pfi gnss daniel lechner (dr2) loïc baque (ai...
TRANSCRIPT

1
INRETS-MA Salon de Provence Dynamique du véhicule
Daniel LECHNER (DR2)Loïc BAQUE (AI CDD)Damien THOMAS (AI CDD)Claire NAUDE (IR)Olivier BELLOT (T)
PFI GNSSBron, 2 décembre 2008

2
Plan de la présentation
�Historique INRETS MA, Dynamique, Véhicules instrumentés
�Besoin : trajectométrie centimétrique�Matériel, performances, utilisations�Limitations Temps Réel => Temps
différé : Méthodes, performances�Perspectives

3
Historique INRETS MA, Dynamique Véhicule
�Développement de véhicules instrumentés depuis 1990 : Citroën BX, Peugeot 306, 307
�Utilisation réelle des véhicules 92-99 : GPS

4
�Dynamique des véhicules : Validation de modèles pour l'accidentologie
�Mesures, modèles, paramétrage, validation
�Difficulté croissante�Accélération, vitesses angulaires, �dérive, suspension, trajectoire…
Historique INRETS MA, Dynamique Véhicule
Accélérations linéaires au CDG306_jpc2.vhc & Validation
306_jpc2.vhc & Import Acquisition
-10
-8
-6
-4
-2
0
2
4
6
8
10
0 1 2 3 4 5 6
Temps(s)
Acc
élér
atio
n la
téra
le (
m/s
2)
Accel y
Accel y
Lacet306_jpc2.vhc & Validation
306_jpc2.vhc & Import Acquisition
-40
-30
-20
-10
0
10
20
30
40
0 1 2 3 4 5 6
Temps(s)
Vite
sse
de la
cet (
°/s)
Vit lacet
Vit lacet

5
�Lacune sur la mesure des trajectoires
�Besoin : trajectométrie centimétrique
Historique INRETS MA, Dynamique Véhicule
0 20 40 60 80−200
−100
0
100
200Passage a 60 km/h
0 20 40 60 80−200
−100
0
100
200Premier passage limite
0 20 40 60 80−200
−100
0
100
200Second passage limite
0 20 40 60 80−200
−100
0
100
200Troisieme passage limite
0 20 40 60 80−200
−100
0
100
200Quatrieme passage limite
0 20 40 60 80−200
−100
0
100
200Cinquieme passage limite

6
Besoin : trajectométriecentimétrique
�GPS de précision centimétrique�Investissement Mi-lourd, Marché
public en 1999, x UR intéressées�DSNP, LEICA, 2 intégrateurs de
matériels TRIMBLE…�Séances d'essais sur piste�DSNP retenu : Aquarius 5000�Matériel, performances, résultats

7
Matériel DSNP acquis par INRETS-MA
� 2 Récepteurs GPS RTK DSNP (Dassault SercelNavigation Positionnement) Aquarius 5000– Station mobile embarquée et station fixe en bord de voie– Liaison Radio HF entre les deux– Kit piéton pour relevé de points– Package logiciel (W95) : Confpack, 3S-pack

8
�Caractéristiques principales� Mesure de trajectoire centimétrique en 3D
� 1 cm en XY, 2 cm en Z� Des informations de Vitesse GPS et de
cap (lacet)� Données en dynamique (véhicule roulant)
à 10 Hz� Synchronisation avec notre système
d’acquisition � On travaille en relatif la plupart du temps
(/manœuvre), mais l'absolu est possible avec une référence fiable ("moyennage")
� Trames sur port RS232, récupération en WGS84, et projections en Lambert 1, 2 ou 3, selon l'endroit en France ou Lambert2 Etendu
Matériel DSNP acquis par INRETS-MA

9
�Principales contraintes� Masques physiques perturbant ou empêchant
la réception des signaux des satellites (végétation, rochers, constructions…)
� Performances dépendantes de la constellation GPS (logiciel de prévision)
� Portée limitée des signaux HF pour le temps réel (1 à 2 km, selon l’environnement, même si 30 km théoriques en mer)
� Temps d’accroche des satellites (jusqu’àplusieurs minutes)
� Système complexe, nécessitant une certaine expérience de l’équipe
� Temps de mise en œuvre pour équiper un site (Moyennage si recherche "l'absolu"…)
Matériel DSNP acquis par INRETS-MA

