swarm wifi
TRANSCRIPT

8/7/2019 Swarm Wifi
http://slidepdf.com/reader/full/swarm-wifi 1/15
INSTITUT DE TOURISMEDEKWANEH
TITRE du Sujet 1
Recherche en Nouvelles Technologies
en vue d¶un diplôme en informatique de Gestion
préparées par Prénom et NOM
Prénom et NOM
Sous la direction deM. Toni YAZBECK
Mme Nathalie MOUAWAD
DEKWANEH-LIBAN2010-2011
8/7/2019 Swarm Wifi
http://slidepdf.com/reader/full/swarm-wifi 2/15
Logo ou sujet de recherche nom+ prénom
Page 1
A. The Swarming Micro Air Vehicle Network (SMAVNET) Project
I. Created By :
Swiss university EPFL has demonstrated a swarm of Linux-based semi-autonomous "Flying Robots" designed for rescue communications. Each wingeddrone in the "SMAVNET" project is equipped with a Toradex Colibri PXA270
module, plus Wi-Fi, ZigBee, and GPS wireless communications, used to log
location and trajectory and communicate with both ground communications andother craft.
The Ecole Polytechnique Federale de Lausanne (EPFL) project, called SwarmingMicro Air Vehicle Network (SMAVNET), aims to deploy swarms of flying craft thatcan be deployed in disaster areas to quickly create communication networks. The
Flying Robots are designed for safety, as well as low cost and weight, says EPFL.Equipped with human-swarm interfaces, the robots are said to be operable by non-experts.
8/7/2019 Swarm Wifi
http://slidepdf.com/reader/full/swarm-wifi 3/15
Logo ou sujet de recherche nom+ prénom
Page 2
A. About Epfl:
EPFL, the Ecole Polytechnique Federale de Lausanne, is one of Switzerland¶s twoFederal Institutes of Technology. Like its sister institution, ETHZ, it has threemissions: education, research and technology transfer at the highest internationallevel.EPFL is a top-ranked research and teaching university that attracts some of the bestintellects in the world .Located on the shores of Lake Geneva, EPFL brings together acampus of 10,000 people and a yearly budget (2005) of over 500 million US dollars.EPFL offers 13 complete study courses in Engineering, Basic Sciences, Architecture,
