altivar 31 - ac-grenoble.fr · - les attributs des paramètres et des variables (adresse, unité,...
TRANSCRIPT
####
####
####
Guide d’exploitation
Altivar 31
CANopen
2
Sommaire
Avant-propos ________________________________________________________________________________________________ 3Mise en œuvre matérielle _______________________________________________________________________________________ 4Configuration _______________________________________________________________________________________________ 10Signalisation ________________________________________________________________________________________________ 11Mise en œuvre logicielle ______________________________________________________________________________________ 12Mise en œuvre logicielle avec PL7 et SyCon _______________________________________________________________________ 15Description des services ______________________________________________________________________________________ 24Dictionnaire des objets _______________________________________________________________________________________ 37
NOTEMalgré tout le soin apporté à l'élaboration de ce document, Schneider Electric SA nedonne aucune garantie sur les informations qu'il contient, et ne peut être tenuresponsable ni des erreurs qu'il pourrait comporter, ni des dommages qui pourraientrésulter de son utilisation ou de son application.
Les produits présentés dans ce document sont à tout moment susceptiblesd'évolutions quant à leurs caractéristiques de présentation et de fonctionnement.Leur description ne peut en aucun cas revêtir un aspect contractuel.
Avant-propos
Structure de la documentation :
• Le présent guide d'exploitation décrit l'utilisation de l'interface CANopen de l'Altivar 31.
• Pour la mise en œuvre matérielle générale, se reporter au "Guide d'installation".
• Pour une description complète des fonctions, paramètres et variables, se reporter au "Guide de programmation"
• Le guide d'exploitation "Variables de communication" décrit : - le comportement du variateur (graphes d'état, mode d'exploitation, ...)- les attributs des paramètres et des variables (adresse, unité, code, nom, description, ...).
Le présent guide d'exploitation décrit le service "Heartbeat" de l'Altivar 31. Ce service est uniquement disponible avec les versionsV1.2 et supérieures.
3
Mise en œuvre matérielle
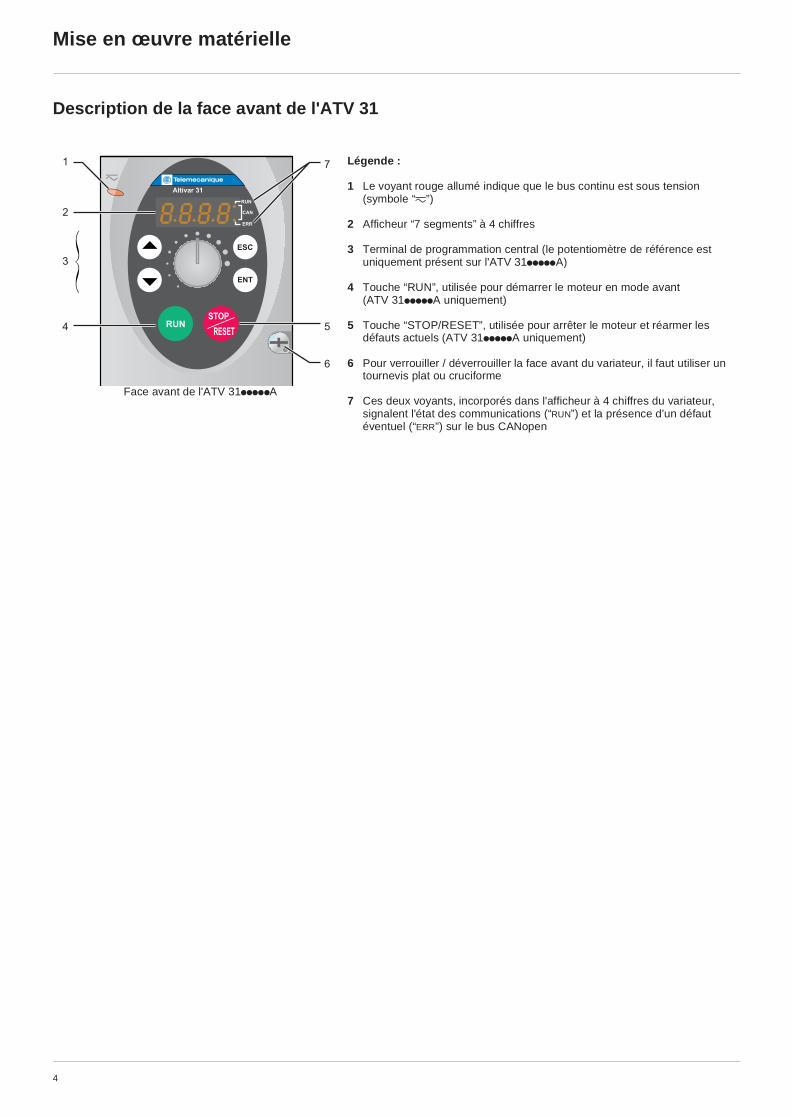
Description de la face avant de l'ATV 31
Face avant de l'ATV 31pppppA
Légende :
1 Le voyant rouge allumé indique que le bus continu est sous tension (symbole “z”)
2 Afficheur “7 segments” à 4 chiffres
3 Terminal de programmation central (le potentiomètre de référence est uniquement présent sur l'ATV 31pppppA)
4 Touche “RUN”, utilisée pour démarrer le moteur en mode avant (ATV 31pppppA uniquement)
5 Touche “STOP/RESET”, utilisée pour arrêter le moteur et réarmer les défauts actuels (ATV 31pppppA uniquement)
6 Pour verrouiller / déverrouiller la face avant du variateur, il faut utiliser un tournevis plat ou cruciforme
7 Ces deux voyants, incorporés dans l'afficheur à 4 chiffres du variateur, signalent l'état des communications (“RUN”) et la présence d'un défaut éventuel (“ERR”) sur le bus CANopen
Altivar 31
RUN
ESC
ENT
STOPRESET
RUN
ERR
CAN
1
2
4
3
5
7
6
4
Mise en œuvre matérielle
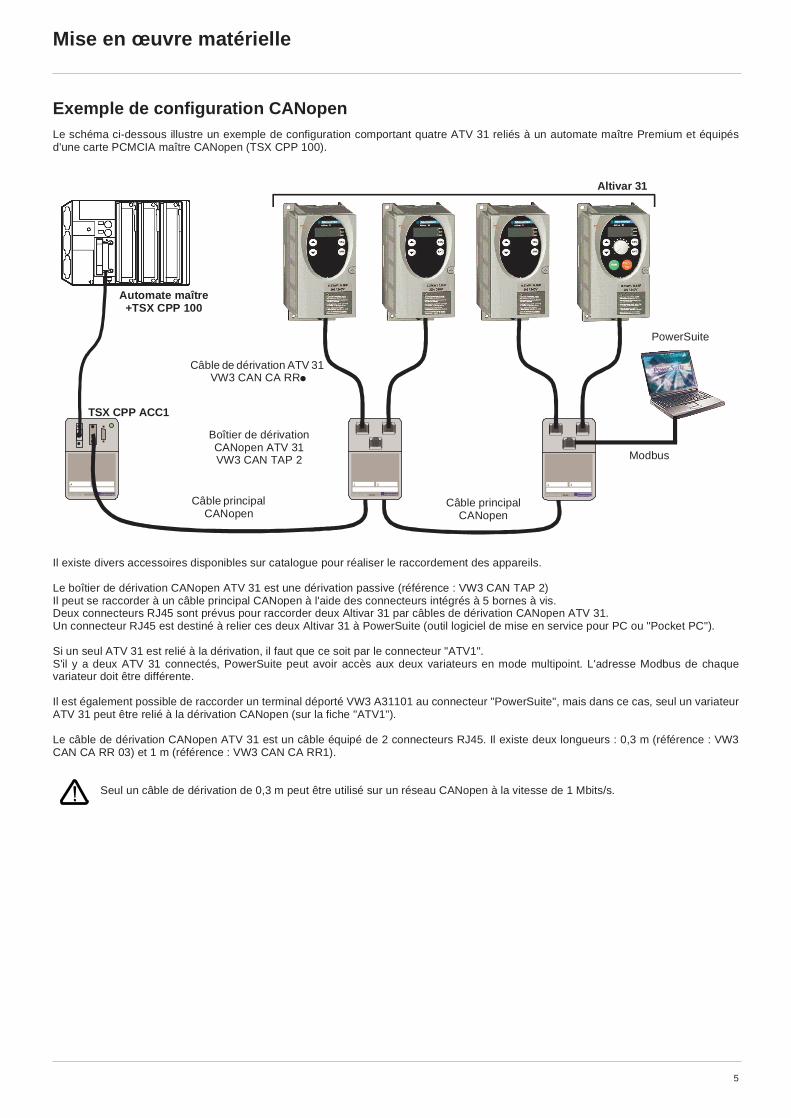
Exemple de configuration CANopenLe schéma ci-dessous illustre un exemple de configuration comportant quatre ATV 31 reliés à un automate maître Premium et équipésd'une carte PCMCIA maître CANopen (TSX CPP 100).
Il existe divers accessoires disponibles sur catalogue pour réaliser le raccordement des appareils.
Le boîtier de dérivation CANopen ATV 31 est une dérivation passive (référence : VW3 CAN TAP 2)Il peut se raccorder à un câble principal CANopen à l'aide des connecteurs intégrés à 5 bornes à vis.Deux connecteurs RJ45 sont prévus pour raccorder deux Altivar 31 par câbles de dérivation CANopen ATV 31.Un connecteur RJ45 est destiné à relier ces deux Altivar 31 à PowerSuite (outil logiciel de mise en service pour PC ou "Pocket PC").
Si un seul ATV 31 est relié à la dérivation, il faut que ce soit par le connecteur "ATV1".S'il y a deux ATV 31 connectés, PowerSuite peut avoir accès aux deux variateurs en mode multipoint. L'adresse Modbus de chaquevariateur doit être différente.
Il est également possible de raccorder un terminal déporté VW3 A31101 au connecteur "PowerSuite", mais dans ce cas, seul un variateurATV 31 peut être relié à la dérivation CANopen (sur la fiche "ATV1").
Le câble de dérivation CANopen ATV 31 est un câble équipé de 2 connecteurs RJ45. Il existe deux longueurs : 0,3 m (référence : VW3CAN CA RR 03) et 1 m (référence : VW3 CAN CA RR1).
Seul un câble de dérivation de 0,3 m peut être utilisé sur un réseau CANopen à la vitesse de 1 Mbits/s.
MODICON TSX CPP ACC 1TELM
A B
MODICON EB 534 TELM
1 2
MODICON EB 534 TELM
1 2
TSX CPP ACC1
Master PLC+ TSX CPP 100
Altivar 31
2170272T 2170272T
EB 534 EB 534
PowerSuite
Câble principal CANopen
Câble principal CANopen
Boîtier de dérivation CANopen ATV 31 VW3 CAN TAP 2
Câble de dérivation ATV 31 VW3 CAN CA RRp
Automate maître +TSX CPP 100
Modbus
5
Mise en œuvre matérielle
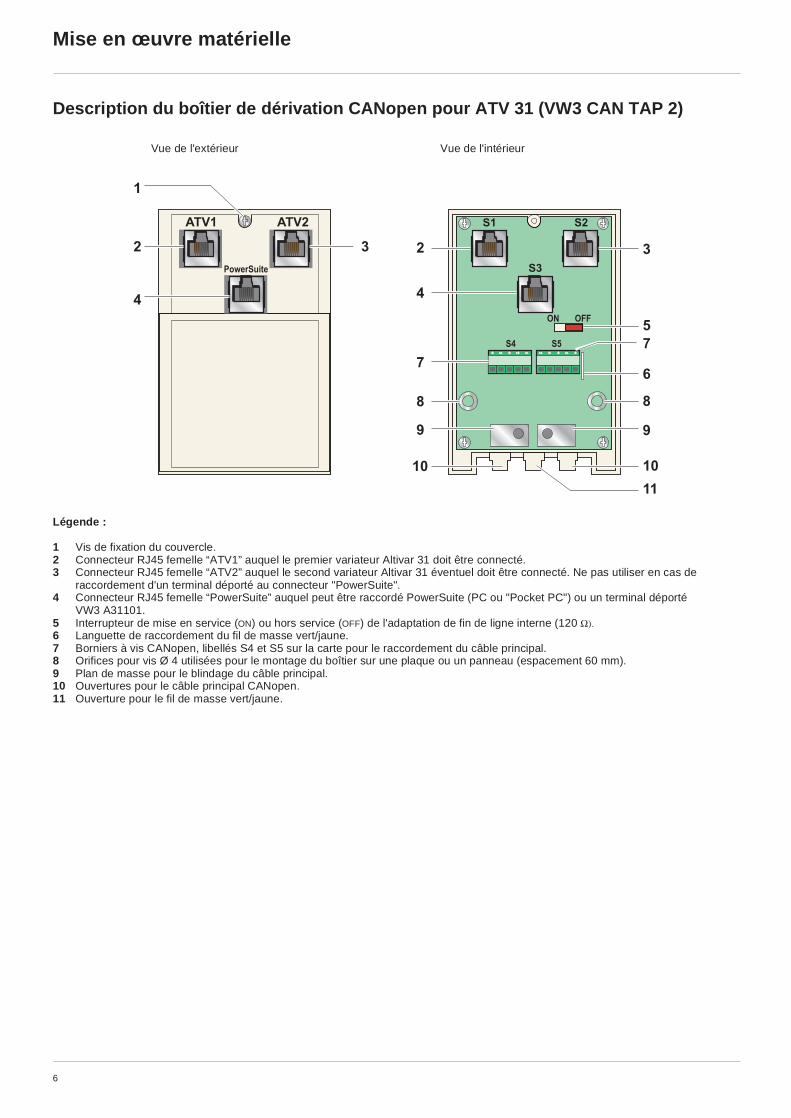
Description du boîtier de dérivation CANopen pour ATV 31 (VW3 CAN TAP 2)
Légende :
1 Vis de fixation du couvercle.2 Connecteur RJ45 femelle “ATV1” auquel le premier variateur Altivar 31 doit être connecté.3 Connecteur RJ45 femelle “ATV2” auquel le second variateur Altivar 31 éventuel doit être connecté. Ne pas utiliser en cas de
raccordement d'un terminal déporté au connecteur "PowerSuite".4 Connecteur RJ45 femelle “PowerSuite” auquel peut être raccordé PowerSuite (PC ou "Pocket PC") ou un terminal déporté
VW3 A31101.5 Interrupteur de mise en service (ON) ou hors service (OFF) de l'adaptation de fin de ligne interne (120 Ω).6 Languette de raccordement du fil de masse vert/jaune.7 Borniers à vis CANopen, libellés S4 et S5 sur la carte pour le raccordement du câble principal.8 Orifices pour vis Ø 4 utilisées pour le montage du boîtier sur une plaque ou un panneau (espacement 60 mm).9 Plan de masse pour le blindage du câble principal.10 Ouvertures pour le câble principal CANopen.11 Ouverture pour le fil de masse vert/jaune.
Vue de l'extérieur Vue de l'intérieur
1
ATV1 ATV2
PowerSuite
S1 S2
S3
ON
S4 S5
OFF
2 3
4
2
4
7
9
8
10
3
57
6
9
8
1110
6
Mise en œuvre matérielle
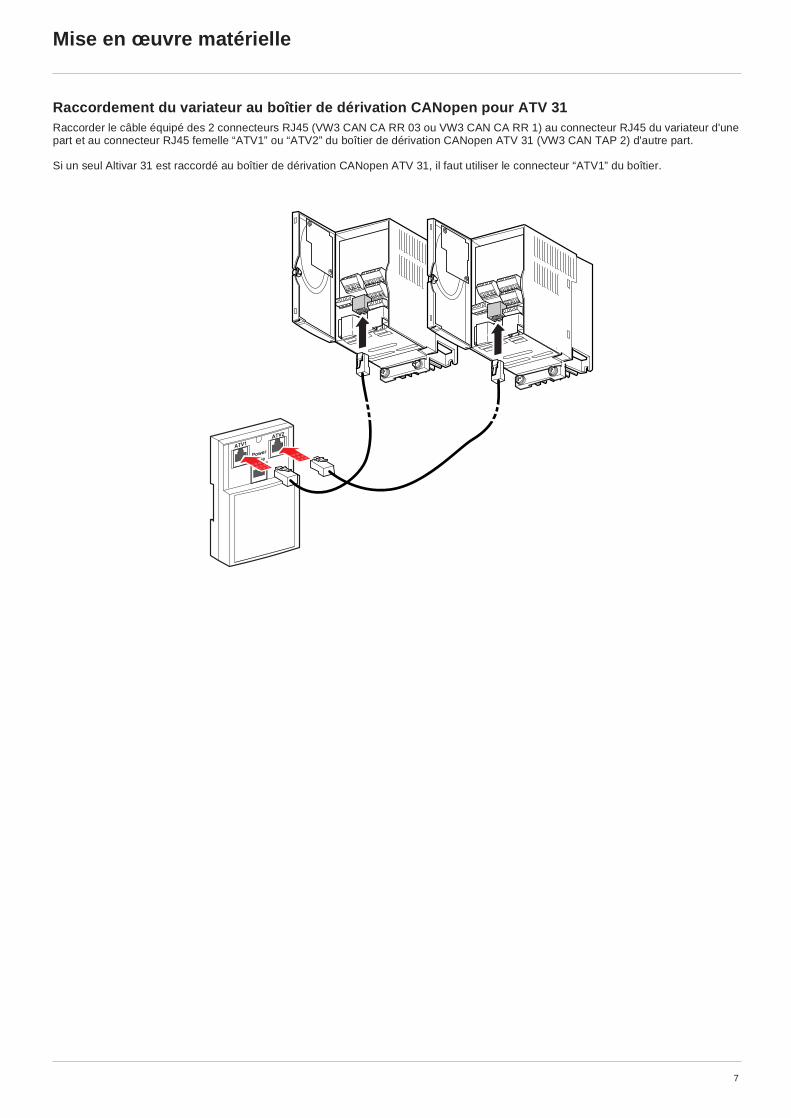
Raccordement du variateur au boîtier de dérivation CANopen pour ATV 31Raccorder le câble équipé des 2 connecteurs RJ45 (VW3 CAN CA RR 03 ou VW3 CAN CA RR 1) au connecteur RJ45 du variateur d'unepart et au connecteur RJ45 femelle “ATV1” ou “ATV2” du boîtier de dérivation CANopen ATV 31 (VW3 CAN TAP 2) d'autre part.
Si un seul Altivar 31 est raccordé au boîtier de dérivation CANopen ATV 31, il faut utiliser le connecteur “ATV1” du boîtier.
