transfert interplanétaire à consommation faible -...
TRANSCRIPT

Position du problème Approximation par problème des 2 corps Approximation par problème des 3 corps Perspectives
Transfert interplanétaire à consommation faible
Philippe Augros1 Maxime Chupin2 Thomas Haberkorn33 Emmanuel Trélat2
1EADS-Astrium 2UPMC-LJLL 3FDP-MAPMOLes Mureaux Université Paris 6 Université d’Orléans
17eme Journée CasCiModOT, 6 Décembre 2012
T. Haberkorn Transfert interplanétaire

Position du problème Approximation par problème des 2 corps Approximation par problème des 3 corps Perspectives
Transfert interplanétaire
But
Transfert d’un engin d’un point à un autre du système solaire à faible coût.
Suivant le mode de propulsion : problème d’optimisation ou de contrôle optimal.
T. Haberkorn Transfert interplanétaire

Position du problème Approximation par problème des 2 corps Approximation par problème des 3 corps Perspectives
Equations du mouvement
Equations générales
Modèle général ne prend en compte que l’influence gravitationnelle desdifférents corps célestes (planètes et soleil ici) :
q(t) = −µSUN
q(t)− qSUN(t)
‖q(t)− qSUN(t)‖3+
9∑
i=1
µi
(
q(t)− qSUN(t)
‖q(t)− qi (t)‖3
)
+T (t)
m(t),
avec q la position, T la poussée et m la masse de l’engin.
On suppose la masse de l’engin négligable par rapport à celle des corpscélestes.
On peut rajouter d’autres corps (e.g. Lune).
Sphère d’influence
Approximation consistant à ne prendre en compte que l’attraction gravitationnellela plus importante.
⇒ On a affaire à une succession de problèmes des 2 corps qu’on recollera.
T. Haberkorn Transfert interplanétaire

Position du problème Approximation par problème des 2 corps Approximation par problème des 3 corps Perspectives
Equations du mouvement
Equations générales
Modèle général ne prend en compte que l’influence gravitationnelle desdifférents corps célestes (planètes et soleil ici) :
q(t) = −µSUN
q(t)− qSUN(t)
‖q(t)− qSUN(t)‖3+
9∑
i=1
µi
(
q(t)− qSUN(t)
‖q(t)− qi (t)‖3
)
+T (t)
m(t),
avec q la position, T la poussée et m la masse de l’engin.
On suppose la masse de l’engin négligable par rapport à celle des corpscélestes.
On peut rajouter d’autres corps (e.g. Lune).
Sphère d’influence
Approximation consistant à ne prendre en compte que l’attraction gravitationnellela plus importante.
⇒ On a affaire à une succession de problèmes des 2 corps qu’on recollera.
T. Haberkorn Transfert interplanétaire
Position du problème Approximation par problème des 2 corps Approximation par problème des 3 corps Perspectives
Modes de propulsion
Principe général
On se déplace en éjectant de la matière : Force = (efficacité) * (débit de masse).
L’efficacité dépend de la vitesse d’éjection de la masse : ve = Ispg0.
Deux catégories de mode de propulsion
Propulsion chimique :
⋄ Combustion d’un carburant (liquide ou solide).⋄ Autorise à éjecter beaucoup de masse avec des Isp d’au mieux 450 s.⋄ Poussée forte (centaines de kN), mais efficacité réduite.
⇒ Durée de poussée courte : modélisation par ∆V .
Propulsion électrique :
⋄ Ejection d’ions qui sont accélérés.⋄ Isp de 1000 à 10000 s.⋄ Poussée faible (6 1 N) mais grande efficacité.
⇒ Durée de poussée longue : on garde le T (t).
Critère
∑#boosti=1
∆Vi (impulsionnel) ou∫ tf
0|T (t)|dt (continu)
T. Haberkorn Transfert interplanétaire
Position du problème Approximation par problème des 2 corps Approximation par problème des 3 corps Perspectives
Modes de propulsion
Principe général
On se déplace en éjectant de la matière : Force = (efficacité) * (débit de masse).
L’efficacité dépend de la vitesse d’éjection de la masse : ve = Ispg0.
Deux catégories de mode de propulsion
Propulsion chimique :
⋄ Combustion d’un carburant (liquide ou solide).⋄ Autorise à éjecter beaucoup de masse avec des Isp d’au mieux 450 s.⋄ Poussée forte (centaines de kN), mais efficacité réduite.
⇒ Durée de poussée courte : modélisation par ∆V .
Propulsion électrique :
⋄ Ejection d’ions qui sont accélérés.⋄ Isp de 1000 à 10000 s.⋄ Poussée faible (6 1 N) mais grande efficacité.
⇒ Durée de poussée longue : on garde le T (t).
Critère
∑#boosti=1
∆Vi (impulsionnel) ou∫ tf
0|T (t)|dt (continu)
T. Haberkorn Transfert interplanétaire