and the Management of Technology. It is one of the world¶s most internationaluniversities, with more than a hundred nationalities represented on campus and 50%of the teaching staff originating from abroad. In addition to excellence in educationand research, EPFL has a strong commitment to technology transfer and providescomprehensive support for the creation of new enterprises. An average of 10 newstart-up companies are formed each year from EPFL discoveries and innovations.
About Swarm Robots
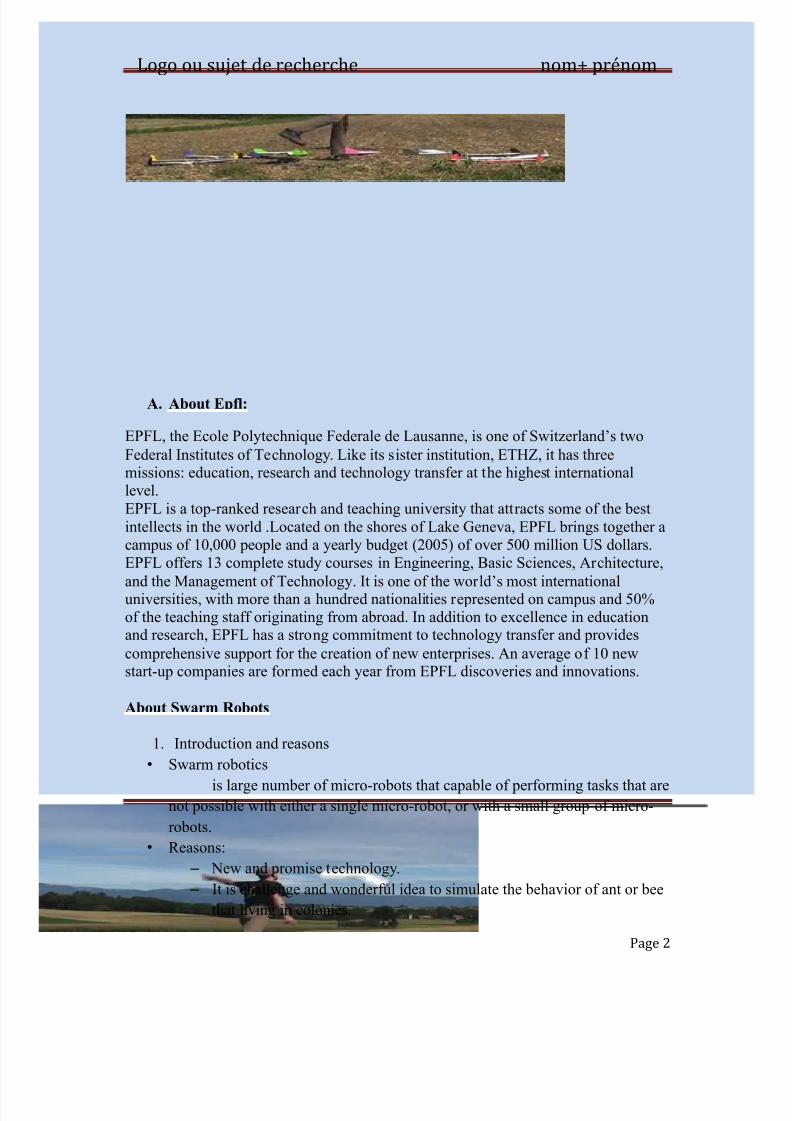
1. Introduction and reasons� Swarm robotics
is large number of micro-robots that capable of performing tasks that arenot possible with either a single micro-robot, or with a small group of micro-robots.
� Reasons: ± New and promise technology. ± It is challenge and wonderful idea to simulate the behavior of ant or bee
that living in colonies.
8/7/2019 Swarm Wifi
http://slidepdf.com/reader/full/swarm-wifi 4/15
8/7/2019 Swarm Wifi
http://slidepdf.com/reader/full/swarm-wifi 5/15
Logo ou sujet de recherche nom+ prénom
Page 4
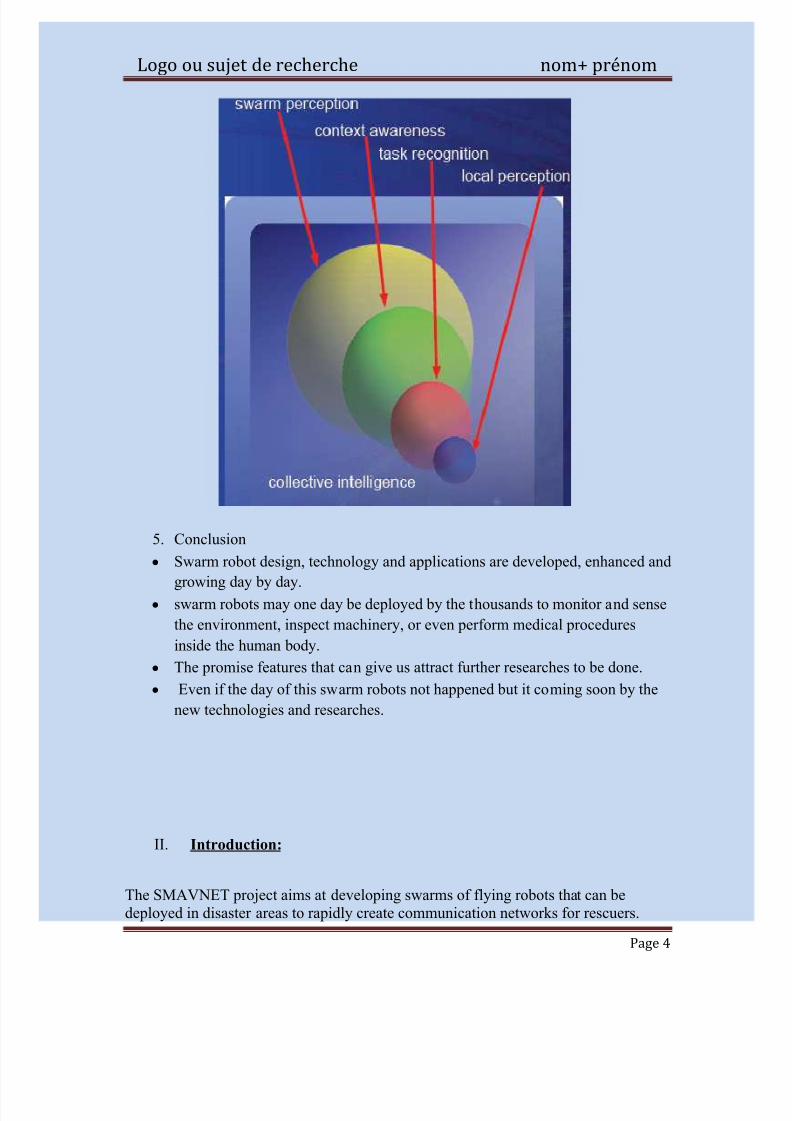
5. Conclusion
y Swarm robot design, technology and applications are developed, enhanced and
growing day by day.y swarm robots may one day be deployed by the thousands to monitor and sense
the environment, inspect machinery, or even perform medical proceduresinside the human body.
y The promise features that can give us attract further researches to be done.
y Even if the day of this swarm robots not happened but it coming soon by thenew technologies and researches.
II. Introduction:
The SMAVNET project aims at developing swarms of flying robots that can bedeployed in disaster areas to rapidly create communication networks for rescuers.
8/7/2019 Swarm Wifi
http://slidepdf.com/reader/full/swarm-wifi 6/15
Logo ou sujet de recherche nom+ prénom
Page 5
Flying robots are interesting for such applications because they are fast, can easilyovercome difficult terrain, and benefit from line-of-sight communication.
To make aerial swarming a reality, robots and controllers need to be made as simpleas possible.
From a hardware perspective, robots are designed to be robust, safe, light-weight andlow-cost. Furthermore, protocols and human-swarm interfaces are developed to allownon-experts to easily and safely operate large groups of robots.
