les équations de maxwellexvacuo.free.fr/div/sciences/cours/phys mp/phys 25... · 25 les équations...
TRANSCRIPT

25Les équations de Maxwell
JAMES CLERK MAXWELL (1831–1879)
Les équations de Maxwell1 forment un système axiomatique d’équations dont les champs électrique ~E et magnétique ~B sontsolutions, les charges et courants qui sont à l’origine de ces champs constituant les données de ce système d’équations. Iln’est pas question de montrer ce système d’équations ; nous nous contenterons d’en proposer une justification.
25.1 Le système d’équations de Maxwell
25.1.1 Géométrie des champs
Les champs électrique et magnétique
La géométrie du champ électrostatique a été décrite en première année ; on a vu en général que les lignes de champ électriquedivergent depuis les zones de charge électrique positive, puis convergent vers les zones de charge électrique négative.La prise en compte quantitative de cette propriété sera proposée plus loin, en fonction de l’opérateur divergence qui a déjàété défini. La géométrie du champ magnétostatique a été décrite en première année ; on a vu en général que les lignes dechamp entourent les courants qui leur donnent naissance. Il y a donc nécessité à décrire un nouvel opérateur, qui portera lenom de rotationnel.
Caractère rotationnel d’un champ
Pour affirmer qu’un champ de vecteurs ~X tourne dans le plan xOy dans le sens direct autour du vecteur~ez, au moins en unpoint M on choisira un contour orienté C , situé dans ce plan xOy, entourant A dans le sens direct, en on évaluera la circulation
1L’œuvre de l’écossais JAMES CLERK MAXWELL (1831-1879) a été capitale pour la théorie physique. Elle a permis d’obtenir une connaissanceunifiée des phénomènes lumineux et électromagnétiques, ce qui est d’autant plus remarquable que cette unification se situe moins d’un demi-siècle aprèsl’ensemble des découvertes relatives à l’électromagnétisme.

196 Manuel de Physique
CC =
∫
C~X ·d~r. Si cette circulation est positive, on dira aussi que la composante sur l’axe Oz du rotationnel de ~X est positive.
Toutefois, une définition locale du rotationnel impose de considérer plutôt la limite de CC lorsque le contour C se rapproche
du point M. La circulation tend alors vers zéro comme la surface SC du contour, et on posera~ez ·−→rot~X = limSC→0
CCSC
.
Rotationnel en coordonnées cartésiennes
Considérant que le contour C est un carré de côtés dx et dy entourant M, et dont les côtés sont parallèles aux axes Oy et Ox,on montre immédiatement :
−→rot~X =
[∂Xy
∂z− ∂Xz
∂y
]
~ex +
[∂Xz
∂x− ∂Xx
∂z
]
~ey +
[∂Xx
∂y− ∂Xy
∂x
]
~ez (25.1)
qu’on notera aussi formellement en fonction de l’opérateur ~∇, −→rot~X =~∇∧~X où on remarque le caractère antisymétrique durotationnel, par opposition au caractère symétrique de l’opérateur divergence, div ~X = ~∇ ·~X .
Le théorème de Stokes
La juxtaposition de deux contours ayant un côté en commun conduit à l’addition des circulations d’un vecteur quelconque~X , donc à l’addition de grandeurs du type dS~ez · −→rot~X . Nous admettrons la généralisation de ce résultat sous le nom duthéorème de Stokes :
∫
S
−→rot~X ·~ndS =
∮
C~X ·d~r (25.2)
pour tout contour fermé orienté C définissant une surface S ; les orientations de C et S doivent être corrélées (on parlede règle de Maxwell de corrélation). On remarquera bien sûr l’analogie de ce théorème avec le théorème d’Ostrogradski,∫
Vdiv ~X dτ =
∮
S~X ·~ndS.
Laplacien vectoriel
On se souvient que l’opérateur de double dérivation spatiale défini pour les champs scalaires prenait le nom de laplacienscalaire, ∆ f = div
−−→grad f =~∇ ·~∇ f =~∇2 f , en prenant en compte les expressions cartésiennes du gradient et de la divergence.
