parm robmob3 - locomotionfabio/eng/documenti/teaching/parm... · la plus répandue en robotique...
TRANSCRIPT
UPJV, Département EEA
Master 2 EEAII Parcours ViRob
Fabio MORBIDI
Laboratoire MIS Équipe Perception et Robotique
E-mail: [email protected]
Semestre 9, AU 2016-2017
Mercredi 14h00-16h30, Jeudi 10h00-12h30 Salle TP101
2
Plan du cours
Chapitre 1: Perception pour la robotique [F. Morbidi]
Chapitre 2: Modélisation d’incertitudes [D. Kachi]
1. Introduction
3. Typologies de capteur
2. Classification des capteurs
1. Introduction
3. Représentation statistique
2. Représentation de l’incertitude
4. Propagation de l’erreur: fusion des mesures de l’incertitude
Chapitre 3: Traitement des mesures [D. Kachi]
1. Réseau multi-capteurs
2. Fusion des mesures
Partie I : Perception Avancée
3
Chapitre 1: Introduction [F. Morbidi]
Plan du cours Partie II : Robotique Mobile
1. Petit historique
3. Marché mondial et besoins technologiques
2. Systèmes, locomotions, applications
Chapitre 2: Locomotion [F. Morbidi]
1. Effecteurs et actionneurs
3. Robots mobiles à roues
2. Robots mobiles à jambes
4. Robots mobiles aériens
Chapitre 3: Décision et contrôle [F. Morbidi]
1. Commandabilité d’un robot
