projet isn 2014 : voiture robotcolbertserv.lyceecolbert-tg.org:8080/siweb/projet/projet...
TRANSCRIPT
PROJET ISN 2014 :
Voiture robot
Dossier de : Meraimi Isam
COEQUIPIERS :
- François Desprez
- Jérémy Tachel
SOMMAIRE
I- Présentation préliminaire
1. Présentation du cahier des charges
2. Présentation de la voiture robot
3. Choix des logiciels de simulation et
d’acquisition
II- Etude des capteurs
1. Identification des capteurs et étude de
leur modèle comportementale
2. Simulation du capteur de lumière LDR
3. Protocole de mesure pour vérifier les
performances des capteurs
III- Conception du banc de test
1. Conception du schéma du banc de test
2. Conception numérique du banc de test

Présentation du cahier des charges :
� THÈME SOCIÉTALE : Robotique
� ENJEU : Afin d'optimiser nos chances de remporter un concours de robotique, on
souhaite connaître et maitriser les performances d'un véhicule robot. Lors de ce
concours, notre robot devra être capable de s'orienter de façon autonome dans un
milieu inconnu. L'aspect esthétique ne devra pas être négligé c'est pourquoi la
conception d'une coque doit être prévue.
� PROBLÉMATIQUE : Comment connaître et maitriser les performances d'un véhicule
robot? Comment rendre ce véhicule robot esthétique ?
Diagramme pieuvre
Voiture Robot
FP1
FC2 FC1 Utilisateur
Traitement informatique
Concours robotique
FC3
Capteurs Energie
FC5
Esthétisme
FC6
Acquisition des grandeurs physiques
Obstacles à contourner

FONCTIONS DE SERVICE CRITERES NIVEAUX
FP1 Permettre à l'utilisateur de maitriser les performances du véhicule robot
Vitesse Maxi en marche avant et en
marche arrière Accélération / Deccélération Rayon de braquage
FC1 Se classer correctement Classement final Dans les 3 premiers FC2 Aucune intervention de l'utilisateur lors du déplacement du
véhicule Autonomie du véhicule Totale
FC3
Utiliser les capteurs présents sur le véhicule Capteurs infrarouge Distance mini et maxi Capteur sonore Intensité mini (dB) Capteur lumière Luxmètre angle
FC4 Utiliser un logiciel de programmation et un logiciel de simulation adapté
Réel Labview Arduino DecPic16 Flowcode
Simulé Matlab Scilab Sinusphy Avimeca FC5 Utiliser l'energie disponible: Tension et courant continues 7,2V - 2A
FC6
Avoir une forme pratique et un design esthétique fixation La plus simple possible Capteurs Ne pas altérer leurs
fonctionnements Accès à la conectique Sans démontage
FC7 S'adapter à une carte d'acquisition existante Carte d'acquisition NI-usb-6809 Arduino-uno PIC-18F456
FC8 Contourner les obstacles du parcours (challenge) Largeur - Longueur 40 cm - 50 cm
Nous avions donc pour but de répondre à ces fonctions en menant premièrement une étude
générale sur le fonctionnement de la voiture robot (repérage des différents composants,
capteurs, etc.).
PRÉSENTATION DES ÉLÉMENTS DE LA VOITURE ROBOT
La voiture robot peut donc effectuer plusieurs tâches grâce à ses différents composants.
Premièrement, la liaison avec l’ordinateur se fait avec un port USB. Nous avons aussi deux
boutons poussoirs réglables par l’utilisateur : nous pouvons choisir de faire jouer le buggy un
son lorsque nous cliquons sur l’un des boutons. Ce son sera joué grâce au haut-parleur. Il y a
en plus de ces boutons « basiques » une prise d’extension pour « E-Blocks ». En effet,
l’entreprise qui fabrique ces voitures robot propose différents blocks (écrans, détecteurs,
etc.) pour différents utilisations.
Puis il y a les différents capteurs qui sont inclus dans chacune de ces voitures robot : le
capteur de lumière, les 3 capteurs de distance, ainsi que le suiveur de ligne. J’expliquerai le
fonctionnement de ces capteurs plus bas.
