ÉlÉments de calcul tensorielfortunier/cours/introduction_to_tensors/... · 2006-01-06 ·...
TRANSCRIPT
ÉLÉMENTS DE CALCUL TENSORIEL
Roland FORTUNIERCentre Micro-électronique de Provence "Georges Charpak"
Avenue des anémones
13541 - GARDANNE

2

Table des matières
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Chapitre 1. Notions de base . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.1. Espace vectorielE et espace dualE∗ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.2. Covariance et contravariance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.3. Cas pré-euclidien et euclidien : identification deE etE∗ . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.4. Le tenseur métrique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Chapitre 2. Algèbre tensorielle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.1. Les tenseurs pré-euclidiens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.2. Composantes d’un tenseur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.3. Opérations sur les tenseurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.4. Notions d’algèbre extérieure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Chapitre 3. Géométrie différentielle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.1. Repère naturel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173.2. Symboles de christoffel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.3. Différentielle absolue, dérivée covariante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.4. Les tenseurs de courbure et de torsion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Chapitre 4. Expression de quelques opérateurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.1. Accélération d’un point . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234.2. Gradient . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244.3. Divergence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244.4. Rotationel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 254.5. Laplacien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Annexes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
A. Coordonnées cylindriques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27B. Coordonnées sphériques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Bibliographie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
5

6

Introduction
En 1900, Ricci et Levi-Civita ont donné le premier exposé systématique relatif au calcul tensoriel. Dans cet ouvrage,les auteurs ont attiré l’attention des mathématiciens et des physiciens sur un certain nombre d’applications de cette théo-rie mathématique. Depuis, l’apparition de la théorie de la relativité, qui n’a été possible que grâce à l’existence préalabledu calcul tensoriel, lui a fait réaliser par contrecoup d’immenses progrès. Ce calcul est devenu l’un des instrumentsessentiels de toute la physique théorique moderne.
L’étude du calcul tensoriel peut être réalisée au sein d’un cadre mathématique formel, à l’aide de définitions et dedémonstrations plus ou moins compliquées. Mais le calcul tensoriel est aussi un outil très pratique pour l’écriture etl’étude des équations servant à décrire des phénomènes physiques. En effet, les lois physiques ne sont valables que sielles sont indépendantes de tout système de coordonnées particulier utilisé pour les représenter mathématiquement. Ilest ainsi très commode d’utiliser l’analyse tensorielle en relativité générale, en géométrie différentielle, en mécanique,en thermodynamique, et dans de nombreuses autres branches de la science ou de la technologie, et il n’est pas nécessairepour cela de connaître l’ensemble des fondements mathématiques de la théorie.
Dans ce document, nous avons choisi de traiter l’analyse tensorielle comme un outil de description simple et concisdes lois physiques que l’ingénieur aura sans doute à connaître et à utiliser au cours de sa vie professionnelle. Le premierchapitre est consacré à la définition des notions élémentaires nécessaires à la compréhension du calcul tensoriel. Il donnele cadre mathématique, volontairement restreint, dans lequel se place ce document. Ensuite, nous définissons dans lesecond chapitre les tenseurs, leurs composantes, et les différentes opérations classiques qui y sont associées. Quelquesnotions d’algèbre extérieure sont également fournies. Dans le troisième chapitre, nous utilisons le calcul tensoriel pourintroduire la géométrie différentielle, qui concrétise cet outil. Enfin, dans le quatrième chapitre, quelques opérateursdifférentiels sont introduits dans un cadre tensoriel. Ces opérateurs sont à la base de la plupart des lois physiques. Ilssont explicités dans les annexes A et B pour le cas de systèmes de coordonnées cylindriques et sphériques.
Le cadre théorique de ce document a été réalisé à l’aide des document [LIC 87, RIE 85]. Le lecteur pourra égalementtrouver des applications du calcul tensoriel dans [HIL 78, FOR 96] pour la mécanique et la déformation plastique, ainsique dans [HEI 73] pour la cosmologie. Enfin, de nombreux exercices résolus se trouvent dans [MUR 73].
7

8

Chapitre 1
Notions de base
1.1. Espace vectorielE et espace dualE∗
Dans l’ensemble de ce document, nous considérons un espace vectorielE de dimensionN sur un corpsK, dont lesvecteurs de base sont notésai. D’une façon générale, les éléments deE seront notés en caractère gras ("vecteurs"), pourles différencier des éléments deK ("scalaires"). Un élémentx de E se décomposera donc sur la base desai sous laforme de composantesxi telles quex = x1a1 + x2a2 + . . . + xNaN .
Nous utiliserons donc fréquemment des sommes sur des indices variant de1 à la dimensionN de l’espace considéré.Pour simplifier les notations, ces sommes seront rendues implicites lorsque, dans un produit ou sur un seul terme, lemême indice apparaîtra à la fois en position inférieure et supérieure. Par exemple, la décomposition d’un élémentx deE sur la base desai s’écrira de façon condensée sous la formex = xiai. De même, en notantAj
i les termes d’unematrice, les composantesyi de lélément deE issu du produit de cette matrice par un élémentx deE, et la trace de cettematrice, s’écriront successivement :
yi = Aijx
j = Ai1x
1 + . . . + AiNxN
Aii = A1
1 + . . . + ANN
(1.1)
Il s’agit de la convention de sommation dite d’Einstein.
Souvent, cette convention de sommation est étendue à tous les indices présents dans un produit ou sur un seul terme,quelle que soit leur position (inférieure ou supérieure). Dans ce document, nous n’effectuerons pas cette extension. Nousverrons en effet que la signification mathématique d’un indice dépend de sa position.
La première notion fondamentale utile en calcul tensoriel est celle d’espace vectoriel dualE∗, issue de l’analysevectorielle. Pour simplifier, nous citerons simplement la définition deE∗. Il s’agit de l’ensemble des formes linéairesudeE dansK, qui satisfont les conditions :
∀x ∈ E,∀y ∈ E,∀λ ∈ K,
u(x + y) = u(x) + u(y)u(λx) = λu(x) (1.2)
Dans la suite, les éléments deE∗ seront différenciés des éléments deE par un "trait supérieur".
Considérons maintenant un certain nombre d’éléments de l’espaceE∗ définis sous la forme :
∀x ∈ E,ai(x) = xi si x = xiai (1.3)
9

10 Calcul tensoriel
On peut remarquer sur l’équation précédente que les élémentsai de l’espaceE∗ sont associés aux élémentsai deE. En particulier, ils sont au nombre deN et satisfont la relation :
aj(ai) = δji =
1 si i = j0 si i 6= j
(1.4)
Les élémentsai forment une base deE∗. Pour démontrer cela, nous vérifions qu’ils forment dansE∗ :
– une famille libre, en considérant une combinaison linéaire nulleλiai, où lesλi sont des éléments du corpsK.
L’image des vecteurs de baseaj deE par cette combinaison linéaire est donc également nulle, et on peut écrire :
λiai(aj) = λiδ
ij = λj = 0 (1.5)
– une famille génératrice, en écrivant pour tout élémentu deE∗ :
∀x ∈ E,u(x) = u(xiai) = xiu(ai) = u(ai)ai(x) = uiai(x) (1.6)
ce qui montre que les composantes deu sur la base desai sont les images paru des vecteurs de baseai de E(ui = u(ai)).
La base desai est souvent appelée "base duale" desai. Elle est constituée deN termes, ce qui montre queE∗ estde dimensionN .
1.2. Covariance et contravariance
Nous considérons maintenant dansE deux systèmes de vecteurs de baseai et bj , qui se déduisent l’un de l’autrepar une combinaison linéaire (bj = Bi
jai etai = Ajibj , où les termesBj
i etAji forment des matrices inverses l’une de
l’autre). Les bases duales associées à ces deux systèmes se déduisent alors l’une de l’autre par des relations analogues,
mais en inversant les deux matrices mises en jeu. On obtientbj
= Ajia
i et ai = Bijb
j. Ceci se montre facilement par
exemple en écrivant l’image parbj
d’un élémentx deE sous la forme :
bj(x) = b
j(xiai) = b
j(ai)xi = b
j(Ak
i bk)xi
= Aki b
j(bk)xi = Ak
i δjkxi = Aj
ixi = Aj
iai(x)
(1.7)
Considérons maintenant un élément quelconqueu deE et u deE∗. Notonsxi et yi les composantes deu dans lesdeux systèmes de base (u = xiai = yjbj). Notons maintenantfi etgi les composantes deu dans ces deux systèmes de
base (u = fiai = gjb
j). A l’aide des relations précédentes, on montre alors facilement que l’on a :
xi = Bi
jyj
yj = Ajix
i et
fi = Aj
igj
gj = Bijfi
(1.8)
On remarque sur l’équation précédente que les composantesfi et gj de u évoluent de la même façon (dans lemême "sens") que les vecteurs de base deE. On dit qu’elles évoluent de façon covariante par rapport à ces vecteurs.Inversement, les composantesxi et yj deu évoluent de façon inverse (dans le sens "inverse") des vecteurs de base deE. On dit qu’elles évoluent de façon contravariante par rapport à ces vecteurs.

