physique - e-monsitepermamath.e-monsite.com/medias/files/mecanique-et-energie-vincent... · ce...
TRANSCRIPT
Physique
Mécanique&
Énergie
12 août 2008

Préambule :
Ce cours de mécanique et énergie a été écrit au début avec le logiciel de PAO Lyx, une interfacegraphique au célèbre Latex et aujourd’hui directement en latex. Il a donc été créé dans un environnement(ces deux logiciels tournant sous GNU-Linux) libre dont l’objectif est de contribuer au progrès en mettantà disposition de chacun, pour un coût moindre, le travail de milliers de programmeurs bénévoles. Dans cecadre, il était naturel de permettre à chaque étudiant d’avoir accès à ce cours librement. C’est pourquoi,à l’instar des logiciels, il est distribué sous licence GFDL, licence de documentation libre. Attentioncependant aux images qui ne sont pas toute sous licence GFDL, mais peuvent être soumise à une autrelicence libre ou être dans le domaine publique. Cela peut avoir une importance dans certains cas.
Normalement la licence GFDL doit figurer avec le cours. Ce n’est pas le cas et ce pour ne pas allongertrop le texte. Mais, le texte de la GFDL se trouve partout sur internet et il suffit d’un moteur de recherchepour le trouver. Par ailleurs, le texte de ce cours est disponible en téléchargement à l’adresse
http ://www.cvgg.org
Pour tout renseignement complémentaire s’adresser à :
Vincent Guyot
Chapeau-Râblé 37
2300 La Chaux-de-Fonds
Copyright 2007 Guyot Vincent
Permission vous est donnée de copier, distribuer et/ou modifier ce document selon les termes de laLicence GNU Free Documentation License, Version 1.1 ou ultérieure publiée par la Free Software
Fundation ; avec les sections inaltérables suivantes :
Pas de section inaltérables
avec le texte de première page de couverture suivant :
Physique Mécanique & Énergie
avec le texte de dernière page de couverture suivant :
Pas de texte de dernière page de couverture
Une copie transparente de ce document se trouve à l’adresse suivante :
www.cvgg.org//Accueil/Physique/
Remerciements
Je tiens ici à remercier tout particulièrement l’encyclopédie Wikipedia et la NASA, pour les nombreusesillustrations dont ce cours à pu bénéficier. Toutes deux rendent accessibles gratuitement à tous des savoirsimportants.
En particulier, je remercie Alain Riazuelo, cosmologue à l’Institut d’Astrophysique de Paris, chercheurau CNRS, pour la magnifique représentation (sous licence libre) d’un trou noir qui fait la couverture decet ouvrage et qu’il est possible de consulter à l’adresse suivante :
http://commons.wikimedia.org/wiki/Image:FY221c15.png
Cette image est particulièrement adapté à ce cours. En effet, on verra que l’accent est mis sur la notionde gravitation à travers la chute libre, les satellites et les marées. Évidemment, il s’agit de physiqueclassique. Pas question d’aborder ici la relativité générale, au cœur de la description des trous noirs.Cependant, comme ils sont issus de la plus moderne des théorie de la gravitation et qu’aujourd’hui ilssont autant vu à travers la relativité que sous l’angle de la physique quantique, ils sont la conclusionprovisoire presque naturelle de notre compréhension de la gravitation dans cette incroyable courbure del’espace qui les enveloppe.
Je tiens aussi à remercier mon collègue M. Michel Augsburger pour son travail, ingrat mais nécessaire,de relecture attentive, de corrections et de suggestions pertinentes qui ont grandement augmenté laqualité de ce cours.
Le chapitre d’introduction est un résumé d’une présentation d’introduction à la physique réalisée avecle logiciel BEAMER. Cette présentation est publiée en licence GFDL à la même adresse (www.cvgg.org)que ce cours. Toutes les images utilisées sont libres (dans le domaine publique ou en GFDL) et référencées.Elle constitue un complément à ce cours.
3

4
Table des matières
1 Introduction 171.1 Du temps . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171.2 De l’infiniment grand à l’infiniment petit . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.2.1 L’univers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171.2.2 Les amas de galaxies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191.2.3 Les galaxies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191.2.4 Les étoiles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201.2.5 Le système solaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201.2.6 La terre et la lune . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
La terre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22La lune . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
1.2.7 Le monde subatomique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2 La cinématique 312.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 312.2 Position . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.2.1 Dimensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31Une dimension . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31Deux dimensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31Trois dimensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.2.2 Système d’axes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 312.2.3 Position . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 322.2.4 Déplacement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 322.2.5 Distance parcourue . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.3 Vitesse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 322.3.1 Vitesse moyenne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 322.3.2 Exemples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Exemple 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32Exemple 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.3.3 Vitesse instantanée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 322.4 Accélération . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.4.1 Accélération moyenne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 332.4.2 Exemples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Exemple 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5

TABLE DES MATIÈRES TABLE DES MATIÈRES
Exemple 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33Remarque : . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.4.3 L’accélération instantanée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 332.5 Mouvements simples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.5.1 Le mouvement rectiligne uniforme (MRU) . . . . . . . . . . . . . . . . . . . . . . . 33Définition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33Propriétés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33Un exemple : Apollo en route vers la lune . . . . . . . . . . . . . . . . . . . . . . . 34Autre exemple : le déplacement d’Andromède . . . . . . . . . . . . . . . . . . . . . 35
2.5.2 Mouvement rectiligne uniformément accéléré (MRUA) . . . . . . . . . . . . . . . . 35Définition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35Propriétés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
2.5.3 La chute libre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36Définition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36Propriétés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36Expérience . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36Calculs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36Analyse des résultats . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
2.5.4 Balistique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38Définition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38Propriétés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38Équations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38Premier exemple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39Second exemple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
2.5.5 La chute libre ... de la lune . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 392.5.6 Mouvement circulaire uniforme (MCU) . . . . . . . . . . . . . . . . . . . . . . . . 41
Relation importante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 412.5.7 Lois de Kepler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3 La mécanique 453.1 La “mécanique” d’Aristote . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.1.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 453.1.2 Platon . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 453.1.3 Aristote . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Cinématique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46Dynamique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.2 Mécanique de Newton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 483.2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 483.2.2 Mécanique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Les trois lois de Newton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49Exemples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
3.2.3 Types de forces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51Loi de la gravitation universelle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51Le poids . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53Masse et poids . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53Poids apparent . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54Gravitation et MCU . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55Troisième loi de Kepler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56Les marées . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
6
TABLE DES MATIÈRES TABLE DES MATIÈRES
Le frottement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62La force d’un ressort . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63Exemples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
4 L’énergie 674.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 674.2 Travail . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 674.3 Puissance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 684.4 Énergie potentielle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 684.5 Énergie cinétique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 694.6 Théorème de l’énergie cinétique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 694.7 Conservation de l’énergie mécanique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 704.8 Variation de l’énergie mécanique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 714.9 Énergie thermique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
4.9.1 Premier principe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 724.10 Énergies renouvelables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
4.10.1 Énergie hydraulique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73Exemple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74Types de turbines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74Alternateur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74Problèmes rencontrés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
4.10.2 Énergie éolienne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 754.10.3 Énergie solaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
Énergie solaire thermique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77Énergie solaire électrique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
4.10.4 Énergie géothermique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 794.11 Énergies non renouvelables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
4.11.1 Énergie nucléaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80Fission . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
Déchets radioactifs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81Accidents nucléaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
Fusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 824.11.2 Énergie de combustion : pétrole et gaz . . . . . . . . . . . . . . . . . . . . . . . . . 82
A Unités internationales 85A.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85A.2 Les unités choisies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85A.3 Exemple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86A.4 Conversions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86A.5 Multiples et sous-multiples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86A.6 Notation scientifique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87A.7 Règles de calcul . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
B Deux systèmes de coordonnées 89B.1 Le système de coordonnées circulaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
B.1.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89B.1.2 Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
B.2 Coordonnées sphériques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89B.2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89B.2.2 Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
7
TABLE DES MATIÈRES TABLE DES MATIÈRES
B.2.3 Latitude et longitude . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
C Mesures de distances 91C.1 La taille de la terre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
C.1.1 Le principe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91C.1.2 Techniquement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
C.2 La taille de la lune . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93C.3 La distance terre-lune . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93C.4 La distance terre-soleil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94C.5 La distance des étoiles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
D Travaux pratiques 97D.1 Le rapport de laboratoire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
D.1.1 Plan d’un rapport de travail pratique . . . . . . . . . . . . . . . . . . . . . . . . . 98Titre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98Résumé . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98But . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98Théorie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98Description de l’expérience . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98Résultats . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100Annexes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
D.2 La nébuleuse du crabe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101D.2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101D.2.2 But du travail pratique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101D.2.3 Dispositif expérimental . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101D.2.4 Mesures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101D.2.5 Résultats . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101D.2.6 Analyse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
D.3 Le pendule simple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101D.3.1 Les mesures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101D.3.2 Organisation des données et graphiques . . . . . . . . . . . . . . . . . . . . . . . . 102
D.4 Mouvement simple : MRU . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102D.4.1 Les mesures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102D.4.2 Organisation des données et graphiques . . . . . . . . . . . . . . . . . . . . . . . . 102D.4.3 Analyse des résultats . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
D.5 Mouvement simple : MRUA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102D.5.1 But . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102D.5.2 Théorie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103D.5.3 Les mesures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103D.5.4 Organisation des données et graphiques . . . . . . . . . . . . . . . . . . . . . . . . 103D.5.5 Galilée et le plan incliné . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
D.6 La chute libre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103D.6.1 Cette expérience donnant lieu à un rapport noté, elle n’est pas décrite. . . . . . . . 103D.6.2 Résultats . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
D.7 Le canon horizontal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103D.8 Le chariot à masse pendante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
8
TABLE DES MATIÈRES TABLE DES MATIÈRES
E Rotations 105E.1 Rotation de la terre sur elle-même . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105E.2 Rotation de la terre autour du soleil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105E.3 Rotation du soleil dans la voie lactée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107E.4 Vitesse et référentiel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
F MRUA développements 109F.1 La position . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109F.2 Une autre relation bien pratique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
F.2.1 Cinématique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109F.2.2 Énergie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
G Chute de la lune 111G.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111G.2 Accélération . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111G.3 Force de gravitation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
H Satellite en orbite géostationnaire 113H.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113H.2 Théoriquement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113H.3 Numériquement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114H.4 Loi de Kepler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
I Relativité 115I.1 Relativité galiléenne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115I.2 Transformation galiléenne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116I.3 Invariance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117I.4 Forces inertielles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
I.4.1 Force d’inertie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117I.4.2 Force centrifuge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
J Marées 119J.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119J.2 Centre de gravité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119J.3 Force d’inertie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
J.3.1 Vitesse angulaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120J.3.2 Force d’inertie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
J.4 Poids relatif . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121J.5 Autres rythmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
J.5.1 Décalages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121J.5.2 Marées de vives et mortes eaux . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122J.5.3 Marées d’équinoxes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122J.5.4 Marées de périgée et périhélie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122J.5.5 Marées de déclinaison . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123J.5.6 Retards et marées côtières . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
9

TABLE DES MATIÈRES TABLE DES MATIÈRES
K Énergies 125K.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125K.2 Énergie hydraulique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125K.3 Énergie éolienne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
K.3.1 Règle de Betz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126K.3.2 Éoliennes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
Éolienne de Collonges-Dorénaz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127Éoliennes du Mont Soleil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
K.4 Géothermie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127K.5 Énergie de combustion des déchets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
L Exercices 129L.1 Problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
L.1.1 Relatifs à la conversion d’unités et à la notation scientifique . . . . . . . . . . . . . 129L.1.2 Relatifs aux notions de déplacement, position et distance parcourue . . . . . . . . 129L.1.3 Relatifs à la notion de vitesse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130L.1.4 Relatif à la notion d’accélération . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130L.1.5 Relatif au MRU . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130L.1.6 Relatif au MRUA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131L.1.7 Relatifs à la physique aristotélicienne . . . . . . . . . . . . . . . . . . . . . . . . . . 131L.1.8 Relatifs à la physique Newtonienne . . . . . . . . . . . . . . . . . . . . . . . . . . . 132L.1.9 Relatifs aux forces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133L.1.10 Relatifs à l’énergie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133L.1.11 Relatifs à la conservation de l’énergie . . . . . . . . . . . . . . . . . . . . . . . . . . 134L.1.12 Relatifs à l’énergie hydraulique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134L.1.13 Relatifs à l’énergie éolienne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134L.1.14 Relatifs à l’énergie solaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
L.2 Solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
10
Liste des figures
1.1 L’univers profond . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181.2 Modèles de courbure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181.4 Groupe local . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181.3 L’évolution du soleil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191.5 Galaxie du Sombrero . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201.7 Nébuleuse planétaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201.6 Interaction de deux galaxies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211.8 Première exoplanète . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211.9 Système solaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 221.10 La taille des planètes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 231.11 Une comète . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 231.12 Les saisons . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241.13 La terre et la lune . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241.15 Orbites de la lune et du soleil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 251.14 Les phases de la lune . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 261.16 La nébuleuse du Crabe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 261.17 L’atome de Bohr . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 271.18 L’atome : onde de probabilité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 271.19 L’orbitale : onde de probabilité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.1 Un système d’axes en une dimension . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 312.2 La position d’un objet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 322.3 Apollo 16 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 342.4 Collision Andromède-Voie Lactée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 352.5 Chute libre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 382.6 Chute libre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 382.7 L’idée de la chute de la lune . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 402.8 Chute de la lune sur la terre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 402.9 Mouvement circulaire uniforme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 412.10 Astronomica pars Optica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 422.11 Résumé de cinématique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.1 La balance de Cavendish . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 523.2 Loi de la gravitation universelle. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 523.3 Poids apparent . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
11

LISTE DES FIGURES LISTE DES FIGURES
3.4 La sensation des mouvements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 553.5 Pleines et basses mers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 583.6 Système terre-lune . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 593.7 Construction de Proctor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 603.8 Force de marée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 613.9 La force de frottement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 623.10 Freins de wagon . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 623.11 Essieu de wagon . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 633.12 La force du ressort . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 633.13 Résumé de mécanique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
4.1 Puissance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 684.2 Énergie cinétique et potentielle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 704.3 Barrage d’Emosson . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 734.4 Turbine Pelton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 744.5 Ancienne turbine Pelton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 754.6 Éolienne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 754.7 Pale d’éolienne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 764.8 Tube de vent . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 764.9 Solaire thermique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 774.10 Effet photoélectrique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 784.11 Cellule photoélectrique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 794.12 Applications de la géothermie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 804.13 Fission de l’uranium . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 804.14 Réacteur nucléaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 814.15 Combustion du méthane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 834.16 Résumé de l’énergie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
A.1 Relation de l’arc de cercle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
B.1 Système de coordonnées circulaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89B.2 Système de coordonnées sphériques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
C.1 Taille de la terre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91C.2 Taille de la lune . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93C.3 Parallaxe de mars . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
D.1 Rail horizontal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98D.2 Chute libre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
E.1 Le système géocentrique de Tycho Brahé . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106E.2 Le soleil dans la voie lactée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
F.1 Discours concernant deux sciences nouvelles de Galilée . . . . . . . . . . . . . . . . . . . . 109
G.1 Chute de la lune . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
H.1 Satellite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
I.1 Transformation de galilée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116J.1 Marée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
12
LISTE DES FIGURES LISTE DES FIGURES
J.2 Système terre-lune . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120J.3 Système terre-lune-eau . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120J.4 Décalage horaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122J.5 Vives et mortes eaux . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
K.1 Le barrage du Châtelot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
L.1 Le rayon de la terre par Eratosthène . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130L.2 La poulie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133L.3 Graphes horaires du MRU. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138L.4 Chute aristotélicienne de la tour Eiffel. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141L.5 Une fusée. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142L.6 Une remorque . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142L.7 Un ascenseur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
13

14

Liste des tableaux
1.1 Tableau des particules élémentaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.1 Données de la mission Apollo 12 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 342.2 La hauteur en fonction du temps . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 362.3 La vitesse en fonction du temps . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
A.1 Les unités du système international . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85A.2 Conversions d’unités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86A.3 Quelques équivalents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86A.4 Multiples et sous-multiples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
D.1 Tableau de mesures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
15

16
Chapitre 1Introduction
Cette introduction présente en premier lieu l’in-contournable notion de temps qui donne à la phy-sique toute sa mesure. Elle extrait du temps com-mun les cycles particuliers qui ont longtemps ryth-més nos vies pour finalement revenir au temps com-mun si particulier au mouvements des horloges ato-miques et des quartz.
Puis, elle souligne le fait que ce mouvement quinous rythme est toujours celui d’un corps et qu’ilne prend sens que dans le cadre de la descriptionde ce que j’appellerai une structure. Car, il est im-portant de marquer que le mouvement n’a lieu quepar rapport à une référence, c’est-à-dire par rap-port à d’autres corps. Ainsi tant le mouvement quel’étude du mouvement ne peuvent-ils plus être abso-lus. L’idée newtonienne de mouvement absolu a faitla place à la relativité et l’étude du mouvements desobjets doit être placée au sein des différentes struc-tures connues de l’univers. Ainsi, on peut mieuxse rendre compte que le mouvement est partout etqu’après la perception des choses il est naturel des’attarder à la compréhension des mouvements.
Enfin, elle montre que la description des mouve-ments des corps est une étape préliminaire à l’étudedes causes du mouvement et à sa prédiction. On yvoit que la description des divers mouvements quel’on peut aborder n’est pas simple parce que lestypes de mouvements sont nombreux et que les dif-férentes manières de les décrire sont très variées.
1.1 Du temps
Le temps qui nous rythme aujourd’hui si précisé-ment n’est pas issu d’une évidence. A l’origine il est
évidemment la marque de répétition qui peuventparaître l’être, mais qui bien vite ont présenté decontrariantes périodes.
Mais qui dit périodes dit mouvement et, plus pré-cisément, mouvement répétitif. En premier lieu il ya le mouvement de la terre sur elle-même, ou plutôt,n’en déplaise à Copernic, le mouvement du soleil“autour” de la terre.
1.2 De l’infiniment grand àl’infiniment petit
1.2.1 L’univers
La plus grande structure connue est l’univers. Lataille de l’univers observable est estimée à environ43 MAL, soit 43 milliard d’années lumière. Sa com-position est analogue à une sorte de gaz dont lesparticules seraient réparties uniformément dans levolume qui le contient. Sauf que de contenant il n’ya pas et que les particules sont des super amas degalaxies dont la taille ne dépasse pas 200 à 300 mil-lions d’années lumière. Leur nombre dans l’universest estimé à 10 millions.
Les super-amas de galaxies sont des amas d’amasde galaxies. C’est au niveau de ces super-amasde galaxies que l’univers apparaît assez homogènebien que constitué aussi d’une structure filamen-teuse. L’ordre de grandeur de telles structures estde 100 Mpc = 3 · 1024 m pour les super-amas degalaxies, voire 150 Mpc = 5 · 1024 m pour les fila-ments.
L’univers est en expansion, ce qui signifie qu’ils’agrandit. Selon les dernières mesures effectuées
17

1.2. DE L’INFINIMENT GRAND À L’INFINIMENT PETIT CHAPITRE 1. INTRODUCTION
Fig. 1.1 – L’univers profondImage du télescope spatial Hubble1
par les astrophysiciens, sa forme serait platea.Qu’est-ce que cela signifie pour un univers qui estmanifestement un volume ? En fait, cela veut direqu’on peut se l’imaginer comme une feuille de pa-pier dont les dimensions augmenteraient indéfini-ment. Nous serions alors des êtres à deux dimen-sions incapables de se déplacer ailleurs que sur cettefeuille. En particulier incapable d’en sortir. Cettefeuille s’étendrait donc dans une (troisième) dimen-sions inaccessible pour nous. Ainsi, notre univers àtrois dimensions s’étend dans une dimension sup-plémentaire qui nous est inaccessible (entendez bienqu’on ne peut se déplacer librement dans celle-ci),une quatrième dimension, le temps.
Il y a peu de cela (quelques année seulement)une autre solution semblait être possible. L’uni-vers, selon les modèles des cosmologistes (physi-ciens étudiant l’univers), aurait pu être une sphère.On aurait donc pu le voir comme un ballon, enflantcomme la grenouille qui voulait être un bœuf, surlequel on aurait posé des amas de galaxies en deuxdimensions (c’est le nombre de dimensions corres-pondant à la surface d’un ballon puisque tout pointde la surface d’une sphère peut être repéré par deuxcoordonnées : la longitude et la latitude. Voir an-nexe B.2.3). Ainsi notre univers aurait été un ballon
aVoir l’article “Quelle est la forme de l’univers”, Scienceet Vie junior, avril 2001
Fig. 1.2 – Modèles de courbureTrois modèles issus de la relativité générale2
Fig. 1.4 – Groupe localLes galaxies proches5
avec une surface tridimensionnelle enflant dans unequatrième dimension, le temps.
En réalité, les choses sont plus complexes en-core, puisqu’aujourd’hui les physiciens envisagentcet univers dans une dizaine de dimensionsb. Ilslaissent supposer aussi l’existence de plusieurs uni-vers parallèles, dits univers bulles.
18

CHAPITRE 1. INTRODUCTION 1.2. DE L’INFINIMENT GRAND À L’INFINIMENT PETIT
Giordano Bruno (1548-1600)
Un grand homme rebelle qui eut le malheur d’avoir raisonavant les autres. Pour lui les étoiles étaient des soleils pareilsau notre. Dans L’Infini, Bruno s’adresse à lui-même en cesmots :
“Enseigne-nous que la composition de notreastre et monde est égale à d’autant d’astres etde mondes qu’il nous est possible de voir. [. . .]Montre-nous que la substance des autres mondesdans l’éther est pareille à celle de notre monde.”
(Jean Rocchi, 2000, p. 42.)
Giordano Bruno fut brûlé vif en 1600, pour avoir, sur labase d’une analyse du mouvement de la terre qui annoncela relativité restreinte de Galilée, remis en cause sa fixité etla finitude de l’univers.
Portrait de Giordano Bruno tiré de Wikipedia3
Fig. 1.3 – L’évolution du soleilVers une nébuleuse planétaire4
1.2.2 Les amas de galaxies
Viennent ensuite les amas de galaxies. Leurnombre dans l’univers est estimé à 25 milliard. Larépartition de ces amas de galaxies n’est pas ho-mogène, contrairement à celle des super-amas degalaxies. Cette répartition est celle de filaments quilaissent apparaître des zones plus ou moins densesd’amas de galaxies.
Cette répartition est complexe et encore sujetteà de nombreuses discussions. En particulier elleest l’objet d’études approfondies en relation avecla naissance de l’univers. En effet, il est difficiled’expliquer comment à partir des conditions homo-gènes propres au big-bang sont nées des structuresaussi particulières. La figure 1.1 montre ce que l’on
bVoir “Sur la piste des mondes parallèles”, Science et Vie,Juillet 2002.
peut voir au-delà des étoiles de notre galaxie. Surla photo de cette “petite” partie de l’espace ne fi-gurent que des galaxies. Leur nombre et leur diver-sité sont saisissants. La figure 1.4 montre quant àelle le groupe local dans lequel se trouve notre ga-laxie la Voie Lactée. Il s’agit d’un amas de galaxie.
1.2.3 Les galaxies
Au nombre d’environ 350 milliards dans l’uni-vers, les galaxies sont des structures composées decentaines de milliards d’étoiles qui se regroupentsous l’effet de la force de gravitation. Dans l’espaceinterstellaire constituant le “vide” autour des étoilesse trouvent aussi des nuages de poussières et de gaz(des nébuleuses).
A cette échelle, les mouvements des galaxies sontperceptibles. Presque toutes s’éloignent de nous. Ce
19
1.2. DE L’INFINIMENT GRAND À L’INFINIMENT PETIT CHAPITRE 1. INTRODUCTION
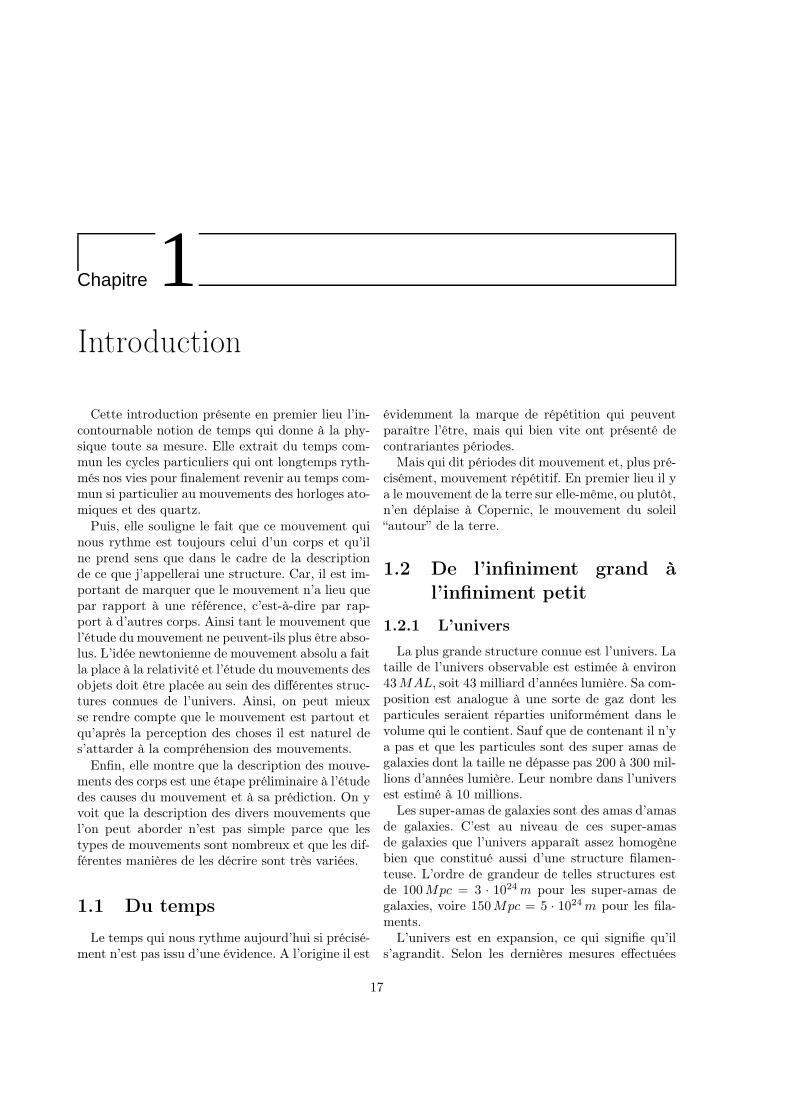
Fig. 1.5 – Galaxie du SombreroImage du télescope spatial Hubble6
phénomène est appelé “expansion”. Il est interprétécomme un mouvement dû au “gonflement” de l’uni-vers lui-même. Le mouvement local des galaxiesétant faible par rapport à celui général de l’expan-sion de l’univers, il est rare de voir des galaxies serapprocher de nous. Pourtant, cela est le cas de latrès fameuse (parce qu’observable à l’œil nu et laplus proche galaxie massive (autre que naine) denous) galaxie d’Andromède.
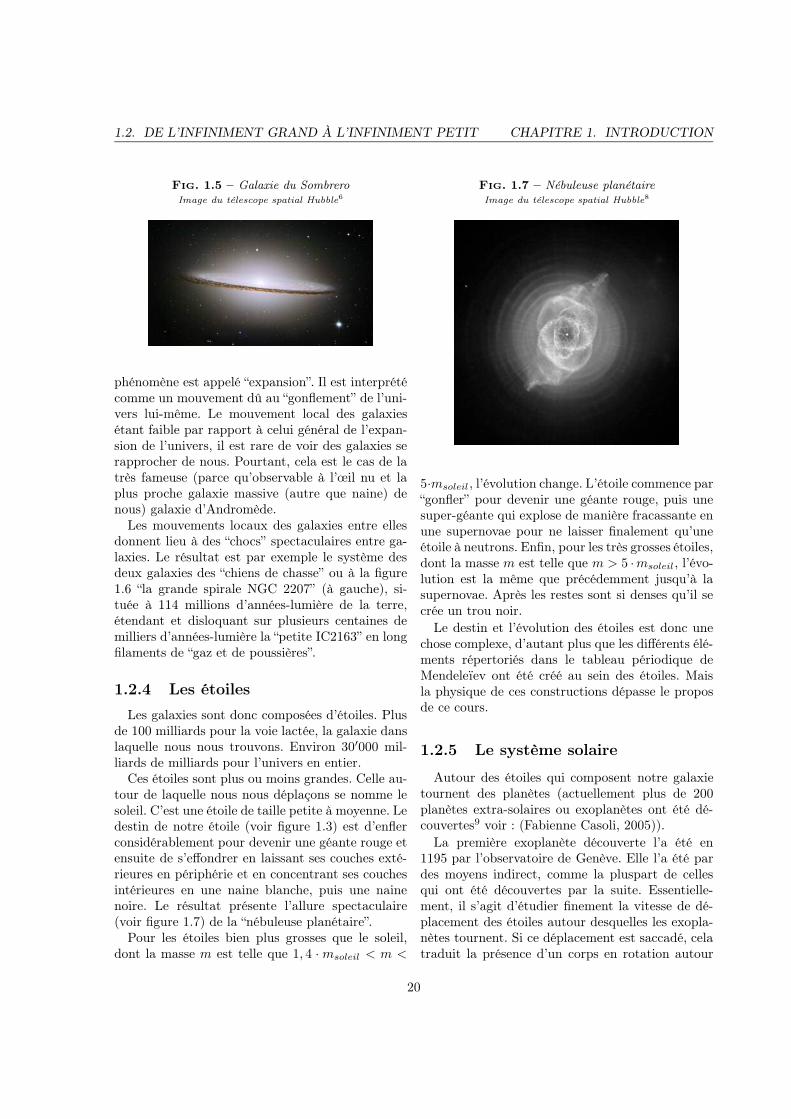
Les mouvements locaux des galaxies entre ellesdonnent lieu à des “chocs” spectaculaires entre ga-laxies. Le résultat est par exemple le système desdeux galaxies des “chiens de chasse” ou à la figure1.6 “la grande spirale NGC 2207” (à gauche), si-tuée à 114 millions d’années-lumière de la terre,étendant et disloquant sur plusieurs centaines demilliers d’années-lumière la “petite IC2163” en longfilaments de “gaz et de poussières”.
1.2.4 Les étoiles
Les galaxies sont donc composées d’étoiles. Plusde 100 milliards pour la voie lactée, la galaxie danslaquelle nous nous trouvons. Environ 30′000 mil-liards de milliards pour l’univers en entier.
Ces étoiles sont plus ou moins grandes. Celle au-tour de laquelle nous nous déplaçons se nomme lesoleil. C’est une étoile de taille petite à moyenne. Ledestin de notre étoile (voir figure 1.3) est d’enflerconsidérablement pour devenir une géante rouge etensuite de s’effondrer en laissant ses couches exté-rieures en périphérie et en concentrant ses couchesintérieures en une naine blanche, puis une nainenoire. Le résultat présente l’allure spectaculaire(voir figure 1.7) de la “nébuleuse planétaire”.
Pour les étoiles bien plus grosses que le soleil,dont la masse m est telle que 1, 4 · msoleil < m <
Fig. 1.7 – Nébuleuse planétaireImage du télescope spatial Hubble8
5·msoleil, l’évolution change. L’étoile commence par“gonfler” pour devenir une géante rouge, puis unesuper-géante qui explose de manière fracassante enune supernovae pour ne laisser finalement qu’uneétoile à neutrons. Enfin, pour les très grosses étoiles,dont la masse m est telle que m > 5 ·msoleil, l’évo-lution est la même que précédemment jusqu’à lasupernovae. Après les restes sont si denses qu’il secrée un trou noir.
Le destin et l’évolution des étoiles est donc unechose complexe, d’autant plus que les différents élé-ments répertoriés dans le tableau périodique deMendeleïev ont été créé au sein des étoiles. Maisla physique de ces constructions dépasse le proposde ce cours.
1.2.5 Le système solaire
Autour des étoiles qui composent notre galaxietournent des planètes (actuellement plus de 200planètes extra-solaires ou exoplanètes ont été dé-couvertes9 voir : (Fabienne Casoli, 2005)).
La première exoplanète découverte l’a été en1195 par l’observatoire de Genève. Elle l’a été pardes moyens indirect, comme la pluspart de cellesqui ont été découvertes par la suite. Essentielle-ment, il s’agit d’étudier finement la vitesse de dé-placement des étoiles autour desquelles les exopla-nètes tournent. Si ce déplacement est saccadé, celatraduit la présence d’un corps en rotation autour
20
CHAPITRE 1. INTRODUCTION 1.2. DE L’INFINIMENT GRAND À L’INFINIMENT PETIT
Fig. 1.6 – Interaction de deux galaxiesImage du télescope spatial Hubble7
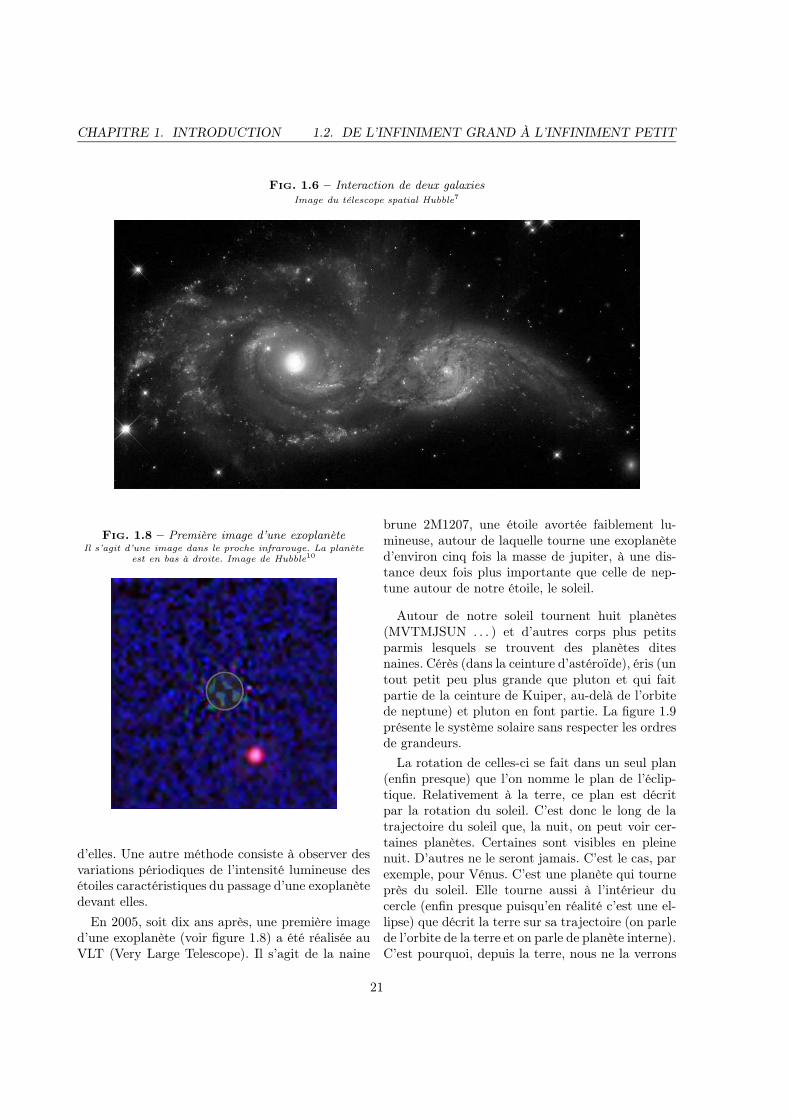
Fig. 1.8 – Première image d’une exoplanèteIl s’agit d’une image dans le proche infrarouge. La planète
est en bas à droite. Image de Hubble10
d’elles. Une autre méthode consiste à observer desvariations périodiques de l’intensité lumineuse desétoiles caractéristiques du passage d’une exoplanètedevant elles.
En 2005, soit dix ans après, une première imaged’une exoplanète (voir figure 1.8) a été réalisée auVLT (Very Large Telescope). Il s’agit de la naine
brune 2M1207, une étoile avortée faiblement lu-mineuse, autour de laquelle tourne une exoplanèted’environ cinq fois la masse de jupiter, à une dis-tance deux fois plus importante que celle de nep-tune autour de notre étoile, le soleil.
Autour de notre soleil tournent huit planètes(MVTMJSUN . . . ) et d’autres corps plus petitsparmis lesquels se trouvent des planètes ditesnaines. Cérès (dans la ceinture d’astéroïde), éris (untout petit peu plus grande que pluton et qui faitpartie de la ceinture de Kuiper, au-delà de l’orbitede neptune) et pluton en font partie. La figure 1.9présente le système solaire sans respecter les ordresde grandeurs.
La rotation de celles-ci se fait dans un seul plan(enfin presque) que l’on nomme le plan de l’éclip-tique. Relativement à la terre, ce plan est décritpar la rotation du soleil. C’est donc le long de latrajectoire du soleil que, la nuit, on peut voir cer-taines planètes. Certaines sont visibles en pleinenuit. D’autres ne le seront jamais. C’est le cas, parexemple, pour Vénus. C’est une planète qui tourneprès du soleil. Elle tourne aussi à l’intérieur ducercle (enfin presque puisqu’en réalité c’est une el-lipse) que décrit la terre sur sa trajectoire (on parlede l’orbite de la terre et on parle de planète interne).C’est pourquoi, depuis la terre, nous ne la verrons
21

1.2. DE L’INFINIMENT GRAND À L’INFINIMENT PETIT CHAPITRE 1. INTRODUCTION
Fig. 1.9 – Système solaireImage de la Nasa11
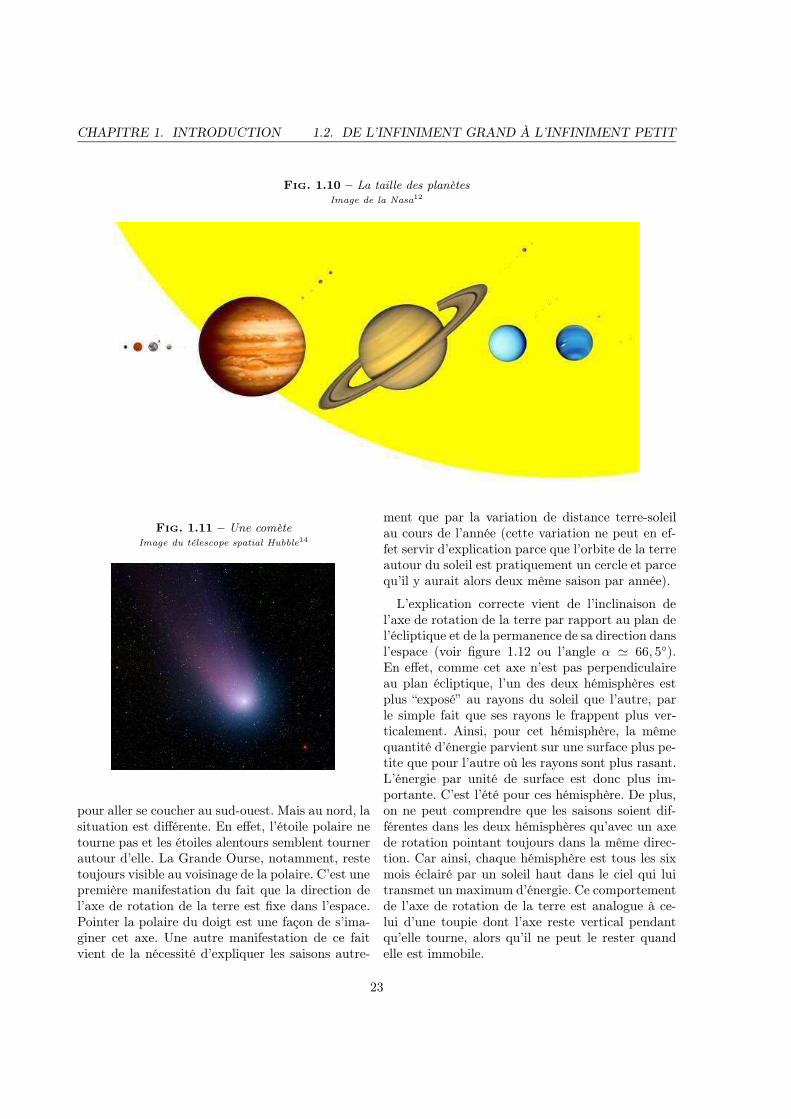
que dans le voisinage du soleil. Ainsi, on peut lavoir le matin avant que le soleil se lève (on l’appellealors l’étoile du matin) ou le soir, peu de tempsaprès que le soleil se soit couché (elle porte alors lenom d’étoile du soir). Les planètes se divisent entrois groupes : les quatre planètes dites telluriquessont celles qui sont le plus proche du soleil. Ellessont petites, solides et relativement semblables à laterre. Les quatre planètes dites joviennes sont, àl’image de jupiter, très grosses et gazeuses. Enfin, àpartir de pluton, les corps sont très petits, très éloi-gnés et ne sont plus considérés comme des planètes.La figure 1.10 présente les planètes en respectant lesordres de grandeurs de leurs tailles respectives.
Il existe encore d’autres corps importants dans lesystème solaire : les comètes (voir figure 1.11). Cesont de très petits corps (quelques dizaines de ki-lomètres de diamètre) qui viennent de régions trèséloignées du système solaire (le nuage de Oort : “ils’agirait d’une vaste enveloppe de corps orbitantentre 40′000 ua et 150′000 ua (0,73 pc) de distancedu Soleil, et donc située bien au-delà de l’orbitedes planètes et de la ceinture de Kuiper”13) et qui,pour ainsi dire, tombent sur le soleil selon une tra-
jectoire très elliptique. En passant elles laissent surleur orbite une traînée de poussière qui se mani-feste sous la forme d’une magnifique queue. Ce sontces traînées de poussières que la terre rencontre surson orbite en donnant lieu aux fameuses pluies demétéorites. Celles-ci semblent alors provenir d’unpoint bien précis dans le ciel, comme la neige quitombe sur le pare-brise d’une voiture semble venird’un point situé dans la direction du déplacementde la voiture. Dans le cas de météorites, ce pointse nomme le radian. Les météorites ne sont donc nides étoiles (même si on parle aussi d’étoiles filantespour les décrire), ni des planètes ou des comètes,mais de “petites” poussières qui s’enflamment enentrant dans l’atmosphère terrestre.
1.2.6 La terre et la lune
La terre
On sait aujourd’hui que la terre tourne autour dusoleil et sur elle même. Ainsi, lorsqu’on regarde leciel depuis la terre, la voûte céleste semble tournerau cours de la nuit. Les étoiles se lèvent au sud-est,
22
CHAPITRE 1. INTRODUCTION 1.2. DE L’INFINIMENT GRAND À L’INFINIMENT PETIT
Fig. 1.10 – La taille des planètesImage de la Nasa12
Fig. 1.11 – Une comèteImage du télescope spatial Hubble14
pour aller se coucher au sud-ouest. Mais au nord, lasituation est différente. En effet, l’étoile polaire netourne pas et les étoiles alentours semblent tournerautour d’elle. La Grande Ourse, notamment, restetoujours visible au voisinage de la polaire. C’est unepremière manifestation du fait que la direction del’axe de rotation de la terre est fixe dans l’espace.Pointer la polaire du doigt est une façon de s’ima-giner cet axe. Une autre manifestation de ce faitvient de la nécessité d’expliquer les saisons autre-
ment que par la variation de distance terre-soleilau cours de l’année (cette variation ne peut en ef-fet servir d’explication parce que l’orbite de la terreautour du soleil est pratiquement un cercle et parcequ’il y aurait alors deux même saison par année).
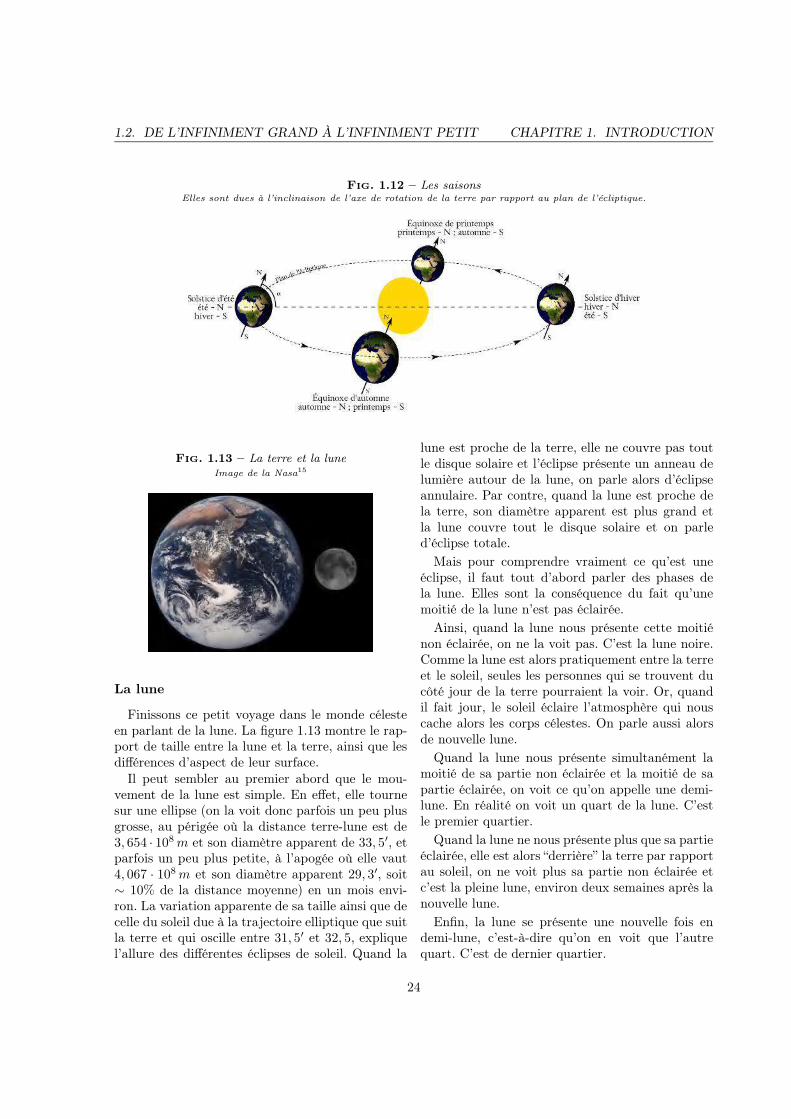
L’explication correcte vient de l’inclinaison del’axe de rotation de la terre par rapport au plan del’écliptique et de la permanence de sa direction dansl’espace (voir figure 1.12 ou l’angle α � 66, 5◦).En effet, comme cet axe n’est pas perpendiculaireau plan écliptique, l’un des deux hémisphères estplus “exposé” au rayons du soleil que l’autre, parle simple fait que ses rayons le frappent plus ver-ticalement. Ainsi, pour cet hémisphère, la mêmequantité d’énergie parvient sur une surface plus pe-tite que pour l’autre où les rayons sont plus rasant.L’énergie par unité de surface est donc plus im-portante. C’est l’été pour ces hémisphère. De plus,on ne peut comprendre que les saisons soient dif-férentes dans les deux hémisphères qu’avec un axede rotation pointant toujours dans la même direc-tion. Car ainsi, chaque hémisphère est tous les sixmois éclairé par un soleil haut dans le ciel qui luitransmet un maximum d’énergie. Ce comportementde l’axe de rotation de la terre est analogue à ce-lui d’une toupie dont l’axe reste vertical pendantqu’elle tourne, alors qu’il ne peut le rester quandelle est immobile.
23
1.2. DE L’INFINIMENT GRAND À L’INFINIMENT PETIT CHAPITRE 1. INTRODUCTION
Fig. 1.12 – Les saisonsElles sont dues à l’inclinaison de l’axe de rotation de la terre par rapport au plan de l’écliptique.
Fig. 1.13 – La terre et la luneImage de la Nasa15
La lune
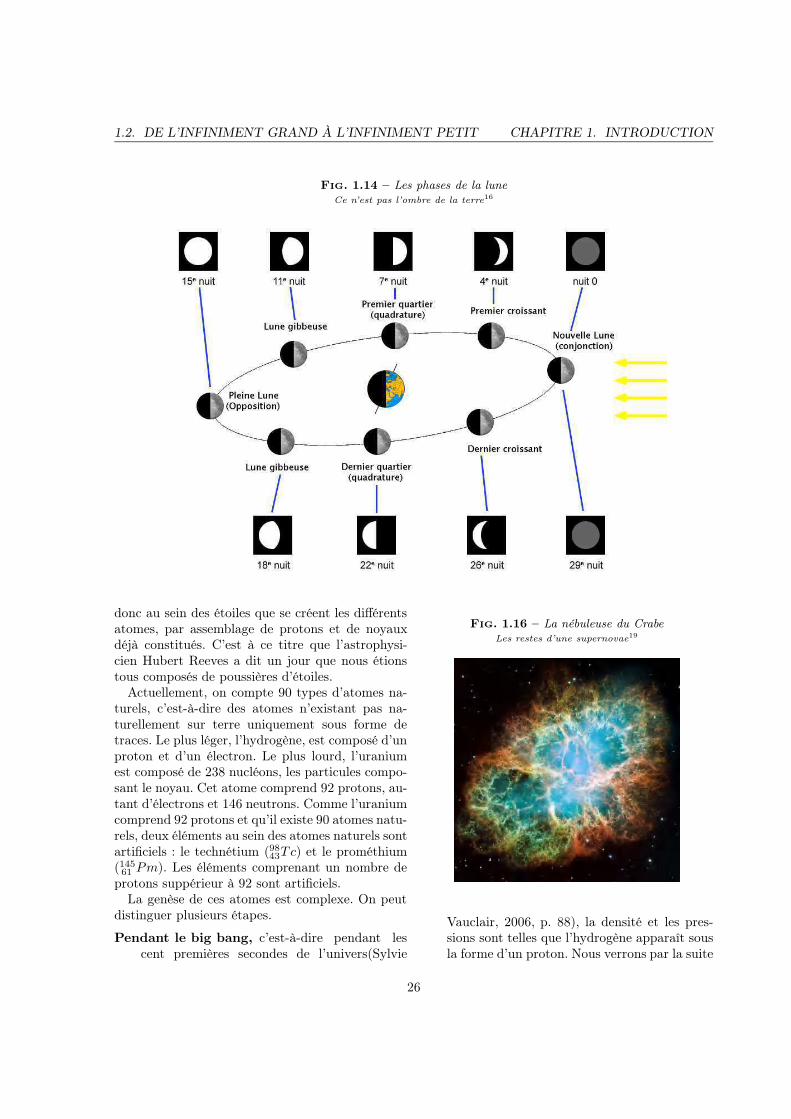
Finissons ce petit voyage dans le monde célesteen parlant de la lune. La figure 1.13 montre le rap-port de taille entre la lune et la terre, ainsi que lesdifférences d’aspect de leur surface.
Il peut sembler au premier abord que le mou-vement de la lune est simple. En effet, elle tournesur une ellipse (on la voit donc parfois un peu plusgrosse, au périgée où la distance terre-lune est de3, 654 · 108 m et son diamètre apparent de 33, 5′, etparfois un peu plus petite, à l’apogée où elle vaut4, 067 · 108 m et son diamètre apparent 29, 3′, soit∼ 10% de la distance moyenne) en un mois envi-ron. La variation apparente de sa taille ainsi que decelle du soleil due à la trajectoire elliptique que suitla terre et qui oscille entre 31, 5′ et 32, 5, expliquel’allure des différentes éclipses de soleil. Quand la
lune est proche de la terre, elle ne couvre pas toutle disque solaire et l’éclipse présente un anneau delumière autour de la lune, on parle alors d’éclipseannulaire. Par contre, quand la lune est proche dela terre, son diamètre apparent est plus grand etla lune couvre tout le disque solaire et on parled’éclipse totale.
Mais pour comprendre vraiment ce qu’est uneéclipse, il faut tout d’abord parler des phases dela lune. Elles sont la conséquence du fait qu’unemoitié de la lune n’est pas éclairée.
Ainsi, quand la lune nous présente cette moitiénon éclairée, on ne la voit pas. C’est la lune noire.Comme la lune est alors pratiquement entre la terreet le soleil, seules les personnes qui se trouvent ducôté jour de la terre pourraient la voir. Or, quandil fait jour, le soleil éclaire l’atmosphère qui nouscache alors les corps célestes. On parle aussi alorsde nouvelle lune.
Quand la lune nous présente simultanément lamoitié de sa partie non éclairée et la moitié de sapartie éclairée, on voit ce qu’on appelle une demi-lune. En réalité on voit un quart de la lune. C’estle premier quartier.
Quand la lune ne nous présente plus que sa partieéclairée, elle est alors “derrière” la terre par rapportau soleil, on ne voit plus sa partie non éclairée etc’est la pleine lune, environ deux semaines après lanouvelle lune.
Enfin, la lune se présente une nouvelle fois endemi-lune, c’est-à-dire qu’on en voit que l’autrequart. C’est de dernier quartier.
24

CHAPITRE 1. INTRODUCTION 1.2. DE L’INFINIMENT GRAND À L’INFINIMENT PETIT
Fig. 1.15 – Orbites de la lune et du soleilDes plans différents17
La figure 1.14 résume la situation décrite ci-dessus.
La question se pose alors de la différence entreéclipse de soleil et nouvelle lune et éclipse de luneet pleine lune. En effet, si la lune tournait dansle plan de l’écliptique, il se produirait une éclipsede soleil chaque nouvelle lune et une éclipse de lunechaque pleine lune. Comme on sait bien que ce n’estpas le cas, cela signifie que la lune ne tourne pasdans le même plan que l’écliptique. En réalité leplan de rotation de la lune fait un angle de 5◦ 17′
par rapport à l’écliptique comme le montre la figure1.15.
Comme ces plans ne coïncident pas, tant que lalune n’est pas dans le plan de l’écliptique, c’est-à-dire sur la ligne des nœuds présentée dans la figure1.15, il ne peut y avoir d’éclipse. Or, la lune coupe leplan de l’écliptique deux fois pas mois. Mais encorefaut-il que la ligne des noeuds soit alors alignée avecle soleil. Il faut dire aussi que le plan de rotationde la lune tourne sur lui-même entraînant la lignedes noeuds avec lui. Sa période de rotation est de18, 61 ans. Ainsi, la ligne des noeuds tourne sur elle-même d’un angle de ∼ 19, 6◦ par an. Finalementdonc, on peut calculer que l’alignement de la lignedes noeuds et du soleil se fait tout les 173 joursenviron18. Cette durée constitue ce qu’on appelleune saison d’éclipses.
Mais, tout cela est en définitive bien plus com-pliqué, pour les éclipses de soleil notamment, par lefait que l’ombre de la lune ne couvre pas la totalitéde la terre. Si bien qu’en un lieu donné à sa surface,au moment où des éclipses de soleil et de lune sontpossibles, il se peut que seule une éclipse de lunesoit visible, alors que celle de soleil ne l’est pas à
cet endroit.
Finalement, avec ce petit tour de l’horizon cé-leste, on peut maintenant mieux se rendre compteque les “objets” qui constituent notre univers sontloin d’être immobiles et que leur mouvement sontdifficile à bien décrire. . . Mais c’est là la tâche de laphysique que d’élaborer cette description avec pré-cision pour nous permettre d’envoyer des hommessur la lune ou de placer des satellites qui nous per-mettent de mieux communiquer.
1.2.7 Le monde subatomique
D’un côté donc, des mondes bien plus grands quele nôtre et de l’autre aussi des mondes bien pluspetits. La biologie nous enseigne que nous sommescomposés de cellules et la chimie que celles-ci sontconstruites avec des molécules. Chacune de ces der-nières sont faites d’atomes. Or, ces atomes sontconstruits dans les étoiles (Une bonne introductionà l’astrogénèse de la matière est donnée dans (Syl-vie Vauclair, 2006) ou (Françoise Balibar, 2005)).En effet, le noyau d’un atome est essentiellementconstitué de protons et de neutrons. Autour de cenoyau tournent des électrons qui sont retenus parla force électrique qui existe entre les électrons decharge négative et les protons de charge positive.Le noyau lui-même est donc chargé positivement.Les neutrons n’étant pas chargés, on peut se de-mander ce qui retient les protons ensemble. Si laseule force présente dans le noyau était électrique,les protons se repousseraient et le noyau éclate-rait. Évidemment, il n’en est rien. Cela traduit laprésence d’une autre force, assez faible pour pas-ser inaperçue tant que les protons sont éloignée,mais plus forte que la force électrique quand ils setrouvent très proches les uns des autres, commec’est le cas dans le noyau. Cette force est nomméeforce forte. On en dira quelques mots plus loin.
Comme cette force agit seulement à faible dis-tance, comme elle a une très courte portée et que laforce électrique est importante tant que les protonssont assez loin les uns des autres, il est nécessairepour les amener à portée de la force forte de lesplacer sous une grande pression. C’est alors que laforce de gravitation entre en jeu, au sein des étoiles,en comprimant assez ces protons pour que la forceélectrique ne les empêchent pas de s’assembler etque la force forte puisse les lier durablement. C’est
25
1.2. DE L’INFINIMENT GRAND À L’INFINIMENT PETIT CHAPITRE 1. INTRODUCTION
Fig. 1.14 – Les phases de la luneCe n’est pas l’ombre de la terre16
donc au sein des étoiles que se créent les différentsatomes, par assemblage de protons et de noyauxdéjà constitués. C’est à ce titre que l’astrophysi-cien Hubert Reeves a dit un jour que nous étionstous composés de poussières d’étoiles.
Actuellement, on compte 90 types d’atomes na-turels, c’est-à-dire des atomes n’existant pas na-turellement sur terre uniquement sous forme detraces. Le plus léger, l’hydrogène, est composé d’unproton et d’un électron. Le plus lourd, l’uraniumest composé de 238 nucléons, les particules compo-sant le noyau. Cet atome comprend 92 protons, au-tant d’électrons et 146 neutrons. Comme l’uraniumcomprend 92 protons et qu’il existe 90 atomes natu-rels, deux éléments au sein des atomes naturels sontartificiels : le technétium (9843Tc) et le prométhium(14561 Pm). Les éléments comprenant un nombre deprotons suppérieur à 92 sont artificiels.
La genèse de ces atomes est complexe. On peutdistinguer plusieurs étapes.
Pendant le big bang, c’est-à-dire pendant lescent premières secondes de l’univers(Sylvie
Fig. 1.16 – La nébuleuse du CrabeLes restes d’une supernovae19
Vauclair, 2006, p. 88), la densité et les pres-sions sont telles que l’hydrogène apparaît sousla forme d’un proton. Nous verrons par la suite
26
CHAPITRE 1. INTRODUCTION 1.2. DE L’INFINIMENT GRAND À L’INFINIMENT PETIT
Fig. 1.17 – L’atome de BohrUn système planétaire20
comment. Puis, se forme le deutérium, isotopede l’hydrogène composé d’un proton et d’unneutron. Puis l’hélium 3 et 4 et le lithium 7.Et c’est tout, car la température diminuant,elle n’est plus assez grande pour permettre laformation d’éléments plus lourds.
A l’intérieur des étoiles, la formation d’héliumà partir de l’hydrogène se produit au début deleur vie. Elle passe encore en premier lieu parla formation de deutérium, puis d’hélium 3 et4. Actuellement dans le soleil plus de 500 mil-lions de tonnes d’hydrogène fusionnent chaqueseconde pour donner de l’hélium. Une petitepartie, environ 0, 7%, est convertie en énergie.Ces deux éléments, hydrogène et hélium,constituent respectivement 71% et 27% de lamasse du système solaire, soit au total 98% decelle-ci. C’est dire leur importance.Lorsque l’hydrogène a été brûlé, l’étoile secontracte et il se forme des atomes plus lourdscomme le carbone, l’azote et l’oxygène en pas-sant par le bérilium. Puis dans un secondtemps le fluor et le néon à partir du carboneet de l’oxygène, puis les éléments suivants jus-qu’au fer.Dans certaines étoiles (les géantes rouges parexemple) la création des éléments encore pluslourds ne se fait plus par fusion. En effet, larépulsion électrique entre les atomes qui de-vraient fusionner devient si importante en rai-son du nombre élevé de protons qu’ils ne fu-
Fig. 1.18 – L’atome : onde de probabilitéUne image bien plus complexe21
sionnent plus. Par contre, ils s’entourent pro-gressivement de neutrons (produits de la fusiondes éléments précédents) qui ne sont pas re-poussés par la force électrique, et grossissenttellement qu’ils deviennent instables. Alorscertains neutrons se transforment par désin-tégration en protons créant ainsi de nouveauxéléments plus lourds que le fer.
Lors de l’explosion d’une étoile, phénomèneappelé supernovae (voir la figure 1.16), seforment les éléments plus lourd que le carbone,l’azote et l’oxygène et cela jusqu’au fer, atomesi stable que ces conditions ne suffisent mêmepas à former des éléments plus lourds.Puis, comme précédemment, les éléments pluslourds sont aussi formés par désintégration desneutrons insensible à la force électrique qui sesont liés au fer.
Dans le gaz interstellaire enfin, se forment lestrois éléments légers particuliers que sont lelithium, le béryllium et le bore par fission ducarbone, de l’azote et de l’oxygène.
Mais la physique ne s’arrête pas là dans sa des-cription de l’infiniment petit. Elle s’intéresse en-core à d’autres objets extraordinaires. En effet, siles mouvements des atomes peuvent encore facile-ment être représentés en termes de trajectoire, ceuxde leurs composants sont bien plus étranges. Car onpeut autant les voir comme de petites particules (etcela à donné lieu, à l’origine, à un modèle de l’atome
27
1.2. DE L’INFINIMENT GRAND À L’INFINIMENT PETIT CHAPITRE 1. INTRODUCTION
Tab. 1.1 – Tableau des particules élémentairesBeaucoup de diversité
Atome Noyau Nucléon Quarks Cordes
Fermions
Ce sont lesparticules quiconstituent lamatièreordinaire
Leptons Quarks
Électron (e−) Neutrino (νe)électronique
Bas (d) Haut (u)
Il détermine les
propriétés
chimiques. Chargé
négativement.
Très faible
interaction avec la
matière. Sans
charge.
1x dans le proton,
2x dans le neutron.
2x dans le proton,
1x dans le neutron
Particules du bigbang, présentesdans les rayonscosmiques ou lesaccélérateurs
Muon (µ−) Neutrinomuonique (νµ)
Étrange (s) Charme (c)
Un électron plus
massif
Un autre neutrino Un bas plus massif Un haut plus mas-
sif
Tau (τ) Neutrinotauique (ντ)
Beauté (b) Vérité ou Top(t)
Un muon plus
massif
Un autre neutrino Un étrange plus
massif
Un haut encore
plus massif
Bosons
Particulesreprésentant lesforcesélémentaires
Photon (γ) Gluon (g) Bosons (W Z)intermédiaires
Graviton
Grain de lumière ;
vecteur de la force
électromagnétique
Cohésion du noyau
et des nucléons ;
vecteur de la force
forte
Radioactivité ;
vecteur de la force
faible
Poids : vecteur de
la force de gravita-
tion
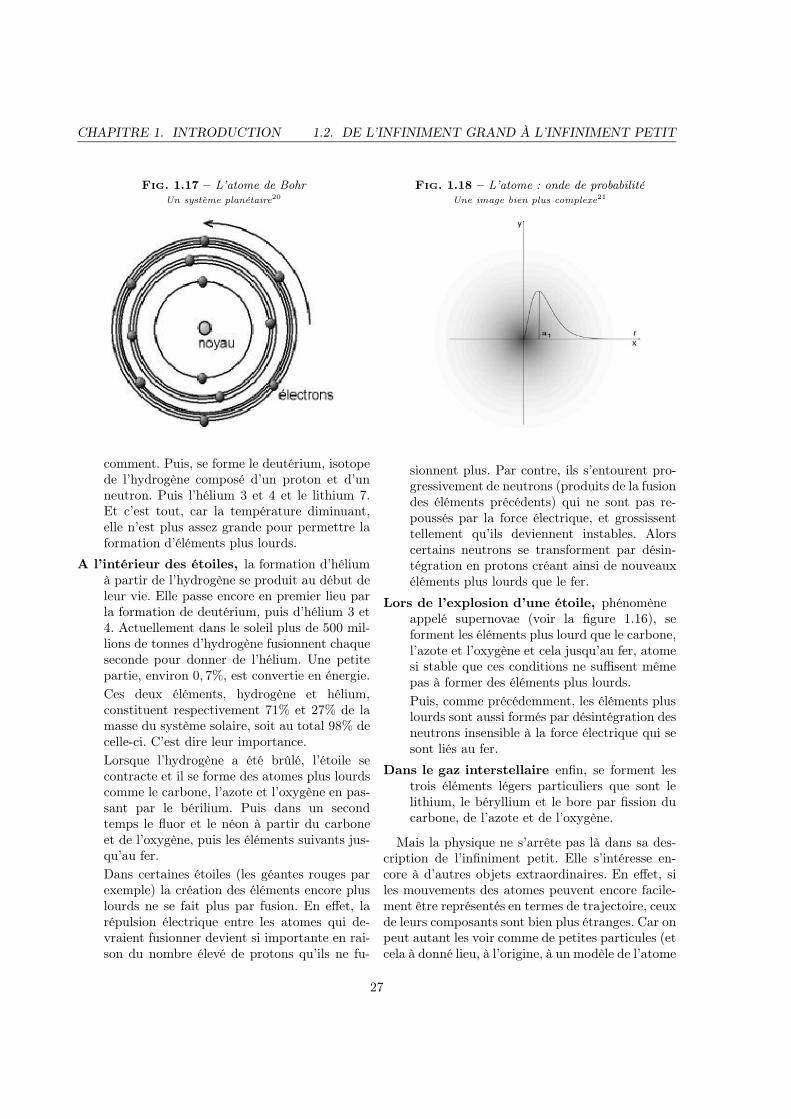
dit de Bohr (voir fig. 1.17) où les électrons orbi-taient autour du noyau, comme les planètes autourdu soleil) que comme des “choses” infiniment éten-dues que l’on appelle ondes. Cette dualité du moded’existence des particules élémentaires comme lesélectrons, les protons, les neutrons et bien d’autreencore traduit l’existence d’un objet physique bienparticulier, le quanton, et présente des difficultésd’analyse de leur mouvement. Au niveau des “tra-
jectoires” électroniques, par exemple, on constateque certaines orbitales semblent passer par le noyau(voir fig. 1.19). En outre, celles-ci ne peuvent êtreprécisément représentées comme l’orbite d’une pla-nète pourrait l’être. En fait, elles ne sont mêmepas des surfaces, mais plutôt des zones étendues del’espace dans lesquelles la probabilité de trouver unélectron est importante (voir fig. 1.18). Car, à cetteéchelle, on ne peut plus décrire la position de l’élec-
28