3. Contrôle de mouvement
2. Architectures de contrôle
4
Ch. 2: Locomotion
Effecteurs et actionneurs
Partie 3
Partie 4
Partie 2
Partie 1
• Robots mobiles à jambes
• Robots mobiles à roues
• Robots mobiles aériens
5
La locomotion à roue ◦ La plus répandue en robotique mobile
◦ La plus efficace dans les environnements faits par l’homme
◦ Simplicité mécanique, construction facile
◦ Pas de problème d’équilibre (contact permanent des roues)
3 roues garantissent un équilibre statique
◦ Suspension nécessaire à partir de 4 roues pour maintenir le contact permanent dans terrains irréguliers
• Comme en voiture, la suspension peut être réalisée à l’aide d’amortisseurs
• Pour les robots mobiles à 4 roue évoluant à l’intérieur, la pression limitée des pneus est généralement la suspension basique utilisée
6
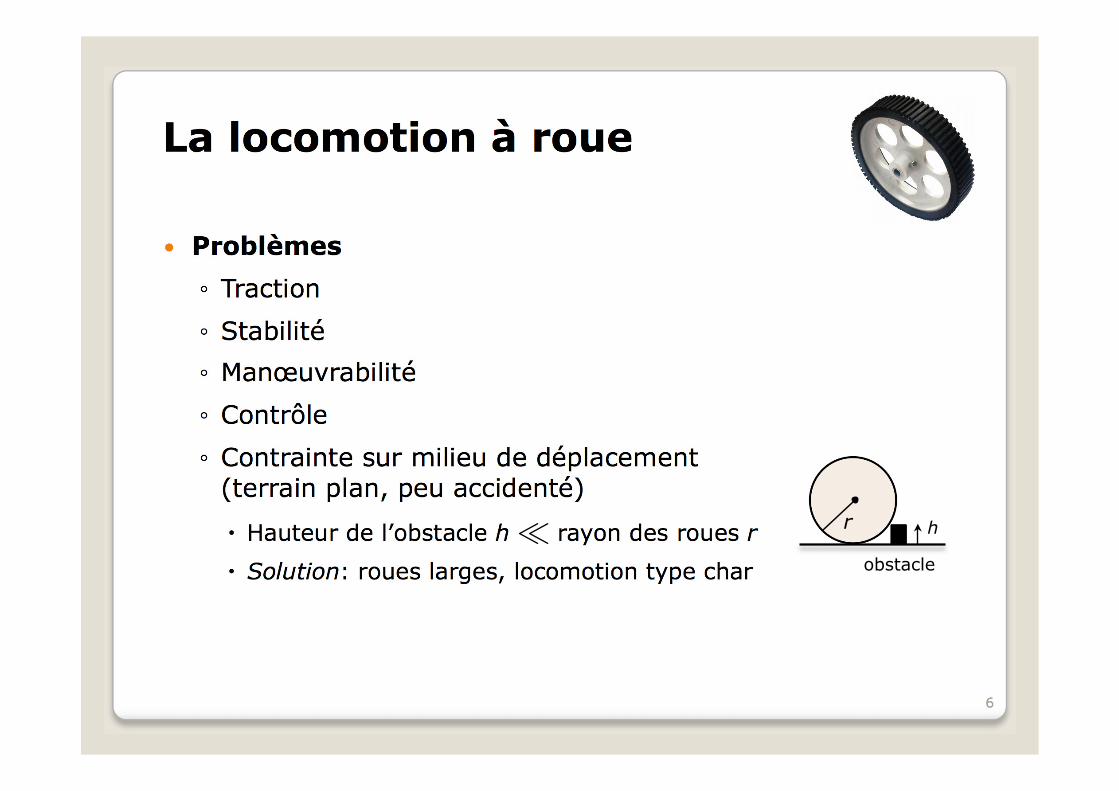
Problèmes
◦ Traction
◦ Stabilité
◦ Manœuvrabilité
◦ Contrôle
◦ Contrainte sur milieu de déplacement (terrain plan, peu accidenté)
Hauteur de l’obstacle h rayon des roues r
Solution: roues larges, locomotion type char
La locomotion à roue
r h �obstacle
7
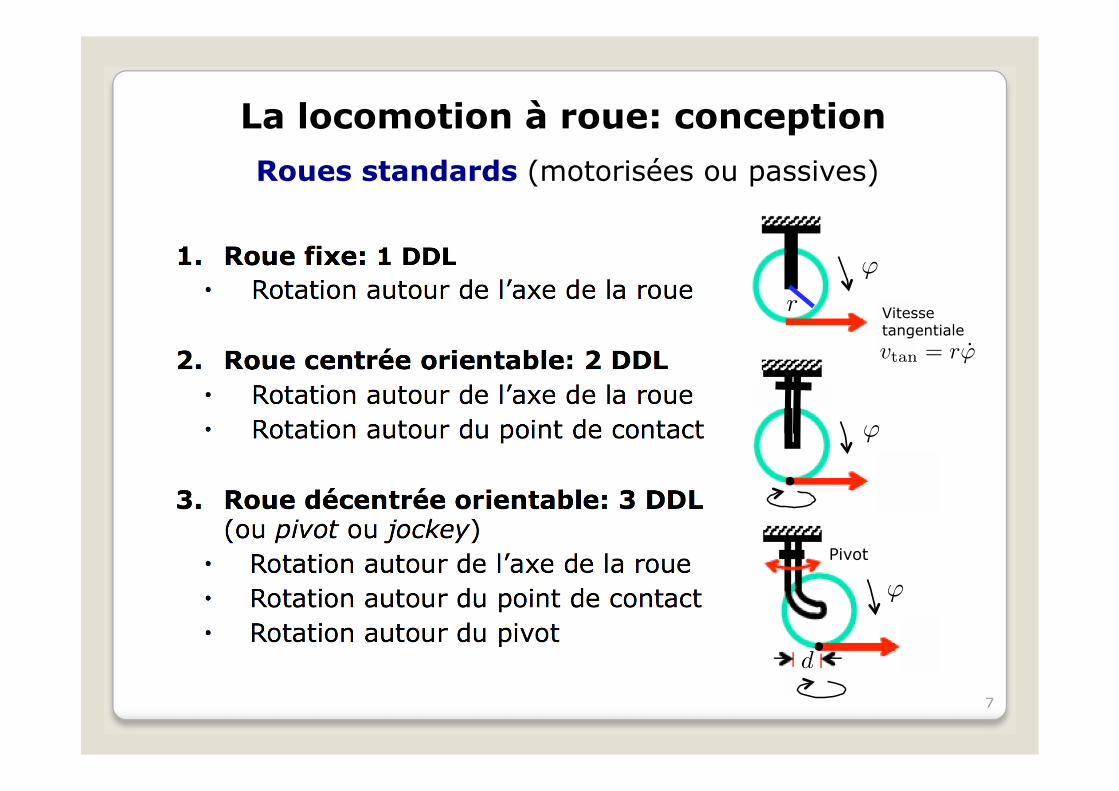
1. Roue fixe: 1 DDL Rotation autour de l’axe de la roue
