c4 : modélisation des performances cinématiques des ... et hypoth esesrep erageparam etrage c4 :...
TRANSCRIPT
Introduction et hypotheses Reperage Parametrage
C4 : Modelisation des performances cinematiques des systemesC4-1 Introduction a la modelisation cinematique des systemes
Emilien [email protected]
Lycee La Martiniere Monplaisir LyonClasse de MPSI
Emilien DURIF [email protected] 1/28
Introduction et hypotheses Reperage Parametrage
Plan
1 Introduction et hypothesesIntroductionObjectifs de la modelisation mecaniqueSolide indeformableDifferents types de modelisations mecaniques
2 Repere et referentiel lies a un solideRepere de referenceReferentielReperes lies aux solides
3 Parametrage d’un solideParametrage de la position de l’origine du repere associeParametrage de l’orientation de la base
Emilien DURIF [email protected] 2/28

Introduction et hypotheses Reperage Parametrage
Modelisation mecanique d’un systeme
Systeme mecanique
Un systeme mecanique est generalement constitue d’un ensemble de mecanismes. Cesmecanismes sont constitues d’un ensemble de solides agences entre eux dans le but derealiser une fonction.
Moteurs pas à pas
Tête d’impression
Mécanisme articulé
Emilien DURIF [email protected] 3/28
Introduction et hypotheses Reperage Parametrage
Modelisation mecanique d’un systeme
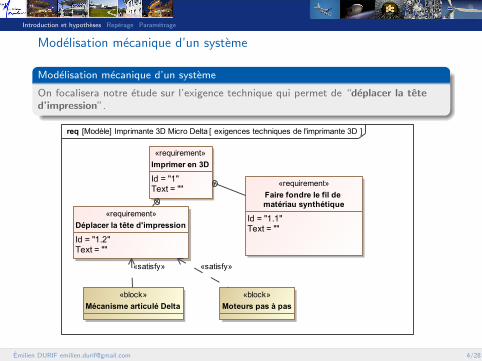
Modelisation mecanique d’un systeme
On focalisera notre etude sur l’exigence technique qui permet de “deplacer la teted’impression”.
Emilien DURIF [email protected] 4/28
Introduction et hypotheses Reperage Parametrage
Plan
1 Introduction et hypothesesIntroductionObjectifs de la modelisation mecaniqueSolide indeformableDifferents types de modelisations mecaniques
2 Repere et referentiel lies a un solideRepere de referenceReferentielReperes lies aux solides
3 Parametrage d’un solideParametrage de la position de l’origine du repere associeParametrage de l’orientation de la base
Emilien DURIF [email protected] 5/28

Introduction et hypotheses Reperage Parametrage
Objectifs de la modelisation mecaniqueObjectifs de la modelisation mecanique
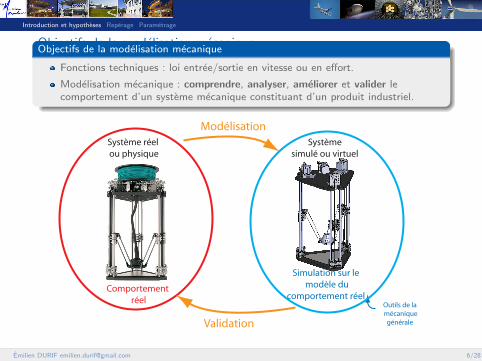
Fonctions techniques : loi entree/sortie en vitesse ou en effort.
Modelisation mecanique : comprendre, analyser, ameliorer et valider lecomportement d’un systeme mecanique constituant d’un produit industriel.
Système simulé ou virtuel
Système réel ou physique
Comportement réel
Simulation sur le modèle du
comportement réel
Modélisation
Validation
Outils de la mécanique
générale
Emilien DURIF [email protected] 6/28
Introduction et hypotheses Reperage Parametrage
Objectifs de la modelisation mecaniqueObjectifs de la modelisation mecanique
Fonctions techniques : loi entree/sortie en vitesse ou en effort.
Modelisation mecanique : comprendre, analyser, ameliorer et valider lecomportement d’un systeme mecanique constituant d’un produit industriel.
Système simulé ou virtuel
Système réel ou physique
Comportement réel
Simulation sur le modèle du
comportement réel
Modélisation
Validation
Outils de la mécanique
générale
Emilien DURIF [email protected] 6/28
Introduction et hypotheses Reperage Parametrage
Plan
1 Introduction et hypothesesIntroductionObjectifs de la modelisation mecaniqueSolide indeformableDifferents types de modelisations mecaniques
2 Repere et referentiel lies a un solideRepere de referenceReferentielReperes lies aux solides
3 Parametrage d’un solideParametrage de la position de l’origine du repere associeParametrage de l’orientation de la base
Emilien DURIF [email protected] 7/28

Introduction et hypotheses Reperage Parametrage
Modelisation mecanique d’un solideSolide indeformable
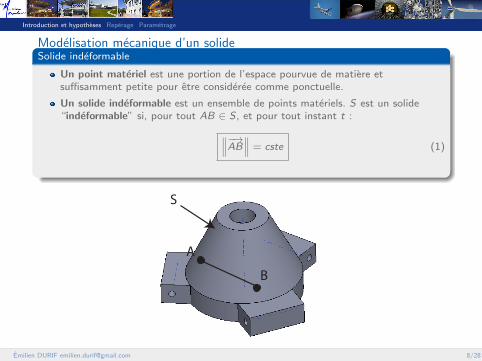
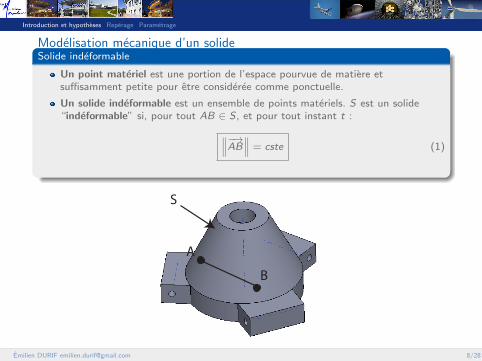
Un point materiel est une portion de l’espace pourvue de matiere etsuffisamment petite pour etre consideree comme ponctuelle.
