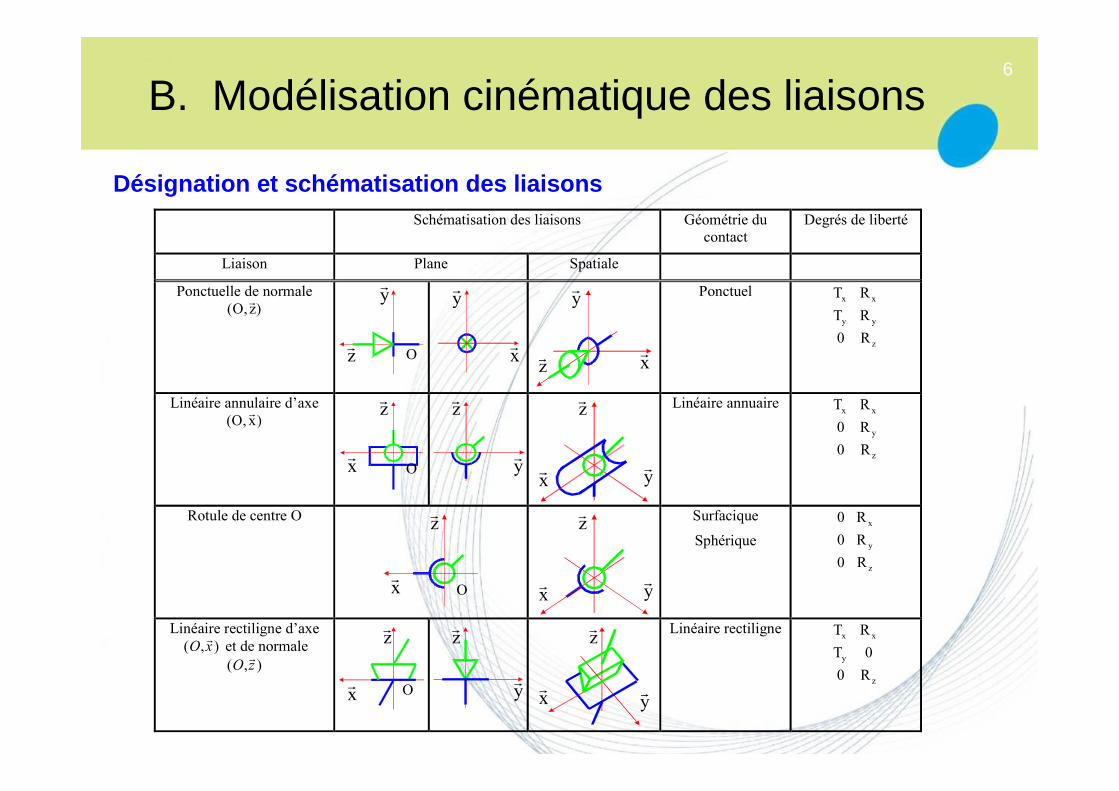
Désignation et schématisation des liaisons Schématisation des liaisons Géométrie du
contact
Degrés de liberté
Liaison Plane Spatiale
Ponctuelle de normale
( , )O z�
Ponctuel x x
y y
z
T R
T R
0 R
Linéaire annulaire d’axe
)x,O(�
Linéaire annuaire x x
y
z
T R
0 R
0 R
Rotule de centre O
Surfacique
Sphérique
x
y
z
0 R
0 R
0 R
Linéaire rectiligne d’axe
( , )O x�
et de normale
( , )O z�
Linéaire rectiligne x x
y
z
T R
T 0
0 R
�
y�
y
�
x �
x
�
y
�
y�
x
�
y�
x
�
z
�
z
�
z �
z �
z
O
O
�
y
�
y
�
y
�
x
�
x
�
z
�
z
�
x
�
z
O
�
x
�
z �
z
O
B. Modélisation cinématique des liaisons
7
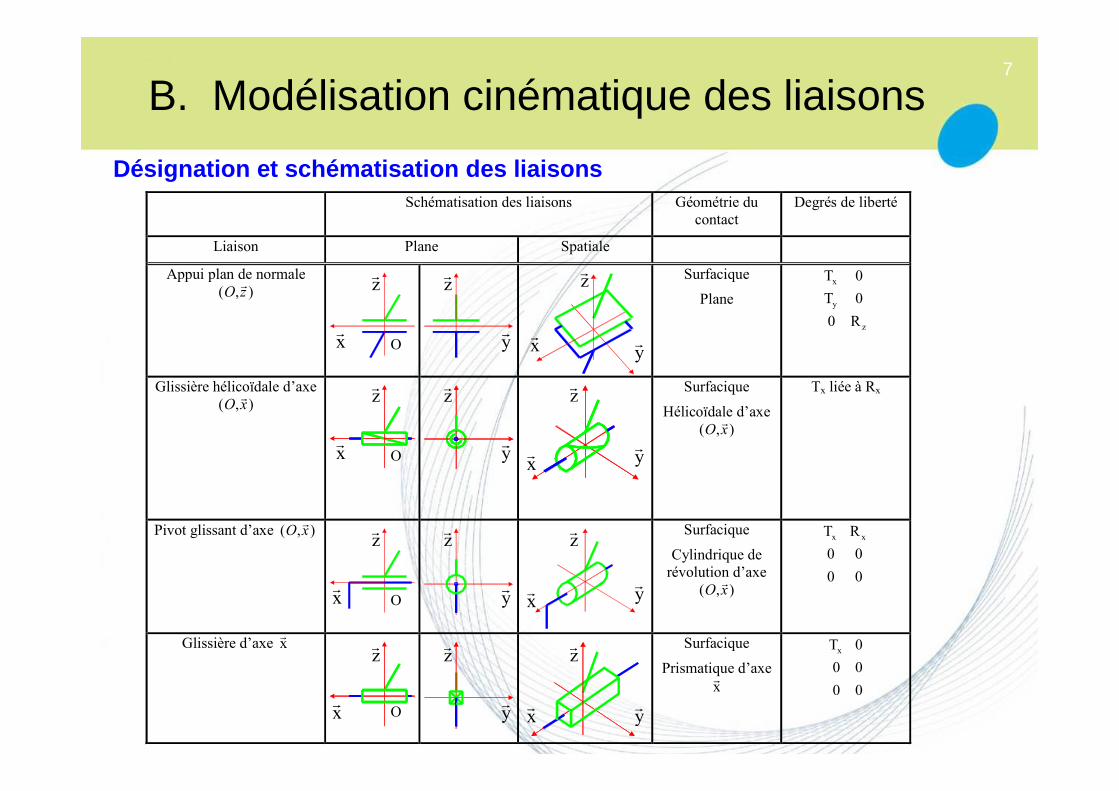
Désignation et schématisation des liaisons Schématisation des liaisons Géométrie du
