methode des forces en theorie des poutres et des
TRANSCRIPT
'N°d'ordre 1.1.C.1-7902
....... ,.'.. ~ - '
r INSTITUT NATIONAL DES SCIENCES APPLIQUEES DE LYON
pour obtenir
LE DIPLOME DE DOCTEUR DE TROISIEME CYCLE
Spécialité: GENIE CIVIL
. ,'par
Féliêién MÈNDENE M'FKWA. j - \
Ma'&Et~-:Séeryc~s et Techniques/ '
METHODE DES FORCESEN THEORIE DES POUTRES ET DES PLAQUES
Soutenue le 2 Juillet 1979 devant la Commission d'Examen
Jury MM le Professeur J.C. CUBAUD
J. F. JULLIEN
M. LEMAIRE
K.DYDUCH
E. ABSI
"
Président
Examinateurs
INSTITUT NATIONAL DES SCIENCES APPLIQUEES DE LYON
-------------------------------------------------
DIRECTEUR R. HAMELIN
CHEFS DE DEPARTEMENTS
Premier Cycle
Biochimie
Génie Civil et Urbanisme
Génie Electrique
Génie Energétique
Géniè Mécanique Construction
Génie Mécanique Développement
Génie Physique Matériaux
Informatique
C. GUILLAUD Professeur
P. LAVIOLETTE Professeur
M'. MONGEREAU Màître de Conférences
H. KLEIMANN Maître de Conférences
M. RICHARD Professeur
J. BAHUAUD Professeur
M. LALANNE Professeur
P. GOBIN Professeur
R. ARNAL Professeur.
DIRECTEURS DE RECHERCHE - PROFESSEURS
R. ARNAL
J. BAHUAUD
J. BOUSQUET
E. BRARD
M. CHEVRETON
B. CLAUDEL
L. CRONENBERGER
J.C. CUBAUD
,L. EYRAUD
J. FAVREL
Y. FETIVEAU
R. GELIN
Informatique Appliquée
Mécanique des Solides
Thermo-Chimie Minérale
Physiologie et Pharmacodynamie
Etude des Matériaux
Cinétique et Génie Chimiques
Chimie Biologique
Génie Civil et Urbanisme (Bétons et structures)
Génie Electrique et Ferroélectricité
Informatique Appliquée
Génie Electrique et Ferroélectricité
Chimie Organique
~
[
\r
2.
P. GOBIN
M. GODET
J. GOLE
R. GOUTTE
C. GUILLAUD
J. LAPON
M. LALANNE
P. LAVIOLETTE
G. MONNIER
H. PACHECO
PERACHON
E. PERNOUX
M. PEYRON
P. PINARD
R. REYNAUD
M. RICHARD
R. RIVIERE
J. ROBIN
M. ROLIN
F. STOEBER
M. THEOLIER
A. ROUX
Groupe d'étude de métallurgie et de physique des matériaux
Mécanique des Contacts
Matériaux Macromoléculaires
Optique Corpusculaire et Ultrasons
Optique Corpusculaire et Ultrasons
Spectroscopie Moléculaire
Mécanique des Structures
Biologie
Physicochimie Industrielle
Chimie Biologique
Thermo-Chimie
Groupe d'étude de métallurgie physiqueet de physique des matériaux
Chimie Physique
Physique de la Matière - Physique IndustrlelIe
Energétique et Automatique
Energétique et Automatique
Groupe d'étude de métallurgie physiqueet de physique des matériaux
Physico-Chimie Industrielle
Physico-Chimie Industrielle
Hicrobiologie
Métallurgie et Traitements Thermiques
Sciences de la Nature (Université ClaudeBernard Lyon 1)
Ch. EYRAUD Chimie Appliquée, Génie chimique etElectrochimie (Université Claude BernardLyon 1)
MAITRES DE CONFERENCES ET CHARGES D'ENSEIGNEMENT
D. BERTHE
M. SOIVIN
Mécanique des Contacts
Mécanique des Solides
J
i,
Gilbert FANTOZZI
J FRENE
J. GIELLY
M. GERY
C. GUITTARD
3.
G.P.M.
Mécanique des Contacts
Génie Civil et Urbanisme (Géotechnique)
Génie Civil et Urbanisme (Equipement
de l'l\abitat)
Electronique Appliquée
,\
1,, '
J.F. JULLIEN
H. KLEIMANN
P. LAREAL
A. LAUGIER
M. LEMAIRE
Claude LESUEUR
Y MARTINEZ
C. MARTY
P. MAY
N. MONGE REAU
, P. PREVOT
J. PEREZ
R. RIEUTORD
Ph. TROMPETTE
J. VERON
C. MENGUY
MAITRES DE RECHERCHE C.N.R.S.
M. MURAT
MAITRES ASSISTANTS
H. BOTTA
Génie Civil et Urbanisme (Bétons et Struc
Structures)
Génie Electrique et Ferroélectricité
Génie Civil et Urbanisme (Géotechnique)
Physique de la Matière
Génie Civil et Urbanisme (Bétons etStructures)
G.M.C.
Informatique Appliquée
Etude des Procédés de Fabrication
Automatisation des Fabrications Mécaniques et Commande Numérique
Génie Civil et Urbanisme (Géotechnique)
Informatique Appliquée
Groupe d'Etude ~êtallurgie Physique etPhysique des Matériaux
Hydraulique et Dynamique des Gaz
Mécanique des Structures
Chimie Appliquée
Physique (Université Claude BernardLyon 1)
Chimie Appliquée
Génie Civil et Urbanisme (Méthodes)
A. JUT~
C. LESUEUR
Mécanique des Solides
Vibrations-Acoustique
j
1
A V A N T - PRO P 0 S
Nos recherches ont été effectuées au laboratoire
du Groupe de Recherche Génie-Civil de l'Université de Cler-
mont Ferrand II.
Qu'il nous soit permis d'exprimer notre resepctueu-
se gratitude à Monsieur le Professeur CUBAUD, Directeur de
Recherche au laboratoire des Bétons et structures de l'Ins-
titut National des Sciences Appliquées de Lyon, qui nous a
fait le grand honneur de Présider notre Jury de thèse.
Monsieur LEMAIRE, Maître de Conférence, Responsable
du Groupe de Recherche Génie-Civil de l'Université de Cler-
mont Ferrand II nous a enseigné la théorie des éléments fi-
nis. Il nous a proposé ce sujet et en a assumé entièrement la
direction. Son aide et ses encouragements tout au long de
nos recherches nous ont été précieux. Nous lui adressons l'ex-
pression de notre très sincère gratitude.
Monsieur JULLIEN, Maître de Conférence à L'Insti-
tut National des Sciences Appliquées de Lyon a bien voulu
examiner notre travail et a accepté de faire partie de no-
tre jury de thèse. Nous lui exprimons nos très vifs remercie-
ments.
il '
1 .
1t! ~t '
r
l1 i
1
1
i
J
Monsieur DYDUCH, ~!aître de Conférence à l'Ecole
Polytechnique de Cracovie en Pologne s'est intéressé à no
tre travail. Nous lui exprimons notre plus vive reconnais
sance.
Malgré ses nombreuses activités, Monsieur ABSI, Dé
légué Général Scientifique du Centre Expérimental des Recher
ches et d'Etudes du Bâtiment et des Travaux Publics a exa
miné notre travail et nous fait le grand honneur d'être mem
bre de notre jury. Nous le remercions très respectueusement.
Nous avons beaucoup apprécié l'aide cordiale et
l'esprit coopératif de notre camarade de laboratoire Bernard
PEUCHOT. Il nous a fait profiter de ses connaissances dans
le domaine de l'informatique. Nous tenons à le remercier sin
cèrement.
Enfin, nous adressons nos remerciements les plus
sincères à tous ceux qui ont apporté leur collaboration à
notre travail.
RES UME
Ce travail est consacré à la méthode des forces en
théorie des poutres et des plaques. Le principe variationnel
des forces virtuelles est à la base de la formulation qui est
appliquée aux éléments linéiques de poutres et aux éléments
surfaciques de plaques. Il est divisé en quatre chapitres.
Le premier rappelle les aspects classiques de la mé-
thode des forces et présente une technique de sélection auto-
matique des inconnues hyperstatiques qui est fondée sur l'al-
gorithme de GAUSS-JORDAN.
Le choix automatique d'un système isostatique de
base permet l'application, dans un deuxième chapitre, de la
méthode des forces à l'analyse limite. Le calcul de la vérifi-
cation ou de dimensionnement plastique optimal par la méthode
statique est alors entièrement automatisé.
Le troisième chapitre décrit la construction d'un
modèle équilibre pur dans le cas d'un élément triangulaire de
plaque fléchie. La procédure utilisée en théorie des poutres est
étendue au cas envisagé.
Les applications numériques font l'objet du dernier
1i
chapitre. Elles présentent les possibilités de la méthode
des forces et ouvrent la voie à son application en théorie
des plaques.
ABSTRACT
This paper treats about the force method in the.'
theory of beams and plates. The variational principle of
virtual forces is on the basis of the formulation which is
applied to the linear elements of beams and surface elements
of plates. It is subdivised in four chapters.
The first one reminds of the classical aspects of
the force method and present an automatic selection technique
of unknown hyperstatics which is founded on the GAUSS-JORDAN
algorithm
The automatic choice of a basic isostatic system
permits to apply, in a second chapter, the force method to
the limit analysis. The weight design and the minimum weight
design by the static method is thus entirely automised.
The third chapter describes the construction of a
pure equilibrium model for a bent triangular plate elernent.
The procedure used in theory of beams is extended ta this
case which is going ta be studied.
The subjet of the last chapter are the numerical
applications. They show the possibilities of the force method
and open the way for its application in theory of plates.
SOM MAI R E
CHAPITRE 2. - APPLICATION DE LA METHODE DES FORCES A L'ANALYSEET AU DIMENSIONNEMENT LIMITE. 48
4
3
6
7
1
9
77
2425
Il
1315
24
49
1922
46
Pages
- Introduction- Présentation de la méthode- Relations forces de pou t r e-vfo roc s intérieures
aux noeuds 27- Construction des équations d'équilibre 31- Etude de l'équilibre d'une structure 35- Equations "canoniques" de la méthode des for-
ces automatique. 37- Application de l'Algorithme de Gauss-Jordan
à la matrice élargie des équations d'équilibrt 4 0- Méthodologie 451.4.8.
1.4.1.1.4.2.1.4.3.
1.3.1. - Introduction ,~_
1.3.2. - Définitions .',~ 0 ... : ; ....-,-,
1.3.3. - Principe fon~mentar·'~~<).,.améthode desforces r;' ; \ . ,
1.3.4. - Relati?ns fq~C€§~~~~o~tre_~'déplacementsdepoutre \ 0.0 /'
\ ~ / s1.3.5. - Rela tions fo~ées',ge ~û.:g.re"",·forces aux noeuds1.3.6. - Théo:èrne~ énebq~~~9g~~~For~ulat~o~ forc:1.3.7. - Appllcatlon des~êbr~mes energetlques a la
méthode des forces1.3.8. - Méthodologie
1.4.7.
1.4.4.1.4.5.1.4.6.
1 .2. - HYPOTHESES DE CALCUL
2.1. - INTRODUCTION
1.1. - INTRODUCTION
1.3. - METHODE DES FORCES SEMI-AUTOMATIQUE
INTRODUCTION
1.4. - METHODE DES FORCES AUTOMATIQUE
CHAPITRE 1. - METHODE DES FORCES EN THEORIE DES POUTRES
1.5. - CONCLUSION
2.2. - CALCUL DE LA CHARGE LIMITE PAR LA METHODE STATIQUE. 52
2.3.1. - Formulation du problème 662.3.2. - Détermination de la fonction à optimaliser 672.3.3. - Dimensionnement limite par la prograwmation
linéaire 682.3.4. - Appréciation du dimensionnement limite 71
3.2.1. - Hypothèses de calcul 773.2.2. - Equations différentielles d'équilibre 783.2.3. - Relations entre les efforts dans les systèmes
d'axes x - y et n - t 823.2.4. - Détermination des conditions aux limites 86
72
77
66
73
101
74
88
103
8893
106
105
9699
3.3.1. - Construction d'un champ de moments3.3.2. - Relations moments-Forces intérieures
inconnues3.3.3. - Relation forces intérieures inconnues~forces
verticales aux noeuds.3.3.4. - Matrice de connexion et conditions limites
2.2.1. - Domaine d'étude du calcul de la charge li-mite-Définitions 52
2.2.2. - Formulation du problème 552.2.3. - Théorème statique 562.2.4. - Méthode statique 58
-2.2.5. - Conclusion 65
CHAPITRE 3. - MODELE EQUILIBRE DE FLEXION DE PLAQUE
2.4. - CONCLUSION
2.3. - DIMENSIONNEMENT LIMITE
3.1. - INTRODUCTION
3.2. - THEORIE DES PLAQUES
3.3. - SOLUTION PAR ELEMENTS FINIS EQUILIBRE
3.5. - METHODES DE RESOLUTION
3.4. - MATRICE DE SOUPLESSE ELEMENTAIRE
4.1. - THEORIE DES POUTRES
CHAPITRE 4. - APPLICATIONS NUMERIQUES
,t,
J
4.2. - THEORIE DES PLAQUES
CONCLUSION
ANNEXES
ANNEXES 1. - CONVENTIONS DE SIGNE
ANNEXES 2. - FOID1ULES DETAILLEES DES EQUATIONS D'EQUILIBRE
ANNEXES 3. - NOTATIONS
BIBLIOGRAPHIE
III
118
121
122
128
131
132
l .
l N T R 0 DUC T ION
Les théories et méthodes de calcul des structures
s'appuient sur des procédés qui conduisent à des volumes de
calcul plus ou moins importants selon leurs principes de ba-
se. A l'origine, la méthode des forces est apparue bien adap-
tée au traitement "manuel" des ossatures. Plus simple dans-sa
logique, mais exigeant plus de calculs numériques, la méthode
des déplacements a été facilement automatisée dans le cas des
réseaux de poutres et elle a servi de modèle aux développements
liés à la méthode des éléments finis dans sa formulation clas-
sique.
Si de nombreuses recherches ont permis au modèle
déplacement d'atteindre un haut niveau dans le calcul élasti-
que, il n'en est pas de même pour le modèle équilibre, plus
difficile à mettre à oeuvre, qui n'a pas fait l'objet de dé-
veloppements aussi poussés.
Le présent travail se propose d'analyser les possi-
bilités de la méthode de type "force" et de chercher une auto-
matisation complète des processus en calcul élastique et plas-
tique. Il vise également à transcrire au niveau d'un milieu
continu; les résultats acquis en théorie des poutres.
\-~
2.
Avant d'aborder le modèle équilibre de la méthode
des éléments finis, nous consacrons le premier chapitre sui
vant les perspectives ouvertes par P.obinson (1) pour la résolu
tionautomatique des inconnues hyperstatiques.
La résolution des problèmes de vérification et de
dimensionnement des ossatures à l'état limite fait l'objet d'un
deuxième chapitre. L'application de la programmation linéaire
après la sélection automatique des inconnues hyperstatiques
permet d'envisager l'analyse automatique aussi bien en régime
élastique que plastique parfait.
Dans un troisième chapitre, nous développons la
construction d'un élément fini triangulaire de plaque fléchie
en utilisant une formulation dérivée de celle de la théorie
des poutres.
Enfin, des applications numériques font l'objet
du dernier chapitre. Elles présentent les possibilités de la
méthode des forces et ouvrent la voie à son application en
théorie des plaques. Les résultats obtenus sont comparés à des
solutions proposées par d'autres m§thodes.

3.
~------------------------------------------------------ - - - - - t1 1
: CHAP ITRE 1. - HETHODE DES FORCES EN THEORIE DES POUTRES l1 11 1~-----------------------------------------------------------~
4 .
1.1. - INTRODUCTION
Depuis 25 ans, les méthodes numériques ont été
considérablement développées et c'est essentiellement la mé
thode des déplacements qui a été concernée par les recherches.
La méthode des forces d'un emploi manuel fréquent, n'a fait
l'objet que de peu de travaux d'automatisation.
Ces deux méthodes, générales dans leur applica-
tion peuvent être classées comme des méthodes algébriques
(1), (2). La méthode des déplacements apparaît co~me étant la
plus utilisée et le manque de popularité de la méthode des
forces est dû au fait que les inconnues hyperstatiques sont
sélectionnées manuellement. Le choix est fait par l'ingénieur
sur les bases de son intuition et de son expérience. Par con-
tre, la logique beaucoup plus élémentaire de la méthode des
déplacements a permis la grande diffusion de celle-ci.
Quoi qu'il en soit, la méthode des forces a été
appliquée de préférence à la méthode des déplacements pour cer-
taines structures. En effet, lorsqu'on a réussi à définir une
structure isostatique de base et à déterminer les matrices de
coefficients, le programme de calcul par la méthode à forces
inconnues ne demande que l'inversion d'une matrice dont la di
mension est égale au nombre d'inconnues hyperstatiques et l'exé-
5 .
cution de quelques produits matriciels. La méthode des dépla
cements par contre exige la résolution d'un système d'équa
tions de dimension égale au nombre de degrés d'indétermina
tion cinématique de la structure.
Cet avantage de la méthode des forces demeure
aussi longtemps que la détermination des systèmes de référen
ce peut être réalisée manuellement et constitue une donnée du
programme de calcul. Pour pallier cet inconvénient, la métho
de des forces a été perfectionnée il est maintenant possi
ble de transférer à l'ordinateur le choix des inconnues hypers
tatiques.
6.
1.2. - HYPOTHESES DE CALCUL
Dans ce paragraphe, nous définissons le domaine
d'étude de notre travail (3).
Les hypothèses de calcul sont celles de la théo-
rie de l'élasticité linéaire et de la théorie des poutres.
En particulier
- Il existe une relation linéaire entre les déplacements et les
déformations.
- Il existe une relation linéaire entre les déformations et
les contraintes. C'est la loi de Hooke.
- Les déplacements et les déformations sont infiniment petits.
- Les poutres possèdent une fibre moyenne et les sections
restent droites après déformation.
Nous supposons en outre que
L'effet énergétique de l'effort tranchant est né-
gligeable, les poutres ont une section constante et une ligne
moyenne rectiligne et nous limitons notre étude au système
plan.
7 •
Enfin, nous considérons que le système de forces
extérieures est constitué par un ensemble de forces appliquées
aux points nodaux choisis. Dans le cas où les forces sont
appliquées en travée, il faut les remplacer par les actions
de la poutre sur ses noeuds parfaitement encastrés.
1.3. - METHODE DES FORCES SEMI-AUTO~ATIQUE
1.3.1. - Introduction
Nous nous proposons ici de développer la méthode
des forces "manuelle". Dans cette méthode, nous disposons d'un
schéma unique de résolution : les inconnues du problème sont
les forces généralisées localisées aux noeuds choisis - for-
ces internes et réactions d'appuis.
1.3.2. - Défirtitions
Dans l'étude d'une structure hyperstatique, il
faut utiliser en plus des équations d'équilibre, les équa-
tions de compatibilité des déplacements. Les équations d'équi-
libre traduisent d'une part que la structure est globale-
ment en équilibre (autrement dit qu'elle ne se déplace pas)
et d'autre part que chaque élément est également en' équili-
bre. Les conditions decanpatihilité des déplacements tradui-
sent la continuité de la structure après déformation. Il ne
doit exister ni fissure, ni recouvrement (3).
8.
1.3.2.1 . ...;. Coupure simple
On pratique une coupure simple chaque fois qu'il
existe un effort intérieur inconnu. Les trois coupures sim
ples sont: la coupure d'effort normal, la coupure d'effort
tranchant et la coupure de moment. Elles doivent être telles
que les diagrammes d'efforts que les inconnues libérées in
duisent, interfèrent le moins possible.
1. 3.2.2. - Degré d' hyperstaticité
Le degré d'hyperstaticité est le nombre total
de coupures simples à effectuer dans une structure pour la
ramener à une structure isostatique. Il est égal à la diffé
rence entre le nombre d'inconnues et le nombre d'équations
d'équilibre aux noeuds.
1.3.2.3. - Système isostatique dé référence
c'est le système isostatique obtenu par suppres
sion des liaisons surabondantes~ leur action étant remplacée
par des forces correspondantes.
D'une façon générale, pour une structure hypersta
tique donnée, on peut choisir plusieurs systèmes isostatiques
de base. Il faut cependant remarquer qu'un système obtenu en
supprimant arbitrairement un nombre suffisant de liaisons
n'est pas forcément un système isostatique de base.
9.
1.3.3. - Pri"ncipe" fondamental de la méthode des forces
Dans ce paragraphe, nous établissons les équa-
tions "canoniques" de la méthode des forces. Ce système d'é-
quations linéaires aux inconnues hyperstatiques constitue
l'élément de base de la méthode des forces.
Etant donné une structure hyperstatique d'ordre
n, soumis à m forces extérieures, n coupures simples sont alors
nécessaires pour rendre le système isostatique.
On note (3) :
1xlT = [Kl' .•• ' xnJ Le vecteur des inconnues hyperstatiques.
Les X. sont soit des forces, soit desl
moments.
Ip }T = [p p ]s l'··" -n Le vecteur des forces extérieures appli-
quées.
Dans le système isostatique de référence, nous
désignons par lU 1, le vecteur des déplacements relatifsxx
des lèvres des coupures sous l'action des forces inconnues IX}.
De même, les déplacements relatifs des livres
des coupures sous l'action des forces appliquées IPs} sont
notés 1Uxol •
Les deux matrices qui lient respectivement les

10.
forces inconnues et les forces appliquées aux déplacements
dans les coupures sont telles que :
(1 la)
Cl - lb)
Dans la relation (1 - la), S " est le déplace-XJl -
ment dans la coupure j sous l'action d'une force unitaire
placée dans la coupure i, ce coefficient peut par exemple
être déterminé par application du théorème de la force uni-
taire.
La symétrie de la matrice [sxJ est d êmont.r.êecpe.r
application du théorème de Maxwell-Betti.
En effet,
s " ~ (X .) = S ., (X.)XJl l X1J J
pour X.= X. = ll J
et la matrice [SxJ est symétrique.
-, --'-. - _..-
/ -.. ;
. ':\ ".
. -r :c '~., ".
On démontre de la même façon que le coe~ficient
S .. est le déplacement dans la coupure j sous l'action d'uneOJl
force unité P = l dans la coupure i.
Au paragraphe 1.3.2. nous avons noté que pour une
structure hyperstatique, il faut utiliser en plus des équa
tions d'équilibre, les équations decompatibilitê des dépla
cements. Cette condition de compatibilité de déplacement se
Il.
traduit par le fait que la structure initiale, statiquement
indéterminée, est une entité (4), cela signifie qu'il n'y a
aucun déplacement relatif des lèvres des coupures. Nous de-
vons donc avoir toutes les extrémités sectionnées fermées.
Il vient
soit
: uxx 1 + 1Uxo 1 = 10 1
[ SxJ1 X 1 + [S0] IP si = 1 0 1
D'où Cl. 2. )
Ce système d'équations constitue la relation fon-
damentale de la méthode des forces. Il permet de calculer les
inconnues hyperstatiques 1xl. Le problème est donc de déter
miner les matrices [Sol, [sJ .
1.3.4. - Relation forces de poutre - "déplacements de poutre"
Cette relation lie les efforts indépendants carac-
térisant l'état de contrainte aux déplacements correspondants.
Il convient pour cela de préciser auoaravant les
forces généralisées indépendantes sélectionnées.
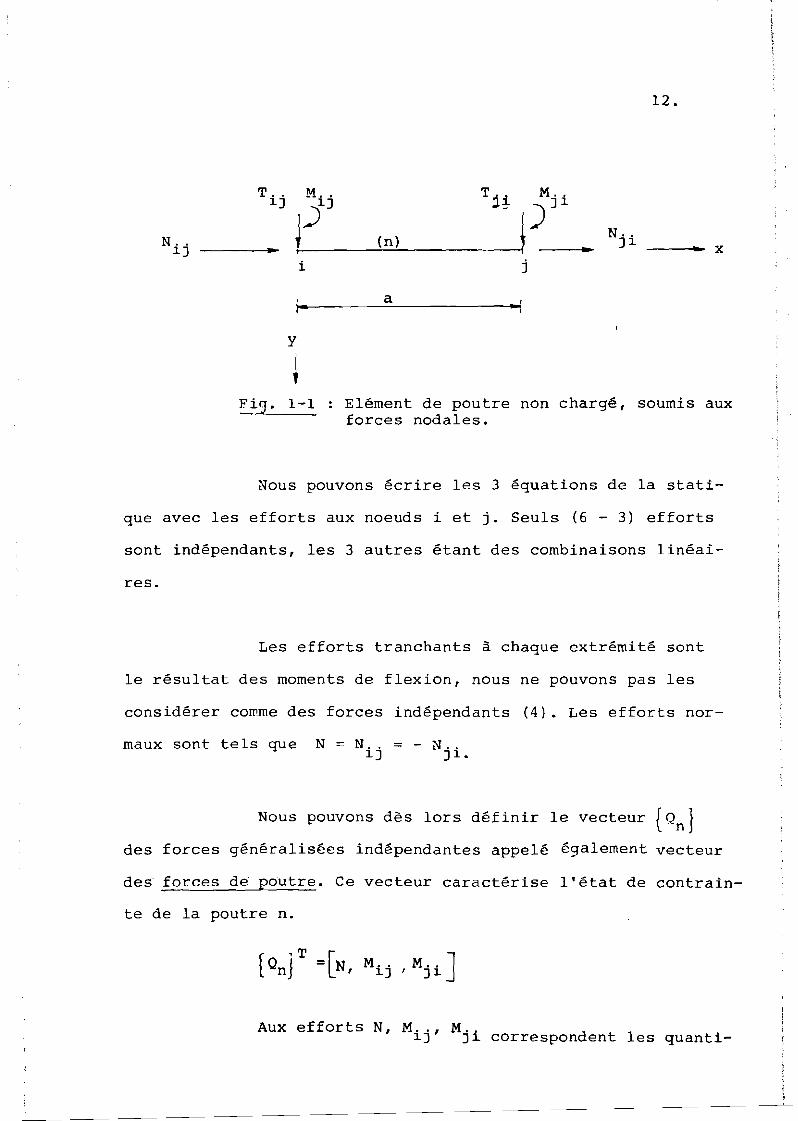
Considérons un élément de poutre, non chargé, en
équilibre sous l'action des efforts aux noeuds.
12.
T.. M .. Ti! M ..1) 1)
))1eN .. (n) j N ..)1
- X1) w- 1 ..i j
f- a -1
y
+Fig. 1-1 Elément de poutre non chargé, soumis aux
forces nodales.
Nous pouvons écrire les 3 équations de la stati-
que avec les efforts aux noeuds i et j. Seuls (6 - 3) efforts
sont indépendants, les 3 autres étant des combinaisons linéai-
res.
Les efforts tranchants à chaque extrémité sont
le résultat des moments de flexion, nous ne pouvons pas les
considérer cowme des forces indépendants (4). Les efforts nor-
maux sont tels que N ~ N.. == - N ..1) )1.
Nous pouvons dès lors définir le vecteur [Q 1·n
des forces généralisées indépendantes appelé également vecteur
de~ forces dé poutre. Ce vecteur caractérise l'état de contrain-
te de la poutre n.
Aux efforts N, M.. , M..1) )1 correspondent les quanti-
13.
tés u, f3i, f3;j qui représentent respectivement : la variation
de la longueur de la poutre n sous l'effet de N, la rotation
de la section i par rapport à la ligne moyenne ij, la rotation
de la section j par rapport à la ligne moyenne ij.
Les trois quantités u, f3i' f3j regroupées dans le
vecteur [Dn ) caractérisent l'état de déformation de la poutre
ij.
Soit
Et la relation liant les forces de poutre aux
déformations de poutre s'écrit:
(1-3 )
où [Sn] est la matrice de souplesse de l'élément n, son expres
sion est donnée en (1.3.6.).
1.3.5. - Relation forces de poutre - forces aux noeuds
Considérons une structure composée de k éléments
de poutre, soumise à n forces extérieures.
La relation liant les forces de poutre aux for-
ces aux noeuds est de la forme
(1-4)
oü ~ Qs1est le vecteur rassemblant les vecteurs forces de poutre
LB~J est la matrice des coefficients d'influence
tPs ) est le vecteur des forces appliquées aux noeuds
14.
Pour une structure isostatique, la force de pou-
tre Qsj est égale à
QSJ' = rB. B. ,L- sJl... SJl B . J• • • sJm
(1-5 )
Pm
Supposons la force appliquée au noeud i égale à
l'unité et la force appliquée au noeud j nulle c'est-à-dire
P = 1si
et P = 0 vj ~ isj
Qsj = Bsji
B " est la force de poutre j lorsqu'une force uniSJl
té est appliquée au noeud i. Les coefficients B " sont appelésSJl
coefficients d'influence. Chaque colonne de la matrice LBs] re-
présente ainsi les efforts qui existent dans les poutres pour
une force unité P = 1.
Dans une structure hyperstatique, le vecteur des
forces de poutre {Qs) est la somme de deux vecteurs: le vecteur
des forces de poutre dans le système isostatique de base et le
vecteur des forces de poutre dérivant des forces hyperstatiques
inconnues.
Les vecteurs [QsoJ et (Qsx) sont reliés aux forces aux noeuds
par les matrices d'influence [Bà] et [Bx]
tQso\ = [Ba] tPs )
tQsx) = [BxJ ~ X ~
15.
d'où la relation entre les forces de poutre et les forces aux
noeuds.
(1-6 )
Remarque Il est bien évident que le calcul des réactions
d'appuis peut être obtenu par un raisonnement analogue, la re
lation liant les réactions d'appuis aux forces extérieures
s'écrit:
(1-7)
1.3.6. - Théorèmes énergétiques
L'importance des principes énergétiques utilisés
en théorie des structures est considérable. Ils sont à la base
des principales méthodes de calcul. Leur emploi en facilite la
représentation.
Les plus importants sont le principe des déplace
ments virtuels et le principe des forces virtuelles. En ce qui
concerne notre travail, c'est le dernier qui nous sert de base
pour développer la méthode des forces. Il constitue le fonde
ment du principe du minimum de l'énergie complémentaire, qui à
son tour est un moyen de formulation des équations de coœpatibi
lité des déplacements.
16.
1.3.6.1. - Travail complémentaire
Dans le cas de l'élasticité linéaire le travail
complémentaire d'une force appliquée Pi = kUi est égale à :
l-2 Pv u .
l. l.(1-8)
1.3.6.2. - Energie complémentaire de déformation
L'énergie complémentaire de déformation J~ est
égale
En substituant respectivement au vectecc, con-
trainte [u~ et au vecteur déformation {E}, le vecteur efforts
de poutre [Qn~ et le vecteur déformation [Dn},
on obtient le
long d'un élément de poutre n
or
il vient :
J~ == i {.Qn l"T {D n ~
tDn) == [Snl tQnJJ~ = i {Qn)T [sn] {Qn}
L'énergie complémentaire de déformation pour un ~lément de pou-
tre s'écrit: J1:: - 1 fa 1T
[sJ f o }z:l: - 2 "ri J n l-n
Et pour une structure de k éléments, l'énergie globale est la
somme des énergies de ces k éléments.
17.
1.3.6.3. - Théorème des forces virtuelles
La relation qui traduit le théorème des forces
virtuelles s'écrit:
dépendent du
ce cas
Supposons que les forces extérieures appliquées
~'potentiel complémentaire T tel que
<5Tx '= _ <5Tx
Le théorème des forces virtuelles s'écrit dans
ss x = <5 TX'
soit(1-10)
La variation s'applique aux forces de poutre.
La quantité E* = JX' est l'énergie potentielle
totale complémentaire. Puisque la variation de cette énergie
est nulle il est possible d'écrire : "parmi tous les champs
de contrainte statiquement admissible, celui qui satisfait aux
équations de éanpatibilité rend stationnaire l' énerg ie complé-
*"mentaire E •
1.3.6.4. - Matrice de souplesse
A partir de l'expression de l'énergie de déforma-
tion, il est possible de construire la matrice de souplesse
[~J d'un élément de poutre. Cette matrice n'est pas unique
pour un élément, elle dépend du choix opéré pour sélectionner
18.
les forces indépendantes.
Calculons l'énergie de déformation de l'effort
normal et celle de flexion. On néglige l'effet énergétique de
l'effort tranchant.
Pour un élément de poutre n de longueur a, le po-
tentiel de l'effort normal est (3).
Jn
l a= - J2 0
dx
et celui de flexion est
avec
Jn
M(x) = M ..1J
= l l,a M2
(x) dx'2 '0 EI
Mj i + Mi j xa [M .. :M.~= 1J: J 1
1
l - ~a
xa
l'énergie de déformation totale est:
l aJ = - f
n 2 0 {
N2ES
a0 NES 0
soit J = ~ [N M..Mj.iJ
a a M..0 3EI 6EIn 1J 1Ja a
M ..0 - 6EI 3EI J1
Et l'expression de la matrice de souplesse relative aux forces
de poutres [N ,Mi j , Mj .] est
19.
a0 0ES
[Sn]a a (1-11)= 0 3EI-6EI
a a0 6EI 3EI
1.3.7. - Application des théorèmes énergétiques àla méthode
des forces
Il est observé dans le paragraphe (1.3.2.) que
dans une structure hyperstatique, les équations d'équilibre
sont insuffisantes pour déterminer les inconnues hyperstatiques.
Il convient de les compléter d'un nombre d'équations égal au
nombre d'inconnues hyperstatiques.
c'est le principe du minimum de l'énergie complé-
mentaire qui va servir de base à la formulation de ces équations
supplémentaires. En effet, on écrit que les inconnues hypersta-
tiques minimisent l'énergie potentielle totale complémentaire.
Le processus à suivre est le suivant
1° - Développement de l'énergie complémentaire de déformation de
toute la structure.
2° - Formation du système d'équations linéaires pour le calcul
des inconnues hyperstatiques.
3° - Calcul des forces de poutre par la relation liant les for-
ces de poutre aux forces au noeuds.
4° - Calcul des déplacements sous les forces appliquées par ap
plication du deuxième théorème de Castigliano.
20.