CHAPITRE 1. INTRODUCTION 1.2. DE L’INFINIMENT GRAND À L’INFINIMENT PETIT
Fig. 1.19 – L’orbitale : onde de probabilitéUne autre image complexe22
tron que par une probabilité de présence. En effet,un principe d’indéterminationc, dit de Heisenberg,règle la relation entre leur position et leur vitesse.Celui-ci exprime la constatation que si l’on connaîtparfaitement la position d’un tel objet, alors sa vi-tesse ne peut nous être que totalement inconnue. Etinversement, si sa vitesse est parfaitement détermi-née, alors on ne peut savoir où est l’objet. Ainsi, auniveau microscopique, la notion même de mouve-ment n’est pas claire, ou plutôt est bien plus com-plexe que celle que nous rencontrons dans la viequotidienne.
“Il n’y a pour les quantons plus demouvement au sens d’une trajectoire,comme celle que suit une particule clas-sique. Puisqu’un quanton possède une spa-tialité continue, a une extension spatialeindéfinie, son mode d’évolution temporelleest plus proche de la propagation des ondesque du mouvement des corpuscules. Il fautdonc ici rompre avec le projet cartésienqui était de décrire le monde « par figureset mouvements ». Plus de figures, plusde mouvement, mais d’autres caractérisa-tions, bien sûr, qui ne correspondent pasà nos intuitions immédiates et à nos pra-tique communes – ce sont de nouvelles no-tions que les théories physiques font émer-ger de l’expérience du monde quantique.”(Jean-Marc Lévy-Leblond, 2006, p. 33)
Ce monde étrange et fascinant de la physique del’infiniment petit ne s’arrête pas à la dualité onde
cLe terme d’indétermination est préférable à celui d’in-certitude, communément attribué au principe de Heisenberg,qui laisse penser que l’indétermination est uniquement dueà la mauvaise qualité de nos instruments de mesure et non àla caractéristique fondamentale des quantons de ne pas êtrelocalisés.
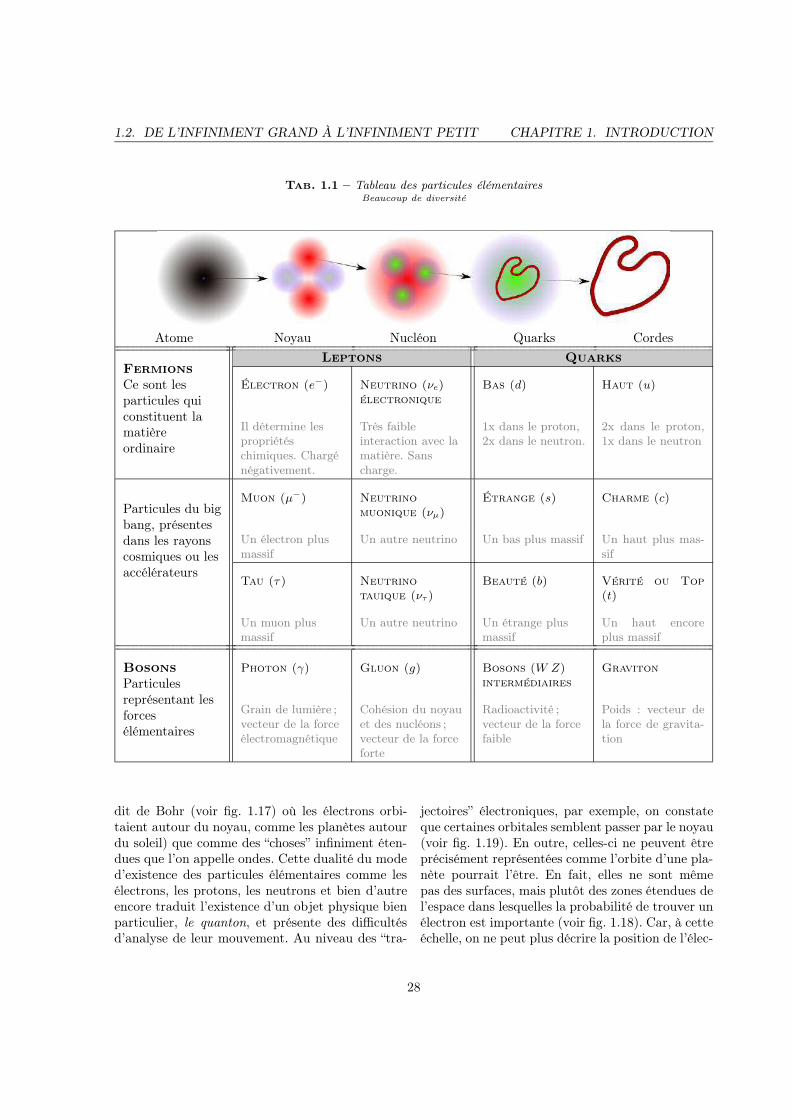
corpuscule. La recherche des composants ultimesde la matière a de tout temps relevé du domaine dela physique. Avec l’atome, un pas important a étéfranchi. Mais il existe plus de 92 types d’atomes quiont chacun leurs propriétés spécifiques. Naturelle-ment donc on s’est intéressé à sa composition. Cequi permit de découvrir les électrons, les protons etles neutrons. Ainsi, d’élémentaire, l’atome est passéau rang de structure complexe. Mais, comme onpeut aussi le voir dans le tableau 1.1, il existe en-core beaucoup d’autres particules qui composent lemonde subatomique.
On peut y voir que l’ensemble des particules sedécompose en deux catégories essentielles : les fer-mions et les bosons. Les premiers forment la ma-tière et les second expliquent la nature des forcesfondamentales.
Les fermions Cette catégorie se compose elle-même de deux groupes : les leptons et lesquarks. Les quarks sont les constituants desnucléons (composants du noyau) : protons etneutrons. Chaque nucléons est composés detrois quarks. Les leptons quant à eux doiventêtre considéré individuellement à l’instar del’électron et du neutrino électronique.
Les bosons Sorte de messagers des interactionsélémentaires, ils permettent de comprendrecomment se réalisent les actions entre les corps.Ces actions sont des forces, comme la forcede frottement, la force de gravitation, la forced’un ressort. . . qui ont toutes pour origine unedes quatre interactions fondamentales à la-quelle correspond chaque fois un type de par-ticule véhiculant cette force :
Électromagnétique ↔ Le photonFaible ↔ Un boson intermédiaire
Forte ↔ Le gluonDe gravitation ↔ Le graviton ?
Il faut noter que le graviton est encore hypo-thétique.
Finalement, il faut encore parler des particulestrès particulières formant l’antimatière. On sait denos jours produire et stocker pendant une courtepériode (quelques joursd) ce type de particules qui
dOn crée des anti-protons dans un accélérateur de par-ticules comme le CERN à Genève, on les ralentis et on lespiège dans un champ électromagnétique. Voici à ce sujet uncommentaire de M. Carlo RUBBIA (Prix Nobel de Physique
29

1.2. DE L’INFINIMENT GRAND À L’INFINIMENT PETIT CHAPITRE 1. INTRODUCTION
interagissent fortement avec la matière ordinaireen disparaissant totalement au profit de lumière.Ce sont des particules qui ont des propriétés in-verses des particules de la matière ordinaire. Parexemple, un positron, qui est un anti-électron, a lamême masse qu’un électron, mais une charge oppo-sée. Ces particules n’existent pas sur terre ailleursque dans les accélérateurs de particules où elles sontproduites par la collision d’autres particules. Maison peut envisager qu’il en existe beaucoup ailleursdans l’univers. Cette question reste cependant dé-battue.
Conclusion
Ainsi donc on peut maintenant mieux se rendrecompte pourquoi la compréhension du mouvementest l’un des premiers objectifs du physicien et pour-quoi la science qui permet de prévoir le “destin” desobjets, la mécanique, commence par une descrip-tion des mouvements les plus simples, par ce quel’on nomme la cinématique.
1984) :
“L’antimatière est, comme vous l’avez vu,
produite au CERN où une véritable usine de pro-
duction a été construite. Nous utilisons des pro-
tons qui sont accélérés et viennent frapper une
cible. Au cours des collisions, il y a production
d’un grand nombre de particules ou d’antiparti-
cules et, parmi elles, on trouve des antiprotons.
Ces antiprotons sont stockés dans une bouteille
magnétique qui, dans le cas particulier, est un
anneau de stockage à accumulation. On obtient
ainsi une quantité d’antimatière qui n’est pas
très petite puisqu’elle atteint un microgramme
par jour.” 23
30
Chapitre 2La cinématique
2.1 Introduction
La cinématique est la science de la descriptiondu mouvement. L’origine du mot, kinêma, le mou-vement, est la même que celle du mot cinéma. Ils’agit de rendre compte des différentes manières dedécrire précisément le mouvement d’un corps dansl’espace. Cette description n’implique pas la déter-mination des causes du mouvement. Celles-ci serontintroduites dans la dynamique.
2.2 Position
2.2.1 Dimensions
Une dimension
On dira du mouvement d’un système qu’il estunidimensionnel ou en une dimension quand il sefait selon une droite.
Deux dimensions
On dira du mouvement d’un système qu’il estbidimensionnel ou en deux dimensions quand il sefait dans un plan.
Trois dimensions
On dira du mouvement d’un système qu’il esttridimensionnel ou en trois dimensions quand il sefait dans l’espace.
2.2.2 Système d’axes
Nous allons ici, pour plus de facilité, nous limiteraux mouvements unidimensionnels. La généralisa-tion en deux dimensions est naturelle pour des sys-tèmes d’axes et de coordonnées cartésiens. Nous neverrons pas d’autre types de système d’axes. Parcontre, vous trouverez en annexe B deux autressystèmes de coordonnées : circulaires (bidimension-nel) et sphérique (tridimensionnel). Ils sont assezsimples pour être compris sans autre.
L’utilisation de plusieurs dimensions impliquela transformation des grandeurs scalaires utiliséespar la suite en grandeurs vectorielles. Présentéeici comme une grandeur scalaire, la vitesse parexemple est en fait un vecteur. Pourtant, par soucide simplicité, quand ce n’est pas absolument néces-saire, seules les grandeurs scalaires seront utilisées.Le passage aux grandeurs vectorielles est cependantsimplement réalisé en plaçant une petite flèche au-dessus des grandeurs à caractère vectoriel. On peutalors considérer les définitions et relations mathé-matiques concernées comme vectorielles.
Un système d’axes est donc, en une dimension,une ligne orientée (munie d’un sens), c’est-à-direune flèche, munie d’une origine notée O, d’une unitéde longueur notée 1 et de graduations multiples decette unité. On la représente comme indiqué à lafigure 2.1 et on la nomme généralement x.
Fig. 2.1 – Un système d’axes en une dimension
0 1 x
31

2.3. VITESSE CHAPITRE 2. LA CINÉMATIQUE
2.2.3 Position
La position d’un objet est tout simplement lepoint coïncidant sur l’axe avec le lieu où se trouvel’objet. En une dimension elle est notée x et prendpour valeur celle donnée par le choix de l’origine etde l’unité. Exemple à la figure 2.2.
Fig. 2.2 – La position d’un objet
0 1 x
On écrira alors dans ce cas particulier : x = 4 cm.Bien entendu, si l’objet se déplace dans un plan,
la position devient le vecteur position −→r , repéré pardeux coordonnées. Par exemple, on pourrait avoir :
−→r =
(
34
)
cm
2.2.4 Déplacement
Le déplacement, noté D ou ∆x est la différenceentre les positions initiale et finale de l’objet. Onpeut donc écrire : D = ∆x = xfinal−xinitial = xf−xi = x2−x1. En deux dimensions, x est simplementun vecteur.
2.2.5 Distance parcourue
Il ne faut pas confondre déplacement et distanceparcourue. Si un objet part d’un point, parcourtune certaine distance et y revient, son déplacementest nul. Par contre sa distance parcourue, notée d,ne l’est pas.
2.3 Vitesse
2.3.1 Vitesse moyenne
La vitesse moyenne v d’un objet est donnée par :
v =deplacement
temps
=positionfinale − positioninitiale
temps
En d’autres termes :
v =d
t=
xf − xi
t=
∆x
t(2.1)
Bien que la notation exacte pour la vitessemoyenne soit v, la barre sur le v est souvent omisequand cela ne pose pas de problème de confusionavec la vitesse instantannée.
Les unités de la vitesse sont : [v] = m/sEn plusieurs dimensions, la définition de la vi-
tesse est identique sauf que la notation vectorielleapparaît.
2.3.2 Exemples
Exemple 1
Un objet se déplace de x = 3 m à x = 7 m en10 s. Quelle est sa vitesse moyenne.
Réponse :
v =7 − 3
10= 0, 4 m/s
Exemple 2
Un objet se déplace de x = 30 km à x = 10 kmen une demi-heure. Calculez sa vitesse moyenne enkm/h et en m/s.
Réponse :
v =10 − 30
0, 5= −40 km/h =
−40 · 103
60 · 60= − 40 · 103
3, 6 · 103= − 40
3, 6= −11, 1 m/s
La vitesse est négative, donc l’objet recule.
2.3.3 Vitesse instantanée
La vitesse instantanée d’un objet est la vitessequ’il a à un instant précis et non au cours d’unintervalle de temps donné. Cette vitesse est obte-nue en raccourcissant l’intervalle de temps entre lesdeux mesures de position finale et initiale, jusqu’àce que cet intervalle soit infiniment court, c’est-à-dire nul. On a alors la vitesse instantanée à ce mo-ment précis. Ainsi on peut écrire formellement :
vinstantannee = lim∆t→0
∆x
∆t=
dx
dtet on verra que cette opération mathématique de
limite correspond à la notion de dérivée.
32

CHAPITRE 2. LA CINÉMATIQUE 2.5. MOUVEMENTS SIMPLES
2.4 Accélération
2.4.1 Accélération moyenne
L’accélération moyenne a d’un objet est donnéepar :
a =vfinale − vinitiale
temps=
v2 − v1
t
a =∆v
t=
vf − vi
t=
∆v
t(2.2)
Bien que la notation exacte pour l’accélérationmoyenne soit a, la barre sur le a est souvent omisequand cela ne pose pas de problème de confusionavec l’accélération instantannée.
Les unités de l’accélération sont [a] = m/s2.En plusieurs dimensions, la définition de l’accélé-
ration est identique sauf que la notation vectorielleapparaît.
2.4.2 Exemples
Exemple 1
Un objet accélère de 0 à 100 km/h en 10 s. Quelleest son accélération ?
Réponse : attention, il faut que les unités dudénominateur (s) correspondent à celles du numé-rateur (km/h). On doit donc soit transformer deskm/h en km/s, soit des secondes en heures :
– 100 km/h = 100/3600 km/s = 0, 028 km/sAinsi, l’accélération vaut alors a = 0, 028/10 =0, 0028 km/s2.
– 10s = 10/3600 = 0, 0028 hAinsi, l’accélération vaut alors a =100/0, 0028 = 36′000 km/h2.
– La solution la plus courante est d’exprimertoutes les grandeurs en unités du système in-ternational (voir annexe A), c’est-à-dire desmètres et des secondes.Ainsi on aurait : 100km/h = 100/3, 6 =27, 8 m/s et l’accélération serait alors a =27, 8/10 = 2, 78 m/s2.
Exemple 2
Un objet passe de 20 m/s à 36 km/h en 10 s.Quelle est son accélération ?
Réponse : 36 km/h = 36/3, 6 = 10 m/s. Ainsia = (10− 20)/10 = −1m/s2. L’accélération est né-gative. Cela signifie ici que l’objet freine. On parlealors d’un cas particulier d’accélération : la décélé-ration.
Remarque :
Dans le calcul de l’accélération, il faut toujourstenir compte des vitesses avec leur signe. Ainsi, ilest possible de concevoir un objet qui ne décélèrepas et dont l’accélération est négative (voir exer-cices).
2.4.3 L’accélération instantanée
De la même manière que pour la vitesse instanta-née, on peut définir l’accélération instantanée par :
ainstantannee = lim∆t→0
∆v
∆t=
dv
dt
2.5 Mouvements simples
2.5.1 Le mouvement rectiligne uni-forme (MRU)
Définition
Un objet est dit en mouvement rectiligne uni-forme (MRU), s’il se déplace en ligne droite et àvitesse constante.
Propriétés
De la définition de la vitesse on tire :
v = vo =x − xo
t⇒ vo · t = x − xo
⇒ x = vo · t + xo
car la vitesse v au cours du temps ne change pas.Elle est donc la même à un instant t quelconque età l’instant t = 0 s, moment où on la note vo.
Ainsi, on peut écrire :
x(t) = vo · t + xo (2.3)
Cette équation donne la position x(t) d’un ob-jet au cours du temps en fonction de sa vitesse vo
(constante), de l’instant t qu’on considère et de saposition initiale xo. C’est une droite affine de pentevo et d’ordonnée initiale xo.
33

2.5. MOUVEMENTS SIMPLES CHAPITRE 2. LA CINÉMATIQUE
Fig. 2.3 – Apollo 16Rencontre du module de commande et du module lunaire
d’apollo 16 le 23 avril 197224.
Un exemple : Apollo en route vers la lune
Il s’agit ici d’un exemple - contre-exemple,comme nous allons le voir par la suite. D’une ma-nière très grossière, on peut décrire le mouvementd’une capsule Apollo en route vers la lune en troisphases :
1. La fusée décolle et amène la capsule à une al-titude de 370 km environ. Celle-ci est alors enorbite autour de la terre.
2. On allume la propulsion pour la faire dégagerde son orbite autour de la terre. Elle se dirigealors vers la lune.
3. Elle arrive à une altitude de 5700 km environde la surface de la lune. Là, elle est freinée (pardes moteurs) pour être capturée par la lune etpouvoir s’y poser.
Pendant la phase de transfert entre les deuxorbites terrestre et lunaire, on peut faire l’hypo-thèse d’un MRU. Nous verrons par la suite la vali-dité de cette hypothèse. En utilisant les différentesgrandeurs données ci-dessous, calculez la vitessemoyenne de la capsule Apollo 12 lors de son trans-fert vers la lune.
Tab. 2.1 – Données de la mission Apollo 12
Grandeur Valeur
Rayon de la terre 6′371 kmAltitude orbite terrestre 370 kmDate départ orbite terrestre 14 nov. 1969Heure départ orbite terrestre 19 h 15Distance terre-lune 3, 84 · 108 mAltitude orbite lunaire 5700 kmDate arrivée orbite lunaire 18 nov. 1969Heure arrivée orbite lunaire 6 h 10Rayon de la lune 1, 738 · 106 m
On a besoin des données du tableau 2.5.1a :Solution :Le temps t de déplacement vaut :
t = 4 h 45 mn + 3 · 24 h + 6 h 10 mn
= 82 h 55 mn = 82, 92 h
La distance d de déplacement vaut :
d = dterre−lune − Rterre − horbite−terre
− Rlune − horbite−lune
= 3, 84 · 105 − 6′371 − 370
− 1, 738 · 103 − 5′700 = 369′821 km
La vitesse moyenne est donc de :
v =d
t=
369′821
82, 92= 4460 km/h
Remarques importantes :
En réalité le mouvement de la capsule est loind’être un MRU. En effet, la terre et la lune exercentleurs attractions respectives. Ainsi, si la vitesse ini-tiale de rotation de la capsule autour de la terreétait de 28000 km/h, celle-ci était augmentée parla propulsion pour se dégager de la terre jusqu’àune valeur de 38000 km/h.
Ensuite, l’attraction de la terre freinait constam-ment le vaisseau. “Sa vitesse tombait ainsi à près de5000 km/h au point d’équigravité (gravité équiva-lente entre la Terre et la Lune) qui se situe à envi-ron 300′000 km de notre planète (sur une distance
aApollo en chiffres : http ://history.nasa.gov/SP-4029/contents.htm
34
CHAPITRE 2. LA CINÉMATIQUE 2.5. MOUVEMENTS SIMPLES
Fig. 2.4 – Collision Andromède-Voie LactéeRencontre, vue depuis la terre, d’Andromède et de la Voie
Lactée. Vue d’artiste26.
moyenne Terre-Lune de 380′000 km), pour accélé-rer à nouveau compte tenu de l’attraction lunaire.Au voisinage de notre satellite, le vaisseau Apolloarrivait à une vitesse de 8.000 km/h, mais encorebien trop rapide pour devenir captif de la gravitélunaire. Aussi, l’engin devait effectuer une rotationde 180◦ (l’arrière vers l’avant) puis, grâce à la miseà feu du propulseur auxiliaire libérant une pousséede 10 tonnes (pendant 4 minutes et demie), ralen-tissait juste ce qu’il fallait pour être pris dans lechamp de la gravité lunaire.” 25
On voit ainsi que le mouvement des engins spa-tiaux est loin d’être un mouvement aussi simplequ’on pourrait le penser étant donné le vide dans le-quel ils se trouvent. En particulier, il est loin d’êtrerectiligne et de se faire à vitesse constante.
Bien entendu, ce mouvement devait être parfaite-ment connu pour pouvoir amener des hommes surla lune. Nous verrons dans le chapitre suivant (pa-ragraphe 3.2) qu’en réalité ce mouvement peut êtreassez facilement déterminé grâce à la loi de la gra-vitation universelle de Newton.
Autre exemple : le déplacement d’Andro-mède
Contrairement à la plupart des galaxies quis’éloignent de nous en raison de l’expansion del’univers, celle d’Andromède (ainsi que celles dugroupe local) se rapproche de nous.
A l’aide des données ci-dessous, calculez dans
combien d’années elle rencontrera notre galaxie lavoie lactée (voir la figure 2.4).
Vitesse d’approche : 500′000 km/hPosition initiale : 2, 55 · 106 ALVitesse de la lumière : 300′000 km/s
Il existe plusieurs manières de résoudre ce pro-blème. En voici une. On commence par déterminerla vitesse d’Andromède en AL/an. Pour cela, oncommence par l’exprimer en km/an :
500′000 km/h = 5 · 105 · 24 · 365 = 4, 38 · 109 km/an
Puis, on traduit ces km en AL à l’aide de :
1 AL = 300′000 · 3600 · 24 · 365 = 9, 4608 · 1012 km
Ce qui permet d’obtenir la vitesse recherchée :
v = 4, 38 · 109 km/an = 4, 38 · 109/9, 4608 · 1012
= 4, 63 · 10−4 AL/an
Enfin, considérant qu’on peut faire l’hypothèsed’un mouvement à vitesse constante, on a alors :
t = 2, 55 · 106/4, 63 · 10−4 = 5, 5 · 109 ans
Ce qui correspond à 5,5 milliards d’années.Mais en réalité, plus Andromède se rapprochera
de la voie lactée, plus sa vitesse augmentera. Ainsi,le mouvement n’est pas à vitesse constante et letemps avant la rencontre sera plus petit : 3 mil-liards d’années.
2.5.2 Mouvement rectiligne unifor-mément accéléré (MRUA)
Définition
Un objet est dit en mouvement rectiligne unifor-mément accéléré (MRUA), s’il se déplace en lignedroite et avec une accélération constante.
35

2.5. MOUVEMENTS SIMPLES CHAPITRE 2. LA CINÉMATIQUE
Propriétés
On montre (voir annexe F.1) que pour unMRUA, on a :
x(t) =1
2· ao · t2 + vo · t + xo (2.4)
où x(t) est la position de l’objet au cours dutemps, ao son accélération initiale (et donc son ac-célération tout court), vo sa vitesse initiale, xo saposition initiale et t l’instant qu’on considère.
Par définition de l’accélération, on a aussi :
a = ao =v − vo
t⇒ ao · t = v − vo
⇒ v = ao · t + vo
Ainsi, on peut écrire :
v(t) = ao · t + vo (2.5)
Comme on le voit, la vitesse au cours du tempsest une droite affine de pente ao et d’ordonnée ini-tiale vo. D’autre part, la position au cours du tempsest une parabole (en t2).
Finalement, on peut constater que le MRU n’estqu’un cas particulier de MRUA. En effet, il suffitde poser ao = 0 dans les équations du MRUA pourretrouver celle du MRU.
2.5.3 La chute libre
Historiquement, le problème de la chute libre futrésolu dans le cadre de la remise en question desthéories d’Aristote (voir paragraphe 3.1.3). Disons,en substance, que ce problème fut la première pierrede l’édifice théorique qui permit de réunifier deuxmondes dont la séparation par Platon fut reprisepar Aristote : le monde sublunaire (en dessous dela lune) et le monde supralunaire (en dessus dela lune). Pour Aristote, la physique dans ces deuxmondes n’obéissait pas aux mêmes lois. Or, on vavoir que les propriétés de la chute libre à la surfacede la terre sont les mêmes que celles de la “chute” dela lune sur la terre. Cette découverte mena à la réfu-tation totale de la théorie d’Aristote et permit auxphysiciens la prétention extraordinaire de pouvoirdécrire tout l’univers avec les mêmes lois. La résolu-tion du problème de la chute libre fut donc un évè-nement très important, pour ne pas dire essentiel,
Tab. 2.2 – La hauteur en fonction du temps
i hi (m) ti (s)
1 0,1 0,14282 0,2 0,20193 0,3 0,24734 0,4 0,28565 0,5 0,31936 0,6 0,34977 0,7 0,37788 0,8 0,40399 0,9 0,4284
dans l’histoire de la physique, même s’il paraît au-jourd’hui d’une moindre importance. Par ailleurs,comme il est un exemple idéal de par sa simplicitéet ses facilités expérimentales pour la présentationde la notion d’accélération, il mérite d’être étudiéattentivement.
Définition La chute d’un objet est dite librequand elle se fait en l’absence totale de tout frot-tement. Un bon exemple est donné par la chuted’un objet à la surface de la lune (qui est sans at-mosphère). On peut aussi considérer la chute d’unobjet dans un tube à vide. Ou encore tout sim-plement la chute d’un objet à la surface de la terre,pour autant qu’elle ne dépasse pas quelques mètres.Dans ces conditions, en effet, le frottement est assezfaible pour être négligé.
Propriétés On montre alors que la chute libred’un objet ne dépend pas de sa masse. Cela si-gnifie que deux objets en chute libre comme unmarteau et une plume tomberont exactement de lamême manière (voir vidéo et tube à vide). D’autrepart, dans les conditions d’une chute de faible hau-teur, l’accélération a une autre propriété impor-tante. Mais pour la déterminer, il faut réaliser l’ex-périence suivante :
Expérience On lâche une petite bille d’une hau-teur connue et on mesure son temps de chute.
Le tableau 2.2 donne les résultats obtenus.
Calculs A partir des mesures brutes du tableau2.2, on calcule les vitesses moyennes de chaque in-
36

CHAPITRE 2. LA CINÉMATIQUE 2.5. MOUVEMENTS SIMPLES
Galilée ou Galileo Galilei(1564-1642)
Galilée est parfois considéré comme le père de la physiquemoderne en ce qu’il fut expérimentateur. Il étudia la chutedes corps sur un plan incliné :
“Plaçant alors l’appareil dans une position in-clinée, en élevant l’une de ses extrémités d’unecoudée ou deux au-dessus de l’horizon, nous lais-sions, comme je l’ai dit, descendre la boule dansle canal, en notant [. . .] le temps nécessaire à unedescente complète. [. . .] La mise en place et cettepremière mesure accomplies, nous faisions des-cendre la même boule sur le quart du canal seule-ment : le temps mesuré était toujours rigoureuse-ment égal à la moitié du temps précédent. Nousfaisions ensuite varier l’expérience, en comparantle temps requis pour parcourir la longueur entièredu canal avec le temps requis pour parcourir samoitié, ou les deux tiers, ou les trois quarts, outout autre fraction ; dans ces expériences répétéesune bonne centaine de fois, nous avons toujourstrouvés que les espaces parcourus étaient entre euxcomme les carrés des temps, et cela quelle que soitl’inclinaison du plan, c’est à dire du canal.”
(Stephen Hawking, 2003, Galilée - 1638 - Dans "Dis-cours et démonstrations mathématiques sur deux nouvellessciences", p. 200.)
On peut considérer Galilée comme le “père” de l’équationhoraire de la position d’un objet en chute libre. Le théorèmeII proposition II des “Discours et démonstrations mathéma-tiques concernant deux sciences nouvelles” dit :
Portrait de Galilée tiré de Wikipedia27
“Si un mobile, partant du re-pos, tombe avec un mouvementuniformément accéléré, les es-paces parcourus en des tempsquelconques par ce même mobilesont entre eux en raison doubledes temps, c’est-à-dire comme lescarrés de ces mêmes temps.”
(Stephen Hawking, 2003, Galilée -1638 - Dans "Discours et démonstra-tions mathématiques sur deux nouvellessciences", p. 197.)
tervalle de temps, ainsi que les temps moyens cor-respondants :
tmoyen =ti+1 + ti
2et vmoyenne =
∆h
∆t=
hi+1 − hi
ti+1 − ti
On peut ainsi remplir le tableau 2.3.A partir des résultats des tableaux 2.2 et 2.3, on
construit les graphes horaires (le temps est toujoursplacé sur l’axe des x) suivants : hauteur en fonctiondu temps (h vs t : figure 2.5) et vitesse en fonctiondu temps moyen (v vs t : figure 2.6)b.
Analyse des résultats Commençons par ana-lyser le graphe de la figure 2.6, plus particulière-ment celui de la vitesse en fonction du temps. Il
bvs signifie “versus” c’est-à-dire “en fonction de” en latin.
Tab. 2.3 – La vitesse en fonction du temps
i tmoyen (s) vmoyenne (m/s)
1-2 0,1724 1,69202-3 0,2246 2,20263-4 0,2665 2,61104-5 0,3025 2,96745-6 0,3345 3,28956-7 0,3638 3,55877-8 0,3909 3,83148-9 0,4162 4,0816
correspond à une droite linéaire. Cela signifie quela vitesse augmente toujours de la même manière,
37
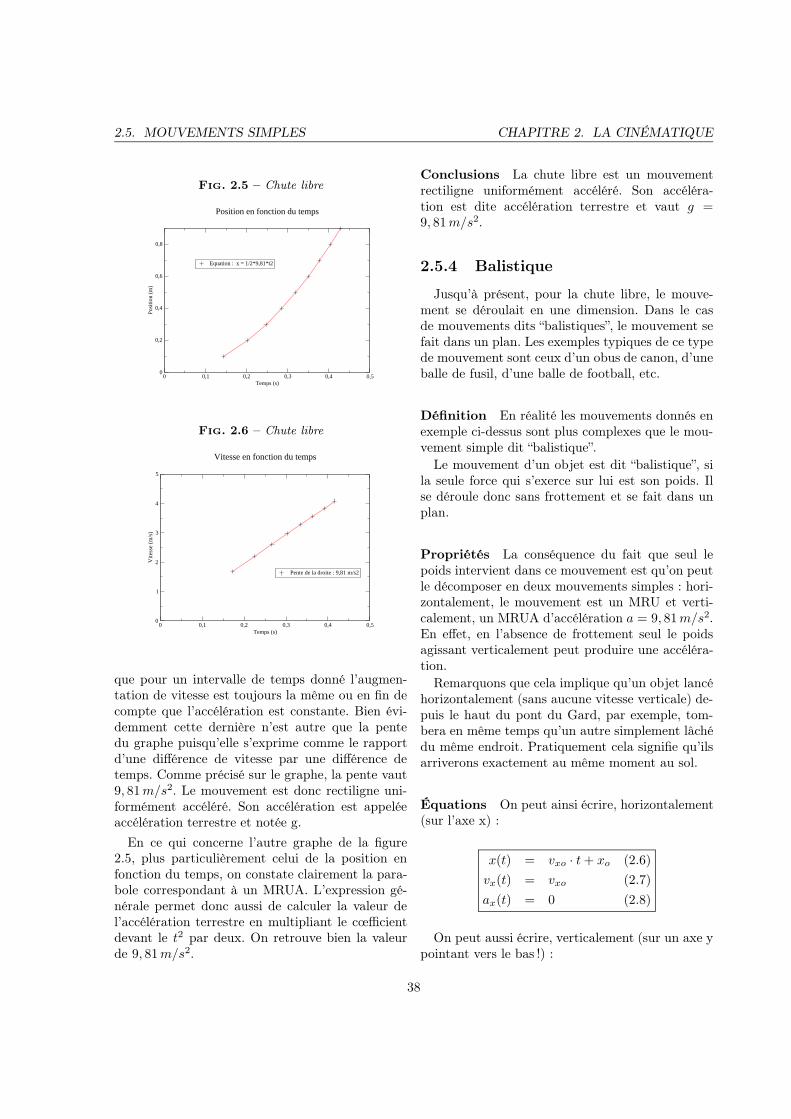
2.5. MOUVEMENTS SIMPLES CHAPITRE 2. LA CINÉMATIQUE
Fig. 2.5 – Chute libre
0 0,1 0,2 0,3 0,4 0,5Temps (s)
0
0,2
0,4
0,6
0,8
Posi
tion
(m)
Equation : x = 1/2*9,81*t2
Position en fonction du temps
Fig. 2.6 – Chute libre
0 0,1 0,2 0,3 0,4 0,5Temps (s)
0
1
2
3
4
5
Vite
sse
(m/s
)
Pente de la droite : 9,81 m/s2
Vitesse en fonction du temps
que pour un intervalle de temps donné l’augmen-tation de vitesse est toujours la même ou en fin decompte que l’accélération est constante. Bien évi-demment cette dernière n’est autre que la pentedu graphe puisqu’elle s’exprime comme le rapportd’une différence de vitesse par une différence detemps. Comme précisé sur le graphe, la pente vaut9, 81 m/s2. Le mouvement est donc rectiligne uni-formément accéléré. Son accélération est appeléeaccélération terrestre et notée g.
En ce qui concerne l’autre graphe de la figure2.5, plus particulièrement celui de la position enfonction du temps, on constate clairement la para-bole correspondant à un MRUA. L’expression gé-nérale permet donc aussi de calculer la valeur del’accélération terrestre en multipliant le cœfficientdevant le t2 par deux. On retrouve bien la valeurde 9, 81 m/s2.
Conclusions La chute libre est un mouvementrectiligne uniformément accéléré. Son accéléra-tion est dite accélération terrestre et vaut g =9, 81 m/s2.
2.5.4 Balistique
Jusqu’à présent, pour la chute libre, le mouve-ment se déroulait en une dimension. Dans le casde mouvements dits “balistiques”, le mouvement sefait dans un plan. Les exemples typiques de ce typede mouvement sont ceux d’un obus de canon, d’uneballe de fusil, d’une balle de football, etc.
Définition En réalité les mouvements donnés enexemple ci-dessus sont plus complexes que le mou-vement simple dit “balistique”.
Le mouvement d’un objet est dit “balistique”, sila seule force qui s’exerce sur lui est son poids. Ilse déroule donc sans frottement et se fait dans unplan.
Propriétés La conséquence du fait que seul lepoids intervient dans ce mouvement est qu’on peutle décomposer en deux mouvements simples : hori-zontalement, le mouvement est un MRU et verti-calement, un MRUA d’accélération a = 9, 81 m/s2.En effet, en l’absence de frottement seul le poidsagissant verticalement peut produire une accéléra-tion.
Remarquons que cela implique qu’un objet lancéhorizontalement (sans aucune vitesse verticale) de-puis le haut du pont du Gard, par exemple, tom-bera en même temps qu’un autre simplement lâchédu même endroit. Pratiquement cela signifie qu’ilsarriverons exactement au même moment au sol.
Équations On peut ainsi écrire, horizontalement(sur l’axe x) :
x(t) = vxo · t + xo (2.6)
vx(t) = vxo (2.7)
ax(t) = 0 (2.8)
On peut aussi écrire, verticalement (sur un axe ypointant vers le bas !) :
38

CHAPITRE 2. LA CINÉMATIQUE 2.5. MOUVEMENTS SIMPLES
y(t) =1
2· g · t2 + vyo · t + yo (2.9)
vy(t) = g · t + vyo (2.10)
ay(t) = g (2.11)
Ce sont là les équations de base du mouve-ment balistique. Remarquez que l’accélération g =9, 81 m/s2 est l’accélération terrestre pour autantque le mouvement se fasse à la surface de la terre.
Notez aussi que le signe positif de l’accélérationvient du fait que l’axe y choisi pointe vers le bas.Le signe de la vitesse vyo doit alors aussi être choiside la même manière, c’est-à-dire positif si celle-cipointe vers le bas. Si on choisit de faire pointer l’axey vers le haut, alors l’accélération devient négative,de même que la vitesse si elle pointe vers le bas.
Enfin, on utilise souvent la notation simplifiée :
h = y − yo =1
2· g · t2 + vyo · t
en omettant y − yo, ce qui permet de relier directe-ment la hauteur au temps.
Premier exemple On lance un caillou du hautdu pont du Gard avec une vitesse horizontale de1 m/s. Il arrive au sol à une distance de 3, 16 mdu pied de l’endroit où il a été lancé. Quelle est lahauteur du pont du Gard ?
Réponse :– Le mouvement horizontal est un MRU de vi-
tesse v = 1 m/s. Ainsi, le temps mis parle caillou pour parcourir horizontalement les3, 16 m est de 3, 16 secondes.
– Or, c’est dans ce même temps (le temps devol) que le caillou a parcouru verticalement lahauteur du pont. Verticalement, le mouvementétant un MRUA, on peut écrire :
h =1
2g · t2 = 0, 5 · 9, 81 · 3, 162 = 49 m
Second exemple Considérons le problème sui-vant :
Un plongeur court horizontalement sur la plate-forme d’un plongeoir haut de 10 m. Arrivé à l’extré-mité avec une vitesse horizontale de 2 m/s, il saute.Calculez la distance horizontale à partir du pied del’extrémité du plongeoir à laquelle le plongeur ar-rive dans l’eau.
Réponse :
– Le temps de chute est donné par : h = 12g·t2 ⇒
t =√
2·hg = 1, 4 s, si on arrondit g à 10m/s2.
– La distance horizontale parcourue est alors :x = vo · t = 2 · 1, 4 = 2, 8 m.
2.5.5 La chute libre ... de la lune
La question est ici de savoir pourquoi la lune“tient” au-dessus de notre tête.
La réponse d’Aristote était qu’il est naturel pourun objet du monde supralunaire (dont la lune faitpartie) de suivre le type de mouvement propre àces objets divins : un mouvement circulaire. Un telobjet n’est en effet pas soumis à la même physiqueque les objets du monde sublunaire, ceux qui sedéplacent à la surface de la terre. La lune ne tombedonc pas sur la terre.
Pour les physiciens actuels, la même physiquedoit être valable dans tout l’univers. Ainsi, la lune,comme un autre objet à la surface de la terre, estsoumise à son poids, c’est-à-dire à l’attraction dela terre. Elle devrait donc tomber sur celle-ci. Or,manifestement, elle ne le fait pas. Cela signifie-t-ilalors que son poids est nul ? Si on considère quela lune est un objet comme un autre, cela ne peutêtre le cas. Comment donc expliquer que la lune netombe pas ?
On pourrait répondre à cette question en admet-tant, même si cela paraît paradoxal, qu’en réalitéelle tombe. L’idée est la suivante : supposons qu’onlance un objet horizontalement un peu au-dessusde la surface de la terre. Appelons v la vitesse ho-rizontale initiale. Si v est nulle, l’objet tombe enchute libre. Si v est non nulle, mais petite, l’objetest en mouvement balistique et il tombe sur la terrequelques mètres plus loin. Plus v est grande, plusla distance qu’il parcourt à la surface de la terre estgrande. Si la vitesse est assez grande, l’objet semblesuivre la courbure de la terre, tout en tombant pe-tit à petit jusqu’à sa surface. A la limite, pour unevitesse donnée, l’objet tombe “en même temps” quela courbure de la terre fait “descendre” sa surface(cf. figure 2.7). C’est alors comme s’il la ratait enpermanence. Ainsi, il peut tomber sur la terre touten tournant autour d’ellec.
cOn trouve dans (Eric Lindemann, 1999, p. 164) une ma-gnifique illustration de Newton tirée des Principia de 1728présentant la relation entre chute et satellisation.
39
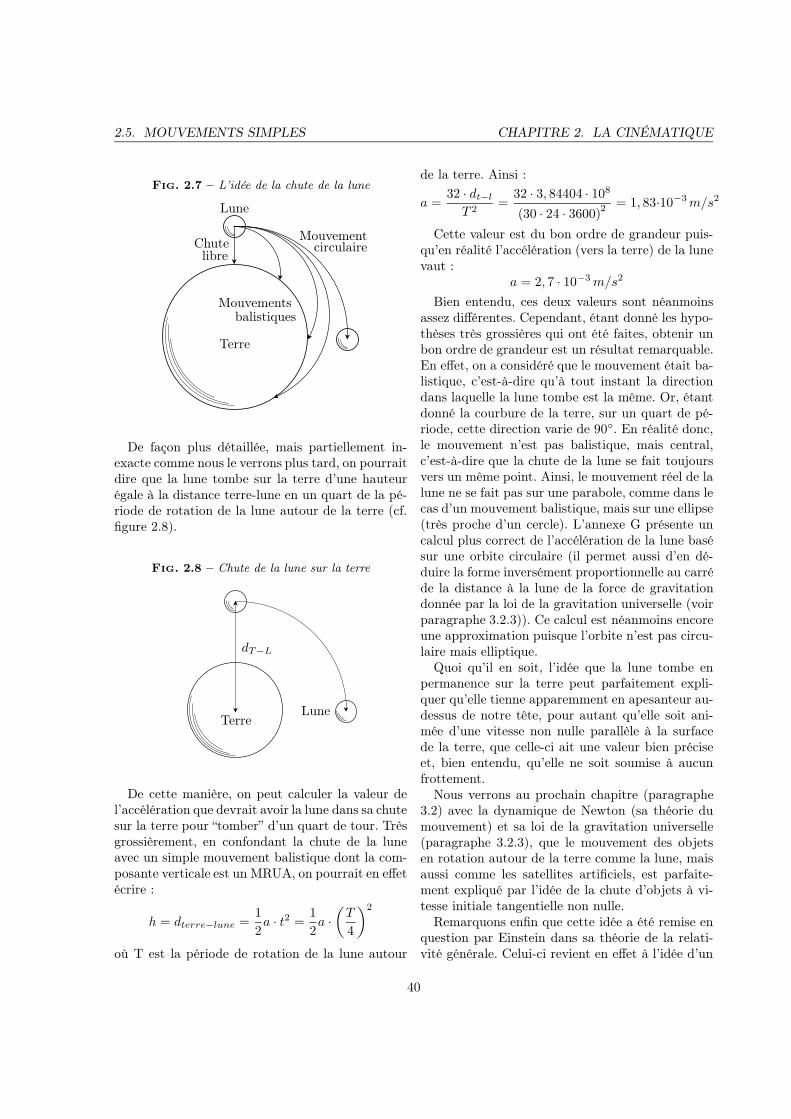
2.5. MOUVEMENTS SIMPLES CHAPITRE 2. LA CINÉMATIQUE
Fig. 2.7 – L’idée de la chute de la lune
Terre
Lune
Mouvements
MouvementcirculaireChute
libre
balistiques
De façon plus détaillée, mais partiellement in-exacte comme nous le verrons plus tard, on pourraitdire que la lune tombe sur la terre d’une hauteurégale à la distance terre-lune en un quart de la pé-riode de rotation de la lune autour de la terre (cf.figure 2.8).
Fig. 2.8 – Chute de la lune sur la terre
Terre
dT−L
Lune
De cette manière, on peut calculer la valeur del’accélération que devrait avoir la lune dans sa chutesur la terre pour “tomber” d’un quart de tour. Trèsgrossièrement, en confondant la chute de la luneavec un simple mouvement balistique dont la com-posante verticale est un MRUA, on pourrait en effetécrire :
h = dterre−lune =1
2a · t2 =
1
2a ·
(
T
4
)2
où T est la période de rotation de la lune autour
de la terre. Ainsi :
a =32 · dt−l
T 2=
32 · 3, 84404 · 108
(30 · 24 · 3600)2 = 1, 83·10−3 m/s2
Cette valeur est du bon ordre de grandeur puis-qu’en réalité l’accélération (vers la terre) de la lunevaut :
a = 2, 7 · 10−3 m/s2
Bien entendu, ces deux valeurs sont néanmoinsassez différentes. Cependant, étant donné les hypo-thèses très grossières qui ont été faites, obtenir unbon ordre de grandeur est un résultat remarquable.En effet, on a considéré que le mouvement était ba-listique, c’est-à-dire qu’à tout instant la directiondans laquelle la lune tombe est la même. Or, étantdonné la courbure de la terre, sur un quart de pé-riode, cette direction varie de 90◦. En réalité donc,le mouvement n’est pas balistique, mais central,c’est-à-dire que la chute de la lune se fait toujoursvers un même point. Ainsi, le mouvement réel de lalune ne se fait pas sur une parabole, comme dans lecas d’un mouvement balistique, mais sur une ellipse(très proche d’un cercle). L’annexe G présente uncalcul plus correct de l’accélération de la lune basésur une orbite circulaire (il permet aussi d’en dé-duire la forme inversément proportionnelle au carréde la distance à la lune de la force de gravitationdonnée par la loi de la gravitation universelle (voirparagraphe 3.2.3)). Ce calcul est néanmoins encoreune approximation puisque l’orbite n’est pas circu-laire mais elliptique.
Quoi qu’il en soit, l’idée que la lune tombe enpermanence sur la terre peut parfaitement expli-quer qu’elle tienne apparemment en apesanteur au-dessus de notre tête, pour autant qu’elle soit ani-mée d’une vitesse non nulle parallèle à la surfacede la terre, que celle-ci ait une valeur bien préciseet, bien entendu, qu’elle ne soit soumise à aucunfrottement.
Nous verrons au prochain chapitre (paragraphe3.2) avec la dynamique de Newton (sa théorie dumouvement) et sa loi de la gravitation universelle(paragraphe 3.2.3), que le mouvement des objetsen rotation autour de la terre comme la lune, maisaussi comme les satellites artificiels, est parfaite-ment expliqué par l’idée de la chute d’objets à vi-tesse initiale tangentielle non nulle.
Remarquons enfin que cette idée a été remise enquestion par Einstein dans sa théorie de la relati-vité générale. Celui-ci revient en effet à l’idée d’un
40
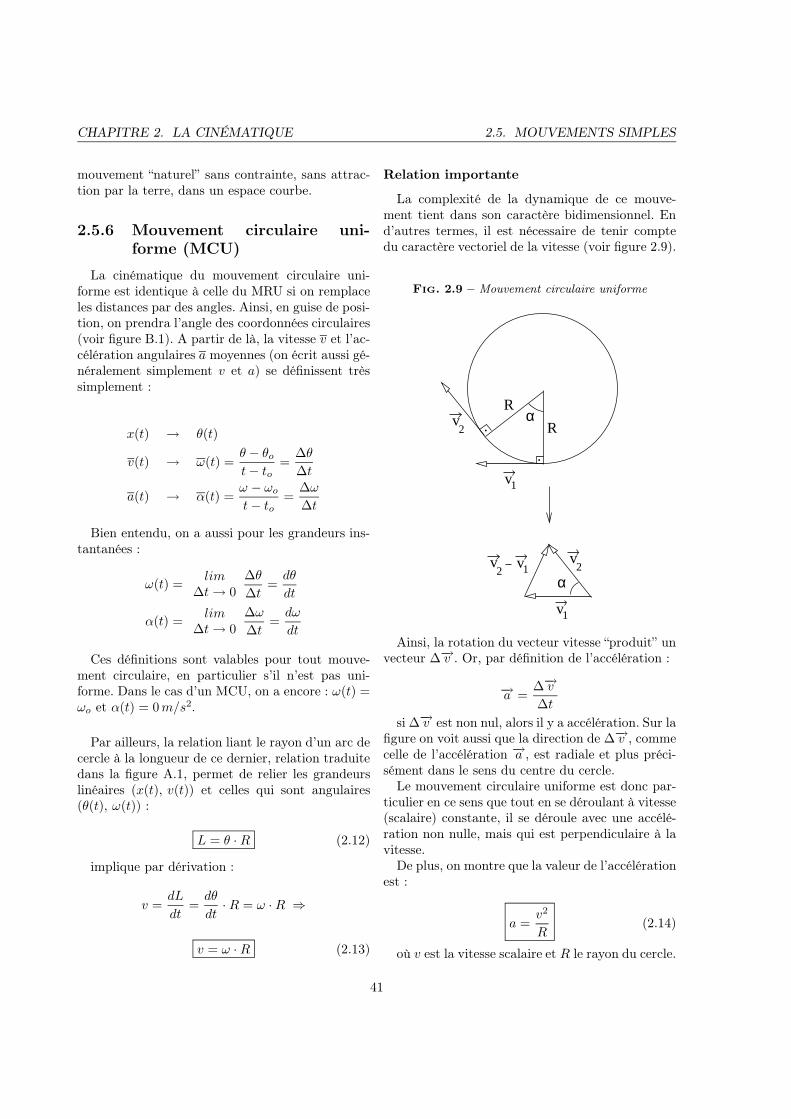
CHAPITRE 2. LA CINÉMATIQUE 2.5. MOUVEMENTS SIMPLES
mouvement “naturel” sans contrainte, sans attrac-tion par la terre, dans un espace courbe.
2.5.6 Mouvement circulaire uni-forme (MCU)
La cinématique du mouvement circulaire uni-forme est identique à celle du MRU si on remplaceles distances par des angles. Ainsi, en guise de posi-tion, on prendra l’angle des coordonnées circulaires(voir figure B.1). A partir de là, la vitesse v et l’ac-célération angulaires a moyennes (on écrit aussi gé-néralement simplement v et a) se définissent trèssimplement :
x(t) → θ(t)
v(t) → ω(t) =θ − θo
t − to=
∆θ
∆t
a(t) → α(t) =ω − ωo
t − to=
∆ω
∆t
Bien entendu, on a aussi pour les grandeurs ins-tantanées :
ω(t) =lim
∆t → 0
∆θ
∆t=
dθ
dt
α(t) =lim
∆t → 0
∆ω
∆t=
dω
dt
Ces définitions sont valables pour tout mouve-ment circulaire, en particulier s’il n’est pas uni-forme. Dans le cas d’un MCU, on a encore : ω(t) =ωo et α(t) = 0 m/s2.
Par ailleurs, la relation liant le rayon d’un arc decercle à la longueur de ce dernier, relation traduitedans la figure A.1, permet de relier les grandeurslinéaires (x(t), v(t)) et celles qui sont angulaires(θ(t), ω(t)) :
L = θ · R (2.12)
implique par dérivation :
v =dL
dt=
dθ
dt· R = ω · R ⇒
v = ω · R (2.13)
Relation importante
La complexité de la dynamique de ce mouve-ment tient dans son caractère bidimensionnel. End’autres termes, il est nécessaire de tenir comptedu caractère vectoriel de la vitesse (voir figure 2.9).
Fig. 2.9 – Mouvement circulaire uniforme
v1
v2
v1
v2v
2v1
α
Rα
.
.
R
Ainsi, la rotation du vecteur vitesse “produit” unvecteur ∆−→v . Or, par définition de l’accélération :
−→a =∆−→v∆t
si ∆−→v est non nul, alors il y a accélération. Sur lafigure on voit aussi que la direction de ∆−→v , commecelle de l’accélération −→a , est radiale et plus préci-sément dans le sens du centre du cercle.
Le mouvement circulaire uniforme est donc par-ticulier en ce sens que tout en se déroulant à vitesse(scalaire) constante, il se déroule avec une accélé-ration non nulle, mais qui est perpendiculaire à lavitesse.
De plus, on montre que la valeur de l’accélérationest :
a =v2
R(2.14)
où v est la vitesse scalaire et R le rayon du cercle.
41

2.5. MOUVEMENTS SIMPLES CHAPITRE 2. LA CINÉMATIQUE
En effet, selon la figure 2.9 et pour de petitsangles, on a :
∆x = α · R et ∆v ∼== α · v
où ∆x est la longueur de l’arc de cercle entre lesdeux instants où on considère la vitesse. Si ∆t estle temps entre ces deux instants, on peut écrire :
a =∆v
∆t=
α · v∆t
=v
R· ∆x
∆t=
v
R· v =
v2
R
C’est ce qu’il fallait démontrer.
Le mouvement circulaire uniforme est donc unmouvement composé de deux mouvements simples :un mouvement uniforme et un mouvement accé-léré. Cependant, il est différent du mouvement ba-listique, lui aussi composé de ces deux mêmes mou-vements, en ce qu’ils ne sont pas rectilignes. En ef-fet, si on peut dire que le mouvement balistique estcomposé d’un MRU et d’un MRUA, on ne peut endire autant pour le MCU. Il serait plutôt composéd’un MU et d’un MUA, voire même d’un MA si onconsidère que bien que la norme du vecteur accélé-ration soit constante, le vecteur lui-même ne l’estpas puisqu’il tourne.
Enfin, la présence d’une accélération dans lemouvement circulaire uniforme a de lourdes consé-quences en termes de dynamique, c’est-à-dire enterme de forces comme nous le verrons au para-graphe 3.2.3, à l’annexe G.2 ou à l’annexe H quitraitent de la dynamique d’objets comme les satel-lites liés à la terre par la force de gravitation.
2.5.7 Lois de Kepler
Un exemple très intéressant de cinématique dumouvement, au sens d’une description du mouve-ment, est donné par les lois de Kepler. Grâce àl’utilisation de mesures très précises fournies parle prestigieux astronome danois Tycho Brahé et àune analyse approfondie de l’orbite de mars, Ke-pler parvient à montrer que l’orbite des planètesn’est pas circulaire, comme le prétendait la cosmo-logie Ptolémenne, mais elliptique. Il énonce alorsles trois loi importantes qui vont porter son nomet permettre de mieux comprendre la mécaniquecéleste.
Fig. 2.10 – Astronomica pars Optica29
Première loi L’orbite des planètes est une ellipsedont le soleil est à l’un des foyers.
Seconde loi En des temps égaux, la surface ba-layée par la distance entre le soleil et la planèteest toujours la même.
Troisième loi Le rapport du cube du demi-grandaxe d’une planète au carré de sa période de ré-volution est constant pour tout les corps tour-nant autour du soleil.
L’énoncé de la première loi peut amener à nousdemander quel est le rôle du second foyer de l’el-lipse, celui où le corps central n’est pas. La ques-tion vient d’une apparente dissymétrie des rôles desfoyers qui est pour nous troublante, mais se révèlesans fondement. Ce foyer est bien présent et n’esttout simplement pas un point exceptionnel.
Ces lois sont en réalité valable pour tout corpstournant autour d’un corps central sous l’effet dela gravitation.
En considérant le demi-grand axe de l’orbite aet la période de révolution T , la troisième loi setraduit mathématiquement par :
a3
T 2= constante (2.15)
42

CHAPITRE 2. LA CINÉMATIQUE 2.5. MOUVEMENTS SIMPLES
Kepler (1571-1630)
Associé au très grand astronome Tycho Brahé, Johanes Ke-pler va mettre fin définitivement à la cosmologie aristotéli-cienne qui prétendait que les orbites de planètes étaient descercles, figure parfaite du monde des Dieux. En effet, à lasuite d’une recherche portant sur les rapports de distanceentre les planètes basée sur les polyèdres réguliers, Keplerva découvrir grâce à l’étude de mars que la forme de l’orbitedes planètes est elliptique.
Avec les observations de Galilée (cratères sur la lune, tachessolaires, phases de vénus et satellites de jupiter), celles deTycho sur le mouvement des comètes à travers les sphèrescristallines sensée “porter” les planètes, les calculs de keplervont non seulement permettre l’abandon de l’idée de fixitéde la terre, mais plus tard trouver une place importantedans la nouvelle physique élaborée par Newton.
Portrait de Kepler tiré de Wikipedia28
Ainsi, pour deux corps A et B tournant autourdu même corps central, on a :
a3A
T 2A
=a3
B
T 2B
(2.16)
Un exemple intéressant d’utilisation de la troi-sième loi de Kepler est celui de la rotation de lalune autour de la terre qui permet le calcul de l’al-titude des satellites en orbite géostationnaire. Il esttraité à au paragraphe H.4 de l’annexe H.
Notons encore que Kepler s’est aussi intéressé aufonctionnement de l’œil et aux théories de la lu-mières. En 1604, il rédige Astronomia pars Opticaun ouvrage d’optique ou le rôle de la rétine et ce-lui du cristallin y sont justement exposés. La figure2.10 présente un planche illustrant le fonctionne-ment de l’œil tirée de cet ouvrage.
43

2.5.
MO
UV
EM
EN
TS
SIM
PLE
SC
HA
PIT
RE
2.LA
CIN
ÉM
AT
IQU
E
Résumé des grandeurs et unités
Grandeur Définition UnitéPosition x mVitesse v = ∆x
t m/sAccélération a = ∆v
t m/s2
Résumé des équations des mouvements simples
Mouvement rectiligne uniformément accéléré(MRUA)Les équations du mouvement :
x(t) =1
2· ao · t2 + vo · t + xo (2.17)
v(t) = ao · t + vo (2.18)
a(t) = ao (2.19)
v2 = v2o + 2 · ao · (x − xo) (2.20)
ao = 0
=⇒
Mouvement rectiligne uniforme(MRU)Les équations du mouvement :
x(t) = vo · t + xo (2.21)
v(t) = vo (2.22)
a(t) = 0 (2.23)
Pour un mouvement de chute libre (MRUA), l’accélération vaut :
a = g = 9, 81 m/s2
Un mouvement balistique est composé d’un MRU horizontalement et d’un MRUA en chute libre vertica-lement.
Un MCU est composé d’un MU et d’un MA d’accélération :
a =v2
R(2.24)
Fig. 2.11 – Résumé de cinématique
44
Chapitre 3La mécanique
3.1 La “mécanique” d’Aristote
3.1.1 Introduction
On pense généralement aujourd’hui que la mé-canique d’Aristote est dépassée. C’est vrai. Toutcomme la mécanique de Newton et la relativité res-treinte. Et tout pousse à penser que la relativitégénérale pourrait être bientôt dépassée. En réalitéchacune de ces théories répond à des questions bienprécises dans un cadre limité. Les réponses donnéespar ces théories à ces questions sont tout-à-fait per-tinentes dans ce cadre. Il est alors important debien comprendre l’utilité de maintenir la connais-sance de ces théories. S’il est naturel aujourd’huide maintenir dans les universités l’enseignement dela théorie de Newton parce que celle-ci à permisd’envoyer des hommes sur la lune, il est tout aussiimportant de présenter la théorie d’Aristote parcequ’elle est née de l’évidence et du sens commun etpour cette raison est partagée par tout un chacun.Il est donc très important de marquer bien précisé-ment les limites aux réponses qu’elle peut fournir.
3.1.2 Platon
La physique aristotélicienne est intimement liéeà la cosmologie de Platon. Celle-ci part d’une idéesimple. Platon pense qu’il existe deux mondes tout-à-fait différents : l’un, humain, composé par tout cequi se trouve au-dessous de la lune et l’autre, divin,composé par tout ce qui est au-dessus.
“Le monde sublunaire où règnent lesapparences [. . .] est formé de couches éta-
gées ; il y a d’abord la Terre, puis l’Eau,l’Air et enfin le Feu se situant tout au-dessus, vers les limites du monde sublu-naire. Ce monde dans lequel vivent leshommes est imparfait, corruptible.Le monde céleste [. . .] est le siège desidées. Il est formé de l’Éther, le cinquièmeélément (ou quintessence). C’est là que setrouvent les astres qui sont des êtres éter-nels, parfaits, divins et immuables. Par-faits, ils doivent aussi avoir un mouve-ment parfait autour de la Terre, c’est-à-dire un mouvement circulaire uniforme(MCU), ou éventuellement une combinai-son de tels mouvements. Dans l’esprit py-thagoricien, le MCU est effectivement lemouvement qui, par ses qualités de symé-trie et d’harmonie, est le plus parfait quel’on puisse imaginer.”
(Eric Lindemann, 1999, p. 43 et 44.)
C’est dans le cadre de cette cosmologie qu’Aris-tote va établir sa physique. Et cette décomposi-tion de l’univers, ce qu’on peut aussi appeler lemacrocosme, avec les quatre éléments “chimiques”du monde sublunaire a aussi longtemps influencé lamédecine avec la théorie des humeurs :
“Selon cette théorie, la santé corpo-relle résulte de l’équilibre de quatre prin-cipes, ou humeurs (liquides), distincts –le sang, le flegme, la bile jaune et la bilenoire ou atrabile. Tout excès d’une de ceshumeurs mène à des types de personnali-tés que l’on continue à qualifier de san-guines, flegmatiques, colériques et mélan-
45