contact
Degrés de liberté
Liaison Plane Spatiale
Appui plan de normale
( , )O z�
Surfacique
Plane
x
y
z
T 0
T 0
0 R
Glissière hélicoïdale d’axe
( , )O x�
Surfacique
Hélicoïdale d’axe
( , )O x�
Tx liée à Rx
Pivot glissant d’axe ( , )O x�
Surfacique
Cylindrique de
révolution d’axe
( , )O x�
x xT R
0 0
0 0
Glissière d’axe x�
Surfacique
Prismatique d’axe
x�
xT 0
0 0
0 0
�
y �
y
�
x �
x
�
z �
z �
z
�
x
�
z
�
y
�
z
�
y�
x
�
z
�
x
�
z
�
y
�
z
�
y�
x
�
z
�
y�
x
�
z
�
x
�
z
�
y
O
O
O
O
�
z
B. Modélisation cinématique des liaisons
8
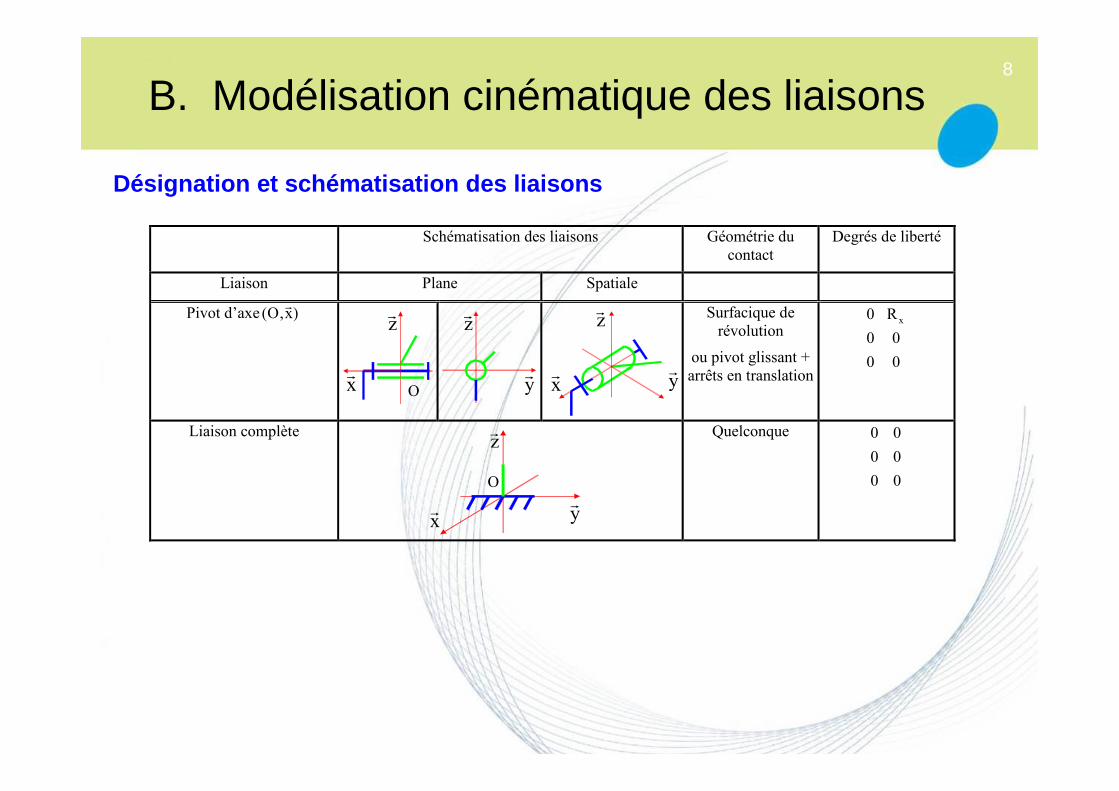
Désignation et schématisation des liaisons
Schématisation des liaisons Géométrie du
contact
Degrés de liberté