Notions de base 11
1.3. Cas pré-euclidien et euclidien : identification deE et E∗
Lorsque E est un espace pré-euclidien, il existe dans cet espace une loi de composition, appelée "produit scalaire",qui à tout couple d’élémentsx et y deE fait correspondre un élément du corpsK (le "scalaire"), que nous noteronsx.y. Ce produit scalaire satisfait de plus les conditions suivantes :
– ∀x ∈ E,∀y ∈ E,x.y = y.x
– ∀λ ∈ E,∀x ∈ E,∀y ∈ E, (λx).y = x.(λy) = λ(x.y)– ∀x ∈ E,∀y ∈ E,∀z ∈ E,x.(y + z) = x.y + x.z
– Si∀x ∈ E,x.y = 0, alorsy = 0
Le caractère pré-euclidien deE a une conséquence importante surE∗. En effet, chaque élément de baseai deE∗
est une forme linéaire deE dansK. On peut donc écrire :
∀x ∈ E,ai(x) = ai.x (1.9)
Pour obtenir lesai, il suffit d’utiliser la définition desai pour écrire :
ai.aj = δij (1.10)
Lesai sont donc les éléments deE orthogonaux aux vecteursai. Il s’en suit que lesai forment une base deE.
Plus généralement, l’image de tout élémentx deE par un élémentu deE∗ peut être écrite sous la formeu(x) =u.x. En effet, on a :
u(x) = fiai(x) = fia
i.x = (fiai).x (1.11)
Les composantesfi deu dansE∗ sont celles deu dansE, relativement à la base desai (on a doncu = fiai). On
peut donc identifier tout élémentu deE∗ avec son vecteur associéu deE, et donc ne considérer qu’un seul espaceE.
Dans un espace vectoriel pré-euclidienE, la base desai est dite "covariante" et celle desai est dite "contravariante".Un vecteur quelconqueu de E aura donc des composantes dans ces deux bases. Pour simplifier les notations, lescomposantesfi sont souvent notéesxi et on peut écrire :
u = xiai
u = xiai et
xi = u.ai
xi = u.ai (1.12)
Les composantesxi deu sont dites "contravariantes", tandis que les composantesxi (i.e.fi) sont dites "covariantes".La figure 1.1 illustre ce résultat dans le cas d’un espace euclidien de dimension 2.
Les espaces euclidiens sont des espaces pré-euclidiens sur le corps des réels, où la dernière condition satisfaite par leproduit scalaire est remplacée par la suivante :
– Six 6= 0, alorsx.x > 0
Il est alors possible de définir une norme sur cet espace vectoriel sous la forme :
∀x ∈ E, ‖ x ‖=√
x.x (1.13)

12 Calcul tensoriel
Figure 1.1. Covariance et contravariance dans un espace de dimension 2
1.4. Le tenseur métrique
Dans un espace pré-euclidienE, le produit scalaire entre deux vecteursx ety, de composantes contravariantesxi etyi, et covariantesxi etyi, par rapport à des vecteurs de baseai etai, s’écrit sous la forme :
∀x ∈ E,∀y ∈ E,x.y = gji x
iyj = gijxiy
j = gijxiyj = gijxiyj (1.14)
avec :
gij = ai.aj = aj .ai = gji
gij = ai.aj = aj .ai = gji
gji = ai.a
j = δji = δi
j = ai.aj = gij
(1.15)
Les termesgij , gij , gji = δj
i et gij = δi
j forment les composantes d’un tenseur symétrique appelé "tenseur mé-trique" ou "tenseur fondamental", qui est d’une grande importance en calcul tensoriel. En effet, il permet de calculer leproduit scalaire de deux vecteurs quelconques. On peut d’ailleurs remarquer que les composantes contravariantesgij
sont obtenues en "inversant" la matrice formée par lesgij , tandis que les composantes "mixtes"gji forment la matrice
identité.

Chapitre 2
Algèbre tensorielle
2.1. Les tenseurs pré-euclidiens
Les tenseurs sont construits sur la base d’une opération appelée "produit tensoriel". Par exemple, siE etF sont deuxespaces vectoriels de dimensionN et P respectivement, sur un même corpsK, on définit leur produit tensorielE ⊗ Fde la façon suivante. Chaque élément deE ⊗ F peut être écrit sous la formeu⊗ v, oùu etv sont des vecteurs deE etF respectivement, l’opération jouissant des propriétés suivantes :
–
∀u ∈ E,∀v1 ∈ F,∀v2 ∈ F,u⊗ (v1 + v2) = u⊗ v1 + u⊗ v2
∀u1 ∈ E,∀u2 ∈ E,∀v ∈ F, (u1 + u2)⊗ v = u1 ⊗ v + u2 ⊗ v
– ∀λ ∈ K,∀u ∈ E,∀v ∈ F, λ(u⊗ v) = λu⊗ v = u⊗ λv
– Si N vecteursai constituent une base deE et P vecteursbj une base deF , alors lesN × P vecteursai ⊗ bj
constituent une base deE ⊗ F .
Le produit tensoriel de deux espaces vectoriels est également un espace vectoriel. On peut donc à son tour le mul-tiplier (de façon tensorielle) par un troisième espace vectorielG, et on obtiendra l’espace vectoriel(E ⊗ F ) ⊗ G. Enconstatant que l’opérateur⊗ est associatif, on peut noter l’espace finalE ⊗ F ⊗ G. D’une façon générale, on appelletenseur construit sur les espacesE, F , G, ... tout élément de l’espace vectorielE ⊗ F ⊗ G ⊗ ... Dans ce qui suit,nous nous limiterons au cas où l’espace vectoriel est engendré uniquement par un espaceE et son dualE∗, tous deuxéventuellement multipliés plusieurs fois entre eux. Dans ce cas les éléments de l’espace vectoriel engendré sont appeléstenseurs affines.
Considérons par exemple un élémentT de l’espace vectorielE ⊗ E∗. Si les vecteursai et aj constituent desbases respectives deE et E∗, alors les composantes deT dans l’espace vectorielE ⊗ E∗ seront notéesT i
j et on auraT = T i
jai ⊗ aj . Il est évident queT aura des équivalents dans les espacesE ⊗ E, E∗ ⊗ E, et E∗ ⊗ E∗, mais lesnotations dans ce cas deviennent vite lourdes. Or dans la plupart des applications, l’espace vectorielE est pré-euclidien,de sorte que l’on identifieE et E∗. Il s’en suit que l’on peut identifierT et ses équivalents. Dans la suite, nous nouslimiterons au cas d’un espace vectoriel pré-euclidienE.
Les tenseurs affines définis dans des espaces vectoriels issus de produits tensoriels (successifs ou non) entre un espacevectoriel pré-euclidienE et son dual (identifié à E) sont appelés tenseurs pré-euclidiens. En notantaj les vecteurs de labase duale desai, on peut alors écrire :
∀T ∈ E ⊗ E,T = T ijai ⊗ aj = Tijai ⊗ aj = T j
i ai ⊗ aj = T ijai ⊗ aj (2.1)
Ceci permet de définir l’ordre d’un tenseur (nombre d’indices sur les composantes), ainsi que le type de ses compo-santes (voir paragraphe suivant).
13

