mathematiques exe mpsi-pcsi-pt · exercices incontournables julien freslon mpsi • pcsi • ptsi...
TRANSCRIPT

Exercicesincontournables
Julien Freslon
MPSI • PCSI • PTSI
polytechnicien, professeur agrégé de mathématiques en classe préparatoire
au lycée Dessaignes de Blois.
Mathématiques
Jérôme Poineaupolytechnicien, agrégé de mathématiques,
maître de conférences à l’université de Strasbourg.
© Dunod, Paris, 2010ISBN 978-2-10-055592-5
© D
unod
La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it
Avant-propos IV
Partie 1Première période
1 Fonctions usuelles 32 Nombres complexes 293 Équations différentielles 49
4 Géométrie 59
Partie 2Analyse
5 Nombres réels, Suites 856 Fonctions continues 1197 Dérivation, développements limités 1398 Intégration 1899 Courbes paramétrées 221
Partie 3Algèbre
10 Algèbre générale 23911 Arithmétique 25112 Algèbre linéaire 26113 Algèbre linéaire en dimension finie 27714 Matrices 30115 Polynômes 33916 Espaces euclidiens 361Index 393
Table des matières
9782100547678-Fresl-TDM.qxd 8/07/10 12:27 Page III
Cet ouvrage s’adresse aux élèves de première année de classes préparatoires scien-tifiques. Il leur propose de mettre en pratique les notions abordées en cours demathématiques par le biais d’exercices. Chacun est assorti d’une correctiondétaillée, dans laquelle l’accent est mis sur la méthode qui mène à la solution.
Le livre est divisé en seize chapitres, consacrés chacun à une partie du programme.Au sein d’un même chapitre, les exercices, classés par ordre croissant de difficulté,ont été choisis de façon à passer en revue les notions à connaître, mais aussi à pré-senter les techniques susceptibles d’être utilisées.
En ce qui concerne les corrections, nous avons choisi de séparer clairement laréflexion préliminaire, comprenant analyse du problème et tâtonnements, de larédaction finale, rigoureuse et précise. Cette dernière étape est signalée, dans le
texte, par la présence d’un liseré gris sur la gauche et d’un . Insistons sur le
fait que nous ne prétendons nullement présenter l’unique cheminement permettantd’aboutir à la solution d’un exercice donné, ni la seule rédaction acceptable. Dansles deux cas, bien des possibilités existent !
Par ailleurs, lorsque nous avons souhaité mettre en lumière un point important nous
l’avons rédigé sur un fond grisé et indiqué par un . De même, la présence d’un
piège dont il faut se méfier est signalée par un .
Pour finir, signalons que cet ouvrage est conçu pour les étudiants des trois filièresMPSI, PCSI et PTSI. Certains exercices, cependant, ne sont accessibles qu’auxélèves de MPSI. D’autres font appel à des connaissances qui dépassent le pro-gramme de PTSI (mais pourront être traités par ceux qui suivent l’option mathé-matique en vue d’entrer en PSI). De tels exercices sont rares et nous signalons cessubtilités dans leur titre.
Avant-propos
Pour bien utiliser cet ouvrage :
Cet encadré vous indique un point important
Cet encadré met en avant un piège à éviter
Le stylo-plume vous signale l’étape de la rédaction finale.
9782100547678-Fresl-Avt.qxd 8/07/10 12:27 Page IV
Partie 1
Premièrepériode
Plan1. Fonctions usuelles 3
1.1 : Raisonnement par analyse-synthèse 31.2 : Étude de fonction 51.3 : Fonctions circulaires réciproques 71.4 : Arctangente 111.5 : Fonctions hyperboliques réciproques 151.6 : Calcul de limite par encadrement 181.7 : Études de fonctions et suites adjacentes 22
2. Nombres complexes 292.1 : Sommes de cosinus 292.2 : cos(2π/5) 322.3 : Racines septièmes 342.4 : Linéarisation, formule de Moivre 372.5 : Argument et Arctangente 392.6 : Systèmes non linéaires 412.7 : Méthode de Cardan 43
3. Équations différentielles 49Équations différentielles linéaires du premier ordre3.1 : Équation du premier ordre et variation de la constante 493.2 : Équation fonctionnelle de l’exponentielle Équations différentielles linéaires du second ordre à coefficients constants 513.3 : Équation du second ordre : second membre exponentiel 533.4 : Équation du second ordre : second membre trigonométrique 543.5 : Équation du second ordre : racine double 56
4. Géométrie 594.1 : Géométrie du triangle 594.2 : Formule de Héron 614.3 : Droite d’Euler 634.4 : Cercle d’Euler 674.5 : Tétraèdre régulier 714.6 : Plans dans l’espace 744.7 : Perpendiculaire commune 75
9782100547678-Fresl-part1.qxd 5/07/10 9:31 Page 2
3
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
Exercice 1.1 : Raisonnement par analyse-synthèse1. Déterminer les réels x tels que
√x(x − 3) = √
3x − 5.2. Déterminer les réels strictement positifs x tels que x (xx ) = (xx)x.
Il s’agit de questions ouvertes : on demande de trouver les solutions d’un problèmesans les donner. Une stratégie consiste à raisonner par analyse-synthèse. C’est unraisonnement en deux étapes :• Première étape (analyse du problème) : on considère une solution x de l’équation
et on essaie, à partir des relations données dans l’énoncé, d’en déduire la formede x .
• Deuxième étape (synthèse) : l’étape précédente à montré que les solutions sontd’une certaine forme ; il ne reste plus qu’à vérifier, parmi ces solutions poten-tielles, lesquelles sont bien les solutions du problème.
La nécessité de cette deuxième étape apparaîtra clairement dans la résolution de lapremière question.
1. Analyse du problème : nous allons élever au carré pour nous ramener à uneéquation du second degré.
Soit x un réel tel que √
x(x − 3) = √3x − 5 . Alors, en élevant au carré :
x(x − 3) = 3x − 5, soit x2 − 6x + 5 = 0. D’après le cours de Terminale lesréels x vérifiant cette relation sont 1 et 5. Nous avons donc démontré :
si x est solution de l’équation alors x = 1 ou x = 5.
Nous n’avons pas démontré que les solutions sont 1 et 5, mais uniquementqu’elles ne peuvent valoir autre chose. Il reste à vérifier si elle conviennent effec-tivement : c’est l’objet de l’étape de synthèse.
Synthèse : on remplace successivement x par 5 puis 1 dans l’équation initiale, lescalculs étant sans difficulté.
Fonctions usuelles 1
9782100547678-Fresl-C1.qxd 5/07/10 8:44 Page 3

4
Partie 1 • Première période
Il est facile de vérifier que 5 est bien solution. En revanche, pour x = 1,l’équation n’a pas de sens : elle fait intervenir des racines carrées de nombresnégatifs. Ainsi, 1 n’est pas solution.
Conclusion : 5 est l’unique réel x tel que √
x(x − 3) = √3x − 5 .
Pourquoi l’étape d’analyse a-t-elle produit une « fausse solution » (dite égalementsolution parasite) ? Nous avons élevé deux expressions au carré. Or cette opéra-
tion n’est pas réversible : s’il est vrai que a = b entraîne a2 = b2, la réciproqueest fausse en général. En élevant au carré, nous avons en fait résolu l’équationx(x − 3) = 3x − 5 qui se trouve avoir plus de solutions que l’équation del’énoncé.
2. Analyse du problème : nous allons prendre les logarithmes afin de simplifier lespuissances.
Soit x un réel strictement positif tel que x (xx ) = (xx)x. Alors, en prenant lelogarithme : xx ln(x) = x ln(xx) = x2 ln(x) .
On ne peut en déduire xx = x2 en simplifiant par ln(x) : en effet, ln(x) pourraitêtre nul. Il faut donc ajouter une hypothèse pour poursuivre les calculs : x =/ 1.
Supposons x =/ 1. On a alors ln(x) =/ 0 , donc xx = x2.En considérant à nouveau les logarithmes il vient : x ln(x) = 2 ln(x).Comme on a supposé ici x =/ 1, on peut encore simplifier par ln(x), d’oùx = 2.Autrement dit, nous venons de démontrer : si x est un réel strictement posi-tif distinct de 1 vérifiant x (xx ) = (xx)x, alors x = 2.Ainsi, il y a ou plus deux solutions éventuelles au problème : 1 et 2.
Synthèse : calculs sans astuce, attention cependant à la place des parenthèses.
Il est clair que 1 convient bien. De même, 2(22) = 24 = 16 et(22)2 = 42 = 16 , donc 2 convient également.
Conclusion : il existe deux réels strictement positifs x tels quex (xx ) = (xx)x : ce sont 1 et 2.
Si l’on oublie l’étape de synthèse dans la première question, on aboutit à un résul-tat faux : il y a une solution parasite.D’autre part, si l’on ne fait pas attention lors de la simplification par ln(x) dans ladeuxième question, on n’obtient que la solution x = 2.Autrement dit, le manque de rigueur dans le raisonnement mathématique peut abou-tir à trouver de « fausses solutions » ou au contraire à en oublier de vraies !
9782100547678-Fresl-C1.qxd 5/07/10 8:44 Page 4

Pour éviter cela, il faut :
• prendre garde, dans le type de raisonnement présenté ici, à ne pas oublier l’étapede synthèse ;
• s’assurer que tous les calculs sont licites (ne pas diviser par zéro, ne pas prendrela racine carrée ou le logarithme d’un nombre négatif...) et, au besoin, distinguerdes cas comme dans la deuxième question.
Exercice 1.2 : Étude de fonction
1. Étudier et tracer la fonction f définie par f (x) = ln(x)
x.
2. En déduire les couples (a,b) d’entiers tels que 2 a < b et ab = ba .
3. Quel est le plus grand : eπ ou πe ?
1. La démarche pour étudier une fonction est toujours la même :
• déterminer le domaine de définition et de dérivabilité ;• calculer la dérivée ;• étudier les limites de la fonction aux bornes de son (ou ses) intervalle(s) de défi-
nition ;• calculer les valeurs de la fonction aux points où la dérivée s’annule ;• résumer tout ceci dans le tableau de variations.
La fonction f est définie et dérivable sur R∗+ et, pour tout x > 0 :
f ′(x) = 1 − ln(x)
x2.
On a de plus, d’après les limites comparées vues en Terminale :
f (1) = 0f (e) = e−1
limx→0
f (x) = −∞lim
x→+∞ f (x) = 0
On en déduit le tableau de variations de f :
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
5
Chapitre 1 • Fonctions usuelles
x 0 e +∞f ′(x) + 0 –
1e
f(x)
−∞ 0
9782100547678-Fresl-C1.qxd 5/07/10 8:44 Page 5
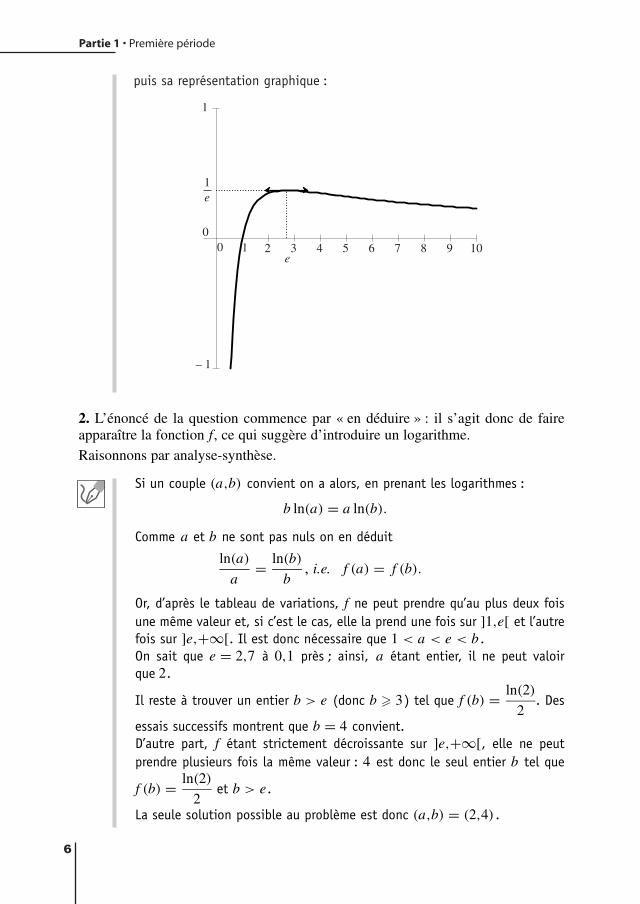
puis sa représentation graphique :
6
Partie 1 • Première période
1
00 1 2 3 4 5 6 7 8 9 10
1e
e
– 1
2. L’énoncé de la question commence par « en déduire » : il s’agit donc de faireapparaître la fonction f, ce qui suggère d’introduire un logarithme.Raisonnons par analyse-synthèse.
Si un couple (a,b) convient on a alors, en prenant les logarithmes :
b ln(a) = a ln(b).
Comme a et b ne sont pas nuls on en déduit
ln(a)
a= ln(b)
b, i.e. f (a) = f (b).
Or, d’après le tableau de variations, f ne peut prendre qu’au plus deux foisune même valeur et, si c’est le cas, elle la prend une fois sur ]1,e[ et l’autrefois sur ]e,+∞[. Il est donc nécessaire que 1 < a < e < b .On sait que e = 2,7 à 0,1 près ; ainsi, a étant entier, il ne peut valoirque 2.
Il reste à trouver un entier b > e (donc b 3) tel que f (b) = ln(2)
2. Des
essais successifs montrent que b = 4 convient.D’autre part, f étant strictement décroissante sur ]e,+∞[, elle ne peutprendre plusieurs fois la même valeur : 4 est donc le seul entier b tel que
f (b) = ln(2)
2et b > e.
La seule solution possible au problème est donc (a,b) = (2,4) .
9782100547678-Fresl-C1.qxd 5/07/10 8:44 Page 6

Enfin, nous allons vérifier que ce couple convient bien. Le premier exercice montrequ’une telle vérification n’est pas superflue !
Réciproquement, on a bien 24 = 42(= 16) : le problème possède donc uneunique solution, (a,b) = (2,4) .
3. De manière analogue nous allons introduire un logarithme.Pour comparer deux réels strictements positifs il suffit de comparer leurs loga-rithmes car la fonction ln est strictement croissante sur R∗+ .
Autrement dit, il s’agit de comparer ln(eπ) = π et ln(πe) = e ln(π) : c’est là que la
fonction f intervient en faisant apparaître les quotients 1
e= ln(e)
e= f (e) et
ln(π)
π= f (π) .
On sait que e < π donc, comme f est strictement décroissante sur [e,+∞[,f (e) > f (π) . Autrement dit :
1
e>
ln(π)
π.
En multipliant par e et π, qui sont strictement positifs, il vient :
π > e ln(π).
En appliquant la fonction exponentielle, qui est strictement croissante, onobtient enfin :
eπ > πe.
Dans cette dernière question, π ne joue aucun rôle : on aurait pu le remplacer parn’importe quel réel x > e .
Exercice 1.3 : Fonctions circulaires réciproques
1. Montrer que, pour tout x ∈ [−1,1], Arcsin(x) + Arccos(x) = π
2.
2. Soit x ∈ R , u = sin(Arctan(x)) et v = cos(Arctan(x)). Déterminer le signe de
v puis, à l’aide de u
vet u2 + v2, déterminer des expressions de u et v en fonction
de x sans utiliser de fonctions trigonométriques.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
7
Chapitre 1 • Fonctions usuelles
9782100547678-Fresl-C1.qxd 5/07/10 8:44 Page 7

1. Il y a plusieurs manières d’aborder un tel problème :a) directement par la définition des fonctions circulaires réciproques. Il suffit alorsd’essayer d’utiliser les formules de trigonométrie usuelles.
b) utiliser la trigonométrie d’une autre manière : pour montrer que deux réels a etb sont égaux, on peut commencer par montrer que sin(a) = sin(b) , puis conclureen déterminant un intervalle contenant a et b sur lequel la fonction sinus ne prendpas plusieurs fois la même valeur.
c) par l’étude d’une fonction bien choisie. Cependant, les fonctions Arcsin et Arccosne sont dérivables que sur ]−1,1[, alors qu’elles sont définies sur [−1,1], et leurdérivée fait intervenir une racine carrée ; autrement dit, il faut être très prudent surle domaine d’étude.
Nous allons utiliser successivement ces trois méthodes.
a) Posons θ = Arcsin(x) et ϕ = Arccos(x) .Alors, par définition :
sin(θ) = x et θ ∈ [−π/2,π/2]
cos(ϕ) = x et ϕ ∈ [0,π].
Pour trouver une relation entre θ et ϕ on peut utiliser des formules de tri-gonométrie : on a
x = sin(θ)= cos(π/2 − θ)
donccos(π/2 − θ) = x
= cos(ϕ).
De plus, π/2 − θ ∈ [0,π] . Or la fonction cos est strictement décroissantesur [0,π] donc ne prend jamais deux fois la même valeur sur cet intervalle ;on a donc π/2 − θ = ϕ, i.e. θ+ ϕ = π/2 ou encore
Arcsin(x) + Arccos(x) = π
2.
Afin de conclure on a dû utiliser les encadrements de θ et ϕ donnés par la défini-tion des fonctions circulaires réciproques. D’une manière générale on a toujoursbesoin de ces encadrements pour étudier un problème faisant intervenir ces fonc-tions.
b) On a, d’après les formules de trigonométrie usuelles et les relations ducours suivantes :
sin(arccos(x)) = cos(arcsin(x)) =√
1 − x2
8
Partie 1 • Première période
9782100547678-Fresl-C1.qxd 5/07/10 8:44 Page 8

la relation :
sin(Arcsin(x) + Arccos(x)) = x2 + (√
1 − x2)2 = 1.
Ceci ne suffit pas pour déterminer la valeur de Arcsin(x) + Arccos(x) ; en effet,le sinus prend une infinité de fois la valeur 1, il faut donc encadrer Arcsin(x)
+Arccos(x) pour trouver sa valeur.
Par définition,
−π/2 Arcsin(x) π/2 et 0 Arccos(x) π.
On a donc
−π/2 Arcsin(x) + Arccos(x) 3π/2.
Or, sur l’intervalle [−π/2,3π/2], la fonction sinus ne prend qu’une fois lavaleur 1 : c’est au point π/2. On a donc :
Arcsin(x) + Arccos(x) = π
2.
On notera ici encore une fois l’usage d’un argument d’encadrement.
c) Pour x ∈ [−1,1] posons f (x) = Arcsin(x) + Arccos(x) .La fonction f ainsi définie est dérivable sur ]−1,1[, car Arcsin et Arccosle sont, mais rien ne permet de dire a priori qu’elle l’est sur [−1,1] ; noussommes donc contraints à ne l’étudier que sur ]−1,1[.Pour x ∈ ]−1,1[ on a
f ′(x) = Arcsin′(x) + Arccos′(x)= 0
d’après les formules du cours ; la fonction f est donc constante sur ]−1,1[.Ainsi, pour tout x ∈ ]−1,1[ :
f (x) = f (0)
= Arcsin(0) + Arccos(0)
= 0 + π
2
= π
2.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
9
Chapitre 1 • Fonctions usuelles
9782100547678-Fresl-C1.qxd 5/07/10 8:44 Page 9

Enfin, on vérifie à la main les cas particuliers exclus de l’étude ci-dessus :
f (1) = Arcsin(1) + Arccos(1)
= π
2+ 0
= π
2et
f (−1) = Arcsin(−1) + Arccos(−1)
= −π2
+ π
= π
2.
On a donc bien :
pour tout x ∈ [−1,1], Arcsin(x) + Arccos(x) = π
2.
Dans cette dernière approche, nous avons échappé à l’argument d’encadrement vudans les deux premières mais il a fallu néanmoins distinguer des cas pour une rai-son de domaine de dérivabilité.
Avec les fonctions Arcsin et Arccos il y a toujours des justifications à apporter : domaine de définition, domaine de dérivabilité ou encadrement desvaleurs prises.
2. Laissons-nous guider par l’énoncé. Nous allons même déterminer le signe strict dev : en effet, il est demandé ensuite de diviser par v qui doit donc être distinct de 0.Pour étudier le signe de v, il suffit de savoir dans quel intervalle Arctan prend sesvaleurs… Ce qui fait partie de sa définition.
Pour tout réel x on a, par définition, Arctan(x) ∈ ]−π/2,π/2[, et donccos(Arctan(x)) > 0 . Ainsi, v > 0, et en particulier v =/ 0 , donc u/v a unsens.D’autre part :
u
v= tan(Arctan(x)) = x .
Enfin, pour tout réel θ, sin2(θ) + cos2(θ) = 1. Avec θ = Arctan(x) onobtient
u2 + v2 = 1.
Comme, par définition, u = vx on obtient, en remplaçant dans l’égalité pré-cédente :
10
Partie 1 • Première période
9782100547678-Fresl-C1.qxd 5/07/10 8:44 Page 10
(vx)2 + v2 = 1
soit
v2(1 + x2) = 1.
Comme 1 + x2 =/ 0 on en tire
v2 = 1
1 + x2
et enfin
v = ± 1√1 + x2
.
Or v > 0, donc
v = 1√1 + x2
.
Enfin, u = vx, donc
u = x√1 + x2
.
Comme souvent en trigonométrie, nous avons calculé les carrés des expressionsdemandées. Pour revenir à u et v il était donc nécessaire de déterminer leur signe,
sans quoi on ne peut dire mieux que |v| =√
v2 .
Exercice 1.4 : Arctangente1. Étant donné un réel strictement positif a on considère la fonction
fa : x → Arctan
(a + x
1 − ax
).
Étudier cette fonction sur chacun des intervalles ]−∞,1/a[ et ]1/a,+∞[.2. Même question, mais avec a < 0.3. Déduire des deux questions précédentes que, pour tous réels a et b (a =/ 0) :
Arctan(a) + Arctan(b) = Arctan
(a + b
1 − ab
)+ kπ
avec
k = 0 si ab < 1k = 1 si ab > 1 et a > 0k = −1 si ab > 1 et a < 0
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
11
Chapitre 1 • Fonctions usuelles
9782100547678-Fresl-C1.qxd 5/07/10 8:44 Page 11

Cet exercice présente à nouveau des problèmes d’ensembles de définition mais cettefois avec la fonction Arctan.
1. Il s’agit ici d’une dérivée composée ; rappelons la formule :
(g f )′ = f ′ × (g′ f )
ou encore, en faisant intervenir la variable notée x :
(g f )′(x) = f ′(x)g′( f (x)).
On a, pour tout x ∈ R \ 1/a :
f ′(x) = d
dx
(a + x
1 − ax
)Arctan′
(a + x
1 − ax
).
Or :
d
dx
(a + x
1 − ax
)= (1 − ax) + a(a + x)
(1 − ax)2
= 1 + a2
(1 − ax)2
et
Arctan′(
a + x
1 − ax
)=
(1 +
(a + x
1 − ax
)2)−1
= (1 − ax)2
(1 − ax)2 + (a + x)2
= (1 − ax)2
1 + (ax)2 + a2 + x2
= (1 − ax)2
(1 + a2)(1 + x2).
Ainsi :
pour tout x ∈ R \ 1/a, f ′a(x) = 1
1 + x2= Arctan′(x).
Le raisonnement suivant est faux : « fa et Arctan ont même dérivée donc il existeune constante K telle que fa = K + Arctan ». En effet, l’égalité ci-dessus n’est pas valable sur un intervalle mais sur les deux intervalles disjoints] − ∞,1/a[ et ]1/a,+∞[ .
L’énoncé correct est : « si f et g sont deux fonctions dérivables sur un intervalleI et si f ′(x) = g′(x) pour tout x de I alors f − g est constante ».
Ainsi, nous devons effectuer deux études de fonction : l’une sur l’intervalle] − ∞,1/a[ et l’autre sur ]1/a,+∞[ .
12
Partie 1 • Première période
9782100547678-Fresl-C1.qxd 5/07/10 8:44 Page 12

On en déduit que, sur chacun des intervalles ]−∞,1/a[ et ]1/a,+∞[,fa − arctan est une fonction constante : il existe deux réels c et d tels que :
• pour tout x ∈ ]−∞,1/a[, fa(x) = Arctan(x) + c ;
• pour tout x ∈ ]1/a,+∞[, fa(x) = Arctan(x) + d .
Comme nous l’avons rappelé, la fonction fa n’étant pas définie sur un intervalle lesdeux constantes c et d n’ont aucune raison d’être égales… Nous verrons d’ailleursqu’elles ne le sont pas.Pour les déterminer, on peut choisir des valeurs particulières de x ou considérer leslimites à l’infini.
On remarque que, d’après la définition de fa :
limx→+∞ fa(x) = lim
x→−∞ fa(x) = Arctan(−1/a).
De plus, comme fa(x) = Arctan(x) + c pour x < 1/a, on a
limx→−∞ fa(x) = c − π/2
et, comme fa(x) = Arctan(x) + d pour x > 1/a, on a
limx→+∞ fa(x) = d + π/2.
On en déduit
d + π/2 = c − π/2
soit
c = d + π.
Nous avons ici une première relation entre les deux paramètres à déterminer c et d.Il nous en faut une autre pour les déterminer explicitement, nous allons pour celaconsidérer la valeur en 0 de la fonction fa.Pour cela, il faut savoir si 0 ∈] − ∞,1/a[ ou 0 ∈]1/a,+∞[ : nous allons pour celaenfin nous servir de l’hypothèse de signe sur a.
Comme a > 0 , on a
0 ∈ ]−∞,1/a[
donc
fa(0) = Arctan(0) + c = c.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
13
Chapitre 1 • Fonctions usuelles
9782100547678-Fresl-C1.qxd 5/07/10 8:44 Page 13

D’autre part, d’après la définition de fa, fa(0) = Arctan(a) , d’où
c = Arctan(a)
puisd = Arctan(a) − π.
On a alors :
• pour tout réel b tel que b < 1/a, Arctan(a) + Arctan(b)
= Arctan
(a + b
1 − ab
);
• pour tout réel b tel que b > 1/a, Arctan(a) + Arctan(b)
= Arctan
(a + b
1 − ab
)+ π .
2. Cherchons ce qui change quand on suppose a < 0.Le signe de a n’intervenait que pour le calcul des constantes ; le calcul de la déri-vation, lui, est toujours valable.
Dans le cas a < 0 on montre de manière analogue qu’il existe deux réels c′
et d ′ tels que :
• pour tout x ∈ ]−∞,1/a[, fa(x) = Arctan(x) + c′ ;
• pour tout x ∈ ]1/a,+∞[, fa(x) = Arctan(x) + d ′ .
De même, en calculant les limites à l’infini, on obtient encore
c′ = d ′ + π.
Pour déterminer c′ et d ′ considérons des valeurs particulières.Cette fois, a < 0 donc 0 ∈ ]1/a,+∞[. On a donc
fa(0) = Arctan(0) + d ′ = d ′.
D’autre part, fa(0) = arctan(a) , d’où
d ′ = Arctan(a)
et enfinc′ = Arctan(a) + π.
On a alors :
• pour tout réel b tel que b > 1/a, Arctan(a) + Arctan(b)
= Arctan
(a + b
1 − ab
);
• pour tout réel b tel que b < 1/a, Arctan(a) + Arctan(b)
= Arctan
(a + b
1 − ab
)− π .
14
Partie 1 • Première période
9782100547678-Fresl-C1.qxd 5/07/10 8:44 Page 14

3. Distinguons trois cas comme le suggère l’énoncé.
• Si ab < 1 : on a soit a > 0 et b < 1/a, soit a < 0 et b > 1/a. D’aprèsce qui précède on a dans ces deux cas
Arctan(a) + Arctan(b) = Arctan
(a + b
1 − ab
).
• Si ab > 1 et a > 0 : on a b > 1/a et, d’après la question 1,
Arctan(a) + Arctan(b) = Arctan
(a + b
1 − ab
)+ π.
• Si ab > 1 et a < 0 : on a b < 1/a et, d’après la question 2,
Arctan(a) + Arctan(b) = Arctan
(a + b
1 − ab
)− π.
Exercice 1.5 : Fonctions hyperboliques réciproques
1. Montrer que, pour tout réel x , Argsh(x) = ln(x + √x2 + 1) .
2. Montrer que, pour tout x ∈ [1,+∞[, Argch(x) = ln(x + √x2 − 1) .
3. Montrer que, pour tout x ∈ ]−1,1[, Argth(x) = 1
2ln
(1 + x
1 − x
).
Les fonctions hyperboliques s’expriment par définition simplement en fonction del’exponentielle : il ne s’agit donc pas réellement de « nouvelles » fonctions maissimplement de notations abrégées pour des fonctions qui sont du ressort du pro-gramme de Terminale.Les expressions faisant intervenir ch(x) et sh(x) peuvent se simplifier en posantu = ex : on a alors ch(x) = (u + 1/u)/2 et sh(x) = (u − 1/u)/2 , ce qui permet dese ramener à une expression qui est un quotient de polynômes en u et se prête doncmieux au calcul. Tous les calculs proposés ici seront traités de cette manière.
1. Soit x ∈ R et y = Argsh(x). Alors sh(y) = x , autrement dit :
ey − e−y
2= x
soit
ey − e−y = 2x .
Posons z = ey. Il vient
z − z−1 = 2x
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
15
Chapitre 1 • Fonctions usuelles
9782100547678-Fresl-C1.qxd 5/07/10 8:44 Page 15

et on a donc, en multipliant par z :
z2 − 2xz − 1 = 0.
Le nombre réel z est racine de l’équation du second degré
(E) : t2 − 2xt − 1 = 0
d’inconnue t ∈ R .Son discriminant est 4(x2 + 1) et ses racines x ± √
x2 + 1.
Nous venons de démontrer que z = x +√
x2 + 1 ou z = x −√
x2 + 1. Nousdevons donc décider laquelle de ces deux expressions est correcte.
Pour cela, il suffit de trouver un critère pour distinguer ces solutions, par exempleleur signe : si elles sont de signes opposés et qu’on connaît le signe de z , on pour-ra choisir la bonne solution.
Comme z = ey et y ∈ R , on a : z ∈ R∗+ .
D’autre part on a, pour tout réel x , x |x | <√
x2 + 1 , d’où
x − √x2 + 1 < 0.
Cette racine de l’équation (E) ne peut pas être z, donc
z = x +√
x2 + 1
et enfin
y = ln(z) = ln(x +√
x2 + 1)
soit encore
Argsh(x) = ln(x +√
x2 + 1).
2. On peut tenter un raisonnement analogue. Si l’obtention d’une équation dusecond degré se fera sans problème nous verrons que le choix de la bonne racinedevra se faire à l’aide d’un critère différent.
De même, pour x 1, on pose y = Argch(x), d’où
ch(y) = x
etey + e−y = 2x .
Avec z = ey on obtient alors
z2 − 2xz + 1 = 0.
16
Partie 1 • Première période
9782100547678-Fresl-C1.qxd 5/07/10 8:44 Page 16

Le réel z est racine de l’équation
(E ′) : t2 − 2xt + 1 = 0
d’inconnue t ∈ R .Son discriminant est 4(x2 − 1) 0 (car x 1) et elle a donc pour racinesx ± √
x2 − 1.
On se retrouve dans une situation analogue à celle de la question précédente : dedeux solutions potentielles, il faut choisir la bonne. Pour cela, il suffit de trouverun critère pour les départager en commençant par chercher un intervalle danslequel se trouve à coup sûr z .Le mieux que l’on puisse dire, x étant quelconque dans [1,+∞[, est que y 0(par définition de la fonction Argch) et donc que z 1. Ainsi, ce n’est pas le signedes racines qui est déterminant, mais leur position par rapport à 1.
Ces racines sont positives et leur produit vaut 1 : la plus grande est donc 1 et la plus petite 1.
Or √
x2 − 1 0 , d’où x − √x2 − 1 x + √
x2 − 1 .D’autre part, y 0 par définition de Argch donc z 1.
On a donc z = x + √x2 − 1 , soit
Argch(x) = ln(x +√
x2 − 1).
3. Encore une fois, nous allons débuter par le même raisonnement mais la conclu-sion sera différente.
Par un raisonnement analogue, soit x ∈ ]−1,1[ et y = Argth(x). Alors
x = th(y)
= ey − e−y
ey + e−y
= e2y − 1
e2y + 1.
En posant z = ey il vient
x = z2 − 1
z2 + 1
soit z2 − 1 = x(z2 + 1).
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
17
Chapitre 1 • Fonctions usuelles
9782100547678-Fresl-C1.qxd 5/07/10 8:45 Page 17

En développant et regroupant les termes en z, on obtient(1 − x)z2 = 1 + x et, comme x =/ 1 :
z2 = 1 + x
1 − x
soit e2y = 1 + x
1 − x
et enfin y = 1
2ln
(1 + x
1 − x
).
Exercice 1.6 : Calcul de limite par encadrement
1. Démontrer que, pour tout réel x 0,
x − 1
2x2 ln(1 + x) x .
2. En déduire la valeur de
limn→∞
n∏k=1
(1 + k
n2
).
On pourra préalablement démontrer que
n∑k=1
k2 = 1
6n(n + 1)(2n + 1).
1. Pour établir une inégalité de la forme
∀x ∈ I, f (x) g(x)
on peut introduire la fonction g − f et étudier son signe sur I. Dans les cas qui nousintéressent ici, la dérivée se calcule sans peine, ce qui permet de conclure aisément.
Pour x ∈ R+ posons u(x) = ln(1 + x) − x. u est dérivable sur R+ et
∀x ∈ R+, u′(x) = 1
1 + x− 1 = − x
1 + x 0.
La fonction u est donc décroissante sur R+. Etant donné que u(0) = 0, ona donc u(x) 0 pour tout réel x 0. Autrement dit :
∀x ∈ R+, ln(1 + x) x .
18
Partie 1 • Première période
9782100547678-Fresl-C1.qxd 5/07/10 8:45 Page 18

De même, soit la fonction v définie pour x ∈ R+ par
v(x) = ln(1 + x) − x + 1
2x2. v est dérivable et
∀v ∈ R+, v′(x) = 1
1 + x− 1 + x = x2
1 + x 0.
La fonction v est donc croissante sur R+. Etant donné que v(0) = 0, on adonc v(x) 0 pour tout réel x 0. Autrement dit :
∀x ∈ R+, x − 1
2x2 ln(1 + x).
2. Commençons par établir l’égalité donnée en indication. Il s’agit d’une simpledémonstration par récurrence.
Pour n ∈ N∗ posons Hn : « n∑
k=1
k2 = 1
6n(n + 1)(2n + 1) ».
• Initialisation : H1 est clairement vraie, l’égalité se résumant alors à1 = 1.
• Hérédité : soit n ∈ N∗ tel que Hn soit vraie. Alors :n+1∑k=1
k2 =n∑
k=1
k2 + (n + 1)2
= 1
6n(n + 1)(2n + 1) + (n + 1)2
par hypothèse de récurrence. On a donc, en développant :n+1∑k=1
k2 = 1
6(2n3 + 9n2 + 13n + 6).
D’autre part, en posant un = 1
6n(n + 1)(2n + 1) , on a successivement
un+1 = 1
6(n + 1)((n + 1) + 1)(2(n + 1) + 1)
= 1
6(n + 1)(n + 2)(2n + 3)
= 1
6(2n3 + 9n2 + 13n + 6).
Ainsi, Hn+1 est vraie.
• Conclusion : pour tout entier naturel non nul n, n∑
k=1
k2 = 1
6n(n + 1)(2n + 1).
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
19
Chapitre 1 • Fonctions usuelles
9782100547678-Fresl-C1.qxd 5/07/10 8:45 Page 19

On peut écrire le produit de manière peut-être plus lisible :
n∏k=1
(1 + k
n2
)=
(1 + 1
n2
)· · ·
(1 + n
n2
).
La première chose à remarquer est que le nombre de facteurs du produit estvariable. Il s’agit d’un produit comportant de plus en plus de termes qui sont deplus en plus proches de 1. Dans ce genre de situation, on ne peut pas conclure surla limite du produit.
À cet effet, rappelons un calcul classique qui montre qu’il faut se méfier des pro-duits ayant un nombre de facteurs variables.
Pour calculer limn→∞
(1 + 1
n
)n
, considérons plutôt le logarithme :
ln
((1 + 1
n
)n)= n ln
(1 + 1
n
).
Le second membre est une forme indéterminée qui peut s’écrire comme limite d’untaux d’accroissement; plus précisément,
n ln
(1 + 1
n
)=
ln
(1 + 1
n
)− ln(1)(
1 + 1
n
)− 1
et tend donc vers le nombre dérivé en 0 de la fonction x → ln(1 + x) quand n tendvers +∞.
Ainsi,
limn→∞
(n ln
(1 + 1
n
))= 1
donc
limn→∞
(1 + 1
n
)n
= e.
En particulier, on voit que la limite n’est pas 1, comme on aurait pu le croire en sup-
posant que le fait que 1 + 1n tende vers 1 entraîne que sa puissance n-ième tende
aussi vers 1. D’une manière générale, aucun théorème classique ne s’appliquequand les puissances ou le nombre de facteurs d’un produit est variable.
Nous allons simplifier le produit en considérant son logarithme.
ln
( n∏k=1
(1 + k
n2
))=
n∑k=1
ln
(1 + k
n2
)
20
Partie 1 • Première période
9782100547678-Fresl-C1.qxd 5/07/10 8:45 Page 20

Par ailleurs, pour tout entier naturel k n on a, d’après la première ques-tion :
k
n2− 1
2
k2
n4 ln
(1 + k
n2
)
k
n2
En additionnant ces inégalités pour k allant de 1 à n on obtient :
n∑k=1
k
n2−
n∑k=1
1
2
k2
n4
n∑k=1
ln
(1 + k
n2
)
n∑k=1
k
n2
soit, en factorisant les constantes de chaque somme,
1
n2
n∑k=1
k − 1
2n4
n∑k=1
k2 n∑
k=1
ln
(1 + k
n2
)
1
n2
n∑k=1
k
Nous voyons bien apparaître la somme n∑
k=1
k2 dont la valeur est donné dans
l’énoncé. Il se trouve également dans ces inégalités la somme n∑
k=1
k qui, elle, peut
être calculée sans indication : il s’agit simplement de la somme des n premierstermes de la suite arithmétique de premier terme 1 et de raison 1. D’après la formuleclassique donnant la valeur d’une telle somme, on a
n∑k=1
k = n(n + 1)
2.
Notons que l’encadrement que l’on obtiendra en remplaçant les sommes par leursvaleurs sera une forme indéterminée classique : il s’agit d’un quotient de fonctionspolynomiales de n.
Une telle indétermination se lève simplement en factorisant la plus grand puissancede n dans chaque facteur du numérateur et du dénominateur.
On a successivement :
• 1
n2
n(n + 1)
2− 1
2n4
n(n + 1)(2n + 1)
6
n∑k=1
ln
(1 + k
n2
)
1
n2
n(n + 1)
2
• 1
n2
n2(1 + 1n )
2− 1
2n4
n3(1 + 1n )(2 + 1
n )
6
n∑k=1
ln
(1 + k
n2
)
1
n2
n2(1 + 1n )
2
• (1 + 1
n )
2− (1 + 1
n )(2 + 1n )
12n
n∑k=1
ln
(1 + k
n2
)
(1 + 1n )
2© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
21
Chapitre 1 • Fonctions usuelles
9782100547678-Fresl-C1.qxd 5/07/10 8:45 Page 21

Il est désormais clair que les membres de droite et de gauche tendent tous deux vers12 quand n tend vers +∞.
Il ne reste ensuite qu’à revenir au produit en prenant l’exponentielle.
D’après le théorème des gendarmes,
limn→∞
n∑k=1
ln
(1 + k
n2
)= 1
2soit enfin :
limn→∞
n∏k=1
(1 + k
n2
)= √
e.
Exercice 1.7 : Études de fonctions et suites adjacentes
Cet exercice est long mais permet de réviser toutes les notions d’analyse deTerminale, à l’exception des intégrales.On peut directement traiter les questions 4 à 7 en admettant les résultats des troispremières.
On pose f (x) = 1
2ln
(∣∣∣∣1 + x
1 − x
∣∣∣∣)
− x , g(x) = x3
3(1 − x2)et h(x) = f (x) − g(x) .
1. Étudier f, g et h et tracer séparément leurs représentations graphiques.
2. Montrer que, pour n ∈ N∗ , (2n+1) f
(1
2n+1
)=
(n+ 1
2
)ln
(1+ 1
n
)−1 .
3. Montrer que, pour n ∈ N∗ , (2n + 1)g
(1
2n + 1
)= 1
12n(n + 1).
Pour n ∈ N∗ on pose un = nne−n√n
n!et vn = unexp
(1
12n
).
4. À l’aide des résultats précédents déterminer le sens de variation de la suite determe général ln(un).
5. Même question pour la suite de terme général ln(vn).
6. Montrer que (ln(un))n∈N∗ et (ln(vn))n∈N∗ sont adjacentes.
7. Montrer que (un)n∈N∗ et (vn)n∈N∗ sont convergentes de même limite stricte-ment positive (le calcul explicite de cette limite n’est pas demandé).
1. Les formules de dérivation classiques donnent :
f ′(x) = x2
1 − x2, g′(x) = x2(3 − x2)
3(1 − x2)2et h′(x) = − 2x4
3(1 − x2)2.
22
Partie 1 • Première période
9782100547678-Fresl-C1.qxd 5/07/10 8:45 Page 22
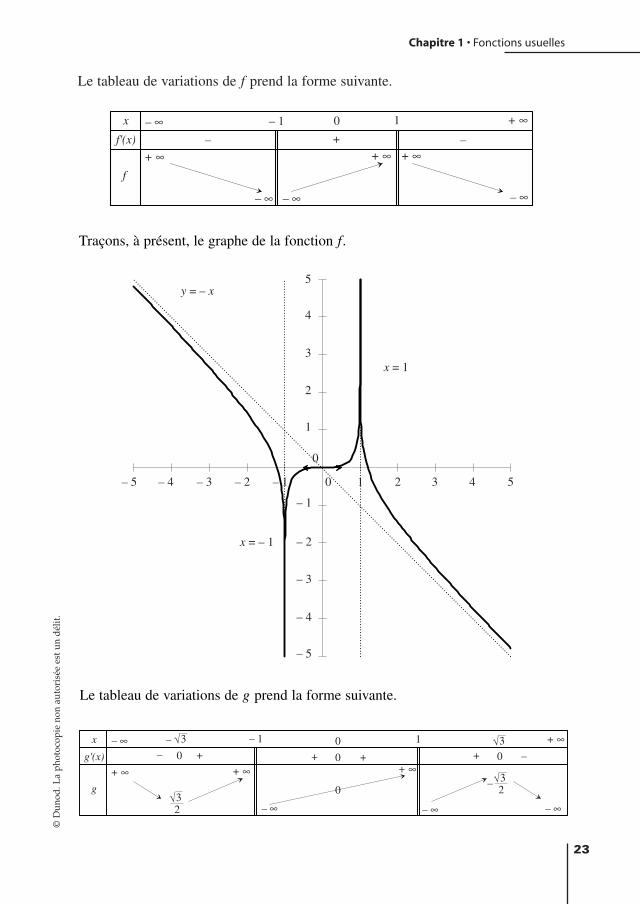
Le tableau de variations de f prend la forme suivante.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
23
Chapitre 1 • Fonctions usuelles
– 1x
f'(x)
f
10– ∞
– ∞ – ∞– ∞
+ ∞ + ∞ + ∞
+ ∞– + –
Traçons, à présent, le graphe de la fonction f.
0
0
1
1
– 1
– 1
– 2
– 2
– 3
– 3
– 4
– 4
– 5
– 5 2
2
3
3
4
4
5
5y = – x
x = 1
x = – 1
Le tableau de variations de g prend la forme suivante.
x
g'(x)
g
– ∞
+ ∞– +
– 1 0 1
0
– ∞ – ∞ – ∞
+ ∞
+ ∞– √3
√32
+ +0
0
√3
√32–
+ –0+ ∞
9782100547678-Fresl-C1.qxd 5/07/10 8:45 Page 23
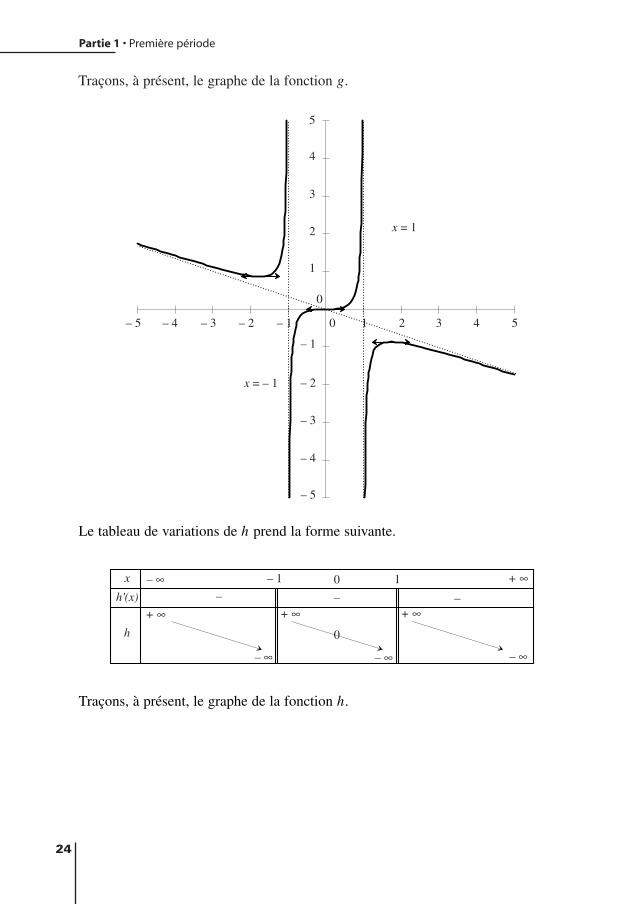
Traçons, à présent, le graphe de la fonction g.
24
Partie 1 • Première période
0
0
1
1
– 1
– 1
– 2
– 2
– 3
– 3
– 4
– 4
– 5
– 5 2
2
3
3
4
4
5
5
x = – 1
x = 1
Le tableau de variations de h prend la forme suivante.
x
h'(x)
h
– ∞
– ∞ – ∞ – ∞
+ ∞ + ∞ + ∞
+ ∞– – –
– 1 0 1
0
Traçons, à présent, le graphe de la fonction h.
9782100547678-Fresl-C1.qxd 5/07/10 8:45 Page 24
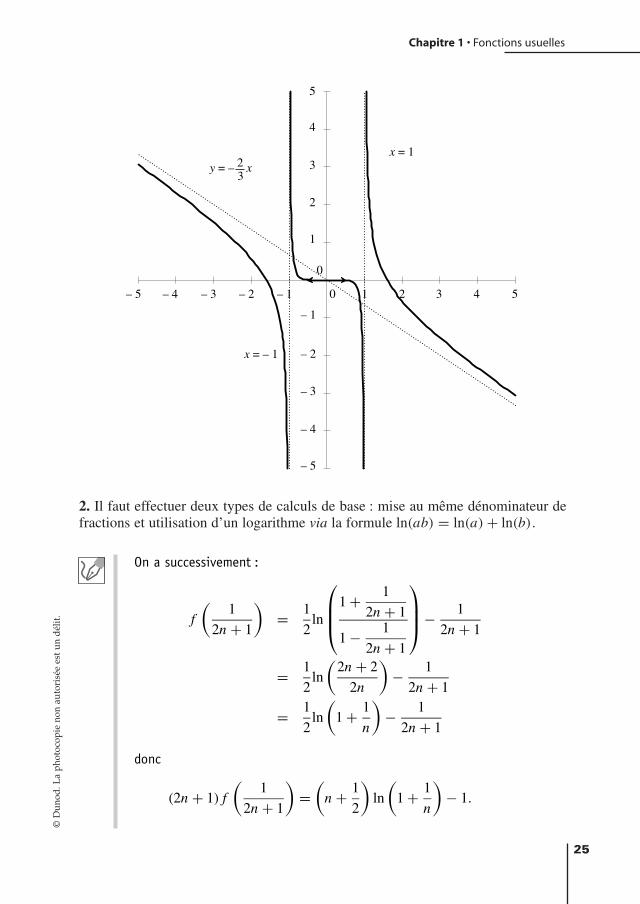
2. Il faut effectuer deux types de calculs de base : mise au même dénominateur defractions et utilisation d’un logarithme via la formule ln(ab) = ln(a) + ln(b).
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
25
Chapitre 1 • Fonctions usuelles
0
0
1
1
– 1
– 1
– 2
– 2
– 3
– 3
– 4
– 4
– 5
– 5 2
2
3
3
4
4
5
5
x = – 1
x = 1y = – x2
3
On a successivement :
f
(1
2n + 1
)= 1
2ln
1 + 1
2n + 1
1 − 1
2n + 1
− 1
2n + 1
= 1
2ln
(2n + 2
2n
)− 1
2n + 1
= 1
2ln
(1 + 1
n
)− 1
2n + 1
donc
(2n + 1) f
(1
2n + 1
)=
(n + 1
2
)ln
(1 + 1
n
)− 1.
9782100547678-Fresl-C1.qxd 5/07/10 8:45 Page 25

3. Idem en plus simple puisqu’il n’y a pas de logarithme.
De la même manière :
(2n + 1)g
(1
2n + 1
)=
(1
2n + 1
)2
3
(1 −
(1
2n + 1
)2 )
= 1
3((2n + 1)2 − 1)
= 1
12n(n + 1)
car (2n + 1)2 = 4n2 + 4n + 1.
4. Le terme un est exprimé à l’aide de produits (dont des puissances et des facto-rielles). Le terme ln(un) peut donc s’écrire comme une somme de termes simples.C’est ce qu’il est conseillé de faire pour y voir plus clair et éviter ainsi les erreursde calcul dans la suite.
On a
ln(un) =(
n + 1
2
)ln(n) − n − ln(n!)
d’où
ln(un+1) =(
n + 3
2
)ln(n + 1) − (n + 1) − ln((n + 1)!).
En utilisant les relations
ln(n + 1) = ln(n) + ln
(1 + 1
n
)
et
ln((n + 1)!) = ln(n!) + ln(n + 1)
il vient
ln((n + 1)!) = ln(n!) + ln(n) + ln
(1 + 1
n
)
et on obtient :
ln(un+1) =(
n + 3
2
)ln(n) +
(n + 3
2
)ln
(1 + 1
n
)
−(n + 1) − ln(n!) − ln(n) − ln
(1 + 1
n
)
26
Partie 1 • Première période
9782100547678-Fresl-C1.qxd 5/07/10 8:45 Page 26

soit enfin
ln(un+1) − ln(un) =(
n + 1
2
)ln
(1 + 1
n
)− 1
= (2n + 1) f
(1
2n + 1
).
Or f est strictement positive sur ]0,1[ d’où : ln(un+1) − ln(un) > 0 . Lasuite (ln(un))n∈N∗ est donc croissante.
5. vn étant défini en fonction de un , on obtient une expression de ln(vn) en fonctionde ln(un) qui a précisément été calculé ci-dessus.
On a, par définition,
ln(vn) = ln(un) + 1
12n
donc
ln(vn+1) − ln(vn) = ln(un+1) − ln(un) + 1
12n− 1
12(n + 1)
= (2n + 1) f
(1
2n + 1
)− 1
12n(n + 1)
= (2n + 1) f
(1
2n + 1
)− (2n + 1)g
(1
2n + 1
)
= (2n + 1)h
(1
2n + 1
).
Or h est strictement négative sur ]0,1[ donc (ln(vn))n∈N∗ est décroissante.
6. Tout le travail a été fait précédemment : il n’y a plus qu’à vérifier la définitiondes suites adjacentes.
La suite (ln(un))n∈N∗ est croissante et la suite (ln(vn))n∈N∗ décroissante.
D’autre part,
ln(vn) = ln(un) + 1
12n
donc
limn→∞ (ln(vn) − ln(un)) = 0
Ainsi, par définition, les suites (ln(un))n∈N∗ et (ln(vn))n∈N∗ sont adja-centes.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
27
Chapitre 1 • Fonctions usuelles
9782100547678-Fresl-C1.qxd 5/07/10 8:45 Page 27

7. Il suffit d’invoquer le théorème des suites adjacentes puis de revenir aux suitesinitiales en utilisant l’exponentielle.
Les suites (ln(un))n∈N∗ et (ln(vn))n∈N∗ étant adjacentes, elles sont conver-gentes de même limite ∈ R .
On a donc
limn→∞ un = lim
n→∞ vn = e ∈ R∗+.
La valeur exacte de cette limite est (2π)−1/2 ; elle peut être calculée à l’aide desintégrales de Wallis présentées dans l’exercice 8.1.
28
Partie 1 • Première période
9782100547678-Fresl-C1.qxd 5/07/10 8:45 Page 28

29
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
Exercice 2.1 : Sommes de cosinus
1. Pour n ∈ N et x ∈ R , calculer n∑
k=0
cos(kx).
2. Même question pour n∑
k=0
(n
k
)cos(kx) .
Les sommes d’expressions trigonométriques se traitent naturellement avec les
nombres complexes. En effet, pour tout réel θ , cos(θ) = Re(eiθ) et la partie réelled’une somme est la somme des parties réelles. On obtient ainsi une somme d’expo-nentielles complexes et, le plus souvent, on pourra reconnaître une somme usuelle :termes d’une suite géométrique ou identité remarquable.
1. En suivant la méthode annoncée nous obtenons ici les termes d’une suite géo-métrique.
n∑k=0
cos(kx) =n∑
k=0
Re(eikx)
= Re
( n∑k=0
eikx)
.
Or eikx = (eix)k donc la somme
n∑k=0
eikx
est la somme des n + 1 premiers termes de la suite géométrique de premierterme 1 et de raison eix.
Nombres complexes 2
9782100547678-Fresl-C2.qxd 5/07/10 9:08 Page 29

Il y a deux cas à distinguer selon que la raison est égale ou non à 1. En effet, laformule
n∑k=0
qk = 1 − qn+1
1 − q
n’est valable que si q =/ 1, et pour cause : le second membre n’a pas de sens pourq = 1 !
Ici, la raison est eix et est donc égale à 1 si, et seulement si, x est un multiple de 2π,ce qui nous donne la condition pour distinguer les deux cas.
Distinguons deux cas :• si eix = 1 , i.e. x est de la forme 2mπ avec m ∈ Z : tous les termes de lasomme valent 1 d’où
n∑k=0
cos(kx) = n + 1.
• si eix =/ 1, on a alors d’après la formule donnant la somme des termesd’une suite géométrique de raison différente de 1 :
n∑k=0
eikx = (eix)n+1 − 1
eix − 1
= ei(n+1)x − 1
eix − 1.
Pour simplifier un quotient de nombres complexes une méthode générale est demultiplier numérateur et dénominateur par le conjugué du dénominateur.
Cependant, quand les nombres complexes qui interviennent sont des exponentielles,on peut essayer une autre méthode bien plus efficace : la méthode de l’argumentmoitié.
Expliquons-la brièvement : dans une expression de la forme 1 + eiθ, on factorise
eiθ/2 et il vient
1 + eiθ = eiθ/2(e−iθ/2 + eiθ/2)
= 2eiθ/2cos(θ/2).
D’une manière générale, étant donné deux complexes a et b, il peut être intéressantde remarquer que
ea + eb = e(a+b)/2(e(a−b)/2 + e−(a−b)/2).
La même factorisation permet de simplifier les différences d’exponentielles.
30
Partie 1 • Première période
9782100547678-Fresl-C2.qxd 5/07/10 9:08 Page 30

En factorisant :
ei(n+1)x − 1
eix − 1= ei(n+1)x/2
eix/2
ei(n+1)x/2 − e−i(n+1)x/2
eix/2 − e−i x/2
= einx/2 sin((n + 1)x/2)
sin(x/2).
Enfin, la somme cherchée est la partie réelle de cette expression, soit
n∑k=0
cos(kx) = cos(nx/2)sin((n + 1)x/2)
sin(x/2).
2. Nous pouvons débuter de manière analogue en faisant apparaître des partiesréelles d’exponentielles complexes. Cette fois-ci, la présence des coefficients bino-miaux nous mènera à une identité remarquable : le binôme de Newton.
De manière analogue :
n∑k=0
(n
k
)cos(kx) =
n∑k=0
(n
k
)Re(eikx)
= Re
( n∑k=0
(n
k
)(eix)k
).
Or, d’après la formule du binôme de Newton :
n∑k=0
(n
k
)(eix)k = (1 + eix)n.
En factorisant encore une fois l’argument moitié :
(1 + eix)n = (eix/2(eix/2 + e−i x/2))n
= einx/22ncosn(x/2).
Enfin, en prenant la partie réelle :
n∑k=0
(n
k
)cos(kx) = 2ncos(nx/2)cosn(x/2).
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
31
Chapitre 2 • Nombres complexes
9782100547678-Fresl-C2.qxd 5/07/10 9:08 Page 31

Exercice 2.2 : cos(2π/5)
On pose ω = e2iπ/5.
1. Montrer que 1 + ω+ ω2 + ω3 + ω4 = 0.
2. On pose z = ω+ ω−1 . Former une équation du second degré vérifiée par z.
3. En déduire les valeurs de cos(2π/5) , sin(2π/5) et tan(2π/5) .
1. C’est un résultat de cours!
En développant :
(1 − ω)(1 + ω+ ω2 + ω3 + ω4) = 1 − ω5 = 0
car ω5 = 1.Or 1 − ω =/ 0 donc 1 + ω+ ω2 + ω3 + ω4 = 0 .
On aurait aussi pu remarquer que cette quantité est la somme des cinq premierstermes d’une suite géométrique de premier terme 1 et de raison ω =/ 1, d’où :
1 + ω+ ω2 + ω3 + ω4 = 1 − ω5
1 − ω= 0
car ω5 = 1.
Cependant, quelle que soit la rédaction choisie, l’hypothèse ω =/ 1 est essentiellepour pouvoir diviser par 1 − ω.
2. Il s’agit de faire apparaître une relation entre z et z2 . On a z = ω+ ω−1 et
z2 = ω2 + 2 + ω−2 : il nous faut donc faire apparaître une relation entre les ωk, k
allant de −2 à 2, à partir de la première question qui est une relation entre les ωk, kallant de 0 à 4. Pour cela, il suffit de diviser le résultat de la première question par
ω2.
Comme ω2 =/ 0 on déduit de la relation précédente :
ω−2 + ω−1 + 1 + ω+ ω2 = 0.
De plus,
z = ω+ ω−1 et z2 = ω2 + 2 + ω−2
d’où :
z2 + z − 1 = 0.
32
Partie 1 • Première période
9782100547678-Fresl-C2.qxd 5/07/10 9:08 Page 32

3. Commençons par résoudre cette équation pour déterminer z.
Cette équation du second degré a pour discriminant 5 et ses racines sont,d’après les formules du cours :
z1 = −1 + √5
2et z2 = −1 − √
5
2.
On a donc z = z1 ou z = z2.
Il faut maintenant déterminer si z = z1 ou z = z2. Pour cela, nous allons étudier lesigne de ces quantités.
On remarque que z2 < 0 < z1 : il suffit donc de déterminer le signe de zpour conclure.D’après la formule d’Euler :
z = ω+ ω−1
= e2iπ/5 + e−2iπ/5
= 2 cos(2π/5).
Or 0 <2π
5<π
2, donc cos(2π/5) > 0 : on a donc z = z1, ce qui donne
cos(2π/5) =√
5 − 1
4.
Il reste désormais à utiliser les formules de trigonométrie usuelles pour déterminerles autres valeurs demandées. Ces formules faisant parfois intervenir des carrés il yaura à nouveau des questions de signes à étudier.
De la formule
sin2(2π/5) + cos2(2π/5) = 1
on tire successivement
sin2(2π/5) = 1 −(√
5 − 1
4
)2
= 10 + 2√
5
16
d’où
sin(2π/5) = ±√
10 + 2√
5
4.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
33
Chapitre 2 • Nombres complexes
9782100547678-Fresl-C2.qxd 5/07/10 9:08 Page 33

Le même argument que précédemment montre que sin(2π/5) > 0 et donc
sin(2π/5) =√
10 + 2√
5
4.
Enfin, on a
tan(2π/5) = sin(2π/5)
cos(2π/5)
=√
10 + 2√
5√5 − 1
.
Il s’agit de simplifier cette expression. Pour cela, nous allons élever au carré pouréliminer la « grande » racine carrée puis multiplier par la « quantité conjuguée » dudénominateur afin qu’il ne subsiste plus qu’une seule racine carrée, au numérateur.
On a successivement :
tan2(2π/5) = 10 + 2√
5
6 − 2√
5
= (10 + 2√
5)(6 + 2√
5)
(6 − 2√
5)(6 + 2√
5)
= 80 + 32√
5
16= 5 + 2
√5.
Enfin, comme tan(2π/5) > 0 , on en déduit
tan(2π/5) =√
5 + 2√
5.
Étant donnée la grande diversité des formules de trigonométrie il existe de nom-breuses méthodes donnant ce résultat.
Par exemple, on aurait pu utiliser la relation cos−2 = 1 + tan2 ; cependant, onremarque que l’on aurait encore eu à utiliser un argument de signe pour en dédui-re la valeur demandée.
Exercice 2.3 : Racines septièmes
On pose z = e2iπ/7, s = z + z2 + z4 et t = z3 + z5 + z6.1. Calculer s + t et st.2. En déduire les valeurs de s et t .
34
Partie 1 • Première période
9782100547678-Fresl-C2.qxd 5/07/10 9:08 Page 34

Il faut bien lire l’énoncé ! Il demande de calculer s + t et st avant de calculer set t ; il est donc incorrect, et probablement difficile, de chercher dès le début à cal-culer s et t pour en déduire s + t et st .
1. Le nombre z est par définition une racine septième de l’unité, donc z7 = 1.
De plus, z =/ 1, donc 1 + z + z2 + z3 + z4 + z5 + z6 = 0. Ce sont les deux seuls résul-tats du cours relatifs aux racines de l’unité : il faudra donc probablement s’en servir.
On a s + t = z + z2 + z3 + z4 + z5 + z6 .Or 1 + z + · · · + z6 = 0 .On a donc
s + t = −1.
De même, on a
st = (z + z2 + z4)(z3 + z5 + z6)
= z4 + z5 + z6 + 3z7 + z8 + z9 + z10.
Or z7 = 1, d’où l’on tire également
z8 = z, z9 = z2 et z10 = z3
soit
st = 3 + z + z2 + z3 + z4 + z5 + z6.
Enfin, d’après ce qui précède, z + z2 + · · · + z6 = −1 .On a donc
st = 2.
2. Il est ici demandé de trouver deux nombres complexes connaissant leur sommeet leur produit. Pour cela, on utilise le résultat suivant du cours : la somme des
racines de l’équation az2 + bz + c = 0 est −b/a et leur produit c/a.
Les nombres s et t sont les racines complexes de l’équation du second degréd’inconnue z :
z2 − (s + t)z + st = 0
autrement dit :
z2 + z + 2 = 0.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
35
Chapitre 2 • Nombres complexes
9782100547678-Fresl-C2.qxd 5/07/10 9:08 Page 35

Son discriminant est −7 et ses racines sont donc
z1 = −1 + i√
7
2et z2 = −1 − i
√7
2.
L’une de ces racines est s et l’autre t . Pour déterminer laquelle est effectivement s,il faut trouver un critère permettant de distinguer ces deux racines.
La différence entre z1 et z2 est le signe de leur partie imaginaire : en effet,Im(z2) < 0 et Im(z1) > 0. Il reste à évaluer le signe de Im(s) pour savoir si s = z1
ou s = z2. Pour cela, il faudra déterminer les positions relatives des réels de laforme kπ/7.
On a successivement :
Im(s) = Im(e2iπ/7 + e4iπ/7 + e8iπ/7)
= sin(2π/7) + sin(4π/7) + sin(8π/7)
= sin(2π/7) + sin(3π/7) − sin(π/7)
car
sin(4π/7) = sin(π− 3π/7)
= sin(3π/7)
et
sin(8π/7) = sin(π+ π/7)
= −sin(π/7).
Or
0 < π/7 < 2π/7 < 3π/7 < π/2
donc, la fonction sinus étant strictement croissante sur [0,π/2],
0 < sin(π/7) < sin(2π/7) < sin(3π/7) < 1.
Ainsi,
sin(2π/7) − sin(π/7) > 0
et sin(3π/7) > 0, d’où Im(s) > 0 ; on a donc s = z1 (d’où t = z2), soit
s = −1 + i√
7
2et t = −1 − i
√7
2.
36
Partie 1 • Première période
9782100547678-Fresl-C2.qxd 5/07/10 9:08 Page 36

Exercice 2.4 : Linéarisation, formule de Moivre
1. Linéariser sin3(x) et cos4(x).2. Exprimer cos(5x) sous forme d’une expression polynomiale en cos(x) . Demême, exprimer sin(5x) en fonction de sin(x) et cos(x) .
1. La méthode générale de linéarisation consiste à utiliser les formules d’Euler, puisà développer les puissances : on regroupe ensuite les exponentielles complexes pourfaire réapparaître des formules d’Euler.
Avec les formules d’Euler on a successivement :
sin3(x) =(
eix − e−i x
2i
)3
= 1
(2i)3(eix − e−i x)3.
D’après la formule du binôme de Newton :
(eix − e−i x)3 = (eix)3 − 3(eix)2e−i x + 3eix(e−i x)2 − (e−i x)3
= e3i x − 3eix + 3e−i x − e−3i x .
Or, toujours d’après les formules d’Euler :
e3i x − e−3i x = 2isin(3x)
et
eix − e−i x = 2isin(x)
donc
(eix − e−i x)3 = 2i(sin(3x) − 3sin(x)).
On a donc :
sin3(x) = 1
(2i)2(sin(3x) − 3sin(x))
soit
sin3(x) = 3
4sin(x) − 1
4sin(3x).
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
37
Chapitre 2 • Nombres complexes
9782100547678-Fresl-C2.qxd 5/07/10 9:08 Page 37

De même :
cos4(x) =(
eix + e−i x
2
)4
= 1
16(eix + e−i x)4.
En développant la puissance il vient
(eix + e−i x)4 = ((eix)4 + 4(eix)3e−i x + 6(eix)2(e−i x)2
+4eix(e−i x)3 + (e−i x)4)
= e4i x + 4e2i x + 6 + 4e−2i x + e−4i x
= 2 cos(4x) + 8 cos(2x) + 6.
On a donc enfin :
cos4(x) = 1
8cos(4x) + 1
2cos(2x) + 3
8.
Dans ce dernier cas, il est également intéressant d’utiliser les formules de trigo-nométrie usuelles :
cos2(x) = 1
2(1 + cos(2x))
donc
cos4(x) = 1
4(1 + cos(2x))2
soit
cos4(x) = 1
4(1 + 2cos(2x) + cos2(2x)).
Enfin,
cos2(2x) = 1
2(1 + cos(4x))
ce qui donne à nouveau le résultat.Cependant, ces manipulations ne sont réalisables aisément que sur des cas assezparticuliers ; pour s’en convaincre, essayez de linéariser la première expressionpar les formules de trigonométrie : les calculs deviennent rapidement illisibles.
2. Pour développer ces expressions, nous allons utiliser la formule de Moivre. Ils’agit en quelque sorte de l’opération inverse de la précédente.
38
Partie 1 • Première période
9782100547678-Fresl-C2.qxd 5/07/10 9:09 Page 38

Nous avons
cos(5x) = Re(e5i x)
= Re((eix)5).
Or, d’après la formule de Moivre :
(eix)5 = (cos(x) + i sin(x))5
donc
(eix)5 = cos5(x) + 5 cos4(x)i sin(x) + 10 cos3(x)(i sin(x))2
+10 cos2(x)(i sin(x))3 + 5 cos(x)(i sin(x))4 + (i sin(x))5
soit :
(eix)5 = cos5(x) + 5 cos4(x)sin(x)i − 10 cos3(x)sin2(x)
−10 cos2(x)sin3(x)i + 5 cos(x)sin4(x) + sin5(x)i
et enfin :
(eix)5 = cos5(x) − 10 cos3(x)sin2(x) + 5 cos(x)sin4(x)
+(5 cos4(x)sin(x) − 10 cos2(x)sin3(x) + sin5(x))i.
On a donc, en considérant la partie réelle :
cos(5x) = cos5(x) − 10 cos3(x)sin2(x) + 5 cos(x)sin4(x).
On peut éliminer les puissances paires de sin(x) par la relationsin2(x) + cos2(x) = 1 :
cos(5x) = 16 cos5(x) − 20 cos3(x) + 5 cos(x).
Avec la partie imaginaire on trouve, sans calcul supplémentaire :
sin(5x) = 5 cos4(x)sin(x) − 10 cos2(x)sin3(x) + sin5(x).
Exercice 2.5 : Argument et arctangente
1. Soit a ∈ R∗+ . Soit ϕ l’argument de a + i pris dans ]−π,π] . Montrer queϕ = Arctan(1/a). Que dire si a ∈ R∗− ?
2. À l’aide de ce qui précède, calculer Arctan(1/2) + Arctan(1/3) .
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
39
Chapitre 2 • Nombres complexes
9782100547678-Fresl-C2.qxd 5/07/10 9:09 Page 39

1. Commençons par utiliser la relation entre la forme trigonométrique et la formealgébrique de a + i afin de faire apparaître son argument.
Par définition, a + i = |a + i |(cos(ϕ) + isin(ϕ)) , donc
tan(ϕ) = Im(a + i)
Re(a + i)= 1
a.
On a donc ϕ = Arctan(1/a) + kπ pour un certain entier relatif k.
Par définition de l’arctangente, l’égalité Arctan(x) = θ signifie tan(θ) = x etθ ∈ ]−π/2,π/2[ .
D’autre part, tan(θ) = tan(θ′) si, et seulement si, θ ≡ θ′[π].Ainsi, on ne peut dire mieux que ϕ = Arctan(1/a) + kπ : l’entier k n’a a prioriaucune raison d’être nul, comme on le verra dans le cas a < 0.
D’autre part, cos(ϕ) = a/|a + i | > 0 et sin(ϕ) = 1/|a + i | > 0 : cecimontre que ϕ ∈ ]0,π/2[.Comme, de plus, Arctan(1/a) ∈ ]0,π/2[ (car a > 0) on a donc k = 0 et :
ϕ = Arctan(1/a).
Dans le cas a < 0 , on a toujours ϕ = Arctan(1/a) + kπ pour un certaink ∈ Z, mais cette fois cos(ϕ) < 0 et sin(ϕ) > 0 : on a donc ϕ ∈ ]π/2,π[.D’autre part, a étant strictement négatif, Arctan(1/a) ∈ ]−π/2,0[ : on adonc k = 1 et :
ϕ = Arctan(1/a) + π.
2. Le problème n’est pas de se rendre compte qu’il faut utiliser le résultat précédentmais d’être conscient que tous les calculs seront faits modulo 2π puisque l’onmanipule des arguments. Ainsi, nous n’aurons pas directement le résultat mais uni-quement sa valeur à un multiple de 2π près, encore faudra-t-il l’encadrer pour ledéterminer exactement.
Un calcul simple montre que (2 + i)(3 + i) = 5 + 5i.En considérant des arguments :
Arg(2 + i) + Arg(3 + i) ≡ Arg(5 + 5i) [2π].
Or, d’après ce qui précède, vu que 2 et 3 sont strictement positifs :
Arg(2 + i) ≡ Arctan(1/2) [2π] et Arg(3 + i) ≡ Arctan(1/3) [2π] ;
enfin, Arg(5 + 5i) ≡ π/4 [2π].
40
Partie 1 • Première période
9782100547678-Fresl-C2.qxd 5/07/10 9:09 Page 40

On a donc :
Arctan(1/2) + Arctan(1/3) ≡ π/4 [2π].
Pour déterminer la valeur exacte de Arctan(1/2) + Arctan(1/3) il reste àdéterminer un intervalle de largeur inférieure à π le contenant.
Or 0 < 1/3 < 1/2 < 1 et Arctan est strictement croissante donc
0 < Arctan(1/2) < Arctan(1/3) < π/4
d’où
0 < Arctan(1/3) + Arctan(1/2) < π/2.
Or le seul élément de ]0,π/2[ qui est congru à π/4 modulo π est π/4 lui-même : on a donc Arctan(1/2) + Arctan(1/3) = π/4 .
Une autre manière d’aborder ce calcul aurait été de calculer la tangente de la sommedes arctangentes à l’aide d’une formule de trigonométrie : on aurait alors obtenu
tan(Arctan(1/2) + Arctan(1/3)) = 1 = tan(π/4)
d’où
Arctan(1/2) + Arctan(1/3) ≡ π/4 [π].
Autrement dit, de toutes façons, nous n’aurions pas échappé à l’étude d’encadre-ments pour éliminer le « modulo ».
Ce calcul aurait aussi pu être effectué avec la formule de l’exercice 1.4 ; cependant,elle est hors-programme.
La manipulation simultanée d’arctangente et d’arguments de nombres complexessera à nouveau rencontrée en Physique (filtres et fonctions de transfert).
Exercice 2.6 : Systèmes non linéaires
1. Résoudre le système, d’inconnue (u,v) ∈ C2 :
u + v = 2uv = −4
2. Résoudre le système, d’inconnue (u,v) ∈ C2 :
u + v = 41/u + 1/v = 4
3. Résoudre le système, d’inconnue (u,v) ∈ C2 :
u + v = 4u2 + v2 = 2
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
41
Chapitre 2 • Nombres complexes
9782100547678-Fresl-C2.qxd 5/07/10 9:09 Page 41

Le premier système est traité dans le cours : il s’agit de voir u et v comme lesracines d’une équation du second degré à déterminer. Les deux autres peuvent setraiter en se ramenant à un système de cette forme : u + v étant donné, il suffit demanipuler l’autre expression pour faire apparaître uv.
1. Appliquons directement le cours.
D’après le cours, u et v sont les solutions de l’équation du second degré d’in-connue z ∈ C : z2 − (u + v)z + uv = 0 , i.e. z2 − 2z − 4 = 0.Son discriminant est 20 et ses racines sont donc (2 ± √
20)/2 ;
avec 20 = 225 on peut les réécrire 1 ± √5.
On a donc les deux couples de solutions :
(u,v) = (1 −√
5,1 +√
5) et (u,v) = (1 +√
5,1 −√
5).
2. Ramenons-nous à un problème du type précédent. Nous avons déjà la valeur deu + v. D’autre part
1
u+ 1
v= u + v
uv
ce qui permet de trouver uv.
On a
4 = 1
u+ 1
v= u + v
uv
et
u + v = 4
d’où
uv = 1
Ainsi, u et v sont les racines de z2 − 4z + 1.
Ce polynôme du second degré a pour discriminant 12 et ses racines sont2 ± √
3, d’où les couples de solutions éventuelles :
(u,v) = (2 −√
3,2 +√
3) et (u,v) = (2 +√
3,2 −√
3).
Nous avons démontré qu’il ne pouvait y avoir d’autres solutions, il reste doncà vérifier que celles-ci conviennent bien, ce qui est aisé.
42
Partie 1 • Première période
9782100547678-Fresl-C2.qxd 5/07/10 9:09 Page 42

3. Pour faire apparaître u2 et v2, il suffit de calculer (u + v)2.
Soit (u,v) une solution de ce système.On a
(u + v)2 = u2 + 2uv + v2
d’où, comme u + v = 4 et u2 + v2 = 2 :
uv = 7.
Les inconnues u et v sont donc les racines de z2 − 4z + 7, dont le discri-minant est −12.Ses racines sont donc 2 ± i
√3 d’où les solutions éventuelles :
(u,v) = (2 − i√
3,2 + i√
3) et (u,v) = (2 + i√
3,2 − i√
3).
De même, il est facile de vérifier qu’elles conviennent bien.
Exercice 2.7 : Méthode de Cardan
On considère deux nombres complexes non nuls p et q et l’équation (E) d’in-connue z ∈ C :
(E) z3 + pz + q = 0.
On considère également l’équation (R) d’inconnue Z ∈ C :
(R) Z2 + q Z − p3/27 = 0.
Soient U et V les racines complexes de (R). Soit u ∈ C tel que u3 = U .
1. Montrer que u =/ 0. On pose alors v = −p/(3u) .
2. Calculer u3v3 ; en déduire que v3 = V .
3. En déduire la valeur de u3 + v3.
4. Montrer que u + v est solution de (E).
5. Montrer que ju + j2v et j2u + jv (avec j = e2iπ/3) sont aussi solutionsde (E).
6. Application : on prend p = q = −1. Calculer U, V , puis u, v et enfin la valeur
exacte de la racine réelle de z3 − z − 1.
7. Application : comme précédemment avec p = −3 et q = 1.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
43
Chapitre 2 • Nombres complexes
9782100547678-Fresl-C2.qxd 5/07/10 9:09 Page 43

1. Si u = 0, U = 0 et il suffit de remplacer dans (R) pour obtenir une contradic-tion.
Si u = 0, U = u3 = 0 et 0 serait racine de (R) donc le terme constantp3/27 serait nul, ce qui contredit p =/ 0. On a donc u =/ 0.
Ceci permet de donner un sens à v = −p/(3u). D’une manière générale ilconvient de vérifier systématiquement, quand un quotient intervient, que le déno-minateur n’est pas nul.
2. Le produit uv est connu par définition de v.
Par définition
uv = − p
3
donc
u3v3 = − p3
27.
Or, d’après le cours, le terme constant de Z2 + q Z − p3/27 est le produitde ses racines qui sont par définition U et V : on a donc
U V = u3v3.
Comme u3 = U on a donc Uv3 = U V . Enfin, U =/ 0, d’où v3 = V .
3. Comme précédemment, la valeur de U + V est donnée par les coefficients del’équation (R).
Le coefficient de Z dans Z2 + q Z − p3/27 est, d’après le cours, l’opposéde la somme de ses racines, i.e.
U + V = −q.
On a donc, d’après le résultat précédent :
u3 + v3 = −q.
4. Il suffit de remplacer z par u + v dans l’équation (E) : tous les calculs néces-saires ont été effectués dans les questions précédentes.
44
Partie 1 • Première période
9782100547678-Fresl-C2.qxd 5/07/10 9:09 Page 44

On a (u + v)3 = u3 + 3u2v + 3uv2 + v3 donc
(u + v)3 + p(u + v) + q = u3 + v3 + (u + v)(3uv + p) + q.
Or 3uv + p = 0 (car v = −p/(3u) ) et u3 + v3 = −q donc
(u + v)3 + p(u + v) + q = 0.
u + v est donc bien solution de (E).
5. Le nombre complexe ju est aussi une racine cubique de U : on peut doncreprendre le même raisonnement en remplaçant u par u′ = ju. Alors v est remplacé
par v′ = −p/(3u′) = j2v (car j−1 = j2) et u′ + v′ = ju + j2v est solution de
(E). Idem pour j2u + jv .
6. On cherche ici à résoudre l’équation z3 = z + 1 . L’équation (R) est
Z2 − Z + 1/27 = 0, dont le discriminant est 23/27. Ses racines sont donc
1
2(1 +
√23/27) et
1
2(1 −
√23/27).
Prenons U = 1
2(1 +
√23/27) . On peut alors choisir
u = 3
√1
2(1 +
√23/27)
et on a alors
v = −p/(3u) = 1/(3u).
Ceci est difficile à calculer, mais v vérifie une autre relation simple :
v3 = V = 1
2(1 −
√23/27).
Ainsi, d’après le cours sur les racines n-ièmes, v est de la forme j kw, aveck ∈ 0,1,2 et w une racine cubique de V .
On peut choisir
w = 3
√1
2(1 −
√23/27).
D’autre part, v est réel, car v = −1/(3u) avec u réel : on a donc k = 0 et v = w,ce qui fournit une solution réelle de (E) :©
Dun
od. L
a ph
otoc
opie
non
aut
oris
ée e
st u
n d
élit
.
45
Chapitre 2 • Nombres complexes
9782100547678-Fresl-C2.qxd 5/07/10 9:09 Page 45

3
√1
2(1 +
√23/27) + 3
√1
2(1 −
√23/27).
L’étude de la fonction x → x3 − x − 1 montre qu’il n’y en a pas d’autre.
En effet, soit la fonction f définie sur R par
f (x) = x3 − x − 1.
f est dérivable et, pour tout réel x :
f ′(x) = 3x2 − 1 = 3
(x2 − 1
3
)= 3
(x + 1√
3
)(x − 1√
3
).
Ainsi, f ′ est strictement positive sur ] − ∞;− 1√3[ et ] 1√
3;+∞[ et strictement
négative sur ] − 1√3; 1√
3[.
Il reste à déterminer les valeurs de f en ± 1√3
et, plus précisément, leur signe, afin
de savoir combien de fois f s’annule sur R.
En réduisant les fractions au même dénominateur on obtient
f
(− 1√
3
)=
(− 1√
3
)3
+ 1√3
− 1 = −1 + 3 − 3√
3
3√
3< 0.
et
f
(1√3
)=
(1√3
)3
− 1√3
− 1 = 1 − 3 − 3√
3
3√
3< 0.
Nous pouvons dresser le tableau de variations de f :
x −∞ − 1√3
1√3
+∞f ′(x) + 0 − 0 +
2−3√
33√
3+∞
f (x) −∞ − 2+3
√3
3√
3
Les valeurs prises en ± 1√3
étant strictement négatives, nous en déduisons que f
s’annule une unique fois sur R. Autrement dit, il existe un unique réel x vérifiant
x3 = x + 1 (et le tableau permet également d’affirmer que, de plus, x > 1/√
3).
46
Partie 1 • Première période
9782100547678-Fresl-C2.qxd 5/07/10 9:09 Page 46

Il est en fait inutile de calculer f ( 1√3) : f étant strictement décroissante sur
[− 1√3; 1√
3], on a sans calcul l’inégalité
f
(1√3
)< f
(− 1√
3
)< 0.
7. Ici, (R) est Z2 + Z + 1 = 0 dont les racines sont j et j2.
Prenons U = j. Alors on peut prendre
u = e2iπ/9 et v = −p/(3u) = 1/u = e−2iπ/9
ce qui donne
u + v = 2cos(2π/9).
D’autre part, ju = e8iπ/9 et j2v = e−8iπ/9 , ce qui fournit une autre solution :
ju + j2v = 2cos(8π/9) = −2cos(π/9).
Enfin, avec j2u = e14iπ/9 et jv = e−14iπ/9 il vient
j2u + jv = 2cos(14π/9) = −2cos(5π/9).
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
47
Chapitre 2 • Nombres complexes
9782100547678-Fresl-C2.qxd 5/07/10 9:09 Page 47

9782100547678-Fresl-C2.qxd 5/07/10 9:09 Page 48
49
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
ÉQUATIONS DIFFÉRENTIELLES LINÉAIRES DU PREMIER ORDRE
La méthode pour résoudre complètement une équation différentielle linéaire du pre-mier ordre est toujours la même.
• Dans un premier temps, on résout l’équation homogène associée, c’est-à-direl’équation dont le premier membre est identique et le second membre est égal à 0.Cette première partie peut être traitée directement à l’aide des théorèmes ducours : si l’équation homogène est de la forme
y′ − a(x)y = 0,
l’ensemble de ses solutions est l’ensemble des fonctions de la forme x → CeA(x) ,où la fonction A est une primitive de a et C est une constante.
• Dans un second temps, on cherche une solution particulière de l’équation avecsecond membre.
Une façon de résoudre ce problème consiste à utiliser la méthode dite de variationde la constante : on cherche des solutions sous la forme
x → f (x)eA(x),
où f désigne une fonction inconnue (c’est la constante qui varie). En réinjectantcette solution dans l’équation, on obtient f ′, d’où f par un calcul de primitive.
• À la fin de ces deux étapes, on connaît toutes les solutions de l’équation différen-tielle : ce sont exactement les fonctions qui peuvent s’écrire comme somme de lasolution particulière et d’une solution de l’équation homogène.
Exercice 3.1 : Équation du premier ordre et variation de la constante
Déterminer l’ensemble des solutions à valeurs réelles de l’équation différentielle
(1 + x2) y′ − 2x y = 1 + x2.
Équations différentielles
3
9782100547678-Fresl-C3.qxd 5/07/10 9:10 Page 49

Cette équation n’est pas tout à fait de la forme du cours : il y a une fonction en fac-teur du terme y′. On se ramène à une équation de la forme souhaitée en divisant par
1 + x2 après avoir bien sûr vérifié que cette division était licite.
• Intéressons-nous, tout d’abord, à l’équation homogène associée :
(1 + x2) y′ − 2x y = 0.
Puisque la fonction x → 1 + x2 ne s’annule pas sur R, cette dernière équation seramène à
y′ − 2x
1 + x2y = 0.
Nous connaissons toutes les solutions d’une telle équation différentielle : ce sont lesfonctions de la forme
x ∈ R → C eF(x)
où C désigne un nombre réel et F une primitive de la fonction
f : x ∈ R → 2x/(1 + x2).
Il nous reste à trouver une primitive de la fonction f.
Cette dernière s’écrit sous la forme u′/u et admet donc une primitive de la formeln |u| .Aussi pouvons-nous choisir pour F la fonction
x ∈ R → ln(1 + x2).
Comme eln(1+x2) = 1 + x2 on obtient pour l’ensemble des solutions de l’équationhomogène :
x ∈ R → C (1 + x2)∣∣ C ∈ R
.
• Exhibons, à présent, une solution particulière de l’équation différentielle avecsecond membre.
Nous la chercherons en utilisant la méthode de la variation de la constante, doncsous la forme
g : x ∈ R → h(x)(1 + x2)
où h est une fonction dérivable inconnue.
50
Partie 1 • Première période
9782100547678-Fresl-C3.qxd 5/07/10 9:10 Page 50

