ba ecotron-fr stand 10 16 - sipos.de · pdf filetous les travaux relatifs au transport, au...
TRANSCRIPT

Instructions de service
Servomoteurs électriques
SIPOS 5ECOTRON
Edition 10.16 Y070.019/FRTous droits de modifi cation réservés !

Instructions de service SIPOS 5 ECOTRON
Page 2 Y070.019/FR
Sommaire
Sommaire1 Remarques fondamentales ................ 3
1.1 Informations de sécurité ........................ 3
1.2 Transport et stockage ............................ 4
1.3 Elimination et recyclage ........................ 4
1.4 Remarques relatives aux instructions de service .............................................. 4
1.5 Manuels complémentaires .................... 5
2 Généralités ........................................... 6
2.1 Principe de fonctionnement ................... 6
2.2 Sous-groupes ........................................ 7
2.3 Schéma fonctionnel (raccords élec-triques) .................................................. 8
3 Montage et raccordement ................... 9
3.1 Montage rapporté sur vanne / réducteur ............................................... 9
3.2 Raccordement électrique .................... 10
3.3 Mise en place séparée ........................ 14
4 Instructions sur la commande et le fonctionnement ............................. 15
4.1 Manivelle, volant à main ...................... 15
4.2 Commande locale, visuel .................... 16
4.3 Commande à distance ........................ 18
4.4 COM-SIPOS ........................................ 18
5 Mise en service .................................. 19
5.1 Remarques fondamentales ................. 19
5.2 Réglage des vitesses de rotation, des couples de déconnexion ...................... 20
5.3 Réglage du sens de fermeture, des types de déconnexion ................... 24
5.4 Autres réglages spécifi ques de la vanne via COM-SIPOS ....................... 27
5.5 Régler la démultiplication du réducteur de signalisation et les butées ................................................. 28
6 Signaux d’état et de dérangement ... 35
7 Entretien, inspection, service après-vente ........................................ 37
7.1 Généralités .......................................... 37
7.2 Intervalles de lubrifi cation et lubrifi ants ............................................. 38
8 Pièces de rechange ........................... 39
8.1 Généralités .......................................... 39
8.2 Liste des pièces de rechange .............. 39
8.3 Dessins éclatés ................................... 40
9 Index ................................................... 48
Déclaration de Conformité UE /Déclaration d’incorporation selon laDirective relative aux machines ........... 50

Y070.019/FR Page 3
Instructions de serviceSIPOS 5 ECOTRON
1
Rem
arqu
es fo
ndam
enta
les
1 Remarques fondamentales
1 Remarques fondamentales
1.1 Informations de sécurité
Généralités
Les appareils traités ici sont des parties d’installations pour domaines d’application industriels. Ils sont réalisés conformément aux règles de la technique reconnues correspondantes.
Tous les travaux relatifs au transport, au montage, à l’installation, à la mise en service, à l’entretien et aux réparations doivent impérativement être effectués par des personnes dûment qualifi ées.
Les personnes qualifi ées dans le sens des consignes de sécurité contenues dans la présente documentation sont des personnes qui ont le droit d’exercer l’activité chaque fois requise confor-mément aux normes de la technique de sécurité et sont alors en mesure de détecter les éventuels dangers encourus et de les éviter. Elles doivent très bien connaître les avertissements inscrits sur l’appareil et les consignes de sécurité contenues dans les présentes instructions de service.
Pour les travaux sur les installations à courant fort, l’interdiction d’emploi de personnes non qualifi -ées est réglementée entre autres dans les normes DIN EN 50110-1 (anciennement DIN VDE 0105) ou IEC 60364-4-47 (VDE 0100 Partie 470).
■ Courant de fuiteLe courant de fuite des servomoteurs est typiquement supérieur à 3,5 mA. Une installation fi xe conformément à la norme IEC 61800-5-1 est de ce fait nécessaire.
■ Disjoncteur différentiel ou appareils de surveillanceGrâce au convertisseur de fréquence intégré, un courant continu peut être généré dans le con-ducteur de mise à la terre de protection.Lorsqu’un dispositif différentiel résiduel (DDR) ou un contrôleur d’isolement à courant différen-tiel résiduel (RCM) en amont est utilisé dans le réseau, il doit être de type B.
Le fonctionnement parfait et en toute sécurité implique un transport correct, le stockage, la mise en place et le montage conformément aux règles d’art ainsi qu’une mise en service soigneusement effectuée.
Il s’agit ici d’un produit à disponibilité restreinte selon IEC 61800-3.Ce produit peut causer des interférences radio dans la zone de séjour ; dans ce cas, il peut s’avérer nécessaire de prendre des mesures adéquates.Prière d’observer particulièrement :
■ les données et indications techniques relatives à l’utilisation admissible (conditions de montage, de raccordement, d’environnement et de service) qui sont contenues entre autres dans le cata-logue, les documents de commande, les instructions de service, sur les panneaux et le reste de la documentation du produit ;
■ les prescriptions générales d’érection et de sécurité ; ■ les dispositions et exigences locales spécifi ques à l’installation ; ■ l’utilisation conforme d’outils, d’équipements de levage et d’équipements de transport ; ■ l’utilisation d’équipements de protection personnels, en particulier en cas de températures ambi-antes et de températures de surface élevées sur le servomoteur (causées par des actionnements fréquents et de longues durées).
Avertissements sur l’appareil
Danger d’écrasement. Lors de la pression de la mani-velle ou du volant à main, veiller à ce que la main ou les doigts ne soient pas écrasés ; voir fi g.
S’applique aux appareils des gammes 2SA5.5/6/7/8 et 2SB555/6 : indique le lubrifi ant utilisé ; voir égale-ment le Chapitre.
Fig. : Danger d’écrasement

Instructions de service SIPOS 5 ECOTRON
Page 4 Y070.019/FR
1 Remarques fondamentales
1
Rem
arques fondamentales 1.3 Elimination et recyclage
Emballage
Les emballages de nos produits se composent de matériaux favorables à l’environnement et facile-ment dissociables et peuvent être recyclés. Nos matériaux d’emballage sont : plaques en dérivés du bois (MSB/OSB), carton, papier, feuille en PE. Nous vous recommandons de faire recours à des entreprises de recyclage pour l’élimination des matériaux d’emballage.
Servomoteur
Nos servomoteurs ont une construction modulaire et leurs matériaux peuvent ainsi être aisément séparés et triés en : pièces électroniques, différents métaux, matières synthétiques, graisses et huiles.En règle générale :
■ Collecter les graisses et huiles lors du démontage. Il s’agit en règle générale de matières dange-reuses pour l’eau qui ne doivent en aucun cas être libérées dans l’environnement.
■ Eliminer les matériaux démontés conformément aux règles en vigueur ou les recycler séparément.
■ Observer les prescriptions nationales/locales en matière d’élimination des déchets.
1.4 Remarques relatives aux instructions de service
1.4.1 Consignes de sécurité: Symboles utilisées et leur signifi cationDans les instructions de service, on utilise les symboles ci-après qui ont des signifi cations différentes. En cas de non-respect, on encourt le risque de blessures graves ou de dommages matériels.
Avertissement indique des activités qui, si elles ne sont pas exécutées correctement, présentent un risque de dommages corporels ou matériels.
Remarque indique des activités qui ont une infl uence essentielle sur le fonctionnement correct. Le non-respect pourrait dans certaines conditions entraîner des dommages consécutifs.
Les composants en danger électrostatique se trouvent sur des cartes ; ils peuvent être endommagés ou détruits par des décharges électrostatiques. Si, lors de travaux de réglage, de mesures ou du remplacement de cartes, il est indispensable de toucher des composants, veiller directement avant cela à dériver la charge électrostatique en touchant une surface métallique mise à la terre (p. ex. sur le boîtier).
Opérations déjà exécutées par le fournisseur des vannes : Si les servomoteurs sont livrés montés sur des vannes, cette opération est exécutée chez le four-nisseur des vannes. A la mise en service, le réglage doit être contrôlé.
1.2 Transport et stockage ■ L’expédition doit impérativement être effectuée dans un emballage solide.
■ Pour le transport, boucler une corde autour du moteur et du boîtier du volant à main ; voir Figure. Utiliser les œillets de l’unité électronique (fi g. Pos. 1) uniquement pour lever le poids à vide du servomoteur.
■ Ne jamais fi xer l’engin de levage sur la manivelle ou le volant à main.
■ Stockage dans une pièce bien aérée et sèche. ■ Protection contre l’humidité du sol par stockage sur une étagère ou sur un grillage de bois.
■ Toujours maintenir fermés le capot/couvercle de raccorde-ment et les passe-câbles ainsi que le couvercle de l’unité électronique. Fig. : Transport
Y070.019/FR Page 5
Instructions de serviceSIPOS 5 ECOTRON
1
Rem
arqu
es fo
ndam
enta
les
1 Remarques fondamentales
1.4.2 Champ d’applicationPour des raisons de clarté, les instructions de service ne peuvent pas contenir toutes les informa-tions détaillées sur les variantes constructives possibles et, par conséquent, ne peut prendre en considération chaque cas individuel imaginable en ce qui concerne la mise en place, le fonctionne-ment ou la maintenance. Les instructions de service contiennent donc essentiellement des informa-tions destinées à un personnel qualifi é (voir Paragraphe 1.1) dont la connaissance est indispensab-le pour l’utilisation conforme des appareils dans les domaines d’application industriels.
Si les appareils ne sont pas utilisés dans des domaines industriels et cela implique des exigences de sécurité accrues, la conformité à ces dernières doit impérativement être garantie par la prise de mesures de protection supplémentaires au niveau de l’installation.
Pour toute question à ce sujet, en particulier en ce qui concerne les informations détaillées spé-cifi ques aux produits, veuillez vous adresser au distributeur SIPOS Aktorik compétent. Prière d’indique par principe la désignation de type et le numéro de série du servomoteur concerné (voir la plaque signalétique).
Nous recommandons de faire recours à l’assistance et aux prestations du service après-vente SIPOS Aktorik compétent pour les travaux de planifi cation, de montage, de mise en service ainsi que d’entretien et maintenance.
Nous attirons votre attention sur le fait que le contenu des instructions de service et des documen-tations des produits ne sont pas partie intégrante d’un accord, d’un engagement ou d’un rapport juridique antérieur ou actuel ou n’a pour but de les amender. Toutes les obligations de SIPOS Akto-rik résultent du contrat de vente qui contient également la réglementation intégrale et seule valide en matière de responsabilité pour défaut de qualité garantie. Ces règles contractuelles ne sont ni étendues ni limitées par les informations contenues dans les instructions de service et documenta-tions en question.
1.5 Manuels complémentaires
2SB5 Servomoteur à translation Y070.0272SC5 Servomoteur à fraction de tour Y070.0282SG5 Petit servomoteur à fraction de tour Y070.029Programme de paramétrage pour PC COM-SIPOS Y070.024 Instructions de service PROFIBUS Y070.023 Instructions de service MODBUS Y070.022Instructions de service HART Y070.221Type de protection IP68 "K51" Y070.047Résistance aux vibrations accrue "K57", "K58" Y070.048Résistance aux vibrations accrue selon classe sismique S2A "K59" Y070.049Niveau très élevé de protection contre la corrosion catégorie de corrosivité C5 avec longue durée de protection "L38" Y070.162
Servomoteur SIPOS 5 avec ASI Y070.053Entrées binaires et analogiques librement accessibles par bus Y070.050Manuel abrégé ECOTRON Y070.149et autres
Dans le cas où le fabricant d’éléments étrangers montés ou intégrés en complément a établi et livré des instructions de montage et de service spéciales, ces dernières sont jointes aux présentes et doivent également être observées.

Instructions de service SIPOS 5 ECOTRON
Page 6 Y070.019/FR
2 Généralités
2
Généralités
2 Généralités
2.1 Principe de fonctionnement
Description
Le système électronique avec convertisseur de fréquence integré (1) commande le moteur (2). Par l’intermédiaire de l’arbre à vis sans fi n (3), le moteur fait tourner l’arbre mené (4) qui pour sa part entraîne un train d’engrenages ou, par l’intermédiaire d’un écrou à broche, une broche à vanne (5).
Le mouvement de l’arbre à vis sans fi n (3) est transmis par l’intermédiaire de l’arbre de signalisati-on (6) au réducteur de signalisation (7). Le réducteur de signalisation démultiplie le mouvement et tourne le potentiomètre ou le capteur de course magnétique (8).
Sur la base de la position du potentiomètre ou du capteur de course magnétique, le système élect-ronique détecte la position de l’arbre mené (9), et ainsi la position de la vanne actionnée et com-mande le moteur conformément à la requête de processus.
La détection de couple (DE) est assurée électroniquement.
Fig. : Principe de fonctionnement

Y070.019/FR Page 7
Instructions de serviceSIPOS 5 ECOTRON
2
Gén
éral
ités
2 Généralités
2.2 Sous-groupes
Les servomoteurs de la gamme SIPOS 5 se composent des sous-groupes principaux Réducteur et unité électronique. Pour de plus amples informations à ce sujet, veuillez vous reporter au Chapitre 8.
Le sous-groupe principal Réducteur se compose des sous-groupes suivants :
1 Elément connecteur Raccordement électronique,
2 Moteur,
3 Bloc réducteur,
4 Réducteur de signalisation (pas pour 2SG5) avec couvercle,
5 Commande à main (avec manivelle ou roue),
6 Pièces rapportées mécaniques éventuelles, en fonction du modèle.
Sur le petit servomoteur à fraction de tour 2SG5, on renonce au réducteur de signalisation ; le bloc réducteur et la commande à main ont une autre forme.
Le sous-groupe principal Unité électro-nique se compose des sous-groupes suivants :
1 raccordement électrique (il en existe trois variantes),
2 élément connecteur Raccordement du réducteur,
3 boîtier du système électronique avec couvercle,
Fig. : Sous-groupes Réducteur
Fig. : Sous-groupes Système électronique
4 sous-groupe bloc de puissance avec module de puissance,
5 platine bus de terrain (en option) ou
6 carte à relais (en option),
7 carte de commande.

