tp détection d’intrusion - jeulin · iv mesures et exploitation (séance de tp) 1) etude du...
TRANSCRIPT

1
TP Détection d’intrusion
Sommaire
Détection d’intrusion : fiche professeur ................................................................................................. 2
Capteur à infra-rouge et chaîne de mesure ............................................................................................ 4
Correction .............................................................................................................................................. 14
2
Détection d’intrusion : fiche professeur
L'activité proposée concerne:
Niveau : terminales STL et STI2D
Programme commun de sciences-physiques
Partie de programme : Habitat
Sous-partie : La communication dans l'habitat
Capacités exigibles :
- Citer quelques exemples de capteurs et de détecteurs utilisés dans l'habitat.
- Préciser les grandeurs d’entrée et de sortie ainsi que le phénomène physique auquel la grandeur
d'entrée est sensible.
- Distinguer les deux types de grandeurs : analogiques ou numériques.
- Mettre en œuvre expérimentalement une chaîne de mesure simple utilisée en communication dans
l'habitat.
Objectifs de la séquence:
Comprendre le fonctionnement d’un capteur Infra-Rouge
Déterminer les limites d’utilisation du capteur
S'approprier une problématique
Réaliser un protocole
Exploiter des mesures
Organisation et durée de la séquence:
Durée : 3 heures dont 2 heures en TP. La séquence est organisée en deux temps :
Premier temps : travail préparatoire (étude préalable de deux documents) que les élèves doivent faire
à la maison après explication des consignes en classe. Ceci a pour but de les préparer au TP.
Deuxième temps : correction du travail préalable, réalisation de la partie expérimentale puis
exploitation des résultats.

3
Matériel pour le TP (à réaliser dans une salle informatique):
L’interface Groomy – 181 000
Pack détection d’intrusion – 181 269
Logiciel Groomy acquisition – 000 202
Remarques concernant l'organisation de la partie TP
Une progression possible consiste à réaliser cette activité expérimentale à la fin du thème Habitat,
après le chapitre sur les ondes. Il permet d’enchaîner ensuite sur le thème de la santé et donc de
réinvestir la loi de Wien.
Une autre progression peut permettre de réaliser le chapitre sur les capteurs à la fin du thème
Transport et en introduction du thème de l’Habitat. Ce TP permet alors un enchaînement sur le thème
des ondes.
Les connaissances nécessaires sur les ondes pour la réalisation de ce TP font partie du programme de
1ère STI2D.
4
Détection d’intrusion
I Introduction
Les systèmes de détection d’intrusion sont mis en œuvre pour assurer la protection des biens et des
personnes vis-à-vis des risques d'intrusion et d'agression.
Les détecteurs de présence sont parmi les éléments les plus importants pour assurer la sécurité d'une
maison. Ils peuvent être intégrés à un système d’alarme et détecter la présence non désirée d’un
humain dans une zone définie. Mais ils peuvent aussi servir de prévention et être entièrement
autonome en les couplant à un spot halogène puissant qui va effrayer en extérieur les malfrats.
Devant la recrudescence des cambriolages,
ces dernières années, certaines municipalités
conseillent à leurs citoyens d’installer un
détecteur de présence dans le jardin ou
devant le garage, qui constitue un bon
instrument de dissuasion.
http://www.duchartre.com/
II Problématique et démarche de résolution
Voici la problématique à laquelle vous devez tenter de répondre :
Comment réaliser un système de détection d’intrusion ?
→Vous effectuerez une étude préalable de documents afin de comprendre le problème.
→ Vous réaliserez des mesures (séance de TP) à l'aide du matériel suivant :
Interface Groomy, avec le capteur détecteur de présence IR et les actionneurs DEL blanche et buzzer : ils permettront de réaliser un système de détection d’intrusion et d’en étudier les limites de fonctionnement.
Les objectifs de cette séance de TP sont:
Comprendre le fonctionnement d’un capteur IR
Déterminer les caractéristiques et les limites d’utilisation du capteur.
Mettre en œuvre expérimentalement une chaîne de mesure simple dans l’habitat.