ATV1ATV2
Power
Suite
7
Mise en œuvre matérielle
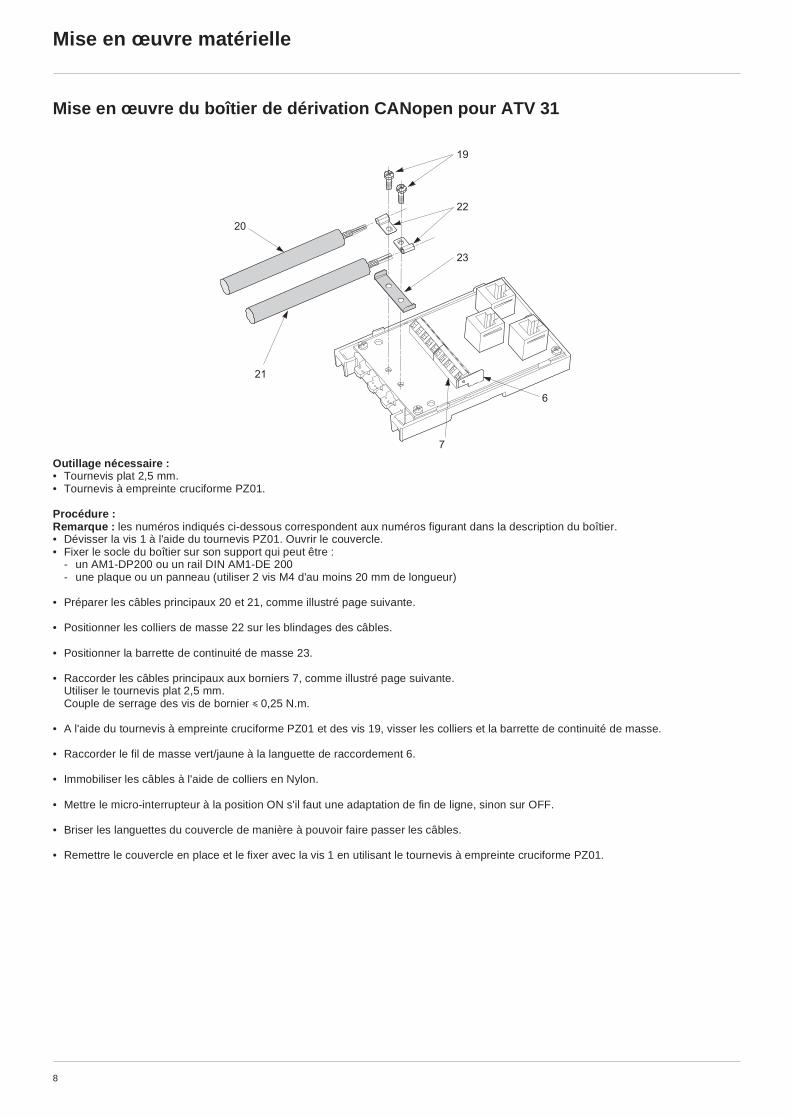
Mise en œuvre du boîtier de dérivation CANopen pour ATV 31
Outillage nécessaire :• Tournevis plat 2,5 mm.• Tournevis à empreinte cruciforme PZ01.
Procédure :Remarque : les numéros indiqués ci-dessous correspondent aux numéros figurant dans la description du boîtier.• Dévisser la vis 1 à l'aide du tournevis PZ01. Ouvrir le couvercle.• Fixer le socle du boîtier sur son support qui peut être :
- un AM1-DP200 ou un rail DIN AM1-DE 200 - une plaque ou un panneau (utiliser 2 vis M4 d'au moins 20 mm de longueur)
• Préparer les câbles principaux 20 et 21, comme illustré page suivante.
• Positionner les colliers de masse 22 sur les blindages des câbles.
• Positionner la barrette de continuité de masse 23.
• Raccorder les câbles principaux aux borniers 7, comme illustré page suivante.Utiliser le tournevis plat 2,5 mm.Couple de serrage des vis de bornier y 0,25 N.m.
• A l'aide du tournevis à empreinte cruciforme PZ01 et des vis 19, visser les colliers et la barrette de continuité de masse.
• Raccorder le fil de masse vert/jaune à la languette de raccordement 6.
• Immobiliser les câbles à l'aide de colliers en Nylon.
• Mettre le micro-interrupteur à la position ON s'il faut une adaptation de fin de ligne, sinon sur OFF.
• Briser les languettes du couvercle de manière à pouvoir faire passer les câbles.
• Remettre le couvercle en place et le fixer avec la vis 1 en utilisant le tournevis à empreinte cruciforme PZ01.
20
19
22
23
21
7
6
8
rer
Mise en œuvre matérielle
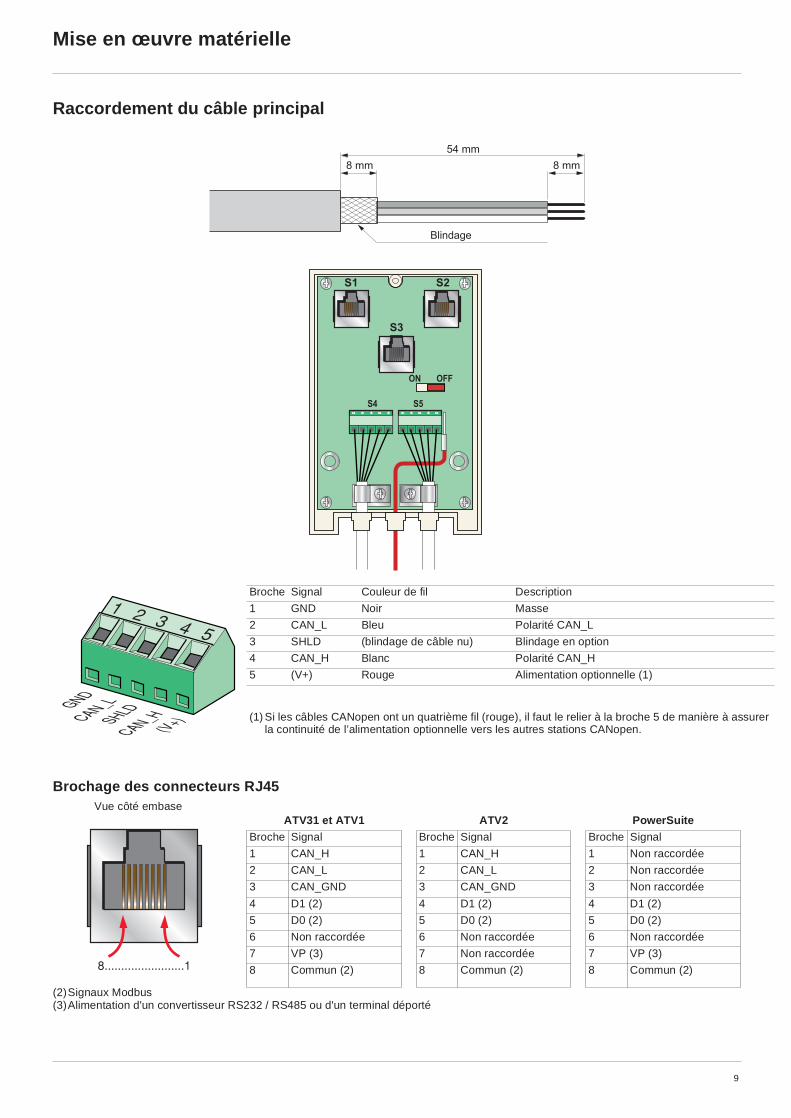
Raccordement du câble principal
Brochage des connecteurs RJ45Vue côté embase
(2)Signaux Modbus(3)Alimentation d'un convertisseur RS232 / RS485 ou d'un terminal déporté
Broche Signal Couleur de fil Description
1 GND Noir Masse
2 CAN_L Bleu Polarité CAN_L
3 SHLD (blindage de câble nu) Blindage en option
4 CAN_H Blanc Polarité CAN_H
5 (V+) Rouge Alimentation optionnelle (1)
(1) Si les câbles CANopen ont un quatrième fil (rouge), il faut le relier à la broche 5 de manière à assula continuité de l’alimentation optionnelle vers les autres stations CANopen.
ATV31 et ATV1 ATV2 PowerSuiteBroche Signal Broche Signal Broche Signal
1 CAN_H 1 CAN_H 1 Non raccordée
2 CAN_L 2 CAN_L 2 Non raccordée
3 CAN_GND 3 CAN_GND 3 Non raccordée
4 D1 (2) 4 D1 (2) 4 D1 (2)
5 D0 (2) 5 D0 (2) 5 D0 (2)
6 Non raccordée 6 Non raccordée 6 Non raccordée
7 VP (3) 7 Non raccordée 7 VP (3)
8 Commun (2) 8 Commun (2) 8 Commun (2)
8 mm 8 mm54 mm
Blindage
S1 S2
S3
ON
S4 S5
OFF
1 2 3 4 5
GNDCAN_L
SHLD
CAN_H(V+)
8........................1
9
Configuration
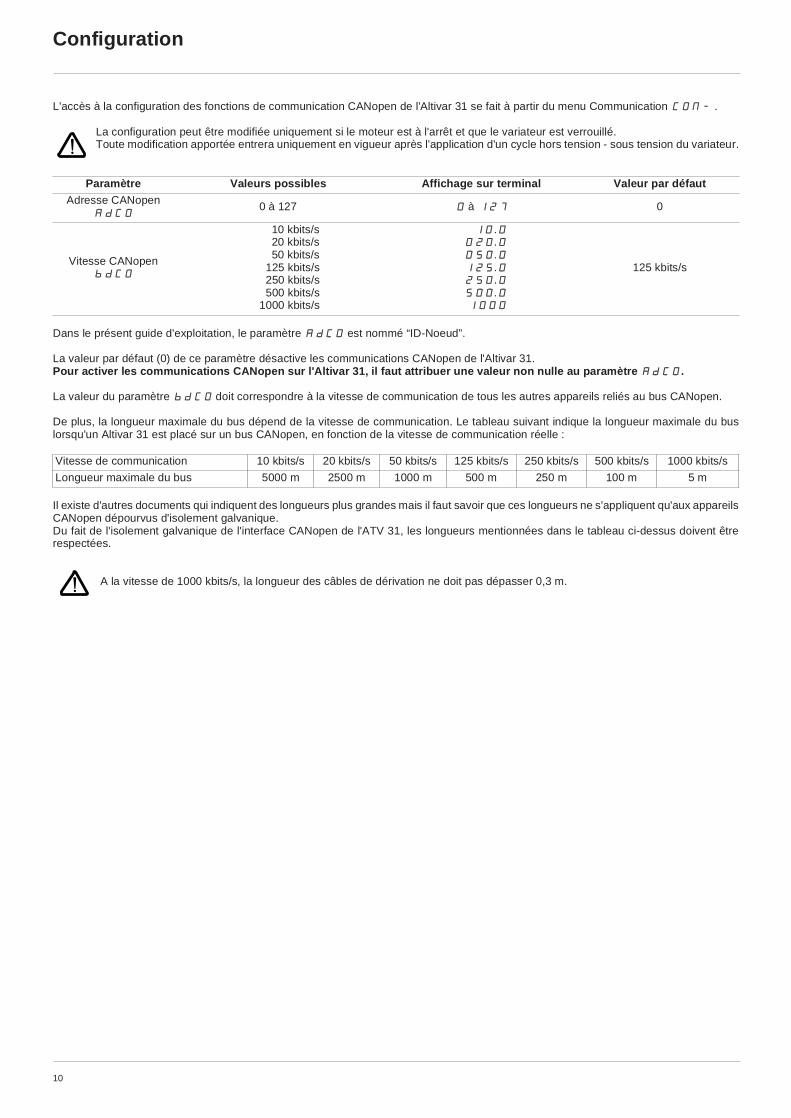
L'accès à la configuration des fonctions de communication CANopen de l'Altivar 31 se fait à partir du menu Communication CON- .
La configuration peut être modifiée uniquement si le moteur est à l'arrêt et que le variateur est verrouillé.Toute modification apportée entrera uniquement en vigueur après l'application d'un cycle hors tension - sous tension du variateur.
Dans le présent guide d'exploitation, le paramètre AdC0 est nommé “ID-Noeud”.
La valeur par défaut (0) de ce paramètre désactive les communications CANopen de l'Altivar 31.Pour activer les communications CANopen sur l'Altivar 31, il faut attribuer une valeur non nulle au paramètre AdC0.
La valeur du paramètre bdC0 doit correspondre à la vitesse de communication de tous les autres appareils reliés au bus CANopen.
De plus, la longueur maximale du bus dépend de la vitesse de communication. Le tableau suivant indique la longueur maximale du buslorsqu'un Altivar 31 est placé sur un bus CANopen, en fonction de la vitesse de communication réelle :
Il existe d'autres documents qui indiquent des longueurs plus grandes mais il faut savoir que ces longueurs ne s'appliquent qu'aux appareilsCANopen dépourvus d'isolement galvanique.Du fait de l'isolement galvanique de l'interface CANopen de l'ATV 31, les longueurs mentionnées dans le tableau ci-dessus doivent êtrerespectées.
A la vitesse de 1000 kbits/s, la longueur des câbles de dérivation ne doit pas dépasser 0,3 m.
Paramètre Valeurs possibles Affichage sur terminal Valeur par défautAdresse CANopen
AdC00 à 127 0 à 127 0
Vitesse CANopenbdC0
0,010 kbits/s20 kbits/s50 kbits/s
125 kbits/s250 kbits/s500 kbits/s
1000 kbits/s
010.0020.0050.0125.0250.0500.01000
125 kbits/s
Vitesse de communication 10 kbits/s 20 kbits/s 50 kbits/s 125 kbits/s 250 kbits/s 500 kbits/s 1000 kbits/s
Longueur maximale du bus 5000 m 2500 m 1000 m 500 m 250 m 100 m 5 m
10
Signalisation
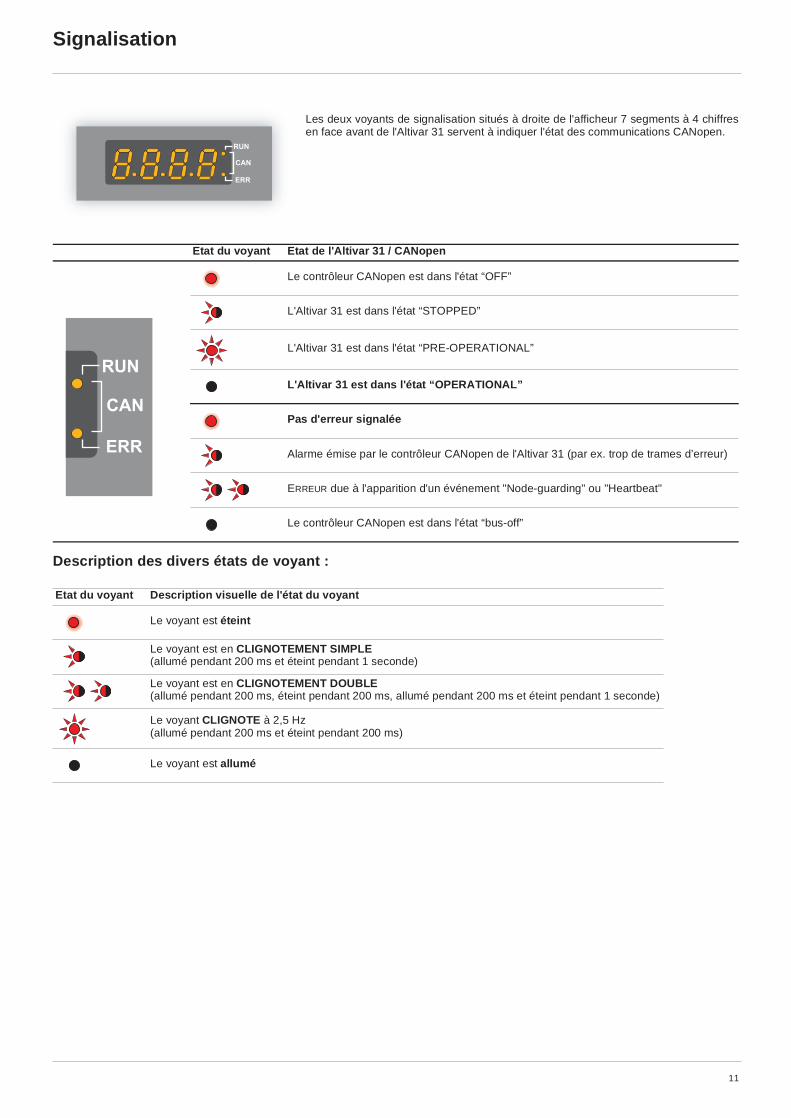
Les deux voyants de signalisation situés à droite de l'afficheur 7 segments à 4 chiffresen face avant de l'Altivar 31 servent à indiquer l'état des communications CANopen.
Description des divers états de voyant :
Etat du voyant Etat de l'Altivar 31 / CANopen
Le contrôleur CANopen est dans l'état “OFF”
L'Altivar 31 est dans l'état “STOPPED”
L'Altivar 31 est dans l'état “PRE-OPERATIONAL”
L'Altivar 31 est dans l'état “OPERATIONAL”
Pas d'erreur signalée
Alarme émise par le contrôleur CANopen de l'Altivar 31 (par ex. trop de trames d’erreur)
ERREUR due à l'apparition d'un événement "Node-guarding" ou "Heartbeat"
Le contrôleur CANopen est dans l'état “bus-off”
Etat du voyant Description visuelle de l'état du voyant
Le voyant est éteint
Le voyant est en CLIGNOTEMENT SIMPLE(allumé pendant 200 ms et éteint pendant 1 seconde)
Le voyant est en CLIGNOTEMENT DOUBLE(allumé pendant 200 ms, éteint pendant 200 ms, allumé pendant 200 ms et éteint pendant 1 seconde)
Le voyant CLIGNOTE à 2,5 Hz(allumé pendant 200 ms et éteint pendant 200 ms)
Le voyant est allumé
11
Mise en œuvre logicielle
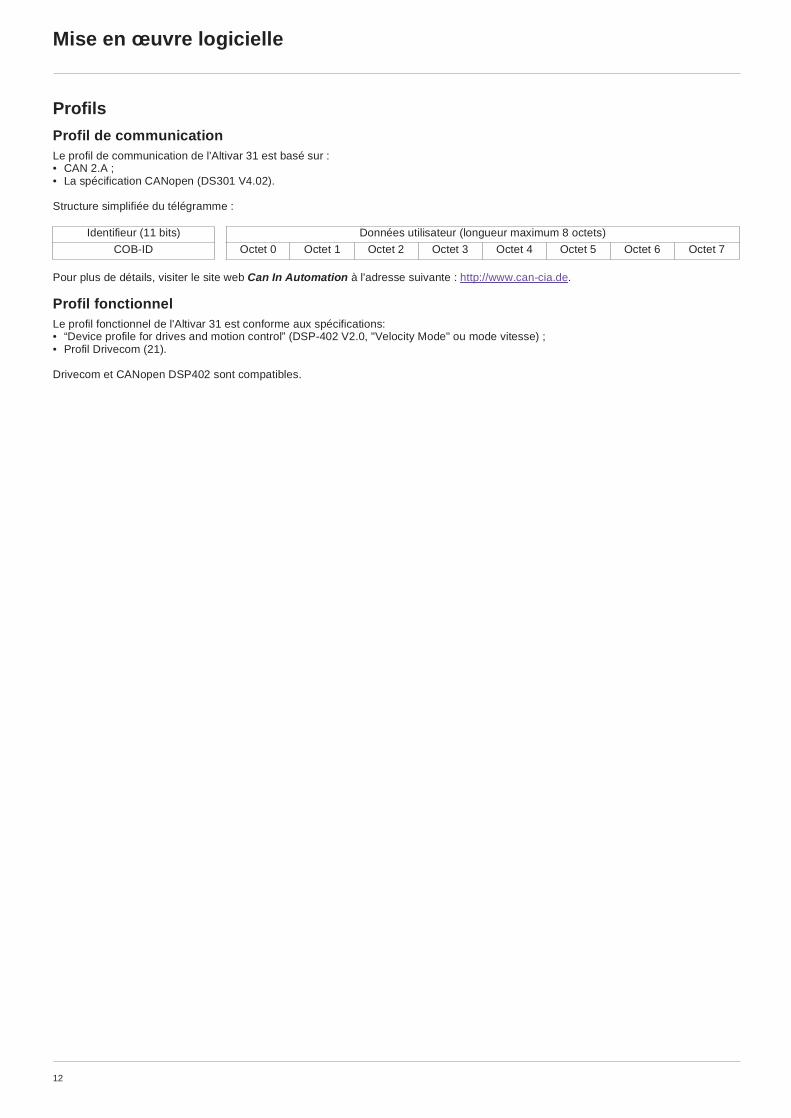
Profils
Profil de communicationLe profil de communication de l'Altivar 31 est basé sur :• CAN 2.A ;• La spécification CANopen (DS301 V4.02).
Structure simplifiée du télégramme :
Pour plus de détails, visiter le site web Can In Automation à l'adresse suivante : http://www.can-cia.de.
Profil fonctionnelLe profil fonctionnel de l'Altivar 31 est conforme aux spécifications:• “Device profile for drives and motion control” (DSP-402 V2.0, "Velocity Mode" ou mode vitesse) ;• Profil Drivecom (21).