Liaison Plane Spatiale
Pivot d’axe ( , )O x�
Surfacique de
révolution
ou pivot glissant +
arrêts en translation
x0 R
0 0
0 0
Liaison complète
Quelconque
00
00
00
�
y�
y�
x �
x
�
z �
z �
z
�
y�
x
�
z
O
O
B. Modélisation cinématique des liaisons
9
Modélisations des surfaces réelles de contact
B. Modélisation cinématique des liaisons
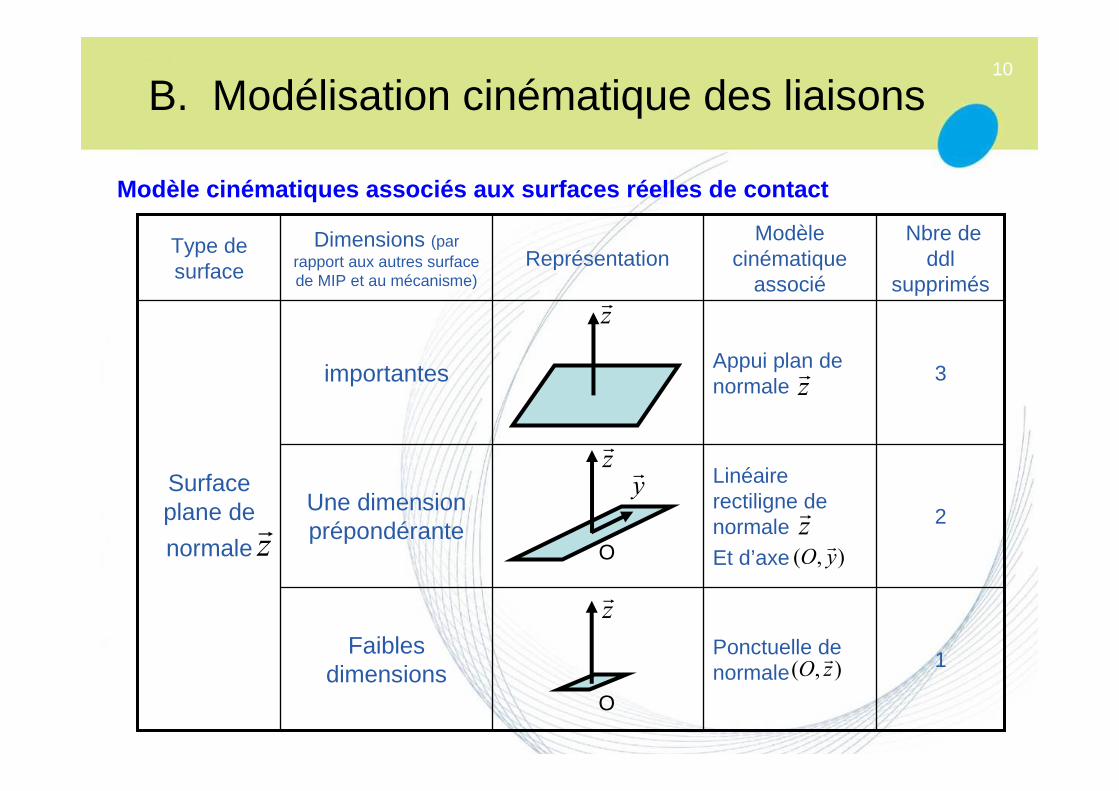
En fonction des dimensions de la surface de contact par rapport aux dimensions caractéristiques du mécanisme, on associera un modèle de contact.
Pour pouvoir définir les liaisons élémentaires, nous avons imaginé des solides de géométrie parfaite Contacts de trois natures:
• ponctuel• Linéique• surfacique
En réalité seul le contact surfacique existe.
