méthode des éléments finis : thermique - iut le mans
TRANSCRIPT

Methode des elements finis :
thermique
Yves Debard
Universite du MansMaster Modelisation Numerique et Realite Virtuelle
http://iut.univ-lemans.fr/ydlogi/index.html
24 mars 2006 – 29 mars 2011

Table des matieres
1 Loi de Fourier 1
2 Charges thermiques 2
2.1 Source de chaleur ponctuelle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2.2 Source de chaleur volumique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2.3 Temperature imposee (ou prescrite) TP sur une surface ST . . . . . . . . . . . . . . . . 3
2.4 Densite de flux ϕS imposee sur une surface Sϕ . . . . . . . . . . . . . . . . . . . . . . 3
2.5 Echange de chaleur par convection sur une surface Sϕ . . . . . . . . . . . . . . . . . . 3
2.6 Echange de chaleur par radiation en milieu infini sur une surface Sϕ . . . . . . . . . . 3
3 Bilan thermique : equation de la chaleur 3
4 Forme differentielle 4
5 Forme integrale faible 5
6 Forme discretisee : elements finis 6
6.1 Discretisation du domaine : maillage . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
6.2 Representation elementaire (ou locale) du champ de temperatures . . . . . . . . . . . 6
6.3 Representation globale du champ de temperatures . . . . . . . . . . . . . . . . . . . . 7
6.4 Exemple : probleme a une dimension . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
6.5 Partition des degres de liberte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
6.6 Discretisation de la forme integrale faible . . . . . . . . . . . . . . . . . . . . . . . . . 8
7 Mise en œuvre pratique : calculs elementaires et assemblage 10
8 Exemples de calculs elementaires 11
8.1 Element a deux nœuds (probleme a une dimension) . . . . . . . . . . . . . . . . . . . . 11
8.2 Triangle a trois nœuds (probleme plan) . . . . . . . . . . . . . . . . . . . . . . . . . . 12
8.3 Element isoparametrique a trois nœuds equidistants (probleme a une dimension) . . . 14
9 Exemple de mise en equation 15
9.1 Donnees du probleme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
9.2 Discretisation du domaine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
9.3 Partition des temperatures nodales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
9.4 Matrices elementaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
9.5 Remarque : champ de temperatures T (x; t) et fonctions test T ∗ = δT . . . . . . . . . . 17
9.6 Assemblage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
9.7 Equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
10 Resolution en regime stationnaire 17
10.1 Probleme lineaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
10.1.1 Equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
10.1.2 Exemple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
10.2 Probleme non lineaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
10.2.1 Methode de substitution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
10.2.2 Methode de Newton-Raphson . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
10.2.3 Methode mixte : substitution et Newton-Raphson . . . . . . . . . . . . . . . . 26
11 Resolution en regime transitoire 2711.1 Probleme lineaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2811.2 Probleme non lineaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
A Caracteristiques de quelques materiaux isotropes 32
B Programmes Maple 32B.1 lin 3n . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32B.2 nonlin 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32B.3 nonlin 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33B.4 nonlin 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
C Programme Scilab 35C.1 nonlin 3a . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
References 38

Thermique 1
1 Loi de Fourier
Soit T (x, y, z; t) la temperature au point M de coordonnees (x, y, z) 1 a l’instant t. Si la temperaturedepend du temps, on dit que le regime thermique est variable (ou transitoire) ; dans le cas contraire,on dit qu’il est permanent (ou stationnaire).
La temperature s’exprime en kelvin (K).
Dans la pratique, on utilise souvent le degre Celsius ( C) : T (en K) = T (en C) +273.15.
Considerons en un point M un element de surface dS infiniment petit. Soit ~n un vecteur unitaire etnormal a dS. La puissance thermique (quantite de chaleur par unite de temps) qui traverse dSdans le sens de ~n est egale a (loi de Fourier 2) :
dΦ = ~n ·(−¯λ · −−→gradT
)dS = ~n · ~ϕ dS (1.1)
ou le tenseur de conductivite thermique du materiau ¯λ a pour representation matricielle dans lerepere orthonorme {x, y, z} :
[λ] =
λxx λxy λxz
λyy λyz
sym. λzz
(1.2)
La quantite de chaleur s’exprime en joule (1 J=1 N.m=1 kg.m2.s−2).
dΦ est le flux thermique en M , a travers dS.
Le flux thermique est une puissance thermique et s’exprime en watt (1 W=1 J/s).
La conductivite thermique s’exprime en W/(m.K).
Le vecteur ~ϕ = −¯λ · −−→gradT est le vecteur densite de flux thermique en M .
La quantite ϕ = ~n · ~ϕ =dΦ
dSest appele densite de flux thermique en M et dans la direction ~n.
La densite de flux thermique s’exprime en W/m2.
Remarque :
– Le vecteur densite de flux et le gradient thermique ne sont pas necessairement colineaires (fi-gure 1).
1. Le repere {x, y, z} est un repere orthonorme direct.2. Joseph Fourier (1768-1830)

2 Methode des elements finis
Figure 1 – Materiau anisotrope
– Si le materiau est isotrope, la matrice de conductivite se reduit a :
[λ] = λ
1
11
(1.3)
ou λ est le coefficient de conductivite thermique du materiau (§ A) et
~ϕ = −λ−−→gradT (1.4)
Le vecteur densite de flux et le gradient thermique sont colineaires (figure 2).
Figure 2 – Materiau isotrope
2 Charges thermiques
Convention : les quantites de chaleur recues par le solide sont comptees positivement.
2.1 Source de chaleur ponctuelle
Une source de chaleur ponctuelle Q est definie par la puissance thermique recue par le systeme. Elles’exprime en W.
2.2 Source de chaleur volumique
Une source de chaleur volumique q est definie par la puissance thermique generee par unite de volume.Elle s’exprime en W/m3.

Thermique 3
2.3 Temperature imposee (ou prescrite) TP sur une surface ST
La temperature peut etre imposee en un point ou sur une surface.
2.4 Densite de flux ϕS imposee sur une surface Sϕ
Elle s’exprime en W/m2.
2.5 Echange de chaleur par convection sur une surface Sϕ
La convection est l’echange de chaleur entre un solide et un fluide. Soit un point M situe a la surfacedu solide. Soient T la temperature du solide en M et Tf la temperature du fluide au voisinage de M .L’experience montre que la quantite de chaleur recue par le solide en M , par unite de surface et parunite de temps, est egale a :
ϕc = h (Tf − T ) (loi de Newton) (2.1)
ou h est le coefficient d’echange par convection.
h s’exprime en W/(m2.K).
2.6 Echange de chaleur par radiation en milieu infini sur une surface Sϕ
La quantite de chaleur recue par le solide, considere comme un corps gris a la temperature T etrayonnant vers l’exterieur considere comme un corps noir a la temperature T∞, par unite de surfaceet par unite de temps, est egale a :
ϕr = ε σ (T 4∞ − T 4 ) (loi de Stefan-Boltzmann) (2.2)
ou :
– les temperatures sont exprimees en Kelvin.– ε < 1 est l’emissivite (sans dimension).– σ est la constante de Stefan : σ = 5.67 10−8 W/(m2.K4).
3 Bilan thermique : equation de la chaleur
Soit v une partie quelconque de V limitee par la surface s.
La puissance thermique stockee dans v est egale a la somme de la puissance thermique generee par lessources volumiques contenues dans v et de la puissance thermique recue sous forme de flux a traversla surface s :
∫
vρ cP
∂T
∂tdv =
∫
vq dv +
∫
s−~n · (−¯λ · −−→gradT ) ds (3.1)

4 Methode des elements finis
ou :
ρ est la masse volumique du materiau (kg/m3).cp est la capacite thermique massique (J/(kg.K)) (§ A).~n est la normale unitaire a s dirigee vers l’exterieur de v.
Transformons la derniere integrale de la relation (3.1) en integrale de volume a l’aide du theoremed’Ostrogradski. Il vient : ∫
v(ρ cP T − div (¯λ · −−→gradT )− q ) dv = 0 (3.2)
ou : T =∂T
∂t.
Le domaine v etant arbitraire, on en deduit :
ρ cP T − div ( ¯λ · −−→gradT )− q = 0 (3.3)
en tout point du solide.
Cette equation est appelee equation de la chaleur.
Remarque : pour un materiau homogene et isotrope, l’equation (3.3) s’ecrit dans le repere ortho-norme {x, y, z} :
ρ cP T = λ
(∂2T
∂x2+
∂2T
∂y2+
∂2T
∂z2
)+ q (3.4)
4 Forme differentielle
Resoudre un probleme thermique consiste a chercher un champ de temperatures T (x, y, z; t) tel que :
ρ cP T − div ( ¯λ · −−→gradT )− q = 0 en tout point du solide (4.1a)
avec :
– les conditions aux limites :
T = TP sur ST
~n · ( ¯λ · −−→gradT ) = ϕS + h (Tf − T )︸ ︷︷ ︸convection
+ ε σ (T 4∞ − T 4 )︸ ︷︷ ︸
rayonnement
sur Sϕ
S = ST ∪ Sϕ , ST ∩ Sϕ = ∅
(4.1b)
ou S est la surface du solide et ~n la normale unitaire a S dirigee vers l’exterieur de V .
– la condition initiale a l’instant t = t0 :
T (x, y, z; t0) = T0(x, y, z) (4.1c)
La quantite r(T ) definie par :
r(T ) = ρ cP T − div ( ¯λ · −−→gradT )− q (4.2)
est appelee residu de l’equation (4.1a). r(T ) est nul si T est solution de l’equation (4.1a) et differentde 0 dans le cas contraire.

Thermique 5
5 Forme integrale faible
Pour resoudre l’equation (4.1) par la methode des elements finis, nous utilisons la methode desresidus ponderes dans la formulation de Galerkin [2, 11, 16, 18, 26, 27, 43, 44] . Multiplionsl’equation (4.1a) par une fonction arbitraire T ∗ et integrons sur le domaine V :
W(T, T ∗) =∫
VT ∗ r(T ) dV =
∫
VT ∗ ( ρ cP T − div ( ¯λ · −−→gradT )− q ) dV = 0 ∀ T ∗ (5.1)
La fonction T ∗ est appelee fonction de ponderation (ou fonction test).
En utilisant la relation :div (f ~v ) = f div~v + ~v · −−→grad f (5.2)
ou f est un scalaire, l’equation (5.1) s’ecrit :
W(T, T ∗) =∫
VT ∗ ρ cP T dV −
∫
Vdiv (T ∗ ( ¯λ · −−→gradT ) ) dV
+
∫
V
−−→gradT ∗ · ( ¯λ · −−→gradT ) dV −
∫
VT ∗ q dV = 0
(5.3)
Transformons la deuxieme integrale de cette equation en integrale de surface a l’aide du theoremed’Ostrogradski :
∫
Vdiv (T ∗ (¯λ · −−→gradT ) ) dV =
∫
Sϕ
T ∗ ~n · ( ¯λ · −−→gradT ) dS +
∫
ST
T ∗ ~n · ( ¯λ · −−→gradT ) dS (5.4)
et imposons la condition T ∗ = 0 sur ST , ce qui annule la derniere integrale.
En utilisant la relation (5.4), les conditions aux limites (4.1b) et l’equation (5.3), nous obtenons laformulation integrale faible d’un probleme thermique :
Trouver T (x, y, z ; t) tel que :
W(T, T ∗) =∫
VT ∗ ρ cP T dV +
∫
V
−−→gradT ∗ · ¯λ · −−→gradT dV
−∫
Sϕ
T ∗ (ϕS + h (Tf − T ) + ε σ (T 4∞ − T 4 ) ) dS −
∫
VT ∗ q dV
=0 ∀T ∗ , T ∗ = 0 sur ST
(5.5a)
avec la condition aux limites :T = TP sur ST (5.5b)
et la condition initiale :T (x, y, z; t0) = T0(x, y, z) (5.5c)
Remarques :
– Les fonctions T et T ∗ doivent etre suffisamment regulieres pour que les expressions ci-dessusaient un sens.
– La fonction T ∗ est appelee champ de temperatures virtuelles.– La formulation integrale (5.5) est l’analogue pour un probleme thermique du principe des
travaux virtuels en mecanique.