Du fait de l’importance de l’opérateur laplacien pour l’étude des ondes, on cherchera à généraliser celui-ci pour un champ
de vecteurs, sous la forme ~∇∧~∇∧~X = ~∇(~∇ ·~X
)
−~∇2~X ou, plus généralement, en définissant le laplacien vectoriel par :
∆~X =−−→graddiv~x−−→rot−→rot~X (25.3)
On peut utiliser l’expression ci-dessus pour expliciter la forme de l’opérateur laplacien vectoriel dans le seul cas des coor-
données cartésiennes, avec ∆~X =~∇2~X =(∆Xx)~ex +(∆Xy)~ey +(∆Xz)~ez où on se souvient que ∆ f =~∇2 f =∂2 f∂x2 +
∂2 f∂y2 +
∂2 f∂z2 .
Dans les autres systèmes de coordonnées, l’expression du laplacien vectoriel est bien trop lourde pour être mémorisée.
Analyse vectorielle
Rappelons ici brièvement les théorèmes intégraux de Stokes∮
C~X · d~r =
∫
S
−→rot~X ·~ndS et celui, qui en découle, du gradient∮
Cf d~r =
∫
S~n∧−−→grad~XdS. On pourra comparer ces expressions aux théorèmes d’Ostrogradski
∮
S~X ·~ndS =
∫
Vdiv ~Xdτ et de
Kelvin∮
Sf~ndS =
∫
V
−−→grad f dτ.
On a déjà indiqué les expressions dans divers systèmes de coordonnées des opérateurs gradient et divergence ; indiquons ici
les expressions de l’opérateur rotationnel, −→rot~W =
[∂Wz
∂y− ∂Wy
∂z
]
~ex +
[∂Wx
∂z− ∂Wz
∂x
]
~ey +
[∂Wy
∂x− ∂Wx
∂y
]
~ez en coordonnées
Les équations de Maxwell 197
cartésiennes,−→rot~W =
[1ρ
∂Wz
∂φ− ∂Wφ
∂z
]
~eρ +
[∂Wρ
∂z− ∂Wz
∂ρ
]
~eφ +1ρ
[
∂(ρWφ
)
∂ρ− ∂Wρ
∂φ
]
~ez en coordonnées cylindro-polaires et
−→rot~W =1
r sinθ
[
∂(sinθWφ
)
∂θ− ∂Wθ
∂φ
]
~er +1r
[
1sinθ
∂Wr
∂φ− ∂
(rWφ)
∂r
]
~eθ +1r
[∂(rWθ)
∂r− ∂Wr
∂θ
]
~eφ en coordonnées sphériques.
Enfin, on montre directement (par exemple en utilisant la notation simplifiée ~∇ en coordonnées cartésiennes) les propriétés
de dérivation d’un produit, −→rot(
f ~W)
= f−→rot~W +−−→grad f ∧ ~W et div
(
~A∧~B)
= ~B ·−→rot~A−~A ·−→rot~B.
On montre aussi facilement que, pour tout champ scalaire f , −→rot−−→grad f =~0 ;réciproquement, affirmer qu’un certain champ
de vecteurs ~W est un gradient, c’est affirmer qu’il existe une fonction f dont les dérivées vérifient Wx =∂ f∂x
, Wy =∂ f∂y
et Wz =∂ f∂z
. Une condition nécessaire et suffisante pour qu’une telle fonction f existe est l’identité de Schwartz entre
dérivées partielles secondes ; on écrira par exemple∂Wy
∂x=
∂Wx
∂y; cette relation, et les deux autres obtenues par permutation
