centre des classes prÉparatoires lydex ...pcsi-lydex 1.2. courant Électrique ⊲ pour un circuit...
TRANSCRIPT

CENTRE DES CLASSES PRÉPARATOIRES
LYDEX-Benguerir/Maroc
COURS DE PHYSIQUE
PCSI/MPSI/TSI
ÉLECTRONIQUE
SAID EL FILALI

Première partie
ÉLECTRONIQUE
3


TABLE DES MATIÈRES
I ÉLECTRONIQUE 3
1 LOIS GÉNÉRALES DANS LE CADRE DE L’A.R.Q.P 91.1 INTRODUCTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.2 Courant électrique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.2.1 Définition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.2.2 Bilan de charges . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.2.3 Loi des nœuds . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.3 Tension électrique, loi des mailles . . . . . . . . . . . . . . . . . . . . . . . . . 111.4 La puissance électromagnétique reçue par un dipôle . . . . . . . . . . . . . . 111.5 Caractère générateur et récepteur . . . . . . . . . . . . . . . . . . . . . . . . . 12
2 ÉLÉMENTS DE CIRCUITS LINÉAIRES EN RÉGIME CONTINU OU QUASI-PERMANENT2.1 Définition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.2 Modélisation de dipoles passifs linéaires R,C et L . . . . . . . . . . . . . . . . 13
2.2.1 Le conducteur ohmique . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.2.1.1 Modélisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.2.1.2 Association des conducteurs ohmiques . . . . . . . . . . . . . 142.2.1.3 Effet JOULE . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.2.2 Le condensateur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.2.2.1 Modélisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.2.2.2 Association des condensateurs . . . . . . . . . . . . . . . . . . 152.2.2.3 Aspect énergétique . . . . . . . . . . . . . . . . . . . . . . . . 16
2.2.3 La bobine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.2.3.1 Modélisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.2.3.2 Aspect énergétique . . . . . . . . . . . . . . . . . . . . . . . . 17
2.3 Diviseurs de tension et de courant. . . . . . . . . . . . . . . . . . . . . . . . . 172.3.1 Diviseurs de courant . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.3.2 Diviseurs de tension . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.4 Modélisations linéaires d’un dipôle actif . . . . . . . . . . . . . . . . . . . . . 182.4.1 Générateur de courant (représentation de Norton) . . . . . . . . . . . 192.4.2 Générateur de tension (représentation de Thevenin) . . . . . . . . . . 192.4.3 Équivalence entre les deux modélisations . . . . . . . . . . . . . . . . 19
2.5 Sources libres. Sources liées . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
5

PCSI-LYDEX TABLE DES MATIÈRES
2.6 Théorème de Millman . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3 Régime transitoire 213.1 Cas du circuit (R-C) : . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.1.1 Charge du condensateur (régime forcé) : . . . . . . . . . . . . . . . . . 223.1.1.1 L’équation différentielle : . . . . . . . . . . . . . . . . . . . . . 223.1.1.2 Détermination expérimentale de la constante de temps τ : . . 22
3.1.1.2.1 La pente à l’origine . . . . . . . . . . . . . . . . . . . . 223.1.1.2.2 la valeur de u(τ) . . . . . . . . . . . . . . . . . . . . . . 233.1.1.2.3 Temps de montée . . . . . . . . . . . . . . . . . . . . . 24
3.1.1.3 Le portrait de phase : . . . . . . . . . . . . . . . . . . . . . . . 253.1.1.3.1 Définitions . . . . . . . . . . . . . . . . . . . . . . . . . 253.1.1.3.2 Représentation dans le plan de phase . . . . . . . . . 25
3.1.1.4 Aspect énergétique : . . . . . . . . . . . . . . . . . . . . . . . . 253.1.2 Décharge du condensateur (régime libre) : . . . . . . . . . . . . . . . . 26
3.1.2.1 Équation différentielle et solution : . . . . . . . . . . . . . . . 263.1.2.2 L’équation de la trajectoire de phase : . . . . . . . . . . . . . . 26
3.2 Cas du circuit (R-L) : . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273.2.1 Régime forcé : . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.2.1.1 L’équation différentielle et solution . . . . . . . . . . . . . . . 273.2.1.2 Portrait de phase . . . . . . . . . . . . . . . . . . . . . . . . . . 293.2.1.3 Aspect énergétique . . . . . . . . . . . . . . . . . . . . . . . . 29
3.2.2 Régime libre : . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303.3 Circuit (RLC) série : . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.3.1 Régime libre : . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303.3.1.1 Régime apériodique ∆
′ > 0 : . . . . . . . . . . . . . . . . . 313.3.1.2 Régime critique ∆
′= 0 : . . . . . . . . . . . . . . . . . . . 32
3.3.1.3 Régime pseudopériodique ∆′ < 0 : . . . . . . . . . . . . . 35
3.3.2 Régime forcé : . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4 Régime alternatif sinusoidal 454.1 Amplitude complexe ,Impedance et admittance complexes . . . . . . . . . . . 45
4.1.1 Amplitude complexe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 454.1.2 Impédance complexe et admittance complexe : . . . . . . . . . . . . . 47
4.1.2.1 Définitions : . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 474.1.2.2 Applications : . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.1.2.2.1 Impédance d’un resistor . . . . . . . . . . . . . . . . . 484.1.2.2.2 Impedance d’une bobine idéale . . . . . . . . . . . . . 484.1.2.2.3 Impedance d’un condensateur . . . . . . . . . . . . . 49
4.2 Étude du circuit RLC série en régime sinusoidal forcé . . . . . . . . . . . . . 494.2.1 Régime transitoire et régime permanent . . . . . . . . . . . . . . . . . 494.2.2 Étude de l’impedance . . . . . . . . . . . . . . . . . . . . . . . . . . . . 504.2.3 Résonance en tension aux bornes du condensateur (Charge) . . . . . 51
4.2.3.1 Équation différentielle et solution . . . . . . . . . . . . . . . . 514.2.3.2 Étude de l’amplitude Uc . . . . . . . . . . . . . . . . . . . . . . 524.2.3.3 La bande passante à -3dB pour la charge . . . . . . . . . . . . 534.2.3.4 Étude du déphasage φ = ϕc − ϕe . . . . . . . . . . . . . . . . . . 54
20 juin 2018 Page -6- [email protected]

PCSI-LYDEX TABLE DES MATIÈRES
4.2.4 Résonance en intensité . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.2.4.1 Étude de l’amplitude Im . . . . . . . . . . . . . . . . . . . . . . 55
4.2.4.2 La bande passante à -3dB . . . . . . . . . . . . . . . . . . . . . 56
4.2.4.3 Étude du déphasage ϕ = ϕi − ϕe . . . . . . . . . . . . . . . . . . 57
4.3 La puissance : . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4.3.1 Facteur de puissance : . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4.3.2 Adaptation d’impedance : . . . . . . . . . . . . . . . . . . . . . . . . . . 60
5 Diagrammes de BODE des filtres du premier et second ordre 61
5.1 Fonction de transfert . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
5.1.1 Définitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
5.1.2 Exemples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
5.1.3 Lien entre la fonction de transfert et l’équation différentielle . . . . . 62
5.1.4 Diagrammes de BODE . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
5.2 Filtrage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5.2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5.2.2 Principaux types de filtres . . . . . . . . . . . . . . . . . . . . . . . . . 64
5.3 Filtres du premier ordre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
5.3.1 Filtre passe-bas du premier ordre . . . . . . . . . . . . . . . . . . . . . 64
5.3.1.1 L’étude d’un exemple : . . . . . . . . . . . . . . . . . . . . . . . 65
5.3.1.2 Diagramme de Bode pour le gain : . . . . . . . . . . . . . . . . 65
5.3.1.3 Diagramme de Bode pour la phase : . . . . . . . . . . . . . . . 66
5.3.2 Filtre passe-haut du premier ordre . . . . . . . . . . . . . . . . . . . . 67
5.3.2.1 L’étude d’un exemple : . . . . . . . . . . . . . . . . . . . . . . . 67
5.3.2.2 Diagramme de Bode pour le gain : . . . . . . . . . . . . . . . . 67
5.3.2.3 Diagramme de Bode pour la phase : . . . . . . . . . . . . . . . 68
5.4 Filtres du deuxième ordre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
5.4.1 Filtre passe-bas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
5.4.1.1 L’étude d’un exemple . . . . . . . . . . . . . . . . . . . . . . . 69
5.4.1.2 Diagramme de Bode pour le gain . . . . . . . . . . . . . . . . . 69
5.4.1.3 Diagramme de Bode pour la phase . . . . . . . . . . . . . . . . 70
5.4.2 Filtre passe-haut . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
5.4.2.1 L’étude d’un exemple . . . . . . . . . . . . . . . . . . . . . . . 71
5.4.2.2 Diagramme de Bode pour le gain . . . . . . . . . . . . . . . . . 72
5.4.2.3 Diagramme de Bode pour la phase . . . . . . . . . . . . . . . . 72
5.4.3 Filtre passe-bande . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
5.4.3.1 L’étude d’un exemple . . . . . . . . . . . . . . . . . . . . . . . 73
5.4.3.2 Diagramme de Bode pour le gain . . . . . . . . . . . . . . . . . 74
5.4.3.3 Diagramme de Bode pour la phase . . . . . . . . . . . . . . . . 76
5.4.4 Filtre coupe (ou réjecteur) de bande . . . . . . . . . . . . . . . . . . . 76
5.4.4.1 L’étude d’un exemple . . . . . . . . . . . . . . . . . . . . . . . 76
5.4.4.2 Diagramme de Bode pour le gain . . . . . . . . . . . . . . . . . 77
5.4.4.2.1 Comportement asymptotique . . . . . . . . . . . . . 77
5.4.4.2.2 Représentation graphique du gain pour quelques valeurs de Q5.4.4.2.3 La bande passante . . . . . . . . . . . . . . . . . . . 77
5.4.4.3 Diagramme de Bode pour la phase . . . . . . . . . . . . . . . . 78
20 juin 2018 Page -7- [email protected]

PCSI-LYDEX TABLE DES MATIÈRES
6 Filtrage linéaire des signaux périodiques 816.1 Composition en fréquence d’un signal . . . . . . . . . . . . . . . . . . . . . . . 81
6.1.1 Représentation temporelle et fréquentielle . . . . . . . . . . . . . . . . 816.1.2 Exemples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
6.1.2.1 Signal sinusoidal . . . . . . . . . . . . . . . . . . . . . . . . . . 846.1.2.2 Signal carré impair . . . . . . . . . . . . . . . . . . . . . . . . . 856.1.2.3 Signal carré pair . . . . . . . . . . . . . . . . . . . . . . . . . . 866.1.2.4 Signal triangulaire pair de pentes symétriques . . . . . . . . . 866.1.2.5 Signal dent de scie . . . . . . . . . . . . . . . . . . . . . . . . . 876.1.2.6 Signal sinusoidal pair redressé monoalternance . . . . . . . . 876.1.2.7 Signal sinusoidal pair redressé doublealternance . . . . . . . 886.1.2.8 Signal rectangulaire pair de rapport cyclique α quelconque . 88
6.1.3 L’aspect énergétique . . . . . . . . . . . . . . . . . . . . . . . . . . . . 886.2 Traitement d’un signal périodique par un système linéaire . . . . . . . . . . . 89
6.2.1 Rappel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 896.2.2 Application 1 : CNC 2009 Filière MP . . . . . . . . . . . . . . . . . . . 90
20 juin 2018 Page -8- [email protected]
CHAPITRE 1
LOIS GÉNÉRALES DANS LE CADRE DE L’A.R.Q.P
LOIS GÉNÉRALES DANS LE CADRE DE L’APPROXIMATION DES RÉGIMES QUASI-PERMANENTS
1.1 INTRODUCTION
L’éléctrocinétique :Il s’agit de l’étude du transport d’information (courant électrique ) dans des réseauxélectriques. Cadre de l’étude :
L’étude de l’éléctrocinétique se fait dans le cadre de l’Approximation des états (ou ré-gimes) quasi-stationnaires ( quasi-permanent ) noté ARQP ou AEQS (plus de détail voirMP). en effet :L’approximation des états quasi-stationnaires consiste à limiter l’étude des réseaux éléc-trocinétiques à des dimensions maximales ℓmax et à des durées minimales τmin vérifiant lacondition suivante :
ℓmax
τmin≪ co c0 = 2, 99792458 108 ms−1
co étant la célérité de la lumière .
Dans ce cadre,on peut négliger tout phénomène de propagation dans le réseauéléctrocinétique ; en particulier, la modification d’une grandeur électrique en unpoint du circuit a pour conséquence des modifications instantanées des gran-deurs analogues caractérisant les autres points du réseau.
Remarque
9

PCSI-LYDEX 1.2. COURANT ÉLECTRIQUE
⊲ Pour un circuit de dimension ℓmax = 3 m, on trouve τmin ≫ 10−8 s ; on pourradonc se placer dans le cadre de l’ARQP pour l’étude d’un signal de fréquencefmax ≪ 108 Hz = 100 MHz, ce qui correspond à ce qu’on appelle électroniquebasse fréquence.⊲ Par contre, l’électronique de haute fréquence peut imposer la miniaturisationdes circuits, sous peine de sortir du domaine de l’ARQP; ainsi à la fréquencede réception des signaux de téléphonie cellulaire ( f = 1800 MHz donc τmin =
5, 6.10−10 s), l’ARQP impose ℓmax ≪ 17 cm, ce qui est nettement plus restrictif.⊲ Pour le courant industriel, à la fréquence f = 50 Hz, donc avec τmin = 20ms ; la condition de l’ARQP impose donc ℓmax ≪ 6000 km : cette condition estaisément remplie pour un réseau domestique ou une installation industrielle. Parcontre, dans un réseau d’alimentation de puissance à l’échelle continentale, il estindispensable de prendre en compte les effets de propagation.
Exemples
1.2 Courant électrique
1.2.1 Définition
Une charge électrique dq qui traverse une surface S pendant un intervalle detemps dt crée un courant d’intensité i telle que :
i =dqdt⇐⇒ q =
∫
i dt
Si q(C) et t(s) alors i(A).
DéfinitionCourant électrique
Le sens du courant est le sens du déplacement des porteurs de charges positifs.
Remarque
1.2.2 Bilan de charges
On admet que la charge (q) et la masse (m) d’un système isolé sont conservatives.
1.2.3 Loi des nœuds
On appelle nœud un point de jonction entre au moins trois fils de connexion.
DéfinitionLoi des nœud
La loi des nœuds est une conséquence de la conservation de la charge électrique dans
20 juin 2018 Page -10- [email protected]

PCSI-LYDEX 1.3. TENSION ÉLECTRIQUE, LOI DES MAILLES
le cadre de l’ARQP. La charge électrique ne peut pas s’accumuler au niveau des nœuds.
∑
ie =
∑
is ⇐⇒N∑
k=0
εkik = 0
avec ε2= 1.
C’est la première loi de KIRCHHOFF .
1.3 Tension électrique, loi des mailles
On appelle branche un ensemble de dipôles montés en série entre deux nœuds . On appelle maille un ensemble de branches formant un contour fermé .
Une maille peut être orientée arbitrairement.
Remarque
On admet que la somme algébrique des tensions (ou différence de potentiel ) dansune maille est nulle : c’est la deuxième loi de KIRCHHOFF .
N∑
k=0
εkuk = 0
1.4 La puissance électromagnétique reçue par un di-
pôle
Soit un dipôle D traversé par un courant électrique i(t) , maintenant entre ces bornesune tension uAB.
D
i(t)
u(t)La puissance électromagnétique reçue par le dipôle D est donnée par :
P = uAB(t)i(t)
Et par conséquent l’énergie reçue pendant la durée t f − ti vaut :
W =
∫ t f
ti
uAB(t)i(t) dt
On adopte la convention thermodynamique :• L’énergie reçue par un système sera comptée positive.• L’énergie fournie par un système sera comptée négative.
Remarque
20 juin 2018 Page -11- [email protected]
PCSI-LYDEX 1.5. CARACTÈRE GÉNÉRATEUR ET RÉCEPTEUR
1.5 Caractère générateur et récepteur
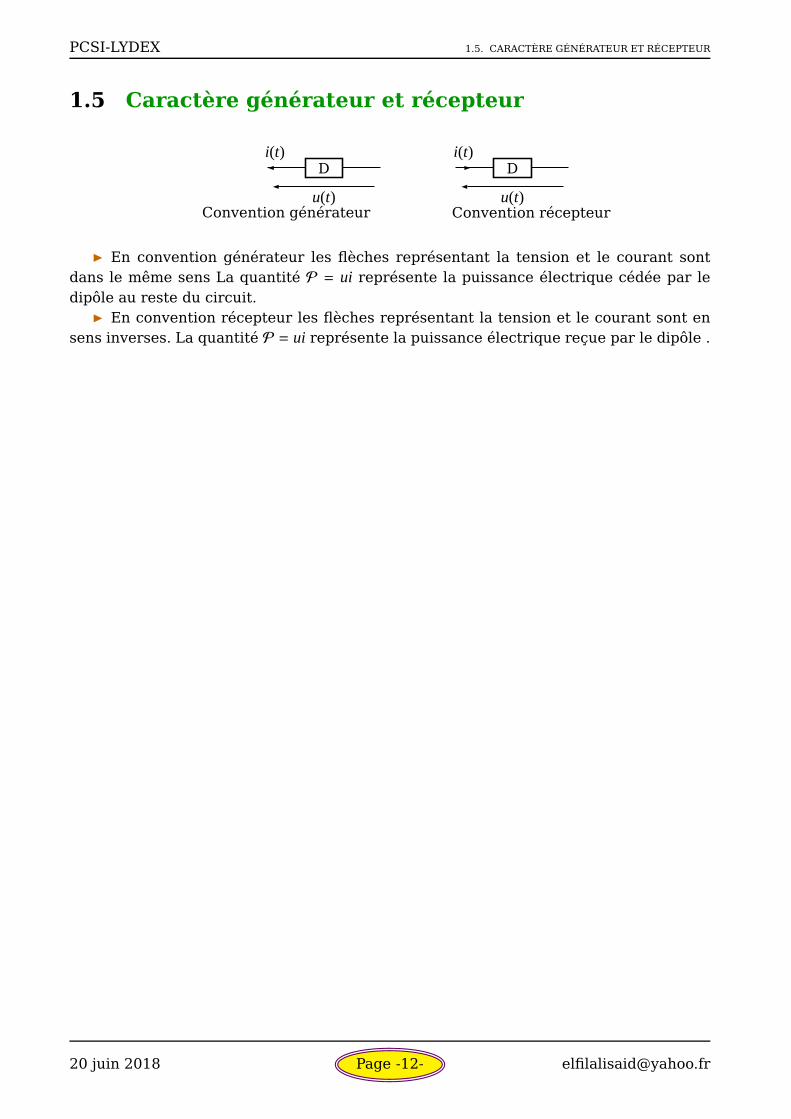
Di(t)
u(t)Convention générateur
Di(t)
u(t)Convention récepteur
En convention générateur les flèches représentant la tension et le courant sontdans le même sens La quantité P = ui représente la puissance électrique cédée par ledipôle au reste du circuit. En convention récepteur les flèches représentant la tension et le courant sont en
sens inverses. La quantité P = ui représente la puissance électrique reçue par le dipôle .
20 juin 2018 Page -12- [email protected]
CHAPITRE 2
ÉLÉMENTS DE CIRCUITS LINÉAIRES EN RÉGIME
CONTINU OU QUASI-PERMANENT
2.1 Définition
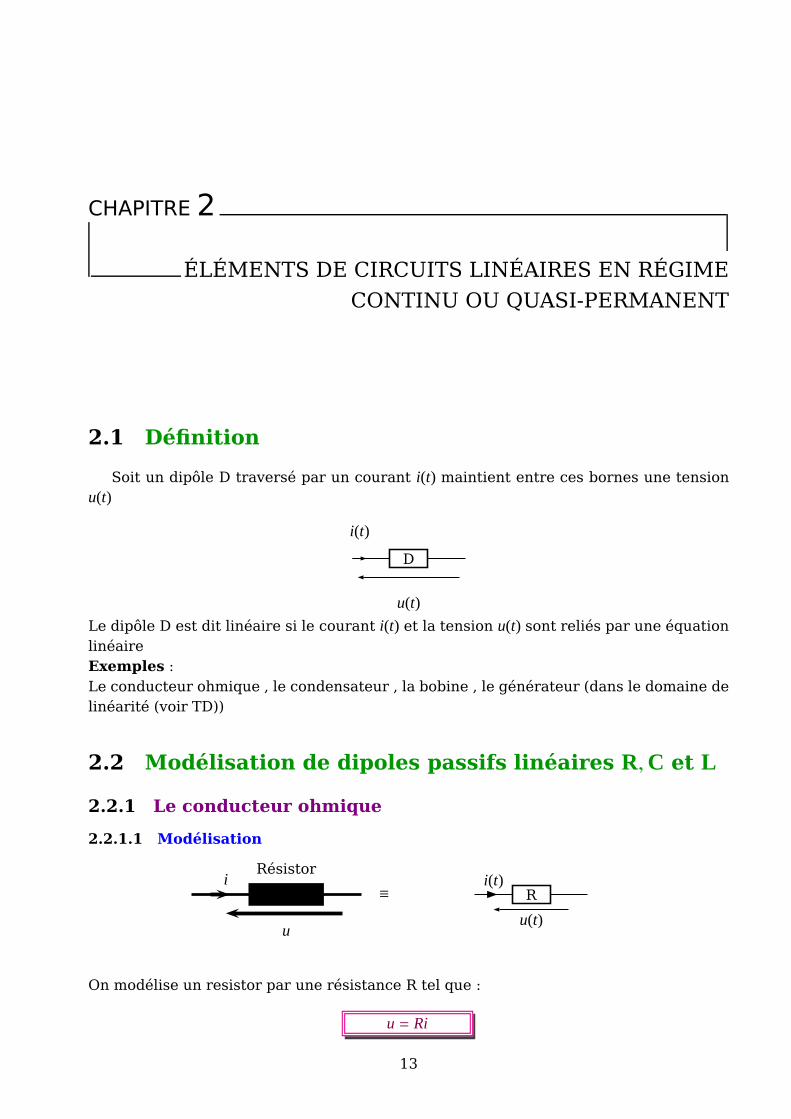
Soit un dipôle D traversé par un courant i(t) maintient entre ces bornes une tensionu(t)
D
i(t)
u(t)
Le dipôle D est dit linéaire si le courant i(t) et la tension u(t) sont reliés par une équationlinéaireExemples :Le conducteur ohmique , le condensateur , la bobine , le générateur (dans le domaine delinéarité (voir TD))
2.2 Modélisation de dipoles passifs linéaires R,C et L
2.2.1 Le conducteur ohmique
2.2.1.1 Modélisation
i
u
Résistor
Ri(t)
u(t)
≡
On modélise un resistor par une résistance R tel que :
u = Ri
13

PCSI-LYDEX 2.2. MODÉLISATION DE DIPOLES PASSIFS LINÉAIRES R,C ET L
On conclut que le résistor est un dipôle linéaire.
1. Pour un fil cylindrique de section S et de longueur ℓ et de résistivité ρ alors :
R =1G= ρℓ
S=
1σ
ℓ
S
avec : G la conductivité (S (siemens)) , ρ la résistivité du conducteur (Ω.m)et σ la conductivité du conducteur (S .m−1)
2. ρ représente la résistance d’un d’un fil de section 1 m2 et de longueur 1 m ;ainsi pour σ.
3. Un conducteur ohmique est dit parfait s’il ne présente pas de propriétés dié-lectiques (εr = 1) et magnétiques (µr = 1).(Voir cours d’électromagnétismesdes milieux)
Remarque
2.2.1.2 Association des conducteurs ohmiques
Des résistances sont montées en série s’elles sont traversées par lemême courantet on a :
Re =
i=N∑
i=1
Ri
Des résistances sont montées en parallèle s’elles sont maintenues par la mêmetension et on a :
1Re=
i=N∑
i=1
1Ri
Application :Deux résistances R1 et R2 en parallèle alors :
Re =R1R2
R1 + R2=
ProduitS omme
2.2.1.3 Effet JOULE
Lorsque un courant i traverse une résistance R pendant la durée dt , on a dissipationde l’énergie
dEJ = dWJ = uRiR dt =⇒ WJ =
∫ t f
ti
uRiR dt
En continue :
WJ = RI2∆t =⇒P J = RI2
20 juin 2018 Page -14- [email protected]