From a software perspective, controllers allow flying robots to work together. For swarming, robots react to wireless communication with neighboring robots or rescuers(communication-based behaviors). Using communication as a sensor is interesting
because most flying robots are generally equipped with off-the-shelf radio modulesthat are low-cost, light-weight and relatively long-range. Furthermore, this strategyalleviates the need for position which is required for all existing aerial swarm
algorithms and typically requires using sensors that depend on the environment (GPS,cameras) or are expensive and heavy (lasers, radars).
MAVs (micro air vehicles) are cool little bots that sour through the skies, but
what if you could have a whole bunch of them, and have them communicating
with each other? EPFL (École Polytechnique Fédérale de Lausanne) scientists
have been working on the next step, called SMAVNET (Swarming Micro Air
Vehicle Network) robots, who do precisely what their name suggests ± theyform networks and exchange information while in operation. They borrow the
mannerisms of army ants to create their own algorithm and decide how best to
proceed over a given area.
The ultimate goal for these machines is to create a better way to help survivors
at a disaster sites, or who knows ± maybe the army can find them one or two
jobs as well. But in order for this conception to be successful, the robotic
vehicles were each designed to be agile, light-weight, and priced fairly low, sothat a whole bunch of them can be bought together. The researchers also say
they made the protocol and interface to be as simple as possible, so that non-
expert workers can use them too.
8/7/2019 Swarm Wifi
http://slidepdf.com/reader/full/swarm-wifi 7/15
Logo ou sujet de recherche nom+ prénom
Page 6
The SMAVNET bots rely on long-range wireless signals to establish the
network, but for now they can¶t last for too long in the air, as their LiPo
batteries give them only half an hour of autonomy. Each can be manually
controlled from the human base at the ground, but they also have an autopilotinstalled that best judges what to do when it encounters specific atmospheric
conditions.
