td 8 - performances cinématiques des systèmes : … · c4 : performances cinÉmatiques c4-3...
TRANSCRIPT
C4 : PERFORMANCES CINÉMATIQUES C4-1 Introduction à la modélisation des systèmes mécaniques
LYCÉE LA MARTINIÈRE MONPLAISIR LYON
SCIENCES INDUSTRIELLES POUR L’INGÉNIEUR
CLASSE PRÉPARATOIRE M.P.S.I.
ANNÉE 2018 - 2019
C4 : MODÉLISATION CINÉMATIQUES DES SYSTÈMES COMPOSÉS DE CHAINES DE SOLIDES
TD 8 - Introduction à la modélisation des systèmesmécaniques(C4-1)
27 Novembre 2018
Compétences
• Analyser : Apprécier la pertinence et la validité des résultats :◦ unités du système international ;◦ homogénéité des grandeurs.
• Modéliser : Proposer un modèle de connaissance et de comportement :◦ Solide indéformable ;◦ référentiel, repère◦ équivalence solide/référentiel
1 Bras articulé du robot Spirit
a) Présentation
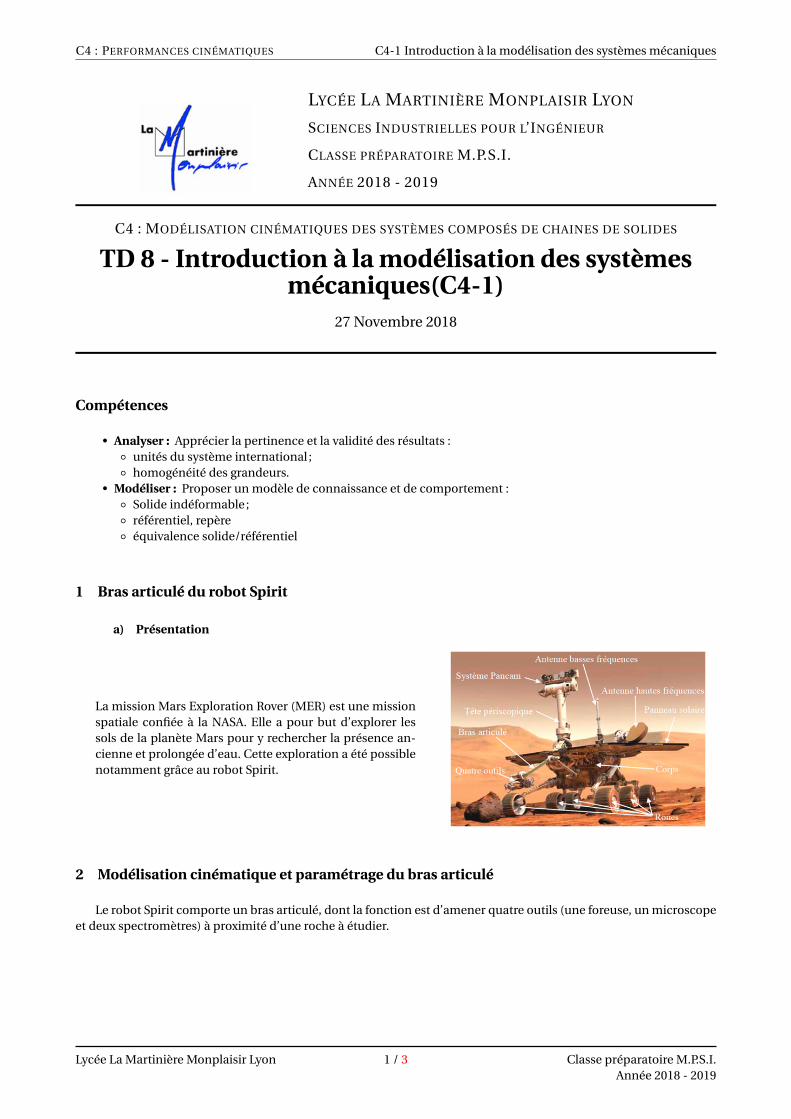
La mission Mars Exploration Rover (MER) est une missionspatiale confiée à la NASA. Elle a pour but d’explorer lessols de la planète Mars pour y rechercher la présence an-cienne et prolongée d’eau. Cette exploration a été possiblenotamment grâce au robot Spirit.
