systèmes de mesure linéaire à règle nue - m.a.m. - mesure asservissement machines ·...
TRANSCRIPT
Mars 2012
Systèmes de
mesure linéaire
à règle nue

Systèmes de mesure linéaire à règle nue
Les systèmes de mesure linéaire mesu-rent la position des axes linéaires sans élé-ments mécaniques supplémentaires. Cela exclu ainsi toutes une une série de sources d‘erreurs possibles :
erreur de positionnement due à l'échauf-• fement de la vis à billeserreur à l'inversion• erreur cinématique due aux défauts • de la vis à billes
Les systèmes de mesure linéaire sont donc indispensables pour les machines exi-geantes, au niveau de la précision de po-
sitionnement et de la vitesse d'usinage.
Les systèmes de mesure linéaire à règle
nue équipent les machines et équipements qui exigent une grande précision de mesu-re. Domaines d'applications typiques :
équipements de production et de mesu-• re dans l'industrie des semi-conducteursMachines d'insertion de composants• machines et équipements de très haute • précision, tels que tours à diamant pour l'usinage de pièces optiques, tours à pla-teau pour disques magnétiques, recti-fi euses de pièces en ferrite, etc.machines-outils de grande précision• machines de mesure et comparateurs, • microscopes de mesure ou autres appa-reils de précision en métrologieEntraînements directs•
Structure mécanique
Les systèmes de mesure linéaire à règle nue se composent d'une règle ou d'un ru-ban de mesure et d'une tête captrice fonc-tionnant sans contact mécanique.Avec les systèmes de mesure linéaire à rè-gle nue, la règle de mesure est fi xée sur une face d'appui. Par conséquent, il est in-dispensable de disposer d'une grande pla-néité de celle-ci pour garantir la précision élevée du système de mesure linéaire.
Les informations sur lesSystèmes de mesure angulaire absolue • avec balayage optimiséSystèmes de mesure angulaire avec • roulementSystèmes de mesure angulaire sans • roulement intégréSystèmes de mesure magnétique • encastrablesCapteurs rotatifs• Systèmes de mesure pour entraîne-• ments électriquesSystèmes de mesure linéaire pour ma-• chines-outils à commande numériqueElectroniques d'interfaçage• Commandes numériques HEIDENHAIN•
sont disponibles à l'adresse internet www.heidenhain.fr.
Ce catalogue rend obsolètes toutes les précédentes publications.Dans le cas d'une commande chez HEIDENHAIN, le catalogue de référence est l'édition courante à la date de com-mande.
Les normes (EN, ISO, etc.) ne s'appliquent que si elles sont expressément citées dans le catalogue.

Résumé
Systèmes de mesure linéaire à règle nue 2
Tableau récapitulatif 4
Caractéristiques techniques
Principes de mesure 6
Précision de la mesure 10
Fiabilité 12
Versions et schémas de montage mécanique 14
Informations mécaniques d'ordre général 17
Caractéristiques techniques
pour acquisition des positions en absolu LIC 4015 18
LIC 4017 20
LIC 4019 22
pour une précision élevée LIP 372, LIP 382 24
LIP 281 26
LIP 471, LIP 481 28
LIP 571, LIP 581 30
LIF 471, LIF 481 32
pour une grande vitesse de déplacement LIDA 473, LIDA 483 34
LIDA 475, LIDA 485 36
LIDA 477, LIDA 487 38
LIDA 479, LIDA 489 40
LIDA 277, LIDA 287 42
LIDA 279, LIDA 289 44
pour une mesure de coordonnées 2D PP 281 R 46
Connexion électrique
Interfaces 48
Connecteurs et câbles 57
Généralités sur les caractéristiques électriques 60
Appareils de mesure et de contrôle HEIDENHAIN 64
Electroniques d'interfaçage 66
Sommaire

4
Tableau récapitulatif
Mesure absolue de la position
Les systèmes de mesure linéaire absolue LIC permettent l'acquisition de la position absolue sur de grandes courses jusqu'à 27 m, même à de grandes vitesses de déplacement. Les dimensions ainsi que le montage correspondent à ceux du LIDA 400.
Support de mesure et
montage
Coeffi cient de
dilatation
αtherm
Classe de
précision
Mesure absolue de la position
LIC
pour acquisition des positions en absolu
Ruban de mesure en acier inséré et serré dans profi lés alu
idem à la face de montage
± 5 µm
Ruban de mesure en acier, inséré et fi xé dans profi lés alu
10 · 10–6K–1 ± 15 µm± 5 µm2)
Ruban de mesure en acier, collé sur la face de montage
10 · 10–6K–1 ± 15 µm± 5 µm2)
Mesure linéaire incrémentale
LIP
pour précision maximaleVitrocéramique Zerodur dans support en Invar à visser
0 · 10–6K–1 ± 0,5 µm3)
Règle en vitrocéramique Zerodur fi xée avec griffes de serrage
0 · 10–6K–1 ± 3 µm± 1 µm
Règle en vitrocéramique Zerodur ou en verre, fi xée avec griffes de serrage
0 · 10–6K–1 ou 8 · 10–6K–1
± 1 µm± 0,5 µm3)
Règle de mesure en verre, fi xée avec griffes de serrage
8 · 10–6K–1 ± 1 µm
LIF
pour une précision élevéeRègle en vitrocéramique Zerodur ou en verre, collée avec fi lm PRECIMET
0 · 10–6K–1 ou 8 · 10–6K–1
± 3 µm
LIDA
pour vitesses de déplace-ment élevées et grandes longueurs de mesure
Règle de mesure en vitrocéra-mique ou en verre, à coller sur la face de montage
0 · 10–6K–1 ou 8 · 10–6K–1
± 5 µm3)
Ruban de mesure en acier inséré et serré dans profi lés alu
idem à la face de montage
± 5 µm
Ruban de mesure en acier, inséré et fi xé dans profi lés alu
10 · 10–6K–1 ± 15 µm± 5 µm2)
Ruban de mesure en acier, collé sur la face de montage
10 · 10–6K–1 ± 15 µm± 5 µm2)
Ruban de mesure en acier, inséré et fi xé dans profi lés alu
10 · 10–6K–1 ± 30 µm
Ruban de mesure en acier, collé sur la face de montage
10 · 10–6K–1 ± 30 µm
PP
pour une mesure de coordonnées 2D
Plaque avec division en verre, à coller à plat
8 · 10–6K–1 ± 2 µm
1) Période de signal des signaux sinusoïdaux ; elle est déterminante pour les écarts à l'intérieur d'une période de signal (voir Précision de mesure)
Précision très élevée
Les systèmes de mesure linéaire à règle nue LIP se distinguent par de très faibles résolutions de mesure avec une très gran-de précision et reproductibilité. Ils fonction-nent selon le principe de balayage interfé-rentiel avec un réseau de phase DIADUR comme support de la mesure (LIP 281 : réseau de phase OPTODUR).
Grande précision
Les systèmes de mesure linéaire à règle nue LIF disposent d'un support de mesure basé sur le procédé SUPRADUR et fonc-tionnant selon le principe de balayage inter-férentiel. Ils possèdent une grande précision et reproductibilité, sont particulièrement faciles à installer et équipés de commuta-teurs de limite et d'une piste Homing. La version spéciale LIF 481 V convient aux ap-plications spéciales dans l'ultravide 10–7 bar (voir l'information produit séparée).
Vitesses de déplacement élevées
Les systèmes de mesure linéaire à règle nue LIDA sont particulièrement adaptés aux grandes vitesses de déplacement, jusqu'à 10 m/s. Les différentes possibilités de montage leurs confèrent une grande souplesse d'installation. En fonction des versions, les supports pour les divisions METALLUR peuvent être un ruban en acier, du verre ou de la vitrocéramique. Ils possè-dent un commutateur de limite.
Mesure de coordonnées 2D
Dans le système de mesure de coordon-nées 2D PP, la mesure est matérialisée par un réseau de phases 2D basé sur le procé-dé DIADUR et fonctionnant selon le princi-pe de balayage interférentiel. Il est ainsi possible de mesurer une position dans un plan.

LIF 481
LIP 581
LIC 4015
PP 281
LIDA 489
LIDA 287
LIC 4017
LIP 382
LIP 281
5
Erreur de
position par
période de
signal typ.
Période
du
signal1)
Longueur
de mesure
Interface Type Page
± 0,08 µm – 140 mm à 27 040 mm
EnDat 2.2/22 LIC 4015 18
± 0,08 µm – 240 mm à 6 040 mm
EnDat 2.2/22 LIC 4017 20
± 0,08 µm – 70 mm à 1 020 mm
EnDat 2.2/22 LIC 4019 22
± 0,001 µm 0,128 µm 70 mm à 270 mm
« TTL» 1 VCC
LIP 372
LIP 382
24
± 0,001 µm 0,512 µm 20 mm à 3 040 mm
» 1 VCC LIP 281 26
± 0,02 µm 2 µm 70 mm à 420 mm
« TTL» 1 VCC
LIP 471
LIP 481
28
± 0,04 µm 4 µm 70 mm à 1 440 mm
« TTL» 1 VCC
LIP 571
LIP 581
30
± 0,04 µm 4 µm 70 mm à 1 020 mm
« TTL» 1 VCC
LIF 471
LIF 481
32
± 0,2 µm 20 µm 240 mm à 3 040 mm
« TTL» 1 VCC
LIDA 473
LIDA 483
34
± 0,2 µm 20 µm 140 mm à 30 040 mm
« TTL» 1 VCC
LIDA 475
LIDA 485
36
± 0,2 µm 20 µm 240 mm à 6 040 mm
« TTL» 1 VCC
LIDA 477
LIDA 487
38
± 0,2 µm 20 µm jusqu'à 6 000 mm4)
« TTL» 1 VCC
LIDA 479
LIDA 489
40
± 2 µm 200 µm jusqu'à 10 000 mm4)
« TTL» 1 VCC
LIDA 277
LIDA 287
42
± 2 µm 200 µm jusqu'à 10 000 mm4)
« TTL» 1 VCC
LIDA 279
LIDA 289
44
± 0,04 µm 4 µm Plage de mesure 68 x 68 mm4)
» 1 VCC PP 281 46
2) après compensation des défauts linéaires dans l'électronique consécutive3) classes de précision supérieures sur demande4) autres classes de précision sur demande
Résu
mé
6
Principes de mesure
Support de la mesure
Dans les systèmes de mesure HEIDENHAIN à balayage optique, la mesure est matériali-sée par des structures régulières – appe-lées divisions.Des substrats en verre ou en acier sont utilisés comme support de division. Dans les systèmes de mesure pour grandes lon-gueurs, le réseau de divisions est déposé sur un ruban en acier.
Les divisions fi nes sont réalisées au moyen de procédés photo lithographiques spécia-lement développés par HEIDENHAIN.
AURODUR : traits dépolis sur des rubans • en acier revêtus d'une couche d'or ; période de division typique 40 µmMETALLUR : division insensible aux salis-• sures constituée de traits métalliques sur or ; période de division typique 20 µmDIADUR : traits en chrome particulière-• ment résistants (période de division typi-que 20 µm) ou structure tridimensionnelle sur verre en chrome (période de division typique 8 µm)Réseau de phases SUPRADUR : structure • planaire tridimensionnelle, particulièrement insensible aux salissures ; période de division typique 8 µm et inférieure.Réseau de phases OPTODUR : structure • planaire tridimensionnelle, avec réfl exion particulièrement importante ; période de division typique 2 µm et inférieure.
Ces procédés permettent non seulement d'obtenir des périodes de divisions très fi nes mais aussi une grande netteté des bords ainsi qu'une bonne homogénéité de la gravure. Associés au balayage photoélec-trique, ils sont déterminants pour obtenir une qualité élevée des signaux de sortie.
HEIDENHAIN réalise les matrices de gravure sur ses propres machines de très haute précision.
Procédé de mesure absolue
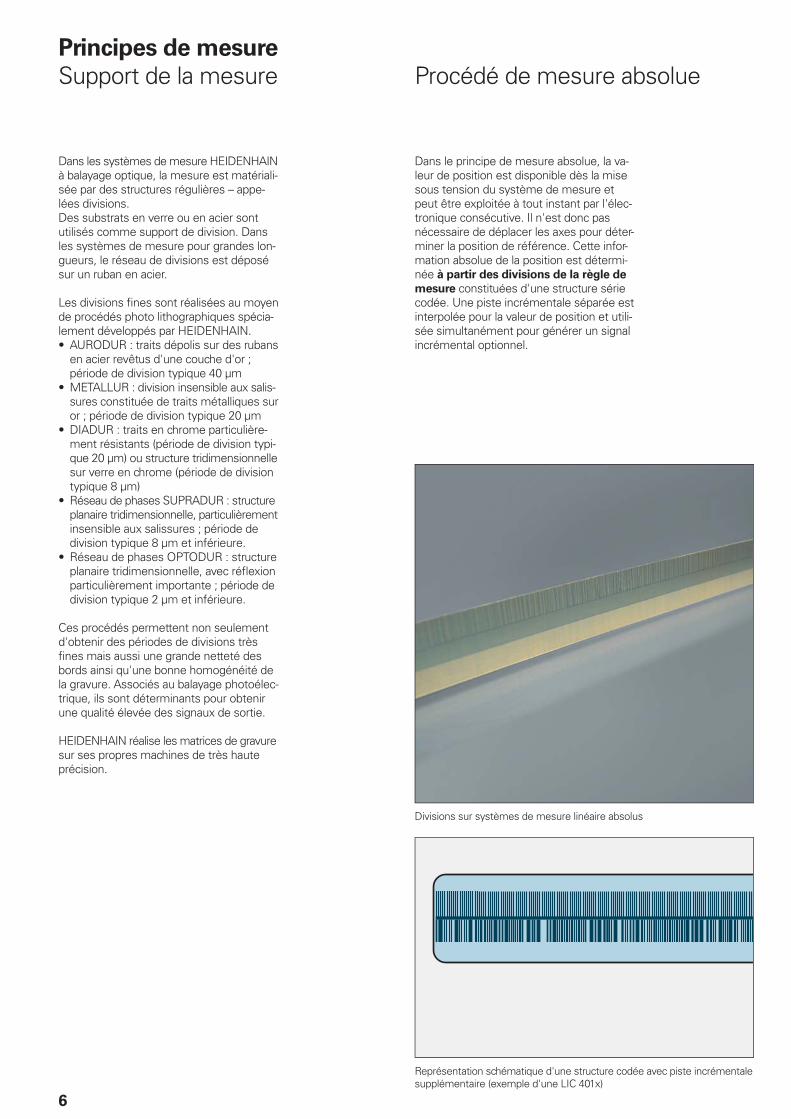
Dans le principe de mesure absolue, la va-leur de position est disponible dès la mise sous tension du système de mesure et peut être exploitée à tout instant par l'élec-tronique consécutive. Il n'est donc pas nécessaire de déplacer les axes pour déter-miner la position de référence. Cette infor-mation absolue de la position est détermi-née à partir des divisions de la règle de
mesure constituées d'une structure série codée. Une piste incrémentale séparée est interpolée pour la valeur de position et utili-sée simultanément pour générer un signal incrémental optionnel.
Représentation schématique d'une structure codée avec piste incrémentale supplémentaire (exemple d'une LIC 401x)
Divisions sur systèmes de mesure linéaire absolus

7
Cara
cté
risti
qu
es t
ech
niq
ues
Procédé de mesure incrémentale
Dans le procédé de mesure incrémentale, la division est constituée d'une structure de réseau régulière. L'information de posi-tion est obtenue par comptage des diffé-rents incréments (pas de mesure) à partir de n'importe quel point zéro donné. Dans la mesure où un rapport absolu est néces-saire pour déterminer les positions, le sup-port de la mesure dispose d'une seconde piste sur laquelle se trouve une marque de
référence. La position absolue de la règle de mesure défi nie grâce à la marque de ré-férence correspond exactement à un pas de mesure.Il est donc nécessaire de franchir la marque de référence pour établir un rapport absolu ou pour retrouver le dernier point d'origine sélectionné.
Dans le cas le plus défavorable, des déplace-ments importants dans la plage de mesure sont nécessaires. Pour faciliter ce „franchis-sement du point de référence“, de nom-breux systèmes de mesure HEIDENHAIN disposent de marques de référence à dis-
tances codées : la piste de référence pos-sède plusieurs marques dont les distances sont différentes les unes par rapport aux autres. L'électronique consécutive détermine le rapport absolu dès le passage sur deux marques de référence voisines – par consé-quent après un déplacement de quelques millimètres seulement (voir tableau).Les systèmes de mesure avec marques de référence à distances codées comportent la lettre „C“ derrière leur désignation (p. ex. LIP 581 C).
Grâce aux marques de référence à distances codées, le référence absolue est calculée par comptage des incréments entre deux marques de référence d'après la formule suivante :
avec :
P1 = (abs B–sgn B–1) x G + (sgn B–sgn V) x abs MRR2 2
B = 2 x MRR–G
avec :P1 = position en périodes de signal de la
première marque de référence franchie
abs = valeur absolue
sgn = fonction sens (fonction signe = „+1“ ou „–1“)
MRR = nombre de périodes de signal entre les marques de référence franchies
G = incrément nominal entre deux marques de référence fi xes, en périodes de signal (voir tableau)
V = sens de déplacement (+1 ou –1) - Un déplacement de la tête captrice vers la droite (montage conforme au plan) donne „+1“
Divisions de systèmes de mesure linéaire incrémentaux
Représentation schématisée de divisions incrémentales avec marques de référence à distances codées (exemple d'un LIP 5x1 C)
Période de
signal
Ecart de base G en
périodes de signal
Déplacement
max.
LIP 5x1 C 4 µm 5 000 20 mm
LIDA 4x3 C 20 µm 1 000 20 mm
8
Balayage photoélectrique
La plupart des systèmes de mesure HEIDENHAIN fonctionnent selon le principe de balayage photoélectrique. Ce balayage s'effectue sans contact et donc sans usure. Il détecte des traits de divisions extrême-ment fi ns d'une largeur de quelques mi-crons et génère des signaux de sortie de périodes très faibles.
Plus la période de division du réseau de traits est fi ne et plus les effets de la diffrac-tion infl uent sur le balayage photoélectri-que. Pour les systèmes de mesure linéaire, HEIDENHAIN utilise deux principes de balayage :
le • principe de mesure par projection pour périodes de division de 10 µm à 200 µm.le • principe de mesure interférentielle pour de très faibles périodes de division, p. ex. 4 µm et inférieure.
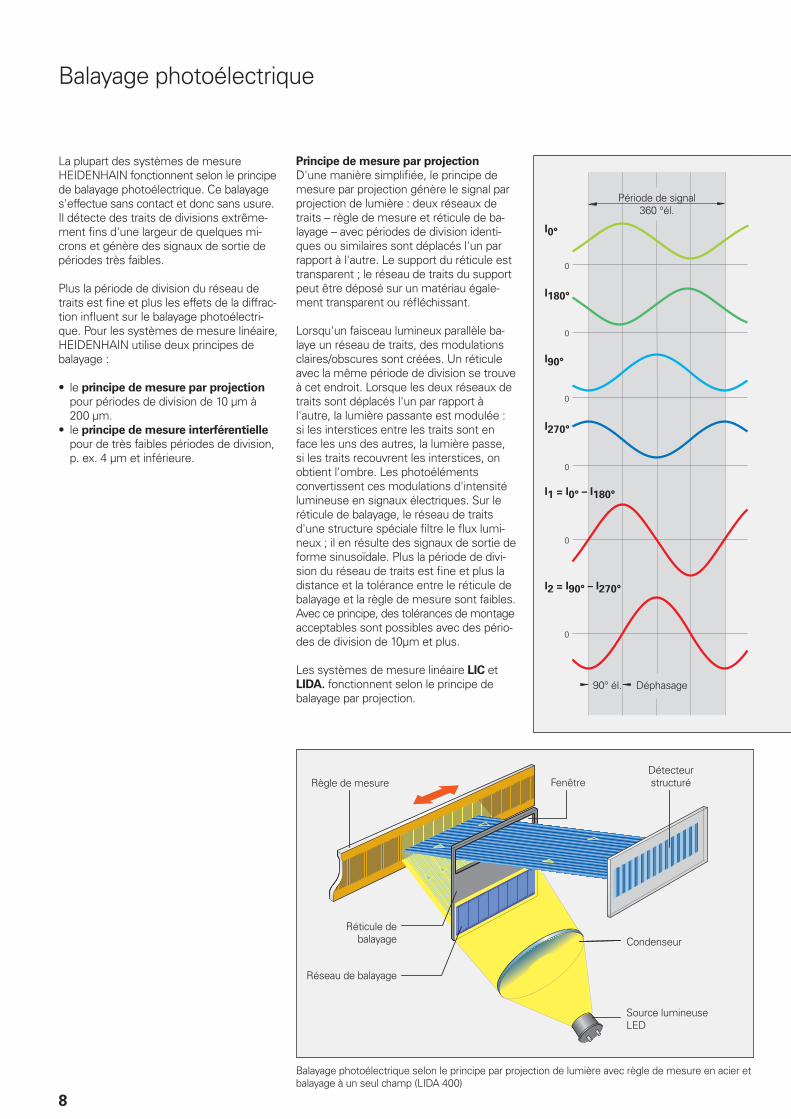
Principe de mesure par projection
D'une manière simplifi ée, le principe de mesure par projection génère le signal par projection de lumière : deux réseaux de traits – règle de mesure et réticule de ba-layage – avec périodes de division identi-ques ou similaires sont déplacés l'un par rapport à l'autre. Le support du réticule est transparent ; le réseau de traits du support peut être déposé sur un matériau égale-ment transparent ou réfl échissant.
Lorsqu'un faisceau lumineux parallèle ba-laye un réseau de traits, des modulations claires/obscures sont créées. Un réticule avec la même période de division se trouve à cet endroit. Lorsque les deux réseaux de traits sont déplacés l'un par rapport à l'autre, la lumière passante est modulée : si les interstices entre les traits sont en face les uns des autres, la lumière passe, si les traits recouvrent les interstices, on obtient l'ombre. Les photoéléments convertissent ces modulations d'intensité lumineuse en signaux électriques. Sur le réticule de balayage, le réseau de traits d'une structure spéciale fi ltre le fl ux lumi-neux ; il en résulte des signaux de sortie de forme sinusoïdale. Plus la période de divi-sion du réseau de traits est fi ne et plus la distance et la tolérance entre le réticule de balayage et la règle de mesure sont faibles. Avec ce principe, des tolérances de montage acceptables sont possibles avec des pério-des de division de 10µm et plus.
Les systèmes de mesure linéaire LIC et LIDA. fonctionnent selon le principe de balayage par projection.
Période de signal360 °él.
90° él. Déphasage
Règle de mesure FenêtreDétecteur structuré
Réticule de balayage
Réseau de balayage
Condenseur
Source lumineuseLED
Balayage photoélectrique selon le principe par projection de lumière avec règle de mesure en acier et balayage à un seul champ (LIDA 400)
9
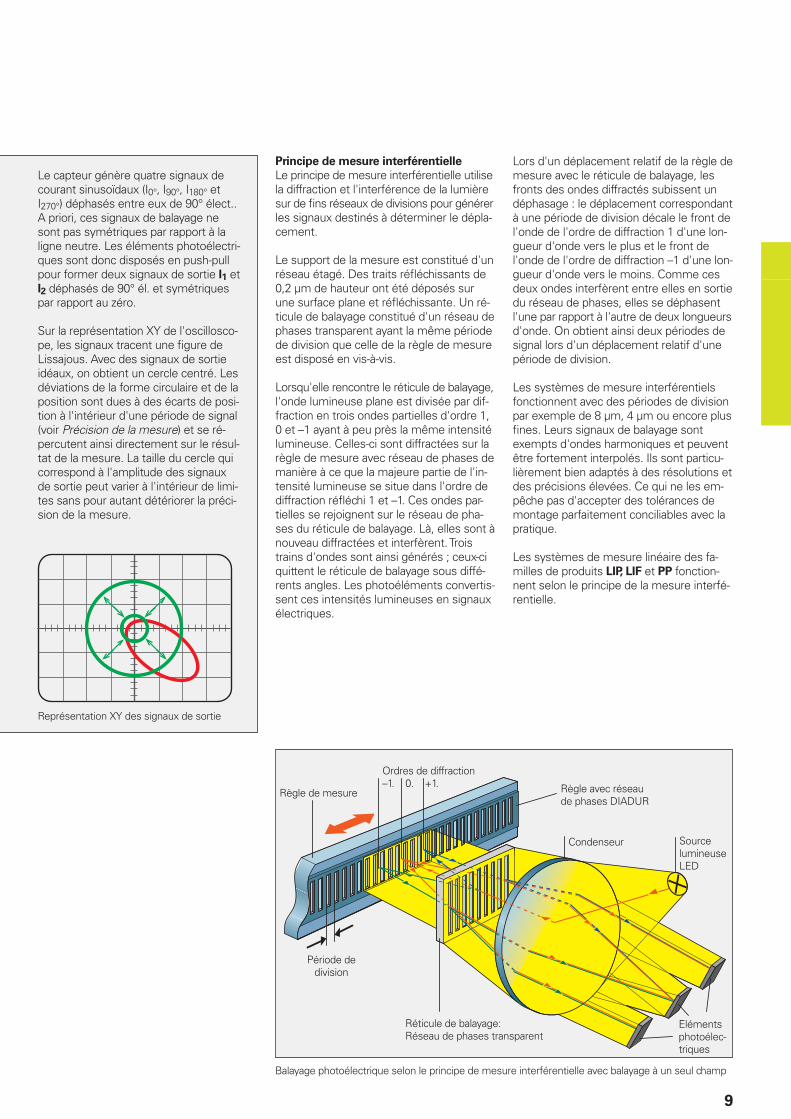
Le capteur génère quatre signaux de courant sinusoïdaux (I0°, I90°, I180° et I270°) déphasés entre eux de 90° élect.. A priori, ces signaux de balayage ne sont pas symétriques par rapport à la ligne neutre. Les éléments photoélectri-ques sont donc disposés en push-pull pour former deux signaux de sortie I1 et I2 déphasés de 90° él. et symétriques par rapport au zéro.
Sur la représentation XY de l'oscillosco-pe, les signaux tracent une fi gure de Lissajous. Avec des signaux de sortie idéaux, on obtient un cercle centré. Les déviations de la forme circulaire et de la position sont dues à des écarts de posi-tion à l'intérieur d'une période de signal (voir Précision de la mesure) et se ré-percutent ainsi directement sur le résul-tat de la mesure. La taille du cercle qui correspond à l'amplitude des signaux de sortie peut varier à l'intérieur de limi-tes sans pour autant détériorer la préci-sion de la mesure.
Balayage photoélectrique selon le principe de mesure interférentielle avec balayage à un seul champ
Règle de mesure
Ordres de diffraction–1. 0. +1. Règle avec réseau
de phases DIADUR
Période de division
Réticule de balayage: Réseau de phases transparent
Eléments photoélec-triques
Source lumineuse LED
Condenseur
Principe de mesure interférentielle
Le principe de mesure interférentielle utilise la diffraction et l'interférence de la lumière sur de fi ns réseaux de divisions pour générer les signaux destinés à déterminer le dépla-cement.
Le support de la mesure est constitué d'un réseau étagé. Des traits réfl échissants de 0,2 µm de hauteur ont été déposés sur une surface plane et réfl échissante. Un ré-ticule de balayage constitué d'un réseau de phases transparent ayant la même période de division que celle de la règle de mesure est disposé en vis-à-vis.
Lorsqu'elle rencontre le réticule de balayage, l'onde lumineuse plane est divisée par dif-fraction en trois ondes partielles d'ordre 1, 0 et –1 ayant à peu près la même intensité lumineuse. Celles-ci sont diffractées sur la règle de mesure avec réseau de phases de manière à ce que la majeure partie de l'in-tensité lumineuse se situe dans l'ordre de diffraction réfl échi 1 et –1. Ces ondes par-tielles se rejoignent sur le réseau de pha-ses du réticule de balayage. Là, elles sont à nouveau diffractées et interfèrent. Trois trains d'ondes sont ainsi générés ; ceux-ci quittent le réticule de balayage sous diffé-rents angles. Les photoéléments convertis-sent ces intensités lumineuses en signaux électriques.
Lors d'un déplacement relatif de la règle de mesure avec le réticule de balayage, les fronts des ondes diffractés subissent un déphasage : le déplacement correspondant à une période de division décale le front de l'onde de l'ordre de diffraction 1 d'une lon-gueur d'onde vers le plus et le front de l'onde de l'ordre de diffraction –1 d'une lon-gueur d'onde vers le moins. Comme ces deux ondes interfèrent entre elles en sortie du réseau de phases, elles se déphasent l'une par rapport à l'autre de deux longueurs d'onde. On obtient ainsi deux périodes de signal lors d'un déplacement relatif d'une période de division.
Les systèmes de mesure interférentiels fonctionnent avec des périodes de division par exemple de 8 µm, 4 µm ou encore plus fi nes. Leurs signaux de balayage sont exempts d'ondes harmoniques et peuvent être fortement interpolés. Ils sont particu-lièrement bien adaptés à des résolutions et des précisions élevées. Ce qui ne les em-pêche pas d'accepter des tolérances de montage parfaitement conciliables avec la pratique.
Les systèmes de mesure linéaire des fa-milles de produits LIP, LIF et PP fonction-nent selon le principe de la mesure interfé-rentielle.
Représentation XY des signaux de sortie
10
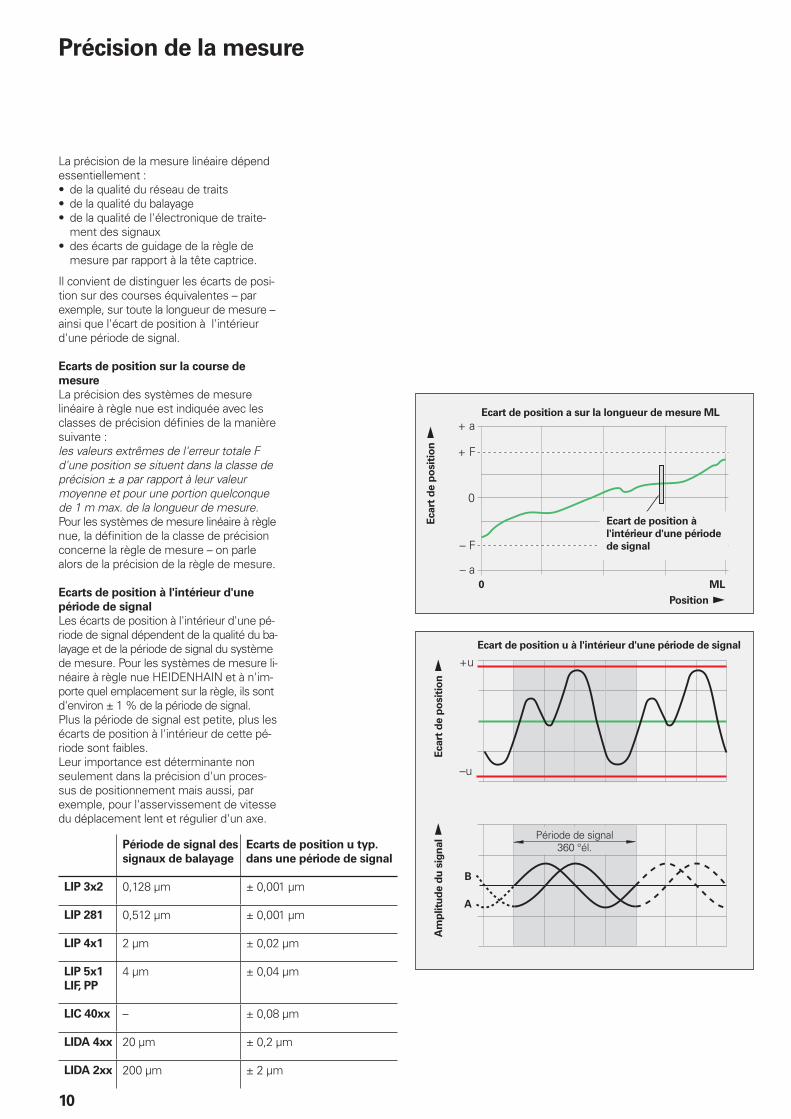
Précision de la mesure
La précision de la mesure linéaire dépend essentiellement :
de la qualité du réseau de traits• de la qualité du balayage• de la qualité de l'électronique de traite-• ment des signauxdes écarts de guidage de la règle de • mesure par rapport à la tête captrice.
Il convient de distinguer les écarts de posi-tion sur des courses équivalentes – par exemple, sur toute la longueur de mesure – ainsi que l'écart de position à l'intérieur d'une période de signal.
Ecarts de position sur la course de
mesure
La précision des systèmes de mesure linéaire à règle nue est indiquée avec les classes de précision défi nies de la manière suivante :les valeurs extrêmes de l'erreur totale F d'une position se situent dans la classe de précision ± a par rapport à leur valeur moyenne et pour une portion quelconque de 1 m max. de la longueur de mesure.Pour les systèmes de mesure linéaire à règle nue, la défi nition de la classe de précision concerne la règle de mesure – on parle alors de la précision de la règle de mesure.
Ecarts de position à l'intérieur d'une
période de signal
Les écarts de position à l'intérieur d'une pé-riode de signal dépendent de la qualité du ba-layage et de la période de signal du système de mesure. Pour les systèmes de mesure li-néaire à règle nue HEIDENHAIN et à n'im-porte quel emplacement sur la règle, ils sont d'environ ± 1 % de la période de signal. Plus la période de signal est petite, plus les écarts de position à l'intérieur de cette pé-riode sont faibles.Leur importance est déterminante non seulement dans la précision d'un proces-sus de positionnement mais aussi, par exemple, pour l'asservissement de vitesse du déplacement lent et régulier d'un axe.
Période de signal des
signaux de balayage
Ecarts de position u typ.
dans une période de signal
LIP 3x2 0,128 µm ± 0,001 µm
LIP 281 0,512 µm ± 0,001 µm
LIP 4x1 2 µm ± 0,02 µm
LIP 5x1
LIF, PP
4 µm ± 0,04 µm
LIC 40xx – ± 0,08 µm
LIDA 4xx 20 µm ± 0,2 µm
LIDA 2xx 200 µm ± 2 µm
Ecart de position a sur la longueur de mesure ML
Ecart de position à
l'intérieur d'une période
de signal
Ecart
de p
osit
ion
Ecart
de p
osit
ion
Am
plitu
de d
u s
ign
al
Position
Période de signal 360 °él.
Ecart de position u à l'intérieur d'une période de signal