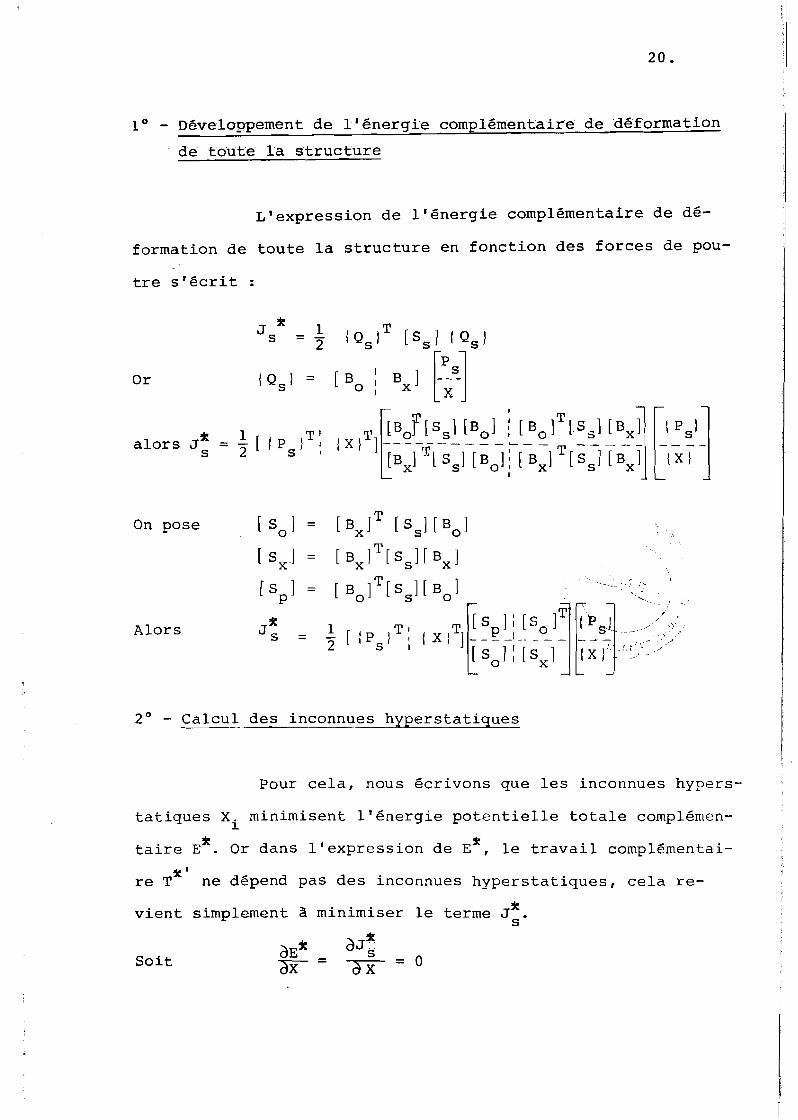
1 0- Développement de l'énergie complémentaire de déformation
de toute la strUctUre
L'expression de l'énergie complémentaire de dé-
formation de toute la structure en fonction des forces de pou-
tre s'écrit:
1Q 1 =s
=.![IP IT~2 s 1
Or
alors J%s
J %s 1
= "2
On pose
Alors
[S ] =0
[ Sx.J =
[s J =P
J%s =
2 0- Calcul des inconnues hyperstatiques
Pour cela, nous écrivons que les inconnues hypers-
tatiques x. minimisent l'énergie potentielle totale complémen1
taire E%. Or dans l'expression de E%, le travail complémentai
%'re T ne dépend pas des inconnues hyperstatiques, cela re-
vient simplement à minimiser le terme J%.s
Soit
11
21.
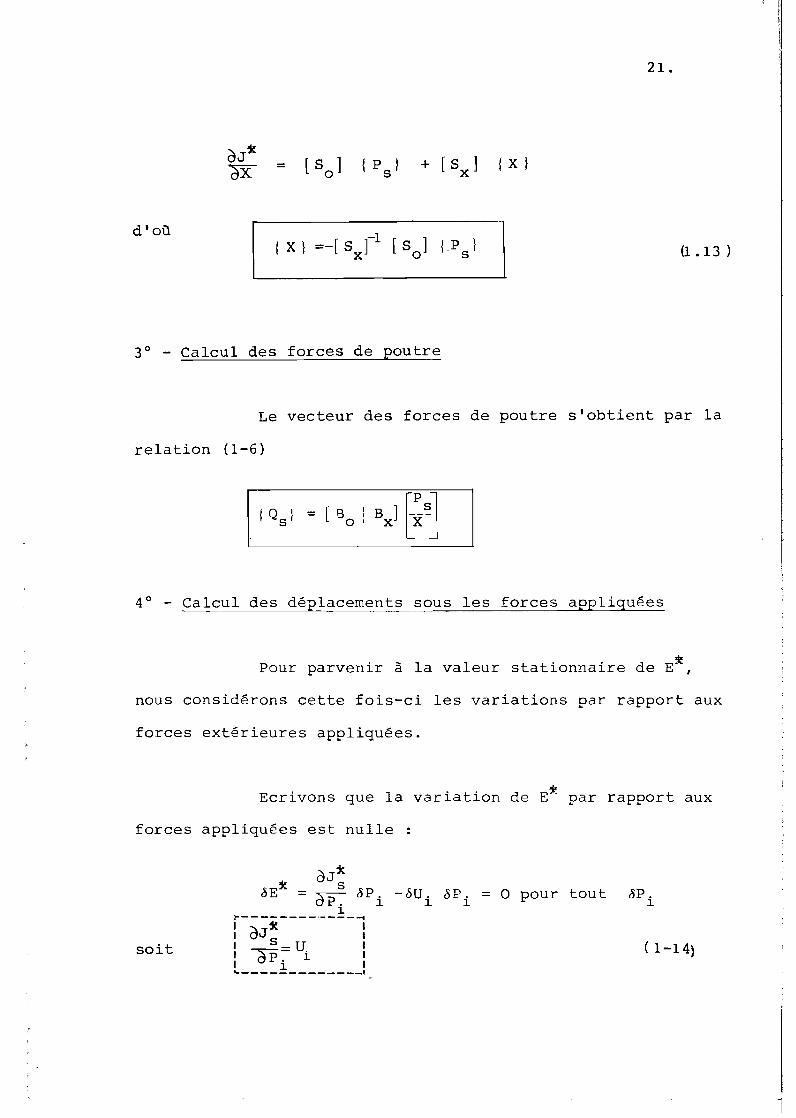
àJX[S ] {P } + [s ] 1X}dX = a s x
ld'où l 1XI =-[Sxr1 [Sa] {.PsI U .13 )
3° - Calcul des forces de poutre
Le vecteur des forces de poutre s'obtient par la
relation (1-6)
4° - Calcul des déplacements sous les forces appliquées
Pour parvenir à la valeur stationnaire de E*,
nous considérons cette fois-ci les variations par rapport aux
forces extérieures appliquées.
Ecrivons que la variation de E* par rapport aux
forces appliquées est nulle
soit
àJ*8E*=dP~8Pi
1.~-------_._----"'I
1 ~Jx 1lOS 11 -u 11 ~- i 11 aPi 1'- 1
-bU. 8F. = 0 pour tout1. 1.
8P.1.
( 1-14)
22.
Cette relation traduit le deuxième théorème de
Castigliano. Le vecteur déplacement sous les forces est égal
à :
d'où
Remarque
t u , =s =[S]T{XI+[S){Plo p s
= [s ]T {X, + [S ] 1 P 1o p s (1-15 )
Pour calculer les déplacements aux noeuds où
n'agissent pas les forces appliquées, il suffit de placer en
ces points des forces unitaires dans la direction du déplace-
ment cherché.
1.3.8. - Méthodologie
Les différentes étapes de calcul sont les sui-
vantes
1° - Choisir un système isostatique de base et définir le vec-
teur Ixl des inconnues hyperstatiques.
2° - Déterminer les charges équivalentes et le vecteur Ip Js
des forces appliquées aux noeuds.
3° - Définir le vecteur des forces de poutre {Qs' = {Q }+IQ 1so . sx

23.
4° - Calculer les matrices des coefficients [Bo ] et [Bx ] tel-
les que
= [Bo]{Psl
= [B l{XIx
5° - Former la matrice de souplesse [ss]
6° - Calculer les expressions
[ ~], = [B lT [ s s] [ Bo]x
[ sxl = [B lT [s ][B ]x s x
7° - Résoudre le système linéaire [S ]IXI = -[S ] IP 1x 0 s
8° - Calculer le vecteur forces de poutre {Qs! = [ Ba: Bx 1 t~êJ
9° - Calculer les efforts réels tels que :
Efforts réels du=
Effort calculé du Action de la
noeud sur la poutre noeud sur la poutre poutre sur le
noeud bloqué
10° - Calculer les expressions
{Us o1 = [Bo] T [ss] [Bo] lPs \
{Usxl = [BoJT [Ss] [BxJ tX' )
11° - Calculer le vecteur déplacement t Us ~ tel que
fUs} = tUs o\ + rU \l. sx
24.
1.4. - METHODE DES FORCES AUTOMATIQUE------------------------------
1.4.1. - Introduction
L'analyse statique d'une structure par la méthode
des forces semi-automatique exige :
- la réalisation de la stabilité de la structure.
- la détermination du degré d'hyperstaticité
- le choix des inconnues hyperstatiques.
Cette démarche convient à des structures faible-
ment hyperstatiques. Elle s'avère longue et compliquée lors-
qu'il slagit de traiter des problèmes de grande dimension. Ces
difficultés qui ne sont pas d'ordre logique, se situent dans
l'analyse de la structure isostatique de base. En effet, opé-
rée manuellement, cette partie constitue une gêne en calcul
automatique. Tant que ce handicap n'est pas levé, le calcul
automatique dans la méthode des forces ne peut être que le pro-
longement du calcul manuel.
L'objet du présent paragraphe est de présenter
une formulation automatique de la méthode des forces. La mé-
thode que nous exposons à cet effet est une méthode de déter-
mination automatique du système isostatique et par conséquent
des inconnues hyperstatiques. Le calcul automatique a pour
objet d'effectuer toutes les opérations à partir des proprié-
25.
tés géométriques et élastiques de la structure.
Cette technique détermine non seulement le degré
d'hyperstaticité du système, mais isole aussi automatiquement
un groupe compatible d'efforts surabondants.
1.4.2. - Présentation de la méthode
La méthode des forces automatique (en anglais
The Rank Technique), présentée pour la première fois par J.
ROBINSON (5) a été mise au point pour conférer à la méthode
des forces"manuelle"un certain nombre d'automatismes nécessai
res au traitement sur ordinateur de la méthode des forces, en
particulier la génération et le traitement automatique des
équations d'équilibre nodales. Cette technique est surtout fon
dée sur une procédure algébrique (1).
Le jeu des trois équations d'équilibre en chaque
noeud permet d'écrire l'équilibre des forces internes et exter
nes dans les trois directions ox, oy et oz.
Ces équations sont soit compatibles soit incompa
tibles. Lorsqu'elles sont compatibles, elles peuvent être suf
fisantes ou insuffisantes pour la détermination des inconnues.
Dans le premier cas, la structure est statiquement déterminée
et dans le second elle est hyperstatique. Par contre, lorsque
les équations sont incompatibles, cela signifie que la struc
ture est instable pour un système de forces appliquées donnés (1).
26.
Pour déterminer si un système d'équations est
compatible ou incompatible, nous faisons appel au théorème
fondamental des équations linéaires, à savoir : "un système
d'équations linéaires est compatible si et seulement si la
matrice de coefficients et la matrice élargie ont le même rang",
le rang d'une matrice étant la dimension de la plus grande sous
matrice extraite de la matrice d'origine, dont le déterminant
est non nul (6).
Cependant, il n'est pas nécessaire de calculer
directement le rang de la matrice des coefficients. Il nous
suffit d'appliquer la procédure d'élimination de GAUSS-JORDAN
uniquement à la matrice élargie des équations d'équilibre (6).
Ce procédé, que nous avons déjà développé (7)
consiste à chercher en premier lieu le plus grand coefficient
en valeur absolue (pivot) sur la première ligne de la matrice
restante. Dans la seconde étape, tous les éléments de la pre-
mière ligne sont divisés par la valeur de cet élément. La troi-
sième étape consiste à réduire les autres lignes. Pour cela,
la première ligne est multipliée par le premier coefficient
de la deuxième ligne, le résultat obtenu est ensuite soustrait
de la deuxième ligne. Cette opération est répétée pour chaque
ligne.
Si le pivot est systématiquement choisi sur la
première colonne de la matrice restante, nous obtenons bien
la transformation de la matrice amplifiée, mais il n'y a pas
27.
sélection des inconnues hyperstatiques puisque l'ordre des
termes du vecteur des forces inconnues reste inchangé.
L'interprétation physique de cette technique est
la suivante : nous passons en revue tous les degrés de liberté
dans l'ordre où ils sont définis dans la structure et nous éli-
minons chaque fois la force qui contribue le plus à l'équilibre
de la structure.
Si à la fin de l'exploration de toutes les lignes,
le pivot a toujours été localisé dans la matrice restante cor-
respondant aux inconnues du problème, alors, la matrice élar-
gie et la matrice des coefficients ont le même rang, le système
est dit compatible. Si au contraire le pivot a été sélectionné
dans la partie de la matrice restante correspondant aux for-
ces appliquées, alors, la matrice élargie et la matrice de
coefficients n'ont pas le même rang, le système d'équations
est dit incompatible (5).
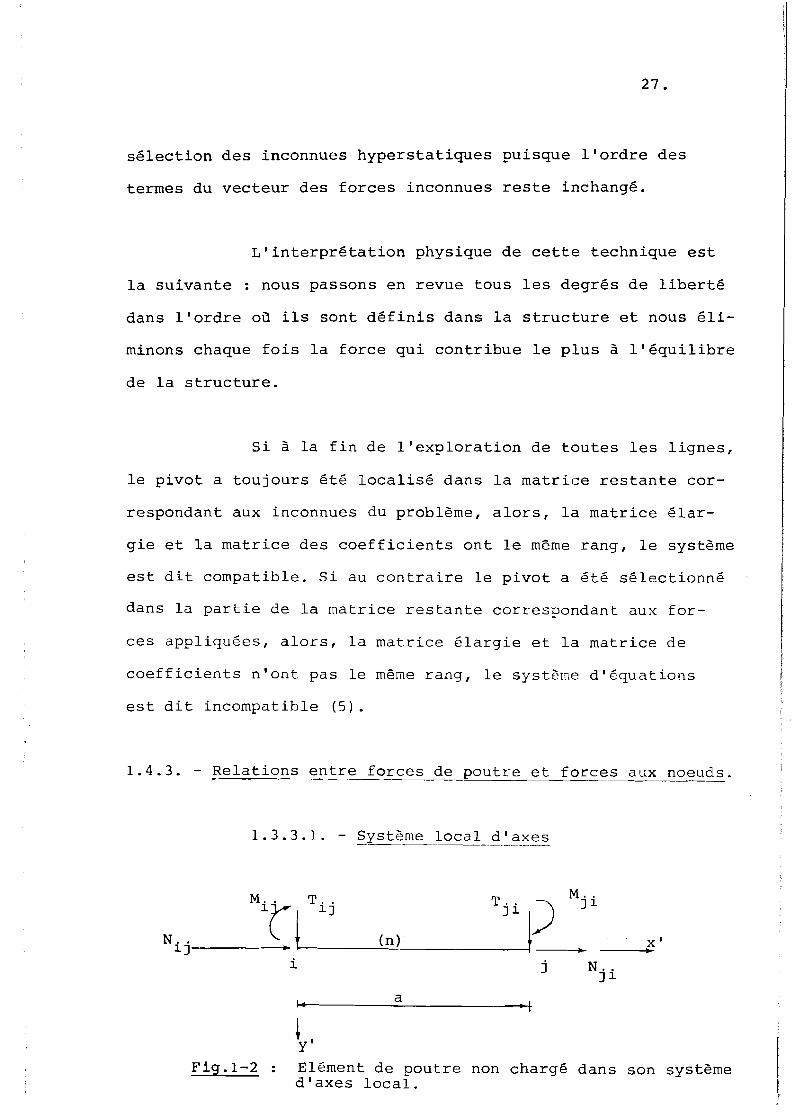
1.4.3. - Relations entre forces de poutre et forces aux noeuds.
N ..~J
i
T ..~J
a
T ..J~
j
M ..J~
N ..J~
x'•
Fig.1-2
~ ,y
Elément de poutre non chargé dans son systèmed'axes local.
28.
Considérons un élément de poutre rapporté à son
système d'axes local x'iy'. En l'absence des forces extérieu-
res, cet élément est en équilibre sous l'action des forces in-
térieures aux noeuds i et j.
est le vecteur desAu noeud i, le vecteur {p.~]l)J
actions du noeud i sur l'élément de poutre ij. L'indice' in-
dique qu'il est exprimé dans le repère x'y' lié à l'élément ij.
[~I,} =l.J
N. '1l.J
T. ,l.J
M. 'Jl.J
( 1-16)
De même en j
N, .Jl.
{p,'. }Jl.
T, ,Jl. (l-li)
M, .Jl.
Ecrivons l'équilibre de l'élément
+ N .. =: 0Jl.
+ T.. 0Jl.
dans la direction x N. ,l.J
dans la direction y T, ,l.J
équilibre des moments en j M .. + M .. - T .. x a 0l.J Jl. l.J
ces équations s'écrivent encore sous la forme:
N. , = N = N ..l.J Jl.M.. + M, .
T. , = l.J Jl. =l.J aT ..
Jl.

29.
Ce qui permet d'écrire les relations entre les
forces de poutre [N Mi j ML:}] et les forces aux noeuds
iN .. 1 0 0 N1)
en i lT
i j = 0 lia lia M..1)
M .. 0 1 0 M"Jl)J )1
soit sous forme condensée {p.'.} [v~J {OnJ1)
N .. 1 0 0 N1) -
en j T .. 0 -lia -lia M ..)1 = 1)
M .. 0 0 1 M ..)1 )1
(1-18 )
(1-19)
(1-20 )
soit sous forme condensée (1-21 )
Posons
1.4.3.2. - Système global d'axes
Les vecteurs [p~ .} et \P.'.. J. sont définis pour1J '- J1
chaque élément dans le système local de celui-ci, [Pi j} et
tPji} sont leur expression dans un repère oxy global.
Pour une rotation d'angle Cl' , le vecteur [p ij}
est lié au vecteur IP!.} par la relation:l 1)
tPij} = [p JT[PjiJ (1-22)
30.
où Cp] est la matrice des cosinus directeurs du changement
d'axes.
r P,'.}\. 1JAvec
alors
En posant
= [viJ {Qn}tPi j 1= [pJT [vin] {Qn 1[vin.1 = [p ]T [v{j
La relation entre les forces au noeud i et les forces de pou-
tre de l'élément n s'écrit alors
Par définition, la matrice [Vin] est la matrice
de transformation des forces de poutre de l'élément n en for-
ces au noeud i. Elle est la contribution du noeud i (relatif
à l'élément de poutre ij) à la construction de la matrice de
coefficients relative aux forces de poutre {On1
De même au noeud j on a
En posant
tP ij1 =
lPnlT
[VnJT =
[vnjJ tOnJ
[p i j1T: {PjJT ]
[vin] T : l VjnJ~ JLa relation entre les forces de poutre et les forces aux noeuds
i et j s'écrit:
Lorsque la poutre est soumise à des conditions
d'extrémités différentes, on obtient des expressions parti-
31.
culières de la matrice [Vli J (3).
1.4.4. - Construction des équations d'équilibre
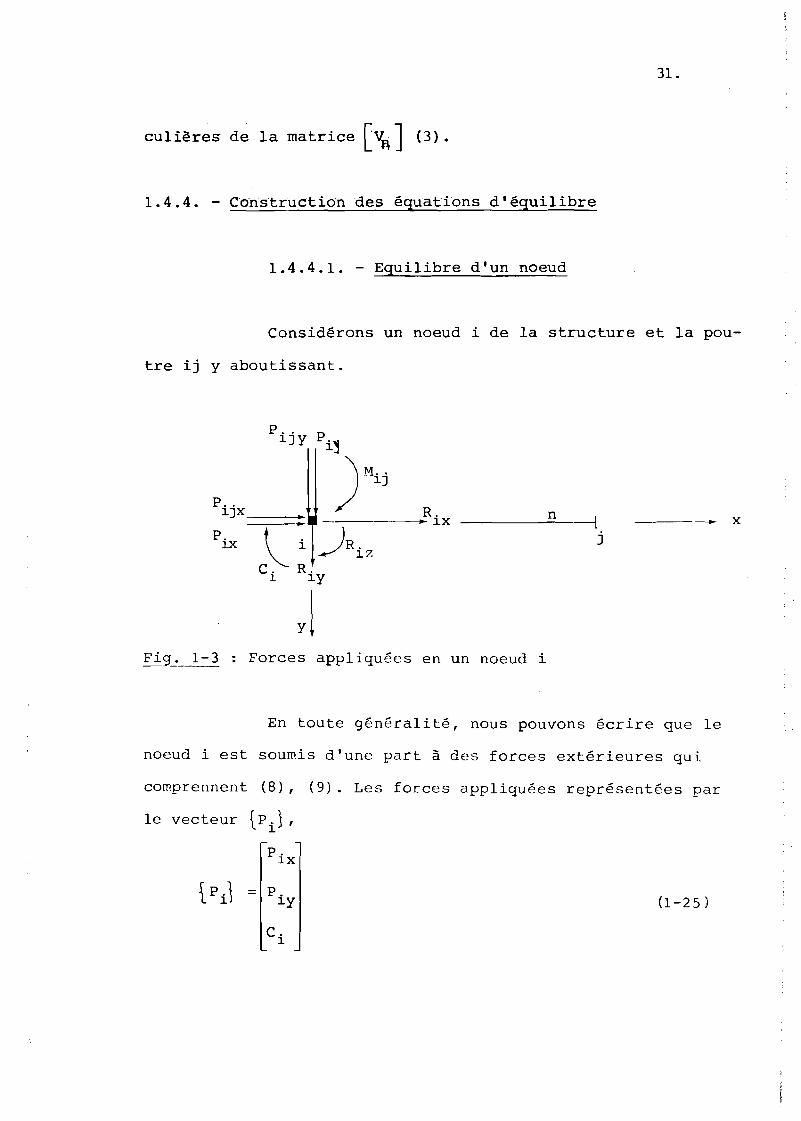
1.4.4.1. - Equilibre d'un noeud
Considérons un noeud i de la structure et la pou-
tre ij Y aboutissant.
R.~ lX n
j
____ X
Fig- 1-3 Forces appliquées en un noeud i
En toute généralité, nous pouvons écrire que le
noeud i est soumis d'une part à des forces extérieures qui
comprennent (8), (9) _ Les forces appliquées représentées par
le vecteur tP i J 'p.
lX
P.lY (1-25 )
32.
Les réactions d'appuis ~Ri} tels que,
R.lX
R.lY 1-26 )
et d'autre part à des forces intérieures notées {PijJ
P ..lJX
= P ...lJY
M..lJ
(1-27)
Le noeud i doit être en équilibre sous l'action
de ce système de forces. L'équilibre du noeud écrit dans les
trois directions x, y et z donne :
or
alors
L t P i j } + tRi) = tPi}n
tP i j} = [Vin] {Qn}
L [Vin] {Qn3 + tRi} [pi1n
(1- 2 8 )
Afin de préserver l'homogénéité de la relation
(1-28), il convient de transformer les vecteurs tRi 1 et tPi1.
Nous savons que pour un noeud i soumis à trois
forces appliquées P. ,P. et C., et à trois réactions d'appuis.1X lY 1
R. , R. et R. , nous pouvons écrirelX lY lZ
et
tPi1 = [I 3J tpd{Ri} = [I3J tRi}
33.
[I 3J est une matrice unité d'ordre 3.
Lorsque certaines composantes des vecteurs [Pi}
ou tRi} sont absentes, par exemple P i x = 0 et Riz = 0, nous
introduisons à la place de la matrice unité [I3J, deux matri
ces booléennes quelconques que nous notons [Np i] et [Nr i].
Nous pouvons donc écrire d'une façon générale
les relations (1-29a) et (1-29b) sous la forme :
où
tPiJ
tRi ~
[NpiJ et [NrJ
(1-30a)
(1-30b)
sont les matrices de coefficients booléens.
Compte tenu de ces adaptations, l'expression
(1-32) devient
Cette relation représente le système d'équations
d'équilibre au noeud i entre les forces de poutre, les réac-
tions d'appuis et les forces appliquées.
1.4.4.2. - Equilibre d'une structure
Si la structure possède p éléments de poutre, n
noeuds, r réactions d'appuis et c charges appliquées (10),
(8) Parmi les p poutres :
34.
Pl sont liées rigidement aux noeuds
P2 sont articulées à une extrémité
P3 sont articulées aux deux extrémités
Le nombre de forces intérieures inconnues est égal à
3PI dans le premier cas
2P2 dans le second
P3 dans le troisième cas
Soit au total (3PI + 2P2 + P 3) forces intérieures inconnues.
Parmi les n noeuds
nI sont rigides
n 2 sont articulées
Le nombre d'équations d'équilibre nodales est égal
à
3n1 dans le premier cas
2n2 dans le deuxième
équations d'équilibre nodales.
Ainsi la relation (1-31) écrite en chacun des n
noeuds de la structure permet d'établir un système de (3nl + n 2)
équations à
Soient
(3P1 + 2P2 + P3 + r) inconnues.
le vecteur des forces de poutre de la structure
35.
R 1
Le vecteur des réactions d'appuis de la structure
Rr
P -i
Le vecteur des forces appliquées aux noeuds
Pc
L'équilibre des noeuds de la structure se traduit par
N
(1-32)
Il faut considérer [vikJ = [oJ si le noeud i n'est pas lié à
l'élément k.
Sous forme condensée cette relation devient
(1-33)
1.4.5. - Etude de l'équilibre d'une structure
A partir du système d'équations d'équilibre d'une
structure, il est possible de déterminer si la structure est
stable ou instable.
36.
Le système d'équations (1-33) peut encore se met-
tre sous la forme
[ NO NRJ [-~~=rp] [ps l ( 1-34)
Posons n = 3n1 + 2n2e
n i nc = 3P1 + 2P2 + P3 + r
n = N. - nx lnc e
l'expression (1-34) est un système de n 2 équations à n i nc in-
connues.
Trois cas sont envisageables
1 0- n. < n Il y a plus d'équations que d'inconnues. Le syslnc e
tème d'équations d'équilibre n'admet aucune so-
lution. La structure ne peut rester stable sous
les charges qui lui sont appliquées. Toutefois
si nx équations sont compatibles avec le systè
me des n équations d'équilibre, le système ade
met une solution unique qui est solution du sys-
tème des n équations d'équilibre.e
2 0- n = ninc e
c'est le cas des structures isostatiques. Le sys-
tème a une solution unique, sa résolution s'effec
tue en inversant la matrice [NQ
i NRJ. Cette opé
ration n'est possible que dans le cas oü le dé
terminant de la matrice [NO: NRJ est différent
37.
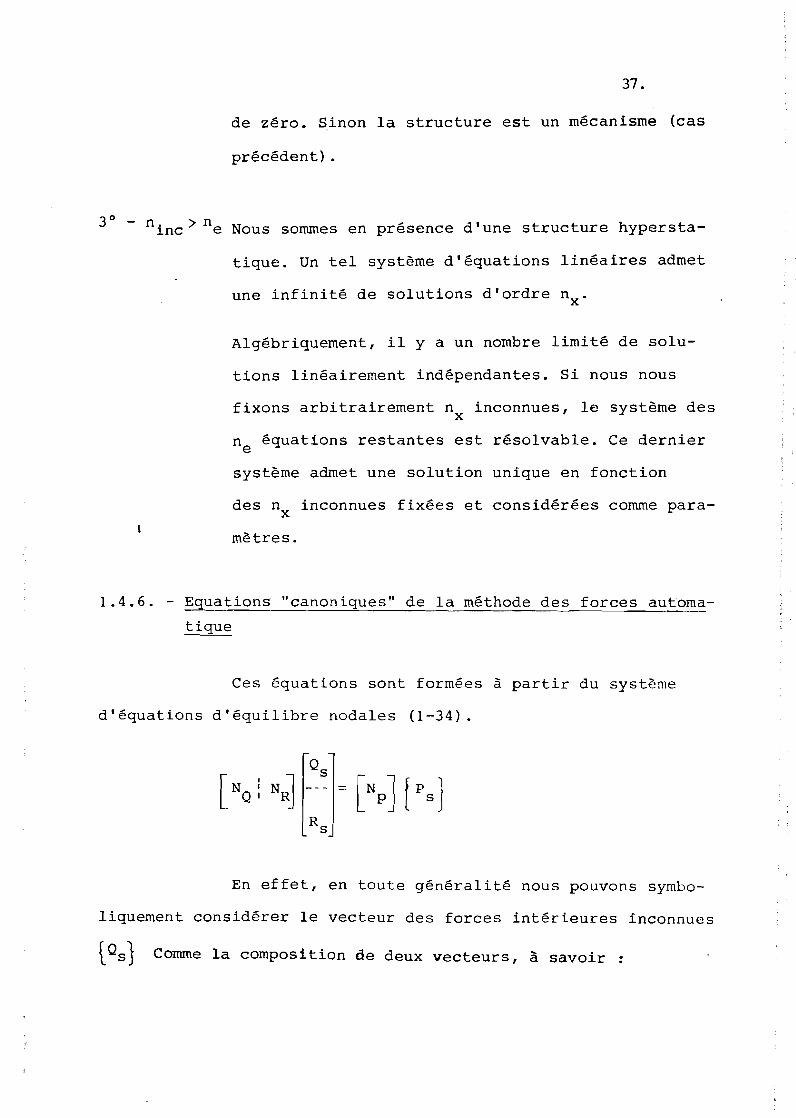
de zéro. ~inon la structure est un mécanisme (cas
précédent) .
3 0- n. > nelnc Nous sommes en présence d'une structure hypersta-
tique. Un tel système d'équations linéaires admet
une infinité de solutions d'ordre nx.
Algébriquement, il y a un nombre limité de solu-
tians linéairement indépendantes. Si nous nous
fixons arbitrairement n inconnues, le système desx
n équations restantes est résolvable. Ce derniere
système admet une solution unique en fonction
des n inconnues fixées et considérées comme parax
mètres.
1.4.6. - Equations "canoniques" de la méthode des forces automa
tique
Ces équations sont formées à partir du système
d'équations d'équilibre nodales (1-34).
En effet, en toute généralité nous pouvons symbo-
liquement considérer le vecteur des forces intérieures inconnues
~Qs} Conune la composition de deux vecteurs, à savoir:
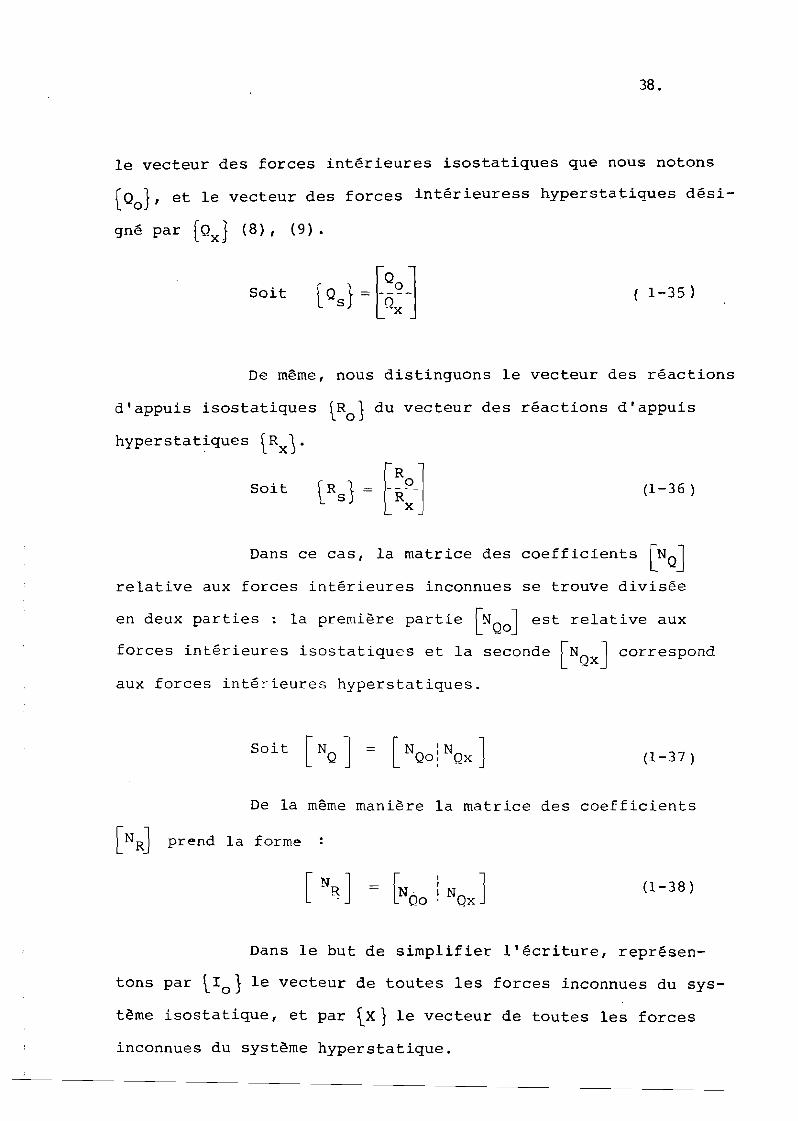
38.
le vecteur des forces intérieures isostatiques que nous notons
(Oo} , et le vecteur des forces intérieuress hyperstatiques dési
gné par [Qx} (8), ( 9) •
Soit ( 1-35)
De même, nous distinguons le vecteur des réactions
d'appuis isostatiques tRo} du vecteur des réactions d'appuis
hyperstatiques tRx).
Soit (1-36)
Dans ce cas, la matrice des coefficients [NO]
relative aux forces intérieures inconnues se trouve divisée
en deux parties : la première partie [NQoJ est relative aux
forces intérieures isostatiques et la seconde [NQx]
correspond
aux forces inté~ieures hyperstatiques.
Soit[NQ J = [ NQo !NQ X ] (1-37 )
De la même manière la matrice des coefficients
[NRJ prend la forme
[ N~ ] [N NQx ] (1-38)Qo
Dans le but de simplifier l'écriture, représen
tons par tIo} le vecteur de toutes les forces inconnues du sys
tème isostatique, et par tX} le vecteur de toutes les forces
inconnues du système hyperstatique.