La fonction g est solution de l’équation si, et seulement si, on a, quel que soitx ∈ R :
(1 + x2)g′(x) − 2xg(x) = 1 + x2
soit
(1 + x2)(h′(x)(1 + x2) + 2x h(x)) − 2x h(x)(1 + x2) = 1 + x2
ou encore, les termes en h(x) se simplifiant (ce qui est toujours le cas en appliquantcette méthode) :
h′(x) = 1
1 + x2.
La fonction h = Arctan vérifie cette dernière égalité.
On en déduit que la fonction
x ∈ R → Arctan(x)(1 + x2)
est une solution particulière de l’équation différentielle avec second membre.
• Toutes les solutions s’obtiennent à partir de cette dernière en ajoutant une solutionde l’équation différentielle homogène associée. Finalement, l’ensemble des solu-tions de l’équation est
x ∈ R → (Arctan(x) + C) (1 + x2)∣∣ C ∈ R
.
Exercice 3.2 : Équation fonctionnelle de l’exponentielle
Soit f une application dérivable de R dans lui-même, non nulle, telle que, pourtous réels x et y, f (x + y) = f (x) f (y).1. Fixons un réel u et soit g : x → f (x + u) . Calculer de deux façons différentesg′(0).2. En déduire qu’il existe un réel a tel que la fonction f vérifie f ′ = a f .3. Montrer qu’on a alors : pour tout réel x , f (x) = eax.
1. u est ici un réel fixé, autrement dit une constante ; f (u) est donc également uneconstante. C’est ainsi que la dérivée de la fonction x → f (x) f (u) estx → f ′(x) f (u) .
Pour ne pas commettre d’erreur grossière, comme par exemple écrire
f ′(x) f (u) + f (x) f ′(u)
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
51
Chapitre 3 • Équations différentielles
9782100547678-Fresl-C3.qxd 5/07/10 9:10 Page 51
dans l’expression de la dérivée, il faut donc impérativement se poser la question desavoir qui est la variable et qui est une constante.
On a d’une part, pour tout réel x, g′(x) = f ′(x + u) , soit g′(0) = f ′(u).
D’autre part, comme g(x) = f (x) f (u) pour tout réel x, on a également larelation g′(x) = f ′(x) f (u), d’où g′(0) = f ′(0) f (u) .
2. Les relations précédentes étant vraies pour tout u et tout x , on peut choisir unevaleur particulière pour l’un d’eux afin d’obtenir la relation demandée.
La question précédente montre que, pour tout réel u, f ′(u) = f ′(0) f (u).En posant a = f ′(0) on a donc montré que f ′ = a f .
3. Il existe donc un réel λ tel que, pour tout réel x , f (x) = λeax . Il reste à détermi-ner λ. Pour cela, il suffit de calculer f (0), ce que l’on peut faire en utilisant l’équa-tion fonctionnelle vérifiée par f. Autrement dit, nous allons déterminer une condi-tion initiale : connaître la valeur en un point d’une solution d’une équation diffé-rentielle linéaire du premier ordre permet de déterminer entièrement cette solution.
D’après le cours il existe un réel λ tel que :
pour tout x ∈ R, f (x) = λ eax .
D’une part, on a f (0) = λ.
D’autre part, f (0) = f (0 + 0) = f (0)2 , donc f (0) = 0 ou 1, i.e.λ ∈ 0,1 .Si λ était nul, f serait identiquement nulle, ce qui est exclu par hypothèse.On a donc λ = 1 d’où :
pour tout réel x, f (x) = eax .
ÉQUATIONS DIFFÉRENTIELLES LINÉAIRES DU SECOND ORDRE ÀCOEFFICIENTS CONSTANTS
La méthode pour résoudre une équation différentielle linéaire du second ordre àcoefficients constants est systématique.
• Dans un premier temps, on résout l’équation homogène associée. Cette premièrepartie peut être traitée directement à l’aide des théorèmes du cours en utilisantl’équation caractéristique.
• Dans un second temps, on cherche une solution particulière de l’équation avecsecond membre.
52
Partie 1 • Première période
9782100547678-Fresl-C3.qxd 5/07/10 9:10 Page 52

Dans certains cas simples, nous savons sous quelle forme chercher les solutions. Parexemple, lorsque le second membre s’écrit sous la forme P(x)eαx, où P est un poly-nôme et α un nombre complexe, on cherche une solution sous la forme Q(x)eαx,où Q est un polynôme. Lorsque α n’est pas racine de l’équation caractéristique, onpeut chercher Q de même degré que P ; si α en est racine simple, augmenter ledegré de 1 et, s’il est racine double, l’augmenter de 2.
• À la fin de ces deux étapes, on connaît toutes les solutions de l’équation différen-tielle : ce sont exactement les fonctions qui peuvent s’écrire comme somme de lasolution particulière et d’une solution de l’équation homogène.
Exercice 3.3 : Équation du second ordre : second membre exponentielDéterminer l’ensemble des solutions à valeurs réelles de l’équation différentielle
y′′ − 3y′ + 2y = (6x − 5)e−x .
• Cherchons, tout d’abord, les solutions de l’équation homogène associée
y′′ − 3y′ + 2y = 0.
L’équation caractéristique de cette équation est r2 − 3r + 2 = 0, dont les racinessont 1 et 2.
On en déduit que l’ensemble des solutions de l’équation homogène est
x ∈ R → Aex + Be2x | A,B ∈ R.
• Déterminons, à présent, une solution particulière de l’équation avec secondmembre.
Nous savons que lorsque le second membre de l’équation est de la forme P(x)eαx,où P est un polynôme et α un nombre complexe différent des racines du polynômecaractéristique, on peut trouver une solution de la forme Q(x)eαx, où Q est un poly-nôme de même degré que P.
Par conséquent, nous allons chercher une solution sous la forme
f : x ∈ R → (ax + b)e−x ,
avec (a,b) ∈ R2.
Un simple calcul montre que, quel que soit x ∈ R , on a pour tout réel x :
f ′(x) = (−ax + a − b)e−x
f ′′(x) = (ax + b − 2a)e−x
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
53
Chapitre 3 • Équations différentielles
9782100547678-Fresl-C3.qxd 5/07/10 9:10 Page 53

et donc
f ′′(x) − 3 f ′(x) + 2 f (x) = (6ax − 5a + 6b)e−x .
Par conséquent, la fonction f est solution si, et seulement si, on a
6ax − 5a + 6b = 6x − 5.
Cette dernière égalité est vérifiée lorsque a = 1 et b = 0.
On en déduit que la fonction
x ∈ R → xe−x
est une solution particulière de l’équation avec second membre.
• Finalement, l’ensemble des solutions à valeurs réelles de l’équation est
x ∈ R → xe−x + Aex + Be2x | A,B ∈ R.
Exercice 3.4 : Équation du second ordre : second membre trigonométrique
Déterminer l’ensemble des solutions à valeurs réelles de l’équation différentielle
y′′ − 4y′ + 13y = (12x + 8)cos(x) + (4x + 2)sin(x).
Dans cet exercice nous verrons les deux manières d’aborder les équations différen-tielles du second ordre : soit en effectuant les calculs dans C pour revenir aux réelsà la fin, soit en calculant directement dans R.
L’approche avec les complexes peut paraître moins naturelle mais elle est beaucoupplus souple au niveau des calculs ; elle sera très souvent utilisée en Physique.
• Cherchons, tout d’abord, les solutions de l’équation homogène associée
y′′ − 4y′ + 13y = 0.
Son équation caractéristique est r2 − 4r + 13 = 0, dont les racines complexes sont2 + 3i et 2 − 3i.
On en déduit, d’après les formules du cours, que l’ensemble des solutions à valeurscomplexes de l’équation homogène est
x ∈ R → Ae(2+3i)x + Be(2−3i)x | (A,B) ∈ C2,ou encore que l’ensemble de ses solutions à valeurs réelles est
x ∈ R → Ce2x cos(3x) + De2x sin(3x) | (C,D) ∈ R2.
54
Partie 1 • Première période
9782100547678-Fresl-C3.qxd 5/07/10 9:10 Page 54

• Déterminons, à présent, une solution particulière de l’équation avec secondmembre.
Deux méthodes s’offrent à nous. La première consiste à chercher une solution sousla forme
f : x ∈ R → (ax + b)cos(x) + (cx + d)sin(x),
avec (a,b,c,d) ∈ R4 . On a alors :f ′(x) = (cx + a + d) cos(x) + (−ax + c − b) sin(x)
f ′′(x) = (−ax + 2c − b) cos(x) − (cx + 2a + d) sin(x)
et donc
f ′′(x) − 4 f ′(x) + 13 f (x) = ((12a − 4c)x − 4a + 12b + 2c − 4d) cos(x)
+((12c + 4a)x − 2a + 4b − 4c + 12d)sin(x).
Par conséquent, la fonction f est solution si, et seulement si, on a
12a − 4c = 1212c + 4a = 4
−4a + 12b + 2c − 4d = 8−2a + 4b − 4c + 12d = 2
Ces égalités sont vérifiées lorsque a = 1, b = 1, c = 0 et d = 0.
On en déduit que la fonction
x ∈ R → (x + 1) cos(x)
est une solution particulière de l’équation avec second membre.
• La seconde méthode consiste à considérer la fonction
s : x ∈ R → (12x + 8) cos(x) + (4x + 2) sin(x)
comme la partie réelle de la fonction
S : x ∈ R → ((12 − 4i)x + (8 − 2i))eix .
Nous allons chercher une solution particulière de l’équation avec S au secondmembre et en déduirons une solution particulière de l’équation de départ en prenantsa partie réelle.
Considérons donc une fonction de la forme
g : x ∈ R → (αx + β)eix ,
avec α,β ∈ C.© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
55
Chapitre 3 • Équations différentielles
9782100547678-Fresl-C3.qxd 5/07/10 9:10 Page 55

Cette fonction est de classe C∞ sur R et un simple calcul montre que, quel que soitx ∈ R , on a
g′(x) = (iαx + (α+ iβ))eix
g′′(x) = (−αx + 2iα− β)eix
et donc
g′′(x) − 4g′(x) + 13g(x) = ((12α− 4iα)x + 12β− 4α+ i(2α− 4β))eix .
Par conséquent, la fonction g est solution de l’équation avec second membre S si,et seulement si, on a
12α− 4iα = 12 − 4i
12β− 4α+ i(2α− 4β) = 8 − 2i
Ces égalités sont vérifiées lorsque α = 1 et β = 1.
On en déduit que la fonction
x ∈ R → (x + 1)eix
est une solution particulière de l’équation avec second membre S et donc que lafonction
x ∈ R → (x + 1) cos(x)
est une solution particulière de l’équation de départ.
• Finalement, l’ensemble des solutions à valeurs réelles de l’équation est
x ∈ R → (x + 1) cos(x) + Ce2x cos(3x) + De2x sin(3x) | (C,D) ∈ R2.
Exercice 3.5 : Équation du second ordre : racine doubleDéterminer l’ensemble des solutions à valeurs réelles de l’équation différentielle
y′′ − 4y′ + 4y = 2 e2x .
• L’équation caractéristique est r2 − 4r + 4 = 0 qui possède la racine double 2.L’ensemble des solutions à valeurs réelles de l’équation homogène est donc
x ∈ R → (Ax + B)e2x | A,B ∈ R,
• Cherchons une solution particulière de l’équation avec second membre. Le secondmembre est 2ex = P(x)ex avec P le polynôme constant (i.e. de degré 0) valant 2.
56
Partie 1 • Première période
9782100547678-Fresl-C3.qxd 5/07/10 9:10 Page 56

Le coefficient de x dans l’exponentielle est 2 et est donc racine double de l’équa-tion caractéristique. Ainsi, on cherche une solution particulière sous la forme
g : x → Q(x)e2x avec Q de degré 2 de plus que celui de P, i.e. Q(x) =a x2 + b x + c .
Des calculs simples montrent que, pour tout réel x :
g′(x) = (2a x2 + (2a + 2b) x + (b + 2c))e2x
g′′(x) = (4a x2 + (8a + 4b) x + (2a + 4b + 4c))e2x .
On obtient alors, en reportant dans l’équation complète et après simplification des
termes en x et x2 : 2ae2x = 2e2x, d’où a = 1 ; aucune condition n’étant imposée
sur b et c on peut les choisir nuls, ce qui donne la solution particulière x → x2e2x.
• Ainsi, l’ensemble des solutions à valeurs réelles de l’équation est
x ∈ R → (x2 + Ax + B)e2x | A,B ∈ R.
Si on n’avait pas pris garde au fait que 2 est racine double de l’équation caracté-ristique et qu’on avait donc cherché une solution particulière avec Q de degré 0(i.e. constant) on aurait aboutit à 0 = 0… D’autre part, on voit que le choix de bet c est sans importance : on peut toujours les inclure dans les constantes A et Bqui apparaissent dans l’expression des solutions de l’équation complète.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
57
Chapitre 3 • Équations différentielles
9782100547678-Fresl-C3.qxd 5/07/10 9:10 Page 57

9782100547678-Fresl-C3.qxd 5/07/10 9:10 Page 58

59
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
Exercice 4.1 : Géométrie du triangle
Dans le plan on considère un triangle ABC de côtés a = BC , b = AC, c = AB.
On note A (resp. B, C) l’angle non orienté au sommet A (resp. B, C). Soit S
l’aire de ABC. Enfin, on pose p = a + b + c
2(demi-périmètre de ABC).
1. Soit R le rayon du cercle circonsrit à ABC. Montrer que 4RS = abc.
2. Soit r le rayon du cercle inscrit dans ABC. En considérant les aires des tri-angles I AB, I BC et I C A, montrer que 2S = r(a + b + c).
3. Montrer que 2Rr = abc
a + b + c.
1. Une seule formule usuelle de géométrie fait intervenir R : c’est a = 2Rsin( A) .Il faudra donc probablement s’en servir, mais cela introduira un sinus dans lescalculs.
Ainsi, nous chercherons à relier sin( A) et S afin de faire apparaître S dans le résul-
tat tout en éliminant sin( A) .
La hauteur issue de B a pour longueur c sin( A) (par définition du sinus).On a donc
S = 1
2bc sin( A).
De plus, d’après le cours :
a = 2R sin( A).
De ces deux relations on tire :
4RS = abc.
Géométrie 4
9782100547678-Fresl-C4.qxd 5/07/10 9:12 Page 59

2. Les hauteurs des petits triangles I AB, I BC et I C A sont des rayons du cercle ins-crit et ont donc pour longueur r . Quand aux bases de ces triangles, ce ne sont autresque les côtés du grand triangle ABC. On peut alors calculer les aires de tous cestriangles.
La hauteur issue de I du triangle I AB a pour longueur r (car (AB) est tan-gente au cercle inscrit) et le côté opposé est c ; son aire est donc rc/2.De même, l’aire de I BC est ra/2 et celle de I C A est rb/2.Or l’aire du triangle ABC est la somme des aires de ces trois triangles : ona donc
S = r(a + b + c)/2
soit encore
2S = r(a + b + c).
Graphiquement, avec les bissectrices en pointillés :
60
Partie 1 • Première période
A
I
BC
rr
r
3. Vous avez établi deux formules contenant S , l’une contenant R et l’autre r ; onvous demande une formule contenant R et r mais pas S . Il faut donc éliminer Sentre les deux relations.
On élimine S entre les deux relations précédentes : comme
4RS = abc et S = r(a + b + c)/2
on a, en remplaçant dans la première relation S par la valeur donnée dansla seconde :
9782100547678-Fresl-C4.qxd 5/07/10 9:12 Page 60

4Rr(a + b + c)/2 = abc
soit
2Rr = abc
a + b + c.
Raisonnons un instant en termes physiques : les lettres a, b, c, R et r désignentdes longueurs et S une aire. On constate que toutes les formules ci-dessus sontbien homogènes !Mieux encore : les lettres a, b et c jouent des rôles identiques dans le problèmecar les permuter revient à changer les noms des côtés mais ne modifie pas R, r niS ; on constate que les formules obtenues sont bien, elles aussi, invariantes parpermutation de a, b et c.
Exercice 4.2 : Formule de Héron
On garde les notations de l’exercice précédent.
1. Montrer que 4S2 = b2c2(1 − cos2( A)) .
2. Exprimer 16S2 en fonction de a, b et c (sans fonction trigonométrique).
3. En reconnaissant des identités remarquables, montrer que
S2 = p(p − a)(p − b)(p − c) (formule de Héron).
1. Dans l’exercice 4.1 nous avions un résultat presque identique : il y avait un sinus
mais pas de carrés... Nous allons donc reprendre la formule reliant S , b, c et sin( A)
et l’élever au carré.
On reprend l’expression de S donnée ci-dessus :
S = 1
2bc sin( A)
d’où
4S2 = b2c2sin2( A)
= b2c2(1 − cos2( A)).
2. Une formule permet de faire disparaître le cosinus pour n’avoir plus que les lon-gueurs des côtés : c’est la formule d’Al-Kâshi.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
61
Chapitre 4 • Géométrie
9782100547678-Fresl-C4.qxd 5/07/10 9:12 Page 61

On rappelle la formule d’Al-Kâshi :
a2 = b2 + c2 − 2bc cos( A).
On en déduit :
16S2 = 4b2c2 − 4b2c2cos2( A)
= 4b2c2 − (a2 − (b2 + c2))2.
3. Les identités remarquables à reconnaître sont visiblement des différences de car-rés ; de plus, on voit qu’il y a des termes croisés (i.e. faisant intervenir un produitde deux paramètres), les formules de développement de carrés de sommes ou de dif-férences pourront donc également intervenir.
On reconnaît une différence de carrés :
4b2c2 − (a2 − (b2 + c2))2 = (2bc + (a2 − (b2 + c2)))
× (2bc − (a2 − (b2 + c2)))
= (a2 − b2 + 2bc − c2)
× (−a2 + b2 + 2bc + c2).
Chaque terme est lui-même un développement de carré :
(b − c)2 = b2 − 2bc + c2
et
(b + c)2 = b2 + 2bc + c2.
On a donc
16S2 = (a2 − (b − c)2)(−a2 + (b + c)2).
On reconnaît enfin dans chaque facteur une différence de carrés :
(a2 − (b − c)2) = (a − (b − c))(a + (b − c))
(−a2 + (b + c)2) = ((b + c) + a)((b + c) − a)
soit :
16S2 = (a − b + c)(a + b − c)(a + b + c)(−a + b + c).
62
Partie 1 • Première période
9782100547678-Fresl-C4.qxd 5/07/10 9:12 Page 62

Or
−a + b + c = 2(p − a)
a − b + c = 2(p − b)
a + b − c = 2(p − c)
a + b + c = 2p
d’où, en réorganisant les termes :
16S2 = 16p(p − a)(p − b)(p − c).
Encore une fois la formule est homogène, chaque membre ayant la dimensiond’une longueur à la puissance quatre.
Exercice 4.3 : Droite d’Euler
Soit ABC un triangle non aplati, O le centre de son cercle circonscrit, H sonorthocentre et G son isobarycentre. Le but de cet exercice est de montrer que O,G et H sont alignés. Quand ces trois points ne sont pas confondus (i.e. quand letriangle n’est pas équilatéral) la droite qui les porte s’appelle la droite d’Euler dutriangle ABC.On rappelle que, si u et v sont deux vecteurs non colinéaires du plan, et qu’un
vecteur w vérifie w · u = w · v = 0, alors w = 0.
1. Que valent −→B H · −→AC ,
−→C H · −→AB et
−→AH · −→BC ?
2. Montrer que −→AG = 1
3(−→AB + −→
AC) .
3. Quelle est la nature du triangle O AB ? En déduire la valeur de (−→OA + −→
OB) ·−→AB ,
puis celle de −→OA · −→AB .
4. À l’aide des questions précédentes, calculer les produits scalaires de
(−→OH − 3
−→OG) avec
−→AB puis avec
−→AC .
5. Montrer que O, G et H sont alignés et préciser leurs positions relatives.
Une figure complète se trouve à la fin de la correction. Vous pouvez bien sûr vousy référer pour mieux visualiser l’exercice et le résoudre mais la meilleure chose àfaire est bien sûr de réaliser vous-même cette figure.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
63
Chapitre 4 • Géométrie
9782100547678-Fresl-C4.qxd 5/07/10 9:12 Page 63

Faire une bonne figure est toujours intéressant en géométrie ; cependant, il faut bienprendre garde à ne pas faire de figure trop particulière.
Plus précisément, aucune hypothèse n’est faite sur le triangle : il n’est supposé nirectangle, ni isocèle (ni, a fortiori, équilatéral). Il faudra donc faire une figure avecun triangle le plus quelconque possible afin de ne pas être abusé par des proprié-tés spécifiques de ces triangles remarquables.
Un dernier conseil : dessinez un triangle acutangle, i.e. sans angle obtus : ainsi vousserez certain que l’orthocentre est à l’intérieur du triangle. Quand un angle est obtusl’orthocentre est en dehors, ce qui n’est pas un problème en soi, mais il peut se trou-ver tellement loin qu’il sort de la feuille !
1. Par définition, une hauteur issue d’un sommet est orthogonale au côté opposé.
B et H sont sur la hauteur de ABC issue de B, donc −→B H est orthogonal
à −→AC . Idem en échangeant les rôles de A, B et C : les trois produits sca-
laires donnés sont donc nuls.
2. La définition du barycentre fait intervenir les vecteurs −→GA ,
−→GB et
−→GC ; pour éli-
miner les deux derniers, on peut utiliser la relation de Chasles en introduisant lepoint A.
Par définition,
−→G A + −→
G B + −→GC = 0.
En introduisant le point A la relation de Chasles donne
3−→G A + −→
AB + −→AC = 0
soit
−→AG = 1
3(−→AB + −→
AC).
3. Rappelons que, par définition, O est équidistant de A, B et C.
O est le centre du cercle circonscrit à ABC donc O A = O B = OC : le tri-angle O AB est donc isocèle en O.
Le vecteur −→O A + −→
O B dirige la médiane de OAB issue de O ; or cettemédiane est une médiatrice, puisque le triangle est isocèle en O, doncorthogonale à (AB).
64
Partie 1 • Première période
9782100547678-Fresl-C4.qxd 5/07/10 9:12 Page 64

Ainsi,
(−→O A + −→
O B) · −→AB = 0.
Avec −→O B = −→
O A + −→AB on en déduit :
−→O A · −→AB = − AB2
2.
4. Les questions précédentes font intervenir un certain nombre de vecteurs qui nesont pas ceux qui apparaissent ici : la relation de Chasles s’impose.
On a, en introduisant le point C :
−→O H · −→AB = −→
OC · −→AB + −→C H · −→AB
= −→OC · −→AB.
D’autre part, en introduisant A :
−→OG · −→AB = −→
O A · −→AB + −→AG · −→AB
= −→O A · −→AB + 1
3(−→AB + −→
AC) · −→AB
On en déduit
(−→O H − 3
−→OG) · −→AB = (
−→OC − 3
−→O A − −→
AB − −→AC) · −→AB
= (−2−→O A − −→
AB) · −→AB
et enfin :
(−→O H − 3
−→OG) · −→AB = −2
−→O A · −→AB − AB2 = 0
car
−→O A · −→AB = − AB2
2.
On montre de même que (−→O H − 3
−→OG) · −→AC = 0 .
5. Comme souvent pour la dernière question tout a été fait avant !
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
65
Chapitre 4 • Géométrie
9782100547678-Fresl-C4.qxd 5/07/10 9:12 Page 65

D’après le rappel de l’énoncé appliqué à :
u = −→AB
v = −→AC
w = −→O H − 3
−→OG
il vient
−→O H = 3
−→OG.
Les points O, G et H sont donc alignés.
On a même plus : G est entre O et H et la longueur OG est le tiers de lalongueur O H.
Voici la figure, les milieux des côtés étant désignés par A′ , B ′ et C ′ et les médianestracées en pointillés :
66
Partie 1 • Première période
A
H
G
O
B
B'
A'
C'
C
9782100547678-Fresl-C4.qxd 5/07/10 9:13 Page 66

Exercice 4.4 : Cercle d’Euler
Cet exercice utilise le résultat de l’exercice 4.3. On garde les mêmes notations.Soient A′ , B ′ et C ′ les milieux respectifs des côtés BC, C A et AB.Soit le cercle circonscrit au triangle A′B ′C ′ et son centre.
1. Montrer que l’isobarycentre de A′B ′C ′ est G .
2. Montrer que son orthocentre est O.
3. En appliquant les résultats des questions concernant la droite d’Euler autriangle A′B ′C ′ montrer que est le milieu de [O H ].
4. Soit HA le pied de la hauteur de ABC issue de A, i.e. le point de (BC) parlequel passe cette hauteur. On définit de manière analogue HB et HC.En appliquant le théorème de Thalès au quadrilatère HA H O A′ montrer que HA
est sur .Soit K A (resp. K B , KC) le milieu de [AH ] (resp. [B H ], [C H ]). Soit ′ le centredu cercle circonscrit au triangle K A K B KC , G ′ son isobarycentre et H ′ son ortho-centre.
5. Montrer que H ′ = H .
6. Montrer que −−→HG ′ = 1
2−→HG .
7. En utilisant le résultat sur la droite d’Euler appliqué au triangle K A K B KC
montrer que ′ = .
8. Montrer que −−→K A = −−→
A′ .9. Montrer que les neufs points A′ , B ′, C ′, HA , HB , HC, K A, K B et KC sontcocycliques.
1. La définition de G fait intervenir A, B et C ; il reste à utiliser la relation deChasles pour éliminer ces trois points et les remplacer par A′ , B ′ et C ′.
On a successivement :
0 = −→G A + −→
G B + −→GC
= −−→G B ′ + −−→
GC ′ + −−→G A′ + −→
B ′ A + −→C ′B + −→
A′C= −−→
G B ′ + −−→GC ′ + −−→
G A′ + 1
2(−→C A + −→
AB + −→BC)
= −−→G B ′ + −−→
GC ′ + −−→G A′
ce qui montre que G est l’isobarycentre de A′B ′C ′ .
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
67
Chapitre 4 • Géométrie
9782100547678-Fresl-C4.qxd 5/07/10 9:13 Page 67

2. O est l’intersection des médiatrices de ABC et on souhaite montrer que c’est l’in-tersection des hauteurs de A′B ′C ′ .Les points A′ , B ′ et C ′ étant les milieux des côtés de ABC ces triangles sont sem-blables : le théorème de Thalès est donc bien adapté à la question.
D’après le théorème de Thalès, (B ′C ′) est parallèle à (BC). La médiatricede ABC passant par A′ est donc orthogonale à (B ′C ′) . De plus, elle passepar A′, donc c’est aussi la hauteur de A′B ′C ′ issue de A′. Idem pour lesautres médiatrices de ABC : ce sont les hauteurs de A′B ′C ′ , ce qui montreque l’orthocentre de ce dernier est O.
3. Tout est dans l’intitulé de la question !
On a donc, d’après la propriété de la droite d’Euler du triangle A′B ′C ′ ,−→O = 3
−→G . Or
−→G = −→
O + −→OG et
−→OG = 1
3−→OH d’où −2
−→O = −→
OH
ou encore −→O = 1
2−→OH : est donc le milieu de [OH ].
4. L’énoncé donne la méthode : utiliser le théorème de Thalès. Il faudra donc utili-ser des propriétés de parallélisme ; on voit par exemple que les droites (HA H) et(O A′), dont il est question dans l’énoncé, sont parallèles...
Il suffit de le faire pour HA, un raisonnement analogue donnant le résultatpour HB et HC.Soit I le milieu de [HA A′]. Consisérons le quadrilatère HA H O A′. Les côtés[HA H ] et [O A′] sont tous deux orthogonaux au côté [HA A′] donc sontparallèles. De plus, I étant le milieu de [HA A′] et celui de [O H ], la droi-te (I ) est parallèle à (HA H) et (O A′), donc orthogonale au côté[HA A′]. Cette droite, qui est par définition la médiane de HA A′ issue de, en est donc également une médiatrice. Le triangle HA A′ est donc iso-cèle en , donc HA = A′. HA est donc sur le cercle de centre et derayon A′, i.e. HA ∈ .
5. Il suffit de montrer que K A K B KC a les mêmes hauteurs que ABC.
La hauteur de ABC issue de A passe par H, donc par K A. De plus, dans letriangle H BC, K B est le milieu de H B et KC celui de HC ; d’après lethéorème de Thalès, (K B KC) et (BC) sont parallèles. La hauteur de ABCissue de A étant orthogonale à (BC), elle l’est donc aussi à (K B KC). Cecimontre que cette hauteur de ABC est aussi la hauteur de K A K B KC issuede K A. Il en va clairement de même pour les autres hauteurs. On a doncH ′ = H .
68
Partie 1 • Première période
9782100547678-Fresl-C4.qxd 5/07/10 9:13 Page 68

6. Encore une fois, la relation de Chasles sera utile : nous avons des relations vec-torielles faisant intervenir les points dont il est question, la relation de Chasles per-mettra de faire apparaître exactement les vecteurs demandés.
On a, par définition, −−−→G ′K A + −−−→
G ′K B + −−−→G ′KC = 0 donc, en introduisant H
par la relation de Chasles, 3−−→G ′H + −−→
H K A + −−→H K B + −−→
H KC = 0.
Or, par définition, on a −−→H K A = 1
2−→H A (et de même pour B et C), soit
encore −−→H K A = 1
2−→HG + 1
2−→G A . En remplaçant dans la relation ci-dessus,
compte tenu du fait que −→G A + −→
G B + −→GC = 0 , on obtient :
3−−→G ′H + 3
2−→HG = 0 , on encore
−−→HG ′ = 1
2−→HG .
7. C’est une question tout à fait analogue à la question 3 : on utilise un résultat pré-cédent en l’appliquant à un autre triangle. Autant il est difficile d’y penser soi-même, autant il n’y a aucun problème à appliquer ce résultat quand l’énoncé sug-gère de le faire.
La propriété de la droite d’Euler du triangle K A K B KC s’écrit−−→′H ′ = 3
−−→′G ′ , soit encore
−−→′H = 3
−−→′G ′ = 3
−−→′H + 3
−−→HG ′ , ce qu’on
peut écrire −2−−→′H = 3
2−→HG .
Or, d’après la propriété de la droite d’Euler de ABC,−→O H = 3
−→OG = 3
−→O H + 3
−→HG , d’où −2
−→O H = 3
−→HG . étant le milieu
de [O H ], on a −→O H = 2
−→H d’où −4
−→H = 3
−→HG . Comme
−2−−→′H = 3
2−→HG il vient
−→H = −−→
′H , soit ′ = .
8. D’après ce qui précède, le cercle circonscrit à K A K B KC a même centre que .Si l’on montre qu’ils ont même rayon on aura donc montré que K A, K B et KC sontsur . C’est précisément le but de cette question dont la conclusion est, en norme :K A = A′.
Dans le triangle HOA, K A est le milieu de [H A] et celui de [OH ] donc,d’après le théorème de Thalès :
−−→K A = 1
2−→O A.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
69
Chapitre 4 • Géométrie
9782100547678-Fresl-C4.qxd 5/07/10 9:13 Page 69
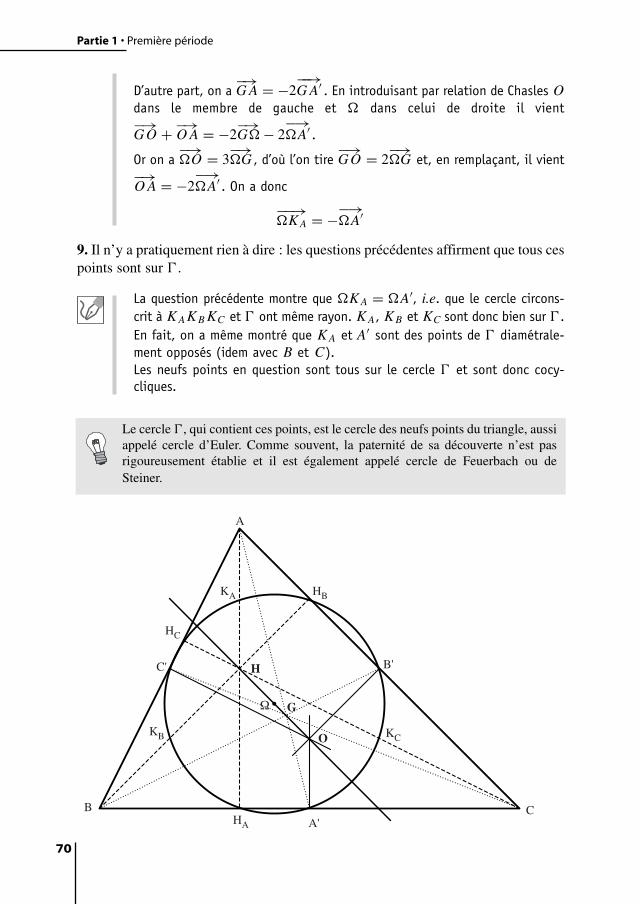
D’autre part, on a −→G A = −2
−−→G A′ . En introduisant par relation de Chasles O
dans le membre de gauche et dans celui de droite il vient−→GO + −→
O A = −2−→G − 2
−→A′ .
Or on a −→O = 3
−→G , d’où l’on tire
−→GO = 2
−→G et, en remplaçant, il vient
−→O A = −2
−→A′ . On a donc
−−→K A = −−→
A′
9. Il n’y a pratiquement rien à dire : les questions précédentes affirment que tous cespoints sont sur .
La question précédente montre que K A = A′, i.e. que le cercle circons-crit à K A K B KC et ont même rayon. K A, K B et KC sont donc bien sur .En fait, on a même montré que K A et A′ sont des points de diamétrale-ment opposés (idem avec B et C).Les neufs points en question sont tous sur le cercle et sont donc cocy-cliques.
Le cercle , qui contient ces points, est le cercle des neufs points du triangle, aussiappelé cercle d’Euler. Comme souvent, la paternité de sa découverte n’est pasrigoureusement établie et il est également appelé cercle de Feuerbach ou deSteiner.
70
Partie 1 • Première période
A
H
Ω G
O
B
B'
A'
C'
C
HC
HA
KA HB
KCKB
9782100547678-Fresl-C4.qxd 5/07/10 9:13 Page 70

Exercice 4.5 : Tétraèdre régulier
Soit ABC D un tétraèdre régulier d’arête a > 0. Soit G son isobarycentre et Hcelui du triangle ABC.
1. Montrer que H, A et G sont alignés en précisant leurs positions relatives.
2. Montrer que (H D) est orthogonale au plan (ABC).
3. Exprimer H A, H B, HC , H D, G A, G B, GC et G D en fonction de a.
4. Calculer −→G A · −→G B ; en déduire une mesure de l’angle AG B en fonction d’arc-
cosinus.
5. Application numérique : exprimer cet angle en degrés et minutes. Commenter.
1. Les points H et G sont définis par des relations vectorielles. Nous allons doncessayer d’obtenir une traduction vectorielle de l’alignement des points H, A et G enpartant de la définition des barycentres et en se servant, comme toujours dans cettesituation, de la relation de Chasles.
Par définition des isobarycentres on a les deux égalités :
−→G A + −→
G B + −→GC + −→
G D = 0−→H A + −→
H B + −→HC = 0.
En introduisant H dans la première de ces relations il vient
4−→G H + −→
H A + −→H B + −→
HC + −→H D = 0
ce qui, d’après la seconde relation, se simplifie en 4−→G H + −→
H D = 0 , soit
encore −→H D = 4
−→HG . Ainsi, les points H, G et D sont alignés dans cet
ordre, la longueur H D étant quatre fois plus grande que HG .
Encore une fois, comme dans l’exercice 4.3, on voit que les relations vectorielles,combinées à l’usage de la relation de Chasles, permettent non seulement de mon-trer que des points sont alignés mais aussi de déterminer leurs positions relativeset les différents rapports de longueur.
2. Il suffit de montrer que −→H D est orthogonal à deux vecteurs non colinéaires por-
tés par le plan (ABC), par exemple −→AB et
−→AC . Pour calculer ces produits scalaires,
nous verrons que la relation de Chasles est encore bien utile.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
71
Chapitre 4 • Géométrie
9782100547678-Fresl-C4.qxd 5/07/10 9:13 Page 71

Calculons −→H D · −→AB :
−→H D · −→AB = −→
H A · −→AB + −→AD · −→AB .
H étant l’isobarycentre du triangle équilatéral ABC son projeté orthogonal
sur (AB) est le milieu de [AB], donc −→AH · −→AB = a2/2 , d’où
−→H A · −→AB
= −a2/2.
D’autre part, le triangle AB D étant équilatéral de côté a, −→AD · −→AB
= a2/2.
On a donc −→H D · −→AB = 0.
On montre de même que −→H D · −→AC = 0, ce qui montre que la droite (H D)
est orthogonale au plan (ABC).
3. Certaines longueurs ont déjà été calculées. Pour les autres, n’oublions pas qu’il ya beaucoup de triangles rectangles dans ce problème : nous allons pouvoir utiliserle théorème de Pythagore.
• Calcul de H A, H B et HC :
Soit I le milieu de [BC] : −→I B + −→
I C = 0. D’autre part, −→H A + −→
H B + −→HC
= 0 donc, en introduisant I dans les deux derniers vecteurs par la relation
de Chasles, −→H A + 2
−→H I = 0 , on encore 3
−→H A + 2
−→AI = 0 ; on a donc
H A = 2
3AI .
Le triangle ABC étant équilatéral le triangle AB I est rectangle en I.D’après le théorème de Pythagore on a donc AB2 = AI 2 + I B2 d’où :
AI 2 = AB2 − I B2
= AB2 − (BC/2)2
= 3a2/4
et finalement AI = a√
3/2 . On en déduit H A = a√
3/3 . Un raisonnementanalogue montre que H B = HC = H A.• Le triangle H AD est rectangle en H donc AD2 = AH2 + H D2, soitH D2 = a2 − a2/3 = 2a2/3 et enfin H D = a
√2/3 .
• Le triangle AG H est rectangle en H donc AG2 = AH2 + G H2. OrAH = a
√3/3 et G H = H D/4 = a
√2/3/4 d’où : G A = a
√3/8 . On
montre de même que G B et GC ont cette valeur.
• −→H D = 4
−→HG donc
−→HG + −→
G D = 4−→HG , soit
−→G D = 3
−→HG d’où l’on tire
G D = 3HG = 3H D/4 . On en déduit G D = a√
18/48 = a√
3/8 :G est donc équidistant des quatre sommets du tétraèdre.
72
Partie 1 • Première période
9782100547678-Fresl-C4.qxd 5/07/10 9:13 Page 72

4. Ici encore nous allons exploiter la régularité de la figure : il y a beaucoup de tri-angles rectangles mais aussi de triangles équilatéraux… En ce sens cet exercice estdonc beaucoup plus simple que les exercices 4.1 et 4.2 qui traitaient de trianglesquelconques.
−→G A · −→G B = (
−→G H + −→
H A) · (−→G H + −→
H B)
= G H2 + −→H A · −→
H B
car (H B) et (HC) sont orthogonales à (HG) .On a vu que
G H = a
4
√2/3
soit
G H2 = a2/24.
D’autre part,
−→H A · −→
H B = H A × H B × cos( AH B) ;
or cet angle est 2π/3, car H est l’isobarycentre du triangle équilatéralABC, donc d’après les calculs de H A et H B faits plus haut :
−→H A · −→
H B = −a2/6.
On en déduit
−→G A · −→G B = a2/24 − a2/6 = −a2/8.
D’autre part
−→G A · −→G B = G A × G B × cos( AG B) = 3a2cos( AG B)/8.
On en déduit cos( AG B) = −1/3 ; cet angle étant mesuré entre 0 et π onen déduit
AG B = Arccos(−1/3).
On aurait aussi pu appliquer la formule d’Al-Kâshi dans le triangle AG B :
AB2 = AG2 + BG2 − 2AG · BG cos( AG B) ce qui, d’après les valeurs des lon-
gueurs AG et BG calculées plus haut, donne bien cos( AG B) = −1/3 ; en fait, lecalcul que nous avons fait plus haut n’est rien d’autre qu’une démonstration de cetteformule à l’aide du produit scalaire !Cependant, la manipulation d’expressions vectorielles est beaucoup plus souple etgénérale, c’est pourquoi nous l’avons préférée.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
73
Chapitre 4 • Géométrie
9782100547678-Fresl-C4.qxd 5/07/10 9:13 Page 73

5. Numériquement on trouve AG B = 10928′ a une minute d’angle près par défaut.
On retrouve un résultat de la théorie VSEPR : il s’agit de l’angle entre les liaisonsd’une molécule de type AXn Em pour n + m = 4.
Attention aux applications numériques concernant les angles : il ne faut pasmélanger les radians et les degrés et donc vérifier avant tout calcul le réglage devotre calculatrice.
Exercice 4.6 : Plans dans l’espace
Dans l’espace E muni d’un repère orthonormé direct (0,i, j,k) on considère deuxplans :P1, d’équation cartésienne 3x − 2y + z = 1 ;P2, passant par le point A2 de coordonnées (1,2,1) et de vecteur normal
n2 = i + 2 j − 2k .
1. Déterminer un point A1 de P1 et un vecteur normal n1 à ce plan.
2. Déterminer une équation cartésienne de P2.
3. Déterminer un point et un vecteur directeur de la droite D = P1 ∩ P2.
1. On demande un point absolument quelconque de P1 : on peut le chercher partâtonnements. Quant au vecteur normal, d’après le cours, ses coordonnées sont lescoefficients des inconnues de l’équation.
Soient (x1,y1,z1) les coordonnées du point A1 cherché : alors 3x1 − 2y1 + z1 = 1.On peut chercher un tel point avec une ou plusieurs coordonnées nulles. Parexemple, on voit qu’on peut prendre x1 = y1 = 0 et z1 = 1.
Le point A1 de coordonnées (0,0,1) est élément de P1.De plus, d’après le cours, le vecteur n1 = 3i − 2 j + k est normal à P1.
2. Une équation cartésienne s’obtient en traduisant la définition du vecteur normalà l’aide d’un produit scalaire.
Un point M(x,y,z) est élément de P2 si, et seulement si, −−→A2 M · n2 = 0,
i.e. :
(x − 1) + 2(y − 2) − 2(z − 1) = 0
ou encore :
x + 2y − 2z = 3
qui est l’équation cherchée.
74
Partie 1 • Première période
9782100547678-Fresl-C4.qxd 5/07/10 9:13 Page 74

3. Un vecteur directeur de D est orthogonal aux vecteurs normaux à P1 et P2 doncest colinéaire à leur produit vectoriel.
On a :
n1 ∧ n2 = 2i + 7 j + 8k.
Ce vecteur n’étant pas nul, les plans P1 et P2 ne sont pas parallèles et secoupent donc selon une droite, ce qui justifie la question.De plus, tout vecteur normal à P1 ou à P2 est normal à D : un vecteur direc-teur de D est donc colinéaire au vecteur précédemment calculé ; en parti-culier, 2i + 7 j + 8k lui-même dirige D.
Encore une fois, on demande un point quelconque d’un ensemble donné : on peutdonc le chercher sous une forme simple et, si on trouve un point convenant, secontenter de la parachuter (la vérification étant immédiate).
Si M(x,y,z) appartient à D, il appartient à P1 et P2 donc 3x − 2y + z = 1 etx + 2y − 2z = 3.
Si on le cherche tel que x = 0, on a alors −2y + z = 1 et 2y − 2z = 3 : en addi-tionnant il vient z = −4 puis y = −5/2.
Si l’on avait aboutit à une contradiction, on aurait ainsi démontré qu’aucun point depremière coordonnée non nulle n’était dans D ; on aurait alors pu essayer y = 0 oux = 1… N’oublions pas que l’on ne cherche pas à déterminer tous les points de Dmais seulement l’un quelconque d’entre eux : tout est permis du moment que celapermet d’en trouver un !
Bien sûr ce genre de recherche n’a sa place qu’au brouillon.
Un point M(x,y,z) appartient à D = P1 ∩ P2 si, et seulement si :3x − 2y + z = 1
x + 2y − 2z = 3
On vérifie aisément que le point de coordonnées (0,−5/2,−4) convient.
Exercice 4.7 : Perpendiculaire commune
Soit E l’espace et (0,i, j,k) un repère orthonormé direct.Soit D1 la droite passant par le point A1 de coordonnées (1,2,0) et dirigée par le
vecteur u1 = i + k .Soit D2 la droite passant par le point A2 de coordonnées (3,2,−1) et dirigée par
le vecteur u2 = i + j − k .Soit la droite perpendiculaire commune à D1 et D2.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
75
Chapitre 4 • Géométrie
9782100547678-Fresl-C4.qxd 5/07/10 9:13 Page 75

1. Donner un point et un vecteur directeur de .
2. Déterminer une représentation paramétrique de .3. Donner un système d’équations cartésiennes de .
D’après le cours, deux droites non parallèles de l’espace possèdent une unique per-pendiculaire commune : nous commencerons donc par vérifier que D1 et D2 ne sontpas parallèles, même si ce n’est pas explicitement demandé par l’exercice.
De plus, le cours va plus loin : non seulement il affirme l’existence de cette per-pendiculaire commune mais également qu’elle est dirigée par le produit vectorielu1 ∧ u2 ; la moitié de la première question est donc résolue !
1. Pour montrer que les droites ne sont pas parallèles il suffit de montrer que les vec-teurs u1 et u2 ne sont pas colinéaires ; le meilleur moyen de le faire est de calculerleur produit vectoriel : non seulement sa nullité caractérise la colinéarité des vec-teurs mais en plus ce vecteur dirige : nous allons ainsi faire d’une pierre deuxcoups.
Soit v = u1 ∧ u2. Alors : v = −i + 2 j + k .
v =/ 0 donc les droites D1 et D2 ne sont pas parallèles : elles possèdentdonc bien une unique perpendiculaire commune qui est, de plus, dirigée parv.
Il faut désormais déterminer un point de .
Pour cela, n’oublions pas que coupe D1 et D2 : on cherchera donc plutôt direc-tement le point d’intersection de et D1.
Si on le note B1, on sait qu’alors −−→A1 B1 est colinéaire à u1 ; ceci ne suffit pas à
déterminer le point B1.
De manière analogue, en notant B2 le point commun à et B2, on aura −−→A2 B2 coli-
néaire à u2 .
Pour conclure, il ne restera plus qu’à écrire que −−→B1 B2 est colinéaire à v.
Soit B1 le point commun à D1 et ; on note (x1,y1,z1) ses coordonnées.
Alors le vecteur −−→A1 B1 est colinéaire à u1 : il existe un réel λ tel que
−−→A1 B1 = λu1, i.e. (x1 − 1)i + (y1 − 2) j + z1k = λ(i + k) , ce qui fournitle système
x1 − 1 = λy1 − 2 = 0
z1 = λ
dont les inconnues sont λ et les trois coordonnées de B1.
76
Partie 1 • Première période
9782100547678-Fresl-C4.qxd 5/07/10 9:13 Page 76

Il y a quatre inconnues mais seulement trois équations : il n’est pas possible derésoudre ce système.
De même, soit B2 le point d’intersection de D2 et et (x2,y2,z2) ses coor-données.
Le vecteur −−→A2 B2 étant colinéaire à u2 il existe un réel µ tel que
−−→A2 B2 = µu2 soit :
(x2 − 3)i + (y2 − 2) j + (z2 + 1)k = µ(i + j − k)
d’où l’on tire le système
x2 − 3 = µy2 − 2 = µz2 + 1 = −µ
On a −−→B1 B2 = (x2 − x1)i + (y2 − y1) j + (z2 − z1)k . On peut désormais exprimer
ce vecteur en fonction uniquement de λ et µ, puis écrire qu’il est colinéaire à v :ceci permettra de déterminer λ et µ, puis les coordonnées des points B1 et B2.
On a donc
−−→B1 B2 = (−λ+ µ+ 2)i + µ j + (−λ− µ− 1)k.
Ce vecteur étant colinéaire à v = −i + 2 j + k il existe un réel α tel que−−→B1 B2 = αv , d’où un dernier système :
−λ+ µ+ 2 = −αµ = 2α
−λ− µ− 1 = α
que l’on peut résoudre sans problème : on obtient
α = −1/2λ = 1/2µ = −1
d’où les coordonnées de B1 : (3/2,2,1/2) et de B2 : (2,1,0) .
Nous avons fait un peu mieux que ce qui était demandé : nous avons simultané-ment trouvé deux points de , bien qu’un seul aurait suffit.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
77
Chapitre 4 • Géométrie
9782100547678-Fresl-C4.qxd 5/07/10 9:13 Page 77

2. La représentation paramétrique n’est qu’une réécriture de la description par vec-teur directeur : plus précisément, on traduit la colinéarité.
Un point M(x,y,z) de l’espace appartient à si, et seulement si, le vec-
teur −−→B2 M est colinéaire à v, condition qui peut s’écrire : il existe un réel γ
tel que −−→B2 M = γv.
En écrivant les coordonnées on obtient la représentation paramétrique cher-chée :
x = 2 − γy = 1 + 2γ, γ ∈ Rz = γ
3. On cherche deux plans dont l’intersection est égale à .
Il est aisé de voir quels plans on va prendre : P1 le plan contenant D1 et et P2
celui contenant D2 et .
En effet, D1 et étant sécantes mais non confondues il existe bien un unique planles contenant toutes les deux ; l’existence de P2 se démontre de même.
De plus, par définition, est contenue dans P1 ∩ P2.
Enfin, les trois droites D1, D2 et n’étant pas coplanaires, P1 n’est pas parallèle àP2 ; ainsi, leur intersection est bien réduite à la droite .
Afin de déterminer des équations cartésiennes de ces plans, il suffira de trouver unpoint et un vecteur normal pour chacun.
Commençons par déterminer un point et un vecteur normal à chacun de ces plans.
• Les droites et D1 étant sécantes mais non confondues, il existe ununique plan P1 qui les contient toutes les deux.
De plus, B1 ∈ P1 car, par définition, B1 est élément à la fois de et D1.Enfin, un vecteur normal à P1 est en particulier normal à et D1, doncorthogonal à v et u1 , donc colinéaire à v ∧ u1.
Or
v ∧ u1 = 2i + 2 j − 2k.
Le vecteur u2 est non nul et colinéaire au vecteur précédent donc est nor-mal à P1.
• De même les droites et D2 sont sécantes mais non confondues donc ilexiste un unique plan P2 qui les contient toutes les deux.
De plus, par définition, B2 ∈ P2.
78
Partie 1 • Première période
9782100547678-Fresl-C4.qxd 5/07/10 9:13 Page 78

Soit n2 un vecteur normal à P2 : il est également normal à et D2 doncorthogonal à v et u2 , i.e. colinéaire à v ∧ u2.
Or
v ∧ u2 = −3(i + k).
On a donc u1 normal à P2.
Pour déterminer des équations cartésiennes de ces plans, n’oublions pas qu’ils sontdéfinis à l’aide de vecteurs normaux : l’outil adapté est donc le produit scalaire.
Un point M(x,y,z) appartient à P1 si, et seulement si, −−→B1 M · u2 = 0, i.e. :
(x − 3/2) + (y − 2) − (z − 1/2) = 0
ou encore :
x + y − z = 3.
De même, M appartient à P2 si, et seulement si, −−→B2 M · u1 = 0, soit :
x + z = 2.
Un système d’équations cartésiennes de est donc :x + y − z = 3
x + z = 2
Il est facile de vérifier ce résultat : les coordonnées de B1 vérifient bien ce systè-me, celles de B2 également.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
79
Chapitre 4 • Géométrie
9782100547678-Fresl-C4.qxd 5/07/10 9:13 Page 79

9782100547678-Fresl-C4.qxd 5/07/10 9:13 Page 80
Partie 2
Analyse
Plan5. Nombres réels, Suites 85
5.1 : Partie entière 855.2 : Borne supérieure 865.3 : Série harmonique 895.4 : Étude d’une suite définie par une somme 935.5 : Irrationnalité de e 975.6 : Valeurs approchées de racines carrées 1005.7 : Divergence de (sin n)n∈N 1045.8 : Critère de comparaison logarithmique 1065.9 : Critère spécial des séries alternées 1095.10 : Suite récurrente 1115.11 : Étude d’une suite définie implicitement 115
6. Fonctions continues 1196.1 : Trois théorèmes de point fixe pour des applications continues 1196.2 : Équation fonctionnelle 1236.3 : Cordes universelles 1256.4 : Fonction continue ayant des limites finies à l’infini 1276.5 : Fonction continue injective 1296.6 : Fonction lipschitzienne et continuité uniforme (MPSI) 1316.7 : Continuité uniforme et limite (MPSI) 135
7. Dérivation, développements limités 1397.1 : Applications du théorème de Rolle 1397.2 : Application de l’égalité des accroissements finis 1427.3 : Généralisation du théorème de Rolle 1447.4 : Formule de Leibniz 1467.5 : Formule de Leibniz et coefficient du binôme 1487.6 : Fonctions pathologiques 1507.7 : f ( f (x)) = ax + b 1537.8 : Fonctions convexes (sauf PTSI) 1567.9 : Inégalités de convexité (sauf PTSI) 1597.10 : Développements limités 1627.11 : Formes indéterminées 1687.12 : Développement limité d’une fonction réciproque 1717.13 : Développement limité et convexité (sauf PTSI) 1747.14 : Prolongements 1767.15 : Synthèse : prolongement de fonction et étude de suite implicite 182
9782100547678-Fresl-part2.qxd 5/07/10 9:33 Page 82
Plan8. Intégration 189
8.1 : Intégrales de Wallis 1898.2 : Changements de variable usuels : règles de Bioche 1928.3 : Changements de variable usuels : u = tan(t/2) 1978.4 : Changements de variable usuels : u = ex 1998.5 : Intégrale de Gauss 2018.6 : Sommes de Riemann 2058.7 : Inégalité de Taylor-Lagrange 2078.8 : Lemme de Riemann-Lebesgue (MPSI) 2118.9 : Étude d’une fonction définie par une intégrale 2148.10 : Intégrales doubles : rectangle et triangle 2178.11 : Intégrale double en polaires 219
9 Courbes paramétrées 221Courbes paramétrées définies en coordonnées cartésiennes
9.1 : Cycloïde 2219.2 : Astroïde 2239.3 : Courbe rationnelle 226
Courbes paramétrées définies en coordonnées polaires9.4 : Cardioïde 2289.5 : Rosace 2309.6 : Branche infinie polaire 232
9782100547678-Fresl-part2.qxd 5/07/10 9:33 Page 83
9782100547678-Fresl-part2.qxd 5/07/10 9:33 Page 84

85
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
Exercice 5.1 : Partie entière
Soient x ∈ R et n ∈ N∗ .
1. Montrer que 0 E(nx) − nE(x) n − 1.
2. En déduire E(E(nx)/n) = E(x).
Étant donné un réel a, la partie entière de a est par définition l’unique entier rela-tif E(a) vérifiant E(a) a < E(a) + 1.
Aucune propriété de la partie entière n’est au programme : tout exercice la faisantintervenir se ramène donc à des manipulations de cet encadrement qui la définit.
1. Ici interviennent deux parties entières : celle de x et celle de nx . Par définition :
E(x) x < E(x) + 1 et E(nx) nx < E(nx) + 1.
Afin de faire intervenir nE(x) multiplions le premier encadrement par n. Commen > 0, cette multiplication conserve les inégalités strictes d’où :
nE(x) nx < nE(x) + n.
On en déduit l’encadrement opposé :
−nE(x) − n < −nx −nE(x).
Ne pas soustraire des inégalités ! En effet, l’introduction d’un signe « – » renversele sens des inégalités.Pour ne pas commettre d’erreur, il faut prendre le temps d’une étape intermédiaireoù l’on passe à l’opposé dans un encadrement avant d’additionner.
Par définition de la partie entière :
(1) E(x) x < E(x) + 1 et (2) E(nx) nx < E(nx) + 1
Nombres réels,Suites
5
9782100547678-Fresl-C5.qxd 5/07/10 9:15 Page 85

d’où l’on tire
(3) x − 1 < E(x) x et (4) nx − 1 < E(nx) nx .
En multipliant l’encadrement (3) par −n qui est strictement négatif onobtient :
(5) − nx −nE(x) < n − nx .
Enfin, en additionnant les encadrements (4) et (5), il vient :
(6) − 1 < E(nx) − nE(x) < n.
Pour conclure, nous pouvons utiliser un argument spécifique aux inégalités entreentiers : si a et b sont deux entiers tels que a < b , alors a b − 1.
Tous les termes de l’encadrement (6) étant entiers (car n l’est) on peut leréécrire :
(7) 0 E(nx) − nE(x) n − 1.
On a utilisé le fait que n est entier pour transformer les inégalités strictes en lesinégalités larges demandées.D’autre part, on a utilisé le fait que n est strictement positif au début en multipliantl’encadrement définissant E(x) par n sans changer le sens des inégalités.Ainsi, on a bien utilisé complètement l’hypothèse n ∈ N∗.
2. Soient y = E(nx)/n et p = E(y). Par définition, p est l’unique entier vérifiantp y < p + 1. Or E(x) est un entier : pour montrer que E(x) = p il suffit doncde montrer que E(x) y < E(x) + 1.
De l’encadrement obtenu à la question précédente on tire :
nE(x) E(nx) nE(x) + n − 1
soit, n étant strictement positif :
E(x) E(nx)/n E(x) + 1 − 1/n < E(x) + 1
Comme E(x) est un entier on a alors, par définition de la partie entière :
E(x) = E(E(nx)/n).
Exercice 5.2 : Borne supérieure
Soient a et b deux réels, avec a < b , et f : [a,b] → [a,b] une application crois-sante. On pose A = x ∈ [a,b]| x f (x).
86
Partie 2 • Analyse
9782100547678-Fresl-C5.qxd 5/07/10 9:15 Page 86
1. Justifier l’existence de c = sup(A) et montrer que c ∈ [a,b].
2. Montrer par l’absurde que f (c) c.
3. Montrer par l’absurde que f (c) c.Ainsi, f (c) = c : l’application f possède un point fixe.
La question « justifier l’existence de la borne supérieure de tel ensemble » est clas-sique et simple : il suffit pour cela de montrer que l’ensemble en question est unepartie non vide et majorée de R. Un théorème admis du cours énonce alors qu’ilpossède bien une borne supérieure.
Il faut garder à l’esprit qu’il est en général difficile de calculer explicitement uneborne supérieure. Il faut donc bien lire l’énoncé : démontrer l’existence d’un objetmathématique ne signifie pas que l’on est capable de l’écrire explicitement.Autrement dit, lorsqu’un énoncé pose une question d’existence (d’une borne supé-rieure, d’une limite…) mais ne demande pas de valeur explicite, il ne faut pas for-cément chercher à déterminer cette valeur.
Lorsque l’on a posé c = sup(A) on peut affirmer les deux choses suivantes, qui sontla traduction du fait que c est le plus petit des majorants de A :
• c est un majorant de A donc, pour tout x ∈ A, x c ;
• si c′ est réel strictement inférieur à c, c′ n’est pas un majorant de A, donc il existex ∈ A tel que x > c′ .La première propriété fournit une inégalité vérifiée par tous les éléments de A ; laseconde montre l’existence d’un certain élément de A vérifiant une inégalité.
Ces inégalités permettront de traiter les deux questions suivantes en n’oubliant pasqu’il y a une hypothèse supplémentaire sur l’application f : elle est supposée crois-sante.
1. La première partie de la question se rédige comme expliqué plus haut :
Vérifions que A est une partie non vide et majorée de R.
• A =/ ∅ : en effet, f (a) ∈ [a,b] donc f (a) a, i.e. a ∈ A.
• A est majorée : en effet, par définition, A ⊂ [a,b], donc A est majoréepar b.
Ainsi, c est bien défini.
Il reste à montrer que a c b .
Pour cela, on utilise encore les deux propriétés de c :
• pour montrer qu’un réel est inférieur ou égal à c il faut d’abord se demander s’ilest élément de A, auquel cas le résultat est clair, c étant un majorant de A ;
• pour montrer qu’un réel est supérieur ou égal à c, il suffit de montrer qu’il est unmajorant de A (car c est le plus petit des majorants).©
Dun
od. L
a ph
otoc
opie
non
aut
oris
ée e
st u
n d
élit
.
87
Chapitre 5 • Nombres réels, Suites
9782100547678-Fresl-C5.qxd 5/07/10 9:15 Page 87

Le raisonnement que nous venons de faire en dit plus : • a ∈ A et c est un majorant de A, donc a c ;• b est un majorant de A et c est le plus petit de ces majorants, donc c b.Ainsi, a c b donc c ∈ [a,b].
Ce résultat est important : cela a donc un sens de parler dans la suite de l’exercicede f (c) .
2. Récapitulons les propriétés des objets de l’énoncé :
i) tout élément x de A vérifie x c (c est un majorant de A) ;
ii) pour tout réel c′ < c il existe un élément x de A tel que x > c′ (c est le plus petitdes majorants de A) ;
iii) tout élément x de A vérifie f (x) x (définition de A) ;
iv) pour tous x et y de [a,b], si x y alors f (x) f (y) (f est croissante).
Nous venons ainsi de résumer complètement toutes les données de l’énoncé.L’exercice doit donc pouvoir se résoudre en utilisant ces quatre points et rienqu’eux.
Il est demandé de raisonner par l’absurde : supposons f (c) > c et cherchons, parmiles quatre points précédents, celui ou ceux que nous pouvons utiliser.
Les points i et iii sont inutiles : aucun élément de A n’apparaît dans l’intitulé de cettequestion.
Le point ii fait intervenir les réels strictements inférieurs à c et il n’y en a pas dansla question ici posée. Ainsi, il ne reste que le point iv pour débuter le raisonnement.
On prendra garde au fait que la fonction f est croissante mais pas nécessairementstrictement croissante : autrement dit, l’inégalité stricte c < f (c) implique l’inéga-lité large f (c) f ( f (c)) mais cette dernière peut être une égalité ; nous verronsque cela n’est pas gênant.
Supposons c < f (c). f étant croissante on a alors f (c) f ( f (c)) . Cecimontre que f (c) ∈ A.Or c est un majorant de A donc f (c) c. Ceci contredit l’hypothèsef (c) > c.Ainsi, on a f (c) c.
3. On souhaite ici montrer que f (c) c, i.e. c ∈ A. Ceci n’est a priori pas évident !En effet, la borne supérieure de A n’appartient pas forcément à A en général (onpourrait par exemple avoir A = [a,c[). Il y a donc bien quelque chose à démontrer.
L’énoncé demande ici de supposer f (c) < c. On voit ainsi apparaître clairement lepoint ii.
88
Partie 2 • Analyse
9782100547678-Fresl-C5.qxd 5/07/10 9:15 Page 88

Supposons f (c) < c. Alors f (c) n’est pas un majorant de A donc il existeun élément d de A tel que f (c) < d .Comme d ∈ A on a aussi, c étant un majorant de A : d c .On a également, par définition de A, f (d) d.
Nous avons ainsi quatre inégalités : f (c) < c, f (c) < d , d c et d f (d). D’autrepart, nous n’avons toujours pas utilisé le point iv, i.e. la croissance de f, qui nouspermet de transformer ces inégalités en nouvelles inégalités.
De d c on tire, f étant croissante : f (d) f (c) .D’autre part, d f (d), d’où d f (c) .Ceci contredit l’inégalité f (c) < d : ainsi, f (c) c.
Exercice 5.3 : Série harmonique
Pour n ∈ N∗ on pose hn =n∑
k=1
1
k. La suite (hn)n∈N∗ est la série harmonique.
1. Soit un entier k 2. Montrer que ∫ k+1
k
1
tdt
1
k
∫ k
k−1
1
tdt . On pourra
commencer par illustrer graphiquement cet encadrement.
2. Montrer que, pour tout n ∈ N∗ , ln(n) hn 1 + ln(n) .
3. Montrer que la suite de terme général hn − ln(n) est convergente. On notera γsa limite.
4. Déterminer limn→∞ (h2n − hn).
1. Représentons graphiquement cet encadrement :
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
89
Chapitre 5 • Nombres réels, Suites
1k
1x
y =
k – 1 k + 1 k
Sur le dessin, on voit que l’encadrement vient du fait que la courbe représentativede la fonction inverse se trouve, sur l’intervalle [k,k + 1] , en-dessous de la droited’équation y = 1/k et que sur, l’intervalle [k − 1,k] , elle est au-dessus de cettedroite.
9782100547678-Fresl-C5.qxd 5/07/10 9:15 Page 89

Plus précisément, chacun des rectangles hachurés est d’aire 1/k. On voit que le rec-tangle de gauche a une aire inférieure à l’aire sous la courbe, qui est l’intégrale dedroite de l’encadrement, alors que l’autre a une aire supérieure à l’aire sous lacourbe, qui est l’intégrale de gauche.
Nous allons donc transformer une inégalité sur des fonctions (positions relatives decourbes) en une inégalité sur des intégrales (qui représentent des aires).
Pour t ∈ [k,k + 1] on a k t k + 1 donc, en particulier, 1
t
1
k.
En intégrant cette inégalité de k à k + 1 il vient :
∫ k+1
k
1
tdt
∫ k+1
k
1
kdt = 1
k
car 1
kest une constante.
De même, pour t ∈ [k − 1,k] , on a k − 1 t k donc, en particulier,1
k
1
t.
En intégrant cette inégalité de k − 1 à k il vient :
1
k=
∫ k
k−1
1
kdt
∫ k
k−1
1
tdt
car 1
kest une constante.
Nous avons bien utilisé le fait que k 2 puisque nous avons considéré l’intégrale∫ k
k−1
1
tdt : pour k = 1 ceci n’a pas de sens !
2. Afin de faire apparaître hn on peut additionner les encadrements précédents.Cependant, ils ne sont valables que pour k 2 : nous allons donc d’abord les addi-tionner pour k allant de 2 à n puis ajouter 1.
En additionnant les encadrements précédents pour k = 2,. . . ,n on obtient :
n∑k=2
∫ k+1
k
1
tdt
n∑k=2
1
k
n∑k=2
∫ k
k−1
1
tdt .
Le terme du milieu est hn − 1.
D’autre part, on reconnaît dans les deux autres termes la relation de Chasles.
90
Partie 2 • Analyse
9782100547678-Fresl-C5.qxd 5/07/10 9:15 Page 90

En effet :
n∑k=2
∫ k+1
k
1
tdt =
∫ 3
2
1
tdt + · · · +
∫ n+1
n
1
tdt
=∫ n+1
2
1
tdt
car l’extrémité supérieure de chaque intégrale est l’extrémité inférieure de la précé-dente.
De même, la somme de droite se réduit à :∫ n
1
1
tdt .
D’après la relation de Chasles :
n∑k=2
∫ k+1
k
1
tdt =
∫ n+1
2
1
tdt = ln(n + 1) − ln(2)
etn∑
k=2
∫ k
k−1
1
tdt =
∫ n
1
1
tdt = ln(n).
L’encadrement précédent est donc :
ln(n + 1) − ln(2) hn − 1 ln(n).
Or
ln(n) ln(n + 1) et − 1 −ln(2)
donc
ln(n) − 1 ln(n + 1) − ln(2)
et enfin
ln(n) hn 1 + ln(n).
3. La question précédente montre que, pour tout n ∈ N∗ , hn − ln(n) ∈ [0,1] : cettesuite est bornée. Il suffit donc d’étudier sa monotonie pour, si possible, appliquer lethéorème de la limite monotone.
hn étant défini par une somme nous allons évaluer le signe de la différence de deuxtermes successifs de la suite de terme général hn − ln(n) .©
Dun
od. L
a ph
otoc
opie
non
aut
oris
ée e
st u
n d
élit
.
91
Chapitre 5 • Nombres réels, Suites
9782100547678-Fresl-C5.qxd 5/07/10 9:15 Page 91

Pour n ∈ N∗ on a
(hn+1 − ln(n + 1)) − (hn − ln(n)) = 1
n + 1− ln
(1 + 1
n
).
Or, pour tout x ∈] − 1,+∞[, ln(1 + x) x.
D’autre part :
ln
(1 + 1
n
)= −ln
(n
n + 1
)
= −ln
(1 − 1
n + 1
).
On en déduit, avec x = − 1
n + 1dans l’inégalité rappelée ci-dessus :
(hn+1 − ln(n + 1)) − (hn − ln(n)) 0.
La suite de terme général hn − ln(n) est donc décroissante.
Comme elle est par ailleurs minorée par 0, elle est convergente.
Le réel γ = limn→∞ (hn − ln(n)) est la constante d’Euler, égale à 0,577 à 0,001 près.
On notera que l’énoncé ne demande pas de calculer explicitement cette valeur, onse gardera donc de le faire. Le théorème de la limite monotone permet souvent dedémontrer la convergence d’une suite mais ne permet pas de déterminer explicite-ment sa limite.
4. On a donc limn→∞ (hn − ln(n)) = γ. Afin de faire intervenir h2n , remarquons que
d’après le théorème des suites extraites on a également limn→∞ (h2n − ln(2n)) = γ . Il
ne reste plus qu’à soustraire pour faire apparaître h2n − hn.
De limn→∞ (hn − ln(n)) = γ on tire lim
n→∞ (h2n − ln(2n)) = γ car toute suite
extraite d’une suite convergente est convergente de même limite.
En soustrayant ces deux limites, vu que ln(2n) − ln(n) = ln(2) , il vientlim
n→∞ (h2n − hn − ln(2)) = 0 soit :
limn→∞ (h2n − hn) = ln(2).
92
Partie 2 • Analyse
9782100547678-Fresl-C5.qxd 5/07/10 9:15 Page 92

Exercice 5.4 : Étude d’une suite définie par une somme
Pour n ∈ N∗ on pose un =n∑
k=1
1√k
, vn = un√n
et wn = un − 2√
n .
1. Montrer par récurrence que, pour tout n ∈ N∗ :
2√
n + 1 − 2 un √
n − 1 + √n.
2. Montrer que limn→∞ vn = 2.
3. Montrer que (wn)n∈N∗ est convergente (on ne demande pas sa limite).
L’encadrement de un nous fournira, en divisant par √
n , un encadrement de vn : ilest probable que l’argument adapté pour la deuxième question soit le théorèmed’encadrement (aussi appelé théorème des gendarmes).
La troisième question ressemble à la deuxième à ceci près qu’elle demande de mon-trer qu’une suite est convergente sans calculer sa limite : le théorème le plus cou-rant fournissant un tel résultat existentiel (la limite existe) mais non constructif (onne trouve pas la valeur exacte de la limite) est le théorème de la limite monotone. Ilfaudra donc commencer la troisième question par l’étude de la monotonie de la suitede terme général wn pour voir si les hypothèses de ce théorème sont vérifiées.
1. Pour plus de clarté, séparons l’étude des deux inégalités de l’encadrement.
Inégalité de droite
Procédons par récurrence : pour n ∈ N∗ on pose Hn : « un √
n − 1 + √n ».
• H1 est clairement vraie.• Soit n ∈ N∗ tel que Hn soit vraie. Alors un
√n − 1 + √
n donc
un+1 √
n − 1 + √n + 1√
n + 1.
On veut démontrer que un+1 √
n + √n + 1 : autrement dit, il suffit de montrer
que √
n − 1 + 1√n + 1
√
n + 1. Afin de simplifier les expressions comportant
des racines carrées commençons par réduire les termes du membre de gauche aumême dénominateur :
√n − 1 + 1√
n + 1=
√n2 − 1 + 1√
n + 1.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
93
Chapitre 5 • Nombres réels, Suites
9782100547678-Fresl-C5.qxd 5/07/10 9:15 Page 93

Pour montrer que ceci est inférieur ou égal à √
n + 1 il suffit de démontrer que son
numérateur est inférieur ou égal à n + 1. Or on a n2 − 1 n2, d’où √
n2 − 1 net enfin :
√n2 − 1 + 1√
n + 1
√n + 1.
D’autre part :
√n − 1 + 1√
n + 1=
√n2 − 1 + 1√
n + 1.
On a n2 − 1 n2 donc, par croissance de la fonction racine carrée,√n2 − 1 + 1 n + 1 d’où l’on tire, en reportant dans la précédente majo-
ration de un+1 :
un+1 √
n + √n + 1.
Ainsi Hn+1 est vraie.
• D’après le principe de récurrence, Hn est donc vraie pour tout n ∈ N∗ .
Inégalité de gauche
De même posons, pour n ∈ N∗ , Kn : « 2√
n + 1 − 2 un ».
• K1 est vraie : on a √
2 3/2 donc 2√
n + 1 − 2 1 = u1.
• Soit n ∈ N∗ tel que Kn soit vraie, i.e. 2√
n + 1 − 2 un. On a alors
2√
n + 1 + 1√n + 1
− 2 un+1 .
On a 2√
n + 1 + 1√n + 1
= 2n + 3√n + 1
. On veut montrer que ceci est supérieur ou
égal à 2√
n + 2. Pour cela, montrons que leur différence est positive.
En réduisant au même dénominateur on a :
2n + 3√n + 1
− 2√
n + 2 = 2n + 3 − 2√
(n + 1)(n + 2)√n + 1
.
Il reste à déterminer le signe du numérateur, i.e. à comparer 2n + 3 et2√
(n + 1)(n + 2) .
94
Partie 2 • Analyse
9782100547678-Fresl-C5.qxd 5/07/10 9:15 Page 94

Comme ces deux réels sont positifs, il suffit de comparer leurs carrés, i.e.
(2n + 3)2 = 4n2 + 12n + 9 et 4(n + 1)(n + 2) = 4n2 + 12n + 8.
Il est alors clair que 2n + 3 − 2√
(n + 1)(n + 2) 0 , d’où :
2n + 3√n + 1
2√
n + 2.
En réduisant au même dénominateur :
2√
n + 1 + 1√n + 1
− 2√
n + 2 = 2n + 3 − 2√
(n + 1)(n + 2)√n + 1
.
D’autre part
(2n + 3)2 = 4n2 + 12n + 9 4n2 + 12n + 8 = 4(n + 1)(n + 2)
donc
2n + 3 2√
(n + 1)(n + 2).
Ainsi, 2√
n + 2 2√
n + 1 + 1√n + 1
un+1 + 2 , d’où :
2√
n + 2 − 2 un+1
ce qui montre que Kn+1 est vraie.
D’après le principe de récurrence, Kn est donc vraie pour tout n ∈ N∗ .
2. Comme annoncé nous allons diviser l’encadrement par √
n pour pouvoir utiliserle théorème des gendarmes. Il faut néanmoins faire attention à deux choses :
• s’assurer que l’on ne divise pas par 0, ce qui n’aurait aucun sens ;
• connaître le signe de la quantité par laquelle on divise : si elle est négative il fau-dra renverser le sens des encadrements.
Ici il n’y a aucun problème : n est un entier naturel non nul donc √
n est bien définiet strictement positif. Cependant n’oubliez jamais de préciser la raison pour laquellevos calculs sont licites, même si ce n’est qu’en quelques mots en disant «
√n > 0
donc… ».
En divisant l’encadrement
2√
n + 1 − 2 un √
n − 1 + √n
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
95
Chapitre 5 • Nombres réels, Suites
9782100547678-Fresl-C5.qxd 5/07/10 9:15 Page 95

par √
n , qui est strictement positif :
2
√1 + 1
n− 2√
n vn
√1 − 1
n+ 1.
On en déduit, d’après le théorème d’encadrement et les limites usuelles, quelim
n→∞ vn = 2.
3. D’autre part on a, pour n ∈ N∗ :
wn+1 − wn = un+1 − 2√
n + 1 − un + 2√
n
= 2√
n − 2√
n + 1 + 1√n + 1
.
On en déduit
wn+1 − wn = 2√
n(n + 1) − (2n + 1)√n + 1
.
Il suffit de déterminer le signe du numérateur, ce que l’on peut faire par un calculanalogue à celui de la question précédente :
(2n + 1)2 = 4n2 + 4n + 1 4n2 + 4n = 4n(n + 1)
donc
2n + 1 2√
n(n + 1).
Pour n ∈ N∗ on a, après réduction au même dénominateur :
wn+1 − wn = 2√
n(n + 1) − (2n + 1)√n + 1
.
Or
(2n + 1)2 = 4n2 + 4n + 1 4n2 + 4n = 4n(n + 1)
donc
2n + 1 2√
n(n + 1)
et enfin
wn+1 − wn 0.
96
Partie 2 • Analyse
9782100547678-Fresl-C5.qxd 5/07/10 9:15 Page 96

D’autre part :
wn = un − 2√
n 2√
n + 1 − 2√
n − 2 −2.
La suite de terme général wn est décroissante et minorée par −2 doncconvergente.
On peut aborder ce type de problème comme dans l’exercice 5.3 pour établir lesencadrements de départ. En effet, un raisonnement analogue montre que, pour toutentier k 2 : ∫ k+1
k
1√t
dt 1√k
∫ k
k−1
1√t
dt
d’où l’on tire ∫ n+1
2
1√t
dt un − 1 ∫ n
1
1√t
dt
soit enfin
2(√
n + 1 −√
2) un − 1 2(√
n − 1)
puis, en remarquant que −2 1 − 2√
2 et √
n − 1 √
n − 1 :
2√
n + 1 − 2 un √
n − 1 + √n.
Inversement, les encadrements obtenus sur la série harmonique auraient pu êtredonnés par l’énoncé puis vérifiés par récurrence.
Exercice 5.5 : Irrationnalité de e
Pour n ∈ N∗ on pose un =n∑
k=0
1
k!et vn = un + 1
n · n!.
1. Montrer que (un)n∈N∗ et (vn)n∈N∗ sont adjacentes.Soit leur limite commune. On suppose que est rationnelle et on choisit deuxentiers naturels a et b tels que = a/b.
2. Montrer que ub < < vb.
3. En déduire deux entiers naturels M et N tels que N < M < N + 1. Conclure.
On peut montrer, à l’aide de l’inégalité de Taylor-Lagrange, que = e.
Montrer que deux suites sont adjacentes est une application directe d’une définitiondu cours. La difficulté est ici calculatoire : il faudra manipuler simultanément lesymbole et des factorielles.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
97
Chapitre 5 • Nombres réels, Suites
9782100547678-Fresl-C5.qxd 5/07/10 9:15 Page 97
1. C’est une application directe d’une définition du cours : il faut démontrer quel’une des deux suites est croissante, l’autre décroissante et que la différence tendvers 0.
Pour la monotonie des suites on considérera les différences de termes successifs carelles sont définies par des sommes.
Étude de la monotonie de (un)n∈N∗
Pour tout n ∈ N∗ , un+1 − un = 1
(n + 1)!> 0 donc (un)n∈N∗ est croissante
(et même strictement croissante).
Étude de la monotonie de (vn)n∈N∗
Les calculs sont ici un peu plus lourds, nous allons les détailler avant de passer à larédaction finale. En particulier, nous allons effectuer étape par étape la réduction aumême dénominateur des fractions avec les factorielles.
Pour n ∈ N∗ on a :
vn+1 − vn = un+1 + 1
(n + 1) · (n + 1)!− un − 1
n · n!
= 1
(n + 1)!+ 1
(n + 1) · (n + 1)!− 1
n · n!.
Réduisons ces fractions au même dénominateur. Tout d’abord,
1
(n + 1)!+ 1
(n + 1) · (n + 1)!= n + 1
(n + 1)(n + 1)!+ 1
(n + 1) · (n + 1)!
= n + 2
(n + 1) · (n + 1)!.
D’autre part,
n + 2
(n + 1) · (n + 1)!− 1
n · n!= n(n + 2)
n(n + 1) · (n + 1)!− (n + 1)2
n(n + 1) · (n + 1)!
= − 1
n(n + 1) · (n + 1)!
< 0
car n(n + 2) − (n + 1)2 = −1 .
98
Partie 2 • Analyse
9782100547678-Fresl-C5.qxd 5/07/10 9:15 Page 98

Pour n ∈ N∗ on a :
vn+1 − vn = 1
(n + 1)!+ 1
(n + 1) · (n + 1)!− 1
n · n!
soit, après simplification :
vn+1 − vn = − 1
n(n + 1) · (n + 1)!< 0.
Ainsi, vn+1 − vn < 0 : la suite de terme général vn est donc décroissante etmême strictement décroissante.
La dernière étape, comme souvent, ne pose pas de problème :
• Pour n ∈ N∗ on a vn − un = 1
n · n!donc lim
n→∞ (vn − un) = 0 .
• Ainsi, (un)n∈N∗ et (vn)n∈N∗ sont adjacentes.
2. La conclusion du théorème des suites adjacentes fournit l’encadrementun vn pour tout entier naturel non nul n. Pour montrer que les inégalités sonten fait strictes on peut raisonner par l’absurde en supposant que ce sont des égalités.
D’après le théorème des suites adjacentes on a, pour tout n ∈ N∗ ,un vn .
Supposons que ub = . La suite (un)n∈N∗ étant strictement croissante onaurait alors ub+1 > ub = , ce qui contredit ub+1 .
Ainsi, ub < . L’inégalité vb > se montre de la même manière.
3. La question précédente donne l’encadrement b∑
k=0
1
k!<
a
b<
b∑k=0
1
k!+ 1
b · b!.
Il s’agit en fait d’un encadrement entre fractions : pour aboutir à un encadremententre entiers il suffit donc de le multiplier par un entier bien choisi.
On remarque que les dénominateurs apparaissant dans les sommes se divisent lesuns les autres : 0!,1!,. . . ,b! .
Ainsi, en multipliant par b!, tous les termes seront des entiers.
L’encadrement précédent peut s’écrire :
b∑k=0
1
k!<
a
b<
b∑k=0
1
k!+ 1
b · b!.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
99
Chapitre 5 • Nombres réels, Suites
9782100547678-Fresl-C5.qxd 5/07/10 9:15 Page 99

En multipliant ces inégalités par b!, qui est strictement positif, on obtient
b∑k=0
b!
k!< a(b − 1)! <
b∑k=0
b!
k!+ 1
b.
Or, pour tout entier naturel k b, b!
k!est un entier : c’est 1 si k = b et le
produit (k + 1) · · · b si k < b.
Le membre de gauche est donc un entier naturel que nous noterons N .
Le membre du milieu est aussi un entier que nous noterons M.
On a alors, avec ces notations : N < M < N + 1
b.
Comme b ∈ N∗, 1
b 1 d’où M < N + 1.
On a donc N < M < N + 1 avec M et N entiers : c’est absurde, car Mserait alors un entier strictement compris entre deux entiers successifs.
L’hypothèse de départ, c’est-à-dire ∈ Q, est donc fausse : est irrationnel.
Lorsque vous aurez étudié les intégrales, vous pourrez montrer que = e en appli-quant l’inégalité de Taylor-Lagrange à la fonction exponentielle entre les points 0et 1.
On obtient alors sans aucun calcul la majoration
|e − un| e
(n + 1)!
qui montre que limn→∞ un = e et fournit en plus un majorant explicite de la diffé-
rence : par exemple, en prenant n = 9, elle montre que u9 est une valeur appro-
chée de e à 10−6 près.
En deuxième année vous apprendrez à utiliser de manière systématique cette for-mule afin d’établir la convergence de suites de ce type.
Exercice 5.6 : Valeurs approchées de racines carrées
Soient deux réels strictement positifs a b, (un)n∈N et (vn)n∈N les deux suitesstrictement positives définies par :
u0 = a et v0 = b
un+1 = 2unvn
un + vnet vn+1 = un + vn
2
100
Partie 2 • Analyse
9782100547678-Fresl-C5.qxd 5/07/10 9:15 Page 100

1. Montrer que, pour tout n ∈ N, un vn (on pourra exprimer vn − un sousforme d’une fraction en un−1 et vn−1).
2. Montrer que (un)n∈N et (vn)n∈N sont convergentes, puis que leurs limites sontégales.
3. À l’aide du produit unvn déterminer la valeur de cette limite.
4. Application : donner des approximations rationnelles de √
2 et √
3.
1. Le calcul est suggéré par l’énoncé : exprimer un et vn en fonction de un−1 et vn−1
puis mettre au même dénominateur. Afin que un−1 ait un sens on supposera n 1 ;le cas n = 0 se traitera à la main.
Pour n ∈ N∗ on a
vn − un = un−1 + vn−1
2− 2un−1vn−1
un−1 + vn−1.
En réduisant au même dénominateur, on obtient
vn − un = (un−1 + vn−1)2 − 4un−1vn−1
2(un−1 + vn−1).
On reconnaît des identités remarquables :
(un−1 + vn−1)2 = u2
n−1 + 2un−1vn−1 + v2n−1
donc
(un−1 + vn−1)2 − 4un−1vn−1 = u2
n−1 − 2un−1vn−1 + v2n−1
= (un−1 − vn−1)2.
Ainsi,
vn − un = (un−1 − vn−1)2
2(un−1 + vn−1) 0.
On a donc bien un vn pour tout n ∈ N∗ .
Enfin, pour n = 0 , c’est vrai par hypothèse.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
101
Chapitre 5 • Nombres réels, Suites
9782100547678-Fresl-C5.qxd 5/07/10 9:15 Page 101

2. Nous allons montrer que ces suites convergent par un argument de monotonie.
• Pour n ∈ N on a vn+1 − vn = un − vn
2qui est négatif d’après la première
question : (vn)n∈N est donc décroissante.
• D’autre part, pour n ∈ N, un+1
un= 2vn
un + vn. Or, toujours d’après la pre-
mière question, 2vn un + vn donc un+1
un 1 : la suite (un)n∈N est donc
croissante.
On aurait aussi pu calculer un+1 − un :
un+1 − un = −un(vn − un)
un + vn 0.
Pour une fois, la différence comme le quotient permettaient tous deux de conclure.
On poursuit en mimant la démonstration du théorème des suites adjacentes.
En particulier, pour tout n ∈ N, u0 un vn v0.
Ainsi, (vn)n∈N est décroissante et minorée par u0 , (un)n∈N est croissante etmajorée par v0. Ces deux suites sont donc convergentes.
Enfin, en passant à la limite dans l’égalité vn+1 = un + vn
2:
limn→∞ vn = 1
2( lim
n→∞ un + limn→∞ vn)
d’où limn→∞ un = lim
n→∞ vn . Notons cette limite commune.
Le théorème de la limite monotone affirme de plus que = supun| n ∈ N et = infvn| n ∈ N .
On a donc, pour tout n ∈ N : un vn.
3. Les deux suites étant définies par une relation de récurrence, cherchons une rela-tion entre un+1vn+1 et unvn .
Par définition :
un+1vn+1 = 2unvn
un + vn× un + vn
2= unvn.
102
Partie 2 • Analyse
9782100547678-Fresl-C5.qxd 5/07/10 9:15 Page 102
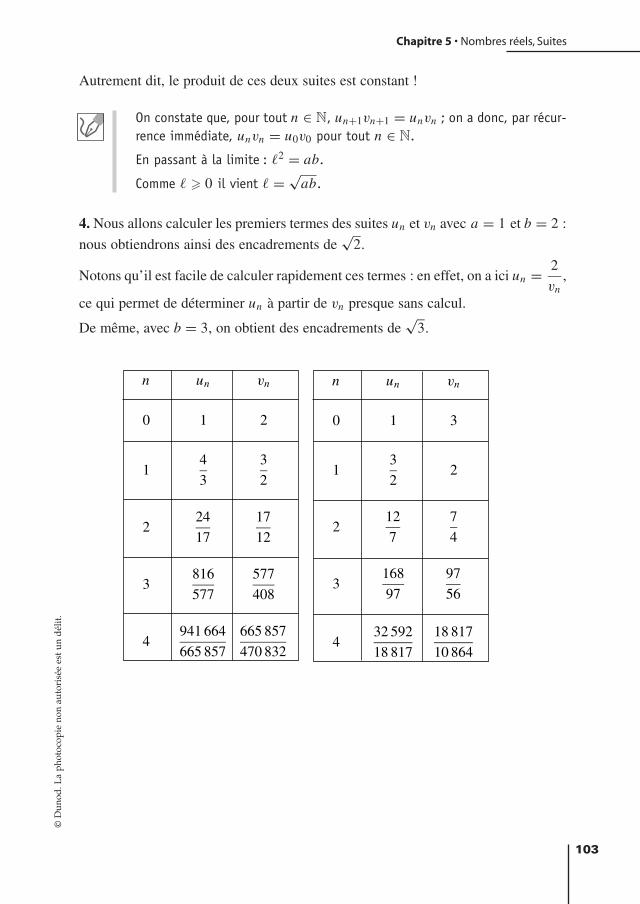
Autrement dit, le produit de ces deux suites est constant !
On constate que, pour tout n ∈ N, un+1vn+1 = unvn ; on a donc, par récur-rence immédiate, unvn = u0v0 pour tout n ∈ N.
En passant à la limite : 2 = ab.
Comme 0 il vient = √ab.
4. Nous allons calculer les premiers termes des suites un et vn avec a = 1 et b = 2 :
nous obtiendrons ainsi des encadrements de √
2.
Notons qu’il est facile de calculer rapidement ces termes : en effet, on a ici un = 2
vn,
ce qui permet de déterminer un à partir de vn presque sans calcul.
De même, avec b = 3, on obtient des encadrements de √
3.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
103
Chapitre 5 • Nombres réels, Suites
n un vn
0 1 2
14
3
3
2
224
17
17
12
3816
577
577
408
4941 664
665 857
665 857
470 832
n un vn
0 1 3
13
22
212
7
7
4
3168
97
97
56
432 592
18 817
18 817
10 864
9782100547678-Fresl-C5.qxd 5/07/10 9:16 Page 103

