projet bibliographique robotique et...
TRANSCRIPT
Oldrik Ceugnart
Rodolphe Wronski
Projet Bibliographique
Robotique et vision
Licence Professionnelle Gestion de Production IndustrielleSpécialité : Vision Industrielle
Année 2011/2012
1
Sommaire
1)Présentation .................................................................3- Présentions de la robotique industrielle..................3- Présentation de la vision industrielle......................3- Présentation de l'asservissement.............................4
2)Système robotisé avec caméra déportée ......................7- Par asservissement visuel 2D..................................7- Par asservissement visuel 3D..................................9
3)Système robotisé avec caméra embarquée ..................11- Par asservissement visuel 2D................................11- Par asservissement visuel 3D................................12
4)Étude de cas ................................................................14
Conclusion.........................................................................16
Bibliographie.....................................................................17
2
Présentation
Qu'est ce qu'un « robotique industriel» :
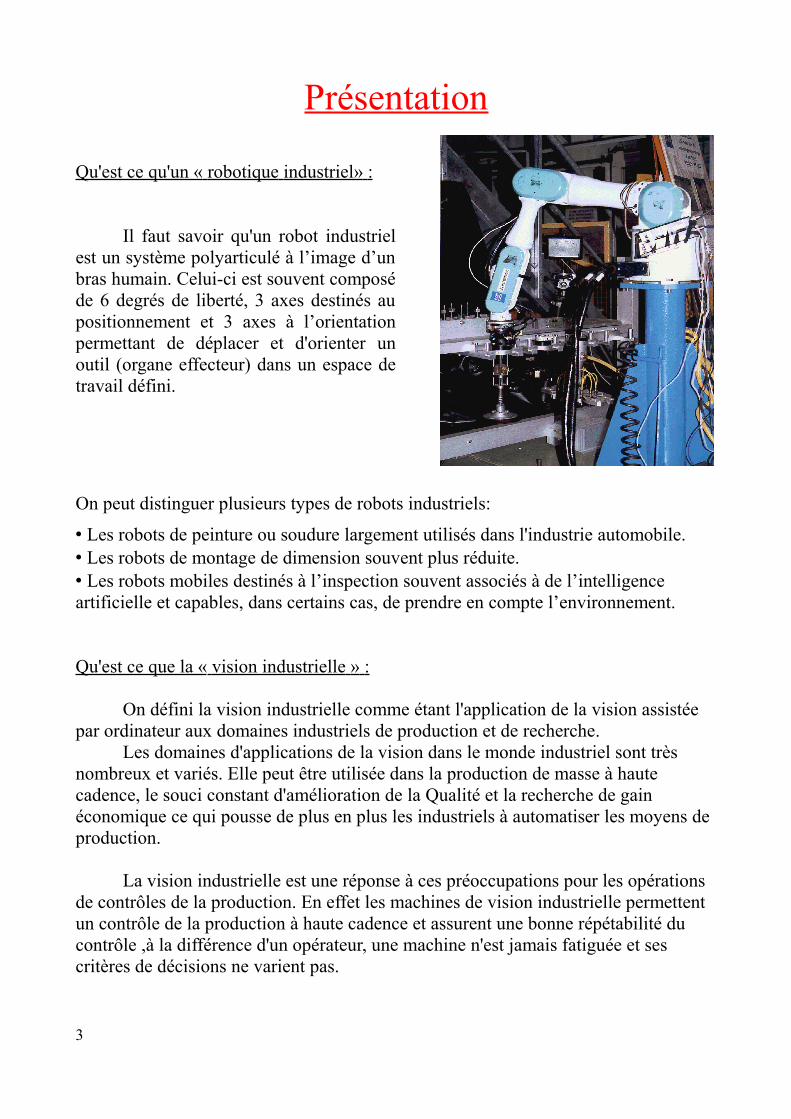
Il faut savoir qu'un robot industriel est un système polyarticulé à l’image d’un bras humain. Celui-ci est souvent composé de 6 degrés de liberté, 3 axes destinés au positionnement et 3 axes à l’orientation permettant de déplacer et d'orienter un outil (organe effecteur) dans un espace de travail défini.
On peut distinguer plusieurs types de robots industriels:
• Les robots de peinture ou soudure largement utilisés dans l'industrie automobile.• Les robots de montage de dimension souvent plus réduite.• Les robots mobiles destinés à l’inspection souvent associés à de l’intelligence artificielle et capables, dans certains cas, de prendre en compte l’environnement.
Qu'est ce que la « vision industrielle » :
On défini la vision industrielle comme étant l'application de la vision assistée par ordinateur aux domaines industriels de production et de recherche.
Les domaines d'applications de la vision dans le monde industriel sont très nombreux et variés. Elle peut être utilisée dans la production de masse à haute cadence, le souci constant d'amélioration de la Qualité et la recherche de gain économique ce qui pousse de plus en plus les industriels à automatiser les moyens de production.
La vision industrielle est une réponse à ces préoccupations pour les opérations de contrôles de la production. En effet les machines de vision industrielle permettent un contrôle de la production à haute cadence et assurent une bonne répétabilité du contrôle ,à la différence d'un opérateur, une machine n'est jamais fatiguée et ses critères de décisions ne varient pas.
3
La vision industrielle peut aussi être utilisée pour gérer des flux d’objets important. Par exemple la lecture optique d’un code à barres ou d’une adresse postale sur un colis pour l’orienter dans un centre de tri. Ou encore le tri de pommes par couleurs différentes avant emballage.
Enfin la vision industrielle peut être un moyen de guidage pour un système mobile autonome (comme un robot) lorsque ses mouvements ne peuvent pas être déterminés par avance comme, par exemple, la préhension d'objets sur un tapis roulant. Une caméra est alors embarquée sur la tête du robot et permet le positionnement de celui-ci au point désiré.