Choix des logiciels de simulation et d’acquisition
Pour simuler les différents capteurs, le logiciel Proteus isis semble être tout à fait adapté. En
effet, grâce à sa bibliothèque d’éléments nous pouvons simuler différents types de
composants électriques. De plus, son utilisation reste assez simple et les résultats semblent
satisfaisants.
Nous pouvons aussi utiliser Matlab pour simuler (si nous avons besoin de tracer des
fonctions, etc.) car ce logiciel est aussi très complet et nous avons eu une première approche
avec pendant l’année scolaire.
Pour simuler le fonctionnement du buggy selon un certain algorithme, le logiciel Flowcode
est la solution idéale. En effet, il a été développé par matrix multimedia, même société qui
produit le buggy. De plus, le logiciel flowcode permet de simuler directement ce que ferait le
buggy s’il rencontrait un obstacle.
Identification des capteurs et étude de leur modèle
comportementale
Il y a 3 différents types de capteurs intégrés dans la voiture robot :
- Capteur de lumière
- Capteur de distance
- Suiveur de ligne
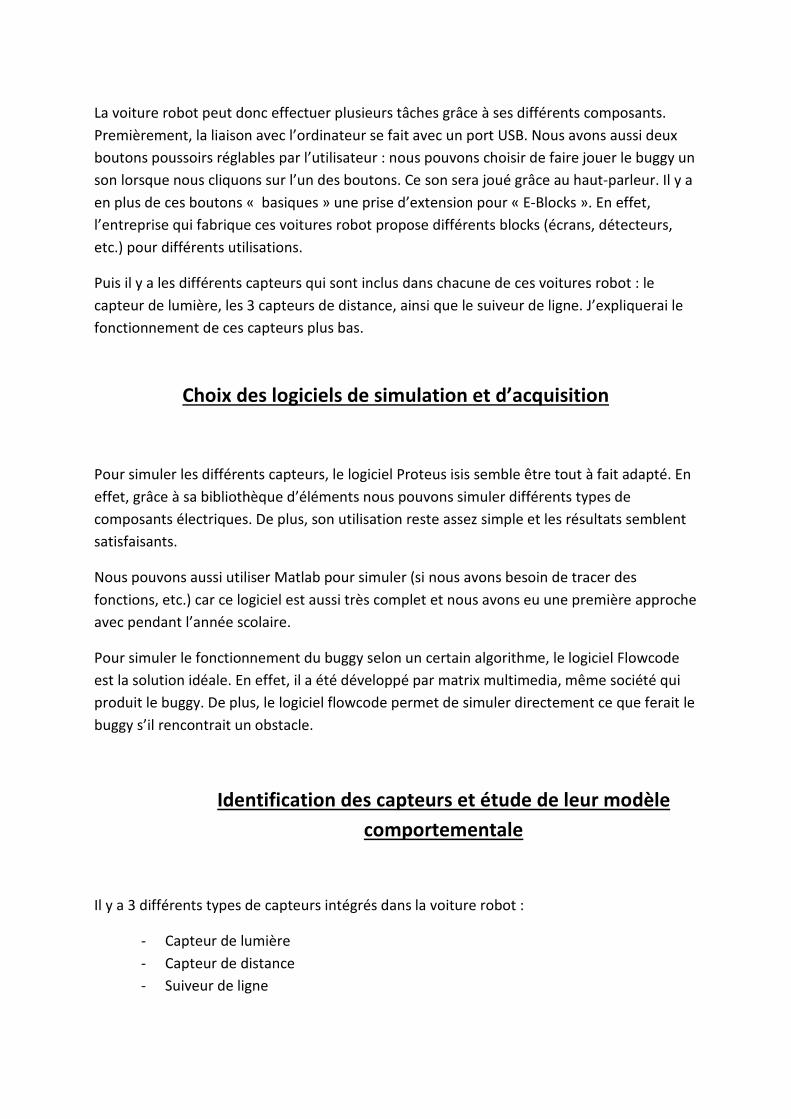
Capteur de lumière :
Le capteur de lumière est en faite une résistance. Sa résistance au courant est très élevée
lorsque le capteur n’est pas éclairé (allant jusqu’à 1 000 000 ohms). Il empêche donc le
courant de passer s’il n’y a pas d’éclairage. Lorsque nous l’éclairons, sa résistance diminue et
donc permet de laisser passer le courant. Il n’est pas précisé quel modèle de capteur est
utilisé sur la voiture robot donc nous prendrons un modèle quelconque pour l’étude du
capteur.