11
Avant livraison, les fonctions de tous les sys-tèmes de mesure linéaire de HEIDENHAIN sont contrôlées, et leur précision est mesurée.
La précision des systèmes de mesure li-néaire est mesurée en procédant à un dé-placement dans les deux sens. Le nombre de positions de mesure est choisi de ma-nière à enregistrer avec une grande préci-sion non seulement l'erreur d'onde longue mais aussi les écarts de position à l'inté-rieur d'une période de signal.
Le certifi cat de contrôle du constructeur atteste la précision garantie de chaque sys-tème de mesure. Les étalons de référence également indiqués renvoient – comme il est spécifi é dans EN ISO 9001 – aux éta-lons nationaux ou internationaux reconnus.
Pour les séries LIP et PP, un procès-verbal
d'étalonnage précise les écarts de position sur toute la longueur de mesure. Le pas de mesure ainsi que l'incertitude de l'étalon-nage sont également indiqués.
Plage de température
Les systèmes de mesure linéaire sont éta-lonnés à une température de référence de 20 °C. La précision du système indiquée sur le procès-verbal de mesure est valable à cette température.La plage de température de service indi-que les limites de température ambiante dans lesquelles fonctionnent les systèmes de mesure linéaire.La plage de température de stockage de –20 à 70 °C est valable pour l'appareil dans son emballage.
En cas de montage non conforme aux conditions requises, des erreurs de guidage peuvent infl uencer fortement les valeurs de position. Pour réduire au maximum les erreurs d'Abbe, il est recommandé de fi xer la règle ou son boitier au niveau de la table, sur le chariot de la machine. Concernant la face de montage, il faut veiller en particulier au parallélisme par rapport au guidage de la machine.

12
Fiabilité
Les systèmes de mesure linéaire à règle nue de HEIDENHAIN ont été optimisés pour équiper les machines précises et rapi-des. Bien qu'ils ne soient pas protégés par un carter, ils sont peu sensibles aux salis-sures et présentent une grande stabilité à long terme. Leur montage est simple et rapide.
Faible sensibilité aux salissures
En plus de la qualité élevée du réseau de divi-sions, le procédé de balayage infl uence direc-tement la précision et la fi abilité des systè-mes de mesure linéaire. Les systèmes de mesure linéaire à règle nue HEIDENHAIN fonctionnent avec un balayage à un seul
champ. Les signaux sont générés à partir d'un seul champ de balayage. Contraire-ment au balayage avec quatre champs, les salissures locales présentes sur le support de mesure (p. ex. les empreintes de doigt laissées lors du montage ou l'accumulation d'huile des glissières etc.) infl uencent dans les mêmes proportions l'intensité lumineu-se et les signaux de balayage. L'amplitude des signaux de sortie est certes modifi ée, par contre l'offset et le déphasage ne va-rient pas. Ils peuvent toujours être forte-ment interpolés, avec des écarts de posi-tion restant faibles à l'intérieur d'une période de signal.
Le grand champ de balayage réduit la sensibilité aux salissures. Un disfonctionne-ment du système de mesure peut égale-ment être évité en cas de salissures. Cela est particulièrement évident pour les LIDA 400 et LIF 400 qui possèdent une très grande surface de balayage de 14,5 mm2 par rap-port à la période de signal. Les signaux four-nis sont de grande qualité même en pré-sence de salissures de 3 mm de diamètre comme du toner d'imprimante, des pous-sières, de l'eau ou de l'huile. Les écarts de position restent très en deçà des valeurs défi nissant la classe de précision de la règle de mesure.
Infl uences des salissures sur le balayage avec 4 champs (en rouge) et avec un champ (en vert)
Réaction aux salissures du LIF 400
Position [mm]
Position [mm]
Ecart
de p
osit
ion
[µ
m]
Ecart
de p
osit
ion
[µ
m]
Huile Eau Toner Poussière Trace de doigt

LIDA 400
LIF 400
13
Des supports de mesure résistants
Par leur composition, les supports des sys-tèmes de mesure à règle nue sont très ex-posés à l'environnement. HEIDENHAIN utilise donc en général des réseaux de divi-sions robustes réalisés avec des procédés spéciaux.
Avec le procédé DIADUR, les structures en chrome dur sont déposées sur un support en verre ou en acier.
Avec les procédés OPTODUR et SUPRA-DUR, une couche transparente est d'abord appliquée sur la couche primaire réfl échis-sante. Une couche en chrome dur de quel-ques nanomètres seulement est ensuite déposée pour réaliser un réseau de phases optique tridimensionnel. La structure est la même pour les divisions METALLUR avec le principe de mesure par projection. Sur une couche réfl échissante en or, on a dé-posé une couche intermédiaire en verre. Celle-ci est recouverte d'un réseau de traits en chrome à pouvoir absorbant, semi-trans-parents d'une épaisseur de quelques nano-mètres seulement. Les règles avec divisions OPTODUR, SUPRADUR et METALLUR sont particulièrement robustes et insensi-bles aux salissures. En effet, la faible hau-teur des structures ne laisse quasiment aucun emplacement où pourraient s'accu-muler les poussières, salissures ou autres particules d'humidité.
Tolérances de montage pratiques
En règle générale, de faibles périodes de signal sont associées à d'étroites toléran-ces de montage pour la distance fonction-nelle entre la tête captrice et le ruban de mesure. Cela est dû aux propriétés de dif-fraction des structures en réseau. Une fl uc-tuation de la distance fonctionnelle de seu-lement ± 0,1 mm provoque une chute de 50 %du signal. Le principe de balayage in-terférentiel ainsi que les nouveaux réticules des systèmes de mesure basés sur le prin-cipe de mesure par projection permettent des tolérances de montage raisonnables malgré les faibles périodes des signaux.
Les tolérances de montage des systèmes de mesure linéaire à règle nue HEIDENHAIN n'agissent que très faiblement sur les si-gnaux de sortie. En particulier, la tolérance spécifi ée de l'écart entre la règle et la tête captrice (distance fonctionnelle) ne modifi e l'amplitude du signal que de manière négli-geable. Ce comportement est déterminant pour la grande fi abilité des systèmes de mesure linéaire à règle nue de HEIDENHAIN. Dans les appareils des séries LIDA 400 et LIF 400, la relation entre la distance fonc-tionnelle et l'amplitude du signal est illus-trée à titre d'exemple dans les deux dia-grammes de droite.
Couche réfl échissante
Couche transparente
Couche de base réfl échissante
Substrat
OPTODURSUPRADUR
Am
plitu
de d
u s
ign
al [%
]A
mp
litu
de d
u s
ign
al [%
]
Distance fonctionnelle [mm]
Distance fonctionnelle [mm]
1) = ruban de mesure2) = support du ruban
Tolérance de montage
Tolérance de montage
METALLUR
Couche transparente
Couche de base réfl échissante
Couche semi-transparente

14
Versions et schémas de montage mécanique
Règles de mesure
Les systèmes de mesure linéaire à règle nue sont constitués d'éléments séparés tels que tête captrice, règle ou ruban de mesure. C'est uniquement le guidage de la machine qui assure le positionnement de ces éléments l'un par rapport à l'autre. Par conséquent, certaines conditions particulière sont à considérer lors de la conception de la machine :
le guidage de la machine doit être conçu • de manière à ce que les distances fonc-
tionnelles soient respectées à l'endroit prévu pour le montage (voir Caractéristi-ques techniques).la face d'appui de la règle de mesure doit • respecter les tolérances de planéité.pour faciliter le réglage de la tête captrice • par rapport à la règle de mesure, il est conseillé d'utiliser une équerre de mon-
tage.
Versions des règles de mesure
Pour les diverses applications et exigences en matière de précision, HEIDENHAIN fournit la version adaptée de la règle de mesure.
LIP 3x2
Les règles de très grande précision LIP 300 possèdent un support de divisions Zerodur collé sur la fi bre thermiquement neutre d'un support en acier. Le support en acier est vissé sur la surface d'appui. Les élé-ments de fi xation fl exibles garantissent un comportement thermique reproductible.
LIP 281
LIP 4x1
LIP 5x1
Les supports de divisions Zerodur ou en verre sont fi xés directement sur la face d'appui au moyen de griffes de serrage et sécurisés avec une colle silicone. Un point de fi xation avec colle époxy défi nit le point zéro thermique.
Accessoires pour LIP 281Griffes de serrage (6 x) ID 683609-01Griffe de serrage pour point zéro thermique ID 638611-01Colle époxy ID 734360-01
Accessoires pour LIP 4xx/LIP 5xxGriffes de serrage ID 270711-04Colle silicone ID 200417-02Colle époxy ID 200409-01
LIF 4x1
LIDA 4x3
Les supports de divisions en verre sont collés directement sur la face d'appui au moyen du fi lm de montage PRECIMET. Un rouleau permet d'assurer une pression régulière.
AccessoiresRouleau ID 276885-01
Règle de mesure LIP 302
Règle de mesure
LIP 401
Règle de mesure
LIP 501
Règle de mesure LIF 401
Règle de mesure
LIP 200

15
LIC 4015
LIDA 4x5
Les systèmes des séries LIC 4015 et LIDA 4x5 sont particulièrement bien adap-tés aux grandes longueurs de mesure. Lors du montage, les tronçons du support du ruban sont vissés ou collés avec le fi lm de montage PRECIMET sur la face d'appui. Le ruban monobloc est ensuite inséré dans le support, serré de manière défi nie et fi xé aux extrémités sur le banc de la ma-chine. Les LIC 40x5 et LIDA 4x5 présen-tent ainsi les mêmes comportements ther-miques que la face d'appui.
LIC 4017
LIDA 2x7
LIDA 4x7
Les systèmes de mesures LIC 4017, LIDA 2x7 et LIDA 4x7 sont également adaptés aux grandes longueurs de mesure. Les tronçons du support du ruban sont col-lés sur la face d'appui avec le fi lm de mon-tage PRECIMET. Le ruban monobloc est inséré dans le support, fi xé en son centre sur le banc de la machine. Ce mode de fi xation permet au ruban de se dilater libre-ment vers les deux extrémités et garantit un comportement thermique défi ni.
Accessoire pour LIC 4017, LIDA 4x7Outil de montage ID 373990-01
Ruban de mesure LIC 4019, LIDA 209/409
Règle de mesure LIC 4015, LIDA 405
Règle de mesure LIC 4017, LIDA 207/407
Outil de montage (pour LIC 4017, LIDA 4x7)
LIC 4019
LIDA 2x9
LIDA 4x9
Le ruban de mesure en acier et son réseau de divisions est collé directement sur la face d'appui au moyen du fi lm de montage PRECIMET. Un rouleau permet d'assurer une pression régulière. Le positionnement latéral du ruban de mesure est à prévoir au moyen d'un épaulement ou d'une barrette de butée d'une hauteur de 0,3 mm.
Accessoire pour versions avec PRECIMETRouleau ID 276885-01

LIP 200
LIC/LIDA 400
LIP/LIF
LIDA 400
16
Versions et schémas de montage mécanique
Têtes captrices
Les systèmes de mesure à règle nue sont montés sur la machine. Il est donc néces-saire, à l'issue du montage, de faire un ré-glage précis, ce qui déterminera la préci-sion défi nitive du système de mesure. La machine doit être conçue de telle sorte que le réglage puisse être fait de manière simple et pratique et que la construction soit aussi stable que possible.
La tête captrice doit être réglable dans cinq axes pour permettre un alignement précis avec la règle de mesure (voir fi gure). Des trous de fi xation oblongs dans l'équerre de montage sont généralement suffi sants pour les réglages nécessaires très fi ns.
Montage LIP 281
Le montage de la tête captrice LIP 281 est possible sur une face plane (p. ex. une équerre), par l'arrière ou le dessus. Des surfaces de contacts servant de ponts thermiques assurent une conduction ther-mique optimale. Les éléments de montage devraient être constitués de matériaux ayant une bonne conduction thermique.
Montage LIP/LIF
La tête captrice possède un diamètre de centrage grâce auquel elle peut être orien-tée dans un perçage de l'équerre de mon-tage. Un réglage parallèle à la règle est ainsi possible.
Montage LIC/LIDA
Il existe trois possibilités pour monter la tête captrice ( voir cotes d'encombrement). La distance fonctionnelle entre la règle ou le ruban de mesure est réglable avec une feuille d'écartement. L'avantage en est la fi xation par l'arrière de la tête captrice au moyen d'une équerre de montage. Au moyen d'un outil, la tête captrice est alors réglée de manière précise en la tournant dans un trou prévu à cet effet dans l'équerre de montage.
Réglage
Réglage de la distance fonctionnelle entre la règle de mesure et la tête captrice à l'aide d'une feuille d'écartement.
Le Kit de réglage et de contrôle PWM 20 permet de régler de manière simple et rapide les signaux des systèmes LIC et LIP 281. Pour tous les autres systèmes de mesure linéaire à règle nue, les signaux incrémen-taux et les marques de référence sont ré-glables en tournant légèrement la tête cap-trice (un outil est prévu pour le LIDA 400).
Pour faciliter les réglages, HEIDENHAIN fournit les appareils de mesure adéquats (voir Appareils de mesure HEIDENHAIN).
Feuille d'écartement
Feuille d'écartement
Feuille d'écartement

17
Montage
Les phases de montage et cotes à res-pecter sont uniquement celles qui fi gu-rent dans le manuel de montage livré avec l'appareil. Toutes les spécifi cations relatives au montage fi gurant dans ce ca-talogue sont provisoires et ne constituent pas un engagement ; elles ne sont pas contractuelles.
Informations mécaniques d'ordre général
Montage
Pour faciliter le passage des câbles, la tête captrice est montée de préférence sur la partie fi xe de la machine, la règle de mesure sur la partie mobile.L'emplacement de montage des systèmes de mesure linéaire doit être choisi avec pré-caution afi n de ne pas infl uencer la précision mais également la durée de vie.
La position de montage doit être la plus • proche possible de la zone d'usinage afi n de limiter l'erreur d'Abbe.Pour un fonctionnement optimal, le sys-• tème de mesure ne doit pas être soumis en permanence à de fortes vibrations. Pour cette raison, utiliser pour le monta-ge les parties massives de la machine et éviter de monter le système de mesure sur des éléments creux ou des tasseaux.Les systèmes de mesure linéaire ne • doivent pas être montés à proximité de sources de chaleur pour limiter les in-fl uences thermiques.
Plage de température
La plage de température de service indi-que les limites de température ambiante à l'intérieur desquelles les caractéristiques techniques des systèmes de mesure linéaire seront respectées.La plage de température de stockage de –20 à 70 °C concerne l'appareil dans son emballage.
Comportement thermique
Le comportement thermique du système de mesure linéaire est un critère important pour la précision de la machine. En général, le comportement thermique du système de mesure linéaire devrait être identique à celui de la pièce ou de l'objet à mesurer. Le système de mesure linéaire devrait se dila-ter ou se contracter de manière défi nie et reproductible lors de variations thermiques.Les supports de gravure des systèmes de mesure linéaire HEIDENHAIN (voir Carac-téristiques techniques) possèdent diffé-rents coeffi cients de dilatation thermique. Vous pouvez donc choisir le système de mesure le mieux adapté à votre application en fonction de ce coeffi cient.
Indice de protection (EN 60 529)
Les têtes captrices des systèmes de me-sure linéaire à règle nue LIP, LIF et PP pos-sèdent un indice de protection IP 50 et les têtes LIDA et LIC, l'indice IP 40. Les règles de mesure n'ont pas de protection particu-lière. Si les règles de mesure sont expo-sées aux salissures, il convient alors de les protéger en conséquence.
Accélérations
Les systèmes de mesure linéaire sont sou-mis à des accélérations de types divers, aussi bien en fonctionnement que lors du montage.
Les valeurs limites de la • tenue aux vibra-
tions sont valables pour des fréquences de 55 à 2 000 Hz (EN 60 068-2-6). Si des vibrations dues à l'application ou au mon-tage dépassent les valeurs d'accélération admissibles, le système de mesure peut être détérioré. Des tests du système
dans sa globalité sont donc indispen-
sables.
Les valeurs limites de l'accélération ad-• missible (choc semi-sinusoïdal) par rapport à la résistance aux chocs et aux coups sont valables pendant 11 ms ou 6 ms pour le LIC (EN 60 068-2-27). Il faut éviter impérativement de donner des coups de maillet ou autres..., p. ex. pour aligner le système de mesure.
Pièces d'usure
Les systèmes de mesure HEIDENHAIN sont conçus pour une longue durée de vie. Une maintenance préventive n'est pas né-cessaire. Néanmoins, ils contiennent des composants soumis à une usure qui dé-pend de l'application et de la manipulation. Il s'agit notamment du câble soumis à une courbure fréquente.Pour les systèmes de mesure avec roule-ment intégré tels que les capteurs rotatifs et systèmes de mesure angulaire s'y rajoutent les roulements et les joints d'étanchéité ainsi que les lèvres d'étanchéité pour les systèmes de mesure linéaire cartérisés.
Test-système
En règle générale, les systèmes de mesure HEIDENHAIN sont intégrés dans des systèmes complets. Dans ce cas, et indé-pendamment des caractéristiques du sys-tème de mesure, il convient de tester le
système complet de manière consé-
quente.Les caractéristiques techniques de ce cata-logue concernent le système de mesure et non pas le système complet. L'utilisation du système de mesure en dehors des spé-cifi cations indiquées ou en dehors du ca-dre d'une utilisation non conforme à la destination de l'appareil se fait sous l'entiè-re et la seule responsabilité de l'utilisateur.Sur les systèmes de sécurité, la valeur de position du système de mesure doit être contrôlée après la mise sous tension du système principal.
DIADUR, AURODUR, METALLUR et OPTODUR sont des marques déposées de la société DR. JOHANNES HEIDENHAIN GmbH, Traunreut.Zerodur et ROBAX sont des marques déposées de Schott-Glaswerke, Mayence.
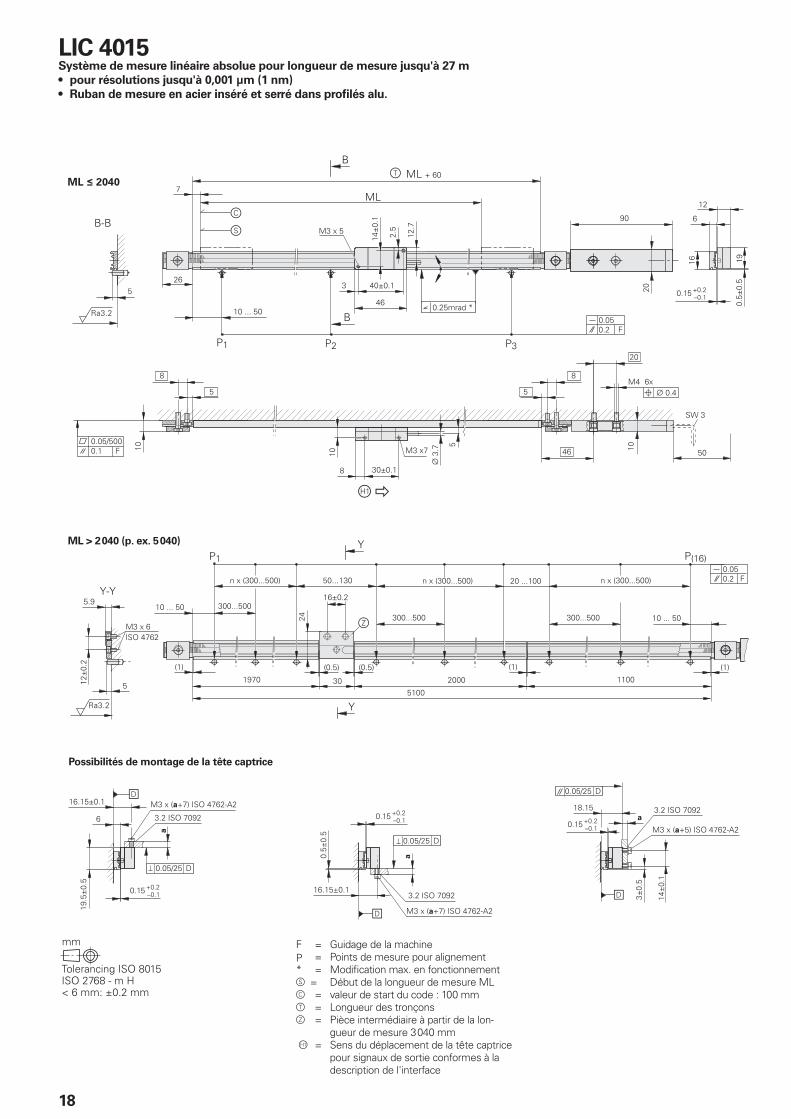
18
LIC 4015Système de mesure linéaire absolue pour longueur de mesure jusqu'à 27 m
pour résolutions jusqu'à 0,001 µm (1 nm) •
Ruban de mesure en acier inséré et serré dans profi lés alu.•
F = Guidage de la machineP = Points de mesure pour alignement* = Modifi cation max. en fonctionnements = Début de la longueur de mesure MLc = valeur de start du code : 100 mmt = Longueur des tronçonsz = Pièce intermédiaire à partir de la lon-
gueur de mesure 3 040 mm À = Sens du déplacement de la tête captrice
pour signaux de sortie conformes à la description de l'interface
ML > 2 040 (p. ex. 5 040)
Possibilités de montage de la tête captrice