Un solide indeformable est un ensemble de points materiels. S est un solide“indeformable” si, pour tout AB ∈ S, et pour tout instant t :∥∥∥−→AB∥∥∥ = cste (1)
A
B
S
Remarque
Dans la realite, aucun solide n’est indeformable
Emilien DURIF [email protected] 8/28
Introduction et hypotheses Reperage Parametrage
Modelisation mecanique d’un solideSolide indeformable
Un point materiel est une portion de l’espace pourvue de matiere etsuffisamment petite pour etre consideree comme ponctuelle.
Un solide indeformable est un ensemble de points materiels. S est un solide“indeformable” si, pour tout AB ∈ S, et pour tout instant t :∥∥∥−→AB∥∥∥ = cste (1)
A
B
S
Remarque
Dans la realite, aucun solide n’est indeformable
Emilien DURIF [email protected] 8/28
Introduction et hypotheses Reperage Parametrage
Modelisation mecanique d’un solideSolide indeformable
Un point materiel est une portion de l’espace pourvue de matiere etsuffisamment petite pour etre consideree comme ponctuelle.
Un solide indeformable est un ensemble de points materiels. S est un solide“indeformable” si, pour tout AB ∈ S, et pour tout instant t :∥∥∥−→AB∥∥∥ = cste (1)
A
B
S
Remarque
Dans la realite, aucun solide n’est indeformable
Emilien DURIF [email protected] 8/28
Introduction et hypotheses Reperage Parametrage
Plan
1 Introduction et hypothesesIntroductionObjectifs de la modelisation mecaniqueSolide indeformableDifferents types de modelisations mecaniques
2 Repere et referentiel lies a un solideRepere de referenceReferentielReperes lies aux solides
3 Parametrage d’un solideParametrage de la position de l’origine du repere associeParametrage de l’orientation de la base
Emilien DURIF [email protected] 9/28
Introduction et hypotheses Reperage Parametrage
Differents types de modelisation mecanique
Modelisation mecaniques
la cinematique : etude des mouvements et des vitesses ;
la statique : etude des actions mecaniques (types efforts) des solides “al’equilibre” ;
la cinetique : etude des quantites de mouvement et des inerties (programme dedeuxieme annee) ;
la dynamique : lien entre les mouvements et leurs causes (programme dedeuxieme annee) ;
l’energetique : etude des mouvements et de leur cause d’un point de vueenergetique (programme de deuxieme annee).
Emilien DURIF [email protected] 10/28
Introduction et hypotheses Reperage Parametrage
Differents types de modelisation mecanique
Modelisation mecaniques
la cinematique : etude des mouvements et des vitesses ;
la statique : etude des actions mecaniques (types efforts) des solides “al’equilibre” ;
la cinetique : etude des quantites de mouvement et des inerties (programme dedeuxieme annee) ;
la dynamique : lien entre les mouvements et leurs causes (programme dedeuxieme annee) ;
l’energetique : etude des mouvements et de leur cause d’un point de vueenergetique (programme de deuxieme annee).
Emilien DURIF [email protected] 10/28
Introduction et hypotheses Reperage Parametrage
Differents types de modelisation mecanique
Modelisation mecaniques
la cinematique : etude des mouvements et des vitesses ;
la statique : etude des actions mecaniques (types efforts) des solides “al’equilibre” ;
la cinetique : etude des quantites de mouvement et des inerties (programme dedeuxieme annee) ;
la dynamique : lien entre les mouvements et leurs causes (programme dedeuxieme annee) ;
l’energetique : etude des mouvements et de leur cause d’un point de vueenergetique (programme de deuxieme annee).
Emilien DURIF [email protected] 10/28
Introduction et hypotheses Reperage Parametrage
Differents types de modelisation mecanique
Modelisation mecaniques
la cinematique : etude des mouvements et des vitesses ;
la statique : etude des actions mecaniques (types efforts) des solides “al’equilibre” ;
la cinetique : etude des quantites de mouvement et des inerties (programme dedeuxieme annee) ;
la dynamique : lien entre les mouvements et leurs causes (programme dedeuxieme annee) ;
l’energetique : etude des mouvements et de leur cause d’un point de vueenergetique (programme de deuxieme annee).
Emilien DURIF [email protected] 10/28
Introduction et hypotheses Reperage Parametrage
Differents types de modelisation mecanique
Modelisation mecaniques
la cinematique : etude des mouvements et des vitesses ;
la statique : etude des actions mecaniques (types efforts) des solides “al’equilibre” ;
la cinetique : etude des quantites de mouvement et des inerties (programme dedeuxieme annee) ;
la dynamique : lien entre les mouvements et leurs causes (programme dedeuxieme annee) ;
l’energetique : etude des mouvements et de leur cause d’un point de vueenergetique (programme de deuxieme annee).