circulaire, se regroupent sous la forme −→rot~W =~0. Une fonction vectorielle de point ~W est donc un gradient si et seulementsi son rotationnel est nul :
−→rot~W =~0⇐⇒∃ f tel que ~W =−−→grad f (25.4)
De même, le calcul direct montre aisément div −→rot~W = 0 pour toute fonction vectorielle ~W ; nous admettrons la réciproque :une fonction vectorielle de point ~W est un rotationnel si et seulement si sa divergence est nulle :
div ~W = 0⇐⇒∃~U tel que ~W =−→rot~U (25.5)
25.1.2 Un cas particulier : les ondes dans un câble coaxial
Le champ dans le câble
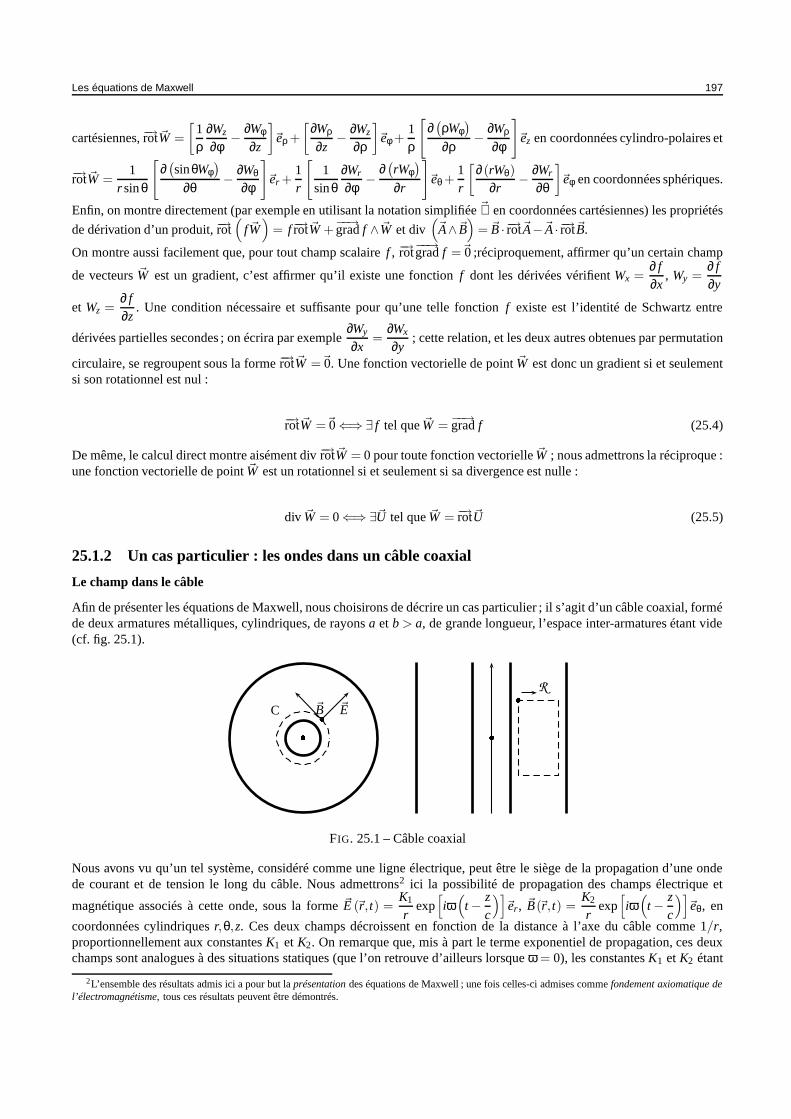
Afin de présenter les équations de Maxwell, nous choisirons de décrire un cas particulier ; il s’agit d’un câble coaxial, forméde deux armatures métalliques, cylindriques, de rayons a et b > a, de grande longueur, l’espace inter-armatures étant vide(cf. fig. 25.1).
~E~B
C
R
FIG. 25.1 – Câble coaxial
Nous avons vu qu’un tel système, considéré comme une ligne électrique, peut être le siège de la propagation d’une ondede courant et de tension le long du câble. Nous admettrons2 ici la possibilité de propagation des champs électrique et
magnétique associés à cette onde, sous la forme ~E (~r, t) =K1
rexp[
iω(
t− zc
)]
~er, ~B(~r, t) =K2
rexp[
iω(
t− zc
)]
~eθ, en
coordonnées cylindriques r,θ,z. Ces deux champs décroissent en fonction de la distance à l’axe du câble comme 1/r,proportionnellement aux constantes K1 et K2. On remarque que, mis à part le terme exponentiel de propagation, ces deuxchamps sont analogues à des situations statiques (que l’on retrouve d’ailleurs lorsque ω = 0), les constantes K1 et K2 étant
2L’ensemble des résultats admis ici a pour but la présentation des équations de Maxwell ; une fois celles-ci admises comme fondement axiomatique del’électromagnétisme, tous ces résultats peuvent être démontrés.

198 Manuel de Physique
alors liées à la charge et au courant qui créent ~E et ~B. Nous admettrons que ce lien est le même qu’en régime statique,
K1 =λ0
2πε0, K2 =
µ0I0
2πoù λ0 est, en régime statique, la charge portée par unité de longueur du câble central, et I0 le courant
qu’il transporte.Enfin, nous noterons dans la suite f (z, t) = exp [iω(t− z/c)] le terme qui décrit la propagation de ces champs. En régimevariable, les charge et courant deviennent λ(z, t) = λ0 f (z, t) et I(z, t) = I0 f (z, t). Nous admettrons enfin la relation essentielleK1 = cK2 ou, si on préfère, E = cB.
