mécanique du point : problèmes à 2 corps (pcsi) · mécanique du point : problèmes à 2 corps...
TRANSCRIPT
Mécanique du point : problèmes à 2 corps (PCSI)
Question de cours & exercice
On considère une étoile double consituée deux points M1 et M2 de masse m1 et m2, située dans la voielactée. On ne considère pas d'autres forces que l'attraction gravitationnelle qu'exerce une étoile surl'autre et on considère la voie lactée comme un référentiel galiléen.
1. Montrez que l'on peut attacher au centre de masse G de l'étoile double un repère barycentrique
galiléen R∗ de vecteurs unitaires−→i ,−→j ,−→k .
2. Exprimez les positions −→r1 =−−−→GM1 et −→r2 =
−−−→GM2 des deux étoiles dans le référentiel barycentrique
en fonction des masses des étoiles et de leur écart −→r =−−−−→M1M2.
3. Exprimez les quantités de mouvement −→p1 et −→p2 de chaque étoile en fonction de leurs vitesses relatives−→v = −→v2 −−→v1 et de leur masse réduite µ.
4. Exprimez le moment cinétique du système par rapport à G ainsi que son énergie mécanique. Queremarquez vous ?
5. Montrez que le problème est équivalent à la détermination de la trajectoire d'une particule M demasse µ placée en −→r par rapport à G et soumise à la force exercée par M1 sur M2. Commentdéduit-t-on les trajectoires de M1 et M2 de celle de M ?
6. Déterminez et tracez la trajectoire de M , puis celles de M1 et de M2?
7. Question d'ouverture : comment peut-on détecter de telles étoiles ?
_____________________________________________________________
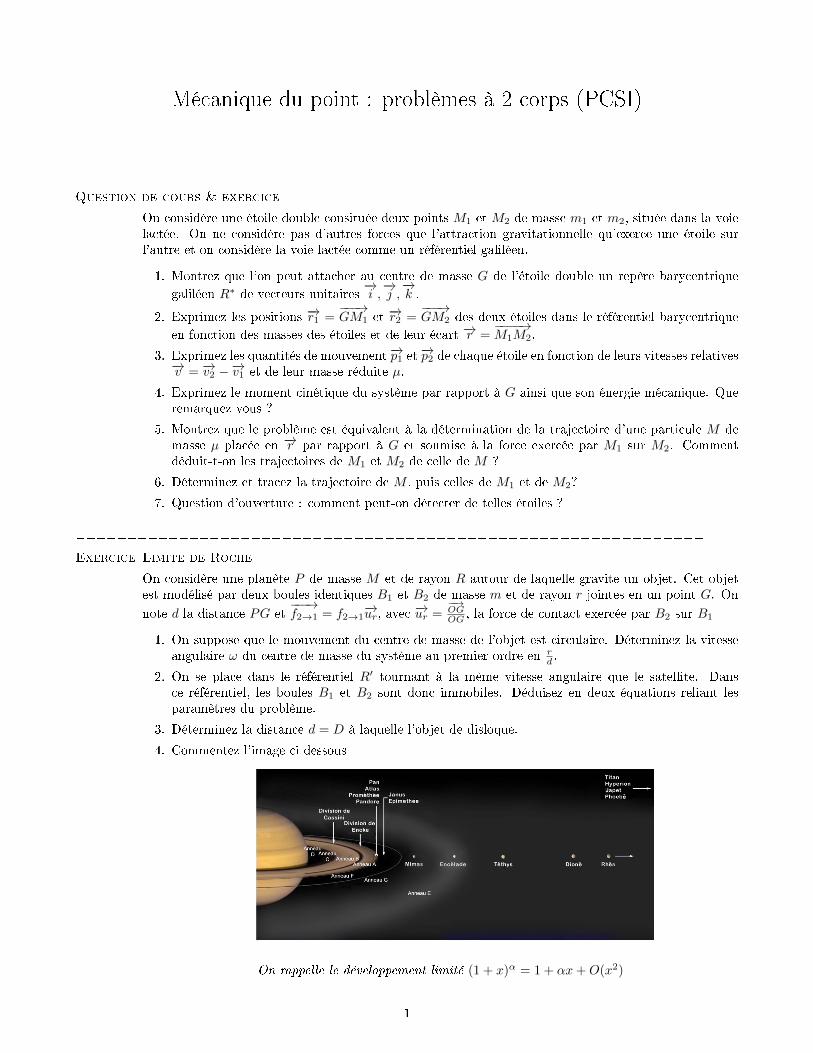
Exercice Limite de Roche
On considère une planète P de masse M et de rayon R autour de laquelle gravite un objet. Cet objetest modélisé par deux boules identiques B1 et B2 de masse m et de rayon r jointes en un point G. On
note d la distance PG et−−−→f2→1 = f2→1
−→ur, avec −→ur =−−→OGOG , la force de contact exercée par B2 sur B1
1. On suppose que le mouvement du centre de masse de l'objet est circulaire. Déterminez la vitesseangulaire ω du centre de masse du système au premier ordre en r
d .