5
III Étude préalable et questionnement
DOCUMENT N°1
Comment empêcher un cambrioleur de s’introduire chez soi ou le prendre sur le fait ?
En équipant son habitation d’un détecteur de mouvement.
Le détecteur de mouvement à infrarouge passif
(PIR)
Le détecteur de mouvement à infrarouge passif
(PIR = Passive InfraRed) associe un capteur
pyroélectrique avec une électronique de
conditionnement (adaptation, traitement) du signal
et une optique à base de lentille de Fresnel.
La lentille de Fresnel a pour fonction de focaliser sur
le capteur pyroélectrique le rayonnement infrarouge d’une personne se déplaçant dans le champ de
surveillance du détecteur. La forme et la taille de la lentille déterminent en grande partie la
directivité et la sensibilité du détecteur.
Ainsi constitué, le détecteur prend la forme d'un petit module fournissant
un signal logique dont l'état dépend de l'activité du capteur.
Le capteur pyrométrique
Le capteur pyrométrique détecte les variations de radiation infrarouge provoquées par le
mouvement d'une personne (ou d'un objet) dont la température est différente de la température du
milieu ambiant.
Le capteur PIR n'est sensible qu'aux déplacements de chaleur se produisant dans la zone de
détection (quelques mètres au maximum). Ainsi, les variations lentes de la température ambiante ne
sont pas perçues. Pour limiter l'influence des perturbations extérieures, dues notamment à la
lumière, la zone active du capteur est équipée d'un filtre optique, dit « passe-haut ».
La caractéristique de transmission ("transmittance en fonction de la longueur d’onde") de différents
filtres est donnée sur la figure suivante.

6
DOCUMENT N°2
A la fin du XIXème siècle, Max Planck établit la relation entre la longueur d’onde principalement émise
par un corps qui rayonne et sa température. Il participe ainsi à la naissance de la physique quantique.
En 1893, Wilhem Wien simplifie cette loi et l’exprime sous la forme suivante :
avec λ : longueur d’onde principalement émise par le corps en mètres (m)
T : température du corps en KELVIN (K).
Information : le Kelvin est l’unité du système international de la température. La température T en
Kelvin est reliée à la température θ en °C par la relation : T = θ + 273,15
Exploitation des documents N°1 et N°2
Rappeler le domaine de longueur d’onde du visible.
L’homme présente une température externe avoisinant les 35°C. Il émet donc un rayonnement.
Déterminer la longueur d’onde émise par le corps humain.
En déduire le domaine de ces radiations.
A partir de la caractéristique de transmission, choisir un filtre approprié.
λ.T = 3.10-3 m.K

7
Quelle est la fréquence correspondante au filtre choisi ? Comment nomme-t-on alors le filtre en
fonction de la fréquence (donnée c = 3.108 m.s-1) ?
Justifiez que le détecteur utilisé est insensible aux conditions climatiques (en particulier à la
température).
IV Mesures et exploitation (séance de TP)
1) Etude du capteur récepteur infrarouge passif
Mode opératoire
→ Alimenter la Groomy® grâce à son cordon d’alimentation et au transformateur fourni, la connecter
sur le réseau.
→ Brancher le capteur récepteur infrarouge passif sur l’entrée numérique 1.
→ Dans Groomy Acquisition :
Cliquer sur l’icône « Sélectionner une interface Groomy »
Sélectionner une interface présente sur le réseau sur laquelle l’expérimentation est réalisée.
Cliquer sur « Affection des entrées/sorties » , puis positionner le détecteur passif sur l’entrée
numérique 1 et « Accepter ».