10
3.71583.716
3.71623.7164
3.71663.7168
3.717
x 105
3.39
3.392
3.394
3.396
3.398
3.4
x 105
44
46
48
50
52
54
56
58
60
62
X en m
PREDIT APTP RN137 − 2 bords et ligne médiane de la zone des essais − GPS INRETS
Y en m
Z e
n m
�Kit piéton : Relevé d'infrastructuresRN137 : PREDIT APTP
Types d'utilisation à MA
� Pente et dévers : Planches d'adhérences différentes des pistes du LCPC à Nantes� Prêt au LIVIC en 2001 pour relevé des pistes de Satory

11
Types d'utilisation à MA�Programmes PREDIT APTP
�Visualisation de la trajectoire GPS d'un essai de slalom sur la nappe 3D du sol (Palas2 - A75 Pl. 4) : orniérage

12
• Combinaison GPS embarqué et Kit piéton (/ bords de voies)�Analyse des trajectoires / Dynamique
�Programmes PREDIT SPLBL
Types d'utilisation à MA
7.6036 7.6038 7.604 7.6042 7.6044 7.6046 7.6048
x 105
1.9517
1.9518
1.9519
1.952
1.9521
1.9522
1.9523
1.9524
1.9525
1.9526
1.9527
x 105 CONES (o) − TRAJECTOIRE SELLETTE (−) − RELEVES GPS CENTIMETRIQUE
ESSAIS TRACTEUR + CITERNE − CONFIGURATION DU ROND−POINT
X en m
Y e
n m
rayon intérieur 15 m
rayon extérieur 22 m
7.6038 7.6039 7.6039 7.604 7.604 7.6041 7.6041 7.6041 7.6042 7.6043 7.6043
x 105
1.9521
1.9522
1.9522
1.9523
1.9523
1.9524
1.9524
1.9525
x 105 CONES (o) − TRAJECTOIRE SELLETTE (−) − RELEVES GPS CENTIMETRIQUE
ESSAIS TRACTEUR + CITERNE − CONFIGURATION DU CERCLE
X en m
Y e
n m
rayon intérieur 15 m
rayon extérieur 19 m

13
Quand le ciel et la terre se rejoignent !� GPS (avec ou sans correction du roulis)� Intégration des signaux du capteur optique de vitesse 2 axes
• Fusion de données, validation capteursTypes d'utilisation à MA
GPS
GPS with roll
Speed Integ.
GPS
GPS with roll
Speed Integ.
roulis

14
�Validation des performances de GPS faible coût avec une référence fiable
�EMMA2
Types d'utilisation à MA

15
�Validation des performances de GPS faible coût avec une référence fiable : vitesse
�EMMA2
Types d'utilisation à MA

16
Peugeot 307 : Instrumentation Haut de gamme : 128 voies
GPS centimétrique Moyeux dynamométriques
Architecture logicielle : modèle temps réel, recalage d’adhérence, reconstructeurs, observateurs…
Validation de modèles dynamiques utilisables enReconstitution d’accidents
Peugeot 307 : Véhicule instrumentépour la recherche en Sécurité Active

17
Aujourd'hui intégré à 307
�Évolution vers temps réel embarqué�Diagnostic de Sécurité Primaire : thèse DL�ARCOS 2004 : Application Adhérence
• SERA – NEXYAD
�Diagnostic de rupture : MA, RADARR (SARI) • Identifier la vitesse de franchissement limite d'une
infrastructure• GPS : Une alternative de reconstitution de trajectoire• Développement d'un automate de conduite (respect
d'une consigne)
�C'est aussi une réponse au sous-effectif � De nouvelles exigences et une mise en évidence
plus nette des contraintes de l'équipement

18
�Les contraintes d'utilisation�Couverture GPS (prédictions), liaison
UHF, masques�Notre équipement le plus délicat
�Conséquences�On a équipé la 307 d'un GPS de
base pour pallier aux lacunes du centimétrique !
�On a approfondi les possibilités du temps différé !
Aujourd'hui intégré à 307

19
Perturbations masques physiques
3 environnements identifiés• Niveau 1 : Espace dégagé :Aucun arbre, horizon dégagé de tous les côtés
20
• Niveau 2 : Moyennement perturbé :Quelques arbres sur les côtés, mais ne couvrent
pas la route…
Perturbations masques physiques