Drivecom et CANopen DSP402 sont compatibles.
Identifieur (11 bits) Données utilisateur (longueur maximum 8 octets)
COB-ID Octet 0 Octet 1 Octet 2 Octet 3 Octet 4 Octet 5 Octet 6 Octet 7
12
Mise en œuvre logicielle
Services disponibles
PDO (Process Data Objects)Les télégrammes PDO servent à échanger des données en temps réel sur le process.
Les automates actualisent de manière cyclique leurs entrées et sorties par les PDO (variables périodiques).
L'Altivar 31 comporte deux jeux de PDO prédéfinis :
• Le premier jeu de PDO (PDO 1 – obligatoire pour tous les modes) inclut :- un PDO reçu, pour commander (mot de commande "CMDD") le variateur ;- un PDO émis, pour surveiller (mot d'état "ETAD") le variateur.
Les PDO 1 sont asynchrones et le PDO émis est uniquement envoyé quand la valeur des données change.
• Le second jeu de PDO (PDO 6 pour le mode vitesse) inclut :- un PDO reçu, pour commander le variateur (mot de commande "CMDD" et consigne de vitesse "LFRD") ; il peut en outre être configuré
pour inclure deux autres variables ; le mot de commande "CMDD" et la consigne de vitesse "LFRD" peuvent aussi être remplacés par deux autres variables ayant des droits d'accès à l'écriture ;
- un PDO émis, pour surveiller le variateur (mot d'état "ETAD" et vitesse de sortie "RFRD") ; il peut en outre être configuré pour inclure deux autres variables ; le mot d'état "ETAD" et la vitesse de sortie "RFRD" peuvent aussi être remplacés par deux autres variables quelconques.
Le mode de communication des PDO 6 peut être défini par l'utilisateur, en fonction de ses besoins : asynchrone (comme PDO 1) oucyclique, basé sur la réception d'un objet de synchronisation (SYNC). Un troisième mode est possible, à savoir le mode synchroneacyclique, dans lequel le PDO émis est envoyé à chaque fois que la valeur des données change mais uniquement pendant la “fenêtre”synchrone autorisée par l'objet SYNC.En mode asynchrone, les durées "inhibit time" et "event timer" peuvent être modifiées.
SDO (Service Data Objects)Les télégrammes SDO servent à la configuration et au réglage. Les automates émettent et reçoivent des messages de manière acycliquepar l'intermédiaire de SDO.
L'Altivar 31 gère un SDO, caractérisé par deux identifieurs COB-ID :• un pour les requêtes (télégrammes émis par l'automate et destinés à l'Altivar 31) ;• un pour les réponses (télégrammes renvoyés à l'automate par l'Altivar 31)L'Altivar 31 supporte le transfert segmenté.
Autres services• Affectation par défaut des identifieurs (COB-ID), basée sur l'adresse ;• Service NMT : Start_Remote_Node (16#01), Stop_Remote_Node (16#02), Enter_Pre_Operational (16#80), Reset_Node (16#81),
Reset_Communication (16#82) ;• Acceptation de la diffusion générale sur COB-ID 0 ;• Objet Heartbeat (pour Altivar 31 versions V1.2 et supérieures) ;• Objet Node guarding ;• Objet Emergency (urgence - EMCY) ;• Service SYNC, pour le second jeu de PDO (PDO 6).
Service non disponible• Objet d'horodatage (TIME)
Adresse sur le bus (ID-Noeud)ID-Noeud = adresse du variateur sur le bus CANopen.
Le terme “client” désigne une entité transmettant un télégramme destiné au variateur de vitesse (exemple : automate).
13
Mise en œuvre logicielle
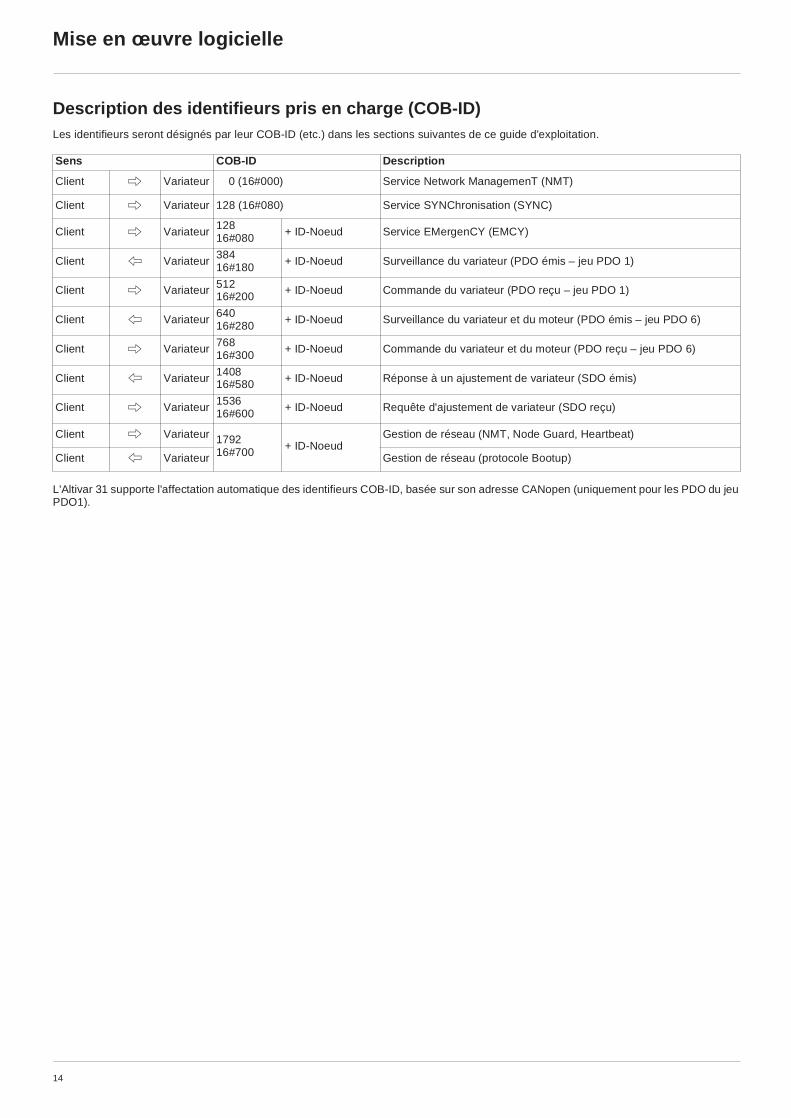
Description des identifieurs pris en charge (COB-ID)Les identifieurs seront désignés par leur COB-ID (etc.) dans les sections suivantes de ce guide d'exploitation.
L'Altivar 31 supporte l'affectation automatique des identifieurs COB-ID, basée sur son adresse CANopen (uniquement pour les PDO du jeuPDO1).
Sens COB-ID Description
Client C Variateur 000 (16#000) Service Network ManagemenT (NMT)
Client C Variateur 128 (16#080) Service SYNChronisation (SYNC)
Client C Variateur 12816#080 + ID-Noeud Service EMergenCY (EMCY)
Client B Variateur 38416#180 + ID-Noeud Surveillance du variateur (PDO émis – jeu PDO 1)
Client C Variateur 51216#200 + ID-Noeud Commande du variateur (PDO reçu – jeu PDO 1)
Client B Variateur 64016#280 + ID-Noeud Surveillance du variateur et du moteur (PDO émis – jeu PDO 6)
Client C Variateur 76816#300 + ID-Noeud Commande du variateur et du moteur (PDO reçu – jeu PDO 6)
Client B Variateur 140816#580 + ID-Noeud Réponse à un ajustement de variateur (SDO émis)
Client C Variateur 153616#600 + ID-Noeud Requête d'ajustement de variateur (SDO reçu)
Client C Variateur 179216#700 + ID-Noeud
Gestion de réseau (NMT, Node Guard, Heartbeat)
Client B Variateur Gestion de réseau (protocole Bootup)
14
Mise en œuvre logicielle avec PL7 et SyCon
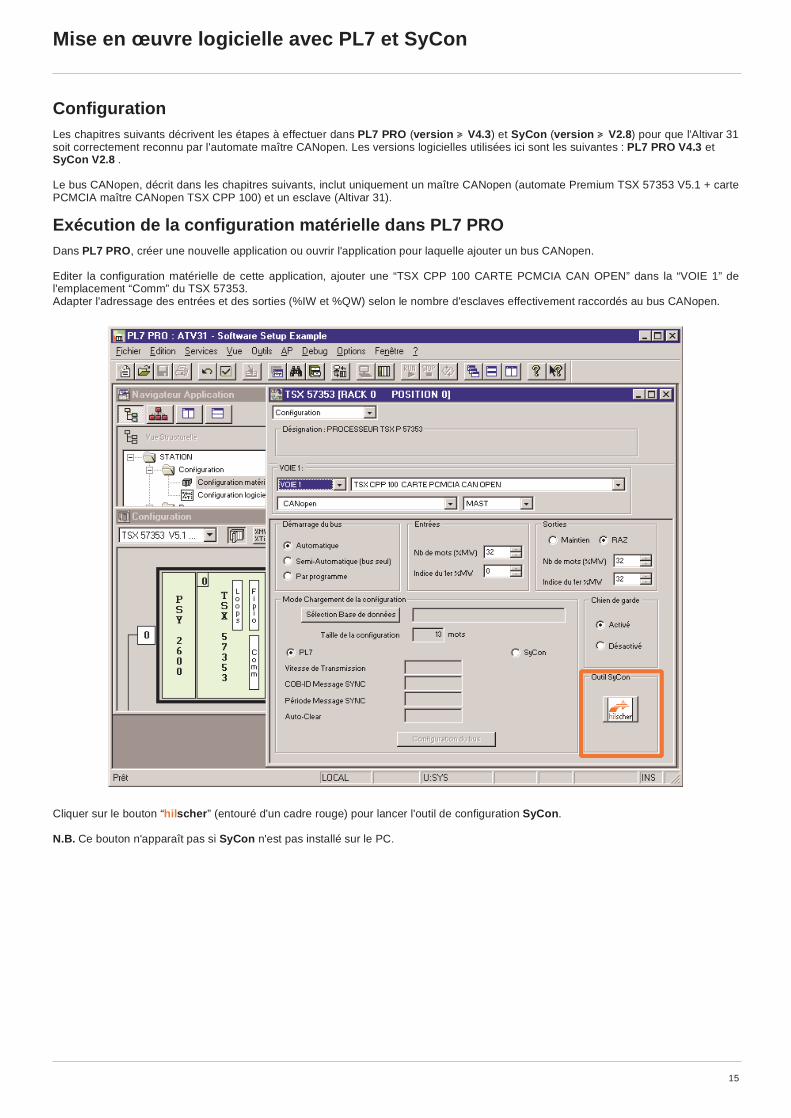
ConfigurationLes chapitres suivants décrivent les étapes à effectuer dans PL7 PRO (version u V4.3) et SyCon (version u V2.8) pour que l'Altivar 31soit correctement reconnu par l'automate maître CANopen. Les versions logicielles utilisées ici sont les suivantes : PL7 PRO V4.3 et SyCon V2.8 .
Le bus CANopen, décrit dans les chapitres suivants, inclut uniquement un maître CANopen (automate Premium TSX 57353 V5.1 + cartePCMCIA maître CANopen TSX CPP 100) et un esclave (Altivar 31).
Exécution de la configuration matérielle dans PL7 PRODans PL7 PRO, créer une nouvelle application ou ouvrir l'application pour laquelle ajouter un bus CANopen.
Editer la configuration matérielle de cette application, ajouter une “TSX CPP 100 CARTE PCMCIA CAN OPEN” dans la “VOIE 1” del'emplacement “Comm” du TSX 57353.Adapter l'adressage des entrées et des sorties (%IW et %QW) selon le nombre d'esclaves effectivement raccordés au bus CANopen.
Cliquer sur le bouton “hilscher” (entouré d'un cadre rouge) pour lancer l'outil de configuration SyCon.
N.B. Ce bouton n'apparaît pas si SyCon n'est pas installé sur le PC.
15
Mise en œuvre logicielle avec PL7 et SyCon
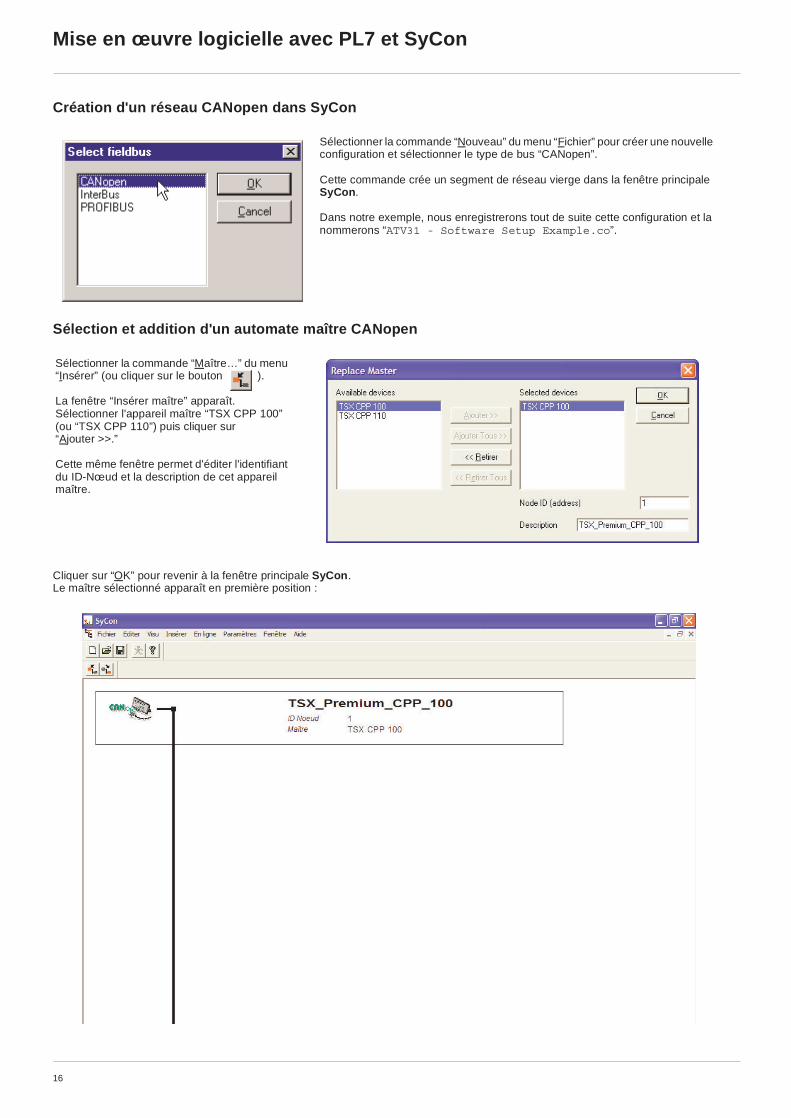
Création d'un réseau CANopen dans SyCon
Sélection et addition d'un automate maître CANopen
Cliquer sur “OK” pour revenir à la fenêtre principale SyCon.Le maître sélectionné apparaît en première position :
Sélectionner la commande “Nouveau” du menu “Fichier” pour créer une nouvelle configuration et sélectionner le type de bus “CANopen”.
Cette commande crée un segment de réseau vierge dans la fenêtre principale SyCon.
Dans notre exemple, nous enregistrerons tout de suite cette configuration et la nommerons “ATV31 - Software Setup Example.co”.
Sélectionner la commande “Maître…” du menu “Insérer” (ou cliquer sur le bouton ).
La fenêtre “Insérer maître” apparaît. Sélectionner l'appareil maître “TSX CPP 100” (ou “TSX CPP 110”) puis cliquer sur “Ajouter >>.”
Cette même fenêtre permet d'éditer l'identifiant du ID-Nœud et la description de cet appareil maître.
16
Mise en œuvre logicielle avec PL7 et SyCon
Addition de fichiers EDS Altivar 31 aux appareils CANopen gérés par SyConLe fichier EDS qui décrit l'Altivar 31 doit être importé dans SyCon de manière à figurer dans sa base de données des appareils. Ce fichiers'appelle "ATV31_Vxy.eds".Vx.y : version logicielle d'Altivar 31 :
- x : révision majeure ;- y : révision mineure.
Pour importer ce fichier dans SyCon, exécuter la commande “Copier EDS” du menu “Fichier” et sélectionner le fichier EDS indiqué plushaut. L'utilisateur est invité à choisir ou non d'“importer les fichiers bitmap correspondants”. Cliquer sur “Oui” pour ajouter les trois icônesd'état Altivar 31 à la base de données bitmap de SyCon ; ces icônes seront affichées par la suite.
Si la commande est exécutée correctement, une fenêtre informe l'utilisateur que 1 fichier EDS et 3 fichiers bitmap ont été correctementimportés.
Les fichiers eds et les fichiers d'icône sont dans le cd-rom PowerSuite ou dans le cd-rom délivré avec le variateur Altivar 31.
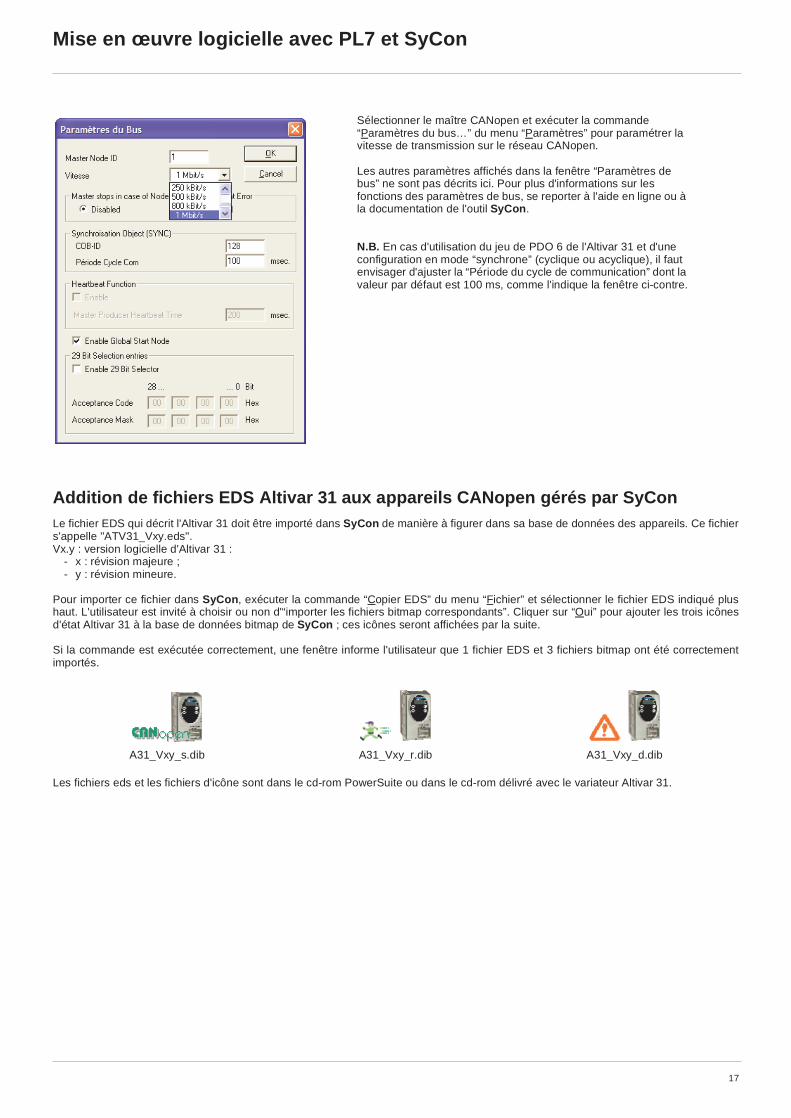
Sélectionner le maître CANopen et exécuter la commande “Paramètres du bus…” du menu “Paramètres” pour paramétrer la vitesse de transmission sur le réseau CANopen.