6 Methode des elements finis
– Dans l’equation (5.1) la fonction T doit etre derivable deux fois et une fois dans l’equation (5.5).Ces equations sont dites respectivement forme integrale forte et forme integrale faible del’equation differentielle (4.1).
– Sous certaines conditions de regularite, les formulations (4.1) et (5.5) sont equivalentes.
6 Forme discretisee : elements finis
La solution analytique de l’equation (5.5) est en general inaccessible. On est donc conduit a chercherune solution approchee par une methode numerique : la methode des elements finis. Cette methodeest un cas particulier de la methode de Galerkin : le champ de temperatures et les fonctions testappartiennent au meme espace de dimension finie.
6.1 Discretisation du domaine : maillage
Le domaine V est decompose en sous-domaines V e de forme geometrique simple (les elements) reliesentre eux en des points appeles nœuds. Cette operation s’appelle maillage (figure 3).
Figure 3 – Domaine plan discretise en 12 elements relies entre eux par 15 noeuds
Le maillage est defini par la table des nœuds et la table des elements.
6.2 Representation elementaire (ou locale) du champ de temperatures
Le champ de temperatures T e(x, y, z; t) dans l’element (e) a pour expression :
T e(x, y, z; t) =[N e
1 (x, y, z) . . . N ei (x, y, z) . . . N e
ne(x, y, z)]
T e1 (t)...
T ei (t)...
T ene(t)
= [N e(x, y, z)] {T e(t)}
(6.1)
ou :
– ne est le nombre de nœuds de l’element.– les fonctions N e
i (x, y, z) sont les fonctions d’interpolation elementaires.– la matrice [N e(x, y, z)] est la matrice d’interpolation elementaire.– le vecteur {T e(t)} regroupe les temperatures des nœuds de l’element (e).
Thermique 7
6.3 Representation globale du champ de temperatures
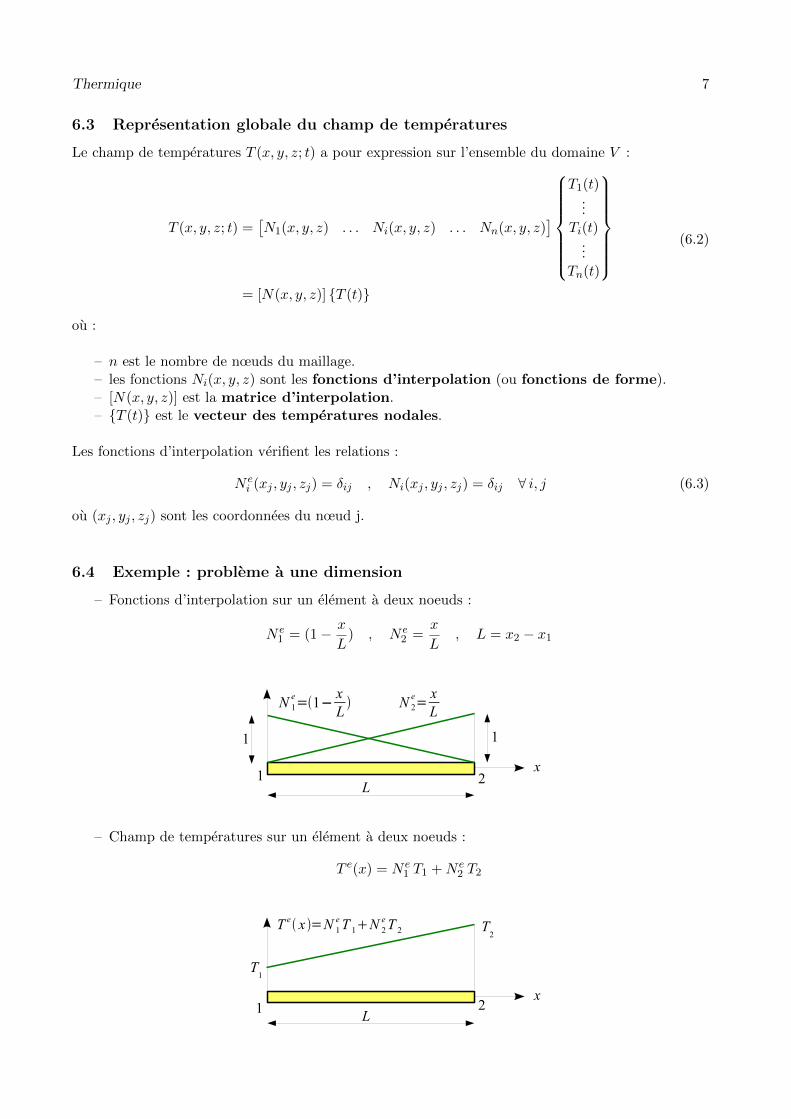
Le champ de temperatures T (x, y, z; t) a pour expression sur l’ensemble du domaine V :
T (x, y, z; t) =[N1(x, y, z) . . . Ni(x, y, z) . . . Nn(x, y, z)
]
T1(t)...
Ti(t)...
Tn(t)
= [N(x, y, z)] {T (t)}
(6.2)
ou :
– n est le nombre de nœuds du maillage.– les fonctions Ni(x, y, z) sont les fonctions d’interpolation (ou fonctions de forme).– [N(x, y, z)] est la matrice d’interpolation.– {T (t)} est le vecteur des temperatures nodales.
Les fonctions d’interpolation verifient les relations :
N ei (xj , yj , zj) = δij , Ni(xj , yj , zj) = δij ∀ i, j (6.3)
ou (xj , yj , zj) sont les coordonnees du nœud j.
6.4 Exemple : probleme a une dimension
– Fonctions d’interpolation sur un element a deux noeuds :
N e1 = (1− x
L) , N e
2 =x
L, L = x2 − x1
– Champ de temperatures sur un element a deux noeuds :
T e(x) = N e1 T1 +N e
2 T2
8 Methode des elements finis
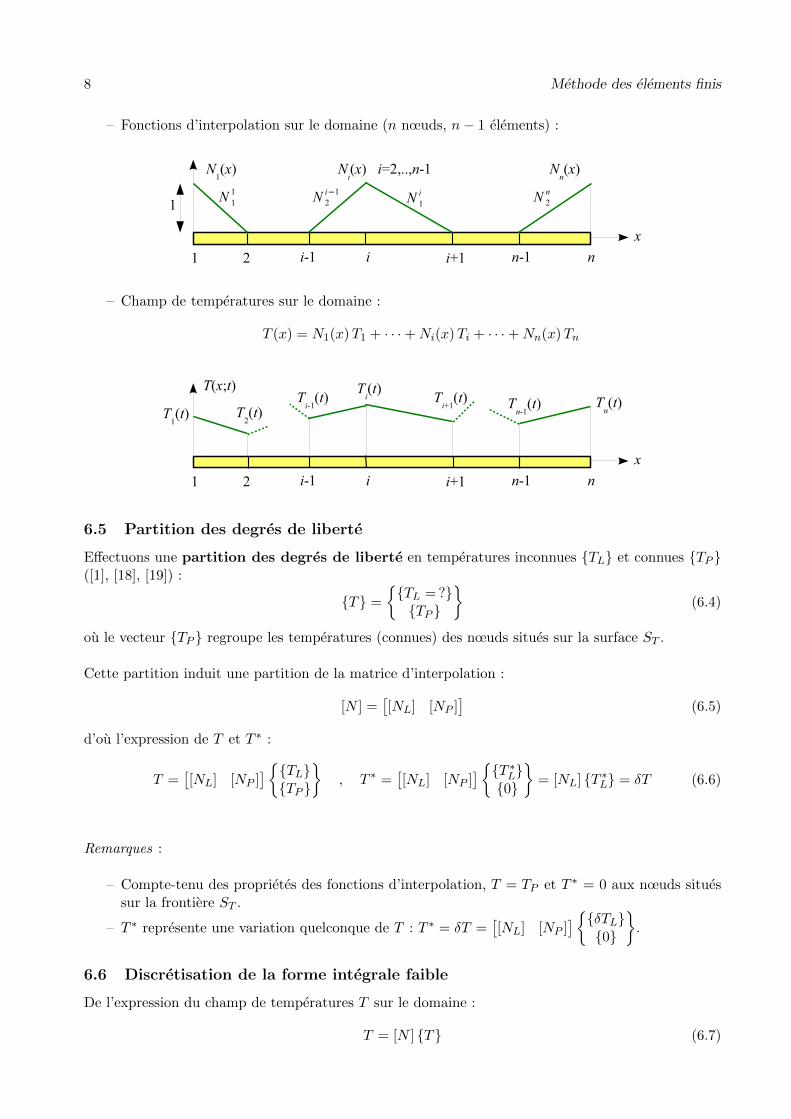
– Fonctions d’interpolation sur le domaine (n nœuds, n− 1 elements) :
– Champ de temperatures sur le domaine :
T (x) = N1(x)T1 + · · ·+Ni(x)Ti + · · ·+Nn(x)Tn
6.5 Partition des degres de liberte
Effectuons une partition des degres de liberte en temperatures inconnues {TL} et connues {TP }([1], [18], [19]) :
{T} =
{{TL =?}{TP }
}(6.4)
ou le vecteur {TP } regroupe les temperatures (connues) des nœuds situes sur la surface ST .
Cette partition induit une partition de la matrice d’interpolation :
[N ] =[[NL] [NP ]
](6.5)
d’ou l’expression de T et T ∗ :
T =[[NL] [NP ]
]{{TL}{TP }
}, T ∗ =
[[NL] [NP ]
]{{T ∗L}
{0}}
= [NL] {T ∗L} = δT (6.6)
Remarques :
– Compte-tenu des proprietes des fonctions d’interpolation, T = TP et T ∗ = 0 aux nœuds situessur la frontiere ST .
– T ∗ represente une variation quelconque de T : T ∗ = δT =[[NL] [NP ]
]{{δTL}{0}
}.
6.6 Discretisation de la forme integrale faible
De l’expression du champ de temperatures T sur le domaine :
T = [N ] {T} (6.7)

Thermique 9
on deduit :
T = [N ] {T} (6.8)
et
{gradT} = [B] {T} (6.9)
avec :
[B] =[{B1} . . . {Bi} . . . {Bn}
](6.10)
ou {Bi} depend du probleme traite (spatial, plan, axisymetrique. . . ). Pour un probleme spatial, {Bi}s’ecrit dans le repere orthonorme {x, y, z} :
{Bi} =
∂Ni
∂x
∂Ni
∂y
∂Ni
∂z
(6.11)
De meme, on a :
T ∗ = [N ] {T ∗} = {T ∗}T [N ]T (6.12)
d’ou :
{gradT ∗} = [B] {T ∗} , {gradT ∗}T = {T ∗}T [B]T (6.13)
En portant ces relations dans l’equation (5.5a), il vient :
W(T, T ∗) = {T ∗}T ( [C] {T}+ [K] {T} − {F} ) (6.14)
ou :
[C] =
∫
Vρ cP [N ]T [N ] dV (6.15)
[K] =
∫
V[B]T [λ] [B] dV +
∫
Sϕ
h [N ]T [N ] dS (6.16)
{F} =
∫
V[N ]T q dV +
∫
Sϕ
[N ]T (ϕS + hTf + ε σ (T 4∞ − T 4 ) ) dS (6.17)
[C] est la matrice de capacite thermique (J/K).
[K] est la matrice de conductivite thermique (W/K).
{F} est le vecteur des flux nodaux (W).
{T} est le vecteur des temperatures nodales (K).
Remarque : par construction, les matrices [C] et [K] sont symetriques.
La partition des degres de liberte induit une partition de [C], [K] et {F} :
[C] =
[[CLL] [CLP ][CPL] [CPP ]
], [K] =
[[KLL] [KLP ][KPL] [KPP ]
], {F} =
{{FL}{FP }
}(6.18)