Exercice 5.7 : Divergence de (sin(n))n∈NOn suppose que la suite de terme général sin(n) est convergente de limite .
1. En considérant la suite de terme général sin(n + 1) , montrer que la suite determe général cos(n) est convergente. On note ′ sa limite.
2. À l’aide de formules de trigonométrie exprimer de différentes manières leslimites des suites (sin(2n))n∈N et (cos(2n))n∈N à l’aide de et ′. En déduire lesvaleurs possibles de ′, puis montrer que = 0 et ′ = 1.
3. Conclure.
Comme l’indique le titre nous allons démontrer que la suite de terme général sin(n)
est divergente. L’énoncé commençant par « supposons que cette suite converge », ils’agit en fait d’une démonstration par l’absurde.
Il est ici question de suites extraites (ou sous-suites). La propriété fondamentale estla suivante : toute suite extraite d’une suite convergente est convergente de mêmelimite. C’est ce théorème qui servira à calculer les limites de sin(n + 1) , sin(2n) etcos(2n) quand n tend vers +∞ en fonction de celles de sin(n) et cos(n).
1. La formule de trigonométrie
sin(a + b) = sin(a) cos(b) + cos(a) sin(b)
est évidemment à utiliser : on vous demande en effet de faire le lien entre sin(n) ,cos(n) et sin(n + 1) , il suffit donc d’utiliser cette relation avec a = n et b = 1.
On a, pour tout entier naturel n, sin(n + 1) = sin(n)cos(1) + cos(n)sin(1)
d’où, sin(1) étant non nul :
cos(n) = sin(n + 1) − sin(n) cos(1)
sin(1).
Or sin(n) →n→∞ , donc sin(n + 1) →
n→∞
et il vient cos(n) →n→∞
1 − cos(1)
sin(1).
2. Rappelons les formules de trigonométrie reliant sin(2n) et cos(2n) à sin(n) etcos(n) :
sin(2n) = 2 sin(n) cos(n) et cos(2n) = 2 cos2(n) − 1 = 1 − 2 sin2(n).
On demande d’établir plusieurs expressions de la limite d’une même suite. Cecipermettra d’établir des équations dont ces limites sont solutions en invoquant lethéorème d’unicité de la limite : toutes les expressions obtenues pour la limite d’unesuite donnée sont nécessairement égales.
104
Partie 2 • Analyse
9782100547678-Fresl-C5.qxd 5/07/10 9:16 Page 104

(sin(2n))n∈N est une sous-suite de (sin(n))n∈N. Elle a donc la mêmelimite .
D’autre part, on a pour tout n ∈ N : sin(2n) = 2 sin(n) cos(n) ; on endéduit lim
n→∞ sin(2n) = 2′ .
La limite d’une suite convergente étant unique, on a donc = 2′.De même, (cos(2n))n∈N est une sous-suite de (cos(n))n∈N et tend doncégalement vers ′.
D’autre part, la relation cos(2n) = 2cos2(n) − 1 montre que limn→∞ cos(2n)
= 2′2 − 1 et l’unicité de la limite donne ′ = 2′2 − 1.
Si on avait plutôt utilisé la relation cos(2n) = 1 − 2sin2(n) on auraitobtenu ′ = 1 − 22 .
À ce stade on ne connaît ni ni ′. Pour déterminer ′ nous allons utiliser la seuledes trois relations précédentes qui ne fait pas intervenir .
Nous venons de voir que ′ = 2′2 − 1 : ′ est donc racine de l’équation2z2 − z − 1 = 0. Un calcul simple montre que ses racines sont −1/2 et 1,donc ′ ∈ −1/2,1.Déterminons les valeurs possibles de en utilisant la relation = 2′. Si′ = 1, on a alors = 2, soit = 0. Si ′ = −1/2 , il vient = − etencore une fois = 0. Ainsi, on a = 0.
La dernière relation, ′ = 1 − 22 , montre alors que ′ = 1.
On aurait pu procéder autrement en partant de ′ = 1 − 22 pour calculer sachantque ′ ∈ −1/2,1 mais cela n’aurait pas permis de conclure immédiatement. En
effet, si ′ = −1/2, on en déduit 2 = 3/4 et, si ′ = 1, 2 = 0, d’où
∈ −√3/2,0,
√3/2. Il faut alors de toutes façons considérer la relation = 2′
pour conclure que = 0.
3. Chacune des deux premières questions permettait d’établir des relations entre et ′ ou de déterminer les valeurs éventuelles qu’elles pouvaient prendre ; il n’y aplus qu’à comparer ces résultats pour constater qu’ils sont incompatibles, ce quiachèvera la démonstration par l’absurde.
Reprenons la première question :
′ = 1 − cos(1)
sin(1).
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
105
Chapitre 5 • Nombres réels, Suites
9782100547678-Fresl-C5.qxd 5/07/10 9:16 Page 105
Avec la deuxième question, on a = 0 et ′ = 1. En remplaçant ces valeursdans la première relation il vient 1 = 0, ce qui est absurde.Nous avons donc démontré par l’absurde que la suite de terme général sin(n)
est divergente.
Exercice 5.8 : Critère de comparaison logarithmique
Soit (un)n∈N une suite réelle à terme strictements positifs. On suppose :un+1
un→
n→∞ ∈ [0,1[.
1. Montrer qu’il existe un entier naturel N tel que, pour tout entier n N,
un+1 (
+ 1
2
)un .
2. En déduire que limn→∞ un = 0.
3. Applications : étant donnés deux réels α > 0 et a > 1 déterminer limn→∞
nα
an,
limn→∞
an
n!et lim
n→∞n!
nn.
Cet exercice fournit un outil simple pour déterminer des limites de formes indéter-minées telles que celles présentées dans la dernière question. Ce type d’argumentsera utilisé couramment en deuxième année dans le cadre des séries entières.
1. L’énoncé de cette première question rappelle fortement la définition rigoureusede la limite « avec ε ». Il s’agira donc de l’appliquer judicieusement à la suite de
terme général un+1
un.
Ce type de raisonnement étant nouveau on commencera la résolution par une dis-cussion partant du résultat afin de « deviner » l’argument de départ.
Un tel procédé peut s’avérer utile mais n’est évidemment pas rigoureux : il a doncsa place au brouillon et la copie devra comporter la rédaction propre et rigoureusepartant des hypothèses de la question pour arriver à la conclusion.
Rappelons la définition de la limite sur l’exemple donné : étant donné un réel ε > 0quelconque, il existe un entier naturel N tel que, pour tout entier n N, on a∣∣∣∣un+1
un−
∣∣∣∣ ε .
Cette dernière inégalité peut se traduire par l’encadrement −ε un+1
un− ε ou
encore, en ajoutant à chaque membre, − ε un+1
un + ε. Pour obtenir une
inégalité de la forme demandée, il suffirait d’avoir + ε = + 1
2, soit ε = 1 −
2.
106
Partie 2 • Analyse
9782100547678-Fresl-C5.qxd 5/07/10 9:16 Page 106

Ainsi, il suffit de considérer la définition de la limite, appliquée à la situation pré-sente, pour une valeur particulière de ε .
Nous pouvons maintenant effectuer une rédaction rigoureuse.
Considérons le réel ε = 1 −
2. ε > 0 (car < 1) donc il existe un entier
naturel N tel que, pour tout entier n N,
∣∣∣∣un+1
un−
∣∣∣∣ ε .
Ceci peut également s’écrire : pour tout entier n N,
− ε un+1
un + ε, d’où
un+1
un + ε = + 1
2. Comme un > 0 on en
déduit que, pour tout entier n N, un+1 + 1
2un.
2. Si on avait un+1 = + 1
2un , la suite (un)n∈N serait géométrique de raison stric-
tement inférieure à 1 en valeur absolue donc convergente de limite nulle.
Nous allons essayer de nous ramener à ce type d’argument en faisant apparaître unesuite géométrique.
Par une récurrence immédiate on a :
pour tout entier n N , un (
+ 1
2
)n−N
uN .
Or 0 <
( + 1
2
)< 1 (car ∈ [0,1[) donc
limn→∞
( + 1
2
)n−N
= 0.
Comme d’autre part on a un > 0 par hypothèse le théorème d’encadrementmontre que lim
n→∞ un = 0 .
3. Rien de particulier à signaler : il n’est ici demandé que d’appliquer le résultat pré-cédent à des exemples explicites.
• Posons un = nα
an> 0. Alors
un+1
un= 1
a
(1 + 1
n
)α
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
107
Chapitre 5 • Nombres réels, Suites
9782100547678-Fresl-C5.qxd 5/07/10 9:16 Page 107

qui tend vers 1
a< 1 quand n tend vers +∞ : on a donc
limn→∞
nα
an= 0.
• Posons vn = an
n!> 0 . Alors
vn+1
vn= a
n + 1
qui tend vers 0 < 1 quand n tend vers +∞ donc limn→∞ vn = 0.
• Enfin, posons wn = n!
nn. Alors
wn+1 = (n + 1)!
(n + 1)n+1.
En simplifiant numérateur et dénominateur par n + 1 on obtient
wn+1 = n!
(n + 1)n
d’où
wn+1
wn=
(1 + 1
n
)−n
.
Or (1 + 1
n
)−n
= exp
(−n ln
(1 + 1
n
)).
On reconnaît un taux d’accroissement :
n ln
(1 + 1
n
)= ln(1 + 1/n) − ln(1)
1/n
qui tend vers ln′(1) = 1 quand n tend vers +∞, ce qui donne
limn→∞
wn+1
wn= 1
e.
Enfin 1
e< 1 : on a donc lim
n→∞ wn = 0 .
108
Partie 2 • Analyse
9782100547678-Fresl-C5.qxd 5/07/10 9:16 Page 108

Cette dernière situation n’a rien à voir avec celle rencontrée dans le calcul de
limn→∞
un+1
un.
• Dans le cas de un : on obtenait le quotient
(1 + 1
n
)αoù α est une constante,
i.e. ne dépend pas de n. La limite de cette expression est alors bien 1 d’après lesthéorèmes du cours déjà rencontrés au lycée.
• Dans le cas de wn : on a affaire au quotient
(1 + 1
n
)−n
: l’exposant dépend
de n. Dans ce cas, aucun théorème usuel ne s’applique directement. Il faut reve-nir aux exponentielles et logarithmes pour pouvoir conclure.
Exercice 5.9 : Critère spécial des séries alternées
1. Soit (un)n∈N une suite réelle. On suppose qu’il existe un nombre réel tel queu2n →
n→∞ et u2n+1 →n→∞ . Montrer que un →
n→∞ .
2. Soit (an)n∈N une suite réelle décroissante tendant vers 0. Pour n ∈ N on pose :
un =n∑
k=0
(−1)kak .
Montrer que (u2n)n∈N et (u2n+1)n∈N sont adjacentes, puis que (un)n∈N est conver-gente.
Dans la première question, aucune hypothèse n’est faite sur (un)n∈N : aucun desthéorèmes classiques (encadrement, limite monotone, suites adjacentes) ne peuts’appliquer. Il va donc falloir revenir à la définition de la limite.
Autrement dit, nous allons démontrer que, pour tout réel ε > 0, il existe un entiernaturel N tel que, pour tout entier n N, |un − | ε.
Pour déterminer, à ε ∈ R∗+ donné, un tel entier N , il faudra commencer par écrireles hypothèses, i.e. la définition de la limite pour les suites de termes généraux u2n
et u2n+1. Nous aurons alors toutes les données pour conclure.
Comparée à cette première question technique, la deuxième question est sans diffi-culté : la première partie (montrer que deux suites sont adjacentes) est une vérifi-cation d’une définition du cours et la conclusion sera visiblement une application dela question précédente.
1. Fixons un nombre réel ε > 0.
Nous voulons démontrer qu’il existe un entier naturel N tel que, pour tout entiern N, |un − | ε.
Comme la suite (u2n)n∈N tend vers nous savons qu’il existe un entier naturel n0
tel que, pour tout entier n n0, |u2n − | ε.© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
109
Chapitre 5 • Nombres réels, Suites
9782100547678-Fresl-C5.qxd 5/07/10 9:16 Page 109

Ceci peut s’écrire de manière légèrement différente : pour tout entier pair p 2n0,|up − | ε . Ainsi écrite, cette inégalité est de la forme souhaitée car elle fait inter-venir |up − | .D’autre part, on sait également que la suite (u2n+1)n∈N tend vers . Ainsi, il existeun entier naturel n1 tel que, pour tout entier n n1, |u2n+1 − | ε .
Comme précédemment nous pouvons reformuler ceci : pour tout entier impairp 2n1 + 1, |up − | ε .
On a donc deux inégalités du type souhaité ; la première est valable pour les entierspairs supérieurs ou égaux à 2n0 et la seconde pour les entiers impairs supérieurs ouégaux à 2n1 + 1.
Il nous faut déterminer un entier naturel N tel que cette inégalité soit vraie pour tousles entiers supérieurs ou égaux à N , quelle que soit leur parité. Pour cela, il suffit dechoisir un entier N qui soit à la fois supérieur ou égal à 2n0 et à 2n1 + 1. Parexemple, on pourra prendre N = max(2n0,2n1 + 1).
Soit ε ∈ R∗+.
Comme limn→∞ u2n = il existe un entier naturel n0 tel que, pour tout entier
n n0, |u2n − | ε ou encore :
pour tout entier pair p 2n0,|up − | ε.
De même, limn→∞ u2n+1 = donc il existe un entier naturel n1 tel que, pour
tout entier n n1, |u2n+1 − | ε ou encore :
pour tout entier impair p 2n1 + 1,|up − | ε.
Posons N = max(2n0,2n1 + 1). Alors, si n est un entier N, deux cas seprésentent :
• si n est pair, n est un entier pair N 2n0 donc |un − | ε d’aprèsla première inégalité ;
• si n est impair, n est un entier impair N 2n1 + 1 donc |un − | εd’après la seconde inégalité.
Ainsi : pour tout entier n N on a |un − | ε.En conclusion, nous avons montré que, quel que soit le réel ε > 0, il existeun certain entier naturel N tel que, pour tout entier n N, |un − | ε.Ceci signifie exactement, par définition, que un tend vers quand n tendvers +∞.
110
Partie 2 • Analyse
9782100547678-Fresl-C5.qxd 5/07/10 9:16 Page 110

2. Montrer que ces deux suites sont adjacentes est routinier : comme elles sont défi-nies par des sommes on évaluera les différences de termes successifs pour étudierleur monotonie.
Étude de la monotonie de (u2n)n∈N
Le terme d’indice n + 1 de (u2n)n∈N est u2(n+1) , i.e. u2n+2 . Il faut prendre gardeà ne pas se tromper d’indice : c’est l’entier n dans l’expression de u2n qu’il fautremplacer par n + 1.
On a :
u2n+2 − u2n =2n+2∑k=0
(−1)kak −2n∑
k=0
(−1)kak .
Tous les termes de la première somme se simplifient avec un terme de la seconde
sauf les deux derniers, i.e. (−1)2n+1a2n+1 et (−1)2n+2a2n+2.
Enfin, n’oublions pas que (−1)p = 1 si p est pair et −1 si p est impair. En l’occu-rence, les deux termes dont il est question ci-dessus sont respectivement −a2n+1 eta2n+2 .
Pour tout n ∈ N, u2n+2 − u2n = a2n+2 − a2n+1 qui est négatif car la suite(an)n∈N est décroissante.
Ainsi, (u2n)n∈N est décroissante.
Étude de la monotonie de (u2n+1)n∈N
Même remarque : le terme d’indice n + 1 de (u2n+1)n∈N. est u2(n+1)+1 = u2n+3.
Dans la différence u2n+3 − u2n+1 les termes restants sont (−1)2n+2a2n+2 = a2n+2
et (−1)2n+3a2n+3 = −a2n+3 .
Pour tout n ∈ N, u2n+3 − u2n+1 = a2n+2 − a2n+3 qui est positif car lasuite (an)n∈N est décroissante.
Ainsi, (u2n+1)n∈N est croissante.
• Enfin, il faut montrer que limn→∞ u2n+1 − u2n = 0.
Cette différence est
2n+1∑k=0
(−1)kak −2n∑
k=0
(−1)kak .
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
111
Chapitre 5 • Nombres réels, Suites
9782100547678-Fresl-C5.qxd 5/07/10 9:16 Page 111

Dans cette expression, tous les termes des sommes se simplifient sauf le dernier de
la première somme, (−1)2n+1a2n+1, qui est égal à −a2n+1 car 2n + 1 est impair.
Pour tout n ∈ N, u2n+1 − u2n = −a2n+1. Or limn→∞ an = 0 donc
limn→∞(u2n+1 − u2n) = 0 .
Ainsi, les suites (u2n)n∈N et (u2n+1)n∈N sont adjacentes.
La première partie de la question est résolue. Notons que toutes les hypothèses((an)n∈N décroissante et de limite nulle) ont bien été utilisées.
Il reste à utiliser le résultat de la première question.
Les suites (u2n)n∈N et (u2n+1)n∈N étant adjacentes elles sont convergentesde même limite.D’après la première question, (un)n∈N est convergente.
112
Partie 2 • Analyse
Ceci montre en particulier la convergence des suites très classiques de termes
généraux n∑
k=0
(−1)k
k + 1,
n∑k=0
(−1)k
k!,
n∑k=1
(−1)k
k2 …
La valeur exacte de la limite de telles suites peut être difficile voire impossible àcalculer mais dans certains cas favorables l’inégalité de Taylor-Lagrange appli-quée à une fonction bien choisie permet de conclure.Les séries entières et les séries de Fourier, au programme de deuxième année, per-mettent également parfois de déterminer certaines de ces valeurs.
Exercice 5.10 : Suite récurrenteCet exercice utilise des résultats du cours sur les fonctions : continuité et déri-vabilité.
Soit (un)n∈N une suite réelle vérifiant :
∀n ∈ N, un+1 = 1
2cos(un).
1. Démontrer qu’il existe un unique réel tel que = 1
2cos(). Montrer que
∈ [0,1].
2. Montrer que un tend vers quand n tend vers +∞.
Cet exercice est très classique. À terme vous devrez être capable de résoudre ce typede problème sans indication.
9782100547678-Fresl-C5.qxd 5/07/10 9:16 Page 112

1. Le théorème dédié à ce type de résultat est le théorème des valeurs intermédiaires
que nous allons appliquer à la fonction x → 1
2cos(x) − x.
Plus précisément, il y a deux choses à montrer :
• dans un premier temps, l’étude de cette fonction sur R montrera l’existence etl’unicité de ;
• dans un deuxième temps, nous affinerons le résultat en montrant que ∈ [0,1] enappliquant à nouveau le théorème des valeurs intermédiaires sur ce segment.
• Pour x ∈ R posons f (x) = 1
2cos(x) − x .
f est dérivable sur R et, pour tout réel x, f ′(x) = −1
2sin(x) − 1 .
Comme |sin| 1, f ′ est strictement négative sur R : f est donc strictementdécroissante.De plus, cos est bornée sur R donc
limx→+∞ f (x) = −∞ et lim
x→−∞ f (x) = +∞.
D’après le théorème des valeurs intermédiaires, f s’annule donc au moins unefois.f étant strictement décroissante, elle ne peut s’annuler plus d’une fois : ilexiste donc un unique réel tel que f () = 0.
• De plus, f (0) = 1
2> 0 et f (1) = 1
2cos(1) − 1 < 0 : f s’annule donc en
un point de [0,1].
Vu que est l’unique réel tel que f () = 0 on a donc ∈ [0,1] .
2. Nous allons déterminer une majoration explicite de |un − | en appliquantl’inégalité des accroissements finis à une fonction bien choisie.
La relation un+1 = 1
2cos(un) peut s’écrire un+1 = g(un) où g est la fonction défi-
nie pour x réel par g(x) = 1
2cos(x) .
On a alors, de plus, g() = . Ainsi, nous pouvons établir une relation entre|un+1 − | et |un − | :
|un+1 − | = |g(un) − g()| M |un − |
où M est un majorant de |g′| sur R, par exemple 1
2.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
113
Chapitre 5 • Nombres réels, Suites
9782100547678-Fresl-C5.qxd 5/07/10 9:16 Page 113

On voit alors qu’une récurrence permettra de montrer que |un − | 1
2n|u0 − |.
Pour x ∈ R posons g(x) = 1
2cos(x) . La suite de terme général un vérifie
donc la relation de récurrence :
∀n ∈ N,un+1 = g(un).
De plus, par définition de : g() = .
Enfin, g est dérivable et, pour tout réel x, |g′(x)| 1
2.
Pour n ∈ N posons Hn : « |un − | 1
2n|u0 − | ».
• H0 est clairement vraie.
• Soit n ∈ N tel que Hn est vraie.
Alors :
|un+1 − | = |g(un) − g()|
g′ étant majorée en valeur absolue par 1
2on en déduit, d’après l’inégalité
des accroissements finis :
|g(un) − g()| 1
2|un − |
et enfin, en utilisant Hn, il vient
|un+1 − | 1
2n+1|u0 − |
donc Hn+1 est vraie.• Ainsi, d’après le principe de récurrence, Hn est vraie pour tout n ∈ N.Ceci montre, en particulier, que un tend vers quand n tend vers +∞.
En fait, nous avons même obtenu une majoration explicite de la distance entre un
et .
Par exemple, si u0 = 1, on a |u0 − | 1 ; en prenant n = 10, on a
210 = 1024 > 1000 d’où |u10 − | < 0,001.
114
Partie 2 • Analyse
9782100547678-Fresl-C5.qxd 5/07/10 9:16 Page 114
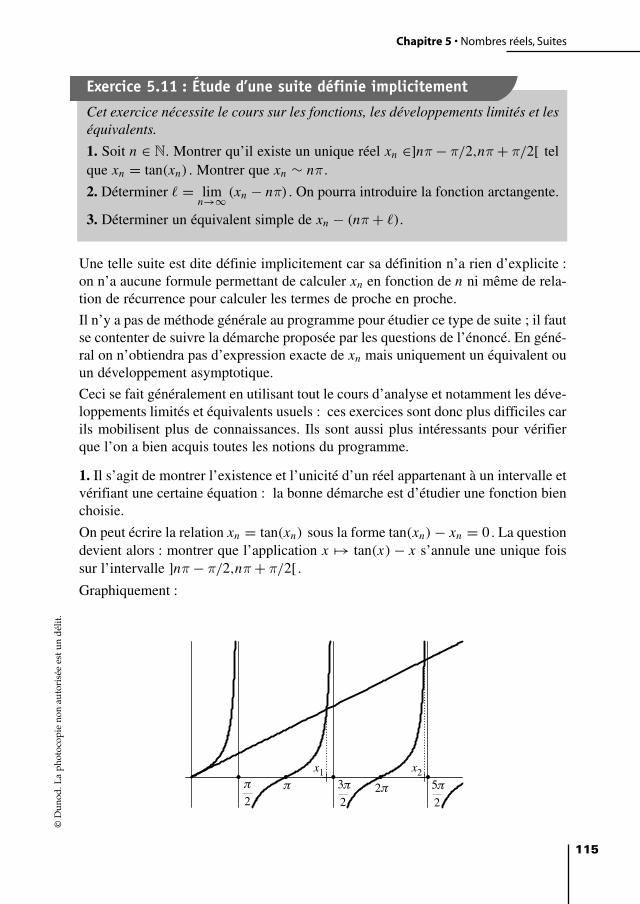
Exercice 5.11 : Étude d’une suite définie implicitement
Cet exercice nécessite le cours sur les fonctions, les développements limités et leséquivalents.
1. Soit n ∈ N. Montrer qu’il existe un unique réel xn ∈]nπ− π/2,nπ+ π/2[ telque xn = tan(xn) . Montrer que xn ∼ nπ .
2. Déterminer = limn→∞ (xn − nπ) . On pourra introduire la fonction arctangente.
3. Déterminer un équivalent simple de xn − (nπ+ ).
Une telle suite est dite définie implicitement car sa définition n’a rien d’explicite :on n’a aucune formule permettant de calculer xn en fonction de n ni même de rela-tion de récurrence pour calculer les termes de proche en proche.
Il n’y a pas de méthode générale au programme pour étudier ce type de suite ; il fautse contenter de suivre la démarche proposée par les questions de l’énoncé. En géné-ral on n’obtiendra pas d’expression exacte de xn mais uniquement un équivalent ouun développement asymptotique.
Ceci se fait généralement en utilisant tout le cours d’analyse et notamment les déve-loppements limités et équivalents usuels : ces exercices sont donc plus difficiles carils mobilisent plus de connaissances. Ils sont aussi plus intéressants pour vérifierque l’on a bien acquis toutes les notions du programme.
1. Il s’agit de montrer l’existence et l’unicité d’un réel appartenant à un intervalle etvérifiant une certaine équation : la bonne démarche est d’étudier une fonction bienchoisie.
On peut écrire la relation xn = tan(xn) sous la forme tan(xn) − xn = 0 . La questiondevient alors : montrer que l’application x → tan(x) − x s’annule une unique foissur l’intervalle ]nπ− π/2,nπ+ π/2[ .
Graphiquement :
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
115
Chapitre 5 • Nombres réels, Suites
π π2
π
2
3 π
2
5π2
x1 x2
9782100547678-Fresl-C5.qxd 5/07/10 9:16 Page 115

Soit f : ]nπ− π/2,nπ+ π/2[→ R, x → tan(x) − x .
f est continue sur l’intervalle ]nπ− π/2,nπ+ π/2[ . De plus,lim
x→nπ−π/2f (x) = −∞ et lim
x→nπ+π/2f (x) = +∞ : d’après le théorème
des valeurs intermédiaires, f s’annule donc au moins une fois sur]nπ− π/2,nπ+ π/2[ .
D’autre part, f est dérivable et, pour tout x ∈]nπ− π/2,nπ+ π/2[ ,
f ′(x) = tan2(x). f ′ est donc positive et ne s’annule qu’en un seul point(nπ) : f est donc strictement croissante et ne s’annule ainsi qu’au plus unefois.
En résumé : il existe un unique réel xn ∈]nπ− π/2,nπ+ π/2[ tel quef (xn) = 0, i.e. tel que xn = tan(xn) .
Il est en général difficile de deviner un équivalent d’une telle suite. Cependant,l’énoncé donne ici le résultat : nous allons donc simplement vérifier qu’il est cor-
rect en montrant que le quotient xn
nπtend vers 1.
Par définition on a nπ− π/2 xn nπ+ π/2 d’où, pour n 1 :
1 − 1
2n
xn
nπ 1 + 1
2n.
D’après le théorème d’encadrement on a donc
limn→∞
xn
nπ= 1
soit encore
xn ∼ nπ.
Bien sûr ceci est un peu frustrant : comment aurions-nous trouvé cet équivalent sil’énoncé ne l’avait pas donné ?
Ceci peut se faire de manière qualitative : la notion d’équivalent en mathématiquessert à traduire rigoureusement la notion de « suites du même ordre de grandeur ».Comme nπ− π/2 < xn < nπ+ π/2 on « voit » que, quand n est grand, xn est « del’ordre » de nπ .
Ceci n’a rien de rigoureux mais fournit une idée du résultat qu’on peut ensuite sim-plement vérifier comme cela a été fait ci-dessus.
2. L’unique difficulté dans la manipulation des fonctions circulaires réciproquesconcerne leur ensemble de définition et d’arrivée.
116
Partie 2 • Analyse
9782100547678-Fresl-C5.qxd 5/07/10 9:16 Page 116

Concernant l’arctangente rappelons que, si x est un réel, Arctan(x) est par défini-tion l’unique réel appartenant à ] − π/2,π/2[ dont la tangente est x .
En particulier, Arctan(tan(θ)) n’est pas forcément égal à θ : c’est le réelϕ ∈] − π/2,π/2[ vérifiant tan(ϕ) = tan(θ) , on a donc seulement ϕ = θ+ kπ pourun certain entier relatif k.
Enfin, il est simple de faire apparaître xn − nπ : la fonction tangente étant π-périodiqueet n entier on a tan(xn) = tan(xn − nπ) .
On a tan(xn − nπ) = tan(xn) = xn .
De plus, xn − nπ ∈] − π/2,π/2[ donc, par définition de la fonction arc-tangente : xn − nπ = Arctan(xn) .
Comme xn ∼ nπ, limn→∞ xn = +∞ donc lim
n→∞ Arctan(xn) = π/2 , d’où
= π/2.
3. Dans la question précédente nous avons utilisé une propriété de la fonction tan-gente pour faire apparaître xn − nπ et obtenir l’égalité tan(xn − nπ) = tan(xn) .
On peut utiliser une autre propriété de cette fonction pour faire apparaître
xn − nπ− π/2 : tan(π/2 − θ) = 1
tan(θ)donc également, en utilisant le fait que la
tangente est impaire, tan(θ− π/2) = − 1
tan(θ).
Avec θ = xn − nπ on obtient une expression de tan(xn − (nπ+ π/2)) en fonctionde tan(xn − nπ) = tan(xn) = xn . Il n’y a plus alors qu’à injecter dans cette relationles résultats précédemment obtenus sur xn.
En raisonnant comme précédemment on a :
xn = tan(xn)
= tan(xn − nπ)
= − 1
tan(xn − (nπ+ π/2)).
On en déduit
tan(xn − (nπ+ π/2)) = − 1
xn.
Comme tan(h) est équivalent à h quand h tend vers 0 etlim
n→∞ (xn − (nπ+ π/2)) = 0 on a
tan(xn − (nπ+ π/2)) ∼ (xn − (nπ+ π/2)).© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
117
Chapitre 5 • Nombres réels, Suites
9782100547678-Fresl-C5.qxd 5/07/10 9:16 Page 117

D’autre part, xn ∼ nπ donc
− 1
xn∼ − 1
nπ.
On en déduit :
(xn − (nπ+ π/2)) ∼ − 1
nπ.
Avec les notations de Landau ceci s’écrit également
xn = nπ+ π/2 − 1
nπ+ o(
1
n).
Si l’on connaît la formule (hors-programme mais exercice classique)Arctan(u) + Arctan(1/u) = π/2 pour u > 0 on peut également traiter cette der-nière question de la manière suivante :
xn − (nπ+ π/2) = Arctan(xn) − π/2
= − Arctan(1/xn).
Or Arctan(h) est équivalent à h quand h tend vers 0 et limn→∞ 1/xn = 0 donc
− Arctan(1/xn) ∼ − 1
xn∼ − 1
nπ.
Pour démontrer la formule dont il est question, étudiez la fonctionu → Arctan(u) + Arctan(1/u) sur R∗+ et R∗− en prenant bien garde au fait qu’el-
le n’est pas définie en 0 ; on trouve alors qu’elle est constante égale à π
2sur R∗+ et
constante égale à − π
2sur R∗−.
118
Partie 2 • Analyse
9782100547678-Fresl-C5.qxd 5/07/10 9:16 Page 118
119
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
Exercice 6.1 : Trois théorèmes de point fixepour des applications continues
Les trois questions sont indépendantes.Chacune donne une condition suffisante pour qu’une application f possède unpoint fixe, i.e. un élément x de son ensemble de définition tel que f (x) = x .
1. Soient S = [a,b] un segment et f une application continue de S dans lui-même. Montrer qu’il existe un élément c de S tel que f (c) = c.
2. Soit f une application continue décroissante de R dans R. Montrer qu’il existeun unique réel c tel que f (c) = c. Ce résultat reste-t-il vrai si on suppose plutôtf croissante ?
3. Soient k ∈ [0,1[ et f une application de R dans R qui est k-lipschitzienne, i.e. :pour tous réels x et y, | f (x) − f (y)| k|x − y| . Montrer qu’il existe un uniqueréel c tel que f (c) = c.
Les fonctions introduites par l’énoncé sont continues sur un intervalle et on souhaitedémontrer l’existence d’un élément de cet intervalle vérifiant une certaine relation.C’est la situation courante où le théorème des valeurs intermédiaires sera appliqué.
Afin de l’utiliser, on introduira une fonction auxiliaire dont les points d’annulationseront les solutions du problème posé.
1. Pour montrer qu’il existe c ∈ S tel que f (c) = c, il suffit de montrer qu’il existec ∈ S tel que f (c) − c = 0. Cette remarque simple suggère la forme de la fonctionauxiliaire à laquelle appliquer le théorème des valeurs intermédiaires.
Graphiquement, avec a = 0 et b = 2, on peut avoir l’allure suivante :
Fonctions continues 6
9782100547678-Fresl-C6.qxd 5/07/10 9:18 Page 119
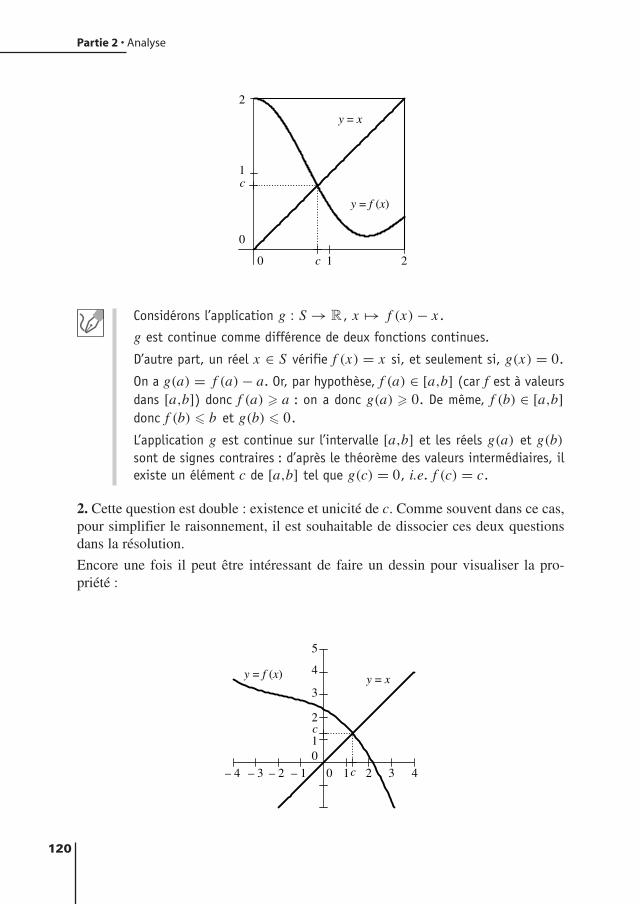
Considérons l’application g : S → R , x → f (x) − x .
g est continue comme différence de deux fonctions continues.
D’autre part, un réel x ∈ S vérifie f (x) = x si, et seulement si, g(x) = 0.
On a g(a) = f (a) − a. Or, par hypothèse, f (a) ∈ [a,b] (car f est à valeursdans [a,b]) donc f (a) a : on a donc g(a) 0. De même, f (b) ∈ [a,b]donc f (b) b et g(b) 0.
L’application g est continue sur l’intervalle [a,b] et les réels g(a) et g(b)
sont de signes contraires : d’après le théorème des valeurs intermédiaires, ilexiste un élément c de [a,b] tel que g(c) = 0, i.e. f (c) = c.
2. Cette question est double : existence et unicité de c. Comme souvent dans ce cas,pour simplifier le raisonnement, il est souhaitable de dissocier ces deux questionsdans la résolution.
Encore une fois il peut être intéressant de faire un dessin pour visualiser la pro-priété :
120
Partie 2 • Analyse
0
0
1
1
2
2
y = x
y = f (x)
c
c
0
0
1
1
2
2
3
3
4
4
5
y = xy = f (x)
c
c– 1– 2– 3– 4
9782100547678-Fresl-C6.qxd 5/07/10 9:18 Page 120
Existence : posons de la même manière g(x) = f (x) − x pour x ∈ R . g est conti-nue comme différence de fonctions continues et on veut monter qu’elle s’annule.
La situation est différente de celle de la première question : on n’a pas de rensei-gnement sur les valeurs de g en des points particuliers. On peut en revanche s’inté-resser aux limites de g en +∞ et −∞.
Posons, pour x ∈ R , g(x) = f (x) − x.
La fonction f étant décroissante sur R elle possède une limite en +∞ quiest éventuellement −∞ (théorème de la limite monotone pour les fonc-tions). On a donc lim
x→+∞ g(x) = −∞.
De même, f a une limite en +∞ qui est éventuellement +∞. On en déduitque lim
x→−∞ g(x) = +∞.
L’ensemble g(R) est un intervalle car R est un intervalle et g est continue(théorème des valeurs intermédiaires).
g(R) n’est pas majoré (car g tend vers +∞ en −∞) et n’est pas non plusminoré (car g tend vers −∞ en +∞).
Le seul intervalle qui ne soit ni majoré ni minoré est R : on a doncg(R) = R.
g prend toutes les valeurs réelles, en particulier la valeur 0 : il existe un réelc tel que g(c) = 0 et on a alors f (c) = c.
Unicité : soit (c1,c2) ∈ R2 tel que f (c1) = c1 et f (c2) = c2. Nous voulons montrerque c1 = c2.
Pour cela, n’oublions pas qu’il y a une hypothèse de monotonie sur f : elle estdécroissante. Nous allons donc introduire la relation d’ordre en supposant, parexemple, que c1 c2 .
Soit (c1,c2) ∈ R2 tel que f (c1) = c1 et f (c2) = c2.
Supposons c1 c2 . f étant décroissante, f (c1) f (c2) donc c1 c2 , d’oùc1 = c2.
De même, si c1 c2 , on obtient que c1 = c2.
Dans tous les cas on a c1 = c2, ce qui montre l’unicité de c.
On remarque que l’hypothèse de décroissance de f a servi deux fois dans des situa-tions complètement différentes : pour l’existence du point fixe, via le théorème dela limite monotone, et pour l’unicité.
Le résultat ne s’étend pas aux fonctions croissantes comme on le voit en considé-rant la fonction exponentielle.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
121
Chapitre 6 • Fonctions continues
9782100547678-Fresl-C6.qxd 5/07/10 9:18 Page 121

De plus, même quand un point fixe existe, il n’est pas forcément unique : il suffit deprendre pour f l’application identité.
3. Rappelons que toute fonction lipschitzienne est continue. Nous allons suivre lemême schéma que pour la question précédente : séparer l’existence et l’unicité etutiliser les limites à l’infini de f (x) − x pour appliquer le théorème des valeursintermédiaires.
Existence : posons, pour x réel, g(x) = f (x) − x. g est continue comme différencede fonctions continues. Pour déterminer les limites de g à l’infini on peut transfor-mer la valeur absolue en encadrement.
On sait que, pour tous réels x et y, | f (x) − f (y)| k|x − y| .• Avec y = 0 et x 0 on obtient | f (x) − f (0)| kx, soit−kx f (x) − f (0)kx et enfin f (0)−(1+k)xg(x) f (0)+(k−1)x.Comme k − 1 < 0 le membre de droite tend vers −∞ quand x tend vers+∞ d’où : lim
x→+∞ g(x) = −∞.
• Avec y =0 et x 0 on a |x | =−x d’où l’inégalité | f (x)− f (0)|−kxpuis l’encadrement f (0) + (k − 1)x g(x) f (0) − (k + 1)x. Commek − 1 < 0 le membre de gauche tend vers +∞ quand x tend vers −∞d’où : lim
x→−∞ g(x) = +∞.
L’argument de la question précédente s’applique mot pour mot :
L’ensemble g(R) est un intervalle car R est un intervalle et g est continue(théorème des valeurs intermédiaires).
g(R) n’est pas majoré (car g tend vers +∞ en −∞) et n’est pas non plusminoré (car g tend vers −∞ en +∞).
Le seul intervalle qui ne soit ni majoré ni minoré est R : on a doncg(R) = R.
g prend toutes les valeurs réelles, en particulier la valeur 0 : il existe un réelc tel que g(c) = 0 et on a alors f (c) = c.
Unicité : soient c1 et c2 deux points fixes de f. La relation | f (x)− f (y)| k|x−y|est vraie pour tous les réels x et y. Cependant, les réels c1 et c2 sont particuliers carf (c1) = c1 et f (c2) = c2 : nous allons donc écrire cette relation avec x = c1 ety = c2.
Soit (c1,c2) ∈ R2 tel que f (c1) = c1 et f (c2) = c2.Alors | f (c1) − f (c2)| k|c1 − c2| car f est k-lipschitzienne.Or f (c1) = c1 et f (c2) = c2 d’où : |c1 − c2| k|c1 − c2| .
122
Partie 2 • Analyse
9782100547678-Fresl-C6.qxd 5/07/10 9:18 Page 122

Si c1 =/ c2 alors |c1 − c2| > 0 d’où, en divisant la relation précédente par|c1 − c2| : k 1, ce qui contredit k ∈ [0,1[.
Ainsi, c1 = c2, ce qui montre que le réel c vérifiant f (c) = c est unique.
Dans le cours sur les fonctions dérivées vous verrez que si f est dérivable sur R etque, pour tout réel x , | f ′(x)| k, alors f est k-lipschitzienne (ce sera une consé-quence immédiate de l’inégalité des accroissements finis). Ceci permet de vérifierà peu de frais qu’une application (supposée dérivable) est k-lipschitzienne.
Par exemple, avec f (x) = 1
2cos(x), on a f ′(x) = −1
2sin(x) : f est donc
1
2-lipschit-
zienne et il existe donc un unique réel c tel que 1
2cos(c) = c . L’étude précise de ce
point fixe est abordée dans l’exercice 5.10.
Exercice 6.2 : Équation fonctionnelleSoit f : R→ R , continue, telle que, pour tout (x,y) ∈ R2, f (x+y)= f (x)+ f (y) .On souhaite montrer que, pour tout x ∈ R , f (x) = x f (1) .
1. Démontrer que, pour tout n ∈ N, f (n) = n f (1). Montrer que ceci reste vraipour n ∈ Z.
2. En déduire que, pour tout x ∈ Q, f (x) = x f (1) .
3. Conclure.
Le fait que l’on demande de calculer d’abord les valeurs de f aux points entiers sug-gère de débuter par une récurrence.
Pour passer des valeurs de f (x) avec x rationnel aux valeurs de f (x) avec x réelquelconque on utilisera la densité de Q dans R. En effet, nous savons que tout réelest limite d’une suite de rationnels. L’hypothèse de continuité sur f permettra, àl’aide de la caractérisation séquentielle de la continuité, d’en déduire le résultatvoulu.
1. Calcul de f(n) pour n ∈ N∈ N
Le résultat étant donné par l’énoncé, posons directement l’hypothèse de récurrence.
Afin d’alléger la rédaction posons a = f (1) .
Pour n ∈ N on pose Hn : « f (n) = an ».
• H0 est vraie : nous devons vérifier que f (0) = 0. En prenant x = y = 0dans la définition il vient f (0) = f (0 + 0) = f (0) + f (0) , soit f (0) = 0.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
123
Chapitre 6 • Fonctions continues
9782100547678-Fresl-C6.qxd 5/07/10 9:18 Page 123

L’astuce de calcul consistant à utiliser le fait que 0 = 0 + 0 est à essayer systé-matiquement lorsque l’on souhaite résoudre une équation fonctionnelle faisantintervenir des additions.Quand il y a des multiplications, c’est la relation 1 = 1 × 1 qui s’avérera souventbien utile.Vous rencontrerez couramment ce type de considération dans les démonstrationsdu cours d’algèbre.
• Soit n ∈ N tel que Hn soit vraie : autrement dit, on suppose quef (n) = an . Alors f (n + 1) = f (n) + f (1) (par définition de f). Orf (n) = an (par hypothèse de récurrence) et f (1) = a (c’est la définition dea) donc f (n + 1) = an + a = a(n + 1). Hn+1 est donc vraie.• Ainsi, d’après le principe de récurrence, Hn est vraie pour tout entier natu-rel n.
Calcul de f(n) pour n ∈ Z∈ ZNous avons ici besoin de calculer la valeur de f en des points connaissant sa valeuraux points opposés. La définition de f fait intervenir des sommes : il faut donc relierles opposés et les sommes, par exemple en utilisant le fait que n + (−n) = 0.
Soit n ∈ Z.Si n 0, on sait que f (n) = an .Sinon, −n ∈ N donc f (−n) = a × (−n) = −an .D’autre part, 0 = f (0) = f (n + (−n)) = f (n) + f (−n) = f (n) − an ,d’où f (n) = an .
Ce raisonnement peut paraître un peu laborieux mais il faut bien être conscient qu’ilest nécessaire : l’équation fonctionnelle de départ ne faisant intervenir qu’une addi-tion il faut jongler pour faire apparaître une soustraction. Dans la suite nous auronsle même problème avec des multiplications et des divisions qu’il faudra ramener àdes sommes pour utiliser l’équation fonctionnelle de départ.
2. Afin de calculer la valeur de f aux points rationnels il faut relier les nombresrationnels aux nombres entiers en utilisant des sommes. En effet, la définition de ffait intervenir les sommes mais pas les produits : aucune hypothèse concernant lesproduits et quotients n’a été faite.
Soit x ∈ Q : x = p/q avec p ∈ Z et q ∈ N∗.On a : p = (p/q) + · · · + (p/q) (q termes dans la somme) donc
f (p) = f ((p/q) + · · · + (p/q)) = f (p/q) + · · · + f (p/q)
(q termes dans la somme)
i.e. f (p) = q f (p/q) .
124
Partie 2 • Analyse
9782100547678-Fresl-C6.qxd 5/07/10 9:18 Page 124

Or f (p) = ap, car p ∈ Z, donc f (p/q) = ap/q.
Ainsi, pour tout nombre rationnel x, f (x) = ax.
3. Comme annoncé nous allons obtenir les valeurs de f en un point quelconque àl’aide de deux caractérisations séquentielles : celle de la densité et celle de la conti-nuité.
Soit x ∈ R . Q étant dense dans R il existe une suite (un)n∈N de rationnelstendant vers x.
On a donc, f étant continue sur R : limn→∞ f (un) = f (x).
D’autre part, pour tout n ∈ N, f (un) = aun (car un ∈ Q). On a donclim
n→∞ f (un) = limn→∞ aun = ax .
Par unicité de la limite, il vient f (x) = ax.
Ainsi, pour tout x ∈ R , f (x) = x f (1) .
Nous avons déjà rencontré des équations fonctionnelles dans la section Équationsdifférentielles. La démarche était radicalement différente.Pour traiter une équation fonctionnelle, la méthode est dictée par l’hypothèse faitesur la fonction inconnue f :
• si f est supposée dérivable : utiliser la dérivation pour faire apparaître une équa-tion différentielle vérifiée par f. Les solutions sont alors données par le cours. Dessolutions parasites peuvent apparaître à cause de la dérivation, il faut donc ensuiteune étape de synthèse (voir exercice 3.2) ;• si f est supposée continue : déterminer les valeurs de f aux points rationnels, encommençant par les entiers. Conclure par densité de Q dans R à l’aide de la carac-térisation séquentielle de la continuité.
Exercice 6.3 : Cordes universelles
Soit f une application continue de [0,1] dans R telle que f (0) = f (1). Soit unentier n 2. Montrer qu’il existe un réel cn ∈ [0,1 − 1/n] tel quef (cn) = f (cn + 1/n).
Comme précédemment nous allons modifier l’expression donnée afin de reformu-ler la question sous la forme : « montrer qu’il existe un réel cn ∈ [0,1 − 1/n] tel queg(cn) = 0 », avec g une fonction continue. L’outil adapté sera alors le théorème desvaleurs intermédiaires.
Il n’y a qu’un choix naturel : prendre g(x) = f (x + 1/n) − f (x) pourx ∈ [0,1 − 1/n].
Il reste à montrer que g est continue (ce qui est clair) et qu’elle prend des valeurspositives et négatives afin de conclure par le théorème des valeurs intermédiaires.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
125
Chapitre 6 • Fonctions continues
9782100547678-Fresl-C6.qxd 5/07/10 9:18 Page 125

Considérons les valeurs de g aux extrémités :
g(0) = f (1/n) − f (0) et g(1 − 1/n) = f (1) − f (1 − 1/n).
Nous avons bien une hypothèse sur f (0) et f (1) mais le problème est que l’on aainsi fait apparaître f (1/n) et f (1 − 1/n) sur lesquels on ne sait absolument rien !
Afin de les faire disparaître, on peut leur additionner respectivement
g(1/n) = f (2/n) − f (1/n)
et
g(1 − 2/n) = f (1 − 1/n) − f (1 − 2/n)
mais on fait alors apparaître f (2/n) et f (1 − 2/n) , etc.
Afin d’obtenir une somme « télescopique » où tous les termes se simplifient saufceux qui nous intéressent (f (0) et f (1)) nous allons directement considérer
n−1∑k=0
g(k/n) = ( f (1/n) − f (0))
+( f (2/n) − f (1/n))
+ · · ·+( f (1 − 1/n) − f (1 − 2/n))
+( f (1) − f (1 − 1/n)).
Dans cette somme, les termes se simplifient deux à deux et il ne reste quef (1) − f (0) qui est précisément nul par hypothèse.
Soit
g : [0,1 − 1/n] → R
x → f (x + 1/n) − f (x)
qui est clairement continue.On a alors :
n−1∑k=0
g(k/n) = f (1) − f (0) = 0.
Les g(k/n) ne peuvent donc tous être de même signe strict.Ainsi, il existe deux entiers distincts l et m (disons l < m) compris entre 0et n − 1 tels que g(l/n) et g(m/n) sont de signes opposés.g étant continue sur [l/n,m/n] le théorème des valeurs intermédiairesmontre qu’il existe un réel cn ∈ [l/n,m/n] (a fortiori c ∈ [0,1 − 1/n]) telque g(cn) = 0 .
126
Partie 2 • Analyse
9782100547678-Fresl-C6.qxd 5/07/10 9:18 Page 126

Exercice 6.4 : Fonction continue ayant des limites finies à l’infini
Soit f : R→ R une application continue. On suppose que f possède des limitesfinies λ et µ en −∞ et +∞ respectivement.Pour x ∈] − π/2,π/2[ on pose g(x) = f (tan(x)).
1. Montrer que g possède un prolongement par continuité à [−π/2,π/2]. Onnotera encore g cette fonction.
2. À l’aide de g, montrer que f est bornée sur R.
3. On suppose de plus que λ = µ. Montrer que f atteint l’une de ses bornes.Atteint-elle forcément les deux ?
Il est ici question de fonctions continues, de fonctions bornées et de bornes atteintes.Le théorème adapté est donc le suivant : toute fonction continue sur un segment estbornée et atteint ses bornes.
Plus précisément, la fonction auxiliaire g est introduite de manière à pouvoir luiappliquer ce théorème et en déduire des renseignements sur la fonction f.
Rappelons que « atteindre ses bornes » signifie « posséder un minimum et un maxi-mum » et que « atteindre au moins une de ses bornes » signifie « posséder un mini-mum ou un maximum ».
1. Cette question est une application directe du résultat du cours concernant le pro-longement par continuité.
Tout d’abord, g est bien continue sur ] − π/2,π/2[ comme composée de lafonction tangente, qui est continue sur ] − π/2,π/2[ , et de f qui est conti-nue sur R.Appliquons le théorème de composition des limites : comme
limx→(π/2)−
tan(x) = +∞
on a
limx→π/2
g(x) = limx→+∞ f (x) = µ ∈ R.
En posant g(π/2) = µ la fonction g ainsi obtenue est continue en π/2.De même, en posant g(−π/2) = λ, la fonction g ainsi construite est conti-nue en −π/2.
2. Suivons l’argumentation proposée au début de la solution : appliquons le théo-rème classique à g. On pourra ensuite revenir à f en utilisant le fait que, par défini-tion, f (t) = g(Arctan(t)) pour tout réel t .
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
127
Chapitre 6 • Fonctions continues
9782100547678-Fresl-C6.qxd 5/07/10 9:18 Page 127
La fonction g est continue sur le segment [−π/2,π/2] donc bornée : ilexiste un réel positif A tel que, pour tout x ∈ [−π/2,π/2], |g(x)| A.Considérons un réel quelconque t . Alors f (t) = g(Arctan(t)) donc| f (t)| A .Ceci montre que la fonction f est bornée sur R.
3. Nous savons que, de plus, g atteint ses bornes : et notant m son minimum et Mson maximum il existe deux éléments u et v de [−π/2,π/2] tels que g(u) = m etg(u) = M .
On peut se ramener à f comme précédemment en utilisant f (tan(x)) = g(x) mais ily a un problème : les valeurs prises par f sont celles prises par g sur ] − π/2,π/2[.Autrement dit, si u (ou v) est égal à ±π/2, f (tan(u)) n’a pas de sens. Il va donc fal-loir distinguer des cas selon que u ou v est égal à ±π/2 ou non.
g étant continue sur [−π/2,π/2] elle atteint ses bornes ; en notant m(resp. M) sont minimum (resp. maximum) il existe donc un élément u (resp.v) de [−π/2,π/2] tel que g(u) = m (resp. g(v) = M).Distinguons trois cas.• Si u ∈] − π/2,π/2[ : posons t = tan(u). On a alors f (t) = g(u) = m.D’autre part, m est un minorant de f car, pour tout x ∈ R ,f (x) = g(Arctan(x)) m .Ainsi, m est le minimum de f.• Si v ∈] − π/2,π/2[ : posons t = tan(v) . On a alors f (t) = g(v) = M.D’autre part, M est un majorant de f car, pour tout x ∈ R ,f (x) = g(Arctan(x)) M .Ainsi, M est le maximum de f.• Sinon, u et v sont tous deux extrémités de [−π/2,π/2].Ainsi, g(u) est égal à λ ou à µ, idem pour g(v) .Or il a été supposé dans cette question que λ et µ étaient égaux : on a doncg(u) = g(v) , i.e. m = M .Par définition de m et M on a, pour tout x ∈ [−π/2,π/2], m g(x) M.Comme m = M la fonction g est donc constante ; comme f = g Arctanla fonction f l’est également et atteint donc son maximum et son minimumen tout point.
L’hypothèse λ = µ a bien été utilisée dans le dernier point.Elle était bien essentielle : en prenant pour f la fonction arctangente, on voit quesi λ =/ µ la fonction f peut ne posséder ni maximum ni minimum.
Afin de répondre à la question ouverte (f atteint-elle forcément ses deux bornes ?)examinons les conclusions de chacun des points.
128
Partie 2 • Analyse
9782100547678-Fresl-C6.qxd 5/07/10 9:18 Page 128

On voit que si u et v sont tous deux éléments de ] − π/2,π/2[, f atteint ses deuxbornes ; il en va de même si ni u ni v ne sont éléments de cet intervalle ouvert.
Pour trouver un contre-exemple il faut chercher un cas où u ∈] − π/2,π/2[ etv = ±π/2 (ou le contraire). En prenant pour g la fonction valeur absolue on a biencette situation (avec m = 0, M = π/2, u = 0 et v = ±π/2).
Ceci suggère de considérer la fonction f : x → |Arctan(x)|.Soit f : x ∈ R → |Arctan(x)|.f est continue sur R et possède, en +∞ et −∞, des limites qui sont égales(à savoir π/2).f possède un minimum qui est 0, atteint pour x = 0.Cependant, f n’a pas de maximum : en effet, la borne supérieure de f sur Rest π/2 mais f ne prend pas cette valeur.Ainsi, il est possible que la fonction f n’atteigne pas ses deux bornes.
Exercice 6.5 : Fonction continue injective
Soit I un intervalle et f une application continue sur I et injective. Le but de cetexercice est de montrer que f est strictement monotone sur I.On fixe deux éléments a et b de I avec a < b . f étant injective, f (a) =/ f (b) .Supposons f (a) < f (b) .Soient x et y deux éléments de I avec x < y. Pour t ∈ [0,1] on pose g(t) =f ((1 − t)b + t y) − f ((1 − t)a + t x) .
1. Montrer que g est continue sur I et ne s’annule pas.
2. Déterminer le signe de g(0) puis de g(1).
3. En déduire que f est strictement croissante.
4. Que dire si f (a) > f (b) ?
1. Comme souvent la continuité de g est simple à vérifier car elle est construite parcomposition et différence de fonctions continues.
Il faut prendre garde aux notations : ici les lettres a, b, x et y désignent des réelsfixés, la variable étant la lettre t.
Les applications t → (1 − t)a + t x et t → (1 − t)b + t y sont continuescar affines. g est donc continue comme différence de composées de fonc-tions continues.
Pour montrer que g ne s’annule pas on peut raisonner par l’absurde : si g s’annuleen un point u on obtient deux points où f prend la même valeur et l’hypothèse d’in-jectivité de f intervient alors naturellement.© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
129
Chapitre 6 • Fonctions continues
9782100547678-Fresl-C6.qxd 5/07/10 9:18 Page 129

Supposons qu’il existe u ∈ [0,1] tel que g(u) = 0 : on a alors
f ((1 − u)b + uy) = f ((1 − u)a + ux).
f étant injective il vient
(1 − u)b + uy = (1 − u)a + ux .
On en déduit
(1 − u)(b − a) = u(x − y).
Or on a b − a > 0, x − y < 0, u 0 et 1 − u 0 : on a donc
(1 − u)(b − a) 0 et u(x − y) 0
d’où, ces deux quantités étant égales,
(1 − u)(b − a) = u(x − y) = 0.
Comme b − a =/ 0 et x − y =/ 0 on en déduit 1 − u = u = 0 , soit u = 0et u = 1 : c’est absurde.Ainsi, g ne s’annule pas sur [0,1].
2. Il est ici question d’étudier le signe de g qui est continue sur un intervalle : nousutiliserons donc le théorème des valeurs intermédiaires.
Une fonction continue sur un intervalle prenant des valeurs de signes oppo-sés s’annule (théorème des valeurs intermédiaires).g est continue sur l’intervalle [0,1]. Comme elle ne s’annule pas, elle est designe strict constant (contraposée de l’argument précédent) : g(0) et g(1)
sont donc de même signe strict. Or g(0) = f (b) − f (a) > 0 par hypothèsedonc g(1) > 0 .
3. Par définition, g(1) = f (y) − f (x) . Nous venons donc de voir quef (y) − f (x) > 0.
On a donc démontré que, pour tous x et y de I tels que x < y, f (x) < f (y) : f estdonc strictement croissante.
4. Il y a deux manières de traiter ce type de question :
• soit refaire tout ce qui précède en changeant le sens des inégalités, éventuellementavec des ellipses du type « par un calcul analogue », ce qui n’est ni efficace ni trèsélégant ;
• soit se ramener au cas précédent en introduisant une fonction auxiliaire qui véri-fie les hypothèses du début de l’exercice.
On voit que − f vérifie les hypothèses des questions précédentes et nous allons doncutiliser le résultat précédent appliqué à cette fonction.
130
Partie 2 • Analyse
9782100547678-Fresl-C6.qxd 5/07/10 9:18 Page 130
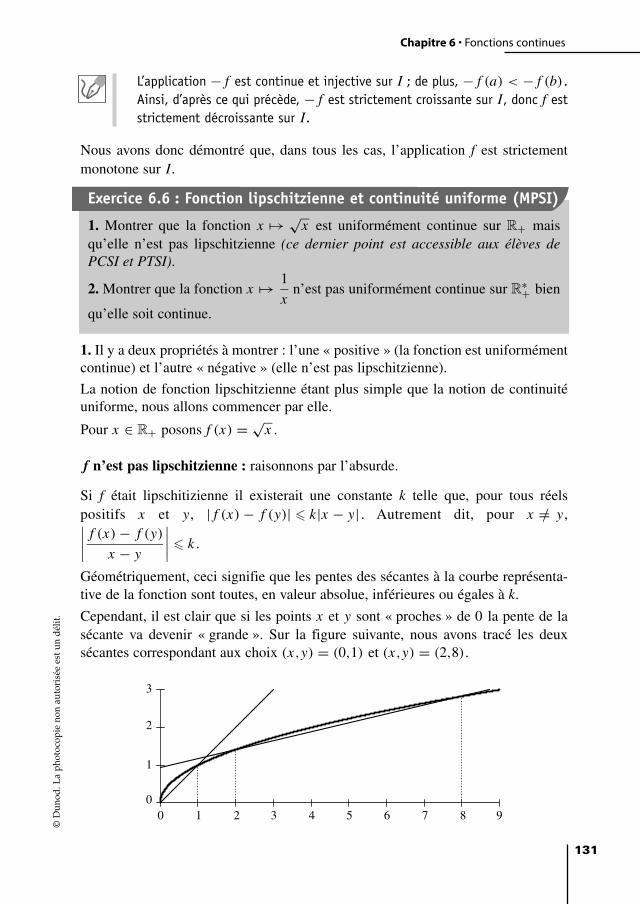
L’application − f est continue et injective sur I ; de plus, − f (a) < − f (b).Ainsi, d’après ce qui précède, − f est strictement croissante sur I, donc f eststrictement décroissante sur I.
Nous avons donc démontré que, dans tous les cas, l’application f est strictementmonotone sur I.
Exercice 6.6 : Fonction lipschitzienne et continuité uniforme (MPSI)
1. Montrer que la fonction x → √x est uniformément continue sur R+ mais
qu’elle n’est pas lipschitzienne (ce dernier point est accessible aux élèves dePCSI et PTSI).
2. Montrer que la fonction x → 1
xn’est pas uniformément continue sur R∗+ bien
qu’elle soit continue.
1. Il y a deux propriétés à montrer : l’une « positive » (la fonction est uniformémentcontinue) et l’autre « négative » (elle n’est pas lipschitzienne).
La notion de fonction lipschitzienne étant plus simple que la notion de continuitéuniforme, nous allons commencer par elle.
Pour x ∈ R+ posons f (x) = √x .
f n’est pas lipschitzienne : raisonnons par l’absurde.
Si f était lipschitizienne il existerait une constante k telle que, pour tous réelspositifs x et y, | f (x) − f (y)| k|x − y| . Autrement dit, pour x =/ y ,∣∣∣∣ f (x) − f (y)
x − y
∣∣∣∣ k .
Géométriquement, ceci signifie que les pentes des sécantes à la courbe représenta-tive de la fonction sont toutes, en valeur absolue, inférieures ou égales à k.
Cependant, il est clair que si les points x et y sont « proches » de 0 la pente de lasécante va devenir « grande ». Sur la figure suivante, nous avons tracé les deuxsécantes correspondant aux choix (x,y) = (0,1) et (x,y) = (2,8).
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
131
Chapitre 6 • Fonctions continues
00
1
1
2
2
3
3 4 5 6 7 8 9
9782100547678-Fresl-C6.qxd 5/07/10 9:18 Page 131

Nous allons donc considérer le cas particulier y = 0 puis faire tendre x vers 0. Ainsinous aurons les sécantes avec les plus grandes pentes et donc, probablement, notrecontradiction.
Supposons qu’il existe un réel positif k tel que :
∀(x,y) ∈ R2+,|√x − √
y| k|x − y|.Alors, en particulier, pour y = 0 :
∀x ∈ R+,√
x kx .
Pour x > 0 on a donc, en divisant par x :
∀x ∈ R∗+,
1√x k.
Enfin, en considérant la limite quand x tend vers 0 :
+∞ k
ce qui est absurde.Ainsi, f n’est pas lipschitzienne sur R+.
On peut raisonner de manière légèrement différente : en fixant x =/ 0 et en faisant
tendre y vers x on obtient | f ′(x)| k, i.e. 1
2√
x k , ce qui mène à la même contra-
diction.
Dans ce nouveau raisonnement nous avons en fait commencé par le passage à lalimite, i.e. nous avons remplacé la condition sur les pentes des sécantes par unecondition sur les pentes des tangentes.
f est uniformément continue : cette question est plus délicate.
Avant de commencer, écrivons la conclusion que l’on souhaite obtenir : quel quesoit le réel ε > 0, il existe un réel η > 0 tel que, pour tous les couples (x,y) de réelspositifs, si |x − y| η alors | f (x) − f (y)| ε .
Nous devons donc, ε étant donné, trouver un réel η > 0 tel que l’on puisse passerde l’inégalité |x − y| η à |√x − √
y| ε. La subtilité de la continuité uniformeest que ce réel η doit être le même pour toutes les valeurs de x et y.
Nous cherchons donc à introduire une relation entre |x − y| et |√x − √y|.
La première chose qui vient à l’esprit est de reconnaître une différence de carrés :
|x − y| = |√x 2 − √y 2| = |√x − √
y||√x + √y|.
132
Partie 2 • Analyse
9782100547678-Fresl-C6.qxd 5/07/10 9:18 Page 132

Afin d’y voir plus clair, supposons x y. Ceci n’influera pas le résultat puisqu’il ya des valeurs absolues dans tous les termes.
On a alors :
y − x = (√
y − √x)(
√y + √
x)
soit
√y − √
x = y − x√y + √
x.
Comme 0 x y , on a 0 y − x y et donc
√y − x
√y
√y + √
x .
Ainsi, on obtient :√
y − √x
√y − x .
Pour avoir √
y − √x ε , il suffit donc d’avoir y − x ε2. Autrement dit, le choix
η = ε2 convient.
L’inégalité √
y − √x √
y − x (en n’oubliant pas que x y , faute de quoi on a
seulement |√y − √x | √|y − x | ) peut aussi se lire comme l’inégalité clas-
sique :√
a + b √a + √
b (en prenant a = x et b = y − x ).
Cette dernière vient du fait que a + b a + b + 2√
ab = (√
a + √b)2 en consi-
dérant ensuite la racine carrée.Il est toujours profitable de connaître (ou, au moins, de savoir retrouver) ce typed’inégalité : cela permet de ne pas être bloqué par une expression avec des racinescarrées.
Soit un réel ε > 0 et posons η = ε2 > 0.Soient x et y deux réels positifs tels que |x − y| η. Nous pouvons, sansperte de généralité, supposer x y.Alors :
|√x − √y| = |x − y|√
x + √y.
De plus :√
x + √y
√y
√y − x
d’où :
|√x − √y|
√|x − y| = ε.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
133
Chapitre 6 • Fonctions continues
9782100547678-Fresl-C6.qxd 5/07/10 9:18 Page 133

En résumé nous avons démontré :
∀ε ∈ R∗+,∃η ∈ R∗
+,∀(x,y) ∈ R2+,|x − y| η ⇒ | f (x) − f (y)| ε
ce qui signifie exactement, par définition, que f est uniformément continuesur R+.
2. Comme précédemment, pour démontrer ce résultat négatif, nous pouvons tenterun raisonnement par l’absurde.
Pour x ∈ R∗+ posons g(x) = 1
xet supposons que g soit uniformément continue
sur R∗+ .
Soit un réel ε > 0. Il existe un réel η > 0 tel que, si |x − y| η, |1
x− 1
y| ε, i.e. :
|y − x |xy
ε.
Le problème est que l’on ne peut pas faire tendre x vers 0 sans précaution dans cetteexpression : x et y ne sont pas tout à fait quelconques, ils doivent vérifier la rela-tion |x − y| η . Une stratégie est donc de considérer des valeurs particulières de ypour éliminer cette variable et n’avoir plus que la seule variable x .
Pour cela, on peut prendre y = x + η : on a alors bien y ∈ R∗+ et |x − y| η etl’inégalité ci-dessus devient la propriété
∀x ∈ R∗+,
η
x(x + η) ε
dont on voit clairement qu’elle est absurde en faisant tendre x vers 0.
Enfin, on constate que le choix de ε est indifférent : on n’a pas besoin de vérifierceci pour tout réel ε > 0, un seul suffit ; nous pouvons par exemple prendre ε = 1,ce qui allègera la rédaction.
Supposons que g soit uniformément continue sur R∗+.Alors il existe un réel η > 0 tel que :
∀(x,y) ∈ (R∗+)2,|x − y| η ⇒ |g(x) − g(y)| 1.
En considérant un réel x > 0 quelconque et en posant y = x + η on a bien
(x,y) ∈ (R∗+)2 et |y − x | η. Ainsi :
η
x(x + η) 1.
134
Partie 2 • Analyse
9782100547678-Fresl-C6.qxd 5/07/10 9:18 Page 134
Cette inégalité est vraie pour tout réel x > 0 ; en considérant la limitequand x tend vers 0 on aboutit à
+∞ 1
ce qui est absurde.
Ainsi, g n’est pas uniformément continue sur R∗+.
On sait que, si f est une fonction d’un intervalle I dans R , on a les implications :
f lipschitzienne ⇒ f uniformément continue ⇒ f continue.
Les exemples ci-dessus montrent que les implications réciproques sont fausses.Cependant, avec des hypothèses supplémentaires, elles peuvent être vraies :
• si f est continue sur un segment alors elle est uniformément continue (théorèmede Heine) ;
• si f est de classe C1 sur un segment alors elle est lipschitzienne (conséquence del’inégalité des accroissements finis).
Il existe un certain nombre d’autres conditions suffisantes pour qu’une fonctionsoit lipschitzienne ou uniformément continue sur un intervalle qui n’est pas néces-sairement un segment ; cependant, seules les deux citées ici sont au programme.
Exercice 6.7 : Continuité uniforme et limite (MPSI)
Soit f une application uniformément continue de R+ dans R.On suppose que, pour tout réel strictement positif t , la suite ( f (nt))n∈N tend vers0 quand n tend vers +∞.
1. Soit un réel h > 0. Montrer qu’il existe un réel δ > 0 et un entier naturel Ntels que :
i) pour tout (x,y) ∈ R2+ tel que |x − y| δ, | f (x) − f (y)| h ;ii) pour tout entier n N, | f (nδ)| h.
2. Montrer que limx→+∞ f (x) = 0.
Dans l’hypothèse, on fait tendre l’entier n vers +∞, le réel t ayant été précé-demment fixé de manière arbitraire. Autrement dit, on suppose que des suitesconvergent vers 0.Dans la conclusion, en revanche, c’est la fonction f qui tend vers 0.
1. On reconnaît ici deux définitions du cours : la continuité uniforme et la limited’une suite. Il n’y a donc qu’à traduire correctement les hypothèses de l’énoncépour avoir le résultat de cette question préliminaire.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
135
Chapitre 6 • Fonctions continues
9782100547678-Fresl-C6.qxd 5/07/10 9:19 Page 135

Par définition de la continuité uniforme il existe un réel δ > 0 tel que :
∀(x,y) ∈ R2+,|x − y| δ ⇒ | f (x) − f (y)| h.
De plus, en prenant t = δ dans l’hypothèse de l’exercice : la suite de termegénéral f (nδ) tend vers 0 quand n tend vers +∞. Ainsi, par définition dela limite d’une suite, il existe un entier naturel N tel que :
∀n ∈ N,n N ⇒ | f (nδ)| h.
Le réel δ et l’entier N ci-dessus conviennent donc.
2. Avant de commencer, écrivons le résultat auquel on souhaite arriver :
Pour tout réel ε > 0, il existe un réel positif A tel que, pour tout réel x A,
| f (x)| εFixons donc un réel ε > 0 et cherchons un tel A.
D’après le deuxième point de la question précédente, en prenant h = ε, on al’inégalité | f (x)| ε pour les réels x de la forme n δ avec n N. C’est presque ceque l’on souhaite : il faudrait juste obtenir une telle inégalité pour tous les réels xsupérieurs ou égaux à N δ , plutôt que de ne l’avoir que pour les réels de la formen δ, et on concluerait en prenant A = N δ.
Les nombres de la forme n δ, avec n entier, sont répartis de δ en δ. Ainsi, tout réelpositif x est distant d’un tel nombre d’au plus δ. Plus précisément, à l’aide de la par-tie entière, on peut démontrer que pour tout réel positif x il existe un entier naturelm tel que m δ x < (m + 1) δ .
Graphiquement, sur la droite réelle :
136
Partie 2 • Analyse
0 …δ 2δ m δ (m + 1) δ
x
On a alors |x − m δ| δ et donc, | f (x) − f (mδ)| ε .
Nous pouvons maintenant obtenir un renseignement sur f (x) : d’après l’inégalitétriangulaire,
| f (x)| = | f (x) − f (m δ) + f (m δ)| | f (x) − f (m δ)| + | f (m δ)|
et ceci est inférieur ou égal à 2ε si m N, i.e. si x N δ .
9782100547678-Fresl-C6.qxd 5/07/10 9:19 Page 136

On aurait préféré une majoration par ε plutôt que 2ε pour obtenir exactement ladéfinition du résultat demandé ; pour cela, on reprend tout à l’identique mais avech = ε/2.
Soit un réel ε > 0 et posons h = ε/2.Considérons le réel δ > 0 et l’entier naturel N donnés par la première ques-tion.Soit un réel x N δ et posons m = E(x/δ) .On a alors :
m x
δ< m + 1
soit, comme δ > 0 :
0 x − mδ < δ.
De plus :
| f (x)| = | f (x) − f (mδ) + f (mδ)| | f (x) − f (mδ)| + | f (mδ)|.Comme |x − mδ| δ on a | f (x) − f (mδ)| h.
Enfin, x
δ N qui est un entier donc m N (car m est le plus grand entier
inférieur ou égal à x
δ). Ainsi, | f (mδ)| h .
En conclusion :
| f (x)| 2h = ε.
Résumons tout ce qui vient d’être dit à l’aide de quantificateurs et en notantA = N δ :
∀ε ∈ R∗+,∃A ∈ R+,∀x ∈ R+,x A ⇒ | f (x)| ε.
Par définition de la limite en +∞ ceci signifie exactement :
limx→+∞ f (x) = 0.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
137
Chapitre 6 • Fonctions continues
9782100547678-Fresl-C6.qxd 5/07/10 9:19 Page 137

9782100547678-Fresl-C6.qxd 5/07/10 9:19 Page 138

139
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
Exercice 7.1 : Applications du théorème de Rolle
Soient I un intervalle, f une application deux fois dérivable de I dans R.On considère trois éléments a, b et x0 de I tels que a < x0 < b. Pour x ∈ [a,b]
on pose g(x) = f (x) − f (a) − (x − a)f (b) − f (a)
b − a− (x − a)(x − b)A , A
constante réelle.
1. Montrer qu’on peut choisir A de sorte que g(a) = g(x0) = g(b) .
2. En déduire, en appliquant plusieurs fois le théorème de Rolle, qu’il existe un
élément c de ]a,b[ tel que f (x0) − f (a)
x0 − a= f (b) − f (a)
b − a+ x0 − b
2f ′′(c) .
C’est un exercice typique d’application du théorème de Rolle : pour démontrer unrésultat sur f on introduit une fonction auxiliaire g à laquelle on applique une ouplusieurs fois ce théorème. C’est d’ailleurs par un tel procédé que l’on peut déduirel’égalité des accroissements finis du théorème de Rolle.
1. On voit sur la définition de g que g(a) = g(b) = 0 : on souhaite choisir A tel queg(x0) = 0.
Raisonnons par analyse-synthèse : si un tel réel A convient on a alors
f (x0) − f (a) − (x0 − a)f (b) − f (a)
b − a− (x0 − a)(x0 − b)A = 0
Dérivation,développementslimités
7
9782100547678-Fresl-C7.qxd 5/07/10 9:21 Page 139

donc
(x0 − a)(x0 − b)A = f (x0) − f (a) − (x0 − a)f (b) − f (a)
b − a.
Or x0 est distinct de a et de b donc on peut diviser l’égalité par (x0 − a)(x0 − b) ,ce qui donne
A = 1
(x0 − a)(x0 − b)
(f (x0) − f (a) − (x0 − a)
f (b) − f (a)
b − a
).
Pour la rédaction, on se contentera de poser cette dernière formule, en n’oubliantpas de justifier qu’elle a un sens, et de vérifier qu’elle convient.
Il est clair que g(a) = g(b) = 0 .
Posons
A = 1
(x0 − a)(x0 − b)
(f (x0) − f (a) − (x0 − a)
f (b) − f (a)
b − a
); ceci
est licite car x0 − a et x0 − b ne sont pas nuls. On a alors clairement :
g(x0) = 0 = g(a) = g(b).
Cette réponse peut paraître surprenante ! L’unique argument mathématique attenduest la justification de la division par (x0 − a)(x0 − b) , i.e. que ce réel n’est pas nul.
Dans une telle situation il ne faut pas chercher à trouver une expression plus simplepour A : c’est précisément l’objet de la suite de l’exercice.
2. En appliquant le théorème de Rolle à g on obtiendra un ou plusieurs points où g′
s’annule. Cependant, l’expression de g′ fera intervenir f ′ alors que la réponsecontient f ′′ : on appliquera donc à nouveau le théorème de Rolle à g′ pour obtenirle résultat.
D’autre part, g vérifie bien les hypothèses du théorème de Rolle sur [a,b] mais ona mieux : elle les vérifie sur [a,x0] et [x0,b]. Ainsi, on pourra appliquer deux fois lethéorème de Rolle à g′ sur deux segments distincts, ce qui fournira deux points oùla dérivée s’annule ; on pourra alors appliquer le théorème de Rolle à g′ entre cesdeux points pour aboutir au résultat demandé.
g est continue sur [a,x0] et dérivable sur ]a,x0[ ; de plus, g(a) = g(x0).D’après le théorème de Rolle il existe un réel c1 ∈]a,x0[tel que g′(c1) = 0.Le même raisonnement sur [x0,b] montre qu’il existe un réel c2 ∈]x0,b[ telque g′(c2) = 0.
140
Partie 2 • Analyse
9782100547678-Fresl-C7.qxd 5/07/10 9:21 Page 140
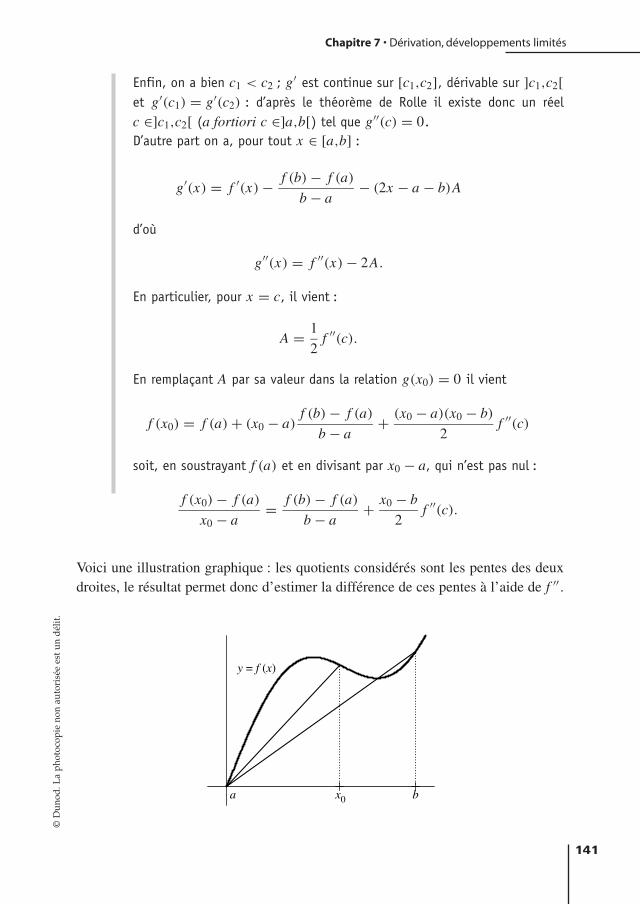
Enfin, on a bien c1 < c2 ; g′ est continue sur [c1,c2], dérivable sur ]c1,c2[et g′(c1) = g′(c2) : d’après le théorème de Rolle il existe donc un réelc ∈]c1,c2[ (a fortiori c ∈]a,b[) tel que g′′(c) = 0.D’autre part on a, pour tout x ∈ [a,b] :
g′(x) = f ′(x) − f (b) − f (a)
b − a− (2x − a − b)A
d’où
g′′(x) = f ′′(x) − 2A.
En particulier, pour x = c, il vient :
A = 1
2f ′′(c).
En remplaçant A par sa valeur dans la relation g(x0) = 0 il vient
f (x0) = f (a) + (x0 − a)f (b) − f (a)
b − a+ (x0 − a)(x0 − b)
2f ′′(c)
soit, en soustrayant f (a) et en divisant par x0 − a, qui n’est pas nul :
f (x0) − f (a)
x0 − a= f (b) − f (a)
b − a+ x0 − b
2f ′′(c).
Voici une illustration graphique : les quotients considérés sont les pentes des deuxdroites, le résultat permet donc d’estimer la différence de ces pentes à l’aide de f ′′ .
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
141
Chapitre 7 • Dérivation, développements limités
y = f (x)
a bx0
9782100547678-Fresl-C7.qxd 5/07/10 9:21 Page 141

Exercice 7.2 : Application de l’égalité des accroissements finis
Soient I un intervalle, f une application deux fois dérivable de I dans R, a et bdeux éléments de I avec a < b .
Pour x ∈ I on pose g(x) = f (a) + f (x)
2−
(f
(a + x
2
)+ (x − a)2 A
), où A
est une constante réelle.
1. Montrer qu’on peut choisir A de sorte que g(a) = g(b) = 0.
2. Montrer qu’il existe c ∈]a,b[ tel que g′(c) = 0.
3. En appliquant l’égalité des accroissements finis à f ′ entre deux points bienchoisis en déduire qu’il existe d ∈]a,b[ tel que :
f (a) + f (b)
2= f
(a + b
2
)+ (b − a)2
8f ′′(d).
Il s’agit du même type d’exercice que le 7.1. La différence est qu’ici, au lieu den’appliquer que le théorème de Rolle, on utilisera également l’égalité des accrois-sements finis.
1. Vu qu’on a clairement g(a) = 0, il faut choisir A tel que g(b) = 0. Ceci estsimple en prenant le problème « à l’envers » : si A convient, alors :
0 = g(b) = f (a) + f (b)
2−
(f
(a + b
2
)+ (b − a)2 A
)
et le réel
1
(b − a)2
(f (a) + f (b)
2− f
(a + b
2
))
convient donc, tout simplement !
Pour déterminer la valeur de A convenant nous avons divisé par (b − a)2 ; laréponse n’est donc correcte que si l’on justifie cette division, i.e. qu’on véri-
fie que (b − a)2 =/ 0 , ce qui est évident mais doit néanmoins être signalé.
Posons A = 1
(b − a)2
(f (a) + f (b)
2− f
(a + b
2
)), ce qui est licite car
a =/ b. Avec ce choix de A on a clairement g(b) = 0 = g(a) .
2. Les hypothèses du théorème de Rolle sont vérifiées et même clairement mises envaleur…
142
Partie 2 • Analyse
9782100547678-Fresl-C7.qxd 5/07/10 9:21 Page 142

g est dérivable sur [a,b] et g(a) = g(b) : d’après le théorème de Rolle ilexiste donc c ∈]a,b[ tel que g′(c) = 0.
L’énoncé précis du théorème de Rolle demande en fait que g soit continue sur[a,b] et dérivable sur ]a,b[ ; ceci est bien vérifié quand g est dérivable sur [a,b]tout entier !Le fait qu’on ne demande pas la dérivabilité en a et b ne signifie pas que la fonc-tion ne doit pas y être dérivable mais uniquement que le résultat reste vrai qu’ellele soit ou non.
3. On a, pour tout x ∈ I :
g′(x) = 1
2f ′(x) − 1
2f ′
(a + x
2
)− 2(x − a)A.
D’une part, f (a) est une constante donc sa dérivée est nulle.
D’autre part, x → f
(a + x
2
)est une composée, plus précisément de f par une
fonction affine, d’où le facteur 1/2 quand on dérive.
En écrivant que g′(c) = 0 on aura donc l’expression d’une variation de f ′, à savoir
f ′(c) − f ′(
a + c
2
). On peut exprimer ceci à l’aide de f ′′ grâce à l’égalité des
accroissements finis après en avoir bien sûr vérifié les hypothèses.
On sait que g′(c) = 0 ce qui donne, en regroupant les termes en f ′ à gauchede l’égalité :
f ′(c) − f ′(
a + c
2
)= 4(c − a)A.
a + c
2< c et f ′ est dérivable sur
[a + c
2,c
]: on peut donc appliquer l’éga-
lité des accroissements finis à f ′ entre ces deux points.
Ainsi, il existe d ∈]
a + c
2,c
[tel que
f ′(c) − f ′(
a + c
2
)=
(c − a + c
2
)f ′′(d) = c − a
2f ′′(d).
On a donc c − a
2f ′′(d) = 4(c − a)A soit, comme c =/ a, A = 1
8f ′′(d).
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
143
Chapitre 7 • Dérivation, développements limités
9782100547678-Fresl-C7.qxd 5/07/10 9:21 Page 143
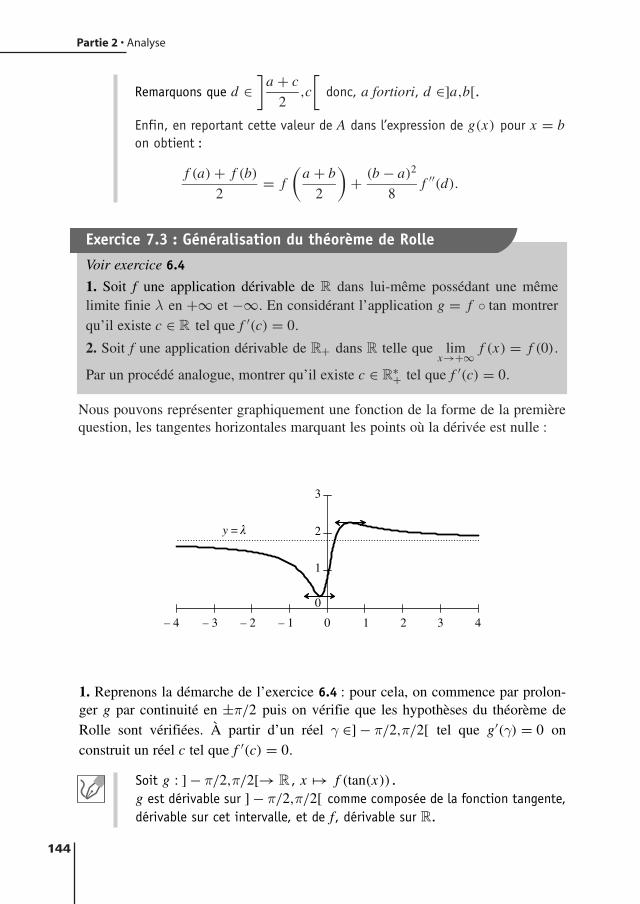
Remarquons que d ∈]
a + c
2,c
[donc, a fortiori, d ∈]a,b[.
Enfin, en reportant cette valeur de A dans l’expression de g(x) pour x = bon obtient :
f (a) + f (b)
2= f
(a + b
2
)+ (b − a)2
8f ′′(d).
Exercice 7.3 : Généralisation du théorème de Rolle
Voir exercice 6.4
1. Soit f une application dérivable de R dans lui-même possédant une mêmelimite finie λ en +∞ et −∞. En considérant l’application g = f tan montrerqu’il existe c ∈ R tel que f ′(c) = 0.
2. Soit f une application dérivable de R+ dans R telle que limx→+∞ f (x) = f (0).
Par un procédé analogue, montrer qu’il existe c ∈ R∗+ tel que f ′(c) = 0.
Nous pouvons représenter graphiquement une fonction de la forme de la premièrequestion, les tangentes horizontales marquant les points où la dérivée est nulle :
144
Partie 2 • Analyse
0
0
1
1
– 1– 2– 3– 4 2
2
3
3
4
y = λ
1. Reprenons la démarche de l’exercice 6.4 : pour cela, on commence par prolon-ger g par continuité en ±π/2 puis on vérifie que les hypothèses du théorème deRolle sont vérifiées. À partir d’un réel γ ∈] − π/2,π/2[ tel que g′(γ) = 0 onconstruit un réel c tel que f ′(c) = 0.
Soit g : ] − π/2,π/2[→ R , x → f (tan(x)) .g est dérivable sur ] − π/2,π/2[ comme composée de la fonction tangente,dérivable sur cet intervalle, et de f, dérivable sur R.
9782100547678-Fresl-C7.qxd 8/07/10 12:28 Page 144