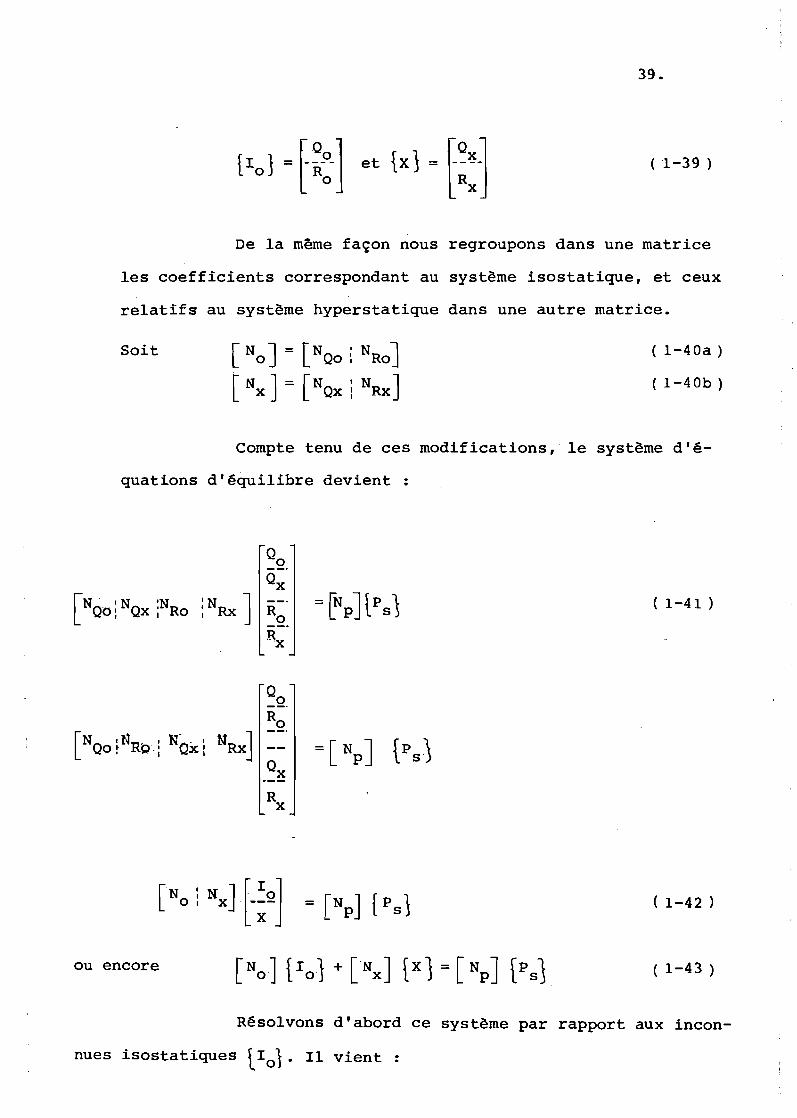
39.
( 1-39 )
De la même façon nous regroupons dans une matrice
les coefficients correspondant au système isostatique, et ceux
relatifs au système hyperstatique dans une autre matrice.
Soit [NO] = [NOO: NROJ[ Nx ] = [NOXi NRXJ
( 1-40a )
( 1-40b )
Compte tenu de ces modifications, le système dré-
quations dréquilibre devient:
°0°x
[ Noo:NOx ;NRo : NRx J Ro
= [NpJtp s1~x
( 1-41 )
[N 1 NR, 1 K - 1 N ]00 ~ Q. : Qx : Rx
( 1-42 )
ou encore ( 1-43 )
Résolvons drabord ce système par rapport aux incon
nues isostatiques tlo). Il vient:
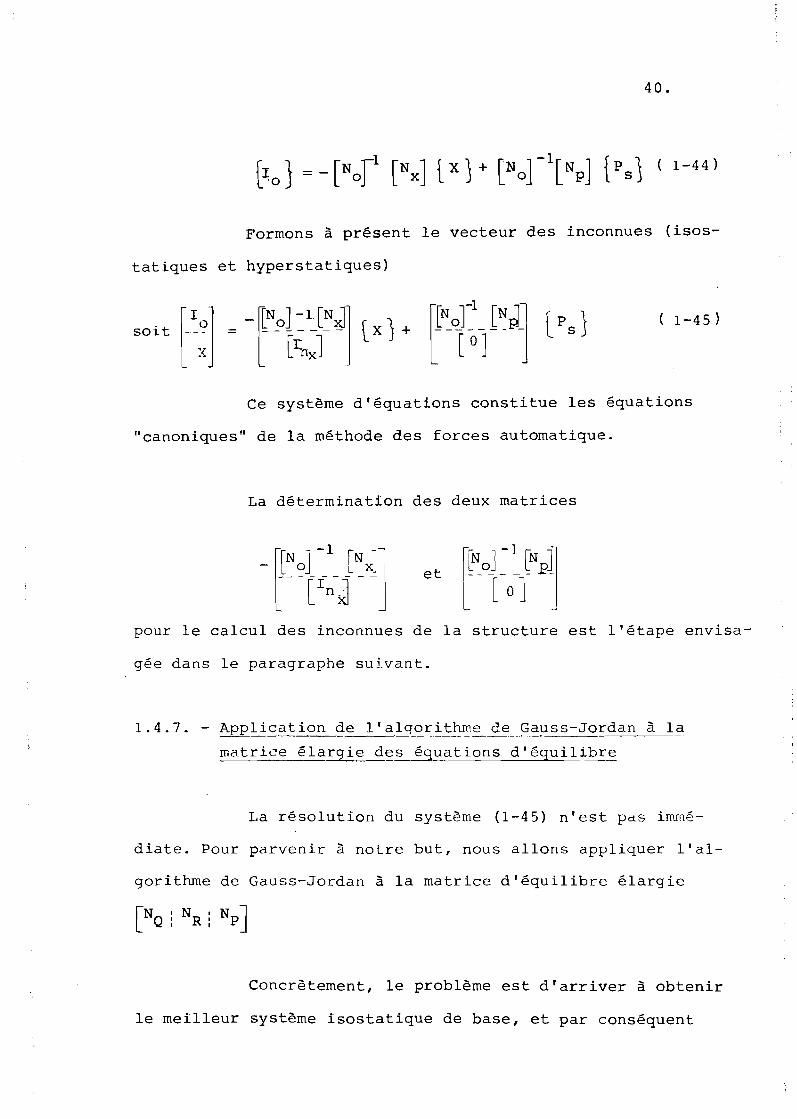
40.
Formons à présent le vecteur des inconnues (isos-
tatiques et hyperstatiques)
1-45 )
Ce système d'équations constitue les équations
"canoniques" de la méthode des forces automatique.
La détermination des deux matrices
et
pour le calcul des inconnues de la structure est l'étape envisa~
gée dans le paragraphe suivant.
1.4.7. -Application de l'algorit~e de Gauss-Jordan à la
matrice élargie des équations d'équilibre
La résolution du système (1-45) n'est pas immé-
diate. Pour parvenir à notre but, nous allons appliquer l'al-
gorithme de Gauss-Jordan à la matrice d'équilibre élargie
N 1R:
Concrètement, le problème est d'arriver à obtenir
le meilleur système isostatique de base, et par conséquent
41.
à isoler un groupe compatible de n inconnues. A la fin de lax
procédure, il faut"identifier les quatre matrices de eoeffi-
cients d'influence définies au paragraphe 1-3, à savoir [BoJ,
Comme nous l'avons déjà développé (7), le procé-
dé d'élimination de GAUSS-JORDAN consiste à effectuer sur la
matrice amplifiée un certain nombre de transformations égal
au nombre d'équations d'équilibre nodales de façon à obtenir
à la fin de l'opération une matrice de la forme.
A chaque sous-matrice correspond un vecteur. Ainsi,
aux matrices [ In -J' [A} [-EJ correspondent respectivemente
les vecteurs tVll, ~V2\' tV31. Ces vecteurs ne sont autres que
les vecteurs lIo}' LXJ et ~psJ définis au paragraphe 1.3.6.
Où
(re x n~ .
[In e]
est une matrice unité d'ordre ne.
[AJ est une matrice rectangulaire de dimensions
Chaque colonne de la matrice représente les ef-
forts dans les éléments de la structure isostatique sous l'ac-
tion des forces hyperstatiques sélectionnées Xi = 1. Ces ef
forts sont disposés dans un ordre quelconque à cause de la
recherche du pivot.
42.
[BJ est une matrice rectangulaire de dimensions
(ri x ml. m étant le nombre de forces extérieures appliquées.e
Chaque colonne représente les efforts dans les
éléments de la structure isostatique sous l'action des for-
ces appliquées P. = 1. Pour des raisons déjà observées, ces1
forces sont placées dans un ordre quelconque.
Il est néanmoins nécessaire d'avoir les efforts
dans les éléments de la structure toute entière, c'est-à-dire,
les efforts de la structure isostatique que nous avons déjà
et les efforts de la structure hyperstatique dont nous de-
vons tenïr compte. Il convient donc à cet effet de rajouter
aux matrices [A] et [B] les coefficients complémentaires cor-
respondant aux efforts dans les éléments de la structure hy-
perstatïque.
Les matrices [A] et [B] deviennent alors
et
où [c] est une matrice carrée de dimensions (nx
* n ). Chax
que colonne représente les efforts de la structure hY~~3ta
tique sous l'action des forces hyperstatiques retenues Xi = 1.
Il faut noter que la matrice [c] ne peut être dans
ce cas qu'une matrice unité d'ordre nx.

43.
Nous posons
[ 0] est également une matrice rectangulaire de dimension
(n ~ m). Chaque colonne représente les efforts dans les éléx
ments de la structure hyperstatique sous l'action des forces
appliquées Pi = 1
Or, il n'y a pas de forces appliquées dans la
structure hyperstatique. Par conséquent, il n'y a pas d'ef
forts dans les éléments. Doric , la matrice [OJ est nulle.
Finalement nous avons
[OJ=[oJSoit
Ces deux matrices ont respectivement pour dimen-
A ce stade, il est facile de s'apercevoir que les
matrices CA] et [No] -1 [Nx] d'une part, les matrices [B ] et
[NoJ-1 [ Np] d'autre part sont équivalentes.
Nous pouvons dès lors établir les égalités
(1-4Ga)
44.
( 1-4Gb)
Après application de la procédure d'élimination
de GAUSS-JORDAN à la matrice amplifiée [NO i NF. i Np1, nous
avons bien déterminé les vecteurs {loS et lX} définissant
respectivement les inconnues isostatiques et les inconnues
hyperstatiques. La résolution du système (1-45) apparaît im-
médiate.
Il faut noter que lors de l'élimination de Gauss
Jordan la matrice amplifiée [NQ : NR i Np] a subi des transfor
mations. Au cours de chaque transformation, les colonnes de la
matrice ont été interverties. Cette opération entraîne à son
tour un certain "désordre" au niveau des efforts. En vue de
mettre en évidence chaque type d'inconnues (forces intérieures
et réactions d'appuis), il convient de remettre les lignes
correspondant à ces colonnes à leur place.
Nous avons les transformations suivantes
r°0 o0
l-:~R l~:] °x0 se transforme =
R
°xen 0
RR x
x
-1
~NoJ .[N~~---------
[ 0J se transforme en
45.
Le système d'équations "canoniques" (1-50) devient
+
Il est évident que en comparant ces deux expres-
ou encore :
iQs} = [Jo] [Ps}+ [Jx] Ix}
{Rs ) = [Ko ] Ip s } + [KxJ tXJ
sions avec les expressions (1-6) et (1-7).
et
(1-48)
par identification des termes nous obtenons les matrices cher-
chées.
[BOJ = [Jo] et [Bx ]::: [Jx ]
(1-50)
[ AoJ:::
[Ko] et [Ax]:::
[Kx]
1.4.8. - Méthodologie
La marche à suivre pour calculer une structure-
par la méthode des forces automatique est la suivante :
46.
1° - Construire les équations d'équilibre nodales de la struc-
ture.
2° - Former la matrice amplifiée des équations d'équilibre.
3° - Déterminer les matrices de coefficients [Bo]' [Bx]' [AoJ,
rA lJ' en appliquant l'algorithme de Gauss-Jordan à la matriceL x
amplifiée.
Une fois ces matrices déterminées, poursuivre les
calculs comme dans la méthode des forces semi-automatique .
1.5. - CONCLUSION
Tous les aspects de la méthode des forces ont été
abordés. En particulier, il a été montré que l'application de
la méthode des forces ne comportant pas une sélection automa-
tique des inconnues hyperstatiques est presque impraticable
pour le calcul des structures de configurations diverses.
Les adaptations apportées à la méthode des forces
semi-automatique nous ont conduit à mettre au point un program-
me général de calcul automatique permettant d'étudier des sys-
tèmes fortement hyperstatiques. Sa version actuelle fournit
des résultats intéressants.
47.
Si la sélection automatique des inconnues hypers
tatiques constitue une étape décisive dans l'analyse élasti
que des structures par la méthode des forces, elle est en
outre le point de départ du calcul de la charge limite et
du dimensionnement optimal par la méthode statique.
48.
------------------------------------------------------- - - - - - - - - - - - - - - - - - ~1 1
: CHAPITRE 2. : APPLICATION DE LA METHODE DES FORCES A L'ANALYSE LIMITE:1 1f------------------------------------ l
49.
2.1. - INTRODUCTION
Jusqu'au début de ce siècle, les recherches théori
ques et expérimentales sur la résolution des problèmes de struc
tures portaient principalement sur la théorie de l'élasticité,
c'est-à-dire sur l'assimilation du matériau à un corps naturel
élastique. Ces recherches ont atteint un haut niveau de perfec-
tionnement.
Dès la fin de la Première Guerre Mondiale, un inté-
rêt particulier est porté à la plasticité pour la raison suivan-
te : les structures rencontrées en Génie-civil et en mécanique
présentent une résistance plastique au-delà de la limite élas
tique. L'image idéalisée des matériaux est alors le comportement
élasto-plastique parfait. Cette nouvelle doctrine montre que le
modèle élastique est simpliste voire insuffisant dans l'analyse
des structures et a conduit les projetteurs à une déviation du
concept de sécurité.
Depuis, les recherches sur le comportement des ma
tériaux en régime plastique ont atteint leur maturité. Les ré
sultats de ces réflexions ont permis la mise au point des métho
des de calcul en plasticité (11).
Nous pouvons donc affirmer qu'il existe mainte-
50.
nant deux possibilités dans le calcul des structures : le cal
cul en contrainte admissible et le calcul en plasticité. Il faut
remarquer toutefois que l'avènement du calcul plastique ne signi
fie pas abandon total du calcul élastique car tous les pays
qui disposent actuellement d'un règlement de calcul élastique
continuent d'appliquer dans certains cas leurs anciennes métho
des de calcul élastique.
Ces deux méthodes diffèrent essentiellement par
leurs principes de base. En effet dans le calcul élastique, un
état limite admissible est un état pour lequel, sous les char
ges pondérées, un point de la structure atteint la contrainte
admissible. Dans le calcul plastique, un état limite admissible
est un état pour lequel sous les charges pondérées multipliées
par un certain coefficient de sécurité donné, la structure at
teint la ruine, c'est-à-dire devient hors d'usage. Les deux
méthodes reposent donc sur des principes différents; lorsqu'un
point de la structure atteint sa contrainte admissible la struc
ture n'est pas, en général, hors d'usage: elle peut supporter
des charges supplémentaires. La ruine est atteinte lorsqu'un
des phénomènes suivants se produit :
- perte d'équilibre de la structure
- transformation de tout ou d'une partie de la structure en un
mécanismej
- instabilité de formej
- rupture d'un élément;
déformations plastiques excessives j
51.
Nous orientons spécialement notre travail vers
l'analyse limite c'est-à-dire la partie de la théorie de la
plasticité qui donne les méthodes de calcul de la charge limite
ou charge d'effondrement et du dimensionnement limite. Dans ce
nouveau mode de calcul, il existe deux méthodes fondamentales :
la méthode incrémentale ou pas à pas et les méthodes aux états
ultimes. Ces dernières font appel aux deux théorèmes fondamen
taux en plasticité : le théorème cinématique et le théorème
statique. Le premier porte sur l'ensemble des mécanismes de
ruine cinématiquement admissibles, l'autre sur l'ensemble des
distributions des moments statiquement admissibles.
Dans ces deux méthodes, la méthode incrémentale se
rapproche plus des méthodes traditionnelles de calcul élastique.
En effet, elle permet de déterminer la charge de ruine en sui
vant l'histoire du chargement. En d'autres termes, on se fixe
le trajet de la charge de la valeur zéro à une valeur corres
pondant à l'état de ruine. Les efforts et les déplacements sont
alors connus à chaque instant. Cette méthode se révèle d'un
emploi peu aisé dans le cas d'un traitement manuel. Elle est
par contre três pratique pour une résolution automatique. Un
programme a été développé au C.T.l.C.M. à partir de cette tech
nique (12).
Les méthodes cinématique et statique sont très vi
te limitées pour les applications manuelles lorsqu'il s'agit
de traiter des structures complexes. La possibilité de résou
dre les problèmes d'Analyse et de Dimensionnement limite par
52.
la programmation linéaire a tourné en partie la difficulté. La
recherche automatique d'un système complet de mécanisme indé-
pendant dans le cas de la méthode cinématique (13) a rendu cel-
le-ci entièrement automatique.
Il a fallu attendre l'introduction de la sélection
automatique des inconnues hyperstatiques dans la méthode des
forces pour que la foemulation statique du problème devienne
complètement automatique. Il est désormais possible d'étudier
l'évolution élastoplastique d'une structure depuis le régime
élastique jusqu'à l'état de ruine à l'aide d'une méthode géné-
raIe de type "force". C'est cette dernière approche que nous
nous proposons de traiter dans ce chapitre. Nous développons
surtout, par le biais du théorème statique, les divees aspects
de la détermination de la charge limite et du dimensionnement
limite.
~.2. - CALCUL DE LA CHARGE LIMITE PAR LA METHODE STATIQUE
2.2.1. - Domaine_d'étude du calcul de la charge limite - défi-
nitions
La théorie du calcul de la charge limite est vala-
ble sous les hypothèses suivantes
1 0- Chaque élément de la structure possède un moment fléchis-
sant maximum, le moment plastique M . Il correspond à lap
plastification de sa section droite ;
53.
2° - La valeur de l'effort normal, de l'effort tranchant et
l'effet des surtensions locales dues à une charge concen-
trée appliquée dans une section n'influent pas sur la valeur
du moment plastique d'un élément;
3° - Le matériau a un comportement ductile, c'est-à-dire qu'il
n'e~ ~ pas menacé d'une rupture fragile ou par fatique ;
4° - Au voisinage des sections oa M = M , il se forme à causep
de la ductilité du métal, des zones à forte courbure qu'on
peut supposer concentrées dans une section (rotule plasti-
que)
5° - Malgré les importantes déformations plastiques localisées,
la structure ne manifeste aucun phénomène d'instabilité
avant que la rotule ccmplètant le mécanisme articulé ne
se for~e ;
6° - Au moment où la dernière rotule apparaît, les déformations
sont encore acceptables, c'est-~-dire assez faibles pour
ne pas modifier le jeu des forces dans la structure
7° - Les charges appliquées à la structure sont supposées toutes
grandir proprotionn~llement
8° - Les assemblages de la structure sont capables de transmet-
tre le plein moment plastique ;
9° - Le principe de superposition des effets des forces n'est
plus applicable car le système n'obéit plus à la loi de
Hooke.
54.
Les dispositions constructives à adopter en vue
de satisfaire ces hypothèses de calcul ainsi que toutes les
notions de base de la théorie de la plasticité ne sont pas abor
dées dans le cadre de notre étude (14), (15), (16), (17), (18) •
Il n'est pas exagéré d'affirmer que la théorie sur
le comportement plastique des matériaux est en partie élucidée
et défrichée. Elle est maintenant bien connue des spécialistes.
Nous rappelons cependant brièvement les notions de sections po
tentiellement critiques, de rotules plastiques et de mécanismes
de ruine.
- Sections potentiellement critiques : ce sont les sections
susceptibles de se déformer lors de l'effondrement de la struc
ture. Elles se situent :
- aux points d'application des charges concentrées
- aux extrémités des barres
- aux points encastrés ;
- aux points où le moment peut présenter un extremum
en pleine barre dans le cas des barres chargées de forces
uniformément réparties.
- Dans les structures pour lesquelles on peut admettre que le
seul effort interne déterminant au point de vue de la plastifica
tïon est le moment fléchissant, la plastification d'une section
entraîne la formation d'une rotule plastique. Cette section se
comporte comme si elle était articulée, la rotule oppose cepen
dant à la rotation un moment résistant constant M •P
55.
On appelle mécanisme de ruine une disposition de
sections dans lesquelles le moment est égal au moment plastique
Mp.
Nous pouvons également le définir comme un système de dé
placements compatibles entre eux. Le nombre de mécanismes pos-
sibles dans une structure est infini. Si nous nous fixons un
nombre de sections potentiellement critiques, ce nombre est fini.
2.2.2. - Formulation du problème
D'une façon générale, le problème de recherche de
la charge limite est un problème de vérification. Il est formu-
lé de la façon suivante : "une structure supporte un système
de charges appliquées [p j } et un ensemble de forces internes
en équilibre avec ces charges c'est-à-dire statiquement admissi-
ble i trouver un coefficient À tel que le système de chargesr
extérieures À J. P j J provoque l'effondrement de la structure".
Le multiplicateur~est appelé le facteur de charge de ruine.
Pour la résolution de ce problème, nous connaissons
- les caractéristiques géométriques et élastiques de la struc-
ture i
- les moments plastiques des éléments de la structure i
le système de forces extérieureS pondérées •.
Nous sommes conduits à déterminer
- le facteur de charge de ruine À ri
56.
_ la valeur des inconnues hyperstatiques à la ruine
- le diagramme des moments à la ruine.
2.2.3. - Théorème statique
Dans la théorie de la plasticité, comme dans celle
de l'élasticité, les théorèmes généraux ont une grande impor-
tance. Ils constituent le fondement des principales méthodes
de calcul.
Comme nous l'avons déjà remarqué dans l'introduc-
tion, les plus importants en calcul plastique sont le théorème
statique et le théorème cinématique. Nous nous basons sur le
premier pour calculer la charge de ruine d'une structure.
Pour clarifier le problème, considérons une struc-
ture soumise à un système de forces extérieures {Pj}. La ruine
plastique est obtenue pour la valeur de la charge Àr{P j}.
Le théorème statique permet de déterminer la va-
leur du facteur de charge As . Il s'énonce "si pour un charge-
ment Às{PjJ, il est possible de trouver une distribution d'ef-
forts internes en équilibre avec les forces extérieures, donc
statiquement admissibles et respectant le critère de plasticité,
donc plastiquement admissibles", alors
( 2-1)
57.
En théorie des poutres, cela signifie que les
efforts normaux, tranchants et les moments de flexion doivent
être en équilibre statique avec les forces extérieures et que le
moment de flexion M vérifie la condition IMI ( Mp•
Notons que la distribution licite d'efforts inter-
nes ne satisfait pas nécessairement les conditions de mécanis-
me dont dépend le théorème cinématique. Si toutefois il en était
ainsi, la seule valeur du multiplicateur de charge qui correspond
simultanément à des efforts internes Statiquement et Plastique-
ment Admissibles et à un mécanisme Cinématiquement Admissible
est la valeur limite réelle. En d'autres termes, si nous appli-
quons successivement les deux théorèmes statique et cinématique
à une même structure et que nous obtenons à la fin À =À (Àc s c
étant le facteur de charge calculé à partir des conditions ci-
nématiques) alors À = À = À •r c s
En conséquence, l'application du théorème stati-
que au calcul des structures va dans le sens de la sécurité,
car le facteur de charge calculé sur la base du respect des
conditions d'équilibre et des conditions de plasticité en tous
points de la structure est inférieur ou au mieux égal au fac-
teur réel de ruine. Cela signifie que la structure est en mesu-
re de résister à une charge supérieure ou, à la rigueur, égale
à celle pour laquelle elle a été calculée.
58.
2.2.4. - Méthode statique
Dans l'approche statique de détermination de la
charge de ruine, nous distinguons deux méthodes de base : la
méthode semi-graph~que et la méthode directe. Elles peuvent
être formulées aussi bien manuellement qu'automatiquement.
2.2.4.1. - Application manuelle de la méthode
semi-graphique
Le processus à suivre est le suivant
1° - Déterminer le degré d'hyperstaticité h de la structure et
définir les s sections potentiellement critiques.
2° - Transformer la structure hyperstatique en une structure
isostatique associée .
3° - Déterminer sur cette structure isostatique associée, le
diagramme des moments fléchissants da aux forces extérieu-
res.
5° - Additionner les deux diagrammes de moments fléchissants
obtenus précédemment pour obtenir le diagramme des moments
réels dans la structure.
6° - Faire l'hypothèse d'un certain nombre de rotules plastiques
(h + 1) aux sections potentiellement critiques et calculer
la charge de ruine sur la base du mécanisme de ruine ainsi
choisi. Cela revient à écrire que dans les sections poten-
tentiellement.critiques, 1~LI = M i = 1,5.l P
59.
7° - Vérifier par résolution graphique qu'en aucun point de
la structure la valeur des moments fléchissants M ne dé
passe la valeur du moment plastique Mp• Cette condition
se traduit mathématiquement par IMI ( Mp•
Cette méthode, simple dans sa logique, est pour
tant limitée dans ses applications. Il y a deux raisons à
cela : la première est liée à la structure isostatique de base
qui doit être obtenue manuellement. Nous avons évoqué à plu
sieurs reprises dans le premier chapitre cette "entorse" faite
à la méthode des forces. Le remède qui a été apporté est la
sélection automatique des inconnues hyperstatiques. La seconde
raison se situe au niveau du mode de ruine. En effet, la métho
de semi-graphique convient mieux à des structures dont la rui
ne est complète. La représentation du diagramme des m@ments
fléchissants correspondants est ensuite facile. Par contre, le
tracé du diagramme des moments fléchissants à la ruine dans une
structure dont le mode de ruine est partiel ou surabondant
n'est pas évident. Le premier mode de ruine correspond à un
système mis hors service par la ruine plastique d'une partie du
système. Il se forme dans ce cas un nombre de rotules plasti
ques inférieur à h + 1. Le second se produit lorsque la mise
hors service entraine la formation à la ruine de plus de h+1
rotules.
2.2.4.2. - Méthode pseudo-statique
Cette méthode est une formulation analytique de
60.
la méthode semi-graphique.
Considérons une structure de degré hyperstatique h
nées toutes variant proportionnellement.
Exprimons le moment de flexion dans les sections
(i = i , 2, ••• , s) (2 - 2 )X.J
pour X. = 1.J
h
+ .LJ
appliquées. Ce moment est proportionnel au facteur
hyperstatique Xj
moment isostatique dans la section i dU aux charges
de charge .il.
M~ moment isostatique dans la section i dU à l'inconnue
M~1
appliquées et des inconnues hyperstatiques Xj considérés d'ail
leurs comme des forces extérieures. Dans une section i de la
potentiellement critiques en fonction des forces extérieures
structure, il se met sous la forme :
avec
dans laquelle nous définissons s sections potentiellement criti
ques. Elle est soumise à un système de charges extérieures don-
Choisissons un mécanisme de ruine qui possède des
rotules plastiques dans ( h + 1) sections. Cela revient à im-
poser la plastification de (h + 1) sections. Ce qui s'écrit
mathématiquement
M. = + M . (j = 1,2, ••• , h + 1)J PJ
2-3
61.
Si nous remplaçons M. par sa valeur dans la relation (2-2),J
nous obtenons un système d'équations linéaires
hM~ + L M~ x. =
1 j=l 1 J+ M .
PJ
dont les inconnues sont Xl' X2, aaa, Xh et À.
la méthode
te :
Pour déterminer le facteur de charge à l'aide de
pseudo-statique, nous opérons de la façon suivan-
Choisir dans un premier temps les signes + ou - des moments
plastiques tel que le diagramme des moments à la ruine soit
plastiquement admissible, c'est-à-dire que le moment de fle-
xion IMjl ne dépasse nulle part le moment plastique Mp j de
la barre correspondante ;
- Résoudre ensuite le système d'équations linéaires (2-4). Après
résolution nous obtenons les inconnues hyperstatiques X. etJ
le facteur de charge À ;
- Calculer au cours de cette étape les efforts réels dans les
sections à l'aide des formules (2-2) ;
.... Vérifier ensuite que le diagramme des moments est plastique-
ment admissible. Si la condition de plasticité est violée en
certaines sections, il suffit d'un ajustement de la position
des rotules plastiques. Pour cela, il faut introduire des
rotules dans ces sections et supprimer celles imposées dès
62.
le départ, puis recommencer la procédure.
Il faut remarquer qu'à chaque étape de calcul,
nous obtenons une valeur de À qui constitue une borne supérieu-
re de là charge de ruine. Cette méthode apparaît dans ce cas
comme une forme déguisée de la méthode cinématique.
Enfin, lorsque le diagramme des moments est rendu
plastiquement admissible, la solution correcte du problème est
obtenue.
Nous venons de développer une méthode statique as
sez incommode à employer dans le cas des grandes structures.
Bien qu'elle soit partiellement automatique, cette méthode exi-
ge nénamoins une certaine habileté. Ainsi, trouver une méthode
conduisant systématiquement à la bonne solution devient une
nécessité. C'est le but que nous visons dans le paragraphe qui
suit.
2.2.4.3. - Réduction de la méthode statique en un
programme linéaire
Notre ambition ici n'est pas de faire une étude
détaillée et approfondie de la programmation linéaire. Notre
but est de résoudre les problèmes de l'analyse limite par voie
statique en utilisant l'analogie qui existe entre les théorèmes·
généraux de l'analyse limite et la programmation linéaire. Ainsi,
au lieu de programmer directement les équations du type (2-4),
64.
voie statique est le suivant
- Maximiser À
- avec les contraintes
hjMiÀ + L x.( M ( 2-6)M.
j=1 1 J pi
MP.A fM~ X. c M- - pi1 j=1 1 J
Transposons ce problème sur un tableau "Simplexe".
Pour cela, nous transformons la formulation ci-dessus en utili-
sant des variables auxiliaires :
soit
= M . + M1. ) 0
p1
= M . - M.p1 1
) o( 2-7)
L'énoncé du problème (2-6) devient
Maximiser À
avec les contraintesh
Y21-1 = M=l.\ ~ M~ X. + Mp i) 0
1 J=1 1 J
r-fl.~ tM~ (2-10 )Y2 i = + X. + Mpi) D1 j=1 1 J
Cette dernière formulation nous permet de former
un premier tableau "Simplexe" avec (h + 1) variables (les in-
connues hyperstatiques X. et la fonction À à maximiser). CeJ
tableau comporte 2.:; lignes et ( h + 1) colonnes. Soit [ T ] ce
tableau.
Posons À = Xo
X. = Z.J J
65.
( j = 0, 1, ••• , h+1) (2-j i )
Le tableau final "Simplexe" prend Lacforme
[T 1- TJ. Il porte sur les 2(h + 1) variables Zj' la fonction
à maximiser se réduit toujours à la seule variable À.
2.2. - Conclusion
Le calcul de la charge de ruine par la méthode
statique n'a d'intérêt que par les techniques modernes de ré-
solution qu'elle utilise à savoir la sélection automatique des
inconnues hyperstatiques et la programmation linéaire. Grâce
à ces nouvelles adaptations, la méthode statique connaît un
regain de faveur vis-à-vis de la méthode cinématique.
Les informations que cette approche nous fournit
sont intéressantes. Ce sont : le facteur de charges À, les
inconnues hyperstatiques Xj, les sections plastifiées et par
conséquent le diagramme des moments à la ruine, même lorsaue
le mode ruine est partiel. Il est d'ailleurs facile de répérer
ce dernier car le nombre de rotules plastiques est inférieur à
(h + 1), une partie de la structure restant par conséquent hy
perstatique. Par une méthode classique de la résistance des
matériaux nous pouvons lever l'hyperstaticité et compléter le
diagramme des moments à la ruine.
66.
2.3. - DIMENSIONNEMENT LIMITE----------------------
2.3.1. - Formulation du problème
Nous nous sommes proposés dans ce deuxième chapi-
tre de traiter deux des grands problèmes de la théorie de la
plasticité : le calcul de la charge limite et le dimensionne-
ment limite. Dans la première partie, nous avons développé une
méthode de recherche de la charge limite ; la méthode statique.
Dans le présent paragraphe, nous exposons la doctrine du dimen-
sionnement limite basé sur les mêmes hypothèses de calcul que
celles de l'analyse limite.
Le premier problème est un problème de vérifica-
tion tandis que le second concerne le dimensionnement. Si le
premier concept est complet dans sa forme, le deuxième doit
être basé sur un code de construction (11) qui considère comme
état limite de résistance la formation d'un mécanisme de ruine.
c'est ce code établi par la Convention Européenne de la Cons-
truction Métallique qui prescrit les règles générales garantis-
sant une sécurité suffisante.
Le problème de dimensionnement limite se pose de
la façon suivante :
- la structure est connue par :
• ses caractéristiques géométriques
67.
• les charges réelles pondérées appliquées. Les charges de
calcul sont ces charges pondérées multipliées par un coef-
ficient de sécurité donné
- Il s'agit de déterminer:
• la valeur de la fonction à optimaliser
• La valeur à donner aux moments de plastification des pou-
tres ce qui revient à choisir les poutres dans la gamme
des profilés disponibles. Par mesure de sécurité, il con-
vient de choisir pour chaque barre le profilé dont le mo-
ment plastique est immédiatement supérieur à celui calculé.
Après cette opération, il est indispensable de
procéder à un calcul d'analyse limite pour vérifier la structu-
re ainsi dimensionnée vis-à-vis de la sécurité.
2 ..3 .. 2. ~ Détertnin'ation de la' . fonction à optimaliser
Il. s'agit de trouver une fonction économique li-
néaire optimalisant le coût de la structure. Comme le coût d'une
structure est sensiblement proportionnel à son poids, le cri-
tère adopté pour réaliser la structure de moindre coût est le
poids de celle-ci (16), (17), (19).
On posem
C = L 11_ 'Mpkk=l K( 2-12)
oil m est le nombre de poutrep de la structure. La fonction ob
jective C s'appelle la fonction de poids.
68.
Le problème du dimensionnement limite réalisant
le poids minimum peut donc être défini comme suit : déterminer
les sections d'une structure de dimensions générales données,
devant résister à des charges limites données, et telle que
sa fonction de poids soit minimale.
Le problême est de chercher quelles valeurs il
faut donner aux moments plastiques Mp k
(k = l, 2, .•• , m) pour
que la fonction de poids C soit minimale sous les charges de
ruine. Nous pouvons encore restreindre cette formulation. En
effet, si nous choisissons un moment plastique de référence Mp
d'une poutre k, le moment plastique d'une poutre quelconque j
différente de k de la structure peut se mettre sous la forme
M . = a. M oü a. est une constante donnée de chaque barre J'.PJ J P J .
Le problème se réduit donc à la détermination du seul moment
Mp• Il faut remarquer que cette dernière façon de formuler le
problème de dimensionnement est. équivalente au problème de dé-
termination de la charge limite.
2.3.3. -- Dimensionnementlimite par la progranunationlinéaire
Pour la résolution du problême de dimensionnement
limite il existe deux approches: l'approche cinématique et
l'approche statique. Comme dans le calcul de la charge limite,
il est possible d'assimiler ce problême à un programme linéaire
en adoptant comme fonction économique la fonction de poids don
née par la formule (2-12) et comme contraintes les équations
d'équilibre transformées en inéquations.