Voici l’allure de la courbe d’un tel capteur :
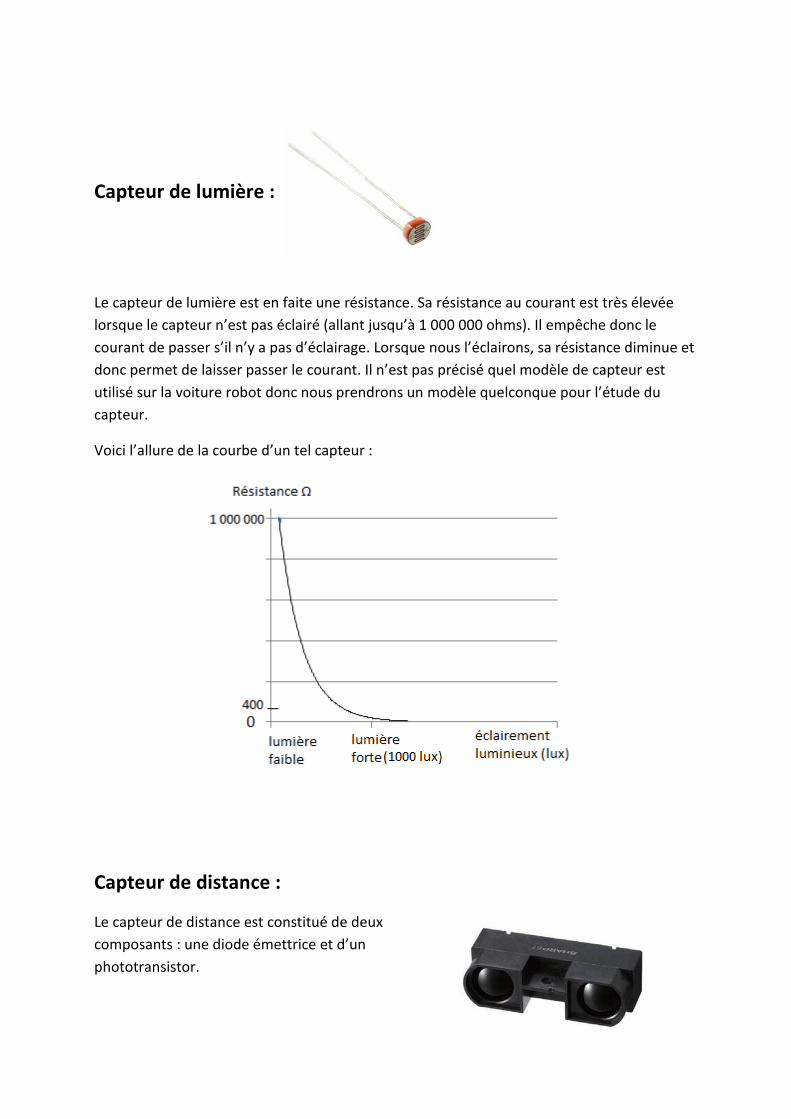
Capteur de distance :
Le capteur de distance est constitué de deux
composants : une diode émettrice et d’un
phototransistor.

Le fonctionnement est assez simple
l’œil nu). Ce dernier est réfléchi par l’obstacle et revient avec une certaine énergie (l’énergie
est inversement proportionnelle au carré de la distance, donc E = K
rayonnement réfléchi revient au phototransistor. Le phototransistor délivre par la suite un
courant électrique selon l’irradiance
distance qui la sépare de l’obstacle.
Diode émettrice :
Le buggy est fourni avec une diode émettrice TSAL5100. Elle émet avec une longueur d’onde
de 940 nm (infrarouge).