De plus, par composition des limites, on a
limx→π/2
g(x) = λ = limx→−π/2
g(x).
En posant g(−π/2) = g(π/2) = λ on obtient donc une fonction continuesur [−π/2,π/2].
En résumé : g est continue sur [−π/2,π/2], dérivable sur ] − π/2,π/2[ etg(−π/2) = g(π/2) : g vérifie donc les hypothèses du théorème de Rolle etil existe donc un réel γ ∈] − π/2,π/2[ tel que g′(γ) = 0.
Autrement dit :
(1 + tan2(γ)) f ′(tan(γ)) = 0
soit f ′(tan(γ)) = 0 car 1 + tan2(γ) =/ 0 .
En posant c = tan(γ) ∈ R , on a donc f ′(c) = 0.
Nous aurions pu également utiliser le résultat de l’exercice 6.4 (qui est cependanthors-programme) : f est continue sur R (car dérivable) et possède une même limitefinie en −∞ et +∞ donc f est bornée et atteint au moins une de ses bornes en unpoint c.Or la dérivée d’une fonction dérivable qui possède un maximum ou un minimumen un point qui n’est pas l’une des extrémités éventuelles de son intervalle de défi-nition (ce qui est le cas ici, cet intervalle étant R il n’a pas d’extrémités) s’annuleen ce point, d’où f ′(c) = 0.Le lecteur attentif aura par ailleurs reconnu, dans le raisonnement de l’exer-cice 6.4, une démarche semblable à la démonstration du théorème de Rolle :démonstration de l’existence d’extrema puis localisation des points où ils sontatteints.Notons enfin que g n’est pas forcément dérivable en ±π/2, ce qui ne pose aucunproblème pour appliquer le théorème de Rolle puisque ses hypothèses n’exigent
que la dérivabilité sur l’ouvert. Par exemple, avec f (x) =√π2/4 − Arctan2(x) ,
on a g(x) =√π2/4 − x2 qui n’est pas dérivable aux extrémités.
2. Nous allons refaire le raisonnement précédent mais avec [0,π/2[ à la place de] − π/2,π/2[ : il n’y a ici à considérer qu’un prolongement, à savoir en π/2.
Soit g : [0,π/2[→ R,x → f (tan(x)) . g est dérivable sur [0,π/2[.De plus :
limx→π/2
g(x) = f (0)
donc, en posant g(π/2) = f (0), on obtient une fonction g continue sur[0,π/2] et dérivable sur [0,π/2[.©
Dun
od. L
a ph
otoc
opie
non
aut
oris
ée e
st u
n d
élit
.
145
Chapitre 7 • Dérivation, développements limités
9782100547678-Fresl-C7.qxd 5/07/10 9:21 Page 145

De plus, g(0) = f (0) = g(π/2) donc, d’après le théorème de Rolle, ilexiste un réel γ ∈]0,π/2[ tel que g′(γ) = 0, i.e.
(1 + tan2(γ)) f ′(tan(γ)) = 0.
En posant c = tan(γ) ∈ R∗+ on a alors (1 + c2) f ′(c) = 0 soit, comme
1 + c2 =/ 0, f ′(c) = 0.
Exercice 7.4 : Formule de LeibnizOn considère la fonction f définie pour x ∈ R par
f (x) = (x2 + 2x − 1)e−x .
Calculer les dérivées successives de f.
La fonction est donnée sous forme d’un produit et le calcul de la dérivée n-ièmed’un produit fait naturellement penser à la formule de Leibniz. Cette formule estutile si on sait effectivement calculer les dérivées successives de chaque facteur duproduit. Or, ici, ces facteurs sont :
• un polynôme, dont les dérivées successives sont identiquement nulles à partir d’uncertain rang ;
• une exponentielle, dont les dérivées successives peuvent se calculer aisément parrécurrence.
La présence du polynôme aura pour effet de tronquer la somme obtenue par appli-cation de la formule de Leibniz : en effet, sa dérivée sera nulle à partir d’une cer-tain rang (ici, à partir de la dérivée troisième).
Commençons donc par déterminer ces dérivées successives, la formule de Leibnizpermettant de conclure.
Pour x ∈ R posons g(x) = x2 + 2x − 1 et h(x) = e−x.
D’une part, on a, pour tout réel x :
g(x) = x2 + 2x − 1
g(x) = 2x + 2
g(x) = 2
g(n)(x) = 0 (n 3).
D’autre part, pour tout réel x et tout entier naturel n, on ah(n)(x) = (−1)ne−x.
Ainsi, d’après la formule de Leibniz, on a pour tout réel x et tout entier natu-rel n :
146
Partie 2 • Analyse
9782100547678-Fresl-C7.qxd 5/07/10 9:21 Page 146

f (n)(x) =n∑
k=0
(n
k
)g(k)(x)h(n−k)(x).
Comme la fonction g(k) est identiquement nulle pour k 3, la somme précédentes’arrête en fait à k = 2 si n 2.
Écrire
n∑k=0
(n
k
)g(k)(x)h(n−k)(x) =
2∑k=0
(n
k
)g(k)(x)h(n−k)(x)
car g(k) = 0 si k 3 n’est pas rigoureusement exact : en effet, si n = 1 parexemple, la somme s’arrête à k = 1 ; que signifierait alors le terme pour k = 2,
à savoir (1
2
)g(2)(x)h(−1)(x) ? Nous allons donc traiter à part les cas particuliers
n = 0 et n = 1.
Pour n 2 il vient successivement :
f (n)(x) = g(x)h(n)(x) + ng′(x)h(n−1)(x) + n(n − 1)
2g′′(x)h(n−2)(x)
= (x2 + 2x − 1)(−1)ne−x + n(2x + 2)(−1)n−1e−x
+ n(n − 1)
22(−1)ne−x
= (−1)ne−x ((x2 + 2x − 1) − n(2x + 2) + n(n − 1)
).
= (−1)ne−x(x2 + 2(1 − n)x + n2 − 3n − 1).
Il reste à traiter le cas des premières dérivées (n = 0 ou 1). Celles-ci se calculentdirectement sans problème.
Par ailleurs, pour tout réel x :
f (0)(x) = f (x) = (x2 + 2x − 1)e−x
f ′(x) = −(x2 − 3)e−x .
On remarque que la formule établie plus haut est encore valable avec n = 0ou n = 1 ; nous avons donc établi :
∀n ∈ N,∀x ∈ R, f (n)(x) = (−1)ne−x(x2 + 2(1 − n)x + n2 − 3n − 1).
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
147
Chapitre 7 • Dérivation, développements limités
9782100547678-Fresl-C7.qxd 5/07/10 9:21 Page 147

Exercice 7.5 : Formule de Leibniz et coefficients du binômeOn fixe une entier naturel n.
1. Calculer de deux façons différentes la dérivée n-ième de la fonction x → x2n
(on pourra par exemple écrire x2n = xn × xn).
2. En déduire la valeur de n∑
k=0
(n
k
)2
.
3. Retrouver la valeur de cette somme en calculant de deux façons différentes lenombre de sous-ensembles de 1,. . . ,2n de cardinal n.
Notons que la dernière question utilise uniquement des techniques de dénombre-ment, ce qui est l’origine même des coefficients binomiaux ; il y a bien souventdeux façons d’établir des relations vérifiées par ces coefficients : par le dénombre-ment ou par le calcul en utilisant les formules qui les font intervenir, à savoir la for-mule du binôme de Newton et la formule de Leibniz.
Illustrons ces méthodes sur un exemple simple bien connu :n∑
k=0
(n
k
)= 2n . Ceci
peut se démontrer :
• en remarquant que la somme n’est autre que le nombre de sous-ensembles de
1,. . . ,n (pour chaque entier k il y a en effet (n
k
)sous-ensembles de cardinal k) et
est donc égal à 2n ;
• en reconnaissant (de manière un peu astucieuse) un cas particulier de la formuledu binôme de Newton :
n∑k=0
(n
k
)=
n∑k=0
(n
k
)1k1n−k = (1 + 1)n = 2n.
L’exercice propose ici des raisonnements analogues à ceci près que les coefficientsbinomiaux apparaîtront via la formule de Leibniz.
• Tout d’abord, rappelons une formule générale qui peut se démontrer par récurren-ce : pour tout entier naturel p et tout entier naturel k p , on a
dk
dxk(x p) = p!
(p − k)!x p−k .
Cette formule se retrouve facilement en considérant les première valeurs de k :
d0
dx0(x p) = x p = p!
(p − 0)!x p−0
148
Partie 2 • Analyse
9782100547678-Fresl-C7.qxd 5/07/10 9:21 Page 148

d1
dx1(x p) = px p−1 = p!
(p − 1)!x p−1
Elle permet déjà, avec p = 2n et k = n, de calculer d’une façon aisée la dérivéedemandée.
dn
dxn(x2n) = (2n)!
n!xn.
• L’application de la formule de Leibniz au produit xn × xn fournit une expressionde cette dérivée sous la forme d’une somme :
dn
dxn(xn × xn) =
n∑k=0
(n
k
)dk
dxk(xn)
dn−k
dxn−k(xn)
=n∑
k=0
(n
k
)n!
(n − k)!xn−k n!
(n − (n − k))!xn−(n−k)
=n∑
k=0
(n
k
)(n!)2
(n − k)!k!xn
= xnn!n∑
k=0
(n
k
)2
.
Nous avons donc deux expressions de la dérivée n-ième de x → x2n, ce qui permetde conclure.
On a, pour tout nombre réel x :
(2n)!
n!xn = xnn!
n∑k=0
(n
k
)2
d’où l’on tire, pour x = 1 :
n∑k=0
(n
k
)2
= (2n)!
(n!)2=
(2n
n
).
3. Par définition des coefficients binomiaux, il y a
(2n
n
)sous-ensembles de cardi-
nal n d’un ensemble à 2n éléments.
Pour retrouver la relation précédente, il faut désormais faire apparaître les
(n
k
)pour
toutes les valeurs de k de 0 à n.© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
149
Chapitre 7 • Dérivation, développements limités
9782100547678-Fresl-C7.qxd 5/07/10 9:21 Page 149

Une façon de faire est la suivante : pour construire un sous-ensemble de cardinal nde 1,. . . ,2n, on commence par choisir k éléments de 1,. . . ,n puis n − k élé-ments de n + 1,. . . ,2n . Chacun de ces deux choix fera apparaître un coefficientbinomial.
Pour une valeur donnée de k entre 0 et n il y a (
n
k
)façons de choisir k
entiers entre 1 et n et (
n
n − k
)façons d’en choisir n − k entre n + 1 et 2n.
Il y a donc (
n
k
)(n
n − k
)=
(n
k
)2
possibilités (car (
n
n − k
)=
(n
k
)) de choi-
sir n entiers entre 1 et 2n de sorte qu’il y en ait exactement k qui soient infé-rieurs ou égaux à n.
Au total, il y a donc
n∑k=0
(n
k
)2
sous-ensembles de 1,. . . ,2n de cardinal n.
Etant donné qu’il y en a également (
2n
n
)par définition même des coeffi-
cients binomiaux, nous avons bien retrouvé la relation précédente.
Exercice 7.6 : Fonctions pathologiques
1. On pose f (0) = 0 et, pour x ∈ R∗ , f (x) = x2sin(1/x) . Montrer que f est déri-
vable sur R mais pas de classe C1.
2. On considère la fonction g définie pour x ∈ R par g(x) = x f (x) . Montrerque g ne possède pas de dérivée seconde en 0 mais qu’elle possède néanmoinsun développement limité en 0 à l’ordre 2.
Cet exercice présente des fonctions possédant des propriétés contre-intuitives. Il estintéressant de les avoir à l’esprit afin de ne pas inventer des théorèmes fauxcomme « si f est dérivable alors f ′ est continue » ou « f possède un développementlimité à l’ordre 2 donc est deux fois dérivable »…
Rassurez-vous : en pratique on manipule des fonctions suffisamment régulières,bien souvent de classe C∞ , pour lesquelles il n’y a pas de problème de ce type.
Parfois les fonctions considérées sont définies « en plusieurs morceaux », i.e. par
différentes formules comme f l’est ici par f (x) = x2sin(1/x) sur R∗ et f (0) = 0. Ilfaut alors soigneusement étudier leur régularité aux points de raccordement desdomaines de validité des formules (ici c’est en 0).
150
Partie 2 • Analyse
9782100547678-Fresl-C7.qxd 5/07/10 9:21 Page 150

1. Les théorèmes usuels sur les produits et composées de fonctions dérivables s’ap-pliquent sans problème sur les intervalles R∗+ et R∗− ; il restera ensuite à étudier à lamain le comportement de f en 0 (limite de son taux d’accroissement pour étudier ladérivabilité en 0 et limite de sa dérivée pour étudier la continuité de f ′).
Dérivabilité sur R∗R
∗
Sur les intervalles R∗+ et R∗− la fonction f est le produit de la fonction
x → x2, qui est dérivable, et de la fonction x → sin(1/x) , qui l’est aussicomme composée de fonctions dérivables.Ainsi, f est dérivable sur R∗+ et R∗−.De plus, d’après les formules usuelles :
∀x ∈ R∗, f ′(x) = 2xsin(1/x) − cos(1/x).
Dérivabilité en 0
Pour x ∈ R∗ on a :
f (x) − f (0)
x − 0= xsin(1/x).
Cette expression est le produit de x, qui tend vers 0 en 0, et de sin(1/x),qui est borné : on a donc
limx→0
f (x) − f (0)
x − 0= 0
ce qui montre que f est dérivable en 0 et que f ′(0) = 0.
Il reste donc à voir que f ′(x) ne tend pas vers f ′(0) = 0 quand x tend vers 0. Pourcela, d’après la caractérisation séquentielle de la limite, il suffit de trouver une suiteréelle (xn)n∈N de limite nulle telle que f ′(xn) ne tende pas vers 0 quand n tend vers+∞.
Discontinuité de f ′ en 0
Si f ′ était continue en 0 on aurait
limx→0
f ′(x) = 0.
Or
limx→0
2x sin(1/x) = 0
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
151
Chapitre 7 • Dérivation, développements limités
9782100547678-Fresl-C7.qxd 5/07/10 9:21 Page 151

(produit d’une fonction tendant vers 0 par une fonction bornée) donc
limx→0
cos(1/x) = 0.
En particulier, pour tout suite (xn)n∈N de réels non nuls tendant vers 0 :
limn→∞ cos(1/xn) = 0.
Cependant, en prenant xn = 1
2nπ, on a :
limn→∞ xn = 0 et lim
n→∞ cos(1/xn) = 1.
C’est absurde : ainsi f ′ ne tend pas vers 0 en 0.
On voit ce qui se passe en représentant graphiquement les fonctions f et f ′ : f
« s’écrase » bien au voisinage de 0, ce qui confirme le résultat f ′(0) = 0, mais f ′
oscille violemment entre −1 et 1 et de ce fait ne converge pas en 0.
152
Partie 2 • Analyse
y = f (x)
y = f '(x)
2. Pour étudier la dérivabilité de g on peut utiliser les résultats précédents : les rai-sonnements s’adaptent sans problème. g s’exprime en fonction de f donc g′ enfonction de f et f ′ : les résultat précédents d’existence (ou non) de limites peuventdonc être utilisés sans avoir à refaire tous les calculs.
Développement limité à l’ordre 2 de g en 0 :
Il nous faut un o(x2), i.e. une expression de la forme x2h(x) avec h qui tend vers0 en 0. On remarque que la fonction g elle-même est de cette forme !
On a la factorisation :
g(x) = x3sin(1/x)
= x2 × x sin(1/x).
9782100547678-Fresl-C7.qxd 5/07/10 9:21 Page 152

Comme sin(1/x) est borné :
limx→0
x sin(1/x) = 0
et enfin g(x) = o(x2) quand x tend vers 0 : ceci montre que g possède undéveloppement limité à l’ordre 2 en 0 (de partie régulière nulle).
Étude de l’existence de la dérivée seconde de g en 0 :
g est dérivable comme produit de fonctions dérivables et, pour tout réel x :
g′(x) = f (x) + x f ′(x).
On en déduit, pour x =/ 0 :
g′(x) − g′(0)
x − 0= f (x)
x+ f ′(x).
Si la dérivée seconde de g en 0 existe ce quotient tend vers g′′(0) quand xtend vers 0.Or
limx→0
f (x)
x= f ′(0) = 0
d’oùlimx→0
f ′(x) = 0.
Ainsi, f ′ serait continue en 0, ce qui contredit le résultat de la premièrequestion.
Exercice 7.7 : f ( f (x)) = ax + b
Cet exercice fait intervenir des suites arithmético-géométriques.
Soient a ∈]0,1[ et b ∈ R. Soit f une application de R dans lui-même, de classe
C1, telle que, pour tout réel x , f ( f (x)) = ax + b.
1. Montrer que, pour tout réel x , f (ax + b) = a f (x) + b . En déduire que, pourréel x , f ′(a x + b) = f ′(x) .
2. Soit (un)n∈N une suite réelle telle que, pour tout n ∈ N, un+1 = a un + b.
Montrer que (un)n∈N est convergente de limite = b
1 − a.
3. Montrer que f ′ est constante. En déduire l’expression de f.
4. Que faire si a ∈]1,+∞[ ?
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
153
Chapitre 7 • Dérivation, développements limités
9782100547678-Fresl-C7.qxd 5/07/10 9:21 Page 153

1. Pour faire apparaître a f (x) + b il suffit de remplacer x par f (x) dans la relationdonnée : puisqu’elle est vraie pour tout réel x elle est aussi vraie pour tous les réelsde la forme f (x) .
La relation vérifiée par f donne, quand on remplace x par f (x) :
f ( f ( f (x))) = a f (x) + b.
Si, au lieu de faire ceci, on avait appliqué la fonction f aux deux membresde l’égalité, on aurait obtenu :
f ( f ( f (x))) = f (a x + b).
On a donc montré la propriété :
∀x ∈ R, f (a x + b) = a f (x) + b.
Plus abstraitement, il y a deux façons de voir f f f : dire que c’est ( f f ) f(c’est la première relation obtenue) ou encore f ( f f ) (deuxième relation).La clef est donc en fait l’associativité de la composition des applications.
On peut enfin dériver pour obtenir la relation voulue sur f ′ . Attention, le membre degauche est une fonction composée !
En dérivant cette égalité par rapport à la variable x on obtient :
∀x ∈ R,a f ′(ax + b) = a f ′(x).
Le réel a étant différent de 0 on en déduit :
∀x ∈ R, f ′(ax + b) = f ′(x).
Il faut rester vigilant et rigoureux jusqu’au bout : avant de simplifier une relation(ici par a) il faut s’assurer que l’ on ne divise pas par 0.
2. La suite (un)n∈N est arithmético-géométrique : pour l’étudier, on considère lasuite auxiliaire (vn)n∈N définie par vn = un − c où c est la solution de l’équationax + b = x ... qui n’est autre que .
Ne vous attendez pas à être toujours autant guidé que dans cet exercice lorsque vousaurez à étudier de telles suites : il faut savoir poser soi-même le réel c en questionet étudier la suite.
Pour n ∈ N on a :
un+1 − = aun + b − b
1 − a
= aun − ab
1 − a
= a(un − ).
154
Partie 2 • Analyse
9782100547678-Fresl-C7.qxd 5/07/10 9:21 Page 154

Ainsi, la suite de terme général vn = un − est géométrique de raisona ∈]0,1[ : elle est donc convergente de limite nulle, ce qui montre quelim
n→∞ un = .
3. Les deux premières questions n’avaient aucun rapport entre elles, il est tempsd’utiliser leurs résultats respectifs.
Le lien est donné par la relation vérifiée par f ′ : en effet, si (un)n∈N est une suite tellecomme dans la deuxième question, on a, pour tout entier naturel n,f ′(un+1) = f ′(un). De plus, (un)n∈N converge et f ′ est continue donc nous allonspouvoir utiliser la caractérisation séquentielle de la continuité.
Soit x ∈ R et (un)n∈N la suite réelle définie par u0 = x et, pour n ∈ N,un+1 = a un + b.Le résultat de la première question montre que :
∀n ∈ N, f ′(un+1) = f ′(un).
La suite de terme général f ′(un) est donc constante et, en particulier :
∀n ∈ N, f ′(un) = f ′(u0).
Or f ′ est continue et limn→∞ un = donc, en faisant tendre n vers +∞ :
f ′() = f ′(u0) = f ′(x).
Le réel x ayant été choisi arbitrairement on a donc la propriété :
∀x ∈ R, f ′(x) = f ′().
Autrement dit, f ′ est constante.
f ′ étant constante, f est affine (i.e. une fonction polynomiale de degré inférieur ouégal à 1). On peut déterminer ses coefficients en reportant son expression dans larelation vérifée par f f.
Nous aurons ainsi obtenu une condition nécessaire sur l’expression de f : si f estsolution du problème alors f est de la forme… Il restera à vérifier que les fonc-tions obtenues conviennent bien (ou, si besoin, éliminer les solutions parasites).
f est donc affine : il existe deux réels λ et µ tels que :
∀x ∈ R, f (x) = λx + µ.
On en déduit :
∀x ∈ R, f ( f (x)) = λ2x + (λ+ 1)µ.© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
155
Chapitre 7 • Dérivation, développements limités
9782100547678-Fresl-C7.qxd 5/07/10 9:21 Page 155

Par définition de f on a donc :λ2 = a
(λ+ 1)µ = b
Nous pouvons alors distinguer deux cas :
• si λ = √a alors µ = b
1 + √a
;
• si λ = −√a alors µ = b
1 − √a
(ce dernier calcul est licite car
1 − √a) =/ 0).
Il est aisé de vérifier que les deux applications
x → x√
a + b
1 + √a
et
x → −x√
a + b
1 − √a
conviennent bien.
4. En reprenant la démarche et les notations précédentes, la suite (vn)n∈N est géo-métrique de raison a > 1 d’où lim
n→∞ un = +∞ : le raisonnement ci-dessus ne peut
alors plus être poursuivi.On peut néanmoins tenter de s’y ramener en faisant intervenir la réciproque de l’ap-plication affine x → ax + b , qui est x → (x − b)/a.
Supposons a > 1 . On a alors, comme précédemment :
∀x ∈ R, f (x) = f (ax + b)
soit, en remplaçant x par x − b
a:
f (x) = f
(x
a− b
a
).
On peut donc appliquer le résultat précédent en remplaçant b par −b
aet a
par 1
a∈]0,1[ : la fonction f est donc affine.
Le calcul de la question reste valable et les fonctions convenant sont défi-nies par les mêmes expressions.
Exercice 7.8 : Fonctions convexes (sauf PTSI)Les deux questions sont indépendantes.1. Soit f une application convexe et majorée sur R. Montrer que f est constante.Montrer que ceci n’est pas forcément le cas pour une fonction convexe et majo-rée sur R+ .
156
Partie 2 • Analyse
9782100547678-Fresl-C7.qxd 5/07/10 9:21 Page 156

2.a. Soit f une application convexe sur un intervalle non majoré I. Montrer quef (x)
xpossède une limite, finie ou +∞, quand x tend vers +∞.
2.b. Dans le cas où cette limite est un réel , montrer que f (x) − x possède unelimite, finie ou −∞, quand x tend vers +∞.Pour cela, on pourra étudier la monotonie de l’application qui, à x ∈ I, associef (x) − x.
Il est ici question de fonctions convexes mais il n’y a pas d’hypothèse de dériva-bilité. Les outils adaptés sont donc les fonctions « pentes des sécantes », ce que
laisse également penser la présence de f (x)
xdans la question 2.a.
1. Afin de débuter, nous pouvons faire intervenir les fonctions pentes de deuxfaçons : tout d’abord, nous savons qu’elles sont croissantes car f est convexe ;ensuite, f étant majorée, on peut en déduire une inégalité vérifiée par ces fonctions.Les différentes théorèmes liant limite et monotonie permettront de conclure.
Plutôt que de considérer une fonction pente arbitraire nous considérerons la fonc-tion pente en 0 (qui à x associe ( f (x) − f (0))/x) afin d’alléger les calculs.
Soit M un majorant de f sur R.
f étant convexe, l’application p : R∗ → R,x → f (x) − f (0)
x, est croissante.
Pour x > 0 on a p(x) M − f (0)
x.
p étant croissante, elle possède une limite (éventuellement +∞) en +∞.
En passant à la limite dans l’inégalité précédente on obtientlim
x→+∞ p(x) 0 , ce qui montre que cette limite est finie et négative.
Pour x < 0 on a p(x) M − f (0)
x; de la même manière, p possède une
limite (éventuellement −∞) en −∞ et le passage à la limite donnelim
x→−∞ p(x) 0 , ce qui montre que cette limite est finie et positive.
Nous avons ainsi bien utilisé toutes les hypothèses : f est convexe (croissance de p),f est majorée (par M) mais également le fait que ces propriétés sont vraies sur R toutentier puisqu’on a considéré des limites en ±∞.
Nous avons ainsi montré que p est croissante sur R et que sa limite en −∞ est supé-rieure ou égale à sa limite en +∞ ! Ceci n’est possible que dans une situation : sip est constante.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
157
Chapitre 7 • Dérivation, développements limités
9782100547678-Fresl-C7.qxd 5/07/10 9:22 Page 157

Pour rédiger correctement ceci nous pouvons affiner ce qui précède : non seulementle théorème de la limite monotone montre l’existence de limites mais il fournitencore l’expression abstraite de cette limite avec une borne supérieure ou inférieure.Nous aurons ainsi utilisé toute la conclusion du théorème.
p étant croissante, limx→−∞ p(x) (resp. lim
x→+∞ p(x)) est la borne inférieure
(resp. supérieure) de p sur R∗ .
En particulier, pour tout réel non nul t :
limx→−∞ p(x) p(t) lim
x→+∞ p(x).
Les inégalités précédemment obtenues sur ces limites montrent que0 p(t) 0 , i.e. p(t) = 0 : on a donc, pour tout réel non nul t ,f (t) = f (0) , donc f est constante.
Si on remplace R par R+ le résultat est faux comme on le voit en considérant lafonction définie par f (x) = e−x : elle est convexe (car f ′′ = f est positive) et majo-rée sur R+ (par 1) mais n’est pas constante.
Plus précisément, seule la première partie du raisonnement précédent reste valable(on peut considérer des limites en +∞ mais pas en −∞).
On peut toujours affirmer que la fonction p est négative mais faute d’un autre enca-drement elle n’est plus nécessairement nulle.
2.a. L’expression f (x)
xsuggère d’utiliser la fonction « pente de la sécante » d’ori-
gine 0 mais 0 n’a aucune raison d’appartenir à I…
Nous pouvons néanmoins conserver l’idée de la fonction pente : nous allonsd’abord considérer une fonction pente d’origine a ∈ I puis faire apparaître le rap-
port f (x)
x.
Soit a ∈ I et p : I \ a → R,x → f (x) − f (a)
x − a.
f étant convexe, p est croissante.
D’après le théorème de la limite monotone, p possède donc une limite, éven-tuellement +∞, en +∞.
D’autre part : f (x)
x= (x − a)p(x) + f (a)
x=
(1 − a
x
)p(x) + f (a)
x.
Comme limx→+∞
a
x= lim
x→+∞f (a)
x= 0 on en déduit que
f (x)
xpossède une
limite en +∞ égale à limx→+∞ p(x) ; cette limite est donc finie ou +∞.
158
Partie 2 • Analyse
9782100547678-Fresl-C7.qxd 5/07/10 9:22 Page 158

2.b. Suivons l’indication de l’énoncé : pour étudier la monotonie dex → f (x) − x nous allons essayer de faire apparaître un quotient de la formef (x) − f (a)
x − acar on sait, f étant convexe, que cette expression croît avec x et que de
plus, d’après la question précédente, elle tend vers quand x tend vers +∞.
Il n’y a pas d’hypothèse de dérivabilité, on ne peut donc pas dériver pour étudierla monotonie !
Pour x ∈ I posons g(x) = f (x) − x .
Fixons un élément a de I et étudions le signe de g(x) − g(a) en fonctionde celui de x − a .
On a : g(x) − g(a) = ( f (x) − f (a)) − (x − a) .
Pour x =/ a on a donc g(x) − g(a) = (x − a)
(f (x) − f (a)
x − a−
): il
reste désormais à déterminer le signe de f (x) − f (a)
x − a− .
À la question précédente on a montré que f (x) − f (a)
x − aétait une fonction
croissante de x tendant vers en +∞.
D’après le théorème de la limite monotone, cette limite est la borne supé-
rieure de la fonction x → f (x) − f (a)
x − a.
Ainsi : pour tout x ∈ I, f (x) − f (a)
x − a .
Ainsi, g(x) − g(a) est du signe opposé à celui de x − a : la fonction g estdonc décroissante sur I.
D’après le théorème de la limite monotone, elle possède donc une limite en+∞ qui est finie ou −∞.
Exercice 7.9 : Inégalités de convexité (sauf PTSI)
Les deux questions sont indépendantes.
1. Soient un entier n 2 et (a1,. . . ,an) ∈ (R∗+)n . Montrer que :
n√
a1 · · · an 1
n(a1 + · · · + an).
2. Pour x ∈ R on pose f (x) = ln(1 + ex).
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
159
Chapitre 7 • Dérivation, développements limités
9782100547678-Fresl-C7.qxd 5/07/10 9:22 Page 159

Montrer que f est convexe sur R ; en déduire que, pour tous n-uplets (a1,. . . ,an)
et (b1,. . . ,bn) de réels strictement positifs :
n
√√√√ n∏k=1
ak + n
√√√√ n∏k=1
bk n
√√√√ n∏k=1
(ak + bk).
On pourra commencer par traiter le cas particulier b1 = · · · = bn = 1.
Rappelons les inégalités de convexité : si f est une fonction convexe sur un inter-
valle I, (a,b) ∈ I 2 et λ ∈ [0,1], f (λa + (1 − λ)b) λ f (a) + (1 − λ) f (b) .
On dispose de la généralisation suivante, également appelée inégalité de Jensen : six1,. . . ,xn sont des éléments de I et λ1,. . . ,λn des réels positifs tels queλ1 + . . . + λn = 1 alors
f
( n∑k=1
λk xk
)
n∑k=1
λk f (xk).
Elle est presque toujours utilisée dans le cas où tous les λk sont égaux à 1
n, soit :
f
(1
n
n∑k=1
xk
)
1
n
n∑k=1
f (xk).
De plus, la fonction exponentielle permet de passer des sommes aux produits et detransformer le facteur 1/n en racine n-ième, ce qui permettra d’obtenir les formesdes résultats donnés dans l’énoncé.
1. Nous allons commencer par utiliser la convexité de l’exponentielle en écrivantl’inégalité de Jensen pour cette fonction : comme nous venons de le voir ce sera unbon moyen pour faire apparaître à terme des racines n-ièmes.
La fonction exponentielle est convexe sur R.
Ainsi, en appliquant l’inégalité de Jensen avec λ1 = · · · = λn = 1
net
x1,. . . ,xn des réels quelconques :
exp
(1
n
n∑k=1
xk
)
1
n
n∑k=1
exk .
Notons que
exp
(1
n
n∑k=1
xk
)= n
√√√√ n∏k=1
exk
160
Partie 2 • Analyse
9782100547678-Fresl-C7.qxd 5/07/10 9:22 Page 160

d’où
n
√√√√ n∏k=1
exk 1
n
n∑k=1
exk .
C’est presque le résultat attendu. Plus précisément, il suffirait d’avoir exk = ak, soitxk = ln(ak). Ceci est possible car ak > 0 : l’hypothèse de signe intervient ici.
L’inégalité précédente donne, dans le cas où l’on prend xk = ln(ak) (ce quiest licite car ak > 0) :
n√
a1 · · · an 1
n(a1 + · · · + an).
Pour n = 2 on retrouve une inégalité classique :√
ab a + b
2, qui peut se
démontrer de manière plus élémentaire en remarquant que (√
a − √b)2 0 .
2. Cette fonction étant indéfiniment dérivable nous allons vérifier que sa dérivéeseconde est positive pour montrer qu’elle est convexe.
Ceci fait, les calculs seront tout à fait analogues à ceux de la question précédente.La difficulté calculatoire sera juste un niveau au-dessus puisqu’il faudra manipulersimultanément le logarithme et l’exponentielle.
On a, pour tout réel x :
f ′(x) = ex
1 + exet f ′′(x) = ex
(1 + ex)2.
f ′′ est positive sur R donc f est convexe.Étant donné un n-uplet de réels (x1,. . . ,xn) l’inégalité de Jensen appliquéeà f donne, avec tous les λk égaux à 1/n :
ln
(1 + exp
(1
n
n∑k=1
xk
))
1
n
n∑k=1
ln(1 + exk
).
On remarque que, d’une part :
1 + exp
(1
n
n∑k=1
xk
)= 1 + n
√√√√ n∏k=1
exk
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
161
Chapitre 7 • Dérivation, développements limités
9782100547678-Fresl-C7.qxd 5/07/10 9:22 Page 161

et que, d’autre part :
1
n
n∑k=1
ln(1 + exk
) = ln
(n
√√√√ n∏k=1
(1 + exk )
).
La fonction exp étant croissante, on en déduit :
1 + n
√√√√ n∏k=1
exk n
√√√√ n∏k=1
(1 + exk ).
Ainsi, si tous les bk sont égaux à 1 on obtient, avec xk = ln(ak) :
1 + n
√√√√ n∏k=1
ak n
√√√√ n∏k=1
(1 + ak).
Revenons au cas général où les bk sont strictements positifs quelconques.On peut appliquer la précédente inégalité au n-uplet (a1/b1,. . . ,an/bn) , cequi donne :
1 + n
√√√√ n∏k=1
ak
bk n
√√√√ n∏k=1
(1 + ak
bk
)
soit, en multipliant par n
√√√√ n∏k=1
bk :
n
√√√√ n∏k=1
ak + n
√√√√ n∏k=1
bk n
√√√√ n∏k=1
(ak + bk).
Exercice 7.10 : Développements limités
1. Calculer le développement limité à l’ordre 4 en 0 de ch(x)cos(x)
+ sh(x)sin(x).
2. Calculer le développement limité à l’ordre 4 en 0 de cos(sin(x)) .
3. Calculer le développement limité à l’ordre 4 en 0 de 1
cos(x).
4. Calculer le développement limité à l’ordre 2 en 2 de √
x .
5. Calculer le développement limité à l’ordre 2 en π/4 de tan(x).
1. La première chose à faire est d’écrire les développements limités à l’ordre 4 en0 de toutes les fonctions usuelles intervenant dans l’expression considérée. Cesdéveloppements limités doivent être connus par cœur.
162
Partie 2 • Analyse
9782100547678-Fresl-C7.qxd 5/07/10 9:22 Page 162

ch(x) = 1 + 1
2x2 + 1
24x4 + o(x4)
cos(x) = 1 − 1
2x2 + 1
24x4 + o(x4)
sh(x) = x + 1
6x3 + o(x4)
sin(x) = x − 1
6x3 + o(x4)
Pour calculer les développements limités des produits, il suffit de calculer les pro-duits des parties régulières (i.e. la partie polynomiale, sans le o) en omettant lestermes dont le degré excède 4.
Plus précisément, pour le produit ch(x)cos(x) on a :(1 + 1
2x2 + 1
24x4
)(1 − 1
2x2 + 1
24x4
)= 1 − 1
6x4 + termes de degrés > 4.
De même, pour le produit sh(x)sin(x) :(x + 1
6x3
)(x − 1
6x3
)= x2 + termes de degrés > 4.
La notation de Landau, i.e. avec o, sert précisément à écrire ceci rigoureusement :
tout terme de degré strictement supérieur à 4 est « absorbé » par le terme o(x4).Autrement dit, on peut rédiger comme suit :
En utilisant les développements limités usuels on obtient
ch(x)cos(x) = 1 − 1
6x4 + o(x4)
et
sh(x)sin(x) = x2 + o(x4).
Notez que l’on ne calcule surtout pas l’intégralité des produits ! On sait que lestermes de degré strictement supérieur à 4 n’apparaîtront pas dans le résultat et onne prend donc même pas la peine de les expliciter dans les calculs intermédiaires.Ceci permet de calculer efficacement, i.e. rapidement et sans risque d’erreur.
Enfin, il n’y a plus qu’à additionner pour obtenir le résultat.
Ainsi :
ch(x)cos(x) + sh(x)sin(x) = 1 + x2 − 1
6x4 + o(x4).
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
163
Chapitre 7 • Dérivation, développements limités
9782100547678-Fresl-C7.qxd 5/07/10 9:22 Page 163

2. Comme sin(0) = 0, nous avons une composition de développements limités en0.
Le principe général est le même : on doit commencer par expliciter les développe-ments limités en 0 des fonctions sinus et cosinus à l’ordre demandé (ici 4) puiscomposer les parties régulières en supprimant systématiquement tout terme dont ledegré excède 4.
Rappelons que
cos(x) = 1 − 1
2x2 + 1
24x4 + o(x4).
Autrement dit, dans la composition, il faudra faire intervenir le carré et la puis-sance 4 de la partie régulière du développement limité de la fonction sinus en 0.
Pour faire ceci efficacement, nous allons calculer de proche en proche les dévelop-pements limités des puissances de sinus en effectuant à chaque étape les simpli-fications : nous verrons que plus la puissance est grande plus les calculs sontsimples car il y aura de plus en plus de termes simplifiés !
Pour finir, on remplace dans le développement limité du cosinus le terme en x2 par
la partie régulière de sin2(x) et le terme en x4 par celle de sin4(x).
Tous les termes qui ont pu être oubliés à un moment ou un autre parce que leur
degré était supérieur à 4 sont alors en fait « cachés » dans le terme o(x4).
D’une part, d’après le cours :
cos(x) = 1 − 1
2x2 + 1
24x4 + o(x4).
De plus, on a successivement :
sin(x) = x − 1
6x3 + o(x4)
sin2(x) = x2 − 1
3x4 + o(x4)
sin3(x) = x3 + o(x4)
sin4(x) = x4 + o(x4).
Ainsi, le développement limité composé s’écrit
cos(sin(x)) = 1 − 1
2
(x2 − 1
3x4
)+ 1
24x4 + o(x4)
soit, toutes simplifications effectuées :
cos(sin(x)) = 1 − 1
2x2 + 5
24x4 + o(x4)
164
Partie 2 • Analyse
9782100547678-Fresl-C7.qxd 5/07/10 9:22 Page 164

3. Le calcul du développement limité d’un quotient se ramène à celui d’une com-
posée avec la fonction f : x → 1
1 + x.
Comme cos(0) = 1, il suffit de poser u(x) = cos(x) − 1 . Alors cos(x) = 1 + u(x)
et u(0) = 0. On peut donc voir la fonction cosinus comme la composée f u : il n’ya plus qu’à composer deux développements limités en 0 en suivant exactement lamême démarche que dans la question précédente.
Posons f (x) = 1
1 + xet u(x) = cos(x) − 1 . Alors
1
cos(x)= f (u(x)).
D’autre part, on a les développements limités en 0 :
cos(x) = 1 − 1
2x2 + 1
24x4 + o(x4)
donc
u(x) = −1
2x2 + 1
24x4 + o(x4)
et également
f (x) = 1 − x + x2 − x3 + x4 + o(x4).
Les développements limités des puissances de u sont :
u2(x) = 1
4x4 + o(x4)
u3(x) = o(x4)
u4(x) = o(x4)
d’où l’on tire
f (u(x)) = 1 −(
−1
2x2 + 1
24x4
)+ 1
4x4 + o(x4)
soit finalement
1
cos(x)= 1 + 1
2x2 + 5
24x4 + o(x4).
4. On connaît le développement limité de √
1 + x quand x tend vers 0 ou, ce qui estla même chose, celui de
√x quand x tend vers 1. Autrement dit, nous ne sommes
pas dans un cas relevant directement du cours.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
165
Chapitre 7 • Dérivation, développements limités
9782100547678-Fresl-C7.qxd 5/07/10 9:22 Page 165

Afin de s’y ramener posons une nouvelle variable h qui tend vers 0 quand x tendvers 2 ; il n’y aura alors plus qu’à essayer de faire apparaître des expressionsconnues de développements limités en 0.
Cette démarche doit être systématiquement effectuée.
Posons h = x − 2. On a alors √
x = √2 + h dont on cherche le développement
limité quand h tend vers 0.
Il ne nous reste plus qu’à faire apparaître une expression de la forme √
1 + u avecu tendant vers 0 pour pouvoir calculer le développement limité demandé par unecomposition. Pour cela, on peut factoriser 2 et prendre u = h/2.
Nous avons ici plusieurs développements limités, mais tous ne sont pas considé-rés au même point selon que l’on manipule x, u ou h .Il faut donc, d’une manière ou d’une autre, préciser ceci. Soit on l’indique dans la
notation o, par exemple ox→2((x − 2)4) , soit on conserve pour ne pas l’alourdir
la notation o((x − 2)4) mais en précisant avant en toutes lettres que l’on considèrela situation où x tend vers 2.
Posons h = x − 2. Alors √
x = √2 + h . De plus :
√2 + h =
√2
√1 + h
2
et on cherche le développement limité de ceci quand h tend vers 0 car xtend vers 2 et h = x − 2.
Or on a le développement limité quand u tend vers 0 :
√1 + u = 1 + 1
2u − 1
8u2 + o(u2)
Il faut maintenant remplacer u par h/2 dans cette expression. Notez que c’est unecomposée, mais particulièrement simple : il n’y a pas de o dans l’expression de uen fonction de h.
Comme h
2tend vers 0 on peut remplacer u par
h
2dans le développement
limité précédent et on obtient le développement limité quand h tend vers 0 :√1 + h
2= 1 + 1
4h − 1
32h2 + o(h2).
166
Partie 2 • Analyse
9782100547678-Fresl-C7.qxd 5/07/10 9:22 Page 166

d’où, en multipliant par √
2 :
√2 + h =
√2 +
√2
4h −
√2
32h2 + o(h2).
En revenant à x on a le développement limité quand x tend vers 2 :
√x =
√2 +
√2
4(x − 2) −
√2
32(x − 2)2 + o((x − 2)2).
5. La situation est analogue : nous poserons h = x − π/4 pour faire apparaître ledéveloppement limité quand h tend vers 0 de tan(h + π/4) .
Pour se ramener à des formules connues de développements limités en 0 on peututiliser la trigonométrie : ainsi on fera apparaître des termes en tan(h).
Posons h = x − π/4 : on cherche alors le développement limité quand htend vers 0 de tan(h + π/4) .
Or, d’après les formules de trigonométrie usuelles :
tan(h + π/4) = tan(h) + tan(π/4)
1 − tan(h)tan(π/4)= 1 + tan(h)
1 − tan(h).
Toujours d’après les formules du cours on sait que tan(h) = h + o(h2). Ona donc :
1 + tan(h) = 1 + h + o(h2) et 1 − tan(h) = 1 − h + o(h2).
On en déduit :
1
1 − tan(h)= 1 + h + h2 + o(h2)
et enfin
1 + tan(h)
1 − tan(h)= 1 + 2h + 2h2 + o(h2)
soit, en revenant à x, le développement limité quand x tend vers π/4 :
tan(x) = 1 + 2(x − π/4) + 2(x − π/4)2 + o((x − π/4)2)
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
167
Chapitre 7 • Dérivation, développements limités
9782100547678-Fresl-C7.qxd 5/07/10 9:22 Page 167
Exercice 7.11 : Formes indéterminées
1. Calculer la limite suivante :
limx→0
xch(x) − cos(x)
sh(x) − sin(x).
2. Calculer la limite suivante :
limx→1
((x2 + x − 2)tan(πx/2)
).
3. Soient a et b deux réels distincts. Déterminer un équivalent quand x tend vers+∞ de
f (x) =√
x2 + b −√
x2 + a
puis un réel α tel que xα f (x) possède une limite finie non nulle, que l’on calcu-lera, quand x tend vers +∞.
Il y a ici trois types de formes indéterminées :
• dans la première, x tend vers 0, ce qui permet d’utiliser les développements limi-tés en 0 connus des fonctions usuelles ;
• dans la deuxième, x tend vers 1 : on posera donc h = x − 1 et on essaiera de faireapparaître des développements limités connus quand h tend vers 0 ;
• dans la troisième, x tend vers +∞ : on posera donc h = 1
xpour se ramener à des
développements limités quand h tend vers 0.
Enfin, rappelons qu’une fonction est équivalente en 0 au premier terme non nul deson développement limité : comme l’exercice demande de calculer de simpleslimites, et non des développements limités à des ordres plus ou moins grands, onpourra simplifier les expressions obtenues avec des équivalents.
Par exemple, comme tan(u) = u + o(u) quand u tend vers 0, on pourra simplementécrire tan(u) ∼ u.
La rédaction avec des équivalents peut être dangereuse car il n’y a aucune règlegénérale simple pour les additionner ou les composer. Cependant, on peut multi-plier ou diviser des équivalents.
Ainsi, si l’on considère par exemple la première question :
• il faut utiliser des développements limités pour étudier séparément le numérateuret le dénominateur, car ils contiennent une différence ;
168
Partie 2 • Analyse
9782100547678-Fresl-C7.qxd 5/07/10 9:22 Page 168

• on peut en déduire un équivalent de chacun puis calculer directement avec ceséquivalents puisqu’on aura alors un quotient et un produit.
Évidemment, rien n’interdit de manipuler des développements limités de bout enbout mais nous adopterons ici le point de vue des équivalents quand cela est pos-sible.
1. Il faut avant tout décider de l’ordre auquel on poussera les développements limités.
On sait que sh(x) et sin(x) ont tous deux pour premier terme x ; pour obtenir undéveloppement limité intéressant de leur différence il faudra aller à un ordre qui feraapparaître au moins un terme en plus, donc au moins à l’ordre 3 vu que leurs termesd’ordre 2 sont nuls.
La même remarque s’applique à ch(x) et cos(x) .
Au pire, si l’on avait oublié cette discussion, on aurait obtenu ch(x) − cos(x)
= o(x2) et sh(x) − sin(x) = o(x2), ce qui est à la fois parfaitement vrai et complè-tement inutile pour répondre à la question.
Quand ceci vous arrive, rien n’est perdu : il suffit de tout recommencer mais enallant à un ordre supérieur dans les développements limités de départ.
D’après les formules usuelles du cours on a les développements limités àl’ordre 3 en 0 :
ch(x) − cos(x) = x2 + o(x3)
sh(x) − sin(x) = 1
3x3 + o(x3)
ce qui fournit les équivalents en 0 :
ch(x) − cos(x) ∼ x2 et sh(x) − sin(x) ∼ 1
3x3
soit enfin :
xch(x) − cos(x)
sh(x) − sin(x)∼ x
x2
x3/3
d’où la limite cherchée :
limx→0
xch(x) − cos(x)
sh(x) − sin(x)= 3.
2. Comme d’habitude, on se ramène à une limite en 0 en posant h = x − 1.Cependant, tout n’est pas réglé : on fait ainsi apparaître tan(π/2 + πh/2) quidiverge quand h tend vers 0.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
169
Chapitre 7 • Dérivation, développements limités
9782100547678-Fresl-C7.qxd 5/07/10 9:22 Page 169

Encore une fois, il va falloir user de formules de trigonométrie pour faire apparaîtredes termes en tan(u) avec u tendant vers 0 et donc utiliser les développements limi-tés usuels.
Posons h = x − 1 : il faut alors déterminer la limite quand h tend vers 0 de
(x2 + x − 2)tan(πx/2) = ((1 + h)2 + (1 + h) − 2) tan(π(1 + h)/2)
= (h2 + 3h) tan(π/2 + πh/2).
D’après une formule usuelle de trigonométrie :
tan(π/2 + πh/2) = − 1
tan(πh/2)
d’où :
(x2 + x − 2) tan(πx/2) = − h2 + 3h
tan(πh/2).
On sait que tan(u) ∼ u quand u tend vers 0, donc tan(πh/2) ∼ πh/2quand h tend vers 0.
De plus, h2 + 3h ∼ 3h quand h tend vers 0.
On en déduit
− h2 + 3h
tan(πh/2)∼ − 3h
πh/2
= − 6
π.
Ainsi :
limx→1
(x2 + x − 2) tan(πx/2) = − 6
π.
3. Comme annoncé en préambule nous allons poser h = 1/x. Nous verrons qu’il nese pose alors aucune difficulté supplémentaire.
Posons h = 1/x : on cherche alors un équivalent quand h tend vers 0 de
f (x) =√
1
h2+ b −
√1
h2+ a
= 1
h(√
1 + bh2 −√
1 + ah2).
170
Partie 2 • Analyse
9782100547678-Fresl-C7.qxd 5/07/10 9:22 Page 170

On connaît le développement limité suivant quand u tend vers 0 :
√1 + u = 1 + 1
2u + o(u)
d’où, en posant u = bh2 qui tend bien vers 0 quand h tend vers 0, le déve-loppement limité suivant quand h tend vers 0 :
√1 + bh2 = 1 + 1
2bh2 + o(h2)
et, de même :
√1 + ah2 = 1 + 1
2ah2 + o(h2).
En soustrayant ces deux résultats il vient
√1 + bh2 −
√1 + ah2 = b − a
2h2 + o(h2)
et enfin, en divisant par h :
1
h(√
1 + bh2 −√
1 + ah2) = b − a
2h + o(h)
∼ b − a
2h.
En revenant à x = 1/h on obtient l’équivalent cherché :
f (x) ∼ b − a
2xquand x tend vers + ∞.
On en déduit que α = 1 et :
limx→+∞ x f (x) = b − a
2=/ 0.
Exercice 7.12 : Développement limité d’une fonction réciproque
Pour x ∈ R on pose f (x) = xex2.
1. Montrer que f est une bijection de R dans R et que sa réciproque est declasse C∞ .
2. Déterminer le développement limité à l’ordre 5 de f −1 en 0.
On ne cherchera à aucun moment à déterminer explicitement f −1 .
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
171
Chapitre 7 • Dérivation, développements limités
9782100547678-Fresl-C7.qxd 5/07/10 9:22 Page 171

Bien que l’on ne puisse pas déterminer une expression explicite simple de f −1 nousallons cependant en déterminer un développement limité en 0 ; autrement dit, nous
nous intéressons ici au comportement de f −1 en 0 tout en sachant que l’on n’a pasde formule explicite.
1. Rappelons le théorème de régularité des fonctions réciproques :
si f est une bijection de classe Cn (avec n ∈ N∗ ou n = ∞) d’un intervalle I dans unintervalle J et que sa dérivée f ′ ne s’annule pas sur I alors sa bijection réciproque
f −1 est elle aussi de classe Cn.
Notons que l’on n’impose aucune condition de non-annulation sur les dérivéesd’ordres supérieurs : seule f ′ intervient dans l’hypothèse.
f est dérivable sur R et :
∀x ∈ R, f ′(x) = (1 + 2x2)ex2> 0.
f est donc strictement croissante sur R.
De plus, d’après les limites usuelles du cours :
limx→+∞ f (x) = +∞ et lim
x→−∞ f (x) = −∞.
Ainsi, f réalise une bijection de R dans lui-même.
De plus, f est de classe C∞ et sa dérivée ne s’annule pas : sa réciproque estdonc elle aussi de classe C∞ .
La représentation graphique de f a l’allure suivante :
172
Partie 2 • Analyse
0
0
1
1
– 1
– 1
– 2
– 3
– 4
2
3
4
y = f (x) = xex2
9782100547678-Fresl-C7.qxd 5/07/10 9:22 Page 172

2. f −1 étant de classe C∞ elle possède des développements limités en tout point àtout ordre.
f étant impaire, f −1 aussi : son développement limité à l’ordre 5 en 0 est donc de la
forme f −1(x) = ax + bx3 + cx5 + o(x5) .
On sait que, pour tout réel x , f −1( f (x)) = x : autrement dit, on connaît le dévelop-
pement limité à l’ordre 5 de f −1 f en 0. Il ne nous reste plus qu’à le calculer àl’aide des formules précédentes puis à identifier les coefficients.
Le développement limité à l’ordre 5 en 0 de la fonction exponentielle est
ex = 1 + x + 1
2x2 + 1
6x3 + 1
24x4 + 1
120x5 + o(x5)
d’où
ex2 = 1 + x2 + 1
2x4 + o(x5)
et enfin :
f (x) = x + x3 + 1
2x5 + o(x5).
On en déduit successivement :
f (x)2 = x2 + 2x4 + o(x5)
f (x)3 = x3 + 3x5 + o(x5)
f (x)4 = x4 + o(x5)
f (x)5 = x5 + o(x5)
d’où le développement limité à l’ordre 5 en 0 de f −1( f (x)) :
f −1( f (x)) = a(x + x3 + 1
2x5) + b(x3 + 3x5) + cx5 + o(x5)
= ax + (a + b)x3 + (a
2+ c + 3b)x5 + o(x5).
Vous avez peut-être vu en cours des procédés pour calculer plus rapidement undéveloppement limité de fonction composée ; aucune méthode de ce type n’estexigible et il faut, avant de s’y intéresser, être sûr de bien maîtriser la méthodegénérale que nous venons de revoir sur deux exemples (le développement limité
de ex2à partir de celui de ex et celui de f −1 f).
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
173
Chapitre 7 • Dérivation, développements limités
9782100547678-Fresl-C7.qxd 5/07/10 9:22 Page 173

Mais f −1( f (x)) = x donc, par unicité du développement limité :
a = 1
a + b = 0a
2+ c + 3
b= 0
ce qui donne
a = 1
b = −1
c = 5
2
et enfin le développement limité cherché :
f −1(x) = x − x3 + 5
2x5 + o(x5).
On aurait bien sûr également abouti en partant d’une expression générale du déve-
loppement limité de f −1 :
f −1(x) = α+ β x + γ x2 + δ x3 + ε x4 + ζ x5 + o(x5).
On aurait alors eu à résoudre un système de six équations à six inconnues et onaurait bien trouvé :
(α,β,γ,δ,ε,ζ) = (0,1,0,−1,0,5
2).
Avoir remarqué que f −1 est impaire nous a donc épargné bien des calculs !
Ce n’est pas une astuce : lorsque l’on étudie des fonctions, que ce soit pour les tra-cer, déterminer un développement limité, tracer une courbe paramétrée ou calculerune intégrale, il est toujours profitable d’étudier les propriétés de symétrie oude périodicité.
Dans le cas d’un développement limité en 0, c’est la notion de parité qui permet dediviser par deux le nombre de coefficients à déterminer.
Exercice 7.13 : Développement limité et convexité (sauf PTSI)
Soit f : R→ R une application deux fois dérivable.
On suppose que :
∀(x,y) ∈ R2, f (x + y) f (x − y) f (x)2.
174
Partie 2 • Analyse
9782100547678-Fresl-C7.qxd 5/07/10 9:22 Page 174

1. Démontrer que :
∀x ∈ R, f (x) f ′′(x) f ′(x)2.
On pourra effectuer un développement limité à l’ordre 2 pour y au voisinage de0 de f (x + y) f (x − y) .
2. On suppose de plus que f est à valeurs strictement positives. Démontrer que lafonction ln f est convexe.
3. En déduire que f est convexe.
1. L’hypothèse fait intervenir deux réels x et y, la conclusion uniquement la variablex . L’indication suggère de fixer le réel x et de considérer l’expressionf (x + y) f (x − y) comme une fonction de y.
Soit un réel x. f étant deux fois dérivable, la formule de Taylor-Young four-nit le développement limité quand y tend vers 0 :
f (x + y) = f (x) + y f ′(x) + 1
2y2 f ′′(x) + o(y2).
En substituant −y à y il vient également :
f (x − y) = f (x) − y f ′(x) + 1
2y2 f ′′(x) + o(y2).
Pour calculer le dévelopepment limité du produit, nul besoin de tout développer :
on ne conserve que les termes en yk avec k 2.
On en déduit :
f (x + y) f (x − y) = f (x)2 + y2( f (x) f ′′(x) − f ′(x)2) + o(y2)
ou encore, en divisant par y2 :
f (x + y) f (x − y) − f (x)2
y2= f (x) f ′′(x) − f ′(x)2 + o(1)
Le signe du numérateur du membre de gauche est connu : c’est précisément l’hy-pothèse de l’exercice !
Le membre de gauche de l’inégalité précédente est positif carf (x + y) f (x − y) f (x)2 par hypothèse et y2 > 0.On obtient donc, en faisant tendre y vers 0 :
0 f (x) f ′′(x) − f ′(x)2.© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
175
Chapitre 7 • Dérivation, développements limités
9782100547678-Fresl-C7.qxd 5/07/10 9:22 Page 175

2. f est deux fois dérivable donc ln f aussi. Il suffit donc de montrer que (ln f )′′
est positive. Le calcul de cette dérivée seconde fait précisément intervenir l’expres-sion précédente.
On a successivement, pour tout réel x :
(ln f )′(x) = f ′(x)
f (x)
(ln f )′′(x) = f (x) f ′′(x) − f ′(x)2
f (x)2 0.
Ainsi, ln f est convexe.
3. Ici aussi nous pouvons simplement étudier le signe de f ′′en l’exprimant à l’aidede ln f.
Avec g = ln f on a successivement, pour tout réel x :
f (x) = exp(g(x))
f ′(x) = g′(x)exp(g(x))
f ′′(x) = (g′′(x) + g′(x)2)exp(g(x)) 0
car g′′ 0 d’après ce qui précède.
f est donc convexe.
Exercice 7.14 : Prolongements
Les questions 1 et 2 sont indépendantes et proposent chacune une illustration desthéorèmes de prolongement de fonctions.1. Pour x ∈] − π/2,0[∪]0,π/2[ on pose
f (x) = 1
sin(x)− 1
x.
Montrer que f peut se prolonger en une fonction de classe C1 sur ] − π/2,π/2[.
2. Pour x ∈ R∗ on pose f (x) = exp(−1/x2).
2.a. Montrer que, pour tout n ∈ N, il existe un polynôme Pn tel que, pour toutx ∈ R∗ :
f (n)(x) = Pn(1/x)exp(−1/x2).
2.b. En déduire que f se prolonge en une fonction de classe C∞ sur R et donner
les valeurs de f (n)(0) pour n ∈ N.
176
Partie 2 • Analyse
9782100547678-Fresl-C7.qxd 5/07/10 9:22 Page 176

1. Il y a deux manières de montrer qu’une fonction se prolonge en 0 en une fonc-
tion de classe C1 :
• on peut montrer que f se prolonge en 0 (i.e. possède une limite finie en 0), puisque la fonction ainsi prolongée est dérivable en 0 et enfin que f ′(x) tend bien versf ′(0) quand x tend vers 0 (autrement dit, vérification de la définition d’une fonc-
tion de classe C1) ;
• ou, plus simplement, montrer que f et f ′ possèdent des limites finies en 0 (autre-
ment dit, application du théorème de prolongement des fonctions C1).
Ceci est surprenant : la deuxième méthode semble bien plus faible que la première!Cependant, on démontre dans le cours que le deuxième point entraîne bien que f se
prolonge en une fonction de classe C1. Tout l’intérêt de cette démarche est qu’il y abien moins de calculs à faire que dans la première.
Convergence de f en 0
Nous utiliserons bien entendu les développements limités usuels pour lever l’indé-termination ; de plus, comme nous avons affaire à un quotient, nous pourrons rédi-ger de manière plus souple en étudiant séparément le numérateur et le dénomina-teur et en déterminant pour chacun d’eux un équivalent.
En mettant les fractions au même dénominateur :
f (x) = 1
sin(x)− 1
x
= x − sin(x)
x sin(x).
En effectuant un développement limité du numérateur à l’ordre 3 en 0 àl’aide de la formule connue
sin(x) = x − 1
6x3 + o(x3)
on obtient :
x − sin(x) = 1
6x3 + o(x3)
∼ 1
6x3
D’autre part, sin(x) ∼ x donc le dénominateur est équivalent à x2 ; on endéduit :
f (x) ∼ x
6© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
177
Chapitre 7 • Dérivation, développements limités
9782100547678-Fresl-C7.qxd 5/07/10 9:22 Page 177

et, en particulier :
limx→0
f (x) = 0.
Convergence de f ′ en 0
Le problème est exactement le même : il faut lever une forme indéterminée à l’aidede développements limités.
On a
f ′(x) = − cos(x)
sin2(x)+ 1
x2
= sin2(x) − x2cos(x)
x2sin2(x).
L’équivalent usuel sin(x) ∼ x donne un équivalent du dénominateur :
x2sin2(x) ∼ x4.
Pour le numérateur, effectuons un développement limité à l’ordre 4 en 0. Onsait que
sin(x) = x − 1
6x3 + o(x4)
cos(x) = 1 − 1
2x2 + 1
24x4 + o(x4)
d’où, d’une part :
sin2(x) = x2 − 1
3x4 + o(x4)
et, d’autre part :
x2cos(x) = x2 − 1
2x4 + o(x4)
soit enfin, en soustrayant :
sin2(x) − x2cos(x) = 1
6x4 + o(x4)
ce que l’on peut également écrire avec un équivalent :
sin2(x) − x2cos(x) ∼ 1
6x4.
178
Partie 2 • Analyse
9782100547678-Fresl-C7.qxd 5/07/10 9:22 Page 178
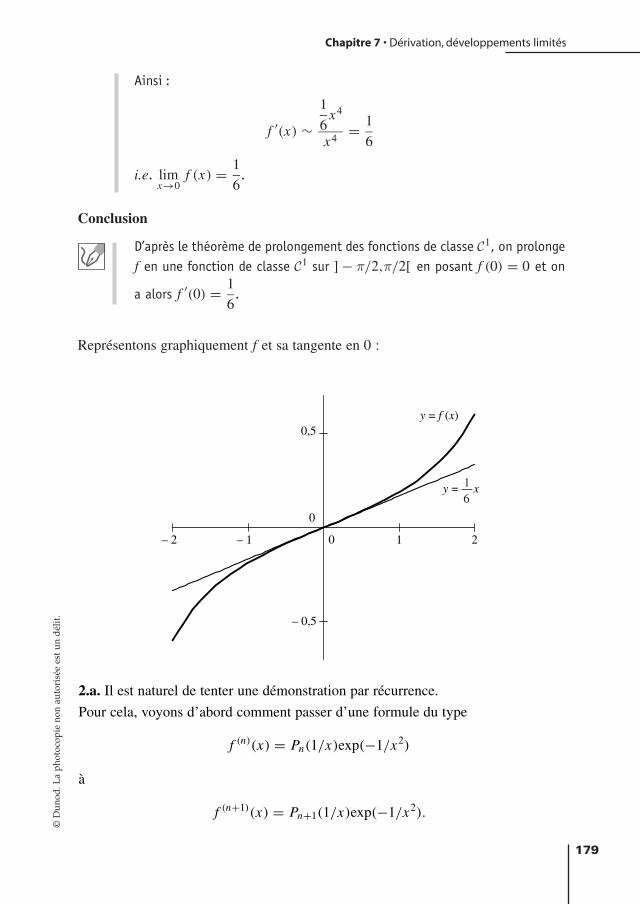
Ainsi :
f ′(x) ∼1
6x4
x4= 1
6
i.e. limx→0
f (x) = 1
6.
Conclusion
D’après le théorème de prolongement des fonctions de classe C1, on prolongef en une fonction de classe C1 sur ] − π/2,π/2[ en posant f (0) = 0 et on
a alors f ′(0) = 1
6.
Représentons graphiquement f et sa tangente en 0 :
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
179
Chapitre 7 • Dérivation, développements limités
y = f (x)
y = x
0
0
0,5
– 0,5
– 1 1 2– 2
16
2.a. Il est naturel de tenter une démonstration par récurrence.
Pour cela, voyons d’abord comment passer d’une formule du type
f (n)(x) = Pn(1/x)exp(−1/x2)
à
f (n+1)(x) = Pn+1(1/x)exp(−1/x2).
9782100547678-Fresl-C7.qxd 5/07/10 9:22 Page 179

Partant de f (n)(x) = Pn(1/x)exp(−1/x2) on obtient, en dérivant :
f (n+1)(x) = d
dx(Pn(1/x)) exp(−1/x2) + Pn(1/x)
d
dx
(exp(−1/x2)
)= − 1
x2P ′
n (1/x)exp(−1/x2) + Pn(1/x) ×(
2
x3
)exp(−1/x2)
=(
− 1
x2P ′
n (1/x) + 2
x3Pn(1/x)
)exp(−1/x2)
Remarquons que l’expression à dériver est un produit de deux fonctions composéeset qu’il faut donc prendre soin de détailler soigneusement les étapes au brouillonpour ne pas se tromper…
Il faut reconnaître ici une expression de la forme Pn+1(1/x)exp(−1/x2), soit
Pn+1(1/x) = − 1
x2P ′
n(1/x) + 2
x3Pn(1/x).
Or
− 1
x2P ′
n(1/x) + 2
x3Pn(1/x) = −(1/x)2 P ′
n(1/x) + 2(1/x)3 Pn(1/x)
soit, en posant y = 1/x,
Pn+1(y) = −y2 P ′n(y) + 2y3 Pn(y).
Nous avons donc ainsi trouvé l’expression que doit avoir Pn+1 en fonction de Pn.
Pour rédiger de manière plus lisible on pourra poser l’expression de Pn+1 puis véri-fier qu’elle convient.
Pour n ∈ N posons Hn : « il existe un polynôme Pn tel que, pour toutx ∈ R∗, f (n)(x) = Pn(1/x)exp(−1/x2) ».
• H0 est vraie : en effet, le polynôme P0 = 1 convient.
• Soit n ∈ N tel que Hn est vraie. On a donc un polynôme Pn tel que, pourtout x ∈ R∗, f (n)(x) = Pn(1/x)exp(−1/x2) .
En dérivant cette relation par rapport à x on obtient :
∀x ∈ R∗, f (n+1)(x) =(
− 1
x2P ′
n (1/x) + 2
x3Pn(1/x)
)exp(−1/x2).
180
Partie 2 • Analyse
9782100547678-Fresl-C7.qxd 5/07/10 9:22 Page 180
Posons Pn+1(X) = −X2 P ′n (X) + 2X3 Pn(X) . Alors Pn+1 est un polynôme
et on a bien, pour tout x ∈ R∗, f (n+1)(x) = Pn+1(1/x)exp(−1/x2). Ainsi,Hn+1 est vraie.
• D’après le principe de récurrence, Hn est vraie pour tout n ∈ N.
2.b. Rappelons le théorème de prolongement des fonctions C∞ :
si une fonction f de classe C∞ sur R∗ possède une limite finie 0 en 0, et que pourtout n ∈ N∗ sa dérivée n-ième possède une limite finie n en 0, alors :
• en posant f (0) = 0 on obtient une fonction de classe C∞ sur R ;
• de plus, pour tout n ∈ N∗ , f (n)(0) = n .
Pour calculer ces limites dans le cas traité ici on peut se ramener très simplement àdes limites usuelles bien connues.
Fixons n ∈ N. Alors, d’après les théorèmes de croissances comparées,limx→0
f (n)(x) = 0 .
Ainsi, en posant f (0) = 0, f est prolongée en une fonction de classe C∞
sur R vérifiant, de plus, f (n)(0) = 0 pour tout n ∈ N.
La formule de Taylor montre que f possède un développement limité à tout ordreen 0 et que f (x) = o(xn) en 0. Pourtant, f n’est pas la fonction nulle : elle ne s’an-nule même qu’en 0.Cet exemple montre que la connaissance des développements limités à tout ordreen 0 d’une fonction ne permet pas de déterminer cette fonction : deux fonctionsdistinctes peuvent avoir les mêmes développements limités.
On peut représenter graphiquement cette fonction : d’après les propriétés usuelleselle est positive, paire, tend vers 1 par valeurs inférieures en ±∞.
Nous venons de voir qu’en 0 elle tend vers 0 plus vite que toute puissance, autre-ment dit de manière très rapide : la courbe semble « plate » et pourtant f ne s’annulequ’en 0, contrairement aux apparences.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
181
Chapitre 7 • Dérivation, développements limités
9782100547678-Fresl-C7.qxd 5/07/10 9:22 Page 181

Exercice 7.15 : Synthèse : prolongement de fonctionet étude de suite implicite
Pour x ∈ R∗ on pose f (x) = x
ex − 1.
1. Montrer que f possède un prolongement par continuité à R.
2. Montrer que ce prolongement est de classe C1 sur R.
3. Montrer que, pour tout n ∈ N∗ , il existe un unique réel un tel que
f (un) = 1 + 1
n.
4. Déterminer limn→∞ un .
5. Déterminer un équivalent simple de un .
Les premières questions sont relativement simples car d’une forme classique : lesdeux premières se traitent par des arguments de limites et de développements limi-tés pour lever les indéterminations ; la troisième est typique d’une application duthéorème des valeurs intermédiaires.
En revanche, les deux dernières questions sont plus difficiles ; en effet, la suite enquestion est définie implicitement, il n’y a donc pas de méthode systématique pourl’étudier et aucune formule simple ne nous permet de voir à l’avance quel théorèmeinvoquer.
1. Nous pouvons bien sûr trouver cette limite avec un développement limité de l’ex-ponentielle mais nous sommes ici dans une situation plus simple déjà vue en termi-nale : il s’agit de l’inverse du taux d’accroissement de l’exponentielle en 0.
182
Partie 2 • Analyse
y = e –1/ x2
0
0– 1 1
1
2 3 4– 2– 3– 4
9782100547678-Fresl-C7.qxd 5/07/10 9:22 Page 182

f est bien définie et continue sur R∗ comme quotient de deux fonctionscontinues.De plus, d’après les limites usuelles du cours :
limx→1
f (x) = 1.
f possède donc un prolongement par continuité à R en posant f (0) = 1.
2. Nous allons utiliser le théorème de prolongement des fonctions de classe C1.
Il est clair que f est de classe C1 sur R∗ et nous savons déjà que f possède une limitefinie en 0 ; il n’y a plus qu’à prouver la convergence de f ′ en 0.
Notons tout d’abord que f est clairement de classe C1 sur R∗ .
De plus on a, pour x ∈ R∗, f ′(x) = (1 − x)ex − 1
(ex − 1)2.
Afin de déterminer la limite de f ′ en 0, effectuons les développements limi-tés à l’ordre 2 du numérateur et du dénominateur :
(1 − x)ex − 1 = (1 − x)(1 + x + 1
2x2) − 1 + o(x2)
= − 1
2x2 + o(x2)
(ex − 1)2 = (x + 1
2x2)2 + o(x2)
= x2 + o(x2).
On a donc les équivalents en 0 :
(1 − x)ex − 1 ∼ − 1
2x2
(ex − 1)2 ∼ x2
d’où, en effectuant le quotient : limx→0
f ′(x) = − 1
2.
Ainsi, f est continue sur R, de classe C1 sur R∗ et sa dérivée converge en 0.
D’après le théorème de prolongement des fonctions de classe C1 la fonction
f est donc de classe C1 sur R et, de plus, f ′(0) = − 1
2.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
183
Chapitre 7 • Dérivation, développements limités
9782100547678-Fresl-C7.qxd 5/07/10 9:22 Page 183
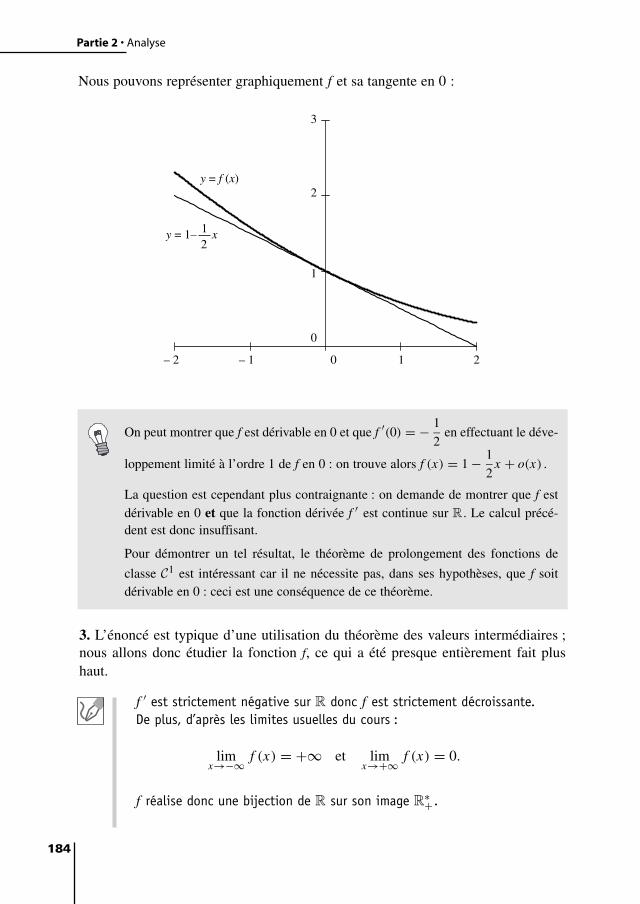
Nous pouvons représenter graphiquement f et sa tangente en 0 :
184
Partie 2 • Analyse
y = f (x)
0
0– 1 1
1
2
3
2– 2
y = 1– x12
On peut montrer que f est dérivable en 0 et que f ′(0) = − 1
2en effectuant le déve-
loppement limité à l’ordre 1 de f en 0 : on trouve alors f (x) = 1 − 1
2x + o(x) .
La question est cependant plus contraignante : on demande de montrer que f estdérivable en 0 et que la fonction dérivée f ′ est continue sur R . Le calcul précé-dent est donc insuffisant.
Pour démontrer un tel résultat, le théorème de prolongement des fonctions de
classe C1 est intéressant car il ne nécessite pas, dans ses hypothèses, que f soitdérivable en 0 : ceci est une conséquence de ce théorème.
3. L’énoncé est typique d’une utilisation du théorème des valeurs intermédiaires ;nous allons donc étudier la fonction f, ce qui a été presque entièrement fait plushaut.
f ′ est strictement négative sur R donc f est strictement décroissante.De plus, d’après les limites usuelles du cours :
limx→−∞ f (x) = +∞ et lim
x→+∞ f (x) = 0.
f réalise donc une bijection de R sur son image R∗+.
9782100547678-Fresl-C7.qxd 5/07/10 9:22 Page 184

En particulier, étant donné n ∈ N∗ , il existe un unique réel un tel que
f (un) = 1 + 1
n.
4. L’approche de cette question est malaisée car la suite est définie implicitement.
Cependant, au vu de la représentation graphique de f, on voit que cette suite estcroissante et négative, ce qui permet déjà de montrer sa convergence.
Autrement dit, nous allons utiliser la monotonie de f pour étudier celle de la suite(un)n∈N∗.
On a, pour tout n ∈ N∗ :
1 + 1
n + 1< 1 + 1
n
soit, par définition de un et un+1 :
f (un+1) < f (un).
f étant strictement décroissante :
un+1 > un.
La suite (un)n∈N∗ est donc strictement croissante.
De plus, pour tout n ∈ N∗ , f (un) > 1 = f (0) donc, f étant strictementdécroissante, un < 0 .
(un)n∈N∗ étant croissante et majorée elle est convergente. Soit sa limite.
De f (un) = 1 + 1
non tire en faisant tendre n vers +∞, f étant continue :
f () = 1.
Or f (0) = 1 et f est une bijection de R dans R∗+ donc = 0, soit encorelim
n→∞ un = 0 .
Les arguments que nous venons d’utiliser sont donc :
• le théorème de la limite monotone appliqué à la suite (un)n∈N∗ pour démontrerl’existence de la limite ;
• l’utilisation de la continuité de f (plus précisément, de la caractérisation séquen-tielle de la continuité) pour calculer cette limite.
Ainsi, pour calculer une limite, il peut être nécessaire de démontrer de manière abs-traite l’existence de cette limite pour ensuite l’injecter dans des formules précé-demment établies et en déduire sa valeur.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
185
Chapitre 7 • Dérivation, développements limités
9782100547678-Fresl-C7.qxd 5/07/10 9:22 Page 185

Une autre solution est de transformer l’expression : au lieu d’avoir un implicite-ment, nous allons chercher à écrire un = g(vn) avec (vn)n∈N∗ une suite « simple ».
Démonstration alternative :
D’après l’étude précédente, f réalise une bijection de R dans R∗+.
En notant g la bijection réciproque de f, on a donc : un = g
(1 + 1
n
).
Or g est continue, car réciproque d’une bijection continue entre deux inter-valles ; on a donc
limn→∞ g
(1 + 1
n
)= g(1).
Or f (0) = 1, d’où g(1) = 0 et enfin : limn→∞ un = g(1) = 0.
Cette deuxième méthode n’est pas anecdotique : elle utilise le théorème de la bijec-tion (continuité de la réciproque) et présente donc un intérêt. À vous de choisirlaquelle vous plaît le plus, mais les deux constituent des compétences exigibles.
Notez qu’à aucun moment nous n’avons explicité g ; nous n’en connaissonsd’ailleurs aucune expression en terme de fonctions usuelles mais ceci n’a pas d’im-portance dans cette question, seule sa continuité intervient.
5. Avec les notations de l’exercice :
1 + 1
n= f (un) = un
eun − 1
Or on sait que ex − 1 ∼ x quand x tend vers 0 ; comme limn→∞ un = 0 on a donc
eun − 1 ∼ un soit, en remplaçant dans l’expression ci-dessus : 1 ∼ 1 + 1
n… ce qui
n’est pas très intéressant.
Lorsque les équivalents de fonctions ne suffisent pas, il faut passer à la vitesse supé-rieure : les développements limités.
Dans le raisonnement précédent, on a en fait utilisé (et même redémontré) quef (0) = 1 et que f est continue en 0, i.e. f (x) = 0 + o(x). Autrement dit, nous avonsutilisé le développement limité à l’ordre 0 de f en 0.
Nous allons donc reprendre tout ceci mais cette fois à l’ordre 1.
186
Partie 2 • Analyse
9782100547678-Fresl-C7.qxd 5/07/10 9:22 Page 186

On a
f (x) = 1 − 1
2x + o(x)
d’où, comme limn→∞ un = 0 ,
f (un) = 1 − un
2+ o(un)
ce qui donne
1 − un
2+ o(un) = 1 + 1
n
et enfin
1
n= − un
2+ o(un).
On en déduit
un ∼ − 2
n.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
187
Chapitre 7 • Dérivation, développements limités
9782100547678-Fresl-C7.qxd 5/07/10 9:22 Page 187

9782100547678-Fresl-C7.qxd 5/07/10 9:22 Page 188

189
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
Exercice 8.1 : Intégrales de Wallis
Pour n ∈ N on pose In =∫ π
2
0sinn(t)dt.
1. Établir une relation de récurrence entre In et In+2.
2. Montrer que (In)n∈N est décroissante, strictement positive, puis que In+1 ∼ In.
3. En considérant le produit (n + 1)In+1 In déterminer un équivalent simple de In
quand n tend vers +∞.
4. Montrer que, pour tout n ∈ N :
I2n = (2n)!
(2nn!)2
π
2.
Ce dernier calcul n’utilise que la relation de la première question.
1. Les relations de récurrence entre les termes d’une suite définie par des intégralespeuvent très souvent s’obtenir à l’aide d’une intégration par parties.
Écrivons sinn+2(t) = sinn+1(t)sin(t) et intégrons par parties en primitivantsin(t) et dérivant sinn+1(t) :
In+2 = [−sinn+1(t)cos(t)]π
20 + (n + 1)
∫ π2
0sinn(t)cos2(t)dt .
Intégration 8
9782100547678-Fresl-C8.qxd 5/07/10 9:25 Page 189

En utilisant la relation cos2(t) = 1 − sin2(t) on voit que :
∫ π2
0sinn(t)cos2(t)dt =
∫ π2
0sinn(t)dt −
∫ π2
0sinn+2(t)dt = In − In+2
d’où, en remplaçant dans la première relation :
In+2 = (n + 1)(In − In+2)
d’où l’on tire la relation désirée :
In+2 = n + 1
n + 2In.
2. Nous devons visiblement utiliser la croissance de l’intégrale, i.e. intégrer uneinégalité entre les fonctions.
Il est ensuite demandé de montrer que In+1 ∼ In. Une possibilité intéressante est de
montrer que limn→∞
In+1
In= 1 : en effet, les inégalités précédemment obtenues
devraient nous permettre d’utiliser le théorème d’encadrement.
Pour tout t ∈ [0,π/2] et n ∈ N on a sinn+1(t) sinn(t) d’où, en intégrantsur [0,π/2], In+1 In : la suite (In)n∈N est donc décroissante.
De plus, étant donné n ∈ N, la fonction sinn est continue, positive et nonidentiquement nulle sur [0,π/2]. Son intégrale sur [0,π/2] est donc stric-tement positive, i.e. : In > 0.
Enfin, pour tout n ∈ N : In+2 In+1 In. En divisant par In, qui est stric-tement positif, et en utilisant la relation de récurrence établie dans la pre-mière question, on obtient :
n + 1
n + 2
In+1
In 1
d’où, d’après le théorème d’encadrement, limn→∞
In+1
In= 1, soit encore :
In+1 ∼ In.
Il y a effectivement quelque chose à démontrer ici : en effet, étant donnée une suite(un)n∈N , on n’a pas forcément un+1 ∼ un (considérer par exemple un = 2n).
190
Partie 2 • Analyse
9782100547678-Fresl-C8.qxd 5/07/10 9:25 Page 190

3. Nous avons déjà une relation entre In+2 et In ; nous pouvons donc en déduire unerelation entre (n + 2)In+2 In+1 et (n + 1)In+1 In .
(n + 1)In+1 In = (n + 1)In+1n + 2
n + 1In+2
= (n + 2)In+2 In+1.
La suite de terme général (n + 1)In+1 In est constante.
On a donc, pour tout n ∈ N : (n + 1)In+1 In = I1 I0.
Or : I0 =∫ π
2
01 dt = π
2et I1 =
∫ π2
0sin(t) dt = [−cos(t)]
π20 = 1 d’où :
∀n ∈ N,(n + 1)In+1 In = π
2.
Enfin, In+1 ∼ In d’après la question précédente et n + 1 ∼ n d’où
(n + 1)In+1 In ∼ nI 2n .
Comme (n + 1)In+1 In = π
2on a donc nI 2
n ∼ π
2d’où, d’après les règles de
calcul sur les équivalents et puisque In 0 :
In ∼√π
2n.
4. Une récurrence s’impose ! En effet, on connaît une relation de récurrence entreI2n et I2n+2 = I2(n+1) .
Par définition, (2n)! = 1 × 2 × · · · × (2n − 1) × (2n) . Une erreur fréquenteconsiste à oublier les facteurs impairs…En particulier, (2n + 2)! = (2n)! × (2n + 1) × (2n + 2) ; il faudra donc,pour obtenir (2n + 2)!, faire apparaître les deux facteurs 2n + 1 et 2n + 2.
Pour n ∈ N posons Hn : « I2n = (2n)!
(2nn!)2
π
2».
• H0 est vraie : en effet, I0 =∫ π/2
01 dt = π
2.
• Soit n ∈ N tel que Hn est vraie. Alors :
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
191
Chapitre 8 • Intégration
9782100547678-Fresl-C8.qxd 5/07/10 9:25 Page 191

I2n+2 = 2n + 1
2n + 2I2n
= 2n + 1
2n + 2
(2n)!
(2nn!)2
π
2
= (2n + 1)(2n + 2)
22(n + 1)2
(2n)!
(2nn!)2
π
2
= (2n + 2)!
(2n+1(n + 1)!)2
π
2
donc Hn+1 est vraie.
• Ainsi, d’après le principe de récurrence, Hn est vraie pour tout n ∈ N.
Nous avions démontré, dans l’exercice 1.7, qu’il existe un réel strictement positifλ tel que
n! ∼ λ nne−n√n.
On a donc :
(2n)! ∼ λ (2 n)2 ne−2n√
2 n
mais aussi2nn! ∼ λ (2 n)ne−n√
net
(2nn!)2 ∼ λ2 (2 n)2 ne−2 nnsoit, d’après la formule ci-dessus, une fois toutes les simplifications faites :
I2n ∼ π
λ√
2 n.
Or on a montré que In ∼√π
2 n, d’où I2n ∼
√π
4 n.
De ces deux équivalents on tire λ = √2π , i.e. :
n! ∼ nne−n√
2πn.
Il s’agit de la formule de Stirling, au programme de deuxième année.
Exercice 8.2 : Changements de variable usuels : règles de Bioche
Calculer l’intégrale suivante :∫1
sin(t) + tan(t)dt .
192
Partie 2 • Analyse
9782100547678-Fresl-C8.qxd 5/07/10 9:25 Page 192

Changement de variable
Nous cherchons une primitive d’une fraction rationnelle en les fonctions circu-laires : nous pouvons donc appliquer les règles de Bioche.
En changeant t en −t il vient :
1
sin(−t) + tan(−t)d(−t) = 1
sin(t) + tan(t)dt.
donc le changement de variable u = cos(t) permettra de se ramener à une fractionrationnelle en u.
L’élément différentiel sera alors du = −sin(t)dt .
Il faut donc à la fois faire apparaître sin(t) au numérateur mais aussi éliminer lesfonctions sinus et tangente pour ne plus avoir, hormis ce nouvel élément différen-tiel, que des termes en cos(t).
1
sin(t) + tan(t)= sin(t)
sin2(t) + sin(t)tan(t)
et
sin(t)tan(t) = sin2(t)
cos(t).
Le dénominateur est donc :
sin2(t) + sin(t)tan(t) = sin2(t)
(1 + 1
cos(t)
)
= (1 − cos2(t))
(1 + 1
cos(t)
)
et la fraction peut donc s’écrire :
1
sin(t) + tan(t)= cos(t)sin(t)
(1 − cos2(t))(1 + cos(t))
ce qui donne, avec u = cos(t) et du = −sin(t)dt :
∫1
sin(t) + tan(t)dt = −
∫u
(1 − u2)(1 + u)du =
∫u
(u2 − 1)(1 + u)du.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
193
Chapitre 8 • Intégration
9782100547678-Fresl-C8.qxd 5/07/10 9:25 Page 193