Instructions de service SIPOS 5 ECOTRON
Page 8 Y070.019/FR
2 Généralités
2
Généralités
2.3 Schéma fonctionnel (raccords électriques)
Le schéma fonctionnel montre les sous-groupes électroniques ainsi que les entrées et sorties pour les éventuels raccordements spécifi ques du client.
Fig. : Schéma fonctionnel SIPOS 5 ECOTRON

Y070.019/FR Page 9
Instructions de serviceSIPOS 5 ECOTRON
3
Mon
tage
et r
acco
rdem
ent
3 Montage et raccordement
3 Montage et raccordement
3.1 Montage rapporté sur vanne / réducteur
Si le servomoteur a été livré monté sur une vanne, cette opération est exécutée chez le fournis-seur des vannes. A la mise en service, le réglage doit toutefois être contrôlé.
■ Observer les informations de sécurité (voir Chapitre 1.1) ! ■ Avant de commencer le montage, s’assurer que les mesures à prendre (actionnement éventuel de la vanne, etc.) ne présentent aucun danger pour les personnes ou un risque de dérange-ment de l’installation.
Nous recommandons de faire recours à l’assistance et aux prestations du service après-vente SIPOS Aktorik compétent pour les travaux de planifi cation, de montage, de mise en service ainsi que d’entretien et maintenance.
3.1.1 Instructions de montage générales pour tous les modèles d’arbre de sortie ■ Montage et fonctionnement possibles dans n’importe quelle position. ■ Eviter les chocs et tout autre usage de violence. ■ Vérifi er si la bride de raccordement et le modèle d’arbre de sortie correspondent à la vanne / au réducteur.
■ Nettoyer soigneusement les surfaces d’appui des brides de raccordement sur le servomoteur et sur la vanne / le réducteur.
■ Légèrement graisser les points de jonction. ■ Poser le servomoteur sur la vanne / le réducteur ; veiller alors à ce qu’il soit bien centré. ■ Utiliser des vis de qualité 8.8 ou supérieure. En cas d’utilisation de vis inoxydables de qualité équivalente, les enduire légèrement de vaseline.Choisir une profondeur de vissage au moins égale à 1,25 fois le diamètre du fi letage.
■ Emboîter le servomoteur sur la vanne / le réducteur et serrer fermement les vis en quinconce. ■ Le boîtier des servomoteurs SIPOS 5 se compose d’un alliage d’aluminium résistant à la cor-rosion dans les conditions d’environnement normales. Si la peinture est endommagée suite au montage, vous pouvez la restaurer avec la peinture originale disponible en petits emballages chez SIPOS Aktorik.
3.1.2 Modèle d’arbre de sortie Forme A
Instruction de montage
Pour visser la douille fi letée sur la broche de la vanne, tourner la manivelle / le volant de la vanne.
Montage et démontage de la douille fi letée
Si la douille fi letée n’a pas été commandée avec un fi let trapé-zoïdal (supplément au numéro de commande : Y18), ou bien si la douille fi letée est usée et doit être remplacée, procéder comme suit :
La bride de sortie (fi g. Pos. 1) ne doit pas impérativement être démontée du servomoteur multitours !1. Tourner la bague de centrage (fi g. Pos. 5) pour la faire sortir
de la bride de sortie.
2. Enlever la douille fi letée (4) ensemble avec la couronne à aiguilles axiale et les disques de palier de butée (3).
3. Enlever la couronne à aiguilles axiale et les disques de palier de butée (3) de la douille fi letée. Fig. : Montage Modèle d’arbre
de sortie Forme A

Instructions de service SIPOS 5 ECOTRON
Page 10 Y070.019/FR
3 Montage et raccordement
3
Montage et raccordem
ent
4. Seulement si la douille fi letée a été livrée sans fi letage : Tarauder la douille fi letée (4) (veiller à ce qu’elle soit concentrique et reste bien dans l’axe lors de son serrage) et la nettoyer.
5. Enduire la couronne à aiguilles axiale et les disques de palier de butée (3) de graisse à rou-lement à bille et les emboîter sur la douille fi letée (4) neuve ou usinée.
6. Insérer la douille fi letée (4) avec les paliers de butée dans la bride de sortie (les dents doivent prendre correctement dans la rainure de l’arbre mené du servomoteur).
7. Visser la bague de centrage (5) et la serrer à fond.Veiller alors à ce que la bague à lèvres en caoutchouc (6) soit correctement insérée.
8. Injecter de la graisse à roulement à billes avec la pompe à graisse dans le graisseur jusqu’à ce que le lubrifi ant sorte entre la bague de centrage (5) et la douille fi letée (4).
Pour l’arbre de sortie Forme A, noter que la lubrifi cation de la broche à vanne doit être effectuée séparément !
3.1.3 Monter le tube protecteur de broche1. Enlever l’obturateur (fi g. Pos. 1).
2. Vérifi er si la broche sortie ne dépasse pas la longueur du tube protecteur de broche.
3. Doter le fi letage et les surfaces d’étanchéité de masse d’étanchéité (p. ex. 732 RTV de la société Dow Corning, Munich).
4. Visser le tube protecteur de broche (2).
Fig. : Modèle d’arbre de sortie Forme A monté
Fig. : Montage du tube protecteur de broche
3.2 Raccordement électrique
Les composants sont dimensionnés de manière à ce que, après un raccordement réglementaire, il ne soit pas possible de toucher des pièces nues sous tension, c’est-à-dire conformément au stan-dard de protection anti-contact selon IP2X ou IPXXB.
Il existe des tensions dangereuses dans le servomoteur même lorsque le moteur est à l’arrêt. Avant d’ouvrir le couvercle de raccord ou le capot de raccord, mettre le servomoteur hors tension. Observer une durée de déchargement des condensateurs d’au moins 5 minutes et veiller à ne toucher aucun contact pendant cette durée.
■ La tension de secteur doit en tout cas être dans la plage de tensions indiquée sur la plaque signalétique.
■ Cordon d’alimentation : Pour le branchement au secteur, utiliser un passe-câble à vis en métal.
■ Câble de signalisation : Pour le branchement du câble de signalisation, utiliser un passe-câb-le à vis en métal avec revêtement de blindage, sinon des dérangements peuvent se produire. Le câble de signalisation doit être blindé et le blindage appliqué sur les deux côtés ou mis à la terre. Veiller à ce que le blindage soit soigneusement réalisé dans le passe-câble à vis !
■ Les passe-câbles à vis et points d’étanchéité (joints toriques) doivent absolument être montés soigneusement pour assurer la conformité du type de protection ! Les sections de câble admissibles sont indiquées dans le schéma des connexions.
■ Les passe-câbles à vis et les câbles ne font pas partie de l’étendue de la livraison.
Y070.019/FR Page 11
Instructions de serviceSIPOS 5 ECOTRON
3
Mon
tage
et r
acco
rdem
ent
3 Montage et raccordement
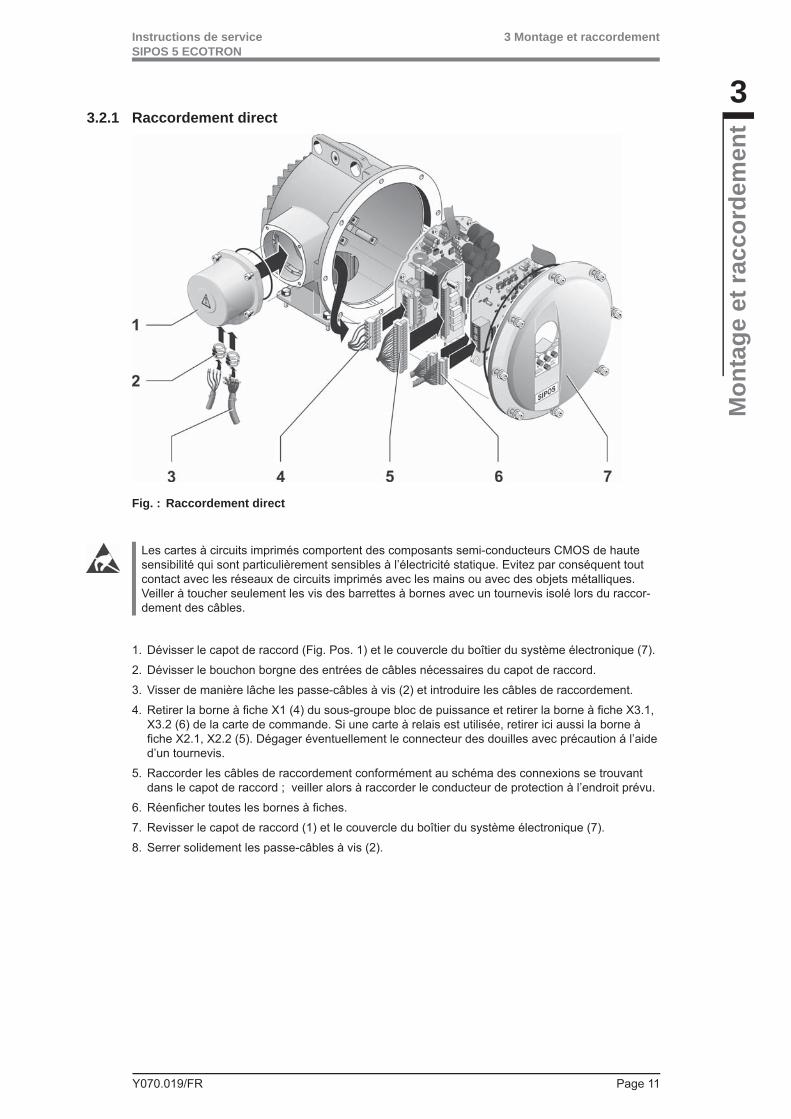
3.2.1 Raccordement direct
Fig. : Raccordement direct
Les cartes à circuits imprimés comportent des composants semi-conducteurs CMOS de haute sensibilité qui sont particulièrement sensibles à l’électricité statique. Evitez par conséquent tout contact avec les réseaux de circuits imprimés avec les mains ou avec des objets métalliques. Veiller à toucher seulement les vis des barrettes à bornes avec un tournevis isolé lors du raccor-dement des câbles.
1. Dévisser le capot de raccord (Fig. Pos. 1) et le couvercle du boîtier du système électronique (7).
2. Dévisser le bouchon borgne des entrées de câbles nécessaires du capot de raccord.
3. Visser de manière lâche les passe-câbles à vis (2) et introduire les câbles de raccordement.
4. Retirer la borne à fi che X1 (4) du sous-groupe bloc de puissance et retirer la borne à fi che X3.1, X3.2 (6) de la carte de commande. Si une carte à relais est utilisée, retirer ici aussi la borne à fi che X2.1, X2.2 (5). Dégager éventuellement le connecteur des douilles avec précaution á l’aide d’un tournevis.
5. Raccorder les câbles de raccordement conformément au schéma des connexions se trouvant dans le capot de raccord ; veiller alors à raccorder le conducteur de protection à l’endroit prévu.
6. Réenfi cher toutes les bornes à fi ches.
7. Revisser le capot de raccord (1) et le couvercle du boîtier du système électronique (7).
8. Serrer solidement les passe-câbles à vis (2).

Instructions de service SIPOS 5 ECOTRON
Page 12 Y070.019/FR
3 Montage et raccordement
3
Montage et raccordem
ent
3.2.2 Raccordement avec connecteur rondDévisser complètement le capot de raccord (fi g. Pos. 2) avec l’élément connecteur (1).
1. Dévisser le bouchon borgne des entrées de câbles nécessaires du capot de raccord.
2. Dévisser complètement l’élément connecteur (1) du capot de raccord (2).
3. Visser de manière lâche le passe-câble à vis (3) et introduire les câbles de raccordement (4).
4. Raccorder les câbles de raccordement conformé-ment au schéma des connexions se trouvant dans le capot de raccord ; veiller alors à raccor-der le conducteur de protection à l’endroit prévu.
5. Visser l’élément connecteur (1) dans le capot de raccord (2), puis visser le capot de raccord.
6. Serrer solidement les passe-câbles à vis (3).
3.2.3 Raccordement du bus de terrain 1. Démonter complètement le boîtier de raccord
de bus de terrain (fi g. Pos. 2) et le couvercle de raccord (4).
2. Dévisser complètement l’élément connecteur (1) du boîtier de raccord de bus de terrain (2).
3. Dévisser le bouchon borgne des entrées de câbles nécessaires du boîtier de raccord de bus de terrain.
4. Visser de manière lâche le passe-câbles à vis (5) et introduire les câbles de raccordement (6).Pour les câbles de bus de terrain, il suffi t d’utiliser des passe-câbles à vis sans revêtement de blindage ; voir Paragraphe 7 ci-dessous.
5. Raccorder les câbles d’alimentation et de signalisation conformément au schéma des connexions se trouvant dans le boîtier de raccord ; veiller alors à raccorder le conducteur de protection à l’endroit prévu.
6. Revisser l’élément connecteur (1) dans leboîtier de raccord de bus de terrain (2).
7. Raccorder les câbles de raccordement du bus de terrain à la carte de terminaison de bus (3). Faire alors passer la gaine isolante de blindage (7) sous la borne métallique (8).
8. Revisser le couvercle de raccord (4) et le boîtier de raccord de bus de terrain (2).
9. Serrer solidement les passe-câbles à vis (5).
a = Si le servomoteur est le dernier abonné au bus, la résistance terminale doit être sur ON, ou une résistance terminale externe doit être activée.b = Raccord pour alimentation électrique 24 V externe. Permet la communication lorsque le réseau est déconnecté.c = raccord pour moniteur de bus PROFIBUS-DP (Protocol Analyzer).
Fig. : Raccordement avec connecteur rond
Fig. : Raccordement bus de terrain