2 Modélisation cinématique et paramétrage du bras articulé
Le robot Spirit comporte un bras articulé, dont la fonction est d’amener quatre outils (une foreuse, un microscopeet deux spectromètres) à proximité d’une roche à étudier.
Lycée La Martinière Monplaisir Lyon 1 / 3 Classe préparatoire M.P.S.I.Année 2018 - 2019
C4 : PERFORMANCES CINÉMATIQUES C4-1 Introduction à la modélisation des systèmes mécaniques
OO!
1O
1
2
3O
4O
4
0 1
2
3
4
3
5
O2
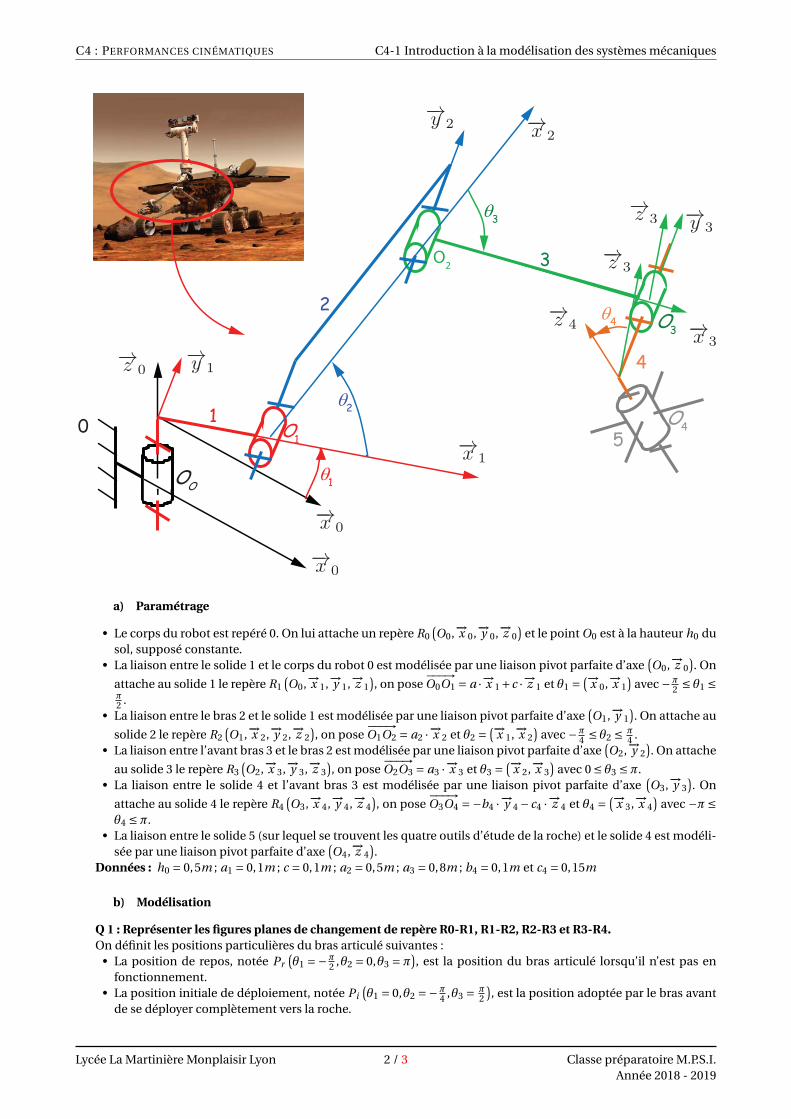
a) Paramétrage
• Le corps du robot est repéré 0. On lui attache un repère R0(O0,−→x 0,−→y 0,−→z 0
)et le point O0 est à la hauteur h0 du
sol, supposé constante.• La liaison entre le solide 1 et le corps du robot 0 est modélisée par une liaison pivot parfaite d’axe
(O0,−→z 0
). On
attache au solide 1 le repère R1(O0,−→x 1,−→y 1,−→z 1
), on pose
−−−→O0O1 = a ·−→x 1+c ·−→z 1 et θ1 =
(−→x 0,−→x 1)
avec −π2 ≤ θ1 ≤
π2 .