3.1. LA “MÉCANIQUE” D’ARISTOTE CHAPITRE 3. LA MÉCANIQUE
coliques. Une domination plus complèted’une de ces humeurs entraîne une ma-ladie [. . .] Le remède à la maladie, définiecomme un déséquilibre entre les humeurs,consiste donc à réduire les humeurs enexcès et à complémenter les humeurs af-faiblies. La théorie des humeurs à ainsiinspiré la croyance séculaire en des théra-pies considérées aujourd’hui comme tota-lement inefficaces, sinon barbares, parmilesquelles la saignée (réduction de l’hu-meur sanguine), la suée, la purge, le vo-missement, etc.Mais pourquoi, en l’absence de toutepreuve directe de l’existence de telles hu-meurs, la médecine classique a-t-elle silourdement insisté sur quatre, et seule-ment quatre, humeurs ? [. . . Car] de mêmeque les quatre humeurs régissaient le mi-crocosme, les quatre éléments (l’air, lefeu, la terre et l’eau) constituaient le ma-crocosme.”
(Gould Stephen Jay, 2005, p. 136)
Ainsi, on peut comprendre l’importance de lacosmologie de Platon dans le monde des Anciens.La recherche de principes simples et identiques pourtous les domaines de la connaissance n’est pas nou-velle et surtout pas l’apanage des scientifiques ac-tuels.
3.1.3 Aristote
L’idée fondamentale de la dynamique d’Aristotevient de l’observation commune du fait que le mou-vement finit toujours par s’arrêter. Ainsi, selonAristote, il existe pour chacun des cinq élémentsa
qui composent toute chose dans l’univers (la terre,l’eau, l’air, le feu et l’éther) un lieu de repos naturel.Pour la terre, c’est le centre de l’univers (cela im-plique que le centre de la terre se trouve au centrede l’univers). Pour l’eau, c’est sur la terre. Pourl’air, c’est sur l’eau ou la terre. Pour le feu, c’est au-dessus de l’air (c’est pourquoi le feu monte), mais
aIl faut mentionner le parallèlisme entre les cinq élémentsfondamentaux constituant l’univers et l’existence des cinqpolyèdres réguliers convexes, dit platoniciens, que sont le té-traèdre, dont les quatres faces sont composées d’un triangleéquilatéral, le cube, dont les six faces sont carrées, l’octaèdre,dont les huit faces sont un triangle équilatéral, le dodécaèdre,dont les douze faces sont pentagonales et l’icosaèdre, dontles vingt faces sont des triangles équilatéraux.
au-dessous de la lune. Enfin, pour l’éther, c’est au-dessus de la lune.
Cinématique
En conséquence, il existe des mouvements ditsnaturels, ceux qui mènent un objet, selon sa com-position, vers son lieu naturel de repos, et des mou-vements dits forcés ou violents, ceux qui éloignentl’objet de son lieu naturel de repos. Par exemple,étant essentiellement composée de terre, une pierrequ’on laisse tomber va naturellement rejoindre, auplus près qu’il lui est possible de le faire, le centrede la terre. La chute d’un tel objet est donc unmouvement naturel. Par contre, le mouvement d’unboulet de canon est composé : au début, le boulet,composé de terre, s’élève et ainsi s’éloigne de sonlieu naturel de repos, le centre de l’univers. Sonmouvement est donc violent. Puis, il s’approche dela lune, lieu divin dans lequel il n’existe qu’un mou-vement éternel : le mouvement circulaire uniforme(MCU), c’est-à-dire un mouvement que l’on pour-rait dire sans mouvement, un mouvement à vitesseconstante. Sa trajectoire prend donc une allure di-vine, c’est-à-dire tend vers le cercle. C’est la partiehaute du mouvement du boulet. Puis, il retombe.Son mouvement redevient donc naturel.
Au total, on distingue donc trois types de mou-vement dans la cinématique d’Aristote : les mou-vements naturels, les mouvements violents et lesmouvements divins. Les deux premiers se font es-sentiellement en ligne droite. Le dernier est circu-laire à vitesse constante.
Dynamique
Cette cinématique est complétée par une dyna-mique en parfaite logique avec la première. Car, siles objets ont un lieu naturel de repos, c’est queleur état naturel est précisément d’être au repos(comme les hommes en quelque sorte, et on peutbien penser que cette comparaison pouvait avoirun sens à cette époque). Ainsi, pour qu’ils restenten mouvement, il faut les y aider en exerçant sureux une contrainte, une “force” en termes modernes.Pour Aristote, l’état de mouvement est donc direc-tement lié à la force qui lui permet d’exister. Et bienentendu plus cette force est grande, plus l’état demouvement sera grand, c’est-à-dire plus la vitessede l’objet sera importante.
46
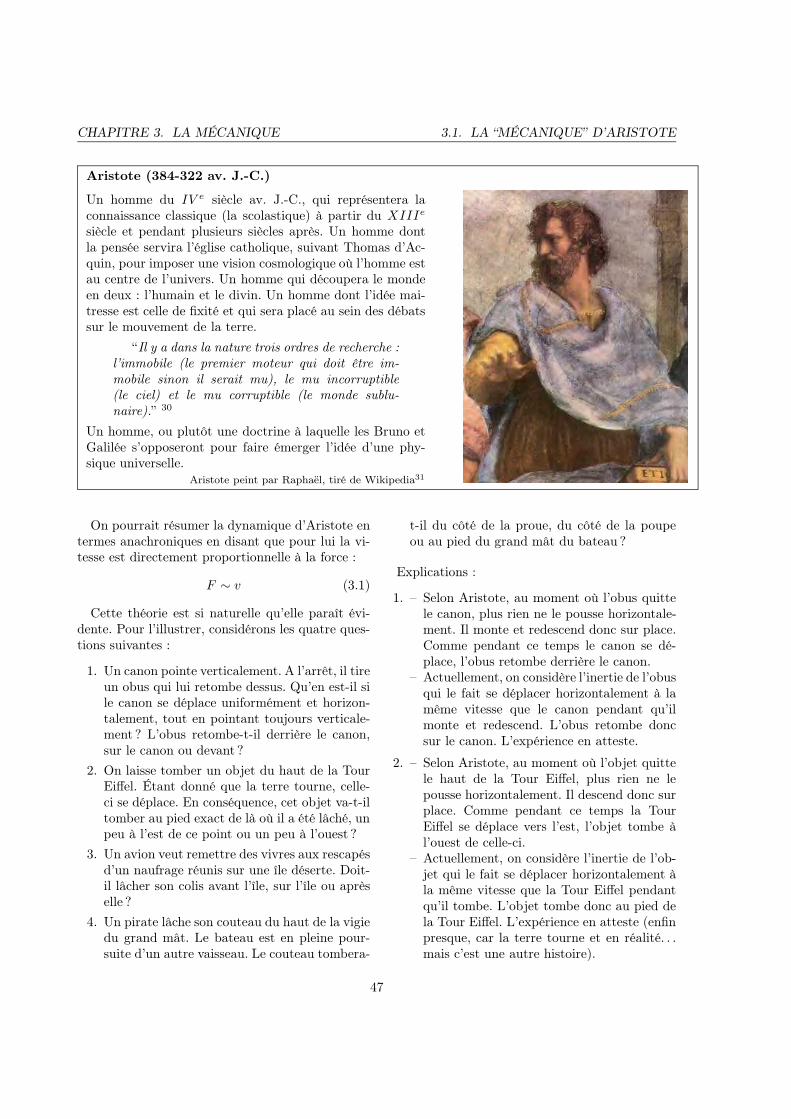
CHAPITRE 3. LA MÉCANIQUE 3.1. LA “MÉCANIQUE” D’ARISTOTE
Aristote (384-322 av. J.-C.)
Un homme du IV e siècle av. J.-C., qui représentera laconnaissance classique (la scolastique) à partir du XIIIe
siècle et pendant plusieurs siècles après. Un homme dontla pensée servira l’église catholique, suivant Thomas d’Ac-quin, pour imposer une vision cosmologique où l’homme estau centre de l’univers. Un homme qui découpera le mondeen deux : l’humain et le divin. Un homme dont l’idée mai-tresse est celle de fixité et qui sera placé au sein des débatssur le mouvement de la terre.
“Il y a dans la nature trois ordres de recherche :l’immobile (le premier moteur qui doit être im-mobile sinon il serait mu), le mu incorruptible(le ciel) et le mu corruptible (le monde sublu-naire).” 30
Un homme, ou plutôt une doctrine à laquelle les Bruno etGalilée s’opposeront pour faire émerger l’idée d’une phy-sique universelle.
Aristote peint par Raphaël, tiré de Wikipedia31
On pourrait résumer la dynamique d’Aristote entermes anachroniques en disant que pour lui la vi-tesse est directement proportionnelle à la force :
F ∼ v (3.1)
Cette théorie est si naturelle qu’elle paraît évi-dente. Pour l’illustrer, considérons les quatre ques-tions suivantes :
1. Un canon pointe verticalement. A l’arrêt, il tireun obus qui lui retombe dessus. Qu’en est-il sile canon se déplace uniformément et horizon-talement, tout en pointant toujours verticale-ment ? L’obus retombe-t-il derrière le canon,sur le canon ou devant ?
2. On laisse tomber un objet du haut de la TourEiffel. Étant donné que la terre tourne, celle-ci se déplace. En conséquence, cet objet va-t-iltomber au pied exact de là où il a été lâché, unpeu à l’est de ce point ou un peu à l’ouest ?
3. Un avion veut remettre des vivres aux rescapésd’un naufrage réunis sur une île déserte. Doit-il lâcher son colis avant l’île, sur l’île ou aprèselle ?
4. Un pirate lâche son couteau du haut de la vigiedu grand mât. Le bateau est en pleine pour-suite d’un autre vaisseau. Le couteau tombera-
t-il du côté de la proue, du côté de la poupeou au pied du grand mât du bateau ?
Explications :
1. – Selon Aristote, au moment où l’obus quittele canon, plus rien ne le pousse horizontale-ment. Il monte et redescend donc sur place.Comme pendant ce temps le canon se dé-place, l’obus retombe derrière le canon.
– Actuellement, on considère l’inertie de l’obusqui le fait se déplacer horizontalement à lamême vitesse que le canon pendant qu’ilmonte et redescend. L’obus retombe doncsur le canon. L’expérience en atteste.
2. – Selon Aristote, au moment où l’objet quittele haut de la Tour Eiffel, plus rien ne lepousse horizontalement. Il descend donc surplace. Comme pendant ce temps la TourEiffel se déplace vers l’est, l’objet tombe àl’ouest de celle-ci.
– Actuellement, on considère l’inertie de l’ob-jet qui le fait se déplacer horizontalement àla même vitesse que la Tour Eiffel pendantqu’il tombe. L’objet tombe donc au pied dela Tour Eiffel. L’expérience en atteste (enfinpresque, car la terre tourne et en réalité. . .mais c’est une autre histoire).
47
3.2. MÉCANIQUE DE NEWTON CHAPITRE 3. LA MÉCANIQUE
3. – Selon Aristote, au moment où le colis quittel’avion, plus rien ne le pousse horizontale-ment. Il tombe donc sur place. Il faudraitdonc lâcher le colis juste au dessus de l’île.
– Actuellement, on considère l’inertie du co-lis qui le fait se déplacer horizontalement àla même vitesse que l’avion pendant qu’iltombe. Il faut donc le lâcher avant l’île pourqu’il arrive bien à destination. L’expérienceen atteste.
4. – Selon Aristote, au moment où le couteauquitte la vigie, plus rien ne le pousse horizon-talement. Il tombe donc sur place. Commependant ce temps le bateau se déplace, lecouteau tombe du côté de la poupe du ba-teau.
– Actuellement, on considère l’inertie du cou-teau qui le fait se déplacer horizontalement àla même vitesse que le bateau pendant qu’iltombe. Le couteau tombe donc au pied dugrand mât. L’expérience en atteste.
Ainsi, la mécanique d’Aristote traduit le faitévident qu’il faut pousser un objet pour qu’il sedéplace. Dans la vie de tous les jours, c’est exactparce qu’il y a du frottement. Mais on sait aujour-d’hui que cette affirmation est généralement fausse,qu’il n’est pas nécessaire d’exercer une force sur unobjet pour qu’il soit en mouvement.
Ainsi on peut dire que la théorie d’Aristote estfausse. Mais on peut aussi la voir comme une bonnethéorie pour les cas de la vie courante. En effet,il semble normal de dire qu’il faut une force pourdéménager un meuble d’un point à un autre et il estidiot de dire qu’il va se déplacer sans qu’on exerceune force sur lui. Il est intéressant de remarquer queles personnes qui soutiennent qu’il est absolumentnécessaire d’exercer une force sur lui pour qu’il sedéplace oublient qu’immobile devant eux, il tourneen réalité à cause de la rotation de la terre.
Finalement, il faut mentionner le fait qu’aucuneexpérience irréfutable ne réfutera la théorie d’Aris-tote avant celle du pendule de Foucault (1851) quiprouvera de manière indiscutable la rotation de laterre. Pourtant, c’est bien avant cette date que lathéorie d’Aristote a été rejetée sur la base de ladécouverte par Galilée de cratères sur la lune, pré-sentés dans le “Sidereus Nuncius” en 1610, ne cor-respondant pas à la lune parfaite du monde divind’Aristote, de taches solaires qu’un tel astre divin
n’aurait pas du présenté, de satellites tournant au-tour de jupiter, évoquant l’idée que la lune pourraitn’être qu’un satellite de la terre tournant autourdu soleil et finalement des phases de vénus, dont lasuccession était incompatible avec le système géo-centrique d’Aristote, mais parfaitement expliquableavec une théorie héliocentrique. Dès ces découvertesconnues des scientifiques d’alors, le monde d’Aris-tote va commencer à s’écrouler. Certes progressi-vement dans l’opignon publique, mais rapidementchez les intellectuels, malgré la condamnation deGalilée à rétracter ses idées.
Mais Galilée n’a pas été le seul à entamer ledogme Aristotélicien. Avant lui Giordano Brunosoutint que les étoiles étaient des soleils pareils aunotre, que la terre tournait autour de lui et que cemouvement ne se voyait pas car nous y participions.Bruno fut brûlé vif par l’église (qui ne reconnaîttoujours pas son erreur !) en 1600.
Le travail de ces hommes prépara la possibilitémême de penser l’univers d’une autre manière. Cefut le travail d’autres scientifiques, dont Newton,qui donnèrent à la physique son véritable caractèreuniversel en détruisant totalement l’idée des deuxmondes d’Aristote. Mais, nous allons voir que lathéorie de Newton, si elle résout les erreurs d’Aris-tote, et donc en ce sens est une théorie plus exacteque celle d’Aristote, a aussi ses propres limitations.Et jusqu’à aujourd’hui, malgré la prétention affir-mée des physiciens à décrire l’ensemble de l’univers,il n’existe toujours pas de théorie universellementvalable.
3.2 Mécanique de Newton
3.2.1 Introduction
Newton est avec Einstein le plus grand physi-cien de tous les temps (bien qu’il faille se méfierdes génies qui ont tous puisé à la source des nom-breuses connaissances de leur temps, comme c’estparticulièrement le cas de Newton) (Stephen Haw-king, 2003, voir la préface de Jean-Pierre Luminet).C’est lui qui, avec les “Principes mathématiques dela philosophie naturelle”b (entendez par “philoso-phie naturelle” la physique) parus en 1687, posepour la première fois les bases d’une théorie com-
bSon principal ouvrage intitulé aussi “Principia mathe-matica ...”, publié en 1687.
48

CHAPITRE 3. LA MÉCANIQUE 3.2. MÉCANIQUE DE NEWTON
plète du mouvement et de ses causes. Mais il nese limite pas à cela. Il publie aussi sa fameuse loide la gravitation, qui détermine une relation d’at-traction très générale entre les corps qui ont unemasse. Mais le travail de Newton ne se limite pasà cela. Il porte aussi sur l’optique de son temps,domaine dans lequel il se signale par la découvertedes anneaux dits de Newton.
3.2.2 Mécanique
Toute la mécanique de Newton repose sur troisaxiomesc ou lois fondamentales. L’invention (ausens de “découverte”) de ces lois n’est pas due auhasard, mais dérive directement d’une réflexion enopposition à la physique d’Aristote, comme on vale voir ci-dessous.
Les trois lois de Newton
Présentons tout d’abord ces trois lois fondamen-tales.
Première loi (ou loi de l’inertie)
« Tout corps persévère dans son état derepos ou de mouvement rectiligne uni-forme, si et seulement si, la somme desforces qui s’exercent sur lui est nulle. »d
Cette loi est en opposition totale avec la no-tion “d’état de repos” d’Aristote. Pour Aristote, uncorps n’est dans son état de repos que s’il ne bougepas par rapport au centre de l’univers. Ainsi, unétat de mouvement ne peut être un état de repos,c’est-à-dire un état qui persévère. Pour lui, le mou-vement ne dure pas, à moins qu’on le force à du-rer. Pour Newton, l’état de repos et l’état de mou-vement rectiligne uniforme sont deux choses iden-tiques.
Pour Aristote, un objet qui ne bouge pas n’estsoumis à aucune force. Pour Newton, un objet quibouge en se déplaçant en ligne droite et à vitesseconstante, n’est pas plus soumis à une quelconqueforce. En d’autres termes, pour Newton, il n’est pasnécessaire d’exercer une force pour qu’il y ait mou-vement.
La traduction mathématique actuelle de la pre-mière loi élimine ainsi naturellement la référence à
cLe terme d’axiome est intéressant ici puisqu’il souligneque toute la mécanique de Newton peut être logiquementdéduite de ces postulats initiaux.
un état de repos pour l’inclure dans la loi en tantque mouvement rectiligne à vitesse constante nulle :
Première loi (version actuelle)
MRU ⇔∑
−−→F ext = 0 (3.2)
La double flèche signifie “si et seulement si”. End’autre termes, on peut lire cette loi dans les deuxsens :
– si un objet est en Mouvement Rectiligne Uni-forme, alors on peut dire que la somme desforces extérieures qui s’exercent sur lui estnulle (⇒).
– si on sait que la somme des forces quis’exercent sur un objet est nulle, alors cet objetest en Mouvement Rectiligne Uniforme (⇐).
Seconde loi (loi fondamentale de la dyna-mique)e
∑−−→F ext = m−→·a (3.3)
Cette loi exprime la relation entre cause et effet.La cause du mouvement étant la force totale quis’exerce sur le système étudié et l’effet étant sonaccélération, la loi exprime la relation qui existeentre les deux par l’intermédiaire de la masse. Ainsila cause mène à une expression du mouvement, enl’occurrence l’accélération, qui permet d’obtenir enfin de compte la position de l’objet au cours dutemps, comme nous le verrons plus tard.
Par ailleurs nous reviendrons aussi sur la notionde force extérieure.
Troisième loi (loi de l’action et de la réac-tion)
« La réaction est toujours contraire etégale à l’action : ou encore les actionsque deux corps exercent l’un sur l’autresont toujours égales et dirigées en senscontraire. »f
Troisième loi (loi de l’action et de la réac-tion) Cette loi se traduit mathématiquement parle fait que le vecteur force exercée par un objet Asur un objet B est de mêmes grandeur et direction,mais de sens opposé au vecteur force exercée parl’objet B sur le A. En d’autres termes :
eLe texte exact (Biarnais Marie-Françoise, 1985, p. 41)dit : « Le changement de mouvement est proportionnel àla force motrice imprimée et s’effectue suivant la droite parlaquelle cette force est imprimée. »
49
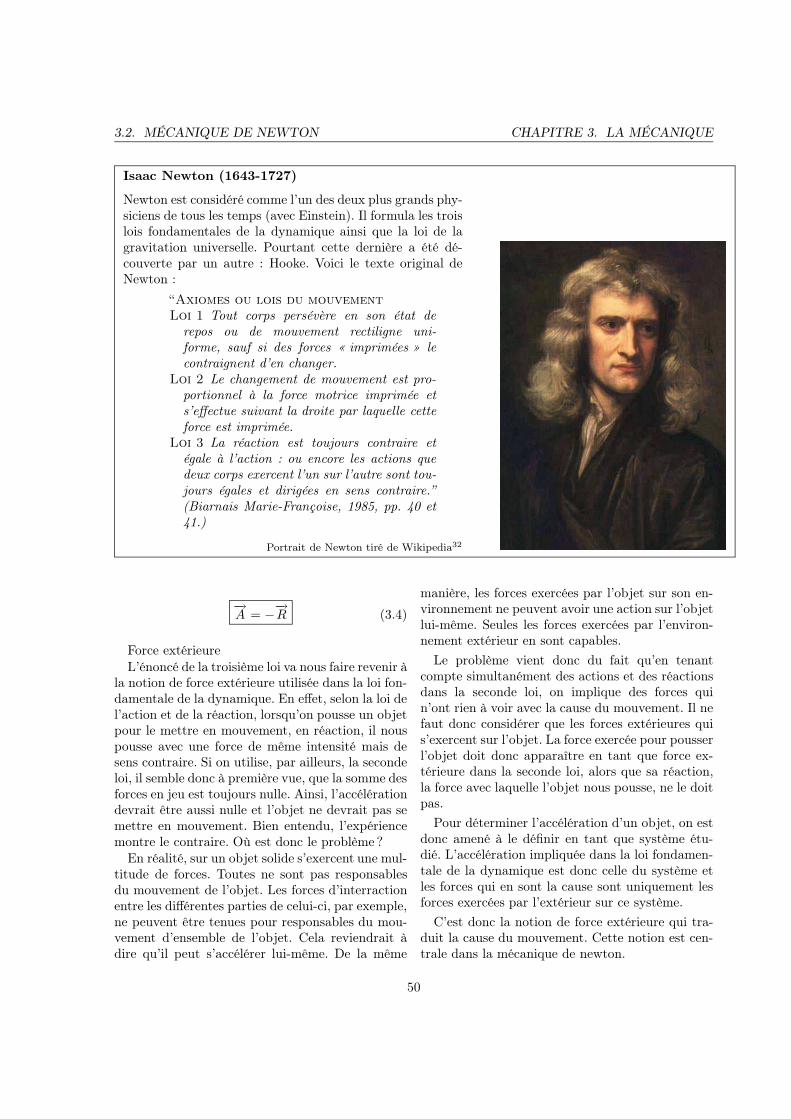
3.2. MÉCANIQUE DE NEWTON CHAPITRE 3. LA MÉCANIQUE
Isaac Newton (1643-1727)
Newton est considéré comme l’un des deux plus grands phy-siciens de tous les temps (avec Einstein). Il formula les troislois fondamentales de la dynamique ainsi que la loi de lagravitation universelle. Pourtant cette dernière a été dé-couverte par un autre : Hooke. Voici le texte original deNewton :
“Axiomes ou lois du mouvementLoi 1 Tout corps persévère en son état de
repos ou de mouvement rectiligne uni-forme, sauf si des forces « imprimées » lecontraignent d’en changer.
Loi 2 Le changement de mouvement est pro-portionnel à la force motrice imprimée ets’effectue suivant la droite par laquelle cetteforce est imprimée.
Loi 3 La réaction est toujours contraire etégale à l’action : ou encore les actions quedeux corps exercent l’un sur l’autre sont tou-jours égales et dirigées en sens contraire.”(Biarnais Marie-Françoise, 1985, pp. 40 et41.)
Portrait de Newton tiré de Wikipedia32
−→A = −−→
R (3.4)
Force extérieureL’énoncé de la troisième loi va nous faire revenir à
la notion de force extérieure utilisée dans la loi fon-damentale de la dynamique. En effet, selon la loi del’action et de la réaction, lorsqu’on pousse un objetpour le mettre en mouvement, en réaction, il nouspousse avec une force de même intensité mais desens contraire. Si on utilise, par ailleurs, la secondeloi, il semble donc à première vue, que la somme desforces en jeu est toujours nulle. Ainsi, l’accélérationdevrait être aussi nulle et l’objet ne devrait pas semettre en mouvement. Bien entendu, l’expériencemontre le contraire. Où est donc le problème ?
En réalité, sur un objet solide s’exercent une mul-titude de forces. Toutes ne sont pas responsablesdu mouvement de l’objet. Les forces d’interractionentre les différentes parties de celui-ci, par exemple,ne peuvent être tenues pour responsables du mou-vement d’ensemble de l’objet. Cela reviendrait àdire qu’il peut s’accélérer lui-même. De la même
manière, les forces exercées par l’objet sur son en-vironnement ne peuvent avoir une action sur l’objetlui-même. Seules les forces exercées par l’environ-nement extérieur en sont capables.
Le problème vient donc du fait qu’en tenantcompte simultanément des actions et des réactionsdans la seconde loi, on implique des forces quin’ont rien à voir avec la cause du mouvement. Il nefaut donc considérer que les forces extérieures quis’exercent sur l’objet. La force exercée pour pousserl’objet doit donc apparaître en tant que force ex-térieure dans la seconde loi, alors que sa réaction,la force avec laquelle l’objet nous pousse, ne le doitpas.
Pour déterminer l’accélération d’un objet, on estdonc amené à le définir en tant que système étu-dié. L’accélération impliquée dans la loi fondamen-tale de la dynamique est donc celle du système etles forces qui en sont la cause sont uniquement lesforces exercées par l’extérieur sur ce système.
C’est donc la notion de force extérieure qui tra-duit la cause du mouvement. Cette notion est cen-trale dans la mécanique de newton.
50

CHAPITRE 3. LA MÉCANIQUE 3.2. MÉCANIQUE DE NEWTON
Précisons enfin que l’unité de la force est le New-ton. Il s’agit de la force nécessaire pour accélérer de1 m/s2 une masse de 1 kg.
Exemples
– Une voiture roule en ligne droite à vitesseconstante. La force qui lui permet de main-tenir sa vitesse vaut 200 N . Calculez la forcede frottement.Réponse : comme la voiture roule à vitesseconstante et en ligne droite, la première loi deNewton nous indique que la somme des forcesqui s’exercent sur elle est nulle. Ainsi, la forcepoussant la voiture étant vers l’avant et la forcede frottement vers l’arrière, on peut dire quela force de frottement vaut aussi 200N.
– Une voiture (de masse m = 2000 kg) accélèrede 0 m/s à 100 km/h en 12 secondes. Quelledistance a-t-elle parcouru ? D’où vient la forcequi lui permet d’accélérer de telle manière etquelle est sa valeur ?Réponse : 100 km/h = 27, 7 m/s. L’accéléra-tion est, par définition : a = (27, 7 − 0)/12 =2, 31 m/s2. La distance vaut alors : x = 2, 31 ·122/2 + 0 · 12 + 0 = 166, 6 m.La force qui lui permet d’accélérer vient dufrottement avec le sol. C’est le sol qui l’exerce.En effet, la force exercée par les pneus sur le solest clairement vers l’arrière (pensez en effet ausens dans lequel serait projeté un petit cailloucollé au pneu au moment du démarrage de lavoiture). Ce ne sont donc pas les pneus qui per-mettent à la voiture de démarrer. D’ailleurs,sur sol gelé, malgré la rotation des pneus, ellene pourrait pas démarrer. Ainsi, il faut consi-dérer la force exercée par le sol sur les pneus.En effet, selon la troisième loi de Newton, celle-ci, en tant que réaction à l’action vers l’arrièredes pneus sur le sol, s’exerce vers l’avant.La valeur de la force de frottement se calculeaisément par F = m·a = 2000·2, 31 = 4620·N .
– Une voiture (de masse m = 2000 · kg) freinesur une distance de 50 m pour éviter une col-lision avec un mur. Sa vitesse initiale étant de50 km/h, calculez son accélération et la forcequi lui permet de s’arrêter.Réponse : On ne connaît ni l’accélération, nile temps d’arrêt. On peut donc soit utiliserles deux équations de la position et de la vi-
tesse (deux équations à deux inconnues) danslesquelles apparaissent le temps et l’accéléra-tion, soit utiliser une relation dérivée de cesdeux équations où n’apparaît pas le temps,mais seulement l’accélération. Cette relationest (voir annexe F.2.1) :
v2 = v2o + 2 · ao · (x − xo)
Avec : vo = 50 km/h = 13, 8 m/s, v = 0 m/set x − xo = 50 m, on a :
ao =v2 − v2
o
2 · (x − xo)=
02 − 13, 82
2 · 50= −1, 93 m/s2
Le signe négatif traduit une décélération (unfreinage).Finalement, la force de freinage vaut : F =m · a = 2000 · 1, 93 = 3860 N .
3.2.3 Types de forces
La seconde loi de Newton propose donc de fairejouer à la notion de force le rôle de cause du chan-gement du mouvement. Le programme de New-ton consiste donc en premier lieu à rechercher lesforces qui agissent sur le système étudié. Il est doncfondamental de connaître les principales forces quipeuvent agir. Il y en a beaucoup. On ne pourra lesétudier toutes. En fait, il en existe principalementquatre. Ce sont la force de gravitation, la force élec-tromagnétique, la force faible et la force forte. Ellessont dites fondamentales parce qu’elles sont à l’ori-gine de toutes les autres. En d’autres termes, toutesles autres sont une manifestation de la présence desforces fondamentales.
Dans le cadre de ce cours de mécanique nous enétudierons quatre, dont une seule fondamentale :la force de gravitation, donnant lieu à la loi de lagravitation universelle.
Loi de la gravitation universelle
La force de gravitation−→F exprime l’attraction
à distance exercée par une masse sur une autre etréciproquement.
L’expression mathématique de cette loi, qui faitréférence à la figure 3.2, est la suivante :
51
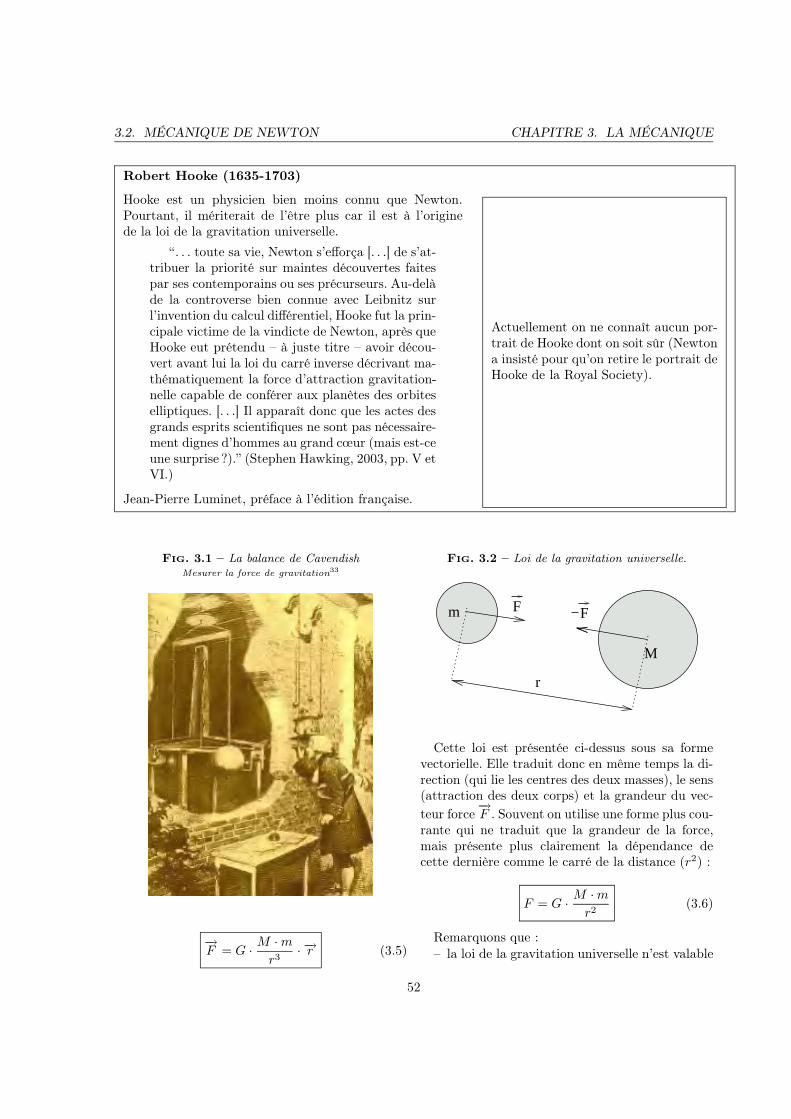
3.2. MÉCANIQUE DE NEWTON CHAPITRE 3. LA MÉCANIQUE
Robert Hooke (1635-1703)
Hooke est un physicien bien moins connu que Newton.Pourtant, il mériterait de l’être plus car il est à l’originede la loi de la gravitation universelle.
“. . . toute sa vie, Newton s’efforça [. . .] de s’at-tribuer la priorité sur maintes découvertes faitespar ses contemporains ou ses précurseurs. Au-delàde la controverse bien connue avec Leibnitz surl’invention du calcul différentiel, Hooke fut la prin-cipale victime de la vindicte de Newton, après queHooke eut prétendu – à juste titre – avoir décou-vert avant lui la loi du carré inverse décrivant ma-thématiquement la force d’attraction gravitation-nelle capable de conférer aux planètes des orbiteselliptiques. [. . .] Il apparaît donc que les actes desgrands esprits scientifiques ne sont pas nécessaire-ment dignes d’hommes au grand cœur (mais est-ceune surprise ?).” (Stephen Hawking, 2003, pp. V etVI.)
Jean-Pierre Luminet, préface à l’édition française.
Actuellement on ne connaît aucun por-trait de Hooke dont on soit sûr (Newtona insisté pour qu’on retire le portrait deHooke de la Royal Society).
Fig. 3.1 – La balance de CavendishMesurer la force de gravitation33
−→F = G · M · m
r3· −→r (3.5)
Fig. 3.2 – Loi de la gravitation universelle.
FF
M
m
r
Cette loi est présentée ci-dessus sous sa formevectorielle. Elle traduit donc en même temps la di-rection (qui lie les centres des deux masses), le sens(attraction des deux corps) et la grandeur du vec-teur force
−→F . Souvent on utilise une forme plus cou-
rante qui ne traduit que la grandeur de la force,mais présente plus clairement la dépendance decette dernière comme le carré de la distance (r2) :
F = G · M · mr2
(3.6)
Remarquons que :– la loi de la gravitation universelle n’est valable
52

CHAPITRE 3. LA MÉCANIQUE 3.2. MÉCANIQUE DE NEWTON
que pour des corps ponctuels ou sphériques,– qu’elle traduit une action à distance, ce qui
posera par la suite de graves problèmes,– que Newton était conscient des problèmes
qu’une action à distance pouvait poser, maisqu’il n’y a pas trouvé de réponse satisfaisante,
– que la constante G est une constante fon-damentale appelée “constante de la gravi-tation universelle”, et vaut G = 6, 67 ·10−11 Nm2/kg2. Cette constante est très pe-tite. Cela traduit une force relativement faible(même si pour des masses conséquentes commela terre et le soleil par exemple, elle peut avoirune valeur importante). Nous verrons, avec laforce électrique par exemple, un exemple deforce beaucoup plus forte.
Le poids
On a vu au paragraphe 2.5.3 que l’accélération àla surface de la terre d’un objet en chute libre (c’est-à-dire qui n’est soumis à aucun frottement) vautg = 9, 81 m/s2. Or, en chute libre, la seule force quis’exerce est le poids. Ainsi, selon la seconde loi deNewton, on peut écrire :
P = F = m · a = m · g ⇒
P = m · g (3.7)
Évidemment le poids étant une force, il s’exprimeen newton.
On peut aussi comprendre le poids d’une autremanière. On peut considérer que le poids n’est quel’expression de la force de gravitation qui s’exerceentre la terre et le corps considéré placé à la surfacede celle-ci. Ainsi, à l’aide de la loi de la gravitation,on peut écrire :
F = G ·Mterre · m
r2terre
= m · g
Il faut bien comprendre que le poids et la gra-vitation ne constituent pas deux choses distinctes,mais qu’il s’agit de la même force ! Ainsi, on peutécrire, à la suite de l’équation précédente :
g = G · Mterre
r2terre
= 9, 81 m/s2 (3.8)
C’est l’expression de l’accélération d’un corps enchute libre à la surface de la terre. On peut doncfacilement généraliser cette équation pour un corpsautre que la terre :
g = G · Mplanete
r2planete
(3.9)
En particulier aussi, on peut utiliser l’expressionde g ci-dessus pour exprimer la variation de l’accé-lération terrestre en fonction de l’altitude :
g = G · Mterre
(rterre + h)2
où h est l’altitude au-dessus de la surface de laterre. On constate donc que l’accélération diminueavec l’altitude. Par conséquent, le poids aussi. Onpeut donc se poser la question suivante : “de com-bien maigrit-on en montant au sommet de l’Eve-rest”.
Masse et poids
La relation entre masse et poids est donc cellequi lie une quantité de matière à la force exercéesur elle par un autre corps (la terre par exemple).Or, déterminer une quantité de matière n’est passimple, alors que mesurer une force l’est : un simpleressort comprimé le permet. D’où l’idée de rappor-ter la force exercée sur un objet à sa quantité dematière, c’est-à-dire sa masse, via l’équation :
m =F
a
Il est alors un appareil dont la mesure peut prêterà confusion : la balance. Et même si le langage estprécis, on dit “je vais mesurer mon poids sur la ba-lance”, il est nécessaire d’insister sur le fait qu’unebalance mesure le poids et non la masse. Car il fautbien comprendre que la mesure du poids à l’aided’une balance passe nécessairement par l’utilisationd’un ressort (ou un mécanisme du même type) dontla force de réaction limite l’enfoncement. C’est cetteforce de réaction qui est mesurée par la balance etnon la masse de la personne, comme pourrait nousle faire croire l’indication donnée en kilogrammes.On peut s’en convaincre en mesurant la masse d’unobjet à l’aide d’une balance alternativement placéesur terre et sur la lune. Même si la masse est lamême dans les deux cas, la balance va donner des
53
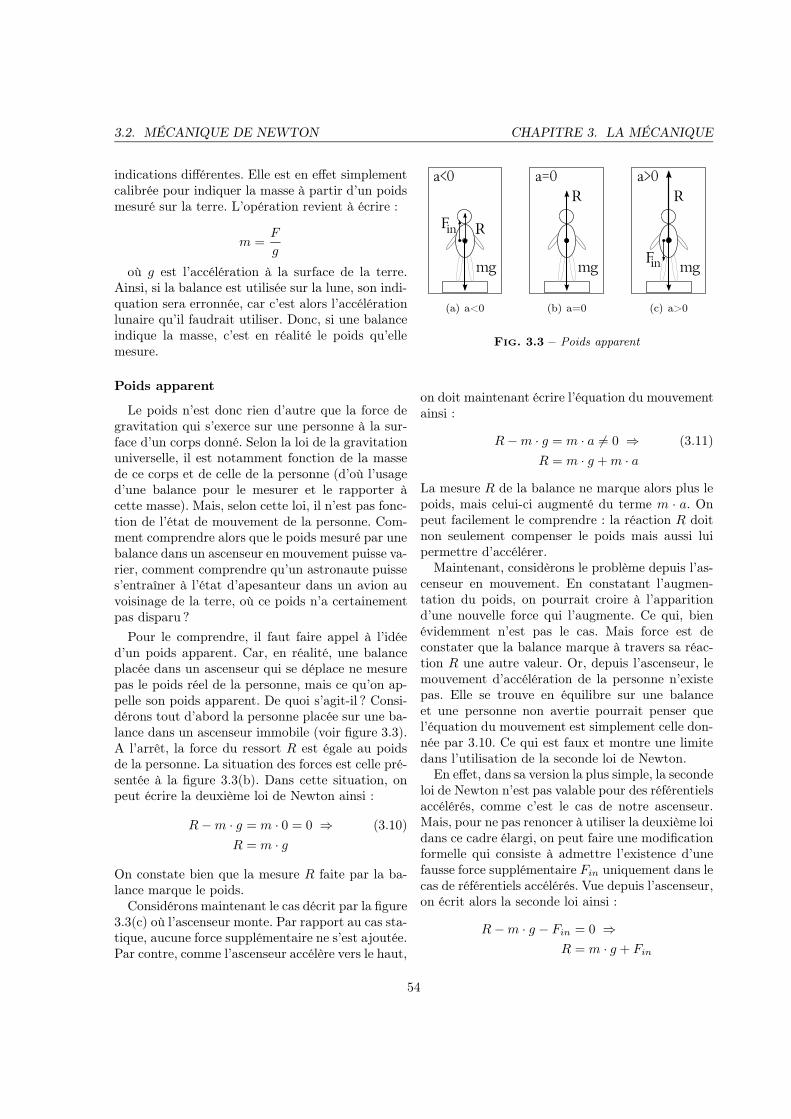
3.2. MÉCANIQUE DE NEWTON CHAPITRE 3. LA MÉCANIQUE
indications différentes. Elle est en effet simplementcalibrée pour indiquer la masse à partir d’un poidsmesuré sur la terre. L’opération revient à écrire :
m =F
g
où g est l’accélération à la surface de la terre.Ainsi, si la balance est utilisée sur la lune, son indi-quation sera erronnée, car c’est alors l’accélérationlunaire qu’il faudrait utiliser. Donc, si une balanceindique la masse, c’est en réalité le poids qu’ellemesure.
Poids apparent
Le poids n’est donc rien d’autre que la force degravitation qui s’exerce sur une personne à la sur-face d’un corps donné. Selon la loi de la gravitationuniverselle, il est notamment fonction de la massede ce corps et de celle de la personne (d’où l’usaged’une balance pour le mesurer et le rapporter àcette masse). Mais, selon cette loi, il n’est pas fonc-tion de l’état de mouvement de la personne. Com-ment comprendre alors que le poids mesuré par unebalance dans un ascenseur en mouvement puisse va-rier, comment comprendre qu’un astronaute puisses’entraîner à l’état d’apesanteur dans un avion auvoisinage de la terre, où ce poids n’a certainementpas disparu ?
Pour le comprendre, il faut faire appel à l’idéed’un poids apparent. Car, en réalité, une balanceplacée dans un ascenseur qui se déplace ne mesurepas le poids réel de la personne, mais ce qu’on ap-pelle son poids apparent. De quoi s’agit-il ? Consi-dérons tout d’abord la personne placée sur une ba-lance dans un ascenseur immobile (voir figure 3.3).A l’arrêt, la force du ressort R est égale au poidsde la personne. La situation des forces est celle pré-sentée à la figure 3.3(b). Dans cette situation, onpeut écrire la deuxième loi de Newton ainsi :
R − m · g = m · 0 = 0 ⇒ (3.10)
R = m · g
On constate bien que la mesure R faite par la ba-lance marque le poids.
Considérons maintenant le cas décrit par la figure3.3(c) où l’ascenseur monte. Par rapport au cas sta-tique, aucune force supplémentaire ne s’est ajoutée.Par contre, comme l’ascenseur accélère vers le haut,
(a) a<0 (b) a=0 (c) a>0
Fig. 3.3 – Poids apparent
on doit maintenant écrire l’équation du mouvementainsi :
R − m · g = m · a �= 0 ⇒ (3.11)
R = m · g + m · a
La mesure R de la balance ne marque alors plus lepoids, mais celui-ci augmenté du terme m · a. Onpeut facilement le comprendre : la réaction R doitnon seulement compenser le poids mais aussi luipermettre d’accélérer.
Maintenant, considèrons le problème depuis l’as-censeur en mouvement. En constatant l’augmen-tation du poids, on pourrait croire à l’apparitiond’une nouvelle force qui l’augmente. Ce qui, bienévidemment n’est pas le cas. Mais force est deconstater que la balance marque à travers sa réac-tion R une autre valeur. Or, depuis l’ascenseur, lemouvement d’accélération de la personne n’existepas. Elle se trouve en équilibre sur une balanceet une personne non avertie pourrait penser quel’équation du mouvement est simplement celle don-née par 3.10. Ce qui est faux et montre une limitedans l’utilisation de la seconde loi de Newton.
En effet, dans sa version la plus simple, la secondeloi de Newton n’est pas valable pour des référentielsaccélérés, comme c’est le cas de notre ascenseur.Mais, pour ne pas renoncer à utiliser la deuxième loidans ce cadre élargi, on peut faire une modificationformelle qui consiste à admettre l’existence d’unefausse force supplémentaire Fin uniquement dans lecas de référentiels accélérés. Vue depuis l’ascenseur,on écrit alors la seconde loi ainsi :
R − m · g − Fin = 0 ⇒R = m · g + Fin
54

CHAPITRE 3. LA MÉCANIQUE 3.2. MÉCANIQUE DE NEWTON
et on identifie cette pseudo-force Fin au terme m ·ade l’équation du mouvement 3.11. En effet, celle-cipeut être écrite comme :
R − m · g − m · a = 0
Ainsi, on constate, dans ce second exemple où leréférentiel est accéléré, que le poids donné par unebalance n’est pas le poids réel dû à la force de gravi-tation. Ce poids est dit poids apparent et est com-posé de la force de gravitation, à laquelle il faut ad-joindre une pseudo-force d’inertie. Mais, il faut rele-ver que cette force est fictive. En effet, rien n’exercede force supplémentaire au poids vers le bas. Aucontraire, c’est la force de réaction de la balance,qui est vers le haut et est nécessaire pour accélérerla personne, qui est à l’origine de la force d’inertie.Nous verrons par la suite que ce problème se re-trouve dans les mouvements circulaires où une vraieforce, la force centripète, est à l’origine d’une fausseforce, la force centrifuge, et cela pour les mêmes rai-sons.
Considérons enfin le cas décrit par la figure 3.3(a)où l’ascenseur descend. Pour cela, dans l’équationdu mouvement, il faut relever que nous avons précé-demment compté positivement les termes orientésvers le haut, comme la réaction R, et négativementceux dont le sens est vers le bas, comme le poids.Par là, nous avons choisi un axe pointant vers lehaut. Ainsi, dans le cas d’une accélération vers lehaut, le terme m·a était compté positivement. Dansle cas qui nous occupe maintenant, il est vers lebas et doit être compté négativement. L’équationdu mouvement devient alors :
R − m · g = −m · a ⇒R = m · g − m · a
et le poids apparent R noté par la balance est plusfaible que le poids réel, puisqu’il est diminué dem · a qui peut être considéré comme un pseudo-force d’inertie.
L’exemple de la relation entre poids et poids ap-parent montre donc que le mouvement d’un ob-jet n’est pas sans incidence sur la mesure de sonpoids. C’est particulièrement le cas pour les cos-monautes qui s’entraînent à l’état d’apesanteur enavion. Cette apesanteur fictive n’est obtenue quegrâce à la chute simultanée de l’avion autour descosmonautes, ce qui rend leur poids apparent nul.
Fig. 3.4 – La sensation des mouvementsGravitation, poids et mouvement circulaire34
Ainsi, par la suite, dans le problème de l’analysedu phénomène de marée notamment, il faudra tenircompte des mouvements accélérés.
De plus, il marque les limites de la seconde loide Newton qui n’est valable sous sa forme la plussimple que pour des référentiels qui se déplacentà vitesse constante, référentiels dits inertiels. Pourdes référentiels non-inertiels, des référentiels accé-lérés, il est nécessaire de la modifier en y ajoutantdes pseudo-forces d’inertie qui traduisent l’état demouvement du référentiel. Mais nous y reviendrons.
Gravitation et MCU
Une des nombreuses applications intéressantes dela loi de la gravitation universelle est la détermina-tion de l’altitude à laquelle il faut placer un satel-lite en orbite pour qu’il soit géostationnaire. Ce casest présenté en annexe H. Il repose sur la loi dela gravitation universelle et sur la dynamique dumouvement circulaire uniforme.
Comme on l’a vu (voir paragraphe 2.5.6), le MCUest un mouvement à vitesse constante, mais à ac-célération non nulle. La présence d’une accéléra-tion implique celle d’une force. Celle-ci est naturel-lement dans la même direction et le même sens que
55

3.2. MÉCANIQUE DE NEWTON CHAPITRE 3. LA MÉCANIQUE
l’accélération. En effet, cela découle de la secondeloi de Newton et du fait que la masse est toujourspositive. Cette accélération, nommée centripète (etnon centrifuge), est donc créée par une force dirigéevers le centre de rotation qui dévie l’objet de sa tra-jectoire. Cela est parfaitement compatible avec lapremière loi de Newton, puisque selon elle, seule laprésence d’une force peut expliquer une trajectoirenon rectiligne.
Il est important de bien différencier la force cen-tripète, qui est dirigée vers le centre du cercle dela trajectoire, de la pseudo-force centrifuge qui tra-duit l’impression d’être éjecté que peut avoir unepersonne qui est en rotation dans un manège, parexemple. Nous sommes là, comme au paragraphe3.2.3 dans le cadre d’un mouvement accéléré : lemouvement circulaire uniforme. L’étude de ce mou-vement peut se faire en observant sa dynamique del’extérieur. On écrit alors l’équation du mouvementnaturellement ainsi :
Fcentripete = m · acentripete = m · v2
R
Une seule force est présente : la force centripète.Elle est réelle et peut être exercée par la gravitationd’une autre planète par exemple.
Mais, on peut aussi étudier le mouvement en ana-lysant la dynamique d’un objet qui est fixe à l’in-térieur du manège. Comme celui-ci est alors à l’ar-rêt par rapport à ce qui l’entoure, la seconde loi deNewton doit présenter une somme des forces qui estnulle. Pour cela, la force centripète doit être com-pensée par une pseudo-force dite centrifuge et di-rigée radialement vers l’extérieur du manège. Maiscette force est fictive. Elle ne traduit que les limitesde la seconde loi de Newton qui, pour pouvoir êtreutilisée dans un référentiel accéléré, doit prendreen compte la pseudo-force centrifuge. Ainsi, écrirel’équation du mouvement en passant son terme dedroite à gauche permet d’en obtenir une expres-sion valable aussi dans le référentiel non inertielque constitue le manège. On peut donc écrire :
Fcentripete = m · v2
R⇒ (3.12)
Fcentripete − m · v2
R= 0 ⇒
Fcentripete − Fcentrifuge = 0 (3.13)
L’équation 3.12 constitue la loi de Newton correc-tement écrite dans un référentiel non accéléré, dit
inertiel. Par contre, l’équation 3.13, tout en étantformellement correcte puisqu’elle dérive de 3.12, estconceptuellement fausse puisque la force centrifugen’existe pas. En réalité, elle est écrite ainsi pourque la seconde loi de Newton reste valable dansle référentiel en rotation, non-inertiel, et traduisel’impression fictive qu’une force en éjecte l’objetvers l’extérieur. Impression fictive, en effet, car sila force centripète n’était pas là, conformément àla première loi de Newton, l’objet irait tout simple-ment tout droit, marquant l’absence irréfutable dela force centrifuge.
Dans le cas du mouvement de la lune, la forcecentripète est celle de la gravitation universelle,communément nommée poids. On peut donc biendire que la lune tourne autour de la terre parcequ’elle lui tombe dessus sous l’effet de son poids.Et son poids la fait bien accélérer, mais sans que savitesse n’augmente. En effet, la vitesse de la lunedans son mouvement quasi-circulaire autour de laterre étant perpendiculaire à son poids, et donc àson accélération, aucune composante de cette der-nière n’existe parallèlement à la vitesse. On peutainsi dire que le poids de la lune ne sert qu’à lafaire tourner. Elle tombe donc bien sur la terre touten paraissant suspendue en état d’apesanteur. Maisc’est une apesanteur fictive.
Ainsi, Newton réconcilie les deux univers de Pla-ton séparés par la lune, le monde sublunaire et lemonde supralunaire, à l’aide justement de ce corpsqui en traçait la frontière : la lune. Elle devientun corps comme les autres dans un univers réuni-fié ou les objets du monde supralunaire acquièrentun statut sublunaire et où la terre se met à tournerautour du soleil comme les corps parfaits du mondesupralunaire.
Mais la révolution ne s’arrête pas là, puisque lemouvement circulaire uniforme perd son statut deperfection en devenant un cas particulier du mouve-ment elliptique suivant lequel s’établira désormaisla mécanique céleste.
Troisième loi de Kepler
Au paragraphe 2.5.7, page 42, nous avons vu queles mouvements des planètes se font sur des ellipses.Or, dans la pluspart des cas, ces ellipses sont trèsproches de cercles et l’approximation d’un mouve-ment circulaire uniforme peut être faite. Dans ce
56

CHAPITRE 3. LA MÉCANIQUE 3.2. MÉCANIQUE DE NEWTON
cas, on peut retrouver l’expression de la troisièmeloi de Kepler donnée par l’équation 2.16 à partir dela seconde loi de Newton. En effet, avec la force degravitation comme force centripète, on a :
G · M · ma2
= m · v2
a(3.14)
Pour un mouvement circulaire, la vitesse est don-née par :
v =2 · π · a
T(3.15)
En remplaçant l’équation 3.15 dans 3.14, on ob-tient :
G · M · ma2
= m · (2 · π · a/T )2
a⇒
G · M
a2=
4 · π2 · aT 2
⇒
a3
T 2=
G · M4 · π2
(3.16)
L’équation 3.16 constitue la troisième loi de Ke-pler.
Mais la nouvelle forme de cette équation met enévidence le rôle de la masse M du corps central quipeut être calculée à partir du rayon de l’orbite etde la période du corps en rotation autour de lui.Cela constitue une méthode de calcul de la massedes astres, comme celle de jupiter à partir du rayonde l’orbite et de la période de io, par exemple, oucelle de la lune.
La masse de la lune peut en effet être très simple-ment évaluée à partir de la troisième loi de Kepler.Pour cela, de l’équation 3.16, on commence par ti-rer l’expression de la masse de la lune :
Mlune =4 · π2
G·d3
terre−lune
T 2lune
(3.17)
Pour déterminer cette masse, il faut donc la périodede la lune et sa distance à la terre. Pour la période,on peut en première approximation, utiliser la pé-riode synodique, c’est-à-dire le temps entre deuxpleines lunes. Celle-ci vaut : 29 jours et 13 heures,soit T = 2′552′400 s. Pour la distance à la terre,on peut recourir à l’observation des éclipses. En ef-fet, en observant l’ombre de la terre sur la lune lorsd’une éclipse lunaire, on constate que le rapport desdiamètres est d’environ deux fois et demi (rapport,
cependant, difficile à obtenir, voir annexe C.2). Deplus, en constatant lors des éclipses solaires, quel’ombre de la lune portée par le soleil sur la terreest très petite, on peut évaluer qu’un objet tel quela lune voit son ombre réduite d’un diamètre lu-naire sur la distance terre lune. Il doit en aller demême pour l’ombre de la terre sur la lune. Ainsi, levrai rapport des diamètres ne doit pas être de deuxfois et demi, mais de trois fois et demi. En d’autrestermes :
φterre = 3, 5 · φlune
Au IIIe siècle avant J-C, Érathostène parvient(semble-t-il, car sa mesure prète à discussion, voirannexe C.1) à déterminer que la circonférence de laterre vaut un peu plus que 39′000 km, soit que laterre a un diamètre de :
φ =39′000
π= 12′414 km
Cela implique que le diamètre de la lune vaut :
φlune =12′414
3, 5= 3547 km
Or, l’angle α sous lequel on voit la lune est d’undemi-degré, soit en radian π/360 = 0, 0087 rad. Al’aide d’une simple relation liant la longueur d’unarc L à son angle α au centre en radian et au rayonR du cercle, on en tire alors :
L = α · R ⇒
R =L
α=
φlune
α
R = dterre−lune =3′547
0, 0087= 407′701 km
Ce qui représente environ 6% d’écart avec la valeurd’aujourd’hui.
A partir de là, l’équation 3.17, nous permet d’es-timer la masse de la lune :
Mlune =4 · π2
G· 407′701′0003
2′552′4002= 6, 2 · 1024 kg
ce qui représente un ordre de grandeur de 100 foistrop grand sur 1024. Ce qui n’est tout de même passi mal.
Les marées
L’application des lois de la physique humaine(monde sublunaire) à l’univers dans son ensemble
57

3.2. MÉCANIQUE DE NEWTON CHAPITRE 3. LA MÉCANIQUE
va non seulement permettre de mieux comprendrela physique des objets célestes, mais aussi de mieuxcomprendre la physique de la terre elle-même. Laphysique newtonienne et la loi de la gravitation uni-verselle vont en effet donner une explication pro-bante des marées (voir l’annexe J pour une expli-cation plus mathématique).
Pour bien comprendre ce succès, il faut toutd’abord donner une description de ce phénomènetrès complexe. Il n’est pas possible d’aborder celle-ci de manière exhaustive et nous limiterons à unedescriptions des phénomènes qui trouvent une ex-plication dans la théorie dite statique de Newton(nous n’aborderons pas la théorie ondulatoire deLaplace) et dans les mouvements des principauxcorps responsables des marées : la lune et le soleil.Encore que certaines propriétés des marées, par-faitement explicables grâce à ces mouvements, neseront pas abordés par manque de place. Pour unedescription physique plus approfondie et très clairedes marées, on peut consulter (Odile Guérin, 2004).
De nos jours, seule la théorie ondulatoire de La-place permet une prédiction suffisante pour les ma-rées cotières notamment. Cette théorie faisant ap-pel à des équations très complexes, le recours à l’in-formatique est absolument nécessaireg.
De plus, dans ce paragraphe, on se limitera àl’explication des marées de pleine mer et de bassemer (voir ci-dessous) crées par l’influence de la lune.Pour les marées de vives eaux et de mortes eaux,qui font intervenir l’influence du soleil, il faudra sereporter à l’annexe J.
La principale période caractéristique de la maréeest celle qui rythme les pleines mers et les bassesmers. Contrairement à ce à quoi on pourrait s’at-tendre en pensant que c’est l’action de la lune quiélève la mer, ce ne sont pas une pleine mer (ou bassemer) par jour qui se produit, mais deux. La périodede rotation de la terre sur elle-même étant d’unejournée et celle de la lune d’un mois, un point (voirfigure 3.5(a)) à l’équateur devrait se trouver à ma-rée haute une seule fois par jour. En effet, en unejournée le déplacement de la lune est assez faiblepour qu’on puisse en première approximation le né-gliger. Ce qui implique que pendant cette périodel’eau en état de marée haute reste fixe et se situedu côté de la lune.
gPour une description très mathématique mais très com-plète du phénomène de marée, voir (Bernard Simon, 2007)
(a) Logique mais faux
(b) Le cas réel
Fig. 3.5 – Pleines et basses mers
Comme cela n’est pas le cas et qu’on constatel’existence de deux marées (haute ou basse) parjour, à douze heures d’intervalle, on est bien forcéde décrire le phénomène non seulement avec unemarée haute du côté de la lune (figure 3.5(a)), maissimultanément avec une autre marée haute à l’op-posé de celle-ci, comme présenté sur la figure 3.5(b).
Ce rythme de deux marées par jour a constituéle principal problème pour l’explication des maréespar l’influence de la lune jusqu’à la théorie de New-ton.
C’est la loi de la gravitation universelle qui vadonner une idée plus précise du phénomène. Maiscela ne va pas se faire aussi simplement qu’on peutle penser. En particulier, le rapport des influencesde la lune et du soleil qui peut être précisémentétabli grâce à elle pose aussi problème. En effet, onpeut calculer la force exercée par la lune sur unemasse m située sur terre par :
Flune = G ·Mlune · md2
terre−lune
= 6, 67 · 10−11 · 7, 35 · 1022 · m(3, 844 · 108)2
= 3, 32 · 10−5 · m
Pour une masse m = 100 kg, cela correspond à uneforce F = 3, 32 · 10−3 N = 3, 32 mN .
Par ailleurs, on peut calculer la force exercée par
58

CHAPITRE 3. LA MÉCANIQUE 3.2. MÉCANIQUE DE NEWTON
le soleil sur une masse m située sur terre par :
Fsoleil = G · Msoleil · md2
terre−soleil
= 6, 67 · 10−11 · 1, 981 · 1030 · m(1, 496 · 1011)2
= 5, 90 · 10−3 · m
Pour une masse m = 100 kg, cela correspond à uneforce F = 5, 90 · 10−1 N = 590 mN .
Le rapport r de la force de marée due au soleilpar celle due à la lune est alors de :
r =Fsoleil
Flune=
590
3, 32= 177, 7× (3.18)
Cela contredit l’hypothèse que les marées sont es-sentiellement dues à l’influence de la lune. C’est évi-demment faux. Les deux calculs effectués ci-dessusreprésentent en fait un cas ou tout les corps : soleil,lune et terre sont immobile. Ce qui n’est du tout lecas.
Il ne faut donc pas seulement considérer l’in-fluence gravifique de la lune sur la terre, maisaussi le mouvement de ces deux corps. En d’autrestermes, il faut considérer la dynamique du systèmeterre-lune à travers la seconde loi de Newton touten considérant une interaction donnée par la loi dela gravitation universelle.
Le problème peut essentiellement être abordé dedeux manières. La plus connue est celle qu’on dé-signe par “construction de Proctor”. Elle a le méritede faire apparaître clairement la cause physique dela marée haute opposée à la lune. Elle a cependantle désavantage de procéder par une différence dedeux forces qui ne s’appliquent pas au même en-droit, ce qui pose des problème conceptuels dansl’emploi de la seconde loi de Newton.
Dans le cadre de ce paragraphe, on va présen-ter la construction de Proctor, car elle a aussi lemérite de permettre une visualisation bidimention-nelle simple des forces de marée. Mais il ne faudrapas oublier qu’elle n’est que le résultat d’un déve-loppement bien plus rigoureux basé sur la secondeloi de Newton. Ce développement est présenté enannexe J.
Pour comprendre la dynamique du système terre-lune, il faut s’imaginer la rotation de la lune autour
Fig. 3.6 – Le système dynamique terre-luneLe centre de gravité du système C n’est pas au centre de la
terre.
de la terre. Si la terre avait une masse infinie, lalune tournerait autour du centre de la terre. Or,ce n’est pas le cas. La terre à une masse Mterre =5, 97·1024 kg et la lune une masse de Mlune = 7, 35·1022 kg, ce qui représente pour la lune un rapportp à la masse totale du système de :
p =Mlune
Mterre + Mlune
=7, 35 · 1022
5, 97 · 1024 + 7, 35 · 1022= 0, 012 = 1, 2%
Ce n’est pas négligeable. En effet, pour cette rai-son, le centre de gravité du système terre-lune necorrespond pas au centre de la terre. Il se situe àune distance du centre de la terre correspondant aurapport de masses p calculé ci-dessus, soit 1, 2% dela distance terre-lune :
r = 0, 012 · 3, 84 · 105 = 4608 km
Par rapport au rayon de la terre, qui est de6371 km, cela représente :
4608
6371= 72, 3%
Ainsi, la lune ne tourne pas vraiment autour dela terre mais autour du centre de gravité du sys-tème terre-lune. La figure 3.6 présente la situation.Le système tourne autour de l’axe ∆ qui passe parle centre de gravité C. Le centre de la terre O etle point P tournent aussi autour de cet axe, se dé-plaçant en O’ et P’. En plus de la rotation diurneen 24 h sur elle-même, la terre tourne donc autourdu centre de gravité C en un mois environ. Cetterotation crée une pseudo-force dite centrifuge quiest à l’origine de la marée haute à l’opposé de lalune, mais l’action existe aussi en PP’.
59

3.2. MÉCANIQUE DE NEWTON CHAPITRE 3. LA MÉCANIQUE
Fig. 3.7 – Marées : la construction de ProctorRichard Anthony Proctor, astronome anglais du XIXe siècle.
Il faut relever la complexité de cette action quiexiste aussi pour les masse d’eau qui sont du côtéde la lune. L’ensemble de ces forces se traduit ma-thématiquement par une action très simple sur lecentre de la terre et, formellement, cela revientà considérer le rapport des forces de gravitations’exerçant au niveau de la surface de la terre aveccelle s’exerçant au niveau du centre de celle-ci.
La figure 3.7 présente la situation. On y voit ladécomposition de l’effet de marée
−→F maree en deux
forces : l’attraction gravitationnelle de la lune−→F g
et une force d’inertie−→F in.
En première analyse, on comprend bien en effetqu’une masse d’eau située au point P soit à la foisattirée par la lune et soulevée vers l’extérieur parla rotation de la terre autour du centre de gravitéterre-lune. Si le point P était situé à l’opposé de lalune, le raisonnement serait parfaitement justifié.Par contre, pour le point P indiqué (intentionnel-lement) sur la figure 3.7, on comprend mal que laforce d’inertie soit dirigée vers l’axe de rotation. Enréalité, il y a derrière la force d’inertie une physiquedes objets en rotation ou cette pseudo-force joue unrôle différent des vraies forces. Il s’agit d’une phy-sique des référentiels non inertiels décrite à l’annexeI. En fait, la force d’inertie devrait être appliquéeau référentiel lié au centre de la terre, soit au pointO. En effet, il s’agit d’une pseudo-force, dite cen-trifuge, qui n’apparaît dans l’équation de Newtonque dans le cas de référentiels en rotation. Commela seconde loi de Newton n’est valable que dansdes référentiels inertiels, c’est-à-dire en translationuniforme les uns par rapport aux autres (voir an-nexe I), pour la préserver dans des référentiels enrotation, il faut y ajouter de pseudo-forces d’inertietraduisant le mouvement de rotation du référentiel.Dans ce cas particulier, il s’agit d’une pseudo-forcecentrifuge appliquée au centre de la terre O et di-
rigée à l’opposé du centre de masse C du systèmeterre-lune. L’annexe J donne le développement cor-rect sur l’axe terre-lune de la seconde loi de Newton,ce qui constitue une justification de la constructionde Proctor. Elle constitue aussi le cœur de l’expli-cation newtonienne du phénomène de marée, puis-qu’elle part de la seconde loi de Newton et de la loide la gravitation universelle.
De nos jours, le graphe du vecteur−→F maree le
long d’un méridien est relativement simple à réali-ser avec un ordinateur. La construction de Proctoren permet le tracé approximatif sans calcul, puisquela direction de
−→F maree est celle qui relie le point
d’application de la force au point N (sur la figure3.7) dont la règle de Proctor dit qu’il est situé surla ligne qui relie la terre à la lune, à trois fois la dis-tance δ correspondant à la hauteur de la projectionorthogonale du point P sur cette ligne.
Le résultat correspond au graphe du champ vec-toriel le long du méridien présenté sur la figure 3.8.
On peut montrer sur la base de la seconde loide Newton et de la loi de la gravitation univer-selle (voir (Gruber Christian, 1988, p. 416)) que levecteur
−→F maree correspondant à la force de marée
s’exerçant sur une masse m d’eau située au pointde coordonnées (x, y) d’un référentiel cartésien liéau centre de la terre (dans le plan d’un méridien)vaut :
−→F maree = G · ML · m
d3T−L
·(
2 · x−y
)
(3.19)
Où ML est la masse de la lune et dT−L la distanceterre-lune.
L’expression de la force−→F maree donnée par 3.19
trouve sa représentation graphique dans le champde vecteurs représenté à la figure 3.8. On y voitl’attraction de la lune sur les masses d’eau qui setrouvent de son côté et de l’autre côté l’effet de laforce d’inertie (pseudo-force centrifuge). Deux ma-rées hautes se trouvent donc aux antipodes l’unede l’autre. La terre tournant sur elle-même bienplus rapidement que la lune ne tourne autour d’elle,l’existence de deux marées par jour trouve donc iciune explication à travers l’application de la secondeloi de Newton.
Remarquez aussi la symétrie du champ de forcespar rapport à l’axe (en traitillé) passant par lecentre O de la terre. Mais, attention, cet axe ne cor-respond pas à l’axe de rotation diurne de la terre sur
60

CHAPITRE 3. LA MÉCANIQUE 3.2. MÉCANIQUE DE NEWTON
Fig. 3.8 – Marées : le champ de forcesSelon la construction de Proctor.
elle-même. En effet, il est perpendiculaire au plande rotation de la lune autour de la terre qui faitun angle de 5◦9′ par rapport au plan de l’écliptique(le plan de rotation de la terre autour du soleil).Comme le plan équatorial, lui-même perpendicu-laire à l’axe de rotation diurne de la terre, fait unangle de 23◦26′ avec le plan de l’écliptique, l’axede rotation de la terre sur elle-même et celui dusystème terre-lune ne correspondent pas.
Si déterminer par calcul la force de marée s’exer-çant sur une masse donnée d’eau constitue un grandprogrès, cette explication peut sembler limitée puis-qu’elle ne prédit pas directement les hauteurs d’eau.Et la vérification de l’expression de la force peutsembler de prime abord difficile à réaliser.
Pour comprendre dans quelle mesure l’explica-tion newtonienne correspond numériquement avecles observations, considérons une forme réduite del’équation 3.19. Il s’agit de l’expression de celle-cisur une masse m d’eau située sur l’axe terre-lune.La détermination de cette force est présentée à l’an-nexe J, équation J.8, page 121. Le résultat est lesuivant :
Fmaree = 2 · G · ML · md3
T−L
· RT (3.20)
Évidemment, cette force est proportionnelle à lamasse ML de la lune, puisque la marée est en partiedue à la force de gravitation. Mais, contrairementà la loi de la gravitation, elle n’est pas inversément
proportionnelle au carré de la distance terre-lune,car elle est aussi en partie du à la force d’inertie(ou pseudo-force centrifuge). La somme de ces deuxforces (de gravitation et d’inertie) varie comme l’in-verse du cube de la distance terre-lune. C’est là unedifférence importante qui va permettre de détermi-ner le rapport d’influence de la lune et du soleil surles masses océaniques.
On a vu que le rapport des forces gravifiquesexercées par la lune et par le soleil sur une massed’eau vaut r = 177, 7 (voir équation 3.18). Ce quiest en contradiction avec l’observation qui montreune influence prédominante de la lune sur le so-leil. Cette contradiction tient au fait que la forced’inertie a été négligée. Pour en tenir compte, onpeut recalculer le rapport r à partir de l’équation3.20 appliquée à la lune et au soleil :
F lunemaree = 2 · G · ML · m
d3T−L
· RT (3.21)
F soleilmaree = 2 · G · MS · m
d3T−S
· RT (3.22)
Le rapport s’exprime alors par :
r =F soleil
maree
F lunemaree
=MS/d3
T−S
ML/d3T−L
=MS
ML
(
dT−L
dT−S
)3
=1, 99 · 1030
7, 35 · 1022
(
3, 84 · 108
1, 50 · 1011
)3
= 0, 46× (3.23)
61
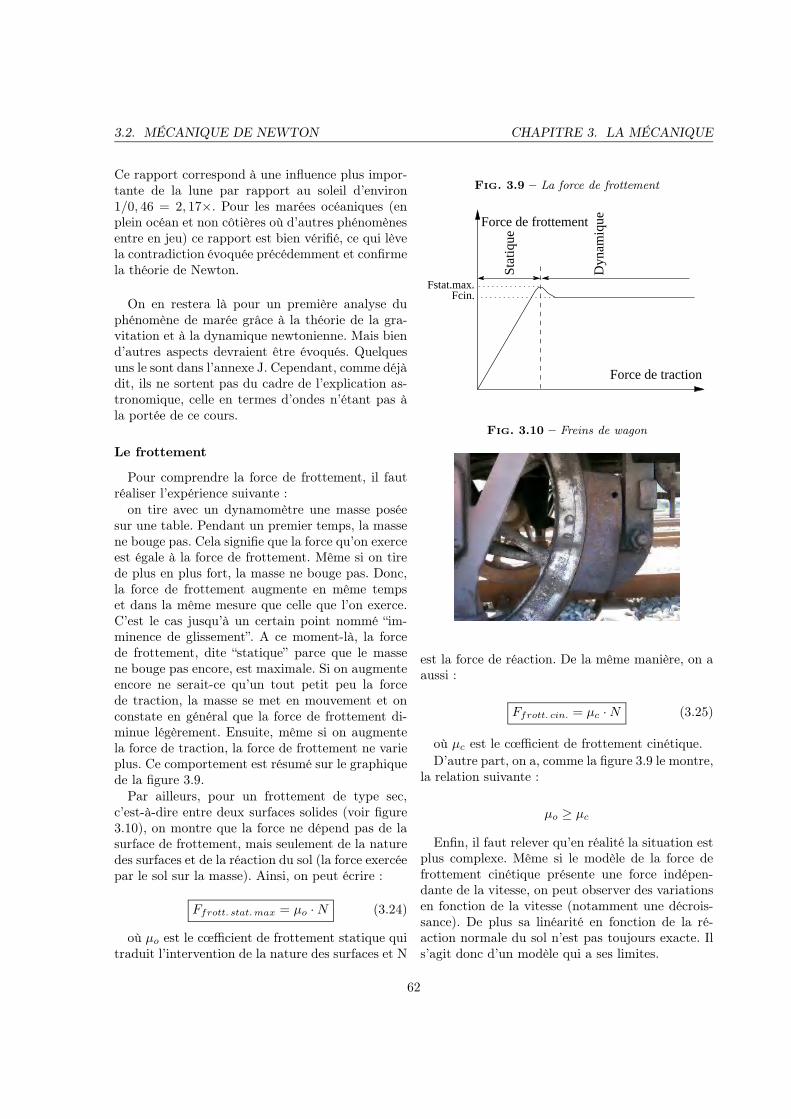
3.2. MÉCANIQUE DE NEWTON CHAPITRE 3. LA MÉCANIQUE
Ce rapport correspond à une influence plus impor-tante de la lune par rapport au soleil d’environ1/0, 46 = 2, 17×. Pour les marées océaniques (enplein océan et non côtières où d’autres phénomènesentre en jeu) ce rapport est bien vérifié, ce qui lèvela contradiction évoquée précédemment et confirmela théorie de Newton.
On en restera là pour un première analyse duphénomène de marée grâce à la théorie de la gra-vitation et à la dynamique newtonienne. Mais biend’autres aspects devraient être évoqués. Quelquesuns le sont dans l’annexe J. Cependant, comme déjàdit, ils ne sortent pas du cadre de l’explication as-tronomique, celle en termes d’ondes n’étant pas àla portée de ce cours.
Le frottement
Pour comprendre la force de frottement, il fautréaliser l’expérience suivante :
on tire avec un dynamomètre une masse poséesur une table. Pendant un premier temps, la massene bouge pas. Cela signifie que la force qu’on exerceest égale à la force de frottement. Même si on tirede plus en plus fort, la masse ne bouge pas. Donc,la force de frottement augmente en même tempset dans la même mesure que celle que l’on exerce.C’est le cas jusqu’à un certain point nommé “im-minence de glissement”. A ce moment-là, la forcede frottement, dite “statique” parce que le massene bouge pas encore, est maximale. Si on augmenteencore ne serait-ce qu’un tout petit peu la forcede traction, la masse se met en mouvement et onconstate en général que la force de frottement di-minue légèrement. Ensuite, même si on augmentela force de traction, la force de frottement ne varieplus. Ce comportement est résumé sur le graphiquede la figure 3.9.
Par ailleurs, pour un frottement de type sec,c’est-à-dire entre deux surfaces solides (voir figure3.10), on montre que la force ne dépend pas de lasurface de frottement, mais seulement de la naturedes surfaces et de la réaction du sol (la force exercéepar le sol sur la masse). Ainsi, on peut écrire :
Ffrott. stat. max = µo · N (3.24)
où µo est le cœfficient de frottement statique quitraduit l’intervention de la nature des surfaces et N
Fig. 3.9 – La force de frottement
Force de frottement
Force de traction
Stat
ique
Dyn
amiq
ue
Fstat.max.Fcin.
Fig. 3.10 – Freins de wagon
est la force de réaction. De la même manière, on aaussi :
Ffrott. cin. = µc · N (3.25)
où µc est le cœfficient de frottement cinétique.D’autre part, on a, comme la figure 3.9 le montre,
la relation suivante :
µo ≥ µc
Enfin, il faut relever qu’en réalité la situation estplus complexe. Même si le modèle de la force defrottement cinétique présente une force indépen-dante de la vitesse, on peut observer des variationsen fonction de la vitesse (notamment une décrois-sance). De plus sa linéarité en fonction de la ré-action normale du sol n’est pas toujours exacte. Ils’agit donc d’un modèle qui a ses limites.
62