Y070.019/FR Page 13
Instructions de serviceSIPOS 5 ECOTRON
3
Mon
tage
et r
acco
rdem
ent
3 Montage et raccordement
Fig. : Raccord avec isolation galvanique
Fig. : Visser le conducteur équipotentiel
3.2.4 Raccordement avec isolation galvanique Les entrées et sorties binaires sont isolées galvaniquement par l’intermédiaire d’optocoupleurs. Les signaux analogiques peuvent en option être isolés galvaniquement. Ceci s’avère nécessaire quand on veut éviter les interférences de courant et de tension par des potentiels de compensation.
A la commande de « Valeur réelle de position (sortie analogique), isolé galvaniquement », indiquer l’option de commande C10.
1. Dévisser complètement le boîtier de raccord (fi g. Pos. 2) et le couvercle de raccord (4).
2. Dévisser complètement l’élément connecteur (1) du boîtier de raccord (2).
3. Dévisser le bouchon borgne des entrées de câbles nécessaires du boîtier de raccord.
4. Visser de manière lâche le passe-câble à vis (5) et introduire les câbles de raccordement (6).
5. Raccorder les câbles de raccordement conformément au schéma des connexions se trouvant dans le capot de raccord ; veiller alors à raccorder le conducteur de protection à l’endroit prévu.Raccorder le câble pour signaux analogiques "Valeur réelle de position" sur la carte de connexion (3). Faire alors passer la gaine isolante de blindage sous la borne métallique.
6. Visser complètement l’élément connecteur (1) dans le boîtier de raccord (2).
7. Revisser le boîtier de raccord (2) et le couvercle de raccord (4).
8. Serrer solidement les passe-câbles à vis (5).
3.2.5 Raccord de conducteur équipotentiel externeLe raccord de conducteur équipotentiel externe peut être utilisé pour une mise à la terre fonction-nelle, et non comme terre de protection.1. Retirer le bouchon en plastique (1) du boîtier
électronique.
2. Visser le conducteur équipotentiel (3) avec la vis M5 (2) et le disque à crans (4).
Instructions de service SIPOS 5 ECOTRON
Page 14 Y070.019/FR
3 Montage et raccordement
3
Montage et raccordem
ent
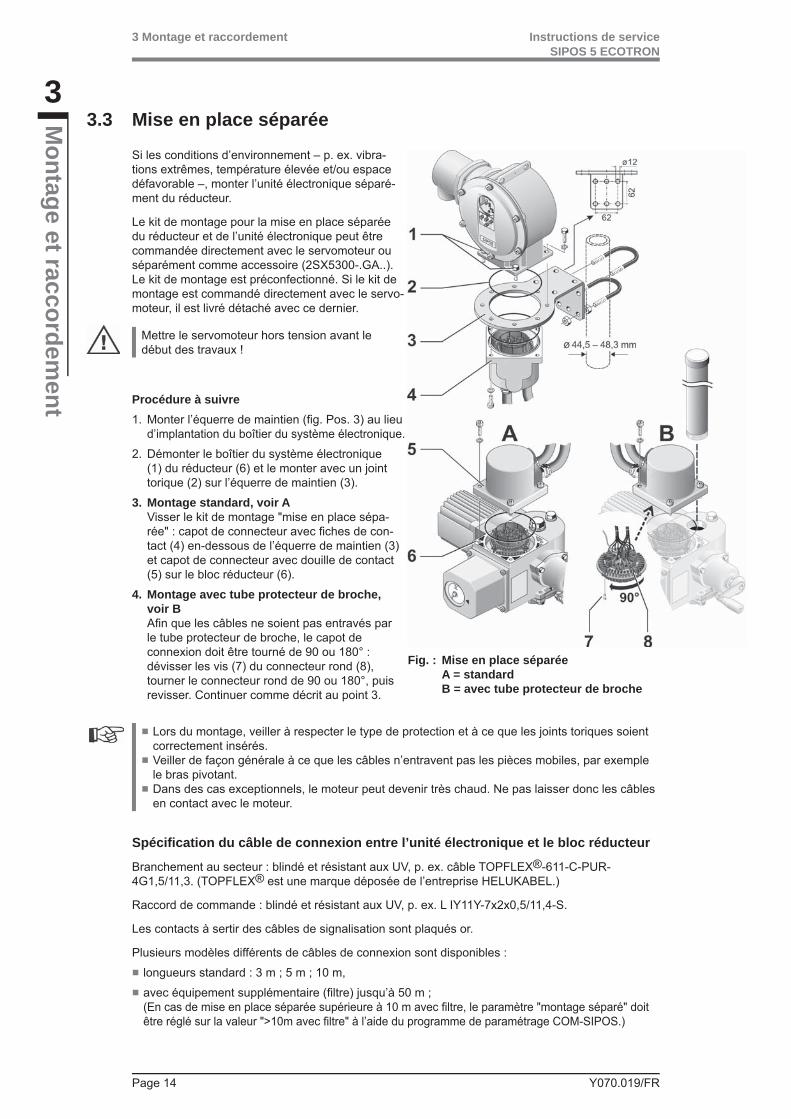
3.3 Mise en place séparée
Si les conditions d’environnement – p. ex. vibra-tions extrêmes, température élevée et/ou espace défavorable –, monter l’unité électronique séparé-ment du réducteur.
Le kit de montage pour la mise en place séparée du réducteur et de l’unité électronique peut être commandée directement avec le servomoteur ou séparément comme accessoire (2SX5300-.GA..). Le kit de montage est préconfectionné. Si le kit de montage est commandé directement avec le servo-moteur, il est livré détaché avec ce dernier.
Mettre le servomoteur hors tension avant le début des travaux !
Procédure à suivre1. Monter l’équerre de maintien (fi g. Pos. 3) au lieu
d’implantation du boîtier du système électronique.
2. Démonter le boîtier du système électronique (1) du réducteur (6) et le monter avec un joint torique (2) sur l’équerre de maintien (3).
3. Montage standard, voir AVisser le kit de montage "mise en place sépa-rée" : capot de connecteur avec fi ches de con-tact (4) en-dessous de l’équerre de maintien (3) et capot de connecteur avec douille de contact (5) sur le bloc réducteur (6).
4. Montage avec tube protecteur de broche, voir BAfi n que les câbles ne soient pas entravés par le tube protecteur de broche, le capot de connexion doit être tourné de 90 ou 180° :dévisser les vis (7) du connecteur rond (8), tourner le connecteur rond de 90 ou 180°, puis revisser. Continuer comme décrit au point 3.
■ Lors du montage, veiller à respecter le type de protection et à ce que les joints toriques soient correctement insérés.
■ Veiller de façon générale à ce que les câbles n’entravent pas les pièces mobiles, par exemple le bras pivotant.
■ Dans des cas exceptionnels, le moteur peut devenir très chaud. Ne pas laisser donc les câbles en contact avec le moteur.
Fig. : Mise en place séparée A = standard B = avec tube protecteur de broche
Spécifi cation du câble de connexion entre l’unité électronique et le bloc réducteur
Branchement au secteur : blindé et résistant aux UV, p. ex. câble TOPFLEX®-611-C-PUR-4G1,5/11,3. (TOPFLEX® est une marque déposée de l’entreprise HELUKABEL.)
Raccord de commande : blindé et résistant aux UV, p. ex. L IY11Y-7x2x0,5/11,4-S.
Les contacts à sertir des câbles de signalisation sont plaqués or.
Plusieurs modèles différents de câbles de connexion sont disponibles : ■ longueurs standard : 3 m ; 5 m ; 10 m, ■ avec équipement supplémentaire (fi ltre) jusqu’à 50 m ;(En cas de mise en place séparée supérieure à 10 m avec fi ltre, le paramètre "montage séparé" doit être réglé sur la valeur ">10m avec fi ltre" à l’aide du programme de paramétrage COM-SIPOS.)

Y070.019/FR Page 15
Instructions de serviceSIPOS 5 ECOTRON
4
Inst
ruct
ions
sur
la c
omm
ande
et l
e fo
nctio
nnem
ent
4 Instructions sur la commande et le fonctionnment
4 Instructions sur la commande et le fonctionnement
4.1 Manivelle, volant à main
■ Il est interdit d’actionner mécaniquement la manivelle / le volant à main. ■ Après la mise en service, ne pas conduire le servomoteur à l’aide de la manivelle / du volant à main au-delà de ses positions fi nales défi nies.
■ Lors de l’enfoncement de la manivelle / du volant à main, veiller à ce que la main ne se trouve pas entre la manivelle / le volant à main et le boîtier : Danger d’écrasement ! Voir l’étape de commande 3 ci-après.
En mode motorisé, la manivelle / le volant à main est à l’arrêt.
Commande
Commande pour tous les servomoteurs, sauf 2SG5 :1. Le servomoteur doit être à l’arrêt.
2. Retirer la bride de fi xation (option). La bride de fi xa-tion sert de protection contre l’accouplement invo-lontaire de la manivelle / du volant à main lorsque le servomoteur est soumis à des vibrations importantes ou à la pression de l’eau (type de protection IP 68).
3. Enfoncer la manivelle / le volant à main vers le boîtier du réducteur contre la tension de ressort et la/le tourner. (Attention : Danger d’écrasement lors de l’enfoncement !)
Le fonctionnement en mode manuel a priorité sur le fonctionnement en mode motorisé. On ne peut de nouveau déplacer électriquement le servomoteur qu’après avoir relâché la manivelle / le volant à main.
Seulement pour 2SG5 :
Tourner le volant à main sans l’enfoncer. Le fonctionnement en mode manuel est prioritaire par rap-port au fonctionnement en mode motorisé : si on tourne le volant à main en mode motorisé, on as-siste, en fonction du sens de rotation, à une augmentation ou une réduction du temps de réglage.
Sens de rotation
Rotation à droite de la manivelle / du volant à main a l’effet suivant ■ Servomoteur multitours 2SA5 : rotation à droite à l’arbre mené (exception pour 2SA5.7. et 2SA5.8.).
■ Servomoteur à translation 2SB5 : sortie de la bielle motrice. ■ Servomoteur à fraction de tour 2SC5 : Avec vue sur le couvercle de pointeur du réducteur à vis sans fi n, rotation à droite sur l’accouplement ou sur le levier pivotant pour les modèles de réducteur RR ou LR.
■ Servomoteur à fraction de tour 2SG5 : Avec vue sur l’indicateur de position mécanique, rotation à droite sur l’accouplement ou sur le levier pivotant.
Fig. : Commande de la manivelle

Instructions de service SIPOS 5 ECOTRON
Page 16 Y070.019/FR
4 Instructions sur la commande et le fonctionnment
4
Instructions sur la comm
ande et le fonctionnement
Commande localeAvec la commande locale (VOS – de l’allemand Vor-Ort-Steuerung), on peut procéder à la commande directement sur le servomoteur à l’aide de 4 boutons-poussoirs (voir fi g. Panneau de commande).
En appuyant sur la touche LOCAL/DISTANCE, on peut commuter entre les deux états « Distance » et « Local ».
Selon l’état dans lequel se trouve le servomoteur, les boutons ont une fonction différente.
Le programme de paramétrage COM-SIPOS pour PC permet une commande confortable du servomoteur ; voir Chap. 4.4. On peut alors accéder au servomoteur à partir du PC (ordinateur portable) par câble.
4.1.1 Signifi cation des diodes électroluminescentes (DEL) et fonction des boutons-poussoirs
Diodes électroluminescentes "LOCAL" et "DISTANCE"
Les diodes électroluminescentes indiquent l’état dans lequel se trouve le servomoteur : ■ Distance » : la DEL DISTANCE (jaune) est éclairée ; ■ Local » : la DEL LOCAL (jaune) est éclairée ;
Diodes électroluminescentes OUVERT) et (FERMÉ)
La DEL OUVERT (verte) clignote quand le servomoteur se déplace dans le sens OUVERT, et est éclairée en perma-nence lorsque le servomoteur est à la butée OUVERT. Ceci est analogue pour la DEL OUVERT (jaune).
Diodes électroluminescentes H1 et H2
Les DEL H1 (verte) et H2 (rouge) indiquent les messa-ges d’état et de dérangement ; voir Chapitre 6 suivant « Signaux d’état et de dérangement ». Ces DEL indiquent en outre les états lors de l’ajustage des butées.
Fonction des boutons-poussoirs à l’état « Local »
A l’état « Local », le déplacement (OUVERT, FERMÉ ainsi que ARRET) du servomoteur sur place est possible, l’activation de « Distance » est bloquée.
1 Bouton ARRÊT/ENTRÉE Le bouton ARRÊT/ENTRÉE arrête le servomoteur.
2 Bouton LOCAL/DISTANCE Le bouton LOCAL/DISTANCE commute entre les états « Distance » et « Local » .
3 Touche (OUVERT)Quand elle est actionnée, le servomoteur se déplace dans le sens OUVERT. Lorsqu’elle est actionnée brièvement (< 2 s), le servomoteur se déplace tant que la touche est enfoncée. Lorsqu’on tient le bouton-poussoir enfoncé pendant plus de 2 secondes, le servomoteur continue à se déplacer après le relâchement de la touche jusqu’à ce que la butée soit atteinte ou bien qu’on appuie sur la touche ARRÊT ou la touche FERMÉ (automaintien).
4 Touche (FERMÉ)Le servomoteur se déplace dans le sens FERMÉ. Comportement comme pour la touche OUVERT.
Appuyer simultanément sur les touches OUVERT et FERMÉ pour activer la fonction URGENCE : Le servomoteur se déplace à la vitesse de rotation / vitesse de réglage / temps de réglage d’urgence paramétré(e) vers la position d’URGENCE Butée FERMÉ.
Si on appuie sur la touche LOCAL/DISTANCE à l’état « Local », le servomoteur se met à l’état « Distance » et se déplace à la réception d’une instruction d’excitation du poste de commande !
Fig. : Panneau de commande

Y070.019/FR Page 17
Instructions de serviceSIPOS 5 ECOTRON
4
Inst
ruct
ions
sur
la c
omm
ande
et l
e fo
nctio
nnem
ent
4 Instructions sur la commande et le fonctionnment
4.1.2 Indication de l’état du servomoteurLes DEL indiquent par leur état (éclairé et/ou clignotant) dans quel état le servomoteur se trouve actuellement.
Les états des DEL (éteint – éclairé – clignotant) sont représentés dans les présentes instructions de service comme suit:
La DEL (diode électroluminescente) est éteinte
La DEL (diode électroluminescente) est éclairée
La DEL (diode électroluminescente) clignote
Disposition des DEL État des DEL Explication
(jaune) (vert)
Les DEL FERMÉ et OUVERT indiquent si le servomoteur ■ est immobile, ■ se déplace et dans quelle direction (OUVERT ou FERMÉ), ■ se trouve à la butée et à laquelle (OUVERT ou FERMÉ).
Les deux DEL sont éteintes : le servomoteur est immobile et se trouve entre les butées.La DEL FERMÉ clignote : Le servomoteur se déplace dans le sens Butée FERMÉ.La DEL OUVERT clignote : Le servomoteur se déplace dans le sens Butée OUVERT.La DEL FERMÉ est éclairée en permanence : Le servomoteur se trouve à la butée FERMÉ.La DEL OUVERT est éclairée en permanence : Le servomo-teur se trouve à la butée OUVERT.
LOCAL(jaune)
DISTANCE(jaune)
Les DEL LOCAL et DISTANCE indiquent dans quel état se trouve le servomoteur : « Local » ou « Distance ».
Le servomoteur se trouve à l’état « Local ».
Le servomoteur se trouve à l’état « Distance ».
H1(vert)
H2(rouge)
Les DEL H1 et H2 indiquent « Prêt » ou « Dérangement » et, pendant la mise en service, les états.La DEL H1 est constamment éclairée : Le servomoteur est en état de marche.
La DEL H1 clignote : Le servomoteur se trouve à la mise en service.Etats pendant la mise en service : voir les chapitres suivants.
La DEL H1 est éteinte : Dérangement ! Voir Chapitre « Messages d’état et de dérangement ».

Instructions de service SIPOS 5 ECOTRON
Page 18 Y070.019/FR
4 Instructions sur la commande et le fonctionnment
4
Instructions sur la comm
ande et le fonctionnement
4.2 Commande à distance
4.2.1 ExcitationL’excitation des servomoteurs se fait, en fonction du système d’automatisation, via
■ raccord conventionnel (24 V binaire) ou ■ bus de terrain (p. ex. PROFIBUS DP ou MODBUS RTU).Chaque servomoteur (abonné) au bus de terrain est excité par l’intermédiaire de son adresse de bus. L’adresse de bus est prédéfi nie à l’état à la livraison pour tous les appareils : 126 pour PROFIBUS et 247 pour MODBUS, si rien d’autre n’a été commandé avec le formulaire de pro-grammation Supplément de commande « Y11 ».Le fonctionnement via une interface de bus de terrain est décrit dans les instructions de service séparées ; voir également Chapitre 1.5 « Manuels complémentaires ».La commutation de « Distance » à « Local » peut être bloquée via le bus de terrain.
Une instruction d’URGENCE émise par le poste de commande est, indépendamment du type d’excitation et de la source de signal sélectionnés, en tout cas exécutée par le servomoteur, même si le servomoteur est excité conventionnellement et l’instruction d’URGENCE est reçue via le bus de terrain et vice versa.
4.2.2 ObserverL’observation à distance n’est possible qu’en mode d’excitation par bus de terrain.
■ PROFIBUS DP Le paramétrage de l’appareil peut être lu à l’aide de services cycliques ou acycliques. On dispo-se d’un grand nombre d’outils logiciels pour l’intégration aisée.
Outils de planifi cation et de paramétrage pour tous les fabricants :
– SIMATIC PDM (Process Device Manager). La description de l’appareil SIPOS 5 Flash EDD (Electronic Device Description) est intégrée dans cet outil de paramétrage et de planifi cation.
– FDT/DTM (Field Device Tool/Device Type Manager). Pour l’intégration dans l’outil de paramé-trage FDT, la description d’appareil SIPOS 5 Flash DTM est disponible.
■ MODBUS RTU Les paramètres de l’appareil peuvent être lus à l’aide de soi-disant « Holding Registers » et « Coils ». L’observation et le diagnostic sont possibles à l’aide des « Input Register » et « Discrete Inputs ».
4.3 COM-SIPOS
Le programme de paramétrage COM-SIPOS pour PC est un outil logiciel pour les opérations suivantes :
■ commande: déplacement du servomoteur en mode local; ■ observation: lecture des paramètres du servomoteur, de l’état de l’appareil aux états « Local » et « Distance »;
■ diagnostic: dépistage des défauts ; ■ installation de nouveaux micrologiciels: mise à jour du logiciel ; ■ archivage: enregistrement des paramètres du servomoteur.COM-SIPOS permet un paramétrage étendu du servomoteur.
La connexion entre le PC et le servomoteur se fait via câble zéro modem standard.
COM-SIPOS peut être fourni avec câble zéro modem, adaptateur USB-série et manuel de l’utilisateur (sur CD) ; numéro de commande: 2SX5100-3PC02.

