modèles numériques de terrain interpolation numériquedelacourt/cours/m/m1teldetsig/mnt... · •...
TRANSCRIPT


2

3

4

5
Altimétrie Spatiale
Comment mesurer la Topographie sous Marine ?

6
Bathymétrie Multifaisceaux

7
R = Rg+Rw+(Rb-Rw)e-Kz
Transfert radiatif (simplifié)
Restitution par modèle bathymétrique (1/2)
Conclusion & perspectives
Restitution par bathymétrie

8
Placement des balises & mesures hauteurs dPlacement des balises & mesures hauteurs d’’eaueau
Mesure hauteur d’eauet observations substrats(mire)
Position des balises(DGPS)

9
Août 2004
Février2004
Y = 4,501*canal1-3,04*canal2-1,296*canal3-110,313R² = 78 %
Régression multiple sur les 3 canaux
-- Objectif : prObjectif : préédire les hauteurs ddire les hauteurs d’’eau eau --

10
LIDAR : Lasers :
• vert (532 nm)
• PIR (1064 nm):
• position surface de l’eau
• topographie zones emergées
« ta »

11
time (s)
pow
er (W
)
2.82e-06 2.84e-06 2.86e-06 2.88e-06 2.90e-06
0.00
000.
0002
0.00
040.
0006
0.00
080.
0010
0.00
12
Lasers :
• vert (532 nm)
Principes physiques
ContextePrincipes
LimitesApplications
LiDAR « hydrographique »: Principes physiques et applications
teta
surface fonds
Ce. teZ=
2
Comment mesurer la Topographie terrestre ?

12
Nivellement Triangulation - Trilatération:
Comment mesurer la topographie ???
GPS

13
B
Objet
Image 1 Image 2
Objectif 1 Objectif 2
A
A1A2
B1B2 2 images
d ’une même zone
acquises sous des angles différents
• Principe
Télédétection
- Stéréophotogrammétrie

14
Quelques Paramètres Importants
Couverture spatiale – Fauchée
Résolution Spatiale
Précision – Résolution Verticale
Date de Mesure - Période de revisite
MNT décrivent le sol tandis que le MNE ou MNS (Modèles Numériques d’Elévation ou de Surface) intègrent le sursol (bâti, végétation)

15
Radar : Interférométrie : SRTM (Shuttle Radar Topography Mission) : http://srtm.csi.cgiar.orgInterférométrie Radar multi-passesRoue InterférométriqueTanDEM-X (TerraSAR-X add-on for Digital Elevation Measurement)
http://www.dlr.de/hr/tdmx
Exercice 1:Télécharger le MNT SRTM de la Bretagne et ouvrez le via le logiciel ENVI
Systèmes - Spatiaux
ASTER :
http://edcimswww.cr.usgs.gov/pub/imswelcome/http://glovis.usgs.gov/ImgViewer/ImgViewer.html
- SPOT5 - HRS (Haute Résolution Stéréoscopique)http://www.spotimage.fr/automne_modules_files/standard/public/p732_fileLINKEDFILE_Description_du_produit_SPOT_DEM__v1-2.pdf
- SPOT stéréoScènes disponibles :
http://sirius.spotimage.fr/francais/welcome.htmProgramme ISIS : http://medias.obs-mip.fr/isis/

16
QuickBird http://www.digitalglobe.com/
ORFEO – PLEIADES http://smsc.cnes.fr/PLEIADES/Fr/
LIDAR Spatial : http://icesat.gsfc.nasa.gov/
Systèmes aéroportés
Photogrammétrie http://www.ign.fr
LIDAR terrestre aéroporté
Drone, ULM, Hélicoptère radiocommandé
Systèmes au sol
Scanner : http://www.riegl.com/Scanner photogrammétrique : http://atm3d.free.fr/v5/html/accueil.htm
ProduitsBD Alti®: http://www.ign.fr/telechargement/MPro/plaquettes/bdalti.pdfBD Topo : http://www.ign.fr/telechargement/Mpro/plaquettes/bdtopo.pdf