Emilien DURIF [email protected] 10/28
Introduction et hypotheses Reperage Parametrage
Plan
1 Introduction et hypothesesIntroductionObjectifs de la modelisation mecaniqueSolide indeformableDifferents types de modelisations mecaniques
2 Repere et referentiel lies a un solideRepere de referenceReferentielReperes lies aux solides
3 Parametrage d’un solideParametrage de la position de l’origine du repere associeParametrage de l’orientation de la base
Emilien DURIF [email protected] 11/28
Introduction et hypotheses Reperage Parametrage
Repere de referenceRepere
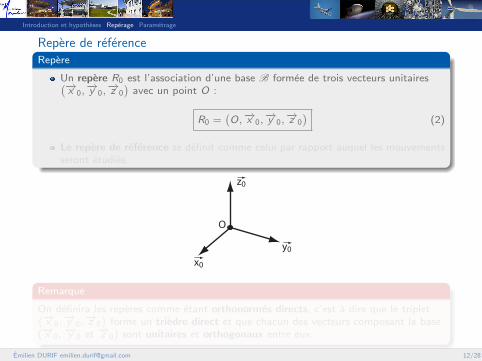
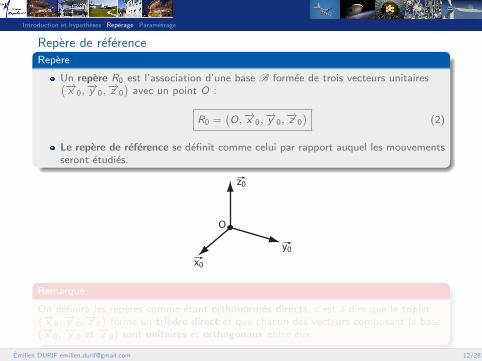
Un repere R0 est l’association d’une base B formee de trois vecteurs unitaires(−→x 0,−→y 0,−→z 0
)avec un point O :
R0 =(O,−→x 0,
−→y 0,−→z 0
)(2)
Le repere de reference se definit comme celui par rapport auquel les mouvementsseront etudies.
O
x0
y0
z0
Remarque
On definira les reperes comme etant orthonormes directs, c’est a dire que le triplet(−→x 0,−→y 0,−→z 0
)forme un triedre direct et que chacun des vecteurs composant la base
(−→x 0, −→y 0 et −→z 0) sont unitaires et orthogonaux entre eux.
Emilien DURIF [email protected] 12/28
Introduction et hypotheses Reperage Parametrage
Repere de referenceRepere
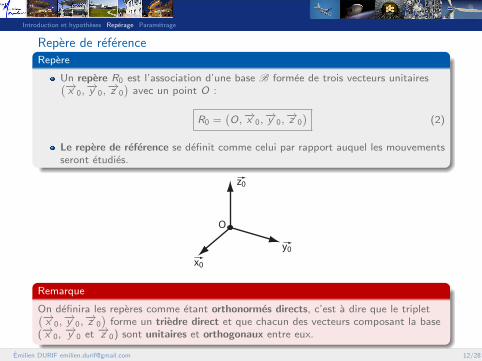
Un repere R0 est l’association d’une base B formee de trois vecteurs unitaires(−→x 0,−→y 0,−→z 0
)avec un point O :
R0 =(O,−→x 0,
−→y 0,−→z 0
)(2)
Le repere de reference se definit comme celui par rapport auquel les mouvementsseront etudies.
O
x0
y0
z0
Remarque
On definira les reperes comme etant orthonormes directs, c’est a dire que le triplet(−→x 0,−→y 0,−→z 0
)forme un triedre direct et que chacun des vecteurs composant la base
(−→x 0, −→y 0 et −→z 0) sont unitaires et orthogonaux entre eux.
Emilien DURIF [email protected] 12/28
Introduction et hypotheses Reperage Parametrage
Repere de referenceRepere
Un repere R0 est l’association d’une base B formee de trois vecteurs unitaires(−→x 0,−→y 0,−→z 0
)avec un point O :
R0 =(O,−→x 0,
−→y 0,−→z 0
)(2)
Le repere de reference se definit comme celui par rapport auquel les mouvementsseront etudies.
O
x0
y0
z0
Remarque
On definira les reperes comme etant orthonormes directs, c’est a dire que le triplet(−→x 0,−→y 0,−→z 0
)forme un triedre direct et que chacun des vecteurs composant la base
(−→x 0, −→y 0 et −→z 0) sont unitaires et orthogonaux entre eux.
Emilien DURIF [email protected] 12/28
Introduction et hypotheses Reperage Parametrage
Plan
1 Introduction et hypothesesIntroductionObjectifs de la modelisation mecaniqueSolide indeformableDifferents types de modelisations mecaniques
2 Repere et referentiel lies a un solideRepere de referenceReferentielReperes lies aux solides
3 Parametrage d’un solideParametrage de la position de l’origine du repere associeParametrage de l’orientation de la base
Emilien DURIF [email protected] 13/28
Introduction et hypotheses Reperage Parametrage
Referentiel
Referentiel
Un “referentiel” est constitue :
d’un repere de reference (ie R0 =(O,−→x 0,
−→y 0,−→z 0
)) ;
d’une horloge qui servira de reference pour mesurer le temps (et deriver parrapport au temps).
Emilien DURIF [email protected] 14/28
Introduction et hypotheses Reperage Parametrage
Referentiel
Referentiel
Un “referentiel” est constitue :
d’un repere de reference (ie R0 =(O,−→x 0,
−→y 0,−→z 0
)) ;
d’une horloge qui servira de reference pour mesurer le temps (et deriver parrapport au temps).
Emilien DURIF [email protected] 14/28

Introduction et hypotheses Reperage Parametrage
Referentiel
Referentiel
Un “referentiel” est constitue :
d’un repere de reference (ie R0 =(O,−→x 0,
−→y 0,−→z 0
)) ;
d’une horloge qui servira de reference pour mesurer le temps (et deriver parrapport au temps).