19
Caractéristiques techniques LIC 4015
Support de la mesure
Coeffi cient de dilatation linéaireRuban de mesure en acier avec piste codée METALLURen fonction de la face de montage
Classe de précision ± 5 µm
Longueur de mesure ML* en mm
140 240 340 440 540 640 740 840 940 1 040 1 140 1 240 1 340 1 4401 540 1 640 1 740 1 840 1 940 2 040
longueurs supérieures (jusqu'à 27 040 mm) avec ruban monobloc et tronçons support de ruban
Val. absolues de position EnDat 2.2
Désignation de commande EnDat 22
Résolution 0,001 μ m (1 nm)
Temps de calcul tcal † 6 µs
Alimentation en tension DC 3,6 à 14 V
Consommation en puissance1) (max.)
à 14 V: † 1 000 mWà 3,6 V: † 800 mW
Consom. en courant (typ.) à 5 V: 110 mA
Raccordement électrique*
Longueur de câbleCâble 1 m ou 3 m avec prise d'accouplement M12 (mâle) 8 broches† 50 m (avec câble HEIDENHAIN)
Vitesse de déplacement † 480 m/min
Vibration 55 à 2 000 HzChoc 6 ms
† 500 m/s2 (EN 60 068-2-6)† 1 000 m/s2 (EN 60 068-2-27)
Température de service 0 à 70 °C
Protection EN 60 529 IP 40
Masse Tête captrice Ruban de mesure Jeu de pièces Supports de ruban Câble de raccordement Prise d'accouplement
16 g (sans câble de raccordement)31 g/m80 g + n2) × 27 g187 g/m20 g/m32 g
* à indiquer SVP à la commande1) voir Informations électriques d'ordre général2) n = 1 pour ML 3 140 à 5 040 mm; n = 2 pour ML 5 140 à 7 040 mm; etc..
Cara
cté
risti
qu
es t
ech
niq
ues
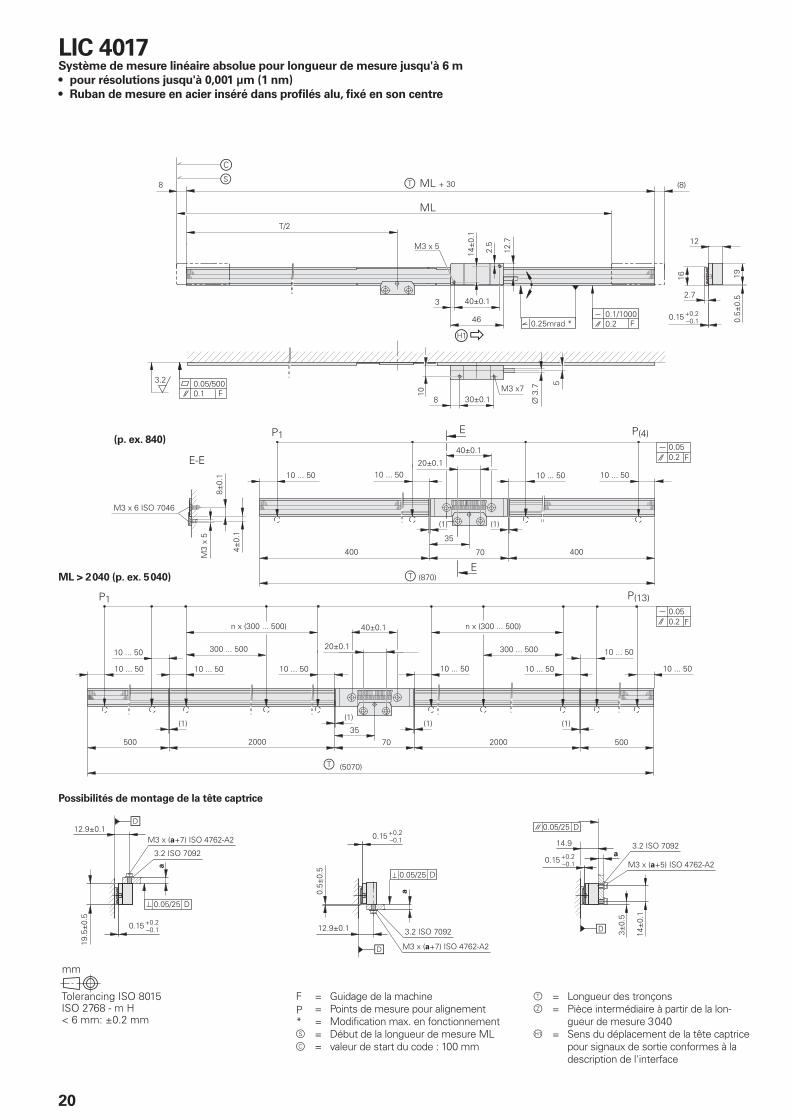
20
LIC 4017Système de mesure linéaire absolue pour longueur de mesure jusqu'à 6 m
pour résolutions jusqu'à 0,001 µm (1 nm) •
Ruban de mesure en acier inséré dans profi lés alu, fi xé en son centre•
F = Guidage de la machineP = Points de mesure pour alignement* = Modifi cation max. en fonctionnements = Début de la longueur de mesure MLc = valeur de start du code : 100 mm
Possibilités de montage de la tête captrice
(p. ex. 840)
ML > 2 040 (p. ex. 5 040)
t = Longueur des tronçonsz = Pièce intermédiaire à partir de la lon-
gueur de mesure 3 040À = Sens du déplacement de la tête captrice
pour signaux de sortie conformes à la description de l'interface
21
Caractéristiques techniques LIC 4017
Support de la mesure
Coeffi cient de dilatation linéaireRuban de mesure en acier avec piste codée METALLURÞtherm 10 · 10–6 K–1
Classe de précision ± 15 µm ou ± 5 µm après compensation des erreurs linéaires dans l'électronique consécutive
Longueur de mesure ML* en mm
240 440 640 840 1 040 1 240 1 440 1 640 1 840 2 040 2 240 2 440 2 640 2 8403 040 3 240 3 440 3 640 3 840 4 040 4 240 4 440 4 640 4 840 5 040 5 240 5 440 5 6405 840 6 040
Valeurs absolues de position EnDat 2.2
Désignation de commande EnDat 22
Résolution 0,001 μ m (1 nm)
Temps de calcul tcal † 6 µs
Alimentation en tension DC 3,6 à 14 V
Consommation en puissance1) (max.)
à 14 V: † 1 000 mWà 3,6 V: † 800 mW
Consom. en courant (typ.) à 5 V: 110 mA
Raccordement électrique*
Longueur de câbleCâble 1 m ou 3 m avec prise d'accouplement M12 (mâle) 8 broches† 50 m (avec câble HEIDENHAIN)
Vitesse de déplacement † 480 m/min
Vibration 55 à 2 000 HzChoc 6 ms
† 500 m/s2 (EN 60 068-2-6)† 1 000 m/s2 (EN 60 068-2-27)
Température de service 0 à 70 °C
Protection EN 60 529 IP 40
Masse Tête captrice Ruban de mesure Jeu de pièces Supports de ruban Câble de raccordement Prise d'accouplement
16 g (sans câble de raccordement)31 g/m20 g68 g/m20 g/m32 g
* à indiquer SVP à la commande1) voir Informations électriques d'ordre général

ML + 28±1
22
LIC 4019Système de mesure linéaire absolue pour longueur de mesure jusqu'à 1 m
pour résolutions jusqu'à 0,001 µm (1 nm) •
Ruban de mesure en acier collé sur la surface de montage•
F = Guidage de la machine* = Modifi cation max. en fonctionnementc = valeur de start du code : 100 mms = Début de la longueur de mesure MLl = Longueur du ruban de mesureÀ = Sens du déplacement de la tête captrice
pour signaux de sortie conformes à la description de l'interface
Possibilités de montage de la tête captrice

23
Caractéristiques techniques LIC 4019
Support de la mesure
Coeffi cient de dilatation linéaireRuban de mesure en acier avec piste codée METALLURÞtherm 10 · 10–6 K–1
Classe de précision ± 15 µm ou ± 5 µm après compensation des erreurs linéaires dans l'électronique consécutive
Longueur de mesure ML* en mm
70 120 170 220 270 320 370 420 520 620 720 820 920 1 020
Val. absolues de position EnDat 2.2
Désignation de commande EnDat 22
Résolution 0,001 μ m (1 nm)
Temps de calcul tcal † 6 µs
Alimentation en tension DC 3,6 à 14 V
Consommation en puissance1) (max.)
à 14 V: † 1 000 mWà 3,6 V: † 800 mW
Consom. en courant (typ.) à 5 V: 110 mA
Raccordement électrique*
Longueur de câbleCâble 1 m ou 3 m avec prise d'accouplement M12 (mâle) 8 broches† 50 m (avec câble HEIDENHAIN)
Vitesse de déplacement † 480 m/min
Vibration 55 à 2 000 HzChoc 6 ms
† 500 m/s2 (EN 60 068-2-6)† 1 000 m/s2 (EN 60 068-2-27)
Température de service 0 à 70 °C
Protection EN 60 529 IP 40
Masse Tête captrice Ruban de mesure Câble de raccordement Prise d'accouplement
16 g (sans câble de raccordement)31 g/m20 g/m32 g
* à indiquer SVP à la commande1) voir Informations électriques d'ordre général

24
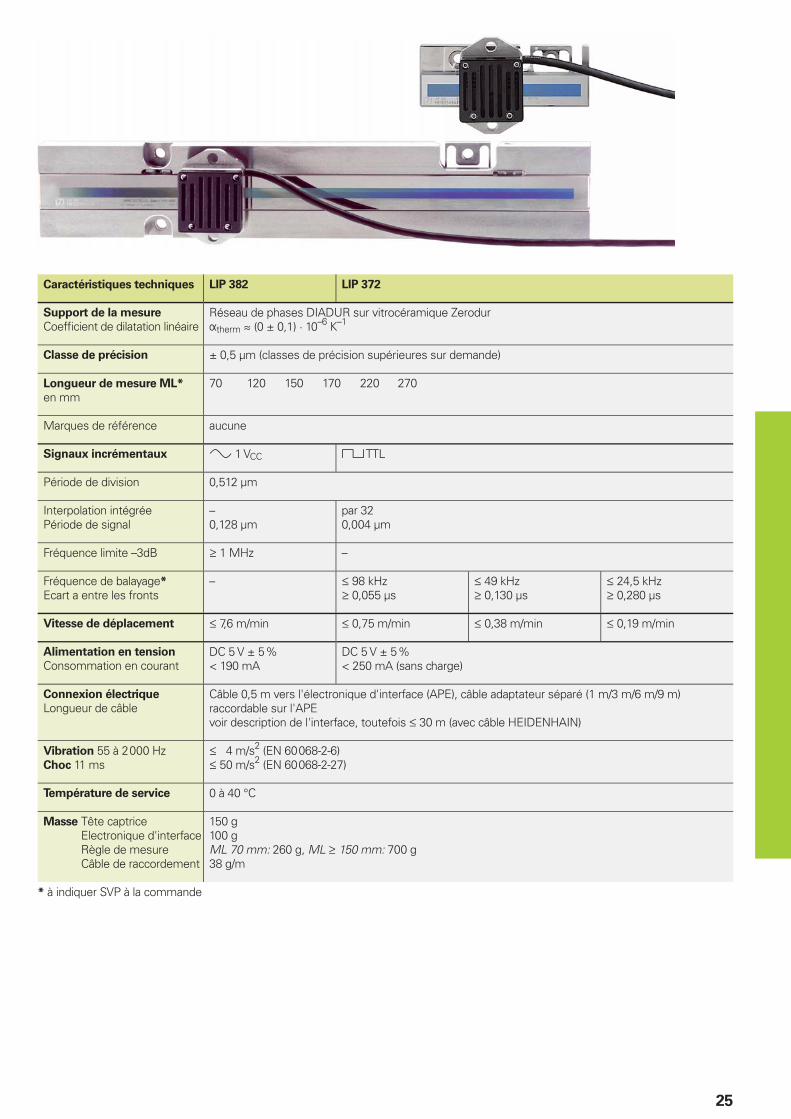
LIP 372, LIP 382Système de mesure linéaire incrémentale de très haute précision
Résolutions jusqu'à 0,001 µm (1nm)•
Support de la mesure vissé•
* = Modifi cation max. en fonctionnementF = Guidage de la machines = Début de la longueur de mesure MLm = Surface de montage pour la tête captriceÀ = Sens du déplacement de la tête captrice
pour signaux de sortie conformes à la description de l'interface
25
Caractéristiques techniques LIP 382 LIP 372
Support de la mesure
Coeffi cient de dilatation linéaireRéseau de phases DIADUR sur vitrocéramique ZerodurÞtherm (0 ± 0,1) · 10–6 K–1
Classe de précision ± 0,5 µm (classes de précision supérieures sur demande)
Longueur de mesure ML* en mm
70 120 150 170 220 270
Marques de référence aucune
Signaux incrémentaux » 1 VCC « TTL
Période de division 0,512 µm
Interpolation intégréePériode de signal
–0,128 µm
par 320,004 µm
Fréquence limite –3dB ‡ 1 MHz –
Fréquence de balayage*
Ecart a entre les fronts– † 98 kHz
‡ 0,055 µs† 49 kHz‡ 0,130 µs
† 24,5 kHz‡ 0,280 µs
Vitesse de déplacement † 7,6 m/min † 0,75 m/min † 0,38 m/min † 0,19 m/min
Alimentation en tension
Consommation en courantDC 5 V ± 5 %< 190 mA
DC 5 V ± 5 %< 250 mA (sans charge)
Connexion électrique
Longueur de câbleCâble 0,5 m vers l'électronique d'interface (APE), câble adaptateur séparé (1 m/3 m/6 m/9 m) raccordable sur l'APEvoir description de l'interface, toutefois † 30 m (avec câble HEIDENHAIN)
Vibration 55 à 2 000 HzChoc 11 ms
† 4 m/s2 (EN 60 068-2-6)† 50 m/s2 (EN 60 068-2-27)
Température de service 0 à 40 °C
Masse Tête captrice Electronique d'interface Règle de mesure Câble de raccordement
150 g100 gML 70 mm: 260 g, ML ‡ 150 mm: 700 g38 g/m
* à indiquer SVP à la commande
INVISIBLE LASER RADIATION
IEC60825-1:2001Pmax = 4 mW
λ= 850 nm
CLASS 3B LASER PRODUCT
26
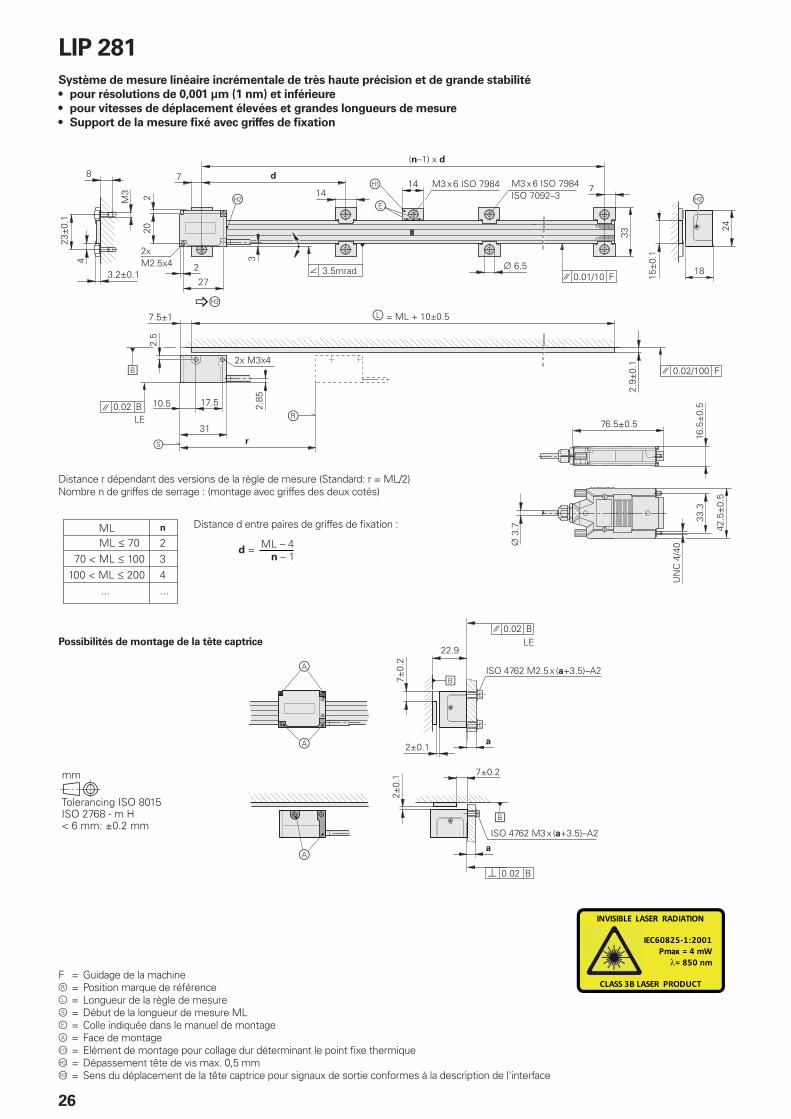
F = Guidage de la machiner = Position marque de référencel = Longueur de la règle de mesures = Début de la longueur de mesure MLe = Colle indiquée dans le manuel de montagea = Face de montageÀ = Elément de montage pour collage dur déterminant le point fi xe thermiqueÁ = Dépassement tête de vis max. 0,5 mm = Sens du déplacement de la tête captrice pour signaux de sortie conformes à la description de l'interface
LIP 281
Système de mesure linéaire incrémentale de très haute précision et de grande stabilité
pour résolutions de 0,001 µm (1 nm) et inférieure•
pour vitesses de déplacement élevées et grandes longueurs de mesure•
Support de la mesure fi xé avec griffes de fi xation•
Distance r dépendant des versions de la règle de mesure (Standard: r = ML/2)Nombre n de griffes de serrage : (montage avec griffes des deux cotés)
Distance d entre paires de griffes de fi xation :
Possibilités de montage de la tête captrice
27
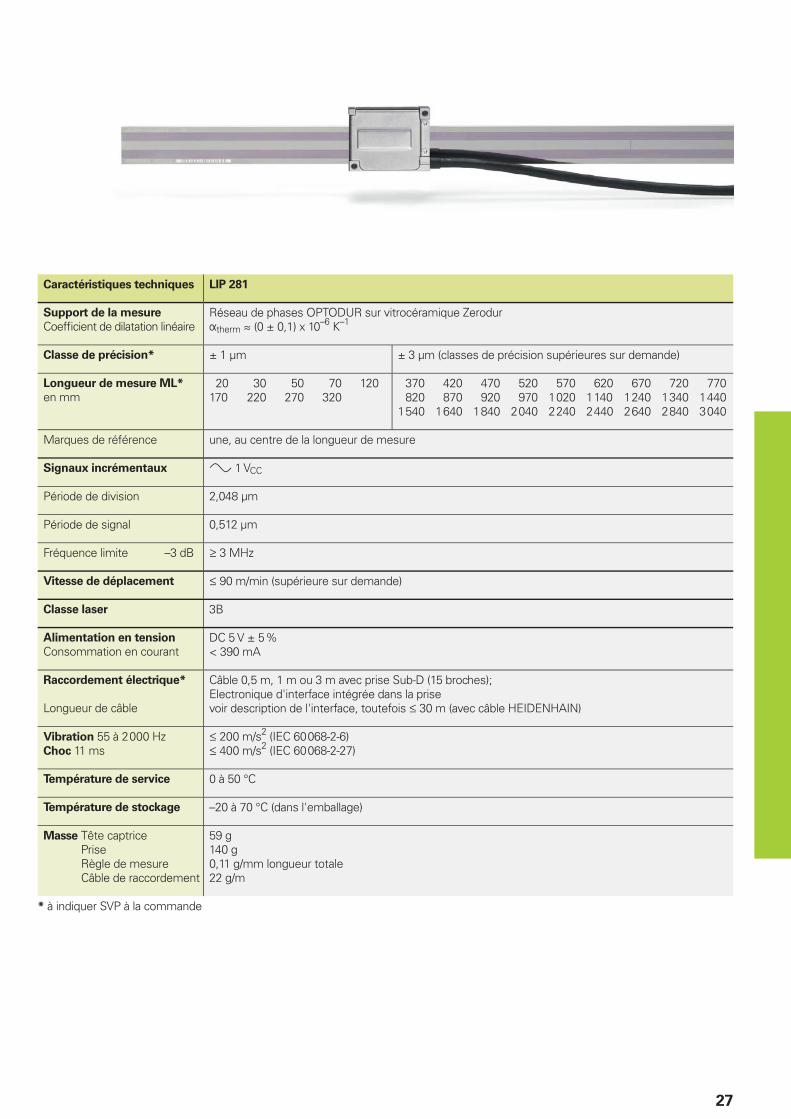
Caractéristiques techniques LIP 281
Support de la mesure
Coeffi cient de dilatation linéaireRéseau de phases OPTODUR sur vitrocéramique ZerodurÞtherm (0 ± 0,1) x 10–6 K–1
Classe de précision* ± 1 µm ± 3 µm (classes de précision supérieures sur demande)
Longueur de mesure ML*
en mm 20 30 50 70 120170 220 270 320
370 420 470 520 570 620 670 720 770 820 870 920 970 1 020 1 140 1 240 1 340 1 4401 540 1 640 1 840 2 040 2 240 2 440 2 640 2 840 3 040
Marques de référence une, au centre de la longueur de mesure
Signaux incrémentaux » 1 VCC
Période de division 2,048 µm
Période de signal 0,512 µm
Fréquence limite –3 dB ‡ 3 MHz
Vitesse de déplacement † 90 m/min (supérieure sur demande)
Classe laser 3B
Alimentation en tension
Consommation en courantDC 5 V ± 5 %< 390 mA
Raccordement électrique*
Longueur de câble
Câble 0,5 m, 1 m ou 3 m avec prise Sub-D (15 broches);Electronique d'interface intégrée dans la prisevoir description de l'interface, toutefois † 30 m (avec câble HEIDENHAIN)
Vibration 55 à 2 000 HzChoc 11 ms
† 200 m/s2 (IEC 60 068-2-6)† 400 m/s2 (IEC 60 068-2-27)
Température de service 0 à 50 °C
Température de stockage –20 à 70 °C (dans l'emballage)
Masse Tête captrice Prise Règle de mesure Câble de raccordement
59 g140 g0,11 g/mm longueur totale22 g/m
* à indiquer SVP à la commande

