systèmes de manipulation et confi gurateur handling … · 4 handling guide online – votre...
TRANSCRIPT

Systèmes de manipulationet confi gurateur Handling Guide Online

22
Vous avez besoin de systèmes complets.Vous souhaitez un maximum de fi abilité.Nous sommes votre partenaire pour la solution idéale.
Introduction
3 Avantages de la solution prête-à-installer
4 Confi gurateur Handling Guide Online6 Tout chez un seul fournisseur
Page 3
Vues d'ensemble
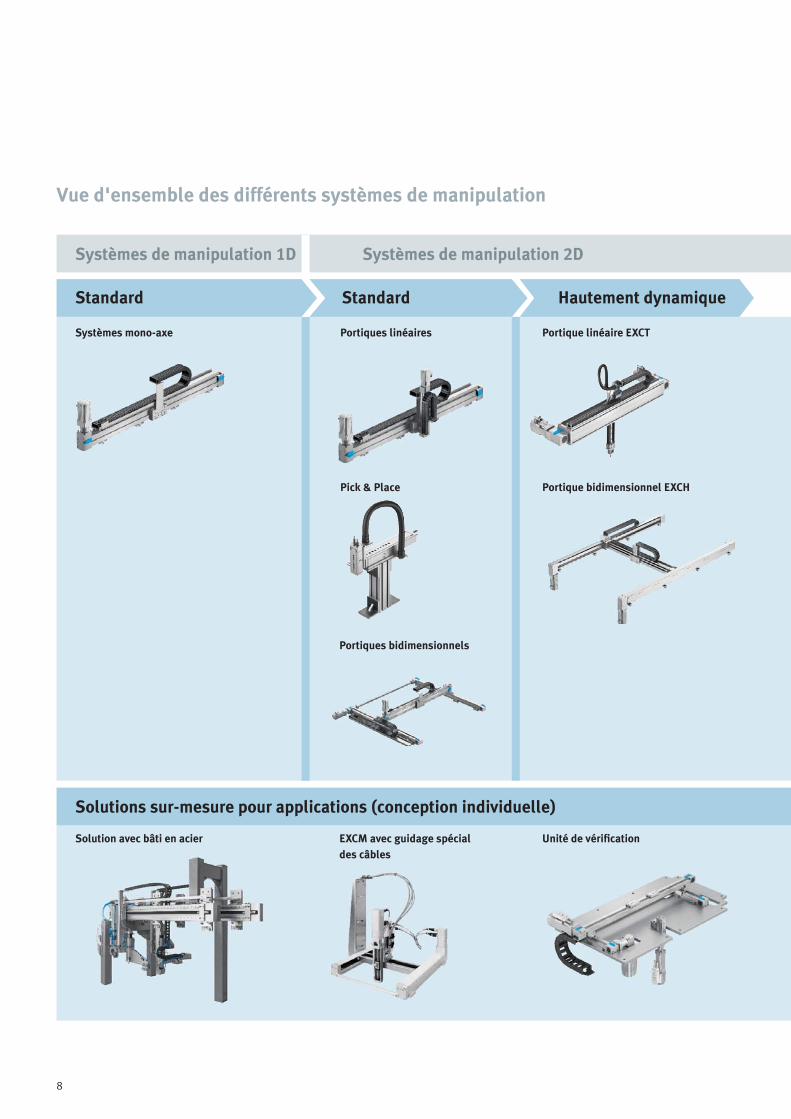
8 Vue d'ensemble des différents systèmes de manipulation
10 Les éléments du système dans le détail14 Vue d'ensemble de la périphérie standardisée 16 Exemples d'applications
Solutions standardisées
18 Systèmes mono-axe20 Portiques linéaires22 Portique linéaire EXCT24 Portiques bidimensionnels26 Portique bidimensionnel EXCH28 Portique bidimensionnel miniature EXCM30 Pick & Place DHSP31 Modules de manipulation32 Bras mobiles34 Portiques tridimensionnels36 Tripode EXPT
Page 8 Page 18
33
Vous cherchez le bon partenaire pour votre nouveau système de manipulation ? Festo propose une grande diversité de systèmes de manipulation pour les applications les plus variées. Des solutions standard pour toutes les applications courantes aux solutions personnalisées adaptées à vos exigences individuelles.
De plus, nos systèmes prêts-à-installer, nos logiciels et notre service après-vente vous garantissent un maximum de sérénité. Nous vous accompagnons de l'étude de projet à la mise en service en passant par le montage. Vous pouvez ainsi vous concentrer sur votre cœur de métier et augmenter votre productivité.
Systèmes de manipulation Festo : diversité, précision, rentabilité.Et toujours une haute productivité.
Développement de solutions individuelles
38 Sur mesure42 En fonction du secteur
Page 38
Périphérie et services
46 Bâtis 47 Capteurs Vision, systèmes de vision compacts
et Checkbox48 Commandes49 Armoires de commande50 Ensemble de commande CMCA52 Solutions servopneumatiques54 Services
Page 46
Sans compromis
Mouvement
4
Handling Guide Online – Votre système de manipulation en 3 étapes
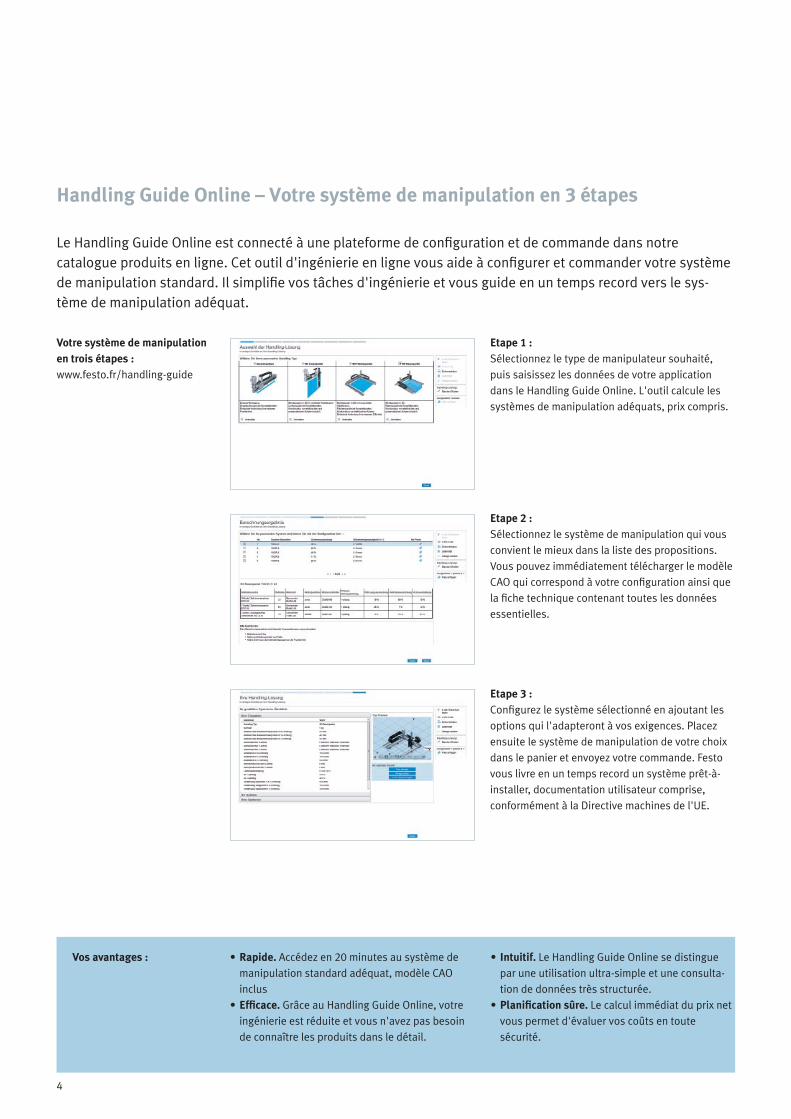
Le Handling Guide Online est connecté à une plateforme de confi guration et de commande dans notre catalogue produits en ligne. Cet outil d'ingénierie en ligne vous aide à confi gurer et commander votre système de manipulation standard. Il simplifi e vos tâches d'ingénierie et vous guide en un temps record vers le sys-tème de manipulation adéquat.
Votre système de manipulation en trois étapes :www.festo.fr/handling-guide
Etape 1 :Sélectionnez le type de manipulateur souhaité, puis saisissez les données de votre application dans le Handling Guide Online. L'outil calcule les systèmes de manipulation adéquats, prix compris.
Etape 2 :Sélectionnez le système de manipulation qui vous convient le mieux dans la liste des propositions. Vous pouvez immédiatement télécharger le modèle CAO qui correspond à votre confi guration ainsi que la fi che technique contenant toutes les données essentielles.
Etape 3 :Confi gurez le système sélectionné en ajoutant les options qui l'adapteront à vos exigences. Placez ensuite le système de manipulation de votre choix dans le panier et envoyez votre commande. Festo vous livre en un temps record un système prêt-à-installer, documentation utilisateur comprise, conformément à la Directive machines de l'UE.
Vos avantages : • Rapide. Accédez en 20 minutes au système de manipulation standard adéquat, modèle CAO inclus
• Effi cace. Grâce au Handling Guide Online, votre ingénierie est réduite et vous n'avez pas besoin de connaître les produits dans le détail.
• Intuitif. Le Handling Guide Online se distingue par une utilisation ultra-simple et une consulta-tion de données très structurée.
• Planifi cation sûre. Le calcul immédiat du prix net vous permet d'évaluer vos coûts en toute sécurité.

5
Vous avez des exigences techniques poussées ? D'un simple clic, vous pouvez ensuite envoyer à nos experts les données d'application que vous avez sai-sies dans le Handling Guide Online pour recevoir votre offre personnalisée.
Saisie de toutes les données d'application dans le Handling Guide Online
Conception sur-mesure de systèmes de manipulationSi vos exigences sortent du cadre des systèmes de manipu-lation standard, nos ingénieurs se chargent de l'étude du projet pour une fl exibilité totale dans les domaines de la charge, de la dynamique, de la zone de travail et de la mécanique.
Offre individuelle de nos expertsVous recevez une offre sur-mesure élaborée à partir des données que vous avez saisies.
Systèmes de manipulation standard
Vous confi gurez votre système de manipulation directement dans le Handling Guide Online.
Possibilité de commande directe dans le Handling Guide Online Une fois vos données saisies, plusieurs solutions vous sont immédiatement proposées, avec le modèle de CAO qui cor-respond à votre confi guration, la fi che technique et votre prix net.
6
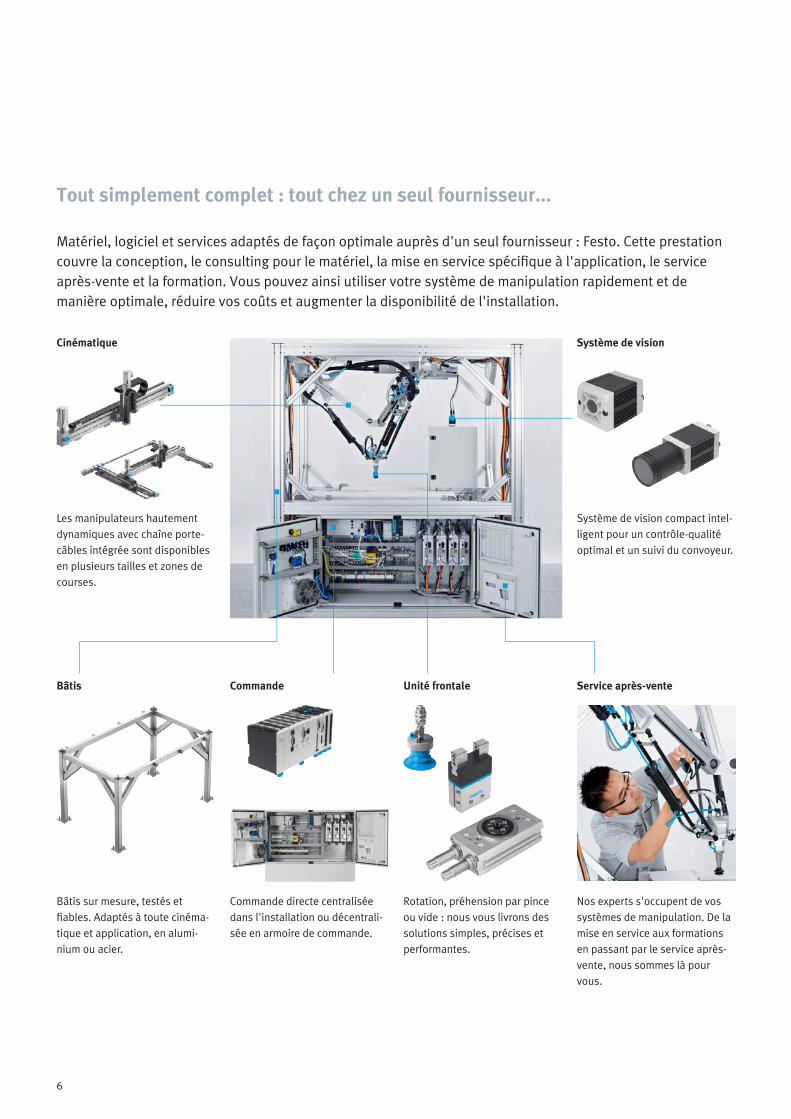
Matériel, logiciel et services adaptés de façon optimale auprès d'un seul fournisseur : Festo. Cette prestation couvre la conception, le consulting pour le matériel, la mise en service spécifi que à l'application, le service après-vente et la formation. Vous pouvez ainsi utiliser votre système de manipulation rapidement et de manière optimale, réduire vos coûts et augmenter la disponibilité de l'installation.
Tout simplement complet : tout chez un seul fournisseur...
Les manipulateurs hautement dynamiques avec chaîne porte-câbles intégrée sont disponibles en plusieurs tailles et zones de courses.
Cinématique
Système de vision compact intel-ligent pour un contrôle-qualité optimal et un suivi du convoyeur.
Système de vision
Rotation, préhension par pince ou vide : nous vous livrons des solutions simples, précises et performantes.
Unité frontale
Commande directe centralisée dans l'installation ou décentrali-sée en armoire de commande.
Commande
Bâtis sur mesure, testés et fi ables. Adaptés à toute cinéma-tique et application, en alumi-nium ou acier.
Bâtis
Nos experts s'occupent de vos systèmes de manipulation. De la mise en service aux formations en passant par le service après-vente, nous sommes là pour vous.
Service après-vente
7
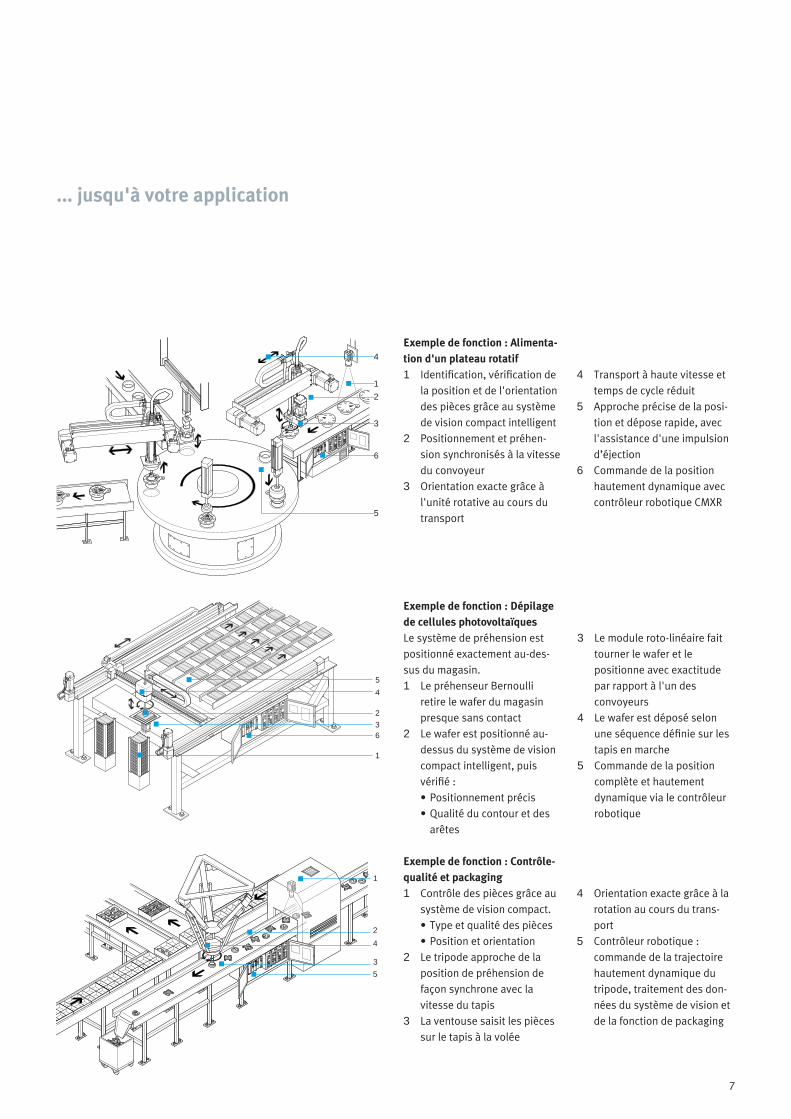
... jusqu'à votre application
5
4
1
2
36
Exemple de fonction : Dépilage de cellules photovoltaïquesLe système de préhension est positionné exactement au-des-sus du magasin.1 Le préhenseur Bernoulli
retire le wafer du magasin presque sans contact
2 Le wafer est positionné au-dessus du système de vision compact intelligent, puis vérifi é :• Positionnement précis• Qualité du contour et des
arêtes
3 Le module roto-linéaire fait tourner le wafer et le positionne avec exactitude par rapport à l'un des convoyeurs
4 Le wafer est déposé selon une séquence défi nie sur les tapis en marche
5 Commande de la position complète et hautement dynamique via le contrôleur robotique
Exemple de fonction : Alimenta-tion d'un plateau rotatif1 Identifi cation, vérifi cation de
la position et de l'orientation des pièces grâce au système de vision compact intelligent
2 Positionnement et préhen-sion synchronisés à la vitesse du convoyeur
3 Orientation exacte grâce à l'unité rotative au cours du transport
4 Transport à haute vitesse et temps de cycle réduit
5 Approche précise de la posi-tion et dépose rapide, avec l'assistance d'une impulsion d’éjection
6 Commande de la position hautement dynamique avec contrôleur robotique CMXR
4
1
2
3
6
5
Exemple de fonction : Contrôle-qualité et packaging1 Contrôle des pièces grâce au
système de vision compact.• Type et qualité des pièces• Position et orientation
2 Le tripode approche de la position de préhension de façon synchrone avec la vitesse du tapis
3 La ventouse saisit les pièces sur le tapis à la volée
4 Orientation exacte grâce à la rotation au cours du trans-port
5 Contrôleur robotique : commande de la trajectoire hautement dynamique du tripode, traitement des don-nées du système de vision et de la fonction de packaging
1
2
4
3
5
8
Systèmes mono-axe Portiques linéaires
Pick & Place
Portiques bidimensionnels
EXCM avec guidage spécial des câbles
Portique bidimensionnel EXCH
Unité de vérifi cationSolution avec bâti en acier
Portique linéaire EXCT
Systèmes de manipulation 1D Systèmes de manipulation 2D
Standard Standard Hautement dynamique
Vue d'ensemble des différents systèmes de manipulation
Solutions sur-mesure pour applications (conception individuelle)
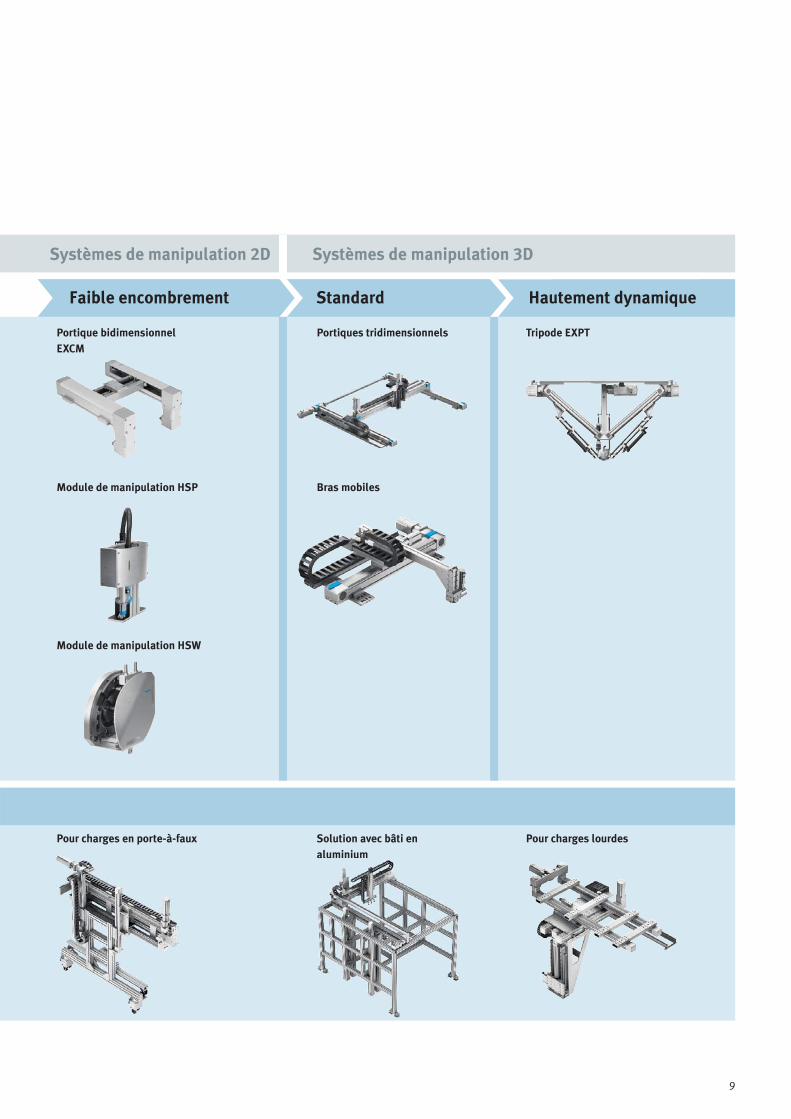
9
Tripode EXPT
Pour charges lourdes
Portique bidimensionnel EXCM
Module de manipulation HSP
Module de manipulation HSW
Pour charges en porte-à-faux
Portiques tridimensionnels
Bras mobiles
Solution avec bâti en aluminium
Systèmes de manipulation 2D Systèmes de manipulation 3D
Faible encombrement Standard Hautement dynamique