Emilien DURIF [email protected] 14/28
Introduction et hypotheses Reperage Parametrage
Plan
1 Introduction et hypothesesIntroductionObjectifs de la modelisation mecaniqueSolide indeformableDifferents types de modelisations mecaniques
2 Repere et referentiel lies a un solideRepere de referenceReferentielReperes lies aux solides
3 Parametrage d’un solideParametrage de la position de l’origine du repere associeParametrage de l’orientation de la base
Emilien DURIF [email protected] 15/28
Introduction et hypotheses Reperage Parametrage
Repere et referentiel lies a un solide
Reperes lies aux solides
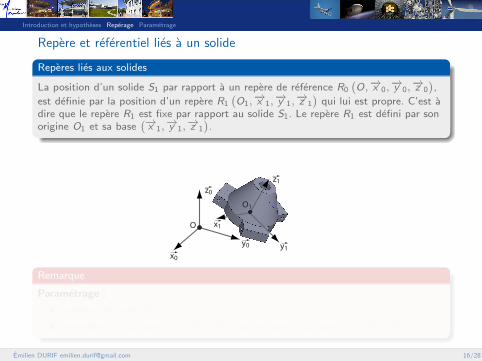
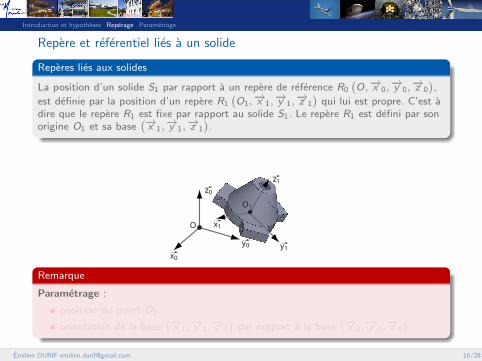
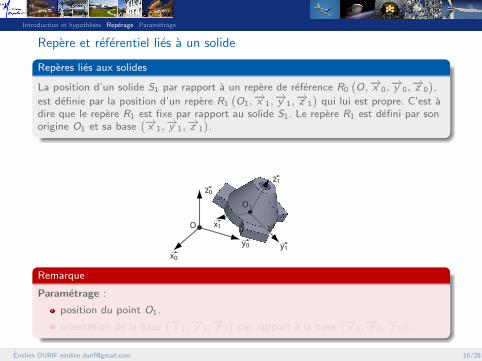
La position d’un solide S1 par rapport a un repere de reference R0
(O,−→x 0,
−→y 0,−→z 0
),
est definie par la position d’un repere R1
(O1,−→x 1,−→y 1,−→z 1
)qui lui est propre. C’est a
dire que le repere R1 est fixe par rapport au solide S1. Le repere R1 est defini par sonorigine O1 et sa base
(−→x 1,−→y 1,−→z 1
).
O
x0
y0
z0
O1
x1
y1
z1
Remarque
Parametrage :
position du point O1.
orientation de la base(−→x 1,
−→y 1,−→z 1
)par rapport a la base
(−→x 0,−→y 0,−→z 0
).
Emilien DURIF [email protected] 16/28
Introduction et hypotheses Reperage Parametrage
Repere et referentiel lies a un solide
Reperes lies aux solides
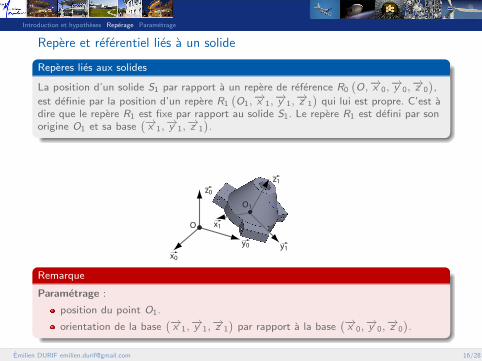
La position d’un solide S1 par rapport a un repere de reference R0
(O,−→x 0,
−→y 0,−→z 0
),
est definie par la position d’un repere R1
(O1,−→x 1,−→y 1,−→z 1
)qui lui est propre. C’est a
dire que le repere R1 est fixe par rapport au solide S1. Le repere R1 est defini par sonorigine O1 et sa base
(−→x 1,−→y 1,−→z 1
).
O
x0
y0
z0
O1
x1
y1
z1
Remarque
Parametrage :
position du point O1.
orientation de la base(−→x 1,
−→y 1,−→z 1
)par rapport a la base
(−→x 0,−→y 0,−→z 0
).
Emilien DURIF [email protected] 16/28
Introduction et hypotheses Reperage Parametrage
Repere et referentiel lies a un solide
Reperes lies aux solides
La position d’un solide S1 par rapport a un repere de reference R0
(O,−→x 0,
−→y 0,−→z 0
),
est definie par la position d’un repere R1
(O1,−→x 1,−→y 1,−→z 1
)qui lui est propre. C’est a
dire que le repere R1 est fixe par rapport au solide S1. Le repere R1 est defini par sonorigine O1 et sa base
(−→x 1,−→y 1,−→z 1
).
O
x0
y0
z0
O1
x1
y1
z1
Remarque
Parametrage :
position du point O1.
orientation de la base(−→x 1,
−→y 1,−→z 1
)par rapport a la base
(−→x 0,−→y 0,−→z 0
).
Emilien DURIF [email protected] 16/28
Introduction et hypotheses Reperage Parametrage
Repere et referentiel lies a un solide
Reperes lies aux solides
La position d’un solide S1 par rapport a un repere de reference R0
(O,−→x 0,
−→y 0,−→z 0
),
est definie par la position d’un repere R1
(O1,−→x 1,−→y 1,−→z 1
)qui lui est propre. C’est a
dire que le repere R1 est fixe par rapport au solide S1. Le repere R1 est defini par sonorigine O1 et sa base
(−→x 1,−→y 1,−→z 1
).
O
x0
y0
z0
O1
x1
y1
z1
Remarque
Parametrage :
position du point O1.
orientation de la base(−→x 1,
−→y 1,−→z 1
)par rapport a la base
(−→x 0,−→y 0,−→z 0
).
Emilien DURIF [email protected] 16/28
Introduction et hypotheses Reperage Parametrage
Plan
1 Introduction et hypothesesIntroductionObjectifs de la modelisation mecaniqueSolide indeformableDifferents types de modelisations mecaniques
2 Repere et referentiel lies a un solideRepere de referenceReferentielReperes lies aux solides
3 Parametrage d’un solideParametrage de la position de l’origine du repere associeParametrage de l’orientation de la base
Emilien DURIF [email protected] 17/28
Introduction et hypotheses Reperage Parametrage
Parametrage d’un solide
Types de parametrage
Differents types de parametrage peuvent etre choisis pour reperer un point dansl’espace. Il s’agit des systemes de coordonnees :
cartesiennes,cylindriques,spheriques.
