mémoire de soutenance de diplôme...
TRANSCRIPT
Institut National des Sciences Appliquées Département Génie Civil et Topographie
Spécialité Topographie
Mémoire de soutenance de Diplôme d'Ingénieur Mémoire présenté en Septembre 2012 par Matthieu Tracol Réalisé au sein de l'entreprise : SARL TPLM-3D
1, rue Édouard Prénat 69700 Givors
Directeur de PFE : Correcteurs :
M. David Desbuisson Mme Tania Landes Co-gérant M. Jean-Claude Fischer
Annexes

Tables des annexes
Annexe A : Comparaison des logiciels LTOP, TRINET+ et Comp3D Annexe B : Expériences et analyses Annexe C : Calcul robuste de coordonnées approchées Annexe D : Notice LTOP / TopTools Annexe E : Fiche de contrôle d'un calcul LTOP / TopTools Annexe F : Le calcul automatique de coordonnées approchées – C. Million [1994]
Annexe A : Comparaison des logiciels LTOP,
TRINET+ et Comp3D

SOMMAIRE
ANNEXE A : COMPARAISON DES LOGICIELS LTOP, TRINET+, ET COMP3D
Étude réalisée par Matthieu TRACOL pour TPLM-3D, Mai 2012
SOMMAIRE :1 Le réseau Primaire ................................................................................................................................ 2
1.1 Plan de réseau .................................................................................................................................. 21.2 Appareil utilisé : le TS 30 ................................................................................................................ 3
1.2.1 Méthode de lever ..................................................................................................................... 31.2.2 Compensation du réseau primaire ............................................................................................ 3
1.2.2.1 Initialisation du calcul ......................................................................................................31.2.2.2 Résultats de la compensation ........................................................................................... 5
2 Le réseau secondaire ............................................................................................................................ 62.1 Plan de réseau ................................................................................................................................. 62.2 Matériel ........................................................................................................................................... 72.3 Méthode de lever ............................................................................................................................ 72.4 Coordonnées des points du réseau ................................................................................................... 7
3 Calculs comparatifs sur le réseau secondaire ...................................................................................... 83.1 Compensation avec faute minime .................................................................................................... 8
3.1.1 Résultats du calcul contraint sous LTOP ................................................................................. 83.1.2 Résultats du calcul contraint sous TRINET+ .......................................................................... 93.1.3 Résultats du calcul contraint sous Comp3D ..........................................................................103.1.4 Résultats du calcul robuste sous LTOP .................................................................................. 11
3.2 Compensation avec fautes combinées (grossière + minime) ..........................................................123.2.1 Résultats du calcul contraint sous LTOP ............................................................................... 123.2.2 Résultats du calcul contraint sous TRINET+ ........................................................................ 133.2.3 Résultats du calcul contraint sous Comp3D ..........................................................................143.2.4 Résultats du calcul robuste sous LTOP .................................................................................. 14
3.3 Extrait du listing des résultats de la compensation robuste du réseau secondaire avec introduction des fautes combinées ........................................................................................................................... 163.4 Extrait du listing des résultats de la compensation contrainte sous TRINET+ du réseau secondaire avec introduction des fautes combinées ............................................................................................... 163.5 Extrait du listing des résultats de la compensation sous Comp3D du réseau secondaire avec introduction des fautes combinées ....................................................................................................... 17
i
COMPARAISON DES LOGICIELS LTOP, TRINET+, ET COMP3D
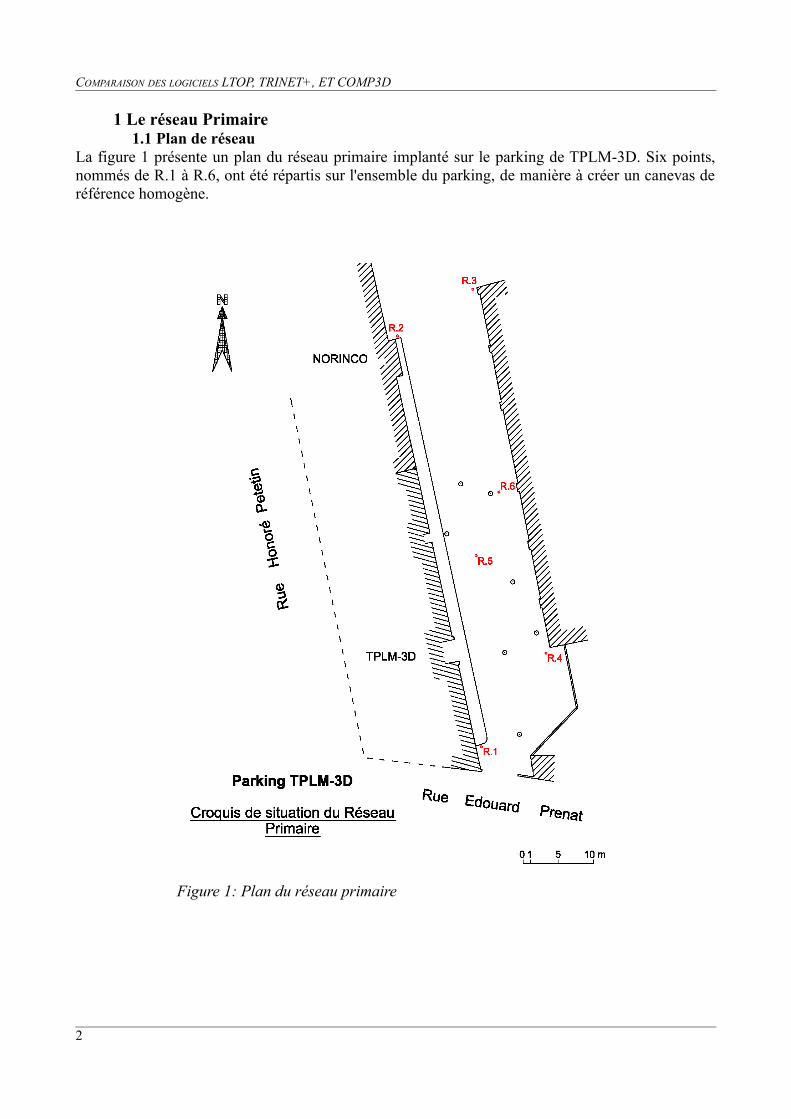
1 Le réseau Primaire1.1 Plan de réseau
La figure 1 présente un plan du réseau primaire implanté sur le parking de TPLM-3D. Six points, nommés de R.1 à R.6, ont été répartis sur l'ensemble du parking, de manière à créer un canevas de référence homogène.
2
Figure 1: Plan du réseau primaire
COMPARAISON DES LOGICIELS LTOP, TRINET+, ET COMP3D
1.2 Appareil utilisé : le TS 30
écart-type constructeur
Mesure d'angles (Av, Ah) ± 0,15mgon
Mesure de distance avec réflecteur ± 0,6mm + 1ppm
Tableau 1: Écarts types constructeur sur les mesures au TS30
Ce réseau primaire servira ultérieurement de réseau de rattachement, il est donc nécessaire d'utiliser des instruments de précision pour s'assurer d'avoir des points déterminés avec une très bonne qualité (à quelques millimètres près).
La station totale TS30 de Leica répond parfaitement à ce besoin. Le tableau 1 ci-dessous présente les écarts types constructeur annoncés pour la mesure d'angles et de distances.
1.2.1 Méthode de lever
Pour la réalisation de ce réseau primaire, on utilisera la méthode du centrage forcé afin de s'affranchir des erreurs systématiques de centrage des instruments et des réflecteurs sur les points du réseau. Les mesures seront effectuées en double retournement.
On empruntera l'étude sur la détermination de la précision, sans tenir compte des erreurs dues à la rotation de la plateforme, des coordonnées d'un point issu d'un levé tachéométrique sur plateforme pétrolière, effectuée par Élodie Hermier [2011], pour évaluer la précision a priori des points du réseau primaire. Par ce biais, on pourra ainsi déterminer a priori la précision d'un point lancé depuis une station.
Ce calcul a priori ne tenant pas compte de la redondance de données et de la géométrie du réseau, la précision déterminée sera donc approchée. Par conséquent, elle sera légèrement plus faible qu'un calcul de pré-analyse tenant compte de la configuration et de la redondance des observations.
En considérant des distances maximales entre points du réseau de 65m (distance approximative de R.1 vers R.3), on obtient un écart-type a priori sur la détermination de la position XYZ d'un point de ± 0,5 mm.
1.2.2 Compensation du réseau primaire
1.2.2.1 Initialisation du calculPour la mise en place du réseau, on définit un système de coordonnées locales. L'origine est placée au niveau du point R.1, on lui affecte les coordonnées suivantes :
R.1 X=1000,0000 m
Y=1000,0000 m
Z=100,0000 m
3
Figure 2: Station totale TS 30 de Leica
COMPARAISON DES LOGICIELS LTOP, TRINET+, ET COMP3D
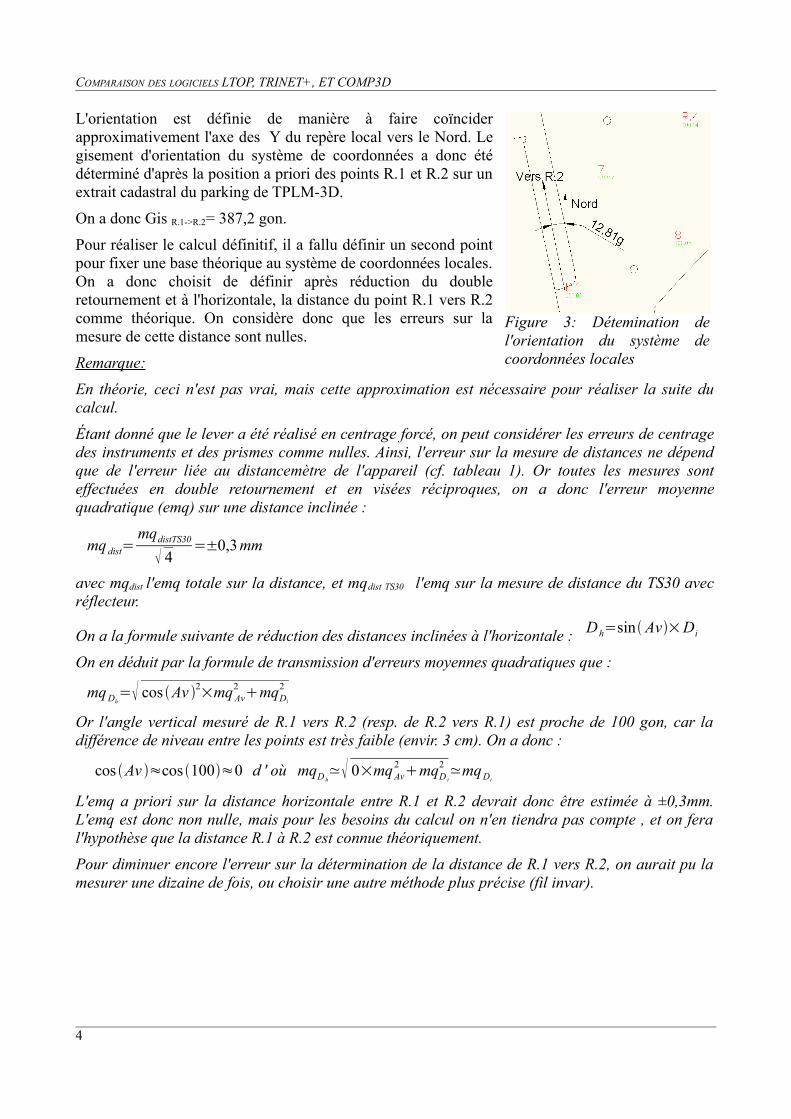
L'orientation est définie de manière à faire coïncider approximativement l'axe des Y du repère local vers le Nord. Le gisement d'orientation du système de coordonnées a donc été déterminé d'après la position a priori des points R.1 et R.2 sur un extrait cadastral du parking de TPLM-3D.
On a donc Gis R.1->R.2= 387,2 gon.
Pour réaliser le calcul définitif, il a fallu définir un second point pour fixer une base théorique au système de coordonnées locales. On a donc choisit de définir après réduction du double retournement et à l'horizontale, la distance du point R.1 vers R.2 comme théorique. On considère donc que les erreurs sur la mesure de cette distance sont nulles.
Remarque:
En théorie, ceci n'est pas vrai, mais cette approximation est nécessaire pour réaliser la suite du calcul.
Étant donné que le lever a été réalisé en centrage forcé, on peut considérer les erreurs de centrage des instruments et des prismes comme nulles. Ainsi, l'erreur sur la mesure de distances ne dépend que de l'erreur liée au distancemètre de l'appareil (cf. tableau 1). Or toutes les mesures sont effectuées en double retournement et en visées réciproques, on a donc l'erreur moyenne quadratique (emq) sur une distance inclinée :
mq dist=mqdistTS30
4=±0,3mm
avec mqdist l'emq totale sur la distance, et mqdist TS30 l'emq sur la mesure de distance du TS30 avec réflecteur.
On a la formule suivante de réduction des distances inclinées à l'horizontale : Dh=sin Av×Di
On en déduit par la formule de transmission d'erreurs moyennes quadratiques que :
mqDh= cos Av 2×mqAv
2 mqDi
2
Or l'angle vertical mesuré de R.1 vers R.2 (resp. de R.2 vers R.1) est proche de 100 gon, car la différence de niveau entre les points est très faible (envir. 3 cm). On a donc :
cos Av ≈cos 100≈0 d ' où mqD h≃ 0×mqAv
2 mqD i
2 ≃mqDi
L'emq a priori sur la distance horizontale entre R.1 et R.2 devrait donc être estimée à ±0,3mm. L'emq est donc non nulle, mais pour les besoins du calcul on n'en tiendra pas compte , et on fera l'hypothèse que la distance R.1 à R.2 est connue théoriquement.
Pour diminuer encore l'erreur sur la détermination de la distance de R.1 vers R.2, on aurait pu la mesurer une dizaine de fois, ou choisir une autre méthode plus précise (fil invar).
4
Figure 3: Détemination de l'orientation du système de coordonnées locales
COMPARAISON DES LOGICIELS LTOP, TRINET+, ET COMP3D
Un simple calcul par point lancé depuis R.1 et à partir du gisement fixé précédemment, a permis de déterminer les coordonnées de R.2. On a :
R.2 X=988,0610 m
Y=1058,5480 m
Z=99,9673 m
1.2.2.2 Résultats de la compensationLe calcul de compensation a été effectué sous LTOP. On a considéré les points R.1 et R.2 comme fixes.
Le tableau 2 présente un listing des coordonnées compensées des points R.1 à R.6.
Le tableau 3 présente les paramètres des ellipses d'erreur liées à chaque point, ainsi que les écarts types planimétriques et sur la position XYZ déduits. Les paramètres EMA et EMB sont les demi-grands axes et demi-petits axes des ellipses. GISA représente le gisement d'orientation du demi-grand axe EMA, et EMH est un intervalle de confiance pour la composante altimétrique d'un point.
Aucun paramètre d'ellipses d'erreur n'est calculé pour les points R.1 et R.2 puisqu'ils sont fixes dans le calcul. Leur position est donc considérée comme théorique.
On constate que la précision a posteriori des points est sub-millimétrique et inférieure à la précision a priori calculée (cf § 1.1.3). L'emq XYZ moyen est de ± 0,3 mm.
5
Tableau 2: Coordonnées compensées des points du réseau primaire
Coordonnées compensées LTOPPoint X (m)R.1 1000,0000 1000,0000 100,0000R.2 988,0610 1058,5480 99,9670R.3 998,7813 1065,2092 100,1020R.4 1009,2237 1013,3768 100,1423R.5 1002,5175 1036,3085 100,1896R.6 999,2514 1027,2545 100,1096
Y (m) Z (m)
Tableau 3: Paramètres des ellipses d'erreur et écart-type sur la position XYZ de chaque point du réseau primaire
POINT EMA EMB GISA EMH Emq Plani. Emq XYZ MM MM G MM MM MM
R.3 0,3 0,2 77,4 0,2 0,4 0,4R.4 0,2 0,2 78,0 0,2 0,3 0,3R.5 0,2 0,2 78,5 0,2 0,3 0,3R.6 0,2 0,2 71,3 0,2 0,3 0,3
COMPARAISON DES LOGICIELS LTOP, TRINET+, ET COMP3D
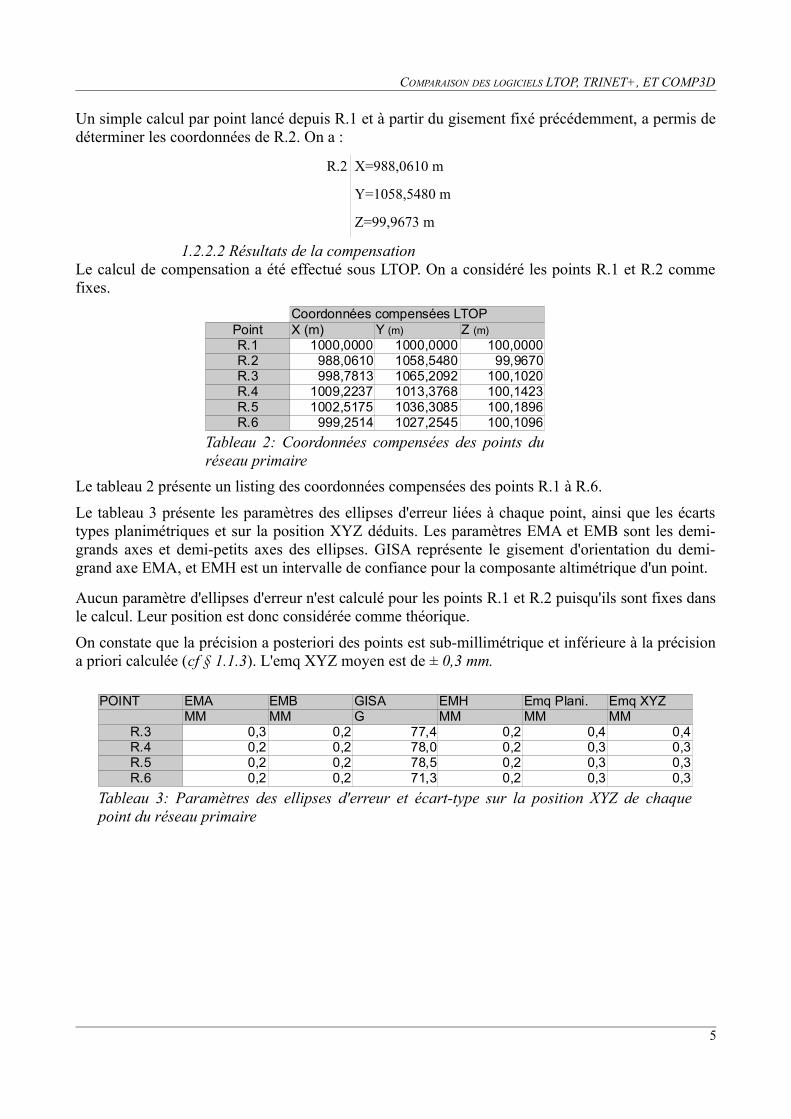
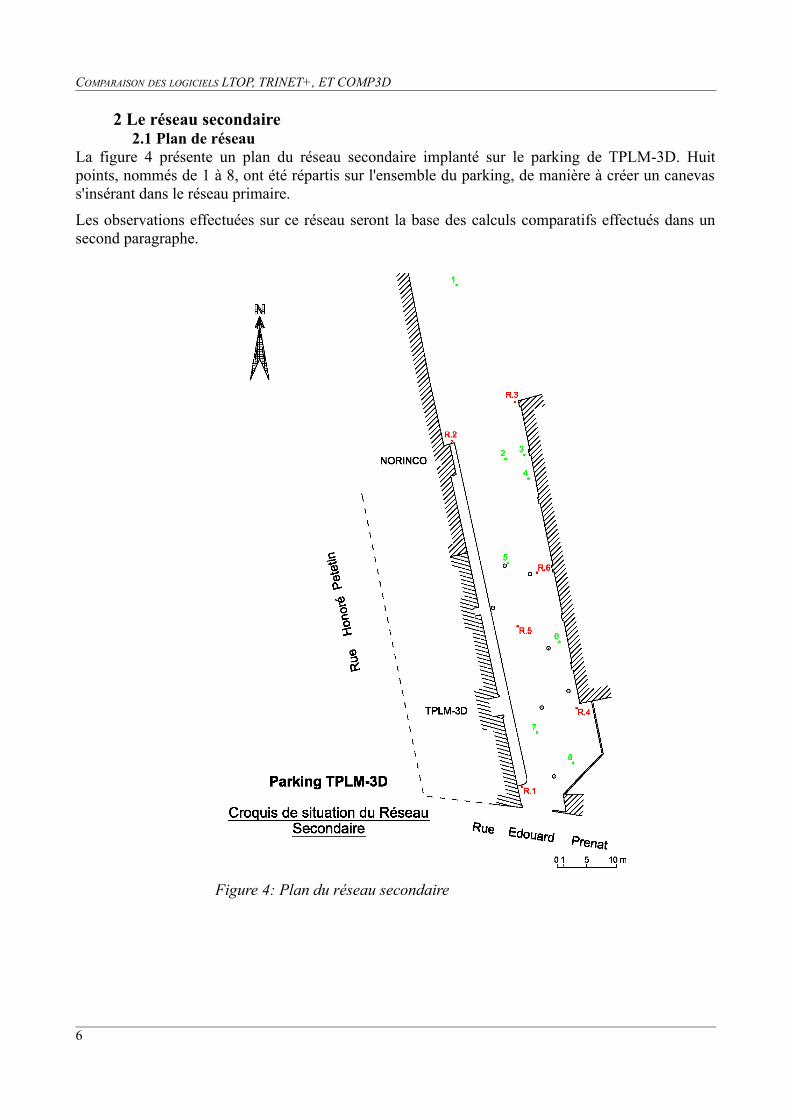
2 Le réseau secondaire 2.1 Plan de réseau
La figure 4 présente un plan du réseau secondaire implanté sur le parking de TPLM-3D. Huit points, nommés de 1 à 8, ont été répartis sur l'ensemble du parking, de manière à créer un canevas s'insérant dans le réseau primaire.
Les observations effectuées sur ce réseau seront la base des calculs comparatifs effectués dans un second paragraphe.
6
Figure 4: Plan du réseau secondaire
COMPARAISON DES LOGICIELS LTOP, TRINET+, ET COMP3D
2.2 MatérielCe réseau secondaire est rattaché au réseau primaire. Il servira de base à l'étude suivante, nous ne nous sommes fixés aucune contrainte de précision. L'appareil utilisé est une station totale de TPLM-3D régulièrement utilisée sur tous types de chantiers : le TCRA 1101 de Leica.
Le tableau 4 ci-dessous présente les écarts types constructeur annoncés pour la mesure d'angles et de distances.
écart-type constructeur
Mesures d'angles (Av, Ah) ± 0,5mgon
Mesure de distance avec réflecteur ± 2mm + 2ppm
Tableau 4: Écarts types constructeur sur les mesures au TCRA 1101
2.3 Méthode de lever Pour la réalisation de ce réseau secondaire, on utilisera une méthode de lever classique en utilisant des réflecteurs sur cannes maintenues par des tripodes. Les mesures seront effectuées en double retournement.
De même que pour le réseau primaire, on empruntera l'étude d'Elodie Hermier [2011] sur la détermination de la précision des coordonnées d'un point issu d'un levé tachéométrique sur plateforme pétrolière, pour évaluer la précision a priori des points du réseau. Par ce biais, on pourra ainsi déterminer a priori la précision d'un point lancé depuis une station.
Ce calcul a priori ne tenant pas compte de la redondance de données et de la géométrie du réseau, la précision déterminée sera donc approchée. Par conséquent, elle sera légèrement plus faible qu'un calcul de pré-analyse tenant compte de la configuration et de la redondance des observations.
En considérant des distances maximales entre point du réseau secondaire de 85 m (distance approximative de 1 vers 8), on obtient un écart-type a priori sur la détermination de la position XYZ d'un point de ± 1,6 mm.
2.4 Coordonnées des points du réseau
7
Tableau 5: Coordonnées compensées sous LTOP des points du réseau secondaire
Coordonnées compensées LTOPPoint X (m)
1 988,9234 1085,0318 100,11432 997,1739 1055,5865 100,04203 1000,3683 1056,2628 100,10504 1001,0406 1052,2653 100,10865 997,6273 1037,9560 100,08056 1006,3191 1024,5920 100,23027 1002,5379 1009,2134 99,96648 1008,6290 1004,1018 100,0516
Y (m) Z (m)
Figure 5: TCRA 1101 de Leica
COMPARAISON DES LOGICIELS LTOP, TRINET+, ET COMP3D
L'écart-type moyen en position XYZ des points du réseau primaire est de ± 1,6 mm.
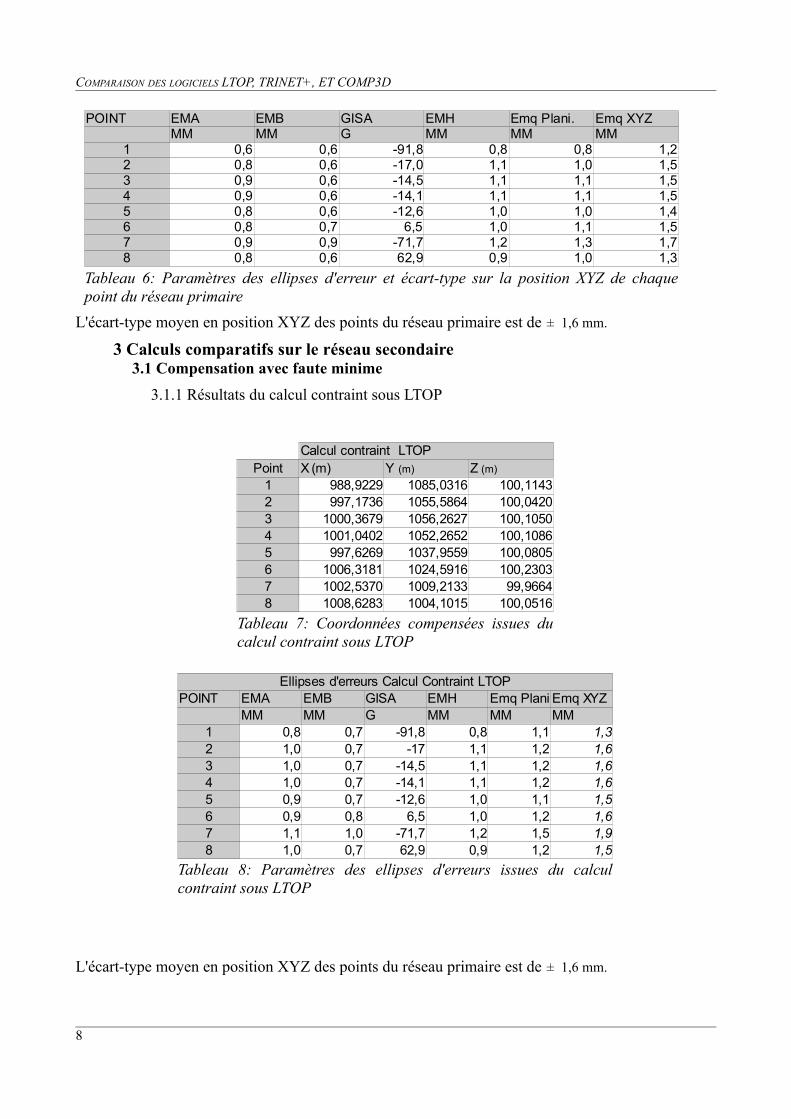
3 Calculs comparatifs sur le réseau secondaire3.1 Compensation avec faute minime
3.1.1 Résultats du calcul contraint sous LTOP
L'écart-type moyen en position XYZ des points du réseau primaire est de ± 1,6 mm.
8
Tableau 8: Paramètres des ellipses d'erreurs issues du calcul contraint sous LTOP
Ellipses d'erreurs Calcul Contraint LTOPPOINT EMA EMB GISA EMH Emq Plani,Emq XYZ
MM MM G MM MM MM1 0,8 0,7 -91,8 0,8 1,1 1,32 1,0 0,7 -17 1,1 1,2 1,63 1,0 0,7 -14,5 1,1 1,2 1,64 1,0 0,7 -14,1 1,1 1,2 1,65 0,9 0,7 -12,6 1,0 1,1 1,56 0,9 0,8 6,5 1,0 1,2 1,67 1,1 1,0 -71,7 1,2 1,5 1,98 1,0 0,7 62,9 0,9 1,2 1,5
Tableau 7: Coordonnées compensées issues du calcul contraint sous LTOP
Calcul contraint LTOPPoint X (m)
1 988,9229 1085,0316 100,11432 997,1736 1055,5864 100,04203 1000,3679 1056,2627 100,10504 1001,0402 1052,2652 100,10865 997,6269 1037,9559 100,08056 1006,3181 1024,5916 100,23037 1002,5370 1009,2133 99,96648 1008,6283 1004,1015 100,0516
Y (m) Z (m)
Tableau 6: Paramètres des ellipses d'erreur et écart-type sur la position XYZ de chaque point du réseau primaire
POINT EMA EMB GISA EMH Emq Plani. Emq XYZ MM MM G MM MM MM
1 0,6 0,6 -91,8 0,8 0,8 1,22 0,8 0,6 -17,0 1,1 1,0 1,53 0,9 0,6 -14,5 1,1 1,1 1,54 0,9 0,6 -14,1 1,1 1,1 1,55 0,8 0,6 -12,6 1,0 1,0 1,46 0,8 0,7 6,5 1,0 1,1 1,57 0,9 0,9 -71,7 1,2 1,3 1,78 0,8 0,6 62,9 0,9 1,0 1,3
COMPARAISON DES LOGICIELS LTOP, TRINET+, ET COMP3D
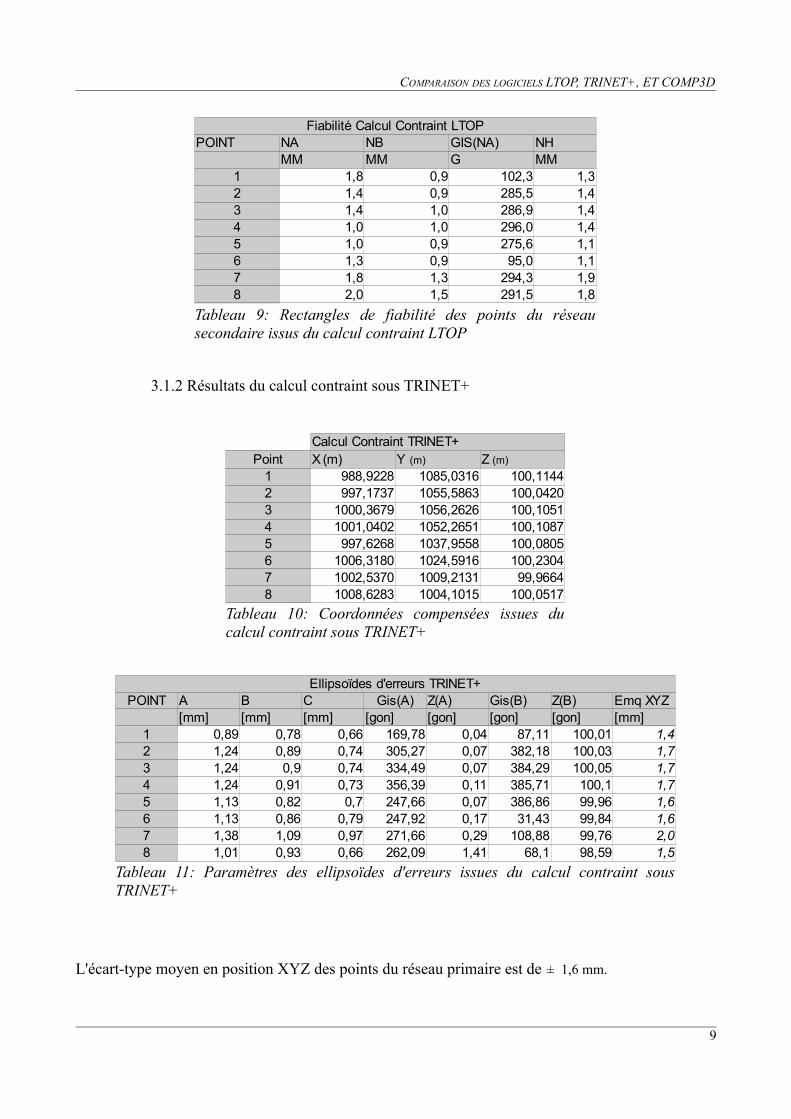
3.1.2 Résultats du calcul contraint sous TRINET+
L'écart-type moyen en position XYZ des points du réseau primaire est de ± 1,6 mm.
9
Tableau 10: Coordonnées compensées issues du calcul contraint sous TRINET+
Calcul Contraint TRINET+Point X (m)
1 988,9228 1085,0316 100,11442 997,1737 1055,5863 100,04203 1000,3679 1056,2626 100,10514 1001,0402 1052,2651 100,10875 997,6268 1037,9558 100,08056 1006,3180 1024,5916 100,23047 1002,5370 1009,2131 99,96648 1008,6283 1004,1015 100,0517
Y (m) Z (m)
Tableau 11: Paramètres des ellipsoïdes d'erreurs issues du calcul contraint sous TRINET+
Ellipsoïdes d'erreurs TRINET+POINT A B C Gis(A) Z(A) Gis(B) Z(B) Emq XYZ
[mm] [mm] [mm] [gon] [gon] [gon] [gon] [mm]1 0,89 0,78 0,66 169,78 0,04 87,11 100,01 1,42 1,24 0,89 0,74 305,27 0,07 382,18 100,03 1,73 1,24 0,9 0,74 334,49 0,07 384,29 100,05 1,74 1,24 0,91 0,73 356,39 0,11 385,71 100,1 1,75 1,13 0,82 0,7 247,66 0,07 386,86 99,96 1,66 1,13 0,86 0,79 247,92 0,17 31,43 99,84 1,67 1,38 1,09 0,97 271,66 0,29 108,88 99,76 2,08 1,01 0,93 0,66 262,09 1,41 68,1 98,59 1,5
Tableau 9: Rectangles de fiabilité des points du réseau secondaire issus du calcul contraint LTOP
Fiabilité Calcul Contraint LTOPPOINT NA NB GIS(NA) NH
MM MM G MM1 1,8 0,9 102,3 1,32 1,4 0,9 285,5 1,43 1,4 1,0 286,9 1,44 1,0 1,0 296,0 1,45 1,0 0,9 275,6 1,16 1,3 0,9 95,0 1,17 1,8 1,3 294,3 1,98 2,0 1,5 291,5 1,8
COMPARAISON DES LOGICIELS LTOP, TRINET+, ET COMP3D
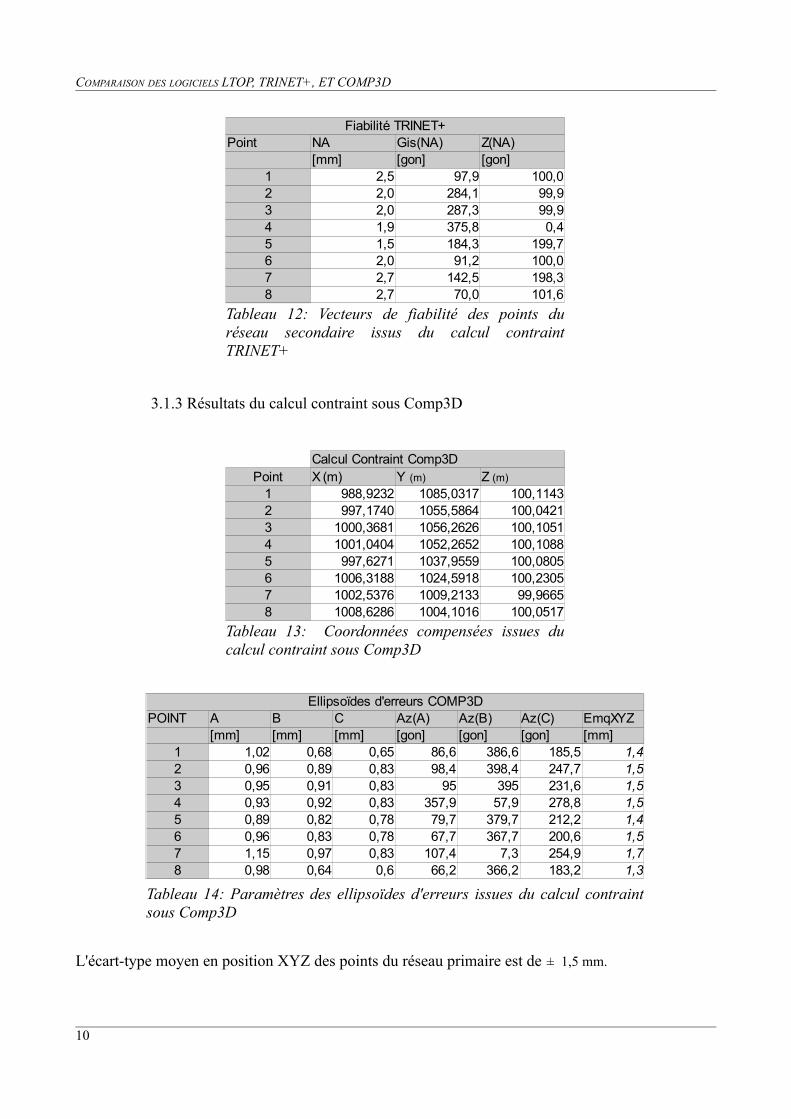
3.1.3 Résultats du calcul contraint sous Comp3D
L'écart-type moyen en position XYZ des points du réseau primaire est de ± 1,5 mm.
10
Tableau 13: Coordonnées compensées issues du calcul contraint sous Comp3D
Calcul Contraint Comp3DPoint X (m)
1 988,9232 1085,0317 100,11432 997,1740 1055,5864 100,04213 1000,3681 1056,2626 100,10514 1001,0404 1052,2652 100,10885 997,6271 1037,9559 100,08056 1006,3188 1024,5918 100,23057 1002,5376 1009,2133 99,96658 1008,6286 1004,1016 100,0517
Y (m) Z (m)
Tableau 14: Paramètres des ellipsoïdes d'erreurs issues du calcul contraint sous Comp3D
Ellipsoïdes d'erreurs COMP3DPOINT A B C Az(A) Az(B) Az(C) EmqXYZ
[mm] [mm] [mm] [gon] [gon] [gon] [mm]1 1,02 0,68 0,65 86,6 386,6 185,5 1,42 0,96 0,89 0,83 98,4 398,4 247,7 1,53 0,95 0,91 0,83 95 395 231,6 1,54 0,93 0,92 0,83 357,9 57,9 278,8 1,55 0,89 0,82 0,78 79,7 379,7 212,2 1,46 0,96 0,83 0,78 67,7 367,7 200,6 1,57 1,15 0,97 0,83 107,4 7,3 254,9 1,78 0,98 0,64 0,6 66,2 366,2 183,2 1,3
Tableau 12: Vecteurs de fiabilité des points du réseau secondaire issus du calcul contraint TRINET+
Fiabilité TRINET+Point NA Gis(NA) Z(NA)
[mm] [gon] [gon]1 2,5 97,9 100,02 2,0 284,1 99,93 2,0 287,3 99,94 1,9 375,8 0,45 1,5 184,3 199,76 2,0 91,2 100,07 2,7 142,5 198,38 2,7 70,0 101,6
COMPARAISON DES LOGICIELS LTOP, TRINET+, ET COMP3D
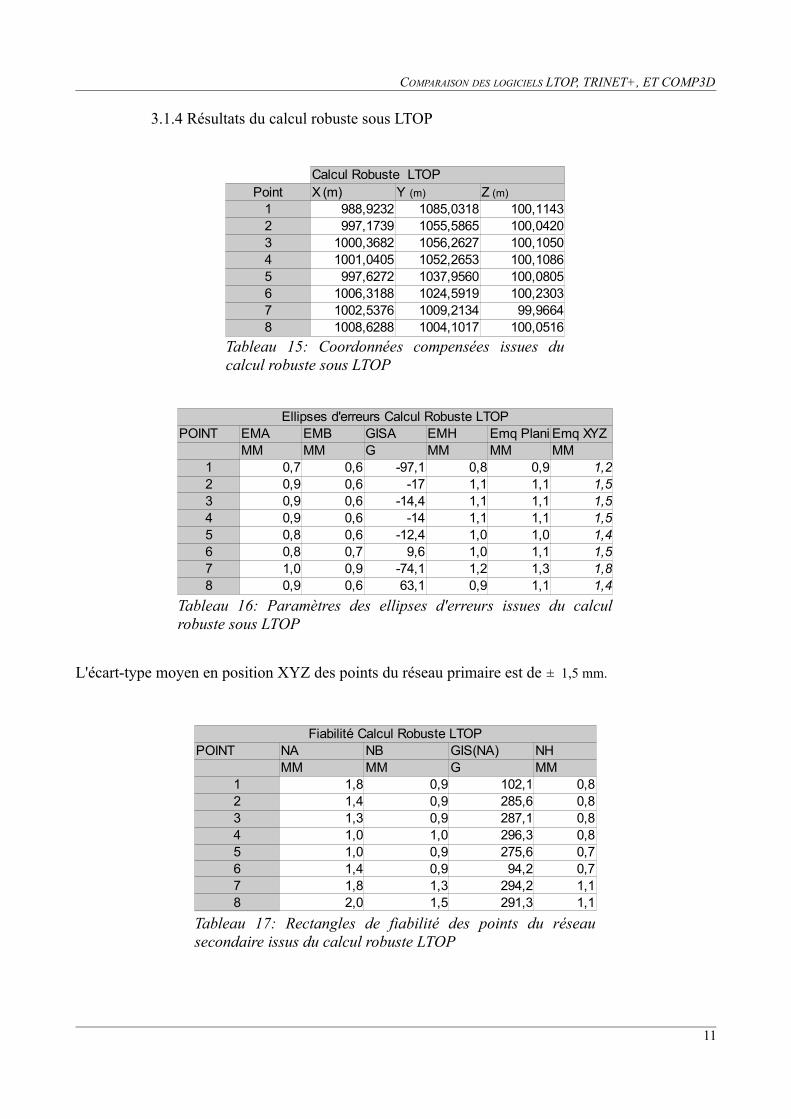
3.1.4 Résultats du calcul robuste sous LTOP
L'écart-type moyen en position XYZ des points du réseau primaire est de ± 1,5 mm.
11
Tableau 15: Coordonnées compensées issues du calcul robuste sous LTOP
Calcul Robuste LTOPPoint X (m)
1 988,9232 1085,0318 100,11432 997,1739 1055,5865 100,04203 1000,3682 1056,2627 100,10504 1001,0405 1052,2653 100,10865 997,6272 1037,9560 100,08056 1006,3188 1024,5919 100,23037 1002,5376 1009,2134 99,96648 1008,6288 1004,1017 100,0516
Y (m) Z (m)
Tableau 16: Paramètres des ellipses d'erreurs issues du calcul robuste sous LTOP
Ellipses d'erreurs Calcul Robuste LTOPPOINT EMA EMB GISA EMH Emq Plani,Emq XYZ
MM MM G MM MM MM1 0,7 0,6 -97,1 0,8 0,9 1,22 0,9 0,6 -17 1,1 1,1 1,53 0,9 0,6 -14,4 1,1 1,1 1,54 0,9 0,6 -14 1,1 1,1 1,55 0,8 0,6 -12,4 1,0 1,0 1,46 0,8 0,7 9,6 1,0 1,1 1,57 1,0 0,9 -74,1 1,2 1,3 1,88 0,9 0,6 63,1 0,9 1,1 1,4
Tableau 17: Rectangles de fiabilité des points du réseau secondaire issus du calcul robuste LTOP
Fiabilité Calcul Robuste LTOPPOINT NA NB GIS(NA) NH
MM MM G MM1 1,8 0,9 102,1 0,82 1,4 0,9 285,6 0,83 1,3 0,9 287,1 0,84 1,0 1,0 296,3 0,85 1,0 0,9 275,6 0,76 1,4 0,9 94,2 0,77 1,8 1,3 294,2 1,18 2,0 1,5 291,3 1,1