Position du problème Approximation par problème des 2 corps Approximation par problème des 3 corps Perspectives
Modes de propulsion
Principe général
On se déplace en éjectant de la matière : Force = (efficacité) * (débit de masse).
L’efficacité dépend de la vitesse d’éjection de la masse : ve = Ispg0.
Deux catégories de mode de propulsion
Propulsion chimique :
⋄ Combustion d’un carburant (liquide ou solide).⋄ Autorise à éjecter beaucoup de masse avec des Isp d’au mieux 450 s.⋄ Poussée forte (centaines de kN), mais efficacité réduite.
⇒ Durée de poussée courte : modélisation par ∆V .
Propulsion électrique :
⋄ Ejection d’ions qui sont accélérés.⋄ Isp de 1000 à 10000 s.⋄ Poussée faible (6 1 N) mais grande efficacité.
⇒ Durée de poussée longue : on garde le T (t).
Critère
∑#boosti=1
∆Vi (impulsionnel) ou∫ tf
0|T (t)|dt (continu)
T. Haberkorn Transfert interplanétaire

Position du problème Approximation par problème des 2 corps Approximation par problème des 3 corps Perspectives
Dynamique du problème des 2 corps
Equation de Kepler contrôlée
q = −qµ
r3+
F
m
q ∈ IR3 : position, r = |q|, F : poussée, m masse :
m = −β|F | = −1
g0Isp
|F |
Contrainte de poussée maximale
|F | = (u21+ u2
2+ u2
3)1/2 6 Fmax
Transfert d’orbite classique : max m(tf )
D’une orbite initiale excentrique etinclinée vers une orbite géostationnaire.
Pour transfert interplanétaire
Transfert d’une orbite elliptique à une orbite hyperbolique de libération ou inversement.
T. Haberkorn Transfert interplanétaire

Position du problème Approximation par problème des 2 corps Approximation par problème des 3 corps Perspectives
Dynamique du problème des 2 corps
Equation de Kepler contrôlée
q = −qµ
r3+
F
m
q ∈ IR3 : position, r = |q|, F : poussée, m masse :
m = −β|F | = −1
g0Isp
|F |
Contrainte de poussée maximale
|F | = (u21+ u2
2+ u2
3)1/2 6 Fmax
Transfert d’orbite classique : max m(tf )
D’une orbite initiale excentrique etinclinée vers une orbite géostationnaire.
Pour transfert interplanétaire
Transfert d’une orbite elliptique à une orbite hyperbolique de libération ou inversement.
T. Haberkorn Transfert interplanétaire
Position du problème Approximation par problème des 2 corps Approximation par problème des 3 corps Perspectives
Approche Patch-Conic (recollement de coniques)
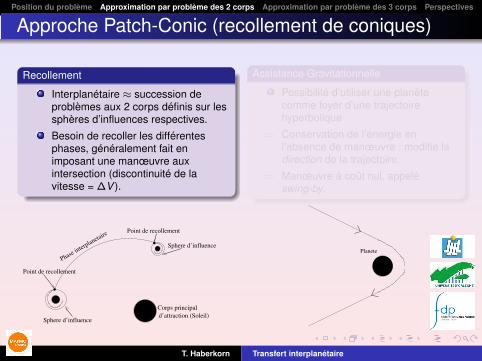
Recollement
Interplanétaire ≈ succession deproblèmes aux 2 corps définis sur lessphères d’influences respectives.
Besoin de recoller les différentesphases, généralement fait enimposant une manœuvre auxintersection (discontinuité de lavitesse = ∆V ).
Point de recollement
Point de recollement
Corps principal
d’attraction (Soleil)
Sphere d’influence
Sphere d’influence
Phase interplanetaire
Assistance Gravitationnelle
Possibilité d’utiliser une planètecomme foyer d’une trajectoirehyperbolique
⇒ Conservation de l’énergie enl’absence de manœuvre : modifie ladirection de la trajectoire.
⇒ Manœuvre à coût nul, appeléswing-by.
Planete
T. Haberkorn Transfert interplanétaire