Phototransistor :
La référence du phototransistor est BPV11F. Il reçoit toutes les longueurs d’ondes comprises
entre 900 et 980 nm (infrarouge). Le courant qu’il délivre est proportionnel au rayonnement
lumineux qu’il absorbe comme on peut le voir d’après cette fonction
Le fonctionnement est assez simple : la diode émet un rayonnement infrarouge (invisible à
l’œil nu). Ce dernier est réfléchi par l’obstacle et revient avec une certaine énergie (l’énergie
est inversement proportionnelle au carré de la distance, donc E = K * (1/d²)). Ce
rayonnement réfléchi revient au phototransistor. Le phototransistor délivre par la suite un
l’irradiance qu’il a reçu et la voiture robot peut donc connaître la
distance qui la sépare de l’obstacle.
Le buggy est fourni avec une diode émettrice TSAL5100. Elle émet avec une longueur d’onde
La référence du phototransistor est BPV11F. Il reçoit toutes les longueurs d’ondes comprises
entre 900 et 980 nm (infrarouge). Le courant qu’il délivre est proportionnel au rayonnement
lumineux qu’il absorbe comme on peut le voir d’après cette fonction :
: la diode émet un rayonnement infrarouge (invisible à
l’œil nu). Ce dernier est réfléchi par l’obstacle et revient avec une certaine énergie (l’énergie
* (1/d²)). Ce
rayonnement réfléchi revient au phototransistor. Le phototransistor délivre par la suite un
qu’il a reçu et la voiture robot peut donc connaître la
Le buggy est fourni avec une diode émettrice TSAL5100. Elle émet avec une longueur d’onde
La référence du phototransistor est BPV11F. Il reçoit toutes les longueurs d’ondes comprises
entre 900 et 980 nm (infrarouge). Le courant qu’il délivre est proportionnel au rayonnement
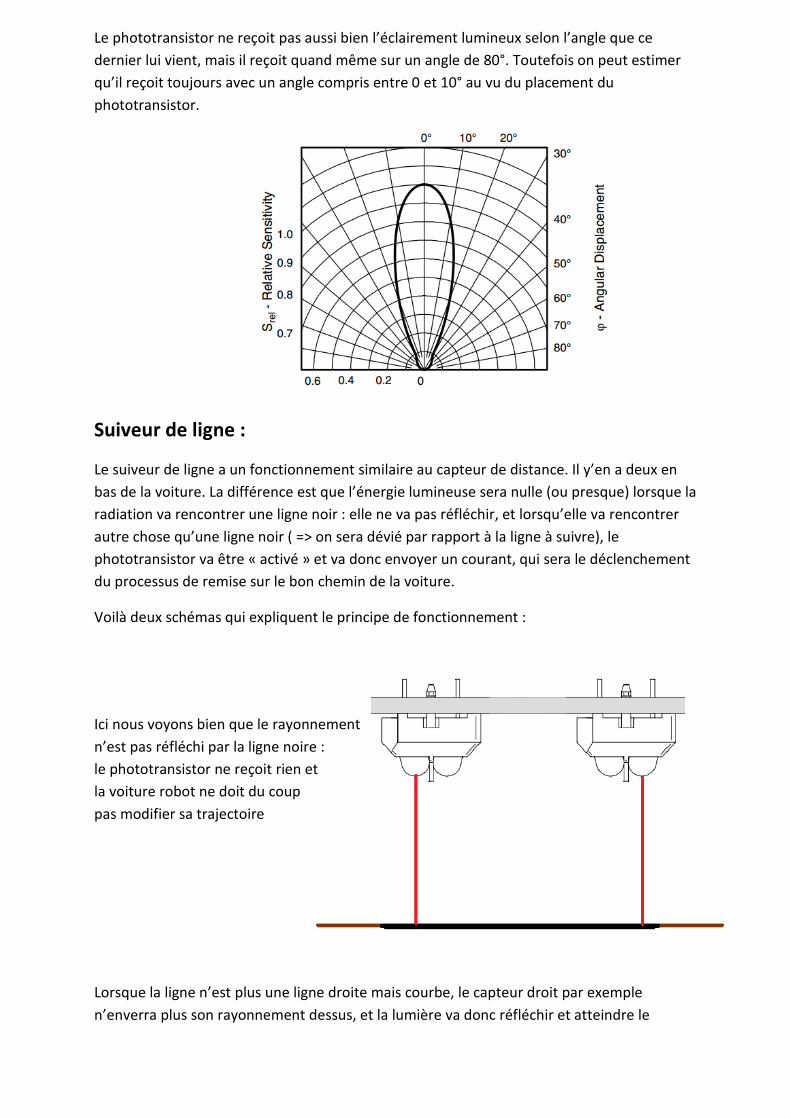
Le phototransistor ne reçoit pas aussi bien l’éclairement lumineux selon l’angle que ce
dernier lui vient, mais il reçoit quand même sur un angle de 80°. Toutefois on peut estimer
qu’il reçoit toujours avec un angle compris entre 0 et 10° au vu du placement du
phototransistor.