2. On se place dans le référentiel R′ tournant à la même vitesse angulaire que le satellite. Dansce référentiel, les boules B1 et B2 sont donc immobiles. Déduisez en deux équations reliant lesparamètres du problème.
3. Déterminez la distance d = D à laquelle l'objet de disloque.
4. Commentez l'image ci dessous
On rappelle le développement limité (1 + x)α = 1 + αx+O(x2)
1

Solution
1. Forces extérieures :−−−−→FP→B1
= −GMm 1(d−r)2
−→ur et−−−−→FP→B2
= −GMm 1(d+r)2
−→urdonc
2md−→vGdt
= −2mv2
d−→ur = −GMm
(1
(d− r)2+
1
(d+ r)2
)−→ur
= −GMm
d2
((1 + 2
r
d
)+(
1− 2r
d
))−→ur= −2GMm
d2−→ur
donc v2 = d2ω2 = GMd d'où ω =
√GMd3
2. Forces exercées sur B1 :−−−−→FP→B1
,−−−−−→F gravB2→B1
,−−−→f2→1,
−→Fie donc
−GMm1
(d− r)2+Gm2 1
(2r)2 + f2→1 +mω2 (d− r) = 0
−GMm1
(d+ r)2 −Gm
2 1
(2r)2 − f2→1 +mω2 (d+ r) = 0
3. A la limite, f2→1 = 0 donc
−GMm1
(D − r)2+Gm2 1
(2r)2 +mω2 (D − r) = 0
−GMm
D2
(1 + 2
r
D
)+Gm2 1
4r2+m
GM
D2
(1− r
D
)= 0
−M − 2Mr
D+m
D2
4r2+M −M r
D= 0
−3Mr
D+m
D2
4r2= 0
donc D =(12Mm
)1/3r
_____________________________________________________________
2 Daniel Suchet - 2012
_____________________________________________________________
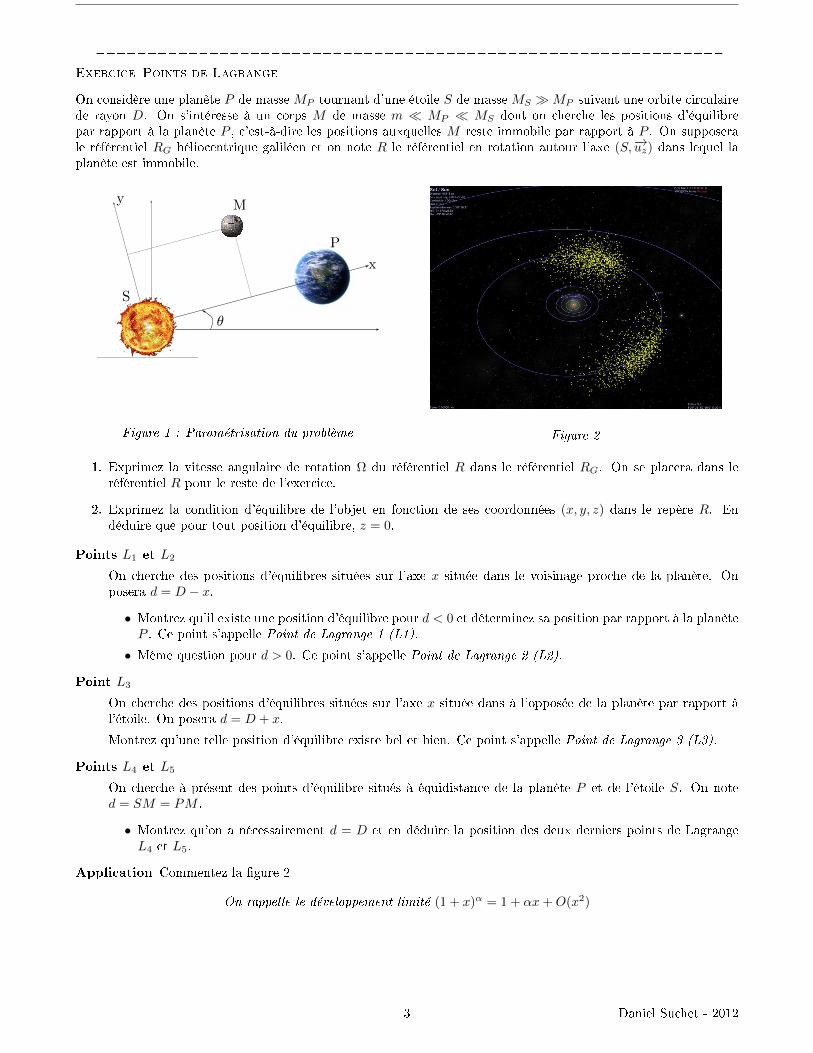
Exercice Points de Lagrange
On considère une planète P de masse MP tournant d'une étoile S de masse MS MP suivant une orbite circulairede rayon D. On s'intéresse à un corps M de masse m MP MS dont on cherche les positions d'équilibrepar rapport à la planète P , c'est-à-dire les positions auxquelles M reste immobile par rapport à P . On supposerale référentiel RG héliocentrique galiléen et on note R le référentiel en rotation autour l'axe (S,−→uz) dans lequel laplanète est immobile.
Figure 1 : Paramétrisation du problème Figure 2
1. Exprimez la vitesse angulaire de rotation Ω du référentiel R dans le référentiel RG. On se placera dans leréférentiel R pour le reste de l'exercice.
2. Exprimez la condition d'équilibre de l'objet en fonction de ses coordonnées (x, y, z) dans le repère R. Endéduire que pour tout position d'équilibre, z = 0.
Points L1 et L2
On cherche des positions d'équilibres situées sur l'axe x située dans le voisinage proche de la planète. Onposera d = D − x.
• Montrez qu'il existe une position d'équilibre pour d < 0 et déterminez sa position par rapport à la planèteP . Ce point s'appelle Point de Lagrange 1 (L1).
• Même question pour d > 0. Ce point s'appelle Point de Lagrange 2 (L2).
Point L3
On cherche des positions d'équilibres situées sur l'axe x située dans à l'opposée de la planète par rapport àl'étoile. On posera d = D + x.
Montrez qu'une telle position d'équilibre existe bel et bien. Ce point s'appelle Point de Lagrange 3 (L3).
Points L4 et L5
On cherche à présent des points d'équilibre situés à équidistance de la planète P et de l'étoile S. On noted = SM = PM .
• Montrez qu'on a nécessairement d = D et en déduire la position des deux derniers points de LagrangeL4 et L5.