COMPARAISON DES LOGICIELS LTOP, TRINET+, ET COMP3D
3.2 Compensation avec fautes combinées (grossière + minime)
3.2.1 Résultats du calcul contraint sous LTOP
L'écart-type moyen en position XYZ des points du réseau primaire est de ± 9,7 mm.
12
Tableau 18: Coordonnées compensées issues du calcul contraint sous LTOP
Calcul Contraint LTOPPoint X (m)
1 988,9228 1085,0318 100,11432 997,1653 1055,5854 100,04203 1000,3758 1056,2647 100,10514 1001,0410 1052,2642 100,10875 997,6269 1037,9555 100,08056 1006,3181 1024,5914 100,23037 1002,5371 1009,2130 99,96648 1008,6283 1004,1014 100,0516
Y (m) Z (m)
Tableau 20: Rectangles de fiabilité des points du réseau secondaire issus du calcul contraint LTOP
Fiabilité Calcul Contraint LTOPPOINT NA NB GIS(NA) NH
MM MM G MM1 2,2 1,2 102,3 1,62 1,8 1,2 285,5 1,73 1,7 1,2 286,9 1,74 1,3 1,2 296 1,75 1,3 1,2 275,6 1,46 1,7 1,1 95 1,47 2,2 1,6 294,3 2,38 2,5 1,9 291,5 2,3
Tableau 19: Paramètres des ellipses d'erreurs issues du calcul contraint sous LTOP
Ellipses d'erreurs Calcul Contraint LTOPPOINT EMA EMB GISA EMH Emq Plani,Emq XYZ
MM MM G MM MM MM1 5,9 5,8 -91,8 0,8 8,3 8,32 7,8 5,7 -17 1,1 9,7 9,73 7,9 5,6 -14,5 1,1 9,7 9,74 8 5,6 -14,1 1,1 9,8 9,85 7,2 5,4 -12,6 1,0 9,0 9,16 7,4 6,3 6,5 1,0 9,7 9,87 8,8 8,1 -71,7 1,2 12,0 12,08 7,8 5,3 62,9 0,9 9,4 9,5
COMPARAISON DES LOGICIELS LTOP, TRINET+, ET COMP3D
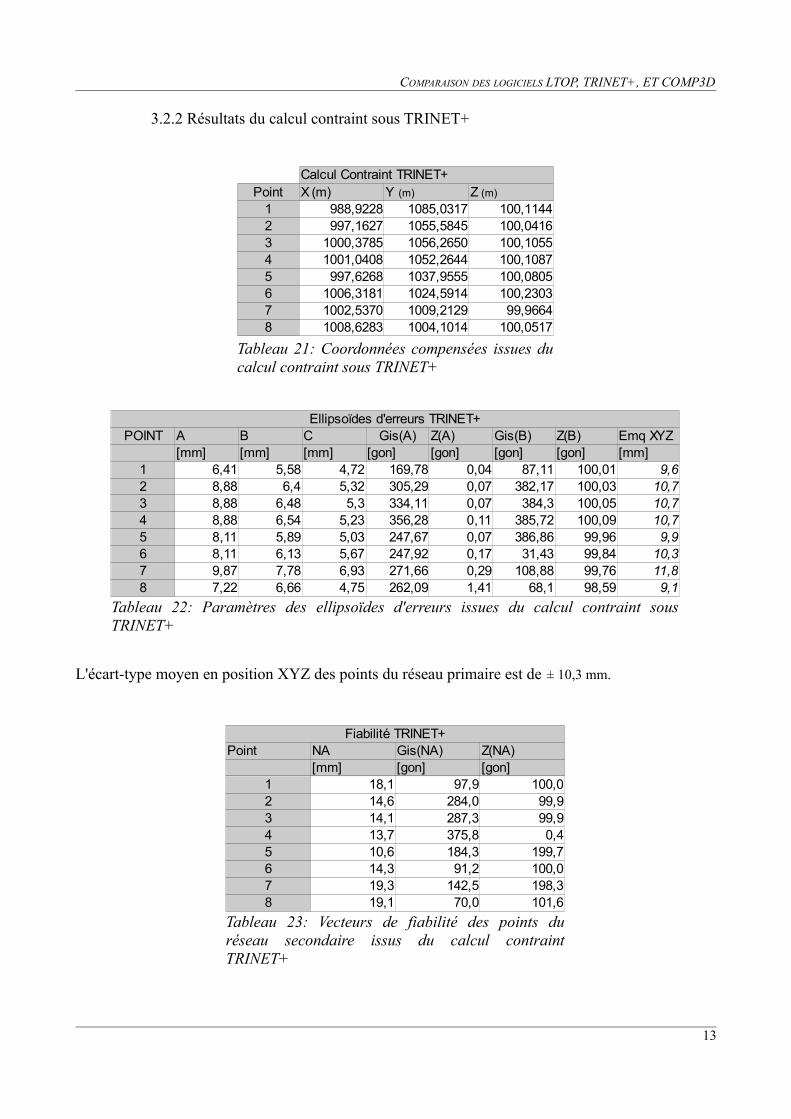
3.2.2 Résultats du calcul contraint sous TRINET+
L'écart-type moyen en position XYZ des points du réseau primaire est de ± 10,3 mm.
13
Tableau 21: Coordonnées compensées issues du calcul contraint sous TRINET+
Calcul Contraint TRINET+Point X (m)
1 988,9228 1085,0317 100,11442 997,1627 1055,5845 100,04163 1000,3785 1056,2650 100,10554 1001,0408 1052,2644 100,10875 997,6268 1037,9555 100,08056 1006,3181 1024,5914 100,23037 1002,5370 1009,2129 99,96648 1008,6283 1004,1014 100,0517
Y (m) Z (m)
Tableau 22: Paramètres des ellipsoïdes d'erreurs issues du calcul contraint sous TRINET+
Ellipsoïdes d'erreurs TRINET+POINT A B C Gis(A) Z(A) Gis(B) Z(B) Emq XYZ
[mm] [mm] [mm] [gon] [gon] [gon] [gon] [mm]1 6,41 5,58 4,72 169,78 0,04 87,11 100,01 9,62 8,88 6,4 5,32 305,29 0,07 382,17 100,03 10,73 8,88 6,48 5,3 334,11 0,07 384,3 100,05 10,74 8,88 6,54 5,23 356,28 0,11 385,72 100,09 10,75 8,11 5,89 5,03 247,67 0,07 386,86 99,96 9,96 8,11 6,13 5,67 247,92 0,17 31,43 99,84 10,37 9,87 7,78 6,93 271,66 0,29 108,88 99,76 11,88 7,22 6,66 4,75 262,09 1,41 68,1 98,59 9,1
Tableau 23: Vecteurs de fiabilité des points du réseau secondaire issus du calcul contraint TRINET+
Fiabilité TRINET+Point NA Gis(NA) Z(NA)
[mm] [gon] [gon]1 18,1 97,9 100,02 14,6 284,0 99,93 14,1 287,3 99,94 13,7 375,8 0,45 10,6 184,3 199,76 14,3 91,2 100,07 19,3 142,5 198,38 19,1 70,0 101,6
COMPARAISON DES LOGICIELS LTOP, TRINET+, ET COMP3D
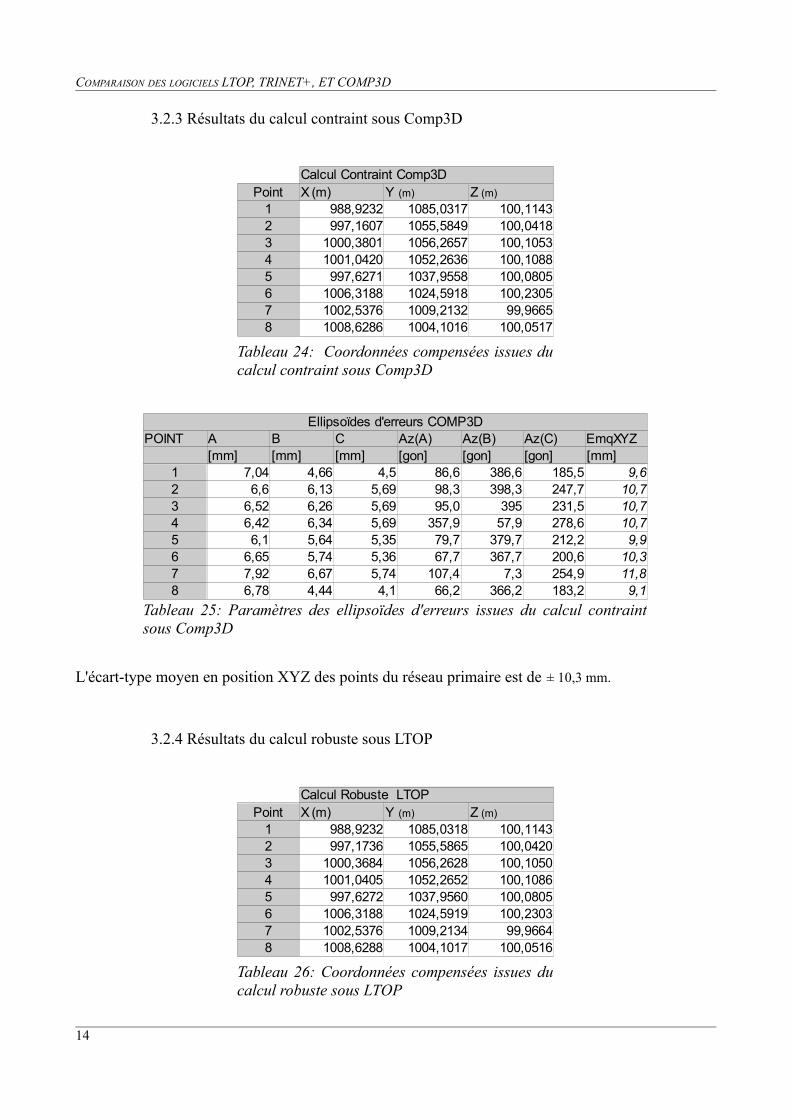
3.2.3 Résultats du calcul contraint sous Comp3D
L'écart-type moyen en position XYZ des points du réseau primaire est de ± 10,3 mm.
3.2.4 Résultats du calcul robuste sous LTOP
14
Tableau 24: Coordonnées compensées issues du calcul contraint sous Comp3D
Calcul Contraint Comp3DPoint X (m)
1 988,9232 1085,0317 100,11432 997,1607 1055,5849 100,04183 1000,3801 1056,2657 100,10534 1001,0420 1052,2636 100,10885 997,6271 1037,9558 100,08056 1006,3188 1024,5918 100,23057 1002,5376 1009,2132 99,96658 1008,6286 1004,1016 100,0517
Y (m) Z (m)
Tableau 25: Paramètres des ellipsoïdes d'erreurs issues du calcul contraint sous Comp3D
Ellipsoïdes d'erreurs COMP3DPOINT A B C
[mm] [mm] [mm] [mm]1 7,04 4,66 4,5 86,6 386,6 185,5 9,62 6,6 6,13 5,69 98,3 398,3 247,7 10,73 6,52 6,26 5,69 95,0 395 231,5 10,74 6,42 6,34 5,69 357,9 57,9 278,6 10,75 6,1 5,64 5,35 79,7 379,7 212,2 9,96 6,65 5,74 5,36 67,7 367,7 200,6 10,37 7,92 6,67 5,74 107,4 7,3 254,9 11,88 6,78 4,44 4,1 66,2 366,2 183,2 9,1
Az(A) Az(B) Az(C) EmqXYZ[gon] [gon] [gon]
Tableau 26: Coordonnées compensées issues du calcul robuste sous LTOP
Calcul Robuste LTOPPoint X (m)
1 988,9232 1085,0318 100,11432 997,1736 1055,5865 100,04203 1000,3684 1056,2628 100,10504 1001,0405 1052,2652 100,10865 997,6272 1037,9560 100,08056 1006,3188 1024,5919 100,23037 1002,5376 1009,2134 99,96648 1008,6288 1004,1017 100,0516
Y (m) Z (m)
COMPARAISON DES LOGICIELS LTOP, TRINET+, ET COMP3D
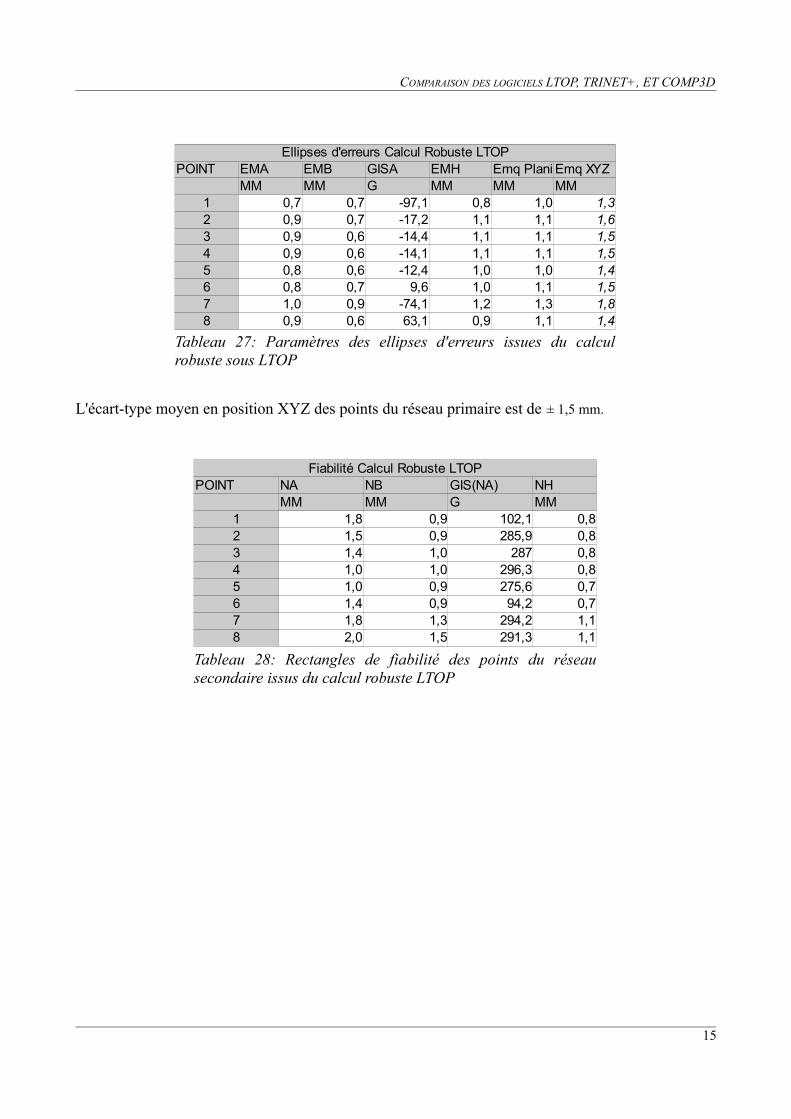
L'écart-type moyen en position XYZ des points du réseau primaire est de ± 1,5 mm.
15
Tableau 28: Rectangles de fiabilité des points du réseau secondaire issus du calcul robuste LTOP
Fiabilité Calcul Robuste LTOPPOINT NA NB GIS(NA) NH
MM MM G MM1 1,8 0,9 102,1 0,82 1,5 0,9 285,9 0,83 1,4 1,0 287 0,84 1,0 1,0 296,3 0,85 1,0 0,9 275,6 0,76 1,4 0,9 94,2 0,77 1,8 1,3 294,2 1,18 2,0 1,5 291,3 1,1
Tableau 27: Paramètres des ellipses d'erreurs issues du calcul robuste sous LTOP
Ellipses d'erreurs Calcul Robuste LTOPPOINT EMA EMB GISA EMH Emq Plani,Emq XYZ
MM MM G MM MM MM1 0,7 0,7 -97,1 0,8 1,0 1,32 0,9 0,7 -17,2 1,1 1,1 1,63 0,9 0,6 -14,4 1,1 1,1 1,54 0,9 0,6 -14,1 1,1 1,1 1,55 0,8 0,6 -12,4 1,0 1,0 1,46 0,8 0,7 9,6 1,0 1,1 1,57 1,0 0,9 -74,1 1,2 1,3 1,88 0,9 0,6 63,1 0,9 1,1 1,4
COMPARAISON DES LOGICIELS LTOP, TRINET+, ET COMP3D
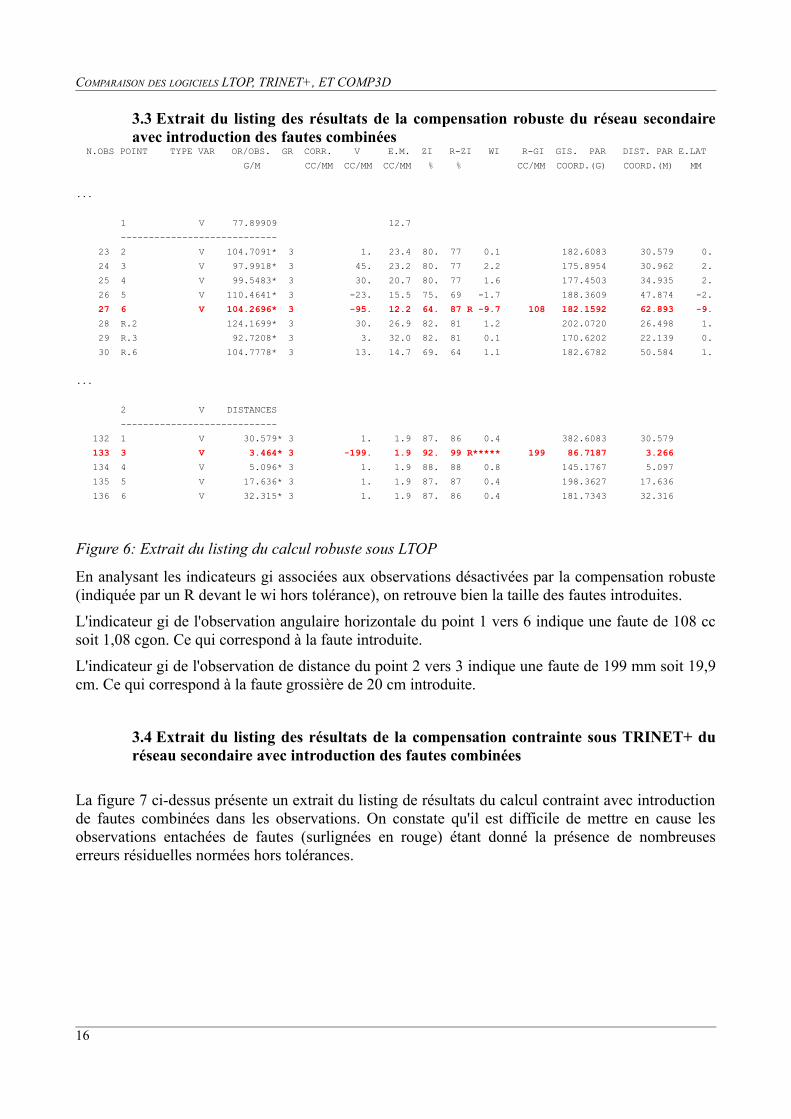
3.3 Extrait du listing des résultats de la compensation robuste du réseau secondaire avec introduction des fautes combinées
En analysant les indicateurs gi associées aux observations désactivées par la compensation robuste (indiquée par un R devant le wi hors tolérance), on retrouve bien la taille des fautes introduites.
L'indicateur gi de l'observation angulaire horizontale du point 1 vers 6 indique une faute de 108 cc soit 1,08 cgon. Ce qui correspond à la faute introduite.
L'indicateur gi de l'observation de distance du point 2 vers 3 indique une faute de 199 mm soit 19,9 cm. Ce qui correspond à la faute grossière de 20 cm introduite.
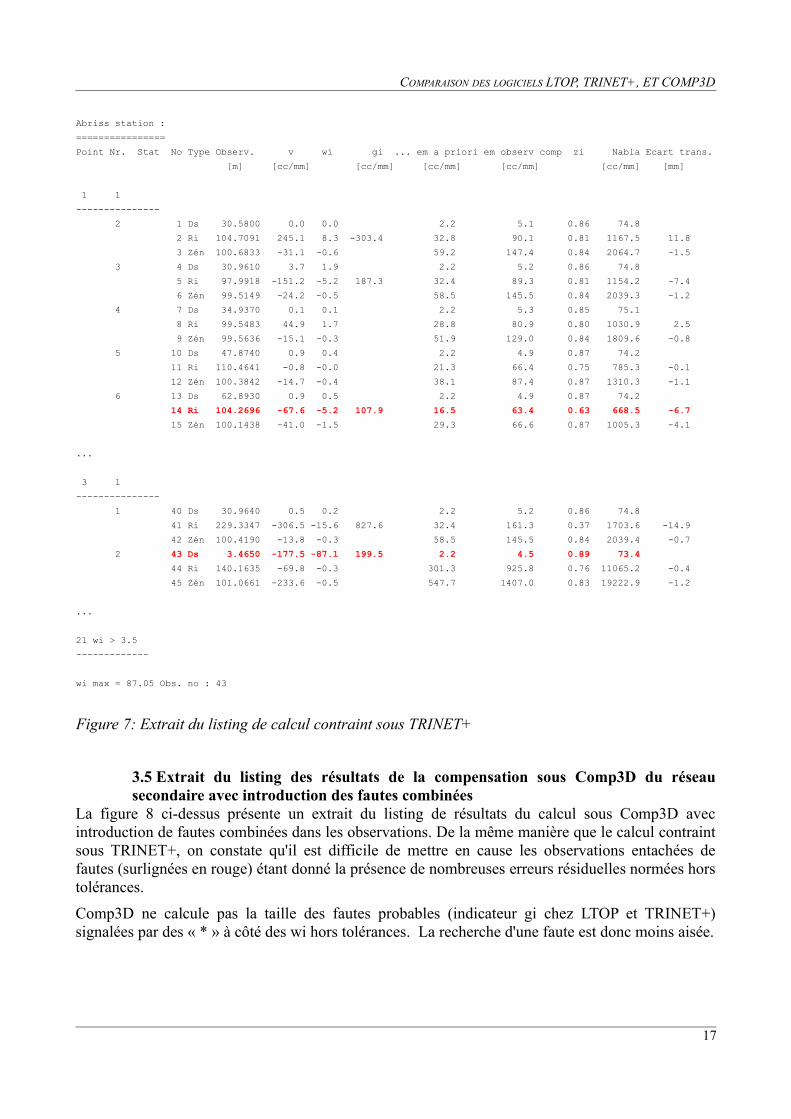
3.4 Extrait du listing des résultats de la compensation contrainte sous TRINET+ du réseau secondaire avec introduction des fautes combinées
La figure 7 ci-dessus présente un extrait du listing de résultats du calcul contraint avec introduction de fautes combinées dans les observations. On constate qu'il est difficile de mettre en cause les observations entachées de fautes (surlignées en rouge) étant donné la présence de nombreuses erreurs résiduelles normées hors tolérances.
16
N.OBS POINT TYPE VAR OR/OBS. GR CORR. V E.M. ZI R-ZI WI R-GI GIS. PAR DIST. PAR E.LAT
G/M CC/MM CC/MM CC/MM % % CC/MM COORD.(G) COORD.(M) MM
...
1 V 77.89909 12.7
----------------------------
23 2 V 104.7091* 3 1. 23.4 80. 77 0.1 182.6083 30.579 0.
24 3 V 97.9918* 3 45. 23.2 80. 77 2.2 175.8954 30.962 2.
25 4 V 99.5483* 3 30. 20.7 80. 77 1.6 177.4503 34.935 2.
26 5 V 110.4641* 3 -23. 15.5 75. 69 -1.7 188.3609 47.874 -2.
27 6 V 104.2696* 3 -95. 12.2 64. 87 R -9.7 108 182.1592 62.893 -9.
28 R.2 124.1699* 3 30. 26.9 82. 81 1.2 202.0720 26.498 1.
29 R.3 92.7208* 3 3. 32.0 82. 81 0.1 170.6202 22.139 0.
30 R.6 104.7778* 3 13. 14.7 69. 64 1.1 182.6782 50.584 1.
...
2 V DISTANCES
----------------------------
132 1 V 30.579* 3 1. 1.9 87. 86 0.4 382.6083 30.579
133 3 V 3.464* 3 -199. 1.9 92. 99 R***** 199 86.7187 3.266
134 4 V 5.096* 3 1. 1.9 88. 88 0.8 145.1767 5.097
135 5 V 17.636* 3 1. 1.9 87. 87 0.4 198.3627 17.636
136 6 V 32.315* 3 1. 1.9 87. 86 0.4 181.7343 32.316
Figure 6: Extrait du listing du calcul robuste sous LTOP
COMPARAISON DES LOGICIELS LTOP, TRINET+, ET COMP3D
3.5 Extrait du listing des résultats de la compensation sous Comp3D du réseau secondaire avec introduction des fautes combinées
La figure 8 ci-dessus présente un extrait du listing de résultats du calcul sous Comp3D avec introduction de fautes combinées dans les observations. De la même manière que le calcul contraint sous TRINET+, on constate qu'il est difficile de mettre en cause les observations entachées de fautes (surlignées en rouge) étant donné la présence de nombreuses erreurs résiduelles normées hors tolérances.
Comp3D ne calcule pas la taille des fautes probables (indicateur gi chez LTOP et TRINET+) signalées par des « * » à côté des wi hors tolérances. La recherche d'une faute est donc moins aisée.
17
Abriss station :
================
Point Nr. Stat No Type Observ. v wi gi ... em a priori em observ comp zi Nabla Ecart trans.
[m] [cc/mm] [cc/mm] [cc/mm] [cc/mm] [cc/mm] [mm]
1 1
---------------
2 1 Ds 30.5800 0.0 0.0 2.2 5.1 0.86 74.8
2 Ri 104.7091 245.1 8.3 -303.4 32.8 90.1 0.81 1167.5 11.8
3 Zén 100.6833 -31.1 -0.6 59.2 147.4 0.84 2064.7 -1.5
3 4 Ds 30.9610 3.7 1.9 2.2 5.2 0.86 74.8
5 Ri 97.9918 -151.2 -5.2 187.3 32.4 89.3 0.81 1154.2 -7.4
6 Zén 99.5149 -24.2 -0.5 58.5 145.5 0.84 2039.3 -1.2
4 7 Ds 34.9370 0.1 0.1 2.2 5.3 0.85 75.1
8 Ri 99.5483 44.9 1.7 28.8 80.9 0.80 1030.9 2.5
9 Zén 99.5636 -15.1 -0.3 51.9 129.0 0.84 1809.6 -0.8
5 10 Ds 47.8740 0.9 0.4 2.2 4.9 0.87 74.2
11 Ri 110.4641 -0.8 -0.0 21.3 66.4 0.75 785.3 -0.1
12 Zén 100.3842 -14.7 -0.4 38.1 87.4 0.87 1310.3 -1.1
6 13 Ds 62.8930 0.9 0.5 2.2 4.9 0.87 74.2
14 Ri 104.2696 -67.6 -5.2 107.9 16.5 63.4 0.63 668.5 -6.7
15 Zén 100.1438 -41.0 -1.5 29.3 66.6 0.87 1005.3 -4.1
...
3 1
---------------
1 40 Ds 30.9640 0.5 0.2 2.2 5.2 0.86 74.8
41 Ri 229.3347 -306.5 -15.6 827.6 32.4 161.3 0.37 1703.6 -14.9
42 Zén 100.4190 -13.8 -0.3 58.5 145.5 0.84 2039.4 -0.7
2 43 Ds 3.4650 -177.5 -87.1 199.5 2.2 4.5 0.89 73.4
44 Ri 140.1635 -69.8 -0.3 301.3 925.8 0.76 11065.2 -0.4
45 Zén 101.0661 -233.6 -0.5 547.7 1407.0 0.83 19222.9 -1.2
...
21 wi > 3.5
-------------
wi max = 87.05 Obs. no : 43
Figure 7: Extrait du listing de calcul contraint sous TRINET+

COMPARAISON DES LOGICIELS LTOP, TRINET+, ET COMP3D
18
Station Vise Code Sigma Calculé Résidu Redondance V0
dmgr mm stand. %
= = = W:\2012901.0 PFE MT\14_test_logiciels\Parking TPLM-3D\TCRA1101\AVEC FAUTES\COMP3D\reseau_secondaire.obs = = =
...
1 2 Hor 40.8 104.7370 279 13.4 16.15 *** 82.1
1 2 Zen 40.8 100.6798 -35 -1.7 -2.34 86.9
1 2 Dist 2.0 30.5790 -1.0 -1.39 87.0
1 3 Hor 40.6 97.9728 -191 -9.3 -11.26 *** 82.6
1 3 Zen 40.6 99.5130 -20 -1.0 -1.40 87.1
1 3 Dist 2.0 30.9645 3.5 4.78 * 86.5
1 4 Hor 38.2 99.5508 24 1.3 1.58 83.6
1 4 Zen 38.2 99.5619 -18 -1.0 -1.39 88.5
1 4 Dist 2.0 34.9381 1.1 1.50 85.5
1 6 Hor 30.1 104.2613 -83 -8.2 -5.97 * 78.7
1 6 Zen 30.1 100.1398 -40 -4.0 -5.38 * 93.9
1 6 Dist 2.0 62.8936 0.6 0.84 87.3
...
2 1 Ref 40.8 12.8626 376 18.0 11.89 *** 40.1 369.7723
2 1 Zen 40.8 100.3073 -32 -1.6 -2.19 86.9
2 1 Dist 2.0 30.5776 -1.4 -1.92 87.0
2 5 Hor 56.1 228.5439 -305 -8.5 -9.56 *** 67.6
2 5 Zen 56.1 100.6544 -30 -0.8 -1.35 84.7
2 5 Dist 2.0 17.6362 -0.3 -0.36 87.5
2 6 Hor 39.7 211.9368 -131 -6.6 -4.80 * 52.9
2 6 Zen 39.7 100.0619 -49 -2.5 -3.70 * 88.8
2 6 Dist 2.0 32.3179 2.9 3.95 * 86.9
2 3 Hor 213.5 116.9617 247 1.3 2.07 68.6
2 3 Zen 213.4 98.8889 -447 -2.3 -4.21 * 75.3
2 3 Dist 2.0 3.2910 26.0 36.37 *** 87.2
2 4 Hor 144.6 175.2885 -1064 -8.5 -13.81 *** 71.6
2 4 Zen 144.6 98.7166 -83 -0.7 -1.20 77.1
2 4 Dist 2.0 5.1095 12.5 16.73 *** 86.1
...
Les 20 plus gros résidus
3 2 Dist -243.05
R.3 R.5 Zen -44.80
R.3 R.4 Zen -43.52
R.4 R.3 Dist -37.56
2 3 Dist 36.37
R.3 R.2 Zen -30.59
R.2 R.1 Zen -28.01
R.2 R.4 Dist -26.49
R.4 R.2 Zen -25.93
R.3 R.4 Dist -25.86
R.3 R.6 Zen -24.25
...
Figure 8: Extrait du listing de calcul contraint sous Comp3D

Annexe B : Expériences et analyses

SOMMAIRE
ANNEXE B : EXPÉRIENCES ET ANALYSES
Étude réalisée par Matthieu TRACOL pour TPLM-3D, Mai 2012
SOMMAIRE :1 Le réseau « Conduite Forcée » .............................................................................................................. 2
1.1 Appareil utilisé : le TCRA 1101 ....................................................................................................... 21.2 Coordonnées des points du réseau ................................................................................................... 21.3 Croquis des ellipses d'erreurs ........................................................................................................... 5
2 Réseau « Descente de Point » ................................................................................................................ 62.1 Appareil utilisé : le TCRA 1101 ....................................................................................................... 62.2 Coordonnées des points du réseau ................................................................................................... 6
i
EXPÉRIENCES & ANALYSES
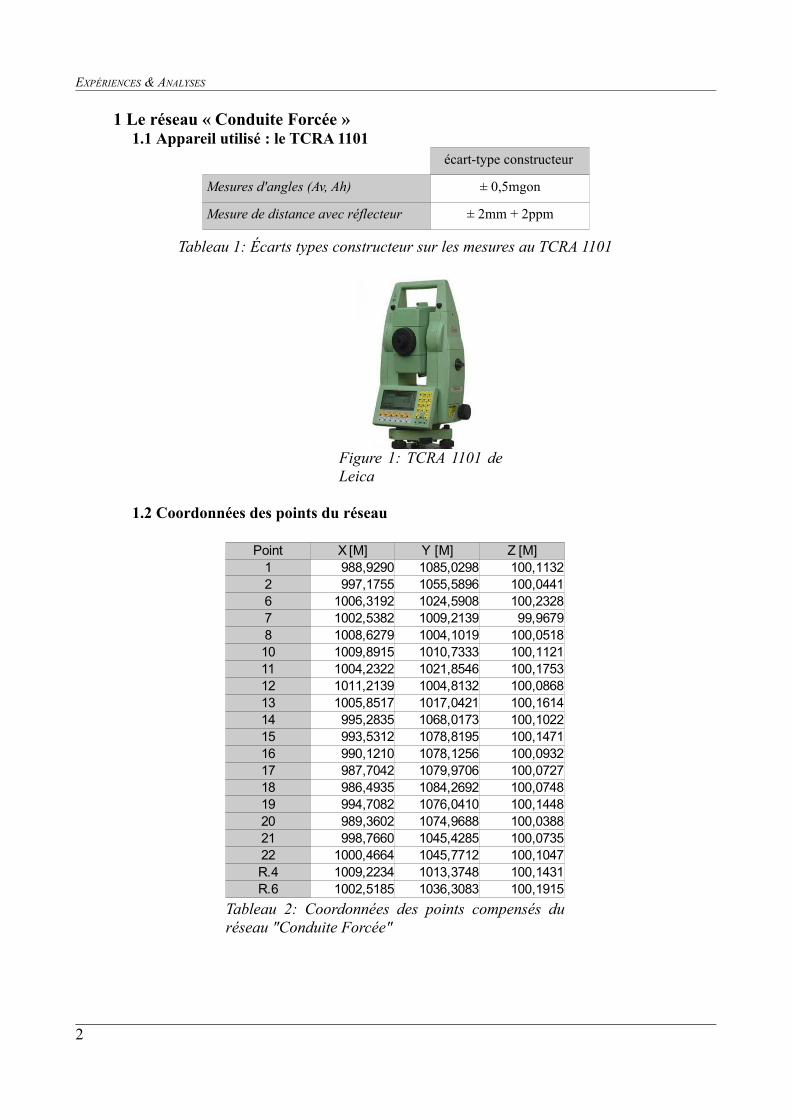
1 Le réseau « Conduite Forcée »1.1 Appareil utilisé : le TCRA 1101
écart-type constructeur
Mesures d'angles (Av, Ah) ± 0,5mgon
Mesure de distance avec réflecteur ± 2mm + 2ppm
Tableau 1: Écarts types constructeur sur les mesures au TCRA 1101
1.2 Coordonnées des points du réseau
2
Figure 1: TCRA 1101 de Leica
Tableau 2: Coordonnées des points compensés du réseau "Conduite Forcée"
Point X [M] Y [M] Z [M]1 988,9290 1085,0298 100,11322 997,1755 1055,5896 100,04416 1006,3192 1024,5908 100,23287 1002,5382 1009,2139 99,96798 1008,6279 1004,1019 100,051810 1009,8915 1010,7333 100,112111 1004,2322 1021,8546 100,175312 1011,2139 1004,8132 100,086813 1005,8517 1017,0421 100,161414 995,2835 1068,0173 100,102215 993,5312 1078,8195 100,147116 990,1210 1078,1256 100,093217 987,7042 1079,9706 100,072718 986,4935 1084,2692 100,074819 994,7082 1076,0410 100,144820 989,3602 1074,9688 100,038821 998,7660 1045,4285 100,073522 1000,4664 1045,7712 100,1047R.4 1009,2234 1013,3748 100,1431R.6 1002,5185 1036,3083 100,1915

EXPÉRIENCES & ANALYSES
3
Tableau 3: Paramètres des ellipses d'erreurs et écart-type sur la position XYZ de chaque point du réseau « Conduite Forcée »
Point EMA EMB GISA EMH[MM] [MM] [GON] [MM] [MM] [MM]
1 1,3 0,6 74,9 0,7 1,4 1,62 1,8 0,8 81,5 1 2,0 2,26 0,5 0,4 -68,3 0,4 0,6 0,87 0,4 0,3 63,5 0,4 0,5 0,68 0,8 0,6 80 0,8 1,0 1,310 0,4 0,3 -18,4 0,4 0,5 0,611 0,4 0,3 -54,7 0,4 0,5 0,612 0,5 0,3 4,6 0,4 0,6 0,713 0,9 0,7 71,7 0,9 1,1 1,514 1,9 0,8 82,6 1 2,1 2,315 2,1 0,8 83,7 1 2,2 2,516 2 0,8 85,1 1 2,2 2,417 1,7 0,9 87,1 1 1,9 2,218 1,5 0,8 68,8 0,9 1,7 1,919 0,7 0,5 90,2 0,6 0,9 1,020 0,8 0,5 49,7 0,6 0,9 1,121 1,7 0,8 81,4 1 1,9 2,122 1,7 0,8 82,6 1 1,9 2,1R.4 0,4 0,3 -33,3 0,4 0,5 0,6R.6 1,4 0,8 81 1 1,6 1,9
Ellipses d'erreurs des points du réseau « Conduite Forcée »Emq Plani Emq XYZ
Tableau 4: Rectangles de fiabilité des points du réseau « Conduite Forcée »
Point NA NB GISA NH[MM] [MM] [GON] [MM]
1 81,6 3,1 272,9 6,12 42,8 4,2 277,7 11,16 4,3 3,5 247,6 4,67 2,7 2,2 143,4 4,68 9,1 5,3 283,9 12,910 2,6 1,9 125,5 3,611 4,8 2,9 265,1 4,612 2,6 2 198,8 4,413 11,4 4,2 259,7 1214 53,5 4,2 279,6 10,615 63 4,2 279,9 9,716 63,8 8,8 273,4 7,817 70,1 13,6 267,8 9,718 82,6 11,2 267,5 11,619 43,1 3,9 279,1 8,220 50,2 4 253,1 8,221 34,3 5,2 275 11,322 34,1 5,1 277,6 11,3R.4 2,3 1,9 321,1 3,6R.6 26,4 4,3 275,5 11,5
Rectangles de Fiabilité des points du réseau « Conduite Forcée »
EXPÉRIENCES & ANALYSES
L'écart-type moyen en position XYZ des points du réseau primaire est de ± 1,5 mm.
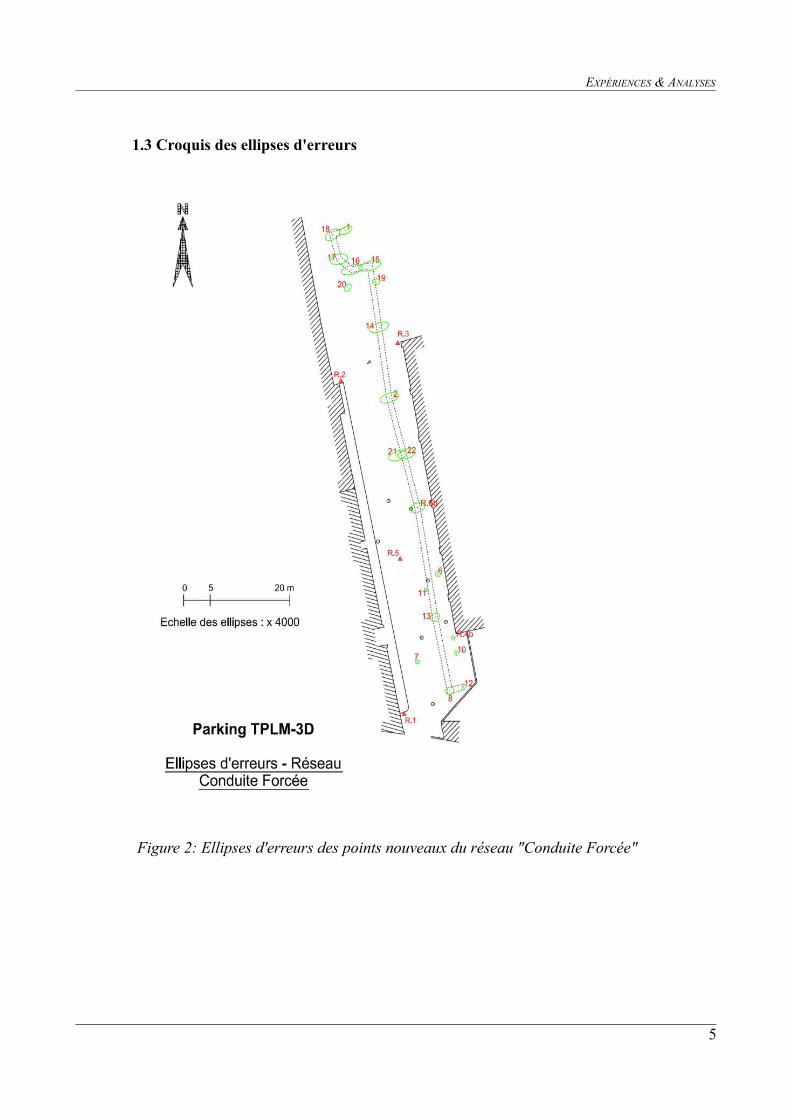
On constate d'après l'analyse des indicateurs de précision et de fiabilité une baisse de la précision des points situés au Nord du réseau (cf. Plan de réseau). La remarque peut se faire au niveau des indicateurs de fiabilité, qui augmentent sensiblement au niveau de ces points. En visualisant le croquis des ellipses d'erreur (cf. Figure 2 ci-dessous), on comprend facilement les raisons de cette de baisse de la précision et de la fiabilité des points du réseau.
La partie Nord du réseau est rattachée sur les points du réseau primaire R2 et R3. Or, on a stationné uniquement le point R3 et effectué une seule visée d'orientation vers le point R2. A ce niveau du réseau, l'orientation est donc beaucoup moins contrôlée que dans la partie Sud où le rattachement est consolidé par un réseau de visées en centrage forcée.
Remarque :
Pour les tests effectués dans la partie Expériences et Analyses du mémoire, on a aussi calculé le réseau sans tenir compte de la différenciation entre les visées en centrage forcé du reste du réseau levé par une méthode classique. Aucune différence n'a été constatée sur les résultats finaux.
Ceci s'explique par le fait que les conditions de lever du chantier réel n'ont pas pu être recréées totalement. En effet, sur le chantier réel qui a inspiré cette configuration la dénivelée entre l'entrée et la sortie de la conduite forcée était d'environ 300 m. Sur le parking de TPLM-3D nous n'avons pas pu recréer une telle dénivelée, seulement 0,30 m en altitude séparait l'entrée SUD de la conduite par rapport à la sortie NORD.
Par ailleurs, le lever du réseau « Conduite Forcée » a été effectué dans des conditions « laboratoire ». Les opérateurs terrains n'avaient pas les mêmes conditions de pression liées au faible temps disponible pour réaliser le lever sur le chantier réel.
Il est donc normale que la précision des points levés soit très bonne, et qu'aucune différence majeure ne soit mise en évidence entre les calculs.
4
EXPÉRIENCES & ANALYSES
1.3 Croquis des ellipses d'erreurs
5
Figure 2: Ellipses d'erreurs des points nouveaux du réseau "Conduite Forcée"

EXPÉRIENCES & ANALYSES
2 Réseau « Descente de Point »2.1 Appareil utilisé : le TCRA 1101
écart-type constructeur
Mesure d'angles (Av, Ah) ± 0,5mgon
Mesure de distance avec réflecteur ± 2mm + 2ppm
Tableau 5: Écarts types constructeur sur les mesures au TCRA 1101
2.2 Coordonnées des points du réseauPour tester l'impact des visées fortement inclinées sur la précision des résultats, on a réalisé trois calculs différents suivant le chemin emprunté pour le passage du rez-de-chaussée au 1er étage (cf. Plan de réseau).
Le cheminement 1 est un passage progressif du rez-de-chaussée au 1er étage, par l'implantation d'une station intermédiaire (point 51) dans les escaliers.
Le cheminement 2 est un passage direct du rez-de-chaussée au 1er étage. On a donc une visée réciproque très contraignante et inclinée entre les stations 51B (rdc) et 51C (1er étage) avec un angle zénithal de 51B vers 51C d'environ 30 gon.
Le cheminement 3 est une reprise du cheminement 2 où l'on a désactivé la visée réciproque du point 54 vers le point 13 origine de la boucle.
Les tableau 6, 7 et 8 suivant présentent les coordonnées compensées des points du réseau pour chaque cheminement.
6
Figure 3: TCRA 1101 de Leica
Tableau 6: Coordonnées compensées des points du cheminement 1
X Y Z Emq Plani Emq Alti[m] [m] [m] [mm] [mm]
50 987,405 1011,721 100,498 2,0 0,851 985,987 1017,616 102,737 2,5 1,152 990,220 1012,991 104,308 1,9 1,153 991,599 1007,049 104,321 1,6 154 996,972 1009,052 106,110 1,1 0,855 999,272 1009,430 99,900 1,1 0,8
EXPÉRIENCES & ANALYSES
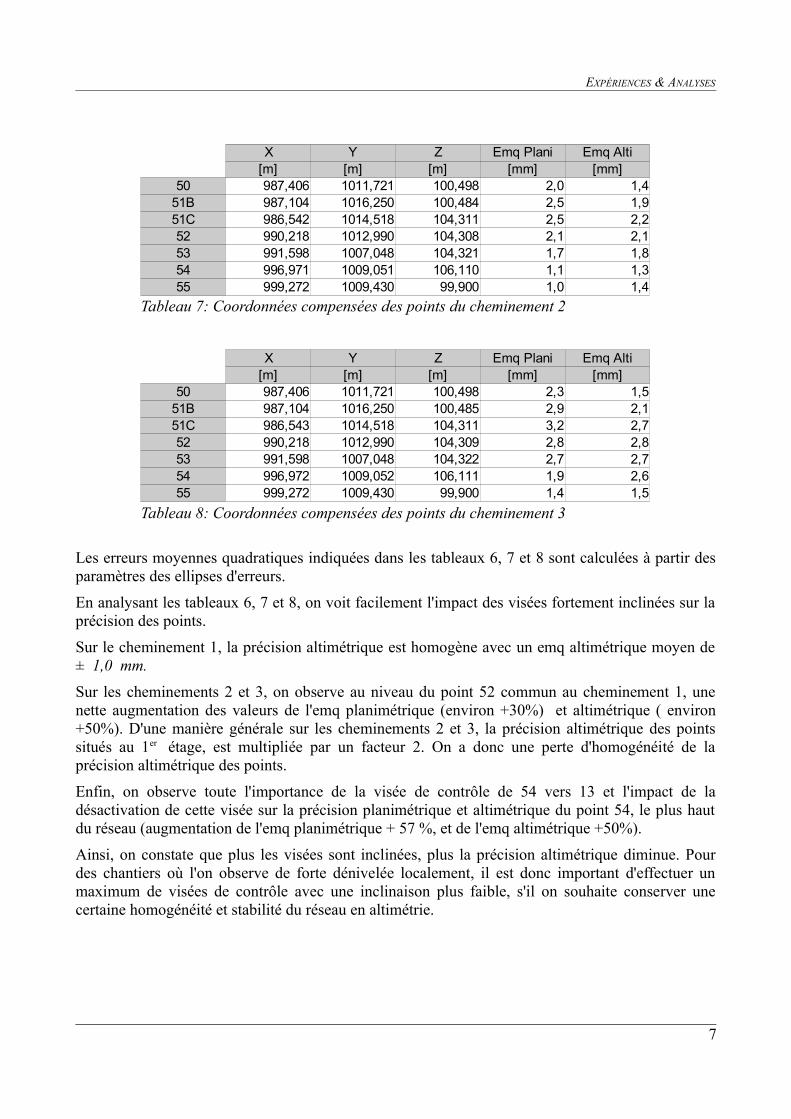
Les erreurs moyennes quadratiques indiquées dans les tableaux 6, 7 et 8 sont calculées à partir des paramètres des ellipses d'erreurs.
En analysant les tableaux 6, 7 et 8, on voit facilement l'impact des visées fortement inclinées sur la précision des points.
Sur le cheminement 1, la précision altimétrique est homogène avec un emq altimétrique moyen de ± 1,0 mm.
Sur les cheminements 2 et 3, on observe au niveau du point 52 commun au cheminement 1, une nette augmentation des valeurs de l'emq planimétrique (environ +30%) et altimétrique ( environ +50%). D'une manière générale sur les cheminements 2 et 3, la précision altimétrique des points situés au 1er étage, est multipliée par un facteur 2. On a donc une perte d'homogénéité de la précision altimétrique des points.
Enfin, on observe toute l'importance de la visée de contrôle de 54 vers 13 et l'impact de la désactivation de cette visée sur la précision planimétrique et altimétrique du point 54, le plus haut du réseau (augmentation de l'emq planimétrique + 57 %, et de l'emq altimétrique +50%).
Ainsi, on constate que plus les visées sont inclinées, plus la précision altimétrique diminue. Pour des chantiers où l'on observe de forte dénivelée localement, il est donc important d'effectuer un maximum de visées de contrôle avec une inclinaison plus faible, s'il on souhaite conserver une certaine homogénéité et stabilité du réseau en altimétrie.
7
Tableau 7: Coordonnées compensées des points du cheminement 2
X Y Z Emq Plani Emq Alti[m] [m] [m] [mm] [mm]
50 987,406 1011,721 100,498 2,0 1,451B 987,104 1016,250 100,484 2,5 1,951C 986,542 1014,518 104,311 2,5 2,252 990,218 1012,990 104,308 2,1 2,153 991,598 1007,048 104,321 1,7 1,854 996,971 1009,051 106,110 1,1 1,355 999,272 1009,430 99,900 1,0 1,4
Tableau 8: Coordonnées compensées des points du cheminement 3
X Y Z Emq Plani Emq Alti[m] [m] [m] [mm] [mm]
50 987,406 1011,721 100,498 2,3 1,551B 987,104 1016,250 100,485 2,9 2,151C 986,543 1014,518 104,311 3,2 2,752 990,218 1012,990 104,309 2,8 2,853 991,598 1007,048 104,322 2,7 2,754 996,972 1009,052 106,111 1,9 2,655 999,272 1009,430 99,900 1,4 1,5
Annexe C : Calcul robuste de coordonnées approchées


SOMMAIRE
ANNEXE C : CALCUL ROBUSTE DE COORDONNÉES APPROCHÉES
Étude réalisée par Matthieu TRACOL pour TPLM-3D, Septembre 2012
SOMMAIRE :1 Les opérateurs de calculs de TopTools ................................................................................................. 2
1.1 Calcul par point rayonné (ou point lancé) ........................................................................................ 21.2 Calcul par intersection de visées ...................................................................................................... 21.3 Calcul par relèvement simple sur 3 points ....................................................................................... 31.4 Calcul par Résection ou station libre .............................................................................................. 31.5 Calcul d'un point par recoupement ...................................................................................................31.6 Calcul d'un point par multilatération (ou trilatération) ..................................................................... 41.7 Calcul d'un point par triangulatération ............................................................................................ 5
1.7.1 Définition des notations : ......................................................................................................... 51.7.2 Équations d'observations : ....................................................................................................... 51.7.3 Équations d'erreurs : ................................................................................................................ 6
2 Diagramme synoptique de l'enchainement des calculs planimétriques ............................................. 6
i

CACUL ROBUSTE DE COORDONNÉES APPROCHÉES
1 Les opérateurs de calculs de TopToolsLe tableau 1 ci-dessous récapitule les opérateurs de calculs utilisés dans l'algorithme de calcul de coordonnées approchées.
OpérateurDonnées Observations
TotalPoint connu XY G0 Ah Dh
Rayonnement 1 1 1 1 4
Intersection 2 2 2 - 6
Relèvement 3 - 3 - 6
Résection 2 - 2 2 6
Multilatération 3 - - 3 6
Recoupement 3 1 3 - 7
Tableau 1: Récapitulatif du nombre de données nécessaires par opérateur pour le calcul d'un point
1.1 Calcul par point rayonné (ou point lancé)L'opérateur de calcul élémentaire Point rayonné nécessite la connaissance des coordonnées XA et YA, de la station et de son gisement d'orientation G0.
D'après les mesures terrain, on a alors :
GAM =G0+lM où lM est l ' angle horizontal observé
On en déduit les coordonnées du point rayonné :
X M=X A+DAM⋅sin (GAM )Y M=Y A+DAM⋅cos (GAM )
1.2 Calcul par intersection de viséesL'opérateur Intersection nécessite de connaître les coordonnées et les gisements d'orientation de deux stations.
De la même manière que pour les points rayonnés, on détermine à partir des observations terrain les gisements des stations vers le point M à déterminer.
On a alors les coordonnées de M par intersection des visées depuis A et B :
2
Figure 1: Point M rayonné depuis la station A
A
GAM
M
DAM
Figure 2: Point M déterminé par intersection depuis les stations A et B
GBM
A
GAM
M
BX M=X A+( ( X A−X B)−(Y A−Y B)⋅tan GBM
tanGBM −tan GAM )⋅tan GAM
Y M=Y A+( ( X A−X B)−(Y A−Y B)⋅tan GBM
tan GBM −tan GAM)