21
• Niveau 3 : Environnement très perturbé :Arbres très présents, ciel très souvent masqué…
Perturbations masques physiques
22
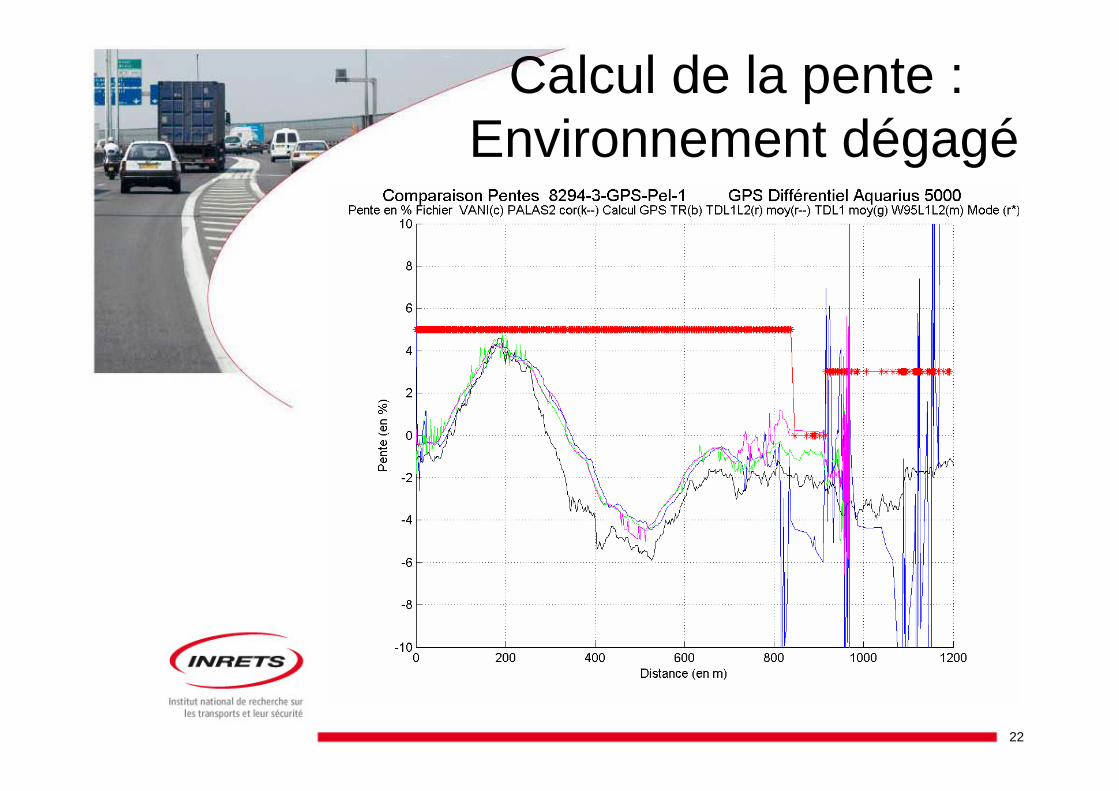
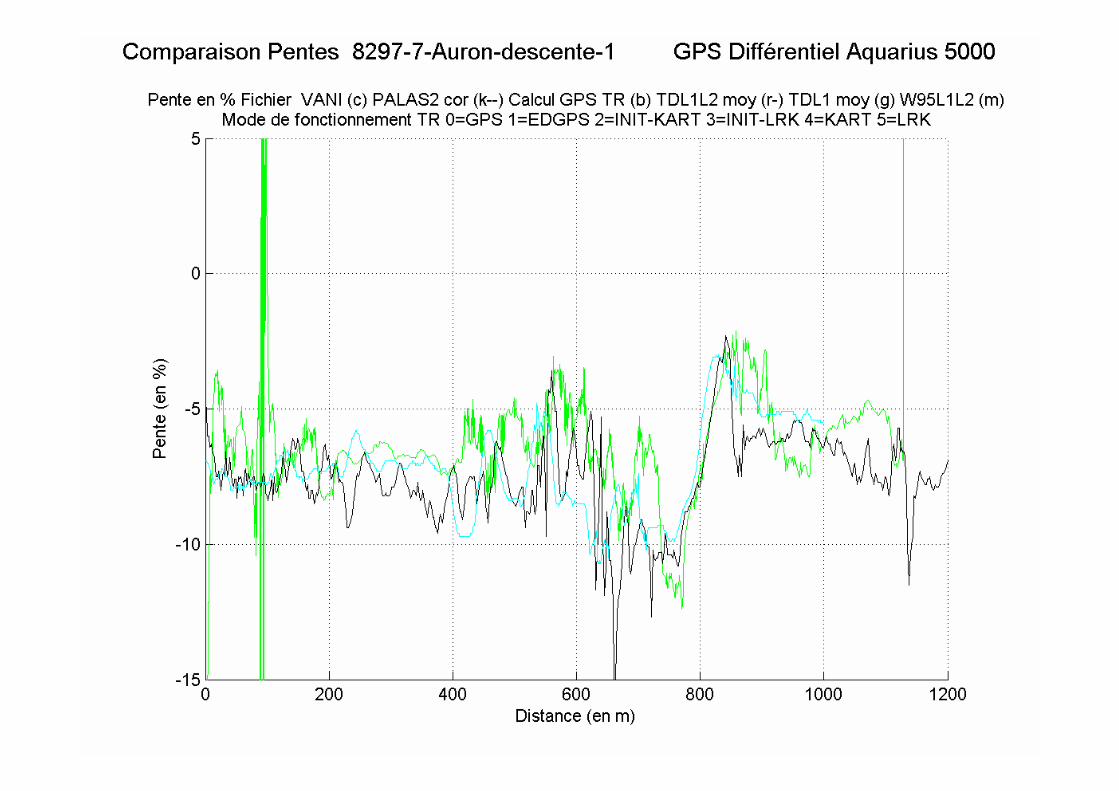
Calcul de la pente :Environnement dégagé