Asservissement visuel :
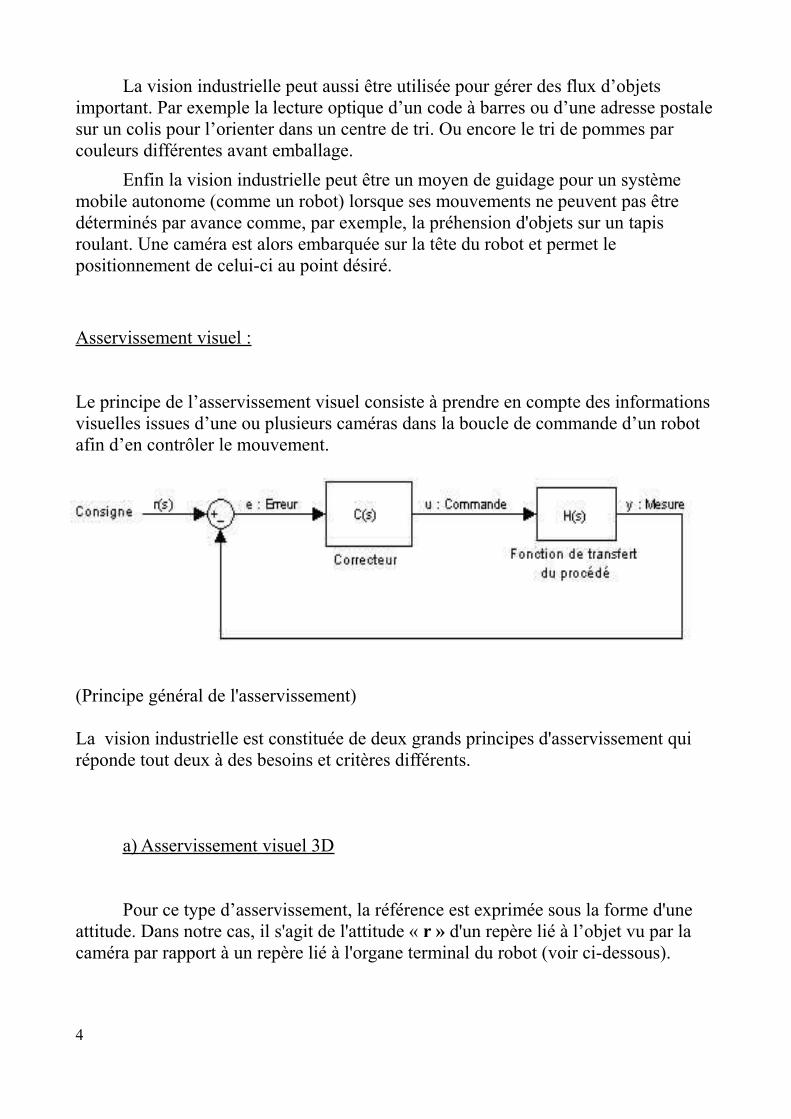
Le principe de l’asservissement visuel consiste à prendre en compte des informations visuelles issues d’une ou plusieurs caméras dans la boucle de commande d’un robot afin d’en contrôler le mouvement.
(Principe général de l'asservissement)
La vision industrielle est constituée de deux grands principes d'asservissement qui réponde tout deux à des besoins et critères différents.
a) Asservissement visuel 3D
Pour ce type d’asservissement, la référence est exprimée sous la forme d'une attitude. Dans notre cas, il s'agit de l'attitude « r » d'un repère lié à l’objet vu par la caméra par rapport à un repère lié à l'organe terminal du robot (voir ci-dessous).
4
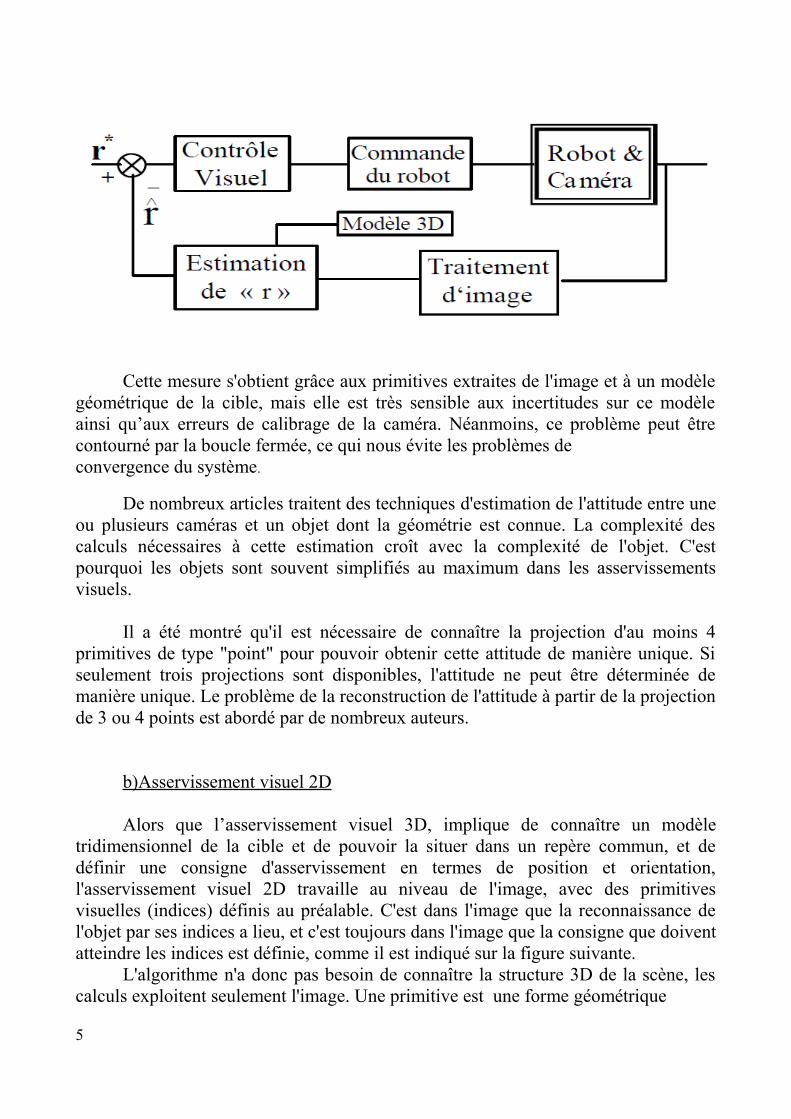
Cette mesure s'obtient grâce aux primitives extraites de l'image et à un modèle géométrique de la cible, mais elle est très sensible aux incertitudes sur ce modèle ainsi qu’aux erreurs de calibrage de la caméra. Néanmoins, ce problème peut être contourné par la boucle fermée, ce qui nous évite les problèmes deconvergence du système.