14 Calcul tensoriel
2.2. Composantes d’un tenseur
Nous avons vu que les composantes d’un vecteuru deE exprimées par rapport à deux systèmes de vecteurs de baseai (de dualaj) etbi (de dualbj) se déduisaient les unes des autres par des combinaisons linéaires faisant intervenir unematrice ou son inverse suivant leur caractère covariant ou contravariant. D’une façon plus générale, on peut définir destenseurs d’ordre quelconque qui se transforment de façon mixte (covariante et contravariante). Par exemple,Xklm
ij etY klm
ij sont les composantes trois fois contravariantes et deux fois covariantes d’un même tenseurT d’ordre 5, expriméesrespectivement par rapport aux vecteurs de baseai etbi. Ces composantes respectent donc la relation suivante :
T = Xklmij ai ⊗ aj ⊗ ak ⊗ al ⊗ am = Y klm
ij bi ⊗ bj ⊗ bk ⊗ bl ⊗ bm (2.2)
et se déduisent les unes des autres sous la forme :
Y rstpq = Ai
pAjqB
rkBs
l BtmXklm
ij (2.3)
Un tenseur d’ordre zéro est un scalaire invariant par changement de système de coordonnées. Un tenseur est ditsymétrique par rapport à deux indices covariants ou deux indices contravariants si ses composantes restent inchangéesdans une permutation des deux indices. Il sera dit antisymétrique par rapport à ces indices si ses composantes changentde signe dans une permutation.
Le tenseur métrique permet de relier entre elles les différentes composantes d’un tenseur. En effet,la multiplicationpargij peut être interprétée de la façon suivante : poseri = j (ouj = i) dans tout ce qui suit et élever l’indice. De mêmenous pouvons donner à la multiplication pargij la signification suivante : poseri = j (ou j = i) dans tout ce qui suit etabaisser l’indice. Par exemple, les composantes covariantes du tenseurY de l’équation précédente sont obtenues sous laforme :
Ypqrst = grigsjgtkY ijkpq (2.4)
Il existe enfin pour les tenseurs un autre type de composantes, largement utilisé en physique, dans les espaces eu-clidiens. Ces composantes sont d’ailleurs appelées "composantes physiques". Ce sont les projections du tenseur sur lesvecteurs de base de l’espace. Nous avons donc pour un vecteuru les composantes physiquesuI suivantes, en fonctionde ses composantes covariantes et contravariantes, et de la métrique :
uI = u.ai
‖ai‖=
ui√gii
=giju
j
√gii
(2.5)
De même, pour un tenseurA d’ordre 2, les composantes physiquesAIJ s’obtiennent de la façon suivante :
AIJ = A :ai ⊗ aj
‖ai ⊗ aj‖=
Aij√giigjj
=gikgjlA
kl
√giigjj
(2.6)
Dans le cas d’une base orthogonale, les composantes de la métriques forment une matrice diagonale, ce qui permetde simplifier les relations précédentes. Dans un système orthonormé, les composantes du tenseur métrique coïncidenttoutes avec la matrice identité. Il s’en suit que tous les types de composantes d’un tenseur sont identiques. Dans ce cas,les indices sont tous placés "en bas" en ne considérant que les composantes covariantes des tenseurs. En calcul matriciel,ceci est couramment utilisé. La convention de sommation d’Einstein est alors étendue aux indices répétés en mêmeposition (et non en haut et en bas comme c’est normalement le cas).
Algèbre tensorielle 15
2.3. Opérations sur les tenseurs
Considérons deux tenseursX et Y du même ordre. Alors, leur sommeZ sera un tenseur du même ordre dontles composantes sont la somme des composantes correspondantes deX et Y . Toutefois, il convient de sommer lescomposantes de même type uniquement. De même, la soustraction de deux tenseursX et Y donne un tenseur dont lescomposantes sont obtenues en soustrayant celles deX etY .
Le produit de deux tenseursX et Y se fait également en multipliant les composantes. Par contre, dans ce cas, letenseurZ = X ⊗ Y obtenu a un ordre égal à la somme des ordres deX et Y . De plus, le produit de composantes detypes différents peut être réalisé. Notons enfin que l’on ne peut pas écrire n’importe quel tenseur comme le produit dedeux tenseurs d’ordres inférieurs. Pour cette raison, la division des tenseurs n’est pas toujours possible.
Si on pose l’égalité entre un indice contravariant et un indice covariant des composantes d’un même tenseur, lerésultat indique qu’on doit faire une sommation sur les indices égaux d’après la convention d’Einstein. La sommerésultante est la composante d’un tenseur d’ordreN − 2 où N est l’ordre du tenseur initial. Le procédé s’appelle unecontraction. Par exemple, dans un tenseurX d’ordre 5, si on applique une contraction à ses composantesXklm
ij enposantm = j, on obtient les composantesY kl
i d’un nouveau tenseurY d’ordre 3. De plus, en posantl = i, on obtientles composantes contravariantesZk d’un tenseurZ d’ordre 1.
Par un produit tensoriel de deux tenseurs suivi d’une contraction, on obtient un nouveau tenseur appelé produitcontracté des tenseurs donnés. Par exemple, le produit d’un tenseurX d’ordre 3 et d’un tenseurY d’ordre 2 fournitun tenseur d’ordre 5. En effectuant une contraction d’indice, on obtient un tenseurZ d’ordre 3 dont les composantessontZil
k = Xijk Y l
j . Un exemple courant de produit contracté est le produit matriciel. Ainsi, le produit de deux matrices(d’ordre 2) donne par contraction une nouvelle matrice (d’ordre 2x2-2=2).
Parfois, on utilise un produit "doublement contracté" de deux tenseurs. Il y a alors sommation sur deux indices, etl’ordre du tenseur final est diminué de 4. C’est le cas par exemple de l’énergie de déformation élastique (scalaire outenseur d’ordre 0), issue du produit doublement contracté entre les tenseurs de contraintes (ordre 2) et de déformations(ordre 2).
Notons enfin qu’il existe un critère, dit "critère de tensorialité", pour vérifier si une quantité est un tenseur. Si leproduit contracté de cette quantité avec un tenseur donne un tenseur, alors cette quantité est elle-même un tenseur. Cecritère est également appelé "loi du quotient" en anglais.
2.4. Notions d’algèbre extérieure
Nous nous intéressons ici aux tenseurs d’ordrep ≤ N (oùN est la dimension deE) complètement antisymétriques.SoitT un tel tenseur, alors ses composantes covariantesTi1i2...ip changent de signe dès que l’on permute deux indices.On montrent alors qu’il en est de même pour tous ses types de composantes. SiE(p) est l’ensemble des tenseurs com-plètement antisymétriques d’ordrep ≤ N , alorsE(p) est un sous-espace vectoriel de celui des tenseurs d’ordre p surE.
SoitT un élément deE(p). On définit ses composantes "strictes"Tα1α2...αp telles que1 ≤ α1 < α2 < . . . < αp ≤N . On a alors :
Ti1i2...ip = δα1α2...αp
i1i2...ipTα1α2...αp (2.7)
où le termeδj1j2...jp
i1i2...ipest une généralisation du symbole de Kroeneckerδj
i qui vaut(−1)q si les deux suitesi1i2 . . . ipet j1j2 . . . jp se déduisent l’une de l’autre parq permutations d’indices, et0 sinon.
Ainsi, tous les types de composantes deT se déduisent de ses composantes strictes, qui sont au nombre deCpn.
Par exemple, pourN = 3, les tenseurs d’ordre2 complètement antisymétriques ontC23 = 3 composantes strictes
(T12, T23, T13). On reconnaît ici les termes indépendants des matrices3x3 antisymétriques.