Army ants are well organized and establish their own networks when searching
for food in nature, and they provide the inspiration for the flying robots. Each
bot has a specific position it has to be and a specific role it has to play in the
network. Enjoy below a very well done video of a deployment of SMAVNET
swarm.
How do you communicate in the wake of a disaster? With SMAVNET(Swarming Micro Air Vehicle Network) you can easily set up a Wi-Fi network to allow you to use phones and computers.
Just chuck the flying robots into the air and they fly in a holding patter n untilyou order them down.
The SMAVNET project aims at developing swarms of flying robots that can be
deployed in disaster areas to rapidly create communication networks for rescuers. Flying robots are interesting for such applications because they arefast, can easily overcome difficult terrain, and benefit from line-of-sightcommunication.
To make aerial swarming a reality, robots and controllers need to be made assimple as possible.
From a hardware perspective, robots are designed to be robust, safe, light-weight and low-cost. Furthermore, protocols and human-swarm interfaces aredeveloped to allow non-experts to easily and safely operate large groups of robots.
From a software perspective, controllers allow flying robots to work together.For swarming, robots react to wireless communication with neighboring robotsor rescuers (communication-based behaviors). Using communication as a
8/7/2019 Swarm Wifi
http://slidepdf.com/reader/full/swarm-wifi 8/15
L u su t r h r h r
P 7
sensor is interesting because most f l ing robots are generall equi ed wit
off-t e-shelf radio modules that are low-cost light-weight and relati el long-
range. Fur thermore, this strategy alleviates the need for position which isrequired for all existing aer ial swarm algor ithms and typically requires using
sensors that depend on the environment (GPS, cameras) or are expensive andheavy (lasers, radars).
III. Robots:
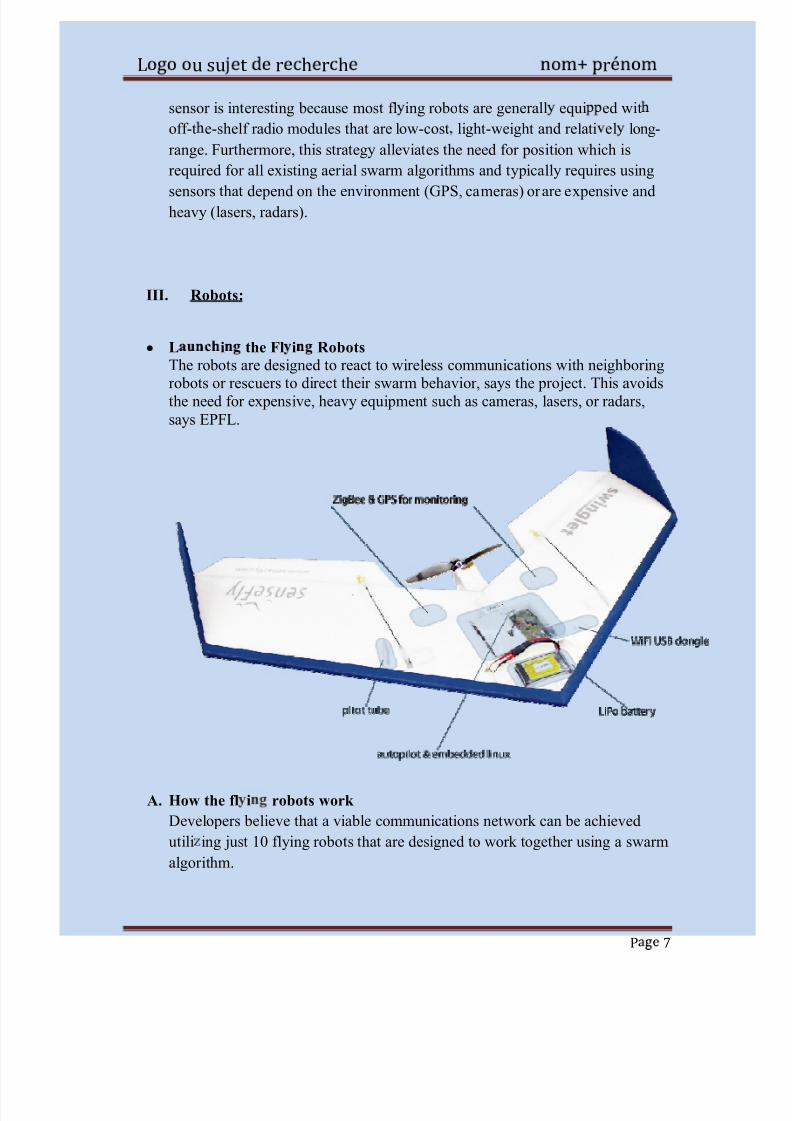
y L i the Fl i Robots
The robots are designed to react to wireless communications with neighbor ingrobots or rescuers to direct their swarm behavior, says the pro ject. This avoids
the need for expensive, heavy equi pment such as cameras, lasers, or radars,
says EPFL.