• La liaison entre le bras 2 et le solide 1 est modélisée par une liaison pivot parfaite d’axe(O1,−→y 1
). On attache au
solide 2 le repère R2(O1,−→x 2,−→y 2,−→z 2
), on pose
−−−→O1O2 = a2 ·−→x 2 et θ2 =
(−→x 1,−→x 2)
avec −π4 ≤ θ2 ≤ π
4 .• La liaison entre l’avant bras 3 et le bras 2 est modélisée par une liaison pivot parfaite d’axe
(O2,−→y 2
). On attache
au solide 3 le repère R3(O2,−→x 3,−→y 3,−→z 3
), on pose
−−−→O2O3 = a3 ·−→x 3 et θ3 =
(−→x 2,−→x 3)
avec 0 ≤ θ3 ≤π.• La liaison entre le solide 4 et l’avant bras 3 est modélisée par une liaison pivot parfaite d’axe
(O3,−→y 3
). On
attache au solide 4 le repère R4(O3,−→x 4,−→y 4,−→z 4
), on pose
−−−→O3O4 =−b4 ·−→y 4 − c4 ·−→z 4 et θ4 =
(−→x 3,−→x 4)
avec −π≤θ4 ≤π.
• La liaison entre le solide 5 (sur lequel se trouvent les quatre outils d’étude de la roche) et le solide 4 est modéli-sée par une liaison pivot parfaite d’axe
(O4,−→z 4
).
Données : h0 = 0,5m ; a1 = 0,1m ; c = 0,1m ; a2 = 0,5m ; a3 = 0,8m ; b4 = 0,1m et c4 = 0,15m
b) Modélisation
Q 1 : Représenter les figures planes de changement de repère R0-R1, R1-R2, R2-R3 et R3-R4.On définit les positions particulières du bras articulé suivantes :
• La position de repos, notée Pr(θ1 =−π
2 ,θ2 = 0,θ3 =π), est la position du bras articulé lorsqu’il n’est pas en
fonctionnement.• La position initiale de déploiement, notée Pi
(θ1 = 0,θ2 =−π
4 ,θ3 = π2
), est la position adoptée par le bras avant
de se déployer complètement vers la roche.
Lycée La Martinière Monplaisir Lyon 2 / 3 Classe préparatoire M.P.S.I.Année 2018 - 2019
C4 : PERFORMANCES CINÉMATIQUES C4-1 Introduction à la modélisation des systèmes mécaniques
• La position horizontale, notée Ph (θ1 = 0,θ2 = 0,θ3 = 0).• La position verticale, notée Pv
(θ1 = 0,θ2 =−π
4 ,θ3 = 0)