CHAPITRE 3. LA MÉCANIQUE 3.2. MÉCANIQUE DE NEWTON
Fig. 3.11 – Essieu de wagon
La force d’un ressort
Il est particulièrement intéressant de comprendrecomment agit la force d’un ressort. En effet, c’estun premier modèle traduisant les liaisons inter-atomiques à l’intérieur d’un cristal par exemple.Mais beaucoup d’autres cas pourraient être présen-tés (voir figure 3.11).
Dans le domaine où le ressort a un comporte-ment plastique (c’est-à-dire que son extension estparfaitement réversible), on montre que l’expres-sion donnant le force de rappel par rapport à l’étatd’équilibre où le ressort est détendu, est :
F = −k · x (3.26)
Fig. 3.12 – La force du ressort
xéquilibre
+
ressort détendu force de rappel
où k est appelée constante du ressort, traduitsa “dureté” et s’exprime en N/m. Le signe néga-tif, quant à lui, vient du fait que c’est une force derappel (dirigée dans le sens contraire de l’axe).
Exemples
1. Déterminez la perte de poids que constateune personne de masse m = 80 kg en pas-sant du bord de la mer au sommet de l’Everest(∼ 8000 m).
Solution :L’accélération terrestre au niveau de la mervaut :
gmer = G · Mterre
(rterre + h)2
= 6, 67 · 10−11 · 5, 97 · 1024
(6, 37 · 106 + 0)2
= 9, 81344 m/s2
L’accélération terrestre au niveau du sommetde l’Everest vaut :
gEverest = G · Mterre
(rterre + h)2
= 6, 67 · 10−11 · 5, 97 · 1024
(6, 37 · 106 + 8000)2
= 9, 78884 m/s2
Ainsi, le poids de la personne au niveau de lamer vaut :
Pmer = m · gmer = 80 · 9, 81344 = 785 N
et celui à 8000 m vaut :
PEverest = m · gEverest = 80 · 9, 78884 = 783 N
La différence est donc de : ∆P = 785 − 783 =2 N
Au niveau de la mer, cela correspond à unevariation de masse qui vaut :
∆m =∆P
gmer=
2
9, 81344= 204 g
2. Calculez la distance de freinage d’une voitureroulant à 50 km/h sur une route mouillée dontles cœfficients de frottement avec les pneusvalent : µo = 0, 4 et µc = 0, 3. Le conducteurne sait pas freiner.Solution :Comme le conducteur ne sait pas freiner, ilbloque les roues et elles glissent sur la chaussée.Le cœfficient de frottement est donc µc = 0, 3.La force de frottement vaut alors :
63

3.2. MÉCANIQUE DE NEWTON CHAPITRE 3. LA MÉCANIQUE
Ffrot. = µc · N = µc · m · g
Mais, la seconde loi de Newton implique :
a =Ffrot.
m=
µc · m · gm
= µc · g
= 0, 3 · 9, 81 = 2, 943 m/s2
Par ailleurs, on a aussi : v2 = v2o + 2 · a · d
Ainsi, on tire :
d =v2 − v2
o
2 · a =02 − 13, 92
2 · (−2, 943)= 32, 8 m
Car, 50 km/h = 13, 9 m/s et a < 0 pour unedécélération.
3. On suspend à un ressort de constante k =200 N/m une masse de 2 kg. Calculez son élon-gation.Solution :L’équilibre des forces (le poids vers le bas et laforce de rappel du ressort vers le haut) mèneà la solution suivante :
m ·g = k ·x ⇒ x =m · g
k=
2 · 9, 81
200= 9, 81 cm
64

CH
AP
ITR
E3.
LA
MÉ
CA
NIQ
UE
3.2.M
ÉC
AN
IQU
ED
EN
EW
TO
NRésumé des grandeurs et unités
Grandeur Définition UnitéDistance r mMasse m , M kgForce F N
Constante de la gravitation G = 6, 67 · 10−11 N ·m2
kg2
Coefficient de frottement µ -Constante du ressort k N
m
Résumé des lois de la dynamique
Lois de NewtonLes lois fondamentales de la dynamique :
MRU ⇔ Σ−→F ext = 0 (3.27)
Σ−→F ext = m · −→a (3.28)
−−−−→Action = −
−−−−−−→Reaction (3.29)
(3.30)
et Lois de forcesQuelques lois :
−→P = m · −→g (3.31)
F = G · M · mr2
(3.32)
F = −k · x (3.33)
F = µ · N (3.34)
MCU ; force centripète de nature diverse :
Fc = m · v2
R⇒ ac =
v2
R(3.35)
Fig. 3.13 – Résumé de mécanique
65

66
Chapitre 4L’énergie
4.1 Introduction
A l’origine, la notion d’énergie est apparuecomme une seconde voie dans l’étude de la dy-namique des mouvements. En effet, la théorie deNewton, qui se situe au niveau de la relation cau-sale entre force et accélération, utilise des gran-deurs qui sont en permanente évolution au cours dutemps (F(t), a(t), v(t) et x(t)). De plus, elle se placeau niveau mathématique de l’accélération. Pour re-monter à la vitesse ou à la position, il faut ensuiteeffectuer une série d’opérations mathématiques quipeuvent ne pas être simples (intégrations). Est doncapparue une nouvelle théorie utilisant des conceptsse situant au niveau mathématique de la vitesse etdéveloppant des théorèmes de conservation. Ainsi,cette seconde voie s’est vite présentée comme uncomplément à la théorie de Newton permettant dessolutions mathématiques parfois plus simples quecelles de la théorie newtonienne aux problèmes demécanique. Mais elle a aussi permis de mettre enévidence la conservation de certaines grandeurs im-portantes.
D’un autre côté, les nouveaux concepts dévelop-pés ont pris, avec le développement des appareilsnécessitant des sources d’énergie, une véritable si-gnification dans la vie courante. Et les problèmesénergétiques de ce début de XXIe siècle contri-buent plus encore aujourd’hui à imposer la néces-sité de comprendre les notions de travail, d’énergieet de puissance.
Ce chapitre va donc tenter de formuler aussi sim-plement que possible tous ces concepts, afin de per-mettre de mieux comprendre les enjeux des pro-
blèmes énergétiques d’aujourd’hui.
4.2 Travail
La première notion importante à connaître estcelle liée à l’action d’une force sur une distance don-née. On imagine bien qu’un cheval tirant un traî-neau doit effectuer un certain travail. Évidemment,plus la force qu’il doit exercer pour compenser laforce de frottement et faire avancer le traîneau estimportante, plus le travail qui lui est demandé lesera. Par ailleurs aussi, plus la distance qu’il vaparcourir sera grande plus son travail le sera. Onpeut ainsi assez simplement définir le travail par :
A = F · d (4.1)
où A est le travail (Arbeit en allemand), F laforce exercée et d la distance parcourue. Les unitésdu travail sont donc :
[A] = [F ] · [d] = N · m = J Joule
On peut ainsi calculer le travail nécessaire pourfaire avancer un objet horizontalement avec uneforce de 4 N sur une distance de 5 m :
A = F · d = 4 · 5 = 20 J
Deux autres unité de travail (et d’énergie) trèsconnues (mais non SI) sont la calorie (cal) et lekilowattheure (kWh). On a que :
1 cal = 4, 186 J
67

4.4. ÉNERGIE POTENTIELLE CHAPITRE 4. L’ÉNERGIE
Fig. 4.1 – PuissanceLe cheval vapeur35
et :1 kWh = 3, 6 · 106 J
Attention, la présence du symbole W pour wattne signifie pas qu’il s’agit d’une puissance, commenous le verrons au paragraphe 4.3
Remarquons finalement que la définition du tra-vail donnée ci-dessus n’est valable que pour desforces s’exerçant dans la même direction et le mêmesens que le déplacement. Pour une force agissantdans le sens contraire du déplacement, le travailest négatif et pour une force perpendiculaire au dé-placement, il est nul. Cela se traduit aisément enconsidérant comme définition du travail le produitscalaire entre le vecteur force et le vecteur déplace-ment.
4.3 Puissance
On voit que le travail ne dépend pas du temps.Or, on peut produire un même travail lentement(voir figure 4.1) ou rapidement. La manière dontce travail est produit dans le temps donne lieu à ladéfinition de la notion de puissance. Plus le tempsmis pour produire un travail donné est court, puisil faudra de la puissance. On doit donc écrire :
P =A
t(4.2)
où P est la puissance, A le travail et t le tempsmis pour le produire. Les unités de la puissance
sont donc :
[P ] =[A]
[t]=
J
s= W Watt
On peut ainsi calculer la puissance nécessairepour produire un travail de 20 J en une minute :
P =A
t=
20
60= 0, 33 W
Une autre unité de puissance (non SI) est lecheval-vapeur (Ch ou CV). On a :
1 Ch = 736 W
Il faut remarquer que le fait qu’on puisse aussiécrire l’équation 4.2 sous la forme :
A = P · t
permet de définir le kilowattheure (kWh) en tantqu’unité du travail (ou d’énergie). En effet, en choi-sissant le kW pour unité de puissance et l’heurepour unité de temps, on a :
[A] = [P ] · [t] = kW · h
4.4 Énergie potentielle
Le poids d’un objet de masse m tombant d’uneune hauteur h produit un travail qu’on peut calcu-ler ainsi :
A = F · d = P · h = mg · h
On peut s’imaginer que le travail qu’est capable deproduire cet objet est potentiellement contenu dansl’objet situé à la hauteur h. En d’autres termes, onpeut s’imaginer que cet objet dispose de par sa si-tuation à la hauteur h d’une “énergie potentielle”.En tombant sous l’effet de son poids, cette éner-gie potentielle se transformerait alors en travail.Comme le travail que l’objet est capable de four-nie vaut mg ·h, on peut définir l’énergie potentiellepar :
Epot = mg · h (4.3)
La possible transformation de l’énergie potentielleen travail implique une identité des unités de cesdeux grandeurs. Ainsi :
[Epot] = [A] = J Joule
68

CHAPITRE 4. L’ÉNERGIE 4.6. THÉORÈME DE L’ÉNERGIE CINÉTIQUE
On peut ainsi résumer la situation en disant quepour monter un objet de masse m soumis à sonpoids, on doit fournir un travail sous la forme d’uneforce opposée et égale à son poids qui se déplace surune hauteur h. Au fur et à mesure de l’élévation, letravail fourni se transforme en énergie potentielle.Ce travail est récupérable à travers le travail fournipar le poids de l’objet quand on le redescend à sahauteur initiale.
4.5 Énergie cinétique
Un camion s’écrasant contre un mur à une vitessede 50 km/h va produire un travail de déformationde celui-ci. Sa masse et son mouvement constituentdonc une sorte de réservoir d’énergie que nous ap-pellerons “énergie cinétique”. Pour calculer celle-ciprécisément, on procède comme pour l’énergie po-tentielle. On calcule le travail nécessaire pour ame-ner le camion à la vitesse choisie et on considère quece travail constitue l’énergie cinétique du camion.Dans le cas d’un mouvement rectiligne uniformé-ment accéléré, avec une vitesse initiale nulle, on a :
v2 = v2o + 2 · a · d ⇒ a =
v2 − 02
2 · d
On peut donc écrire :
A = F · d = ma · d
= m · v2
2 · d· d
=1
2· m · v2
On montre que ce résultat n’est pas valable seule-ment dans les conditions ci-dessus, mais est tout-à-fait général. Ainsi, l’énergie cinétique d’un objetde masse m et de vitesse v est donnée par :
Ecin =1
2· m · v2 (4.4)
A nouveau, la possible transformation de l’énergiecinétique en travail implique une identité des unitésde ces deux grandeurs et :
[Ecin] = [A] = J Joule
On peut aussi résumer la situation en disant quepour augmenter la vitesse d’un objet de masse m
du repos à une vitesse donnée, on doit fournir untravail qui s’accumule sous la forme d’énergie ci-nétique dans l’objet. Ce travail est récupérable àtravers le travail fourni lorsque l’objet exerce uneforce qui diminue sa vitesse.
4.6 Théorème de l’énergie ci-nétique
La remarque de la fin du paragraphe 4.5 nousmène à considérer la variation d’énergie cinétique àtravers le travail qui la produit ou qu’elle produit.Cela constitue le théorème de l’énergie cinétique quis’exprime ainsi :
∆Ecin =∑
AF ext (4.5)
Il faut bien comprendre que le travail à prendreen compte dans ce théorème est celui de toutes lesforces extérieures en jeu. Il peut s’agir de forces quidissipent de l’énergie, dites dissipatives, comme laforce de frottement, ou de forces qui la conservent,dites conservatives, comme le poids par exemple.
Nous verrons au paragraphe 4.7 que le théorèmede conservation de l’énergie mécanique ne traitequant à lui que des cas où les forces sont conser-vatives. Il n’est apparemment valable qu’en l’ab-sence de frottement. La résolution des problèmes necontenant que de telles forces s’en trouve facilitée.Cela peut néanmoins apparaître comme une limi-tation. Elle n’est pourtant qu’apparente, car au ni-veau fondamental, les forces de frottement s’avèrenten réalité être des forces électriques qui sont conser-vatives. Le théorème de conservation de l’énergiemécanique est donc tout aussi général que celui del’énergie cinétique.
Il existe cependant une autre façon de prendreen compte les forces de frottement au sein d’unthéorème analogue à celui de conservation de l’éner-gie mécanique. Au paragraphe 4.8 nous montreronsqu’il suffit pour cela de considérer la variation del’énergie mécanique comme équivalente au travaildes seules forces non conservatives (forces de frot-tement).
69
4.7. CONSERVATION DE L’ÉNERGIE MÉCANIQUE CHAPITRE 4. L’ÉNERGIE
Fig. 4.2 – Énergie cinétique et potentielleL’énergie se transforme36
4.7 Conservation de l’énergiemécanique
Qu’elle soit potentielle ou cinétique, il s’agit tou-jours d’énergie. On comprend donc facilement qu’ilpuisse exister des transferts entre ces deux formesd’énergie (comme avec d’autre formes d’énergie quenous verrons par la suite d’ailleurs !).
Le cas de la chute d’un objet permet de bien illus-trer la situation. Un objet immobile à une hauteurh a une énergie potentielle donnée par :
Epot = mg · h
et une énergie cinétique nulle en raison de son im-mobilité :
Ecin = 0
Si on le lâche, sous l’effet de son poids, il va tomber.La hauteur à laquelle il se situe va donc diminueret avec elle son énergie potentielle :
h ↘ ⇒ Epot = mg · h ↘
Bien entendu, cette diminution d’énergie poten-tielle se fait au profit d’un autre type d’énergie :l’énergie cinétique. En effet, la vitesse de l’objet
ainsi que son énergie cinétique, augmentent en tom-bant :
v ↗ ⇒ Ecin =1
2· m · v2 ↗
Arrivé à une hauteur nulle, l’objet n’a plus que del’énergie cinétique :
h = 0 ⇒ Epot = 0 ; Ecin =1
2· m · v2
Dans le cas où il n’y a pas de frottements, onpeut considérer que toute l’énergie potentielle s’esttransformée en énergie cinétique. Il y a donc là uneconservation de l’énergie qui passe d’une forme po-tentielle à une autre forme cinétique. On peut doncécrire :
Epot = mg · h =1
2· m · v2 = Ecin
et déterminer ainsi la vitesse à laquelle l’objet ar-rive en bas :
mg · h =1
2· m · v2 ⇒
v =√
2 · g · h
Pour formaliser ce principe de conservation del’énergie, on définit une nouvelle grandeur appeléeénergie mécanique Emec par :
Emec =1
2· m · v2 + mg · h (4.6)
qui permet d’écrire le théorème de conservation del’énergie suivant :
Emec = const (4.7)
Ce qui signifie aussi :
Emec 2 = Emec 1 ⇒Emec 2 − Emec 1 = 0
∆Emec = 0
ou
Ecin 2 + Epot 2 − (Ecin 1 + Epot 1) = 0
Ecin 2 − Ecin 1 + Epot 2 − Epot 1 = 0
∆Ecin + ∆Epot = 0
1
2· m · v2
2 − 1
2· m · v2
1
+m · g · h2 − m · g · h1 = 0
70

CHAPITRE 4. L’ÉNERGIE 4.9. ÉNERGIE THERMIQUE
Toutes ces expressions sont équivalentes. Il estimportant de bien comprendre que celles-ci signi-fient toutes que l’énergie mécanique reste la mêmeau cours du temps.
Il est aussi important de dire que que cette loin’est valable qu’en l’absence de frottements.
On peut alors récrire le problème du calcul dela vitesse atteinte par un objet en chute libre aubout d’une hauteur h d’une autre manière. On com-mence par déterminer l’énergie mécanique au dé-but :
Edebmec = Ecin + Epot = 0 + mg · h
et à la fin du mouvement :
Efinmec = Epot + Ecin =
1
2· m · v2 + 0
et on impose que l’énergie mécanique soit conservéeentre le début et la fin du mouvement :
0 + mg · h =1
2· m · v2 + 0
Et on obtient bien alors la vitesse trouvée précé-demment.
Finalement, rappelons que l’on peut aussi trou-ver cette vitesse sans passer par l’énergie, maisen utilisant la cinématique du mouvement recti-ligne uniformément accéléré (MRUA). En effet, unechute libre est un MRUA et pour une vitesse ini-tiale nulle, on peut écrire :
v2 = 02 + 2 · g · h ⇒ v =√
2 · g · h
Visiblement, ce calcul est plus simple. Pourtant,il faut relativiser. En effet, l’équation utilisée ré-sulte de la composition des deux équations du mou-vement d’un MRUA. Par ailleurs, elle n’est plusvalable pour un mouvement non uniformément ac-céléré pour lequel la méthode de la conservationde l’énergie est toujours fonctionnelle. En fin decompte, il s’agit de choisir au cas par cas s’il estplus simple d’utiliser Newton ou l’énergie.
4.8 Variation de l’énergie mé-canique
En présence de frottements (forces dissipatives),on peut modifier le théorème de conservation del’énergie mécanique en s’inspirant du théorème de
l’énergie cinétique. On peut considérer le travail desforces extérieures impliqué dans ce dernier commecomprenant deux termes : l’un correspondant auxforces conservatives et l’autre aux forces dissipa-tives. Ainsi, on peut écrire :
∆Ecin = AF extcons
+ AF ext
diss
Or, le travail des forces conservatives représentetout simplement l’énergie potentielle qui leur cor-respond. Ainsi, on a :
∆Ecin + ∆Epot = AF ext
diss
⇒ ∆Emec = AF ext
diss
(4.8)
L’équation 4.8 montre que l’énergie mécaniqueen tant que telle n’est plus conservée. Mais on com-prend bien que sa variation est en relation étroiteavec la dissipation d’énergie due à la force de frot-tement : il y a production de chaleur.
4.9 Énergie thermique
L’objectif de ce chapitre n’est pas la thermody-namique. Il s’agit donc simplement ici de présen-ter ici le plus simplement possible la relation quiexiste entre les concepts de travail, d’énergie in-terne et de chaleur. Nous avons déjà vu ce qu’estle travail. L’énergie interne est constituée, quant àelle, de la somme des énergie potentielles et ciné-tiques d’un corps constitué de plusieurs éléments.L’énergie potentielle représente ici l’énergie liée auxforces qui s’exercent entre les éléments du corps etl’énergie cinétique est celle qui est liée à l’agitationde ces éléments dont une bonne mesure est donnéepar la température. La chaleur quant à elle s’en-tend comme de l’énergie qui transite d’un corps àl’autre.
Ainsi, pour élever la température d’un corps demasse m, d’une température ∆θ, il faut une chaleurQ donnée par :
Q = m · c · ∆θ (4.9)
où la constante c est dite chaleur spécifique mas-sique et représente la manière dont le corps utiliséréagit au transfert de chaleur.
Un exemple simple est celui qui consiste à chauf-fer de l’eau. Pour déterminer la quantité de chaleurnécessaire pour faire passer 2 kg d’eau de 15 à 20◦C
71
4.10. ÉNERGIES RENOUVELABLES CHAPITRE 4. L’ÉNERGIE
Nicolas Léonard Sadi Carnot (1796-1832)
Nicolas Léonard Sadi Carnot ne publia qu’un seul livre,oeuvre de sa vie : “Réflexions sur la puissance motrice dufeu et sur les machines propres à développer cette puissan-ce” (Paris, 1824).Il est l’un des fondateurs de la thermodynamique, sciencedes phénomènes thermiques. Il développa l’idée d’un mo-teur idéal d’un rendement maximum indépassable. Il esten effet impossible de transformer intégralement la chaleurprovenant d’une source chaude fournie à un moteur ther-mique en travail mécanique. Nécessairement, un partie decette chaleur est rejetée vers une source froide.Il ébaucha la première loi de la thermodynamique en ten-tant de trouver un lien entre travail et chaleur.Évidemment, une révolution motrice fut engagée avec Car-not et les machines à vapeur, révolution qui fut à l’originede la société thermo-industrielle.
Nicolas Léonard Sadi Carnot en uniforme de polytechnicien peint
par Louis Léopold Boilly, tiré de Wikipedia37
en sachant que la chaleur spécifique massique del’eau vaut 4180 J/kg◦C, on pose :
Q = 2 · 4180 · (20 − 15) = 41′800 J
4.9.1 Premier principe
Lorsqu’on chauffe un gaz contenu dans un réci-pient muni d’un piston, la chaleur Q transférée à cegaz peut produire deux effets : une augmentation deson énergie interne ∆U , c’est-à-dire de sa tempéra-ture et/ou une variation de son volume impliquantun travail A du piston.
Le premier principe de la thermodynamique diten effet que :
Q = ∆U + A (4.10)
Pour des corps, comme les liquides, dont le volumene varie pas (ou presque), Q = ∆U . Et on retrouvel’expression donnée précédemment en sachant que :
∆U = m · cv · ∆θ
où cv est la chaleur spécifique massique à volumeconstant.
Par contre pour des corps dont le volume peutvarier sensiblement, comme les gaz, on peut envi-sager une variation de l’énergie interne et/ou un
travail produit. On touche alors au domaine desmoteurs thermiques, ce qui n’est pas le propos dece paragraphe.
4.10 Énergies renouvelables
Parti est pris ici de mettre en avant des énergiesrespectueuses de l’environnement et renouvelables.Certaines sont de réelles alternatives aux énergiesnon renouvelables et ont depuis longtemps fait leurpreuves. D’autres commencent seulement à per-mettre des productions assez importantes pour êtresignalées. Quoi qu’il en soit, elles méritent d’êtreprésentées avec un regard critique autant que lesautres. C’est ce qui va être fait ici dans la mesure dela place disponible (Lhomme Jean-Christian, 2004,pour de plus amples renseignements sur les énergiesrenouvelables) .
Une juste appréciation de la valeur d’un typed’énergie n’est pas une chose facile tant nombreuxsont les paramètres qui doivent intervenir. Les va-riables à prendre en compte peuvent être d’ordrephysique, géographique, politique, écologique, ...Les grandeurs physiques seront cependant privilé-giées dans ce cours de physique pour des raisonsévidentes. Cependant, dans la mesure du possible,plusieurs autres paramètres seront aussi abordés.
72
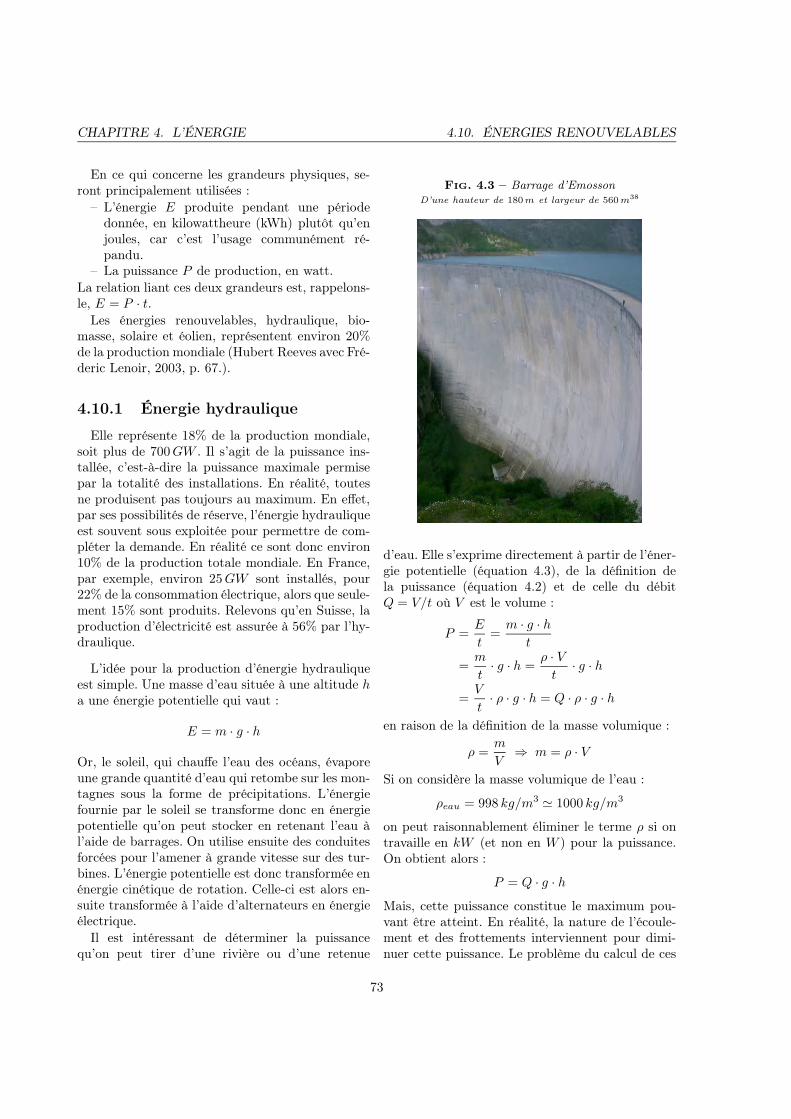
CHAPITRE 4. L’ÉNERGIE 4.10. ÉNERGIES RENOUVELABLES
En ce qui concerne les grandeurs physiques, se-ront principalement utilisées :
– L’énergie E produite pendant une périodedonnée, en kilowattheure (kWh) plutôt qu’enjoules, car c’est l’usage communément ré-pandu.
– La puissance P de production, en watt.La relation liant ces deux grandeurs est, rappelons-le, E = P · t.
Les énergies renouvelables, hydraulique, bio-masse, solaire et éolien, représentent environ 20%de la production mondiale (Hubert Reeves avec Fré-deric Lenoir, 2003, p. 67.).
4.10.1 Énergie hydraulique
Elle représente 18% de la production mondiale,soit plus de 700 GW . Il s’agit de la puissance ins-tallée, c’est-à-dire la puissance maximale permisepar la totalité des installations. En réalité, toutesne produisent pas toujours au maximum. En effet,par ses possibilités de réserve, l’énergie hydrauliqueest souvent sous exploitée pour permettre de com-pléter la demande. En réalité ce sont donc environ10% de la production totale mondiale. En France,par exemple, environ 25 GW sont installés, pour22% de la consommation électrique, alors que seule-ment 15% sont produits. Relevons qu’en Suisse, laproduction d’électricité est assurée à 56% par l’hy-draulique.
L’idée pour la production d’énergie hydrauliqueest simple. Une masse d’eau située à une altitude ha une énergie potentielle qui vaut :
E = m · g · h
Or, le soleil, qui chauffe l’eau des océans, évaporeune grande quantité d’eau qui retombe sur les mon-tagnes sous la forme de précipitations. L’énergiefournie par le soleil se transforme donc en énergiepotentielle qu’on peut stocker en retenant l’eau àl’aide de barrages. On utilise ensuite des conduitesforcées pour l’amener à grande vitesse sur des tur-bines. L’énergie potentielle est donc transformée enénergie cinétique de rotation. Celle-ci est alors en-suite transformée à l’aide d’alternateurs en énergieélectrique.
Il est intéressant de déterminer la puissancequ’on peut tirer d’une rivière ou d’une retenue
Fig. 4.3 – Barrage d’EmossonD’une hauteur de 180 m et largeur de 560 m38
d’eau. Elle s’exprime directement à partir de l’éner-gie potentielle (équation 4.3), de la définition dela puissance (équation 4.2) et de celle du débitQ = V/t où V est le volume :
P =E
t=
m · g · ht
=m
t· g · h =
ρ · Vt
· g · h
=V
t· ρ · g · h = Q · ρ · g · h
en raison de la définition de la masse volumique :
ρ =m
V⇒ m = ρ · V
Si on considère la masse volumique de l’eau :
ρeau = 998 kg/m3 � 1000 kg/m3
on peut raisonnablement éliminer le terme ρ si ontravaille en kW (et non en W ) pour la puissance.On obtient alors :
P = Q · g · h
Mais, cette puissance constitue le maximum pou-vant être atteint. En réalité, la nature de l’écoule-ment et des frottements interviennent pour dimi-nuer cette puissance. Le problème du calcul de ces
73

4.10. ÉNERGIES RENOUVELABLES CHAPITRE 4. L’ÉNERGIE
facteurs étant complexe, on en rend compte simple-ment à l’aide d’un facteur de rendement qui modèrela puissance maximale. Ainsi, la “puissance de chu-te” se calcule par :
Prelle = η · Q · g · h (4.11)
où on a :
– la puissance P en kW ,– le débit Q en m3/s et– la hauteur de chute en m.
Un rendement typique vaut : η = 0, 8 = 80%.
Exemple
On peut comparer deux types d’installations :
1. une chute de 10 m avec un débit de 4 m3/s et
2. une chute de 40 m avec un débit de 1 m3/s.
En considérant un rendement de 90%, par exemple,la puissance de ces deux installations est de :
P = 0, 9 · 4 · 9, 81 · 10
= 0, 9 · 1 · 9, 81 · 40
= 353, 16 kW
On a donc ici deux installations de même puissance.Mais certainement pas de même coût. En effet, il estbien plus facile (et donc moins coûteux) de faire uneconduite forcée dans la montagne pour amener l’eausur une différence d’altitude de 40 m avec un débitde 1 m3/s que de construire une turbine adaptée àun débit de 10 m3/s.
Types de turbines
Différents types de turbines correspondent à dif-férentes plages d’utilisation. Il existe essentielle-ment trois types de turbines en fonctionnementdans le monde.
Fig. 4.4 – Turbine PeltonDes godets propulseurs39
– Les turbines Kaplan sont à réaction : totale-ment immergée dans l’eau, elles fonctionnentcomme une aile d’avion. Elles ressemblent àune hélice (comme pour un bateau) généra-lement verticale. Elles sont utilisées pour defaibles chutes, jusqu’à 30 m, et un débit de 4 à350 m3/s.
– Les turbines Francis sont aussi à réaction etont des pales qui les font ressembler à unréacteur d’avion. Elles sont utilisées pour demoyennes chutes, entre 10 et 700 m, et un dé-bit de 4 à 55 m3/s.
– Les turbines Pelton (voir figure 4.4 et 4.5) sontquant à elle à action : c’est la poussée du fluidequi les fait tourner. Elles ressemblent au an-ciennes roues à aube, mais tournent horizon-talement et sont munies de godets. Elles sontutilisées pour de hautes chutes, entre 200 et2000 m, et un débit de 4 à 15 m3/s.
Le rendement de ces turbines varient entre 80 et90%.
Alternateur
Il faut mentionner ici que l’énergie cinétique derotation des turbines est transformée en énergieélectrique grâce à un alternateur. Il n’est pas ici né-cessaire d’en expliquer le fonctionnement qui relèvede l’électromagnétisme. Relevons cependant que lerendement (rendement dont tient compte le facteurη de la puissance de chute) d’un alternateur est su-périeur à 90%, ce qui permet de dire que la pro-duction d’électricité grâce à l’énergie hydraulique
74
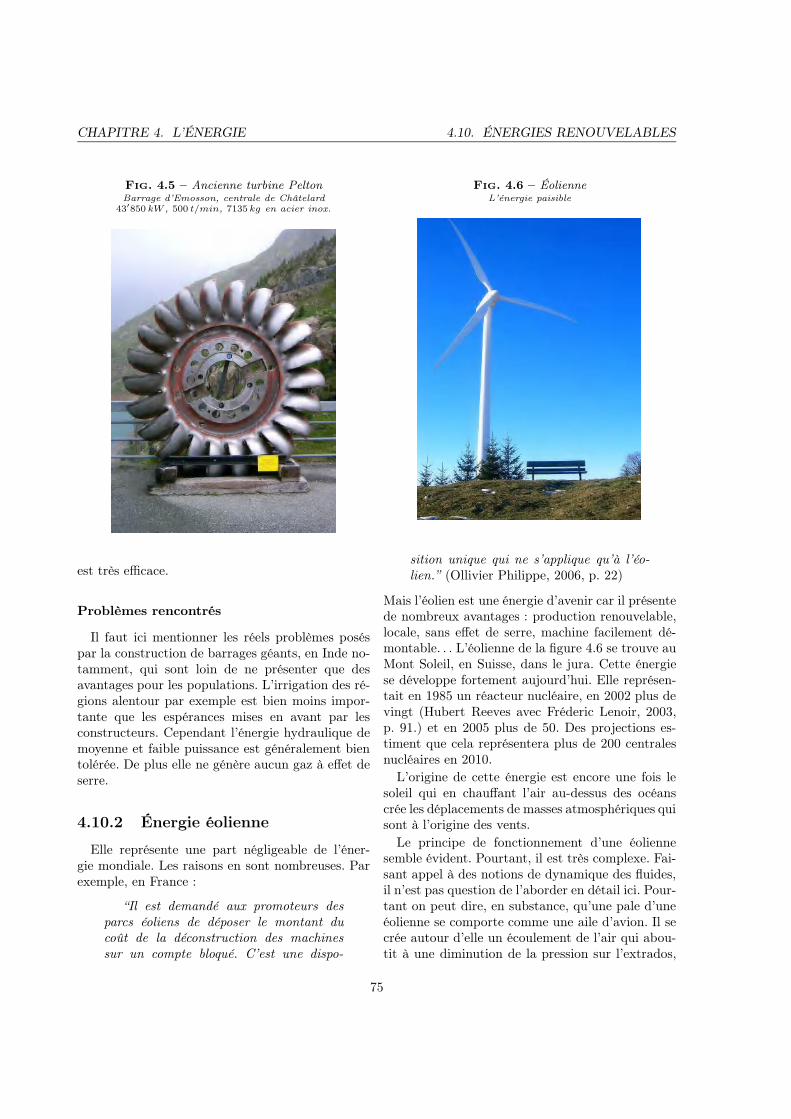
CHAPITRE 4. L’ÉNERGIE 4.10. ÉNERGIES RENOUVELABLES
Fig. 4.5 – Ancienne turbine PeltonBarrage d’Emosson, centrale de Châtelard
43′850 kW , 500 t/min, 7135 kg en acier inox.
est très efficace.
Problèmes rencontrés
Il faut ici mentionner les réels problèmes poséspar la construction de barrages géants, en Inde no-tamment, qui sont loin de ne présenter que desavantages pour les populations. L’irrigation des ré-gions alentour par exemple est bien moins impor-tante que les espérances mises en avant par lesconstructeurs. Cependant l’énergie hydraulique demoyenne et faible puissance est généralement bientolérée. De plus elle ne génère aucun gaz à effet deserre.
4.10.2 Énergie éolienne
Elle représente une part négligeable de l’éner-gie mondiale. Les raisons en sont nombreuses. Parexemple, en France :
“Il est demandé aux promoteurs desparcs éoliens de déposer le montant ducoût de la déconstruction des machinessur un compte bloqué. C’est une dispo-
Fig. 4.6 – ÉolienneL’énergie paisible
sition unique qui ne s’applique qu’à l’éo-lien.” (Ollivier Philippe, 2006, p. 22)
Mais l’éolien est une énergie d’avenir car il présentede nombreux avantages : production renouvelable,locale, sans effet de serre, machine facilement dé-montable. . . L’éolienne de la figure 4.6 se trouve auMont Soleil, en Suisse, dans le jura. Cette énergiese développe fortement aujourd’hui. Elle représen-tait en 1985 un réacteur nucléaire, en 2002 plus devingt (Hubert Reeves avec Fréderic Lenoir, 2003,p. 91.) et en 2005 plus de 50. Des projections es-timent que cela représentera plus de 200 centralesnucléaires en 2010.
L’origine de cette énergie est encore une fois lesoleil qui en chauffant l’air au-dessus des océanscrée les déplacements de masses atmosphériques quisont à l’origine des vents.
Le principe de fonctionnement d’une éoliennesemble évident. Pourtant, il est très complexe. Fai-sant appel à des notions de dynamique des fluides,il n’est pas question de l’aborder en détail ici. Pour-tant on peut dire, en substance, qu’une pale d’uneéolienne se comporte comme une aile d’avion. Il secrée autour d’elle un écoulement de l’air qui abou-tit à une diminution de la pression sur l’extrados,
75

4.10. ÉNERGIES RENOUVELABLES CHAPITRE 4. L’ÉNERGIE
Fig. 4.7 – Pale d’éoliennePortance et traînée d’une aile
la partie supérieure de l’aile, et une augmentationsur l’intrados, la partie inférieure. Le résultat estqu’une force de portance, dans le cas d’un avion, detraction dans le cas d’une éolienne, apparaît commele montre la figure 4.7.
Encore une fois, l’écoulement de l’air autourd’une pale d’éolienne est très complexe, d’autantplus que la vitesse de l’air augmente à mesure qu’ons’approche de son extrémité. En effet, la vitesse àl’extrémité d’une pale de 30 m tournant à 30 tr/mn(T = 2 s/tr) vaut :
v =2 · π · r
T=
2 · π · 30
2= 94 m/s = 339 km/h
Alors qu’à 4 m du rotor, elle vaut :
v =2 · π · 4
2= 13 m/s = 45 km/h
Mais, le résultat d’un calcul très simplifié permetune première évaluation de la puissance maximaleque peut fournir une éolienne. Il est connu sous lenom de règle de Betz. Même s’il est approximatif, ilest intéressant. Sa démonstration est donné à l’an-nexe K.3.1.
On peut calculer l’équivalent de la puissance duvent en considérant l’énergie cinétique d’une massed’air m qui se déplace à la vitesse v en considérantun tube d’air cylindrique de surface à la base S,correspondant à la surface balayée par les pales del’éolienne, et de hauteur d, comme présenté à lafigure 4.8.
Fig. 4.8 – Tube de vent
La puissance du vent
S
d = v · t
Le volume d’air V qui traverse la surface S en untemps t donné est :
V = S · d = S · v · t
Or, la définition de la masse volumique permetd’écrire :
ρ =m
V⇒ m = ρ · V = ρ · S · v · t
Ainsi, le débit vaut :
D =m
t= ρ · V = ρ · S · v
Par définition de la puissance, on a alors :
Pvent =Ecin
t=
12 · m · v2
t
=1
2· m
t· v2 =
1
2· D · v2
=1
2· ρ · S · v · v2
=1
2· ρ · S · v3 (4.12)
Par ailleurs, voir l’annexe K.3.1, en supposant quel’éolienne prenne une partie ∆P ce cette énergieavec pour conséquence une diminution de la vitessevav en aval de l’hélice par rapport à celle vam enamont, on montre que :
∆P =1
4· ρ · S · (v2
am − v2av)(vam + vav)
Par dérivation de ∆P en fonction de vav, on trouvela vitesse en aval qui donne le maximum de puis-sance à l’éolienne :
vav =1
3· vam =
1
3· v (4.13)
76
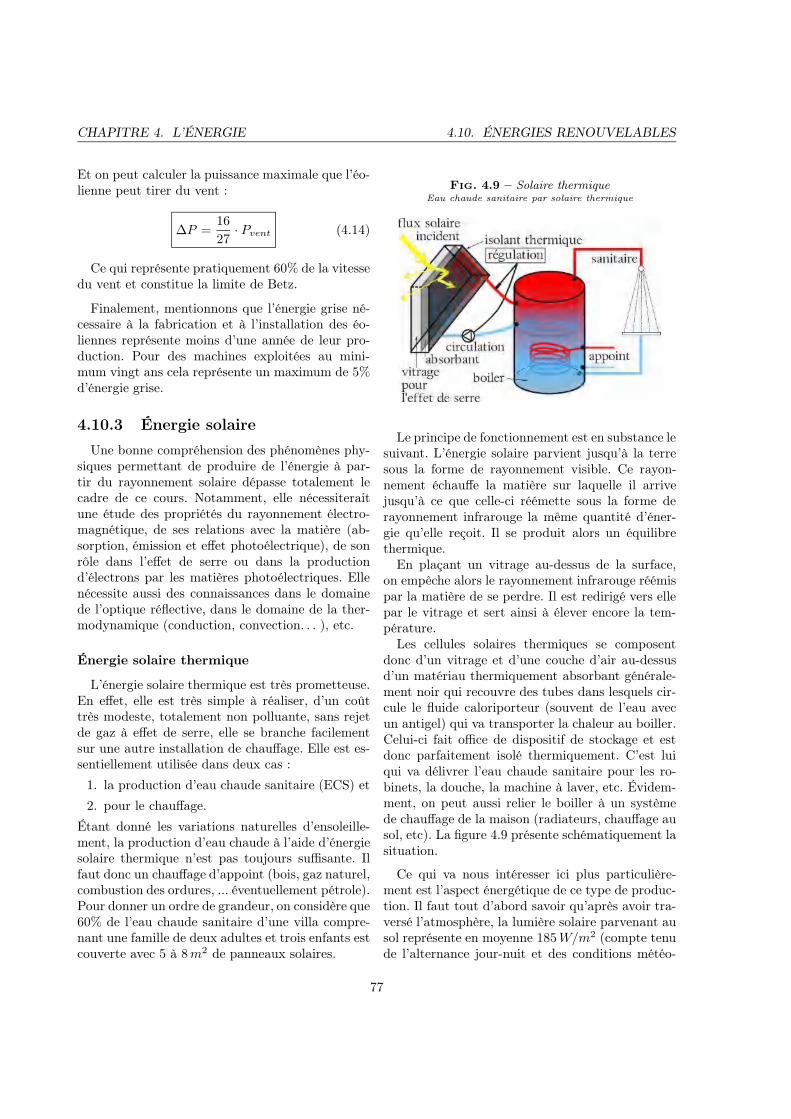
CHAPITRE 4. L’ÉNERGIE 4.10. ÉNERGIES RENOUVELABLES
Et on peut calculer la puissance maximale que l’éo-lienne peut tirer du vent :
∆P =16
27· Pvent (4.14)
Ce qui représente pratiquement 60% de la vitessedu vent et constitue la limite de Betz.
Finalement, mentionnons que l’énergie grise né-cessaire à la fabrication et à l’installation des éo-liennes représente moins d’une année de leur pro-duction. Pour des machines exploitées au mini-mum vingt ans cela représente un maximum de 5%d’énergie grise.
4.10.3 Énergie solaire
Une bonne compréhension des phénomènes phy-siques permettant de produire de l’énergie à par-tir du rayonnement solaire dépasse totalement lecadre de ce cours. Notamment, elle nécessiteraitune étude des propriétés du rayonnement électro-magnétique, de ses relations avec la matière (ab-sorption, émission et effet photoélectrique), de sonrôle dans l’effet de serre ou dans la productiond’électrons par les matières photoélectriques. Ellenécessite aussi des connaissances dans le domainede l’optique réflective, dans le domaine de la ther-modynamique (conduction, convection. . . ), etc.
Énergie solaire thermique
L’énergie solaire thermique est très prometteuse.En effet, elle est très simple à réaliser, d’un coûttrès modeste, totalement non polluante, sans rejetde gaz à effet de serre, elle se branche facilementsur une autre installation de chauffage. Elle est es-sentiellement utilisée dans deux cas :
1. la production d’eau chaude sanitaire (ECS) et
2. pour le chauffage.
Étant donné les variations naturelles d’ensoleille-ment, la production d’eau chaude à l’aide d’énergiesolaire thermique n’est pas toujours suffisante. Ilfaut donc un chauffage d’appoint (bois, gaz naturel,combustion des ordures, ... éventuellement pétrole).Pour donner un ordre de grandeur, on considère que60% de l’eau chaude sanitaire d’une villa compre-nant une famille de deux adultes et trois enfants estcouverte avec 5 à 8 m2 de panneaux solaires.
Fig. 4.9 – Solaire thermiqueEau chaude sanitaire par solaire thermique
Le principe de fonctionnement est en substance lesuivant. L’énergie solaire parvient jusqu’à la terresous la forme de rayonnement visible. Ce rayon-nement échauffe la matière sur laquelle il arrivejusqu’à ce que celle-ci réémette sous la forme derayonnement infrarouge la même quantité d’éner-gie qu’elle reçoit. Il se produit alors un équilibrethermique.
En plaçant un vitrage au-dessus de la surface,on empêche alors le rayonnement infrarouge réémispar la matière de se perdre. Il est redirigé vers ellepar le vitrage et sert ainsi à élever encore la tem-pérature.
Les cellules solaires thermiques se composentdonc d’un vitrage et d’une couche d’air au-dessusd’un matériau thermiquement absorbant générale-ment noir qui recouvre des tubes dans lesquels cir-cule le fluide caloriporteur (souvent de l’eau avecun antigel) qui va transporter la chaleur au boiller.Celui-ci fait office de dispositif de stockage et estdonc parfaitement isolé thermiquement. C’est luiqui va délivrer l’eau chaude sanitaire pour les ro-binets, la douche, la machine à laver, etc. Évidem-ment, on peut aussi relier le boiller à un systèmede chauffage de la maison (radiateurs, chauffage ausol, etc). La figure 4.9 présente schématiquement lasituation.
Ce qui va nous intéresser ici plus particulière-ment est l’aspect énergétique de ce type de produc-tion. Il faut tout d’abord savoir qu’après avoir tra-versé l’atmosphère, la lumière solaire parvenant ausol représente en moyenne 185 W/m2 (compte tenude l’alternance jour-nuit et des conditions météo-
77

4.10. ÉNERGIES RENOUVELABLES CHAPITRE 4. L’ÉNERGIE
rologiques). Pour l’ensemble de l’Europe du Nord,elle représente une puissance moyenne d’environ100 W/m2. Bien entendu, elle est fonction du lieugéographique et plus particulièrement de la lati-tude. Le rayonnement moyen pour la France, parexemple, représente 1400 kWh/m2 · an, soit unepuissance de :
P =E
t=
1400
365 · 24= 160 W/m2 (4.15)
En raison des pertes, les capteurs solaires nepeuvent tirer qu’une partie de cette puissance.Celle-ci est déterminée par le rendement optiquequi caractérise la puissance lumineuse récupéréepar le capteur et par les pertes thermiques. Or,ces dernières varient en fonction de la différencede température entre le fluide qui circule dans lescapteurs et la température extérieure. Si on note :
– P la puissance par unité de surface incidentesur le capteur,
– S la surface totale des capteurs,– B le rendement optique,– K le cœfficient des pertes du capteur,– Ti la température à l’intérieur du capteur et– Te la température à l’extérieur
la puissance utile ∆P est alors donnée par :
∆P = S · (B · P − K · (Ti − Te)) (4.16)
Typiquement, on a un cœfficient B compris entre0, 7 et 0, 8 pour des capteurs plans, un cœfficient Kentre 1 et 5 W/(m2 ·◦ C), Ti de l’ordre de 45◦C etTe à 20◦C. Ainsi, pour la France, on a en moyennepour un mètre carré :
∆P = 0, 8 · 160 − 3 · (45 − 20) = 53 W
Ce qui en terme de production énergétique annuellecorrespond à :
E = P · t = 0, 053 · 365 · 24 = 464 kWh/(m2 · an)
Ainsi, une installation de 5 m2 de surface per-met d’obtenir une production d’énergie annuelleE = 5 ·464 = 2′320 kWh/an. Évidemment, il s’agitd’un ordre de grandeur, car le problème est en réa-lité très complexe. Beaucoup d’autres paramètres,comme l’orientation et le type des capteurs, le sys-tème de stockage de l’énergie. . . interviennent aussiet, généralement, on utilise des logiciels de dimen-sionnement qui les prennent en compte afin de dé-terminer correctement les besoins.
Fig. 4.10 – Effet photoélectriqueOu effet photovoltaïque40
Relevons enfin de nouvelles dispositions en fa-veur du solaire thermique. Comme dans le cas dela ville de Barcelone qui impose à toute nouvelleconstruction ou pour les bâtiments réhabilités quela consommation d’eau chaude sanitaire soit cou-verte au minimum à 60% par du solaire thermique.Cette législation a déjà créé beaucoup d’emplois lo-calement pour subvenir au besoin.
Énergie solaire électrique
Le principe de base est celui découvert par Hein-rich Rudolf Hertz en 1887 et expliqué par AlbertEinstein en 1905 : l’effet photoélectrique. Sans vou-loir tenter ici l’explication d’un phénomène com-plexe touchant à la lumière et à l’électricité, on peutdire simplement que certaines matières émettentspontanément des électrons et donc un courantélectrique quand elles sont soumises à de la lumière(voir figure 4.10).
Le rendement courant des cellules photoélec-triques (voir figure 4.11) actuelles se situe entre 10et 20% de la puissance solaire incidente (siliciumpolycristallin : ∼ 13% et monocristallin :∼ 17%).Ainsi, la puissance développée par de telles cel-lules se situe-t-elle, pour une puissance incidente de160 W/m2 (voir l’équation 4.15), aux alentours des20 W/m2. Sachant que la consommation électriqueannuelle d’une famille de cinq personnes en Europeest d’environ 2′000 kWh, la puissance nécessaire estde :
P =E
t=
2′000 · 103
365 · 24= 228 W
Ce qui représente plus de 10 m2 de surface et estimportant. On peut raisonnablement penser que la
78
CHAPITRE 4. L’ÉNERGIE 4.11. ÉNERGIES NON RENOUVELABLES
Fig. 4.11 – Cellule photoélectriqueOu cellule photovoltaïque41
moitié de celle-ci peut être installée sur une habi-tation de particulier. Le rendement est donc deuxfois trop faible. De nouvelles générations de cellulessont donc nécessaires. Elles existent déjà et des ren-dements supérieurs à 30% ont été obtenus en labo-ratoire, mais pas encore en production.
Deux autres points doivent aussi être abor-dés. Celui de l’énergie “grise” nécessaire pour laconstruction des cellules et celui de leur recyclage.En effet, une idée fausse court à propos de l’énergiesolaire électrique. Il s’agit du fait que les cellulesnécessiteraient plus d’énergie pour être produitesqu’elles ne sont capables d’en fournir. Or, l’énergienécessaire42 pour fabriquer et installer les cellulesest de l’ordre de Efab = 420 kWh/m2. Avec unepuissance de l’ordre de 20 W/m2, qui représenteune énergie E = 20 · 24 · 365 = 175, 2 kWh/an,il faut :
n =420
175, 2= 2, 4 ans
pour que la cellule ait produit l’équivalent de ce quesa production a nécessité. Sur une durée de fonc-tionnement entre vingt et trente ans, le bilan éner-gétique est très favorable43. En effet, pour vingt ansd’utilisation, l’énergie produite est :
E = 20 · 20 · 24 · 365 = 3′504 kWh
L’énergie nécessaire à la fabrication est donc del’ordre de 12% de l’énergie totale produite sur vingtans, ce qui constitue une durée minimum d’exploi-tation.
De plus, l’énergie produite par une installationsolaire électrique est propre : il n’y a pas d’émissionde gaz à effet de serre et aucun déchet. Enfin, lesanciens panneaux sont recyclables.
4.10.4 Énergie géothermique
Plus on s’enfonce dans la croûte terrestre, plusla température augmente. L’ordre de grandeur del’élévation de température par 100 mètres de pro-fondeur varie entre 3, dans les régions sédimen-taires, et 30◦ C, dans les régions volcaniques.
On distingue essentiellement deux types de géo-thermie, exception faite de la géothermie de surfacereprésentée par les pompes à chaleur :
la géothermie à haute énergie, qui exploitedes sources très chaudes, supérieures à100 − 150◦ C, où des forages très profondsdans lesquels de l’eau sous pression est injec-tée. Elle permet d’utiliser de la vapeur d’eausous pression pour faire tourner une turbineproductrice d’électricité.
la géothermie à basse énergie, qui exploitedes sources d’une température variant entre30 et 100◦ C, à des profondeurs allant dequelques centaines de mètres à plusieurs kilo-mètres. Elle sert essentiellement aux réseauxde chauffages urbains.
Différentes applications peuvent être envisagées in-dustriellement. Elle sont présentées dans le tableau4.12.
Malgré tous les atouts de la géothermie, c’est uneénergie encore relativement peu exploitée. Même sielle permet une production continue d’énergie, ellepeut aussi parfois mener à des séismes, comme cefut le cas à Bâle, en Suisse, ou des test de pro-duction d’énergie géothermique ont mené à des se-cousses assez importantes pour arrêter l’expérience.
En Suisse, la puissance installée est de 525 MW .La centrale géothermique de Riehen, près de Bâle,produit 22, 8 GWh. Elle est brièvement décrite àl’annexe K.4.
4.11 Énergies non renouve-lables
Les sources d’énergie non renouvelables pro-duisent aujourd’hui une partie importante de
79
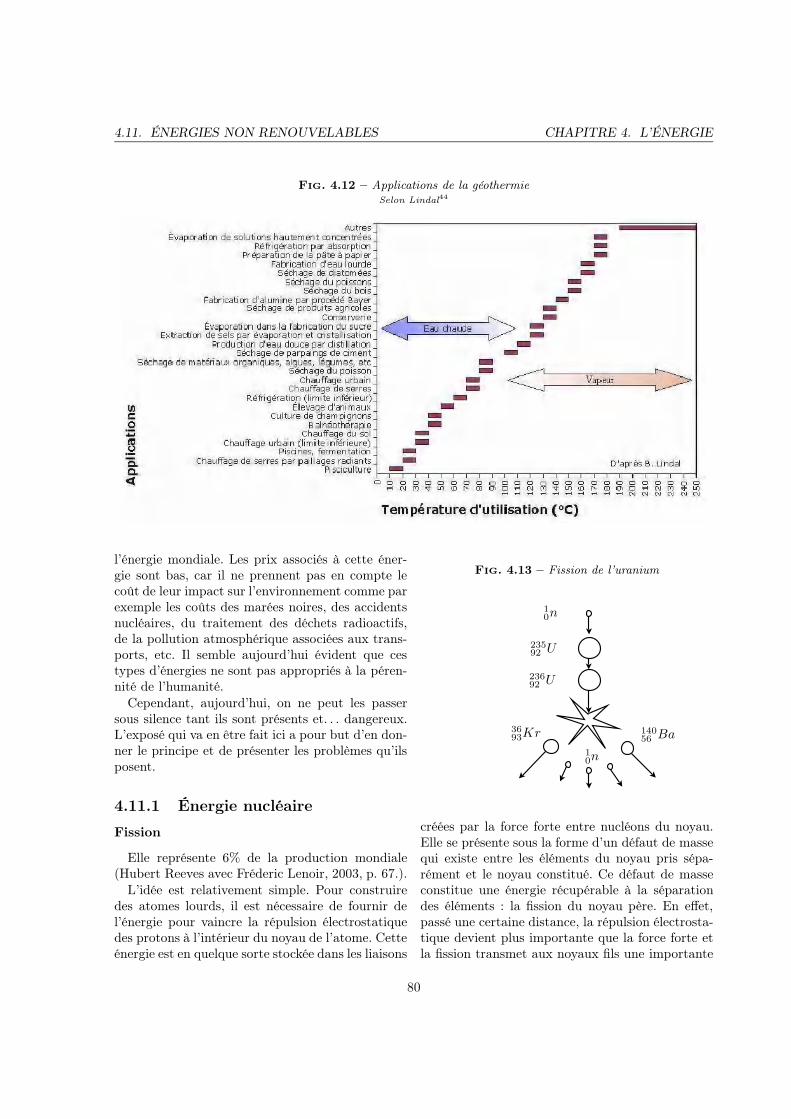
4.11. ÉNERGIES NON RENOUVELABLES CHAPITRE 4. L’ÉNERGIE
Fig. 4.12 – Applications de la géothermieSelon Lindal44
l’énergie mondiale. Les prix associés à cette éner-gie sont bas, car il ne prennent pas en compte lecoût de leur impact sur l’environnement comme parexemple les coûts des marées noires, des accidentsnucléaires, du traitement des déchets radioactifs,de la pollution atmosphérique associées aux trans-ports, etc. Il semble aujourd’hui évident que cestypes d’énergies ne sont pas appropriés à la péren-nité de l’humanité.
Cependant, aujourd’hui, on ne peut les passersous silence tant ils sont présents et. . . dangereux.L’exposé qui va en être fait ici a pour but d’en don-ner le principe et de présenter les problèmes qu’ilsposent.
4.11.1 Énergie nucléaire
Fission
Elle représente 6% de la production mondiale(Hubert Reeves avec Fréderic Lenoir, 2003, p. 67.).
L’idée est relativement simple. Pour construiredes atomes lourds, il est nécessaire de fournir del’énergie pour vaincre la répulsion électrostatiquedes protons à l’intérieur du noyau de l’atome. Cetteénergie est en quelque sorte stockée dans les liaisons
Fig. 4.13 – Fission de l’uranium
23692 U
23592 U
3693Kr 140
56 Ba
10n
10n
créées par la force forte entre nucléons du noyau.Elle se présente sous la forme d’un défaut de massequi existe entre les éléments du noyau pris sépa-rément et le noyau constitué. Ce défaut de masseconstitue une énergie récupérable à la séparationdes éléments : la fission du noyau père. En effet,passé une certaine distance, la répulsion électrosta-tique devient plus importante que la force forte etla fission transmet aux noyaux fils une importante
80
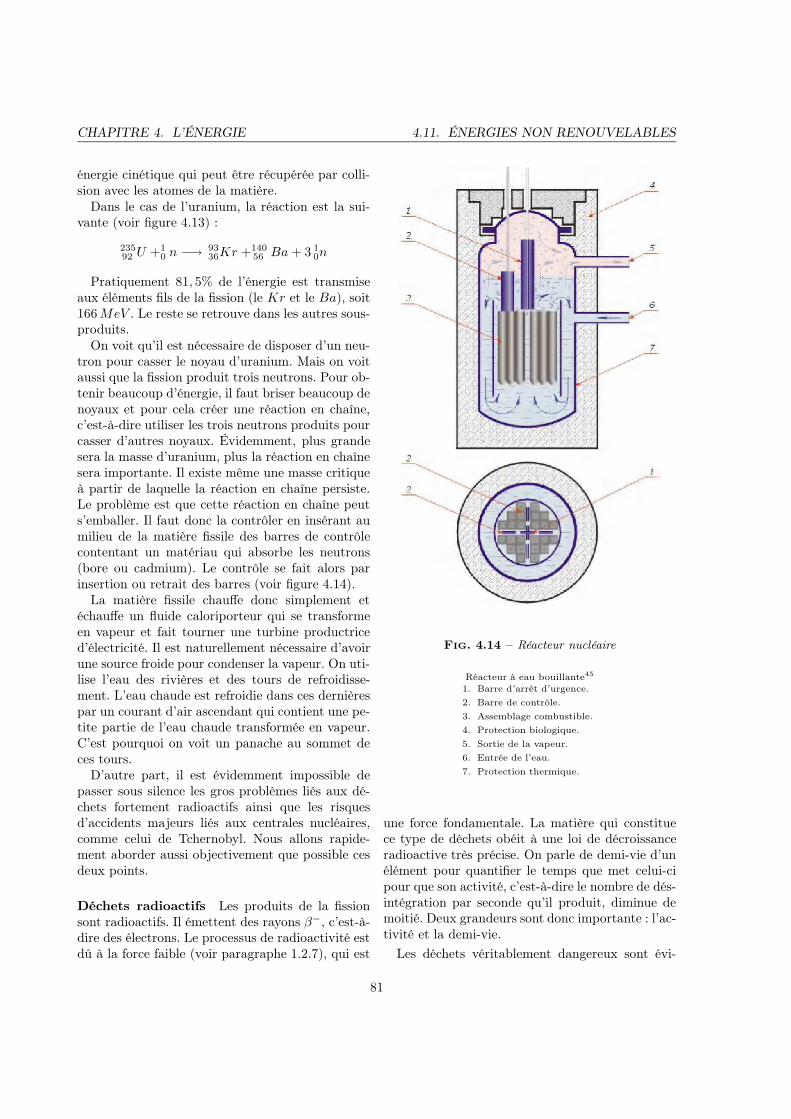
CHAPITRE 4. L’ÉNERGIE 4.11. ÉNERGIES NON RENOUVELABLES
énergie cinétique qui peut être récupérée par colli-sion avec les atomes de la matière.
Dans le cas de l’uranium, la réaction est la sui-vante (voir figure 4.13) :
23592 U +1
0 n −→ 9336Kr +140
56 Ba + 3 10n
Pratiquement 81, 5% de l’énergie est transmiseaux éléments fils de la fission (le Kr et le Ba), soit166 MeV . Le reste se retrouve dans les autres sous-produits.
On voit qu’il est nécessaire de disposer d’un neu-tron pour casser le noyau d’uranium. Mais on voitaussi que la fission produit trois neutrons. Pour ob-tenir beaucoup d’énergie, il faut briser beaucoup denoyaux et pour cela créer une réaction en chaîne,c’est-à-dire utiliser les trois neutrons produits pourcasser d’autres noyaux. Évidemment, plus grandesera la masse d’uranium, plus la réaction en chaînesera importante. Il existe même une masse critiqueà partir de laquelle la réaction en chaîne persiste.Le problème est que cette réaction en chaîne peuts’emballer. Il faut donc la contrôler en insérant aumilieu de la matière fissile des barres de contrôlecontentant un matériau qui absorbe les neutrons(bore ou cadmium). Le contrôle se fait alors parinsertion ou retrait des barres (voir figure 4.14).
La matière fissile chauffe donc simplement etéchauffe un fluide caloriporteur qui se transformeen vapeur et fait tourner une turbine productriced’électricité. Il est naturellement nécessaire d’avoirune source froide pour condenser la vapeur. On uti-lise l’eau des rivières et des tours de refroidisse-ment. L’eau chaude est refroidie dans ces dernièrespar un courant d’air ascendant qui contient une pe-tite partie de l’eau chaude transformée en vapeur.C’est pourquoi on voit un panache au sommet deces tours.
D’autre part, il est évidemment impossible depasser sous silence les gros problèmes liés aux dé-chets fortement radioactifs ainsi que les risquesd’accidents majeurs liés aux centrales nucléaires,comme celui de Tchernobyl. Nous allons rapide-ment aborder aussi objectivement que possible cesdeux points.
Déchets radioactifs Les produits de la fissionsont radioactifs. Il émettent des rayons β−, c’est-à-dire des électrons. Le processus de radioactivité estdû à la force faible (voir paragraphe 1.2.7), qui est
Fig. 4.14 – Réacteur nucléaire
Réacteur à eau bouillante45
1. Barre d’arrêt d’urgence.
2. Barre de contrôle.
3. Assemblage combustible.
4. Protection biologique.
5. Sortie de la vapeur.
6. Entrée de l’eau.
7. Protection thermique.
une force fondamentale. La matière qui constituece type de déchets obéit à une loi de décroissanceradioactive très précise. On parle de demi-vie d’unélément pour quantifier le temps que met celui-cipour que son activité, c’est-à-dire le nombre de dés-intégration par seconde qu’il produit, diminue demoitié. Deux grandeurs sont donc importante : l’ac-tivité et la demi-vie.
Les déchets véritablement dangereux sont évi-
81