Suiveur de ligne :
Le suiveur de ligne a un fonctionnement similaire au capteur de distance. Il y’en a deux en
bas de la voiture. La différence est que l’énergie lumineuse sera nulle (ou presque) lorsque la
radiation va rencontrer une ligne noir : elle ne va pas réfléchir, et lorsqu’elle va rencontrer
autre chose qu’une ligne noir ( => on sera dévié par rapport à la ligne à suivre), le
phototransistor va être « activé » et va donc envoyer un courant, qui sera le déclenchement
du processus de remise sur le bon chemin de la voiture.
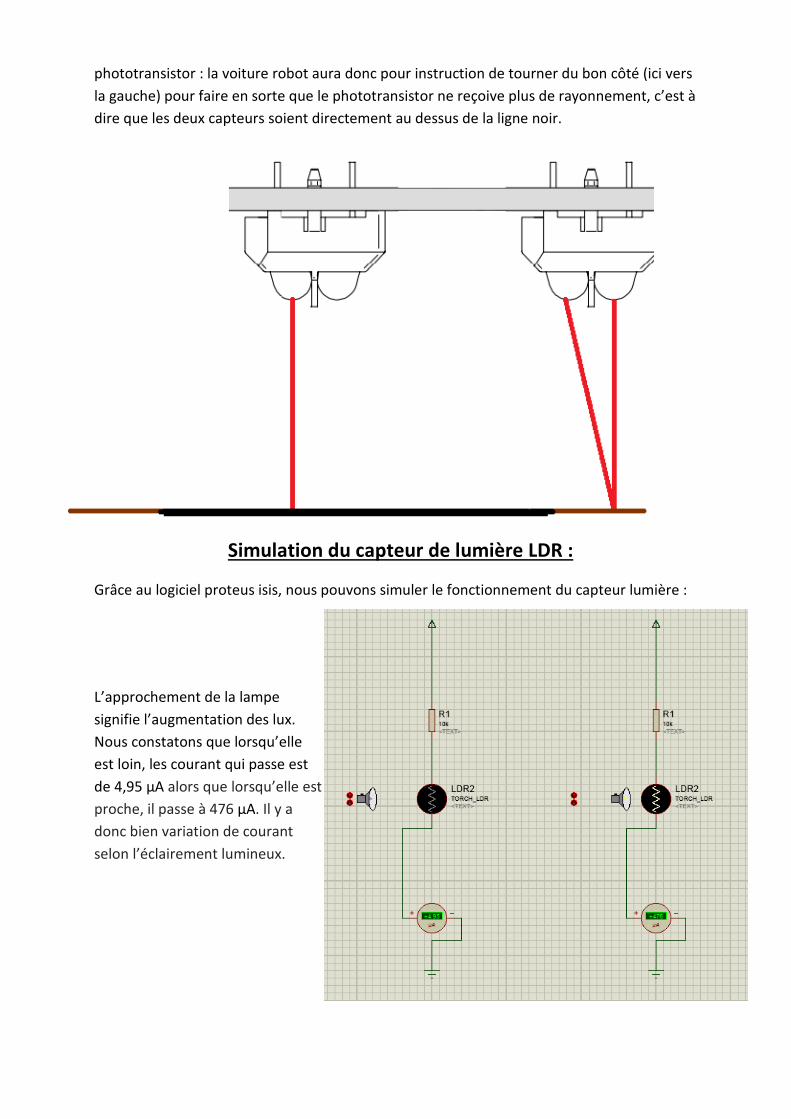
Voilà deux schémas qui expliquent le principe de fonctionnement :
Ici nous voyons bien que le rayonnement
n’est pas réfléchi par la ligne noire :
le phototransistor ne reçoit rien et
la voiture robot ne doit du coup
pas modifier sa trajectoire
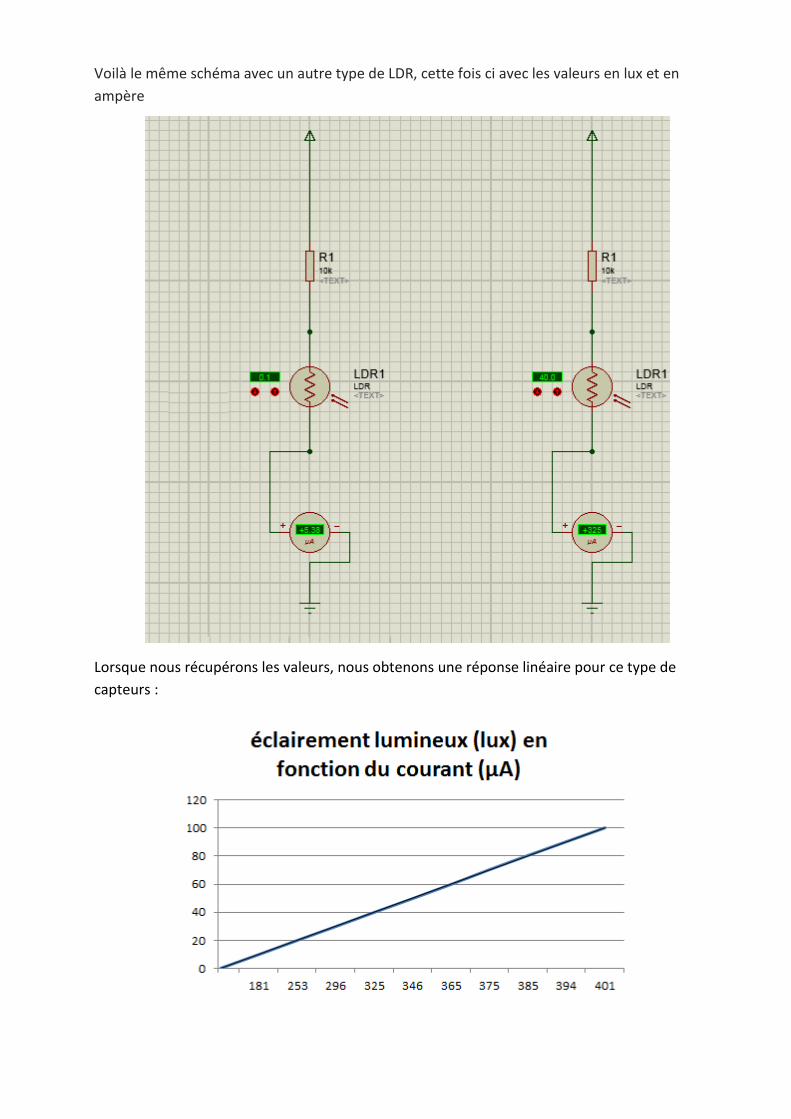
Lorsque la ligne n’est plus une ligne droite mais courbe, le capteur droit par exemple
n’enverra plus son rayonnement dessus, et la lumière va donc réfléchir et atteindre le
phototransistor : la voiture robot aura donc pour instruction de tourner du bon côté (ici vers
la gauche) pour faire en sorte que le phototransistor ne reçoive plus de rayonnement, c’est à
dire que les deux capteurs soient directement au dessus de la ligne noir.
Simulation du capteur de lumière LDR :
Grâce au logiciel proteus isis, nous pouvons simuler le fonctionnement du capteur lumière :
L’approchement de la lampe
signifie l’augmentation des lux.
Nous constatons que lorsqu’elle
est loin, les courant qui passe est
de 4,95 μA alors que lorsqu’elle est
proche, il passe à 476 μA. Il y a
donc bien variation de courant
selon l’éclairement lumineux.