8
→ Cliquez sur démarrer,
La fenêtre suivante s’ouvre :
Modifier le nombre de points : 1000 ;
Puis « Accepter ».
L’acquisition est lancée.
→ Passer la main au-dessus du capteur à plusieurs reprises, et laisser des temps de pose. Vérifier
qualitativement le bon fonctionnement du système.
→ Une fois l’enregistrement terminé, cliquer sur l’icône afin de voir l’ensemble des
mesures.
Question 1
Plusieurs types de signaux sont utilisés tout au long d’une chaîne de mesure.
Schéma1 Schéma 2 Schéma 3
Définition A. Un capteur TOR est un capteur numérique pour lequel on aurait que deux tranches : soit
0, soit 1.
Définition B. Le signal peut prendre n’importe quelle valeur entre deux extrêmes, le capteur est dit
analogique.
Définition C. La sortie est un nombre. Cela revient à découper l’espace en tranches et à attribuer un
numéro à chaque tranche.

9
Associer la définition et le schéma correspondant à chaque type de signal.
…...........................................................................................................................................................
…...........................................................................................................................................................
A partir de l’enregistrement réalisé, déduire le type de capteur utilisé :
…...........................................................................................................................................................
Question 2
A chaque mouvement, la diode électroluminescente, positionnée à côté du capteur s’éclaire indiquant
le passage de l’état 0 à l’état 1. Poser le capteur récepteur infrarouge passif sur la table, réaliser des
mouvements à différentes hauteurs au-dessus du capteur. Puis faire des mouvements avec 1 doigt, la
main étant posée sur la table à proximité du capteur.
Indiquer vos observations et conclure sur l’amplitude de la zone de détection.
…...........................................................................................................................................................
…...........................................................................................................................................................
…...........................................................................................................................................................
…...........................................................................................................................................................
Question 3
Dans la documentation technique du fabricant, on trouve le document suivant :
Angle d’ouverture en degré
Distance au capteur en mètre
Tolérance ± 0,5°

10
Ce document permet-il de vérifier les observations et conclusions faites à la question 2 ?
…...........................................................................................................................................................
…...........................................................................................................................................................
Question 4
Plier une feuille A4 dans le sens de la longueur. A une trentaine de centimètres au-dessus du capteur
posé sur la table, faites bouger la feuille (Attention, il faut la tenir par l’extrémité opposée).
Observation : ….................................................................................................................................
…...........................................................................................................................................................
En vous aidant des caractéristiques du capteur données ci-dessous, expliquer le phénomène observé.
…...........................................................................................................................................................
…...........................................................................................................................................................
…...........................................................................................................................................................