10
Modèle cinématiques associés aux surfaces réelles d e contact
Ponctuelle de normale
Linéaire rectiligne de normale
Et d’axe
Appui plan de normale
Modèle cinématique
associé
1
2
3
Nbre de ddl
supprimés
Faibles dimensions
Une dimension prépondérante
importantes
Surface plane de
normale
ReprésentationDimensions (par
rapport aux autres surface de MIP et au mécanisme)
Type de surface
z�
z�
z�
y�
O
z�
O
z�
),( yO�
z�
),( zO�
B. Modélisation cinématique des liaisons
11
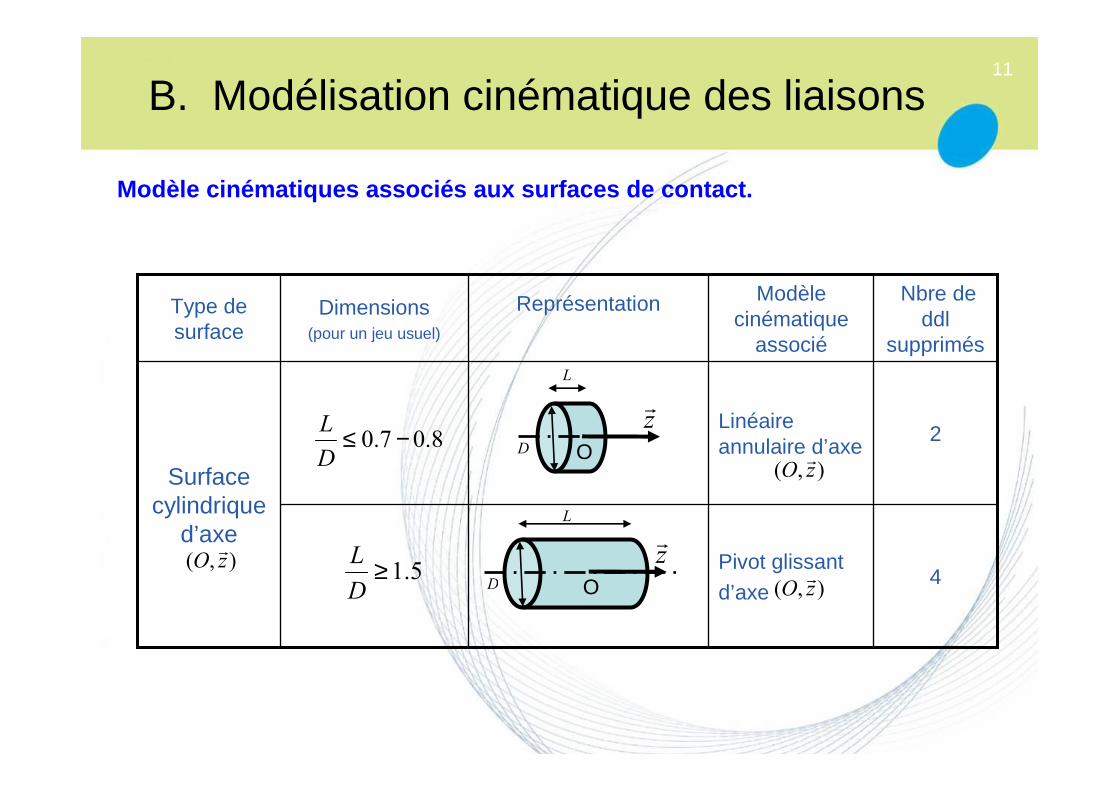
Modèle cinématiques associés aux surfaces de contac t.
Pivot glissantd’axe
Linéaire annulaire d’axe
Modèle cinématique
associé
4
2
Nbre de ddl
supprimés
Surface cylindrique
d’axe
ReprésentationDimensions(pour un jeu usuel)
Type de surface
),( zO�
8.07.0 −≤D
L
5.1≥D
L
z�
O),( zO�
),( zO�
z�
O
L
L
D
D