4.11. ÉNERGIES NON RENOUVELABLES CHAPITRE 4. L’ÉNERGIE
demment les déchets de grande activité et de demi-vie longuea. Ces déchets ont des demi-vie de plu-sieurs centaines de milliers d’années, voire de mil-lions d’années. Le seul moyen d’arrêter le processusde désintégration radioactive serait de transmuterles déchets en d’autres éléments moins radioactifset de demi-vie plus courte. L’idée est de bombar-der ces déchets de neutrons pour les amener à setransformer en d’autres éléments. Mais, de l’aveumême des partisans du nucléaire, cela peut produired’autres éléments à demi-vie longue qui pourraientannuler le bénéfice de l’opération. Clairement, latechnologie n’est pas maîtrisée, malgré le temps etles sommes importantes investies. Par ailleurs, lecoût d’un tel programme de transmutation seraitprohibitif.
Accidents nucléaires On ne mentionnera icique le plus important accident survenu à une cen-trale nucléaire : celle de Tchernobyl.
L’accident s’explique assez simplement, suite àune série d’erreur des techniciens de la centrale, parun échauffement accidentel du coeur du réacteurqui se met à fondre. La chaleur libérée permet uneradiolyse de l’eau, le fluide destiné à transporterla chaleur, et la recomposition de l’hydrogène etde l’oxygène produit des explosions qui éjectent lesbarres de contrôle. Cela amène le coeur à exploseret projette dans l’atmosphère une grande quantitéd’éléments radioactifs.
Sans plus entrer dans les détails, relevons qu’ila été dit avant l’accident qu’une centrale ne pou-vait exploser, au contraire d’une bombe atomique.C’est pourtant ce qui s’est passé à Tchernobyl.Relevons que les différentes zones touchées repré-sentent plusieurs dizaine de milliers de personnes,au bas mot. Relevons que le nombre reconnu demorts suite à cet accident est de quelques di-zaines de personnes selon l’Organisation Mondialede la Santé (de concert avec l’Agence Intenation-nale pour l’Énergie Atomique avec laquelle elle apassé un accord d’intérêts !) et plusieurs dizaines demilliers de personnes voire beaucoup plus selon dessources non-gouvernementales. Relevons enfin quela zone contaminée est désormais interdite pour des
aComme l’activité croît comme l’inverse de la demi-vie,les déchets de demi-vie longue ont une activité relativementfaible, mais pas négligeable pour autant. Cela dit les déchetsvraiments dangereux sont donc ceux de grande activité et dedemi-vie assez longue.
centaines d’années.
Fusion
Il convient ici de mentionner rapidement unesource très hypothétique d’énergie. Il s’agit del’énergie disponible par la fusion d’éléments commele deutérium et le tritium selon la réaction :
2H +3 H −→ 4He + n + 17, 6 MeV
Le problème est que les noyaux de deutérium etde tritium se repoussent fortement en raison de laprésence de leurs protons. Il est donc d’abord né-cessaire de les faire se rencontrer à l’aide de laserstrès puissants. Puis, il faut confiner la réaction àl’aide de forts champs magnétiques par exemple,pour pouvoir l’exploiter. Cela fait plusieurs dizainesd’années que les physiciens envisagent l’avènementde cette énergie comparable, selon eux, à celle pro-duite au centre du soleil. Mais tous ne pensent pasainsi :
“De tous côtés, y compris chez les phy-siciens, on entend dire que les scienti-fiques vont ainsi reproduire sur Terre lesréactions existant à l’intérieur du soleil.C’est faux ! S’il est vrai que l’énergie so-laire vient de réactions de fusion se pro-duisant dans ses régions centrales, il s’agitde réactions très différentes [. . .] Et pourcause : la première réaction solaire se pro-duit très, très lentement. Il faut attendreplus de dix milliards d’années pour que lafusion de l’hydrogène s’accomplisse inté-gralement dans le soleil. On imagine pasun [réacteur terrestre] demandant de telleséchelles de temps pour produire son éner-gie.”
(Sylvie Vauclair, 2006, pp. 154,155)
Et il faut bien reconnaître qu’à part dans lesbombes à hydrogène (bombes H) jamais l’hommen’est parvenu à produire de l’énergie par fusion.
4.11.2 Énergie de combustion : pé-trole et gaz
Elle représente 74% de la production mondiale(Hubert Reeves avec Fréderic Lenoir, 2003, p. 67.).
Ce n’est pas ici le lieu d’expliquer la combus-tion chimique du fioul (mazout) qui est la principale
82
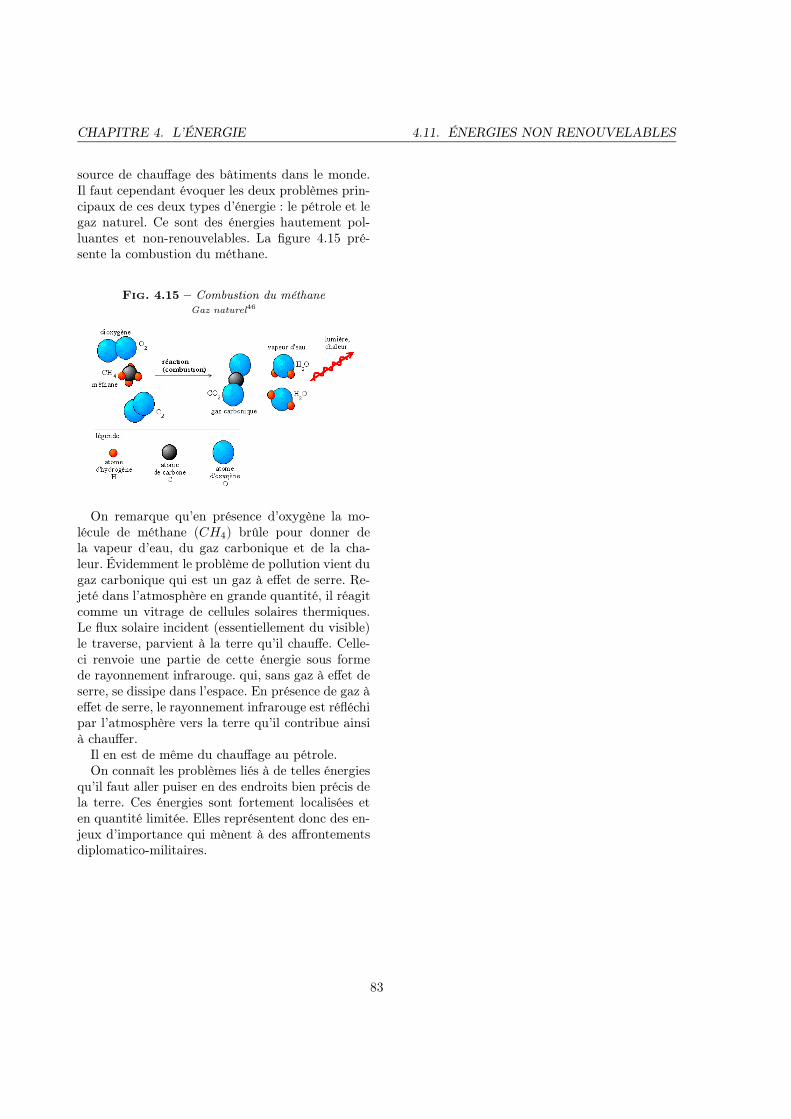
CHAPITRE 4. L’ÉNERGIE 4.11. ÉNERGIES NON RENOUVELABLES
source de chauffage des bâtiments dans le monde.Il faut cependant évoquer les deux problèmes prin-cipaux de ces deux types d’énergie : le pétrole et legaz naturel. Ce sont des énergies hautement pol-luantes et non-renouvelables. La figure 4.15 pré-sente la combustion du méthane.
Fig. 4.15 – Combustion du méthaneGaz naturel46
On remarque qu’en présence d’oxygène la mo-lécule de méthane (CH4) brûle pour donner dela vapeur d’eau, du gaz carbonique et de la cha-leur. Évidemment le problème de pollution vient dugaz carbonique qui est un gaz à effet de serre. Re-jeté dans l’atmosphère en grande quantité, il réagitcomme un vitrage de cellules solaires thermiques.Le flux solaire incident (essentiellement du visible)le traverse, parvient à la terre qu’il chauffe. Celle-ci renvoie une partie de cette énergie sous formede rayonnement infrarouge. qui, sans gaz à effet deserre, se dissipe dans l’espace. En présence de gaz àeffet de serre, le rayonnement infrarouge est réfléchipar l’atmosphère vers la terre qu’il contribue ainsià chauffer.
Il en est de même du chauffage au pétrole.On connaît les problèmes liés à de telles énergies
qu’il faut aller puiser en des endroits bien précis dela terre. Ces énergies sont fortement localisées eten quantité limitée. Elles représentent donc des en-jeux d’importance qui mènent à des affrontementsdiplomatico-militaires.
83
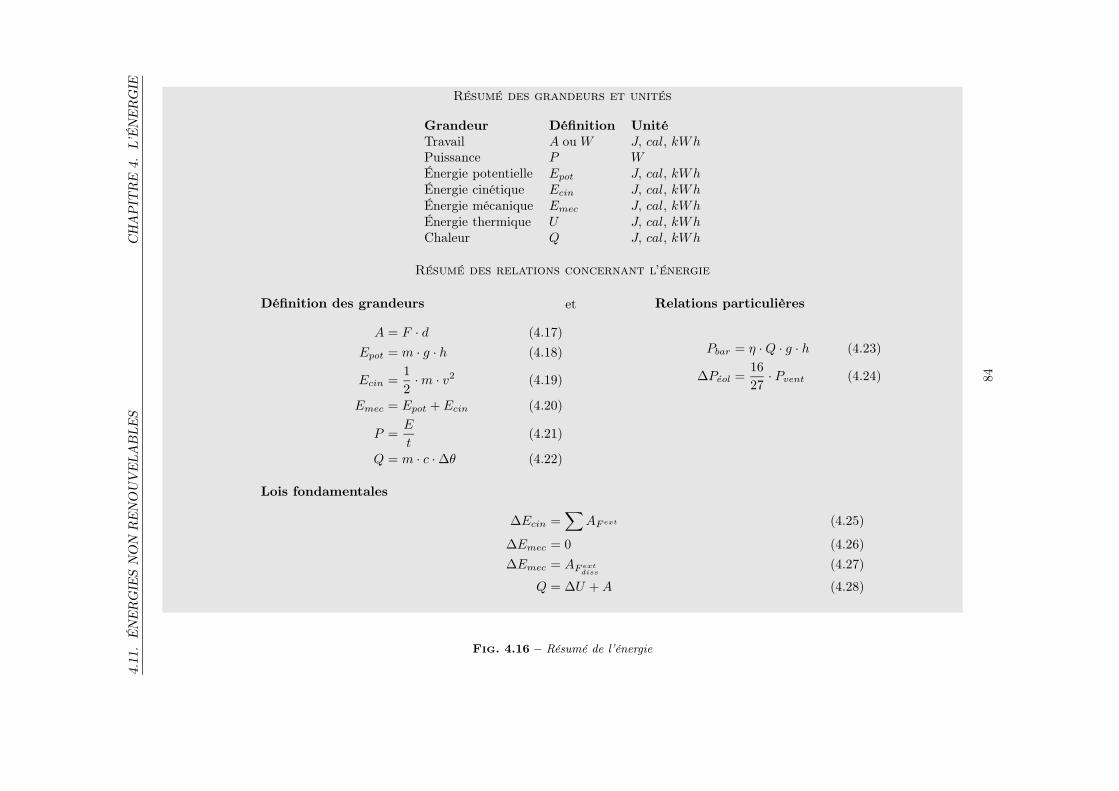
4.11
.É
NE
RG
IES
NO
NR
EN
OU
VE
LA
BLE
SC
HA
PIT
RE
4.L’É
NE
RG
IE
Résumé des grandeurs et unités
Grandeur Définition UnitéTravail A ou W J, cal, kWhPuissance P WÉnergie potentielle Epot J, cal, kWhÉnergie cinétique Ecin J, cal, kWhÉnergie mécanique Emec J, cal, kWhÉnergie thermique U J, cal, kWhChaleur Q J, cal, kWh
Résumé des relations concernant l’énergie
Définition des grandeurs
A = F · d (4.17)
Epot = m · g · h (4.18)
Ecin =1
2· m · v2 (4.19)
Emec = Epot + Ecin (4.20)
P =E
t(4.21)
Q = m · c · ∆θ (4.22)
et Relations particulières
Pbar = η · Q · g · h (4.23)
∆Peol =16
27· Pvent (4.24)
Lois fondamentales
∆Ecin =∑
AF ext (4.25)
∆Emec = 0 (4.26)
∆Emec = AF ext
diss
(4.27)
Q = ∆U + A (4.28)
Fig. 4.16 – Résumé de l’énergie
84
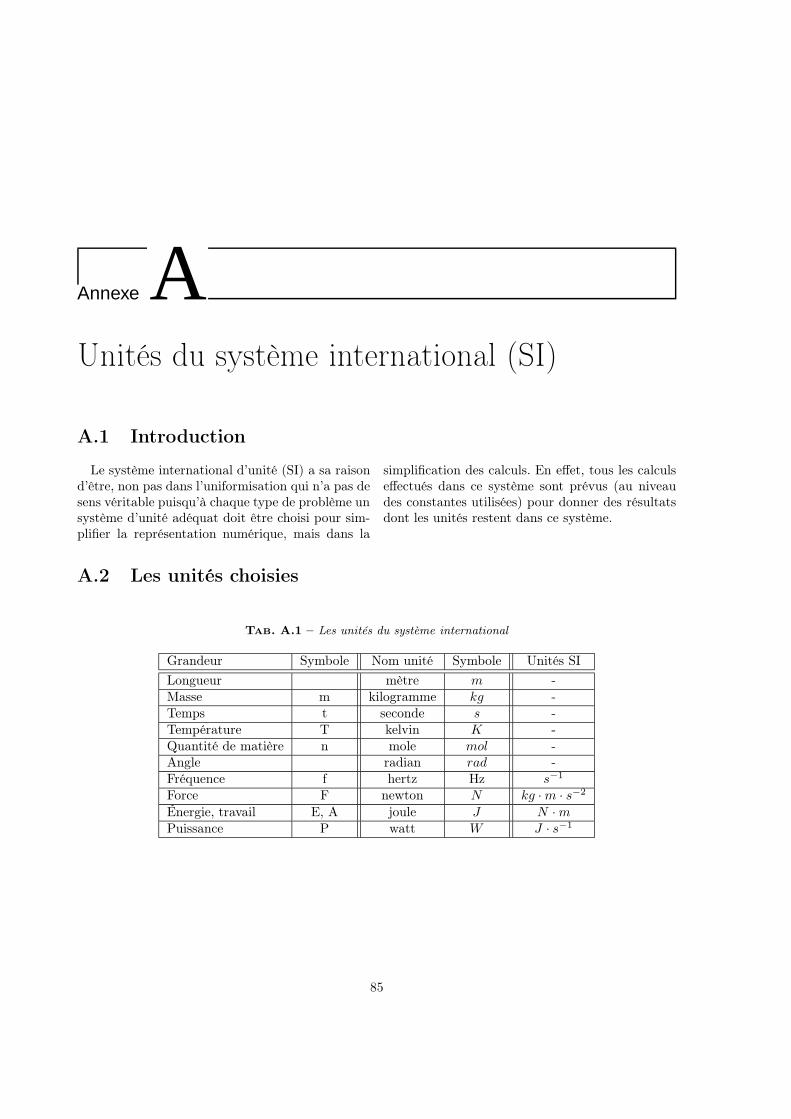
Annexe AUnités du système international (SI)
A.1 Introduction
Le système international d’unité (SI) a sa raisond’être, non pas dans l’uniformisation qui n’a pas desens véritable puisqu’à chaque type de problème unsystème d’unité adéquat doit être choisi pour sim-plifier la représentation numérique, mais dans la
simplification des calculs. En effet, tous les calculseffectués dans ce système sont prévus (au niveaudes constantes utilisées) pour donner des résultatsdont les unités restent dans ce système.
A.2 Les unités choisies
Tab. A.1 – Les unités du système international
Grandeur Symbole Nom unité Symbole Unités SI
Longueur mètre m -Masse m kilogramme kg -Temps t seconde s -Température T kelvin K -Quantité de matière n mole mol -Angle radian rad -Fréquence f hertz Hz s−1
Force F newton N kg · m · s−2
Énergie, travail E, A joule J N · mPuissance P watt W J · s−1
85
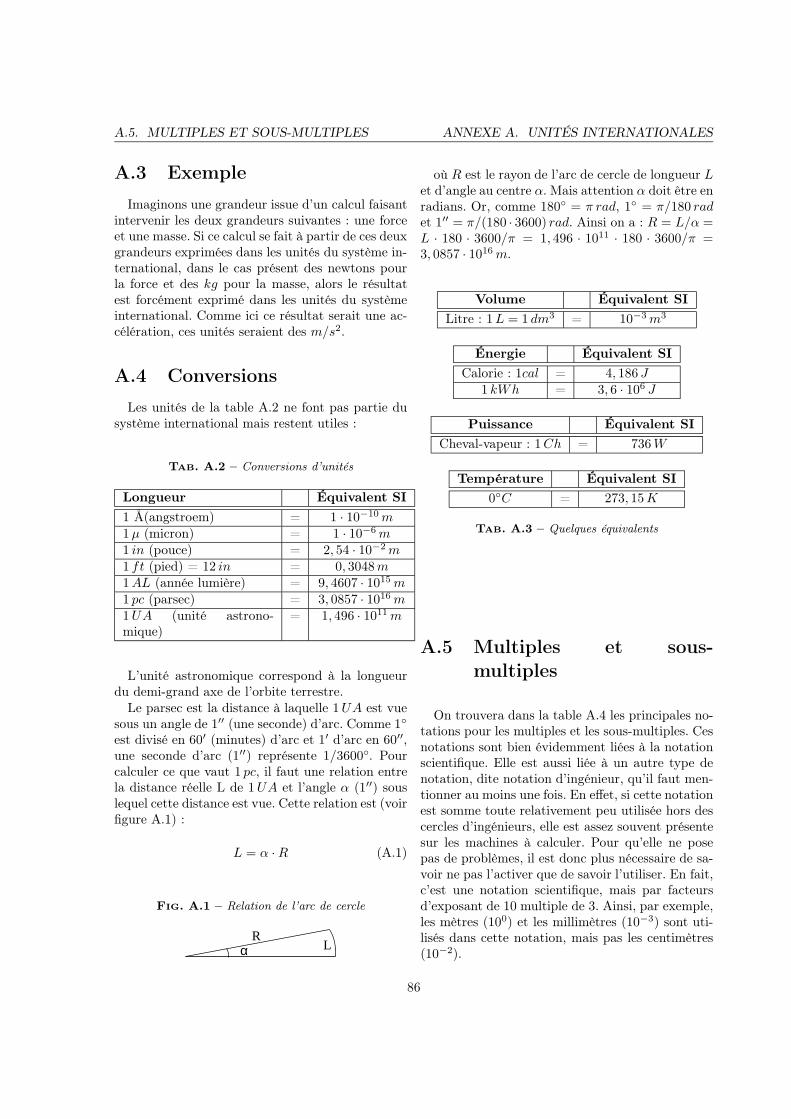
A.5. MULTIPLES ET SOUS-MULTIPLES ANNEXE A. UNITÉS INTERNATIONALES
A.3 Exemple
Imaginons une grandeur issue d’un calcul faisantintervenir les deux grandeurs suivantes : une forceet une masse. Si ce calcul se fait à partir de ces deuxgrandeurs exprimées dans les unités du système in-ternational, dans le cas présent des newtons pourla force et des kg pour la masse, alors le résultatest forcément exprimé dans les unités du systèmeinternational. Comme ici ce résultat serait une ac-célération, ces unités seraient des m/s2.
A.4 Conversions
Les unités de la table A.2 ne font pas partie dusystème international mais restent utiles :
Tab. A.2 – Conversions d’unités
Longueur Équivalent SI
1 Å(angstroem) = 1 · 10−10 m1 µ (micron) = 1 · 10−6 m1 in (pouce) = 2, 54 · 10−2 m1 ft (pied) = 12 in = 0, 3048 m1 AL (année lumière) = 9, 4607 · 1015 m1 pc (parsec) = 3, 0857 · 1016 m1 UA (unité astrono-mique)
= 1, 496 · 1011 m
L’unité astronomique correspond à la longueurdu demi-grand axe de l’orbite terrestre.
Le parsec est la distance à laquelle 1 UA est vuesous un angle de 1′′ (une seconde) d’arc. Comme 1◦
est divisé en 60′ (minutes) d’arc et 1′ d’arc en 60′′,une seconde d’arc (1′′) représente 1/3600◦. Pourcalculer ce que vaut 1 pc, il faut une relation entrela distance réelle L de 1 UA et l’angle α (1′′) souslequel cette distance est vue. Cette relation est (voirfigure A.1) :
L = α · R (A.1)
Fig. A.1 – Relation de l’arc de cercle
RLα
où R est le rayon de l’arc de cercle de longueur Let d’angle au centre α. Mais attention α doit être enradians. Or, comme 180◦ = π rad, 1◦ = π/180 radet 1′′ = π/(180 · 3600) rad. Ainsi on a : R = L/α =L · 180 · 3600/π = 1, 496 · 1011 · 180 · 3600/π =3, 0857 · 1016 m.
Volume Équivalent SI
Litre : 1 L = 1 dm3 = 10−3 m3
Énergie Équivalent SI
Calorie : 1cal = 4, 186 J1 kWh = 3, 6 · 106 J
Puissance Équivalent SI
Cheval-vapeur : 1 Ch = 736 W
Température Équivalent SI
0◦C = 273, 15 K
Tab. A.3 – Quelques équivalents
A.5 Multiples et sous-multiples
On trouvera dans la table A.4 les principales no-tations pour les multiples et les sous-multiples. Cesnotations sont bien évidemment liées à la notationscientifique. Elle est aussi liée à un autre type denotation, dite notation d’ingénieur, qu’il faut men-tionner au moins une fois. En effet, si cette notationest somme toute relativement peu utilisée hors descercles d’ingénieurs, elle est assez souvent présentesur les machines à calculer. Pour qu’elle ne posepas de problèmes, il est donc plus nécessaire de sa-voir ne pas l’activer que de savoir l’utiliser. En fait,c’est une notation scientifique, mais par facteursd’exposant de 10 multiple de 3. Ainsi, par exemple,les mètres (100) et les millimètres (10−3) sont uti-lisés dans cette notation, mais pas les centimètres(10−2).
86

ANNEXE A. UNITÉS INTERNATIONALES A.7. RÈGLES DE CALCUL
Préfixe Symbole Facteur
peta P 1015
téra T 1012
giga G 109
méga M 106
kilo k 103
hecto h 102
déca da 101
- - -déci d 10−1
centi c 10−2
milli m 10−3
micro µ 10−6
nano n 10−9
pico p 10−12
femto f 10−15
Tab. A.4 – Multiples et sous-multiples
A.6 Notation scientifique
A ne pas confondre avec la notation d’ingénieur(par multiples de 103), la notation scientifique :·10x, ou x est un nombre entier positif ou négatif,peut être utilisée sur une machine à calculer à l’aidede la touche EXP ou EE . Notez que l’affichagepeut alors donner, par exemple :
5 E 2 ou même 5 2
pour 5 · 102, sans marquer le 10 et avec un 2 sur lamême ligne d’affichage que le 5. Ce type d’affichagepose des problème de compréhension et génére desfautes de calcul. Par exemple, pour calculer :
(10−10)2
l’erreur courante est de taper : 10 EE -10. L’affi-chage donne alors malheureusement :
10 E -10
ce qui est trompeur puisque cela signifie 10·10−10 etnon 10−10, c’est-à-dire 1 ·10−10. Pour cela, il auraitfallu taper : 1 EE -10 et l’affichage aurait donné :
1 E -10
A.7 Règles de calcul
Remarquons encore les règles mathématiquestrès utiles suivantes (voir annexe L) :
10a · 10b = 10a+b et1
10a= 10−a
Elles permettent de réaliser de tête et rapidementdes calculs complexes comme :
F = 9 · 109 · 2 · 10−3 · 2 · 10−2
(2 · 104)2
= 9 · 2 · 24
· 109 · 10−3 · 10−2 · ((104)2)−1
= 9 · 109−3−2 · 102·(−4) = 9 · 104 · 10−8
= 9 · 10−4 N
87

88
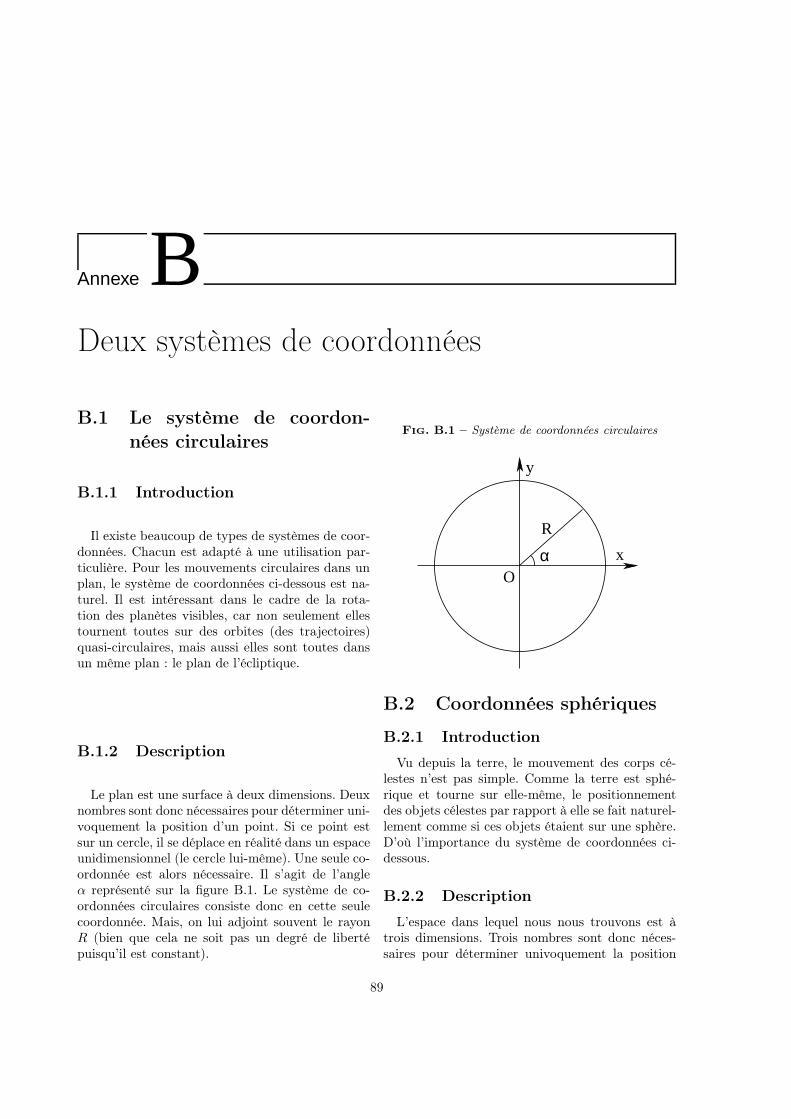
Annexe BDeux systèmes de coordonnées
B.1 Le système de coordon-nées circulaires
B.1.1 Introduction
Il existe beaucoup de types de systèmes de coor-données. Chacun est adapté à une utilisation par-ticulière. Pour les mouvements circulaires dans unplan, le système de coordonnées ci-dessous est na-turel. Il est intéressant dans le cadre de la rota-tion des planètes visibles, car non seulement ellestournent toutes sur des orbites (des trajectoires)quasi-circulaires, mais aussi elles sont toutes dansun même plan : le plan de l’écliptique.
B.1.2 Description
Le plan est une surface à deux dimensions. Deuxnombres sont donc nécessaires pour déterminer uni-voquement la position d’un point. Si ce point estsur un cercle, il se déplace en réalité dans un espaceunidimensionnel (le cercle lui-même). Une seule co-ordonnée est alors nécessaire. Il s’agit de l’angleα représenté sur la figure B.1. Le système de co-ordonnées circulaires consiste donc en cette seulecoordonnée. Mais, on lui adjoint souvent le rayonR (bien que cela ne soit pas un degré de libertépuisqu’il est constant).
Fig. B.1 – Système de coordonnées circulaires
x
y
O
R
α
B.2 Coordonnées sphériques
B.2.1 Introduction
Vu depuis la terre, le mouvement des corps cé-lestes n’est pas simple. Comme la terre est sphé-rique et tourne sur elle-même, le positionnementdes objets célestes par rapport à elle se fait naturel-lement comme si ces objets étaient sur une sphère.D’où l’importance du système de coordonnées ci-dessous.
B.2.2 Description
L’espace dans lequel nous nous trouvons est àtrois dimensions. Trois nombres sont donc néces-saires pour déterminer univoquement la position
89
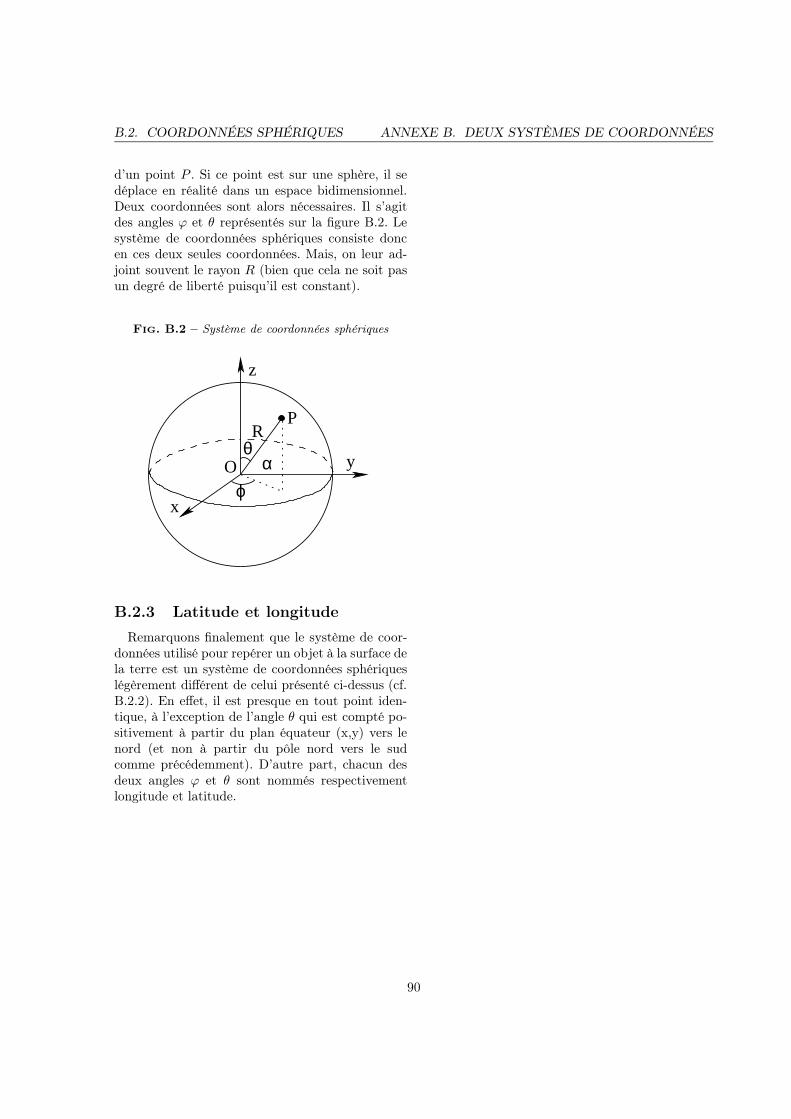
B.2. COORDONNÉES SPHÉRIQUES ANNEXE B. DEUX SYSTÈMES DE COORDONNÉES
d’un point P . Si ce point est sur une sphère, il sedéplace en réalité dans un espace bidimensionnel.Deux coordonnées sont alors nécessaires. Il s’agitdes angles ϕ et θ représentés sur la figure B.2. Lesystème de coordonnées sphériques consiste doncen ces deux seules coordonnées. Mais, on leur ad-joint souvent le rayon R (bien que cela ne soit pasun degré de liberté puisqu’il est constant).
Fig. B.2 – Système de coordonnées sphériques
α
R
O y
z
x
θ
ϕ
P
B.2.3 Latitude et longitude
Remarquons finalement que le système de coor-données utilisé pour repérer un objet à la surface dela terre est un système de coordonnées sphériqueslégèrement différent de celui présenté ci-dessus (cf.B.2.2). En effet, il est presque en tout point iden-tique, à l’exception de l’angle θ qui est compté po-sitivement à partir du plan équateur (x,y) vers lenord (et non à partir du pôle nord vers le sudcomme précédemment). D’autre part, chacun desdeux angles ϕ et θ sont nommés respectivementlongitude et latitude.
90
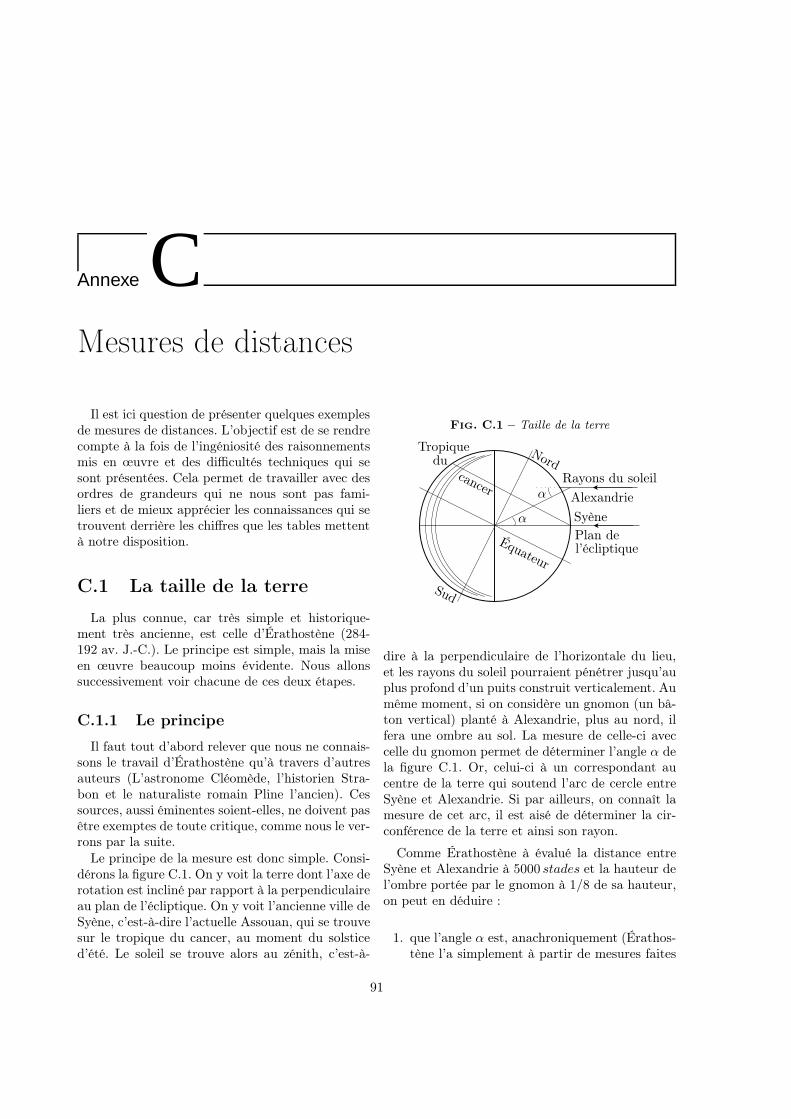
Annexe CMesures de distances
Il est ici question de présenter quelques exemplesde mesures de distances. L’objectif est de se rendrecompte à la fois de l’ingéniosité des raisonnementsmis en œuvre et des difficultés techniques qui sesont présentées. Cela permet de travailler avec desordres de grandeurs qui ne nous sont pas fami-liers et de mieux apprécier les connaissances qui setrouvent derrière les chiffres que les tables mettentà notre disposition.
C.1 La taille de la terre
La plus connue, car très simple et historique-ment très ancienne, est celle d’Érathostène (284-192 av. J.-C.). Le principe est simple, mais la miseen œuvre beaucoup moins évidente. Nous allonssuccessivement voir chacune de ces deux étapes.
C.1.1 Le principe
Il faut tout d’abord relever que nous ne connais-sons le travail d’Érathostène qu’à travers d’autresauteurs (L’astronome Cléomède, l’historien Stra-bon et le naturaliste romain Pline l’ancien). Cessources, aussi éminentes soient-elles, ne doivent pasêtre exemptes de toute critique, comme nous le ver-rons par la suite.
Le principe de la mesure est donc simple. Consi-dérons la figure C.1. On y voit la terre dont l’axe derotation est incliné par rapport à la perpendiculaireau plan de l’écliptique. On y voit l’ancienne ville deSyène, c’est-à-dire l’actuelle Assouan, qui se trouvesur le tropique du cancer, au moment du solsticed’été. Le soleil se trouve alors au zénith, c’est-à-
Fig. C.1 – Taille de la terre
Équateur
Nord
Sud
Syène
Alexandrie
Rayons du soleilα
α
Tropique
Plan del’écliptique
ducancer
dire à la perpendiculaire de l’horizontale du lieu,et les rayons du soleil pourraient pénétrer jusqu’auplus profond d’un puits construit verticalement. Aumême moment, si on considère un gnomon (un bâ-ton vertical) planté à Alexandrie, plus au nord, ilfera une ombre au sol. La mesure de celle-ci aveccelle du gnomon permet de déterminer l’angle α dela figure C.1. Or, celui-ci à un correspondant aucentre de la terre qui soutend l’arc de cercle entreSyène et Alexandrie. Si par ailleurs, on connaît lamesure de cet arc, il est aisé de déterminer la cir-conférence de la terre et ainsi son rayon.
Comme Érathostène à évalué la distance entreSyène et Alexandrie à 5000 stades et la hauteur del’ombre portée par le gnomon à 1/8 de sa hauteur,on peut en déduire :
1. que l’angle α est, anachroniquement (Érathos-tène l’a simplement à partir de mesures faites
91

C.1. LA TAILLE DE LA TERRE ANNEXE C. MESURES DE DISTANCES
avec un scaphéa), donné par :
tan(α) =1/8
1= 1/8 ⇒ α = 7, 13◦ = 7◦8′
2. que la circonférence de la terre vaut :
C = 5000 · 360
7, 13= 252′631 stades
3. et que son rayon vaut alors,
C = 2 · π · R ⇒ R =252′631
2 · π= 40′208 stades
Évidemment, il faut savoir ce que vaut un stade.Et là apparaît le premier problème. En effet, lesestimations varient entre 157, 5 et 192, 27 m. Si onutilise la première valeur, on a :
R = 40′208 · 157, 5 = 6′333 km
Ce qui représente une erreur par rapport à la valeuractuelle de :
e =6′378 − 6′333
6′378· 100 = 0, 7%
alors qu’avec la seconde valeur, on a :
R = 40′208 · 192, 27 = 7′730 km
Ce qui représente une erreur de :
e =7′730 − 6378
6378· 100 = 21, 2%
C.1.2 Techniquement
On loue souvent la méthode d’Érathostène pourla précision de sa mesure. Mais comme on neconnaît pas de manière certaine la valeur du stade,il faut être très prudent.
D’autant plus prudent que ce n’est pas le seulproblème posé par la mesure d’Érathostèneb. Jean-Baptiste Joseph Delambre dans (Jean-Baptiste Jo-seph Delambre, 1821, p. 92-96.) développe une cri-tique de la mesure d’Érathostène basée sur lespoints suivants :
aLe scaphé est une sorte de bol en forme de demi-sphèremuni en son centre d’un gnomon, c’est-à-dire un petit styletvertical.
bLes points ci-dessus sont aussi développés dans (ArkanSimaan, 2002, p. 1193-1196).
La mesure de l’angle , tout d’abord. On ne saitpas précisément comment Érathostène à me-suré cet angle. Il a pu utiliser un scaphéc oud’un gnomon de grande taille (environ cinqmètres). Évidemment, la mesure avec un gno-mon de cinq mètres est plus précise que celleavec un scaphé de plus petite taille. Or, avec ungnomon de cinq mètres, en imaginant une pré-cision de ±3 mm sur l’ombre portée, on peutdéterminer l’imprécision sur l’angle en consi-dérant un triangle rectangle de côté adjacentvalant cinq mètres et de côté opposé valant3 mm. Ainsi, on a :
tan(∆α) =3
5000⇒ ∆α = 0, 034◦ = 2′
Avec un gnomon de 1 m, l’incertitude angu-laire, correspondant à 3 mm sur l’ombre, vautplus de 10′. Ce qui met en évidence la difficultéà réaliser la mesure.D’autant plus que l’ombre du soleil n’est pasnette en raison de son diamètre apparent. Eneffet, le diamètre apparent du soleil, c’est-à-dire l’angle sous lequel on le voit, est de32′. Cela signifie que si on considère l’ombred’un gnomon idéal pointant directement vers lecentre d’un soleil ponctuel, l’ombre d’un gno-mon réel sera 15′ plus loin, en raison des rayonsprovenant du bord du disque solaire.Au minimum donc, l’erreur est de l’ordre de17′. Or, cela correspond alors à une erreur surle rayon de la terre d’environ 5% dans le casd’un stade à 157, 5 m et à 26% au maximumdans le cas d’un stade de 192, 27 m !
La mesure de l’arc , ensuite. Les calculs précé-dents montrent que la valeur du stade est dé-terminante pour la qualité de la mesure effec-tuée par Érathostène. Mais, la valeur de l’arcaussi. Car, outre le fait que notre connaissancede la valeur du stade est incertaine, il sembleque les mesures de distances aient pu se faire endurée de marche. Par exemple, à une journéede marche correspondrait 200 stades. Ce quipermet de comprendre l’incertitude de la me-sure. Par ailleurs, Érathostène a lui-même faitun arrondi significatif. Considérant la distancede 250′000 stades pour la circonférence de la
cOp. cit. a
92

ANNEXE C. MESURES DE DISTANCES C.3. LA DISTANCE TERRE-LUNE
terre (obtenue avec un angle de 7◦12′), il dé-termine la distance par degré : 250′000/360 =694, 44 stades et . . .l’arrondit à 700 stades. Ilrecalcule alors la circonférence terrestre et ob-tient 700 · 360 = 252′000 stades.
Si, ce qui précède montre qu’il faut être très prudentavec cette mesure de la terre, cela permet aussi dese rendre compte qu’une mesure est toujours liée àl’incertitude des termes qui on permis de l’obtenir.Sans la précision de ces incertitudes, la mesure peutne pas être significative. Bien entendu la méthodeutilisée par Érathostène est remarquable. Mais saportée n’en reste pas moins limitée par la précisiondes mesures qu’elle utilise. Et parallèlement, la por-tée historique de cette mesure est aussi à évaluerà l’aulne de ces incertitudes. C’est pourquoi, touthistorien consciencieux ne peut se passer d’avoirune bonne connaissances des méthodes de mesuresutilisées à l’époque et des moyens mathématiquesnécessaires pour évaluer leur précision.
C.2 La taille de la lune
Une première méthode simple consiste à observerune éclipse de lune. On peut voir alors la l’ombre dela terre sur la lune. En reproduisant un cercle quiépouse la forme de l’ombre de la terre sur la lune, onpeut déterminer le rapport de taille entre ces deuxcorps. La méthode paraît simple. Cependant, elle secomplique quand on considère les deux problèmessuivants :
– La distance du soleil à la terre est finie et lesoleil a une taille importante par rapport à laterre. Ainsi, l’ombre portée par la terre sur lalune n’a pas la taille de la terre.
– Sans photographies d’éclipses de lune, il esttrès difficile de trouver le rapport de la taillede l’ombre de la terre à celle de la lune.
Même de nos jours, avec des images de taille ré-duites, l’incertitude sur le rayon du cercle qui sou-tend l’ombre de la terre sur la lune est important.La figure C.2 montre en effet, suivant l’image choi-sie, un rapport de 95/28, 9 = 3, 3 à 60/28, 9 = 2, 1.
Et cela sans tenir compte du premier point men-tionné ci-dessus.
Cependant, cette méthode permet une premièreévaluation de la taille de la lune. Pour cela, il fautencore tenir compte du premier point évoqué ci-dessus. On peut le faire de manière très rapide en
Fig. C.2 – Taille de la luneUne taille incertaine47
constatant que lors des éclipses de soleil, l’ombreportée par la lune sur la terre est très petite. Celasignifie que sur la distance terre-lune l’ombre de lalune est réduite d’une fois sa taille. On peut doncsupposer qu’il en va de même pour l’ombre de laterre portée sur la lune lors d’éclipses de lune. Ainsi,en prenant un rapport de diamètre de l’ombre dela terre sur la lune à la taille de la lune de 2, 5×environ, le rapport de la taille de la terre (et nonde son ombre sur la lune) à celle de la lune vaut3, 5×.
On peut alors calculer la taille de la lune à partirde la mesure du rayon terrestre d’Érathostène. Sion admet qu’il ait pu obtenir une valeur du rayonde la terre R = 6333 km, le rayon de la lune r estalors :
r =R
3, 5=
6333
3, 5= 1809 km
Soit par rapport à la valeur admise actuellement de1738 km, une erreur de 4%.
C.3 La distance terre-lune
A partir de la valeur du rayon de la terre, lamesure de la distance terre-lune est aisée. Il fautconsidérer que l’angle α sous lequel on voit lalune est d’un demi-degré, soit en radian π/360 =0, 0087 rad. Alors, à l’aide d’une simple relationliant la longueur d’un arc L à son angle α au centre
93

C.4. LA DISTANCE TERRE-SOLEIL ANNEXE C. MESURES DE DISTANCES
en radian et au rayon R du cercle, on tire :
L = α · R ⇒
R =L
α=
φlune
α
R = dterre−lune =3′618
0, 0087= 415′862 km
Ce qui représente environ 8% d’écart avec la valeurd’aujourd’hui.
De nos jours, la distance de la terre à la lune estmesuré par la réflexion de faisceaux laser sur desmiroirs déposés par les missions Apollo. Elle atteintune précision de l’ordre de quelques millimètres.
C.4 La distance terre-soleil
La mesure de distances plus importantes quecelle de la terre à la lune fut réalisée par la suite àl’aide de la méthode de la parallaxe. On peut évo-quer ici cette méthode réalisée par une observationen deux points différents de la terre. Une variantede cette méthode sera utilisée pour la mesure desdistances aux étoiles.
La mesure de la parallaxe repose sur l’idée sui-vante. Quand on observe son pouce levé devant soià bout de bras avec l’œil droit puis l’œil gauche al-ternativement, on voit qu’il se déplace par rapportaux objets éloignés. Si le pouce est proche des yeux,il se déplace fortement et s’il est éloigné, il se dé-place faiblement. L’observation de son mouvementpermet donc de se faire une idée de la distance entreles yeux et le pouce.
En termes astronomiques, on voit sur la figureC.3 que l’angle α entre une étoile lointaine et lapolaire est le même pour deux points d’observationC et P sur la terre. Pour un astre peu éloigné M ,ces deux angles β et γ sont différents. On appelleparallaxe de l’astre M l’angle δ qui vaut :
δ = γ − β
en raison du fait que deux droites parallèles sonttoujours coupées par une troisième droite selondeux angles égaux.
L’astronome Cassini, qui détermina pour la pre-mière fois la distance terre-soleil à partir de la pa-rallaxe de Mars, décrit la mesure ainsi :
“La meilleure méthode pour chercherla parallaxe de Mars par la correspon-dance des observations faites à Paris &en Caïenne auroit été d’observer, par lalunette, la conjonction précise de cetteplanète avec une étoile fixe. Car si cetteconjonction avoit été vue de l’un & del’autre lieu au même instant & précisé-ment de la même manière sans aucunedistance, c’eût été une marque qu’il n’yavoit point de parallaxe sensible. S’il y enavoit eu quelque peu, à l’instant que Marsauroit paru toucher par son bord supé-rieur une Etoile fixe en Caïenne, il auroitparu à Paris un peu éloigné de la mêmeEtoile vers l’Horizon, & quand il auroitparu à Paris toucher l’Etoile par son bordinférieur, il auroit paru en Caïenne éloi-gné de la même Etoile vers le Zénit &cette distance vue d’un lieu & non pas del’autre, aurait été attribuée à la parallaxe”J. D. Cassini, dans “Mémoires de l’Acadé-mie Royale des Sciences”, volume 8, année1730.48
Fig. C.3 – Parallaxe de marsPremière étape pour déterminer la distance terre-soleil.
E
βP
CT
Polaire
γM
α
αN
S
δ
O
L’application de cette méthode pour détermi-ner la position d’un astre comme mars, M sur leschéma C.3, consiste à observer cette planète simul-tanément depuis deux endroits éloignés de la terre.Deux observateurs P et C (les astronomes Cassinià Paris et Richer à Cayenne, en 1672) mesurent aumême moment l’écart angulaire entre mars M etune étoile E en arrière plan. La somme des deuxangles mesurés constitue l’angle δ au sommet dutriangle PMC, soit le double de la parallaxe. En
94

ANNEXE C. MESURES DE DISTANCES C.4. LA DISTANCE TERRE-SOLEIL
raison de l’important éloignement de mars par rap-port à la distance PC (Paris-Cayenne), on peut po-ser grâce à la relation A.1, page 86, pour l’angle δ :
δ =PC
MO⇒ MO =
PC
δ
La distance PC, approximativement la distanceentre Paris et Cayenne, permet alors de trouverMO. La distance de la terre à mars vaut alors :
dT−M = MO + OT = MO + RT (C.1)
où RT est le rayon de la terre.
Le résultat est donné par Cassini lui-même :
“Le 5 septembre 1672 trois jours avantl’opposition du Soleil à Mars, nous ob-servâmes à Paris trois Etoiles dans l’EauAquarius marquées par Bayerus Ψ, verslesquelles Mars alloit par son mouvementparticulier rétrograde, de sorte que l’on ju-geoit qu’il en auroit pu cacher une. Il étoitalors un peu plus septentrional que la plusseptentrionale des trois. On prit la hau-teur Méridienne de celle-ci qui passoit lapremière ; & celle de la moyenne vers la-quelle le mouvement particulier de Marss’adressoit. Par le choix des Observationsles plus exactes & les plus conformes entreelles, on fixa à 15" la parallaxe que faitMars de Paris à Caïenne” J. D. Cassini,dans “Mémoires de l’Académie Royale desSciences”, volume 8, année 1730.49
Le résultat de la mesure est donc de quinze secondesd’arc. Mais attention, il s’agit de la parallaxe quiest la moitié de l’angle δ. Celui-ci vaut donc : δ =0, 008332◦ ou 1, 454 · 10−4 rad. Avec une distancede Paris à Cayenne de 7082, 1 km cela donne :
MO =7, 0821 · 106
1, 454 · 10−4= 4, 87 · 1010 m
Soit une distance entre la terre et mars de :
dT−M = 4, 87 · 1010 + 6, 371 · 106 = 4, 87 · 1010 m
Mais ce n’est là que la distance de la terre à mars. Ilfallait encore réaliser une condition de mesure pourobtenir la distance terre-soleil : choisir le bon mo-ment. Cassini précise que la mesure fut faite troisjours avant l’opposition du soleil à mars. Cela signi-fie qu’alors la terre se trouvait sur une même ligne
entre mars et le soleil. A ce moment, et seulementà ce moment, on peut écrire :
dS−M = dT−M + dS−T (C.2)
où on n’a pas tenu compte du caractère elliptiquedes orbites, notamment de celle de mars (voir ci-dessous). Mais, l’équation C.2 a deux inconnues :les distances mars-soleil et terre-soleil. Pour les dé-terminer, il faut une seconde équation.
Il s’agit de la troisième loi de Kepler, donnée parl’équation 2.16, page 43, appliquée au cas de la terreet de mars :
d3S−T
T 2T
=d3
S−M
T 2M
(C.3)
où dS−T et dS−M sont les distances soleil-terre etsoleil-mars et TT et TM leur périodes respectives.
Le système composé des équations C.2 et C.3 estun système de deux équations à deux inconnues.Pour le résoudre, remplaçons la distance dS−M del’équation C.2 dans la troisième loi de Kepler C.3 :
d3S−T
T 2T
=d3
S−M
T 2M
⇒
d3S−T
T 2M
T 2T
= d3S−M ⇒
d3S−T (
TM
TT)2 = (dT−M + dS−T )3 ⇒
dS−T (TM
TT)2/3 = dT−M + dS−T ⇒
dS−T (TM
TT)2/3 − dS−T = dT−M ⇒
dS−T ((TM
TT)2/3 − 1) = dT−M ⇒
dS−T =dT−M
(TM/TT )2/3 − 1(C.4)
Numériquement, avec les période de mars et de laterre TT = 365 j et TM = 686 j, on obtient :
dS−T =4, 87 · 1010
(686/365)2/3 − 1= 9, 31 · 1010 m
Ce qui représente un écart de 38% par rapport àla valeur de l’unité astronomique connue actuelle-ment : dT−S = 1, 496 · 1011 m. Cet écart est im-portant. La moitié de celui-ci peut être attribuée à
95

C.5. LA DISTANCE DES ÉTOILES ANNEXE C. MESURES DE DISTANCES
l’excentricité de mars. En effet, un calculd basé surl’hypothèse d’une orbite terrestre circulaire, maisd’une orbite elliptique de mars mène au résultatsuivant :
dS−T =dT−M
(1 − e)(TM/TT )2/3 − 1(C.5)
=4, 87 · 1010
(1 − 0, 093)(686/365)2/3 − 1
= 1, 27 · 1011 m
où e est l’excentricité de l’orbite de mars. La valeurobtenue à l’aide de l’équation C.5 ne représente plusalors qu’un écart de 15%.
C.5 La distance des étoiles
On a vu que la parallaxe de mars est d’environ15′′ d’arc. Cette valeur est vraiment très petite. Ilest donc impossible d’effectuer une mesure de laparallaxe d’une étoile à l’aide de la méthode uti-lisée pour mars. Deux observations simultanées endeux endroits différents de la terre ne permettentpas une telle mesure. Par la méthode de la paral-laxe, la seule grandeur qu’il est possible de modi-fier est la distance entre les deux points d’obser-vation. Comme des distances de l’ordre du rayonde la terre ne suffisent pas, un effet de parallaxeplus important fut obtenu en effectuant la mesureà six mois d’intervalle. Ainsi, la distance entre lesdeux “points de vue” correspond au diamètre del’orbite terrestre. La première mesure de la paral-laxe d’une étoile (parallaxe stellaire) a été faite en1838 par Friedrich Wilhelm Bessel pour la binaire61 du Cygne. Mais, même pour une telle distance,les parallaxes d’étoiles restent inférieures à la se-conde d’arc. Par exemple pour Proxima du Cen-taure, l’étoile la plus proche de nous, la parallaxevaut 760 milliseconde d’arc.
dEn opposition, le demi-grand axe de l’orbite de marss’exprime en réalité par : aM = e · aM + dS−T + dT−M . Lagrandeur e·aM représentant la distance du centre de l’ellipsede mars au foyer sur lequel se trouve le soleil. On ne calculeplus alors dans l’équation de Kepler la distance dS−M , maisle demi-grand axe aM .
96
Annexe DTravaux pratiques
D.1 Le rapport de laboratoire
Tout d’abord un avertissement. La “méthode”de construction d’un rapport présentée ci-dessousest propre à celle d’une discipline scientifique. Elleconstitue une manière de faire qui est actuellementreconnue. Pourtant l’histoire montre que la présen-tation des résultats a souvent adopté des formestrès différentes. On doit donc plus la comprendrecomme le rappel d’un nécessaire soucis de rigueurque comme une exigence formelle. De plus, si elleest un outil particulièrement bien adapté à la pré-sentation de cette forme de savoir qu’est la science,elle ne l’est certainement pas pour celle de touteforme de connaissances. En effet :
“La conception et la mise au pointd’instruments spécifiques, toujours plusdiversifiés, est l’une des marques du pro-grès technique. Comment croire que leprogrès intellectuel puisse suivre un che-min inverse ? S’il existe aujourd’hui desdizaines de types de tournevis, de scies, derabots, peut-on sérieusement imaginer quela pensée, elle, puisse se contenter d’uneaussi pauvre panoplie que celle empruntéeaux seules sciences dites exactes ? ”
(Jean-Marc Lévy-Leblond, 1996, p. 13-14)
L’objectif premier d’un rapport est de réaliserune trace du travail effectué. Celle-ci est d’abordun souvenir destiné à l’expérimentateur.
Le second objectif est de permettre à d’autrespersonnes de s’intéresser au travail réalisé.
Ces deux objectifs ne peuvent être réalisés sansqu’une attention particulière ne soit portée sur la
clarté et la concision.
Les détails de la réalisation d’un rapport peuventvarier beaucoup en fonction des spécificités de l’ex-périence et de la personnalité de l’expérimentateur.Cependant, si une certaine liberté en ce domainedevrait être toujours possible, pour ne pas oublierde traiter des points importants et pour faciliter lalecture de personne qui s’attendent à trouver cer-taines formes définies de rapport, il est recommandéde suivre une structure de rapport type déterminéepar l’expérience.
Le rapport à présenter sur une expérience termi-née est aussi important que l’expérience elle-même.Il doit être ordonnée, exprimé dans un langagesimple et concis, et ne comporter que les faits im-portants de l’expérience. Ce genre d’exercice se re-trouve dans toutes les disciplines. La qualité d’unprocès verbal ou d’un rapport peut être détermi-nante pour des décisions importantes ou pour l’ave-nir de leur auteur.
Pensez, lorsque vous l’écrivez, que vous vousadressez à un lecteur du même niveau que vous,par exemple un de vos camarades qui était absent lejour de l’expérience, et imaginez qu’il doit prendreconnaissance et comprendre l’essentiel de votre tra-vail de laboratoire.
Lorsque deux élèves font une expérience, ils pré-sentent un seul rapport et obtiennent ainsi unemême note de laboratoire. Il s’agit d’un travail degroupe. Il est important que chaque élève participeà l’élaboration de chaque rapport en collaborationavec son collègue.
97
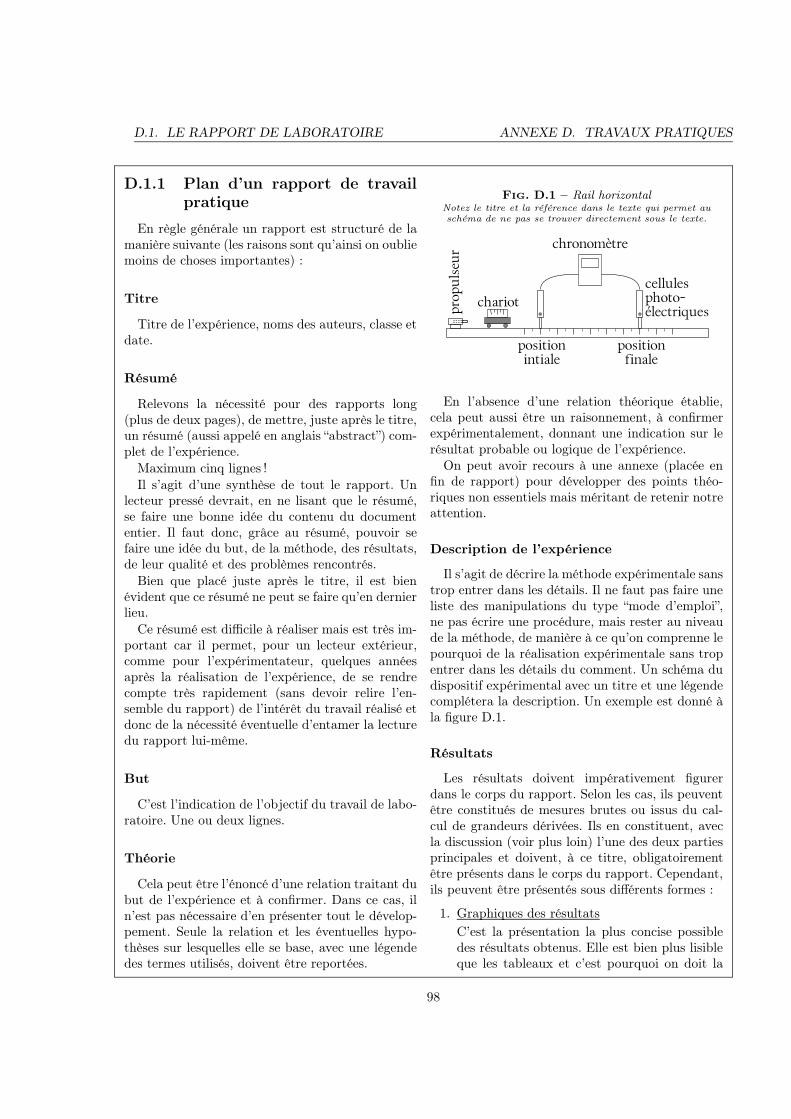
D.1. LE RAPPORT DE LABORATOIRE ANNEXE D. TRAVAUX PRATIQUES
D.1.1 Plan d’un rapport de travailpratique
En règle générale un rapport est structuré de lamanière suivante (les raisons sont qu’ainsi on oubliemoins de choses importantes) :
Titre
Titre de l’expérience, noms des auteurs, classe etdate.
Résumé
Relevons la nécessité pour des rapports long(plus de deux pages), de mettre, juste après le titre,un résumé (aussi appelé en anglais “abstract”) com-plet de l’expérience.
Maximum cinq lignes !Il s’agit d’une synthèse de tout le rapport. Un
lecteur pressé devrait, en ne lisant que le résumé,se faire une bonne idée du contenu du documententier. Il faut donc, grâce au résumé, pouvoir sefaire une idée du but, de la méthode, des résultats,de leur qualité et des problèmes rencontrés.
Bien que placé juste après le titre, il est bienévident que ce résumé ne peut se faire qu’en dernierlieu.
Ce résumé est difficile à réaliser mais est très im-portant car il permet, pour un lecteur extérieur,comme pour l’expérimentateur, quelques annéesaprès la réalisation de l’expérience, de se rendrecompte très rapidement (sans devoir relire l’en-semble du rapport) de l’intérêt du travail réalisé etdonc de la nécessité éventuelle d’entamer la lecturedu rapport lui-même.
But
C’est l’indication de l’objectif du travail de labo-ratoire. Une ou deux lignes.
Théorie
Cela peut être l’énoncé d’une relation traitant dubut de l’expérience et à confirmer. Dans ce cas, iln’est pas nécessaire d’en présenter tout le dévelop-pement. Seule la relation et les éventuelles hypo-thèses sur lesquelles elle se base, avec une légendedes termes utilisés, doivent être reportées.
Fig. D.1 – Rail horizontalNotez le titre et la référence dans le texte qui permet au
schéma de ne pas se trouver directement sous le texte.
En l’absence d’une relation théorique établie,cela peut aussi être un raisonnement, à confirmerexpérimentalement, donnant une indication sur lerésultat probable ou logique de l’expérience.
On peut avoir recours à une annexe (placée enfin de rapport) pour développer des points théo-riques non essentiels mais méritant de retenir notreattention.
Description de l’expérience
Il s’agit de décrire la méthode expérimentale sanstrop entrer dans les détails. Il ne faut pas faire uneliste des manipulations du type “mode d’emploi”,ne pas écrire une procédure, mais rester au niveaude la méthode, de manière à ce qu’on comprenne lepourquoi de la réalisation expérimentale sans tropentrer dans les détails du comment. Un schéma dudispositif expérimental avec un titre et une légendecomplétera la description. Un exemple est donné àla figure D.1.
Résultats
Les résultats doivent impérativement figurerdans le corps du rapport. Selon les cas, ils peuventêtre constitués de mesures brutes ou issus du cal-cul de grandeurs dérivées. Ils en constituent, avecla discussion (voir plus loin) l’une des deux partiesprincipales et doivent, à ce titre, obligatoirementêtre présents dans le corps du rapport. Cependant,ils peuvent être présentés sous différents formes :
1. Graphiques des résultatsC’est la présentation la plus concise possibledes résultats obtenus. Elle est bien plus lisibleque les tableaux et c’est pourquoi on doit la
98