10 Methode des elements finis
La forme discretisee d’un probleme thermique s’ecrit finalement :
Trouver {TL(t)} tel que :
W({TL}, {T ∗L}) ={T ∗
L}T([
[CLL] [CLP ]]{{TL}
{TP }}
+[[KLL] [KLP ]
]{{TL}{TP }
}− {FL}
)= 0 ∀ {T ∗
L}(6.19)
avec la condition initiale {TL(t0)} = {TL,0}.
Les temperatures nodales inconnues {TL(t)} sont donc les solutions de l’equation :
[CLL] {TL}+ [KLL] {TL} = {FL} − [CLP ] {TP } − [KLP ] {TP } (6.20a)
avec la condition initiale :
{TL(t0)} = {TL,0} (6.20b)
7 Mise en œuvre pratique : calculs elementaires et assemblage
Dans la pratique, [C], [K] et {F} sont construits element par element. Cette operation s’appelleassemblage.
De l’expression du champ de temperatures dans l’element (e) :
T e = [N e] {T e} (7.1)
on deduit :
{gradT e} = [Be] {T e} et T e = [N e] {T e} (7.2)
De meme, on a :
T e∗ = [N e] {T e∗} = {T e∗}T [N e]T (7.3)
d’ou :
{gradT e∗} = [Be]{T e∗} , {gradT e∗}T = {T e∗}T [Be]T (7.4)
En reportant ces expressions dans l’equation (5.5a), il vient :
W(T, T ∗) =∑e
({T e∗}T ( [ce] {T e}+ [ke] {T e} − {fe} )
)(7.5)
ou :
[ce] =
∫
V e
ρ cP [N e]T [N e] dV (7.6)

Thermique 11
[ke] =
∫
V e
[Be]T [λ] [Be] dV +
∫
Seϕ
h [N e]T [N e] dS (7.7)
{fe} =
∫
V e
[N e]T q dV +
∫
Seϕ
[N e]T (ϕS + hTf + ε σ (T 4∞ − T 4 ) ) dS (7.8)
Dans ces formules, V e represente le volume de l’element (e) et Seϕ la partie de Sϕ qui appartient a la
frontiere de l’element (e).
Ces quantites sont en general evaluees numeriquement.
L’equation (5.5a) s’ecrit :
W(T, T ∗) =∑e
({T ∗}T
([Ce] {T}+ [Ke] {T} − {F e}
) )(7.9)
ou les matrices [Ce], [Ke] et {F e} sont obtenus par expansion respectivement de [ce], [ke] et {fe}. Dansces matrices, les seuls termes non nuls sont les termes associes aux degres de liberte de l’element (e).
On en deduit :
[C] =∑e
[Ce] , [K] =∑e
[Ke] , {F} =∑e
{F e} (7.10)
Remarque : dans la pratique, la partition des degres de liberte est effectuee avant la phase d’assemblage.
8 Exemples de calculs elementaires
Dans cette section, l’exposant e est omis.
8.1 Element a deux nœuds (probleme a une dimension)
Considerons un element a deux nœuds de longueur L dont les caracteristiques A, λ, ρ et cP sontconstantes.
Le champ de temperatures dans l’element s’ecrit (§ 6.4) :
T (x) =(1− x
L
)T1 +
x
LT2 =
1
L
[L− x x
]{T1
T2
}= [N ] {T}
ou T1 et T2 les temperatures nodales. On en deduit la matrice [B] :
[B] =
[∂N1
∂x
∂N2
∂x
]=
1
L
[−1 1]
, [B]T =1
L
[−11
]
la matrice de conductivite [k] :
[ k ] =
∫
V[B]T λ [B] dV =
∫ L
0λA [B]T [B] dx =
λA
L
[1 −1−1 1
]

12 Methode des elements finis
la matrice de capacite [c] :
[ c ] =
∫
V[N ]T ρ cP [N ] dV =
∫ L
0ρ cP A [N ]T [N ] dx =
ρ cP AL
6
[2 11 2
]
et le vecteur flux {f} du a une source volumique d’intensite q :
{f} =
∫
V[N ]T q dV =
∫ L
0Aq [N ]T dx =
q AL
2
{11
}
La densite de flux calculee avec la formule :
ϕx(x) = −λ∂T
∂x= −λ [B] {T} = −λ
L(T2 − T1 )
est constante dans l’element.
Remarques :
– Pour cet element, l’equation :
{fnod} =
{Aϕx(0)−Aϕx(L)
}= [ k ] {T}+ [ c ] {T} − {f}
donne la valeur exacte des flux thermiques aux nœuds de l’element.
– Cas particulier : probleme stationnaire.
L’integration de l’equation :dϕx
dx= q (8.1)
donne :
ϕx(x) = ϕx1 +
∫ x
0q ds = ϕx1 + q x (8.2)
L’integration de l’equation :
ϕx = −λdT
dx(8.3)
donne :
T (x) = T1 − 1
λ
∫ x
0ϕx(s) ds = T1 − ϕx1
λx− q
2λx2 (8.4)
La fonction ϕx(x) s’annule pour :
xm = −ϕx1
q(8.5)
Si xm est compris entre 0 et L, la temperature passe par une valeur extremale :
Tm = T1 +ϕ2x1
2λ q(8.6)
8.2 Triangle a trois nœuds (probleme plan)
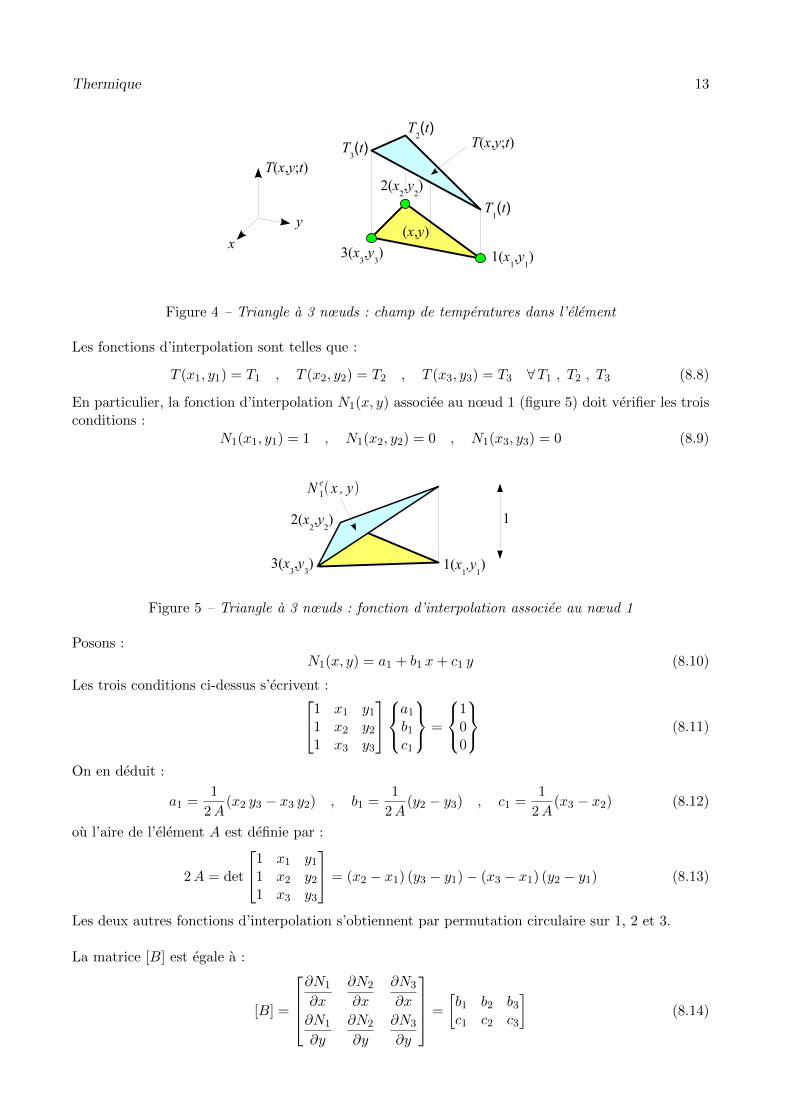
A l’interieur de l’element dont les nœuds sont 1, 2 et 3 (dans le sens trigonometrique), le champ detemperatures T (x, y) est defini par(figure 4) :
T (x, y) = [N(x, y)] {T} = N1(x, y)T1 +N2(x, y)T2 +N3(x, y)T3 (8.7)
Thermique 13
Figure 4 – Triangle a 3 nœuds : champ de temperatures dans l’element
Les fonctions d’interpolation sont telles que :
T (x1, y1) = T1 , T (x2, y2) = T2 , T (x3, y3) = T3 ∀T1 , T2 , T3 (8.8)
En particulier, la fonction d’interpolation N1(x, y) associee au nœud 1 (figure 5) doit verifier les troisconditions :
N1(x1, y1) = 1 , N1(x2, y2) = 0 , N1(x3, y3) = 0 (8.9)
Figure 5 – Triangle a 3 nœuds : fonction d’interpolation associee au nœud 1
Posons :N1(x, y) = a1 + b1 x+ c1 y (8.10)
Les trois conditions ci-dessus s’ecrivent :1 x1 y11 x2 y21 x3 y3
a1b1c1
=
100
(8.11)
On en deduit :
a1 =1
2A(x2 y3 − x3 y2) , b1 =
1
2A(y2 − y3) , c1 =
1
2A(x3 − x2) (8.12)
ou l’aire de l’element A est definie par :
2A = det
1 x1 y11 x2 y21 x3 y3
= (x2 − x1) (y3 − y1)− (x3 − x1) (y2 − y1) (8.13)
Les deux autres fonctions d’interpolation s’obtiennent par permutation circulaire sur 1, 2 et 3.
La matrice [B] est egale a :
[B] =
∂N1
∂x
∂N2
∂x
∂N3
∂x
∂N1
∂y
∂N2
∂y
∂N3
∂y
=
[b1 b2 b3c1 c2 c3
](8.14)

14 Methode des elements finis
et est constante sur l’element. Si de plus l’epaisseur t de l’element et la conductivite λ du materiausont constantes, la matrice de conductivite elementaire se reduit a :
[ k ] = [B]T λ [B] tA (8.15)
Avec les memes hypotheses, le vecteur flux elementaire equivalent a une source volumique d’intensite qest egal a :
{f} =q tA
3
111
(8.16)
Remarque : le vecteur densite de flux calcule avec la formule :
{ϕ} = −λ [B] {T} (8.17)
est constant dans l’element.
8.3 Element isoparametrique a trois nœuds equidistants (probleme a une dimen-sion)
Les coordonnees nodales sont x1, x2 et x3 avec L = x3 − x1 et x2 =x1 + x3
2.
T1, T2 et T3 sont les temperatures nodales.
L’element est isoparametrique :
– representation de la geometrie :
x(ξ) = [N ]
x1x2x3
=
ξ (ξ − 1)
2x1 + (1− ξ2)x2 +
ξ (ξ + 1)
2x3 = x2 + ξ
L
2
− 1 ≤ ξ ≤ 1
(8.18)
Le jacobien de la transformation est egal a : J(ξ) =∂x(ξ)
∂ξ=
L
2.
– representation du champ de temperatures :
T (ξ) = [N ]
T1
T2
T3
=
ξ (ξ − 1)
2T1 + (1− ξ2)T2 +
ξ (ξ + 1)
2T3 (8.19)
On en deduit l’expression de la matrice [B] :
[B] =[B1 B2 B3
]avec Bi =
∂Ni
∂x=
1
J
∂Ni
∂ξ(8.20a)
d’ou
[B] =1
L
[2 ξ − 1 −4 ξ 2 ξ + 1
](8.20b)