B. Modélisation cinématique des liaisons
12
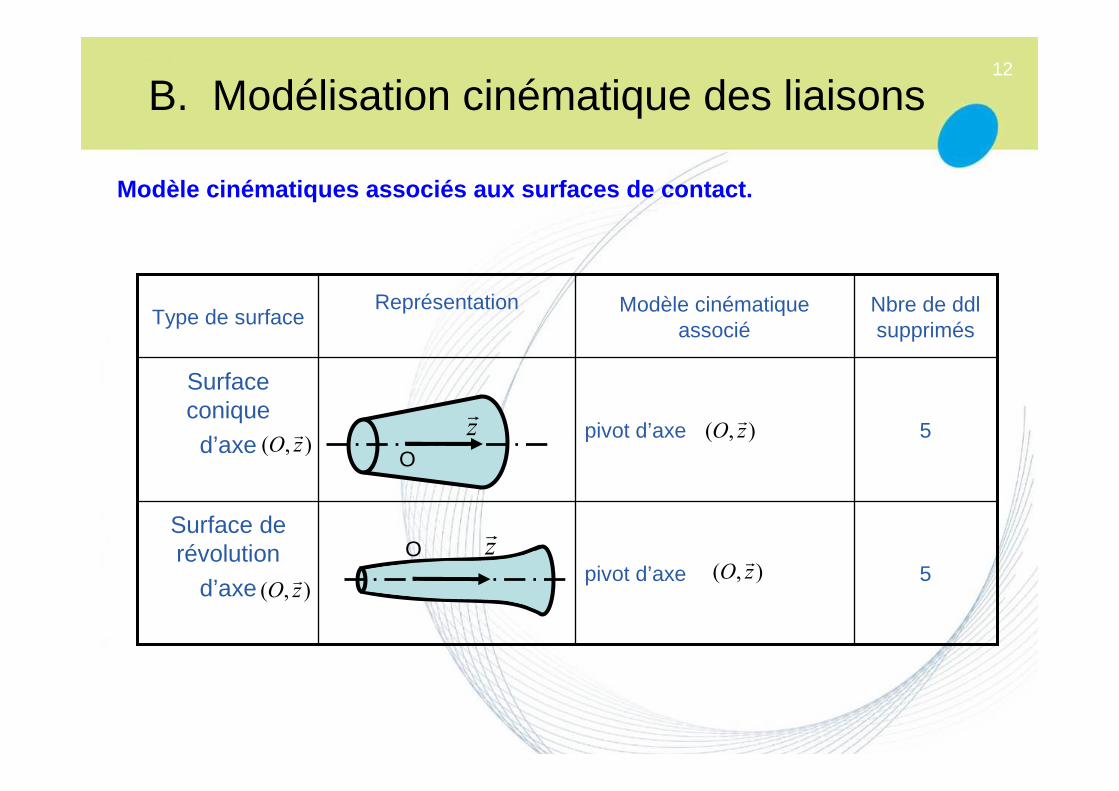
Modèle cinématiques associés aux surfaces de contac t.
pivot d’axe
pivot d’axe
Modèle cinématique associé
5
5
Nbre de ddlsupprimés
Surface de révolution
d’axe
Surface conique
d’axe
ReprésentationType de surface
),( zO�
z�
O),( zO�
),( zO�
z�
O
),( zO�
B. Modélisation cinématique des liaisons
13
C. Modélisation cinématique des mécanismes
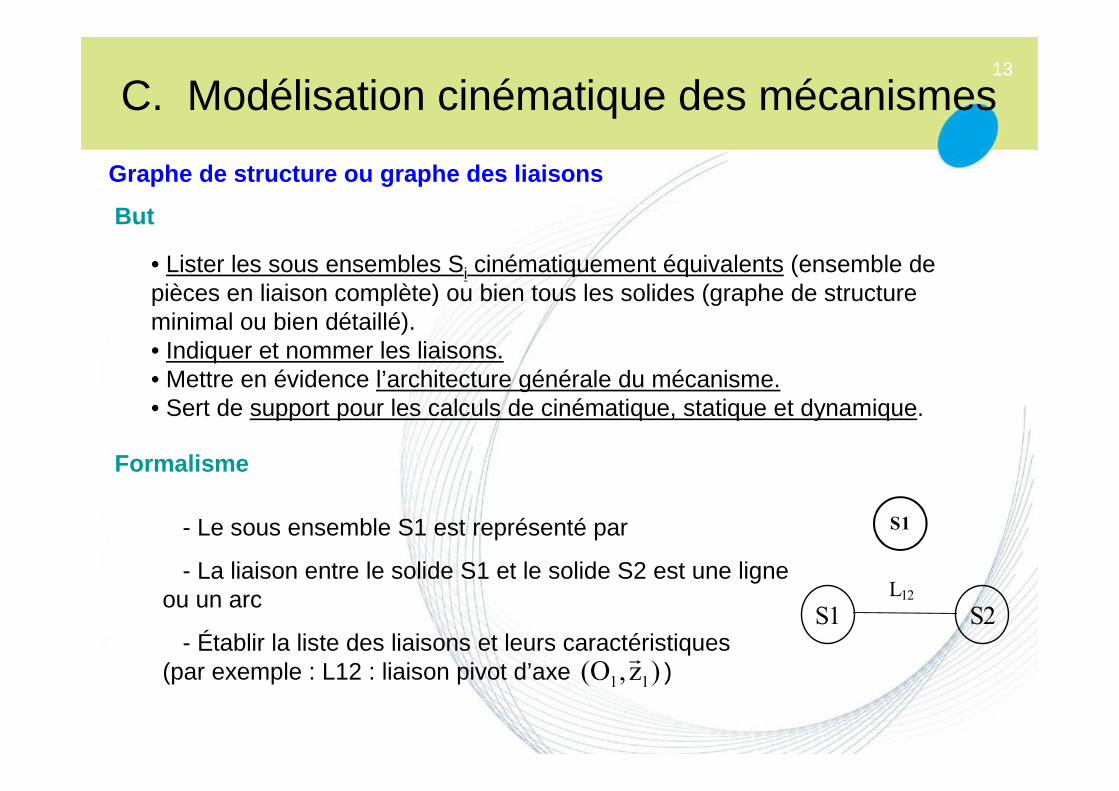
Graphe de structure ou graphe des liaisons
But
• Lister les sous ensembles Si cinématiquement équivalents (ensemble de pièces en liaison complète) ou bien tous les solides (graphe de structure minimal ou bien détaillé).• Indiquer et nommer les liaisons.• Mettre en évidence l’architecture générale du mécanisme.• Sert de support pour les calculs de cinématique, statique et dynamique.