Flux du champ électrique
Le flux du champ électrostatique peut être calculé à travers une surface cylindrique de rayon r et de hauteur h, complétée
de deux disques de base ; on obtient alors∮
~E · d~S = 2πr∫ h
z=0
λ0
2πε0rf (z, t)dz =
1ε0
∫ h
z=0λ(z, t)dz qui s’interprète, comme
en régime statique, sous la forme du théorème de Gauss∮
S~E (~r, t) · d~S =
Q(~r, t)ε0
pour toute surface fermée S . Appliquant
le théorème d’Ostrogradski à cette surface, de volume intérieur V , il vient∫
Vdiv ~E (~r, t) dτ =
1ε0
∫
Vρ(~r, t) dτ qui, étant
vérifiée pour tout volume V , prend la forme locale connue sous le nom d’équation de Maxwell-Gauss :
div ~E (~r, t) =ρ(~r, t)
ε0(25.6)
Nous admettrons la généralisation de cette équation à tous les régimes, variables ou non.
Flux du champ magnétique
Calculons directement la divergence du champ magnétique proposé ; l’application des expressions cylindriques de l’opéra-teur divergence conduit à :
div ~B(~r, t) = 0 (25.7)
qui prend bien sûr, par application du théorème d’Ostrogradski, la forme intégrale∮
S~B(~r, t) · d~S = 0 pour toute surface
fermée S . Nous admettrons la généralisation de ces équations (la forme locale prenant le nom d’équation de Maxwell-Thomson) à tous les régimes, variables ou non.
Théorème de Faraday
Déterminons maintenant la circulation du champ électrique le long du rectangle orienté R , compris entre les distances
r et r + dr de l’axe, sur une hauteur dz. On a alors∮
R~E (~r, t) · d~r =
K1
r( f (z+dz, t)− f (z, t))dr = −i
ωc
drdzK1
rf (z, t)
que nous pouvons écrire sous la forme équivalente∮
R~E (~r, t) · d~r = −iω
K2
rf (z, t)dS avec dS = drdz, ou, de façon plus
générale,∮
C~E (~r, t) · d~r = −
∫
S
∂~B(~r, t)∂t
· d~S qui est l’équation intégrale de Faraday. Admettant sa généralisation à une
surface quelconque S de bord fermé C , on lui applique le théorème de Stokes sous la forme∮
C~E (~r, t) ·d~r =
∫
S
−→rot~E (~r, t) ·d~S
et deux termes qui ont même flux à travers une surface arbitraire S doivent être égaux ; on en déduit l’équation locale deMaxwell-Faraday :
−→rot~E (~r, t) =−∂~B(~r, t)∂t
(25.8)

Les équations de Maxwell 199
Théorème d’Ampère
Considérons enfin la circulation du champ magnétique le long d’un cercle C de rayon r, orienté dans le sens trigonomé-
trique ; on obtient∮
C~B · d~r = 2πr
µ0I2πr
f (z, t) = µ0I0 f (z, t) ; il semble s’agir du théorème d’Ampère, classique en régime
statique. Nous allons pourtant voir qu’il doit ici être modifié. Définissons pour cela un contour fermé, formé de deux droitesparallèles à Oz et de hauteur dz, et de deux arcs de cercle de longueur rdθ, l’ensemble étant situé à la distance fixe rde l’axe. Ce contour K est tracé sur la surface d’un cylindre de rayon r. La circulation du champ magnétique le long de
ce contour s’écrit∮
B~B(~r, t) ·d~r = r dθ
K2
r( f (z, t)− f (z+dz, t)) = i
ωc
dzK2d θ Pour interpréter cette circulation comme un
flux (comme dans le théorème d’Ampère, nous écrirons∮
B~B(~r, t) · d~r = iω
K1
rc2 f (z, t)dS avec dS = r dθdz. On voit donc
bien que la circulation de ~B fait intervenir la somme de deux termes, le courant électrique « vrai » IS =
∮
~j · d~S et le cou-
rant de déplacement de Maxwell IDS =
∮ ∂~E∂t· d~S. La forme intégrale du théorème d’Ampère ainsi modifié devient donc
∮
C~B(~r, t) · d~r = µ0I +
1c2
∫
S
∂E∂t· d~S pour une surface quelconque S dont le bord est le contour fermé C . L’application
du théorème de Stokes à cette équation permet d’écrire∮
C~B(~r, t) · d~r =
∫
S
−→rot~B(~r, t) · d~S et, admettant que l’expression
intégrale ci-dessus est vraie pour toute surface S , on en déduit la forme locale dite équation de Maxwell-Ampère :
−→rot~B(~r, t) = µ0~j (~r, t)+1c2
∂~E (~r, t)∂t
(25.9)
ÉQUATIONS DE MAXWELL
Les équations de Maxwell forment un système axiomatique pour la détermination du champ électroma-
gnétique à partir des densités volumiques de charge et de courant ; ces équations s’écrivent div ~E =ρε0
,
div ~B = 0, −→rot~E =−∂~B∂t
et −→rot~B = µ0~j +1c2
∂~E∂t
.