10
Porte-ventouses Venturi intelligentVentouses complètes
VAS/VAS-B
ESG
Combinai-son ventouse-éjecteur
DHPS
HGPT-B
HGRC/HGWC
DHDS DHEB
HGDT/HGDT-F
HGPC
HGPD
DHRS
DHWS
HGRT
HGPL
HGPP
VAL/LJK
ESH
OVEMVN
ESS/ESV
Venturis
Pinces à serrage radial et angulaire
Pinces à serrage concentrique
Pince à souffl et
Préhenseur Bernoulli
Pinces à serrage parallèle
Mors de pince Préhension
Vide
HGDD OGGB
Unité frontale
Ventouses
HGPLE
Les éléments du système en détails
11
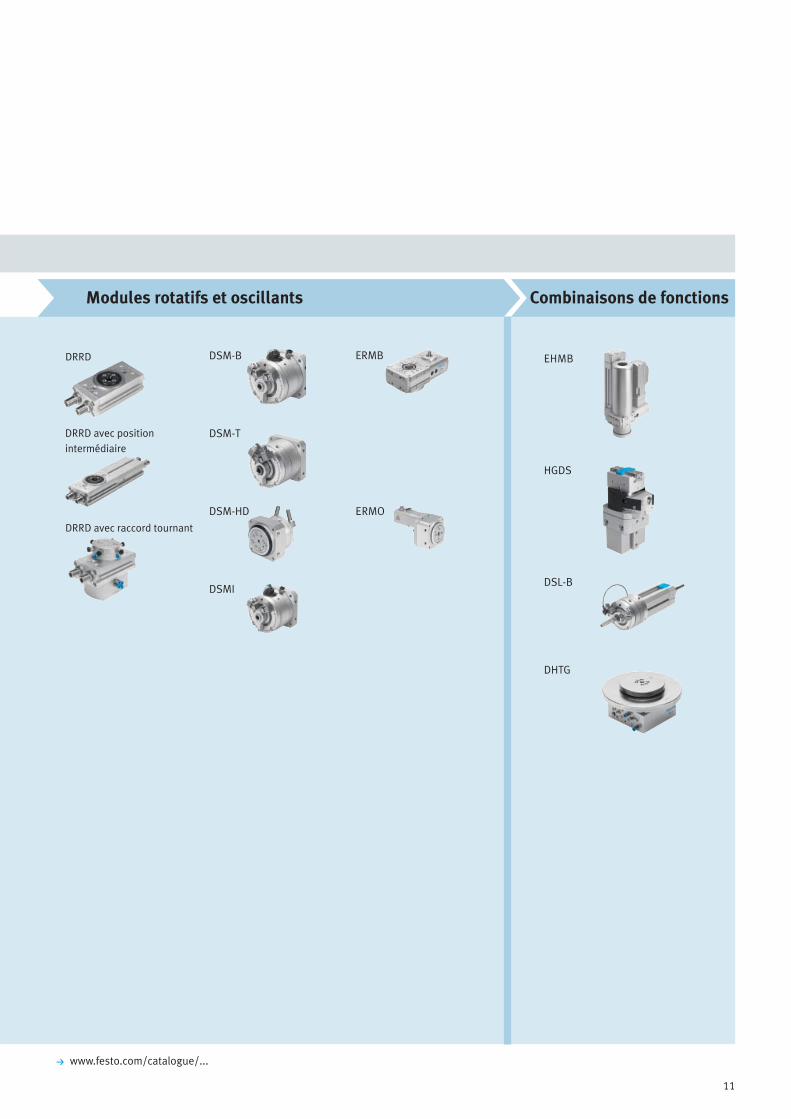
Modules rotatifs et oscillants Combinaisons de fonctions
EHMB
DSL-B
DHTG
HGDS
DSMI
DRRD avec positionintermédiaire
DRRD avec raccord tournant
ERMB
ERMO
DSM-B
DSM-HD
DSM-T
DRRD
www.festo.com/catalogue/...