28
* = Modifi cation max. en fonctionnementF = Guidage de la machineI = Longueur de la règle de mesured = Représentation sans griffe de fi xations = Début de la longueur de mesure ML
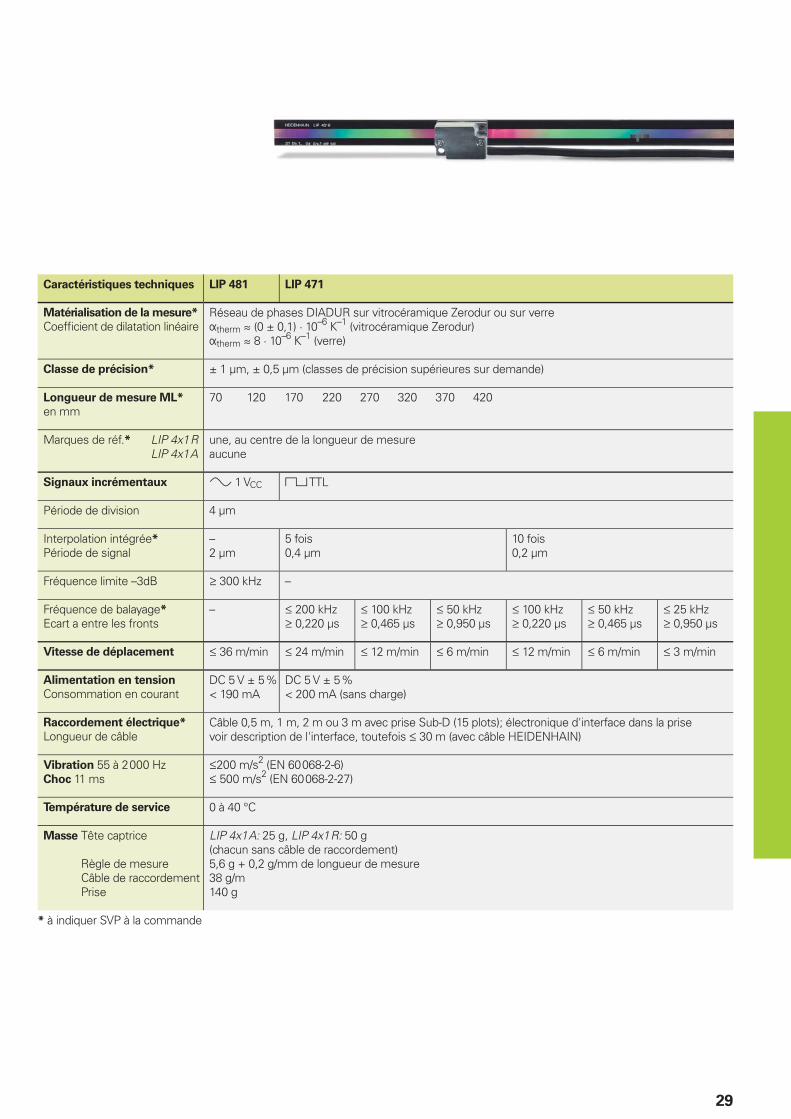
LIP 471, LIP 481Système de mesure linéaire incrémentale de très haute précision
pour espaces de montage réduits•
pour résolutions de mesure de 1 µm à 0,005 µm•
Support de la mesure fi xé avec griffes de fi xation•
r = Position marque de référence LIP 4x1 Rm = Surface de montage pour la tête captriceÀ = Sens du déplacement de la tête captrice
pour signaux de sortie conformes à la description de l'interface
29
Caractéristiques techniques LIP 481 LIP 471
Matérialisation de la mesure*
Coeffi cient de dilatation linéaireRéseau de phases DIADUR sur vitrocéramique Zerodur ou sur verreÞtherm (0 ± 0,1) · 10–6 K–1 (vitrocéramique Zerodur) Þtherm 8 · 10–6 K–1 (verre)
Classe de précision* ± 1 µm, ± 0,5 µm (classes de précision supérieures sur demande)
Longueur de mesure ML* en mm
70 120 170 220 270 320 370 420
Marques de réf.* LIP 4x1 R LIP 4x1 A
une, au centre de la longueur de mesureaucune
Signaux incrémentaux » 1 VCC « TTL
Période de division 4 µm
Interpolation intégrée*
Période de signal–2 µm
5 fois0,4 µm
10 fois0,2 µm
Fréquence limite –3dB ‡ 300 kHz –
Fréquence de balayage*
Ecart a entre les fronts– † 200 kHz
‡ 0,220 µs† 100 kHz‡ 0,465 µs
† 50 kHz‡ 0,950 µs
† 100 kHz‡ 0,220 µs
† 50 kHz‡ 0,465 µs
† 25 kHz‡ 0,950 µs
Vitesse de déplacement † 36 m/min † 24 m/min † 12 m/min † 6 m/min † 12 m/min † 6 m/min † 3 m/min
Alimentation en tension
Consommation en courantDC 5 V ± 5 %< 190 mA
DC 5 V ± 5 %< 200 mA (sans charge)
Raccordement électrique*
Longueur de câbleCâble 0,5 m, 1 m, 2 m ou 3 m avec prise Sub-D (15 plots); électronique d'interface dans la prisevoir description de l'interface, toutefois † 30 m (avec câble HEIDENHAIN)
Vibration 55 à 2 000 HzChoc 11 ms
†200 m/s2 (EN 60 068-2-6)† 500 m/s2 (EN 60 068-2-27)
Température de service 0 à 40 °C
Masse Tête captrice
Règle de mesure Câble de raccordement Prise
LIP 4x1 A: 25 g, LIP 4x1 R: 50 g (chacun sans câble de raccordement)5,6 g + 0,2 g/mm de longueur de mesure38 g/m140 g
* à indiquer SVP à la commande
30
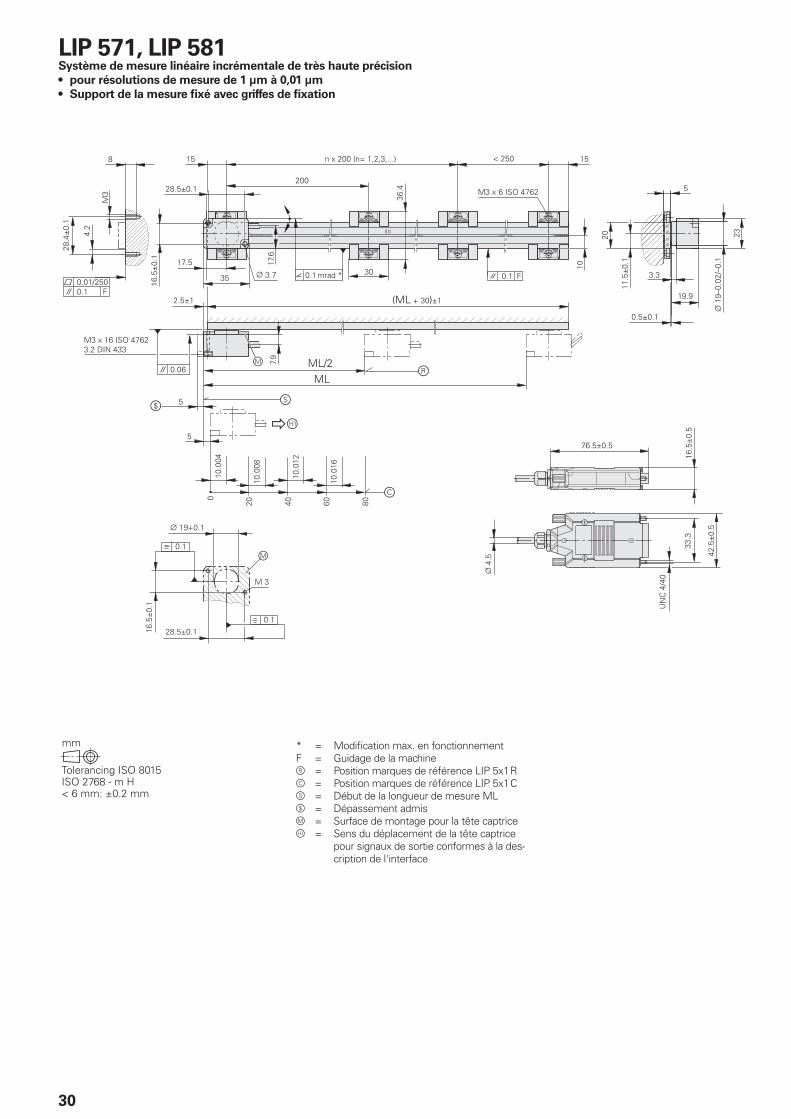
* = Modifi cation max. en fonctionnementF = Guidage de la machiner = Position marques de référence LIP 5x1 Rc = Position marques de référence LIP 5x1 Cs = Début de la longueur de mesure MLØ = Dépassement admism = Surface de montage pour la tête captriceÀ = Sens du déplacement de la tête captrice
pour signaux de sortie conformes à la des-cription de l'interface
LIP 571, LIP 581Système de mesure linéaire incrémentale de très haute précision
pour résolutions de mesure de 1 µm à 0,01 µm•
Support de la mesure fi xé avec griffes de fi xation•

31
Caractéristiques techniques LIP 581 LIP 571
Support de la mesure
Coeffi cient de dilatation linéaireRéseau de phases DIADUR sur verreÞtherm 8 · 10–6 K–1
Classe de précision* ± 1 µm
Longueur de mesure ML* en mm
70 120 170 220 270 320 370 420 470 520 570 620 670 720 770 820 870 920 970 1 020 1 240 1 440
Marques de réf.* LIP 5x1 R LIP 5x1 C
une, au centre de la longueur de mesureà distances codées
Signaux incrémentaux » 1 VCC « TTL
Période de division 8 µm
Interpolation intégrée*
Période de signal–4 µm
5 fois0,8 µm
10 fois0,4 µm
Fréquence limite –3dB ‡ 300 kHz –
Fréquence de balayage*
Ecart a entre les fronts– † 200 kHz
‡ 0,220 µs† 100 kHz‡ 0,465 µs
† 50 kHz‡ 0,950 µs
† 100 kHz‡ 0,220 µs
† 50 kHz‡ 0,465 µs
† 25 kHz‡ 0,950 µs
Vitesse de déplacement †72 m/min † 48 m/min † 24 m/min † 12 m/min † 24 m/min † 12 m/min † 6 m/min
Alimentation en tension
Consommation en courantDC 5 V ± 5 %< 175 mA
DC 5 V ± 5 %< 175 mA (sans charge)
Raccordement électrique*
Longueur de câbleCâble 0,5 m, 1 m, 2 m ou 3 m avec prise Sub-D (15 plots); électronique d'interface dans la prisevoir description de l'interface, toutefois † 30 m (avec câble HEIDENHAIN)
Vibration 55 à 2 000 HzChoc 11 ms
†200 m/s2 (EN 60 068-2-6)† 500 m/s2 (EN 60 068-2-27)
Température de service 0 à 50 °C
Masse Tête captrice Règle de mesure Câble de raccordement Prise
25 g (sans câble de raccordement)7,5 g + 0,25 g/mm de longueur de mesure38 g/m140 g
* à indiquer SVP à la commande

32
* = Modifi cation max. en fonctionnementF = Guidage de la machineML = Longueur de mesuree = Epoxy pour ML < 170À = Sens du déplacement de la tête captrice
pour signaux de sortie conformes à la description de l'interface
LIF 471, LIF 481Système de mesure linéaire incrémentale pour montage facile
pour résolutions de mesure de 1 µm à 0,01 µm•
Détection de la position par piste Homing et commutateurs de limite•
Support de mesure collé avec fi lm de montage•
33
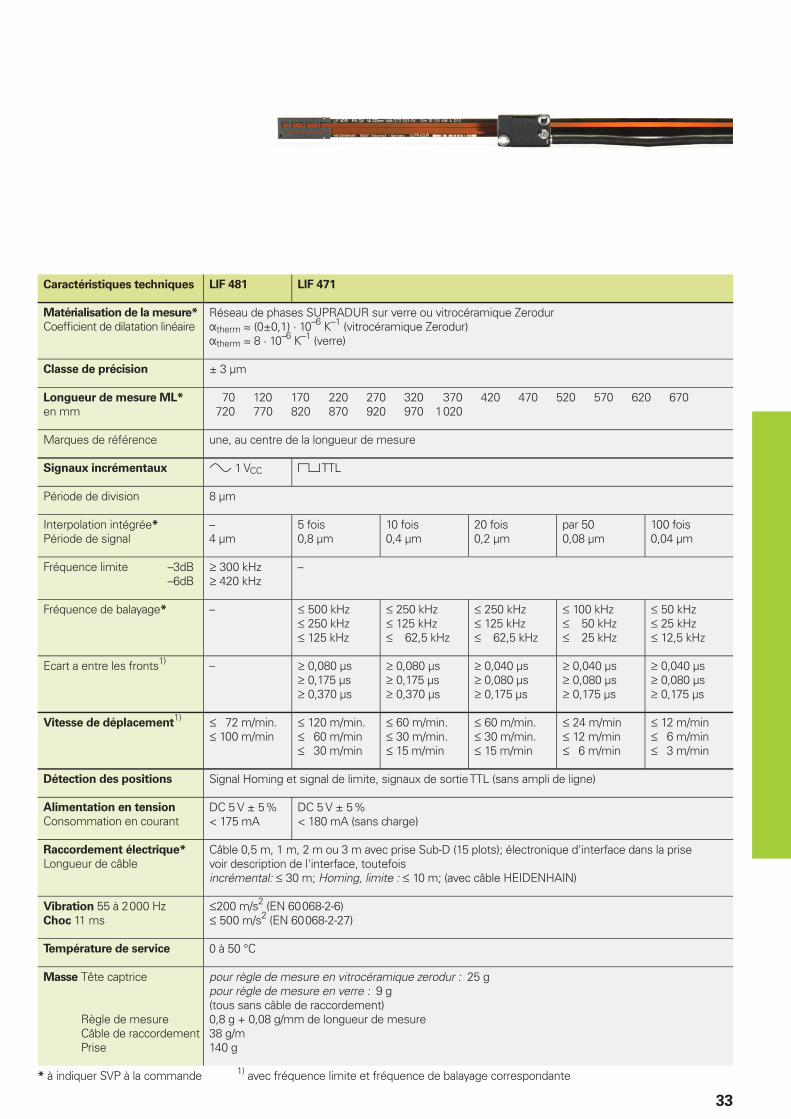
Caractéristiques techniques LIF 481 LIF 471
Matérialisation de la mesure*
Coeffi cient de dilatation linéaireRéseau de phases SUPRADUR sur verre ou vitrocéramique ZerodurÞtherm (0±0,1) · 10–6 K–1 (vitrocéramique Zerodur)Þtherm 8 · 10–6 K–1 (verre)
Classe de précision ± 3 µm
Longueur de mesure ML* en mm
70 120 170 220 270 320 370 420 470 520 570 620 670 720 770 820 870 920 970 1 020
Marques de référence une, au centre de la longueur de mesure
Signaux incrémentaux » 1 VCC « TTL
Période de division 8 µm
Interpolation intégrée*
Période de signal–4 µm
5 fois0,8 µm
10 fois0,4 µm
20 fois0,2 µm
par 500,08 µm
100 fois0,04 µm
Fréquence limite –3dB –6dB
‡ 300 kHz‡ 420 kHz
–
Fréquence de balayage* – † 500 kHz† 250 kHz† 125 kHz
† 250 kHz† 125 kHz† 62,5 kHz
† 250 kHz† 125 kHz† 62,5 kHz
† 100 kHz† 50 kHz† 25 kHz
† 50 kHz† 25 kHz† 12,5 kHz
Ecart a entre les fronts1) – ‡ 0,080 µs‡ 0,175 µs‡ 0,370 µs
‡ 0,080 µs‡ 0,175 µs‡ 0,370 µs
‡ 0,040 µs‡ 0,080 µs‡ 0,175 µs
‡ 0,040 µs‡ 0,080 µs‡ 0,175 µs
‡ 0,040 µs‡ 0,080 µs‡ 0,175 µs
Vitesse de déplacement1) † 72 m/min.
† 100 m/min† 120 m/min.† 60 m/min† 30 m/min
† 60 m/min.† 30 m/min.† 15 m/min
† 60 m/min.† 30 m/min.† 15 m/min
† 24 m/min† 12 m/min† 6 m/min
† 12 m/min† 6 m/min† 3 m/min
Détection des positions Signal Homing et signal de limite, signaux de sortie TTL (sans ampli de ligne)
Alimentation en tension
Consommation en courantDC 5 V ± 5 %< 175 mA
DC 5 V ± 5 %< 180 mA (sans charge)
Raccordement électrique*
Longueur de câbleCâble 0,5 m, 1 m, 2 m ou 3 m avec prise Sub-D (15 plots); électronique d'interface dans la prisevoir description de l'interface, toutefois incrémental: † 30 m; Homing, limite : † 10 m; (avec câble HEIDENHAIN)
Vibration 55 à 2 000 HzChoc 11 ms
†200 m/s2 (EN 60 068-2-6)† 500 m/s2 (EN 60 068-2-27)
Température de service 0 à 50 °C
Masse Tête captrice
Règle de mesure Câble de raccordement Prise
pour règle de mesure en vitrocéramique zerodur : 25 gpour règle de mesure en verre : 9 g(tous sans câble de raccordement)0,8 g + 0,08 g/mm de longueur de mesure38 g/m140 g
* à indiquer SVP à la commande 1) avec fréquence limite et fréquence de balayage correspondante
34
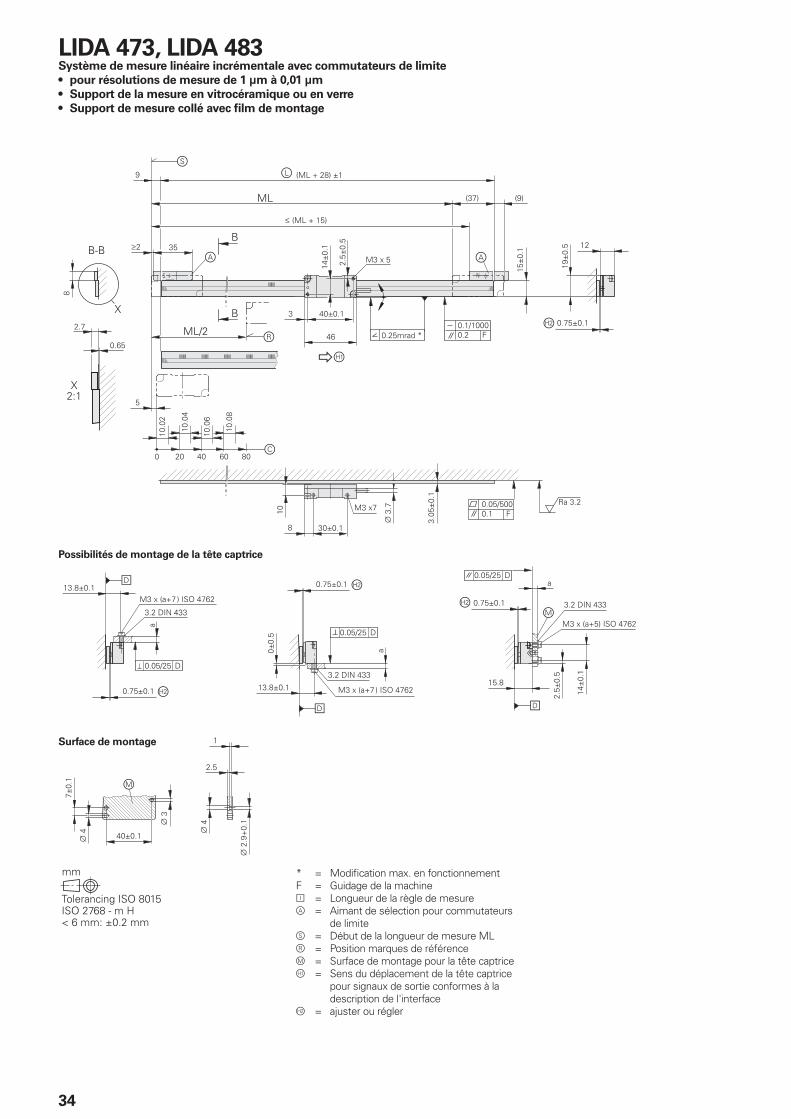
LIDA 473, LIDA 483Système de mesure linéaire incrémentale avec commutateurs de limite
pour résolutions de mesure de 1 µm à 0,01 µm•
Support de la mesure en vitrocéramique ou en verre•
Support de mesure collé avec fi lm de montage•
* = Modifi cation max. en fonctionnementF = Guidage de la machineI = Longueur de la règle de mesurea = Aimant de sélection pour commutateurs
de limites = Début de la longueur de mesure MLr = Position marques de référencem = Surface de montage pour la tête captriceÀ = Sens du déplacement de la tête captrice
pour signaux de sortie conformes à la description de l'interface
Á = ajuster ou régler
Possibilités de montage de la tête captrice
Surface de montage
35
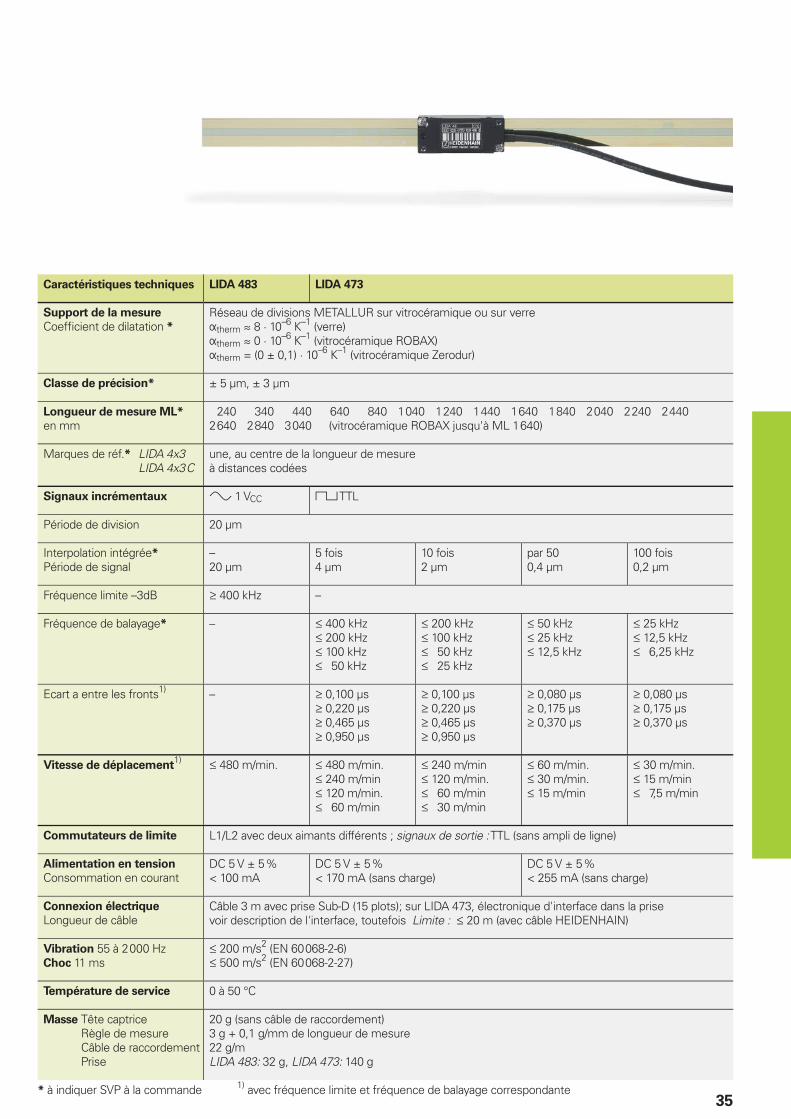
Caractéristiques techniques LIDA 483 LIDA 473
Support de la mesure
Coeffi cient de dilatation *Réseau de divisions METALLUR sur vitrocéramique ou sur verreÞtherm 8 · 10–6 K–1 (verre) Þtherm 0 · 10–6 K–1 (vitrocéramique ROBAX) Þtherm = (0 ± 0,1) · 10–6 K–1 (vitrocéramique Zerodur)
Classe de précision* ± 5 µm, ± 3 µm
Longueur de mesure ML* en mm
240 340 440 640 840 1 040 1 240 1 440 1 640 1 840 2 040 2 240 2 4402 640 2 840 3 040 (vitrocéramique ROBAX jusqu'à ML 1 640)
Marques de réf.* LIDA 4x3 LIDA 4x3 C
une, au centre de la longueur de mesureà distances codées
Signaux incrémentaux » 1 VCC « TTL
Période de division 20 µm
Interpolation intégrée*
Période de signal–20 µm
5 fois4 µm
10 fois2 µm
par 500,4 µm
100 fois0,2 µm
Fréquence limite –3dB ‡ 400 kHz –
Fréquence de balayage* – † 400 kHz† 200 kHz† 100 kHz† 50 kHz
† 200 kHz† 100 kHz† 50 kHz† 25 kHz
† 50 kHz† 25 kHz† 12,5 kHz
† 25 kHz† 12,5 kHz† 6,25 kHz
Ecart a entre les fronts1) – ‡ 0,100 µs‡ 0,220 µs‡ 0,465 µs‡ 0,950 µs
‡ 0,100 µs‡ 0,220 µs‡ 0,465 µs‡ 0,950 µs
‡ 0,080 µs‡ 0,175 µs‡ 0,370 µs
‡ 0,080 µs‡ 0,175 µs‡ 0,370 µs
Vitesse de déplacement1) † 480 m/min. † 480 m/min.
† 240 m/min† 120 m/min.† 60 m/min
† 240 m/min† 120 m/min.† 60 m/min† 30 m/min
† 60 m/min.† 30 m/min.† 15 m/min
† 30 m/min.† 15 m/min† 7,5 m/min
Commutateurs de limite L1/L2 avec deux aimants différents ; signaux de sortie : TTL (sans ampli de ligne)
Alimentation en tension
Consommation en courantDC 5 V ± 5 %< 100 mA
DC 5 V ± 5 %< 170 mA (sans charge)
DC 5 V ± 5 %< 255 mA (sans charge)
Connexion électrique
Longueur de câbleCâble 3 m avec prise Sub-D (15 plots); sur LIDA 473, électronique d'interface dans la prisevoir description de l'interface, toutefois Limite : † 20 m (avec câble HEIDENHAIN)
Vibration 55 à 2 000 HzChoc 11 ms
† 200 m/s2 (EN 60 068-2-6)† 500 m/s2 (EN 60 068-2-27)
Température de service 0 à 50 °C
Masse Tête captrice Règle de mesure Câble de raccordement Prise
20 g (sans câble de raccordement)3 g + 0,1 g/mm de longueur de mesure22 g/mLIDA 483: 32 g, LIDA 473: 140 g
* à indiquer SVP à la commande 1) avec fréquence limite et fréquence de balayage correspondante