16 Calcul tensoriel
On peut maintenant définir le "produit extérieur" entrep éléments deE (u1,u2, . . . ,up), qui est une généralisationdu produit vectoriel classique, sous la forme du tenseur suivant :
u1 ∧ u2 ∧ . . . ∧ up = δi1i2...ip
12...p ui1 ⊗ ui2 ⊗ . . .⊗ uip(2.8)
Si on noteaj les vecteurs de base deE, et xji les composantes contravariantes deui sur cette base (ui = xj
iaj),alors le produit extérieur s’écrit :
u1 ∧ u2 ∧ . . . ∧ up = xj1i1
xj2i2
. . . xjp
ipδ
i1i2...ip
12...p aj1 ⊗ aj2 ⊗ . . .⊗ ajp
= xj11 xj2
2 . . . xjpp aj1 ∧ aj2 ∧ . . . ∧ ajp
(2.9)
On montre ainsi que lesCpn tenseursaα1 ∧aα2 ∧ . . .∧aαp
forment une base de l’espace vectorielE(p) des tenseurscomplètement antisymétriques d’ordrep. Ceci permet de donner la dimension de cet espace, et d’exprimer tout tenseurT sous la forme :
T = Tα1α2...αpaα1 ∧ aα2 ∧ . . . ∧ aαp
= Tα1α2...αpaα1 ∧ aα2 ∧ . . . ∧ aαp
(2.10)
Lors d’un changement de base dansE (passage desai auxbj avecbj = Bijai et ai = Aj
ibj), on constate que lescomposantes strictesXα1α2...αp et Y β1β2...βp d’un même tenseurT deE(p) dans les deux bases issues de celles deEsont reliées de la façon suivante :
T = Xα1α2...αpaα1 ∧ aα2 ∧ . . . ∧ aαp= Y β1β2...βpbβ1 ∧ bβ2 ∧ . . . ∧ bβp
(2.11)
avec :
Xα1α2...αp = δα1α2...αp
j1j2...jpBj1
β1Bj2
β2. . . B
jp
βpY β1β2...βp (2.12)
Chapitre 3
Géométrie différentielle
3.1. Repère naturel
Nous nous plaçons ici dans un espace ponctuel (affine) euclidienE0, dont l’espace vectoriel associéE est de dimen-sionN , muni d’un repère (R) d’origine O et d’un système de coordonnées curvilignes (xi). Ce système de coordonnéesest caractérisé parN fonctions plusieurs fois continuement différentiables reliant les coordonnées curvilignesxi d’unpointM à ses coordonnéesXi dans le repère (R). De plus, nous supposerons qu’il existe autour du pointM une relationbi-univoque entre lesxi et lesXi. Les coordonnées curvilignes les plus utilisées en dimension 3 sont les coordonnéescylindriques (r, θ, z) et les coordonnées sphériques (r, θ, φ).
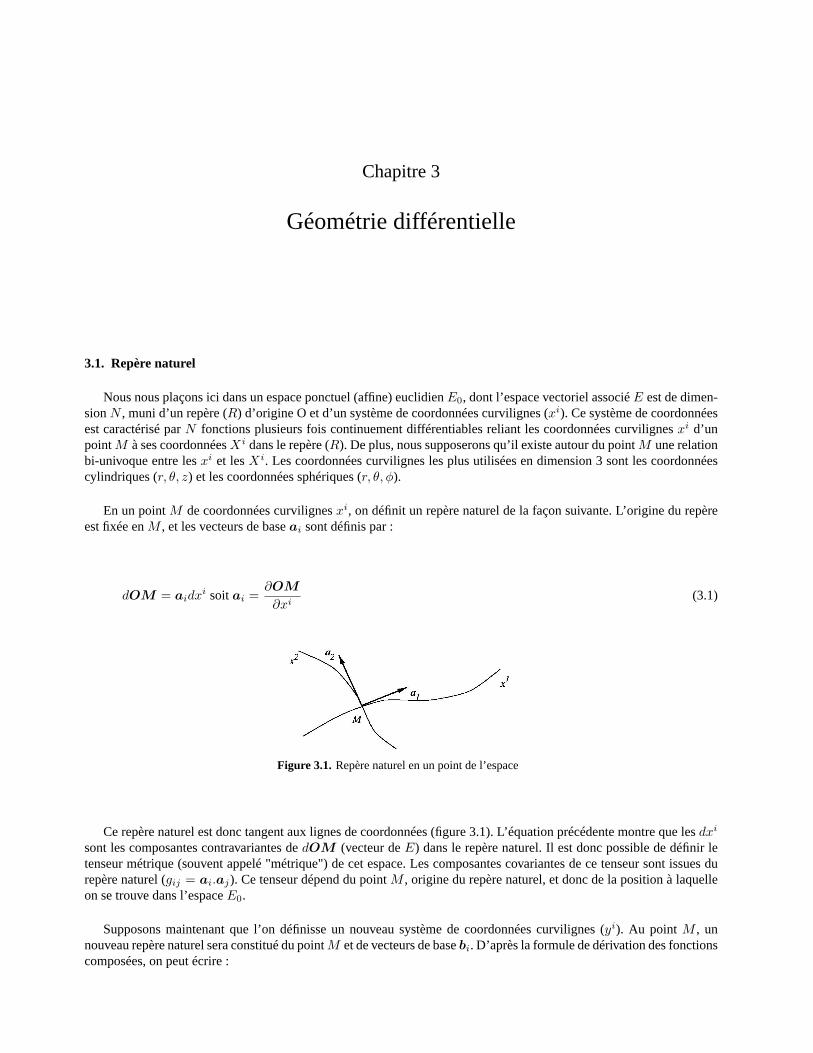
En un pointM de coordonnées curvilignesxi, on définit un repère naturel de la façon suivante. L’origine du repèreest fixée enM , et les vecteurs de baseai sont définis par :
dOM = aidxi soitai =∂OM
∂xi(3.1)
Figure 3.1. Repère naturel en un point de l’espace
Ce repère naturel est donc tangent aux lignes de coordonnées (figure 3.1). L’équation précédente montre que lesdxi
sont les composantes contravariantes dedOM (vecteur deE) dans le repère naturel. Il est donc possible de définir letenseur métrique (souvent appelé "métrique") de cet espace. Les composantes covariantes de ce tenseur sont issues durepère naturel (gij = ai.aj). Ce tenseur dépend du pointM , origine du repère naturel, et donc de la position à laquelleon se trouve dans l’espaceE0.
Supposons maintenant que l’on définisse un nouveau système de coordonnées curvilignes (yi). Au point M , unnouveau repère naturel sera constitué du pointM et de vecteurs de basebi. D’après la formule de dérivation des fonctionscomposées, on peut écrire :
17