Y070.019/FR Page 19
Instructions de serviceSIPOS 5 ECOTRON
5
Mis
e en
ser
vice
5 Mise en service
5 Mise en service
5.1 Remarques fondamentales
■ Avant tous travaux sur le servomoteur installé, s’assurer auprès du personnel opérateur de l’installation que la mise en service ne peut entraîner aucun dérangement de l’installation ou présenter des dangers pour les personnes.
■ Le choix d’un type de déconnexion ou le réglage d’un couple inadéquat pour la vanne peut entraîner l’endommagement de la vanne !
■ Des tensions dangereuses sont présentes dans le servomoteur. ■ Si on appuie sur la touche LOCAL/DISTANCE à l’état « Local », le servomoteur se met à l’état « Distance » et se déplace à la réception d’une instruction d’excitation du poste de commande !
■ Avant la mise en service, activer l’état « Local ». ■ Nous recommandons de faire recours à l’assistance et aux prestations du service après-vente SIPOS Aktorik compétent pour les travaux de planifi cation, de montage, de mise en service ainsi que d’entretien et maintenance.
5.1.1 S’assurer que toutes les conditions requises pour la mise en service sont rempliesVérifi er les conditions suivantes ou s’assurer qu’elles sont remplies après le montage ou lors de la révision:
■ Le servomoteur est correctement monté. ■ Toutes les vis de fi xation et tous les éléments de connexion sont solidement serrés. ■ Les connexions de mise à la terre et de compensation de potentiel sont correctement établies. ■ Le raccordement électrique est correctement réalisé. ■ Toutes les mesures de protection anti-contact pour pièces mobiles ou sous tension ont été prises. ■ Le servomoteur et la vanne ne sont pas endommagés. ■ La plage de températures admissibles pour le servomoteur est respectée, et la transmission de chaleur de l’actionneur a été prise en considération.
D’autres contrôles sont éventuellement indispensables, en fonction des conditions spécifi ques qui prévalent pour l’installation.
5.1.2 Les opérations de mise en service doivent être effectuées dans l’ordre suivant et sont décrites en détail ci-après
■ Chaque réglage ne doit pas impérativement être effectué. En fonction de ce que des directives ont été données pour le réglage à la commande du servomoteur ou non, ou bien si le servomo-teur a même déjà été livré monté sur la vanne, il peut être nécessaire de contrôler seulement les réglages.
■ Après la modifi cation des réglages, mettre le commutateur DIP S8 sur ON puis de nouveau sur OFF afi n que les modifi cations soient adoptées.
1. Paramétrer / contrôler la vitesse de rotation ou vitesse de réglage / temps de réglage et les couples / la force de déconnexion.
2. Paramétrer/contrôler le sens de fermeture, le mode de déconnexion et le mode d’excitation.
3. Sélectionner l’un des 4 jeux de messages et, ainsi, défi nir les messages prédéfi nis aux 5 sorties de signalisation.
4. Contrôler / régler la démultiplication du réducteur de signalisation et les butées. Le réglage de la démultiplication du réducteur de signalisation n’est nécessaire que si aucune directive n’a été faire à la commande du servomoteur et le réglage par défaut ne correspond pas aux exigences.
5. Contrôler / régler l’indicateur de position mécanique s’il est installé.

Instructions de service SIPOS 5 ECOTRON
Page 20 Y070.019/FR
5 Mise en service
5
Mise en service
5.1.3 Potentiomètres et commutateur DIPLe paramétrage se fait aux potentiomètres et sur le commutateur DIP de la carte électronique. Dévisser à cet effet le couvercle de l’unité électronique.
Disposition des potentiomètres et du commu-tateur DIP sur la carte électronique1. Commutateur DIP : Voir les réglages ci-dessous
2. Potentiomètre – Vitesse de rotation
3. Potentiomètre – Couple de déconnexion à la butée FERMÉ
4. Potentiomètre – Couple de déconnexion à la butée OUVERT
Commutateur DIP
S1 Sens de fermeture : rotation à gauche ou à droite
S2 Type de déconnexion FERMÉ : en fonction de la course ou du couple
S3 Type de déconnexion OUVERT : en fonction de la course ou du couple
S4 et S5 Jeux de messages : quatre jeux sélectionna-bles
S6 Mode d’excitation « DISTANCE » : Régler Contact à impulsion (automaintien) ou Contact permanent.
S7 Adoption de l’ajustage des butées
S8 Adoption générale
Les réglages des potentiomètres et du commutateur DIP illustrés ici sont les réglages par défaut, sauf exigence contraire du client.
5.2 Réglage des vitesses de rotation, des couples de déconnexion
Les servomoteurs neufs sont préréglés. Sauf exigence contraire du client, les valeurs par défaut des paramètres sont les suivantes :
■ Vitesse de rotation / vitesse de réglage / temps de réglage dans les sens FERMÉ et OUVERT : 4ème valeur de la plage de paramètres à 7 valeurs (facteur de classement : 1,4).
■ couples/forces de déconnexion dans les sens FERMÉ et OUVERT : Plus petite valeur de pa-ramètre en fonction de l’appareil ; pour servomoteur de commande 30 %, pour servomoteur de régulation 50 % de la valeur maximale (invariable pour 2SG5).
Dans le cas où on souhaite garder le paramétrage actuel, continuer avec les instructions du Chapit-re 5.3 « Réglage du sens de fermeture, des types de déconnexion ».
Fig. : Commutateur DIP
Fig. : Disposition des potentiomètres et du commutateur DIP
Fig. : Enlever le couvercle

Y070.019/FR Page 21
Instructions de serviceSIPOS 5 ECOTRON
5
Mis
e en
ser
vice
5 Mise en service
5.2.1 Régler les vitesses de rotation / vitesses de réglage / temps de réglageLe paramétrage des vitesses de rotation permet de défi nir à quelle vitesse le servomoteur se dé-place. En fonction du type de servomoteur, différentes valeurs peuvent être réglées pour la vitesse de rotation :
Vitesses de rotation pour servomoteur multitours 2SA5Plages de vitesses Valeurs possibles pour la vitesse de rotation de sortie [1/min]
Servomoteur de commande1,25 – 10 1,25 1,75 2,5 3,5 5 7 102,5 – 20 2,5 3,5 5 7 10 14 205 – 28 5 7 10 14 20 28 –5 – 40 5 7 10 14 20 28 40
10 – 80 10 14 20 28 40 56 8020 – 112 20 28 40 56 80 112 –20 – 160 20 28 40 56 80 112 160
Servomoteur de régulation1,25 – 10 1,25 1,75 2,5 3,5 5 7 10
5 – 40 5 7 10 14 20 28 40Régimes : Par défaut = 4 1 2 3 4 5 6 7
Vitesses de réglage pour servomoteur à translation 2SB5Plages de vitesses de
réglage Valeurs possibles pour la vitesse de réglage en mm/mn
25 – 200 25 35 50 70 100 140 20030 – 240 30 42 60 84 120 168 24035 – 280 35 49 70 98 140 196 28040 – 320 40 56 80 112 160 224 320
Régimes de vitesses de réglage : Par défaut = 4 1 2 3 4 5 6 7
Temps de réglage pour servomoteur à fraction de tours 2SC5 et 2SG5Plage de temps de réglage Valeurs possibles pour le temps de réglage en s/90°2SC5 160 – 20 160 112 80 56 40 28 202SG5 80 – 10 80 56 40 28 20 14 10
Niveaux de temps de réglage : Par défaut = 4 1 2 3 4 5 6 7
Régler
Le réglage de la vitesse de rotation se fait à l’aide du potentiomètre gauche des trois potentiomètres.
Potentiomètres FonctionRéglage de la (du)
■ vitesse de rotation pour servomoteur multitours, ■ vitesse de réglage pour servomoteur à translation, ■ temps de réglage pour servomoteur à fraction de tours.
Sept (7) réglages sont possibles au sein d’une plage en fon-ction du type (le type de servomoteur est également indiqué sur la plaque signalétique).Régler : Tourner le potentiomètre sur le régime souhaité (1 – 7). Valeurs de réglage par régime : voir table ci-dessus.
Si on ne procède à aucun autre réglage, ■ mettre le commutateur DIP S8 sur ON, puis de nouveau sur OFF et ■ Visser le couvercle de l’unité électronique.

Instructions de service SIPOS 5 ECOTRON
Page 22 Y070.019/FR
5 Mise en service
5
Mise en service
5.2.2 Régler les couples / forces de déconnexion
Couple / force de déconnexion
Le réglage du couple de déconnexion pour le servomoteur multitours et le servomoteur à fraction de tour ainsi que de la force de déconnexion pour le servomoteur à translation défi nit le couple ou la force que doit atteindre le servomoteur en fonction de la charge afi n que le moteur se décon-necte. Ceci s’applique aussi bien à la déconnexion en fonction du couple / de la force à la butée qu’à un blocage. Par conséquent, il faut également régler le couple de déconnexion et la force de déconnexion même en cas de déconnexion en fonction de la course.
La plage de réglage est 30 – 100 % du couple maximal pour le servomoteur de commande et 50 – 100 % du couple maximal pour le servomoteur de régulation en pas de 10 % (pour quelques servomoteurs à fraction de tour, d’autres valeurs limites sont applicables). Le réglage par défaut est chaque fois la valeur la plus petite possible (typiquement 30 % de la valeur maximale pour le servo-moteur de commande et 50 % de la valeur maximale pour le servomoteur de régulation).
Les tables ci-après indiquent les valeurs de paramètres disponibles.
Pour le servomoteur à fraction de tour 2SG5, le couple de déconnexion n’est pas variable.
Couples de déconnexion pour servomoteur multitours 2SA5Plage de déconnexion Valeurs possibles pour le réglage en Nm de Mdmax
Servomoteur de commande9 – 30 9 12 15 18 21 24 27 3018 – 60 18 24 30 36 42 48 54 60
37 – 125 37 50 62 75 87 100 112 12575 – 250 75 100 125 150 175 200 225 250
150 – 500 150 200 250 300 350 400 450 500300 – 1000 300 400 500 600 700 800 900 1000600 – 2000 600 800 1000 1200 1400 1600 1800 2000
1200 – 4000 1200 1600 2000 2400 2800 3200 3600 4000Couple de
déconnexion en%:Par défaut = 30 %
30 40 50 60 70 80 90 100
Servomoteur de régulation10 – 20 10 12 14 16 18 2020 – 40 20 24 28 32 36 4040 – 80 40 48 56 64 72 80
87 – 175 87 105 122 140 157 175175 – 350 175 210 245 280 315 350350 – 700 350 420 490 560 630 700700 – 1400 700 840 980 1120 1260 1400
1400 – 2800 1400 1680 1960 2240 2520 2800Couple de
déconnexion en%: Par défaut = 50 %
50 60 70 80 90 100
Forces de déconnexion pour servomoteur à translation 2SB5Plage de déconnexion Valeurs possibles pour le réglage en kN de Fmax
3,8 – 7,7 3,8 4,6 5,3 6,1 6,9 7,77,7 – 15,4 7,7 9,2 10,7 12,3 13,8 15,412,5 – 25 12,5 15 17,5 20 22,5 2522,5 – 45 22,5 27 31,5 36 40,5 4545 – 90 45 54 63 72 81 9076 – 152 76 91 106 121 136 152
Force de déconnexion en%: Par défaut = 50 %
50 60 70 80 90 100

Y070.019/FR Page 23
Instructions de serviceSIPOS 5 ECOTRON
5
Mis
e en
ser
vice
5 Mise en service
Couples de déconnexion pour servomoteur à fraction de tour 2SC5Plage de déconnexion Valeurs possibles pour le réglage en Nm de Mdmax
Servomoteur de commande150 – 250 150 200 250 --- --- --- --- ---150 – 500 150 200 250 300 350 400 450 500330 – 990 330 440 550 660 770 880 990 –330 – 1100 330 440 550 660 770 880 990 1100690 – 1840 690 920 1150 1380 1610 1840 – –690 – 2300 690 920 1150 1380 1610 1840 2070 2300
1440 – 3840 1440 1920 2400 2880 3360 3840 – –1440 – 4800 1440 1920 2400 2880 3360 3840 4320 4800
Couple de déconnexion en %: Par défaut = 30 % 30 40 50 60 70 80 90 100
Servomoteur de régulation175 – 350 175 210 245 280 315 350385 – 770 385 462 539 616 693 770
800 – 1600 800 960 1120 1280 1440 16001800 – 3600 1800 2160 2520 2880 3240 3600
Couple de déconnexion en % : Par défaut = 50 % 50 60 70 80 90 100
Régler
Le réglage des couples/forces de déconnexion se fait pour FERMÉ à l’aide du potentiomètre central et pour OUVERT à l’aide du potentiomètre de droite. La plage de réglage est 30 – 100 % du couple maximal pour le servomoteur de commande et 50 – 100 % du couple maximal pour le servomoteur de régulation en pas de 10 %.
Potentiomètres FonctionRéglage à la butée FERMÉ des
■ couples de déconnexion pour servomoteur multitours et pour servomoteur à fraction de tour
■ forces de déconnexion pour servomoteur à translation.
Régler : Tourner le potentiomètre sur le régime souhaité (servomoteur de commande : 30 % – 100 % ; servomoteur de régulation : 50 % – 100 %). Valeurs de réglage par régime : voir table ci-dessus.Réglage à la butée OUVERT des
■ couples de déconnexion pour servomoteur multitours et pour servomoteur à fraction de tour
■ forces de déconnexion pour servomoteur à translation.Régler : Tourner le potentiomètre sur le régime souhaité (30 % – 100 % ; servomoteur de régulation : 50 % – 100 %). Valeurs de réglage par régime : voir table ci-dessus.
Si on ne procède à aucun autre réglage, ■ mettre le commutateur DIP S8 sur ON, puis de nouveau sur OFF et ■ Visser le couvercle de l’unité électronique.

Instructions de service SIPOS 5 ECOTRON
Page 24 Y070.019/FR
5 Mise en service
5
Mise en service
5.3 Réglage du sens de fermeture, des types de déconnexion
Les servomoteurs neufs sont préréglés. Sauf exigence contraire du client, les réglages par défaut sont les suivants :
■ sens de fermeture : rotation à droite ; ■ type de déconnexion dans les sens FERMÉ et OUVERT : en fonction de la course ;
Dans le cas où on souhaite garder le réglage actuel, continuer avec les instructions du Chapitre 5.5 « Réglage de la démultiplication du réducteur de signalisation et des butées ».
Le réglage du sens de fermeture et du type de déconnexion se fait à l’aide du commutateur DIP.
5.3.1 Réglage du sens de fermetureSauf exigence contraire du client, les servomoteurs sont livrés par défaut avec rotation à droite comme sens de fermeture. S’il est nécessaire que l’arbre mené tourne à gauche dans le sens FER-MÉ, il faut changer le sens de fermeture. Dans le cas où on souhaite garder le sens de fermeture actuel, continuer avec les instructions du Chapitre 5.3.2.
Après chaque changement du sens de fermeture, il faut ajuster les butées.
Régler
Commutateur DIP FonctionSens de fermeture FERMÉ : rotation à gauche.
Sens de fermeture FERMÉ : rotation à droite (l’arbre mené tourne à droite).
Si on ne procède à aucun autre réglage sur le commutateur DIP, ■ mettre le commutateur DIP S8 sur ON, puis de nouveau sur OFF (afi n d’adopter le réglage du sens de fermeture) et
■ ajuster les butées ; voir Chapitre 5.5.3 suivant.
5.3.2 Réglage des types de déconnexion
Type de déconnexion
Lorsque le servomoteur se déplace, il peut être déconnecté aux butées en fonction de la course ou en fonction du couple.
Déconnexion en fonction de la course
La déconnexion en fonction de la course signifi e que le servomoteur se met hors service lorsque la vanne a atteint une position défi nie.
Déconnexion en fonction du couple
La déconnexion en fonction du couple signifi e que le servomoteur ne se met hors service que quand le couple défi ni au préalable est atteint lors du déplacement au niveau des butées.
La valeur par défaut pour le type de déconnexion des deux butées, OUVERT et FERMÉ, dépend de la course. Dans le cas où on souhaite garder les valeurs actuelles, continuer avec les instruc-tions du Chapitre 5.3.3.
Après chaque changement du type de déconnexion, il faut ajuster les butées.