Système international d’unités
Le choix du système international d’unités mène, comme on le verra progressivement, à affirmer l’identité :
ε0 µ0 c2 = 1 (25.10)
liant les constantes conventionnelles que sont la célérité c des ondes électromagnétiques et la perméabilité du vide µ0 àla constante dérivée ε0 (permittivité du vide). On en rappelle ici les valeurs numériques, c = 2,99792458× 108 m · s−1,µ0 = 4π×10−7 H ·m−1 et ε0 ' 8,85×10−12 F ·m−1.
25.1.3 Le système d’équations de Maxwell
Aucune des équations ci-dessus n’a bien sûr été démontrée ; nous devons les considérer, dans la formulation qui va en êtrerappelée ci-dessous, comme une formulation axiomatique de l’électromagnétisme.
Charges et courants
Le système d’équations de Maxwell décrit les sources ou causes du champ électromagnétique sous la forme des densitésvolumiques de charge ρ(~r, t) et de courants ~j (~r, t). Celles-ci s’interprètent en termes de charge totale et de courant total(grandeurs intégrales), reliées aux grandeurs locales par les relations :
QV (t) =
∫
Vρ(~r, t)dτ IS(t) =
∫
S~j(~r, t) ·~ndS (25.11)

200 Manuel de Physique
Toutefois, certains problèmes simplificateurs feront intervenir des distributions de charge surfaciques, avec les expressions
Q =
∫
Sσ(~r, t)dS et I =
∫
C~js(~r, t) ·~ndl où on n’oubliera pas la géométrie particulière du vecteur ~n, normal à la courbe C
à travers laquelle passe le courant, mais tangent à la nappe de courants. Enfin, certains problèmes hautement simplifiésse décrivent dans une modélisation filiforme. Un circuit filiforme est alors parcouru par le courant I et porte la charge
Q =
∫
Cλ(~r, t)dl. On notera les unités de mesure de ces grandeurs ; λ, σ et ρ se mesurent respectivement en C ·m−1, C ·m−2
et C ·m−3, tandis que I, ~js et ~j se mesurent en A, A ·m−1 et A ·m−2. On prendra donc garde au caractère trompeur desunités de mesures des densités de courant ; une densité volumique se mesure en ampères par mètre carré puisque son fluxest un courant, mesure en ampère.Enfin, l’utilisation de distributions surfaciques ou filiformes s’accompagne généralement de discontinuités des champsélectriques et magnétiques.
Conservation de la charge électrique
On a déjà vu que la conservation de la charge électrique d’un volume finidQV
dt=−IS peut, par l’intermédiaire du théorème
d’Ostrogradski, se mettre sous la forme de l’équation de continuité, condition nécessairement vérifiée par les sources duchamp électromagnétique :
div ~j +∂ρ∂t
= 0 (25.12)
Énoncé des équations
Le système d’équations de Maxwell a déjà été énoncé ; on le rappelle ici, regroupées en équations de structure (indépen-
dantes des sources), dites de3 MAXWELL-THOMSON div ~B(~r, t) = 0 et de MAXWELL-FARADAY−→rot~E (~r, t) =−∂~B(~r, t)
∂t,
et équations reliant les champs à leurs causes, dites de MAXWELL-GAUSS div ~E (~r, t) =ρ(~r, t)
ε0et de MAXWELL-AMPÈRE
−→rot~B(~r, t) = µ0~j (~r, t)+ ε0µ0∂~E (~r, t)
∂t. On remarquera que ces équations imposent automatiquement la relation de conserva-
tion de la charge électrique4.