2. Roue centrée orientable: 2 DDL Rotation autour de l’axe de la roue Rotation autour du point de contact
3. Roue décentrée orientable: 3 DDL (ou pivot ou jockey) Rotation autour de l’axe de la roue Rotation autour du point de contact Rotation autour du pivot
ϕ
r
La locomotion à roue: conception
Vitesse tangentiale
Roues standards (motorisées ou passives)
d
ϕ
ϕ
Pivot
vtan = rϕ̇
8
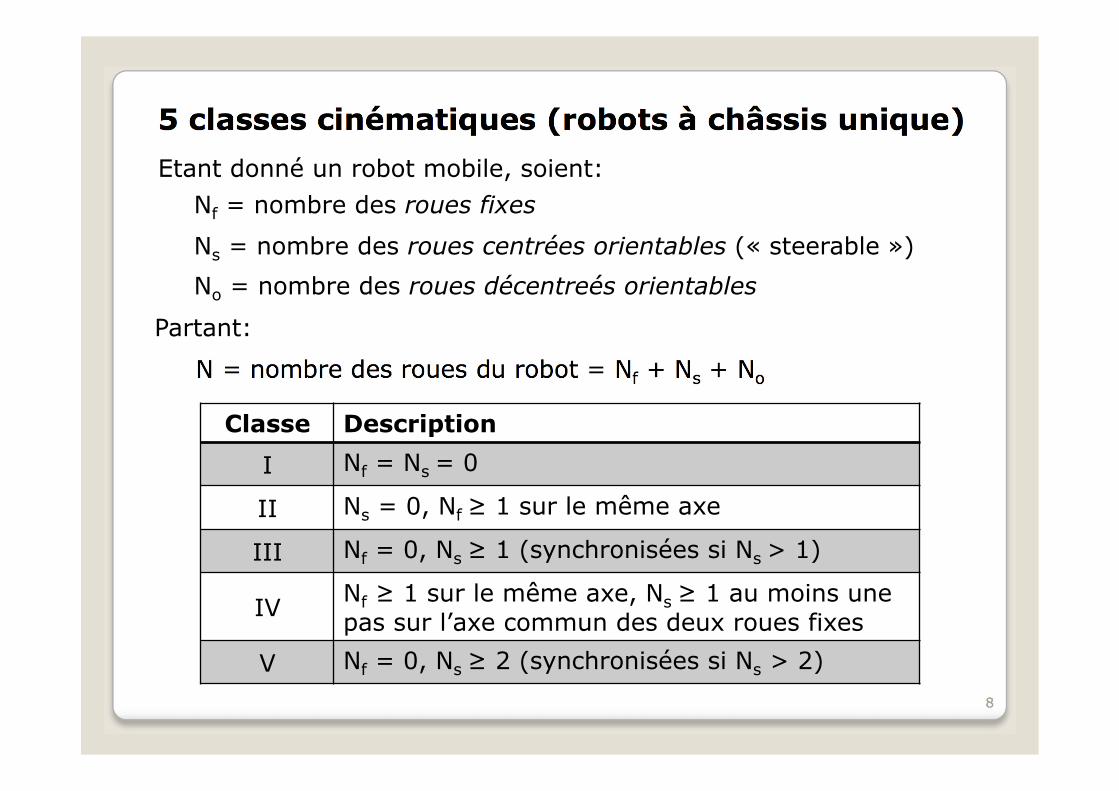
5 classes cinématiques (robots à châssis unique)
N = nombre des roues du robot = Nf + Ns + No
Classe Description
I Nf = Ns = 0
II Ns = 0, Nf ≥ 1 sur le même axe
III Nf = 0, Ns ≥ 1 (synchronisées si Ns > 1)
IV Nf ≥ 1 sur le même axe, Ns ≥ 1 au moins une pas sur l’axe commun des deux roues fixes
V Nf = 0, Ns ≥ 2 (synchronisées si Ns > 2)
Nf = nombre des roues fixes
Ns = nombre des roues centrées orientables (« steerable »)
No = nombre des roues décentreés orientables
Etant donné un robot mobile, soient:
Partant:
9
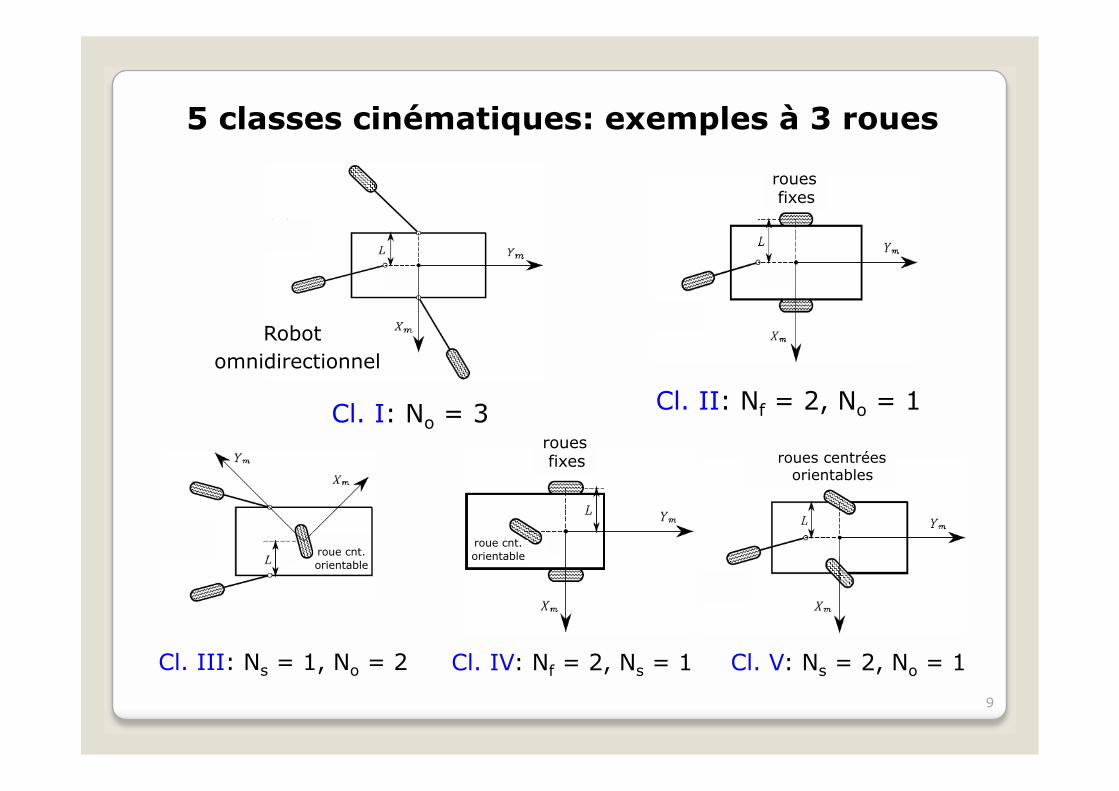
Cl. I: No = 3 Cl. II: Nf = 2, No = 1
Cl. III: Ns = 1, No = 2 Cl. IV: Nf = 2, Ns = 1 Cl. V: Ns = 2, No = 1
5 classes cinématiques: exemples à 3 roues
roues fixes
roues fixes roues centrées
orientables
roue cnt. orientable roue cnt.