23
Calcul de la pente :Moyennement perturbé

24
Calcul de la pente :Environnement très perturbé

25
Comparaison des performances selon les options utilisées :
-Mono L1 ou bi-fréquences L1L2
-3S-Pack (W95) / GNSS
Performances en temps différé

26

27
28
29
30
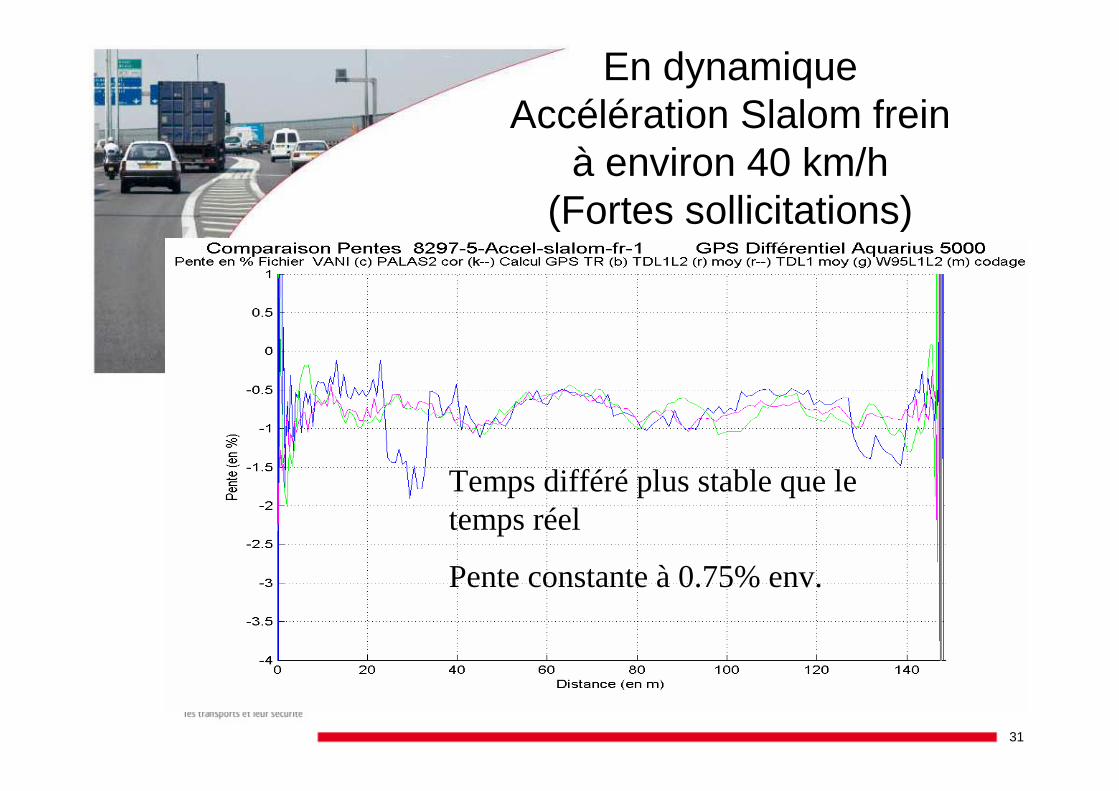
31
En dynamiqueAccélération Slalom frein
à environ 40 km/h(Fortes sollicitations)
Temps différé plus stable que le temps réel
Pente constante à 0.75% env.