CACUL ROBUSTE DE COORDONNÉES APPROCHÉES
Les formules sont issues de [BRA03]. Elles sont intéressantes pour la programmation car on a la relation tan G=tan(G+200) , on peut donc s'affranchir de vérifier que l'orientation des gisements est bien vers le point M à déterminer.
1.3 Calcul par relèvement simple sur 3 pointsL'opérateur relèvement simple nécessite la connaissance de 3 points sans gisement d'orientation.
Pour le calcul du point M, on a choisit la méthode de Delambre décrite dans [BRA03] et [LAN09]. Cette méthode de calcul analytique est très bien adaptée à la programmation.
Dans un premier temps, on calcule à partir des visées angulaires les angles de relèvements α et β.
D'après la formule de Delambre, on obtient le gisement GAM :
GAM =arctan ( ( X B−X A)⋅cotanα−( X C−X A)⋅cotanβ+(Y C−Y B)(Y B−Y A)⋅cotanα−(Y C−Y A)⋅cotanβ−( X C−X B) )
On en déduit alors les gisements issus de B et de C :
GBM =GAM +αGCM =GAM+β
Enfin, on calcule le point M par intersection de droites la plus favorable.
1.4 Calcul par Résection ou station libre L'opérateur de calcul Résection nécessite la connaissance des coordonnées de 2 points, ainsi que d'un angle de relèvement et de deux distances observées.
On calcule dans un premier temps les coordonnées du centre du cercle passant par les trois points, ainsi que son rayon.
Les distances observées DAM et DBM, définissent les rayons des cercles centrés en A et B.
On peut ensuite déterminer les coordonnées du point M par intersection de cercle. (cf. Calcul par Multilatération)
1.5 Calcul d'un point par recoupementL'opérateur Recoupement permet de calculer un point par relèvement et intersection combinés. Il nécessité la connaissance des cordonnées de deux points visés depuis le point M, et la connaissance des coordonnées et du gisement d'orientation d'une station qui vise M.
3
Figure 3: Point M déterminé par relèvement sur 3 points
β
A
αM
B
C
Figure 4: Point M déterminé par Resection
A
M
B
α
O
r DAM
DBM
CACUL ROBUSTE DE COORDONNÉES APPROCHÉES
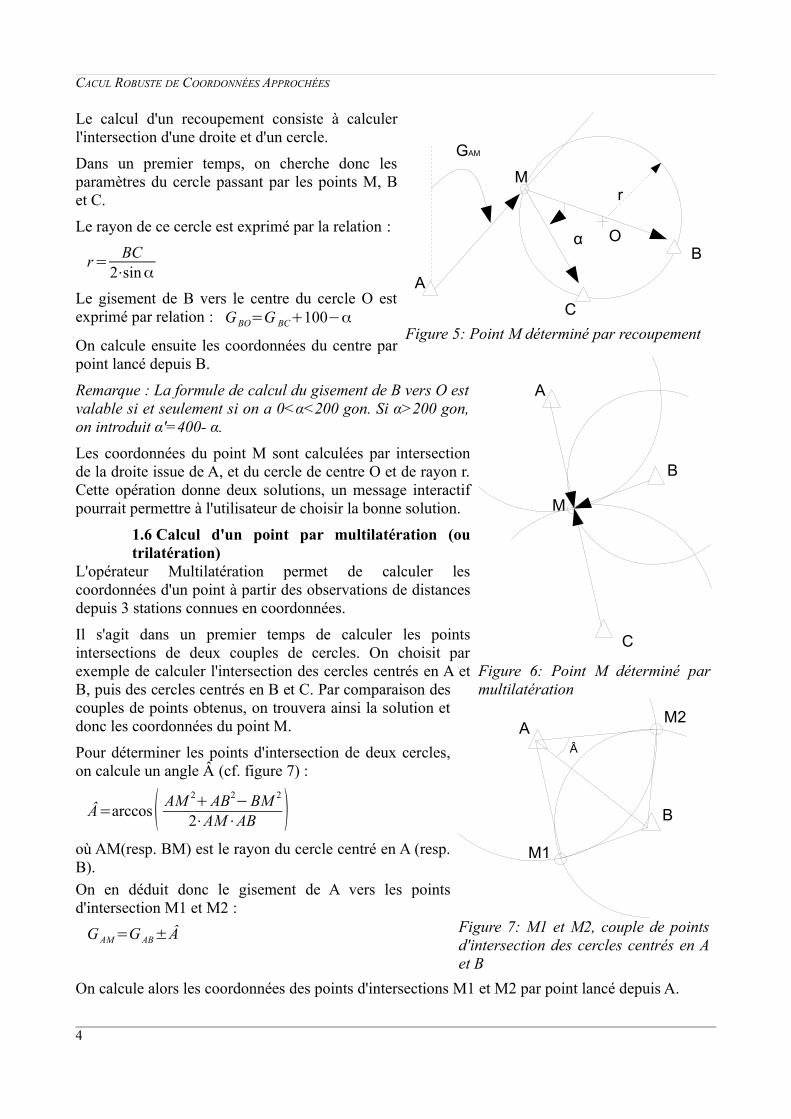
Le calcul d'un recoupement consiste à calculer l'intersection d'une droite et d'un cercle.
Dans un premier temps, on cherche donc les paramètres du cercle passant par les points M, B et C.
Le rayon de ce cercle est exprimé par la relation :
r= BC2⋅sinα
Le gisement de B vers le centre du cercle O est exprimé par relation : GBO=G BC+100−α
On calcule ensuite les coordonnées du centre par point lancé depuis B.
Remarque : La formule de calcul du gisement de B vers O est valable si et seulement si on a 0<α<200 gon. Si α>200 gon, on introduit α'=400- α.
Les coordonnées du point M sont calculées par intersection de la droite issue de A, et du cercle de centre O et de rayon r. Cette opération donne deux solutions, un message interactif pourrait permettre à l'utilisateur de choisir la bonne solution.
1.6 Calcul d'un point par multilatération (ou trilatération)
L'opérateur Multilatération permet de calculer les coordonnées d'un point à partir des observations de distances depuis 3 stations connues en coordonnées.
Il s'agit dans un premier temps de calculer les points intersections de deux couples de cercles. On choisit par exemple de calculer l'intersection des cercles centrés en A et B, puis des cercles centrés en B et C. Par comparaison des couples de points obtenus, on trouvera ainsi la solution et donc les coordonnées du point M.
Pour déterminer les points d'intersection de deux cercles, on calcule un angle  (cf. figure 7) :
Â=arccos( AM 2+AB2−BM 2
2⋅AM⋅AB )où AM(resp. BM) est le rayon du cercle centré en A (resp. B).
On en déduit donc le gisement de A vers les points d'intersection M1 et M2 :
GAM =GAB±Â
On calcule alors les coordonnées des points d'intersections M1 et M2 par point lancé depuis A.
4
Figure 5: Point M déterminé par recoupement
A
α
M
B
C
GAM
O
r
Figure 7: M1 et M2, couple de points d'intersection des cercles centrés en A et B
A
M1
B
M2
Â
Figure 6: Point M déterminé par multilatération
A
M
B
C

CACUL ROBUSTE DE COORDONNÉES APPROCHÉES
De même, on calcule dans un second temps l'intersection des cercles issus de B et C. On obtient alors un couple de points N1 et N2.
Par comparaison des deux couples de points on peut alors trouver une unique solution. Les coordonnées définitives du point calculé par multilatération sont déterminées par la moyenne des cordonnées du couple de points retenu.
1.7 Calcul d'un point par triangulatération Il s'agit par cette méthode de calculer les coordonnées d'un point en utilisant un maximum de données terrain. On utilise ainsi la redondance pré-supposée pour contrôler les coordonnées du point et ainsi les mesures d'angles et de distances.
1.7.1 Définition des notations :
Dans un réseau de triangulatération, un point P stationné est visé par plusieurs points Si.
On considère un stationnement (mesures d'angles et/ou de distances) effectué en un point P vers plusieurs points Si stationnés ou non.
P est un point définitif de coordonnées ( X P ;Y P)P' est le point approché de P de coordonnées ( X P ' ;Y P ' )
On a : X P=X P'+d xp
Y P=Y P '+d yp
avec (d xp ;d yp) les appoints
Si est un point définitif de coordonnées ( X Si ;Y Si)G'osi est le gisement moyen approché en Si : Gosi=G ' osi+d osi
Gosi est le gisement moyen définitif du stationnement en Si.
li est la lecture horizontale effectuée de P vers SLi est la lecture définitive compensée de P vers S : Li=l i+v i
di est la distance horizontale mesurée entre P et SiDi est la distance définitive compensée de P vers Si : Di=d i+v i
D'i est la distance horizontale approchée entre P et Si, c'est à dire la distance calculée entre P' et Si
Gop est le gisement moyen définitif G'op est le gisement moyen approché en P : Gop=G ' op+d op
G'si est le gisement approché de P vers Si, c'est à dire le gisement calculé entre P' et Si
1.7.2 Équations d'observations :
Les équations d'observations permettent d'écrire chaque observation i (mesures d'angle ou de distance) en fonction des inconnues.
On peut alors écrire :
→ Pour les observations angulaires : Li=arctan( ( X Si−X p)(Y Si−Y p) )−Gop
→ Pour les mesures de distances : Di=√ (( X Si−X p)2+(Y Si−Y p)
2)
5

CACUL ROBUSTE DE COORDONNÉES APPROCHÉES
1.7.3 Équations d'erreurs :
Le principe des moindres carrés exige d'écrire les équations d'erreurs. Ces équations permettent d'exprimer les résidus des observations en fonction des inconnues et des observations brutes.
On a alors :
→ Pour les observations angulaires : v li=arctan( ( X Si−X p)(Y Si−Y p) )−(Gop+li)
→ Pour les mesures de distances : vdi=√ (( X Si−X p)2+(Y Si−Y p)
2)−di
Pour pouvoir appliquer le principe des moindres carrés, il est nécessaire de linéariser ces équations d'erreurs par un développement en série de Taylor.
On obtient alors les équations d'erreurs génériques suivantes :
• Pour une visée de relèvement issue du point P approché :
v li=−cosG ' si
D ' i⋅dxp+ sin G ' si
D ' i⋅dyp−dGop+(G ' si−(G ' op+li))
• Pour une visée d'intersection issue d'un point S connu :
v li=cosG ' si
D ' i⋅dxp− sin G ' si
D ' i⋅dyp−dGosi+(G ' si−(G ' os+li))
• Pour une visée en distance vers un point S issu du point P approché
vdi=−sin G ' si⋅dxp−cosG ' si⋅dyp+(D ' i−di)
2 Diagramme synoptique de l'enchainement des calculs planimétriques
La figure 8 ci-dessous présente un diagramme synoptique décrivant le principe d'enchaînement des calculs mis en place au sein de l'algorithme de calcul robuste de coordonnées approchées.
6


Annexe D : Notice LTOP / TopTools

Givors, Le 9 Août 2012
Notice LTOP / TopToolsversion 1.0
Notice réalisée par Matthieu Tracol, étudiant Ingénieur en Topographie à l'INSA de Strasbourg, au cours de son PFE intitulé :
« Intégration du logiciel de compensation LTOP, aux méthodes de TPLM-3D pour les chantiers spéciaux »
Directeur de PFE : M. David Desbuisson
Date : Version : Auteur : Modifications :
09/08/12 1.0 MT Première version de la Notice
SOMMAIRE
SOMMAIRE
PARTIE 1: Procédure interne de compensation de réseaux de points sous LTOP...................................1
PARTIE 2: Le Logiciel TopTools.................................................................................................................. 3
2.1 L'application TopTools....................................................................................................................... 3
2.2 Interprétation et réduction des carnets *.GSI.................................................................................. 32.2.1 Chargement du fichier *.GSI........................................................................................................ 32.2.2 Interprétation du fichier *.GSI...................................................................................................... 52.2.3 Réduction des données................................................................................................................. 62.2.4 Calcul des coordonnées approchées.............................................................................................. 6
2.3 Le calcul robuste de coordonnées approchées.................................................................................. 82.3.1 Principe de fonctionnement de l'algorithme.................................................................................. 8
2.3.1.1 Méthodes de calculs robuste................................................................................................. 82.3.1.1.1 Contrôle des observations réduites............................................................................... 82.3.1.1.2 Contrôle des V0 des stations......................................................................................... 92.3.1.1.3 Compensation altimétrique et planimétrique................................................................ 9
2.3.1.2 Niveau de fiabilité de détermination des points approchés................................................. 102.3.1.3 Calcul par filiation successive.............................................................................................10
2.3.1.3.1 Principe et modes de calculs....................................................................................... 102.3.1.3.2 Initialisation................................................................................................................ 11
2.3.2 Les fichiers d'entrée.................................................................................................................... 112.3.2.1 Le fichier de données.......................................................................................................... 112.3.2.2 Le fichier de paramétrage du calcul.................................................................................... 12
2.3.2.2.1 Options de contrôle planimétrique ............................................................................. 122.3.2.2.2 Précision Instrument................................................................................................... 122.3.2.2.3 Tolérances pour les contrôles...................................................................................... 122.3.2.2.4 Paramètres estimation robuste.................................................................................... 122.3.2.2.5 Autres paramètres....................................................................................................... 13
2.3.3 Le fichier de résultats..................................................................................................................142.3.3.1 Description du contenu et pistes d'analyses........................................................................ 14
2.3.3.1.1 Résumé des paramètres de calculs et des données...................................................... 142.3.3.1.2 Contrôle des observations réduites (DH et DZ).......................................................... 142.3.3.1.3 Compensation altimétrique......................................................................................... 152.3.3.1.4 Compensation planimétrique...................................................................................... 162.3.3.1.5 Tableau récapitulatif des coordonnées approchées des points..................................... 19
2.3.3.2 Méthodologie d'analyse du fichier de résultats................................................................... 202.3.3.3 Remarques et conseils pour les calculs :............................................................................. 20
PARTIE 3: Le logiciel LTOP...................................................................................................................... 22
3.1 Présentation du logiciel.................................................................................................................... 22
3.2 Les fichiers d'entrée.......................................................................................................................... 233.2.1 Le fichier de configuration..........................................................................................................23
3.2.1.1 Les modes de calculs.......................................................................................................... 243.2.1.2 Les inconnues..................................................................................................................... 263.2.1.3 Le modèle stochastique.......................................................................................................27
i
SOMMAIRE
3.2.1.4 Les groupes de distance et de direction...............................................................................303.2.1.5 Les corrections préexistantes ............................................................................................. 313.2.1.6 Calcul de session GPS........................................................................................................ 313.2.1.7 Les paramètres de fiabilité.................................................................................................. 333.2.1.8 Définition du système de projection .................................................................................. 34
3.2.2 Le fichier de coordonnées........................................................................................................... 353.2.3 Le fichier d'observations............................................................................................................. 36
3.3 Les étapes de calcul sous LTOP....................................................................................................... 403.3.1 Pré-analyse, simulation .............................................................................................................. 41
3.3.1.1 Éléments requis pour une pré-analyse.................................................................................423.3.1.2 Analyses, Précision et fiabilité............................................................................................ 423.3.1.3 Définition des intentions de mesures.................................................................................. 42
3.3.2 Calcul libre................................................................................................................................. 433.3.3 Calcul libre-ajusté....................................................................................................................... 433.3.4 Calcul contraint ..........................................................................................................................443.3.5 La recherche d'erreurs : compensation robuste .......................................................................... 443.3.6 Remarques et conseils.................................................................................................................44
3.3.6.1 Recherche de fautes dans les points approchés................................................................... 443.3.6.2 Finaliser correctement un calcul contraint.......................................................................... 45
3.4 Le fichier de résultat......................................................................................................................... 453.4.1 Description du contenu du fichier et pistes d'analyses................................................................ 45
3.4.1.1 Réduction des distances...................................................................................................... 453.4.1.2 Abriss planimétrique........................................................................................................... 463.4.1.3 Abriss altimétrique.............................................................................................................. 473.4.1.4 Tableau des coordonnées compensées et des ellipses d'erreurs........................................... 483.4.1.5 Tableau de la fiabilité externe des coordonnées.................................................................. 493.4.1.6 Résumé de la compensation................................................................................................ 493.4.1.7 Registre complet des coordonnées et altitudes.................................................................... 51
3.4.2 Méthodologie d'analyse des fichiers de résultats.........................................................................513.4.2.1 Pour un calcul libre............................................................................................................. 513.4.2.2 Pour un calcul libre-ajusté.................................................................................................. 523.4.2.3 Pour un calcul contraint...................................................................................................... 53
Table des Illustrations.................................................................................................................................54
Annexe A : Description du Format LTOP.................................................................................................. A
Annexe B : Exemple de fichier de paramétrage du calcul de coordonnées approchées...........................I
Annexe C : EXTRAITS de fichier de Résultats d'un calcul de coordonnées approchées.......................K
Annexe D : Fichier de configuration de TopTools...................................................................................... S
ii
PARTIE 1: PROCÉDURE INTERNE DE COMPENSATION DE RÉSEAUX DE POINTS SOUS LTOP
PARTIE 1: PROCÉDURE INTERNE DE COMPENSATION DE RÉSEAUX DE POINTS SOUS LTOP
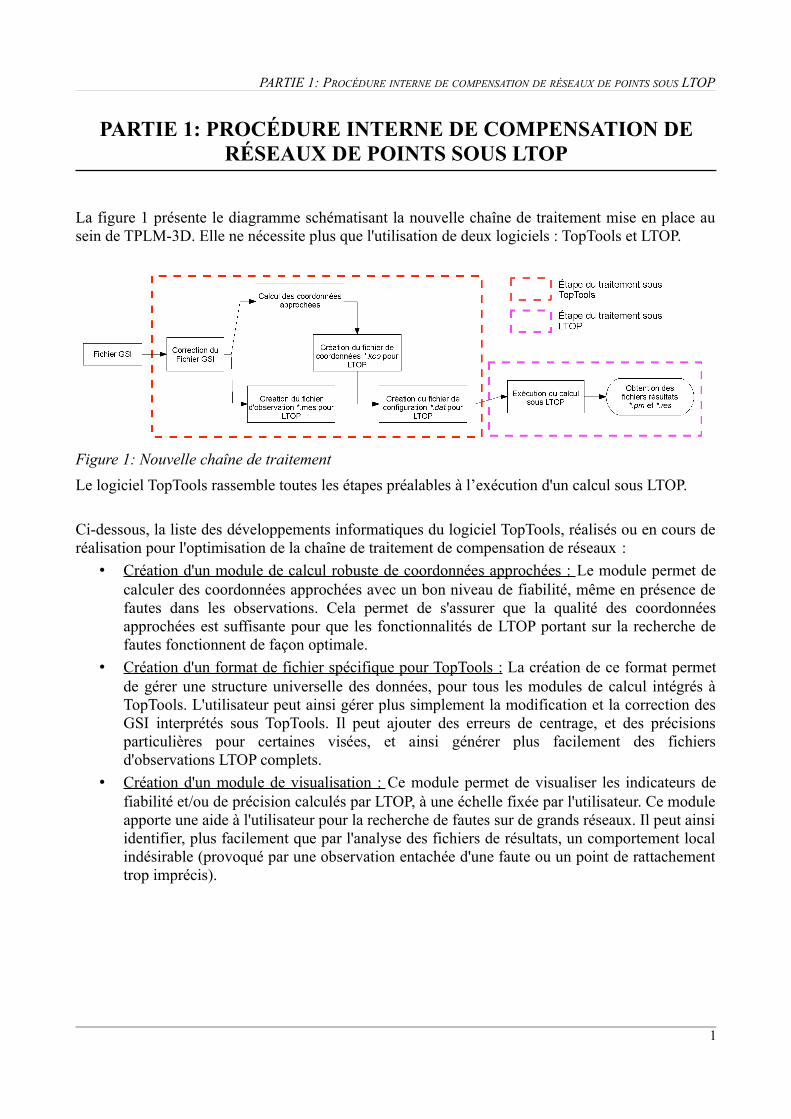
La figure 1 présente le diagramme schématisant la nouvelle chaîne de traitement mise en place au sein de TPLM-3D. Elle ne nécessite plus que l'utilisation de deux logiciels : TopTools et LTOP.
Le logiciel TopTools rassemble toutes les étapes préalables à l’exécution d'un calcul sous LTOP.
Ci-dessous, la liste des développements informatiques du logiciel TopTools, réalisés ou en cours de réalisation pour l'optimisation de la chaîne de traitement de compensation de réseaux :
• Création d'un module de calcul robuste de coordonnées approchées : Le module permet de calculer des coordonnées approchées avec un bon niveau de fiabilité, même en présence de fautes dans les observations. Cela permet de s'assurer que la qualité des coordonnées approchées est suffisante pour que les fonctionnalités de LTOP portant sur la recherche de fautes fonctionnent de façon optimale.
• Création d'un format de fichier spécifique pour TopTools : La création de ce format permet de gérer une structure universelle des données, pour tous les modules de calcul intégrés à TopTools. L'utilisateur peut ainsi gérer plus simplement la modification et la correction des GSI interprétés sous TopTools. Il peut ajouter des erreurs de centrage, et des précisions particulières pour certaines visées, et ainsi générer plus facilement des fichiers d'observations LTOP complets.
• Création d'un module de visualisation : Ce module permet de visualiser les indicateurs de fiabilité et/ou de précision calculés par LTOP, à une échelle fixée par l'utilisateur. Ce module apporte une aide à l'utilisateur pour la recherche de fautes sur de grands réseaux. Il peut ainsi identifier, plus facilement que par l'analyse des fichiers de résultats, un comportement local indésirable (provoqué par une observation entachée d'une faute ou un point de rattachement trop imprécis).
1
Figure 1: Nouvelle chaîne de traitement
PARTIE 1: PROCÉDURE INTERNE DE COMPENSATION DE RÉSEAUX DE POINTS SOUS LTOP
• Création d'un module de configuration d'un calcul LTOP : Ce module a pour vocation de simplifier la génération de fichiers de configuration de calcul LTOP. En effet, sur les chantiers, TPLM-3D utilise régulièrement les mêmes appareils topographiques, projections, systèmes de coordonnées locales. De plus, certains paramètres restent fixes selon l'étape de la compensation (calculs libre, libre-ajusté, contraint et robuste). En fixant par défaut ces paramètres, on diminue l'intervention de l'utilisateur dans la configuration du calcul, et par conséquent le risque d'erreur.
• Mise en page des fichiers de résultats avec un formalisme propre à TPLM-3D : Ce module permet de simplifier l'analyse des fichiers de résultats de manière à mettre en évidence plus rapidement les informations les plus importantes du résumé d'un calcul LTOP. Il permet aussi à l'utilisateur de fixer ses propres seuils de tolérance, en terme de précision et de fiabilité, en fonction des recommandations des clients.
N.B.( 01/08/12 ) : A ce jour, seul l'algorithme de calcul robuste de coordonnées approchées est implémenté dans TopTools. On a aussi amélioré la gestion et l'interprétation des GSI sous TopTools par la création d'un format de données spécifique et la possibilité de désactiver des lignes de mesures.
2

PARTIE 2: LE LOGICIEL TOPTOOLS
PARTIE 2: LE LOGICIEL TOPTOOLS
2.1 L'application TopToolsÀ l'origine TopTools est un logiciel créé par David Desbuisson qui rassemblait quelques fonctions d'aide à la préparation d'un calcul sous LTOP. Il permettait ainsi de préparer un fichier d'observation *.GSI pour le transformer au format *.mes de LTOP, et de transformer un fichier de coordonnées au format *.koo propre à LTOP.
La figure 2 présente le schéma de principe du fonctionnement du module d'interprétation des carnets de terrain *.GSI et création de fichier de coordonnées au format LTOP..
TPLM-3D souhaitant faire de TopTools une boîte à outils avec de multiples options de calculs autour des traitements de carnets de terrain *.GSI ; au cours de son projet de fin d'études Élodie Hermier, [2011], a ainsi rajouté des modules de calculs permettant un géoréférencement global d'un réseau de cibles issu d'un lever sur plateforme flottante.A terme, TopTools rassemblera toutes les fonctionnalités décrites dans la partie 1 de cette notice.
2.2 Interprétation et réduction des carnets *.GSITopTools à été développé suite à une recrudescence des chantiers en Suisse nécessitant l'utilisation du logiciel LTOP. David Desbuisson souhaitait donc avoir un outil simple d'utilisation permettant de contrôler et de corriger des fichiers *.GSI. Ainsi, l'interprétation des données et le rapport de réduction des visées en double retournement fournissent à l'utilisateur une bonne aide pour cette étape de contrôle préalable à tous calculs (cf. figures 3 et 5).
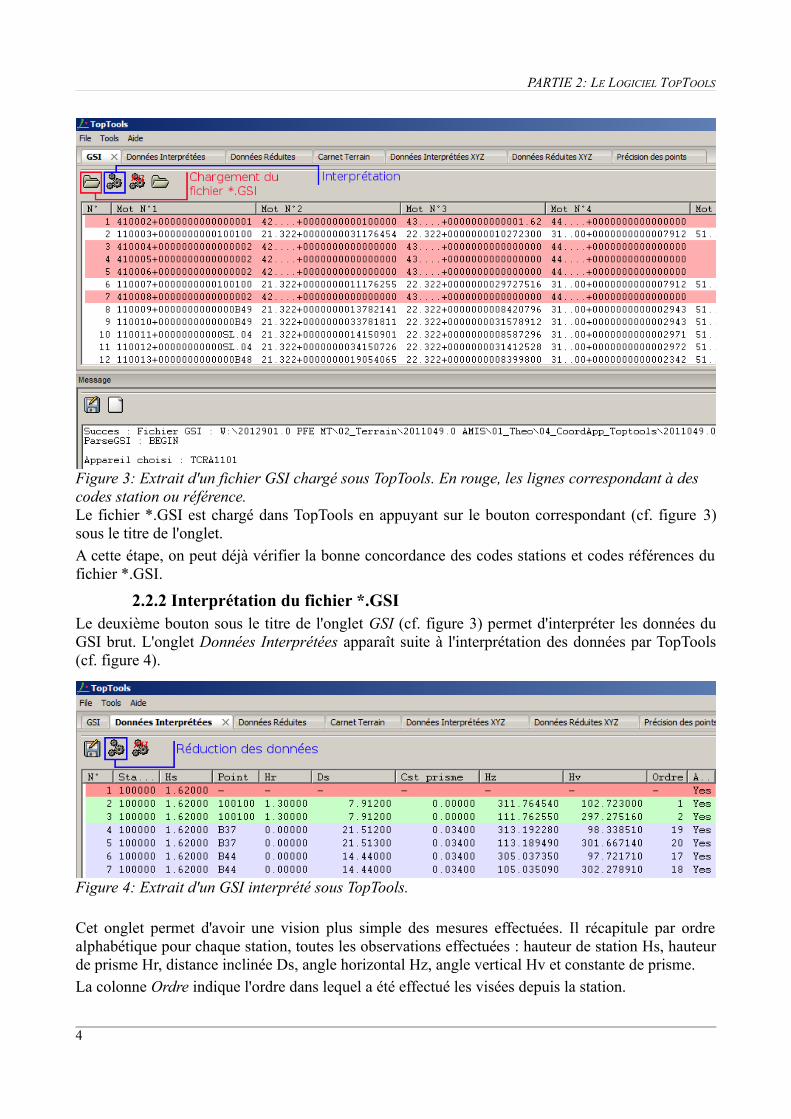
2.2.1 Chargement du fichier *.GSIÀ l’ouverture de TopTools, on se trouve dans un premier onglet appelé GSI. On observe une fenêtre centrale dans laquelle vont s’afficher les données, et une fenêtre appelée Message, très importante, qui va contenir les rapports de calculs.
3
Figure 2: Schéma de principe de fonctionnement des fonctions natives du logiciel TopTools
PARTIE 2: LE LOGICIEL TOPTOOLS
Le fichier *.GSI est chargé dans TopTools en appuyant sur le bouton correspondant (cf. figure 3) sous le titre de l'onglet.
A cette étape, on peut déjà vérifier la bonne concordance des codes stations et codes références du fichier *.GSI.
2.2.2 Interprétation du fichier *.GSILe deuxième bouton sous le titre de l'onglet GSI (cf. figure 3) permet d'interpréter les données du GSI brut. L'onglet Données Interprétées apparaît suite à l'interprétation des données par TopTools (cf. figure 4).
Cet onglet permet d'avoir une vision plus simple des mesures effectuées. Il récapitule par ordre alphabétique pour chaque station, toutes les observations effectuées : hauteur de station Hs, hauteur de prisme Hr, distance inclinée Ds, angle horizontal Hz, angle vertical Hv et constante de prisme.La colonne Ordre indique l'ordre dans lequel a été effectué les visées depuis la station.
4
Figure 3: Extrait d'un fichier GSI chargé sous TopTools. En rouge, les lignes correspondant à des codes station ou référence.
Figure 4: Extrait d'un GSI interprété sous TopTools.

PARTIE 2: LE LOGICIEL TOPTOOLS
Un code couleur est adopté pour différencier les lignes de stations (en rouge), les lignes de références (en vert) et les lignes d'observations (en bleu).
Les lignes de références sont détectées et différenciées des lignes d'observations par deux méthodes :
• soit grâce aux codes 2 du fichier *.GSI,
• soit grâce aux matricules des points visés, dont les expressions régulières1 sont enregistrées par l'utilisateur dans le fichier de configuration de TopTools avant son exécution.
Le fichier de configuration est disponible à l'adresse suivante :
C:\Program Files\TopTools\Config\TopToolsLast.xmlRemarque : Un paramétrage particulier de ce fichier peut aussi permettre interpréter des fichiers *.GSI avec un format particulier (format cabinet C.Haller) et des carnets de terrain issus d'appareils TRIMBLE. Pour voir comment paramétrer ce fichier dans ces cas, on pourra consulter l'annexe D.
A cette étape l'utilisateur peut, s'il le souhaite, désactiver des visées qu'il ne veut pas intégrer à la réduction des mesures en double retournement. En cliquant à droite sur la ligne concernée, puis en appuyant sur le bouton « Toogle Activity » l'utilisateur peut désactiver une mesure. Pour cette mesure, dans le champ de la colonne Activity apparaît alors, la valeur « No » (cf. figure 5).
2.2.3 Réduction des donnéesLe deuxième bouton sous le titre de l'onglet Données Interprétées (cf. figure 4) permet d'interpréter les données du GSI brut. L'onglet Données Réduites apparaît suite à la réduction des données par TopTools (cf. figure 6).Dans cet onglet, les visées en double retournement ou mesurées à plusieurs reprises depuis une même station sont affichées réduites et moyennées. Les visées désactivées précédemment ne sont pas incluses dans cet onglet.
Un rapport de réduction apparaît dans la fenêtre Message, où l'utilisateur peut contrôler les écarts des visées intermédiaires (Hz, Hv et Ds) à la visée moyennée.A cette étape, il est possible d'enregistrer le contenu des onglets Données Interprétées et Données Réduites dans un fichier au format *.tts, en allant dans le menu File\Save. Cela permet de sauver un premier travail d'analyse du fichier *.GSI pour y revenir plus tard en rechargeant le fichier *.tts (menu File\Load).
Depuis cette fenêtre, il est possible d'enregistrer un fichier d'observations au format propre à LTOP et d’exécuter le calcul des coordonnées approchées des points du réseau (cf. figure 6).
2.2.4 Calcul des coordonnées approchéesEn appuyant sur le bouton permettant d'exécuter le calcul de coordonnées approchées, une fenêtre apparaît, dans laquelle l'utilisateur peut choisir le fichier de données contenant les points d'appui et/ou gisement nécessaires au calcul.
1 Voir livre : Les expressions régulières par l'exemple, V. Fourmond
5
Figure 5: Désactiver une visée avant la réduction des données

PARTIE 2: LE LOGICIEL TOPTOOLS
Les résultats du calcul sont consultables dans la fenêtre Message. Le premier bouton sous le titre de la fenêtre permet d'enregistrer le contenu de cette fenêtre dans un fichier *.txt. Le second permet de vider l'intégralité de la fenêtre et donc de tous les rapports imprimés dans cette fenêtre depuis l'ouverture de TopTools.
Le calcul des coordonnées approchées est paramétrable dans un fichier présent à l'adresse suivante :C:\Program Files\TopTools\Config\TopToolsCapp.txt
Pour une description des fichiers de données et de paramétrage du calcul de coordonnées approchées se référer au paragraphe 2.3.2.
6
Figure 6: Extrait d'un fichier *.GSI réduit sous TopTools

PARTIE 2: LE LOGICIEL TOPTOOLS
2.3 Le calcul robuste de coordonnées approchéesLe logiciel LTOP dispose de nombreux outils offrant une aide à la recherche et la détection de faute dans des séries d'observations. Or, ces outils fonctionnent correctement seulement si les coordonnées approchées sont justes (à une précision près relative à la taille du chantier).L'algorithme de calcul robuste de coordonnées approchées créé pour TopTools répond à ce problème rappelé dans le cahier des charges (cf. PARTIE 1).
2.3.1 Principe de fonctionnement de l'algorithmePour conserver la philosophie de calcul de LTOP, les calculs de la planimétrie et de l'altimétrie ont été séparés. Le calcul des altitudes des points est effectué par le biais d'une compensation globale du réseau. Pour la détermination des coordonnées planimétriques des points, on a mis en place une méthode de calcul par filiation successive.
Le module de calcul de coordonnées approchées créé pour TopTools fonctionne avec l'hypothèse d'une redondance suffisante des mesures pour pouvoir écarter au fur et à mesure des calculs les observations qui ont une forte probabilité d'être entachées de fautes. On a mis en place des méthodes de calculs robustes à plusieurs niveaux dans l'algorithme, ainsi qu'un niveau de fiabilité de détermination des points lors du calcul planimétrique.
Les calculs effectués au cours de l'exécution de cet algorithme, sont basés sur des observations réduites, déduites de l'interprétation d'un fichier *.GSI sous TopTools, ainsi que des données (points d'appui et/ou gisement) rentrées par l'utilisateur.
2.3.1.1 Méthodes de calculs robuste
Une calcul dit « robuste », permet d'estimer la valeur d'une variable tout en écartant les observations susceptibles d'être fausses. On a donc choisit d'insérer dans l'algorithme de calcul de coordonnées approchées ce type de calcul à divers niveaux : pour le contrôle des observations réduites (distances horizontales et dénivelés partielles), pour le calcul des V0 de stations, pour les compensations altimétrique et planimétrique.
2.3.1.1.1 Contrôle des observations réduites
Dans un réseau supposé redondant, une distance ou une dénivelée peut être observée plusieurs fois. Pour une utilisation dans les calculs planimétrique et altimétrique des points approchés, ces observations sont, dans un premier temps, moyennées par une méthode robuste afin de mettre en évidence d'éventuelles fautes.La moyenne est calculée de manière itérative. A l'itération i, on affecte des poids aux observations fonction de leur écart à la moyenne calculé à l'itération i-1. Cette moyenne est initialisée à l'aide d'un estimateur robuste : la médiane de la série d'observation. A la dernière itération, la moyenne a donc convergé vers un groupe d'observations potentiellement justes (cf. figure 7). Le calcul des écarts à la moyenne permet alors de mettre en évidence des observations fausses.
En paramètres de calcul, l'utilisateur peut définir les écarts à la moyenne maximum tolérés. Ainsi, si la moitié des écarts à la moyenne sont hors tolérances, il y a potentiellement une faute dans les observations issues des deux points concernés. L'observation moyennée est donc désactivée pour la suite des calculs, afin que l'influence de la faute ne se propage pas sur les coordonnées approchées des points calculés. La décision d'écarter cette observation ne bloque pas les calculs planimétriques et altimétriques du fait de la redondance présupposée des observations, qui permet de déterminer par plusieurs méthodes de calcul classique les coordonnées approchées d'un point.En fixant, dans cette première étape de calcul des tolérances larges, on peut déjà mettre en évidence des éventuelles fautes de matricules, ou problèmes de mesures de distance, hauteurs de prisme, etc.
7

PARTIE 2: LE LOGICIEL TOPTOOLS
2.3.1.1.2 Contrôle des V0 des stations
Pour le calcul du V0 d'une station, le même principe de calcul que pour le contrôle des observations réduites, est mis en œuvre. La moyenne robuste permet alors de mettre en évidence des fautes dans les V0 intermédiaires calculés entre la station et les points connus, et donc par conséquent de probables fautes sur les angles horizontaux issus de cette station.A l'issue d'un calcul de V0 moyen, on calcule pour chaque V0 intermédiaire son écart angulaire, duquel on peut déduire un écart latéral en mètre. En paramètre de calcul, l'utilisateur peut définir l'écart latéral maximum toléré.
De la même manière que pour le contrôle des observations réduites, lorsqu'un V0 intermédiaire est considéré hors tolérance, l'observation angulaire correspondante est désactivée pour la suite des calculs.
2.3.1.1.3 Compensation altimétrique et planimétrique
Le calcul de compensation altimétrique est par défaut implémenté avec une méthode robuste. On contrôle ainsi de manière globale l'ensemble des dénivelées partielles.La solution obtenue grâce à la compensation étant proche de la réalité même en présence de fautes, on peut alors facilement détecter les observations responsables. En les mettant en évidence dans le rapport de calcul, l'utilisateur peut alors contrôler toutes les observations liant les points (source et cible) d'une dénivelée identifiée comme fasse.
Dans la méthode de calcul des points par filiation successive, le programme calcul dans un premier temps, les coordonnées planimétriques approchées par une méthode classique (rayonnement, intersection, relèvement, … etc). Si les observations liant ce point aux autres points connus du réseau le permettent, un contrôle local des coordonnées calculées est effectué en réalisant une compensation (triangulatération2).
2 Mot « valise » composé de triangulation et trilatération. Il désigne donc une compensation mélangeant des observations de distances et d'angles.
8
Figure 7: Visualisation graphique de la différence entre moyenne arithmétique et moyenne robuste