Choix du systeme de coordonnees
Le choix du systeme de coordonnees repose generalement sur les symetries duprobleme a traiter.
Vecteur position−−→OO1 decompose avec trois vecteurs unitaires formant une base
orthonormee directe(−→u 1,
−→u 2,−→u 3
):
−−→OO1 = α(t) · −→u 1 + β(t) · −→u 2 + γ(t) · −→u 3 (3)
Les parametres α(t), β(t) et γ(t) sont les coordonnees et peuvent dependre dutemps.
Emilien DURIF [email protected] 18/28
Introduction et hypotheses Reperage Parametrage
Parametrage d’un solide
Types de parametrage
Differents types de parametrage peuvent etre choisis pour reperer un point dansl’espace. Il s’agit des systemes de coordonnees :
cartesiennes,cylindriques,spheriques.
Choix du systeme de coordonnees
Le choix du systeme de coordonnees repose generalement sur les symetries duprobleme a traiter.
Vecteur position−−→OO1 decompose avec trois vecteurs unitaires formant une base
orthonormee directe(−→u 1,
−→u 2,−→u 3
):
−−→OO1 = α(t) · −→u 1 + β(t) · −→u 2 + γ(t) · −→u 3 (3)
Les parametres α(t), β(t) et γ(t) sont les coordonnees et peuvent dependre dutemps.
Emilien DURIF [email protected] 18/28
Introduction et hypotheses Reperage Parametrage
Parametrage d’un solide
Types de parametrage
Differents types de parametrage peuvent etre choisis pour reperer un point dansl’espace. Il s’agit des systemes de coordonnees :
cartesiennes,cylindriques,spheriques.
Choix du systeme de coordonnees
Le choix du systeme de coordonnees repose generalement sur les symetries duprobleme a traiter.
Vecteur position−−→OO1 decompose avec trois vecteurs unitaires formant une base
orthonormee directe(−→u 1,
−→u 2,−→u 3
):
−−→OO1 = α(t) · −→u 1 + β(t) · −→u 2 + γ(t) · −→u 3 (3)
Les parametres α(t), β(t) et γ(t) sont les coordonnees et peuvent dependre dutemps.
Emilien DURIF [email protected] 18/28
Introduction et hypotheses Reperage Parametrage
Parametrage d’un solide
Types de parametrage
Differents types de parametrage peuvent etre choisis pour reperer un point dansl’espace. Il s’agit des systemes de coordonnees :
cartesiennes,cylindriques,spheriques.
Choix du systeme de coordonnees
Le choix du systeme de coordonnees repose generalement sur les symetries duprobleme a traiter.
Vecteur position−−→OO1 decompose avec trois vecteurs unitaires formant une base
orthonormee directe(−→u 1,
−→u 2,−→u 3
):
−−→OO1 = α(t) · −→u 1 + β(t) · −→u 2 + γ(t) · −→u 3 (3)
Les parametres α(t), β(t) et γ(t) sont les coordonnees et peuvent dependre dutemps.
Emilien DURIF [email protected] 18/28
Introduction et hypotheses Reperage Parametrage
Parametrage d’un solide
Types de parametrage
Differents types de parametrage peuvent etre choisis pour reperer un point dansl’espace. Il s’agit des systemes de coordonnees :
cartesiennes,cylindriques,spheriques.
Choix du systeme de coordonnees
Le choix du systeme de coordonnees repose generalement sur les symetries duprobleme a traiter.
Vecteur position−−→OO1 decompose avec trois vecteurs unitaires formant une base
orthonormee directe(−→u 1,
−→u 2,−→u 3
):
−−→OO1 = α(t) · −→u 1 + β(t) · −→u 2 + γ(t) · −→u 3 (3)
Les parametres α(t), β(t) et γ(t) sont les coordonnees et peuvent dependre dutemps.
Emilien DURIF [email protected] 18/28
Introduction et hypotheses Reperage Parametrage
Parametrage d’un solide
Types de parametrage
Differents types de parametrage peuvent etre choisis pour reperer un point dansl’espace. Il s’agit des systemes de coordonnees :
cartesiennes,cylindriques,spheriques.
Choix du systeme de coordonnees
Le choix du systeme de coordonnees repose generalement sur les symetries duprobleme a traiter.
Vecteur position−−→OO1 decompose avec trois vecteurs unitaires formant une base
orthonormee directe(−→u 1,
−→u 2,−→u 3
):
−−→OO1 = α(t) · −→u 1 + β(t) · −→u 2 + γ(t) · −→u 3 (3)
Les parametres α(t), β(t) et γ(t) sont les coordonnees et peuvent dependre dutemps.
Emilien DURIF [email protected] 18/28
Introduction et hypotheses Reperage Parametrage
Parametrage d’un solide
Types de parametrage
Differents types de parametrage peuvent etre choisis pour reperer un point dansl’espace. Il s’agit des systemes de coordonnees :
cartesiennes,cylindriques,spheriques.
Choix du systeme de coordonnees
Le choix du systeme de coordonnees repose generalement sur les symetries duprobleme a traiter.
Vecteur position−−→OO1 decompose avec trois vecteurs unitaires formant une base
orthonormee directe(−→u 1,
−→u 2,−→u 3
):
−−→OO1 = α(t) · −→u 1 + β(t) · −→u 2 + γ(t) · −→u 3 (3)
Les parametres α(t), β(t) et γ(t) sont les coordonnees et peuvent dependre dutemps.