PCSI-LYDEX 2.2. MODÉLISATION DE DIPOLES PASSIFS LINÉAIRES R,C ET L
2.2.2 Le condensateur
2.2.2.1 Modélisation
Constitué par deux conducteurs en influence totale ,séparés par un diélectrique (pa-pier ,mica ,plastique,.....) ;on le modélise par une capacité C en parallèle avec une resis-tance de fuite R f .
A BDiélectrique
≡
.
R f
C
A B
Pour les condensateurs électrochimiques (polarisés) la valeur de C varie de quelques mFà quelques F la résistance de fuite R f > 1MΩUn condensateur est dit idéal si R f →∞
Convention récepteur
i
+q −qA B
u
Le condensateur se charge
u =qC
; i =dqdt> 0
Convention générateur
i
+q −qA B
u
Le condensateur se décharge
u =qC
; i = −dqdt< 0
1. Pour un condensateur plan dont les armatures ont une section S et séparé
par une distance e on a :C = εoSe.
2. Si l’espace entre les armatures du condensateur est rempli par un diélec-trique de permitivité diélectrique εr alors C = εrCo
Remarque
2.2.2.2 Association des condensateurs
• Association série :1
Ce=
i=N∑
i=1
1Ci
• Association parallèle :
Ce =
i=N∑
i=1
Ci
20 juin 2018 Page -15- [email protected]
PCSI-LYDEX 2.2. MODÉLISATION DE DIPOLES PASSIFS LINÉAIRES R,C ET L
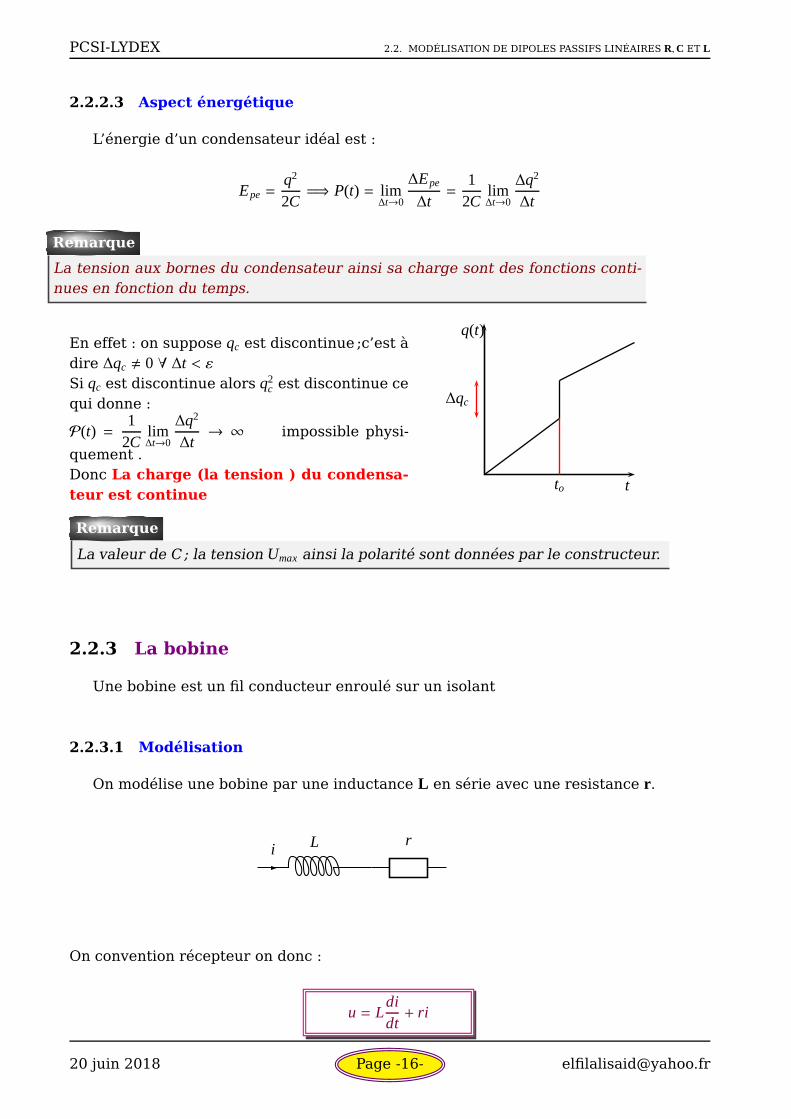
2.2.2.3 Aspect énergétique
L’énergie d’un condensateur idéal est :
Epe =q2
2C=⇒ P(t) = lim
∆t→0
∆Epe
∆t=
12C
lim∆t→0
∆q2
∆t
La tension aux bornes du condensateur ainsi sa charge sont des fonctions conti-nues en fonction du temps.
Remarque
En effet : on suppose qc est discontinue ;c’est àdire ∆qc , 0 ∀ ∆t < εSi qc est discontinue alors q2
c est discontinue cequi donne :
P(t) =1
2Clim∆t→0
∆q2
∆t→ ∞ impossible physi-
quement .Donc La charge (la tension ) du condensa-teur est continue
t
q(t)
∆qc
to
La valeur de C ; la tension Umax ainsi la polarité sont données par le constructeur.
Remarque
2.2.3 La bobine
Une bobine est un fil conducteur enroulé sur un isolant
2.2.3.1 Modélisation
On modélise une bobine par une inductance L en série avec une resistance r.
Lir
On convention récepteur on donc :
u = Ldidt+ ri
20 juin 2018 Page -16- [email protected]
PCSI-LYDEX 2.3. DIVISEURS DE TENSION ET DE COURANT.
Pour les bobines sans noyau de fer : L = cte(i),L ne depend pas de i.Par contreles bobines avec noyau de fer L = L(i)Mais pour i faible on peut considérer L ≃ cte (un DL à l’ordre 0 au voisinage de i)
L’énergie d’une bobine parfaite (r = 0) : Epm =12
Li2
Association des bobines parfaites :
⋆ Parallèle :1Le=∑ 1
Li
⋆ Série : Le =∑
Li
Remarque
2.2.3.2 Aspect énergétique
• L’intensité du courant qui traverse une bobine est une fonction continuede temps
2.3 Diviseurs de tension et de courant.
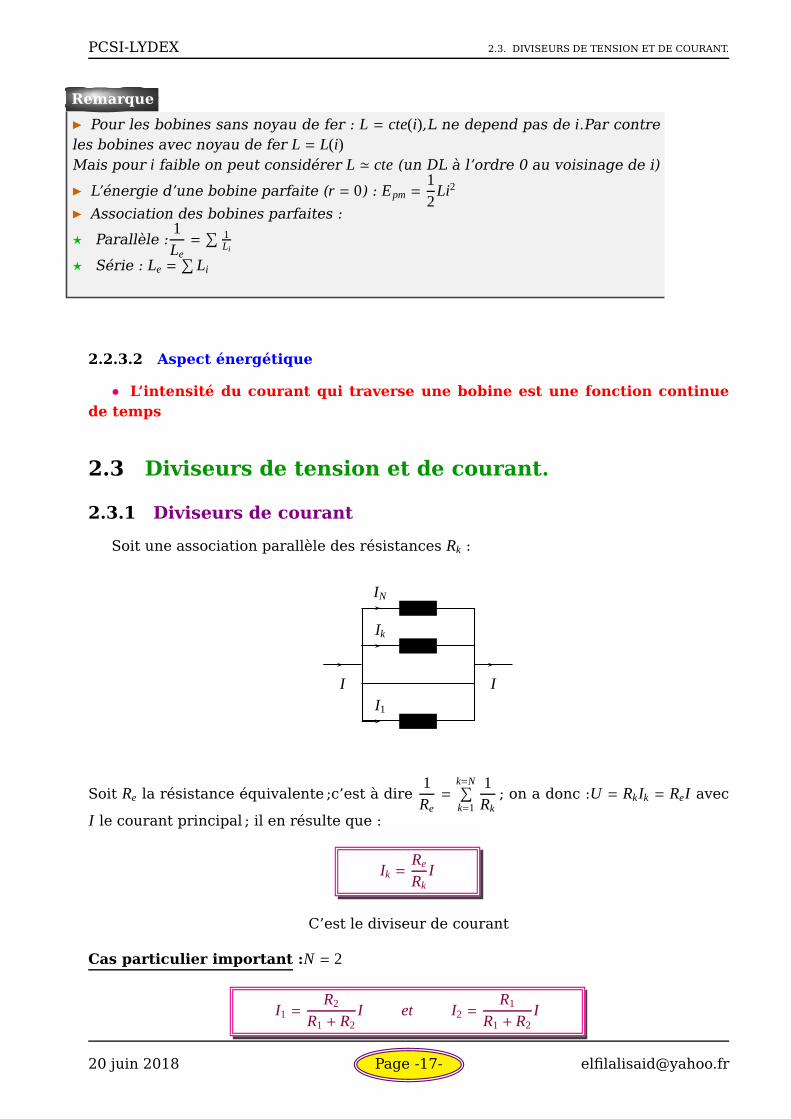
2.3.1 Diviseurs de courant
Soit une association parallèle des résistances Rk :
I
IN
Ik
I1
I
Soit Re la résistance équivalente ;c’est à dire1Re=
k=N∑
k=1
1Rk
; on a donc :U = RkIk = ReI avec
I le courant principal ; il en résulte que :
Ik =Re
RkI
C’est le diviseur de courant
Cas particulier important :N = 2
I1 =R2
R1 + R2I et I2 =
R1
R1 + R2I
20 juin 2018 Page -17- [email protected]

PCSI-LYDEX 2.4. MODÉLISATIONS LINÉAIRES D’UN DIPÔLE ACTIF
Si R1 = R2 =⇒ I1 = I2 =I2: méthode demi-courant utiliser pour déterminer les
résistances de faibles valeurs (voir TP)
Remarque
2.3.2 Diviseurs de tension
Soit une association série de N résistances Rk avec k = 1→ N :R1 R2
RNU
Rk RN−1
Soit Uk la tension aux bornes de la résistance Rk et Re la résistance équivalente c’est à
dire Re =k=N∑
k=1Rk .On a : I =
Uk
Rk=
URe
; ce qui donne la loi du diviseur de tension :
Uk =Rk
ReU =
Rk
k=N∑
k=1Rk
U
Cas particulier important :N = 2
U1 =R1
R1 + R2U et U2 =
R2
R1 + R2I
Si R1 = R2 =⇒ U1 = U2 =U2
: méthode demi-tension utiliser pour déterminer les
résistances de grandes valeurs (voir TP)
Remarque
2.4 Modélisations linéaires d’un dipôle actif
Soit un circuit électrique linéaire ( constitué des dipoles linéaires) contenant unesource de puissance électrique ; A et B deux points de ce circuit.
bc
bc
A
BCircuit
linéaireUAB
I
20 juin 2018 Page -18- [email protected]
PCSI-LYDEX 2.4. MODÉLISATIONS LINÉAIRES D’UN DIPÔLE ACTIF
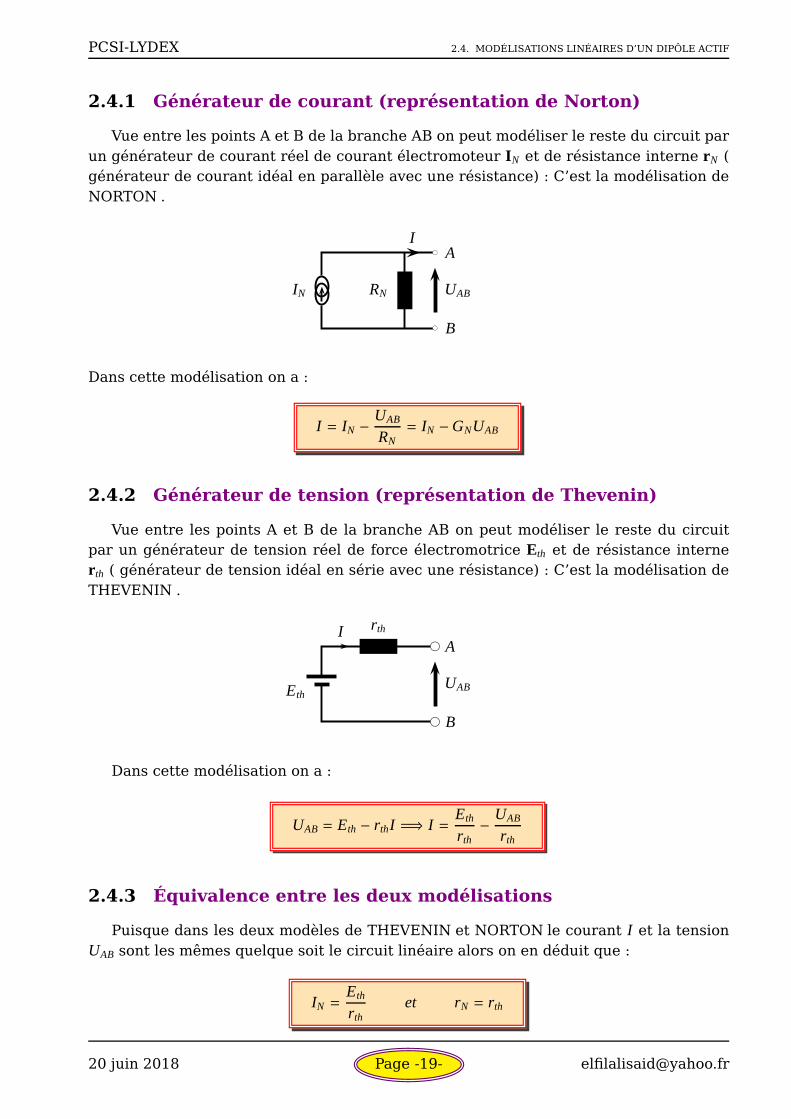
2.4.1 Générateur de courant (représentation de Norton)
Vue entre les points A et B de la branche AB on peut modéliser le reste du circuit parun générateur de courant réel de courant électromoteur IN et de résistance interne rN (générateur de courant idéal en parallèle avec une résistance) : C’est la modélisation deNORTON .
bc
bc
UAB
A
B
I
IN RN
Dans cette modélisation on a :
I = IN −UAB
RN= IN −GNUAB
2.4.2 Générateur de tension (représentation de Thevenin)
Vue entre les points A et B de la branche AB on peut modéliser le reste du circuitpar un générateur de tension réel de force électromotrice Eth et de résistance internerth ( générateur de tension idéal en série avec une résistance) : C’est la modélisation deTHEVENIN .
bc
bc
UAB
A
B
I
Eth
rth
Dans cette modélisation on a :
UAB = Eth − rthI =⇒ I =Eth
rth− UAB
rth
2.4.3 Équivalence entre les deux modélisations
Puisque dans les deux modèles de THEVENIN et NORTON le courant I et la tensionUAB sont les mêmes quelque soit le circuit linéaire alors on en déduit que :
IN =Eth
rthet rN = rth
20 juin 2018 Page -19- [email protected]

PCSI-LYDEX 2.5. SOURCES LIBRES. SOURCES LIÉES
2.5 Sources libres. Sources liées
• Un générateur (de tension ou de courant ) est une source de puissance qui fournitde l’énergie au circuit extérieur .• Générateur indépendant : source de puissance électrique indépendante d’autre gran-deur électrique du circuit.• Générateur lié : si une des grandeurs physiques dépend d’une grandeur électrique ducircuit .Exemple :Le transistor : c’est un générateur de courant en régime linéaire puisque Ic = βIB (géné-rateur de courant lié).
2.6 Théorème de Millman
Le théorème de MILLMANN n’est rien d’autre que la loi des nœuds exprimé en termede potentiel (référence commune est la masse ).
R1
I1
R2
I2
R3
I3
R4
I4
I6
I5
b
b
b
bbV1
V2
V3
V4
M
On a :I1 + I2 + I3 + I4 − I5 + I6 = 0
I1 =V1 − VM
R1= G1(V1 − VM)
I2 =V2 − VM
R2= G2(V2 − VM)
I3 =V3 − VM
R3= G3(V3 − VM)
I4 =V4 − VM
R4= G4(V4 − VM) G1(V1 − VM)+G2(V2 − VM)+G3(V3 − VM)+G4(V4 − VM)− I5 + I6 = 0
On tire que :
VM =−I5 + I6 +G1V1 +G2V2 +G3V3 +G4V4
G1 +G2 +G3 +G4=
∑
GiVi + εIi∑
Gi
20 juin 2018 Page -20- [email protected]
CHAPITRE 3
RÉGIME TRANSITOIRE
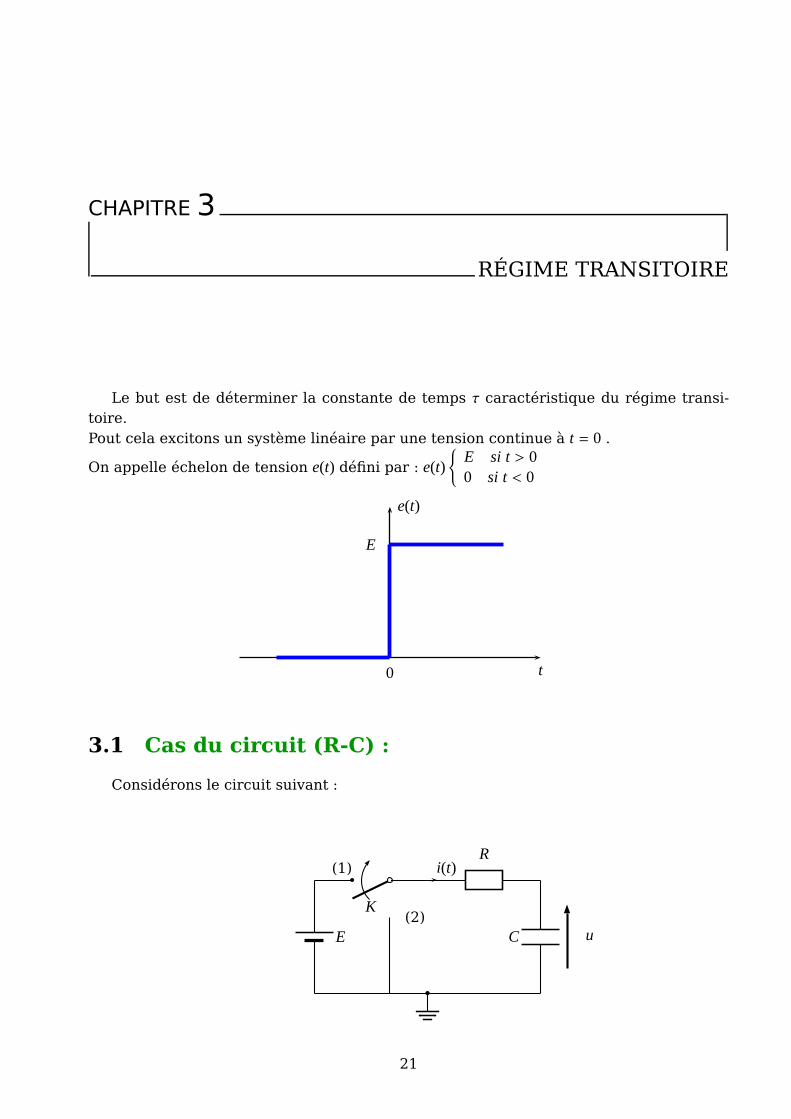
Le but est de déterminer la constante de temps τ caractéristique du régime transi-toire.Pout cela excitons un système linéaire par une tension continue à t = 0 .
On appelle échelon de tension e(t) défini par : e(t)
E si t > 00 si t < 0
t
E
e(t)
0
3.1 Cas du circuit (R-C) :
Considérons le circuit suivant :
E
K
R
C u
i(t)(1)
(2)
21
PCSI-LYDEX 3.1. CAS DU CIRCUIT (R-C) :
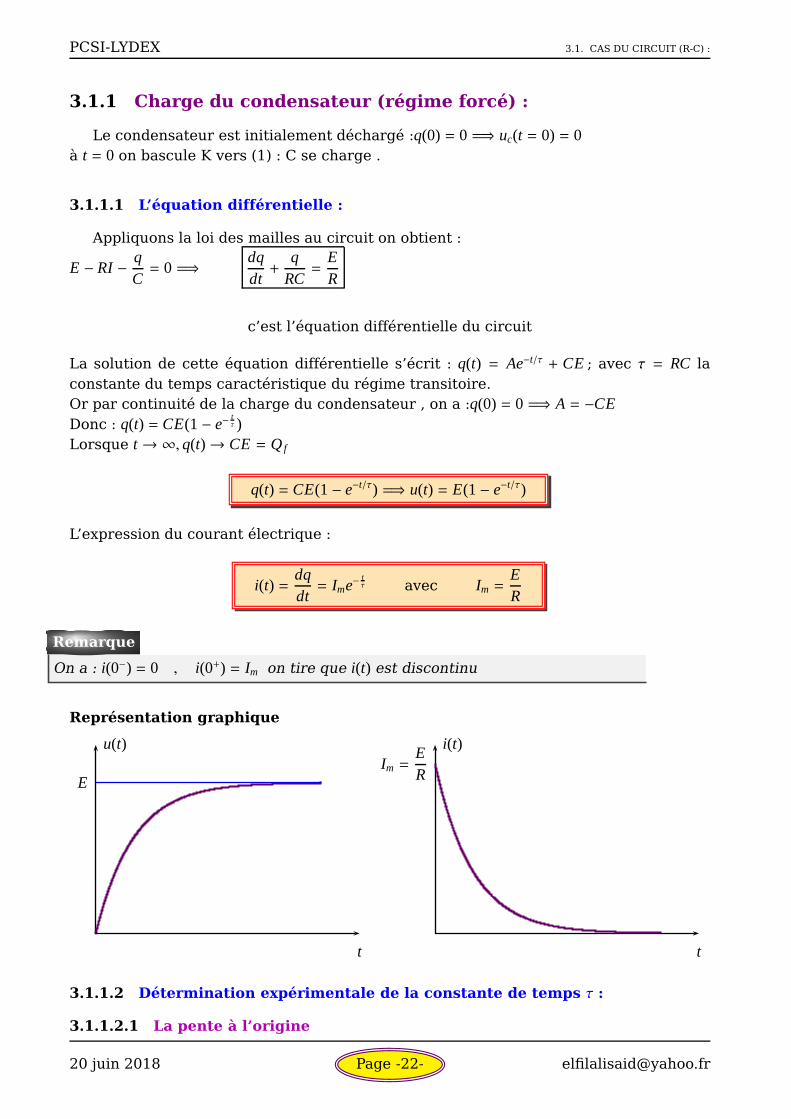
3.1.1 Charge du condensateur (régime forcé) :
Le condensateur est initialement déchargé :q(0) = 0 =⇒ uc(t = 0) = 0à t = 0 on bascule K vers (1) : C se charge .
3.1.1.1 L’équation différentielle :
Appliquons la loi des mailles au circuit on obtient :
E − RI − qC= 0 =⇒ dq
dt+
qRC=
ER
c’est l’équation différentielle du circuit
La solution de cette équation différentielle s’écrit : q(t) = Ae−t/τ+ CE ; avec τ = RC la
constante du temps caractéristique du régime transitoire.Or par continuité de la charge du condensateur , on a :q(0) = 0 =⇒ A = −CEDonc : q(t) = CE(1− e−
tτ )
Lorsque t → ∞, q(t)→ CE = Q f
q(t) = CE(1− e−t/τ) =⇒ u(t) = E(1− e−t/τ)
L’expression du courant électrique :
i(t) =dqdt= Ime−
tτ avec Im =
ER
On a : i(0−) = 0 , i(0+) = Im on tire que i(t) est discontinu
Remarque
Représentation graphique
t t
E
u(t) i(t)Im =
ER
3.1.1.2 Détermination expérimentale de la constante de temps τ :
3.1.1.2.1 La pente à l’origine
20 juin 2018 Page -22- [email protected]
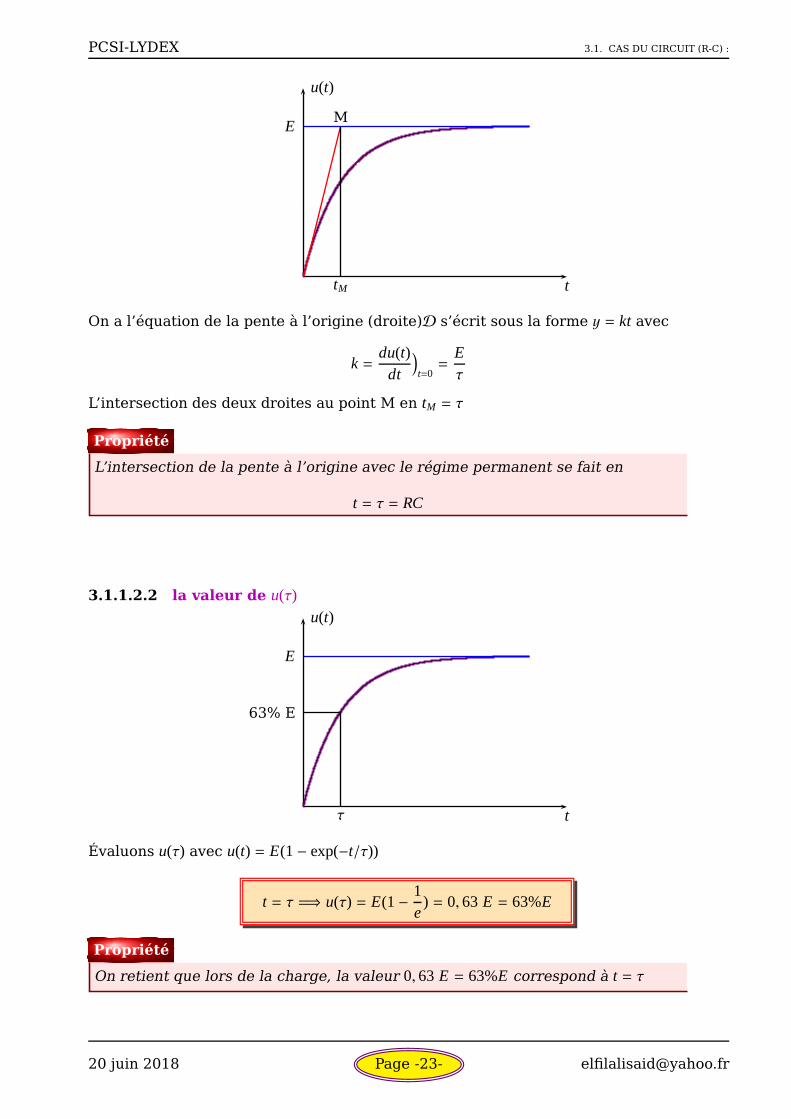
PCSI-LYDEX 3.1. CAS DU CIRCUIT (R-C) :
t
E
u(t)
tM
M
On a l’équation de la pente à l’origine (droite)D s’écrit sous la forme y = kt avec
k =du(t)
dt
)
t=0=
Eτ
L’intersection des deux droites au point M en tM = τ
L’intersection de la pente à l’origine avec le régime permanent se fait en
t = τ = RC
Propriété
3.1.1.2.2 la valeur de u(τ)
t
E
u(t)
τ
63% E
Évaluons u(τ) avec u(t) = E(1− exp(−t/τ))
t = τ =⇒ u(τ) = E(1− 1e
) = 0, 63 E = 63%E
On retient que lors de la charge, la valeur 0, 63 E = 63%E correspond à t = τ
Propriété
20 juin 2018 Page -23- [email protected]
PCSI-LYDEX 3.1. CAS DU CIRCUIT (R-C) :
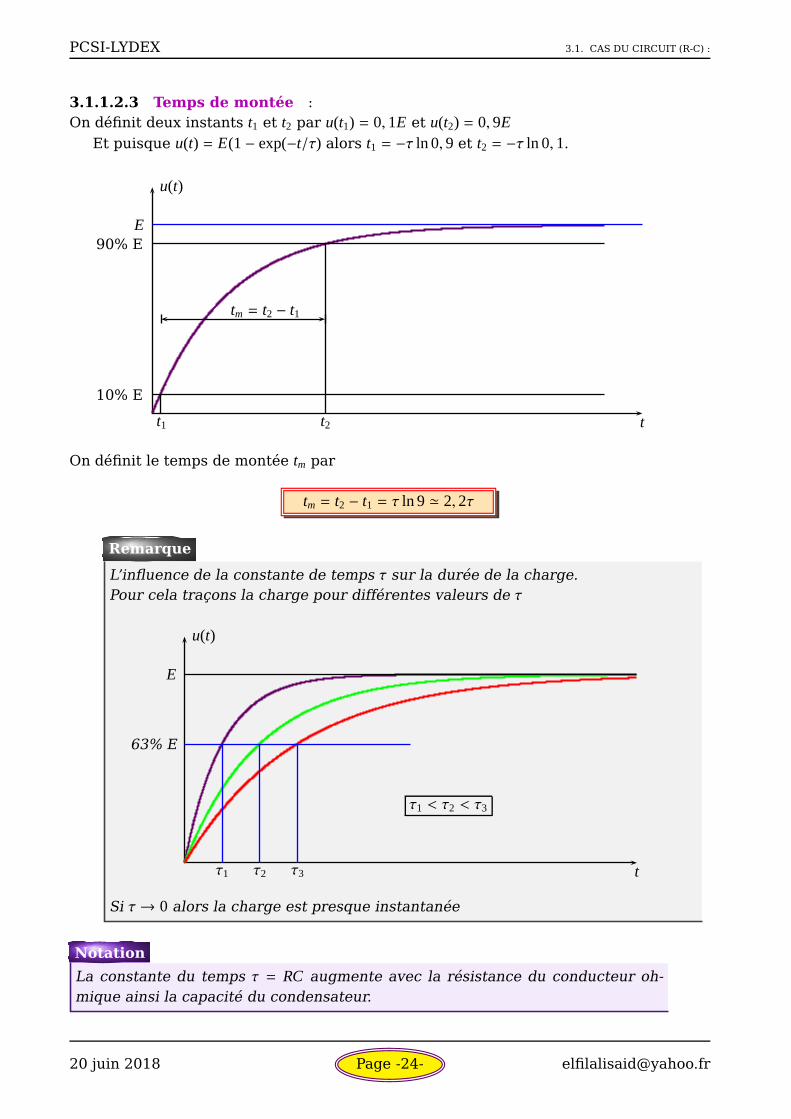
3.1.1.2.3 Temps de montée :On définit deux instants t1 et t2 par u(t1) = 0, 1E et u(t2) = 0, 9E
Et puisque u(t) = E(1− exp(−t/τ) alors t1 = −τ ln 0, 9 et t2 = −τ ln 0, 1.
t
E
u(t)
10% E
90% E
t1 t2
tm = t2 − t1
On définit le temps de montée tm par
tm = t2 − t1 = τ ln 9 ≃ 2, 2τ
L’influence de la constante de temps τ sur la durée de la charge.Pour cela traçons la charge pour différentes valeurs de τ
t
E
u(t)
τ1
63% E
τ2 τ3
τ1 < τ2 < τ3
Si τ→ 0 alors la charge est presque instantanée
Remarque
La constante du temps τ = RC augmente avec la résistance du conducteur oh-mique ainsi la capacité du condensateur.
Notation
20 juin 2018 Page -24- [email protected]