Forme intégrale des équations
Les équations de Maxwell exprimées en termes de divergence se transforment aisément, par application du théorème d’Os-trogradski, pour tout volume V limité par la surface fermée S orienté vers l’extérieur ; on retrouve le théorème de Gauss :
∮
S~E ·~ndS =
1ε0
∫
Vρdτ (25.13)
et la conservation du flux magnétique :
∮
S~B ·~ndS = 0 (25.14)
De même, les équations de Maxwell exprimées en termes de rotationnel se transforment aisément, par application duthéorème de Stokes, pour toute surface S limitée par le bord fermé C orienté ; on retrouve le théorème d’Ampère généralisé :
∮
C~B ·d~r = µ0
∫
S
(
~j + ε0∂~E∂t
)
·~ndS (25.15)
3L’équation de Maxwell-Thomson div ~B = 0 porte aussi le nom d’équation de conservation du flux magnétique, pour des raisons qui apparaîtrontprogressivement.
4Il suffit pour s’en assurer de calculer la divergence du terme−→rot~B. C’est pour assurer cette conservation de la charge électrique, que n’assure pasla forme statique du théorème d’Ampère, que Maxwell a été amené à modifier celui-ci, ajoutant le terme aujourd’hui connu sous le nom de courant dedéplacement de Maxwell

Les équations de Maxwell 201
et la loi de Faraday de l’induction :
∮
C~E ·d~r =−
∫
S
∂~B∂t·~ndS (25.16)
Dans le premier cas, on remarquera l’intervention de la densité volumique de courant de déplacement de Maxwell :
~jd = ε0∂~E∂t
qui s’ajoute au courant volumique de conduction. La mise en évidence de ce terme de déplacement, qui ne peut se fairequ’en régime de haute fréquence (à cause du terme dérivé) et dans un milieu vide ou peu conducteur (pour que le courantde conduction soit négligeable), constitue la validation historique des équations de Maxwxell par Hertz5.
25.2 Conséquences des équations de structure
25.2.1 Le potentiel vecteur
Définition
On a vu que l’équation div ~B = 0 impose nécessairement l’existence d’au moins une grandeur ~A(~r, t), dite potentiel vecteur,telle que :
~B =−→rot~A (25.17)
Le potentiel vecteur peut servir d’intermédiaire de calcul pour la détermination des champs électrique et magnétique ;toutefois, du fait de son absence d’unicité, il ne peut en général donner lieu à une interprétation physique. Nous apprendronsà lever cette ambiguïté en imposant des conditions de jauge qui restitueront le caractère unique du potentiel vecteur.
Formulation intégrale
Le lien entre champ magnétique et potentiel vecteur peut s’écrire, compte tenu du théorème de Stokes, sous la formeintégrale :
∫
S~B ·~ndS =
∮
C
~A ·d~n (25.18)
pour toute surface S appuyée sur le contour orienté C. On retrouve ici l’interprétation de l’équation de Maxwell en termesde conservation du flux magnétique : ce flux est le même à travers toute surface appuyée sur un contour donné.
25.2.2 Le potentiel scalaire
Définition
Considérons l’équation de Maxwell-Faraday, modifiée compte tenu de l’existence d’au moins un potentiel vecteur, ~B =
−→rot~A⇒−→rot
(
~E +∂~A∂t
)
=~0 et il existe donc au moins un potentiel scalaire V tel que :
~E =−−−→gradV − ∂~A∂t
(25.19)
5Le physicien allemand HEINRICH RUDOLPH HERTZ (1857-1894), après des études d’ingénieur, étudie la physique sous la direction de HERMANN
VON HELMHOLTZ. Hertz étudie et enseigne la théorie de Maxwell à l’École polytechnique de Karlsruhe. Helmholtz attire son attention sur un prix offertpar l’Académie de Berlin et destiné à couronner un travail expérimental sur l’électromagnétisme. Il découvre la propagation des ondes de Maxwell, etdétermine leur longueur d’onde, leur vitesse, leur caractère transversal et leurs propriétés de réflexion, de réfraction et de polarisation.

202 Manuel de Physique
Formulation intégrale
Considérons un contour quelconque (non nécessairement fermé) C menant du point A au point B ; la circulation du champélectrique le long de ce contour devient :
∫
C~E ·d~r = V (A)−V(B)− d
dt
∫
C
~A ·d~r (25.20)
mais si le contour est fermé, cette équation devient∮
C~E · d~r = − d
dt
∮
C
~A · d~r = − ddt
∫
S~B ·~ndS qui constitue la loi de l’in-
duction électromagnétique.
25.2.3 Conditions de Jauge
Choix de jauge
Nous admettrons la possibilité d’imposer, sans perte de généralité, une relation particulière reliant les potentiels V et ~A.Selon le domaine d’étude choisi, on rencontre plusieurs conditions. Citons la condition V = 0 ; en apparence simple, ellemène à des calculs de champs complexes sauf dans le domaine de la quantification du champ électromagnétique.