36
Ô = Tronçons supports du ruban vissésÕ = Tronçons supports du ruban collés avec
PRECIMET* = Modifi cation max. en fonctionnementF = Guidage de la machineP = Points de mesure pour alignementr = Position marques de références = Début de la longueur de mesure ML
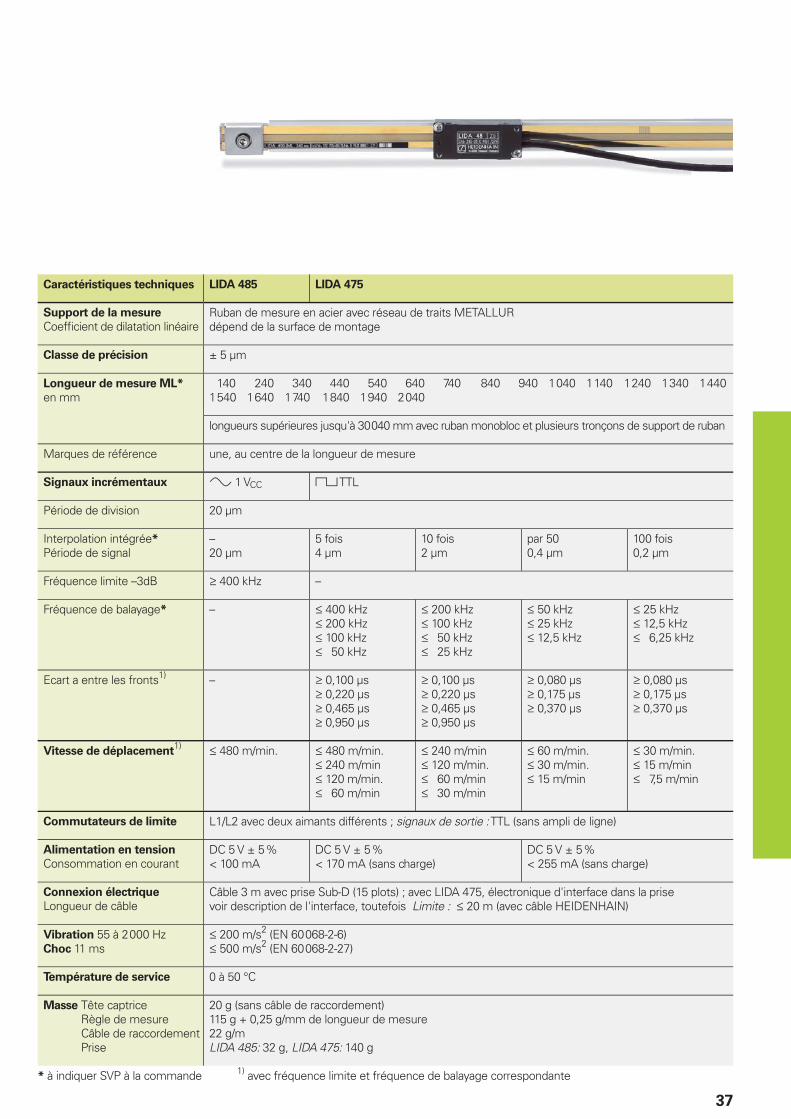
LIDA 475, LIDA 485pour système de mesure linéaire incrémentale jusqu'à 30 m
pour résolutions de mesure de 1 µm à 0,05 µm•
Commutateurs de limite•
Ruban de mesure en acier inséré et serré dans profi lés alu•
a = Aimant de sélection pour commutateurs de limite
t = Longueur des tronçonsz = Pièce intermédiaire à partir de la lon-
gueur de mesure 3 040 mmÀ = Sens du déplacement de la tête captrice
pour signaux de sortie conformes à la description de l'interface
Á = Réglage
Possibilités de montage de la tête captrice
37
Caractéristiques techniques LIDA 485 LIDA 475
Support de la mesure
Coeffi cient de dilatation linéaireRuban de mesure en acier avec réseau de traits METALLURdépend de la surface de montage
Classe de précision ± 5 µm
Longueur de mesure ML* en mm
140 240 340 440 540 640 740 840 940 1 040 1 140 1 240 1 340 1 4401 540 1 640 1 740 1 840 1 940 2 040
longueurs supérieures jusqu'à 30 040 mm avec ruban monobloc et plusieurs tronçons de support de ruban
Marques de référence une, au centre de la longueur de mesure
Signaux incrémentaux » 1 VCC « TTL
Période de division 20 µm
Interpolation intégrée*
Période de signal–20 µm
5 fois4 µm
10 fois2 µm
par 500,4 µm
100 fois0,2 µm
Fréquence limite –3dB ‡ 400 kHz –
Fréquence de balayage* – † 400 kHz† 200 kHz† 100 kHz† 50 kHz
† 200 kHz† 100 kHz† 50 kHz† 25 kHz
† 50 kHz† 25 kHz† 12,5 kHz
† 25 kHz† 12,5 kHz† 6,25 kHz
Ecart a entre les fronts1) – ‡ 0,100 µs‡ 0,220 µs‡ 0,465 µs‡ 0,950 µs
‡ 0,100 µs‡ 0,220 µs‡ 0,465 µs‡ 0,950 µs
‡ 0,080 µs‡ 0,175 µs‡ 0,370 µs
‡ 0,080 µs‡ 0,175 µs‡ 0,370 µs
Vitesse de déplacement1) † 480 m/min. † 480 m/min.
† 240 m/min† 120 m/min.† 60 m/min
† 240 m/min† 120 m/min.† 60 m/min† 30 m/min
† 60 m/min.† 30 m/min.† 15 m/min
† 30 m/min.† 15 m/min† 7,5 m/min
Commutateurs de limite L1/L2 avec deux aimants différents ; signaux de sortie : TTL (sans ampli de ligne)
Alimentation en tension
Consommation en courantDC 5 V ± 5 %< 100 mA
DC 5 V ± 5 %< 170 mA (sans charge)
DC 5 V ± 5 %< 255 mA (sans charge)
Connexion électrique
Longueur de câbleCâble 3 m avec prise Sub-D (15 plots) ; avec LIDA 475, électronique d'interface dans la prisevoir description de l'interface, toutefois Limite : † 20 m (avec câble HEIDENHAIN)
Vibration 55 à 2 000 HzChoc 11 ms
† 200 m/s2 (EN 60 068-2-6)† 500 m/s2 (EN 60 068-2-27)
Température de service 0 à 50 °C
Masse Tête captrice Règle de mesure Câble de raccordement Prise
20 g (sans câble de raccordement)115 g + 0,25 g/mm de longueur de mesure22 g/mLIDA 485: 32 g, LIDA 475: 140 g
* à indiquer SVP à la commande 1) avec fréquence limite et fréquence de balayage correspondante
38
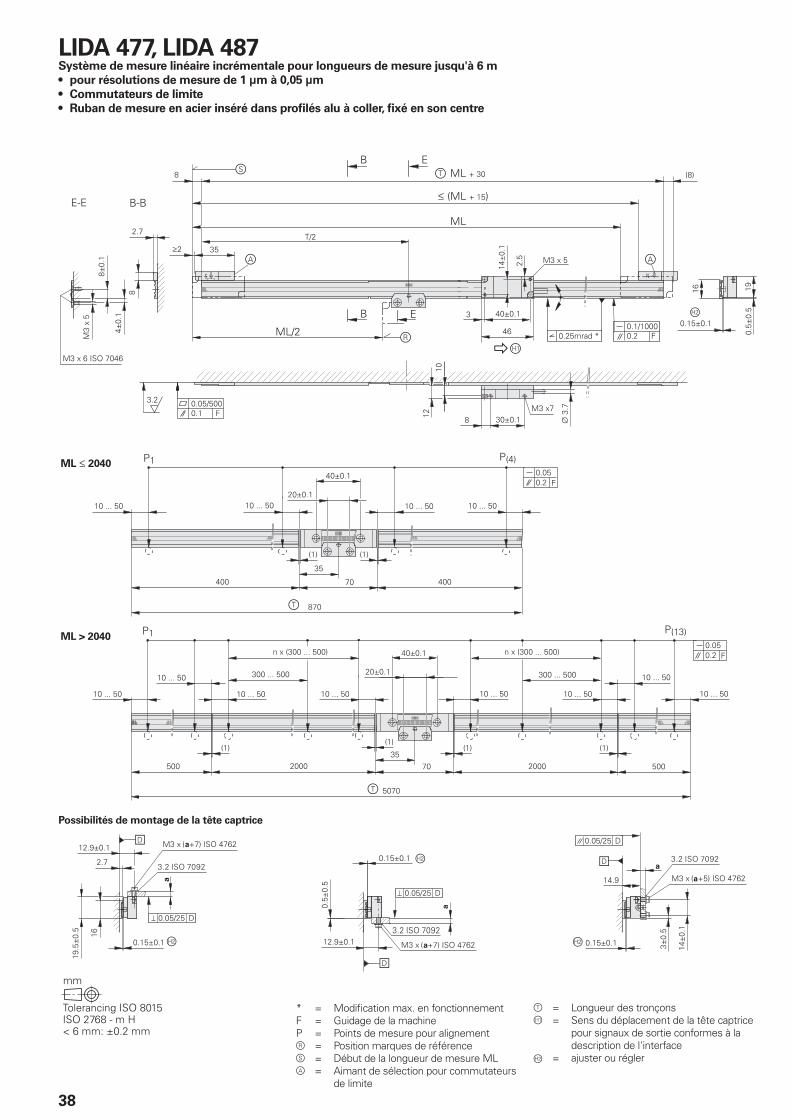
Possibilités de montage de la tête captrice
* = Modifi cation max. en fonctionnementF = Guidage de la machineP = Points de mesure pour alignementr = Position marques de références = Début de la longueur de mesure MLa = Aimant de sélection pour commutateurs
de limite
t = Longueur des tronçonsÀ = Sens du déplacement de la tête captrice
pour signaux de sortie conformes à la description de l'interface
Á = ajuster ou régler
LIDA 477, LIDA 487Système de mesure linéaire incrémentale pour longueurs de mesure jusqu'à 6 m
pour résolutions de mesure de 1 µm à 0,05 µm•
Commutateurs de limite•
Ruban de mesure en acier inséré dans profi lés alu à coller, fi xé en son centre•

39
Caractéristiques techniques LIDA 487 LIDA 477
Support de la mesure
Coeffi cient de dilatation linéaireRuban de mesure en acier avec réseau de traits METALLURÞtherm 10 · 10–6 K–1
Classe de précision ± 15 µm ou ± 5 µm après compensation des erreurs linéaires dans l'électronique consécutive
Longueur de mesure ML* en mm
240 440 640 840 1 040 1 240 1 440 1 640 1 840 2 040 2 240 2 440 2 640 2 8403 040 3 240 3 440 3 640 3 840 4 040 4 240 4 440 4 640 4 840 5 040 5 240 5 440 5 6405 840 6 040
Marques de référence une, au centre de la longueur de mesure
Signaux incrémentaux » 1 VCC « TTL
Période de division 20 µm
Interpolation intégrée*
Période de signal–20 µm
5 fois4 µm
10 fois2 µm
par 500,4 µm
100 fois0,2 µm
Fréquence limite –3dB ‡ 400 kHz –
Fréquence de balayage* – † 400 kHz† 200 kHz† 100 kHz† 50 kHz
† 200 kHz† 100 kHz† 50 kHz† 25 kHz
† 50 kHz† 25 kHz† 12,5 kHz
† 25 kHz† 12,5 kHz† 6,25 kHz
Ecart a entre les fronts1) – ‡ 0,100 µs‡ 0,220 µs‡ 0,465 µs‡ 0,950 µs
‡ 0,100 µs‡ 0,220 µs‡ 0,465 µs‡ 0,950 µs
‡ 0,080 µs‡ 0,175 µs‡ 0,370 µs
‡ 0,080 µs‡ 0,175 µs‡ 0,370 µs
Vitesse de déplacement1) † 480 m/min. † 480 m/min.
† 240 m/min† 120 m/min.† 60 m/min
† 240 m/min† 120 m/min.† 60 m/min† 30 m/min
† 60 m/min.† 30 m/min.† 15 m/min
† 30 m/min.† 15 m/min† 7,5 m/min
Commutateurs de limite L1/L2 avec deux aimants différents ; signaux de sortie : TTL (sans ampli de ligne)
Alimentation en tension
Consommation en courantDC 5 V ± 5 %< 100 mA
DC 5 V ± 5 %< 170 mA (sans charge)
DC 5 V ± 5 %< 255 mA (sans charge)
Connexion électrique
Longueur de câbleCâble 3 m avec prise Sub-D (15 broches) ; avec LIDA 477, électronique d'interface dans la prisevoir description de l'interface, toutefois Limite : † 20 m (avec câble HEIDENHAIN)
Vibration 55 à 2 000 HzChoc 11 ms
† 200 m/s2 (EN 60 068-2-6)† 500 m/s2 (EN 60 068-2-27)
Température de service 0 à 50 °C
Masse Tête captrice Règle de mesure Câble de raccordement Prise
20 g (sans câble de raccordement)25 g + 0,1 g/mm de longueur de mesure22 g/mLIDA 487: 32 g, LIDA 477: 140 g
* à indiquer SVP à la commande 1) avec fréquence limite et fréquence de balayage correspondante

40
F = Guidage de la machine* = Modifi cation max. en fonctionnementr = Position marques de références = Début de la longueur de mesure MLa = Aimant de sélection pour commutateurs
de limite
l = Longueur du ruban de mesurem = Surface de montage pour la tête captriceÀ = Sens du déplacement de la tête captrice
pour signaux de sortie conformes à la description de l'interface
Á = Réglage
LIDA 479, LIDA 489Système de mesure linéaire incrémentale pour longueurs de mesure jusqu'à 6 m
pour résolutions de mesure de 1 µm à 0,05 µm•
Commutateurs de limite•
Ruban de mesure en acier collé sur la surface de montage•
Possibilités de montage de la tête captrice

41
Caractéristiques techniques LIDA 489 LIDA 479
Support de la mesure
Coeffi cient de dilatation linéaireRuban de mesure en acier avec réseau de traits METALLURÞtherm 10 · 10–6 K–1
Classe de précision ± 15 µm ou ± 5 µm après compensation des erreurs linéaires dans l'électronique consécutive
Longueur de mesure ML* en mm
70 120 170 220 270 320 370 420 520 620 720 820 920 1 020
Marques de référence une, au centre de la longueur de mesure
Signaux incrémentaux » 1 VCC « TTL
Période de division 20 µm
Interpolation intégrée*
Période de signal–20 µm
5 fois4 µm
10 fois2 µm
par 500,4 µm
100 fois0,2 µm
Fréquence limite –3dB ‡ 400 kHz –
Fréquence de balayage* – † 400 kHz† 200 kHz† 100 kHz† 50 kHz
† 200 kHz† 100 kHz† 50 kHz† 25 kHz
† 50 kHz† 25 kHz† 12,5 kHz
† 25 kHz† 12,5 kHz† 6,25 kHz
Ecart a entre les fronts1) – ‡ 0,100 µs‡ 0,220 µs‡ 0,465 µs‡ 0,950 µs
‡ 0,100 µs‡ 0,220 µs‡ 0,465 µs‡ 0,950 µs
‡ 0,080 µs‡ 0,175 µs‡ 0,370 µs
‡ 0,080 µs‡ 0,175 µs‡ 0,370 µs
Vitesse de déplacement1) † 480 m/min. † 480 m/min.
† 240 m/min† 120 m/min.† 60 m/min
† 240 m/min† 120 m/min.† 60 m/min† 30 m/min
† 60 m/min.† 30 m/min.† 15 m/min
† 30 m/min.† 15 m/min† 7,5 m/min
Commutateurs de limite L1/L2 avec deux aimants différents ; signaux de sortie : TTL (sans ampli de ligne)
Alimentation en tension
Consommation en courantDC 5 V ± 5 %< 100 mA
DC 5 V ± 5 %< 170 mA (sans charge)
DC 5 V ± 5 %< 255 mA (sans charge)
Connexion électrique
Longueur de câbleCâble 3 m avec prise Sub-D (15 broches) ; avec LIDA 479, électronique d'interface dans la prisevoir description de l'interface, toutefois Limite : † 20 m (avec câble HEIDENHAIN)
Vibration 55 à 2 000 HzChoc 11 ms
† 200 m/s2 (EN 60 068-2-6)† 500 m/s2 (EN 60 068-2-27)
Température de service 0 à 50 °C
Masse Tête captrice Ruban de mesure Câble de raccordement Prise
20 g (sans câble de raccordement)31 g/m22 g/mLIDA 489: 32 g, LIDA 479: 140 g
* à indiquer SVP à la commande 1) avec fréquence limite et fréquence de balayage correspondante

42
* = Modifi cation max. en fonctionnementF = Guidage de la machinek = Cotes de montage requises, coté clientr = Marque de référencel = Longueur du ruban de mesure
s = Début de la longueur de mesure MLÀ = Filetage des deux côtésÁ = Sens du déplacement de la tête captrice
pour signaux de sortie conformes à la description de l'interface
LIDA 277, LIDA 287Système de mesure linéaire incrémentale avec larges tolérances de montage
pour résolutions de mesure jusqu'à 0,5 µm•
Ruban de mesure en rouleau•
Ruban de mesure en acier inséré dans profi lés alu à coller, et fi xé •
Marque de référence:k = position au choix de la marque de référence sélectionnée à partir du début de la longueur de
mesure (dépend de la coupe)

43
Caractéristiques techniques LIDA 287 LIDA 277
Support de la mesure
Coeffi cient de dilatation linéaireRuban de mesure en acierÞtherm 10 · 10–6 K–1
Classe de précision ± 30 µm
Ruban de mesure en
rouleau*
3 m, 5 m, 10 m
Marques de référence sélectionnable tous les 100 mm
Signaux incrémentaux » 1 VCC « TTL
Période de division 200 µm
Interpolation intégrée*
Période de signal–200 µm
10 fois20 µm
par 504 µm
100 fois2 µm
Fréquence limiteFréquence de balayageEcart a entre les fronts
‡ 50 kHz––
–† 50 kHz‡ 0,465 µs
–† 25 kHz‡ 0,175 µs
–† 12,5 kHz‡ 0,175 µs
Vitesse de déplacement † 600 m/min. † 300 m/min † 150 m/min
Alimentation en tension
Consommation en courantDC 5 V ± 5 %< 110 mA
DC 5 V ± 5 %< 140 mA (sans charge)
Raccordement électrique*
Longueur de câbleCâble 1 m ou 3 m avec prise Sub-D (15 plots)voir description de l'interface, toutefois † 30 m (avec câble HEIDENHAIN)
Vibration 55 à 2 000 HzChoc 11 ms
† 200 m/s2 (EN 60 068-2-6)† 500 m/s2 (EN 60 068-2-27)
Température de service 0 à 50 °C
Masse Tête captrice Ruban de mesure Supports de ruban Câble de raccordement Prise
20 g (sans câble de raccordement)20 g/m70 g/m30 g/m32 g
* à indiquer SVP à la commande

44
* = Modifi cation max. en fonctionnementF = Guidage de la machinek = Cotes de montage requises, coté clientr = Marque de référencel = Longueur du ruban de mesures = Début de la longueur de mesure ML
À = Filetage des deux côtésÁ = Ruban adhésif = Ruban de mesure en acierà = Sens du déplacement de la tête captrice
pour signaux de sortie conformes à la description de l'interface
LIDA 279, LIDA 289Système de mesure linéaire incrémentale avec larges tolérances de montage
pour résolutions de mesure jusqu'à 0,5 µm•
Ruban de mesure en rouleau•
Ruban de mesure en acier collé sur la surface de montage•
Marque de référence:k = position au choix de la marque de référence sélectionnée à partir du début de la longueur de
mesure (dépend de la coupe)

45
Caractéristiques techniques LIDA 289 LIDA 279
Support de la mesure
Coeffi cient de dilatation linéaireRuban de mesure en acierÞtherm 10 · 10–6 K–1
Classe de précision ± 30 µm
Ruban de mesure en
rouleau*
3 m, 5 m, 10 m
Marques de référence sélectionnable tous les 100 mm
Signaux incrémentaux » 1 VCC « TTL
Période de division 200 µm
Interpolation intégrée*
Période de signal–200 µm
10 fois20 µm
par 504 µm
100 fois2 µm
Fréquence limiteFréquence de balayageEcart a entre les fronts
‡ 50 kHz––
–† 50 kHz‡ 0,465 µs
–† 25 kHz‡ 0,175 µs
–† 12,5 kHz‡ 0,175 µs
Vitesse de déplacement † 600 m/min. † 300 m/min † 150 m/min
Alimentation en tension
Consommation en courantDC 5 V ± 5 %< 110 mA
DC 5 V ± 5 %< 140 mA (sans charge)
Raccordement électrique*
Longueur de câbleCâble 1 m ou 3 m avec prise Sub-D (15 plots)voir description de l'interface, toutefois † 30 m (avec câble HEIDENHAIN)
Vibration 55 à 2 000 HzChoc 11 ms
† 200 m/s2 (EN 60 068-2-6)† 500 m/s2 (EN 60 068-2-27)
Température de service 0 à 50 °C
Masse Tête captrice Ruban de mesure Câble de raccordement Prise
20 g (sans câble de raccordement)20 g/m30 g/m32 g
* à indiquer SVP à la commande
46
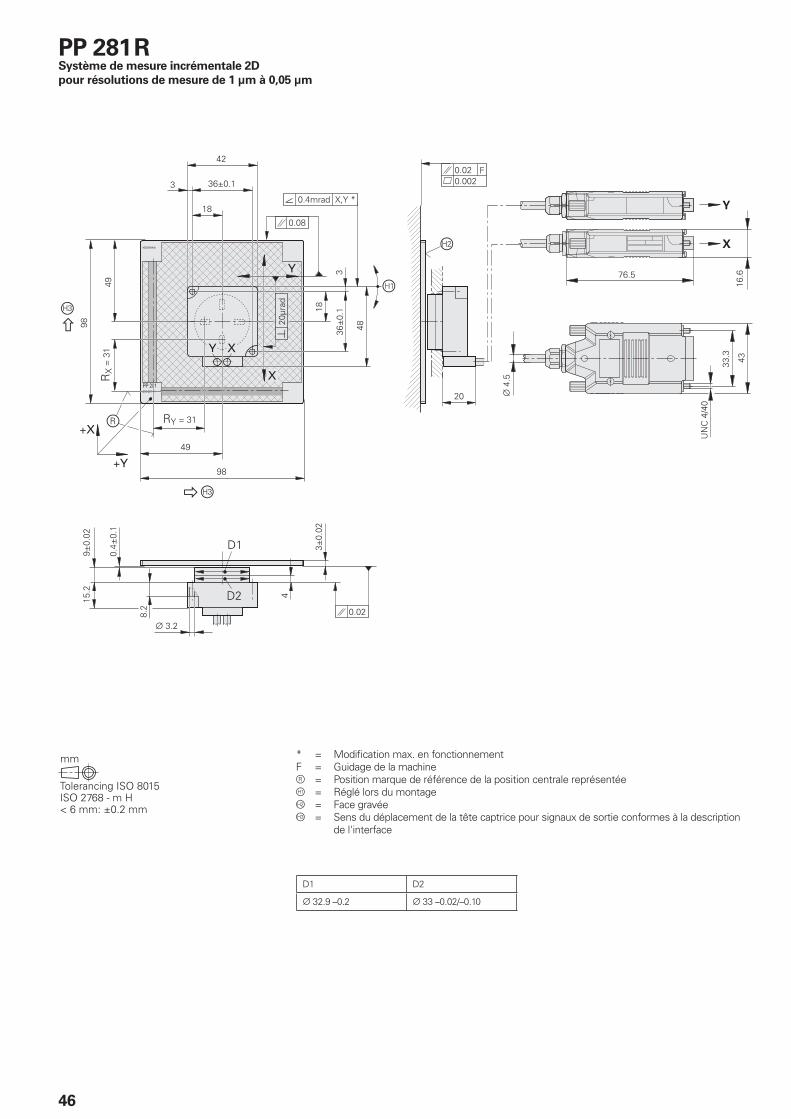
PP 281 RSystème de mesure incrémentale 2D
pour résolutions de mesure de 1 µm à 0,05 µm
* = Modifi cation max. en fonctionnementF = Guidage de la machiner = Position marque de référence de la position centrale représentéeÀ = Réglé lors du montageÁ = Face gravée = Sens du déplacement de la tête captrice pour signaux de sortie conformes à la description
de l'interface
47
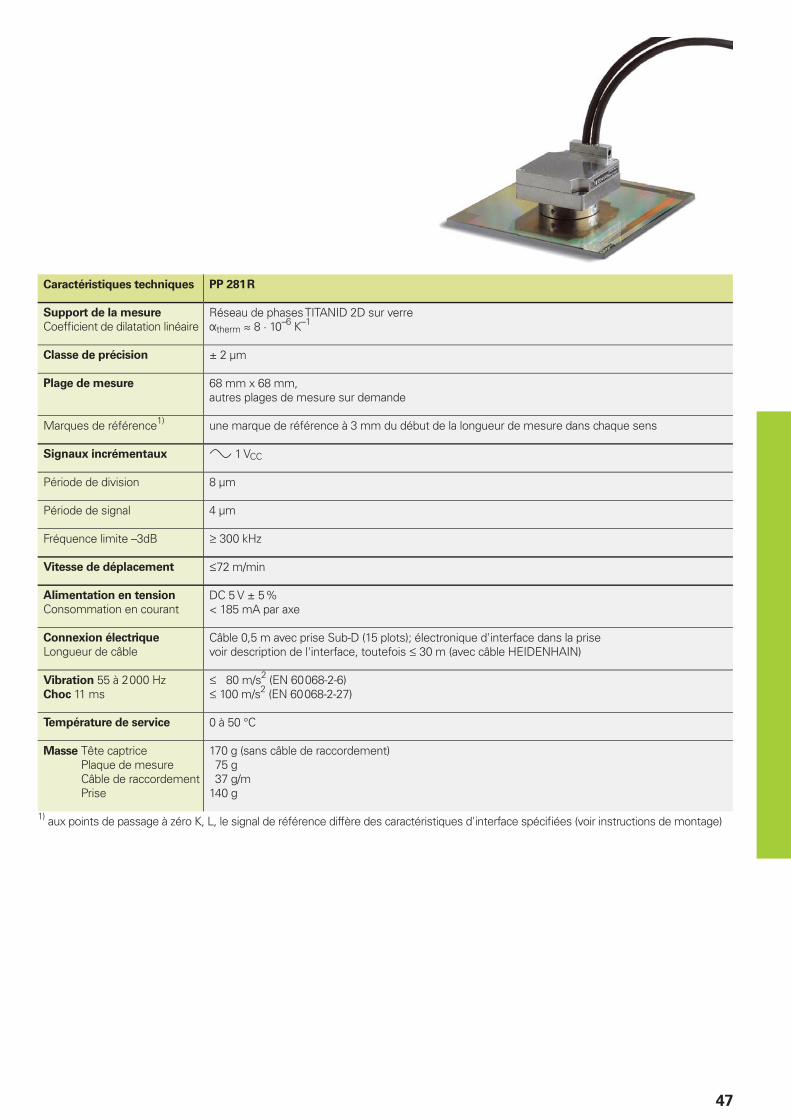
Caractéristiques techniques PP 281 R
Support de la mesure
Coeffi cient de dilatation linéaireRéseau de phases TITANID 2D sur verreÞtherm 8 · 10–6 K–1
Classe de précision ± 2 µm
Plage de mesure 68 mm x 68 mm, autres plages de mesure sur demande
Marques de référence1) une marque de référence à 3 mm du début de la longueur de mesure dans chaque sens
Signaux incrémentaux » 1 VCC
Période de division 8 µm
Période de signal 4 µm
Fréquence limite –3dB ‡ 300 kHz
Vitesse de déplacement †72 m/min
Alimentation en tension
Consommation en courantDC 5 V ± 5 %< 185 mA par axe
Connexion électrique
Longueur de câbleCâble 0,5 m avec prise Sub-D (15 plots); électronique d'interface dans la prisevoir description de l'interface, toutefois † 30 m (avec câble HEIDENHAIN)
Vibration 55 à 2 000 HzChoc 11 ms
† 80 m/s2 (EN 60 068-2-6)† 100 m/s2 (EN 60 068-2-27)
Température de service 0 à 50 °C
Masse Tête captrice Plaque de mesure Câble de raccordement Prise
170 g (sans câble de raccordement) 75 g 37 g/m140 g
1) aux points de passage à zéro K, L, le signal de référence diffère des caractéristiques d'interface spécifi ées (voir instructions de montage)
48
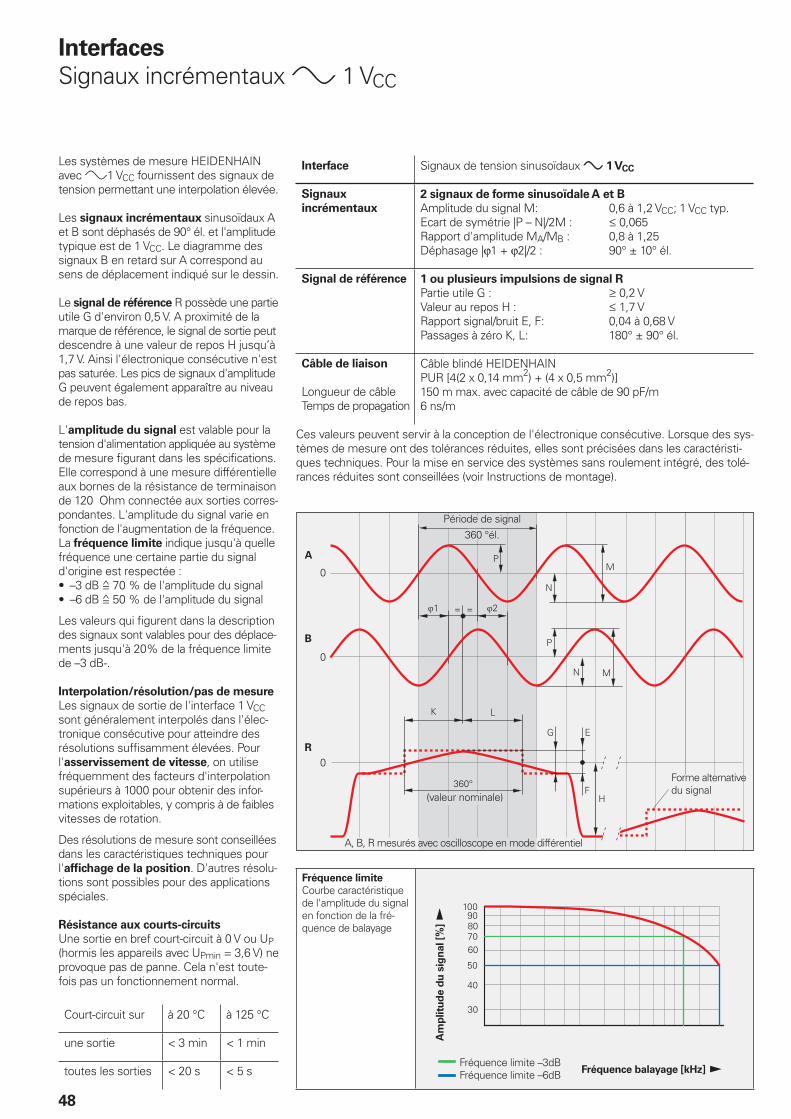
Période de signal360 °él.
(valeur nominale)
A, B, R mesurés avec oscilloscope en mode différentiel
Fréquence limite
Courbe caractéristique de l'amplitude du signal en fonction de la fré-quence de balayage
Am
plitu
de d
u s
ign
al [%
]
Fréquence balayage [kHz]Fréquence limite –3dBFréquence limite –6dB
Interfaces
Signaux incrémentaux » 1 VCC
Les systèmes de mesure HEIDENHAIN avec »1 VCC fournissent des signaux de tension permettant une interpolation élevée.
Les signaux incrémentaux sinusoïdaux A et B sont déphasés de 90° él. et l'amplitude typique est de 1 VCC. Le diagramme des signaux B en retard sur A correspond au sens de déplacement indiqué sur le dessin.
Le signal de référence R possède une partie utile G d'environ 0,5 V. A proximité de la marque de référence, le signal de sortie peut descendre à une valeur de repos H jusqu’à 1,7 V. Ainsi l'électronique consécutive n'est pas saturée. Les pics de signaux d'amplitude G peuvent également apparaître au niveau de repos bas.
L'amplitude du signal est valable pour la tension d'alimentation appliquée au système de mesure fi gurant dans les spécifi cations. Elle correspond à une mesure différentielle aux bornes de la résistance de terminaison de 120 Ohm connectée aux sorties corres-pondantes. L'amplitude du signal varie en fonction de l'augmentation de la fréquence. La fréquence limite indique jusqu'à quelle fréquence une certaine partie du signal d'origine est respectée :
–3 dB • ƒ 70 % de l'amplitude du signal–6 dB • ƒ 50 % de l'amplitude du signal
Les valeurs qui fi gurent dans la description des signaux sont valables pour des déplace-ments jusqu'à 20% de la fréquence limite de –3 dB-.
Interpolation/résolution/pas de mesure
Les signaux de sortie de l'interface 1 VCC sont généralement interpolés dans l'élec-tronique consécutive pour atteindre des résolutions suffi samment élevées. Pour l'asservissement de vitesse, on utilise fréquemment des facteurs d'interpolation supérieurs à 1000 pour obtenir des infor-mations exploitables, y compris à de faibles vitesses de rotation.
Des résolutions de mesure sont conseillées dans les caractéristiques techniques pour l'affi chage de la position. D'autres résolu-tions sont possibles pour des applications spéciales.
Résistance aux courts-circuits
Une sortie en bref court-circuit à 0 V ou UP (hormis les appareils avec UPmin = 3,6 V) ne provoque pas de panne. Cela n'est toute-fois pas un fonctionnement normal.
Court-circuit sur à 20 °C à 125 °C
une sortie < 3 min < 1 min
toutes les sorties < 20 s < 5 s
Interface Signaux de tension sinusoïdaux » 1 VCC
Signaux
incrémentaux
2 signaux de forme sinusoïdale A et B
Amplitude du signal M: 0,6 à 1,2 VCC; 1 VCC typ.Ecart de symétrie |P – N|/2M : † 0,065Rapport d'amplitude MA/MB : 0,8 à 1,25Déphasage |ϕ1 + ϕ2|/2 : 90° ± 10° él.
Signal de référence 1 ou plusieurs impulsions de signal R
Partie utile G : ‡ 0,2 VValeur au repos H : † 1,7 VRapport signal/bruit E, F: 0,04 à 0,68 VPassages à zéro K, L: 180° ± 90° él.
Câble de liaison
Longueur de câbleTemps de propagation
Câble blindé HEIDENHAINPUR [4(2 x 0,14 mm2) + (4 x 0,5 mm2)]150 m max. avec capacité de câble de 90 pF/m6 ns/m
Ces valeurs peuvent servir à la conception de l'électronique consécutive. Lorsque des sys-tèmes de mesure ont des tolérances réduites, elles sont précisées dans les caractéristi-ques techniques. Pour la mise en service des systèmes sans roulement intégré, des tolé-rances réduites sont conseillées (voir Instructions de montage).
Forme alternative du signal