A. How the f l i robots work
Developers believe that a viable communications network can be achieved
utili ing just 10 f lying robots that are designed to work together using a swarm
algor ithm.
8/7/2019 Swarm Wifi
http://slidepdf.com/reader/full/swarm-wifi 9/15
Logo ou sujet de recherche nom+ prénom
Page 8
The robots themselves are designed to be lightweight, safe and inexpensive sothat they can be continually developed and used in larger applications.
Prototype SMAVNET flying robots have been constructed out of Expanded
Polypropylene and weigh no more than 420 grams with a wingspan of 80centimeters.
A small electric motor is mounted on the back of the device and powered by aLiPo battery that can hold an independent charge for up to 30 minutes.
An autopilot controls altitude, airspeed and turn rate, while a micro -controller embedded in the autopilot chooses the most economical flight strategy basedon input from three sensors: a gyroscope and two pressure sensors. Theautopilot runs on a Toradex Colibri PXA270 CPU board running Linux, whichis also connected to an off-the-shelf USB Wi-Fi dongle. In order to log flighttrajectories, the robot is also equipped with a u-blox LEA-5H GPS module anda ZigBee (XBee PRO) transmitter.
Two pressure sensors and a single gyroscope steered by a micro-controller areinstalled for navigation purposes and the flying robot receives swarmalgorithms using a USB Wi-Fi adapter that is connected to an on-boardToradex Colibri PXA270 CPU board running Linux.
Flight trajectories are logged using a u-blox LEA-5H GPS module, while aZigBee (Xbee PRO) transmitter is used to send data to and from the robot.
The SMAVNET robots represent a revolutionary advancement in how rescueworkers and governments will be able to respond to disasters and other situations that require immediate information in inaccessible areas.
As is so often the case, the SMAVNET designers turned to nature for inspiration in creating the behavior of the swarm. For the deployment andmaintenance of retraction of the swarm MAV network the team turned to thearmy ants, which are able to lay and maintain pheromone paths from the nest to
food sources. This method allows the swarm to maintain communication pathways between a base node and rescuers in the environment.
The robots use wireless communication between the robots themselves as asensor instead of other methods that depend on the environment (GPS,cameras) or more expensive and heavy methods (lasers, radars). As the moveout from their base to the users individual robots will hold position and form a
8/7/2019 Swarm Wifi
http://slidepdf.com/reader/full/swarm-wifi 10/15
Logo ou sujet de recherche nom+ prénom
Page 9
node as the remainder of the swarm continues on until the objective is reachedand the network complete. Although the robots are autonomous, the y can bemonitored and controlled through a swarm-interface running on a single PC.
Although 30 minutes of flight time might be somewhat limiting in a real worlddisaster situation, the EPFL team has conducted tests of the SMAVNET systemthat demonstrate its feasibility and provide encouragement for the team tocontinue with their efforts to create a low-cost system that could be deployedquickly in disaster hit areas.