11
2) Fonctionnement du système de détection des intrusions
Lorsque le système de détection des intrusions est en fonctionnement, un système d’éclairage doit se
mettre en route lorsqu’un mouvement est détecté. Si le mouvement perdure, alors l’alarme retentit.
Vous devez modéliser ce système.
Le système d’éclairage sera modélisé par une DEL blanche. L’alarme sera modélisée par un bref « bip »
du buzzer, afin de ne pas engendrer trop de nuisances sonores pendant le TP.
Mode opératoire
→ Dans Groomy SysML :
Cliquer sur l’icône « Sélectionner une interface Groomy »
Sélectionner une interface présente sur le réseau sur laquelle l’expérimentation est réalisée.
Ouvrir le fichier détection.gmy correspondant au TP
Vérifier en cliquant sur « Affection des entrées/sorties » la configuration des
capteurs/actionneurs comme ci-dessous :
12
Les icônes DEL blanche et buzzer doivent être respectivement sur les sorties numériques 1 et 2.
=> Les actionneurs DEL blanche et buzzer doivent être câblés aux mêmes endroits sur l’interface
Groomy®
L’icône détecteur passif doit être sur l’entrée numérique 1 => le capteur IR doit être câblé au même
endroit sur l’interface Groomy®
Lancer l’exécution du programme en cliquant sur l’icône « Démarrer/continuer »
Dans ce cas, les valeurs des entrées/sorties sont visibles à droite de l’écran dans l’onglet
variable
Télécharger le programme dans l’interface Groomy® qui devient alors un automate en cliquant sur
l’icône .
Question 5
Le système de détection d’intrusion réel doit fonctionner suivant le modèle suivant :
- Situation N°1 : une personne s’approche de la maison, l’éclairage fonctionne jusqu’à la
désactivation du boîtier d’alarme;
- Situation N°2 : une personne s’approche de la maison et reste devant la porte, l’éclairage
fonctionne puis si le temps est trop long, le signal sonore de l’alarme retentit.
Réaliser un mouvement bref à proximité du capteur puis réaliser un mouvement plus long, décrire le
fonctionnement du système :
…...........................................................................................................................................................
…...........................................................................................................................................................
…...........................................................................................................................................................
Question 6
Le fonctionnement de notre installation est-il en adéquation avec le système de détection d’intrusion
réel souhaité ? Vous préciserez les éventuelles différences.
…...........................................................................................................................................................
…...........................................................................................................................................................
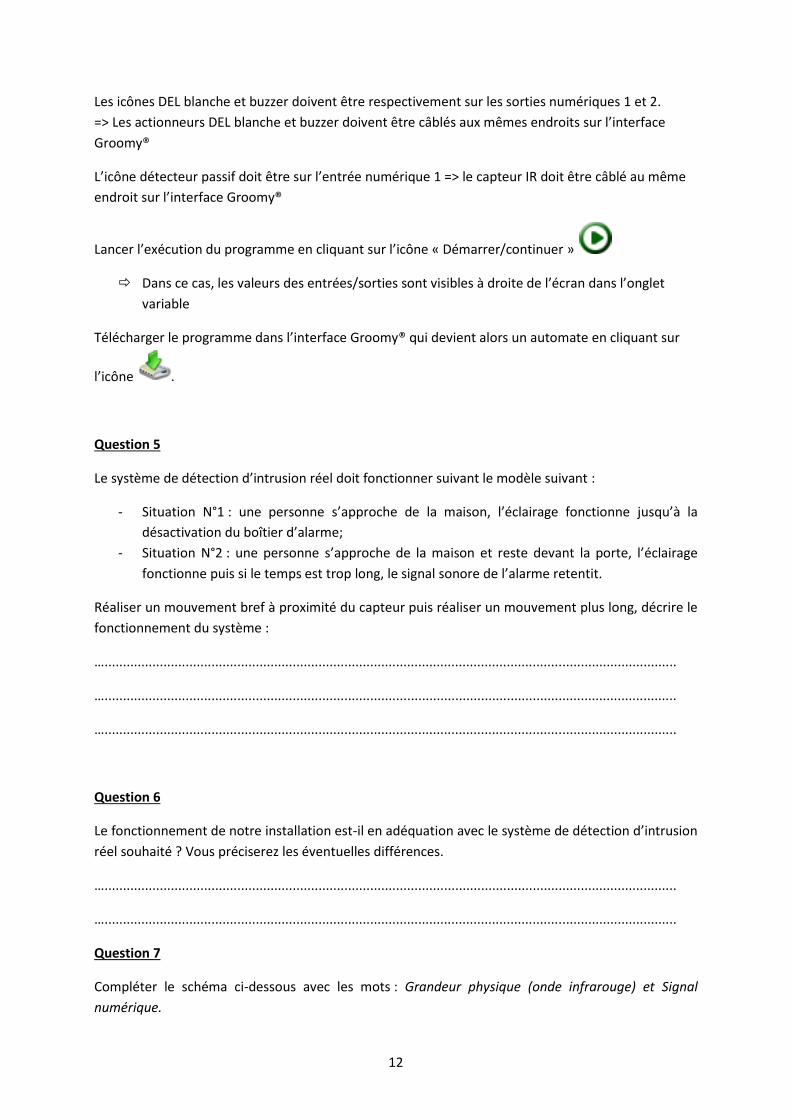
Question 7
Compléter le schéma ci-dessous avec les mots : Grandeur physique (onde infrarouge) et Signal
numérique.
13
Question 8
Un oiseau passe dans le champ de détection du capteur IR, pensez-vous que l’alarme se déclenchera ?
…...........................................................................................................................................................
Un chat errant vient s’installer devant la porte de la maison, en l’absence des propriétaires. L’alarme
se déclenchera-t-elle ?
…...........................................................................................................................................................
Quelle solution peut-on envisager pour ne pas avoir de déclenchement intempestif du fait d’animaux ?
…...........................................................................................................................................................
Correction
Capteur IR
Interface Groomy