Posons u = cos(t). On a alors du = −sin(t)dt.
De plus :∫1
sin(t) + tan(t)dt =
∫cos(t)sin(t)
(1 − cos2(t))(1 + cos(t))dt
soit, avec le changement de variable suggéré :∫1
sin(t) + tan(t)dt =−
∫u
(1 − u2)(1 + u)du =
∫u
(u2 − 1)(1 + u)du.
Décomposition en éléments simples
Il faut désormais décomposer en éléments simples cette fraction rationnelle en uafin d’en déterminer aisément une primitive.
En factorisant le dénominateur il vient :
u
(u2 − 1)(1 + u)= u
(u − 1)(1 + u)2
et il existe donc trois réels a, b et c tels que
u
(u2 − 1)(1 + u)= a
u − 1+ b
1 + u+ c
(1 + u)2.
On constate que 1 est un pôle simple alors que −1 est un pôle double.
Pour calculer a, la méthode est simple : multiplier par u − 1, simplifier, puis faireu = 1.
Pour b et c, c’est plus difficile car tout ne se simplifiera pas aussi bien ; on commencera par calculer le coefficient du terme ayant la plus grande puissance, i.e.
c, en multipliant par (1 + u)2, puis en prenant, après simplification, u = −1.
• En multipliant par u − 1 on obtient :
u
(1 + u)2= a + b(u − 1)
1 + u+ c(u − 1)
(1 + u)2
soit, pour u = 1 : a = 1
4.
• En multipliant par (1 + u)2 il vient :
u
u − 1= a(1 + u)2
u − 1+ b(1 + u) + c
194
Partie 2 • Analyse
9782100547678-Fresl-C8.qxd 5/07/10 9:25 Page 194
soit, pour u = −1 : c = 1
2.
Ainsi :
u
(u − 1)(1 + u)2= 1/4
u − 1+ b
1 + u+ 1/2
(1 + u)2.
Si on multiplie par 1 + u pour ensuite prendre u = −1, nous tomberons sur une
forme indéterminée à cause des termes en (1 + u)2.
La solution est de regrouper tous ces termes ensemble : tout se simplifiera alors.
Éliminons le terme de degré 2 en le changeant de membre :
1/4
u − 1+ b
1 + u= u
(u − 1)(1 + u)2− 1/2
(1 + u)2
= u
(u − 1)(1 + u)2− 1/2 (u − 1)
(u − 1)(1 + u)2
= 1/2 (u + 1)
(u − 1)(1 + u)2
= 1/2
(u − 1)(1 + u)
D’où, en multipliant par 1 + u :
1/4 (1 + u)
u − 1+ b = 1/2
(u − 1)
et enfin, pour u = −1 : b = − 1
4.
• On a donc :
u
(u2 − 1)(1 + u)= u
(u − 1)(1 + u)2= 1/4
u − 1− 1/4
1 + u+ 1/2
(1 + u)2.
Primitives des éléments simples
Chaque terme possède une primitive usuelle bien connue.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
195
Chapitre 8 • Intégration
9782100547678-Fresl-C8.qxd 5/07/10 9:25 Page 195

D’après les formules usuelles nous avons successivement :
∫u
(u − 1)(1 + u)2du =
∫ (1/4
u − 1− 1/4
1 + u+ 1/2
(1 + u)2
)du
= 1
4ln(|u − 1|) − 1
4ln(|1 + u|) − 1
2
1
1 + u
= 1
4ln
(∣∣∣∣u − 1
u + 1
∣∣∣∣)
− 1
2
1
1 + u
Retour à la variable initiale
En remplaçant u par cos(t) il apparaîtra deux termes simplifiables par les formules
de trigonométrie : 1 + cos(t) = 2cos2(t/2) et 1 − cos(t) = 2sin2(t/2) , sans
oublier que 1
cos2= 1 + tan2 ; nous pourrons donc ainsi tout exprimer en termes de
la seule fonction tangente.
Comme u = cos(t) on a∣∣∣∣u − 1
u + 1
∣∣∣∣ =∣∣∣∣1 − cos(t)
1 + cos(t)
∣∣∣∣ = tan2(t/2)
et
1
1 + u= 1
1 + cos(t)
= 1
2cos2(t/2)
= 1
2(1 + tan2(t/2))
soit, en remplaçant dans la primitive trouvée plus haut :∫1
sin(t) + tan(t)dt = 1
2ln|tan(t/2)| − 1
4(1 + tan2(t/2)).
Pour finir, notons que l’on cherchait ici une primitive de la fonction et que le résul-tat est donc défini à une constante additive près ; on peut donc oublier la constante
additive –1
4dans le résultat et il est tout aussi correct d’écrire :
∫1
sin(t) + tan(t)dt = 1
2ln|tan(t/2)| − 1
4tan2(t/2).
196
Partie 2 • Analyse
9782100547678-Fresl-C8.qxd 5/07/10 9:25 Page 196

Exercice 8.3 : Changements de variable usuels : u = tan(t/2)
Calculer l’intégrale suivante :
∫ π2
−π2
1
4 + sin(t)dt
en posant u = tan(t/2) .Pour simplifier le résultat on admettra la formule suivante :
si a > 0, Arctan(a) + Arctan(1/a) = π/2
Les règles de Bioche ne permettent pas de trouver un changement de variable plussimple en sinus ou cosinus.
Le changement de variable u = tan(t/2) fonctionne cependant dans tous les caspour les fractions rationnelles de fonctions circulaires comme ici.
Nous savons en effet qu’alors sin(t) = 2u
1 + u2et (mais c’est inutile ici)
cos(t) = 1 − u2
1 + u2.
De plus, on a
du = 1
2(1 + tan2(t/2))dt = 1 + u2
2dt
soit encore dt = 2
1 + u2du .
Ainsi, nous aurons bien, tous calculs faits, l’intégrale d’une fraction rationnelle en u.
En posant u = tan(t/2) pour t ∈ [−π/2,π/2] on a :
• sin(t) = 2u
1 + u2;
• dt = 2
1 + u2du .
• Pour t = −π/2 (resp. π/2), u = −1 (resp. 1) ;Ainsi : ∫ π
2
−π2
1
4 + sin(t)dt =
∫ 1
−1
1
4 + 2u
1 + u2
2
1 + u2du
=∫ 1
−1
1
2u2 + u + 2du.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
197
Chapitre 8 • Intégration
9782100547678-Fresl-C8.qxd 5/07/10 9:26 Page 197

Nous nous sommes ainsi bien ramenés à une intégrale de fraction rationnelle, etmême mieux encore : elle est déjà décomposée en éléments simples! Nous échap-pons donc à cette étape fastidieuse.
En l’occurence, il s’agit de l’inverse d’un trinôme irréductible du second degré ;nous allons donc le mettre sous forme canonique puis effectuer un changement de
variable affine pour faire apparaître une expression de la forme 1
y2 + 1qui pourra
alors s’intégrer avec la fonction arctangente.
On a, en mettant le trinôme du dénominateur sous forme canonique :
2u2 + u + 2 = 2(u2 + 1
2u + 1)
= 2
((u + 1
4
)2
+ 15
16
)
soit :∫ 1
−1
1
2u2 + u + 2du = 1
2
∫ 1
−1
1(u + 1
4
)2
+ 15
16
du
= 8
15
∫ 1
−1
1(4u + 1√
15
)2
+ 1
du.
En effectuant le changement de variable y = 4u + 1√15
on a :
•
(4u + 1√
15
)2
+ 1 = y2 + 1 ;
• dy = 4√15
du soit du =√
15
4dy
• Pour u = −1 (resp. 1), y = − 3√15
(resp. 5√15
) ;
d’où :
198
Partie 2 • Analyse
9782100547678-Fresl-C8.qxd 5/07/10 9:26 Page 198

8
15
∫ 1
−1
1(4u + 1√
15
)2
+ 1
du = 8
15
∫ 5/√
15
−3/√
15
1
y2 + 1
√15
4dy
= 2√15
∫ 5/√
15
−3/√
15
1
y2 + 1dy
= 2√15
[Arctan(y)]5/√
15
−3/√
15
= 2√15
(Arctan(5/√
15) − Arctan(−3/√
15))
= 2√15
(Arctan(5/√
15) + Arctan(3/√
15))
Enfin, vu que Arctan(a) + Arctan(1/a) = π
2si a > 0 on obtient, pour
a = 5/√
15 (et 1/a = 3/√
15) :∫ π2
−π2
1
4 + sin(t)dt = π√
15
Une idée de démonstration de cette formule sur les Arctan est proposée à la fin del’exercice 5.11.
Exercice 8.4 : Changements de variable usuels : u = ex
Calculer ∫ex/2ch(x/2)
ch(x)dx
à l’aide du changement de variable u = ex.
Toute intégrale de la forme ∫
F(ex)dx , avec F une fraction rationnelle, peut se cal-
culer simplement à l’aide du changement de variable u = ex : on obtient alors àcoup sûr une intégrale de fraction rationnelle.
Ceci s’applique, en particulier, en présence de fonctions hyperboliques. Nous allonsexprimer la fonction à intégrer à l’aide de la seule fonction exponentielle.
ex/2ch(x/2)
ch(x)=
ex/2
(ex/2 + e−x/2
2
)ex + e−x
2© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
199
Chapitre 8 • Intégration
9782100547678-Fresl-C8.qxd 5/07/10 9:26 Page 199

soit, en développant le numérateur :
ex/2ch(x/2)
ch(x)= ex + 1
ex + e−x
et enfin, en multipliant numérateur et dénominateur par ex :
ex/2ch(x/2)
ch(x)= e2x + ex
e2x + 1.
Avec u = ex on a donc
e2x + ex
e2x + 1= u2 + u
u2 + 1.
Afin de terminer le changement de variable, il faut déterminer le nouvel élément dif-férentiel.
Comme on a posé u = ex, on a x = ln(u), donc dx = 1
udu. Il ne reste plus qu’à
écrire le résultat.
En posant u = ex il vient :
∫ex/2ch(x/2)
ch(x)dx =
∫u2 + u
u2 + 1× 1
udu
=∫
u + 1
u2 + 1du.
Nous allons essayer de faire apparaître un terme en f ′(u)/ f (u), dont une primitivesera ln(| f (u)|) .
Le dénominateur étant u2 + 1, nous voulons voir l’expression 2u
u2 + 1. En ajustant
le coefficient dominant du numérateur :
u + 1
u2 + 1= 1
2
2u + 2
u2 + 1
= 1
2
2u
u2 + 1+ 1
u2 + 1
et chaque terme possède une primitive usuelle simple.
200
Partie 2 • Analyse
9782100547678-Fresl-C8.qxd 5/07/10 9:26 Page 200

Tout d’abord
u + 1
u2 + 1= 1
2
2u
u2 + 1+ 1
u2 + 1
soit, d’après les formules usuelles du cours,∫u + 1
u2 + 1du = 1
2ln(u2 + 1) + Arctan(u)
et enfin, en revenant à la variable initiale :∫ex/2ch(x/2)
ch(x)dx = 1
2ln(e2x + 1) + Arctan(ex)
Exercice 8.5 : Intégrale de GauβCet exercice utilise des résultats de l’exercice 8.1 (intégrales de Wallis).
Pour a ∈ R+ on pose F(a) =∫ a
0e−t2
dt.
Pour n ∈ N, In désigne l’intégrale de Wallis vue précédemment.
1. Montrer que F est bien définie et possède une limite (éventuellement +∞)quand a tend vers +∞.On fixe n ∈ N∗ .
2. À l’aide d’un argument de convexité montrer que, pour tout t ∈ [0,√
n] :(1 − t2
n
)n
e−t2
(1 + t2
n
)−n
.
3. On intègre de 0 à √
n les inégalités précédentes. On effectue le changement devariable t = √
n sin(u) dans celle de gauche et t = √n tan(v) dans celle de
droite. Quel encadrement obtient-on ? On fera apparaître les intégrales de Wallis.
4. À l’aide de l’équivalent de In trouvé au 8.1 donner la valeur de .
1. Il suffit d’étudier la fonction F, ce qui est facile puisque sa dérivée n’est autre quela fonction sous l’intégrale.
F est la primitive de t → e−t2nulle en 0. Sa dérivée est positive donc cette
fonction est croissante sur R+ : d’après le théorème de la limite monotoneelle possède donc une limite en +∞ qui peut éventuellement être +∞.
2. La difficulté de ce genre de question est de trouver la fonction convexe à laquelleon va appliquer les inégalités de convexité. Cependant, la fonction exponentielle
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
201
Chapitre 8 • Intégration
9782100547678-Fresl-C8.qxd 5/07/10 9:26 Page 201

joue visiblement un rôle central dans l’exercice et nous allons essayer de démarreravec la plus simple inégalité de convexité la concernant : pour tout réel x ,1 + x ex.
Pour faire apparaître 1 − t2
n, nous remplaçons simplement x par − t2
net on obtient
1 − t2
n e−t2/n.
Il n’y a plus qu’à élever à la puissance n pour obtenir ce que l’on souhaite… Maison ne peut en général pas élever à une puissance donnée des inégalités. C’est parceque les deux membres sont positifs que ceci est possible.
On a l’inégalité de convexité :
∀x ∈ R,1 + x ex .
Etant donné un réel t ∈ [0,√
n] on a donc :
0 1 − t2
n e−t2/n.
Comme ces réels sont positifs et n ∈ N∗ on en déduit en élevant à la puis-sance n :
(1 − t2
n
)n
e−t2.
De même, pour t ∈ [0,√
n] :
0 < 1 + t2
n et2/n.
Comme ces réels sont strictement positifs on obtient en élevant à la puis-sance n :
0 <
(1 + t2
n
)n
et2
et enfin, en considérant l’inverse :
e−t2
(1 + t2
n
)−n
.
202
Partie 2 • Analyse
9782100547678-Fresl-C8.qxd 5/07/10 9:26 Page 202

3. L’intégration suggérée donne l’encadrement :
∫ √n
0
(1 − t2
n
)n
dt ∫ √
n
0e−t2
dt ∫ √
n
0
(1 + t2
n
)−n
dt .
Les changements de variables étant imposés par l’énoncé, il ne reste plus qu’à appli-quer les formules du cours.
Membre de gauche
En posant t = √n sin(u) et u ∈ [−π/2;π/2] on a :
• Pour t = 0 (resp. √
n ), u = 0 (resp. π/2) ;
•
(1 − t2
n
)n
= (1 − sin2(u)
)n = cos2n(u) ;
• dt = √n cos(u)du .
Ainsi :
∫ √n
0
(1 − t2
n
)n
dt =∫ π/2
0cos2n(u)(
√n cos(u))du
= √n
∫ π/2
0cos2n+1(u)du
= √n I2n+1.
Membre de droite
En posant t = √n tan(v)et v ∈] − π/2;π/2[ on a :
• Pour t = 0 (resp. √
n ), u = 0 (resp. π/4) ;
•
(1 + t2
n
)−n
= (1 + tan2(v)
)−n;
• dt = √n (1 + tan2(v))dv .
Ainsi :
∫ √n
0
(1 + t2
n
)−n
dt =∫ π/4
0
(1 + tan2(v)
)−n(√
n(1 + tan2(v))dv
= √n
∫ π/4
0
(1 + tan2(v)
)−n+1dv.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
203
Chapitre 8 • Intégration
9782100547678-Fresl-C8.qxd 5/07/10 9:26 Page 203

Afin de faire apparaître une intégrale de Wallis on utilise la relation
1 + tan2(v) = 1
cos2(v), d’où :
∫ √n
0
(1 + t2
n
)−n
dt =∫ π/4
0cos2n−2(v)dv.
Enfin, la fonction v → cos2n−2(v) est positive sur [0,π/2] et[0,π/4] ⊂ [0,π/2] d’où :
∫ π/4
0cos2n−2(v)dv
∫ π/2
0cos2n−2(v)dv = I2n−2
soit, en reportant dans le calcul initial :
∫ √n
0
(1 + t2
n
)−n
dt √
n I2n−2.
Conclusion
Comme ∫ √
n
0e−t2
dt = F(√
n) par définition de F on a donc :
√n I2n+1 F(
√n)
√n I2n−2.
4. Nous pouvons utiliser les équivalents des intégrales de Wallis afin de déterminerles limites des expressions qui interviennent ici.
Calculons la limite quand n tend vers +∞ de chaque membre de l’encadre-ment.
On a In ∼√π
2ndonc
I2n+1 ∼√
π
4n + 2
∼ 1
2
√π
n
car 4n + 2 ∼ 4n donc √
4n + 2 ∼ 2√
n .
On a donc : limn→∞ (
√n I2n+1) = 1
2
√π .
204
Partie 2 • Analyse
9782100547678-Fresl-C8.qxd 5/07/10 9:26 Page 204

De même :
I2n−2 ∼√
π
4n − 4
∼ 1
2
√π
n
d’où limn→∞ (
√n I2n−2) = 1
2
√π.
Enfin, par définition, limn→∞ F(
√n) = .
On obtient donc, en passant à la limite dans l’encadrement précédent :
= 1
2
√π
ce que l’on notera abusivement (avec une notation qui sera précisée endeuxième année) : ∫ +∞
0e−t2
dt = 1
2
√π.
Exercice 8.6 : Sommes de Riemann
1. Calculer limn→∞
(n−3/2
n∑k=1
√n + k
).
2. Calculer limn→∞
n
√n!
(2nn
)nn
.
1. Il faut faire apparaître une expression de la forme :
b − a
n
n∑k=1
f
(a + k
b − a
n
)
dont on sait, d’après le cours, qu’elle converge vers ∫ b
af (x)dx quand n tend vers
+∞.
Le plus simple, pour cela, est d’abord de faire apparaître dans le terme général dela somme le quotient k/n, puis un facteur 1/n devant la somme ; pour cela nous uti-
liserons la relation √
n + k = √n
√1 + k
n.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
205
Chapitre 8 • Intégration
9782100547678-Fresl-C8.qxd 5/07/10 9:26 Page 205

n−3/2n∑
k=1
√n + k = 1
n
n∑k=1
√1 + k
n
qui tend vers ∫ 1
0
√1 + x dx lorsque n tend vers l’infini.
Il faut bien sûr désormais calculer cette intégrale ! Ici, le calcul est simple car onreconnaît une dérivée usuelle ; en pratique, il peut bien sûr arriver que l’on obtiennedes intégrales plus compliquées nécessitant une intégration par parties ou un chan-gement de variable.
∫ 1
0
√1 + x dx =
∫ 1
0(1 + x)1/2dx
=[(1 + x)3/2
3/2
]1
0
= 2
3
(23/2 − 1
).
2. Il faut tout d’abord faire apparaîte des sommes de Riemann là où on n’en voit pasencore !
L’expression donnée faisant intervenir des factorielles et des puissances, c’est-à-dire des produits, nous allons plutôt considérer son logarithme.
Tout d’abord :
n!
(2n
n
)= (2n)!
n!= (n + 1) · · · (2n).
On a donc, en divisant chacun des n termes du produit par n :
n!(2n
n
)nn
=(
1 + 1
n
)· · ·
(1 + n
n
)
et enfin
ln
(n!
(2nn
)nn
)= ln
(1 + 1
n
)+ · · · + ln
(1 + n
n
)
=n∑
k=1
ln
(1 + k
n
).
206
Partie 2 • Analyse
9782100547678-Fresl-C8.qxd 5/07/10 9:26 Page 206

Ainsi :
ln
(n
√n!
(2nn
)nn
)= 1
nln
(n!
(2nn
)nn
)
= 1
n
n∑k=1
ln
(1 + k
n
).
On reconnaît une somme de Riemann associée à la fonction continue
x → ln(1 + x) sur le segment [0,1], sa limite est donc ∫ 1
0ln(1 + x)dx.
On reconnaît l’un des exemples classiques d’intégrale se calculant par parties. Plusprécisément, nous allons voir ln(1 + x) comme le produit 1 × ln(1 + x) et choisircomme primitive de la constante 1 la fonction x → x + 1.
Bien sûr, si l’on avait plutôt choisi x comme primitive de 1 nous aurions abouti maisau prix de calculs supplémentaires. Ici, le choix judicieux de la constante d’inté-gration permet de simplifier l’intégrale apparaissant dans le second membre de laformule d’intégration par parties.
Ce choix judicieux d’une primitive dans une intégration par parties a déjà été ren-contré en cours dans la démonstration de la formule de Taylor avec reste intégral.
D’après la formule d’intégration par parties :∫ 1
0ln(1 + x)dx = [(1 + x)ln(1 + x)]1
0 −∫ 1
01dx
= 2ln(2) − 1.
C’est le logarithme de la limite demandée, et cette limite est donc
limn→∞
n
√n!
(2nn
)nn
= exp(2 ln(2) − 1) = 4
e.
Exercice 8.7 : Inégalité de Taylor-Lagrange
Soit f ∈ C2(R) .On suppose que f et f ′′ sont bornées sur R et on note
M0 = sup| f (x)| : x ∈ RM2 = sup| f ′′(x)| : x ∈ R
1. On suppose que M2 = 0. Montrer que f est constante.On suppose dans la suite que M2 > 0.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
207
Chapitre 8 • Intégration
9782100547678-Fresl-C8.qxd 5/07/10 9:26 Page 207

2. On fixe un réel a.Montrer que
∀h ∈ R∗+,| f ′(a)| ϕ(h)
où la fonction ϕ est définie par :
ϕ(h) = M0
h+ hM2
2.
On pourra pour cela commencer par écrire l’inégalité de Taylor-Lagrange sur lesintervalles [a,a + h] et [a − h,a].
3. En déduire que f ′ est bornée sur R et que, en posant
M1 = sup| f ′(x)| : x ∈ Ron a la majoration :
M1 √
2M0 M2.
On remarque que cette majoration reste valable si M2 = 0.
1. M2 est un majorant de | f ′′| qui est par ailleurs positive : si M2 = 0 alors f ′′ = 0,d’où f ′ constante et enfin f est affine, i.e. est polynôme de degré inférieur ou égal à 1.
Il reste à déterminer ses coefficients : le raisonnement ci-dessus montre que sousl’hypothèse de la question la fonction f est d’une certaine forme mais la réciproquen’est pas forcément vraie !C’est même clair : une fonction affine n’est pas bornée sur R ... sauf si elle estconstante.Autrement dit, nous venons encore une fois de raisonner par analyse-synthèse.
Si M2 = 0, f ′′ = 0. f ′ est donc constante et f est une fonction affine : ilexiste deux réels a et b tels que
∀x ∈ R, f (x) = a x + b.
Cependant, f est bornée. On a donc a = 0 et ainsi f est constante.
2. Rappelons l’inégalité de Taylor-Lagrange à l’ordre 2 : si f est une application de
classe C2 sur un intervalle I alors, pour tous éléments a et b de I :
| f (b) − f (a) − (b − a) f ′(a)| (b − a)2
2M
où M est un majorant de | f ′′| sur [a,b].
208
Partie 2 • Analyse
9782100547678-Fresl-C8.qxd 5/07/10 9:26 Page 208

Dans la situation présentée ici, on peut prendre M = M2 et b = a ± h, ce qui four-nit les deux inégalités :
| f (a + h) − ( f (a) + h f ′(a))| h2
2M2
et
| f (a − h) − ( f (a) − h f ′(a))| h2
2M2.
La difficulté est d’obtenir une majoration de | f ′(a)| ; on peut tenter de faire appa-raître l’inégalité triangulaire.
Pour voir comment faire, commençons par manipuler les expressions ci-dessus sansles valeurs absolues. Il est alors simple de faire apparaître f ′(a) par soustraction :(
f (a + h) − ( f (a) + h f ′(a))) − (
f (a − h) − ( f (a) − h f ′(a)))
= −2h f ′(a) + f (a + h) − f (a − h)
puis on isole f ′(a) en changeant le terme f (a + h) − f (a − h) de membre.
On a la relation :
−2h f ′(a) = (f (a + h) − ( f (a) + h f ′(a))
)− (
f (a − h) − ( f (a) − h f ′(a))) + f (a − h) − f (a + h)
L’inégalité triangulaire donne :
|2h f ′(a)| | f (a + h) − ( f (a) + h f ′(a))| + | f (a − h)
−( f (a) − h f ′(a))| + | f (a − h)| + | f (a + h)| h2 M2 + 2M0
2h ϕ(h)
car, d’après l’inégalité de Taylor-Lagrange, les quantités | f (a + h)
−( f (a) + h f ′(a))| et | f (a − h) − ( f (a) − h f ′(a))| sont toutes deux
majorées par h2
2M2.
En divisant par 2h , qui est strictement positif, on obtient l’inégalité sou-haitée :
| f ′(a)| ϕ(h).
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
209
Chapitre 8 • Intégration
9782100547678-Fresl-C8.qxd 5/07/10 9:26 Page 209

3. Cette majoration est vraie pour tout réel a et tout réel strictement positif h ; enparticulier, en prenant h = 1, on a
∀a ∈ R,| f ′(a)| ϕ(1)
ce qui montre que f ′ est bornée sur R : ainsi, M1 est bien défini.
Pour tout réel h > 0 le nombre ϕ(h) est un majorant de | f ′| : on a donc M1 ϕ(h).
Il n’y a plus qu’à déterminer l’éventuel minimum m de ϕ sur R∗+ : on aura alorsM1 m . Pour cela, il suffit d’étudier ϕ .
Étudions la fonction ϕ sur R∗+.
ϕ est dérivable et on a, pour tout h ∈ R∗+ :
ϕ′(h) = − M0
h2+ M2
2
donc ϕ possède un minimum en
h0 =√
2M0
M2.
En particulier, M1 ϕ(h0). Or
ϕ(h0) = M0
√M2
2M0+ M2
2
√2M0
M2
=√
M0 M2
2+
√M0 M2
2
=√
2M0 M2
d’où le résultat demandé :
M1 √
2M0 M2
Nous avions ici une relation vraie pour tout a ∈ R et h ∈ R∗+.Dans cette situation, nous avons le choix entre fixer a et considérer ainsi uneminoration de la fonction ϕ par une constante ou fixer h et obtenir ainsi une majo-ration de | f ′| par une constante.
210
Partie 2 • Analyse
9782100547678-Fresl-C8.qxd 5/07/10 9:26 Page 210

Exercice 8.8 : Lemme de Riemann-Lebesgue (MPSI)
Soient deux réels a et b avec a < b .
1. Soit f ∈ C1([a,b],R). Montrer que limn→∞
∫ b
af (t)sin(nt)dt = 0.
2. Soit f une fonction en escalier sur [a,b]. Montrer qu’on a encore
limn→∞
∫ b
af (t)sin(nt)dt = 0.
3. En déduire que ce résultat reste vrai pour une fonction continue par morceaux sur [a,b].
1. f étant de classe C1 on peut intégrer par parties en dérivant f ; un facteur 1/n appa-raîtra dans une primitive de sin(nt) ce qui permettra de montrer que la limite estbien nulle.
L’intégration par parties est bien un argument spécifique aux fonctions de classe C1 :ce calcul sera impossible dans les questions suivantes car la fonction f n’y seramême plus nécessairement continue.
En intégrant par parties on a, pour n =/ 0 :
∫ b
af (t)sin(nt)dt =
[f (t)
−cos(nt)
n
]b
a+ 1
n
∫ b
af ′(t)cos(nt)dt .
D’une part, le crochet vaut 1
n( f (a)cos(na) − f (b)cos(nb)) qui tend vers 0
quand n tend vers +∞.
D’autre part, on peut majorer la dernière intégrale en introduisant le réel
M = max| f ′(t)| : t ∈ [a,b]
(qui existe car f ′ est continue sur le segment [a,b]) :
∣∣∣∣1
n
∫ b
af ′(t)cos(nt)dt
∣∣∣∣ M(b − a)
n
donc cette intégrale tend aussi vers 0 quand n tend vers +∞.
Ainsi, on a bien limn→∞
∫ b
af (t)sin(nt)dt = 0 .
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
211
Chapitre 8 • Intégration
9782100547678-Fresl-C8.qxd 5/07/10 9:26 Page 211

2. f étant en escalier sur [a,b] il existe un entier naturel non nul p, une subdivisiona = c0 < · · · < cp = b de [a,b] et p nombres réels (pas forcément distincts)λ0,. . . ,λp−1 tels que, pour tout k ∈ 0,. . . ,p − 1 , et pour tout x ∈]ck,ck+1[ ,f (x) = λk.
Attention au choix des notations! La lettre n étant déjà prise par l’énoncé il fauten choisir une nouvelle pour numéroter les éléments de la subdivision.
Sur chacun des intervalles ]ck,ck+1[ le calcul est simple puisque f y est constante ;nous allons donc découper le segment [a,b] aux points ck à l’aide de la relation deChasles.
D’après la relation de Chasles :∫ b
af (t)sin(nt)dt =
p−1∑k=0
∫ ck+1
ck
f (t)sin(nt)dt .
Or, à k fixé et pour n ∈ N∗ quelconque :∫ ck+1
ck
f (t)sin(nt)dt =∫ ck+1
ck
λksin(nt)dt
=[−λk
cos(nt)
n
]ck+1
ck
= λk
n(cos(n ck+1) − cos(n ck)).
Comme la fonction cosinus est bornée en valeur absolue par 1 sur R on adonc : ∣∣∣∣
∫ ck+1
ck
f (t)sin(nt)dt
∣∣∣∣ 2|λk |n
.
On conclut avec la relation de Chasles donnée plus haut :∣∣∣∣∫ b
af (t)sin(nt)dt
∣∣∣∣ =∣∣∣∣∣
p−1∑k=0
∫ ck+1
ck
f (t)sin(nt)dt
∣∣∣∣∣
p−1∑k=0
∣∣∣∣∫ ck+1
ck
f (t)sin(nt)dt
∣∣∣∣
2
n(|λ0| + · · · + |λp−1|).
Ainsi : limn→∞
∫ b
af (t)sin(nt)dt = 0 .
212
Partie 2 • Analyse
9782100547678-Fresl-C8.qxd 5/07/10 9:26 Page 212

3. Commençons par raisonner qualitativement.
On sait que, si ϕ est une fonction en escalier sur [a,b],∫ b
aϕ(t)sin(nt)dt est proche
de 0 pour n assez grand. De plus, f étant continue par morceaux, on sait qu’on peutl’approcher aussi près que l’on veut par une fonction en escalier ϕ et donc que les
intégrales de f et de ϕ seront proches ; ainsi, pour n assez grand,∫ b
af (t)sin(nt)dt
est proche de 0.
Ainsi, on commencera par approcher f par une fonction en escalier ϕ puis on consi-
dérera des entiers assez grands pour que ∫ b
aϕ(t)sin(nt)dt soit proche de 0.
Il reste maintenant à formaliser ceci en utilisant rigoureusement le théorème d’ap-proximation des fonctions continues par morceaux par les fonctions en escalier.
Soit un réel h > 0.
f étant continue par morceaux sur le segment [a,b] il existe une fonction ϕen escalier sur [a,b] telle que : ∀x ∈ [a,b],| f (x) − ϕ(x)| h .
De plus, limn→∞
∫ b
aϕ(t)sin(nt)dt = 0 ; il existe donc un entier naturel N tel
que, pour tout entier n N,
∣∣∣∣∫ b
aϕ(t)sin(nt)dt
∣∣∣∣ h .
On a donc, pour n N :
∣∣∣∣∫ b
af (t)sin(nt)dt
∣∣∣∣ =∣∣∣∣∫ b
a( f (t) − ϕ(t))sin(nt)dt +
∫ b
aϕ(t)sin(nt)dt
∣∣∣∣
∣∣∣∣∫ b
a( f (t)−ϕ(t))sin(nt)dt
∣∣∣∣+∣∣∣∣∫ b
aϕ(t)sin(nt)dt
∣∣∣∣
∫ b
a| f (t) − ϕ(t)||sin(nt)|dt + h
(b − a + 1)h.
Considérons maintenant un réel ε > 0. Posons h = ε/(b − a + 1). Soit ϕla fonction en escalier et N l’entier naturel ci-dessus correspondant à cechoix de h.
On a alors, pour tout entier n N :
∣∣∣∣∫ b
af (t)sin(nt)dt
∣∣∣∣ ε .
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
213
Chapitre 8 • Intégration
9782100547678-Fresl-C8.qxd 5/07/10 9:26 Page 213

Ceci signifie exactement, par définition de la limite d’une suite, que
limn→∞
∫ b
af (t)sin(nt)dt = 0.
On voit que, pour arriver à « ε » à la fin, il a fallu écrire le théorème d’ap-proximation avec h. Ceci est courant et, pour trouver la bonne forme de h à poser,il est généralement utile de commencer avec h puis, a posteriori, de choisir h enfonction de ε pour obtenir exactement l’inégalité souhaitée.
Exercice 8.9 : Étude d’une fonction définie par une intégralePour x ∈ R∗+ on pose
f (x) =∫ 2x
x
cos(t)
tdt .
1. Montrer que f est dérivable sur R∗+ et donner une expression de sa dérivée sanssymbole intégral (ne pas chercher une primitive explicite de la fonction intégrée).
2. Montrer que limx→+∞ f (x) = 0 (on pourra intégrer par parties avant de majorer
l’intégrale).
3. Montrer que f possède une limite finie en 0 que l’on déterminera. On pourraétudier le comportement quand x tend vers 0 de∫ 2x
x
cos(t) − 1
tdt .
1. La fonction intégrée ne possède pas de primitive exprimable à l’aide des fonc-tions usuelles ; les changements de variable ou intégrations par parties que l’onpourrait être tenté d’essayer ne simplifient pas l’expression.
Cependant, nous savons calculer les dérivées d’expressions de ce type ; plus préci-
sément, la dérivée d’une application de la forme x → ∫ xa g(t)dt , avec a fixé et g
continue, est tout simplement la fonction g (ce résultat est parfois appelé théorèmefondamental de l’analyse). Ici, x apparaît dans les deux bornes, ce qui n’est pascontraignant car on peut utiliser la relation de Chasles :
∫ 2x
x
cos(t)
tdt =
∫ 1
x
cos(t)
tdt +
∫ 2x
1
cos(t)
tdt =
∫ 2x
1
cos(t)
tdt −
∫ x
1
cos(t)
tdt .
214
Partie 2 • Analyse
9782100547678-Fresl-C8.qxd 5/07/10 9:26 Page 214

Formulé autrement : si on pose F(x) = ∫ x1
cos(t)t dt (qui est, d’après le cours, la pri-
mitive nulle en 1 de x → cos(x)x ), on a f (x) = F(2x) − F(x) .
La fonction t → cos(t)
test définie et continue sur R∗+ et possède donc une
primitive F.
Par ailleurs, f (x) = F(2x) − F(x) donc, F étant dérivable, f l’est égale-ment. De plus :
∀x ∈ R∗+, f (x) = 2 F ′(2x) − F ′(x)
soit
∀x ∈ R∗+, f ′(x) = 2
cos(2x)
2x− cos(x)
x= cos(2x) − cos(x)
x
ou encore, en utilisant la relation cos(2x) − cos(x) =−2 sin(x/2)sin(3x/2) :
∀x ∈ R∗+, f ′(x) = −2
sin(x/2)sin(3x/2)
x
L’utilisation de la formule de trigonométrie pour factoriser la dernière expressionn’est pas absolument nécessaire au regard de la question posée. Ceci dit, il est utilede savoir factoriser ce genre d’expression pour pouvoir, si nécessaire, détermineraisément le signe et les points d’annulation de la fonction.
2. Une majoration directe ne permet pas de conclure. En effet, la seule majorationsimple possible du cosinus sur R est la constante 1. On obtient alors :
∀x ∈ R∗+, | f (x)|
∫ 2x
x
1
tdt = ln(2)
qui ne permet pas de conclure.
L’idée de l’intégration par partie est de faire apparaître 1/t2 dans l’intégrale, ce quifournira un terme en 1/x dans la majoration.
Nous allons donc « dériver 1/t et primitiver cos(t) ».
D’après la formule d’intégration par parties :∫ 2x
x
cos(t)
tdt =
[sin(t)
t
]2x
x+
∫ 2x
x
sin(t)
t2dt
= sin(2x)
2x− sin(x)
x+
∫ 2x
x
sin(t)
t2dt .
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
215
Chapitre 8 • Intégration
9782100547678-Fresl-C8.qxd 5/07/10 9:26 Page 215

Les deux premiers termes tendent clairement vers 0 quand x tend vers +∞. Resteà traiter l’intégrale : cette fois, la majoration fournira un résultat intéressant.
Une majoration grossière donne∣∣∣∣∫ 2x
x
sin(t)
t2
∣∣∣∣ ∫ 2x
x
1
t2dt = 1
2x.
Ainsi, l’expression de f (x) trouvée plus haut est la somme de trois termestendant vers 0 quand x tend vers +∞ : on a donc lim
x→+∞ f (x) = 0.
3. Le problème de la définition de f est que la fonction intégrée diverge en 0. Dansl’intégrale qu’il est ici suggéré d’étudier, on peut effectuer une majoration simple,encore une fois grâce à une formule de trigonométrie.
Comme cos(t) − 1 = −2 sin2(t/2) pour tout réel t on a :
∀x ∈ R∗+,
∫ 2x
x
cos(t) − 1
tdt = −
∫ 2x
x
2 sin2(t/2)
tdt .
En utilisant l’inégalité |sin(θ)| |θ|, vraie pour tout réel |θ|, il vient suc-cessivement, pour tout réel x > 0 :∣∣∣∣
∫ 2x
x
cos(t) − 1
tdt
∣∣∣∣ ∫ 2x
x
∣∣∣∣2sin2(t/2)
t
∣∣∣∣ dt
∫ 2x
x
t2/2
tdt = 3x2
4.
Ainsi, limx→0
(∫ 2x
x
cos(t) − 1
tdt
)= 0 .
Par ailleurs :
f (x) =∫ 2x
x
cos(t)
tdt =
∫ 2x
x
cos(t) − 1
tdt +
∫ 2x
x
1
tdt
et ∫ 2x
x
1
tdt = ln(2).
En conclusion :
limx→0
f (x) = ln(2).
216
Partie 2 • Analyse
9782100547678-Fresl-C8.qxd 5/07/10 9:26 Page 216

Exercice 8.10 : Intégrales doubles : rectangle et triangle
1. Soit R le rectangle [0,2] × [0,1]. Calculer
I =∫∫
R(x + y)2dxdy.
2. Soit T le triangle de sommets (0,0), (1,0) et (0,1). Calculer
J =∫∫
Tx2ydxdy.
1. Il s’agit d’une intégrale sur un rectangle dont les côtés sont parallèles aux axes :autrement dit, le domaine d’intégration est l’ensemble des couples (x,y) avec0 x 2 et 0 y 1.
Dans cette situation, c’est-à-dire quand les deux variables varient entre des bornesfixes, nous avons le choix de l’ordre d’intégration : c’est le théorème de Fubini.
On a ∫∫R
(x + y)2dxdy =∫ 1
0
∫ 2
0(x + y)2dxdy
Calculons l’intégrale intérieure : on considère y comme une constante. Ilvient :
∫ 2
0(x + y)2dx =
[1
3(x + y)3
]2
0
= 1
3((y + 2)3 − y3)
= 1
3(6y2 + 12y + 8)
d’où :
I =∫ 1
0
1
3(6y2 + 12y + 8)dy
= 1
3
[2y3 + 6y2 + 8y
]10
= 16
3.
D’après le théorème de Fubini on aurait pu intégrer d’abord par rapport à y puis parrapport à x . Cela aurait donné les calculs suivants :©
Dun
od. L
a ph
otoc
opie
non
aut
oris
ée e
st u
n d
élit
.
217
Chapitre 8 • Intégration
9782100547678-Fresl-C8.qxd 5/07/10 9:26 Page 217
∫ 1
0(x + y)2dy =
[1
3(x + y)3
]1
0
= 1
3((x + 1)3 − x3)
= 1
3(3x2 + 3x + 1)
puis
I =∫ 2
0
1
3(3x2 + 3x + 1)dx
= 1
3
[x3 + 3
2x2 + x
]2
0
= 16
3.
2. Cherchons une description de T à l’aide d’encadrements de x et y.
On peut voir T comme l’ensemble des couples (x,y) avec 0 x 1 et
0 y 1 − x. Dans ce cas, J =∫ 1
0
∫ 1−x
0x2ydydx .
Nous n’avons plus le choix de l’ordre d’intégration : la dernière intégrale (cellequi se trouve à l’extérieur) doit avoir des bornes fixes pour avoir un sens !
Si l’on préfère décrire T comme l’ensemble des couples (x,y) avec 0 x 1 − y
et 0 y 1, il faut intégrer dans l’autre sens : J =∫ 1
0
∫ 1−y
0x2ydxdy .
D’après le cours, les deux calculs donnent bien le même résultat.
Les éléments de T sont décrits par les encadrements :0 x 1
0 y 1 − x
On a donc :
J =∫ 1
0
∫ 1−x
0x2ydydx .
Intégrale intérieure : x est constant et∫ 1−x
0x2ydy =
[x2 y2
2
]1−x
0
= 1
2x2(1 − x)2
= 1
2(x4 − 2x3 + x2).
218
Partie 2 • Analyse
9782100547678-Fresl-C8.qxd 5/07/10 9:26 Page 218

Ainsi :
J =∫ 1
0
1
2(x4 − 2x3 + x2)dx
= 1
2
[1
5x5 − 1
2x4 + 1
3x3
]1
0
= 1
60.
Si l’on avait plutôt écrit
J =∫ 1
0
∫ 1−y
0x2ydxdy
on aurait fait des calculs analogues, en intégrant d’abord par rapport à x puis parrapport à y ; le résultat obtenu est le même.
Plus précisément :
∫ 1−y
0x2ydx =
[1
3x3y
]1−y
0
= 1
3((1 − y)3y)
= 1
3(−y4 + 3y3 − 3y2 + y)
puis
J =∫ 1
0
1
3(−y4 + 3y3 − 3y2 + y)dy
= −1
3
[1
5y5 − 3
4y4 + y3 − 1
2y2
]1
0
= 1
60.
Exercice 8.11 : Intégrale double en polaires
Dans R2 on désigne par Da le disque de centre (0,0) et de rayon a > 0.Calculer
Ia =∫∫
Da
e−(x2+y2)dxdy.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
219
Chapitre 8 • Intégration
9782100547678-Fresl-C8.qxd 5/07/10 9:26 Page 219

Il n’y a aucune hésitation à avoir : le domaine d’intégration est un disque donc lechangement de variable polaire s’impose !
• Tout d’abord, changeons les variables dans la fonction à intégrer :
Notons (r,θ) les coordonnées polaires d’un point de coordonnées cartésiennes(x,y) . Alors :
x = r cos(θ)
y = r sin(θ)
et donc : e−(x2+y2) = e−r2.
• D’après le cours, l’élément différentiel polaire est rdrdθ.
• Enfin, il faut déterminer le nouveau domaine d’intégration.
Autrement dit, nous devons décrire le disque Da par des encadrements portant surr et θ , de sorte qu’aucun point du disque n’apparaisse plusieurs fois dans cette des-cription, ou au pire que l’ensemble des points qui apparaissent plusieurs fois soitd’aire nulle.
En l’occurence, on peut décrire les points de Da par0 r a
0 θ 2π
Les points qui sont décrits plusieurs fois sont l’origine (r = 0, θ quelconque) et les
points du segment [0,1] × 0 de R2, pour lesquels r est donné mais θ peut valoir0 ou 2π.
Les points de Da décrits de plusieurs manières forment donc un ensemble d’airenulle : nous pouvons donc prendre 0 et a comme bornes d’intégration sur lavariable r et 0 et 2π comme bornes pour θ .
• On peut enfin écrire la formule de changement de variable polaire :
Ia =∫∫
Da
e−(x2+y2)dxdy =∫ 2π
0
∫ a
0e−r2
rdrdθ.
Calculons l’intégrale intérieure :∫ a
0e−r2
rdr =[−1
2e−r2
]a
0= 1
2− 1
2e−a2
.
Et enfin, le résultat ne dépendant pas de θ, l’intégrale extérieure est immé-diate :
Ia =∫ 2π
0
(1
2− 1
2e−a2
)dθ = π
(1 − e−a2
).
220
Partie 2 • Analyse
9782100547678-Fresl-C8.qxd 5/07/10 9:26 Page 220
221
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
L’étude des courbes paramétrées s’effectue toujours en suivant les mêmes étapes.
• Dans un premier temps, on détermine l’intervalle d’étude. Celui-ci dépend du lieude définition des fonctions qui entrent en jeu. Souvent, des considérations desymétrie permettent de restreindre l’intervalle d’étude et de minimiser ainsi lenombre de calculs.
• Dans un deuxième temps, on étudie la courbe sur l’intervalle déterminé précé-demment par des moyens appropriés. Il est également utile de chercher à com-prendre ce qui se passe aux bornes de l’intervalle et d’y calculer les éventuellestangentes, asymptotes, etc.
• Dans un troisième temps, enfin, on trace la courbe, à l’aide des informationsrecueillies.
COURBES PARAMÉTRÉES DÉFINIES EN COORDONNÉES CARTÉSIENNES
Soit (O,i, j) un repère orthonormé de R2.
Exercice 9.1 : Cycloïde
Tracer la courbe C définie, en coordonnées cartésiennes, par :x(t) = t − sin(t)
y(t) = 1 − cos(t)
Courbes paramétrées9
9782100547678-Fresl-C9.qxd 5/07/10 9:28 Page 221

Intervalle d’étude
Les fonctions x et y sont définies sur R tout entier. Cependant, nous pouvons nousrestreindre, pour leur étude, à un intervalle plus petit, à l’aide des symétries.
Remarquons que, quel que soit t ∈ R , on a
x(t + 2π) = 2π+ x(t) et y(t + 2π) = y(t).
Cela signifie que l’on passe du point de coordonnées cartésiennes (x(t),y(t)) aupoint de coordonnées cartésiennes (x(t + 2π),y(t + 2π)) en effectuant une transla-
tion de vecteur 2πi . Par conséquent, il nous suffit d’étudier les fonctions x et y surun intervalle de longueur 2π, par exemple [0,2π] ou [−π,π] .
Remarquons encore que, quel que soit t ∈ R , on a
x(−t) = −x(t) et y(−t) = y(t).
Cela signifie que l’on passe du point de coordonnées cartésiennes (x(t),y(t)) aupoint de coordonnées cartésiennes (x(−t),y(−t)) en effectuant une symétrie parrapport à l’axe des ordonnées. Une étude des fonctions x et y sur l’intervalle [0,π]nous permettra donc de les connaître sur l’intervalle [−π,π] et donc sur R, d’aprèsle point précédent.
Étude sur l’intervalle [0,π]
Dressons le tableau de variation des fonctions x et y sur l’intervalle [0,π].Calculons, tout d’abord, leur dérivée :
x ′(t) = 1 − cos(t)
y′(t) = sin(t).
On en déduit aussitôt que, quel que soit t ∈ [0,π], on a x ′(t) 0 et y′(t) 0.
Le tableau de variation prend la forme suivante :
222
Partie 2 • Analyse
t π
π
x'
y'
x
y
0
0
0
2
0
02
0
+
+
9782100547678-Fresl-C9.qxd 5/07/10 9:28 Page 222

Calculons également les coordonnées des points situés aux extrémités de l’inter-valle d’étude, ainsi que la direction des tangentes en ces points.
Le point correspondant à t = 0 a pour coordonnées cartésiennes (0,0). Le vecteur(x ′(0),y′(0)) = (0,0) ne nous donne pas d’information sur la tangente à la courbeen ce point. Aussi devons-nous calculer des dérivées supplémentaires. Le vecteur de
coordonnées (x ′′(0),y′′(0)) = (0,1) = j n’étant pas nul, il dirige la tangente à lacourbe.
Le point correspondant à t = π a pour coordonnées cartésiennes (π,2). Le vecteur
(x ′(π),y′(π)) = (2,0) = 2i n’étant pas nul, il dirige la tangente à la courbe.
Tracé de la courbe
Nous traçons tout d’abord la portion de la courbe correspondant à t ∈ [0,π]. Cettepartie est tracée en gras. Le reste de la courbe est obtenu par les arguments de symé-trie décrits lors de la détermination de l’intervalle d’étude
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
223
Chapitre 9 • Courbes paramétrées
0
0
– 2– 4– 6– 8– 10 2
2
4 6 8 10π
Exercice 9.2 : Astroïde
Tracer la courbe C définie, en coordonnées cartésiennes, par :x(t) = 4 cos3(t)
y(t) = 4 sin3(t)
Intervalle d’étude
Les fonctions x et y sont définies sur R tout entier. Cependant, nous pouvons nousrestreindre, pour leur étude, à un intervalle plus petit, à l’aide des symétries.
Remarquons que, quel que soit t ∈ R , on a
x(t + 2π) = x(t) et y(t + 2π) = y(t).
9782100547678-Fresl-C9.qxd 8/07/10 12:29 Page 223

Par conséquent, il nous suffit d’étudier les fonctions x et y sur un intervalle de lon-gueur 2π.
Remarquons encore que, quel que soit t ∈ R , on a
x(t + π) = −x(t) et y(t + π) = −y(t).
Cela signifie que l’on passe du point de coordonnées cartésiennes (x(t),y(t)) aupoint de coordonnées cartésiennes (x(t + π),y(t + π)) en effectuant une symétriepar rapport à l’origine O. Cette remarque nous permet de restreindre l’étude à unintervalle de longueur π.
Remarquons également que, quel que soit t ∈ R , on a
x(
t + π
2
)= −y(t) et y
(t + π
2
)= x(t).
Cela signifie que l’on passe du point de coordonnées cartésiennes (x(t),y(t)) aupoint de coordonnées cartésiennes (x(t + π/2),y(t + π/2)) en effectuant une rota-tion d’angle π/2. Cette remarque nous permet de restreindre l’étude à un intervallede longueur π/2.
Remarquons finalement que, quel que soit t ∈ R , on a
x(−t) = x(t) et y(−t) = −y(t).
Cela signifie que l’on passe du point de coordonnées cartésiennes (x(t),y(t)) aupoint de coordonnées cartésiennes (x(−t),y(−t)) en effectuant une symétrie parrapport à l’axe des abscisses. Une étude des fonctions x et y sur l’intervalle [0,π/4]nous permettra donc de les connaître sur l’intervalle [−π/4,π/4], ce qui nous suf-fit pour tracer entièrement la courbe, d’après le point précédent.
Étude sur l’intervalle [0,π/4]
Dressons le tableau de variation des fonctions x et y sur l’intervalle [0,π/4].Calculons, tout d’abord, leur dérivée :
x ′(t) = −12 sin(t)cos2(t)
y′(t) = 12 cos(t)sin2(t).
Le tableau de variation prend la forme suivante :
224
Partie 2 • Analyse
9782100547678-Fresl-C9.qxd 5/07/10 9:28 Page 224
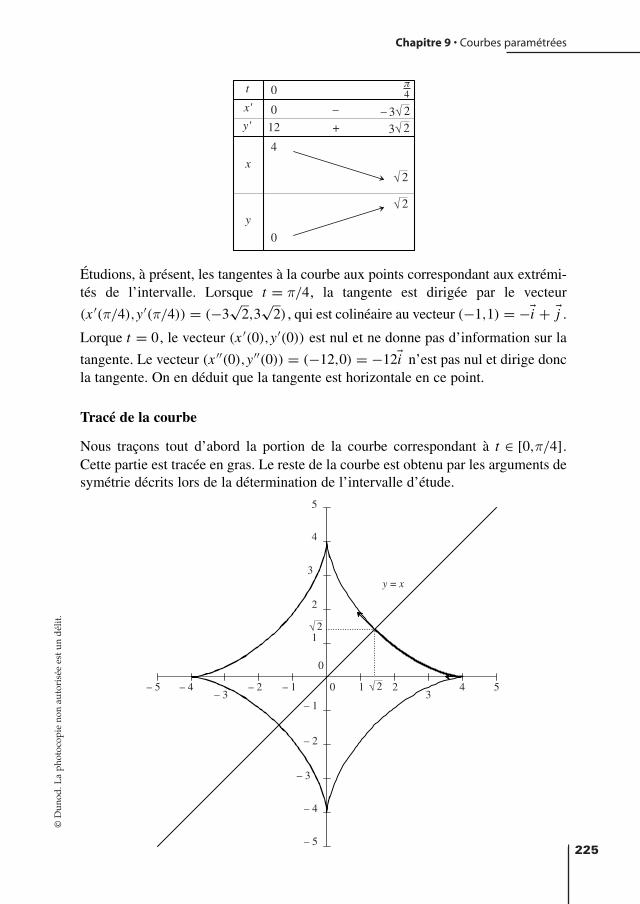
225
Chapitre 9 • Courbes paramétrées©
Dun
od. L
a ph
otoc
opie
non
aut
oris
ée e
st u
n d
élit
.
t
x'
y'
x
y
0
0
12
4
0
–
+
π4
√ 2
√ 2
√ 23√ 23–
Étudions, à présent, les tangentes à la courbe aux points correspondant aux extrémi-tés de l’intervalle. Lorsque t = π/4, la tangente est dirigée par le vecteur
(x ′(π/4),y′(π/4)) = (−3√
2,3√
2) , qui est colinéaire au vecteur (−1,1) = −i + j .
Lorque t = 0, le vecteur (x ′(0),y′(0)) est nul et ne donne pas d’information sur la
tangente. Le vecteur (x ′′(0),y′′(0)) = (−12,0) = −12i n’est pas nul et dirige doncla tangente. On en déduit que la tangente est horizontale en ce point.
Tracé de la courbe
Nous traçons tout d’abord la portion de la courbe correspondant à t ∈ [0,π/4].Cette partie est tracée en gras. Le reste de la courbe est obtenu par les arguments desymétrie décrits lors de la détermination de l’intervalle d’étude.
0
0
1
1
– 1
– 1
– 2
– 2
– 3
– 3
– 4
– 4
– 5
– 5 2
2
3
3
4
4
5
5
y = x
√ 2
√ 2
9782100547678-Fresl-C9.qxd 5/07/10 9:28 Page 225

Exercice 9.3 : Courbe rationnelle
Tracer la courbe C définie, en coordonnées cartésiennes, par :
x(t) = t3
(t − 1)(t + 2)
y(t) = t2 − 2t
t − 1
Intervalle d’étude
La fonction x est définie sur R \ −2,1 et la fonction y est définie sur R \ 1. Cesfonctions ne présentent pas de symétrie visible. Aussi les étudierons-nous simple-ment sur leurs intervalles de définition.
Étude des fonctions
Dressons le tableau de variation des fonctions x et y. Calculons, tout d’abord, leurdérivée, là où elle est définie :
∀t ∈ R \ −2,1, x ′(t) = t2(t2 + 2t − 6)
(t − 1)2(t + 2)2
R \ 1, y′(t) = t2 − 2t + 2
(t − 1)2
Le polynôme X2 + 2X − 6 possède deux racines : −1 − √7 et −1 + √
7. En
revanche, le discriminant du polynôme X2 − 2X + 2 est strictement négatif et cepolynôme ne prend donc que des valeurs strictement positives sur R.
Nous pouvons, à présent, dresser le tableau de variation :
226
Partie 2 • Analyse
t
x'
y'
x
y
– ∞
– ∞ – ∞ – ∞
– ∞ – ∞
+ ∞
+ ∞ + ∞ + ∞
+ ∞+ ∞
0 0+ – – –
+ + + +
+
+
– 1 – √ 7 – 1 + √ 7– 2 1
α
β
83
–
Nous avons noté α = x(−1 − √7) −6,34 et β = x(−1 + √
7) 1,89.
9782100547678-Fresl-C9.qxd 5/07/10 9:28 Page 226

Étude des branches à l’infini
Avant de tracer la courbe, il nous reste à étudier les branches à l’infini.
L’étude au voisinage de t = −2 est particulièrement simple. En effet, la fonction yadmet une limite finie en t = −2, alors que la fonction x tend vers l’infini. On endéduit aussitôt que la courbe possède une asymptote horizontale d’équationy = −8/3.
Pour étudier le comportement au voisinage des autres valeurs de t , nous auronsbesoin d’étudier la fonction y/x. Calculons-la dès à présent :
∀t ∈ R \ −2,0,1, y(t)
x(t)= (t − 2)(t + 2)
t2= t2 − 4
t2.
Plaçons-nous, à présent, au voisinage de −∞. On a
limt→−∞
y(t)
x(t)= 1.
Par conséquent, la courbe possède une direction asymptotique d’équation y = x .Calculons-la plus précisément :
limt→−∞ y(t) − x(t) = lim
t→−∞−4t
(t − 1)(t + 2)= 0.
Par conséquent, la droite d’équation y = x est asymptote à la courbe lorsque t tendvers −∞. Un calcul similaire nous montre que cette droite est encore asymptotelorsque t tend vers +∞.
Plaçons-nous, à présent, au voisinage de t = 1. On a
limt→1
y(t)
x(t)= −3.
Par conséquent, la courbe possède direction asymptotique d’équation y = −3x .Calculons-la plus précisément :
limt→1
y(t) + 3x(t) = limt→1
4t3 − 4t
(t − 1)(t + 2)= lim
t→1
4t (t + 1)
t + 2= 8
3.
Par conséquent, la droite d’équation y = −3x + 8/3 est asymptote à la courbelorsque t tend vers 1.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
227
Chapitre 9 • Courbes paramétrées
9782100547678-Fresl-C9.qxd 5/07/10 9:28 Page 227
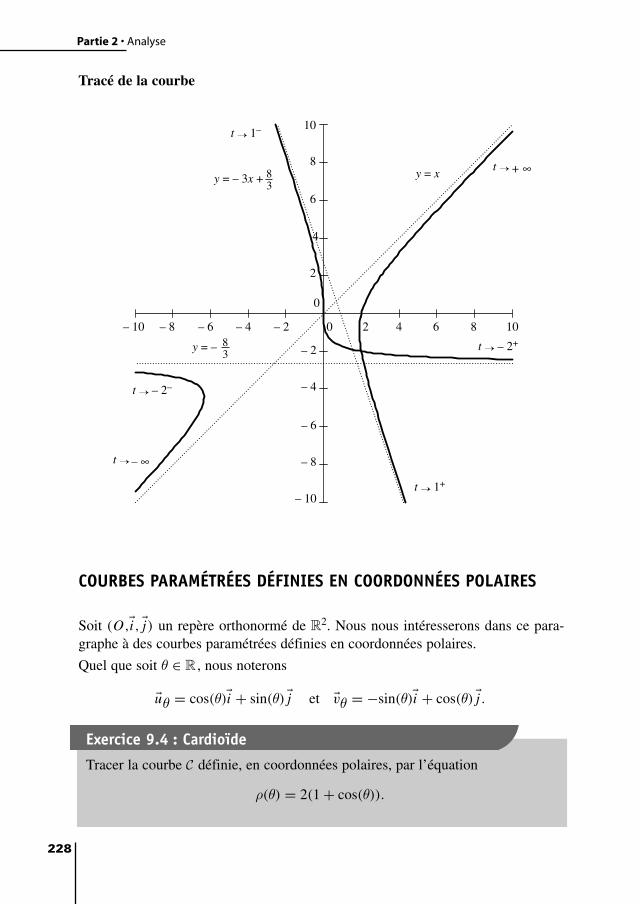
Tracé de la courbe
228
Partie 2 • Analyse
0
0
2
2
– 2
– 2
– 4
– 4
– 6
– 6
– 8
– 8
– 10
– 10 4
4
6
6
8
8
10
10
y = xy = – 3x + 83
y = – 83
t → – 2+
t → 1+
t → 1–
t → – 2–
t → + ∞
t → – ∞
COURBES PARAMÉTRÉES DÉFINIES EN COORDONNÉES POLAIRES
Soit (O,i, j) un repère orthonormé de R2. Nous nous intéresserons dans ce para-graphe à des courbes paramétrées définies en coordonnées polaires.
Quel que soit θ ∈ R , nous noterons
uθ = cos(θ)i + sin(θ) j et vθ = −sin(θ)i + cos(θ) j .
Exercice 9.4 : Cardioïde
Tracer la courbe C définie, en coordonnées polaires, par l’équation
ρ(θ) = 2(1 + cos(θ)).
9782100547678-Fresl-C9.qxd 5/07/10 9:28 Page 228

Intervalle d’étude
La fonction ρ est définie sur R tout entier. Cependant, nous pouvons nous res-treindre, pour son étude, à un intervalle plus petit, à l’aide des symétries.
Remarquons que, quel que soit θ ∈ R , on a
ρ(θ+ 2π) = ρ(θ).
Par conséquent, il nous suffit d’étudier la fonction ρ sur un intervalle de longueur2π, par exemple [0,2π] ou [−π,π] .
Remarquons encore que, quel que soit θ ∈ R , on a
ρ(−θ) = ρ(θ).
Cela signifie exactement que pour passer du point de coordonnées polaires (ρ(θ),θ)au point de coordonnées polaires (ρ(−θ),−θ) , on effectue une symétrie par rapportà l’axe des abscisses. Une étude de la fonction ρ sur l’intervalle [0,π] nous permet-tra donc de la connaître sur l’intervalle [−π,π] et donc sur R, d’après le point pré-cédent.
Étude sur l’intervalle [0,π]
Pour tracer la courbe, il nous suffit de connaître le signe de la fonction ρ ainsi queles points correspondant aux extrémités de l’intervalle d’étude et les directions destangentes en ces points. En particulier, il n’est pas utile de dresser le tableau devariations de la fonction ρ.
Quel que soit θ ∈ [0,π], on a
ρ(θ) = 2(1 + cos(θ)) 0.
Étudions, à présent, le point correspondant à θ = 0. Ce point s’écrit (4,0) en coor-données polaires et donc (4,0) en coordonnées cartésiennes. La tangente en ce pointest dirigée par le vecteur
ρ′(0)u0 + ρ(0)v0 = 4v0.
Étudions, à présent, le point correspondant à θ = π . Ce point s’écrit (0,π) en coor-données polaires et donc (0,0) en coordonnées cartésiennes. Puisque ρ(π) est nul,nous savons que la tangente en ce point est dirigée par le vecteur uπ.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
229
Chapitre 9 • Courbes paramétrées
9782100547678-Fresl-C9.qxd 5/07/10 9:28 Page 229

Tracé de la courbe
Nous traçons tout d’abord la portion de la courbe correspondant à t ∈ [0,π]. Cettepartie est tracée en gras. Le reste de la courbe est obtenu par les arguments de symé-trie décrits lors de la détermination de l’intervalle d’étude.
230
Partie 2 • Analyse
0
0
1
1
– 1
– 1
– 2
– 3
2
2
3
3
4 5
Exercice 9.5 : Rosace
Tracer la courbe C définie, en coordonnées polaires, par l’équation
ρ(θ) = sin
(3θ
2
).
On apportera un soin particulier à l’étude des symétries de cette courbe.
Intervalle d’étude
La fonction ρ est définie sur R tout entier. Cependant, nous pouvons nous res-treindre, pour son étude, à un intervalle plus petit, à l’aide des symétries.
• Remarquons que, quel que soit θ ∈ R , on a
ρ
(θ+ 4π
3
)= sin
(3θ
2+ 2π
)= ρ(θ).
Cela signifie exactement que pour passer du point de coordonnées polaires (ρ(θ),θ)au point de coordonnées polaires (ρ(θ+ 4π/3),θ+ 4π/3), on effectue une rotationd’angle 4π/3. Par conséquent, il nous suffit d’étudier la fonction ρ sur un intervallede longueur 4π/3.
9782100547678-Fresl-C9.qxd 5/07/10 9:28 Page 230

Contrairement aux exemples précédents, il ne suffira pas ici de tracer la partie dela courbe correspondant à une variation de θ de 4π/3. En effet, les points corres-pondant à θ et θ+ 4π/3 sont différents, même si ρ(θ) = ρ(θ+ 4π/3). Pour queles points correspondant à θ et θ+ α soient identiques, il suffit que α soit mul-tiple de 4π/3, pour que ρ ne change pas, et multiple de 2π, pour que θ ne changepas. Le plus petit α convenable est α = 4π. Par conséquent, une fois qu’on a tracéla courbe sur un intervalle de longueur 4π/3, il faut encore effectuer deux rota-tions d’angle 4π/3 pour obtenir la courbe complète.
• Remarquons encore que, quel que soit θ ∈ R , on a
ρ
(θ+ 2π
3
)= sin
(3θ
2+ π
)= −ρ(θ).
Cela signifie que pour passer du point de coordonnées polaires (ρ(θ),θ) au point decoordonnées polaires (ρ(θ+ 2π/3),θ+ 2π/3), on effectue une rotation d’angle2π/3, puis une symétrie centrale, autrement dit, une rotation d’angle −π/3. Cepoint, joint au précédent, montre qu’il nous suffit d’étudier la fonction ρ sur unintervalle de longueur 2π/3.
• Remarquons finalement que, quel que soit θ ∈ R , on a
ρ(−θ) = −ρ(θ).
On passe donc du point de coordonnées polaires (ρ(θ),θ) au point de coordonnéespolaires (ρ(−θ),−θ) en effectuant une symétrie par rapport à l’axe des ordonnées.Cela nous permet de restreindre encore l’intervalle d’étude à [0,π/3].
Résumons, à présent, la stratégie. Nous commençons par étudier la fonction ρ surl’intervalle [0,π/3]. On en déduit son comportement sur [−π/3,π/3], grâce au der-nier point, puis sur [−π/3,π], grâce au deuxième point et donc sur R, grâce au pre-mier point.
Étude sur l’intervalle [0,π/3]
Quel que soit θ ∈ [0,π/3], on a 3θ/2 ∈ [0,π/2] et donc
ρ(θ) = sin
(3θ
2
) 0.
Étudions, à présent, le point correspondant à θ = 0. Ce point s’écrit (0,0) en coor-données polaires et donc (0,0) en coordonnées cartésiennes. Puisque ρ(0) est nul,nous savons que la tangente en ce point est dirigée par le vecteur u0 .
Étudions, à présent, le point correspondant à θ = π/3. Ce point s’écrit (1,π/3) en© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
231
Chapitre 9 • Courbes paramétrées
9782100547678-Fresl-C9.qxd 5/07/10 9:28 Page 231

coordonnées polaires et donc (1/2,√
3/2) en coordonnées cartésiennes. La tangenteen ce point est dirigée par le vecteur
ρ′(π
3
)u π
3+ ρ
(π3
)vπ
3= vπ
3.
Tracé de la courbe
Nous traçons tout d’abord la portion de la courbe correspondant à t ∈ [0,π/3]. Cettepartie est tracée en gras. Le reste de la courbe est obtenu par les arguments de symé-trie décrits lors de la détermination de l’intervalle d’étude.
232
Partie 2 • Analyse
– 1
– 1
1
1
00
Exercice 9.6 : Branche infinie polaire
Tracer la courbe C définie, en coordonnées polaires, par l’équation
ρ(θ) = tan
(θ
2
).
Intervalle d’étude
La fonction ρ est définie sur
I = R \ π+ 2kπ | k ∈ Z .
Cependant, nous pouvons nous restreindre, pour son étude, à un intervalle pluspetit, à l’aide des symétries.
9782100547678-Fresl-C9.qxd 5/07/10 9:28 Page 232

• Remarquons que, quel que soit θ ∈ I, on a
ρ (θ+ 2π) = tan
(θ
2+ π
)= ρ(θ).
Par conséquent, il nous suffit d’étudier la fonction ρ sur un intervalle delongueur 2π.
• Remarquons encore que, quel que soit θ ∈ I, on a
ρ(−θ) = −ρ(θ).
On passe donc du point de coordonnées polaires (ρ(θ),θ) au point de coordonnéespolaires (ρ(−θ),−θ) en effectuant une symétrie par rapport à l’axe des ordonnées.Cela nous permet de restreindre l’intervalle d’étude à [0,π[.
Étude sur l’intervalle [0,π[
Quel que soit θ ∈ [0,π[, on a θ/2 ∈ [0,π/2[ :
ρ(θ) = tan
(θ
2
) 0.
• Étudions, à présent, le point correspondant à θ = 0. Ce point s’écrit (0,0) en coor-données polaires et donc (0,0) en coordonnées cartésiennes. Puisque ρ(0) est nul,nous savons que la tangente en ce point est dirigée par le vecteur u0 .
• Remarquons que la limite de ρ(θ) lorsque θ tend vers π par valeurs inférieures estégale à +∞. Par conséquent, la courbe C possède une direction asymptotique hori-zontale dans le repère (0,uπ,vπ).
Notons la droite passant par l’origine du repère et dirigée par le vecteur uπ. C’estla droite d’équation y = 0. L’asymptote éventuelle est la droite + k vπ où
k = limθ→π−
ρ(θ)sin(θ− π).
Quel que soit θ ∈ [0,π[, on a
ρ(θ)sin(θ− π) = −tan
(θ
2
)sin(θ) = −2sin2
(θ
2
).
Par conséquent, k = −2. On en déduit que l’asymptote est la droite d’équationy = 2.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
233
Chapitre 9 • Courbes paramétrées
9782100547678-Fresl-C9.qxd 5/07/10 9:28 Page 233
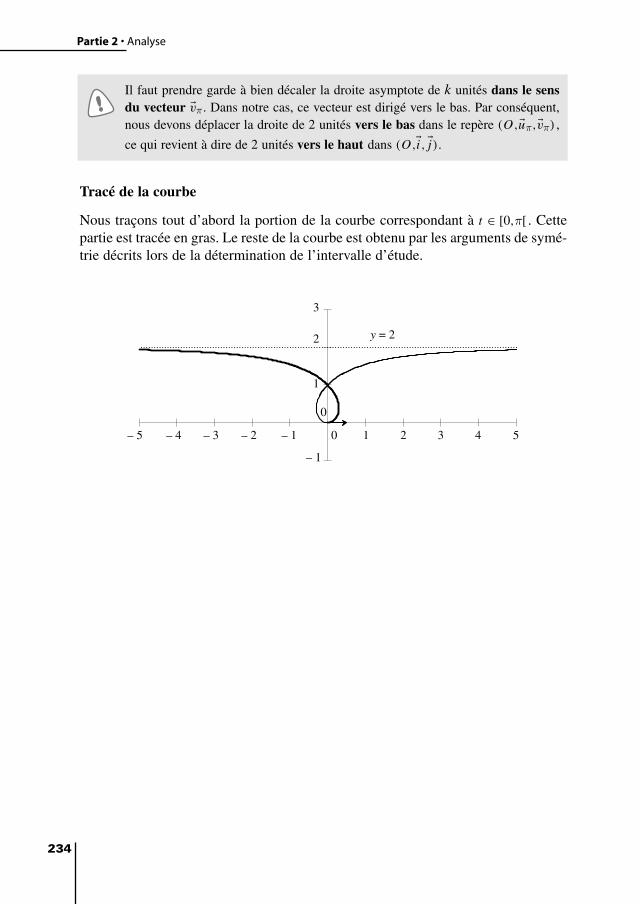
Il faut prendre garde à bien décaler la droite asymptote de k unités dans le sensdu vecteur vπ. Dans notre cas, ce vecteur est dirigé vers le bas. Par conséquent,nous devons déplacer la droite de 2 unités vers le bas dans le repère (O,uπ,vπ) ,
ce qui revient à dire de 2 unités vers le haut dans (O,i, j).
Tracé de la courbe
Nous traçons tout d’abord la portion de la courbe correspondant à t ∈ [0,π[ . Cettepartie est tracée en gras. Le reste de la courbe est obtenu par les arguments de symé-trie décrits lors de la détermination de l’intervalle d’étude.
234
Partie 2 • Analyse
3
2
1
0
0 1– 1
– 1
– 2– 3– 4– 5 2 3 4 5
y = 2
9782100547678-Fresl-C9.qxd 5/07/10 9:28 Page 234

Partie 3
Algèbre
Plan10. Algèbre générale 239
10.1 : Différence symétrique 23910.2 : Sous-groupes de Z 24310.3 : Groupe des permutations (MPSI) 246
11. Arithmétique 25111.1 : Petit théorème de Fermat 25111.2 : Congruences et restes 25411.3 : Équation diophantienne (MPSI) 256
12. Algèbre linéaire 26112.1 : Fonctions paires et fonctions impaires 26112.2 : Images et noyaux I 26312.3 : Somme de projecteurs 26612.4 : L’espace vectoriel des polynômes 27012.5 : Familles libres 272
13. Algèbre linéaire en dimension finie 27713.1 : Images et noyaux II 27813.2 : Noyaux et images itérés 28013.3 : Indice de nilpotence 28413.4 : Calcul explicite de rang 28713.5 : Homothéties 29113.6 : Inégalités sur le rang 29513.7 : Multilinéarité (MPSI) 297
9782100547678-Fresl-part3.qxd 5/07/10 9:34 Page 236
Plan14. Matrices 301
14.1 : Matrices d’ordre 2 30114.2 : Matrices unipotentes (sauf PTSI) 30314.3 : Calcul de puissances (sauf PTSI) 30514.4 : Calcul explicite d’inverse 30914.5 : Une matrice inversible 31014.6 : Réduction d’un endomorphisme 31214.7 : Projections et symétries 31414.8 : Suites couplées 32114.9 : Matrice de Vandermonde 32714.10 : Matrices de permutations (MPSI) 33014.11 : Formes linéaires sur les espaces de matrices 336
15. Polynômes 33915.1 : Polynômes de Chebyshev 33915.2 : Polynômes de Legendre 34615.3 : Relations coefficients-racines 34815.4 : Familles de polynômes échelonnées en degré 35215.5 : Étude d’un endomorphisme de Kn[X] 35415.6 : Polynômes interpolateurs de Lagrange 358
16. Espaces euclidiens 36116.1 : Caractérisation des projecteurs orthogonaux (sauf PTSI) 36116.2 : Matrices orthogonales d’ordre 3 36516.3 : Orthonormalisation dans R3 37716.4 : Décomposition 38216.5 : Espace euclidien de polynômes (sauf PTSI) 386
9782100547678-Fresl-part3.qxd 5/07/10 9:34 Page 237

9782100547678-Fresl-part3.qxd 5/07/10 9:34 Page 238

239
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
Exercice 10.1 : Différence symétrique
Soit E un ensemble. On note P(E) l’ensemble de ses parties. Si F et G sont deuxparties de E, on définit leur différence symétrique par
FG = (F \ G) ∪ (G \ F).
1. Soient F,G ∈ P(E). Montrer que l’on a
F \ G = F ∩ Gc.
2. Montrer que (P(E),) est un groupe commutatif.
Avant de commencer, il est bon de faire un dessin pour se représenter la situation.Cette remarque vaut, de manière générale, pour les exercices qui concernent lesensembles. Si F et G sont deux sous-ensembles de E, rappelons que F \ G désignel’ensemble des éléments de F qui n’appartiennent par à G . Par conséquent, les élé-ments de la différence symétrique FG = (F \ G) ∪ (G \ F) sont les éléments deE qui appartiennent à F mais pas à G ou à G mais pas à F, autrement dit, ce sontles éléments qui appartiennent à un et un seul des deux ensembles F et G .
Algèbre générale 10
9782100547678-Fresl-C10.qxd 5/07/10 8:47 Page 239

1. Nous voulons montrer l’égalité de deux ensembles. Dans ce cas de figure, on rai-sonne généralement par double inclusion.
• Montrons, tout d’abord, que F \ G ⊂ F ∩ Gc . Soit x ∈ F \ G . Par défi-nition, cela signifie que x ∈ F et x /∈ G. Cette dernière condition signifieexactement que x ∈ Gc. Par conséquent, nous avons x ∈ F et x ∈ Gc,autrement dit, x ∈ F ∩ Gc .• Réciproquement, montrons que F ∩ Gc ⊂ F \ G . Soit x ∈ F ∩ Gc . Pardéfinition, on a x ∈ F et x ∈ Gc, autrement dit x /∈ G. Nous avons doncx ∈ F \ G .Finalement, nous avons bien F \ G = F ∩ Gc .
2. Nous devons montrer qu’un certain ensemble muni d’une loi de compositioninterne est un groupe commutatif. Ici, nous n’avons pas d’autre choix que de véri-fier, un à un, les axiomes définissant un groupe commutatif. Rappelons qu’unensemble G muni d’une loi de composition interne ∗ est un groupe si
– la loi ∗ est associative, c’est-à-dire
∀(g,h,i) ∈ G3, (g ∗ h) ∗ i = g ∗ (h ∗ i) ;– l’ensemble G possède un élément neutre, c’est-à-dire un élément e qui vérifie
∀g ∈ G,g ∗ e = e ∗ g = g ;
– tout élément de G est inversible, c’est-à-dire
∀g ∈ G, ∃h ∈ G, h ∗ g = g ∗ h = e.
240
Partie 3 • Algèbre
F
G
F ∆ G
F ∩ G
9782100547678-Fresl-C10.qxd 5/07/10 8:47 Page 240

Si, de plus, la loi ∗ est commutative, c’est-à-dire
∀(g,h) ∈ G2, g ∗ h = h ∗ g,
on dit que le groupe (G,∗) est commutatif.L’une de ces propriétés est ici évidente : il s’agit de la commutativité de la loi, quidécoule directement de sa définition.
Commutativité
Remarquons, tout d’abord, que la loi est commutative. En effet, quels quesoient F,G ∈ P(E), on a
FG = (F \ G) ∪ (G \ F)
= (G \ F) ∪ (F \ G)
= GF.
Associativité
Montrons, à présent, l’associativité de la loi . Nous devons donc montrer que,quels que soient F,G,H ∈ P(E) , on a F(GH) = (FG)H . L’opération \est difficile à manipuler. Il vaut donc mieux essayer de se ramener aux opérationsplus classiques : ∩, ∪ et .c. C’est d’ailleurs ce que nous suggère la première ques-tion. Pour ces opérations, nous connaissons plusieurs formules qui pourront nousaider :
– ∀F,G,H ∈ P(E), F ∩ (G ∪ H) = (F ∩ G) ∪ (F ∩ H) ;
– ∀F,G,H ∈ P(E), F ∪ (G ∩ H) = (F ∪ G) ∩ (F ∪ H) ;
– ∀F,G ∈ P(E), (F ∩ G)c = Fc ∪ Gc ;
– ∀F,G ∈ P(E), (F ∪ G)c = Fc ∩ Gc ;
– ∀F ∈ P(E), (Fc)c = F.
Il ne nous reste plus, à présent, qu’à utiliser ces formules pour démontrer l’associa-tivité de la loi . Les formules que nous obtiendrons seront assez lourdes et il fau-dra donc procéder par étapes, avec beaucoup de précautions.
Soient F,G,H ∈ P(E) . Calculons F(GH). Nous avons
F(GH) = (F \ (GH)) ∪ ((GH) \ F)
= (F ∩ (GH)c) ∪ ((GH) ∩ Fc),
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
241
Chapitre 10 • Algèbre générale
9782100547678-Fresl-C10.qxd 5/07/10 8:47 Page 241

d’après la question précédente. Commençons par calculer (GH)c :
(GH)c = ((G \ H) ∪ (H \ G))c
= ((G ∩ Hc) ∪ (H ∩ Gc))c
= ((G ∪ H) ∩ (G ∪ Gc) ∩ (Hc ∪ H) ∩ (Hc ∪ Gc))c
= (G ∪ H)c ∪ (G ∪ Gc)c ∪ (Hc ∪ H)c ∪ (Hc ∪ Gc)c
= (Gc ∩ Hc) ∪ (Gc ∩ G) ∪ (H ∩ Hc) ∪ (H ∩ G)
= (Gc ∩ Hc) ∪ (G ∩ H),
car Gc ∩ G = ∅ et H ∩ Hc = ∅ . On en déduit que
F ∩ (GH)c = F ∩ ((Gc ∩ Hc) ∪ (G ∩ H))
= (F ∩ Gc ∩ Hc) ∪ (F ∩ G ∩ H).
Calculons, à présent, (GH) ∩ Fc :
(GH) ∩ Fc = ((G ∩ Hc) ∪ (H ∩ Gc)) ∩ Fc
= (G ∩ Hc ∩ Fc) ∪ (H ∩ Gc ∩ Fc).
On en déduit que
F(GH) = (F ∩ Gc ∩ Hc) ∪ (F ∩ G ∩ H)
∪ (Fc ∩ G ∩ Hc) ∪ (Fc ∩ Gc ∩ H).
Calculons, à présent, (FG)H. Puisque est commutative, on a
(FG)H = H(FG)
= (H ∩ Fc ∩ Gc) ∪ (H ∩ F ∩ G)
∪(Hc ∩ F ∩ Gc) ∪ (Hc ∩ Fc ∩ G)= F(GH).
Par conséquent, la loi est associative.
Élément neutre
Cherchons, à présent, l’élément neutre e pour la loi . Réfléchissons en considérantnotre dessin précédent. Quel que soit F ∈ P(E), nous devons avoir Fe = F .Si l’ensemble e coupe F, alors, en construisant Fe, on ôte une partie de F. Parconséquent, nous ne pouvons pas avoir Fe = F dans ce cas.
Si l’ensemble e est disjoint de F, alors on voit facilement que l’on a Fe = F ∪ e .Pour que F ∪ e = F , avec e disjoint de F, la seule solution est que e soit vide. Nousallons vérifier que l’ensemble vide est bien l’élément neutre recherché.
242
Partie 3 • Algèbre
9782100547678-Fresl-C10.qxd 5/07/10 8:47 Page 242

Montrons que l’ensemble vide est un élément neutre pour la loi . En effet,quel que soit F ∈ P(E), on a
F∅ = (F \ ∅) ∪ (∅ \ F) = F ∪ ∅ = F.
Puisque la loi est commutative, nous avons également ∅F = F.
Inverse
Il nous reste, à présent, à montrer que tout élément possède un inverse. Autrementdit, pour tout sous-ensemble F de E, nous devons trouver un ensemble G qui véri-fie FG = ∅. Regardons de nouveau le dessin. Si l’ensemble G contient un pointqui n’appartient pas à F, alors ce point appartient à FG . De même, si un point deF n’appartient pas à G , alors ce point appartient à FG . Par conséquent, le seulcandidat possible est G = F .
Soit F ∈ P(E). On a
FF = (F \ F) ∪ (F \ F) = ∅ ∪ ∅ = ∅.
Par conséquent, l’élément F possède un inverse qui est F.Finalement, nous avons montré que (P(E),) est un groupe commutatif.
Exercice 10.2 : Sous-groupes de Z
1. Montrer que, quel que soit n ∈ Z la partie
nZ = nk, k ∈ Z
est un sous-groupe de Z.
2. Soit G un sous-groupe non nul de Z.
a. Montrer que l’ensemble E = m ∈ G, m > 0 n’est pas vide et que sa borneinférieure n appartient à E.
b. Montrer que l’on a l’inclusion
nZ ⊂ G.
c. Montrer que l’on a l’égalité
nZ = G.
1. Cette première question est une simple question de vérification. Nous la rédi-geons sans plus attendre.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
243
Chapitre 10 • Algèbre générale
9782100547678-Fresl-C10.qxd 5/07/10 8:47 Page 243

Nous avons
0 = n0 ∈ nZ.
Soient u,v ∈ nZ. Par définition, il existe k,l ∈ Z tels que u = nk etv = nl. Nous avons alors
u + v = nk + nl = n(k + l) ∈ nZ.
Soit u ∈ Z. Il existe k ∈ Z tel que u = nk. Alors
−u = −nk = n(−k) ∈ nZ.
Finalement, nous avons montré que nZ est un sous-groupe de Z.
2. Soit G un sous-groupe non nul de Z. L’énoncé nous propose de montrer qu’il estnécessairement de la forme nZ, avec n ∈ N. Pour ce faire, il est logique de chercherà déterminer d’abord un n candidat et de vérifier, dans un second temps, que l’on abien G = nZ. Comment trouver l’entier n ? Il se repère facilement dans le groupenZ : c’est le plus petit élément strictement positif du groupe. Nous voyons doncqu’il est naturel de poser
n = infm ∈ G, m > 0,ainsi que nous le propose l’énoncé.
2.a. Il suffit ici d’utiliser les définitions.
Montrons que l’ensemble
E = m ∈ G, m > 0n’est pas vide. En effet, il existe un élément g ∈ Z ∩ G qui est différentde 0. Si g > 0, alors g ∈ E. Sinon, g < 0, donc −g > 0. Mais −g ∈ G,puisque G est un groupe. On en déduit que −g ∈ E . Posons
n = inf(E).
Observons que E est une partie de N. Elle admet donc un plus petit élément.Par conséquent, n ∈ E.
Les considérations précédentes sont plus subtiles qu’il n’y paraît. En effet, laborne inférieure d’une partie d’un groupe n’appartient pas nécessairement à cegroupe. Pour s’en convaincre, il suffit de considérer le groupe (Q,+) . On a, eneffet,
infx ∈ Q, x > 0 = 0 /∈ x ∈ Q,x > 0.
244
Partie 3 • Algèbre
9782100547678-Fresl-C10.qxd 5/07/10 8:47 Page 244

2.b. Nous venons de montrer que n ∈ E ⊂ G et nous devons, à présent, montrerque, quel que soit k ∈ Z, nous avons encore kn ∈ G. Si k ∈ N, ce n’est pas difficile.En effet, nous avons
kn = n + · · · + n,
où le membre de droite comporte k termes. Puisque n ∈ G , nous avons kn ∈ G. Ceraisonnement se rédige proprement à l’aide d’une récurrence.
Montrons, par récurrence que, quel que soit k ∈ N, la proposition
Hk : « kn ∈ G »
est vraie.• La proposition H0 est vraie. En effet, nous avons
0n = 0 ∈ G,
car G est un sous-groupe de Z.• Soit k ∈ N tel que Hk est vraie. Nous avons alors kn ∈ G. On en déduitque
(k + 1)n = kn + n ∈ G,
car kn ∈ G, par hypothèse, et n ∈ E ⊂ G, d’après la question précédente.Par conséquent, la proposition Hk+1 est vraie. • Finalement, nous avons montré que, quel que soit k ∈ N, on a kn ∈ G.
Nous avons traité le cas des éléments de la forme kn , avec k 0. Il nous reste doncà montrer que les éléments de la forme kn , avec k 0, appartiennent à G . Nouspouvons nous ramener au cas précédent en utilisant le fait que, si k 0, alors−k 0.
Soit k ∈ Z tel que k 0. Nous avons alors −k ∈ N . Par conséquent, noussavons que −kn ∈ G. Son opposé kn appartient donc encore à G.Finalement, nous avons montré que
nZ ⊂ G.
2.c. Nous devons montrer que tout élément g de G s’écrit sous la forme g = kn,avec k ∈ Z. Les éléments de Z ne possèdent pas de telle écriture en général.Cependant, nous pouvons les écrire de façon proche, à l’aide de la division eucli-dienne : quel que soit g ∈ Z, il existe q ∈ Z et r ∈ 0,. . . ,n − 1 tels que
g = qn + r.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
245
Chapitre 10 • Algèbre générale
9782100547678-Fresl-C10.qxd 5/07/10 8:47 Page 245