De nombreux articles traitent des techniques d'estimation de l'attitude entre une ou plusieurs caméras et un objet dont la géométrie est connue. La complexité des calculs nécessaires à cette estimation croît avec la complexité de l'objet. C'est pourquoi les objets sont souvent simplifiés au maximum dans les asservissements visuels.
Il a été montré qu'il est nécessaire de connaître la projection d'au moins 4 primitives de type "point" pour pouvoir obtenir cette attitude de manière unique. Si seulement trois projections sont disponibles, l'attitude ne peut être déterminée de manière unique. Le problème de la reconstruction de l'attitude à partir de la projection de 3 ou 4 points est abordé par de nombreux auteurs.
b)Asservissement visuel 2D
Alors que l’asservissement visuel 3D, implique de connaître un modèle tridimensionnel de la cible et de pouvoir la situer dans un repère commun, et de définir une consigne d'asservissement en termes de position et orientation, l'asservissement visuel 2D travaille au niveau de l'image, avec des primitives visuelles (indices) définis au préalable. C'est dans l'image que la reconnaissance de l'objet par ses indices a lieu, et c'est toujours dans l'image que la consigne que doivent atteindre les indices est définie, comme il est indiqué sur la figure suivante.
L'algorithme n'a donc pas besoin de connaître la structure 3D de la scène, les calculs exploitent seulement l'image. Une primitive est une forme géométrique
5
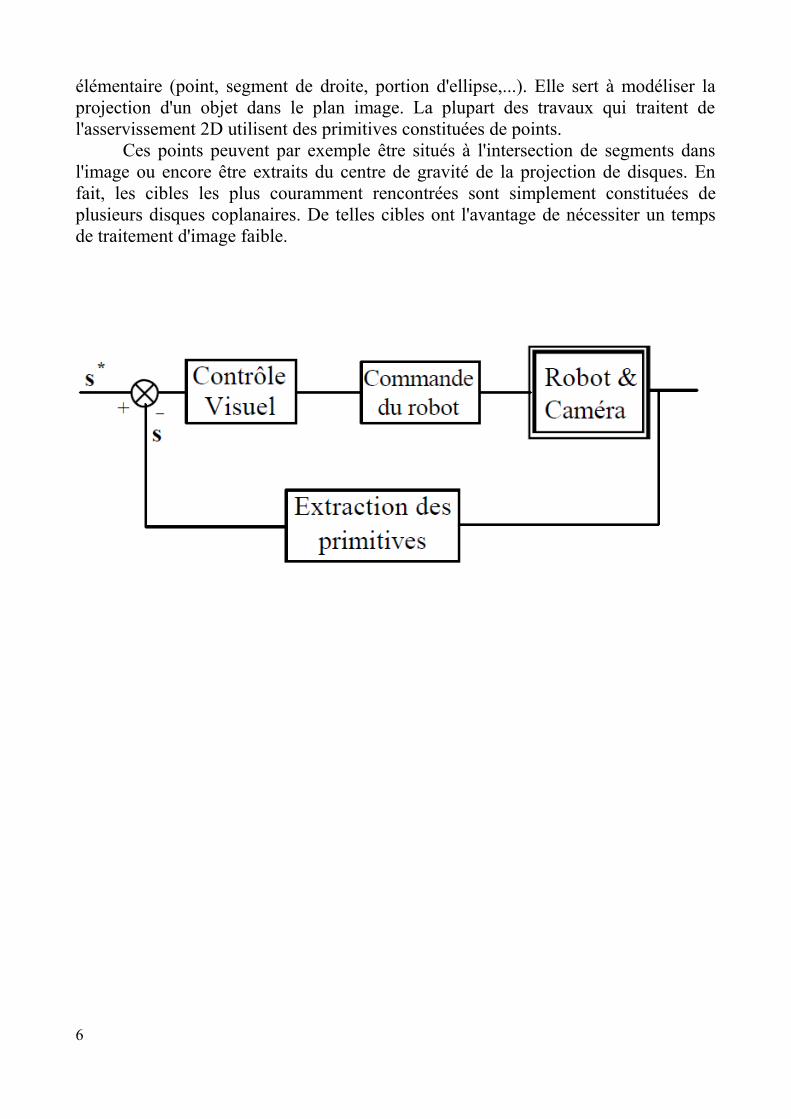
élémentaire (point, segment de droite, portion d'ellipse,...). Elle sert à modéliser la projection d'un objet dans le plan image. La plupart des travaux qui traitent de l'asservissement 2D utilisent des primitives constituées de points.
Ces points peuvent par exemple être situés à l'intersection de segments dans l'image ou encore être extraits du centre de gravité de la projection de disques. En fait, les cibles les plus couramment rencontrées sont simplement constituées de plusieurs disques coplanaires. De telles cibles ont l'avantage de nécessiter un temps de traitement d'image faible.