Formalisme
S1
)z,O( 11
�
- Le sous ensemble S1 est représenté par
- La liaison entre le solide S1 et le solide S2 est une ligne ou un arc
- Établir la liste des liaisons et leurs caractéristiques (par exemple : L12 : liaison pivot d’axe )
S1 S2 L12
14
Méthode
• Analyser les liaisons entre pièces, afin de comprendre le fonctionnement du mécanisme
• Relever les groupes de pièces qui sont en liaison complète. Constituer alors des sous ensembles Si (dits « cinématiquement équivalents »)
• Caractériser les liaisons partielles entre sous ensembles Si.
• Tracer le graphe
Graphe de structure ou graphe des liaisons
C. Modélisation cinématique des mécanismes
15
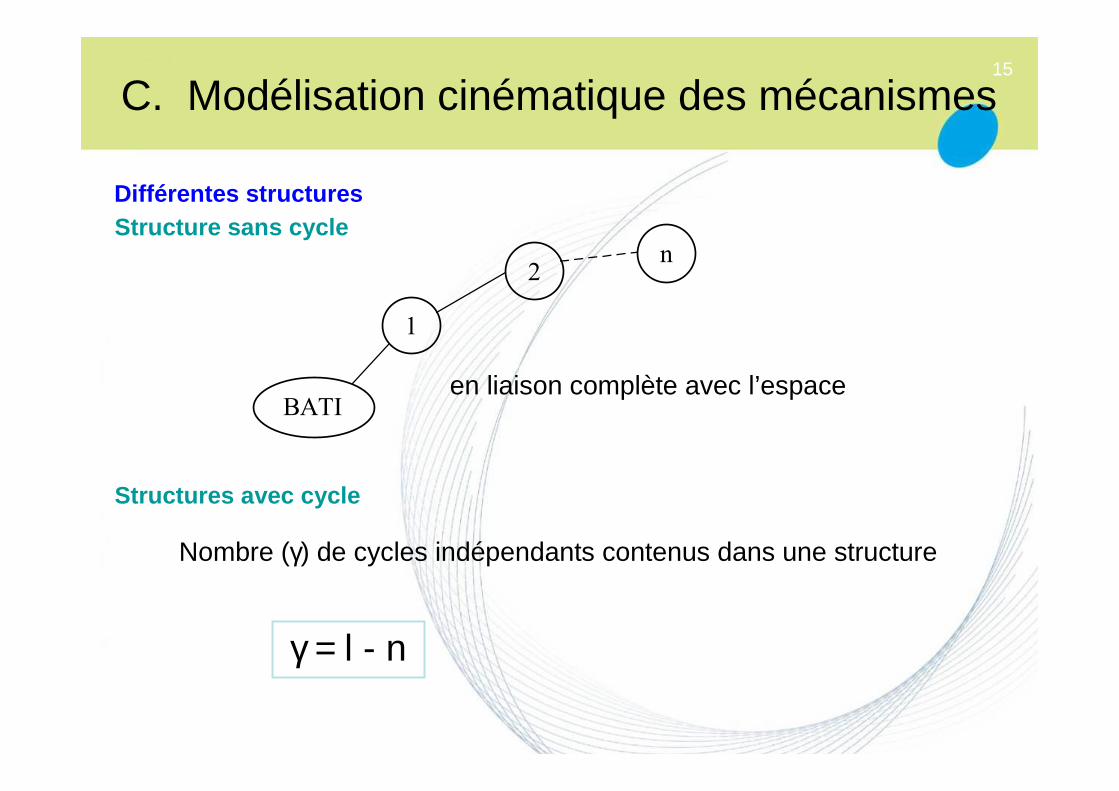
Différentes structuresStructure sans cycle
Structures avec cycle
1
BATI
2n
Nombre (γ) de cycles indépendants contenus dans une structure
γ = l - n
en liaison complète avec l’espace
C. Modélisation cinématique des mécanismes
16
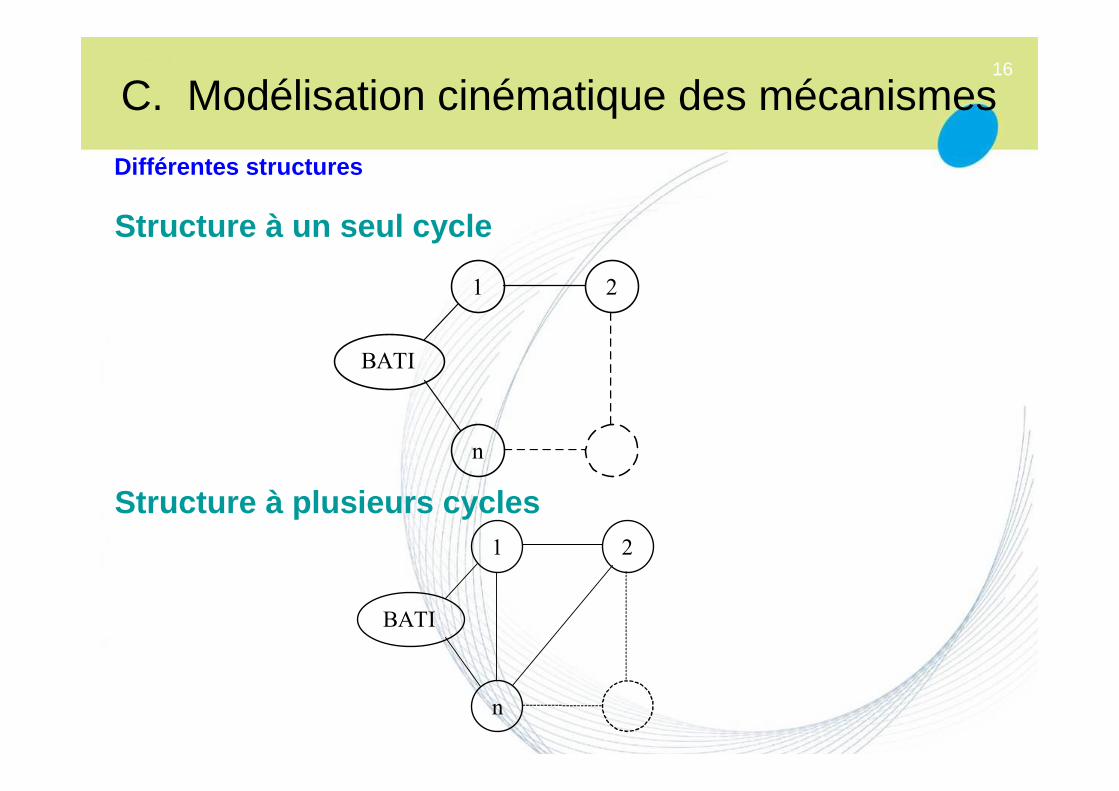
Structure à un seul cycle
Structure à plusieurs cycles