PCSI-LYDEX 3.1. CAS DU CIRCUIT (R-C) :
3.1.1.3 Le portrait de phase :
3.1.1.3.1 Définitions :
• C’est la représentation dans le plan (O, f (x),f (x)dt
) lorsque t varie.
• On appelle point de phase un point P figuratif dont les coordonnées à un instant donné
t sont ( f (t),d f (t)
dt).
• Lorsque t varie , le point P décrit une courbe, cette courbe est appelé trajectoire dephase.• On appelle portrait de phase l’ensemble des trajectoires de phase lorsque les condi-tions initiales varient.
3.1.1.3.2 Représentation dans le plan de phase :
Dans notre cas f (t) = q(t) etd fdt= i(t).
On a q(t) = CE(1− exp(−t/τ) et i(t) =ER
exp(−t/τ) alors :
i =ER− 1
RCq
C’est l’équation de la trajectoire de phase :droite de pente − 1RC
Lorsque E varie alors la trajectoire de phase décrit des droites parallèles.
q(t)
i(t)
3.1.1.4 Aspect énergétique :
On a : E = Ri +qC=⇒ Eidt = Ri2dt +
1C
qdq
Eidt = Ri2dt + d(q2
2C)
On appelle :
Wc =q2
2C: énergie totale emmagasinée dans le condensateur .
δWg = Eidt : énergie élémentaire fournit par le générateur .δWJ = Ri2dt : énergie élémentaire dissipée par effet Joule dans le circuit .
∫ t
0Eidt =
∫ t
0Ri2dt +
∫ q
0
qC
dq
20 juin 2018 Page -25- [email protected]

PCSI-LYDEX 3.1. CAS DU CIRCUIT (R-C) :
3.1.2 Décharge du condensateur (régime libre) :
3.1.2.1 Équation différentielle et solution :
Quand le condensateur est chargé (q = CE = Q f ) ,on bascule l’interrupteur vers laposition (2) :donc en prenant l’instant de basculement comme origine des temps ,lesconditions initiales seront :q(0) = CE = Q f ; i(0) = 0
Ri +1C
q = 0 =⇒ dq +1τ
q = 0
La solution est :q(t) = Ae−t/τ en utilisant les C.I on obtient :
q(t) = CEe−t/τ=⇒ u(t) = Ee−t/τ ‖ i(t) = −E
Re−t/τ
t
E
u(t)
10% E
90% E
t1 t2
tm = t1 − t2
• Lors de la décharge on a :
td = t10%− t90%
• q(τ) = 0, 37CE• Le régime permanent est q = 0 (q(t) est une fonction décroissante).
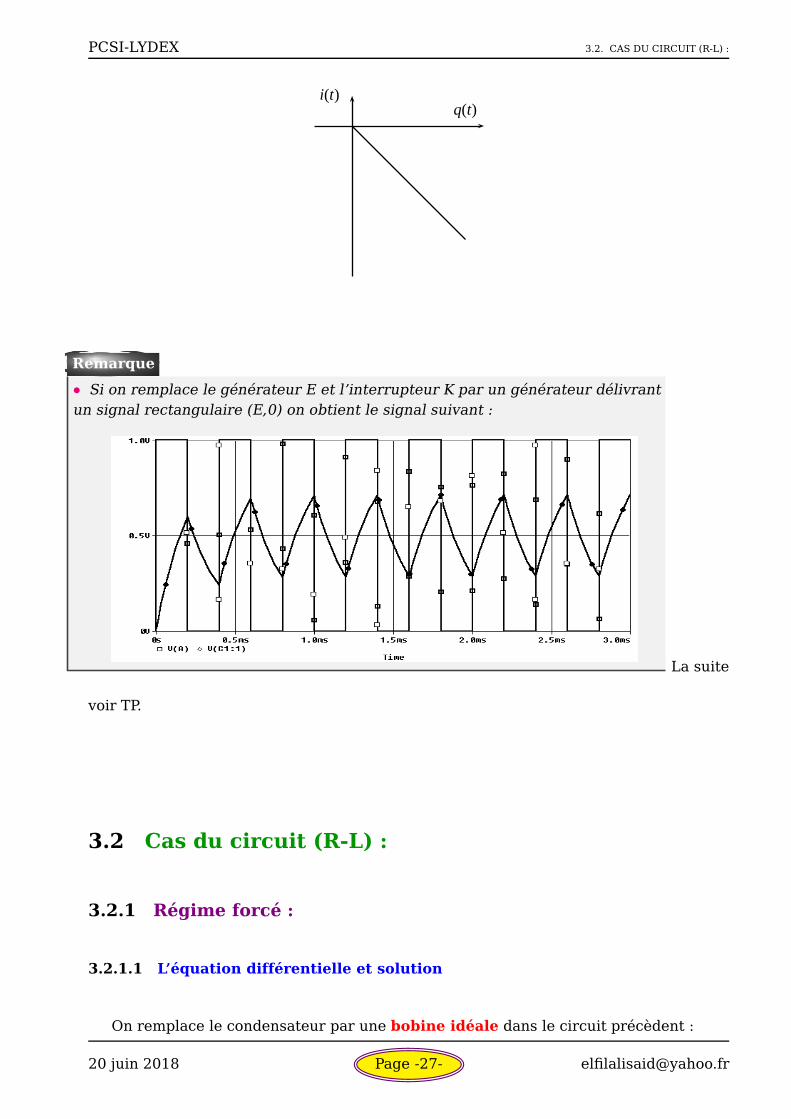
3.1.2.2 L’équation de la trajectoire de phase :
D’après ce qui précède on tire que :
i = − 1RC
q
C’est une droite affine
20 juin 2018 Page -26- [email protected]
PCSI-LYDEX 3.2. CAS DU CIRCUIT (R-L) :
q(t)i(t)
• Si on remplace le générateur E et l’interrupteur K par un générateur délivrantun signal rectangulaire (E,0) on obtient le signal suivant :
Remarque
La suite
voir TP.
3.2 Cas du circuit (R-L) :
3.2.1 Régime forcé :
3.2.1.1 L’équation différentielle et solution
On remplace le condensateur par une bobine idéale dans le circuit précèdent :
20 juin 2018 Page -27- [email protected]

PCSI-LYDEX 3.2. CAS DU CIRCUIT (R-L) :
E
K
R
Li(t)(1)
(2)
L’interrupteur k est en position (1) : E = Ri + Ldidt
donc :
didt+
RL
i =EL
c’est l’équation différentielle du circuit
La solution de cette équation différentielle en posant
τ =LR
: constante du temps
Et en tenant compte que le courant qui traverse une bobine est continu alors on trouveque :
i(t) = Im(1− e−t/τ) avec Im =ER
t
Im
i(t)
τ
63% Im
La tension aux bornes de la bobine idéale est :
uL(t) = Ldidt= Ee−t/τ
20 juin 2018 Page -28- [email protected]

PCSI-LYDEX 3.2. CAS DU CIRCUIT (R-L) :
t
E
uL(t)
τ
37% E
3.2.1.2 Portrait de phase
On a : i =ER
(1− exp(−t/τ)) ainsididt=
EL
exp(−t/τ)
didt=
EL− R
Li
Le portrait des phase est l’ensemble des droites parallèle de pente −RL= −1τ
i(t)
di(t)dt
3.2.1.3 Aspect énergétique
E = Ri + Ldidt=⇒ Eidt = Ri2dt + d(
12
Li2)
• δWg = Eidt : l’énergie élémentaire fournie par le générateur.• δWJ = Ri2dt : l’énergie élémentaire perdue par effet Joule.
• δWm = d(12
Li2) : l’énergie élémentaire emmagasinée par la bobine.
Le bilan énergétique pour le circuit s’écrit
Wg = WJ +Wm
20 juin 2018 Page -29- [email protected]

PCSI-LYDEX 3.3. CIRCUIT (RLC) SÉRIE :
3.2.2 Régime libre :
L’interrupteur maintenant en position (2) ; l’équation différentielle sera donc :
Ri + Ldidt= 0 ; les conditions initiales sont i(0) =
ER
par changement d’origine des dates ,la solution s’écrit :
i(t) =ER
e−t/τ
La tension au bornes de la bobine est :
uL(t) = −E e−t/τ
t
t
Im
i(t) uL(t)
−E
On vérifie bien que le courant qui traverse la bobine est continu par contre la tensionpas forcément continue.
3.3 Circuit (RLC) série :
Soit le circuit (RLC) série :
L C
R
i(t)
3.3.1 Régime libre :
Soit q la charge du condensateur et u la tension entre ces bornes. L’équation différen-tielle est :
Lq + Rq +1C
q = 0 =⇒ LCu + RCu + u = 0
20 juin 2018 Page -30- [email protected]
PCSI-LYDEX 3.3. CIRCUIT (RLC) SÉRIE :
On pose :
ωo =
√
1LC
: pulsation propre
2α =RL=ωo
Q;α cœfficient d’amortissement et Q le facteur de qualité
La forme canonique de l’équation différentielle sera :
q + 2αq + ω2oq = 0 =⇒ u + 2αu + ω2
ou = 0
L’équation caractéristique est : r2+ 2αr + ω2
o = 0On pose : ∆
′= α2 − ω2
o = (α − ωo)(α + ωo)
3.3.1.1 Régime apériodique ∆′ > 0 :
∆′ > 0 =⇒ α > ωo : Q <
12
Deux racines réelles distinctes : r± = −α ±√
α2 − ω2o
q(t) = Aer+t+ Ber−t
=⇒ q(t) = e−αt[Ae√α2−ω2
ot+ Be−
√α2−ω2
ot]
Lorsque t → ∞, e−αt l’emporte ;d’où q→ 0 sans osciller :C’est le régime apériodique.Détermination des constantes A et B :Pour cela on suppose que q(t = 0) = q0 et i(t = 0) = i0
A + B = q0
Ar1 + Br2 = i0=⇒
B =i0 + (α +
√
α2 + ω2o)qo
2√
α2 + ω2o
A =−i0 + (−α +
√
α2 + ω2o)qo
2√
α2 + ω2o
Representation graphique
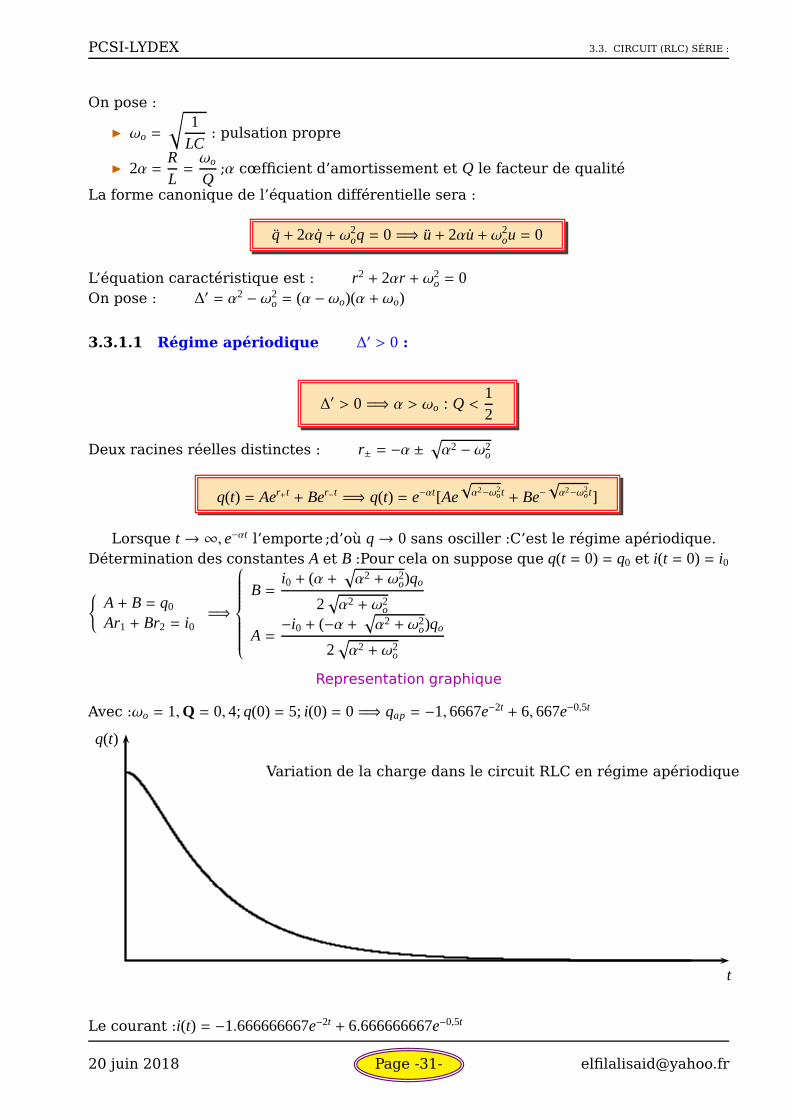
Avec :ωo = 1,Q = 0, 4;q(0) = 5; i(0) = 0 =⇒ qap = −1, 6667e−2t+ 6, 667e−0,5t
t
q(t)
Variation de la charge dans le circuit RLC en régime apériodique
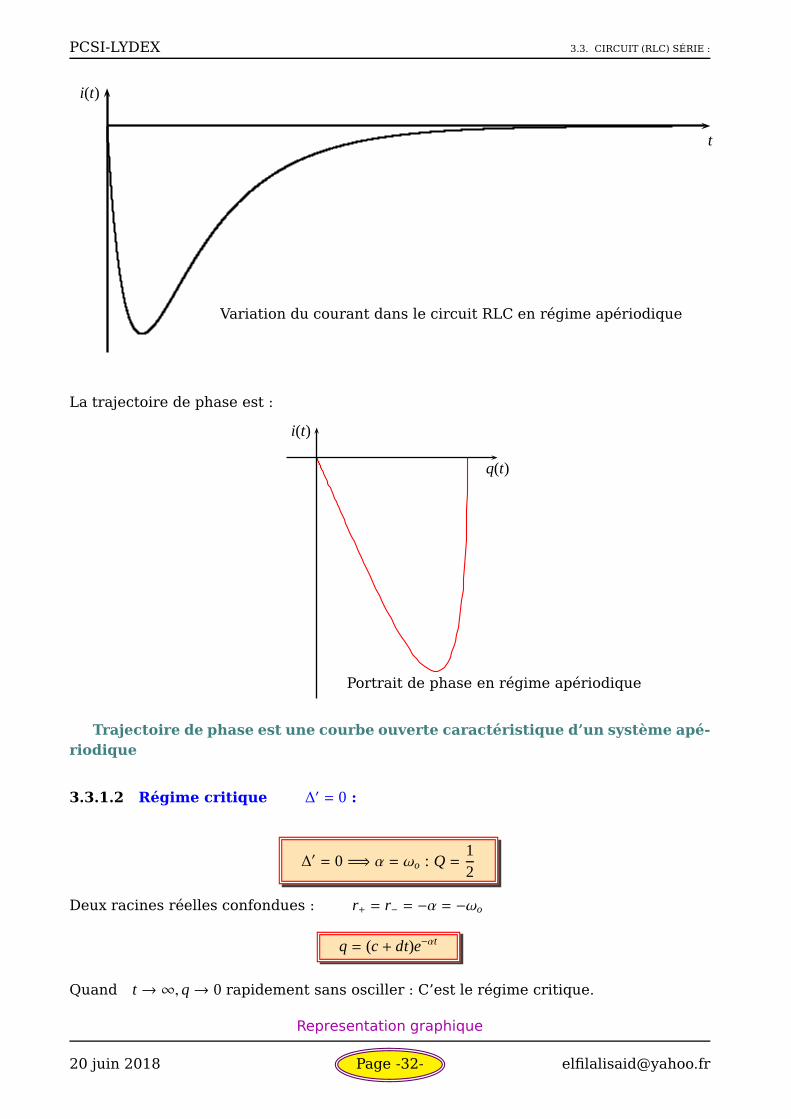
Le courant :i(t) = −1.666666667e−2t+ 6.666666667e−0,5t
20 juin 2018 Page -31- [email protected]
PCSI-LYDEX 3.3. CIRCUIT (RLC) SÉRIE :
t
i(t)
Variation du courant dans le circuit RLC en régime apériodique
La trajectoire de phase est :
q(t)
i(t)
Portrait de phase en régime apériodique
Trajectoire de phase est une courbe ouverte caractéristique d’un système apé-riodique
3.3.1.2 Régime critique ∆′= 0 :
∆′= 0 =⇒ α = ωo : Q =
12
Deux racines réelles confondues : r+ = r− = −α = −ωo
q = (c + dt)e−αt
Quand t → ∞, q→ 0 rapidement sans osciller : C’est le régime critique.
Representation graphique
20 juin 2018 Page -32- [email protected]

PCSI-LYDEX 3.3. CIRCUIT (RLC) SÉRIE :
Conditions initiales :ωo = 1;Q = 0.5;q(0) = 5; i(0) = 0 =⇒ q(t) = 5 exp(−t) + 5t exp(−t); i(t) =−5t exp(−t)
t
q(t)
Variation de la charge dans le circuit RLC en régime critique
De même :
t
i(t)
Variation du courant dans le circuit RLC en régime critique
La trajectoire de phase est :
20 juin 2018 Page -33- [email protected]

PCSI-LYDEX 3.3. CIRCUIT (RLC) SÉRIE :
q(t)
i(t)
Portrait de phase en régime critique
• Le régime critique est le régime le plus rapide qui tend vers le régime perma-nent (q = 0)• Si c = 0 alors q(t) = dt e−αt
Représentation temporelle
q(t)
t
i(t)
t
Portrait de phasei(t)
q(t)
Remarque
20 juin 2018 Page -34- [email protected]

PCSI-LYDEX 3.3. CIRCUIT (RLC) SÉRIE :
3.3.1.3 Régime pseudopériodique ∆′ < 0 :
∆′ < 0 =⇒ α < ωo : Q >
12
∆′= α2 − ω2
o = i2Ω2 avec :Ω2= ω2
o − α2
Deux racines complexes conjuguées : r1 = −α+iΩ et r2 = −α−iΩ donc la solution s’écrit :
q(t) = e−αt(A cosΩt + B sinΩt) = C e−αt cos(Ωt + ϕ)
C’est une fonction pseudopériodique d’amplitude Qm = C e−αt variable en fonction dutemps Qm t → +∞−−−−−−→ 0
La pseudopériode est :
T =2πΩ=
To√
1− (α
ωo)2
=To
√
1− 14Q2
Representation graphique
La fonction q(t) est le produit d’une fonction périodique est une fonction non pério-dique (amplitude), et puisque
−C e−αt6 C e−αt cos(Ωt + ϕ) 6 C e−αt
alors on représente les deux enveloppes puis la fonction q(t) (q(t) ne peut pas dépasserl’enveloppe) α = 0.5, ωo =
√9, 25,Ω = 3, ϕ = 0, qo = 1 =⇒ qpp = e−0.5t cos 3t
Representation graphique
Conditions initiales :ωo = 8;Q = 10;q(0) = 5; i(0) = 0 =⇒ q(t) = exp(−0.4t)(5 cos(7, 99t) +0, 25 sin(7, 99t)); i(t) = exp(−0, 4t)[−40 sin(7, 99t) + 10−9 cos(7, 99t)]
20 juin 2018 Page -35- [email protected]
PCSI-LYDEX 3.3. CIRCUIT (RLC) SÉRIE :
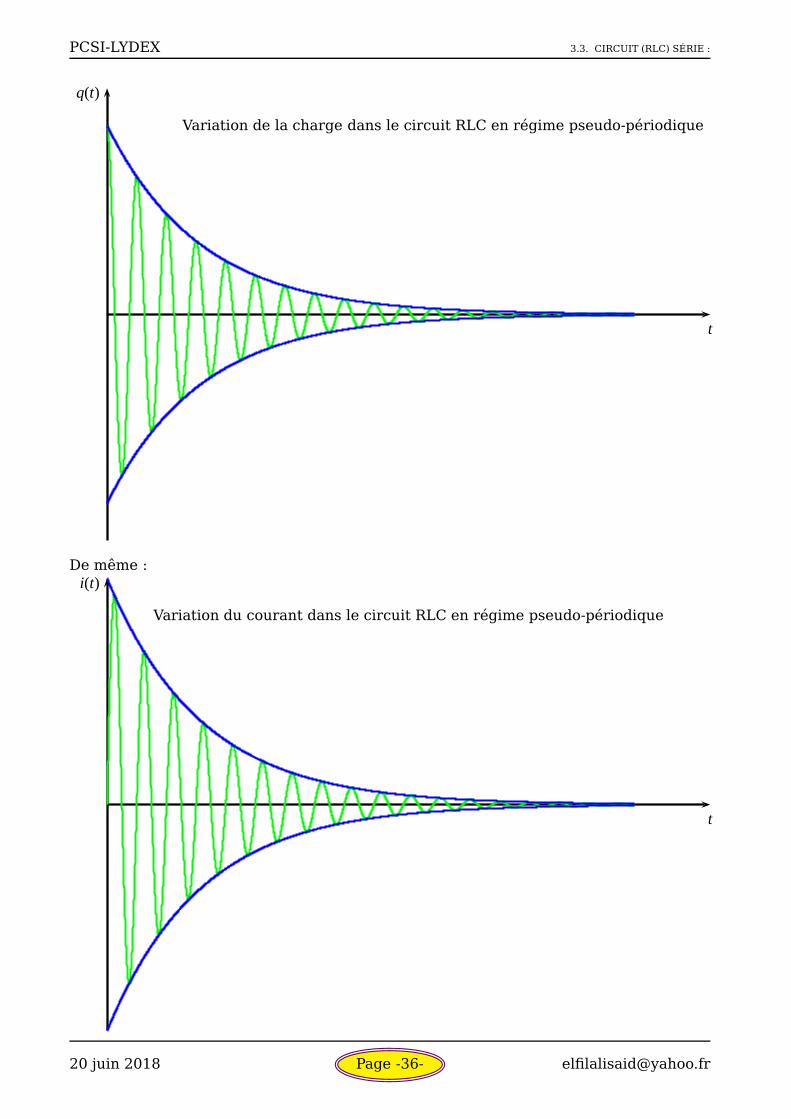
t
q(t)
Variation de la charge dans le circuit RLC en régime pseudo-périodique
De même :
t
i(t)
Variation du courant dans le circuit RLC en régime pseudo-périodique
20 juin 2018 Page -36- [email protected]