6
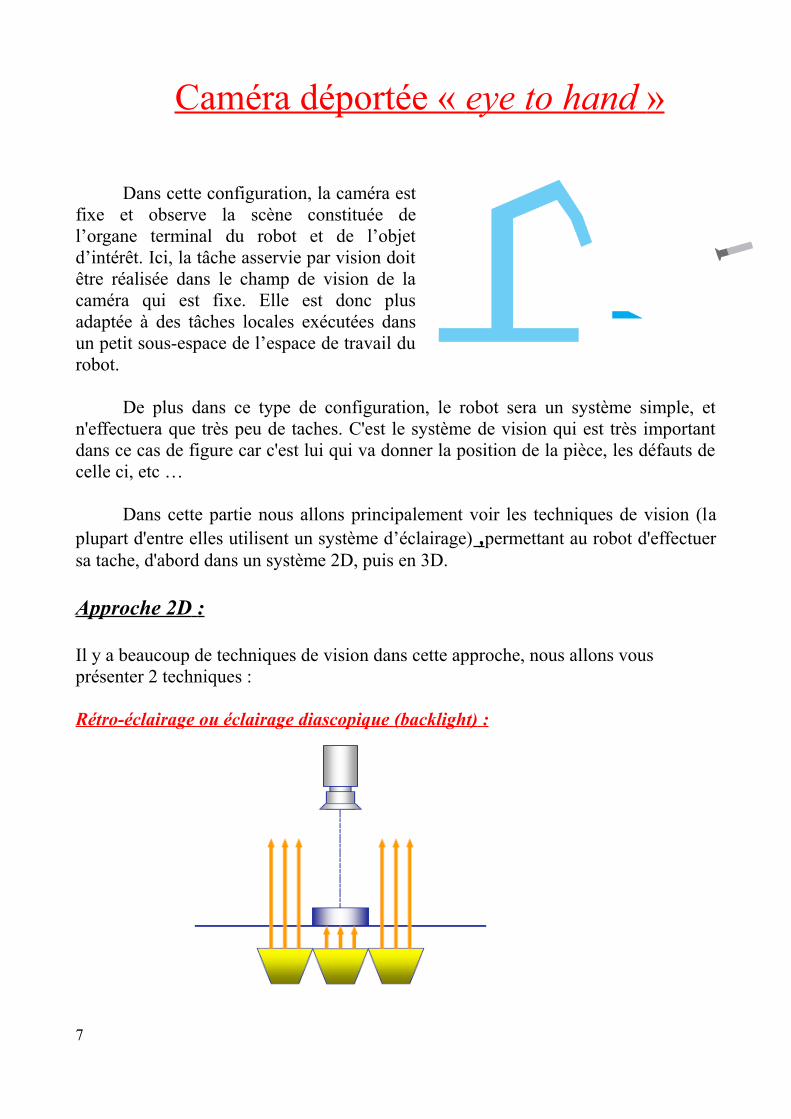
Caméra déportée « eye to hand »
Dans cette configuration, la caméra est fixe et observe la scène constituée de l’organe terminal du robot et de l’objet d’intérêt. Ici, la tâche asservie par vision doit être réalisée dans le champ de vision de la caméra qui est fixe. Elle est donc plus adaptée à des tâches locales exécutées dans un petit sous-espace de l’espace de travail du robot.
De plus dans ce type de configuration, le robot sera un système simple, et n'effectuera que très peu de taches. C'est le système de vision qui est très important dans ce cas de figure car c'est lui qui va donner la position de la pièce, les défauts de celle ci, etc …
Dans cette partie nous allons principalement voir les techniques de vision (la plupart d'entre elles utilisent un système d’éclairage) ,permettant au robot d'effectuer sa tache, d'abord dans un système 2D, puis en 3D.
Approche 2D :
Il y a beaucoup de techniques de vision dans cette approche, nous allons vous présenter 2 techniques :
Rétro-éclairage ou éclairage diascopique (backlight) :
7
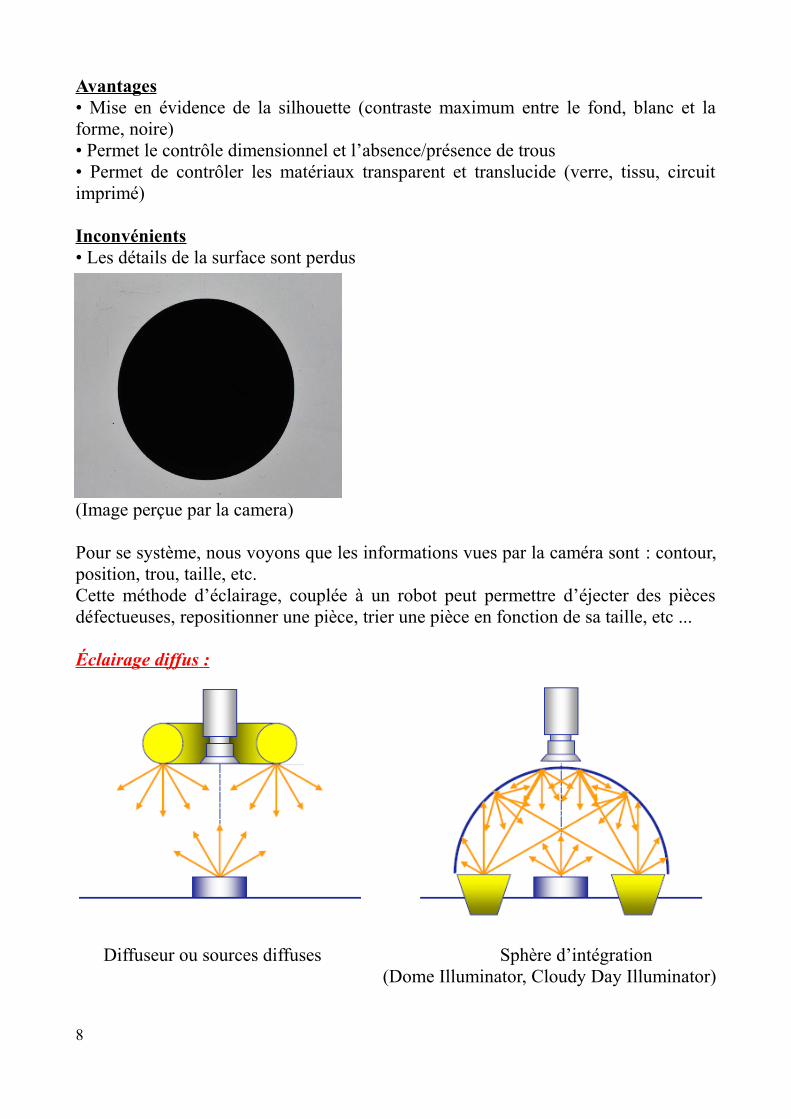
Avantages• Mise en évidence de la silhouette (contraste maximum entre le fond, blanc et la forme, noire)• Permet le contrôle dimensionnel et l’absence/présence de trous• Permet de contrôler les matériaux transparent et translucide (verre, tissu, circuit imprimé)
Inconvénients• Les détails de la surface sont perdus
(Image perçue par la camera)
Pour se système, nous voyons que les informations vues par la caméra sont : contour, position, trou, taille, etc.Cette méthode d’éclairage, couplée à un robot peut permettre d’éjecter des pièces défectueuses, repositionner une pièce, trier une pièce en fonction de sa taille, etc ...