Thermique 15
Les matrices elementaires sont (programme lin 3n) :
– matrice de conductivite :
[ k ] =
∫ x3
x1
λA [B]T [B] dx
=
∫ 1
−1λA [B]T [B] J dξ =
λA
3L
7 −8 1−8 16 −81 −8 7
(8.21)
– matrice de capacite :
[ c ] =
∫ x3
x1
ρ cP A [N ]T [N ] dx
=
∫ 1
−1ρ cP A [N ]T [N ]J dξ =
ρ cP AL
30
4 2 −12 16 2−1 2 4
(8.22)
– vecteur flux du a une source de chaleur uniformement repartie d’intensite volumique q :
{f} =
∫ x3
x1
[N ]TAq dx =
∫ 1
−1[N ]TA q J dξ =
q AL
6
141
(8.23)
9 Exemple de mise en equation
9.1 Donnees du probleme
Le mur represente la figure (6) est constitue de deux troncons de meme longueur L. Les caracteristiquesdu mur sont : A , λ , ρ et cP .
Figure 6 – Exemple de mise en equation
Le mur est soumis aux charges thermiques suivantes :
– temperature imposee sur la face x = 0 : T (0; t) = T0 +B sinωt .– echange de chaleur par convection sur la face x = 2L : ϕ = h(Tf − T (2L; t) ).– source de chaleur volumique d’intensite q entre x = 0 et x = L.
A l’instant t = 0, la temperature du mur est egale a T0 : T (x; 0) = T0.
Les etapes de la mise en equations sont :

16 Methode des elements finis
9.2 Discretisation du domaine
Le mur est discretise en deux elements a deux nœuds (1− 2) et (2− 3).
Les variables nodales sont :
{T (t)} =
T1(t)T2(t)T3(t)
Les conditions aux limites et la condition initiale s’ecrivent :
T1(t) = T0 +B sinωt , ϕ3 = h (Tf − T3(t)) , T2(0) = T3(0) = T0.
9.3 Partition des temperatures nodales
Effectuons une partition des degres de liberte en temperatures inconnues et temperatures connues :
{T} =
{{TL}{TP }
}=
{T2 =?T3 =?
}
{T1 = T0 +B sinωt}
On en deduit la localisation des degres de liberte dans les matrices globales :
{DDL} =
T1 → 3T2 → 1T3 → 2
9.4 Matrices elementaires
Les matrices elementaires sont (§ 8.1) :
– Element 1− 2 :
Localisation des degres de liberte :
{ddl1−2} =
{T1 → 3T2 → 1
}
Matrices elementaires :
[k1−2] =λA
L
[1 −1−1 1
], [c1−2] =
ρ cP AL
6
[2 11 2
], {f1−2} =
q AL
2
{11
}
– Element 2− 3 :
Localisation des degres de liberte :
{ddl2−3} =
{T2 → 1T3 → 2
}
Matrices elementaires :
[k2−3] =λA
L
[1 −1−1 1
], [c2−3] =
ρ cP AL
6
[2 11 2
]

Thermique 17
9.5 Remarque : champ de temperatures T (x; t) et fonctions test T ∗ = δT
Le champ de temperatures T et les fonctions test T ∗ = δT ont pour expression (figure (7)) :
T (x; t) =(1− x
L
)T1(t) +
(x
L
)T2(t) , T ∗(x) =
(x
L
)T ∗2 (T ∗
1 = δT1 = 0)
sur l’element 1− 2 et
T (x; t) =(2− x
L
)T2(t) +
(x
L− 1
)T3(t) , T ∗(x) =
(2− x
L
)T ∗2 +
(x
L− 1
)T ∗3
sur l’element 2− 3.
Figure 7 – Champ de temperatures T et fonctions test T ∗ = δT
9.6 Assemblage
L’assemblage des matrices elementaires conduit a la relation :
ρ cP AL
6
[2 + 2 1 11 2 0
]
T2
T3
B ω cosωt
+
λA
L
[1 + 1 −1 −1−1 1 0
]
T2
T3
T0 +B sinωt
=q AL
2
{10
}+
{0
Ah (Tf − T3)
}
Remarque : seuls les blocs [KLL], [KLP ], [CLL], [CLP ] et {FL} sont assembles.
9.7 Equation
Les temperatures inconnues T2(t) et T3(t) sont les solutions de l’equation :
ρ cP AL
6
[4 11 2
]{T2
T3
}+
(λA
L
[2 −1−1 1
]+
[0 00 Ah
]) {T2
T3
}
=q AL
2
{10
}+
{0
AhTf
}− ρ cP AL
6
{B ω cosωt
0
}+
λA
L
{T0 +B sinωt
0
}
avec la condition initiale : T2(0) = T3(0) = T0.
10 Resolution en regime stationnaire
En regime stationnaire, l’equation (6.20) se reduit a :
[KLL] {TL} = {FL} − [KLP ] {TP } (10.1)
Remarque : en l’absence de temperatures imposees, d’echange de chaleur par convection ou rayonne-ment, la matrice [KLL] est singuliere et l’equation (10.1) n’a pas de solution.

18 Methode des elements finis
10.1 Probleme lineaire
10.1.1 Equation
Les temperatures nodales inconnues sont egales a :
{TL} = [KLL]−1 ( {FL} − [KLP ] {TP } ) (10.2)
10.1.2 Exemple
Le mur de surface A represente sur la figure (8) est constitue de trois domaines.
Figure 8 – Exemple : probleme lineaire
On donne :
– Geometrie :
L1−2 = 50 mm , L2−3 = 200 mm , L3−4 = 140 mm
– Conductivite thermique :
λ1−2 = 1 W/(m.K) , λ2−3 = 3 W/(m.K) , λ3−4 = 10 W/(m.K)
– Conditions aux limites :
Convection sur la face 1 : coefficient h1 = 120 W/(m2.K), temperature du fluide Tf1 = 30 CConvection sur la face 4 : coefficient h4 = 200 W/(m2.K), temperature du fluide Tf4 = 10 CSource volumique dans le domaine 2− 3 : q = 3000 W/m3
Les matrices elementaires sont (§ 8.1) :
[ki−j ] =
[ki −ki−ki ki
]avec ki =
λi−j A
Li−j, {f2−3} =
q AL2−3
2
{11
}
Les temperatures nodales T1, T2, T3 et T4 sont les solutions de l’equation :
k1 + h1 −k1 0 0
−k1 k1 + k2 −k2 0
0 −k2 k2 + k3 −k30 0 k3 k3 + h4
T1
T2
T3
T4
=
Ah1 T1e
Aq L2−3/2Aq L2−3/2Ah4 T4e
On obtient :
T1 = 30.660 C , T2 = 34.618 C , T3 = 19.896 C , T4 = 12.604 C
Les flux nodaux sont evaluees avec la formule :
{fnod,i−j} =
{ϕxi
−ϕxj
}= [ki−j ]
{Ti
Tj
}− {fi−j}
Thermique 19
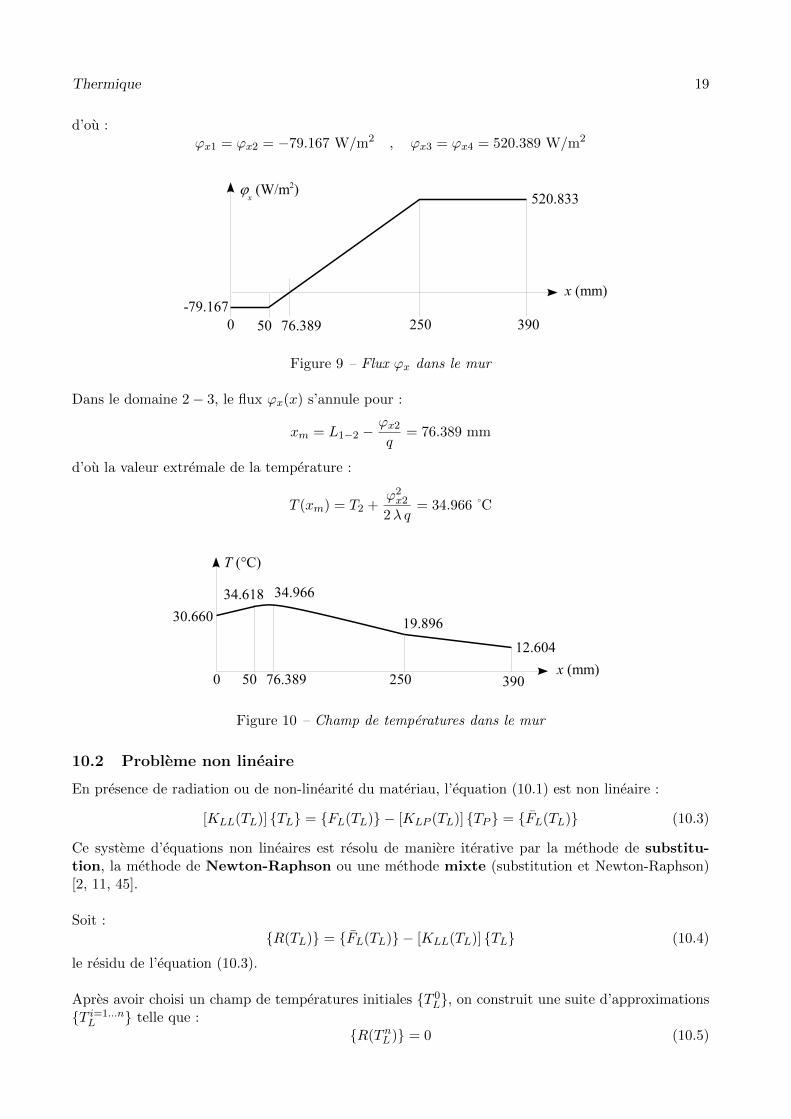
d’ou :ϕx1 = ϕx2 = −79.167 W/m2 , ϕx3 = ϕx4 = 520.389 W/m2
Figure 9 – Flux ϕx dans le mur
Dans le domaine 2− 3, le flux ϕx(x) s’annule pour :
xm = L1−2 − ϕx2
q= 76.389 mm
d’ou la valeur extremale de la temperature :
T (xm) = T2 +ϕ2x2
2λ q= 34.966 C
Figure 10 – Champ de temperatures dans le mur
10.2 Probleme non lineaire
En presence de radiation ou de non-linearite du materiau, l’equation (10.1) est non lineaire :
[KLL(TL)] {TL} = {FL(TL)} − [KLP (TL)] {TP } = {FL(TL)} (10.3)
Ce systeme d’equations non lineaires est resolu de maniere iterative par la methode de substitu-tion, la methode de Newton-Raphson ou une methode mixte (substitution et Newton-Raphson)[2, 11, 45].
Soit :{R(TL)} = {FL(TL)} − [KLL(TL)] {TL} (10.4)
le residu de l’equation (10.3).
Apres avoir choisi un champ de temperatures initiales {T 0L}, on construit une suite d’approximations
{T i=1...nL } telle que :
{R(TnL )} = 0 (10.5)
20 Methode des elements finis
Remarques :
– Le residu {R(TL)} est construit element par element par assemblage des residus elementaires.– Le residu doit etre evalue avec precision.
10.2.1 Methode de substitution
Principe
Apres avoir choisi un vecteur {T 0L}, on construit une suite d’approximations {T i=1...n
L } telle que :{
[KLL(Ti−1L )] {T i
L} = {FL(Ti−1L )}
{R(TnL )} = 0
(10.6)
ou sous forme incrementale :
[KLL(Ti−1L )] {∆T i
L} = {FL(Ti−1L )} − [KLL(T
i−1L )] {T i−1
L } = {R(T i−1L )}
{T iL} = {T i−1
L }+ {∆T iL}
{R(TnL )} = 0
(10.7)
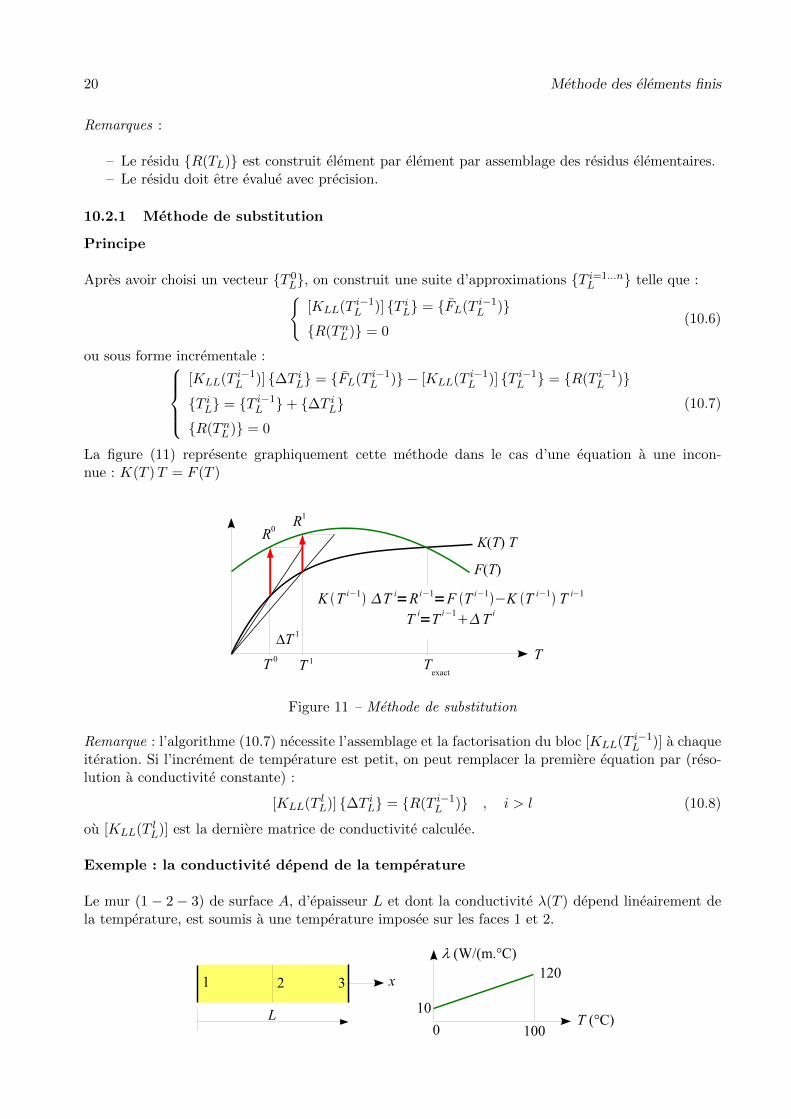
La figure (11) represente graphiquement cette methode dans le cas d’une equation a une incon-nue : K(T )T = F (T )
Figure 11 – Methode de substitution
Remarque : l’algorithme (10.7) necessite l’assemblage et la factorisation du bloc [KLL(Ti−1L )] a chaque
iteration. Si l’increment de temperature est petit, on peut remplacer la premiere equation par (reso-lution a conductivite constante) :
[KLL(TlL)] {∆T i
L} = {R(T i−1L )} , i > l (10.8)
ou [KLL(TlL)] est la derniere matrice de conductivite calculee.
Exemple : la conductivite depend de la temperature
Le mur (1 − 2 − 3) de surface A, d’epaisseur L et dont la conductivite λ(T ) depend lineairement dela temperature, est soumis a une temperature imposee sur les faces 1 et 2.