49
Co
nn
exio
n é
lectr
iqu
e
Circuit d'entrée de
l'électronique consécutive
Composants et valeurs
Amplifi cateur opérationnel p. ex. MC 34074Z0 = 120 −R1 = 10 k− et C1 = 100 pFR2 = 34,8 k− et C2 = 10 pFUB = ± 15 VU1 env. U0
Fréquence limite du circuit à –3dB
env. 450 kHzenv. 50 kHz avec C1 = 1000 pF et C2 = 82 pFLa variante du circuit pour 50 kHz réduit certes la largeur de bande du circuit, mais améliore toutefois son immunité au bruit.
Signaux de sortie du circuit
Ua = 3,48 VCC typ.Amplifi cation 3,48 fois
Signaux incrémentaux
Signal de référence
Ra < 100 −, typ. 24 −Ca < 50 pFΣIa < 1 mAU0 = 2,5 V ± 0,5 V(par rapport au 0 V de la tension d'alimentation)
Système de mesure Electronique consécutive
Signaux incrémentaux
Signal de référence
Ra < 100 −, typ. 24 −Ca < 50 pFΣIa < 1 mAU0 = 2,5 V ± 0,5 V(par rapport au 0 V de la tension d'alimentation)
Système de mesure LIP 281 Electronique consécutive
Surveillance des signaux incrémentaux
Les seuils de réponse suivants sont conseillés pour la surveillance de l'amplitude de signal M :seuil de réponse bas : 0,30 VCCseuil haut : 1,35 VCC
Circuit d’entrée de
l’électronique consécutive
pour fréquences élevées
Un circuit d’entrée spécial est nécessaire pour les systèmes de mesure à fréquences élevées des signaux (p. ex. LIP 281).
Composants et valeurs
Amplifi cateur opérationnel, par ex. AD 8138Z0 = 130 −R1 = 681 −R2 = 1 k−R3 = 464 −C0 = 15 pFC1 = 10 pF+UB = 5 V–UB = 0 V ou –5 V
Fréquence limite du circuit à –3dB
env. 10 MHz
Signaux de sortie du circuit
Ua = 1,47 VCC typ.Amplifi cation 1,47 fois

50
Interfaces
Signaux incrémentaux « TTL
Les systèmes de mesure HEIDENHAIN avec interface « TTL sont équipés de cir-cuits qui numérisent les signaux de balayage sinusoïdaux, avec ou sans interpolation.
Les signaux incrémentaux de sortie se présentent sous la forme de trains d'impul-sions rectangulaires Ua1 et Ua2 déphasés de 90° él. Le signal de référence est constitué d'une ou plusieurs impulsions de référence Ua0 combinées aux signaux incrémentaux. L'électronique intégrée génère en plus les signaux inverses , £ et ¤ permet-tant ainsi une transmission moins sensible aux parasites. Le diagramme ci-dessous des signaux de sortie – Ua2 en retard sur Ua1 – est conforme au sens de déplace-ment indiqué sur le plan d'encombrement.
Le signal de perturbation ¥ indique des fonctions défectueuses, p. ex., une rupture de fi ls d'alimentation, une panne de source lumineuse, etc. Il peut être utilisé pour mettre la machine hors service, notamment dans le cadre d'une production automatisée.
Le pas de mesure résulte de l'écart entre deux fronts des signaux incrémentaux Ua1 et Ua2 après exploitation par 1, par 2 ou par 4.
L'électronique consécutive doit être conçue de manière à exploiter chaque front des impulsions rectangulaires. L'écart min. a entre les fronts indiqué dans les caracté-
ristiques techniques s'applique au circuit d'entrée illustré, avec un câble de 1 m et se réfère à une mesure en sortie du récep-teur de ligne différentiel. En plus, des diffé-rences de temps de propagation du signal dépendant du câble réduisent l'écart entre les fronts de 0,2ns max. par mètre de câ-ble. Pour éviter les erreurs de comptage, il faut concevoir l'électronique consécutive de façon à pouvoir traiter encore 90% de l'écart entre les fronts qui en résultent.Il convient de ne pas dépasser, même briè-vement, la vitesse de rotation ou la vites-
se de déplacement max. admissible.
La longueur de câble admissible pour la transmission des signaux rectangulaires TTL dépend de l'écart a entre les fronts. Elle est de 100 m ou 50 m max. pour le si-gnal de perturbation. Pour cela, il faut que l'alimentation en tension soit garantie à l'entrée du système de mesure (voir Carac-téristiques techniques). Au moyen des li-gnes sensor, il est possible de mesurer la tension alimentant le système de mesure et, si nécessaire, de la réguler avec un dis-positif de régulation adaptée (boîtier d'ali-mentation contrôlée).
Interface Signaux rectangulaires « TTL
Signaux
incrémentaux
2 signaux rectangulaires TTL Ua1, Ua2 et leurs signaux inverses , £
Signal de référence
Largeur d'impulsionTemps de retard
1 ou plusieurs impulsions rectangulaires TTL, Ua0 et leurs impulsions inverses ¤ 90° él. (autre largeur sur demande); LS 323: non combiné|td| † 50 ns
Signal de
perturbation
Largeur d'impulsion
1 impulsion rectangulaire TTL ¥Perturbation : LOW (sur demande : Ua1/Ua2 haute impédance)Système en état de marche : HIGHtS ‡ 20 ms
Amplitude du signal Amplifi cateur de ligne différentiel selon EIA-Standard RS 422UH ‡ 2,5 V avec –IH = 20 mA ERN 1x23: 10 mAUL † 0,5 V avec IL = 20 mA ERN 1x23: 10 mA
Charge admissible Z0 ‡ 100 − aux bornes des sorties correspondantes|IL| † 20 mA charge max. par sortie (ERN 1x23: 10 mA)Ccharge † 1 000 pF par rapport à 0 VSorties protégées contre court-circuit à 0 V
Temps commutation
(10% à 90%)t+ / t– † 30 ns (10 ns typ.)avec 1 m de câble et circuit d'entrée indiqué
Câble de liaison
Longueur de câbleTemps de propagation
Câble blindé HEIDENHAINPUR [4(2 × 0,14 mm2) + (4 × 0,5 mm2)]100 m max. (¥ 50 m max.) avec capacité de câble de 90 pF/m6 ns/m
Période de signal 360° él. Perturbation
Incrément de mesure
après exploitation 4 fois
Les signaux inverses , £, ¤ ne sont pas représentés
Longueur de câble
admissible
en fonction de l'écart entre les fronts
Lo
ng
ueu
r d
e c
âb
le [
m]
Ecart entre les fronts [µs]
sans ¥
avec ¥

51
Circuit d'entrée de
l'électronique consécutive
Composants et valeurs
IC1 = récepteur de ligne différentiel conseillé
DS 26 C 32 AT seulement pour a > 0,1 µs: AM 26 LS 32 MC 3486 SN 75 ALS 193
R1 = 4,7 k−R2 = 1,8 k−Z0 = 120 −C1 = 220 pF (pour améliorer l'immunité
aux parasites)
Signaux incrémentaux
Signal de référence
Signal de perturbation
Système de mesure Electronique consécutive

52
Interfaces
Commutateurs de limite
Les LIDA 400 sont équipés de deux com-mutateurs de limite intégrés, destinés à détecter des positions de fi n de course ou à créer une piste Homing. Les commutateurs de limite sont activés au moyen d'aimants adhésifs qui permettent la sélection des commutateurs de limite droite ou gauche. La mise en série des aimants permet de réaliser également des pistes Homing. Les signaux des commutateurs de limite sont fournis sur des lignes séparées et sont dis-ponibles directement. Toutefois, le câble de diamètre 3,7 mm est de faible dimension afi n de limiter au maximum les forces exer-cées sur les composants mobiles de la machine.
LIDA 47x LIDA 48x
Signaux de sortie 1 impulsion rectangulaire TTL pour chaque commuta-teur de limite L1 et L2; „actifs high”
Amplitude du signal TTL avec signal push-pull (ex. 74 HCT 1G 08)
TTL avec montage à collec-teur commun et résistance de charge 10 k− à 5 V
Charge admissible IaL † 4 mAIaH † 4 mA
Temps
commutation
(10 % jusqu'à 90 %)
MontéeDescente
t+ † 50 nst– † 50 nsmesurés avec câble de 3 m et circuit d'entrée conseillé
t+ † 10 µst– † 3 µsmesurés avec câble de 3 m et circuit d'entrée conseillé
Longueur de câble admissible max. 20 m
L1/L2 = Signaux de sortie des commutateurs de limite 1 et 2 Tolérance du front de commutation : ± 2 mm
s = Début de la longueur de mesure ML1 = Aimant N pour commutateur de limite 12 = Aimant S pour commutateur de limite 2
Circuit conseillé à l'entrée de
l'électronique consécutive
Composants et valeurs
IC3 Ex. 74AC14R3 = 1,5 k−
Commutateurs de
limite LIDA 400
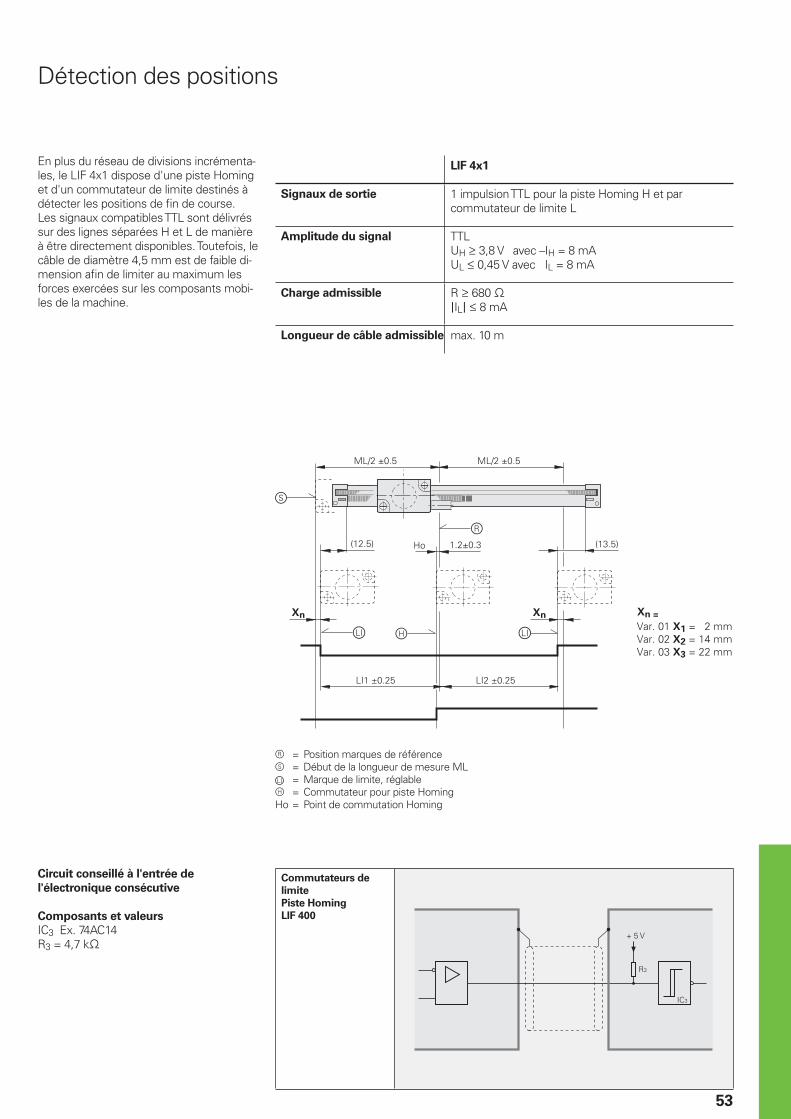
53
Détection des positions
En plus du réseau de divisions incrémenta-les, le LIF 4x1 dispose d'une piste Homing et d'un commutateur de limite destinés à détecter les positions de fi n de course.Les signaux compatibles TTL sont délivrés sur des lignes séparées H et L de manière à être directement disponibles. Toutefois, le câble de diamètre 4,5 mm est de faible di-mension afi n de limiter au maximum les forces exercées sur les composants mobi-les de la machine.
LIF 4x1
Signaux de sortie 1 impulsion TTL pour la piste Homing H et par commutateur de limite L
Amplitude du signal TTLUH ‡ 3,8 V avec –IH = 8 mAUL † 0,45 V avec IL = 8 mA
Charge admissible R ‡ 680 −IILI † 8 mA
Longueur de câble admissible max. 10 m
r = Position marques de références = Début de la longueur de mesure ML LI = Marque de limite, réglableh = Commutateur pour piste HomingHo = Point de commutation Homing
Commutateurs de
limite
Piste Homing
LIF 400
Circuit conseillé à l'entrée de
l'électronique consécutive
Composants et valeurs
IC3 Ex. 74AC14R3 = 4,7 k−
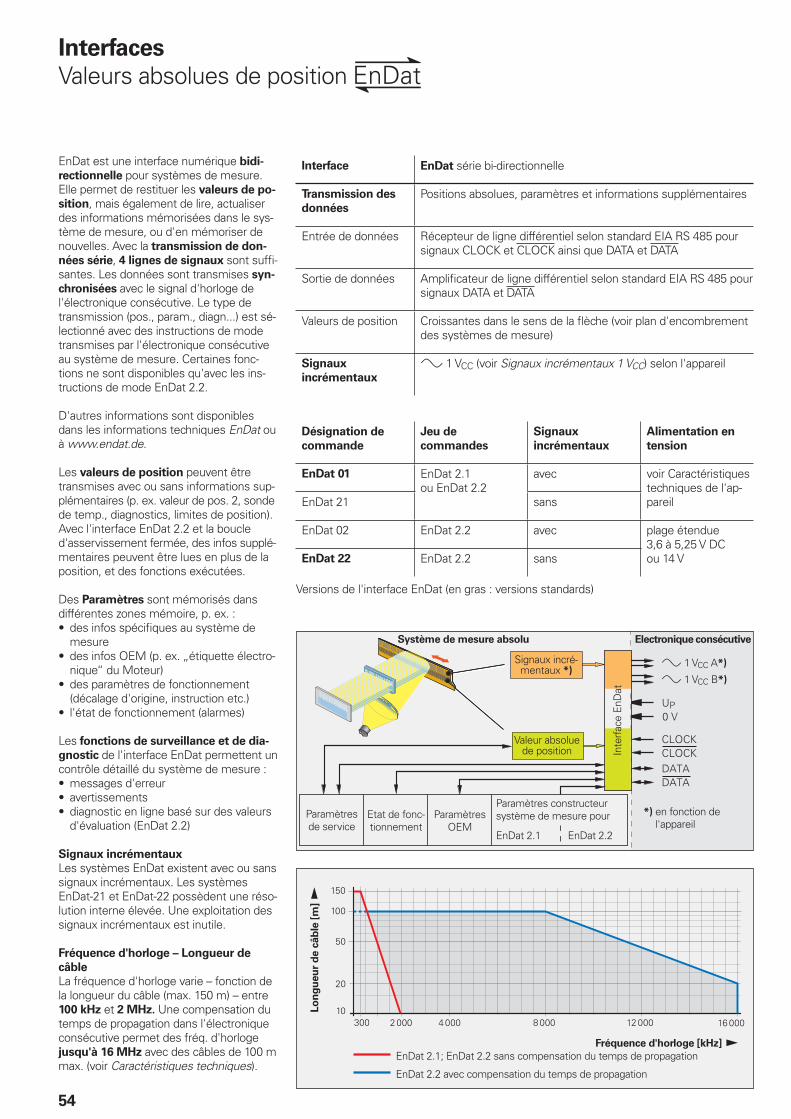
54
Interfaces
Valeurs absolues de position
Interface EnDat série bi-directionnelle
Transmission des
données
Positions absolues, paramètres et informations supplémentaires
Entrée de données Récepteur de ligne différentiel selon standard EIA RS 485 pour signaux CLOCK et CLOCK ainsi que DATA et DATA
Sortie de données Amplifi cateur de ligne différentiel selon standard EIA RS 485 pour signaux DATA et DATA
Valeurs de position Croissantes dans le sens de la fl èche (voir plan d'encombrement des systèmes de mesure)
Signaux
incrémentaux
» 1 VCC (voir Signaux incrémentaux 1 VCC) selon l'appareil
EnDat est une interface numérique bidi-
rectionnelle pour systèmes de mesure. Elle permet de restituer les valeurs de po-
sition, mais également de lire, actualiser des informations mémorisées dans le sys-tème de mesure, ou d'en mémoriser de nouvelles. Avec la transmission de don-
nées série, 4 lignes de signaux sont suffi -santes. Les données sont transmises syn-
chronisées avec le signal d'horloge de l'électronique consécutive. Le type de transmission (pos., param., diagn...) est sé-lectionné avec des instructions de mode transmises par l'électronique consécutive au système de mesure. Certaines fonc-tions ne sont disponibles qu'avec les ins-tructions de mode EnDat 2.2.
D'autres informations sont disponibles dans les informations techniques EnDat ou à www.endat.de.
Les valeurs de position peuvent être transmises avec ou sans informations sup-plémentaires (p. ex. valeur de pos. 2, sonde de temp., diagnostics, limites de position).Avec l'interface EnDat 2.2 et la boucle d'asservissement fermée, des infos supplé-mentaires peuvent être lues en plus de la position, et des fonctions exécutées.
Des Paramètres sont mémorisés dans différentes zones mémoire, p. ex. :
des infos spécifi ques au système de • mesuredes infos OEM (p. ex. „étiquette électro-• nique“ du Moteur)des paramètres de fonctionnement • (décalage d'origine, instruction etc.)l'état de fonctionnement (alarmes)•
Les fonctions de surveillance et de dia-
gnostic de l'interface EnDat permettent un contrôle détaillé du système de mesure :
messages d'erreur• avertissements• diagnostic en ligne basé sur des valeurs • d'évaluation (EnDat 2.2)
Signaux incrémentaux
Les systèmes EnDat existent avec ou sans signaux incrémentaux. Les systèmes EnDat-21 et EnDat-22 possèdent une réso-lution interne élevée. Une exploitation des signaux incrémentaux est inutile.
Fréquence d'horloge – Longueur de
câble
La fréquence d'horloge varie – fonction de la longueur du câble (max. 150 m) – entre 100 kHz et 2 MHz. Une compensation du temps de propagation dans l'électronique consécutive permet des fréq. d'horloge jusqu'à 16 MHz avec des câbles de 100 m max. (voir Caractéristiques techniques).
Lo
ng
ueu
r d
e c
âb
le [
m]
Fréquence d'horloge [kHz]
EnDat 2.1; EnDat 2.2 sans compensation du temps de propagation
EnDat 2.2 avec compensation du temps de propagation
Système de mesure absolu Electronique consécutive
» 1 VCC A*)
» 1 VCC B*)
Paramètres de service
Etat de fonc-tionnement
Paramètres OEM
Paramètres constructeur système de mesure pour
EnDat 2.1 EnDat 2.2
*) en fonction de l'appareil
Désignation de
commande
Jeu de
commandes
Signaux
incrémentaux
Alimentation en
tension
EnDat 01 EnDat 2.1 ou EnDat 2.2
avec voir Caractéristiques techniques de l'ap-pareilEnDat 21 sans
EnDat 02 EnDat 2.2 avec plage étendue3,6 à 5,25 V DC ou 14 VEnDat 22 EnDat 2.2 sans
Versions de l'interface EnDat (en gras : versions standards)
Valeur absolue de position In
terf
ace
EnD
at
Signaux incré-mentaux *)
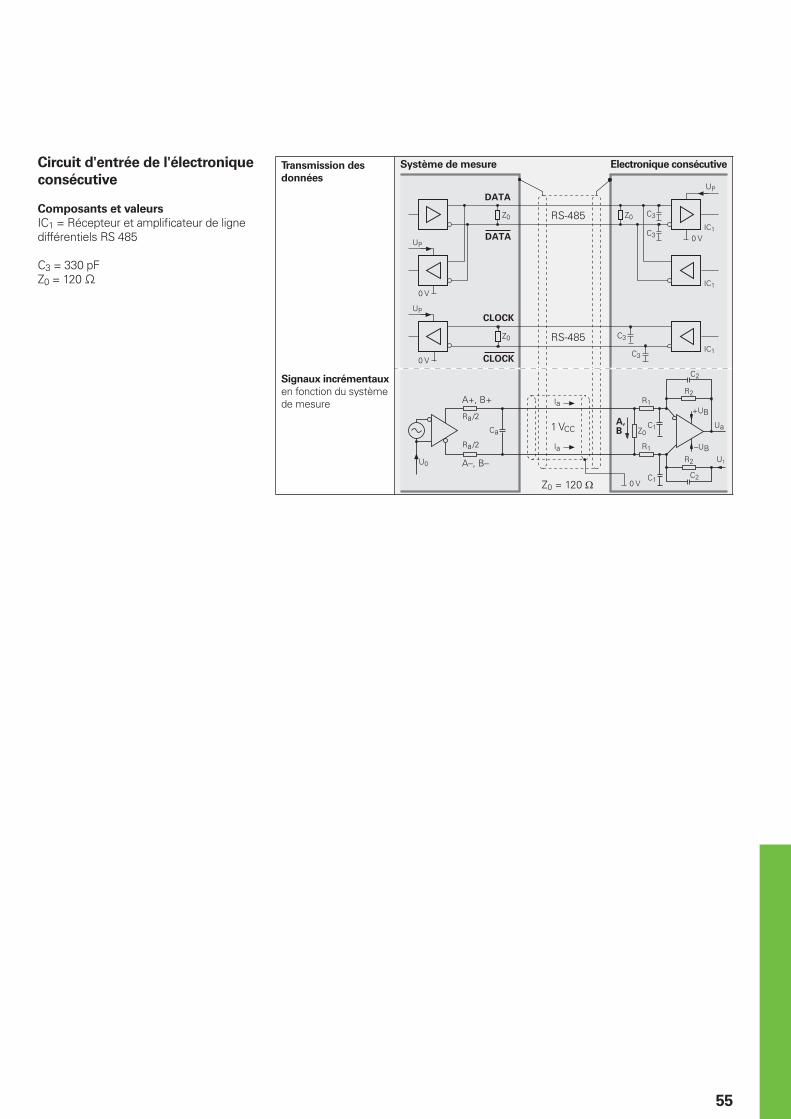
55
Circuit d'entrée de l'électronique
consécutive
Composants et valeurs
IC1 = Récepteur et amplifi cateur de ligne différentiels RS 485
C3 = 330 pFZ0 = 120 −
Transmission des
données
Signaux incrémentaux
en fonction du système de mesure
Système de mesure Electronique consécutive
1 VCC
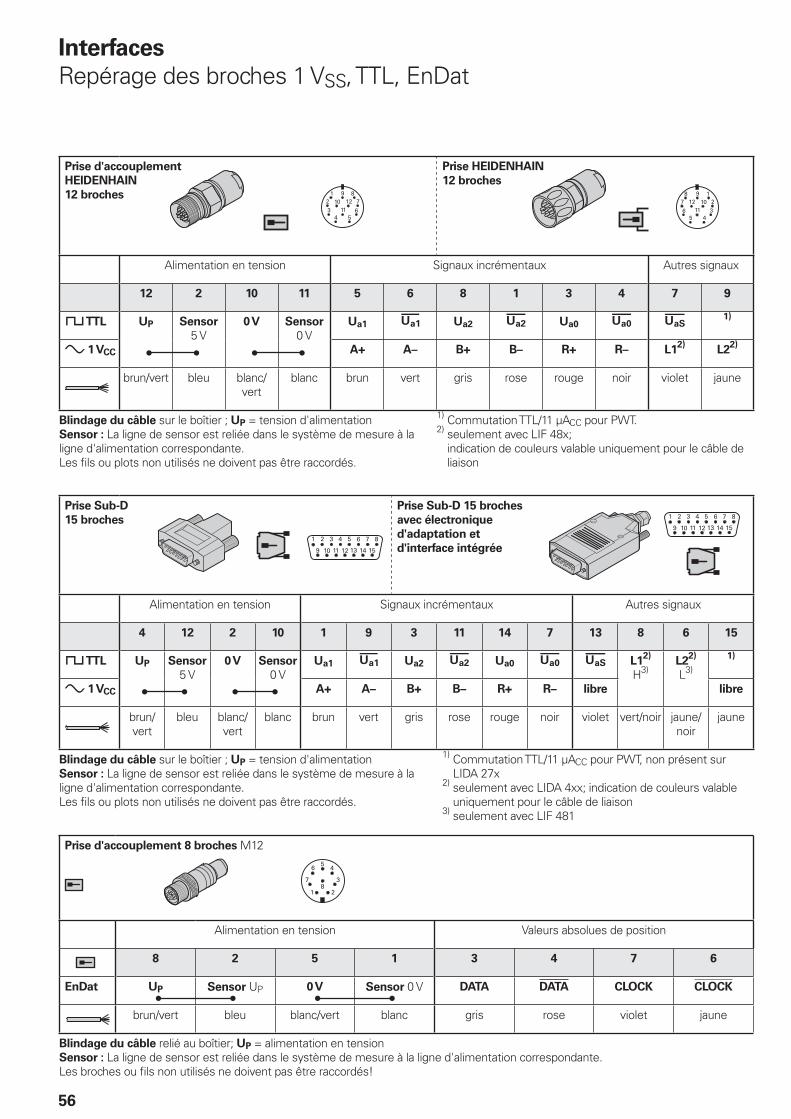
56
Interfaces
Repérage des broches 1 VSS, TTL, EnDat
Prise d'accouplement
HEIDENHAIN
12 broches
Prise HEIDENHAIN
12 broches
Alimentation en tension Signaux incrémentaux Autres signaux
12 2 10 11 5 6 8 1 3 4 7 9
« TTL UP Sensor
5 V0 V Sensor
0 VUa1 Ua2 £ Ua0 ¤ ¥ 1)
» 1 VCC A+ A– B+ B– R+ R– L12)
L22)
brun/vert bleu blanc/vert
blanc brun vert gris rose rouge noir violet jaune
Blindage du câble sur le boîtier ; UP = tension d'alimentationSensor : La ligne de sensor est reliée dans le système de mesure à la ligne d'alimentation correspondante.Les fi ls ou plots non utilisés ne doivent pas être raccordés.
1) Commutation TTL/11 µACC pour PWT.2) seulement avec LIF 48x;
indication de couleurs valable uniquement pour le câble de liaison
Prise Sub-D
15 broches
Prise Sub-D 15 broches
avec électronique
d'adaptation et
d'interface intégrée
Alimentation en tension Signaux incrémentaux Autres signaux
4 12 2 10 1 9 3 11 14 7 13 8 6 15
« TTL UP Sensor
5 V0 V Sensor
0 VUa1 Ua2 £ Ua0 ¤ ¥ L1
2)
H3)L2
2)
L3)
1)
» 1 VCC A+ A– B+ B– R+ R– libre libre
brun/vert
bleu blanc/vert
blanc brun vert gris rose rouge noir violet vert/noir jaune/noir
jaune
Blindage du câble sur le boîtier ; UP = tension d'alimentationSensor : La ligne de sensor est reliée dans le système de mesure à la ligne d'alimentation correspondante.Les fi ls ou plots non utilisés ne doivent pas être raccordés.
1) Commutation TTL/11 µACC pour PWT, non présent sur LIDA 27x
2) seulement avec LIDA 4xx; indication de couleurs valable uniquement pour le câble de liaison
3) seulement avec LIF 481
Prise d'accouplement 8 broches M12
Alimentation en tension Valeurs absolues de position
8 2 5 1 3 4 7 6
EnDat UP Sensor UP 0 V Sensor 0 V DATA DATA CLOCK CLOCK
brun/vert bleu blanc/vert blanc gris rose violet jaune
Blindage du câble relié au boîtier; UP = alimentation en tensionSensor : La ligne de sensor est reliée dans le système de mesure à la ligne d'alimentation correspondante.Les broches ou fi ls non utilisés ne doivent pas être raccordés!