17
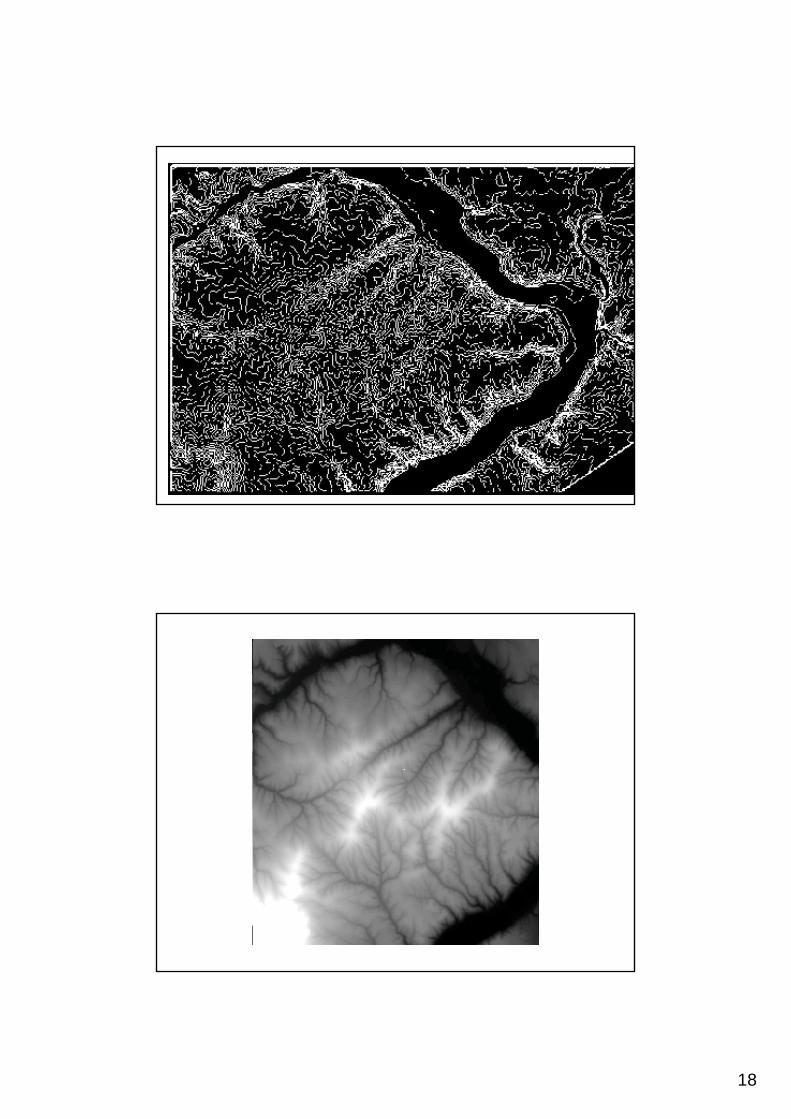
Comment représenter la topographie ?
* Hachures-1eres cartes maritimes-A partir des sommets, représentation radiale des lignes de plus grandes pentes, perpendiculaires aux courbes de niveau. -Taille proportionnelle à la valeur de la pente
* Les courbes de niveau : Lignes qui réunissent les points de même altitude.
* Les Modèles numériques de Terrain MNT .Description mathématique du relief.
18

19

20
TP - MNT – Utilisation d’ENVI Exemple du glissement de Terrain de « La Clapière »
21
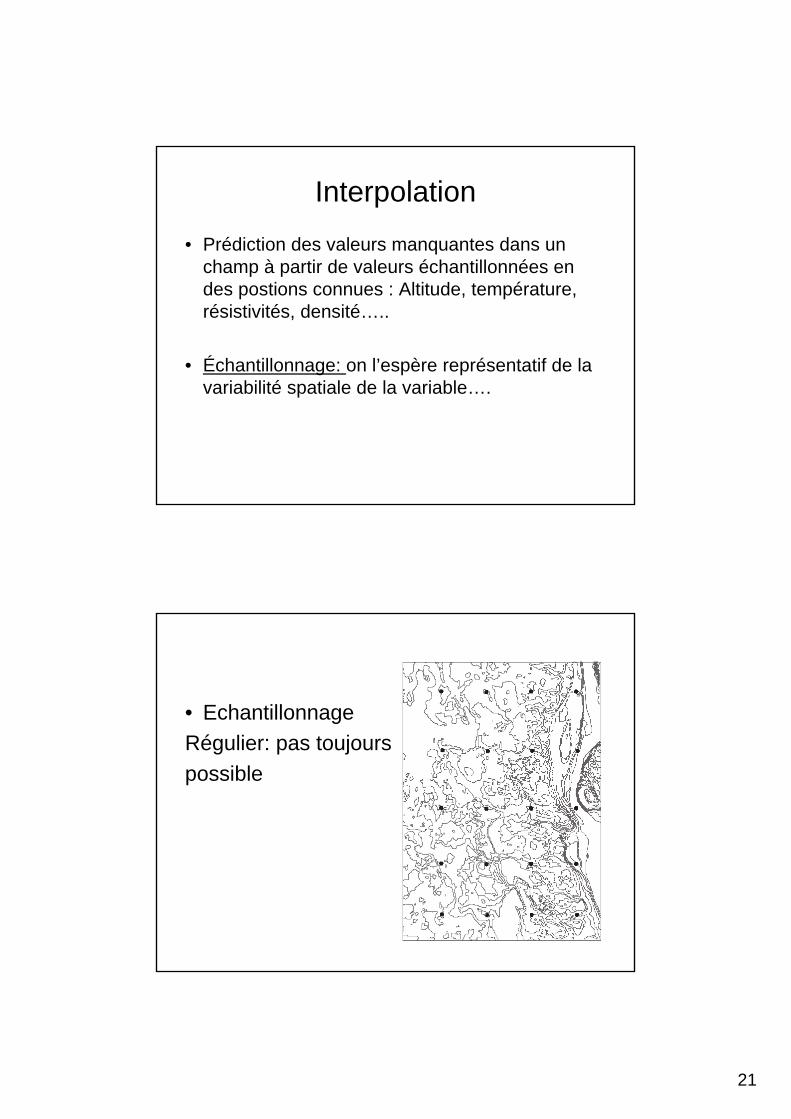
Interpolation
• Prédiction des valeurs manquantes dans un champ à partir de valeurs échantillonnées en des postions connues : Altitude, température, résistivités, densité…..
• Échantillonnage: on l’espère représentatif de la variabilité spatiale de la variable….
• Echantillonnage Régulier: pas toujourspossible