32
TD 3S-Pack (W95) décroche plus facilement que GNSS (W2000)
Décrochage W95
Trajectoire
Pente

33
TD 3S-Pack (W95) décroche plus facilement que GNSS (W2000)
Temps réel
Temps différé (W2000)
Temps différé (W95)

34
Cas d’un bon signal (LRK) perdu suite à passage sous arbres
Temps réel
Temps différé (W2000)
Temps différé (W95)
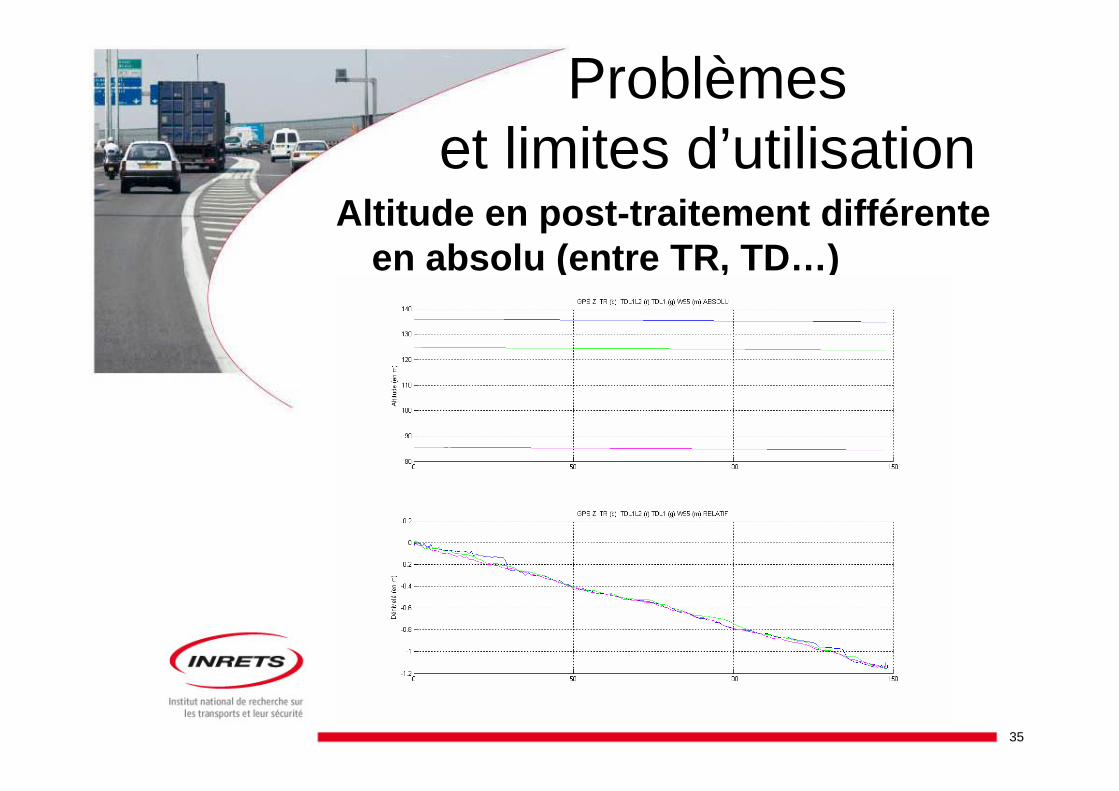
35
Problèmeset limites d’utilisation
Altitude en post-traitement différente en absolu (entre TR, TD…)

36
Problèmeset limites d’utilisation
• Temps de réaccroche du signal en Temps réel– 1 ou 2 minutes dans certains cas
• Réglages à affiner :• Angle d’élévation minimum ? 10 degrés en
général• Temps d'accroche VS qualité• Expérience d’autres utilisateurs sur la portée
de la HF (selon les terrains…) ?• Portée optique 30 km avec 4 Watts ?
bileHantenneMoxeHantenneFi +×18.4

37
Conclusions et perspectives�Un matériel performant mais pointu�Des applications très diversifiées�Évolution : acquisition nouveau logiciel
de post-traitement plus performant�En réparation actuellement…�Utilisation dans l'AS "Véhicules
Hybrides et Dynamique des Véhicules" LTE, LESCOT, MA : pentes des parcours de référence