Éclairage diffus :
Diffuseur ou sources diffuses Sphère d’intégration (Dome Illuminator, Cloudy Day Illuminator)
8
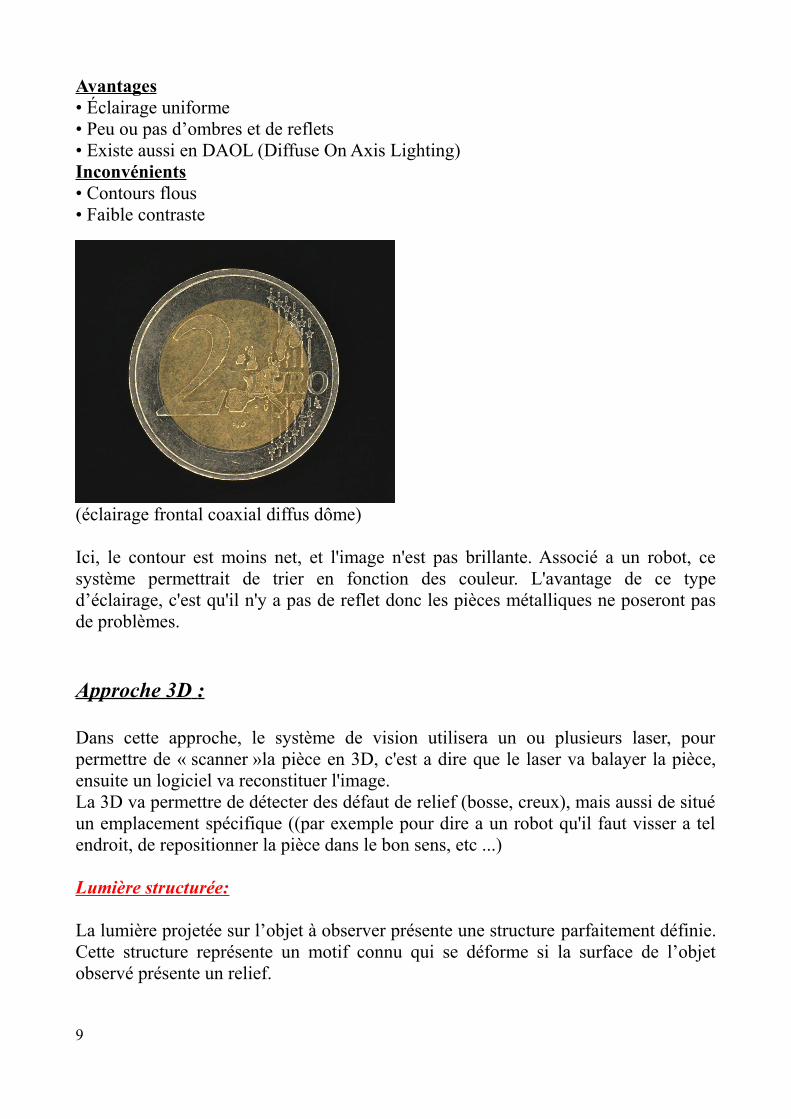
Avantages• Éclairage uniforme• Peu ou pas d’ombres et de reflets• Existe aussi en DAOL (Diffuse On Axis Lighting)Inconvénients• Contours flous• Faible contraste
(éclairage frontal coaxial diffus dôme)
Ici, le contour est moins net, et l'image n'est pas brillante. Associé a un robot, ce système permettrait de trier en fonction des couleur. L'avantage de ce type d’éclairage, c'est qu'il n'y a pas de reflet donc les pièces métalliques ne poseront pas de problèmes.
Approche 3D :
Dans cette approche, le système de vision utilisera un ou plusieurs laser, pour permettre de « scanner »la pièce en 3D, c'est a dire que le laser va balayer la pièce, ensuite un logiciel va reconstituer l'image.La 3D va permettre de détecter des défaut de relief (bosse, creux), mais aussi de situé un emplacement spécifique ((par exemple pour dire a un robot qu'il faut visser a tel endroit, de repositionner la pièce dans le bon sens, etc ...)
Lumière structurée:
La lumière projetée sur l’objet à observer présente une structure parfaitement définie. Cette structure représente un motif connu qui se déforme si la surface de l’objet observé présente un relief.