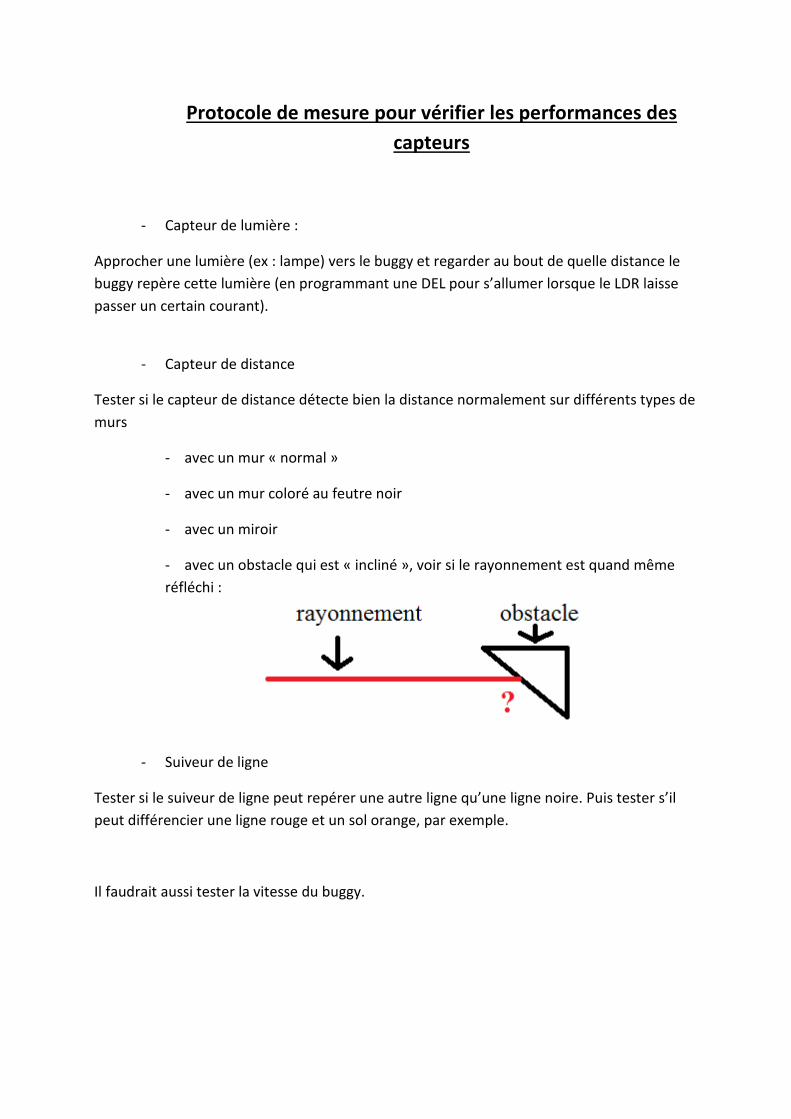
Voilà le même schéma avec un autre type de LDR, cette fois ci avec les valeurs en lux et en
ampère
Lorsque nous récupérons les valeurs, nous obtenons une réponse linéaire pour ce type de
capteurs :
Protocole de mesure pour vérifier les performances des
capteurs
- Capteur de lumière :
Approcher une lumière (ex : lampe) vers le buggy et regarder au bout de quelle distance le
buggy repère cette lumière (en programmant une DEL pour s’allumer lorsque le LDR laisse
passer un certain courant).
- Capteur de distance
Tester si le capteur de distance détecte bien la distance normalement sur différents types de
murs
- avec un mur « normal »
- avec un mur coloré au feutre noir
- avec un miroir
- avec un obstacle qui est « incliné », voir si le rayonnement est quand même
réfléchi :
- Suiveur de ligne
Tester si le suiveur de ligne peut repérer une autre ligne qu’une ligne noire. Puis tester s’il
peut différencier une ligne rouge et un sol orange, par exemple.
Il faudrait aussi tester la vitesse du buggy.