Les autres paramètres affichés dans la fenêtre “Paramètres de bus” ne sont pas décrits ici. Pour plus d'informations sur les fonctions des paramètres de bus, se reporter à l'aide en ligne ou à la documentation de l'outil SyCon.
N.B. En cas d'utilisation du jeu de PDO 6 de l'Altivar 31 et d'une configuration en mode “synchrone” (cyclique ou acyclique), il faut envisager d'ajuster la “Période du cycle de communication” dont la valeur par défaut est 100 ms, comme l'indique la fenêtre ci-contre.
A31_Vxy_s.dib A31_Vxy_r.dib A31_Vxy_d.dib
17
Mise en œuvre logicielle avec PL7 et SyCon
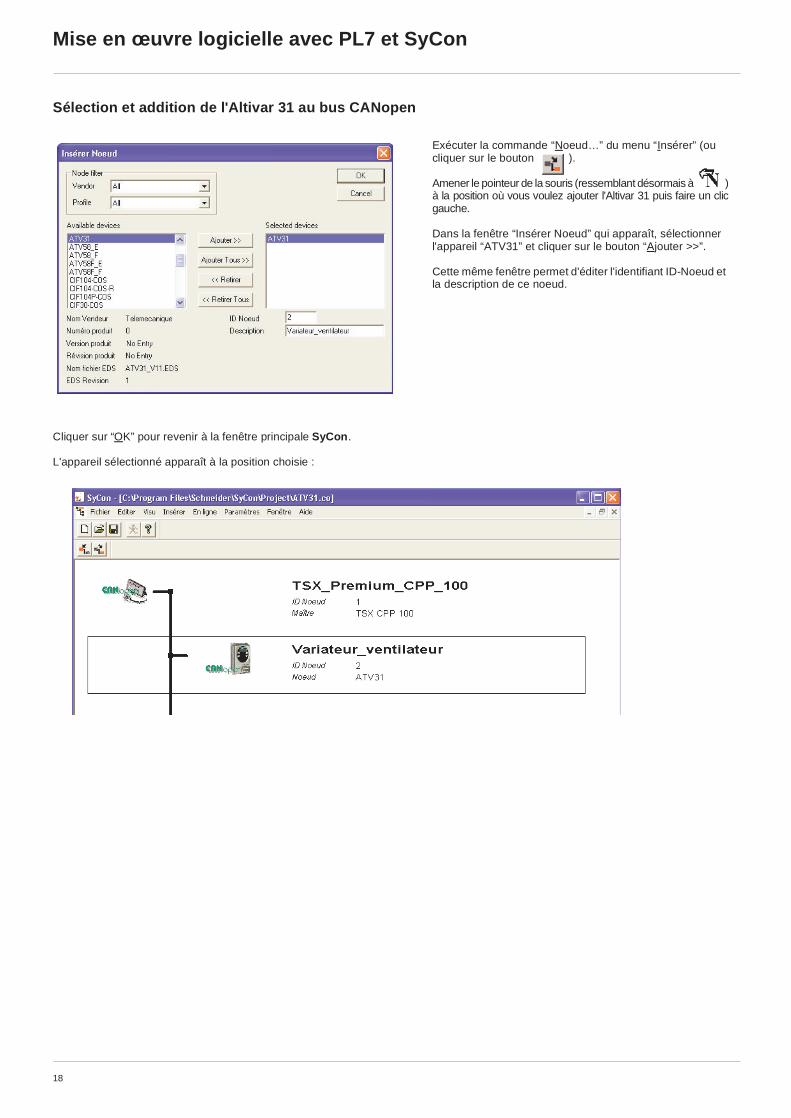
Sélection et addition de l'Altivar 31 au bus CANopen
Cliquer sur “OK” pour revenir à la fenêtre principale SyCon.
L'appareil sélectionné apparaît à la position choisie :
Exécuter la commande “Noeud…” du menu “Insérer” (ou cliquer sur le bouton ).
Amener le pointeur de la souris (ressemblant désormais à )à la position où vous voulez ajouter l'Altivar 31 puis faire un clicgauche.
Dans la fenêtre “Insérer Noeud” qui apparaît, sélectionner l'appareil “ATV31” et cliquer sur le bouton “Ajouter >>”.
Cette même fenêtre permet d'éditer l'identifiant ID-Noeud et la description de ce noeud.
18
Mise en œuvre logicielle avec PL7 et SyCon
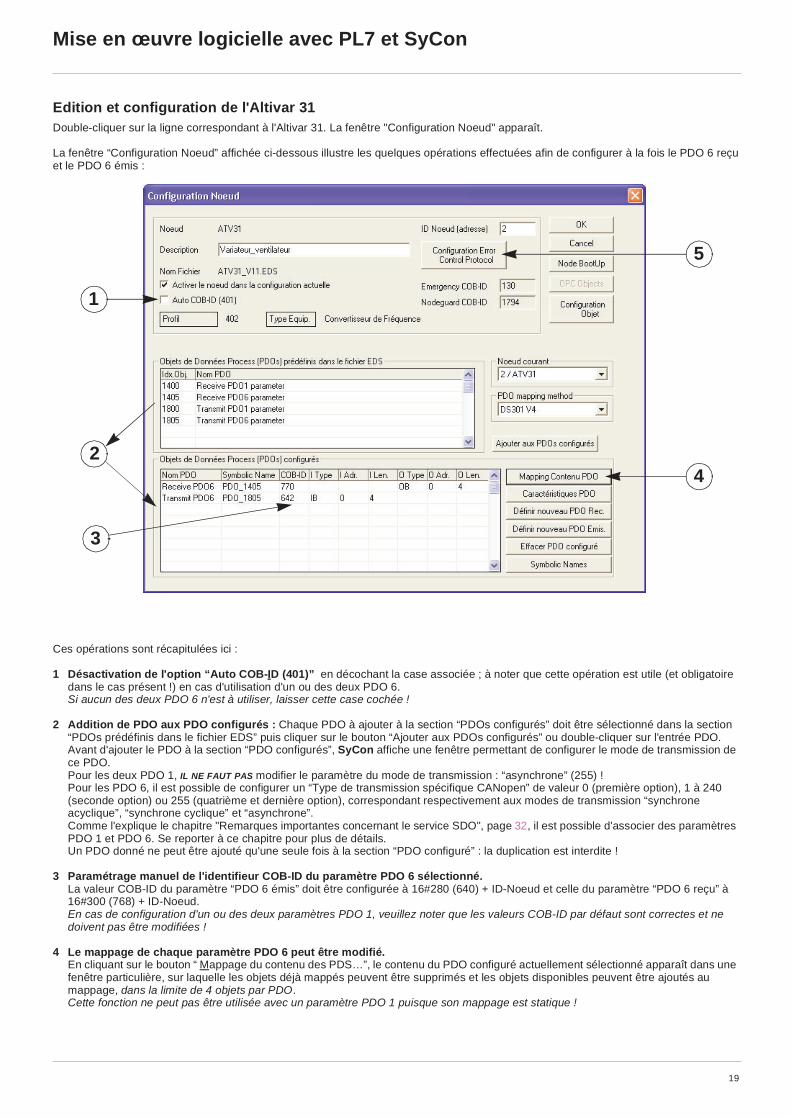
Edition et configuration de l'Altivar 31Double-cliquer sur la ligne correspondant à l'Altivar 31. La fenêtre "Configuration Noeud" apparaît.
La fenêtre “Configuration Noeud” affichée ci-dessous illustre les quelques opérations effectuées afin de configurer à la fois le PDO 6 reçuet le PDO 6 émis :
Ces opérations sont récapitulées ici :
1 Désactivation de l'option “Auto COB-ID (401)” en décochant la case associée ; à noter que cette opération est utile (et obligatoire dans le cas présent !) en cas d'utilisation d'un ou des deux PDO 6.Si aucun des deux PDO 6 n'est à utiliser, laisser cette case cochée !
2 Addition de PDO aux PDO configurés : Chaque PDO à ajouter à la section “PDOs configurés” doit être sélectionné dans la section “PDOs prédéfinis dans le fichier EDS” puis cliquer sur le bouton “Ajouter aux PDOs configurés” ou double-cliquer sur l'entrée PDO.Avant d'ajouter le PDO à la section “PDO configurés”, SyCon affiche une fenêtre permettant de configurer le mode de transmission de ce PDO.Pour les deux PDO 1, IL NE FAUT PAS modifier le paramètre du mode de transmission : “asynchrone” (255) !Pour les PDO 6, il est possible de configurer un “Type de transmission spécifique CANopen” de valeur 0 (première option), 1 à 240 (seconde option) ou 255 (quatrième et dernière option), correspondant respectivement aux modes de transmission “synchrone acyclique”, “synchrone cyclique” et “asynchrone”.Comme l'explique le chapitre "Remarques importantes concernant le service SDO", page 32, il est possible d'associer des paramètres PDO 1 et PDO 6. Se reporter à ce chapitre pour plus de détails.Un PDO donné ne peut être ajouté qu'une seule fois à la section “PDO configuré” : la duplication est interdite !
3 Paramétrage manuel de l'identifieur COB-ID du paramètre PDO 6 sélectionné.La valeur COB-ID du paramètre “PDO 6 émis” doit être configurée à 16#280 (640) + ID-Noeud et celle du paramètre “PDO 6 reçu” à 16#300 (768) + ID-Noeud. En cas de configuration d'un ou des deux paramètres PDO 1, veuillez noter que les valeurs COB-ID par défaut sont correctes et ne doivent pas être modifiées !
4 Le mappage de chaque paramètre PDO 6 peut être modifié.En cliquant sur le bouton “ Mappage du contenu des PDS…”, le contenu du PDO configuré actuellement sélectionné apparaît dans une fenêtre particulière, sur laquelle les objets déjà mappés peuvent être supprimés et les objets disponibles peuvent être ajoutés au mappage, dans la limite de 4 objets par PDO.Cette fonction ne peut pas être utilisée avec un paramètre PDO 1 puisque son mappage est statique !
1
2
3
4
5
19
Mise en œuvre logicielle avec PL7 et SyCon
5 Configuration du protocole de contrôle d'erreur de l'Altivar 31Cliquer sur le bouton “Configuration Error Control Protocol” pour faire apparaître le choix suivant de protocoles d'erreur à appliquer à l'Altivar 31 : “Protocole Node Guarding” ou “Protocole Heartbeat.”
- Protocole Node Guarding : Si ce protocole est sélectionné, les deux paramètres “Guard Time” et “Life Time Factor” sont utilisés pour générer un “Life Time”. Pour plus d'informations sur ce sujet, se reporter au chapitre Protocole Node guarding, page 34.ex. dans notre exemple, nous configurons un “Guard Time” de 500 ms et un “Life Time Factor” de 4, paramétrant ainsi un “Life Time” de 4 × 500 ms = 2 secondes.
- Protocole Heartbeat : Si ce protocole est sélectionné, le paramètre du maître “Master Consumer Time of Node” (16#1016: 16#xx) doit être supérieur au paramètre du noeud “Node Heartbeat Producer Time” (16#1017: 16#00). Si le “Master Consumer Time of Node” vaut 0 pour le nœud actuellement configuré, le maître ne contrôlera pas l'activité du bus de ce noeud.
N.B. Pour utiliser le protocole Heartbeat avec le maître CANopen, il faut d'abord activer “Fonction Heartbeat” dans la fenêtre “Paramètres de bus” (voir chapitre Création d'un réseau CANopen dans SyCon, page 16). Il faut bien entendu que le maître CANopen supporte ce protocole, ce qui n'est pas le cas du maître CANopen utilisé ici (TSX CPP 100). La carte PCMCIA maître CANopen TSX CPP 110 est un exemple de maître CANopen supportant ce protocole.
De plus, la section “Node Heartbeat Consumer List” permet de configurer l'Altivar 31 pour qu'il contrôle une autre station (distinguée par son ID-Noeud) du bus. Chaque station est nommée et son “Producer Time (ms)” est rappelé par commodité. En cochant une case de la colonne “Active”, le nœud “ID-Noeud” correspondant sera contrôlé à intervalles réguliers par l'Altivar 31 ; dans ce cas, le “Consumer Time (ms)” doit être supérieur au “Producer Time (ms).”
Enregistrement et ouverture de la configuration du bus CANopen dans PL7 PROEnregistrer la configuration CANopen et lui donner un nom (commande “Enregistrer” ou “Enregistrer sous…” du menu “Fichier”). Cetteconfiguration est enregistrée dans un fichier “.co”.
Dans la fenêtre PL7 PRO affichée au chapitre "Exécution de la configuration matérielle dans PL7 PRO", page 15, cliquer sur le bouton“Sélection Base de données” et sélectionner le fichier enregistré au préalable (ex. “C:\Program Files\Schneider\SyCon\Project\ATV31 -Software Setup Example.co”). Une fois le choix validé, la section “Mode Chargement de la configuration” est actualisée.
Il faut effectuer cette opération et désactiver par exemple les deux PDO du jeu PDO 1 si seuls les deux PDO du jeu PDO 6 sont utilisés.Exemple : L'exemple PL7 suivant désactive le PDO 1 reçu de l'Altivar 31 situé à l'adresse 4 :
Sycon V2.8 ne désactive pas automatiquement PDO1, il faut le faire par programme PL7.
La désactivation du PDO émis ou reçu (jeu PDO 1) se fait dans l'application PL7 en utilisant le service SDO qui permet d'activer le bit 31 du paramètre “COB-ID utilisé par PDO” de l'objet correspondant “Paramètre PDO1 reçu/émis” (voir plus bas). Cette activation du bit marquera le PDO comme étant “non valide”.Toutefois, il ne faut pas modifier les 31 autres bits de COB-ID!
Index Sous-index Description PDO activé PDO désactivé16#1400 16#01 COB-ID du PDO 1 reçu 16#00000200 + ID-Noeud 16#80000200 + ID-Noeud
16#1800 16#01 COB-ID du PDO 1 émis 16#00000180 + ID-Noeud 16#80000180 + ID-Noeud
%MD1000:=16#80000184;(* Données à envoyer = Inhibition du PDO *)%MW500:=16#1400;(* Adresse logique - Index dans %MD500 LSB *)%MW501:=16#0001;(* Adresse logique - Sous-Index dans %MD500 MSB *)%MW22:=50;(* Temporisation = 50 x 10 ms = 500 ms *)%MW23:=4;(* Longueur de donnée = 4 octets *)(* ENVOIE la commande d'écriture SDO WRITE *)WRITE_VAR(ADR#0.1.SYS,'SDO',%MD500,4,%MW1000:2,%MW20:4) ;
20
Mise en œuvre logicielle avec PL7 et SyCon
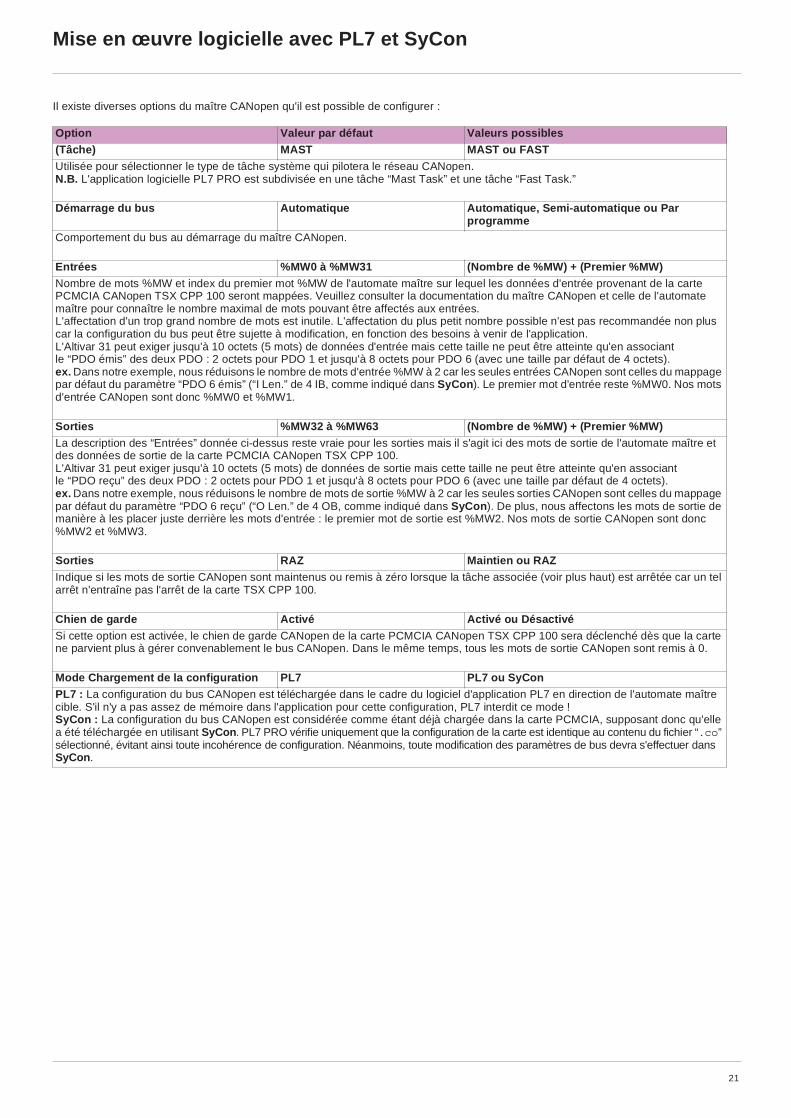
Il existe diverses options du maître CANopen qu'il est possible de configurer :
Option Valeur par défaut Valeurs possibles(Tâche) MAST MAST ou FASTUtilisée pour sélectionner le type de tâche système qui pilotera le réseau CANopen.N.B. L'application logicielle PL7 PRO est subdivisée en une tâche “Mast Task” et une tâche “Fast Task.”
Démarrage du bus Automatique Automatique, Semi-automatique ou Par programme
Comportement du bus au démarrage du maître CANopen.
Entrées %MW0 à %MW31 (Nombre de %MW) + (Premier %MW)Nombre de mots %MW et index du premier mot %MW de l'automate maître sur lequel les données d'entrée provenant de la carte PCMCIA CANopen TSX CPP 100 seront mappées. Veuillez consulter la documentation du maître CANopen et celle de l'automate maître pour connaître le nombre maximal de mots pouvant être affectés aux entrées.L'affectation d'un trop grand nombre de mots est inutile. L'affectation du plus petit nombre possible n'est pas recommandée non plus car la configuration du bus peut être sujette à modification, en fonction des besoins à venir de l'application.L'Altivar 31 peut exiger jusqu'à 10 octets (5 mots) de données d'entrée mais cette taille ne peut être atteinte qu'en associant le “PDO émis” des deux PDO : 2 octets pour PDO 1 et jusqu'à 8 octets pour PDO 6 (avec une taille par défaut de 4 octets).ex. Dans notre exemple, nous réduisons le nombre de mots d'entrée %MW à 2 car les seules entrées CANopen sont celles du mappage par défaut du paramètre “PDO 6 émis” (“I Len.” de 4 IB, comme indiqué dans SyCon). Le premier mot d'entrée reste %MW0. Nos mots d'entrée CANopen sont donc %MW0 et %MW1.
Sorties %MW32 à %MW63 (Nombre de %MW) + (Premier %MW)La description des “Entrées” donnée ci-dessus reste vraie pour les sorties mais il s'agit ici des mots de sortie de l'automate maître et des données de sortie de la carte PCMCIA CANopen TSX CPP 100.L'Altivar 31 peut exiger jusqu'à 10 octets (5 mots) de données de sortie mais cette taille ne peut être atteinte qu'en associant le “PDO reçu” des deux PDO : 2 octets pour PDO 1 et jusqu'à 8 octets pour PDO 6 (avec une taille par défaut de 4 octets).ex. Dans notre exemple, nous réduisons le nombre de mots de sortie %MW à 2 car les seules sorties CANopen sont celles du mappage par défaut du paramètre “PDO 6 reçu” (“O Len.” de 4 OB, comme indiqué dans SyCon). De plus, nous affectons les mots de sortie de manière à les placer juste derrière les mots d'entrée : le premier mot de sortie est %MW2. Nos mots de sortie CANopen sont donc %MW2 et %MW3.