orientable
Robot omnidirectionnel
10
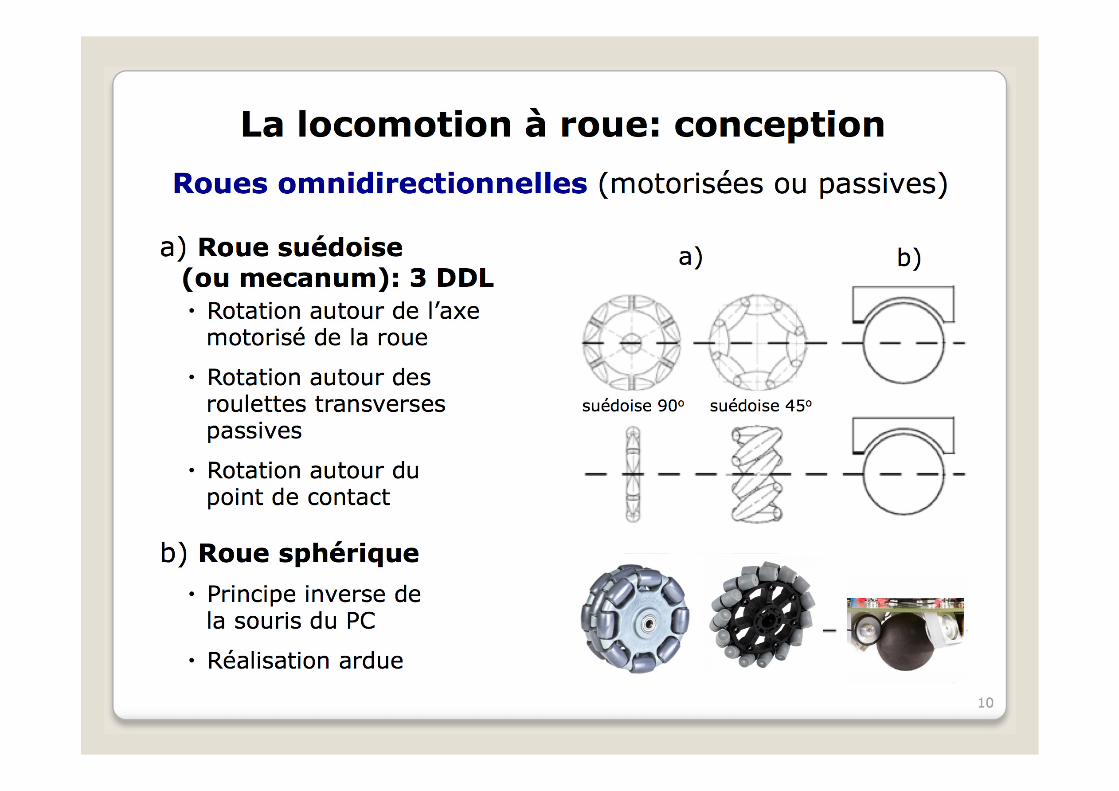
a) Roue suédoise (ou mecanum): 3 DDL Rotation autour de l’axe motorisé de la roue
Rotation autour des roulettes transverses passives
Rotation autour du point de contact
b) Roue sphérique Principe inverse de la souris du PC
Réalisation ardue
La locomotion à roue: conception
a) b)
suédoise 90o suédoise 45o
Roues omnidirectionnelles (motorisées ou passives)
11
La locomotion à roue: conception
• Les types de roues précédents ont des cinématiques différentes: par conséquent, le choix d’un type de roue a un impact important sur la cinématique globale du robot