Position du problème Approximation par problème des 2 corps Approximation par problème des 3 corps Perspectives
Approche Patch-Conic (recollement de coniques)
Recollement
Interplanétaire ≈ succession deproblèmes aux 2 corps définis sur lessphères d’influences respectives.
Besoin de recoller les différentesphases, généralement fait enimposant une manœuvre auxintersection (discontinuité de lavitesse = ∆V ).
Point de recollement
Point de recollement
Corps principal
d’attraction (Soleil)
Sphere d’influence
Sphere d’influence
Phase interplanetaire
Assistance Gravitationnelle
Possibilité d’utiliser une planètecomme foyer d’une trajectoirehyperbolique
⇒ Conservation de l’énergie enl’absence de manœuvre : modifie ladirection de la trajectoire.
⇒ Manœuvre à coût nul, appeléswing-by.
Planete
T. Haberkorn Transfert interplanétaire
Position du problème Approximation par problème des 2 corps Approximation par problème des 3 corps Perspectives
Sous-problème dans la sphère d’influence :
modélisation impulsionnelle
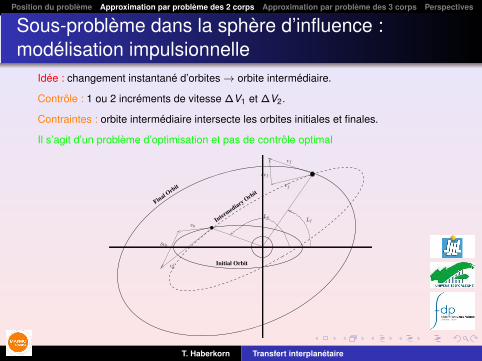
Idée : changement instantané d’orbites → orbite intermédiaire.
Contrôle : 1 ou 2 incréments de vitesse ∆V1 et ∆V2.
Contraintes : orbite intermédiaire intersecte les orbites initiales et finales.
Il s’agit d’un problème d’optimisation et pas de contrôle optimal
Final O
rbit
Inter
med
iary O
rbit
Initial Orbit
vf
vif
LfL0
δv0
v0
vi0
δvf
T. Haberkorn Transfert interplanétaire
Position du problème Approximation par problème des 2 corps Approximation par problème des 3 corps Perspectives
Sous-problème dans la sphère d’influence :
modélisation continue
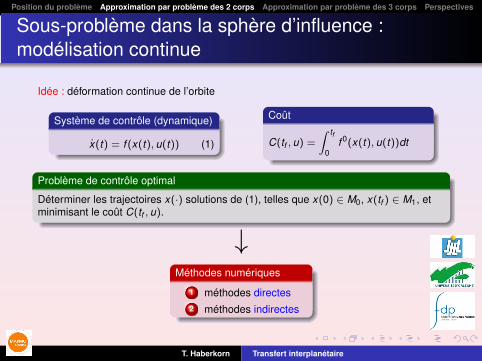
Idée : déformation continue de l’orbite
Système de contrôle (dynamique)
x(t) = f (x(t), u(t)) (1)
Coût
C(tf , u) =
∫ tf
0
f 0(x(t), u(t))dt
Problème de contrôle optimal
Déterminer les trajectoires x(·) solutions de (1), telles que x(0) ∈ M0, x(tf ) ∈ M1, etminimisant le coût C(tf , u).
↓Méthodes numériques
1 méthodes directes
2 méthodes indirectes
T. Haberkorn Transfert interplanétaire
Position du problème Approximation par problème des 2 corps Approximation par problème des 3 corps Perspectives
Méthodes directes
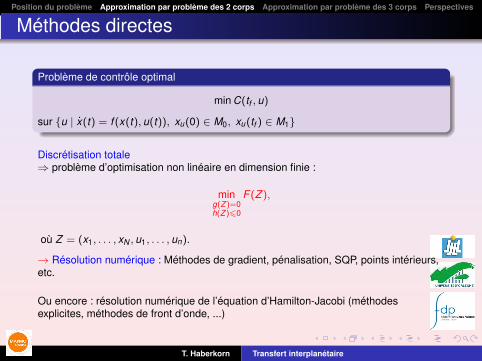
Problème de contrôle optimal
min C(tf , u)
sur u | x(t) = f (x(t), u(t)), xu(0) ∈ M0, xu(tf ) ∈ M1
Discrétisation totale⇒ problème d’optimisation non linéaire en dimension finie :
ming(Z )=0h(Z )60
F (Z ),
où Z = (x1, . . . , xN , u1, . . . , un).
→ Résolution numérique : Méthodes de gradient, pénalisation, SQP, points intérieurs,etc.
Ou encore : résolution numérique de l’équation d’Hamilton-Jacobi (méthodesexplicites, méthodes de front d’onde, ...)
T. Haberkorn Transfert interplanétaire