18 Calcul tensoriel
ai = ∂OM
∂xi = ∂OM∂yj
∂yj
∂xi = ∂yj
∂xi bj = Ajibj avecAj
i = ∂yj
∂xi
bj = ∂OM∂yj = ∂OM
∂xi∂xi
∂yj = ∂xi
∂yj ai = Bijai avecBi
j = ∂xi
∂yj
(3.2)
Cette équation montre qu’un changement de coordonnées curvilignes est caractérisé par un changement de repèrenaturel. Les composantes d’un tenseurT changeront donc lorsque, en un pointM fixé, on changera de système decoordonnées. Pour obtenir les nouvelles composantes deT dans le repère naturel défini par lesbi, on utilisera doncles relations de changement de base vues précédemment. Les composantes d’un tenseurT pourront également changerlorsque l’on déplacera le pointM , tout en gardant le même système de coordonnées, puisque le repère naturel change.On parle alors de "champs de tenseurs".
3.2. Symboles de christoffel
Nous avons vu que, en chaque pointM de l’espaceE0, on pouvait caractériser la métrique de cet espace par untenseur de composantes covariantesgij . Ainsi, si l’on se déplace de quantitésdxi dans le repère naturel desai, l’élémentde longueur engendréds est obtenu par le produit scalaire, dansE, du vecteurdx de composantesdxi avec lui-même.On obtient alors :
ds2 = dx.dx = gijdxidxj (3.3)
Le problème fondamental en géométrie différentielle réside dans le fait que le repère naturel, et donc la métrique,dépend du pointM de l’espace. Il s’en suit que deux tenseurs définis par leurs composantes par rapport à deux repèresdifférents (ou en deux points distincts de l’espace) ne pourront être comparés que si l’on connaît le lien entre ces deuxrepères. L’objectif des symboles de Christoffel est de réaliser le lien entre deux repères naturels infiniment voisinsai etai + dai.
Lorsque l’on déplace l’origineM du repère naturel d’une quantitédx, les vecteurs de baseai de ce repère semodifient d’une quantitédai. En notant dans le repère naturel initialdxi et dxi les composantes dedx (dx = dxiai,dxi = dx.ai) et dωj
i et dωij celles dedai (dai = dωji aj , dωij = dai.aj), les symboles de Christoffel relient ces
quantités sous la forme :
dωkj = Γikjdxi
dωkj = Γk
ijdxi (3.4)
Les fonctionsΓikj etΓkij sont appelés symboles de Christoffel respectivement de première et de deuxième espèce. Il
s’agit deN3 fonctions reliées entre elles sous la formeΓikj = gklΓlij et Γk
ij = gklΓilj . Pour obtenir cesN3 fonctions,on différencie les composantes covariantes de la métrique pour obtenir :
dgjk = ∂gjk
∂xi dxi
dgjk = dak.aj + daj .ak = (Γikj + Γijk)dxi ⇒ ∂gjk
∂xi= Γikj + Γijk (3.5)
On peut enfin interpréter les symboles de Christoffel de seconde espèce comme les composantes dans le repèrenaturel des dérivées partielles secondes du vecteur positionOM :
dai = dωji aj = Γj
kidxkaj = (Γjkiaj)dxk ⇒ Γj
kiaj =∂ai
∂xk=
∂2OM
∂xk∂xi(3.6)
Géométrie différentielle 19
La symétrie des dérivées secondes croisées du vecteurOM (qui sera discutée lors de la définition du tenseur detorsion) implique les relations de symétrieΓikj = Γjki etΓl
ij = Γlji, qui permettent d’écrire par permutation circulaire
des indices les relations suivantes :
Γkij + Γikj = ∂gjk
∂xi
Γikj + Γjik = ∂gki
∂xj
Γjik + Γkji = ∂gij
∂xk
(3.7)
En effectuant dans l’équation précédente la somme des deux premières relations moins la dernière, on obtient ladéfinition des termesΓikj . On peut finalement écrire l’expression des symboles de Christoffel de première et de secondeespèce sous la forme :
Γikj = 1
2 (∂gik
∂xj + ∂gjk
∂xi − ∂gij
∂xk )Γk
ij = gklΓilj(3.8)
On remarque sur les équations précédentes que les symboles de Christoffel peuvent être exprimés directement enfonction des variations des composantes du tenseur métrique le long des lignes de coordonnées.
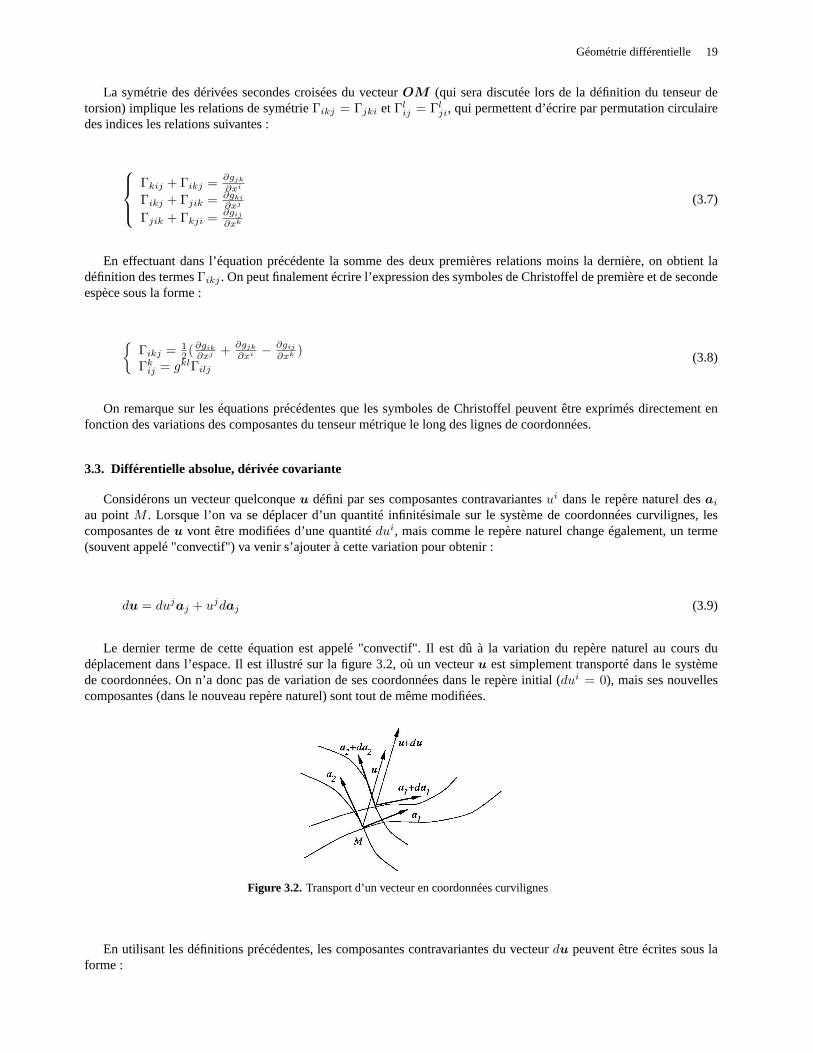
3.3. Différentielle absolue, dérivée covariante
Considérons un vecteur quelconqueu défini par ses composantes contravariantesui dans le repère naturel desai
au pointM . Lorsque l’on va se déplacer d’un quantité infinitésimale sur le système de coordonnées curvilignes, lescomposantes deu vont être modifiées d’une quantitédui, mais comme le repère naturel change également, un terme(souvent appelé "convectif") va venir s’ajouter à cette variation pour obtenir :
du = dujaj + ujdaj (3.9)
Le dernier terme de cette équation est appelé "convectif". Il est dû à la variation du repère naturel au cours dudéplacement dans l’espace. Il est illustré sur la figure 3.2, où un vecteuru est simplement transporté dans le systèmede coordonnées. On n’a donc pas de variation de ses coordonnées dans le repère initial (dui = 0), mais ses nouvellescomposantes (dans le nouveau repère naturel) sont tout de même modifiées.
Figure 3.2. Transport d’un vecteur en coordonnées curvilignes
En utilisant les définitions précédentes, les composantes contravariantes du vecteurdu peuvent être écrites sous laforme :