Sorties RAZ Maintien ou RAZIndique si les mots de sortie CANopen sont maintenus ou remis à zéro lorsque la tâche associée (voir plus haut) est arrêtée car un tel arrêt n'entraîne pas l'arrêt de la carte TSX CPP 100.
Chien de garde Activé Activé ou DésactivéSi cette option est activée, le chien de garde CANopen de la carte PCMCIA CANopen TSX CPP 100 sera déclenché dès que la carte ne parvient plus à gérer convenablement le bus CANopen. Dans le même temps, tous les mots de sortie CANopen sont remis à 0.
Mode Chargement de la configuration PL7 PL7 ou SyConPL7 : La configuration du bus CANopen est téléchargée dans le cadre du logiciel d'application PL7 en direction de l'automate maître cible. S'il n'y a pas assez de mémoire dans l'application pour cette configuration, PL7 interdit ce mode !SyCon : La configuration du bus CANopen est considérée comme étant déjà chargée dans la carte PCMCIA, supposant donc qu'elle a été téléchargée en utilisant SyCon. PL7 PRO vérifie uniquement que la configuration de la carte est identique au contenu du fichier “.co” sélectionné, évitant ainsi toute incohérence de configuration. Néanmoins, toute modification des paramètres de bus devra s'effectuer dans SyCon.
21
Mise en œuvre logicielle avec PL7 et SyCon
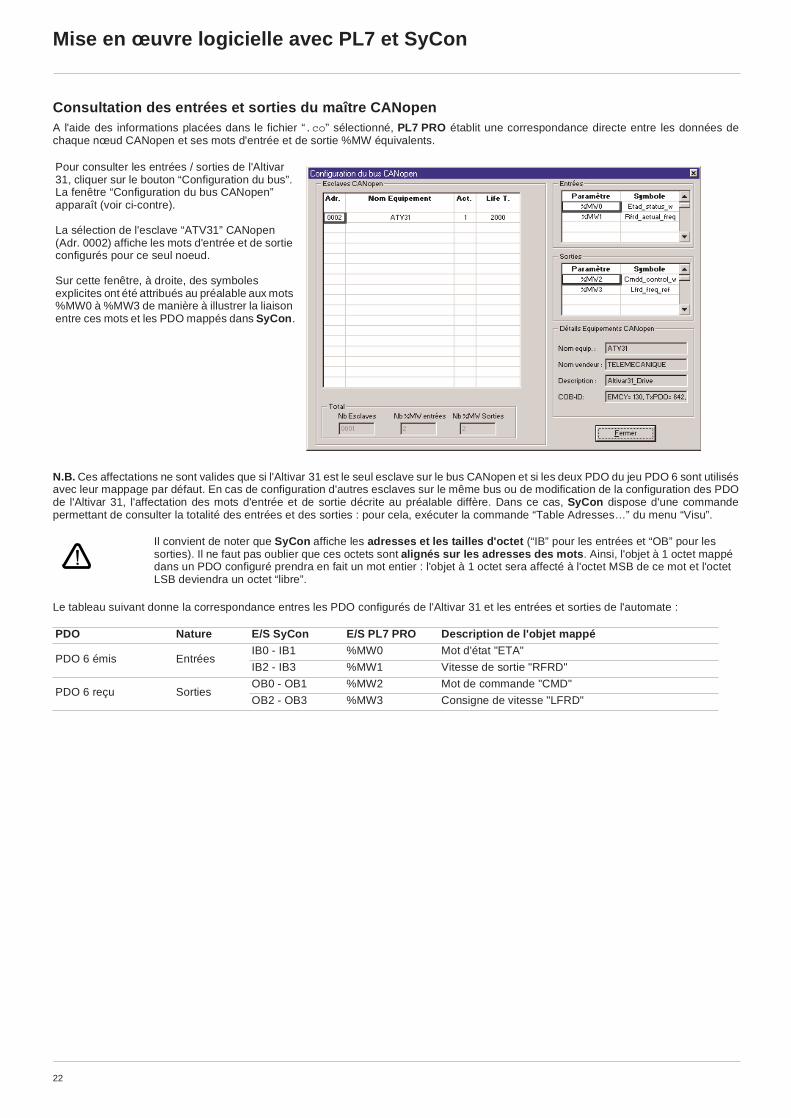
Consultation des entrées et sorties du maître CANopenA l'aide des informations placées dans le fichier “.co” sélectionné, PL7 PRO établit une correspondance directe entre les données dechaque nœud CANopen et ses mots d'entrée et de sortie %MW équivalents.
N.B. Ces affectations ne sont valides que si l'Altivar 31 est le seul esclave sur le bus CANopen et si les deux PDO du jeu PDO 6 sont utilisésavec leur mappage par défaut. En cas de configuration d'autres esclaves sur le même bus ou de modification de la configuration des PDOde l'Altivar 31, l'affectation des mots d'entrée et de sortie décrite au préalable diffère. Dans ce cas, SyCon dispose d'une commandepermettant de consulter la totalité des entrées et des sorties : pour cela, exécuter la commande “Table Adresses…” du menu “Visu”.
Le tableau suivant donne la correspondance entres les PDO configurés de l'Altivar 31 et les entrées et sorties de l'automate :
Pour consulter les entrées / sorties de l'Altivar 31, cliquer sur le bouton “Configuration du bus”. La fenêtre “Configuration du bus CANopen” apparaît (voir ci-contre).
La sélection de l'esclave “ATV31” CANopen(Adr. 0002) affiche les mots d'entrée et de sortie configurés pour ce seul noeud.
Sur cette fenêtre, à droite, des symboles explicites ont été attribués au préalable aux mots %MW0 à %MW3 de manière à illustrer la liaison entre ces mots et les PDO mappés dans SyCon.
Il convient de noter que SyCon affiche les adresses et les tailles d'octet (“IB” pour les entrées et “OB” pour les sorties). Il ne faut pas oublier que ces octets sont alignés sur les adresses des mots. Ainsi, l'objet à 1 octet mappé dans un PDO configuré prendra en fait un mot entier : l'objet à 1 octet sera affecté à l'octet MSB de ce mot et l'octet LSB deviendra un octet “libre”.
PDO Nature E/S SyCon E/S PL7 PRO Description de l'objet mappé
PDO 6 émis EntréesIB0 - IB1 %MW0 Mot d'état "ETA"
IB2 - IB3 %MW1 Vitesse de sortie "RFRD"
PDO 6 reçu SortiesOB0 - OB1 %MW2 Mot de commande "CMD"
OB2 - OB3 %MW3 Consigne de vitesse "LFRD"
22
Mise en œuvre logicielle avec PL7 et SyCon
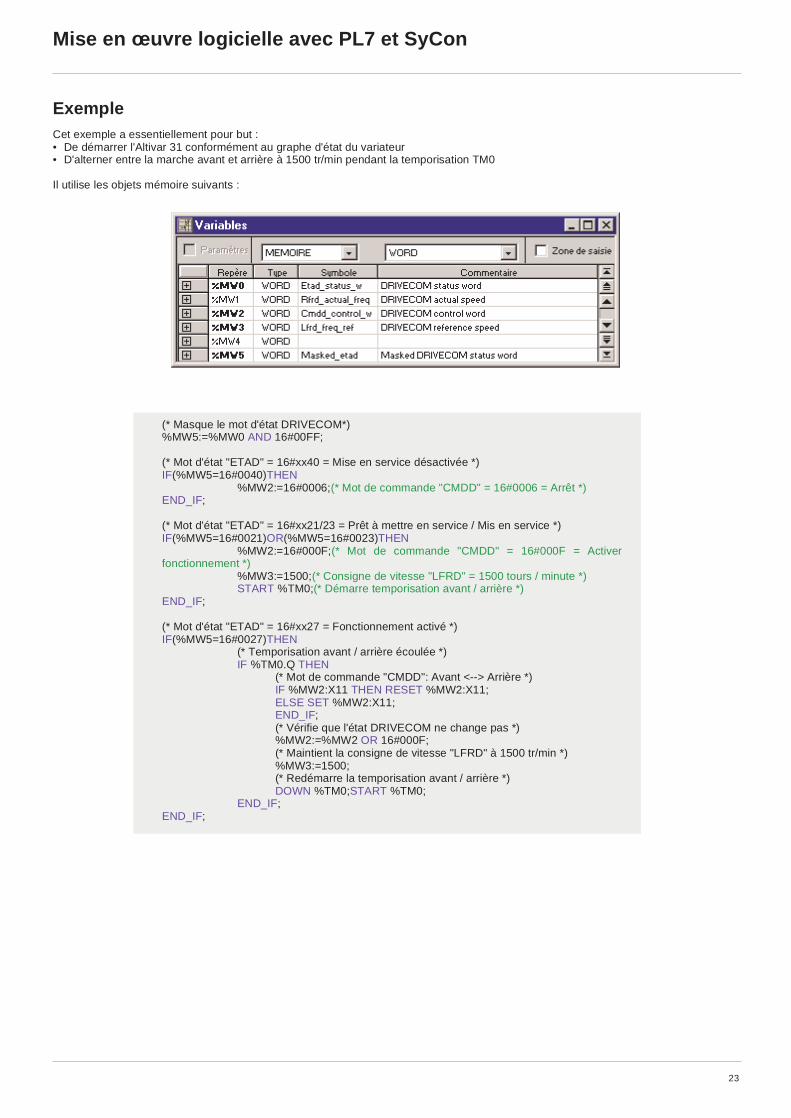
ExempleCet exemple a essentiellement pour but : • De démarrer l'Altivar 31 conformément au graphe d'état du variateur• D'alterner entre la marche avant et arrière à 1500 tr/min pendant la temporisation TM0
Il utilise les objets mémoire suivants :
(* Masque le mot d'état DRIVECOM*)%MW5:=%MW0 AND 16#00FF;
(* Mot d'état "ETAD" = 16#xx40 = Mise en service désactivée *)IF(%MW5=16#0040)THEN
%MW2:=16#0006;(* Mot de commande "CMDD" = 16#0006 = Arrêt *)END_IF;
(* Mot d'état "ETAD" = 16#xx21/23 = Prêt à mettre en service / Mis en service *)IF(%MW5=16#0021)OR(%MW5=16#0023)THEN
%MW2:=16#000F;(* Mot de commande "CMDD" = 16#000F = Activerfonctionnement *)
%MW3:=1500;(* Consigne de vitesse "LFRD" = 1500 tours / minute *)START %TM0;(* Démarre temporisation avant / arrière *)
END_IF;
(* Mot d'état "ETAD" = 16#xx27 = Fonctionnement activé *)IF(%MW5=16#0027)THEN
(* Temporisation avant / arrière écoulée *)IF %TM0.Q THEN
(* Mot de commande "CMDD": Avant <--> Arrière *)IF %MW2:X11 THEN RESET %MW2:X11;ELSE SET %MW2:X11;END_IF;(* Vérifie que l'état DRIVECOM ne change pas *)%MW2:=%MW2 OR 16#000F;(* Maintient la consigne de vitesse "LFRD" à 1500 tr/min *)%MW3:=1500;(* Redémarre la temporisation avant / arrière *)DOWN %TM0;START %TM0;
END_IF;END_IF;
23
Description des services
Ce chapitre décrit les divers services CANopen du variateur, répertoriés par ordre croissant des identifieurs COB-ID.
Les données dont la longueur dépasse un octet sont réglées sur LSB en premier et MSB en dernier dans la trame CANopen.
Commande de la machine d'état NMT (COB-ID = 16#000)Description de la trameClient C Variateur
(1)Si ID-Noeud = 0, le “Spécificateur de commande” est diffusé à tous les esclaves CANopen (Altivar 31 compris) ; chacun d'eux doit ensuite exécuter cette commande NMT, passant ainsi la transition correspondante (voir ci-après).
Exemple : Transition à l'état Pré-opérationnel (Entrer_Etat_Pré-opérationnel = 16#80) de l'Altivar 31 situé à l'adresse CANopen 4 (16#04).
COB-ID Octet 0 Octet 10
(16#000)Spécificateur de commande (CS)
ID-Noeud(1)
Spécificateur de commande (CS)
Signification
001 (16#01) Démarrer_Noeud_Déporté (Start_Remote_Node)
002 (16#02) Arrêter_Noeud_Déporté (Stop_Remote_Node)
128 (16#80) Entrer_Etat_Pré-opérationnel (Enter_Pre-Operational_State)
129 (16#81) Réinitialisation_Noeud (Reset_Node)
130 (16#82) Réinitialisation_Communication (Reset_Communication)
16#000 16#80 16#04
24

Description des services
Graphe d'état de la gestion de réseau (machine d'état NMT)Mise sous tension ou réarmement matériel
En fonction de l'état des communications du variateur, les services suivants sont disponibles :
Transition Description(1) A la mise sous tension, le noeud atteint l'état initialisation de façon autonome
(2) Une fois l'initialisation terminée, l'état pré-opérationnel est automatiquement activé
(3), (6) Démarrer_Noeud_Déporté (Start_Remote_Node)
(4), (7) Arrêter_Noeud_Déporté (Stop_Remote_Node)
(5), (8) Entrer_Etat_Pré-opérationnel (Enter_Pre-Operational_State)
(9), (10), (11) Réinitialisation_Noeud (Reset_Node)
(12), (13), (14) Réinitialisation_Communication (Reset_Communication)
Initialisation en cours Pré-opérationnel Opérationnel ArrêtéPDO X
SDO X X
Synchronisation (SYNC) X X
Urgence X X
Démarrage X X
Gestion de réseau X X X
Mise sous tension ou réarmement matériel
Pré-opérationnel
Opérationnel
Initialisation
Arrêté
(1)
(2)
(3)
(4)(5)
(7)
(6)
(8)
(14)
(13)
(12)
(11)
(10)
(9)
25
Description des services
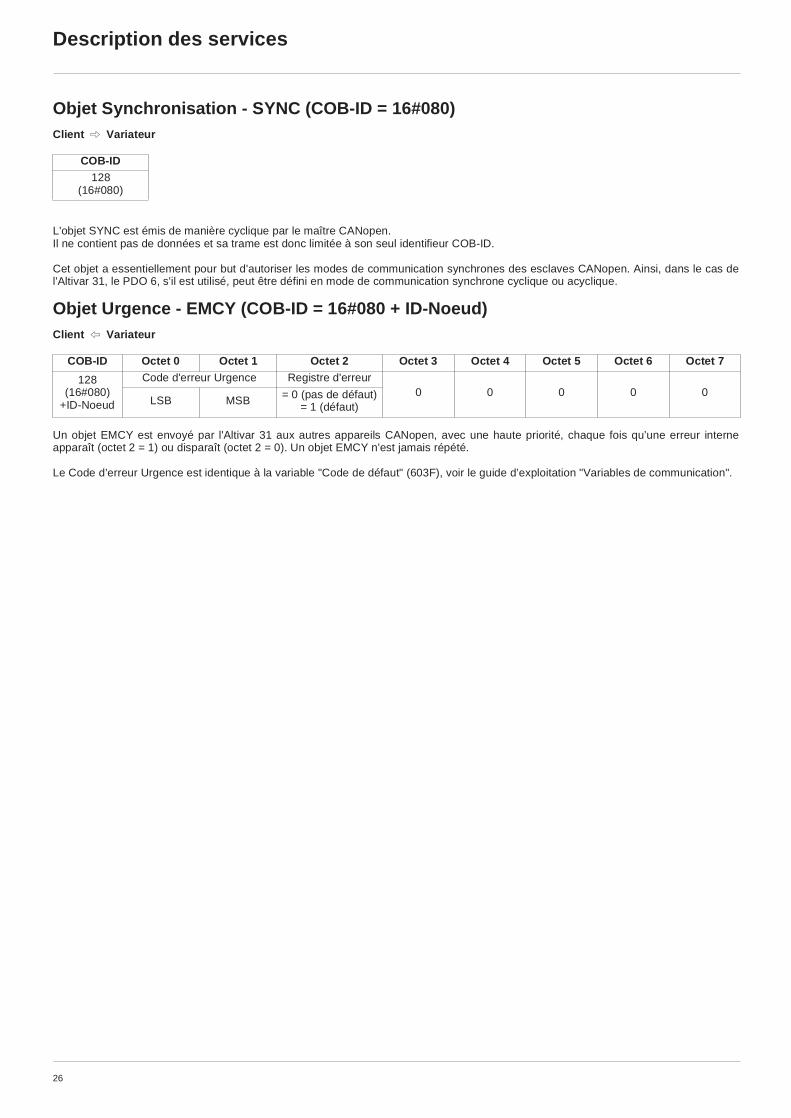
Objet Synchronisation - SYNC (COB-ID = 16#080)Client C Variateur
L'objet SYNC est émis de manière cyclique par le maître CANopen.Il ne contient pas de données et sa trame est donc limitée à son seul identifieur COB-ID.
Cet objet a essentiellement pour but d'autoriser les modes de communication synchrones des esclaves CANopen. Ainsi, dans le cas del'Altivar 31, le PDO 6, s'il est utilisé, peut être défini en mode de communication synchrone cyclique ou acyclique.
Objet Urgence - EMCY (COB-ID = 16#080 + ID-Noeud)Client B Variateur
Un objet EMCY est envoyé par l'Altivar 31 aux autres appareils CANopen, avec une haute priorité, chaque fois qu’une erreur interneapparaît (octet 2 = 1) ou disparaît (octet 2 = 0). Un objet EMCY n'est jamais répété.
Le Code d’erreur Urgence est identique à la variable "Code de défaut" (603F), voir le guide d’exploitation "Variables de communication".
COB-ID128
(16#080)
COB-ID Octet 0 Octet 1 Octet 2 Octet 3 Octet 4 Octet 5 Octet 6 Octet 7
128(16#080)
+ID-Noeud
Code d'erreur Urgence Registre d'erreur0 0 0 0 0
LSB MSB = 0 (pas de défaut)= 1 (défaut)
26
Description des services
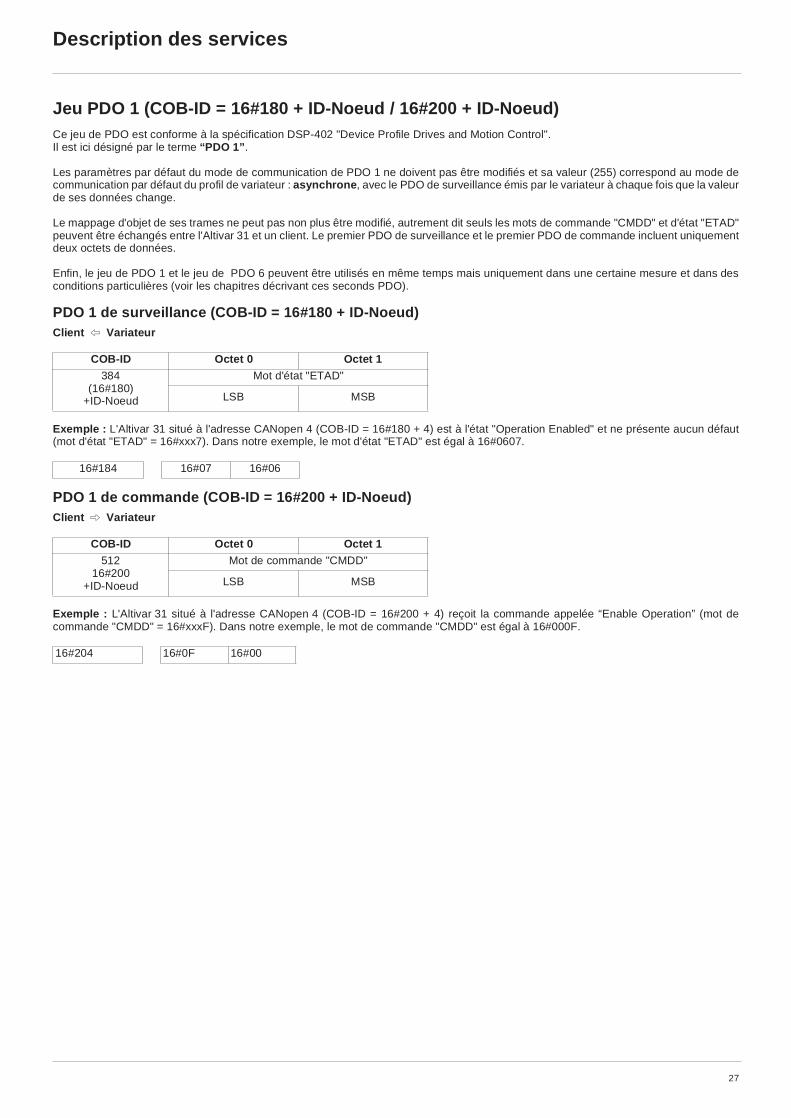
Jeu PDO 1 (COB-ID = 16#180 + ID-Noeud / 16#200 + ID-Noeud)Ce jeu de PDO est conforme à la spécification DSP-402 "Device Profile Drives and Motion Control".Il est ici désigné par le terme “PDO 1”.