• Les roues standards sont directionnelles • Pour changer de direction la roue doit d’abord tourner autour de l’axe vertical de rotation
• La roue suédoise et la roue sphérique sont moins contraintes: • Seul l’axe principal de la roue suédoise est actionné • Les roulettes de la roue suédoise sont passives mais sont peu résistantes à un mouvement dans une autre direction, perpendiculaire pour la roue suédoise 90o et intermédiaire pour la roue suédoise 45o
Remarques:
12
• Type et arrangement de roues sont fortement corrélés
À considérer simultanément lors de la conception d’un robot
• Problèmes importants pour les robots à roues:
Stabilité
Manœuvrabilité
Commandabilité
La locomotion à roue: conception
Remarques:
13
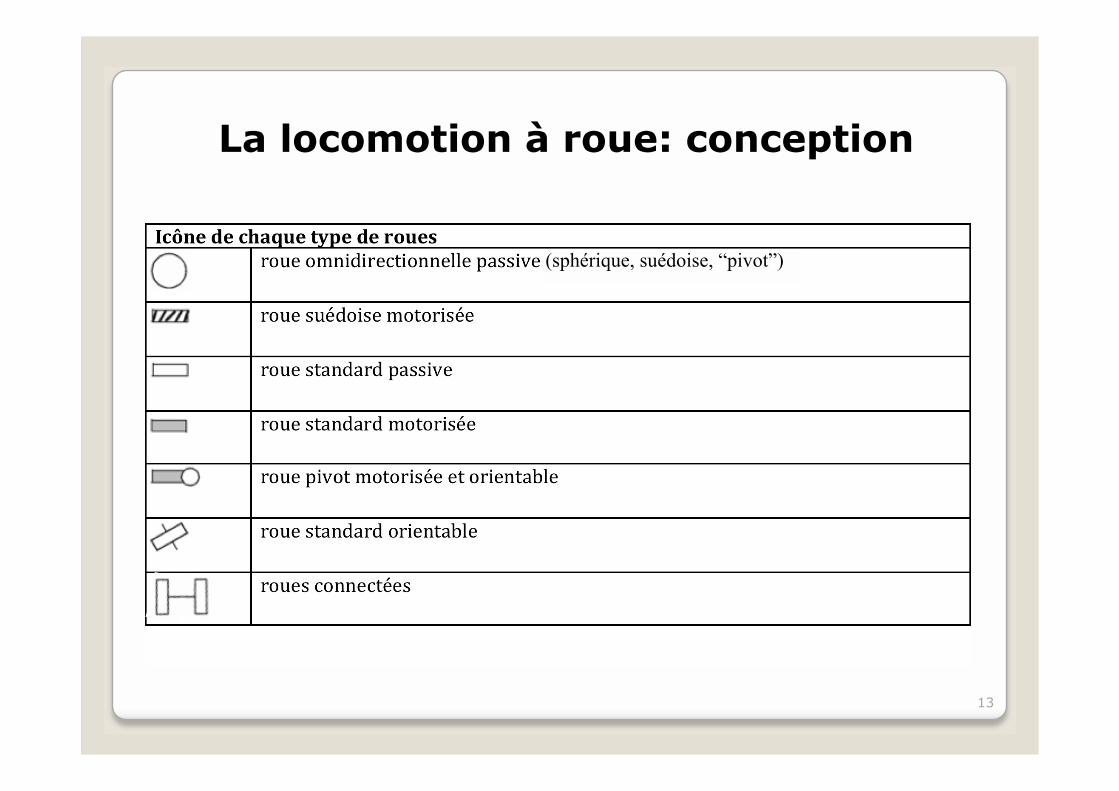
La locomotion à roue: conception
(sphérique, suédoise, “pivot”)
14
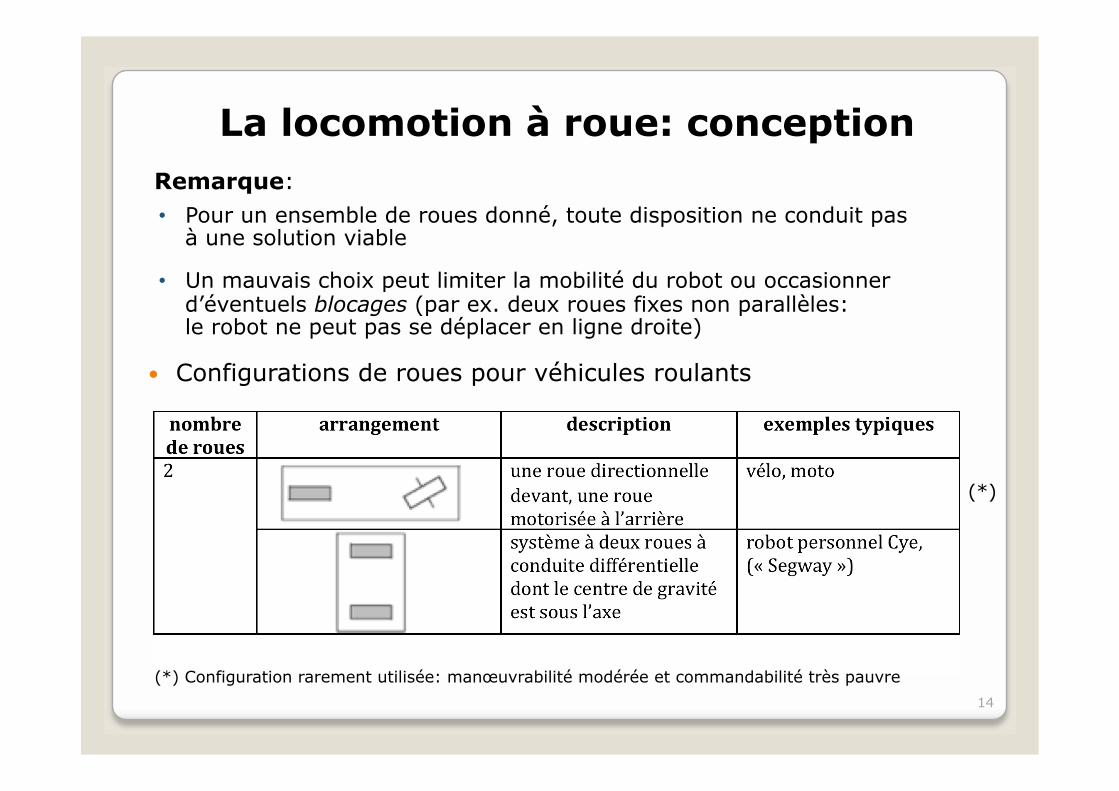
Configurations de roues pour véhicules roulants
• Pour un ensemble de roues donné, toute disposition ne conduit pas à une solution viable
• Un mauvais choix peut limiter la mobilité du robot ou occasionner d’éventuels blocages (par ex. deux roues fixes non parallèles: le robot ne peut pas se déplacer en ligne droite)
La locomotion à roue: conception
(*) Configuration rarement utilisée: manœuvrabilité modérée et commandabilité très pauvre
(*)
Remarque:
15
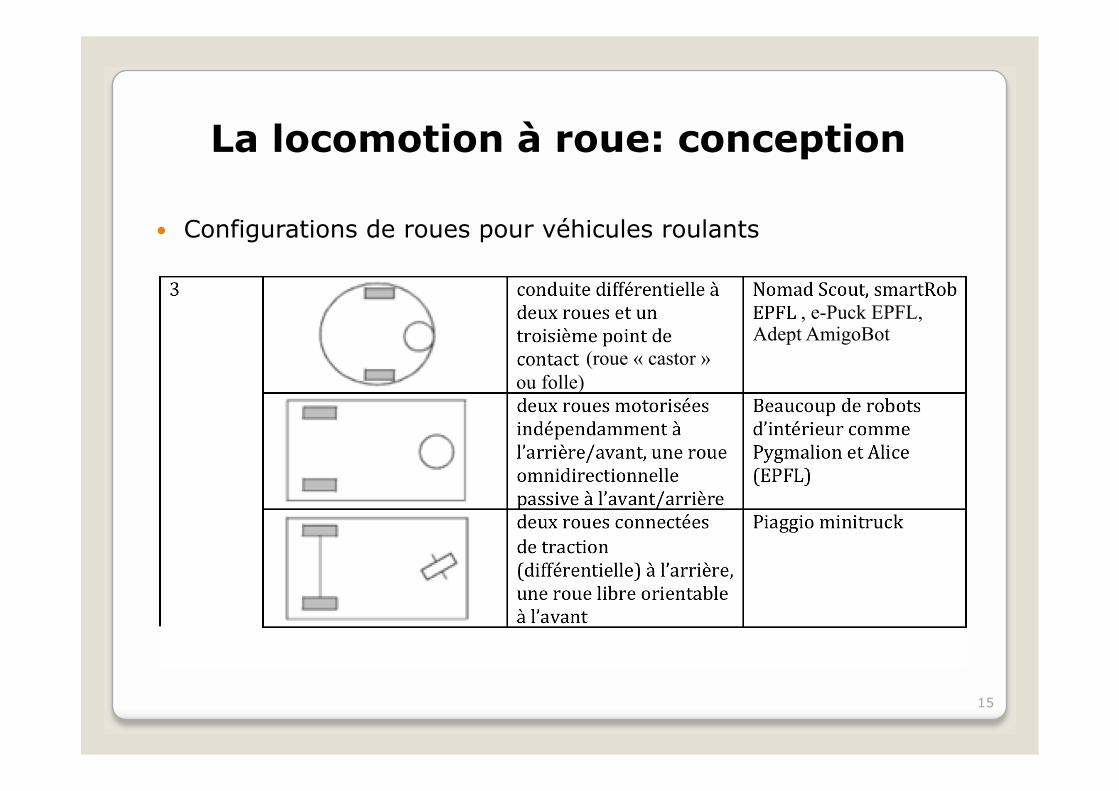
Configurations de roues pour véhicules roulants