12
Pneumatique Servopneumatique
Actionneurs
Distributeurs
Distributeurs proportionnels
Embases
Contrôleurs de positionnement et soft-stop
VPWP VABP
CPX-CMAX CPX-CMPX
Terminaux de distributeurs
Les éléments du système en détails
Vérins avec système de mesure de déplacement
Vérins sans tige avec système de mesure de déplacement
Vérins sans tige
DNCI
Chariots
Vérins à tige
Vérins avec guidage
DDPC
DGCI DDLIDGC-KF DGC-HD
DSBC
DFM-YSRW
DGSL
DGC-GF
ADN
DFM
VUVG
CPV
MPA CPX-MPA
VTSA
13
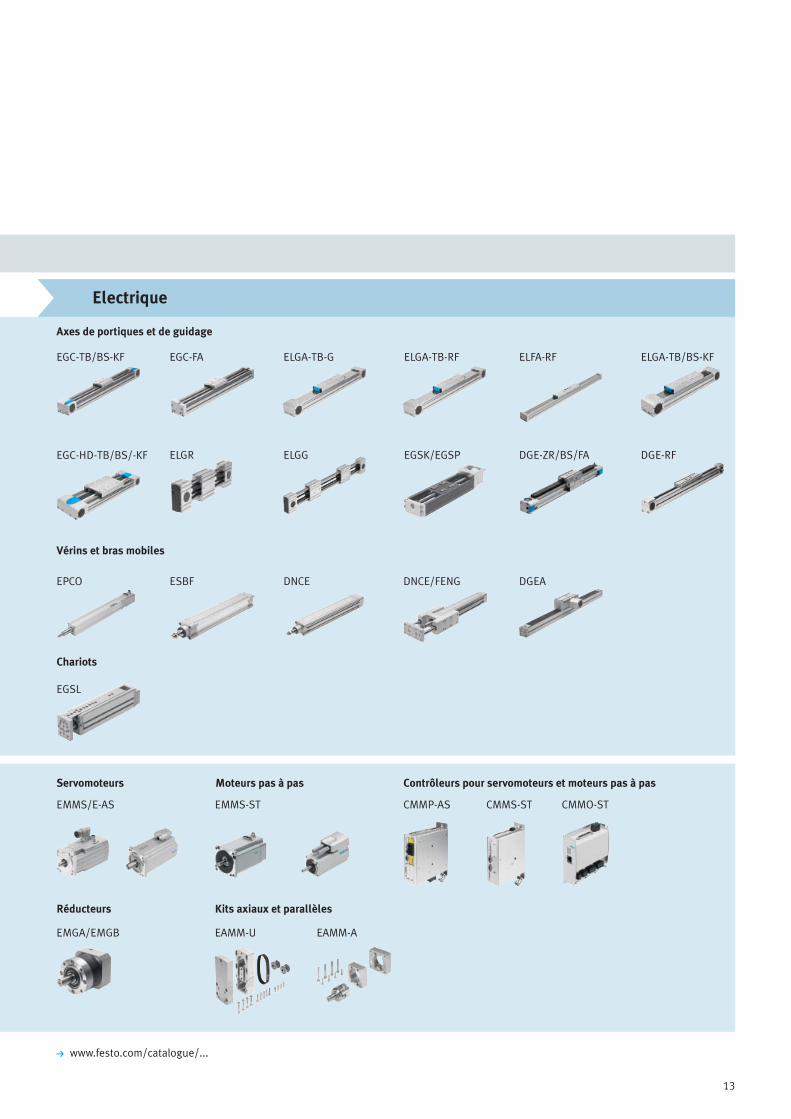
Electrique
Servomoteurs Moteurs pas à pas Contrôleurs pour servomoteurs et moteurs pas à pas
CMMP-AS CMMO-STCMMS-STEMMS/E-AS EMMS-ST
EMGA/EMGB EAMM-U EAMM-A
Réducteurs Kits axiaux et parallèles
Vérins et bras mobiles
EPCO DNCE/FENGESBF DGEA
Chariots
EGSL
Axes de portiques et de guidage
EGC-TB/BS-KF ELFA-RFELGA-TB-RF ELGA-TB/BS-KFEGC-FA ELGA-TB-G
EGSK/EGSP DGE-ZR/BS/FA DGE-RFELGR ELGG
www.festo.com/catalogue/...
EGC-HD-TB/BS/-KF
DNCE
14
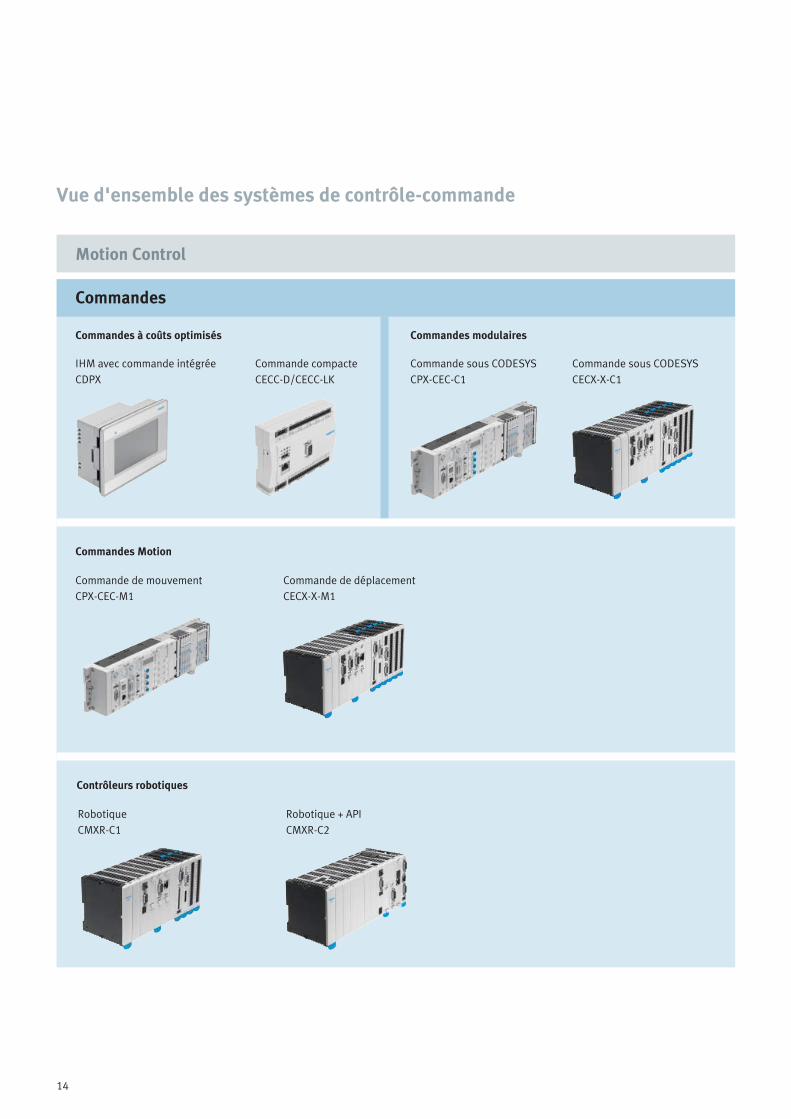
Commandes
Commandes à coûts optimisés
Commandes Motion
Contrôleurs robotiques
Commandes modulaires
Vue d'ensemble des systèmes de contrôle-commande
Motion Control
IHM avec commande intégréeCDPX
Commande sous CODESYSCECX-X-C1
RobotiqueCMXR-C1
Commande compacteCECC-D/CECC-LK
Commande de mouvementCPX-CEC-M1
Robotique + APICMXR-C2
Commande sous CODESYSCPX-CEC-C1
Commande de déplacementCECX-X-M1
15
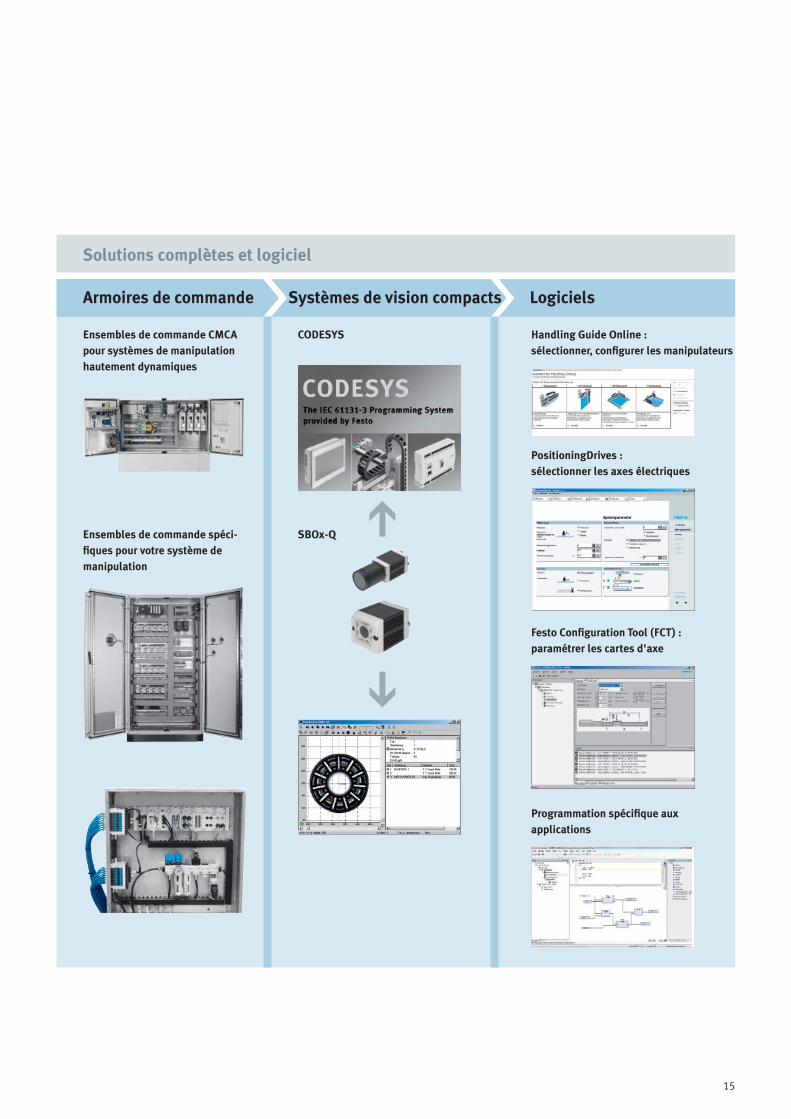
Ensembles de commande CMCA pour systèmes de manipulation hautement dynamiques
CODESYS
Ensembles de commande spéci-fi ques pour votre système de manipulation
SBOx-Q
Armoires de commande Systèmes de vision compacts Logiciels
Solutions complètes et logiciel
PositioningDrives :sélectionner les axes électriques
Festo Confi guration Tool (FCT) :paramétrer les cartes d'axe
Handling Guide Online :sélectionner, confi gurer les manipulateurs
Programmation spécifi que aux applications
16
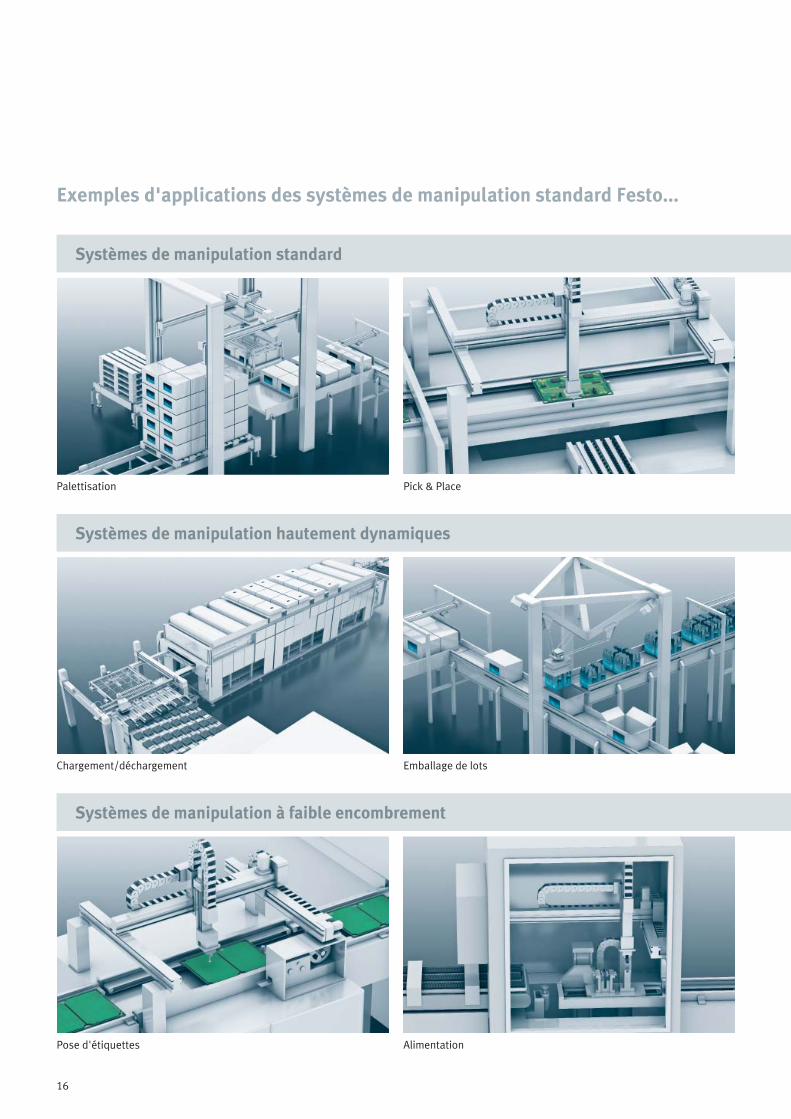
Systèmes de manipulation standard
Systèmes de manipulation hautement dynamiques
Systèmes de manipulation à faible encombrement
Exemples d'applications des systèmes de manipulation standard Festo...
Palettisation
Pose d'étiquettes
Pick & Place
Alimentation
Chargement/déchargement Emballage de lots
17
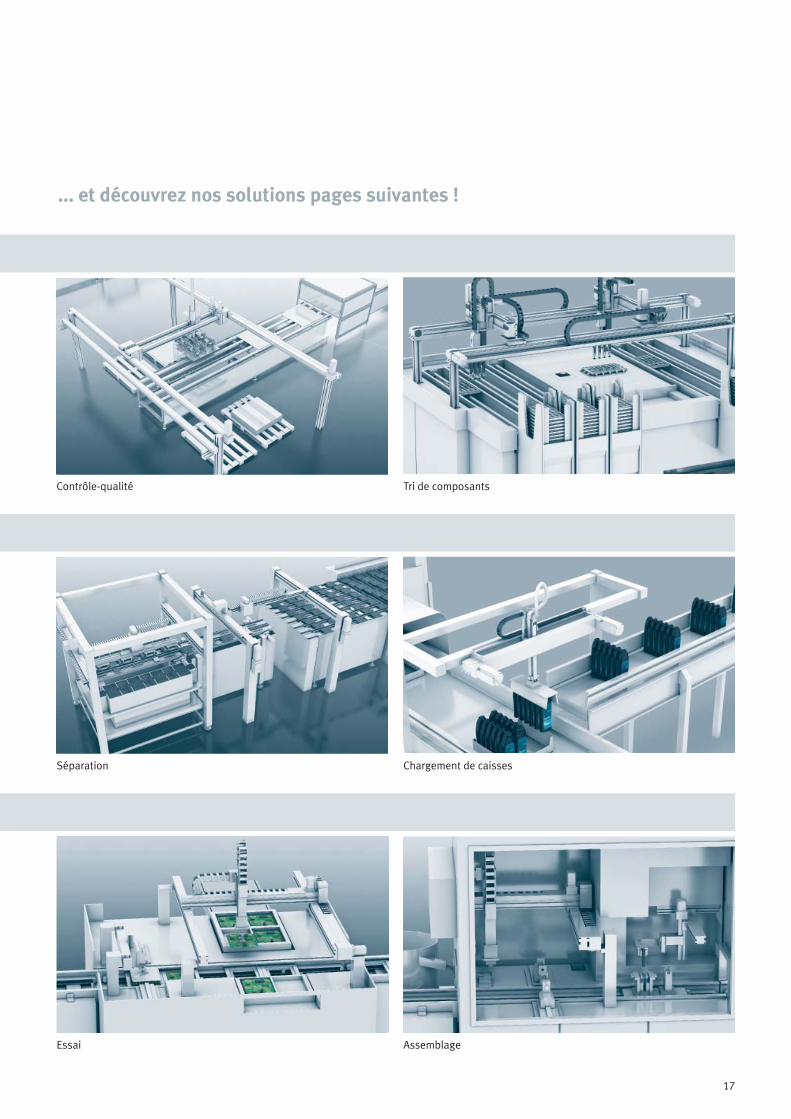
... et découvrez nos solutions pages suivantes !
Contrôle-qualité
Essai
Tri de composants
Assemblage
Séparation Chargement de caisses
18
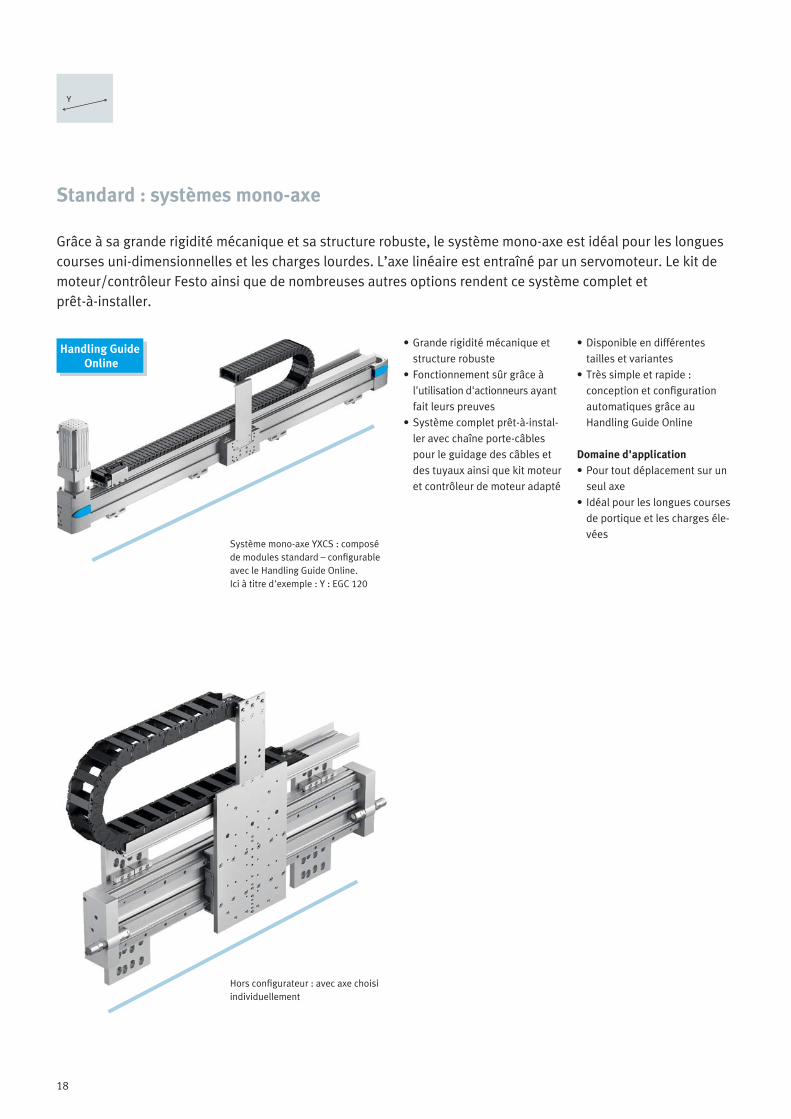
Standard : systèmes mono-axe
Grâce à sa grande rigidité mécanique et sa structure robuste, le système mono-axe est idéal pour les longues courses uni-dimensionnelles et les charges lourdes. L’axe linéaire est entraîné par un servomoteur. Le kit de moteur/contrôleur Festo ainsi que de nombreuses autres options rendent ce système complet et prêt-à-installer.
• Grande rigidité mécanique et structure robuste
• Fonctionnement sûr grâce à l'utilisation d'actionneurs ayant fait leurs preuves
• Système complet prêt-à-instal-ler avec chaîne porte-câbles pour le guidage des câbles et des tuyaux ainsi que kit moteur et contrôleur de moteur adapté
• Disponible en différentes tailles et variantes
• Très simple et rapide : conception et confi guration automatiques grâce au Handling Guide Online
Domaine d'application• Pour tout déplacement sur un
seul axe• Idéal pour les longues courses
de portique et les charges éle-vées
Système mono-axe YXCS : composé de modules standard – confi gurable avec le Handling Guide Online.Ici à titre d'exemple : Y : EGC 120
Hors confi gurateur : avec axe choisi individuellement
Y
Handling Guide Online
19
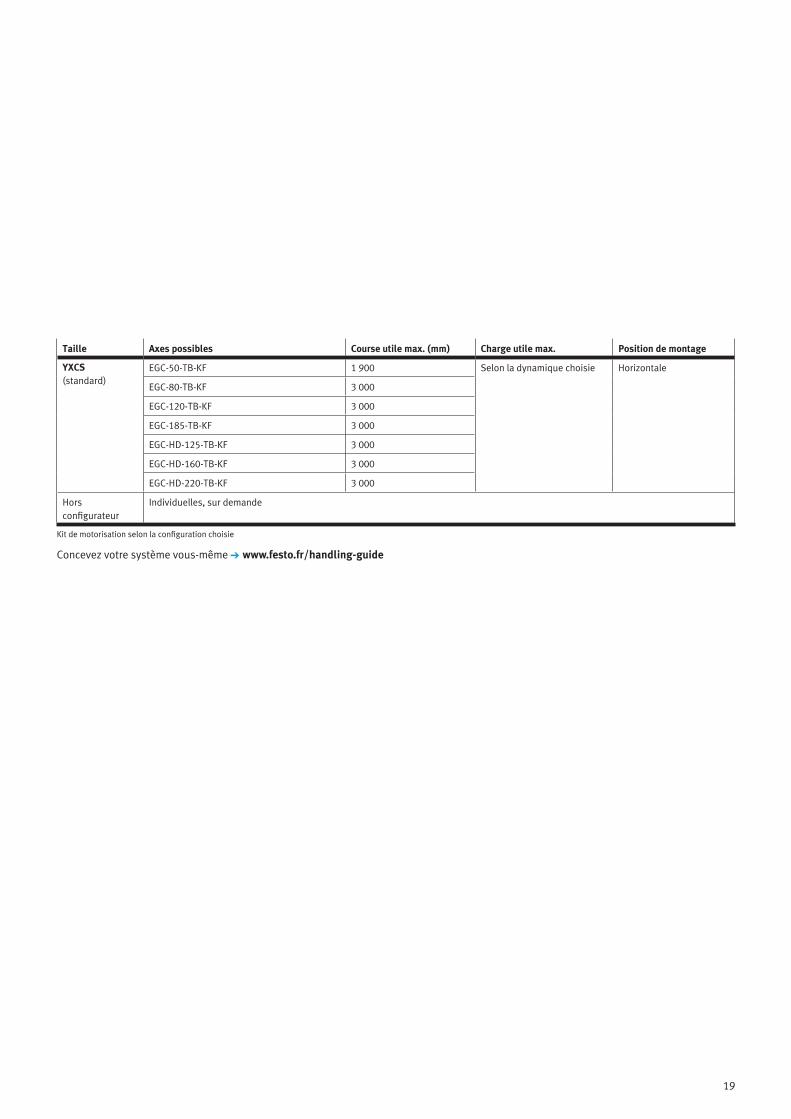
Taille Axes possibles Course utile max. (mm) Charge utile max. Position de montage
YXCS(standard)
EGC-50-TB-KF 1 900 Selon la dynamique choisie Horizontale
EGC-80-TB-KF 3 000
EGC-120-TB-KF 3 000
EGC-185-TB-KF 3 000
EGC-HD-125-TB-KF 3 000
EGC-HD-160-TB-KF 3 000
EGC-HD-220-TB-KF 3 000
Hors confi gurateur
Individuelles, sur demande
Kit de motorisation selon la confi guration choisie
Concevez votre système vous-même www.festo.fr/handling-guide
20
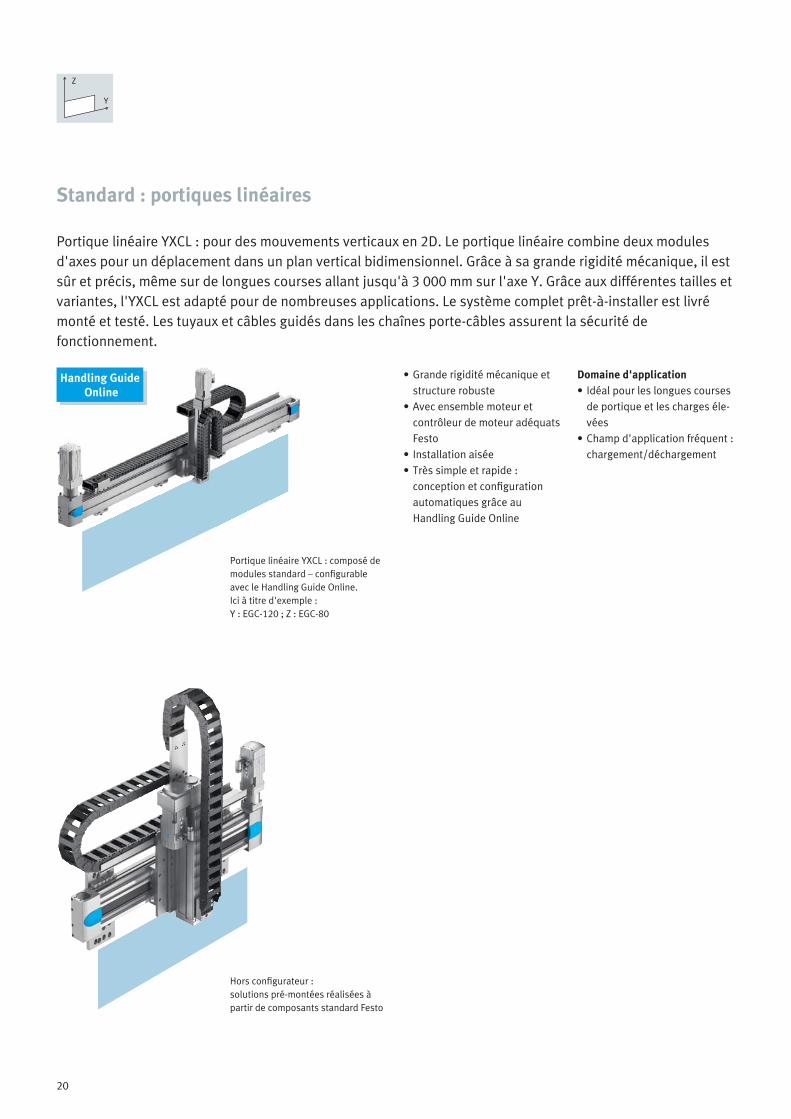
Standard : portiques linéaires
• Grande rigidité mécanique et structure robuste
• Avec ensemble moteur et contrôleur de moteur adéquats Festo
• Installation aisée• Très simple et rapide :
conception et confi guration automatiques grâce au Handling Guide Online
Domaine d'application• Idéal pour les longues courses
de portique et les charges éle-vées
• Champ d'application fréquent :chargement/déchargement
Hors confi gurateur :solutions pré-montées réalisées à partir de composants standard Festo
Portique linéaire YXCL : pour des mouvements verticaux en 2D. Le portique linéaire combine deux modules d'axes pour un déplacement dans un plan vertical bidimensionnel. Grâce à sa grande rigidité mécanique, il est sûr et précis, même sur de longues courses allant jusqu'à 3 000 mm sur l'axe Y. Grâce aux différentes tailles et variantes, l'YXCL est adapté pour de nombreuses applications. Le système complet prêt-à-installer est livré monté et testé. Les tuyaux et câbles guidés dans les chaînes porte-câbles assurent la sécurité de fonctionnement.
Z
Y
Portique linéaire YXCL : composé de modules standard – confi gurable avec le Handling Guide Online.Ici à titre d'exemple :Y : EGC-120 ; Z : EGC-80
Handling Guide Online
21
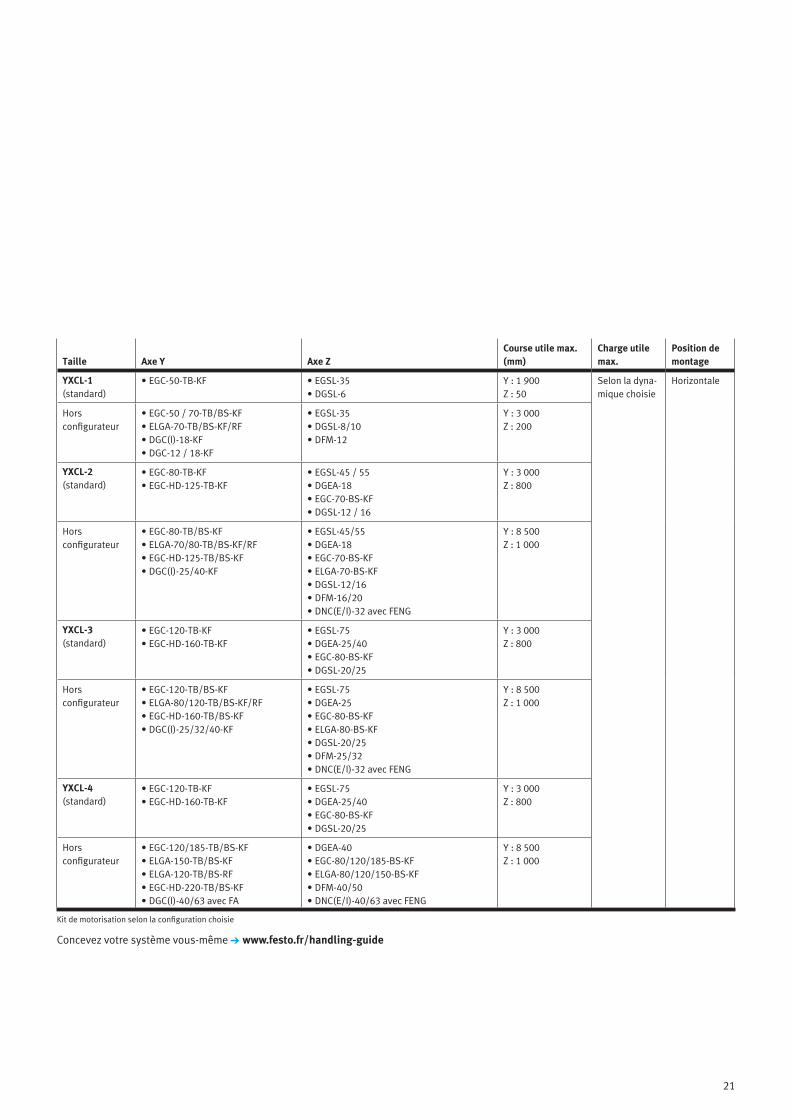
Taille Axe Y Axe ZCourse utile max. (mm)
Charge utile max.
Position de montage
YXCL-1(standard)
• EGC-50-TB-KF • EGSL-35• DGSL-6
Y : 1 900Z : 50
Selon la dyna-mique choisie
Horizontale
Hors confi gurateur
• EGC-50 / 70-TB/BS-KF• ELGA-70-TB/BS-KF/RF• DGC(I)-18-KF• DGC-12 / 18-KF
• EGSL-35• DGSL-8/10• DFM-12
Y : 3 000Z : 200
YXCL-2(standard)
• EGC-80-TB-KF• EGC-HD-125-TB-KF
• EGSL-45 / 55• DGEA-18 • EGC-70-BS-KF• DGSL-12 / 16
Y : 3 000Z : 800
Hors confi gurateur
• EGC-80-TB/BS-KF• ELGA-70/80-TB/BS-KF/RF• EGC-HD-125-TB/BS-KF• DGC(I)-25/40-KF
• EGSL-45/55• DGEA-18• EGC-70-BS-KF• ELGA-70-BS-KF• DGSL-12/16• DFM-16/20• DNC(E/I)-32 avec FENG
Y : 8 500Z : 1 000
YXCL-3(standard)
• EGC-120-TB-KF• EGC-HD-160-TB-KF
• EGSL-75• DGEA-25/40• EGC-80-BS-KF• DGSL-20/25
Y : 3 000Z : 800
Hors confi gurateur
• EGC-120-TB/BS-KF• ELGA-80/120-TB/BS-KF/RF• EGC-HD-160-TB/BS-KF• DGC(I)-25/32/40-KF
• EGSL-75• DGEA-25• EGC-80-BS-KF• ELGA-80-BS-KF• DGSL-20/25• DFM-25/32• DNC(E/I)-32 avec FENG
Y : 8 500Z : 1 000
YXCL-4(standard)
• EGC-120-TB-KF• EGC-HD-160-TB-KF
• EGSL-75• DGEA-25/40• EGC-80-BS-KF• DGSL-20/25
Y : 3 000Z : 800
Hors confi gurateur
• EGC-120/185-TB/BS-KF• ELGA-150-TB/BS-KF• ELGA-120-TB/BS-RF• EGC-HD-220-TB/BS-KF• DGC(I)-40/63 avec FA
• DGEA-40• EGC-80/120/185-BS-KF• ELGA-80/120/150-BS-KF• DFM-40/50• DNC(E/I)-40/63 avec FENG
Y : 8 500Z : 1 000
Kit de motorisation selon la confi guration choisie
Concevez votre système vous-même www.festo.fr/handling-guide