22
• EchantillonnageAléatoire
Echantillonnage adaptatif: nécessite un a priori

23
• INTERPOLATION
• De nombreuses méthodes
• Toutes les méthodes utilisent la position et la valeur pour estimer la variable en des sites non échantillonnés
• Chaque méthode produit un résultat différent (mêmeavec le même jeu de données)
• Il n’y a pas de “meilleure” méthode
• La précision est estimée à partir de mesures non incluses dans l’interpolation. On calcule la différenceentre la valeur calculée et la valeur mesurée.
Plus proche voisin
• La valeur interpolée est égale à la valeur mesurée au point d’échantillonnage le plus proche
• Méthode simple
• Un point est utilisé pour le calcul en plus du calcul de distance
• C’est la méthode du plus proche voisin
• Polygones de Thiessen
24
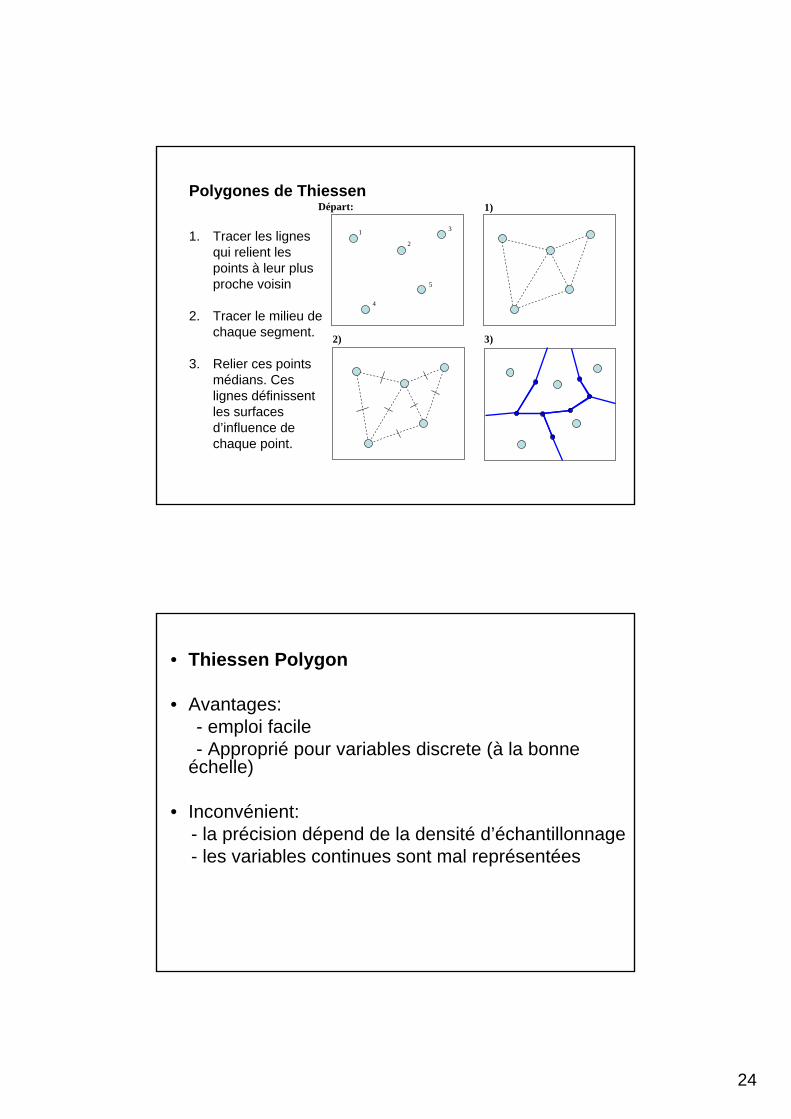
1. Tracer les lignesqui relient les points à leur plus proche voisin
2. Tracer le milieu de chaque segment.
3. Relier ces points médians. Ceslignes définissentles surfaces d’influence de chaque point.
Polygones de Thiessen
1
2
3
5
4
Départ: 1)
2) 3)
• Thiessen Polygon
• Avantages:- emploi facile- Approprié pour variables discrete (à la bonne
échelle)
• Inconvénient:- la précision dépend de la densité d’échantillonnage- les variables continues sont mal représentées