Position du problème Approximation par problème des 2 corps Approximation par problème des 3 corps Perspectives
Méthodes indirectes
→ Emploi préalable du Principe du Maximum de Pontryagin(Multiplicateurs de Lagrange, ou KKT, en dim infinie)
H(x , p, p0, u) = 〈p, f (x , u)〉+ p0f 0(x , u).
Principe du maximum de Pontryagin
Toute minimisante x(·) est la projection d’une extrémale (x(·), p(·), p0, u(·)) solution de
x =∂H
∂p, p = −
∂H
∂x, H(x , p, p0, u) = max
v∈ΩH(x , p, p0, v).
T. Haberkorn Transfert interplanétaire

Position du problème Approximation par problème des 2 corps Approximation par problème des 3 corps Perspectives
Méthodes indirectes
→ Emploi préalable du Principe du Maximum de Pontryagin(Multiplicateurs de Lagrange, ou KKT, en dim infinie)
H(x , p, p0, u) = 〈p, f (x , u)〉+ p0f 0(x , u).
Principe du maximum de Pontryagin
Toute minimisante x(·) est la projection d’une extrémale (x(·), p(·), p0, u(·)) solution de
x =∂H
∂p, p = −
∂H
∂x, H(x , p, p0, u) = max
v∈ΩH(x , p, p0, v).
ւu(t) = u(x(t), p(t))
T. Haberkorn Transfert interplanétaire

Position du problème Approximation par problème des 2 corps Approximation par problème des 3 corps Perspectives
Méthodes indirectes
→ Emploi préalable du Principe du Maximum de Pontryagin(Multiplicateurs de Lagrange, ou KKT, en dim infinie)
H(x , p, p0, u) = 〈p, f (x , u)〉+ p0f 0(x , u).
Principe du maximum de Pontryagin
Toute minimisante x(·) est la projection d’une extrémale (x(·), p(·), p0, u(·)) solution de
x =∂H
∂p, p = −
∂H
∂x, H(x , p, p0, u) = max
v∈ΩH(x , p, p0, v).
տ ւu(t) = u(x(t), p(t))
T. Haberkorn Transfert interplanétaire