PARTIE 2: LE LOGICIEL TOPTOOLS
Dans les paramètres de calculs, l'utilisateur peut activer ou non l'estimation robuste. Si l'estimation robuste est activée, la compensation permettra alors de mettre en évidence des observations fausses.
S'il y a présence d'observations identifiées comme des fautes par la compensation robuste, et/ou que la précision planimétrique du point dépasse un seuil fixé en paramètre de calcul on peut alors affecter un statut douteux au point compensé. Ce point est ainsi écarté pour la suite des calculs, puis sera recalculé à la fin du processus itératif. Sinon, le statut définitif est attribué au point et ses coordonnées sont stockées pour être réutilisées dans la suite des calculs.
2.3.1.2 Niveau de fiabilité de détermination des points approchés
Cette notion est implémentée dans le calcul planimétrique. Elle permet de sélectionner les meilleurs points lors de l’exécution des calculs à l'aide d'opérateurs élémentaires.
A l'initialisation du processus itératif, le niveau de fiabilité est fixé à 1. Ensuite, selon la configuration du réseau, la distribution des points d'appui et la mise en évidence de fautes probables, ce niveau peut être abaissé pour permettre de calculer l'ensemble des points du réseau.Ainsi :
• au niveau de fiabilité 1 : on utilisera seulement les points d'appui et les points ayant un statut définitif. Par ailleurs, pour les opérateurs élémentaires de calculs nécessitant la connaissance des v0 des stations, on ne retiendra parmi les points d'appui et définitifs que ceux possédant un v0 contrôlé, c'est à dire avec au moins deux visées de références,
• au niveau de fiabilité 2 : on s'autorisera à utiliser les points non contrôlés dans les données, tout en gardant la condition sur les v0 contrôlés,
• au niveau de fiabilité 3 : toutes les données disponibles sont utilisées, on prend donc aussi en compte les stations dont les v0 ne sont pas contrôlés.
2.3.1.3 Calcul par filiation successive
2.3.1.3.1 Principe et modes de calculs
Le principe de ce calcul est décrit brièvement dans le paragraphe 2.3.1.1.3.La détermination de proche en proche des coordonnées planimétriques d'un réseau est totalement soumise à la configuration de celui-ci ainsi qu'à la distribution des points de rattachement. Ainsi, il est difficile de généraliser ce problème afin de trouver une méthode de calcul de coordonnées approchées applicables à tous les réseaux de points. On a donc retenu une méthode de calcul des points approchés par filiation successive. Pour ce faire, on a utilisé un certain nombre d'opérateurs de calculs élémentaires (cf. tableau 1) permettant de calculer les coordonnées d'un point avec un minimum de données.
En pratique, dans l'algorithme écrit on a mis en place une boucle itérative sur tous les points du réseau qui recherche, lorsqu'elle découvre un point inconnu, la possibilité d'exécuter un calcul à partir d'un des opérateurs de calculs définis dans le tableau 1. Si cela est possible (nombre d'observations suffisant) le point approché est ensuite contrôlé par triangulatération .L'ordre des opérateurs élémentaires choisit pour la recherche des possibilités d’exécution de calculs est celui indiqué dans le tableau 1. On retrouve donc en première place le calcul par rayonnement, qui est l'opérateur qui a la plus grande probabilité d'être exécuter vis-à-vis des méthodes de lever sur le terrain.
9
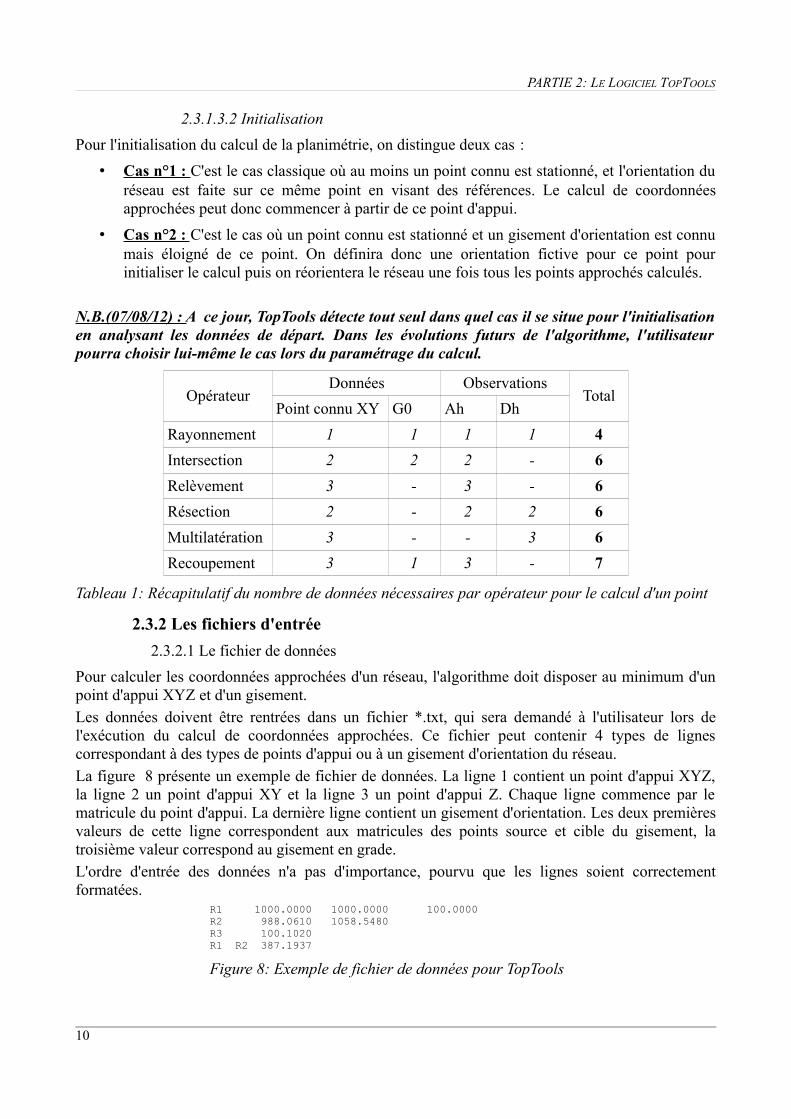
PARTIE 2: LE LOGICIEL TOPTOOLS
2.3.1.3.2 Initialisation
Pour l'initialisation du calcul de la planimétrie, on distingue deux cas :
• Cas n°1 : C'est le cas classique où au moins un point connu est stationné, et l'orientation du réseau est faite sur ce même point en visant des références. Le calcul de coordonnées approchées peut donc commencer à partir de ce point d'appui.
• Cas n°2 : C'est le cas où un point connu est stationné et un gisement d'orientation est connu mais éloigné de ce point. On définira donc une orientation fictive pour ce point pour initialiser le calcul puis on réorientera le réseau une fois tous les points approchés calculés.
N.B.( 07/08/12 ) : A ce jour, TopTools détecte tout seul dans quel cas il se situe pour l'initialisation en analysant les données de départ. Dans les évolutions futurs de l'algorithme, l'utilisateur pourra choisir lui-même le cas lors du paramétrage du calcul.
OpérateurDonnées Observations
TotalPoint connu XY G0 Ah Dh
Rayonnement 1 1 1 1 4
Intersection 2 2 2 - 6
Relèvement 3 - 3 - 6
Résection 2 - 2 2 6
Multilatération 3 - - 3 6
Recoupement 3 1 3 - 7
Tableau 1: Récapitulatif du nombre de données nécessaires par opérateur pour le calcul d'un point
2.3.2 Les fichiers d'entrée
2.3.2.1 Le fichier de données
Pour calculer les coordonnées approchées d'un réseau, l'algorithme doit disposer au minimum d'un point d'appui XYZ et d'un gisement.Les données doivent être rentrées dans un fichier *.txt, qui sera demandé à l'utilisateur lors de l'exécution du calcul de coordonnées approchées. Ce fichier peut contenir 4 types de lignes correspondant à des types de points d'appui ou à un gisement d'orientation du réseau.
La figure 8 présente un exemple de fichier de données. La ligne 1 contient un point d'appui XYZ, la ligne 2 un point d'appui XY et la ligne 3 un point d'appui Z. Chaque ligne commence par le matricule du point d'appui. La dernière ligne contient un gisement d'orientation. Les deux premières valeurs de cette ligne correspondent aux matricules des points source et cible du gisement, la troisième valeur correspond au gisement en grade.L'ordre d'entrée des données n'a pas d'importance, pourvu que les lignes soient correctement formatées.
10
R1 1000.0000 1000.0000 100.0000R2 988.0610 1058.5480 R3 100.1020 R1 R2 387.1937
Figure 8: Exemple de fichier de données pour TopTools
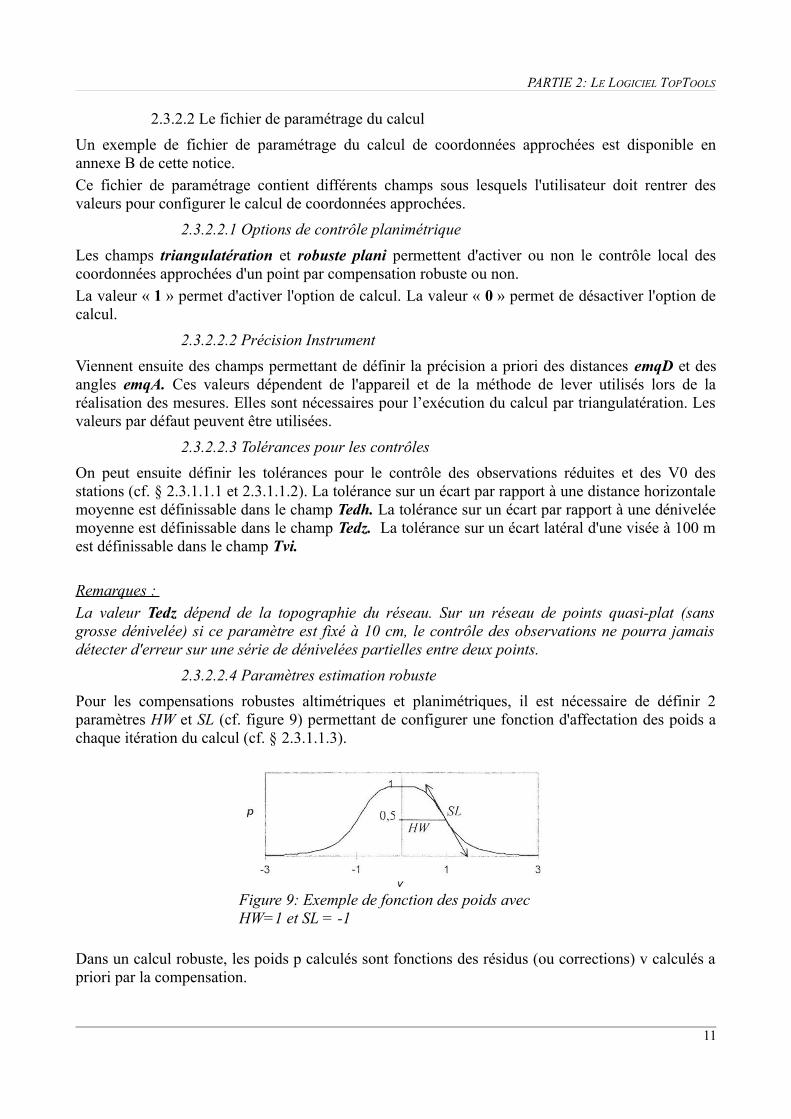
PARTIE 2: LE LOGICIEL TOPTOOLS
2.3.2.2 Le fichier de paramétrage du calcul
Un exemple de fichier de paramétrage du calcul de coordonnées approchées est disponible en annexe B de cette notice.Ce fichier de paramétrage contient différents champs sous lesquels l'utilisateur doit rentrer des valeurs pour configurer le calcul de coordonnées approchées.
2.3.2.2.1 Options de contrôle planimétrique
Les champs triangulatération et robuste plani permettent d'activer ou non le contrôle local des coordonnées approchées d'un point par compensation robuste ou non. La valeur « 1 » permet d'activer l'option de calcul. La valeur « 0 » permet de désactiver l'option de calcul.
2.3.2.2.2 Précision Instrument
Viennent ensuite des champs permettant de définir la précision a priori des distances emqD et des angles emqA. Ces valeurs dépendent de l'appareil et de la méthode de lever utilisés lors de la réalisation des mesures. Elles sont nécessaires pour l’exécution du calcul par triangulatération. Les valeurs par défaut peuvent être utilisées.
2.3.2.2.3 Tolérances pour les contrôles
On peut ensuite définir les tolérances pour le contrôle des observations réduites et des V0 des stations (cf. § 2.3.1.1.1 et 2.3.1.1.2). La tolérance sur un écart par rapport à une distance horizontale moyenne est définissable dans le champ Tedh. La tolérance sur un écart par rapport à une dénivelée moyenne est définissable dans le champ Tedz. La tolérance sur un écart latéral d'une visée à 100 m est définissable dans le champ Tvi.
Remarques :
La valeur Tedz dépend de la topographie du réseau. Sur un réseau de points quasi-plat (sans grosse dénivelée) si ce paramètre est fixé à 10 cm, le contrôle des observations ne pourra jamais détecter d'erreur sur une série de dénivelées partielles entre deux points.
2.3.2.2.4 Paramètres estimation robuste
Pour les compensations robustes altimétriques et planimétriques, il est nécessaire de définir 2 paramètres HW et SL (cf. figure 9) permettant de configurer une fonction d'affectation des poids a chaque itération du calcul (cf. § 2.3.1.1.3).
Dans un calcul robuste, les poids p calculés sont fonctions des résidus (ou corrections) v calculés a priori par la compensation.
11
Figure 9: Exemple de fonction des poids avec HW=1 et SL = -1
PARTIE 2: LE LOGICIEL TOPTOOLS
Le paramètre HW doit être proche de l'écart type sur la mesure de l'observation. Il peut être interprété comme la correction maximale calculée par la compensation que l'utilisateur accepte sur l'observation lors d'une compensation. Lorsque cette correction maximale est atteinte à l'itération suivante la compensation robuste affecte à l'observation concernée un poids de 0.5.
Le paramètre SL peut être laissé par défaut à -2.5. Il permet de définir la pente de la courbe des poids. Plus SL est grand, plus les poids affectés aux observations dont la correction dépasse HW tendent rapidement vers zéro.Remarque :
Le paramètre sl est commun au compensation robuste planimétrique et altimétrique.Pour la compensation altimétrique, il faut définir le paramètre HW dans le champ hw_dz.
Pour la compensation planimétrique, le paramètre HW :
• pour les observations angulaires est définissable dans le champ hw_hz,
• pour les observations de distances est définissable dans le champ hw_dh.
2.3.2.2.5 Autres paramètres
Pour les calculs par rayonnement, il est nécessaire de connaître les V0 des stations connues en coordonnées. Pour diminuer l'influence d'une orientation approchée de la station, il peut être intéressant de limiter la distance jusqu'à laquelle un point approché peut être calculer par rayonnement, en fonction de la distance à la référence la plus éloignée contribuant au calcul de V0.
Ainsi, l'utilisateur peut définir un ratio permettant de fixer une distance limite de calcul par rayonnement dans le champ Rdmax. Par défaut, cette valeur peut être fixée à 2, ainsi on n'autorise que le calcul des points situés à une distance maximale correspondant à 2 fois celle de la référence de la station la plus éloignée.Pour les calculs de compensation, l'utilisateur peut définir des tolérances sur les erreurs résiduelles normées 3: dans le champ wi_Z pour la compensation altimétrique, et dans le champ wi_XY pour la compensation planimétrique. Les erreurs résiduelles normées wi sont calculées à partir des résidus d'une compensation. Étant redistribuées selon une courbe normale de Gauss, elles sont plus facilement comparables. Le principe des moindres carrés faisant tendre tous les résidus vers un minimum, il est admis que si le wi d'une observation dépasse la valeur 5.1, alors la présence d'une faute sur l'observation est très probable.
Les calculs de compensation étant des processus itératifs, l'utilisateur peut définir un nombre d'itération maximale permettant de stopper le calcul en cas de divergence. Ce nombre maximum peut être définit dans le champ IterLimit.On a vu précédemment que lors du calcul par filiation successive des points pouvaient être définis avec un statut douteux (cf.§ 2.3.1.1.3). Ces points sont définis douteux si leur précision planimétrique calculée a posteriori dépasse un seuil sXY fixé dans le fichier de paramétrage et/ou des wi hors tolérances sont mis en évidence à l'issue de la triangulatération. Ces points sont recalculés à la fin du calcul en utilisant les opérateurs de calculs élémentaires définis précédemment (cf. § 2.3.1.3), avec un niveau de fiabilité fixé par l'utilisateur (cf. § 2.3.1.2). Ce niveau peut être défini dans le champ nivf_ptdout.
3 Pour une définition de l'erreur résiduelle normée, consulter la Notice Notions Théoriques dans le classeur de R&D LTOP/TopTools
12
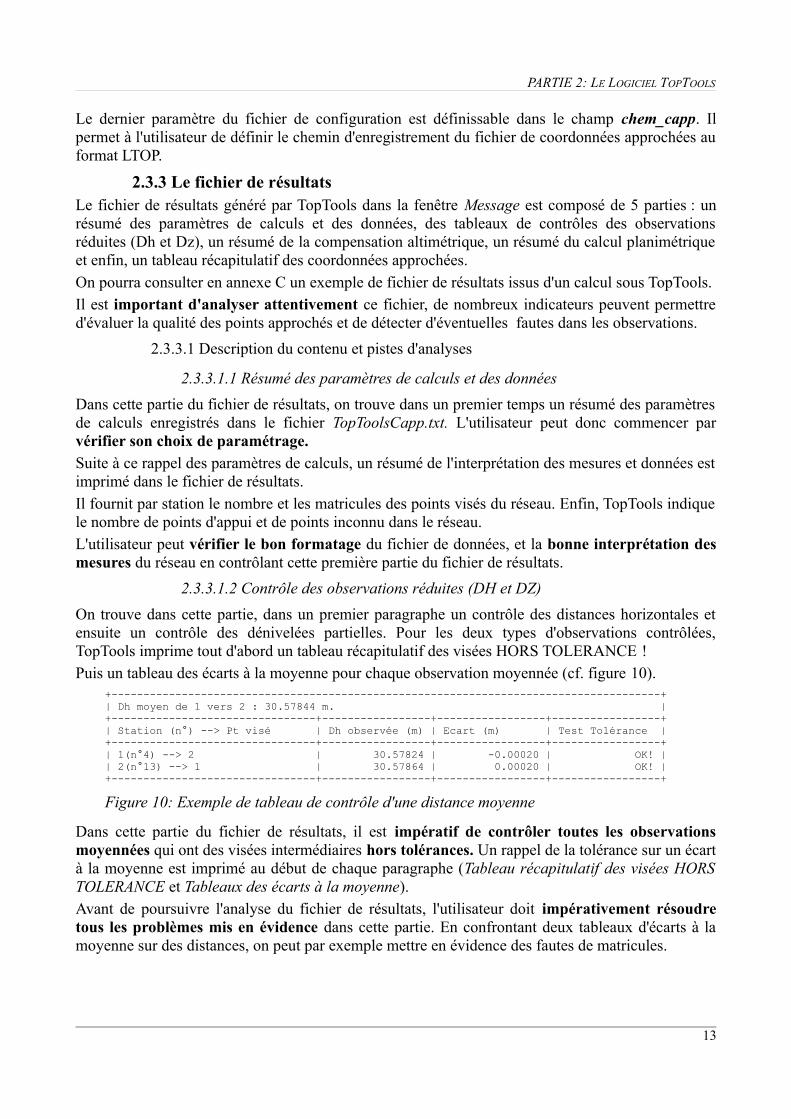
PARTIE 2: LE LOGICIEL TOPTOOLS
Le dernier paramètre du fichier de configuration est définissable dans le champ chem_capp. Il permet à l'utilisateur de définir le chemin d'enregistrement du fichier de coordonnées approchées au format LTOP.
2.3.3 Le fichier de résultatsLe fichier de résultats généré par TopTools dans la fenêtre Message est composé de 5 parties : un résumé des paramètres de calculs et des données, des tableaux de contrôles des observations réduites (Dh et Dz), un résumé de la compensation altimétrique, un résumé du calcul planimétrique et enfin, un tableau récapitulatif des coordonnées approchées.
On pourra consulter en annexe C un exemple de fichier de résultats issus d'un calcul sous TopTools.Il est important d'analyser attentivement ce fichier, de nombreux indicateurs peuvent permettre d'évaluer la qualité des points approchés et de détecter d'éventuelles fautes dans les observations.
2.3.3.1 Description du contenu et pistes d'analyses
2.3.3.1.1 Résumé des paramètres de calculs et des données
Dans cette partie du fichier de résultats, on trouve dans un premier temps un résumé des paramètres de calculs enregistrés dans le fichier TopToolsCapp.txt. L'utilisateur peut donc commencer par vérifier son choix de paramétrage.Suite à ce rappel des paramètres de calculs, un résumé de l'interprétation des mesures et données est imprimé dans le fichier de résultats.
Il fournit par station le nombre et les matricules des points visés du réseau. Enfin, TopTools indique le nombre de points d'appui et de points inconnu dans le réseau. L'utilisateur peut vérifier le bon formatage du fichier de données, et la bonne interprétation des mesures du réseau en contrôlant cette première partie du fichier de résultats.
2.3.3.1.2 Contrôle des observations réduites (DH et DZ)
On trouve dans cette partie, dans un premier paragraphe un contrôle des distances horizontales et ensuite un contrôle des dénivelées partielles. Pour les deux types d'observations contrôlées, TopTools imprime tout d'abord un tableau récapitulatif des visées HORS TOLERANCE ! Puis un tableau des écarts à la moyenne pour chaque observation moyennée (cf. figure 10).
Dans cette partie du fichier de résultats, il est impératif de contrôler toutes les observations moyennées qui ont des visées intermédiaires hors tolérances. Un rappel de la tolérance sur un écart à la moyenne est imprimé au début de chaque paragraphe (Tableau récapitulatif des visées HORS TOLERANCE et Tableaux des écarts à la moyenne). Avant de poursuivre l'analyse du fichier de résultats, l'utilisateur doit impérativement résoudre tous les problèmes mis en évidence dans cette partie. En confrontant deux tableaux d'écarts à la moyenne sur des distances, on peut par exemple mettre en évidence des fautes de matricules.
13
+--------------------------------------------------------------------------------------+| Dh moyen de 1 vers 2 : 30.57844 m. |+--------------------------------+-----------------+-----------------+-----------------+| Station (n°) --> Pt visé | Dh observée (m) | Ecart (m) | Test Tolérance |+--------------------------------+-----------------+-----------------+-----------------+| 1(n°4) --> 2 | 30.57824 | -0.00020 | OK! | | 2(n°13) --> 1 | 30.57864 | 0.00020 | OK! | +--------------------------------+-----------------+-----------------+-----------------+
Figure 10: Exemple de tableau de contrôle d'une distance moyenne
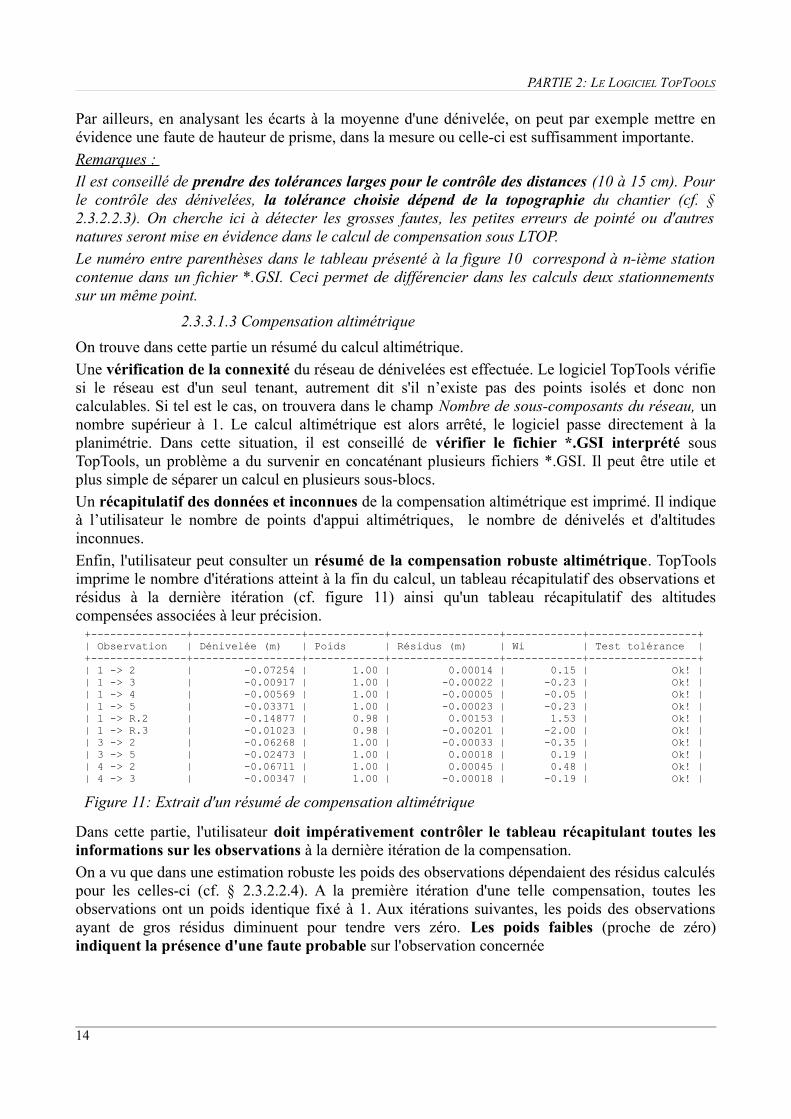
PARTIE 2: LE LOGICIEL TOPTOOLS
Par ailleurs, en analysant les écarts à la moyenne d'une dénivelée, on peut par exemple mettre en évidence une faute de hauteur de prisme, dans la mesure ou celle-ci est suffisamment importante.
Remarques : Il est conseillé de prendre des tolérances larges pour le contrôle des distances (10 à 15 cm). Pour le contrôle des dénivelées, la tolérance choisie dépend de la topographie du chantier (cf. § 2.3.2.2.3). On cherche ici à détecter les grosses fautes, les petites erreurs de pointé ou d'autres natures seront mise en évidence dans le calcul de compensation sous LTOP.
Le numéro entre parenthèses dans le tableau présenté à la figure 10 correspond à n-ième station contenue dans un fichier *.GSI. Ceci permet de différencier dans les calculs deux stationnements sur un même point.
2.3.3.1.3 Compensation altimétrique
On trouve dans cette partie un résumé du calcul altimétrique.
Une vérification de la connexité du réseau de dénivelées est effectuée. Le logiciel TopTools vérifie si le réseau est d'un seul tenant, autrement dit s'il n’existe pas des points isolés et donc non calculables. Si tel est le cas, on trouvera dans le champ Nombre de sous-composants du réseau, un nombre supérieur à 1. Le calcul altimétrique est alors arrêté, le logiciel passe directement à la planimétrie. Dans cette situation, il est conseillé de vérifier le fichier *.GSI interprété sous TopTools, un problème a du survenir en concaténant plusieurs fichiers *.GSI. Il peut être utile et plus simple de séparer un calcul en plusieurs sous-blocs.Un récapitulatif des données et inconnues de la compensation altimétrique est imprimé. Il indique à l’utilisateur le nombre de points d'appui altimétriques, le nombre de dénivelés et d'altitudes inconnues.
Enfin, l'utilisateur peut consulter un résumé de la compensation robuste altimétrique. TopTools imprime le nombre d'itérations atteint à la fin du calcul, un tableau récapitulatif des observations et résidus à la dernière itération (cf. figure 11) ainsi qu'un tableau récapitulatif des altitudes compensées associées à leur précision.
Dans cette partie, l'utilisateur doit impérativement contrôler le tableau récapitulant toutes les informations sur les observations à la dernière itération de la compensation. On a vu que dans une estimation robuste les poids des observations dépendaient des résidus calculés pour les celles-ci (cf. § 2.3.2.2.4). A la première itération d'une telle compensation, toutes les observations ont un poids identique fixé à 1. Aux itérations suivantes, les poids des observations ayant de gros résidus diminuent pour tendre vers zéro. Les poids faibles (proche de zéro) indiquent la présence d'une faute probable sur l'observation concernée
14
+---------------+-----------------+------------+-----------------+------------+-----------------+| Observation | Dénivelée (m) | Poids | Résidus (m) | Wi | Test tolérance |+---------------+-----------------+------------+-----------------+------------+-----------------+| 1 -> 2 | -0.07254 | 1.00 | 0.00014 | 0.15 | Ok! || 1 -> 3 | -0.00917 | 1.00 | -0.00022 | -0.23 | Ok! || 1 -> 4 | -0.00569 | 1.00 | -0.00005 | -0.05 | Ok! || 1 -> 5 | -0.03371 | 1.00 | -0.00023 | -0.23 | Ok! || 1 -> R.2 | -0.14877 | 0.98 | 0.00153 | 1.53 | Ok! || 1 -> R.3 | -0.01023 | 0.98 | -0.00201 | -2.00 | Ok! || 3 -> 2 | -0.06268 | 1.00 | -0.00033 | -0.35 | Ok! || 3 -> 5 | -0.02473 | 1.00 | 0.00018 | 0.19 | Ok! || 4 -> 2 | -0.06711 | 1.00 | 0.00045 | 0.48 | Ok! || 4 -> 3 | -0.00347 | 1.00 | -0.00018 | -0.19 | Ok! |
Figure 11: Extrait d'un résumé de compensation altimétrique

PARTIE 2: LE LOGICIEL TOPTOOLS
Il est aussi conseillé de contrôler toutes les erreurs résiduelles normées wi. Les wi hors tolérances indiquent une faute probable sur l'observation concernée. Le test de tolérance est effectué sur les wi. Ainsi, si un wi est supérieur à la tolérance fixée en paramètre de calculs, la valeur HORS TOLERANCE apparaîtra dans la dernière colonne Test Tolérance.
Remarques : Si une faute sur une dénivelée partielle moyenne a été mise en évidence dans le contrôle des observations réduites et non corrigée par l'utilisateur, l'observation moyenne correspondante est désactivée pour la suite des calculs. Ainsi, elle n’apparaîtra pas dans le tableau récapitulant toutes les informations sur les observations à la dernière itération.
2.3.3.1.4 Compensation planimétrique
a) Description du contenuOn trouve dans cette partie un résumé du calcul par filiation successive des coordonnées planimétriques des points d'un réseau.De même que pour le calcul altimétrique, on trouve dans un premier temps, une vérification de la connexité des réseaux de distances et d'angles horizontaux, et un récapitulatif des données de départ (points d'appui et gisements).
N.B. ( 07/08/12 ) : A ce jour, un problème de connexité dans les réseaux de distances et d'angles n’empêche pas l'exécution du calcul planimétrique. En effet, si un point est isolé et ne peut être visé en distance, cela n'empêche pas de le viser par intersection. Le test de connexité étant effectué indépendamment sur les réseaux d'angles et de distances, TopTools ne peut pas détecter ces situations.
Si le logiciel repère un problème de connexité sur un des réseaux, un message d'erreur est imprimé et le calcul planimétrique est exécuté. Si l'utilisateur se trouve dans cette situation, il est conseillé de vérifier le fichier *.GSI. Une solution pour résoudre ce problème consiste à diviser en blocs le calcul de coordonnées approchées.
Ensuite, TopTools imprime un paragraphe contenant les informations rappelant l'initialisation du calcul par filiation successive. On trouve donc un message indiquant le cas détecté par TopTools d'après les données initiales (cf. § 2.3.1.3.2). L'utilisateur trouve ensuite un tableau récapitulatif des V0 calculés à partir des données et avant le début du calcul par filiation successive.Dans une quatrième partie du résumé du calcul planimétrique, on trouve tous les résultats du calcul par filiation successive. A chaque itération, TopTools imprime dans le fichier de résultats :
• un rappel du niveau de fiabilité (cf. § 2.3.1.2),
• un récapitulatif des points calculés à l'itération, avec leurs coordonnées approchées, l'opérateur élémentaire et les points connus utilisés pour le calcul,
• un tableau récapitulatif des points calculés, avec les coordonnées définitives, le type du point, le niveau de fiabilité de détermination, et le statut du point,
• un résumé des compensations robustes par triangulatération,
• un récapitulatif des V0 calculés à l'itération,
• le nombre de points restants à calculer,
A la dernière itération du calcul, si tous les points n'ont pas pu être déterminés, TopTools imprime un listing des matricules des points non calculés.
15
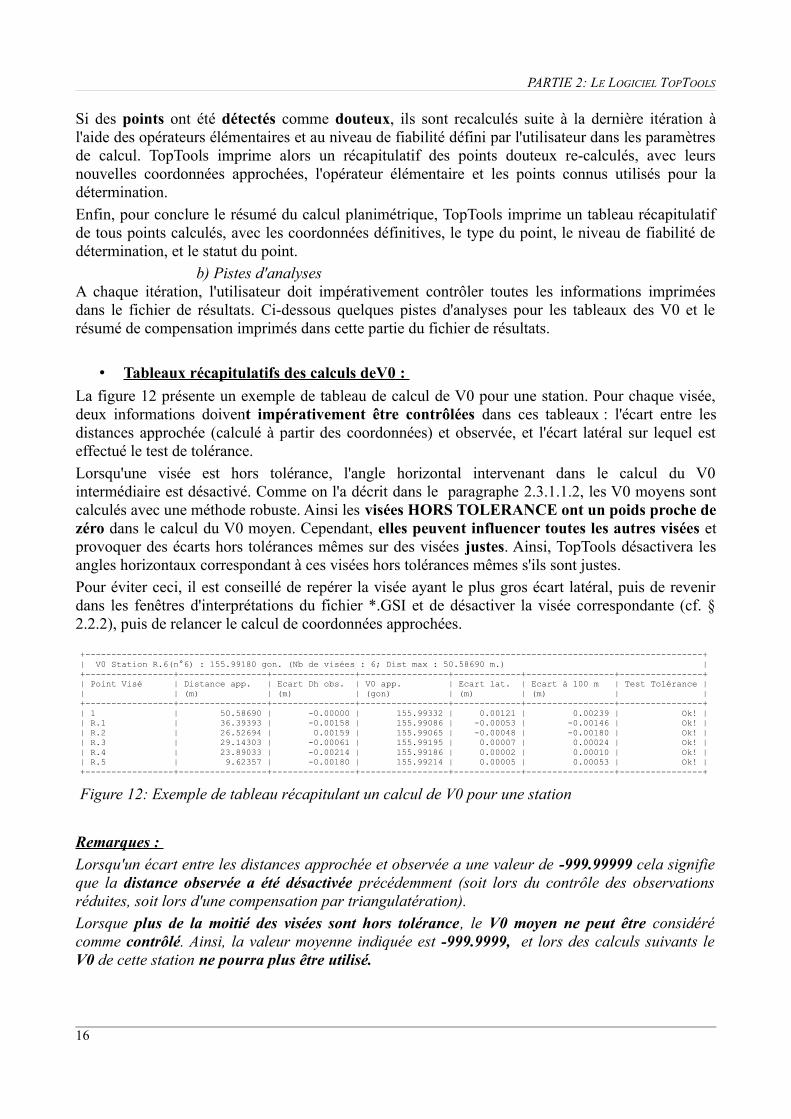
PARTIE 2: LE LOGICIEL TOPTOOLS
Si des points ont été détectés comme douteux, ils sont recalculés suite à la dernière itération à l'aide des opérateurs élémentaires et au niveau de fiabilité défini par l'utilisateur dans les paramètres de calcul. TopTools imprime alors un récapitulatif des points douteux re-calculés, avec leurs nouvelles coordonnées approchées, l'opérateur élémentaire et les points connus utilisés pour la détermination.
Enfin, pour conclure le résumé du calcul planimétrique, TopTools imprime un tableau récapitulatif de tous points calculés, avec les coordonnées définitives, le type du point, le niveau de fiabilité de détermination, et le statut du point.
b) Pistes d'analysesA chaque itération, l'utilisateur doit impérativement contrôler toutes les informations imprimées dans le fichier de résultats. Ci-dessous quelques pistes d'analyses pour les tableaux des V0 et le résumé de compensation imprimés dans cette partie du fichier de résultats.
• Tableaux récapitulatifs des calculs deV0 :
La figure 12 présente un exemple de tableau de calcul de V0 pour une station. Pour chaque visée, deux informations doivent impérativement être contrôlées dans ces tableaux : l'écart entre les distances approchée (calculé à partir des coordonnées) et observée, et l'écart latéral sur lequel est effectué le test de tolérance.
Lorsqu'une visée est hors tolérance, l'angle horizontal intervenant dans le calcul du V0 intermédiaire est désactivé. Comme on l'a décrit dans le paragraphe 2.3.1.1.2, les V0 moyens sont calculés avec une méthode robuste. Ainsi les visées HORS TOLERANCE ont un poids proche de zéro dans le calcul du V0 moyen. Cependant, elles peuvent influencer toutes les autres visées et provoquer des écarts hors tolérances mêmes sur des visées justes. Ainsi, TopTools désactivera les angles horizontaux correspondant à ces visées hors tolérances mêmes s'ils sont justes. Pour éviter ceci, il est conseillé de repérer la visée ayant le plus gros écart latéral, puis de revenir dans les fenêtres d'interprétations du fichier *.GSI et de désactiver la visée correspondante (cf. § 2.2.2), puis de relancer le calcul de coordonnées approchées.
Remarques :
Lorsqu'un écart entre les distances approchée et observée a une valeur de -999.99999 cela signifie que la distance observée a été désactivée précédemment (soit lors du contrôle des observations réduites, soit lors d'une compensation par triangulatération).Lorsque plus de la moitié des visées sont hors tolérance, le V0 moyen ne peut être considéré comme contrôlé. Ainsi, la valeur moyenne indiquée est -999.9999, et lors des calculs suivants le V0 de cette station ne pourra plus être utilisé.
16
+-----------------------------------------------------------------------------------------------------------------------+| V0 Station R.6(n°6) : 155.99180 gon. (Nb de visées : 6; Dist max : 50.58690 m.) |+-----------------+-----------------+----------------+-----------------+-------------+-----------------+----------------+| Point Visé | Distance app. | Ecart Dh obs. | V0 app. | Ecart lat. | Ecart à 100 m | Test Tolérance || | (m) | (m) | (gon) | (m) | (m) | |+-----------------+-----------------+----------------+-----------------+-------------+-----------------+----------------+| 1 | 50.58690 | -0.00000 | 155.99332 | 0.00121 | 0.00239 | Ok! || R.1 | 36.39393 | -0.00158 | 155.99086 | -0.00053 | -0.00146 | Ok! || R.2 | 26.52694 | 0.00159 | 155.99065 | -0.00048 | -0.00180 | Ok! || R.3 | 29.14303 | -0.00061 | 155.99195 | 0.00007 | 0.00024 | Ok! || R.4 | 23.89033 | -0.00214 | 155.99186 | 0.00002 | 0.00010 | Ok! || R.5 | 9.62357 | -0.00180 | 155.99214 | 0.00005 | 0.00053 | Ok! |+-----------------+-----------------+----------------+-----------------+-------------+-----------------+----------------+
Figure 12: Exemple de tableau récapitulant un calcul de V0 pour une station
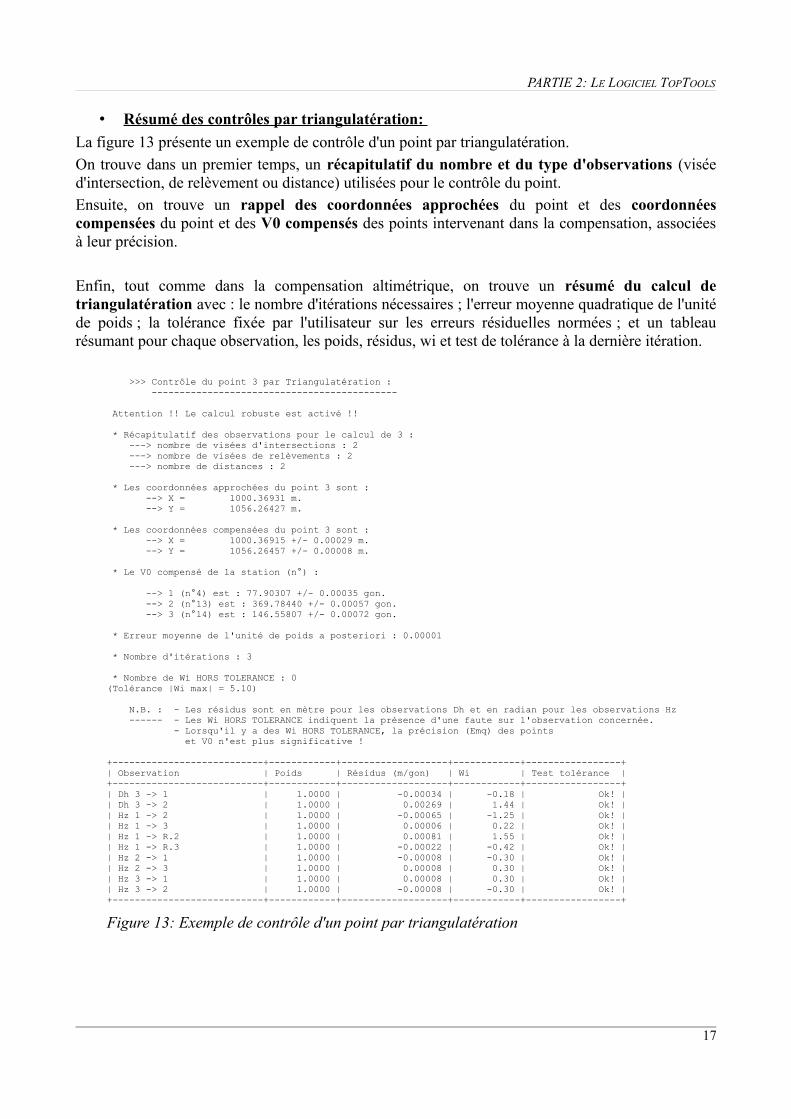
PARTIE 2: LE LOGICIEL TOPTOOLS
• Résumé des contrôles par triangulatération:
La figure 13 présente un exemple de contrôle d'un point par triangulatération.
On trouve dans un premier temps, un récapitulatif du nombre et du type d'observations (visée d'intersection, de relèvement ou distance) utilisées pour le contrôle du point. Ensuite, on trouve un rappel des coordonnées approchées du point et des coordonnées compensées du point et des V0 compensés des points intervenant dans la compensation, associées à leur précision.
Enfin, tout comme dans la compensation altimétrique, on trouve un résumé du calcul de triangulatération avec : le nombre d'itérations nécessaires ; l'erreur moyenne quadratique de l'unité de poids ; la tolérance fixée par l'utilisateur sur les erreurs résiduelles normées ; et un tableau résumant pour chaque observation, les poids, résidus, wi et test de tolérance à la dernière itération.
17
>>> Contrôle du point 3 par Triangulatération : --------------------------------------------
Attention !! Le calcul robuste est activé !!
* Récapitulatif des observations pour le calcul de 3 : ---> nombre de visées d'intersections : 2 ---> nombre de visées de relèvements : 2 ---> nombre de distances : 2
* Les coordonnées approchées du point 3 sont : --> X = 1000.36931 m. --> Y = 1056.26427 m.
* Les coordonnées compensées du point 3 sont : --> X = 1000.36915 +/- 0.00029 m. --> Y = 1056.26457 +/- 0.00008 m.
* Le V0 compensé de la station (n°) :
--> 1 (n°4) est : 77.90307 +/- 0.00035 gon. --> 2 (n°13) est : 369.78440 +/- 0.00057 gon. --> 3 (n°14) est : 146.55807 +/- 0.00072 gon.
* Erreur moyenne de l'unité de poids a posteriori : 0.00001
* Nombre d'itérations : 3
* Nombre de Wi HORS TOLERANCE : 0(Tolérance |Wi max| = 5.10)
N.B. : - Les résidus sont en mètre pour les observations Dh et en radian pour les observations Hz ------ - Les Wi HORS TOLERANCE indiquent la présence d'une faute sur l'observation concernée. - Lorsqu'il y a des Wi HORS TOLERANCE, la précision (Emq) des points et V0 n'est plus significative !
+---------------------------+------------+-------------------+------------+-----------------+| Observation | Poids | Résidus (m/gon) | Wi | Test tolérance |+---------------------------+------------+-------------------+------------+-----------------+| Dh 3 -> 1 | 1.0000 | -0.00034 | -0.18 | Ok! || Dh 3 -> 2 | 1.0000 | 0.00269 | 1.44 | Ok! || Hz 1 -> 2 | 1.0000 | -0.00065 | -1.25 | Ok! || Hz 1 -> 3 | 1.0000 | 0.00006 | 0.22 | Ok! || Hz 1 -> R.2 | 1.0000 | 0.00081 | 1.55 | Ok! || Hz 1 -> R.3 | 1.0000 | -0.00022 | -0.42 | Ok! || Hz 2 -> 1 | 1.0000 | -0.00008 | -0.30 | Ok! || Hz 2 -> 3 | 1.0000 | 0.00008 | 0.30 | Ok! || Hz 3 -> 1 | 1.0000 | 0.00008 | 0.30 | Ok! || Hz 3 -> 2 | 1.0000 | -0.00008 | -0.30 | Ok! |+---------------------------+------------+-------------------+------------+-----------------+
Figure 13: Exemple de contrôle d'un point par triangulatération

PARTIE 2: LE LOGICIEL TOPTOOLS
L'utilisateur doit impérativement contrôler le tableau récapitulant toutes les informations sur les observations. Il doit contrôler chaque poids et chaque wi pour détecter d'éventuelles fautes sur les observations.
Remarques : Si la compensation robuste n'est pas activée dans les paramètres de calcul, les poids des observations restent identiques et égaux à 1 à chaque itération. Seuls les wi permettent alors de détecter des fautes sur les observations.
Les observations Dh et Hz désactivées précédemment qui auraient pu rentrer dans le contrôle d'un point par triangulatération n'entrent pas en jeu dans la compensation. Elles n’apparaissent donc pas dans le tableau récapitulant toutes les informations sur les observations.
2.3.3.1.5 Tableau récapitulatif des coordonnées approchées des points
Ce tableau est imprimé en dernière partie du fichier de résultats. Il comporte plusieurs informations concernant la nature et la fiabilité des points nouveaux calculés. La figure 14 présente un exemple de ce tableau.
Pour chaque point nouveau du réseau on trouve : le triplet de coordonnées, le type, le niveau de fiabilité avec lequel il a été déterminé, et le statut permettant de savoir s'il a été contrôlé par triangulatération et s'il est défini comme douteux.La colonne Type indique pour chaque point nouveau la méthode de calcul utilisé pour la détermination des coordonnées planimétriques du point :
• RAY. pour le rayonnement,
• INT. pour l'intersection,
• REL. pour le relèvement,
• RES. pour la resection,
• MUL. pour la multilatération,
• REC. pour le recoupement,
Pour chaque point d'appui, le type est indiqué dans la colonne Appui : XY Z pour les points d'appui planimétrique et altimétrique, XY pour les points d'appui planimétrique et Z pour les points d'appui altimétrique.
Suite à ce tableau, TopTools imprime des messages concernant la création du fichier de coordonnées *.koo. L'utilisateur peut ainsi vérifier que l'export au format LTOP s'est bien déroulé.
18
+-----------------+-----------------+-----------------+------------+---------+---------+---------+------------+| Point | X (m) | Y (m) | Z (m) | Appui | Type | Fiab. | Contrôlé |+-----------------+-----------------+-----------------+------------+---------+---------+---------+------------+| 1 | 988.9240 | 1085.0329 | 100.1142 | XY Z | | | || 2 | 997.1727 | 1055.5880 | 100.0418 | | REL. | 1 | Non || 3 | 1000.3692 | 1056.2646 | 100.1048 | | RAY. | 1 | Oui |
Figure 14: Exemple de tableau récapitulatif du calcul de coordonnées approchées
PARTIE 2: LE LOGICIEL TOPTOOLS
2.3.3.2 Méthodologie d'analyse du fichier de résultats
Le calcul de coordonnées approchées implémenté sous TopTools a pour objectif de fournir des coordonnées fiables mêmes en présence de fautes dans une série d'observations. On pourrait donc penser qu'il n'est pas nécessaire de contrôler le fichier de résultat. Ceci est totalement FAUX, il est nécessaire et même obligatoire de contrôler correctement un calcul de coordonnées approchées. Il peut permettre d'épurer les grosses fautes d'une série d'observations et ainsi faciliter les calculs sous LTOP et leur analyse. Il convient donc de contrôler le fichier de résultats selon les étapes suivantes :
• Contrôle des paramètres de calculs
• Analyses des tableaux de contrôle des observations réduites : Si des fautes corrigeables sont détectées à cette étape, elles doivent être immédiatement corrigées dans le fichier *.GSI. Puis, le calcul de coordonnées approchées doit être relancé pour la suite de l'analyse du fichier de résultats.
• Analyses des résultats de la compensation altimétrique : même remarque.
• Analyses des résultats de la compensation planimétrique : Cette analyse est plus complexe. Il n'est pas conseillé de procéder comme aux étapes précédentes. En effet, au cours du calcul planimétrique, on cumule des petites imprécisions sur les coordonnées des points, qui peuvent être la cause de la mise en évidence de fautes probables par les diverses méthodes de calcul robuste.
• Contrôle du tableau récapitulatif des coordonnées approchées : S'il reste des points douteux ou des points non déterminés, l'utilisateur peut procéder selon deux méthodes :
▪ Soit re-contrôler le fichier de résultats globalement pour mettre en évidence des fautes non détectées.
▪ Soit modifier le paramétrage de son calcul pour augmenter les seuils de tolérance et/ou désactiver les contrôles planimétriques par triangulatération avec compensation robuste.
2.3.3.3 Remarques et conseils pour les calculs :
Pour des calculs de coordonnées approchées sur des polygonales ou des réseaux avec très peu de points d'appui, on constaté lors de multiples expériences que certains paramètres sensibles du calcul pouvaient bloquer la détermination des points, notamment le ratio Rdmax.
Par exemple : Si les côtés d'une polygonale sont très inégaux, un V0 d'une station peut être calculé à partir de références situées à 2 ou 3 mètres. Avec un ratio Rdmax fixé à 2 il devient alors impossible de calculer des points par rayonnement à plus de 6 mètres. En augmentant ce ratio, on peut alors débloquer des situations où l'algorithme n'arrive plus à calculer des points.Par ailleurs, dans certains cas de contrôle par triangulatération, où le point a un degré de surdétermination peu élevé, la compensation robuste peut rendre la compensation très sensible et faire diverger le calcul si le nombre d'itérations est trop élevé. Il convient donc de fixer le paramètre IterLimit à 3.
19

PARTIE 2: LE LOGICIEL TOPTOOLS
Aussi, on a pu constater sur des polygonales de grandes tailles, où les rattachements des points de départ et d'arrivée ne peuvent être fait directement à cause d'obstacles, que le cumul de petites imprécisions sur les coordonnées perturbait la bonne exécution des calculs de coordonnées approchées. Cela se caractérisant par un grand nombre de points douteux et d'observations indiquées par TopTools comme fausses. Dans cette situation, deux solutions sont à envisager :
• Soit l'utilisateur limite les données initiales à deux points situés au départ ou à l'arrivée de la polygonale. Lors des calculs planimétriques, les imprécisions provoqueront des défauts d'orientation tout au long de la polygonale, et donc de grosses imprécisions sur les coordonnées approchées des points nouveaux. D'après l'expérience ces imprécisions sur les coordonnées résultantes restent inférieures au seuil de tolérance de LTOP.
• Soit l'utilisateur divise le calcul de sa polygonale en blocs.
N.B. ( 07/08/12 ) : Pour diminuer la taille de ces imprécisions, il est prévu d'ajouter à l’algorithme, une fonction de réorientation globale d'un réseau. Dans la situation décrite précédemment, l'utilisateur pourra ainsi configurer son calcul avec comme données initiales seulement deux points au départ de la polygonale. Puis configurer la réorientation globale avec tous les points d'appui disponibles.
20
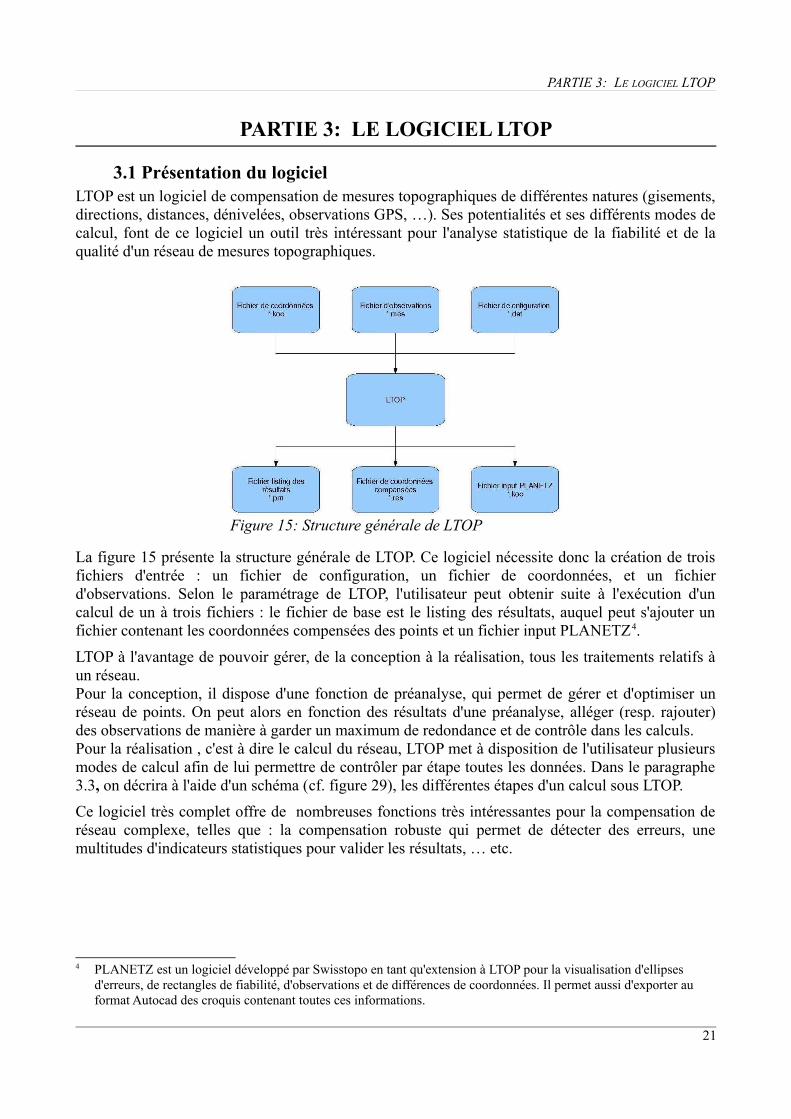
PARTIE 3: LE LOGICIEL LTOP
PARTIE 3: LE LOGICIEL LTOP
3.1 Présentation du logicielLTOP est un logiciel de compensation de mesures topographiques de différentes natures (gisements, directions, distances, dénivelées, observations GPS, …). Ses potentialités et ses différents modes de calcul, font de ce logiciel un outil très intéressant pour l'analyse statistique de la fiabilité et de la qualité d'un réseau de mesures topographiques.
La figure 15 présente la structure générale de LTOP. Ce logiciel nécessite donc la création de trois fichiers d'entrée : un fichier de configuration, un fichier de coordonnées, et un fichier d'observations. Selon le paramétrage de LTOP, l'utilisateur peut obtenir suite à l'exécution d'un calcul de un à trois fichiers : le fichier de base est le listing des résultats, auquel peut s'ajouter un fichier contenant les coordonnées compensées des points et un fichier input PLANETZ4.
LTOP à l'avantage de pouvoir gérer, de la conception à la réalisation, tous les traitements relatifs à un réseau. Pour la conception, il dispose d'une fonction de préanalyse, qui permet de gérer et d'optimiser un réseau de points. On peut alors en fonction des résultats d'une préanalyse, alléger (resp. rajouter) des observations de manière à garder un maximum de redondance et de contrôle dans les calculs.Pour la réalisation , c'est à dire le calcul du réseau, LTOP met à disposition de l'utilisateur plusieurs modes de calcul afin de lui permettre de contrôler par étape toutes les données. Dans le paragraphe 3.3, on décrira à l'aide d'un schéma (cf. figure 29), les différentes étapes d'un calcul sous LTOP.
Ce logiciel très complet offre de nombreuses fonctions très intéressantes pour la compensation de réseau complexe, telles que : la compensation robuste qui permet de détecter des erreurs, une multitudes d'indicateurs statistiques pour valider les résultats, … etc.
4 PLANETZ est un logiciel développé par Swisstopo en tant qu'extension à LTOP pour la visualisation d'ellipses d'erreurs, de rectangles de fiabilité, d'observations et de différences de coordonnées. Il permet aussi d'exporter au format Autocad des croquis contenant toutes ces informations.
21
Figure 15: Structure générale de LTOP
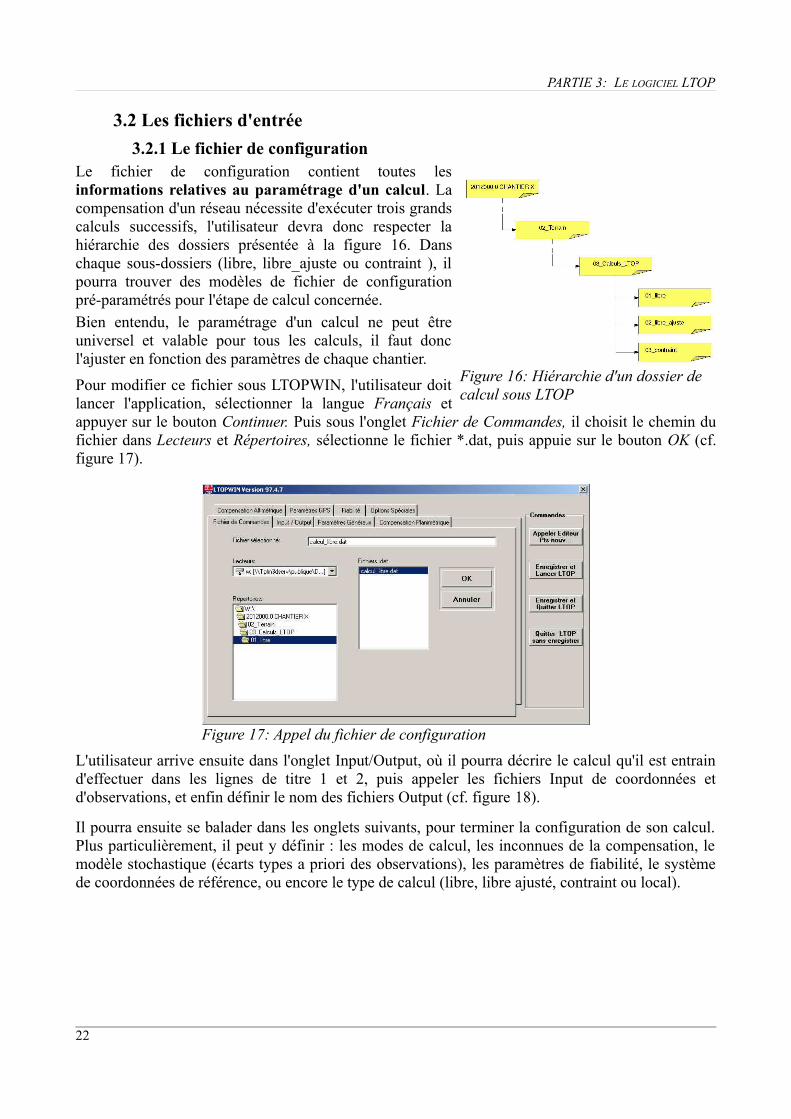
PARTIE 3: LE LOGICIEL LTOP
3.2 Les fichiers d'entrée
3.2.1 Le fichier de configurationLe fichier de configuration contient toutes les informations relatives au paramétrage d'un calcul. La compensation d'un réseau nécessite d'exécuter trois grands calculs successifs, l'utilisateur devra donc respecter la hiérarchie des dossiers présentée à la figure 16. Dans chaque sous-dossiers (libre, libre_ajuste ou contraint ), il pourra trouver des modèles de fichier de configuration pré-paramétrés pour l'étape de calcul concernée.
Bien entendu, le paramétrage d'un calcul ne peut être universel et valable pour tous les calculs, il faut donc l'ajuster en fonction des paramètres de chaque chantier.
Pour modifier ce fichier sous LTOPWIN, l'utilisateur doit lancer l'application, sélectionner la langue Français et appuyer sur le bouton Continuer. Puis sous l'onglet Fichier de Commandes, il choisit le chemin du fichier dans Lecteurs et Répertoires, sélectionne le fichier *.dat, puis appuie sur le bouton OK (cf. figure 17).
L'utilisateur arrive ensuite dans l'onglet Input/Output, où il pourra décrire le calcul qu'il est entrain d'effectuer dans les lignes de titre 1 et 2, puis appeler les fichiers Input de coordonnées et d'observations, et enfin définir le nom des fichiers Output (cf. figure 18).
Il pourra ensuite se balader dans les onglets suivants, pour terminer la configuration de son calcul. Plus particulièrement, il peut y définir : les modes de calcul, les inconnues de la compensation, le modèle stochastique (écarts types a priori des observations), les paramètres de fiabilité, le système de coordonnées de référence, ou encore le type de calcul (libre, libre ajusté, contraint ou local).
22
Figure 16: Hiérarchie d'un dossier de calcul sous LTOP
Figure 17: Appel du fichier de configuration
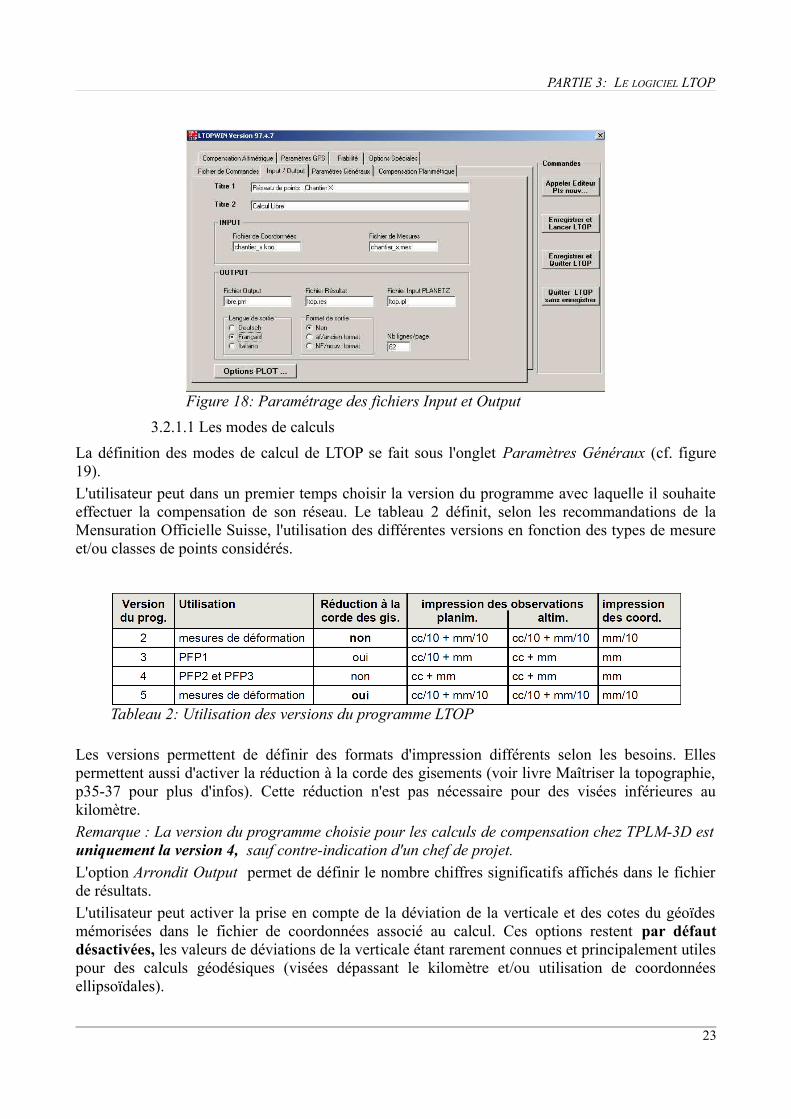
PARTIE 3: LE LOGICIEL LTOP
3.2.1.1 Les modes de calculs
La définition des modes de calcul de LTOP se fait sous l'onglet Paramètres Généraux (cf. figure 19).
L'utilisateur peut dans un premier temps choisir la version du programme avec laquelle il souhaite effectuer la compensation de son réseau. Le tableau 2 définit, selon les recommandations de la Mensuration Officielle Suisse, l'utilisation des différentes versions en fonction des types de mesure et/ou classes de points considérés.
Les versions permettent de définir des formats d'impression différents selon les besoins. Elles permettent aussi d'activer la réduction à la corde des gisements (voir livre Maîtriser la topographie, p35-37 pour plus d'infos). Cette réduction n'est pas nécessaire pour des visées inférieures au kilomètre.Remarque : La version du programme choisie pour les calculs de compensation chez TPLM-3D est uniquement la version 4, sauf contre-indication d'un chef de projet.
L'option Arrondit Output permet de définir le nombre chiffres significatifs affichés dans le fichier de résultats.L'utilisateur peut activer la prise en compte de la déviation de la verticale et des cotes du géoïdes mémorisées dans le fichier de coordonnées associé au calcul. Ces options restent par défaut désactivées, les valeurs de déviations de la verticale étant rarement connues et principalement utiles pour des calculs géodésiques (visées dépassant le kilomètre et/ou utilisation de coordonnées ellipsoïdales).
23
Figure 18: Paramétrage des fichiers Input et Output
Tableau 2: Utilisation des versions du programme LTOP