Application Commentez la gure 2
On rappelle le développement limité (1 + x)α = 1 + αx+O(x2)
3 Daniel Suchet - 2012

Solution
1. Troisième loi de Kepler pour la planète : T 2
D3 = 4π2
GMS. La vitesse angulaire est uniforme car le mouvement
est circulaire (donc la conservation de la constante des aires impose θ = cste) et est donnée par Ω =2πT =
√GMS
D3 .
2. Bilan des forces :
• Attraction gravitationnelle de S sur M :−−→FSM = −GMSm
SM3
−−→SM = − GMSm
(x2+y2+z2)3/2
xyz
• Attraction gravitationnelle de T sur M :
−−→FTM = −GMTm
TM3
−−→TM = − GMTm
((x−D)2+y2+z2)3/2
x− dyz
• Force d'inertie d'entrainement :
−→Fie = −m−→ae = −m
−→Ω ∧
(−→Ω ∧ −→r
)= GMSm
D3
xy0
Equilibre ⇒ compensation des forces
0 = − GMS
(x2+y2+z2)3/2x− GMT
((x−D)2+y2+z2)3/2 (x−D) + GMS
D3 x
0 = − GMS
(x2+y2+z2)3/2y − GMT
((x−D)2+y2+z2)3/2 y + GMS
D3 y
0 = − GMS
(x2+y2+z2)3/2z − GMT
((x−D)2+y2+z2)3/2 z
Les deux termes qui apparaissent dans la troisième équation sont de même signe. Pour que leur sommesoit nulle, ils doivent être tous les deux nuls. On doit donc avoir z = 0.
Points L1 et L2
On impose y = 0 et on réécrit l'équation sur x en introduisant d D. Attention à la simplicationdd3 = ± 1
d2 en fonction du signe de d.
0 = − GMS
(D+d)3 (D + d)− GMT
d3 d+ GMS
D3 (D + d)
= − GMS
(D+d)2 ±GMT
d2 + GMS
D3 (D + d)
= −GMS
D2
(1− 2 d
D
)± GMT
d2 + GMS
D2
(1 + d
D
)⇒ 3d3 = ± MT
MSD3
Points L3
On impose y = 0 et on réécrit l'équation sur x en introduisant d D. Attention aux signes, d−D < 0et d− 2D aussi
0 = − GMS
(d−D)3(d−D)− GMT
(d−2D)3(d− 2D) + GMS
D3 (d−D)
= + GMS
(d−D)2+ GMT
(d−2D)2+ GMS
D3 (d−D)
= GMS
D2
(1 + 2 d
D
)+ GMT
4D2
(1 + 2 d
2D
)+ GMS
D2
(dD − 1
)= −GMT
4D2 − 3d(GMS+MT
D3
)⇒ d = MT
12MSD
Points L4 et L5
On a à présent la condition x2 + y2 = (x−D)2
+ y2 = d2 et la condition d'équilibre sur y impose
0 =(−GMS
d3 −GMT
d3 + GMS
D3
)y
⇒ d = D
Les points L4 et L5 sont donc situés au troisième sommet d'un triangle équilatéral de côté D. On endéduit les postions de x et y :
x = D/2 y =√
3D/2
L'image montre le système solaire, Soleil au centre. Jupiter étant la planète la plus lourde, c'est elle qui al'inuence gravitationnelle la plus importante. Des corps célestes s'accumulent visiblement sur les deux pointsL4 et L5 du système Soleil - Jupiter mais pas sur les autres points. On en déduit que ce sont les deux seuls
4 Daniel Suchet - 2012
points stables. En réalité, ils constituent des maxima du potentiel et pour comprendre leur stabilité, il fautprendre en compte la force de Coriolis. Les points L1, L2 et L3 sont des points selle du potentiel et ne sontpas stables même avec la force de Coriolis.
Les corps situés autour de L4 sont dits troyens et portent des noms associés (Priam, Enée, Anchise...). Lescorps situés autour de L5 sont dits Grecs (Achille, Agamemnon...). A noter l'existence de transfuges : Hectorgravite autour de L4 et Patrocle autour de L5.
5 Daniel Suchet - 2012