Y070.019/FR Page 25
Instructions de serviceSIPOS 5 ECOTRON
5
Mis
e en
ser
vice
5 Mise en service
Régler
Commutateur DIP FonctionType de déconnexion Butée FERMÉ : en fonction de la course (réglage par défaut, sauf exigence con-traire du client).
Type de déconnexion Butée FERMÉ : en fonction du couple.
Type de déconnexion Butée OUVERT : en fonction de la course (réglage par défaut, sauf exigence contraire du client).
Type de déconnexion Butée OUVERT : en fonction du couple.
Si on ne procède à aucun autre réglage sur le commutateur DIP, ■ mettre le commutateur DIP S8 sur ON, puis de nouveau sur OFF (afi n d’adopter le réglage du type de déconnexion) et
■ ajuster les butées ; voir Chapitre 5.5.3 suivant.
5.3.3 Sélection d’un jeu de messagesOn peut défi nir quels messages sont disponibles aux 5 sorties de signalisation. On peut alors choi-sir entre 4 jeux de messages 8se composant de messages prédéfi nis pour chacune des 5 sorties de signalisation). La sélection se fait au moyen des commutateurs DIP S4 et S5.
Commutateur DIP
Sort
ies
de
sign
alis
atio
n
Niv
eau* Message
S4 S5
Set 1
1 H Fin de course OUVERT2 H Fin de course FERMÉ3 L Couple OUV/FER4 H Prêt + DISTANCE5 L Avertissement Température du moteur**
Set 2
1 H Butée OUVERT2 H Butée FERMÉ3 H Clignotant4 H Prêt + DISTANCE5 L Avertissement Température du moteur**
Set 3
1 H Butée OUVERT2 H Butée FERMÉ3 L Dérangement4 H Local5 L Avertissement Température du moteur**
Set 4
1 H Fin de course OUVERT2 H Fin de course FERMÉ3 H Prêt + DISTANCE4 L Couple OUVERT5 L Couple FERMÉ
Si on ne procède à aucun autre réglage, ■ mettre le commutateur DIP S8 sur ON, puis de nouveau sur OFF et ■ Visser le couvercle de l’unité électronique.
*H = courant de travail (active high DC 18 – 30 V), L = courant de repos (active low DC 0 – 4 V)
**pour 2SG5… « Température du moteur trop élevée »
Instructions de service SIPOS 5 ECOTRON
Page 26 Y070.019/FR
5 Mise en service
5
Mise en service
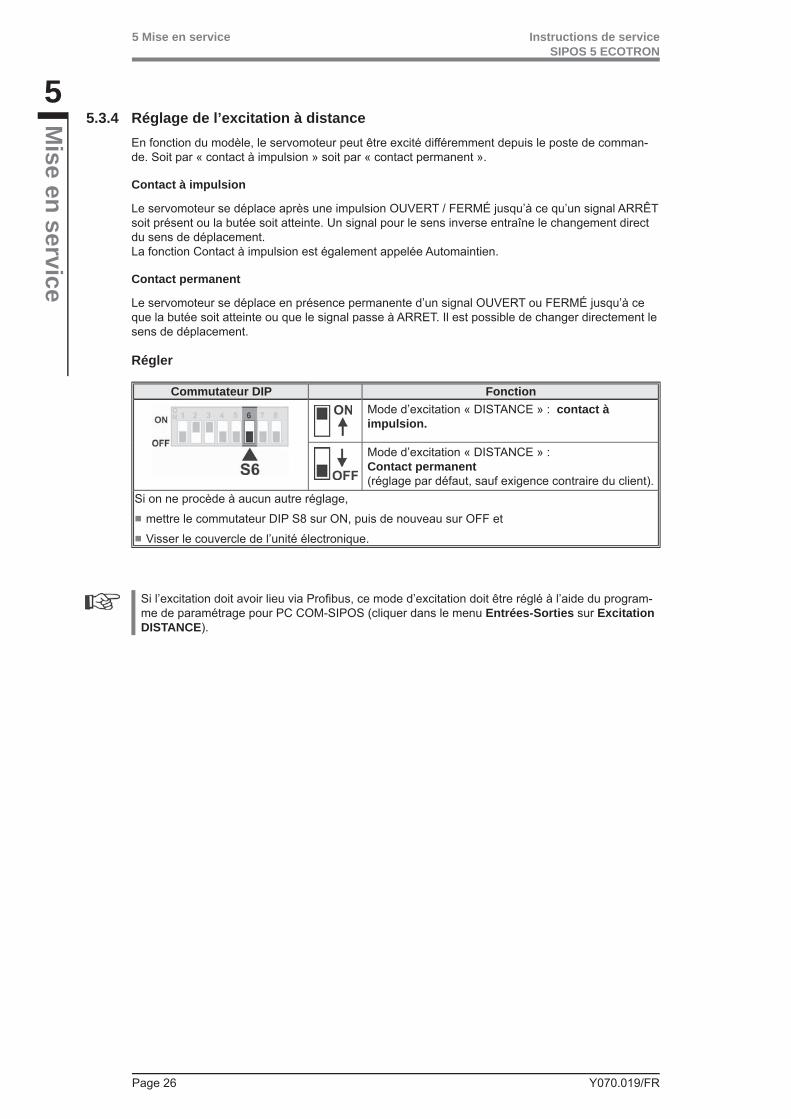
5.3.4 Réglage de l’excitation à distance En fonction du modèle, le servomoteur peut être excité différemment depuis le poste de comman-de. Soit par « contact à impulsion » soit par « contact permanent ».
Contact à impulsion
Le servomoteur se déplace après une impulsion OUVERT / FERMÉ jusqu’à ce qu’un signal ARRÊT soit présent ou la butée soit atteinte. Un signal pour le sens inverse entraîne le changement direct du sens de déplacement. La fonction Contact à impulsion est également appelée Automaintien.
Contact permanent
Le servomoteur se déplace en présence permanente d’un signal OUVERT ou FERMÉ jusqu’à ce que la butée soit atteinte ou que le signal passe à ARRET. Il est possible de changer directement le sens de déplacement.
Régler
Commutateur DIP FonctionMode d’excitation « DISTANCE » : contact à impulsion.
Mode d’excitation « DISTANCE » :Contact permanent(réglage par défaut, sauf exigence contraire du client).
Si on ne procède à aucun autre réglage, ■ mettre le commutateur DIP S8 sur ON, puis de nouveau sur OFF et ■ Visser le couvercle de l’unité électronique.
Si l’excitation doit avoir lieu via Profi bus, ce mode d’excitation doit être réglé à l’aide du program-me de paramétrage pour PC COM-SIPOS (cliquer dans le menu Entrées-Sorties sur Excitation DISTANCE).
Y070.019/FR Page 27
Instructions de serviceSIPOS 5 ECOTRON
5
Mis
e en
ser
vice
5 Mise en service
5.4 Autres réglages spécifi ques de la vanne via COM-SIPOS
Le programme de paramétrage pour PC COM-SIPOS permet de régler d’autres paramètres. Certains d’eux sont décrits ci-après. Pour de plus amples informations à ce sujet, voir le Chapitre 4.4.
Surmonter un blocage
Si le servomoteur détecte un blocage hors des plages de butée, il se déconnecte et l’indication générale de dysfonctionnement est émise. Le servomoteur continue toutefois de signaler « Prêt », car il peut encore être déplacé dans le sens inverse.
Si la valeur du paramètre « Surmonter blocage » est différente de zéro, le servomoteur se déplace après la détection d’un blocage automatiquement dans le sens inverse conformément à la grandeur de la plage de butée vers laquelle on se déplaçait avant que le blocage ne survienne, mais pas pendant plus de 2 s, puis de nouveau dans le sens du blocage. Cela se produit jusqu’à ce que le blocage soit surmonté ou que le nombre paramétré de tentatives ait été atteint.Le réglage par défaut est 0.
Avertissement du moteur
Un avertissement est émis lorsque la température du moteur atteint une valeur défi nie au préalable. On peut régler une valeur située entre 0 et 155°C. Le signal d’alerte peut être communiqué au poste de commande par signal binaire et protocole de bus de terrain.La valeur par défaut est 135°C.Pour le servomoteur à fraction de tour 2SG5, ce paramètre n’est pas disponible.
Chauffage du moteur
Le chauffage du moteur peut être activé pour éviter la condensation. Le moteur est échauffé à l’arrêt avec du courant continu, le chauffage de moteur étant activé, et en fonction de la différence entre la température du moteur et la température ambiante. Le chauffage est par défaut désactivé.
Dans les conditions climatiques très variables, il est recommandé d’exploiter le servomoteur avec chauffage de moteur activé.
Protection du moteurLe moteur possède un dispositif électronique de protection intégrale contre les dommages ther-miques. La protection du moteur est activée dès usine.

Instructions de service SIPOS 5 ECOTRON
Page 28 Y070.019/FR
5 Mise en service
5
Mise en service
5.5 Régler la démultiplication du réducteur de signalisation et les butées
Si les servomoteurs sont livrés montés sur des vannes, cette opération est exécutée chez le four-nisseur des vannes. A la mise en service, le réglage doit être contrôlé.
Le réglage de la démultiplication du réducteur de signalisation n’est pas nécessaire pour le servo-moteur à fraction de tour 2SG5… Ce servomoteur n’a pas de réducteur de signalisation réglable. Continuer au Chapitre 5.5.3.
5.5.1 GénéralitésLe réglage de la démultiplication du réducteur de signalisation et des butées garantit que la longueur ainsi que le début et la fi n (butées OUVERT et FERMÉ) de la course de réglage de la vanne soient correctement communiqués au système électronique.
Fig. : Représentation schématique des réglages de la démultiplication du réducteur designalisation et des butées
Explication
Les tours de l’arbre mené (4) qui sont nécessaires pour la course de réglage entière [(5) X – Y] sont réduits par l’intermédiaire du réducteur de signalisation (7) à un mouvement rotatif inférieur à un tour (angle de rotation maximal du potentiomètre ou capteur de course magnétique : x – y) (réglage (a) voir Chapitre suivant « Réglage de la démultiplication du réducteur de signalisation »).
A partir de la position du potentiomètre ou du capteur de course magnétique (ci-après, pour des raisons de simplicité, appelé seulement « potentiomètre »), le système électronique détecte la posi-tion de l’arbre mené et, ainsi, la position de la vanne raccordée.
Le potentiomètre doit à cet effet être réglé de manière à ce qu’une butée mécanique de la vanne (X ou Y) coïncide avec une fi n de la plage de réglage électrique du potentiomètre (x ou y) (réglage (b) voir Chapitre « Ajustage des butées » ci-après).

Y070.019/FR Page 29
Instructions de serviceSIPOS 5 ECOTRON
5
Mis
e en
ser
vice
5 Mise en service
5.5.2 Réglage de la démultiplication du réducteur de signalisation Le nombre de tours nécessaires pour parcourir la course de réglage entière doit être connu. Cette information est fournie par le fabricant des vannes. En cas d’absence de cette information, voir la remarque ci-après. Le réglage alors nécessaire du réducteur de signalisation est indiqué dans la table suivante « Réglage du réducteur de signalisation ».
Les valeurs intermédiaires de tr/course ou la course de réglage (mm) ou les degrés angulaires sont arrondis à la valeur supérieure suivante (p. ex., pour 30 tr / course, il faut régler la valeur 36).
Réglage du réducteur de signalisation Type Unité Course de réglage de la vanne
Servo-moteur multitours
2SA5.1/2/3/4/5/6 tr/course
0,8 2,1 5,5 14 36* 93 240 610 1575 4020
2SA5.7/8 0,2 0,52 1,37 3,5 9 * 23,2 60 152 393 1005
Servo-moteur à translation
2SB551/2mm/
course de réglage
4 10,5 27,5 70* 180 4652SB553 4,8 12,6 33 84* 216 558
2SB554/5 5,6 14,7 38,5 98* 252 6512SB556 6,4 16,8 44 112* 288 744
Servo-moteur à fraction de tour
2SC5.1/2/3/4/5/6Degrés angu-laires
90° * 120/240° 360°
10 réglages possibles sur le réducteur de
signalisation (échelle) ▬►
▼ ▼ ▼ ▼ ▼ ▼ ▼ ▼ ▼ ▼
0,8 2,1 5,5 14 36 93 240 610 1575 4020
*réglage par défaut, sauf exigence contraire du client
Si le nombre de tours / course n’est pas connu, par exemple parce que le servomoteur doit être exploité sur une « ancienne » vanne disponible, déplacer le servomoteur sur toute la course de réglage et observer combien de tours tourne l’arbre de sortie. Si l’observation de l’arbre mené n’est pas possible, sauter ce chapitre. Observer les conditions requises pour l’ajustage des butées indiquées au Chapitre 5.5.3 « Ajustage des butées » sous « Condition requise pour l’ajustage des butées » la remarque relative au réducteur de signalisation.
Procédure à suivre1. Desserrer 4 vis (Pos. 1) du couvercle du
réducteur de signalisation et enlever le couvercle.
2. Arrondir la valeur de tr / course ou mm/course de réglage ou de degrés angulaires à la valeur d’étage la plus proche (voir les valeurs d’étages dans le tableau ci-dessus).
3. Ajuster le pignon baladeur (2) de manière à ce que sa couronne dentée soit en face de la valeur d’étage souhaitée sur l’échelle graduée.Faire glisser le pignon baladeur avec une légère pression dans le sens souhaité. L’ajustage du pignon baladeur est facilité par un léger mouvement de la roue centrale (3).
Ne pas encore monter le couvercle du réducteur de signalisation. Il faut encore ajuster les butées et, en fonction de cela, l’indicateur de position mécanique s’il est présent.
Fig. : Réglage de la démultiplication du réducteur de signalisation

Instructions de service SIPOS 5 ECOTRON
Page 30 Y070.019/FR
5 Mise en service
5
Mise en service
5.5.3 Ajustage des butéesL’ajustage des butées se fait directement sur le servomoteur.
Condition requise pour l’ajustage des butées ■ Veiller à ce que la vanne ne soit en aucun cas déformée. La desserrer éventuellement avec la manivelle / le volant à main. Pour l’utilisation de la manivelle, voir le Chapitre.
■ Le réducteur de signalisation devrait être réglé ; voir Chapitre précédent « Réglage de la démul-tiplication du réducteur de signalisation ».Si la démultiplication du réducteur de signalisation n’a pas été réglée parce que le nombre de tours/course n’est pas connu, procéder malgré tout comme décrit ci-après et, à l’étape 11, obser-ver le message affi ché.
■ Les réglages des commutateurs DIP S1 – S6 doivent être terminés avant l’ajustage des butées et ne doivent en aucun cas être modifi és pendant l’ajustage des butées.
■ L’ajustage des butées (OUVERT et FERMÉ) ne prend effet qu’après actionnement ON/OFF du commutateur DIP S7.
■ Tant que la roue centrale (accouplement à glissement) n’a pas été déréglée et/ou le com-mutateur DIP S7 n’a pas été actionné, on peut annuler l’ajustage des butées en remettant le commutateur DIP S8 sur OFF.
■ L’ordre d’ajustage des butées est obligatoire : Il faut tout d’abord ajuster la butée OUVERT.
Commande pendant l’ajustage des butéesPour ajuster les butées, il faut dévisser le couvercle de l’unité électronique. Le couvercle électronique étant enlevé, le servomoteur est déplacé à l’aide des boutons de la carte électronique ; voir Figure, Position 3 à 6.
1 DEL H1 (vert)
2 DEL H2 (rouge)
3 Bouton FERMÉ
4 Bouton OUVERT
5 Bouton Commutation Local/Distance
6 Bouton ARRÊT
Signaux des diodes électroluminescentes Fig. : Disposition des boutons sur la carte électronique
Pendant l’ajustage des butées, les DEL H1 (vert) et H2 (rouge) indiquent par leur état (éclairé et / ou clignotant) dans quel état le servomoteur se trouve actuelle-ment.Dans la description suivante « Ordre des opérations de com-mande », les différents états pos-sibles des DEL (éteint – éclairé – clignotant) sont représentés comme ci-contre :
= La DEL (diode électroluminescente) est éteinte
= La DEL (diode électroluminescente) est éclairée
= La DEL (diode électroluminescente) clignote
3 x
= La DEL (diode électroluminescente) clignote périodiquement : 3 x clignotement + pause = 1 période
= Valable uniquement pour la DEL H2 (rouge) pendant l’ajustage des butées : Le fait que la DEL soit éclairée ou non n’a pas d’importance
Si le modèle des DEL indiqué diffère de la représentation de la description suivante « Ordre des opérations de commande », cela signifi e qu’il y a une erreur ou un dérangement (voir Chapitre « Signaux d’état et de dérangement »).