69.
Dans ce paragraphe nous abordons le problème par
l'approche statique. En fait deux méthodes statiques ont été
mises au point, celle qui fait appel aux mécanismes simples in-
dépendants, développée par Massonnet (15) et une deuxième, éla-
borée au C.T.I.C.M. (17) qui dérive directement du théorème
statique. En ce qui concerne notre travail, nous exploitons la
formulation qui est une application du théorème statique.
D'après le théorème statique, nous écrivons que
la répartition d'efforts internes dans une structure de degré
d'hyperstaticité h est statiquement et plastiquement admissible.
Alors À • Icir À est un coefficient de sécurité donnéo
par les recommandations. De telles structures résistent aux
charges appliquées Ào CP j1. Parmi donc ces structures, nous
cherchons celle pour laquelle la fonction de poidsl'fi
C = l lk M k est minimale.Jë=1 p
Nous énonçons le problème de dimensionnement limi-
te de la façon suivante :
- Minimiser
mC = - l lk Mac
k = l
- avec les contraintes (2-13 )
~Ài 0 +j
h .~ I Mi Xj (Mp i
i = 1, .... , s
-~i
h j" M.X- c . M
j ~ 1 ~ J . pi
Toutes les données et les inconnues de ce problè-
70.
me ont été définies au paragraphe 2.3.1. Sa résolution est fai-
te comme lors du calcul de la charge de ruine par le "Simplexe".
Les relations (2-13) peuvent être transposées en
un tableau "Simplexe". Pour cela nous procédons comme au para-
graphe 2.2.4. en posant:
o
y 2 i = Mp i + Mi) 0
le problème (2-13)devient
1
- Minimiser C = 1k=1
- avec les contraintesh
Y2i-i= -M?'.,\ l M~ X. + Mp i ) 0 (2-14 )10 j=1 1 J
hY2i = M?À + L M~ X. + Mp i ) 0
1 0 j=1 1 J
Ce problème de programmation comporte (h + m) va-
riables indépendantes. Ce sont les h inconnues hyperstatiques
Xj et les moments plastiques Mp des 'm barres. Le tableau "Sim
plexe" correspondant a pour dimension (2s x (h + m) ). Soient
2s lignes et (h + m) colonnes.
Pour former le tableau "Simplexe" final, faisons
encore un changement de variables.
Xi = Zi - Zi +h + m(i =1,2, ••• , h+m) (2-15)
Les Xi sont soit des inconnues hyperstatiques soit des moments
71.
plastiques. Nous obtenons finalement un programme linéaire com
portant 2 (h+m) variables Zi dont la fonction à minimiser est:
m
" l1~ ~C = k ~ l
2.3.5. .,.: Apprécï:ation du dimensionnemeontlimite
Il est évident que pour une structure isostatique
i.l n'y a aucun intérêt à faire du dimensionnement plastique
puisque le mécanisme de ruine est obtenu dès l'apparition de
la première rotule plastique. Par contre, pour des structures
hyperstatiques le calcul plastique présente des avantages. Non
seulement il nous supprime la notion de contrainte admissible
tant condamnée, mais il nous évite éga~ement d'introduire des
complications dans le dimensionnement des structu~es hypersta-
tiques.
Les deux approches utilisées dans le dimensionne-
ment limite conduisent au même résultat. Bien que la méthode
statique exige plus de variables dans son programme linéaire
que la méthode cinématique, elle apparaît néanmoins plus per-
formante que cette dernière. Ce paradoxe est da au fait que le
nombre de mécanisme~ de ruine croît en même temps que le nombre
de sections potentiellement critiques pour les structures de
° grandes tailles. Il est donc difficile de recenser tous les
mécanismes de ruine sans risquer d'en oublier.
72.
D'un autre côté, le dimensionnement préconisé par
la méthode statique n'est pas complet. En effet, il ne prend
pas en compte tous les facteurs (17) affectant le moment plas
tique.
2~4. - CONCLUSION
La plupart des études portant sur le calcul des
structures reposent essentiellement sur les deux théorèmes sui
vants' :le théorème des déplacements virtuels et le théorème
cinématique. Le premier est relatif au calcul élastique des
structures par la méthode des déplacements et le second au cal
cul plastique des structures par la méthode cinématique. Les
deux chapitres précédents ont été élaborés dans le but de don
ner à la formulation de typ~ "force" un regain d'application
vis-à-vis de la formulation déplacement. Nous avons donc établi
à ces fins un programme général de calcul automatique qui étu
die une structure aussi bien en régime é'lastique" qu'en régime
plastique. Ce programme nous fournit des résultats encourageants.
Il s'adresse uniquement aux structures planes et nous n'avons
pas tenu compte de tous les effets secondaires de la plastioi
té. La méthodologie développée en calcul d'ossatures est appli
cable à n'importe quel type de structure, nous l'étudions main
tenant dans le cas des plaques fléchies.
73.
r-------------------------------------------------------11 1
l CHAPITRE 3. : MODELE EQUILIBRE DE FLEXION DE PLAQUE l1 1- t-:_o..:_. ._._o o . .J.
74.
3.1. - INTRODUCTION
Bien que l'analyse des structures par la méthode
des Eléments Finis soit maintenant bien connue des spécialites,
il est toujours nécessaire de rappeler les principaux modèles
de cette théorie. Ce sont : le modèle déplacement, le modèle
équilibre et le modèle hybride. Dans un modèle déplacement,
les hypothèses portent sur le champ de déplacements. Dans un
modèle équilibre, les hypothèses sont faites sur le champ de
contraintes. Dans un modèle hybride, les hypothèses portent à
la fois sur les champs de déplacement et de contrainte. La plu-
part des méthodes utilisées pour la résolution des problèmes en
théorie des poutres sont des cas particuliers d'une procédure
générale par Eléments Finis.
Nous nous proposons dans ce chapitre de dévelop-
per une procédure capable de résoudre les problèmes de pla-
ques fléchies en utilisant le modèle équilibre de la théorie
des Eléments Finis. Le principe variationnel dont ce modèle
dérive opère sur des variables inconnues dont l'interprétation
physique n'est pas évidente, c'est en partie à cause de cet
attachement à la représentation concrète du phénomène physique
"déplacement" que le modèle déplacement a été le plus sollici
té. A la limite, la méthode des Eléments Finis a été assimilée
au modèle déplacement. Cependant, plusieurs publications et
mémoires donnant des solutions "équilibre" approximatives ou
75.
exactes ont été présentées. Les difficultés pour obtenir la
bonne solution, proviennent d'une part de l'idéalisation de
la structure et d'autre part de la représentation de la varia
tion du champ de contraintes à l'intérieur de l'élément. Le
choix de celui-ci est donc fondamental car il doit remplir
certaines conditions pour qu'il soit licite. En effet, il doit
vérifier les équations d'équilibre et la continuité des moments
à l'intérieur et aux interfaces des éléments - la valeur du mo
ment doit être identique de chaque côté d'un interface.
Ainsi
- MORLEY (20), (21) utilise les fonction U(x,y)
et V(x,y) de SOUTHWELL (22) pour obtenir une solution équili
bre. Son modèle satisfait les conditions d'équilibre. Il faut
préciser que SOUTHWELL a obtenu un élément en flexion .de pla
que à partir d'un élément à l'état membranaire pour lequel le
champ de déplacements est du type U(x,y) et V(x,y). Inverse
ment, à un élément équilibre en flexion, il est possible de
faire correspondre de manière univoque un élément en état mem
branaire.
- A la faculté des Sciences de Liège, SANDER (23)
reprend une formulation semblable. Il exploite l'analogie exis
tant entre les fonctions de contraintes pour les plaques flé
chies et les déplacements u et v en contraintes planes bien
connues.
76.
Avec FRAEIJS DE VEUBEKE (24) ils utilisent les fonc-
tions de contraintes équilibre· en vue d'évaluer les matrices
de rigidité des éléments. Mais les paramètres inconnus du
problème de la structure assemblée sont des déplacements géné
ralisés~ Ils sont choisis telles que les équations d'équilibre
soient satisfaites.
- Léonard R. HERRMAN(25} de son côté a étudié un
modèle formé de deux champs : un champ de déplacement w linéai
re et un champ de moments ~ , M et M constants. Ce modèlex y xy
hybride viole le plus souvent les équations d'équilibre, les
équations de compatibilité, la continuité des contraintes ou
la continuité des déplacements aux interfaces.
- Edoardo ANDERHEGGEN (26) a analysé un modèle
avec un champ de moments paraboliques. Il l'a résolu par la
méthode de de Lagrange.
- A l'tnstitùt National des Sciences Appliquées de
Lyon, deux mémoires de fin d'études (27), (28) ont été élaborés
dans les perspectives ouvertes par le cours d'Eléments Finis
dispensé par M. LEMAIRE (29) en D.E.A. Ces mémoires montrent
que la notion de fonction de tension introduite dans l'analyse
des structures par le modèle équilibre des éléments finis per
met de réaliser une synthèse des formulations disponibles. Ils
ont établi à la fin un programme général de résolution à partir
77.
d'un algorithme simple. J. ROBINSON (30) dans son livre
"Integrated Theory of Finite Element Method" tait une analyse
détaillée de cette notion de fonction de tension.
Toutes les solutions sugérées ci-dessus ont été
limitées à des éléments bien définis. Le but de notre travail
est de développer un élément triangulaire de plaque fléchie. Le
champ de moments est choisi tels que les équations d'équilibre
soient satisfaites et que la continuité des moments à l'inté-
rieur d'un élément et entre les éléments adjacents soit véri-
fiée. Le champ de déplacements qui en découle ne satisfait pas
obligatoirement les conditions de compatibilité et la continui-
té des déplacements. La résolution est faite à partir du prin-
cipe variationnel des forces virtuelles qui n'est qu'un aspect
particulier d'une formulation générale par Eléments Finis. Cet-
te méthode exige un grand effort de programmation.
Nous rappelons brièvement la théorie des plaques.
Toutes les formules sont développées en termes de "force". En-
suite, nous introduisons le concept d'Eléments Finis "équili-
bren pour la résolution.
3.2. - THEORIE DES PLAQUES
3.2.1. - Hypothè"ses de calcul
Les hypothèses de calcul sont celles d'un solide
qui possède un plan moyen et dont l'épaisseur t est faible vis-
78.
à-vis des deux autres dimensions. Celles qui sont vérifiées
dans cette étude sont les suivantes :
1° - Les contraintes a normales au plan moyen sont négligeables.z
2° L'effet des contraintes de cisaillement transversal est
négligeable.
3° - Les points situés sur une normale au plan moyen avant dé-
formation restent sur une droite normale à la surface dé-
formée. La distance entre deux de ces points reste cons-
tantes.
4° Les sections planes restent planes après déformation.
5° Il n'y a pas de déformation du plan moyen.
6~ Les propriétés élastiques de la matière composant la pla-
ques sont les mêmes dans toutes les directions. Cependant,
il est possible d'étudier un matériau anisotrope dont les
caractéristiques élastiques sont connues.
3.2.2. -Equatio"ns différentielles d'équilibre
3.2.2.1. - Relation moments-courbures
Considérons un élément de plaque fléchie soumis à
une charge répartie agissant sur sa face supérieure (Fig. 3-1)
Les directions positives sont indiquées sur la Fig. 3-2.
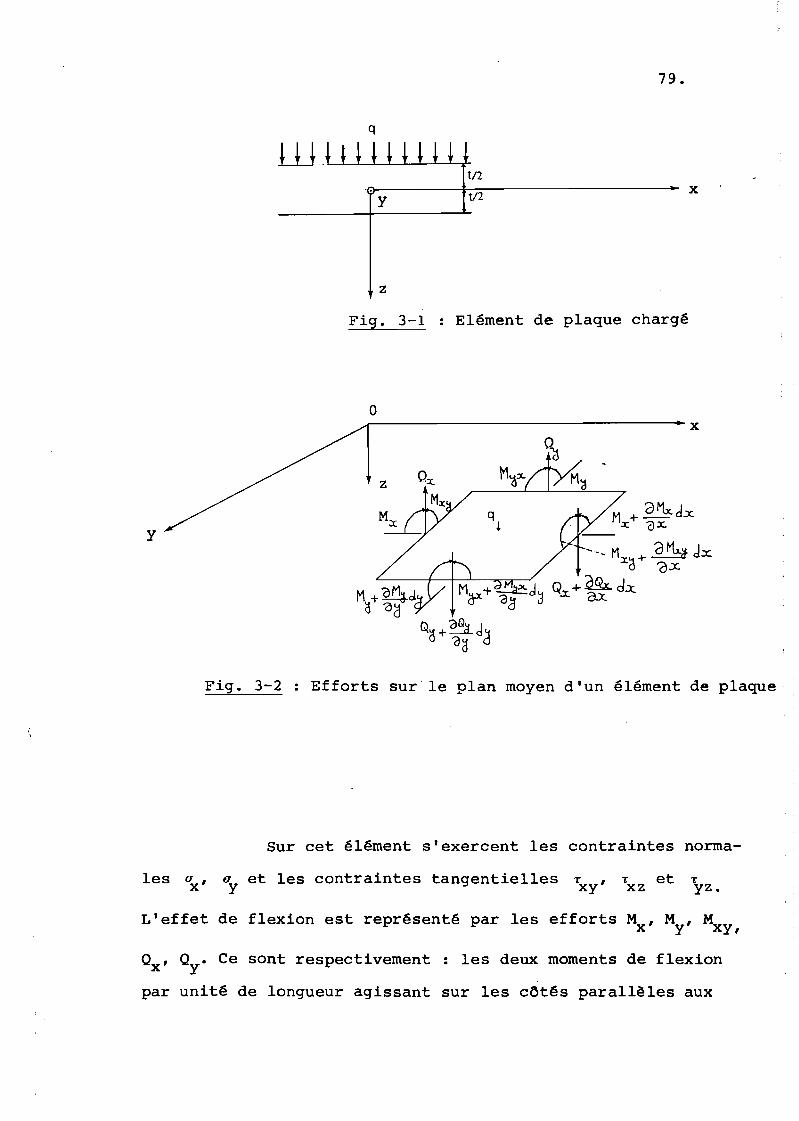
79.
q
y
tl2
V2x
z
Fig. 3-1 Elément de plaque chargé
o
qL
z
M:;c M + âM.x.d.x-"C ô:x.
--~ M (1M:t.a- dx:J:d+ ô.:x:.
~+~iJ M(jX+ ô!j:eodd Q.x+~ d->:
Qo +ôG
(1 d'fô d <J
.-.-------------------x
y
Fig. 3-2 Efforts sur le plan moyen d'un élément de plaque
Sur cet élément s'exercent les contraintes norma-
u et les contraintes tangentiellesy Tyz.
L'effet de flexion est représenté par les efforts Mx' My' Mx y,
Qx' Qy. Ce sont respectivement : les deux moments de flexion
par unité de longueur agissant sur les cOtés parallèles aux
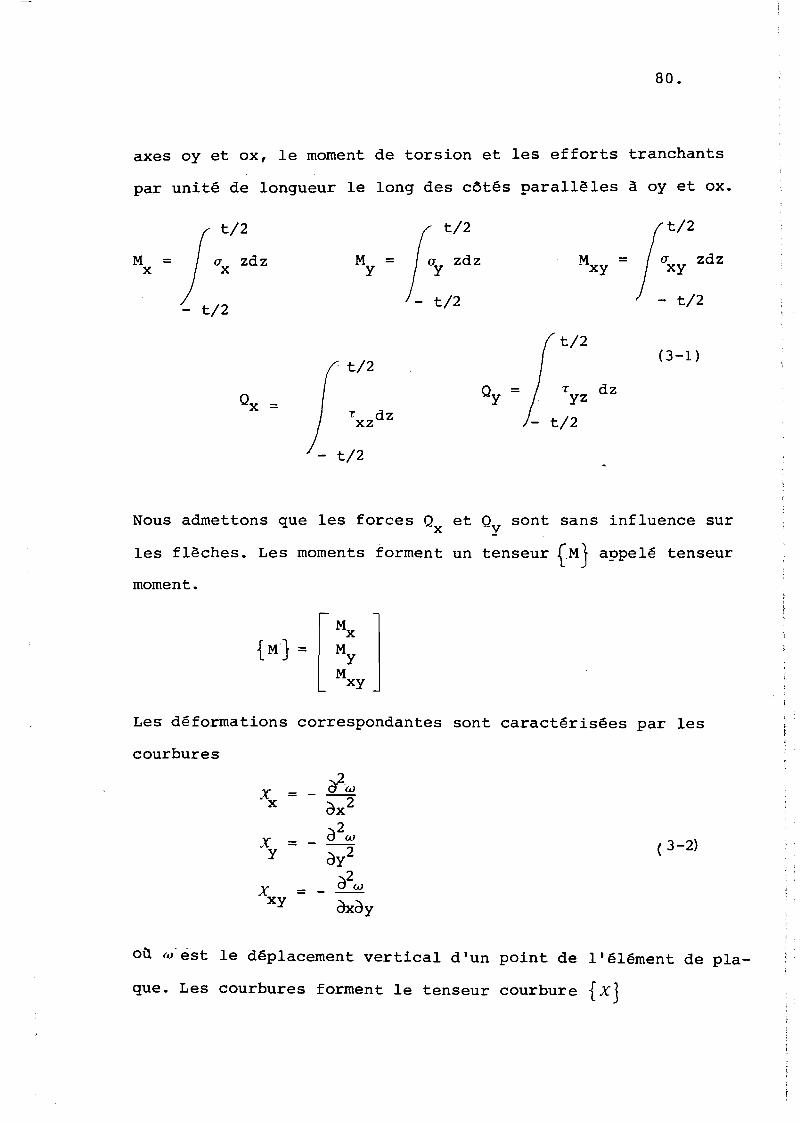
ao.
axes oy et ox, le moment de torsion et les efforts tranchants
par unité de longueur le long des côtés parallèles à oy et ox.
t/2
T dzxz
t/2
T dzyz
(3-1 )
- t/2
Nous admettons que les forces Qx et Qy sont sans influence sur
les flèches. Les moments forment un tenseur (M} appelé tenseur
moment.
Les déformations correspondantes sont caractérisées par les
courbures
x = 2l·wx dX2
X = d2w
( 3-2)Y dy2
X = d2wxy dxdy
où w'èst le déplacement vertical d'un point de l'élément de pla
que. Les courbures forment le tenseur courbure {XJ

81.
( 3-3)
Les relations qui lient les moments aux courbures
s'écrivent sous forme matricielle :
û 0 1-v
v
1
o
o
Xx
xxy
(3-4)
- -Et3.où D = 2 est la rigidité flexionnelle de la plaque et v
12 (l- V )
le coefficient de Poisson.
Soit sous forme condensée
( 3-5 )
3.2.2.2. - Relations entre moments
Considérons la Fig. 3-2. L'équilibre de l'élément
exige d'une part que la somme des forces parallèles à oz soit
nulle soit
+ q = 0, ( 3-6 )
d'autre part, que la somme des moments de toutes les forces par
rapport aux axes ox et oy soit nulle.
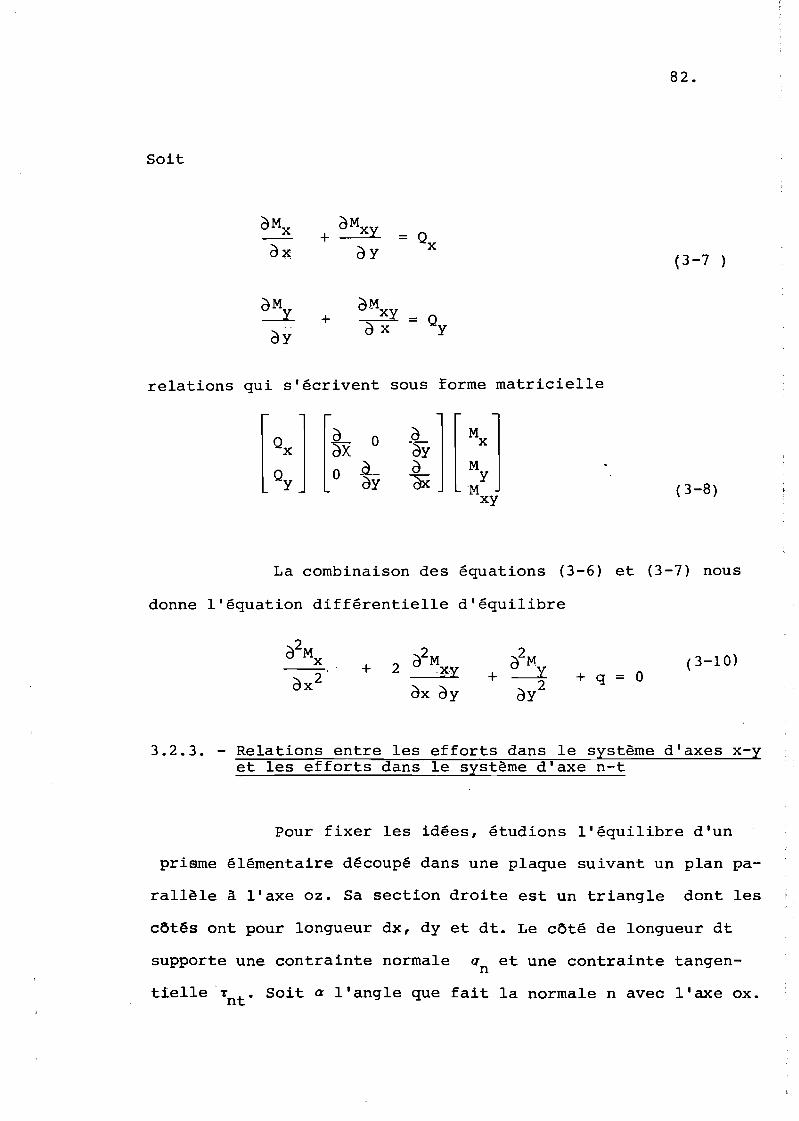
82.
Soit
(3-7 )
OMy +
Oy
relations qui s'écrivent sous forme matricielle
( 3-8)
La combinaison des équations (3-6) et (3-7) nous
donne l'équation différentielle d'équilibre
+ + q = 0(3-10)
3.2.3. - Relations entre les efforts dans le système d'axes x-yet les efforts dans le système d'axe n-t
Pour fixer les idées, étudions l'équilibre d'un
prisme élémentaire découpé dans une plaque suivant un plan pa-
rallèle à l'axe oz. Sa section droite est un triangle dont les
cOtés ont pour longueur dx, dy et dt. Le côté de longueur dt
supporte une contrainte normale qn et une contrainte tangen
tielle 'Tnt. Soit a l'angle que fait la normale n avec l'axe ox.
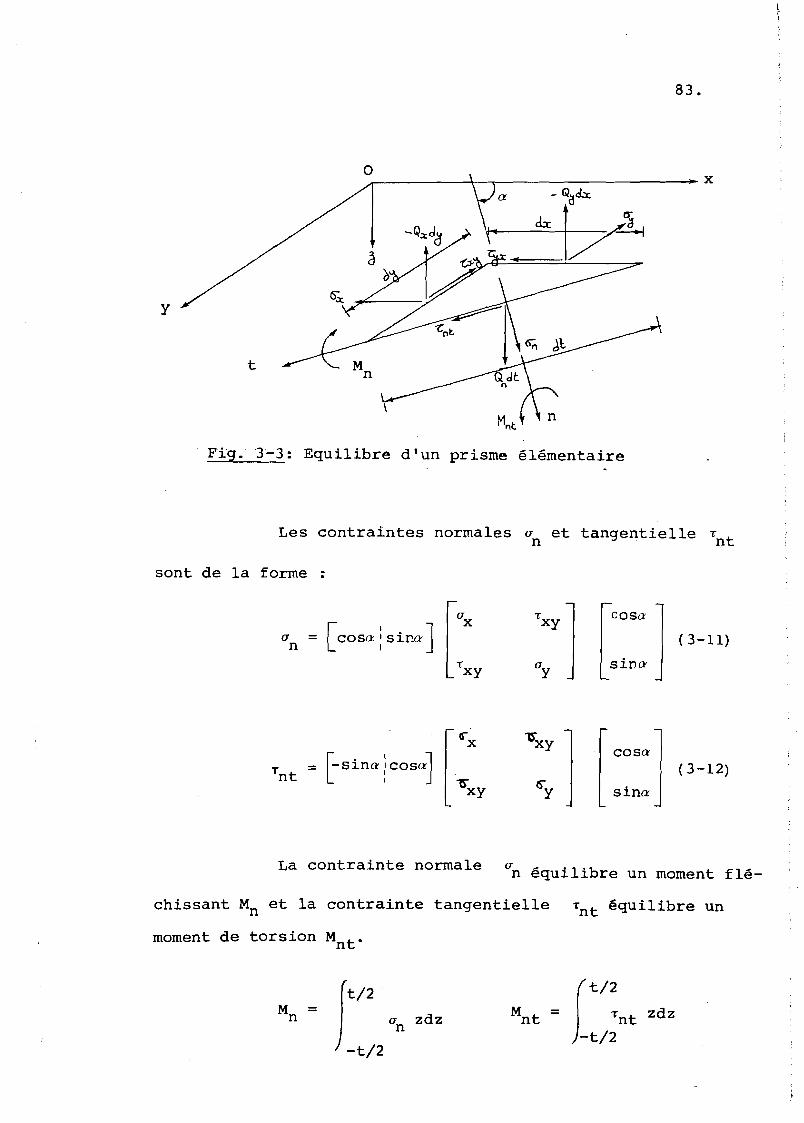
83.
0X
a - Qèld.:x:
dxf7Aa
y
t
Fig. 3-3: Equilibre d'un prisme élémentaire
Les contraintes normales an et tangentielle Tnt
sont de la forme :
(3-11)
= [-Sina 1cosaJ ["X1S"xy
1fx y
( 3-12)
La contrainte normale an équilibre un moment flé-
chissant Mn et la contrainte tangentielle Tnt équilibre un
moment de torsion Mn t"
Mnt
- (t/~nt zdz
)-t/2
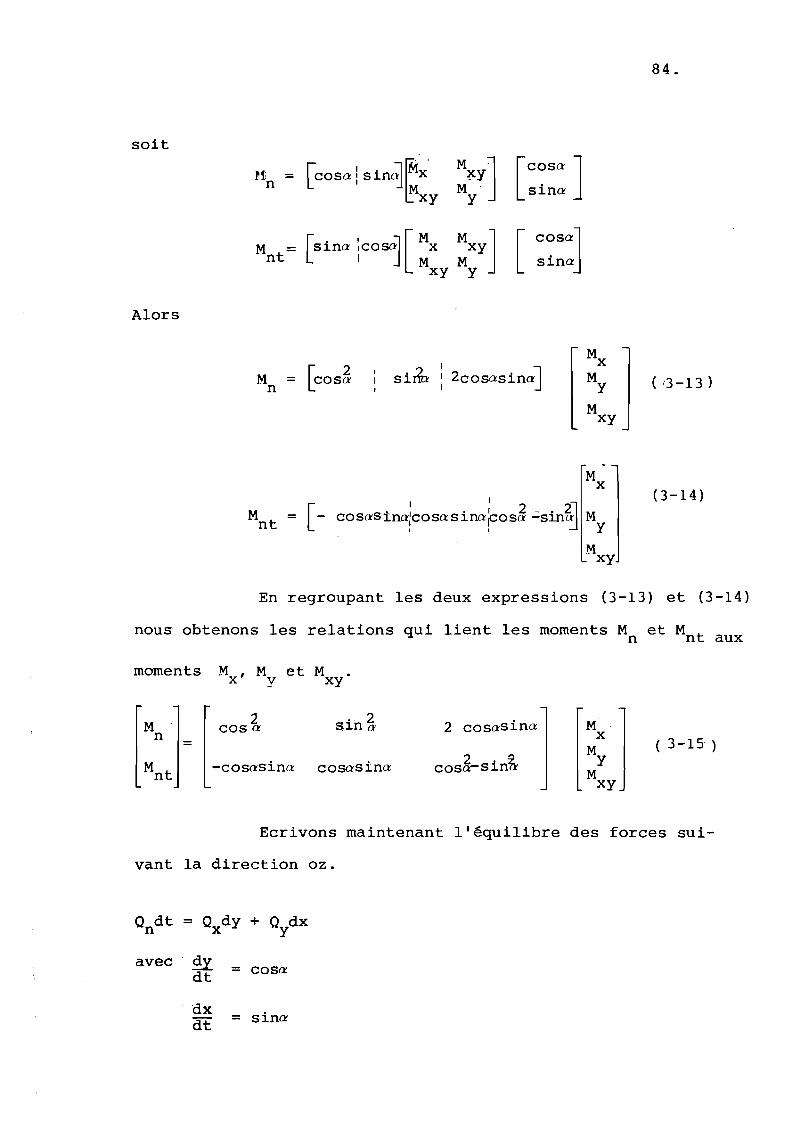
84.
soit
ttn M J~y
MY
[ c~sa JSlna
Alors
M = [sina :cos;] [ Mx MXY]nt 1 J M M
xy y[
c~saJSlna
sirfu 2cosasina] ( 13-13 )
Mx
t : .: 2-. 4l McosaS na,cosaslna,cosa -sm~l , Y
Mxy
(3-14)
En regroupant les deux expressions (3-13) et (3-14)
nous obtenons les relations qui lient les moments Mn et Mn t aux
moments M , M et Mx y xy
Mn =
2cos a
-cosasina cosasina
2 cosasina
2 ..!)cosa-sln"lk
M .x
MyMxy
( 3-15 )
Ecrivons maintenant l'équilibre des forces sui-
vant la direction oz.
Ondt = ° dy + Qydxx
avec ~ = cosadt
dx sinadt =
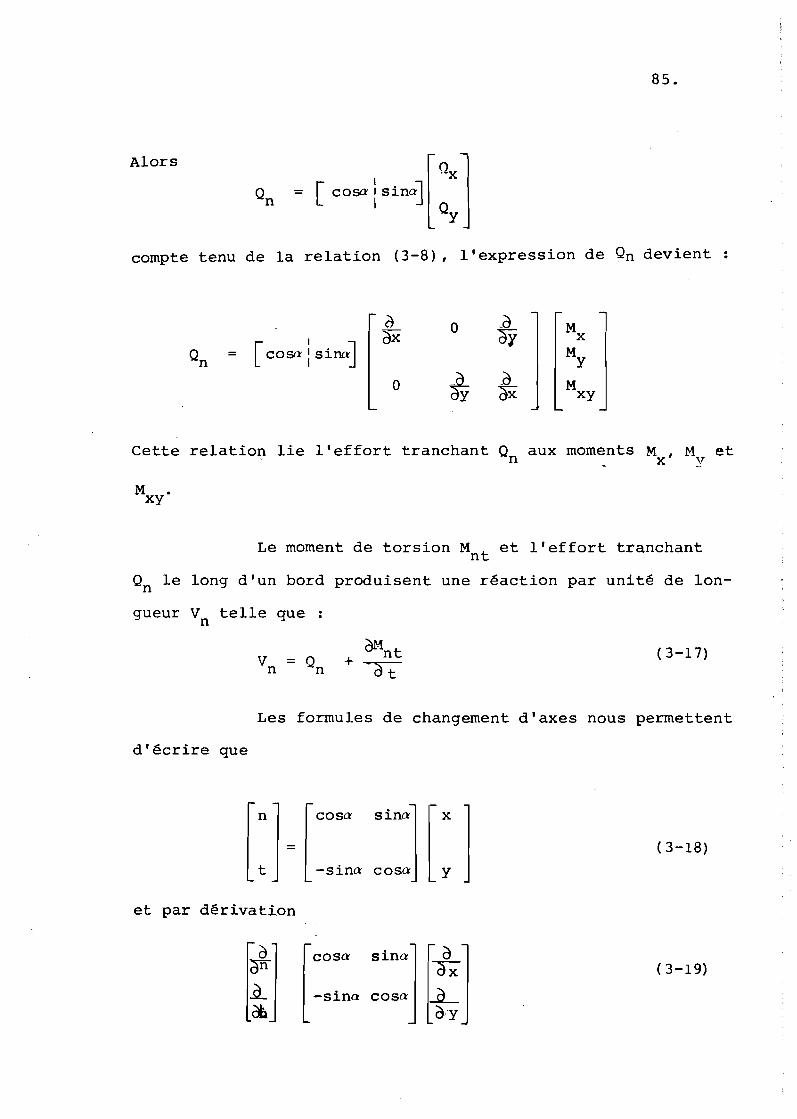
85.
Alors
compte tenu de la relation (3-8), l'expression de Qn devient
a 0 -ô Mx
[cosa lsina]ôx dY
Qn = My
0 fy ~ Môx xy
Cette relation lie l'effort tranchant Qn aux moments Mx' Mv
et
Mxy
Le moment de torsion Mn t
et l'effort tranchant
Qn le long d'un bord produisent une réaction par unité de lon
gueur Vn telle que :
(3-17)
Les formules de changement d'axes nous permettent
d'écrire que
[n] [cosa .: [X ]t = -sina cosa y
et par dérivation
~] [cosa s ina] 1- Ô ]
l~ -sina casa [;:
( 3-18)
( 3-19)
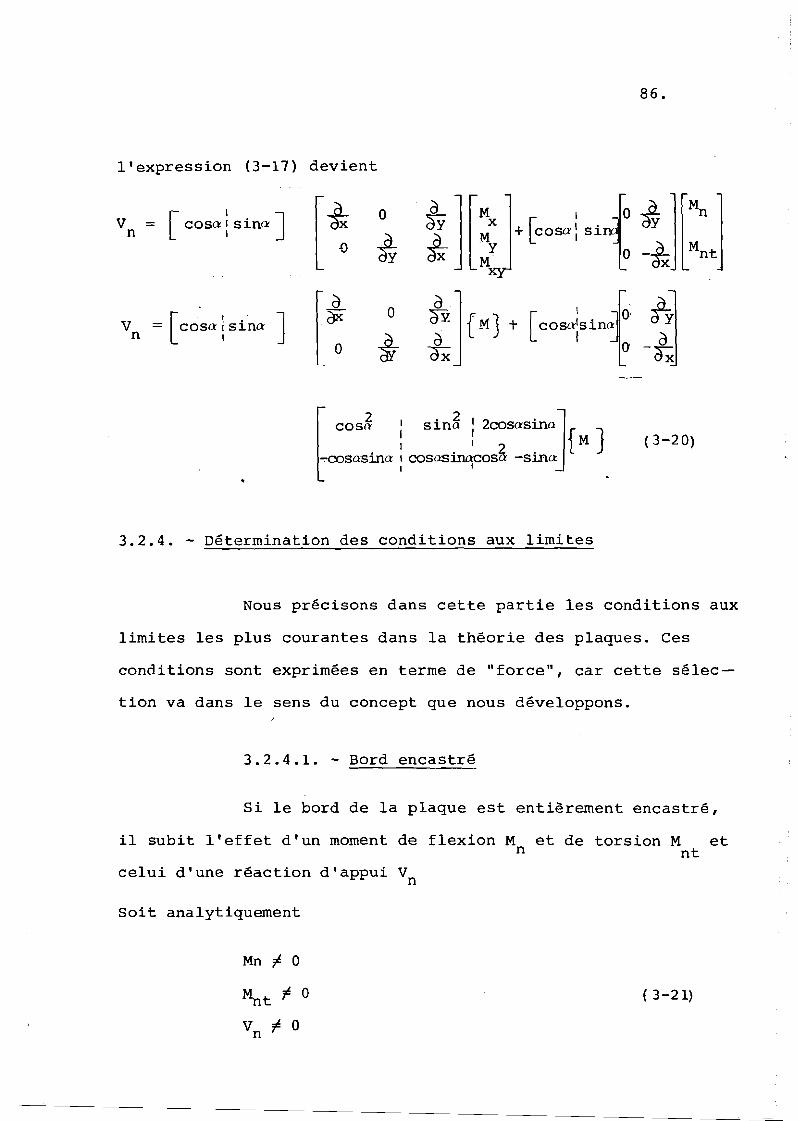
86.
l'expression (3-17) devient
V [cosa: s Lno ] [~0 tx][:x + [casa: Si{ ~ ][~ ]=n
t dX MY 0 -~ Mnt
= [cosa !s Ln« ] [~0 ~] {Ml + [casœ;sin{ ~Vn
~ di () -d;{
~2
1,2 1 2 'Jcos« 1 s i nc 1 cosœsano { J1 1 2 M
-cososdne : cosasinqcosa -sina .