ANNEXE D. TRAVAUX PRATIQUES D.1. LE RAPPORT DE LABORATOIRE
privilégier. Il faut cependant faire attention àprésenter les grandeurs, brutes (mesures) oudérivées (issues d’un calcul), qui représententau mieux les résultats en fonction des butschoisis.Tout graphique doit avoir un titre, des axesportant clairement les symboles des grandeursconcernées et leurs unités. On n’indique pasles coordonnées des points sur les graduations,mais des valeurs d’accroissement régulier. Lespoints expérimentaux ne sont jamais reliés (cequi pourrait faire croire que des mesures ontété faites entre les mesures principales), maison peut faire passer la meilleure courbe pos-sible à travers ceux-ci. On indique les barresd’incertitudes de chaque axe aux points où lescalculs ont été faits.Un exemple, est présenté à la figure D.2.
Fig. D.2 – Chute libre ¡ ¢ £ ¤ ¥ ¤ ¦ ¡ ¢ § ¡ ¥ ¨ ¥ © ¢ £ ¦ A § * § ¦ +, - . / 1 2 3 1 45 678 98 6: ;< BC D E F D E G D E H D E I D E J D E K D E L D E M D E N FD FGHI J O P Q R S T U V
2. Tableau des mesuresLes mesures effectuées au laboratoire, lors-qu’elles sont peu nombreuses, peuvent êtremises dans un ou plusieurs tableaux ayant laforme présentée dans le tableau D.1. La pre-mière ligne présente les grandeurs physiqueset leurs symboles. La seconde donne les unitésdes grandeurs et la troisième les incertitudesabsolues des mesures directes (non calculées àpartir d’autres grandeurs). Enfin, les suivantesprésentent les résultats. Attention, présentertrop de résultats simultanément nuit à la lisi-bilité d’un tableau. Par ailleurs, une bonne lec-ture d’un tableau passe par sa simplification :pas de colonne de valeurs identiques qu’on peutprésenter une seule fois avant le tableau, pas de
colonnes exagérément large, et donc de videinutile, en raison d’un titre trop long, pas decolonnes de calculs intermédiaires sans raisonaucune, etc.
Tab. D.1 – Tableau de mesures
temps t position x vitesse vs cm cm/s
0,1 0,10
2, 02, 42, 6
31, 617, 812, 4
1, 83, 24, 8
Si les mesures sont trop nombreuses, pour amé-liorer la lisibilité du rapport, on peut les re-porter en annexe. Mais, encore une fois, il fautalors impérativement présenter soit celles quiconstituent les résultats principaux ou signifi-catifs ou importants soit les valeurs des gran-deurs dérivées des mesures et qui constituent àproprement parlé les résultats de l’expérience.Par exemple, dans la recherche d’une accélé-ration à partir de mesures d’une distance par-courue et d’un temps, on peut reporter en an-nexe les nombreuses mesures réalisées, maispas les valeurs d’accélération qui en découlentet constituent les résultats de l’expérience.
Par ailleurs, il faut ici insister sur ce qui est né-cessaire pour permettre la comparaison entrethéorie et expérience. Une notion simple per-met de quantifier la différence entre une me-sure, notée valeurexp, et une valeur théorique,notée valeurth, celle d’écart ou d’erreur :
e(%) =valeurth − valeurexp
valeurth· 100 (D.1)
Lorsqu’une valeur théorique est très précisé-ment connue, on parle d’erreur à la valeur théo-rique plutôt que d’écart. Relevons enfin la né-cessité de maintenir le signe du résultat pourdétecter une éventuelle erreur systématique.
3. Exemples de calcul
Lorsque des résultats sont obtenus à par-tir d’opérations sur des mesures directes, on
99

D.1. LE RAPPORT DE LABORATOIRE ANNEXE D. TRAVAUX PRATIQUES
donne un ou deux exemples des calculs effec-tués en précisant bien leur position dans le ta-bleau d’où elles ont été extraites.
4. Calcul des incertitudesLes calculs des incertitudes des grandeurs indi-rectement obtenues (par calcul) sont présentésdans un ou deux cas en précisant bien lesquelsdans le tableau.A défaut, quelques mesures permettant de sefaire une idée des incertitudes doivent être pré-sentées et brièvement commentées pour éva-luer la qualité de l’expérience.
Discussion
Il s’agit d’une analyse du travail. S’il n’existe pasde méthode permettant de faire une bonne discus-sion, on peut relever que souvent les points suivantsapparaissent.
1. Une explication en français des résultats pré-sentés dans les graphes. Un graphe, s’il est pluslisible qu’un tableau, ne suffit pas. Des expli-cations claires améliorent la compréhension.
2. On compare les résultats avec les prévisionsthéoriques. On met en évidence leur significa-tion. On discute leur qualité. On insiste surles mesures s’écartant des prévisions, on tentede les expliquer logiquement ou on présented’autres mesures de confirmation. On remeten cause les mesures autant que la théorie sinécessaire.
3. On remet en question la méthode et on proposedes améliorations.
C’est la partie la plus dense et la plus importantedu rapport.
Conclusion
Il s’agit de dire très brièvement si le but à étéatteint et de juger s’il l’a été bien, partiellement oumal.
Annexes
Tout ce qui nuit à la lisibilité du rapport, mais aune certaine importance à vos yeux, doit être misen annexe. Chacune de celles-ci doit comporter untitre relatif à son contenu.
100
ANNEXE D. TRAVAUX PRATIQUES D.3. LE PENDULE SIMPLE
D.2 La nébuleuse du crabe
D.2.1 Introduction
La nébuleuse du Crabe est le reste de l’explosiond’une étoile arrivée en fin d’évolution : les couchesextérieures de l’étoile ont formé la nébuleuse ac-tuelle, alors que le noyau s’est contracté brutale-ment, pour former une étoile à neutron qui rayonnece qui lui reste d’énergie thermique. Cette étoile estun pulsar de très courte période (33 ms).
D.2.2 But du travail pratique
Deux photographies prises à plusieurs annéesd’intervalle montrent que la nébuleuse est en ex-pansion, ce qui permet d’estimer son âge en sup-posant que toute la matière était condensée dansl’étoile centrale.
D.2.3 Dispositif expérimental
Établir l’échelle, en secondes d’arc par milli-mètre, de chacune des photographies, sachant queles deux étoiles repérées par des flèches sont dis-tantes de 576”.
D.2.4 Mesures
Identifier le pulsar sur les photographies (desdeux étoiles centrales, c’est celle qui est au sud-ouest) et mesurer successivement les distancesd’une douzaine de filaments par rapport à lui. Choi-sir des filaments bien répartis sur la périphérie dela nébuleuse.
D.2.5 Résultats
Faire un tableau où figurerons pour chaque fila-ment : la distance x1 en ′′ de la première photogra-phie, la distance x2 en ′′ de la seconde photo, et lemouvement propre
v =∆x
∆tou ∆x = x2 − x1 et ∆t = 34, 1 ans
A titre de contrôle, mesurer de la même manièrela distance de quelques étoiles sur chaque photo-graphie.
Porter sur un graphique v en fonction de x2.
D.2.6 Analyse
Comment obtient-on l’âge de la nébuleuse ?Des astronomes chinois du haut Moyen Âge ont
signalé l’apparition, en l’année 1054, d’une étoilenouvelle (qui fut visible en plein jour pendant troissemaines !) dans la direction de la nébuleuse ac-tuelle. La date est-elle compatible avec l’âge quevous avez trouvé ?
D.3 Le pendule simple
D.3.1 Les mesures
Une partie très importante du travail du physi-cien est de déterminer la (ou les) grandeur perti-nente pour décrire le phénomène étudié.
Ici il s’agit de la période du pendule, c’est-à-diredu temps qu’il met pour faire un aller-retour. En-suite, il s’agit de déterminer quelles variables (quelsparamètres) pourraient influer cette grandeur. Onpeut citer pêle-mêle la masse et la longueur du pen-dule, sa position initiale (l’angle du fil par rapportà la verticale), son poids, le fluide dans lequel ilse trouve, etc. Tous ces paramètres n’ont pas for-cément de liens avec la grandeur choisie pour dé-crire le phénomène. Dans un premier temps, onpeut donc en éliminer certains qui paraissent enpremière approximation n’avoir aucun rôle, en rai-son des difficultés pour les mesurer, des impossibili-tés matérielles pour les déterminer ou du coût qu’ilengendrent. Bien entendu, il faut tenter de minimi-ser l’influence de paramètres que l’on ne pourraitprendre en considération pour diverses raisons touten les sachant importants.
D’autre part, pratiquement, il est indispensablede réaliser l’expérience en ne faisant varier qu’unseul paramètre à la fois. Dans le cas présent, commeseules les variables masse, longueur et angle initialont été choisies, il faut réaliser trois séries de me-sures :
– la masse et la longueur restent constantes eton ne fait varier que l’angle,
– la masse et l’angle restent constants et on nefait varier que la longueur,
– la longueur et l’angle restent constants et onne fait varier que la masse.
Bien entendu, cette procédure a une répercussionsur l’organisation des données dont nous verronsquelques éléments par la suite.
101
D.5. MOUVEMENT SIMPLE : MRUA ANNEXE D. TRAVAUX PRATIQUES
Finalement, il faut relever deux choses. Premiè-rement, la nécessité d’évaluer l’incertitude des me-sures. On peut procéder en effectuant une série demesures avec strictement les mêmes paramètres. Onprend ensuite le plus grand écart. Ce n’est pas trèsfiable mais constitue une bonne approximation. Se-condement, il est important de relever le moindrepetit problème survenu pendant les mesures. Un pe-tit changement des conditions d’expérience pouvantavoir des répercussions non négligeables, il faut lit-téralement faire attention à tout.
D.3.2 Organisation des données etgraphiques
L’objectif est avant tout la clarté. L’organisationdes données repose sur une grandeur (la périoded’oscillation T) et trois variables (la masse m, lalongueur L et l’angle initial α). Il est fondamen-tal d’étudier chacune de ces trois variables indé-pendamment. Pour cela on fixe une valeur pourles deux autres (en général la plus grande possiblepour limiter les incertitudes ; bien que pour l’angleinitial il ne faudrait pas dépasser 15◦ pour que lathéorie classique T ≈
√L soit valable) et on ne
fait varier que celle qui est choisie. Ainsi, dans lecas du pendule, on est amené à construire trois ta-bleaux : T (m), T (L) et T (α). L’objectif de clartéimplique alors notamment que l’on ne répète parpour chaque mesure la valeur des variables fixées.Bien entendu, mettre un titre, une date, les nomsdes expérimentateurs, reporter le nom des gran-deurs et les unités sont des choses importantes.
En ce qui concerne les graphes, comme la va-riable change pour chaque expérience, il faut aussiconstruire trois graphes qui correspondent aux troistableaux précédents. On ne représente sur ceux-cique les points effectivement mesurés. On ne reliedonc jamais les points. Bien entendu, à nouveau,titre, date, unités, etc. sont à reporter.
D.4 Mouvement simple : MRU
Il s’agit de tracer le graphe horaire de la positionpour un mobile se déplaçant sur un rail avec diffé-rentes vitesses initiales et avec peu de frottements.
D.4.1 Les mesures
Les mesures sont celles du temps parcouru surune distance donnée. Elles se réalisent avec deuxcellules photoélectriques et un chronomètre. Il estimportant de soigner la réalisation : horizontalitédu rail, détermination précise des longueurs, etc.Il faut aussi évaluer l’incertitude des mesures enrépétant quelques mesures plusieurs fois.
D.4.2 Organisation des données etgraphiques
C’est l’occasion de réaliser un tableau avec uneseule variable : la distance parcourue et avec plu-sieurs grandeurs : le temps mis pour parcourir ladistance avec diverses poussées : forte, moyenne etfaible. Le fait que la variable soit commune à toutesles grandeurs (qui toutes représentent un temps)permet de ne réaliser qu’un seul graphique avec plu-sieurs courbes. Cela permet de mieux comparer lescourbes et de montrer très clairement que plus lavitesse est grande plus la pente de la courbe estforte.
D.4.3 Analyse des résultats
Deux points sont essentiellement à relever :– la pente du graphe horaire de la position re-
présente la vitesse du mobile et le point où legraphe coupe l’axe de la position correspondà la position du mobile au moment où on en-clenche le chronomètre et
– lorsque le frottement est important le graphen’est pas linéaire (ou affine), mais sa pente di-minue progressivement.
D.5 Mouvement simple :MRUA
D.5.1 But
Il s’agit de tracer le graphe horaire de la posi-tion pour un mobile descendant un rail incliné avecdifférentes pentes et avec peu de frottements.
Il s’agit aussi de trouver deux théories permet-tant d’obtenir l’accélération du mobile et de lescomparer à une accélération expérimentale obtenueà partir des mesures.
102
ANNEXE D. TRAVAUX PRATIQUES D.6. LA CHUTE LIBRE
D.5.2 Théorie
Pour déterminer l’accélération d’un mobile surun plan incliné, on peut suivre deux raisonnements.
1. On peut établir une simple relation linéaireentre l’angle du plan et l’accélération. En ef-fet, sachant que l’accélération d’un objet enchute libre vaut a = 9, 81 m/s2, on peut faireles correspondances suivantes : 0◦ ⇒ 0 m/s2
et 90◦ ⇒ 9, 81 m/s2
Cela mène à la relation suivante :
a = g · α/90
2. On peut considérer que l’accélération du mo-bile qui descend le long du rail incliné est lacomposante le long de ce plan du vecteur cor-respondant à l’accélération du mobile en chutelibre. Il s’agit donc de projeter le vecteur −→g denorme g = 9, 81 m/s2 perpendiculairement auplan incliné. La figure représentant cette pro-jection est un triangle rectangle d’hypoténuseg et de côté adjacent a recherché. On obtientdonc la relation suivante :
a = g · sin(α)
.
D.5.3 Les mesures
Les mesures sont celles du temps parcouru surune distance donnée. Elles se réalisent avec deuxcellules photoélectriques et un chronomètre. Pourobtenir l’accélération expérimentale, on se placedans le cas d’un MRUA de vitesse initiale nulle. Ilest donc nécessaire de lâcher le mobile et de veillerà ne pas le lancer.
D.5.4 Organisation des données etgraphiques
On réalise un tableau avec une variable et deuxgrandeurs : la distance parcourue, le temps corres-pondant et l’accélération expérimentale. On peutalors comparer par un écart la moyenne des accé-lérations expérimentales, obtenues grâce à l’hypo-thèse d’un MRUA qui nous permet d’écrire aexp =2 · d/t2, pour chaque pente et chaque valeur d’ac-célération obtenue théoriquement.
La comparaison montre clairement que la dépen-dance sinusoïdale est réalisée.
D.5.5 Galilée et le plan incliné
C’est un mouvement chargé d’histoire puisqueGalilée l’étudia de manière approfondie pour en dé-duire que la distance parcourue par un objet enMRUA est proportionnelle au temps de parcoursau carré.
L’idée était simple. Le mouvement de chute libreétant trop rapide pour pouvoir être aisément étu-dié, il faut le ralentir par un plan incliné. Celaamena Galilée à découvrir la relation entre la dis-tance parcourue et le temps mis pour le faire parun mobile en mouvement rectiligne uniformémentaccéléré et plus particulièrement par un mobile enchute libre.
D.6 La chute libre
D.6.1 Cette expérience donnant lieuà un rapport noté, elle n’estpas décrite.
D.6.2 Résultats
Les trois résultats importants de cette expériencesont :
– que l’accélération d’un objet en chute libre estconstante (c’est un MRUA),
– que cette accélération vaut a = g = 9, 81 m/s2,– que cette accélération est indépendante de la
masse de l’objet.
D.7 Le canon horizontal
C’est une expérience dont le but est très simple.Il s’agit de tirer une petite bille avec un canon àressort horizontal à partir du haut d’une table. Ondoit auparavant déterminer par calcul le lieu exactd’impact au sol. C’est une application de la balis-tique. Pour ce faire, on n’est autorisé qu’à tirer ver-ticalement. Ainsi on détermine la vitesse de sortiedu canon. En faisant l’hypothèse qu’elle ne changepas lors d’un tir horizontal, on peut alors détermi-ner le point d’impact au sol. En effet, à l’aide de lahauteur à laquelle se trouve le canon par rapport ausol, on peut déterminer le temps de chute vertical dela bille à l’aide de l’équation horaire de la positiond’un objet en chute libre de vitesse initiale (verti-cale) nulle. Puis, on peut déterminer la distance ho-
103

D.8. LE CHARIOT À MASSE PENDANTE ANNEXE D. TRAVAUX PRATIQUES
rizontale parcourue en considérant le même tempspour le vol parabolique et le mouvement horizon-tal à vitesse constante correspondant à la vitessede sortie du canon précédemment calculée via lesmesures en tir vertical. Dans le détail, on a :
Tir vertical. C’est un MRUA d’accélération ter-restre, pour lequel on peut poser :
v2 = v2o − 2 · g · h ⇒ vo =
√
2 · g · h
car la vitesse au sommet de la trajectoire estnulle.
MRU et MRUA. Verticalement, on a un MRUAd’équation :
h =1
2· g · t2 ⇒ t =
√
2 · hg
Et horizontalement, on a un MRU d’équation :
d = vo · t
Soit, en combinant les deux :
d = vo ·
√
2 · hg
Cette expérience peut aussi se faire à l’aide del’énergie. En effet, pour déterminer la vitesse de sor-tie de la bille du canon, on peut mesurer la hauteurmaximale qu’elle va atteindre et poser que l’énergiecinétique à la sortie du canon se transforme intégra-lement en énergie potentielle. Ainsi, on peut poser :
1
2· m · v2
o = m · g · h ⇒
vo =√
2 · g · h
Ce qui correspond à la vitesse qu’on peut trouverde manière cinématique.
D.8 Le chariot à masse pen-dante
L’idée est d’accélérer un chariot, se déplaçantsur un rail horizontal avec peu de frottements, parune masse pendante reliée à lui à l’aide d’une pe-tite ficelle. Une poulie permet de faire pendre lamasse tout en tirant le chariot horizontalement. On
fait varier la masse pendante pour obtenir diffé-rentes accélérations. C’est une expérience portantsur la seconde loi de Newton. Elle est intéressantesi on laisse l’expérimentateur construire sa proprethéorie menant à l’accélération du système chariot-masse pendante. Il est alors possible de comparerune théorie construite de toute pièce (sur la base dela seconde loi de Newton) avec les résultats expé-rimentaux. Ceux-ci sont obtenus à partir de l’hy-pothèse d’un MRUA à l’aide de l’équation de laposition utilisée avec une vitesse initiale nulle. Unesérie de mesures de diverses distances parcouruesen fonction du temps, permet de trouver l’accéléra-tion.
Le résultat ne sera pas explicité ici puisqu’il per-mettrait de découvrir la bonne théorie, ce qui n’estpas l’objectif recherché.
104

Annexe ERotations
L’objectif de cette annexe est de prendreconscience des mouvements auxquels nous partici-pons sans même le savoir. Il est aussi de se rendrecompte que les vitesses qui leur correspondent sontdifficilement imaginables et plus, elles sont relativeset il est parfois difficile de savoir par rapport à quoiles décrire.
Ces mouvements sont cependant assez bienconnus pour qu’on puisse prévoir le futur prochede notre position dans l’espace.
E.1 Rotation de la terre surelle-même
On se propose de calculer la vitesse de rotationd’un point à l’arrêt sur l’équateur terrestre.
Le calcul est simple. Il se base sur les donnéessuivantes :
– le rayon de la terre à l’équateur vaut : RT =6, 378 · 106 m et
– la période sidérale de rotation de la terre surelle-même vaut : Ts = 23 h 56 mn 4, 1 s =86′164, 1 s
Le calcul est celui de la vitesse d’un corps en ro-tation sur un cercle de rayon et de période donnés.On a :
v =d
t=
2 · π · RT
Ts
=2 · π · 6, 378 · 106
86′164, 1
= 465, 1 m/s = 1674 km/h
A elle seule, cette vitesse est déjà fantastique. Nousne la ressentons pas ou peu à cause de l’inertie.
E.2 Rotation de la terre au-tour du soleil
On se propose de calculer la vitesse de rotationde la terre autour du soleil.
Le calcul est simple. Il se base sur les donnéessuivantes :
– la distance de la terre au soleil vaut environ :RT→S = 1, 496 · 1011 m et
– la période sidérale de rotation de la terre au-tour du soleil vaut : Ts = 365, 263 j = 31, 559 ·106 s
Le calcul est celui de la vitesse d’un corps en ro-tation sur un cercle de rayon et de période donnés.On a :
v =d
t=
2 · π · RT→S
Ts
=2 · π · 1, 496 · 1011
31, 559 · 106
= 29′784, 4 m/s = 107′224 km/h
Cette vitesse est encore plus fantastique. Nous ne laressentons à nouveau pas ou peu à cause de l’inertie.
Ce qui vient d’être dit montre qu’il est importantde préciser par rapport à quoi on observe le mou-vement. Historiquement cette question a pris beau-coup d’importance lors de la mise en question del’immobilité de la terre. En effet, si pendant long-temps l’idée que la terre tourne autour du soleil a
105

E.2. ROTATION DE LA TERRE AUTOUR DU SOLEIL ANNEXE E. ROTATIONS
paru absurde, aujourd’hui elle est évidente. Et aucontraire, c’est l’idée qu’on puisse considérer que lesoleil tourne autour de la terre qui est devenue ab-surde. A tel point qu’on envisage même plus qu’onpuisse l’affirmer effectivement. Or, la relativité desmouvements permet de dire à juste titre que le so-leil tourne autour de la terre pour autant qu’on ob-serve le mouvement depuis celle-ci. La terre tourneautour du soleil par rapport au soleil et le soleiltourne autour de la terre par rapport à la terre. Ceque Galilée lui-même, dans son “Dialogue sur lesdeux grands systèmes du monde”, a exprimé par :
“Les choses reviennent au même si laTerre seule se meut alors que tout le restede l’Univers est immobile ou si, alors quela terre seule est immobile, tout l’Universse meut d’un même mouvement ”a
(Jean-François Robredo, 2007, p. 60, sans ré-férence à la page originale.)
Qu’en est-il alors de la fameuse question histo-rique de l’immobilité de la terre ? Celle-ci révèle,en réalité, deux problèmes qui ne remettent pas encause la possibilité d’une description relative desmouvements du soleil et de la terre.
Le premier problème se traduit dans l’immobi-lité de la terre dans l’univers. C’est un problèmeautant cosmologique que physique. Cosmologique,car il met en cause une vision de l’univers historiqueet religieuse qui dépasse clairement la simple relati-vité des mouvements. Physique, car il met en jeu leproblème de l’inertie qui lui aussi dépasse le cadrede la relativité des mouvements. Nous n’en discu-terons pas ici en raison de sa complexité, mais onpeut relever qu’elle n’empêche nullement d’affirmerque le soleil tourne autour de la terre.
Le second problème tient dans la cinématiquedes planètes du système solaire. Il est aujourd’huiincontestable que les planètes tournent autour dusoleil selon des orbites elliptiques et non, commel’envisageait Ptolémée, autour de la terre. Car lemodèle utilisé à l’époque, qui faisait tourner lesplanètes autour de la terre et sur des épicyclesb
aOn trouve dans (Galileo Galilei, 1992, p. 274) le textesuivant :
“si la Terre est immobile, il faut que le soleil
et les étoiles fixes se meuvent, mais il se peut
aussi que le Soleil et les fixes soient immobiles
si c’est la Terre qui se meut.”
bLes épicycles sont de petits cercles dont le centre tourne
Fig. E.1 – Le système géocentrique de Tycho BrahéUn modèle encore actuel50.
pour expliquer leur rétrogradationc dans le ciel, estclairement faux. Les observations, notamment cellede l’orbite de Mars, l’invalident. Mais, il n’est pasfaux en raison de l’affirmation de la rotation du so-leil autour de la terre, mais en raison de celle dela rotation des planètes autour de la terre sur descercles avec des épicycles.
Cette erreur, qui est celle du modèle de Ptolé-mée, si elle est bien une erreur, n’empêche pas qu’onpuisse considérer que le soleil tourne autour de laterre, vu depuis la terre. Elle fut d’ailleurs reconnueet corrigée par Tycho Brahé qui proposa un modèle(voir figure E.1) où la terre restait fixe dans l’uni-vers, où le soleil tournait autour d’elle et les autresplanètes tournaient autour. . . du soleil. Ce modèle,excepté la fixité de la terre dans l’univers qui relèvedu premier problème énoncé ci-dessus, est parfai-tement valide. Il s’agit tout simplement de la vi-sion du système solaire relativement à la terre. Etla description actuelle des mouvements célestes vudepuis la terre adopte un point de vue très prochede celui de Tycho Brahé, exception faite des orbitescirculaires qui sont devenues des ellipses.
sur un plus grand cercle, le déférent, centré sur la terre. Lesplanètes tournent sur les épicycles qui eux-mêmes tournentautour de la terre.
cLa rétrogradation est le fait que les planètes plus éloi-gnées du soleil que la terre, semblent parfois, vu depuis laterre, revenir en arrière dans le ciel par rapport aux étoilesfixes.
106

ANNEXE E. ROTATIONS E.4. VITESSE ET RÉFÉRENTIEL
E.3 Rotation du soleil dans lavoie lactée
On se propose de calculer la vitesse de rotationdu soleil dans notre galaxie la voie lactée.
La figure E.2 présente une vue d’artiste de la voielactée telle qu’on se la représente. La position dusoleil y figure sous la forme d’un point jaune.
Fig. E.2 – Le soleil dans la voie lactéeReprésentation artistique51
Le calcul est simple. Il se base sur les donnéessuivantes :
– la distance du soleil au centre de la galaxie vautenviron : RS→G = 26′000 AL et
– la période sidérale de rotation du soleil autourdu centre de la galaxie vaut environ : Ts =220 · 106 ans
On a que 220 millions d’années représentent ensecondes :
220 · 106 ans = 220 · 106 · 365 · 24 · 3600
= 6, 937 · 1015 s
Pendant ce temps, le soleil fait un cercle de rayon26′000 AL. La distance qu’il parcourt vaut donc :
d = 2 · π · 26′000 · 9, 4608 · 1015 = 1, 546 · 1021 m
car, comme la vitesse de la lumière vaut300′000 km/s, on a que :
1 AL = 300′000′000 ·3600 ·24 ·365 = 9, 4608 ·1015 m
Le calcul est alors celui de la vitesse d’un corpsen rotation sur un cercle de rayon et de périodedonnés. On a :
v =d
t=
2 · π · RS→G
Ts
=1, 546 · 1021
6, 937 · 1015
= 222′863 m/s = 222, 863 km/s = 222, 863 · 3600
= 802′306 km/h
Cette vitesse est incroyable. Nous ne la ressentonsà nouveau pas ou peu toujours à cause de l’inertie.
Notons que cette vitesse est la même pour toutesles étoiles proches du soleil qui participent au mou-vement de rotation autour du centre de la galaxie.Mais le soleil a aussi un mouvement propre, c’est-à-dire qu’une partie de sa vitesse ne correspond pas àsa vitesse de rotation autour du centre de la galaxie.Cette composante vaut environ 20 km/s.52
Relevons enfin une règle bien pratique pour latransformation d’unité entre les m/s et les km/h.On a en effet :
1 km/h =1 km
1 h=
1000 m
3600 s=
1
3, 6m/s
Ainsi, pour transformer des km/h en m/s, il fautdiviser le chiffre correspondant aux km/h par lefacteur 3, 6. Inversément, pour passer de m/s enkm/h, il faut multiplier les m/s par 3, 6.
E.4 Vitesse et référentiel
La question de savoir par rapport à quoi on cal-cule la vitesse se pose donc puisque les différentesvitesses calculées précédemment constituent cha-cune une partie de la vitesse d’un point immobile àl’équateur terrestre. Toutes ces vitesses sont doncrelatives à des référentiels différents.
Par exemple, la vitesse de rotation de la terresur elle-même est calculée dans un référentiel lié àla terre, au centre de celle-ci, mais ne tournant paspar rapport à elle. Il peut être fixé sur des étoilesproches qui, à l’échelle de la période de rotation dela terre, ne se déplacent pratiquement pas.
Pour évaluer la vitesse caractéristique du mou-vement propre du soleil dans la galaxie, mouve-ment auquel on a soustrait celui de rotation du
107

E.4. VITESSE ET RÉFÉRENTIEL ANNEXE E. ROTATIONS
soleil autour du centre de la galaxie, il faut utili-ser un référentiel dit LSR pour Local Standard ofRest, c’est-à-dire un référentiel standard local derepos. Celui-ci a été construit à l’aide des vitesseset positions moyennes des étoiles proches du soleil.Celles-ci sont donc statistiquement au repos dansle référentiel LSR. C’est ainsi qu’on peut étudier lemouvement propre du soleil.
En conclusion, on voit qu’il est indispensable detoujours rapporter un mouvement à un référentielpour que la vitesse associée ait du sens.
Cependant, on sait aujourd’hui qu’il n’existe pasde référentiel absolu par rapport auquel tout mou-vement pourrait être rapporté. Newton a cru enl’existence d’un tel référentiel, Einstein, dans la re-lativité restreinte et à l’aide des expériences de Mi-chelson et Morley, a démontré qu’il n’en existaitpas. Un mouvement est donc nécessairement tou-jours rapporté à un autre corps qui tient lieu deréférentiel.
108

Annexe FMRUA développements
F.1 La position
Pour un MRUA, la position est donnée par :
x =1
2· a · t2 + vo · t + xo (F.1)
Démonstration :Par définition la vitesse moyenne est :
v =x − xo
t⇒ x = v · t + xo
Mais, la vitesse moyenne peut aussi s’exprimerpar :
v =v + vo
2
Ainsi, on a :
x = v · t + vo =v + vo
2· t + xo
Or, par définition de l’accélération (constante) :
a = ao =v − vo
t⇒ v = ao · t + vo
Donc, on a :
x =v + vo
2· t + xo =
ao · t + vo + vo
2+ xo
=1
2· a · t2 + vo · t + xo
C’est ce qu’il fallait démontrer.
Fig. F.1 – Discours concernant deux sciences
nouvelles de GaliléeDiscours dans lesquels Galilée présente ses expériences sur la
chute des corps et fonde la mécanique. Il tente aussi d’ycréer une science de la résistance des matériaux53
F.2 Une autre relation bienpratique
F.2.1 Cinématique
Jusqu’à présent, les relations obtenues (la vi-tesse et la position) sont fonction du temps. Il estnéanmoins pratique dans bien des cas de disposerd’une relation où le facteur temps n’apparaît pas.Cette relation est facilement obtenue en éliminantle temps des deux équations de la vitesse et de laposition. Pour le calcul on part de équations duMRUA suivantes :
109

F.2. UNE AUTRE RELATION BIEN PRATIQUE ANNEXE F. MRUA DÉVELOPPEMENTS
v = ao · t + vo
x =1
2· a · t2 + vo · t + xo
Elles constituent généralement un système dedeux équations à deux inconnues, dont le tempst est l’une d’elles. Pour résoudre ce système et éli-miner le temps par substitution, on tire t de la pre-mière équation :
t =v − vo
ao
et on le remplace dans la seconde (faire lecontraire est aussi réalisable, mais mathématique-ment plus complexe) :
x =1
2· ao · (
v − vo
ao)2 + vo ·
v − vo
ao+ xo
=1
2· ao ·
(v − vo)2
a2o
+ vo ·v − vo
ao+ xo
=1
2· v2 − 2 · v · vo + v2
o
ao+
v · vo − v2o
ao+ xo
=v2 − 2 · v · vo + v2
o + 2 · v · vo − 2 · v2o
2 · ao+ xo
⇒ x =v2 − v2
o
2 · ao+ xo ⇒
v2 = v2o + 2 · ao · (x − xo) (F.2)
Cette relation est indépendante du temps t. Elleest canoniquement présentée sous cette forme.
F.2.2 Énergie
Il faut relever que la relation F.2 peut aussiêtre obtenue grâce au théorème de conservation del’énergie. En effet, imaginons un objet de masse mà une hauteur h qu’on lance à une vitesse vo versle bas. Son énergie cinétique initiale est non nulle,de même que son énergie potentielle initiale. Sonénergie potentielle finale est nulle. Par contre, son
énergie cinétique finale ne l’est pas. Par conserva-tion de l’énergie, on peut écrire :
Eicin + Ei
pot = Efcin + Ef
pot ⇒1
2· m · v2
o + m · g · h =1
2· m · v2 ⇒
v2 = v2o + 2 · g · h
Soit, de manière plus générale, en posant g = a eth = x − xo, ce qu’il fallait démontrer :
v2 = v2o + 2 · ao · (x − xo)
110
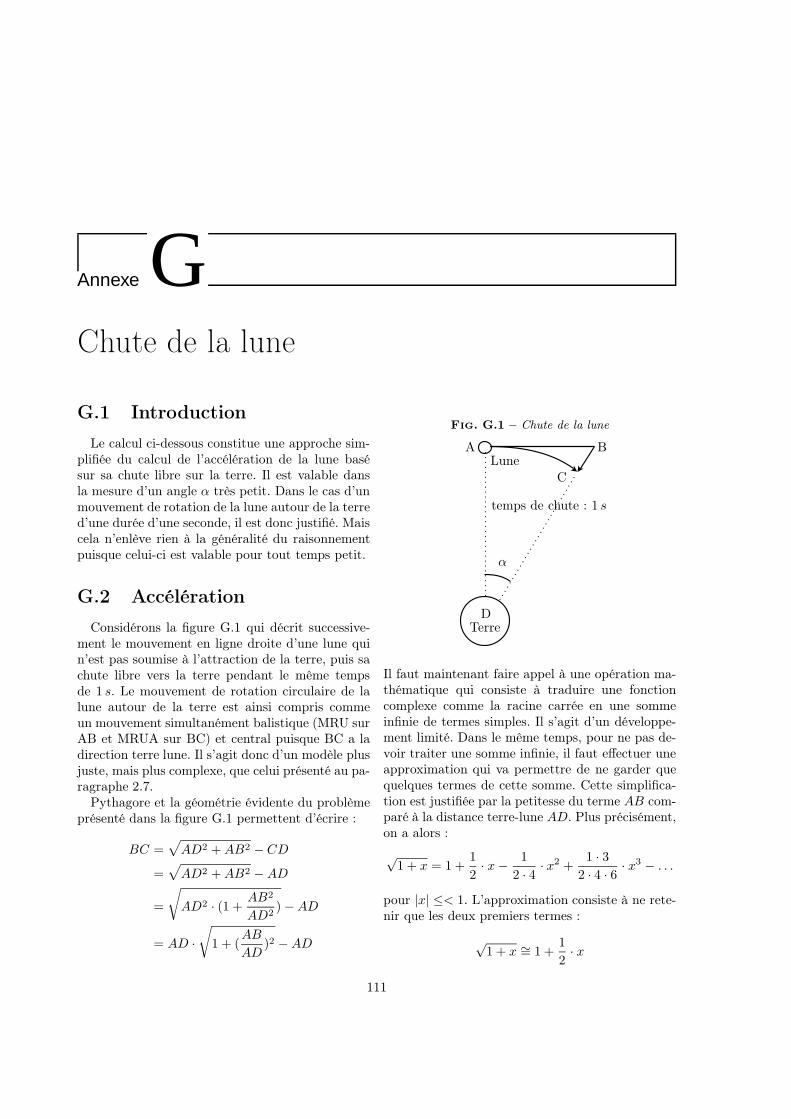
Annexe GChute de la lune
G.1 Introduction
Le calcul ci-dessous constitue une approche sim-plifiée du calcul de l’accélération de la lune basésur sa chute libre sur la terre. Il est valable dansla mesure d’un angle α très petit. Dans le cas d’unmouvement de rotation de la lune autour de la terred’une durée d’une seconde, il est donc justifié. Maiscela n’enlève rien à la généralité du raisonnementpuisque celui-ci est valable pour tout temps petit.
G.2 Accélération
Considérons la figure G.1 qui décrit successive-ment le mouvement en ligne droite d’une lune quin’est pas soumise à l’attraction de la terre, puis sachute libre vers la terre pendant le même tempsde 1 s. Le mouvement de rotation circulaire de lalune autour de la terre est ainsi compris commeun mouvement simultanément balistique (MRU surAB et MRUA sur BC) et central puisque BC a ladirection terre lune. Il s’agit donc d’un modèle plusjuste, mais plus complexe, que celui présenté au pa-ragraphe 2.7.
Pythagore et la géométrie évidente du problèmeprésenté dans la figure G.1 permettent d’écrire :
BC =√
AD2 + AB2 − CD
=√
AD2 + AB2 − AD
=
√
AD2 · (1 +AB2
AD2) − AD
= AD ·√
1 + (AB
AD)2 − AD
Fig. G.1 – Chute de la lune
Terre
Lune
temps de chute : 1 s
A B
C
D
α
Il faut maintenant faire appel à une opération ma-thématique qui consiste à traduire une fonctioncomplexe comme la racine carrée en une sommeinfinie de termes simples. Il s’agit d’un développe-ment limité. Dans le même temps, pour ne pas de-voir traiter une somme infinie, il faut effectuer uneapproximation qui va permettre de ne garder quequelques termes de cette somme. Cette simplifica-tion est justifiée par la petitesse du terme AB com-paré à la distance terre-lune AD. Plus précisément,on a alors :
√1 + x = 1 +
1
2· x − 1
2 · 4· x2 +
1 · 32 · 4 · 6
· x3 − . . .
pour |x| ≤< 1. L’approximation consiste à ne rete-nir que les deux premiers termes :
√1 + x ∼= 1 +
1
2· x
111

G.3. FORCE DE GRAVITATION ANNEXE G. CHUTE DE LA LUNE
Ainsi, en raison du fait que :
(AB
AD)2 � 1
on peut écrire, à fortiori, la suite du calcul précé-dent :
BC = AD ·√
1 + (AB
AD)2 − AD
= AD · (1 +1
2· (AB
AD)2) − AD
= AD + AD · 1
2· (AB
AD)2 − AD
= AD · 1
2· (AB
AD)2
Or, on peut calculer la vitesse angulaire sur untemps de 1 s par :
ω(t = 1 s) =α
t=
α
1= α
En considérant un angle α petit, on a d’autre part :
α ∼= tan(α) =AB
AD
Ce qui permet d’écrire :
ω =AB
AD
En remplaçant AD par dterre−lune, on peut finale-ment trouver BC :
BC = dterre−lune ·1
2· ω2 (G.1)
Mais, si on fait l’hypothèse d’une chute libre de lalune en MRUA pendant une seconde, on a :
BC =1
2· a · t2 =
1
2· a (G.2)
Si on considère maintenant le mouvement de rota-tion de la lune pendant une période T , soit pen-dant 27, 33 jours, sur un tour (2 · π rad) autour dela terre, on peut écrire :
ω =2 · πT
Et en réunissant alors les équations G.1 et G.2, on
a :
1
2· a =
1
2· dterre−lune · ω2 ⇒
a = dterre−lune · ω2 = dterre−lune · (2 · πT
)2
= 3, 844 · 108 · ( 2 · π27, 33 · 24 · 3600
)2
= 2, 72 · 10−3 m/s2 = 2, 72 mm/s2
On peut comparer cette valeur à la valeur exactedonnée à la fin du paragraphe 2.5.5 :
a = 2, 7 · 10−3 m/s2
G.3 Force de gravitation
On peut aller plus loin en déterminant le rap-port r de l’accélération de la lune à l’accélérationterrestre :
r =g
a=
9, 81
2, 72 · 10−3= 3607
et en remarquant que c’est précisément le rapportdes carrés des distances dterre−lune et Rterre :
r =d2
terre−lune
R2terre
=(3, 844 · 108)2
(6, 371 · 106)2= 3640
La conséquence en est que l’accélération due aupoids est inversément proportionnelle au carré dela distance. Comme F = m · a, la force de gravita-tion est aussi inversément proportionnelle au carrédes distances :
F ∼ 1
r2
On voit apparaître là la loi de la gravitation uni-verselle.
112
Annexe HSatellite en orbite géostationnaire
H.1 Introduction
Un exemple intéressant de l’utilisation de la se-conde loi de Newton, du mouvement circulaire uni-forme et de la loi de la gravitation universelle, estdonné par le calcul de l’altitude nécessaire pourqu’un satellite soit en orbite géostationnaire.
H.2 Théoriquement
On va donc utiliser les équations suivantes :
F = m · a : seconde loi de Newtona = v2
R : mouvement circulaire uniformeF = G · M·m
R2 : loi de la gravitation universelle
De ces trois lois, on tire :
G · MT · ms
(RT + h)2= ms ·
v2
(RT + h)
où :– G est la constante de la gravitation universelle,– MT est la masse de la terre,– ms est la masse du satellite,– RT est le rayon de la terre,– h est l’altitude du satellite et– v est la vitesse linéaire du satellite.Avec, par définition de la vitesse, pour une tra-
jectoire circulaire :
v =2 · π · (RT + h)
T
Fig. H.1 – SatelliteEn orbite géostationnaire54
où : T est la période du mouvement, c’est à direle temps que doit mettre le satellite pour faire untour autour de la terre.
De là on tire (faites les calculs par vous même) :
h = (G · MT · T 2
4 · π2)
1
3 − RT
113
H.4. LOI DE KEPLER ANNEXE H. SATELLITE EN ORBITE GÉOSTATIONNAIRE
H.3 Numériquement
Le calcul est simple :
h = (6, 67 · 10−11 · 5, 97 · 1024 · (24 · 60 · 60)2
4 · π2)
1
3
− 6, 37 · 106 = 35′857 km
Il s’agit de l’altitude des satellites en orbite géo-stationnaire au-dessus de l’équateur. Pour des lati-tudes plus élevées, on comprend bien que plus onmonte vers le pôle, plus le satellite sera bas surl’horizon. Il se peut même qu’ils soient sous l’ho-rizon. C’est pouquoi, d’autres types d’orbites sontnécessaires, comme l’orbite de Molniya, qui permetde couvrir à l’aide de plusieurs satellites les régionspolaires vingt-quatre heures sur vingt-quatre.
H.4 Loi de Kepler
Une autre manière de parvenir au même résultatconsiste à utiliser la troisième loi de Kepler et lalune. En effet, selon l’équation 2.16 de la page 43,on peut écrire :
R3terre−lune
T 2lune
=(RT + h)3
T 2sat
⇒
RT + h = Rterre−lune · 3
√
T 2sat
T 2lune
= 384′404 · 3
√
242
(27 · 24 + 8)2
= 42′364 km ⇒h = 42′364 − RT = 35′993 km
Et on retrouve (aux arrondis près) le même ré-sultat que précédemment.
114
Annexe IRelativité
La notion de relativité est entourée d’une auraparticulière. Elle évoque immanquablement Ein-stein et des idées entourées de mystère comme la di-latation du temps ou la courbure de l’espace. Mêmesi cette notion se comprend de nos jours à travers lesrelativités restreinte et générale d’Einstein, elle estdéjà présente chez Bruno au xvie siècle et Galiléeau xviie siècle. On parle aujourd’hui de relativitégaliléenne pour faire la différence avec celles d’Ein-stein. Dans tous les cas, cette notion nous mèneà considérer des changements de référentiels et àétudier le changement de forme des lois de la phy-sique à travers ceux-ci. Sans aborder les relativitésrestreinte et générale d’Einstein, qui traitent deslois de l’électromagnétisme et de la gravitation àtravers ces changements de référentiels, on va s’in-téresser ici à la notion de relativité galiléenne et àses implications pour la physique newtonienne.
I.1 Relativité galiléenne
Deux textes historiques fondent l’idée de relati-vité. Le plus connu est celui de Galileo Galilei (Ga-lilée) :
“Enfermez-vous avec un ami dans lacabine principale à l’intérieur d’un grandbateau et prenez avec vous des mouches,des papillons et d’autres petits animauxvolants. Prenez une grande cuve d’eauavec un poisson dedans, suspendez unebouteille qui se vide goutte à goutte dansun grand récipient en dessous d’elle. Avecle bateau à l’arrêt, observez soigneuse-ment comment les petits animaux volent
à des vitesses égales vers tous les côtésde la cabine. Le poisson nage indifférem-ment dans toutes les directions, les gouttestombent dans le récipient en dessous, etsi vous lancez quelque chose à votre ami,vous n’avez pas besoin de le lancer plusfort dans une direction que dans uneautre, les distances étant égales, et si voussautez à pieds joints, vous franchissezdes distances égales dans toutes les direc-tions. Lorsque vous aurez observé toutesces choses soigneusement (bien qu’il n’yait aucun doute que lorsque le bateau est àl’arrêt, les choses doivent se passer ainsi),faites avancer le bateau à l’allure qui vousplaira, pour autant que la vitesse soit uni-forme [c’est-à-dire constante] et ne fluc-tue pas de part et d’autre. Vous ne ver-rez pas le moindre changement dans au-cun des effets mentionnés et même aucund’eux ne vous permettra de dire si le ba-teau est en mouvement ou à l’arrêt . . .”Galileo Galilei, dans “Dialogue concernantles deux plus grands systèmes du monde”,deuxième journée, 1632.
(Gruber Christian, 1988, p. 400.)
Galilée décrit tout d’abord un changement de réfé-rentiel particulier. Il s’agit de passer d’un lieu im-mobile sur la terre ferme à la cabine d’un navirese déplaçant uniformément, c’est-à-dire à vitesseconstante. Il n’est donc pas question d’un référen-tiel en accélération par exemple. On parlera doncde relativité restreinte. Puis, Galilée compare lesmouvements dans ces deux référentiels et conclutqu’il n’y a pas de moyens de les différencier. L’ex-
115

I.2. TRANSFORMATION GALILÉENNE ANNEXE I. RELATIVITÉ
plication actuelle complète et étend ce résultat quiconstitue l’idée de relativité. Elle s’exprime par :
Les lois de la physique sont formel-lement les mêmes dans deux référentielsen translation à vitesse constante l’un parrapport à l’autre.
Cette idée, au contraire de dire que “tout est rela-tif”, affirme que la forme des lois de la physique estpréservée par ce type de changement de référentiel.Elle en assure la généralité pour des observateurs enmouvement rectiligne uniforme les uns par rapportaux autres.
Le plus ancien à pour auteur Jordano Bruno.
“Si nous supposons une personne surun bateau en mouvement au milieu desflots, celui qui ne sait pas que l’eau esten mouvement et qui ne voit pas la terreferme, ne sera pas conscient du mou-vement du bateau . Pour cette raison,j’en viendrai à mettre en doute la quié-tude et la fixité de notre Terre. Et jesuis en mesure de croire que si j’étaissur le Soleil, la Lune ou sur une autreétoile, je m’imaginerais toujours au centredu monde sans mouvement autour duquelsemblerait tourner l’univers entier, bienqu’en vérité le corps contenant sur lequelje me trouve serait en train de tournersur lui-même. Ainsi je ne puis en rienêtre certain de ce qui distingue un corpsmobile d’un corps stable.” Jordano Bruno,dans “L’Infini, l’univers et les mondes”,troisième dialogue, 1584.
(Jean Rocchi, 2000, p. 170.)
Bruno, bien avant Galilée avait posé très clairementles bases du principe de relativité. Et Bruno allaplus loin que Galilée en postulant la pluralité desmondes. Cela lui coûta la vie puisqu’il fut brûlé vifen 1600.
I.2 Transformation galiléenne
Le changement de référentiel sur lequel se basela relativité restreinte de Galilée (ou de Bruno) ade nos jours une formulation mathématique pré-cise. Pour la découvrir, considérons la figure I.1 quiprésente deux référentiels R et R′ dont l’un, R′, sedéplace en ligne droite à vitesse constante vref par
Fig. I.1 – Transformation de GaliléeSelon l’axe x.
rapport à l’autre. Pour simplifier les calculs, le dé-placement de R′ se fait selon l’axe x du référentielR.
On peut donner la position du point P danschaque référentiel à l’aide des coordonnées x et x′.Si on admet, pour simplifier, que les deux référen-tiels avaient à t = 0 s la même origine, la positionde l’origine du référentiel R′ à un instant t par rap-port à R vaut alors vref · t. On peut alors écrirepour le point P :
x′ = x − vref · t (I.1)
L’équation I.1 constitue la transformation de Gali-lée, sous sa forme la plus simplifiée. Il faut cepen-dant lui ajouter une équation ici évidente :
t′ = t
qui postule l’invariance du temps par changementde référentiel.
On peut dériver de l’équation I.1 un corollaire im-portant : le théorème d’addition des vitesses. Consi-dérons le déplacement du point P le long de l’axe x.Notons xf la position finale et xi la position initialedu point P . En notant v la vitesse du point P , enutilisant le ’ pour les grandeurs dans le référentielR′ et avec la transformation de Galilée, on a :
v′ =x′
f − x′
i
t′f − t′i=
(xf − vref · tf ) − (xi − vref · titf − ti
=xf − xi − vref · (tf − ti)
tf − ti=
xf − xi
tf − ti− vref
v′ = v − vref (I.2)
L’expression I.2 constitue le théorème d’additiondes vitesses. Il traduit à l’idée que la vitesse d’un
116

ANNEXE I. RELATIVITÉ I.4. FORCES INERTIELLES
point P dans le référentiel R′ correspond à sa vi-tesse dans le référentiel R à laquelle on soustraitla vitesse du référentiel R′ lui-même. Plus simple-ment, en inversant l’équation I.2, on a :
v = v′ + vref (I.3)
Cette équation I.3 se comprend aisément en disantque la vitesse par rapport au sol du passager d’untrain correspond à sa vitesse par rapport au train àlaquelle on ajoute la vitesse du train lui-même (parrapport au sol).
I.3 Invariance
La transformation de Galilée permet maintenantd’étudier précisément le changement des lois de laphysique par changement de référentiel. La trans-formation de galilée se restreint aux référentiels enMRU les uns par rapport aux autres. La relativitéde Galilée utilisant implicitement cette transforma-tion est donc une relativité restreinte. Voyons doncdans quelle mesure la transformation de Galilée mo-difie la seconde loi de Newton.
Comme précédemment, notons avec un indice i
l’instant initial et un indice f l’instant final et cal-culons la force F ′ exercée sur un objet de masse mdont l’accélération dans le référentiel R′ vaut a′ :
F ′ = m · a′ = m ·v′f − v′it′f − t′i
= m · (vf − vref ) − (vi − vref )
tf − ti
= m ·vf − vi
tf − ti= m · a = F
On utilise l’équation I.2 pour changer de référen-tiel et le fait qu’en relativité galiléenne la masse mest invariante par changement de référentiel. Fina-lement, on obtient :
F ′ = m · a′ = m · a = F (I.4)
Ainsi, la seconde loi de Newton s’écrit de la mêmemanière dans les deux référentiels R et R′. On ditqu’elle est formellement invariante par changementde référentiel. En d’autres termes, aucune expé-rience vérifiant la seconde loi de Newton ne peut
permettre de faire la distinction entre les référen-tiels R et R′. Pour Bruno, cela s’exprime par :“Ainsi je ne puis en rien être certain de ce quidistingue un corps mobile d’un corps stable.” etpour Galilée, “. . .aucun des effets mentionnés [. . .]ne vous permettra de dire si le bateau est en mou-vement ou à l’arrêt . . .” comme on l’a vu dans lescitations ci-dessus.
Les lois de la physique sont donc formellement lesmêmes dans les deux référentiels et rien ne permetde dire que l’un est en mouvement et l’autre pas.
I.4 Forces inertielles
Comme cela a été dit plus haut, l’invariance dela seconde loi de Newton n’existe que dans le cadrede la relativité restreinte, pour des référentiels ditsinertiels, c’est-à-dire se déplaçant les uns par rap-port aux autres en mouvement rectiligne uniforme.Mais qu’en est-il quand on considère d’autres réfé-rentiels qui ne se déplacent pas l’un par rapport àl’autre en ligne droite et à vitesse constante ? Dansle cas de référentiels en rotation par exemple, laseconde loi de Newton est-elle vraiment caduque ?
Il ne s’agit pas ici de développer la dynamique detels référentiels. Seuls deux aspects qu’on évoqueparfois, sans vraiment savoir ce dont il s’agit, vontêtre abordés. Il s’agit du concept de force d’inertieet de celui de force centrifuge.
I.4.1 Force d’inertie
La notion de force d’inertie est très complexe,tant au niveau mathématique (produit vectoriel)qu’au niveau conceptuel (voir le paragraphe I.4.2).L’idée est ici de montrer que la seconde loi de New-ton n’est pas invariante par un changement de ré-férentiel non-inertiel. En d’autres termes, pour dé-crire le mouvement d’une particule dans un référen-tiel tournant, il faut soit ajouter des forces fictives(point de vue de Newton) dont l’une est la forced’inertie, soit interpréter celle-ci comme un champde gravitation supplémentaire. On va présenter icile premier point de vue.
Considérons deux référentiels R et R′ qui ne sontpas en MRU l’un par rapport à l’autre, mais dontle second, R′, est en rotation à la vitesse angulaireωref par rapport au premier, R. Contrairement à
117

I.4. FORCES INERTIELLES ANNEXE I. RELATIVITÉ
l’invariance de l’accélération par une transforma-tion de Galilée, on montre (voir (Gruber Christian,1988, p. 202-204.)) que l’accélération d’un objetdans le référentiel R′ n’est pas la même que dansle référentiel R. Plus précisément, l’accélération adans le référentiel R vaut :
a = a′ + aref (I.5)
où a′ est l’accélération dans le référentiel R′ et aref
l’accélération du référentiel R′ par rapport à R.
C’est là un changement fondamental qui restreintla portée de la relativité galiléenne (et qui a menéEinstein vers la relativité générale).
Comme on a vu au paragraphe 3.2.3, page 55,qu’un objet en rotation circulaire uniforme a uneaccélération centripète, c’est-à-dire dirigée vers lecentre du cercle, donnée par :
ac =v2
r
où v est la vitesse linéaire de l’objet et r le rayondu cercle, on peut appliquer cette relation pour ex-primer l’accélération aref de R′ par rapport à R àl’aide de la vitesse v d’un point du référentiel R′
situé à une distance r de l’axe de rotation. De plus,l’équation 2.13 permet d’exprimer cette accéléra-tion en fonction de la vitesse angulaire ωref . On adonc :
aref =v2
r=
(ω · r)2
r= ω2 · r (I.6)
L’équation I.5 de l’accélération d’un objet par rap-port au référentiel R′ peut alors s’écrire :
a = a′ + ω2 · r (I.7)
Les équations de la cinématique ne sont donc paspréservées par un tel changement de référentiel(non inertiel).
La dynamique n’est évidemment pas non pluspréservée. L’accélération se trouvant au cœur dela seconde loi de Newton, elle ne peut rester for-mellement invariante. En effet, si elle s’écrit dansle référentiel R :
∑
F ext = m · a (I.8)
elle doit s’écrire dans le référentiel R′ :∑
F ′ext = m · a′
= m · (a − ω2 · r)= m · a − m · ω2 · r (I.9)
Visiblement l’équation I.8 est formellement diffé-rente de I.9.
On peut cependant modifier l’équation I.9 décri-vant le mouvement dans le référentiel en rotation R′
pour qu’elle corresponde à l’expression I.8 donnéepour le référentiel R :
∑
F ′ext + m · ω2 · r = m · a (I.10)∑
F ext =∑
F ′ext + Fin = m · a (I.11)
En réinterprétant le terme correspondant à l’accé-lération du référentiel R′ comme une force d’inertie(Fin) qui s’additionne aux forces réellement exer-cées sur l’objet, on peut s’imaginer préserver laforme de la seconde loi de Newton. Bien entendu,ce n’est qu’une manière de masquer le problème,puisque pour le référentiel R′ uniquement, il fautajouter la force d’inertie. Et comme cette force n’aaucune réalité, comme aucun corps ne l’exerce, elleest considérée comme une force fictive, une pseudo-force qui n’a pas d’existence propre. On lui donneun nom : la force centrifuge.
I.4.2 Force centrifuge
Du point de vue de la mécanique newtonienne, laforce centrifuge est donc une pseudo-force à n’intro-duire dans la seconde loi que pour des référentielsnon inertiels (c’est-à-dire accélérés). Dans le cadred’une annexe portant sur la relativité, il convientde mentionner que cette force peut ne pas être vuecomme une pseudo-force. Einstein va lui donner une“réalité” en la considérant comme une force de gra-vitationa. Cela va le mener à redéfinir la notionmême de gravitation à travers la courbure de l’es-pace.
aLe cas d’un pendule placé dans un train qui accélèrepermet de comprendre le lien entre l’inertie et la gravitation(voir (Gruber Christian, 1988, p. 400-404.))
118
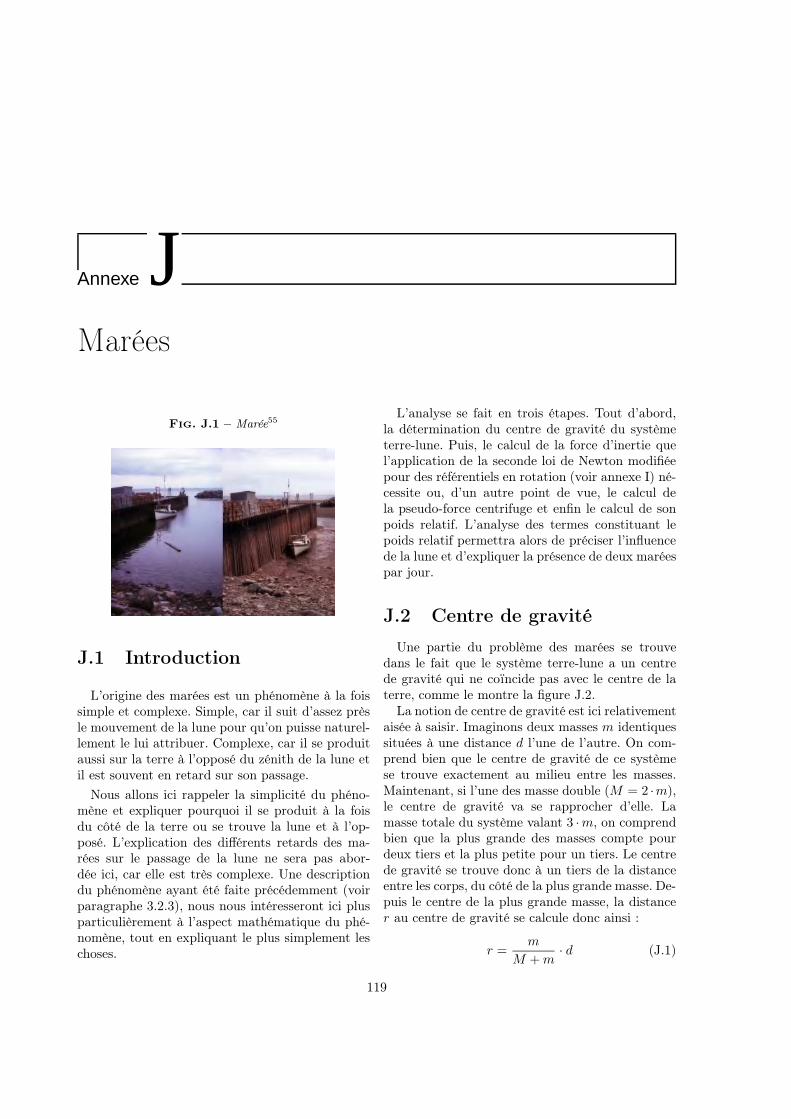
Annexe JMarées
Fig. J.1 – Marée55
J.1 Introduction
L’origine des marées est un phénomène à la foissimple et complexe. Simple, car il suit d’assez prèsle mouvement de la lune pour qu’on puisse naturel-lement le lui attribuer. Complexe, car il se produitaussi sur la terre à l’opposé du zénith de la lune etil est souvent en retard sur son passage.
Nous allons ici rappeler la simplicité du phéno-mène et expliquer pourquoi il se produit à la foisdu côté de la terre ou se trouve la lune et à l’op-posé. L’explication des différents retards des ma-rées sur le passage de la lune ne sera pas abor-dée ici, car elle est très complexe. Une descriptiondu phénomène ayant été faite précédemment (voirparagraphe 3.2.3), nous nous intéresseront ici plusparticulièrement à l’aspect mathématique du phé-nomène, tout en expliquant le plus simplement leschoses.
L’analyse se fait en trois étapes. Tout d’abord,la détermination du centre de gravité du systèmeterre-lune. Puis, le calcul de la force d’inertie quel’application de la seconde loi de Newton modifiéepour des référentiels en rotation (voir annexe I) né-cessite ou, d’un autre point de vue, le calcul dela pseudo-force centrifuge et enfin le calcul de sonpoids relatif. L’analyse des termes constituant lepoids relatif permettra alors de préciser l’influencede la lune et d’expliquer la présence de deux maréespar jour.
J.2 Centre de gravité
Une partie du problème des marées se trouvedans le fait que le système terre-lune a un centrede gravité qui ne coïncide pas avec le centre de laterre, comme le montre la figure J.2.
La notion de centre de gravité est ici relativementaisée à saisir. Imaginons deux masses m identiquessituées à une distance d l’une de l’autre. On com-prend bien que le centre de gravité de ce systèmese trouve exactement au milieu entre les masses.Maintenant, si l’une des masse double (M = 2 ·m),le centre de gravité va se rapprocher d’elle. Lamasse totale du système valant 3 ·m, on comprendbien que la plus grande des masses compte pourdeux tiers et la plus petite pour un tiers. Le centrede gravité se trouve donc à un tiers de la distanceentre les corps, du côté de la plus grande masse. De-puis le centre de la plus grande masse, la distancer au centre de gravité se calcule donc ainsi :
r =m
M + m· d (J.1)
119
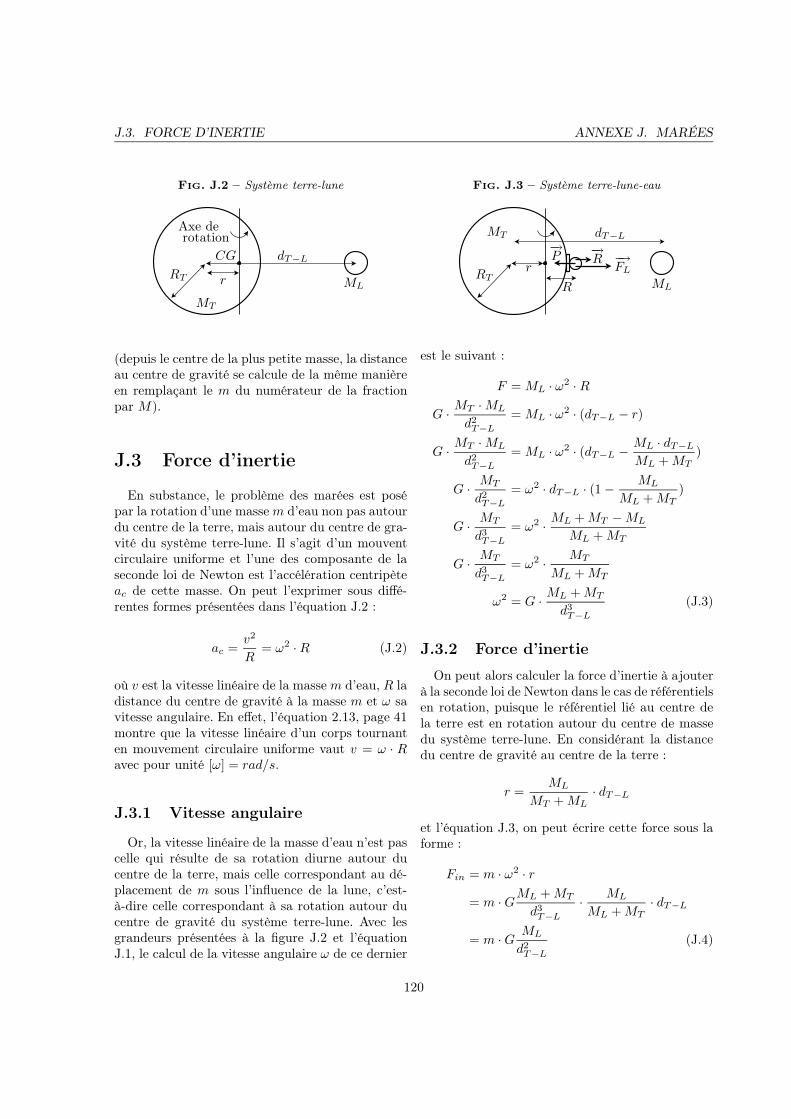
J.3. FORCE D’INERTIE ANNEXE J. MARÉES
Fig. J.2 – Système terre-lune
MT
CG
r
dT−L
ML
Axe derotation
RT
(depuis le centre de la plus petite masse, la distanceau centre de gravité se calcule de la même manièreen remplaçant le m du numérateur de la fractionpar M).
J.3 Force d’inertie
En substance, le problème des marées est posépar la rotation d’une masse m d’eau non pas autourdu centre de la terre, mais autour du centre de gra-vité du système terre-lune. Il s’agit d’un mouventcirculaire uniforme et l’une des composante de laseconde loi de Newton est l’accélération centripèteac de cette masse. On peut l’exprimer sous diffé-rentes formes présentées dans l’équation J.2 :
ac =v2
R= ω2 · R (J.2)
où v est la vitesse linéaire de la masse m d’eau, R ladistance du centre de gravité à la masse m et ω savitesse angulaire. En effet, l’équation 2.13, page 41montre que la vitesse linéaire d’un corps tournanten mouvement circulaire uniforme vaut v = ω · Ravec pour unité [ω] = rad/s.
J.3.1 Vitesse angulaire
Or, la vitesse linéaire de la masse d’eau n’est pascelle qui résulte de sa rotation diurne autour ducentre de la terre, mais celle correspondant au dé-placement de m sous l’influence de la lune, c’est-à-dire celle correspondant à sa rotation autour ducentre de gravité du système terre-lune. Avec lesgrandeurs présentées à la figure J.2 et l’équationJ.1, le calcul de la vitesse angulaire ω de ce dernier
Fig. J.3 – Système terre-lune-eau
MT
r
dT−L
MLRT
−→R −→
FL
−→P
R
est le suivant :
F = ML · ω2 · R
G · MT · ML
d2T−L
= ML · ω2 · (dT−L − r)
G · MT · ML
d2T−L
= ML · ω2 · (dT−L − ML · dT−L
ML + MT)
G · MT
d2T−L
= ω2 · dT−L · (1 − ML
ML + MT)
G · MT
d3T−L
= ω2 · ML + MT − ML
ML + MT
G ·MT
d3T−L
= ω2 ·MT
ML + MT
ω2 = G · ML + MT
d3T−L
(J.3)
J.3.2 Force d’inertie
On peut alors calculer la force d’inertie à ajouterà la seconde loi de Newton dans le cas de référentielsen rotation, puisque le référentiel lié au centre dela terre est en rotation autour du centre de massedu système terre-lune. En considérant la distancedu centre de gravité au centre de la terre :
r =ML
MT + ML· dT−L
et l’équation J.3, on peut écrire cette force sous laforme :
Fin = m · ω2 · r
= m · GML + MT
d3T−L
· ML
ML + MT· dT−L
= m · G ML
d2T−L
(J.4)
120