1
BATI
2
n
1
BATI
2
n
Différentes structures
C. Modélisation cinématique des mécanismes
17
Schéma cinématique
But
Le schéma cinématique d’un mécanisme doit :
- permettre la compréhension du fonctionnement (degrés de liberté) par la schématisation des liaisons
- permettre de représenter le paramétrage
- Sert de support pour les calculs de cinématique, statique et dynamique.
C. Modélisation cinématique des mécanismes
18
Schéma cinématique
Méthode
A partir du graphe de structure et du plan d’ensemble du mécanisme :
- Choisir la représentation (plane ou spatiale).- Positionner les éléments caractéristiques des liaisons (centre de rotule, axe de pivot, plan d’un appui plan, etc…).- Représenter les symboles des liaisons.- Représenter les pièces en filaire.- Effectuer le paramétrage, le représenter.
C. Modélisation cinématique des mécanismes
19
D. Caractérisation technique des liaisons
Classement des solutions constructives
On distingue en général 4 critères :
• Permanence
• Déformabilité
• Possibilité de réglage
• Existence de degré de liberté
Liaison permanente
≠≠≠≠Liaison démontable
Liaison rigide
≠≠≠≠liaison élastique
Liaison réglable
≠≠≠≠Liaison non réglable
Liaison complète
≠≠≠≠liaison partielle

20
Classement des solutions constructives
Liaison permanente
Liaison démontableLiaison guidon –
potence
Liaison colonne de direction – tube de
cadre
D. Caractérisation technique des liaisons
21
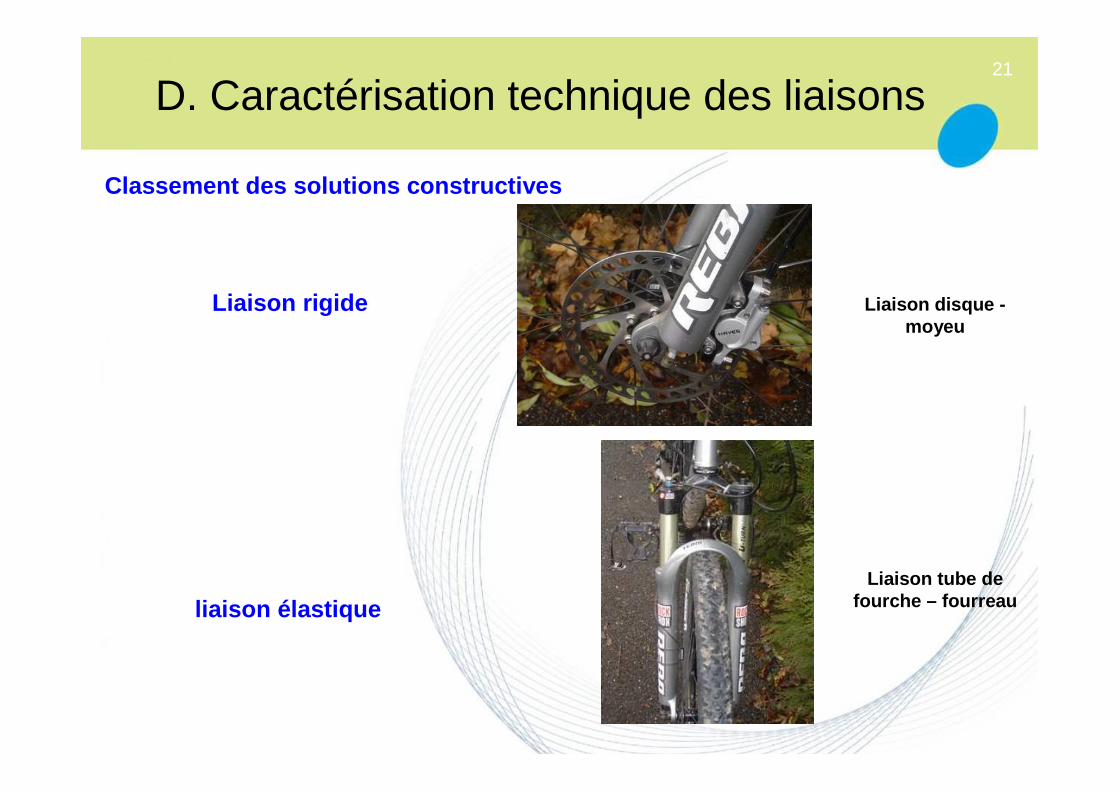
Classement des solutions constructives
Liaison rigide
liaison élastiqueLiaison tube de
fourche – fourreau
Liaison disque -moyeu
D. Caractérisation technique des liaisons
22
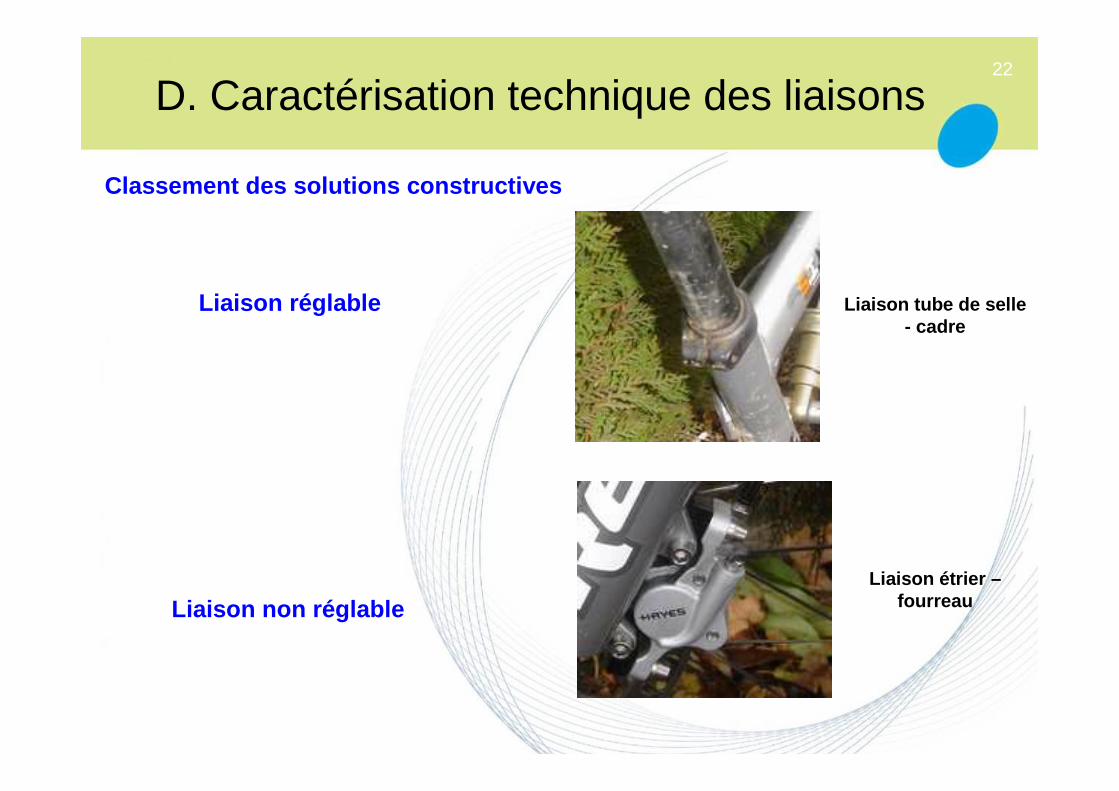
Classement des solutions constructives
Liaison réglable
Liaison non réglableLiaison étrier –
fourreau
Liaison tube de selle - cadre
D. Caractérisation technique des liaisons
23
Classement des solutions constructives
Liaison complète
liaison partielle
Liaison tube de selle - cadre
Liaison roue – axe de roue
D. Caractérisation technique des liaisons