20 Calcul tensoriel
du = (∆uk)ak avec∆uk = duk + ujdωkj (3.10)
On donne à∆uk le nom de "différentielle absolue" deuk. Il s’agit des composantes contravariantes du tenseurdu,ce qui n’est pas le cas pour les termesduk. Par abus de language, on dit souvent quedu est la différentielle absolue deu. En introduisant maintenant les dérivées partielles par rapport aux coordonnées curvilignesxi, on peut écrire :
∆uk = uk,idxi avecuk
,i =∂uk
∂xi+ Γk
ijuj (3.11)
Les termesuk,i sont les composantes mixte d’un tenseur appelé "dérivée covariante" deu. Si u avait été donné par
ses composantes covariantesuk, alors le même raisonnement nous aurait conduit à définir la dérivée covariante deu parrapport à ses composantes covariantes. On peut résumer ces résultats par les formules suivantes :
uk,i = ∂uk
∂xi + Γkiju
j
uk,i = ∂uk
∂xi − Γjkiuj
(3.12)
D’une façon plus générale, on définit la dérivée covariante d’un tenseur d’ordre quelconqueT par celles de sescomposantes. Par exemple, siT est d’ordre 5, sa dérivée covariante sera d’ordre 6. Ses composantes mixtes (4 foiscovariantes et 2 fois contravariantes) seront données par :
Tmnijk,l =
∂T mn
ijk
∂xl
−ΓrilT
mnrjk − Γr
jlTmnirk − Γr
klTmnijr
+ΓmlrT rn
ijk + ΓnlrT
mrijk
(3.13)
En applicant par exemple ces formules au tenseur métrique, et en utilisant les relations précédentes, on obtient :
gij,k =∂gij
∂xk− Γl
ikglj − Γlkjgli =
∂gij
∂xk− (Γjik + Γkji) = 0 (3.14)
La différentielle absolue du tenseur métrique est donc nulle. Ce résultat est connu sous la nom de "théorème deRicci".
3.4. Les tenseurs de courbure et de torsion
La dérivée covariante peut être calculée sur tout tenseur, et donc en particulier sur des tenseurs eux-même dérivéecovariante. En utilisant les relations précédentes, on peut relier la différence entre les dérivées covariantes secondescroisées d’un vecteur à ce vecteur sous la forme :
uj,kl − uj,lk = Rnjklun avecRn
jkl = ΓmjlΓ
nmk − Γm
jkΓnml +
∂Γnjl
∂xk−
∂Γnjk
∂xl(3.15)
Les termesRnjkl sont les composantes d’un tenseur. En effet, d’après cette équation, leur produit contracté avec un
tenseur d’ordre1 donne une différence de tenseurs, et donc un tenseur. Le tenseurR ainsi obtenu est d’ordre 4. Il estappelé "tenseur de Riemann-Christoffel" ou "tenseur de courbure". Ses composantes covariantes sontRijkl = ginRn
jkl.On montre qu’elles sont :

Géométrie différentielle 21
– antisymétriques en(k, l) : Rijkl = −Rijlk
– antisymétriques en(i, j) : Rijkl = −Rjikl
– symetriques en(i, j),(k, l) : Rijkl = Rklij
Par exemple, en dimension 2, ce tenseur ne possède qu’une seule composante non nulle :R1212. De plus, les pro-priétés preécédentes montrent que l’on peut caractériser ce tenseur à l’aide des seules composantesRjk = gilRijkl, quiforment un tenseur symétrique d’ordre 2 appelé "tenseur de Ricci". Enfin, la trace de ce tenseur est appelée "courburescalaire".
Dans un espace euclidien, le tenseur de Riemann-Christoffel est nul. En effet, dans ce type d’espace, le changementde repère naturel ne dépend pas du chemin suivi. Ceci signifie que, si en chaque point d’un espace une métrique (c’est àdire des composantesgij) peut être choisie de façon arbitraire, celle-ci ne correspondra pas forcément à celle d’un espaceeuclidien. Pour cela, il faudra qu’elle annule le tenseur de Riemann-Christoffel. On peut maintenant se poser la question :si le tenseur de Riemann-Christoffel est nul, l’espace est-il euclidien ? En fait, l’espace n’est alors que "localement"euclidien, puisque ce tenseur n’est défini qu’autour d’un pointM de l’espace. Plus généralement, si ce tenseur n’est pasnul, alors l’espace est dit "localement" non-euclidien. Nous entrons alors dans le domaine de la géométrie riemannienne(espaces de Riemann), géométrie par exemple largement utilisée en cosmologie [HEI 73].
Les symboles de Christoffel ont été définis comme des fonctionsΓikj etΓkij . Toutefois, ces fonctions ne sont pas les
composantes d’un tenseur. Considérons en effet deux repères naturels en un pointM de l’espace, avec des vecteurs debaseai etbi tels quebi = Bj
i aj etai = Ajibj . On montre alors facilement que :
dbi = Ωj
ibj
dai = ωji aj
⇒ Ωji = Bk
i Ajl ω
lk + dBk
i Ajk (3.16)
En notant maintenantxi les coordonnées curvilignes associées auxai, etyi celles associées auxbi, etΓkij etΠk
ij lessymboles de Christoffel associés respectivement à ces deux systèmes de coordonnées, on obtient la relation suivante detransformation des symboles de Christoffel par changement de coordonnées :
Πkij = Al
iAmj Bk
nΓnlm + Bk
n
∂2xn
∂yi∂yj(3.17)
Le dernier terme de cette équation montre que les symboles de Christoffel n’ont pas de caractère tensoriel. Par contre,ce dernier terme est symétrique en(i, j). Il s’en suit que les termes :
τkij = Γk
ij − Γkji (3.18)
forment les composantes d’un tenseurT du troisième ordre, antisymétrique en(i, j), appelé "tenseur de torsion" ou"tenseur de Cartan". Ce tenseur est par exemple utilisé dans la description des défauts linéaires (dislocations) dans lescristaux [FOR 96].
Nous avions précédemment relié les symboles de Christoffel aux dérivées secondes du vecteur positionOM . Ilapparaît que la nullité du tenseur de torsion equivaut à la permutabilité des dérivées partielles de fonctions vectorielles(telles que le vecteur position). Elle conduit à la symétrie des symboles de Christoffel, et à leur expression explicite enfonction des variations de la métrique le long des lignes de coordonnées.

22

Chapitre 4
Expression de quelques opérateurs
4.1. Accélération d’un point
Nous considérons ici un pointM de l’espace dont la trajectoire est paramétrée part (que nous interprèterons commele temps). Cette trajectoire est donc donnée par l’évolution au cours du temps des coordonnées du pointM , que nous no-teronsui(t). La vitesse instantanée du point sera un vecteurv, de composantes contravariantesvi = dui
dt . L’accélérationinstantanéeγ du pointM sera également un vecteur, obtenu comme la dérivée du vecteur vitesse, soitγ = dv
dt . Commele vecteurdv a pour composantes contravariantes les différencielles absolues desvi, alors le vecteur accélération auracomme composantes contravariantes :
γi =∆vi
dt=
dvi
dt+ Γi
klvl duk
dt=
d2ui
dt2+ Γi
kl
duk
dt
dul
dt(4.1)
Considérons maintenant les trajectoires des pointM d’accélération nulle. Ces trajectoires sont communément ap-pelées des "droites". En fait, les trajectoires d’accélération nulle sont données d’une façon générale par le systèmed’équations différentielles suivant, issu de l’équation précédente :
∀i = 1, ..., N,d2ui
dt2+ Γi
kl
duk
dt
dul
dt= 0 (4.2)
Elles sont appelées "géodésiques". Dans un espace dont la métrique est constante, c’est-à-dire ne dépend pas dupointM considéré, alors les symboles de Christoffel sont par définition nuls, est on retombe sur l’équation d’une droite.Notons enfin que la distanced qui sépare deux points situés sur une courbe paramétréexi = xi(t), aux abscissest1 ett2, est donnée par :
d =∫ t2
t1
√gij
dui
dt
duj
dtdt (4.3)
On montre que les géodésiques rendent extrémale cette distance (minimum ou maximum). Par exemple, la surfaced’une sphère peut être considérée comme un espace de dimension 2, dans lequel on peut définir un système de coordon-nées curvilignes (lattitude et longitude), et dans lequel les grands cercles joignent deux point avec une distance minimumou maximum. Ces grands cercles sont des courbes paramétrées qui satisfont le système d’équations différentielles pré-cédent. Ce sont les géodésiques de cet espace.
23