ANNEXE J. MARÉES J.5. AUTRES RYTHMES
J.4 Poids relatif
On peut maintenant calculer le poids relatif àl’aide de la seconde loi de Newton. La masse d’eaum est en équilibre statique dans le référentiel lié aucentre de la terre et son accélération est nulle. Onpeut s’imaginer cette masse comme posée sur unebalance. Les forces qui s’exercent sur elle sont sonpoids P , correspondant à l’attraction de la terre,l’attraction FL de la lune, la force d’inertie Fin etla réaction R de la balance qui constitue le poidsapparent de la masse d’eau. Si on choisit un axedirigé vers le centre de la terre, on peut ainsi écrire :
∑
F = P − R − FL + Fin = 0(= m · am) (J.5)
Soit en utilisant la loi de la gravitation universelleet l’équation J.4 dans l’équation J.5 :
P − R − GML · m
(dT−L − RT )2+ G
ML
d2T−L
= 0
P − R−
GML · md2
T−L
· (1 +2 · RT
dT−L) + G
ML
d2T−L
= 0 (J.6)
P − R − GML · md2
T−L
−
2GML · md3
T−L
· RT + GML · md2
T−L
= 0
P − R − 2GML · md3
T−L
· RT = 0 (J.7)
Où on a utilisé pour l’équation J.6 le développe-ment limité : (1 + x)p � 1 + p · x. On a alors :
1
(dT−L − RT )2=
1
d2T−L
· 1
(1 − RT /dT−L)2
=1
d2T−L
· (1 − RT /dT−L)−2
� 1
d2T−L
· (1 + (−2) · (− RT
dT−L))
=1
d2T−L
· (1 +2 · RT
dT−L)
En réorganisant les termes de l’équation J.7, onobtient finalement la force de réaction d’une ba-lance qu’on placerait sous la masse m d’eau :
R = P − 2 · GML · md3
T−L
· RT (J.8)
Cette équation se comprend par l’action du poidsP sur la masse d’eau m et par une force, dite forcede marée, opposée au poids et qui soulève la masse.
La force de marée de l’équation J.8 correspond àla force donnée par l’équation 3.20, page 61, et ledéveloppement ci-dessus en constitue une démons-tration.
L’analyse du rapport des forces de marées lunaireet solaire qui suit l’équation 3.20, page 61, et quiest issue de la forme de l’équation J.8, constitueaussi une suite logique au calcul présenté ci-dessusque nous ne reprendrons pas ici.
J.5 Autres rythmes
L’explication de la présence de deux marées parjour (dites de pleines et basses mers) ne constituequ’une partie de la compréhension du phénomènede marée. Même dans le cadre de la théorie deNewton, et sans entrer dans la théorie ondulatoire,d’autres périodes sont associées aux marées. Dansce paragraphe on va entrer dans ce qu’on peut appe-ler la dimension astronomique du phénomène. Évi-demment, c’est la gravitation qui reste le moteurdes influences. Mais, celles-ci varient en fonction dela position des astres.
J.5.1 Décalages
Une première conséquence du mouvement relatifde la lune sur les marées se présente sous la formed’un déplacement perpétuel des heure de pleine etbasse mer. Si la lune ne tournait pas autour de laterre, les pleine et basse mer auraient lieu toujoursau même moment dans la journée. Ce n’est pas lecas en raison du déplacement de la lune autour dela terre. En effet, comme le montre la figure J.4,pendant que la terre fait un tour sur elle-même envingtquatre heures, la lune se déplace. Comme cettedernière fait un tour autour de la terre en trentejours, en vingtquatre heures, c’est-à-dire en unejournée, la lune parcours un angle de 360/30 = 12◦.Au bout de vingtquatre heures, une personne si-tuée au point P ne verrait plus la lune au zénith(au-dessus d’elle). Il lui faudrait parcourir encoreun angle de 12◦ pour cela. Comme la terre par-cours 360◦ en vingtquatre heures, il lui faut encoreattendre 48 minutes pour se retrouver en situation
121
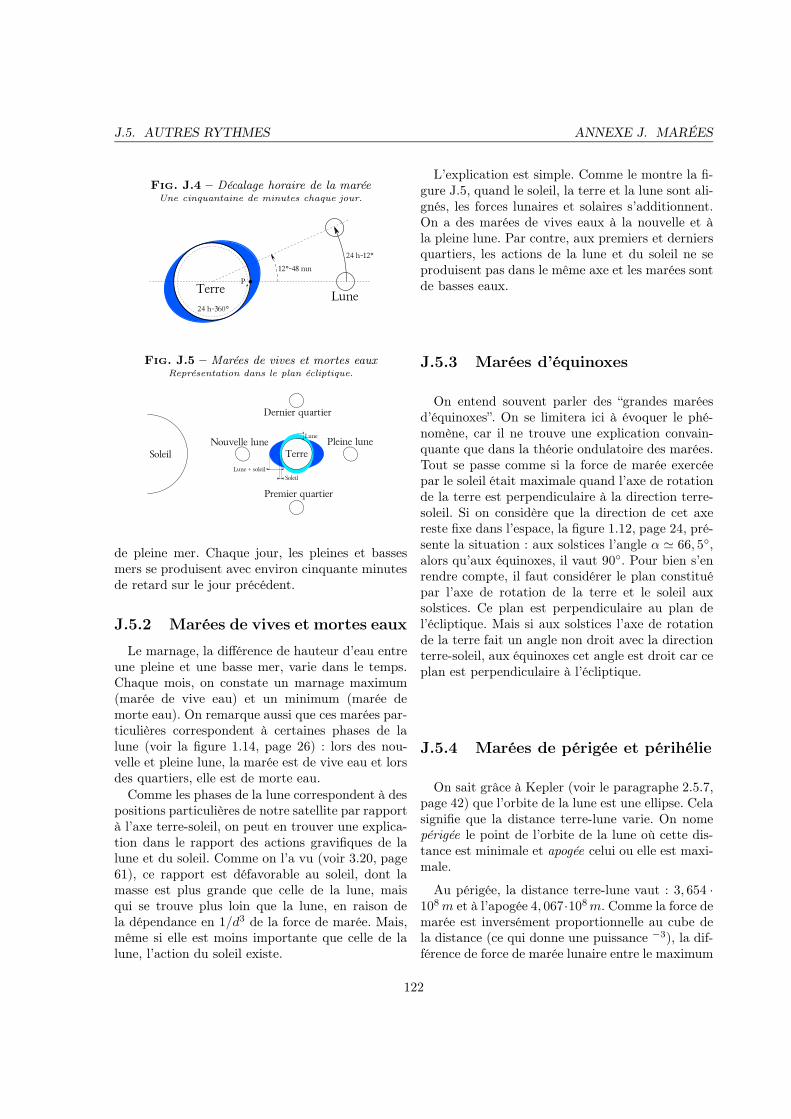
J.5. AUTRES RYTHMES ANNEXE J. MARÉES
Fig. J.4 – Décalage horaire de la maréeUne cinquantaine de minutes chaque jour.
Fig. J.5 – Marées de vives et mortes eauxReprésentation dans le plan écliptique.
de pleine mer. Chaque jour, les pleines et bassesmers se produisent avec environ cinquante minutesde retard sur le jour précédent.
J.5.2 Marées de vives et mortes eaux
Le marnage, la différence de hauteur d’eau entreune pleine et une basse mer, varie dans le temps.Chaque mois, on constate un marnage maximum(marée de vive eau) et un minimum (marée demorte eau). On remarque aussi que ces marées par-ticulières correspondent à certaines phases de lalune (voir la figure 1.14, page 26) : lors des nou-velle et pleine lune, la marée est de vive eau et lorsdes quartiers, elle est de morte eau.
Comme les phases de la lune correspondent à despositions particulières de notre satellite par rapportà l’axe terre-soleil, on peut en trouver une explica-tion dans le rapport des actions gravifiques de lalune et du soleil. Comme on l’a vu (voir 3.20, page61), ce rapport est défavorable au soleil, dont lamasse est plus grande que celle de la lune, maisqui se trouve plus loin que la lune, en raison dela dépendance en 1/d3 de la force de marée. Mais,même si elle est moins importante que celle de lalune, l’action du soleil existe.
L’explication est simple. Comme le montre la fi-gure J.5, quand le soleil, la terre et la lune sont ali-gnés, les forces lunaires et solaires s’additionnent.On a des marées de vives eaux à la nouvelle et àla pleine lune. Par contre, aux premiers et derniersquartiers, les actions de la lune et du soleil ne seproduisent pas dans le même axe et les marées sontde basses eaux.
J.5.3 Marées d’équinoxes
On entend souvent parler des “grandes maréesd’équinoxes”. On se limitera ici à évoquer le phé-nomène, car il ne trouve une explication convain-quante que dans la théorie ondulatoire des marées.Tout se passe comme si la force de marée exercéepar le soleil était maximale quand l’axe de rotationde la terre est perpendiculaire à la direction terre-soleil. Si on considère que la direction de cet axereste fixe dans l’espace, la figure 1.12, page 24, pré-sente la situation : aux solstices l’angle α � 66, 5◦,alors qu’aux équinoxes, il vaut 90◦. Pour bien s’enrendre compte, il faut considérer le plan constituépar l’axe de rotation de la terre et le soleil auxsolstices. Ce plan est perpendiculaire au plan del’écliptique. Mais si aux solstices l’axe de rotationde la terre fait un angle non droit avec la directionterre-soleil, aux équinoxes cet angle est droit car ceplan est perpendiculaire à l’écliptique.
J.5.4 Marées de périgée et périhélie
On sait grâce à Kepler (voir le paragraphe 2.5.7,page 42) que l’orbite de la lune est une ellipse. Celasignifie que la distance terre-lune varie. On nomepérigée le point de l’orbite de la lune où cette dis-tance est minimale et apogée celui ou elle est maxi-male.
Au périgée, la distance terre-lune vaut : 3, 654 ·108 m et à l’apogée 4, 067·108 m. Comme la force demarée est inversément proportionnelle au cube dela distance (ce qui donne une puissance −3), la dif-férence de force de marée lunaire entre le maximum
122

ANNEXE J. MARÉES J.5. AUTRES RYTHMES
et le minimum par rapport au minimum vaut :
∆F lunairemaree =
d−3perigee − d−3
apogee
d−3apoee
=(3, 654 · 108)−3 − (4, 067 · 108)−3
(4, 067 · 108)−3
� 0, 38 ≡ 38%
Ce rapport n’est de loin pas négligeable et il fauten tenir compte.
L’orbite de la terre autour du soleil est aussiune ellipse et la distance terre-soleil varie aussi. Onnome périhélie le point de l’orbite de la terre oùcette distance est minimale et aphélie le point leplus éloigné.
Au périhélie (le 3 janvier) la distance terre-soleilvaut : 1, 471 · 1011 m et à l’aphélie (le 3 juillet)1, 521 · 1011 m. Comme la force de marée est inver-sément proportionnelle au cube de la distance (cequi donne une puissance −3), la différence de forcede marée solaire entre le maximum et le minimumpar rapport au minimum vaut :
∆F solairemaree =
d−3perihelie − d−3
aphelie
d−3aphelie
=(1, 471 · 1011)−3 − (1, 521 · 1011)−3
(1, 521 · 1011)−3
� 0, 1 ≡ 10%
Bien que plus faible que pour la lune, ce rapportn’est pas non plus négligeable et il faut en tenircompte.
J.5.5 Marées de déclinaison
Jusque là, on a considéré que la lune tournaitdans le plan de l’écliptique. Ce n’est en réalité pasle cas. Elle tourne dans un plan dont l’inclinaisonpar rapport à l’écliptique varie de 5◦ à 5◦17′ enoscillant sur une période de 173 jours. La symétrieaxiale du champ de force de marée présentée à lafigure 3.8, page 61, évolue donc de part et d’autrede l’équateur au cours du temps.
Un rythme de plus . . .
J.5.6 Retards et marées côtières
La théorie newtonienne des marées, analysée àla lumière de l’astronomie de position, permet donc
une première compréhension du phénomène de ma-rée. Elle démontre clairement que le principal ac-teur expliquant celui-ci est la lune. Mais, elle n’ex-plique de loin pas tout. En effet, on peut noterdes décalages systématiques de plusieurs dizainesd’heures entre les marées de vive (ou morte) eau etles phases de la lune. Ce retard ne s’explique qu’enterme d’ondes.
De plus, si les prédictions de la théorie newto-nienne sont bons en haute mer, ils sont largementinsuffisant près des côtes ou des effets ondulatoiressont à prendre en compte.
La théorie ondulatoire de la marée repose sur decomplexes équations dites de Laplace et inacces-sible dans le cadre de ce cours. Mais, on peut trou-ver une bonne description mathématique de cettethéorie dans (Bernard Simon, 2007).
123

124
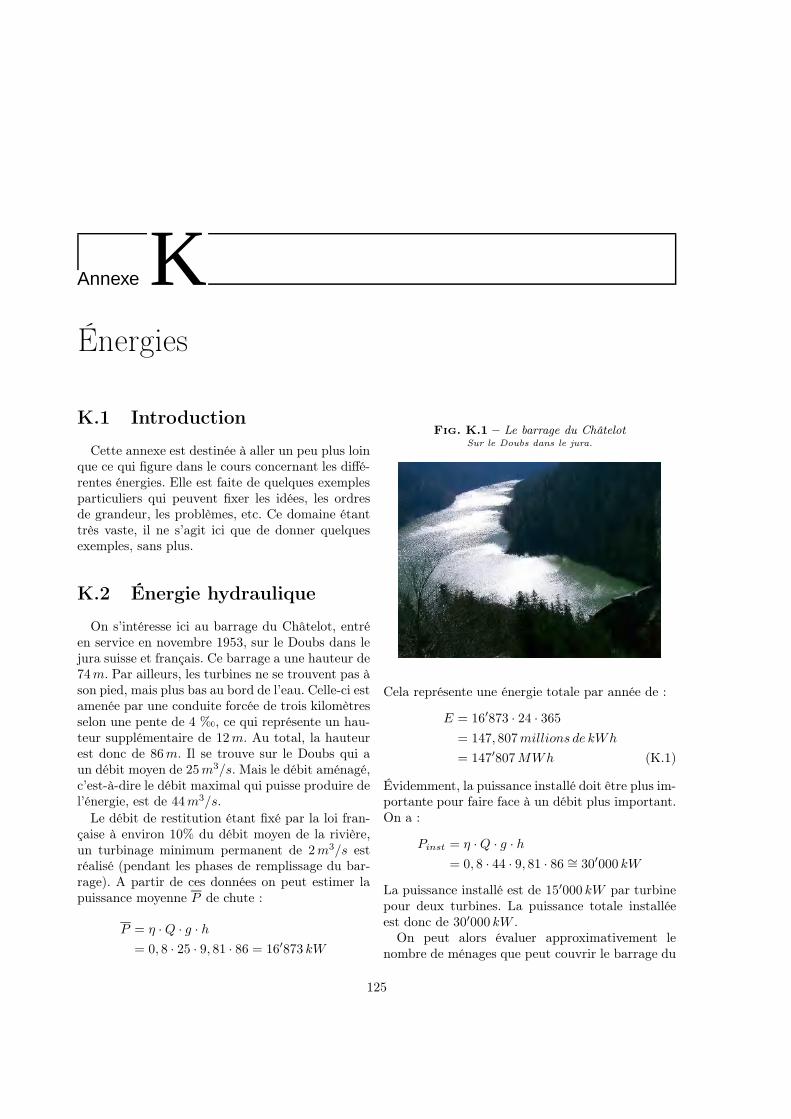
Annexe KÉnergies
K.1 Introduction
Cette annexe est destinée à aller un peu plus loinque ce qui figure dans le cours concernant les diffé-rentes énergies. Elle est faite de quelques exemplesparticuliers qui peuvent fixer les idées, les ordresde grandeur, les problèmes, etc. Ce domaine étanttrès vaste, il ne s’agit ici que de donner quelquesexemples, sans plus.
K.2 Énergie hydraulique
On s’intéresse ici au barrage du Châtelot, entréen service en novembre 1953, sur le Doubs dans lejura suisse et français. Ce barrage a une hauteur de74 m. Par ailleurs, les turbines ne se trouvent pas àson pied, mais plus bas au bord de l’eau. Celle-ci estamenée par une conduite forcée de trois kilomètresselon une pente de 4 ‰, ce qui représente un hau-teur supplémentaire de 12 m. Au total, la hauteurest donc de 86 m. Il se trouve sur le Doubs qui aun débit moyen de 25 m3/s. Mais le débit aménagé,c’est-à-dire le débit maximal qui puisse produire del’énergie, est de 44 m3/s.
Le débit de restitution étant fixé par la loi fran-çaise à environ 10% du débit moyen de la rivière,un turbinage minimum permanent de 2 m3/s estréalisé (pendant les phases de remplissage du bar-rage). A partir de ces données on peut estimer lapuissance moyenne P de chute :
P = η · Q · g · h= 0, 8 · 25 · 9, 81 · 86 = 16′873 kW
Fig. K.1 – Le barrage du ChâtelotSur le Doubs dans le jura.
Cela représente une énergie totale par année de :
E = 16′873 · 24 · 365
= 147, 807 millions de kWh
= 147′807 MWh (K.1)
Évidemment, la puissance installé doit être plus im-portante pour faire face à un débit plus important.On a :
Pinst = η · Q · g · h= 0, 8 · 44 · 9, 81 · 86 ∼= 30′000 kW
La puissance installé est de 15′000 kW par turbinepour deux turbines. La puissance totale installéeest donc de 30′000 kW .
On peut alors évaluer approximativement lenombre de ménages que peut couvrir le barrage du
125

K.3. ÉNERGIE ÉOLIENNE ANNEXE K. ÉNERGIES
Châtelot. En effet, sachant que ce barrage fournitla moitié de son énergie à la France et l’autre moi-tié à la Suissea et que la consommation électriquemoyenne par ménage est d’environ 2000 kWh/an,on a que le nombre n de ménages suisses couvertsest de :
n =147, 807 · 106
2 · 2000= 36′951 ménages
Très grossièrement, on peut dire que le barragecouvre trois fois les besoins des ménages (sans lesentreprises, commerces et administrations) de laville de la Chaux-de-Fonds (∼ 30′000 personnesc’est-à-dire, à trois personnes par ménages, ap-proximativement 10′000 ménages).
L’énergie électrique est distribuée vers la Suissepar quatre lignes haute tension de 60′000 V chacuneet par deux lignes sous la même tension vers laFrance.
K.3 Énergie éolienne
K.3.1 Règle de Betz
Démonstration de la règle de Betz :On s’imagine une éolienne brassant à l’aide de ses
pales une surface S. Si la vitesse du vent en amontest vamont, en un temps donné t toutes les parti-cules se trouvant jusqu’à une distance d = vamont ·td’elle la traverseront. Le volume d’air qu’elle bras-sera sera donc de :
V = S · d = S · vamont · t
En considérant la masse volumique de l’air ρ =m/V , on en tire la masse d’air que cela représente :
m = ρ · V = ρ · S · vamont · t
On peut alors calculer la puissance correspondantau déplacement de cette masse d’air :
P =Ecin
t=
12 · m · v2
amont
t
=1
2· m
t· v2
amont
=1
2· ρ · S · v3
amont
aSelon la Convention franco-suisse du 19 novembre 1930.
Si maintenant on considère qu’une partie de cetteénergie est prise au vent par l’éolienne, on s’imagineune diminution de sa vitesse en aval. Soit vaval cettevitesse. On peut considérer que la même masse d’airtraverse l’éolienne, mais à une vitesse moyenne plusfaible. On peut considérer (cela se justifie) que cettevitesse est la moyenne des vitesses en amont et enaval :
vmoy =vamont + vaval
2
Ainsi, le volume traversant l’éolienne est :
V = S · vmoy · t = S · vamont + vaval
2· t
Et la masse est alors :
m = ρ · S · vamont + vaval
2· t
La diminution de la puissance du flux d’air quicorrespond à la puissance reçue par l’éolienne estainsi :
∆P =∆Ecin
t=
Eamontcin − Eaval
cin
t
=12 · m · v2
amont − 12 · m · v2
aval
t
=1
2· m
t· (v2
amont − v2aval)
=1
2· ρ · S · vamont + vaval
2· (v2
amont − v2aval)
=1
4· ρ · S · (v2
amont − v2aval) · (vamont + vaval)
Si on cherche quel est la vitesse en aval vav quidonne un maximum de puissance, il faut dériver lafonction ∆P par rapport à vav et l’annuler. Pourécourter la notation, on pose encore : vamont = vam.
d∆P
dvav=
d
dvav(1
4· ρ · S · (v2
am − v2av) · (vam + vav))
=1
4· ρ · S · d
dvav((v2
am − v2av) · (vam + vav)) = 0
L’équation à résoudre alors est :
d
dvav((v2
am − v2av) · (vam + vav)) = 0 ⇒
d
dvav(v3
am + v2am · vav − v2
av · vam − v3av) = 0 ⇒
v2am − 2 · vam · vav − 3 · v2
av = 0
126

ANNEXE K. ÉNERGIES K.4. GÉOTHERMIE
Il s’agit d’une équation du second degré en vav dontla solution est :
vav =2 · vam ±
√
(2 · vam)2 − 4 · (−3) · v2am
2 · (−3)
=2 · vam ±
√
16 · v2am
−6
=2 · vam ± 4 · vam
−6
=vam ± 2 · vam
−3=
{
vam/3
−vam
Évidemment vaval > 0 et donc seule la solutionpositive à un sens. On a donc finalement que :
vaval =vamont
3(K.2)
Et la conséquence pour la variation de puissanceest que :
∆P =1
4· ρ · S · (v2
am − v2av) · (vam + vav)
=1
4· ρ · S · (v2
am − (vam/3)2) · (vam + vam/3)
=1
4· ρ · S · (9 · v2
am − v2am
9) · (3 · vam + vam
3)
=1
4· ρ · S · (8 · v2
am
9) · (4 · vam
3)
=16
27· 1
2· ρ · S · v3
am
=16
27· P
Ce qui signifie que la puissance maximale que l’éo-lienne peut développer est le 16/27 de la puissancedu vent :
Peolienne =16
27· Pvent (K.3)
Cela constitue la limite de Betz.
K.3.2 Éoliennes
Éolienne de Collonges-Dorénaz
Il ne s’agit pas ici de se substituer aux multiplesinformations qui se trouvent sur internet56. Il s’agitsimplement de parler de l’exemple concret de laplus grande éolienne de Suisse pour permettre unecomparaison avec un barrage comme celui du Cha-telot (voir paragraphe K.2).
Le mât fait pratiquement 100 m de haut et lalongueur des pales est de 33 m. Le rendement esttrès proche de la limite de Betz puisqu’il vaut 56%.La puissance maximale est de 2000 kW , mais laproduction annuelle est de 3, 5 millions de kWh. Sila consommation électrique annuelle moyenne d’unménage est d’environ 2000 kWh, le nombre n deménages qui peuvent être alimentés par cette éo-lienne vaut :
n =3, 5 · 106
2000= 1750 ménages
Comparé au 74′000 ménages alimentés par le bar-rage du Châtelot (partie suisse et française en-semble), cela peut paraître bien peu. Encore faut-il comparer le coût du barrage aux quatre mil-lions d’investissement pour cette éolienne. Encorefaut-il comparer les deux impacts écologiques, lespossibilités et le coût de démontage, les risquesd’accidents. . . Une juste comparaison nécessite deprendre en compte un assez grand nombre de para-mètres pour qu’il ne soit pas possible ici de pour-suivre plus avant la comparaison.
Éoliennes du Mont Soleil
A nouveau l’information se trouve sur internet57.Il faut savoir que cette centrale est constituée
de huit éoliennes d’une puissance allant de 600 à1750 kW . Elles ont une hauteur de mât de 45 à67 m et des pales de 22 à 33 m. L’ensemble a produiten 2006 une énergie de 9, 176 millions de kWh. Celareprésente un nombre de ménages (à 2000 kWh/an)de 4588. Une fois encore c’est bien peu comparéau barrage du Châtelot. Mais les remarques faitesprécédemment restent valables.
Au total, la centrale de Collonges-Dorénaz etcelle du Mont Soleil alimentent ensemble environ6300 ménages, soit très approximativement la moi-tié d’une ville comme La Chaux-de-Fonds en Suisse.
K.4 Géothermie
IL existe en Suisse une centrale géothermique quipermet un chauffage urbain, à l’instar de Cridorà La Chaux-de-Fonds. Il s’agit de la centrale deRiehen près de Bâle. Elle est constituée de deuxpompes à chaleur qui exploitent l’eau provenantd’un forage à 1547 m amenant une eau à 65◦. Un
127

K.5. ÉNERGIE DE COMBUSTION DES DÉCHETS ANNEXE K. ÉNERGIES
second forage, distant de 1 km du premier, réinjectede l’eau froide à 1247 m. Le débit est de 18 l/s. Ellepermet d’approvisionner 180 immeubles à Riehenet de nouvelles constructions en Allemagne. L’éner-gie annuellement produite est de 22, 8 GWh58. Àraison d’environ 20 MWh/an pour une famille detrois personnes, on a une couverture en terme dechauffage à distance (chauffage et eau chaude sani-taire) de :
n =22′800
20= 1′140 ménages
Ce qui représente environ 3′500 personnes.
K.5 Énergie de combustion desdéchets
Nous allons ici prendre pour exemple de ce typede production énergétique la centrale de chauffageà distance de Cridor à La Chaux-de-Fonds dansle jura suisse. L’objectif est d’avoir un exempleconcret de ce qui se fait déjà dans un domaineconcernant les énergies renouvelables qui passe sou-vent trop inaperçu.
La production59 totale d’énergie par cette usined’incinération est de 85′000 MWh/an. Par compa-raison, rappelons que la production du barrage duChatelot est de 150′000 MWh/an (voir équationK.1), soit environ le double.
Cette énergie se partage en 60′000 MWh/anpour le chauffage à distance (chauffage des habita-tions) et 25′000 MWh/an produit par une turbinesous forme électrique, dont 19′000 MWh/an sontvendus. Cela représente 55′000 t/an de déchets in-cinérés. Le nombres de ménages fournis en énergieélectrique est donc de :
n =19′000 · 106
2000 · 103= 9500 ménages
Pour l’énergie thermique, en comptant très ap-proximativement 20 MWh/an pour une famille detrois personnes, on a une couverture en terme dechauffage à distance (chauffage et eau chaude sani-taire) de :
n =60′000
20= 3000 ménages
Ce qui représente environ 10′000 personnes.
128
Annexe LExercices
Deux conseils pour la résolution des exercices :faites un dessin et expliquez-vous le problème enfrançais.
L.1 Problèmes
L.1.1 Relatifs à la conversion d’uni-tés et à la notation scientifique
Exercice 1 Alpha du Centaure C est l’étoile laplus proche de nous. Elle se situe à 4, 238 AL denous. Combien de km cela fait-il ? Exprimez le ré-sultat en notation scientifique. Combien de parsec(pc) cela fait-il ?
Exercice 2 Quelle est la distance terre-soleil enkm, en UA et en AL ? Entre nous et l’étoile (autreque le soleil) la plus proche, combien de fois peut-onmettre cette distance ?
Exercice 3 Combien y a-t-il de fois la distanceentre nous et Alpha du Centaure dans le dia-mètre de notre galaxie la voie lactée (φgalaxie =80′000 AL) ?
Exercice 4 Sous quel angle (en °, en ’ et en”) voit-on le diamètre de la lune depuis la terre(Rlune = 0, 2725 · Rterre ; dterre−lune = 3, 84 ·108 m).
Exercice 5 La matière interstellaire est constituéede gaz neutre (hydrogène atomique et moléculaire),de gaz ionisé, de poussières et de particules cos-miques (électrons, protons, ...). La densité d’unnuage de gaz neutre est de 0, 1 · 104 atomes/cm3.Combien cela fait-il d’atomes par m3 ? Par litre ?
Exercice 6 La première mesure du rayon de laterre à été faite à Alexandrie en 235 avant notreère par Eratosthènea. La méthode qu’il a utiliséeest très simple. Il a tout d’abord observé qu’un cer-tain jour de l’année le soleil éclairait le fond d’unpuits à Syène. Il en a déduit qu’à ce moment-là les rayons du soleil alors parfaitement au zé-nith, pointaient directement vers le centre de laterre (voir figure L.1). Par ailleurs, il a mesuré aumême moment l’angle fait par ces mêmes rayonsau sommet d’un bâton planté 5000 stades plus aunord, à Alexandrie. Comme le montre le schéma ci-dessous, cet angle est l’angle au centre de la terreque fait l’arc de cercle déterminé par la surface dela terre entre Syène et Alexandrie. Connaissant cetangle (α = 7, 5◦) et la longueur de l’arc de cercle(L = 5000 stades), il en déduisit le rayon de la terreavec une précision extraordinaire pour l’époque : 4% d’écart avec la valeur connue aujourd’hui.
Sachant qu’un stade valait environ 160 m d’au-jourd’hui, calculez le rayon R de la terre obtenu parEratosthène.
L.1.2 Relatifs aux notions de dépla-cement, position et distanceparcourue
Exercice 7 Un objet se déplace de la position x =0 m à x = 10 m, puis à x = 11 m, puis à x = −5 m.Calculez le déplacement total et la distance totaleparcourue.
aVoir “Mécanique”, Éric Lindemann, DeBoeck Université,1999, p. 15,16.
129

L.1. PROBLÈMES ANNEXE L. EXERCICES
Fig. L.1 – Le rayon de la terre par Eratosthène
;
;
2
@
Rayons du soleilAlexandrie
Syène
Rterre
C α
α
Exercice 8 Le conducteur d’une automobile qui sedéplace à 120 km/h est inattentif pendant deux se-condes. Quelle distance a-t-il parcourue pendant cetemps ?
Exercice 9 La position en mètres d’un objet estdonné par l’équation suivante :
x =
2 · t si 0 ≤ t ≤ 4s
8 si 4 ≤ t ≤ 6s
−2 · t + 20 si 6 ≤ t ≤ 10s
Calculez le déplacement et la distance parcourueau bout de 10s.
Exercice 10 Deux trains se dirigent l’un versl’autre sur une même voie. Ils se déplacent à100 km/h par rapport au sol. Si la distance initialequi les séparait était de 12 km, dans combien detemps aura lieu l’accident ?
Exercice 11 Une voiture dont la vitesse est de110 km/h se trouve 600 m derrière un camion dontla vitesse vaut 80 km/h. Combien de temps mettra-t-elle pour rattraper le camion ?
L.1.3 Relatifs à la notion de vitesse
Exercice 12 Quelle est notre vitesse de rotationapproximative à la surface de la terre ? N’utilisezpas votre machine à calculer et faites tous vos cal-culs en notation scientifique.
Exercice 13 Un joueur de pétanque tire la bouled’un adversaire. Celle-ci se trouve à 9 m de lui. Ensupposant que la boule se déplace en ligne droite, à
vitesse constante et que le joueur entende le bruitdu carreau sur la boule adverse 1, 2 s après l’avoirlancée, trouvez la vitesse de la boule. Le son se pro-page à une vitesse de 343 m/s.
Exercice 14 Un objet se déplace de x1 = 3, 6 cm àx2 = −5, 2 cm dans l’intervalle de temps entre t1 =3 s et t2 = 6, 8 s. Déterminez sa vitesse moyenne.
L.1.4 Relatif à la notion d’accéléra-tion
Exercice 15 Une voiture roulant à 50 km/h freinesoudainement pour ne pas heurter un piéton.Si la décélération maximale moyenne que sespneus peuvent lui permettre est de −3 m/s2 (routemouillée), en combien de temps s’arrêtera-t-elle ?
Exercice 16 Calculez l’accélération moyenne d’unsprinterb qui parvient à une vitesse de 10 m/s en9, 9 s.
Exercice 17 Déterminez l’accélération moyennedans les cas suivants :
– Un avion DC 10 qui part du repos atteint, en50 secondes, une vitesse de 350 km/h au mo-ment du décollage.
– Un avion s’approche d’un porte-avions à190 km/h. Il se pose et est arrêté par un câblede retenue en 5 secondes.
– Une capsule spatiale passe d’une vitesse nulleà 1450 km/h en 3 secondes.
Exercice 18 A l’instant t = 3 s, une particule setrouve en x = 7 m à la vitesse de 4 m/s. A t =7 s, elle est en x = −5 m à la vitesse de −2 m/s.Calculez sa vitesse et son accélération moyennes.
L.1.5 Relatif au MRU
Exercice 19 Une voiture se déplace à la vitesseconstante de 50 km/h pendant 5 minutes. Esquis-sez les graphes horaires de la position, de la vitesseet de l’accélération pendant cette période. Quelle estla distance totale parcourue ? Par quelle grandeurcette distance est-elle représentée sur le graphe dela vitesse en fonction du temps ?
bThe physics of sports, A. Armenti, New York, 1992, p.112.
130
ANNEXE L. EXERCICES L.1. PROBLÈMES
Exercice 20 Une voiture de sport se déplaçant àla vitesse constante de 160 km/h est prise en chassepar une voiture de police alors que celle-ci à 1 kmde retard. Pour rattraper la voiture de sport, la voi-ture de police prend très rapidement une vitesse de180 km/h. Au bout de combien de temps et de quelledistance la police rattrapera la voiture de sport ?
L.1.6 Relatif au MRUA
Exercice 21 Une voiture de police à l’arrêt dé-marre la poursuite d’un chauffard lorsque celui-cila croise à une vitesse de 144 km/h. Son accélé-ration est alors de 5 m/s2. En combien de tempset sur quelle distance rattrape-t-elle le chauffard ?Quelle est alors sa vitesse ?
Exercice 22 Une voiture entre en collision fron-talement avec un arbre. Sa vitesse juste avant lechoc était de 50 km/h. Elle est stoppée net surune distance de 1, 5 m (le moteur est complètementécrasé).
Calculez la valeur de l’accélération (ici une décé-lération), exprimez-là comme un multiple de l’accé-lération terrestre g (g = 9, 81 m/s2) et calculez letemps que dure la collision.
Exercice 23 Le chauffeur d’une voiture roulant à40 m/s aperçoit soudain un kangourou 70 m devantlui. Quel sera l’avenir de l’animal si le temps deréflexe du chauffeur est de 0, 8 s et sa décélérationmaximale de 8 m/s2 ?
Exercice 24 Un plongeur capable de sauter surplace très haut est capable de s’élever de 50 cm.Quelle doit être sa vitesse initiale (supposez quele mouvement est un MRUA d’accélération g =9, 81 m/s2) ? Un dauphin peut s’élever lui à 6 mau-dessus de l’eau. Quelle est sa vitesse verticaleinitiale ?
Exercice 25 Un plongeur s’élance du haut de laplate-forme des dix mètres d’un plongeoir.
– Combien de temps met-il pour arriver dansl’eau s’il se laisse tomber ?
– Combien de temps met-il pour arriver dansl’eau si sa vitesse initiale est horizontale etvaut 1 m/s ?
– Combien de temps met-il pour arriver dansl’eau si sa vitesse initiale est verticale vers lehaut et vaut 1 m/s ?
Dans les trois cas, à quelle vitesse arrive-t-il dansl’eau ?
Exercice 26 Un objet est lâché à la surface de laterre d’une hauteur h. Déterminez la vitesse à la-quelle il arrive au sol.
Exercice 27 Une voiture de course tente d’arri-ver en 4 s à 100 km/h départ arrêté. Déterminezquelle accélération (supposée constante) il lui fautpour cela et la distance qu’elle va parcourir.
Exercice 28 Une moto passe de 50 km/h à100 km/h sur une distance de 59 m. A combien deg est-elle soumise ?
Exercice 29 Un plongeur s’élance de la plate-forme des cinq mètres avec une vitesse horizontalede 2 m/s.
1. Combien de temps mettra-t-il pour arriverdans l’eau ?
2. Si on suppose sa vitesse horizontale constante,à quelle distance du pied du bord de la plate-forme arrivera-t-il dans l’eau ?
Exercice 30 Une petite fusée d’enfant a pour deuxminutes de carburant. Elle s’élève dans les airs àune vitesse moyenne de 3 m/s pendant la phase depoussée. A la fin de cette phase, sa vitesse atteint4 m/s (son accélération n’est pas constante durantcette première phase). Calculez à quelle hauteur elles’est élevée et combien de temps à duré son vol.
L.1.7 Relatifs à la physique aristoté-licienne
Exercice 31 Un scooter se déplaçant à la vitessede 5 km/h sur un lac gelé horizontal tire vertica-lement un petit obus éclairant. Il monte et retombeen 2 s. Déterminez, selon la théorie aristotéliciennedu mouvement son lieu d’atterrissage sur le lac. Ace moment là, déterminez sa distance au scooter.
Exercice 32 La vigie d’un trois mâts laisse tom-ber son couteau. Il met 0, 8 s pour arriver sur lepont. Le bateau se déplace à 8 km/h. Selon la théo-rie d’Aristote, déterminez à quelle distance du pieddu mât, il va se planter.
131
L.1. PROBLÈMES ANNEXE L. EXERCICES
Exercice 33 Un touriste visitant Paris laisse tom-ber une pièce de cinq francs du haut du premierétage de la Tour Eiffel. En tenant compte de la vi-tesse de Paris autour le l’axe de rotation de la terreet selon la cinématique d’Aristote, calculez la dis-tance au pied du point de chute à laquelle la pièceva arriver au sol. Le temps de chute est de 2, 1 s etla latitude de Paris vaut β = 48◦ 48′. On ne tien-dra compte que du déplacement de Paris dû à larotation de la terre sur elle-même.
L.1.8 Relatifs à la physique Newto-nienne
Pour résoudre un problème de mécanique newto-nienne, aucune méthode n’est prescrite. Cependant,dans la mesure où le problème est bien posé (c’estlà une étape particulièrement difficile à réaliser etpour laquelle il faut rester ouvert à toute bonneidée), une suite d’opérations assez bien définie per-met de résoudre clairement le problème.
Attention, cette “procédure”, qui présente beau-coup d’avantages, est aussi assez stricte pour éli-miner des idées originales parfaitement valables etefficaces. Il faut donc l’utiliser sans dogmatisme.Elle consiste en ce qui suit :
Méthode de résolution des problèmes
Choisir le système. C’est l’étape la plus im-portante. Elle est fondamentale, car c’estdu choix du système que dépend la possi-bilité d’exprimer les grandeurs nécessairesà la résolution du problème. En particu-lier, il faut choisir le système de manièreà éliminer, dans la mesure du possible, lesgrandeurs qui sont inconnues et non néces-saires.
Choisir un système d’axes. Simple et, sipossible orienté dans le sens supposé del’accélération. Cela permet d’éliminer uncertain nombre de fautes de signe.
Faire un dessin avec forces extérieures.Il ne faut en oublier aucune. La détermi-nation du caractère extérieur des forcesen jeu est évidemment aussi une étapedifficile. Mais elle est fondamentale.
Spécifier les contraintes sur le système.Par exemple : se déplace uniquement
horizontalement.
Écrire les équations du mouvement. Ils’agit d’écrire la seconde loi de Newtonsur chaque axe. Il faut donc décomposerles vecteurs forces et accélération surceux-ci.
Résoudre le problème. Vérifier que lenombre d’équations est égal au nombred’inconnues. A l’aide des équations décri-vant les contraintes et des équations dumouvement, résoudre alors le problème.
Vérifier la solution sur des cas simples.Par exemple, si on a obtenu l’accélérationd’un objet sur un plan incliné, il fautvérifier que si celui-ci est vertical, alorsl’accélération est celle de la chute libre.
Exercice 34 Une fusée d’une masse de 60 tonnesdécolle verticalement. Au bout d’une minute, elleatteint la vitesse de 1000 km/h. En supposant l’ac-célération constante, calculez la force totale des mo-teurs.
Exercice 35 Une voiture tire une remorque àvitesse constante. Si la force de frottement quis’exerce sur la remorque vaut 500 N , quelle est laforce exercée par la voiture sur la remorque ? Quelleest la somme des forces qui s’exercent sur la re-morque ? Répondez à ces deux questions si la voi-ture a une accélération de 5 m/s2 et la remorqueune masse de 500 kg.
Exercice 36 Un ascenseur de masse m = 200 kg,dans lequel une personne de 60 kg se trouve, monteavec une accélération de 4 m/s2. Quelle est la forceexercée par le câble sur l’ascenseur ?
Exercice 37 Une voiture de deux tonnes roulant à50 km/h freine brusquement pour s’arrêter sur unedistance de 40 m. Calculez la force de frottementdes pneus et expliquez précisément d’où elle vient.
Exercice 38 Un train de 300 tonnes (locomotive :50 tonnes, wagons : 250 tonnes) accélère de 0 à10 km/h en une minute. On néglige les frottements.
1. Calculez la force Ftot nécessaire pour réalisercette augmentation de vitesse.
132
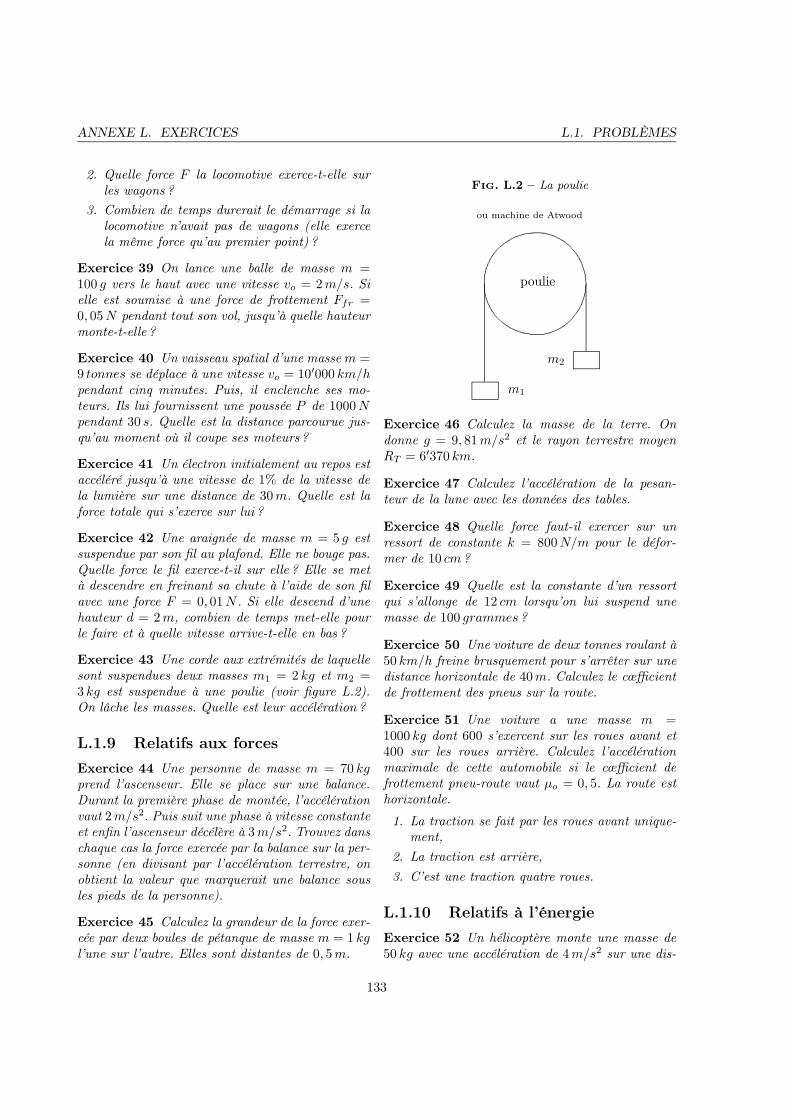
ANNEXE L. EXERCICES L.1. PROBLÈMES
2. Quelle force F la locomotive exerce-t-elle surles wagons ?
3. Combien de temps durerait le démarrage si lalocomotive n’avait pas de wagons (elle exercela même force qu’au premier point) ?
Exercice 39 On lance une balle de masse m =100 g vers le haut avec une vitesse vo = 2 m/s. Sielle est soumise à une force de frottement Ffr =0, 05 N pendant tout son vol, jusqu’à quelle hauteurmonte-t-elle ?
Exercice 40 Un vaisseau spatial d’une masse m =9 tonnes se déplace à une vitesse vo = 10′000 km/hpendant cinq minutes. Puis, il enclenche ses mo-teurs. Ils lui fournissent une poussée P de 1000 Npendant 30 s. Quelle est la distance parcourue jus-qu’au moment où il coupe ses moteurs ?
Exercice 41 Un électron initialement au repos estaccéléré jusqu’à une vitesse de 1% de la vitesse dela lumière sur une distance de 30 m. Quelle est laforce totale qui s’exerce sur lui ?
Exercice 42 Une araignée de masse m = 5 g estsuspendue par son fil au plafond. Elle ne bouge pas.Quelle force le fil exerce-t-il sur elle ? Elle se metà descendre en freinant sa chute à l’aide de son filavec une force F = 0, 01 N . Si elle descend d’unehauteur d = 2 m, combien de temps met-elle pourle faire et à quelle vitesse arrive-t-elle en bas ?
Exercice 43 Une corde aux extrémités de laquellesont suspendues deux masses m1 = 2 kg et m2 =3 kg est suspendue à une poulie (voir figure L.2).On lâche les masses. Quelle est leur accélération ?
L.1.9 Relatifs aux forces
Exercice 44 Une personne de masse m = 70 kgprend l’ascenseur. Elle se place sur une balance.Durant la première phase de montée, l’accélérationvaut 2 m/s2. Puis suit une phase à vitesse constanteet enfin l’ascenseur décélère à 3 m/s2. Trouvez danschaque cas la force exercée par la balance sur la per-sonne (en divisant par l’accélération terrestre, onobtient la valeur que marquerait une balance sousles pieds de la personne).
Exercice 45 Calculez la grandeur de la force exer-cée par deux boules de pétanque de masse m = 1 kgl’une sur l’autre. Elles sont distantes de 0, 5 m.
Fig. L.2 – La poulie
ou machine de Atwood
poulie
m1
m2
Exercice 46 Calculez la masse de la terre. Ondonne g = 9, 81 m/s2 et le rayon terrestre moyenRT = 6′370 km.
Exercice 47 Calculez l’accélération de la pesan-teur de la lune avec les données des tables.
Exercice 48 Quelle force faut-il exercer sur unressort de constante k = 800 N/m pour le défor-mer de 10 cm?
Exercice 49 Quelle est la constante d’un ressortqui s’allonge de 12 cm lorsqu’on lui suspend unemasse de 100 grammes?
Exercice 50 Une voiture de deux tonnes roulant à50 km/h freine brusquement pour s’arrêter sur unedistance horizontale de 40 m. Calculez le cœfficientde frottement des pneus sur la route.
Exercice 51 Une voiture a une masse m =1000 kg dont 600 s’exercent sur les roues avant et400 sur les roues arrière. Calculez l’accélérationmaximale de cette automobile si le cœfficient defrottement pneu-route vaut µo = 0, 5. La route esthorizontale.
1. La traction se fait par les roues avant unique-ment,
2. La traction est arrière,
3. C’est une traction quatre roues.
L.1.10 Relatifs à l’énergie
Exercice 52 Un hélicoptère monte une masse de50 kg avec une accélération de 4 m/s2 sur une dis-
133
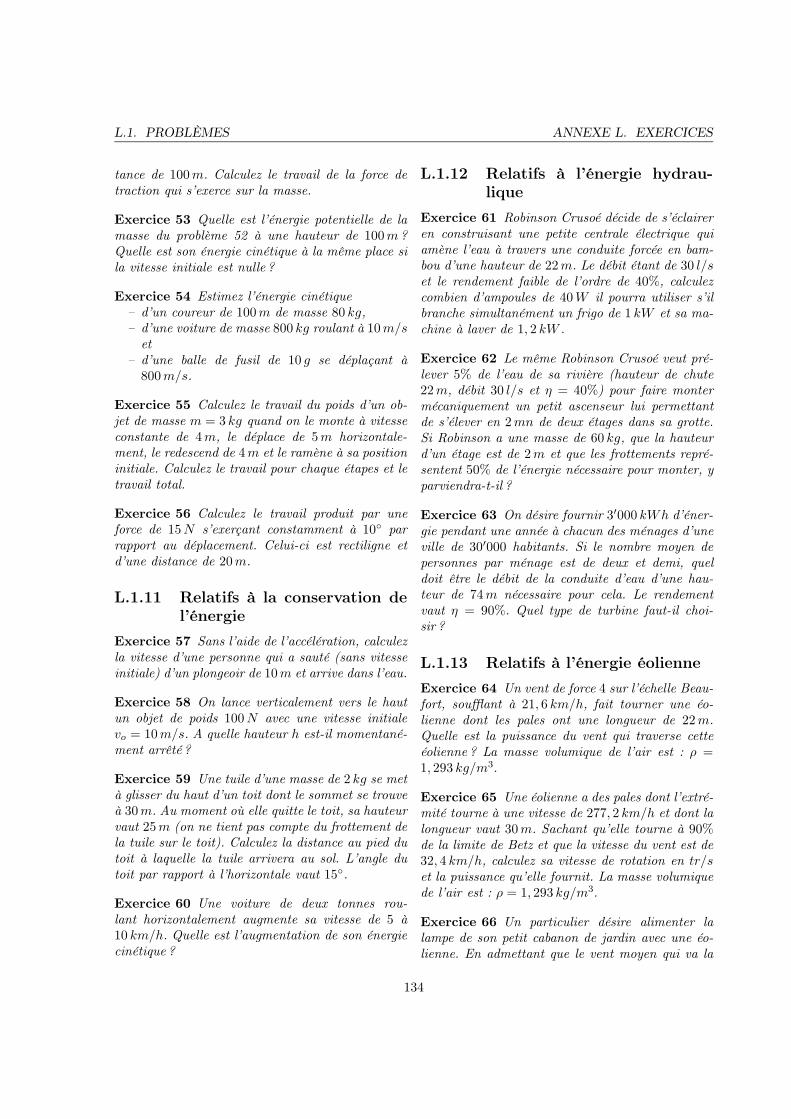
L.1. PROBLÈMES ANNEXE L. EXERCICES
tance de 100 m. Calculez le travail de la force detraction qui s’exerce sur la masse.
Exercice 53 Quelle est l’énergie potentielle de lamasse du problème 52 à une hauteur de 100 m ?Quelle est son énergie cinétique à la même place sila vitesse initiale est nulle ?
Exercice 54 Estimez l’énergie cinétique– d’un coureur de 100 m de masse 80 kg,– d’une voiture de masse 800 kg roulant à 10 m/s
et– d’une balle de fusil de 10 g se déplaçant à
800 m/s.
Exercice 55 Calculez le travail du poids d’un ob-jet de masse m = 3 kg quand on le monte à vitesseconstante de 4 m, le déplace de 5 m horizontale-ment, le redescend de 4 m et le ramène à sa positioninitiale. Calculez le travail pour chaque étapes et letravail total.
Exercice 56 Calculez le travail produit par uneforce de 15 N s’exerçant constamment à 10◦ parrapport au déplacement. Celui-ci est rectiligne etd’une distance de 20 m.
L.1.11 Relatifs à la conservation del’énergie
Exercice 57 Sans l’aide de l’accélération, calculezla vitesse d’une personne qui a sauté (sans vitesseinitiale) d’un plongeoir de 10 m et arrive dans l’eau.
Exercice 58 On lance verticalement vers le hautun objet de poids 100 N avec une vitesse initialevo = 10 m/s. A quelle hauteur h est-il momentané-ment arrêté ?
Exercice 59 Une tuile d’une masse de 2 kg se metà glisser du haut d’un toit dont le sommet se trouveà 30 m. Au moment où elle quitte le toit, sa hauteurvaut 25 m (on ne tient pas compte du frottement dela tuile sur le toit). Calculez la distance au pied dutoit à laquelle la tuile arrivera au sol. L’angle dutoit par rapport à l’horizontale vaut 15◦.
Exercice 60 Une voiture de deux tonnes rou-lant horizontalement augmente sa vitesse de 5 à10 km/h. Quelle est l’augmentation de son énergiecinétique ?
L.1.12 Relatifs à l’énergie hydrau-lique
Exercice 61 Robinson Crusoé décide de s’éclaireren construisant une petite centrale électrique quiamène l’eau à travers une conduite forcée en bam-bou d’une hauteur de 22 m. Le débit étant de 30 l/set le rendement faible de l’ordre de 40%, calculezcombien d’ampoules de 40 W il pourra utiliser s’ilbranche simultanément un frigo de 1 kW et sa ma-chine à laver de 1, 2 kW .
Exercice 62 Le même Robinson Crusoé veut pré-lever 5% de l’eau de sa rivière (hauteur de chute22 m, débit 30 l/s et η = 40%) pour faire montermécaniquement un petit ascenseur lui permettantde s’élever en 2 mn de deux étages dans sa grotte.Si Robinson a une masse de 60 kg, que la hauteurd’un étage est de 2 m et que les frottements repré-sentent 50% de l’énergie nécessaire pour monter, yparviendra-t-il ?
Exercice 63 On désire fournir 3′000 kWh d’éner-gie pendant une année à chacun des ménages d’uneville de 30′000 habitants. Si le nombre moyen depersonnes par ménage est de deux et demi, queldoit être le débit de la conduite d’eau d’une hau-teur de 74 m nécessaire pour cela. Le rendementvaut η = 90%. Quel type de turbine faut-il choi-sir ?
L.1.13 Relatifs à l’énergie éolienne
Exercice 64 Un vent de force 4 sur l’échelle Beau-fort, soufflant à 21, 6 km/h, fait tourner une éo-lienne dont les pales ont une longueur de 22 m.Quelle est la puissance du vent qui traverse cetteéolienne ? La masse volumique de l’air est : ρ =1, 293 kg/m3.
Exercice 65 Une éolienne a des pales dont l’extré-mité tourne à une vitesse de 277, 2 km/h et dont lalongueur vaut 30 m. Sachant qu’elle tourne à 90%de la limite de Betz et que la vitesse du vent est de32, 4 km/h, calculez sa vitesse de rotation en tr/set la puissance qu’elle fournit. La masse volumiquede l’air est : ρ = 1, 293 kg/m3.
Exercice 66 Un particulier désire alimenter lalampe de son petit cabanon de jardin avec une éo-lienne. En admettant que le vent moyen qui va la
134

ANNEXE L. EXERCICES L.2. SOLUTIONS
traverser souffle à 14, 4 km/h (3 Beaufort), que lalampe nécessite une puissance de 40 W et que l’éo-lienne tourne à 40% de la limite de Betz, calculez lalongueur des pales nécessaires. La masse volumiquede l’air est : ρ = 1, 293 kg/m3.
L.1.14 Relatifs à l’énergie solaire
Exercice 67 On désire chauffer une masse de100 l d’eau (ceau = 4′180 J/(kg ·◦ C)) en quatreheures. Quelle est la surface de panneaux solairenécessaire. On donne B = 0, 8, K = 3 W/(m2 ·◦ C)et la différence de température entre l’intérieur etl’extérieur des capteurs ∆θ = 20◦C. La puissancedu rayonnement incident est de 120 W/m2.
Exercice 68 Quel est le débit d’eau (ceau =4′180 J/(kg ·◦ C)) nécessaire pour évacuer l’énergieproduite par 5 m2 de capteurs solaires thermiquescaractérisés par B = 0, 7, K = 2 W/(m2 ·◦ C) et ladifférence de température entre l’intérieur et l’ex-térieur des capteurs ∆θ = 15◦C. La puissance durayonnement incident est de 150 W/m2.
Exercice 69 Un particulier consomme2500 kWh/an d’énergie électrique. Il désireproduire lui-même une partie de cette énergie àl’aide de cellules solaires électriques. Il installedonc 8 m2 de panneaux photoélectriques. Cela luipermet-il de subvenir à ses besoins ? Si non, quelleest la puissance d’appoint dont il a besoin ? Il setrouve dans une région où la puissance solaireincidente est de 160 W/m2.
L.2 Solutions
1 Comme le nombre de km est 1000 fois plus pe-tit que le nombre de mètres et que 1 AL = 9, 46 ·1015 m, on a :
4, 238 AL = 4, 238 · 9, 46 · 1015
= 4 · 1016 m = 4 · 1013 km
Comme 1 pc ≈ 3 · 1016 m, on a :
4 · 1016 m ≈ 4 · 1016
3 · 1016= 1, 33 pc
2 La distance terre-soleil vaut 1, 496 · 1011 m. On adonc :
1, 496 · 1011 m = 1, 496 · 108 km
Par ailleurs, par définition de l’unité astronomique(UA), on a :
1, 496 · 1011 m = 1 UA
Finalement, avec 1 AL = 9, 46 · 1015 m, on a :
1, 496 · 1011 m =1, 496 · 1011
9, 46 · 1015
= 1, 58 · 10−5 AL ∼= 16 µAL
L’exercice 1 nous indique que l’étoile la plus prochede nous est à 4, 238 AL. On a donc :
4, 238
1, 58 · 10−5= 2, 68 · 105 ×
Alpha du Centaure se trouve donc à 268′228× ladistance terre-soleil.
3 Le diamètre de notre galaxie est de 80′000 AL.L’exercice 1 nous indique que la distance à Alphadu Centaure vaut 4, 238 AL. Ainsi, on a :
80′000
4, 238= 18′877×
Le diamètre de la galaxie représente donc 18′877×la distance à l’étoile la plus proche de nous.
4 La distance terre-lune est beaucoup plus grandeque le diamètre de la lune. L’angle est donc petit et
135

L.2. SOLUTIONS ANNEXE L. EXERCICES
on peut écrire la relation d’arc donnée par l’équa-tion A.1 :
D = 2 · Rlune = d · α ⇒ α =2 · Rlune
dterre−lune
α =2 · 0, 2725 · 6, 371 · 106
3, 84 · 108= 0, 009 rad
Comme 180◦ = π radians, l’angle considéré est :
α = 0, 009 ·180
π= 0, 5157◦
Comme un degré vaut soixante minutes d’arc, 1◦ =60′, on a :
α = 0, 5157◦ = 0, 5157 · 60 = 31′
et :α = 31′ = 31 · 60 = 1860′′
5 Dans 1 m3, on trouve 1000 dm3 et 106 cm3. Ainsi,dans 1 m3, on trouve un million de fois plusd’atomes que dans 1 cm3. On a donc par m3 :
nb atomes = 0, 1 · 104 · 106 = 109 atomes
Et par litre, c’est-à-dire par dm3 :
nb atomes = 0, 1 · 104 · 103 = 106 atomes
6 La relation d’arc donnée par l’équation A.1 nouspermet d’écrire :
L = R · α ⇒ R =L
α
Avec la longueur L en m et l’angle α en rad :
L = 5000 · 160 = 8 · 105 m
α = 7, 5 · π
180= 0, 13 rad
Ainsi, le rayon de la terre d’Eratosthène valait :
R =8 · 105
0, 13= 6′111′550 m = 6′111, 55 km
Sachant que la valeur actuelle du rayon moyen dela terre vaut :
Rterre = 6′371, 03 km
à l’aide de l’équation D.1, on peut déterminerl’écart entre les deux valeurs :
e =6′371, 03− 6′111, 55
6′371, 03· 100 = 4, 1%
7 Par définition, le déplacement se calcule par :
D = ∆x = xf − xi = −5 − 0 = −5 m
Et la distance parcourue est la distance réellementeffectuée :
d = 10 + 1 + 11 + 5 = 27 m
8 Pour passer de km/h en m/s, il faut diviser parun facteur de 3, 6. En effet :
120 km/h =120 · 103 m/h
3600 s/h=
120
3, 6= 33, 3 m/s
Ainsi, la distance parcourue en deux secondes est :
d = v · t = 33, 3 · 2 = 66, 6 m
9 Comme la position au bout de 10 s se calcule par :
x(10 s) = −2 · 10 + 20 = 0 m
le déplacement est donné par :
D = ∆x = xf − xi = 0 − 0 = 0 m
Selon l’équation de la position donnée ici, le mou-vement de l’objet est le suivant :
1. à la vitesse constante de 2 m/s l’objet se dé-place pendant 4 s,
2. il s’arrête de 4 à 6 s et
3. il revient en arrière à la vitesse de −2 m/s de6 à 10 s.
Ainsi, l’objet parcourt dans un premier temps 2 ·4 = 8 m en avant et dans un second temps 8 m enarrière. La distance parcourue est donc :
d = 8 + 8 = 16 m
10 Deux raisonnements sont possibles :– On s’imagine être dans un train qu’on ne voit
pas bouger. Sa vitesse par rapport à nous estnulle. L’autre train se trouve au départ à unedistance de 12 km et se déplace par rapportà nous à une vitesse relative de 200 km/h (savitesse et notre vitesse sont cumulées). Ainsi,on peut écrire :
v =∆x
t⇒ t =
∆x
v=
12
200= 0, 06 h
136

ANNEXE L. EXERCICES L.2. SOLUTIONS
– On définit le zéro du système d’axes à la po-sition du premier train au moment où ils sontséparés de 12 km. L’équation de la position dupremier train est alors :
x1 = 100 · t
Comme la position initiale du second trainvaut 12 km et qu’il s’approche, sa vitesse estnégative et l’équation de sa position au coursdu temps est :
x2 = −100 · t + 12
La condition de rencontre s’écrit alors :
x1 = x2
100 · t = −100 · t + 12 ⇒
200 · t = 12 ⇒ t =12
200= 0, 06 h
Le premier raisonnement se fait par rapport à l’undes objets en mouvement. Il est dit relatif. Le se-cond raisonnement se fait par rapport à un référen-tiel commun : le sol. Il est dit absolu.
Mais quel que soit le référentiel, le résultat est lemême.
11 Deux raisonnements sont possibles :– On s’imagine être dans le camion qu’on ne
voit pas bouger. Sa vitesse par rapport à nousest nulle. La voiture, elle, se trouve au dé-part à une distance de 0, 6 km et se déplacepar rapport à nous à une vitesse relative de110 − 80 = 30 km/h (sa vitesse est diminuéede notre vitesse, puisqu’on la fuit). Ainsi, onpeut écrire :
v =∆x
t⇒ t =
∆x
v=
0, 6
30= 0, 02 h
– On définit le zéro du système d’axes à la posi-tion de la voiture au moment où la voiture etle camion sont séparés de 0, 6 km. L’équationde la position de la voiture est alors :
xv = 110 · t
Comme la position initiale du camion vaut0, 6 km et qu’il va dans la même direction quela voiture, l’équation de sa position au coursdu temps est :
xc = 80 · t + 0, 6
La condition de rencontre s’écrit alors :
xv = xc
110 · t = 80 · t + 0, 6 ⇒
30 · t = 0, 6 ⇒ t =0, 6
30= 0, 02 h
Le premier raisonnement se fait par rapport à l’undes objets en mouvement. Il est dit relatif. Le se-cond raisonnement se fait par rapport à un référen-tiel commun : le sol. Il est dit absolu.
Mais quel que soit le référentiel, le résultat est lemême.
12 On sait que le rayon de la terre vaut environ6′400 km. Sa circonférence vaut donc :
C = 2 ·π · r ≈ 2 · 3 · 6′000 = 36′000 km ≈ 40′000 km
Sa vitesse se calcule donc ainsi :
v =C
t≈ 40′000
24≈ 40′000
25
= 40′000 ·4
100= 400 · 4 = 1′600 km/h
En réalité, on a :
v =2 · π · r
t=
2 · π · 6′371
24= 1668 km/h
Ce qui correspond à un écart (équation D.1) de :
e =1668− 1600
1668· 100 = 4%
Ce qui est un bon écart, compte tenu des grossesapproximations faites.
13 Le temps donné ttot est constitué du tempstboule mis par la boule pour aller frapper celle del’adversaire et du temps tson mis par le son pourrevenir se faire entendre par le joueur. On a donc :
ttot = 1, 2 = tboule + tson
Or, pour avoir la vitesse de la boule sur les 9 m deson parcours, il nous faut tboule. Pour cela, il fautdonc calculer tson, qui est le temps mis pas le sonpour parcourir 9 m à la vitesse de 343 m/s :
v =d
t⇒ t =
d
v=
9
343= 0, 026 s
137

L.2. SOLUTIONS ANNEXE L. EXERCICES
Ainsi, le temps de parcours de la boule est :
tboule = 1, 2 − tson = 1, 2 − 0, 026 = 1, 174 s
Et la vitesse de la boule est finalement :
vboule =9
1, 174= 7, 666 m/s
14 Par définition de la vitesse moyenne, on a toutsimplement :
v =x2 − x1
t2 − t1=
−5, 2 − 3, 6
6, 8 − 3= −2, 32 cm/s
15 Par définition de l’accélération, on a :
a =vf − vi
t⇒
t =vf − vi
a=
0 − 50/3, 6
−3= 4, 63 s
16 On a simplement :
a =vf − vi
t=
10 − 0
9, 9= 1, 01 m/s2
17 On a successivement :– pour le DC 10 :
a =350/3, 6− 0
50= 1, 94 m/s2
– pour l’avion sur le porte-avions :
a =0 − 190/3, 6
5= −10, 56 m/s2
C’est une décélération et l’accélération estdonc négative.
– pour la capsule spatiale :
a =1450/3, 6− 0
3= 134 m/s2
18 Par définition de la vitesse moyenne, on a :
v =xf − xi
tf − ti=
−5 − 7
7 − 3= −3 m/s
Par définition de l’accélération moyenne, on a :
a =vf − vi
tf − ti=
−2 − 4
7 − 3= −1, 5 m/s2
Fig. L.3 – Graphes horaires du MRU.
19 Les graphes sont présentés à la figure L.3.La distance totale parcourue se calcule simple-
ment :
d = v · t =50
3, 6· 5 · 60 = 4′167 m
Sur le graphe de la vitesse en fonction du temps, ladistance parcourue apparaît simplement être l’airesous le graphe. En effet, la base t = 5 · 60 = 300 smultipliée par la hauteur v = 50/3, 6 = 13, 9 m/sdonne bien la distance parcourue.
20 On va décrire mathématiquement le mouve-ment des voitures de sport et de police.
Les deux mouvements sont des MRU. On peutdonc écrire, dans un système d’axes dont l’origineest sur la voiture de police au moment où elle en-tame sa poursuite :
vpolice = 180 · tvsport = 160 · t + 1
La condition de rencontre s’écrit alors :
vpolice = vsport ⇒ 180 · t = 160 · t + 1 ⇒20 · t = 1
t =1
20= 0, 05 h
La voiture de police se trouve alors à une distancede l’origine du système d’axes de :
xpolice = 180 · 0, 05 = 9 km
Alors que la voiture de sport est à :
xsport = 160 · 0, 05 + 1 = 9 km
Ce qu’il fallait montrer.
21 Ici, aucune symétrie n’est présente. Comme lesdeux voitures ne sont pas à vitesse constante, on
138