On considère par la suite que 4 et 5 restent toujours immobiles l’un par rapport à l’autre et que l’ensemble (4+5)reste toujours horizontal par rapport au sol (−→z 0 =−→z 4)
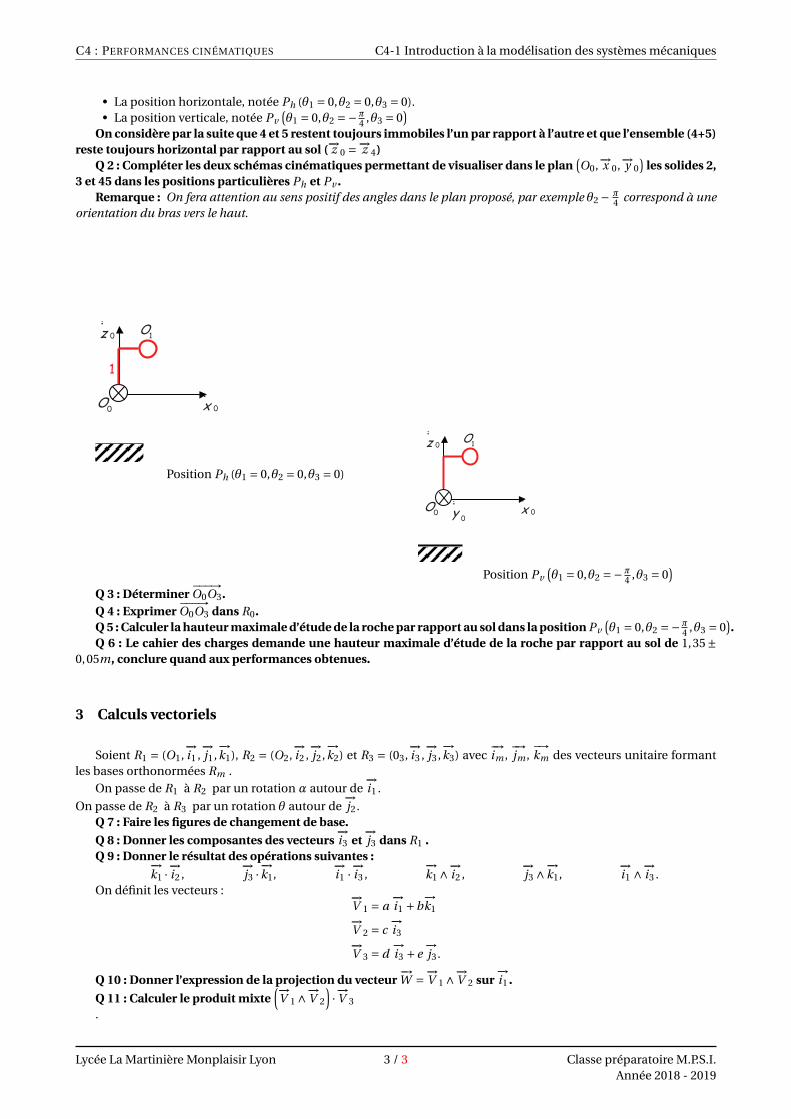
Q 2 : Compléter les deux schémas cinématiques permettant de visualiser dans le plan(O0,−→x 0,−→y 0
)les solides 2,
3 et 45 dans les positions particulières Ph et Pv .Remarque : On fera attention au sens positif des angles dans le plan proposé, par exemple θ2 − π
4 correspond à uneorientation du bras vers le haut.
0x!"
0z!"
0O
1O
1
Position Ph (θ1 = 0,θ2 = 0,θ3 = 0)
0x!"
0z!"
0y!"
0O
1O
Position Pv(θ1 = 0,θ2 =−π
4 ,θ3 = 0)
Q 3 : Déterminer−−−→O0O3.
Q 4 : Exprimer−−−→O0O3 dans R0.
Q 5 : Calculer la hauteur maximale d’étude de la roche par rapport au sol dans la position Pv(θ1 = 0,θ2 =−π
4 ,θ3 = 0).
Q 6 : Le cahier des charges demande une hauteur maximale d’étude de la roche par rapport au sol de 1,35±0,05m, conclure quand aux performances obtenues.
3 Calculs vectoriels
Soient R1 = (O1,−→i1 ,
−→j1 ,
−→k1), R2 = (O2,
−→i2 ,
−→j2 ,
−→k2) et R3 = (03,
−→i3 ,
−→j3 ,
−→k3) avec
−→im ,
−→jm ,
−→km des vecteurs unitaire formant
les bases orthonormées Rm .On passe de R1 à R2 par un rotation α autour de
−→i1 .
On passe de R2 à R3 par un rotation θ autour de−→j2 .
Q 7 : Faire les figures de changement de base.
Q 8 : Donner les composantes des vecteurs−→i3 et
−→j3 dans R1 .
Q 9 : Donner le résultat des opérations suivantes :−→k1 ·−→i2 ,
−→j3 ·
−→k1,
−→i1 ·−→i3 ,
−→k1 ∧−→
i2 ,−→j3 ∧
−→k1,
−→i1 ∧−→
i3 .On définit les vecteurs : −→
V 1 = a−→i1 +b
−→k1
−→V 2 = c
−→i3
−→V 3 = d
−→i3 +e
−→j3 .
Q 10 : Donner l’expression de la projection du vecteur−→W =−→
V 1 ∧−→V 2 sur
−→i1 .
Q 11 : Calculer le produit mixte(−→
V 1 ∧−→V 2
)·−→V 3
.
Lycée La Martinière Monplaisir Lyon 3 / 3 Classe préparatoire M.P.S.I.Année 2018 - 2019