La locomotion à roue: conception
(roue « castor » ou folle)
, e-Puck EPFL, Adept AmigoBot
16
3
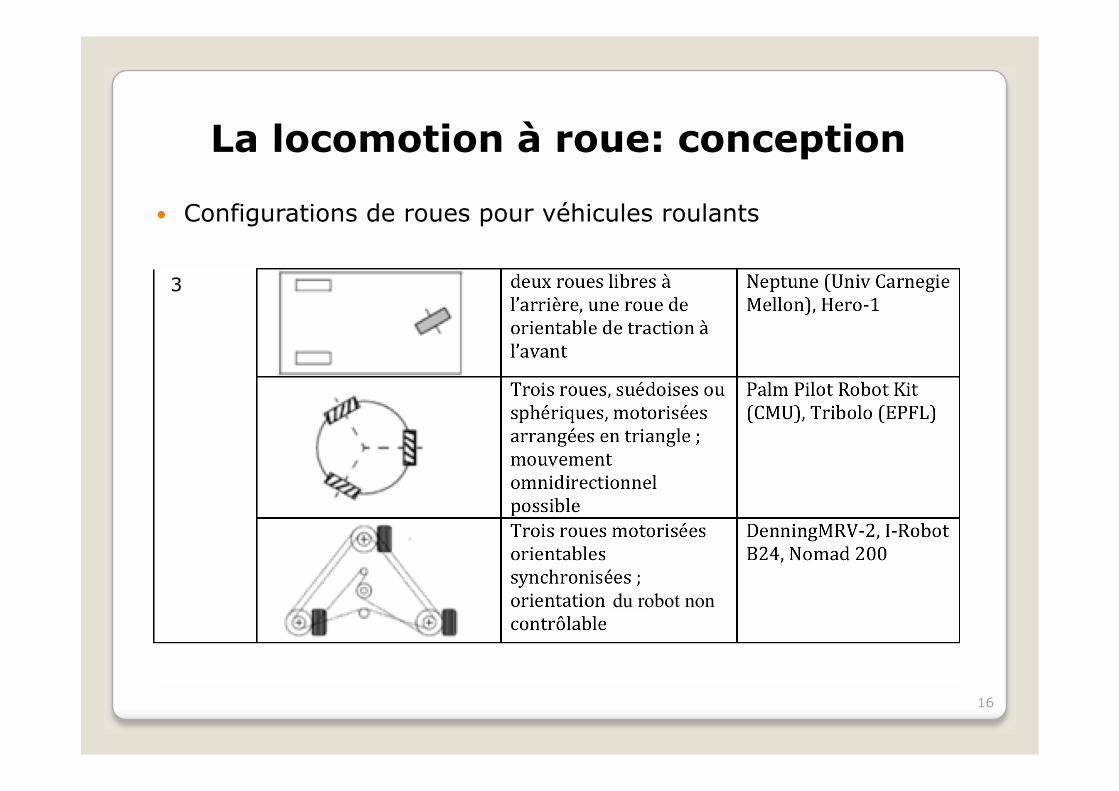
Configurations de roues pour véhicules roulants
La locomotion à roue: conception
du robot non
17
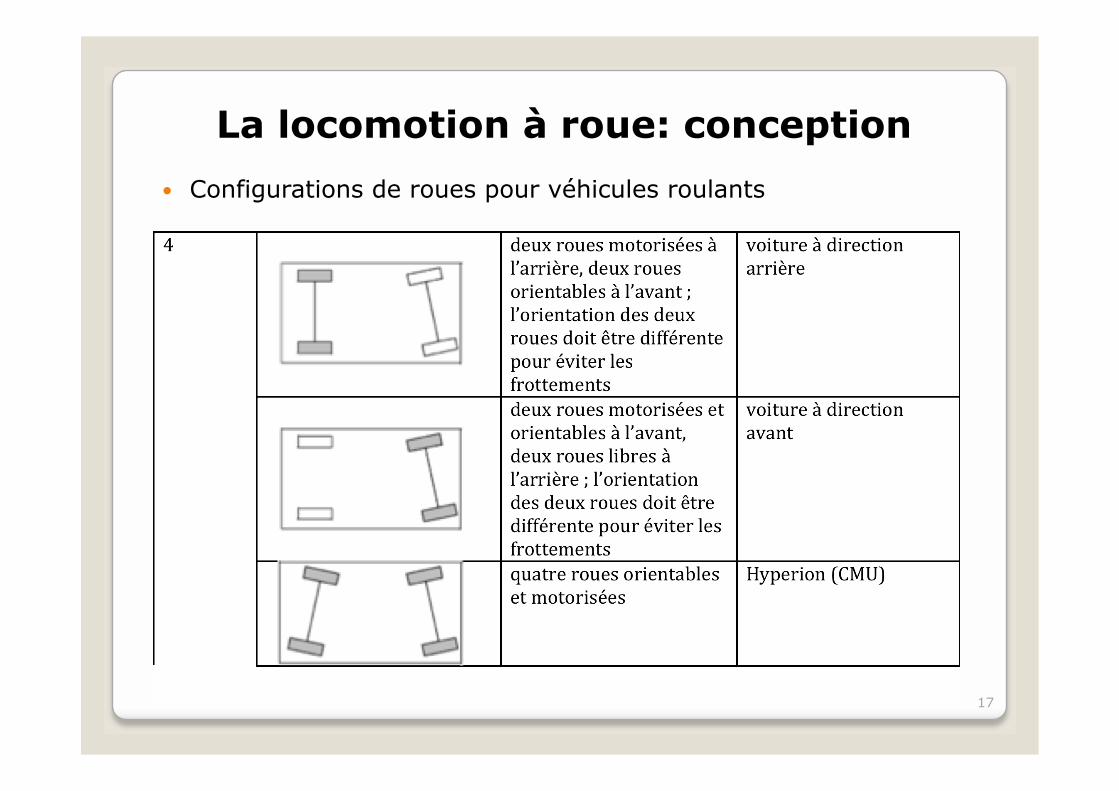
Configurations de roues pour véhicules roulants
La locomotion à roue: conception
18
4
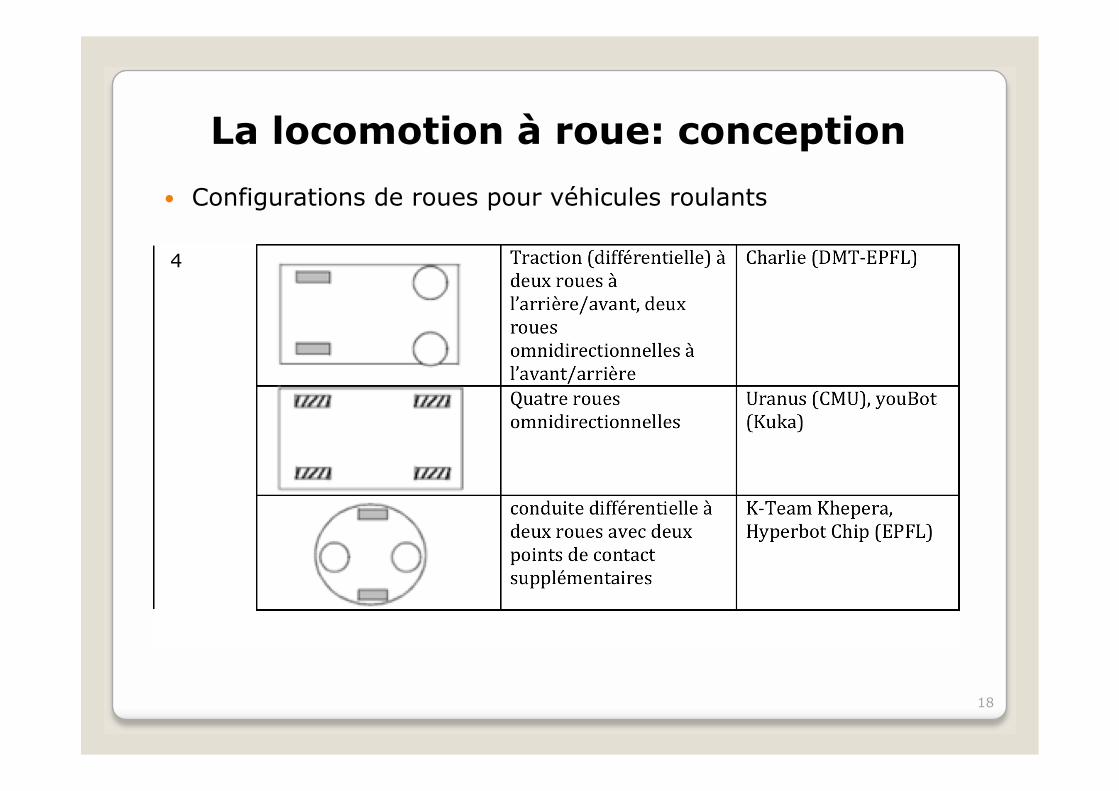
Configurations de roues pour véhicules roulants
La locomotion à roue: conception
19
4
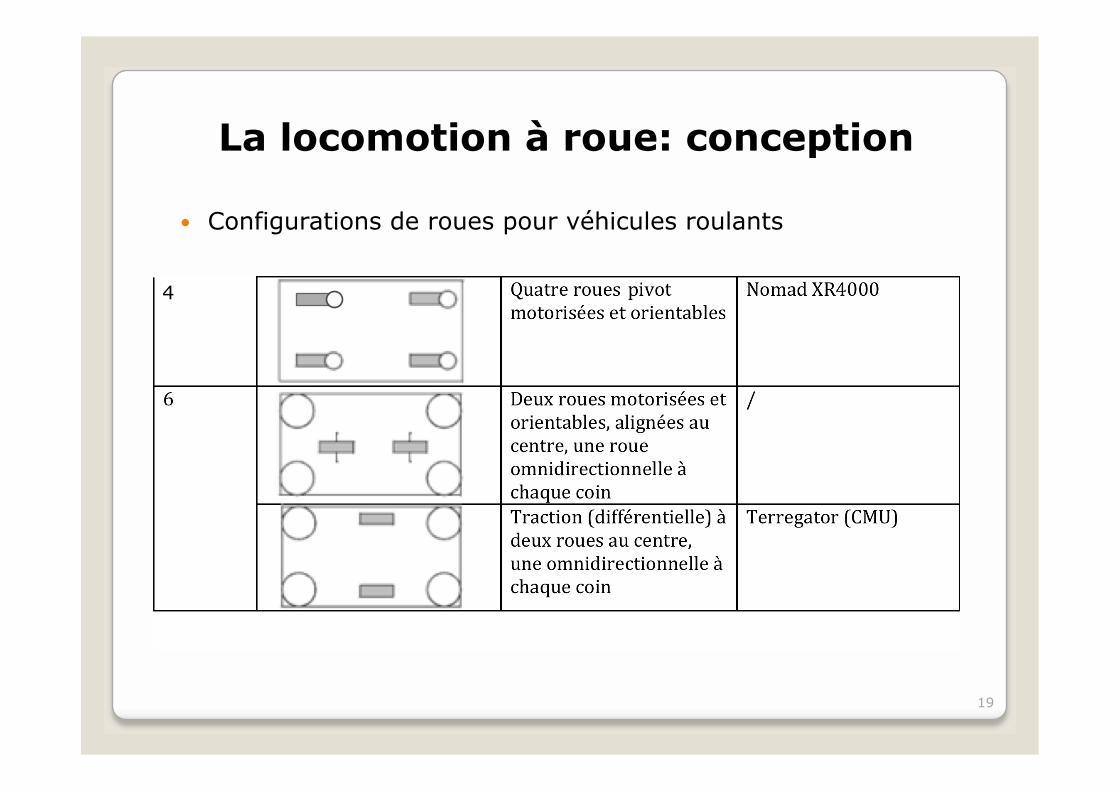
Configurations de roues pour véhicules roulants
La locomotion à roue: conception

◦ En statique: deux roues minimum (théorique) Centre de gravité sous l’axe des deux roues