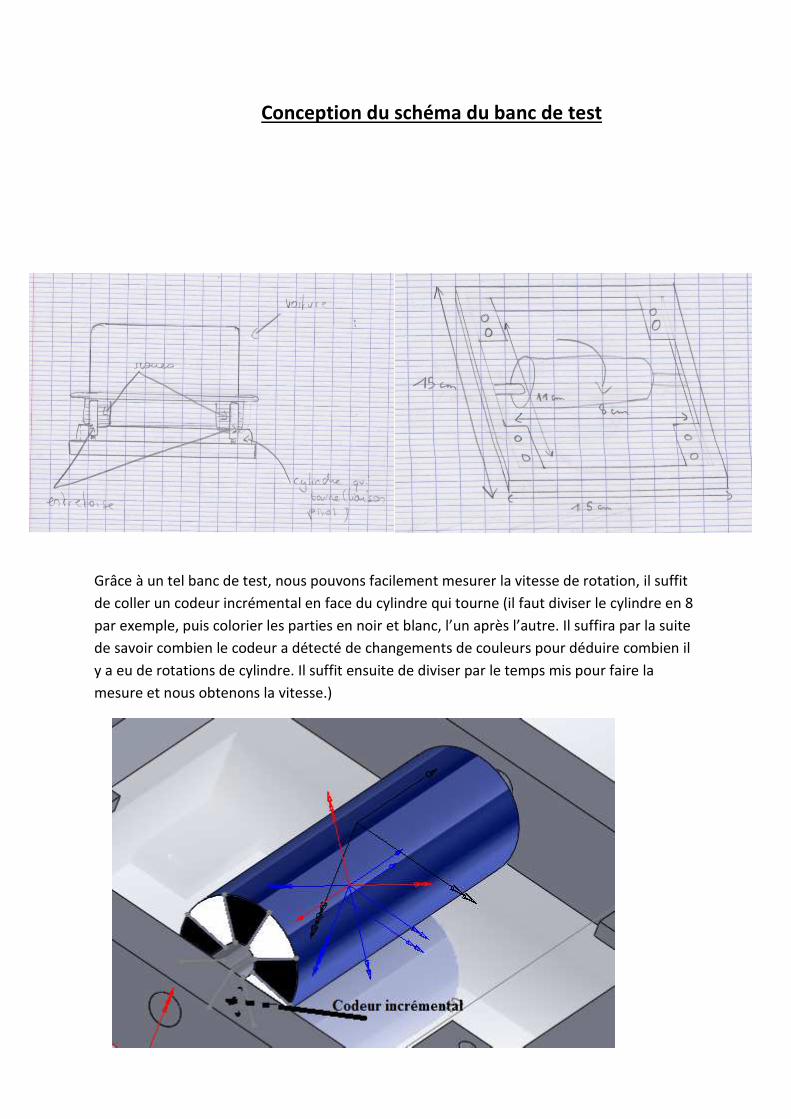
Conception du schéma du banc de test
Grâce à un tel banc de test, nous pouvons facilement mesurer la vitesse de rotation, il suffit
de coller un codeur incrémental en face du cylindre qui tourne (il faut diviser le cylindre en 8
par exemple, puis colorier les parties en noir et blanc, l’un après l’autre. Il suffira par la suite
de savoir combien le codeur a détecté de changements de couleurs pour déduire combien il
y a eu de rotations de cylindre. Il suffit ensuite de diviser par le temps mis pour faire la
mesure et nous obtenons la vitesse.)

Conception numérique du banc de test
Voici le banc de test, effectué avec le logiciel SolidWorks :
Pour mesurer les performances du capteur distance, nous avons besoin d’une pièce qui fait
office de surface qui s’approche et recule. Nous pouvons donc utiliser une pièce qui translate
sur un axe et qui peut pivoter pour pouvoir la « cacher » lorsque nous n’avons pas besoin de
mesurer les performances du capteur de distance

Voilà la version numérique de cette pièce :
Bibliographie :
-Capteur de distance réferrence Emetteur : http://www.vishay.com/docs/81009/tsal6100.pdf Récepteur : http://www.vishay.com/docs/81505/bpv11f.pdf -Suiveur de ligne
http://www.vishay.com/docs/83760/tcrt5000.pdf -Capteur LDR (light dependant resistance)
http://www.technologystudent.com/elec1/ldr1.htm http://www.ac-nancy-metz.fr/pres-etab/loritz/pre_bac/ssi/cours/electronique/Optoelec/optoelec.htm
-Codeur incrémental http://sitelec.org/cours/abati/captvit.htm
-Irradiance http://fr.wikipedia.org/wiki/%C3%89clairement_%C3%A9nerg%C3%A9tique