3.2.4. - Détermination des conditions aux limites
(3-20)
Nous précisons dans cette partie les conditions aux
limites les plus courantes dans la théorie des plaques. Ces
conditions sont exprimées en terme de "force", car cette sélec-
tion va dans le sens du concept que nous développons.
3.2.4.1. - Bord encastré
Si le bord de la plaque est entièrement encastré,
il subit l'effet d'un moment de flexion M et de torsion M etn nt
celui d'une réaction d'appui Vn
Soit analytiquement
( 3-21)
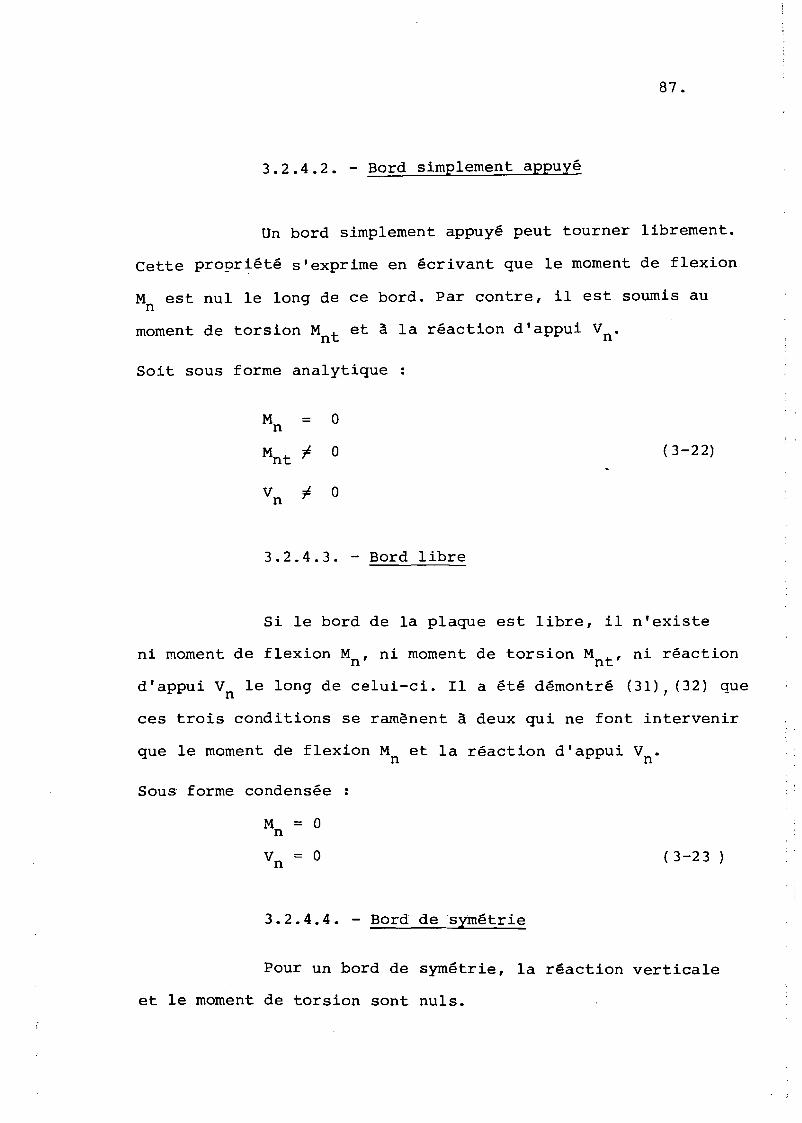
87.
3.2.4.2. - Bord simplement appuvé
Un bord simplement appuyé peut tourner librement.
Cette propriété s'exprime en écrivant que le moment de flexion
M est nul le long de ce bord. Par contre, il est soumis aun
moment de torsion M t et à la réaction d'appui V •n n
Soit sous forme analytique
( 3-22)
3.2.4.3. - Bord libre
Si le bord de la plaque est libre, il n'existe
ni moment de flexion M , ni moment de torsion M t' ni réactionn n
d'appui Vn le long de celui-ci. Il a été démontré (31), (32) que
ces trois conditions se ramènent à deux qui ne font intervenir
que le moment de flexion M et la réaction d'appui V •n n
Sous forme condensée
( 3-23 )
3.2.4.4. - Bord de symétrie
Pour un bord de symétrie, la réaction verticale
et le moment de torsion sont nuls.
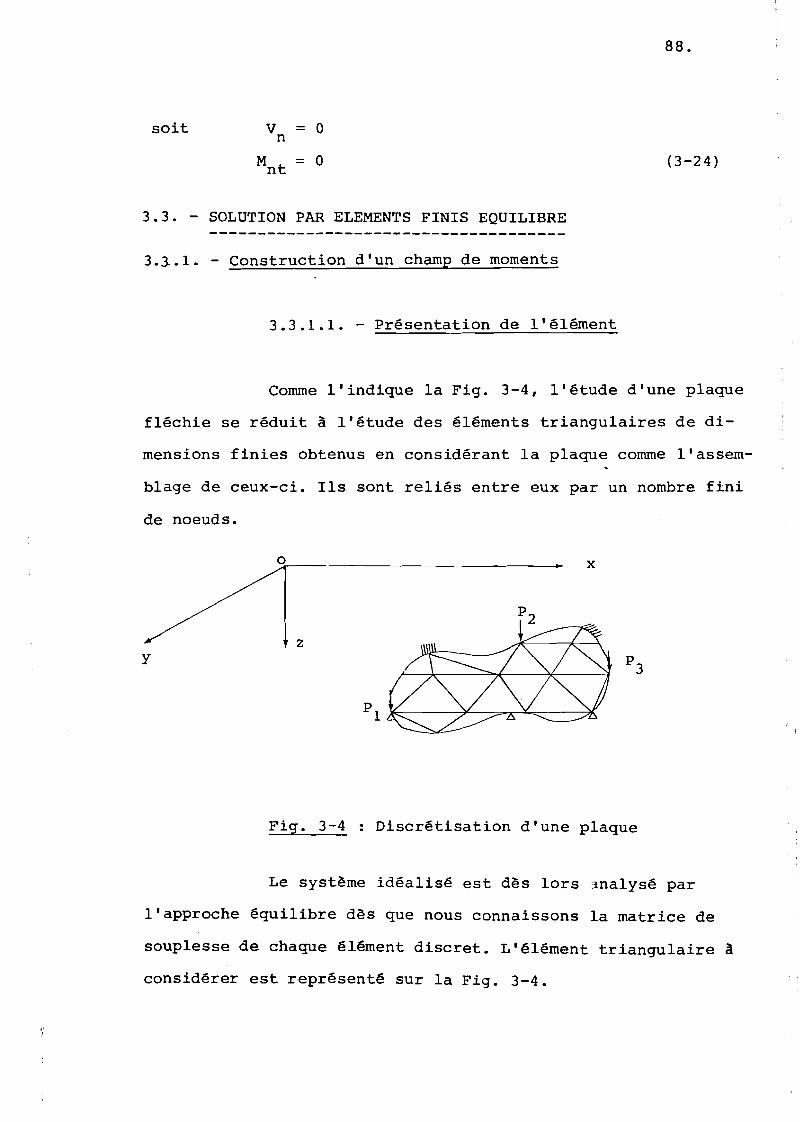
soit v = 0n
88.
(3-24)
3.3. - SOLUTION PAR ELEMENTS FINIS EQUILIBRE
3.3..1. - Construction d'un champ de moments
3.3.1.1. - Présentation de l'élément
Comme l'indique la Fig. 3-4, l'étude d'une plaque
fléchie se réduit à l'étude des éléments triangulaires de di-
mensions finies obtenus en considérant la plaque comme l'assem-
b1age de ceux-ci. Ils sont reliés entre eux par un nombre fini
de noeuds.
zy
Fig. 3-4
x
Discrétisation d'une plaque
,.},
Le système idéalisé est dès lors analysé par
l'approche équilibre dès que nous connaissons la matrice de
souplesse de chaque élément discret. L'élément triangulaire à
considérer est représenté sur la Fig. 3-4.
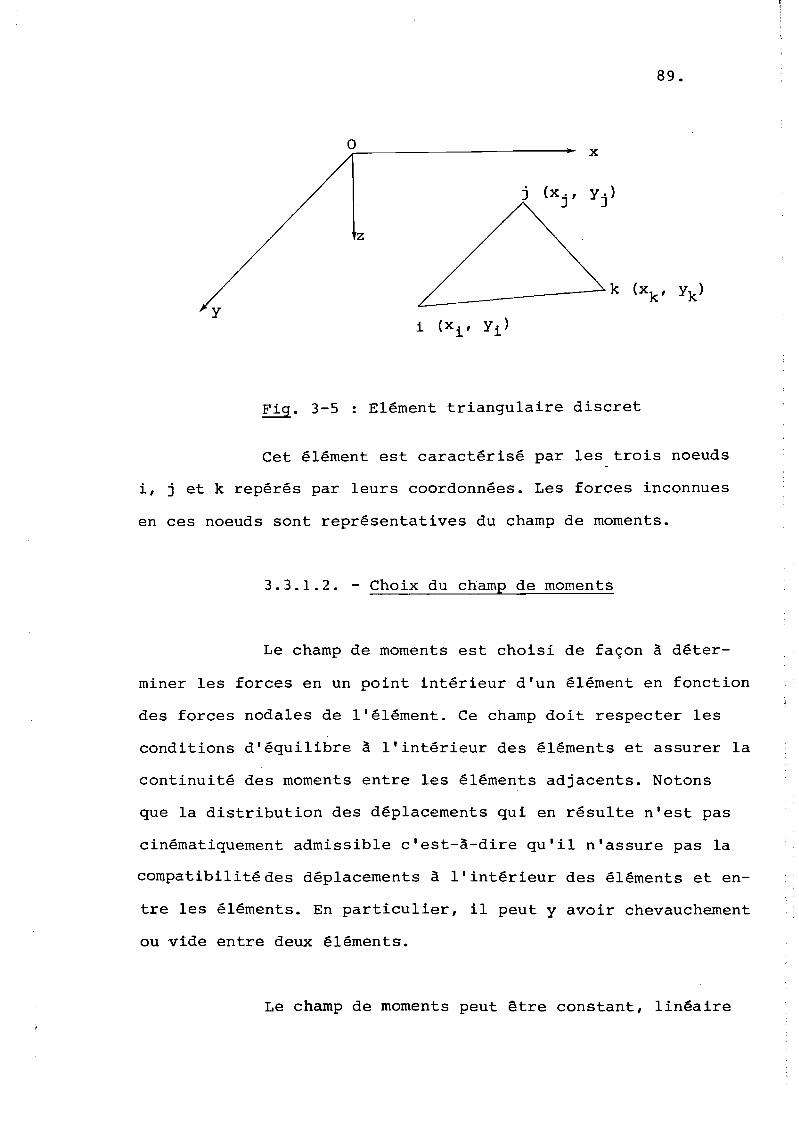
o
z
x
j (x., y.)J J
89.
y
Fig. 3-5 : Elément triangulaire discret
Cet élément est caractérisé par les trois noeuds
i, j et k repérés par leurs coordonnées. Les forces inconnues
en ces noeuds sont représentatives du champ de moments.
3.3.1.2. - Choix du champ de moments
Le champ de moments est choisi de façon à déter-
miner les forces en un point intérieur d'un élément en fonction
des forces nodales de l'élément. Ce champ doit respecter les
conditions d'équilibre à l'intérieur des éléments et assurer la
continuité des moments entre les éléments adjacents. Notons
que la distribution des déplacements qui en résulte n'est pas
cinématiquement admissible c'est-à-dire qu'il n'assure pas la
compatibilitédes déplacements à l'intérieur des éléments et en-
tre les éléments. En particulier, il peut y avoir chevauchement
ou vide entre deux éléments.
Le champ de moments peut être constant, linéaire
90.
ou quadratique :
- Le champ de moments constant c'est le champ le plus sim-
pIe. Il a été testé par ALLMAN (33). Il vérifie les équations
d'équilibre mais viole celle des déplacements.
- Le champ de moments linéaire : Ce champ a été décrit par
FRAEIJS DE VEUBEKE et SANDER (24). La particularité de l'élêment
triangulaire qu'ils ont développé est que les axes ox et oy coin-
cident avec deux côtés du triangle. L'équation d'équilibre des
plaques n'est pas vérifiée. En tournant la difficulté, nous
observons que ce champ satisfait les équations d'équilibre en
l'absence des forces extérieures. Cet inconvénient est remédié
(24) en introduisant un terme quadratique au champ de moments
sans augmenter le nombre des forces généralisées inconnues de
l'élément. Les inconnues du problème adoptées dans ces travaux
sont: le moment normal M et l'effort tranchant de Kirchoffn
Vn le long d'un interface et la force verticale Zi en un noeud
i. Cette dernière force est le résultat du ~oment de torsion
Mn t , elle est telle que Zi = (M) - (M )nt i+O nt i-O
- Le champ de moments quadratique: Le champ de moments quadra-
tique complet compte 18 paramètres parmi lesquels 3 contribuent
à l'équilibre des charges appliquées. Par contre, il y a 19
forces généralisées inconnues (34).
Compte tenu des possibilités qui nous sont offer
tes, le choix du champ de moments devient délicat. Il est d'ail-
leurs fondamental pour la convergence des résultats du problè-
91.
me. Les spécialistes s'accordent à construire des champs com
plexes pour approcher la solution exacte. Dans notre étude,
nous adoptons un champ de moments linéaire.
Pour ce champ, trois cas se présentent
1° - Le nombre de forces intérieures inconnues est inférieur
au nombre de paramètres du champ de moments. Ce cas nous con
duit à une solution qui n'est pas admissible. En effet, comme
le note M. LEMAIRE (29) les matrices obtenues sont singulières,
il faut donc éliminer à la résolution les modes d'auto contra in-
tes.
2° - Le nombre de forces intérieures inconnues est égal au nom
bre de paramètres du champ de moments. Les champs d'autocontrain
tes sont éliminés au niveau des éléments. Il est alors facile
d'établir les relations entre le champ de moments et les for-
ces intérieures inconnues d'une part, entre les forces inté
rieures inconnues et les forces nodales d'autre part. En même
temps les expressions des matrices de souplesse élémentaires
deviennent faciles à calculer.
3° - Le nombre de forces intérieures inconnues est suoérieurL
au nombre de paramètres. Ce cas se présente lorsqu'il existe
des relations entre les forces inconnues. Ainsi si nous avons
n forces nodales, seuls n-3 forces sont indépendantes, les
3 autres sont des combinaisons des équations d'équilibre.
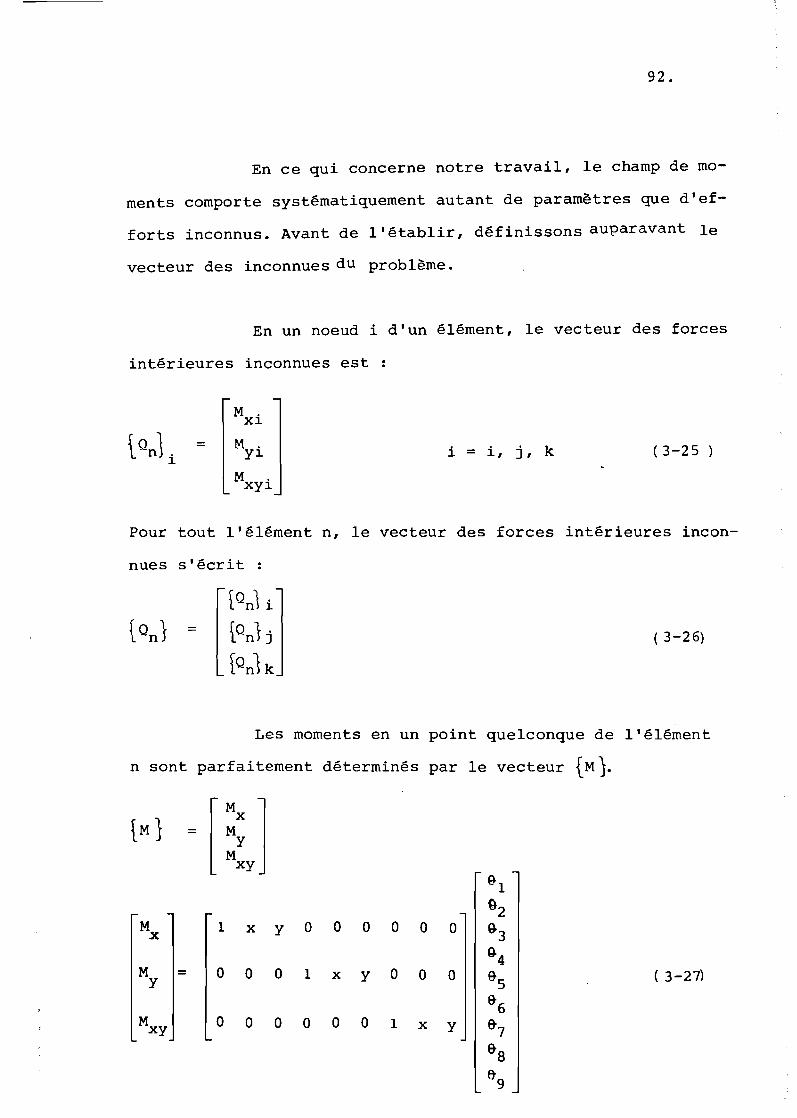
92.
En ce qui concerne notre travail, le champ de mo-
ments comporte systématiquement autant de paramètres que d'ef
forts inconnus. Avant de l'établir, définissons auparavant le
vecteur des inconnues du problème.
En un noeud i d'un élément, le vecteur des forces
intérieures inconnues est :
n, le vecteur des forces intérieures incon-
Mxi
lQn1. = Myi1
M .XYl
Pour tout l'élément
nues s'écrit ..[Qn\ i
tQn l = tOn1 j
tQn1 k
i = i, j, k ( 3-25 )
( 3-26)
Les moments en un point quelconque de l'élément
n sont parfaitement déterminés par le vecteur {M).
{M} = [:~J~l
Q2M l x y 0 0 0 0 0 0 9-3x
MQ.4
= 0 0 0 l x y 0 0 0 ~5 ( 3-27)Y
&6Mx y 0 0 0 0 0 0 l x y &7
&8
6'9
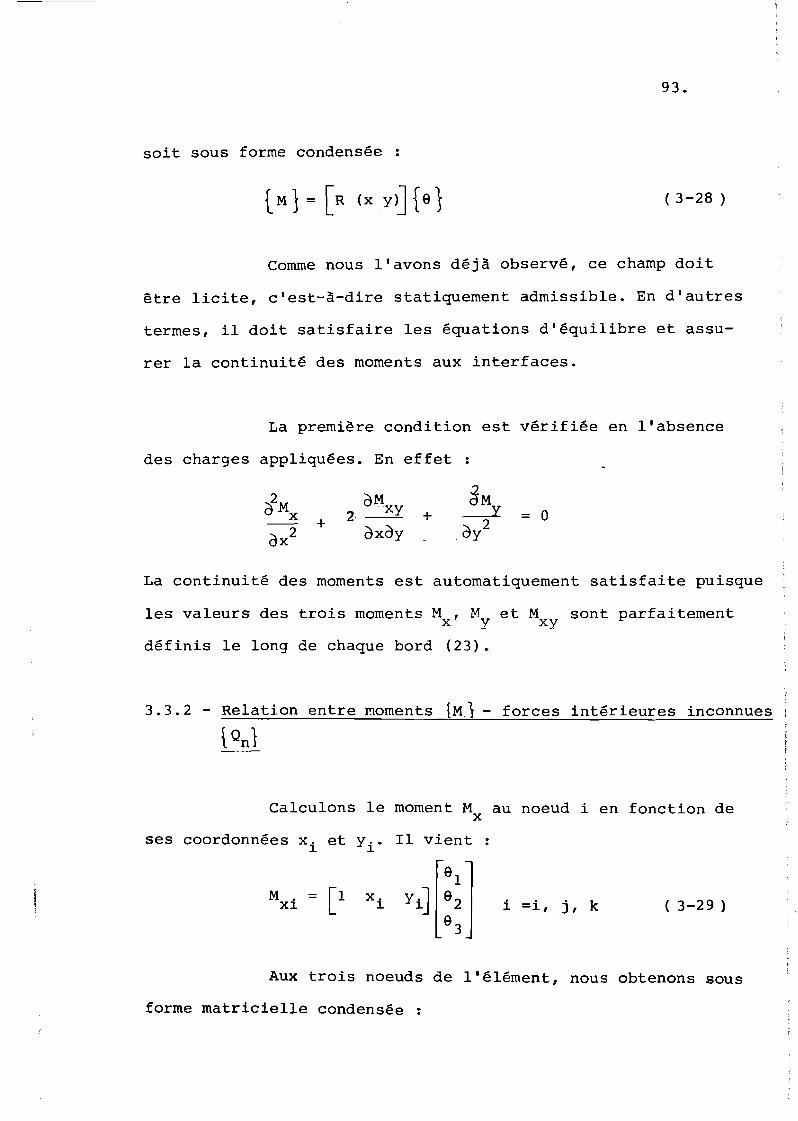
93.
soit sous forme condensée :
( 3-28 )
Comme nous l'avons déjà observé, ce champ doit
être licite, c'est-à-dire statiquement admissible. En d'autres
termes, il doit satisfaire les équations d'équilibre et assu-
rer la continuité des moments aux interfaces.
La première condition est vérifiée en l'absence
des charges appliquées. En effet
+àr-ixy
2àxày
+ = a
La continuité des moments est automatiquement satisfaite puisque
les valeurs des trois moments M , M et M . sont parfaitementx y xy
définis le long de chaque bord (23).
3.3.2 - Relation entre Moments {M,} - forces intérieures inconnues
Calculons le moment M au noeud i en fonction dex
ses coordonnées xi et Yi· Il vient
M = [1 xi Yi] [:~]xi i =i, j, k ( 3-29 )
Aux trois noeuds de l'élément, nous obtenons sous
forme matricielle condensée :
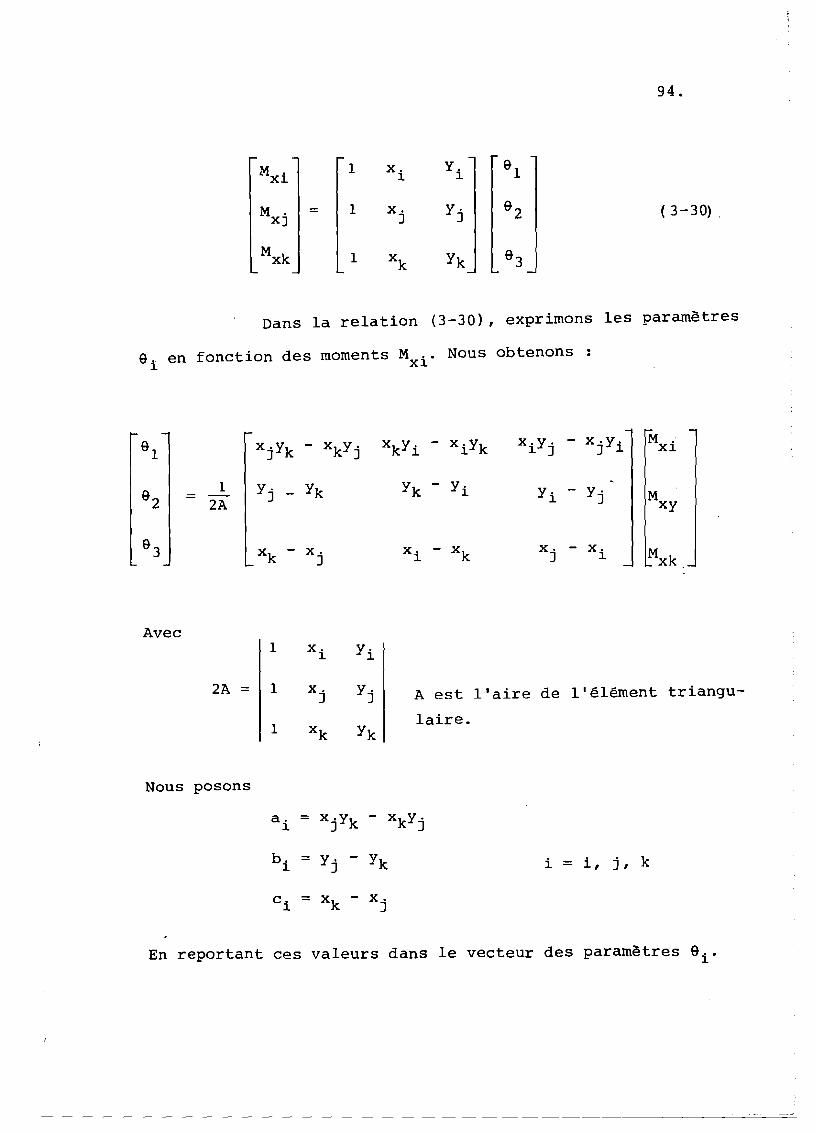
94.
Mx i1 x. Y. 9 11 1
M . = 1 x. y. 9 2 ( 3-30) .XJ J J
Mxk 1 xk Yk 9 3
Dans la relation (3-30), exprimons les paramètres
91,. en fonction des moments M .. Nous obtenons:
Xl
9 1 xjYk - xkYj xkYi - xiYk x.y. - x.y. Mxi1 J J 1
1 y. Yk Yk - Yi9 2 = J - Yi - y. M2A J xY
9 3 x k - x. xi - x k x· - x.J J 1 Mxk
Avec1 xi y.
1
2A = 1 x. y. l'aire de l'élément triangu-J J A est
1 x k Yklaire.
Nous posons
ai = xjYk - xkYj
b i = y. - YkJ i = i, j, k
ci = x k - x.J
En reportant ces valeurs dans le vecteur des paramètres 9 ..1
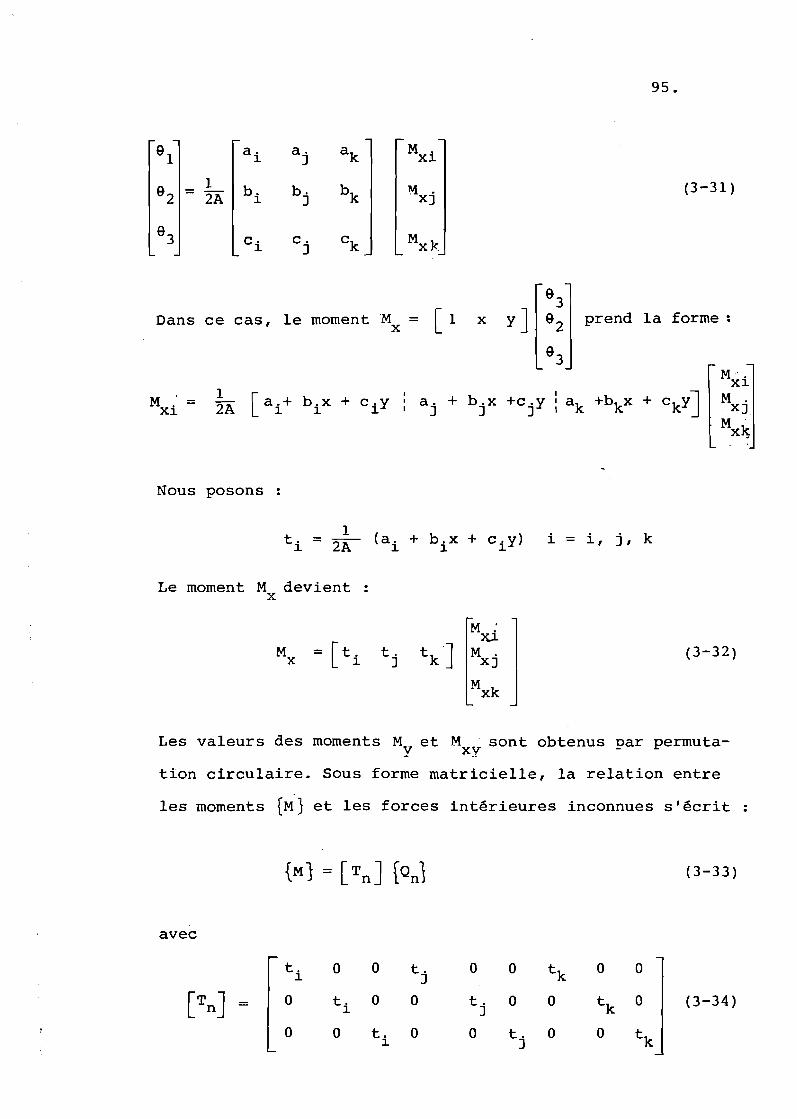
95.
9 1 ai a. a kMxiJ
9 21 b i b. b k M (3-31 )= 2A xjJ
9 3 ci c. c k Mxl<J
93
Dans ce cas, le moment Mx = [1 x y ] 9 2 prend la forme;
9 3M'.
XlM .. XJ.M .x~
Nous posons
Le moment M devientx
t.J
M .xaM.
XJ
Mxk
(3-32)
Les valeurs des moments My et MXY
sont obtenus par permuta
tion circulaire. Sous forme matricielle, la relation entre
les moments [Ml et les forces intérieures inconnues s'écrit
(3-33)
avec
t. 0 0 t. 0 0 t k 0 01 J
[TnJ = 0 t i 0 0 t. 0 0 t k 0 (3-34)J
0 0 t. 0 0 t j 0 0 t k1
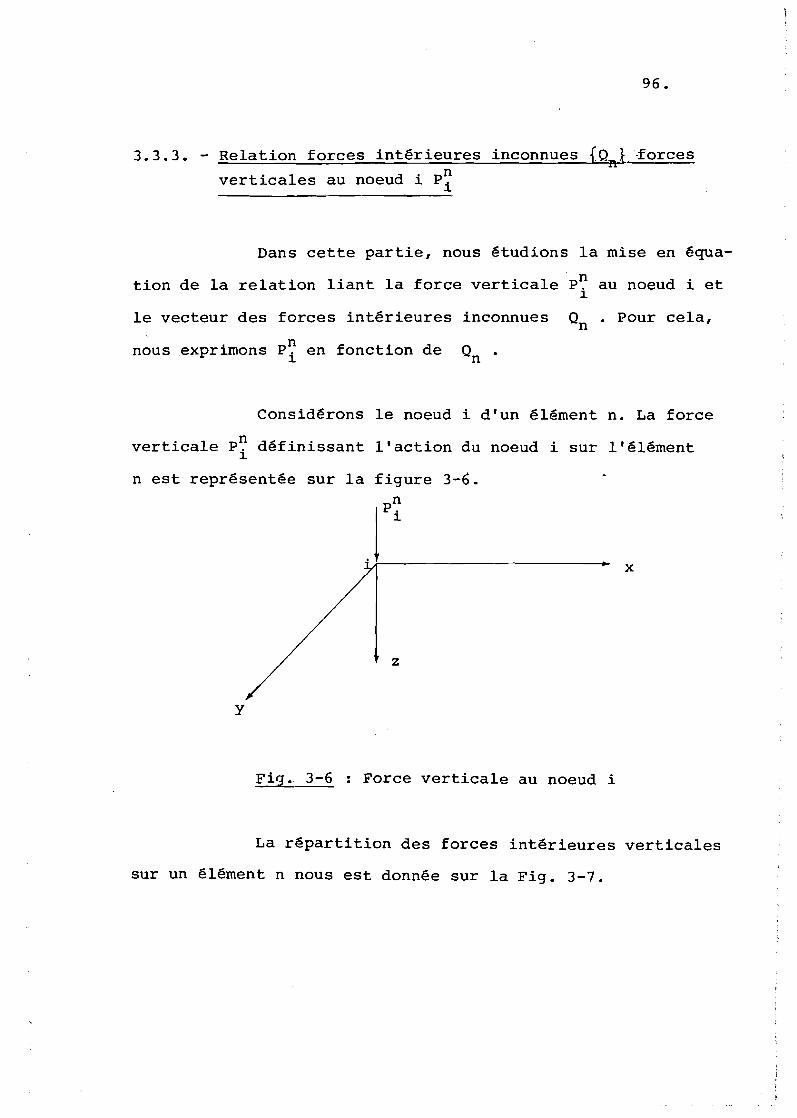
96.
3.3.3. - Relation forces intérieures inconnues {Qfil.~orces
verticales au noeud i P~a
Dans cette partie, nous étudions la mise en équa
tion de la relation liant la force verticaleP~ au noeud i eta
le vecteur des forces intérieures inconnues
nous exprimons P~ en fonction de Qn.
Q . Pour cela,n
Considérons le noeud i d'un élément n. La force
verticale P~ définissant l'action du noeud i sur l'élémenta
n est représentée sur la figure 3-6.
x
z
y
Force verticale au noeud i
La répartition des forces intérieures verticales
sur un élément n nous est donnée sur la Fig. 3-7.