1. autopilot:
Monitor the DTR line of /dev/palm and run a command to start syncAutoPilot monitors the DTR line of /dev/palm, waiting for it to go fromLOW to HIGH, which is used to activate a command automatically tomake syncing easier. It can be used to boot up your favourite Palmsyncer.
2. ZigBee:
y ZigBee is a Ad-hoc networking technology for LR-WPAN
y Based On IEEE 802.15.4 standard that defines the PHY and Mac Layers for
ZigBee.
y and 915 Mhz Band.
8/7/2019 Swarm Wifi
http://slidepdf.com/reader/full/swarm-wifi 11/15
Logo ou sujet de recherche nom+ prénom
Page 10
y Low in cost ,complexity & powIntended for 2.45 Ghz , 868 Mhz er
consumption as compared to competing technologies.
y Intended to network inexpensive devices
y Data rates touch 250Kbps for 2.45Ghz ,40 Kbps 915Mhz and 20Kbps for
868Mhz band
3. LiPo battery
Lithium-ion polymer batteries, polymer lithium ion, or morecommonly lithium polymer batteries (abbreviated Li-poly, Li-Pol,LiPo, LIP, PLI or LiP) are rechargeable batteries (secondary cell
batteries). Normally batteries are composed of several identicalsecondary cells in parallel addition to increase the discharge currentcapability.
4. autopilot:Monitor the DTR line of /dev/palm and run a command to start syncAutoPilot monitors the DTR line of /dev/palm, waiting for it to go fromLOW to HIGH, which is used to activate a command automatically tomake syncing easier. It can be used to boot up your favourite Palmsyncer.
5. GPS:GPS stands for the Global Positioning System. It refers to a system of
satellites and receivers that allow people and devices to pinpoint their precise location on the earth. The heart of the system relies on 24satellites that orbit the earth twice per day. Devices that are equippedwith GPS equipment receive transmissions from at least a few of thesatellites and are able to discern very precise positioning data.
6. Pitot Tube:
The pitot tube is used to measure the local velocity at a given point in the flowstream and not the average velocity in the pipe or conduit.
IV. Swarm Algorithms
8/7/2019 Swarm Wifi
http://slidepdf.com/reader/full/swarm-wifi 12/15
Logo ou sujet de recherche nom+ prénom
Page 11
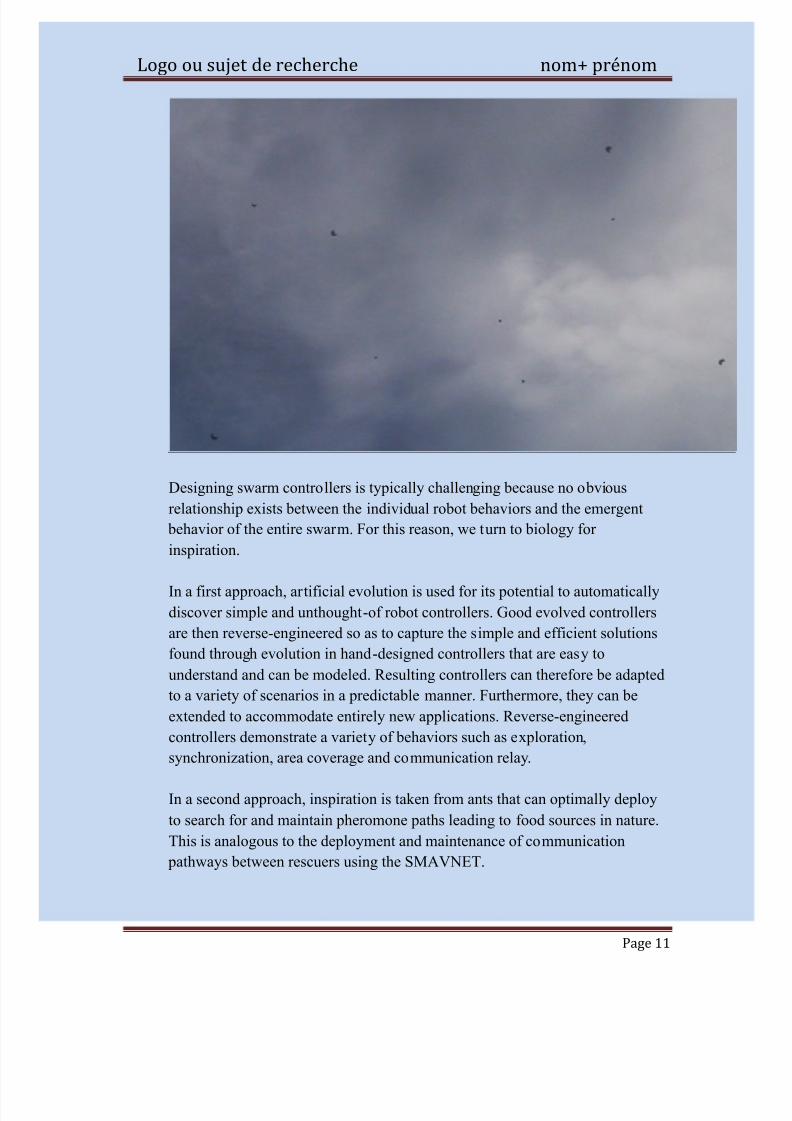
Designing swarm controllers is typically challenging because no obviousrelationship exists between the individual robot behaviors and the emergent
behavior of the entire swarm. For this reason, we turn to biology for inspiration.