PARTIE 3: LE LOGICIEL LTOP
Il peut ensuite régler une série de champs permettant de définir le mode calcul en planimétrie et en altimétrie et les paramètres de calculs associés :
• Compensation robuste : les champs sont fixés à 0.0 pour désactiver ce mode de calcul. Pour l'activer, il faut rentrer dans ces champs les valeurs limites 2.5.
• Points de rattachement comme observations : Pour un calcul libre ou contraint les valeurs des champs doivent être « Non ». Pour activer le mode de calcul libre-ajusté, les valeurs des champs doivent être « Oui ».
• Erreur moyenne sur les coordonnées : On rentre ici la précision en planimétrie et en altimétrie des points d'appui d'un réseau. Ces valeurs ne sont utiles que lorsque le calcul libre-ajusté est activé.
• Nombre d'itérations : On définit ici le nombre d'itération maximum du calcul de compensation. Si le calcul de compensation diverge à cause d'une erreur dans les données, il sera stoppé à l'itération maximum définie.
• Seuil d'interruption : Il indique après quel appoint maximum calculé sur les coordonnées le calcul itératif peut s'interrompre. On choisit en général un seuil entre 10 et 20 mm
• Seulement abriss provisoire : Si les valeurs des champs sont fixées à « Oui », aucune compensation des données n'est réalisée. LTOP réduit seulement les données et propose dans le fichier de résultats des tableaux permettant d'effectuer un premier contrôle des observations en analysant les différences entre distances et dénivelés réciproques.
• Calcul de pré-analyse : Ce mode de calcul ne doit être activé que lorsque l'on souhaite effectuer des analyses sur la conception d'un réseau, étape à laquelle on ne dispose d'aucune observation.
24
Figure 19: Paramètres de calcul sous LTOP
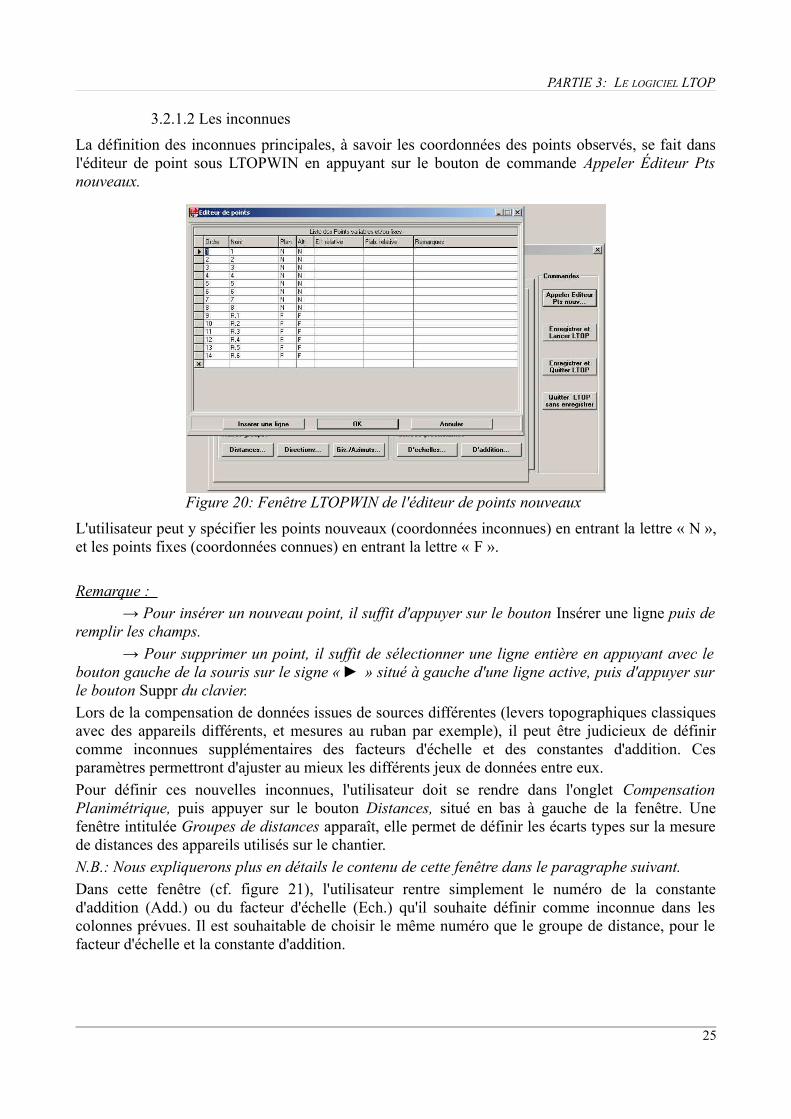
PARTIE 3: LE LOGICIEL LTOP
3.2.1.2 Les inconnues
La définition des inconnues principales, à savoir les coordonnées des points observés, se fait dans l'éditeur de point sous LTOPWIN en appuyant sur le bouton de commande Appeler Éditeur Pts nouveaux.
L'utilisateur peut y spécifier les points nouveaux (coordonnées inconnues) en entrant la lettre « N », et les points fixes (coordonnées connues) en entrant la lettre « F ».
Remarque : → Pour insérer un nouveau point, il suffit d'appuyer sur le bouton Insérer une ligne puis de
remplir les champs.
→ Pour supprimer un point, il suffit de sélectionner une ligne entière en appuyant avec le bouton gauche de la souris sur le signe « ► » situé à gauche d'une ligne active, puis d'appuyer sur le bouton Suppr du clavier.Lors de la compensation de données issues de sources différentes (levers topographiques classiques avec des appareils différents, et mesures au ruban par exemple), il peut être judicieux de définir comme inconnues supplémentaires des facteurs d'échelle et des constantes d'addition. Ces paramètres permettront d'ajuster au mieux les différents jeux de données entre eux.
Pour définir ces nouvelles inconnues, l'utilisateur doit se rendre dans l'onglet Compensation Planimétrique, puis appuyer sur le bouton Distances, situé en bas à gauche de la fenêtre. Une fenêtre intitulée Groupes de distances apparaît, elle permet de définir les écarts types sur la mesure de distances des appareils utilisés sur le chantier. N.B.: Nous expliquerons plus en détails le contenu de cette fenêtre dans le paragraphe suivant.
Dans cette fenêtre (cf. figure 21), l'utilisateur rentre simplement le numéro de la constante d'addition (Add.) ou du facteur d'échelle (Ech.) qu'il souhaite définir comme inconnue dans les colonnes prévues. Il est souhaitable de choisir le même numéro que le groupe de distance, pour le facteur d'échelle et la constante d'addition.
25
Figure 20: Fenêtre LTOPWIN de l'éditeur de points nouveaux
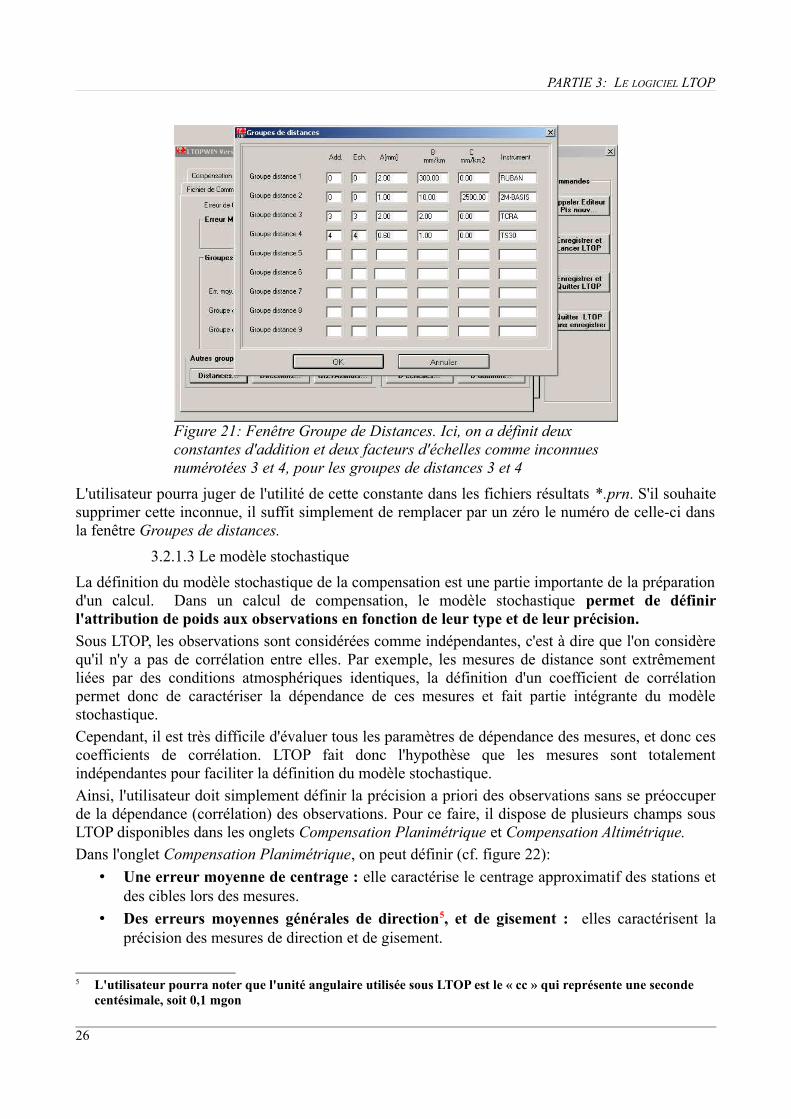
PARTIE 3: LE LOGICIEL LTOP
L'utilisateur pourra juger de l'utilité de cette constante dans les fichiers résultats *.prn. S'il souhaite supprimer cette inconnue, il suffit simplement de remplacer par un zéro le numéro de celle-ci dans la fenêtre Groupes de distances.
3.2.1.3 Le modèle stochastique
La définition du modèle stochastique de la compensation est une partie importante de la préparation d'un calcul. Dans un calcul de compensation, le modèle stochastique permet de définir l'attribution de poids aux observations en fonction de leur type et de leur précision.
Sous LTOP, les observations sont considérées comme indépendantes, c'est à dire que l'on considère qu'il n'y a pas de corrélation entre elles. Par exemple, les mesures de distance sont extrêmement liées par des conditions atmosphériques identiques, la définition d'un coefficient de corrélation permet donc de caractériser la dépendance de ces mesures et fait partie intégrante du modèle stochastique. Cependant, il est très difficile d'évaluer tous les paramètres de dépendance des mesures, et donc ces coefficients de corrélation. LTOP fait donc l'hypothèse que les mesures sont totalement indépendantes pour faciliter la définition du modèle stochastique.
Ainsi, l'utilisateur doit simplement définir la précision a priori des observations sans se préoccuper de la dépendance (corrélation) des observations. Pour ce faire, il dispose de plusieurs champs sous LTOP disponibles dans les onglets Compensation Planimétrique et Compensation Altimétrique.Dans l'onglet Compensation Planimétrique, on peut définir (cf. figure 22):
• Une erreur moyenne de centrage : elle caractérise le centrage approximatif des stations et des cibles lors des mesures.
• Des erreurs moyennes générales de direction5, et de gisement : elles caractérisent la précision des mesures de direction et de gisement.
5 L'utilisateur pourra noter que l'unité angulaire utilisée sous LTOP est le « cc » qui représente une seconde centésimale, soit 0,1 mgon
26
Figure 21: Fenêtre Groupe de Distances. Ici, on a définit deux constantes d'addition et deux facteurs d'échelles comme inconnues numérotées 3 et 4, pour les groupes de distances 3 et 4
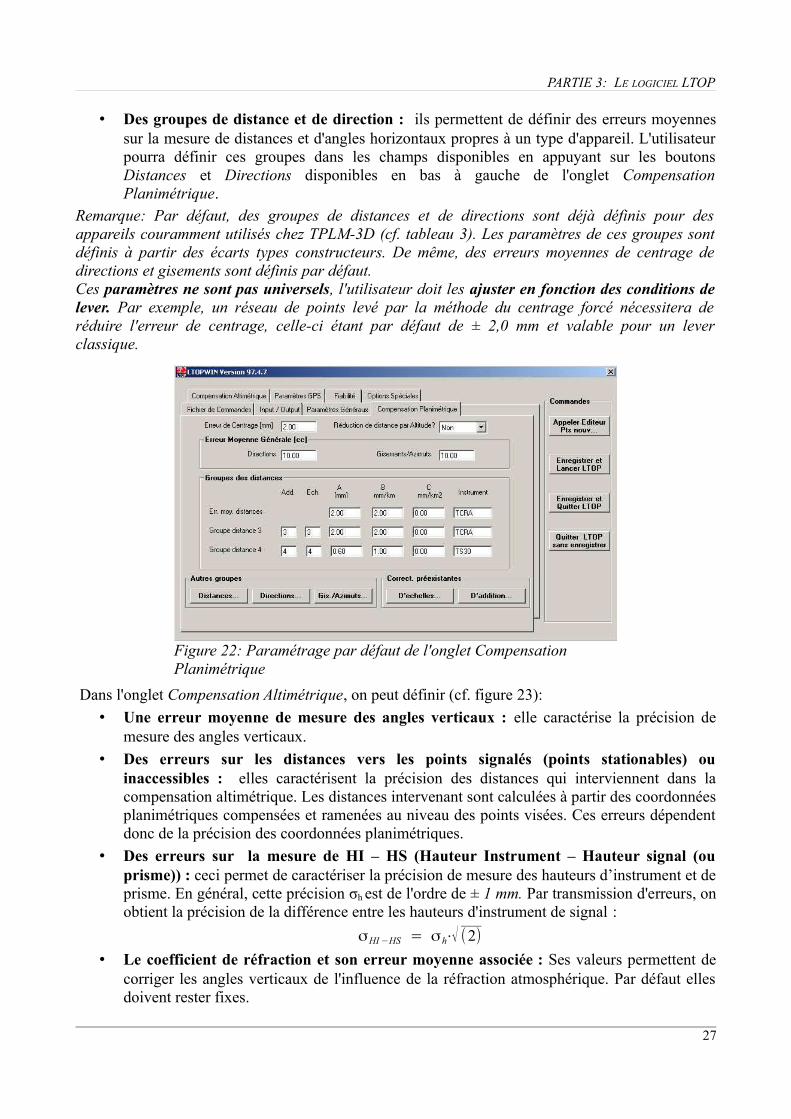
PARTIE 3: LE LOGICIEL LTOP
• Des groupes de distance et de direction : ils permettent de définir des erreurs moyennes sur la mesure de distances et d'angles horizontaux propres à un type d'appareil. L'utilisateur pourra définir ces groupes dans les champs disponibles en appuyant sur les boutons Distances et Directions disponibles en bas à gauche de l'onglet Compensation Planimétrique.
Remarque: Par défaut, des groupes de distances et de directions sont déjà définis pour des appareils couramment utilisés chez TPLM-3D (cf. tableau 3). Les paramètres de ces groupes sont définis à partir des écarts types constructeurs. De même, des erreurs moyennes de centrage de directions et gisements sont définis par défaut.Ces paramètres ne sont pas universels, l'utilisateur doit les ajuster en fonction des conditions de lever. Par exemple, un réseau de points levé par la méthode du centrage forcé nécessitera de réduire l'erreur de centrage, celle-ci étant par défaut de ± 2,0 mm et valable pour un lever classique.
Dans l'onglet Compensation Altimétrique, on peut définir (cf. figure 23):
• Une erreur moyenne de mesure des angles verticaux : elle caractérise la précision de mesure des angles verticaux.
• Des erreurs sur les distances vers les points signalés (points stationables) ou inaccessibles : elles caractérisent la précision des distances qui interviennent dans la compensation altimétrique. Les distances intervenant sont calculées à partir des coordonnées planimétriques compensées et ramenées au niveau des points visées. Ces erreurs dépendent donc de la précision des coordonnées planimétriques.
• Des erreurs sur la mesure de HI – HS (Hauteur Instrument – Hauteur signal (ou prisme)) : ceci permet de caractériser la précision de mesure des hauteurs d’instrument et de prisme. En général, cette précision σh est de l'ordre de ± 1 mm. Par transmission d'erreurs, on obtient la précision de la différence entre les hauteurs d'instrument de signal :
σHI −HS = σh⋅√ (2)
• Le coefficient de réfraction et son erreur moyenne associée : Ses valeurs permettent de corriger les angles verticaux de l'influence de la réfraction atmosphérique. Par défaut elles doivent rester fixes.
27
Figure 22: Paramétrage par défaut de l'onglet Compensation Planimétrique
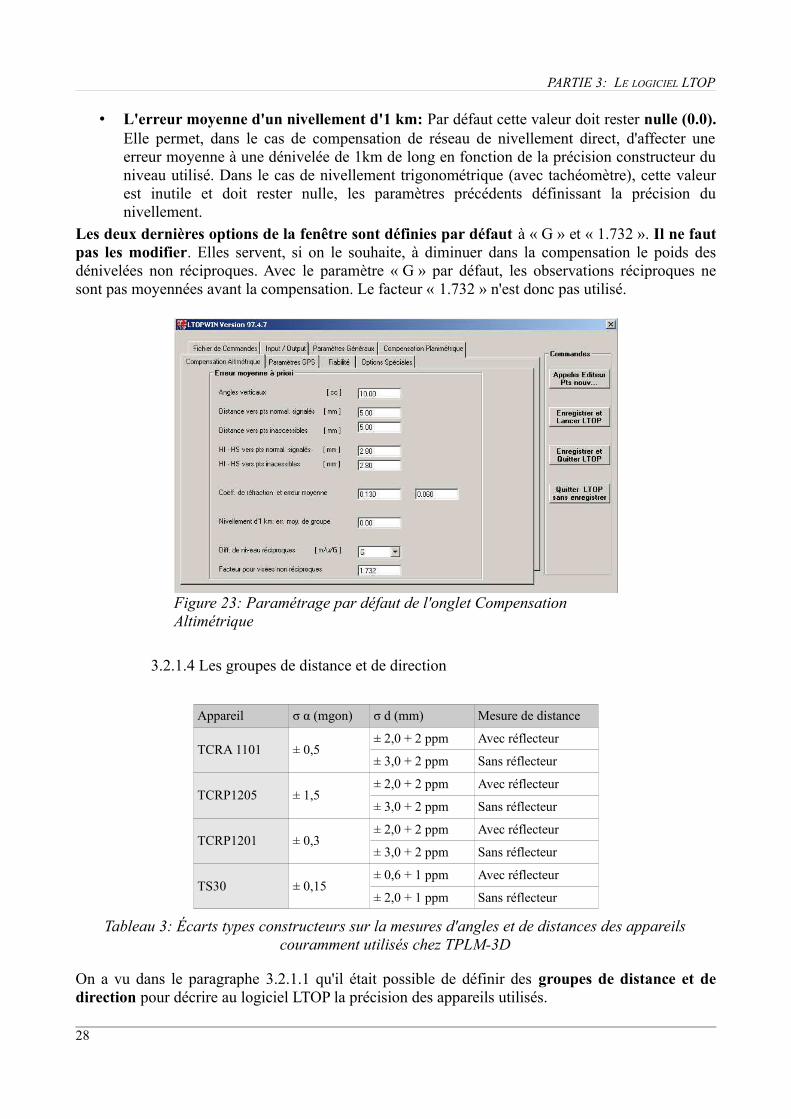
PARTIE 3: LE LOGICIEL LTOP
• L'erreur moyenne d'un nivellement d'1 km: Par défaut cette valeur doit rester nulle (0.0). Elle permet, dans le cas de compensation de réseau de nivellement direct, d'affecter une erreur moyenne à une dénivelée de 1km de long en fonction de la précision constructeur du niveau utilisé. Dans le cas de nivellement trigonométrique (avec tachéomètre), cette valeur est inutile et doit rester nulle, les paramètres précédents définissant la précision du nivellement.
Les deux dernières options de la fenêtre sont définies par défaut à « G » et « 1.732 ». Il ne faut pas les modifier. Elles servent, si on le souhaite, à diminuer dans la compensation le poids des dénivelées non réciproques. Avec le paramètre « G » par défaut, les observations réciproques ne sont pas moyennées avant la compensation. Le facteur « 1.732 » n'est donc pas utilisé.
3.2.1.4 Les groupes de distance et de direction
Appareil σ α (mgon) σ d (mm) Mesure de distance
TCRA 1101 ± 0,5± 2,0 + 2 ppm Avec réflecteur
± 3,0 + 2 ppm Sans réflecteur
TCRP1205 ± 1,5± 2,0 + 2 ppm Avec réflecteur
± 3,0 + 2 ppm Sans réflecteur
TCRP1201 ± 0,3± 2,0 + 2 ppm Avec réflecteur
± 3,0 + 2 ppm Sans réflecteur
TS30 ± 0,15± 0,6 + 1 ppm Avec réflecteur
± 2,0 + 1 ppm Sans réflecteur
Tableau 3: Écarts types constructeurs sur la mesures d'angles et de distances des appareils couramment utilisés chez TPLM-3D
On a vu dans le paragraphe 3.2.1.1 qu'il était possible de définir des groupes de distance et de direction pour décrire au logiciel LTOP la précision des appareils utilisés.
28
Figure 23: Paramétrage par défaut de l'onglet Compensation Altimétrique
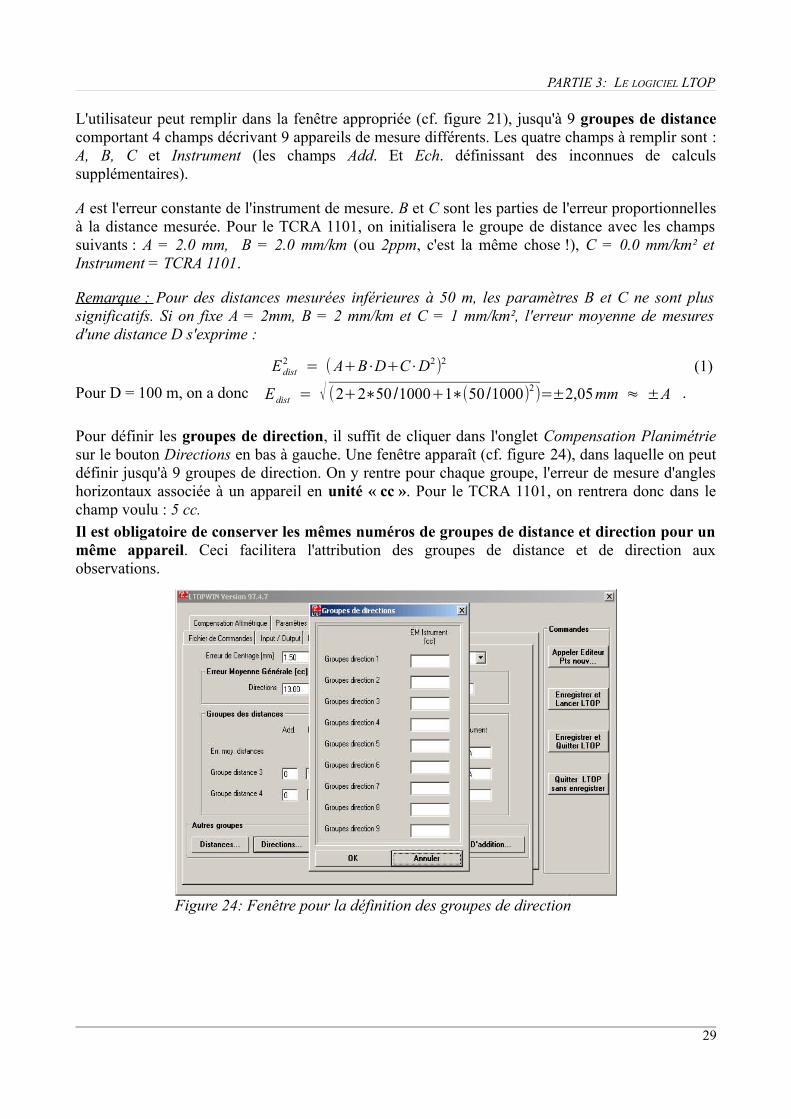
PARTIE 3: LE LOGICIEL LTOP
L'utilisateur peut remplir dans la fenêtre appropriée (cf. figure 21), jusqu'à 9 groupes de distance comportant 4 champs décrivant 9 appareils de mesure différents. Les quatre champs à remplir sont : A, B, C et Instrument (les champs Add. Et Ech. définissant des inconnues de calculs supplémentaires).
A est l'erreur constante de l'instrument de mesure. B et C sont les parties de l'erreur proportionnelles à la distance mesurée. Pour le TCRA 1101, on initialisera le groupe de distance avec les champs suivants : A = 2.0 mm, B = 2.0 mm/km (ou 2ppm, c'est la même chose !), C = 0.0 mm/km² et Instrument = TCRA 1101.
Remarque : Pour des distances mesurées inférieures à 50 m, les paramètres B et C ne sont plus significatifs. Si on fixe A = 2mm, B = 2 mm/km et C = 1 mm/km², l'erreur moyenne de mesures d'une distance D s'exprime :
Edist2 = ( A+B⋅D+C⋅D2)2 (1)
Pour D = 100 m, on a donc Edist = √ (2+2∗50 /1000+1∗(50 /1000)2)=±2,05mm ≈ ±A .
Pour définir les groupes de direction, il suffit de cliquer dans l'onglet Compensation Planimétrie sur le bouton Directions en bas à gauche. Une fenêtre apparaît (cf. figure 24), dans laquelle on peut définir jusqu'à 9 groupes de direction. On y rentre pour chaque groupe, l'erreur de mesure d'angles horizontaux associée à un appareil en unité « cc ». Pour le TCRA 1101, on rentrera donc dans le champ voulu : 5 cc.
Il est obligatoire de conserver les mêmes numéros de groupes de distance et direction pour un même appareil. Ceci facilitera l'attribution des groupes de distance et de direction aux observations.
29
Figure 24: Fenêtre pour la définition des groupes de direction

PARTIE 3: LE LOGICIEL LTOP
3.2.1.5 Les corrections préexistantes
En appuyant sur les boutons D'échelles ou D'additions de l'onglet Compensation Planimétrique , on peut définir des corrections d'échelles et des constantes d'additions préexistantes à un groupe de distances. Il est rarement nécessaire d'avoir recours à l'utilisation de ce type de correction sur des chantiers classiques, même lorsque deux appareils de lever différents sont utilisés.
3.2.1.6 Calcul de session GPS
Il est possible sous LTOP de mélanger des observations topographiques classiques (angles, distances) avec des coordonnées issues de sessions de mesures GPS. On rentre donc dans l'onglet Paramètres GPS, la précision a priori des coordonnées de la session GPS concernée. Ensuite, on définit les types de transformations que l'on souhaite appliquer à la série de coordonnées GPS pour qu'elle s’insère dans le réseau de points d'appui.
Les paramètres permettant de définir une transformation sont décrits dans le tableau 4.
dY Translation selon l'axe Y6 suisse (donc X français)
dX Translation selon l'axe X suisse (donc Y français)
rH Rotation autour de l'axe Z
Ech Facteur d'échelle
dH Translation en Z
rX Basculement autour de l'axe X (Y français)
rY Basculement autour de l'axe Y (X français)
Tableau 4: Paramètres de définition d'une transformation
La figure 25 montre un exemple de 2 transformations différentes définies :
• Série 1 : transformation de type « XY » : c'est donc une translation, ou un changement de repère. Seuls les paramètres dY et dX sont activés. Le chiffre 1 inscrit pour chaque paramètre permet d'affecter un numéro à l'inconnue de la transformation calculée. Ce numéro doit correspondre avec celui de la série.
• Série 2 : transformation de type « XYRE » : c'est donc une similitude 2D ou une transformation de Helmert. On a activé les paramètres dY, dX, rH, et Ech, en leur affectant un numéro 2. De cette façon si on introduit les deux transformations dans une même compensation, les chiffres 1 et 2 affectées aux inconnues permettront de différencier les inconnues.
Remarque : Si on souhaite calculer un facteur d'échelle commun, ou une rotation commune à deux transformations, il suffit de rentrer un numéro d'inconnue pour le paramètre de la première transformation puis le sigle « = » pour le champ du même paramètre dans la deuxième transformation.
6 En Suisse, dans un système de coordonnées, la notation adoptée pour l'axe des abscisses est Y, et pour l'axe des ordonnées est X. Les matricules sont donc à l'inverse de la notation utilisée en France.
30

PARTIE 3: LE LOGICIEL LTOP
3.2.1.7 Les paramètres de fiabilité
Selon les recommandations de la Mensuration Officielle Suisse, l'utilisateur peut définir les classes et catégories de points qui seront compensés dans l'onglet Fiabilité (cf. figure 26). En fonction des types choisis, les niveaux de précision et fiabilité maximum seront ajustés pour les tests effectués en fin de calcul. L'utilisateur peut ensuite définir les valeurs limites :
• Des erreurs résiduelles wi : elles doivent rester par défaut fixées à 2.5 en planimétrie et altimétrie.
• Du passage du test du χ² (test global du modèle) : idem, cette valeur reste par défaut à 20%.
• De l'erreur de deuxième type : idem, cette valeur reste par défaut à 5%.
L'utilisateur désireux d'approfondir théoriquement ses connaissances pourra se référer au paragraphe sur les indicateurs de fiabilité dans la notice Notions Théoriques disponible dans le classeur de R&D LTOP/TopTools.
31
Figure 25: Paramètres GPS
Figure 26: Paramètres de fiabilité
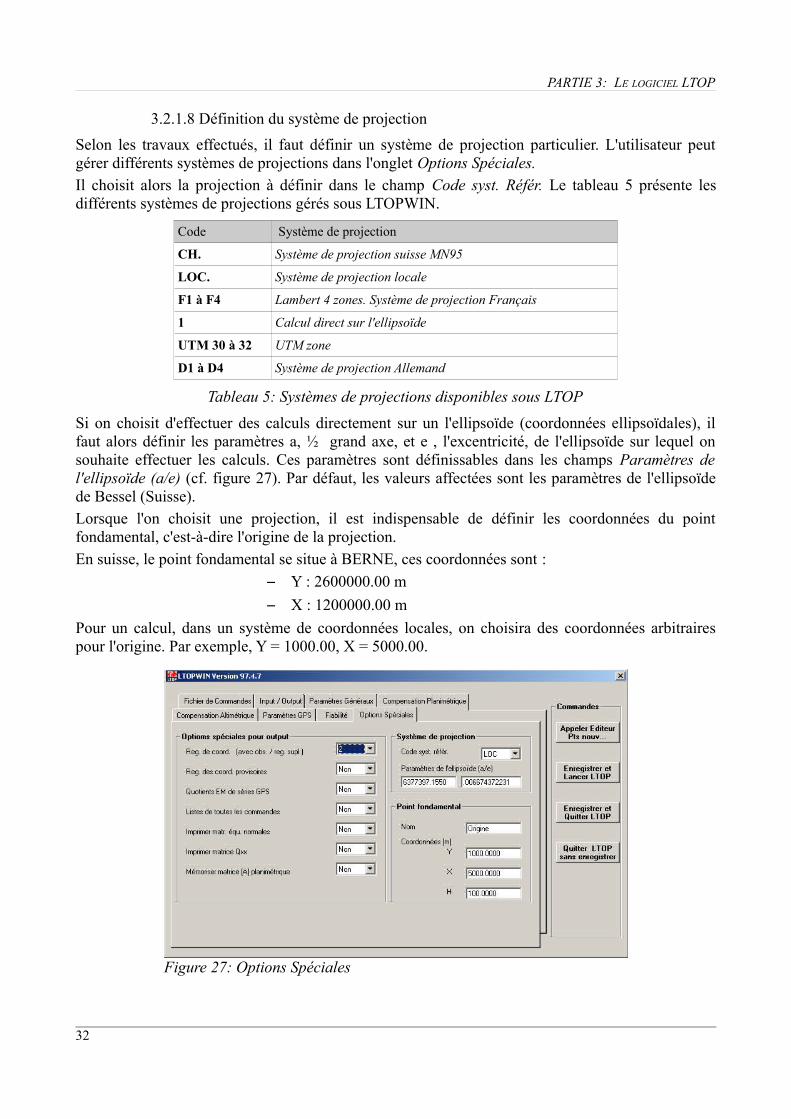
PARTIE 3: LE LOGICIEL LTOP
3.2.1.8 Définition du système de projection
Selon les travaux effectués, il faut définir un système de projection particulier. L'utilisateur peut gérer différents systèmes de projections dans l'onglet Options Spéciales.Il choisit alors la projection à définir dans le champ Code syst. Référ. Le tableau 5 présente les différents systèmes de projections gérés sous LTOPWIN.
Code Système de projection
CH. Système de projection suisse MN95
LOC. Système de projection locale
F1 à F4 Lambert 4 zones. Système de projection Français
1 Calcul direct sur l'ellipsoïde
UTM 30 à 32 UTM zone
D1 à D4 Système de projection Allemand
Tableau 5: Systèmes de projections disponibles sous LTOP
Si on choisit d'effectuer des calculs directement sur un l'ellipsoïde (coordonnées ellipsoïdales), il faut alors définir les paramètres a, ½ grand axe, et e , l'excentricité, de l'ellipsoïde sur lequel on souhaite effectuer les calculs. Ces paramètres sont définissables dans les champs Paramètres de l'ellipsoïde (a/e) (cf. figure 27). Par défaut, les valeurs affectées sont les paramètres de l'ellipsoïde de Bessel (Suisse). Lorsque l'on choisit une projection, il est indispensable de définir les coordonnées du point fondamental, c'est-à-dire l'origine de la projection.
En suisse, le point fondamental se situe à BERNE, ces coordonnées sont :
– Y : 2600000.00 m
– X : 1200000.00 m
Pour un calcul, dans un système de coordonnées locales, on choisira des coordonnées arbitraires pour l'origine. Par exemple, Y = 1000.00, X = 5000.00.
32
Figure 27: Options Spéciales
PARTIE 3: LE LOGICIEL LTOP
IMPORTANT :
Dans la définition du point fondamental, on peut fixer l'altitude de référence. Si celle-ci est défini à 0.000 m, les distances observées sont réduites au niveau de la mer. Ceci peut provoquer des corrections relativement importantes qui ne sont pas forcément souhaitables.
Ainsi, pour les calculs pour le compte de la Mensuration Officielle, l'utilisateur laissera cette altitude de référence à zéro. Cependant, dans le cadre de travaux topographiques spéciaux (la majorité des chantiers de TPLM-3D) dans un système de projection local ou national, il est indispensable d'indiquer l'altitude moyenne du chantier pour s'affranchir de ces corrections non souhaitables.
Le paramétrage des Options Spéciales pour output, n'est pas nécessaire. Les valeurs indiquées des champs de l'onglet présenté dans la figure 27, peuvent rester celles par défaut. Sauf dans le cas de compensation de sessions GPS, ou dans ce cas il faut choisir la valeur « Oui » dans le champ Quotient EM de séries GPS.
3.2.2 Le fichier de coordonnéesEn entrée d'un calcul LTOP, il est nécessaire d'avoir un fichier du type *.koo, contenant les coordonnées des points d'appui et les coordonnées approchées des points nouveaux.
Chez TPLM-3D, ce fichier est directement généré en sortie du module de calcul de coordonnées approchées sous TopTools.Suivant les types de coordonnées (cartésiennes, géographiques, ..etc) un formatage spécifique de ce fichier est requis. On pourra consulter en annexe A de cette notice, une description du format du fichier *.koo pour chaque type de coordonnées accepté par LTOP.
Type du Fichier *.koo Type de Coordonnées
$$PK Coordonnées Planes, altitudes sur le géoïde
$$PE Coordonnées Planes, altitudes sur l'ellipsoïde
$$EL Coordonnées Ellipsoïdales (unité : degrés, minutes et secondes sexagésimales)
$$EM Coordonnées Ellipsoïdales (unité : degrés et minutes sexagésimales)
$$ED Coordonnées Ellipsoïdales (unité : degrés décimaux)
$$EN Coordonnées Ellipsoïdales (unité : grades)
$$3D Coordonnées géocentriques tridimensionnelles
Tableau 6: Types de coordonnées acceptées dans le fichier *.koo
3.2.3 Le fichier d'observationsChez TPLM-3D, ce fichier d'observations est directement généré par le logiciel TopTools à partir d'un fichier *.GSI.Ce fichier *.MES est de type « colonné », les informations qu'il contient ont donc des positions précises qui ne peuvent pas être modifiées. Par conséquent, si une valeur sort de la taille définie de son champ, la lecture du fichier d'observation risque de ne plus marcher.
Pour une description complète du format de fichier *.MES, on pourra consulter l'annexe A décrivant les formats LTOP.
33
PARTIE 3: LE LOGICIEL LTOP
Dans un fichier d'observations, on trouve trois types de lignes contenant des informations différentes :
– Des lignes de commentaires où l'on peut écrire ce que l'on veut. Elles commencent par « ** » en position 1 et 2 de la ligne. (N.B. : la position 1 correspond au premier caractère de la ligne, la position 2 au second, ...etc).
– Des lignes de stations : Elles commencent par les codes « SL » ou « ST », suivis directement en position 3 par le matricule du point pour les lignes de stations d'observations terrestres, ou par le nom d'une série GPS pour les lignes de stations d'observations GPS. Ces lignes permettent d'introduire des lignes d'observations. Toutes les lignes qui suivent une ligne de station, sont des observations mesurées depuis la station définie en amont. Le code « SL » introduit des données relatives à une série de coordonnées GPS. Le code « ST » introduit des données relatives à une série d'observations topographiques classiques (angles , distances, dénivelés, …).
– Des lignes d'observations : Elles sont deux types : lignes d'observations pour des observations terrestres, et lignes d'observations pour des observations GPS. Ces lignes commencent toujours par un des codes définis dans le tableau 7. Ces codes qui définissent le type d'observation sont suivis directement en position 3 par le matricule du point visé depuis le point défini à la ligne de station précédente.
Code Type d'observations
AZ Azimut astronomique
AP Gisement dans le plan de projection
RI Angle horizontal en grade
RA Angle horizontale en degré sexagésimaux
DS Distance oblique
DP Distance horizontale dans le plan de projection
DB Distance horizontale à l'altitude du point visé (stadia horizontale)
HW Angle vertical en grade
ZD Distance zénithale en grade
HA Angle vertical en degrés sexagésimaux
DY, DX, DH Différences de coordonnées dans un plan de projection
YY, XX, HH Coordonnées dans un plan de projection
DE, DN Différence de coordonnées géographiques
EE, NN Coordonnées géographiques
LY, LX Coordonnées planimétriques déterminées par GPS
LH Altitude orthométrique déterminé par GPS
Tableau 7: Codes des lignes d'observations associés aux types d'observations
Les tableaux 8, 9, 10 et 11 définissent les informations les plus courantes qui peuvent être inscrites dans les deux types de lignes de stations et d'observations. Pour une description en détails des lignes de stations et d'observations on pourra se référer à l'annexe A décrivant le format LTOP, ou au manuel d'utilisateur de LTOP.
34

PARTIE 3: LE LOGICIEL LTOP
Position du champ dans le fichier
Contenu Remarques
1 - 2 Code « ST »
3 - 12 Nom du point
37 - 42 Erreur moyenne générale des directions unité : cc
43 - 46 Groupe de distance général
47 - 52 Hauteur d'instrument unité : m
61 - 78 Opérateur et date
85 - 90 Erreur de centrage de la station unité : mm
Tableau 8: Format des lignes de stations d'observations terrestres
Position du champ dans le fichier
Contenu Remarques
1 - 2 Un des Codes du tableau 7 sauf (LY, LX, LH)
3 - 12 Nom du point visé
25 - 36 Valeur mesurée
37 - 42 Erreur moyenne ne concernant que l'observation
« F » signifie qu'il s'agit d'une observation fictive« 9999. » signifie que l'observation est éliminée (écartée de la compensation)
43 - 46 Groupe de l'observation
47 - 52 Hauteur d'instrument unité : m
53 - 58 Hauteur de signal (prisme) unité : m
85 - 90 Erreur de centrage de la cible unité : mm
Tableau 9: Format des lignes d'observations terrestres
Position du champ dans le fichier
Contenu Remarques
1 - 2 Code « SL »
3 - 12 Commentaires
37 - 42 Erreur moyenne des observations GPS unité : mm
43 - 52 Nom de la série GPS (cf. § 3.2.1.6)
Tableau 10: Format des lignes de stations d'observations GPS
Position du champ dans le fichier
Contenu Remarques
1 - 2 Code «LY », « LX » ou « LH »
3 - 12 Nom du point
25 - 36 Coordonnées mesurée unité : m
43 - 52 Erreur moyenne de la coordonnée unité : mm
Tableau 11: Format des lignes d'observations GPS
35

PARTIE 3: LE LOGICIEL LTOP
Remarques :
• Définition des erreurs moyennes : On a déjà vu comment définir les erreurs moyennes des observations, de centrage des stations et cibles, ...etc dans le paragraphe décrivant le fichier de configuration. On a vu dans les tableaux 8, 9, 10 et 11 qu'il était possible de définir ponctuellement des erreurs moyennes associées à des lignes d'observations et de stations. Pour éviter qu'il y ait des conflits entre les définitions, il existe dans LTOP une hiérarchie à 3 niveaux pour la prise en compte de ces erreurs dans la définition du modèle stochastique :
▪ Degré de priorité 1 : l'erreur moyenne a priori sur les lignes d'observations
▪ Degré de priorité 2 : l'erreur moyenne a priori sur les lignes de stations qui s'applique à toutes les observations suivantes.
▪ Degré de priorité 3 : l'erreur moyenne a priori définie dans le fichier de configuration.
• Observations fictives : En calcul libre, on réalise le positionnement d'un réseau à l'aide d'un point fixe et d'un gisement d'orientation. Le gisement est à introduire comme observation fictive (« F » dans la colonne de l'erreur moyenne). Ce gisement a une influence sur la fiabilité externe du réseau car on a aucun moyen de contrôle de l'orientation possible, il provoquerait donc une fiabilité nulle. En l'introduisant comme observation fictive, ce gisement est écarté du calcul de fiabilité mais conservé dans la compensation.
36
Figure 28: Exemple de fichier *.MES, avec des observations tachéométriques, des mesures de nivellements, et une session GPS
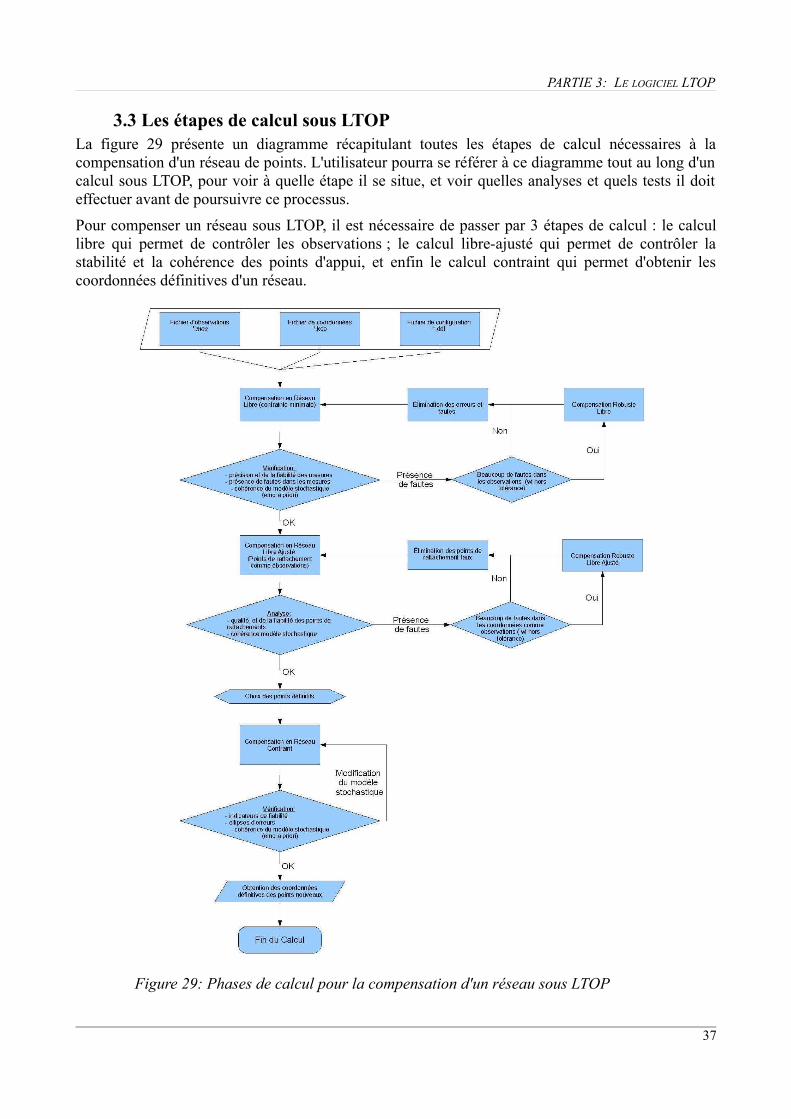
PARTIE 3: LE LOGICIEL LTOP
3.3 Les étapes de calcul sous LTOPLa figure 29 présente un diagramme récapitulant toutes les étapes de calcul nécessaires à la compensation d'un réseau de points. L'utilisateur pourra se référer à ce diagramme tout au long d'un calcul sous LTOP, pour voir à quelle étape il se situe, et voir quelles analyses et quels tests il doit effectuer avant de poursuivre ce processus.
Pour compenser un réseau sous LTOP, il est nécessaire de passer par 3 étapes de calcul : le calcul libre qui permet de contrôler les observations ; le calcul libre-ajusté qui permet de contrôler la stabilité et la cohérence des points d'appui, et enfin le calcul contraint qui permet d'obtenir les coordonnées définitives d'un réseau.
37
Figure 29: Phases de calcul pour la compensation d'un réseau sous LTOP