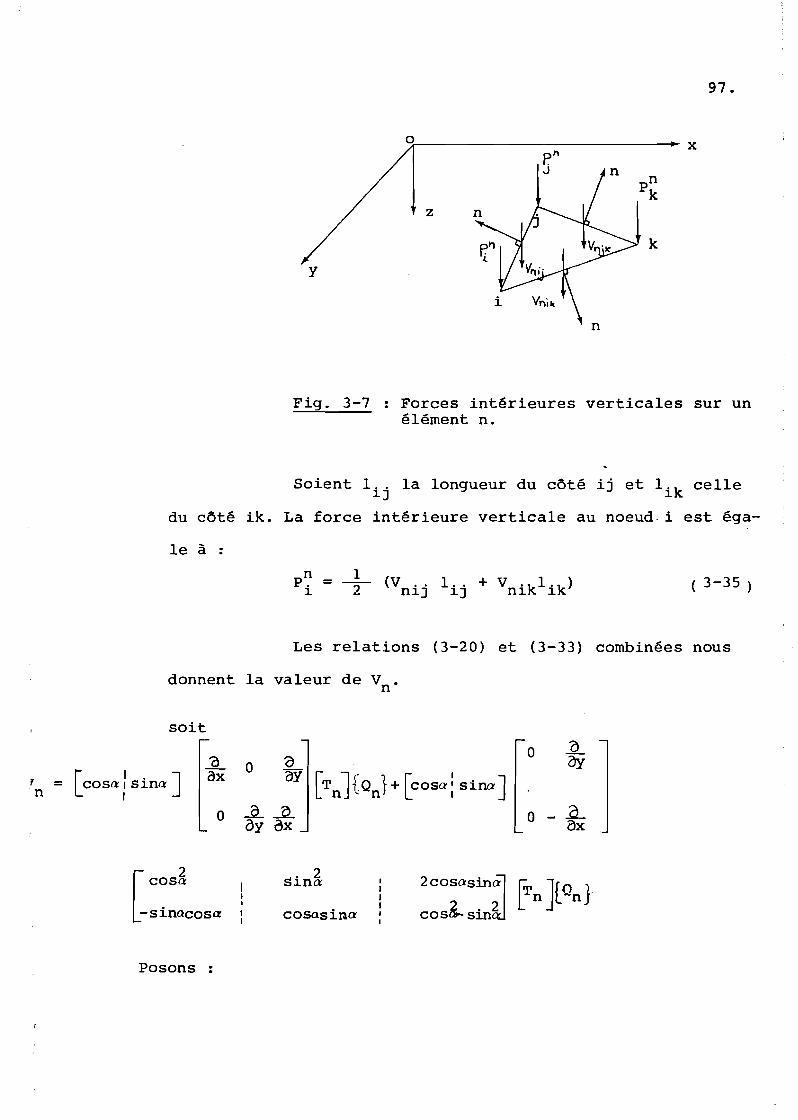
97.
k
z
r----------------~xo
y
Fig. 3-7 Forces intérieures verticales sur unélément n.
Soient lij la longueur du côté ij et lik celle
du côté ik. La force intérieure verticale au noeud i est éga-
le à :
P~ =1
l2 (V " l,. + V 'kl.k)n1) 1) n1 1 ( 3-35 )
Les relations (3-20) et (3-33) combinées nous
donnent la valeur de Vn .
soit
o'n = [cosa/sinaJ
o
ô
oY [Tnl{Qnl + [cosa: sina ]
..Q. -aôy dx
o
o - aâx
[
2cosa
-sinacosa
... ' 2Q1na
cosasina
Posons

c.-b.cosasina 2b.sin&1 1 1
Alors
b.-c.cosasina1 1
b. cosasina1
C. COSa sina1
98.
22c.cosa1
i=i,j,k
Vn = ~A [cosa sinaJ
Il faut noter que V est constant le long d'un côté.n
Posons encore
. 2 2 ..C.cosa .. Slna... c r cos a-..1 1) 1) 1 ;L)
b1. - C. cosa . . s Lnc,.
1 1)1D
b .i cosa . . slna ..1) 1)
i =i, j, k.
c.-b.cosa .. sina ..1 1 1) 1)
2b .. 2. s~n a ..1 1)
(a . .>J= [T.( 1: •• i: TJ. (a ..>
1) 1 1) ~ 1)
i = i, j, k.
Finalement, l'expression donnant la force inté-
rieure verticale au noeud i en fonction du vecteur des forces in-
térieures inconnues se met sous la forme
, ~-
i = i, j, k (3-37>
Soit {Pn1le vecteur des actions des noeuds i, j
et k sur l'élément n.
99.
La relation constituant les équations d'équilibre
aux noeuds de l'élément n s'écrit:
( 3-38 )
où [~QJ est la matrice qui lie les forces intérieures vertica
les aux forces intérieures inconnues de l'élément n.
3.3.4. - Matrice de connexion et conditions limites
Dans ce paragraphe nous résumons les transforrna-
tions qui sont apportées au système d'équations d'équilibre
(3-38) .
En théorie des poutres, les équations d'équili-
bre et les conditions de continuité des efforts de chaque côté
d'un noeud sont automatiquement vérifiées car l'interface entre
deux éléments de poutre est réduit à leur extrémité commune qui
est le noeud. Ce n'est pas le cas pour vérifier les conditions
de continuité d'un élément de plaque fléchie. En effet, en ana-
lyse par éléments finis, ces conditions doivent être satisfaites
non seulement à l'intérieur de l'élément et aux frontières ex-
térieures mais aussi aux interfaces. La continuité des efforts
à l'intérieur de l'élément est immédiate en raison de la continui-
té du champ de moments linéaire choisi. Les problèmes de discon-
tinuité apparaissent au passage des interfaces et en particulier
aux trois noeuds extrêmes. Il suffit d'imposer la valeur des mo-
100.
ments pour restituer la continuité des efforts au passage des
frontières de l'élément.
La matrice de connexion que nous définissons ici
est composée des coefficients des équations de continuité et
des conditions limites. Les premières sont de la forme :
( 3-39 a)
où i est le noeud commun aux éléments k et 1. Les équations des
conditions limites sont obtenues en imposant par exemple
M_ . = 0XYl
pour un noeud i placé le long d'un bord de symétrie.
( 3-39 b j
Nous obtenons ainsi un système d'équations sup-
plémentaires dont les coefficients forment la matrice de con-
nexion. . Chaque équation élimine une force intérieure inconnue
et le degré d'hyperstaticité se trouve réduit. Dans le même
temps, le nombre total des équations d'équilibre augmente. Autre-
ment dit, le système d'équations d'équilibre de la structure est
maintenant formé des équations (3-38) augmentées des équations
(3-39). La matrice obtenue à partir de ce système constitue la
matrice de coefficients relative aux forces intérieures inconnues.
Comme en théorie des poutres, cette matrice est indispensable pour
le procédé d'élimination de' 'GAUSS-JORDAN.
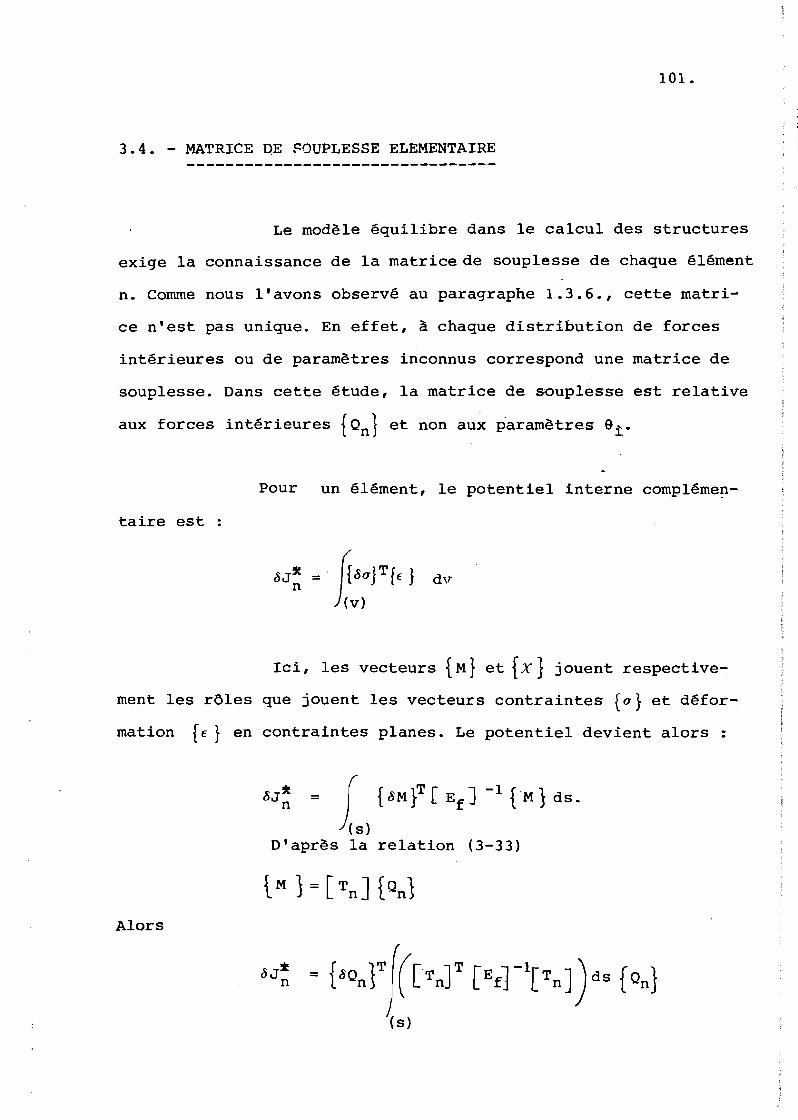
101.
3.4. - MATRICE PE ~OUPLESSE ELEMENTAIRE
Le modèle équilibre dans le calcul des structures
exige la connaissance de la matrice de souplesse de chaque élément
n. Comme nous l'avons observé au paragraphe 1.3.6., cette matri-
ce n'est pas unique. En effet, à chaque distribution de forces
intérieures ou de paramètres inconnus correspond une matrice de
souplesse. Dans cette étude, la matrice de souplesse est relative
aux forces intérieures {On! et non au~ paramètres 9 t .
Pour un élément, le potentiel interne compléme~-
taire est
Ici, les vecteurs {M} et fx} jouent respective-:
ment les rôles que jouent les vecteurs contraintes {a} et défor
mation {€} en contraintes planes. Le potentiel devient alors:
= f {8M}T[ Ef] -1 {"M} ds.
(s)D'après la relation (3-33)
8J~n
Alors
JJ~ = {JOn lT!([TnJT[Efr 1[Tn ] )dS {On}
(s)
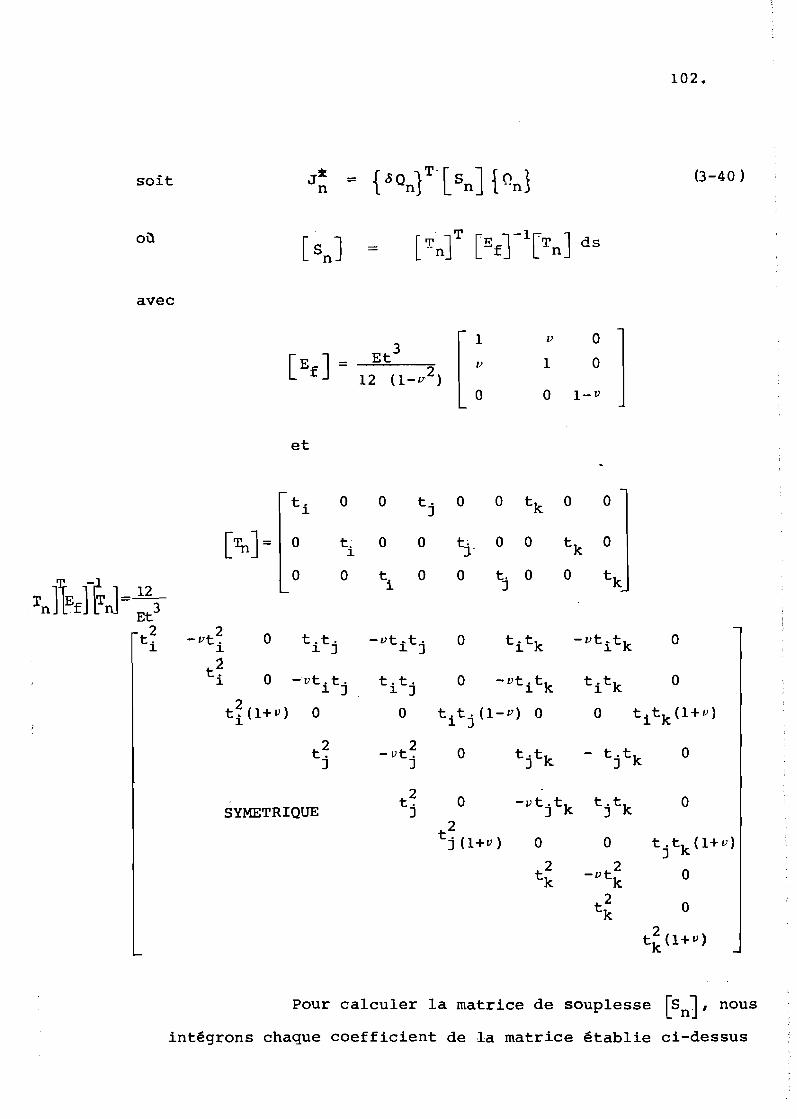
102.
soit (3-40 )
où
avec
v
1
o~ ]
I-v
et
o o t. 0J
o
o
oo
t. 0J
oo
oo
t.1
o
t~1
o
0 t.t. -vt~t. 0 titk -vtitk 01 J 1 J
0 -vt.t. t.t. 0 -vtitk titk 01 J 1 J
t~(l+V) 0 0 t.t.(l-V) 0 0 t i t k (l+V)1 1 J
t~ 2 0 tjtk - tjtk 0-vt.J J
t~ 0 -vtjtk tjtk 0SYMETRIQUE J
2t j (l+v) 0 0 t
jt
k(l+v)
t2 2
0-vtk k
t 20k
t 2(l+V)k
['rnJ= 0
Pour calculer la matrice de souplesse [Sn]' nous
intégrons chaque coefficient de la matrice établie ci-dessus

= 2!p!q!r!(p+q+r+2) !
103.
par rapport à la même variable. Ces intégrales sont de la
forme
.!.ftJ? t~ tr
d sA 1·1 k
(s)
Nous obtenons la matrice de. souplesse élémentai-
re [Sn] à calculer pour chaque élément.
2 -2v 0 1 -v 0 1 -v 0
2 0 -v 1 0 -v 1 0
2 (1+v) 0 0 (1+v)O 0 - (l+ v)
2 -2v 0 1 -v 0 (3-41)
[Sn]A SYMETRIQUE=
Et3 2 0 1 0-v
2 (1+v) 0 0 (1+v)
2 -2v 0
2 0
2 (l+ V )
3.5. - METHODE DE RESOLUTION
Nous venons de développer les principes de cons-
truction d'un élément triangulaire de plaque fléchie. Il s'agit
maintenant de mettre au point ou plutôt de choisir une métho-
de de résolution par éléments finis pour un programme de cal-
cul automatique. La méthode retenue est la méthode des forces
automatique exposée au paragraphe 1-4. En particulier, elle
104.
permet la détermination automatique d'un groupe compatible
d'inconnues hyperstatiques qui rend minimum l'énergie totale
complémentaire. Ainsi, la méthode développée au chapitre l
pour les ossatures est applicable à un problème de flexion
de plaque.
.--------------------------------------------11· 1
: CHAPITRE 4. : APPLICATIONS Nm1ERIQUES :1 • 1._-------------------------------------------.
105 .
lOG.
A partir de la théorie des poutres et de celle
des plaques nous avons mis au point deux programmes de cal
cul sur ordinateur. Ce chapitre est consacré aux applications
numériques. Elles sont réalisées dans un double but : vérifier
la précision et la qualité de convergence des résultats obte-
nus, comparer ces résultats aux solutions connues fournies
par d'autres méthodes. Les calculs ont été effectués sur l'or-
dinateur POP-ID du Centre Interuniversitaire de calcul de
l'Université de Clermont-Ferrand.
4.1 ... THEORIE DES POUTRES------------_._------
Plusieurs exemples ont été testés pour prouver
la tiabilité du programme élasto-plastique. Nous portons ici
deux exemples en théorie des poutres pour illustrer ce cha-
pitre. Le premier correspond à un problème de vérification
alors que le second est un problème de dimensionnement.
4 • l . 1. -' Problème de vérification
Le problème consiste à calculer le facteur de
charge À du portique présenté Fig. 4-1 (1'7).
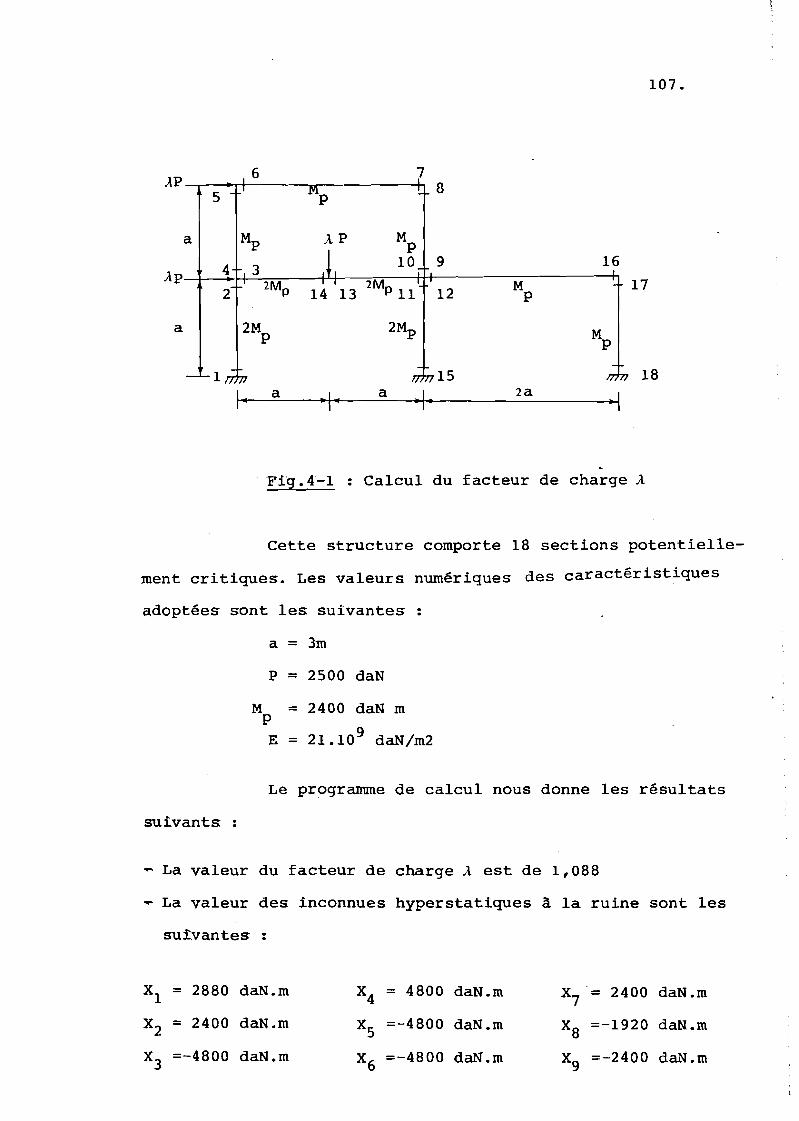
107.
ÀP6 7
85 P
a Mp ÀP MP
4 3 10 9 16Àp
2Mp 2Mp M 172 14 13 Il 12 P
a 2M 2Mp MP P
1 15 18
l- a -1" a ·1 .. 2a ·1
. Yig.4-1 Calcul du facteur de charge À
Cette structure comporte 18 sections potentielle
ment critiques. Les valeurs numériques des caractéristiques
adoptées sont les suivantes
a = 3m
p = 2500 daN
M = 2400 daN mp
E = 21.10 9 daN/m2
Le programme de calcul nous donne les résultats
suivants
La valeur du facteur de charge À est de 1,088
La valeur des inconnues hyperstatiques à la ruine sont les
suivantes :
Xl = 2880 daN.m X4 = 4800 daN.In X7 = 2400 daN.m
X2 = 2400 daN.m X5=-4800 daN.m X8
=-1920 daN.In
X3 =-4800 daN.m X6 =-4800 daN.m X9
=-2400 déiL'1 •m
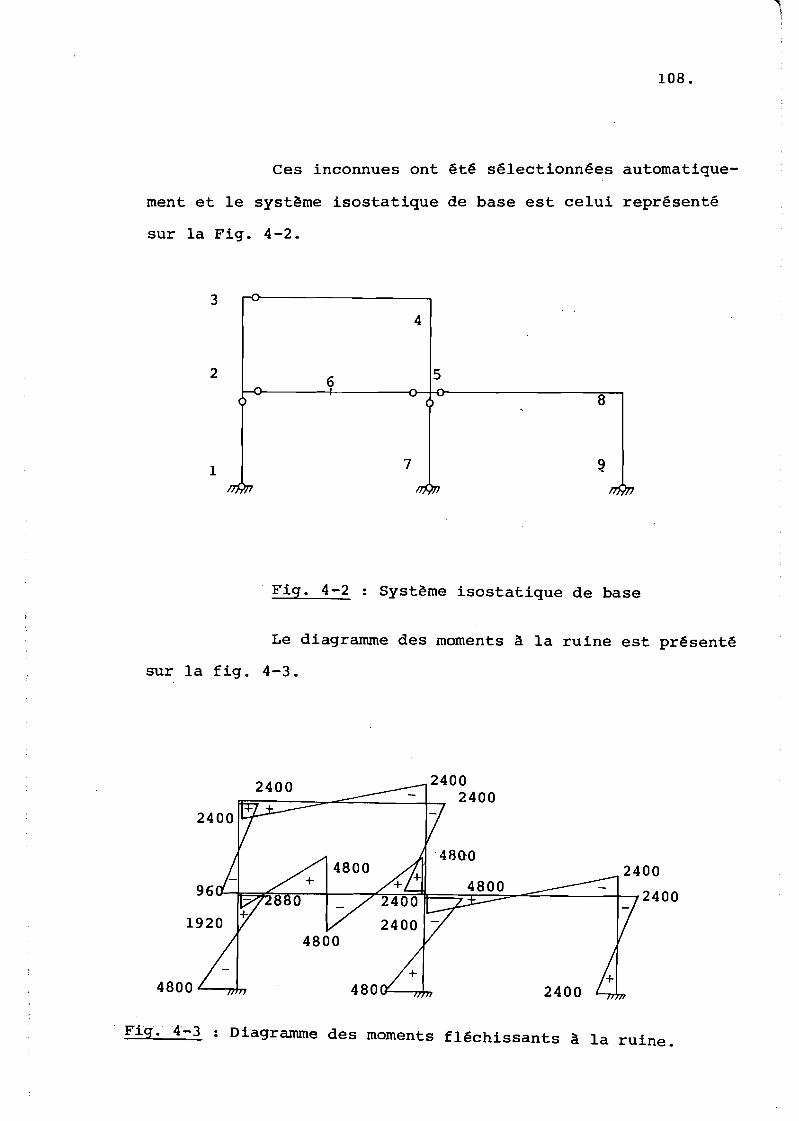
108.
Ces inconnues ont été sélectionnées automatique-
ment et le syst~me isostatique de base est celui représenté
sur la Fig. 4-2.
34
26 5
8
l 7
Fig.· 4-2 : Syst~me isostatique de base
Le diagramme des moments à la ruine est présenté
sur la fig. 4-3.
2400
24002400
480lf----n';"
2400
2400
u-E~roïi.----+--""7"'-m~F=::;;:;;-:r=-:::;:"--==:::::::'__---J1--t 2 40 0
4800 l---"77:m
Fig. 4-3 Diagramme des moments fléchissants à la ruine.
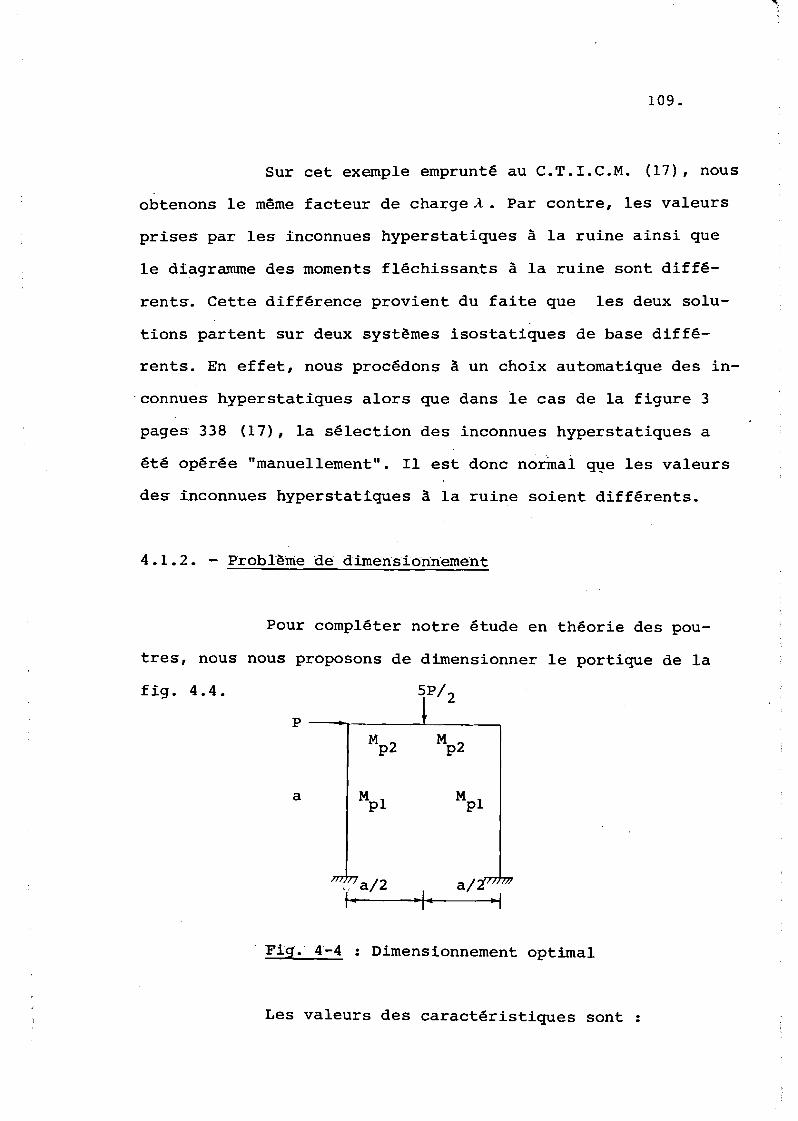
109.
Sur cet exemple emprunté au C.T.I.C.M. (17), nous
obtenons le même facteur de chargeA. Par contre, les valeurs
prises par les inconnues hyperstatiques à la ruine ainsi que
le diagramme des moments fléchissants à la ruine sont diffé-
rents. Cette différence provient du faite que les deux solu-
tions partent sur deux systèmes isostatiques de base diffé-
rents. En effet, nous procédons à un choix automatique des in-
connues hyperstatiques alors que dans le cas de la figure 3
pages 338 (17), la sélection des inconnues hyperstatiques a
été opérée "manuellement". Il est donc norinal q\le les valeurs
des inconnues hyperstatiques à la ruine soient différents.
4.1.2. - Problème de dimensionnement
Pour compléter notre étude en théorie des pou-
tres, nous nous proposons de dimensionner le portique de la
fig. 4.4.
P--....-----.4--__----...
a
... a/21~
al-1
Fi·g'.4-4 : Dimensionnement optimal
Les valeurs des caractéristiques sont :
110.
a = 3 m
P = 2000 daN
A = 10
2400 daN/cm2a =e
Nous imposons à priori que les poteaux ont les
mêmes sections et qu'il en est de même pour les poutres, ce
ci pour répondre à un souci de simplification de la construc
tion.
Le problème est donc de maximiser la fonction C = -6Mp 1- 3Mp 2
Les résultats fournit par le programme sont
La valeur de la fonction à minimiser C = 20250 daN.m2
La valeur des moments plastiques Mp 1 = 1500 daN.m
Mp 2 = 3750 daN.m
A partir des valeurs des moments plastiques, nous
pouvons choisir les profilés métalliques correspondants, dans
la gamme des produits fabriqués. Nous choisissons de préfé
rence des profils de type HEA pour les poteaux et des profils
de type IPE pour les poutres.
Si Mp = Z a le moment plastiquee
Z = 2S~ le module de flexion plastique
S : le moment statique de la moitié de la sec-X·
tion droite par rapport à l'axe de symé-
trie horizontal.
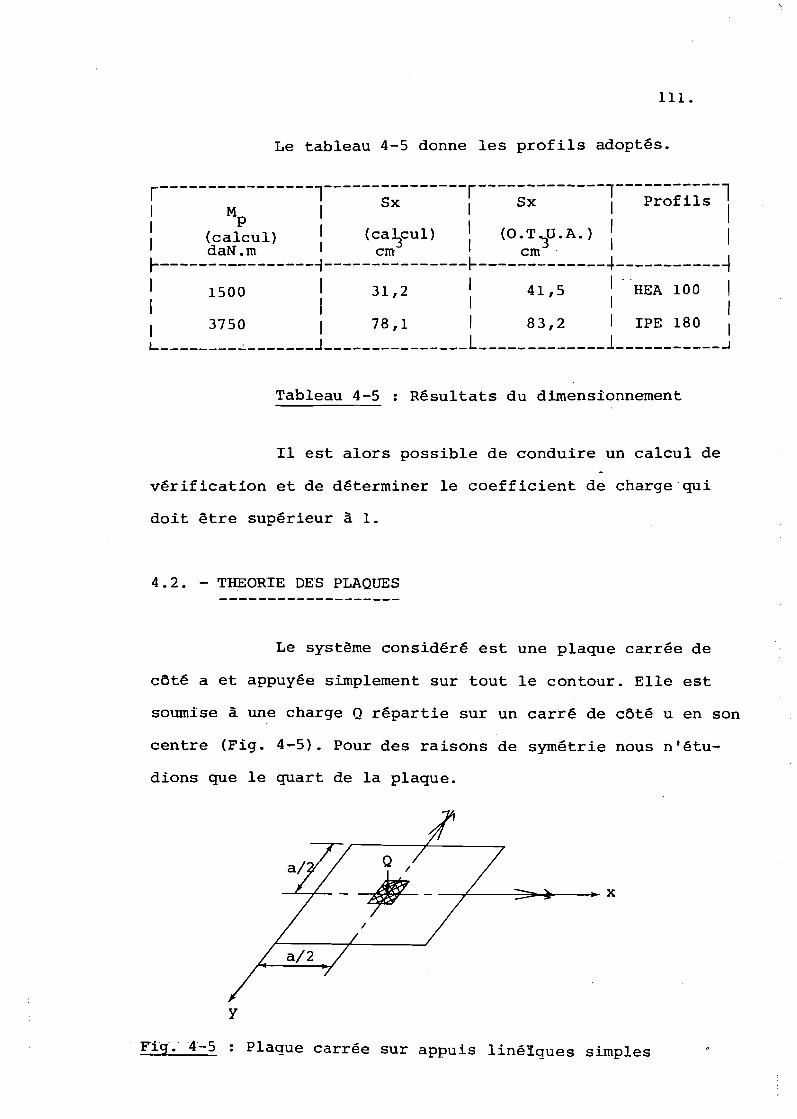
Ill.
Le tableau 4-5 donne les profils adoptés.
----------------l---------------r-------------l-------:---lr Sx 1 Sx 1 Prof~ls 11 Mp 1
1 1 1 1(calcul) (ca~cul) (O.T")U.A.) 1 1
1 daN. m 1 cm- 1 cm-
~----------------,---------------~-------------~-----------~1 1500 1 31 , 2 1 4 1 , 5 1 HEA 1 0 0 1
1 1 1 1 11 37 50 1 78 , 1 1 8 3 , 2 1 IPE 180 1L ~ J L 1 -----~
Tableau 4-5 Résultats du dimensionnement
Il est alors possible de conduire un calcul de
vérification et de déterminer le coefficient de charge qui
doit être supérieur à 1.
4.2. - THEORIE DES PLAqUES
Le système considéré est une plaque carrée de
côté a et appuyée simplement sur tout le contour. Elle est
soumise à une charge Q répartie sur un carré de côté u en son
centre (Fig. 4-5). Pour des raisons de symétrie nous n'étu-
dions que le quart de la plaque.
-~----:::::;:~t--_x
y
Fig.· 4-5 Plaque carrée sur appuis linéiques simples
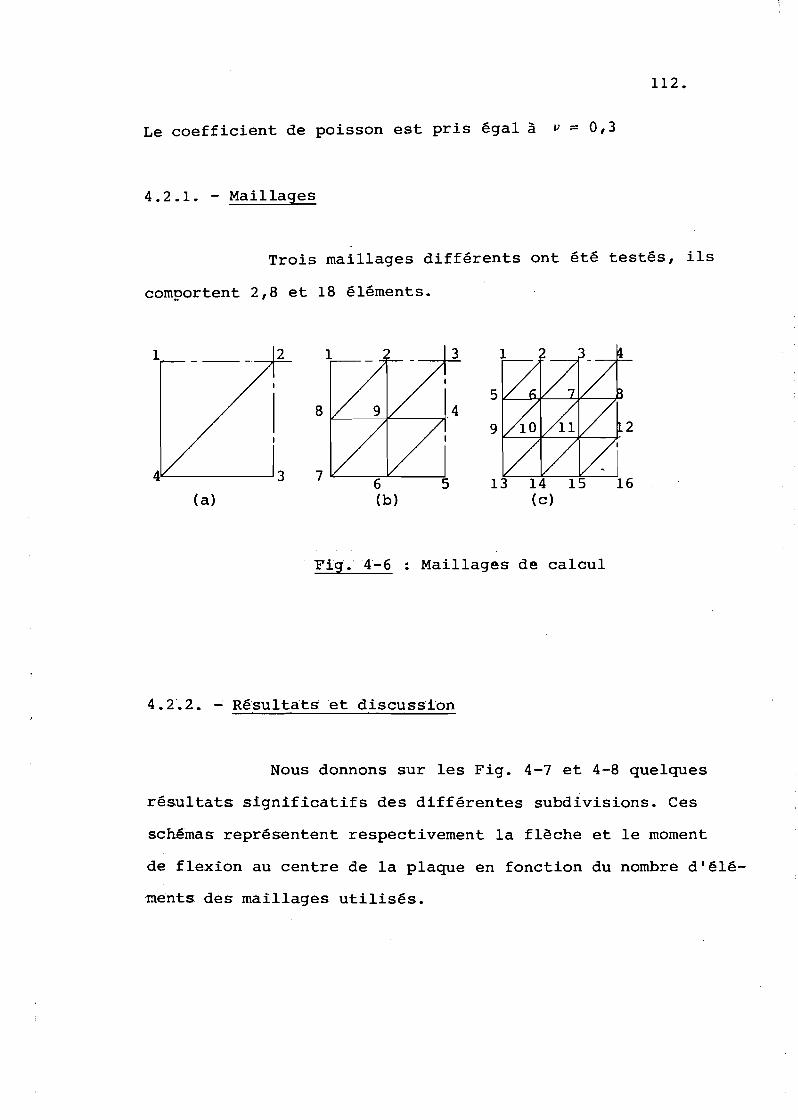
112.