Exemples: 1) Cye de Probotics
o Robot domestique
o Porte aspirateur
Stabilité
2) Scooter électrique de smart-balancewheel
o Transport urbain
20
21
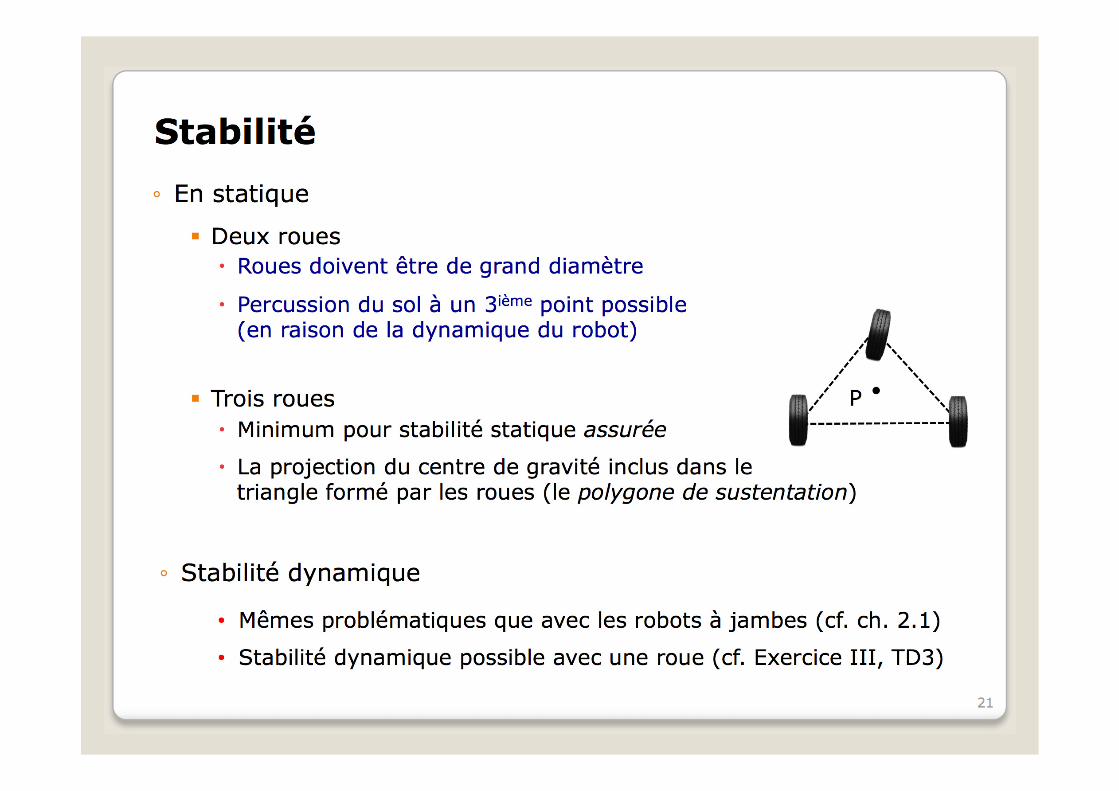
Deux roues Roues doivent être de grand diamètre
Percussion du sol à un 3ième point possible (en raison de la dynamique du robot)
Trois roues Minimum pour stabilité statique assurée
La projection du centre de gravité inclus dans le triangle formé par les roues (le polygone de sustentation)
Stabilité
P
◦ En statique
◦ Stabilité dynamique
• Mêmes problématiques que avec les robots à jambes (cf. ch. 2.1)
• Stabilité dynamique possible avec une roue (cf. Exercice III, TD3)