PCSI-LYDEX 3.3. CIRCUIT (RLC) SÉRIE :
La trajectoire de phase est :
q(t)
i(t)
Portrait de phase en régime pseudo-périodique
20 juin 2018 Page -37- [email protected]

PCSI-LYDEX 3.3. CIRCUIT (RLC) SÉRIE :
On a T =2πΩ=⇒ T =
2π
ωo
√
1−( α
ωo
)2et comme To =
2πωo
ainsi2αωo=
1Q
Q étant le
facteur de qualité ; alors
T =To
√
1−( α
ωo
)2=
To√
1− 14Q2
Si α ≪ ωo =⇒ Q ≫ 1 ;en effet R très faible ,alors T ≃ To oscillations synchrones. Comme e−αt est un nombre sans dimension alors α à la dimension d’un temps−1
, on pose
α =1τ
τ s’appelle le temps de relaxation ou temps d’amortissement.
Donc pour t = τ l’amplitude Ce−αt(t = τ) =Ce
On conclut donc que :Le temps de relaxation est le temps nécessaire pourque l’amplitude se divise par e
Pour t = 10τ alors l’amplitude Ce−αt(t = 10τ) =C
22026.46579= 0.0000454C → 0
On retient donc que pour t > 10τ le régime transitoire disparaît.
Remarque
Aspect énergétique :
On a : Lq + Rq +1C
q = 0 =⇒ (12
Li2) + Ri2dt + d(1
2Cq2) = 0
• δWe = d(1
2Cq2) :l’énergie électrostatique élémentaire emmagasinée par le conden-
sateur .
• δWm = d(12
Li2) :l’énergie magnétique élémentaire emmagasinée par la bobine .
• δWe = Ri2dt :l’énergie élémentaire dissipée par effet Joule dans la resistance .
We +WJ +Wm = 0
le bilan énergétique pour le circuit (RLC série) libre
20 juin 2018 Page -38- [email protected]
PCSI-LYDEX 3.3. CIRCUIT (RLC) SÉRIE :
Decrement logarithmiqueon définit le décrément logarithmique par
δ = αT
cœfficient sans unité
On a :⊲ u(t) = Ae−αt cos(Ωt + ϕ)⊲ u(t + nT ) = Ae−α(t+nT ) cos(Ωt + nΩT + ϕ) = e−αnT u(t)
D’où :u(t)
u(t + nT )= eαnT
=⇒ αnT = lnu(t)
u(t + nT )
On en déduit que
δ = αT =1n
lnu(t)
u(t + nT )
Si n = 1 alors :
δ = αT = lnu(t)
u(t + T )
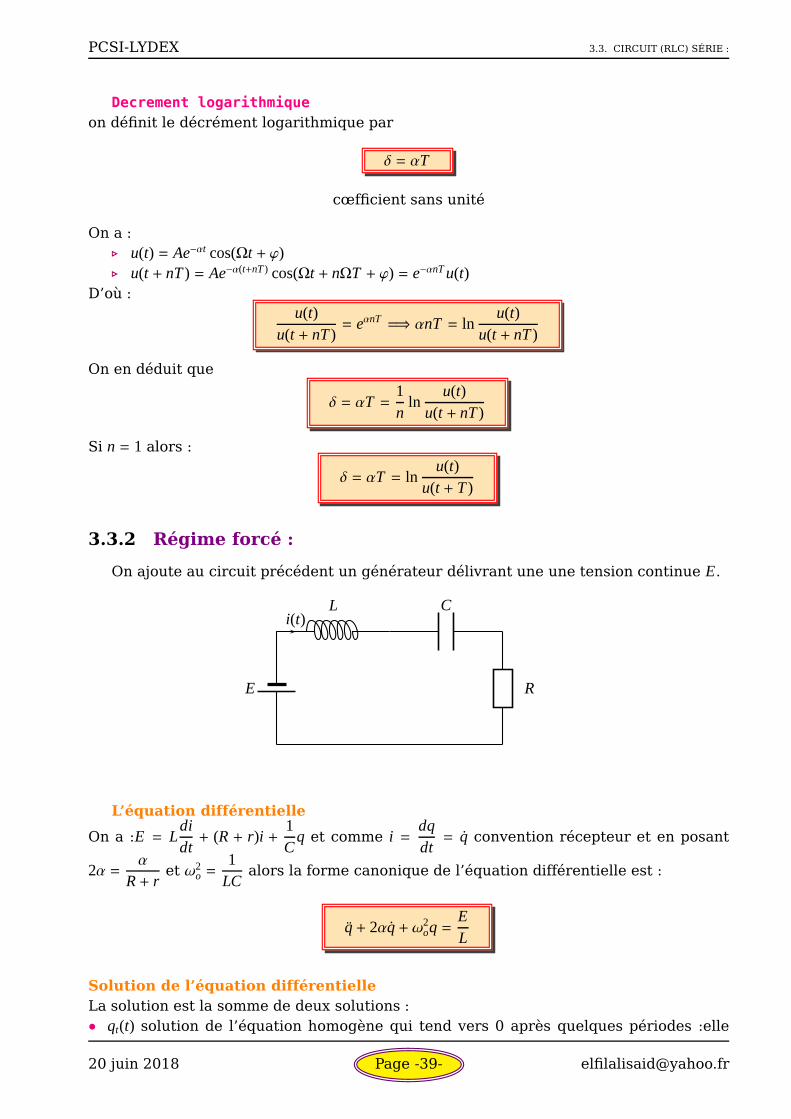
3.3.2 Régime forcé :
On ajoute au circuit précédent un générateur délivrant une une tension continue E.
E
L C
R
i(t)
L’équation différentielle
On a :E = Ldidt+ (R + r)i +
1C
q et comme i =dqdt= q convention récepteur et en posant
2α =α
R + ret ω2
o =1
LCalors la forme canonique de l’équation différentielle est :
q + 2αq + ω2oq =
EL
Solution de l’équation différentielleLa solution est la somme de deux solutions :• qt(t) solution de l’équation homogène qui tend vers 0 après quelques périodes :elle
20 juin 2018 Page -39- [email protected]

PCSI-LYDEX 3.3. CIRCUIT (RLC) SÉRIE :
décrit donc un régime transitoire• qp(t) solution particulière décrit le régime permanent.On a :• qp(t) = CE• L’expression de qt(t) dépend du signe de ∆′.Pour la suite on suppose que ∆′ < 0 =⇒ α < ωo : régime pseudo-périodique, donc
qt(t) = Ae−αt cos(Ωt + ϕ)
A l’amplitude ( grandeur positive) et ϕ la phase à l’origine deux constantes déterminéspar les conditions initiales ;on suppose que q(t = 0) = 0 condensateur initialement dé-chargé et i(t = 0) bobine initialement déchargé.q(t) = CE + Ae−αt cos(Ωt + ϕ) =⇒ q(t = 0) = 0 = CE + A cosϕ (I)i(t) = −Ae−αt(α cos(Ωt + ϕ) + Ω sin(Ωt + ϕ))i(t = 0) = 0 =⇒ α cosϕ + Ω sinϕ = 0 (II)D’après (II) :
tanϕ = −αΩ
D’après (I) :A = − CEcosϕ
et comme 1+ tan2 x =1
cos2 x=⇒ 1
cosx= ±√
1+ tan2 x
alors A = ±CE
√
1+α2
Ω2
Puisque A est une amplitude alors le signe +, donc
A = CE
√
1+α2
Ω2
Cas particulier important α ≪ ωo =⇒ Q ≫ 1Dans ce cas
α ≪ ωo =⇒ Ω = ωo; T = To; A = CE; ϕ = 0
Donc
q(t) = CE(1+ e−αt cos(ωot))
Ainsi
i(t) = −CEe−αt(α cosωot + ωo sinωot)
Puisque les fonctions cosx et sinx sont bornées et α ≪ ωo alors
i(t) = −CEωoe−αt sinωot
Representation graphique
Représentation de la charge
20 juin 2018 Page -40- [email protected]
PCSI-LYDEX 3.3. CIRCUIT (RLC) SÉRIE :
t
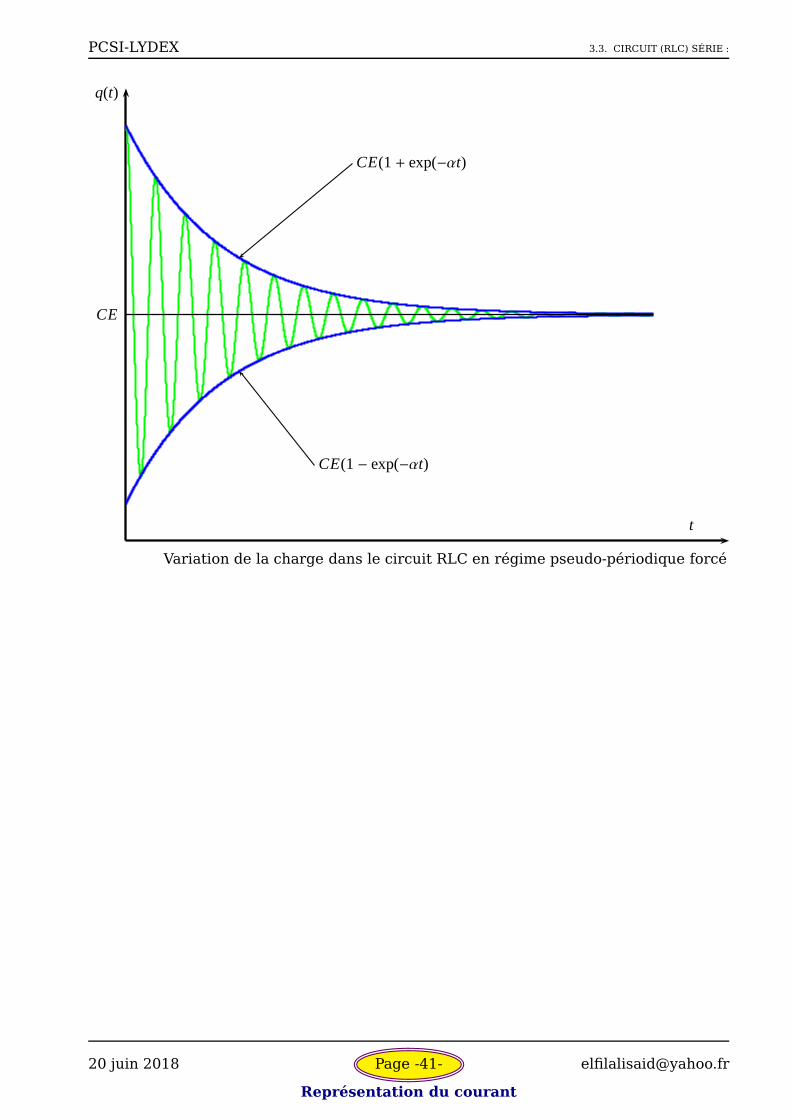
q(t)
CE
Variation de la charge dans le circuit RLC en régime pseudo-périodique forcé
CE(1+ exp(−αt)
CE(1− exp(−αt)
Représentation du courant
20 juin 2018 Page -41- [email protected]

PCSI-LYDEX 3.3. CIRCUIT (RLC) SÉRIE :
t
i(t)
Variation du courant dans le circuit RLC en régime pseudo-périodique forcé
Représentation du portrait de phase
20 juin 2018 Page -42- [email protected]
PCSI-LYDEX 3.3. CIRCUIT (RLC) SÉRIE :
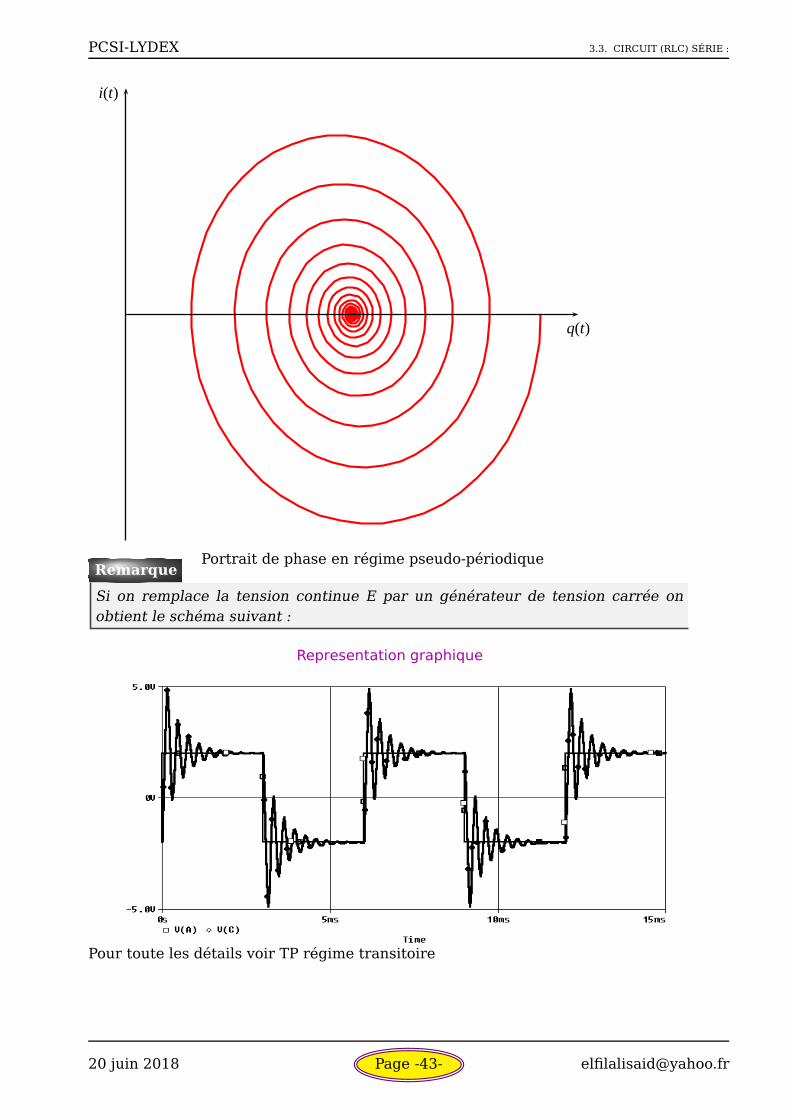
q(t)
i(t)
Portrait de phase en régime pseudo-périodique
Si on remplace la tension continue E par un générateur de tension carrée onobtient le schéma suivant :
Remarque
Representation graphique
Pour toute les détails voir TP régime transitoire
20 juin 2018 Page -43- [email protected]


CHAPITRE 4
RÉGIME ALTERNATIF SINUSOIDAL
Un signal alternatif est un signal qui n’admet pas de composante continue (sa valeurmoyenne est nulle :< u(t) >= 0) ,en effet son expression s’écrit sous la forme :
x(t) = Xm cos(ωt + ϕ)
avec :• Xm : amplitude du signal (valeur positive).• ωt + ϕ : la phase à l’instant t.• ϕ : La phase à l’origine, c’est à dire la phase pour t = 0• ω : la pulsation .
4.1 Amplitude complexe ,Impedance et admittance com-
plexes
4.1.1 Amplitude complexe
Soit un signal sinusoidal d’amplitude Xm et de pulsation ω, c’et à dire
x(t) = Xm cos(ωt + ϕ)
A ce signal on peut lui associer : Un vecteur tournant de norme Xm et d’angle θ = ωt+ϕ : représentation de Fresnel. Un nombre complexe de module Xm et d’argument ϕ : représentation complexe.
Rappel :⊲ | Z1 × Z2 |=| Z1 | × | Z2 |
⊲
∣
∣
∣
∣
∣
∣
Z1
Z2
∣
∣
∣
∣
∣
∣
=| Z1 || Z2 |
⊲ arg(Z1Z2) = argZ1 + argZ2 ⊲ arg(Z1/Z2) = argZ1 − argZ2
⊲ arg(a > 0) = 0 ⊲ arg(a < 0) = π ⊲ arg(ja)(a > 0) =π
2⊲ arg(ja)(a < 0) = −π
2⊲ = z1 + z2 = z1 + z2 ⊲ z1/z2 = z1/z2
Si Z = a + jb =| Z | e jθ alors :
45

PCSI-LYDEX 4.1. AMPLITUDE COMPLEXE ,IMPEDANCE ET ADMITTANCE COMPLEXES
⊲ | Z |=√
a2 + b2 ⊲ sinθ =b√
a2 + b2=ℑ(Z)
| Z |
⊲ cosθ =a√
a2 + b2=ℜ(Z)
| Z | ⊲ tanθ =ba=ℑ(Z)
ℜ(Z)La notation complexe consiste à associe à une fonction sinusoïdale un nombre complexe :x(t) = Xm cos(ωt + ϕ)→ x(t) = Xm cos(ωt + ϕ) + jXm sin(ωt + ϕ)=⇒ x(t) = Xme j(ωt+ϕ)
= Xme jϕe jωt avec :x(t) = ℜ(x(t))
x(t) = Xme jϕe jωt
On rappelle que pour un signal sinusoidal :Xe =Xm√
2: valeur efficace.
On pose :
Xm = Xme jϕ=⇒ Xe = Xee
jϕ
On conclut que :
Xe = |Xe| ‖ Xm = |Xm| ‖ ϕ = argXm = argXe
Intérêt de la notation complexe :⋆ Linéarité :
Si x1 = X1m cos(ωt + ϕ1) et x2 = X2m cos(ωt + ϕ2) alors pour :x = x1 + x2 = Xm cos(ωt + ϕ) =⇒ Xme jϕe jωt
= X1me jϕ1e jωt+ X2me jϕ2e jωt
Xm = X1m + X2m
L’addition de deux fonctions sinusoïdales de même pulsation ω est équi-valent à l’addition des amplitudes complexes en notation complexe.
PropriétéLinéarité
⋆ Dérivation :x(t) = Xm cos(ωt + ϕ) =⇒ x = Xme jϕe jωt
=⇒ dxdt= −ωXm sin(ωt + ϕ) = ωXm cos(ωt + ϕ +
π
2)→ ωXme jϕe jωte
jπ
2 = jωXme jϕe jωt
dx
dt= jωx(t)
Dériver par rapport à t en notation réelle revient à multiplier par ( jω) ennotation complexe
PropriétéDérivation
⋆ Intégration :
20 juin 2018 Page -46- [email protected]

PCSI-LYDEX 4.1. AMPLITUDE COMPLEXE ,IMPEDANCE ET ADMITTANCE COMPLEXES
∫
x(t)dt =1ω
Xm sin(ωt + ϕ) =Xm
ωcos(ωt + ϕ − π
2)
→ Xm
ωe jϕe jωte
− jπ
2 =Xm
jωe jϕe jωt
∫
x(t)dt =1jω
x(t)
Intégrer par rapport à t en notation réelle revient à multiplier par (1jω)
en notation complexe
PropriétéIntégration
4.1.2 Impédance complexe et admittance complexe :
4.1.2.1 Définitions :
Soit un dipole linéaire AB ;
Di(t)
u(t)
i = Im cos(ωt + ϕi)→ i = Ime jωt avec Im = Ime jϕi
Puisque le dipole est linéaire alors la tension u(t) est sinusoidal de même pulsation ωu = Um cos(ωt + ϕu)→ u = Ume jωt avec Um = Ume jϕu
On appelle impedance complexe
Z =Um
Im
=Ue
Ie
Z =Um
Ime j(ϕu−ϕi) = Ze jϕ
Z = |Z| = Um
Im‖ ϕ = ϕu − ϕi = argZ
ϕ étant le déphasage entre u(t) et i(t)
On appelle admittance complexe :
Ym =1
Zm
=Im
Um
=Im
Ume− jϕ
20 juin 2018 Page -47- [email protected]

PCSI-LYDEX 4.1. AMPLITUDE COMPLEXE ,IMPEDANCE ET ADMITTANCE COMPLEXES
4.1.2.2 Applications :
4.1.2.2.1 Impédance d’un resistor :u = Ri =⇒ Um = RIm
Conclusion:
ZR = R =⇒ ϕR = 0: u(t) et i(t) sont en phase
t
i(t)
uR(t)
4.1.2.2.2 Impedance d’une bobine idéale :
u = Ldidt=⇒ Um = jLωIm =⇒
ZL = jLω
Conclusion:
• ZL = Lω• ϕL = +
π
2• ϕL > 0 =⇒ u(t) est en quadrature avance par rapport à i(t)
• ϕL =π
2=⇒ ∆t = T/4
t
i(t)
uL(t)
20 juin 2018 Page -48- [email protected]