Nous allons utiliser cette écriture pour aboutir au résultat. Plus précisément, nousvoulons montrer que si l’on écrit un élément g de G sous la forme précédente, on anécessairement r = 0.
Soit g ∈ G. Nous avons n ∈ E, donc n ∈ N∗ . Effectuons la division eucli-dienne de g par n.
Il est important de bien faire remarquer ici que n =/ 0. En effet, nous ne pourrionspas effectuer de division euclidienne si n était nul.
• Il existe q ∈ Z et r ∈ 0,. . . ,n − 1 tels que
g = qn + r.
D’après la question précédente, nZ ⊂ G , donc qn ∈ G. Par conséquent,nous avons
r = g − qn ∈ G.
• Supposons, par l’absurde que r =/ 0. Nous disposons alors d’un élément rde G qui est strictement positif. Par conséquent, on a r ∈ E. On en déduitque r inf(E) = n . On aboutit à une contradiction.• Nous venons de montrer que l’on a nécessairement r = 0. On en déduitque
g = qn ∈ nZ.
Finalement, nous avons bien
G = nZ.
Exercice 10.3 : Groupe des permutations (MPSI)
Soit n ∈ N∗ . Nous nous intéresserons ici au groupe Sn des permutations de néléments.
1. Soient i, j ∈ 1,. . . ,n et σ ∈ Sn . Montrer que
σ (i j) σ−1 = (σ(i) σ( j)).
2. Montrer que le groupe Sn est engendré par les transpositions (i i + 1), aveci ∈ 1,. . . ,n − 1 .
3. Montrer que le groupe Sn est engendré par le cycle (1 2 . . . n) et la transposi-tion (1 2).
1. Dans cette première question, nous devons vérifier une égalité entre deux per-mutations de n éléments. Pour cela, il nous suffit de vérifier que ces permutations
246
Partie 3 • Algèbre
9782100547678-Fresl-C10.qxd 5/07/10 8:47 Page 246

coïncident sur les éléments 1,. . . ,n. Rappelons que la permutation (σ(i) σ( j)) estdéfinie par
1,. . . ,n → 1,. . . ,nσ(i) → σ( j)
σ( j) → σ(i)
k =/ σ(i),σ( j) → k
Nous allons montrer que la permutation σ (i j) σ−1 agit de la même façon surl’ensemble 1,. . . ,n.
• Nous avons
(σ (i j) σ−1)(σ(i)) = (σ (i j))(i)
= σ( j).
• De même,
(σ (i j) σ−1)(σ( j)) = σ(i).
• Soit k ∈ 1,. . . ,n \ σ(i),σ( j) . Nous avons alors σ−1(k) /∈ i, j etdonc
(i j)(σ−1(k)) = (σ−1(k)).
On en déduit que
(σ (i j) σ−1)(k) = σ(σ−1(k)) = k.
• Finalement, nous avons montré que
σ (i j) σ−1 = (σ(i) σ( j)).
2. Nous allons chercher à utiliser la question précédente avec les transpositions dontnous disposons. En choisissant la transposition (1 2) et la permutation σ = (2 3), onobtient
(2 3) (1 2) (2 3) = (1 3).
Est-il possible d’obtenir la transposition (1 4) ? Si l’on veut appliquer la méthodede la question précédente, il nous faut trouver une permutation σ envoyant 1 sur 1et 3 sur 4, ou 1 sur 4 et 3 sur 3. La transposition (3 4) convient. Nous avons donc
(3 4) (1 3) (3 4) = (1 4).© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
247
Chapitre 10 • Algèbre générale
9782100547678-Fresl-C10.qxd 5/07/10 8:47 Page 247

Nous voyons qu’il est possible d’obtenir par cette méthode toutes les transpositionsdu type (1 k), avec k ∈ 2,. . . ,n . Rédigeons ce premier résultat. Nous procéderonspar récurrence.
Notons T le sous-ensemble de Sn formé de toutes les permutations que l’onpeut obtenir en composant les transpositions (i i + 1), aveci ∈ 1,. . . ,n − 1 . Montrons par récurrence que, quel que soitk ∈ 2,. . . ,n , la proposition
Hk : « la transposition (1 k) appartient à T »
est vraie.La proposition H2 est vraie car la transposition (1 2) appartient à T.
• Soit k ∈ 2,. . . ,n − 1 tel que la proposition Hk est vraie. La transposi-tion (1 k) appartient alors à T. Nous avons
(k k + 1) (1 k) (k k + 1) = (1 k + 1).
Par conséquent, la transposition (1 k + 1) appartient à T et la propositionHk+1 est vraie.
• Finalement, quel que soit k ∈ 2,. . . ,n , la transposition (1 k) appartientà T.
Nous devons maintenant obtenir toutes les transpositions manquantes. Soienti, j ∈ 2,. . . ,n avec j i + 2. Comment obtenir la transposition (i j) ? D’après lerésultat que nous venons de démontrer, nous savons échanger 1 avec n’importe quelautre élément. Il est donc naturel de chercher à passer par 1 pour échanger i et j.Nous échangerons donc d’abord 1 et i, puis 1 et j. On obtient
(1 j) (1 i) = (1 i j).
Nous avons bien réussi à envoyer i sur j, mais j est envoyé sur 1. Nous allons doncenvoyer 1 sur i à la fin. Nous obtenons
(1 i) (1 j) (1 i) = (i j).
Remarquons que cette formule est encore du type considéré à la première question.Nous utiliserons cette observation dans la rédaction.
• Montrons que toutes les transpositions de Sn appartiennent à T. Soienti, j ∈ 1,. . . ,n avec i < j. Si i = 1, cela découle du résultat précédent.Supposons que i 2. Posons σ = (1 i) . On a σ(1) = i et σ( j) = j, cari =/ j. D’après la question 1., on a donc
σ (1 j) σ−1 = (1 i) (1 j) (1 i) = (i j).
248
Partie 3 • Algèbre
9782100547678-Fresl-C10.qxd 5/07/10 8:47 Page 248

Par conséquent, la transposition (i j) appartient à T. • Finalement, toutes les transpositions appartiennent à T. Or nous savonsque les transpositions engendrent Sn. On en déduit que T = Sn et donc queles transpositions (i i + 1), avec i ∈ 1,. . . ,n − 1, engendrent Sn.
3. Cette fois-ci, nous ne disposons que de deux éléments : le cycle (1 2 . . . n) et latransposition (1 2). La formule de la première question appliquée avec ces deuxéléments nous donne
(1 2 . . . n) (1 2) (1 2 . . . n)−1 = (2 3).
En continuant ainsi, nous pouvons obtenir toutes les transpositions (i i + 1), aveci ∈ 1,. . . ,n − 1 . Nous savons, d’après la question précédente, que ces transposi-tions engendrent Sn.
Cependant, nous avons eu besoin pour écrire la formule d’utiliser la permutation
(1 2 . . . n)−1 = (1 n n − 1 . . . 2).
Comment obtenir cette permutation en utilisant seulement (1 2 . . . n) et (1 2) ? Lecycle dont nous disposons, (1 2 . . . n) , correspond à des décalages de 1 dans lesindices. Le cycle que nous voulons obtenir, (1 n n − 1 . . . 2), correspond à desdécalages de n − 1, mais est du même type. Nous allons donc prendre la puissance(n − 1)-ième du premier cycle afin d’obtenir des décalages de n − 1 et le secondcycle. Nous rédigerons tout cela par récurrence.
Notons σ = (1 2 . . . n) . Montrons par récurrence que, quel que soitk ∈ N∗, la proposition
Hk : « ∀i ∈ 1,. . . ,n,σk(i) = i + k mod n »
est vraie.
• La proposition H1 est vraie par définition de σ.
• Soit k ∈ N∗ tel que la proposition Hk soit vraie. On a alors
∀i ∈ 1,. . . ,n,σk(i) = i + k mod n.
Soit i ∈ 1,. . . ,n. Notons j l’unique élément de 1,. . . ,n tel que
j = i + k mod n. Nous avons alors σk(i) = j. On a
σk+1(i) = σ(σk(i))
= σ( j)
= j + 1 mod n
= i + k + 1 mod n.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
249
Chapitre 10 • Algèbre générale
9782100547678-Fresl-C10.qxd 5/07/10 8:47 Page 249

Par conséquent, la proposition Hk+1 est vraie.
• Finalement, la proposition Hk est vraie, quel que soit k ∈ N∗. En particu-lier, pour k = n − 1 , on trouve
σn−1(1) = n, σn−1(2) = 1,. . . ,σn−1(n) = n − 1.
On en déduit que
σn−1 = (1 n n − 1 . . . 2) = σ−1.
Montrons, à présent, par récurrence que, quel que soit i ∈ 1,. . . ,n − 1, laproposition
Ki : « on peut engendrer la transposition (i i + 1) à l’aide de σ et de (1 2) »
est vraie.
• La proposition H1 est vraie car la transposition recherchée est justementla transposition (1 2) dont l’on dispose.
• Soit i ∈ 1,. . . ,n − 2 tel que la proposition Hi est vraie. On peut doncengendrer la transposition (i i + 1) à l’aide de σ et de (1 2). D’après laquestion 1., on a
σ (i i + 1) σn−1 = σ (i i + 1) σ−1
= (σ(i) σ(i + 1)) = (i + 1 i + 2).
On en déduit que l’on peut engendrer la transposition (i + 1 i + 2) à l’aidede σ et de (1 2) et que la proposition Hi+1 est vraie.
• Finalement, nous pouvons engendrer toutes les transpositions (i i + 1),avec i ∈ 1,. . . ,n − 1, à l’aide de σ et (1 2). D’après la question 2., on endéduit que l’on peut engendrer Sn avec ces mêmes éléments.
250
Partie 3 • Algèbre
9782100547678-Fresl-C10.qxd 5/07/10 8:47 Page 250

251
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
Exercice 11.1 : Petit théorème de Fermat
Soit p un nombre premier impair.
1. Montrer que, pour k ∈ 1,. . . ,p − 1 , p divise
(p
k
).
2. En déduire que, pour tout n ∈ Z, n p ≡ n[p].
3. Montrer que si, de plus, p ne divise pas n, alors n p−1 ≡ 1[p].
4. Montrer que ces résultats restent vrais pour p = 2.
1. Nous allons utiliser la propriété suivante, appelée lemme de Gauβ : si un nombrepremier divise un produit alors il divise au moins l’un des facteurs du produit.
Par définition : (p
k
)= p!
k!(p − k)!.
On a donc
p! = k!(p − k)!
(p
k
).
Comme p divise p!, p divise le produit
k!(p − k)!
(p
k
)= 1 × · · · × k × 1 × · · · × (p − k) ×
(p
k
).
p étant premier, il divise donc au moins l’un des facteurs de ce produit.Cependant, p ne divise aucun des entiers compris entre 1 et k ni aucun deceux compris entre 1 et p − k car 0 < k < p et 0 < p − k < p ; ainsi, p
divise
(p
k
).
Arithmétique 11
9782100547678-Fresl-C11.qxd 5/07/10 8:49 Page 251

Bien noter où intervient la primalité de p : p divise un produit donc divise aumoins l’un des facteurs du produit.En revanche, le fait que p ne divise aucun entier compris strictement entre 0 et pn’a rien à voir avec le fait que p soit premier : aucun entier N ne peut diviser unentier compris strictement entre 0 et N car ces deux nombres sont deux multiplesconsécutifs de N.
2. Nous allons commencer par établir le résultat par récurrence pour n ∈ N. Les
(p
k
)apparaîtront naturellement en développant une puissance p-ième avec le binôme deNewton.
Pour n ∈ N posons Hn : « n p ≡ n[p] ».
• H0 : clairement vraie car 0p = 0 ≡ 0[p].• Hérédité : soit n ∈ N tel que n p ≡ n[p].Alors, d’après la formule du binôme de Newton :
(n + 1)p =p∑
k=0
(p
k
)nk .
Or, si k ∈ 1,. . . ,p − 1 , p divise
(p
k
)d’après la première question, i.e.
(p
k
)≡ 0[p]
d’où (p
k
)nk ≡ 0[p].
Ainsi, dans la somme, tous les termes dont l’indice k est compris entre 1 etp − 1 sont congrus à 0 modulo p ; la congruence se réduit donc à
(n + 1)p ≡ n p + 1[p].
Or, d’après Hn :
n p ≡ n[p]
d’où
(n + 1)p ≡ n + 1[p].
Hn+1 est donc vraie.
252
Partie 3 • Algèbre
9782100547678-Fresl-C11.qxd 5/07/10 8:49 Page 252

• En conclusion, Hn est vraie pour tout n ∈ N, i.e. :
∀n ∈ N,n p ≡ n[p].
Pour traiter le cas où n < 0 on se ramène au cas précédent en considérant −n .
Soit n ∈ Z. Si n 0, le résultat est acquis. Si n < 0 , alors −n > 0 et lerésultat précédent appliqué à −n donne :
(−n)p ≡ −n[p].
Or p est impair donc (−n)p = −n p, d’où le résultat :
n p ≡ n[p].
3. On ne peut pas se contenter de dire « simplifions la congruence par n » car cetype de calcul n’est en général pas licite.
Par exemple, on a 2 × 2 ≡ 2 × 0[4] mais 2 n’est pourtant pas congru à 0 modulo 4.
Il va donc falloir revenir à la définition des congruences et exploiter correctementles deux hypothèses : p est premier et ne divise pas n.
On a n p ≡ n[p], i.e. p divise n p − n = n(n p−1 − 1).p étant premier, il divise au moins l’un des facteurs ; or, par hypothèse, p ne
divise pas n, donc p divise n p−1 − 1, i.e. :
n p−1 ≡ 1[p].
4. Pourquoi l’énoncé distingue-t-il les cas p impair et p = 2 ? Si l’on regarde lescalculs précédents, l’hypothèse « p impair » n’intervient que pour montrer le résul-tat de la deuxième question dans le cas n < 0.
• Le résultat de la première question est vrai : la démonstration est encorevalable dans le cas p = 2.
• Le résultat de la deuxième question est vrai pour n 0 : encore une fois,la démonstration est encore valable car elle n’utilise pas la parité de p.
• Considérons désormais un entier n < 0 . On a alors, comme précédemment,
(−n)2 ≡ −n[2]
d’où
n2 ≡ −n[2].
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
253
Chapitre 11 • Arithmétique
9782100547678-Fresl-C11.qxd 5/07/10 8:49 Page 253

Cependant,
−n ≡ n[2]
donc
n2 ≡ n[2].
Le résultat de la deuxième question reste donc vrai avec p = 2.• Enfin, le résultat de la troisième question se déduisait de celui de ladeuxième en utilisant le fait que p est premier mais sans utiliser sa parité ;cette déduction reste donc valable si p = 2 et le résultat est donc égale-ment vrai.
Exercice 11.2 : Congruences et restes
Soit n ∈ N∗ . Déterminer le reste de la division euclidienne de 1010npar 7.
1010nsignifie 10(10n).
En conséquence :
1010n+1 = 10(10n×10)
= (1010n)10.
Ainsi, chaque terme est égal au précédent élevé à la puissance 10.
Pour alléger les notations posons un = 1010n.
Nous venons de rappeler que un+1 = u10n : ceci suggère d’essayer de trouver le
résultat par tâtonnements pour de petites valeurs de n puis de le vérifier rigoureu-sement par récurrence.
Le titre suggère d’utiliser des congruences. Rappelons la relation entre congruenceet division euclidienne : le reste de la division euclidienne de a par b > 0 estl’unique entier r vérifiant les deux relations :
a ≡ r[b]0 r b − 1.
Illustrons la méthode générale en déterminant la solution du problème pour n = 1 :
10 ≡ 3 [7]
En élevant au carré :
102 ≡ 9 [7]≡ 2 [7]
254
Partie 3 • Algèbre
9782100547678-Fresl-C11.qxd 5/07/10 8:49 Page 254

Nous avons simplifié la congruence en utilisant le fait que 9 ≡ 2[7]. Le but étantd’obtenir à la fin une congruence avec un entier naturel inférieur ou égal à 6 il estintéressant, à chaque étape, de simplifier au maximum la congruence.
En élevant encore deux fois au carré on obtient de même :
104 ≡ 4 [7]108 ≡ 16 [7]
≡ 2 [7]
et enfin, en multipliant la relation avec 108 par celle avec 102 :
1010 ≡ 4 [7]
Comme 0 4 7 − 1 ceci montre que le reste de la division euclidienne de 1010
par 7 est 4.
Comme u2 = u101 , on a :
u2 ≡ 410[7] .
On peut reprendre un raisonnement analogue au précédent en partant de 4 au lieude 10 et on obtient, tous calculs faits :
410 ≡ 4[7]
i.e. le reste de la division euclidienne de u2 par 7 est 4.
On voit alors qu’en répétant l’opération (élévation à la puissance 10) on obtiendratoujours 4 : voici notre réponse qu’il ne reste plus qu’à formaliser dans une hypo-thèse de récurrence.
Pour n ∈ N∗ posons Hn : « un ≡ 4[7] ».
• H1 : vraie, c’est le calcul fait précédemment en exemple.
• Hérédité : soit n ∈ N∗ tel que Hn soit vraie, i.e. :
un ≡ 4[7].
Alors :
un+1 ≡ 410[7].
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
255
Chapitre 11 • Arithmétique
9782100547678-Fresl-C11.qxd 5/07/10 8:49 Page 255

On a successivement :
42 ≡ 16 [7]
≡ 2 [7]
44 ≡ 4 [7]
48 ≡ 16 [7]
≡ 2 [7]
410 ≡ 48 × 42 [7]
≡ 4 [7]
d’où
un+1 ≡ 4[7].
Hn+1 est donc vraie.
• En conclusion, on a un ≡ 4[7] pour tout n ∈ N∗ .Comme 0 4 7 − 1 , 4 est le reste de la division euclidienne de un
par 7.
Pour passer de la congruence au reste il faut vérifier l’encadrement0 4 7 − 1.En effet, on a par exemple également un ≡ −3[7] mais −3 n’en est pas pourautant le reste de la division, vu qu’il ne vérifie pas cet encadrement.
Exercice 11.3 : Équation diophantienne (MPSI)
1. Déterminer l’entier d = pgcd(495,147) et deux entiers relatifs u et v tels que147u + 495v = d .
2. Déterminer un couple (x0,y0) ∈ Z2 tel que 147x0 + 495y0 = 12 .
3. En déduire tous les couples (x,y) ∈ Z2 tels que 147x + 495y = 12.
1. Le pgcd peut être calculé par l’algorithme d’Euclide. Mieux encore : les calculsque nous ferons pourront être réutilisés afin de déterminer les entiers u et v.
Il est bien plus efficace d’utiliser cet algorithme pour calculer un pgcd que de déter-miner les décompositions en facteurs premiers ; le fait qu’il nous permette ensuitede déterminer les coefficients de la relation de Bézout est une raison de plus pourl’utiliser sans hésiter.
256
Partie 3 • Algèbre
9782100547678-Fresl-C11.qxd 5/07/10 8:49 Page 256
En appliquant l’algorithme d’Euclide on obtient les divisions euclidiennessuccessives :
495 = 147 × 3 + 54
147 = 54 × 2 + 39
54 = 39 × 1 + 15
39 = 15 × 2 + 9
15 = 9 × 1 + 6
9 = 6 × 1 + 3
6 = 3 × 2 + 0
Le pgcd est le dernier reste non nul, i.e. d = 3.
Afin de déterminer les coefficients de Bézout on reprend les égalités précédentesdans l’ordre. Dans chacun, on exprime le reste en fonction du dividende et du divi-seur et on reporte dans les suivantes : c’est l’algorithme d’Euclide étendu.
En utilisant les résultats précédents :
54 = 495 − 147 × 339 = 147 − 54 × 2
= 147 − (495 − 147 × 3) × 2
= 147 × 7 − 495 × 215 = 54 − 39
= (495 − 147 × 3) − (147 × 7 − 495 × 2)
= 495 × 3 − 147 × 109 = 39 − 15 × 2
= (147 × 7 − 495 × 2) − (495 × 3 − 147 × 10) × 2
= 147 × 27 − 495 × 86 = 15 − 9
= (495 × 3 − 147 × 10) − (147 × 27 − 495 × 8)
= 495 × 11 − 147 × 373 = 9 − 6
= (147 × 27 − 495 × 8) − (495 × 11 − 147 × 37)
= 147 × 64 − 495 × 19
On peut donc prendre (u,v) = (64,−19).
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
257
Chapitre 11 • Arithmétique
9782100547678-Fresl-C11.qxd 5/07/10 8:49 Page 257
2. Il suffit de tout multiplier par 4.
De la relation
147 × 64 + 495 × (−19) = 3
on tire, en multipliant par 4 :
147 × 256 + 495 × (−76) = 12.
Le couple (x0,y0) = (256,−76) convient donc.
3. L’idée est analogue à celle utilisée pour résoudre les équations différentielles dontle second membre n’est pas nul : en soustrayant la relation 147x0 + 495y0 = 12 à147x + 495y = 12, on se ramène à une équation « homogène ».
Soit un couple (x,y) convenant. Alors
147x + 495y = 12 = 147x0 + 495y0
d’où, en soustrayant les deux relations :
147(x − x0) = 495(y0 − y).
Le problème est que 147 et 495 ne sont pas premiers entre eux : le lemme de Gauβne s’applique donc pas… Mais on peut toujours diviser la relation par leur pgcd afinde pouvoir l’utiliser !
En divisant par pgcd(147,495) = 3 on obtient
49(x − x0) = 165(y0 − y)
et pgcd(49,165) = 1.
Ainsi, 165 divise 49(x − x0) ; comme 49 et 165 sont premiers entre eux,165 divise donc x − x0 . Ainsi, il existe un entier relatif k tel quex = x0 + 165k.En reportant, il vient 49(x − x0) = 49 × 165k , soit
49 × 165k = 165(y0 − y)
et enfin, en simplifiant par 165 :
y = y0 − 49k.
258
Partie 3 • Algèbre
9782100547678-Fresl-C11.qxd 5/07/10 8:49 Page 258

Ainsi, d’après les valeurs précédemment trouvées :
(x,y) = (256 + 165k,−76 − 49k).
Réciproquement, on vérifie aisément que tout couple de cette formeconvient : les solutions sont donc les couples
(x,y) = (256 + 165k,−76 − 49k), k ∈ Z.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
259
Chapitre 11 • Arithmétique
9782100547678-Fresl-C11.qxd 5/07/10 8:49 Page 259

9782100547678-Fresl-C11.qxd 5/07/10 8:49 Page 260

261
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
Dans ce chapitre, K désignera R ou C.
Exercice 12.1 : Fonctions paires et fonctions impaires
Soit E l’espace vectoriel des fonctions continues de R dans R. Notons P l’en-semble des fonctions paires de E et I l’ensemble des fonctions impaires de E.
1. Montrer que les ensembles P et I, munis des structures induites par celle deE, sont des sous-espaces vectoriels de E.
2. Montrer qu’on a l’égalité P ⊕ I = E .
1. On applique ici la définition du cours pour montrer qu’un espace est un sous-espace vectoriel d’un autre.
Montrons, tout d’abord, que P est un sous-espace vectoriel de E.
• La fonction nulle est paire. On a donc 0 ∈ P .
• Soient f,g ∈ P. Quel que soit x ∈ R , on a
( f + g)(−x) = f (−x) + g(−x) = f (x) + g(x) = ( f + g)(x),
car f et g sont paires. On en déduit que f + g ∈ P .
• Soit f ∈ P et λ ∈ R. Quel que soit x ∈ R , on a
(λ f )(−x) = λ f (−x) = λ f (x) = (λ f )(x),
car f est paire. On en déduit que λ f ∈ P.
Nous avons montré que P est un sous-espace vectoriel de E.
Un raisonnement similaire montre que I est un sous-espace vectoriel de E.
Algèbre linéaire 12
9782100547678-Fresl-C12.qxd 5/07/10 8:54 Page 261

2. Cette deuxième question en recouvre deux : nous devons montrer que les espacesP et I sont en somme directe, autrement dit, que
P ∩ I = 0
et que leur somme est égale à E, autrement dit, que
P + I = E .
Somme directe
Nous allons commencer par montrer que les espaces sont en somme directe. Il suf-fit pour cela de montrer que P ∩ I = 0 .
Pour commencer, montrons que les espaces P et I sont en somme directe.Soit f ∈ P ∩ I . Soit x ∈ R . On a f (x) = f (−x), car f ∈ P, mais aussi f (x) = − f (−x) , car f ∈ I. On en déduit, en ajoutant les deux éga-lités, que 2 f (x) = 0 et donc que f (x) = 0. Nous venons de montrer que f est la fonction nulle. On en déduit que P ∩ I = 0 , ce qu’il fallaitdémontrer.
Somme des espaces
Il nous reste à montrer que P + I = E . Autrement dit, nous devons montrer quetout élément f de E se décompose sous la forme f = g + h, avec g ∈ P et h ∈ I.Dans ce genre de cas, on raisonne par analyse et synthèse. Soit f ∈ E . Supposonsque la fonction f s’écrive sous la forme f = g + h, avec g ∈ P et h ∈ I. Alors, quelque soit x ∈ R , on a
f (x) = g(x) + h(x)
et
f (−x) = g(−x) + h(−x) = g(x) − h(x).
On en déduit que g(x) = ( f (x) + f (−x))/2 et h(x) = ( f (x) − f (−x))/2 .L’étape d’analyse est terminée.
Nous allons rédiger directement l’étape de synthèse. Insistons une nouvelle fois :l’étape d’analyse doit être faite au brouillon et seule l’étape de synthèse figure dansla rédaction finale.
262
Partie 3 • Algèbre
9782100547678-Fresl-C12.qxd 5/07/10 8:54 Page 262

Montrons, à présent, que P + I = E . Soit f ∈ E. Soient g et h les fonc-tions de E définies par
g :R → R
x → f (x) + f (−x)
2
et
h :R → R
x → f (x) − f (−x)
2.
Quel que soit x ∈ R , on a
g(−x) = f (−x) + f (x)
2= g(x)
et
h(−x) = f (−x) − f (x)
2= −h(x).
Par conséquent, g ∈ P et h ∈ I.
En outre, quel que soit x ∈ R , on a
g(x) + h(x) = f (x) + f (−x)
2+ f (x) − f (−x)
2= f (x).
On en déduit que f = g + h. Nous avons montré que P + I = E et donc,finalement, que P ⊕ I = E.
Exercice 12.2 : Images et noyaux I
Soit E un espace vectoriel sur K. Soit f un endomorphisme de E. Montrer queles équivalences suivantes sont vraies.
1. Ker( f 2) = Ker( f ) ⇐⇒ Ker( f ) ∩ Im( f ) = 02. Im( f 2) = Im( f ) ⇐⇒ Ker( f ) + Im( f ) = E
Cet exercice n’est pas difficile. Il s’agit simplement de se souvenir des définitionsvues en cours et de les appliquer. Aucune astuce n’est requise. Nous allons volon-tairement proposer une correction très détaillée. À chaque question, nous devonsmontrer l’équivalence entre deux égalités. Nous décomposerons chaque équiva-lence en deux implications et chaque égalité en deux inclusions.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
263
Chapitre 12 • Algèbre linéraire
9782100547678-Fresl-C12.qxd 5/07/10 8:54 Page 263

Au préalable, rappelons les deux traductions suivantes qu’il est indispensable deconnaître : si g désigne un endomorphisme de E et y un élément de E, on a
y ∈ Ker(g) ⇐⇒ g(y) = 0
et
y ∈ Im(g) ⇐⇒ ∃z ∈ E, y = g(z).
1. Première implication
• Première égalité
L’une des deux inclusions formant l’égalité est évidente.
Supposons que Ker( f 2) = Ker( f ). L’inclusion Ker( f ) ∩ Im( f ) ⊃ 0 estclaire. En effet, puisque Ker( f ) et Im( f ) sont des sous-espaces vectorielsde E, on a 0 ∈ Ker( f ) et 0 ∈ Im( f ). On en déduit que0 ∈ Ker( f ) ∩ Im( f ) .
• Seconde égalité
Pour finir la démonstration de la première implication, il nous reste à prouver queKer( f ) ∩ Im( f ) ⊂ 0. Soit donc un élément x de Ker( f ) ∩ Im( f ). Nous voulonsmontrer qu’il est nul. Nous disposons de deux informations :
x ∈ Ker( f ) et x ∈ Im( f ),
autrement dit,
f (x) = 0 et ∃y ∈ E, x = f (y).
En les combinant, on obtient f ( f (y)) = 0, ce que l’on traduit immédiatement par
y ∈ Ker( f 2). Or, nous avons supposé que Ker( f 2) = Ker( f ) . On en déduit quey ∈ Ker( f ) . Par conséquent, f (y) = 0, c’est-à-dire x = 0. C’est ce que nous vou-lions démontrer. Répétons ce raisonnement de manière plus concise.
Il nous reste à prouver que Ker( f ) ∩ Im( f ) ⊂ 0. Soitx ∈ Ker( f ) ∩ Im( f ). Puisque x ∈ Im( f ) , il existe y ∈ E tel quex = f (y). Puisque x ∈ Ker( f ), on a
0 = f (x) = f ( f (y)).
On en déduit que y ∈ Ker( f 2) = Ker( f ) et donc que x = f (y) = 0 .
264
Partie 3 • Algèbre
9782100547678-Fresl-C12.qxd 5/07/10 8:54 Page 264

Seconde implication
• Première inclusion
Comme précédemment, l’une des deux inclusions est immédiate.
Réciproquement, supposons que Ker( f ) ∩ Im( f ) = 0. Montrons que
Ker( f 2) ⊃ Ker( f ). Soit x ∈ Ker( f ). Par définition, on a f (x) = 0 et
donc f 2(x) = f (0) = 0. On en déduit que x ∈ Ker( f 2).
• Seconde inclusion
Démontrons l’inclusion réciproque : Ker( f 2) ⊂ Ker( f ) . Soit x ∈ Ker( f 2). Il nousfaut, à présent, utiliser l’hypothèse Ker( f ) ∩ Im( f ) = 0. Pour cela, nous avonsbesoin d’un élément y ∈ E qui soit à la fois dans le noyau de f, c’est-à-dire qui véri-fie f (y) = 0, et dans l’image de f, c’est-à-dire de la forme y = f (z), avec z ∈ E.Que connaissons-nous comme éléments de l’image de f ? Un seul semble adapté auproblème : c’est f (x) . Appartient-il au noyau de f ? Oui, puisque nous venons de
supposer que x ∈ Ker( f 2), autrement dit, que f ( f (x)) = 0. Voilà notre candidat.
Démontrons l’inclusion réciproque : Ker( f 2) ⊂ Ker( f ). Soit x ∈ Ker( f 2).On a f ( f (x)) = 0. Par conséquent, f (x) ∈ Ker( f ) ∩ Im( f ). Par hypothèse,on a Ker( f ) ∩ Im( f ) = 0. On en déduit que f (x) = 0, autrement dit quex ∈ Ker( f ). Nous venons de démontrer l’inclusion voulue et, finalement,
l’égalité Ker( f 2) = Ker( f ).
2. Cette deuxième question n’est pas plus difficile que la première. Il suffit de rai-sonner pas à pas en retraduisant patiemment. Nous allons la rédiger directement.
Supposons que Im( f 2) = Im( f ). L’inclusion Ker( f ) + Im( f ) ⊂ E estévidente car Ker( f ) et Im( f ) sont deux sous-espaces vectoriels de E. Démontrons l’inclusion réciproque : Ker( f ) + Im( f ) ⊃ E . Soit x ∈ E. Par
hypothèse, Im( f ) = Im( f 2), donc f (x) ∈ Im( f 2). On en déduit qu’ilexiste y ∈ E tel que f (x) = f ( f (y)), autrement dit f (x − f (y)) = 0, ouencore x − f (y) ∈ Ker( f ). En écrivant x = (x − f (y)) + f (y) , onmontre que x ∈ Ker( f ) + Im( f ) . Réciproquement, supposons que Ker( f ) + Im( f ) = E . L’inclusion
Im( f 2) ⊂ Im( f ) est toujours vraie. En effet, soit x ∈ Im( f 2). Il existey ∈ E tel que x = f ( f (y)). Par conséquent, x = f (z), avec z = f (y),donc x ∈ Im( f ).
Démontrons l’inclusion réciproque : Im( f 2) ⊃ Im( f ). Soit x ∈ Im( f ). Ilexiste y ∈ E tel que x = f (y).
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
265
Chapitre 12 • Algèbre linéraire
9782100547678-Fresl-C12.qxd 5/07/10 8:55 Page 265

À ce stade de l’exercice, nous devons utiliser l’hypothèse Ker( f ) + Im( f ) = E .Elle nous permettra de décomposer un élément de E bien choisi sous la forme a + bavec a ∈ Ker( f ) et b ∈ Im( f ). Quel élément choisir ? Nous n’avons en fait quedeux possibilités : les éléments x et y. Le vecteur x appartient à l’image de f et ilest donc déjà sous cette forme (il suffit de l’écrire x = 0 + x , puisque 0 ∈ Ker( f )
et x ∈ Im( f )). Il est donc naturel de chercher à décomposer y.
Utilisons l’hypothèse Ker( f ) + Im( f ) = E : il existe a ∈ Ker( f ) etb ∈ Im( f ) tels que y = a + b. Il existe c ∈ E tel que b = f (c).Réinjectons, à présent, ces éléments dans l’égalité x = f (y). On obtient
x = f (a + f (c)) = f (a) + f ( f (c)) = f ( f (c)),
car a ∈ Ker( f ) . On en déduit que x ∈ Im( f 2). Nous venons de démontrer
l’inclusion voulue et, finalement, l’égalité Im( f 2) = Im( f ).
Exercice 12.3 : Somme de projecteurs
Soit E un espace vectoriel sur K. Soient p et q deux projecteurs de E.
1. Montrer que p + q est un projecteur si, et seulement si, p q = q p = 0.
2. Supposons que p + q est un projecteur. Montrer que Im(p + q) =Im(p) + Im(q) et que Ker(p + q) = Ker(p) ∩ Ker(q) .
1. Rappelons, tout d’abord, qu’un endomorphisme f de E est un projecteur si, et
seulement si, il vérifie l’égalité f 2 = f. En particulier, on a p2 = p et q2 = q.L’exercice nous propose de nous intéresser au fait que p + q soit un projecteur.
Calculons donc (p + q)2 : on a
(p + q)2 = (p + q) (p + q) = p2 + p q + q p + q2
= p + q + p q + q p.
On pourrait être tenté, par analogie avec l’identité remarquable que l’on connaît
par exemple dans R ou dans C , d’écrire (p + q)2 = p2 + q2 + 2p q . Cette for-mule est en général fausse dans un anneau, car les éléments p et q n’ont aucuneraison de commuter. Nous n’avons pas d’autre choix que de développer la formuleterme à terme.
Passons maintenant à la résolution de l’exercice. On nous demande de démontrerune équivalence : nous allons donc raisonner en démontrant deux implications. Auvu de la formule précédente, l’un des deux sens de l’équivalence est très simple.Rédigeons-le.
266
Partie 3 • Algèbre
9782100547678-Fresl-C12.qxd 5/07/10 8:55 Page 266

Supposons que p q = q p = 0 . On a alors
(p + q)2 = p2 + p q + q p + q2
= p + q,
car p et q sont des projecteurs. On en déduit que p + q est un projecteur.
Pour démontrer l’implication réciproque, nous allons supposer que p + q est un pro-
jecteur. Nous devons alors montrer que p q = q p = 0. On a (p + q)2 = p + q ,d’où p + q + p q + q p = p + q et donc p q + q p = 0.
Nous avons retraduit l’hypothèse en une formule reliant p et q. Nous allons mani-puler cette formule afin d’en obtenir d’autres en utilisant les seules égalités dont
nous disposons : p2 = p et q2 = q. Pour faire apparaître des termes de la forme p2
ou q2, nous pouvons composer l’égalité par p ou par q, à gauche ou à droite. Afinde rendre la rédaction la plus propre possible, nous conseillons au lecteur d’écriretoutes les égalités obtenues au brouillon, puis de les combiner afin d’arriver à lasolution. Dans la rédaction finale, on ne conservera que les égalités qui nous onteffectivement servi.
Réciproquement, supposons que p + q est un projecteur. On a
p + q = (p + q)2
= p2 + p q + q p + q2
= p + p q + q p + q.
On en déduit que
(1) p q + q p = 0.
En composant par p à gauche, on obtient p2 q + p q p = 0 , c’est-à-dire
(2) p q + p q p = 0.
En composant l’égalité (1) par p à droite, on obtient p q p+q p2 = 0,soit
(3) p q p + q p = 0.
En soustrayant les égalités (2) et (3), on trouve
(4) p q − q p = 0.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
267
Chapitre 12 • Algèbre linéraire
9782100547678-Fresl-C12.qxd 5/07/10 8:55 Page 267

En additionnant (1) et (4), on obtient 2p q = 0. En les soustrayant, onobtient 2q p = 0. On en déduit finalement que
p q = q p = 0.
2. Nous devons démontrer deux égalités. Nous raisonnerons à chaque fois endémontrant deux inclusions.
Première égalité
• Première inclusion
Commençons par démontrer que Im(p + q) ⊂ Im(p) + Im(q) . Pour débuter cettepreuve, il n’y a pas à réfléchir : on fixe un élément x de Im(p + q) et on traduit lacondition d’appartenance. Écrivons-le directement.
Démontrons, tout d’abord, l’égalité Im(p + q) = Im(p) + Im(q) .Commençons par montrer que l’on a Im(p + q) ⊂ Im(p) + Im(q). Soitx ∈ Im(p + q). Alors il existe y ∈ E tel que
x = (p + q)(y) = p(y) + q(y).
Puisque p(y) ∈ Im(p) et que q(y) ∈ Im(q), on a bien x ∈ Im(p) + Im(q).
Cette première inclusion provient directement des définitions et reste vraie si l’onremplace p et q par n’importe quels endomorphismes de E. C’est pour démontrerl’inclusion réciproque que nous aurons besoin d’utiliser l’hypothèse que p + q estun projecteur. Grâce à la question précédente, nous savons que cela signifie quep q = q p = 0.
• Seconde inclusion
Nous voulons, à présent, démontrer l’inclusion réciproque : Im(p) + Im(q)
⊂ Im(p + q). Il suffit de démontrer que Im(p) ⊂ Im(p + q) et queIm(q) ⊂ Im(p + q). Commençons par la première. Soit x ∈ Im(p). Traduisonscette appartenance : il existe y ∈ E tel que x = p(y) .
Nous chercherons à montrer que x ∈ Im(p + q) , autrement dit, à écrire l’élément xsous la forme (p + q)(z) , avec z ∈ E. Nous ne connaissons que deux éléments par-ticuliers de E : y et x . Ce sont nos meilleurs candidats pour z. Nous allons lesessayer tous les deux.
Commençons par y. Malheureusement, nous ne possédons aucune information sur(p + q)(y) = p(y) + q(y) .
268
Partie 3 • Algèbre
9782100547678-Fresl-C12.qxd 5/07/10 8:55 Page 268
Essayons avec x : on a (p + q)(x) = (p + q)(p(y)) = p2(y) + q p(y)
= p(y) = x. C’est le résultat que nous cherchions.
Réciproquement, montrons que Im(p) + Im(q) ⊂ Im(p + q). Il suffit dedémontrer que Im(p) ⊂ Im(p + q) et que Im(q) ⊂ Im(p + q). Soitx ∈ Im(p). Il existe y ∈ E tel que x = p(y). On en déduit que
(p + q)(x) = (p + q)(p(y)) = p2(y) + q p(y) = p(y) = x,
car q p = 0, d’après la question précédente. On en déduit queIm(p) ⊂ Im(p + q) . On montre de même que Im(q) ⊂ Im(p + q) et l’onen déduit que Im(p + q) = Im(p) + Im(q).
Seconde égalité
Démontrons, à présent, l’égalité Ker(p + q) = Ker(p) ∩ Ker(q) .
• Première inclusion
Nous allons commencer par l’inclusion Ker(p) ∩ Ker(q) ⊂ Ker(p + q) . Il n’y apas à réfléchir pour cette étape : on traduit simplement les différentes conditionsd’appartenance.
Démontrons, à présent, l’égalité Ker(p + q) = Ker(p) ∩ Ker(q) . Soitx ∈ Ker(p) ∩ Ker(q) . Par définition, on a p(x) = q(x) = 0, d’où(p + q)(x) = 0. On en déduit que Ker(p) ∩ Ker(q) ⊂ Ker(p + q) .
Remarquons que cette inclusion reste vraie si l’on remplace p et q par n’importequels endomorphismes de E.
• Seconde inclusion
Il nous reste à démontrer l’inclusion réciproque : Ker(p + q) ⊂ Ker(p) ∩ Ker(q) .Pour cela, on fixe x ∈ Ker(p + q) , on retraduit cette appartenance par(p + q)(x) = 0 et l’on cherche, en manipulant cette égalité, à montrer quex ∈ Ker(p) ∩ Ker(q), autrement dit, que p(x) = q(x) = 0.
Démontrons l’inclusion réciproque. Soit x ∈ Ker(p + q) . On a(p + q)(x) = 0. En appliquant p aux deux membres de l’égalité, on obtient
p((p + q)(x)) = p2(x) + p q(x) = p(x) = 0,
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
269
Chapitre 12 • Algèbre linéraire
9782100547678-Fresl-C12.qxd 5/07/10 8:55 Page 269
car p q = 0, d’après la question précédente. On en déduit quex ∈ Ker(p). On montre de même que x ∈ Ker(q) et l’on en déduit finale-ment que Ker(p + q) = Ker(p) ∩ Ker(q) .
Exercice 12.4 : L’espace vectoriel des polynômes
Dans cet exercice, nous nous intéresserons à l’espace vectoriel K[X] des poly-nômes à coefficients dans K.
1. Montrer que l’application
ϕ : K[X] → K[X]P(X) → X P(X)
est un endomorphisme de K[X] injectif mais pas surjectif.
2. Montrer que l’application
ψ : K[X] → K[X]P(X) → P ′(X)
est un endomorphisme de K[X] surjectif mais pas injectif.
1. La première étape consiste à montrer que ϕ est un endomorphisme.
Montrons, tout d’abord, que l’application ϕ est bien linéaire.
• Soient P,Q ∈ K[X]. On a
ϕ(P + Q) = X (P + Q)(X)
= X P(X) + X Q(X)
= ϕ(P) + ϕ(Q).
• Soient P ∈ K[X] et λ ∈ K . On a
ϕ(λP) = XλP(X)
= λX P(X)
= λϕ(X).
On en déduit que l’application ϕ est un endomorphisme de K[X].
Continuons en montrant que l’endomorphisme ϕ est injectif. Pour ce problème, onraisonne toujours de la même façon : on montre que le noyau de l’endomorphismeϕ est nul.
270
Partie 3 • Algèbre
9782100547678-Fresl-C12.qxd 5/07/10 8:55 Page 270

Montrons, à présent, que l’endomorphisme ϕ est injectif. Soit P ∈ Ker(ϕ) .On a alors X P(X) = 0. Puisque le polynôme X n’est pas nul, on a néces-sairement P(X) = 0.
Il nous reste à montrer que l’endomorphisme ϕ n’est pas surjectif, autrement dit quecertains polynômes de K[X] n’appartiennent pas à l’image de ϕ . Une bonne façonde procéder est de chercher une propriété que vérifient tous les éléments de l’image.
Dans notre cas, les éléments Q(X) de l’image sont de la forme Q(X) = X P(X) ,avec P ∈ K[X] . On observe que l’on a nécessairement Q(0) = 0. Il est clair quetous les éléments de K[X] ne vérifient pas tous cette propriété.
Montrons, à présent, que l’endomorphisme ϕ n’est pas surjectif. Plus préci-sément, nous allons montrer que le polynôme 1 n’appartient pas à l’imagede ϕ . En effet, supposons qu’il existe P ∈ K[X] tel queϕ(P) = X P(X) = 1 . En prenant la valeur en 0 de ces deux polynômes,nous obtiendrions 1 = 0, ce qui est absurde.
2. Comme précédemment, nous allons commencer par montrer que ϕ est un endo-morphisme.
Montrons, tout d’abord, que l’application ψ est bien linéaire. • Soient P,Q ∈ K[X]. On a
ψ(P + Q) = (P + Q)′
= P ′ + Q′
= ψ(P) + ψ(Q).
• Soient P ∈ K[X] et λ ∈ k. On a
ψ(λP) = (λP)′
= λP ′
= λψ(X).
On en déduit que l’application ψ est un endomorphisme de K[X].
Nous devons ensuite montrer que l’endomorphisme ψ est surjectif. Pour cela, onprocède toujours de la même manière. On fixe un élément Q de l’espace vectorield’arrivée K[X] et on cherche un élément P de l’espace de départ K[X] qui estenvoyé par ψ sur Q. Dans notre cas, l’application ψ est la dérivation. Nous devonsdonc trouver une primitive du polynôme Q, ce qui peut se faire explicitement.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
271
Chapitre 12 • Algèbre linéraire
9782100547678-Fresl-C12.qxd 5/07/10 8:55 Page 271

Montrons, à présent, que l’endomorphisme ψ est surjectif. Soit Q un élé-ment de K[X]. Il possède une écriture sous la forme
Q(X) =d∑
i=0
ai Xi ,
où ai ∈ K, quel que soit i ∈ 0,. . . ,d. Posons
P(X) =d∑
i=0
ai
i + 1Xi+1.
On vérifie immédiatement, que l’on a bien ψ(P) = P ′ = Q .
Il nous reste à montrer que l’endomorphisme ψ n’est pas injectif. Pour cela, il noussuffit de montrer que son noyau n’est pas réduit à 0. Dans notre cas, ce problèmeest très simple puisque tous les polynômes constants sont envoyés sur 0 par l’ap-plication de dérivation ψ .
Montrons, à présent, que l’endomorphisme ψ n’est pas injectif. Il nous suf-fit, pour cela, d’observer que ψ(1) = 0 .
Les résultats que nous venons de démontrer sont propres aux espaces vectoriels dedimension infinie. En effet, rappelons que si E désigne un K-espace vectoriel dedimension finie et f un endomorphisme de E, on a les équivalences
f est injectif ⇐⇒ f est surjectif ⇐⇒ f est bijectif.
Ainsi retrouvons-nous, en particulier, le fait que l’espace vectoriel K[X] est dedimension infinie.
Exercice 12.5 : Familles libres
Soit E l’espace vectoriel des fonctions continues de R dans R. Quel que soitk ∈ N, nous définissons deux éléments ck et ek de E par
ck : R → R
x → cos(kx)
et
ek : R → R
x → ekx .
1. Soit n ∈ N. Montrer que la famille (c0,. . . ,cn) est libre.
2. Soit n ∈ N. Montrer que la famille (e0,. . . ,en) est libre.
272
Partie 3 • Algèbre
9782100547678-Fresl-C12.qxd 5/07/10 8:55 Page 272

1. Par définition d’une famille libre, nous devons montrer que, quels que soientu0,. . . ,un ∈ R vérifiant la relation
n∑k=0
ukck = 0,
on a u0 = · · · = un = 0.
Dans la situation précédente, comment procéder pour montrer queu0 = · · · = un = 0 ? Nous disposons, par hypothèse, d’une relation entre les uk :
n∑k=0
ukck = 0.
Nous allons chercher à manipuler cette relation afin d’en obtenir de nouvelles, enespérant qu’elles nous permettront, sinon de résoudre, du moins de simplifier le pro-blème.
De nombreuses possibilités s’offrent à nous : nous pouvons composer par des fonc-tions à gauche ou à droite, prendre les valeurs en certains points, calculer deslimites, des périodicités, etc. Il existe plusieurs façons de résoudre ce problème,mais nous allons essayer d’en trouver une aussi simple que possible.
Avant de manipuler l’équation, il est utile de se demander quelles sont les proprié-tés vérifiées par les fonctions ck. Elles sont paires, mais nous n’obtiendrons aucunenouvelle relation en utilisant cette propriété. Ces fonctions sont périodiques, maison voit mal comment en tirer une nouvelle relation. En revanche, nous obtiendronsune information intéressante à partir de la dérivation. Pour tout indice k, on a
c′′k = −k2 ck. En dérivant deux fois la relation
(1)
n∑k=0
ukck = 0,
nous obtenons
(2) −n∑
k=0
ukk2 ck = 0.
Nous sommes parvenus à obtenir une nouvelle relation (2), proche de la première.
Rendons-les plus proches encore en multipliant la relation (1) par n2 :
(3)
n∑k=0
ukn2 ck = 0.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
273
Chapitre 12 • Algèbre linéraire
9782100547678-Fresl-C12.qxd 5/07/10 8:55 Page 273

En additionnant, à présent, la relation (2), on obtient
n−1∑k=0
uk(n2 − k2) ck = 0.
Remarquons que le dernier terme à disparu. Nous sommes parvenus à passer d’unerelation contenant n + 1 termes à une relation n’en contenant plus que n. Cetteobservation nous invite à tenter de démontrer le résultat voulu par récurrence.
Nous allons montrer, par récurrence, que, quel que soit m ∈ 0,. . . ,n , laproposition
Hm : « la famille (c0,. . . ,cm) est libre »
est vraie.
• La fonction c0 n’est pas nulle. Par conséquent, la famille (c0) est libre etla proposition H0 est vraie.
• Soit m ∈ 0,. . . ,n − 1 tel que la proposition Hm est vraie. La famille(c0,. . . ,cm) est donc libre. Nous allons montrer que la famille(c0,. . . ,cm+1) l’est encore. Soient u0,. . . ,um+1 ∈ R tels que l’on ait
(1)
m+1∑k=0
ukck = 0.
En dérivant la relation (1), puis en ajoutant (m + 1)2(1), on obtient
(2)
m∑k=0
uk((m + 1)2 − k2) ck = 0.
D’après l’hypothèse de récurrence, la famille (c0,. . . ,cm) est libre. On endéduit que, quel que soit k ∈ 0,. . . ,m, on a uk((m + 1)2 − k2) = 0 etdonc uk = 0.
Revenons à la relation (1). Il reste simplement um+1cm+1 = 0 . On en déduitque um+1 = 0 , car la fonction cm+1 n’est pas nulle. Finalement, nous avonsdémontré que u0 = · · · = um+1 = 0 . Par conséquent, la famille(c0,. . . ,cm+1) est libre et la proposition Hm+1 est vraie.
• Finalement, nous avons montré que, quel que soit m ∈ 0,. . . ,n , lafamille (c0,. . . ,cm) est libre. En particulier, la famille (c0,. . . ,cn) est libre.
2. Comme dans la première question, par définition d’une famille libre, nous devonsmontrer que, quel que soient u0,. . . ,un ∈ R vérifiant la relation
274
Partie 3 • Algèbre
9782100547678-Fresl-C12.qxd 5/07/10 8:55 Page 274
n∑k=0
ukek = 0,
on a u0 = · · · = un = 0.
Posons-nous la même question que précédemment : comment construire une nou-velle relation à partir de
n∑k=0
ukek = 0 ?
Nous pourrions procéder de la même manière que pour la famille (c0,. . . ,cn) endérivant (une seule fois). Nous allons proposer une autre méthode.
Nous disposons d’une information supplémentaire sur les éléments ek : nousconnaissons bien leur croissance à l’infini. Plus précisément, si un =/ 0, alors lafonction
n∑k=0
ukek
est nécessairement équivalente à unen au voisinage de +∞. Si un = 0, maisun−1 =/ 0, alors la fonction est équivalente à un−1en−1, etc. Cette observation nousmontre comment procéder : si l’un des coefficients uk n’est pas nul, nous pourronsdonner un équivalent de la somme qui contredira sa nullité.
Soient u0,. . . ,un ∈ R tels que l’on ait
n∑k=0
ukek = 0.
Supposons, par l’absurde, que les coefficients uk, avec k ∈ 0,. . . ,n nesont pas tous nuls. Notons l ∈ 0,. . . ,n le plus grand indice tel que l’onait ul =/ 0. Alors, la fonction
n∑k=0
ukek
est équivalente, au voisinage de +∞, à la fonction ulel . En particulier,cette fonction n’est pas nulle, car ul =/ 0. On aboutit à une contradiction.Nous venons de montrer que, quel que soit k ∈ 0,. . . ,n , le coefficient uk
est nul. On en déduit que la famille (e0,. . . ,en) est libre.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
275
Chapitre 12 • Algèbre linéraire
9782100547678-Fresl-C12.qxd 5/07/10 8:55 Page 275

9782100547678-Fresl-C12.qxd 5/07/10 8:55 Page 276

277
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
Dans ce chapitre, K désignera R ou C.
L’étude des espaces vectoriels de dimension finie est bien plus simple que celle desespaces vectoriels généraux. Cela tient, en particulier, au fait que certaines proprié-tés des espaces se testent simplement en comparant des dimensions. Dans certainscas bien précis, nous pourrons donc ramener l’étude de certaines propriétés peu évi-dentes (égalités d’espaces, sommes directes, etc.), à une comparaison de nombresentiers, bien plus élémentaire.
Rappelons, ici, quelques-unes de ces propriétés fort utiles. Nous fixons un corps K,un entier n ∈ N et un K-espace vectoriel E de dimension n.
Soit f = ( f1,. . . , fn) une famille de E composée de n vecteurs. Alors
(1) la famille f est une base de E ⇐⇒ la famille f est libre
et
(2) la famille f est une base de E ⇐⇒ la famille f engendre E .
Soient E0 un K-espace vectoriel de dimension n et ϕ une application linéaire de Edans E0. Alors
(3) l’application ϕ est un isomorphisme ⇐⇒ Ker(ϕ) = 0
et
(4) l’application ϕ est un isomorphisme ⇐⇒ Im(ϕ) = E0.
Soient F et G deux sous-espaces vectoriels de E tels que F ⊂ G . Alors
(5) F = G ⇐⇒ dim(F) = dim(G).
Soient F et G deux sous-espaces vectoriels de E. Commençons par rappeler uneimplication bien utile :
(6) F ⊕ G = E ⇒ dim(F) + dim(G) = n.
Algèbre linéaireen dimension finie
13
9782100547678-Fresl-C13.qxd 5/07/10 10:29 Page 277

Réciproquement, supposons que dim(F) + dim(G) = n. Alors
(7) F ⊕ G = E ⇐⇒ F ∩ G = 0
et
(8) F ⊕ G = E ⇐⇒ F + G = E .
Ces résultats propres à la dimension finie sont très importants et nous permettrontde résoudre de nombreux exercices.
Exercice 13.1 : Images et noyaux II
Soit E un K-espace vectoriel de dimension finie n. Soit f un endomorphisme deE. Démontrer les équivalences suivantes
Ker( f ) ⊕ Im( f ) = E ⇐⇒ Im( f 2) = Im( f ) ⇐⇒ Ker( f 2) = Ker( f ).
Cet exercice ressemble beaucoup à l’exercice 12.2. Cependant, nous allons voirqu’en utilisant le fait que l’espace E est de dimension finie, on peut grandementsimplifier les démonstrations.
Pour chaque implication que nous démontrons, nous commençons par utiliser desarguments identiques à ceux de l’exercice 12.2. Ce n’est qu’à la fin qu’un argumentde dimension nous permet de démontrer plus facilement que deux espaces sontégaux ou supplémentaires.
Nous démontrerons, dans l’ordre, les implications, 1 ⇒ 2, 2 ⇒ 3 et 3 ⇒ 1.
1 ⇒ 2
L’une des deux inclusions est très simple.
Supposons que Ker( f ) ⊕ Im( f ) = E . Montrons que Im( f 2) ⊂ Im( f ).
Soit x ∈ Im( f 2). Il existe y ∈ E tel que x = f 2(y). Nous avons doncx = f ( f (y)) et donc x ∈ Im( f ).
Ici, nous ne voyons pas comment utiliser un argument de dimension pour conclure.Nous ne disposons, en effet, d’aucune information sur la dimension de l’espace
Im( f 2). Nous allons donc démontrer directement l’inclusion réciproque.
Démontrons l’inclusion réciproque. Soit x ∈ Im( f ). Il existe y ∈ E tel quex = f (y). Par hypothèse, Ker( f ) + Im( f ) = E , donc il existe
278
Partie 3 • Algèbre
9782100547678-Fresl-C13.qxd 5/07/10 10:29 Page 278

a ∈ Ker( f ) et b ∈ Im( f ) tels que y = a + b. En outre, il existe c ∈ E telque b = f (c). On en déduit que
x = f (a + f (c)) = f 2(c) ∈ Im( f 2).
Finalement, on a bien Im( f 2) = Im( f ).
2 ⇒ 3
Comme précédemment, l’une des deux inclusions est très simple.
Supposons que Im( f 2) = Im( f ). Montrons que Ker( f ) ⊂ Ker( f 2). Soitx ∈ Ker( f ). Nous avons donc f (x) = 0. En composant par f, on obtient
f 2(x) = f (0) = 0. On en déduit que x ∈ Ker( f 2). Par conséquent, nousavons
Ker( f ) ⊂ Ker( f 2).
Puisque nous disposons déjà d’une inclusion, d’après la propriété (5), pour
conclure, il nous suffit de démontrer l’égalité des dimensions de Ker( f 2) et Ker( f ) .
Par hypothèse, nous avons Im( f 2) = Im( f ) et donc dim(Im( f 2)) = dim(Im( f )) .Nous allons pouvoir passer aux dimensions des noyaux en utilisant le théorème durang.
En outre, d’après le théorème du rang, on a
dim(Ker( f 2)) = n − dim(Im( f 2)) = n − dim(Im( f )) = dim(Ker( f )).
On en déduit que
Ker( f 2) = Ker( f ).
3 ⇒ 1
Nous allons commencer par démontrer que Ker( f ) ∩ Im( f ) = 0.
Supposons que Ker( f 2) = Ker( f ). Soit x ∈ Ker( f ) ∩ Im( f ). Il existe
y ∈ E tel que x = f (y). Puisque x ∈ Ker( f ), on a f (x) = f 2(y) = 0.
Par conséquent, y ∈ Ker( f 2) = Ker( f ). On en déduit que x = f (y) = 0 .Nous venons de démontrer que
Ker( f ) ∩ Im( f ) = 0.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
279
Chapitre 13 • Algèbre linéraire en dimension finie
9782100547678-Fresl-C13.qxd 5/07/10 10:29 Page 279

D’après la propriété (7), pour obtenir l’égalité, il nous suffit de montrer quedim(Ker( f )) + dim(Im( f )) = dim(E). D’après le théorème du rang, cette pro-priété est toujours vérifiée.
Or, d’après le théorème du rang, on a
dim(Ker( f )) + dim(Im( f )) = dim(E).
On en déduit que
Ker( f ) ⊕ Im( f ) = E .
Exercice 13.2 : Noyaux et images itérés
Soit E un K-espace vectoriel de dimension finie n. Soit f un endomorphismede E.
1. Montrer que la suite (Ker( f k))k∈N est croissante et que la suite (Im( f k))k∈Nest décroissante.
2. Montrer que la suite (Ker( f k))k∈N stationne.
3. Notons
p = mink ∈ N | ∀l k, Ker( f l) = Ker( f k).
Montrer que, quel que soit l p , on a Im( f l) = Im( f p).
4. Soit q ∈ N tel que
dim(Ker( f q)) = dim(Ker( f q+1)).
Montrer que, quel que soit l q, on a Ker( f l) = Ker( f q) . En déduire quep n.
5. Montrer que Ker( f p) ⊕ Im( f p) = E .
1. Pour montrer que la suite (Ker( f k))k∈N est croissante, il faut montrer que, quelque soit k ∈ N, nous avons
Ker( f k) ⊂ Ker( f k+1).
Cela se démontre sans peine.
Soit k ∈ N. Montrons que Ker( f k) ⊂ Ker( f k+1) . Soit x ∈ Ker( f k). Nous
avons f k(x) = 0. En appliquant f aux deux membres de l’égalité, on obtient
f k+1(x) = f (0) = 0.
280
Partie 3 • Algèbre
9782100547678-Fresl-C13.qxd 5/07/10 10:29 Page 280

On en déduit que x ∈ Ker( f k+1) . Par conséquent, nous avons
Ker( f k) ⊂ Ker( f k+1) et la suite (Ker( f k))k∈N est croissante.
Le raisonnement pour les images n’est pas plus difficile que le précédent.
Soit k ∈ N. Montrons que Im( f k) ⊃ Im( f k+1) . Soit y ∈ Im( f k+1) . Il
existe x ∈ E tel que y = f k+1(x). Nous avons donc
y = f k( f (x)).
On en déduit que y ∈ Im( f k). Par conséquent, nous avons
Im( f k) ⊃ Im( f k+1) et la suite (Im( f k))k∈N est décroissante.
2. Nous considérons ici une suite croissante d’espaces vectoriels de dimension finie.D’après la propriété (5), la suite stationne si, et seulement si, la suite des dimensionsstationne. Or la suite des dimensions est majorée par dim(E) = n. Cela nous suffirapour conclure.
• D’après la question précédente, la suite (Ker( f k))k∈N est croissante. On
en déduit que la suite (dim(Ker( f k)))k∈N est croissante.
• Quel que soit k ∈ N, Ker( f k) est un sous-espace de E et donc
dim(Ker( f k)) n . La suite (dim(Ker( f k)))k∈N est donc une suite d’en-tiers croissante et majorée. On en déduit qu’elle stationne :
∃l ∈ N,∀k l, dim(Ker( f k)) = dim(Ker( f l)).
• Soit k l . Nous avons Ker( f k) ⊃ Ker( f l) et dim(Ker( f k)) =dim(Ker( f l)). On en déduit que
Ker( f k) = Ker( f l).
Par conséquent, la suite (Ker( f k))k∈N stationne.
3. Soit l p . Nous voulons montrer que Im( f l) = Im( f p). D’après la première
question, nous avons Im( f l) ⊂ Im( f p). D’après la propriété (5), il nous suffit donc
de montrer que dim(Im( f l)) = dim(Im( f p)) . Par le théorème du rang, nous pou-vons nous ramener à une égalité de dimensions de noyaux, ce que nous connaissons.
Soit l p. Nous avons Ker( f l) = Ker( f p). Par conséquent, nous avons
dim(Ker( f l)) = dim(Ker( f p)) . En appliquant le théorème du rang, on endéduit que ©
Dun
od. L
a ph
otoc
opie
non
aut
oris
ée e
st u
n d
élit
.
281
Chapitre 13 • Algèbre linéraire en dimension finie
9782100547678-Fresl-C13.qxd 5/07/10 10:29 Page 281

dim(Im( f l)) = n − dim(Ker( f l))
= n − dim(Ker( f p))
= dim(Im( f p)).
Or, d’après la question 1., nous avons Im( f l) ⊂ Im( f p). On en déduit que
Im( f l) = Im( f p).
4. Par hypothèse, on a
dim(Ker( f q)) = dim(Ker( f q+1)).
D’après la question 1., nous avons également Ker( f q) ⊂ Ker( f q+1) . En utilisant la
propriété (5), on en déduit que Ker( f q) = Ker( f q+1) .
Nous voulons montrer que, quel que soit l q, on a Ker( f l) = Ker( f q) . Il estnaturel de chercher à démontrer cette égalité par récurrence.
Montrons, par récurrence, que, quel que soit l q + 1, la proposition
Hl : « Ker( f l) = Ker( f q)»
est vraie.• D’après la question 1., nous avons Ker( f q) ⊂ Ker( f q+1) . Par hypothèse,
ces espaces ont même dimension. On en déduit que Ker( f q) = Ker( f q+1).La proposition Hq+1 est donc vraie.• Soit l q + 1 tel que les propositions Hq+1,. . . ,Hl sont vraies. Nousavons alors les égalités
Ker( f l) = Ker( f l−1) = · · · = Ker( f q).
D’après la question 1., nous avons Ker( f q) ⊂ Ker( f l+1) . Il nous reste àmontrer l’inclusion réciproque. Raisonnons par l’absurde. Si elle était fausse il existerait un élément x de Eappartenant à Ker( f l+1), mais pas à Ker( f q) = Ker( f l) . Nous aurionsdonc
f l+1(x) = 0 et f l(x) =/ 0,
autrement dit
f l( f (x)) = 0 et f l−1( f (x)) =/ 0.
282
Partie 3 • Algèbre
9782100547678-Fresl-C13.qxd 5/07/10 10:29 Page 282

Ceci est absurde, car Ker( f l) = Ker( f l−1)(= Ker( f q)) , par hypothèse.
Nous avons donc nécessairement l’égalité Ker( f l+1) = Ker( f q) et la pro-position Hl+1 est vraie.• Finalement, nous avons montré que, quel que soit l q, on a
Ker( f l) = Ker( f q) .
Nous souhaitons, à présent, montrer que p n. D’après le résultat précédent, s’il existe
l ∈ N tel que dim(Ker( f l+1)) = dim(Ker( f l)) , alors la suite stationne à partir du rangl, autrement dit, p l. Nous pouvons donc conclure dès qu’il existe l ∈ 0,. . . ,n tel
que dim(Ker( f l+1)) = dim(Ker( f l)) .
Que se passe-t-il si ce n’est pas le cas ? La suite (dim(Ker( f k)))k∈N étant croissante,nous avons alors nécessairement
dim(Ker( f 0)) < dim(Ker( f 1)) < · · · < dim(Ker( f n)).
Nous avons
dim(Ker( f 0)) = dim(Ker(Id)) = dim(0) = 0,
et donc dim(Ker( f 1)) > 0 , c’est-à-dire dim(Ker( f 1)) 1, puis
dim(Ker( f 2)) > 1, c’est-à-dire dim(Ker( f 1)) 2, etc. En continuant ainsi, on
obtient dim(Ker( f n)) n et donc Ker( f n) = E . La suite (Ker( f k))k∈N étant crois-
sante, nous avons nécessairement Ker( f k) = E, quel que soit k n. On en déduitque p n.
• Supposons, tout d’abord, qu’il existe l ∈ 0,. . . ,n tel que
dim(Ker( f l+1)) = dim(Ker( f l)).
D’après le résultat précédent, nous avons alors Ker( f k) = Ker( f l), quelque soit k l. En particulier, p l n.• Dans le cas contraire, nous avons
0 = dim(Ker( f 0)) < dim(Ker( f 1)) < · · · < dim(Ker( f n)).
On en déduit immédiatement que, quel que soit l ∈ N, on a
dim(Ker( f j )) j.
En particulier, dim(Ker( f n)) n et donc Ker( f n) = E . La suite
(Ker( f k))k∈N étant croissante, nous avons nécessairement Ker( f k) = E,quel que soit k n. On en déduit que p n.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
283
Chapitre 13 • Algèbre linéraire en dimension finie
9782100547678-Fresl-C13.qxd 5/07/10 10:29 Page 283

5. Nous souhaitons montrer que Ker( f p) ⊕ Im( f p) = E . Un raisonnement sur lesdimensions va nous permettre de nous ramener à une propriété plus simple à prou-ver. D’après le théorème du rang, appliqué à l’endomorphisme f p, nous avons, eneffet,
dim(Ker( f p)) + dim(Im( f p)) = dim(E).
D’après la propriété (7), il nous suffit donc de montrer que
Ker( f p) ∩ Im( f p) = 0.• Montrons, tout d’abord, que les espaces Ker( f p) et Im( f p) sont ensomme directe. Soit x un élément de Ker( f p) ∩ Im( f p). Puisquex ∈ Im( f p) , il existe y ∈ E tel que
x = f p(y).
Puisque x ∈ Ker( f p) , on a
f p(x) = f 2p(y) = 0.
Par conséquent, y ∈ Ker( f 2p) . Or, par définition de p, on a
Ker( f 2p) = Ker( f p).
Nous avons donc f p(y) = x = 0. Nous venons de démontrer que
Ker( f p) ∩ Im( f p) = 0.• D’après le théorème du rang, appliqué à l’endomorphisme f p, nous avons,en outre,
dim(Ker( f p)) + dim(Im( f p)) = dim(E).
On en déduit que
Ker( f p) ⊕ Im( f p) = E .
Exercice 13.3 : Indice de nilpotence
Soit E un K-espace vectoriel de dimension finie n. Soit f un endomorphisme deE. Nous supposerons que f est nilpotent, c’est-à-dire qu’il existe s ∈ N∗ tel quef s = 0. On appelle indice de nilpotence de f l’entier r ∈ N∗ défini par
r = mins ∈ N∗ | f s = 0.
1. Soit x ∈ E \ Ker( f r−1). Montrer que la famille (x, f (x),. . . , f r−1(x)) est libre.2. En déduire que r n.
284
Partie 3 • Algèbre
9782100547678-Fresl-C13.qxd 5/07/10 10:29 Page 284

1. Nous devons montrer que la famille (x, f (x),. . . , f r−1(x)) est libre. La façon deprocéder dans ce genre de cas est classique : on considère une famille (λ0,. . . ,λr−1)
d’éléments de K vérifiant
λ0 x + · · · + λr−1 f r−1(x) = 0
et l’on cherche à montrer que λ0 = · · · = λr−1 = 0.
Nous disposons, pour le moment, d’une seule relation :λ0 x + · · · + λr−1 f r−1(x) = 0et d’une seule hypothèse : f r = 0. La seule façon d’utiliser l’hypothèse est visiblementd’appliquer l’endomorphisme f à la relation. On obtient
λ0 f (x) + · · · + λr−2 f r−1(x) + λr−1 f r (x) = 0,
soit
λ0 f (x) + · · · + λr−2 f r−1(x) = 0.
Nous sommes parvenus à faire disparaître l’un des coefficients et à obtenir une rela-tion mettant en jeu uniquement λ0,. . . ,λr−2 . En appliquant f de façon répétée, nouspouvons faire disparaître, un à un, tous les coefficients jusqu’à obtenir une relationne contenant que le coefficient λ0. Nous pourrons alors en déduire que λ0 = 0. Larelation de départ s’écrira alors
λ1 f (x) + · · · + λr−1 f r−1(x) = 0.
Nous pouvons alors reprendre le même raisonnement : en composant par f unnombre suffisant de fois, nous montrerons que λ0 = 0, etc. Afin de rédiger cela pro-prement, nous allons mettre en œuvre une récurrence.
Soit (λ0,. . . ,λr−1) ∈ Kr vérifiant
(R) λ0 x + · · · + λr−1 f r−1(x) = 0.
Montrons par récurrence que, quel que soit l ∈ 0,. . . ,r − 1 , la proposition
Hl : « λl = 0 »
est vraie.• Quel que soit s r, on a
f s = f s−r f r = 0.
Par conséquent, en appliquant l’endomorphisme f r−1 à la relation (R), onobtient
λ0 f r−1(x) = 0.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
285
Chapitre 13 • Algèbre linéraire en dimension finie
9782100547678-Fresl-C13.qxd 5/07/10 10:29 Page 285

Par hypothèse, x /∈ Ker( f r−1), donc f r−1(x) =/ 0. On en déduit queλ0 = 0 et donc que la proposition H0 est vraie.• Soit l ∈ 0,. . . ,r − 2 tel que les propositions H0,. . . ,Hl sont vraies.Nous avons donc
λ0 = · · · = λl = 0.
La relation (R) se réécrit alors
λl+1 f l+1(x) + · · · + λr−1 f r−1(x) = 0.
En appliquant f r−l−2, on obtient
λl+1 f r−1(x) = 0,
d’où l’on tire λl+1 = 0. Par conséquent, la proposition Hl+1 est vraie.• Finalement, nous avons montré que λ0 = · · · = λr−1 = 0 . On en déduit
que la famille (x, f (x),. . . , f r−1(x)) est libre.
2. Nous voulons, à présent, démontrer que r n. La façon de procéder est claire :l’énoncé nous a fait construire une famille libre à r éléments. Or dans un espace dede dimension n, toutes les familles libres possèdent moins de n éléments.
Il faut prêter attention à un point. L’énoncé commence par « Soit
x ∈ E \ Ker( f r−1) », sans se préoccuper de l’existence d’un tel élément. Il se
pourrait que l’ensemble E \ Ker( f r−1) soit vide. Notre premier souci doit doncconsister à montrer qu’un tel élément x existe bien.
Par définition de l’indice de nilpotence r, on a f r−1 =/ 0. En particulier,
Ker( f r−1) =/ E. Nous pouvons donc choisir un élément x dans
E \ Ker( f r−1). Le raisonnement précédent assure alors que la famille
(x, f (x),. . . , f r−1(x)) est libre. Par conséquent, elle comporte nécessaire-ment moins d’éléments que la dimension de l’espace. On en déduit quer n.
Nous pouvons retrouver l’inégalité r n en utilisant le résultat de l’exercice pré-cédent. Quel que soit s r, nous avons f s = 0 et donc
Ker( f s) = E .
Par conséquent, la suite (Ker( f k))k∈N est croissante et stationne à la valeur E. Onen déduit que
p = minu ∈ N∗ | Ker( f u) = E= minu ∈ N∗ | f u = 0= r.
D’après la question 4. de l’exercice précédent, nous avons
r = p n.
286
Partie 3 • Algèbre
9782100547678-Fresl-C13.qxd 5/07/10 10:29 Page 286

Exercice 13.4 : Calcul explicite de rang
1. Montrer que la famille
B = ((1,3,2),(2,5,2),(−2,−2,−1))
est une base de R3.
2. Calculer le rang de la famille de vecteurs de R4 définie par
C = ((2,0,1,−1),(1,1,2,1),(1,−1,−3,0),(0,1,−1,0),(2,1,−2,1)) .
Extraire de cette famille une famille libre de rang maximal.
3. Soit f l’endomorphisme de R3 défini par
f : R3 → R
3
(x,y,z) → (−2y,2x + 4z,x + 2y + 2z) .
Calculer le rang de l’endomorphisme f. Déterminer une base de son image et unebase de son noyau.
1. Il existe une méthode classique pour calculer le rang d’une famille F de vecteurs :on considère la matrice dont les colonnes sont les vecteurs de la famille F et l’on seramène à une matrice triangulaire supérieure par la méthode du pivot de Gauβ, eneffectuant des opérations élémentaires sur les lignes. Le rang de la famille F estalors égal au nombres de lignes non nulles de la matrice obtenue.
D’après la propriété (2), nous savons qu’une famille de trois vecteurs de R3 est unebase si, et seulement si, elle est de rang trois. Nous pouvons donc appliquer laméthode décrite ci-dessus.
Nous rappelons que les opérations élémentaires sur les lignes sont de trois sortes :
– Li Li + α L j , avec i =/ j ;
– Li ↔ L j ;
– Li α Li avec α =/ 0.
Lorsque l’on applique la méthode du pivot de Gauβ, on n’utilise jamais la dernièreopération.
Considérons la matrice
M = 1 2 −2
3 5 −22 2 −1
.
Nous allons calculer le rang de cette matrice en effectuant des opérationsélémentaires sur ses lignes.©
Dun
od. L
a ph
otoc
opie
non
aut
oris
ée e
st u
n d
élit
.
287
Chapitre 13 • Algèbre linéraire en dimension finie
−→
−→
9782100547678-Fresl-C13.qxd 5/07/10 10:29 Page 287

1 2 −2
0 −1 40 −2 3
L2 L2 − 3L1
L3 L3 − 2L1 1 2 −2
0 −1 40 0 −5
L3 L3 − 2L2
La matrice M est de rang 3. On en déduit que la famille B est également derang 3. Puisqu’elle est composée de trois vecteurs et que R3 est de dimen-sion 3, on en déduit que la famille B est une base de R3.
2. Appliquons la même méthode qu’à la question précédente.
Considérons la matrice
N =
2 1 1 0 20 1 −1 1 1
−1 2 −3 −1 −21 1 0 0 1
.
Nous allons calculer le rang de cette matrice en effectuant des opérationsélémentaires sur ses lignes.
2 1 1 0 20 1 −1 1 10 5
2 −52 −1 −1
0 12 −1
2 0 0
L3 L3 + 1
2 L1
L4 L4 − 12 L1
2 1 1 0 20 1 −1 1 10 0 0 −7
2 −72
0 0 0 −12 −1
2
L3 L3 − 5
2 L2
L4 L4 − 12 L2
2 1 1 0 20 1 −1 1 10 0 0 −7
2 −72
0 0 0 0 0
L4 L4 − 17 L3
La matrice N est de rang 3. On en déduit que la famille C est de rang 3.
288
Partie 3 • Algèbre
−→−→
−→
−→−→
−→−→
−→
9782100547678-Fresl-C13.qxd 5/07/10 10:29 Page 288

Nous devons, à présent, extraire de la famille C une famille libre de rang maximal,c’est-à-dire de rang 3. Cela revient à trouver une famille C′ formée de trois vecteursde C qui soit de rang 3. Nous pouvons en fait lire sur la matrice finale les vecteursà choisir. En effet, il faut qu’en effectuant des opérations élémentaires sur les lignesde la matrice associée à C′ , on obtienne une matrice de rang 3. Si l’on garde les pre-mière, deuxième et quatrième colonne, ce sera visiblement le cas.
Considérons la famille
C′ = ((2,0,1,−1),(1,1,2,1),(0,1,−1,0)) .
En effectuant sur la matrice associée à cette famille les mêmes opérationsélémentaires que précédemment, on obtient la matrice
2 1 00 1 10 0 −7
20 0 0
,
qui est de rang 3. Par conséquent, la famille C′ est de rang 3. Comme elleest composée de trois vecteurs, cette famille est libre.
3. Rang
Le calcul du rang d’un morphisme se ramène au calcul du rang d’une matrice, pro-blème que nous avons traité dans les questions précédentes. En effet, le rang d’unmorphisme est le même que le rang de sa matrice exprimée dans n’importe quelles
bases, au départ et à l’arrivée. Ici, nous utiliserons la base canonique de R3.
La matrice de l’endomorphisme f dans la base canonique de R3 est
M = 0 −2 0
2 0 41 2 2
.
Nous allons calculer le rang de cette matrice en effectuant des opérationsélémentaires sur ses lignes.
Dans ce cas, nous ne pouvons pas utiliser le coefficient en haut à gauche de lamatrice comme pivot, puisque celui-ci est nul. Nous devons commencer paréchanger deux lignes pour amener un coefficient non nul dans cette position.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
289
Chapitre 13 • Algèbre linéraire en dimension finie
9782100547678-Fresl-C13.qxd 5/07/10 10:29 Page 289

1 2 2
2 0 40 −2 0
L1 ↔ L3
1 2 2
0 −4 00 −2 0
L2 L2 − 2L1
1 2 2
0 −4 00 0 0
L3 L3 − 12 L2
Le rang de M est égal à 2. On en déduit que le rang de f vaut également 2.
Image
Une fois que nous avons réussi à transformer, à l’aide d’opérations élémentaires surles lignes, la matrice M en une matrice triangulaire supérieure, il est facile dedéterminer une base de l’image de f. Cela revient exactement à extraire une famillelibre de rang maximal de la famille des colonnes de la matrice M. En effet, l’imagede f est engendrée par les colonnes de cette matrice. Nous avons vu, à la questionprécédente, comment procéder.
En outre, la forme de la matrice obtenue nous montre que les premier etdeuxième vecteurs colonnes de la matrice M engendrent l’image de lamatrice. On en déduit que la famille ((0,2,1),(−2,0,2)) est une base del’image de f.
Noyau
Une fois que nous avons réussi à transformer, à l’aide d’opérations élémentaires surles lignes, la matrice M en une matrice triangulaire supérieure, il est égalementfacile de déterminer le noyau de f. Expliquons plus en détails. Un vecteur (x,y,z)
de R3 appartient au noyau de f si, et seulement si, on a
−2y = 02x + 4z = 0
x + 2y + 2z = 0
Nous pouvons effectuer sur ce système les mêmes opérations que nous avons effec-tué sur la matrice et simplifier ainsi sa résolution. Les calculs sont exactement iden-tiques et il est donc inutile de les refaire.
290
Partie 3 • Algèbre
−→
−→
9782100547678-Fresl-C13.qxd 5/07/10 10:29 Page 290

Un vecteur (x,y,z) de R3 appartient au noyau de f si, et seulement si, on a
−2y = 02x + 4z = 0
x + 2y + 2z = 0
En effectuant exactement les mêmes opérations sur le système que sur lamatrice, on montre que ce système est équivalent à
x + 2y + 2z = 0
−4y = 00 = 0
,
et donc à x = −2zy = 0 .
On en déduit que la famille ((2,0,−1)) est une base du noyau de f.
Remarquons, pour finir, que nous avons trouvé une image de dimension 2 et un
noyau de dimension 1. La somme des dimensions est 3, qui est la dimension de R3,en accord avec le théorème du rang.
Exercice 13.5 : Homothéties
Soit E un K-espace vectoriel de dimension finie. On rappelle qu’une homothétiede E est une application linéaire de la forme
ha :E → Ex → ax
,
avec a ∈ R.
1. Soit f un endomorphisme de E. Supposons que, quel que soit x ∈ E, il existeax ∈ K tel que
f (x) = ax x .
a. Soient x,y ∈ E deux vecteurs linéairement indépendants. Montrer queax = ay. On pourra chercher à calculer f (x + y) de deux façons différentes.
b. Montrer que f est une homothétie.
2. On appelle centre de L(E) l’ensemble des éléments f de E vérifiant la condi-tion suivante
∀g ∈ L(E), f g = g f.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
291
Chapitre 13 • Algèbre linéraire en dimension finie
9782100547678-Fresl-C13.qxd 5/07/10 10:29 Page 291

a. Soit x ∈ E. Montrer qu’il existe un projecteur px de E dont l’image est égaleà Vect(x).b. Déterminer le centre de L(E) .
1.a. L’énoncé nous suggère de calculer de deux façons différentes la quantitéf (x + y). Puisque f est linéaire, nous avons f (x + y) = f (x) + f (y) . En utilisantl’hypothèse, on en déduit que
ax+y (x + y) = ax x + ay y.
Il nous reste à utiliser la liberté de la famille (x,y) pour trouver une relation entreles coefficients ax et ay.
Par hypothèse, nous avons
f (x + y) = ax+y (x + y) = ax+y x + ax+y y.
Nous avons également
f (x + y) = f (x) + f (y)
= ax x + ay y.
En soustrayant ces deux égalités, on obtient
(ax − ax+y) x + (ay − ax+y) y = 0.
Puisque la famille (x,y) est libre, cette condition impose ax = ax+y etay = ax+y. On en déduit que
ax = ay.
1.b. L’expression « f est une homothétie » signifie
∃a ∈ K,∀x ∈ E, f (x) = a x .
Nous disposons de l’hypothèse
∀x ∈ E, ∃ax ∈ K, f (x) = ax x .
Sous cette forme, nous voyons que l’exercice consiste en fait à inverser les quanti-ficateurs ∀ et ∃.
Nous voulons trouver un élément a de K tel que, quel que soit x ∈ E, on aitf (x) = a x. Soit x ∈ E . Nous avons, par hypothèse, f (x) = ax x . Nous
292
Partie 3 • Algèbre
9782100547678-Fresl-C13.qxd 5/07/10 10:29 Page 292

devons donc avoir a x = ax x . Si le vecteur x n’est pas nul, cela impose que l’onait
a = ax .
Nous avons donc trouvé un candidat pour le scalaire a. Il nous reste à vérifier que,quel que soit y =/ x , on a encore
f (y) = a y = ax y.
La question précédente nous suggère de distinguer deux cas selon que le vecteur yest linéairement dépendant du vecteur x ou non.
Soit x ∈ E \ 0. Par hypothèse, il existe ax ∈ K tel que
f (x) = ax x .
Soit y ∈ E. Montrons que l’on a encore
f (y) = ax y.
Nous allons distinguer deux cas.
• La famille (x,y) est liée.
Puisque x =/ 0, il existe λ ∈ K tel que y = λx. Nous avons alors
f (y) = f (λx)= λ f (x)= λax x= ax y.
• La famille (x,y) est libre.
D’après la question précédente, nous avons ax = ay et donc
f (y) = ay y = ax y.
Finalement, nous avons montré que, quel que soit y ∈ E, on a
f (y) = ax y.
Par conséquent, l’endomorphisme f est l’homothétie de rapport ax.
2.a. Cette question est presque une question de cours. Rappelons qu’un projecteurest défini par la donnée de deux sous-espaces supplémentaires, l’image et la direc-
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
293
Chapitre 13 • Algèbre linéraire en dimension finie
9782100547678-Fresl-C13.qxd 5/07/10 10:29 Page 293

tion. Plus précisément, si F et G sont deux sous-espaces vectoriels de E supplé-mentaires et si p est la projection sur F le long de G , on a
p|F = Id et p|G = 0.
L’image de ce projecteur est F. Nous allons donc imposer la condition F =Vect(x).
Soit G un supplémentaire de Vect(x) dans E. Considérons le projecteur px
sur Vect(x) le long de G. Son image est alors Vect(x).
2.b. Nous devons déterminer le centre de L(E) , c’est-à-dire l’ensemble des endo-morphismes de E qui commutent avec tous les autres. Avant de commencer à rai-sonner, essayons de nous faire une idée en trouvant des éléments du centre. La ques-tion précédente nous donne une indication : considérer les homothéties. On seconvainc facilement qu’elles appartiennent toutes au centre de L(E) . Rédigeons cerésultat.
Soit f une homothétie de E. Il existe a ∈ R tel que f = ha = a Id . Quelque soit g ∈ L(E) et quel que soit x ∈ E, nous avons alors
(g f )(x) = g( f (x))= g(a x)= a g(x)= f (g(x))= ( f g)(x).
On en déduit que f appartient au centre de L(E).
Nous allons montrer que les homothéties sont les seuls éléments du centre. Soit f unélément du centre de L(E) . D’après la question 1.b., pour montrer que f est unehomothétie, il suffit de montrer que, quel que soit x ∈ E, il existe ax ∈ K tel quef (x) = ax x . Nous allons appliquer la question précédente pour essayer de démon-trer cette propriété.
Soit f un élément du centre de L(E). Soit x ∈ E. D’après la question 2.a.,il existe un projecteur px de E dont l’image est égale à Vect(x). Puisque fappartient au centre de L(E), nous avons
f px = px f.
En évaluant les deux membres de cette égalité en x, on obtient
f (px(x)) = px( f (x)).
294
Partie 3 • Algèbre
9782100547678-Fresl-C13.qxd 5/07/10 10:29 Page 294