Thermique 21
On donne :
A = 1 m2 , L = 100 mmλ(0 C) = 20 W/(m. C) , λ(100 C) = 120 W/(m. C)T1 = 20 C, T3 = 100 C
Le mur est represente par un element isoparametrique a trois nœuds equidistants :
– representation de la geometrie :
x(ξ) =ξ + 1
2L , J =
∂x
∂ξ=
L
2
– representation du champ de temperatures :
T (ξ) =ξ (ξ − 1)
2T1 + (1− ξ2) T2 +
ξ (ξ + 1)
2T3
ou T1, T2 et T3 sont les temperatures nodales.
La matrice de conductivite est egale a :
[K(T )] =
∫ 1
−1Aλ(T (ξ)) [B(ξ)]T [B(ξ)]J dξ , [B] =
1
L
[2 ξ − 1 −4 ξ 2 ξ + 1
]
La temperature T2 est la solution de l’equation non lineaire :
K22(T2) T2 = −K21(T2) T1 −K23(T2) T3 = F2(T2)
Les etapes de la resolution sont :
1. Choisir la precision ∆Tmin
2. Choisir la temperature initiale T 02
3. Calculer K = K22(T02 ) (resolution a conductivite constante)
4. A chaque iteration i = 1 . . .
(a) Calculer K = K22(Ti−12 ) (resolution a conductivite variable)
(b) Calculer le residu : Ri−1 = F2(Ti−12 )−K22(T
i−12 ) T i−1
2
(c) Calculer l’increment de temperature ∆T i2 : K ∆T i
2 = Ri−1
(d) Mettre a jour la temperature T2 : T i2 = T i−1
2 +∆T i2
(e) Verifier la convergence : si∣∣∆T i
2
∣∣ < ∆Tmin fin du calcul
On obtient (programme nonlin 1) :
Methode de substitution
iteration K = K22(Ti−12 ) residu ∆T2 T2 (en C)
0 60.00
1 4266.67 42666.67 10.00 70.00
2 4480.00 -2133.33 -0.48 69.52
3 4469.84 96.75 0.02 69.55
4 4470.30 -4.41 -0.00 69.54
22 Methode des elements finis
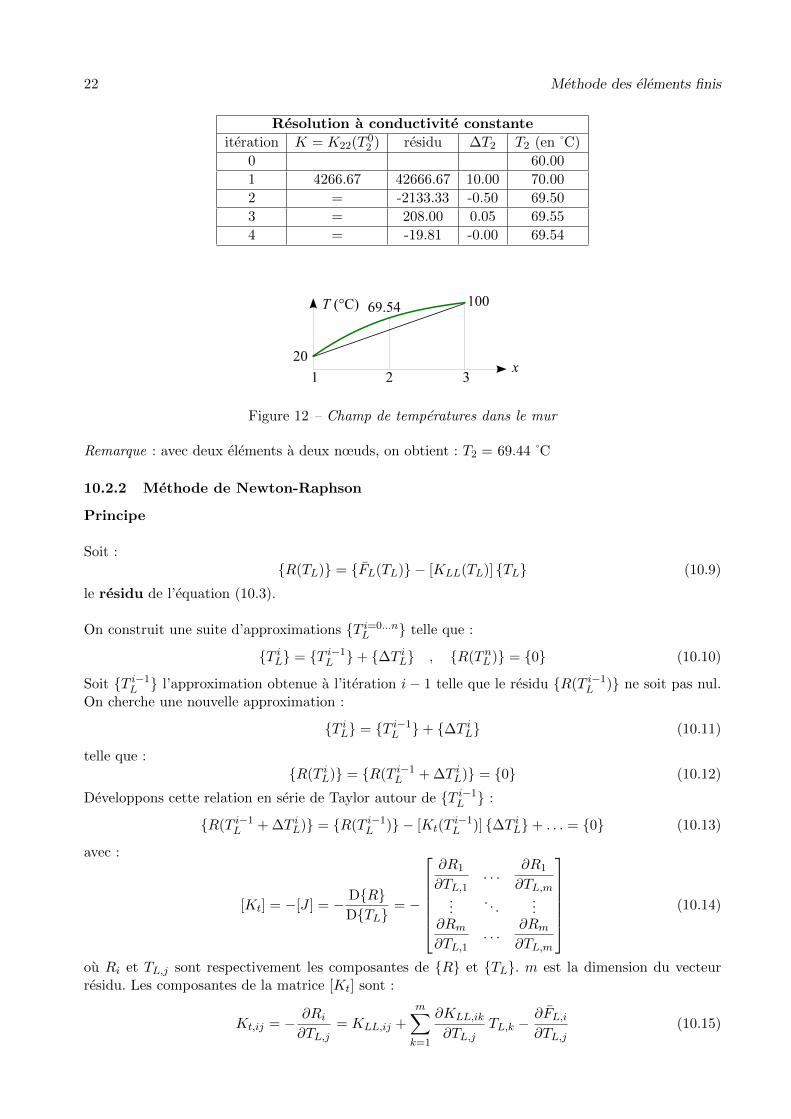
Resolution a conductivite constante
iteration K = K22(T02 ) residu ∆T2 T2 (en C)
0 60.00
1 4266.67 42666.67 10.00 70.00
2 = -2133.33 -0.50 69.50
3 = 208.00 0.05 69.55
4 = -19.81 -0.00 69.54
Figure 12 – Champ de temperatures dans le mur
Remarque : avec deux elements a deux nœuds, on obtient : T2 = 69.44 C
10.2.2 Methode de Newton-Raphson
Principe
Soit :{R(TL)} = {FL(TL)} − [KLL(TL)] {TL} (10.9)
le residu de l’equation (10.3).
On construit une suite d’approximations {T i=0...nL } telle que :
{T iL} = {T i−1
L }+ {∆T iL} , {R(Tn
L )} = {0} (10.10)
Soit {T i−1L } l’approximation obtenue a l’iteration i− 1 telle que le residu {R(T i−1
L )} ne soit pas nul.On cherche une nouvelle approximation :
{T iL} = {T i−1
L }+ {∆T iL} (10.11)
telle que :{R(T i
L)} = {R(T i−1L +∆T i
L)} = {0} (10.12)
Developpons cette relation en serie de Taylor autour de {T i−1L } :
{R(T i−1L +∆T i
L)} = {R(T i−1L )} − [Kt(T
i−1L )] {∆T i
L}+ . . . = {0} (10.13)
avec :
[Kt] = −[J ] = − D{R}D{TL} = −
∂R1
∂TL,1. . .
∂R1
∂TL,m...
. . ....
∂Rm
∂TL,1. . .
∂Rm
∂TL,m
(10.14)
ou Ri et TL,j sont respectivement les composantes de {R} et {TL}. m est la dimension du vecteurresidu. Les composantes de la matrice [Kt] sont :
Kt,ij = − ∂Ri
∂TL,j= KLL,ij +
m∑
k=1
∂KLL,ik
∂TL,jTL,k − ∂FL,i
∂TL,j(10.15)

Thermique 23
[J ] est la matrice jacobienne de {R} par rapport a {TL}.
[Kt] est la matrice tangente.
En negligeant les termes d’ordre superieur a 1, on est amene a resoudre l’equation :
[Kt(Ti−1L )] {∆T i
L} = {R(T i−1L )} (10.16)
Cas particulier : si la non linearite se reduit a un echange de chaleur par radiation en milieuinfini (equation 2.2) :
ϕr = ε σ (T 4∞ − T 4 )
la matrice tangente est egale a :
[Kt(Ti−1L )] = [KLL] +
∫
Sϕ
4 ε σ T 3,i−1 [NL]T [NL] dS (10.17a)
avec
T i−1 =[[NL] [NP ]
]{{T i−1L }
{TP }}
(10.17b)
Remarque : la methode de Newton-Raphson necessite l’assemblage et la factorisation de la matrice [Kt]a chaque iteration. Dans la pratique, le systeme d’equations est resolu par la methode de Newton-Raphson lors des premieres iterations, puis par la methode de Newton-Raphson modifiee desque l’increment de temperatures {∆T i
L} devient suffisamment petit : a chaque iteration, on resout :
[Kt(TlL)] {∆T i
L} = {R(T i−1L )} , i > l (10.18)
ou [Kt(TlL)] est la derniere matrice tangente calculee.
Les figures (13) et (14) representent graphiquement ces deux methodes dans le cas d’une equation aun degre de liberte :
K(T )T = F (T ) , R(T ) = F (T )−K(T )T (10.19)
Dans ce cas, la matrice tangente est egale a :
Kt(T ) = −∂R
∂T= K +
dK
dTT − dF
dT(10.20)
Figure 13 – Methode de Newton-Raphson

24 Methode des elements finis
Figure 14 – Methode de Newton-Raphson modifiee
L’algorithme utilise est le suivant :
1. Choix d’un champ de temperatures initiales : {T 0L}
2. Methode = Newton-Raphson
3. Pour chaque iteration i :
(a) Calcul du residu :
{R(T i−1L )} = {F (T i−1
L )} − [K (T i−1L ) ] {T i−1
L }
(b) Resolution de :
[K] {∆T iL} = {R(T i−1
L )}ou [K] est la matrice tangente [Kt(T
i−1L )] (methode de Newton-Raphson) ou la derniere
matrice tangente calculee [Kt(TlL)] (methode de Newton-Raphson modifiee)
(c) Mise a jour du champ de temperature :
{T iL} = {T i−1
L }+ {∆T iL}
(d) Evaluation de la convergence : le calcul s’arrete si :
√{∆T i
L}T {∆T iL}√
{T iL}T {T i
L}< ε
ou ε est la precision desiree.
(e) Si la plus grande composante (en module) du vecteur {∆T iL} est plus petite que la quan-
tite ∆Tm, la methode utilisee pour la suite du calcul est la methode de Newton-Raphsonmodifiee.
Les parametres du calcul sont donc :
– le champ de temperatures initiales : {T 0L}.
– la precision ε.– la quantite ∆Tm.
Exemple : rayonnement en milieu infini
Soient 1 et 2 les deux faces d’un mur de surface A et d’epaisseur L = 0.3 m .