Les paramètres par défaut du mode de communication de PDO 1 ne doivent pas être modifiés et sa valeur (255) correspond au mode decommunication par défaut du profil de variateur : asynchrone, avec le PDO de surveillance émis par le variateur à chaque fois que la valeurde ses données change.
Le mappage d'objet de ses trames ne peut pas non plus être modifié, autrement dit seuls les mots de commande "CMDD" et d'état "ETAD"peuvent être échangés entre l'Altivar 31 et un client. Le premier PDO de surveillance et le premier PDO de commande incluent uniquementdeux octets de données.
Enfin, le jeu de PDO 1 et le jeu de PDO 6 peuvent être utilisés en même temps mais uniquement dans une certaine mesure et dans desconditions particulières (voir les chapitres décrivant ces seconds PDO).
PDO 1 de surveillance (COB-ID = 16#180 + ID-Noeud)Client B Variateur
Exemple : L'Altivar 31 situé à l'adresse CANopen 4 (COB-ID = 16#180 + 4) est à l'état "Operation Enabled" et ne présente aucun défaut(mot d'état "ETAD" = 16#xxx7). Dans notre exemple, le mot d'état "ETAD" est égal à 16#0607.
PDO 1 de commande (COB-ID = 16#200 + ID-Noeud)Client C Variateur
Exemple : L'Altivar 31 situé à l'adresse CANopen 4 (COB-ID = 16#200 + 4) reçoit la commande appelée “Enable Operation” (mot decommande "CMDD" = 16#xxxF). Dans notre exemple, le mot de commande "CMDD" est égal à 16#000F.
COB-ID Octet 0 Octet 1384
(16#180)+ID-Noeud
Mot d'état "ETAD"
LSB MSB
16#184 16#07 16#06
COB-ID Octet 0 Octet 1512
16#200+ID-Noeud
Mot de commande "CMDD"
LSB MSB
16#204 16#0F 16#00
27
Description des services
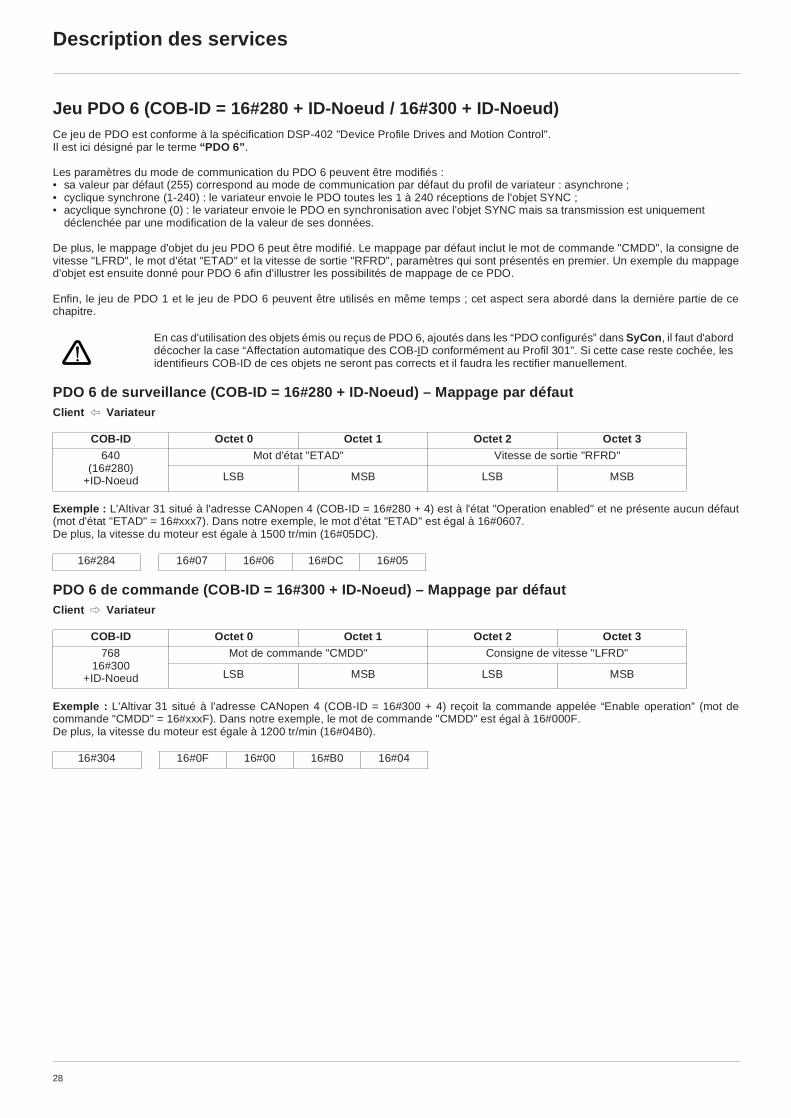
Jeu PDO 6 (COB-ID = 16#280 + ID-Noeud / 16#300 + ID-Noeud)Ce jeu de PDO est conforme à la spécification DSP-402 "Device Profile Drives and Motion Control". Il est ici désigné par le terme “PDO 6”.
Les paramètres du mode de communication du PDO 6 peuvent être modifiés :• sa valeur par défaut (255) correspond au mode de communication par défaut du profil de variateur : asynchrone ;• cyclique synchrone (1-240) : le variateur envoie le PDO toutes les 1 à 240 réceptions de l'objet SYNC ;• acyclique synchrone (0) : le variateur envoie le PDO en synchronisation avec l'objet SYNC mais sa transmission est uniquement
déclenchée par une modification de la valeur de ses données.
De plus, le mappage d'objet du jeu PDO 6 peut être modifié. Le mappage par défaut inclut le mot de commande "CMDD", la consigne devitesse "LFRD", le mot d'état "ETAD" et la vitesse de sortie "RFRD", paramètres qui sont présentés en premier. Un exemple du mappaged'objet est ensuite donné pour PDO 6 afin d'illustrer les possibilités de mappage de ce PDO.
Enfin, le jeu de PDO 1 et le jeu de PDO 6 peuvent être utilisés en même temps ; cet aspect sera abordé dans la dernière partie de cechapitre.
PDO 6 de surveillance (COB-ID = 16#280 + ID-Noeud) – Mappage par défautClient B Variateur
Exemple : L'Altivar 31 situé à l'adresse CANopen 4 (COB-ID = 16#280 + 4) est à l'état "Operation enabled" et ne présente aucun défaut(mot d'état "ETAD" = 16#xxx7). Dans notre exemple, le mot d'état "ETAD" est égal à 16#0607.De plus, la vitesse du moteur est égale à 1500 tr/min (16#05DC).
PDO 6 de commande (COB-ID = 16#300 + ID-Noeud) – Mappage par défautClient C Variateur
Exemple : L'Altivar 31 situé à l'adresse CANopen 4 (COB-ID = 16#300 + 4) reçoit la commande appelée “Enable operation” (mot decommande "CMDD" = 16#xxxF). Dans notre exemple, le mot de commande "CMDD" est égal à 16#000F.De plus, la vitesse du moteur est égale à 1200 tr/min (16#04B0).
En cas d'utilisation des objets émis ou reçus de PDO 6, ajoutés dans les “PDO configurés” dans SyCon, il faut d'abord décocher la case “Affectation automatique des COB-ID conformément au Profil 301”. Si cette case reste cochée, les identifieurs COB-ID de ces objets ne seront pas corrects et il faudra les rectifier manuellement.
COB-ID Octet 0 Octet 1 Octet 2 Octet 3640
(16#280)+ID-Noeud
Mot d'état "ETAD" Vitesse de sortie "RFRD"
LSB MSB LSB MSB
16#284 16#07 16#06 16#DC 16#05
COB-ID Octet 0 Octet 1 Octet 2 Octet 3768
16#300+ID-Noeud
Mot de commande "CMDD" Consigne de vitesse "LFRD"
LSB MSB LSB MSB
16#304 16#0F 16#00 16#B0 16#04
28

Description des services
PDO 6 de surveillance (COB-ID = 16#280 + ID-Noeud) – Mappage utilisateurClient B Variateur
Pour modifier le mappage du second PDO de surveillance dans SyCon, double-cliquer sur l'élément “Transmit PDO 6” une fois qu'il estajouté à la section “PDOs configurés”. La fenêtre “Mapping contenu PDO – index objet 1A05” s'ouvre.
Il faut alors ajouter ou retirer des éléments de la section supérieure “Objets du fichier EDS” à la section inférieure “Répertoire des objets”.Cette opération s'effectue à l'aide des deux boutons “Ajouter objet” et “Effacer objet”.
Une fois que la modification du mappage du “PDO 6 émis” est terminée, valider ou annuler les modifications à l'aide du bouton “OK” ou“Cancel”.
N.B. Tout octet laissé vide à la fin de ce PDO ne sera pas transmis sur le bus par l'Altivar 31, autrement dit si aucun paramètre n'est attribuéaux octets 6 et 7, la longueur des données PDO sera de 6 octets au lieu de 8.
Exemple : Les deux objets par défaut sont conservés (6041:0 et 6044:0) mais les octets 4 et 5 sont mappés sur l'objet “courant moteur;LCR” (2002:4) et les octets 6 et 7 sont mappés sur l'objet “couple moteur; OTR” (2002:9), conduisant au mappage suivant :
Prenons maintenant un Altivar 31 situé à l'adresse CANopen 4 (COB-ID = 16#280 + 4) avec l'état suivant :• Etat actuel "Operation enabled" et aucun défaut (mot d'état "ETAD" = 16#xxx7). Dans notre exemple, le mot d'état "ETAD" est égal à
16#0607 ;• La vitesse de sortie "RFRD" est égale à 1500 tr/min (16#05DC);• Le courant moteur "LCR" est égal à 4,0 A (16#0028);• Le couple moteur "OTR" est égal à 83 % (16#0053).
La trame correspondante envoyée pour ce PDO de surveillance est donc la suivante (8 octets de données) :
COB-ID Octet 0 Octet 1 Octet 2 Octet 3 Octet 4 Octet 5 Octet 6 Octet 7
640(16#280)
+ID-Noeud
Variable Altivar(par défaut : mot d'état
"ETAD")
Variable Altivar(par défaut : vitesse de sortie
"RFRD")
Variable Altivar(par défaut : pas d'objet)
Variable Altivar(par défaut : pas d'objet)
LSB MSB LSB MSB LSB MSB LSB MSB
COB-ID Octet 0 Octet 1 Octet 2 Octet 3 Octet 4 Octet 5 Octet 6 Octet 7640
(16#280)+ID-Noeud
Mot d'état "ETAD" Vitesse de sortie "RFRD" Courant moteur "LCR" Couple moteur "OTR"
LSB MSB LSB MSB LSB MSB LSB MSB
16#284 16#07 16#06 16#DC 16#05 16#28 16#00 16#53 16#00
29
Description des services
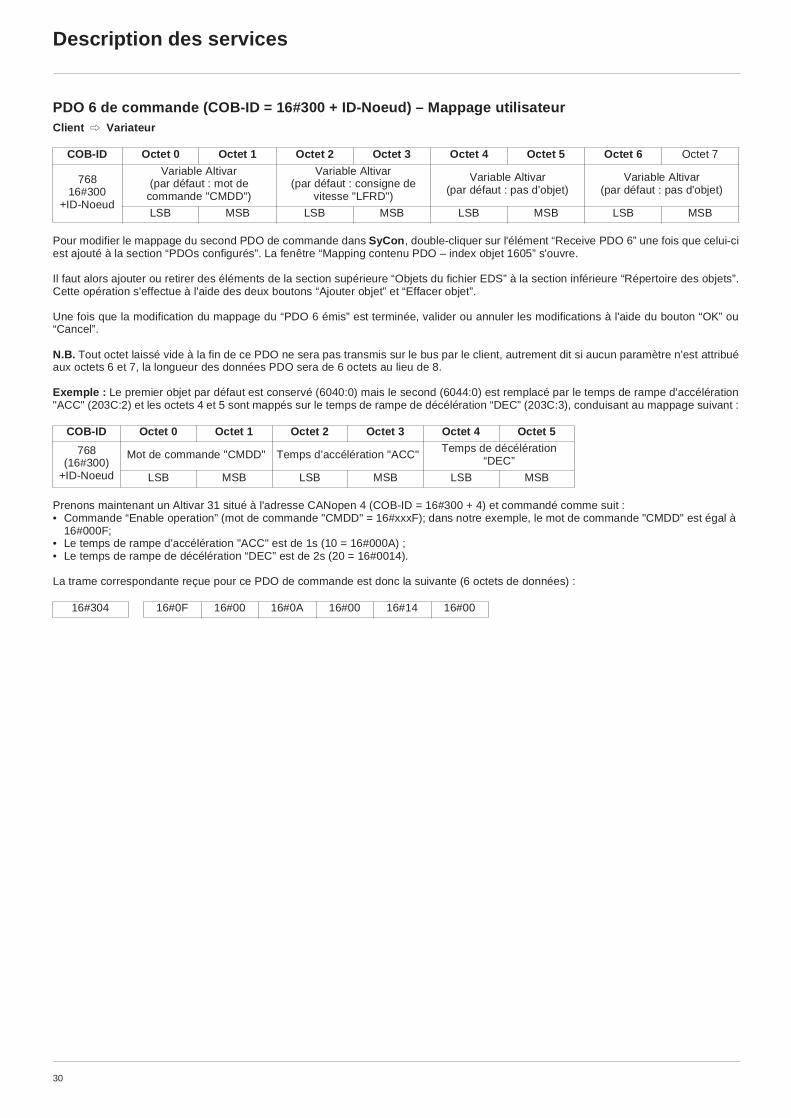
PDO 6 de commande (COB-ID = 16#300 + ID-Noeud) – Mappage utilisateurClient C Variateur
Pour modifier le mappage du second PDO de commande dans SyCon, double-cliquer sur l'élément “Receive PDO 6” une fois que celui-ciest ajouté à la section “PDOs configurés”. La fenêtre “Mapping contenu PDO – index objet 1605” s'ouvre.
Il faut alors ajouter ou retirer des éléments de la section supérieure “Objets du fichier EDS” à la section inférieure “Répertoire des objets”.Cette opération s'effectue à l'aide des deux boutons “Ajouter objet” et “Effacer objet”.
Une fois que la modification du mappage du “PDO 6 émis” est terminée, valider ou annuler les modifications à l'aide du bouton “OK” ou“Cancel”.
N.B. Tout octet laissé vide à la fin de ce PDO ne sera pas transmis sur le bus par le client, autrement dit si aucun paramètre n'est attribuéaux octets 6 et 7, la longueur des données PDO sera de 6 octets au lieu de 8.
Exemple : Le premier objet par défaut est conservé (6040:0) mais le second (6044:0) est remplacé par le temps de rampe d'accélération"ACC" (203C:2) et les octets 4 et 5 sont mappés sur le temps de rampe de décélération “DEC” (203C:3), conduisant au mappage suivant :
Prenons maintenant un Altivar 31 situé à l'adresse CANopen 4 (COB-ID = 16#300 + 4) et commandé comme suit :• Commande “Enable operation” (mot de commande "CMDD" = 16#xxxF); dans notre exemple, le mot de commande "CMDD" est égal à
16#000F;• Le temps de rampe d'accélération "ACC" est de 1s (10 = 16#000A) ;• Le temps de rampe de décélération “DEC” est de 2s (20 = 16#0014).
La trame correspondante reçue pour ce PDO de commande est donc la suivante (6 octets de données) :
COB-ID Octet 0 Octet 1 Octet 2 Octet 3 Octet 4 Octet 5 Octet 6 Octet 7
76816#300
+ID-Noeud
Variable Altivar(par défaut : mot de
commande "CMDD")
Variable Altivar(par défaut : consigne de
vitesse "LFRD")
Variable Altivar(par défaut : pas d'objet)
Variable Altivar(par défaut : pas d'objet)
LSB MSB LSB MSB LSB MSB LSB MSB
COB-ID Octet 0 Octet 1 Octet 2 Octet 3 Octet 4 Octet 5
768(16#300)
+ID-Noeud
Mot de commande "CMDD" Temps d’accélération "ACC" Temps de décélération “DEC”
LSB MSB LSB MSB LSB MSB
16#304 16#0F 16#00 16#0A 16#00 16#14 16#00
30
Description des services
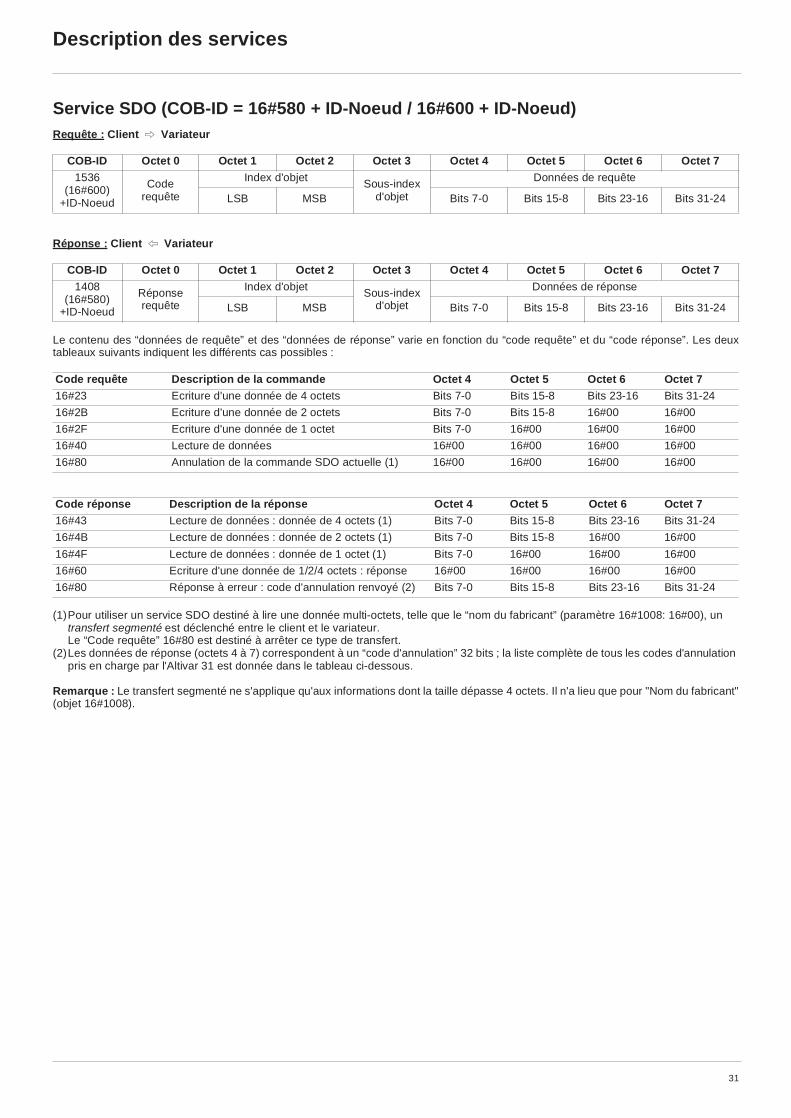
Service SDO (COB-ID = 16#580 + ID-Noeud / 16#600 + ID-Noeud)Requête : Client C Variateur
Réponse : Client B Variateur
Le contenu des “données de requête” et des “données de réponse” varie en fonction du “code requête” et du “code réponse”. Les deuxtableaux suivants indiquent les différents cas possibles :
(1)Pour utiliser un service SDO destiné à lire une donnée multi-octets, telle que le “nom du fabricant” (paramètre 16#1008: 16#00), un transfert segmenté est déclenché entre le client et le variateur.Le “Code requête” 16#80 est destiné à arrêter ce type de transfert.