In a first approach, artificial evolution is used for its potential to automaticallydiscover simple and unthought-of robot controllers. Good evolved controllersare then reverse-engineered so as to capture the simple and efficient solutionsfound through evolution in hand-designed controllers that are easy tounderstand and can be modeled. Resulting controllers can therefore be adaptedto a variety of scenarios in a predictable manner. Furthermore, they can beextended to accommodate entirely new applications. Reverse-engineeredcontrollers demonstrate a variety of behaviors such as exploration,synchronization, area coverage and communication relay.
In a second approach, inspiration is taken from ants that can optimally deployto search for and maintain pheromone paths leading to food sources in nature.This is analogous to the deployment and maintenance of communication
pathways between rescuers using the SMAVNET.
8/7/2019 Swarm Wifi
http://slidepdf.com/reader/full/swarm-wifi 13/15
Logo ou sujet de recherche nom+ prénom
Page 12
V. Swarm Setup All necessary software and hardware to perform experiments with 10 flyingrobots was developed in the scope of this project. To the best of our knowledge, this setup is the one with the most flying robots operating
outdoors to this day.
For fast deployment of large swarms, input from the swarm operator must be reduced to a minimum during robot calibration, testing and all phases of flight (launch, swarming, landing). Therefore, robot reliability, safety andautonomy must be pushed to a maximum so that operators can easily
perform experiments without safety pilots. In our setup, robots auto -calibrate and perform a self-check before being launched by the operator.Robots can be monitored and controlled though a swarm-interface runningon a single computer.
The critical issue of operational safety has been addressed by light-weight,low-inertia platform design and by implementing several security featuresin software. Among other things, we looked at mid-air collision avoidanceusing local communication links and negotiation of flight altitudes betweenrobots. By providing a risk analysis for ground impact and mid-air collisions to the Swiss Federal Office for Civil Aviation (FOCA), weobtained an official authorization for beyond-line-of-sight swarm operationat our testing site.
8/7/2019 Swarm Wifi
http://slidepdf.com/reader/full/swarm-wifi 14/15
Logo ou sujet de recherche nom+ prénom
Page 13
Reference:
http://www.wikipedia.org
http://presentation.epfl.ch
http://www.ideaconnection.com
http://www.inhabitat.com
http://www.worldchanging.com
http://www.linuxfordevices.com/
http://www.gizmag.com/
http://www.clearleadinc.com/
http://www.wisegeek.com/
http://www.engadget.com
http://www.makezine.com
http://www.gglo.com
Search engine:
http://www.google.com
8/7/2019 Swarm Wifi
http://slidepdf.com/reader/full/swarm-wifi 15/15
Logo ou sujet de recherche nom+ prénom
Page 14