Thermique 25
Les faces 1 et 2 sont respectivement soumises a une temperature imposee T1 = 300 K et a un echangede chaleur par rayonnement (emissivite : ε = 0.6 ; temperature exterieure : T∞ = 800 K).
Soit λ = 40 W/(m.K) la conductivite thermique du materiau.
La temperature T2 est solution de l’equation (6.20) :
λA
L
[−1 1]{T1
T2
}= {Aεσ (T 4
∞ − T 42 )}
soit
K T2 = F (T2)
avec :
K =λ
L, F =
λ
LT1 + ε σ (T 4
∞ − T 42 )
ou les temperatures sont exprimees en Kelvin.
La matrice tangente et le vecteur residu sont :
Kt = K − ∂F
∂T2=
λ
L+ 4 ε σ T 3
2 , R = ε σ (T 4∞ − T 4
2 ) +λ
L(T1 − T2 )
Les etapes de la resolution sont :
1. Choix de la temperature initiale : T 02 .
2. Pour chaque iteration i :
Kt∆T i2 = Ri−1
avec Kt =λ
L+ 4 ε σ T 3,i−1
2 , Ri−1 = ε σ (T 4∞ − T 4,i−1
2 ) +λ
L(T1 − T i−1
2 )
T i2 = T i−1
2 +∆T i2
|∆T i2| ≤ ε ?
On obtient (programme nonlin 2) :
Methode de Newton-Raphson
Iteration Kt(Ti−12 ) Residu ∆T2 T2 (en K)
0 0.00
1 133.33 53934.59 404.51 404.51
2 142.34 -910.85 -6.40 398.11
3 141.92 -1.35 -0.01 398.10

26 Methode des elements finis
Methode de Newton-Raphson modifiee
Iteration Kt(T02 ) Residu ∆T2 T2 (en K)
0 0.00
1 133.33 53934.59 404.51 404.51
2 - -910.85 -6.83 397.68
3 - 59.99 0.45 398.13
4 - -3.86 -0.03 398.10
5 - 0.25 0.00 398.10
10.2.3 Methode mixte : substitution et Newton-Raphson
Le mur (1 − 2 − 3) de surface A, d’epaisseur L et dont la conductivite λ(T ) depend lineairement dela temperature, est soumis aux charges thermiques suivantes :
– rayonnement sur la face 1 : ϕ1 = ε σ(T 4∞ − T 41 )
– convection sur la face 3 : ϕ3 = h (Tf − T3 )
On donne :
– A = 1 m2 , L = 500 mm– λ(0 C) = 5 W/(m.K)) , λ(500 C) = 20 W/(m.K))– ε = 0.8 , T∞ = 500 C– h =100 W/(m2.K)) , Tf = 20 C
Le mur est represente par un element isoparametrique a trois nœuds equidistants :
– representation de la geometrie :
x(ξ) =ξ + 1
2L , J =
∂x
∂ξ=
L
2
– representation du champ de temperatures :
T (ξ) =ξ (ξ − 1)
2T1 + (1− ξ2) T2 +
ξ (ξ + 1)
2T3
La matrice de conductivite du mur est egale a :
[K(T )] =
∫ 1
−1Aλ(T (ξ)) [B(ξ)]T [B(ξ)] J dξ

Thermique 27
ou
[B] =1
L
[2 ξ − 1 −4 ξ 2 ξ + 1
]
Les temperatures nodales sont les solutions de l’equation non lineaire :
[K(T )] {T} = {F (T )} avec {T} =
T1
T2
T3
et {F} =
Aεσ (T 4∞ − T 4
1 )0
Ah (Tf − T3)
Cette equation est resolue par une methode mixte : substitution pour la non-linearite du materiau etNewton-Raphson pour le rayonnement. A chaque iteration, on resout :
[Kt(Ti−1)] {∆T i} = {R(T i−1)}
avec :{R(T i−1)} = {F (T i−1)} − [K(T i−1)] {T i−1}
[Kt(Ti−1)] = [K(T i−1)] +
4Aεσ T 3,i−1
1 0 00 0 00 0 Ah
On obtient (programme nonlin 3) :
Iteration ∆T1 ∆T2 ∆T3 T1 (en C) T2 (en C) T3 (en C)
0 500.00 260.00 20.00
1 -87.27 37.89 73.18 412.73 297.89 93.18
2 -23.87 -28.86 2.49 388.86 269.03 95.67
3 3.00 -0.34 -2.29 391.86 268.69 93.38
4 0.13 0.51 -0.08 391.99 269.20 93.30
5 -0.07 -0.02 0.03 391.93 269.18 93.33
6 0.00 -0.01 -0.00 = 269.17 =
T2 − (T1 + T3)/2 = 26.54 C
Remarque : avec deux elements a deux nœuds, on a :
[k1−2] =λ((T1 + T2)/2) 2
L
[1 −1−1 1
], [k2−3] =
λ((T2 + T3)/2) 2
L
[1 −1−1 1
]
et on obtient (programme nonlin 3a) :
T1 = 391.93 C , T2 = 269.01 , T3 = 93.33 C , T2 − (T1 + T3)/2 = 26.38 C
11 Resolution en regime transitoire
Discretisons la duree du chargement en intervalles de temps : t0 · · · ts · · · .
A l’instant t compris entre ts et ts+1, en supposant une variation lineaire de la temperature surl’intervalle :
t = (1− α) ts + α ts+1 = ts + α∆t avec ∆t = ts+1 − ts , 0 ≤ α ≤ 1
{TL(t)} = (1− α) {TL}s + α {TL}s+1 = {TL}s + α {∆TL}avec {∆TL} = {TL}s+1 − {TL}s
(11.1)

28 Methode des elements finis
d’ou :
T (t) =[NL NP
]{{TL}s + α {∆TL}{TP (t)}
}(11.2)
Figure 15 – Composante Ti de {TL}
On en deduit :
{TL} =∂{TL}∂α
∂α
∂t=
{∆TL}∆t
(11.3)
En portant les expressions ci-dessus dans l’equation (6.20) il vient :{
[KLL] {∆TL} = {FL(t)}{TL}s+1 = {TL}s + {∆TL}
(11.4a)
avec :
[KLL] = [CLL] + α∆t [KLL]
{FL(t)} = ∆t({FL(t)} − [CLP ] {TP (t)} − [KLP ] {TP (t)} − [KLL] {TL}s
) (11.4b)
Remarque : certaines valeurs de α sont associees a des methodes classiques :
α = 0 : methode d’Euler explicite.α = 1/2 : methode de Crank-Nicholson.α = 2/3 : methode de Galerkin.α = 1 : methode d’Euler implicite.
11.1 Probleme lineaire
L’increment de temperature {∆TL} est egal a :
{∆TL} = [KLL]−1 {FL(t)} (11.5)
La stabilite du schema d’integration depend de α et de l’increment de temps.
Exemple : considerons l’equation a une inconnue :
T + ω T = 0 avec T (0) = T0
La solution exacte est : T = T0 e−ω t.
L’algorithme ci-dessus s’ecrit :
Ts+1 − Ts
∆t+ ω ((1− α)Ts + αTs+1)

Thermique 29
d’ou :
Ts+1 = ATs avec A =1−∆t (1− α)ω
1 + α∆t ω
A l’instant n∆t la temperature est egale a : T (n∆t) = An T0.
Pour que la methode converge, le module de A doit etre inferieur a 1 d’ou :
−1− α∆t ω < 1−∆t (1− α)ω < 1 + α∆t ω
Il vient, apres simplification :
−∆t ω < 0 et (1− 2α)∆t ω < 2
La premiere inegalite est toujours satisfaite ; la seconde l’est si :
α ≥ 1
2ou
α <1
2et ∆t <
2
(1− 2α)ω
De plus, il y a stabilite sans oscillation si le coefficient A est positif, ce qui impose :
1−∆t (1− α)ω > 0
soit :
∆t <1
(1− α)ω
Figure 16 – Domaine de stabilite (ω = 1)
Soit ωmax la plus grande valeur propre de [C]−1 [K]. On montre que ([2, 16, 11, 18, 26]) :
– le schema d’integration est stable pour :
∆t <2
(1− 2α)ωmax(11.6)
Remarque : le schema d’integration est inconditionnellement stable pour α ≥ 1
2.
– il y a stabilite sans oscillation si :
∆t <1
(1− α)ωmax(11.7)