PCSI-LYDEX 4.2. ÉTUDE DU CIRCUIT RLC SÉRIE EN RÉGIME SINUSOIDAL FORCÉ
4.1.2.2.3 Impedance d’un condensateur :
u =1C
∫
i(t)dt =⇒ Um =1
jCωIm =⇒
ZC =1
jωC
•ZC =
1Cω
; ϕC = −π/2
• ϕC < 0 =⇒ u(t) est en quadratureretard par rapport à i(t)• |ϕC | = π/2 =⇒ ∆t = T/4
t
i(t)
uc(t)
Tous les résultats trouvés en courant continu reste valable en régime si-nusoidal forcé à condition de travailler avec les grandeurs complexes
RemarqueConclusion
Exemple :Voir TD 3 :
4.2 Étude du circuit RLC série en régime sinusoidal
forcé
Soit un circuit RLC série alimenté par un GBF maintenant entre ses bornes une ten-sione(t) = E cos(ωt + ϕe) avec ω = 2π f variable ; f étant la fréquence
∼u(t)
L
C
Ri(t)
4.2.1 Régime transitoire et régime permanent
L’équation différentielle s’écrit :
d2qdt2+ωo
Qdqdt+ ω2
oq =EL
cos(ωt + ϕe)
20 juin 2018 Page -49- [email protected]
PCSI-LYDEX 4.2. ÉTUDE DU CIRCUIT RLC SÉRIE EN RÉGIME SINUSOIDAL FORCÉ
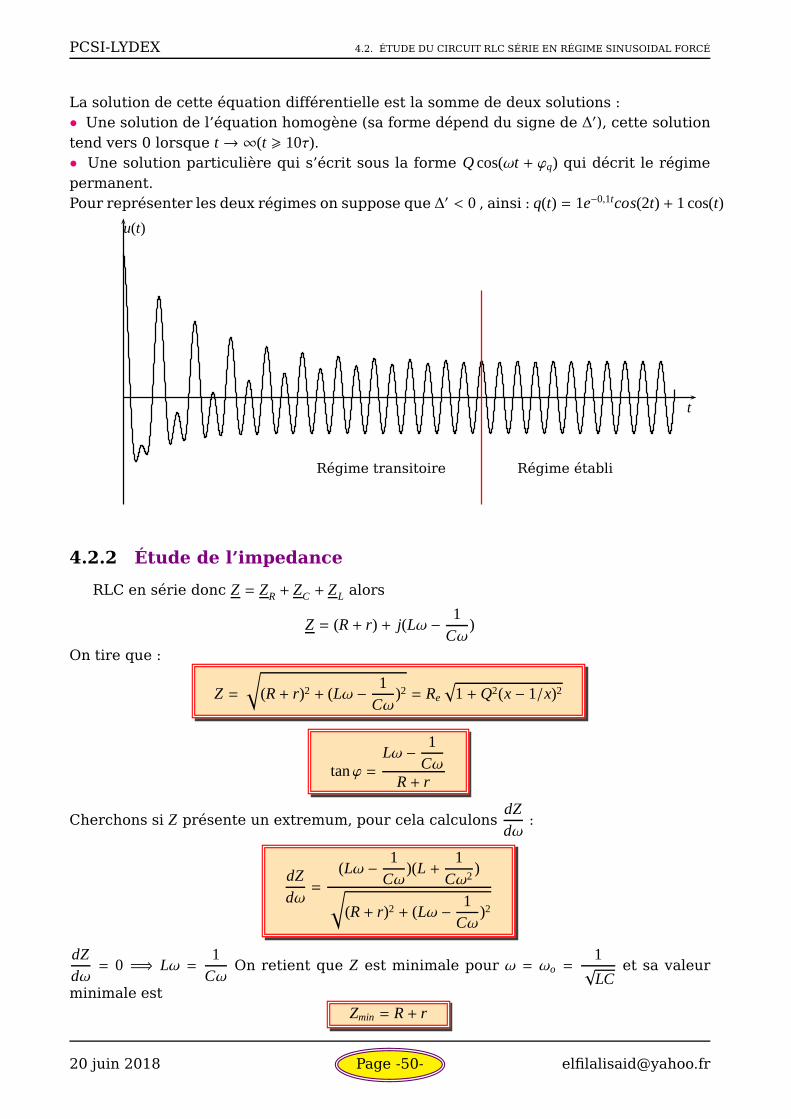
La solution de cette équation différentielle est la somme de deux solutions :• Une solution de l’équation homogène (sa forme dépend du signe de ∆′), cette solutiontend vers 0 lorsque t → ∞(t > 10τ).• Une solution particulière qui s’écrit sous la forme Q cos(ωt + ϕq) qui décrit le régimepermanent.Pour représenter les deux régimes on suppose que ∆′ < 0 , ainsi : q(t) = 1e−0,1tcos(2t) + 1 cos(t)
t
u(t)
Régime transitoire Régime établi
4.2.2 Étude de l’impedance
RLC en série donc Z = ZR + ZC + ZL alors
Z = (R + r) + j(Lω − 1Cω
)
On tire que :
Z =
√
(R + r)2 + (Lω − 1Cω
)2 = Re
√
1+ Q2(x − 1/x)2
tanϕ =Lω − 1
CωR + r
Cherchons si Z présente un extremum, pour cela calculonsdZdω
:
dZdω=
(Lω − 1Cω
)(L +1
Cω2)
√
(R + r)2 + (Lω − 1Cω
)2
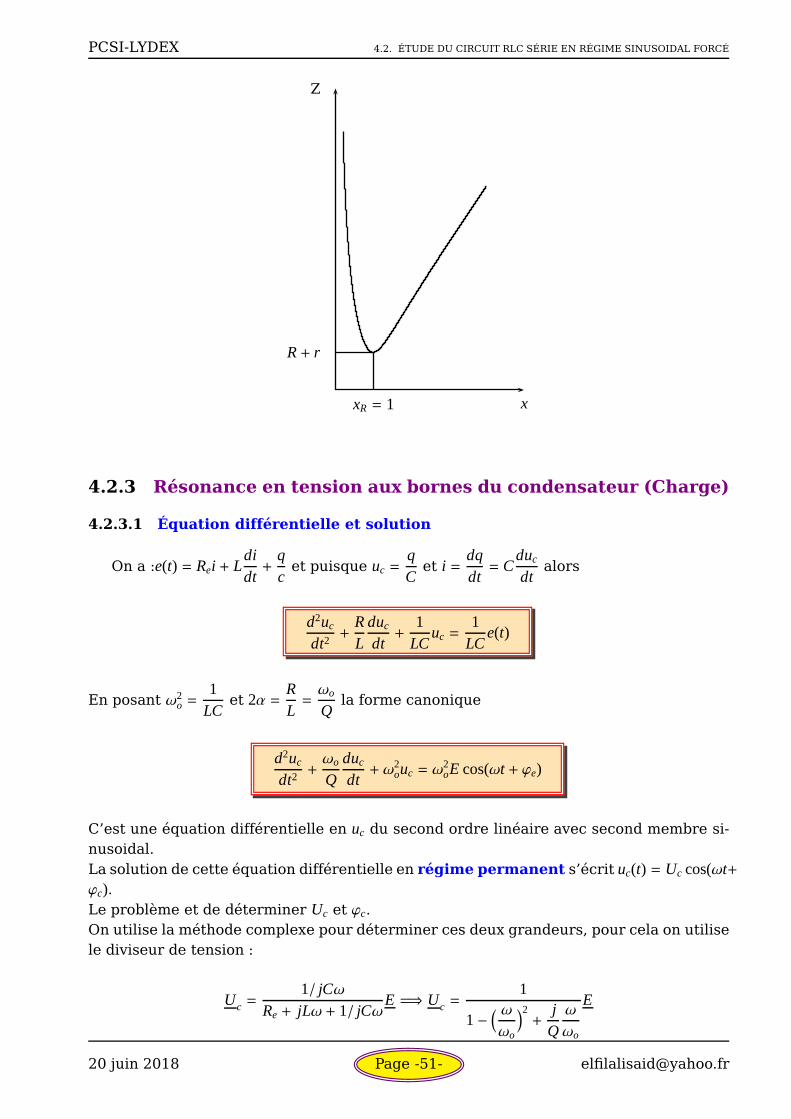
dZdω= 0 =⇒ Lω =
1Cω
On retient que Z est minimale pour ω = ωo =1√LC
et sa valeur
minimale estZmin = R + r
20 juin 2018 Page -50- [email protected]
PCSI-LYDEX 4.2. ÉTUDE DU CIRCUIT RLC SÉRIE EN RÉGIME SINUSOIDAL FORCÉ
xR = 1
R + r
x
Z
4.2.3 Résonance en tension aux bornes du condensateur (Charge)
4.2.3.1 Équation différentielle et solution
On a :e(t) = Rei + Ldidt+
qcet puisque uc =
qC
et i =dqdt= C
duc
dtalors
d2uc
dt2+
RL
duc
dt+
1LC
uc =1
LCe(t)
En posant ω2o =
1LC
et 2α =RL=ωo
Qla forme canonique
d2uc
dt2+ωo
Qduc
dt+ ω2
ouc = ω2oE cos(ωt + ϕe)
C’est une équation différentielle en uc du second ordre linéaire avec second membre si-nusoidal.La solution de cette équation différentielle en régime permanent s’écrit uc(t) = Uc cos(ωt+ϕc).Le problème et de déterminer Uc et ϕc.On utilise la méthode complexe pour déterminer ces deux grandeurs, pour cela on utilisele diviseur de tension :
Uc =1/ jCω
Re + jLω + 1/ jCωE =⇒ Uc =
1
1−( ω
ωo
)2+
jQω
ωo
E
20 juin 2018 Page -51- [email protected]
PCSI-LYDEX 4.2. ÉTUDE DU CIRCUIT RLC SÉRIE EN RÉGIME SINUSOIDAL FORCÉ
Posons pour la suite x =ω
ωo: pulsation réduite (sans dimension)
Uc =1
1− x2 +j
Qx
E
Donc
Uc =E
√
(1− x2)2 +x2
Q2
ϕc = ϕe − arg(1− x2+
jQ
x)
4.2.3.2 Étude de l’amplitude Uc
Cherchons si Uc présente un extremum; pour cela calculonsdUc
dx:
dUc
dx= −E
x(
2(x2 − 1)+1
Q2
)
(
(x2 − 1)2 +x2
Q2
)3/2
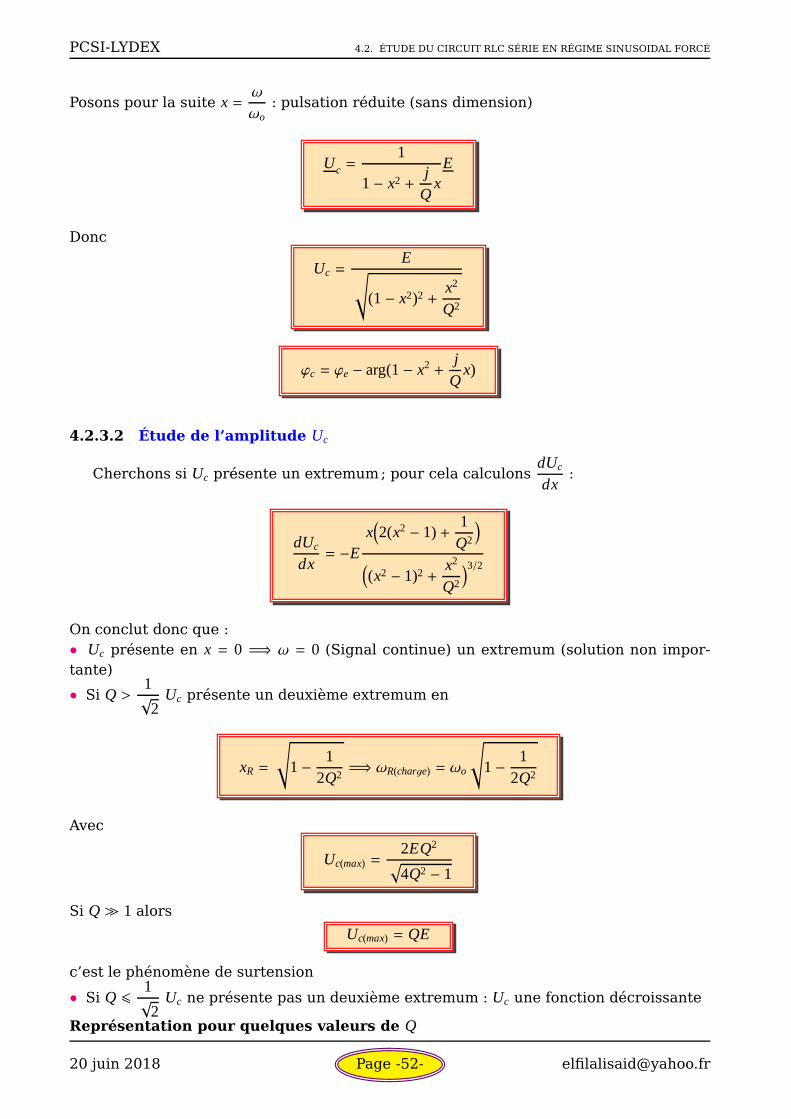
On conclut donc que :• Uc présente en x = 0 =⇒ ω = 0 (Signal continue) un extremum (solution non impor-tante)
• Si Q >1√2
Uc présente un deuxième extremum en
xR =
√
1− 12Q2=⇒ ωR(charge) = ωo
√
1− 12Q2
Avec
Uc(max) =2EQ2
√
4Q2 − 1
Si Q ≫ 1 alors
Uc(max) = QE
c’est le phénomène de surtension
• Si Q 61√2
Uc ne présente pas un deuxième extremum : Uc une fonction décroissante
Représentation pour quelques valeurs de Q
20 juin 2018 Page -52- [email protected]

PCSI-LYDEX 4.2. ÉTUDE DU CIRCUIT RLC SÉRIE EN RÉGIME SINUSOIDAL FORCÉ
Em
QEm
Uc
Pour Q > 5 =⇒ ωR = 0, 9899ωo ≃ ωo
Remarque
4.2.3.3 La bande passante à -3dB pour la charge
On suppose pour la suite que Q >
√2
2On définit la bande passante à -3dB par l’intervalle des pulsations [ω1, ω2](ou fréquences
[ f1, f2] ou [x1, x2]) tel que Uc >Uc(max)√
2
20 juin 2018 Page -53- [email protected]
PCSI-LYDEX 4.2. ÉTUDE DU CIRCUIT RLC SÉRIE EN RÉGIME SINUSOIDAL FORCÉ
Uc
Uc(max)
Uc(max)
=QE
E
ωo
ω
√2
ωc1 ωc2
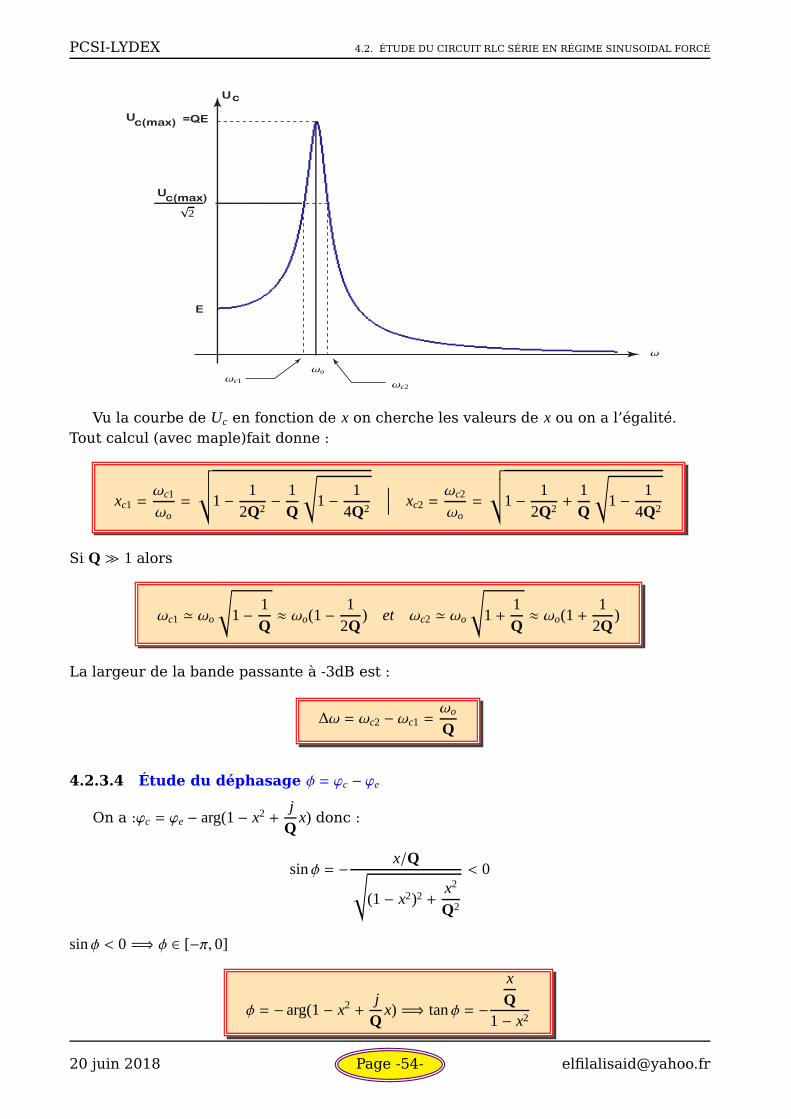
Vu la courbe de Uc en fonction de x on cherche les valeurs de x ou on a l’égalité.Tout calcul (avec maple)fait donne :
xc1 =ωc1
ωo=
√
√
√
1− 12Q2− 1
Q
√
1− 14Q2
∣
∣
∣
∣
xc2 =ωc2
ωo=
√
√
√
1− 12Q2+
1Q
√
1− 14Q2
Si Q ≫ 1 alors
ωc1 ≃ ωo
√
1− 1Q≈ ωo(1−
12Q
) et ωc2 ≃ ωo
√
1+1Q≈ ωo(1+
12Q
)
La largeur de la bande passante à -3dB est :
∆ω = ωc2 − ωc1 =ωo
Q
4.2.3.4 Étude du déphasage φ = ϕc − ϕe
On a :ϕc = ϕe − arg(1− x2+
jQ
x) donc :
sinφ = − x/Q√
(1− x2)2 +x2
Q2
< 0
sinφ < 0 =⇒ φ ∈ [−π, 0]
φ = − arg(1− x2+
jQ
x) =⇒ tanφ = −
xQ
1− x2
20 juin 2018 Page -54- [email protected]

PCSI-LYDEX 4.2. ÉTUDE DU CIRCUIT RLC SÉRIE EN RÉGIME SINUSOIDAL FORCÉ
⊲ x→ 0 =⇒ φ→ 0
⊲ x→ 1 =⇒ φ→ −π2
⊲ x→ +∞ =⇒ φ→ −π en effet :
φ ∈ [−π, π] =⇒ φ + π2∈ [−π
2,π
2]
tan(φ +π
2) = − 1
tanφ=
Q(1− x2)x
=⇒ φ = −π2+ arctan
Q(1− x2)x
Pour x→∞ =⇒ φ→ −π2− π
2= −π
x1
φ
−π2
−π
4.2.4 Résonance en intensité
En régime permanent le courant à pour expression i(t) = Im cos(ωt + ϕi) =⇒ i(t) = Ime jωt
avec Im = Ime jϕi
En appliquant la loi d’OHM en notation complexe, on obtient
Im =E
Re + jLω +1
jCω
=⇒ Im =E/Re
1+ jQ(x − 1x)
4.2.4.1 Étude de l’amplitude Im
On a
Im =E|Z| =
E/Re√
1+ Q2(
x − 1x
)2
⊲ x = 0 =⇒ Im = 0⊲ x→ ∞ =⇒ Im → 0
⊲ Im est maximal si Z est minimal c’est à dire pour ω = ωo =1
LC: C’est la pulsation
de résonance du courant
⊲ Im(ωo) =ERe= Imax
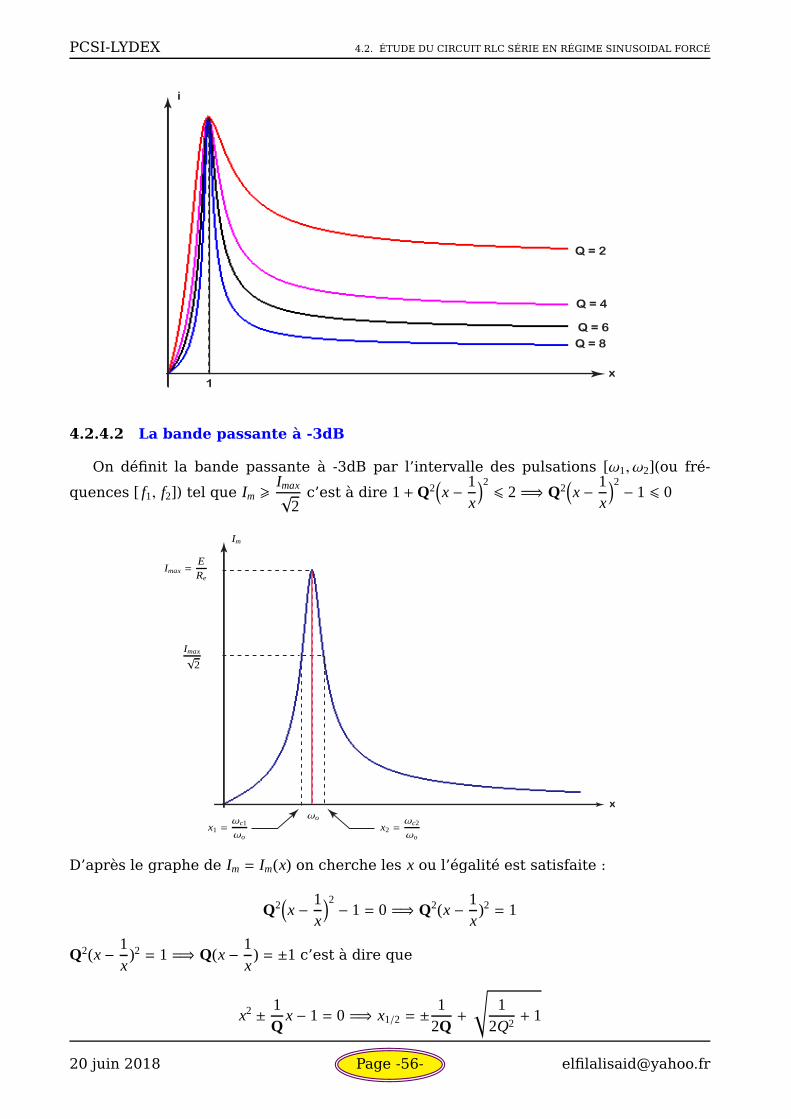
Representation graphique de Im en fonction du facteur de qualité Q
20 juin 2018 Page -55- [email protected]
PCSI-LYDEX 4.2. ÉTUDE DU CIRCUIT RLC SÉRIE EN RÉGIME SINUSOIDAL FORCÉ
i
Q = 4
Q = 2
x1
Q = 8Q = 6
4.2.4.2 La bande passante à -3dB
On définit la bande passante à -3dB par l’intervalle des pulsations [ω1, ω2](ou fré-
quences [ f1, f2]) tel que Im >Imax√
2c’est à dire 1+Q2
(
x − 1x
)26 2 =⇒ Q2
(
x − 1x
)2− 1 6 0
x
Im
Imax =ERe
Imax√2
ωo
x2 =ωc2
ωox1 =
ωc1
ωo
D’après le graphe de Im = Im(x) on cherche les x ou l’égalité est satisfaite :
Q2(
x − 1x
)2− 1 = 0 =⇒ Q2(x − 1
x)2= 1
Q2(x − 1x)2= 1 =⇒ Q(x − 1
x) = ±1 c’est à dire que
x2 ± 1Q
x − 1 = 0 =⇒ x1/2 = ±1
2Q+
√
12Q2+ 1
20 juin 2018 Page -56- [email protected]

PCSI-LYDEX 4.2. ÉTUDE DU CIRCUIT RLC SÉRIE EN RÉGIME SINUSOIDAL FORCÉ
x1 =ω1
ωo= − 1
2Q+
√
12Q2+ 1 ; x2 =
ω2
ωo=
12Q+
√
12Q2+ 1
La largeur de la bande passante à -3dB est :
∆ω = ω2 − ω1 =ωo
Q=
Re
L
La résonance est aiguë si la bande passante est étroite (Re faible)
On retrouve la définition du facteur de qualité
Q =ωo
∆ω=
1R
√
LC=
Lωo
R=
1RCωo
Remarque
4.2.4.3 Étude du déphasage ϕ = ϕi − ϕe
On a ϕi = ϕe − arg(1+ jQ(x − 1x) en posantϕ = ϕi − ϕe alors
ϕ = − arg(1+ jQ(x − 1x) =⇒ cosϕ =
1√
1+Q2(x − 1x)2
> 0 =⇒ ϕ ∈ [−π2,π
2]
⊲ Si x→ 0 alors ϕ→ π2
⊲ Si x→ ∞ alors ϕ→ −π2
⊲ Si x→ 1(à la résonance en courant) alors ϕ→ 0
⊲ Si x→ x1 = −1
2Q+
√
12Q2+ 1 alors ϕ→ +π
4
⊲ Si x→ x2 =1
2Q+
√
12Q2+ 1 alors ϕ→ −π
4
Representation graphique de ϕ en fonction x
20 juin 2018 Page -57- [email protected]

PCSI-LYDEX 4.3. LA PUISSANCE :
x
ϕ
4.3 La puissance :
4.3.1 Facteur de puissance :
⋆ La puissance instantanée :
p(t) =δWδt= u(t).i(t)
⋆ La puissance moyenne :
Pm =< p(t) >=1T
∫ T
0p(t)dt
sachant que• u(t) = Um cos(ωt + ϕu)• i(t) = Im cos(ωt + ϕi)
• cosa cosb =12
[cos(a + b) + cos(a − b)]
Et en posant ϕ = ϕu − ϕi le déphasage de le tension par rapport au courant alors :Pm = UmIm cos(ωt + ϕu) cos(ωt + ϕi)
Pm =< p(t) >=UmIm
2cosϕ = UeIe cosϕ
⊲ cosϕ : facteur de puissance.
⊲ Pm =UmIm
2cosϕ :puissance active ou puissance utile
⊲ Q =UmIm
2sinϕ :puissance réactive
⊲ S =UmIm
2:puissance apparente
S 2= P2
m +Q2
20 juin 2018 Page -58- [email protected]
PCSI-LYDEX 4.3. LA PUISSANCE :
ui∗ = UI∗ = UmIme j(ϕ+ϕi)e− jϕi = UmIm cosϕ + jUmIm sinϕ
Pm =12ℜ(ui∗) =
12ℜ(UmI∗m) = ℜ(UeI∗e)
Remarque
Et puisque Um = ZIm alors
Pm =I2
2ℜ(Z) = I2
eℜ(Z)
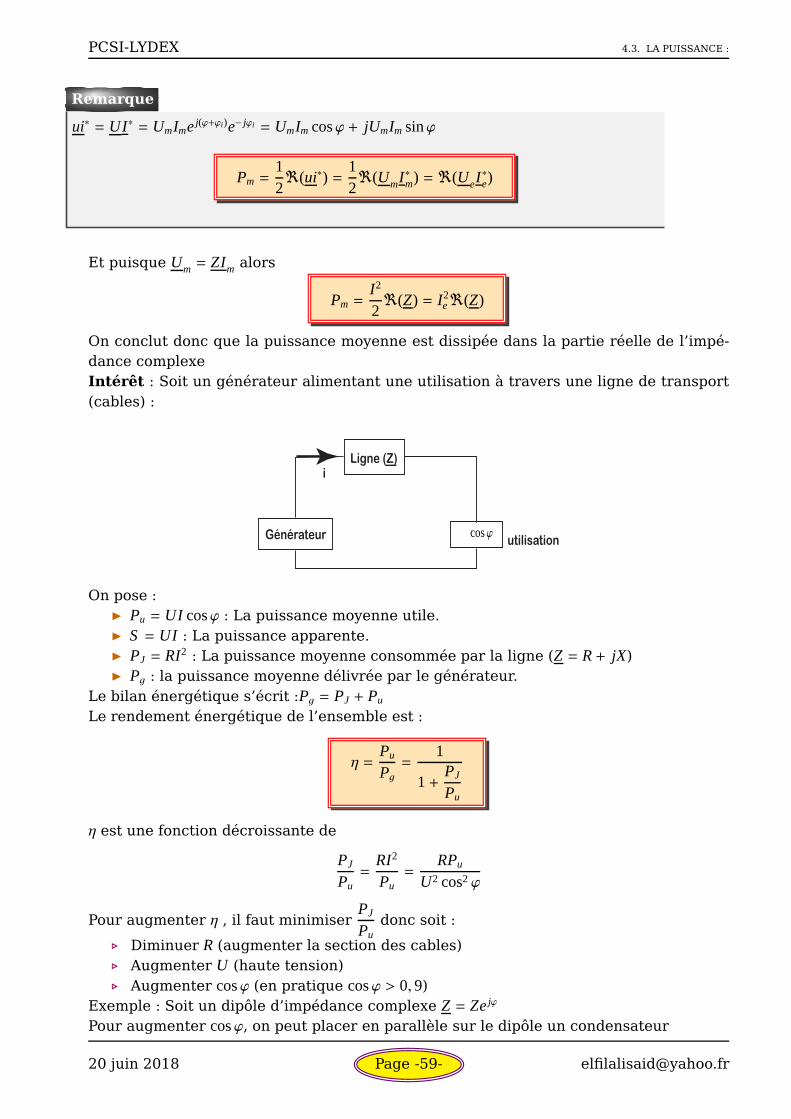
On conclut donc que la puissance moyenne est dissipée dans la partie réelle de l’impé-dance complexeIntérêt : Soit un générateur alimentant une utilisation à travers une ligne de transport(cables) :
Ligne (Z)
Générateur utilisation
i
cosϕ
On pose : Pu = UI cosϕ : La puissance moyenne utile. S = UI : La puissance apparente. PJ = RI2 : La puissance moyenne consommée par la ligne (Z = R + jX) Pg : la puissance moyenne délivrée par le générateur.
Le bilan énergétique s’écrit :Pg = PJ + Pu
Le rendement énergétique de l’ensemble est :
η =Pu
Pg=
1
1+PJ
Pu
η est une fonction décroissante de
PJ
Pu=
RI2
Pu=
RPu
U2 cos2 ϕ
Pour augmenter η , il faut minimiserPJ
Pudonc soit :
⊲ Diminuer R (augmenter la section des cables)⊲ Augmenter U (haute tension)⊲ Augmenter cosϕ (en pratique cosϕ > 0, 9)
Exemple : Soit un dipôle d’impédance complexe Z = Ze jϕ
Pour augmenter cosϕ, on peut placer en parallèle sur le dipôle un condensateur
20 juin 2018 Page -59- [email protected]