Emilien DURIF [email protected] 18/28
Introduction et hypotheses Reperage Parametrage
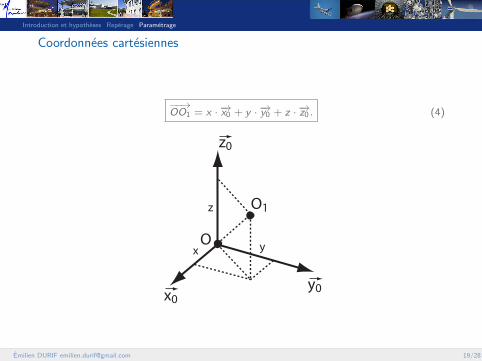
Coordonnees cartesiennes
−−→OO1 = x · −→x0 + y · −→y0 + z · −→z0 . (4)
O
x0y0
z0
O1
x y
z
Emilien DURIF [email protected] 19/28
Introduction et hypotheses Reperage Parametrage
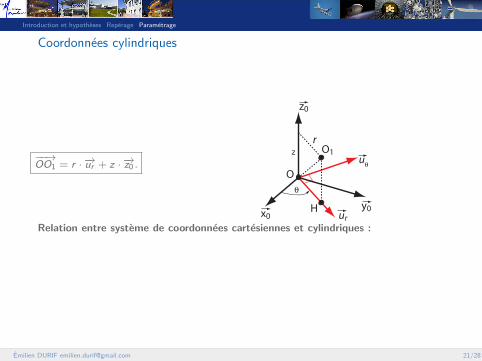
Coordonnees cylindriques
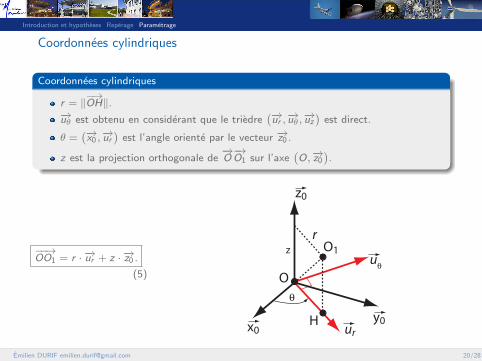
Coordonnees cylindriques
r = ‖−→OH‖.
−→uθ est obtenu en considerant que le triedre(−→ur ,−→uθ,−→uz ) est direct.
θ =(−→x0 ,−→ur)
est l’angle oriente par le vecteur −→z0 .
z est la projection orthogonale de−→O−→O1 sur l’axe
(O,−→z0
).
−−→OO1 = r · −→ur + z · −→z0 .
(5) O
x0y0
z0
O1z
ur
θ
r
uq
H
Emilien DURIF [email protected] 20/28
Introduction et hypotheses Reperage Parametrage
Coordonnees cylindriques
−−→OO1 = r · −→ur + z · −→z0 .
O
x0y0
z0
O1z
ur
θ
r
uq
H
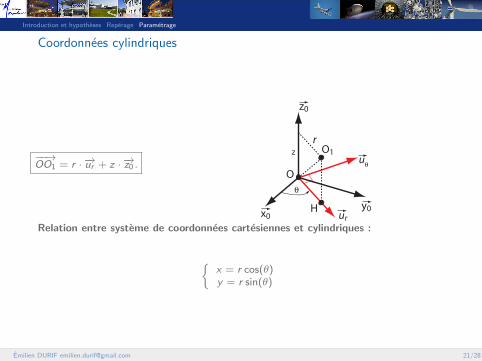
Relation entre systeme de coordonnees cartesiennes et cylindriques :
Emilien DURIF [email protected] 21/28
Introduction et hypotheses Reperage Parametrage
Coordonnees cylindriques
−−→OO1 = r · −→ur + z · −→z0 .
O
x0y0
z0
O1z
ur
θ
r
uq
H
Relation entre systeme de coordonnees cartesiennes et cylindriques :
{x = r cos(θ)y = r sin(θ)
Emilien DURIF [email protected] 21/28
Introduction et hypotheses Reperage Parametrage
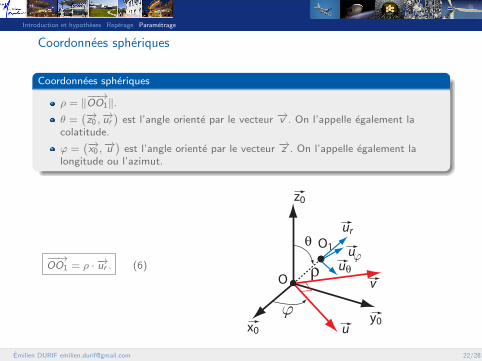
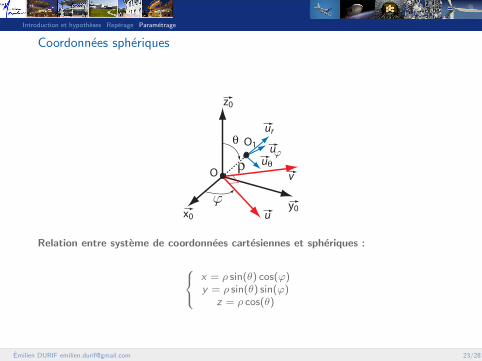
Coordonnees spheriques
Coordonnees spheriques
ρ = ‖−−→OO1‖.
θ =(−→z0 ,−→ur)
est l’angle oriente par le vecteur −→v . On l’appelle egalement lacolatitude.
ϕ =(−→x0 ,−→u)
est l’angle oriente par le vecteur −→z . On l’appelle egalement lalongitude ou l’azimut.