14
Correction de l'étude préalable (travail préparatoire au TP)
Exploitation des documents N°1 et N°2
Rappeler le domaine de longueur d’onde du visible.
Le domaine de longueur d’onde du visible s’étend de 380 nm à 780 nm
L’homme présente une température externe avoisinant les 35°C. Il émet donc un rayonnement.
Déterminer la longueur d’onde émise par le corps humain.
T = 35 + 273 = 308 K
λ = 3.10-3 / T = 974 µm
En déduire le domaine de ces radiations.
Cette longueur d’onde est au-dessus du domaine du visible, il s’agit des infrarouges.
A partir de la caractéristique de transmission, choisir un filtre approprié.
On peut choisir le filtre passe-haut 5 µm ou le filtre passe-haut 6,5 µm, afin que les longueurs
d’ondes du visible ne viennent pas parasiter le système de détection.
Quelle est la fréquence correspondante au filtre choisi ? Comment nomme-t-on alors le filtre en
fonction de la fréquence (donnée c = 3.108 m.s-1) ?
Pour le filtre passe-haut 5 µm : f = c / λ = 6.1013 Hz
Pour le filtre passe-haut 6,5 µm : f = c / λ = 4,6.1013 Hz
La fréquence et la longueur d’onde sont inversement proportionnelles, le filtre est appelé filtre
passe-bas en fréquence.
Justifiez que le détecteur utilisé est insensible aux conditions climatiques (en particulier à la
température).
15
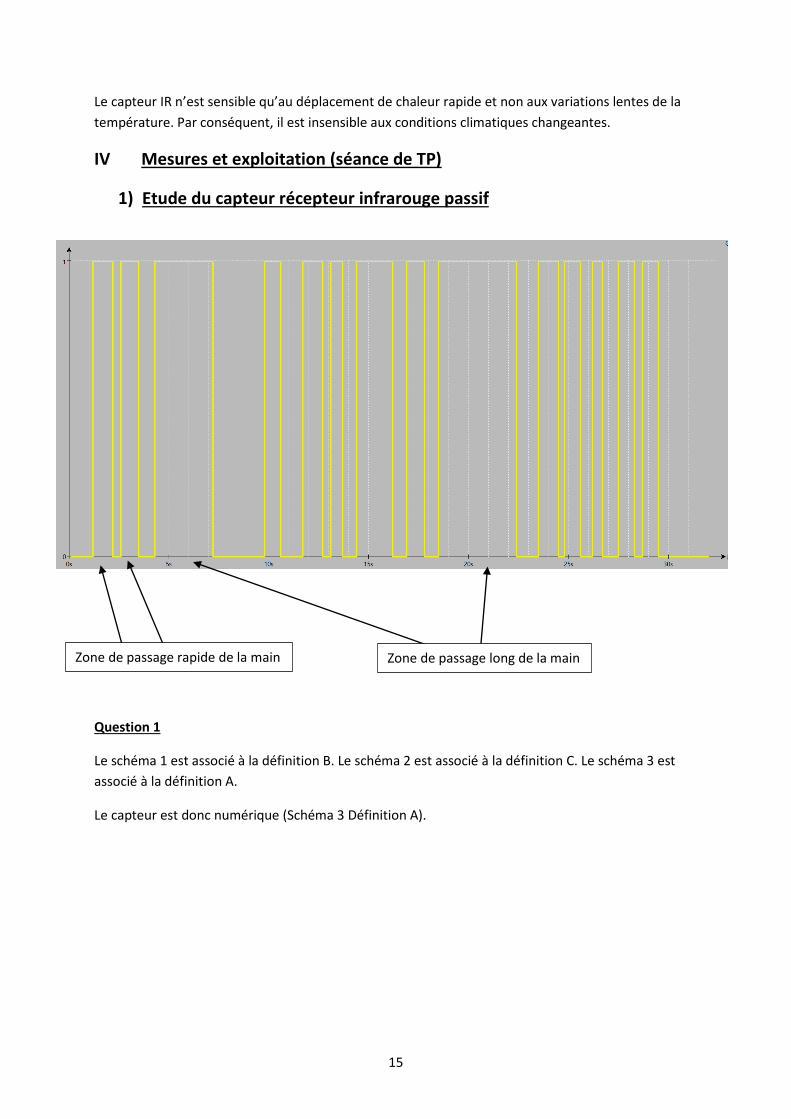
Le capteur IR n’est sensible qu’au déplacement de chaleur rapide et non aux variations lentes de la
température. Par conséquent, il est insensible aux conditions climatiques changeantes.
IV Mesures et exploitation (séance de TP)
1) Etude du capteur récepteur infrarouge passif
Question 1
Le schéma 1 est associé à la définition B. Le schéma 2 est associé à la définition C. Le schéma 3 est
associé à la définition A.
Le capteur est donc numérique (Schéma 3 Définition A).
Zone de passage rapide de la main Zone de passage long de la main
16
Question 2
Les mouvements sont détectés même à des distances supérieures à 1 mètre. (Il peut être pratique de