PCSI-LYDEX 4.3. LA PUISSANCE :
D C
L’admittance équivalente est
Ye = jCω +1Z
On veut que cosϕtotal = 1 =⇒ Ye ∈ R c’est à dire
Cω − 1Z
sinϕ = 0 =⇒ C =1
Zωsinϕ
4.3.2 Adaptation d’impedance :
Voir Exercice No1 de la série II électrocinétique
1. Pm =XE2
2[(X + XG)2 + (Y + YG)2]2. Pm est maximale si sa dérivée est nulle :
• ∂Pm
∂Y= 0 =⇒ X = XG
• ∂Pm
∂X= 0 =⇒ Y = −YG
Donc Z = Z∗
3. Z est imaginaire pur =⇒ X = 0 d’où la puissance moyenne est nulle
4. la fréquence f = 150 MHz• Z = R//C avec R = 150 Ω et C = 100 pF
Z = Z∗G =⇒ Y = Y∗G et comme Y =1R+ jCω =⇒ YG =
1R− jCω
donc YG =1R+
1jLω
avec Lω =1
Cω2=⇒ L =
1Cω2
AN L =1
4π f 2C= 11, 26 nH
On conclut donc queZG = R//L
• Z = R//L =⇒ ZG = R//C tel que C =1
Lω2=
14π2L f 2
AN C = 37, 5 pF
20 juin 2018 Page -60- [email protected]
CHAPITRE 5
DIAGRAMMES DE BODE DES FILTRES DU PREMIER ET
SECOND ORDRE
On admet le Théorème de FOURIER : toute fonction périodique peut être décompo-sable en une série de fonctions sinusoïdales.C’est pour cela qu’on s’interesse aux signaux sinusoïdaux appliqués aux systèmes li-néaires.
5.1 Fonction de transfert
5.1.1 Définitions
Soit D un quadripole constitué par un système linéaire possédant une entrée ve et unesortie vs :
DVe Vs
Puisque on s’interesse aux signaux sinusoidaux , alors on pose :⊲ ve(t) = Ve cos(ωt + ϕe) =⇒ ve(t) = Vee
jωt avec Ve = Vee jϕe
⊲ vs(t) = Vs cos(ωt + ϕs) =⇒ vs(t) = V sejωt avec V s = Vee jϕs
On appelle fonction de transfert :
H( jω) =V s
Ve
=Vs
Vee j(ϕs−ϕe) = He jϕ
avec H =Vs
Vele module de la fonction de transfert et ϕ = ϕs−ϕe son argument(le déphasage
de la sortie par rapport à l’entrée).
5.1.2 Exemples
Déterminer la fonction de transfert pour les circuits suivants :
circuit CR :H =jRCω
1+ jRCω
61

PCSI-LYDEX 5.1. FONCTION DE TRANSFERT
circuit RC :H =1
1+ jRCω
circuit RLC :H =1
1− LCω2 + jRCω
circuit RCL :H =−LCω2
1− LCω2 + jRCω
circuit LCR :H =jRCω
1− LCω2 + jRCω
5.1.3 Lien entre la fonction de transfert et l’équation différen-
tielle
Rappelons que en notation complexe multiplier par ( jω)n c’est dérivé n fois par rap-port au temps et diviser par ( jω)n c’est intégrer n fois par rapport au temps.Prenons l’exemple du circuit RC :
H( jω) =V s
Ve
=⇒ Ve = V s + jω
ωcV s en passant à la notation réelle on a
ve(t) = vs(t) +1ωc
dvs(t)dt
C’est l’équation différentielle du circuit
5.1.4 Diagrammes de BODE
En électronique , on couvre en général une large plage de fréquences (10→ 100 kHzcadre de l’ARQP) ,la representation linéaire est peu pratique et peu utilisé.• Diagramme de Bode : c’est une representation en échelle logarithmique en abscisse.• On définit le gain G en décibels par :
GdB = 20 logH
On rappelle que H est sans dimension.Le diagramme de Bode est le tracé des deux courbes : GdB = f (log(ω)) :diagramme de Bode pour H en décibels ; ϕ = g(log(ω)) :diagramme de Bode pour la phase.
20 juin 2018 Page -62- [email protected]
PCSI-LYDEX 5.2. FILTRAGE
1. On trace en général un diagramme de Bode sur un papier «semi-logarithmique» (avec une échelle logarithmique )
2. On a limω→0
logω→ −∞ : un diagramme de Bode ne «s’arrête pas » à logω = 0
3. Si H = H1 × H2 =⇒
GdB = G1dB +G2dB
ϕ = ϕ1 + ϕ2
On peut sommer les diagrammes de Bode
4.
GdB = 0⇐⇒ H = 1GdB < 0⇐⇒ H < 1GdB > 0⇐⇒ H > 1
5.
H = 10⇐⇒ GdB = 20H = 102⇐⇒ GdB = 40...
H = 10−1⇐⇒ GdB = −20H = 10−2⇐⇒ GdB = −40...
Remarque
On appelle le décade l’intervalle des pulsations [ω1, ω2] tel que ω2 = 10ω1
5.2 Filtrage
5.2.1 Introduction
Un filtre est un système linéaire qui transmet (le plus parfaitement possible ) cer-taines fréquences et atténue (le plus possible ) les autres.Il est caractérisé par sa bande passante [ωc1, ωc2] ou ∆ω = ωc2 − ωc1 avec ωc1 et ωc2 lespulsations de coupure.On définit la bande passante à -3dB par
H(ωc) =Hmax√
2=⇒ G(ωc) = Gmax − 3dB
20 juin 2018 Page -63- [email protected]
PCSI-LYDEX 5.3. FILTRES DU PREMIER ORDRE
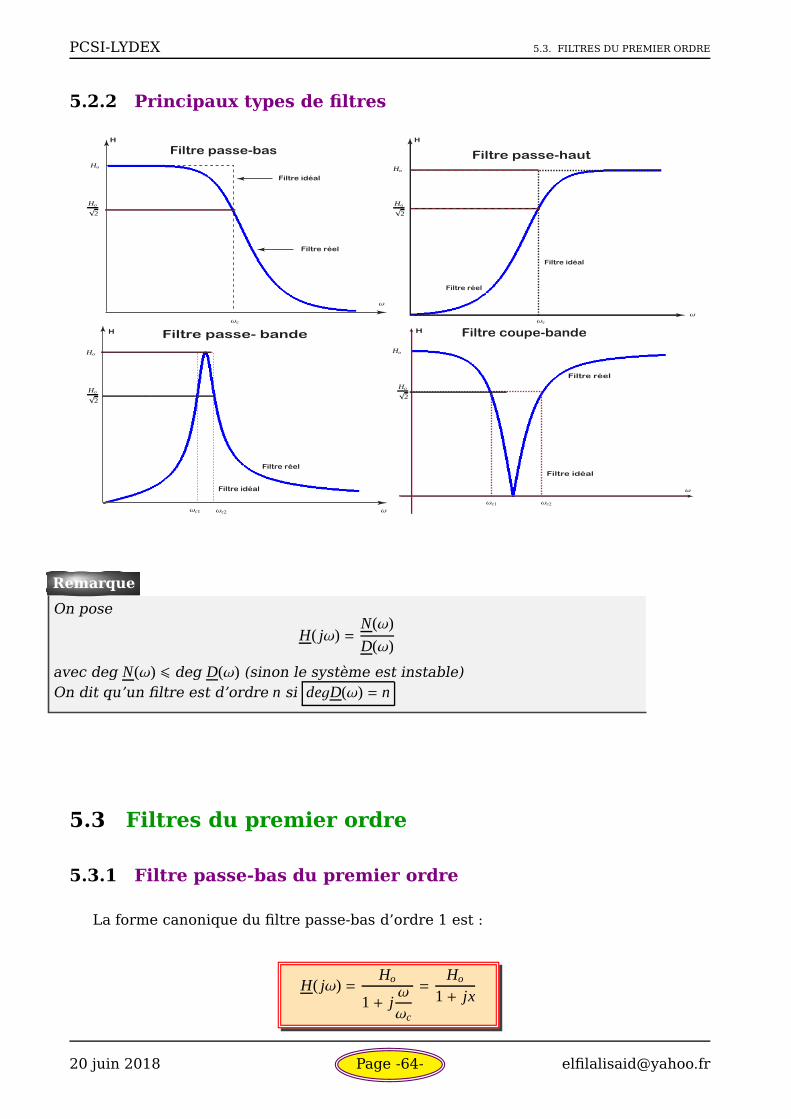
5.2.2 Principaux types de filtres
H
Filtre réel
Filtre idéal
Filtre passe-bas
Ho√2
ωc
ω
Ho
H
Filtre passe-haut
Filtre réel
Filtre idéal
Ho√2
ωc
ω
Ho
H Filtre passe- bande
Filtre réel
Filtre idéal
Ho√2
ω
Ho
ωc1 ωc2
H Filtre coupe-bande
Filtre idéal
Filtre réelHo√
2
ω
Ho
ωc1 ωc2
On pose
H( jω) =N(ω)
D(ω)
avec deg N(ω) 6 deg D(ω) (sinon le système est instable)On dit qu’un filtre est d’ordre n si degD(ω) = n
Remarque
5.3 Filtres du premier ordre
5.3.1 Filtre passe-bas du premier ordre
La forme canonique du filtre passe-bas d’ordre 1 est :
H( jω) =Ho
1+ jω
ωc
=Ho
1+ jx
20 juin 2018 Page -64- [email protected]

PCSI-LYDEX 5.3. FILTRES DU PREMIER ORDRE
5.3.1.1 L’étude d’un exemple :
considérons le circuit (RC) suivant :
i
R
C
VsVe
En BF :ω(x) → 0 =⇒ 1jCω
→ ∞ (le condensateur se comporte comme un interrup-
teur ouvert) ,donc le courant est nul et par conséquent vs(t) = ve(t)
En HF :ω(x) → ∞ =⇒ 1jCω
→ 0 (le condensateur se comporte comme un fil) ,donc
la tension entre ses bornes est nulle et par conséquent vs(t) = 0On conclut que ce filtre laisse passer les tensions sinusoïdales de faibles fréquences etélimine les tensions de hautes fréquences : C’est un filtre passe-bas
La fonction de transfert s’écrit :H( jω) =
1jCω
R +1
jCω
=1
1+ jRCω
Donc :
ωc =1
RC|| Ho = 1
⋆ Si ω≫ ωc(x→ ∞) =⇒ H( jω)→ 0 (Vs → 0)⋆ Si ω≪ ωc(x→ 0) =⇒ H( jω)→ Ho
⋆ Le circuit est constitué des composants passifs alors le filtre est passif.⋆ Puisque le degré du dénominateur est égal à 1 alors le filtre est passe-bas passif
d’ordre 1.
5.3.1.2 Diagramme de Bode pour le gain :
On a
H =|Ho|
√
1+ (ω
ωc)2
=|Ho|√1+ x2
Comportement asymptotique :
⊲ limω→∞G(ω) = limω≫ωc[20 log10
|Ho|√
1+ (ω
ωc)2
] = 20 log|Ho| − 20 logω
ωc
limω→∞
G(ω) = Go − 20 logω
ωc
⊲ limω→0 G(ω) ≃ 20 log|Ho| = Go
• La courbe représentant le gain GdB en fonction de logω
ωcest une droite de pente
-20dB/décade et qui coupe la droite horizontale G = Go pour ω = ωc
20 juin 2018 Page -65- [email protected]

PCSI-LYDEX 5.3. FILTRES DU PREMIER ORDRE
Courbe réelleIntégrateur20 dB/décade
Go-3dBGo
décade
G(dB)
logω
ωc
Pour ω ≪ ωo =⇒ x → 0 on a H = Ho ∈ R =⇒ vs(t) = Hove(t) : le circuit réalisel’opération «multiplication par une constante»
Pour ω≫ ωc =⇒ H( jω) =Hoωc
jω=⇒ vs = Hoωc
∫
vedt : c’est un intégrateur
Le filtre passe bas d’ordre 1 joue le rôle d’intégrateur en hautes fré-quences (pulsations(ω ≫ ωc))
Remarque
5.3.1.3 Diagramme de Bode pour la phase :
• H( jω) =Ho
1+ jω
ωc
=⇒ ϕ(ω) = arg(Ho
1+ jω
ωc
)
ϕ = argHo − arg(1+ jω
ωc)
Dans notre exemple Ho = 1 =⇒ sinϕ = − x√1+ x2
< 0 et cosϕ =1√
1+ x2> 0 donc
ϕ ∈[
− π2, 0]
d’où ϕ(ω) = − arctanω
ωc< 0
ϕ(ω) logωc
logω
20 juin 2018 Page -66- [email protected]

PCSI-LYDEX 5.3. FILTRES DU PREMIER ORDRE
5.3.2 Filtre passe-haut du premier ordre
La forme canonique du filtre passe haut d’ordre 1 est :
H( jω) = Ho
jω
ωc
1+ jω
ωc
= Hojx
1+ jx
5.3.2.1 L’étude d’un exemple :
considérons le circuit (CR) suivant :En BF :Zc → +∞ =⇒ vs(t)→ 0En HF :Zc → +0 =⇒ vs(t)→ ve(t)Donc le filtre CR est un filtre passif passe-haut
VeC
R
L’expression de la fonction de transfert :
H( jω) =jRCω
1+ jRCω
Donc :Ho = 1 et ωc =1
RC• L’ordre du filtre est égal à 1.• Si ω ≫ ωc =⇒ H( jω)→ Ho
• Si ω ≪ ωc =⇒ H( jω)→ 0• deg(D( jω)) = 1On conclut que c’est un filtre passif passe-haut d’ordre 1
5.3.2.2 Diagramme de Bode pour le gain :
GdB(ω) = 20 log10 |H( jω)| = 20 log10
|Ho|ω
ωc√
1+ (ω
ωc)2
Comportement asymptotique :⊲ limω→∞G(ω) ≃ Go ;
⊲ limω→0 G(ω) ≃ 20 logω
ωc
• La courbe représentant le gain GdB en fonction de logω
ωcest une droite de
pente 20dB/décade et qui coupe la droite horizontale G = Go pour ω = ωc
Remarque
20 juin 2018 Page -67- [email protected]

PCSI-LYDEX 5.3. FILTRES DU PREMIER ORDRE
dérivateur
G(dB)
logω
ωc
G(ωc) = Go − 20 log1√2= Go − 3dB
Pour ω≪ ωc =⇒ H( jω) = jω
ωc=⇒ vs =
1ωc
ve
dt: c’est un dérivateur
Le filtre passe haut d’ordre 1 joue le rôle d’un dérivateur en faibles fré-quences f ≪ fc
Remarque
5.3.2.3 Diagramme de Bode pour la phase :
On a H = Hojx
1+ jx=⇒ ϕ = arg(Ho) +
π
2− arg(1+ jx)
Dans notre exemple Ho = 1 =⇒ arg(Ho) = 1 et par conséquent ϕP.haut =π
2+ ϕP.bas
marConclusion :Le déphasage d’un filtre passe haut du premier ordre se déduit de celui du filtre passe
bas d’ordre 1 par une une translation deπ
2
ϕ(ω)
logω
ωc
20 juin 2018 Page -68- [email protected]

PCSI-LYDEX 5.4. FILTRES DU DEUXIÈME ORDRE
5.4 Filtres du deuxième ordre
L’ordre du filtre est égal à 2 donc le dénominateur D(ω) = D(x) est polynôme d’ordre2.
5.4.1 Filtre passe-bas
La fonction de transfert d’un filtre passe bas d’ordre 2 est :
H =Ho
1− x2 + jxQ
avec ω = xωo
5.4.1.1 L’étude d’un exemple
En HF :x→ ∞ =⇒ Zc → 0 donc Vs → 0 En BF :x→ 0 =⇒ Zc → ∞ donc Vs → Ve
Donc : c’est un filtre passif passe bas
Ri L
Cve vs
L’expression de la fonction de transfert s’écrit :
H =1
1− LCω2 + jRCω
On tire que :
La pulsation propre ωo =1√LC
Ho = 1
Le facteur de qualité Q =1R
√
LC
À partir de l’expression de la fonction de transfert on en déduit que :⊲ En BF x→ 0 =⇒ H → Ho c’est à dire que vs(t) = Hove(t)⊲ En HF x→ ∞ =⇒ H → 0 c’est à dire que vs(t)→ 0
⊲ deg(H) = 2On conclut que le filtre est passif, passe-bas d’ordre 2
5.4.1.2 Diagramme de Bode pour le gain
On a :
H =Ho
1− x2 + jxQ
=⇒ H = |H| = |Ho|√
(1− x2)2 +x2
Q2
Le comportement asymptotique En BF :x→ 0 =⇒ GdB = Go = 20 log|Ho| En HF :x→∞ =⇒ GdB ≃ 20 log(|Ho|ω2
o)−40 logω :C’est une droite de pente -40dB/décade,caractéristique du filtre du deuxième ordre.
20 juin 2018 Page -69- [email protected]
PCSI-LYDEX 5.4. FILTRES DU DEUXIÈME ORDRE
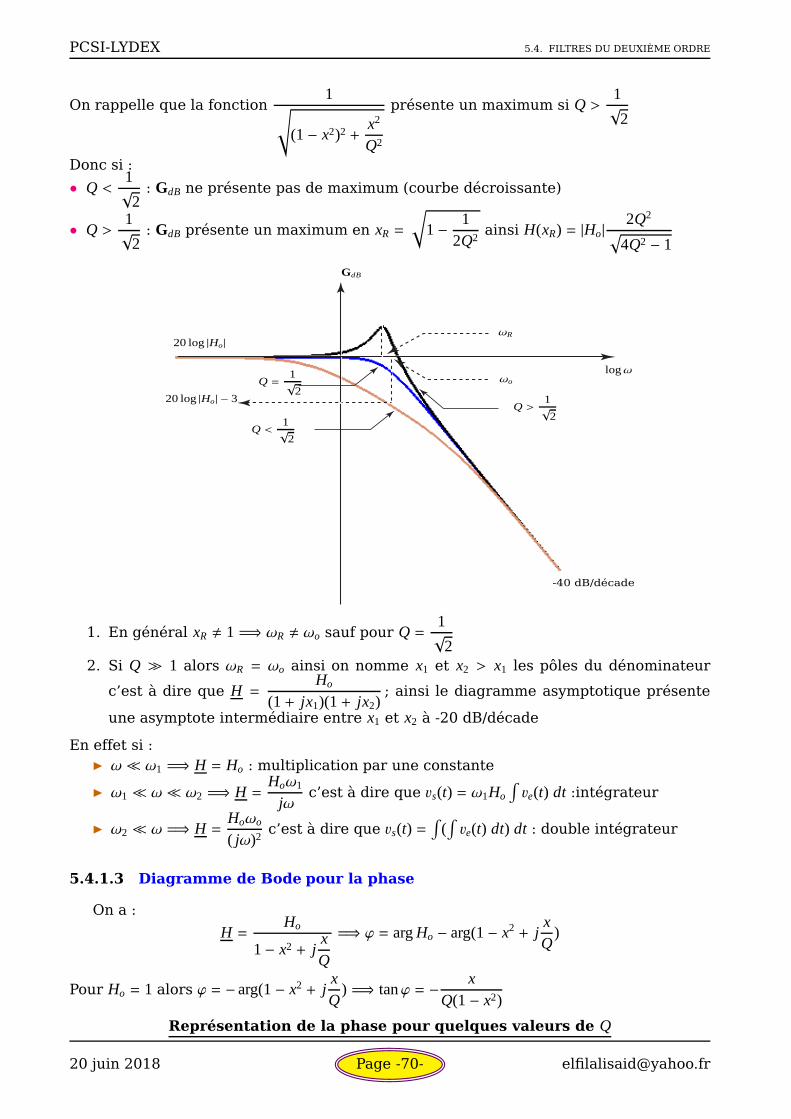
On rappelle que la fonction1
√
(1− x2)2 +x2
Q2
présente un maximum si Q >1√2
Donc si :
• Q <1√2: GdB ne présente pas de maximum (courbe décroissante)
• Q >1√2: GdB présente un maximum en xR =
√
1− 12Q2
ainsi H(xR) = |Ho|2Q2
√
4Q2 − 1
GdB
logω
20 log|Ho|ωR
ωo
Q <1√2
Q >1√2
-40 dB/décade
20 log|Ho| − 3
Q =1√2
1. En général xR , 1 =⇒ ωR , ωo sauf pour Q =1√2
2. Si Q ≫ 1 alors ωR = ωo ainsi on nomme x1 et x2 > x1 les pôles du dénominateur
c’est à dire que H =Ho
(1+ jx1)(1+ jx2); ainsi le diagramme asymptotique présente
une asymptote intermédiaire entre x1 et x2 à -20 dB/décade
En effet si : ω ≪ ω1 =⇒ H = Ho : multiplication par une constante
ω1 ≪ ω ≪ ω2 =⇒ H =Hoω1
jωc’est à dire que vs(t) = ω1Ho
∫
ve(t) dt :intégrateur
ω2 ≪ ω =⇒ H =Hoωo
( jω)2c’est à dire que vs(t) =
∫
(∫
ve(t) dt) dt : double intégrateur
5.4.1.3 Diagramme de Bode pour la phase
On a :
H =Ho
1− x2 + jxQ
=⇒ ϕ = argHo − arg(1− x2+ j
xQ
)
Pour Ho = 1 alors ϕ = − arg(1− x2+ j
xQ
) =⇒ tanϕ = − xQ(1− x2)
Représentation de la phase pour quelques valeurs de Q
20 juin 2018 Page -70- [email protected]