Jauge de Lorentz
Nous admettrons la possibilité de choisir la condition de jauge de Lorentz :
div ~A+1c2
∂V∂t
= 0 (25.21)
Sauf mention expresse du contraire, on cherchera toujours les solutions des équations de Maxwell pour les potentiels dansle cadre de cette condition de jauge. Dans le cas particulier des régimes permanents, cette condition prend le nom de jaugede Coulomb, div ~A = 0.
25.2.4 Équations de Poisson
Expression des équations
On montre sans difficulté que les équations de Maxwell imposent, dans le cadre de la condition de Jauge de Lorentz, leséquations de Poisson :
∆V − 1c2
∂2V∂t2 =− ρ
ε0∆~A− 1
c2
∂2~A∂t2 =−µ0~j (25.22)
La résolution de ces équations, compte tenu de leur caractère découplé, peut être plus aisée que la résolution directe deséquations de Maxwell, qui couplent les deux champs électrique et magnétique.
Ondes électromagnétiques
Dans les milieux vides de charges et de courants, les équations de Poisson prennent la forme d’équations de d’Alembert,
∆V =1c2
∂2V∂t2 et ∆~A =
1c2
∂2~A∂t2 ce qui confirme bien l’interprétation de c =
1√ε0µ0en tant que célérité des ondes électroma-
gnétiques.
Régimes permanents dans le vide
Dans les milieux vides de charges et de courants, les équations de Poisson en régime permanent prennent la forme d’équa-tions de Laplace ∆V = 0, ∆~A =~0.
26Lois de l’électromagnétisme
HEINRICH RUDOLF HERTZ (1857–1894)
26.1 Relations de passage
26.1.1 Discontinuités des champs
Discontinuité des grandeurs volumiques
Le choix d’une modélisation surfacique1 pour la répartition des charges ou des courants constitue un passage d’une fonctionde l’espace ρ(~r, t) ou ~j(~r, t) à une distribution, la grandeur volumique présentant une discontinuité lorsque l’épaisseur de lasurface chargée ou parcourue de courants tend vers zéro, σ = lim
e→0ρ ·e et ~js = lim
e→0~j ·e. Les dérivées des champs électrique et
magnétique qui interviennent dans les équations de Maxwell-Gauss et Maxwell-Ampère sont alors infinies ; on s’attend bienà une discontinuité des champs lorsqu’on passe d’un point à un autre séparés par la région de dérivée infinie, c’est-à-dire depart et d’autre de la nappe chargée ou parcourue de courants surfaciques.
Géométrie
Considérons une nappe porteuse de charges ou de courants surfaciques, dont le plan tangent sera désigné Mxy et considéronsdeux points M1 et M2 situés respectivement dans la zone 1 (z < 0) et dans la zone 2 (z > 0) au voisinage immédiat de cettesurface chargée, de sorte que leurs coordonnées soient respectivement (0,−ε,0) et (0,+ε,0). Le point origine est un certainpoint M de la nappe portant les charges et courants. On appelle discontinuité en M du champ ~X lors de la traversée de la
nappe porteuse des grandeurs surfaciques la différence ∆~X = ~X2−~X1 = limε→0
(
~X(M2)−~X(M1))
.
1Et à plus forte raison lorsqu’on choisit un modèle filiforme.

204 Manuel de Physique
Calcul des discontinuités
Cette discontinuité s’obtient par intégration de part et d’autre de la surface chargée, ~X(M2)− ~X(M1) =∫ +ε
−ε
∂∂z
~X dz. Il
s’agit d’une intégrale sur un intervalle de largeur infinitésimale ; elle ne peut être non nulle que si la grandeur intégrée esteffectivement une distribution présentant un point singulier en z = 0. Dans les calculs qui suivront, nous négligerons donctoutes les dérivées finies ; en particulier, le fait qu’un champ ne varie pas de façon brutale si on ne traverse pas la nappe Mxyimpose que toutes les dérivées partielles relatives à x et y seront réputées bornées ; de même que les dérivées temporelles.