9
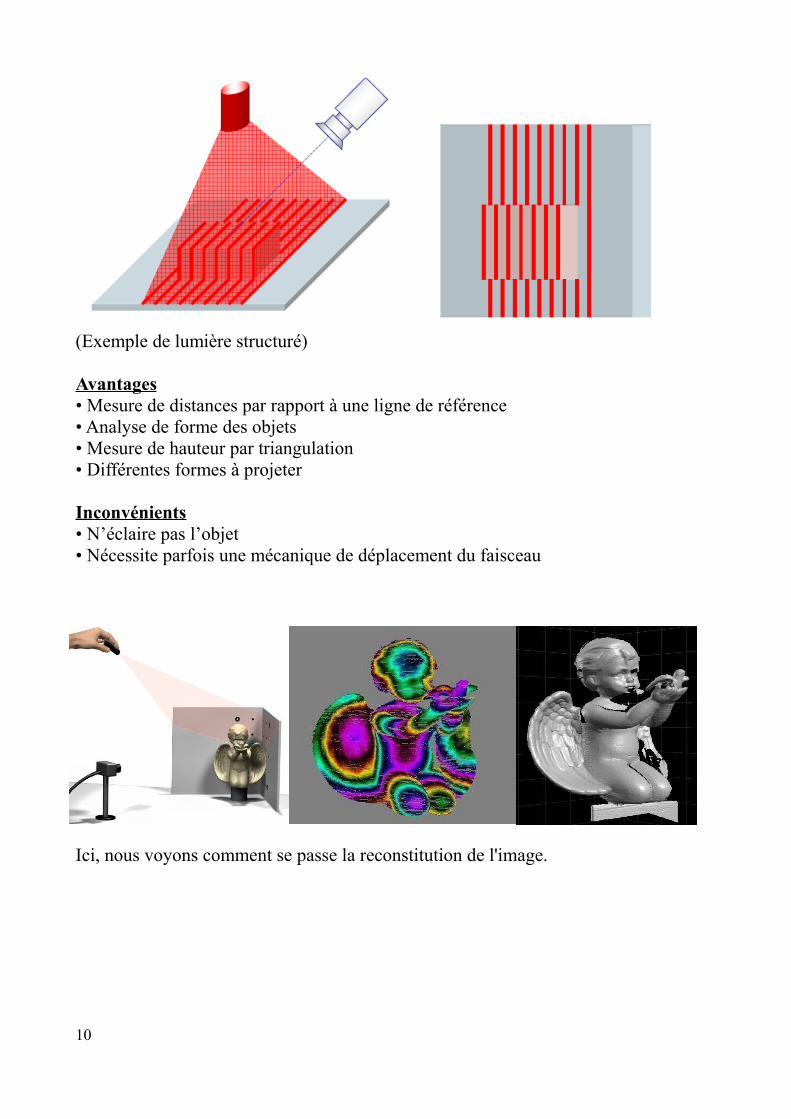
(Exemple de lumière structuré)
Avantages• Mesure de distances par rapport à une ligne de référence• Analyse de forme des objets• Mesure de hauteur par triangulation• Différentes formes à projeter
Inconvénients• N’éclaire pas l’objet• Nécessite parfois une mécanique de déplacement du faisceau
Ici, nous voyons comment se passe la reconstitution de l'image.
10
Caméra embarquée « eye in hand »
La configuration « caméra embarquée », aussi appelée eye in hand, est celle où la caméra est solidaire de l’un des corps du robot.Cette configuration est adaptée à des tâches de suivi (suivi d’un joint de soudure, suivi de surface pour la peinture, dépose d’un joint de colle, ...), de préhension (saisie d’un objet sur un convoyeur) ou d’assemblage (insertion d’un piston dans un cylindre).
En 2D, la mesure et la consigne de l’asservissement visuel sont directement exprimées en terme de coordonnées de primitives.
En 3D, ces grandeurs définissent une attitude (6 coordonnées, 3 coordonnées de translation et 3 coordonnées de rotation). Les 6 coordonnées d’attitude sont calculées à partir des primitives et d’un modèle de la scène.
Par exemple, dans le cas de primitives ponctuelles, la mesure et la consigne sont les coordonnées en pixels des points d’intérêt dans l’image.
Approche 2D :
La figure suivante donne le schéma-bloc d’un asservissement visuel 2D (image-based). Si on compare les figures suivantes, on s’aperçoit que le bloc « reconstruction 3D » n’est pas présent dans l’approche 2D. En effet, ici, la consigne F* et la mesure sont directement exprimées dans l’image.
11
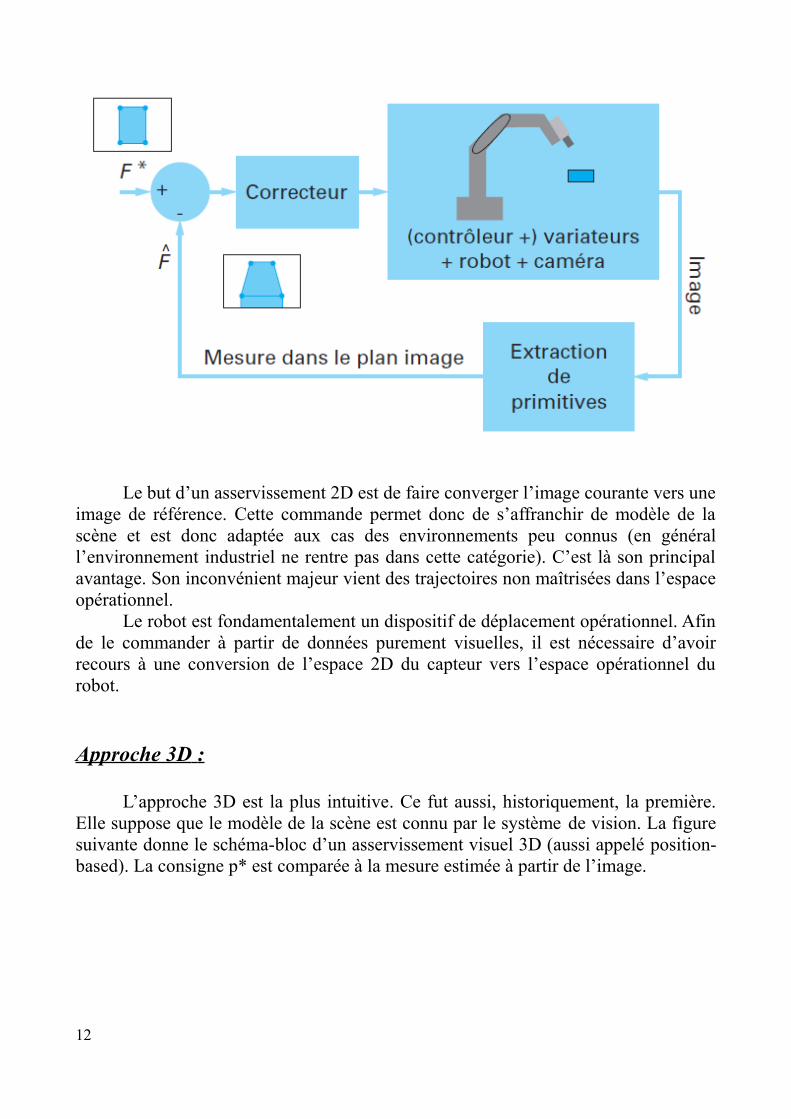
Le but d’un asservissement 2D est de faire converger l’image courante vers une image de référence. Cette commande permet donc de s’affranchir de modèle de la scène et est donc adaptée aux cas des environnements peu connus (en général l’environnement industriel ne rentre pas dans cette catégorie). C’est là son principal avantage. Son inconvénient majeur vient des trajectoires non maîtrisées dans l’espace opérationnel.