(2)Les données de réponse (octets 4 à 7) correspondent à un “code d'annulation” 32 bits ; la liste complète de tous les codes d'annulation pris en charge par l'Altivar 31 est donnée dans le tableau ci-dessous.
Remarque : Le transfert segmenté ne s'applique qu'aux informations dont la taille dépasse 4 octets. Il n'a lieu que pour "Nom du fabricant"(objet 16#1008).
COB-ID Octet 0 Octet 1 Octet 2 Octet 3 Octet 4 Octet 5 Octet 6 Octet 71536
(16#600)+ID-Noeud
Coderequête
Index d'objet Sous-index d'objet
Données de requête
LSB MSB Bits 7-0 Bits 15-8 Bits 23-16 Bits 31-24
COB-ID Octet 0 Octet 1 Octet 2 Octet 3 Octet 4 Octet 5 Octet 6 Octet 71408
(16#580)+ID-Noeud
Réponserequête
Index d'objet Sous-index d'objet
Données de réponse
LSB MSB Bits 7-0 Bits 15-8 Bits 23-16 Bits 31-24
Code requête Description de la commande Octet 4 Octet 5 Octet 6 Octet 716#23 Ecriture d'une donnée de 4 octets Bits 7-0 Bits 15-8 Bits 23-16 Bits 31-24
16#2B Ecriture d'une donnée de 2 octets Bits 7-0 Bits 15-8 16#00 16#00
16#2F Ecriture d'une donnée de 1 octet Bits 7-0 16#00 16#00 16#00
16#40 Lecture de données 16#00 16#00 16#00 16#00
16#80 Annulation de la commande SDO actuelle (1) 16#00 16#00 16#00 16#00
Code réponse Description de la réponse Octet 4 Octet 5 Octet 6 Octet 716#43 Lecture de données : donnée de 4 octets (1) Bits 7-0 Bits 15-8 Bits 23-16 Bits 31-24
16#4B Lecture de données : donnée de 2 octets (1) Bits 7-0 Bits 15-8 16#00 16#00
16#4F Lecture de données : donnée de 1 octet (1) Bits 7-0 16#00 16#00 16#00
16#60 Ecriture d'une donnée de 1/2/4 octets : réponse 16#00 16#00 16#00 16#00
16#80 Réponse à erreur : code d'annulation renvoyé (2) Bits 7-0 Bits 15-8 Bits 23-16 Bits 31-24
31
Description des services
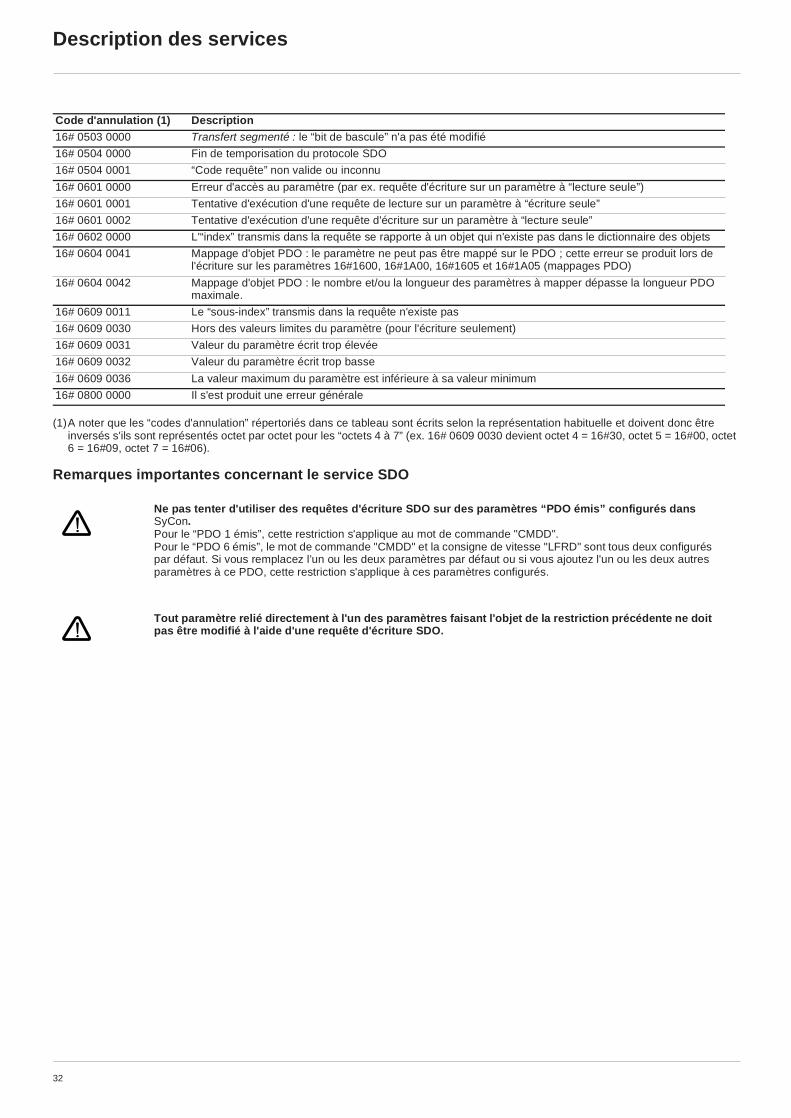
(1)A noter que les “codes d'annulation” répertoriés dans ce tableau sont écrits selon la représentation habituelle et doivent donc être inversés s'ils sont représentés octet par octet pour les “octets 4 à 7” (ex. 16# 0609 0030 devient octet 4 = 16#30, octet 5 = 16#00, octet 6 = 16#09, octet 7 = 16#06).
Remarques importantes concernant le service SDO
Code d'annulation (1) Description16# 0503 0000 Transfert segmenté : le “bit de bascule” n'a pas été modifié
16# 0504 0000 Fin de temporisation du protocole SDO
16# 0504 0001 “Code requête” non valide ou inconnu
16# 0601 0000 Erreur d'accès au paramètre (par ex. requête d'écriture sur un paramètre à “lecture seule”)
16# 0601 0001 Tentative d'exécution d'une requête de lecture sur un paramètre à “écriture seule”
16# 0601 0002 Tentative d'exécution d'une requête d'écriture sur un paramètre à “lecture seule”
16# 0602 0000 L'“index” transmis dans la requête se rapporte à un objet qui n'existe pas dans le dictionnaire des objets
16# 0604 0041 Mappage d'objet PDO : le paramètre ne peut pas être mappé sur le PDO ; cette erreur se produit lors de l'écriture sur les paramètres 16#1600, 16#1A00, 16#1605 et 16#1A05 (mappages PDO)
16# 0604 0042 Mappage d'objet PDO : le nombre et/ou la longueur des paramètres à mapper dépasse la longueur PDO maximale.
16# 0609 0011 Le “sous-index” transmis dans la requête n'existe pas
16# 0609 0030 Hors des valeurs limites du paramètre (pour l'écriture seulement)
16# 0609 0031 Valeur du paramètre écrit trop élevée
16# 0609 0032 Valeur du paramètre écrit trop basse
16# 0609 0036 La valeur maximum du paramètre est inférieure à sa valeur minimum
16# 0800 0000 Il s'est produit une erreur générale
Ne pas tenter d'utiliser des requêtes d'écriture SDO sur des paramètres “PDO émis” configurés dans SyCon.Pour le “PDO 1 émis”, cette restriction s'applique au mot de commande "CMDD".Pour le “PDO 6 émis”, le mot de commande "CMDD" et la consigne de vitesse "LFRD" sont tous deux configurés par défaut. Si vous remplacez l’un ou les deux paramètres par défaut ou si vous ajoutez l'un ou les deux autres paramètres à ce PDO, cette restriction s'applique à ces paramètres configurés.
Tout paramètre relié directement à l'un des paramètres faisant l'objet de la restriction précédente ne doit pas être modifié à l'aide d'une requête d'écriture SDO.
32
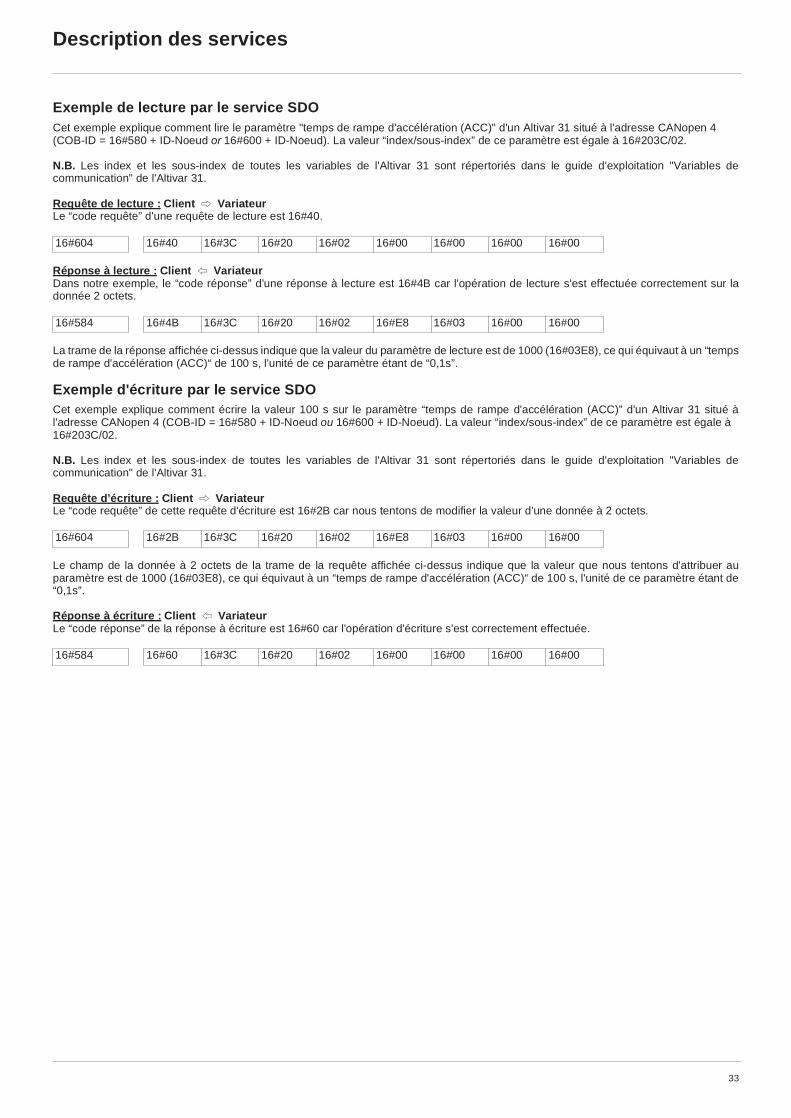
Description des services
Exemple de lecture par le service SDOCet exemple explique comment lire le paramètre "temps de rampe d'accélération (ACC)" d'un Altivar 31 situé à l'adresse CANopen 4(COB-ID = 16#580 + ID-Noeud or 16#600 + ID-Noeud). La valeur “index/sous-index” de ce paramètre est égale à 16#203C/02.
N.B. Les index et les sous-index de toutes les variables de l'Altivar 31 sont répertoriés dans le guide d'exploitation "Variables decommunication" de l'Altivar 31.
Requête de lecture : Client C VariateurLe “code requête” d'une requête de lecture est 16#40.
Réponse à lecture : Client B VariateurDans notre exemple, le “code réponse” d'une réponse à lecture est 16#4B car l'opération de lecture s'est effectuée correctement sur ladonnée 2 octets.
La trame de la réponse affichée ci-dessus indique que la valeur du paramètre de lecture est de 1000 (16#03E8), ce qui équivaut à un “tempsde rampe d'accélération (ACC)“ de 100 s, l'unité de ce paramètre étant de “0,1s”.
Exemple d'écriture par le service SDOCet exemple explique comment écrire la valeur 100 s sur le paramètre “temps de rampe d'accélération (ACC)” d'un Altivar 31 situé àl'adresse CANopen 4 (COB-ID = 16#580 + ID-Noeud ou 16#600 + ID-Noeud). La valeur “index/sous-index” de ce paramètre est égale à 16#203C/02.
N.B. Les index et les sous-index de toutes les variables de l'Altivar 31 sont répertoriés dans le guide d'exploitation "Variables decommunication" de l'Altivar 31.
Requête d’écriture : Client C VariateurLe “code requête” de cette requête d'écriture est 16#2B car nous tentons de modifier la valeur d'une donnée à 2 octets.
Le champ de la donnée à 2 octets de la trame de la requête affichée ci-dessus indique que la valeur que nous tentons d'attribuer auparamètre est de 1000 (16#03E8), ce qui équivaut à un “temps de rampe d'accélération (ACC)“ de 100 s, l'unité de ce paramètre étant de“0,1s”.
Réponse à écriture : Client B VariateurLe “code réponse” de la réponse à écriture est 16#60 car l'opération d'écriture s'est correctement effectuée.
16#604 16#40 16#3C 16#20 16#02 16#00 16#00 16#00 16#00
16#584 16#4B 16#3C 16#20 16#02 16#E8 16#03 16#00 16#00
16#604 16#2B 16#3C 16#20 16#02 16#E8 16#03 16#00 16#00
16#584 16#60 16#3C 16#20 16#02 16#00 16#00 16#00 16#00
33

Description des services
Protocoles de contrôle d'erreur (COB-ID = 16#700 + ID-Noeud)
Protocole BootupClient B Variateur
Protocole Node guardingDescriptionLa surveillance des communications entre le client (le maître NMT ) et le variateur s'effectue soit à l'aide du protocole Node Guarding, décritici, soit avec le protocole Heartbeat, décrit plus loin. Seul un de ces deux protocoles peut être actif à un instant donné !
Client C VariateurLe client interroge à intervalles réguliers le variateur et tout autre esclave NMT, à l'aide des “remote transmit requests”. Chaque esclaveNMT reçoit pour cette interrogation une durée particulière, appelée “Life Time”. Sa valeur peut être modifiée via les deux paramètres “GuardTime” (16#100C: 16#00) et “Life Time Factor” (16#100D: 16#00). “Life time” s'obtient en multipliant le “Guard Time” par le “Life Time Factor”.
Par défaut, le protocole Node Guarding est désactivé sur l'Altivar 31 (les paramètres “Guard Time” et “Life Time Factor” valent tous deux 0).
Client B Variateur
La réponse du variateur donne son état NMT contenu dans le champ “information NMT”, décrit ici :Bit 7 = Bit de bascule : la valeur de ce bit doit alterner d'une réponse du variateur à l'autre. La valeur du bit de bascule de la premièreréponse après activation du protocole Node guarding est 0. La remise à 0 de ce bit ne s'effectue que par la transmission de la commande“Reset_Communication” au variateur (voir chapitre Graphe d'état de la gestion de réseau (machine d'état NMT), page 25). Si une réponseest reçue avec la même valeur du bit de bascule que la réponse précédente, la nouvelle réponse est traitée comme si elle n'avait pas étéreçue.Bits 6-0 = état NMT : Etat NMT actuel de l'Altivar 31 : Arrêté (16#04), Opérationnel (16#05) ou Pré-opérationnel (16#7F).
Si le variateur ne transmet pas sa réponse ou s'il transmet un état incorrect, le client déclenche un événement "Node Guarding".
Si, à l'expiration du “Life Time”, le variateur n'a pas reçu d'interrogation :• il déclenche un événement "Life Guarding",• passe en défaut COF (défaut de communication CANopen),• et envoie un télégramme d'urgence (EMCY).
COB-ID Octet 0 Ce protocole sert à indiquer que le variateur est passé à l'état pré-opérationnel après l'état initialisation en cours.
Le seul octet de données envoyé dans une trame de protocole Bootup est toujours égal à 16#00.
1792(16#700)
+ID-Noeud16#00
COB-ID Octet 01792
(16#700)+ID-Noeud
informationNMT
34
Description des services
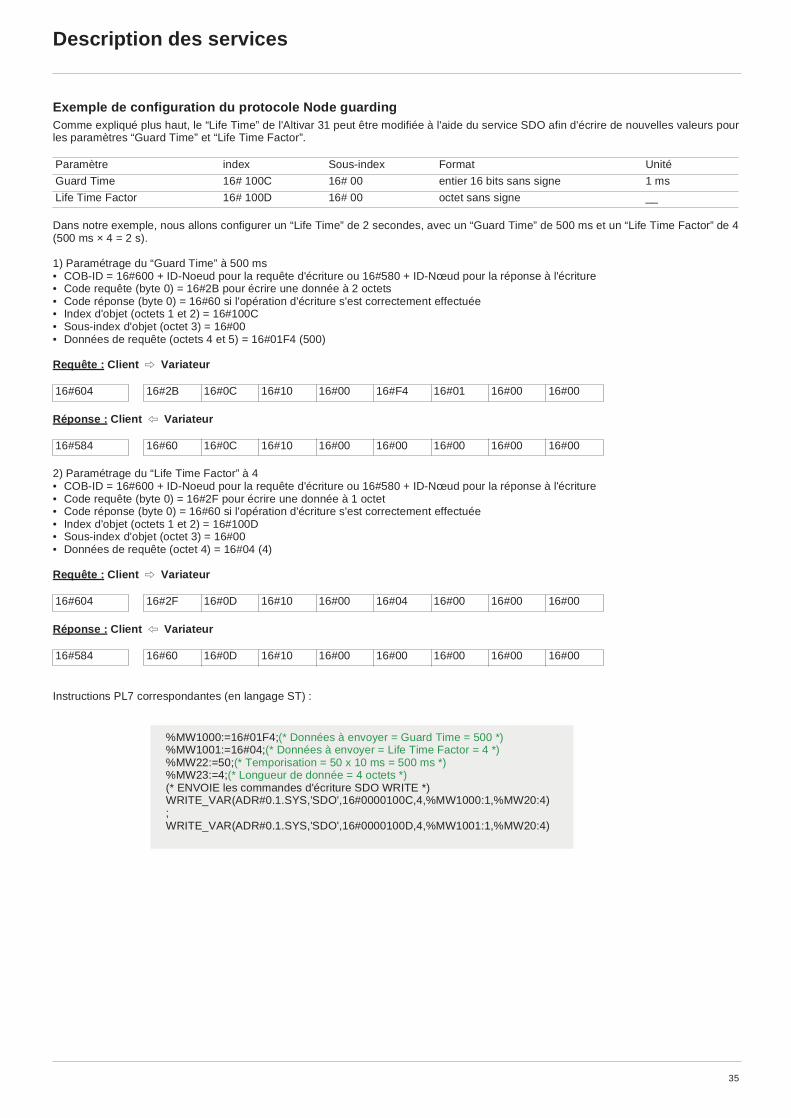
Exemple de configuration du protocole Node guardingComme expliqué plus haut, le “Life Time” de l'Altivar 31 peut être modifiée à l'aide du service SDO afin d'écrire de nouvelles valeurs pourles paramètres “Guard Time” et “Life Time Factor”.
Dans notre exemple, nous allons configurer un “Life Time” de 2 secondes, avec un “Guard Time” de 500 ms et un “Life Time Factor” de 4(500 ms × 4 = 2 s).