24 Calcul tensoriel
4.2. Gradient
Le gradient d’un tenseurT est à son tour un tenseur, dont les composantes sont obtenues comme la dérivée covariantedes composantes deT . Le gradient d’un tenseur d’ordreN est donc un tenseur d’ordreN + 1. Si f est un scalaire(tenseur d’ordre 0, invariant par changement de repère), le gradient def est un tenseur d’ordre 1 (un vecteur) dont lescomposantes covariantes sont définies parf,i = ∂f
∂xi . Si u est un vecteur (tenseur d’ordre 1), le gradient deu est untenseur d’ordre 2, dont les composantes covariantes et mixtes sont :
ui,j =∂ui
∂xj− Γk
ijuk etui,j =
∂ui
∂xj+ Γi
jkuk (4.4)
Le gradient est largement présent dans les disciplines scientifiques. Il sert par exemple à définir les déformationsen mécanique, et les forces motrices en thermique (gradient thermique) et en chimie minérale (gradients de potentielschimiques ou d’activité). En coordonnées orthonormées (x, y, z), on obtient par exemple :
grad(f) =
∂f∂x∂f∂y∂f∂z
(4.5)
grad(u) =
∂ux
∂x∂ux
∂y∂ux
∂z∂uy
∂x∂uy
∂y∂uy
∂z∂uz
∂x∂uz
∂y∂uz
∂z
(4.6)
4.3. Divergence
La divergence d’un tenseurT est à son tour un tenseur, dont les composantes sont obtenues par contraction de sadérivée covariante (son gradient) par rapport à son dernier indice contravariant. La divergence d’un tenseur d’ordreNest donc un tenseur d’ordreN − 1. La divergence d’un vecteuru est donc le scalaireui
,i, tandis que celle d’un tenseur
A d’ordre 2 est un vecteur dont les composantes contravarientes sontAij,j . L’expression générale de la divergence d’un
tenseur d’ordre 2 peut être simplifiée en utilisant le théorème de Ricci.
La divergence est largement présente dans les équations d’équilibre en mécanique, ainsi que dans les équations deconservation en thermique et en transfert de masse. Elle est principalement appliqué sur des tenseurs d’ordre 1 et 2. Encoordonnées orthonormées (x, y, z), on obtient :
div(u) =∂ux
∂x+
∂uy
∂y+
∂uz
∂z(4.7)
div(A) =
∂Axx
∂x + ∂Axy
∂y + ∂Axz
∂z∂Ayx
∂x + ∂Ayy
∂y + ∂Ayz
∂z∂Azx
∂x + ∂Azy
∂y + ∂Azz
∂z
(4.8)

Expression de quelques opérateurs 25
4.4. Rotationel
Le rotationel appliqué sur un vecteuru (tenseur d’ordre 1) est un tenseur d’ordre 2 dont les composantes covariantessontui,j − uj,i. Du fait de la symétrie des symboles de Christoffel de seconde espèce sur les indices covariants, lescomposantes covariantes du rotationel d’un vecteur s’écrivent simplement∂ui
∂xj − ∂uj
∂xi . Le rotationel d’un vecteur estun tenseur anti-symétrie. Il est présent dans les équations de Maxwell en électromagnétisme. Il peut être écrit sous laforme :
Rot(u) =
0 −R3 R2
R3 0 −R1
−R2 R1 0
(4.9)
oùR1, R2 etR3 sont les composantes d’un "vecteur rotation".
En coordonnées orthonormées (x, y, z), on obtient :
Rx = ∂uz
∂y − ∂uy
∂z
Ry = ∂ux
∂z − ∂uz
∂x
Rz = ∂uy
∂x − ∂ux
∂y
(4.10)
4.5. Laplacien
Le laplacien est la divergence du gradient. Il est souvent noté∆. Cet opérateur conserve donc l’ordre d’un tenseur.Appliqué sur une fonction scalairef , on obtient le scalaire∆(f) = (gijf,i),i = gijf,ji. Appliqué sur un vecteuru, onobtient un tenseur d’ordre 1 dont les composantes covariantes sontgkjui,jk.
Le laplacien est largement utilisé dans les équations d’équilibre ou de bilan, lorsque le comportement du matériauest linéaire. En coordonnées orthonormées (x, y, z), on obtient :
∆(f) =∂2f
∂x2+
∂2f
∂y2+
∂2f
∂z2(4.11)
∆(u) =
∂2ux
∂x2 + ∂2ux
∂y2 + ∂2ux
∂z2
∂2uy
∂x2 + ∂2uy
∂y2 + ∂2uy
∂z2
∂2uz
∂x2 + ∂2uz
∂y2 + ∂2uz
∂z2
(4.12)

26

Annexe A
Coordonnées cylindriques
Figure A.1. Système de coordonnées cylindriques
Le système de coordonnées cylindriques est un système particulier de coordonnées curvilignes défini de la façonsuivante (figure A.1). Soit un espace vectorielE de dimension 3 sur le corps des réels, muni d’un système de coordonnéesorthonormées (xi) dans un repère (ei). Soitu un vecteur deE joignant les pointsO et M . Le système de coordonnéescylindriques(r, θ, z) est généré par un repère naturel (ai) tel que, au voisinage du pointM :
du = dx1e1 + dx2e2 + dx3e3 = dra1 + dθa2 + dza3 (A.1)
avec la relation suivante entre les coordonnées :
x1 = rcosθx2 = rsinθx3 = z
(A.2)
Les vecteursai ont donc comme composantes dans le repère orthonormé :
a1 =
∣∣∣∣∣∣cosθsinθ0
, a2 =
∣∣∣∣∣∣−rsinθrcosθ0
, a3 =
∣∣∣∣∣∣001
(A.3)
ce qui donne pour la métrique :
27

28 Calcul tensoriel
gij =
1 0 00 r2 00 0 1
, gij =
1 0 00 1
r2 00 0 1
, (A.4)
Les composantes physiques d’un vecteuru sont donc :
ur = u1 = u1
uθ = u2r = ru2
uz = u3 = u3(A.5)
tandis que celles d’un tenseur du second ordreA seront :
Arr = A11 = A11 Arθ = A12r = rA12 Arz = A13 = A13
Aθr = A21r = rA21 Aθθ = A22
r2 = r2A22 Aθz = A23r = rA23
Azr = A31 = A31 Azθ = A32r = rA32 Azz = A33 = A33
(A.6)
Les symboles de Christoffel de première espèce sont obtenus à l’aide de leur définition et de la métrique définieprécédemment sous la forme :
Γi1j =
0 0 00 −r 00 0 0
etΓ1ij =
0 0 00 −r 00 0 0
(A.7)
Γi2j =
0 r 0r 0 00 0 0
etΓ2ij =
0 1r 0
1r 0 00 0 0
(A.8)
Γi3j =
0 0 00 0 00 0 0
etΓ3ij =
0 0 00 0 00 0 0
(A.9)
L’ensemble de ces équations permet de retrouver l’expression des opérateurs physiques en coordonnées cyclin-driques. On trouve par exemple les composantes physiques suivantes :
– le gradient d’un scalairef :
grad(f) =
∂f∂r1r
∂f∂θ
∂f∂z
(A.10)
– le gradient d’un vecteuru :
grad(u) =
∂ur
∂r1r (∂ur
∂θ − uθ) ∂ur
∂z∂uθ
∂r1r (∂uθ
∂θ + ur) ∂uθ
∂z∂uz
∂r1r
∂uz
∂θ∂uz
∂z
(A.11)