ANNEXE L. EXERCICES L.2. SOLUTIONS
ne peut calculer de vitesse relative pour résoudrele problème. Il faut donc procéder en décrivant lesdeux mouvements par rapport au sol. Ainsi, avec144 km/h = 40 m/s, on peut écrire :
MRU ⇒ xchauffard = 40 · t
MRUA ⇒ xpolice =1
2· 5 · t2
La condition de rencontre permet alors de trouverle temps cherché :
xchauffard = xpolice ⇒
40 · t =1
2· 5 · t2 ⇒
40 = 2, 5 · t ⇒ t = 16 s
car la solution t = 0 s est à rejeter. En effet, ellecorrespond au début de la poursuite.
La position à laquelle se trouvent les deux voi-tures, qui est en même temps la distance qu’ellesont parcourues, est alors :
xchauffard = 40 · 16 = 640 m
xpolice =1
2· 5 · 162 = 640 m
Les deux positions sont bien évidemment lesmêmes.
Quant aux vitesse lors de la rencontre, elles sont :
vchauffard = 40 m/s = 144 km/h
vpolice = 5 · 16 = 80 m/s = 288 km/h
22 On fait l’hypothèse d’un MRUA. La voiture eststoppée sur une distance de 1, 5 m. On peut doncécrire :
v2 = v2o + 2 · a · d ⇒
02 = (50
3, 6)2 + 2 · a · 1, 5 ⇒
a = −13, 892
3= −64, 3 m/s2 = −6, 55 · g
Le temps de collision est donc de :
a =vf − vi
t⇒
t =vf − vi
a=
0 − 50/3, 6
−64, 3= 0, 216 s
23 Oublions la position du kangourou et calculonsla distance totale d’arrêt dt. Elle se compose de ladistance de réaction dr et la distance de freinagedf :
dt = dr + df
Pour la distance de réaction, on a :
dr = v · t = 40 · 0, 8 = 32 m
Pour la distance de freinage, il faut faire l’hypo-thèse d’un MRUA. Comme le mouvement est unedécélération, c’est-à-dire un freinage, l’accélérationest négative, et on a :
v2 = v2o + 2 · a · df ⇒
02 = 402 + 2 · (−8) · df ⇒
df =402
16= 100 m
Ainsi, la distance totale d’arrêt vaut :
dt = 32 + 100 = 132 m
Comme le kangourou se trouve à 70 m, son avenirs’annonce bien sombre.
24 Un objet qui n’est soumis qu’à son poids est enchute libre, même s’il monte. Ainsi, l’accélérationdu plongeur, comme du dauphin, dans sa phased’ascension vaut −9, 81 m/s2. En effet, on a unedécélération. Comme celle-ci est constante et quela vitesse au sommet est nulle, on peut écrire pourle plongeur :
v2 = v2o + 2 · a · h ⇒
02 = v2o + 2 · (−9, 81) · 0, 5 ⇒
vo =√
2 · 9, 81 · 0, 5 = 3, 132 m/s = 11, 3 km/h
Et de la même manière, pour le dauphin :
vo =√
2 · 9, 81 · 6 = 10, 85 m/s = 39 km/h
25 Le plongeur est en chute libre. Son accélérationvaut donc g = 9, 81 m/s2. On fixe un axe verticaldont l’origine se situe à 10 m et qui pointe vers lebas. On peut alors écrire :
x =1
2· g · t2 + vo verticale · t ⇒
10 =1
2· 9, 81 · t2 + vo verticale · t
139

L.2. SOLUTIONS ANNEXE L. EXERCICES
Avec dans le premier cas, comme dans le second,une vitesse initiale verticale nulle, on peut écrire :
10 =1
2· 9, 81 · t2 ⇒
t =
√
2 · 10
9, 81= 1, 43 s
Ce qui donne une vitesse juste avant d’entrer dansl’eau de :
v = a · t = 9, 81 · 1, 43 = 14 m/s = 50, 5 km/h
Le premier et le second cas ne sont pas différentsdu point de vue du temps de chute. Néanmoins,la distance parcourue par le plongeur qui se dé-place horizontalement est plus grande que celle duplongeur qui se laisse tomber. Mais sa vitesse to-tale (horizontale et verticale) est aussi plus grande.On peut ainsi comprendre qu’ils arriveraient en bassimultanément s’ils partaient en même temps.
Le troisième cas est plus complexe puisqu’il fauttenir compte d’une vitesse vo = −1 m/s dans lesens contraire de l’axe :
10 =1
2· 9, 81 · t2 − 1 · t ⇒
0 = 4, 905 · t2 − t − 10
Ce qui constitue une équation à une inconnue (t),mais du second degré. Sa solution est donnée par :
t =1 ±
√
12 − 4 · 4, 905 · (−10)
2 · 4, 905
=1 ± 14
9, 81=
{
1, 53 s
−1, 33 s
Évidemment, la solution négative est à rejeter et lasolution positive est supérieure au temps de chutecalculé précédemment puisque le plongeur parcourtune certaine distance vers le haut avant de tomber.
26 Cet objet est en chute libre. Son accélérationvaut donc g. On peut écrire pour un MRUA :
v2 = v2o + 2 · a · h ⇒
v =√
2 · g · h
27 Par définition de l’accélération, on a :
a =v − vo
t=
100/3, 6− 0
4= 6, 94 m/s2
La distance parcourue est alors :
d =1
2· 6, 94 · 42 = 55, 56 m
28 Le temps n’est pas donné. On doit donc écrire :
v2 = v2o + 2 · a · d ⇒
(100/3, 6)2 = (50/3, 6)2 + 2 · a · 59 ⇒
a =(100/3, 6)2 − (50/3, 6)2
2 · 59
= 4, 905 m/s2
Ce qui représente une accélération d’un demi g.
29 Le temps de chute est le même que celui d’unobjet tombant verticalement. En effet, seul le poidsest présent et l’objet est en chute libre. Ainsi, onpeut écrire :
h =1
2· g · t2 ⇒ 5 =
1
2· 9, 81 · t2 ⇒
t =
√
2 · 59, 81
= 1, 01 s
Si la vitesse horizontale est constante, on peut en-core écrire pour la distance horizontale d parcou-rue :
d = vhoriz · t = 2 · 1, 01 = 2, 02 m
30 Commençons par calculer la distance qu’elle aparcouru pendant la phase de poussée. Pour cela,on a la vitesse moyenne v et le temps que dure lemouvement. Ainsi, on peut poser :
dpoussee = v · t = 3 · 2 · 60 = 360 m
A ce moment-là, au bout de deux minutes et à360 m d’altitude, la poussée cesse (le moteur s’ar-rête). Si on imagine un axe y orienté vers le hautet dont l’origine se situe au sol, on a donc une fu-sée qui se situe en yo = 360 m avec une vitessevo = 4 m/s et qui n’est plus soumise qu’à son poids.Elle est donc en chute libre, même si elle monte, etson accélération dirigée vers le bas, dans le senscontraire du mouvement, est une décélération quivaut : g = −9, 81 m/s2. Pendant quelques instants,elle va donc encore monter jusqu’à s’arrêter. Pourcalculer la distance sur laquelle elle s’arrête, comme
140

ANNEXE L. EXERCICES L.2. SOLUTIONS
on ne dispose pas du temps qu’elle met pour le faire,on doit écrire :
v2 = v2o + 2 · a · d ⇒
02 = 42 + 2 · (−9, 81) · d ⇒
d =16
2 · 9, 81= 0, 8155 m = 81, 55 cm
Ainsi la hauteur totale à laquelle est parvenue lafusée vaut :
htot = 360 + 0, 8155 = 360, 8155 m
Pour déterminer le temps de vol, on dispose en pre-mier lieu du temps de poussée qui est de deux mi-nutes. Il faut encore calculer le temps de chute dela fusée entre le moment ou la poussée cesse et celuiou elle arrive au sol. Pour cela, il faut écrire :
y =1
2· a · t2 + vo · t + yo ⇒
y =1
2· (−9, 81) · t2 + 4 · t + 360 ⇒
0 = −4, 905 · t2 + 4 · t + 360
car on cherche le temps mis pour arriver au sol, soità y = 0. C’est une équation du second degré à uneinconnue, dont la solution est :
t =−4 ±
√
42 − 4 · (−4, 905) · 360
2 · (−4, 905)
=−4 ± 84, 14
−9, 81=
{
−8, 17 s
8, 98 s
La solution t = 8, 98 s est évidemment la bonne.Le temps total est donc finalement de :
ttot = 2 · 60 + 8, 98 = 128, 98 s � 2 mn 9 s
31 Pour Aristote, au moment où l’obus est sorti ducanon, plus aucune action horizontale vers l’avantne s’exerce sur lui. Il cessera donc de se déplacerhorizontalement et retombera exactement là où il aquitté le canon.
Pendant l’élévation et la chute de l’obus, le scoo-ter avance à vitesse constante. La distance dont ils’est déplacé par rapport à l’obus (qui n’a selonAristote pas bougé horizontalement) est donc de :
d = v · t =5
3, 6· 2 = 2, 76 m
Fig. L.4 – Chute aristotélicienne de la tour Eiffel.
32 Rappelons que selon Aristote, dès le moment oùon a lâché le couteau, plus aucune force horizontalene s’exerce sur lui et il va tomber parfaitement ver-ticalement. Or, le bateau avance pendant ce temps.La distance au pied du mât à laquelle tombe le cou-teau est donc de :
d = v · t =8
3, 6· 0, 8 = 1, 78 m
33 Pour connaître la vitesse de rotation de la terreà Paris, il faut connaître la distance parcourue en24 h. Pour cela, il faut connaître sa distance r àl’axe de rotation de la terre (voir figure L.4). On ad’après la figure L.4 que :
r = R · cos(β) = 6′371 · cos(48, 8◦) = 4′197 km
car :
R = Rterre = 6′371 km
β = 48◦ 48′ = 48, 8◦
Ainsi, la vitesse de la tour Eiffel est :
v =2 · π · r
t=
2 · π · 4′197
24= 1099 km/h = 305 m/s
et, selon Aristote, pendant la chute de la pièce, laTour Eiffel devrait s’être déplacée de :
d = v · t = 305 · 2, 1 = 640, 5 m
Ce n’est évidemment pas le cas. L’inertie de la piècel’en empêche.
34 Le schéma de la situation est donné dans la fi-gure L.5. La seconde équation de Newton s’écrit :
−→F +
−→P = m · −→a
141
L.2. SOLUTIONS ANNEXE L. EXERCICES
Fig. L.5 – Une fusée.
Fig. L.6 – Une remorque
En projection sur l’axe et en raison de la définitiondu poids, on a :
F − P = m · a ⇒ F = m · a + m · g
Or, comme l’accélération vaut :
a =vf − vi
t=
1000/3, 6− 0
60= 4, 63 m/s2
on a :
F = 60 · 103 · 4, 63 + 60 · 103 · 9, 81 = 866′400 N
35 Le schéma de la situation est donné par la figureL.6.
La remorque avance à vitesse constante. La pre-mière loi de Newton nous indique alors que lasomme des forces qui s’exercent sur elle est nulle.On peut considérer successivement le cas des forcesverticales et celui des forces horizontales.
Verticalement, la position de la voiture ne changepas. Elle est verticalement à l’arrêt. La réaction dusol
−→R est donc égale en grandeur, mais opposée, au
poids−→P , comme présenté dans la figure L.6.
Horizontalement par contre, la remorque se dé-place. Mais elle le fait à vitesse constante et donc,là encore, la somme des forces horizontales quis’exercent sur elle est nulle. La force de frottement−→F fr est égale en grandeur et opposée à la force
−→F exercée par la voiture pour tirer la remorque.Ainsi :
F = Ffr = 500 N
Si la voiture a une accélération, la situation desforces verticales ne change pas. On a toujours :
−→R =
−−→P . Par contre, la sommes des forces horizontales
n’est plus nulle. On a, selon l’axe de la figure L.6 :
F − Ffr = m · a ⇒F = m · a + Ffr = 500 · 5 + 500 = 3000 N
et la somme des forces qui s’exercent sur la re-morque est :
F − Ffr = m · a = 500 · 5 = 2500 N
36 Ce problème est identique au problème 34 de lafusée. Il suffit de remplacer la fusée par l’ascenseuret de considérer la force de propulsion de la fuséecomme la force de traction du câble. Considéronsdonc la figure L.5. Selon l’axe considéré, on a :
F − P = m · a ⇒F = m · a + m · g = 260 · 4 + 260 · 9, 81
= 3590, 6 N
37 Pour que la voiture ralentisse, il faut que la forcequi s’exerce sur elle soit vers l’arrière. C’est la forcede frottement du sol sur les roues qui la freine. Eneffet, sur la glace elle ne s’exerce pas et la voiturene peut freiner.
Tant la force que l’accélération sont donc dirigéesvers l’arrière. La décélération se calculant par :
v2 = v2o + 2 · a · d ⇒
a =02 − (50/3, 6)2
2 · 40= −2, 4 m/s2
on trouve aisément la force de frottement de laroute sur les pneus qui ralentit la voiture :
Ffr = m · a = 2000 · (−2, 4) = −4′822, 5 N
Elle est négative, donc bien dirigée vers l’arrière.
38 Ce problème illustre bien l’importance du choixdu système. Comme tout se déroule horizontale-ment, on ne va considérer que les forces horizon-tales. Les verticales existent, mais n’interviennentpas.
142

ANNEXE L. EXERCICES L.2. SOLUTIONS
1. Comme on cherche la force nécessaire à l’aug-mentation de vitesse du train dans son entier,considérons pour système le train entier. Samasse totale est M = 300 · 103 kg. Son accélé-ration est :
a =vf − vi
t=
10/3, 6− 0
60= 0, 046 m/s2
On peut donc écrire :
Ftot = M · a = 300 · 103 · 0, 046 = 13′889 N
2. Cette fois-ci, on cherche la force exercée surune partie du train : les wagons. On ne va doncconsidérer comme système que les wagons. Uneseule force F les tire vers l’avant avec la mêmeaccélération que celle du train dans son en-semble. Leur masse est m = 250 · 103 kg. On adonc :
F = m · a = 250 · 103 · 0, 046 = 11′500 N
Valeur inférieure à celle du point précédent,car il ne faut pas tirer la locomotive.
3. Ici, le système est évidemment la locomotiveseule de masse m′ = 50 · 103 kg. On peut donccalculer l’accélération :
Ftot = m′ · a ⇒
a =Ftot
m′=
13′889
50 · 103= 0, 28 m/s2
et finalement le temps :
a =vf − vi
t⇒ t =
10/3, 6− 0
0, 28= 10 s
39 Pendant la montée, la balle subit deux forcesextérieures vers le bas : son poids P = m · g et laforce de frottement Ffr. En prenant un axe verticaldirigé vers le haut, on peut donc écrire :
∑
F ext = −m · g − Ffr = m · a ⇒
−0, 1 · 9, 81 − 0, 05 = 0, 1 · a ⇒a = −10, 31 m/s2
La balle a donc une décélération constante. Ainsi ils’agit d’un MRUA et, connaissant les vitesses ini-tiale et finale et l’accélération, on peut écrire :
v2 = v2o + 2 · a · h ⇒
0 = 22 − 2 · 10, 31 · h ⇒h = 0, 194 m = 19, 4 cm
Évidemment, elle monte moins haut que s’il n’yavait pas de frottements.
40 La première phase du mouvement se déroule àvitesse constante. La distance parcourue pendantcinq minutes, c’est-à-dire 1/12 h, est donc donnéepar :
dMRU = vo · t = 10′000 ·1
12= 833, 3 km
La seconde phase du mouvement se déroule à accé-lération constante. En effet, la force de poussée etla masse étant constantes, on peut écrire :
∑
F ext = P = m · a ⇒
1000 = 9′000 · a ⇒a = 0, 111 m/s2
Connaissant l’accélération, on peut ensuite calculerla distance parcourue en MRUA grâce au temps depoussée :
dMRUA =1
2· a · t2 + vo · t
=1
2· 0, 111 · 302 +
10′000
3, 6· 30
= 83′383, 3 m = 83, 4 km
Au total, la distance parcourue est donc de :
dtot = dMRU + dMRUA = 833, 3+ 83, 4 = 916, 7 km
41 Son accélération, supposée constante, est don-née par :
v2 = v2o + 2 · a · d ⇒
(0, 01 · 3 · 108)2 = 02 + 2 · a · 30 ⇒a = 1, 5 · 1011 m/s2
La force totale qui s’exerce sur lui est alors donnéepar :
Ftot = m ·a = 9, 1 ·10−31 ·1, 5 ·1011 = 1, 37 ·10−19 N
42 Tant que l’araignée ne bouge pas, la force exer-cée par le fil est égale à son poids, c’est-à-dire :
F = m · g = 0, 005 · 9, 81 = 0, 049 N
143

L.2. SOLUTIONS ANNEXE L. EXERCICES
Fig. L.7 – Un ascenseur
Pendant sa chute, la seconde loi de Newton permetd’écrire, en utilisant un axe dans le sens de la chute :
∑
F ext = m · g − F = m · a ⇒
0, 005 · 9, 81 − 0, 01 = 0.005 · a ⇒a = 7, 81 m/s2
Avec une vitesse initiale nulle, le temps de chutesur une hauteur de 2 m est :
h =1
2· a · t2 ⇒
t =
√
2 · ha
=
√
2 · 27, 81
= 0, 716 s
Et la vitesse finale est alors :
v = a · t = 7, 81 · 0, 716 = 5, 59 m/s
43 L’ensemble se comporte comme un système enune dimension dont l’accélération se fait dans lesens de la masse la plus grande et qui est freiné parla masse la plus faible. Si on définit le sens positifde l’axe dans le sens du mouvement, on peut écrire :
∑
F ext = m2 · g − m1 · g = (m1 + m2) · a ⇒
3 · 9, 81 − 2 · 9, 81 = (2 + 3) · a ⇒a = 1, 962 m/s2
44 La figure L.7 présente la situation.On choisit comme système la personne. Les forces
extérieures sont alors :– son poids
−→P et
– la force−→R exercée par la balance sur la per-
sonne. Sa réaction, la force exercée par lapersonne sur la balance, permet à cette der-nière de donner une indication du poids de
la personne, indiqué malheureusement en ki-logrammes (et non en newton, comme cela de-vrait être le cas) par la balance.
Selon l’axe donné, on peut écrire :
R − P = m · a ⇒ R = m · a + m · g
A partir de là, on peut considérer les différents cas :
1. Quand l’ascenseur prend de la vitesse, l’accé-lération vaut 2 m/s2. La réaction de la balanceest alors :
R = 70 · 2 + 70 · 9, 81 = 826, 7 N
et la balance indiquerait :
m =826, 7
9, 81= 84, 3 kg
La personne a un poids plus important qu’àl’arrêt et donc l’indication donnée en terme demasse par la balance pourrait laisser croire à... de l’embonpoint.
2. Pendant la phase à vitesse constante, l’accélé-ration vaut 0 m/s2. La réaction de la balanceest alors :
R = 70 · 0 + 70 · 9, 81 = 686, 7 N
et la balance indiquerait :
m =686, 7
9, 81= 70 kg
La personne a le même poids qu’à l’arrêt etdonc l’indication donnée en terme de masse parla balance est juste.
3. Quand l’ascenseur perd de la vitesse, l’accélé-ration vaut −3 m/s2. La réaction de la balanceest alors :
R = 70 · (−3) + 70 · 9, 81 = 476, 7 N
et la balance indiquerait :
m =476, 7
9, 81= 48, 6 kg
La personne a un poids moins important qu’àl’arrêt et donc l’indication donnée en terme demasse par la balance pourrait laisser croire à... une maladie.
144

ANNEXE L. EXERCICES L.2. SOLUTIONS
On voit qu’une balance indique quelque chose derelatif à l’état de mouvement de la personne. Ellen’indique donc pas une quantité de matière, c’est-à-dire une masse. Une balance devrait donc êtregraduée en newtons. Elle l’est en kg, car on a l’ha-bitude de se peser à l’arrêt (bien que ... la terretournant ...) et à la surface de la terre. Dans ce casbien précis, il suffit en effet de diviser son indication(ou de reporter face à la graduation une indicationde masse) par g pour obtenir la masse.
45 La loi de la gravitation universelle donne :
F = G ·M · m
d2
= 6, 67 · 10−11 · 1 · 10, 52
= 2, 668 · 10−10 N
46 Le poids à la surface de la terre peut être calculéde deux manières. A l’aide de la loi de la gravitationuniverselle et à l’aide de sa définition P = m · g. Ils’agit de la même force. On peut donc écrire :
m · g = G · Mterre · mR2
terre
⇒
g = G · Mterre
R2terre
⇒
Mterre =g · R2
terre
G
=9, 81 · (6′372 · 103)2
6, 67 · 10−11= 5, 97 · 1024 kg
47 Comme au problème 46, on a :
g = G · M
R2
Mais ici il s’agit de la lune. Ainsi :
glune = G ·Mlune
R2lune
= 6, 67 · 10−11 · 7, 35 · 1022
(1, 738 · 106)2
= 1, 62 m/s2
48 On a simplement :
F = k · x = 800 · 0, 1 = 80 N
49 Une masse de 100 g exerce une force
F = m · g = 0, 1 · 9, 81 = 0, 981 N
sur le ressort. On a donc :
F = k · x ⇒ k =F
x=
0, 981
0, 12= 8, 175 N/m
50 L’accélération de la voiture est (hypothèseMRUA) :
v2 = v2o + 2 · a · d ⇒
a =v2 − v2
o
2 · d=
13, 82
2 · 40
= 2, 41 m/s2
La force exercée par la route sur les pneus est doncde :
Ffr = m · a = 2000 · 2, 41 = 4822, 5 N
Or, par définition de la force de frottement sec, ona :
Ffr = µ · R = µ · m · g ⇒
µ =Ffr
m · g=
4822, 5
2000 · 9, 81= 0, 25
51 La force maximale entre les pneus et la routeest donnée par :
Ffr = µo · R = µo · m · g
On a alors :1. Avec les roues avant uniquement, la force maxi-
male est :
Ffr = 0, 5 · 600 · 9, 81 = 2943 N
Et l’accélération :
a =Ffr
m=
2943
1000= 2, 943 m/s2
2. Avec les roues arrière uniquement, la forcemaximale est :
Ffr = 0, 5 · 400 · 9, 81 = 1962 N
Et l’accélération :
a =Ffr
m=
1962
1000= 1, 962 m/s2
3. Avec les roues avant et arrière ensembles, laforce maximale est :
Ffr = 0, 5 · 1000 · 9, 81 = 4905 N
Et l’accélération :
a =Ffr
m=
4905
1000= 4, 905 m/s2
145

L.2. SOLUTIONS ANNEXE L. EXERCICES
52 La seconde loi de Newton permet de calculer lavaleur de la force de traction :
F − m · g = m · a ⇒F = m · a + m · g
= 50 · 4 + 50 · 9, 81 = 690, 5 N
La force de traction et le déplacement étant paral-lèles et de même sens, on a :
A =−→F ·
−→d = F · d = 690, 5 · 100 = 69′050 J
53 Par définition de l’énergie potentielle, on a :
Epot = m · g · h = 50 · 9, 81 · 100 = 49′050 J
Pour le calcul de l’énergie cinétique, si on fait l’hy-pothèse d’un MRUA, la vitesse de la masse au boutde 100 m est :
v2 = v2o + 2 · a · d ⇒
v =√
2 · a · d =√
2 · 4 · 100 = 28, 3 m/s
et l’énergie cinétique est alors :
Ecin =1
2· m · v2 =
1
2· 50 · 28, 32 = 20′022, 25 J
54 Dans chacun des cas, l’énergie cinétique se cal-cule par :
Ecin =1
2· m · v2
– Un bon coureur met environ 10 s pour parcou-rir 100 m. Sa vitesse moyenne est donc de :
v =d
t=
100
10= 10 m/s
Son énergie cinétique est donc de :
Ecin =1
2· 80 · 102 = 4000 J
– Simplement, on calcule l’énergie cinétique :
Ecin =1
2· 800 · 102 = 40′000 J
– Il faut mettre la masse en kg pour calculerl’énergie cinétique :
Ecin =1
2· 0, 01 · 8002 = 3200 J
55 Procédons par étapes :
– si on monte de 4 m, le poids et le déplacementsont opposés et le travail du poids est :
A = m · g · d · cos(α)
= 3 · 9, 81 · 4 · cos(180) = −117, 72 J
– lors d’un déplacement horizontal, le poids et ledéplacement sont perpendiculaires et le travailest nul (car cos(90◦) = 0),
– si on descend de 4 m, le poids et le déplacementsont dans le même sens et le travail du poidsest :
A = m · g · d · cos(α)
= 3 · 9, 81 · 4 · cos(0) = 117, 72 J
– lors d’un déplacement horizontal, le poids et ledéplacement sont perpendiculaires et le travailest nul (car cos(90◦) = 0).
Ainsi, le travail total est la somme des travauxpour chaque déplacement :
Atot = −117, 72 + 0 + 117, 72 + 0 = 0 J
Le travail du poids pour un parcours fermé est doncnul. On dit d’une telle force qu’elle est “conserva-tive”. Ce n’est que pour de telles forces qu’il existeune énergie potentielle.
56 Par définition du travail, on a :
A =−→F ·
−→d = F · d · cos(α)
= 15 · 20 · cos(10◦) = 295, 4 J
57 Pour rappel, résolvons tout d’abord le problèmeà l’aide de l’accélération. Nous sommes dans le casd’un MRUA. Donc, on peut écrire :
v2 = v2o + 2 · a · h ⇒
v =√
2 · 9, 81 · 10 = 14 m/s = 50, 4 km/h
Pour résoudre le problème à l’aide de l’énergie, ilfaut considérer que toute l’énergie potentielle de lapersonne en haut du plongeoir se transforme gra-duellement en énergie cinétique pendant sa chute.Si le zéro de l’énergie potentielle est choisi au niveaude l’eau, le plongeur n’a plus d’énergie potentiellelorsqu’il l’atteint. Elle s’est entièrement transfor-mée en énergie cinétique. On peut donc écrire :
m · g · h =1
2· m · v2 ⇒
v =√
2 · 9, 81 · 10 = 14 m/s = 50, 4 km/h
146

ANNEXE L. EXERCICES L.2. SOLUTIONS
et le problème est résolu.
Cependant, il faut remarquer que l’égalité del’énergie potentielle et de l’énergie cinétique dé-rive du théorème de conservation de l’énergie méca-nique. En effet, comme c’est le cas ici, en l’absencede forces non conservatives, on peut écrire :
∆Emec = 0
Emecf − Emeci = 0
Epotf + Ecinf − Epoti − Ecini = 0
0 +1
2· m · v2 − m · g · h − 0 = 0
⇒ 1
2· m · v2 = m · g · h
Remarquons enfin, que le problème est ici toutaussi facile à résoudre des deux manières. Cepen-dant, dans le premier cas, on a pu le faire car onsait qu’une chute libre est un MRUA. Pour d’autrestypes de mouvements, qui ne sont pas des MRUA,pour trouver la vitesse à partir de l’accélération, ilfaut résoudre une intégrale. Et là, cela peut êtrebeaucoup plus difficile qu’en utilisant l’énergie.
58 On utilisera pas ici la méthode newtonienne,même si le problème peut être résolu de cette ma-nière.
Fixons le zéro de l’énergie potentielle là où l’ob-jet décolle. Alors, son énergie potentielle est nulleet son énergie cinétique maximale. En montant, ilperd graduellement de l’énergie cinétique au pro-fit de l’énergie potentielle. Arrivé au sommet desa trajectoire, il s’arrête brièvement et son éner-gie potentielle est maximale alors que son énergiecinétique est nulle. On peut donc dire que touteson énergie cinétique du départ s’est transforméeen énergie potentielle au sommet et écrire :
1
2· m · v2 = m · g · h ⇒
h =v2
2 · g=
102
2 · 9, 81= 5, 1 m
59 Commençons par calculer la vitesse à laquellela tuile quitte le toit. La conservation de l’énergiemécanique implique que :
m · g · ∆h =1
2· m · v2 ⇒
v =√
2 · g · ∆h
=√
2 · 9, 81 · (30 − 25) = 9.9 m/s
Cette vitesse est un vecteur qui fait avec l’horizon-tale un angle de 15◦. La balistique (voir annexe2.5.4) nous apprend qu’il faut décomposer le mou-vement sur chaque axe. En particulier la vitesseinitiale a les composantes suivantes :
vx = v · cos(α) = 9, 9 · cos(−15◦) = 9, 56 m/s
vy = v · sin(α) = 9, 9 · sin(−15◦) = −2, 56 m/s
puisque le vecteur vitesse pointe sous l’horizontale(α < 0).
En choisissant un système d’axes dont l’origineest au sol et au pied du bord du toit, on peut alorsécrire les équations de la position de la tuile aucours du temps :
x(t) = vx · t = 9, 56 · t
y(t) = −1
2· 9, 81 · t2 + vy · t + yo
= −1
2· 9, 81 · t2 − 2, 56 · t + 25
On cherche alors la position horizontale de la tuileau moment où elle arrive au sol, soit x(tsol). Il fautdonc calculer tsol. Or, à ce moment là, y(tsol) = 0.La seconde équation nous donne donc :
0 = −1
2· 9, 81 · t2sol − 2, 56 · tsol + 25
⇒ −4, 905 · t2sol − 2, 56 · tsol + 25 = 0
C’est une équation du second degré à une inconnuetsol. Sa solution est :
tsol =2, 56 ±
√
2, 562 + 4 · 4, 905 · 25
2 · (−4, 905)
=2, 56 ± 22, 3
−9, 81=
{
−2, 53 s
2 s
Évidemment, le temps correct est celui qui est po-sitif.
Ainsi, tsol = 2 s. La distance au pied du toit àlaquelle la tuile arrivera est donc :
x(tsol) = vx · tsol = 9, 56 · 2 = 19, 12 m
60 Simplement, on a :
∆Ecin =1
2· m · v2
f − 1
2· m · v2
i
=1
2· 2000 · (( 10
3, 6)2 − (
5
3, 6
2
)) = 5787 J
147

L.2. SOLUTIONS ANNEXE L. EXERCICES
61 La puissance de chute est :
P = η · Q · g · h =
= 0, 4 · 30 · 10−3 · 9, 81 · 22 = 2, 59 kW
La chute à donc une puissance de 2590 W . Son frigoet sa machine à laver ont une puissance totale de2, 2 kW . Reste donc 2590 − 2200 = 390 W pourles ampoules. Or, 390/40 = 9, 75 . Robinson pourradonc utiliser 9 ampoules.
62 Le débit de la prise d’eau est de :
Q = 0, 05 · 30 = 1, 5 l/s = 1, 5 · 10−3 m3/s
La puissance de chute est donc de :
P = η · Q · g · h =
= 0, 4 · 1, 5 · 9, 81 · 22 = 129, 5 W
Or, faire monter une masse de 60 kg d’une hauteurde deux étages, soit 4 m, demande une énergie de :
E = m · g · h = 60 · 9, 81 · 4 = 2′354, 4 J
Compte tenu des frottements, l’énergie totale né-cessaire est de 2 · 2′354, 4 = 4′708, 8 J . Soit, pourune montée en 2 mn, une puissance de :
P =E
t=
4′708, 8
2 · 60� 40 W
Ainsi, si 40 W sont nécessaire, Robinson n’utilisecertainement pas les quelques 130 W fournis par lachute d’eau. L’ascenseur est donc réalisable.
63 Le nombre de ménages est de 30′000/2, 5 =12′000. Il faut donc fournir une énergie de :
E = 12′000 · 3′000 = 36′000′000 kWh = 36 GWh
Sur une année, cette énergie représente une puis-sance moyenne de :
P =E
t=
36 · 109
365 · 24= 4′110 W
On a alors :
P = η · Q · g · h ⇒
Q =P
η · g · h
=4′110
0, 9 · 9, 81 · 74= 6, 3 m3/s
Il faut donc choisir une turbine Francis.
64 La puissance du vent est donnée par la relation4.12 :
Pvent =1
2· ρ · S · v3
Soit avec une surface S = π · R2, une vitesse en SIv = 6 m/s et les valeurs données :
Pvent =1
2· 1, 293 · π · 222 · 63
= 212′333 W = 212, 333 kW
65 La vitesse linéaire en bout de pale vaut donc :
v =277, 2
3, 6= 77 m/s
Or, un tour représente une distance en bout depale : d = 2 · π · 30 = 188, 5 m. La vitesse de ro-tation est donc de :
v =77
188, 5= 0, 41 tr/s
La puissance du vent vaut, selon l’équation 4.12 :
Pvent =1
2· 1, 293 · π · 302 · (32, 4
3, 6)3
= 1′332′565 W = 1′332, 6 kW
Comme l’éolienne tourne à η = 90% de la limite deBetz, on a, selon l’équation 4.14 :
∆P = η · 16
27· Pvent
= 0, 9 · 0, 593 · 1′332′565 =
= 710′701 W = 710 kW
66 On a, selon l’équation 4.14, que :
∆P = η · 16
27· Pvent ⇒
Pvent =27 · ∆P
16 · η
=27 · 40
16 · 0, 4= 168, 75 W
Il s’agit de la puissance du vent nécessaire pouralimenter l’ampoule. On a donc, selon l’équation
148

ANNEXE L. EXERCICES L.2. SOLUTIONS
4.12 :
Pvent =1
2· ρ · S · v3
=1
2· ρ · π · R2 · v3 ⇒
R =
√
2 · Pvent
ρ · π · v3
=
√
2 · 168, 75
1, 293 · π · 43
= 1, 14 m
Il faut donc utiliser une petite éolienne de 1, 14 mde rayon.
67 L’équation 4.9 permet de calculer la puissance∆P nécessaire pour chauffer une masse de 100 kgd’eau :
∆P =E
t=
m · ceau · ∆θ
t
=100 · 4′180 · 20
4 · 3600= 581 W
L’équation 4.16 nous donne alors la surface cher-chée S :
∆P = S · (B · P − K · ∆θ) ⇒
S =∆P
B · P − K · ∆θ
=581
0, 8 · 120 − 3 · 20= 16, 2 m2
68 On calcule tout d’abord la puissance fournie parles capteurs :
∆P = S · (B · P − K · ∆θ) ⇒= 5 · (0, 7 · 150 − 2 · 15) = 375 W
Cela signifie que les capteurs produisent une énergieE = 375 J/s. Chaque seconde, il faut donc évacuercette énergie. La masse d’eau nécessaire pour celaest donnée par l’équation 4.9 :
E = m · ceau · ∆θ ⇒
m =E
ceau · ∆θ
=375
4′180 · 15= 6 g
C’est une masse qui correspond à un volume de :
ρ =m
V⇒
V =m
ρ=
6 · 10−3
1= 6 ml
En effet, la masse volumique de l’eau est de 1 kg/l.Le débit est donc très faible et vaut D = 6 ml/s =21, 6 l/h.
69 L’énergie annuelle produite par les 8 m2 de cel-lules est, compte tenu d’un rendement d’environ15%, c’est-à-dire 20 W/m2 :
E = 8 · 20 · 24 · 365 = 1′401, 6 kWh
La couverture solaire ne suffit donc pas. Il manque2′500−1′401, 6 = 1′098, 4 kWh. Cela représente unepuissance de :
P =E
t=
1′098, 4
24 · 365= 125, 4 kW
149
NOTES NOTES
Notes1Voir le site du télescope spatial Hubble : http://hubble.
nasa.gov/multimedia/astronomy.php notamment pour lecopyright de l’image. Remerciements à la NASA.
1Voir le site du télescope spatial Hubble : http://hubble.nasa.gov/multimedia/astronomy.php notamment pour lecopyright de l’image. Remerciements à la NASA.
2Voir le site de l’encyclopédie Wikipedia : http://fr.
wikipedia.org/wiki/Image:End_of_universe.jpg notam-ment pour le copyright de l’image. Remerciements à laNASA.
2Voir le site de l’encyclopédie Wikipedia : http://fr.
wikipedia.org/wiki/Image:End_of_universe.jpg notam-ment pour le copyright de l’image. Remerciements à laNASA.
3Voir le site de l’encyclopédie Wikipedia : http://en.
wikipedia.org/wiki/Image:Giordano_Bruno.jpg4Voir le site de l’encyclopédie wikipedia : http://
commons.wikimedia.org/wiki/Image:Vie_du_soleil.jpg4Voir le site de l’encyclopédie wikipedia : http://
commons.wikimedia.org/wiki/Image:Vie_du_soleil.jpg5Voir le site de l’encyclopédie Wikipedia : http://fr.
wikipedia.org/wiki/Accueil notamment pour le copyrightde l’image. Remerciements à son auteur Greg Goebel.
5Voir le site de l’encyclopédie Wikipedia : http://fr.
wikipedia.org/wiki/Accueil notamment pour le copyrightde l’image. Remerciements à son auteur Greg Goebel.
6Voir le site du télescope spatial Hubble : op cit. Remer-ciements à la NASA.
6Voir le site du télescope spatial Hubble : op cit. Remer-ciements à la NASA.
7Voir le site du télescope spatial Hubble : ibid. Remer-ciements à la NASA.
7Voir le site du télescope spatial Hubble : ibid. Remer-ciements à la NASA.
8Voir le site du télescope spatial Hubble : ibid. Remer-ciements à la NASA.
8Voir le site du télescope spatial Hubble : ibid. Remer-ciements à la NASA.
9Voir : http://fr.wikipedia.org/wiki/Plan%C3%A8tes_extrasolaires
10Voir le site de Hubble : http://hubblesite.org/
newscenter/archive/releases/2005/03/image/a/10Voir le site de Hubble : http://hubblesite.org/
newscenter/archive/releases/2005/03/image/a/11Voir le site de l’encyclopédie wikipedia : http://fr.
wikipedia.org/wiki/Image:Solar_sys.jpg Remerciementsà la NASA.
11Voir le site de l’encyclopédie wikipedia : http://fr.
wikipedia.org/wiki/Image:Solar_sys.jpg Remerciementsà la NASA.
12Voir le site de l’encyclopédie : http://fr.wikipedia.
org/wiki/Image:Portrait_de_famille_%281_px_%3D_1000_
km%29.jpg Remerciements à la NASA.12Voir le site de l’encyclopédie : http://fr.wikipedia.
org/wiki/Image:Portrait_de_famille_%281_px_%3D_1000_
km%29.jpg Remerciements à la NASA.13voir : http://fr.wikipedia.org/wiki/Nuage_de_Oort14Voir le site du télescope spatial Hubble : ibid. Remer-
ciements à la NASA.
14Voir le site du télescope spatial Hubble : ibid. Remer-ciements à la NASA.
15Voir le site de l’encyclopédie Wikipedia :http://commons.wikimedia.org/wiki/Image:Moon_Earth_
Comparison.png. Remerciements à la NASA.15Voir le site de l’encyclopédie Wikipedia :
http://commons.wikimedia.org/wiki/Image:Moon_Earth_
Comparison.png. Remerciements à la NASA.16Voir le site de l’encyclopédie : http://commons.
wikimedia.org/wiki/Image:TerreOrbiteLuneEtPhases.png16Voir le site de l’encyclopédie : http://commons.
wikimedia.org/wiki/Image:TerreOrbiteLuneEtPhases.png17Voir le site de l’encyclopédie Wikipedia : http://fr.
wikipedia.org/wiki/Image:Orbite-lune-soleil.png17Voir le site de l’encyclopédie Wikipedia : http://fr.
wikipedia.org/wiki/Image:Orbite-lune-soleil.png18Voir aux sujet des éclipses l’excellent site de l’institut de
mécanique céleste : http ://www.imcce.fr/19Voir le site de l’encyclopédie Wikipedia : http:
//fr.wikipedia.org/wiki/Image:Crab_Nebula.jpg notam-ment pour le copyright de l’image.
19Voir le site de l’encyclopédie Wikipedia : http:
//fr.wikipedia.org/wiki/Image:Crab_Nebula.jpg notam-ment pour le copyright de l’image.
20Voir le site de l’encyclopédie Wikipedia : http://fr.
wikipedia.org/wiki/Accueil notamment pour le copyrightde l’image. Remerciements à son auteur Christophe DangNgoc Chan.
20Voir le site de l’encyclopédie Wikipedia : http://fr.
wikipedia.org/wiki/Accueil notamment pour le copyrightde l’image. Remerciements à son auteur Christophe DangNgoc Chan.
21Voir le site de l’encyclopédie Wikipedia : http://fr.
wikipedia.org/wiki/Accueil notamment pour le copyrightde l’image. Remerciements à son auteur Pickwick.
21Voir le site de l’encyclopédie Wikipedia : http://fr.
wikipedia.org/wiki/Accueil notamment pour le copyrightde l’image. Remerciements à son auteur Pickwick.
22Voir le site de l’encyclopédie Wikipedia : http:
//commons.wikimedia.org/wiki/Image:8orbitals.jpg no-tamment pour le copyright de l’image.
22Voir le site de l’encyclopédie Wikipedia : http:
//commons.wikimedia.org/wiki/Image:8orbitals.jpg no-tamment pour le copyright de l’image.
23Voir : http://cui.unige.ch/isi/ssc/phys/
Rubbia-Klapisch.html24Voir le site de la NASA (notamment pour le copyright :
sans copyright) : http://grin.hq.nasa.gov/ABSTRACTS/
GPN-2002-000069.html24Voir le site de la NASA (notamment pour le copyright :
sans copyright) : http://grin.hq.nasa.gov/ABSTRACTS/
GPN-2002-000069.html25Les missions Apollo : http://perso.wanadoo.fr/
alexandre.schwenk/index.htm26Voir le site de Wikicommon (notamment pour le co-
pyright : sans copyright) : http://commons.wikimedia.org/wiki/Image:Andromeda_collision.jpg
26Voir le site de Wikicommon (notamment pour le co-pyright : sans copyright) : http://commons.wikimedia.org/wiki/Image:Andromeda_collision.jpg
27Voir http://fr.wikipedia.org/wiki/Image:Galilee.
jpg
150

NOTES NOTES
28Voir http://fr.wikipedia.org/wiki/Image:Johannes_
Kepler_1610.jpg29Voir le site de wikipedia : http://fr.wikipedia.org/
wiki/Image:Kepler_Optica.jpg notamment pour le copy-right de l’image.
29Voir le site de wikipedia : http://fr.wikipedia.org/
wiki/Image:Kepler_Optica.jpg notamment pour le copy-right de l’image.
30Voir http://fr.wikipedia.org/wiki/La_Physique_
%28Aristote%2931Voir http://fr.wikipedia.org/wiki/Image:
Aristotle_by_Raphael.jpg32Voir http://en.wikipedia.org/wiki/Image:
GodfreyKneller-IsaacNewton-1689.jpg33Voir le site de l’encyclopédie Wikipedia : http://
commons.wikimedia.org/wiki/Image:Cavendish-lab.jpg
notamment pour le copyright de l’image.33Voir le site de l’encyclopédie Wikipedia : http://
commons.wikimedia.org/wiki/Image:Cavendish-lab.jpg
notamment pour le copyright de l’image.34Voir le site de l’encyclopédie Wikipedia : http:
//commons.wikimedia.org/wiki/Image:Rollercoaster_
Tornado_Avonturenpark_Hellendoorn_Netherlands.jpg34Voir le site de l’encyclopédie Wikipedia : http:
//commons.wikimedia.org/wiki/Image:Rollercoaster_
Tornado_Avonturenpark_Hellendoorn_Netherlands.jpg35Voir le site de l’encyclopédie Wikipedia :
http://commons.wikimedia.org/wiki/Image:
Finowkanal-treidel.jpg35Voir le site de l’encyclopédie Wikipedia :
http://commons.wikimedia.org/wiki/Image:
Finowkanal-treidel.jpg36Voir le site de l’encyclopédie Wikipedia :
http://commons.wikimedia.org/wiki/Image:
Mozaic-garden009.jpg36Voir le site de l’encyclopédie Wikipedia :
http://commons.wikimedia.org/wiki/Image:
Mozaic-garden009.jpg37Voir http://fr.wikipedia.org/wiki/Image:
Sadi_Carnot.jpeg38Voir le site : http://www.emosson-lac.ch/barrage.htm38Voir le site : http://www.emosson-lac.ch/barrage.htm39Voir le site de l’encyclopédie Wikipedia :
http://fr.wikipedia.org/wiki/Image:S_vs_pelton_
schnitt_1_zoom.png39Voir le site de l’encyclopédie Wikipedia :
http://fr.wikipedia.org/wiki/Image:S_vs_pelton_
schnitt_1_zoom.png40Voir le site de l’encyclopédie : http://fr.wikipedia.
org/wiki/Image:Photoelectric_effect.png40Voir le site de l’encyclopédie : http://fr.wikipedia.
org/wiki/Image:Photoelectric_effect.png41Voir le site de l’encyclopédie : http://fr.wikipedia.
org/wiki/Image:4inch_poly_solar_cell.jpg41Voir le site de l’encyclopédie : http://fr.wikipedia.
org/wiki/Image:4inch_poly_solar_cell.jpg42voir le site OutilsSolaires : http://www.
outilssolaires.com/pv/prin-bilan.htm43voir aussi l’étude : “Compared assessment
of selected environmental indicators of photo-voltaic electricity in OECD cities” à l’adresse :
http://www.eupvplatform.org/fileadmin/Documents/
Brochure-indicateurs_26_pays.pdf44Voir le site de l’encyclopédie : http://fr.wikipedia.
org/wiki/Image:Tableau-lindal.jpg44Voir le site de l’encyclopédie : http://fr.wikipedia.
org/wiki/Image:Tableau-lindal.jpg45Voir le site de l’encyclopédie : http://fr.wikipedia.
org/wiki/Image:Boiling_nuclear_reactor.png46Voir le site de l’encyclopédie : http://commons.
wikimedia.org/wiki/Image:Combustion_methane.png46Voir le site de l’encyclopédie : http://commons.
wikimedia.org/wiki/Image:Combustion_methane.png47Voir le site de l’encyclopédie Wikipedia : http:
//commons.wikimedia.org/wiki/Image:Eclipse_lune.jpg.notamment pour le copyright de l’image. Remerciements àson auteur Luc Viatour.
47Voir le site de l’encyclopédie Wikipedia : http:
//commons.wikimedia.org/wiki/Image:Eclipse_lune.jpg.notamment pour le copyright de l’image. Remerciements àson auteur Luc Viatour.
48http://www.iap.fr/InformationCommunication/
ArticlesGrandPublic/Etoiles/Transit/transit_
parallaxe_mars_1672.html49http://www.iap.fr/InformationCommunication/
ArticlesGrandPublic/Etoiles/Transit/transit_
parallaxe_mars_1672.html50Voir le site de l’encyclopédie Wikipedia : http://
en.wikipedia.org/wiki/Image:Tychonian.gif notammentpour le copyright de l’image.
50Voir le site de l’encyclopédie Wikipedia : http://
en.wikipedia.org/wiki/Image:Tychonian.gif notammentpour le copyright de l’image.
51Voir le site de l’encyclopédie Wikipedia : http://
commons.wikimedia.org/wiki/Image:Milky_Way_2005.jpg.Image dans le domaine public. Remerciements à la NASA.
51Voir le site de l’encyclopédie Wikipedia : http://
commons.wikimedia.org/wiki/Image:Milky_Way_2005.jpg.Image dans le domaine public. Remerciements à la NASA.
52Voir le site http://www.dil.univ-mrs.fr/~gispert/
enseignement/astronomie/5eme_partie/voieLactee.php53Voir le site de l’encyclopédie Wikipedia : http:
//commons.wikimedia.org/wiki/Image:Galileo_Galilei\
%2C_Discorsi_e_Dimostrazioni_Matematiche_Intorno_a_
Due_Nuove_Scienze\%2C_1638_\%281400x1400\%29.png.53Voir le site de l’encyclopédie Wikipedia : http:
//commons.wikimedia.org/wiki/Image:Galileo_Galilei\
%2C_Discorsi_e_Dimostrazioni_Matematiche_Intorno_a_
Due_Nuove_Scienze\%2C_1638_\%281400x1400\%29.png.54Voir le site de l’encyclopédie Wikipedia : http://
fr.wikipedia.org/wiki/Image:Navstar-2.jpg notammentpour le copyright de l’image. Remerciements à la NASA.
54Voir le site de l’encyclopédie Wikipedia : http://
fr.wikipedia.org/wiki/Image:Navstar-2.jpg notammentpour le copyright de l’image. Remerciements à la NASA.
55Voir le site de l’encyclopédie Wikipedia : http:
//commons.wikimedia.org/wiki/Image:Bay_of_Fundy.jpg
notamment pour le copyright de l’image. Remerciements àson auteur Samuel Wantman.
55Voir le site de l’encyclopédie Wikipedia : http:
//commons.wikimedia.org/wiki/Image:Bay_of_Fundy.jpg
notamment pour le copyright de l’image. Remerciements àson auteur Samuel Wantman.
151

NOTES NOTES
56Voir le site de RhônEole : http://www.rhoneole.ch/57Voir le site de Juvent : http://www.juvent.ch/58Voir les sites de Géothermie : http://www.
geothermal-energy.ch/ et http://www.ader.ch/
energieaufutur/energies/geothermie/index2.php59voir dépliant “Nos déchets = notre énergie” sur le site :
http://www.cridor.ch/content/doc/brochures.php
152
Bibliographie
Arkan Simaan (2002). Sur l’expérience d’Éra-thostène. Bulletin de l’Union des physiciens,96 :1193–1196. Suite à l’article “Histoire dessciences : une expérience pédagogique en se-conde”, BUP No 843, avril 2002.
Bernard Simon (2007). La marée La marée océa-nique côtière. Institut océanographique, Paris-Monaco. Ouvrage très complet et très mathé-matique d’analyse du phénomène de marée. Ladescription statique de Newton est donnée enterme de changement de référentiel non inter-tiel et en language vectoriel. Mais la construc-tion de Procor y est très précisément justifiée,ce qui est un grand mérite. La description dy-namique constitue le principal de l’ouvrage etse fonde sur l’analyse de Laplace. C’est un ou-vrage qui nous place au cœur même des mo-dèles mathématiques nécessaires pour prévoirles marées.
Biarnais Marie-Françoise (1985). isaac newton,principia mathematica. Christian Bourgois.
Eric Lindemann (1999). Mécanique. DeBoeck Uni-versité.
Fabienne Casoli, T. E. (2005). Planètes extraso-laires. Belin Pour la science.
Françoise Balibar, Jean-Marc Lévi-Leblond, R. L.(2005). Qu’est-ce que la matière. Le pom-mier/Cité des sciences et de l’industrie, Paris.Petit ouvrage d’une clarté extraordinaire.
Galileo Galilei (1992). Dialogue sur les deux grandssystèmes du monde. Seuil Points Sciences.
Gould Stephen Jay (2005). Le renard et le héris-son. Seuil, science ouverte, harmony books,new york, 2003 edition.
Gruber Christian (1988). Mécanique générale.Presses polytechniques romandes, CH-1015Lausanne, première édition edition. Ouvragetrès complet mais très mathématique.
Hubert Reeves avec Fréderic Lenoir (2003). Mal deTerre. Édition du Seuil, Paris.
Jean-Baptiste Joseph Delambre (1821). Histoire del’astronomie moderne. Courcier, Paris. Celivre est publié par google book à l’adressehttp ://books.google.ch sous “Histoire de l’as-tronomie moderne”. Il existe aussi son pendant“Histoire de l’astronomie ancienne”.
Jean-François Robredo (2007). Comment l’universà perdu tout point fixe. Ciel et Espace, Juin2007.
Jean-Marc Lévy-Leblond (1996). Au contrairesL’exercice de la pensée et la pratique de lascience. Gallimard nrf essais.
Jean-Marc Lévy-Leblond (2006). De la matière re-lativiste quantique interactive. Traces écrites,Édition du Seuil.
Jean Rocchi (2000). Giordano Bruno après le bû-cher. Complexe. Un ouvrage fantastique quiremet Galilée à sa juste place.
Lhomme Jean-Christian (2004). Les énergies re-nouvelables. delachaux et niestlé, réimpression2005, second tirage edition.
Odile Guérin (2004). Tout savoir sur les marées.Éditions Ouest-France. Excellent ouvrage quidécompose l’analyse du phénomène des maréesen différents rythmes. Cela permet une trèsgrande clarté dans l’explication astronomiqueet essentiellement newtonnienne (même si lesmarées côtières sont abordées).
Ollivier Philippe (2006). Éoliennes, quand le ventnous éclaire. Privat.
Stephen Hawking (2003). Sur les épaules desgéants. Dunod, Paris.
Sylvie Vauclair (2006). La naissance des éléments.Du big bang à la terre. Odile Jacob, Paris.
153
Index
A
absolu, 17abstract, 98accélération, 33, 35, 36, 40, 41, 49, 53, 104
instantanée, 33moyenne, 33terrestre, 38, 39
accélérationcentripète, 118, 120
accident nucléaire, 80action, 74
à distance, 53activité, 81air, 45Alexandrie, 91, 129Alpha du Centaure, 129alternateur, 73, 74altitude, 53, 113amas de galaxies, 19Andromède, 20, 35année, 23annexe, 98, 99antimatière, 29apesanteur, 40, 55, 56aphélie, 123apogée, 24, 122Apollo, 34, 35Appolo, 94Aristote, 36, 39, 45–49Assouan, 91astrogénèse, 25atome, 25, 27
naturel, 26attraction, 34, 35, 39, 41, 49, 51Atwood, 133axe de rotation, 23axiomes, 49
azote, 27
B
balance, 53, 121balistique, 38–40, 103balle, 38barrage, 73, 125, 127, 128barre de contrôle, 81, 82basse mer, 121béryllium, 27Bessel, 96Betz, 77big bang, 19, 26boiller, 77bombes à hydrogène, 82bore, 27boson, 29Brahé
Tycho, 43Brahé Tycho, 42Bruno, 115–117Bruno Giordano, 19but du travail pratique, 98
C
canon, 103capsule, 34carbone, 27Carnot, 72Carnot Nicolas Léonard, 72carré
de la distance, 52du temps, 37
cartésien, 31Cassini, 94, 95cause
du changement du mouvement, 51
154
INDEX INDEX
du mouvement, 49, 50ceinture
d’astéroïde, 21de kuiper, 21
centrede l’univers, 46de la terre, 46
centre de gravité, 59, 119centrifuge, 56centripète, 56chaleur, 71
spécifique, 72massique, 71
champde gravitation, 117
chauffage, 77urbain, 79
cheval vapeur, 68choc galactique, 20chute libre, 3, 36, 38, 39, 53, 103cinéma, 31cinématique, 30, 31, 46
d’Aristote, 46cinématique, 118cinq éléments, 46circonférence
de la terre, 57, 91, 93circulaire, 31clarté, 97, 102Cléomède, 91cœfficient de frottement
cinétique, 62statique, 62
comète, 22combustion
des ordures, 77du méthane, 83
comète, 43concision, 97conclusion du travail pratique, 100conduction, 77conduite forcée, 125conservation de l’énergie, 70constante de la gravitation universelle, 53construction
de Proctor, 59, 60convection, 77conversion, 86coordonnée, 18, 31, 89, 90
circulaire, 41
sphériques, 89corps
ponctuel, 53sphérique, 53
corpuscule, 29cosmologie, 18, 45
aristotélicienne, 43de Platon, 46
courbure, 39, 40courbure de l’espace, 115, 118cratère
lunaire, 43cristal, 63cristallin, 43croûte terrestre, 79
D
date, 102débit, 73
aménagé, 125de restitution, 125
décélération, 51déchet radioactif, 81déconstruction, 75défaut de masse, 80Delambre, 92demi-grand axe, 42demi-vie, 81déplacement, 32dérivée, 32description de l’expérience, 98désintégration, 27deutérium, 27diamètre
apparent, 92diamètre apparent, 24dilatation du temps, 115dimension, 18, 31discussion, 100dissipation de l’énergie, 71distance
de freinage, 63parcourue, 32
dualité onde corpuscule, 29dynamique, 31, 40, 46
d’Aristote, 47dynamomètre, 62
E
eau
155
INDEX INDEX
élément, 45chaude sanitaire, 77, 78
écart, 99éclipse, 57
annulaire, 24de lune, 93de soleil, 93lunaire, 25solaire, 25, 57totale, 24
écliptique, 21, 23, 25, 89, 91, 122, 123EE, 87effet
de serre, 83photoélectrique, 77, 78
Eiffel, 47Einstein, 40, 48, 115électron, 26, 28ellipse, 21, 40, 96, 122, 123elliptique, 22élongation, 64énergie, 67, 104
éolienne, 75cinétique, 69, 71, 73, 76de combustion, 82
des déchets, 128grise, 77, 79hydraulique, 73, 125interne, 71mécanique, 70non renouvelable, 79potentielle, 68, 71, 73renouvelable, 72solaire, 77
électrique, 78thermique, 77, 78
éolienne, 126, 127épicycle, 106équateur, 107
terrestre, 105équigravité, 34équinoxe, 122Érathostène, 57, 91Eratosthène, 129erreur, 99
systématique, 99espace courbe, 41état
de mouvement, 46de repos, 49
éther, 45étoile, 19, 20, 22
à neutron, 101à neutrons, 20du matin, 22du soir, 22filante, 22nouvelle, 101polaire, 23
Everest, 53, 63excentricité, 96exemple de calcul, 100exoplanète, 20EXP, 87expansion, 17, 20, 35, 101extrados, 75extrasolaire, 20
F
fermion, 29feu, 45filaments, 101fioul, 82fission, 80, 81fluide caloriporteur, 77, 81forage, 79, 127force, 46, 48, 49, 55
électrique, 25, 27, 53électromagnétique, 51centrifuge, 55, 56, 59, 117, 118centripète, 55, 56conservative, 69, 71d’inertie, 55, 60, 61, 117–121de frottement, 69de gravitation, 25, 40, 51, 53, 54, 118de marée, 121de réaction, 62dissipative, 69, 71extérieure, 49, 50faible, 51fictive, 55, 56, 117, 118fondamentale, 29, 51forte, 25, 51, 80inertielle, 117
foyer, 96d’une ellipse, 42
freinage, 51frottement, 36, 38, 40, 48, 51, 62, 71
sec, 62fusion, 27, 82
156
INDEX INDEX
G
galaxie, 19, 20, 35Galilée, 37, 43, 47, 103, 115Galilei Galileo, 37gaz
à effet de serre, 75, 77, 79, 83carbonique, 83interstellaire, 27naturel, 77, 83
géante rouge, 20, 27géocentrique, 48géostationnaire, 55, 113géothermie, 79, 127Giordano Bruno, 47, 48gnomon, 91grande ourse, 23grandeur, 101graphe horaire, 37, 102graphique, 99gravité, 35gravitation, 3, 19, 35
universelle, 40graviton, 29
H
Heisenberg, 29héliocentrique, 48hélium, 27hémisphère, 23Hooke, 52Hooke Robert, 52hydrogène, 26
I
imminence de glissement, 62immobilité de la terre, 106incertitude, 93, 99, 100, 102inertie, 47, 105–107infini, 19interaction fondamentale, 29interstellaire, 19intrados, 76invariance, 117, 118
du temps, 116formelle, 117, 118
irrigation, 75
J
joule, 67
jovienne, 22jupiter, 22
K
Kepler, 42, 43Johanes, 43Première loi, 42Seconde loi, 42Troisième loi, 42troisième loi, 95
kilowattheure, 73kinêma, 31kWh, 73
L
latitude, 18, 90Leibnitz, 52lepton, 29liaison, 80
interatomique, 63libre, 36licence GFDL, 2lieu naturel de repos, 46ligne des nœuds, 25limite de Betz, 77, 127limite de la deuxième loi, 54lithium, 27Local Standard of Rest, 108loi
de l’action et de la réaction, 49de l’inertie, 49de la gravitation, 49de la gravitation universelle, 40, 51, 52, 113fondamentale, 49fondamentale de la dynamique, 49
loi de la gravitation universelle, 58lois fondamentales de la dynamique, 50longitude, 18, 90lune, 22, 34, 39, 56
noire, 24
M
marée, 3, 57, 119côtière, 58, 123champ vectoriel, 60d’équinoxe, 122de basse mer, 58de déclinaison, 123de morte eau, 58de périgée, 122
157
INDEX INDEX
de périhélie, 122de pleine mer, 58de vive eau, 58de vives et mortes eaux, 122haute, 58océanique, 62théorie ondulatoire, 58théorie statique, 58
marée noire, 80marnage, 122mars, 94masse, 36, 49, 53, 54
critique, 81des astres, 57volumique, 73
mât, 127mazout, 82MCU, 41, 45, 46, 55mécanique, 30, 45
d’Aristote, 48de Newton, 48
Mendeleïev, 20mesure
de distance, 91météorite, 22Michelson et Morley, 108minute d’arc, 86molécule, 25monde
sublunaire, 45, 56supralunaire, 56
Mont Soleil, 75morte eau, 122moteur idéal, 72mouvement, 30, 31
accéléré, 42balistique, 42central, 40circulaire, 39, 55
uniforme, 41, 42, 45, 46, 113circulaire uniforme, 56, 120composé, 46divin, 46elliptique, 56naturel, 41, 46rectiligne
uniformément accéléré, 35, 38uniforme, 33, 49
rectiligne uniforme, 117simple, 33, 102
uniforme, 42violent, 46
MRU, 33, 34, 36, 38, 39, 41, 102, 117MRUA, 35, 36, 38–40, 102–104multiple, 86
N
naineblanche, 20noire, 20
nébuleuse, 19du crabe, 101planétaire, 20
neutrino électronique, 29neutron, 26, 28Newton, 35, 40, 45, 48, 56newton, 51Newton Isaac, 50notation
d’ingénieur, 86, 87scientifique, 86, 87
nouvelle lune, 24, 25, 122nuage de Oort, 22nucléon, 29, 80
O
obus, 38onde, 28, 29opposition, 95optique, 49orbite, 21–23, 34, 55, 89, 113
circulaire, 40, 106de mars, 42, 106elliptique, 42, 43, 52, 95, 96, 106géostationnaire, 43
ordonnée, 33origine, 31oxygène, 27
P
pale, 75, 126, 127parabole, 36, 38, 40parallaxe, 94, 96
stellaire, 96paramètre, 101Paris-Cayenne, 95parsec, 86, 129particule, 27
élémentaire, 28Partie théorique, 98
158
INDEX INDEX
pc, 86pendule, 101pendule de Foucault, 48périgée, 24, 122périhélie, 123période, 57, 101, 113
de révolution, 42de rotation, 40sidérale, 105, 107synodique, 57
pétrole, 83phase
de vénus, 43phase lunaire, 24phases de vénus, 48physique
quantique, 3plan
de l’écliptique, 61plan incliné, 103planète, 20, 21plastique, 63Platon, 36, 45, 56pleine lune, 25, 122pleine mer, 121Pline l’ancien, 91pluralité des mondes, 116pluton, 22poids, 39, 53, 54, 56
apparent, 54, 55relatif, 119, 121
polaire, 94polyèdre
régulier, 43pompe à chaleur, 79pont du Gard, 38, 39portance, 76position, 31–33, 36, 49, 89, 109positron, 30première loi, 49
de la thermodynamique, 72premier principe, 72principe
d’incertitude, 29d’indétermination, 29de conservation de l’énergie, 70
Principia mathematica , 48procédure, 132proton, 26, 28Proxima du Centaure, 96
pseudo-force, 56, 60, 118centrifuge, 60, 61, 119d’inertie, 60
Ptolémée, 106puissance, 67, 68
de chute, 74installée, 73, 125solaire
moyenne, 78utile, 78
pulsar, 101
Q
quantique, 29quanton, 29quark, 29quartier lunaire, 24
R
radian, 22radioactivité, 81rail incliné, 102rapport
de laboratoire, 97de travail pratique, 98
rayon de la terre, 129réaction, 74
en chaîne, 81référentiel, 107, 108
absolu, 108accéléré, 54en rotation, 56, 60inertiel, 55, 56, 60, 117non accéléré, 56non inertiel, 56, 60, 117, 118non-inertiel, 55tournant, 117, 119
règle de Betz, 76, 126relativité, 17, 106
générale, 40, 45restreinte, 19, 45, 108
relativité, 115de Galilée, 117générale, 3, 118galiléenne, 115, 118restreinte, 115, 117
rendementhydraulique, 74maximum, 72optique, 78
159
INDEX INDEX
photoélectrique, 78, 79repos naturel, 46ressort, 53, 63résultats, 98résumé, 98rétine, 43rétrogradation, 106Richer, 94Riehen, 79rotation
de la terre, 105du soleil, 107
roue à aube, 74
S
saison, 23d’éclipse, 25
satellite, 3, 35, 40, 43, 48, 55, 113de jupiter, 43
scaphé, 92scolastique, 47seconde
d’arc, 86loi, 49
de Newton, 104, 113seconde loi, 117seconde loi de Newton, 59séisme, 79SI, 85silicium
monocristallin, 78polycristallin, 78
soleil, 20–22, 75, 105solstice, 122
d’été, 91sous-multiple, 86sphérique, 31, 89sphère
cristalline, 43stade, 92statique, 62Strabon, 91structure, 17
de rapport, 97subatomique, 25sublunaire, 36, 39, 45super amas, 17supergéante, 20supernovae, 20, 27supralunaire, 36, 39
Syène, 91système
d’axes, 31de coordonnées circulaires, 89international d’unité, 85solaire, 20
T
tableau, 99périodique, 20
tachesolaire, 43
tache solaire, 48Tchernobyl, 82tellurique, 22température, 71temps, 17, 18, 37
de vol, 39terre, 22, 45théorie des humeurs, 45théorème
d’addition des vitesses, 116de conservation, 67
de l’énergie cinétique, 69de l’énergie mécanique, 69
de l’énergie cinétique, 69thermodynamique, 72titre, 98, 102toupie, 23trajectoire, 21, 27, 29transformation
de Galilée, 118galiléenne, 116
transmutation, 82travail, 67, 71troisième loi, 49tropique
du cancer, 91trou noir, 20trous noir, 3turbine, 73, 79, 81, 125
Francis, 74Kaplan, 74Pelton, 74
Tycho Brahé, 106type de force, 51
U
UA, 86unité, 85, 86
160
INDEX INDEX
de longueur, 31univers, 17, 19, 20, 36, 39
bulle, 18
V
vapeur, 81variable, 101variation de l’énergie mécanique, 71vent, 75vénus, 21vitesse, 29, 32, 36, 37, 40, 46
angulaire, 120constante, 49, 115instantannée, 32linéaire, 120moyenne, 32scalaire, 41
vive eau, 122voie lactée, 20, 35, 107
W
watt, 68, 73
Z
zénith, 91, 119, 121, 129zone contaminée, 82
161