Y070.019/FR Page 31
Instructions de serviceSIPOS 5 ECOTRON
5
Mis
e en
ser
vice
5 Mise en service
Ordre des opérations de commande
Instruction
Commuta-teur DIPBouton
DEL
H1 H2
1. Si le couvercle du réducteur de signalisation est vissé, dévisser le couvercle.
2. Important : Ajuster la roue centrale de manière à ce que les fl èches 1 et 2 montrent vers le haut ; voir Figure à droite.
3. Si le couvercle de l’unité électronique n’est pas enlevé, dévis-ser le couvercle.
4. Mettre le servomoteur à l’état « Local ».
5. Mettre le commutateur DIP S8 sur ON
La DEL H1 (vert) clignote, la DEL H2 (rouge) s’éclaire.
6. En fonction de ce que la déconnexion doit avoir lieu à la butée OUVERT – en fonction de la course (commutateur DIP S3 = ON) ou
– en fonction du couple (commutateur DIP S3 = OFF), choisir ci-après l’ordre des opérations de commande pour la suite en conséquence.
– Déconnexion en fonction de la course : a) Observer la position de la vanne et déplacer le servomo-
teur avec le bouton OUVERT jusqu’à ce que la vanne atteigne la position de butée OUVERT 1. Nota : Lorsqu’on actionne brièvement (< 2 s) la touche FERMÉ ou OUVERT, le servomoteur se déplace jusqu’à ce que la touche soit enfoncée. Lorsqu’on l’appuie plus longtemps, le servomoteur se déplace jusqu’à ce qu’on appuie sur le bouton STOP (ENTRÉE) ou le bouton du sens inverse (automaintien).Important : Lors du déplacement vers la butée, veiller à ce que le sens de rotation de la roue centrale soit correct ; ceci est important pour l’opération de commande 7. (Rentrer à la butée souhaitée avec le bouton FERMÉ ou le bouton OUVERT).Continuer avec l’opération de commande 7.
1 Si le servomoteur s’est déconnecté automatiquement avant d’avoir atteint la butée, cela peut avoir deux raisons : ■ actionneur grippé ou courbe de couples défavorable; dans ce cas, annuler l’opération : Mettre le commutateur DIP S8 sur OFF, ou
■ la vanne a atteint la butée mécanique; dans ce cas, rentrer à la position fi nale souhaitée.
Instructions de service SIPOS 5 ECOTRON
Page 32 Y070.019/FR
5 Mise en service
5
Mise en service
Instruction
Commuta-teur DIPBouton
DEL
H1 H2
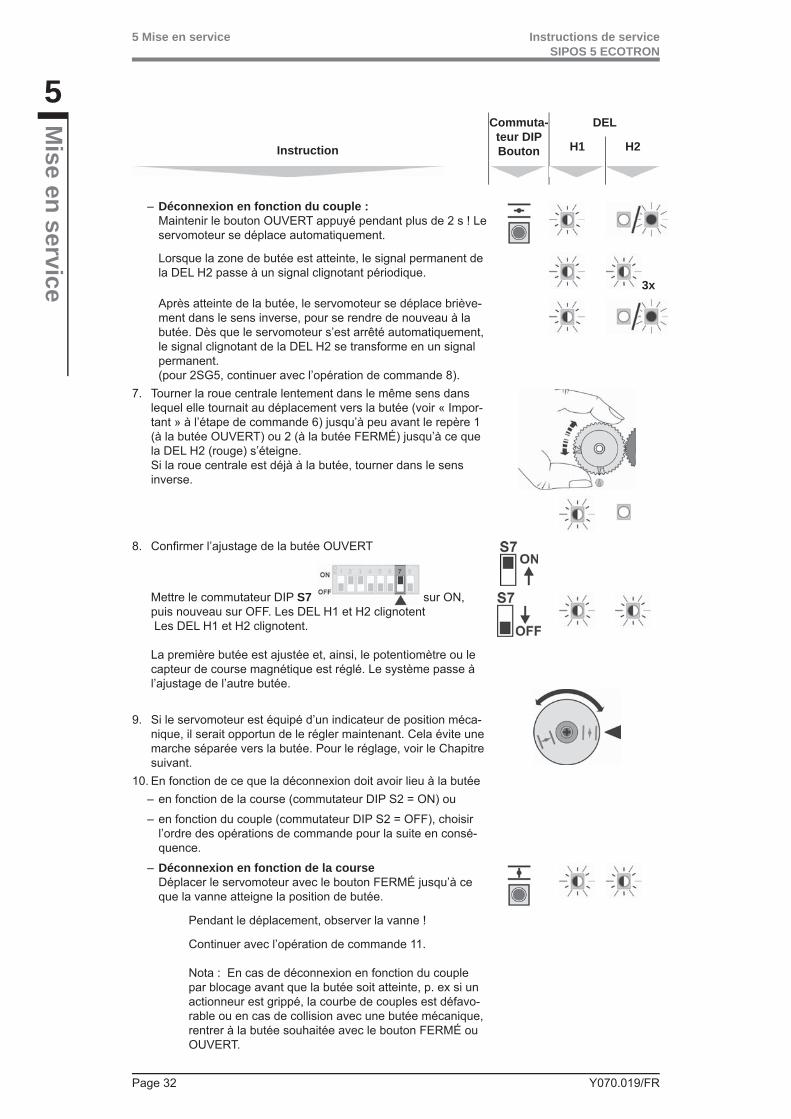
– Déconnexion en fonction du couple : Maintenir le bouton OUVERT appuyé pendant plus de 2 s ! Le servomoteur se déplace automatiquement.
Lorsque la zone de butée est atteinte, le signal permanent de la DEL H2 passe à un signal clignotant périodique.
3xAprès atteinte de la butée, le servomoteur se déplace briève-ment dans le sens inverse, pour se rendre de nouveau à la butée. Dès que le servomoteur s’est arrêté automatiquement, le signal clignotant de la DEL H2 se transforme en un signal permanent. (pour 2SG5, continuer avec l’opération de commande 8).
7. Tourner la roue centrale lentement dans le même sens dans lequel elle tournait au déplacement vers la butée (voir « Impor-tant » à l’étape de commande 6) jusqu’à peu avant le repère 1 (à la butée OUVERT) ou 2 (à la butée FERMÉ) jusqu’à ce que la DEL H2 (rouge) s’éteigne. Si la roue centrale est déjà à la butée, tourner dans le sens inverse.
8. Confi rmer l’ajustage de la butée OUVERT
Mettre le commutateur DIP S7
sur ON, puis nouveau sur OFF. Les DEL H1 et H2 clignotent Les DEL H1 et H2 clignotent.
La première butée est ajustée et, ainsi, le potentiomètre ou le capteur de course magnétique est réglé. Le système passe à l’ajustage de l’autre butée.
9. Si le servomoteur est équipé d’un indicateur de position méca-nique, il serait opportun de le régler maintenant. Cela évite une marche séparée vers la butée. Pour le réglage, voir le Chapitre suivant.
10. En fonction de ce que la déconnexion doit avoir lieu à la butée – en fonction de la course (commutateur DIP S2 = ON) ou
– en fonction du couple (commutateur DIP S2 = OFF), choisir l’ordre des opérations de commande pour la suite en consé-quence.
– Déconnexion en fonction de la course Déplacer le servomoteur avec le bouton FERMÉ jusqu’à ce que la vanne atteigne la position de butée.
Pendant le déplacement, observer la vanne !
Continuer avec l’opération de commande 11.
Nota : En cas de déconnexion en fonction du couple par blocage avant que la butée soit atteinte, p. ex si un actionneur est grippé, la courbe de couples est défavo-rable ou en cas de collision avec une butée mécanique, rentrer à la butée souhaitée avec le bouton FERMÉ ou OUVERT.

Y070.019/FR Page 33
Instructions de serviceSIPOS 5 ECOTRON
5
Mis
e en
ser
vice
5 Mise en service
Instruction
Commuta-teur DIPBouton
DEL
H1 H2
– Déconnexion en fonction du coupleMaintenir le bouton FERMÉ appuyé pendant plus de 2 s. Le servomoteur se déplace automatiquement jusqu’à ce que la butée soit atteinte.
Lorsque la butée est atteinte, le signal clignotant de la DEL H2 passe à un signal clignotant périodique.
3 xAprès atteinte de la butée, le servomoteur se déplace briève-ment dans le sens inverse, pour se rendre de nouveau à la butée. Dès que le servomoteur s’est arrêté automatiquement, le signal clignotant change.
11. Confi rmer l’ajustage de la butée FERMÉ:
Mettre le commutateur DIP S7
sur OFF La puis de nouveau sur OFF. La DEL H2 s’éteint.
Nota : Si la DEL H2 (rouge) ne s’éteint pas, mais est éclairée en permanence, l’ajustage des butées n’est pas correct. (erreur pendant la mise en service, p. ex. démultiplication du réducteur de signalisation pas correcte : régler S8 sur OFF, sélectionner la démultiplication de réducteur de signalisation correcte et recommencer l’ajustage des butées (régler S8 sur ON)).
12. Mettre le commutateur DIP S8
sur OFF stellen.La DEL H1 est éclairée en permanence.
Ajuster maintenant la butée FERMÉ de l’indicateur de position mécanique ; voir Chapitre 5.5.4.
13. Visser le couvercle de l’unité électronique. Veiller alors à ce que la bague-joint soit correctement en place ; fi g. Pos. 1.
14. Si l’indicateur de position mécanique a été réglé, voir opé-rations de commande 9. et 12., puis visser le couvercle du réducteur de signalisation.
■ Si on appuie sur la touche LOCAL / DISTANCE, le servomoteur se met à l’état « Distance » et se déplace à la réception d’une instruction d’excitation du poste de commande !
■ Après l’ajustage des butées, veiller à ne plus dérégler la roue centrale ! Dans le cas contraire, il sera nécessaire de réajuster complètement les butées.

Instructions de service SIPOS 5 ECOTRON
Page 34 Y070.019/FR
5 Mise en service
5
Mise en service
5.5.4 Réglage de l’indicateur de position mécanique L’indicateur de position mécanique indique à quelle position se trouve la vanne. Le symbole vert signifi e alors OUVERT, et le symbole rouge FERMÉ (voir fi g.).
L’indicateur de position mécanique est disponible en option et n’est par conséquent pas disponible sur chaque appareil.
Si le servomoteur a été livré déjà monté sur la vanne, ce réglage a été effectué par le fournisseur de la vanne. A la mise en service, le réglage doit toutefois impérativement être contrôlé.
Si le réglage de l’indicateur de position mécanique n’a pas en-core été effectué lors du réglage des butées, régler l’indicateur comme suit.
Ordre des opérations de commande1. Conduire le servomoteur à la butée FERMÉ.
2. Dévisser le couvercle du réducteur de signalisation.
3. Tourner le disque blanc avec le symbole rouge (fi g. Pos. 2) jusqu’à ce que le symbole pour FERMÉ et le repère fl éché (3) du verre-regard du couvercle soient superposés.
4. Conduire le servomoteur à la position OUVERT.
5. Maintenir le disque blanc (2) et tourner le verre transparent (1) de manière à ce que le symbole vert pour OUVERT et le repère fl éché (3) soient superposés.
6. Visser le couvercle du réducteur de signalisation.
Fig. 1 : Symboles Indicateur de position
Fig. 2 : Réglage de l’indicateur de position
Fig. 3 : Indicateur de position 2SG5

Y070.019/FR Page 35
Instructions de serviceSIPOS 5 ECOTRON
6
Sign
aux
d‘ét
at e
t de
déra
ngem
ent
6 Signaux d‘état et de dérangement
6 Signaux d’état et de dérangementLes DEL H1 et H2 indiquent l’état de l’appareil et les messa-ges de dérangement. Ceci permet également une analyse des dérangements. Certains des « messages de dérangement » peuvent être réinitialisés ; voir colonne droite « Type de déran-gement » dans la table suivante.
Légende : ■ S – Signaux de dérangement à réinitialisation automatique Le signal de dérangement est automatiquement réinitialisé dès que la cause de dérangement est éliminée.
■ R – Signaux de dérangement réinitialisables.Le signal de dérangement persiste même après élimination de la cause de dérangement jusqu’à la confi rmation (S8 ON OFF).
■ N – Signaux de dérangement non réinitialisables.La cause de dérangement doit être éliminée.
La table suivante montre l’état des DEL H1 et H2 et la signifi cation correspondante ainsi que les mesures de dépannage. Les états des DEL (éteint – éclairé – clignotant) sont représentés dans les présentes instructions de service comme suit :
= La DEL (diode électroluminescente) est éteinte
= La DEL (diode électroluminescente) est éclairée
= La DEL (diode électroluminescente) clignote continuellement
3 x= La DEL (diode électroluminescente) clignote périodiquement. Le clignotement, 3 fois ici, est répété après une pause d’1 s : 3 x clignotement + pause = 1 période
DELSignifi cation Mesures de dépannage
Type de dérange-
mentH1
(vert)H2
(rouge
Le servomoteur ne réagit pas à l’excitation à distance ni à l’activation des boutons-poussoirs
Sur la carte électronique, déplacer le commu-tateur BOOT (1) et appuyer sur RESET (2)
Le servomoteur est en état de marche
Dérangement : Défaillance de l’appareil Maintenance, réparation nécessaire N
Dérangement : Mise en service invalide Procéder à la mise en service N
Fig. : DEL électrolumine-scentes H1 et H2