On en déduit que
f (x) ∈ Vect(x),
car px(x) = x et Im(px) = Vect(x). Autrement dit, il existe ax ∈ K tel que
f (x) = ax x .
D’après la question 1.b., f est une homothétie.
Finalement, nous avons montré que le centre de L(E) est exactement l’en-semble des homothéties de E.
Exercice 13.6 : Inégalités sur le rangSoit E un espace vectoriel de dimension finie n et f un endomorphisme de E telque f 3 = 0.
1. Démontrer que rg( f ) + rg( f 2) n .
2. Démontrer que 2 rg( f 2) rg( f ). Pour cela, on pourra introduire la restrictionde f à Im( f ) et déterminer son noyau et son image.
1. On dispose de formules faisant intervenir rg( f ) et rg( f 2) ; plus précisément onsait, d’après le théorème du rang, que
dim(Ker( f )) + rg( f ) = dim(Ker( f 2)) + rg( f 2) = n.
Pour obtenir une inégalité sur des dimensions, il suffit d’établir une inclusion entredes sous-espaces vectoriels.
Plus précisément, une relation de la forme u v = 0, avec u et v linéaires, entraîneIm(v) ⊂ Ker(u) . En effet, pour tout x ∈ E, on a u(v(x)) = 0, soit v(x) ∈ Ker(u).Tous les éléments de l’image de v sont donc éléments du noyau de u.
Nous pouvons ici faire apparaître plusieurs composées nulles : f 3 = 0 peut s’écrire
f f 2 = 0 ou encore f 2 f = 0 qui fournissent respectivement les inclusions
Im( f 2) ⊂ Ker( f ) et Im( f ) ⊂ Ker( f 2).
En passant aux dimensions, on obtient les inégalités
rg( f 2) dim(Ker( f )) et rg( f ) dim(Ker( f 2)).
Comme f 3 = 0 on a
Im( f 2) ⊂ Ker( f )
et donc
rg( f 2) dim(Ker( f )).
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
295
Chapitre 13 • Algèbre linéraire en dimension finie
9782100547678-Fresl-C13.qxd 5/07/10 10:29 Page 295

Etant donné que, d’après le théorème du rang,
dim(Ker( f )) = n − rg( f )
il vient
rg( f 2) n − rg( f )
soit
rg( f ) + rg( f 2) n.
Nous aurions également pu utiliser l’inégalité rg( f ) dim(Ker( f 2)) mais, dansce cas, nous aurions plutôt utilisé pour conclure le théorème du rang appliqué à
f 2 , i.e. la relation dim(Ker( f 2)) + rg( f 2) = n .
2. Soit g la restriction de f à Im( f ) . Par définition, g est l’application qui, à toutélément x de Im( f ) , associe f (x) .
g est linéaire comme restriction d’une application linéaire à un sous-espace vectoriel.
Avant d’appliquer le théorème du rang à g, déterminons ses noyau et image en fonc-tion de f.
• L’image de g est l’ensemble des vecteurs de la forme f (x) pour x appartenant àl’image de f, c’est-à-dire pour x de la forme f (y) avec y ∈ E. Autrement dit, l’ima-ge de g est l’ensemble des vecteurs de la forme f ( f (y)) avec y ∈ E : on a donc
Im(g) = Im( f 2).
• D’autre part, les éléments du noyau de g sont les éléments x de son espace de défi-nition, à savoir Im( f ) , tels que f (x) = 0 : ce sont donc les vecteurs qui appartien-nent à la fois à Im( f ) et Ker( f ) , autrement dit Ker(g) = Ker( f ) ∩ Im( f ).
Le théorème du rang appliqué à g donne
dim(Ker(g)) + rg(g) = rg( f )
soit, d’après la discussion précédente,
dim(Ker( f ) ∩ Im( f )) + rg( f 2) = rg( f ).
Pour aboutir à l’inégalité demandée, il suffit donc de démontrer que
rg( f 2) dim(Ker( f ) ∩ Im( f )).
296
Partie 3 • Algèbre
9782100547678-Fresl-C13.qxd 5/07/10 10:29 Page 296

Cette inégalité est en particulier vérifiée si on a
Im( f 2) ⊂ Ker( f ) ∩ Im( f ).
Il se trouve qu’on a bien cette inclusion, la vérification étant routinière.
Soit x ∈ Im( f 2). Par définition, il existe un élément y de E tel que
x = f 2(y).
D’une part, f (x) = f ( f 2(y)) = f 3(y) = 0 car f 3 = 0 . Ainsi,x ∈ Ker( f ).
D’autre part, x = f ( f (y)) donc x ∈ Im( f ) (f (y) est en effet un antécé-dent de x par f).
Ainsi, x ∈ Ker( f ) ∩ Im( f ). Ceci étant vrai pour tout élément x de Im( f 2)
on a donc
Im( f 2) ⊂ Ker( f ) ∩ Im( f ).
Cette inclusion fournit l’égalité
rg( f 2) dim(Ker( f ) ∩ Im( f )).
Par ailleurs, le théorème du rang appliqué à g donne
dim(Ker( f ) ∩ Im( f )) + rg( f 2) = rg( f )
d’où enfin l’inégalité demandée :
2 rg( f 2) rg( f ).
Exercice 13.7 : Multilinéarité (MPSI)
Soit n ∈ N. Soit f un endomorphisme de Rn et B une base de Rn. Considéronsl’application
ϕ :(Rn)n → R
(x1,. . . ,xn) →n∑
i=1detB(x1,. . . ,xi−1, f (xi ),xi+1,. . . ,xn)
.
1. Montrer que l’application ϕ est une forme n-linéaire et alternée.
2. Montrer que, quel que soit (x1,. . . ,xn) ∈ (Rn)n , on a
ϕ(x1,. . . ,xn) = tr( f ) detB(x1,. . . ,xn).
1. Il s’agit ici d’une simple vérification. Rappelons qu’une application g : En → F ,où E et F sont des R-espaces vectoriels, est dite n-linéaire si elle est linéaire par©
Dun
od. L
a ph
otoc
opie
non
aut
oris
ée e
st u
n d
élit
.
297
Chapitre 13 • Algèbre linéraire en dimension finie
9782100547678-Fresl-C13.qxd 5/07/10 10:29 Page 297

rapport à chacune de ses variables. Autrement dit, g est n-linéaire si, et seulement
si, quel que soient j ∈ 1,. . . ,n , (x1,. . . ,xj−1,xj+1,. . . ,xn) ∈ En−1 , xj ,yj ∈ E ,λ,µ ∈ R, on a
g(x1,. . . ,xj−1,λ xj + µ yj ,xj+1,. . . ,xn)
= λ g(x1,. . . ,xj−1,xj ,xj+1,. . . ,xn) + µ g(x1,. . . ,xj−1,yj ,xj+1,. . . ,xn).
Rappelons également qu’une forme n-linéaire sur E est une application n-linéairede En dans R.
Soient j ∈ 1,. . . ,n, (x1,. . . ,xj−1,xj+1,. . . ,xn) ∈ (Rn)n−1, xj ,yj ∈ Rn,λ,µ ∈ R. Calculons ϕ(x1,. . . ,xj−1,λ xj + µ yj ,xj+1,. . . ,xn) . Par défini-tion de ϕ, cet élément s’obtient comme somme de n termes. Soit i =/ j. Le terme ai correspondant à l’indice i est un déterminant dontle j-ème facteur vaut λ xj + µ yj. Par n-linéarité du déterminant, on peutdévelopper par rapport à ce facteur et l’on obtient
ai = λ detB(x1,. . . , f (xi ),. . . ,xj ,. . . ,xn)
+ µ detB(x1,. . . , f (xi ),. . . ,yj ,. . . ,xn).
Considérons, à présent, le terme aj correspondant à l’indice j. C’est undéterminant dont le j-ème facteur vaut f (λ xj + µ yj ) =λ f (xj ) + µ f (yj ), par linéarité de f. En développant le déterminant parrapport à ce facteur, on obtient
aj = λ detB(x1,. . . ,xj−1, f (xj ),xj+1,. . . ,xn)
+ µ detB(x1,. . . ,xj−1, f (yj ),xj+1,. . . ,xn).
En additionnant ces différents termes, on obtient
ϕ(x1,. . . ,xj−1,λ xj + µ yj ,xj+1,. . . ,xn)
=n∑
i /= j
λ detB(x1,. . . , f (xi ),. . . ,xj ,. . . ,xn)
+λ detB(x1,. . . , f (xj ),. . . ,xn)
+n∑
i /= j
µ detB(x1,. . . , f (xi ),. . . ,yj ,. . . ,xn)
+µ detB(x1,. . . , f (yj ),. . . ,xn)
= λϕ(x1,. . . ,xj−1,xj ,xj+1,. . . ,xn)
+µϕ(x1,. . . ,xj−1,yj ,xj+1,. . . ,xn).
Par conséquent, l’application ϕ est une forme n-linéaire.
298
Partie 3 • Algèbre
9782100547678-Fresl-C13.qxd 5/07/10 10:29 Page 298

Il nous reste, à présent, à montrer que l’application ϕ est alternée. Rappelonsqu’une application n-linéaire g : En → F , où E et F sont des R-espaces vectoriels,est dite alternée si g(x1,. . . ,xn) = 0 dès qu’il existe i =/ j tels que xi = xj.
Soit (x1,. . . ,xn) ∈ Rn . Supposons qu’il existe i, j ∈ 1,. . . ,n, avec i =/ j,tels que xi = xj. Calculons ϕ(x1,. . . ,xn). Il s’écrit comme une somme de ntermes.
Soit k ∈ 1,. . . ,n \ i, j . Le terme ak d’indice k de la somme est undéterminant dont le i-ème facteur xi est égal au j-ème facteur xj . Parconséquent, on a ak = 0 .Le terme ai d’indice i de la somme vaut detB(x1,. . . , f (xi ),. . . ,xj ,. . . ,xn) .Le terme aj d’indice j de la somme vaut
detB(x1,. . . ,xi ,. . . , f (xj ),. . . ,xn)
= detB(x1,. . . ,xi ,. . . , f (xi ),. . . ,xn)
= −detB(x1,. . . , f (xi ),. . . ,xj ,. . . ,xn)
= −ai .
On en déduit que
ϕ(x1,. . . ,xn) =n∑
k=1
ak = ai + aj = 0.
Par conséquent, l’application ϕ est alternée.
2. Pour résoudre cette deuxième question, il faut se souvenir d’un résultat importantdu cours sur les applications multilinéaires et le déterminant : si E est un R-espacevectoriel de dimension n, l’espace vectoriel des formes n-linéaires et alternées estde dimension 1 et engendré par le déterminant.
Par conséquent, le résultat de la question précédente nous montre que l’applicationϕ est un multiple du déterminant : il existe λ ∈ R tel que ϕ = λ det. Pour détermi-ner le coefficient de multiplicité λ, il nous suffit d’appliquer cette formule avec unn-uplet de vecteurs (x1,. . . ,xn) bien choisi.
L’espace vectoriel des formes n-linéaires alternées sur Rn est de dimension1 et engendré par le déterminant. Par conséquent, il existe λ ∈ R tel que
(S) ϕ = λ detB .
Notons (e1,. . . ,en) la base canonique de Rn. Calculons ϕ(e1,. . . ,en). Soiti ∈ 1,. . . ,n . Calculons, tout d’abord, le nombre réeldet(e1,. . . , f (ei ),. . . ,en). Écrivons le vecteur f (ei ) sous la forme
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
299
Chapitre 13 • Algèbre linéraire en dimension finie
9782100547678-Fresl-C13.qxd 5/07/10 10:29 Page 299

f (ei ) = ∑nj=1 ai, j ej , avec ai, j ∈ R, quel que soit j ∈ 1,. . . ,n. Grâce
aux propriétés du déterminant, on a
detB(e1,. . . , f (ei ),. . . ,en) = detB
(e1,. . . ,ei−1,
n∑j=1
ai, j ej ,ei+1,. . . ,en
)= ai,i detB(e1,. . . ,ei ,. . . ,en)
= ai,i .
On en déduit que
ϕ(e1,. . . ,en) =n∑
i=1
ai,i = tr( f ).
En reportant dans la formule (S), on obtient
tr( f ) = λ detB(e1,. . . ,en) = λ.
On en déduit finalement que
ϕ = tr( f ) detB .
300
Partie 3 • Algèbre
9782100547678-Fresl-C13.qxd 5/07/10 10:29 Page 300

301
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
Dans ce chapitre, K désignera R ou C.
Exercice 14.1 : Matrices d’ordre 2
Soit A une matrice carrée d’ordre 2 à coefficients dans K.
1. Montrer que A2 − tr(A) A + det(A) I2 = 0 .
2. Supposons que det(A) =/ 0. Calculer A−1.
3. Considérons la matrice
A =(
3 2
−2 −2
).
Calculer An , pour n ∈ N.
1. Il s’agit ici d’un simple calcul. Nous allons l’effectuer sans plus de commen-taires.
Il existe a,b,c,d ∈ K tels que
A =(
a b
c d
).
On a alors
A2 =(
a2 + bc ab + bd
ac + cd bc + d2
).
Matrices 14
9782100547678-Fresl-C14.qxd 5/07/10 8:59 Page 301

Nous avons également tr(A) = a + d et det(A) = ad − bc. On en déduitque
A2 − tr(A) A + det(A) I2
=(
a2 + bc − (a + d)a + ad − bc ab + bd − (a + d)b
ac + cd − (a + d)c bc + d2 − (a + d)d + ad − bc
)
=(
0 00 0
).
2. Nous cherchons, à présent, à calculer l’inverse de la matrice A. Comment utiliserla formule trouvée précédemment ? Souvenons-nous que l’inverse de la matrice Aest, par définition, l’unique matrice B vérifiant AB = B A = I. Nous allons doncchercher à faire apparaître une relation du type AB = I en modifiant la formule dontnous disposons.
D’après la question précédente, on a A2 − tr(A) A + det(A) I2 = 0 , autre-ment dit A (A − tr(A) I2) = −det(A) I2. Puisque det(A) =/ 0, cette for-mule peut encore s’écrire
A ((det(A))−1 (tr(A) I2 − A)) = I2.
On en déduit que
A−1 = (det(A))−1 (tr(A) I2 − A).
Si la matrice A s’écrit (
a bc d
), on trouve
A−1 = 1
ad − bc
(d −b
−c a
).
Il faut remarquer ici que nous avons trouvé une matrice B vérifiant AB = I2. Pourque la matrice B soit l’inverse de la matrice A, il faut, a priori, vérifier égalementque l’on a bien B A = I2. Nous nous sommes dispensés de ce calcul, car le résultatest automatique pour les matrices : un inverse à droite est nécessairement un inverseà gauche, et réciproquement.
3. Il existe une méthode classique pour calculer les puissances d’une matrice Mlorsque l’on en connaît un polynôme annulateur P(X). Notons d son degré. Soitn ∈ N. Calculer Mn revient à appliquer le polynôme Xn à la matrice M. Pour effec-tuer ce calcul, nous pouvons profiter de la relation P(M) = 0. En effet, effectuonsla division euclidienne de Xn par P(X) : il existe Q(X),R(X) ∈ K[X], avec R dedegré strictement inférieur à d, vérifiant Xn = P(X)Q(X) + R(X) . Pour la matriceM, cela signifie que l’on a
302
Partie 3 • Algèbre
9782100547678-Fresl-C14.qxd 5/07/10 8:59 Page 302

Mn = P(M)Q(M) + R(M) = R(M).
Puisque R(X) est de degré strictement inférieur à d, on voit qu’il suffit de calculer
les puissances A2,. . . ,Ad−1 pour les avoir toutes. Appliquons, à présent, cetteméthode à la matrice A.
On a tr(A) = 1 et det(A) = −2. D’après la première question, le polynômeX2 − X − 2 annule donc la matrice A.
Soit n 2. Effectuons la division euclidienne de Xn par X2 − X − 2 : il existeQ(X),R(X) ∈ K[X], avec R de degré strictement inférieur à 2, vérifiant
(1) Xn = (X2 − X − 2)Q(X) + R(X).
Calculons R(X) . Il existe a,b ∈ K tels que R(X) = an X + bn. Les racines du polynôme Q(X) sont −1 et 2. Spécialisons la relation (1) enX = −1 : on obtient (−1)n = −an + bn. De même, en spécialisant enX = 2, on obtient 2n = 2an + bn. On en déduit que
an = 2n − (−1)n
3
bn = 2n + 2(−1)n
3
Or, toujours d’après la relation (1), nous avons
An = (A2 − A − 2 I2)Q(A) + R(A) = R(A) = an A + bn I2.
Tous calculs faits, nous obtenons
An = 1
3
(2n+2 − (−1)n 2n+1 − 2(−1)n
−2n+1 + 2(−1)n −2n + 4(−1)n
).
Exercice 14.2 : Matrices unipotentes (sauf PTSI)
Soit N ∈ Mn(R) une matrice nilpotente : il existe r ∈ N∗ tel que Nr = 0.
1. Montrer que la matrice In + N est inversible et calculer son inverse.
2. Calculer (In + N )p, pour p ∈ N .
3. Soit la matrice
A = 1 1 3
0 1 20 0 1
.
Calculer A−1 et Ap, pour p ∈ N .
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
303
Chapitre 14 • Matrices
9782100547678-Fresl-C14.qxd 5/07/10 8:59 Page 303

1. Rappelons que, si R est un anneau et a,b deux éléments de R qui commutent,on a
∀k ∈ N, ak − bk = (a − b)
k∑i=0
ai bk−i .
Nous pouvons, par exemple, utiliser cette formule dans l’anneau (Mn(R),+,×)
avec a = In et b = N. On obtient
In = Irn − Nr = (In − N )
r−1∑i=0
Ni .
Cette remarque permet de trouver directement l’inverse de la matrice In + N .
Signalons que cette méthode est classique et qu’il est bon de la retenir.
La matrice
r−1∑i=0
(−1)i N i
est l’inverse de la matrice In + N . En effet, on a(r−1∑i=0
(−1)i N i
)(In + N ) =
r−1∑i=0
(−1)i N i +r−1∑i=0
(−1)i N i+1
=r−1∑i=0
(−1)i N i +r∑
i=1(−1)i−1 Ni
= In + (−1)r−1 Nr
= In,
car In N = N In.
2. Nous voulons ici calculer les puissances d’une somme de deux matrices. Puisqueces matrices commutent, nous pouvons utiliser la formule du binôme de Newton.
Remarquons que les matrices In et N commutent. Par conséquent, nous pou-vons utiliser la formule du binôme de Newton : quel que soit p ∈ N , on a
(In + N )p =p∑
i=0
(pi
)Ni
=min(p,r−1)∑
i=0
(pi
)Ni ,
car, quel que soit q r , on a N q = 0.
304
Partie 3 • Algèbre
9782100547678-Fresl-C14.qxd 5/07/10 8:59 Page 304

3. Nous devons ici appliquer les résultats théoriques obtenues aux deux questionsprécédentes au cas particulier de la matrice A. Bien entendu, il faut commencer pars’assurer que la matrice A est bien du type considéré précédemment.
La matrice
N = 0 1 3
0 0 20 0 0
est nilpotente. En effet, on a
N 2 = 0 0 2
0 0 00 0 0
et N 3 =
0 0 0
0 0 00 0 0
.
Par conséquent, nous pouvons appliquer les résultats précédents à la matriceA = In + N. On en déduit que la matrice A est inversible d’inverse
A−1 = In − N + N 2 = 1 −1 −1
0 1 −20 0 1
.
On en déduit également que, quel que soit p 2, on a
Ap =2∑
i=0
(pi
)Ni
= In + p N + p(p − 1)
2N 2
= 1 p p2 + 2p
0 1 2p0 0 1
.
Exercice 14.3 : Calcul de puissances (sauf PTSI)
1. Soit A la matrice de Mn(R) dont tous les coefficients valent 1. Calculer Ap,pour p ∈ N∗ .
2. Soit B = (bi, j )1i, jn la matrice carrée de taille n définie par
∀i, j ∈ 1,. . . ,n, bi, j =
2 si i = j;1 si i =/ j.
Calculer B p , pour p ∈ N .
3. Calculer B−1.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
305
Chapitre 14 • Matrices
9782100547678-Fresl-C14.qxd 5/07/10 8:59 Page 305

1. Pour traiter ce genre d’exercices, il est bon de commencer par calculer les pre-mières puissances. On essaie ensuite de deviner une formule, puis de la démontrerpar récurrence. Dans notre cas, nous avons
A = 1 . . . 1
......
1 . . . 1
,
et donc
A2 = n . . . n
......
n . . . n
= n A,
A3 = n2 . . . n2
......
n2 . . . n2
= n2 A.
Il est naturel de chercher à démontrer que, quel que soit p ∈ N , on a Ap = n p−1 A.
Montrons par récurrence que, quel que soit p ∈ N∗ , on a Ap = n p−1 A.
L’initialisation pour p = 1 est évidente.
Soit p ∈ N∗ tel que Ap = n p−1 A. Alors
Ap+1 = Ap A = n p−1 A2 = n p−1 n A = n p A.
Nous avons montré que quel que soit p ∈ N∗ , on a Ap = n p−1 A.
2. Remarquons que l’on a B = In + A. Nous devons donc calculer les puissancesd’une somme de deux matrices. Lorsque les deux matrices en question commutent,on peut appliquer la formule du binôme de Newton : si R et S sont deux matricesde Mn(R) qui commutent, alors, quel que soit p ∈ N , on a
(R + S)p =p∑
i=0
(p
i
)Ri S p−i .
Cette formule n’est pas valable si les matrices ne commutent pas. Considérons, parexemple, les matrices
R =(
1 00 0
)et S =
(1 10 0
).
306
Partie 3 • Algèbre
9782100547678-Fresl-C14.qxd 5/07/10 8:59 Page 306

On a alors
(R + S)2 =(
4 20 0
),
mais
R2 + 2RS + S2 =(
4 30 0
).
Remarquons que l’on a B = In + A et que les matrices In et A commutent.Nous pouvons donc appliquer la formule du binôme de Newton : quel que soitp ∈ N , on a
B p =p∑
i=0
(p
i
)Ai = In +
( p∑i=1
(p
i
)ni−1
)A.
Il nous reste à calculer la somme p∑
i=1
(pi
)ni−1 . Elle ressemble aux sommes que l’on
obtient par la formule du binôme de Newton. Il y a cependant trois différences : lesexposants qui interviennent sont du type i − 1 au lieu de i, la somme n’est pascomplète, puisqu’elle commence à 1 au lieu de 0, et des puissances d’un seul élé-ment, au lieu de deux, interviennent. Pour modifier les exposants, il suffit de multi-plier et diviser la somme par n :
p∑i=1
(p
i
)ni−1 = 1
nn
p∑i=1
(p
i
)ni−1
= 1
n
p∑i=1
(p
i
)ni .
Pour rendre la somme complète, il suffit d’ajouter et soustraire le terme manquant :
1
n
p∑i=1
(p
i
)ni = 1
n
( p∑i=1
(p
i
)ni +
(n
0
)n0 −
(n
0
)n0
)
= 1
n
( p∑i=0
(p
i
)ni − 1
).
Pour faire apparaître un deuxième élément dont on prend les puissances, il suffit de
rajouter des 1p−i :
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
307
Chapitre 14 • Matrices
9782100547678-Fresl-C14.qxd 5/07/10 8:59 Page 307

1
n
( p∑i=0
(pi
)ni − 1
)= 1
n
( p∑i=0
(pi
)ni 1p−i − 1
)
= 1
n((n + 1)p − 1) .
Il n’est pas utile de préciser autant le calcul dans la rédaction.
Calculons encorep∑
i=1
(p
i
)ni−1 = 1
n
( p∑i=0
(p
i
)ni − 1
)= (n + 1)p − 1
n.
On en déduit que, quel que soit p ∈ N , on a
B p = In + (n + 1)p − 1
nA.
3. Pour conserver la symétrie du problème, il est raisonnable de chercher un inverseayant une forme semblable à celle de la matrice B : les coefficients de la diagonalesont tous identiques et les coefficients hors de la diagonale sont tous identiques.Autrement dit, nous allons chercher un inverse sous la forme a In + b A , aveca,b ∈ R .
Quelles conditions faut-il imposer sur a et b ? On a
B (a In + b A) = (In + A) (a In + b A)
= a In + (a + b) A + b A2
= a In + (a + (n + 1)b) A
La matrice a In + b A sera l’inverse de A si l’on impose a = 1 eta + (n + 1)b = 0, autrement dit, b = −1/(n + 1).
Vérifions que la matrice
C = In − 1
n + 1A
est l’inverse de la matrice B. On a
B C = (In + A) (In − 1
n + 1A)
= In + n
n + 1A − 1
n + 1A2
= In,
car A2 = n A.
308
Partie 3 • Algèbre
9782100547678-Fresl-C14.qxd 5/07/10 8:59 Page 308
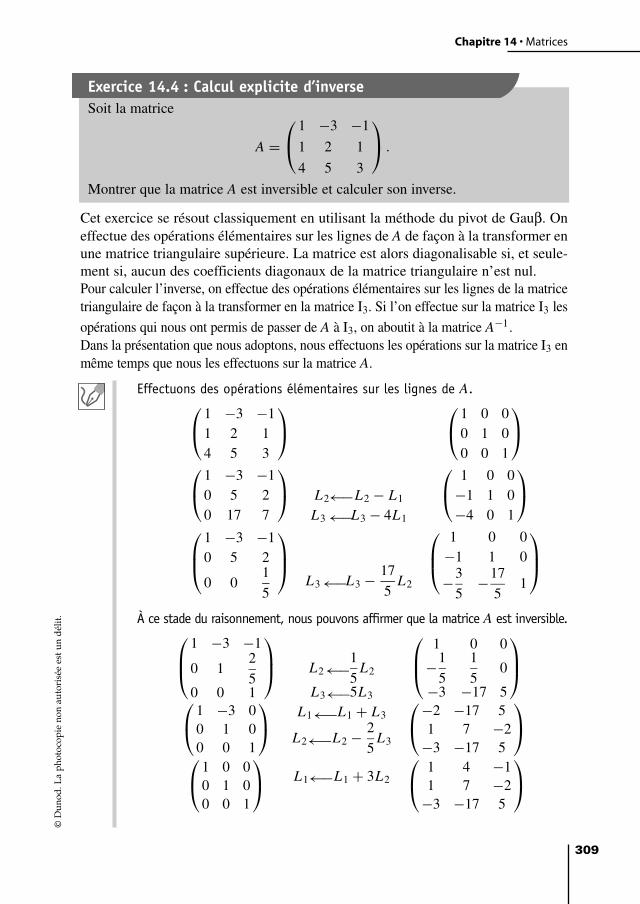
Exercice 14.4 : Calcul explicite d’inverseSoit la matrice
A = 1 −3 −1
1 2 1
4 5 3
.
Montrer que la matrice A est inversible et calculer son inverse.
Cet exercice se résout classiquement en utilisant la méthode du pivot de Gauβ. Oneffectue des opérations élémentaires sur les lignes de A de façon à la transformer enune matrice triangulaire supérieure. La matrice est alors diagonalisable si, et seule-ment si, aucun des coefficients diagonaux de la matrice triangulaire n’est nul.Pour calculer l’inverse, on effectue des opérations élémentaires sur les lignes de la matricetriangulaire de façon à la transformer en la matrice I3. Si l’on effectue sur la matrice I3 les
opérations qui nous ont permis de passer de A à I3, on aboutit à la matrice A−1.Dans la présentation que nous adoptons, nous effectuons les opérations sur la matrice I3 enmême temps que nous les effectuons sur la matrice A.
Effectuons des opérations élémentaires sur les lignes de A. 1 −3 −1
1 2 14 5 3
1 0 0
0 1 00 0 1
1 −3 −1
0 5 20 17 7
L2 L2 − L1
L3 L3 − 4L1
1 0 0
−1 1 0−4 0 1
1 −3 −10 5 2
0 01
5
L3 L3 − 17
5L2
1 0 0−1 1 0
−3
5−17
51
À ce stade du raisonnement, nous pouvons affirmer que la matrice A est inversible.
1 −3 −1
0 12
50 0 1
L2 1
5L2
L3 5L3
1 0 0
−1
5
1
50
−3 −17 5
1 −3 0
0 1 00 0 1
L1 L1 + L3
L2 L2 − 2
5L3
−2 −17 5
1 7 −2−3 −17 5
1 0 0
0 1 00 0 1
L1 L1 + 3L2
1 4 −1
1 7 −2−3 −17 5
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
309
Chapitre 14 • Matrices
−→−→
−→
−→−→
−→−→
−→
9782100547678-Fresl-C14.qxd 5/07/10 9:00 Page 309
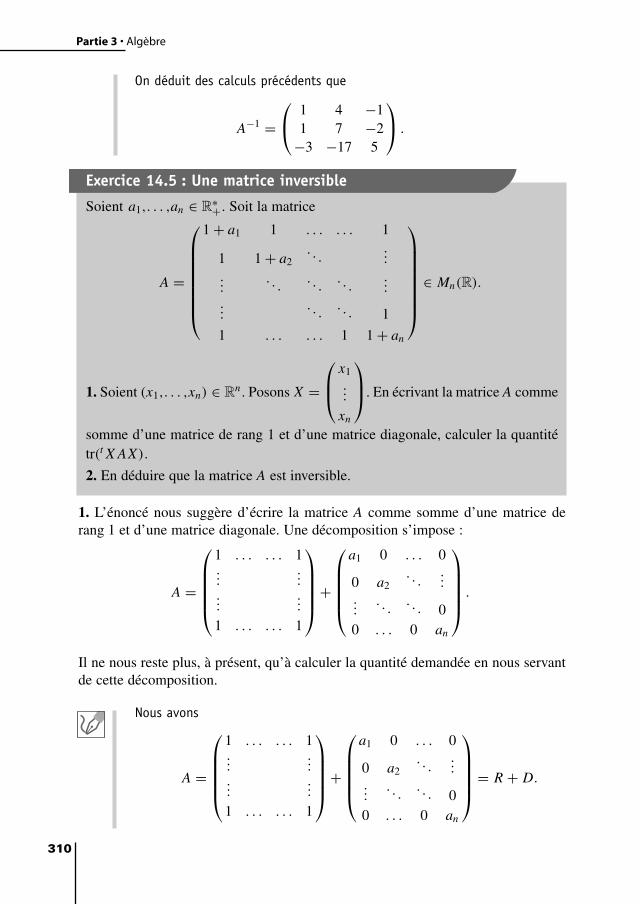
On déduit des calculs précédents que
A−1 = 1 4 −1
1 7 −2−3 −17 5
.
Exercice 14.5 : Une matrice inversible
Soient a1,. . . ,an ∈ R∗+ . Soit la matrice
A =
1 + a1 1 . . . . . . 1
1 1 + a2. . .
...
.... . .
. . .. . .
......
. . .. . . 1
1 . . . . . . 1 1 + an
∈ Mn(R).
1. Soient (x1,. . . ,xn) ∈ Rn . Posons X =
x1...
xn
. En écrivant la matrice A comme
somme d’une matrice de rang 1 et d’une matrice diagonale, calculer la quantitétr(t X AX).
2. En déduire que la matrice A est inversible.
1. L’énoncé nous suggère d’écrire la matrice A comme somme d’une matrice derang 1 et d’une matrice diagonale. Une décomposition s’impose :
A =
1 . . . . . . 1...
......
...
1 . . . . . . 1
+
a1 0 . . . 0
0 a2. . .
...
.... . .
. . . 00 . . . 0 an
.
Il ne nous reste plus, à présent, qu’à calculer la quantité demandée en nous servantde cette décomposition.
Nous avons
A =
1 . . . . . . 1...
......
...
1 . . . . . . 1
+
a1 0 . . . 0
0 a2. . .
...
.... . .
. . . 00 . . . 0 an
= R + D.
310
Partie 3 • Algèbre
9782100547678-Fresl-C14.qxd 5/07/10 9:00 Page 310

Par linéarité de la trace, nous avons
tr(t X AX) = tr(t X RX) + tr(t X DX).
Calculons séparément ces deux termes.
Nous avons
RX =
n∑i=1
xi
...n∑
i=1
xi
et donc
t X RX = ( x1 . . . xn )
n∑i=1
xi
...n∑
i=1
xi
=
(( n∑i=1
xi
)2 ).
D’autre part, nous avons
DX = a1x1
...anxn
et donc
t X DX = ( x1 . . . xn )
a1x1
...anxn
=
( n∑i=1
ai x2i
).
Finalement, on obtient
tr(t X AX) =( n∑
i=1
xi
)2
+n∑
i=1
ai x2i .
L’utilisation de la trace dans la dernière étape peut paraître étrange, puisque nousl’appliquons à une matrice carrée de taille 1 et ne contenant donc qu’un seul coef-ficient. Elle permet en fait de passer d’un objet qui est un élément de M1,1(R) à unobjet, sa trace, qui est véritablement un élément de R.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
311
Chapitre 14 • Matrices
9782100547678-Fresl-C14.qxd 5/07/10 9:00 Page 311

2. Montrer que la matrice A est inversible. Comme d’habitude, nous allons montrerque le noyau de l’application linéaire canoniquement associée est réduit à 0. Ennous aidant du calcul précédent, cela ne devrait pas poser de problèmes.
Notons a l’endomorphisme de Rn dont la matrice dans la base canonique est
A. Soit x = (x1,. . . ,xn) ∈ Ker(a). Posons X = x1
...xn
. Nous avons alors
AX = 0. D’après le résultat de la question précédente, nous avons donc( n∑i=1
xi
)2
+n∑
i=1
ai x2i = tr(t X AX) = 0.
Or, quel que soit i ∈ 1,. . . ,n, on a ai 0. Nous avons donc une sommede termes positifs dont la somme est nulle. On en déduit que chacun de cestermes doit être nul : ( n∑
i=1
xi
)2
= a1 x21 = · · · = an x2
n = 0.
Quel que soit i ∈ 1,. . . ,n , on a ai =/ 0 . Cela impose quex1 = · · · = xn = 0 et donc que x = 0. On en déduit que Ker(a) = 0. Parconséquent, l’endomorphisme a est un isomorphisme et sa matrice A dansla base canonique est inversible.
Exercice 14.6 : Réduction d’un endomorphisme
1. Soient E un espace vectoriel sur R, f et g deux endomorphismes de E. Montrerque f g = 0 si, et seulement si, Im(g) ⊂ Ker( f ) .
2. Soit f un endomorphisme non nul de R3 vérifiant f 2 = 0.
a. En utilisant la question précédente, calculer la dimension du noyau et del’image de f.
b. Montrer qu’il existe une base de R3 dans laquelle l’endomorphisme f a pour
matrice
0 0 1
0 0 00 0 0
. On pensera à chercher une base adaptée à toutes les inclu-
sions rencontrées dans l’exercice.
1. Cette première question est très classique et il faut savoir la rédiger correctementet rapidement.
312
Partie 3 • Algèbre
9782100547678-Fresl-C14.qxd 5/07/10 9:00 Page 312

Supposons que Im(g) ⊂ Ker( f ). Soit x ∈ E. L’élément g(x) appartient àIm(g) ⊂ Ker( f ). Par conséquent, on a f (g(x)) = 0.
Supposons, à présent, que f g = 0. Soit x ∈ Im(g). Il existe y ∈ E telque x = g(y) . Puisque f g = 0, on a f (x) = f (g(y)) = 0 , d’oùx ∈ Ker( f ).
2.a. Dans cette question, nous devons calculer les dimensions du noyau et del’image de l’endomorphisme f. Nous allons commencer par écrire toutes les infor-mations que nous avons concernant ces dimensions. Tout d’abord f est un endo-
morphisme de R3. On en déduit que
dim(Ker( f )) 3 et dim(Im( f )) 3.
En outre, l’endomorphisme f n’est pas nul, autrement dit, dim(Ker( f )) < 3 etdim(Im( f )) > 0. Nous pouvons donc être plus précis :
dim(Ker( f )) ∈ 0,1,2 et dim(Im( f )) ∈ 1,2,3.
Appliquons le théorème du rang. On obtient
dim(Ker( f )) + dim(Im( f )) = dim(R3) = 3.
L’énoncé nous suggère d’utiliser la question précédente. En l’appliquant avecg = f , on obtient Im( f ) ⊂ Ker( f ) . On en déduit que
dim(Im( f )) dim(Ker( f )).
Une fois ces informations regroupées, il ne nous reste qu’une possibilité :dim(Im( f )) = 1 et dim(Ker( f )) = 2.
D’après le théorème du rang, on a
dim(Ker( f )) + dim(Im( f )) = 3.
D’après la question précédente, appliquée avec g = f, on a
dim(Im( f )) dim(Ker( f )).
Il ne nous reste que deux possibilités : soit dim(Im( f )) = 0 etdim(Ker( f )) = 3, soit dim(Im( f )) = 1 et dim(Ker( f )) = 2. La premièrepossibilité est exclue car elle correspond à l’endomorphisme nul. Nous obte-nons finalement
dim(Im( f )) = 1 et dim(Ker( f )) = 2.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
313
Chapitre 14 • Matrices
9782100547678-Fresl-C14.qxd 5/07/10 9:00 Page 313

b. Nous avons la suite d’inclusions Im( f ) ⊂ Ker( f ) ⊂ R3 entre des espaces de
dimension 1, puis 2, puis 3. Il est naturel de chercher une base de R3 adaptée à cesinclusions. Dans un premier temps, choisissons une base (e1) de Im( f ) . Elle n’estcomposée que d’un vecteur car nous avons vu à la question précédente quedim(Im( f )) = 1.
À présent, complétons la famille (e1) en une base (e1,e2) de Ker( f ) . Elle est com-posée de deux vecteurs car dim(Ker( f )) = 2, d’après la question précédente.
Finalement, complétons la famille (e1,e2) en une base B = (e1,e2,e3) de R3.
Calculons la matrice de l’endomorphisme f dans la base B. On a f (e1) = f (e2) = 0,car e1,e2 ∈ Ker( f ). Le vecteur f (e3) appartient à Im( f ) est n’est pas nul care3 /∈ Ker( f ) = Vect(e1,e2) . On en déduit qu’il existe λ =/ 0 tel que f (e3) = λ e1 .
Par conséquent, la matrice de f dans la base B est
0 0 λ
0 0 00 0 0
.
Nous avons presque obtenu la matrice voulue. Posons e′3 = (1/λ) e3 . Nous avons
alors f (e′3) = e1. Définissons une nouvelle base de R3 par B′ = (e1,e2,e′
3). La
matrice de l’endomorphisme f dans la base B′ est
0 0 1
0 0 00 0 0
.
Remarquons que nous aurions pu choisir directement le vecteur e′3 comme un anté-
cédent de e1 par f. Cette observation nous permettra de rendre la rédaction un peuplus élégante.
Nous avons la suite d’inclusions Im( f ) ⊂ Ker( f ) ⊂ R3. D’après la questionprécédente, on a dim(Im( f )) = 1 et dim(Ker( f )) = 2. Soit (e1) une basede Im( f ) et complétons-la en une base (e1,e2) de Ker( f ) . Il existe un vec-
teur e3 de R3 tel que f (e3) = e1. Puisque e3 /∈ Ker( f ), la famille
(e1,e2,e3) est libre. On en déduit que c’est une base de R3. La matrice del’endomorphisme f dans cette base n’est autre que
0 0 10 0 00 0 0
.
Exercice 14.7 : Projections et symétries
1. Soient les vecteurs de R3
b1 = (1,1,2), b2 = (−2,−1,3) et b3 = (0,−3,−1).
314
Partie 3 • Algèbre
9782100547678-Fresl-C14.qxd 5/07/10 9:00 Page 314

Notons
E = Vect(b1,b2) et F = Vect(b3).
a. Montrer que la famille B = (b1,b2,b3) est une base de R3. Que peut-on diredes espaces E et F ?
b. Soit p la projection sur E parallèlement à F. Calculer la matrice M de p dansla base B.
c. Notons E = (e1,e2,e3) la base canonique de R3. Calculer la matrice N de pdans la base E.
d. Calculer la matrice P de passage de E à B. Quelle relation existe-t-il entre lesmatrices M, N et P ?
2. Soient les vecteurs de R3
c1 = (1,−1,−3), c2 = (1,0,3) et c3 = (2,−1,1).
Notons
G = Vect(c1) et H = Vect(c2,c3).
a. Montrer que la famille C = (c1,c2,c3) est une base de R3. Que peut-on dire desespaces G et H ?
b. Soit s la symétrie par rapport à G parallèlement à H. Calculer la matrice S des dans la base C.
c. Calculer la matrice Q de passage de E à C et son inverse.
d. En utilisant la question précédente, calculer la matrice T de s dans la base E.
Cette exercice a pour seul objet de faire revoir les définitions de base du cours et deles appliquer. Nous aurons besoin de savoir montrer qu’une famille est une base, deconnaître la définition d’une projection et d’une symétrie, de calculer la matriced’un endomorphisme dans une base et d’effectuer un changement de base.
1.a. Pour montrer que la famille B est une base de R3, nous allons appliquer laméthode du pivot de Gauβ sur la matrice dont les colonnes sont les vecteurs de B.
Nous allons effectuer des opérations sur les lignes de la matrice dont lescolonnes sont les vecteurs de B.
1 −2 0
1 −1 −3
2 3 −1
1 −2 0
0 1 −3
0 7 −1
L2 L2 − L1
L3 L3 − 2L1© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
315
Chapitre 14 • Matrices
−→−→
9782100547678-Fresl-C14.qxd 5/07/10 9:00 Page 315

1 −2 0
0 1 −3
0 0 20
L3 L3 − 7L2
On déduit des calculs précédents que la matrice est inversible. Par consé-quent, la famille B est une base de R3.Puisque les espaces E et F sont obtenus en prenant les espaces vectorielsengendrés par deux parties complémentaires d’une base de R3, ils sontnécessairement supplémentaires.
1.b. Ici, il s’agit simplement d’appliquer les définitions.
Par définition, on a p|E = Id et p|F = 0. Par conséquent, on a p(b1) = b1,p(b2) = b2 et p(b3) = 0. On en déduit que la matrice de p dans la base B est
M = 1 0 0
0 1 00 0 0
.
1.c. Nous devons calculer la matrice de p dans la base E. Pour cela, il nous fautécrire les vecteurs de E dans la base B. Ces calculs doivent s’effectuer au brouillon :pour la rédaction finale, seul le résultat importe.
Calculons l’expression de e1 dans la base B. Nous devons résoudre le système
x − 2y = 1x − y − 3z = 0
2x + 3y − z = 0
Par opérations élémentaires sur les lignes, on obtient
x − 2y = 1y − 3z = −1 L2 L2 − L1
7y − z = −2 L3 L3 − 2L1
x − 2y = 1y − 3z = −1
20z = 5 L3 L3 − 7L2
On en déduit que
x = 1
2
y = −1
4
z = 1
4
316
Partie 3 • Algèbre
−→
−→−→
−→
9782100547678-Fresl-C14.qxd 5/07/10 9:00 Page 316
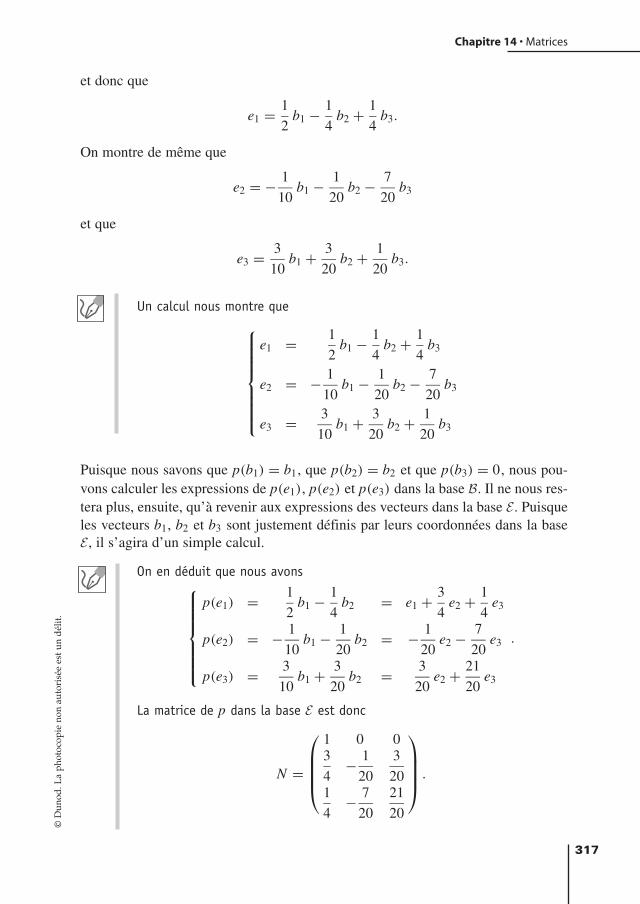
et donc que
e1 = 1
2b1 − 1
4b2 + 1
4b3.
On montre de même que
e2 = − 1
10b1 − 1
20b2 − 7
20b3
et que
e3 = 3
10b1 + 3
20b2 + 1
20b3.
Un calcul nous montre que
e1 = 1
2b1 − 1
4b2 + 1
4b3
e2 = − 1
10b1 − 1
20b2 − 7
20b3
e3 = 3
10b1 + 3
20b2 + 1
20b3
Puisque nous savons que p(b1) = b1, que p(b2) = b2 et que p(b3) = 0, nous pou-vons calculer les expressions de p(e1), p(e2) et p(e3) dans la base B. Il ne nous res-tera plus, ensuite, qu’à revenir aux expressions des vecteurs dans la base E. Puisqueles vecteurs b1, b2 et b3 sont justement définis par leurs coordonnées dans la baseE, il s’agira d’un simple calcul.
On en déduit que nous avons
p(e1) = 1
2b1 − 1
4b2 = e1 + 3
4e2 + 1
4e3
p(e2) = − 1
10b1 − 1
20b2 = − 1
20e2 − 7
20e3
p(e3) = 3
10b1 + 3
20b2 = 3
20e2 + 21
20e3
.
La matrice de p dans la base E est donc
N =
1 0 03
4− 1
20
3
201
4− 7
20
21
20
.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
317
Chapitre 14 • Matrices
9782100547678-Fresl-C14.qxd 5/07/10 9:00 Page 317

1.d. Dans cette dernière partie, il s’agit, là encore, d’appliquer le cours. La matricede passage de E à B est, par définition, la matrice dont les colonnes sont les vecteursde B exprimés dans la base E. Rappelons que c’est également la matrice de l’appli-
cation identité de R3 muni de la base B vers R3 muni de la base E.
En outre, si P est la matrice de passage de E à B, M la matrice de p dans B et N lamatrice de p dans E, nous avons la relation
M = P−1 N P.
La matrice de passage de B à E est
P = 1 −2 0
1 −1 −3
2 3 −1
.
La formule de changement de base nous montre que l’on a la formule
M = P−1 N P.
Pour finir, nous pouvons remarquer que l’on connaît la matrice P−1. En effet, c’estla matrice de passage de la base B à la base E, autrement dit, celle dont les colonnessont les vecteurs de E exprimés dans B. Nous avons effectué ce calcul à la question1.c. et avons trouvé
P−1 =
1
2− 1
10
3
10
−1
4− 1
20
3
201
4− 7
20
1
20
.
2. Cet exercice est proche du précédent : on nous donne une application linéaire quia une expression très simple dans une base donnée et on nous demande de trouverson expression dans une autre base. Cependant, la méthode utilisée est différente.Dans l’exercice précédent, nous raisonnions sur les vecteurs de la base. Cette fois-ci, nous travaillerons avec la matrice de changement de base.
2.a. On procède ici comme à la question 1.a.
Nous allons effectuer des opérations sur les lignes de la matrice dont lescolonnes sont les vecteurs de C.
318
Partie 3 • Algèbre
9782100547678-Fresl-C14.qxd 5/07/10 9:00 Page 318

1 1 2
−1 0 −1
−3 3 1
1 1 2
0 1 1
0 6 7
L2 L2 + L1
L3 L3 + 3L1 1 1 2
0 1 1
0 0 1
L3 L3 − 6L2
On déduit des calculs précédents que la matrice est inversible. Par consé-quent, la famille C est une base de R3.
Puisque les espaces G et H sont obtenus en prenant les espaces vectorielsengendrés par deux parties complémentaires d’une base de R3, ils sontnécessairement supplémentaires.
2.b. Pour répondre à cette question, il suffit de se rappeler la définition d’une symé-trie.
Par définition, on a s|G = Id et s|H = −Id. Par conséquent, on as(c1) = c1 , s(c2) = −c2 et s(c3) = −c3. On en déduit que la matrice de sdans la base C est
S = 1 0 0
0 −1 0
0 0 −1
.
2.c. Dans cette question, il faut se souvenir de la définition d’une matrice de pas-sage et du procédé pour calculer l’inverse d’une matrice.
La matrice de passage de E à C est
Q = 1 1 2
−1 0 −1
−3 3 1
.
Calculons son inverse par la méthode du pivot de Gauβ.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
319
Chapitre 14 • Matrices
−→−→
−→
9782100547678-Fresl-C14.qxd 5/07/10 9:00 Page 319

1 1 2
−1 0 −1
−3 3 1
1 0 0
0 1 0
0 0 1
1 1 2
0 1 1
0 6 7
L2 L2 + L1
L3 L3 + 3L1
1 0 0
1 1 0
3 0 1
1 1 2
0 1 1
0 0 1
L3 L3 − 6L2
1 0 0
1 1 0
−3 −6 1
1 1 0
0 1 0
0 0 1
L1 L1 − 2L3
L2 L2 − L3
7 12 −2
4 7 −1
−3 −6 1
1 0 0
0 1 0
0 0 1
L1 L1 − L2
3 5 −1
4 7 −1
−3 −6 1
On déduit des calculs ci-dessus que l’inverse de la matrice est la matrice
Q−1 = 3 5 −1
4 7 −1
−3 −6 1
.
2.d. Cette dernière question repose sur la formule de changement de base.
D’après la formule de changement de base, la matrice de l’application s dansla base E est
T = QSQ−1.
Finalement, nous avons
T = 1 1 2
−1 0 −1
−3 3 1
1 0 0
0 −1 0
0 0 −1
3 5 −1
4 7 −1
−3 −6 1
= 1 −1 −2
−1 0 1
−3 −3 −1
3 5 −1
4 7 −1
−3 −6 1
= 5 10 −2
−6 −11 2
−18 −30 5
.
320
Partie 3 • Algèbre
−→−→
−→−→−→
−→
9782100547678-Fresl-C14.qxd 5/07/10 9:00 Page 320

Exercice 14.8 : Suites couplées
Soient (un)n∈N et (vn)n∈N les suites à termes réels définies paru0 = 1
v0 = 2
et, quel que soit n ∈ N, un+1 = 4 un − 2 vn
vn+1 = un + vn.
Quel que soit n ∈ N, on pose
Xn =(
un
vn
).
1. Trouver une matrice A ∈ M2(R) telle que, quel que soit n ∈ N, on ait
Xn+1 = A Xn.
Soit n ∈ N. Exprimer Xn en fonction des puissances de A et de X0.
2. Notons f l’endomorphisme de R2 dont la matrice dans la base canonique est A.Calculer une base des espaces vectoriels Ker( f − 2Id) et Ker( f − 3Id) . Endéduire une matrice P ∈ GL2(R) vérifiant
P−1 AP =(
2 0
0 3
)= D.
3. Soit n ∈ N. Calculer An en fonction de Dn. En déduire l’expression de un et vn.
1. La première partie de la question est facile. On nous demande simplement deréécrire sous forme matricielle le système
un+1 = 4 un − 2 vn
vn+1 = un + vn
en faisant intervenir les vecteurs
Xn =(
un
vn
)et Xn+1 =
(un+1
vn+1
).
Posons
A =(
4 −2
1 1
).
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
321
Chapitre 14 • Matrices
9782100547678-Fresl-C14.qxd 5/07/10 9:00 Page 321

Quel que soit n ∈ N, on a
A Xn =(
4 −2
1 1
)(un
vn
)
=(
4 un − 2 vn
un + vn
)
=(
un+1
vn+1
)= Xn+1.
En ce qui concerne la seconde partie de la question, commençons, pour nous faireune idée, par résoudre le problème pour les premières valeurs de n. Nous allons cal-culer Xn en ne faisant intervenir que A et X0. Tout d’abord, on a X0 = X0. Ensuite,le raisonnement précédent nous montre que l’on a X1 = A X0. Calculons encore
X2 = A X1 = A (A X0) = A2 X0
et
X3 = A X2 = A (A2 X0) = A3 X0.
En continuant ainsi, on montre que, quel que soit n ∈ N, on a
Xn = An X0.
Cela se démontre proprement à l’aide d’une récurrence.
Montrons par récurrence que, quel que soit n ∈ N, on a
Xn = An X0.
L’initialisation est évidente : on a
A0 X0 = I2 X0 = X0.
Soit n ∈ N tel que Xn = An X0. D’après le raisonnement précédent, on a
Xn+1 = A Xn
= A (An X0)
= An+1 X0.
2. L’exercice débute par des calculs.
322
Partie 3 • Algèbre
9782100547678-Fresl-C14.qxd 5/07/10 9:00 Page 322

On a
A − 2I2 =(
2 −2
1 −1
).
Par conséquent, (x,y) ∈ Ker( f − 2Id) si, et seulement si, on a2x − 2y = 0
x − y = 0
autrement dit,
y = x .
On en déduit que
Ker( f − 2Id) = (x,x) | x ∈ R
et que la famille (a = (1,1)) est une base de Ker( f − 2Id) .
On a
f − 3Id =(
1 −2
1 −2
).
Par conséquent, (x,y) ∈ Ker( f − 3Id) si, et seulement si, on ax − 2y = 0
x − 2y = 0
autrement dit,
x = 2y.
On en déduit que
Ker( f − 3Id) = (2y,y) | y ∈ R
et que la famille (b = (2,1)) est une base de Ker( f − 3Id) .
Nous devons déduire des résultats précédents une matrice P ∈ GL2(R) vérifiant
P−1 AP = D . Nous reconnaissons ici la formule de changement de base. Détaillons
un peu. Notons c1 et c2 les colonnes de P et B la base (c1,c2) de R2 (cette familleest une base car la matrice P est inversible).
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
323
Chapitre 14 • Matrices
9782100547678-Fresl-C14.qxd 5/07/10 9:00 Page 323

La formule P−1 AP = D signifie exactement que la matrice de l’application f dans
la base B est D =(
2 00 3
). Autrement dit, on a
f (c1) = 2 c1 + 0 c2 = 2 c1
et
f (c2) = 0 c1 + 3 c2 = 3 c2.
Nous pouvons retraduire ces deux dernières égalité sous la forme
c1 ∈ Ker( f − 2Id)
et
c2 ∈ Ker( f − 3Id).
Nous en déduisons des candidats potentiels pour accomplir le rôle de c1 et c2 : cesont respectivement a et b.
La famille B = (a,b) forme une base de R2 car les vecteurs a et b ne sontpas colinéaires. Puisque a ∈ Ker( f − 2Id) et que b ∈ Ker( f − 3Id) , on a
f (a) = 2a et f (b) = 3b.
On en déduit que la matrice de l’application f dans la base B est
D =(
2 0
0 3
).
Soit P ∈ GL2(R) la matrice de changement de base de la base canoniqueà B :
P =(
1 2
1 1
).
Par la formule du changement de base, on a alors
P−1 AP = D.
3. Nous devons exprimer An en fonction de Dn . Commençons par nous faire uneidée en étudiant le problème pour les premières valeurs de n. Pour n = 1, nous
avons D = P−1 AP. En la multipliant par P à gauche et P−1 à droite, on trouve
P D P−1 = P P−1 AP P−1 = A.
324
Partie 3 • Algèbre
9782100547678-Fresl-C14.qxd 5/07/10 9:00 Page 324

Calculons, à présent, A2 grâce à cette formule. On a
A2 = (P D P−1)2 = P D P−1 P D P−1 = P D2 P−1.
Nous pourrions être tentés d’écrire (P D P−1)2 = P2 D2 P−2 , mais cette formuleest, en général, fausse. Nous devons revenir à la définition de l’élévation au carré :
pour toute matrice R ∈ M2(R) , nous avons R2 = R.R . Appliquée à
R = P D P−1 , cette formule nous donne
(P D P−1)2 = (P D P−1)(P D P−1)
= P D(P−1 P)D P−1
= P D2 P−1.
De la même manière que précédemment, on trouve
A3 = A2 A = P D2 P−1 P D P−1 = P D3 P−1.
En continuant ainsi, on montre que, quel que soit n ∈ N, on a
An = P Dn P−1.
Nous allons rédiger ce raisonnement en procédant par récurrence.
Montrons par récurrence que, quel que soit n ∈ N, la proposition
Hn : « An = P Dn P−1 » est vraie.
• On a
A0 = I2 = P D0 P−1.
Par conséquent, la proposition H0 est vraie.
• Soit n ∈ N tel que la proposition Hn est vraie. Nous avonsAn = P Dn P−1. Nous avons montré que D = P−1 AP et donc queA = P D P−1. On en déduit que
An+1 = An A = P Dn P−1 P D P−1 = P Dn+1 P−1.
Par conséquent, la proposition Hn+1 est vraie.
• Finalement, quel que soit n ∈ N, on a An = P Dn P−1 .
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
325
Chapitre 14 • Matrices
9782100547678-Fresl-C14.qxd 5/07/10 9:00 Page 325

Pour calculer un et vn, il nous reste simplement, maintenant, à regrouper les résul-tats précédents. Nous avons vu que(
un
vn
)= Xn = An X0.
Il nous suffit donc de calculer An . Nous venons de montrer que An = P Dn P−1 . Il
nous suffit donc de calculer P−1 et Dn .
Il est facile d’inverser une matrice carrée de taille 2. De manière générale, si
M =(
a bc d
), avec ad − bc =/ 0, on a
M−1 = 1
ad − bc
(d −b
−c a
).
Si l’on ne souhaite pas retenir la formule, on peut appliquer l’algorithme habituelbasé sur le pivot de Gauβ.
Le calcul de Dn est très simple puisque la matrice D est diagonale. Quel que soitn ∈ N, on a
Dn =(
2n 0
0 3n
).
D’après la question 1., quel que soit n ∈ N, on a
Xn = An X0
= P Dn P−1 X0.
Or nous avons
P−1 =(−1 2
1 −1
)
et, quel que soit n ∈ N,
Dn =(
2n 0
0 3n
).
Tous calculs faits, on trouve que, quel que soit n ∈ N, on aun = 3.2n − 2.3n
vn = 3.2n − 3n
326
Partie 3 • Algèbre
9782100547678-Fresl-C14.qxd 5/07/10 9:00 Page 326

Exercice 14.9 : Matrice de Vandermonde
Soient n ∈ N et a1,. . . ,an ∈ K. On note
V (a1,. . . ,an) = 1 a1 . . . an−1
1...
......
1 an . . . an−1n
∈ Mn(K).
1. Montrer que la matrice V (a1,. . . ,an) est inversible si, et seulement si, on a
∀i =/ j, ai =/ aj .
2. Soient α1,. . . ,αn ∈ K tels que ∀i =/ j,αi =/ αj. Considérons l’applicationlinéaire
ϕ : Kn−1[X] → Kn
P(X) → (P(α1),. . . ,P(αn)).
Calculer la matrice de l’application dans la base B = (1,X,. . . ,Xn−1) au départet la base canonique C à l’arrivée. En déduire que, quels que soientβ1,. . . ,βn ∈ K , il existe un unique polynôme P ∈ Kn−1[X] vérifiant
∀i ∈ 1,. . . ,n, P(αi ) = βi .
Connaissez-vous une autre façon de démontrer ce résultat ?
1. Première implication
Commençons par une remarque simple. S’il existe deux indices i et j distincts telsque ai = aj, alors les i-ème et j-ème lignes de la matrice V (a1,. . . ,an) sont égaleset cette matrice ne peut pas être inversible. Cette implication n’est pas, à proprementparler, l’une de celles demandées. Cependant, sa contraposée en est une.
Nous allons montrer que si la matrice V (a1,. . . ,an) est inversible, alors ona ∀i =/ j, ai =/ aj. Par contraposition, il nous suffit de montrer que s’ilexiste i =/ j tels que ai = aj, alors V (a1,. . . ,an) n’est pas inversible.Cette dernière proposition est évidente puisque la matrice V (a1,. . . ,an)
possède alors deux lignes identiques.
Seconde implication
Nous devons, à présent, démontrer l’implication réciproque : si ∀i =/ j, ai =/ aj,alors la matrice V (a1,. . . ,an) est inversible. Nous allons chercher à montrer que lenoyau de l’endomorphisme canoniquement associé à cette matrice est nul.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
327
Chapitre 14 • Matrices
9782100547678-Fresl-C14.qxd 5/07/10 9:00 Page 327

Démontrons, à présent, l’implication réciproque. Supposons que, quels quesoient les indices i et j distincts, on a ai =/ aj. Notons f l’endomorphismede Kn canoniquement associé à V (a1,. . . ,an) , c’est-à-dire l’endomorphismede Kn dont la matrice dans la base canonique est V (a1,. . . ,an) . Soitx = (x1,. . . ,xn) ∈ Ker( f ) . On a alors
x1 + x2 a1 + · · · + xn an−11 = 0
......
......
x1 + x2 an + · · · + xn an−1n = 0
.
Posons P(X) = x1 + x2 X + · · · + xn Xn−1 . Le système précédent peuts’écrire sous la forme
∀i ∈ 1,. . . ,n, P(ai ) = 0.
Par conséquent, le polynôme P(X) possède au moins n racines distinctes :a1,. . . ,an. Puisque le polynôme P(X) est de degré inférieur ou égal àn − 1, cette condition impose que ce soit le polynôme nul. On en déduit quex1 = · · · = xn = 0 et donc que x = 0.
Nous avons montré que le noyau de l’endomorphisme f est nul. On en déduitque f est un isomorphisme et donc que sa matrice V (a1,. . . ,an) dans labase canonique est inversible.
2. Commençons par calculer la matrice de l’application ϕ dans les bases demandées.
Quel que soit i ∈ 0,. . . ,n − 1, nous avons
ϕ(Xi ) = (αi1,. . . ,α
in).
On en déduit que la matrice de ϕ dans la base B au départ et C à l’arrivéeest
1 α1 . . . αn−1
1...
......
1 αn . . . αn−1n
= V (α1,. . . ,αn).
Nous retrouvons la matrice V (α1,. . . ,αn) que nous avons étudiée à la question pré-cédente. Puisque, par hypothèse, les nombres α1,. . . ,αn sont deux à deux distincts,nous savons que cette matrice est inversible. Il nous reste à interpréter ce résultat dela façon dont l’énoncé nous le suggère.
Quels que soient i, j ∈ 1,. . . ,n, avec i =/ j, nous avons αi =/ αj. D’aprèsla question précédente, la matrice V (α1,. . . ,αn) est donc inversible. On en
328
Partie 3 • Algèbre
9782100547678-Fresl-C14.qxd 5/07/10 9:00 Page 328

déduit que l’application linéaire ϕ est un isomorphisme. C’est en particulierune application bijective. Quels que soient β1,. . . ,βn ∈ K , il existe donc ununique polynôme P ∈ Kn−1[X] vérifiant ϕ(P) = (β1,. . . ,βn), c’est-à-dire
∀i ∈ 1,. . . ,n, P(αi ) = βi .
Le résultat obtenu nous rappelle un résultat du cours sur l’interpolation polynomialeet, précisément, l’interpolation de Lagrange (cf. exercice 15.6). Ce dernier nousfournit des formules explicites pour trouver un polynôme P(X) vérifiant les condi-tions requises.
Nous pouvons démontrer le même résultat en raisonnant uniquement sur lespolynômes.
• Unicité. Démontrons, tout d’abord, l’unicité. Supposons qu’il existe deuxpolynômes P et Q dans Kn−1[X] vérifiant
∀i ∈ 1,. . . ,n, P(αi ) = Q(αi ) = βi .
On a alors
∀i ∈ 1,. . . ,n, (P − Q)(αi ) = 0.
Le polynôme P − Q est donc un polynôme de degré inférieur ou égal àn − 1 qui possède n racines distinctes α1,. . . ,αn. C’est nécessairement lepolynôme nul. On en déduit que P = Q .
• Existence. Pour montrer l’existence du polynôme demandé, nous allonsutiliser l’interpolation de Lagrange. Soit i ∈ 1,. . . ,n. On pose
Li (X) =∏j /= i
X − αj
αi − αj∈ Kn−1[X].
On a alors
∀ j ∈ 1,. . . ,n, Li (αj ) =
0 si j =/ i1 si j = i.
Le polynôme
P(X) =n∑
i=1
βi Li (X) ∈ Kn−1[X]
vérifie alors les conditions requises.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
329
Chapitre 14 • Matrices
9782100547678-Fresl-C14.qxd 5/07/10 9:00 Page 329

Exercice 14.10 : Matrices de permutations (MPSI)
Soit n ∈ N∗ . Quel que soit σ ∈ Sn , on note Mσ la matrice carrée de taille n dontla j-ème colonne est le σ( j)-ème vecteur de la base canonique.
1. Soit σ ∈ Sn . Notons Mσ = (mi, j )1i, jn ∈ Mn(R). Donner l’expression demi, j , pour i, j ∈ 1,. . . ,n.
2. Soient σ,τ ∈ Sn. Montrer que l’on a l’égalité
Mστ = MσMτ.
En déduire que la matrice Mσ est inversible et calculer son inverse.
3. Soit σ ∈ Sn . Montrer que la matrice Mσ est orthogonale.
4. Soit σ ∈ Sn . Montrer que la trace de la matrice Mσ est égale au nombre depoints fixes de la permutation σ.
Soient σ1,σ2 ∈ Sn . Montrer que les permutations σ1 σ2 et σ2 σ1 ont le mêmenombre de points fixes.
5. Soit σ ∈ Sn . Montrer que le déterminant de la matrice Mσ est égal à la signa-ture de la permutation σ.
1. Cette première question est élémentaire. Elle a pour but de nous faire manipulerles objets introduits afin de mieux les comprendre. Il est néanmoins essentiel d’enrédiger correctement la réponse.
Soit j ∈ 1,. . . ,n. Par définition de Mσ, sa j-ème colonne est égale auσ( j)-ème vecteur de la base canonique. La j-ème colonne de Mσ n’est autre
que le vecteur
m1, j
...mn, j
∈ Rn. Quel que soit i ∈ 1,. . . ,n, nous avons
donc
mi, j =
0 si i =/ σ( j) ;1 si i = σ( j).
2. Cette deuxième question consiste en une vérification. Puisque nous connaissonsl’expression explicite des coefficients des matrices Mσ et Mτ, nous allons pouvoircalculer les coefficients du produit de ces deux matrices par la formule habituelle.Rappelons-la. Si A = (ai, j )1i, jn et B = (bi, j )1i, jn sont deux matrices et quel’on note AB = (ci, j )1i, jn leur produit, on a
∀i, j ∈ 1,. . . ,n, ci, j =n∑
k=1
ai,kbk, j .
330
Partie 3 • Algèbre
9782100547678-Fresl-C14.qxd 5/07/10 9:00 Page 330

Notons Mσ = (ai, j )1i, jn, Mτ = (bi, j )1i, jn, MσMτ = (ci, j )1i, jn etMστ = (di, j )1i, jn . Soient i, j ∈ 1,. . . ,n. Par définition du produitmatriciel, on a
ci, j =n∑
k=1ai,kbk, j
= ai,τ( j).
En effet, d’après le résultat de la question précédente utilisé pour la matriceMτ, on a bτ( j), j = 1 et, quel que soit k =/ τ( j), bk, j = 0 . En utilisant cerésultat pour la matrice Mσ, on obtient
ci, j =
0 si i =/ σ(τ( j)) ;1 si i = σ(τ( j)).
Nous retrouvons l’expression du coefficient di, j . On en déduit que
MσMτ = Mστ.
Nous devons, à présent, montrer que la matrice Mσ est inversible et calculer soninverse. Nous cherchons donc une matrice N qui vérifie
MσN = In.
Le résultat précédent nous suggère de chercher cette matrice N sous la forme Mτ,avec τ ∈ Sn. Nous devons alors trouver τ tel que l’on ait
MσMτ = Mστ = In.
Il est clair que nous avons MId = In. Par conséquent, nous obtiendrons le résultat
voulu si σ τ = Id. Il suffit donc de choisir τ = σ−1 . Il n’est pas nécessaire d’in-clure ce raisonnement dans la rédaction finale. Une vérification suffit.
D’après la formule précédente, on a
MσMσ−1 = Mσσ−1
= MId
= In.
On en déduit que la matrice Mσ est inversible et que l’on a
(Mσ)−1 = Mσ−1 .
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
331
Chapitre 14 • Matrices
9782100547678-Fresl-C14.qxd 5/07/10 9:00 Page 331

3. Par définition de l’orthogonalité d’une matrice, nous devons montrer que
t Mσ = (Mσ)−1.
Il est donc naturel de commencer par calculer la matrice t Mσ.
Commençons par calculer la transposée de la matrice Mσ. NotonsMσ = (mi, j )1i, jn et t Mσ = (ni, j )1i, jn. D’après la question 1., quelsque soient i, j ∈ 1,. . . ,n, on a
ni, j = mj,i
=
0 si j =/ σ(i)1 si j = σ(i)
=
0 si i =/ σ−1( j)1 si i = σ−1( j)
.
On en déduit que
t Mσ = Mσ−1 = (Mσ)−1,
d’après la question précédente.
On en déduit que la matrice Mσ est orthogonale.
4. Puisque nous connaissons l’expression des coefficients de la matriceMσ = (mi, j )1i, jn , il ne sera pas difficile de calculer sa trace. Par définition, ellevaut
tr(Mσ) =n∑
i=1
mi,i .
Il nous restera ensuite à identifier l’expression obtenue avec le nombre de pointsfixes de σ.
Notons Mσ = (mi, j )1i, jn . Par définition, on a
tr(Mσ) =n∑
i=1
mi,i .
D’après la question 1., quel que soit i ∈ 1,. . . ,n, on a
mi,i =
0 si i =/ σ(i) ;1 si i = σ(i).
332
Partie 3 • Algèbre
9782100547678-Fresl-C14.qxd 5/07/10 9:00 Page 332

Par conséquent, on a
tr(Mσ) = Cardi ∈ 1,. . . ,n | i = σ(i).
Cette dernière expression est le nombre de points fixes de la permutation σ.
Le résultat que l’on nous demande ensuite de démontrer est une application directedu précédent et découle simplement des propriétés de la trace.
D’après les propriétés de la trace, nous avons
tr(Mσ1σ2) = tr(Mσ1 Mσ2)
= tr(Mσ2 Mσ1)
= tr(Mσ2σ1).
D’après le résultat précédent, on en déduit que les permutations σ1 σ2 etσ2 σ1 ont le même nombre de points fixes.
Ce résultat ne dit rien sur les points fixes eux-mêmes. Il est possible que les pointsfixes des permutations σ1 σ2 et σ2 σ1 soient différents. Considérons, parexemple, les permutations σ1 = (1 2) et σ2 = (1 2 3) dans S3. Nous avons
σ1 σ2 = (2 3),
dont l’unique point fixe est 1, et
σ2 σ1 = (1 3),
dont l’unique point fixe est 2.
5. Cette question est plus difficile que les précédentes. Cela tient au fait qu’il n’estpas simple d’obtenir la signature d’une permutation. Rappelons-en une définition.Si σ ∈ Sn possède une écriture sous la forme
σ = τ1 · · · τp,
où p ∈ N et τ1,. . . ,τp sont des transpositions, alors la signature de la permutationσ vaut
ε(σ) = (−1)p.
Cette quantité ne dépend pas de l’écriture de σ comme produit de transpositions.
Au vu de cette définition, une méthode s’impose naturellement. On commence parécrire σ comme produit de transpositions : σ = τ1 · · · τp . Nous voulons ensuitecalculer la quantité det(Mσ). Mais nous savons que
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
333
Chapitre 14 • Matrices
9782100547678-Fresl-C14.qxd 5/07/10 9:00 Page 333

det(Mσ) = det(Mτ1···τp)
= det(Mτ1 · · · Mτp),
d’après la question 2.. Nous obtenons finalement
det(Mσ) = det(Mτ1) · · · det(Mτp).
Il nous suffit donc de calculer det(Mτi ) , pour i ∈ 1,. . . ,n. Puisque les matricesMτi sont simples, cela ne devrait pas être difficile.
Nous savons que la permutation σ peut s’écrire comme produit de transpo-sitions. Il existe un entier p ∈ N et des transpositions τ1,. . . ,τp vérifiant
σ = τ1 · · · τp.
Dans ce cas, la signature de la permutation σ est
ε(σ) = (−1)p.
Calculons tout d’abord le déterminant d’une transposition τ ∈ Sn. Supposonsque ce soit la transposition (i, j), avec i, j ∈ 1,. . . ,n et i < j. La matriceMτ est alors obtenue à partir de la matrice identité en échangeant lescolonnes i et j. Nous savons qu’en échangeant deux colonnes dans un déter-minant, on multiplie celui-ci par −1. On en déduit que
det(Mτ) = −det(In) = −1.
Calculons, à présent, le déterminant de Mσ. D’après la question 2., on a
Mσ = Mτ1 · · · Mτp .
Par conséquent, nous avons
det(Mσ) = det(Mτ1 · · · Mτp
)= det(Mτ1) · · · det(Mτp)
= (−1)p
= ε(σ).
Il existe une autre façon de démontrer le résultat en revenant à la définition dudéterminant. Le déterminant de la matrice A = (ai, j )1i, jn est
det(A) =∑σ∈Sn
(ε(σ)
n∏i=1
ai,σ(i)
).
334
Partie 3 • Algèbre
9782100547678-Fresl-C14.qxd 5/07/10 9:00 Page 334

En appliquant cette formule à la matrice Mσ, nous devrions retrouver encore lerésultat attendu. Nous proposons également une rédaction de l’exercice par cetteméthode.
Notons Mσ = (mi, j )1i, jn . Par définition, on a
det(Mσ) =∑τ∈Sn
(ε(τ)
n∏i=1
mi,τ(i)
).
Presque tous les coefficients de la somme sont nuls. Soit τ ∈ Sn. Pour quele terme
∏ni=1 mi,τ(i) ne soit pas nul, il faut que, quel que soit
i ∈ 1,. . . ,n, le coefficient mi,τ(i) ne soit pas nul. D’après la question 1.,on en déduit qu’il faut que, quel que soit i ∈ 1,. . . ,n, on ait i = σ(τ(i)) ,
autrement dit, σ−1(i) = τ(i) et donc σ−1 = τ. Par conséquent, la sommedonnant le déterminant ne comporte qu’un seul terme non nul :
det(Mσ) = ε(σ−1)n∏
i=1mi,σ−1(i)
= ε(σ−1).
En effet, quel que soit i ∈ 1,. . . ,n, on a mi,σ−1(i) = 1 , puisque
i = σ(σ−1(i)). Or nous savons que ε(σ−1) = ε(σ). On en déduit que
det(Mσ) = ε(σ).
S’il n’est pas connu, le résultat ε(σ−1) = ε(σ) peut se redémontrer facilement. Eneffet, si σ s’écrit comme produit de transpositions sous la forme
σ = τ1 · · · τp,
alors σ−1 s’écrit
σ−1 = τ−1p · · · τ−1
1 = τp · · · τ1.
Le nombre de transposistions intervenant dans σ et σ−1 est le même et nous avonsdonc
ε(σ−1) = ε(σ) = (−1)p.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
335
Chapitre 14 • Matrices
9782100547678-Fresl-C14.qxd 5/07/10 9:00 Page 335

Exercice 14.11 : Formes linéaires sur les espaces de matrices
Soit n ∈ N∗ . A toute matrice A de Mn(R), on associe une forme linéaire surMn(R) par
ϕA :Mn(R) → R
M → tr(AM).
Pour i, j ∈ 1,. . . ,n, on note Ei, j la matrice carrée de taille n dont le coefficientplacé à l’intersection de la i-ème ligne et de la j-ème colonne vaut 1 et lesautres 0. Nous noterons ϕi, j = ϕEi, j
.
1. Montrer que la famille (ϕi, j )1i, jn est libre.
2. Montrer que toute forme linéaire sur Mn(R) est de la forme ϕA, avecA ∈ Mn(R) .
1. Pour montrer qu’une famille est libre, on procède toujours de la même manière :on considère une combinaison linéaire nulle et on montre qu’elle est triviale. Soit
(λi, j )1i, jn ∈ Rn2vérifiant
∑1i, jn
λi, j ϕi, j = 0.
Pour obtenir des informations sur les λi, j , nous allons appliquer la relation précé-dente entre formes linéaires à certains vecteurs. Il est naturel de l’appliquer, toutd’abord, aux vecteurs de la forme Ek,l.
Soit (λi, j )1i, jn ∈ Rn2vérifiant
∑1i, jn
λi, j ϕi, j = 0.
Remarquons que, quel que soient i, j,k,l ∈ 1,. . . ,n , on a
Ei, j Ek,l =
0 si j =/ k ;Ei,l si j = k.
Par conséquent, quel que soient i, j,k,l ∈ 1,. . . ,n , on a
ϕi, j (Ek,l) =
0 si j =/ k ;0 si j = k et i =/ l ;1 si j = k et i = l.
336
Partie 3 • Algèbre
9782100547678-Fresl-C14.qxd 5/07/10 9:00 Page 336

Soient k,l ∈ 1,. . . ,n . On a∑1i, jn
λi, j ϕi, j (Ek,l) = λl,k = 0.
On en déduit que la famille (ϕi, j )1i, jn est libre.
2. D’après la question précédente, la famille (ϕi, j )1i, jn est une famille libre de
(Mn(R))∗ . En fait, nous avons même mieux. En effet, cette famille possède n2 vec-teurs et on a
dim((Mn(R))∗
) = dim (Mn(R)) = n2.
Par conséquent, la famille (ϕi, j )1i, jn est une base de (Mn(R))∗ . Cette remarque
nous permet d’écrire toute forme linéaire sur Mn(R) comme combinaison linéairedes ϕi, j. Cela devrait nous suffire pour conclure.
Nous avons
dim((Mn(R))∗
) = dim (Mn(R)) = n2.
Par conséquent, la famille (ϕi, j )1i, jn est une base de (Mn(R))∗, car elle
est libre et possède n2 vecteurs.
Soit ϕ une forme linéaire sur Mn(R). Nous savons qu’il existe
(µi, j )1i, jn ∈ Rn2vérifiant
ϕ =∑
1i, jn
µi, j ϕi, j .
Or, par linéarité de la trace, quels que soient A,B ∈ Mn(R) et α ∈ R , on a ϕA + ϕB = ϕA+B
αϕA = ϕα A
,
On en déduit que ϕ = ϕR, où R = ∑1i, jn
µi, j Ei, j.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
337
Chapitre 14 • Matrices
9782100547678-Fresl-C14.qxd 5/07/10 9:00 Page 337

9782100547678-Fresl-C14.qxd 5/07/10 9:00 Page 338

339
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
Dans ce chapitre, K désignera R ou C.
Exercice 15.1 : Polynômes de Chebyshev
On définit une suite de polynômes par T0 = 1, T1 = X et, pour n ∈ N,Tn+2 = 2XTn+1 − Tn .
1. Déterminer le degré et le coefficient dominant de Tn.
2. Soit n ∈ N. Montrer que Tn est l’unique polynôme vérifiant :
∀θ ∈ R,Tn(cos(θ)) = cos(nθ).
3. Déterminer les racines de Tn.
4. Déterminer des relations analogues à celle de la deuxième question pour T ′n et
T ′′n . En déduire une équation différentielle linéaire du second ordre vérifiée
par Tn.
5. Déterminer les racines de T ′n et sa factorisation dans R[X]. En déduire, de deux
manières différentes, la valeur de T ′n(0).
Bien que cela ne soit pas demandé ici il est souvent utile, quand une suite est défi-nie par récurrence, de calculer ses premiers termes. Ceci permet parfois de devinerles résultats aux questions mais aussi de vérifier sur des exemples simples les cal-culs généraux ultérieurs.
Nous allons donc calculer les premiers polynômes Tn à l’aide de la relation de récur-rence mais également T ′
n et T ′′n vu qu’ils interviennent dans les deux dernières ques-
tions.
Polynômes 15
9782100547678-Fresl-C15.qxd 5/07/10 9:02 Page 339

À la vue de ces premiers exemples on voit qu’il est raisonnable de penser que Tn estde degré n. De plus, il semblerait que, si n =/ 0, le coefficient dominant de Tn est
2n−1 .
Pour répondre à la première question il n’y a plus qu’à poser ces propriétés dans unehypothèse de récurrence.
1. On peut proposer deux rédactions pour la récurrence :
– la première est de poser Hn : « Tn est de degré n », d’initialiser en démontrant H0 etH1 et de démontrer l’hérédité en établissant l’implication (Hn et Hn+1) ⇒ Hn+2 ;
– la seconde est de poser Hn : « pour k n, Tk est de degré k ». On initialise pourn = 1 et l’hérédité consiste simplement à montrer que Hn implique Hn+1.
Nous allons ici utiliser la première rédaction.
Pour n ∈ N posons Hn : « Tn est de degré n ».
• H0 et H1 sont clairement vraies car T0 = 1 et T1 = X.
• Soit n ∈ N tel que Hn et Hn+1 soient vraies.
On a Tn+2 = 2XTn+1 − Tn . D’après l’hypothèse de récurrence on adeg(Tn) = n et deg(2XTn+1) = 1 + deg(Tn+1) = n + 2 .
Comme deg(2XTn+1) et deg(Tn) sont distincts le degré de leur différenceest le maximum de ces degrés, i.e. n + 2. Ainsi, deg(Tn+2) = n + 2 doncHn+2 est vraie.
• En conclusion, Hn est vraie pour tout n ∈ N, i.e. :
∀n ∈ N,deg(Tn) = n.
Il faut être prudent avec les degrés de sommes. En général, on a seulement l’in-égalité deg(P + Q) max(deg(P),deg(Q)) (l’inégalité étant due au fait que lescoefficients dominants peuvent se simplifier). Lorsque deg(P) =/ deg(Q) , on al’égalité deg(P + Q) = max(deg(P),deg(Q)) .Il faut toujours vérifier cette condition pour calculer exactement le degré d’unesomme.
340
Partie 3 • Algèbre
n Tn T ′n T ′′
n
0 1 0 0
1 X 1 0
2 2X2 − 1 4X 4
3 4X3 − 3X 12X2 − 3 24X
4 8X4 − 8X2 + 1 32X3 − 16X 96X2 − 16
9782100547678-Fresl-C15.qxd 5/07/10 9:02 Page 340

Pour le coefficient dominant nous pouvons nous contenter d’une récurrence simplevu que l’on connaît le degré de chacun des polynômes intervenant dans la relationde récurrence : il n’y a donc qu’à considérer directement les termes de plus hautsdegrés.
Pour n ∈ N posons Kn : « le coefficient dominant de Tn+1 est 2n ».
• K0 est clairement vraie car T1 = X.
• Soit n ∈ N∗ tel que Kn soit vraie.
On a Tn+2 = 2XTn+1 − Tn . Comme Tn+2 est de degré n + 2 son coefficient
dominant est le coefficient de Xn+2 dans Tn+2 = 2XTn+1 − Tn .
Le degré de Tn étant n, le coefficient de Xn+2 dans Tn est 0.
Le degré de Tn+1 étant n + 1, le coefficient de Xn+2 dans 2XTn+1 est le
double de celui de Xn+1 dans Tn+1, i.e. le double du coefficient dominantde Tn+1 qui est, par hypothèse, 2n.
Ainsi, le coefficient dominant de Tn+2 est 2n+1 donc Kn+1 est vraie.
• En conclusion, Kn est vraie pour tout n ∈ N, i.e. :
∀n ∈ N, le coefficient dominant de Tn+1 est 2n.
2. Cette question est double : il faut montrer que Tn possède la propriété annoncéemais également que c’est le seul polynôme la vérifiant. Il est beaucoup plus simpleet clair de séparer ces deux questions.
Vérification de la propriété
Pour établir que Tn vérifie la relation donnée nous allons, sans surprise, raisonnerpar récurrence sur N.
Il reste à poser correctement l’hypothèse de récurrence. On veut montrer que, nétant donné, une certaine relation est vraie pour tout réel θ ; la quantification« ∀θ ∈ R » apparaîtra donc dans l’hypothèse de récurrence.
Pour n ∈ N posons Hn : « pour tout réel θ, Tn(cos(θ)) = cos(nθ) ».
• H0 et H1 sont clairement vraies : T0(cos(θ)) = 1 et T1(cos(θ)) = cos(θ)pour tout réel θ.
• Soit n ∈ N tel que Hn et Hn+1 soient vraies. Soit un réel θ. Alors :
cos((n + 2)θ) = cos((n + 1)θ+ θ)
= cos((n + 1)θ) cos(θ) − sin((n + 1)θ) sin(θ)
et, d’autre part,
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
341
Chapitre 15 • Polynômes
9782100547678-Fresl-C15.qxd 5/07/10 9:02 Page 341

cos(nθ) = cos((n + 1)θ− θ)
= cos((n + 1)θ) cos(θ) + sin((n + 1)θ) sin(θ)
d’où
cos((n + 2)θ) + cos(nθ) = 2 cos((n + 1)θ) cos(θ)
L’hypothèse de récurrence donne alors :
cos((n + 2)θ) + Tn(cos(θ)) = 2Tn+1(cos(θ)) cos(θ)
ou encore :
cos((n + 2)θ) = 2 cos(θ)Tn+1(cos(θ)) − Tn(cos(θ))
= Tn+2(cos(θ))
ce qui démontre Hn+2 .
• En conclusion, Hn est vraie pour tout entier naturel n, soit :
∀n ∈ N,∀θ ∈ R,Tn(cos(θ)) = cos(nθ).
Unicité du polynôme
Soit P un polynôme vérifiant, pour tout θ ∈ R , P(cos(θ)) = cos(nθ) .
On a donc :
∀θ ∈ R,P(cos(θ)) = Tn(cos(θ))
ou encore, vu que cos(θ) parcourt [−1,1] quand θ parcourt R :
∀x ∈ [−1,1],P(x) = Tn(x).
Ainsi, P − Tn possède une infinité de racines (au moins tous les éléments de[−1,1]) ; ce polynôme est donc nul, d’où P = Tn .
3. On voit que, si θ est un réel tel que cos(nθ) = 0, cos(θ) est une racine de Tn.Cependant, ces racines sont toutes de valeurs absolues inférieures ou égales à 1; rienn’interdit, a priori, qu’il y en ait d’autres. Nous allons donc compter ces racines ;s’il y en a n distinctes nous pourrons alors affirmer que ce sont les seules.
Fixons donc n ∈ N∗ .
Si cos(nθ) = 0, il existe un entier relatif k tel que nθ = π
2+ kπ, soit θ = (2k + 1)π
2n
et enfin cos(θ) = cos
((2k + 1)π
2n
). Cependant, différentes valeurs de k peuvent
donner la même valeur de ce cosinus.
342
Partie 3 • Algèbre
9782100547678-Fresl-C15.qxd 5/07/10 9:02 Page 342