Position du problème Approximation par problème des 2 corps Approximation par problème des 3 corps Perspectives
Méthodes indirectes
→ Emploi préalable du Principe du Maximum de Pontryagin(Multiplicateurs de Lagrange, ou KKT, en dim infinie)
H(x , p, p0, u) = 〈p, f (x , u)〉+ p0f 0(x , u).
Principe du maximum de Pontryagin
Toute minimisante x(·) est la projection d’une extrémale (x(·), p(·), p0, u(·)) solution de
x =∂H
∂p, p = −
∂H
∂x, H(x , p, p0, u) = max
v∈ΩH(x , p, p0, v).
տ ւu(t) = u(x(t), p(t))
⇒ Les extrémales (x , p) sont solutions de
x =∂H
∂p, x(0) = x0, x(T ) = x1,
p = −∂H
∂x, p(0) = p0,
−→ Méthode de tir :déterminer p0 t.q. x(tf ) = x1.
T. Haberkorn Transfert interplanétaire
Position du problème Approximation par problème des 2 corps Approximation par problème des 3 corps Perspectives
Problème path-conic complet
2 niveaux d’optimisation classique
Chaque transfert dans une sphère d’influence est un problème d’optimisation oude contrôle optimal.
L’optimisation doit également se faire sur les conditions de recollement.
Scénario non fixé
Le nombre d’étapes intermédiaires n’est pas forcément fixé ⇒ à optimiser(combinatoire).
Nécessité de savoir résoudre le problème à scénario fixé le plus efficacement possible.
T. Haberkorn Transfert interplanétaire
Position du problème Approximation par problème des 2 corps Approximation par problème des 3 corps Perspectives
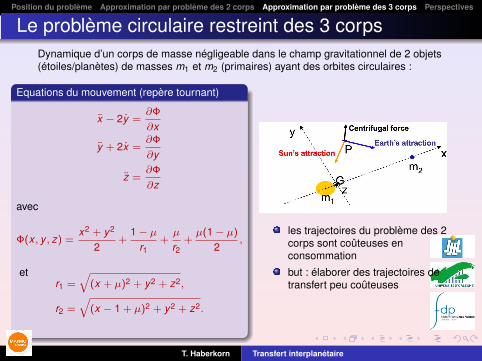
Le problème circulaire restreint des 3 corps
Dynamique d’un corps de masse négligeable dans le champ gravitationnel de 2 objets(étoiles/planètes) de masses m1 et m2 (primaires) ayant des orbites circulaires :
Equations du mouvement (repère tournant)
x − 2y =∂Φ
∂x
y + 2x =∂Φ
∂y
z =∂Φ
∂z
avec
Φ(x , y , z) =x2 + y2
2+
1 − µ
r1
+µ
r2
+µ(1 − µ)
2,
etr1 =
√
(x + µ)2 + y2 + z2,
r2 =√
(x − 1 + µ)2 + y2 + z2.
les trajectoires du problème des 2corps sont coûteuses enconsommation
but : élaborer des trajectoires detransfert peu coûteuses
T. Haberkorn Transfert interplanétaire
Position du problème Approximation par problème des 2 corps Approximation par problème des 3 corps Perspectives
Points de Lagrange
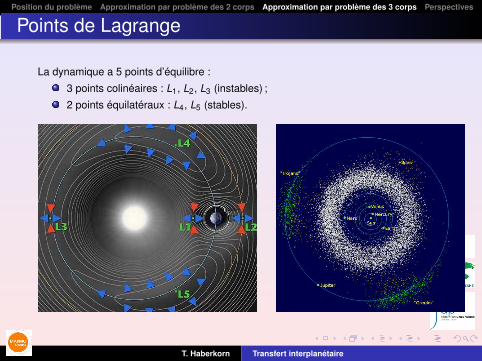
La dynamique a 5 points d’équilibre :
3 points colinéaires : L1, L2, L3 (instables) ;
2 points équilatéraux : L4, L5 (stables).
T. Haberkorn Transfert interplanétaire
Position du problème Approximation par problème des 2 corps Approximation par problème des 3 corps Perspectives
Régions de Hill
Intégrale du mouvement
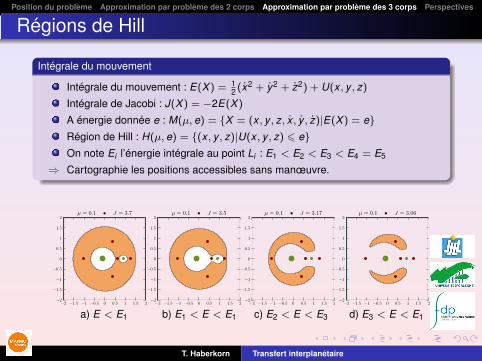
Intégrale du mouvement : E(X) = 12(x2 + y2 + z2) + U(x , y , z)
Intégrale de Jacobi : J(X) = −2E(X)
A énergie donnée e : M(µ, e) = X = (x , y , z, x , y , z)|E(X) = e
Région de Hill : H(µ, e) = (x , y , z)|U(x , y , z) 6 e
On note Ei l’énergie intégrale au point Li : E1 < E2 < E3 < E4 = E5
⇒ Cartographie les positions accessibles sans manœuvre.
µ = 0.1 • J = 3.7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
µ = 0.1 • J = 3.5
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
µ = 0.1 • J = 3.17
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
µ = 0.1 • J = 3.06
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
a) E < E1 b) E1 < E < E1 c) E2 < E < E3 d) E3 < E < E1
T. Haberkorn Transfert interplanétaire
Position du problème Approximation par problème des 2 corps Approximation par problème des 3 corps Perspectives
Trajectoires périodiques
Trajectoires périodiques
On peut montrer l’existence de trajectoires périodiques autour des points d’équilibre(découle d’un théorème de Moser, le linéarisé n’apporte pas directement d’info).
T. Haberkorn Transfert interplanétaire
Position du problème Approximation par problème des 2 corps Approximation par problème des 3 corps Perspectives
Trajectoires périodiques
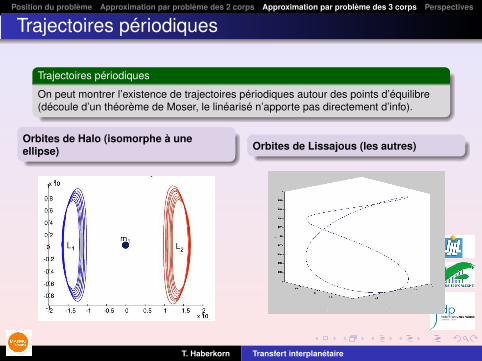
Trajectoires périodiques
On peut montrer l’existence de trajectoires périodiques autour des points d’équilibre(découle d’un théorème de Moser, le linéarisé n’apporte pas directement d’info).
Orbites de Halo (isomorphe à uneellipse) Orbites de Lissajous (les autres)
T. Haberkorn Transfert interplanétaire