Instructions de service SIPOS 5 ECOTRON
Page 36 Y070.019/FR
6 Signaux d‘état et de dérangement
6
Signaux d‘état et de dérangement
DELSignifi cation Mesures de dépannage
Type de dérange-
mentH1
(vert)H2
(rouge
2xDérangement : Température du moteur trop élevée
■ S’assurer que la vanne n’est pas grippée ■ Réduire le nombre de cycles de commuta-tion
■ Température ambiante excessive ■ Vérifi er le paramètre « Mise en place sépa-rée » via COM SIPOS
S
3x
Dérangement : Défaillance de la tension de secteur ou variations trop grandes de la tension de secteur
Vérifi er les tensions d’alimentation S
4x
Dérangement : Rupture de câble du / des
■ potentiomètre de course ou du capteur de température
■ conduites d’alimentation de DISTANCE
■ Contrôler les câbles d’alimentation en cas de mise en place séparée
■ Vérifi er les conduites d’alimentation (évtl. bus de terrain)
R
5x
Dérangement : Course de réglage bloquée, c’est-à-dire couple de déconnexion de la course de réglage atteint
■ S’assurer que la vanne n’est pas grippée. ■ Augmenter les valeurs du couple ■ Vérifi er le paramètre « Mise en place sépa-rée » via COM SIPOS
S
6x
Dérangement : ■ Butées franchies ■ Défaut au niveau de la surveillance du temps de course
■ Nouvelle mise en service ■ Vérifi er le réducteur de signalisation et le potentiomètre de course
■ S’assurer que la vanne n’est pas grippée. ■ Augmenter les valeurs du couple ■ Vérifi er le paramètre « Mise en place sépa-rée » via COM SIPOS
N
1xMES actif : Ajustage des butées OK
--- ---
1xIMES actif : Ajustage des butées pas OK
Terminer la mise en service et la recommen-cer (S8 ► OFF ► ON) N
1x 1x
MES actif : La butée OUVERT est ajustée ; aller à la butée FERMÉ !
--- ---
1x 2xMES actif : Mise en service pas possible
Mettre fi n à la mise en service (S8 ► OFF) et exploiter le modèle clignotant N
1x 3x
MES actif : Le servomoteur se rend automatique-ment à la butée avec déconnexion en fonction du couple
--- ---
2xManivelle / volant à main actionné(e)
■ Relâcher la manivelle / le volant à main ■ Contrôler les câbles d’alimentation en cas de mise en place séparée
S
2x
MES actif : Manivelle / volant à main actionné(e) pendant la mise en service
Relâcher la manivelle / le volant à main S
3x
MES actif : Mise en service via interface série ou in-terface bus de terrain active, c’est-à-dire mise en service sur place et fonction-nement à l’aide du poste de commande locale pas possible
--- ---
4xCommutation DISTANCE à LOCAL bloquée Valider via PROFIBUS S

Y070.019/FR Page 37
Instructions de serviceSIPOS 5 ECOTRON
7
Entr
etie
n, in
spec
tion,
ser
vice
apr
ès-v
ente
7 Entretien, inspection, service après-vente
7 Entretien, inspection, service après-vente
Avant toute intervention sur le servomoteur, s’assurer que ■ les mesures envisagées (actionnement éventuel de vannes) ne peuvent entraîner aucun déran-gement de l’installation ou présenter des dangers pour les personnes ;
■ le servomoteur ou la partie de l’installation est activée conformément aux prescriptions. Outre les circuits électriques principaux, prêter alors aussi attention aux circuits complémentaires ou auxiliaires éventuellement disponibles !
■ Par ailleurs, observer les règles de sécurité générales : -Déconnecter sur tous les pôles (aussi 24 V DC),-Protéger contre la remise en marche,-S’assurer que le lieu d’intervention est hors tension,-Mettre à la terre et court-circuiter,-Protéger les pièces avoisinantes par une barrière ou les recouvrir.
7.1 Généralités
Les servomoteurs nécessitent peu de maintenance (périodicités de regraissage : voir Chapitre 7,2).
Il est recommandé de soumettre le servomoteur à une inspection générale après la mise en service et après env. 50 heures de service afi n de vérifi er si / s’assurer que
■ le fonctionnement parfait est garanti, ■ aucun bruit / aucune vibration inhabituelle ne se produit, ■ les éléments de fi xation ne sont pas relâchés, ■ il n’y a aucune fuite.
Le boîtier des servomoteurs SIPOS 5 se compose d’un alliage d’aluminium résistant à la corrosion dans les conditions d’environnement normales. Si la peinture est endommagée suite au montage, vous pouvez la restaurer avec la peinture originale disponible en petits emballages chez SIPOS Aktorik.
Cette liste ne peut être exhaustive. D’autres contrôles sont éventuellement indispensables, en fonction des conditions spécifi ques qui prévalent pour l’installation. Eliminer immédiatement les divergences et modifi cations inadmissibles constatées lors de l’inspection.
Dans les conditions d’utilisation normales, la maintenance ou révision des appareils est recomman-dée tous les 8 ans, durée de stockage comprise. À cette occasion, les travaux suivants doivent également être effectués :
■ Renouveler le lubrifi ant dans le compartiment de transmission, ■ Remplacer les joints d’étanchéité, ■ Vérifi er l’état d’usure des composants se trouvant dans le fl ux de force, ■ Resserrer les raccords à vis des raccords électriques.
En fonction des conditions de service, des périodicités de maintenance plus courtes peuvent égale-ment s’avérer nécessaires.
Cela vaut notamment pour les servomoteurs en modèle haute température – option de commande T09. Tous les 2 ans, leur bon état doit être contrôlé par le service après-vente de SIPOS, et les pièces d’usure remplacées !
Il est recommandé de recourir à cet effet aux prestations du service après-vente SIPOS Aktorik compétent.
Veuillez adresser vos demandes à SIPOS Aktorik GmbH. Vous trouverez l’adresse et le numéro de téléphone de l’interlocuteur compétent sur Internet à www.sipos.de. Vous pouvez également adresser vos demandes directement par courriel à [email protected].

Instructions de service SIPOS 5 ECOTRON
Page 38 Y070.019/FR
7 Entretien, inspection, service après-vente
7
Entretien, inspection, service après-vente
1 mesuré de la surface du lubrifi ant jusqu’à la face extérieure du boîtier à l’admission d’huile2 Plage de température ambiante -20 – +60 °C.3 Lubrifi ant utilisé pour le remplissage à l’usine.4 Remplissage des servomoteurs - jusqu’à env. octobre 2004 avec Klüber Syntheso D 220 EP ; - jusqu’à env. octobre 2011 avec Mobilgear SHC XPM 220.
5 p. ex. bagues d’étanchéité, raccords dentés, roulements, liaisons par clavettes, surfaces dénudées, etc.6 si installée
7.2 Intervalles de lubrifi cation et lubrifi ants
7.2.1 Intervalles de lubrifi cationAprès environ 8 ans, procéder à la maintenance ou la révision de l’installation (voir Chapitre 7.1).
Toutes les 50 heures de service ou chaque fois après 1 an, regraisser l’insert d’accouplement Forme A, s’il est installé, au niveau du graisseur.
Pour l’arbre de sortie Forme A, veiller à ce que la lubrifi cation de la broche à vanne doit être effectuée séparément !
Ces intervalles sont applicables en cas de sollicitation normale. En cas de sollicitation plus impor-tante, les périodicités de maintenance se raccourcissent en conséquence.
Tous les 2 ans, le bon état des servomoteurs en modèle haute température – option de commande T09 – doit être contrôlé par le service après-vente de SIPOS, et les pièces d’usure remplacées !
Après chaque enlèvement des couvercles et capots de recouvrement, s’assurer que les joints d’étanchéité ne sont pas endommagés et, si nécessaire, les renouveler et graisser.
7.2.2 Affectation des lubrifi ants et quantités nécessaires
Type de servomoteur2SA5.1/2 2SA5.3/4 2SA5.5/6/7/82SB551/2 2SB553/4 2SB555/62SC501/2/3/4, 2SC551/2 2SC505/6, 2SC553/4 -
Huile à engrenages
Quantité 760 cm3 1600 cm3 2400 cm3
Niveau 1 58 mm max. 58 mm max. 23 – 27 mmKlübersynth GH 6 – 220 N (Soc. Klüber) ) ou Alpha-syn PG 220 Polyglycol (Soc. Castrol), Berusynth EP 220 (Soc. Bechem), Panolin EP gear synth 220 (Soc. Kleenoil).
Mobil SHC Gear 220 3,4
(voir marquage sur l’appareil)
Points de mise à la terre (à l’intérieur)
Quantité 1 cm3
Lubrifi ant 2 Vaseline (DAB 10) V10
Autres points de lubrifi cation 5
Quantité 50 cm3
Lubrifi ant 2 Graisse lubrifi ante AR1 (ZEPF)Arbre de sortie Forme A 6 (2SA5)
Quantité 2 cm3
Lubrifi ant 2 Graisse pour roulement à billes courante dans le commerceEtage de poussée pour 2SB5… nécessite peu de maintenance
(Il est conseillé d’observer ici aussi les recommandations données pour les servomoteurs.)
Unité de pivotement pour 2SC5…Réducteur de pivotement pour 2SB5…
■ Pour la manipulation et l’élimination des lubrifi ants, prière d’observer les instructions de fabri-cants et les prescriptions applicables en la matière. Informations techniques sur lubrifi ants sur demande.
■ Avant d’utiliser un autre nouveau lubrifi ant (huile différente de celle utilisée pour le remplissage à l’usine), rincer et nettoyer le réducteur et ses différentes pièces (éviter tout mélange d’huiles).
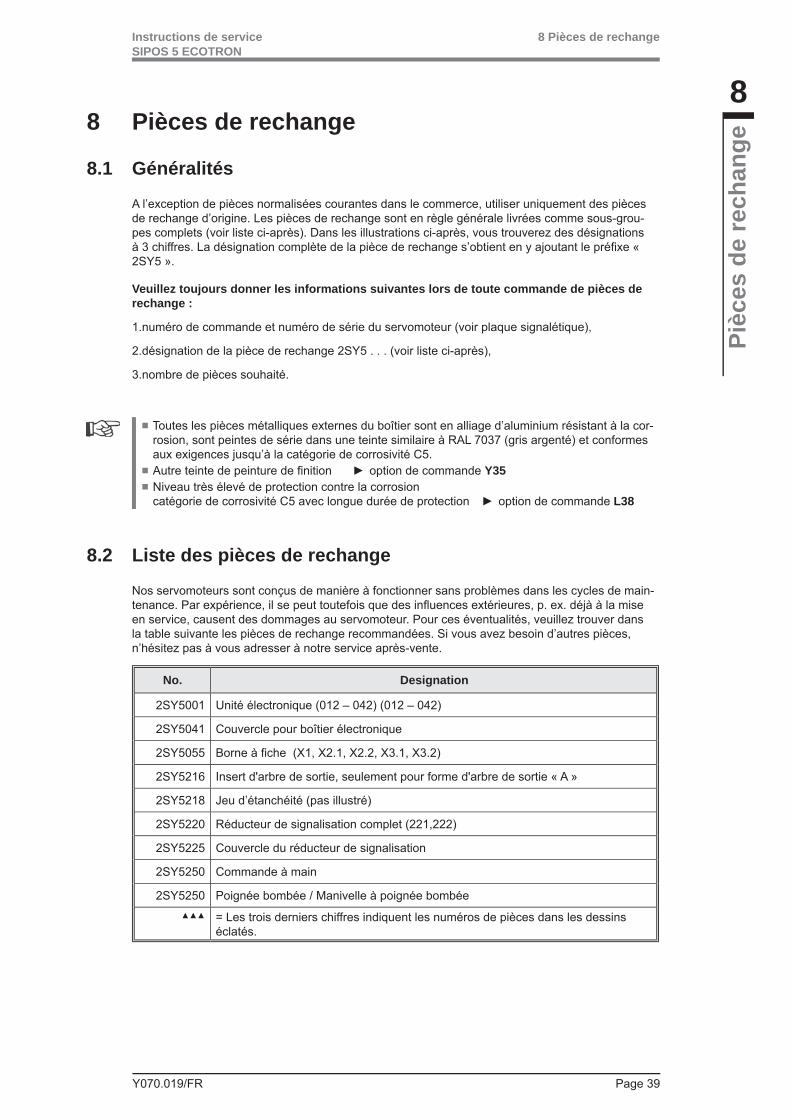
Y070.019/FR Page 39
Instructions de serviceSIPOS 5 ECOTRON
8
Pièc
es d
e re
chan
ge
8 Pièces de rechange
8 Pièces de rechange
8.1 Généralités
A l’exception de pièces normalisées courantes dans le commerce, utiliser uniquement des pièces de rechange d’origine. Les pièces de rechange sont en règle générale livrées comme sous-grou-pes complets (voir liste ci-après). Dans les illustrations ci-après, vous trouverez des désignations à 3 chiffres. La désignation complète de la pièce de rechange s’obtient en y ajoutant le préfi xe « 2SY5 ».
Veuillez toujours donner les informations suivantes lors de toute commande de pièces de rechange :
1.numéro de commande et numéro de série du servomoteur (voir plaque signalétique),
2.désignation de la pièce de rechange 2SY5 . . . (voir liste ci-après),
3.nombre de pièces souhaité.
■ Toutes les pièces métalliques externes du boîtier sont en alliage d’aluminium résistant à la cor-rosion, sont peintes de série dans une teinte similaire à RAL 7037 (gris argenté) et conformes aux exigences jusqu’à la catégorie de corrosivité C5.
■ Autre teinte de peinture de fi nition ► option de commande Y35 ■ Niveau très élevé de protection contre la corrosion catégorie de corrosivité C5 avec longue durée de protection ► option de commande L38
8.2 Liste des pièces de rechange
Nos servomoteurs sont conçus de manière à fonctionner sans problèmes dans les cycles de main-tenance. Par expérience, il se peut toutefois que des infl uences extérieures, p. ex. déjà à la mise en service, causent des dommages au servomoteur. Pour ces éventualités, veuillez trouver dans la table suivante les pièces de rechange recommandées. Si vous avez besoin d’autres pièces, n’hésitez pas à vous adresser à notre service après-vente.
No. Designation
2SY5001 Unité électronique (012 – 042) (012 – 042)
2SY5041 Couvercle pour boîtier électronique
2SY5055 Borne à fi che (X1, X2.1, X2.2, X3.1, X3.2)
2SY5216 Insert d'arbre de sortie, seulement pour forme d'arbre de sortie « A »
2SY5218 Jeu d’étanchéité (pas illustré)
2SY5220 Réducteur de signalisation complet (221,222)
2SY5225 Couvercle du réducteur de signalisation
2SY5250 Commande à main
2SY5250 Poignée bombée / Manivelle à poignée bombée▲▲▲ = Les trois derniers chiffres indiquent les numéros de pièces dans les dessins
éclatés.
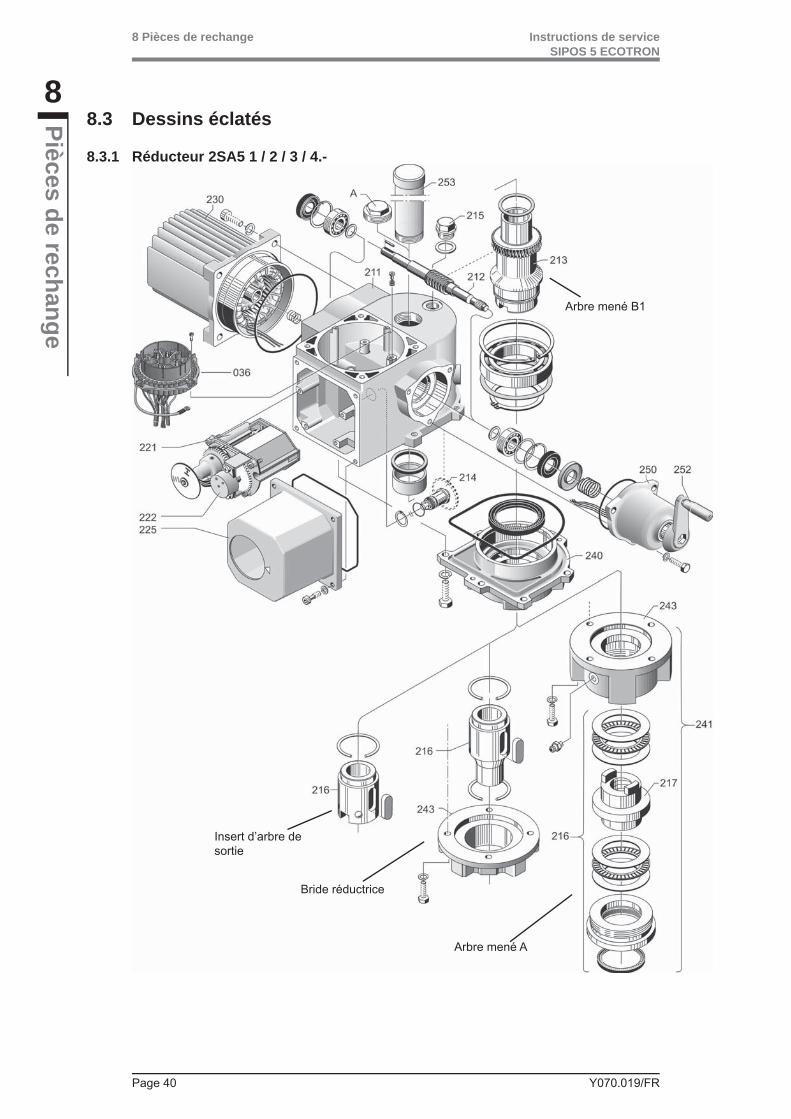
Instructions de service SIPOS 5 ECOTRON
Page 40 Y070.019/FR
8 Pièces de rechange
8
Pièces de rechange
8.3 Dessins éclatés
8.3.1 Réducteur 2SA5 1 / 2 / 3 / 4.-
Bride réductrice
Arbre mené A
Arbre mené B1
Insert d’arbre de sortie