−−→OO1 = ρ · −→ur . (6)
O
x0y0
z0
O1
u
θur
vuq
u
r
Emilien DURIF [email protected] 22/28
Introduction et hypotheses Reperage Parametrage
Coordonnees spheriques
O
x0y0
z0
O1
u
θur
vuq
u
r
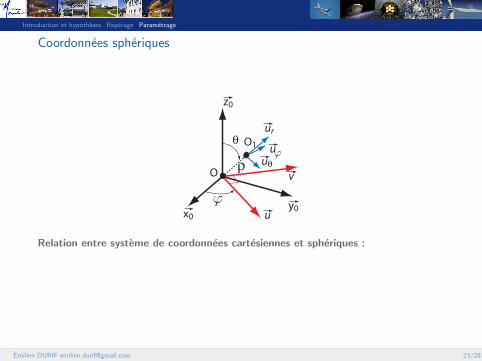
Relation entre systeme de coordonnees cartesiennes et spheriques :
Emilien DURIF [email protected] 23/28
Introduction et hypotheses Reperage Parametrage
Coordonnees spheriques
O
x0y0
z0
O1
u
θur
vuq
u
r
Relation entre systeme de coordonnees cartesiennes et spheriques :
x = ρ sin(θ) cos(ϕ)y = ρ sin(θ) sin(ϕ)
z = ρ cos(θ)
Emilien DURIF [email protected] 23/28
Introduction et hypotheses Reperage Parametrage
Coordonnees spheriques
Systeme de positionnement par satellite (GPS)
C’est le systeme de coordonnees em-ploye par le systeme GPS
Emilien DURIF [email protected] 24/28
Introduction et hypotheses Reperage Parametrage
Plan
1 Introduction et hypothesesIntroductionObjectifs de la modelisation mecaniqueSolide indeformableDifferents types de modelisations mecaniques
2 Repere et referentiel lies a un solideRepere de referenceReferentielReperes lies aux solides
3 Parametrage d’un solideParametrage de la position de l’origine du repere associeParametrage de l’orientation de la base
Emilien DURIF [email protected] 25/28
Introduction et hypotheses Reperage Parametrage
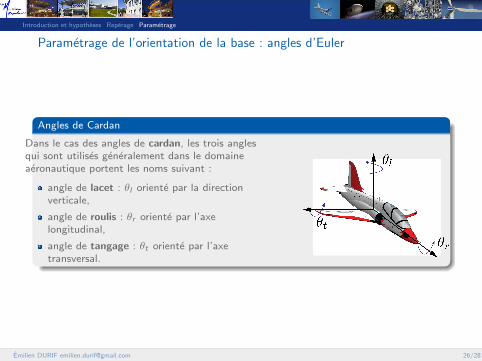
Parametrage de l’orientation de la base : angles d’Euler
Angles de Cardan
Dans le cas des angles de cardan, les trois anglesqui sont utilises generalement dans le domaineaeronautique portent les noms suivant :
angle de lacet : θl oriente par la directionverticale,
angle de roulis : θr oriente par l’axelongitudinal,
angle de tangage : θt oriente par l’axetransversal.
Emilien DURIF [email protected] 26/28
Introduction et hypotheses Reperage Parametrage
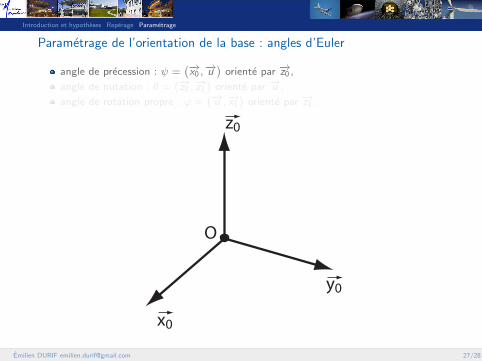
Parametrage de l’orientation de la base : angles d’Euler
angle de precession : ψ =(−→x0 ,−→u)
oriente par −→z0 ,
angle de nutation : θ =(−→z0 ,−→z1
)oriente par −→u ,
angle de rotation propre : ϕ =(−→u ,−→x1
)oriente par −→z1 .
O
x0
y0
z0
Emilien DURIF [email protected] 27/28
Introduction et hypotheses Reperage Parametrage
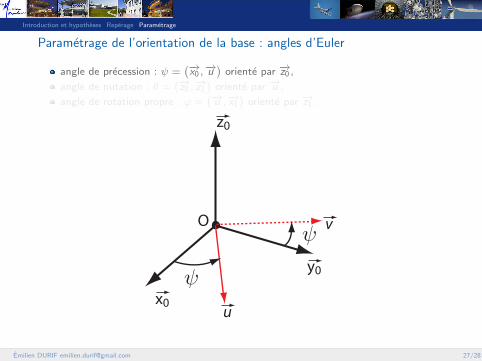
Parametrage de l’orientation de la base : angles d’Euler
angle de precession : ψ =(−→x0 ,−→u)
oriente par −→z0 ,
angle de nutation : θ =(−→z0 ,−→z1
)oriente par −→u ,
angle de rotation propre : ϕ =(−→u ,−→x1
)oriente par −→z1 .
O
x0
y0
z0
u
v
Emilien DURIF [email protected] 27/28
Introduction et hypotheses Reperage Parametrage
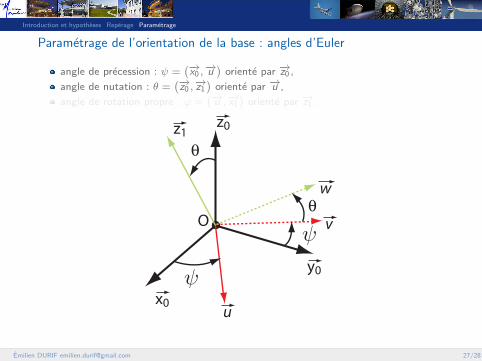
Parametrage de l’orientation de la base : angles d’Euler
angle de precession : ψ =(−→x0 ,−→u)
oriente par −→z0 ,
angle de nutation : θ =(−→z0 ,−→z1
)oriente par −→u ,
angle de rotation propre : ϕ =(−→u ,−→x1
)oriente par −→z1 .
O
x0
y0
z0
u
θz1
v
wθ
Emilien DURIF [email protected] 27/28
Introduction et hypotheses Reperage Parametrage
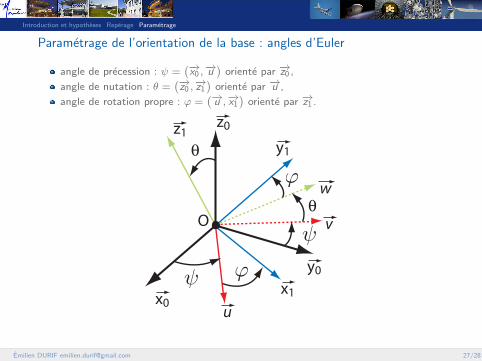
Parametrage de l’orientation de la base : angles d’Euler
angle de precession : ψ =(−→x0 ,−→u)
oriente par −→z0 ,
angle de nutation : θ =(−→z0 ,−→z1
)oriente par −→u ,
angle de rotation propre : ϕ =(−→u ,−→x1
)oriente par −→z1 .
