aucun titre de diapositive -...
TRANSCRIPT
IUT de Toulon – Département GEII
UE21 : Automatisme LP SARII 2016 - 2017
Automatismes Industriels
2IUT Toulon 2013/2014
UE21 : Automatisme LP SARII 2016 - 2017
Plan du Cours :
I / Les Automates Programmables Industriels1 – Présentation2 – Structure et fonctionnement3 - Caractéristiques
II / La Programmation IEC 1131-31 – L'adressage des données2 – Le langage IL3 – Le langage ST4 – Le Langage LD5 – Le langage FBD7 – Le langage SFC
III / API Wago et plateforme logicielle CoDeSys1 – Plateforme logicielle & langages associés2 – Architectures matérielles & Réseaux
IV / API Schneider M340 et plateforme logicielle Unity1 – Architectures matérielles & Réseaux2 – Plateforme logicielle & langages associés
V / API Siemens et plateforme logicielle TIA/Step71 – Architectures matérielles & Réseaux2 – Plateforme logicielle & langages associés

3IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
I / Les Automates Programmables Industriels
1 - Introduction
Les automates programmables industriels sont apparus à la fin des années soixante, à la demande de l'industrie automobile américaine, qui réclamait plus d' adaptabilité de leurs systèmes de commande.Les coûts de l'électronique permettant alors de remplacer avantageusement les technologies alors utilisées.
Avant : utilisation de relais électromagnétiques et de systèmes pneumatiques pour la réalisation des parties commandes
⇒ logique câbléeInconvénients : cher, pas de flexibilité, pas de communication possible

4IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
Contraintes du milieu industriel (1) :
✔ Influences externes :
- poussières,
- température,
- humidité,
- vibrations,
- parasites électromagnétiques, …
→ Solution : utilisation de systèmes à base de microprocesseurs permettant une modification aisée des automatismes.
⇒ logique programmée
5IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
Contraintes du milieu industriel (2) :
✔ Personnel : - dépannage possible par des techniciens de formation électromécanique
- possibilité de modifier le système en cours de fonctionnement
✔ Matériel :
- Évolutif- Modulaire- Implantation aisée
6IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
L'Automate Programmable Industriel (API) est un appareil électronique programmable, adapté à l'environnement industriel, qui réalise des fonctions d'automatisme pour assurer la commande de préactionneurs et d'actionneurs à partir d'informations logique, analogique ou numérique.
Définition :
Les API sont utilisés dans divers secteurs d'activités, que l'on peut regrouper en trois catégories :
7IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
- Les systèmes automatisés de production (SAP), dont l'objectif est d'apporter de la valeur ajoutée à une matière première, en respectant certaines contraintes (financières, normes de sécurité etc...).
- L'industrie automobile, la métallurgie,
- La production d'énergie (centrales nucléaires, thermiques,
hydrauliques...)
- L'industrie agro-alimentaire, pharmaceutique,
- Le génie-chimique, la pétrochimie,
- Les chaînes de conditionnement,
- etc ...
8IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
- L'automatisation des bâtiments (GTB : Gestion Technique des Bâtiments), dont les objectifs sont :
- L'amélioration du confort (gestion des ascenseurs, régulation de
températures...),
- La sécurité (alarmes anti-intrusion, détection de fumées...)
- La réduction des dépenses énergétiques (gestion automatisée des
consignes de température et d'éclairage...)
- Engins de chantiers (grues...),
- Tri postal,
- etc...
- L'automatisation de machines spéciales :
9IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
Nature des informations traitées par l'automate :
➢Analogique : l'information est continue et peut prendre une valeur comprise dans une plage bien déterminée. C'est le type d'information délivrée par un capteur (pression, température …).
Une grandeur analogique (tension, courant...) doit être convertie en grandeur numérique par une carte d'entrée spécifique pour pouvoir être traitée par le programme automate.
➢Numérique : l'information est contenue dans des mots codés sous forme binaire ou bien hexadécimale. Il peut s'agir d'une variable interne du programme (compteur...).
➢Tout ou rien (T.O.R.) : l'information ne peut prendre que deux états (vrai/faux, 0 ou 1 …). C'est le type d'information délivrée par un détecteur, un bouton poussoir …
10IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
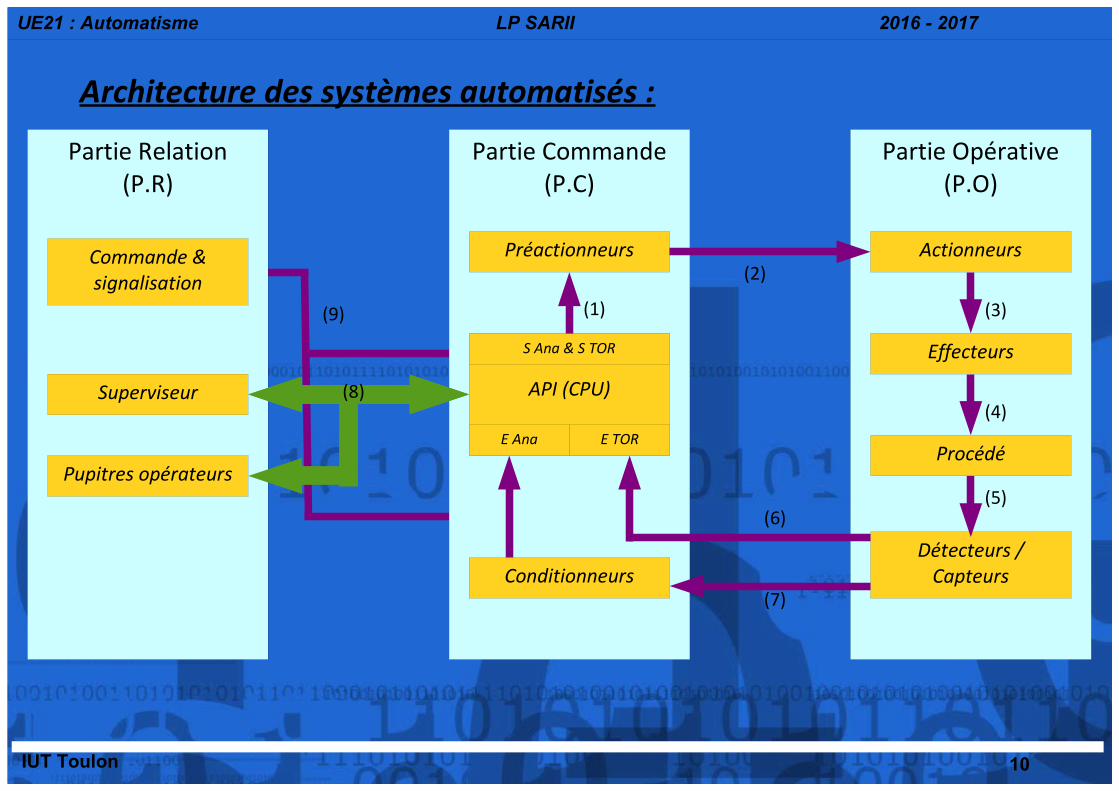
Architecture des systèmes automatisés :
Partie Commande(P.C)
Partie Opérative(P.O)
Partie Relation(P.R)
API (CPU)
Préactionneurs Actionneurs
Effecteurs
Détecteurs /CapteursConditionneurs
E Ana E TOR
S Ana & S TOR
Procédé
Superviseur
Pupitres opérateurs
Commande & signalisation
(1)
(2)
(3)
(4)
(5) (6)
(7)
(8)
(9)

11IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
(1) : l'API transmet les ordres de commandes aux préactionneurs, sous forme de niveaux électriques TOR (0/24V) ou analogiques (0-10V, +/-10V, 4-20mA, 0-20mA)
(2) : Le préactionneur converti ces ordres en commandes contenant l'énergie nécessaire au pilotage des actionneurs. Exemples : contacteurs, distributeurs électro-pneumatique, variateurs de vitesse...
(3) : L'actionneur assure la conversion d'énergie pour agir sur le procédé (exemples : moteur asynchrone, vérin hydraulique, résistance chauffante...).
(4) : l'effecteur se situe entre l'actionneur et le procédé à contrôler (exemples : arbre moteur + pâles pour un malaxeur mu par un moteur asynchrone, ventouse de saisie pour un vérin destiné au déplacement de plaques métalliques etc...
(5) : Les paramètres physiques utiles à la commande du procédé (exemples : températures, pressions, présences...) sont surveillés grâce à des détecteurs (TOR) et des capteurs (analogiques).
(6,7) : Ces informations électriques sont transmises à la P.C - directement reliées aux cartes TOR pour les détecteurs, parfois par le biais d'un conditionneur (et/ou d'un transmetteur) pour l'analogique.
(8) : Un réseau local industriel dédié à la supervision permet de lier la P.C et la P.R (et donc indirectement la P.O). Certains éléments de signalisation peuvent néanmoins se faire par le biais des cartes d'E/S (voyants, b.p ...).
12IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
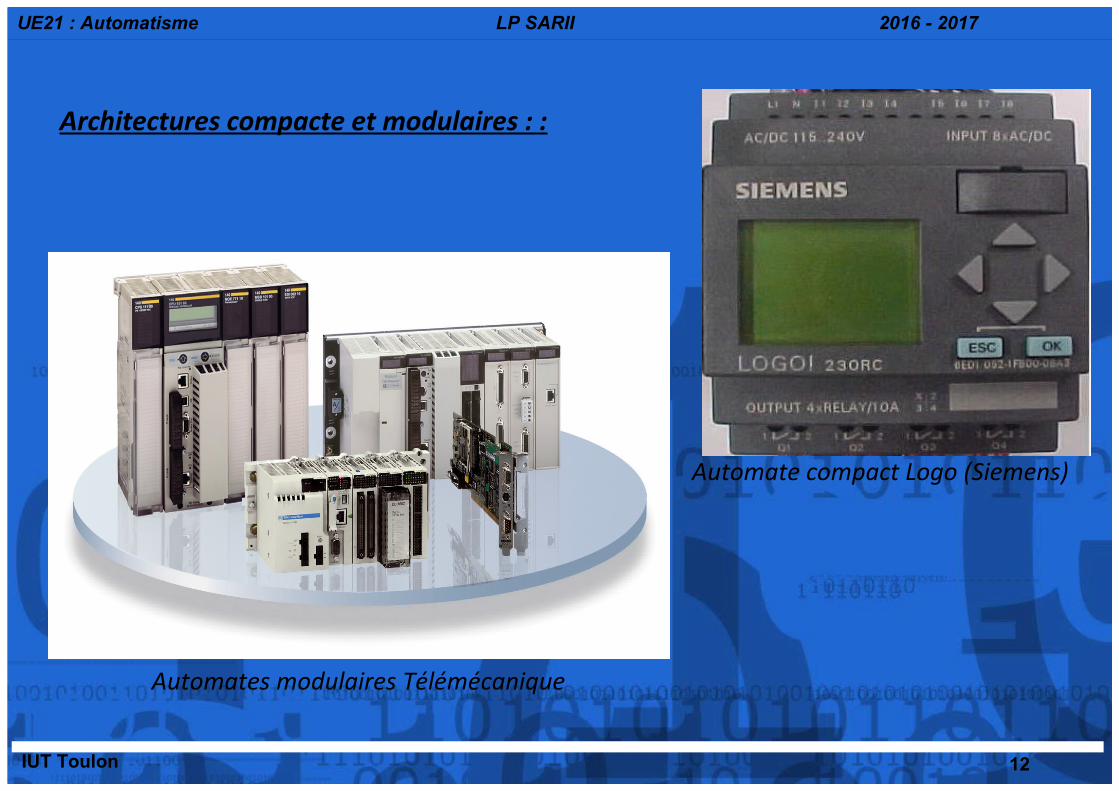
Architectures compacte et modulaires : :
Automates modulaires Télémécanique
Automate compact Logo (Siemens)
13IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
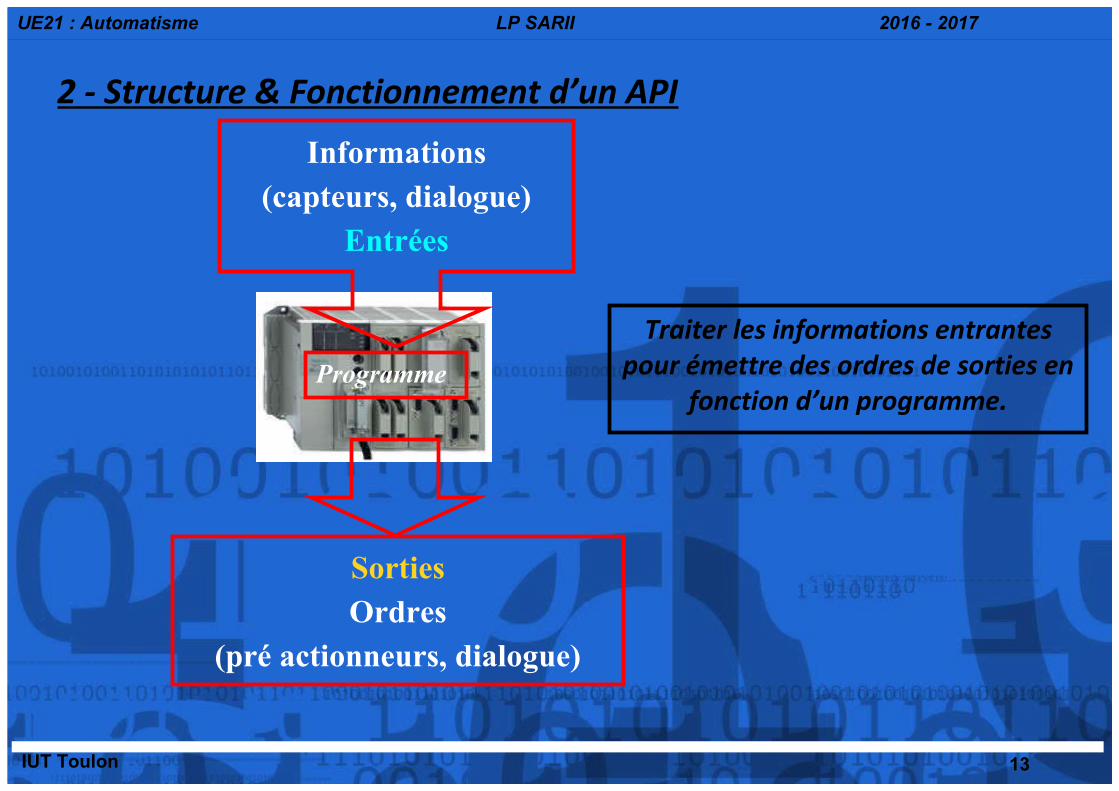
Informations(capteurs, dialogue)
Entrées
SortiesOrdres
(pré actionneurs, dialogue)
Programme
Traiter les informations entrantes pour émettre des ordres de sorties en
fonction d’un programme.
2 - Structure & Fonctionnement d’un API

14IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
Le cycle de fonctionnement est organisé en 4 tâches :
Bus Entrées / Sorties
Unité de Traitement
RAM
Module d' Entrées
Module de Sorties
Tâche 1 : Gestion du système (auto-contrôle de l’automate)Tâche 2 : Acquisition des données en entrée (mémorisation)Tâche 3 : Traitement des données (exécution du programme)Tâche 4 : Affectation des sorties (émission des ordres)
15IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
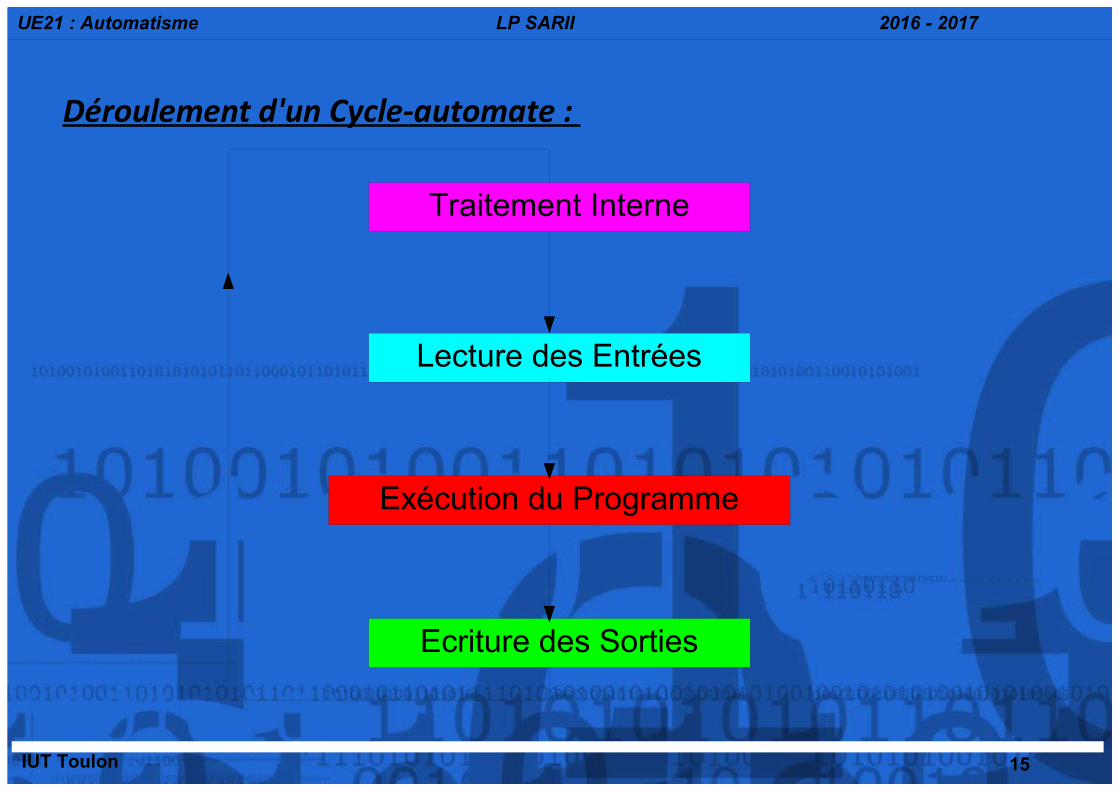
Déroulement d'un Cycle-automate :
Traitement Interne
Lecture des Entrées
Exécution du Programme
Ecriture des Sorties
16IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
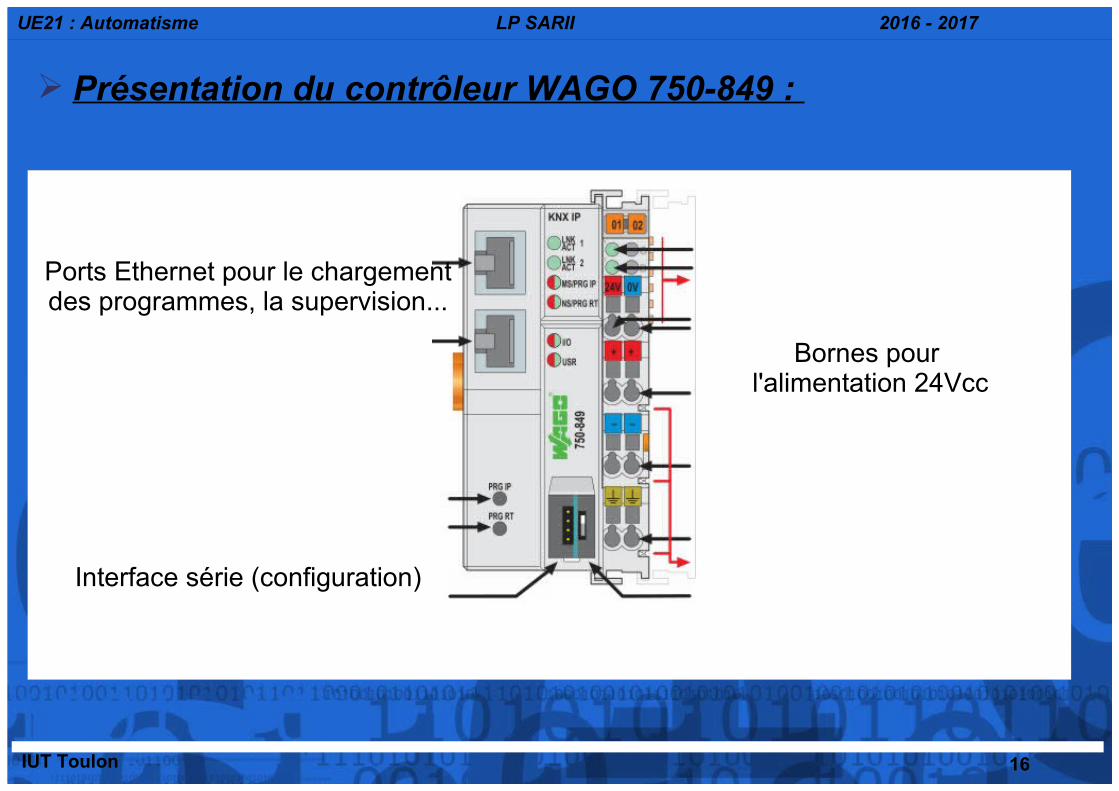
➢ Présentation du contrôleur WAGO 750-849 :
Ports Ethernet pour le chargement des programmes, la supervision...
Interface série (configuration)
Bornes pour l'alimentation 24Vcc
17IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
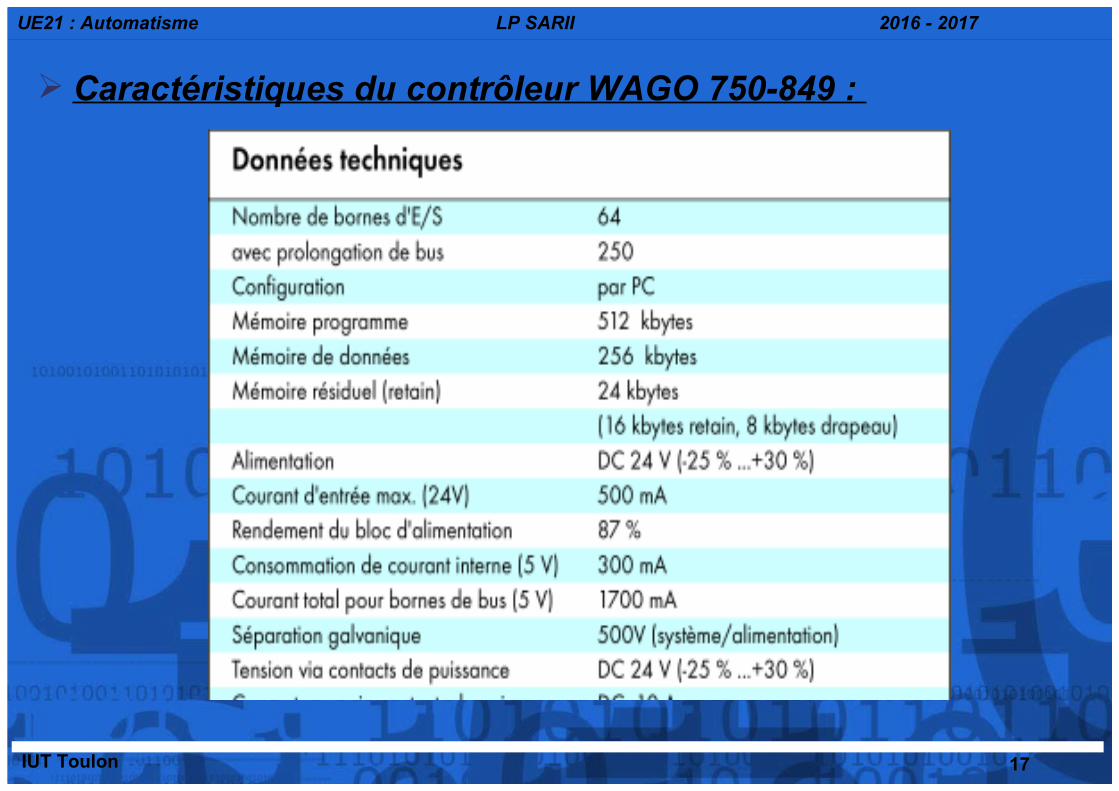
➢ Caractéristiques du contrôleur WAGO 750-849 :
18IUT Toulon 2013/2014
UE21 : Automatisme LP SARII 2016 - 2017
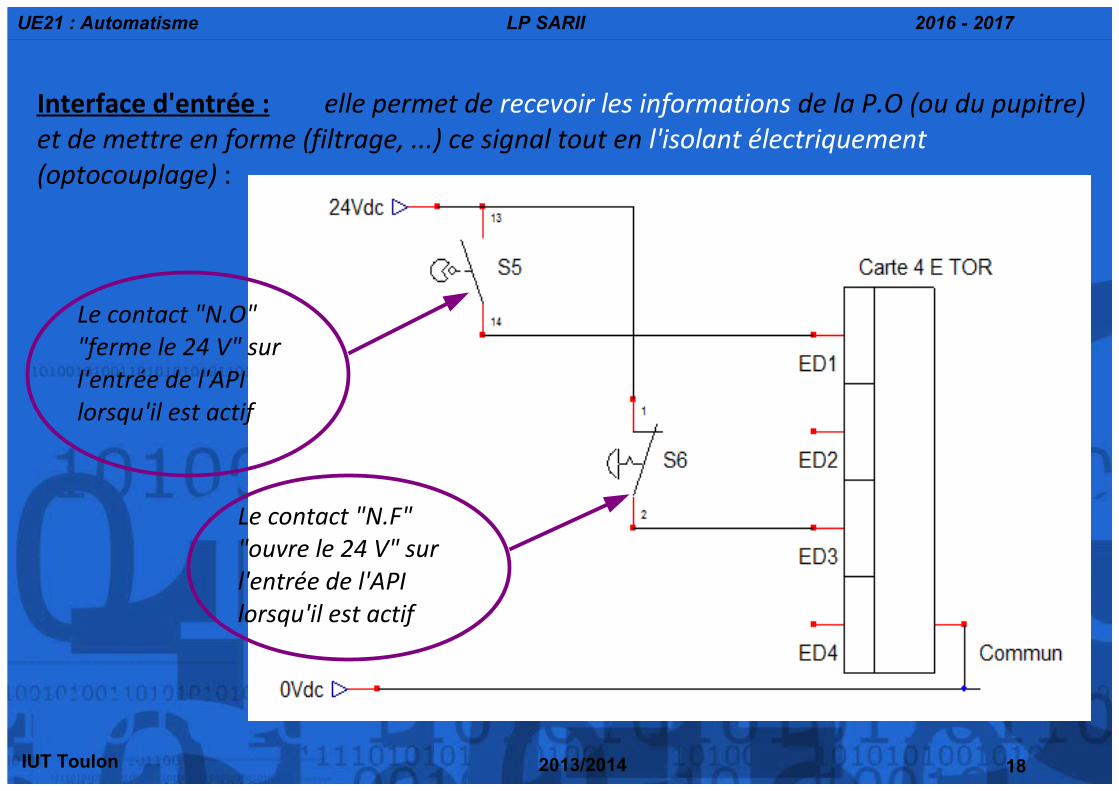
Interface d'entrée : elle permet de recevoir les informations de la P.O (ou du pupitre) et de mettre en forme (filtrage, ...) ce signal tout en l'isolant électriquement (optocouplage) :
Le contact "N.O" "ferme le 24 V" sur l'entrée de l'API lorsqu'il est actif
Le contact "N.F" "ouvre le 24 V" sur l'entrée de l'API lorsqu'il est actif
19IUT Toulon 2013/2014
UE21 : Automatisme LP SARII 2016 - 2017
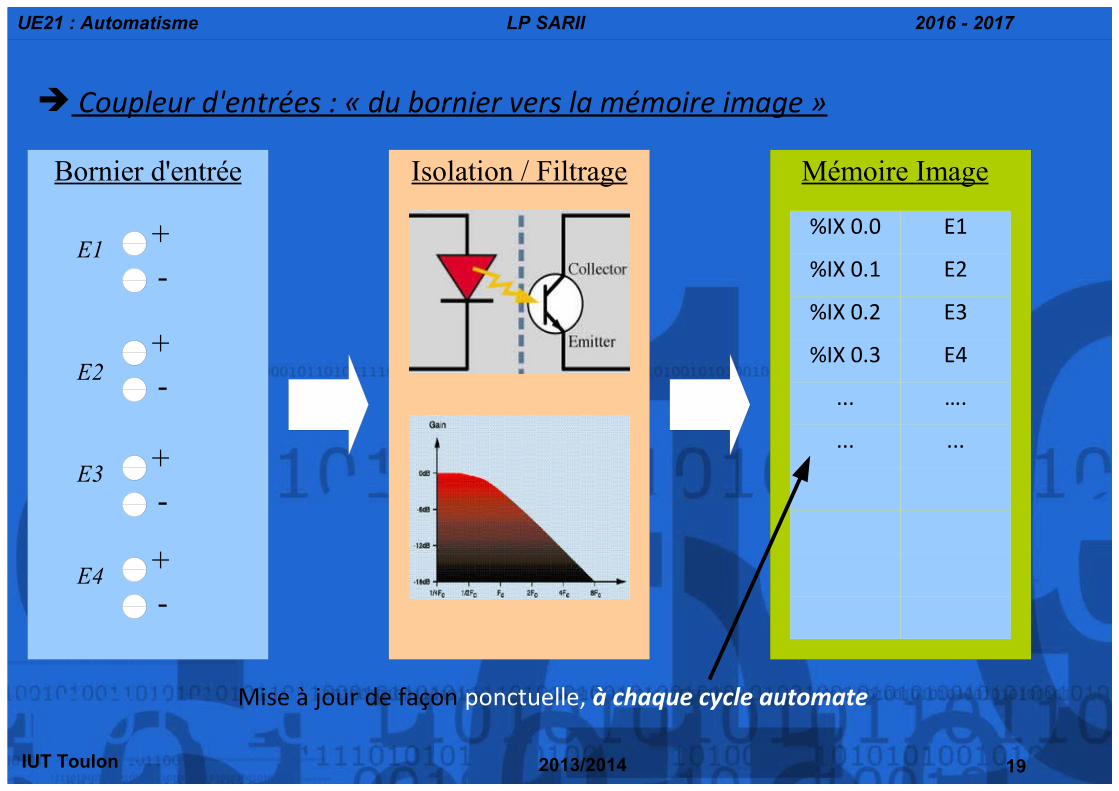
➔ Coupleur d'entrées : « du bornier vers la mémoire image »
Mise à jour de façon ponctuelle, à chaque cycle automate
+-
+-
+-
+-
E1
E2
E3
E4
Bornier d'entrée Isolation / Filtrage Mémoire Image
%IX 0.0 E1
%IX 0.1 E2
%IX 0.2 E3
%IX 0.3 E4
... ….
... ...

20IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
➢ Exemple de Carte D'E TOR (750-400) :
21IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
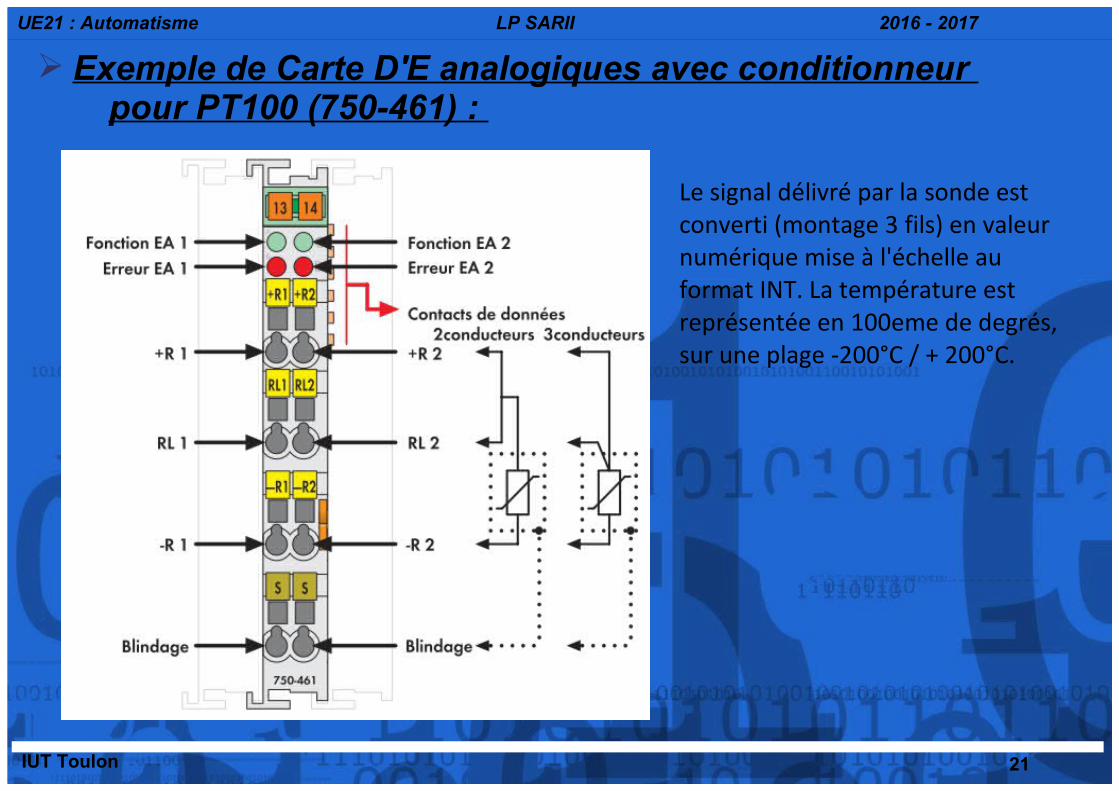
➢ Exemple de Carte D'E analogiques avec conditionneur pour PT100 (750-461) :
Le signal délivré par la sonde est converti (montage 3 fils) en valeur numérique mise à l'échelle au format INT. La température est représentée en 100eme de degrés, sur une plage -200°C / + 200°C.
22IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
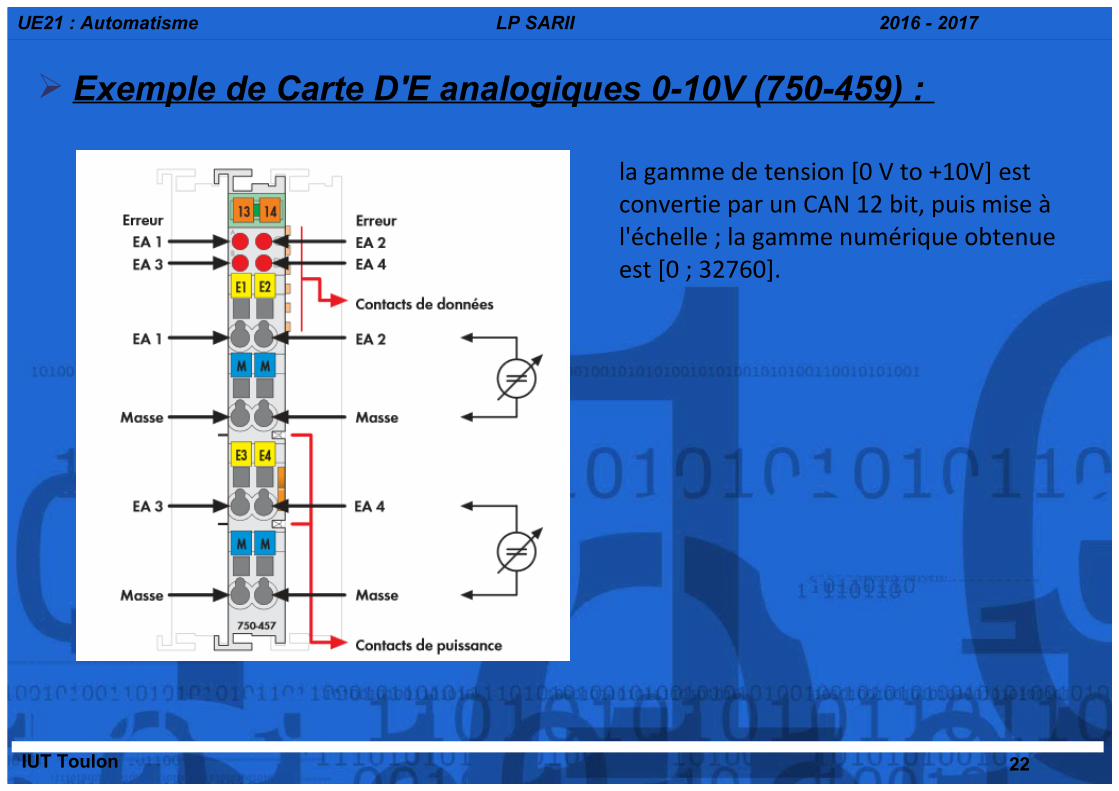
➢ Exemple de Carte D'E analogiques 0-10V (750-459) :
la gamme de tension [0 V to +10V] est convertie par un CAN 12 bit, puis mise à l'échelle ; la gamme numérique obtenue est [0 ; 32760].
23IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
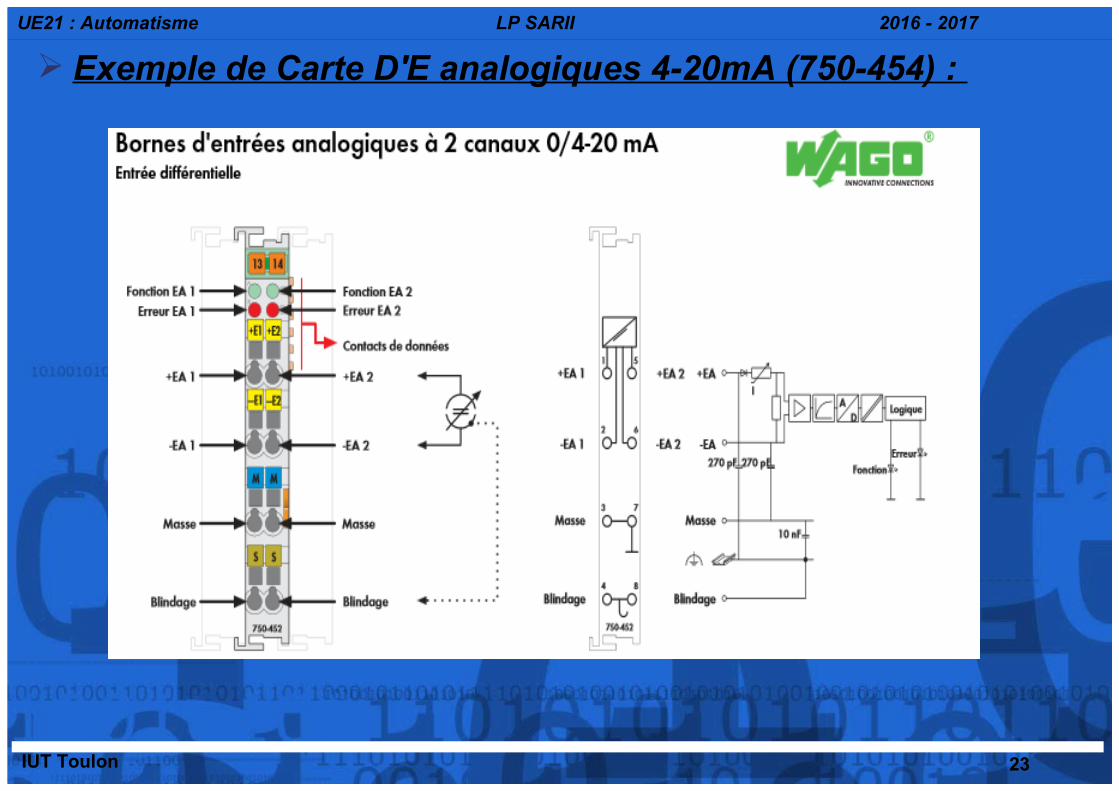
➢ Exemple de Carte D'E analogiques 4-20mA (750-454) :
24IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
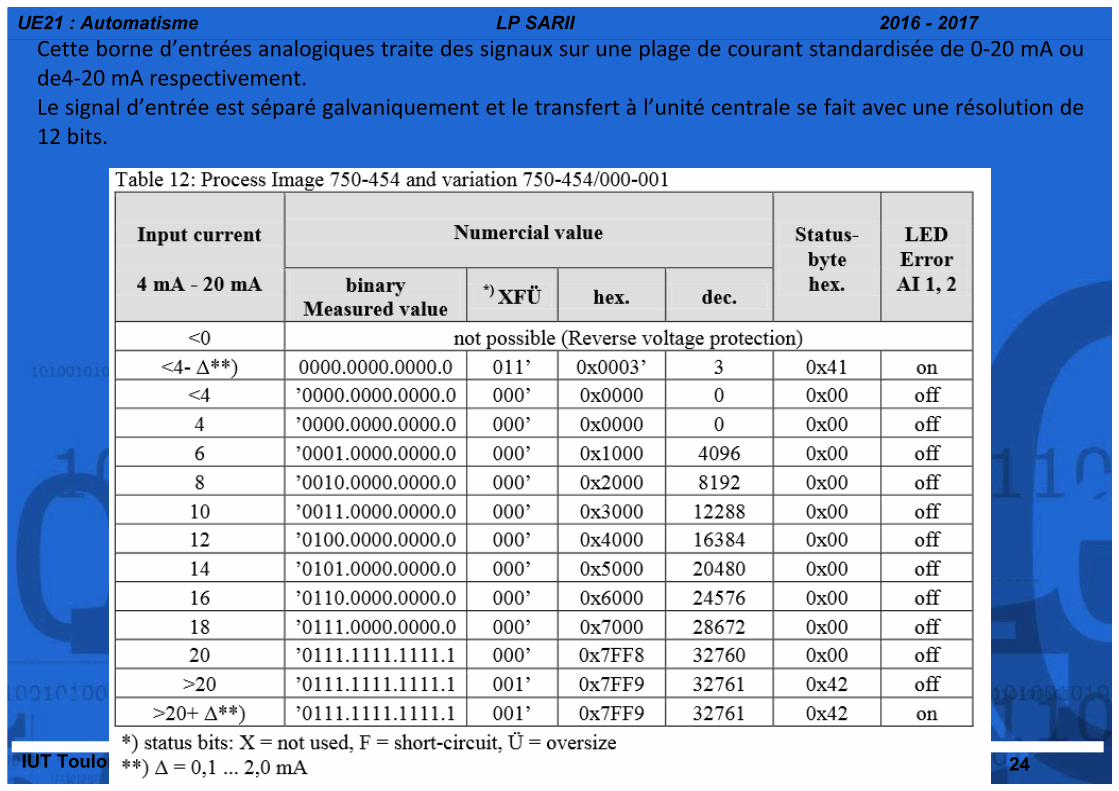
Cette borne d’entrées analogiques traite des signaux sur une plage de courant standardisée de 0-20 mA ou de4-20 mA respectivement.Le signal d’entrée est séparé galvaniquement et le transfert à l’unité centrale se fait avec une résolution de 12 bits.
25IUT Toulon 2013/2014
UE21 : Automatisme LP SARII 2016 - 2017
+-
+-
+-+-
S1
S2
S3
S4
Bornier de sortiesIsolation / Amplification - Relayage
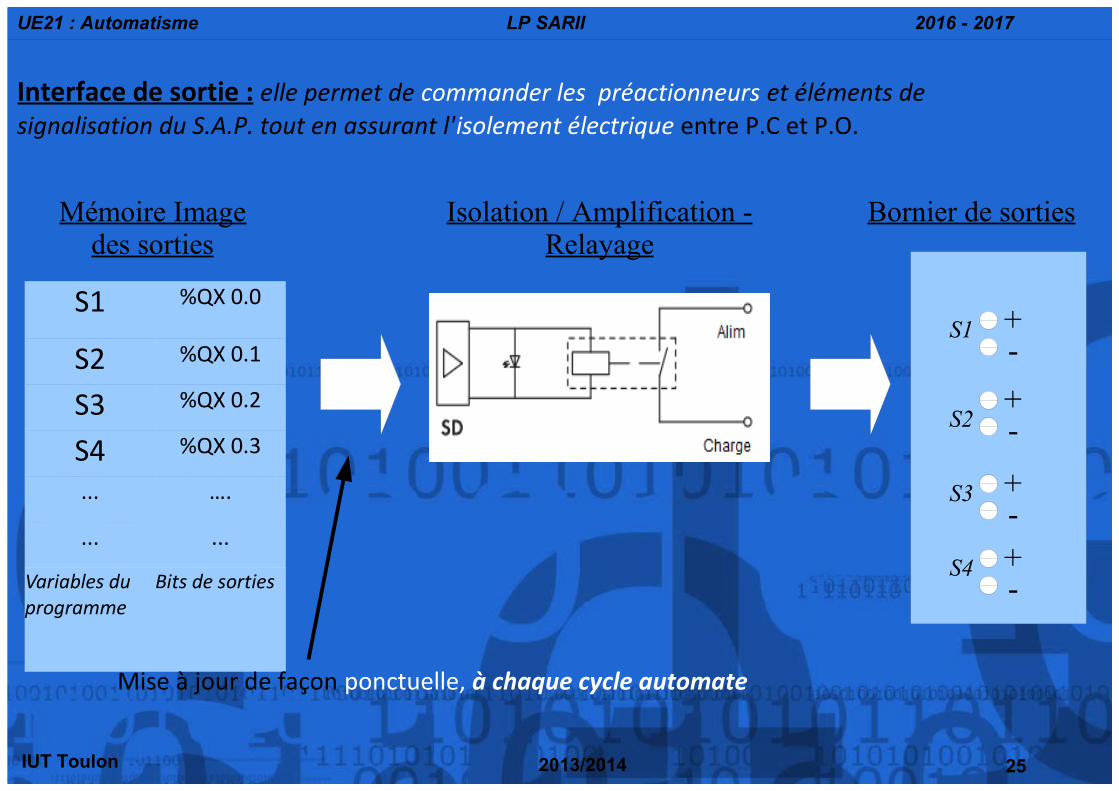
Mémoire Image des sorties
S1 %QX 0.0
S2 %QX 0.1
S3 %QX 0.2
S4 %QX 0.3
... ….
... ...
Variables du programme
Bits de sorties
Interface de sortie : elle permet de commander les préactionneurs et éléments de signalisation du S.A.P. tout en assurant l'isolement électrique entre P.C et P.O.
Mise à jour de façon ponctuelle, à chaque cycle automate

26IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
➢ Exemple de Carte De S TOR à Relais (750-513) :
27IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
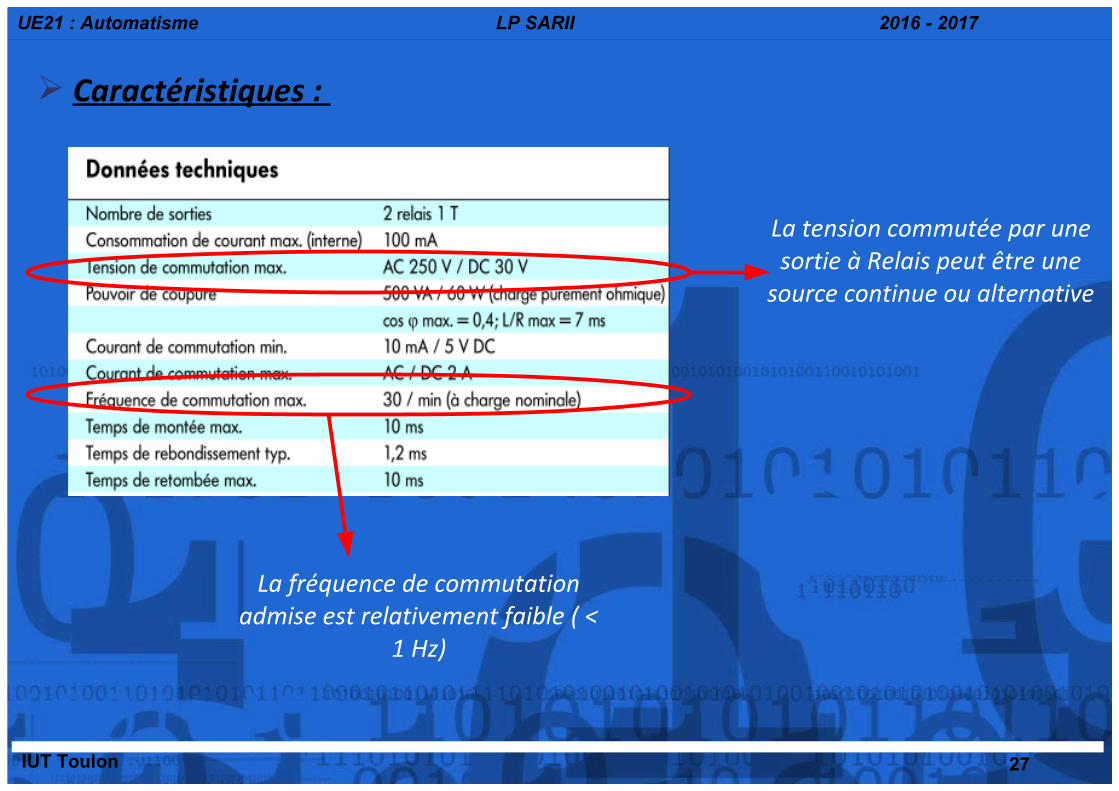
➢ Caractéristiques :
La tension commutée par une sortie à Relais peut être une
source continue ou alternative
La fréquence de commutation admise est relativement faible ( <
1 Hz)

28IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
➢ Exemple de Carte De S TOR à Transistors (750-501) :
29IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
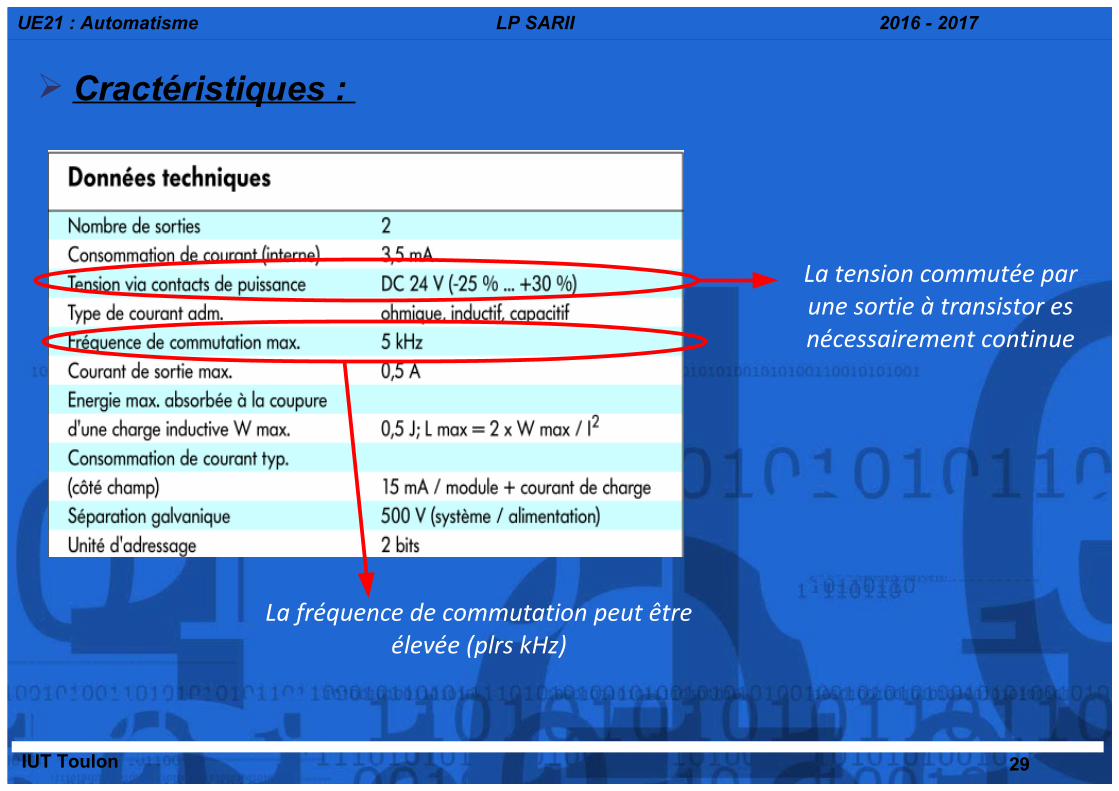
➢ Cractéristiques :
La tension commutée par une sortie à transistor es nécessairement continue
La fréquence de commutation peut être élevée (plrs kHz)
30IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
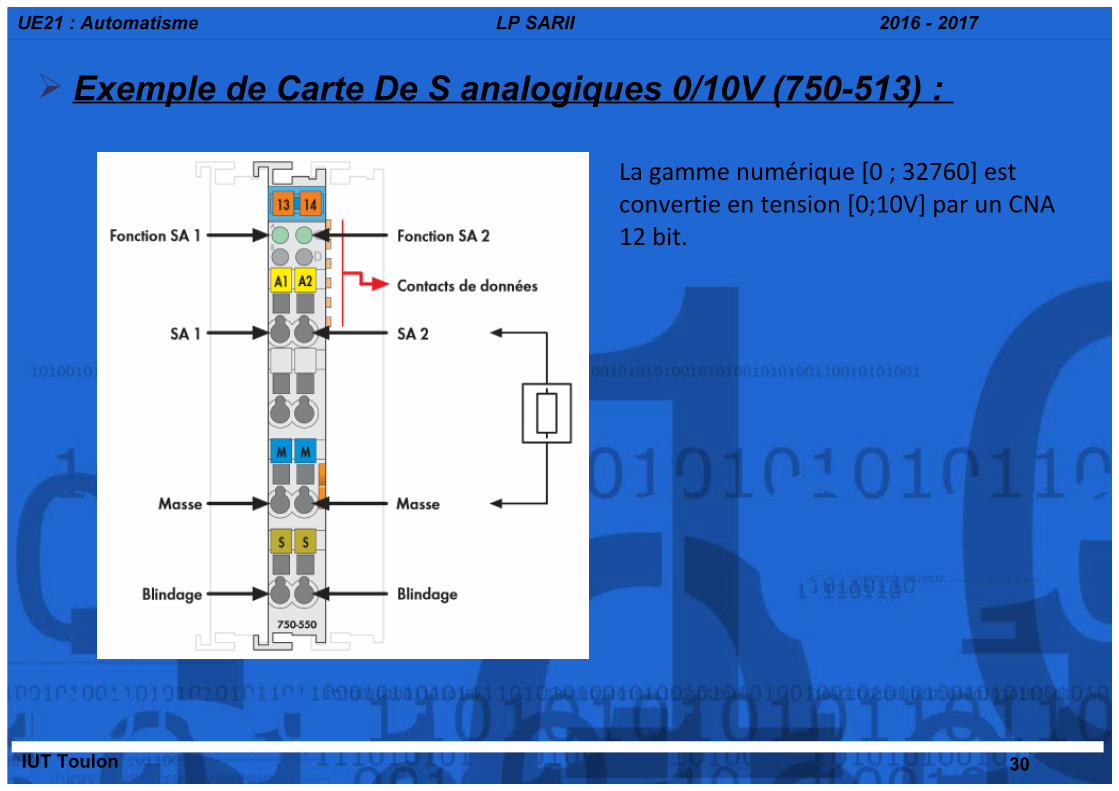
➢ Exemple de Carte De S analogiques 0/10V (750-513) :
La gamme numérique [0 ; 32760] est convertie en tension [0;10V] par un CNA 12 bit.
31IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
La Norme IEC 1131-3 définit les règles d 'écriture des programmes pour les API.
Les fabricants d'API fournissent des logiciels de programmation plus ou moins fidèles à cette norme (de plus en plus tout de même).
Cette norme définit entre autres :
- Les langages de programmation utilisés, ainsi que les règles de programmation et de syntaxe associées ;
- Le principe d'adressage des données traitées par l'API, ainsi que les différents formats de variables éxistants.
II / La Programmation IEC 1131-3
32IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
Toute donnée traitée par un programme automate possède :
- Une Direction (Entrée, Sortie, Interne)
- Un format (Bit, Octet, Mot ...)
- Un numéro d'adressage (valeur numérique indiquant la position de la donnée dans le plan mémoire de l'API).
La syntaxe pour toute donnée est la suivante :
% 'Direction' . 'Format' . 'Numéro'
1 / L'adressage des Données.

33IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
La direction :
Une entrée est une valeur, provenant de la P.O, qui ne peut être que lue par le programme chargé dans le contrôleur.
Notation : %I.x.xExemple : capteur, détecteur, bouton poussoir etc...
Une sortie est une donnée à destination de la P.O, dont la valeur peut être fixée par l'automate. (Remarque : Une sortie peut aussi être lue par le programme)
Notation : %Q.x.xExemple : voyant lumineux, commande d'un contacteur etc...
Une variable interne est une donnée qui n'est pas physiquement liée à la P.O, mais une
information gérée par le programme chargé dans l'API.Exemples : valeur d'un compteur, d'une temporisation, étape d'un grafcet …
Notation : %M.x.x

34IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
Le format : ✔ Un bit est une valeur binaire ou encore booléenne dont la valeur est « VRAIE » (notée TRUE) ou « FAUSSE » (notée FALSE).
Notation : %x.X.x.x
Exemple : Un voyant lumineux est relié à la 4eme borne de la 1°carte de sorties T.O.R du rack automate. Son état correspondra à la variable booléenne :
% Q X 0.3
✔ Un octet est une donnée codée sur 8 bits
Notation : %x.B.x
35IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
✔ Un mot est une donnée codée sur 16 bit
Notation : %x.W.x
Exemple : Un capteur de température est relié à la 3eme entrée analogique du rack automate. La valeur numérique correspondante sera stockée dans la variable :
✔ Un double mot est une variable codée sur 32 bits
Notation : %x.DW.x
% I W 2

36IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
Les valeurs numériques peuvent être représentées sous formes décimales, hexadécimales (en ajoutant 16# devant la valeur) ou binaires (2#...)
➔exemples : 125 → 125 1A216
→ 16#1A2 01102 → 2#0110
En plus du format, on peut définir un type pour les variables internes (liste non exhaustive) :
BOOL : valeur booléenne ('TRUE' ou 'FALSE')
INT : valeur entière signée sur 16 bits
UINT : valeur entière non signée sur 16 bits
DINT : valeur entière signée sur 32 bits
DUINT : valeur entière non signée sur 32 bits
REAL : valeur réelle sur 32 bits
TIME : durée définie en h/mn/s/ms Notation : t # ...h ...m ...s ...ms
DATE : date définie en année/mois/jour Notation : d # ...-...-...
TIME_OF_DAY : heure du jour définie en h/mn/s Notation : tod # ... : ... : ...
DATE_AND_TIME : date & heure Notation : dt # ...-...-... - ... : ... : ...
STRING : chaîne de caractères. Notation : ' Ma Chaine '
37IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
Le dernier champ d'adressage est constitué: - de 2 chiffres séparés par un point pour les bits, le 1° indique le n° du mot**, le second
la position du bit dans ce mot (0 à 15).- d'un seul chiffre pour tous les autres types.
Exemple (bit d'entrée) : %IX0.2 Il s'agit de la 3° entrée (les adresses commencent à 0) T.O.R de l'API.
Exemple (Mot interne) : %MW42
Il s'agit du mot interne d'adresse 42.
** Cela dépend en réalité de la composition -16 bits ou 8 bits - du plan mémoire de l'API. Dans le 1er cas (Wago 750, Schneider) il s'agira d'un n° de mot ; dans le 2°cas (Siemens) d'un n° d'octet.

38IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
2 / Langage IL (Instruction List).Il s'agit d'un langage textuel proche du langage machine de l'API. Il s'apparente à l'assembleur d'un microcontrôleur. Ce langage n'est plus trop utilisé à l'heure actuelle.
Exemple : Soit l'équation logique suivante →
Z = (A . B + C) . D
... se traduit par le code suivant :
La norme IEC 1131-3 définit 5 langages de programmation : IL, ST, SFC, LD et FDB.
39IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
3 / Langage ST (Structured Text).
Il s'agit d'un langage textuel proche des langages évolués tels que le C. Il s'avère indispensable dès lors que l'on a besoin de faire des traitements numériques par exemple.
Exemple : Soit l'équation logique suivante →
... se traduit par le code suivant :
Z = (A . B + C) . D
40IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
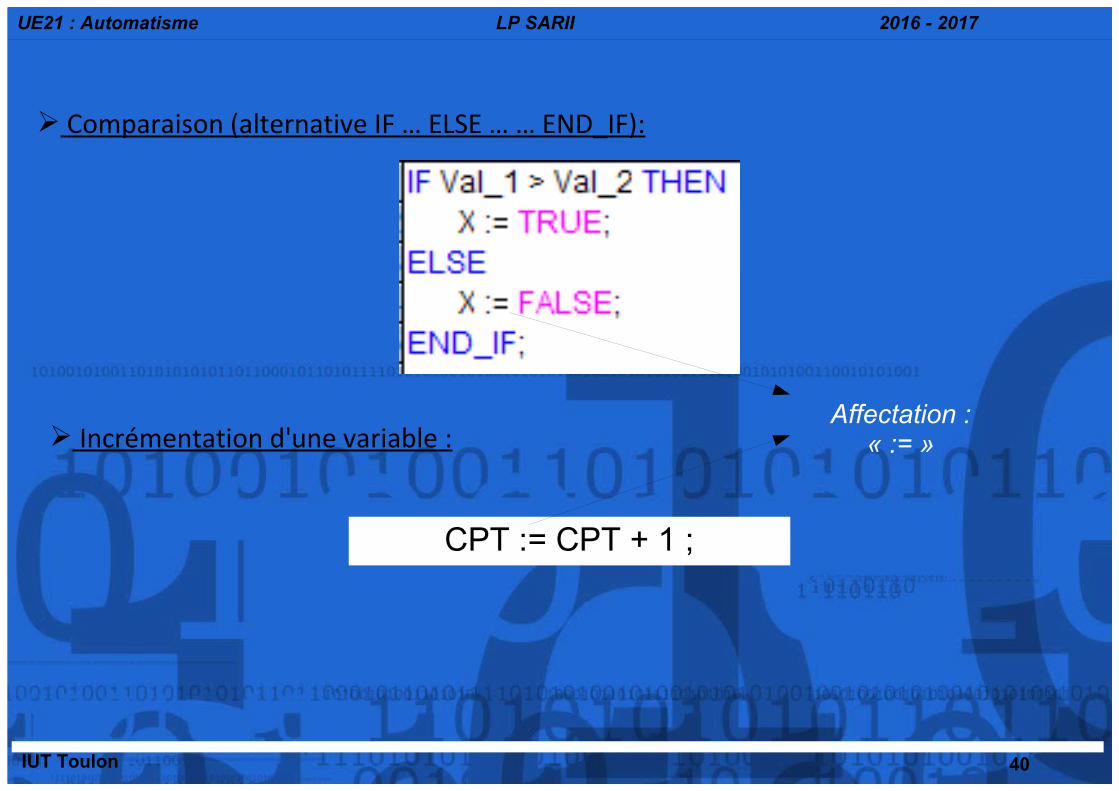
➢ Comparaison (alternative IF … ELSE … … END_IF):
➢ Incrémentation d'une variable :
CPT := CPT + 1 ;
Affectation : « := »
41IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
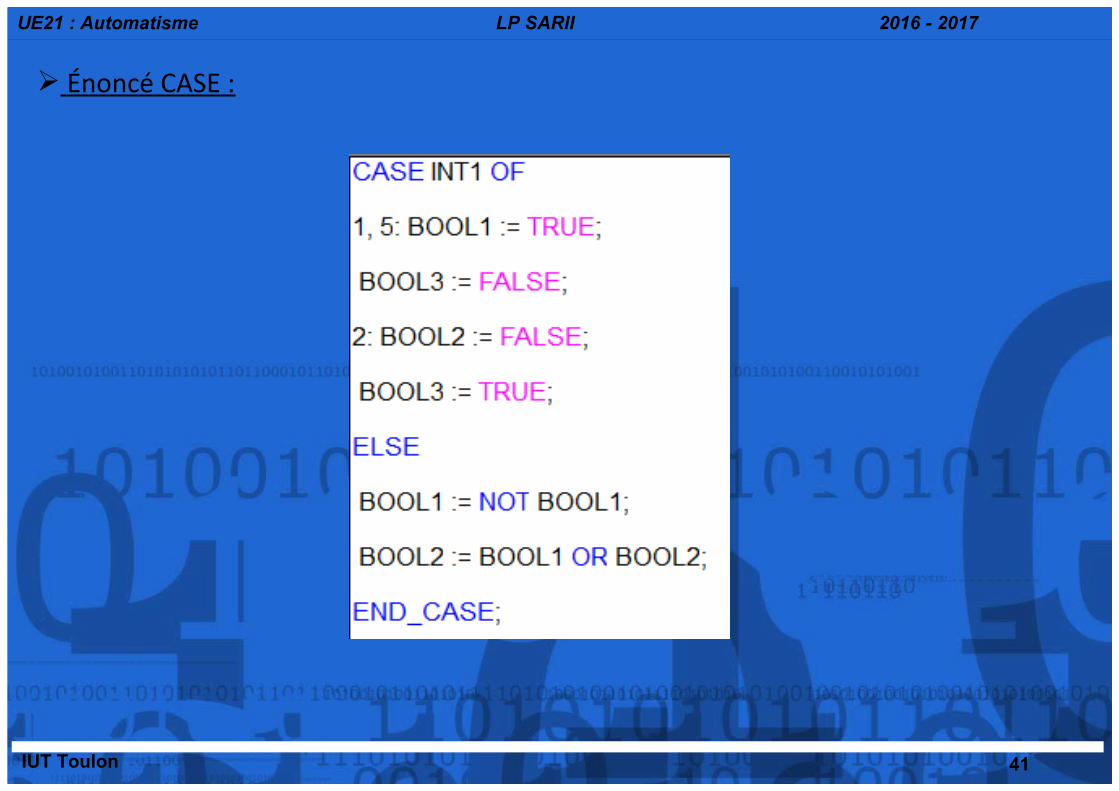
➢ Énoncé CASE :

42IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
➢ Boucle FOR :
➢ Boucle WHILE :
FOR i := 0 TO 9 BY 1 DO
.............. ;
END_FOR;
WHILE condition = TRUE DO
.............. ;
END_WHILE;
43IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
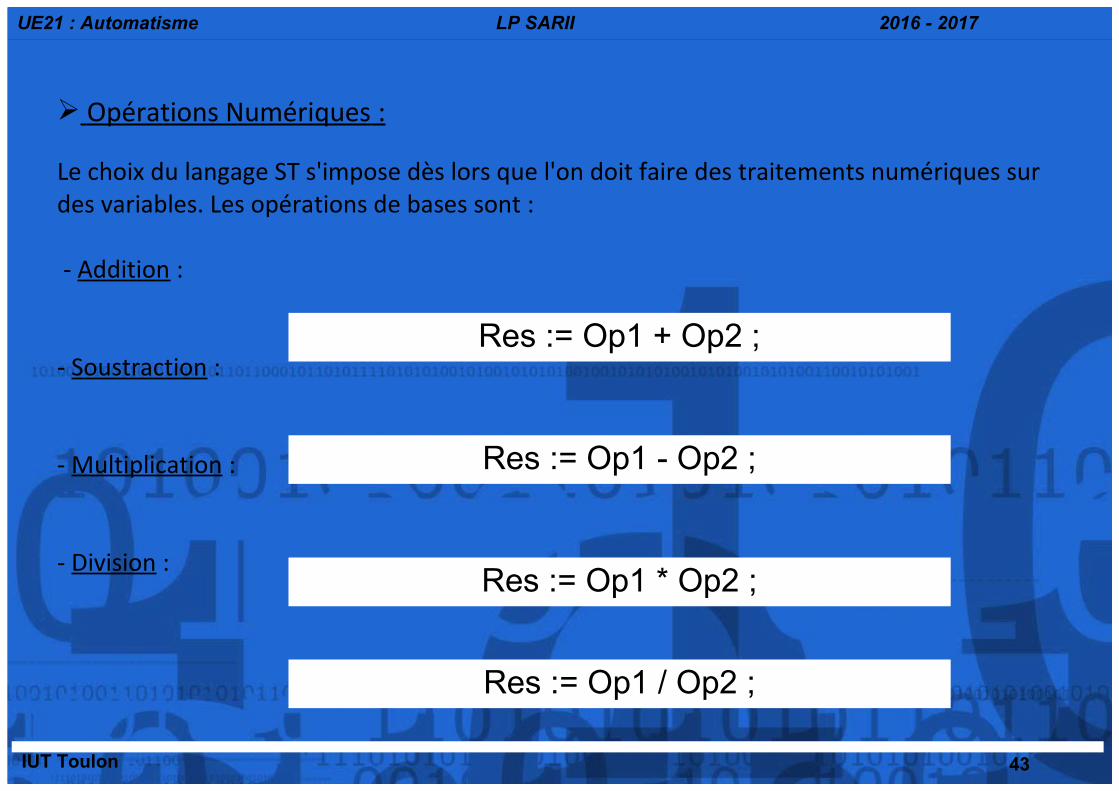
➢ Opérations Numériques :
Le choix du langage ST s'impose dès lors que l'on doit faire des traitements numériques sur des variables. Les opérations de bases sont :
- Addition :
- Soustraction :
- Multiplication :
- Division :
Res := Op1 + Op2 ;
Res := Op1 - Op2 ;
Res := Op1 * Op2 ;
Res := Op1 / Op2 ;
44IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
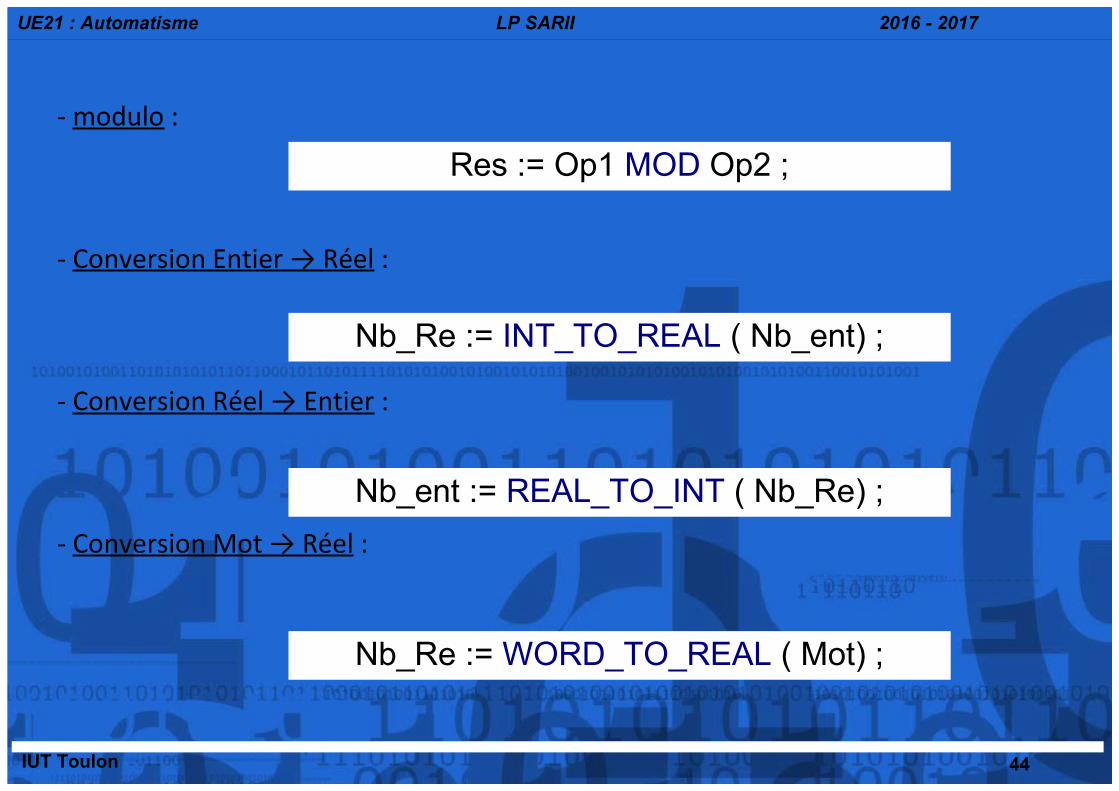
- modulo :
- Conversion Entier → Réel :
- Conversion Réel → Entier :
- Conversion Mot → Réel :
Res := Op1 MOD Op2 ;
Nb_Re := INT_TO_REAL ( Nb_ent) ;
Nb_ent := REAL_TO_INT ( Nb_Re) ;
Nb_Re := WORD_TO_REAL ( Mot) ;
45IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
4 / Langage LD (LaDder ).
Il s'agit d'un langage graphique que l'on pourra par exemple utiliser pour coder les équations logiques des réceptivités d'un grafcet.
Le principe est le suivant :
- Les variables d'entrée sont symbolisés par des contacts électriques(NO ou NF), les variables de sortie par des bobines.
On considère que l'extrémité gauche du réseau constitue la borne + d'une alimentation (imaginaire) et la partie droite sa borne -
La mise en série, en // de contacts (variables d'E) NO ou NF permet l'alimentation conditionnelle de la bobine (variable de S), donc L'implantation d'équation logique.

46IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
➢ Opérations logiques de Base :
ET : OU : NON :
Exemple : Soit l'équation logique suivante →
Cette équation se traduit en LD par la ligne suivante :
Z = (A . B + C) . D
47IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
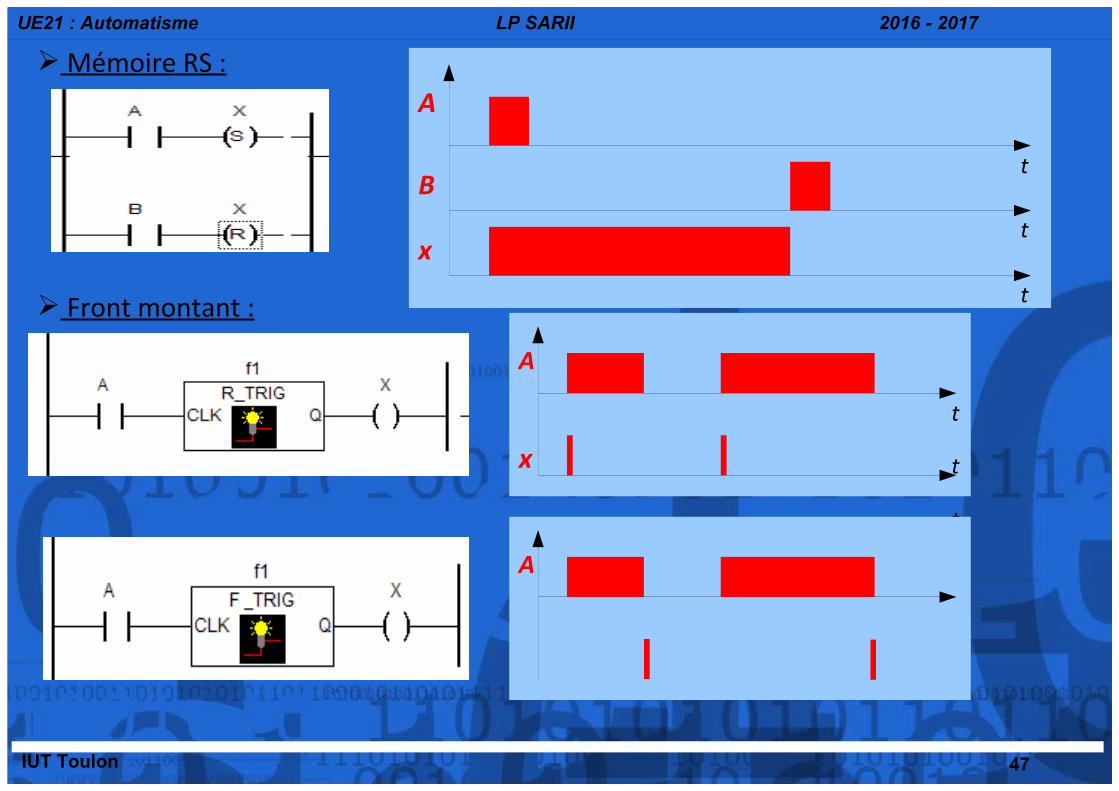
➢ Mémoire RS :
➢ Front montant :
t
t
t
A
B
x
t
t
t
A
x
t
tx
A
48IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
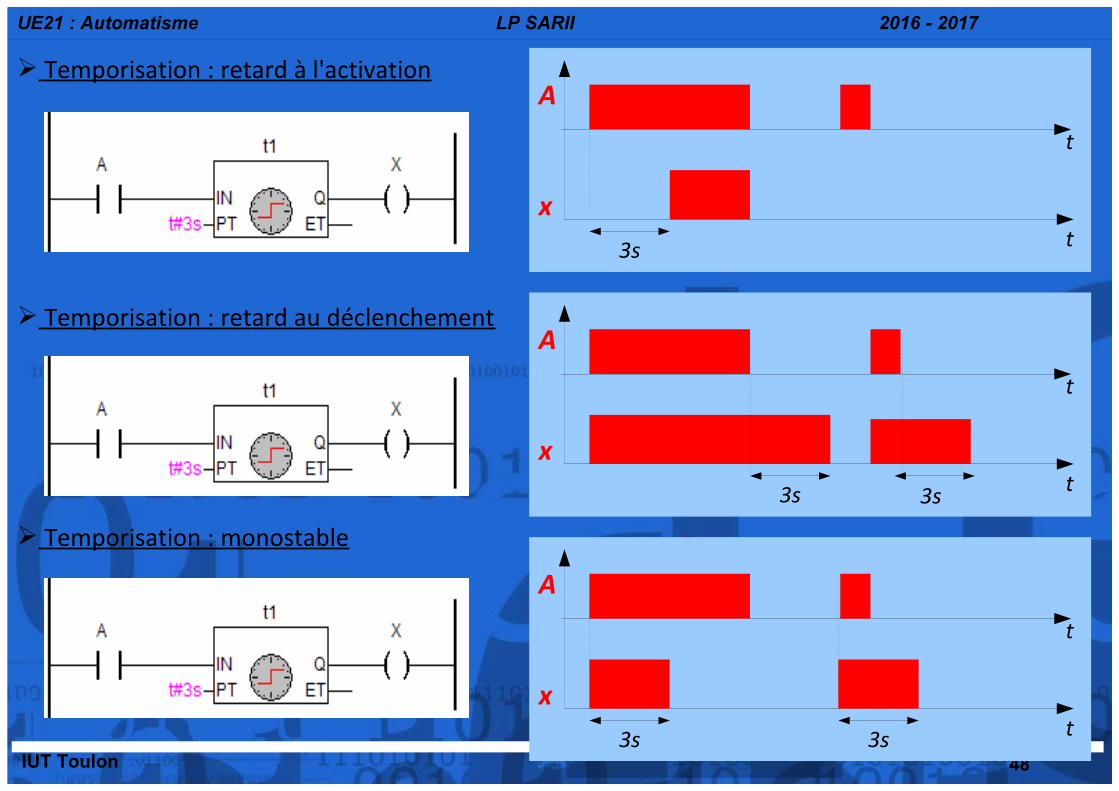
➢ Temporisation : retard à l'activation
➢ Temporisation : retard au déclenchement
➢ Temporisation : monostable
t
t
A
x3s
t
t
A
x3s
t
t
A
x3s
3s
3s
49IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
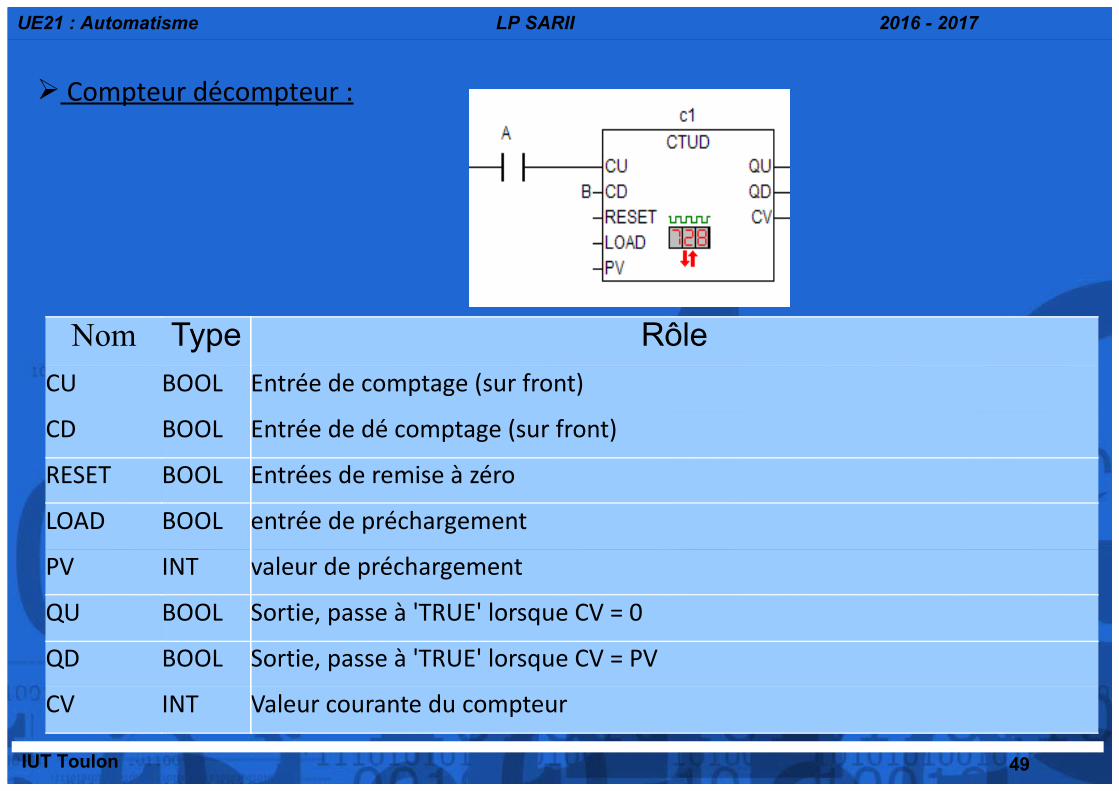
➢ Compteur décompteur :
Nom Type Rôle
CU BOOL Entrée de comptage (sur front)
CD BOOL Entrée de dé comptage (sur front)
RESET BOOL Entrées de remise à zéro
LOAD BOOL entrée de préchargement
PV INT valeur de préchargement
QU BOOL Sortie, passe à 'TRUE' lorsque CV = 0
QD BOOL Sortie, passe à 'TRUE' lorsque CV = PV
CV INT Valeur courante du compteur
50IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
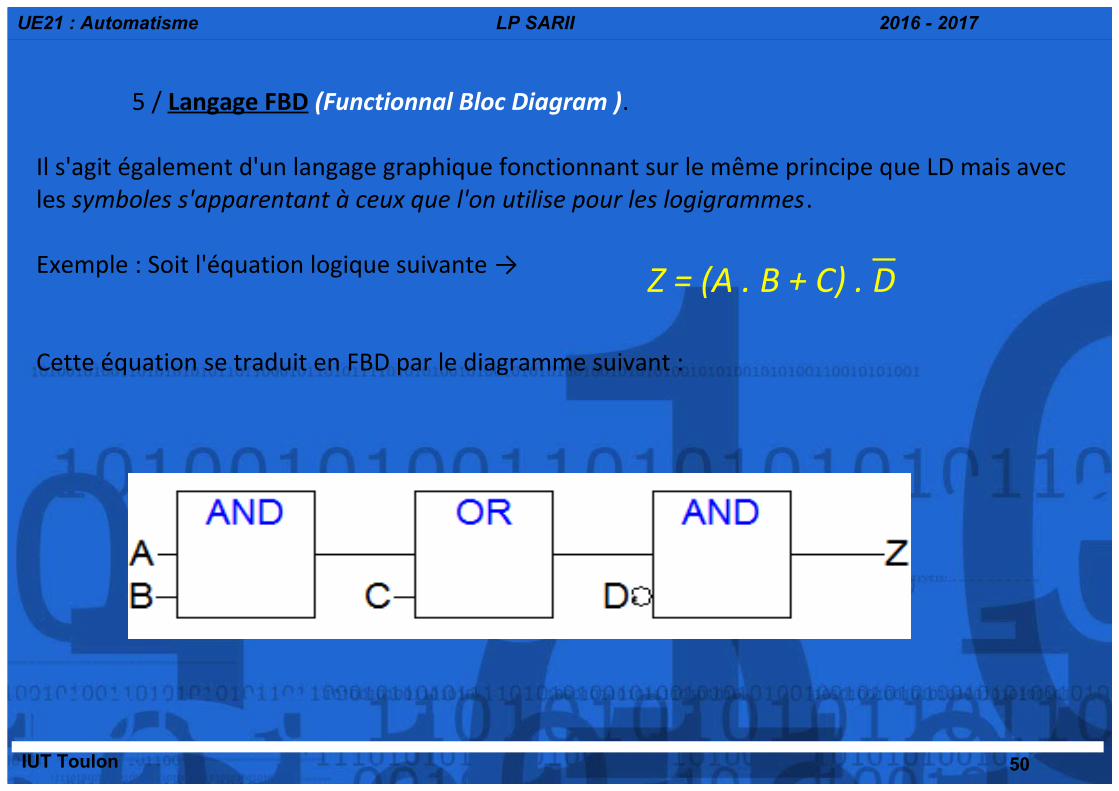
5 / Langage FBD (Functionnal Bloc Diagram ).
Il s'agit également d'un langage graphique fonctionnant sur le même principe que LD mais avec les symboles s'apparentant à ceux que l'on utilise pour les logigrammes.
Exemple : Soit l'équation logique suivante →
Cette équation se traduit en FBD par le diagramme suivant :
Z = (A . B + C) . D
51IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
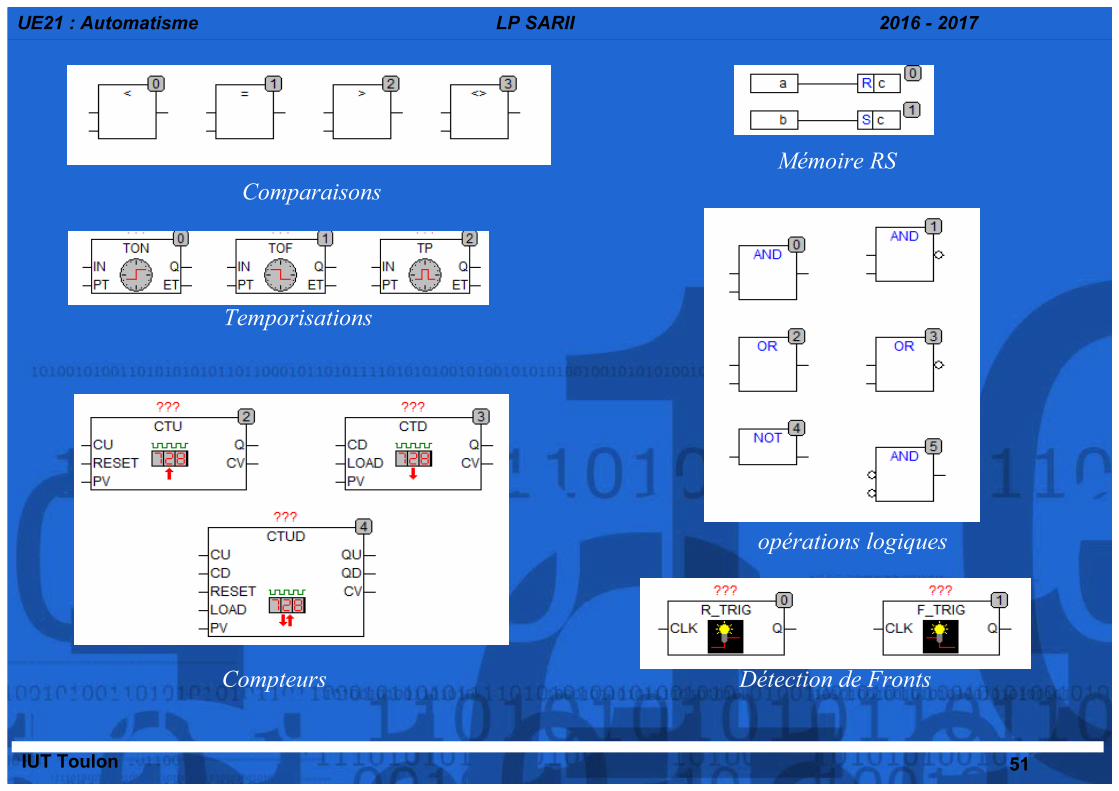
Mémoire RS
opérations logiques
Compteurs
Comparaisons
Détection de Fronts
Temporisations
52IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
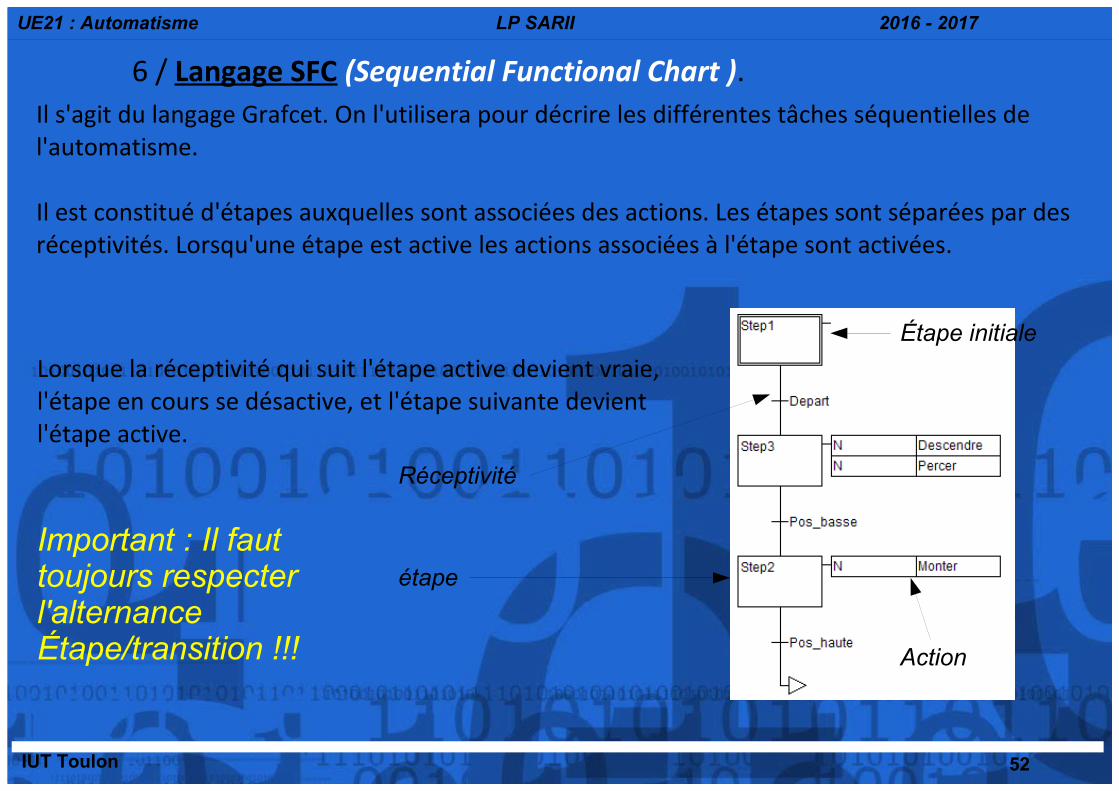
6 / Langage SFC (Sequential Functional Chart ).Il s'agit du langage Grafcet. On l'utilisera pour décrire les différentes tâches séquentielles de l'automatisme.
Il est constitué d'étapes auxquelles sont associées des actions. Les étapes sont séparées par des réceptivités. Lorsqu'une étape est active les actions associées à l'étape sont activées.
Lorsque la réceptivité qui suit l'étape active devient vraie, l'étape en cours se désactive, et l'étape suivante devient l'étape active.
Réceptivité
étape
Action
Étape initiale
Important : Il faut toujours respecter l'alternance Étape/transition !!!

53IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
Les attributs suivants peuvent être associés aux actions en SFC :Attribut Paramètre Description
N Aucun Action Non mémorisée : L'action est activée lorsque l'étape associée est active, et se désactive automatiquement à la sortie de l'étape.
S, R Aucun Action Mémorisée : l'attribut « S » (Set) permet de mémoriser l'activation de l'action, celle-ci restera active jusqu'à ce que l'attribut « R » (Reset) soit rencontré dans le grafcet sur la même action.
L Durée d'activation :
t#.....
Action limitée dans le temps : L'action est activée à l'entrée dans l'étape, puis désactivée automatiquement au bout du temps, spécifié (ou à la sortie de l'étape).
D Temps de retard :
t#.....
Action Retardée : L'action est activée avec le retard spécifié après l'entrée dans l'étape.
54IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
Les réceptivité sont des valeurs booléennes, qui peuvent apparaître directement sur le grafcet (langage ST). Elles peuvent prendre la forme :
- De valeurs booléennes constantes (TRUE ou FALSE)
- De variables booléennes simples
- De combinaisons logiques ( exemple : (a OR b) AND NOT c )
- De comparaison entre des valeurs numériques (exemples : A > 100, A<>B, A=5)
- De combinaisons des éléments précédents
Note 1 : il est impossible de réaliser une affectation (:=) dans une réceptivité.
Note 2 : il sera également possible d'utiliser les langages LD et FBD pour coder les réceptivités ; dans ce cas chaque réceptivité sera programmée dans une section spécifique.

55IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
✔Structure OU : Alternative. Elle permet d'effectuer un choix entre plusieurs séquences. Notez bien la structure de la divergence et de la convergence.
Divergence
Convergence
56IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
✔ Cas particulier d'utilisation de la branche OU : saut d'étapes
✔ Cas particulier d'utilisation de la branche OU : Reprise de séquence

57IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
✔Structure ET : Parallélisation. Elle permet d'effectuer en simultané plusieurs séquences.
Divergence
Convergence

58IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
✔ Convergence en ET : Synchronisation.
La convergence se fait généralement sur des étapes vides (sans action), avec une réceptivité aval toujours vraie, ce qui permet de synchroniser les différents cycles parallèles (le premier cycle terminé attend les autres ; dès que tous les cycles sont terminés, la convergence est réalisée grâce à la réceptivité 'TRUE').

59IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
III / API Wago 750 et plateforme logicielle CoDeSys
1 - Introduction
Le logiciel CoDeSys est une plateforme de développement ouverte, multimatérielle utilisée entre autres pour programmer les contrôleurs WAGO 750 utilisés en TP - mais des bibliothèques existent pour une grande variété d'API et de contrôleurs.
Ce logiciel obéit aux spécification de la norme CEI 61131-3, et permet donc d'utiliser les 5 langages définis par cette norme.
60IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
➢ Langage CFC (Component Functional Chart).
Ce langage, utilisé dans CoDeSys, n'est pas défini par la norme CEI, mais sera utilisé dans l'environnement de programmation CODeSys. Il reprend les éléments utilisés en FBD, mais les symboles peuvent être placés librement sur le schéma (et non pas ligne par ligne comme en FBD).
De plus, la plupart des opérateurs définis en ST sont également utilisables (opérations numériques etc...).
On ne peut pas l'utiliser pour coder les réceptivités.
En revanche, on l'utilisera comme langage de programmation principal qui appellera les différentes tâches. En outre, il permet de traiter les données numériques :
61IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
➢ Déclaration de variables :
Un programme doit réaliser des calculs et utilise donc des variables. Ces variables doivent être déclarées en en-tête de celui-ci.
Une variable peut être :
- une variable d'entrée s'il s'agit d'une variable que le programme utilise (valeur calculée par un autre sous-programme, état d'un capteur...);
- une variable de sortie s'il s'agit d'une variable que le programme modifie (affectation d'une sortie, résultat d'un calcul...)
- D'une variable interne, si cette variable est uniquement utlisée pour faire un calcul intermédiaire.

62IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
variable interne du programme "prog" de type booléen, initialisée à '0' et associée à la sortie physique TOR 4.0.
Variable de sortie du programme "prog", de type 'temps', et initialisée à la valeur 1s et 500ms.
Variable booléenne interne à "prog" initialisée à '1'.
Exemples de déclaration :
Variable d'entrée du programme "prog", de type "mot" et associée à l'entrée analogique 0.
63IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
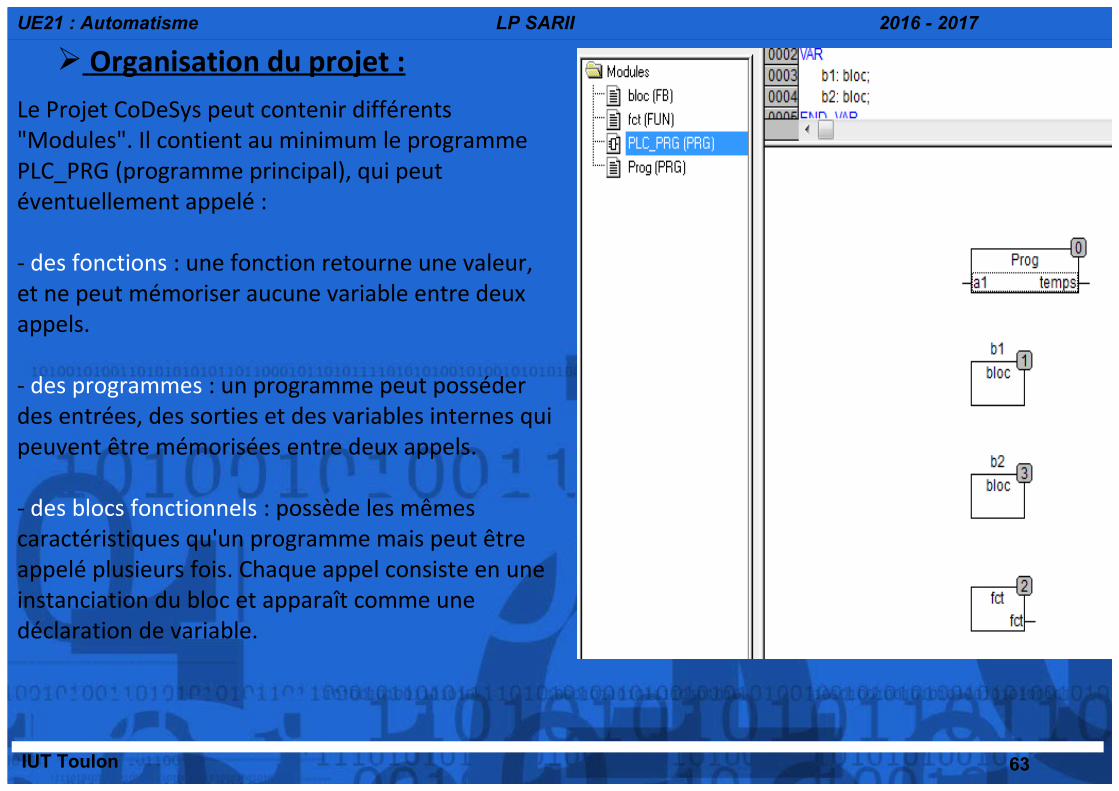
➢ Organisation du projet :Le Projet CoDeSys peut contenir différents "Modules". Il contient au minimum le programme PLC_PRG (programme principal), qui peut éventuellement appelé :
- des fonctions : une fonction retourne une valeur, et ne peut mémoriser aucune variable entre deux appels.
- des programmes : un programme peut posséder des entrées, des sorties et des variables internes qui peuvent être mémorisées entre deux appels.
- des blocs fonctionnels : possède les mêmes caractéristiques qu'un programme mais peut être appelé plusieurs fois. Chaque appel consiste en une instanciation du bloc et apparaît comme une déclaration de variable.
64IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
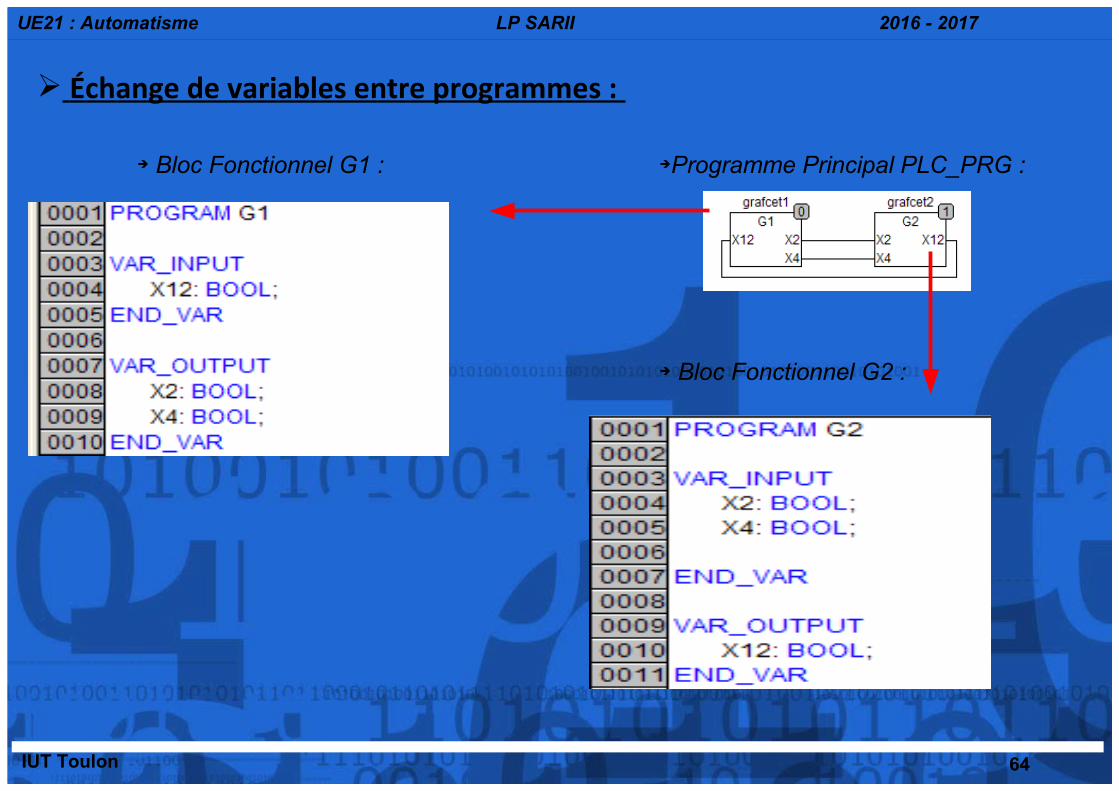
➢ Échange de variables entre programmes :
➔Programme Principal PLC_PRG :
➔ Bloc Fonctionnel G2 :
➔ Bloc Fonctionnel G1 :
65IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
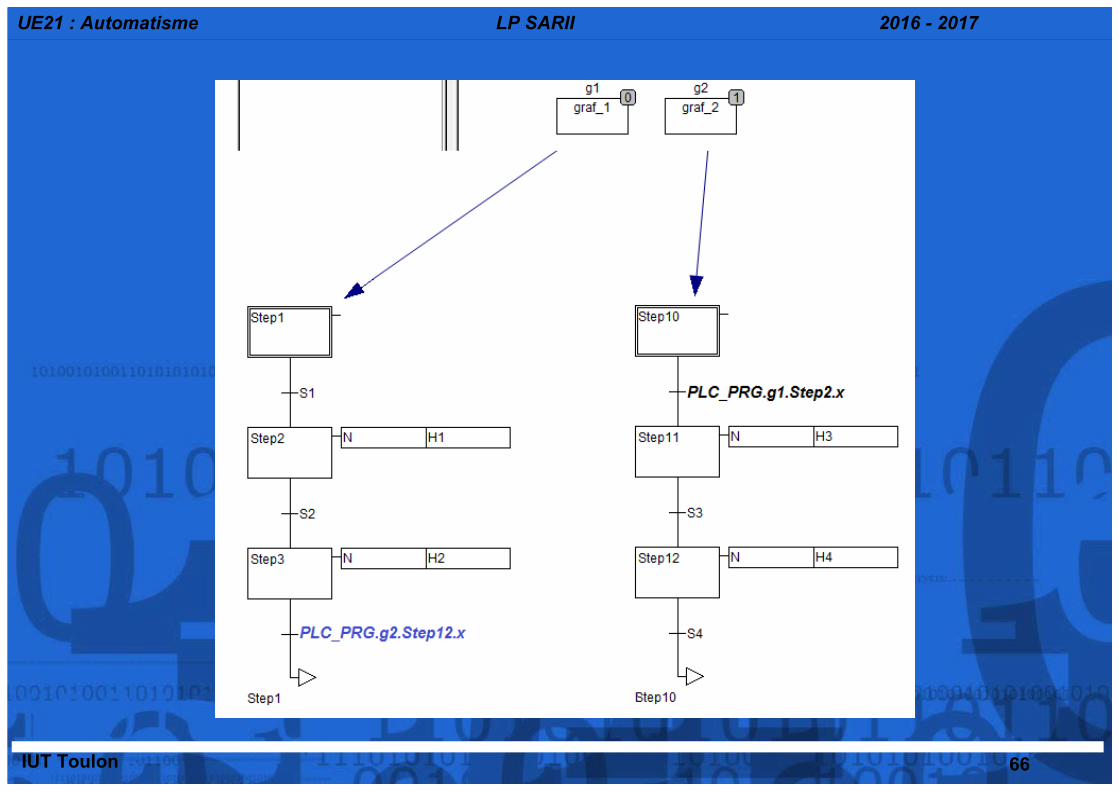
➢ Structures "objets" :
Des structures analogues à celles utilisées dans les langages orientés "objet" sont utilisables dans CoDeSys pour échanger des variables entre différents modules.
Dans le cas du SFC, pour chaque étape, les 2 variables suivantes sont automatiquement créées lorsque la bibliothèque "iec_sfc.lib" est incluse au projet :
• Nom_etape . t → durée d'activité de l'étape (type TIME)• Nom_etape . x → activité de l'étape (type BOOL)
Pour synchroniser deux grafcets, on pourra donc utiliser :'PLC_PRG' . 'nom d'instance du bloc' . 'nom de l'étape' . x
Si le programme SFC est un bloc fonctionnel, ou bien :'nom_du_programme' . 'nom de l'étape' . x
Si le programme SFC est un programme
66IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017

67IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
➢ Variables "drapeau" :
Ce sont des variables utilisables dans les programmes et blocs programmés en SFC, définis dans la bibliothèque "iec_sfc.lib", et qui permettent d'agir sur un grafcet. En voici quelques unes (consulter l'aide pour une liste exhaustive) :
• SFCInit (BOOL) → Réinitialisation du grafcet (retour à l'étape initiale et arrêt de l’exécution)● SFCReset (BOOL) → Retour à l'étape initiale● SFCPause (BOOL) → Figeage du grafcet● SFCError → Dépassement du temps maximal affecté à une étape● SFCCurrentStep (STRING) → Nom de l'étape SFC en cours● SFCTip, SFCTipMode (BOOL) → Lorsque SFCTipMOde est 'TRUE', le grafcet passe en mode pas à pas, la validation des réceptivités sont alors validées avec SFCTip.
68IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
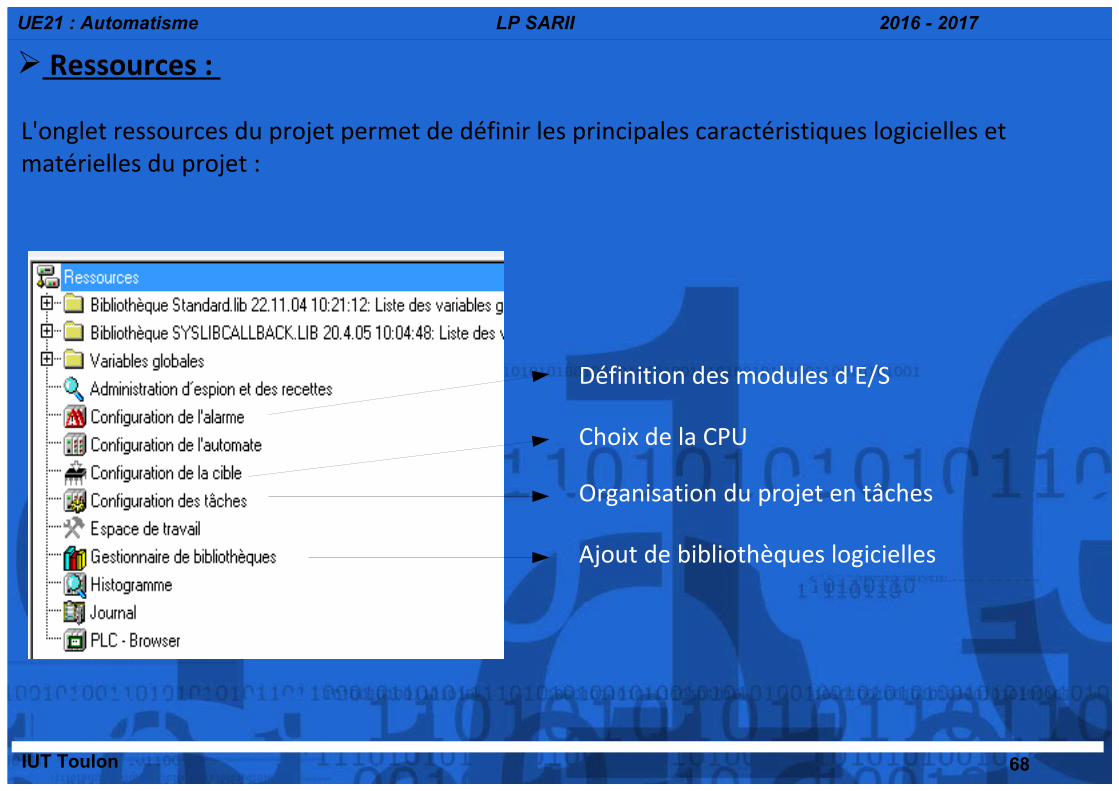
➢ Ressources :
L'onglet ressources du projet permet de définir les principales caractéristiques logicielles et matérielles du projet :
Définition des modules d'E/S
Choix de la CPU
Organisation du projet en tâches
Ajout de bibliothèques logicielles
69IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
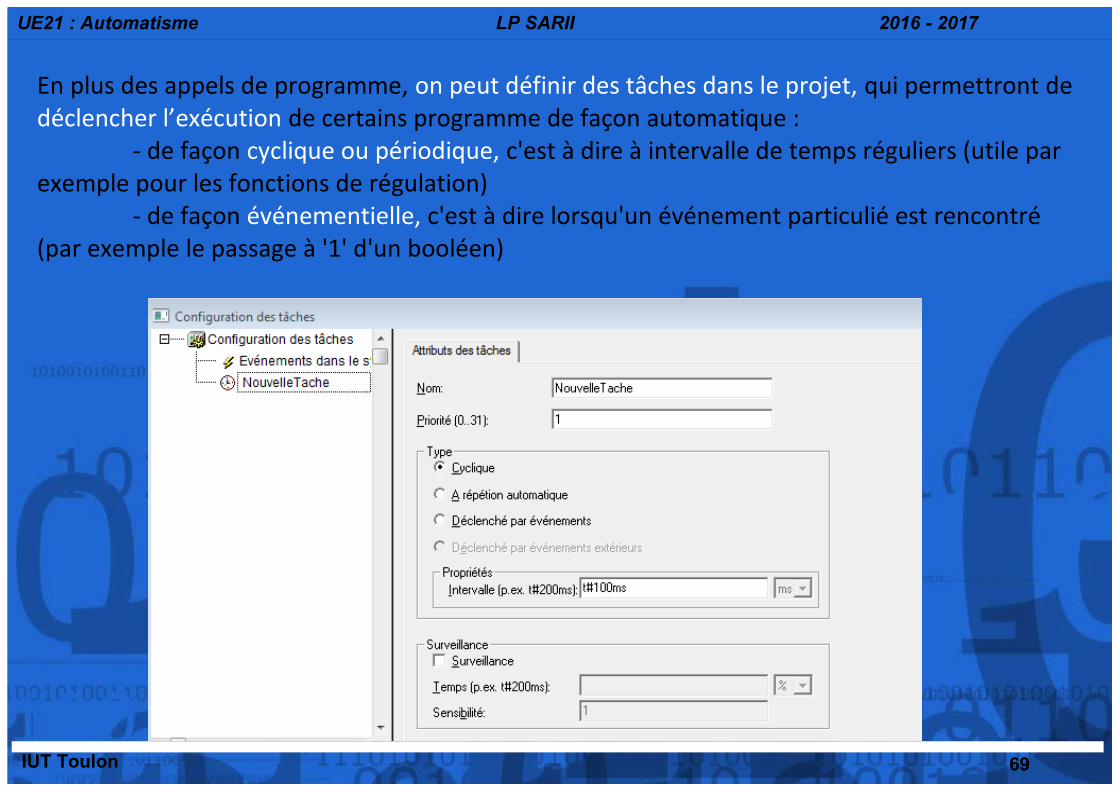
En plus des appels de programme, on peut définir des tâches dans le projet, qui permettront de déclencher l’exécution de certains programme de façon automatique :
- de façon cyclique ou périodique, c'est à dire à intervalle de temps réguliers (utile par exemple pour les fonctions de régulation)
- de façon événementielle, c'est à dire lorsqu'un événement particulié est rencontré (par exemple le passage à '1' d'un booléen)
70IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
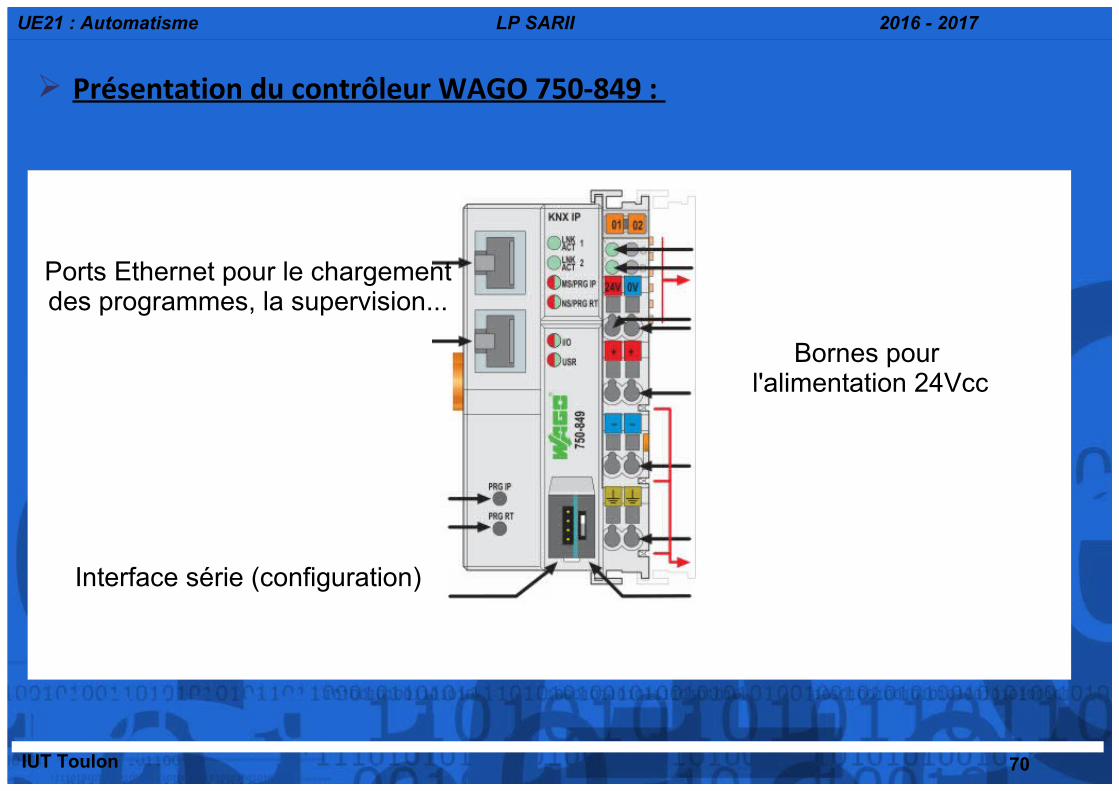
➢ Présentation du contrôleur WAGO 750-849 :
Ports Ethernet pour le chargement des programmes, la supervision...
Interface série (configuration)
Bornes pour l'alimentation 24Vcc

71IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017

72IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
➢ Particularités :
Les contrôleurs Wago 750-xxx sont des API modulaires pouvant gérer un nombre relativement important d'entrées sorties (cf fiche tech. précédente).
Leur plan mémoire est organisé sous forme de mots (les numéros d'adresse seront par conséquent des numéros mot ; les données binaires seront rangées à l'intérieur de ces mot → un numéro de bit sera donc compris entre 0 et 15).
Ces contrôleurs ont été aussi bien pensés pour l'industrie que pour la GTB, ce qui fait que l'on retrouve aussi bien des borne pouvant gérer des bus de communication pour ces deux secteurs :
- Industrie : ASi, Profibus, Modbus, CANopen...- Bâtiment : KNX, LON, Bacnet, DALI...

73IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
IV / Programmation des API Schneider M340 sous Unity
➢ Présentation du contrôleur M-340 :
La série M-340 représente le segment milieu de gamme des API Schneider, de dernière génération.
Ces API sont adaptés aux systèmes automatisés de moyenne taille, et aux grosses installations à système de contrôle / commande possédant une architecture décentralisée.
74IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
Au matériel, l'architecture est modulaire, Schneider propose différentes cartes d'E/S adaptées aux besoins industriels (Sorties relayées ou non, cartes analogiques configurables en 0-10V / 4-20 mA etc...).
Du point de vue communication, Schneider préconise :- Le bus ASI pour le niveau terrain- CanOpen pour le niveau Cellule / Machine- Modbus-TCP pour la supervision
On pourra donc évidemment mettre en œuvre ces protocoles en choisissant les CPU et coupleurs adaptées.
Le modèle de CPU utilisé en TP : P34 2020 offre :- 1 port Modbus RTU (RS485) pouvant être configuré en maître ou
esclave- 1 port Ethernet, pour les communications Modbus TCP, l'accès au
serveur Web intégré, le chargement des programmes.

75IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
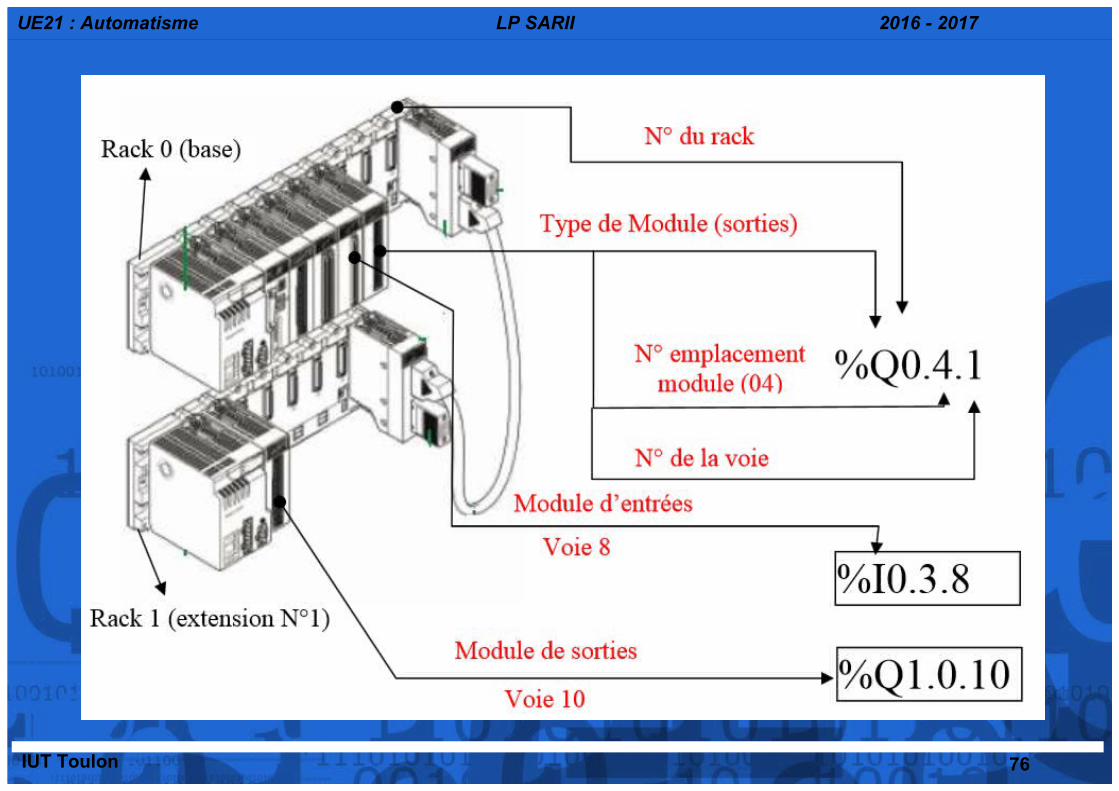
➢ Adressage des données :
76IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
77IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
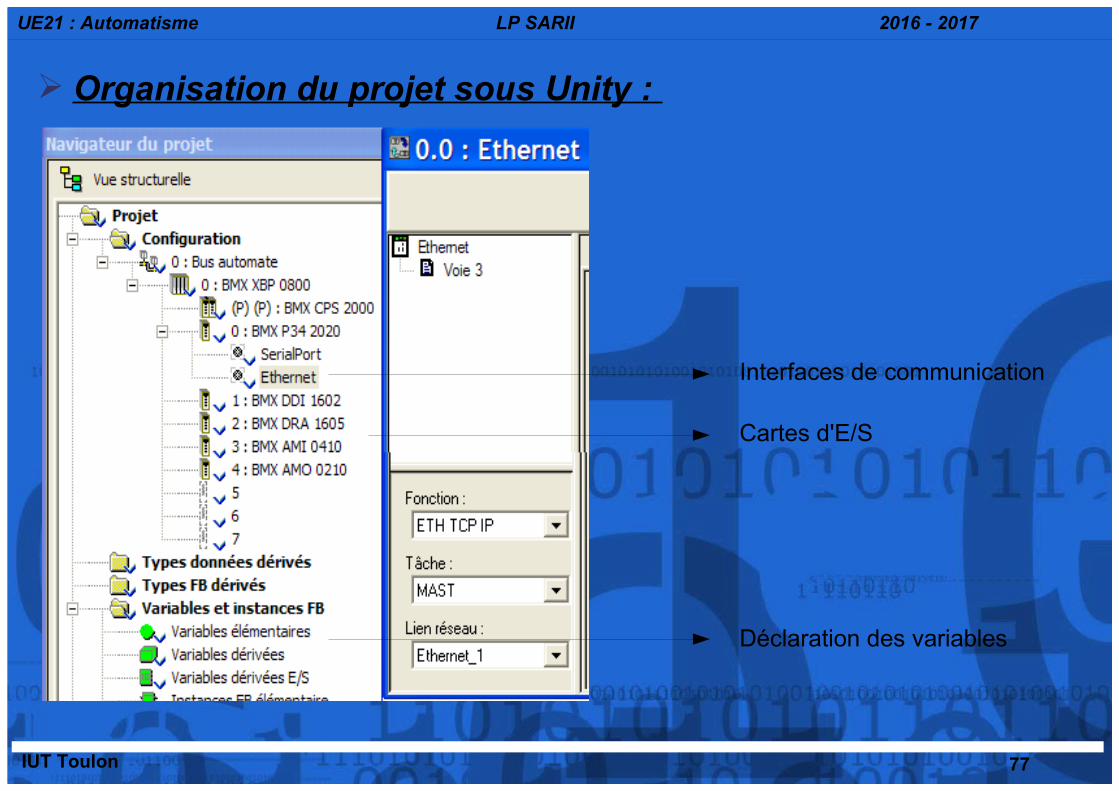
➢ Organisation du projet sous Unity :
Interfaces de communication
Cartes d'E/S
Déclaration des variables
78IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
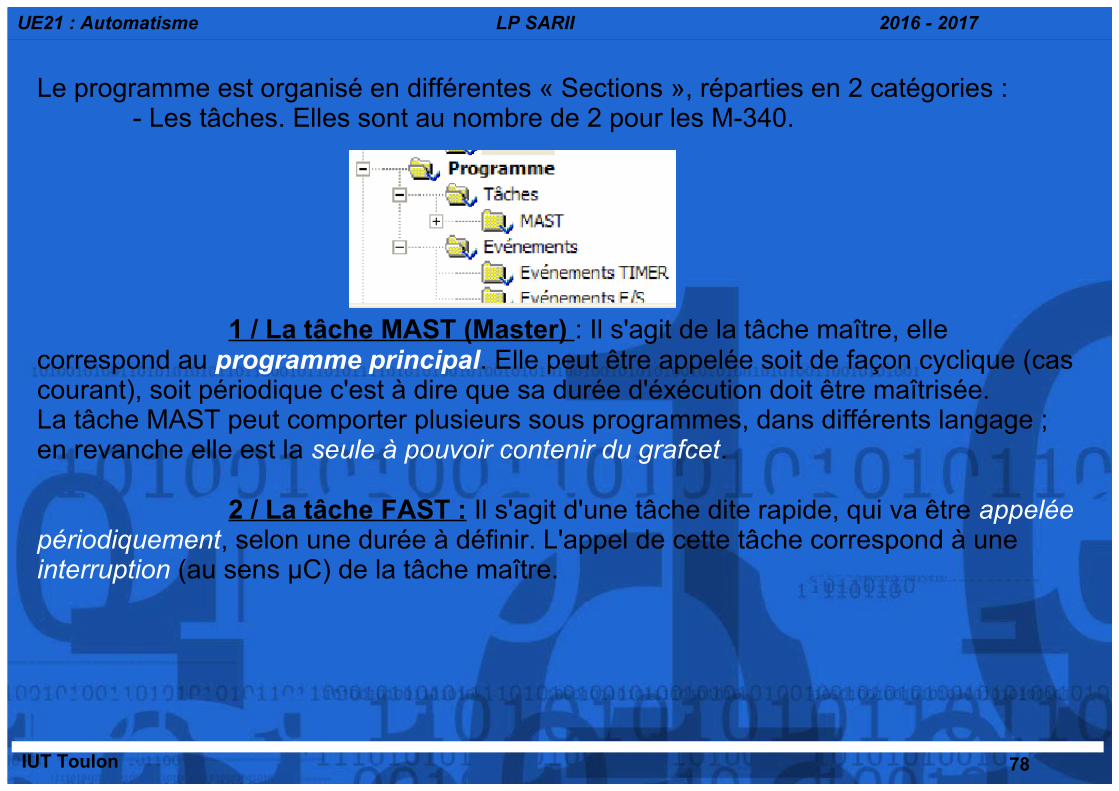
Le programme est organisé en différentes « Sections », réparties en 2 catégories :- Les tâches. Elles sont au nombre de 2 pour les M-340.
1 / La tâche MAST (Master) : Il s'agit de la tâche maître, elle correspond au programme principal. Elle peut être appelée soit de façon cyclique (cas courant), soit périodique c'est à dire que sa durée d'éxécution doit être maîtrisée.La tâche MAST peut comporter plusieurs sous programmes, dans différents langage ; en revanche elle est la seule à pouvoir contenir du grafcet.
2 / La tâche FAST : Il s'agit d'une tâche dite rapide, qui va être appelée périodiquement, selon une durée à définir. L'appel de cette tâche correspond à une interruption (au sens µC) de la tâche maître.

79IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
➢ Langages de Programmation : On retrouve les 5 langages CEI danss Unity : IL, ST, FBD, LD et SFC.
Un module optionnel d'Unity permet de créer des fonctions en langage C.
80IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
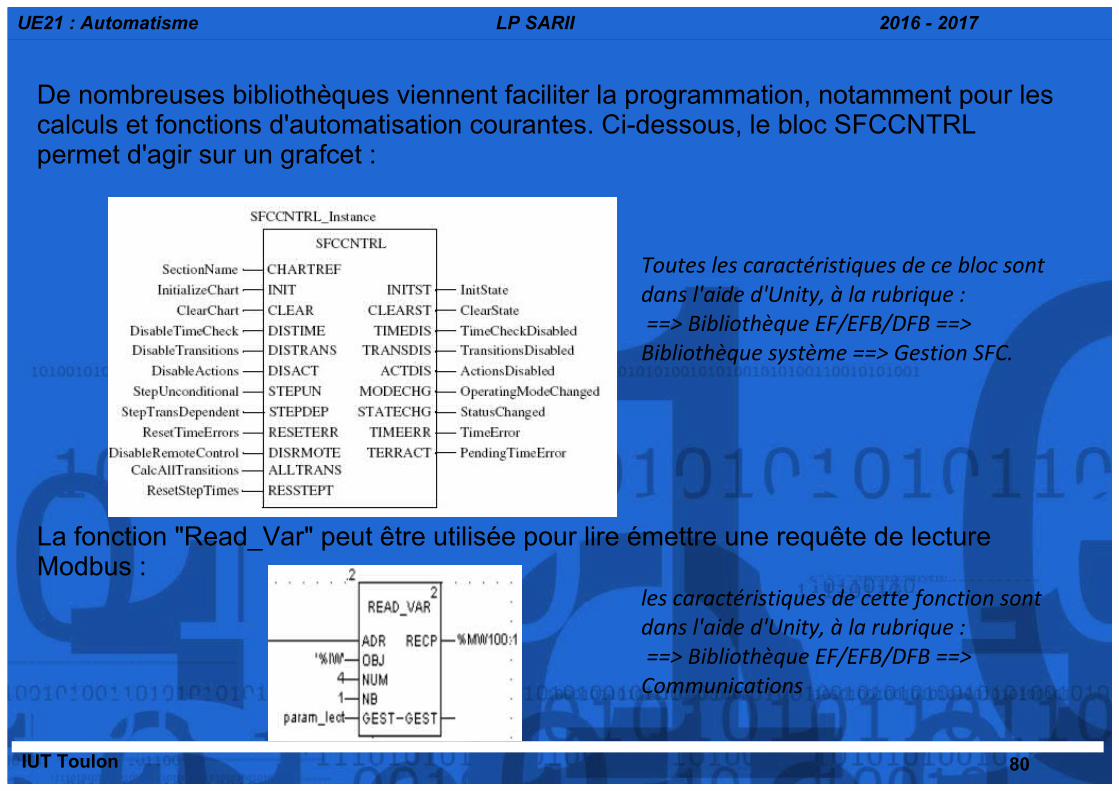
De nombreuses bibliothèques viennent faciliter la programmation, notamment pour les calculs et fonctions d'automatisation courantes. Ci-dessous, le bloc SFCCNTRL permet d'agir sur un grafcet :
Toutes les caractéristiques de ce bloc sont dans l'aide d'Unity, à la rubrique : ==> Bibliothèque EF/EFB/DFB ==> Bibliothèque système ==> Gestion SFC.
La fonction "Read_Var" peut être utilisée pour lire émettre une requête de lecture Modbus :
les caractéristiques de cette fonction sont dans l'aide d'Unity, à la rubrique : ==> Bibliothèque EF/EFB/DFB ==> Communications
81IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
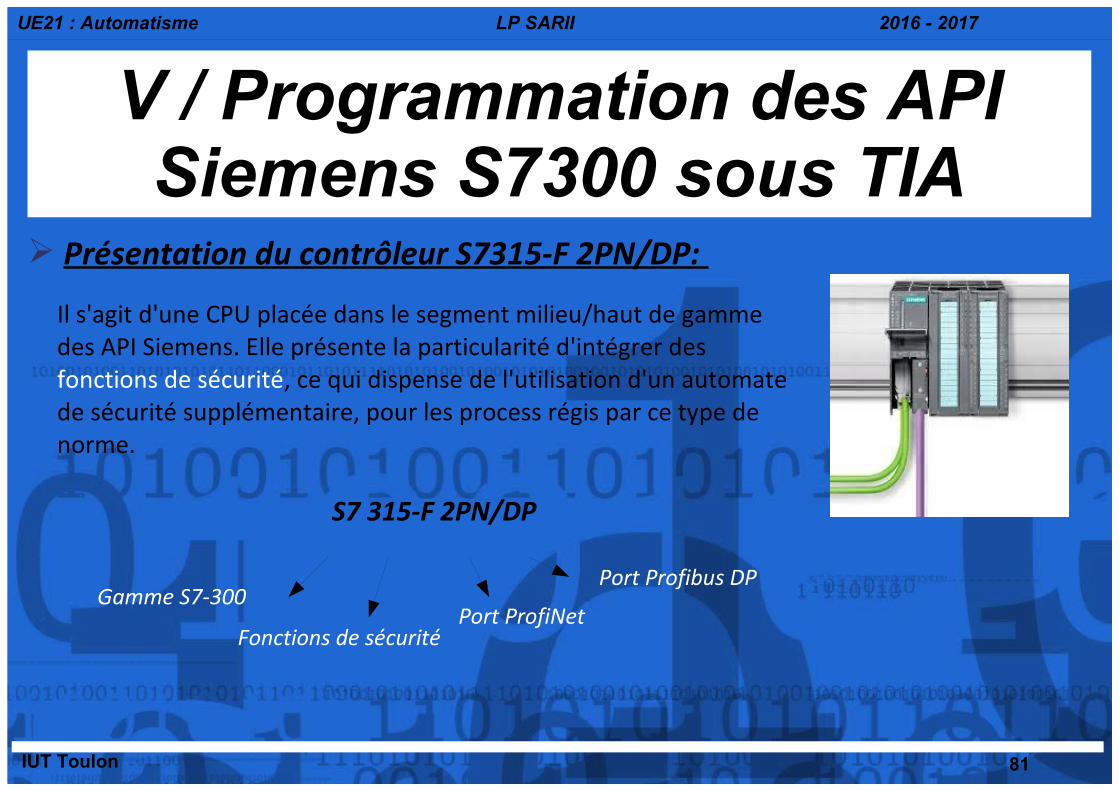
V / Programmation des API Siemens S7300 sous TIA
➢ Présentation du contrôleur S7315-F 2PN/DP:
Il s'agit d'une CPU placée dans le segment milieu/haut de gamme des API Siemens. Elle présente la particularité d'intégrer des fonctions de sécurité, ce qui dispense de l'utilisation d'un automate de sécurité supplémentaire, pour les process régis par ce type de norme.
S7 315-F 2PN/DP
Port Profibus DP
Port ProfiNetFonctions de sécurité
Gamme S7-300

82IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
Du point de vue des communications, Les API Siemens sont orientés vers les protocoles :
✔ Asi pour les capteurs/actionneurs
✔ ProfiBUS et ProfiNet pour les autres niveaux
83IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
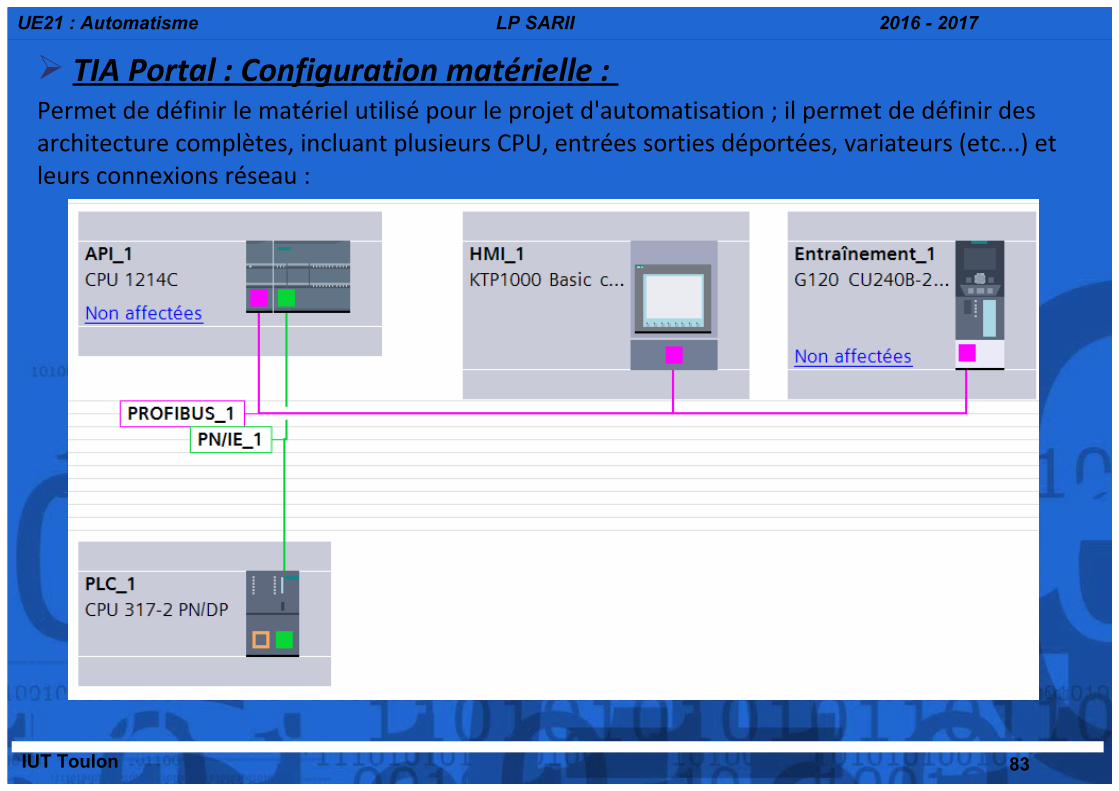
➢ TIA Portal : Configuration matérielle : Permet de définir le matériel utilisé pour le projet d'automatisation ; il permet de définir des architecture complètes, incluant plusieurs CPU, entrées sorties déportées, variateurs (etc...) et leurs connexions réseau :
84IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
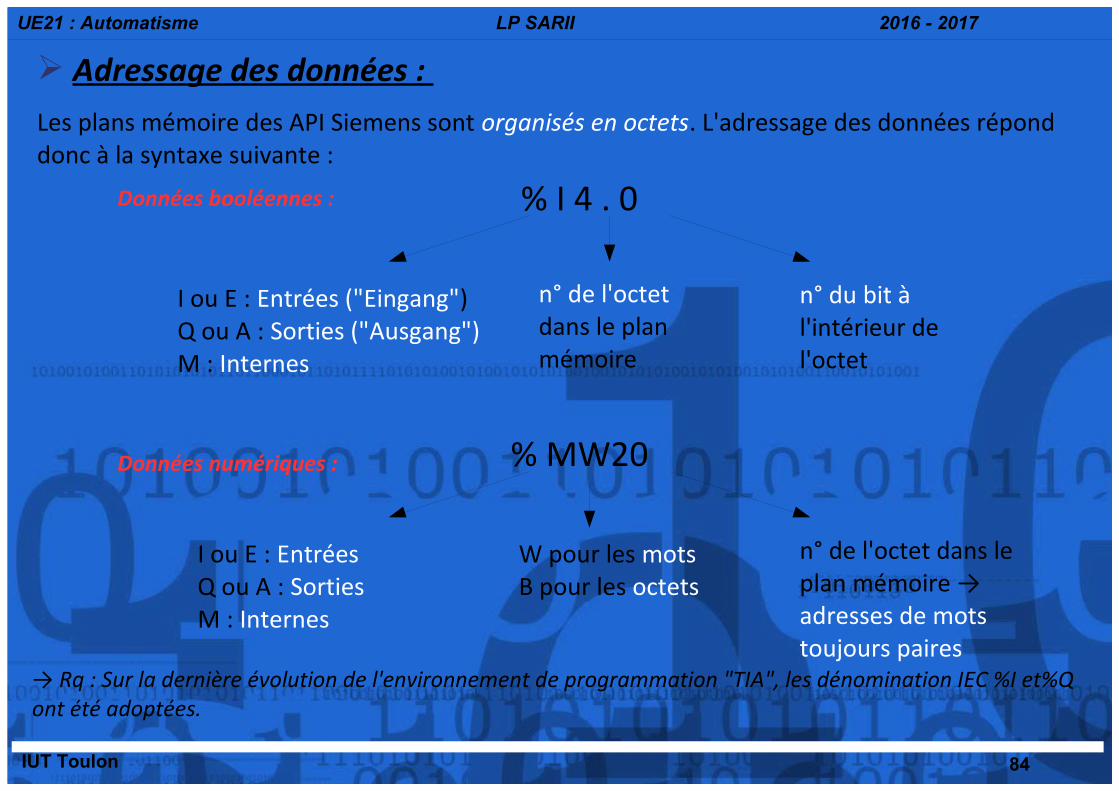
I ou E : Entrées ("Eingang")Q ou A : Sorties ("Ausgang")M : Internes
n° de l'octet dans le plan mémoire
n° du bit à l'intérieur de l'octet
% I 4 . 0
➢ Adressage des données : Les plans mémoire des API Siemens sont organisés en octets. L'adressage des données répond donc à la syntaxe suivante :
→ Rq : Sur la dernière évolution de l'environnement de programmation "TIA", les dénomination IEC %I et%Q ont été adoptées.
I ou E : Entrées Q ou A : Sorties M : Internes
W pour les motsB pour les octets
n° de l'octet dans le plan mémoire → adresses de mots toujours paires
% MW20
Données booléennes :
Données numériques :
85IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
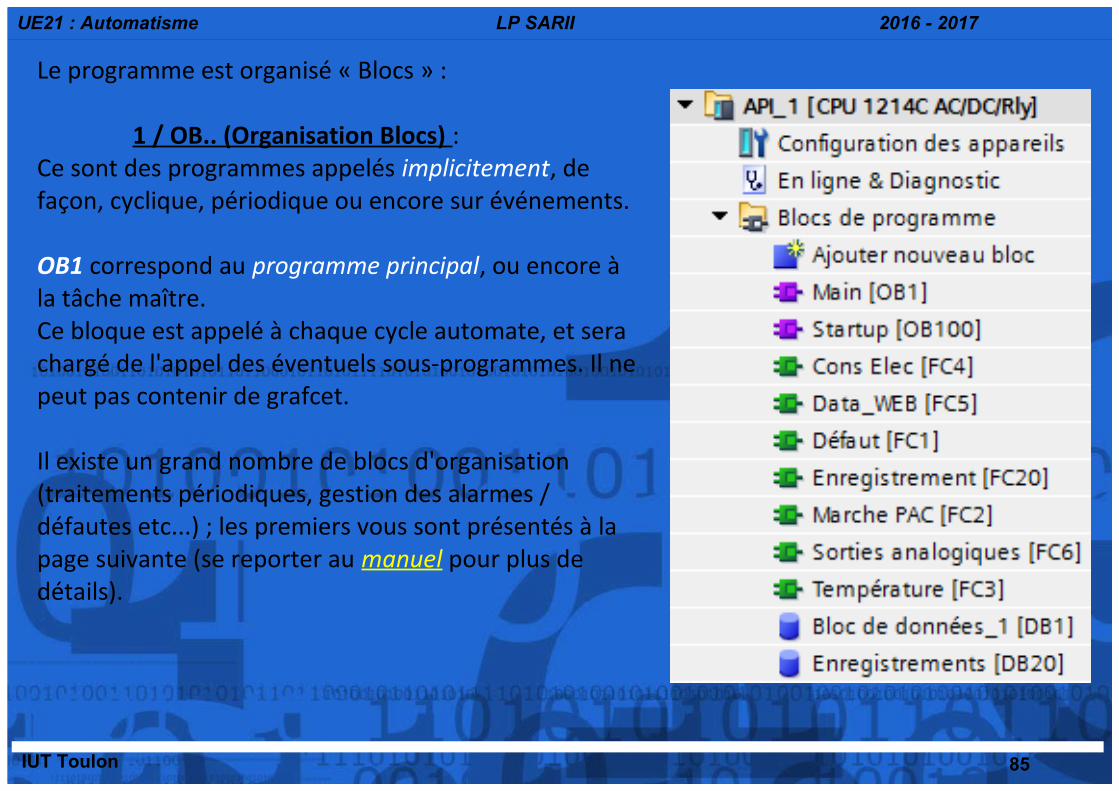
Le programme est organisé « Blocs » :
1 / OB.. (Organisation Blocs) : Ce sont des programmes appelés implicitement, de façon, cyclique, périodique ou encore sur événements.
OB1 correspond au programme principal, ou encore à la tâche maître.Ce bloque est appelé à chaque cycle automate, et sera chargé de l'appel des éventuels sous-programmes. Il ne peut pas contenir de grafcet.
Il existe un grand nombre de blocs d'organisation (traitements périodiques, gestion des alarmes / défautes etc...) ; les premiers vous sont présentés à la page suivante (se reporter au manuel pour plus de détails).

86IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
87IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
2 / FB.. (Functions Blocs) : Ce sont des programmes appelés « explicitement », par des OB ou d'autres FB. Ces blocs possèdent une mémoire associée (DB), qui permet de les instancier (un FB peut donc être appelé plusieurs fois).
3 / FC.. (Functions) : Ce sont des fonctions (appelés « explicitement ») par des OB, FB ou d'autres FC. Ces fonctions ne possèdent pas de bloc mémoire (DB) associé, et ne peuvent donc pas retenir de valeur entre deux appels.
4 / DB.. (Data Blocs) : Données associées à un FB ; contient l'ensemble des variables utilisées par le bloc.
5 / SFC, SFB (System Function / System Bloc funtion) : Fonctions et Blocs insérés automatiquement par le système lors de la compilation.
88IUT Toulon
UE21 : Automatisme LP SARII 2016 - 2017
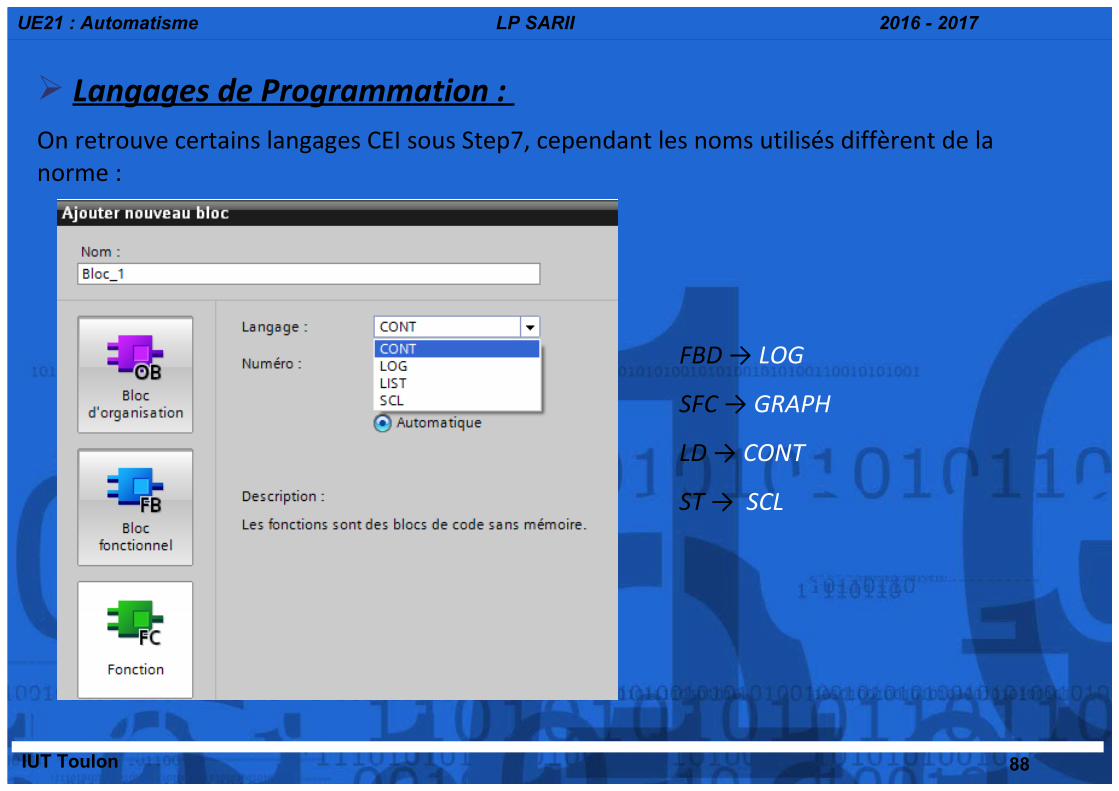
➢ Langages de Programmation : On retrouve certains langages CEI sous Step7, cependant les noms utilisés diffèrent de la norme :
FBD → LOG
SFC → GRAPH
LD → CONT
ST → SCL