Y070.019/FR Page 41
Instructions de serviceSIPOS 5 ECOTRON
8
Pièc
es d
e re
chan
ge
8 Pièces de rechange
8.3.2 Réducteur 2SA5. 5 / 6 / 7 / 8.-
Bride réductrice
Arbre mené A
Arbre mené B1
Insert d’arbre de sortie

Instructions de service SIPOS 5 ECOTRON
Page 42 Y070.019/FR
8 Pièces de rechange
8
Pièces de rechange
8.3.3 Réducteur avec étage de poussée 2SB551 / 2 / 3 / 4.-

Y070.019/FR Page 43
Instructions de serviceSIPOS 5 ECOTRON
8
Pièc
es d
e re
chan
ge
8 Pièces de rechange
8.3.4 Réducteur avec étage de poussée 2SB555 / 6.-

Instructions de service SIPOS 5 ECOTRON
Page 44 Y070.019/FR
8 Pièces de rechange
8
Pièces de rechange
8.3.5 Petit servomoteur à fraction de tour 2SG5...-

Y070.019/FR Page 45
Instructions de serviceSIPOS 5 ECOTRON
8
Pièc
es d
e re
chan
ge
8 Pièces de rechange
8.3.6 Réducteur avec unité de pivotement 2SC5…-

Instructions de service SIPOS 5 ECOTRON
Page 46 Y070.019/FR
8 Pièces de rechange
8
Pièces de rechange
8.3.7 Unité électronique (moteur jusqu’à 1,5 kW)

Y070.019/FR Page 47
Instructions de serviceSIPOS 5 ECOTRON
8
Pièc
es d
e re
chan
ge
8 Pièces de rechange
8.3.8 Unité électronique (moteur à partir de 3 kW)
Instructions de service SIPOS 5 ECOTRON
Page 48 Y070.019/FR
9 Index
9
Index AAffi chage
Position de la vanne. . . . . . . . . . . . . . . . . 34Ajustage des butées. . . . . . . . . . . . . . . . . . . 30
Condition requise. . . . . . . . . . . . . . . . . . . 30Arbre de sortie. . . . . . . . . . . . . . . . . . . . . . . . 9
Instructions de montage-générales. . . . . . . 9Modèle Forme A. . . . . . . . . . . . . . . . . . . . . 9
Avertissement du moteur. . . . . . . . . . . . . . . 27
BBouton ARRÊT. . . . . . . . . . . . . . . . . . . . . . . 16Bouton LOCAL/DISTANCE. . . . . . . . . . . . . 16Boutons-poussoirs. . . . . . . . . . . . . . . . . . . . 16
LOCAL. . . . . . . . . . . . . . . . . . . . . . . . . . . 16Bus de terrain. . . . . . . . . . . . . . . . . . . . . . . . 18
CCâble de signalisation. . . . . . . . . . . . . . . . . 10Carte à relais. . . . . . . . . . . . . . . . . . . . . . . . . 7Chauffage. voir Chauffage du moteurChauffage du moteur. . . . . . . . . . . . . . . . . . 27Commande à distance. . . . . . . . . . . . . . . . . 18
COM-SIPOS. . . . . . . . . . . . . . . . . . . . . . . 18Commande locale.. . . . . . . . . . . . . . . . . . . . 16
Fonction des boutons-poussoirs. . . . . . . . 16Commutateur DIP. . . . . . . . . . . . . . . . . . . . . 20COM-SIPOS. . . . . . . . . . . . . . . . . . . . . . . . . 18Conducteur équipotentiel externe.. . . . . . . . 13Consignes de sécurité. . . . . . . . . . . . . . . . . . 3
Entretien. . . . . . . . . . . . . . . . . . . . . . . . . . 37Contact à impulsion. . . . . . . . . . . . . . . . . . . 26Contact permanent. . . . . . . . . . . . . . . . . . . . 26Course de réglage de la vanne. . . . . . . . . . 29
DDéconnexion en fonction de la course. . . . . 31Déconnexion en fonction du couple. . . . . . . 32Degrés angulaires. voir Réducteur de signalisationDessins de pièces de rechange. . . . . . . . . . 40Diodes électroluminescentes (DEL). . . . . . . 16Distance. . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
EElimination. . . . . . . . . . . . . . . . . . . . . . . . . . . 4Emballage.. . . . . . . . . . . . . . . . . . . . . . . . . . . 4Entrées-analogiques.. . . . . . . . . . . . . . . . . . . 8Entretien. . . . . . . . . . . . . . . . . . . . . . . . . . . . 37Excitation à distance.. . . . . . . . . . . . . . . . . . 18
IIndicateur de position. . . . . . . . . . . . . . . 32, 34Indicateur de position mécanique. . . . . . . . . 34Indicateurs d’etats. . . . . . . . . . . . . . . . . . . . 17Indicateurs d’états. . . . . . . . . . . . . . . . . 30, 35Indication de l’état (DEL). . . . . . . . . . . . . . . 17Informations de sécurité. . . . . . . . . . . . . . . . . 3Instructions de service MODBUS. . . . . . . . . . 5Instructions de service PROFIBUS. . . . . . . . 5Intervalles de lubrifi cation. . . . . . . . . . . . . . . 38
JJeu de messages. . . . . . . . . . . . . . . . . . . . . 25
KKit de montage pour mise en place séparée. . . . . . . . . . . . . . . . . . . . . . . . 14
LListe de pièces de rechange.. . . . . . . . . . . . 39Local. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16Lubrifi ants. . . . . . . . . . . . . . . . . . . . . . . . . . . 38
MMaintenance et entretien. . . . . . . . . . . . . . . 37Manivelle. . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Commande. . . . . . . . . . . . . . . . . . . . . . . . 15Danger d’écrasement. voir Consignes de sécurite
Manuels complémentaires. . . . . . . . . . . . . . . 5Messages
Diodes électroluminescentes. . . . . . . . . . 16État. . . . . . . . . . . . . . . . . . . . . . . . 17, 30, 35
Mise en place séparée. . . . . . . . . . . . . . . . . 14Spécifi cation. . . . . . . . . . . . . . . . . . . . . . . 14
Index
Y070.019/FR Page 49
Instructions de serviceSIPOS 5 ECOTRON
9
Inde
x
9 Index
Mise en service.. . . . . . . . . . . . . . . . . . . . . . 19Conditions requises.. . . . . . . . . . . . . . . . . 19Ordre. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19Remarques fondamentales. . . . . . . . . . . . 19
MODBUS. . . . . . . . . . . . . . . . . . . . . . . . . . . 18Module de puissance. . . . . . . . . . . . . . . . . . . 7
PPanneau de commande. . . . . . . . . . . . . . . . 16Param local.. . . . . . . . . . . . . . . . . . . . . . . . . 16Passe-câbles à vis. . . . . . . . . . . . . . . . . . . . 10Pièces de rechange. . . . . . . . . . . . . . . . . . . 39Pièces de rechange recommandées. . . . . . 39Platine bus de terrain. . . . . . . . . . . . . . . . . . . 7Position. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8Potentiomètres. . . . . . . . . . . . . . . . . . . . . . . 20Principe de fonctionnement. . . . . . . . . . . . . . 6PROFIBUS. . . . . . . . . . . . . . . . . . . . . . . . . . 18Protection du moteur. . . . . . . . . . . . . . . . . . 27
RRaccord
Conducteur équipotentiel externe. . . . . . . 13Raccordement. . . . . . . . . . . . . . . . . . . . . . . 11
Bus de terrain. . . . . . . . . . . . . . . . . . . . . . 12Connectuer rond. . . . . . . . . . . . . . . . . . . . 12Raccordement-direct. . . . . . . . . . . . . . . . . 11
Raccordement électrique. . . . . . . . . . . . . . . 10Raccordement avec connecteur rond. . . . 12Raccordement avec isolation galvanique. 13Raccordement-direct. . . . . . . . . . . . . . . . . 11Raccordement du bus de terrain. . . . . . . . 12
Raccordement mécanique. . . . . . . . . . . . . . . 9Rapport de démultiplication. . . . . . . . . . . . . 29Réducteur de signalisation
Condition requise pour le réglage. . . . . . . 29Course de réglage de la vanne. . . . . . . . . 29Démultiplication. . . . . . . . . . . . . . . . . . . . . 29Généralités. . . . . . . . . . . . . . . . . . . . . . . . 28Régler la démultiplication. . . . . . . . . . . . . 29
RéglageRéducteur de signalisation. . . . . . . . . . . . 19
Réglage de l’excitation à distance. . . . . . . . 26Réglage du type de déconnexion. . . . . . . . . 24Réglages du commutateur DIP. . . . . . . . . . . 20Régler la vitesse de réglage. . . . . . . . . . . . . 21Régler la vitesse de rotation. . . . . . . . . . . . . 21Régler les couples de déconnexion. . . . . . . 22Régler le temps de réglage. . . . . . . . . . . . . 21Roue centrale. . . . . . . . . . . . . . . . . . . . . 28, 31
SSchéma fonctionnel. . . . . . . . . . . . . . . . . . . . 8Sens de fermeture. . . . . . . . . . . . . . . . . . . . 24Sous groupe
Système-électronique. . . . . . . . . . . . . . . . . 7Sous-groupes. . . . . . . . . . . . . . . . . . . . . . . . . 7
Réducteur. . . . . . . . . . . . . . . . . . . . . . . . . . 7Stockage.. . . . . . . . . . . . . . . . . . . . . . . . . 4, 18Surmonter un blocage. . . . . . . . . . . . . . . . . 27Symboles. . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
Avertissement. . . . . . . . . . . . . . . . . . . . . . . 4Électrostatique. . . . . . . . . . . . . . . . . . . . . . 4Opérations par le fabricant des vannes. . . 4Remarque. . . . . . . . . . . . . . . . . . . . . . . . . . 4
TTouche
FERMÉ. . . . . . . . . . . . . . . . . . . . . . . . . . . 16OUVERT. . . . . . . . . . . . . . . . . . . . . . . . . . 16
Tours/Course. . . . . . . . . . . . . . . . . . . . . . . . 29Transport. . . . . . . . . . . . . . . . . . . . . . . . . . . . 4Tube protecteur de broche. . . . . . . . . . . . . . 10Types de déconnexion. . . . . . . . . . . . . . . . . 24
VVolant à main. . . . . . . . . . . . . . . . . . . . . . . . 15

Page 50 Y070.019/FR

Y070.019/FR Page 51
Déclaration de Conformité UE / Déclaration d’incorporation selon la Directive relative aux machines
pour des servomoteurs électriques des désignations types suivantes : 2SA5…, 2SB5…, 2SC5…, 2SG5… 2SA7..., 2SG7…
en versions : ECOTRON PROFITRON HiMod
Le fabricant SIPOS Aktorik GmbH déclare avec la présente que les servomoteurs mentionnés ci-dessus répondent aux exigences essentielles des directives suivantes : 2014/30/UE (Directive CEM) 2006/42/CE (Directive relative aux machines)
Les normes harmonisées ci-après ont été appliquées au sens des directives citées :
Directive 2014/30/UE EN 61800-3: 2004 /A1: 2012
Directive 2006/42/CE EN ISO 12100:2010 EN ISO 5210:1996 EN ISO 5211:2001 DIN 3358:1982
Les servomoteurs SIPOS sont destinés pour manœuvrer des vannes industrielles. La mise en service n’est autorisée qu’après garantie que la machine fi nale est conforme aux dispositions pertinentes à la Directive 2006/42/CE.
Les exigences essentielles énoncées à l’annexe I de la directive sont satisfaites :
Annexe I, sections 1.1.2, 1.1.3, 1.1.5, 1.2.1, 1.2.6, 1.3.1, 1.3.7, 1.5.1, 1.6.3, 1.7.1, 1.7.3, 1.7.4
Sur demande des autorités nationales compétentes, le fabricant s’engage à transmettre par voie électro-nique les documents relatifs aux quasi-machines. La documentation spécifi que technique pertinente pour la machine a été établie selon annexe VII partie B.
Mandataire pour la documentation : Dr. Thomas Suckut, Im Erlet 2, 90518 Altdorf, Allemagne
En outre, les objectifs essentiels tels que la santé et la sécurité de la Directive 2014/35/UE (Directive basse tension) sont satisfaits par l’application des normes harmonisées suivantes, si nécessaire pour le produit : EN 60204-1:2006 / A1:2009 / AC:2010 EN 60034-1:2010 / AC:2010 EN 50178:1997
Altdorf, 01.04.2016
Dr. Thomas Suckut Directeur
Cette déclaration ne comporte aucune garantie. Les consignes de sécurité relatives à la documentation fournie de l’appareil sont à respecter. Toute modifi cation non-autorisée sur l’appareil annule la validité de cette déclaration.
Altdorf, 01.04.2016
Dr. Thomas Suckut Directeur
Les certifi cats sont valables à partir de leur date d’émission respective. Tous droits réservés de modifi cation. Les versions actuellement en vigueur sont disponibles en téléchargement sur le site http://www.sipos.de.

Edition 10.16 Y070.019/FRTous droits de modifi cation réservés !
© SIPOS Aktorik GmbHIm Erlet 2 - D-90518 Altdorf
www.sipos.de