Position du problème Approximation par problème des 2 corps Approximation par problème des 3 corps Perspectives
Variétés invariantes
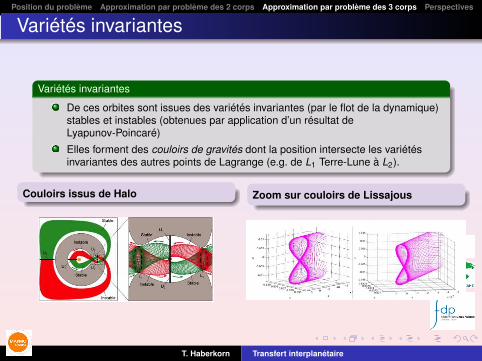
Variétés invariantes
De ces orbites sont issues des variétés invariantes (par le flot de la dynamique)stables et instables (obtenues par application d’un résultat deLyapunov-Poincaré)
Elles forment des couloirs de gravités dont la position intersecte les variétésinvariantes des autres points de Lagrange (e.g. de L1 Terre-Lune à L2).
T. Haberkorn Transfert interplanétaire
Position du problème Approximation par problème des 2 corps Approximation par problème des 3 corps Perspectives
Variétés invariantes
Variétés invariantes
De ces orbites sont issues des variétés invariantes (par le flot de la dynamique)stables et instables (obtenues par application d’un résultat deLyapunov-Poincaré)
Elles forment des couloirs de gravités dont la position intersecte les variétésinvariantes des autres points de Lagrange (e.g. de L1 Terre-Lune à L2).
Couloirs issus de Halo Zoom sur couloirs de Lissajous
T. Haberkorn Transfert interplanétaire
Position du problème Approximation par problème des 2 corps Approximation par problème des 3 corps Perspectives
Utilisation des couloirs de gravité
Les étapes
En ne considérant que les 2 corps et l’engin, le transfert de l’un à l’autre se déroule en3 phases :
i) manœuvre d’évasion du corps de départ pour parking sur variété stable de Li .
ii) manœuvre à l’approche de l’orbite de halo de Li pour parking sur variété instablede Li (pour accélérer les choses).
iii) manœuvre de capture par le corps cible
Optimisation ou contrôle optimal
Comme pour l’approche patch-conic :
modélisation impulsionnelle des manœuvres → (NLP),
ou modélisation continue plus réaliste → (OCP).
Problème complet
Ré-injecter la solution optimale sur le problème des 3 corps dans le champgravitationnel complet (puis relancer l’optimisation).
Ou faire au préalable du recollement de 3 corps
T. Haberkorn Transfert interplanétaire
Position du problème Approximation par problème des 2 corps Approximation par problème des 3 corps Perspectives
Utilisation des couloirs de gravité
Les étapes
En ne considérant que les 2 corps et l’engin, le transfert de l’un à l’autre se déroule en3 phases :
i) manœuvre d’évasion du corps de départ pour parking sur variété stable de Li .
ii) manœuvre à l’approche de l’orbite de halo de Li pour parking sur variété instablede Li (pour accélérer les choses).
iii) manœuvre de capture par le corps cible
Optimisation ou contrôle optimal
Comme pour l’approche patch-conic :
modélisation impulsionnelle des manœuvres → (NLP),
ou modélisation continue plus réaliste → (OCP).
Problème complet
Ré-injecter la solution optimale sur le problème des 3 corps dans le champgravitationnel complet (puis relancer l’optimisation).
Ou faire au préalable du recollement de 3 corps
T. Haberkorn Transfert interplanétaire
Position du problème Approximation par problème des 2 corps Approximation par problème des 3 corps Perspectives
Utilisation des couloirs de gravité
Les étapes
En ne considérant que les 2 corps et l’engin, le transfert de l’un à l’autre se déroule en3 phases :
i) manœuvre d’évasion du corps de départ pour parking sur variété stable de Li .
ii) manœuvre à l’approche de l’orbite de halo de Li pour parking sur variété instablede Li (pour accélérer les choses).
iii) manœuvre de capture par le corps cible
Optimisation ou contrôle optimal
Comme pour l’approche patch-conic :
modélisation impulsionnelle des manœuvres → (NLP),
ou modélisation continue plus réaliste → (OCP).
Problème complet
Ré-injecter la solution optimale sur le problème des 3 corps dans le champgravitationnel complet (puis relancer l’optimisation).
Ou faire au préalable du recollement de 3 corps
T. Haberkorn Transfert interplanétaire
Position du problème Approximation par problème des 2 corps Approximation par problème des 3 corps Perspectives
Exemple classique : transfert Terre-Lune
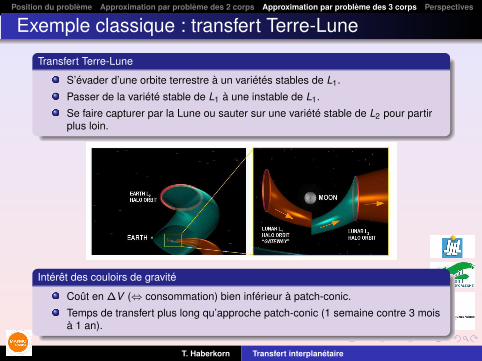
Transfert Terre-Lune
S’évader d’une orbite terrestre à un variétés stables de L1.
Passer de la variété stable de L1 à une instable de L1.
Se faire capturer par la Lune ou sauter sur une variété stable de L2 pour partirplus loin.
Intérêt des couloirs de gravité
Coût en ∆V (⇔ consommation) bien inférieur à patch-conic.
Temps de transfert plus long qu’approche patch-conic (1 semaine contre 3 moisà 1 an).
T. Haberkorn Transfert interplanétaire