M23
M23
M23
M23
M23
M12
M12
57
Le sens de la numérotation des broches varie en fonction des prises d'accouplement ou embases ; mais il est indépendant du fait que les contacts du connecteur soient
mâles
oufemelles.
Lorsqu'ils sont vissés, les connecteurs garantissent l'indice de protection IP 67 (prise Sub-D : IP 50 ; EN 60 529). Les connecteurs non vissés ne présentent aucune protection.
Connecteurs et câbles
Généralités
Prise avec gaine isolante : connecteur avec une collerette fi letée, livrable avec contacts mâles ou femelles.
Symboles
Prise d'accouplement avec gaine isolante : connecteur avec fi letage extérieur ; disponible avec contacts mâles ou femelles.
Symboles
Prise Sub-D : pour commandes HEIDENHAIN, cartes de comptage et cartes de valeurs absolues IK.
Symboles
Accessoires pour embases et prises
d'accouplement encastrables M23
Joint d'étanchéité
ID 266526-01
Capuchon anti-poussière à visser,
en métal
ID 219926-01
Embase : fi xée sur le système de mesure ou à un boîtier avec un fi letage externe (comme la prise d'accouplement); dispo-nible avec contacts mâles ou femelles.
Symboles
Prise d'accouplement
encastrable avec fi xation
centrale
Prise d'accouplement
encastrable avec bride
1) Electronique d'interface intégrée dans la prise
Découpe pour montage
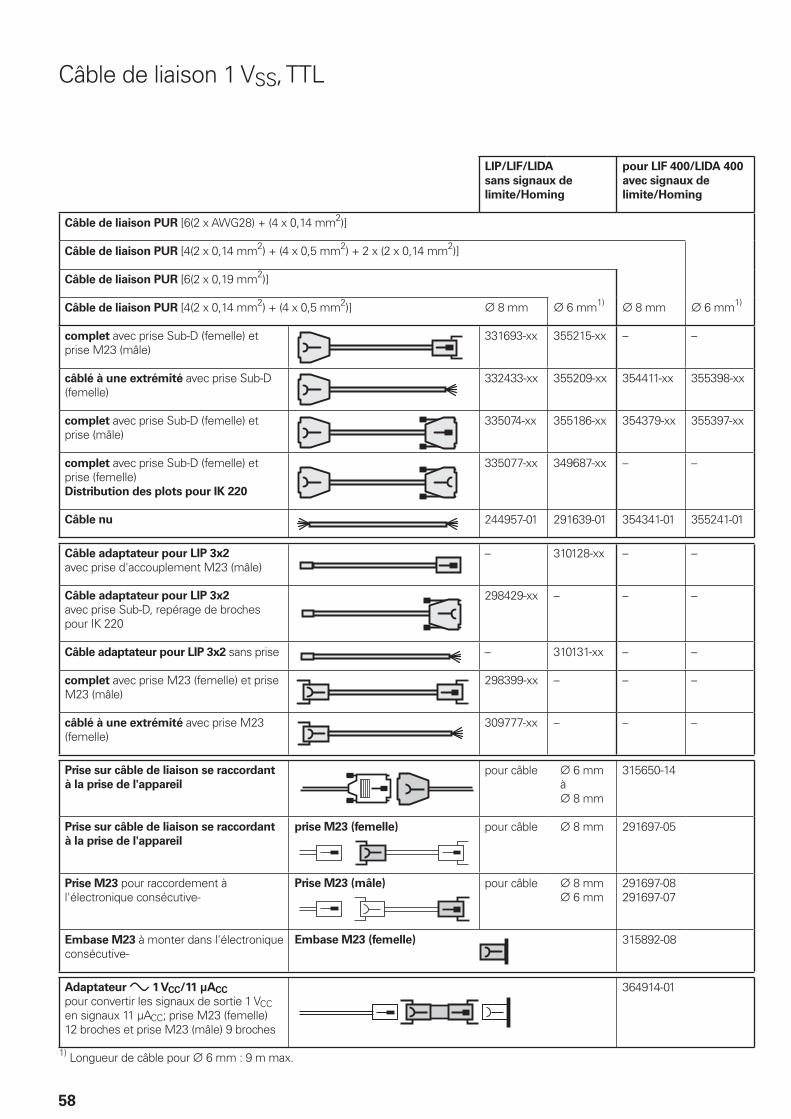
58
Câble de liaison 1 VSS, TTL
LIP/LIF/LIDA
sans signaux de
limite/Homing
pour LIF 400/LIDA 400
avec signaux de
limite/Homing
Câble de liaison PUR [6(2 x AWG28) + (4 x 0,14 mm2)]
Câble de liaison PUR [4(2 x 0,14 mm2) + (4 x 0,5 mm2) + 2 x (2 x 0,14 mm2)]
Câble de liaison PUR [6(2 x 0,19 mm2)]
Câble de liaison PUR [4(2 x 0,14 mm2) + (4 x 0,5 mm2)] ¬ 8 mm ¬ 6 mm1) ¬ 8 mm ¬ 6 mm1)
complet avec prise Sub-D (femelle) et prise M23 (mâle)
331693-xx 355215-xx – –
câblé à une extrémité avec prise Sub-D (femelle)
332433-xx 355209-xx 354411-xx 355398-xx
complet avec prise Sub-D (femelle) et prise (mâle)
335074-xx 355186-xx 354379-xx 355397-xx
complet avec prise Sub-D (femelle) et prise (femelle) Distribution des plots pour IK 220
335077-xx 349687-xx – –
Câble nu 244957-01 291639-01 354341-01 355241-01
Câble adaptateur pour LIP 3x2
avec prise d'accouplement M23 (mâle)– 310128-xx – –
Câble adaptateur pour LIP 3x2
avec prise Sub-D, repérage de broches pour IK 220
298429-xx – – –
Câble adaptateur pour LIP 3x2 sans prise – 310131-xx – –
complet avec prise M23 (femelle) et prise M23 (mâle)
298399-xx – – –
câblé à une extrémité avec prise M23 (femelle)
309777-xx – – –
Prise sur câble de liaison se raccordant
à la prise de l'appareil
pour câble ¬ 6 mm à ¬ 8 mm
315650-14
Prise sur câble de liaison se raccordant
à la prise de l'appareil
prise M23 (femelle) pour câble ¬ 8 mm 291697-05
Prise M23 pour raccordement à l'électronique consécutive-
Prise M23 (mâle) pour câble ¬ 8 mm ¬ 6 mm
291697-08291697-07
Embase M23 à monter dans l'électronique consécutive-
Embase M23 (femelle) 315892-08
Adaptateur » 1 VCC/11 µACC
pour convertir les signaux de sortie 1 VCC en signaux 11 µACC; prise M23 (femelle) 12 broches et prise M23 (mâle) 9 broches
364914-01
1) Longueur de câble pour ¬ 6 mm : 9 m max.

59
EnDat sans signaux incrémentaux
Câble de liaison PUR [4 × 2 × 0,09 mm2]
Câble de liaison PUR [(4 × 0,14 mm2) + (4 × 0,34 mm2)] ¬ 6 mm ¬ 3,7 mm
câblage complet avec prise (femelle) et prise d'accouplement (mâle)
368330-xx 801142-xx1)
complet avec prise (femelle) et prise Sub-D (femelle) pour IK 220
533627-xx –
câblage complet avec prise (femelle) et prise Sub-D (mâle) pour IK 215/PWM 20
524599-xx 801129-xx1)
câblé à une extrémité avec prise (femelle) 634265-xx –
1) longueur de câble max. 6 m
Câble de liaison EnDat 8 broches M12

60
Informations électriques d'ordre général
Alimentation en tension
Ne raccordez les systèmes de mesure HEIDENHAIN qu'à des électroniques consé-cutives dont la tension d'alimentation est générée par des systèmes T.B.T.P. (EN50 178). Pour les applications de sécurité, prévoir une protection supplémentaire contre les surintensités ou les surtensions.
Si les systèmes de mesure HEIDENHAIN doivent être alimentés selon IEC 61010-1, l'alimentation en tension doit être assurée à partir d'un circuit secondaire équipé d'une limitation de courant ou de puissan-ce selon IEC 61010-1:2001, sect. 9.3 ou IEC 60950-1:2005, sect. 2.5 ou d'un circuit secondaire de la classe 2 selon UL1310.
Une tension continue stabilisée UP est nécessaire pour alimenter les systèmes de mesure. Les valeurs de tension et de consommation en courant fi gurent dans les caractéristiques techniques. Ondulation de la tension continue :
Signal de perturbation haute fréquence• UCC < 250 mV avec dU/dt > 5 V/µsOndulation fondamentale basse fréquence• UCC < 100 mV
Les valeurs de tension doivent être respec-tées aux bornes du système de mesure, sans tenir compte du câble. La tension aux bornes du système peut être contrôlée et, si nécessaire, régulée avec les lignes de
sensor. Si l’on ne dispose pas d'une ali-mentation régulée, les lignes de sensor peuvent être mises en parallèle avec les fi ls d’alimentation correspondantes afi n de réduire de moitié les chutes en ligne.
Calcul de la chute de tension :
¹U = 2 · 10–3 ·
avec ¹U: Chute de tension en V 1,05: Facteur de longueur dû aux
brins torsadés LK: Longueur de câble en m I: Consommation courant en mA AV: Section fi ls d'alimentation
en mm2
Pour le calcul de la consommation en
courant, il faut tenir compte de la tension effectivement présente aux bornes du sys-tème de mesure. Celle-ci se compose de la tension d'alimentation UP, fournie par l'électronique consécutive, diminuée de la chute de tension dans les fi ls d'alimenta-tion. Pour les systèmes avec une plage d'alimentation étendue, le calcul de la chute de tension dans les fi ls d'alimentation doit tenir compte de la consommation en cou-rant non linéaire (voir page suivante).
Réponse transitoire de la tension d'alimentation et comportement à la mise sous/hors tension
Signaux de sortie non valides non validesvalides
UCC
1,05 · LK · I56 · AV
Lorsque la valeur de la chute de tension est connue, tous les paramètres pour le système de mesure et l'électronique consécutive peuvent être calculés, p. ex. tension aux bornes du système de mesure, consom-mation en courant et en puissance du sys-tème de mesure, ainsi que la puissance à fournir par l'électronique consécutive.
Comportement à la mise sous/hors
tension des systèmes de mesure
Les signaux de sortie sont valides au plus tôt après la durée tSOT = 1,3 s (2 s avec PROFIBUS-DP) (voir diagramme). Dans tSOT, ils peuvent avoir n'importe quelle am-plitude jusqu'à 5,5 V (jusqu'à UPmax sur les appareils HTL). Si une électronique (d'inter-polation) intermédiaire alimente le système de mesure, les conditions de mise en/hors service de celle-ci sont à considérer en plus. Lors de la mise hors tension, ou bien
si la tension est inférieure à Umin, les si-gnaux de sortie ne sont pas valides non plus. Avant la remise en service, un niveau de tension doit être inférieur à 1V pendant le temps tSOT. Les données concernent les systèmes de mesure du catalogue, pas les interfaces personnalisées.
Des développements plus performants peuvent exiger des durées de démarrage plus longs tSOT. Si vous développez une électronique consécutive, contactez HEIDENHAIN.
Isolation
Les boîtiers des syst. de mes. sont isolés des boucles de courant internes.Surtension transitoire nominale : 500 V(valeur préférentielle selon VDE 0110, chap. 1; catégorie de surtension II, degré de contamination 2)
Câble Section des fi ls d'alimentation AV
1 VCC/TTL/HTL 11 µACC EnDat/SSI
17 brochesEnDat
5)
8 broches
¬ 3,7 mm 0,05 mm2 – – 0,09 mm2
¬ 4,3 mm 0,24 mm2 – – –
¬ 4,5 mm EPG 0,05 mm2 – 0,05 mm2 0,09 mm2
¬ 4,5 mm
¬ 5,1 mm
0,14/0,092) mm2
0,052), 3) mm20,05 mm2 0,05/0,146) mm2 0,14 mm2
¬ 5,5 mm PVC 0,1 mm2 – – –
¬ 6 mm
¬ 10 mm1)
0,19/0,142), 4) mm2 – 0,08/0,196) mm2 0,34 mm2
¬ 8 mm
¬ 14 mm1)
0,5 mm2 1 mm2 0,5 mm2 1 mm2
1) Gaine métallique de protection 2) Capteur rotatif 3) Palpeur de mesure4) LIDA 400 5)également Fanuc, Mitsubishi 6) câble adaptateur RCN, LC
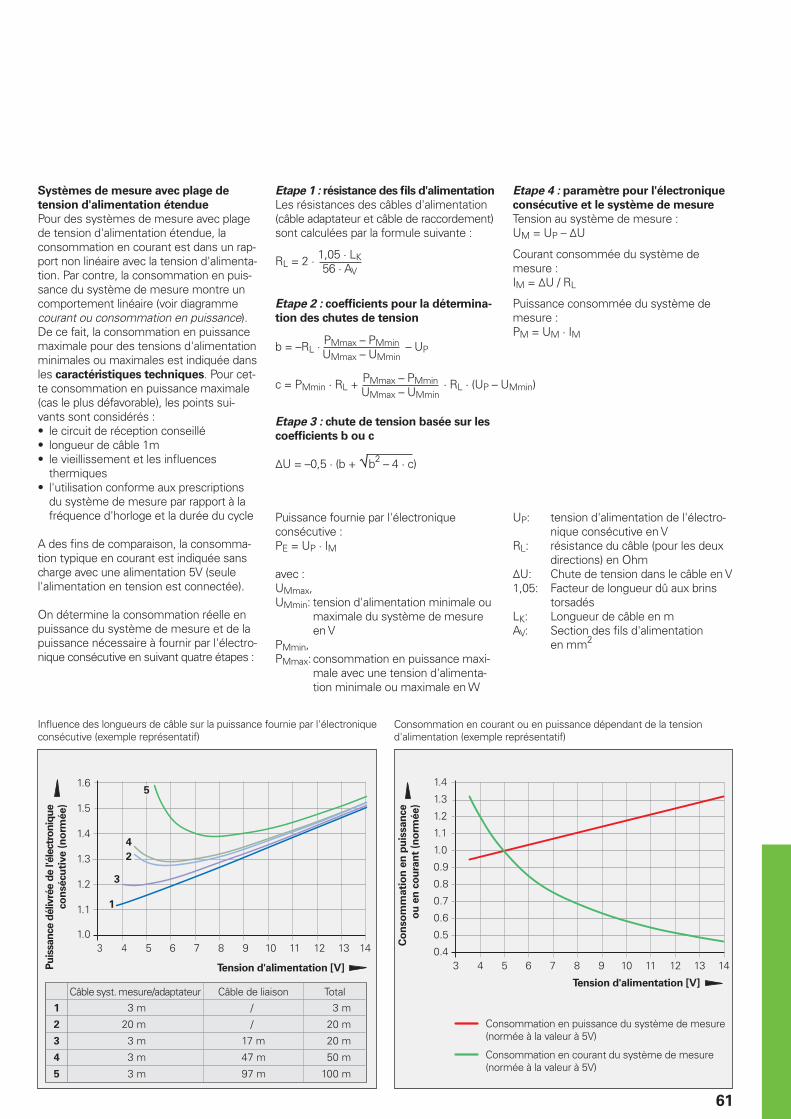
61
Systèmes de mesure avec plage de
tension d'alimentation étendue
Pour des systèmes de mesure avec plage de tension d'alimentation étendue, la consommation en courant est dans un rap-port non linéaire avec la tension d'alimenta-tion. Par contre, la consommation en puis-sance du système de mesure montre un comportement linéaire (voir diagramme courant ou consommation en puissance). De ce fait, la consommation en puissance maximale pour des tensions d'alimentation minimales ou maximales est indiquée dans les caractéristiques techniques. Pour cet-te consommation en puissance maximale (cas le plus défavorable), les points sui-vants sont considérés :
le circuit de réception conseillé• longueur de câble 1m• le vieillissement et les infl uences • thermiquesl'utilisation conforme aux prescriptions • du système de mesure par rapport à la fréquence d'horloge et la durée du cycle
A des fi ns de comparaison, la consomma-tion typique en courant est indiquée sans charge avec une alimentation 5V (seule l'alimentation en tension est connectée).
On détermine la consommation réelle en puissance du système de mesure et de la puissance nécessaire à fournir par l'électro-nique consécutive en suivant quatre étapes :
Etape 1 : résistance des fi ls d'alimentation
Les résistances des câbles d'alimentation (câble adaptateur et câble de raccordement) sont calculées par la formule suivante :
RL = 2 ·
Etape 2 : coeffi cients pour la détermina-
tion des chutes de tension
b = –RL · – UP
c = PMmin · RL + · RL · (UP – UMmin)
Etape 3 : chute de tension basée sur les
coeffi cients b ou c
¹U = –0,5 · (b + ¹b2 – 4 · c)
Etape 4 : paramètre pour l'électronique
consécutive et le système de mesure
Tension au système de mesure :UM = UP – ¹U
Courant consommée du système de mesure :IM = ¹U / RL
Puissance consommée du système de mesure :PM = UM · IM
1,05 · LK56 · AV
Tension d'alimentation [V]
Tension d'alimentation [V]
Pu
issan
ce d
élivré
e d
e l'é
lectr
on
iqu
e
co
nsécu
tive (
no
rmée)
Câble syst. mesure/adaptateur TotalCâble de liaison
Co
nso
mm
ati
on
en
pu
issan
ce
ou
en
co
ura
nt
(no
rmée)
Consommation en puissance du système de mesure(normée à la valeur à 5V)
Consommation en courant du système de mesure(normée à la valeur à 5V)
Puissance fournie par l'électronique consécutive :PE = UP · IM
avec :UMmax,UMmin: tension d'alimentation minimale ou
maximale du système de mesure en V
PMmin,PMmax: consommation en puissance maxi-
male avec une tension d'alimenta-tion minimale ou maximale en W
UP: tension d'alimentation de l'électro-nique consécutive en V
RL: résistance du câble (pour les deux directions) en Ohm
¹U: Chute de tension dans le câble en V1,05: Facteur de longueur dû aux brins
torsadésLK: Longueur de câble en mAV: Section des fi ls d'alimentation
en mm2
Infl uence des longueurs de câble sur la puissance fournie par l'électronique consécutive (exemple représentatif)
Consommation en courant ou en puissance dépendant de la tension d'alimentation (exemple représentatif)
PMmax – PMminUMmax – UMmin
PMmax – PMminUMmax – UMmin
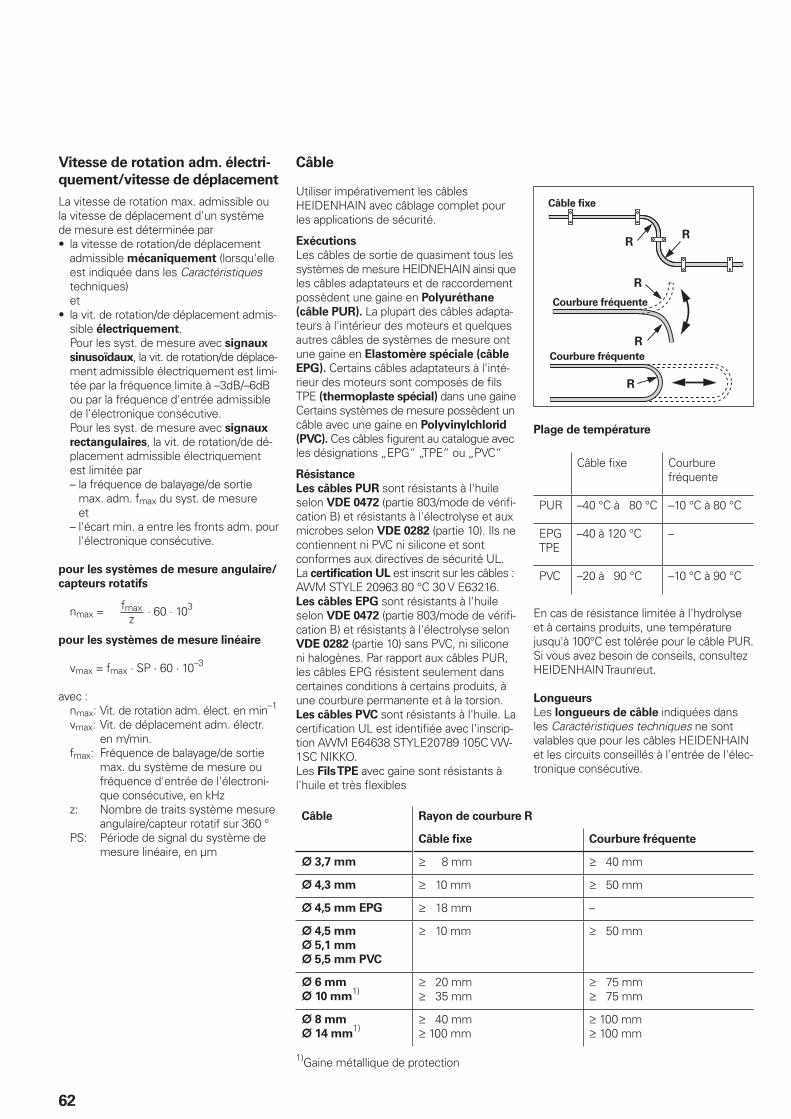
62
Câble fi xe
Courbure fréquente
Courbure fréquente
Câble Rayon de courbure R
Câble fi xe Courbure fréquente
¬ 3,7 mm ‡ 8 mm ‡ 40 mm
¬ 4,3 mm ‡ 10 mm ‡ 50 mm
¬ 4,5 mm EPG ‡ 18 mm –
¬ 4,5 mm
¬ 5,1 mm
¬ 5,5 mm PVC
‡ 10 mm ‡ 50 mm
¬ 6 mm
¬ 10 mm1)
‡ 20 mm‡ 35 mm
‡ 75 mm‡ 75 mm
¬ 8 mm
¬ 14 mm1)
‡ 40 mm‡ 100 mm
‡ 100 mm‡ 100 mm
1)Gaine métallique de protection
Câble
Utiliser impérativement les câbles HEIDENHAIN avec câblage complet pour les applications de sécurité.
Exécutions
Les câbles de sortie de quasiment tous les systèmes de mesure HEIDNEHAIN ainsi que les câbles adaptateurs et de raccordement possèdent une gaine en Polyuréthane
(câble PUR). La plupart des câbles adapta-teurs à l'intérieur des moteurs et quelques autres câbles de systèmes de mesure ont une gaine en Elastomère spéciale (câble
EPG). Certains câbles adaptateurs à l'inté-rieur des moteurs sont composés de fi ls TPE (thermoplaste spécial) dans une gaine Certains systèmes de mesure possèdent un câble avec une gaine en Polyvinylchlorid
(PVC). Ces câbles fi gurent au catalogue avec les désignations „EPG“ „TPE“ ou „PVC“
Résistance
Les câbles PUR sont résistants à l'huile selon VDE 0472 (partie 803/mode de vérifi -cation B) et résistants à l'électrolyse et aux microbes selon VDE 0282 (partie 10). Ils ne contiennent ni PVC ni silicone et sont conformes aux directives de sécurité UL. La certifi cation UL est inscrit sur les câbles : AWM STYLE 20963 80 °C 30 V E63216.Les câbles EPG sont résistants à l'huile selon VDE 0472 (partie 803/mode de vérifi -cation B) et résistants à l'électrolyse selon VDE 0282 (partie 10) sans PVC, ni silicone ni halogènes. Par rapport aux câbles PUR, les câbles EPG résistent seulement dans certaines conditions à certains produits, à une courbure permanente et à la torsion.Les câbles PVC sont résistants à l'huile. La certifi cation UL est identifi ée avec l'inscrip-tion AWM E64638 STYLE20789 105C VW-1SC NIKKO.Les Fils TPE avec gaine sont résistants à l'huile et très fl exibles
Plage de température
Câble fi xe Courbure fréquente
PUR –40 °C à 80 °C –10 °C à 80 °C
EPGTPE
–40 à 120 °C –
PVC –20 à 90 °C –10 °C à 90 °C
En cas de résistance limitée à l'hydrolyse et à certains produits, une température jusqu'à 100°C est tolérée pour le câble PUR. Si vous avez besoin de conseils, consultez HEIDENHAIN Traunreut.
Longueurs
Les longueurs de câble indiquées dans les Caractéristiques techniques ne sont valables que pour les câbles HEIDENHAIN et les circuits conseillés à l'entrée de l'élec-tronique consécutive.
Vitesse de rotation adm. électri-
quement/vitesse de déplacement
La vitesse de rotation max. admissible ou la vitesse de déplacement d'un système de mesure est déterminée par
la vitesse de rotation/de déplacement • admissible mécaniquement (lorsqu'elle est indiquée dans les Caractéristiques techniques)etla vit. de rotation/de déplacement admis-• sible électriquement.Pour les syst. de mesure avec signaux
sinusoïdaux, la vit. de rotation/de déplace-ment admissible électriquement est limi-tée par la fréquence limite à –3dB/–6dB ou par la fréquence d'entrée admissible de l'électronique consécutive.Pour les syst. de mesure avec signaux
rectangulaires, la vit. de rotation/de dé-placement admissible électriquement est limitée par– la fréquence de balayage/de sortie
max. adm. fmax du syst. de mesureet
– l'écart min. a entre les fronts adm. pour l'électronique consécutive.
pour les systèmes de mesure angulaire/
capteurs rotatifs
nmax = fmaxz
· 60 · 103
pour les systèmes de mesure linéaire
vmax = fmax · SP · 60 · 10–3
avec : nmax: Vit. de rotation adm. élect. en min–1
vmax: Vit. de déplacement adm. électr. en m/min.
fmax: Fréquence de balayage/de sortie max. du système de mesure ou fréquence d'entrée de l'électroni-que consécutive, en kHz
z: Nombre de traits système mesure angulaire/capteur rotatif sur 360 °
PS: Période de signal du système de mesure linéaire, en µm
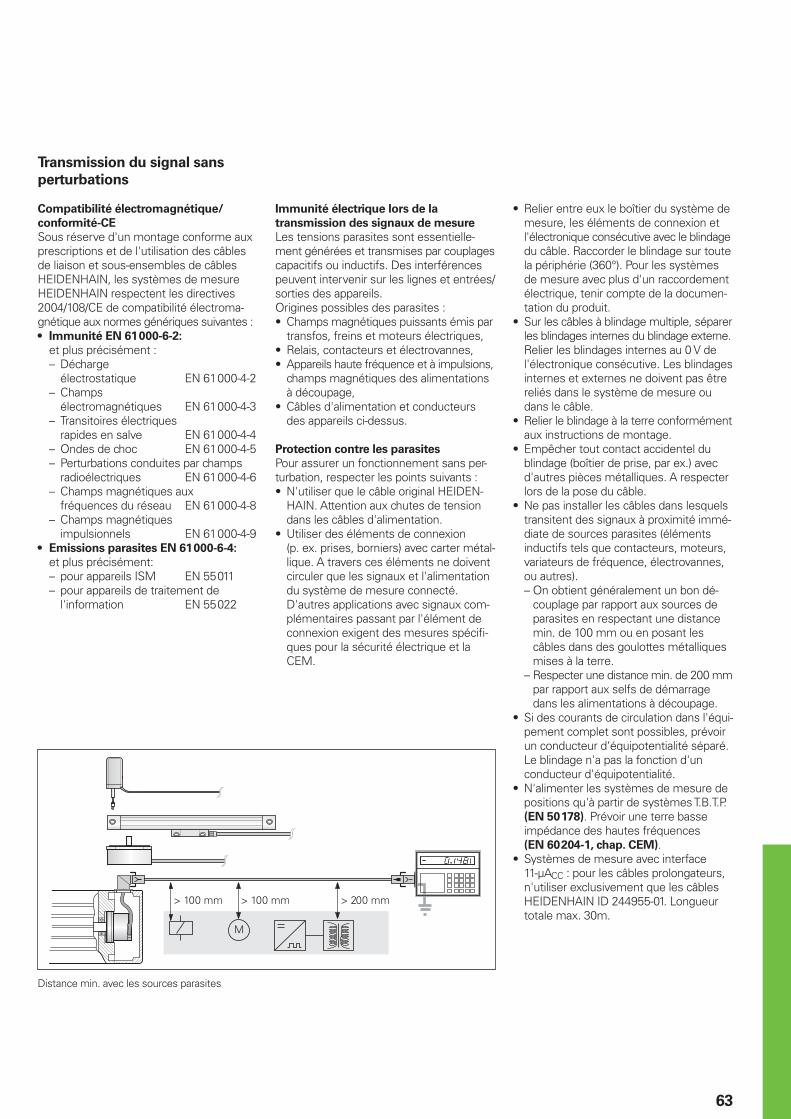
63
Transmission du signal sans
perturbations
Compatibilité électromagnétique/
conformité-CE
Sous réserve d'un montage conforme aux prescriptions et de l'utilisation des câbles de liaison et sous-ensembles de câbles HEIDENHAIN, les systèmes de mesure HEIDENHAIN respectent les directives 2004/108/CE de compatibilité électroma-gnétique aux normes génériques suivantes :
Immunité EN 61 000-6-2:•
et plus précisément : – Décharge électrostatique EN 61 000-4-2 – Champs
électromagnétiques EN 61 000-4-3 – Transitoires électriques rapides en salve EN 61 000-4-4 – Ondes de choc EN 61 000-4-5 – Perturbations conduites par champs
radioélectriques EN 61 000-4-6 – Champs magnétiques aux
fréquences du réseau EN 61 000-4-8 – Champs magnétiques
impulsionnels EN 61 000-4-9Emissions parasites EN 61 000-6-4:•
et plus précisément: – pour appareils ISM EN 55 011 – pour appareils de traitement de
l'information EN 55 022
Relier entre eux le boîtier du système de • mesure, les éléments de connexion et l'électronique consécutive avec le blindage du câble. Raccorder le blindage sur toute la périphérie (360°). Pour les systèmes de mesure avec plus d'un raccordement électrique, tenir compte de la documen-tation du produit.Sur les câbles à blindage multiple, séparer • les blindages internes du blindage externe. Relier les blindages internes au 0 V de l'électronique consécutive. Les blindages internes et externes ne doivent pas être reliés dans le système de mesure ou dans le câble.Relier le blindage à la terre conformément • aux instructions de montage.Empêcher tout contact accidentel du • blindage (boîtier de prise, par ex.) avec d'autres pièces métalliques. A respecter lors de la pose du câble.Ne pas installer les câbles dans lesquels • transitent des signaux à proximité immé-diate de sources parasites (éléments inductifs tels que contacteurs, moteurs, variateurs de fréquence, électrovannes, ou autres).– On obtient généralement un bon dé-
couplage par rapport aux sources de parasites en respectant une distance min. de 100 mm ou en posant les câbles dans des goulottes métalliques mises à la terre.
– Respecter une distance min. de 200 mm par rapport aux selfs de démarrage dans les alimentations à découpage.
Si des courants de circulation dans l'équi-• pement complet sont possibles, prévoir un conducteur d‘équipotentialité séparé. Le blindage n'a pas la fonction d'un conducteur d'équipotentialité.N'alimenter les systèmes de mesure de • positions qu'à partir de systèmes T.B.T.P. (EN 50 178). Prévoir une terre basse impédance des hautes fréquences (EN 60 204-1, chap. CEM).Systèmes de mesure avec interface • 11-µACC : pour les câbles prolongateurs, n'utiliser exclusivement que les câbles HEIDENHAIN ID 244955-01. Longueur totale max. 30m.
Immunité électrique lors de la
transmission des signaux de mesure
Les tensions parasites sont essentielle-ment générées et transmises par couplages capacitifs ou inductifs. Des interférences peuvent intervenir sur les lignes et entrées/sorties des appareils.Origines possibles des parasites :
Champs magnétiques puissants émis par • transfos, freins et moteurs électriques,Relais, contacteurs et électrovannes,• Appareils haute fréquence et à impulsions, • champs magnétiques des alimentations à découpage,Câbles d'alimentation et conducteurs • des appareils ci-dessus.
Protection contre les parasites
Pour assurer un fonctionnement sans per-turbation, respecter les points suivants :
N'utiliser que le câble original HEIDEN-• HAIN. Attention aux chutes de tension dans les câbles d'alimentation.Utiliser des éléments de connexion • (p. ex. prises, borniers) avec carter métal-lique. A travers ces éléments ne doivent circuler que les signaux et l'alimentation du système de mesure connecté. D'autres applications avec signaux com-plémentaires passant par l'élément de connexion exigent des mesures spécifi -ques pour la sécurité électrique et la CEM.
Distance min. avec les sources parasites
64
Le kit de diagnostic pour systèmes de me-sure APS 27 est nécessaire pour contrôler les tolérances de montage des LIDA 27x avec interface TTL. Pour effectuer un dia-gnostic, on connecte le LIDA 27x à l'élec-tronique consécutive à l'aide du connec-teur de contrôle PS 27, ou directement à l'appareil de contrôle PG 27.
Une LED verte signale que le montage est correct pour les signaux incrémentaux et l'impulsion de référence. Si la LED est rouge, il faut alors vérifi er le montage.
APS 27
Système de mesure LIDA 277, LIDA 279
Fonction Détection de l'état correct/incorrect des signaux TTL (signaux incrémentaux et impulsion de référence)
Alimentation en tension à partir de l'électronique consécutive ou du boîtier d'alimentation (compris dans la fourniture)
Fourniture Connecteur de contrôle PS 27Appareil de contrôle PG 27Boîtier d'alimentation pour PG 27 (110 à 240 V; y compris prise d'adaptation)Films d'ombrage
Le PWM 9 est un appareil de mesure univer-sel destiné à contrôler et à régler les systè-mes de mesure incrémentaux HEIDENHAIN. Des modules enfi chables sont disponibles pour l'adaptation aux différents signaux des systèmes de mesure. L'affi -chage se fait dans un écran LCD, l'utilisation est facili-tée par les softkeys.
PWM 9
Entrées Tiroirs (platines d'interface) pour signaux 11 µACC; 1 VCC; TTL; HTL; EnDat*/SSI*/signaux de commutation*aucun affi chage des valeurs de position et paramètres
Fonctions Mesure• d'amplitude des signaux, de la consommation en courant, de la tension d'alimentation et de la fréquence de balayageAffi chage graphique• des signaux incrémentaux (ampli-tudes, déphasage et rapport cyclique) et du signal de référence (largeur et position)Affi chage de symboles• pour marque de référence, signal de perturbation, sens de comptageCompteur universel,• interpolation sélectionnable de 1 à 1 024Aide au réglage• pour systèmes de mesure à règle nue
Sorties Entrées traversantes vers l'électronique consécutive• Prises BNC pour raccordement à un oscilloscope•
Alimentation en tension DC 10 à 30 V, 15 W max.
Dimensions 150 mm x 205 mm x 96 mm
Appareils de mesure et de contrôle HEIDENHAIN
Le PWT constitue un outil de réglage simple pour les systèmes de mesure incrémen-taux de HEIDENHAIN. Les signaux sont affi chés sous la forme de diagrammes en barres dans une petite fenêtre LCD avec référence à leurs limites de tolérance.
PWT 10 PWT 17 PWT 18
Entrée système de
mesure
» 11 µACC « TTL » 1 VCC
Fonctions Acquisition de l’amplitude du signalTolérance pour la forme du signalAmplitude et position du signal de référence
Alimentation en tension par bloc d'alimentation (compris dans la fourniture)
Dimensions 114 mm x 64 mm x 29 mm
65
L'adaptateur SA 27 permet de récupérer dans l‘APE les signaux de balayage sinusoï-daux du LIP 372. A partir des points de mesure sortis, il est possible de raccorder un oscilloscope en utilisant les câbles de mesure classiques.
SA 27
Système de mesure LIP 372
Fonction Points de mesure pour raccordement d'un oscilloscope
Alimentation en tension à partir du système de mesure
Dimensions env. 30 mm x 30 mm
Le phasemètre de contrôle PWM 20, asso-cié au logiciel de réglage et de contrôle fourni ATS, sert de kit de réglage et de contrôle des systèmes de mesure HEIDENHAIN.
PWM 20
Entrée système de
mesure
EnDat 2.1 ou EnDat 2.2 (valeur absolue avec ou sans • signaux incrémentaux)DRIVE-CLiQ• Fanuc Serial Interface• Mitsubishi High Speed Serial Interface• SSI•
Interface USB 2.0
Alimentation en tension AC 100 à 240 V ou DC 24 V
Dimensions 258 mm 154 mm 55 mm
ATS
Langues Anglais ou Allemand au choix
Fonctions Affi chage de position• Dialogue de connexion• Diagnostic• Assistant de montage pour EBI/ECI/EQI, LIP 200, • LIC 4000Fonctions supplémentaires (si elles sont gérées par le • système de mesure)Contenus mémoire•
Conditions requises du
système
PC (processeur double-cœur > 2 GHz);mémoire vive > 1 Go;système d'exploitation Windows XP, Vista, 7 (32 Bit);disque dur 100 Mo disponible sur le disque dur