22
La manipulation cartésienne « Pick & place » à haute vitesse assure une cadence élevée jusqu'à plus de 90 préhensions/min., une grande fl exibilité et une construction compacte. En tant que solution complète, elle constitue l'alternative la plus dynamique aux solutions cartésiennes à déplacement libre. L'ensemble de commande adapté assure des déplacements verticaux précis de point à point ou selon une trajectoire. Cette solution brille par ses faibles coûts d'acquisition et d'exploitation. En effet, cette cinématique sans moteur embarqué entraîne une baisse de la consommation énergétique. Les composants en série ayant fait leurs preuves ainsi que les vibrations réduites contribuent à une longue durée de vie.
Hautement dynamique : portique linéaire EXCT
Z
Y
• Chaîne porte-câbles incluse : pour une installation simple et sûre, même en cas de modifi -cation ou d'extension ultérieure
• Encombrement minimal grâce au design compact : montage facile, installation rapide
Domaine d'application :• Pour les process rapides à
cadences élevées• Chargement/déchargement à
haute fréquence
• Haute dynamique grâce à la faible inertie de l'axe Z : pour un positionnement précis avec une accélération importante ainsi que des vibrations minimales
• Zone de travail fl exible grâce aux courses dimensionnables dans l'axe Y et Z
• Universel : interface avec l'unité frontale pour les solu-tions de rotation et de préhen-sion par pince ou vide
23
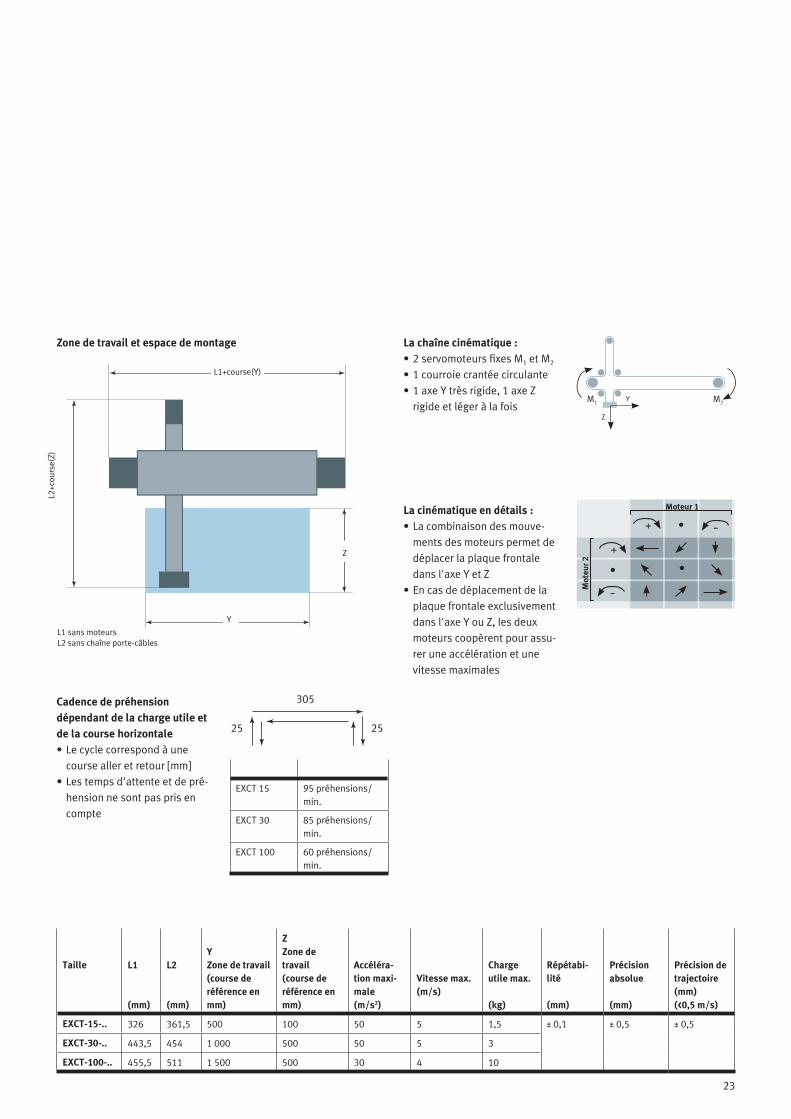
La cinématique en détails :• La combinaison des mouve-
ments des moteurs permet de déplacer la plaque frontale dans l'axe Y et Z
• En cas de déplacement de la plaque frontale exclusivement dans l'axe Y ou Z, les deux moteurs coopèrent pour assu-rer une accélération et une vitesse maximales
Y
Z
M1 M2
La chaîne cinématique :• 2 servomoteurs fi xes M1 et M2
• 1 courroie crantée circulante• 1 axe Y très rigide, 1 axe Z
rigide et léger à la fois
Zone de travail et espace de montage
L1 sans moteurs L2 sans chaîne porte-câbles
L2+c
ours
e(Z)
L1+course(Y)
Y
Z
Cadence de préhension dépendant de la charge utile et de la course horizontale• Le cycle correspond à une
course aller et retour [mm]• Les temps d'attente et de pré-
hension ne sont pas pris en compte
25
305
25
Taille L1
(mm)
L2
(mm)
YZone de travail(course de référence en mm)
ZZone de travail(course de référence en mm)
Accéléra-tion maxi-male(m/s2)
Vitesse max. (m/s)
Charge utile max.
(kg)
Répétabi-lité
(mm)
Précision absolue
(mm)
Précision de trajectoire (mm)(<0,5 m/s)
EXCT-15-.. 326 361,5 500 100 50 5 1,5 ± 0,1 ± 0,5 ± 0,5
EXCT-30-.. 443,5 454 1 000 500 50 5 3
EXCT-100-.. 455,5 511 1 500 500 30 4 10
EXCT 15 95 préhensions/min.
EXCT 30 85 préhensions/min.
EXCT 100 60 préhensions/min.
+
+
•
-
•
•
Moteur 1
Mot
eur 2
-
24
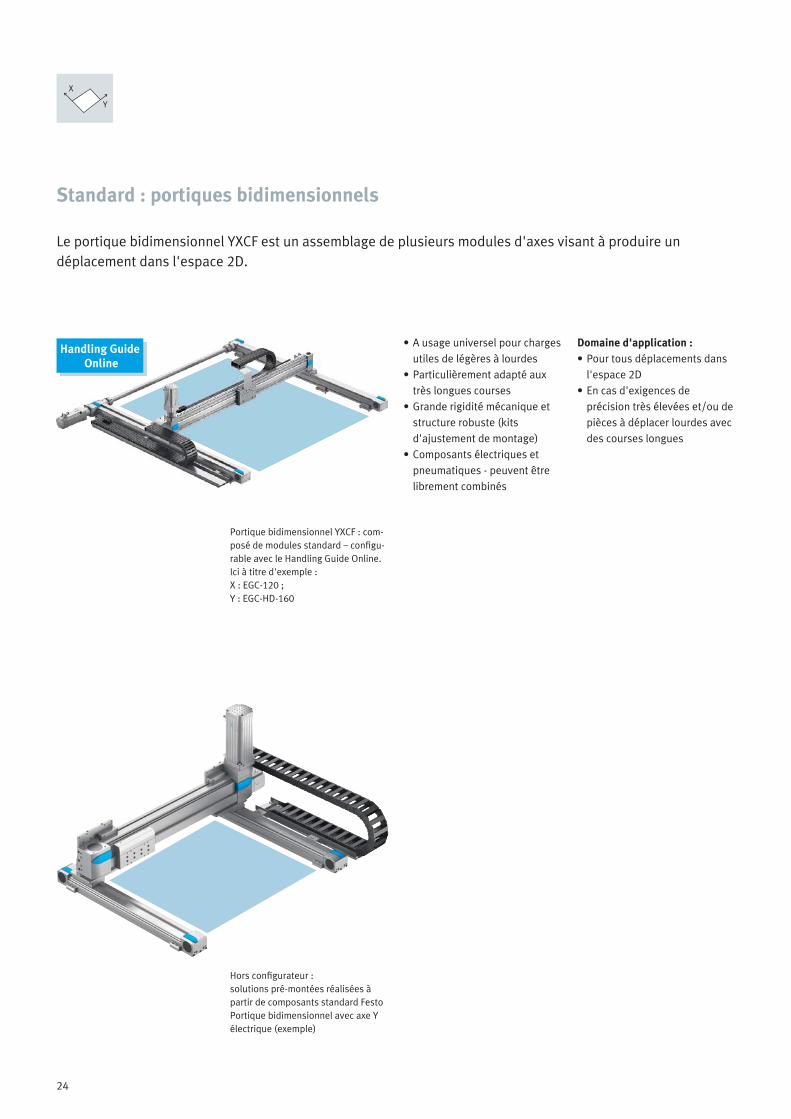
Standard : portiques bidimensionnels
• A usage universel pour charges utiles de légères à lourdes
• Particulièrement adapté aux très longues courses
• Grande rigidité mécanique et structure robuste (kits d'ajustement de montage)
• Composants électriques et pneumatiques - peuvent être librement combinés
Domaine d'application :• Pour tous déplacements dans
l'espace 2D• En cas d'exigences de
précision très élevées et/ou de pièces à déplacer lourdes avec des courses longues
Le portique bidimensionnel YXCF est un assemblage de plusieurs modules d'axes visant à produire un déplacement dans l'espace 2D.
X
Y
Portique bidimensionnel YXCF : com-posé de modules standard – confi gu-rable avec le Handling Guide Online.Ici à titre d'exemple : X : EGC-120 ; Y : EGC-HD-160
Hors confi gurateur :solutions pré-montées réalisées à partir de composants standard FestoPortique bidimensionnel avec axe Y électrique (exemple)
Handling Guide Online
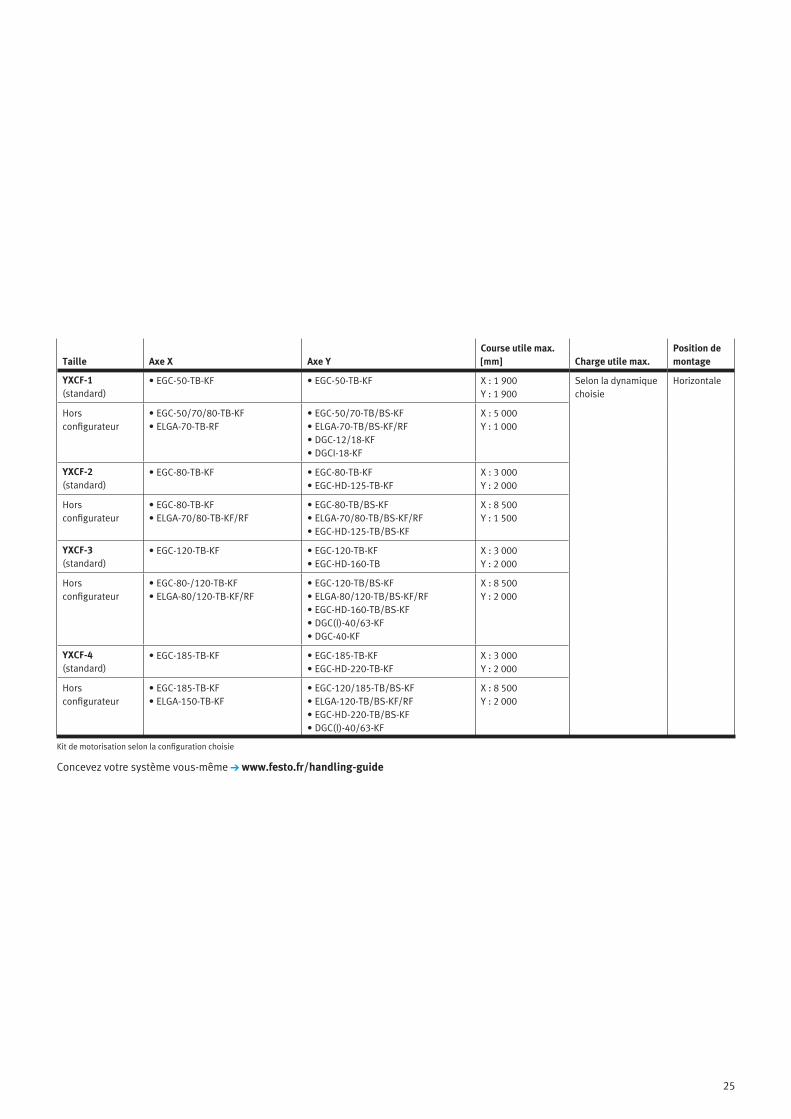
25
Taille Axe X Axe YCourse utile max. [mm] Charge utile max.
Position de montage
YXCF-1(standard)
• EGC-50-TB-KF • EGC-50-TB-KF X : 1 900Y : 1 900
Selon la dynamique choisie
Horizontale
Hors confi gurateur
• EGC-50/70/80-TB-KF• ELGA-70-TB-RF
• EGC-50/70-TB/BS-KF• ELGA-70-TB/BS-KF/RF• DGC-12/18-KF• DGCI-18-KF
X : 5 000Y : 1 000
YXCF-2(standard)
• EGC-80-TB-KF • EGC-80-TB-KF• EGC-HD-125-TB-KF
X : 3 000Y : 2 000
Hors confi gurateur
• EGC-80-TB-KF• ELGA-70/80-TB-KF/RF
• EGC-80-TB/BS-KF• ELGA-70/80-TB/BS-KF/RF• EGC-HD-125-TB/BS-KF
X : 8 500Y : 1 500
YXCF-3(standard)
• EGC-120-TB-KF • EGC-120-TB-KF• EGC-HD-160-TB
X : 3 000Y : 2 000
Hors confi gurateur
• EGC-80-/120-TB-KF• ELGA-80/120-TB-KF/RF
• EGC-120-TB/BS-KF• ELGA-80/120-TB/BS-KF/RF• EGC-HD-160-TB/BS-KF• DGC(I)-40/63-KF• DGC-40-KF
X : 8 500Y : 2 000
YXCF-4(standard)
• EGC-185-TB-KF • EGC-185-TB-KF• EGC-HD-220-TB-KF
X : 3 000Y : 2 000
Hors confi gurateur
• EGC-185-TB-KF• ELGA-150-TB-KF
• EGC-120/185-TB/BS-KF• ELGA-120-TB/BS-KF/RF• EGC-HD-220-TB/BS-KF• DGC(I)-40/63-KF
X : 8 500Y : 2 000
Kit de motorisation selon la confi guration choisie
Concevez votre système vous-même www.festo.fr/handling-guide
26
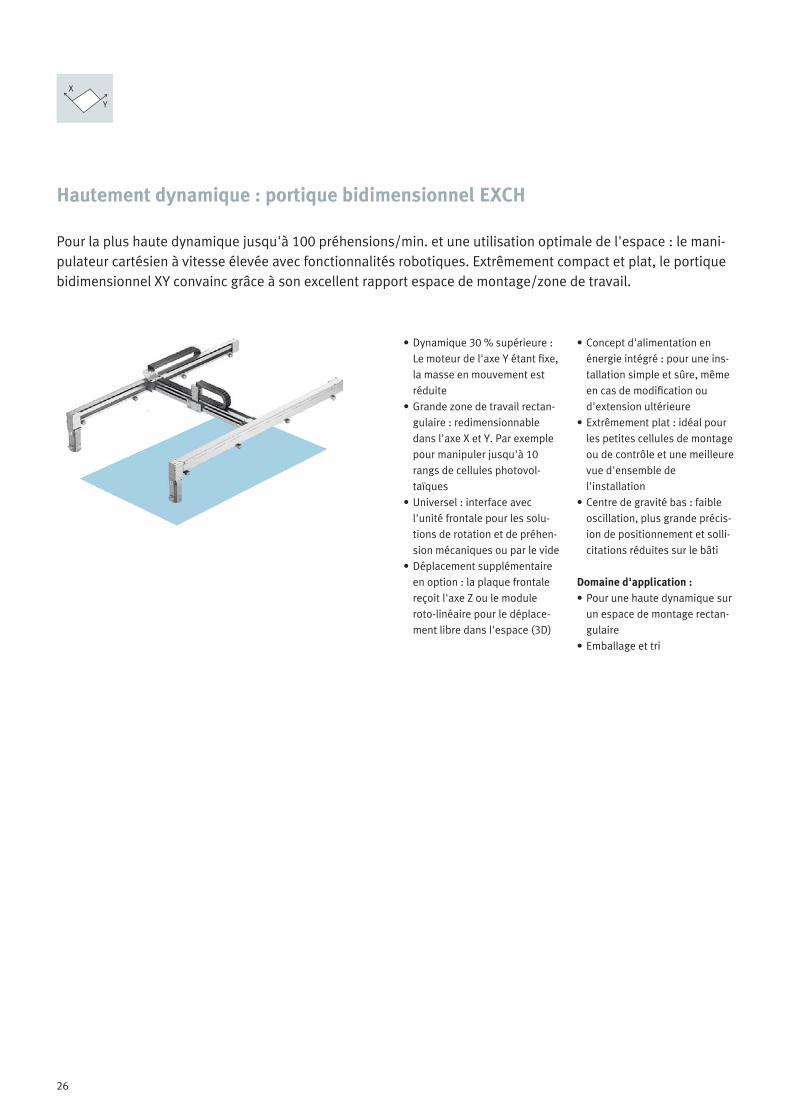
Pour la plus haute dynamique jusqu'à 100 préhensions/min. et une utilisation optimale de l'espace : le mani-pulateur cartésien à vitesse élevée avec fonctionnalités robotiques. Extrêmement compact et plat, le portique bidimensionnel XY convainc grâce à son excellent rapport espace de montage/zone de travail.
Hautement dynamique : portique bidimensionnel EXCH
• Dynamique 30 % supérieure : Le moteur de l'axe Y étant fi xe, la masse en mouvement est réduite
• Grande zone de travail rectan-gulaire : redimensionnable dans l'axe X et Y. Par exemple pour manipuler jusqu'à 10 rangs de cellules photovol-taïques
• Universel : interface avec l'unité frontale pour les solu-tions de rotation et de préhen-sion mécaniques ou par le vide
• Déplacement supplémentaire en option : la plaque frontale reçoit l'axe Z ou le module roto-linéaire pour le déplace-ment libre dans l'espace (3D)
• Concept d'alimentation en énergie intégré : pour une ins-tallation simple et sûre, même en cas de modifi cation ou d'extension ultérieure
• Extrêmement plat : idéal pour les petites cellules de montage ou de contrôle et une meilleure vue d'ensemble de l'installation
• Centre de gravité bas : faible oscillation, plus grande précis-ion de positionnement et solli-citations réduites sur le bâti
Domaine d'application :• Pour une haute dynamique sur
un espace de montage rectan-gulaire
• Emballage et tri
X
Y
27
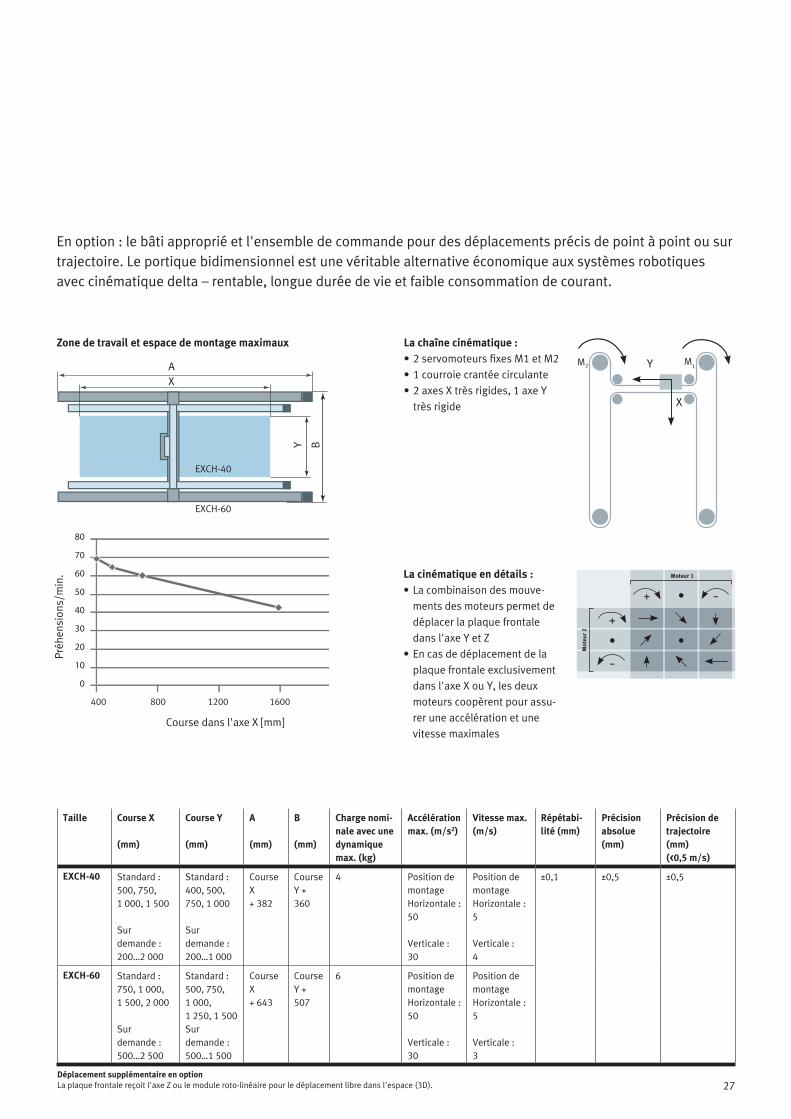
En option : le bâti approprié et l'ensemble de commande pour des déplacements précis de point à point ou sur trajectoire. Le portique bidimensionnel est une véritable alternative économique aux systèmes robotiques avec cinématique delta – rentable, longue durée de vie et faible consommation de courant.
X
Y M1M2
La chaîne cinématique :• 2 servomoteurs fi xes M1 et M2• 1 courroie crantée circulante• 2 axes X très rigides, 1 axe Y
très rigide
La cinématique en détails :• La combinaison des mouve-
ments des moteurs permet de déplacer la plaque frontale dans l'axe Y et Z
• En cas de déplacement de la plaque frontale exclusivement dans l'axe X ou Y, les deux moteurs coopèrent pour assu-rer une accélération et une vitesse maximales
Zone de travail et espace de montage maximaux
BY
XA
EXCH-60
EXCH-40
400 800 1200 1600
80
70
60
50
40
30
20
10
0
Préh
ensi
ons/
min
.
Course dans l'axe X [mm]
Taille Course X
(mm)
Course Y
(mm)
A
(mm)
B
(mm)
Charge nomi-nale avec une dynamique max. (kg)
Accélération max. (m/s2)
Vitesse max. (m/s)
Répétabi-lité (mm)
Précision absolue (mm)
Précision de trajectoire (mm)(<0,5 m/s)
EXCH-40 Standard :500, 750, 1 000, 1 500
Sur demande :200…2 000
Standard :400, 500, 750, 1 000
Sur demande :200…1 000
Course X + 382
Course Y + 360
4 Position de montage Horizontale :50
Verticale :30
Position de montage Horizontale :5
Verticale :4
±0,1 ±0,5 ±0,5
EXCH-60 Standard :750, 1 000, 1 500, 2 000
Sur demande :500…2 500
Standard : 500, 750, 1 000, 1 250, 1 500Sur demande :500…1 500
Course X + 643
Course Y + 507
6 Position de montage Horizontale :50
Verticale :30
Position de montage Horizontale :5
Verticale :3
Déplacement supplémentaire en optionLa plaque frontale reçoit l'axe Z ou le module roto-linéaire pour le déplacement libre dans l'espace (3D).
+
+
•
-
•
•
Moteur 1M
oteu
r 2
-