Position du problème Approximation par problème des 2 corps Approximation par problème des 3 corps Perspectives
Conclusions/Perspectives
Conclusions
Dans la littérature actuelle, surtout approche impulsionnelle
⇒ peu en accord avec la réalité des missions interplanétaires.
Quand modèle continu, utilisation de méthodes de résolutions directes
⇒ gourmand en ressources de calcul et en temps.
Perspectives
Thèse CIFRE débutée par Maxime Chupin (avec EADS Astrium, les Mureaux).
S’intéresser plus particulièrement au modèle continu.
Utiliser le problème des 3 corps pour initialiser les approches numériques.
Utiliser une approche indirecte probablement par continuation (introductiongraduelle des autres corps) pour le problème complet.
T. Haberkorn Transfert interplanétaire

Position du problème Approximation par problème des 2 corps Approximation par problème des 3 corps Perspectives
Conclusions/Perspectives
Conclusions
Dans la littérature actuelle, surtout approche impulsionnelle
⇒ peu en accord avec la réalité des missions interplanétaires.
Quand modèle continu, utilisation de méthodes de résolutions directes
⇒ gourmand en ressources de calcul et en temps.
Perspectives
Thèse CIFRE débutée par Maxime Chupin (avec EADS Astrium, les Mureaux).
S’intéresser plus particulièrement au modèle continu.
Utiliser le problème des 3 corps pour initialiser les approches numériques.
Utiliser une approche indirecte probablement par continuation (introductiongraduelle des autres corps) pour le problème complet.
T. Haberkorn Transfert interplanétaire