PARTIE 3: LE LOGICIEL LTOP
LTOP propose deux autres modes de calcul : la pré-analyse qui permet de préparer l'implantation d'un réseau, et le calcul robuste qui permet de rechercher des fautes dans une série d'observations.
L'utilisateur désireux d'approfondir théoriquement ses connaissances pourra se référer à la notice Notions Théoriques disponible dans le classeur de R&D LTOP/TopTools.
3.3.1 Pré-analyse, simulation Cette fonction permet de réaliser un calcul de compensation avant de disposer d'observations effectives. On peut ainsi calculer des ellipses d'erreurs et de nombreux indicateurs de fiabilité pour chaque point du réseau fictif (à condition que les erreurs moyennes a priori soient le plus proche des conditions de lever). Ce calcul de simulation, réalisé avant d'effectuer un lever sur le terrain, peut être très utile pour tester la stabilité d'un réseau. Aussi, on pourra suivant les résultats de la pré-analyse, optimiser la configuration du réseau, pour par exemple diminuer le nombre de mesures prévues si le degré de surabondance est suffisamment important.
Cet outil de pré-analyse peut donc être très intéressant pour les études préalables à une intervention sur le terrain. Il peut permettre de gagner du temps tout en maintenant le niveau de fiabilité et de qualité requis dans le cahier des charges.
3.3.1.1 Éléments requis pour une pré-analyse
Pour effectuer une pré-analyse sous LTOP, l'utilisateur doit disposer de :
• un projet de canevas avec la définition des intentions de mesures. C'est-à-dire quelles observations l'opérateur va mesurer sur le terrain depuis chaque point du réseau,
• les coordonnées approchées des points du réseau, et les coordonnées des points d'appui,
• la définition du modèle stochastique a priori : les erreurs de mesures de observations dépendant de l'appareil et du mode de lever qui seront utilisé,
• la définition du système de référence dans lequel seront effectués les mesures et calculs.
Toutes ces informations permettent de calculer les matrices principales de la compensation : matrice des coefficients des équations d'erreurs, matrices des poids, matrices des cofacteurs...Ce mode de calcul est pertinent et n'a d’intérêt que si les erreurs moyennes a priori reflètent le mieux que possible la réalité des conditions de lever.
Pour voir comment configurer un calcul de pré-analyse sous LTOP, se référer au paragraphe 3.2.1.1.
3.3.1.2 Analyses, Précision et fiabilité
Les ellipses d'erreurs et un certain nombre d'indicateurs de fiabilité peuvent être calculés à partir des données du modèle stochastique et des intentions de mesures. L'analyse approfondie de tous ces indicateurs doit être à la base de l'optimisation du réseau.
Un réseau idéal est constitué d'un nombre minimum et suffisant de mesures permettant de garantir la précision et la fiabilité imposée pour la réalisation du réseau. Une surabondance excessive de mesures conduits à des temps et des coûts de réalisation et de traitements élevés. A contrario, une insuffisance de mesures se traduit par des faiblesses dans le réseau qui peuvent être responsable d'une perte d'homogénéité de la précision et de la fiabilité d'un réseau.La pré-analyse est donc un travail itératif permettant d'affiner et d'optimiser un réseau.
38
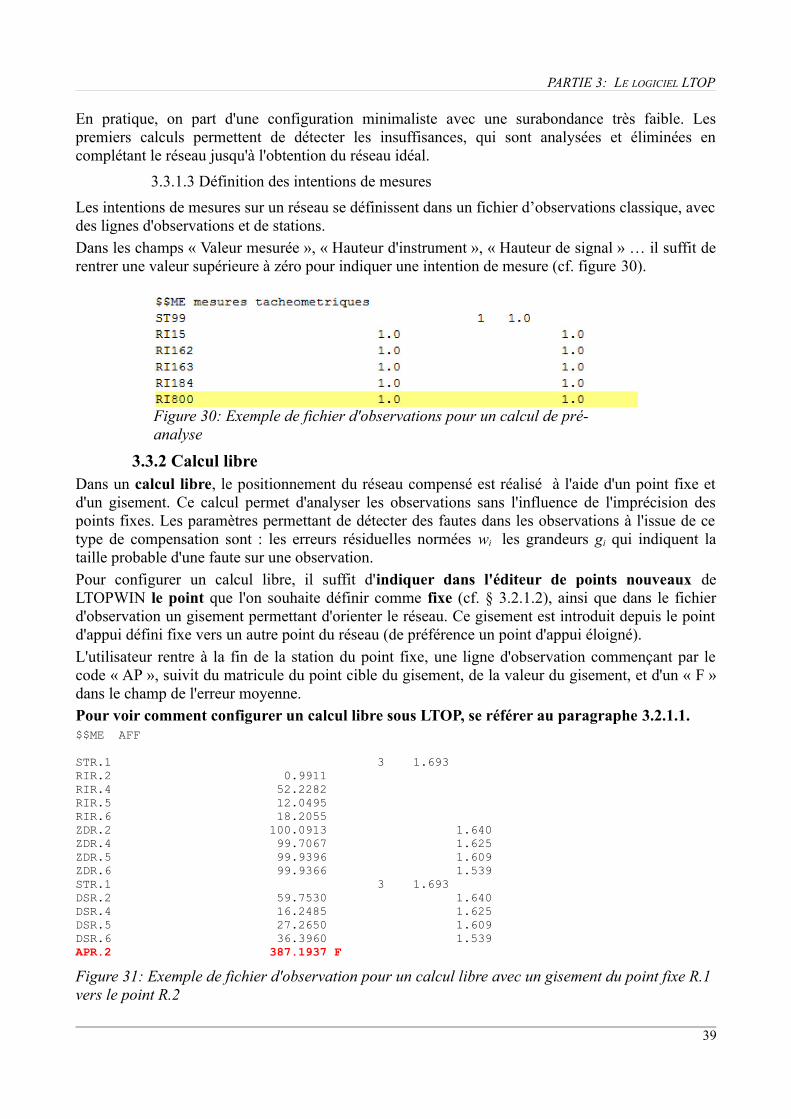
PARTIE 3: LE LOGICIEL LTOP
En pratique, on part d'une configuration minimaliste avec une surabondance très faible. Les premiers calculs permettent de détecter les insuffisances, qui sont analysées et éliminées en complétant le réseau jusqu'à l'obtention du réseau idéal.
3.3.1.3 Définition des intentions de mesures
Les intentions de mesures sur un réseau se définissent dans un fichier d’observations classique, avec des lignes d'observations et de stations.Dans les champs « Valeur mesurée », « Hauteur d'instrument », « Hauteur de signal » … il suffit de rentrer une valeur supérieure à zéro pour indiquer une intention de mesure (cf. figure 30).
3.3.2 Calcul libreDans un calcul libre, le positionnement du réseau compensé est réalisé à l'aide d'un point fixe et d'un gisement. Ce calcul permet d'analyser les observations sans l'influence de l'imprécision des points fixes. Les paramètres permettant de détecter des fautes dans les observations à l'issue de ce type de compensation sont : les erreurs résiduelles normées wi les grandeurs gi qui indiquent la taille probable d'une faute sur une observation. Pour configurer un calcul libre, il suffit d'indiquer dans l'éditeur de points nouveaux de LTOPWIN le point que l'on souhaite définir comme fixe (cf. § 3.2.1.2), ainsi que dans le fichier d'observation un gisement permettant d'orienter le réseau. Ce gisement est introduit depuis le point d'appui défini fixe vers un autre point du réseau (de préférence un point d'appui éloigné).
L'utilisateur rentre à la fin de la station du point fixe, une ligne d'observation commençant par le code « AP », suivit du matricule du point cible du gisement, de la valeur du gisement, et d'un « F » dans le champ de l'erreur moyenne.Pour voir comment configurer un calcul libre sous LTOP, se référer au paragraphe 3.2.1.1. $$ME AFF
STR.1 3 1.693RIR.2 0.9911RIR.4 52.2282RIR.5 12.0495RIR.6 18.2055ZDR.2 100.0913 1.640ZDR.4 99.7067 1.625ZDR.5 99.9396 1.609ZDR.6 99.9366 1.539STR.1 3 1.693DSR.2 59.7530 1.640DSR.4 16.2485 1.625DSR.5 27.2650 1.609DSR.6 36.3960 1.539APR.2 387.1937 F
Figure 31: Exemple de fichier d'observation pour un calcul libre avec un gisement du point fixe R.1 vers le point R.2
39
Figure 30: Exemple de fichier d'observations pour un calcul de pré-analyse
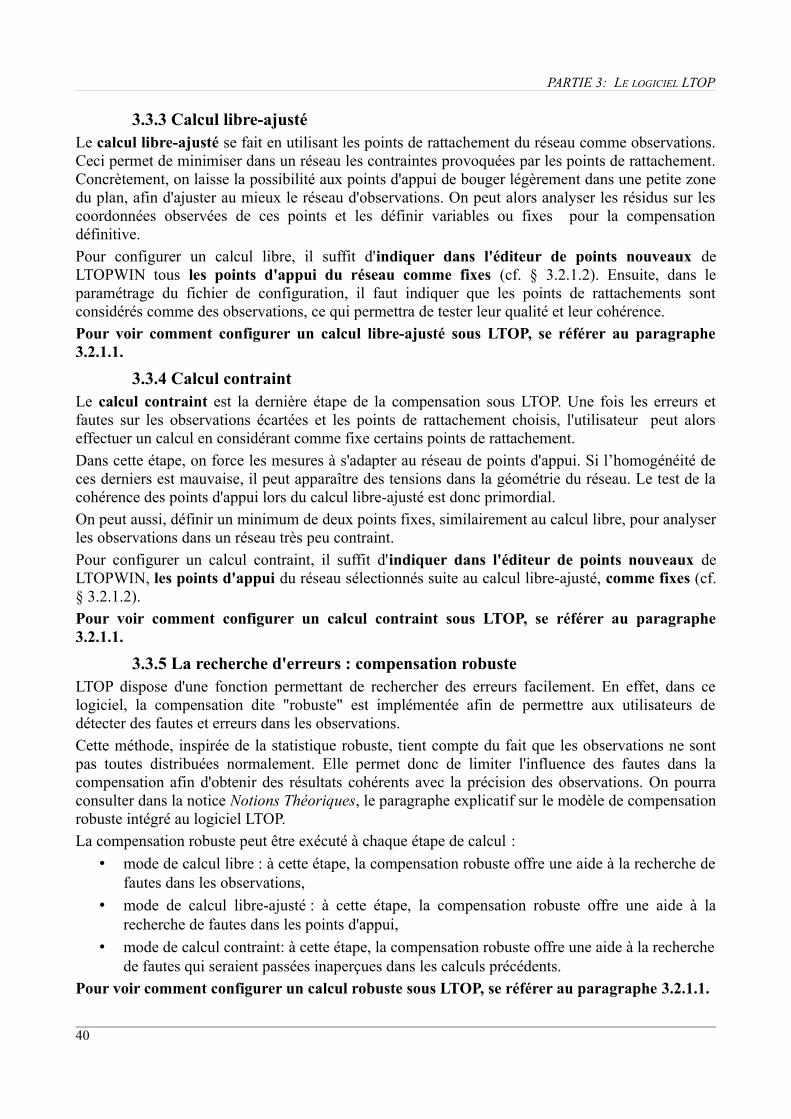
PARTIE 3: LE LOGICIEL LTOP
3.3.3 Calcul libre-ajustéLe calcul libre-ajusté se fait en utilisant les points de rattachement du réseau comme observations. Ceci permet de minimiser dans un réseau les contraintes provoquées par les points de rattachement. Concrètement, on laisse la possibilité aux points d'appui de bouger légèrement dans une petite zone du plan, afin d'ajuster au mieux le réseau d'observations. On peut alors analyser les résidus sur les coordonnées observées de ces points et les définir variables ou fixes pour la compensation définitive.
Pour configurer un calcul libre, il suffit d'indiquer dans l'éditeur de points nouveaux de LTOPWIN tous les points d'appui du réseau comme fixes (cf. § 3.2.1.2). Ensuite, dans le paramétrage du fichier de configuration, il faut indiquer que les points de rattachements sont considérés comme des observations, ce qui permettra de tester leur qualité et leur cohérence.Pour voir comment configurer un calcul libre-ajusté sous LTOP, se référer au paragraphe 3.2.1.1.
3.3.4 Calcul contraint Le calcul contraint est la dernière étape de la compensation sous LTOP. Une fois les erreurs et fautes sur les observations écartées et les points de rattachement choisis, l'utilisateur peut alors effectuer un calcul en considérant comme fixe certains points de rattachement.
Dans cette étape, on force les mesures à s'adapter au réseau de points d'appui. Si l’homogénéité de ces derniers est mauvaise, il peut apparaître des tensions dans la géométrie du réseau. Le test de la cohérence des points d'appui lors du calcul libre-ajusté est donc primordial. On peut aussi, définir un minimum de deux points fixes, similairement au calcul libre, pour analyser les observations dans un réseau très peu contraint.
Pour configurer un calcul contraint, il suffit d'indiquer dans l'éditeur de points nouveaux de LTOPWIN, les points d'appui du réseau sélectionnés suite au calcul libre-ajusté, comme fixes (cf. § 3.2.1.2).Pour voir comment configurer un calcul contraint sous LTOP, se référer au paragraphe 3.2.1.1.
3.3.5 La recherche d'erreurs : compensation robuste LTOP dispose d'une fonction permettant de rechercher des erreurs facilement. En effet, dans ce logiciel, la compensation dite "robuste" est implémentée afin de permettre aux utilisateurs de détecter des fautes et erreurs dans les observations.
Cette méthode, inspirée de la statistique robuste, tient compte du fait que les observations ne sont pas toutes distribuées normalement. Elle permet donc de limiter l'influence des fautes dans la compensation afin d'obtenir des résultats cohérents avec la précision des observations. On pourra consulter dans la notice Notions Théoriques, le paragraphe explicatif sur le modèle de compensation robuste intégré au logiciel LTOP.La compensation robuste peut être exécuté à chaque étape de calcul :
• mode de calcul libre : à cette étape, la compensation robuste offre une aide à la recherche de fautes dans les observations,
• mode de calcul libre-ajusté : à cette étape, la compensation robuste offre une aide à la recherche de fautes dans les points d'appui,
• mode de calcul contraint: à cette étape, la compensation robuste offre une aide à la recherche de fautes qui seraient passées inaperçues dans les calculs précédents.
Pour voir comment configurer un calcul robuste sous LTOP, se référer au paragraphe 3.2.1.1.
40
PARTIE 3: LE LOGICIEL LTOP
3.3.6 Remarques et conseils
3.3.6.1 Recherche de fautes dans les points approchés
Suite à un calcul libre, libre-ajusté et/ou une compensation robuste, s'il subsiste des incohérences dans les fichiers de résultats, il se peut qu'il y ait des coordonnées de points approchés totalement fausses.
Pour détecter les points approchés responsables, l'utilisateur peut alors lancer un calcul libre-ajusté en mode robuste, en définissant dans l'éditeur de points de LTOP, tous les points du réseaux comme fixes, y compris les points nouveaux . De cette manière, tous les points approchés sont testés, en analysant les fichiers de résultats on peut alors localiser les fautes dans les coordonnées approchées. Bien entendu cela ne fonctionne que dans la mesure où il n'y a que très peu de fautes dans les observations et dans les points approchés.
3.3.6.2 Finaliser correctement un calcul contraint
Pour finaliser correctement un calcul contraint, il est d'usage de relancer une dernière fois le calcul en remplaçant les coordonnées du fichier de points *.koo, par les coordonnées du fichier de coordonnées compensées *.res. De cette manière, on peut s'assurer de la convergence du calcul vers la bonne solution en contrôlant les appoints DY, DX et DH du tableau des coordonnées finales (cf. § 3.4.1.4). Ces derniers devant être nuls si le calcul a correctement convergé.
3.4 Le fichier de résultatA l'issue de chaque calcul sous LTOP, un fichier *.prn est généré et enregistré directement dans le dossier source où sont situés les fichiers d'observations, de coordonnées et de configuration du calcul.
Il contient sur plusieurs pages une série de tableaux récapitulant les résultats des différentes phases de calcul sous LTOP. Chaque tableau doit être analysé attentivement en vue de rechercher des éventuelles fautes. Selon les options choisis dans les fenêtres de paramétrage des fichiers input/ouput et des options spéciales (cf. figures 18 et 27), LTOP peut générer d'autres fichiers de résultats :
• un fichier *.res contenant les coordonnées compensées
• un fichier *.ipl contenant des informations pour le logiciel PLANETZ
• un fichier contenant la matrice des coefficients des équations d'erreurs
3.4.1 Description du contenu du fichier et pistes d'analyses
3.4.1.1 Réduction des distances
Dans les premières pages, on trouve un tableau de réduction des distances. Pour chaque station, on trouve n lignes correspondant au n points visés en distance. Ces lignes qui commencent par le matricule du point visé comporte des informations relatives à la réduction de la distance dans le plan de projection.
Le tableau 12, présente une description des éléments de chaque colonne de l'en-tête du tableau de réduction des distances. Si une visée réciproque existe, l'angle vertical réciproque, les hauteurs d'instrument et de prisme sont indiqués directement après la ligne de réduction d'une visée.
Le tableau de réduction des distances doit être analysé à l'issue d'un calcul libre. Il faut porter une attention particulière à la colonne CONTR qui indique l'écart à la moyenne entre deux dénivelées réciproques.
41

PARTIE 3: LE LOGICIEL LTOP
Si on constate un écart qui dépasse plusieurs centimètres, il est probable qu'il y ait une faute sur la distance oblique, l'angle vertical ou les hauteurs de prismes et d'instruments de cette visée.
Suite à cette analyse, si on a déjà identifié des fautes corrigeables (mauvaise hauteur de prisme, problème sur une visée réciproque, …), il est fortement conseillé de les noter puis de les corriger immédiatement et de relancer le calcul.
Remarques concernant le tableau 12 :
• VERT : L'angle vertical est recalculé par rapport à une origine fixée à 100.0 gon sur le cercle topo.
• D.NIV : Elle est calculée à partir de l'angle vertical et de la distance oblique. Si ce n'est pas possible, LTOP utilise les altitudes provisoires des points.
• CONTR. : La dénivelée moyenne est calculée à partir des visées réciproques. Cette colonne contient donc l'écart à la dénivelée moyenne.
POINT TYPE D OBS. GR. HG HP D RED. ...
Nom du point visé
Type du point (voir Manuel LTOP p 3-31)
Distance mesurée
Groupe de distance de la station (cf. § 3.2.1.4)
Hauteur instrument
Hauteur prisme
Distance réduite dans le plan de projection
… VERT HI HS D. NIV CONTR ED=1 MMEHDIFF
Angle vertical
Hauteur instrument
Hauteur prisme
Dénivelée provisoire
Contient l'écart à la dénivelée moyenne
Indique de combien de millimètre la dénivelée peut être faussée avant que l'erreur résultante sur la distance réduite n'atteigne 1mm
Tableau 12: Description de l'en-tête du tableau REDUCTION DES DISTANCES
3.4.1.2 Abriss planimétrique
Suite à la réduction des distances, LTOP imprime un tableau des ABRISS7 PLANIMETRIQUE pour chaque station.
En premier lieu, le modèle stochastique a priori est rappelé dans un tableau regroupant pour chaque groupe de distances, de directions et erreurs définissables, les paramètres rentrés par l'utilisateur dans le fichier de configuration, l'erreur de centrage générale associée et l'erreur moyenne calculée pour une visée équivalente de 1 km.Pour chaque station, on retrouve n lignes correspondant aux n observations de la station. Chaque ligne d'observation rassemble un résumé des informations calculées lors de la compensation planimétrique (résidus, erreurs moyennes, fiabilité, …).
L'ordre de succession des observations de chaque station est le suivant : angles horizontaux, gisements/azimuts, distances, différences de coordonnées et coordonnées. L'ordre des stations dans l'abriss correspond à celui du fichier d'observations.Le tableau 13, présente une description des éléments de chaque colonne de l'en-tête du tableau des abriss planimétriques.
L'abriss planimétrique doit être analysé à l'issue de chaque calcul de compensation (libre, libre-ajusté, contraint ou robuste). Il faut porter une attention particulière aux colonnes WI et E.LAT.
7 Abriss est un terme Allemand qui signifie « abrégé »
42
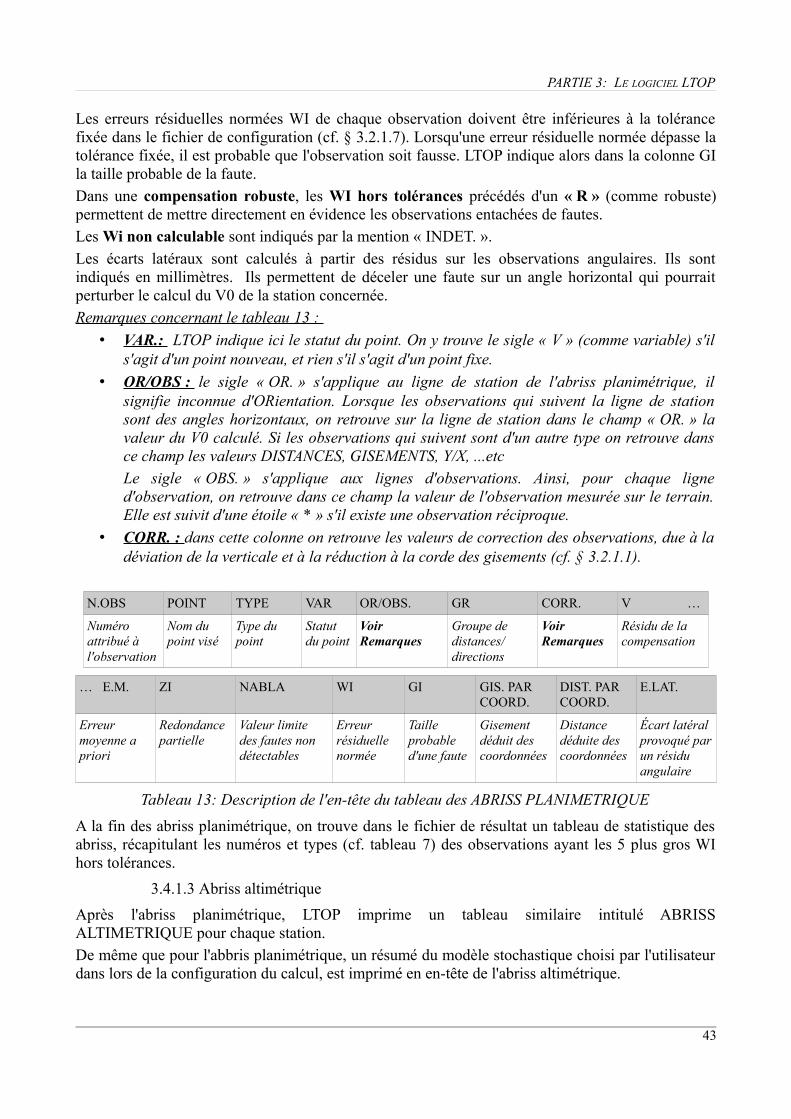
PARTIE 3: LE LOGICIEL LTOP
Les erreurs résiduelles normées WI de chaque observation doivent être inférieures à la tolérance fixée dans le fichier de configuration (cf. § 3.2.1.7). Lorsqu'une erreur résiduelle normée dépasse la tolérance fixée, il est probable que l'observation soit fausse. LTOP indique alors dans la colonne GI la taille probable de la faute.
Dans une compensation robuste, les WI hors tolérances précédés d'un « R » (comme robuste) permettent de mettre directement en évidence les observations entachées de fautes. Les Wi non calculable sont indiqués par la mention « INDET. ».
Les écarts latéraux sont calculés à partir des résidus sur les observations angulaires. Ils sont indiqués en millimètres. Ils permettent de déceler une faute sur un angle horizontal qui pourrait perturber le calcul du V0 de la station concernée.Remarques concernant le tableau 13 :
• VAR.: LTOP indique ici le statut du point. On y trouve le sigle « V » (comme variable) s'il s'agit d'un point nouveau, et rien s'il s'agit d'un point fixe.
• OR/OBS : le sigle « OR. » s'applique au ligne de station de l'abriss planimétrique, il signifie inconnue d'ORientation. Lorsque les observations qui suivent la ligne de station sont des angles horizontaux, on retrouve sur la ligne de station dans le champ « OR. » la valeur du V0 calculé. Si les observations qui suivent sont d'un autre type on retrouve dans ce champ les valeurs DISTANCES, GISEMENTS, Y/X, ...etc
Le sigle « OBS. » s'applique aux lignes d'observations. Ainsi, pour chaque ligne d'observation, on retrouve dans ce champ la valeur de l'observation mesurée sur le terrain. Elle est suivit d'une étoile « * » s'il existe une observation réciproque.
• CORR. : dans cette colonne on retrouve les valeurs de correction des observations, due à la déviation de la verticale et à la réduction à la corde des gisements (cf. § 3.2.1.1).
N.OBS POINT TYPE VAR OR/OBS. GR CORR. V …
Numéro attribué à l'observation
Nom du point visé
Type du point
Statut du point
Voir Remarques
Groupe de distances/directions
Voir Remarques
Résidu de la compensation
… E.M. ZI NABLA WI GI GIS. PARCOORD.
DIST. PAR COORD.
E.LAT.
Erreur moyenne a priori
Redondancepartielle
Valeur limite des fautes non détectables
Erreur résiduelle normée
Taille probable d'une faute
Gisement déduit des coordonnées
Distance déduite des coordonnées
Écart latéral provoqué par un résidu angulaire
Tableau 13: Description de l'en-tête du tableau des ABRISS PLANIMETRIQUE
A la fin des abriss planimétrique, on trouve dans le fichier de résultat un tableau de statistique des abriss, récapitulant les numéros et types (cf. tableau 7) des observations ayant les 5 plus gros WI hors tolérances.
3.4.1.3 Abriss altimétrique
Après l'abriss planimétrique, LTOP imprime un tableau similaire intitulé ABRISS ALTIMETRIQUE pour chaque station. De même que pour l'abbris planimétrique, un résumé du modèle stochastique choisi par l'utilisateur dans lors de la configuration du calcul, est imprimé en en-tête de l'abriss altimétrique.
43
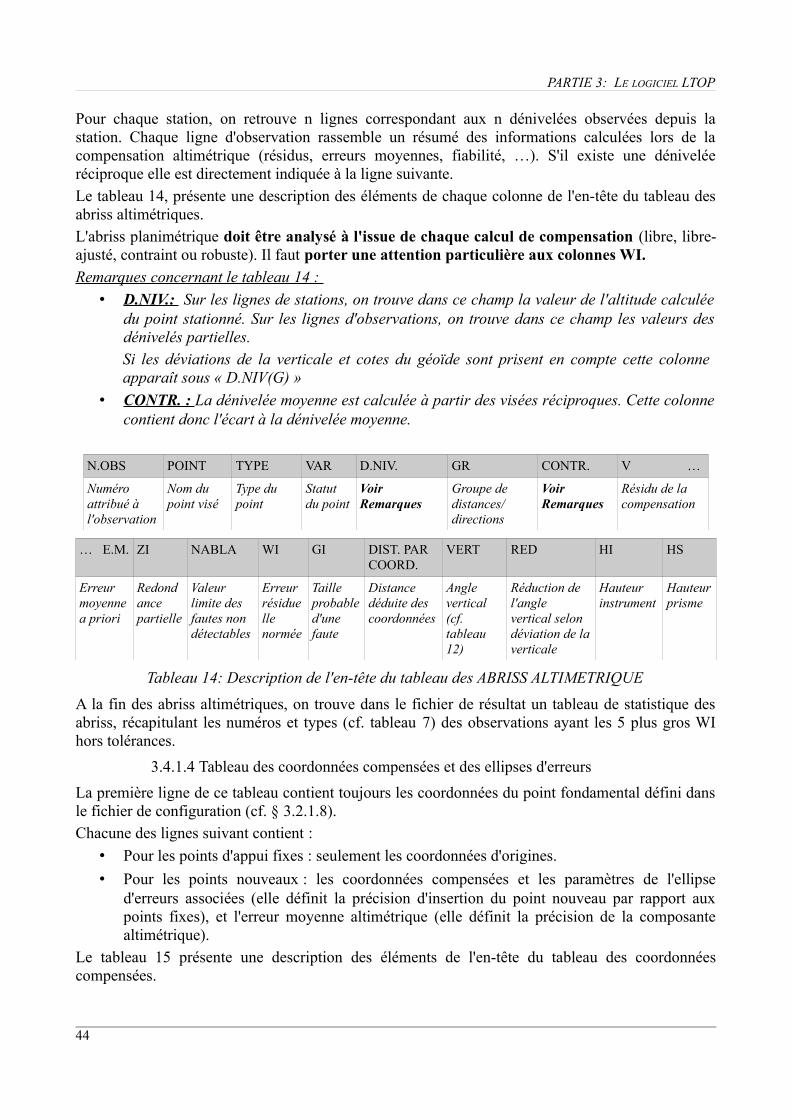
PARTIE 3: LE LOGICIEL LTOP
Pour chaque station, on retrouve n lignes correspondant aux n dénivelées observées depuis la station. Chaque ligne d'observation rassemble un résumé des informations calculées lors de la compensation altimétrique (résidus, erreurs moyennes, fiabilité, …). S'il existe une dénivelée réciproque elle est directement indiquée à la ligne suivante.
Le tableau 14, présente une description des éléments de chaque colonne de l'en-tête du tableau des abriss altimétriques.L'abriss planimétrique doit être analysé à l'issue de chaque calcul de compensation (libre, libre-ajusté, contraint ou robuste). Il faut porter une attention particulière aux colonnes WI.
Remarques concernant le tableau 14 :
• D.NIV.: Sur les lignes de stations, on trouve dans ce champ la valeur de l'altitude calculée du point stationné. Sur les lignes d'observations, on trouve dans ce champ les valeurs des dénivelés partielles.Si les déviations de la verticale et cotes du géoïde sont prisent en compte cette colonne apparaît sous « D.NIV(G) »
• CONTR. : La dénivelée moyenne est calculée à partir des visées réciproques. Cette colonne contient donc l'écart à la dénivelée moyenne.
N.OBS POINT TYPE VAR D.NIV. GR CONTR. V …
Numéro attribué à l'observation
Nom du point visé
Type du point
Statut du point
Voir Remarques
Groupe de distances/directions
Voir Remarques
Résidu de la compensation
… E.M. ZI NABLA WI GI DIST. PAR COORD.
VERT RED HI HS
Erreur moyenne a priori
Redondancepartielle
Valeur limite des fautes non détectables
Erreur résiduelle normée
Taille probable d'une faute
Distance déduite des coordonnées
Angle vertical(cf. tableau 12)
Réduction de l'angle vertical selon déviation de la verticale
Hauteur instrument
Hauteur prisme
Tableau 14: Description de l'en-tête du tableau des ABRISS ALTIMETRIQUE
A la fin des abriss altimétriques, on trouve dans le fichier de résultat un tableau de statistique des abriss, récapitulant les numéros et types (cf. tableau 7) des observations ayant les 5 plus gros WI hors tolérances.
3.4.1.4 Tableau des coordonnées compensées et des ellipses d'erreurs
La première ligne de ce tableau contient toujours les coordonnées du point fondamental défini dans le fichier de configuration (cf. § 3.2.1.8).Chacune des lignes suivant contient :
• Pour les points d'appui fixes : seulement les coordonnées d'origines.
• Pour les points nouveaux : les coordonnées compensées et les paramètres de l'ellipse d'erreurs associées (elle définit la précision d'insertion du point nouveau par rapport aux points fixes), et l'erreur moyenne altimétrique (elle définit la précision de la composante altimétrique).
Le tableau 15 présente une description des éléments de l'en-tête du tableau des coordonnées compensées.
44
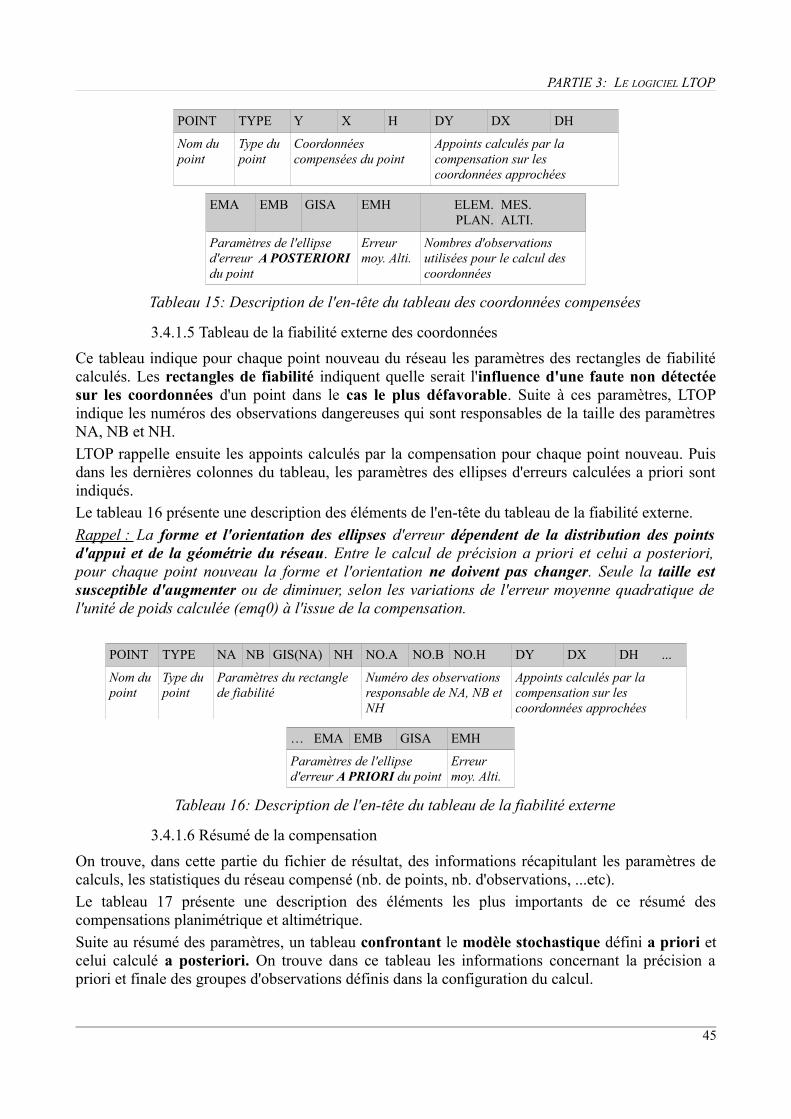
PARTIE 3: LE LOGICIEL LTOP
POINT TYPE Y X H DY DX DH
Nom du point
Type du point
Coordonnées compensées du point
Appoints calculés par la compensation sur les coordonnées approchées
EMA EMB GISA EMH ELEM.PLAN.
MES.ALTI.
Paramètres de l'ellipse d'erreur A POSTERIORI du point
Erreur moy. Alti.
Nombres d'observations utilisées pour le calcul des coordonnées
Tableau 15: Description de l'en-tête du tableau des coordonnées compensées
3.4.1.5 Tableau de la fiabilité externe des coordonnées
Ce tableau indique pour chaque point nouveau du réseau les paramètres des rectangles de fiabilité calculés. Les rectangles de fiabilité indiquent quelle serait l'influence d'une faute non détectée sur les coordonnées d'un point dans le cas le plus défavorable. Suite à ces paramètres, LTOP indique les numéros des observations dangereuses qui sont responsables de la taille des paramètres NA, NB et NH.
LTOP rappelle ensuite les appoints calculés par la compensation pour chaque point nouveau. Puis dans les dernières colonnes du tableau, les paramètres des ellipses d'erreurs calculées a priori sont indiqués.Le tableau 16 présente une description des éléments de l'en-tête du tableau de la fiabilité externe.
Rappel : La forme et l'orientation des ellipses d'erreur dépendent de la distribution des points d'appui et de la géométrie du réseau. Entre le calcul de précision a priori et celui a posteriori, pour chaque point nouveau la forme et l'orientation ne doivent pas changer. Seule la taille est susceptible d'augmenter ou de diminuer, selon les variations de l'erreur moyenne quadratique de l'unité de poids calculée (emq0) à l'issue de la compensation.
POINT TYPE NA NB GIS(NA) NH NO.A NO.B NO.H DY DX DH ...
Nom du point
Type du point
Paramètres du rectangle de fiabilité
Numéro des observations responsable de NA, NB et NH
Appoints calculés par la compensation sur les coordonnées approchées
… EMA EMB GISA EMH
Paramètres de l'ellipse d'erreur A PRIORI du point
Erreur moy. Alti.
Tableau 16: Description de l'en-tête du tableau de la fiabilité externe
3.4.1.6 Résumé de la compensation
On trouve, dans cette partie du fichier de résultat, des informations récapitulant les paramètres de calculs, les statistiques du réseau compensé (nb. de points, nb. d'observations, ...etc). Le tableau 17 présente une description des éléments les plus importants de ce résumé des compensations planimétrique et altimétrique.
Suite au résumé des paramètres, un tableau confrontant le modèle stochastique défini a priori et celui calculé a posteriori. On trouve dans ce tableau les informations concernant la précision a priori et finale des groupes d'observations définis dans la configuration du calcul.
45
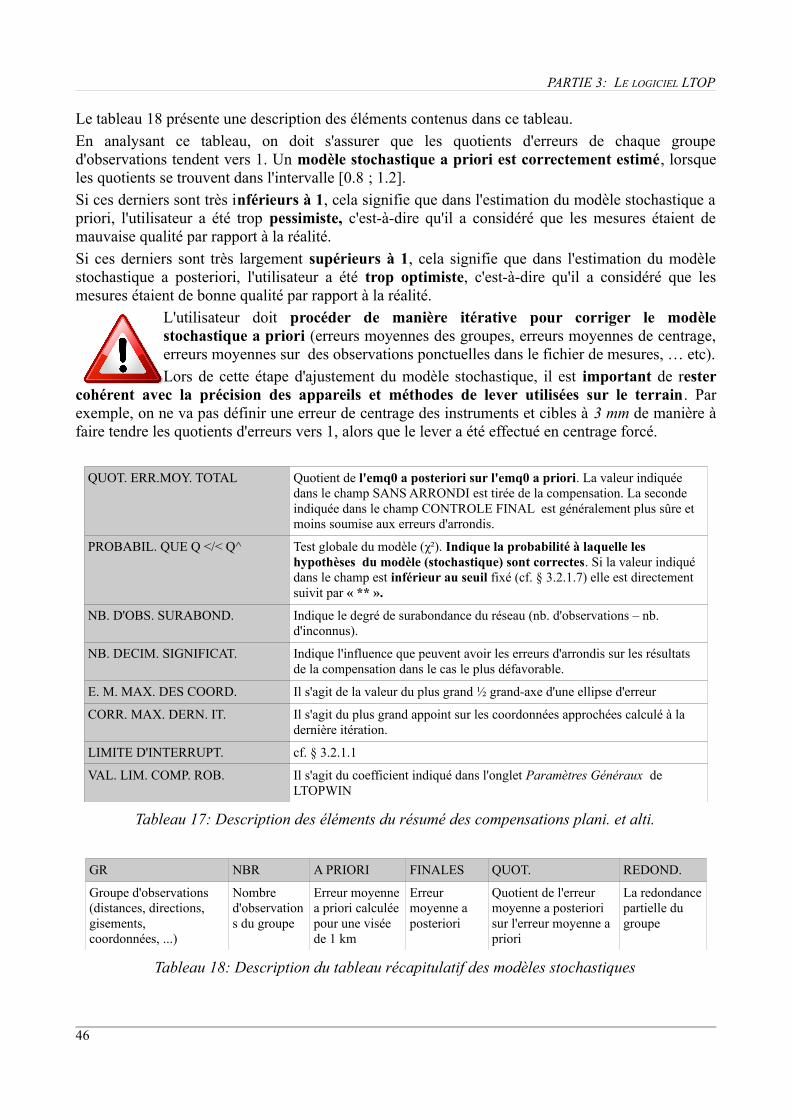
PARTIE 3: LE LOGICIEL LTOP
Le tableau 18 présente une description des éléments contenus dans ce tableau.
En analysant ce tableau, on doit s'assurer que les quotients d'erreurs de chaque groupe d'observations tendent vers 1. Un modèle stochastique a priori est correctement estimé, lorsque les quotients se trouvent dans l'intervalle [0.8 ; 1.2].Si ces derniers sont très inférieurs à 1, cela signifie que dans l'estimation du modèle stochastique a priori, l'utilisateur a été trop pessimiste, c'est-à-dire qu'il a considéré que les mesures étaient de mauvaise qualité par rapport à la réalité.
Si ces derniers sont très largement supérieurs à 1, cela signifie que dans l'estimation du modèle stochastique a posteriori, l'utilisateur a été trop optimiste, c'est-à-dire qu'il a considéré que les mesures étaient de bonne qualité par rapport à la réalité.
L'utilisateur doit procéder de manière itérative pour corriger le modèle stochastique a priori (erreurs moyennes des groupes, erreurs moyennes de centrage, erreurs moyennes sur des observations ponctuelles dans le fichier de mesures, … etc).
Lors de cette étape d'ajustement du modèle stochastique, il est important de rester cohérent avec la précision des appareils et méthodes de lever utilisées sur le terrain. Par exemple, on ne va pas définir une erreur de centrage des instruments et cibles à 3 mm de manière à faire tendre les quotients d'erreurs vers 1, alors que le lever a été effectué en centrage forcé.
QUOT. ERR.MOY. TOTAL Quotient de l'emq0 a posteriori sur l'emq0 a priori. La valeur indiquée dans le champ SANS ARRONDI est tirée de la compensation. La seconde indiquée dans le champ CONTROLE FINAL est généralement plus sûre et moins soumise aux erreurs d'arrondis.
PROBABIL. QUE Q </< Q^ Test globale du modèle (χ²). Indique la probabilité à laquelle les hypothèses du modèle (stochastique) sont correctes. Si la valeur indiqué dans le champ est inférieur au seuil fixé (cf. § 3.2.1.7) elle est directement suivit par « ** ».
NB. D'OBS. SURABOND. Indique le degré de surabondance du réseau (nb. d'observations – nb. d'inconnus).
NB. DECIM. SIGNIFICAT. Indique l'influence que peuvent avoir les erreurs d'arrondis sur les résultats de la compensation dans le cas le plus défavorable.
E. M. MAX. DES COORD. Il s'agit de la valeur du plus grand ½ grand-axe d'une ellipse d'erreur
CORR. MAX. DERN. IT. Il s'agit du plus grand appoint sur les coordonnées approchées calculé à la dernière itération.
LIMITE D'INTERRUPT. cf. § 3.2.1.1
VAL. LIM. COMP. ROB. Il s'agit du coefficient indiqué dans l'onglet Paramètres Généraux de LTOPWIN
Tableau 17: Description des éléments du résumé des compensations plani. et alti.
GR NBR A PRIORI FINALES QUOT. REDOND.
Groupe d'observations(distances, directions, gisements, coordonnées, ...)
Nombre d'observations du groupe
Erreur moyenne a priori calculée pour une visée de 1 km
Erreur moyenne a posteriori
Quotient de l'erreur moyenne a posteriori sur l'erreur moyenne a priori
La redondance partielle du groupe
Tableau 18: Description du tableau récapitulatif des modèles stochastiques
46

PARTIE 3: LE LOGICIEL LTOP
Pour les groupes de distances, on trouve quelques informations supplémentaires concernant les corrections d'échelles et constantes additionnelles définies préexistantes ou comme inconnues de la compensation (cf. tableau 19).
CORR.ECH.EN PPM CORR.ADIT.EN MM
ECH CORR EM ADIT CORR EM
Numéro de la correction d'échelle
Correction calculée par la compensation ou définie préexistante
Erreur moyenne de la correction d'échelle
Numéro de la constante additionnelle
Constante calculée par la compensation ou définie préexistante
Erreur moyenne de la constante d'addition
Tableau 19: Description des informations supplémentaires des groupes de distances
Enfin, dans cette partie du fichier de résultat, on trouve une liste des points nouveaux classés en ligne selon l'ordre des inconnues.
Les inconnues planimétriques sont numérotées en premier puis viennent les inconnues altimétriques. Les coordonnées planimétriques du premier point de la liste, auront les numéros 1 et 2 ; les coordonnées du second auront les numéros 3 et 4 ; et ainsi de suite jusqu'au n-ième point.
La coordonnée altimétrique du premier point de la liste aura le numéro d'inconnue 2n+1, si un calcul planimétrique est effectué avant.
3.4.1.7 Registre complet des coordonnées et altitudes
Ce tableau récapitule les coordonnées compensées de tous les points nouveaux du réseau, ainsi que les coordonnées des points fixes. A chaque triplet de coordonnées (Y, X, H) sont associées les éventuelles cote du géoïde, et composante Est-Ouest ETA et Nord-Sud XI de la déviation de la verticale.
Les dernières colonnes indiquent les résultats des tests de tolérance sur les indicateurs de précision et de fiabilité externe de chaque point, fixés par la Mensuration Officielle Suisse.
3.4.2 Méthodologie d'analyse des fichiers de résultatsOn a déjà décrit le déroulement d'un calcul de compensation d'un réseau sous LTOP (cf. § 3.3). On décrira donc dans cette partie pour chaque mode de calcul les éléments importants à analyser dans le fichier de résultats. Dans tous les cas, il est obligatoire d'analyser les messages d'erreurs générés par LTOP au début du fichier de résultats et/ou au début des Abriss planimétrique et altimétrique, et/ou après le résumé de la compensation. On pourra déterminer les types d'erreurs signalés en consultant le Manuel LTOP à page 7-1. Avant toute analyse, il convient de corriger les erreurs signalées par ces messages.
3.4.2.1 Pour un calcul libre
A cette étape, il s'agit d'analyser la précision et la fiabilité des mesures. La contrainte appliquée au réseau étant minimale, on peut correctement analyser la cohérence globale des mesures.Il convient donc de contrôler le fichier de résultats selon les étapes suivantes :
• Analyse du tableau de réductions des distances (cf.3.4.1.1)
• Analyse des abriss planimétrique et altimétrique (cf. 3.4.1.2 et 3.4.1.3) : il s'agit ici de localiser d'éventuelles fautes dans les observations en contrôlant les erreurs résiduelles normées WI.
47
PARTIE 3: LE LOGICIEL LTOP
• Analyse des modèles stochastiques a priori et a posteriori: il s'agit ici d'analyser la cohérence entre les modèles stochastiques a priori et a posteriori de tous les groupes d'observations. Pour que le résultat d'une compensation soit une estimation correcte de la réalité, il est important de pondérer correctement les observations d'angles, de distances, .. etc. (cf. § 3.4.1.6, tableau 18) Lorsqu'un modèle stochastique est correctement estimé, des erreurs résiduelles normées signalées dans un premier temps hors tolérance peuvent disparaître, car la pondération des observations est correctement effectuée.
Comme on l'a décrit dans le paragraphe 3.4.1.6, l'analyse des modèles stochastiques a priori et a posteriori est un processus itératif dans lequel on modifie les valeurs des erreurs moyennes a priori tout en gardant à l'esprit qu'il faut rester cohérent avec les appareils et méthodes de lever mis en œuvre.Suite à un calcul libre, l'utilisateur doit donc avoir corrigé toutes les fautes de la série d'observations, et défini un modèle stochastique a priori cohérent.
** Recommandations : **
S'il y a beaucoup de WI hors tolérance dans les observations, l'utilisateur peut soit localiser les observations responsables à l'aide d'une compensation robuste, soit rechercher les observations comportant les plus gros WI. Ces observations qui ont une forte probabilité d'être fausses sont en général responsables de la présence des autres wi hors tolérance. Il convient donc de les désactiver de la compensation en leur affectant une erreur moyenne de « 9999. » dans le fichier d'observation (cf. § 3.2.3 tableau 9), ou de les corriger si on a repéré une faute corrigeable (faute de matricule, de hauteur de prisme, …). En relançant le calcul, on s'aperçoit que les observations correspondantes sont imprimés dans les abriss avec la mention ELIM. dans le champ WI. Un résidu VI est calculé, mais elles n'ont plus aucune influence dans la compensation.
Il est strictement interdit de supprimer directement une observation du fichier *.mes. Des observations d'abord traitées comme fausses, mais dont les résidus ne confirment pas cet état de fait peuvent ainsi être réintégrées dans le calcul de compensation.
3.4.2.2 Pour un calcul libre-ajusté
Dans un calcul libre-ajusté, on définit les coordonnées de tous les points d'appui du réseau comme des observations. De cette façon on peut contrôler la cohérence des points d'appui entre eux et s'assurer de l'homogénéité de la précision de ceux-ci.
A cette étape de calcul, on a déjà corrigé l'ensemble des fautes probables dans les observations et ajusté le modèle stochastique. Le calcul libre-ajusté doit reprendre le modèle stochastique a priori défini à la fin du calcul libre. Avant d’exécuter un calcul libre-ajusté, il faut s'assurer d'avoir correctement estimé les erreurs moyennes sur les coordonnées des points d'appui (cf. § 3.2.1.1, tableau 10).
Il convient donc de contrôler le fichier de résultats selon les étapes suivantes :
• Analyse des abriss planimétrique et altimétrique (cf. § 3.4.1.2 et 3.4.1.3) : il s'agit d'analyser les résidus et erreurs résiduelles normées calculés pour chaque point d'appui. En procédant de manière itérative dans l'analyse des WI, on peut mettre en évidence des points potentiellement imprécis et incohérents avec le reste du réseau de point d'appui.
• Analyse des modèles stochastiques a priori et a posteriori: il s'agit ici d'ajuster les erreurs moyennes a priori définis pour les coordonnées des points d'appui. (cf. § 3.4.1.6)
48
PARTIE 3: LE LOGICIEL LTOP
Lorsque les erreurs moyennes sont correctement estimées des erreurs résiduelles normées signalées dans un premier temps hors tolérance peuvent disparaître.
Une compensation robuste peut éventuellement aider l'utilisateur à localiser les points d'appui provoquant des tiraillements dans le réseau d'observations.
Suite à ce calcul, l'utilisateur doit retenir au minimum deux points d'appui pour l'étape de calcul contraint.
3.4.2.3 Pour un calcul contraint
Cette étape de calcul permet d'insérer les points nouveaux dans le réseau de points d'appui. A cette étape, toutes les mesures sont contraintes à passer par les points d'appui définis fixes à l'issue du calcul libre-ajusté.
A l'issue de cette étape de calcul, on obtient les coordonnées définitives des points nouveaux du réseaux.Il convient donc de contrôler le fichier de résultats d'une manière globale :
• Analyse des abriss planimétrique et altimétrique
• Analyse des modèles stochastiques a priori et a posteriori
• Analyse des indicateurs de précision et de fiabilité des points : Il s'agit ici d'analyser la qualité d'intégration des points nouveaux dans le réseau existant. On peut ainsi vérifier que la précision et la fiabilité correspondent aux exigences fixées par le cahier des charges (Tolérances MO93 ou TPLM-3D).
Remarques et conseils :
Lors d'un calcul contraint, les résidus calculés sont différents de ceux calculés dans un calcul libre ou libre ajusté. Ils servent au calcul de l'erreur moyenne de l'unité de poids a posteriori, et interviennent donc dans le calcul des ellipses d'erreur a posteriori. Bien souvent, lors d'une compensation on insère un réseau de mesure précis en relatif, dans un réseau de points dont la précision absolue est beaucoup plus faible. Bien que lors du calcul libre, l'utilisateur ait élimé tous les WI, il est très probable que de nouveaux WI hors tolérance apparaissent lors du calcul contraint.
Ceci est dû au fait que le réseau est fortement contraint sur les points imprécis dont la position est fixée. Ainsi, la compensation dégrade les observations du réseau pour minimiser les tiraillements, et insérer le réseau précis en relatif dans le réseau de points d'appui. L'apparition de nouveaux Wi hors tolérance est donc normale. L'utilisateur doit simplement « grossir » légèrement (être moins optimiste selon LTOP) le modèle stochastique afin de réduire le nombre de WI hors tolérance. Cette manipulation du modèle stochastique permet en théorie de calculer une erreur moyenne de l'unité de poids a posteriori plus juste, ce qui par conséquent permet d'obtenir une précision des points nouveaux plus homogène.
Cette méthode de calcul est imposée lorsque les coordonnées des points d'appui ne doivent pas changer (c'est le cas pour des calculs effectués pour la Mensuration Officielle Suisse). En pratique, quand cette condition ne s'impose pas, et que les coordonnées des points d'appui d'un réseau sont trop imprécises, on conservera les résultats de la compensation en mode libre-ajusté en prenant garde d'avoir écarté
tous les points d'appui douteux.
49
TABLE DES ILLUSTRATIONS
TABLE DES ILLUSTRATIONS
• Liste des figures :
Figure 1: Nouvelle chaîne de traitement........................................................................................................... 1Figure 2: Schéma de principe de fonctionnement des fonctions natives du logiciel TopTools..........................3Figure 3: Extrait d'un fichier GSI chargé sous TopTools. En rouge, les lignes correspondant à des codes station ou référence........................................................................................................................................... 4Figure 4: Extrait d'un GSI interprété sous TopTools......................................................................................... 4Figure 5: Désactiver une visée avant la réduction des données.........................................................................5Figure 6: Extrait d'un fichier *.GSI réduit sous TopTools................................................................................. 6Figure 7: Visualisation graphique de la différence entre moyenne arithmétique et moyenne robuste...............8Figure 8: Exemple de fichier de données pour TopTools................................................................................ 10Figure 9: Exemple de fonction des poids avec HW=1 et SL = -1....................................................................11Figure 10: Exemple de tableau de contrôle d'une distance moyenne.............................................................. 13Figure 11: Extrait d'un résumé de compensation altimétrique.........................................................................14Figure 12: Exemple de tableau récapitulant un calcul de V0 pour une station................................................ 16Figure 13: Exemple de contrôle d'un point par triangulatération.................................................................... 17Figure 14: Exemple de tableau récapitulatif du calcul de coordonnées approchées........................................ 18Figure 15: Structure générale de LTOP........................................................................................................... 21Figure 16: Hiérarchie d'un dossier de calcul sous LTOP................................................................................. 22Figure 17: Appel du fichier de configuration.................................................................................................. 22Figure 18: Paramétrage des fichiers Input et Output....................................................................................... 23Figure 19: Paramètres de calcul sous LTOP....................................................................................................24Figure 20: Fenêtre LTOPWIN de l'éditeur de points nouveaux.......................................................................25Figure 21: Fenêtre Groupe de Distances. Ici, on a définit deux constantes d'addition et deux facteurs d'échelles comme inconnues numérotées 3 et 4, pour les groupes de distances 3 et 4....................................26Figure 22: Paramétrage par défaut de l'onglet Compensation Planimétrique.................................................. 27Figure 23: Paramétrage par défaut de l'onglet Compensation Altimétrique.................................................... 28Figure 24: Fenêtre pour la définition des groupes de direction....................................................................... 29Figure 25: Paramètres GPS............................................................................................................................. 31Figure 26: Paramètres de fiabilité................................................................................................................... 31Figure 27: Options Spéciales.......................................................................................................................... 32Figure 28: Exemple de fichier *.MES, avec des observations tachéométriques, des mesures de nivellements, et une session GPS.......................................................................................................................................... 36Figure 29: Phases de calcul pour la compensation d'un réseau sous LTOP..................................................... 37Figure 30: Exemple de fichier d'observations pour un calcul de pré-analyse.................................................. 39Figure 31: Exemple de fichier d'observation pour un calcul libre avec un gisement du point fixe R.1 vers le point R.2......................................................................................................................................................... 39
50
TABLE DES ILLUSTRATIONS
• Liste des tableaux:
Tableau 1: Récapitulatif du nombre de données nécessaires par opérateur pour le calcul d'un point..............10Tableau 2: Utilisation des versions du programme LTOP............................................................................... 23Tableau 3: Écarts types constructeurs sur la mesures d'angles et de distances des appareils couramment utilisés chez TPLM-3D................................................................................................................................... 28Tableau 4: Paramètres de définition d'une transformation.............................................................................. 30Tableau 5: Systèmes de projections disponibles sous LTOP........................................................................... 32Tableau 6: Types de coordonnées acceptées dans le fichier *.koo.................................................................. 33Tableau 7: Codes des lignes d'observations associés aux types d'observations............................................... 34Tableau 8: Format des lignes de stations d'observations terrestres.................................................................. 35Tableau 9: Format des lignes d'observations terrestres................................................................................... 35Tableau 10: Format des lignes de stations d'observations GPS....................................................................... 35Tableau 11: Format des lignes d'observations GPS......................................................................................... 35Tableau 12: Description de l'en-tête du tableau REDUCTION DES DISTANCES........................................42Tableau 13: Description de l'en-tête du tableau des ABRISS PLANIMETRIQUE......................................... 43Tableau 14: Description de l'en-tête du tableau des ABRISS ALTIMETRIQUE............................................ 44Tableau 15: Description de l'en-tête du tableau des coordonnées compensées................................................45Tableau 16: Description de l'en-tête du tableau de la fiabilité externe............................................................ 45Tableau 17: Description des éléments du résumé des compensations plani. et alti.........................................46Tableau 18: Description du tableau récapitulatif des modèles stochastiques...................................................46Tableau 19: Description des informations supplémentaires des groupes de distances ....................................47
51