Coordonnées cylindriques 29
– la divergence d’un vecteuru :
div(u) =∂ur
∂r+
ur
r+
1r
∂uθ
∂θ+
∂uz
∂z(A.12)
– la divergence d’un tenseurA du second ordre symétrique :
div(A) =
∂Arr
∂r + 1r
∂Arθ
∂θ + ∂Arz
∂z + Arr−Aθθ
r∂Aθr
∂r + 1r
∂Aθθ
∂θ + ∂Aθz
∂z + Arθ+Aθr
r∂Azr
∂r + 1r
∂Azθ
∂θ + ∂Azz
∂z + Azr
r
(A.13)
– les composantes du "vecteur rotation" associé au rotationel d’un vecteuru :
Rr = 1
r∂uz
∂θ − ∂uθ
∂z
Rθ = ∂ur
∂z − ∂uz
∂r
Rz = ∂uθ
∂r − 1r
∂ur
∂θ + uθ
r
(A.14)
– le laplacien d’un scalairef :
∆(f) =∂2f
∂r2+
1r2
∂2f
∂θ2+
∂2f
∂z2+
1r
∂f
∂r(A.15)

30

Annexe B
Coordonnées sphériques
Figure B.1. Système de coordonnées sphériques
Le système de coordonnées sphériques est un système particulier de coordonnées curvilignes défini de la façonsuivante (figure B.1). Soit un espace vectorielE de dimension 3 sur le corps des réels, muni d’un système de coordonnéesorthonormées (xi) dans un repère (ei). Soitu un vecteur deE joignant les pointsO et M . Le système de coordonnéessphériques(r, θ, φ) est généré par un repère naturel (ai) tel que, au voisinage du pointM :
du = dx1e1 + dx2e2 + dx3e3 = dra1 + dθa2 + dφa3 (B.1)
avec des coordonnées liées entre elles sous la forme :
x1 = rsinθcosφx2 = rsinθsinφx3 = rcosθ
(B.2)
Les vecteursai ont donc comme composantes :
a1 =
∣∣∣∣∣∣sinθcosφsinθsinφcosθ
, a2 =
∣∣∣∣∣∣rcosθcosφrcosθsinφ−rsinθ
, a3 =
∣∣∣∣∣∣−rsinθsinφrsinθsinφ0
(B.3)
ce qui donne pour la métrique :
31

32 Calcul tensoriel
gij =
1 0 00 r2 00 0 r2sin2θ
, gij =
1 0 00 1
r2 00 0 1
r2sin2θ
, (B.4)
Les composantes physiques d’un vecteuru sont donc :
ur = u1 = u1
uθ = u2r = ru2
uφ = u3rsinθ = rsinθu3
(B.5)
tandis que celles d’un tenseur du second ordreA seront :
Arr = A11 Arθ = A12r Arφ = A13
rsinθ
Aθr = A21r Aθθ = A22
r2 Aθφ = A23r2sinθ
Aφr = A31rsinθ Aφθ = A32
r2sinθ Aφφ = A33r2sin2θ
(B.6)
ou :
Arr = A11 Arθ = rA12 Arφ = rsinθA13
Aθr = rA21 Aθθ = r2A22 Aθφ = r2sinθA23
Aφr = rsinθA31 Aφθ = r2sinθA32 Aφφ = r2sin2θA33
(B.7)
Les symboles de Christoffel de première espèce sont obtenus à l’aide de leur définition et de la métrique définieprécédemment :
Γi1j =
0 0 00 −r 00 0 −rsin2θ
etΓ1ij =
0 0 00 −r 00 0 −rsin2θ
(B.8)
Γi2j =
0 r 0r 0 00 0 − r2
2 sin(2θ)
etΓ2ij =
0 1r 0
1r 0 00 0 − r
2sin(2θ)
(B.9)
Γi3j =
0 0 rsin2θ
0 0 r2
2 sin(2θ)rsin2θ r2
2 sin(2θ) 0
etΓ3ij =
0 0 1r
0 0 cosθsinθ
1r
cosθsinθ 0
(B.10)
Ces équations permettent de retrouver les opérateurs différentiels classiques en coordonnées sphériques. On trouvepar exemple les composantes physiques des tenseurs suivants :

Coordonnées sphériques 33
– le gradient d’un scalairef :
grad(f) =
∂f∂r1r
∂f∂θ1
rsinθ∂f∂φ
(B.11)
– le gradient d’un vecteuru :
grad(u) =
∂ur
∂r1r
∂ur
∂θ − uθ
r1
rsinθ∂ur
∂φ − uφ
r∂uθ
∂r1r
∂uθ
∂θ + ur
r1
rsinθ∂uθ
∂φ − cosθrsinθuφ
∂uφ
∂r1r
∂uφ
∂θ1
rsinθ∂uφ
∂φ + ur
r + cosθrsinθuθ
(B.12)
– la divergence d’un vecteuru :
div(u) =∂ur
∂r+ 2
ur
r+
1r
∂uθ
∂θ+
1rsinθ
∂uφ
∂φ+
cosθ
rsinθuθ (B.13)
– la divergence d’un tenseurA symétrique d’ordre 2 :
div(A) =
∂Arr
∂r + 1r
∂Arθ
∂θ + 1rsinθ
∂Arφ
∂φ + 2Arr−Aθθ−Aφφ
r + cosθrsinθArθ
∂Aθr
∂r + 1r
∂Aθθ
∂θ + 1rsinθ
∂Aθφ
∂φ + 3Arθ
r + cosθrsinθ (Aθθ −Aφφ)
∂Aφr
∂r + 1r
∂Aφθ
∂θ + 1rsinθ
∂Aφφ
∂φ + 3Arφ
r + 2 cosθrsinθAθφ
(B.14)
– le "vecteur rotation" associé au rotationel d’un vecteuru :
Rr = 1
r∂uφ
∂θ − 1rsinθ
∂uθ
∂φ + cosθrsinθuφ
Rθ = 1rsinθ
∂ur
∂φ − ∂uφ
∂r − uφ
r
Rφ = ∂uθ
∂r + uθ
r − 1r
∂ur
∂θ
(B.15)
– le laplacien d’un scalairef :
∆(f) =∂2f
∂r2+
1r2
∂2f
∂θ2+
1r2sin2θ
∂2f
∂φ2+
2r
∂f
∂r+
cosθ
r2sinθ
∂f
∂θ(B.16)

34
Bibliographie
[FOR 96] FORESTS., Modèles mécaniques de la déformation hétérogène des monocristaux, Thèse de Doctorat, Ecole des Mines deParis, 1996.
[HEI 73] HEIDMANN J., Introduction à la cosmologie, PUF, 1973.
[HIL 78] H ILL R., « Aspects of invariance in solid mechanics »,Advances in applied mechanics, vol. 18, Academic Press, p. 1–75,1978.
[LIC 87] L ICHNEROWICZ A., Eléments de calcul tensoriel, Jacques Gabay, 1987, réimpression de Armand Colin (1946).
[MUR 73] MURRAY, SPIEGEL R., Analyse vectorielle : cours et problemes, McGraw-Hill Inc, New-York, 1973, traduit de ’theoryand problems of vector analysis’.
[RIE 85] RIEU-BÉTRÉMA C., Elements de calcul tensoriel, cours ENSM-SE, 1985.
35