28
Faible encombrement : portique bidimensionnel EXCM
• Extrêmement compact et plat pour une exploitation idéale de l'espace
• Charge utile élevée jusqu'à 5 kg
• Festo plug & work avec précon-fi guration
• Pack d'actionneurs et de con-trôleurs adaptés et préconfi gu-rés de façon optimale
• Confi gurable en longueur et en largeur
Principe de fonctionnementL'EXCM peut approcher toute position d'une zone de travail. La courroie crantée en circulation, couplée aux moteurs fi xes, entraîne le chariot dans un espace bidimensionnel.
Pack d'actionneurs et de contrôleursStandardisé : le pack d'actionneurs et de contrôleurs en IP20 pour Festo plug & work. Le codeur permet un fonctionne-ment assisté en boucle de régu-lation fermée.
Partout où chaque millimètre compte : le portique EXCM à faible encombrement. Une haute fonctionnalité alliée à une construction extrêmement compacte et une couverture maximale de la zone de travail. Le concept d'actionneur à cinématique parallèle assure une charge utile élevée, le pack d'actionneurs et de contrôleurs est préconfi guré pour une mise en service simple.
EXCM-10 : avec pack d'actionneurs et de contrôleurs intégré
EXCM-10 : avec pack d'actionneurs et de contrôleurs intégré
X
Y
29
Axe Y
Moteur 1 Moteur 2
Axe
X
+
+
•
-
•
•
Moteur 1M
oteu
r 2
-
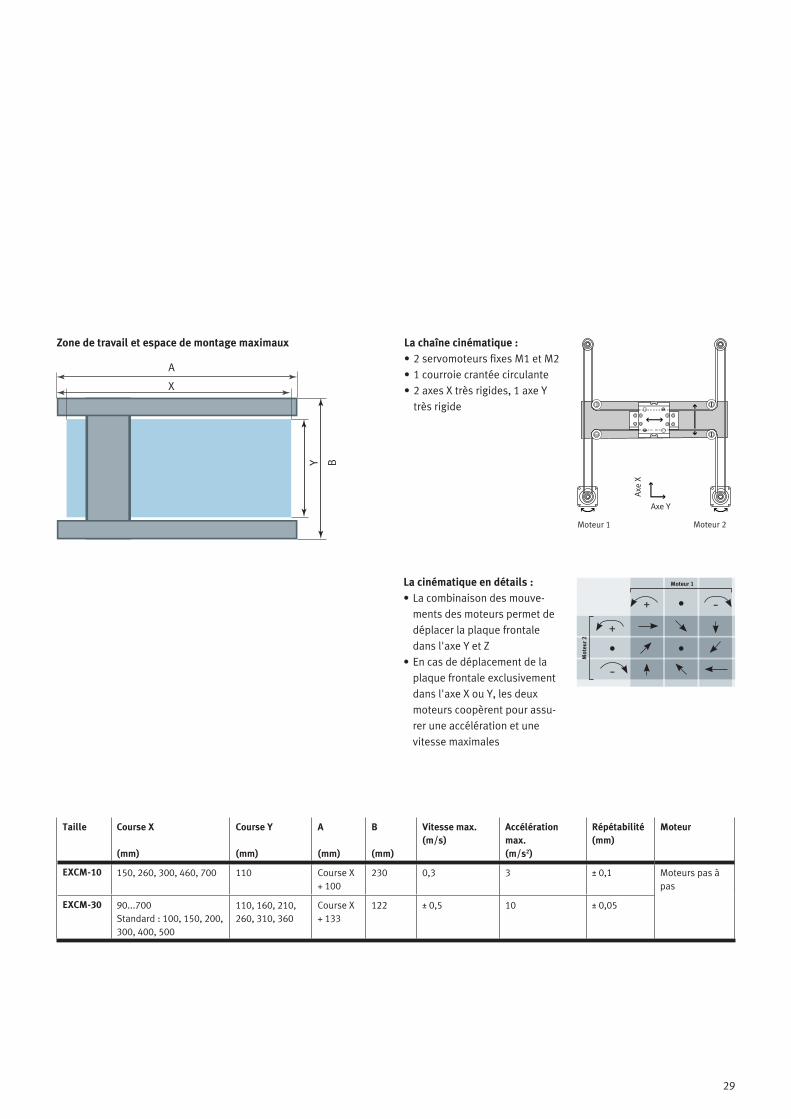
Taille Course X
(mm)
Course Y
(mm)
A
(mm)
B
(mm)
Vitesse max. (m/s)
Accélération max. (m/s2)
Répétabilité (mm)
Moteur
EXCM-10 150, 260, 300, 460, 700 110 Course X + 100
230 0,3 3 ± 0,1 Moteurs pas à pas
EXCM-30 90...700Standard : 100, 150, 200, 300, 400, 500
110, 160, 210, 260, 310, 360
Course X + 133
122 ± 0,5 10 ± 0,05
La chaîne cinématique :• 2 servomoteurs fi xes M1 et M2• 1 courroie crantée circulante • 2 axes X très rigides, 1 axe Y
très rigide
La cinématique en détails :• La combinaison des mouve-
ments des moteurs permet de déplacer la plaque frontale dans l'axe Y et Z
• En cas de déplacement de la plaque frontale exclusivement dans l'axe X ou Y, les deux moteurs coopèrent pour assu-rer une accélération et une vitesse maximales
Zone de travail et espace de montage maximauxBY
X
A

30
• Grande rigidité mécanique et structure robuste
• Composants électriques et pneumatiques - peuvent être librement combinés
• En solution électrique – positionnement de votre choix
Domaine d'application• Charge utile jusqu'à 6 kg• Plages de courses jusqu'à
400 mm• Idéal quand l'unité de préhen-
sion doit être retirée de la zone d'action
Pick and Place électrique/pneumatiqueDGSL/EGSL
Pick and Place électriqueEGSL/EGSL
Variantes Pick and Place (exemple)
Pick and Place pneumatiqueDGSL/DGSL
Standard : Pick and Place DHSP
Les Pick and Place sont composés de deux actionneurs guidés avec possibilités de combinaison de chariot et de bras mobile.
Z
Y

31
Faible encombrement : modules de manipulation
Module de manipulation HSW
Module de manipulation HSP
Grâce à leur cadence très soutenue, ces modules fonctionnels compacts et économiques sont l'idéal pour l'alimentation et le retrait de petites pièces dans les zones les plus étriquées. Cela est rendu possible par un guidage par came. Celui-ci permet la combinaison d'un mouvement d'oscillation et d'un mouvement linéaire pour un cycle Pick and Place complet.
Caractéristiques techniquesVous trouverez les variantes et options dans le catalogue en ligne Festo.
Mode d’entraînement Pneumatique/électrique
Charge utile 0 ... 1,6 kgCourseY 52 ... 170 mmZ 20 ... 70 mmZ (course linéaire utile) 15 ... 25 mmRéglage possible de la courseY ±8 ... 20 mmZ –10 ... –20 mmPosition d'attente 1) En option
Précision ±0,02 mm
1) La position d'attente permet de retirer la pince de la position de prise.
Module de mani-pulation avec sortie d'arbre libre
Module de mani-pulation pneu-matique
Module de mani-pulation pneu-matique
Module de mani-pulation avec sortie d'arbre libre
Caractéristiques techniquesVous trouverez les variantes et options dans le catalogue en ligne Festo.
Mode d’entraînement Pneumatique
Charge utile 0 ... 1,6 kgCourse linéaire max. pour un angle d'oscillation de 90°
90 ... 175 mm
Course utile 9 ... 35 mmTemps de cycle min. 0,6 ... 1,0 sRépétabilité ±0,02 mmPosition d’attente Max. 2
Répétabilité position d'attente < 1 mm