ANNEXE A : DESCRIPTION DU FORMAT LTOP
ANNEXE A : DESCRIPTION DU FORMAT LTOP
----- Description du format LTOP -----Source : http://www.swisstopo.admin.ch/swisstopo/geodesy/geo_software/samples/ltop/format_description/ltop_fr.html
Formats des fichiers de coordonnées :
Les fichiers de coordonnées utilisés à l'Office Fédéral de Topographie sont basés sur des formats fixes, c'est à dire que les différentes indications et les coordonnées doivent être placées dans des colonnes spécifiques.
Pour chaque point, seuls le nom et les coordonnées sont obligatoires. Le format ou le type du fichier est déterminé dans la première ligne qui doit commencer par $$.
Les formats suivants sont définis:
$$PK Coordonnées planes, altitudes sur le géoïde$$PE Coordonnées planes, altitudes sur l'ellipsoïde$$EL Coordonnées ellipsoïdiques (géodésiques), en degrés, minutes et secondes
sexagésimales$$EM Coordonnées ellipsoïdiques (géodésiques), en degrés et minutes sexagésimales$$ED Coordonnées ellipsoïdiques (géodésiques), en degrés sexagésimaux (décimaux)$$EN Coordonnées ellipsoïdiques (géodésiques), en gons$$3D Coordonnées géocentriques tridimensionnelles
Chaque type de fichier peut contenir des lignes de commentaire, qui doivent commencer par un point virgule (;). En plus, les fichiers de coordonnées sont lus seulement jusqu'à la première ligne vide. Ceci permet d'introduire à volonté des lignes de commentaires à la fin du fichier de coordonnées. Les programmes créant un nouveau fichier de coordonnées comme résultat ne reprennent pas ces lignes de commentaires, contrairement aux "vraies" lignes de commentaire précédées du point virgule!
Format des fichiers mesures LTOP : Page G - H
Systèmes de référence
Dans les fichiers de formats $$EL, $$EM, $$ED, $$EN et $$3D, il faut indiquer le datum géodésique dans le champ "Code système de référence". Avec le code de l'ellipsoïde pour la cote du géoïde "Code Ellipsoïde", cela permet aux programmes effectuant les transformations entre les différents systèmes de référence et de projection de n'effectuer les transformations que si les données (coordonnées et cote du géoïde) sont dans le même système de référence. Si ces colonnes restent vides, les tests ne sont pas effectués.
Exemples de tous les fichiers usuels
Format PK
$$PKC'est la ligne titreTRI150 PY 751030 4BL087334 612555.2300 224654.3300 657 568.4000 657MI -0.0531 144CH TRI152 PY 751030 4BL087336 612455.3300 224651.7400 657 584.7000 657MI -0.0524 144CH TRI153 PY 751030 4BL087337 612005.4500 224856.8900 657 546.0000 657MI -0.0409 144CH | | | | | | | | | | | | | | | 1234567890123456789012345678901234567890123456789012345678901234567890123456789012345678901 1 2 3 4 5 6 7 8 9
$$PK Type du fichier de coordonnées PK = Coordonnées planes, altitudes sur le géoïde
1 - 10 (A10) Identification du point, nom 11 - 14 (A4) Identification du point, type 15 - 22 (A8) Identification du point, date du repérage (YYYYMMDD) 23 - 26 (A4) Ordre, canton 27 - 32 (A6) Nouveau numéro: carte / numéro du point 33 - 44 (F12.4) Coordonnée Y [m] (Est) 45 - 56 (F12.4) Coordonnée X [m] (Nord) 57 - 60 (A4) Provenance des coordonnées
A
ANNEXE A : DESCRIPTION DU FORMAT LTOP
61 - 70 (F10.4) Altitude H (sur le géoïde) [m] 71 - 74 (A4) Provenance de l'altitude 75 - 76 (A2) Code des coordonnées - MI : coordonnées militaires en MN03 (Berne: 600'000 / 200'000) - ZI : coordonnées civils en MN03 (Berne: 0 / 0) - LV : système de projection pour MN95 (Berne 2'600'000 / 1'200'000) - DG : projection allemande Gauss-Krüger - AG : projection autrichienne Gauss-Krüger - TM : projection UTM 77 - 84 (F8.4) Cote du géoïde [m] = écart entre le géoïde et l'ellipsoïde défini par le code (Pos.89-90) 85 - 88 (A4) Provenance de la cote du géoïde 89 - 90 (A2) Code de l'ellipsoïde (ellipsoïde de référence pour la cote du géoïde et la déviation de la verticale) - CH : Bessel CH1903 - 3P : Bessel CH1903+ - 95 : GRS80 CHTRF95 - EF : ETRF93 - 84 : WGS84 91 - 96 (F6.1) Déviation de la verticale ETA (à l'altitude H) [cc] 97 - 102 (F6.1) Déviation de la verticale XI (à l'altitude H) [cc]103 - 106 (A4) Provenance de la déviation de la verticale107 - 112 (F6.1) Déviation de la verticale au niveau de la mer ETA0 [cc]113 - 118 (F6.1) Déviation de la verticale au niveau de la mer XI0 [cc]119 - 122 (A4) Provenance de la déviation de la verticale au niveau de la mer123 - 126 (A4) Code point pour RAUMTRI *)127 - 129 (I3) numérotation continue (pour GPS-Software) **)130 - 131 (A2) Flag pour GPS **)132 - 135 (I4) Numéro de session GPS (Day of Year) ***)136 - 138 (I3) Numéro de zone, seulement pour projection Gauss-Krüger ou Lambert ****)139 - 160 (A22) Réserve, texte supplémentaire
*) prévu pour code RAUMTRI **) nécessaire pour "Bernese GPS-Software" ***) nécessaire pour la distinction des sessions (fichier des mesures pour LTOP)****) pour les systèmes de projection à plusieurs zones
Format PE
$$PEC'est la ligne titreTRI150 PY 751030 4BL087334 612555.2300 224654.3300 657 568.3469 657MI -0.0531 144CH TRI152 PY 751030 4BL087336 612455.3300 224651.7400 657 584.6476 657MI -0.0524 144CH TRI153 PY 751030 4BL087337 612005.4500 224856.8900 657 545.0409 657MI -0.0409 144CH | | | | | | | | | | | | | | | 1234567890123456789012345678901234567890123456789012345678901234567890123456789012345678901 1 2 3 4 5 6 7 8 9
$$PE Type du fichier de coordonnées PE = Coordonnées planes, altitudes sur l'ellipsoïde
1 - 10 (A10) Identification du point, nom 11 - 14 (A4) Identification du point, type 15 - 22 (A8) Identification du point, date du repérage (YYYYMMDD) 23 - 26 (A4) Ordre, canton 27 - 32 (A6) Nouveau numéro: carte / numéro du point 33 - 44 (F12.4) Coordonnée Y [m] (Est) 45 - 56 (F12.4) Coordonnée X [m] (Nord) 57 - 60 (I4) Provenance des coordonnées 61 - 70 (F10.4) Altitude H (sur l'ellipsoïde) [m] 71 - 74 (I4) Provenance de l'altitude 75 - 76 (A2) Code des coordonnées - MI : coordonnées militaires en MN03 (Berne: 600'000 / 200'000) - ZI : coordonnées civils en MN03 (Berne: 0 / 0) - ...... 77 - 84 (F8.4) Cote du géoïde [m] = écart entre le géoïde et l'ellipsoïde défini par le code (Pos.89-90) 85 - 88 (I4) Provenance de la cote du géoïde 89 - 90 (A2) Code de l'ellipsoïde (ellipsoïde de référence pour la cote du géoïde et la
B

ANNEXE A : DESCRIPTION DU FORMAT LTOP
déviation de la verticale) - CH : Bessel CH1903 - 84 : WGS84 - ...... 91 - 96 (F6.1) Déviation de la verticale ETA (à l'altitude H) [cc] 97 - 102 (F6.1) Déviation de la verticale XI (à l'altitude H) [cc]103 - 106 (I4) Provenance de la déviation de la verticale107 - 112 (F6.1) Déviation de la verticale au niveau de la mer ETA0 [cc]113 - 118 (F6.1) Déviation de la verticale au niveau de la mer XI0 [cc]119 - 122 (I4) Provenance de la déviation de la verticale au niveau de la mer123 - 126 (A4) Code point pour RAUMTRI *)127 - 129 (I3) numérotation continue (pour GPS-Software) **)130 - 131 (A2) Flag pour GPS **)132 - 135 (I4) Numéro de session GPS (Day of Year) ***)136 - 138 (I3) Numéro de zone, seulement pour projection Gauss-Krüger ou Lambert ****)139 - 160 (A25) Réserve, texte supplémentaire
*) prévu pour code RAUMTRI **) nécessaire pour "Bernese GPS-Software" ***) nécessaire pour la distinction des sessions (fichier des mesures pour LTOP)****) pour les systèmes de projection à plusieurs zones
Format EL
$$ELC'est la ligne titreTRI150 PY 751030 4BL087334 +007 36 15.265890 +47 10 21.838950 657 617.1602 657CH -TRI152 PY 751030 4BL087336 7 36 10.521760 47 10 21.761880 657 633.4622 657CH -TRI153 PY 751030 4BL087337 7 35 49.178250 47 10 28.434750 657 594.7734 657CH -0.0490 114CH -10.9 14.9 660 0.0 0.0 114ZI 03 @ 264TEXT-..| | | | | | | | | | | | | | | | 1234567890123456789012345678901234567890123456789012345678901234567890123456789012345678901 1 2 3 4 5 6 7 8 9
$$EL Type du fichier de coordonnées EL Coordonnées ellipsoïdiques (géodésiques), en degrés, minutes et secondes sexagésimales
1 - 10 (A10) Identification du point, nom 11 - 14 (A4) Identification du point, type 15 - 22 (A8) Identification du point, date du repérage (YYYYMMDD) 23 - 26 (A4) Ordre, canton 27 - 32 (A6) Nouveau numéro: carte / numéro du point 33 - 37 (I5) Longitude: degrés 38 - 40 (I3) Longitude: minutes 41 - 50 (F10.6) Longitude: secondes 51 - 55 (I5) Latitude: degrés 56 - 58 (I3) Latitude: minutes 59 - 68 (F10.6) Latitude: secondes 69 - 72 (I4) Provenance des coordonnées 73 - 82 (F10.4) Altitude H (sur l'ellipsoïde) [m] 83 - 86 (I4) Provenance de l'altitude 87 - 88 (A2) Code système de référence - CH : Bessel CH1903 - 84 : WGS84 - ....... 89 - 96 (F8.4) Cote du géoïde [m] = écart entre le géoïde et l'ellipsoïde défini par le code (Pos.101-102) 97 - 100 (I4) Provenance de la cote du géoïde101 - 102 (A2) Code de l'ellipsoïde (ellipsoïde de référence pour la cote du géoïde et la déviation de la verticale) - CH : Bessel CH1903 - 84 : WGS84 - .......103 - 108 (F6.1) Déviation de la verticale ETA (à l'altitude H) [cc]109 - 114 (F6.1) Déviation de la verticale XI (à l'altitude H) [cc]115 - 118 (I4) Provenance de la déviation de la verticale119 - 124 (F6.1) Déviation de la verticale au niveau de la mer ETA0 [cc]125 - 130 (F6.1) Déviation de la verticale au niveau de la mer XI0 [cc]131 - 134 (I4) Provenance de la déviation de la verticale au niveau de la mer
C

ANNEXE A : DESCRIPTION DU FORMAT LTOP
135 - 138 (A4) Code point pour RAUMTRI *)139 - 141 (I3) numérotation continue (pour GPS-Software) **)142 - 143 (A2) Flag pour GPS **)144 - 147 (I4) Numéro de session GPS (Day of Year) ***)148 - 160 (A13) Réserve, texte supplémentaire
*) prévu pour code RAUMTRI **) nécessaire pour "Bernese GPS-Software" ***) nécessaire pour la distinction des sessions (fichier des mesures pour LTOP)
Format EM
$$EMC'est la ligne titreTRI150 PY 751030 4BL087334 +007 36.25443149 +47 10.36398252 657 617.1602 657CH -0.TRI152 PY 751030 4BL087336 7 36.17536265 47 10.36269799 657 633.4622 657CH -0.TRI153 PY 751030 4BL087337 7 35.81963751 47 10.47391248 657 594.7734 657CH -0.| | | | | | | | | | | | | | 1234567890123456789012345678901234567890123456789012345678901234567890123456789012345678901 1 2 3 4 5 6 7 8 9
$$EM Type du fichier de coordonnées EM Coordonnées ellipsoïdiques (géodésiques), en degrés et minutes sexagésimales
1 - 10 (A10) Identification du point, nom 11 - 14 (A4) Identification du point, type 15 - 22 (A8) Identification du point, date du repérage (YYYYMMDD) 23 - 26 (A4) Ordre, canton 27 - 32 (A6) Nouveau numéro: carte / numéro du point 33 - 37 (I5) Longitude: degrés 38 - 49 (F12.8) Longitude: minutes 50 - 54 (I5) Latitude: degrés 55 - 66 (F12.8) Latitude: minutes 67 - 70 (I4) Provenance des coordonnées 71 - 80 (F10.4) Altitude H (sur l'ellipsoïde) [m] 81 - 84 (I4) Provenance de l'altitude 85 - 86 (A2) Code système de référence - CH : Bessel CH1903 - 84 : WGS84 - ....... 87 - 94 (F8.4) Cote du géoïde [m] = écart entre le géoïde et l'ellipsoïde défini par le code (Pos.101-102) 95 - 98 (I4) Provenance de la cote du géoïde 99 - 100 (A2) Code de l'ellipsoïde (ellipsoïde de référence pour la cote du géoïde et la déviation de la verticale) - CH : Bessel CH1903 - 84 : WGS84 - .......101 - 106 (F6.1) Déviation de la verticale ETA (à l'altitude H) [cc]107 - 112 (F6.1) Déviation de la verticale XI (à l'altitude H) [cc]113 - 116 (I4) Provenance de la déviation de la verticale117 - 122 (F6.1) Déviation de la verticale au niveau de la mer ETA0 [cc]123 - 128 (F6.1) Déviation de la verticale au niveau de la mer XI0 [cc]129 - 132 (I4) Provenance de la déviation de la verticale au niveau de la mer133 - 136 (A4) Code point pour RAUMTRI *)137 - 139 (I3) numérotation continue (pour GPS-Software) **)140 - 141 (A2) Flag pour GPS **)142 - 145 (I4) Numéro de session GPS (Day of Year) ***)146 - 158 (A13) Réserve, texte supplémentaire
*) prévu pour code RAUMTRI **) nécessaire pour "Bernese GPS-Software" ***) nécessaire pour la distinction des sessions (fichier des mesures pour LTOP)
D

ANNEXE A : DESCRIPTION DU FORMAT LTOP
Format ED
$$EDC'est la ligne titreTRI150 PY 751030 4BL087334 +007.6042405250 +47.1727330400 657 617.1602 657CH -0.TRI152 PY 751030 4BL087336 7.6029227110 47.1727116300 657 633.4622 657CH -0.TRI153 PY 751030 4BL087337 7.5969939580 47.1745652100 657 594.7734 657CH -0.| | | | | | | | | | | | 1234567890123456789012345678901234567890123456789012345678901234567890123456789012345678901 1 2 3 4 5 6 7 8 9
$$ED Type du fichier de coordonnées ED = Coordonnées ellipsoïdiques (géodésiques), en degrés sexagésimaux (décimaux)
1 - 10 (A10) Identification du point, nom 11 - 14 (A4) Identification du point, type 15 - 22 (A8) Identification du point, date du repérage (YYYYMMDD) 23 - 26 (A4) Ordre, canton 27 - 32 (A6) Nouveau numéro: carte / numéro du point 33 - 48 (F16.10) Longitude: degrés (décimal) 49 - 64 (F16.10) Latitude: degrés (décimal) 65 - 68 (I4) Provenance des coordonnées 69 - 78 (F10.4) Altitude H (sur l'ellipsoïde) [m] 79 - 82 (I4) Provenance de l'altitude 83 - 84 (A2) Code système de référence - CH : Bessel CH1903 - 84 : WGS84 - ....... 85 - 92 (F8.4) Cote du géoïde [m] = écart entre le géoïde et l'ellipsoïde défini par le code (Pos.97-98) 93 - 96 (I4) Provenance de la cote du géoïde 97 - 98 (A2) Code de l'ellipsoïde (ellipsoïde de référence pour la cote du géoïde et la déviation de la verticale) - CH : Bessel CH1903 - 84 : WGS84 - ....... 99 - 104 (F6.1) Déviation de la verticale ETA (à l'altitude H) [cc]105 - 110 (F6.1) Déviation de la verticale XI (à l'altitude H) [cc]111 - 114 (I4) Provenance de la déviation de la verticale115 - 120 (F6.1) Déviation de la verticale au niveau de la mer ETA0 [cc]121 - 126 (F6.1) Déviation de la verticale au niveau de la mer XI0 [cc]127 - 130 (I4) Provenance de la déviation de la verticale au niveau de la mer131 - 134 (A4) Code point pour RAUMTRI *)135 - 137 (I3) numérotation continue (pour GPS-Software) **)138 - 139 (A2) Flag pour GPS **)140 - 143 (I4) Numéro de session GPS (Day of Year) ***)144 - 160 (A17) Réserve, texte supplémentaire
*) prévu pour code RAUMTRI **) nécessaire pour "Bernese GPS-Software" ***) nécessaire pour la distinction des sessions (fichier des mesures pour LTOP)
Format EN
$$ENC'est la ligne titreTRI150 PY 751030 4BL087334 +008.4491561390 +52.4141478200 657 568.4000 657CH -0.TRI152 PY 751030 4BL087336 8.4476919010 52.4141240300 657 578.7040 657CH -0.TRI153 PY 751030 4BL087337 8.4411043980 52.4161835700 657 549.8400 657CH -0.| | | | | | | | | | | | 1234567890123456789012345678901234567890123456789012345678901234567890123456789012345678901 1 2 3 4 5 6 7 8 9
$$EN Type du fichier de coordonnées EN = Coordonnées ellipsoïdiques (géodésiques), en gons
1 - 10 (A10) Identification du point, nom 11 - 14 (A4) Identification du point, type 15 - 22 (A8) Identification du point, date du repérage (YYYYMMDD) 23 - 26 (A4) Ordre, canton 27 - 32 (A6) Nouveau numéro: carte / numéro du point 33 - 48 (F16.10) Longitude: gons 49 - 64 (F16.10) Latitude : gons 65 - 68 (I4) Provenance des coordonnées 69 - 78 (F10.4) Altitude H (sur l'ellipsoïde) [m]
E
ANNEXE A : DESCRIPTION DU FORMAT LTOP
79 - 82 (I4) Provenance de l'altitude 83 - 84 (A2) Code système de référence - CH : Bessel CH1903 - 84 : WGS84 - ....... 85 - 92 (F8.4) Cote du géoïde [m] = écart entre le géoïde et l'ellipsoïde défini par le code (Pos.97-98) 93 - 96 (I4) Provenance de la cote du géoïde 97 - 98 (A2) Code de l'ellipsoïde (ellipsoïde de référence pour la cote du géoïde et la déviation de la verticale) - CH : Bessel CH1903 - 84 : WGS84 - ....... 99 - 104 (F6.1) Déviation de la verticale ETA (à l'altitude H) [cc]105 - 110 (F6.1) Déviation de la verticale XI (à l'altitude H) [cc]111 - 114 (I4) Provenance de la déviation de la verticale115 - 120 (F6.1) Déviation de la verticale au niveau de la mer ETA0 [cc]121 - 126 (F6.1) Déviation de la verticale au niveau de la mer XI0 [cc]127 - 130 (I4) Provenance de la déviation de la verticale au niveau de la mer131 - 134 (A4) Code point pour RAUMTRI *)135 - 137 (I3) numérotation continue (pour GPS-Software) **)138 - 139 (A2) Flag pour GPS **)140 - 143 (I4) Numéro de session GPS (Day of Year) ***)144 - 160 (A17) Réserve, texte supplémentaire
*) prévu pour code RAUMTRI **) nécessaire pour "Bernese GPS-Software" ***) nécessaire pour la distinction des sessions (fichier des mesures pour LTOP)
Format 3D
$$3DC'est la ligne titreTRI150 PY 751030 4BL087334 +4305840.61410 +574846.15700 +4655292.75750 657CH -0.0485 TRI152 PY 751030 4BL087336 4305866.54940 574748.81900 4655303.09540 657CH -0.0486 TRI153 PY 751030 4BL087337 4305750.10730 574279.80140 4655414.81580 657CH -0.0490 | | | | | | | | | | | 1234567890123456789012345678901234567890123456789012345678901234567890123456789012345678901 1 2 3 4 5 6 7 8 9
$$3D Type du fichier de coordonnées 3D = Coordonnées géocentriques tridimensionnelles
1 - 10 (A10) Identification du point, nom 11 - 14 (A4) Identification du point, type 15 - 22 (A8) Identification du point, date du repérage (YYYYMMDD) 23 - 26 (A4) Ordre, canton 27 - 32 (A6) Nouveau numéro: carte / numéro du point 33 - 47 (F15.5) Coordonnée géocentrique X [m] 48 - 62 (F15.5) Coordonnée géocentrique Y [m] 63 - 77 (F15.5) Coordonnée géocentrique Z [m] 78 - 81 (I4) Provenance des coordonnées 82 - 83 (A2) Code système de référence - CH : Bessel CH1903 - 84 : WGS84 - ....... 84 - 91 (F8.4) Cote du géoïde [m] = écart entre le géoïde et l'ellipsoïde défini par le code (Pos.96-97) 92 - 95 (I4) Provenance de la cote du géoïde 96 - 97 (A2) Code de l'ellipsoïde (ellipsoïde de référence pour la cote du géoïde et la déviation de la verticale) - CH : Bessel CH1903 - 84 : WGS84 - ....... 98 - 103 (F6.1) Déviation de la verticale ETA (à l'altitude H) [cc]104 - 109 (F6.1) Déviation de la verticale XI (à l'altitude H) [cc]110 - 113 (I4) Provenance de la déviation de la verticale114 - 119 (F6.1) Déviation de la verticale au niveau de la mer ETA0 [cc]120 - 125 (F6.1) Déviation de la verticale au niveau de la mer XI0 [cc]126 - 129 (I4) Provenance de la déviation de la verticale au niveau de la mer130 - 133 (A4) Code point pour RAUMTRI *)134 - 136 (I3) numérotation continue (pour GPS-Software) **)137 - 138 (A2) Flag pour GPS **)139 - 142 (I4) Numéro de session GPS (Day of Year) ***)143 - 160 (A18) Réserve, texte supplémentaire
*) prévu pour code RAUMTRI
F
ANNEXE A : DESCRIPTION DU FORMAT LTOP
**) nécessaire pour "Bernese GPS-Software" ***) nécessaire pour la distinction des sessions (fichier des mesures pour LTOP)
Format des fichiers mesures LTOP
Les fichiers de mesures utilisés à l'Office Fédéral de Topographie sont basés sur des formats fixes, c'est à dire que les différentes indications et les coordonnées doivent être placées dans des colonnes spécifiques.La première ligne d'un fichier mesures LTOPdoit commencer avec $$ME. Le reste da la ligne est commentaire. Chaque fichier de mesures peut contenir des lignes de commentaire, qui doivent commencer par **.
Format ME
$$ME TRIANGULATION 4. ORDNUNG, KANTON AARGAU, LK-BLATT 1089ST89.345 SCHOEN 7. STATION1B.MEIER 01.01.85RI89.469 .6 0.00000RI89.472 .6 86.47140RI89.472 .6 87.47140HW89.469 .6 1.47220 1.164 2.000ZD89.472 .6 98.59200 1.164 2.000ST89.466 .6 1.464STATION2 02.01.85 5.0RI89.467 .6 0.00000RI89.470 .6 40.66420RI89.469 .2 57.51640 100.0RI89.469 .6 67.72580SLS287 YXRMHX-LY89.466 .6 645366.165LX89.466 .6 246188.349LH89.466 .6 442.290| | | | | | | | | | | | |123456789012345678901234567890123456789012345678901234567890123456789012345678901234567890 1 2 3 4 5 6 7 8 9
Format des lignes de station des observations terresteres
1 - 2 (A2) type d'observation (toujours ST) 3 - 12 (A10) nom de la station 13 - 16 (A4) type de la station 25 - 36 (A12) indications relatives à la météo 37 - 42 (F6.x) erreur moyenne générale des directions en cc 43 - 46 (I4) groupe de distances générale 47 - 52 (F6.x) hauteur d'instrument 53 - 60 (A8) carnet (resp. ordinateur) de terrain 61 - 78 (A18) observateur et date 85 - 90 (F6.x) erreur de centrage en mm
Format des lignes des observations terrestres
1 - 2 (A2) type d'observation 3 - 12 (A10) nom du point cible 13 - 16 (A4) type du point cible 25 - 36 (F12.x)valeur mesurée 37 - 42 (F6.x) erreur moyenne de l'observation 43 - 46 (I4) groupe d'observation 47 - 52 (F6.x) hauteur d'instrument 53 - 58 (F6.x) hauteur de signal 85 - 90 (F6.x) erreur de centrage de la cible in mm
Format des lignes de station GPS
1 - 2 (A2) type d'observation (toujours SL) 3 - 12 (A10) commentaire 37 - 42 (F6.x) erreur moyenne des observations GPS in mm 43 - 52 (A10) nom de la série GPS
Format des lignes d'observations GPS
1 - 2 (A2) type de l'observation (seulement LY, LX ou LH) 3 - 12 (A10) nom du point 13 - 16 (A4) type du point 25 - 36 (F12.x)coordonnée mesurée 37 - 42 (F6.x) erreur moyenne de la coordonnée en mm
G
ANNEXE A : DESCRIPTION DU FORMAT LTOP
Liste des types d'observation acceptés
** ligne de commentaireST données relatives à une station des observations terrestreSL données relatives à une station des observations GPSAZ azimut astronomiqueAP gisement dans le plan de projectionRI mesure de direction en gonRA mesure de direction en degrés sexagésimauxDS distance obliqueDP distance horizontale dans le plan de projectionDB distance horizontale à l'altitude du point viséHW angle vertical en gonZD distance zénithale en gonHA angle vertical en degrés sexagésimauxDY,DX,DH différences de coordonnées dans le plan de projectionYY,XX,HH coordonnées dans le plan de projectionLY,LX,LH coordonnées déterminées par GPS
H
ANNEXE B : EXEMPLE DE FICHIER DE PARAMÉTRAGE DU CALCUL DE COORDONNÉES APPROCHÉES
ANNEXE B : EXEMPLE DE FICHIER DE PARAMÉTRAGE DU CALCUL DE COORDONNÉES APPROCHÉES
+-------------------------------------------------------------------------------------+| _____ _____ _____ _____ _____ _____ _ _____ || |_ _| / _ \ | _ \ |_ _| / _ \ / _ \ | | / ___/ || | | | | | | | |_| | | | | | | | | | | | | | | |___ || | | | | | | | ___/ | | | | | | | | | | | | \___ \ || | | | |_| | | | | | | |_| | | |_| | | |___ ___| | || |_| \_____/ |_| |_| \_____/ \_____/ |_____| /_____/ || _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ || | | | | | |_| | \ | | |\| |\| |_ |_ |_ /_\ |_| |_| |_| | | | |_| |_ |_ |_ || |_ |_| |_| | \ |_/ |_| | | | | |_ |_ _| | | | | | \ |_| |_ | | |_ |_ _| || || FICHIER DE PARAMETRAGE || || TPLM-3D -- Givors |+-------------------------------------------------------------------------------------+
Contrôle des points par triangulateration1
Estimation robuste plani0
Précision distance [m]emqD0.015Précision angulaire [gon]emqA0.005
Tolérance écart distance horizontale [m]Tedh0.10
Tolérance écart dénivelée partielle [m]Tedz0.10
Tolérance écart lat. à 100 m. V0 [m]Tvi0.25
Ratio dist. max V0Rdmax3
Paramètres estimation robuste hw_HZ0.25hw_DH 0.25 hw_DZ0.10 sl-2.5
Nombre d'itération limiteIterLimit2
Erreur résiduelle normée maxiwiZ5.1wiXY5.1
I
ANNEXE B : EXEMPLE DE FICHIER DE PARAMÉTRAGE DU CALCUL DE COORDONNÉES APPROCHÉES
Emq Plani maxi acceptée (statut Point douteux si emq plani > emqXY max) [m]sXY0.40
Niveau de fiabilité de recalcul des points douteuxnivF_ptdout2
Chemin de destination du fichier de coordonnées approchéeschem_cappW:\2012020.0 OA3D 2012\02_Terrain\01_Theo\02_CALCUL\07_BLOC_4110-4111-4112\05_COORD_APP_TOPTOOLS\coord_app.koo
J
ANNEXE C : EXTRAITS DE FICHIER DE RÉSULTATS D'UN CALCUL DE COORDONNÉES APPROCHÉES
ANNEXE C : EXTRAITS DE FICHIER DE RÉSULTATS D'UN CALCUL DE COORDONNÉES APPROCHÉES
CalcCoordApp : Begin+-------------------------------------------------------------------------------------------------------------+| _____ _____ _____ _____ _____ _____ _ _____ || |_ _| / _ \ | _ \ |_ _| / _ \ / _ \ | | / ___/ || | | | | | | | |_| | | | | | | | | | | | | | | |___ || | | | | | | | ___/ | | | | | | | | | | | | \___ \ || | | | |_| | | | | | | |_| | | |_| | | |___ ___| | || |_| \_____/ |_| |_| \_____/ \_____/ |_____| /_____/ || _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ || | | | | | |_| | \ | | |\| |\| |_ |_ |_ /_\ |_| |_| |_| | | | |_| |_ |_ |_ || |_ |_| |_| | \ |_/ |_| | | | | |_ |_ _| | | | | | \ |_| |_ | | |_ |_ _| || || LISTING DES RESULTATS || || TPLM-3D -- Givors, le : 07/08/2012; 14:32:41 |+-------------------------------------------------------------------------------------------------------------+
================================== RESUME INTERPRETATION MESURES ET DONNEES ==================================
Paramètres de calcul : ----------------------
Contrôle des points par Triangulatération : ACTIVEEstimation robuste pour la Triangulatération : ACTIVE
Précision instrument :emqD = 0.015 m.emqA = 0.005 gon.
Tolérance écart distance horizontale, et dénivelée partielle : Tedh = 0.100 m.Tedz = 0.010 m.
V0 :Tolérance écart latéral à 100 m et Ratio dist max: Tv0 = 0.250 m.Rdmax = 3
Paramètres estimation robustehw_HZ = 0.25hw_DH = 0.25hw_DZ = 0.25sl = -2.50
Nombre d'itérations limite :3
Erreur résiduelle normée maxi : wiZ = 5.10wiXY = 5.10
Emq Plani maxi acceptée : sXY = 0.40
Niveau de fiabilité de re-calcul des points douteux :2
Chemin de destination du fichier de coordonnées approchées : W:\2012901.0 PFE MT\19_présentationTOPTOOLS_CAPP\coord_app_faute.koo
Interpretation des donnees : ----------------------------
Il y a 6 points d'appui et 0 gisement dans le fichier de données: W:\2012901.0 PFE MT\19_présentationTOPTOOLS_CAPP\donnees.txt
Interpretation des mesures : ----------------------------
La station R.2 (n° 2), vise : 6 points du réseau --> 1, R.1, R.3, R.4, R.5, R.6, La station R.3 (n° 3), vise : 5 points du réseau --> 1, R.2, R.4, R.5, R.6, La station 1 (n° 4), vise : 8 points du réseau --> 2, 3, 4, 5, 6, R.2, R.3, R.6,
[… etc]
Il y a 78 visées de polygo réduites dans le fichier GSI
Récapitulatif des données et inconnues :----------------------------------------
--> Nombre de pts d'appui : 6--> Nombre de pts inconnus : 8
K
ANNEXE C : EXTRAITS DE FICHIER DE RÉSULTATS D'UN CALCUL DE COORDONNÉES APPROCHÉES
================================ CONTROLE DES OBSERVATIONS REDUITES (DH et DZ) ===============================
1. Contrôle des distances horizontales:---------------------------------------
--> Tableau récapitulatif des visées HORS TOLERANCE : (Tolérance : 0.100 m) -------------------------------------------------
+--------------------------------+-----------------+-----------------+| Station (n°) --> Pt visé | Ecart (m) | Test |+--------------------------------+-----------------+-----------------+| 1(n°4) --> 2 | 6.47134 | HORS TOLERANCE | | 2(n°13) --> 1 | - 6.47134 | HORS TOLERANCE | | 2(n°13) --> 5 | 6.47138 | HORS TOLERANCE | | 5(n°5) --> 2 | - 6.47138 | HORS TOLERANCE | +--------------------------------+-----------------+-----------------+
--> Tableaux des écarts à la moyenne : (Tolérance : 0.100 m) ----------------------------------
Remarques : -----------* La distance moyenne est calculée par une méthode robuste.* Les distances HORS TOLERANCE sont écartées du calcul de la distance moyenne.* La distance moyenne est désactivée, si le nombre de distances intermédiaires HORS TOLERANCE est égale à la moitié du nombre total de distances intermédiaires.
+--------------------------------------------------------------------------------------+| Dh moyen de 1 vers 2 : -999.99990 m. |+--------------------------------+-----------------+-----------------+-----------------+| Station (n°) --> Pt visé | Dh observée (m) | Ecart (m) | Test Tolérance |+--------------------------------+-----------------+-----------------+-----------------+| 1(n°4) --> 2 | 30.57824 | 6.47134 | HORS TOLERANCE | | 2(n°13) --> 1 | 17.63556 | -6.47134 | HORS TOLERANCE | +--------------------------------+-----------------+-----------------+-----------------+
+--------------------------------------------------------------------------------------+| Dh moyen de 1 vers 3 : 30.96172 m. |+--------------------------------+-----------------+-----------------+-----------------+| Station (n°) --> Pt visé | Dh observée (m) | Ecart (m) | Test Tolérance |+--------------------------------+-----------------+-----------------+-----------------+| 1(n°4) --> 3 | 30.96010 | -0.00161 | OK! | | 3(n°14) --> 1 | 30.96333 | 0.00161 | OK! | +--------------------------------+-----------------+-----------------+-----------------+
[… etc]
+--------------------------------------------------------------------------------------+| Dh moyen de 5 vers 2 : -999.99990 m. |+--------------------------------+-----------------+-----------------+-----------------+| Station (n°) --> Pt visé | Dh observée (m) | Ecart (m) | Test Tolérance |+--------------------------------+-----------------+-----------------+-----------------+| 2(n°13) --> 5 | 30.57864 | 6.47138 | HORS TOLERANCE | | 5(n°5) --> 2 | 17.63587 | -6.47138 | HORS TOLERANCE | +--------------------------------+-----------------+-----------------+-----------------+
+--------------------------------------------------------------------------------------+| Dh moyen de 5 vers 3 : 18.51214 m. |+--------------------------------+-----------------+-----------------+-----------------+| Station (n°) --> Pt visé | Dh observée (m) | Ecart (m) | Test Tolérance |+--------------------------------+-----------------+-----------------+-----------------+| 3(n°14) --> 5 | 18.51048 | -0.00166 | OK! | | 5(n°5) --> 3 | 18.51380 | 0.00166 | OK! | +--------------------------------+-----------------+-----------------+-----------------+
[… etc]
2. Contrôle des dénivelés partielles:-------------------------------------
--> Tableau récapitulatif des visées HORS TOLERANCE : (Tolérance : 0.010 m) -------------------------------------------------
+--------------------------------+-----------------+-----------------+| Station (n°) --> Pt visé | Ecart (m) | Test Tolérance |+--------------------------------+-----------------+-----------------+| 1(n°4) --> 2 | 0.01816 | HORS TOLERANCE | | 2(n°13) --> 1 | - 0.01816 | HORS TOLERANCE | | 2(n°13) --> 5 | 0.01578 | HORS TOLERANCE | | 5(n°5) --> 2 | - 0.01578 | HORS TOLERANCE | +--------------------------------+-----------------+-----------------+
--> Tableaux des écarts à la moyenne : (Tolérance : 0.010 m) ----------------------------------
Remarques : -----------* La dénivelé moyenne est calculée par une méthode robuste.* Les dénivelés moyennes sont indiquées en valeur absolue et dans le sens d'écoulement des eaux (--> point le plus haut vers point le plus bas).* Les dénivelés HORS TOLERANCE sont écartées du calcul de la dénivelé moyenne.* La dénivelé moyenne est désactivée, si le nombre de dénivelés intermédiaires HORS TOLERANCE est égale à la moitié du nombre total de dénivelés intermédiaires.
L
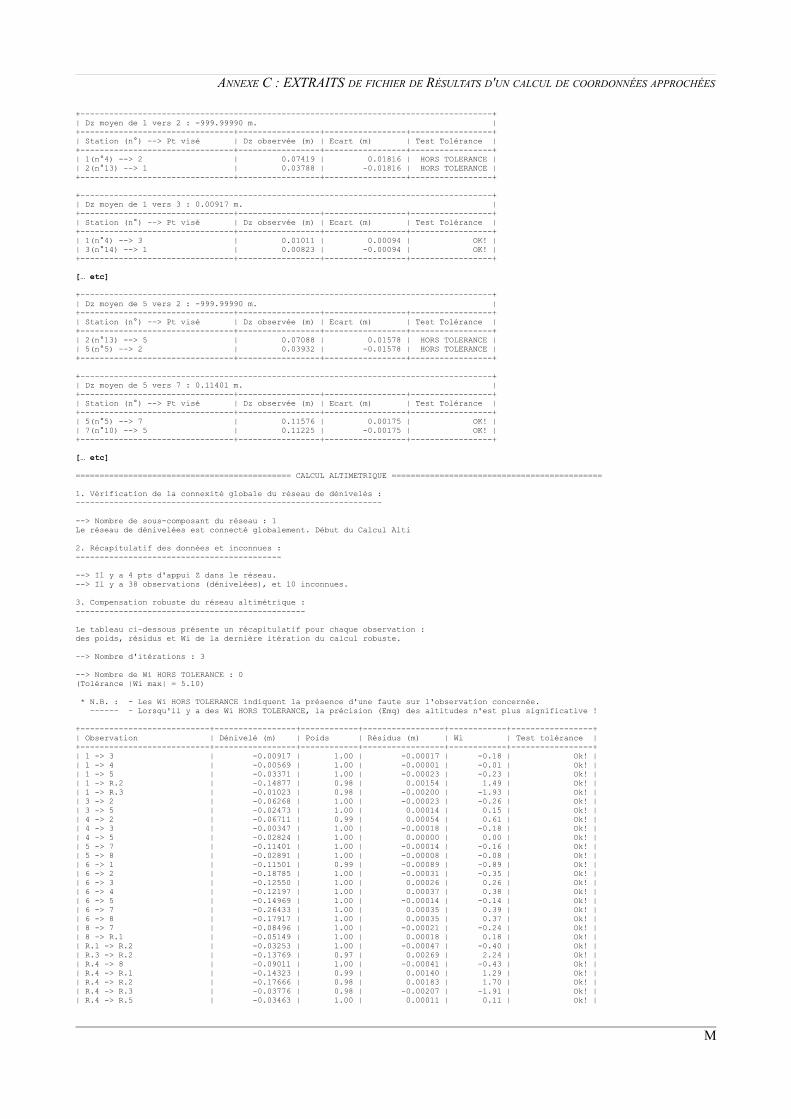
ANNEXE C : EXTRAITS DE FICHIER DE RÉSULTATS D'UN CALCUL DE COORDONNÉES APPROCHÉES
+--------------------------------------------------------------------------------------+| Dz moyen de 1 vers 2 : -999.99990 m. |+--------------------------------+-----------------+-----------------+-----------------+| Station (n°) --> Pt visé | Dz observée (m) | Ecart (m) | Test Tolérance |+--------------------------------+-----------------+-----------------+-----------------+| 1(n°4) --> 2 | 0.07419 | 0.01816 | HORS TOLERANCE | | 2(n°13) --> 1 | 0.03788 | -0.01816 | HORS TOLERANCE | +--------------------------------+-----------------+-----------------+-----------------+
+--------------------------------------------------------------------------------------+| Dz moyen de 1 vers 3 : 0.00917 m. |+--------------------------------+-----------------+-----------------+-----------------+| Station (n°) --> Pt visé | Dz observée (m) | Ecart (m) | Test Tolérance |+--------------------------------+-----------------+-----------------+-----------------+| 1(n°4) --> 3 | 0.01011 | 0.00094 | OK! | | 3(n°14) --> 1 | 0.00823 | -0.00094 | OK! | +--------------------------------+-----------------+-----------------+-----------------+
[… etc]
+--------------------------------------------------------------------------------------+| Dz moyen de 5 vers 2 : -999.99990 m. |+--------------------------------+-----------------+-----------------+-----------------+| Station (n°) --> Pt visé | Dz observée (m) | Ecart (m) | Test Tolérance |+--------------------------------+-----------------+-----------------+-----------------+| 2(n°13) --> 5 | 0.07088 | 0.01578 | HORS TOLERANCE | | 5(n°5) --> 2 | 0.03932 | -0.01578 | HORS TOLERANCE | +--------------------------------+-----------------+-----------------+-----------------+
+--------------------------------------------------------------------------------------+| Dz moyen de 5 vers 7 : 0.11401 m. |+--------------------------------+-----------------+-----------------+-----------------+| Station (n°) --> Pt visé | Dz observée (m) | Ecart (m) | Test Tolérance |+--------------------------------+-----------------+-----------------+-----------------+| 5(n°5) --> 7 | 0.11576 | 0.00175 | OK! | | 7(n°10) --> 5 | 0.11225 | -0.00175 | OK! | +--------------------------------+-----------------+-----------------+-----------------+
[… etc]
============================================= CALCUL ALTIMETRIQUE ============================================
1. Vérification de la connexité globale du réseau de dénivelés :----------------------------------------------------------------
--> Nombre de sous-composant du réseau : 1Le réseau de dénivelées est connecté globalement. Début du Calcul Alti
2. Récapitulatif des données et inconnues :-------------------------------------------
--> Il y a 4 pts d'appui Z dans le réseau.--> Il y a 38 observations (dénivelées), et 10 inconnues.
3. Compensation robuste du réseau altimétrique :------------------------------------------------
Le tableau ci-dessous présente un récapitulatif pour chaque observation :des poids, résidus et Wi de la dernière itération du calcul robuste.
--> Nombre d'itérations : 3
--> Nombre de Wi HORS TOLERANCE : 0(Tolérance |Wi max| = 5.10)
* N.B. : - Les Wi HORS TOLERANCE indiquent la présence d'une faute sur l'observation concernée. ------ - Lorsqu'il y a des Wi HORS TOLERANCE, la précision (Emq) des altitudes n'est plus significative !
+---------------------------+-----------------+------------+-----------------+------------+-----------------+| Observation | Dénivelé (m) | Poids | Résidus (m) | Wi | Test tolérance |+---------------------------+-----------------+------------+-----------------+------------+-----------------+| 1 -> 3 | -0.00917 | 1.00 | -0.00017 | -0.18 | Ok! || 1 -> 4 | -0.00569 | 1.00 | -0.00001 | -0.01 | Ok! || 1 -> 5 | -0.03371 | 1.00 | -0.00023 | -0.23 | Ok! || 1 -> R.2 | -0.14877 | 0.98 | 0.00154 | 1.49 | Ok! || 1 -> R.3 | -0.01023 | 0.98 | -0.00200 | -1.93 | Ok! || 3 -> 2 | -0.06268 | 1.00 | -0.00023 | -0.26 | Ok! || 3 -> 5 | -0.02473 | 1.00 | 0.00014 | 0.15 | Ok! || 4 -> 2 | -0.06711 | 0.99 | 0.00054 | 0.61 | Ok! || 4 -> 3 | -0.00347 | 1.00 | -0.00018 | -0.18 | Ok! || 4 -> 5 | -0.02824 | 1.00 | 0.00000 | 0.00 | Ok! || 5 -> 7 | -0.11401 | 1.00 | -0.00014 | -0.16 | Ok! || 5 -> 8 | -0.02891 | 1.00 | -0.00008 | -0.08 | Ok! || 6 -> 1 | -0.11501 | 0.99 | -0.00089 | -0.89 | Ok! || 6 -> 2 | -0.18785 | 1.00 | -0.00031 | -0.35 | Ok! || 6 -> 3 | -0.12550 | 1.00 | 0.00026 | 0.26 | Ok! || 6 -> 4 | -0.12197 | 1.00 | 0.00037 | 0.38 | Ok! || 6 -> 5 | -0.14969 | 1.00 | -0.00014 | -0.14 | Ok! || 6 -> 7 | -0.26433 | 1.00 | 0.00035 | 0.39 | Ok! || 6 -> 8 | -0.17917 | 1.00 | 0.00035 | 0.37 | Ok! || 8 -> 7 | -0.08496 | 1.00 | -0.00021 | -0.24 | Ok! || 8 -> R.1 | -0.05149 | 1.00 | 0.00018 | 0.18 | Ok! || R.1 -> R.2 | -0.03253 | 1.00 | -0.00047 | -0.40 | Ok! || R.3 -> R.2 | -0.13769 | 0.97 | 0.00269 | 2.24 | Ok! || R.4 -> 8 | -0.09011 | 1.00 | -0.00041 | -0.43 | Ok! || R.4 -> R.1 | -0.14323 | 0.99 | 0.00140 | 1.29 | Ok! || R.4 -> R.2 | -0.17666 | 0.98 | 0.00183 | 1.70 | Ok! || R.4 -> R.3 | -0.03776 | 0.98 | -0.00207 | -1.91 | Ok! || R.4 -> R.5 | -0.03463 | 1.00 | 0.00011 | 0.11 | Ok! |
M