1) Paramétrage du “Guard Time” à 500 ms• COB-ID = 16#600 + ID-Noeud pour la requête d'écriture ou 16#580 + ID-Nœud pour la réponse à l'écriture• Code requête (byte 0) = 16#2B pour écrire une donnée à 2 octets• Code réponse (byte 0) = 16#60 si l'opération d'écriture s'est correctement effectuée• Index d'objet (octets 1 et 2) = 16#100C• Sous-index d'objet (octet 3) = 16#00• Données de requête (octets 4 et 5) = 16#01F4 (500)
Requête : Client C Variateur
Réponse : Client B Variateur
2) Paramétrage du “Life Time Factor” à 4• COB-ID = 16#600 + ID-Noeud pour la requête d'écriture ou 16#580 + ID-Nœud pour la réponse à l'écriture• Code requête (byte 0) = 16#2F pour écrire une donnée à 1 octet• Code réponse (byte 0) = 16#60 si l'opération d'écriture s'est correctement effectuée• Index d'objet (octets 1 et 2) = 16#100D• Sous-index d'objet (octet 3) = 16#00• Données de requête (octet 4) = 16#04 (4)
Requête : Client C Variateur
Réponse : Client B Variateur
Instructions PL7 correspondantes (en langage ST) :
Paramètre index Sous-index Format Unité
Guard Time 16# 100C 16# 00 entier 16 bits sans signe 1 ms
Life Time Factor 16# 100D 16# 00 octet sans signe __
16#604 16#2B 16#0C 16#10 16#00 16#F4 16#01 16#00 16#00
16#584 16#60 16#0C 16#10 16#00 16#00 16#00 16#00 16#00
16#604 16#2F 16#0D 16#10 16#00 16#04 16#00 16#00 16#00
16#584 16#60 16#0D 16#10 16#00 16#00 16#00 16#00 16#00
%MW1000:=16#01F4;(* Données à envoyer = Guard Time = 500 *)%MW1001:=16#04;(* Données à envoyer = Life Time Factor = 4 *)%MW22:=50;(* Temporisation = 50 x 10 ms = 500 ms *)%MW23:=4;(* Longueur de donnée = 4 octets *)(* ENVOIE les commandes d'écriture SDO WRITE *)WRITE_VAR(ADR#0.1.SYS,'SDO',16#0000100C,4,%MW1000:1,%MW20:4);WRITE_VAR(ADR#0.1.SYS,'SDO',16#0000100D,4,%MW1001:1,%MW20:4)
35
Description des services
Protocole HeartbeatDescriptionA part le protocole Node Guarding, décrit au chapitre précédent, il est possible d'utiliser le protocole Heartbeat pour surveiller lescommunications entre un client et le variateur, à condition que le client supporte ce protocole ; vérifier que le jeu de paramètres “ConsumerHeartbeat Time” (index = 16#1016) est à la disposition du client. Ex. la carte PCMCIA maître CANopen TSX CPP 100 ne supporte pas ceprotocole mais la carte TSX CPP 110 le supporte.
Seul un de ces deux protocoles peut être actif à un instant donné !
Contrairement au protocole Node Guarding, le protocole Heartbeat n'exige pas que le client envoie des trames, même des “remote trames”à des appareils.
Client B Variateur
Dans le protocole Heartbeat, chaque “Producer Heartbeat” envoie un message Heartbeat à intervalles réguliers (voir plus haut) et tous les“Consumers Heartbeat” reçoivent ce message et vérifie qu'il arrive dans un temps maximum donné. Deux paramètres servent à configurercette relation : le “Consumer Heartbeat Time” (16#1016: 16#01) et le “Producer Heartbeat Time” (16#1017: 16#00).
Par défaut, le protocole Heartbeat est désactivé sur l'Altivar 31 (les paramètres “Consumer Heartbeat Time” et “Producer Heartbeat Time”valent tous deux 0).
Le “message Heartbeat” provenant du variateur comporte un champ “état Producer Heartbeat”, décrit ici :Bit 7 = réservé : ce bit vaut toujours 0.Bits 6-0 = état Producer Heartbeat : Etat actuel de l'Altivar 31 : Démarré (16#00), Arrêté (16#04), Opérationnel (16#05) ou Pré-opérationnel (16#7F).
Un Consumer Heartbeat vérifie à intervalles réguliers la présence de “messages Heartbeat” reçus dans le “Consumer Heartbeat Time.”Ainsi, le “Producer Heartbeat Time” des Producers Heartbeat doit être inférieur à ce “Consumer Heartbeat Time.”
Si aucun “message Heartbeat” n'est reçu dans le “Consumer Heartbeat Time,” le consommateur déclenche un événement “Heartbeat”.
Puisque la configuration des paramètres “Consumer Heartbeat Time” et “Producer Heartbeat Time” est prise en charge par SyCon v2.8(et les versions à venir), elle ne sera pas décrite dans ce guide d'exploitation car le protocole Heartbeat est l'une des nombreusespossibilités du service SDO.
COB-ID Octet 01792
(16#700)+ID-Noeud
Etat Producer Heartbeat
Client C Variateur
36
Dictionnaire des objets
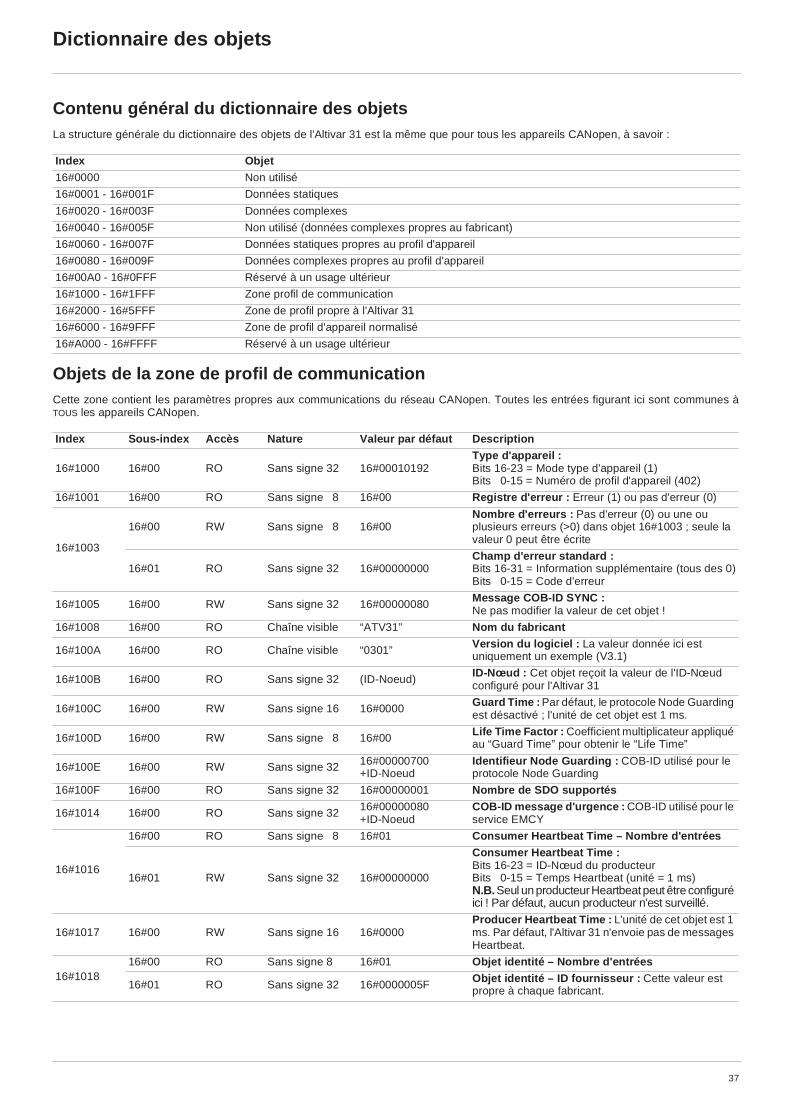
Contenu général du dictionnaire des objetsLa structure générale du dictionnaire des objets de l'Altivar 31 est la même que pour tous les appareils CANopen, à savoir :
Objets de la zone de profil de communicationCette zone contient les paramètres propres aux communications du réseau CANopen. Toutes les entrées figurant ici sont communes àTOUS les appareils CANopen.
Index Objet16#0000 Non utilisé
16#0001 - 16#001F Données statiques
16#0020 - 16#003F Données complexes
16#0040 - 16#005F Non utilisé (données complexes propres au fabricant)
16#0060 - 16#007F Données statiques propres au profil d'appareil
16#0080 - 16#009F Données complexes propres au profil d'appareil
16#00A0 - 16#0FFF Réservé à un usage ultérieur
16#1000 - 16#1FFF Zone profil de communication
16#2000 - 16#5FFF Zone de profil propre à l'Altivar 31
16#6000 - 16#9FFF Zone de profil d'appareil normalisé
16#A000 - 16#FFFF Réservé à un usage ultérieur
Index Sous-index Accès Nature Valeur par défaut Description
16#1000 16#00 RO Sans signe 32 16#00010192Type d'appareil :Bits 16-23 = Mode type d'appareil (1)Bits 00-15 = Numéro de profil d'appareil (402)
16#1001 16#00 RO Sans signe 08 16#00 Registre d'erreur : Erreur (1) ou pas d'erreur (0)
16#1003
16#00 RW Sans signe 08 16#00Nombre d'erreurs : Pas d'erreur (0) ou une ou plusieurs erreurs (>0) dans objet 16#1003 ; seule la valeur 0 peut être écrite
16#01 RO Sans signe 32 16#00000000Champ d'erreur standard :Bits 16-31 = Information supplémentaire (tous des 0)Bits 00-15 = Code d'erreur
16#1005 16#00 RW Sans signe 32 16#00000080 Message COB-ID SYNC :Ne pas modifier la valeur de cet objet !
16#1008 16#00 RO Chaîne visible “ATV31” Nom du fabricant
16#100A 16#00 RO Chaîne visible “0301” Version du logiciel : La valeur donnée ici est uniquement un exemple (V3.1)
16#100B 16#00 RO Sans signe 32 (ID-Noeud) ID-Nœud : Cet objet reçoit la valeur de l'ID-Nœud configuré pour l'Altivar 31
16#100C 16#00 RW Sans signe 16 16#0000 Guard Time : Par défaut, le protocole Node Guarding est désactivé ; l'unité de cet objet est 1 ms.
16#100D 16#00 RW Sans signe 08 16#00 Life Time Factor : Coefficient multiplicateur appliqué au “Guard Time” pour obtenir le “Life Time”
16#100E 16#00 RW Sans signe 32 16#00000700+ID-Noeud
Identifieur Node Guarding : COB-ID utilisé pour le protocole Node Guarding
16#100F 16#00 RO Sans signe 32 16#00000001 Nombre de SDO supportés
16#1014 16#00 RO Sans signe 32 16#00000080+ID-Noeud
COB-ID message d'urgence : COB-ID utilisé pour le service EMCY
16#1016
16#00 RO Sans signe 08 16#01 Consumer Heartbeat Time – Nombre d'entrées
16#01 RW Sans signe 32 16#00000000
Consumer Heartbeat Time :Bits 16-23 = ID-Nœud du producteurBits 00-15 = Temps Heartbeat (unité = 1 ms)N.B. Seul un producteur Heartbeat peut être configuré ici ! Par défaut, aucun producteur n'est surveillé.
16#1017 16#00 RW Sans signe 16 16#0000Producer Heartbeat Time : L'unité de cet objet est 1 ms. Par défaut, l'Altivar 31 n'envoie pas de messages Heartbeat.
16#101816#00 RO Sans signe 8 16#01 Objet identité – Nombre d'entrées
16#01 RO Sans signe 32 16#0000005F Objet identité – ID fournisseur : Cette valeur est propre à chaque fabricant.
37
Dictionnaire des objets
Index Sous-index Accès Nature Valeur par défaut Description
16#1200
16#00 RO Sans signe 8 16#02 SDO serveur – Nombre d'entrées
16#01 RO Sans signe 32 16#00000600+ID-Noeud
SDO serveur - COB-ID Client Variateur (réception)
16#02 RO Sans signe 32 16#00000580+ID-Noeud
SDO serveur - COB-ID Client Variateur (émission)
16#1400
16#00 RO Sans signe 8 16#02 PDO1 reçu – Nombre d'entrées
16#01 RW Sans signe 32 16#00000200+ID-Noeud PDO1 reçu - COB-ID
16#02 RO Sans signe 8 16#FFPDO1 reçu – Type de transmission : Le seul mode disponible pour ce PDO est “asynchrone” (PDO envoyé quand la valeur des données change)
16#1405
16#00 RO Sans signe 8 16#02 PDO6 reçu – Nombre d'entrées
16#01 RW Sans signe 32 16#00000300+ID-Noeud PDO6 reçu - COB-ID
16#02 RW Sans signe 8 16#FFPDO6 reçu – Type de transmission : Choix entre 3 modes pour ce PDO : “asynchrone” (255), “cyclique synchrone” (1-240) et “acyclique synchrone” (0)
16#160016#00 RO Sans signe 8 16#01 Mappage PDO1 reçu – Nombre d'objets mappés
16#01 RO Sans signe 32 16#60400010 Mappage PDO1 reçu – 1er objet mappé : Mot de commande "CMDD" (16#6040)
16#1605
16#00 RW Sans signe 8 16#02 Mappage PDO6 reçu – Nombre d'objets mappés : 0 à 4 objets peuvent être mappés pour ce PDO
16#01 RW Sans signe 32 16#60400010 Mappage PDO6 reçu – 1er objet mappé : Mot de commande "CMDD" (16#6040)
16#02 RW Sans signe 32 16#60420010 Mappage PDO6 reçu - 2ème objet mappé : Consigne de vitesse "LFRD" (16#6042)
16#03 RW Sans signe 32 16#00000000 Mappage PDO6 reçu : Aucun 3ème objet mappé
16#04 RW Sans signe 32 16#00000000 Mappage PDO6 reçu : Aucun 4ème objet mappé
16#1800
16#00 RO Sans signe 8 16#05 PDO1 émis – Nombre d'entrées
16#01 RW Sans signe 32 16#00000180+ID-Noeud PDO1 émis - COB-ID
16#02 RO Sans signe 8 16#FFPDO1 émis – Type de transmission : Le seul mode disponible pour ce PDO est “asynchrone” (PDO envoyé quand la valeur des données change)
16#03 RW Sans signe 16 30 PDO1 émis – Temps d'inhibition : Temps minimum entre deux transmissions ; unité = 1 ms
16#04 RW Sans signe 8 __ PDO1 émis - Réservé
16#05 RW Sans signe 16 100PDO1 émis – Temporisation d'événement : En mode “asynchrone”, cet objet définit un débit de transmission minimum pour ce PDO ; unité = 1 ms
16#1805
16#00 RO Sans signe 8 16#05 PDO6 émis – Nombre d'entrées
16#01 RW Sans signe 32 16#00000280+ID-Noeud PDO6 émis - COB-ID
16#02 RW Sans signe 8 16#FFPDO6 émis – Type de transmission : Choix entre 3 modes pour ce PDO : “asynchrone” (255), “cyclique synchrone” (1-240) et “acyclique synchrone” (0)
16#03 RW Sans signe 16 30 PDO6 émis – Inhibit Time : Temps minimum entre deux transmissions ; unité = 1 ms
16#04 RW Sans signe 8 __ PDO6 émis - Réservé
16#05 RW Sans signe 16 100PDO6 émis – Event Timer : En mode “asynchrone”, cet objet définit un débit de transmission minimum pour ce PDO ; unité = 1 ms
38
Dictionnaire des objets
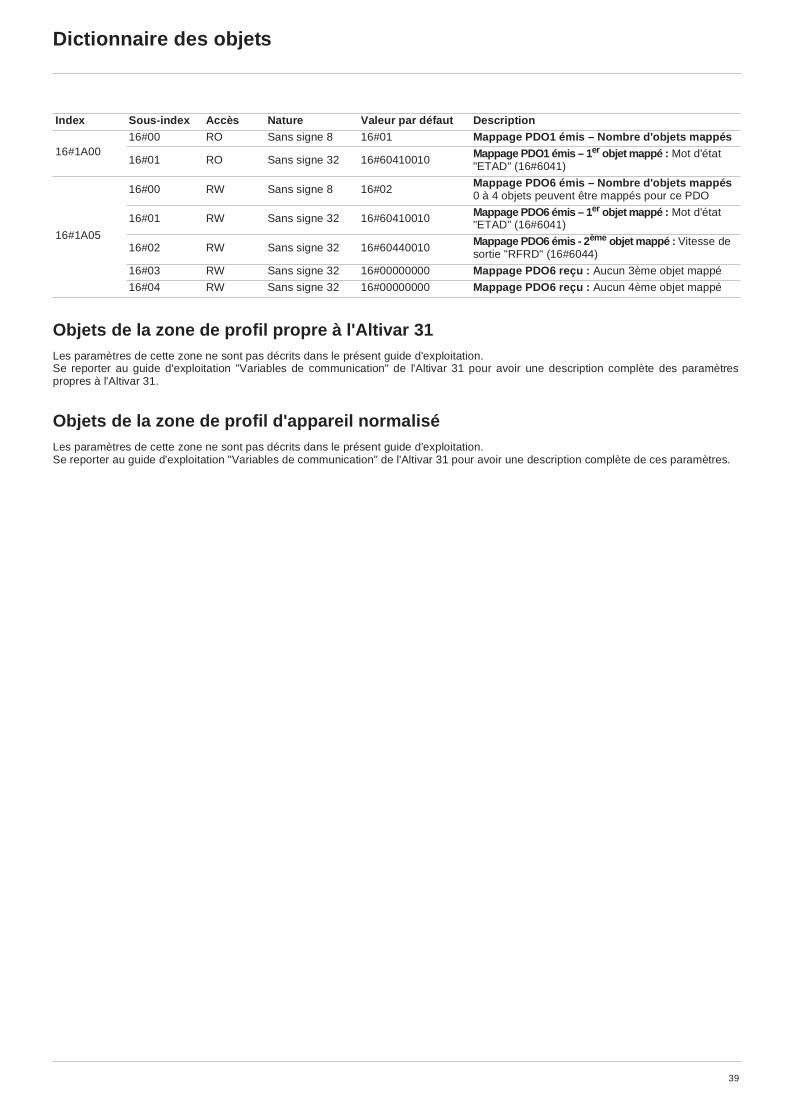
Objets de la zone de profil propre à l'Altivar 31Les paramètres de cette zone ne sont pas décrits dans le présent guide d'exploitation.Se reporter au guide d'exploitation "Variables de communication" de l'Altivar 31 pour avoir une description complète des paramètrespropres à l'Altivar 31.
Objets de la zone de profil d'appareil normaliséLes paramètres de cette zone ne sont pas décrits dans le présent guide d'exploitation.Se reporter au guide d'exploitation "Variables de communication" de l'Altivar 31 pour avoir une description complète de ces paramètres.
Index Sous-index Accès Nature Valeur par défaut Description
16#1A0016#00 RO Sans signe 8 16#01 Mappage PDO1 émis – Nombre d'objets mappés
16#01 RO Sans signe 32 16#60410010 Mappage PDO1 émis – 1er objet mappé : Mot d'état "ETAD" (16#6041)
16#1A05
16#00 RW Sans signe 8 16#02 Mappage PDO6 émis – Nombre d'objets mappés 0 à 4 objets peuvent être mappés pour ce PDO
16#01 RW Sans signe 32 16#60410010 Mappage PDO6 émis – 1er objet mappé : Mot d'état "ETAD" (16#6041)
16#02 RW Sans signe 32 16#60440010 Mappage PDO6 émis - 2ème objet mappé : Vitesse de sortie "RFRD" (16#6044)
16#03 RW Sans signe 32 16#00000000 Mappage PDO6 reçu : Aucun 3ème objet mappé
16#04 RW Sans signe 32 16#00000000 Mappage PDO6 reçu : Aucun 4ème objet mappé
39

VVDED303093FR
2003-10
atv31_CANopen_FR_V1