32
• Composants électriques et pneumatiques - peuvent être librement combinés
• En solution électrique – positions intermédiaires de votre choix
Domaine d'application :Là où l'espace manque pour les portiques tridimensionnels ou lorsque l'unité de manipulation doit être retirée de la zone de travail, les bras sont la meilleure solution à 3 axes pour les déplacements dans l'espace tri-dimensionnel.• Si la zone de travail doit rester
librement accessible et qu'elle ne peut pas accueillir l'unité de manipulation
• Exigences élevées concernant la rigidité du système
Standard : bras mobile
Mouvements en 3D : un système de bras est composé d'un actionneur à guidage renforcé combiné à un Pick and Place. Ils présentent une grande rigidité mécanique et sont de construction robuste.
Z
X Y
Hors confi gurateur :Solutions pré-montées réalisées à partir de composants standard FestoBras avec EGC/DGEA/DFM et unité frontale ERMB
33
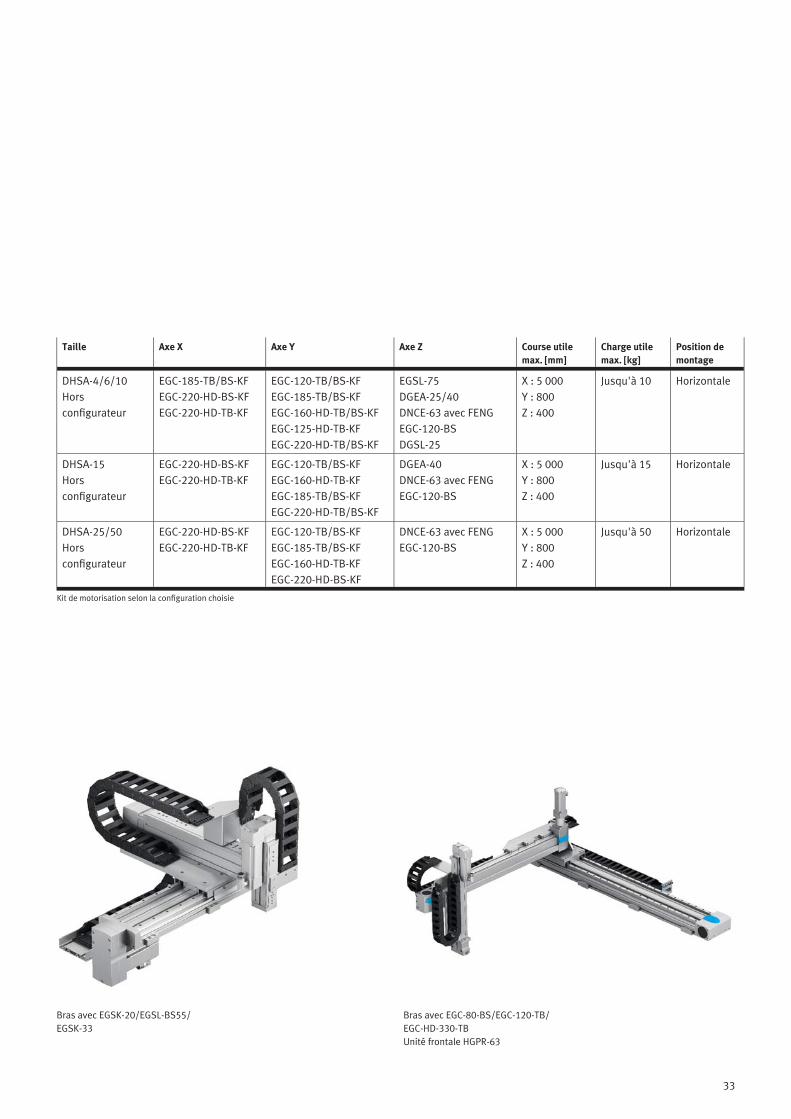
Bras avec EGSK-20/EGSL-BS55/EGSK-33
Bras avec EGC-80-BS/EGC-120-TB/EGC-HD-330-TBUnité frontale HGPR-63
Taille Axe X Axe Y Axe Z Course utile max. [mm]
Charge utile max. [kg]
Position de montage
DHSA-4/6/10 Hors confi gurateur
EGC-185-TB/BS-KFEGC-220-HD-BS-KFEGC-220-HD-TB-KF
EGC-120-TB/BS-KFEGC-185-TB/BS-KFEGC-160-HD-TB/BS-KFEGC-125-HD-TB-KFEGC-220-HD-TB/BS-KF
EGSL-75DGEA-25/40DNCE-63 avec FENGEGC-120-BSDGSL-25
X : 5 000Y : 800Z : 400
Jusqu'à 10 Horizontale
DHSA-15 Hors confi gurateur
EGC-220-HD-BS-KFEGC-220-HD-TB-KF
EGC-120-TB/BS-KFEGC-160-HD-TB-KFEGC-185-TB/BS-KFEGC-220-HD-TB/BS-KF
DGEA-40DNCE-63 avec FENGEGC-120-BS
X : 5 000Y : 800Z : 400
Jusqu'à 15 Horizontale
DHSA-25/50Hors confi gurateur
EGC-220-HD-BS-KFEGC-220-HD-TB-KF
EGC-120-TB/BS-KFEGC-185-TB/BS-KFEGC-160-HD-TB-KF EGC-220-HD-BS-KF
DNCE-63 avec FENGEGC-120-BS
X : 5 000Y : 800Z : 400
Jusqu'à 50 Horizontale
Kit de motorisation selon la confi guration choisie
34
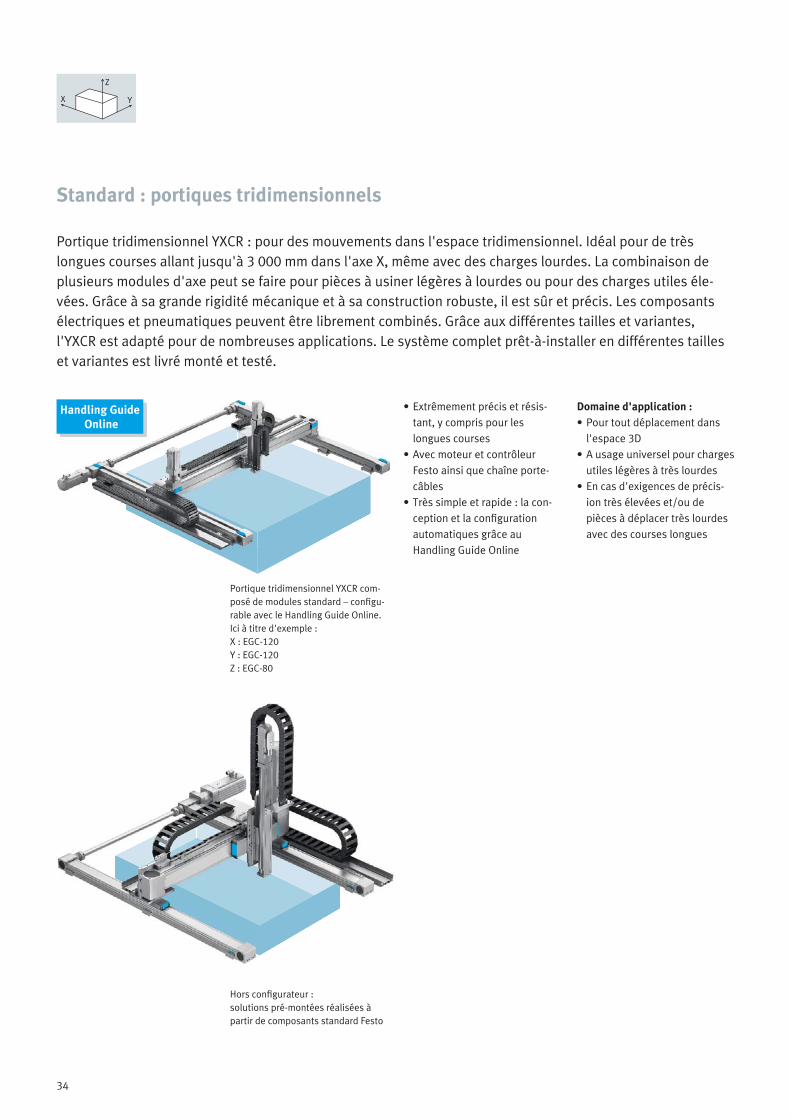
• Extrêmement précis et résis-tant, y compris pour les longues courses
• Avec moteur et contrôleur Festo ainsi que chaîne porte-câbles
• Très simple et rapide : la con-ception et la confi guration automatiques grâce au Handling Guide Online
Domaine d'application :• Pour tout déplacement dans
l'espace 3D• A usage universel pour charges
utiles légères à très lourdes• En cas d'exigences de précis-
ion très élevées et/ou de pièces à déplacer très lourdes avec des courses longues
Portique tridimensionnel YXCR com-posé de modules standard – confi gu-rable avec le Handling Guide Online.Ici à titre d'exemple : X : EGC-120Y : EGC-120Z : EGC-80
Hors confi gurateur :solutions pré-montées réalisées à partir de composants standard Festo
Standard : portiques tridimensionnels
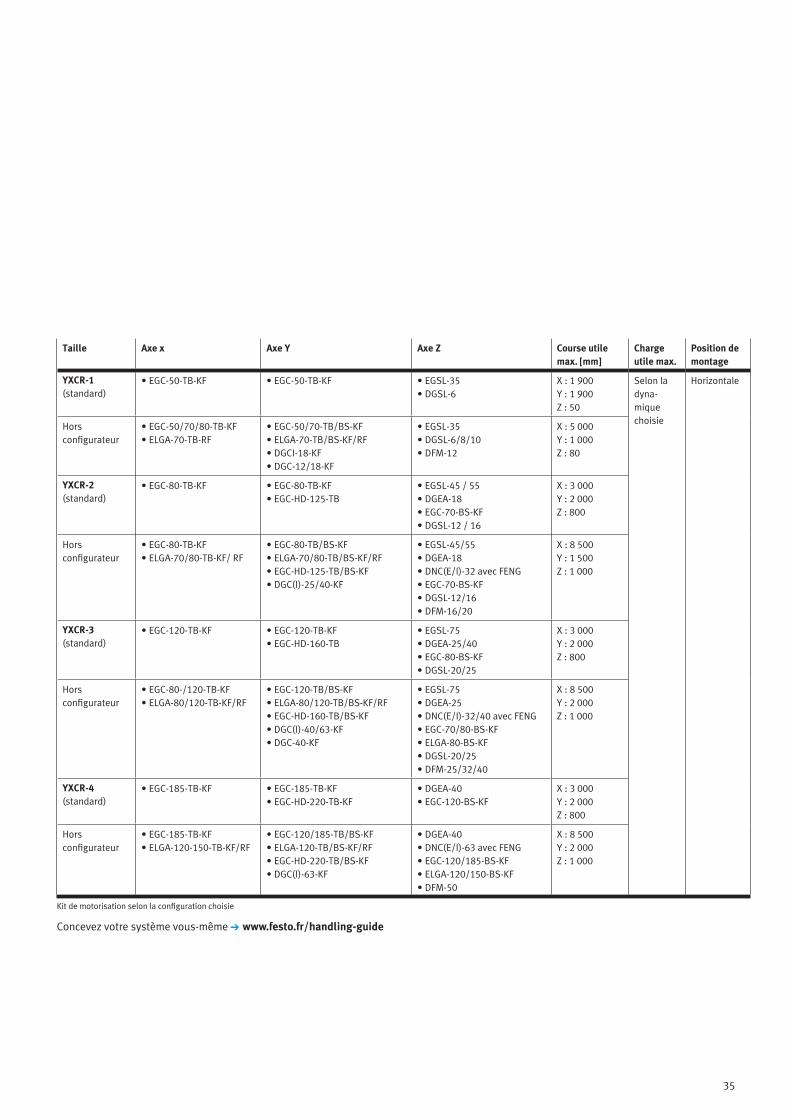
Portique tridimensionnel YXCR : pour des mouvements dans l'espace tridimensionnel. Idéal pour de très longues courses allant jusqu'à 3 000 mm dans l'axe X, même avec des charges lourdes. La combinaison de plusieurs modules d'axe peut se faire pour pièces à usiner légères à lourdes ou pour des charges utiles éle-vées. Grâce à sa grande rigidité mécanique et à sa construction robuste, il est sûr et précis. Les composants électriques et pneumatiques peuvent être librement combinés. Grâce aux différentes tailles et variantes, l'YXCR est adapté pour de nombreuses applications. Le système complet prêt-à-installer en différentes tailles et variantes est livré monté et testé.
Z
X Y
Handling Guide Online
35
Taille Axe x Axe Y Axe Z Course utile max. [mm]
Charge utile max.
Position de montage
YXCR-1(standard)
• EGC-50-TB-KF • EGC-50-TB-KF • EGSL-35 • DGSL-6
X : 1 900Y : 1 900Z : 50
Selon la dyna-mique choisie
Horizontale
Hors confi gurateur
• EGC-50/70/80-TB-KF • ELGA-70-TB-RF
• EGC-50/70-TB/BS-KF• ELGA-70-TB/BS-KF/RF• DGCI-18-KF• DGC-12/18-KF
• EGSL-35 • DGSL-6/8/10• DFM-12
X : 5 000Y : 1 000Z : 80
YXCR-2(standard)
• EGC-80-TB-KF • EGC-80-TB-KF • EGC-HD-125-TB
• EGSL-45 / 55• DGEA-18• EGC-70-BS-KF• DGSL-12 / 16
X : 3 000Y : 2 000Z : 800
Hors confi gurateur
• EGC-80-TB-KF• ELGA-70/80-TB-KF/ RF
• EGC-80-TB/BS-KF• ELGA-70/80-TB/BS-KF/RF• EGC-HD-125-TB/BS-KF• DGC(I)-25/40-KF
• EGSL-45/55 • DGEA-18• DNC(E/I)-32 avec FENG• EGC-70-BS-KF• DGSL-12/16• DFM-16/20
X : 8 500Y : 1 500Z : 1 000
YXCR-3(standard)
• EGC-120-TB-KF • EGC-120-TB-KF• EGC-HD-160-TB
• EGSL-75 • DGEA-25/40• EGC-80-BS-KF• DGSL-20/25
X : 3 000Y : 2 000Z : 800
Hors confi gurateur
• EGC-80-/120-TB-KF• ELGA-80/120-TB-KF/RF
• EGC-120-TB/BS-KF• ELGA-80/120-TB/BS-KF/RF• EGC-HD-160-TB/BS-KF• DGC(I)-40/63-KF• DGC-40-KF
• EGSL-75 • DGEA-25• DNC(E/I)-32/40 avec FENG• EGC-70/80-BS-KF• ELGA-80-BS-KF• DGSL-20/25• DFM-25/32/40
X : 8 500Y : 2 000Z : 1 000
YXCR-4(standard)
• EGC-185-TB-KF • EGC-185-TB-KF• EGC-HD-220-TB-KF
• DGEA-40• EGC-120-BS-KF
X : 3 000Y : 2 000Z : 800
Hors confi gurateur
• EGC-185-TB-KF• ELGA-120-150-TB-KF/RF
• EGC-120/185-TB/BS-KF• ELGA-120-TB/BS-KF/RF• EGC-HD-220-TB/BS-KF• DGC(I)-63-KF
• DGEA-40• DNC(E/I)-63 avec FENG• EGC-120/185-BS-KF• ELGA-120/150-BS-KF• DFM-50
X : 8 500Y : 2 000Z : 1 000
Kit de motorisation selon la confi guration choisie
Concevez votre système vous-même www.festo.fr/handling-guide
36
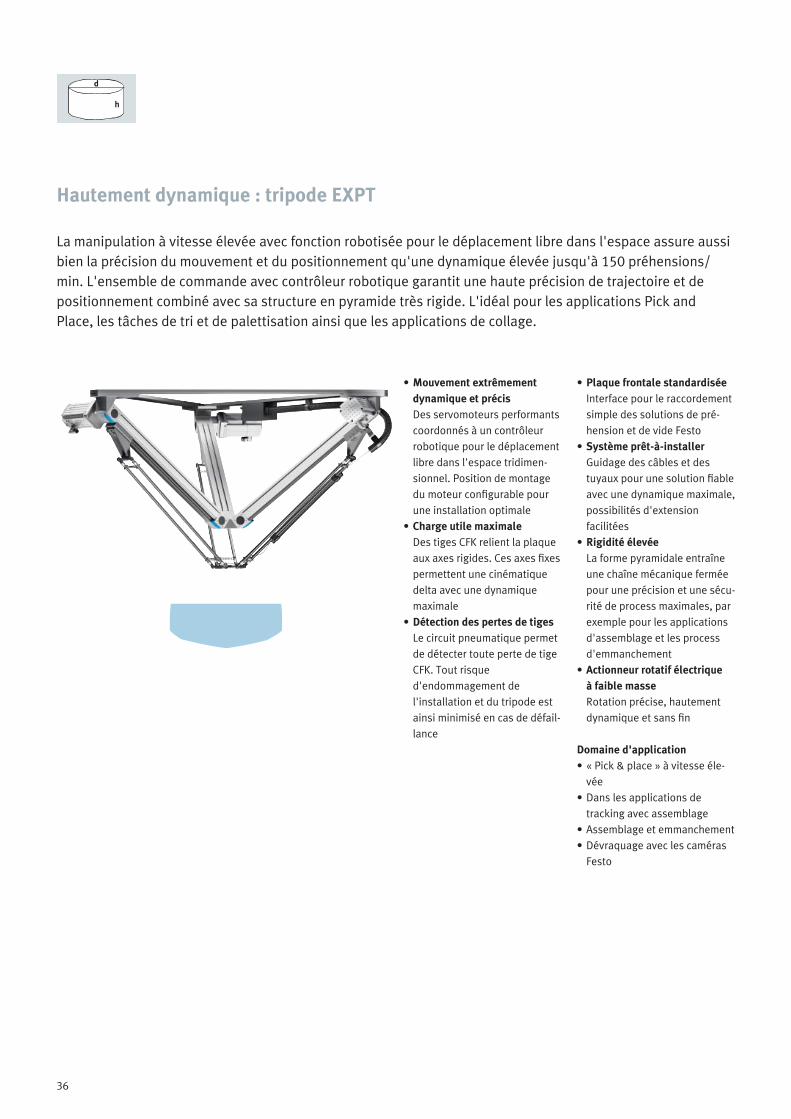
Hautement dynamique : tripode EXPT
La manipulation à vitesse élevée avec fonction robotisée pour le déplacement libre dans l'espace assure aussi bien la précision du mouvement et du positionnement qu'une dynamique élevée jusqu'à 150 préhensions/min. L'ensemble de commande avec contrôleur robotique garantit une haute précision de trajectoire et de positionnement combiné avec sa structure en pyramide très rigide. L'idéal pour les applications Pick and Place, les tâches de tri et de palettisation ainsi que les applications de collage.
• Mouvement extrêmement dynamique et précisDes servomoteurs performants coordonnés à un contrôleur robotique pour le déplacement libre dans l'espace tridimen-sionnel. Position de montage du moteur confi gurable pour une installation optimale
• Charge utile maximaleDes tiges CFK relient la plaque aux axes rigides. Ces axes fi xes permettent une cinématique delta avec une dynamique maximale
• Détection des pertes de tigesLe circuit pneumatique permet de détecter toute perte de tige CFK. Tout risque d'endommagement de l'installation et du tripode est ainsi minimisé en cas de défail-lance
• Plaque frontale standardisée Interface pour le raccordement simple des solutions de pré-hension et de vide Festo
• Système prêt-à-installer Guidage des câbles et des tuyaux pour une solution fi able avec une dynamique maximale, possibilités d'extension facilitées
• Rigidité élevéeLa forme pyramidale entraîne une chaîne mécanique fermée pour une précision et une sécu-rité de process maximales, par exemple pour les applications d'assemblage et les process d'emmanchement
• Actionneur rotatif électrique à faible masseRotation précise, hautement dynamique et sans fi n
Domaine d'application• « Pick & place » à vitesse éle-
vée• Dans les applications de
tracking avec assemblage • Assemblage et emmanchement• Dévraquage avec les caméras
Festo
d
h
37
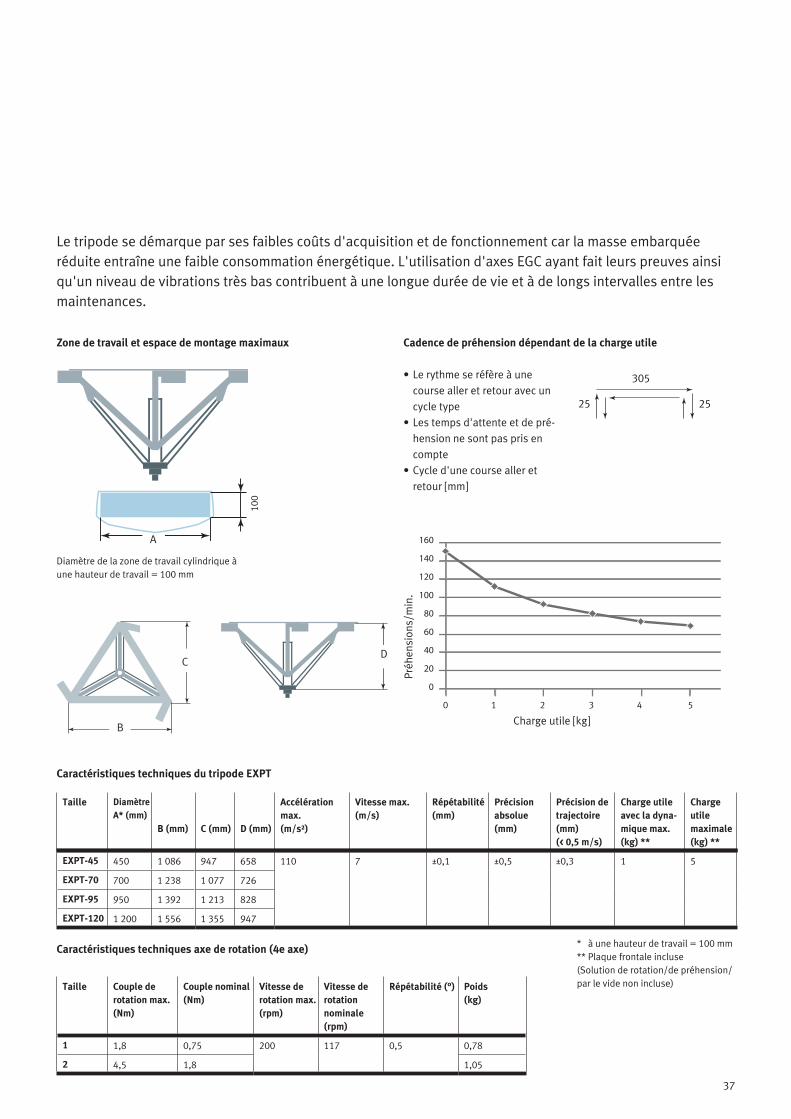
Le tripode se démarque par ses faibles coûts d'acquisition et de fonctionnement car la masse embarquée réduite entraîne une faible consommation énergétique. L'utilisation d'axes EGC ayant fait leurs preuves ainsi qu'un niveau de vibrations très bas contribuent à une longue durée de vie et à de longs intervalles entre les maintenances.
* à une hauteur de travail = 100 mm** Plaque frontale incluse(Solution de rotation/de préhension/par le vide non incluse)
DC
B
Zone de travail et espace de montage maximaux
Caractéristiques techniques du tripode EXPT
Caractéristiques techniques axe de rotation (4e axe)
• Le rythme se réfère à une course aller et retour avec un cycle type
• Les temps d'attente et de pré-hension ne sont pas pris en compte
• Cycle d'une course aller et retour [mm]
Cadence de préhension dépendant de la charge utile
25
305
25
Diamètre de la zone de travail cylindrique à une hauteur de travail = 100 mm
100
A
0 1 2 3 4 5
160
140
120
100
80
60
40
20
0
Préh
ensi
ons/
min
.
Charge utile [kg]
Taille Couple de rotation max. (Nm)
Couple nominal (Nm)
Vitesse de rotation max. (rpm)
Vitesse de rotation nominale (rpm)
Répétabilité (°) Poids (kg)
1 1,8 0,75 200 117 0,5 0,78
2 4,5 1,8 1,05
Taille Diamètre A* (mm)
B (mm) C (mm) D (mm)
Accélération max. (m/s²)
Vitesse max. (m/s)
Répétabilité (mm)
Précision absolue (mm)
Précision de trajectoire (mm)(< 0,5 m/s)
Charge utile avec la dyna-mique max. (kg) **
Charge utile maximale (kg) **
EXPT-45 450 1 086 947 658 110 7 ±0,1 ±0,5 ±0,3 1 5
EXPT-70 700 1 238 1 077 726
EXPT-95 950 1 392 1 213 828
EXPT-120 1 200 1 556 1 355 947

38
Principaux composants :• Préhension : HGPT-63• Doigt de pince :
version spéciale
Principaux composants :• Préhension : ESS• Commande : OVEM, CPX-MPA
Caractéristiques techniques :• Plusieurs circuits de vide à
commande fl exible• Fonction de centrage• Les tailles de pièces variables
requièrent sur les bords quel-ques ventouses avec clapets de sécurité ISV (« vanne à clapet intelligente »)
Caractéristiques techniques :• Robuste grâce au guidage par
rainure en T• Guidages externes pour
l'absorption de couples élevés en raison de la position de montage et des doigts de pince fortement déportés
Solutions sur-mesure pour le client – conception individuelle
Des systèmes de préhension…
Système de préhension par le vide pour plaques fi nes
Préhension de supports de pièces pour bain

39
Principaux composants :• Axes Z : EGC-80-BS• Axes X : EGC-120-TB• Axes Y : EGC-HD-160-TB
Principaux composants :• Préhension : produit tiers• Axe de dépose : DFM-12• Axe Z : DGC-25• Rotation : DRRD-63• Commande : CPX-MPA
Caractéristiques techniques :• Masse à déplacer pour l'axe Z :
15 kg de bâti en aluminium• Deux modules de vissage dans
une unité• Construction compacte• Les axes d'entraînement sont
également les axes de guidage
Caractéristiques techniques :• Masse de la pièce portée par
bras : 1 kg• Manipulation avec bâti en alu-
minium pour une intégration rapide dans la ligne de produc-tion du client
• Station de déplacement entièrement pré-câblée
… aux systèmes de manipulation standard modifi és et solutions sur mesure…
Station de vissage
Station pneumatique de déplacement de pièces

40
Principaux composants :• Préhension : ELGG-35/45/55• Actionneur pneumatique :
ADN-25• Actionneur électrique :
EMMS-AS/ST
Principaux composants :• Préhension : ESS-20-CN, VN-10• Détection de pièce : ADN-20• Axe Z : DGEA-40• Axe Y : EGC-120-TB
Caractéristiques techniques :• Grande plage de courses du
préhenseur grâce à une vaste gamme d'actionneurs linéaires
• Grandes courses jusqu'à 300 mm par doigt de pince
• Charge utile jusqu'à environ 10 kg
• Variable : technologie d'entraînement pneumatique et électrique
• Simple et modulaire• Très fl exible grâce au montage
de doigts de pince individuels• Régulation de la force et de la
position possible
Caractéristiques techniques :• Déplacement de pièces/maté-
riaux minces tels que des feuil-les de carton, de plastique, des tôles, etc.
• Détection de piles grâce au capteur simple
• Sécurité de process d'empilage garantie grâce aux nombreux essais réalisés avant le projet
Solutions sur-mesure pour le client – conception individuelle
… applications duplicables …
•
Solution de portique avec châs-sis à ventouses fl exible
Système modulaire de pinces avec vérin à courroie crantée ELGG

41
Principaux composants :• Axe Z : produit tiers• Axe Y : EGC-120-TB
Principaux composants :• Pince : HGPL-40• Axe X : EGC-120-BS• Axe Y : DGE-63-ZR version spé-
ciale
Caractéristiques techniques :• Masse de la pièce : 30 kg par
portique• Bâti en acier : longueur
8 mètres, hauteur 3 mètres• Intégration de produits tiers,
p. ex. axes à crémaillère• Exigences spéciales telles que
p. ex. unité de blocage, grais-sage central
• Interface défi nie pour le sys-tème de préhension du client et le montage moteur
Caractéristiques techniques :• Adapté de façon optimale aux
exigences du client : aspect mécanique, technique de com-mande et coûts
• Conception et simulation des cinématiques mécaniques
• Sur-mesure pour une intégra-tion complète dans l'installation
• Prise en compte des conditions ambiantes : racleur, raccord pour graissage central, mesu-res de prévention
• Interface ouverte pour les moteurs du client
… jusqu'aux projets complexes de grande envergure
Chargement automatisé pour la machine-outil
Double système de portique