ANNEXE C : EXTRAITS DE FICHIER DE RÉSULTATS D'UN CALCUL DE COORDONNÉES APPROCHÉES
| R.5 -> 8 | -0.05612 | 1.00 | 0.00011 | 0.12 | Ok! || R.5 -> R.1 | -0.10768 | 1.00 | 0.00037 | 0.34 | Ok! || R.5 -> R.2 | -0.14215 | 0.98 | 0.00184 | 1.70 | Ok! || R.5 -> R.3 | -0.00285 | 0.98 | -0.00246 | -2.26 | Ok! || R.6 -> 1 | -0.07541 | 1.00 | 0.00003 | 0.03 | Ok! || R.6 -> R.1 | -0.19052 | 0.99 | 0.00092 | 0.77 | Ok! || R.6 -> R.2 | -0.22380 | 0.99 | 0.00120 | 1.01 | Ok! || R.6 -> R.3 | -0.08623 | 0.99 | -0.00137 | -1.15 | Ok! || R.6 -> R.4 | -0.04863 | 0.99 | 0.00086 | 0.80 | Ok! || R.6 -> R.5 | -0.08207 | 1.00 | -0.00022 | -0.21 | Ok! |+---------------------------+-----------------+------------+-----------------+------------+-----------------+
4. Altitudes compensées des points :------------------------------------
+-----------------+-----------------+-----------------+| Point | Altitude (m) | Emq (m) |+-----------------+-----------------+-----------------+| 1 | 100.1142 | +/- 0.0006 || 2 | 100.0420 | +/- 0.0010 || 3 | 100.1049 | +/- 0.0008 || 4 | 100.1085 | +/- 0.0008 || 5 | 100.0803 | +/- 0.0008 || 6 | 100.2301 | +/- 0.0008 || 7 | 99.9661 | +/- 0.0009 || 8 | 100.0513 | +/- 0.0006 || R.4 | 100.1418 | +/- 0.0005 || R.5 | 100.1073 | +/- 0.0005 |+-----------------+-----------------+-----------------+
============================================ CALCUL PLANIMETRIQUE ============================================
1. Vérification de la connexité globale du réseau :---------------------------------------------------
* de distances : --> Nombre de sous-composant du réseau : 1* de directions :--> Nombre de sous-composant du réseau : 1
Les réseaux de distances et de directions sont connectés globalement. Début du Calcul Plani.
2. Récapitulatif des données :------------------------------
--> Il y a 5 pts d'appui XY dans le réseau--> Il n'y a pas de gisement d'orientation dans les données.
3. Initialisation du calcul :-----------------------------
Cas n°1 : On dispose au minimum d'un point connu et d'un gisement d'orientation issu de ce même point.
--> Calcul des V0 : --------------(Tolérance sur un écart latéral à 100 m : 0.250 m.) :
N.B. : * Le V0 moyen est calculé par une méthode robuste.------ * Les visées 'HORS TOLERANCE' ne sont pas prises en compte dans le calcul du V0 moyen. * Lorsqu'il y a trop de visées 'HORS TOLERANCE' les V0 de stations ne sont pas calculés. Faute probable sur les observations Hz ou matricules des points visées.
+------------------------------------------------------------------------------------------------------------------------+| V0 Station R.1(n°12) : 343.00061 gon. (Nb de visées : 3; Dist max : 59.75289 m.) |+-----------------+-----------------+----------------+-----------------+-------------+-----------------+-----------------+| Point Visé | Distance app. | Ecart Dh obs. | V0 app. | Ecart lat. | Ecart à 100 m | Test Tolérance || | (m) | (m) | (gon) | (m) | (m) | |+-----------------+-----------------+----------------+-----------------+-------------+-----------------+-----------------+| R.2 | 59.75289 | -0.00001 | 343.00230 | 0.00158 | 0.00264 | Ok! || R.4 | 16.24855 | 0.00209 | 342.99741 | -0.00082 | -0.00503 | Ok! || R.5 | 27.26478 | 0.00182 | 343.00213 | 0.00065 | 0.00239 | Ok! |+-----------------+-----------------+----------------+-----------------+-------------+-----------------+-----------------+
+------------------------------------------------------------------------------------------------------------------------+| V0 Station R.2(n°2) : 288.48707 gon. (Nb de visées : 4; Dist max : 59.75289 m.) |+-----------------+-----------------+----------------+-----------------+-------------+-----------------+-----------------+| Point Visé | Distance app. | Ecart Dh obs. | V0 app. | Ecart lat. | Ecart à 100 m | Test Tolérance || | (m) | (m) | (gon) | (m) | (m) | |+-----------------+-----------------+----------------+-----------------+-------------+-----------------+-----------------+| R.1 | 59.75289 | -0.00001 | 288.48880 | 0.00162 | 0.00270 | Ok! || R.3 | 12.62127 | -0.00147 | 288.49338 | 0.00125 | 0.00990 | Ok! || R.4 | 49.88283 | -0.00294 | 288.48194 | -0.00403 | -0.00807 | Ok! || R.5 | 33.23414 | 0.00004 | 288.48419 | -0.00151 | -0.00453 | Ok! |+-----------------+-----------------+----------------+-----------------+-------------+-----------------+-----------------+
[… etc]
4. Calcul des coordonnées par filiation successive :----------------------------------------------------
--> Iteration n° 1: 5 Points connus (et/ou inconnus déjà calculés) ---------------
Niveau de fiabilité de détermination des points : 1
>> Mode de calcul des points approchés : ------------------------------------
N

ANNEXE C : EXTRAITS DE FICHIER DE RÉSULTATS D'UN CALCUL DE COORDONNÉES APPROCHÉES
Le point 1(988.924; 1085.030) est calculé par rayonnement depuis R.2.Le point 3(1000.370; 1056.264) est calculé par rayonnement depuis 1.Le point 4(1001.041; 1052.265) est calculé par rayonnement depuis 1.Le point 5(997.624; 1037.955) est calculé par rayonnement depuis 1.Le point 6(1006.317; 1024.592) est calculé par rayonnement depuis 1.Le point 7(1002.551; 1009.191) est calculé par rayonnement depuis 6.Le point 8(1008.646; 1004.081) est calculé par rayonnement depuis 6.Le point R.6(1002.520; 1036.307) est calculé par rayonnement depuis 1.
>> Taleau récapitulatif des points calculés: ----------------------------------------
+-----------------+-----------------+-----------------+---------+---------+------------+| Point | X (m) | Y (m) | Type | Fiab. | Contrôlé |+-----------------+-----------------+-----------------+---------+---------+------------+| 1 | 988.9240 | 1085.0329 | RAY. | 1 | Oui || 3 | 1000.3696 | 1056.2644 | RAY. | 1 | Non || 4 | 1001.0435 | 1052.2627 | RAY. | 1 | Oui || 5 | 997.6330 | 1037.9343 | RAY. | 1 | Oui || 6 | 1006.3328 | 1024.5707 | RAY. | 1 | Oui || 7 | 1002.5561 | 1009.1823 | RAY. | 1 | Oui || 8 | 1008.6259 | 1004.0882 | RAY. | 1 | Oui || R.6 | | | RAY. | 1 | Douteux |+-----------------+-----------------+-----------------+---------+---------+------------+
>> Résumé des compensations robustes par TRIANGULATERATION: --------------------------------------------------------
>>> Contrôle du point 1 par Triangulatération : --------------------------------------------
Attention !! Le calcul robuste est activé !!
* Récapitulatif des observations pour le calcul de 1 : ---> nombre de visées d'intersections : 2 ---> nombre de visées de relèvements : 2 ---> nombre de distances : 2
* Les coordonnées approchées du point 1 sont : --> X = 988.92438 m. --> Y = 1085.02972 m.
* Les coordonnées compensées du point 1 sont : --> X = 988.92402 +/- 0.00152 m. --> Y = 1085.03288 +/- 0.00307 m.
* Le V0 compensé de la station (n°) :
--> 1 (n°4) est : 77.90432 +/- 0.00435 gon. --> R.2 (n°2) est : 288.48681 +/- 0.00197 gon. --> R.3 (n°3) est : 44.50361 +/- 0.00226 gon.
* Erreur moyenne de l'unité de poids a posteriori : 0.00006
* Nombre d'itérations : 3
* Nombre de Wi HORS TOLERANCE : 0(Tolérance |Wi max| = 5.10)
N.B. : - Les résidus sont en mètre pour les observations Dh et en radian pour les observations Hz ------ - Les Wi HORS TOLERANCE indiquent la présence d'une faute sur l'observation concernée. - Lorsqu'il y a des Wi HORS TOLERANCE, la precision (Emq) des points et V0 n'est plus significative !
+---------------------------+------------+-------------------+------------+-----------------+| Observation | Poids | Résidus (m/gon) | Wi | Test tolérance |+---------------------------+------------+-------------------+------------+-----------------+| Dh 1 -> R.2 | 1.0000 | 0.00315 | 0.27 | Ok! || Dh 1 -> R.3 | 1.0000 | 0.00269 | 0.23 | Ok! || Hz 1 -> R.2 | 1.0000 | 0.00147 | 0.72 | Ok! || Hz 1 -> R.3 | 1.0000 | -0.00147 | -0.72 | Ok! || Hz R.2 -> 1 | 1.0000 | -0.00094 | -0.46 | Ok! || Hz R.2 -> R.1 | 1.0000 | 0.00192 | 0.54 | Ok! || Hz R.2 -> R.3 | 0.9999 | 0.00652 | 1.83 | Ok! || Hz R.2 -> R.4 | 0.9999 | -0.00489 | -1.37 | Ok! || Hz R.2 -> R.5 | 1.0000 | -0.00261 | -0.73 | Ok! || Hz R.3 -> 1 | 1.0000 | 0.00102 | 0.52 | Ok! || Hz R.3 -> R.2 | 1.0000 | 0.00525 | 1.55 | Ok! || Hz R.3 -> R.4 | 1.0000 | -0.00329 | -0.97 | Ok! || Hz R.3 -> R.5 | 1.0000 | -0.00298 | -0.88 | Ok! |+---------------------------+------------+-------------------+------------+-----------------+
>>> Contrôle du point 3 par Triangulatération : --------------------------------------------
Attention !! Le calcul robuste est activé !!
* Récapitulatif des observations pour le calcul de 3 : ---> nombre de visées d'intersections : 1 ---> nombre de visées de relèvements : 0 ---> nombre de distances : 1
* Les coordonnées approchées du point 3 sont : --> X = 1000.36961 m. --> Y = 1056.26439 m.
Le point 3 n'est pas contrôlable par triangulatération
O
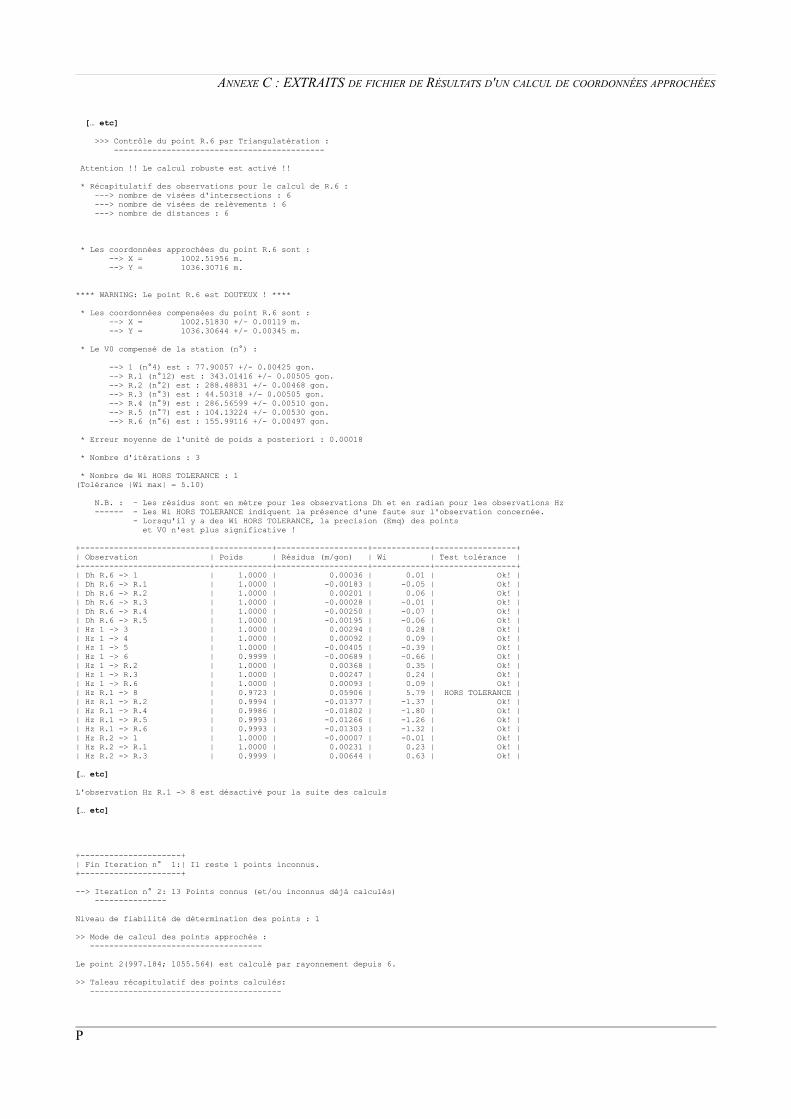
ANNEXE C : EXTRAITS DE FICHIER DE RÉSULTATS D'UN CALCUL DE COORDONNÉES APPROCHÉES
[… etc]
>>> Contrôle du point R.6 par Triangulatération : --------------------------------------------
Attention !! Le calcul robuste est activé !!
* Récapitulatif des observations pour le calcul de R.6 : ---> nombre de visées d'intersections : 6 ---> nombre de visées de relèvements : 6 ---> nombre de distances : 6
* Les coordonnées approchées du point R.6 sont : --> X = 1002.51956 m. --> Y = 1036.30716 m.
**** WARNING: Le point R.6 est DOUTEUX ! ****
* Les coordonnées compensées du point R.6 sont : --> X = 1002.51830 +/- 0.00119 m. --> Y = 1036.30644 +/- 0.00345 m.
* Le V0 compensé de la station (n°) :
--> 1 (n°4) est : 77.90057 +/- 0.00425 gon. --> R.1 (n°12) est : 343.01416 +/- 0.00505 gon. --> R.2 (n°2) est : 288.48831 +/- 0.00468 gon. --> R.3 (n°3) est : 44.50318 +/- 0.00505 gon. --> R.4 (n°9) est : 286.56599 +/- 0.00510 gon. --> R.5 (n°7) est : 104.13224 +/- 0.00530 gon. --> R.6 (n°6) est : 155.99116 +/- 0.00497 gon.
* Erreur moyenne de l'unité de poids a posteriori : 0.00018
* Nombre d'itérations : 3
* Nombre de Wi HORS TOLERANCE : 1(Tolérance |Wi max| = 5.10)
N.B. : - Les résidus sont en mètre pour les observations Dh et en radian pour les observations Hz ------ - Les Wi HORS TOLERANCE indiquent la présence d'une faute sur l'observation concernée. - Lorsqu'il y a des Wi HORS TOLERANCE, la precision (Emq) des points et V0 n'est plus significative !
+---------------------------+------------+-------------------+------------+-----------------+| Observation | Poids | Résidus (m/gon) | Wi | Test tolérance |+---------------------------+------------+-------------------+------------+-----------------+| Dh R.6 -> 1 | 1.0000 | 0.00036 | 0.01 | Ok! || Dh R.6 -> R.1 | 1.0000 | -0.00183 | -0.05 | Ok! || Dh R.6 -> R.2 | 1.0000 | 0.00201 | 0.06 | Ok! || Dh R.6 -> R.3 | 1.0000 | -0.00028 | -0.01 | Ok! || Dh R.6 -> R.4 | 1.0000 | -0.00250 | -0.07 | Ok! || Dh R.6 -> R.5 | 1.0000 | -0.00195 | -0.06 | Ok! || Hz 1 -> 3 | 1.0000 | 0.00294 | 0.28 | Ok! || Hz 1 -> 4 | 1.0000 | 0.00092 | 0.09 | Ok! || Hz 1 -> 5 | 1.0000 | -0.00405 | -0.39 | Ok! || Hz 1 -> 6 | 0.9999 | -0.00689 | -0.66 | Ok! || Hz 1 -> R.2 | 1.0000 | 0.00368 | 0.35 | Ok! || Hz 1 -> R.3 | 1.0000 | 0.00247 | 0.24 | Ok! || Hz 1 -> R.6 | 1.0000 | 0.00093 | 0.09 | Ok! || Hz R.1 -> 8 | 0.9723 | 0.05906 | 5.79 | HORS TOLERANCE || Hz R.1 -> R.2 | 0.9994 | -0.01377 | -1.37 | Ok! || Hz R.1 -> R.4 | 0.9986 | -0.01802 | -1.80 | Ok! || Hz R.1 -> R.5 | 0.9993 | -0.01266 | -1.26 | Ok! || Hz R.1 -> R.6 | 0.9993 | -0.01303 | -1.32 | Ok! || Hz R.2 -> 1 | 1.0000 | -0.00007 | -0.01 | Ok! || Hz R.2 -> R.1 | 1.0000 | 0.00231 | 0.23 | Ok! || Hz R.2 -> R.3 | 0.9999 | 0.00644 | 0.63 | Ok! |
[… etc]
L'observation Hz R.1 -> 8 est désactivé pour la suite des calculs
[… etc]
+---------------------+| Fin Iteration n° 1:| Il reste 1 points inconnus.+---------------------+
--> Iteration n° 2: 13 Points connus (et/ou inconnus déjà calculés) ---------------
Niveau de fiabilité de détermination des points : 1
>> Mode de calcul des points approchés : ------------------------------------
Le point 2(997.184; 1055.564) est calculé par rayonnement depuis 6.
>> Taleau récapitulatif des points calculés: ----------------------------------------
P
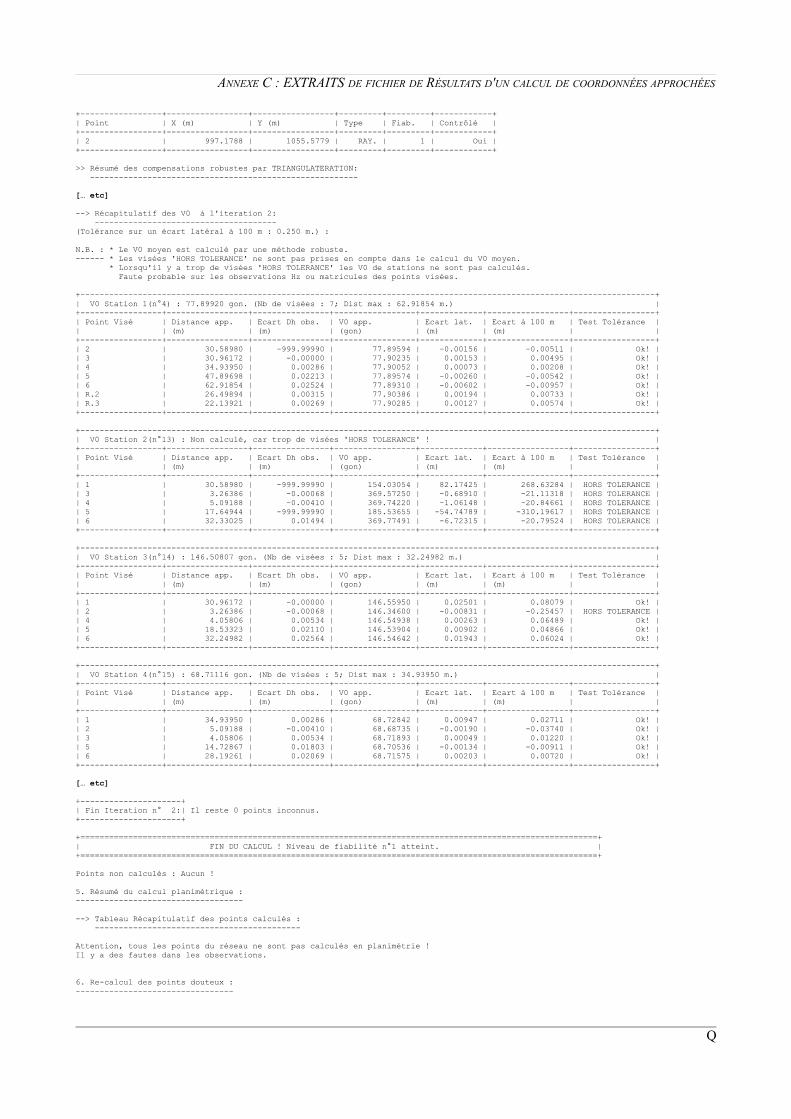
ANNEXE C : EXTRAITS DE FICHIER DE RÉSULTATS D'UN CALCUL DE COORDONNÉES APPROCHÉES
+-----------------+-----------------+-----------------+---------+---------+------------+| Point | X (m) | Y (m) | Type | Fiab. | Contrôlé |+-----------------+-----------------+-----------------+---------+---------+------------+| 2 | 997.1788 | 1055.5779 | RAY. | 1 | Oui |+-----------------+-----------------+-----------------+---------+---------+------------+
>> Résumé des compensations robustes par TRIANGULATERATION: --------------------------------------------------------
[… etc]
--> Récapitulatif des V0 à l'iteration 2: --------------------------------------(Tolérance sur un écart latéral à 100 m : 0.250 m.) :
N.B. : * Le V0 moyen est calculé par une méthode robuste.------ * Les visées 'HORS TOLERANCE' ne sont pas prises en compte dans le calcul du V0 moyen. * Lorsqu'il y a trop de visées 'HORS TOLERANCE' les V0 de stations ne sont pas calculés. Faute probable sur les observations Hz ou matricules des points visées.
+------------------------------------------------------------------------------------------------------------------------+| V0 Station 1(n°4) : 77.89920 gon. (Nb de visées : 7; Dist max : 62.91854 m.) |+-----------------+-----------------+----------------+-----------------+-------------+-----------------+-----------------+| Point Visé | Distance app. | Ecart Dh obs. | V0 app. | Ecart lat. | Ecart à 100 m | Test Tolérance || | (m) | (m) | (gon) | (m) | (m) | |+-----------------+-----------------+----------------+-----------------+-------------+-----------------+-----------------+| 2 | 30.58980 | -999.99990 | 77.89594 | -0.00156 | -0.00511 | Ok! || 3 | 30.96172 | -0.00000 | 77.90235 | 0.00153 | 0.00495 | Ok! || 4 | 34.93950 | 0.00286 | 77.90052 | 0.00073 | 0.00208 | Ok! || 5 | 47.89698 | 0.02213 | 77.89574 | -0.00260 | -0.00542 | Ok! || 6 | 62.91854 | 0.02524 | 77.89310 | -0.00602 | -0.00957 | Ok! || R.2 | 26.49894 | 0.00315 | 77.90386 | 0.00194 | 0.00733 | Ok! || R.3 | 22.13921 | 0.00269 | 77.90285 | 0.00127 | 0.00574 | Ok! |+-----------------+-----------------+----------------+-----------------+-------------+-----------------+-----------------+
+------------------------------------------------------------------------------------------------------------------------+| V0 Station 2(n°13) : Non calculé, car trop de visées 'HORS TOLERANCE' ! |+-----------------+-----------------+----------------+-----------------+-------------+-----------------+-----------------+| Point Visé | Distance app. | Ecart Dh obs. | V0 app. | Ecart lat. | Ecart à 100 m | Test Tolérance || | (m) | (m) | (gon) | (m) | (m) | |+-----------------+-----------------+----------------+-----------------+-------------+-----------------+-----------------+| 1 | 30.58980 | -999.99990 | 154.03054 | 82.17425 | 268.63284 | HORS TOLERANCE || 3 | 3.26386 | -0.00068 | 369.57250 | -0.68910 | -21.11318 | HORS TOLERANCE || 4 | 5.09188 | -0.00410 | 369.74220 | -1.06148 | -20.84661 | HORS TOLERANCE || 5 | 17.64944 | -999.99990 | 185.53655 | -54.74789 | -310.19617 | HORS TOLERANCE || 6 | 32.33025 | 0.01494 | 369.77491 | -6.72315 | -20.79524 | HORS TOLERANCE |+-----------------+-----------------+----------------+-----------------+-------------+-----------------+-----------------+
+------------------------------------------------------------------------------------------------------------------------+| V0 Station 3(n°14) : 146.50807 gon. (Nb de visées : 5; Dist max : 32.24982 m.) |+-----------------+-----------------+----------------+-----------------+-------------+-----------------+-----------------+| Point Visé | Distance app. | Ecart Dh obs. | V0 app. | Ecart lat. | Ecart à 100 m | Test Tolérance || | (m) | (m) | (gon) | (m) | (m) | |+-----------------+-----------------+----------------+-----------------+-------------+-----------------+-----------------+| 1 | 30.96172 | -0.00000 | 146.55950 | 0.02501 | 0.08079 | Ok! || 2 | 3.26386 | -0.00068 | 146.34600 | -0.00831 | -0.25457 | HORS TOLERANCE || 4 | 4.05806 | 0.00534 | 146.54938 | 0.00263 | 0.06489 | Ok! || 5 | 18.53323 | 0.02110 | 146.53904 | 0.00902 | 0.04866 | Ok! || 6 | 32.24982 | 0.02564 | 146.54642 | 0.01943 | 0.06024 | Ok! |+-----------------+-----------------+----------------+-----------------+-------------+-----------------+-----------------+
+------------------------------------------------------------------------------------------------------------------------+| V0 Station 4(n°15) : 68.71116 gon. (Nb de visées : 5; Dist max : 34.93950 m.) |+-----------------+-----------------+----------------+-----------------+-------------+-----------------+-----------------+| Point Visé | Distance app. | Ecart Dh obs. | V0 app. | Ecart lat. | Ecart à 100 m | Test Tolérance || | (m) | (m) | (gon) | (m) | (m) | |+-----------------+-----------------+----------------+-----------------+-------------+-----------------+-----------------+| 1 | 34.93950 | 0.00286 | 68.72842 | 0.00947 | 0.02711 | Ok! || 2 | 5.09188 | -0.00410 | 68.68735 | -0.00190 | -0.03740 | Ok! || 3 | 4.05806 | 0.00534 | 68.71893 | 0.00049 | 0.01220 | Ok! || 5 | 14.72867 | 0.01803 | 68.70536 | -0.00134 | -0.00911 | Ok! || 6 | 28.19261 | 0.02069 | 68.71575 | 0.00203 | 0.00720 | Ok! |+-----------------+-----------------+----------------+-----------------+-------------+-----------------+-----------------+
[… etc]
+---------------------+| Fin Iteration n° 2:| Il reste 0 points inconnus.+---------------------+
+============================================================================================================+| FIN DU CALCUL ! Niveau de fiabilité n°1 atteint. |+============================================================================================================+
Points non calculés : Aucun !
5. Résumé du calcul planimétrique :-----------------------------------
--> Tableau Récapitulatif des points calculés : -------------------------------------------
Attention, tous les points du réseau ne sont pas calculés en planimétrie ! Il y a des fautes dans les observations.
6. Re-calcul des points douteux :---------------------------------
Q
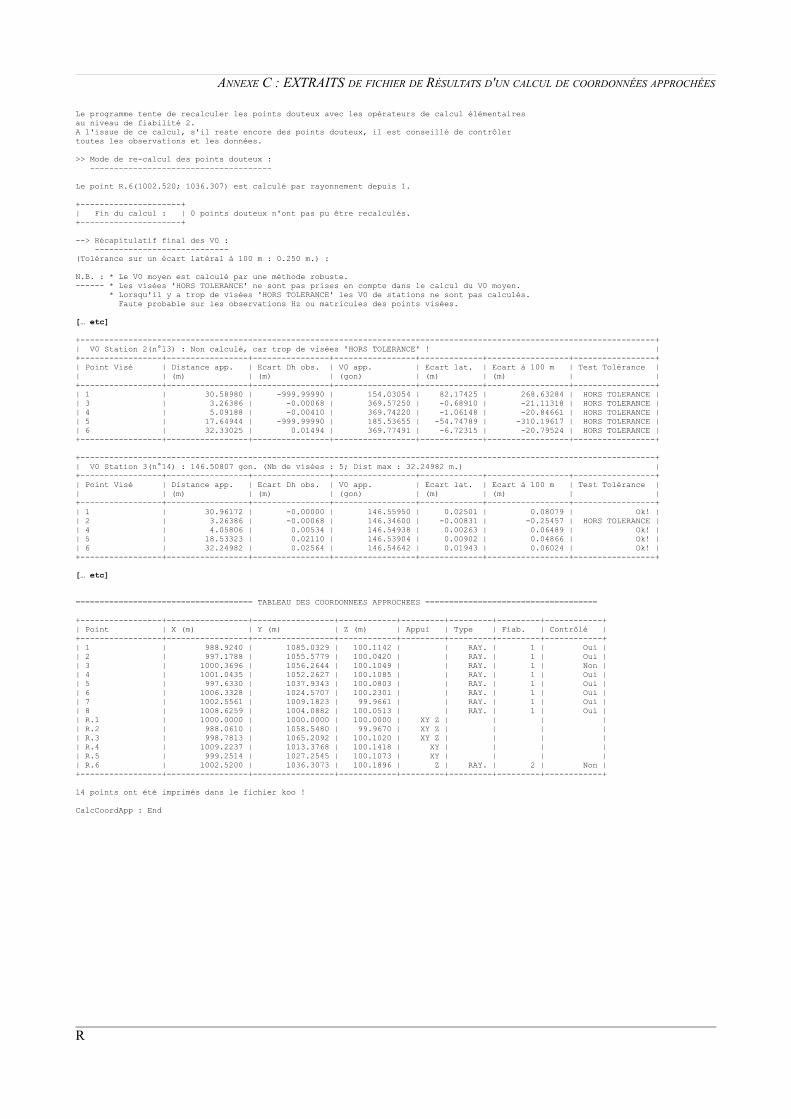
ANNEXE C : EXTRAITS DE FICHIER DE RÉSULTATS D'UN CALCUL DE COORDONNÉES APPROCHÉES
Le programme tente de recalculer les points douteux avec les opérateurs de calcul élémentairesau niveau de fiabilité 2.A l'issue de ce calcul, s'il reste encore des points douteux, il est conseillé de contrôlertoutes les observations et les données.
>> Mode de re-calcul des points douteux : --------------------------------------
Le point R.6(1002.520; 1036.307) est calculé par rayonnement depuis 1.
+---------------------+| Fin du calcul : | 0 points douteux n'ont pas pu être recalculés.+---------------------+
--> Récapitulatif final des V0 : ----------------------------(Tolérance sur un écart latéral à 100 m : 0.250 m.) :
N.B. : * Le V0 moyen est calculé par une méthode robuste.------ * Les visées 'HORS TOLERANCE' ne sont pas prises en compte dans le calcul du V0 moyen. * Lorsqu'il y a trop de visées 'HORS TOLERANCE' les V0 de stations ne sont pas calculés. Faute probable sur les observations Hz ou matricules des points visées.
[… etc]
+------------------------------------------------------------------------------------------------------------------------+| V0 Station 2(n°13) : Non calculé, car trop de visées 'HORS TOLERANCE' ! |+-----------------+-----------------+----------------+-----------------+-------------+-----------------+-----------------+| Point Visé | Distance app. | Ecart Dh obs. | V0 app. | Ecart lat. | Ecart à 100 m | Test Tolérance || | (m) | (m) | (gon) | (m) | (m) | |+-----------------+-----------------+----------------+-----------------+-------------+-----------------+-----------------+| 1 | 30.58980 | -999.99990 | 154.03054 | 82.17425 | 268.63284 | HORS TOLERANCE || 3 | 3.26386 | -0.00068 | 369.57250 | -0.68910 | -21.11318 | HORS TOLERANCE || 4 | 5.09188 | -0.00410 | 369.74220 | -1.06148 | -20.84661 | HORS TOLERANCE || 5 | 17.64944 | -999.99990 | 185.53655 | -54.74789 | -310.19617 | HORS TOLERANCE || 6 | 32.33025 | 0.01494 | 369.77491 | -6.72315 | -20.79524 | HORS TOLERANCE |+-----------------+-----------------+----------------+-----------------+-------------+-----------------+-----------------+
+------------------------------------------------------------------------------------------------------------------------+| V0 Station 3(n°14) : 146.50807 gon. (Nb de visées : 5; Dist max : 32.24982 m.) |+-----------------+-----------------+----------------+-----------------+-------------+-----------------+-----------------+| Point Visé | Distance app. | Ecart Dh obs. | V0 app. | Ecart lat. | Ecart à 100 m | Test Tolérance || | (m) | (m) | (gon) | (m) | (m) | |+-----------------+-----------------+----------------+-----------------+-------------+-----------------+-----------------+| 1 | 30.96172 | -0.00000 | 146.55950 | 0.02501 | 0.08079 | Ok! || 2 | 3.26386 | -0.00068 | 146.34600 | -0.00831 | -0.25457 | HORS TOLERANCE || 4 | 4.05806 | 0.00534 | 146.54938 | 0.00263 | 0.06489 | Ok! || 5 | 18.53323 | 0.02110 | 146.53904 | 0.00902 | 0.04866 | Ok! || 6 | 32.24982 | 0.02564 | 146.54642 | 0.01943 | 0.06024 | Ok! |+-----------------+-----------------+----------------+-----------------+-------------+-----------------+-----------------+
[… etc]
===================================== TABLEAU DES COORDONNEES APPROCHEES ====================================
+-----------------+-----------------+-----------------+------------+---------+---------+---------+------------+| Point | X (m) | Y (m) | Z (m) | Appui | Type | Fiab. | Contrôlé |+-----------------+-----------------+-----------------+------------+---------+---------+---------+------------+| 1 | 988.9240 | 1085.0329 | 100.1142 | | RAY. | 1 | Oui || 2 | 997.1788 | 1055.5779 | 100.0420 | | RAY. | 1 | Oui || 3 | 1000.3696 | 1056.2644 | 100.1049 | | RAY. | 1 | Non || 4 | 1001.0435 | 1052.2627 | 100.1085 | | RAY. | 1 | Oui || 5 | 997.6330 | 1037.9343 | 100.0803 | | RAY. | 1 | Oui || 6 | 1006.3328 | 1024.5707 | 100.2301 | | RAY. | 1 | Oui || 7 | 1002.5561 | 1009.1823 | 99.9661 | | RAY. | 1 | Oui || 8 | 1008.6259 | 1004.0882 | 100.0513 | | RAY. | 1 | Oui || R.1 | 1000.0000 | 1000.0000 | 100.0000 | XY Z | | | || R.2 | 988.0610 | 1058.5480 | 99.9670 | XY Z | | | || R.3 | 998.7813 | 1065.2092 | 100.1020 | XY Z | | | || R.4 | 1009.2237 | 1013.3768 | 100.1418 | XY | | | || R.5 | 999.2514 | 1027.2545 | 100.1073 | XY | | | || R.6 | 1002.5200 | 1036.3073 | 100.1896 | Z | RAY. | 2 | Non |+-----------------+-----------------+-----------------+------------+---------+---------+---------+------------+
14 points ont été imprimés dans le fichier koo !
CalcCoordApp : End
R
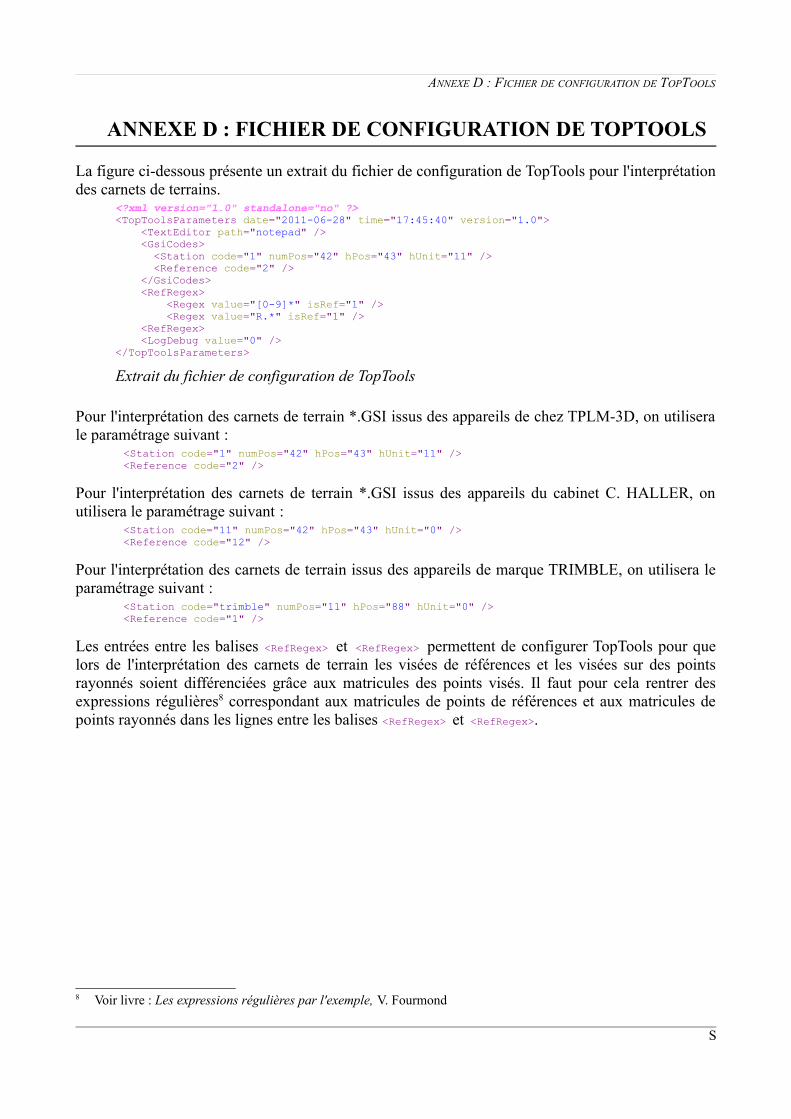
ANNEXE D : FICHIER DE CONFIGURATION DE TOPTOOLS
ANNEXE D : FICHIER DE CONFIGURATION DE TOPTOOLS
La figure ci-dessous présente un extrait du fichier de configuration de TopTools pour l'interprétation des carnets de terrains.
Pour l'interprétation des carnets de terrain *.GSI issus des appareils de chez TPLM-3D, on utilisera le paramétrage suivant :
<Station code="1" numPos="42" hPos="43" hUnit="11" /><Reference code="2" />
Pour l'interprétation des carnets de terrain *.GSI issus des appareils du cabinet C. HALLER, on utilisera le paramétrage suivant :
<Station code="11" numPos="42" hPos="43" hUnit="0" /><Reference code="12" />
Pour l'interprétation des carnets de terrain issus des appareils de marque TRIMBLE, on utilisera le paramétrage suivant :
<Station code="trimble" numPos="11" hPos="88" hUnit="0" /> <Reference code="1" />
Les entrées entre les balises <RefRegex> et <RefRegex> permettent de configurer TopTools pour que lors de l'interprétation des carnets de terrain les visées de références et les visées sur des points rayonnés soient différenciées grâce aux matricules des points visés. Il faut pour cela rentrer des expressions régulières8 correspondant aux matricules de points de références et aux matricules de points rayonnés dans les lignes entre les balises <RefRegex> et <RefRegex>.
8 Voir livre : Les expressions régulières par l'exemple, V. Fourmond
S
<?xml version="1.0" standalone="no" ?><TopToolsParameters date="2011-06-28" time="17:45:40" version="1.0"> <TextEditor path="notepad" /> <GsiCodes> <Station code="1" numPos="42" hPos="43" hUnit="11" /> <Reference code="2" /> </GsiCodes> <RefRegex> <Regex value="[0-9]*" isRef="1" /> <Regex value="R.*" isRef="1" /> <RefRegex> <LogDebug value="0" /></TopToolsParameters>
Extrait du fichier de configuration de TopTools

Annexe E : Fiche de contrôle d'un calcul LTOP / TopTools


FICHE DE CONTROLE DE CALCUL LTOP/TopTools
Mise à jour le 07/08/12
Page 1/2
Dossier n°
Fichier *.tts : Fichier *.mes : Fichier *.koo : (avec coord. app.) Fichier *.koo : (avec coord. comp.)
Sans obj. Contrôles généraux Conforme Remarque Rmq. levée
GSI intervenants : _____________________________________________________
Carnets terrain rempli correctement.
Cohérence du fichier *.tts avec les carnets terrain (matricule, cste prisme, Hi & Hr).
Double retournement sur toutes les références (plani & alti).
Contrôle et enregistrement du rapport d'interprétation.
Répertoires Theo/Calculs en bon ordre Hiérarchie respectée
Sans obj.Contrôle du Calcul de Coordonnées Approchées (TopTools) → cf. Notice LTOP/TopTools p.13 à 20
Conforme Remarque Rmq. levée
Contrôle des paramètres de calculs : Vérifier cohérence avec appareil & méthode de lever, précision recherchée, et distribution des points d'appui
Analyses des tableaux de contrôle des observations réduites : >> indiquer les fautes détectées (corrigées ou non) dans les remarques >>
Contrôle des écarts sur les Dh moyens
Contrôle des écarts sur les Dz moyens
Analyse des résultats de la compensation altimétrique : >> indiquer les fautes détectées (corrigées ou non) dans les remarques >>
Contrôle des poids robustes
Contrôle des résidus et WI
Analyse des résultats de la compensation planimétrique : (à chaque itération) >> indiquer les points douteux et incohérences détectées dans les remarques >>
Contrôle précision plani. des points re-calculés par triangulatération>> si triangulatération ACTIVE
Contrôle différence entre coordonnées approchées et compensées>> si triangulatération ACTIVE
Contrôle des résidus et WI>> si triangulatération ACTIVE
Contrôle des poids robustes>> si robuste plani. ACTIVE
V0 : vérification des écarts : entre dist. app. et obs., et latéraux
Contrôle du tableau récapitulatif des coordonnées compensées : Vérifier aussi le fichier *.koo généré
Sans obj.Contrôles pour un Calcul LTOP → cf. Notice LTOP/TopTools p.41 à 48
Conforme Remarque Rmq. levée
Contrôle des paramètres de calculs :
Contrôle du modèle stochastique>> Vérifier cohérence avec appareil & méthode de lever, précision recherchée, et distribution des points d'appui
Contrôle du système de projection >> cf. Notice LTOP/TopTools p. 32
Contrôle du choix des inconnues (points, cste add., coef. d'échelle, …)>> cf. Notice LTOP/TopTools p. 25. Sauf contre-indication : ne jamais définir de cste d'add. Ou de coef d'echelle en inconnues
Contrôle des paramètres de fiabilité >> cf. Notice LTOP/TopTools p. 31
FicheCtrlCalculLTOPRev00
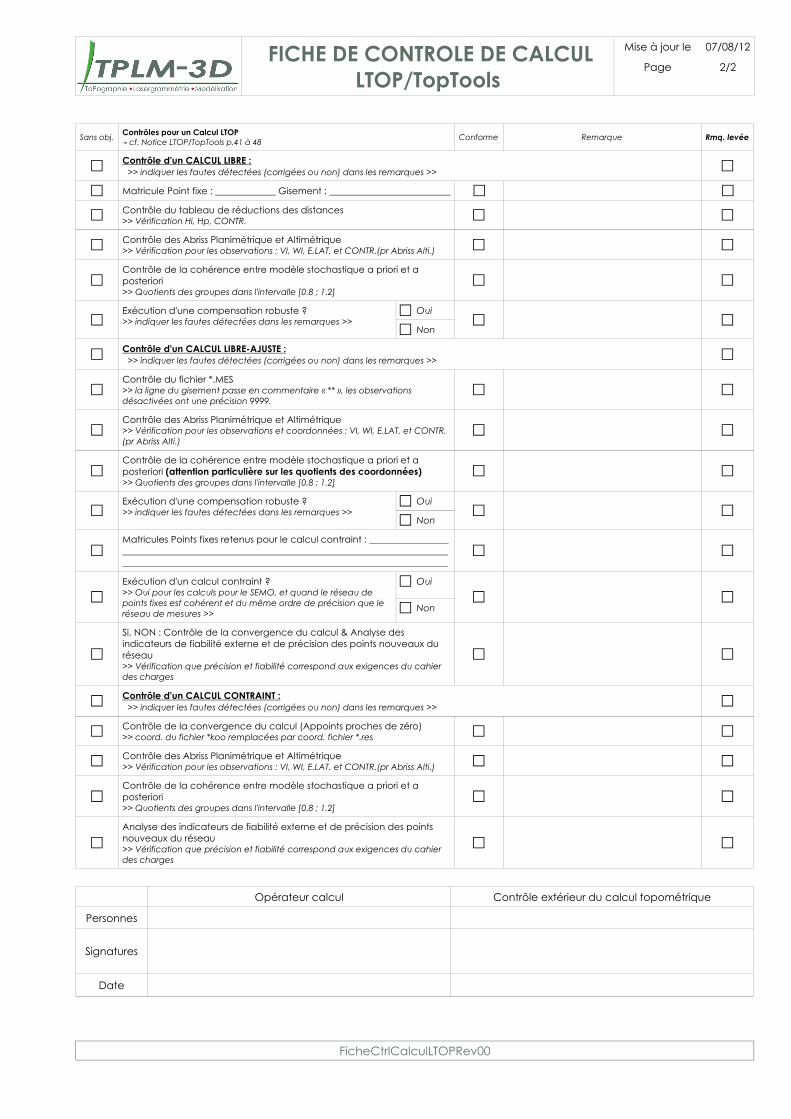
FICHE DE CONTROLE DE CALCUL LTOP/TopTools
Mise à jour le 07/08/12
Page 2/2
Sans obj.Contrôles pour un Calcul LTOP → cf. Notice LTOP/TopTools p.41 à 48
Conforme Remarque Rmq. levée
Contrôle d'un CALCUL LIBRE : >> indiquer les fautes détectées (corrigées ou non) dans les remarques >>
Matricule Point fixe : _____________ Gisement : __________________________
Contrôle du tableau de réductions des distances>> Vérification Hi, Hp, CONTR.
Contrôle des Abriss Planimétrique et Altimétrique>> Vérification pour les observations : VI, WI, E.LAT. et CONTR.(pr Abriss Alti.)
Contrôle de la cohérence entre modèle stochastique a priori et a posteriori>> Quotients des groupes dans l'intervalle [0.8 ; 1.2]
Exécution d'une compensation robuste ?>> indiquer les fautes détectées dans les remarques >>
Oui
Non
Contrôle d'un CALCUL LIBRE-AJUSTE : >> indiquer les fautes détectées (corrigées ou non) dans les remarques >>
Contrôle du fichier *.MES>> la ligne du gisement passe en commentaire « ** », les observations désactivées ont une précision 9999.
Contrôle des Abriss Planimétrique et Altimétrique>> Vérification pour les observations et coordonnées : VI, WI, E.LAT. et CONTR.(pr Abriss Alti.)
Contrôle de la cohérence entre modèle stochastique a priori et a posteriori (attention particulière sur les quotients des coordonnées)>> Quotients des groupes dans l'intervalle [0.8 ; 1.2]
Exécution d'une compensation robuste ?>> indiquer les fautes détectées dans les remarques >>
Oui
Non
Matricules Points fixes retenus pour le calcul contraint : _________________ ____________________________________________________________________________________________________________________________________________
Exécution d'un calcul contraint ?>> Oui pour les calculs pour le SEMO, et quand le réseau de points fixes est cohérent et du même ordre de précision que le réseau de mesures >>
Oui
Non
Si, NON : Contrôle de la convergence du calcul & Analyse des indicateurs de fiabilité externe et de précision des points nouveaux du réseau>> Vérification que précision et fiabilité correspond aux exigences du cahier des charges
Contrôle d'un CALCUL CONTRAINT : >> indiquer les fautes détectées (corrigées ou non) dans les remarques >>
Contrôle de la convergence du calcul (Appoints proches de zéro)>> coord. du fichier *koo remplacées par coord. fichier *.res
Contrôle des Abriss Planimétrique et Altimétrique>> Vérification pour les observations : VI, WI, E.LAT. et CONTR.(pr Abriss Alti.)
Contrôle de la cohérence entre modèle stochastique a priori et a posteriori>> Quotients des groupes dans l'intervalle [0.8 ; 1.2]
Analyse des indicateurs de fiabilité externe et de précision des points nouveaux du réseau>> Vérification que précision et fiabilité correspond aux exigences du cahier des charges
Opérateur calcul Contrôle extérieur du calcul topométrique
Personnes
Signatures
Date
FicheCtrlCalculLTOPRev00

Annexe F : Le calcul automatique de coordonnées
approchées – C. Million [1994]