66
Electroniques d'interfaçage
Les électroniques d'interface HEIDENHAIN adaptent les signaux des systèmes de me-sure à l'interface de l'électronique consé-cutive. Elles sont donc mises en œuvre lorsque l'électronique consécutive ne peut pas traiter directement les signaux de sor-tie des systèmes de mesure HEIDENHAIN ou bien encore si une interpolation des signaux est nécessaire.
Signaux à l'entrée de l'électronique
d'interface
Les électroniques d'interface HEIDENHAIN peuvent être connectées aux systèmes de mesure délivrant des signaux sinusoïdaux 1 VCC (signaux de tension) ou 11 µACC (si-gnaux de courant). Des systèmes de me-sure avec des interfaces EnDat ou SSI peuvent également se connecter aux diffé-rentes électroniques d'interfaçage.
Signaux à la sortie de l'électronique
d'interface
Les électroniques d'interface sont disponi-bles avec les interfaces suivantes vers l'électronique consécutive:
Trains d'impulsions rectangulaires TTL• EnDat 2.2• DRIVE-CLiQ• Fanuc Serial Interface• Mitsubishi High Speed Serial Interface• Bus PCI• Ethernet• PROFIBUS•
Interpolation des signaux d'entrée
sinusoïdaux
Dans l'électronique d'interface, les signaux sinusoïdaux des systèmes de mesure sont non seulement convertis mais aussi inter-polés. Il en résulte des pas de mesure plus fi ns et donc une précision de positionne-ment et une qualité d'asservissement plus élevée.
Formation de la valeur de position
Certaines électroniques d'interface ont une fonction de comptage intégrée. En fran-chissant la marque de référence, on obtient à partir du dernier point de référence initia-lisé une valeur absolue de position qui est transmise à l'électronique consécutive.
Mémoire des valeurs de mesure
Les électroniques d'interfaçage avec mémoire intégrée peuvent mémoriser des valeurs de mesure dans une mémoire tampon :IK 220: au total 8 192 valeurs de mesureEIB 741: par entrée env. 250 000 valeurs de mesure
Boitier
Modèle à connecter
Version à intégrer
Modèle de table
Modèle pour montage sur rail
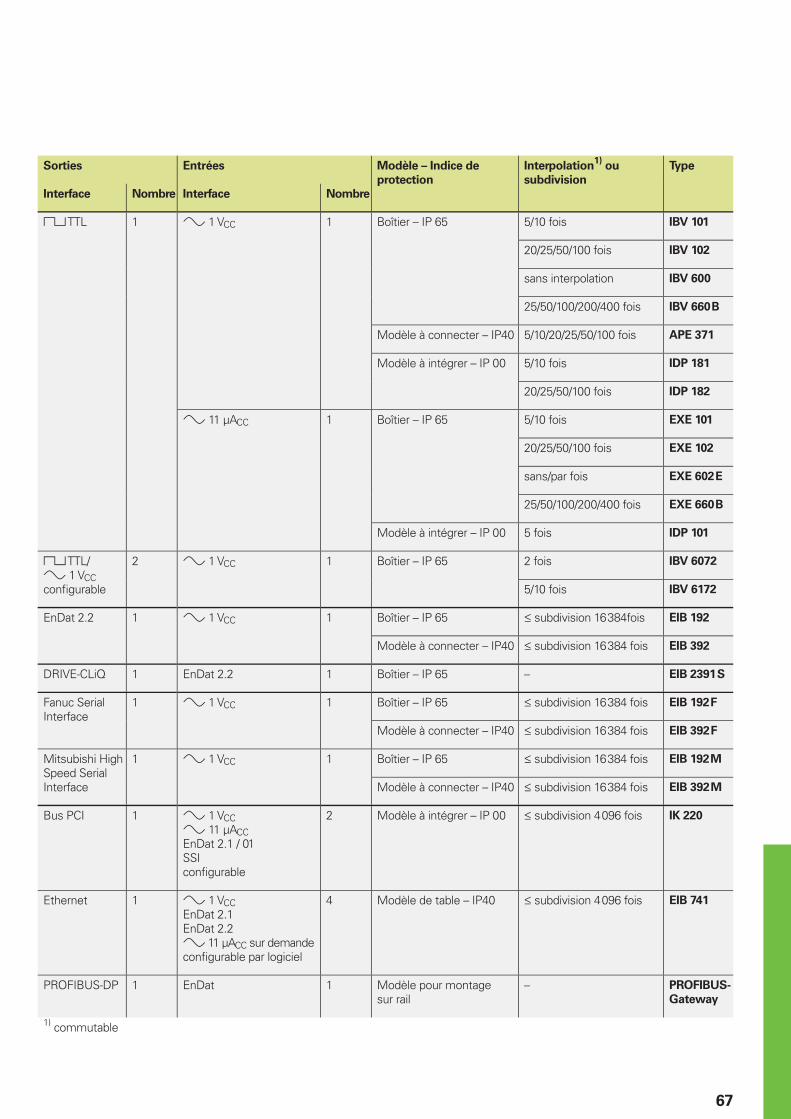
67
Sorties Entrées Modèle – Indice de
protection
Interpolation1)
ou
subdivision
Type
Interface Nombre Interface Nombre
« TTL 1 » 1 VCC 1 Boîtier – IP 65 5/10 fois IBV 101
20/25/50/100 fois IBV 102
sans interpolation IBV 600
25/50/100/200/400 fois IBV 660 B
Modèle à connecter – IP40 5/10/20/25/50/100 fois APE 371
Modèle à intégrer – IP 00 5/10 fois IDP 181
20/25/50/100 fois IDP 182
» 11 µACC 1 Boîtier – IP 65 5/10 fois EXE 101
20/25/50/100 fois EXE 102
sans/par fois EXE 602 E
25/50/100/200/400 fois EXE 660 B
Modèle à intégrer – IP 00 5 fois IDP 101
« TTL/» 1 VCCconfi gurable
2 » 1 VCC 1 Boîtier – IP 65 2 fois IBV 6072
5/10 fois IBV 6172
EnDat 2.2 1 » 1 VCC 1 Boîtier – IP 65 † subdivision 16 384fois EIB 192
Modèle à connecter – IP40 † subdivision 16 384 fois EIB 392
DRIVE-CLiQ 1 EnDat 2.2 1 Boîtier – IP 65 – EIB 2391 S
Fanuc Serial Interface
1 » 1 VCC 1 Boîtier – IP 65 † subdivision 16 384 fois EIB 192 F
Modèle à connecter – IP40 † subdivision 16 384 fois EIB 392 F
Mitsubishi High Speed Serial Interface
1 » 1 VCC 1 Boîtier – IP 65 † subdivision 16 384 fois EIB 192 M
Modèle à connecter – IP40 † subdivision 16 384 fois EIB 392 M
Bus PCI 1 » 1 VCC» 11 µACCEnDat 2.1 / 01SSIconfi gurable
2 Modèle à intégrer – IP 00 † subdivision 4 096 fois IK 220
Ethernet 1 » 1 VCCEnDat 2.1EnDat 2.2» 11 µACC sur demandeconfi gurable par logiciel
4 Modèle de table – IP40 † subdivision 4 096 fois EIB 741
PROFIBUS-DP 1 EnDat 1 Modèle pour montage sur rail
– PROFIBUS-
Gateway
1) commutable

NO HEIDENHAIN Scandinavia AB7300 Orkanger, Norwaywww.heidenhain.no
PH Machinebanks` CorporationQuezon City, Philippines 1113E-mail: [email protected]
PL APS02-489 Warszawa, Polandwww.apserwis.com.pl
PT FARRESA ELECTRÓNICA, LDA.4470 - 177 Maia, Portugalwww.farresa.pt
RO HEIDENHAIN Reprezentanta RomaniaBrasov, 500338, Romaniawww.heidenhain.ro
RS Serbia − BG
RU OOO HEIDENHAIN125315 Moscow, Russiawww.heidenhain.ru
SE HEIDENHAIN Scandinavia AB12739 Skärholmen, Swedenwww.heidenhain.se
SG HEIDENHAIN PACIFIC PTE LTD.Singapore 408593www.heidenhain.com.sg
SK KOPRETINA TN s.r.o.91101 Trencin, Slovakiawww.kopretina.sk
SL Posredništvo HEIDENHAINNAVO d.o.o.2000 Maribor, Sloveniawww.heidenhain-hubl.si
TH HEIDENHAIN (THAILAND) LTDBangkok 10250, Thailandwww.heidenhain.co.th
TR T&M Mühendislik San. ve Tic. LTD. STI·.
34728 Ümraniye-Istanbul, Turkeywww.heidenhain.com.tr
TW HEIDENHAIN Co., Ltd.Taichung 40768, Taiwan R.O.C.www.heidenhain.com.tw
UA Gertner Service GmbH Büro Kiev 01133 Kiev, Ukrainewww.gertnergroup.com
US HEIDENHAIN CORPORATIONSchaumburg, IL 60173-5337, USAwww.heidenhain.com
VE Maquinaria Diekmann S.A. Caracas, 1040-A, VenezuelaE-mail: [email protected]
VN AMS Co. LtdHCM City, VietnamE-mail: [email protected]
ZA MAFEMA SALES SERVICES C.C.Midrand 1685, South Africawww.heidenhain.co.za
DK TP TEKNIK A/S2670 Greve, Denmarkwww.tp-gruppen.dk
ES FARRESA ELECTRONICA S.A.08028 Barcelona, Spainwww.farresa.es
FI HEIDENHAIN Scandinavia AB02770 Espoo, Finlandwww.heidenhain.fi
FR HEIDENHAIN FRANCE sarl92310 Sèvres, Francewww.heidenhain.fr
GB HEIDENHAIN (G.B.) LimitedBurgess Hill RH15 9RD, United Kingdomwww.heidenhain.co.uk
GR MB Milionis Vassilis17341 Athens, Greecewww.heidenhain.gr
HK HEIDENHAIN LTDKowloon, Hong KongE-mail: [email protected]
HR Croatia − SL
HU HEIDENHAIN Kereskedelmi Képviselet1239 Budapest, Hungarywww.heidenhain.hu
ID PT Servitama Era ToolsindoJakarta 13930, IndonesiaE-mail: [email protected]
IL NEUMO VARGUS MARKETING LTD.Tel Aviv 61570, IsraelE-mail: [email protected]
IN HEIDENHAIN Optics & ElectronicsIndia Private LimitedChetpet, Chennai 600 031, Indiawww.heidenhain.in
IT HEIDENHAIN ITALIANA S.r.l.20128 Milano, Italywww.heidenhain.it
JP HEIDENHAIN K.K.Tokyo 102-0083, Japanwww.heidenhain.co.jp
KR HEIDENHAIN Korea LTD.Gasan-Dong, Seoul, Korea 153-782www.heidenhain.co.kr
ME Montenegro − SL
MK Macedonia − BG
MX HEIDENHAIN CORPORATION MEXICO20235 Aguascalientes, Ags., MexicoE-mail: [email protected]
MY ISOSERVE Sdn. Bhd56100 Kuala Lumpur, MalaysiaE-mail: [email protected]
NL HEIDENHAIN NEDERLAND B.V.6716 BM Ede, Netherlandswww.heidenhain.nl
AR NAKASE SRL.B1653AOX Villa Ballester, Argentinawww.heidenhain.com.ar
AT HEIDENHAIN Techn. Büro Österreich83301 Traunreut, Germanywww.heidenhain.de
AU FCR Motion Technology Pty. LtdLaverton North 3026, AustraliaE-mail: [email protected]
BA Bosnia and Herzegovina − SL
BE HEIDENHAIN NV/SA1760 Roosdaal, Belgiumwww.heidenhain.be
BG ESD Bulgaria Ltd.Sofi a 1172, Bulgariawww.esd.bg
BR DIADUR Indústria e Comércio Ltda.04763-070 – São Paulo – SP, Brazilwww.heidenhain.com.br
BY BelarusGERTNER Service GmbH50354 Huerth, Germanywww.gertnergroup.com
CA HEIDENHAIN CORPORATIONMississauga, OntarioL5T2N2, Canadawww.heidenhain.com
CH HEIDENHAIN (SCHWEIZ) AG8603 Schwerzenbach, Switzerlandwww.heidenhain.ch
CN DR. JOHANNES HEIDENHAIN (CHINA) Co., Ltd.Beijing 101312, Chinawww.heidenhain.com.cn
CZ HEIDENHAIN s.r.o.102 00 Praha 10, Czech Republicwww.heidenhain.cz
DE HEIDENHAIN Vertrieb Deutschland83301 Traunreut, Deutschland{ 08669 31-3132| 08669 32-3132E-Mail: [email protected]
HEIDENHAIN Technisches Büro Nord12681 Berlin, Deutschland{ 030 54705-240
HEIDENHAIN Technisches Büro Mitte08468 Heinsdorfergrund, Deutschland{ 03765 69544
HEIDENHAIN Technisches Büro West44379 Dortmund, Deutschland{ 0231 618083-0
HEIDENHAIN Technisches Büro Südwest70771 Leinfelden-Echterdingen, Deutschland{ 0711 993395-0
HEIDENHAIN Technisches Büro Südost83301 Traunreut, Deutschland{ 08669 31-1345
Vollständige und weitere Adressen siehe www.heidenhain.deFor complete and further addresses see www.heidenhain.de
Zu
m A
bh
eft
en
hie
r fa
lzen
! /
Fo
ld h
ere
fo
r fi
lin
g!
������������ ��� ��������������� ��������������������������������������� �������������� ������������������ ��!�"����������
������ !���� ��!�
208960-36 · 15 · 3/2012 · H · Printed in Germany