42
Magasin d'outils• Solution peu encombrante
adaptée à la machine-outil pour optimiser le magasin interne
• Exécution pour différentes tailles d'outils
Machine pour l'usinage du bois• Commande autonome du pro-
cessus de presse lors du sciage de planches de différentes épaisseurs
• Flexible et rapide• Un système pour la régulation
du positionnement et de la force, programmation libre
• Livraison en tant que sous-système avec interfaces adaptées
• Interface ouverte pour les moteurs du client
• Les fonctions de sécurité sont intégrées dans le système : arrêt d'urgence et ligne de signalisation « Planche entrée » pour verrouiller l'installation
• Diagnostic disponible en cas d'erreur
Solutions spécifi ques aux secteurs – conception individuelle
Pour la construction de machines-outils
Pour le travail du bois
43
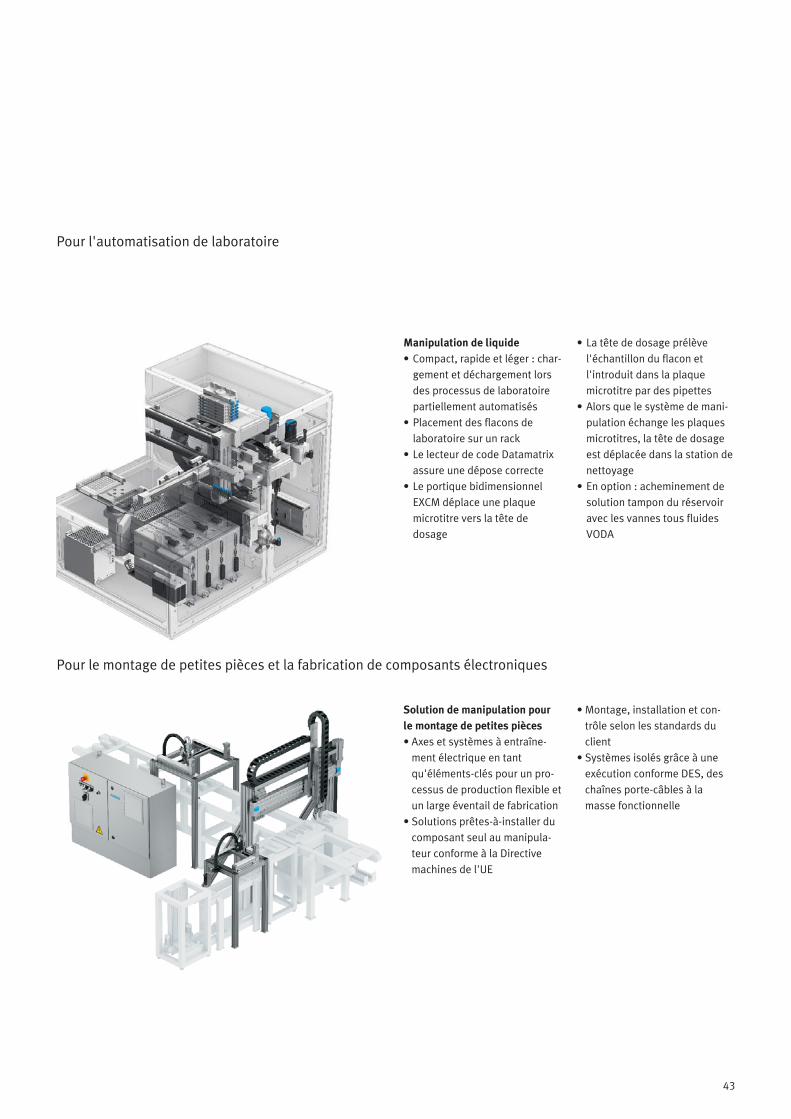
Manipulation de liquide• Compact, rapide et léger : char-
gement et déchargement lors des processus de laboratoire partiellement automatisés
• Placement des fl acons de laboratoire sur un rack
• Le lecteur de code Datamatrix assure une dépose correcte
• Le portique bidimensionnel EXCM déplace une plaque microtitre vers la tête de dosage
Solution de manipulation pour le montage de petites pièces• Axes et systèmes à entraîne-
ment électrique en tant qu'éléments-clés pour un pro-cessus de production fl exible et un large éventail de fabrication
• Solutions prêtes-à-installer du composant seul au manipula-teur conforme à la Directive machines de l'UE
• La tête de dosage prélève l'échantillon du fl acon et l'introduit dans la plaque microtitre par des pipettes
• Alors que le système de mani-pulation échange les plaques microtitres, la tête de dosage est déplacée dans la station de nettoyage
• En option : acheminement de solution tampon du réservoir avec les vannes tous fl uides VODA
• Montage, installation et con-trôle selon les standards du client
• Systèmes isolés grâce à une exécution conforme DES, des chaînes porte-câbles à la masse fonctionnelle
Pour l'automatisation de laboratoire
Pour le montage de petites pièces et la fabrication de composants électroniques
44
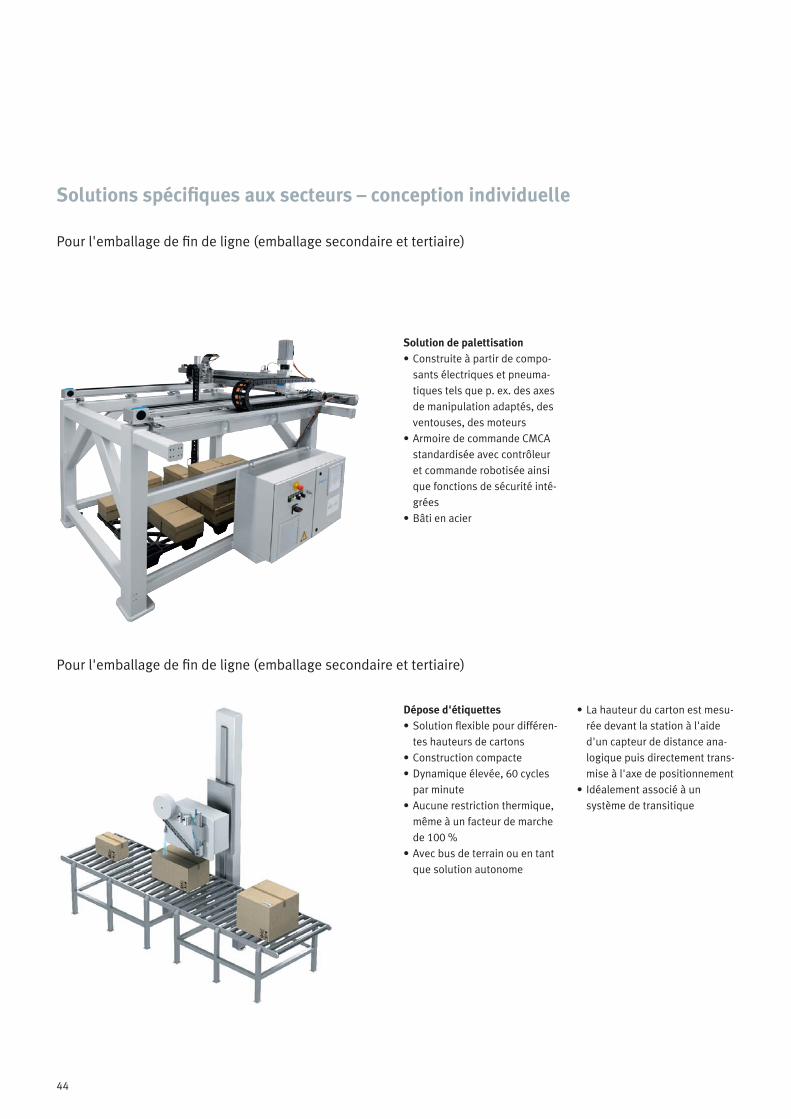
Solutions spécifi ques aux secteurs – conception individuelle
Pour l'emballage de fi n de ligne (emballage secondaire et tertiaire)
Solution de palettisation• Construite à partir de compo-
sants électriques et pneuma-tiques tels que p. ex. des axes de manipulation adaptés, des ventouses, des moteurs
• Armoire de commande CMCA standardisée avec contrôleur et commande robotisée ainsi que fonctions de sécurité inté-grées
• Bâti en acier
Dépose d'étiquettes• Solution fl exible pour différen-
tes hauteurs de cartons• Construction compacte• Dynamique élevée, 60 cycles
par minute• Aucune restriction thermique,
même à un facteur de marche de 100 %
• Avec bus de terrain ou en tant que solution autonome
• La hauteur du carton est mesu-rée devant la station à l'aide d'un capteur de distance ana-logique puis directement trans-mise à l'axe de positionnement
• Idéalement associé à un système de transitique
Pour l'emballage de fi n de ligne (emballage secondaire et tertiaire)
45
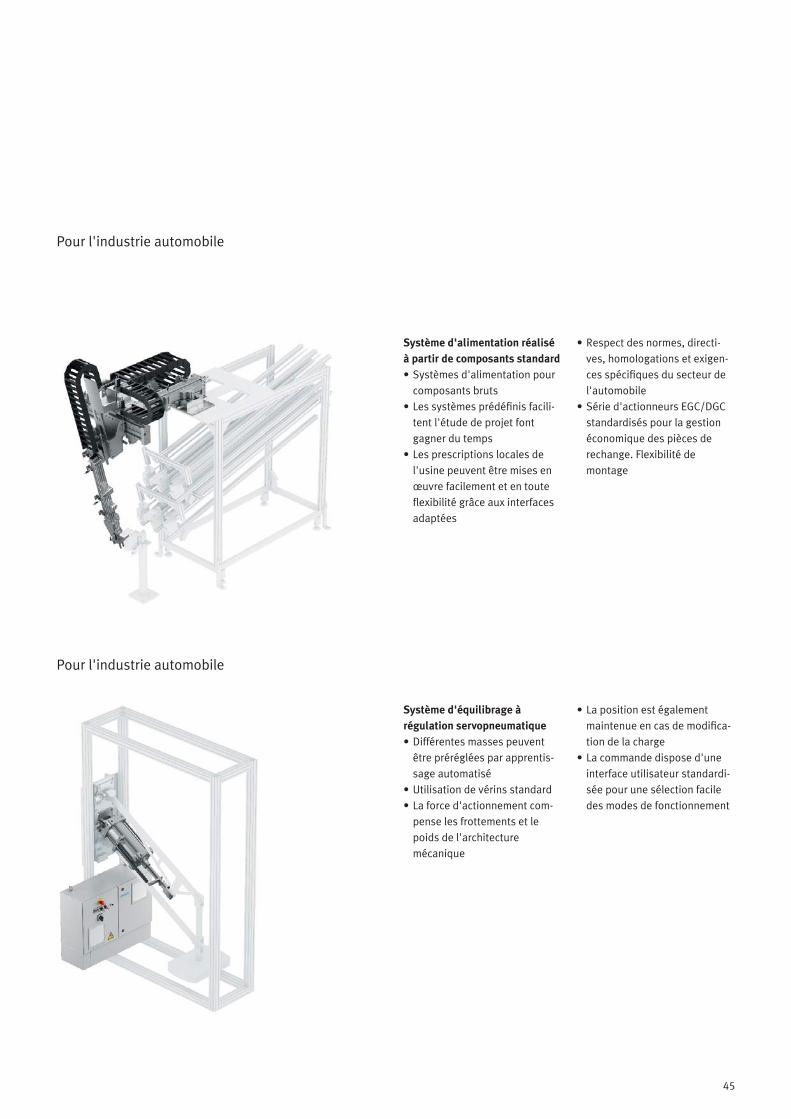
Pour l'industrie automobile
Système d'alimentation réalisé à partir de composants standard• Systèmes d'alimentation pour
composants bruts• Les systèmes prédéfi nis facili-
tent l'étude de projet font gagner du temps
• Les prescriptions locales de l'usine peuvent être mises en œuvre facilement et en toute fl exibilité grâce aux interfaces adaptées
Système d'équilibrage à régulation servopneumatique• Différentes masses peuvent
être préréglées par apprentis-sage automatisé
• Utilisation de vérins standard• La force d'actionnement com-
pense les frottements et le poids de l'architecture mécanique
• Respect des normes, directi-ves, homologations et exigen-ces spécifi ques du secteur de l'automobile
• Série d'actionneurs EGC/DGC standardisés pour la gestion économique des pièces de rechange. Flexibilité de montage
• La position est également maintenue en cas de modifi ca-tion de la charge
• La commande dispose d'une interface utilisateur standardi-sée pour une sélection facile des modes de fonctionnement
Pour l'industrie automobile

46
Handling Guide Online permet de recevoir un manipulateur parfaitement adapté à son bâti via les kits de fi xation ajustables
Périphérie standardisée – bâtis
Fixation au sol avec pieds de réglage
Plaque d'adaptation entre le bâti et le manipulateur
Bâtis (LP-ST) pour portiques linéaires jusqu'à une longueur de 6 m et une hauteur de 2,5 m
Bâtis (LP-AL) pour portiques linéaires jusqu'à une longueur de 6 m et une hauteur de 2 m
Œillet de transport solidement soudé, œillets anneaux sur demande
Jambe de force garantissant la rigidité de la structure
Bâtis standard en acier
Jambe de force garantissant la rigidité de la structure
Raccordement direct sans équerre de fi xation supplémen-taire
Fixation au sol avec pieds de réglage
Renforcement transversal simple en profi lé
Bâtis standard en aluminium
Bâtis (RP-ST) pour portiques tridi-mensionnels jusqu'à une largeur de 2 m, une longueur de 5 m et une hau-teur de 2,5 m
Bâtis (RP-AL) pour portiques tridi-mensionnels jusqu'à une largeur de 2 m, une longueur de 3 m et une hauteur de 1,5 m

47
Périphérie standardisée – capteurs vision, systèmes de vision compact et Checkbox
Capteurs vision SBSI-B/-Q
Systèmes de vision compact SBO…-Q/-M
Checkbox CompactCHB-C
Applications simplesEconomique et rapide pour les applications de caméra simples – même sans connaissances d'expert.Les nouveaux capteurs vision sont disponibles en tant que• capteurs d'objets SBSI-Q pour
un contrôle-qualité simple• lecteurs de code SBSI-B perfor-
mants pour la lecture de codes 1D/2D
L'optique avec différentes foca-les est également intégrée, tout comme l'éclairage en différentes couleurs.
Exigences élevéesPour le contrôle-qualité, la détec-tion de la position et de l'orientation des pièces dans un environnement industriel, il n'existe rien de mieux que les systèmes de vision compacts intelligents SBO…-Q qui ont fait leurs preuves. SBO…-M aide pour le diagnostic de processus rapide
Contrôle optimal des pièces dans les applications d'alimentation rapideContrôle sans contact en continu de l’orientation et de la qualité de pièces de petite taille, telles que vis, ressorts, boulons.
Exemple d'application SBSI-B
Lecture de codes 2DLe lecteur lit les codes Datamatrix et peut également contrôler la qualité du code selon la norme ISO 15415 ou AIM DPM 2006.
Détection de la position et de l'orientationSBO...-Q détecte la position et l'orientation de toutes les pièces afi n que celles-ci puissent être récupérées par le système de manipulation sans aucun problème et en toute fl exibilité.
Contrôle de l'orientation et de la qualité des pièces La Checkbox CHB-C contrôle les pièces et commande le proces-sus d'alimentation entier.
Exemple d'application SBO...-Q
Exemple d'application CHB-C
48
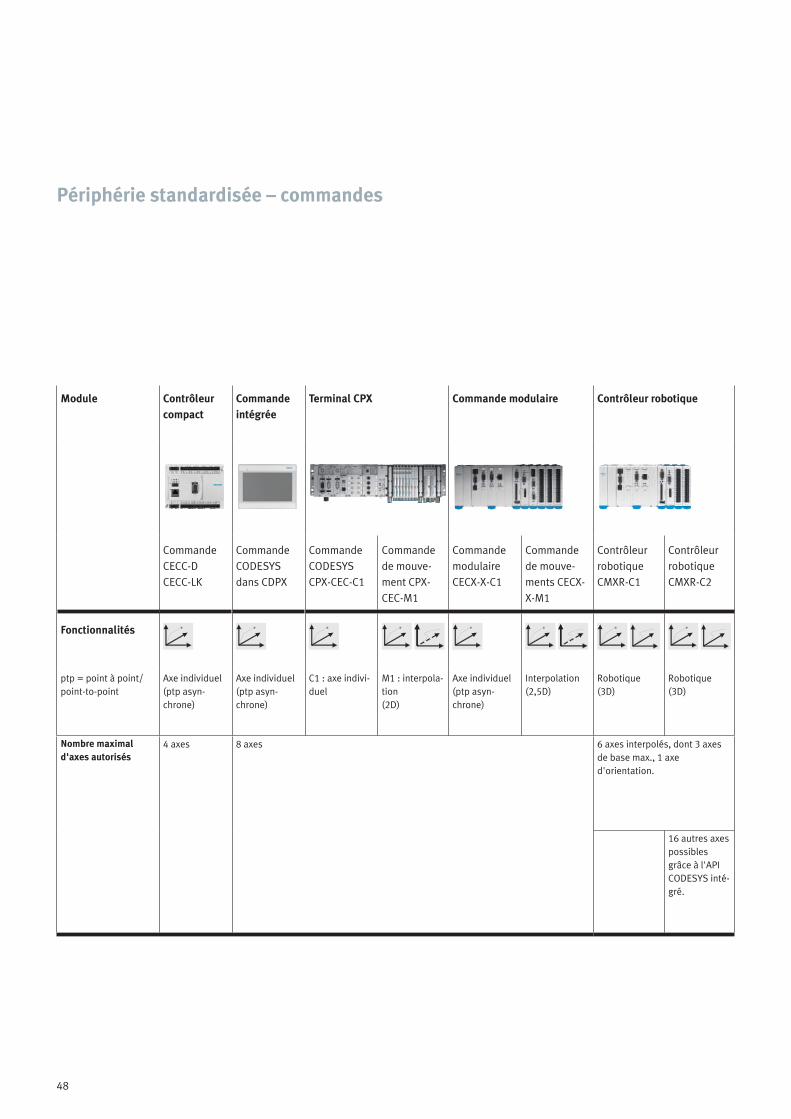
Module Contrôleur compact
Commande intégrée
Terminal CPX Commande modulaire Contrôleur robotique
Commande CECC-D CECC-LK
Commande CODESYS dans CDPX
Commande CODESYS CPX-CEC-C1
Commande de mouve-ment CPX-CEC-M1
Commande modulaire CECX-X-C1
Commande de mouve-ments CECX-X-M1
Contrôleur robotique CMXR-C1
Contrôleur robotique CMXR-C2
Fonctionnalités
ptp = point à point/point-to-point
Axe individuel(ptp asyn-chrone)
Axe individuel(ptp asyn-chrone)
C1 : axe indivi-duel
M1 : interpola-tion(2D)
Axe individuel(ptp asyn-chrone)
Interpolation(2,5D)
Robotique(3D)
Robotique(3D)
Nombre maximal d'axes autorisés
4 axes 8 axes 6 axes interpolés, dont 3 axes de base max., 1 axe d'orientation.
16 autres axes possibles grâce à l'API CODESYS inté-gré.
Périphérie standardisée – commandes
49
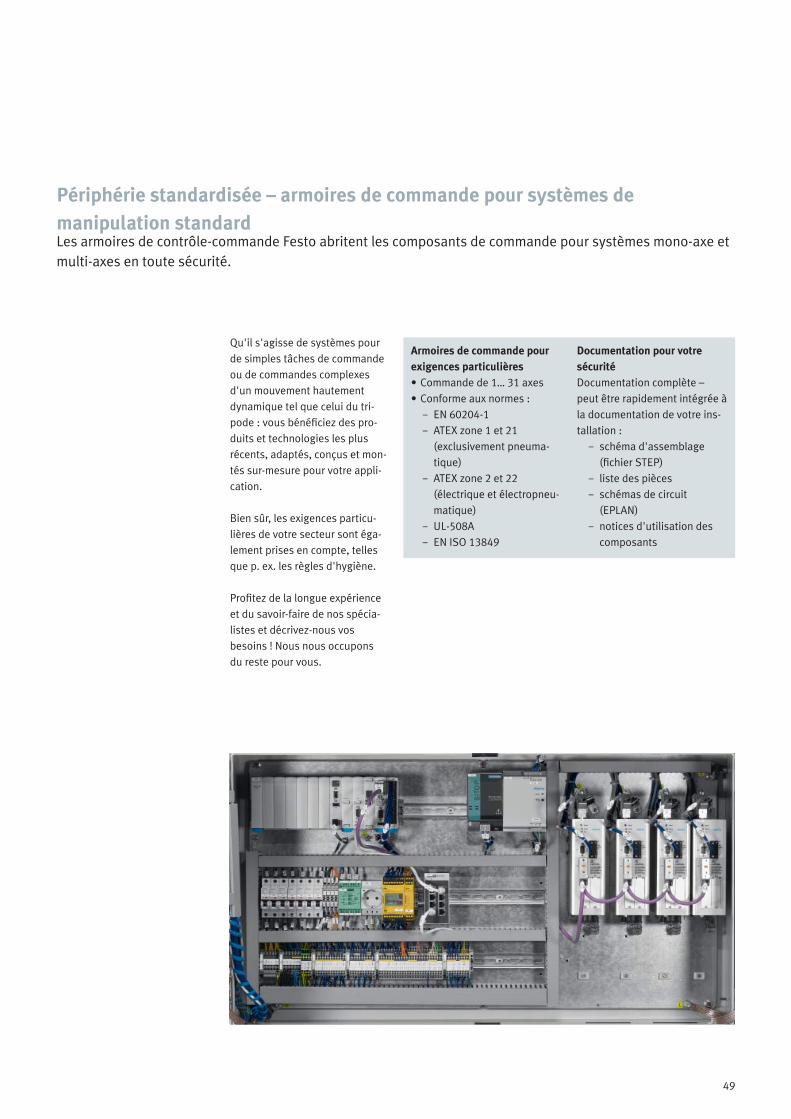
Les armoires de contrôle-commande Festo abritent les composants de commande pour systèmes mono-axe et multi-axes en toute sécurité.
Périphérie standardisée – armoires de commande pour systèmes de manipulation standard
Qu'il s'agisse de systèmes pour de simples tâches de commande ou de commandes complexes d'un mouvement hautement dynamique tel que celui du tri-pode : vous bénéfi ciez des pro-duits et technologies les plus récents, adaptés, conçus et mon-tés sur-mesure pour votre appli-cation. Bien sûr, les exigences particu-lières de votre secteur sont éga-lement prises en compte, telles que p. ex. les règles d'hygiène.
Profi tez de la longue expérience et du savoir-faire de nos spécia-listes et décrivez-nous vos besoins ! Nous nous occupons du reste pour vous.
Armoires de commande pour exigences particulières• Commande de 1… 31 axes• Conforme aux normes :
− EN 60204-1 − ATEX zone 1 et 21
(exclusivement pneuma-tique)
− ATEX zone 2 et 22(électrique et électropneu-matique)
− UL-508A − EN ISO 13849
Documentation pour votre sécuritéDocumentation complète – peut être rapidement intégrée à la documentation de votre ins-tallation :
− schéma d'assemblage (fi chier STEP)
− liste des pièces − schémas de circuit
(EPLAN) − notices d'utilisation des
composants