PCSI-LYDEX 5.4. FILTRES DU DEUXIÈME ORDRE
log x
ϕ
−π
−π/2
Q =1√2
Q >1√2
Q <1√2
5.4.2 Filtre passe-haut
La fonction de transfert d’un filtre passe haut d’ordre 2 est de la forme
H = −Hox2
1− x2 + jxQ
• En BF x→ 0 =⇒ H → 0 donc vs(t)→ 0• En HF x→∞ =⇒ H → Ho donc vs(t)→ Hove(t)• deg D=2on conclut que le filtre est passe-haut d’ordre 2
5.4.2.1 L’étude d’un exemple
Ri
Ce sVV L
En utilisant le diviseur de tension en notation complexe on obtient :
H = − LCω2
1− LCω2 + jRCω= − x2
1− x2 + jxQ
Avec Ho = 1 , Q =1R
√
LC
et ωo =1√LC
20 juin 2018 Page -71- [email protected]
PCSI-LYDEX 5.4. FILTRES DU DEUXIÈME ORDRE
5.4.2.2 Diagramme de Bode pour le gain
H = |Ho|x2
√
(1− x2)2 + x2/Q2
Comportement asymptotique : En HF : H = |Ho| =⇒ GdB = Go = 20 log|Ho| En BF H =
|Ho|x2=⇒ GdB = Go + 40 logx : c’est une droite de pente +40 dB/décade
Cherchons si H ainsi GdB présente un extremum (maximum), pour cela calculons :
dHdx=
xQ(2Q2 − x2(2Q2 − 1))(Q2 − 2Q2 x2 + Q2 x4 + x2)(3/2)
dHdx= 0 =⇒
Si Q <1√2
H ne présente pas de maximum (de même pour GdB)
Si Q >1√2
H présente un maximum (de même pour en GdB) xR tel que
xR =ωR
ω=
2Q√
4Q2 − 2> 1
ainsi H(xR) =2Q2
√
4Q2 − 1Si Q ≫ 1 =⇒ xR = 1 donc ωo = ωR et H(xR) = Q|Ho|
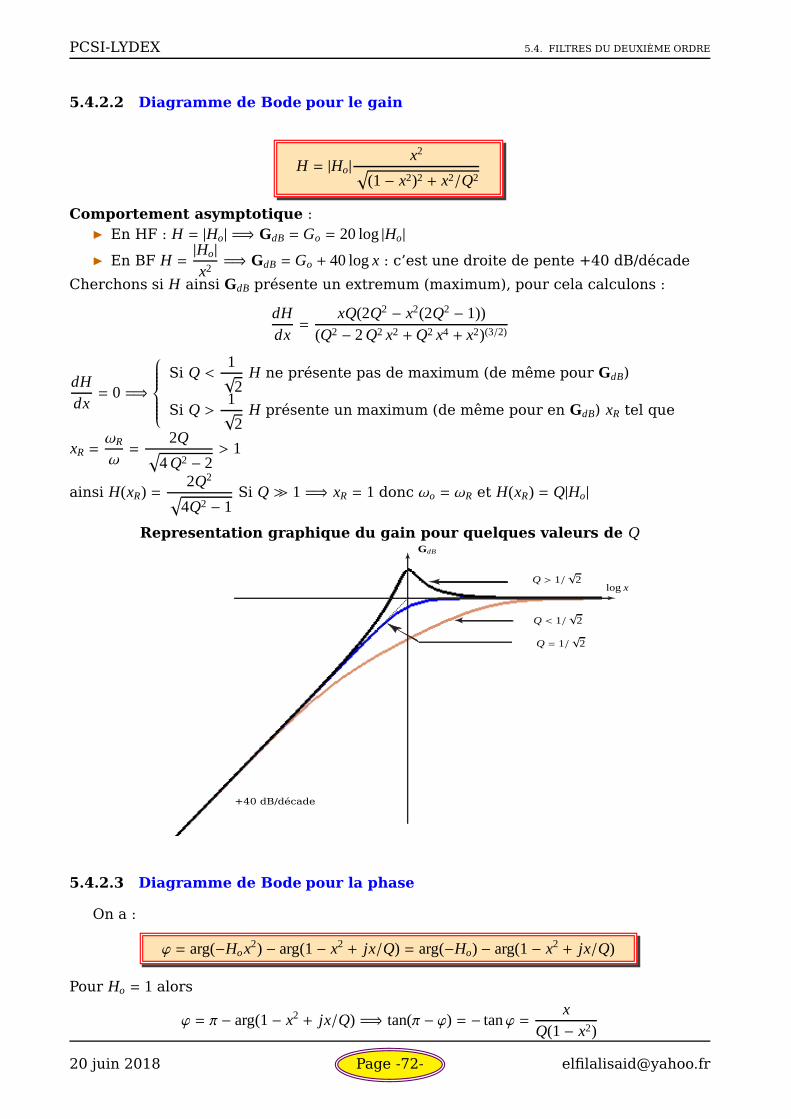
Representation graphique du gain pour quelques valeurs de QGdB
log x
Q = 1/√
2
Q > 1/√
2
Q < 1/√
2
+40 dB/décade
5.4.2.3 Diagramme de Bode pour la phase
On a :
ϕ = arg(−Hox2) − arg(1− x2+ jx/Q) = arg(−Ho) − arg(1− x2
+ jx/Q)
Pour Ho = 1 alors
ϕ = π − arg(1− x2+ jx/Q) =⇒ tan(π − ϕ) = − tanϕ =
xQ(1− x2)
20 juin 2018 Page -72- [email protected]
PCSI-LYDEX 5.4. FILTRES DU DEUXIÈME ORDRE
Donc
tanϕ =x
Q(x2 − 1)
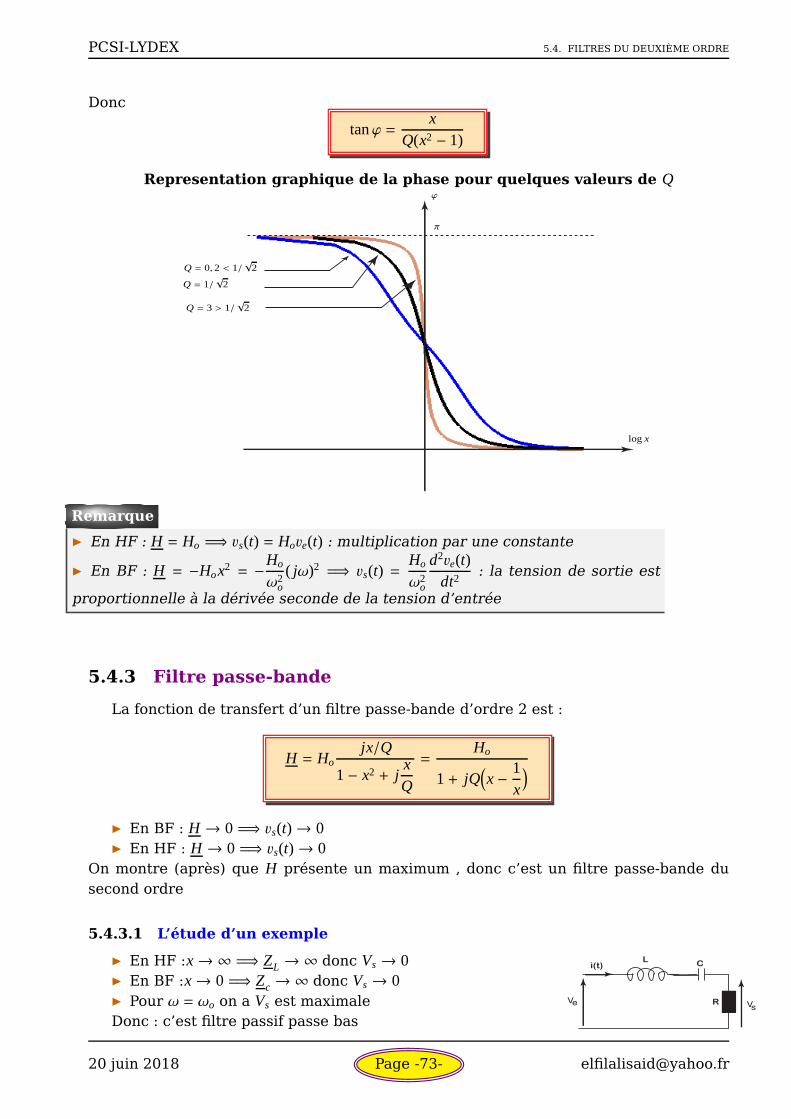
Representation graphique de la phase pour quelques valeurs de Qϕ
log x
π
Q = 0, 2 < 1/√
2
Q = 1/√
2
Q = 3 > 1/√
2
En HF : H = Ho =⇒ vs(t) = Hove(t) : multiplication par une constante
En BF : H = −Hox2= −Ho
ω2o
( jω)2=⇒ vs(t) =
Ho
ω2o
d2ve(t)dt2
: la tension de sortie est
proportionnelle à la dérivée seconde de la tension d’entrée
Remarque
5.4.3 Filtre passe-bande
La fonction de transfert d’un filtre passe-bande d’ordre 2 est :
H = Hojx/Q
1− x2 + jxQ
=Ho
1+ jQ(
x − 1x
)
En BF : H → 0 =⇒ vs(t)→ 0 En HF : H → 0 =⇒ vs(t)→ 0
On montre (après) que H présente un maximum , donc c’est un filtre passe-bande dusecond ordre
5.4.3.1 L’étude d’un exemple
En HF :x→ ∞ =⇒ ZL → ∞ donc Vs → 0 En BF :x→ 0 =⇒ Zc → ∞ donc Vs → 0 Pour ω = ωo on a Vs est maximaleDonc : c’est filtre passif passe bas
L C
R
i(t)
V Ves
20 juin 2018 Page -73- [email protected]

PCSI-LYDEX 5.4. FILTRES DU DEUXIÈME ORDRE
L’expression de la fonction de transfert s’écrit :
H =jRCω
1− LCω2 + jRCω
On tire que :
La pulsation propre ωo =1√LC
Ho = 1
Le facteur de qualité Q =1R
√
LC
5.4.3.2 Diagramme de Bode pour le gain
On a
H =|Ho|
√
1+ Q2(
x − 1x
)2
Comportement asymptotique :
En BF : H =|Ho|Q
x =⇒ GBF = Go − 20 log(Qωo) + 20 logω : C’est une droite de pente
+20 dB/décade
En HF : H =|Ho|Qx=⇒ GHF = Go + 20 log
ωo
Q− 20 logω : C’est une droite de pente -20
dB/décade Pour ω = ωo =⇒ H = |Ho| = Hmax donc GdB(ωo) = 20 log|Ho| = Go
L’intersection des deux pentes : GHF = GBF =⇒ ω = ωo
Pour ω = ωo on a :GHF(ωo) = GBF(ωo) = 20 log|Ho|Q
Représentation du diagramme asymptotique
+20 dB/décade -20 dB/décade
log x
GdB
20 log|Ho|Q
20 juin 2018 Page -74- [email protected]
PCSI-LYDEX 5.4. FILTRES DU DEUXIÈME ORDRE
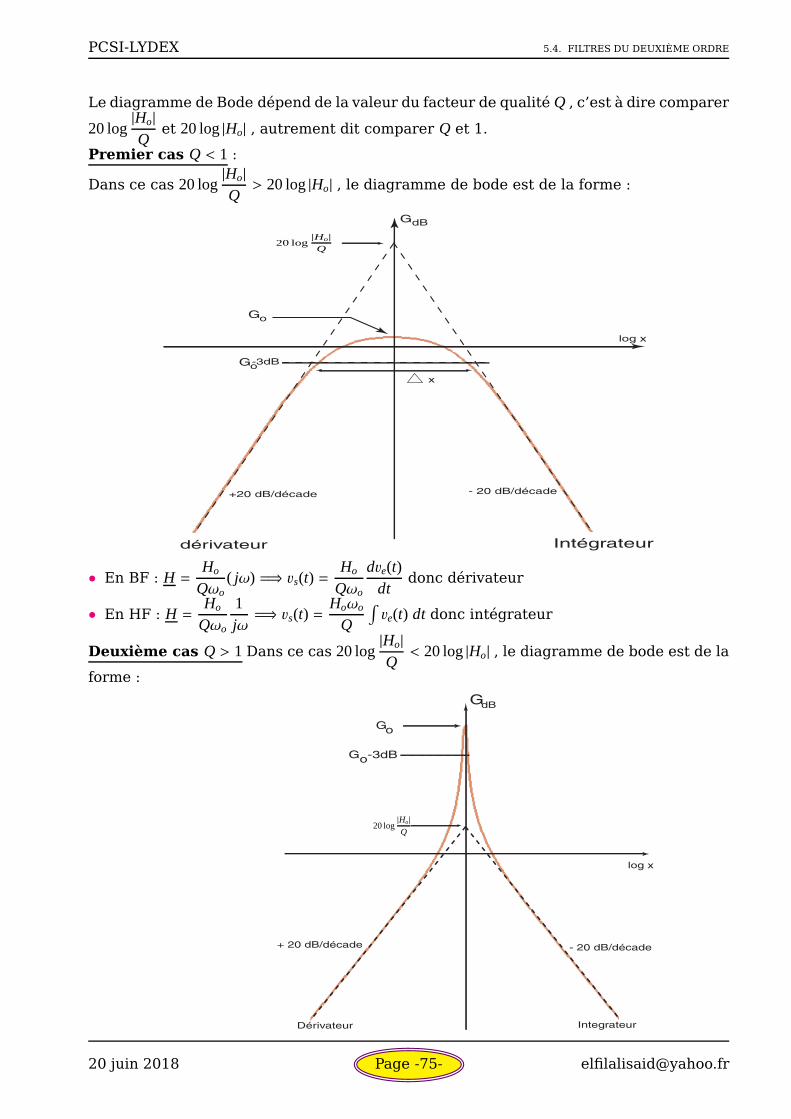
Le diagramme de Bode dépend de la valeur du facteur de qualité Q , c’est à dire comparer
20 log|Ho|Q
et 20 log|Ho| , autrement dit comparer Q et 1.
Premier cas Q < 1 :
Dans ce cas 20 log|Ho|Q> 20 log|Ho| , le diagramme de bode est de la forme :
G
G
o
Go-3dB
dB
log x
x
dérivateur Intégrateur
+20 dB/décade - 20 dB/décade
20 log|Ho|Q
• En BF : H =Ho
Qωo( jω) =⇒ vs(t) =
Ho
Qωo
dve(t)dt
donc dérivateur
• En HF : H =Ho
Qωo
1jω=⇒ vs(t) =
Hoωo
Q
∫
ve(t) dt donc intégrateur
Deuxième cas Q > 1 Dans ce cas 20 log|Ho|Q< 20 log|Ho| , le diagramme de bode est de la
forme :
G
G o
G -3dBo
dB
log x
+ 20 dB/décade - 20 dB/décade
Dérivateur Integrateur
20 log|Ho|Q
20 juin 2018 Page -75- [email protected]

PCSI-LYDEX 5.4. FILTRES DU DEUXIÈME ORDRE
5.4.3.3 Diagramme de Bode pour la phase
ϕ = argHo − arg[1+ jQ(
x − 1x
)
]
Pour le filtre passif Ho = 1 donc
tanϕ = −Qx2 − 1
x
log x
ϕ
+π/2
−π/2
Q =1√2
Q >1√2
Q <1√2
5.4.4 Filtre coupe (ou réjecteur) de bande
La fonction de transfert d’un filtre coupe (réjecteur de) bande du second ordre est dela forme
H = Ho1− x2
1− x2 + jx/Q
En effet : H(x = 1) = 0 =⇒ vs(t) = 0 H(x→ 0) = Ho =⇒ vs(t) = Hove(t) H(x→ ∞) = Ho =⇒ vs(t) = Hove(t)
Ce filtre laisse passer toutes les fréquences sauf aux voisinages de x = 1 c’est à dire auxvoisinage de la pulsation propre
5.4.4.1 L’étude d’un exemple
• En BF :Zc → ∞ =⇒ i = 0 donc vs(t) = ve(t)• En BF :ZL →∞ =⇒ i = 0 donc vs(t) = ve(t)• Pour ωωo =⇒ vs(t) = ve(t)
Ri
L
CV Ve s
C’est
un coupe bande
20 juin 2018 Page -76- [email protected]

PCSI-LYDEX 5.4. FILTRES DU DEUXIÈME ORDRE
L’expression de la fonction de transfert
H =jLω +
1jCω
R + jLω +1
jCω
=⇒ H =1− LCω2
1− LCω2 + jRCω
Donc : Ho = 1 , ωo =1√LC
, Q =1R
√
LC
et x = ω/ωo
5.4.4.2 Diagramme de Bode pour le gain
On a :
H = |Ho||1− x2|
(1− x2)2 + x2/Q2
5.4.4.2.1 Comportement asymptotique En BF x→ 0 =⇒ H = |Ho| ainsi GdB = Go
En HF x→ ∞ =⇒ H = |Ho| ainsi GdB = Go
Le gain présente deux asymptotes horizontales confondues Pour x = 1 =⇒ ω = ωo on a H = 0+ =⇒ GdB(x = 1)→ −∞
GdB présente une asymptote verticale en x = 1 c’est à dire en pulsation propre
5.4.4.2.2 Représentation graphique du gain pour quelques valeurs de Q
GdB
log x
Go
Q =1√2
Q >1√2
Q <1√2
5.4.4.2.3 La bande passante
20 juin 2018 Page -77- [email protected]
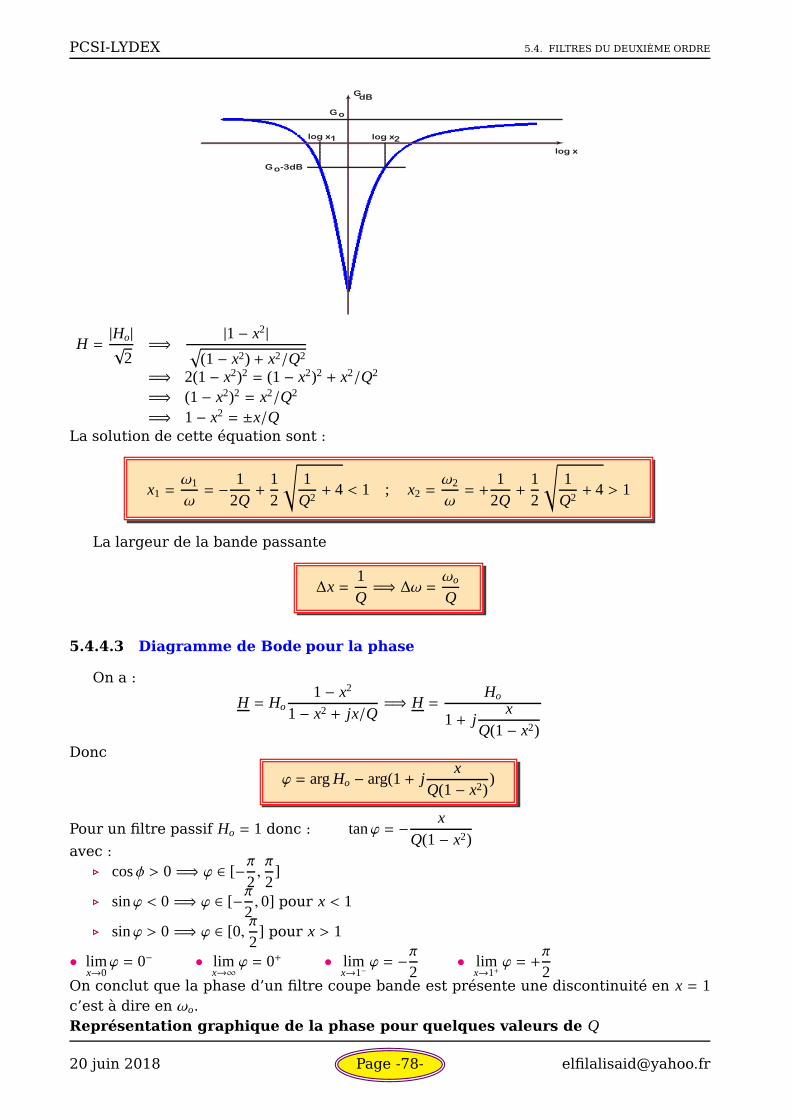
PCSI-LYDEX 5.4. FILTRES DU DEUXIÈME ORDRE
G
log x
Go
dB
G -3dBo
log x log x1 2
H =|Ho|√
2=⇒ |1− x2|
√
(1− x2) + x2/Q2
=⇒ 2(1− x2)2= (1− x2)2
+ x2/Q2
=⇒ (1− x2)2= x2/Q2
=⇒ 1− x2= ±x/Q
La solution de cette équation sont :
x1 =ω1
ω= − 1
2Q+
12
√
1Q2+ 4 < 1 ; x2 =
ω2
ω= +
12Q+
12
√
1Q2+ 4 > 1
La largeur de la bande passante
∆x =1Q=⇒ ∆ω = ωo
Q
5.4.4.3 Diagramme de Bode pour la phase
On a :
H = Ho1− x2
1− x2 + jx/Q=⇒ H =
Ho
1+ jx
Q(1− x2)Donc
ϕ = argHo − arg(1+ jx
Q(1− x2))
Pour un filtre passif Ho = 1 donc : tanϕ = − xQ(1− x2)
avec :⊲ cosφ > 0 =⇒ ϕ ∈ [−π
2,π
2]
⊲ sinϕ < 0 =⇒ ϕ ∈ [−π2, 0] pour x < 1
⊲ sinϕ > 0 =⇒ ϕ ∈ [0,π
2] pour x > 1
• limx→0ϕ = 0− • lim
x→∞ϕ = 0+ • lim
x→1−ϕ = −π
2• lim
x→1+ϕ = +
π
2On conclut que la phase d’un filtre coupe bande est présente une discontinuité en x = 1c’est à dire en ωo.Représentation graphique de la phase pour quelques valeurs de Q
20 juin 2018 Page -78- [email protected]
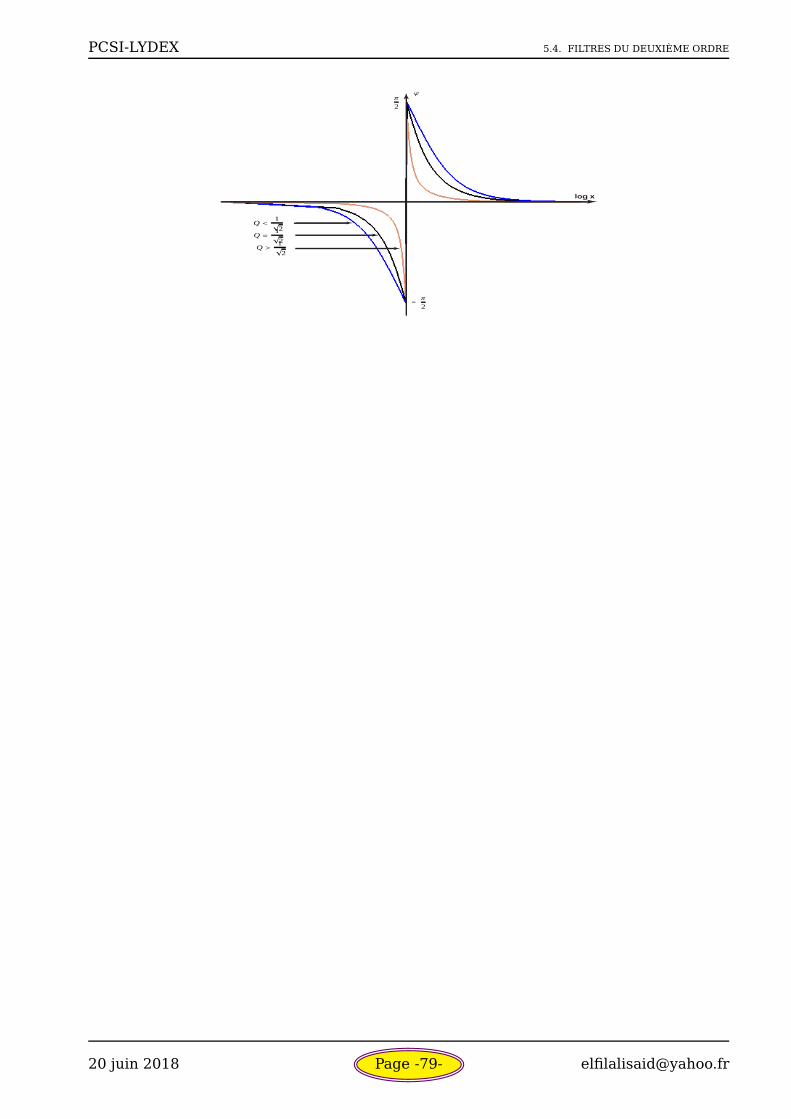
PCSI-LYDEX 5.4. FILTRES DU DEUXIÈME ORDRE
log x
-
Q =1√2
Q <1√2
Q >1√2
ϕ
π
2
π
2
20 juin 2018 Page -79- [email protected]

CHAPITRE 6
FILTRAGE LINÉAIRE DES SIGNAUX PÉRIODIQUES
6.1 Composition en fréquence d’un signal
6.1.1 Représentation temporelle et fréquentielle
Soit g(t) un signal T−périodique c’est à dire g(t + kT ) = g(t) avec :
• f =1Tla fréquence propre du signal.
• ω = 2πT= 2π f la pulsation propre du signal.
Exemples- Signal sinusoidal :
- Signal carrée :
- Signal triangulaire :
81
PCSI-LYDEX 6.1. COMPOSITION EN FRÉQUENCE D’UN SIGNAL
- sinusoidal redressé double-alternance
-Signal dents de scie
On admet le théorème de FOURIER :
g(t) = ao +
∞∑
n=1
(an cos(nωt) + bn sin(nωt))
C’est le développement en série de FOURIER (DSF)
Avec
ao =1T
∫ to+T
to
g(t) dt =< g(t) >= gm
C’est la valeur moyenne (dite aussi composante continue ou offset) du signal g(t).Ainsi
an =2T
∫ to+T
to
g(t) cos(nωt) dt ; bn =2T
∫ to+T
to
g(t) sin(nωt) dt
On retient que tout signal périodique de fréquence f est la somme des fonctions sinusoï-dales de fréquence 0, f , 2 f , 3 f , · · · . On appelle le fondamental le terme correspond à la fréquence f (=⇒ n = 1) c’est à
dire le terme a1 cosωt + b1 sinωt On appelle les harmoniques d’ordre n les termes correspondent aux fréquences n f
avec n > 1.
On peut écrire g(t) sous la forme
g(t) = ao +
∞∑
n=1
An cos(nωt + ϕn)
avec
An =
√
a2n + b2
n ; tanϕn = −bn
an
20 juin 2018 Page -82- [email protected]
PCSI-LYDEX 6.1. COMPOSITION EN FRÉQUENCE D’UN SIGNAL
En effet :
An cos(nωt + ϕn) = An cosnωt cosϕn − An sinnωt sinϕn =⇒
An cosϕn = an
−An sinϕn = bn
D’où le résultat La série de
fourier peut être écrite en utilisant les nombres complexes
g(t) =+∞∑
−∞cne jnωt avec cn =
1T
∫ to+T
to
g(t)e− jnωt dt
En effet : On rappelle les formules d’EULER :
cosx =eix+ e−ix
2; sinx =
eix − e−ix
2i
g(t) = ao +∞∑
n=1an cosnωt + bn sinnωt =⇒ g(t) = ao +
∞∑
n=1
an − jbn
2e jnωt+
an + jbn
2e− jnωt
On pose cn =an − jbn
2=⇒ c∗n =
an + jbn
2
Par conséquent cn =1T
∫ to+T
tog(t)(cosnωt − j sinnωt) dt Donc
cn =1T
∫ to+T
to
g(t)e− jnωt dt
ainsi
c∗n =1T
∫ to+T
to
g(t)e jnωt dt
Remarquons que
c∗n = c−n =⇒ |An| = 2|cn| =√
a2n + b2
n
Il en résulte que
g(t) = ao +∞∑
n=1cne jnωt
+ c∗ne− jnωt=⇒ g(t) = ao +
∞∑
n=1cne jnωt
+
∞∑
n=1c−ne− jnωt
=⇒ g(t) = ao +∞∑
n=1cne jnωt
+
n=−1∑
−∞cne jnωt
c’est à dire en posant co = ao =< g(t) > alors le résultat. Si le signal g(t) est impair (symétrique par rapport à centre de symétrie ) alors
an = 0 ∀n ∈ N et par conséquent
g(t)impair =⇒ g(t) =∞∑
n=1
bn sin(nωt) =∞∑
n=1
bn sin(2πn f t)
20 juin 2018 Page -83- [email protected]