Le coefficient de poisson est pris égal à v = 0,3
4.2.1. - Maillages
Trois maillages différents ont été testés, ils
comportent 2,8 et 18 éléments.
5 1L-----lJ.,,IL-----L.,joL---jJ
91'---:fL---+---J
31
(a)
~-------'3 7 IL-_----=:-....I<..-__-;!
1
Yig.4-6 Maillages de calcul
4.2.2. ...: Résultats et discussion
Nous donnons sur les Fig. 4-7 et 4-8 quelques
résultats significatifs des différentes subdivisions. Ces
schémas représentent respectivement la flèche et le moment
de flexion au centre de la plaque en fonction du nombre d'élé
~ents des maillages utilisés.
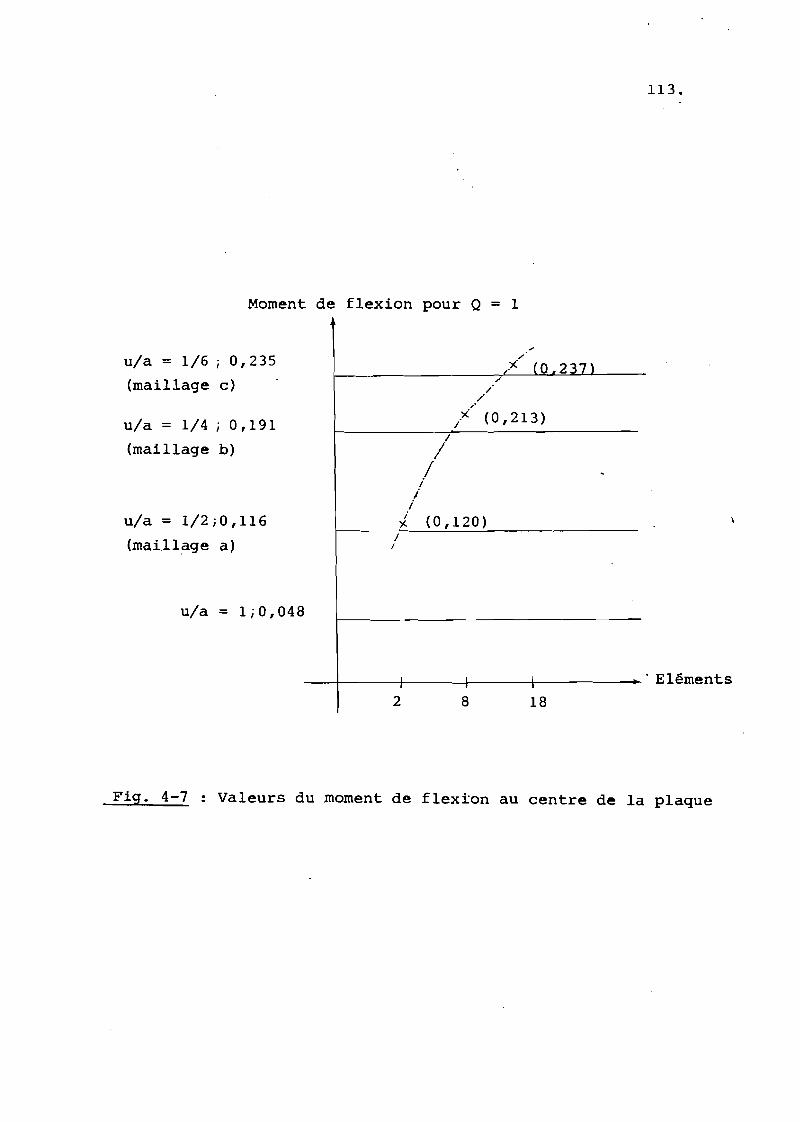
113.
Moment de flexion pour Q = 1~
u/a = 1/6 i 0, 2 3 5
(maillage c)
u/a = 1/4 ; 0, 19 1
(maillage b)
u/a = 1/2;0,116
(maillage a)
u/a = 1;0,048
../
.x (0.232J/
//
"lX (0,213)
//
/i
ii
.;. (0,120)/
1
2 81
18
Fig. 4-7 Valeurs du moment de flexion au centre de la plaque
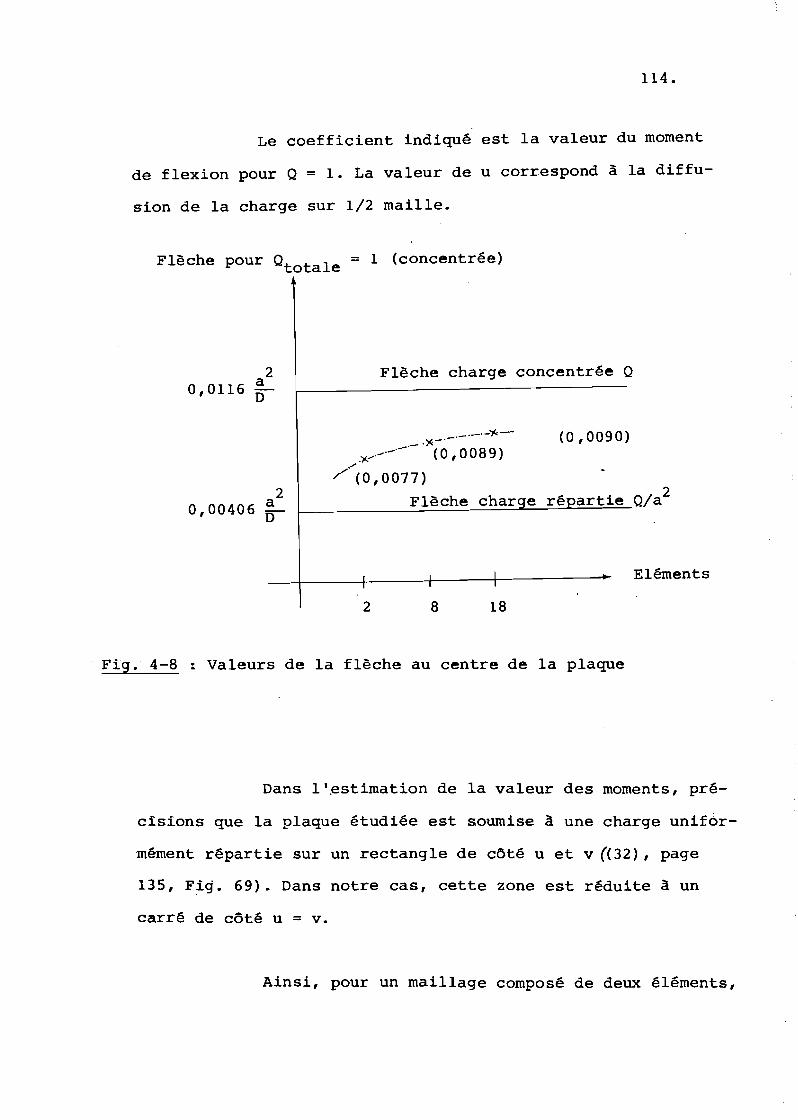
114.
Le coefficient indiqué est la valeur du moment
de flexion pour Q = 1. La valeur de u correspond à la diffu-
sion de la charge sur 1/2 maille.
Flèche pour Qtotale = 1 (concentrée)
2 Flèche charge concentrée Q0,0116 ;
2a0,00406 0
_._.-'1<-')1<-'-'
.K·-·-·-·-· (0,0089),.,-
-: (0,0077)
Flèche
(0,0090)
artie Q/a2
Eléments
2 8 18
Fig. 4-8 : Valeurs de la flèche au centre de la plaque
Dans l'~stimation de la valeur des moments, pré
cisions que la plaque étudiée est soumise à une charge unifor-
mément répartie sur un rectangle de côté u et v (<32), page
135, Fig. 69). Dans notre cas, cette zone est réduite à un
carré de côté u = v.
Ainsi, pour un maillage composé de deux éléments,
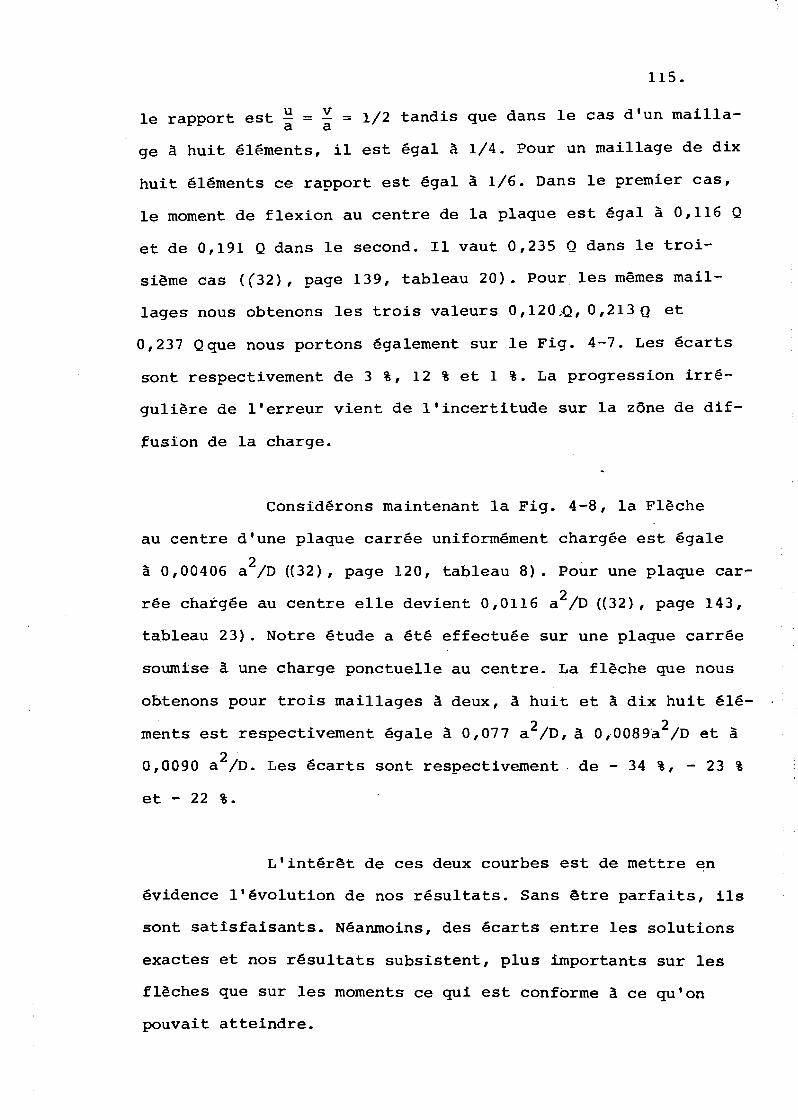
115.
u v / d" d 1 d' "Ille rapport est a = a = 1 2 tan 1S que ans e cas un ma1 a-
ge à huit éléments, il est égal à 1/4. Pour un maillage de dix
huit éléments ce rapport est égal à 1/6. Dans le premier cas,
le moment de flexion au centre de la plaque est égal à 0,116 Q
et de 0,191 Q dans le second. Il vaut 0,235 Q dans le troi
sième cas «(32), page 139, tableau 20). Pour. les mêmes mail
lages nous obtenons les trois valeurs 0,120,Q, 0,213 Q et
0,237 Qque nous portons également sur le Fig. 4-7. Les écarts
sont respectivement de 3 %, 12 % et 1 %. La progression irré-
gulière de l'erreur vient de l'incertitude sur la zône de dif-
fusion de la charge.
Considérons maintenant la Fig. 4-8, la Flèche
au centre d'une plaque carrée uniformément chargée est égale
2à 0,00406 a /D «32), page 120, tableau 8). Pour une plaque car-
rée chargée au centre elle devient 0,0116 a 2/D «32), page 143,
tableau 23). Notre étude a été effectuée sur une plaque carrée
soumise à une charge ponctuelle au centre. La flèche que nous
ohtenons pour trois maillages à deux, à huit et à dix huit élé
ments est respectivement égale à 0,077 a 2/D, à 0,.0089a2/ D et à
0,0090 a 2/D. Les écarts sont respectivement de - 34 %, - 23 %
et - 22 %.
L'intérêt de ces deux courbes est de mettre en
évidence l'évolution de nos résultats. Sans être parfaits, ils
sont satisfaisants. Néanmoins, des écarts entre les solutions
exactes et nos résultats subsistent, plus importants sur les
flèches que sur les moments ce qui est conforme à ce qu'on
pouvait atteindre.
116.
La vérification des conditions d'équilibre mon-
tre que ce dernier est partout satisfait. En particulier il
existe des réactions concentrées en angle, de signe positif,
égale à deux fois le moment de torsion M _.xy
L'exemple présenté met en évidence la possibili-
té d'obtenir des résultats satisfaisants en construisant un
élément équilibre de plaque exactement selon le processus re-
quis en théorie des poutres. La solution n'est évidemment pas
exacte mais le champ de moments est mieux approché que le
champ de flexion ce qui est l'inverse en modèle,déplacement.
Un effort informatique est nécessaire pour or-
ganiser les programmes de façon à traiter des exemples de
plus grande ampleur.
4.2.3. -: Bilan
Afin de mieux situer le modèle"équilibre" de la
méthode des éléments finis par rapport aux autres techniques,
nous récapitulons sur ces tableaux les principaux résultats
obtenus. Notre base de comparaison est la solution proposée
par TIMOSHENKO (32) et celle fournie par l'élément triangulai-
re TRIFX inclus dans le code d'éléments finis élaboré par
M. LEMAIRE (35).
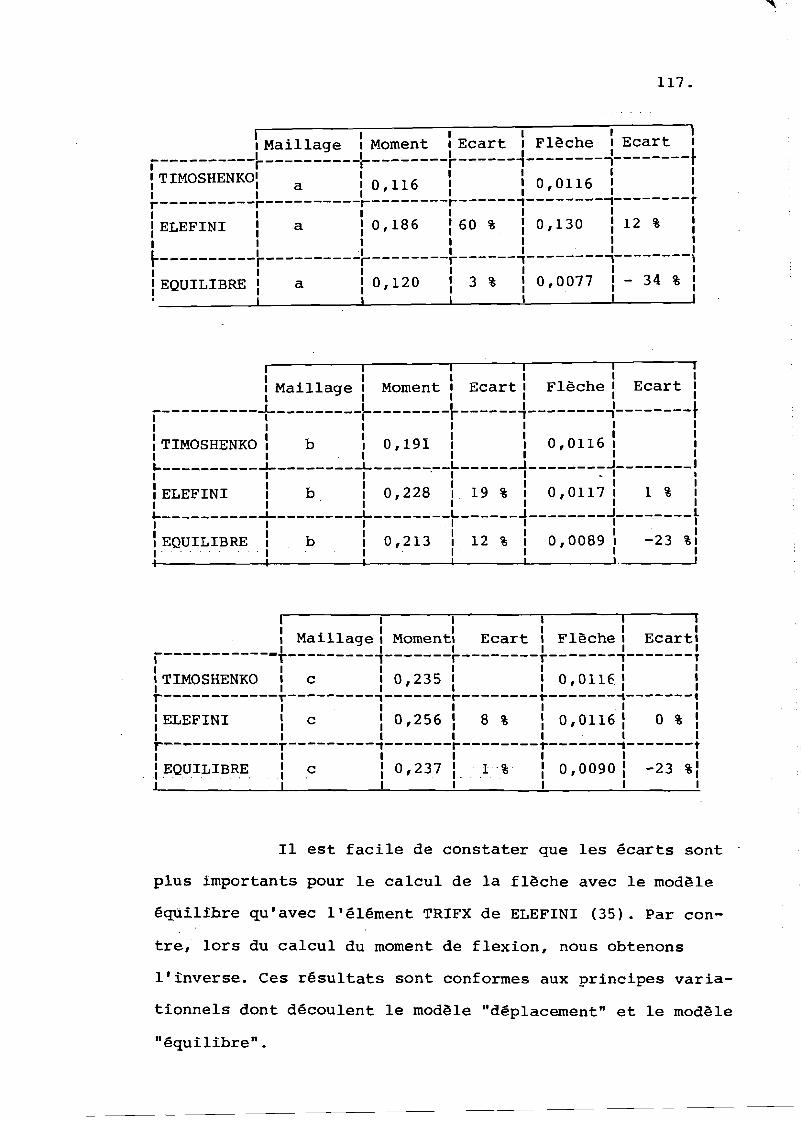
117.
1 1 1 1 1 l1 Maillage 1 Moment 1 Ecart 1 Flèche 1 Ecart 1
-----------t----------~--------t------~--------4--------l1 1 1 1 1 11TIMOSHENKO: a 1 0 116 1 1 0 0116 1 11 , 1 l' 1 1
~----------~----------~--------r------1--------;--------r1 1 1 1 1 1 1IELEFINI 1 a 10,186 '160 % 110,130 : 12 % :1 1 1 .l , 1 1 1 1 1t----------t---------~~--------~------i-----~--~--------{1 1 1 1 1 1 1'EQUILIBRE 1 a 10,120 1 3 % : 0,0077 1 - 34 % l1 1 : : 1 1 1
1 1 11 1 1 1 1 11 Maillage 1 Moment 1 Ecart 1 Flèche 1 Ecart Il1 1 1 1 1
ï----------1r---------~--------~------~--------i--------l1 1 1 1 1 1 11 1 1 1 1 1 11TIMOSHENKO 1 b 1 0 , 191 1 1 0 , 0116 1 11 1· 1 1 1 1 1~ ~ ~ L ~ J 1
1 1 1 . 1 1 - 1 1
lELEFINI 1 b 1 0,228 l. 19 % 1 0,0117: 1 % :1 1· 1 1 1 1. 1
r----------~---------f--------r------l--------l--------t1 1 1 1 1 1 11 EQUILIBRE 1 b 1 0,213 1 12 % 1 0,0089 1 -23 %11· . 1 1 . 1· 1 1 . 1i 1 1 1 1 J. 1
1 1 11. 1 1 1 _ 1 11 Ma~llage 1 Momentl Ecart 1 Fleche 1 Ecartl1 1 1 1 1 1j------------r---------,-------r--------r-------,-------T
1 1 1 1 1 1 11TIMOSHENKO 1 c 1 0,235 1 Il 0,0116 1
1'1
1 1 1 1r------------r---------,-------r--------~-------~-------t1 1 1 1 1 .1 1:ELEFINI : c : 0,256: 8 % : 0,0116: 0 % :1 1 1 1 1·1 1r------------r---------1-------r--------~-------~-------t1 1 1 1 1 1 11EQUILIBRE.: c : 0, 237:' 1- % 1 0, 0090: - 23 %11 1 1 1 1 1 1
Il est facile de constater que les écarts sont
plus importants pour le calcul de la flèche avec le modèle
éqüilibre qu'avec l'élément TRIFX de ELEFINI (35). Par con-
t.re., lors du calcul du moment de flexion, nous obtenons
l'inverse. Ces résultats sont conformes aux principes varia-
tionnels dont découlent le modèle "déplacement" et le modèle
"équilibre".
r-----------------------~1 1
: CONCLUSION:1 1I . J
118.
119.
Le but de notre travail est d'étendre la méthode
des forces, de formulation classique dans le cas de poutres, à
l'étude d'éléments de plaque fléchie.
Comme la plupart des méthodes de calcul utilisées
en analyse des structures, la formulation de la méthode des
forces nécessite l'établissement des équations d'équilibre et
de compatibilité et la résolution de ce système. Pour former
ces équations, nous écrivons que l'énergie potentielle totale
~omplémentaire appliquée à des champs de moments reste station-~
naire. En d'autres termes, la méthode revient à minimiser l'é-
nergie potentielle totale complémentaire par rapport a~ champ
de moments. Ce principe n'est respecté que si le champ de mo-
ments est licite, sinon, les éléments étudiés ne réalisent
qu'une approximation du principe de minimisation de l'énergie
potentielle totale complémentaire.
L'application aux réseaux de poutre est bien con-
nue et la méthode de sélection des inconnues hyperstatiques
permet de rendre entièrement automatique le processus de cal-
cul, aussi bien dans le cas élastique que dans le cas élasto-
plastique.
Les résultats obtenus mettent en évidence la puis
sance de la méthode dans le cas d'éléments linéiques et il a
été envisagé de l'étendre aux cas des plaques bien que les
conditions de formulation du modèle "équilibre" des éléments
120.
finis soient difficiles à satisfaire.
Les qualités du modèle ont été mises en évidence'
IT est possible d'apporter une amélioration aux solutions trou
vées par l'introduction dans le champ de moments du terme qua-
dratique qui équilibre les charges uniformément réparties.
En dépit des procédures mathématiques et de l'uti-
lisation de méthodes d'intégration numérique élaborées que
cette opération implique, la modification du champ ne pose
aucun problème particulier. Le calcul des charges équivalentes
est alors possible.
Ainsi donc, le modèle "équilibre" de la méthode
des éléments finis est fiable. Un vaste domaine d'application
est ouvert pour l'analyse des plaques dans le domaine plasti-
que.
D'une-formulation plus délicate et de calculs plus
complexes que le modèle "déplacement", le modèle "équilibre"
apparaît comme un outil efficace de calcul des structures qui
devait bénéficier d'un effort de recherche et de programmation
plus important.
r----------------------~1 11 A N N E X E S 11 11 1L-------- J
121.
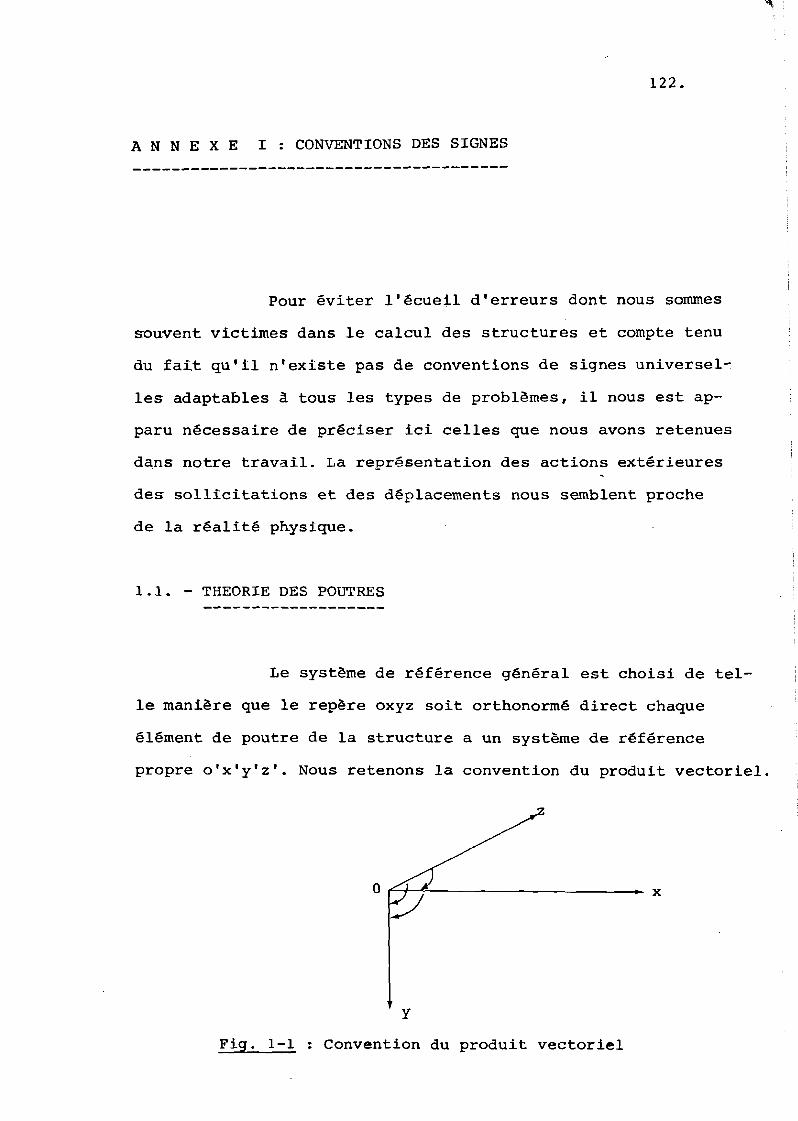
122.
A N N E X E I: CONVENTIONS DES SIGNES
---------------------------------------
Pour éviter l'écueil d'erreurs dont nous sommes
souvent victimes dans le calcul des structures et compte tenu
du fait qu'il n'existe pas de conventions de signes universel~
les adaptables à tous les types de problèmes, il nous est ap-
paru nécessaire de préciser ici celles que nous avons retenues
d~ns notre travail. La représentation des actions extérieures
des sollicitations et des déplacements nous semblent proche
de la réalité physique.
1.1. - THEORIE DES POUTRES
Le système de référence général est choisi de tel-
le manière que le repère oxyz soit orthonormé direct chaque
élément de poutre de la structure a un système de référence
propre o'x'y'z'. Nous retenons la convention du produit vectoriel.
o rc-.f-'~-----~------ x
y
Fig. 1-1 Convention du produit vectoriel
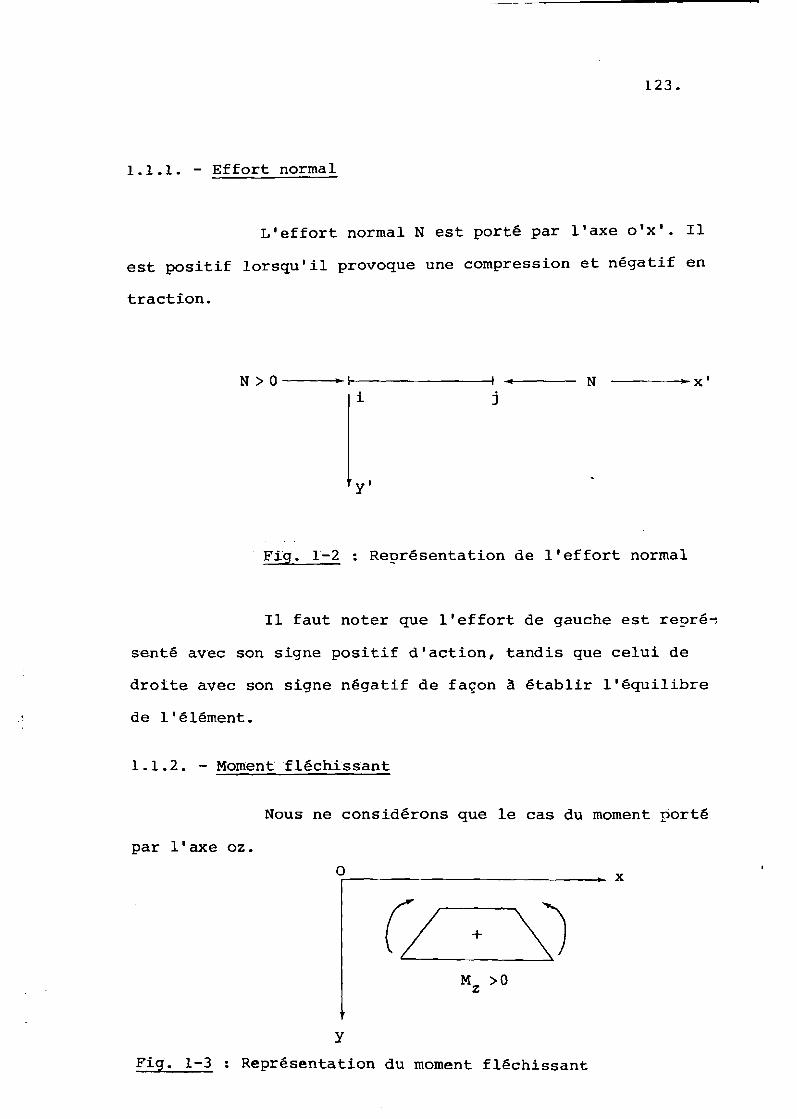
123.
1.1.1. - Effort normal
L'effort normal N est porté par l'axe o'x'. Il
est positif lorsqu'il provoque une compression et négatif en
traction.
• 1
i
y'
N -----. x'
Fig. 1-2 Représentation de l'effort normal
Il faut noter que l'effort de gauche est repré~
senté avec son signe positif d'action, tandis que celui de
dro~te avec son signe négatif de façon à établir l'équilibre
de l'élément.
1.1.2. - Moroentfléchissant
Nous ne considérons que le cas du moment porté
par l'axe oz.
o
y
(1 + \)x
Fig. 1-3 Représentation du moment fléchissant
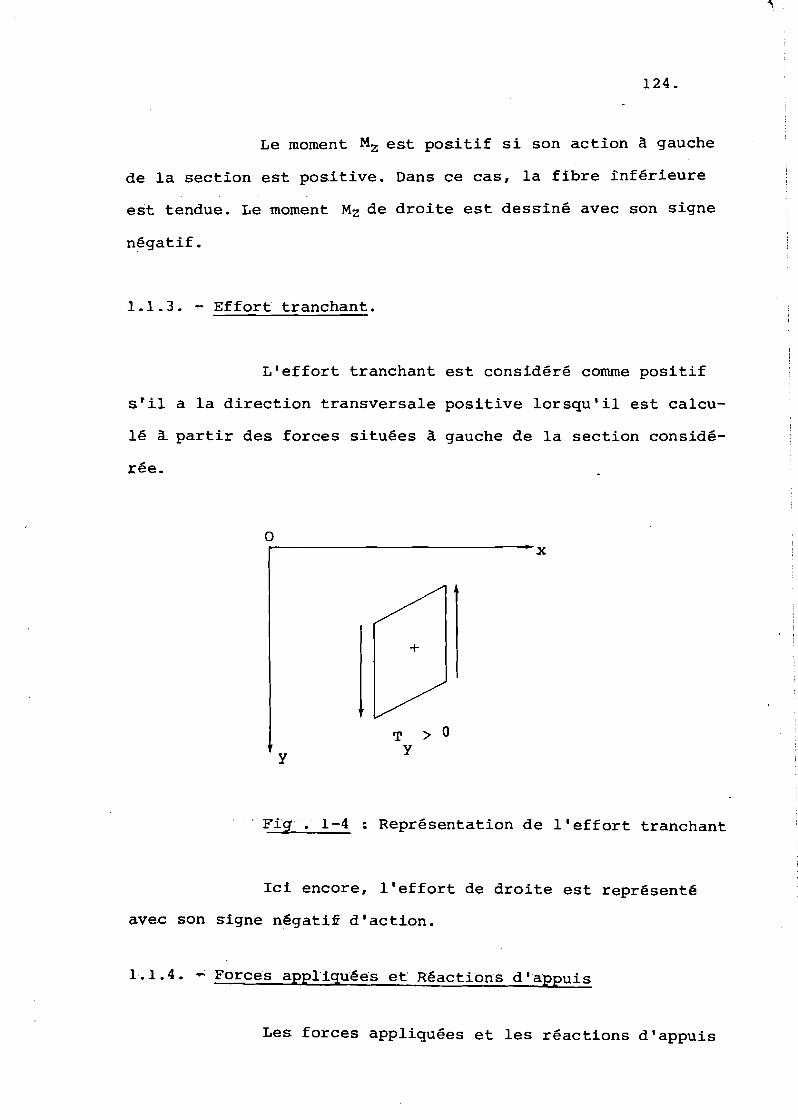
124.
Le moment Mz est positif si son action à gauche
de la section est positive. Dans ce cas, la fibre inférieure
est tendue. Le moment Mz de droite est dessiné avec son signe
négatif.
1.1.3. ~ Effort tranchant.
L'effort tranchant est considéré comme positif
s'il a la direction transversale positive lorsqu'il est calcu
lé à partir des forces situées à gauche de la section considé
rée.
o....----------------x
+
y
T > 0y
Fi"g • 1-4 : Représentation de l'effort tranchant
Ici encore, l'effort de droite est représenté
avec son signe négatif d'action.
L1.4. ..; Forces appliquées et Réactions d'appuis
Les forces appliquées et les réactions d'appuis
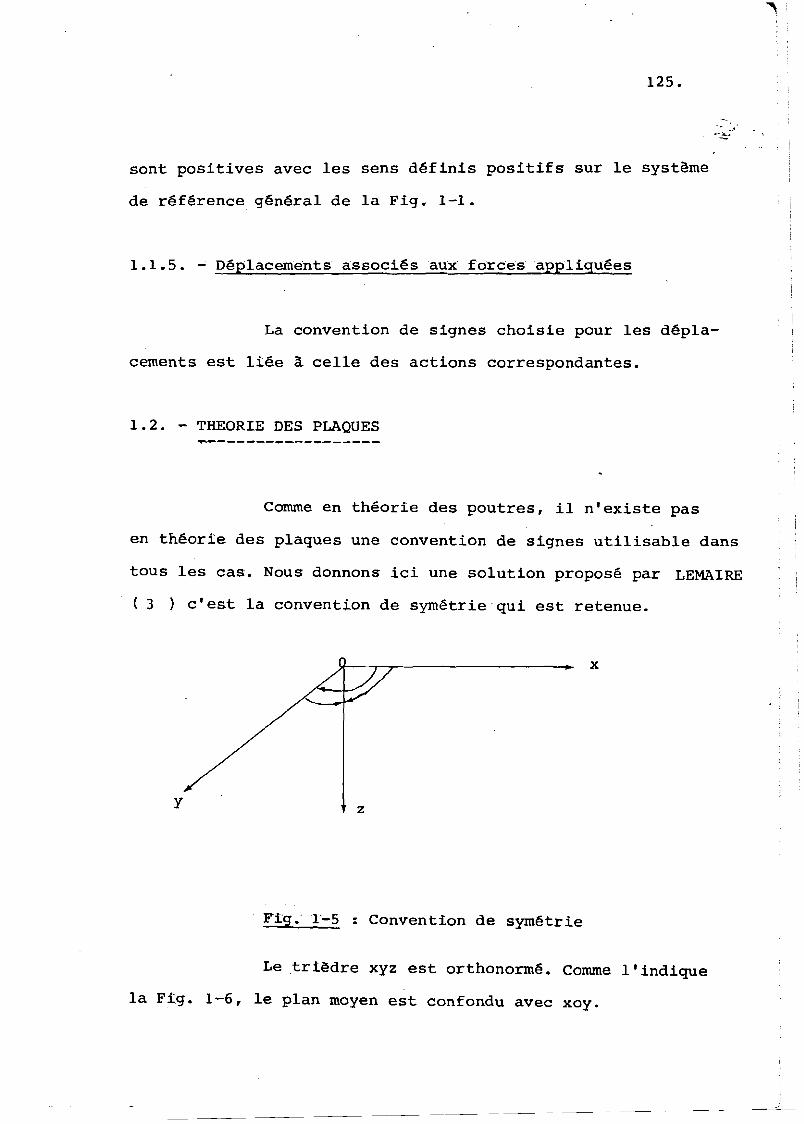
125.
sont positives avec les sens définis positifs sur le système
de référence général de la Fig. 1-1.