50
Périphérie standardisée – ensemble de commande CMCA pour des systèmes de manipulation hautement dynamiques
Tout en un – Le CMCA est un contrôleur robotique et de moteur à la fois, système de sécurité inclus. Cela complète le package de solution prêt à l'emploi pour tous les systèmes de manipulation avancés. Cela facilite même les tâches de mani-pulation les plus complexes : avec un numéro de pièce, vous recevez un système prêt à l'emploi. La livraison peut com-
prendre l'ensemble de com-mande pré-paramétré selon la cinématique choisie.
Le CMCA offre une fonction de commande complète pour les applications de haut niveau – au choix dans l'armoire de com-mande ou en tant que platine de montage.• Contrôle de trajectoire 3D• Système de programmation
CODESYS
• Commande de 4 axes maxi-mum
• Intégration facile dans la hiér-archie de sécurité du client
• Une solution standard à prix attractif
• Optimisé pour l'espace de montage :Adapté exactement au bâti de la cinématique concernée
• Conception facile à utiliser et à entretenir
Système de vision compact SBOx-Q
Cinématiques acceptées pour les tâches de manipulation com-plexes et hautement dyna-miques :• Tripode EXPT• Portique bidimensionnel EXCH• Portique linéaire EXCT
Systèmes cartésiens acceptés pour les tâches de manipulation plus simples :• Portiques• Systèmes 3 axes• Portiques linéaires• Pick & Place
Capacités et options• Système complet pour une uti-
lisation immédiate – Festo plug & work
• Projets de base préprogram-més
• Arrêt sûr SS1 en mode auto-matique avec niveau de performance PL d
• Entrées et sorties numériques en option
• Degré de protection IP54
Terminal manuel CDSA avec fonction d'apprentissage
51
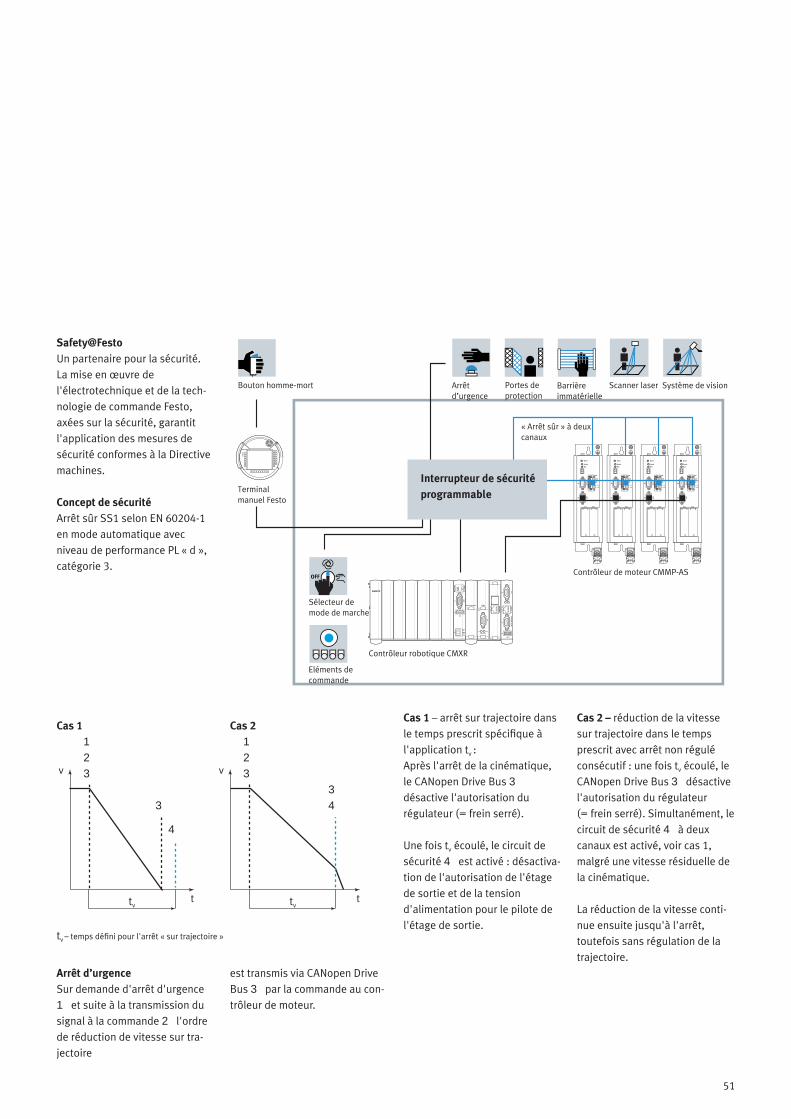
Cas 1 – arrêt sur trajectoire dans le temps prescrit spécifi que à l'application tv :Après l'arrêt de la cinématique, le CANopen Drive Bus 3 désactive l'autorisation du régulateur (= frein serré). Une fois tv écoulé, le circuit de sécurité 4 est activé : désactiva-tion de l'autorisation de l'étage de sortie et de la tension d'alimentation pour le pilote de l'étage de sortie.
Arrêt d’urgence Sur demande d'arrêt d'urgence 1 et suite à la transmission du signal à la commande 2 l'ordre de réduction de vitesse sur tra-jectoire
est transmis via CANopen Drive Bus 3 par la commande au con-trôleur de moteur.
Cas 2 – réduction de la vitesse sur trajectoire dans le temps prescrit avec arrêt non régulé consécutif : une fois tv écoulé, le CANopen Drive Bus 3 désactive l'autorisation du régulateur (= frein serré). Simultanément, le circuit de sécurité 4 à deux canaux est activé, voir cas 1, malgré une vitesse résiduelle de la cinématique.
La réduction de la vitesse conti-nue ensuite jusqu'à l'arrêt, toutefois sans régulation de la trajectoire.
tv – temps défi ni pour l'arrêt « sur trajectoire »
Safety@FestoUn partenaire pour la sécurité. La mise en œuvre de l'électrotechnique et de la tech-nologie de commande Festo, axées sur la sécurité, garantit l'application des mesures de sécurité conformes à la Directive machines.
Concept de sécuritéArrêt sûr SS1 selon EN 60204-1 en mode automatique avec niveau de performance PL « d », catégorie 3.
OFF
Bouton homme-mort Arrêt d’urgence
Portes de protection
Barrière immatérielle
Scanner laser Système de vision
Terminal manuel Festo
Sélecteur de mode de marche
Eléments de commande
« Arrêt sûr » à deux canaux
Contrôleur robotique CMXR
Contrôleur de moteur CMMP-AS
Interrupteur de sécurité programmable
v v
t ttv tv
123
34 3
4
123
Cas 1 Cas 2
52
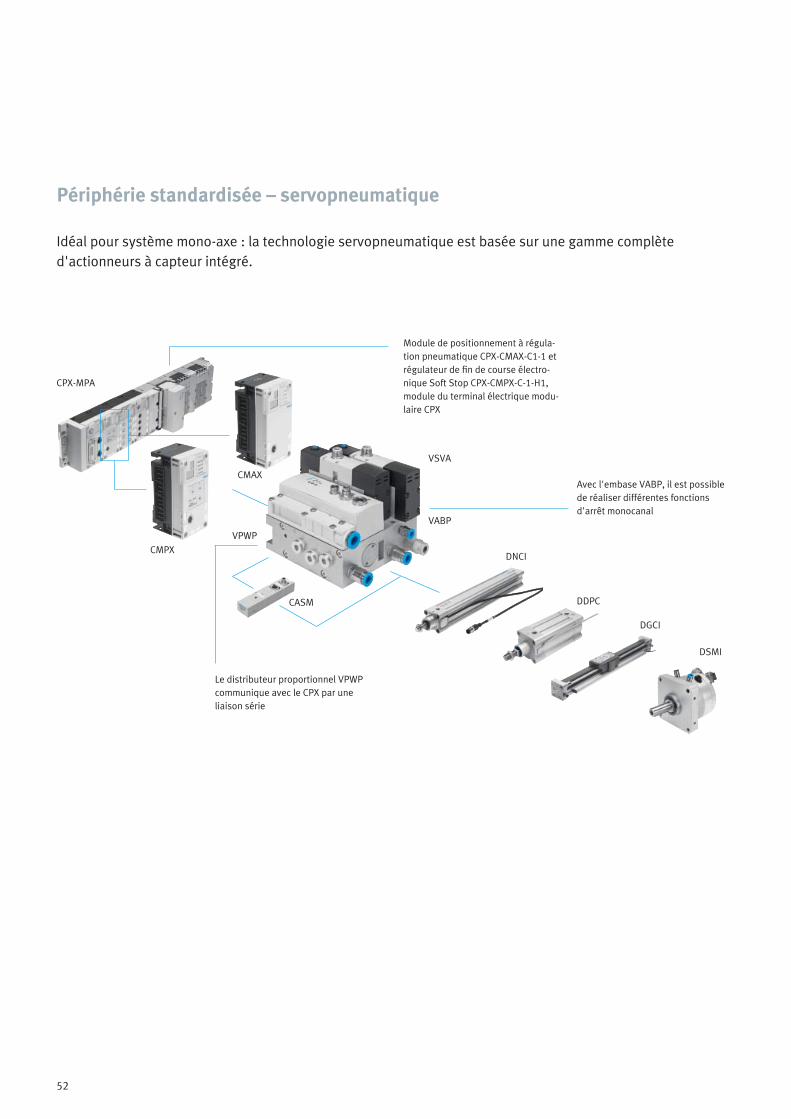
Périphérie standardisée – servopneumatique
Module de positionnement à régula-tion pneumatique CPX-CMAX-C1-1 et régulateur de fi n de course électro-nique Soft Stop CPX-CMPX-C-1-H1, module du terminal électrique modu-laire CPX
Le distributeur proportionnel VPWP communique avec le CPX par une liaison série
Avec l'embase VABP, il est possible de réaliser différentes fonctions d'arrêt monocanal
Idéal pour système mono-axe : la technologie servopneumatique est basée sur une gamme complète d'actionneurs à capteur intégré.
DNCI
VABP
VSVA
CASM
VPWP
CMAX
CMPX
CPX-MPA
DDPC
DGCI
DSMI
53
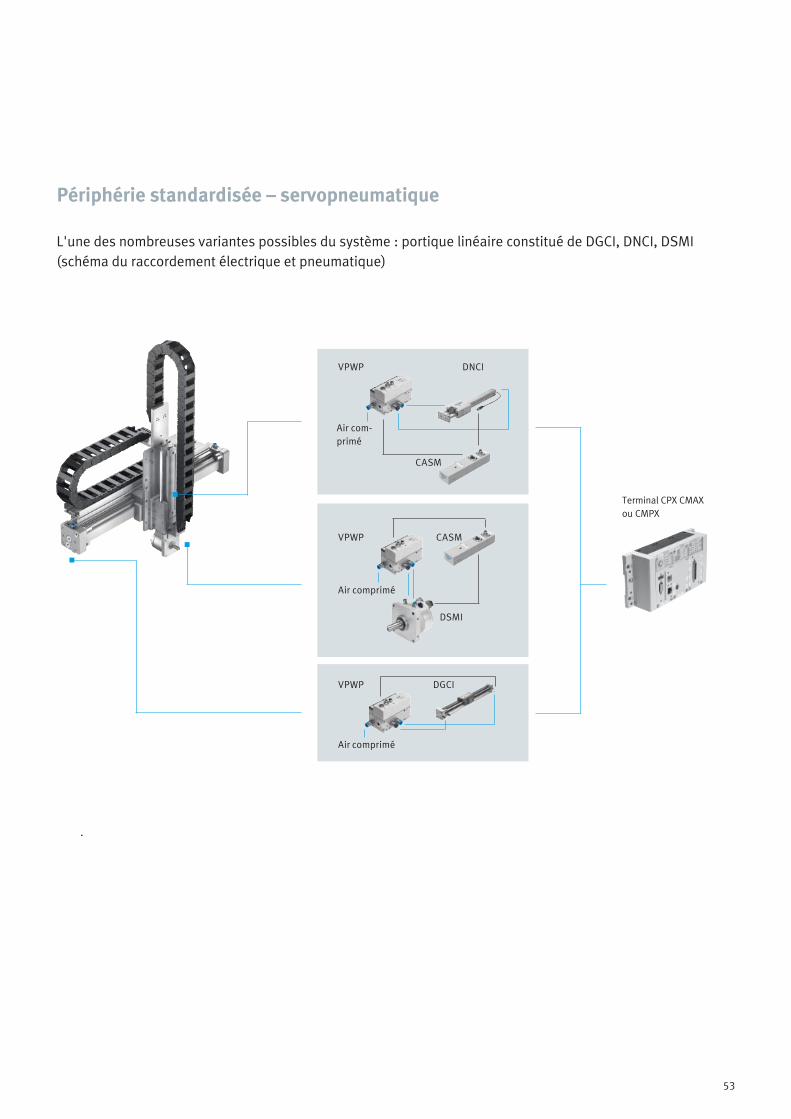
Périphérie standardisée – servopneumatique
L'une des nombreuses variantes possibles du système : portique linéaire constitué de DGCI, DNCI, DSMI (schéma du raccordement électrique et pneumatique)
Terminal CPX CMAX ou CMPX
DGCI
Air comprimé
VPWP
DNCIVPWP
Air com-primé
CASM
CASMVPWP
Air comprimé
DSMI
54
Service complet pour les systèmes d'axes
Services
Les prestations en un coup d'œil
Mise en service• Pour une exploitation fi able :
vérifi cation des câblages, raccordements, fi xation des chaînes porte-câbles
• Pour des trajectoires optima-les : confi guration et paramé-trage des axes
• Pour des performances maxi-males : optimisation des paramètres de réglage et de la mise en référence
• Pour une sécurité testée : com-mande des axes en mode test
• Pour des connaissances sécuri-sées : sauvegarde de données et documentation
• Pour une exploitation sûre : formation des opérateurs, p. ex. pour le diagnostic et l'élimination des erreurs ou pour la modifi cation de valeurs de position
Pack complet et parfaitFesto vous fournit un pack tout compris comprenant le conseil pour le matériel, la mise en ser-vice et le service après-vente ainsi que la formation.
Les services peuvent être conçus individuellement et ajustés avec exactitude à vos besoins.
Mise en œuvre professionnelle : Les services sont réalisés par un personnel qualifi é. Cela vous apporte une grande sécurité de planifi cation et votre système de manipulation est très rapidement opérationnel pour une grande productivité. Par ailleurs, cela permet de décharger votre pro-pre personnel.
Programmation• Ajustement/extension du para-
métrage des composants du système
• Programmation en langage de programmation Festo (FTL) et CODESYS
• Création de la visualisation sous IHM
• Intégration d'autres compo-sants
• Raccordement à la commande maître
Formation technique• Bases de l'automatisation • Solution Motion Control• Maintenance et entretien des
systèmes de manipulation spécifi ques
• Sécurité Machines
Maintenance et entretien• Contrôle de l'état et du degré
d'usure des composants• En cas de besoin : échange des
pièces d'usure• Mises à jour des logiciels/fi rmwares
• Autres prestations sur demande
• Réseau de partenaires agréés et de proximité

55
Service après vente – dans le monde entier
Une équipe d'assistance technique prête à vous aider Disponibilité garantie par téléphone ou par courriel.
Fourniture de pièces de rechange Disponibles en ligne à tout moment : listes de pièces de rechange complètes avec toutes les pièces d'usure et les consom-mables.
Service de réparationNous réparons des composants et modules complexes. En cas de besoin, également en tant que service de réparation express.
La rentabilité et une installation 100 % disponible sont au centre des préoccupations de l'industrie. Une raison de plus pour miser sur le plus haut niveau de sécurité. Nos services
s'en chargent. Ils sont à votre disposition dans 176 pays du monde et s'intègrent parfaite-ment dans votre concept de Total Productive Maintenance (TPM) !
Support technique sur site Contrôle, maintenance, répara-tion et mise en service directe-ment sur votre installation.
Contrats de maintenance modulaires L'assistance idéale, non seule-ment pour la maintenance pré-ventive mais également en cas d'urgence.
Autres services pour un fonctionnement effi cient de l'installation
Les Festo Energy Saving Services (économie d'énergie)aident les exploitants d'installation à déterminer leurs potentiels d'économie en termes d'air comprimé et à les exploiter au maximum. Le résultat : jusqu'à 60 % d'économies d'énergie et de coûts avec une productivité accrue.
Service Condition Monitoring (surveillance d'état)Surveillez les processus critiques en continu et évitez les arrêts machine imprévus qui se révè-lent très coûteux. Les spécialis-tes Festo développent une solu-tion de surveillance d'état spéci-fi quement adaptée à votre instal-lation et vous assistent pour son intégration.
Vous souhaitez en apprendre plus sur nos services ? Alors n'hésitez pas et posez vos ques-tions à nos spécialistes.
1356
38 fr
201
5/04
So
us ré
serv
e de
mod
ifi ca
tions
Productivitété
L'optimisation de la productivité est une question d'exigenceVous êtes aussi de cet avis ? Nous vous accompagnons sur le chemin de la réussite en donnant la priorité à quatre caractéristiques d’excellence :• Sécurité • Effi cience • Simplicité • Compétence
Nous sommes les ingénieurs de votre productivité.
Découvrez de nouvelles perspectives pour votre entreprise : www.festo.com/whyfesto