Le robot est fondamentalement un dispositif de déplacement opérationnel. Afin de le commander à partir de données purement visuelles, il est nécessaire d’avoir recours à une conversion de l’espace 2D du capteur vers l’espace opérationnel du robot.
Approche 3D :
L’approche 3D est la plus intuitive. Ce fut aussi, historiquement, la première. Elle suppose que le modèle de la scène est connu par le système de vision. La figure suivante donne le schéma-bloc d’un asservissement visuel 3D (aussi appelé position-based). La consigne p* est comparée à la mesure estimée à partir de l’image.
12
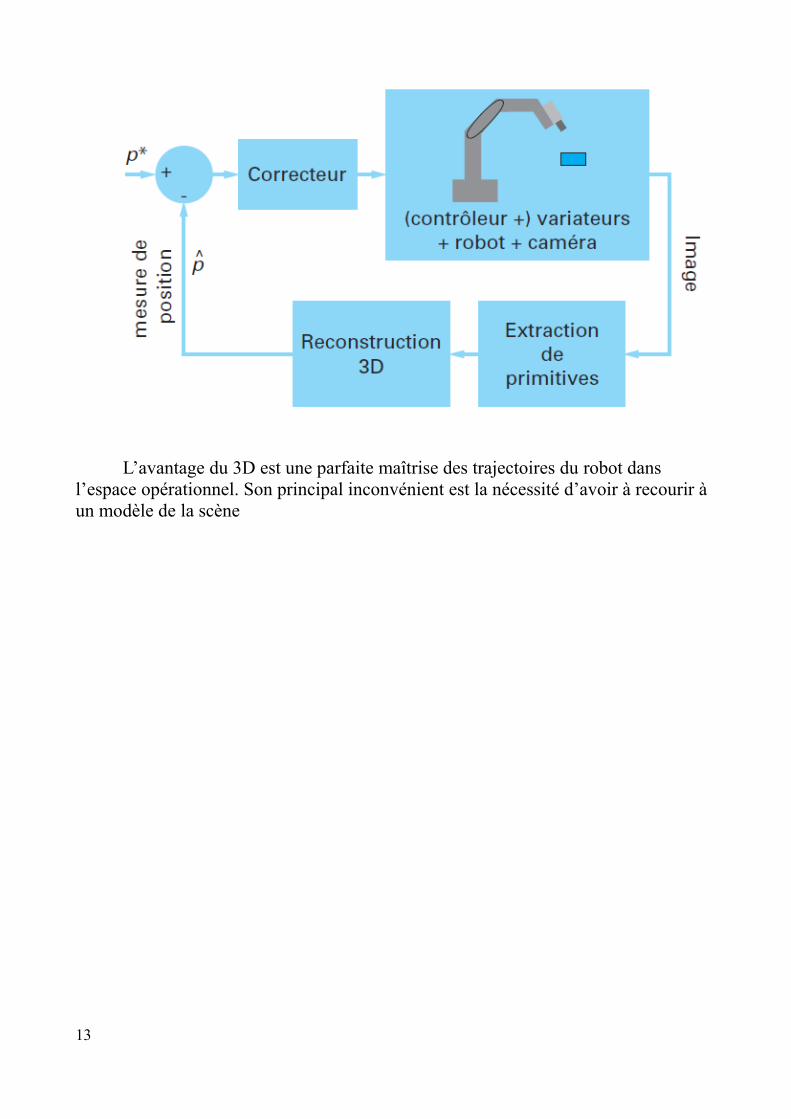
L’avantage du 3D est une parfaite maîtrise des trajectoires du robot dans l’espace opérationnel. Son principal inconvénient est la nécessité d’avoir à recourir àun modèle de la scène
13
Étude de cas
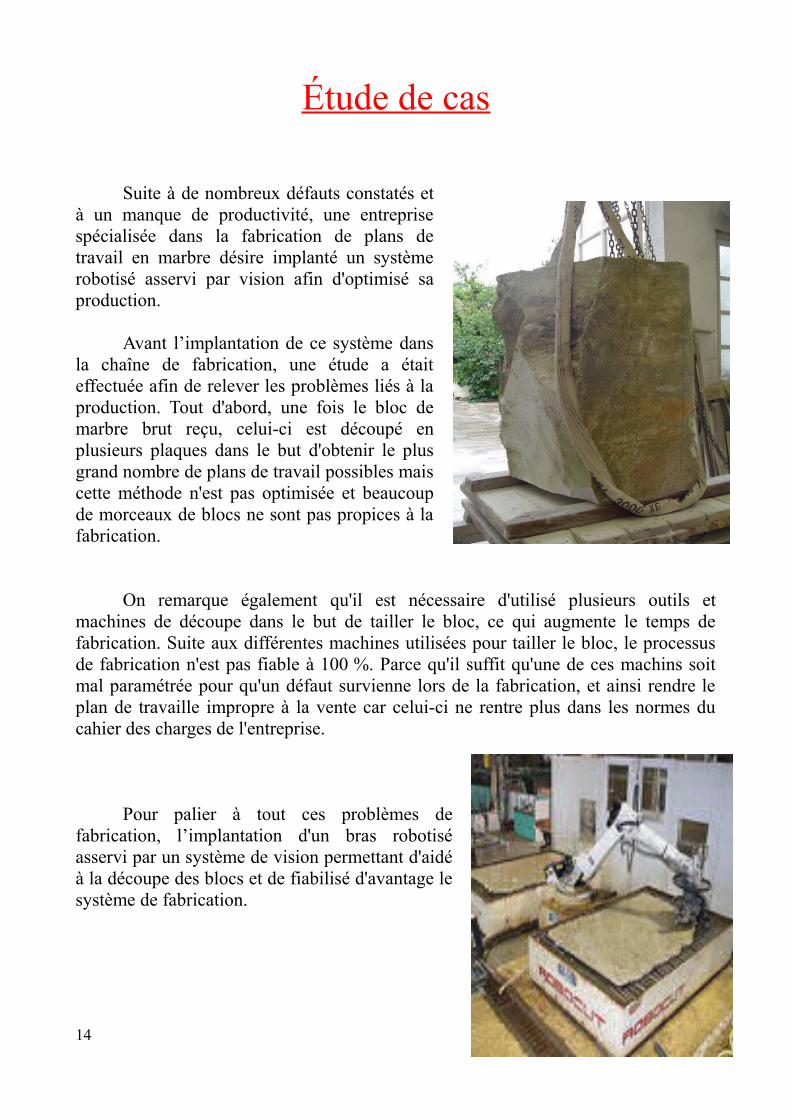
Suite à de nombreux défauts constatés et à un manque de productivité, une entreprise spécialisée dans la fabrication de plans de travail en marbre désire implanté un système robotisé asservi par vision afin d'optimisé sa production.