30 Methode des elements finis
Exemple : considerons un mur de longueur L dont les caracteristiques A , λ , ρ et cP sont constantes.
Ce mur est represente par n elements a deux nœuds de longueurL
n.
Les matrices elementaires sont egales a :
[ k ] =nλA
L
[1 −1−1 1
], [ c ] =
ρ cP AL
6n
[2 11 2
]
d’ou les matrices globales :
[K] =nλA
L
1 −1 0 0 0 0−1 2 −1 0 0 00 −1 2 −1 0 0
0 0. . .
. . .. . . 0
0 0 0 −1 2 −10 0 0 0 −1 1
[C] =ρ cP AL
6n
2 1 0 0 0 01 4 1 0 0 00 1 4 1 0 0
0 0. . .
. . .. . . 0
0 0 0 1 4 10 0 0 0 1 2
La plus grande valeur propre de la matrice [C]−1[K] est :
ωmax =12λn2
ρ cP L2
La condition de stabilite sans oscillation s’ecrit donc :
∆tmax <ρ cP
12 (1− α)λ
(L
n
)2
11.2 Probleme non lineaire
Si l’equation (11.4) est non lineaire (non linearite du materiau . . . ), le vecteur {FL(t)} et l’incrementde temperature {∆TL} dependent de la temperature. {∆TL} est calcule par la methode de Newton-Raphson ou une methode mixte :
A chaque chaque iteration i, on resout :
{[Kt(∆T i−1
L )] {∆T iL} = {Ri−1}
{∆T iL} = {∆T i−1
L }+ {∆T iL}
(11.8a)
ou le residu est egal a :
{Ri−1} = {FL(∆T i−1L )} − [KLL] {∆T i−1
L } (11.8b)
Thermique 31
Remarque : si la non linearite se reduit a un echange de chaleur par radiation en milieu infini (equa-tion 2.2) :
ϕr = ε σ (T 4∞ − T 4 )
la matrice tangente est egale a :
[Kt(∆T i−1L )] = [KLL] + α∆t
∫
Sϕ
4 ε σ T 3,i−1 [NL]T [NL] dS (11.9a)
avec
T i−1 =[NL NP
]{{TL}s + α {∆T i−1L }
{TP (t)}}
(11.9b)
32 Methode des elements finis
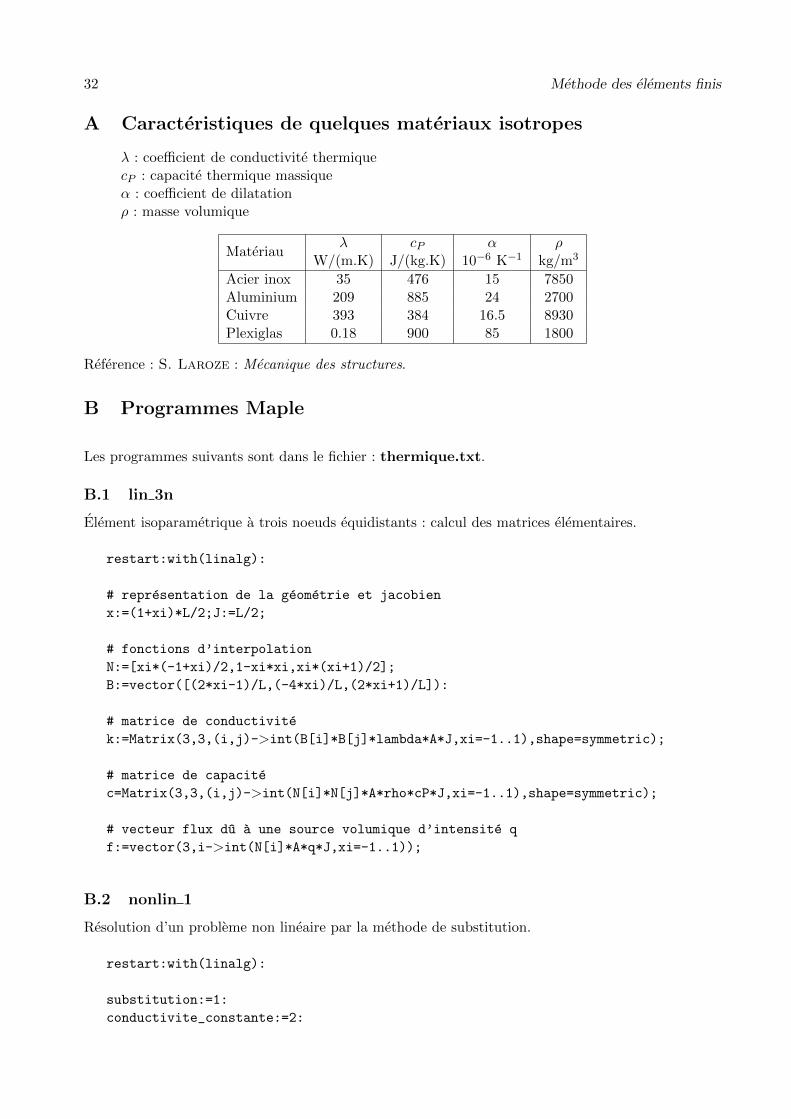
A Caracteristiques de quelques materiaux isotropes
λ : coefficient de conductivite thermiquecP : capacite thermique massiqueα : coefficient de dilatationρ : masse volumique
Materiauλ cP α ρ
W/(m.K) J/(kg.K) 10−6 K−1 kg/m3
Acier inox 35 476 15 7850Aluminium 209 885 24 2700Cuivre 393 384 16.5 8930Plexiglas 0.18 900 85 1800
Reference : S. Laroze : Mecanique des structures.
B Programmes Maple
Les programmes suivants sont dans le fichier : thermique.txt.
B.1 lin 3n
Element isoparametrique a trois noeuds equidistants : calcul des matrices elementaires.
restart:with(linalg):
# representation de la geometrie et jacobien
x:=(1+xi)*L/2;J:=L/2;
# fonctions d’interpolation
N:=[xi*(-1+xi)/2,1-xi*xi,xi*(xi+1)/2];
B:=vector([(2*xi-1)/L,(-4*xi)/L,(2*xi+1)/L]):
# matrice de conductivite
k:=Matrix(3,3,(i,j)->int(B[i]*B[j]*lambda*A*J,xi=-1..1),shape=symmetric);
# matrice de capacite
c=Matrix(3,3,(i,j)->int(N[i]*N[j]*A*rho*cP*J,xi=-1..1),shape=symmetric);
# vecteur flux du a une source volumique d’intensite q
f:=vector(3,i->int(N[i]*A*q*J,xi=-1..1));
B.2 nonlin 1
Resolution d’un probleme non lineaire par la methode de substitution.
restart:with(linalg):
substitution:=1:
conductivite_constante:=2:
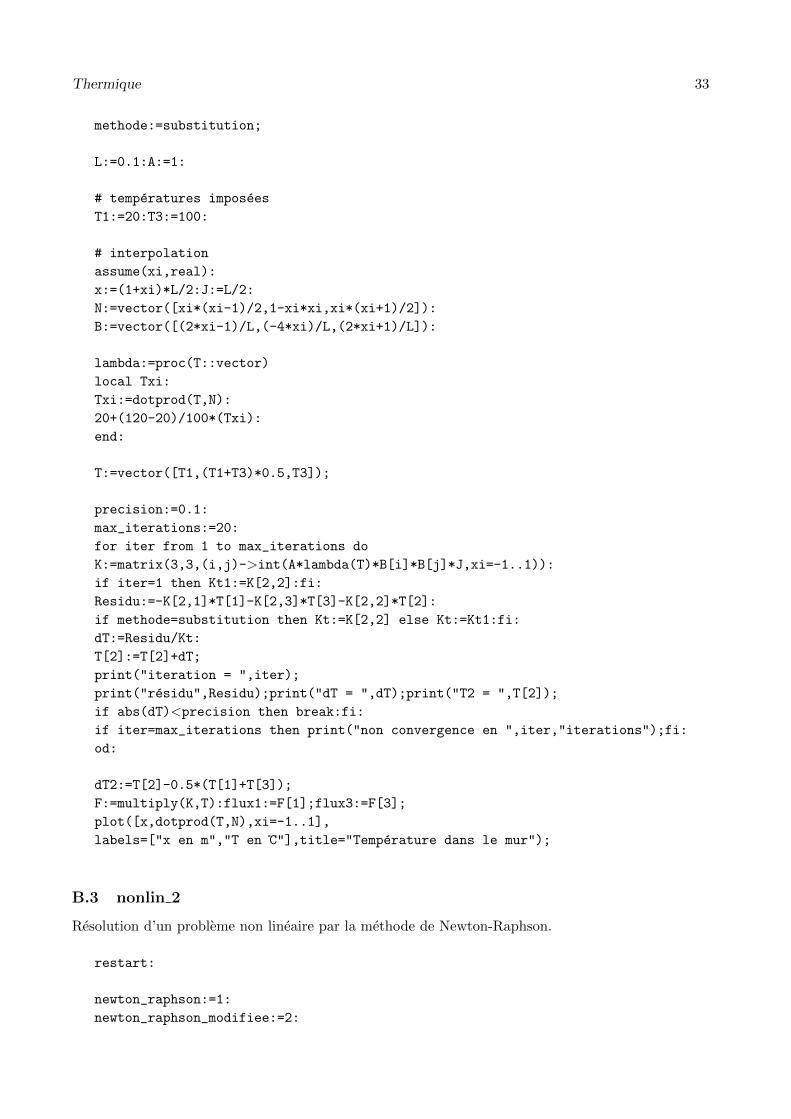
Thermique 33
methode:=substitution;
L:=0.1:A:=1:
# temperatures imposees
T1:=20:T3:=100:
# interpolation
assume(xi,real):
x:=(1+xi)*L/2:J:=L/2:
N:=vector([xi*(xi-1)/2,1-xi*xi,xi*(xi+1)/2]):
B:=vector([(2*xi-1)/L,(-4*xi)/L,(2*xi+1)/L]):
lambda:=proc(T::vector)
local Txi:
Txi:=dotprod(T,N):
20+(120-20)/100*(Txi):
end:
T:=vector([T1,(T1+T3)*0.5,T3]);
precision:=0.1:
max_iterations:=20:
for iter from 1 to max_iterations do
K:=matrix(3,3,(i,j)->int(A*lambda(T)*B[i]*B[j]*J,xi=-1..1)):
if iter=1 then Kt1:=K[2,2]:fi:
Residu:=-K[2,1]*T[1]-K[2,3]*T[3]-K[2,2]*T[2]:
if methode=substitution then Kt:=K[2,2] else Kt:=Kt1:fi:
dT:=Residu/Kt:
T[2]:=T[2]+dT;
print("iteration = ",iter);
print("residu",Residu);print("dT = ",dT);print("T2 = ",T[2]);
if abs(dT)<precision then break:fi:
if iter=max_iterations then print("non convergence en ",iter,"iterations");fi:
od:
dT2:=T[2]-0.5*(T[1]+T[3]);
F:=multiply(K,T):flux1:=F[1];flux3:=F[3];
plot([x,dotprod(T,N),xi=-1..1],
labels=["x en m","T en C"],title="Temperature dans le mur");
B.3 nonlin 2
Resolution d’un probleme non lineaire par la methode de Newton-Raphson.
restart:
newton_raphson:=1:
newton_raphson_modifiee:=2:
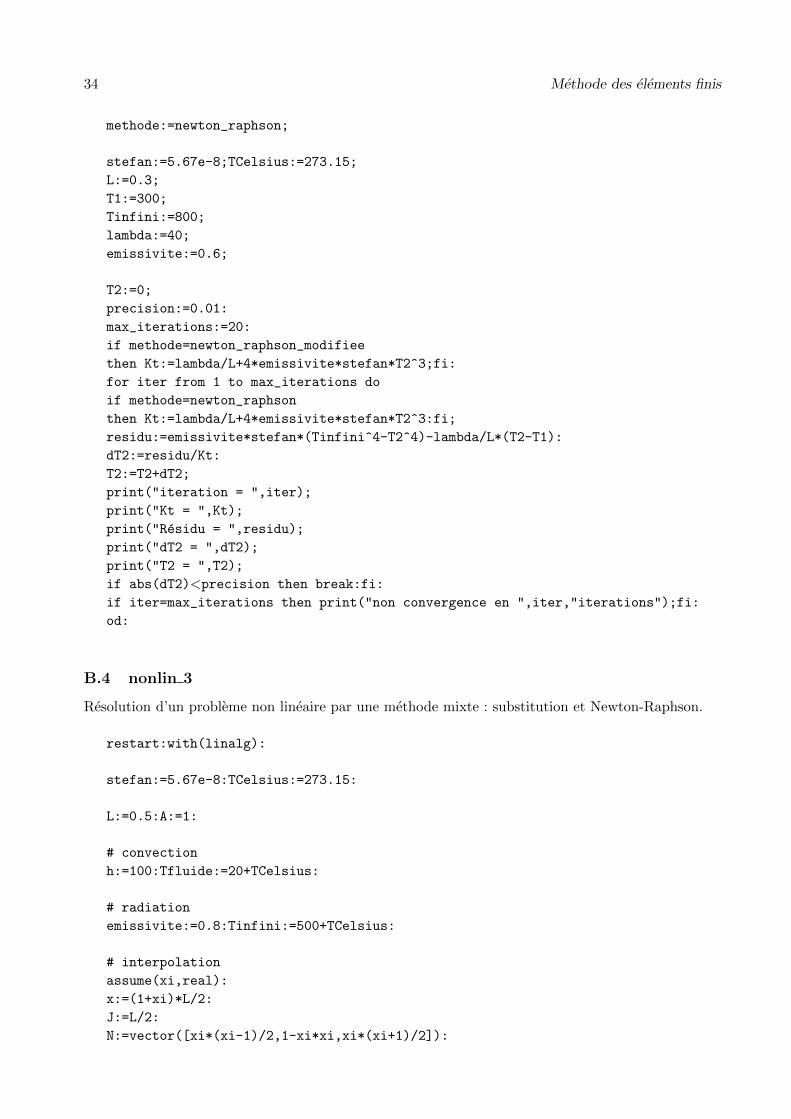
34 Methode des elements finis
methode:=newton_raphson;
stefan:=5.67e-8;TCelsius:=273.15;
L:=0.3;
T1:=300;
Tinfini:=800;
lambda:=40;
emissivite:=0.6;
T2:=0;
precision:=0.01:
max_iterations:=20:
if methode=newton_raphson_modifiee
then Kt:=lambda/L+4*emissivite*stefan*T2^3;fi:
for iter from 1 to max_iterations do
if methode=newton_raphson
then Kt:=lambda/L+4*emissivite*stefan*T2^3:fi;
residu:=emissivite*stefan*(Tinfini^4-T2^4)-lambda/L*(T2-T1):
dT2:=residu/Kt:
T2:=T2+dT2;
print("iteration = ",iter);
print("Kt = ",Kt);
print("Residu = ",residu);
print("dT2 = ",dT2);
print("T2 = ",T2);
if abs(dT2)<precision then break:fi:
if iter=max_iterations then print("non convergence en ",iter,"iterations");fi:
od:
B.4 nonlin 3
Resolution d’un probleme non lineaire par une methode mixte : substitution et Newton-Raphson.
restart:with(linalg):
stefan:=5.67e-8:TCelsius:=273.15:
L:=0.5:A:=1:
# convection
h:=100:Tfluide:=20+TCelsius:
# radiation
emissivite:=0.8:Tinfini:=500+TCelsius:
# interpolation
assume(xi,real):
x:=(1+xi)*L/2:
J:=L/2:
N:=vector([xi*(xi-1)/2,1-xi*xi,xi*(xi+1)/2]):
Thermique 35
B:=vector([(2*xi-1)/L,(-4*xi)/L,(2*xi+1)/L]):
TNodales_celsius:=proc(T::vector)
vector(3,i->T[i]-TCelsius):
end:
lambda:=proc(T::vector)
local Txi:
Txi:=dotprod(T,N):
5+(20-5)/500*(Txi-TCelsius):
end:
F:=proc(T::vector)
vector([A*emissivite*stefan*(Tinfini^4-T[1]^4),0,A*h*(Tfluide-T[3])]):
end:
T:=vector([Tinfini,(Tinfini+Tfluide)*0.5,Tfluide]):TNodales_celsius(T);
precision:=0.1:
max_iterations:=20:
for iter from 1 to max_iterations do
K:=matrix(3,3,(i,j)->int(A*lambda(T)*B[i]*B[j]*J,xi=-1..1)):
Residu:=matadd(F(T),multiply(K,T),1,-1):
# matrice tangente
K[1,1]:=K[1,1]+A*4*emissivite*stefan*T[1]^3:
K[3,3]:=K[3,3]+A*h:
dT:=linsolve(K,Residu):
T:=matadd(T,dT);
print("iteration = ",iter);print("dT = ",dT);
print("T = ",TNodales_celsius(T));
if norm(dT)<precision then break:fi:
if iter=max_iterations then print("non convergence en ",iter,"iterations");fi:
od:
dT2:=T[2]-0.5*(T[1]+T[3]);
flux1:=F(T)[1];flux3:=F(T)[3];
plot([x,dotprod(TNodales_celsius(T),N),xi=-1..1],
labels=["x en m","T en C"],title="Temperature dans le mur");
C Programme Scilab
C.1 nonlin 3a
Resolution d’un probleme non lineaire par une methode mixte : substitution et Newton-Raphson.
Stefan=5.67e-8;
TCelsius=273.15;
function [lambda]=Lambda(T) // T en degres Celsius
lambda=5+15*T/500;
endfunction;
36 Methode des elements finis
L=0.5; // epaisseur en m