PCSI-LYDEX 6.1. COMPOSITION EN FRÉQUENCE D’UN SIGNAL
Si le signal g(t) est pair (symétrique par rapport à l’axe oy ) alors bn = 0 ∀n ∈ N∗ etpar conséquent
g(t)pair =⇒ g(t) = ao +
∞∑
n=1
an cos(nωt) = ao +
∞∑
n=1
an cos(2πn f t)
Formule de BESSEL -PARSEVAL :Soit g(t) une fonction T-périodique, developable en série de FOURIER . on admet que :
f 2m =< f 2 >= f 2 =
1T
∫ to+T
tof 2(t) dt =⇒
f 2m =< f 2 >= f 2 = a2
o +12
∞∑
n=1
(a2n + b2
n) = a2o +
12
∞∑
n=1
A2n =
∞∑
n=−∞|cn|2
C’est la formule de BESSEL - PARSEVAL
On rappelle valeur efficace ge f f du signal g(t) la racine carrée de la valeur moyennedu carrée du signal
ge f f =
√
1T
∫ to+T
to
g2(t) dt
Donc pour toute fonction périodique présente deux représentations : temporelle etspectrale
g(t)
t
cn
fReprésentation temporelle Représentation spectrale
6.1.2 Exemples
6.1.2.1 Signal sinusoidal
Considérons un signal sinusoidal d’amplitude E de fréquence f et de composantecontinue Eo ; Donc g(t) = Eo + E cos(2π f t)
20 juin 2018 Page -84- [email protected]
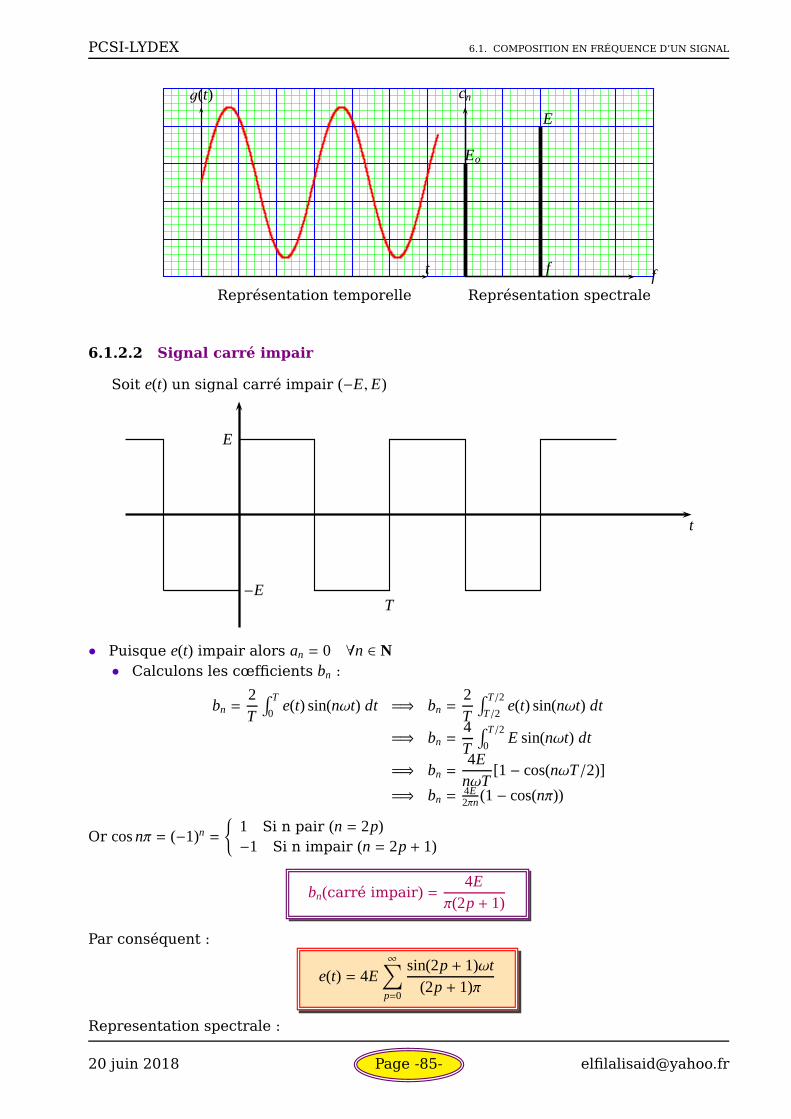
PCSI-LYDEX 6.1. COMPOSITION EN FRÉQUENCE D’UN SIGNAL
g(t)
t
cn
fReprésentation temporelle Représentation spectrale
Eo
E
f
6.1.2.2 Signal carré impair
Soit e(t) un signal carré impair (−E, E)
−E
E
T
t
• Puisque e(t) impair alors an = 0 ∀n ∈ N• Calculons les cœfficients bn :
bn =2T
∫ T
0e(t) sin(nωt) dt =⇒ bn =
2T
∫ T/2
T/2e(t) sin(nωt) dt
=⇒ bn =4T
∫ T/2
0E sin(nωt) dt
=⇒ bn =4E
nωT[1 − cos(nωT/2)]
=⇒ bn =4E2πn(1− cos(nπ))
Or cosnπ = (−1)n =
1 Si n pair (n = 2p)−1 Si n impair (n = 2p + 1)
bn(carré impair) =4E
π(2p + 1)
Par conséquent :
e(t) = 4E∞∑
p=0
sin(2p + 1)ωt(2p + 1)π
Representation spectrale :
20 juin 2018 Page -85- [email protected]

PCSI-LYDEX 6.1. COMPOSITION EN FRÉQUENCE D’UN SIGNAL
p 0 1 2 3 4
n 1 3 5 7 9An
E1,273 0,424 0,255 0,182 0,141
0 1 2 3 4 5 6 7 8 9 10 11 12-1
0
1
2
3
4
5
6
7
8
9
10
11
12
13
An
f
6.1.2.3 Signal carré pair
Conclusion:
La parité du signal ne modifie pas le spectre de fréquence
6.1.2.4 Signal triangulaire pair de pentes symétriques
-3 -2 -1 0 1 2 3 4 5 6 7 8 9 10 11 12-1
0
1
2
3
E
T t
e(t)
e(t) = E(12− 4π2
+∞∑
p=0
cos[(2p + 1)ωt](2p + 1)2
)
20 juin 2018 Page -86- [email protected]
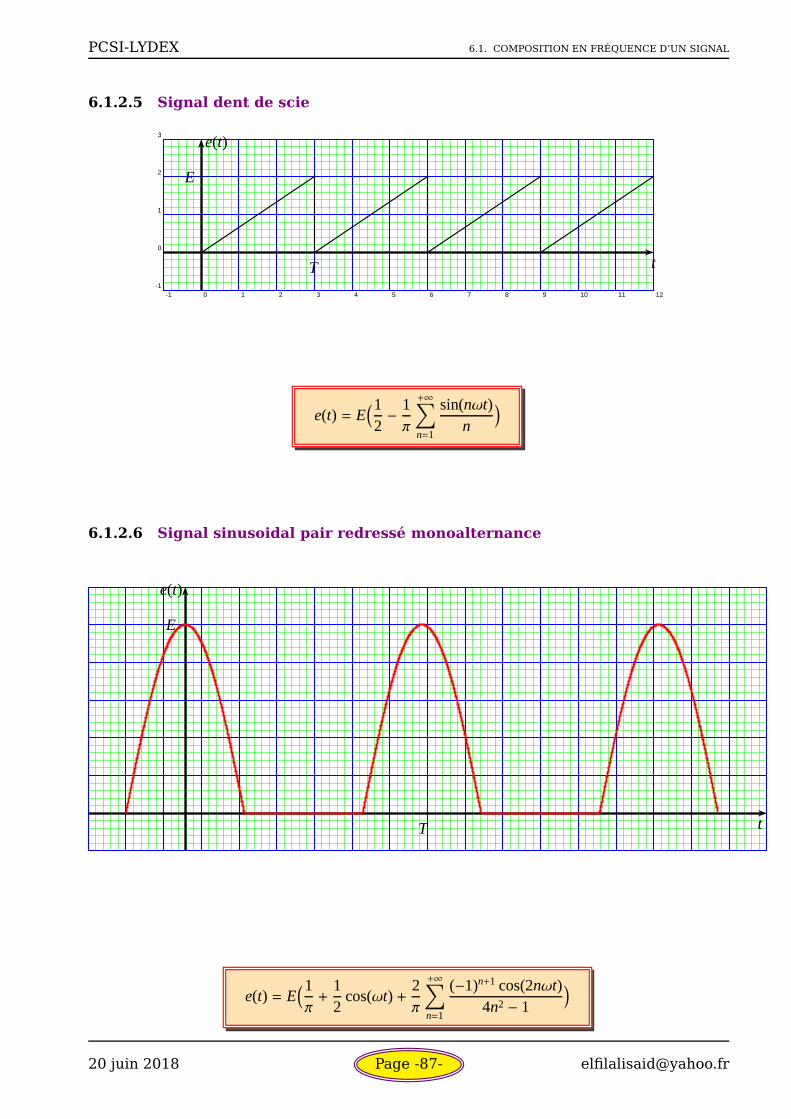
PCSI-LYDEX 6.1. COMPOSITION EN FRÉQUENCE D’UN SIGNAL
6.1.2.5 Signal dent de scie
-1 0 1 2 3 4 5 6 7 8 9 10 11 12-1
0
1
2
3
E
T t
e(t)
e(t) = E(12− 1π
+∞∑
n=1
sin(nωt)n
)
6.1.2.6 Signal sinusoidal pair redressé monoalternance
E
T t
e(t)
e(t) = E(1π+
12
cos(ωt) +2π
+∞∑
n=1
(−1)n+1 cos(2nωt)4n2 − 1
)
20 juin 2018 Page -87- [email protected]

PCSI-LYDEX 6.1. COMPOSITION EN FRÉQUENCE D’UN SIGNAL
6.1.2.7 Signal sinusoidal pair redressé doublealternance
E
T t
e(t)
e(t) = E(2π− π
4
+∞∑
n=1
(−1)n cos(2nωt)4n2 − 1
)
6.1.2.8 Signal rectangulaire pair de rapport cyclique α quelconque
e(t) = Eα(
1+ 2+∞∑
p=0
sin(nαπ)nαπ
cos(nωt))
6.1.3 L’aspect énergétique
En général les grandeurs énergétiques (énergie ou puissance) sont proportionnelle
au carrée de la grandeur physique g(t) (12
kx2;12
mv2;12
cU2; Ri2;12
Li2 · · · )par conséquent
< g2 >= a2o +
∞∑
n=1
a2n + b2
n
2=
+∞∑
−∞|cn|2 (Parseval)
Donc chaque terme harmonique de rang n (an cosnωt + bn sinnωt) a une puissance |cn|2 =a2
n + b2n
2.
Il en résulte que la puissance du signal est la somme des puissance de chaque harmo-nique
20 juin 2018 Page -88- [email protected]

PCSI-LYDEX 6.2. TRAITEMENT D’UN SIGNAL PÉRIODIQUE PAR UN SYSTÈME LINÉAIRE
6.2 Traitement d’un signal périodique par un système
linéaire
6.2.1 Rappel
Un circuit est linéaire si les tensions d’entrée ue(t) et de sortie us(t) sont reliées parune équation différentielle linéaire.Autrement dit si la tension d’entrée ue(t) est sinusoïdale de période T alors la tension desortie us(t) est sinusoïdale de période T . Si on appelle H la fonction de transfert du circuit alors
Ue(t) =+∞∑
−∞cn e jnωt
=⇒ U s(t) =+∞∑
−∞H( jnω)cn e jnωt
On rappelle les formes canoniques des fonctions de transferts des filtres usuelles :• Filtre passe bas du premier ordre
H =Ho
1+ jx
Intégrateur aux hautes fréquences.• Filtre passe haut du premier ordre
H = Hojx
1+ jx
Dérivateur aux basses fréquences.• Filtre passe bas du deuxième ordre
H =Ho
1− x2 + jxQ
• Filtre passe haut du deuxième ordre
H = Ho−x2
1− x2 + jxQ
• Filtre passe bande
H = Hojx/Q
1− x2 + jxQ
=Ho
1+ jQ(x − 1/x)
20 juin 2018 Page -89- [email protected]
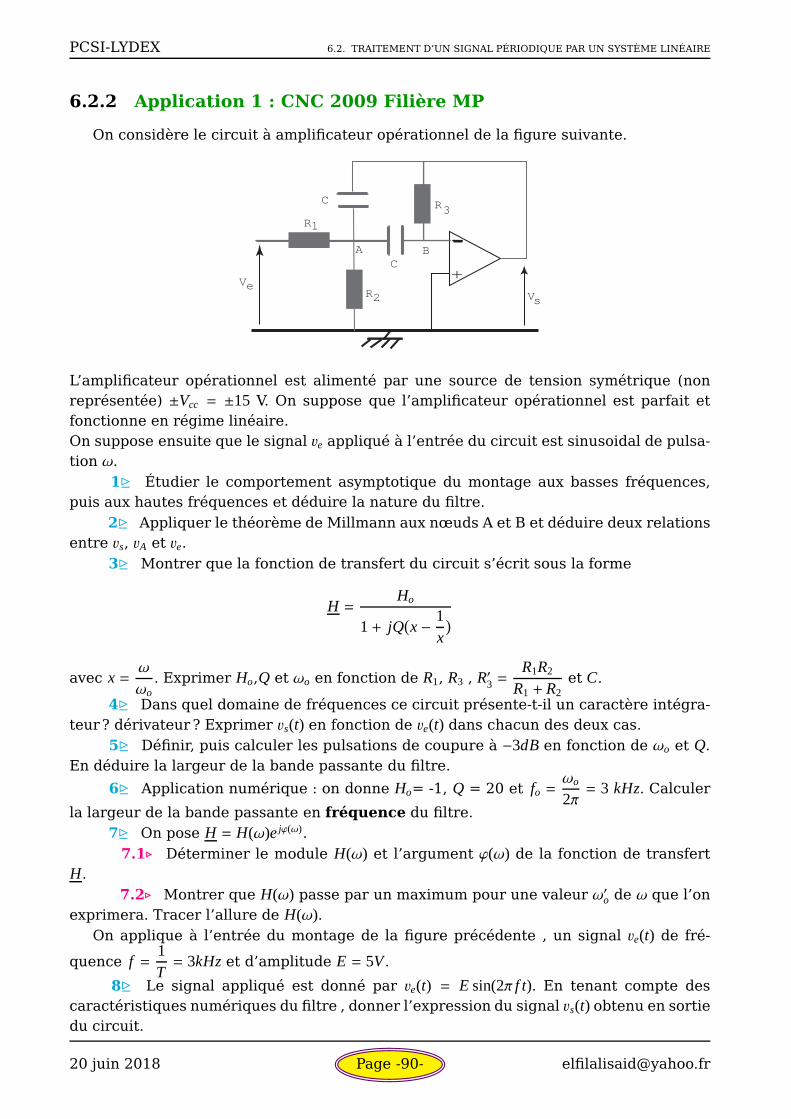
PCSI-LYDEX 6.2. TRAITEMENT D’UN SIGNAL PÉRIODIQUE PAR UN SYSTÈME LINÉAIRE
6.2.2 Application 1 : CNC 2009 Filière MP
On considère le circuit à amplificateur opérationnel de la figure suivante.
R
R
R
C
C
VV
es
+
1
2
3
A B
L’amplificateur opérationnel est alimenté par une source de tension symétrique (nonreprésentée) ±Vcc = ±15 V. On suppose que l’amplificateur opérationnel est parfait etfonctionne en régime linéaire.On suppose ensuite que le signal ve appliqué à l’entrée du circuit est sinusoidal de pulsa-tion ω.
1D Étudier le comportement asymptotique du montage aux basses fréquences,puis aux hautes fréquences et déduire la nature du filtre.
2D Appliquer le théorème de Millmann aux nœuds A et B et déduire deux relationsentre vs, vA et ve.
3D Montrer que la fonction de transfert du circuit s’écrit sous la forme
H =Ho
1+ jQ(
x − 1x
)
avec x =ω
ωo. Exprimer Ho,Q et ωo en fonction de R1, R3 , R′3 =
R1R2
R1 + R2et C.
4D Dans quel domaine de fréquences ce circuit présente-t-il un caractère intégra-teur? dérivateur ? Exprimer vs(t) en fonction de ve(t) dans chacun des deux cas.
5D Définir, puis calculer les pulsations de coupure à −3dB en fonction de ωo et Q.En déduire la largeur de la bande passante du filtre.
6D Application numérique : on donne Ho= -1, Q = 20 et fo =ωo
2π= 3 kHz. Calculer
la largeur de la bande passante en fréquence du filtre.
7D On pose H = H(ω)e jϕ(ω).
7.1⊲ Déterminer le module H(ω) et l’argument ϕ(ω) de la fonction de transfertH.
7.2⊲ Montrer que H(ω) passe par un maximum pour une valeur ω′o de ω que l’onexprimera. Tracer l’allure de H(ω).
On applique à l’entrée du montage de la figure précédente , un signal ve(t) de fré-
quence f =1T= 3kHz et d’amplitude E = 5V.
8D Le signal appliqué est donné par ve(t) = E sin(2π f t). En tenant compte descaractéristiques numériques du filtre , donner l’expression du signal vs(t) obtenu en sortiedu circuit.
20 juin 2018 Page -90- [email protected]

PCSI-LYDEX 6.2. TRAITEMENT D’UN SIGNAL PÉRIODIQUE PAR UN SYSTÈME LINÉAIRE
9D Le signal appliqué maintenant est un signal créneau dont on donne le DSF :
ve(t) =E2+
∞∑
p=0
2E(2p + 1)π
sin(2π(2p + 1) f t)
9.1⊲ Donner la representation temporelle de la tension d’entrée.
9.2⊲ Donner l’allure du spectre en fréquence du signal ve(t) ?9.3⊲ En tenant compte des caractéristiques numériques du filtre , donner l’ex-
pression du signal vs(t) observé en sortie du circuit.
1D Le comportement asymptotique du montage :• Aux basses fréquences :vs(t) = 0 (la maille (Vs; R3; ε))• Aux hautes fréquences :vs(t) = 0 (la maille (Vs; A; B; ε))• La nature du filtre :Filtre actif passe-bande.
2D Le théorème de Millmann aux :• Nœud A :
VA =Ve + jCωR1V s
R1
R′3+ 2 jCωR1
(a)
• Nœud B :
VB = 0 =VA
Zc
+V s
R3=⇒ VA = −
1jCR3ω
V s (b)
3D La fonction de transfert : Dans (a) on remplace VA par son expression dans (2),on en déduit que :
H =− R3
2R1
1+ jCR3ω
2+
1j2R′3Cω
=
− R3
2R1
1+ jCR3xωo
2+
1j2R′3Cxωo
On tire donc que :• Le cœfficient d’amplification statique
Ho = −R3
2R1
• La pulsation propre :
ωo =1
C√
R3R′3
20 juin 2018 Page -91- [email protected]
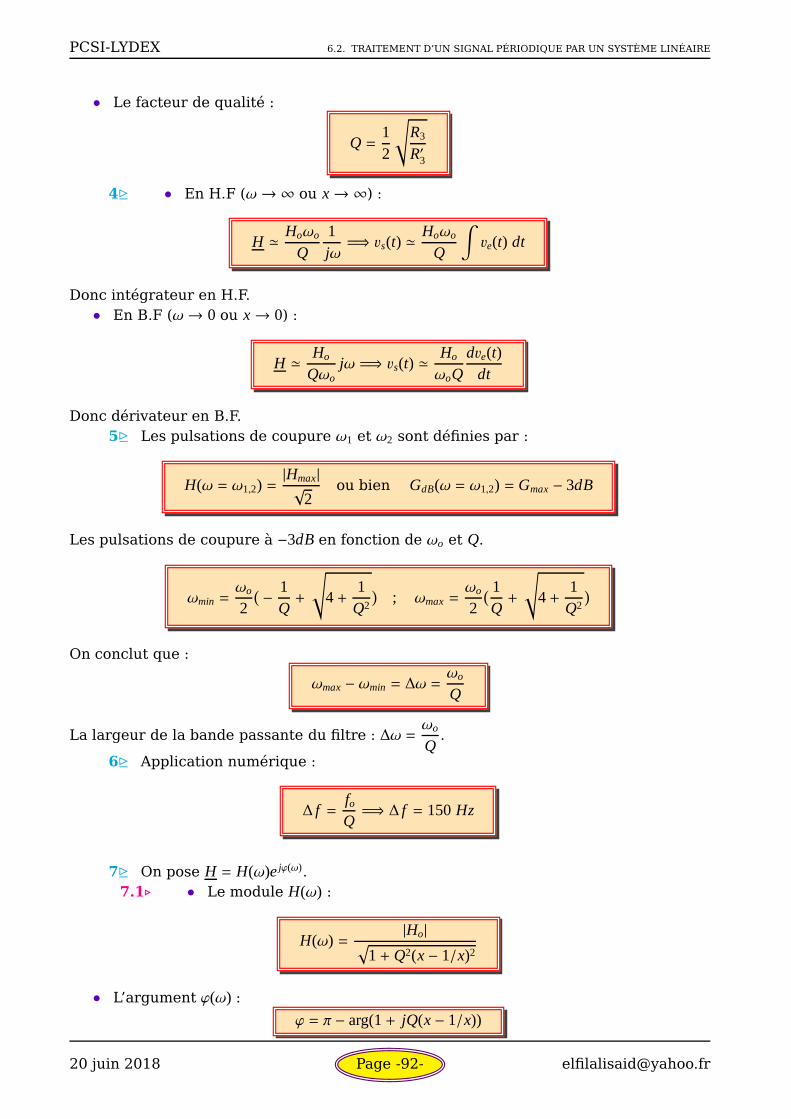
PCSI-LYDEX 6.2. TRAITEMENT D’UN SIGNAL PÉRIODIQUE PAR UN SYSTÈME LINÉAIRE
• Le facteur de qualité :
Q =12
√
R3
R′3
4D • En H.F (ω→∞ ou x→ ∞) :
H ≃ Hoωo
Q1jω=⇒ vs(t) ≃
Hoωo
Q
∫
ve(t) dt
Donc intégrateur en H.F.• En B.F (ω→ 0 ou x→ 0) :
H ≃ Ho
Qωojω =⇒ vs(t) ≃
Ho
ωoQdve(t)
dt
Donc dérivateur en B.F.5D Les pulsations de coupure ω1 et ω2 sont définies par :
H(ω = ω1,2) =|Hmax|√
2ou bien GdB(ω = ω1,2) = Gmax − 3dB
Les pulsations de coupure à −3dB en fonction de ωo et Q.
ωmin =ωo
2( − 1
Q+
√
4+1
Q2
)
; ωmax =ωo
2( 1Q+
√
4+1
Q2
)
On conclut que :
ωmax − ωmin = ∆ω =ωo
Q
La largeur de la bande passante du filtre : ∆ω =ωo
Q.
6D Application numérique :
∆ f =fo
Q=⇒ ∆ f = 150Hz
7D On pose H = H(ω)e jϕ(ω).7.1⊲ • Le module H(ω) :
H(ω) =|Ho|
√
1+ Q2(x − 1/x)2
• L’argument ϕ(ω) :
ϕ = π − arg(1+ jQ(x − 1/x))
20 juin 2018 Page -92- [email protected]

PCSI-LYDEX 6.2. TRAITEMENT D’UN SIGNAL PÉRIODIQUE PAR UN SYSTÈME LINÉAIRE
7.2⊲ H(ω) passe par un maximum siH(ω)dω
=H(ω)
dxdωdx= 0 =⇒ H(ω)
dx= 0
• H(ω)dx= 0 =⇒ 2Q2(x − 1/x)(1+ 1/x2) = 0 comme x > 0 alors H est maximal pour
x = 1 =⇒ ω′o = ωo
• L’allure de H(x) avec x =ω
ωo.
1
0,707
xx2x1
H
8D Puisque le signal d’entrée est sinusoidal alors le signal de sortie est aussi sinu-soidal et par conséquent vs(t) = Vs sin(2π f t + ϕ). avec :• Vs = H( f = fo)E =⇒ Vs = 5 V• ϕ( f = fo) = π − arg(1)= π
vs(t) = 5 sin(6000πt + π) = −5 sin(6000πt)
9D La tension d’entrée est une combinaison linéaire des tensions de fréquencesvariables f ∈ 0, fo, 3 fo, 5 fo.Puisque le filtre est un filtre passe-bande de fréquence centrale est f = fo = 3 kHz et debande passante ∆ f = 150 Hz alors ce filtre ne laisse passer que les tensions sinusoïdalesde fréquence situé dans l’intervalle [ f1, f2] c’est à dire la tension dont la fréquence est fo
d’où avec H( f = fo) = 1 et ϕ( f = fo) = π
vs(t) =2Eπ
sin(2π f t + π)
20 juin 2018 Page -93- [email protected]