Plus précisément, on voit qu’en remplaçant k par k + 2n le cosinus prend la mêmevaleur. Ceci permet donc déjà de se restreindre à k ∈ 0,. . . ,2n − 1 .
De même, en chageant k en 2n − k − 1, le cosinus ne change pas (formule de tri-gonométrie usuelle). On peut donc même se restreindre à k ∈ 0,. . . ,n − 1 .
Pour de telles valeurs de k, les valeurs du cosinus sont bien distinctes: en effet, en
notant ak = (2k + 1)π
2non a:
0 < a0 < · · · < an−1 = (2n − 1)π
2n< π
d’où, la fonction cosinus étant strictement décroissante sur [0,π] :
cos(an−1) < · · · < cos(ak) < · · · < cos(a0).
Ainsi, les réels cos
((2k + 1)π
2n
), avec k = 0,. . . ,n − 1, sont tous des racines de Tn
et sont deux à deux distincts, ce qui fournit n racines distinctes de Tn.
Comme Tn est de degré n, ce sont ses seules racines et elles sont toutes simples.
4. La relation de la deuxième question étant vraie pour tout réel θ nous pouvons ladériver ; cependant, il faut faire attention au fait que le membre de gauche est unefonction composée.
Fixons n ∈ N.
On a, pour tout réel θ :
Tn(cos(θ)) = cos(nθ).
En dérivant cette relation par rapport à θ il vient :
∀θ ∈ R, sin(θ)T ′n(cos(θ)) = n sin(nθ)
puis en dérivant une seconde fois :
∀θ ∈ R,−sin2(θ)T ′′n (cos(θ)) + cos(θ)T ′
n(cos(θ)) = n2 cos(nθ).
Notons que le second membre de cette dernière relation n’est autre que
n2Tn(cos(θ)) et que sin2(θ) = 1 − cos2(θ). On peut donc écrire cette relation enfonction de Tn, T ′
n , T ′′n et cos(θ) .©
Dun
od. L
a ph
otoc
opie
non
aut
oris
ée e
st u
n d
élit
.
343
Chapitre 15 • Polynômes
9782100547678-Fresl-C15.qxd 5/07/10 9:02 Page 343

Cette dernière relation peut également s’écrire :
∀θ ∈ R,
(1 − cos2(θ))T ′′n (cos(θ)) − cos(θ)T ′
n(cos(θ)) + n2Tn(cos(θ)) = 0.
Or, quand θ parcourt R, cos(θ) parcourt [−1,1], d’où :
∀x ∈ [−1,1],(1 − x2)T ′′n (x) − xT ′
n(x) + n2Tn(x) = 0.
Ainsi, le polynôme (1 − X2)T ′′n (X) − XT ′
n(X) + n2Tn(X) possède uneinfinité de racines ; il est donc nul, soit :
∀x ∈ R,(1 − x2)T ′′n (x) − xT ′
n(x) + n2Tn(x) = 0.
Ne pas conclure trop rapidement : la relation en cos(θ) obtenue ne permet d’endéduire qu’une équation différentielle vérifiée sur [−1,1], il faut un argument sup-plémentaire (un polynôme qui a une infinité de racines est nul) pour conclure.
5. Cette question est semblable à la troisième : la formule reliant T ′n et les fonctions
trigonométriques obtenue à la question précédente permet de déterminer facilementdes racines de T ′
n ; il restera alors à vérifier qu’il n’y en a pas d’autres.
Nous avons vu que :
∀θ ∈ R, sin(θ)T ′n(cos(θ)) = n sin(nθ).
En particulier, pour θ = kπ
navec k ∈ Z il vient :
sin(kπ/n)T ′n(cos(kπ/n)) = 0
car sin(kπ) = 0 .
Pour 1 k n − 1 posons xk = cos(kπ/n) . On a alors sin(kπ/n) =/ 0d’où :
T ′n(xk) = 0.
Enfin, la fonction cosinus étant strictement décroissante sur [0,π] on a :
x1 > · · · > xn−1
ce qui montre que les réels xk , k allant de 1 à n − 1, sont deux à deux dis-tincts.
344
Partie 3 • Algèbre
9782100547678-Fresl-C15.qxd 5/07/10 9:02 Page 344

Ainsi, nous avons déterminé n − 1 racines distinctes de T ′n . Or T ′
n est dedegré n − 1, ce qui montre qu’il n’a pas d’autre racine et qu’elles sont toutessimples.
Comme son coefficient dominant est n2n−1 on a donc :
T ′n = n2n−1
n−1∏k=1
(X − cos
(kπ
n
)).
Il nous reste à calculer T ′n(0). Nous pouvons le faire de deux manières différentes,
soit en utilisant la factorisation, soit en utilisant l’expression de T ′n(cos(θ)) .
Nous avons vu que :
∀θ ∈ R, sin(θ)T ′n(cos(θ)) = n sin(nθ).
En écrivant cette égalité pour θ = π/2, on obtient
T ′n(0) = n sin
(nπ
2
).
Distinguons deux cas.
• Si n est pair, nous avons nπ/2 = 0 mod π et donc
T ′n(0) = 0.
• Si n est impair, nous pouvons l’écrire sous la forme n = 2p + 1 , avecp ∈ N . Nous avons alors
T ′2p+1(0) = (2p + 1) sin
(π2
+ pπ)
= (2p + 1)(−1)p sin(π
2
)= (2p + 1)(−1)p.
Nous pouvons également calculer T ′n(0) en utilisant la factorisation du poly-
nôme T ′n trouvée précédemment. Nous obtenons
T ′n(0) = n2n−1
n−1∏k=1
(−cos
(kπ
n
))
= n2n−1(−1)n−1n−1∏k=1
(cos
(kπ
n
)).
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
345
Chapitre 15 • Polynômes
9782100547678-Fresl-C15.qxd 5/07/10 9:02 Page 345

Il est bon de vérifier que cette dernière expression redonne bien T ′n(0) = 0 ,
lorsque n est pair. C’est bien le cas, puisque le terme d’indice k = n/2 du produitvaut
cos
n
2π
n
= cos
(π2
)= 0.
Exercice 15.2 : Polynômes de Legendre
Pour n ∈ N et x ∈ R on pose :
Ln(x) = 1
2nn!
dn
dxn
((x2 − 1)n) .
1. Déterminer le degré et le coefficient dominant de Ln.
2. Calculer Ln(1) et Ln(−1).
3. Calculer de deux manières différentes Ln(0) .
1. Comme précédemment, il est utile de calculer les premiers termes de la suite depolynômes considérée. Nous avons
• L0(x) = 1 ;
• L1(x) = x ;
• L2(x) = 3
2x2 − 1
2;
• L3(x) = 5
2x3 − 3
2x .
Sur ces exemples, il semble que, quel que soit n ∈ N, le polynôme Ln(x) est dedegré n. Cela découle d’ailleurs facilement des propriétés de la dérivation.
Soit n ∈ N. (x2 − 1)n est de degré 2n donc sa dérivée n-ième est de degré2n − n = n . Ainsi :
∀n ∈ N, deg(Ln) = n.
Le coefficient dominant de Ln est le coefficient de son terme de degré n qu’on peut
déterminer à partir du coefficient dominant de (x2 − 1)n.
Soit n ∈ N.
Le terme de plus haut degré de (x2 − 1)n est x2n . Sa dérivée n-ième est
(2n)!
n!xn d’où le coefficient dominant de Ln :
(2n)!
2n(n!)2=
(2nn
)2n
.
346
Partie 3 • Algèbre
9782100547678-Fresl-C15.qxd 5/07/10 9:03 Page 346

2. Nous ne connaissons aucune formule pour calculer directement les dérivées du
polynôme (x2 − 1)n. Cependant, nous pouvons calculer les dérivées des polynômes(x − 1)n et (x + 1)n . Pour k n ∈ N , nous avons
dk
dxk
((x − 1)n) = n!
(n − k)!(x − 1)n−k
et
dk
dxk
((x + 1)n) = n!
(n − k)!(x + 1)n−k .
Pour calculer les dérivées du polynôme (x2 − 1)n, il ne nous reste plus qu’à appli-quer la formule de Leibniz.
D’après la formule de Leibniz :
dn
dxn
((x2 − 1)n) =
n∑k=0
(n
k
)dk
dxk
((x − 1)n) dn−k
dxn−k
((x + 1)n)
=n∑
k=0
(n
k
)n!
(n − k)!(x − 1)n−k n!
k!(x + 1)k
=n∑
k=0
n!
(n
k
)2
(x − 1)n−k(x + 1)k .
Tous les termes de la somme sont nuls en 1 sauf celui d’indice k = n quivaut n!2n ; on a donc Ln(1) = 1.
De même, le seul terme non nul en −1 de la somme est celui d’indice k = 0qui vaut n!(−2)n ; on a donc Ln(−1) = (−1)n.
3. La première façon de calculer Ln(0) qui nous vient à l’esprit consiste à utiliserla même méthode que précédemment.
Pour x = 0 la formule précédente donne
Ln(0) = 1
2n
n∑k=0
(n
k
)2
(−1)n−k .
Cette formule ne semble pas aisée à simplifier. Nous allons donc tâcher de trouverune autre expression de Ln(0) . À cet effet, remarquons que Ln(0) est le termeconstant de Ln. Puisque Ln est une dérivée n-ième, le terme Ln(0) provient donc de
la dérivation du terme de degré n de (x2 − 1)n.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
347
Chapitre 15 • Polynômes
9782100547678-Fresl-C15.qxd 5/07/10 9:03 Page 347

Le polynôme (x2 − 1)n est un polynôme de degré 2n. Il existe donca0,. . . ,a2n ∈ R tels que l’on ait
(x2 − 1)n =2n∑
k=0
ak xk .
On en déduit que
dn
dxn
((x2 − 1)n) =
n∑k=0
(n + k)!
k!an+k xk .
En x = 0, seul le terme d’indice k = 0 de la somme n’est pas nul (il vautn!an). Finalement, nous avons
Ln(0) = an
2n.
Distinguons, à présent, deux cas.
• Si n est impair, le terme de degré n de (x2 − 1)n est nul et, ainsi,
Ln(0) = 0.
• Si n est pair, le coefficient du terme de degré n de
(x2 − 1)n =n∑
k=0
(n
k
)x2k(−1)k
est
an =(
n
n/2
)(−1)n/2.
On en déduit que
Ln(0) = (−1)n/2
( nn/2
)2n
.
Exercice 15.3 : Relations coefficients-racines
Les deux questions sont indépendantes.
1. Montrer que les racines complexes de X3 − X + 1 sont simples. On les notea, b et c.
Calculer a + b + c , a2 + b2 + c2, a3 + b3 + c3, a7 + b7 + c7 et
a−1 + b−1 + c−1.
2. Résoudre le système suivant, d’inconnue (x,y,z) ∈ (C∗)3 :x + y + z = 11x2 + y2 + z2 = 49
x−1 + y−1 + z−1 = 1
348
Partie 3 • Algèbre
9782100547678-Fresl-C15.qxd 5/07/10 9:03 Page 348

1. Il y a deux manières de voir la notion de multiplicité d’une racine ; nous les rap-pelons brièvement.
Si a est une racine de P, son ordre de multiplicité est le plus grand entier naturel
non nul r tel que (X − a)r divise P(X) (ainsi, (X − a)r+1 ne divise pas P(X)). Sir = 1 la racine est dite simple, si r 2 la racine est dite multiple.
Les propriétés suivantes sont équivalentes (caractérisation différentielle de la mul-tiplicité) :
i) a est racine de P d’ordre de multiplicité r ;
ii) P(k)(a) = 0 pour k = 0,. . . ,r − 1 et P(r)(a) =/ 0.
En particulier, a est une racine multiple de P si, et seulement si, P(a) = P ′(a) = 0.
D’une manière générale, la définition de la multiplicité n’est utilisable que si l’onconnaît explicitement la racine : il n’y a alors qu’à factoriser X − a autant que pos-sible en effectuant des divisions euclidiennes successives.
La caractérisation différentielle permet d’étudier la multiplicité des racines de P sansavoir à connaître explicitement ces racines. C’est donc celle-là que nous utiliserons ici.
Soit P = X3 − X + 1.
Si un nombre complexe z est racine multiple de P alors P(z) = P ′(z) = 0,soit z3 − z + 1 = 0 et 3z2 − 1 = 0 .
En multipliant cette dernière relation par z on obtient 3z3 = z ; or la pre-mière donne z3 = z − 1 , on en déduit donc z = 3/2. Enfin, en remplaçant
dans 3z2 = 1 il vient 4 = 27 , ce qui est absurde.
Ainsi, les racines complexes de P sont simples.
On note a,b,c les racines du polynôme X3 − X + 1. Cela impose au polynôme dese factoriser sous la forme
X3 − X + 1 = (X − a)(X − b)(X − c).
En développant et identifiant les coefficients, nous obtenons des équations vérifiéespar les racines.
Puisque a, b et c sont les racines du polynôme X3 − X + 1 , nous avons
X3 − X + 1 = (X − a)(X − b)(X − c).
En développant et identifiant les coefficients, il vient a + b + c = 0
ab + bc + ca = −1abc = −1
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
349
Chapitre 15 • Polynômes
9782100547678-Fresl-C15.qxd 5/07/10 9:03 Page 349

Ces premières relations vont nous permettre d’en obtenir d’autres en les manipu-lant. Pour calculer la somme des carrés des racines, nous allons élever la premièrerelation au carré.
En élevant au carré la première relation il vient
0 = a2 + b2 + c2 + 2ab + 2bc + 2ca,
d’où
a2 + b2 + c2 = 2.
Remarquons que nous connaissons également d’autres relations du fait que les
nombres complexes a, b et c sont racines du polynôme X3 − X + 1.
Puisque les nombres complexes a, b et c sont racines du polynômeX3 − X + 1 , nous avons
a3 = a − 1,b3 = b − 1,c3 = c − 1
En additionnant ces trois égalités, on obtient
a3 + b3 + c3 = a + b + c − 3 = −3.
Pour calculer la somme des puissances septièmes, il va falloir faire preuve d’un peuplus de réflexion. Il s’agit néanmoins d’un procédé classique. Commençons par
effectuer la division euclidienne du polynôme X7 par le polynôme X3 − X + 1.Nous obtenons
X7 = (X3 − X + 1)(X4 + X2 − X + 1) − 2X2 + 2X − 1.
En spécialisant en a, b et c il vient que seule la partie correspondant au reste peutdonner une contribution non nulle. La somme des puissances septièmes des raciness’exprime donc en fonction des sommes des puissances inférieures à deux desracines. Bien entendu, nous pourrions mettre en œuvre le même raisonnement pour
tout polynôme et pas seulement pour X7.
Effectuons la division euclidienne du polynôme X7 par le polynômeX3 − X + 1 :
X7 = (X3 − X + 1)(X4 + X2 − X + 1) − 2X2 + 2X − 1.
350
Partie 3 • Algèbre
9782100547678-Fresl-C15.qxd 5/07/10 9:03 Page 350

En spécialisant en a, b et c, nous obtenons
a7 = −2a2 + 2a − 1
b7 = −2b2 + 2b − 1
c7 = −2c2 + 2c − 1
puis, en additionnant :
a7 + b7 + c7 = −2(a2 + b2 + c2) + 2(a + b + c) − 3
= −7.
Pour calculer la dernière expression demandée, il suffit de réduire au même déno-minateur.
Finalement, nous avons
1
a+ 1
b+ 1
c= bc + ca + ab
abc= −1
−1= 1.
2. Nous allons, ici, suivre le cheminement inverse de celui de la question précé-dente. Les nombres complexes x , y et z sont racines d’un polynôme de degré 3. Sinous parvenons à le déterminer explicitement, nous pourrons alors obtenir x , y et zcomme ses racines. Nous allons donc chercher à exprimer les coefficients de cepolynôme, qui sont des fonctions symétriques des racines x,y,z , en fonction des
fonctions symétriques x + y + z, x2 + y2 + z2 et x−1 + y−1 + z−1, dont nousconnaissons les valeurs.
Procédons par analyse et synthèse. Soit (x,y,z) ∈ (C∗)3 une solution dusystème. Considérons le polynôme
(X − x)(X − y)(X − z)
= X3 − (x + y + z)X2 + (xy + yz + zx)X − xyz
et cherchons à calculer ses coefficients. Par hypothèse, nous avons
x + y + z = 11.
Nous avons également
xy + yz + zx = 1
2
((x + y + z)2 − (x2 + y2 + z2)
)= 1
2(112 − 49)
= 36
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
351
Chapitre 15 • Polynômes
9782100547678-Fresl-C15.qxd 5/07/10 9:03 Page 351

Finalement, nous avons
1 = 1
x+ 1
y+ 1
z
= yz + zx + xy
xyz
= 36
xyz.
On en déduit que
xyz = 36.
Par conséquent, nous avons
(X − x)(X − y)(X − z) = X3 − 11X2 + 36X − 36.
Calculons les racines de ce polynôme. Le nombre réel 2 est racine évidente.En effectuant une division euclidienne, il vient
X3 − 11X2 + 36X − 36 = (X − 2)(X2 − 9X + 18).
Or
X2 − 9X + 18 = (X − 3)(X − 6),
donc les racines de X3 − 11X2 + 36X − 36 sont 2, 3 et 6. On en déduitque le triplet (x,y,z) est égal au triplet (2,3,6) ou à l’un de ceux qui s’endéduisent par permutation.
Réciproquement, on vérifie que les triplets précédents sont solutions du sys-tème.
Exercice 15.4 : Familles de polynômes échelonnée en degré
Soit (P0,. . . ,Pn) une famille de polynômes tels que, pour tout k ∈ 0,. . . ,n , on ait
deg(Pk) = k.
Montrer que (P0,. . . ,Pn) est une base de Kn[X].
Comme d’habitude, pour montrer qu’une famille est une base d’un espace vectorielde dimension finie, nous allons montrer qu’elle est libre puis qu’elle a le bonnombre de vecteurs. Soient λ0,. . . ,λn ∈ K tels que
(R)
n∑i=0
λi Pi = 0.
352
Partie 3 • Algèbre
9782100547678-Fresl-C15.qxd 5/07/10 9:03 Page 352

Nous voulons montrer que λ0 = · · · = λn = 0. Pour cela, nous allons chercher àobtenir d’autres relations à partir de (R). En la dérivant, on obtient
n∑i=1
λi P ′i = 0.
En effet, puisque le polynôme P0 est de degré 0, nous avons P ′0 = 0. Nous obtenons
donc une relation entre polynômes de degré 0,. . . ,n − 1. Cela nous suggère de pro-céder par récurrence.
Montrons, par récurrence, que, quel que soit k ∈ N, la proposition
Hk : « toute famille de polynômes (Q0,. . . ,Qk)
vérifiant la condition ∀i ∈ 0,. . . ,k, deg(Qi ) = i
est libre »
est vraie.
• Soit Q0 un polynôme de degré 0. C’est un polynôme constant non nul. Lafamille (Q0) est donc libre et la proposition H0 est vraie.
• Soit k ∈ N tel que la proposition Hk est vraie. Soit (Q0,. . . ,Qk+1) unefamille de polynômes vérifiant la condition
∀i ∈ 0,. . . ,k + 1, deg(Qi ) = i.
Soient λ0,. . . ,λk+1 ∈ K tels que
k+1∑i=0
λi Qi = 0.
En dérivant cette relation, on obtient
k+1∑i=1
λi Q′i = 0,
car Q′0 = 0 , puisque le polynôme Q0 est de degré 0. Pour i ∈ 0,. . . ,k ,
posons Ri = Q′i+1. Puisque dériver un polynôme non constant fait baisser
son degré d’exactement une unité, la famille (R0,. . . ,Rk) vérifie la pro-priété
∀i ∈ 0,. . . ,k, deg(Ri ) = i.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
353
Chapitre 15 • Polynômes
9782100547678-Fresl-C15.qxd 5/07/10 9:03 Page 353

D’après la proposition Hk , cette famille est libre. On en déduit que
λ1 = · · · = λk+1 = 0.
Revenons à la relation de départ. Elle s’écrit, à présent,
λ0 Q0 = 0.
Puisque le polynôme Q0 est de degré 0, il n’est pas nul et nous avons doncλ0 = 0 . Par conséquent, la famille (Q0,. . . ,Qk+1) est libre et la proposi-tion Hk+1 est vraie.
• Finalement, nous avons montré que, quel que soit k ∈ N, la propositionHk est vraie.
En particulier, la proposition Hn est vraie. La famille (P0,. . . ,Pn) del’énoncé est donc libre. Puisqu’elle est formée de (n + 1) vecteurs et quedim(Kn[X]) = n + 1 , c’est une base de Kn[X].
Exercice 15.5 : Étude d’un endomorphisme de Kn[X]
Soit n ∈ N∗ . Pour P ∈ Kn[X] on pose n(P) = P(X + 1) − P(X) .
1. Montrer que n est un endomorphisme de Kn[X]. Déterminer son noyau etson image. Quelle est sa matrice dans la base canonique ?On pose B0(X) = 1 et, pour 1 k n :
Bk(X) = 1
k!
k−1∏l=0
(X − l) = 1
k!X (X − 1) · · · (X − k + 1).
2. Déterminer n(Bk).
3. Montrer que (B0,. . . ,Bn) est une base de Kn[X]. Quelle est la matrice de n
dans cette base ?
1. Dire que n est un endomorphisme de Kn[X] recouvre deux résultats : l’applica-tion n, définie sur Kn[X], est à valeurs dans Kn[X] et cette application est linéaire.
• ∆n est à valeurs dans Kn[X] : (P) = P(X + 1) − P(X) est bien unpolynôme. De plus, son degré est inférieur ou égal à max(deg(P(X + 1)),
deg(P(X))) donc inférieur ou égal à n.
• Linéarité de ∆n : soient (P,Q) ∈ (Kn[X])2 et (λ,µ) ∈ K2. On a alorssuccessivement :
n(λP + µQ) = λP(X + 1) + µQ(X + 1) − (λP(X) + µQ(X))= λ(P(X + 1) − P(X)) + µ(Q(X + 1) − Q(X))= λn(P) + µn(Q)
ce qui montre que n est linéaire.
354
Partie 3 • Algèbre
9782100547678-Fresl-C15.qxd 5/07/10 9:03 Page 354

De plus, l’espace vectoriel de départ et celui d’arrivée sont égaux : n estdonc un endomorphisme de l’espace vectoriel Kn[X].
Nous allons, maintenant, calculer le noyau et l’image de l’endomorphisme n. Ilsuffit de revenir aux définitions de ces espaces.
• Noyau de ∆n : soit P ∈ Ker(n). Alors P(X + 1) = P(X). Le poly-nôme P − P(0) est donc nul en tout point entier, donc est identiquementnul : ainsi P = P(0), i.e. P est constant. Réciproquement, si P estconstant, n(P) = 0. Ainsi : Ker(n) = K0[X].
• Image de ∆n : P(X + 1) et P(X) ont le même coefficient dominantdonc P(X + 1) − P(X) est de degré strictement inférieur à celui de Ppuisque les termes de plus haut degré se simplifient. Or deg(P) n doncdeg(n(P)) n − 1 . Ainsi, Im(n) ⊂ Kn−1[X].
De plus, d’après le théorème du rang :
dim(Ker(n)) + dim(Im(n)) = dim(Kn[X]).
On sait que dim(Kn[X]) = n + 1 et on a vu que Ker(n) = K0[X] et estdonc de dimension 1 : ainsi, dim(Im(n)) = n qui est aussi la dimensionde Kn−1[X].
En résumé : Im(n) ⊂ Kn−1[X] et dim(Im(n)) = dim(Kn−1[X]) doncIm(n) = Kn−1[X].
Calculons, à présent, la matrice de n dans la base canonique de Kn[X], c’est-à-dire dans la base (1,X,. . . ,Xn) .
• Avec P = X j on trouve n(P) = (X + 1) j − X j =j−1∑i=0
(j
i
)Xi . On en
déduit que la matrice de n dans la base canonique de Kn[X] est
0. . .
(j
i
). . .
0. . .
0
∈ Mn+1(K)
Il est toujours bon de traiter explicitement un exemple. Pour n = 3, nous obtenonsla matrice
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
355
Chapitre 15 • Polynômes
9782100547678-Fresl-C15.qxd 5/07/10 9:03 Page 355

0 1 1 1
0 0 2 3
0 0 0 3
0 0 0 0
2. Le calcul de n(Bk) peut se faire explicitement grâce à la formule définissant Bk .Il nous faudra traiter à part les cas de k = 0 et k = 1.
On a n(B0) = 0 et n(B1) = n(X) = 1 = B0 .
Si k 2 :
n(Bk) = 1
k!
( k−1∏l=0
(X + 1 − l) −k−1∏l=0
(X − l)
)
= 1
k!
( k−2∏l=−1
(X − l) −k−1∏l=0
(X − l)
)
= 1
k!
( k−2∏l=0
(X − l)
)((X + 1) − (X − k + 1)
)
= 1
(k − 1)!
( k−2∏l=0
(X − l)
)
= Bk−1
.
En résumé : n(B0) = 0 et, pour k 1, n(Bk) = Bk−1 .
3. La famille (B0,. . . ,Bn) est composée de n + 1 vecteurs et l’espace vectorielKn[X] est de dimension n + 1. Pour montrer que la famille (B0,. . . ,Bn) est unebase de Kn[X] , il nous suffit donc de montrer qu’elle est libre. Soit
(λ0,. . . ,λn) ∈ Rn+1 tel que n∑
i=0
λi Bi = 0.
Nous voulons montrer que, quel que soit i, on a λi = 0. Pour cela, nous allons tâcherde construire de nouvelles relations à partir de celle que nous avons déjà. La relationque nous avons prouvée précédemment entre n et Bk nous permettra de faire cela.
Montrons, tout d’abord, que la famille (B0,. . . ,Bn) est libre. Soit(λ0,. . . ,λn) ∈ Rn+1 tel que
n∑i=0
λi Bi = 0.
356
Partie 3 • Algèbre
9782100547678-Fresl-C15.qxd 5/07/10 9:03 Page 356

Supposons, par l’absurde, que la famille (λ0,. . . ,λn) ne soit pas nulle.Notons
j = maxi,λi =/ 0.
Nous avons donc
j∑i=0
λi Bi = 0.
D’après la question précédente, quel que soit i ∈ 0,. . . , j − 1, nous avons
jn(Bi ) = 0.
Nous avons également
jn(Bj ) = 1.
En appliquant l’endomorphisme jn à la relation dont nous disposons, nous
trouvons donc
λj = jn
( j∑i=0
λi Bi
)= j
n(0) = 0.
On en déduit que λj = 0, ce qui est absurde.
Nous venons donc de prouver que la famille (λ0,. . . ,λn) est nulle. On endéduit que la famille (B0,. . . ,Bn) est libre. Puisque cette famille est com-posée de n + 1 vecteurs et que dim(Kn[X]) = n + 1 , on en déduit finale-ment que la famille (B0,. . . ,Bn) est une base de Kn[X].
Nous aurions également pu rédiger le raisonnement précédent à l’aide d’unerécurrence descendante plutôt que de faire intervenir l’indice j. En effet, en appli-quant n
n à la relation, on montre que λn = 0 . On obtient donc une relation quipossède un terme de moins et l’on recommence.Une autre possibilité consiste à utiliser l’exercice précédent. En effet, la famille(B0,. . . ,Bn) est échelonnée en degré.
Il nous reste, à présent, à calculer la matrice de l’endomorphisme n dans la base(B0,. . . ,Bn) . Il suffit d’appliquer le résultat de la question précédente.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
357
Chapitre 15 • Polynômes
9782100547678-Fresl-C15.qxd 5/07/10 9:03 Page 357

D’après la question précédente, nous avons n(B0) = 0 et, pour k 1,n(Bk) = Bk−1 . On en déduit que la matrice de l’endomorphisme n dansla base (B0,. . . ,Bn) est
0 1 0
0. . .
. . . 1
0 0
∈ Mn+1(K).
On voit que cette base est particulièrement bien adaptée à la description de n !D’une manière générale, il ne faut jamais écrire la matrice d’un endomorphismedans une base sans avoir un minimum réfléchi auparavant à la base en question.Cependant, en première année, on vous donnera le plus souvent la base la mieuxadaptée à l’endomorphisme.En seconde année vous apprendrez à déterminer vous-même une telle base : cesera le chapitre Réduction des endomorphismes.
Exercice 15.6 : Polynômes interpolateurs de Lagrange
Soit n un entier naturel. Soient a1,. . . ,an+1 des éléments deux à deux distincts deK.
1. Pour P ∈ Kn[X] on pose (P) = (P(a1),. . . ,P(an+1)). Montrer que est
un isomorphisme d’espaces vectoriels de Kn[X] dans Kn+1.
2. On note (e1,. . . ,en+1) la base canonique de Kn+1. Pour k ∈ 1,. . . ,n + 1 on
pose Lk = −1(ek). Montrer que (L1,. . . ,Ln+1) est une base de Kn+1[X] etdonner l’expression de Lk en fonction des aj .
3. Plus précisément, étant donné P ∈ Kn[X] , déterminer les coordonnées de Pdans la base (L1,. . . ,Ln+1).
1. Pour montrer que est un isomorphisme, nous allons découper le raisonnementen plusieurs étapes. Il est indispensable de bien vérifier tout d’abord que est uneapplication linéaire. Même si c’est un résultat immédiat, il ne faut pas oublier de lementionner et le démontrer en quelques lignes.
Nous montrerons ensuite que est un isomorphisme de façon classique, en mon-trant qu’il est injectif et en utilisant un argument de dimension.
• Linéarité de : soient (P,Q) ∈ Kn[X] et (λ,µ) ∈ K2. Alors :
(λ P + µ Q) = ((λ P + µ Q)(a1),. . . ,(λ P + µ Q)(an+1))= (λ P(a1) + µ Q(a1),. . . ,λ P(an+1) + µ Q(an+1))= λ (P(a1),. . . ,P(an+1)) + µ (Q(a1),. . . ,Q(an+1))= λ(P) + µ(Q).
358
Partie 3 • Algèbre
9782100547678-Fresl-C15.qxd 5/07/10 9:03 Page 358

est donc bien linéaire. Noter le caractère routinier de ce genre de vérifi-cation.
• Injectivité de : soit P ∈ Ker(). Alors (P) = (0,. . . ,0), i.e.P(a1) = · · · = P(an+1) = 0 . Ainsi P possède au moins n + 1 racines dis-tinctes. Comme P est de degré au plus n, P est le polynôme nul. On a doncKer() = 0 donc est injective.
• est un isomorphisme : les espaces de départ et d’arrivée ont la mêmedimension : dim(Kn[X]) = dim(Kn+1) = n + 1 . On en déduit que estun isomorphisme.
2. Le fait que la famille (L1,. . . ,Ln+1) soit une base de Kn[X] découle directementdu cours.
La famille (L1,. . . ,Ln+1) est l’image de la base (e1,. . . ,en+1) de Kn+1 par
l’isomorphisme −1 : c’est donc une base de Kn[X] car l’image d’une basepar un isomorphisme est une base.
Fixons k ∈ 1,. . . ,n + 1 et cherchons à déterminer explicitement le polynôme Lk .Nous devons avoir (Lk) = ek, autrement dit :
∀ j ∈ 1,. . . ,n + 1, Lk(aj ) =
0 si j =/ k
1 si j = k
Nous cherchons donc un polynôme qui s’annule en tous les aj avec j =/ k, mais pasen ak . Il est naturel de considérer le polynôme
Pk =n∏
j=0j /= k
(X − aj ).
Nous parviendrons à retrouver le polynôme Lk à partir de celui-ci.
Soit k ∈ 1,. . . ,n + 1 . Par définition, le polynôme Lk vérifie (Lk) = ek
et donc
∀ j ∈ 1,. . . ,n + 1, Lk(aj ) =
0 si j =/ k
1 si j = k
Posons
Pk =n∏
j=0j /= k
(X − aj ).
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
359
Chapitre 15 • Polynômes
9782100547678-Fresl-C15.qxd 5/07/10 9:03 Page 359

Nous avons alors Pk(aj ) = 0 si j =/ k (car Pk possède alors un facteur(X − aj )) et Pk(ak) =/ 0 car
Pk(ak) =n∏
j=0j /= k
(ak − aj )
est un produit de nombres dont aucun n’est nul.
Les polynômes Lk et 1
Pk(ak)Pk prennent donc la même valeur en tous les
aj , à savoir 0 si j =/ k et 1 si j = k. Autrement dit, ils ont même image par, qui est injective, donc sont égaux.
On en déduit une expression condensée de Lk :
Lk =n∏
j=0j /= k
X − aj
ak − aj.
3. Notons (λ1,. . . ,λn+1) les coordonnées de P dans la base (L1,. . . ,Ln+1) : autre-ment dit, P = λ1L1 + · · · + λn+1Ln+1.
Considérons un entier k ∈ 1,. . . ,n + 1 . Nous voulons déterminer λk. Puisquenous connaissons l’effet des L j sur les ai, il nous suffira de spécialiser la relationprécédente en les différents ai.
Il existe (λ1,. . . ,λn+1) ∈ Kn+1 tel que
P = λ1L1 + · · · + λn+1Ln+1.
Soit k ∈ 1,. . . ,n + 1 . Comme L j (ak) = 0 si j =/ k et 1 si j = k l’égalitéprécédente devient, en spécialisant en ak : P(ak) = λk.
Ainsi,
P =n∑
k=0
P(ak)Lk .
En utilisant l’expression des Lk trouvée ci-dessus on a finalement :
P =n∑
k=0
P(ak)
n∏j=0
j /= k
X − aj
ak − aj
.
360
Partie 3 • Algèbre
9782100547678-Fresl-C15.qxd 5/07/10 9:03 Page 360

361
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
Exercice 16.1 : Caractérisation des projecteurs orthogonaux (sauf PTSI)
Soit E un espace euclidien dont nous noterons 〈.,.〉 le produit scalaire. Soit p unprojecteur de E. Montrer que p est un projecteur orthogonal si, et seulement si,quel que soit x ∈ E, on a
‖p(x)‖ ‖x‖.
On nous demande ici de démontrer une équivalence. Nous allons démontrer deuximplications.
Première implication
Dans notre cas, l’implication directe est plus simple. En effet, nous partons d’unprojecteur orthogonal. Nous allons écrire sa définition et vérifier ensuite la propriétédemandée.
Supposons, tout d’abord, que p soit un projecteur orthogonal. Par définition,il existe un sous-espace vectoriel F de E tel que p soit le projecteur sur F
parallèlement à F⊥.
Soit x ∈ E. Il existe un unique couple (y,z) ∈ F × F⊥ tel qu’on ait l’éga-lité
x = y + z.
D’après la définition de p, nous avons alors
p(x) = y.
Espaces euclidiens 16
9782100547678-Fresl-C16.qxd 5/07/10 9:06 Page 361

Nous avons traduit en termes explicites les informations dont nous disposons, àsavoir le fait que p est un projecteur orthogonal. Cette première étape ne demandeque la connaissance du cours. Nous devons, à présent, démontrer une inégalité entre‖p(x)‖ et ‖x‖ . Nous allons donc commencer par calculer ces deux quantités. On avisiblement ‖p(x)‖ = ‖y‖ . Il est un peu plus difficile de calculer ‖x‖ = ‖y + z‖ .Pour calculer la norme d’une somme, on revient à la définition de la norme commeracine carrée du carré scalaire : nous avons
‖y + z‖2 = 〈y + z,y + z〉.
Nous allons maintenant développer le second membre de cette égalité en utilisant labilinéarité du produit scalaire. Nous avons
〈y + z,y + z〉 = 〈y,y〉 + 〈y,z〉 + 〈z,y〉 + 〈z,z〉= ‖y‖2 + ‖z‖2 + 〈y,z〉 + 〈z,y〉.
Le produit scalaire est, par définition, symétrique. Nous avons donc 〈y,z〉 = 〈z,y〉 .On en déduit que
‖y + z‖2 = ‖y‖2 + ‖z‖2 + 2〈y,z〉.
Cette formule est d’utilisation constante et il est bon de la retenir.
Nous avons
‖x‖2 = ‖y + z‖2 = ‖y‖2 + ‖z‖2 + 2〈y,z〉.
Or y ∈ F et z ∈ F⊥. Nous avons donc 〈y,z〉 = 0 et, ainsi,
‖x‖2 = ‖y‖2 + ‖z‖2.
On en déduit que
‖x‖2 ‖y‖2 = ‖p(x)‖2.
Puisque la fontion racine carrée est croissante sur [0,+∞[, on a finalement
‖x‖ ‖p(x)‖.
Seconde implication
Passons, maintenant, à la démonstration de l’implication réciproque. Commençonspar traduire ce que nous devons démontrer. Il existe deux sous-espaces vectoriels F
362
Partie 3 • Algèbre
9782100547678-Fresl-C16.qxd 5/07/10 9:06 Page 362

et G de E tel que le projecteur p soit le projecteur sur F parallèlement à G . Nousdevons montrer que p est un projecteur orthogonal, autrement dit, que
F⊥G.
Nous allons raisonner par l’absurde et supposer que F et G ne sont pas orthogo-naux. Nous cherchons maintenant un élément x de E susceptible de violer l’inéga-
lité ‖p(x)‖ ‖x‖ . L’hypothèse que nous avons faite nous assure que F⊥ =/ G et
que G⊥ =/ F. Nous avons donc quatre types de candidats pour x : les éléments de
F⊥ \ G, de G \ F⊥, de G⊥ \ F et de F \ G⊥.
Nous pouvons éliminer facilement deux de ces types. Si x ∈ G \ F⊥ , nous avons
p(x) = 0 et donc ‖p(x)‖ ‖x‖ . Si x ∈ F \ G⊥ , nous avons p(x) = x et donc‖p(x)‖ = ‖x‖ .
Considérons, à présent, un élément x de F⊥ \ G. Un dessin nous montre que nouspouvons encore avoir ‖p(x)‖ ‖x‖ .
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
363
Chapitre 16 • Espaces euclidiens
F
G
F
x
p(x)
Il nous reste à considérer les éléments de G⊥ \ F . Faisons un nouveau dessin.
9782100547678-Fresl-C16.qxd 5/07/10 9:06 Page 363
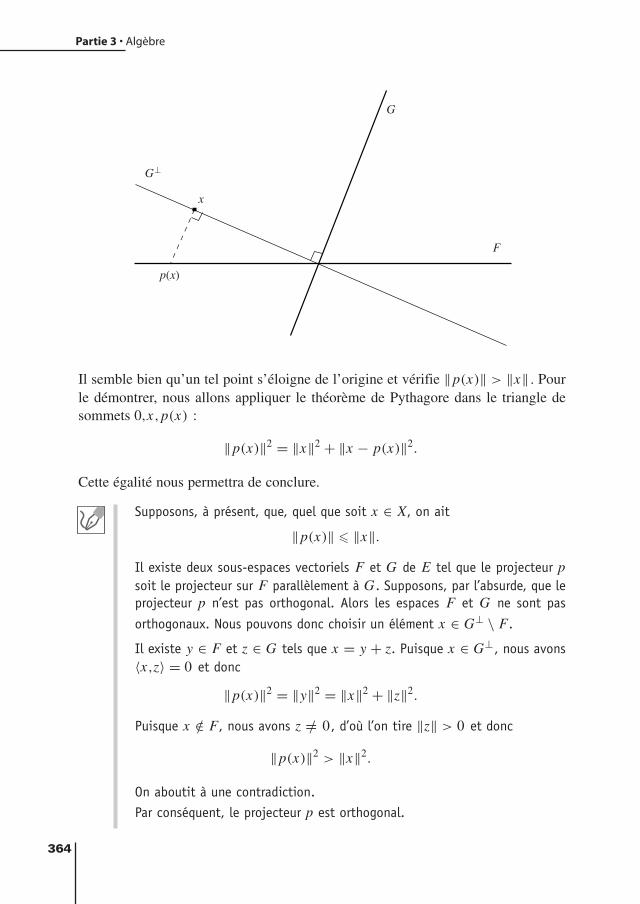
Il semble bien qu’un tel point s’éloigne de l’origine et vérifie ‖p(x)‖ > ‖x‖ . Pourle démontrer, nous allons appliquer le théorème de Pythagore dans le triangle desommets 0,x,p(x) :
‖p(x)‖2 = ‖x‖2 + ‖x − p(x)‖2.
Cette égalité nous permettra de conclure.
Supposons, à présent, que, quel que soit x ∈ X, on ait
‖p(x)‖ ‖x‖.Il existe deux sous-espaces vectoriels F et G de E tel que le projecteur psoit le projecteur sur F parallèlement à G. Supposons, par l’absurde, que leprojecteur p n’est pas orthogonal. Alors les espaces F et G ne sont pas
orthogonaux. Nous pouvons donc choisir un élément x ∈ G⊥ \ F.
Il existe y ∈ F et z ∈ G tels que x = y + z. Puisque x ∈ G⊥, nous avons〈x,z〉 = 0 et donc
‖p(x)‖2 = ‖y‖2 = ‖x‖2 + ‖z‖2.
Puisque x /∈ F, nous avons z =/ 0, d’où l’on tire ‖z‖ > 0 et donc
‖p(x)‖2 > ‖x‖2.
On aboutit à une contradiction.
Par conséquent, le projecteur p est orthogonal.
364
Partie 3 • Algèbre
G
G
F
x
p(x)
9782100547678-Fresl-C16.qxd 5/07/10 9:06 Page 364

Exercice 16.2 : Matrices orthogonales d’ordre 3
Nous nous plaçons ici dans l’espace vectoriel R3 muni du produit scalaire usuel
et de l’orientation canonique. Notons C la base canonique de R3.
1. Soit r une rotation de R3 d’angle θ ∈ R et d’axe D orienté par un vecteur
u ∈ D. Soit u′ ∈ R3 \ D . Montrer que les quantités sin(θ) et detC(u′,r(u′),u) ontmême signe strict. Qu’en est-il pour la composée s de la rotation r et de la
réflexion par rapport à D⊥ ?
2. Soit a l’endomorphisme de R3 dont la matrice dans la base canonique est
A = 1
3
1
√6
√2√
6 0 −√3√
2 −√3 2
.
Décrire géométriquement l’endomorphisme a.
3. Soit b l’endomorphisme de R3 dont la matrice dans la base canonique est
B = 1
3
1 −2 −2
2 2 −1
2 −1 2
.
Décrire géométriquement l’endomorphisme b.
4. Soit c l’endomorphisme de R3 dont la matrice dans la base canonique est
C = 1
5
0 5 0
3 0 −4
4 0 3
.
Décrire géométriquement l’endomorphisme c.
Nous nous intéressons, dans cet exercice, à des matrices orthogonales d’ordre 3 ou,
ce qui revient au même, à des isométries de R3. Leur étude se mène selon un schémaprécis que nous rappelons ici. Soit M ∈ O3(R) et notons f l’endomorphisme dontc’est la matrice dans la base canonique. Dans un premier temps, on calcule ledéterminant de M. On trouve nécessairement 1 ou – 1, mais le signe est important.
Si det(M) = 1, alors l’endomorphisme f est une rotation de R3. Son axe D estdéterminé par
D = Ker( f − Id).
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
365
Chapitre 16 • Espaces euclidiens
9782100547678-Fresl-C16.qxd 5/07/10 9:06 Page 365

Notons θ l’angle de la rotation. Nous avons
1 + 2cos(θ) = tr( f ) = tr(M),
ce qui suffit à déterminer l’angle au signe près. Il est impossible d’être plus précissi l’axe D de la rotation n’est pas orienté.
Supposons, à présent, que la droite D soit orientée. Cela signifie que l’on s’estdonné un vecteur normé u de D tel que la famille (u) forme une base orthonormée
directe de D. Soit (v,w) une base orthonormée du plan D⊥ de la rotation tel que la
famille B = (u,v,w) soit une base orthonormée directe de R3. La matrice de f dansla base B est alors
1 0 0
0 cos(θ) −sin(θ)
0 sin(θ) cos(θ)
.
Cette écriture nous permet de déterminer exactement l’angle θ .
Si det(M) = −1, alors l’endomorphisme f est la composée d’une rotation d’axe D
et d’angle θ et de la symétrie orthogonale par rapport à D⊥. Cette rotation et cetteréflexion commutent. L’axe D de la rotation est déterminé par
D = Ker( f + Id).
L’angle θ de la rotation vérifie
−1 + 2cos(θ) = tr( f ) = tr(M),
ce qui suffit à déterminer l’angle au signe près.
Un cas particulier est celui de la réflexion. Il correspond au cas où la rotation estl’identité, autrement dit, au cas où θ = 0 et donc
tr( f ) = tr(M) = −1 + 2cos(0) = 1.
Dans les autres cas, comme précédemment, il est impossible de déterminer exacte-ment l’angle θ si l’axe D n’est pas orienté.
Supposons, à présent, que la droite D soit orientée. Soient (u) une base orthonormée
directe de D et (v,w) une base orthonormée de D⊥ telles que la famille B = (u,v,w)
soit une base orthonormée directe de R3. La matrice de f dans la base B est alors−1 0 0
0 cos(θ) −sin(θ)
0 sin(θ) cos(θ)
.
Cette écriture nous permet de déterminer exactement l’angle θ .
366
Partie 3 • Algèbre
9782100547678-Fresl-C16.qxd 5/07/10 9:06 Page 366

Nous allons appliquer ces méthodes pour étudier les endomorphismes a, b et c del’énoncé.
1. Ce résultat est classique. On peut l’utiliser sans justifier au cours d’un exercice,mais on nous demande ici de le redémontrer. Pour cela, il suffit de revenir à la défi-nition de la rotation et à calculer la quantité demandée.
Soit (v,w) une base de D⊥ tel que la famille B = (u,v,w) soit une baseorthonormée directe de R3. Dans cette base, on a
MB(r) = 1 0 0
0 cos(θ) −sin(θ)
0 sin(θ) cos(θ)
.
Nous allons commencer par calculer la quantité detB(u′,r(u′),u) , la base B étantmieux adaptée au problème que la base C.
Il existe (α,β,γ) ∈ R3 tel que
u′ = αu + βv + γw.
Puisque u′ /∈ D, on a (β,γ) =/ (0,0). Nous avons alors
detB(u′,r(u′),u) =
∣∣∣∣∣∣∣α α 1
β β cos(θ) − γ sin(θ) 0
γ β sin(θ) + γ cos(θ) 0
∣∣∣∣∣∣∣= β(β sin(θ) + γ cos(θ)) − γ(β cos(θ) − γ sin(θ))
= (β2 + γ2)sin(θ).
Nous allons, à présent, utiliser la formule de changement de base pour calculer laquantité demandée.
D’après la formule de changement de base, on a
detC(u′,r(u′),u) = detC(B)detB(u
′,r(u′),u).
Puisque la base B est orthonormée et directe, on a detC(B) = 1 . On endéduit que
detC(u′,r(u′),u) = (β2 + γ2)sin(θ).
Puisque (β,γ) =/ (0,0) , nous avons β2 + γ2 > 0 et les quantitésdetC(u′,r(u′),u) et sin(θ) ont donc même signe strict.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
367
Chapitre 16 • Espaces euclidiens
9782100547678-Fresl-C16.qxd 5/07/10 9:06 Page 367

Nous allons, à présent, reprendre le raisonnement précédent en remplaçant la rota-
tion r par sa composée s avec la réflexion par rapport à D⊥.
Intéressons-nous, à présent, à la composée s de la rotation r et de laréflexion par rapport à D⊥. Dans la base B considérée précédemment, on a
MB(s) =−1 0 0
0 cos(θ) −sin(θ)
0 sin(θ) cos(θ)
.
Nous avons donc
detB(u′,s(u′),u) =
∣∣∣∣∣∣∣α −α 1
β β cos(θ) − γ sin(θ) 0
γ β sin(θ) + γ cos(θ) 0
∣∣∣∣∣∣∣= β(β sin(θ) + γ cos(θ)) − γ(β cos(θ) − γ sin(θ))
= (β2 + γ2)sin(θ).
Par le même raisonnement que précédemment, on en déduit que
detC(u′,s(u′),u) = (β2 + γ2)sin(θ)
et donc que detC(u′,s(u′),u) et sin(θ) ont même signe strict.
2. Orthogonalité
Dans un premier temps, nous allons montrer que la matrice A est orthogonale.
On a
A t A = 1
3
1
√6
√2√
6 0 −√3√
2 −√3 2
1
3
1
√6
√2√
6 0 −√3√
2 −√3 2
= 1 0 0
0 1 0
0 0 1
.
On en déduit que la matrice A est orthogonale.
Appliquons, à présent, la méthode présentée plus haut.
368
Partie 3 • Algèbre
9782100547678-Fresl-C16.qxd 5/07/10 9:06 Page 368

Déterminant
Calculons le déterminant de A. On a
det(A) = 1
33
∣∣∣∣∣∣1
√6
√2√
6 0 −√3√
2 −√3 2
∣∣∣∣∣∣= 1
27
∣∣∣∣∣∣3 0 3
√2√
6 0 −√3√
2 −√3 2
∣∣∣∣∣∣ L1 L1 + √2L3
= −1.
On en déduit que a est la composée d’une rotation d’axe D et de la réflexionpar rapport au plan D⊥.
Axe de la rotation
L’axe D de la rotation est donné par
D = Ker(a + Id).
On a
A + I3 = 1
3
4
√6
√2√
6 3 −√3√
2 −√3 5
.
On en déduit que D = Ker(a + Id) est l’ensemble des vecteurs (x,y,z)
de R3 vérifiant
4x + √6y + √
2z = 0√6x + 3y − √
3z = 0√2x − √
3y + 5z = 0
,
ou encore, en effectuant les opérations L2 L2 − √6/4L1 et L3
L3 − √2/4L1,
4x + √6y + √
2z = 03
2y − 3
2
√3z = 0
−3
2
√3y + 9
2z = 0
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
369
Chapitre 16 • Espaces euclidiens
−→
−→ −→
9782100547678-Fresl-C16.qxd 5/07/10 9:06 Page 369

et, finalement,
2√
2x + √3y + z = 0
y − √3z = 0
.
On en déduit que
D = Vect((−
√2,
√3,1)
).
Angle de la rotation
De plus, l’angle θ de cette rotation vérifie
−1 + 2cos(θ) = tr(A) = 1.
On en déduit que cos(θ) = 1 et donc que
θ = 0 mod 2π.
Conclusion
Par conséquent, la rotation que l’on considère n’est autre que l’identité. Onen déduit que l’isométrie a est la réflexion par rapport au plan D⊥.
3. Orthogonalité
Dans un premier temps, nous allons montrer que la matrice B est orthogonale.
On a
B t B = 1
3
1 −2 −2
2 2 −1
2 −1 2
1
3
1 2 2
−2 2 −1
−2 −1 2
= 1 0 0
0 1 0
0 0 1
.
On en déduit que la matrice B est orthogonale.
Il ne nous reste plus, à présent, qu’à appliquer la méthode présentée plus haut.
370
Partie 3 • Algèbre
9782100547678-Fresl-C16.qxd 5/07/10 9:06 Page 370

Déterminant
Calculons le déterminant de B. On a
det(B) = 1
33
∣∣∣∣∣∣1 −2 −2
2 2 −1
2 −1 2
∣∣∣∣∣∣= 1
27
∣∣∣∣∣∣1 −2 −3
2 2 −3
2 −1 0
∣∣∣∣∣∣ C3 C3 − C1
= 1
27
∣∣∣∣∣∣1 −2 −3
1 4 0
2 −1 0
∣∣∣∣∣∣ L2 L2 − L1
= 1.
On en déduit que b est une rotation.
Axe de la rotation
L’axe D de cette rotation est donné par
D = Ker(b − Id).
On a
B − I3 = 1
3
−2 −2 −2
2 −1 −1
2 −1 −1
.
On en déduit que D = Ker(b − Id) est l’ensemble des vecteurs (x,y,z)
de R3 vérifiant −2x − 2y − 2z = 0
2x − y − z = 0,
ou encore x = 0
y + z = 0.
On en déduit que
D = Vect ((0,1,−1)) .
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
371
Chapitre 16 • Espaces euclidiens
−→
−→
9782100547678-Fresl-C16.qxd 5/07/10 9:06 Page 371

Angle de la rotation
De plus, l’angle θ de cette rotation vérifie
1 + 2 cos(θ) = tr(B) = 5
3.
On en déduit que cos(θ) = 1/3 et donc que
θ = ±Arccos
(1
3
).
Orientation de l’axe de la rotation
Afin de déterminer complètement l’angle, nous devons choisir une orientation del’axe D. Cela revient à choisir une base orthonormée de D et à décréter qu’elle estdirecte. C’est à nous de prendre cette initiative afin de répondre complètement àl’exercice.
Orientons l’axe D. Nous choisissons la famille (√2
2(0,1,−1)
)
comme base orthonormée directe de D.
Détermination exacte de l’angle de la rotation
Nous pouvons, à présent, déterminer complètement l’angle θ .
• Première méthode
Une première méthode consiste à revenir à la définition. Si (v,w) est une base
orthonormée de D⊥ telle que la famille (u,v,w) soit une base orthonormée directe
de R3, alors la matrice de r dans la base (u,v,w) a pour expression
1 0 0
0 cos(θ) −sin(θ)
0 sin(θ) cos(θ)
.
Nous connaissons alors sin(θ) , ce qui nous suffit pour déterminer le signe de θ .Commençons par mettre en œuvre cette première méthode.
372
Partie 3 • Algèbre
9782100547678-Fresl-C16.qxd 5/07/10 9:06 Page 372

Posons
u =√
2
2(0,1,−1).
Le vecteur
v = (1,0,0)
est orthogonal au vecteur u et de norme 1. C’est donc, en particulier, un vec-teur de D⊥. Posons
w = u ∧ v =√
2
2(0,−1,−1).
Ce vecteur est orthogonal au vecteur u et de norme 1. C’est donc un vecteurde D⊥. Puisque les vecteurs v et w sont orthogonaux et de norme 1, lafamille (u,v) forme une base orthonormée de D⊥. En outre, d’après les pro-priétés du produit vectoriel, la famille B = (u,v,w) forme une base ortho-normée directe de R3.
Calculons la matrice de la rotation b dans la base B. Notons P la matrice depassage de la base canonique à la base B. On a
P =√
2
2
0
√2 0
1 0 −1
−1 0 −1
.
Cette matrice est la matrice d’une base orthonormée dans une autre. Elle estdonc orthogonale. On en déduit que
P−1 = t P.
D’après la formule de changement de base, la matrice de la rotation b dansla base B est
MatB(b) = P−1 B P = t P B P.
Tous calculs faits, on obtient
MatB(b) =
1 0 0
01
3
2√
2
3
0 −2√
2
3
1
3
.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
373
Chapitre 16 • Espaces euclidiens
9782100547678-Fresl-C16.qxd 5/07/10 9:06 Page 373

On en déduit que sin(θ) = −2√
2/3. Nous avons donc sin(θ) < 0, d’où l’ontire
θ ∈ ]−π,0[ mod 2π.
Par définition, la fonction Arccos est à valeurs dans [0,π]. On en déduitfinalement que
θ = −Arccos
(1
3
).
• Seconde méthode
Présentons, à présent, une deuxième méthode basée sur la première question de cetexercice. Elle nous propose une façon rapide de déterminer le signe de sin(θ) .
Posons
u =√
2
2(0,1,−1).
Le vecteur
u′ = (1,0,0)
n’appartient pas à D. Nous avons
detC(u′,b(u′),u) =√
2
6
∣∣∣∣∣∣∣1 1 0
0 2 1
0 2 −1
∣∣∣∣∣∣∣= −2
√2
3< 0.
D’après la première question, nous avons donc
sin(θ) < 0.
On en déduit que
θ ∈ ]−π,0[ mod 2π.
Par définition, la fonction Arccos est à valeurs dans [0,π[. On en déduitfinalement que
θ = −Arccos
(1
3
).
374
Partie 3 • Algèbre
9782100547678-Fresl-C16.qxd 5/07/10 9:06 Page 374

Conclusion
L’application b est la rotation d’axe D =Vect((0,1,−1)) et d’angleθ = −Arccos(1/3).
4. Nous allons appliquer le même raisonnement que précédemment à la matrice C.
Orthogonalité
On a
C tC = 1
5
0 3 4
5 0 0
0 −4 3
1
5
0 5 0
3 0 −4
4 0 3
= 1 0 0
0 1 0
0 0 1
.
On en déduit que la matrice C est orthogonale.
Déterminant
Calculons, à présent, le déterminant de C. On a
det(C) = 1
53
∣∣∣∣∣∣0 3 4
5 0 0
0 −4 3
∣∣∣∣∣∣ = −1.
On en déduit que l’isométrie c est la composée d’une rotation et d’uneréflexion par rapport au plan orthogonal à l’axe de cette rotation.
Axe de la rotation
L’axe D de la rotation est donné par
D = Ker(c + Id).
On a
C + I3 = 1
5
5 3 4
5 5 0
0 −4 8
.
On en déduit que D = Ker(c + Id) est l’ensemble des vecteurs (x,y,z) de
R3 vérifiant
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
375
Chapitre 16 • Espaces euclidiens
9782100547678-Fresl-C16.qxd 5/07/10 9:06 Page 375

5x + 3y + 4z = 0
5x + 5y = 0
−4y + 8z = 0
ou encore x + y = 0
−y + 2z = 0
On en déduit que
D = Vect ((−2,2,1)) .
Angle de la rotation
Nous savons également que l’angle θ de la rotation vérifie
−1 + 2 cos(θ) = tr(C) = 3
5.
On en déduit que cos(θ) = 4/5 et donc que
θ = ±Arccos
(4
5
).
Orientation de l’axe de la rotation
Orientons, à présent, l’axe D. Nous choisissons la famille (u = 1
3(−2,2,1)
)
comme base orthonormée directe de D.
Détermination exacte de l’angle de la rotation
Le vecteur u′ = (1,0,0)
n’appartient pas à l’axe D. Nous avons
detC(u′,c(u′),u) = 1
15
∣∣∣∣∣∣1 0 −2
0 1 2
0 0 1
∣∣∣∣∣∣= 1
15> 0.
376
Partie 3 • Algèbre
9782100547678-Fresl-C16.qxd 5/07/10 9:06 Page 376

D’après la première question, nous avons donc sin(θ) > 0. On en déduit que
θ ∈ ]0,π[ mod 2π.
Par définition, la fonction Arccos est à valeurs dans [0,π]. On en déduitfinalement que
θ = Arccos
(4
5
).
Conclusion
L’application c est la composée de la rotation d’axe D = Vect((−2,2,1)) etd’angle θ = Arccos(4/5) et de la réflexion par rapport au plan D⊥.
Exercice 16.3 : Orthonormalisation dans R3 (sauf PTSI)
Dans les questions qui suivent, l’espace vectoriel R3 sera muni du produit sca-laire usuel que nous noterons 〈.,.〉.
Considérons les vecteurs suivants de R3 :
u1 = 1
22
, u2 =
−1
41
, u3 =
2
51
.
1. Orthonormaliser la famille (u1,u2,u3) par la méthode de Gram-Schmidt.
2. Notons E = Vect(u1,u2). Soit p la projection orthogonale sur E. Déterminer
la matrice de p dans la base canonique de R3.
3. Soit s la réflexion par rapport à E. Exprimer s en fonction de p. Déterminer la
matrice de s dans la base canonique de R3.
Dans cet exercice, on cherche à faire des calculs explicites d’orthonormalisation parla méthode de Gram-Schmidt. Rappelons-en le fonctionnement. On part d’unespace vectoriel F muni d’un produit scalaire 〈.,.〉 et d’une famille libre(u1,. . . ,un), avec n ∈ N∗ , de F. Nous savons alors qu’il existe une unique familleorthonormée (w1,. . . ,wn) de F vérifiant les deux propriétés suivantes : quel quesoit i ∈ 1,. . . ,n, on a
– Vect(u1,. . . ,ui ) = Vect(w1,. . . ,wi ) ;
– 〈ui ,wi 〉 > 0.
La méthode d’orthonormalisation de Gram-Schmidt décrit une façon de déterminerla famille (w1,. . . ,wn), vecteur après vecteur. Pour le premier vecteur, il suffit deposer
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
377
Chapitre 16 • Espaces euclidiens
9782100547678-Fresl-C16.qxd 5/07/10 9:06 Page 377

w1 = 1
‖u1‖ u1.
Soit i ∈ 1,. . . ,n et supposons avoir construit des vecteurs (w1,. . . ,wi−1) vérifiantles conditions requises. On pose
vi = ui −i−1∑k=1
〈uk,wk〉wk .
Les trois propriétés suivantes sont alors vérifiées :
– ∀k ∈ 1,. . . ,i − 1 , 〈vi ,wk〉 = 0 ;
– Vect(u1,. . . ,ui ) = Vect(w1,. . . ,wi−1,vi ) ;
– 〈ui ,vi 〉 > 0.
On pose finalement
wi = 1
‖vi‖ vi .
La famille (w1,. . . ,wn) vérifie alors les propriétés requises.
1. Nous allons appliquer la méthode d’orthonormalisation de Gram-Schmidt à lafamille (u1,u2,u3) . Il faut, au préalable, vérifier que cette famille est libre.
Montrons que la famille (u1,u2,u3) est libre. Pour cela, nous allons calculerson déterminant dans la base canonique C de R3. Nous avons
detC(u1,u2,u3) =∣∣∣∣∣∣1 −1 2
2 4 5
2 1 1
∣∣∣∣∣∣
=∣∣∣∣∣∣1 −1 2
0 6 1
0 3 −3
∣∣∣∣∣∣ L2 L2 − 2L1
L3 L3 − 2L1
= −21 =/ 0.
Par conséquent, la famille (u1,u2,u3) est libre.
Appliquons, à présent, le procédé d’orthonormalisation de Gram-Schmidt.Nous avons
‖u1‖2 = 12 + 22 + 22 = 9.
378
Partie 3 • Algèbre
−→−→
9782100547678-Fresl-C16.qxd 5/07/10 9:06 Page 378

On pose
w1 = 1
‖u1‖ u1 = 1
3
1
2
2
.
Nous avons
〈u2,w1〉 = 1
3(−1 + 8 + 2) = 3.
On pose
v2 = u2 − 3w1 =−2
2
−1
.
Nous avons
‖v2‖2 = (−2)2 + 22 + (−1)2 = 9.
On pose
w2 = 1
‖v2‖ v2 = 1
3
−2
2
−1
.
Nous avons
〈u3,w1〉 = 1
3(2 + 10 + 2) = 14
3
et
〈u3,w2〉 = 1
3(−4 + 10 − 1) = 5
3.
On pose
v3 = u3 − 14
3w1 − 5
3w2 = 7
9
2
1
−2
.
Nous avons
‖v3‖2 =(
7
9
)2 ((2)2 + 12 + (−2)2) =
(7
3
)2
.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
379
Chapitre 16 • Espaces euclidiens
9782100547678-Fresl-C16.qxd 5/07/10 9:06 Page 379

On pose
w3 = 1
‖v3‖ v3 = 1
3
2
1
−2
.
La famille (w1,w2,w3) est la famille obtenue à partir de la famille(u1,u2,u3) par le procédé d’orthonormalisation de Gram-Schmidt.
2. La projection p est, par définition, une projection orthogonale sur l’hyperplan E.
Soit x ∈ R3 . Il existe une méthode simple pour calculer p(x) lorsque l’on connaîtun vecteur orthogonal à cet hyperplan. Dans notre cas, nous avonsVect(u1,u2) = Vect(w1,w2), d’après les propriétés du procédé d’orthonormalisa-
tion de Gram-Schmidt et le vecteur w3 est donc une base de la droite E⊥.
Puisque la famille (w1,w2,w3) est une base orthonormée de R3, nous avons
x = 〈x,w1〉w1 + 〈x,w2〉w2 + 〈x,w3〉w3.
Le vecteur 〈x,w1〉w1 + 〈x,w2〉w2 appartient à E et le vecteur 〈x,w3〉w3 appartient
à E⊥. Nous avons donc, par définition de p,
p(x) = 〈x,w1〉w1 + 〈x,w2〉w2
= w − 〈x,w3〉w3.
Nous voyons donc que pour connaître la projection d’un vecteur sur un hyperplan,il suffit de connaître sa projection sur la droite orthogonale à cet hyperplan.
D’après les propriétés du procédé d’orthonormalisation de Gram-Schmidt,nous avons E = Vect(u1,u2) = Vect(w1,w2). Par conséquent, la famille(w3) forme une base orthonormée de la droite E⊥ orthogonale à cet hyper-plan. Quel que soit x ∈ R3 , nous avons donc
p(x) = x − 〈x,w3〉w3.
En appliquant cette formule aux trois vecteurs de la base canonique de R3,nous obtenons
p
1
0
0
=
1
0
0
− 2
3.1
3
2
1
−2
= 1
9
5
−2
4
,
p
0
1
0
=
0
1
0
− 1
3.1
3
2
1
−2
= 1
9
−2
8
2
380
Partie 3 • Algèbre
9782100547678-Fresl-C16.qxd 5/07/10 9:06 Page 380

et
p
0
01
=
0
0
1
+ 2
3.1
3
2
1−2
= 1
9
4
2
5
.
On en déduit que la matrice de la projection p dans la base canonique de R3
est
MatC(p) = 1
9
5 −2 4
−2 8 2
4 2 5
.
3. On nous demande tout d’abord d’exprimer la réflexion s en fonction de la pro-jection p. C’est un exercice classique pour lequel il suffit de revenir aux définitions.
Soit x ∈ R3 . Puisque E ⊕ E⊥ = R3 , il existe un unique couple(y,z) ∈ E × E⊥ tel que l’on ait x = y + z. Par définition de p et de s,nous avons
p(x) = y et s(x) = y − z.
Remarquons que nous avons également
(Id − p)(x) = y + z − y = z.
On en déduit que
s(x) = y − z = p(x) − (Id − p)(x) = (2p − Id)(x).
Cette égalité étant vérifiée quel que soit x ∈ R3 , nous avons finalement
s = 2p − Id.
Remarquons que l’égalité obtenue est valable dans tout espace euclidien, pour laréflexion par rapport à n’importe quel sous-espace et la projection orthogonale surce même sous-espace.
Il ne nous reste plus maintenant qu’à appliquer la formule pour déterminer la
matrice de la réflexion s dans la base canonique de R3.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
381
Chapitre 16 • Espaces euclidiens
9782100547678-Fresl-C16.qxd 5/07/10 9:06 Page 381

En passant aux matrices dans la base canonique de R3, nous obtenons
MatC(s) = 2 MatC(p) − I3
= 2
9
5 −2 4
−2 8 2
4 2 5
−
1 0 0
0 1 0
0 0 1
= 1
9
1 −4 8
−4 7 4
8 4 1
.
Exercice 16.4 : Décomposition RT (sauf PTSI)
Soient n ∈ N∗ et M ∈ GLn(R) . Montrer qu’il existe un unique couple de
matrices (R,T ) ∈ Mn(R)2 tel que les propriétés suivantes soient vérifiées :
– la matrice R est orthogonale ;– la matrice T est triangulaire supérieure et ses coefficients diagonaux sont stric-
tement positifs ;– on a l’égalité M = RT .
Indication : on pensera à utiliser le procédé d’orthonormalisation de Gram-Schmidt.
Cette question en recouvre deux : l’une concernant l’existence, l’autre l’unicité.
Unicité
Comme souvent, l’unicité est plus simple à démontrer et c’est par elle que nouscommencerons. Nous supposerons donc qu’il existe deux décompositions de lamatrice M sous la forme voulue et montrerons qu’elles sont égales.
Supposons qu’il existe deux couples de matrices (R1,T1) et (R2,T2) véri-fiant les conditions demandées. En particulier, nous avons
M = R1T1 = R2T2.
Remarquons qu’une matrice orthogonale est inversible et que son inverse estune matrice orthogonale. Une matrice triangulaire supérieure à coefficientsdiagonaux strictement positifs est également inversible et son inverse estune matrice du même type. Nous avons donc
R−12 R1 = T2T −1
1 .
382
Partie 3 • Algèbre
9782100547678-Fresl-C16.qxd 5/07/10 9:06 Page 382

La matrice T = T2T −11 est triangulaire supérieure à coefficients diagonaux
strictement positifs. Elle est également orthogonale, car la matrice R−12 R1
est orthogonale. Par conséquent, nous avons
t T = T −1.
Or la matrice t T est triangulaire inférieure et la matrice T −1 est triangulairesupérieure. On en déduit que la matrice t T = T −1 est diagonale. Par consé-quent, la matrice T est également diagonale. Notons a1,. . . ,an ∈ R∗+ ses
coefficients diagonaux. L’égalité t T = T −1 se récrit alors
a1 0 . . . 0
0 a2 . . . 0...
.... . .
...
0 0 . . . an
=
a−11 0 . . . 0
0 a−12 . . . 0
......
. . ....
0 0 . . . a−1n
.
Par conséquent, quel que soit i ∈ 1,. . . ,n, on a ai = a−1i et donc
ai = ±1. Puisque ai > 0 , nous avons finalement ai = 1 . On en déduit queT = In. Puisque T = R−1
2 R1 = T2T −11 , nous avons finalement
(R1,T1) = (R2,T2).
On en déduit que la décomposition demandée est unique.
Existence
Passons, à présent, à la démonstration de l’existence de la décomposition.L’indication donnée par l’énoncé semble, a priori, un peu obscure. En effet, le pro-cédé d’orthonormalisation de Gram-Schmidt s’applique à une base d’un espace vec-toriel et aucune ne figure dans l’énoncé. Nous devons donc en faire apparaître. Pourcela, nous allons interpréter les propriétés des matrices en termes d’algèbre linéaire.Plaçons-nous dans Rn et considérons une famille ( f1,. . . , fn) de vecteurs. Noussavons que la matrice dont les colonnes sont les vecteurs f1,. . . , fn exprimés dansla base canonique est inversible si, et seulement si, la famille ( f1,. . . , fn) est unebase de Rn. De même, nous savons que cette matrice est orthogonale si, et seule-ment si, la famille ( f1,. . . , fn) est une base orthonormée de Rn, pour le produit sca-laire usuel.
Reprenons le raisonnement. De la matrice inversible M, nous allons déduire unebase de Rn. De cette base, nous déduirons, par le procédé d’orthonormalisation de
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
383
Chapitre 16 • Espaces euclidiens
9782100547678-Fresl-C16.qxd 5/07/10 9:06 Page 383

Gram-Schmidt une base orthonormée, et donc une matrice orthogonale. Il nous res-tera à comprendre comment ces deux matrices sont reliées.
Plaçons-nous dans Rn muni du produit scalaire usuel. Notonsf1,. . . , fn ∈ Rn les colonnes de la matrice M, considérées comme des vec-teurs exprimés par leurs coordonnées dans la base canonique. Puisque lamatrice M est inversible, la famille F = ( f1,. . . , fn) est une base de Rn.Appliquons-lui le procédé d’orthonormalisation de Schmidt. Il existe unebase orthonormée (g1,. . . ,gn) de Rn vérifiant les conditions suivantes :quel que soit i ∈ 1,. . . ,n, on a
Vect( f1,. . . , fi ) = Vect(g1,. . . ,gi ) et 〈 fi ,gi 〉 > 0.
Notons R la matrice dont les colonnes sont les vecteurs g1,. . . ,gn exprimésdans la base canonique. Puisque la famille G = (g1,. . . ,gn) est une baseorthonormée, la matrice R est orthogonale.
Il nous reste, à présent, à comprendre comment les matrices M et R sont reliées.Notons C la base canonique de Rn. La matrice M est alors la matrice de passage de labase C à la base F et la matrice R la matrice de passage de la base C à la base G.Notons T la matrice de passage de la base G à la base F. Nous avons alors la relation
M = PC,F= PC,GPG,F= RT .
Notons C la base canonique de Rn. La matrice M est alors la matrice de pas-sage de la base C à la base F et la matrice R la matrice de passage de labase C à la base G. Nous avons donc
M = RT,
où T désigne la matrice de passage de la base G à la base F.
Il nous reste, à présent, à montrer que la matrice T est triangulaire supérieure et queses coefficients diagonaux sont strictement positifs. Souvenons-nous que, dans leprocédé d’orthonormalisation de Gram-Schmidt, les bases F et G sont reliées par lapropriété suivante : quel que soit i ∈ 1,. . . ,n, on a
Vect( f1,. . . , fi ) = Vect(g1,. . . ,gi ) et 〈 fi ,gi 〉 > 0.
Ce sont ces propriétés que nous allons devoir traduire en termes matriciels.
384
Partie 3 • Algèbre
9782100547678-Fresl-C16.qxd 5/07/10 9:06 Page 384

Montrons que la matrice T est triangulaire supérieure et que ses coefficientsdiagonaux sont strictement positifs. La matrice T est la matrice dont lescolonnes sont les vecteurs f1,. . . , fn exprimés dans la base (g1,. . . ,gn). Soiti ∈ 1,. . . ,n et considérons la i-ème colonne de la matrice T. Elle est for-mée des coordonnées (αi,1,. . . ,αi,n) du vecteur fi dans la base (g1,. . . ,gn).Avec ces notations, nous avons
fi =n∑
j=1
αi, j gj .
D’après les propriétés du procédé d’orthonormalisation de Gram-Schmidt,nous avons
fi ∈ Vect(g1,. . . ,gi ).
On en déduit que αi,i+1 = . . . = αi,n = 0 . Puisque la base (g1,. . . ,gn) estorthonormée, nous avons
αi,i = 〈 fi ,gi 〉.D’après les propriétés du procédé d’orthonormalisation de Gram-Schmidt,nous avons donc
αi,i > 0.
Finalement, la matrice T s’écrit sous la forme
T =
α1,1 α2,1 . . . αn−1,1 αn,1
0 α2,2 . . . αn−1,2 αn,2
... 0. . .
......
......
. . . αn−1,n−1 αn,n−1
0 0 . . . 0 αn,n
.
Elle est bien triangulaire supérieure à coefficients diagonaux strictementpositifs.
Finalement, nous avons bien montré que la matrice M peut s’écrire sous laforme
M = RT,
où R est une matrice orthogonale et T une matrice triangulaire supérieuredont les coefficients diagonaux sont strictement positifs.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
385
Chapitre 16 • Espaces euclidiens
9782100547678-Fresl-C16.qxd 5/07/10 9:06 Page 385

Exercice 16.5 : Espace euclidien de polynômes (sauf PTSI)
Définissons une application 〈.,.〉 : R[X] × R[X] → R par la formule
∀P,Q ∈ R[X], 〈P,Q〉 =∫ 1
−1P(t)Q(t)dt.
1. Montrer que l’application 〈.,.〉 définit un produit scalaire sur R[X].
2. Orthonormaliser la base (1,X,X2) de R2[X] par le procédé d’orthonormalisa-tion de Gram-Schmidt.
3. Calculer la distance de X3 à R2[X].
1. Rappelons qu’un produit scalaire est, par définition, une forme bilinéaire symé-trique définie positive. Le caractère bilinéaire et symétrique est aisé à démontrer.
Linéarité par rapport à la première variable
Montrons que l’application 〈.,.〉 est linéaire par rapport à la premièrevariable. Quels que soient P,Q,R ∈ R[X] , nous avons
〈P + Q,R〉 =∫ 1
−1(P(t) + Q(t))R(t)dt
=∫ 1
−1(P(t)R(t) + Q(t)R(t))dt
=∫ 1
−1P(t)R(t)dt +
∫ 1
−1Q(t)R(t)dt
= 〈P,R〉 + 〈Q,R〉.
Quel que soient P,R ∈ R[X] et λ ∈ R, nous avons
〈λP,R〉 =∫ 1
−1λP(t)R(t)dt
= λ
∫ 1
−1P(t)R(t)dt
= λ〈P,R〉.
Par conséquent, l’application 〈.,.〉 est linéaire par rapport à la premièrevariable.
386
Partie 3 • Algèbre
9782100547678-Fresl-C16.qxd 5/07/10 9:06 Page 386
Symétrie
Montrons, à présent, que l’application 〈.,.〉 est symétrique. Quels que soientP,Q ∈ R[X] , nous avons
〈P,Q〉 =∫ 1
−1P(t)Q(t)dt
=∫ 1
−1Q(t)P(t))dt
= 〈Q,P〉.
Par conséquent, l’application 〈.,.〉 est symétrique. On en déduit que l’appli-cation 〈.,.〉 est également linéaire par rapport à la seconde variable.
Positivité
Le caractère positif de l’application 〈.,.〉 est également facile à démontrer.
Montrons que l’application 〈.,.〉 est positive. Soit P ∈ R[X]. Nous avons
〈P,P〉 =∫ 1
−1P(t)2dt.
La fonction t → P(t)2 est positive sur l’intervalle [−1,1]. Par conséquent,son intégrale sur cet intervalle est encore positive. Autrement dit, nousavons
〈P,P〉 0.
Par conséquent, l’application 〈.,.〉 est positive.
Caractère défini positif
Le caractère défini positif de l’application 〈.,.〉 est plus difficile à démontrer.Cependant, c’est un résultat classique dont il est impératif de connaître la preuve.
Montrons que l’application 〈.,.〉 est définie positive. Soit P ∈ R[X] tel que
〈P,P〉 =∫ 1
−1P(t)2dt = 0.
La fonction t → P(t)2 est positive et continue sur l’intervalle [−1,1].Puisque son intégrale est nulle, cette fonction doit être identiquement nullesur l’intervalle [−1,1].
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
387
Chapitre 16 • Espaces euclidiens
9782100547678-Fresl-C16.qxd 5/07/10 9:07 Page 387

Il est ici impératif de mentionner le caractère continu de la fonction t → P(t)2 . Eneffet, il existe des fonctions positives et d’intégrale nulle sur [−1,1] qui ne sont pasidentiquement nulles sur cet intervalle. Un exemple est donné par la fonction
[−1,1] → R
0 → 1
x =/ 0 → 0
Par conséquent, quel que soit t ∈ [−1,1], on a P(t) = 0 . Le polynôme Ppossède donc une infinité de racines. On en déduit que le polynôme P estnul. Par conséquent, l’application 〈.,.〉 est définie positive. On en déduitfinalement que c’est un produit scalaire.
Soulignons que nous ne pouvons pas nous contenter de montrer que la fonctionpolynomiale P est nulle sur l’intervalle [−1,1]. Il manque encore un argument pourmontrer que le polynôme P est nul. Considérer ses racines comme nous l’avons faitpermet de conclure.
2. Dans cette question, nous allons appliquer le procédé habituel d’orthonormalisa-tion de Gram-Schmidt. Nous aurons à calculer plusieurs produits scalaires entrepolynômes de degré inférieur ou égal à 2. Nous allons donc commencer par calcu-
ler les produits scalaires élémentaires 〈1,1〉, 〈1,X〉, 〈1,X2〉, 〈X,X〉, 〈X,X2〉 et
〈X2,X2〉 .
• Calculons, tout d’abord, quelques produits scalaires élémentaires qui nousseront utiles par la suite. Nous avons
〈1,1〉 =∫ 1
−11 dt = 2,
〈1,X〉 =∫ 1
−1t dt =
[t2
2
]1
−1= 0
(nous pouvions également utiliser le fait que la fonction t → t est impaireet l’intervalle d’intégration [−1,1] symétrique par rapport à 0),
〈1,X2〉 =∫ 1
−1t2 dt =
[t3
3
]1
−1= 2
3,
〈X,X〉 =∫ 1
−1t2 dt = 2
3,
388
Partie 3 • Algèbre
9782100547678-Fresl-C16.qxd 5/07/10 9:07 Page 388

〈X,X2〉 =∫ 1
−1t3 dt = 0,
car la fonction t → t3 est impaire, et
〈X2,X2〉 =∫ 1
−1t4 dt =
[t5
5
]1
−1= 2
5.
• Nous avons
‖1‖2 = 〈1,1〉 = 2.
Par conséquent, nous avons
P0 = 1
‖1‖ = 1√2
=√
2
2.
• Nous avons
〈X,P0〉 =√
2
2〈X,1〉 = 0.
Posons
Q1 = X − 〈X,P0〉P0 = X.
Nous avons
‖Q1‖2 = 〈X,X〉 = 2
3.
Par conséquent, nous avons
P1 = Q1
‖Q1‖ =√
3√2
X =√
6
2X.
• Nous avons
〈X2,P1〉 =√
6
2〈X2,X〉 = 0
et
〈X2,P0〉 =√
2
2〈X2,1〉 =
√2
3.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
389
Chapitre 16 • Espaces euclidiens
9782100547678-Fresl-C16.qxd 5/07/10 9:07 Page 389

Posons
Q2 = X2 − 〈X2,P1〉P1 − 〈X2,P0〉P0 = X2 − 1
3.
Nous avons
‖Q2‖2 = ‖X2‖2 +(
1
3
)2
‖1‖2 − 21
3〈X2,1〉
= 2
5+ 2
9− 4
9
= 8
45.
Par conséquent, nous avons
P2 = Q2
‖Q2‖
= 3√
5
2√
2
(X2 − 1
3
)
=√
10
4
(3X2 − 1
).
3. Rappelons comment calculer la distance d’un vecteur à un sous-espace. Soient(E,〈.,.〉) un espace euclidien, F un sous-espace vectoriel de E et x un point de E.
Nous noterons pF et pF⊥ les projections orthogonales sur les espaces F et F⊥.
Par définition, la distance de x à F est
d(x,F) = inf‖x − y‖, y ∈ F.
Cette distance est atteinte au point y = pF(x) et seulement en ce point. Nous avons donc
d(x,F)2 = ‖x − pF(x)‖2
= ‖pF⊥(x)‖2
= ‖x‖2 − ‖pF(x)‖2.
La dernière égalité provient du théorème de Pythagore : puisque les vecteurs pF(x)
et pF⊥(x) sont orthogonaux, nous avons
‖x‖2 = ‖pF(x) + pF⊥(x)‖2 = ‖pF(x)‖2 + ‖pF⊥(x)‖2.
Il ne nous reste plus, à présent, qu’à appliquer ces formules.
390
Partie 3 • Algèbre
9782100547678-Fresl-C16.qxd 5/07/10 9:07 Page 390

• Notons p la projection orthogonale sur R2[X]. La distance d de X3 àR2[X] satisfait alors l’égalité
d2 = ∥∥X3∥∥2 − ∥∥p(X3)
∥∥2.
• Calculons p(X3). Puisque (P0,P1,P2) est une base orthonormée deR2[X], nous avons
p(X3) = 〈X3,P0〉P0 + 〈X3,P1〉P1 + 〈X3,P2〉P2
et donc ∥∥p(X3)∥∥2 = 〈X3,P0〉2 + 〈X3,P1〉2 + 〈X3,P2〉2.
• Calculons les produits scalaires précédents. Nous avons
〈X3,P0〉 =√
2
2
∫ 1
−1t3 dt = 0,
car la fonction t → t3 est impaire et l’intervalle d’intégration symétriquepar rapport à 0.
Pour les mêmes raisons, nous avons
〈X3,P2〉 =√
10
4
∫ 1
−1(3t5 − t3) dt = 0.
Nous avons également
〈X3,P1〉 =√
6
2
∫ 1
−1t4 dt =
√6
5.
• Calculons ‖X3‖2 . Nous avons
‖X3‖2 = 〈X3,X3〉 =∫ 1
−1t6 dt = 2
7.
• Finalement, la distance d de X3 à R2[X] vérifie
d2 = 2
7− 6
25= 8
175.
On en déduit que
d = 2√
14
35.
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
391
Chapitre 16 • Espaces euclidiens
9782100547678-Fresl-C16.qxd 5/07/10 9:07 Page 391

9782100547678-Fresl-C16.qxd 8/07/10 12:30 Page 392
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
393
F
E
D
C
B
AAccroissements finis 142Algorithme d’Euclide 256Arctangente 39Astroïde 223
Base 287Borne supérieure 86Branche infinie 226, 232
Caractérisation séquentielle 123Cardioïde 228Cercle d’Euler 67Changement de variable polaire 220Changement de variable 192, 197, 199Congruences 254Continuité uniforme 131, 135Cycle 246Cycloïde 221
Décomposition en éléments simples 194Densité 123Développement limité 168, 171, 177Différence symétrique 239
Division euclidienne 245, 254Droite d’Euler 63
Équation diophantienne 256Équation fonctionnelle 51, 123Équivalent 115, 168, 177, 182, 189 Étude de fonction 5, 22Exponentielle 51Exponentielles complexes 29, 37
Famille libre 272, 284Fonction circulaire réciproque 7Fonction continue par morceaux 211Fonction convexe 156Fonction en escalier 211Fonction hyperbolique réciproque 15Fonction lipschitzienne 131Fonction réciproque 171Forme indéterminée 168Forme linéaire 336Formes n-linéaire 297Formule d’Euler 37Formule de Moivre 37Formule de Stirling 192
Index
9782100547678-Fresl-Index.qxd 8/07/10 12:31 Page 393
394
Index
N
R
PO
M
L
IH
G©
Dun
od. L
a ph
otoc
opie
non
aut
oris
ée e
st u
n d
élit
.
Géométrie dans l’espace 74Gram-Schmidt 377, 382, 386Groupe des permutations 246Groupe symétrique 246
Homothéties 291
Image 263, 266, 278, 280, 287Inégalité de Jensen 160Inégalité de Taylor-Lagrange 207Inégalité de convexité 159Intégrale de Gauβ 201Intégrales de Wallis 189, 201Intégrales doubles 217Intégration par parties 189Inverse (matrice) 301, 303, 309, 310
Lemme de Gauβ 251Lemme de Riemann-Lebesgue 211Linéarisation 37Loi de composition interne 240
Matrice nilpotente 303Matrices orthogonales d’ordre 3 365Méthode de Cardan 43
Nilpotent 284Nombre premier 251Noyau 263, 266, 278, 280, 287
Opérations élémentaires 287Orthonormalisation 377
Partie entière 85Permutations 330Perpendiculaire commune 75Petit théorème de Fermat 251Pgcd 256Pivot de Gauβ 287Point fixe 87, 119Polynômes de Chebyshev 339Polynômes de Legendre 346Polynômes interpolateurs de Lagrange 358Produit scalaire 386Projecteur 266, 292Projecteurs orthogonaux 361Projection orthogonale 377Projections 314Prolongement 127, 176, 182Puissance (matrice) 301, 302, 305, 321
Racines de l'unité 32, 35Rang 287Réflexion 377Règles de Bioche 192Relations coefficients-racines 348Rosace 230
9782100547678-Fresl-Index.qxd 8/07/10 12:31 Page 394
© D
unod
. La
phot
ocop
ie n
on a
utor
isée
est
un
dél
it.
395
Index
V
TSSérie harmonique 89Séries alternées 109Signature 33Somme directe 262, 278Sommes de Riemann 205Sous-groupes 243Sous-suites 104Suite arithmético-géométrique 154Suite définie implicitement 115, 182Suite récurrente 112Suites adjacentes 22, 97Suites extraites 104Supplémentaire 261Symétries 314
Tétraèdre 71Théorème de Rolle 144Théorème des valeurs intermédiaires119, 125, 130Théorème du rang 280, 281Transpositions 246Triangle 59, 63, 67Trigonométrie 29, 32, 37
Variation de la constante 49, 50
9782100547678-Fresl-Index.qxd 8/07/10 12:31 Page 395