positionner le capteur sur la tranche afin de s’en éloigner et de ne pas créer de parasites avec notre
corps). Le capteur ne détecte pas uniquement à sa verticale immédiate mais aussi tout autour.
Le mouvement d’un doigt proche du capteur, dans son axe horizontal, n’est pas détecté.
La zone de détection du capteur est large et peut être modélisé par un cône, partant du capteur et
s’étendant sur plus d’un mètre et de diamètre conséquent.
Question 3
Le document constructeur vérifie les observations et conclusions faites à la question précédente. Ce
document permet de quantifier les données sur le cône de détection.
Question 4
La feuille de papier n’est pas détectée par le capteur IR (attention au positionnement du corps)
Le capteur ne détecte que des radiations de longueur d’onde comprise entre 3 et 14 µm, soit des
radiations infrarouges. La feuille de papier n’émet pas de chaleur, elle ne sera donc pas détectée.
2) Fonctionnement du système de détection des intrusions
Question 5
Situation N°1 : mouvement très bref, la DEL blanche s’allume quelques secondes puis s’éteint.
Situation N°2 : mouvement long, la DEL blanche s’allume puis le buzzer retentit.
Question 6
Notre système fonctionne de la même manière que le détecteur d’intrusion réel. La différence majeure
est au niveau des temps de déclenchement qui sont bien plus court que pour une installation
domestique.

17
Grandeur physique
(onde infrarouge)
Signal numérique
Question 7
Question 8
Un oiseau passant devant le détecteur, enclenchera l’allumage du spot mais pas l’alarme car le
mouvement est bref.
Dans le cas d’un chat, il peut déclencher la sirène d’alarme s’il reste en mouvement dans le champ du
capteur pendant un temps trop long.
Les animaux émettent un rayonnement infrarouge, et seront détectés, sauf si le capteur est
positionner de façon à ne détecter que des mouvements situés à plus de 1 mètre du sol. Ainsi, un
adulte sera repéré, et les animaux n’engendreront pas de déclenchement intempestif.
Capteur IR
Interface Groomy
Signal numérique