// rayonnement sur la face 1
emissivite=0.8;
Tinfini=500+TCelsius;
// convection sur la face 3
h=100;
Tfluide=20+TCelsius;
// vecteur T initial en K
T=[Tinfini;(Tinfini+Tfluide)/2;Tfluide]
// substitution + Newton-Raphson
max_iterations=10;
eps=1e-2;
convergence=%f;
printf(’\nIteration dT1 dT2 dT3 ’);
printf(’T1 T2 T3 (degres Celcius)\n’);
TC=T-TCelsius // vecteur T initial (degres Celsius)
printf(’%5d %35.2f %7.2f %7.2f\n’,0,TC(1),TC(2),TC(3));
for i=1:max_iterations
// matrice de conductivite
c1=Lambda((TC(1)+TC(2))/2)*2/L;
c2=Lambda((TC(2)+TC(3))/2)*2/L;
K=[c1,-c1,0;-c1,c1+c2,-c2;0,-c2,c2];
// matrice tangente
Kt=K;
Kt(1,1)=Kt(1,1)+4*emissivite*Stefan*T(1)^3;
Kt(3,3)=Kt(3,3)+h;
// vecteur flux et vecteur residu
Flux=[emissivite*Stefan*(Tinfini^4-T(1)^4);0;h*(Tfluide-T(3))]
Residu=Flux-K*T
dT=Kt\Residu // resolution du systeme lineaire par la methode de Gauss
T=T+dT // mise a jour
TC=T-TCelsius; // temperatures en degres Celsius
printf(’%5d %10.3f %7.3f %7.3f’,i,dT(1),dT(2),dT(3));
printf(’%9.2f %7.2f %7.2f\n’,TC(1),TC(2),TC(3));
if norm(dT,’inf’)<eps
convergence=%t;
printf(’\nConvergence en %d iterations\n\n’,i);break;
end
if i==max_iterations printf(’\nNon convergence en %2d iterations\n\n’,i);end
end;
if convergence
printf(’Residu : ’);
printf(’R1 =%6.2f R2 =%6.2f R3 =%6.2f (W/m2)\n’,Residu(1),Residu(2),Residu(3));
printf(’Flux : F1 = %5.2f , F3 = %5.2f (W/m2) \n’,Flux(1),Flux(3));
printf(’T(2)-0.5*(T(1)+T(3)) = %5.2f degres Celsius\n’,T(2)-0.5*(T(1)+T(3)));
end
Thermique 37
References
[1] J. H. Argyris et H.-P. Mlejnek – Die methode der finiten elemente, Band I. Verschiebung-smethode in der statik, Vieweg, 1986.
[2] K.-J. Bathe – Finite element procedures in engineering analysis, Prentice Hall, 1996.
[3] K.-J. Bathe et M. Khoshgoftaar – � Finite element formulation and solution of nonlinearheat transfer �, Nuclear Engineering and Design 51 (1979), p. 389–401.
[4] J.-L. Batoz et G. Dhatt – Modelisation des structures par elements finis, Volume 1. Solideselastiques, Hermes, 1990.
[5] J.-M. Bergheau et R. Fortunier – Simulation numerique des transferts thermiques par ele-ments finis, Hermes, 2004.
[6] A.-M. Bianchi, Y. Fautrelle et J. Etay – Transferts thermiques, Presses Polytechniques etUniversitaires Romandes, 2004.
[7] Y. A. Cengel – Heat transfer. A practical approach, McGraw-Hill, 1998.
[8] B. Cheron – Transferts thermiques, Ellipses, 1999.
[9] J. Crabol – Transfert de chaleur, Masson, 1989.
[10] G. Dhatt et G. Touzot – Une presentation de la methode des elements finis, Maloine, 1984.
[11] G. Dhatt, G. Touzot et E. Lefrancois – Methode des elements finis, Hermes, 2005.
[12] J. Dhombres et J.-B. Robert – Joseph Fourier, Createur de la physique mathematique, Belin,2000.
[13] J. Donea – � On the accuracy of finite element solutions to the transient heat-conductionequation �, International Journal for Numerical Methods in Engineering 8 (1974), p. 103–110.
[14] B. Eyglunent – Manuel de thermique. Theorie et pratique, 2 ed., Hermes, 2000.
[15] J. Fourier – Theorie analytique de la chaleur, Firmin Didot, 1822. Reedition Jacques Gabay,1988.
[16] K. H. Huebner, E. A. Thornton et T. G. Byron – The finite element method for engineers,Wiley, 1995.
[17] T. J. Hughes – � Unconditionally stable algorithms for nonlinear heat conduction �, ComputerMethods in Applied Mechanics and Engineering 10 (1977), p. 135–139.
[18] — , The finite element method. Linear static and dynamic finite element analysis, Dover, 2000.
[19] J.-F. Imbert – Analyse des structures par elements finis, 3 ed., Cepadues, 1995.
[20] F. P. Incropera et D. P. DeWitt – Fundamentals of Heat and Mass Transfer, 4 ed., Wiley,1996.
[21] F. Kreith – Transmission de la chaleur et thermodynamique, Masson, 1967.
[22] F. Kreith et M. S. Bohn – Principles of heat transfer, Brooks/Cole, 2000.
[23] P. Ladeveze et J.-P. Pelle – La maıtrise du calcul en mecanique lineaire et non lineaire,Hermes, 2001.
[24] R. Leleu – Conception et technologie des systemes thermiques, Hermes, 2002.
[25] — , Procedes thermiques de base, Hermes, 2002.
[26] R. W. Lewis, K. Morgan, H. Thomas et K. N. Seetharamu – The finite element methodin heat transfer analysis, Wiley, 1996.
[27] R. W. Lewis, P. Nithiarasu et K. N. Seetharamu – Fondamentals of the Finite ElementMethod for Heat and Fluid Flow, Wiley, 2004.
[28] C. A. Long – Essential heat transfer, Longman, 1999.
38 Methode des elements finis
[29] W. MacAdams – Transmission de la chaleur, Dunod, 1961.
[30] W. Minkowycz, E. Sparrow, G. Schneider et R. Pletcher (eds.) – Handbook of numericalheat transfer, Wiley, 1988.
[31] T. Muneer, J. Kubie et T. Grassie – Heat Transfer. A problem solving approach, Taylor &Francis, 2003.
[32] J. Ouin – Transferts thermiques, Casteilla, 1998.
[33] N. Ozisik – Finite difference methods in heat transfer, CRC Press, 1994.
[34] A. Portela et A. Charafi – Finite elements using Maple. A Symbolic Programming Approach,Springer, 2002.
[35] M. Rappaz, M. Bellet et M. Deville – Modelisation numerique en science et genie desmateriaux, Presses Polytechniques et Universitaires Romandes, 1998.
[36] W. M. Rohsenow, J. P. Harnett et Y. I. Cho (eds.) – Handbook of heat transfer, McGraw-Hill, 1998.
[37] J.-F. Sacadura (ed.) – Initiation aux transferts thermiques, Technique & Documentation, 1978.
[38] J. Taine et J.-P. Petit – Transferts thermiques. Cours et donnees de bases. Mecanique desfluides anisothermes, Dunod, 1991.
[39] — , Transferts thermiques. Applications. 18 exercices integralement corriges, Dunod, 1995.
[40] P. Thomas – Elements finis pour l’ingenieur. Grands principes et petites recettes, Tec & Doc(Collection EDF R&D), 2006.
[41] E. L. Wilson, K.-J. Bathe et F. Peterson – � Finite element analysis of linear and nonlinearheat transfer �, Nuclear Engineering and Design (1974), p. 110–124.
[42] W. Wood et R. W. Lewis – � A comparison of time marching schemes for the transientheat conduction equation �, International Journal for Numerical Methods in Engineering (1975),p. 979–689.
[43] O. C. Zienkiewicz et R. L. Taylor – La methode des elements finis. Formulation de base etproblemes lineaires, AFNOR, 1989.
[44] — , The finite element method, Volume 1. The basis, Butterworth-Heinemann, 2000.
[45] — , The finite element method, Volume 2. Solid mechanics, Butterworth-Heinemann, 2000.
[46] — , The finite element method, Volume 3. Fluid dynamics, Butterworth-Heinemann, 2000.