25
Moyenne locale dans un disque
• Plus complexe• Les valeurs sont estimées en calculant la valeur
moyenne sur un disque de rayon donné . • Certains disques ne contiennent pas de point si
le rayon est trop faible.• Si le rayon est trop grand les données sont
lissées.
26
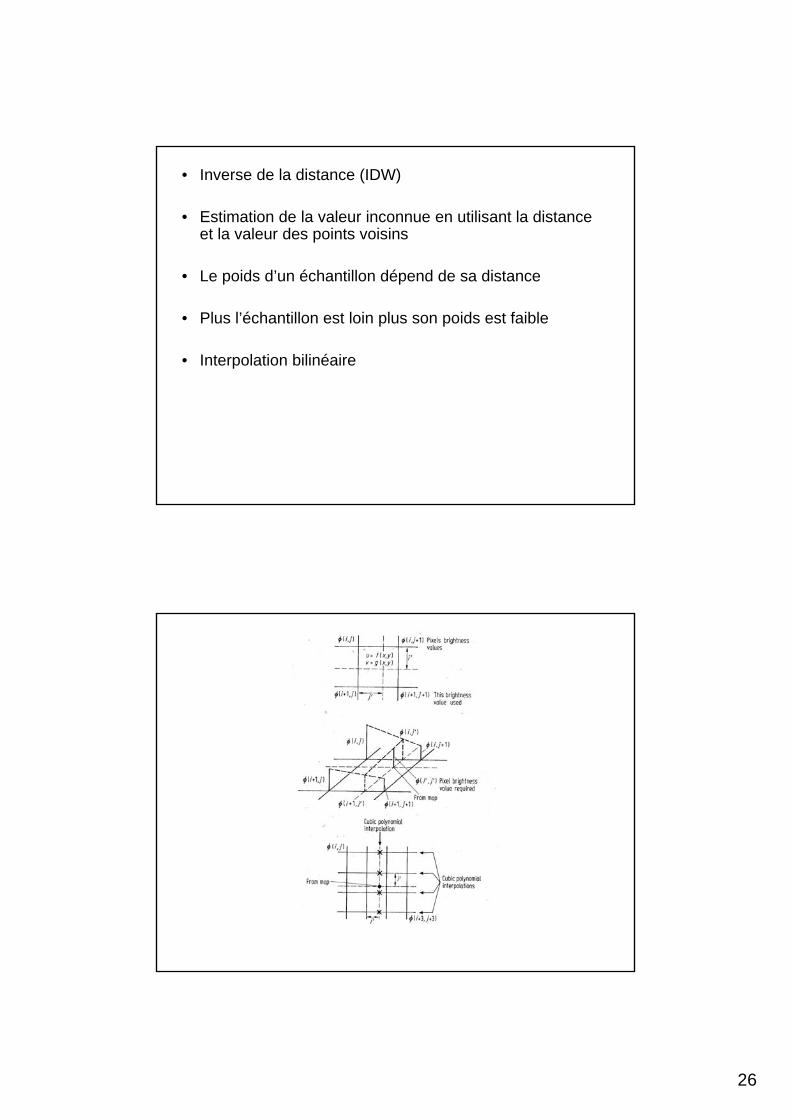
• Inverse de la distance (IDW)
• Estimation de la valeur inconnue en utilisant la distance et la valeur des points voisins
• Le poids d’un échantillon dépend de sa distance
• Plus l’échantillon est loin plus son poids est faible
• Interpolation bilinéaire

27
Zi valeur au pt échantillonné idij distance au point iZj valeur estiméen exposant sélectionné par l’utilisateur(généralement inférieur à 3)
Tous les échantillons peuventêtre utilisés (on en utilise au moins 3)