O
x0
y0
z0
u
θ
x1
y1
z1
v
wθ
Emilien DURIF [email protected] 27/28
Introduction et hypotheses Reperage Parametrage
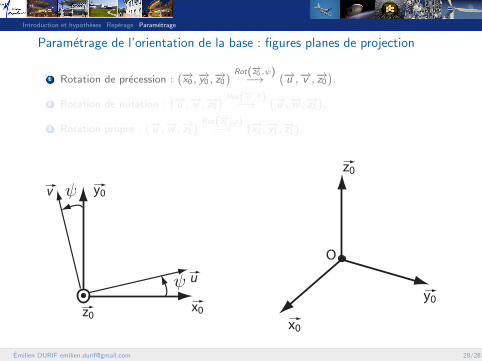
Parametrage de l’orientation de la base : figures planes de projection
1 Rotation de precession :(−→x0 ,−→y0 ,−→z0
) Rot(−→z0 ,ψ)−→
(−→u ,−→v ,−→z0
).
2 Rotation de nutation :(−→u ,−→v ,−→z0
) Rot(−→u ,θ)−→
(−→u ,−→w ,−→z1
).
3 Rotation propre :(−→u ,−→w ,−→z1
) Rot(−→z1 ,ϕ)−→
(−→x1 ,−→y1 ,−→z1
).
0x0
y0
z0
u
θ
r
x1
y1
z1
v
O
x0
y0
z0
Emilien DURIF [email protected] 28/28
Introduction et hypotheses Reperage Parametrage
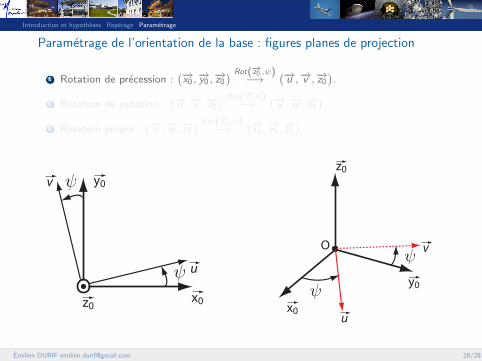
Parametrage de l’orientation de la base : figures planes de projection
1 Rotation de precession :(−→x0 ,−→y0 ,−→z0
) Rot(−→z0 ,ψ)−→
(−→u ,−→v ,−→z0
).
2 Rotation de nutation :(−→u ,−→v ,−→z0
) Rot(−→u ,θ)−→
(−→u ,−→w ,−→z1
).
3 Rotation propre :(−→u ,−→w ,−→z1
) Rot(−→z1 ,ϕ)−→
(−→x1 ,−→y1 ,−→z1
).
0x0
y0
z0
u
θ
r
x1
y1
z1
v
O
x0
y0
z0
u
v
Emilien DURIF [email protected] 28/28
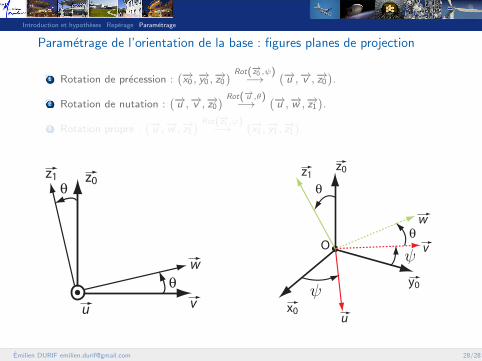
Introduction et hypotheses Reperage Parametrage
Parametrage de l’orientation de la base : figures planes de projection
1 Rotation de precession :(−→x0 ,−→y0 ,−→z0
) Rot(−→z0 ,ψ)−→
(−→u ,−→v ,−→z0
).
2 Rotation de nutation :(−→u ,−→v ,−→z0
) Rot(−→u ,θ)−→
(−→u ,−→w ,−→z1
).
3 Rotation propre :(−→u ,−→w ,−→z1
) Rot(−→z1 ,ϕ)−→
(−→x1 ,−→y1 ,−→z1
).
z0
u
θ
z1
v
w
θ
O
x0
y0
z0
u
θz1
v
wθ
Emilien DURIF [email protected] 28/28
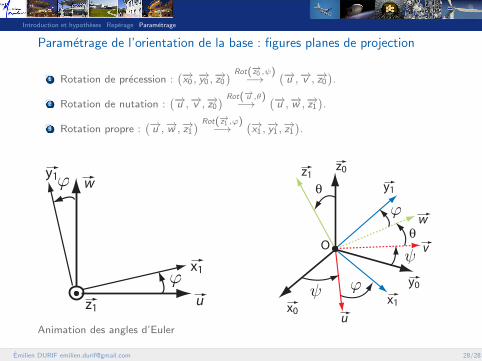
Introduction et hypotheses Reperage Parametrage
Parametrage de l’orientation de la base : figures planes de projection
1 Rotation de precession :(−→x0 ,−→y0 ,−→z0
) Rot(−→z0 ,ψ)−→
(−→u ,−→v ,−→z0
).
2 Rotation de nutation :(−→u ,−→v ,−→z0
) Rot(−→u ,θ)−→
(−→u ,−→w ,−→z1
).
3 Rotation propre :(−→u ,−→w ,−→z1
) Rot(−→z1 ,ϕ)−→
(−→x1 ,−→y1 ,−→z1
).
u
x1
y1
z1
w
O
x0
y0
z0
u
θ
x1
y1
z1
v
wθ
Animation des angles d’Euler
Emilien DURIF [email protected] 28/28