Avant l’implantation de ce système dans la chaîne de fabrication, une étude a était effectuée afin de relever les problèmes liés à la production. Tout d'abord, une fois le bloc de marbre brut reçu, celui-ci est découpé en plusieurs plaques dans le but d'obtenir le plus grand nombre de plans de travail possibles mais cette méthode n'est pas optimisée et beaucoup de morceaux de blocs ne sont pas propices à la fabrication.
On remarque également qu'il est nécessaire d'utilisé plusieurs outils et machines de découpe dans le but de tailler le bloc, ce qui augmente le temps de fabrication. Suite aux différentes machines utilisées pour tailler le bloc, le processus de fabrication n'est pas fiable à 100 %. Parce qu'il suffit qu'une de ces machins soit mal paramétrée pour qu'un défaut survienne lors de la fabrication, et ainsi rendre le plan de travaille impropre à la vente car celui-ci ne rentre plus dans les normes du cahier des charges de l'entreprise.
Pour palier à tout ces problèmes de fabrication, l’implantation d'un bras robotisé asservi par un système de vision permettant d'aidé à la découpe des blocs et de fiabilisé d'avantage le système de fabrication.
14
Après plusieurs mois d'utilisation, on constate que le bras robotisé permet 100 % de qualité grâce à sa flexibilité et à sa vitesse constante de travail. Tous les outils et machines-outils utilisés ont été remplacés par un seul bras robotisé.
Ce bras associé a un système de vision « scanne » le bloc de marbre, et identifie le nombre maximal de plaques de travail possible à tailler dans le bloc brut, ceci afin de limiter le nombres de chutes.
Ce robot permet une découpe du bloc de marbre par jet d'eau constant et a grande vitesse (comparé a une méthode traditionnelle), ce qui a permis de rajouter une seconde table de découpe et donc ainsi diminuer les temps de chargement et déchargement.
Au final, on a donc une production qui a été augmentée de 20 % comparée a la méthode traditionnelle. De plus, grâce a cette méthode, le nombre de rejet a été fortement diminué, ce qui permet a l'entreprise un meilleur chiffre d'affaires.
(Exemple de marbre blanc découpé)
15
Conclusion
La robotique industrielle est un domaine utilisée depuis longtemps, mais l'arrivée de la vision dans le domaine industriel a permis une toute autre approche pour les robots industriels.
Grâce à ce couplage, les robots sont plus « intelligents » car ils peuvent désormais effectuer des taches précises et à grande vitesse sur un objet. C'est le robot qui va s'adapter à son milieu, et non le contraire.
L'asservissement visuel offre de nombreuses possibilités au niveau industriel et permet ainsi d'optimiser la production.
De plus, maintenant, de nombreux systèmes de vision existent, et ces systèmes permettent de couvrir une grande partie des taches industrielles.
Cependant, la vision est à un stade peu avancé , « de jeunesse », et on voit de plus en plus de systèmes tels que des robots mobiles autonomes se développer, ce qui envisage pour l'avenir encore beaucoup d'applications pour les systèmes de robot-vision.
16
Bibliographie
- http://fr.wikipedia.org/wiki/Vision_industrielle
- http://fr.wikipedia.org/wiki/Robotique_industrielle
- Dossier Techniques de l’Ingénieur : Intégration robot-capteur par Philippe POIGNET et Jacques GANGLOFF
- http://www.techniques-ingenieur.fr/search.html;jsessionid=F9C1CD40E9004B4C05D1B31F42BEE545.TIWB4?level=1&query=robot+vision&search_form_submit=+
- http://www.microscan.com/fr/TrainingAndResources/Resources.aspx
- http://www.effilux.fr/index.php
- Asservissement visuel par imagerie médicale par Alexandre Krupa
- Positionnement d'un bras manipulateur par une commande référencée vision par N. OUADAH1(*) , M. HAMERLAIN (*) et M.S. Djouadi (**)
- Cours de Vision Industrielle – Nicolas Vandenbroucke :http://www-lisic.univ-littoral.fr/~vandenbroucke/enseignement/Cours_Vision_Chapitre2.pdf
- http://www.innovmetric.com/polyworks/3D-scanners/pdf/Etude_sur_le_hardware_de_metrologie_3D.pdf
- http://www.cse.unr.edu/~bebis/CS791E/Notes/StereoCamera.pdf
- http://www.microscan.com/fr/TrainingAndResources/Resources.aspx
- http://www2.ifi.auf.org/personnel/Alain.Boucher/cours/vision_par_ordinateur/index.html
- http://newlsiit.u-strasbg.fr/avr_fr/index.php/Vision_et_commande
- http://www.innovmetric.com/polyworks/3D-scanners/me_single-point.aspx?p=0&lang=fr
17