28
Inversion• On dispose de données et on veut ajuster ces données
par un modèle, et donc chercher les paramètres de ce modèle
• Nous nous contenterons de modèles géométriques simples dans un premier temps
Ajustement à une droite
Il nous « semble » qu’il existe une relation linéaire entre les deux données x et y
x
y
y=ax+b
On connaît les doublets (x,y), on cherche les valeurs de a et b qui ajustent le mieux ces valeurs

29
Moindres carrés pour une droite
• On va rechercher les valeurs de a et de b qui minimisent la distance entre les valeurs observées et les valeurs calculées par le modèle
⎟⎟⎠
⎞⎜⎜⎝
⎛
⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜
⎝
⎛
=
⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜
⎝
⎛
ba
x
xx
y
yy
nn 1........11
..
..2
1
2
1
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
−
ba
yAAA
ba
AAyA
ba
Ay
tt
tt
1)(
Ajustement à un plan
• De la même façon on peut ajuster à un plan.
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜
⎝
⎛
=
⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜
⎝
⎛
cba
yx
yxyx
z
zz
nnn 1............11
..
..22
11
2
1
z=ax+by+c
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
−
cba
yAAA
cba
AAyA
cba
Ay
tt
tt
1)(

30
Ajustement polynomial
• La parabole en deux dimensions y= bx2+ax+c• Ecrire sous forme matricielle le cas parabolique
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜
⎝
⎛
=
⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜
⎝
⎛
cba
xx
xxxx
y
yy
nnn 1
11
..
..
2
22
21
2
1
2
1
Ajustement polynomial
• En 3 dimensions z= ax2+by2+cxy+dx+ey+f• Ecrire sous forme matricielle le cas n=3
⎟⎟⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜⎜⎜
⎝
⎛
⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜
⎝
⎛
=
⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜
⎝
⎛
fedcba
yxyxyx
yxyxyxyxyxyx
z
zz
nnnnnnn 1....
11
..
..
22
222222
22
111121
21
2
1
On peut généraliser à n dimensions…..

31
Moindres carrés pour fonctions non linéaires (1)
• Dans les exemples précédents les fonctions étaient linéaires. Ce n’est pas toujours le cas, il faut alors ajuster avec d’autres méthodes
• Soit f une fonction non linéaire qui représente un modèle. On dispose d’observations X et Y. Ces observations devraient suivre la fonction f. On cherche àparamétrer f à l’aide de ces observations
Moindres carrés pour fonctions non linéaires (2)
2
1
2 )( i
m
i yyc ∑ −=
• On cherche à minimiser c tel que• Avec y barre valeur de y mesuré• Et y valeur de (y estimé)

32
Moindres carrés pour fonctions non linéaires (3)
• On peut développer f par une séries de Taylor: on a besoin de dériver par rapport à toutes les variables:
)()()( 0
1
0
0
jj
n
j xxj
iii xx
xfxfxf −⎟⎟⎠
⎞⎜⎜⎝
⎛
∂∂+= ∑
= =
Moindres carrés pour fonctions non linéaires (4)
2
0
1
0
1
2 )()(0 ⎥
⎥⎦
⎤
⎢⎢⎣
⎡−⎟
⎟⎠
⎞⎜⎜⎝
⎛
∂∂−−= ∑∑
= ==jj
n
j xxj
iii
m
ixx
xfxfyc
C, la constante à minimiser devient alors:
Ceci revient à résoudre le pb linéaire:
0
)(
ˆ0
0
xxj
iij
iii
jjj
xfa
xfyy
xxxxAy
=⎟⎟⎠
⎞⎜⎜⎝
⎛ ∂=
−=Δ
−=ΔΔ=Δ

33
Moindres carrés pour fonctions non linéaires (5)
• Pour chaque valeur de x0, on calcule la valeur de f(x0) et les valeurs des dérivées. On résout le système précédent qui nous permet de calculer le Δx, on injecte ce Δx et on continue à itérer.
Krigeage
• Inverse distance weighting : quelle fonction choisir ? Quelle définition du voisinage ?
• Modélisation de surface : on définit la forme de la courbe ou de la surface (polynome ou autre). On force le système
• L’idéal serait une combinaison des avantages des deux méthodes.
34
Krigeage
• Méthode statistique qui utilise la structure spatiale du jeu de données pour déterminer des poids d’interpolation
• 3 étapes:– Description des variations spatiales dans le
jeu de données– Modélisation de cette variation spatiale– Utilisation de ce modèle pour déterminer des
poids d’interpolation