1.1.5. -: Déplacements associés aux forces appliquées
La convention de signes choisie pour les dépla-
cements est liée à celle des actions correspondantes.
1.2. - THEORIE DES PLAQUES.....-------------_._--
Comme en théorie des poutres, il n'existe pas
en théorie des plaques une convention de signes utilisable dans
tous les cas. Nous donnons ici une solution proposé par LEMAIRE
(3 ) c'est la convention de symétrie qui est retenue.
y z
x
Fiq.· 1'-5 : Convention de symétrie
Le trièdre xyz est orthonormé. Comme l'indique
la Fig. 1-6, le plan moyen est confondu avec xoy.
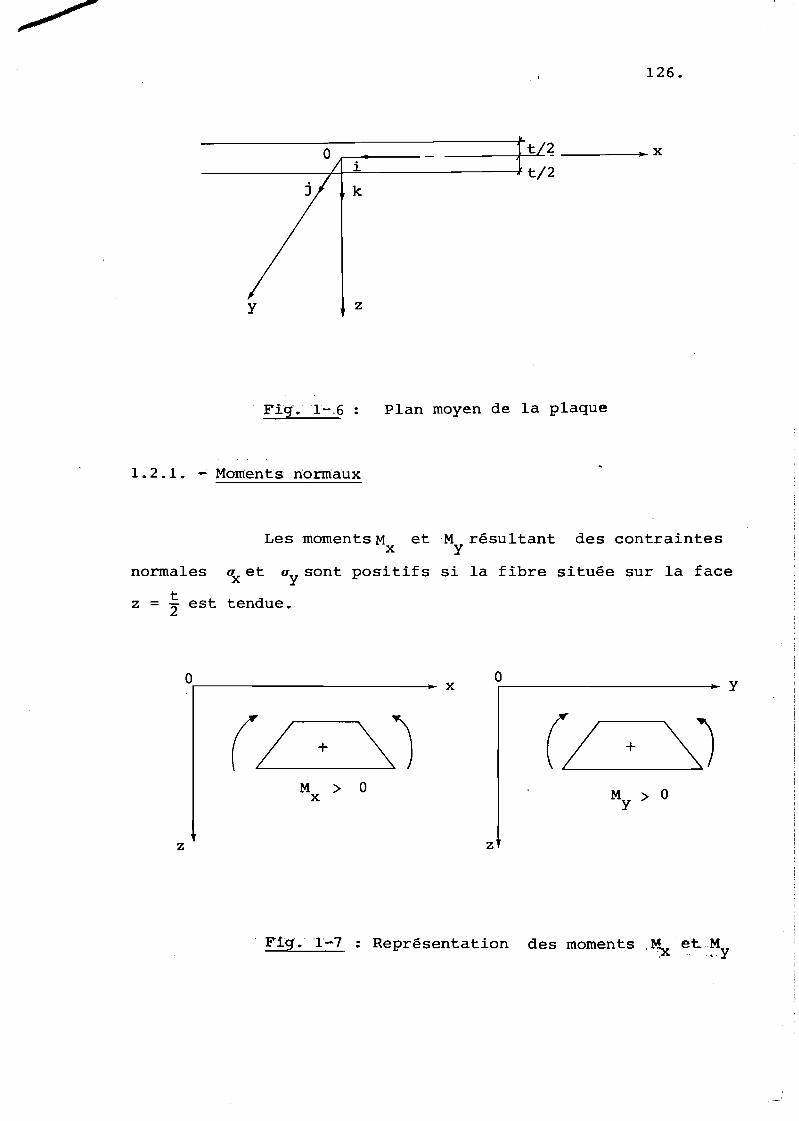
126.
i
k
y z
Fig". 1-.6 Plan moyen de la plaque
Les moments M et 'M résultant des contraintesx y
normales Ux et u y sont positifs si la fibre située sur la face
tz = 2 est tendue.
.----------------;~yox
0.-- _
\j (1 + \jM > 0x
z z
Fi"g".1-7 : Représentation des moments ,Mx et~y
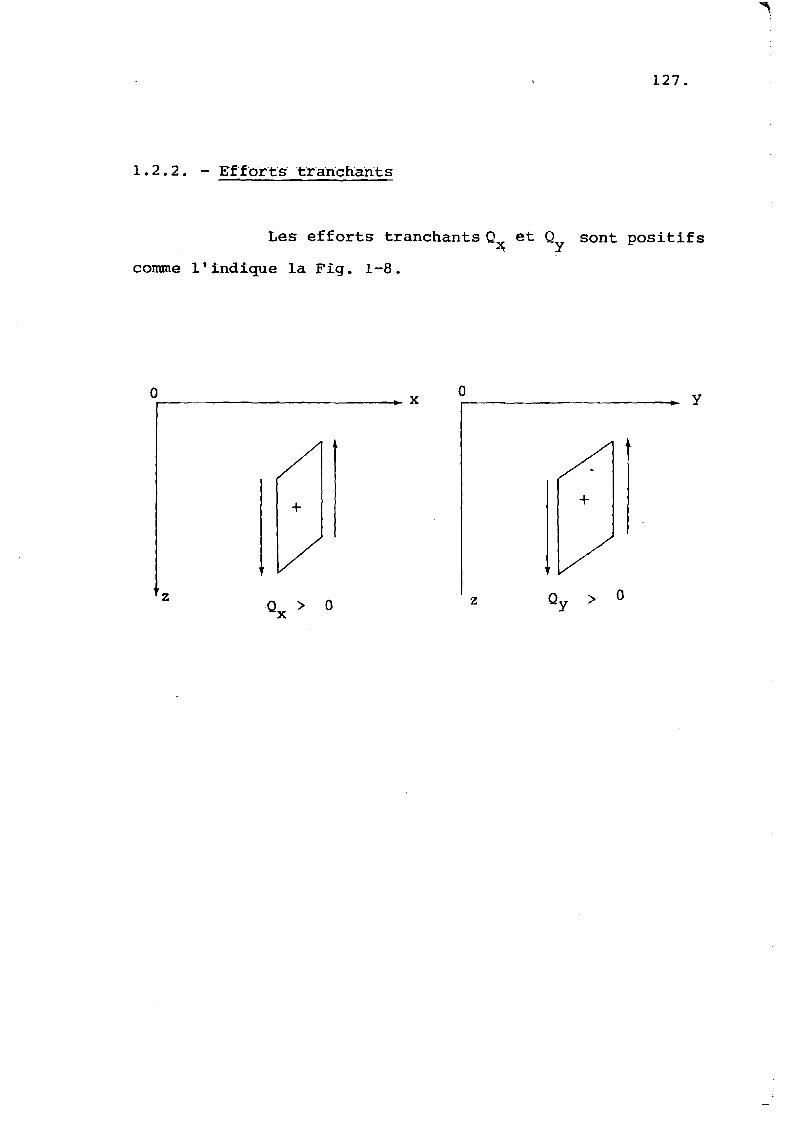
127.
Les efforts tranchants Q et Qy sont positifsx
comme l'indique la Fig. 1-8.
0..-- x
+
o
+
y
zQ > 0x
z o
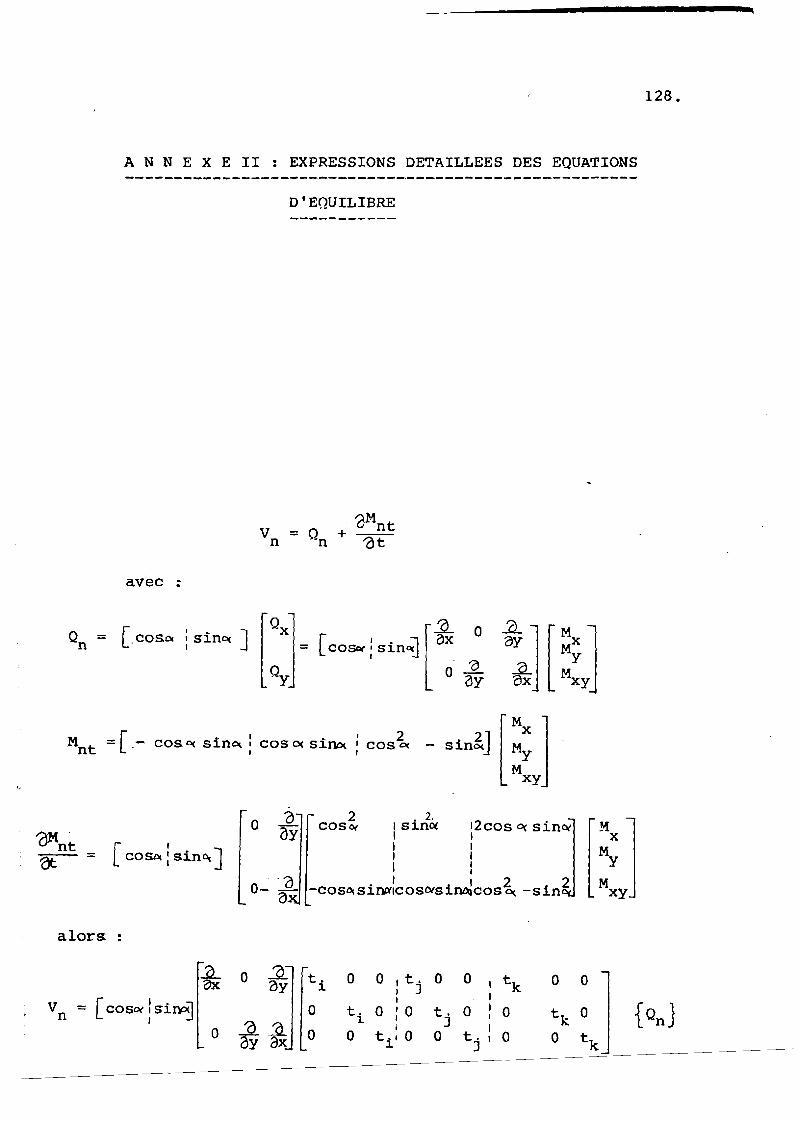
A N N E X E II : EXPRESSIONS DETAILLEES DES EQUATIONS
D'EQUILIBRE
. -aM t=Q + __n_-n '2)t
avec :
128.
[ COSot : s in~ [lx 0.'0
o Ôy
Mn t =[- cos « sin.. : cos 0< si"" i cos~ - s in~ [~J
2COSO(
'ôMn ta-t=
alors:
[ COSDI : sin~ ]
o• 2. J1 s i.n« 12cos 0( s Lnee
1 11 11 11 :
• 1 • 1 2 2-COSOIS1.na'ICOSOI'S1.MqCOS 0( -sin [::J
cm 0ôy t i 0 0 1 t; . 0 0 1 t k 0 o -
1 J[ coaee 1si~J
1 1Vn = 0 t. 0 ;0 t. 0 1 0 t k 0 { On}f 11
~--'Q.l. Ji 10 0 0 tit 0 0 t. 1 0 0 t kL- Ôy ôx_
'- J

129.
"
0 ~ê) [ 2 i i 2 :2cos"< sin .. t. 0 0 t. a 0 t k 0 0cos~ 3 n~ , 1. J1
+ [COS"" :s Ln«J1 11 1
0 t. 0 0 t. 0 0 tkO1 11 1 2 2 1. J
0 - -cos'\'sinar.cosll(sinll('coso< -sin D( 0 0 t i 0 a t. 0 o t kJ
{Qn 1
1= 2A [
b .
[cos<> i sln~ 0a
o C.1. b.J
o
o
c.J
c.J
b.J
o
o
c.cosocsino< 2- . 2)
[ ci cos 0( s Ln« c. (cos a( S1.nO(- '1 1. 1.
+ 2A [cosO( s Ln« JbicoSlXSiThX -bicOS 0(
2 .2)sinOl -bi. (cos~ s a.n«
c.cosotsinOl. s Ln« (cos~ .2)c .cos 0( C, S1.n0(
J J J
bjcosotsinOl. -b .cos Cl( -b. 2 • 2)s Ln « ( cos C( S1.n 0(
J J
ckcoso(sillO< sinD( ( 2 • 2) ]- ckcos 0(, c k COSD. SI.n 0(
· 2) ~lOn\bkcosOl,sinO( -bkcos 0( s Lnc- -bk (cos~ Sl.nC( .
Posons
alors
[
bi - ci cosos Lno
b i cos 0( s Ln«
cicos 0( s Ln«
c - b.coso<sini 1.
2c i cos~ J2b. - sin~1.
i ai, j, k
1=U\ [ COSCll s Ln« ] T.
J
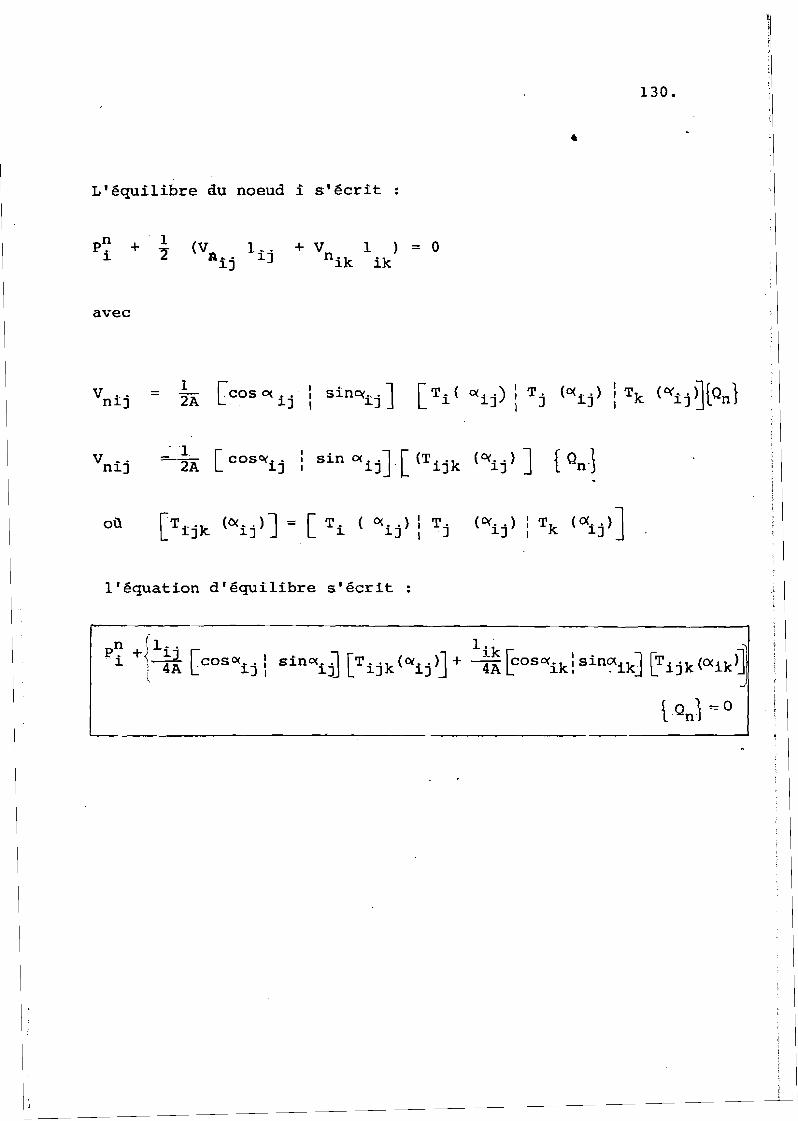
L'équilibre du noeud i s'écrit
+ Vi) = 0n i k ik
1'2"+
•
130 .
nP.a
avec
V ~._- l
[ COSO(ij1
sin 0( •• ] [ (T .. k (O(.. ) ] {°n-)~1
n1.J 1 1.J - ~J 1.J
où [Ti j k (o< • . ) J = [ Ti ( 0( •• ) : T. (O(• • ) Tk (CC.)]~J ~J 1 J ~J 1.J
l'équation d'équilibre s'écrit
?~ +ril [COS"'i.j! sin"'d [Tijk <"'i.d +l~aCOS"'ik! Si.n':'i.k] [Tijk ("'ik)]~
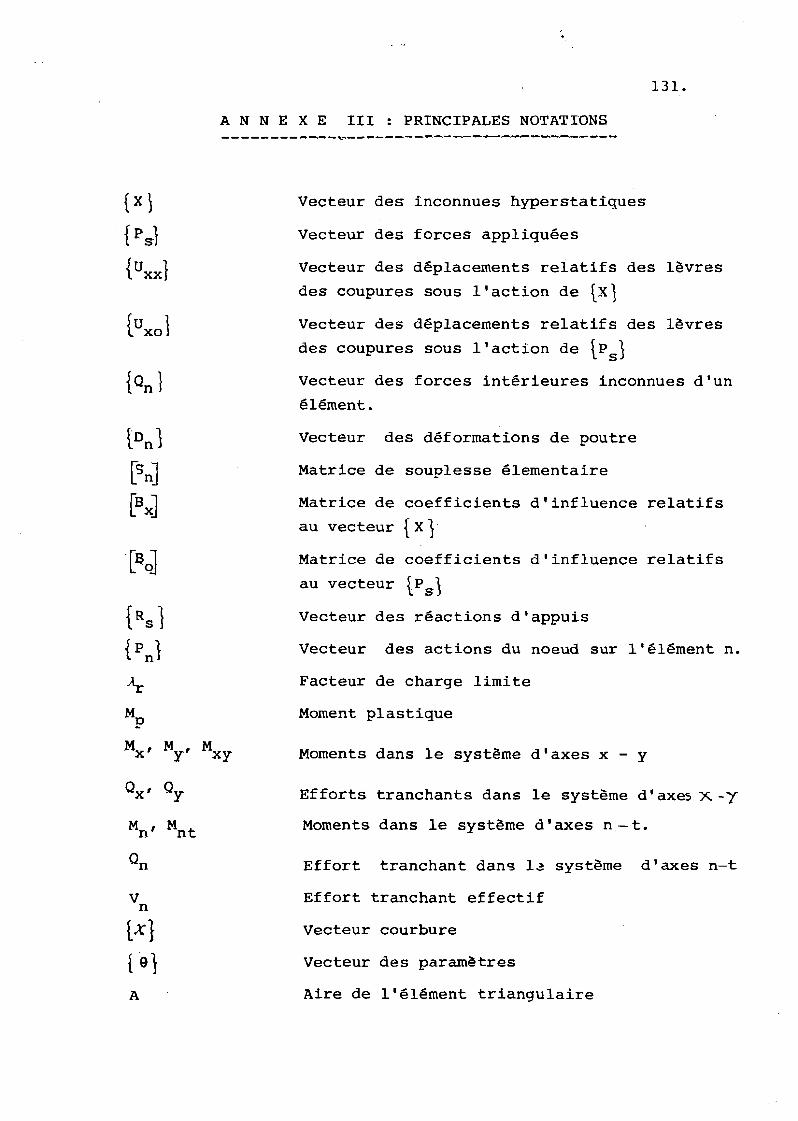
131.
A N N E X E III: PRINCIPALES NOTATIONS------------"""-----------------_.-....-.---.-:--
{x)
{ps1
{Uxxl
[Ux o l
{On 1
tDn1[sn]
[Bx]
Cao]
{Rs 1{pn1
~
Mp
Mx, My' Mx y
°x' Qy
Mn' Mn t
an
vn
tx}Ce}A
Vecteur des inconnues hyperstatiques
Vecteur des forces appliquées
Vecteur des déplacements relatifs des lèvres
des coupures sous l'action de tX)Vecteur des déplacements relatifs des lèvres
des coupures sous l'action de tPs}
Vecteur des forces intérieures inconnues d'un
élément.
Vecteur des déformations de poutre
Matrice de souplesse élementaire
Matrice de coefficients d'influence relatifs
au vecteur {x1
Matrice de coefficients d'influence relatifs
au vecteur {ps J
Vecteur des réactions d'appuis
Vecteur des actions du noeud sur l'élément n.
Facteur de charge limite
Moment plastique
Moments dans le système d'axes x - y
Efforts tranchants dans le système d' axes X - Y
Moments dans le système d'axes n- t.
Effort tranchant dans l~ système d'axes n-t
Effort tranchant effectif
Vecteur courbure
Vecteur des paramètres
Aire de l'élément triangulaire
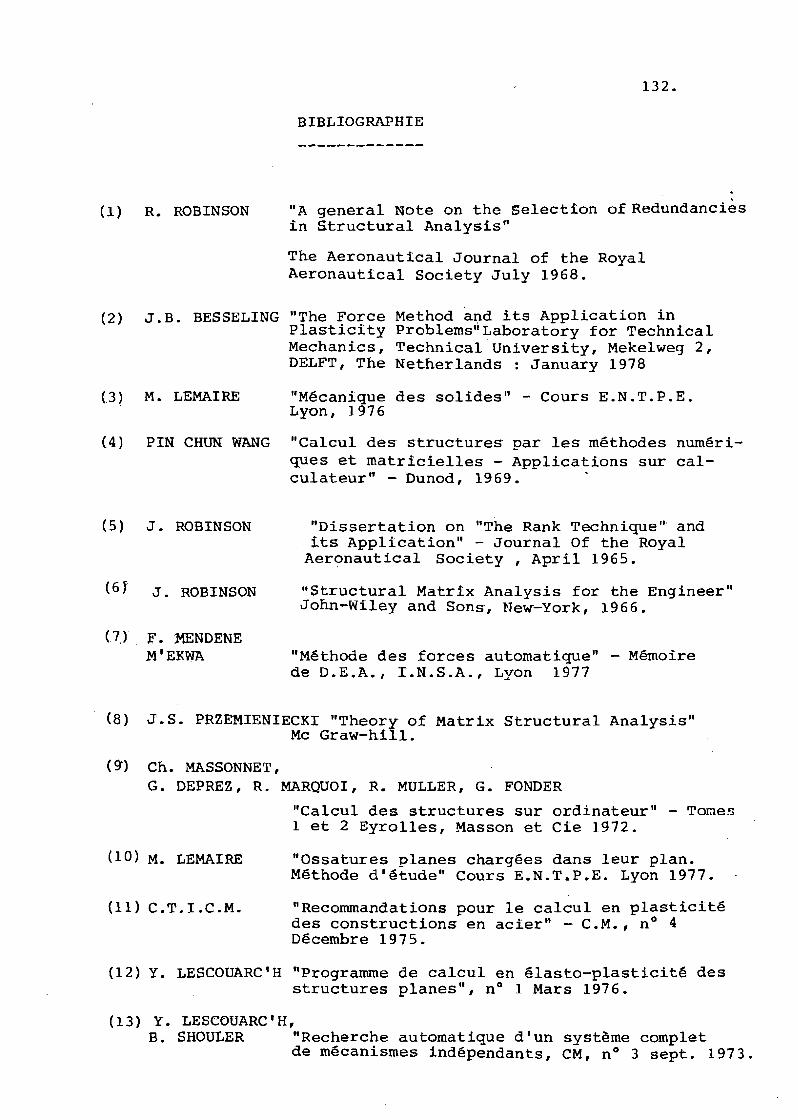
132.
BIBLIOGRAPHIE
(1) R. ROBINSON "A general Note on the Selection ofRedundanci~sin Structural Analysis"
The Aeronautical Journal of the RoyalAeronautical Society July 1968.
(2) J.B. BESSELING "The Force Method ~nd its Application inPlasticity Problems"Laboratory for TechnicalMechanics, TechnicalUniversity, Mekelweg 2,DELFT, The Netherlands : January 1978
0) M. LEMAIRE
(4) PIN CHUN WANG
(5) J. ROBINSON
(6Y J. ROBINSON
0'> r , MENDENEM'EKWA
"Mécanique des solides" - Cours E.N.T.P.E.Lyon, 1976
"Calcul des structures par les méthodes numériques et matricielles - Applications sur calculateur" - Dunod, 1969.
"Dissertation on "The Rank Technique" andits Application" - Journal Of the Royal
Aeronautical Society, April 1965.
"Structural Matrix Analysis for the Engineer"John-Wiley and Sons, New-York, 1966.
"Méthode des forces automatique" - Mémoirede D.E.A., I.N.S.A., Lyon 1977
( 9')
J.S. PRZEMIENIECKI "Theory of Matrix Structural Analysis"Mc Graw-hill.
Ch. MASSONNET,G. DEPREZ, R. MARQUOI, R. MULLER, G. FONDER
"Calcul des structures sur ordinateur" - Tomes1 et 2 Eyrolles, Masson et Cie 1972.
(10) M. LEMAIRE
(11) C.T.LC.M.
"Ossatures planes chargées dans leur plan.Méthode d'étude" Cours E.N.T.P.E. Lyon 1977.
"Recommandations pour le calcul en plasticitédes constructions en acier" - C.M., nO 4Décembre 1975.
(12) Y. LESCOUARC' H "Programme de calcul en élasto-plasticité desstructures planes", nO 1 Mars 1976.
(13) Y. LESCOUARC'H,B. SHOULER "Recherche automatique d'un système complet
de mécanismes indépendants, CM, nO 3 sept. 1973.
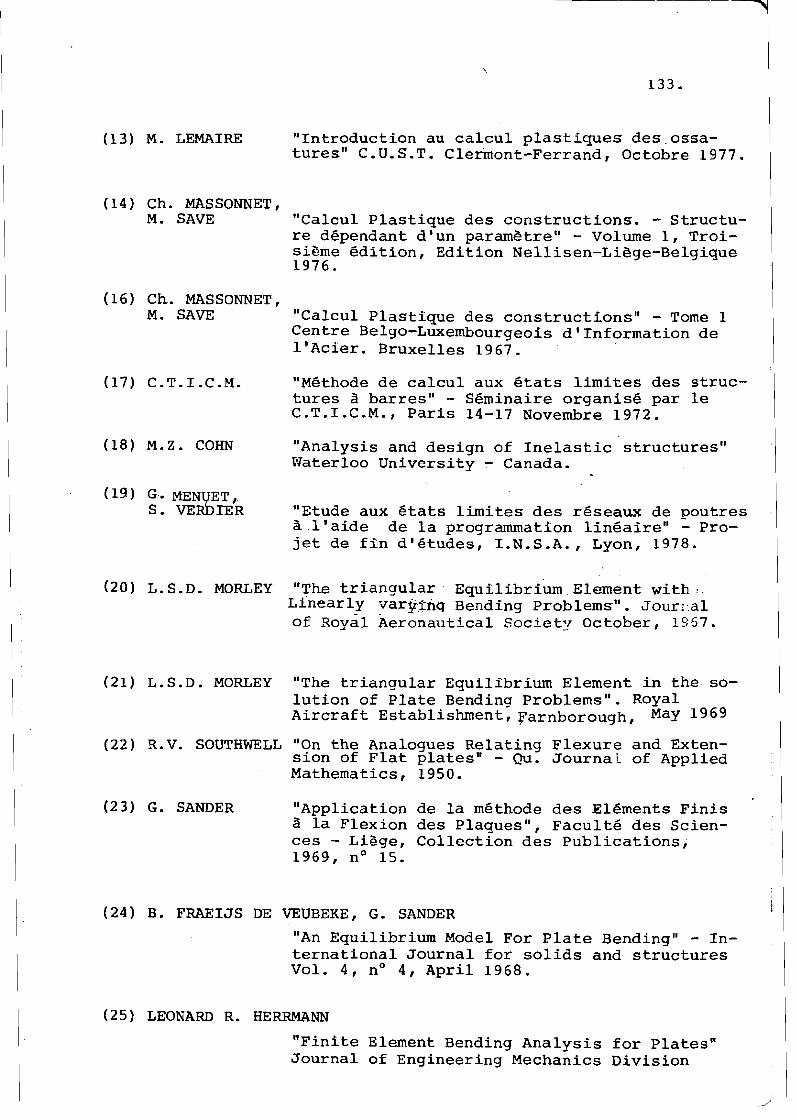
(13) M. LEMAIRE
(14) Ch. MASSONNET,M. SAVE
(16) Ch. MASSONNET,M. SAVE
(17) C.T.I.C.M.
(18) M. Z. CORN
(19) G. MEN{)ET,.S. VERbIER
(20) L.S.D. MORLEY
133.
"Introduction au calcul plasti.ques des.ossatures" C.U.S.T. Clermont-Ferrand, Octobre 1977.
"Calcul Plastique des constructions. - Structure dépendant d'un paramètre" - Volume 1, Troisième édition, Edition Nellisen-Liège-Belgique1976.
"Calcul Plastique des constructi.ons" - Tome 1Centre Belgo-Luxembourgeois d'Information del'Acier. Bruxelles 1967.
"Méthode de calcul aux états limites des structures à barres" - Séminaire organisé par leC.T.I.C.M., Paris 14-17 Novembre 1972.
"Analysis and design of Inelastic structures"Waterloo University ~ Canada.
"Etude aux états limites des réseaux de poutresà l'aide de la programmation linéaire" =- Projet de fin d'études, I.N.S.A., Lyon, 1978.
"The triangular· Equilibrium.Element with,Linearly varlitnq Bending Problems". Jourr.alof Royal Aeronautical Society October, 1957.
(21) L.S.D. MORLEY "The triangular Equilibrium Element in the solution of Plate Bendinq Problems". RoyalAircraft Establishment; farnborough, May 1969
(22) R.V. SOUTHWELL "On the Analogues Relating Flexure and Extension of Flat plates" - Qu. Journal of AppliedMathematics, 1950.
(23) G. SANDER "Application de la méthode des Eléments Finisà la Flexion des Plaques", Faculté des Sciences - Liège, Collection des Publications,1969, nO 15.
(24) B. FRAEIJS DE VEUBEKE, G. SANDER
"An Equilibrium Model For Plate Bending" - International Journal for solids and structuresVol. 4, nO 4, April 1968.
(25) LEONARD R. HERRMANN
"Finite Element Bending Analysis for Plates"Journal of Engineering Mechanics Division
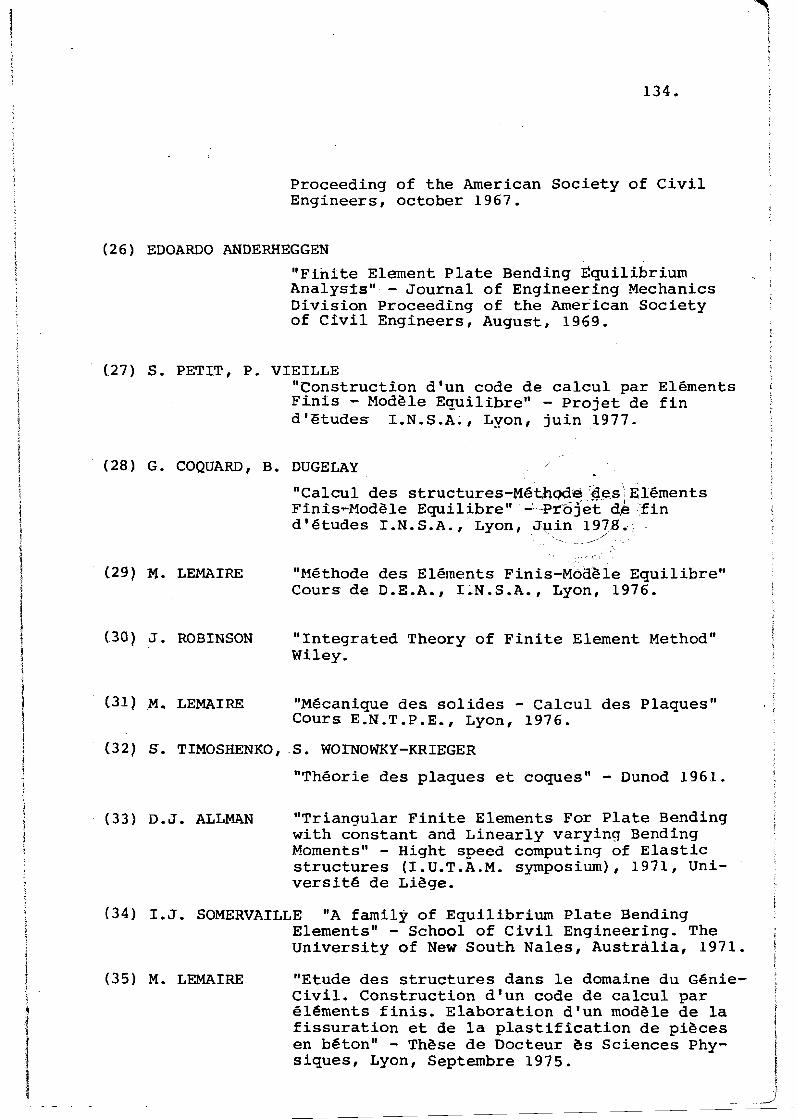
134.
Proceeding of the Arnerican Society of CivilEngineers, october 1967.
(26) EDOARDO ANDERHEGGEN
IIFinite Element Plate Bending EquilibriumAnalyst.s" - Journal of Engineering MechanicsDivision Proceeding of the American Societyof Civil Engineers, August, 1969.
(27) S. PETIT, P. VIEILLEIIConstruction d'un code de calcul par ElémentsFinis .... Modèle Equilibre" - Projet de find'etudes I.N.S.A~, Lyon, juin 1977.
(28) G. COQUARD, B. DUGELAY
"CaLcuL des structures-Mét;hQd'é 1!esi ElémentsFinis.-Modèle Equilibre"":"-Pr'oJet d~~ind'études I.N.S.A., Lyon, Jllin 1978'.'
.' / ._____..- r" .• '
(29) M. LEMAIRE
(30)J. ROBINSON
"në ttiode des Elémemts Finis-Mod'èle Equilibre"Cours de D.E.A., I~N.S.A., Lyon, 1976.
"Integrated Theory of Finite Element Method"Wiley.
(31) .M, LEMAIRE
(33) D.J. ALLMAN
"Mécanique des solides - Calcul des Plaques"Cours E.N.T.P.E., Lyon, 1976.
(32) s. TIMOSHENKO, .S. WOINOWKY-KRIEGER
"Théorie des plaques et coques" - Dunod 1961.
"Trianqular Finite Elements For Plate Bendingwith constant and Linearly varying BendingMoments" - Hight speed cornputing of Elasticstructures (I.U.T.A.M. symposium), 1971, Université de Liège.
(34) IoJ. SOMERVAILLE "A family of Equilibrium Plate BendingElements ll
- School of Civil Engineering. TheUniversity of New South Nales, Australia, 1971.
(35) M. LEMAIRE "Etude des structures dans le domaine du GénieCivil. Construction d'un code de calcul paréléments finis. Elaboration d'un modèle de lafissuration et de la plastification de piècesen béton" - Thèse de Docteur ès Sciences Phy- 1s iques , Lyon, Septembre 1975_1
J