26.1.2 Relations de passage
Relation de passage pour le champ électrique
L’équation de Maxwell-Gauss devient, en ne conservant que les termes éventuellement infinis au voisinage d’un point M
d’une surface chargée, div ~E =ρε0' ∂Ez
∂zet par intégration on obtient ∆Ez =
1ε0
∫ +ε
−ερdz =
σε0
. De même, l’équation de
Maxwell-Faraday−→rot~E =−∂~B∂t
impose∂Ex
∂z' ∂Ey
∂z' 0 et, par intégration, ∆Ex = ∆Ey = 0 ; ainsi, les composantes tangen-
tielles du champ électrique sont continues, les composantes normales sont discontinues en présence de charges surfaciques.On retiendra ces résultats sous la forme unique, où on note~n la normale orientée dirigée du milieu (1) vers le milieu (2) :
∆~E =σ(M)
ε0~n (26.1)
Relation de passage pour le champ magnétique
L’équation de Maxwell-Ampère −→rot~B = µ0~j + ε0µ0∂~E∂t
devient, comme ci-dessus, −∂By
∂z= µ0 jx et
∂Bx
∂z= µ0 jy puisque la
géométrie impose jz = 0. Par intégration, on obtient les discontinuités des composantes tangentielles du champ magnétique,
∆By = −µ0 jsx et ∆Bx = +µ0 jsy. De même, l’équation conservation du flux magnétique div ~B = 0 devient∂Bz
∂z' 0 d’où,
par intégration, la continuité de la composante normale du champ magnétique, ∆Bz = 0. On retiendra ces résultats sous laforme « orthogonale » à celle obtenue pour le champ électrique :
∆~B = µ0~js∧~n (26.2)
Relation de passage pour les potentiels
Dans les milieux porteurs seulement de charges volumiques, les champs sont des solutions continues des équations deMaxwell. Leurs différentes composantes étant des dérivées des potentiels V et ~A, on choisira toujours de chercher pour V et~A des fonctions continues, dérivables. Dans les milieux porteurs de charges volumiques et surfaciques, les champs électriqueet magnétique sont des solutions discontinues, mais présentant des discontinuités finies, des équations de Maxwell. Lespotentiels V et ~A ayant pour composantes des primitives de ces grandeurs continues par morceaux, on conviendra de choisirpour V et ~A des fonctions continues, mais bien sûr non nécessairement dérivables. Enfin, en présence de charges filiformesou ponctuelles, les potentiels vecteur et scalaire pourront présenter des discontinuités éventuellement infinies.
26.2 Énergie électrostatique
26.2.1 Énergie d’un condensateur plan
Le condensateur plan
Nous considérons dans ce problème deux surfaces planes, indéfinies, parallèles, distantes de e, portant respectivement lesdensités surfaciques de charge +σ (pour le plan z = 0) et −σ (pour le plan z = e). Tout le reste de l’espace est assimilé auvide, non chargé ; le problème est étudié en régime permanent2.
2Nous montrerons ultérieurement qu’un tel système représente bien la géométrie d’un condensateur à armatures planes et métalliques, à conditiond’attribuer une surface finie S aux plans chargés ; le choix de surfaces indéfinies permet de négliger les effets de bord.

Lois de l’électromagnétisme 205
Résolution du problème
Les équations de Maxwell du problème deviennent, en régime permanent et dans le vide compris entre les armatures,div ~E = 0 et −→rot~E =~0. Nous en chercherons une solution respectant la symétrie du problème3, c’est-à-dire un champ de laforme ~E = E(x,y,z)~ez en coordonnées cartésiennes. L’application de l’équation de Maxwell-Faraday fournit immédiatement∂E∂x
=∂E∂y
= 0 conformément aux invariances par translation du problème étudié, tandis que l’équation de Maxwell-Gauss
fournit∂E∂z
= 0 dans chaque région vide ; le champ électrique est donc uniforme par morceaux. Enfin, l’application des
relations de passage à travers les deux plans chargés permet d’écrire E(0 < z < e) = E(z > e)+σε0
= E(z < 0)+σε0
. Nous
choisirons une solution en accord avec le caractère effectivement fini de la distribution des charges, qui ne peut créer de
champ uniforme à une distance infinie du condensateur, en posant E(0 < z < e) =σε0
et E(z < 0) = E(z > e) = 0.
Charge et potentiel
La charge électrique portée par les armatures du condensateur peut être écrite ±Q avec Q = σS. D’autre part, on peut ici
chercher un problème à potentiel vecteur nul et dont le potentiel scalaire vérifie donc E =− dVdx
; on peut donc choisir pour
potentiel entre les armatures la solution V (x) = V0−σzε0
, qui mène à la différence de potentiel V (z = e)−V(z = 0) =−σeε0
tandis que le potentiel est pris uniforme par morceaux à l’extérieur du système.
Capacité et énergie
Nous définirons la capacité de ce condensateur plan sous la forme C =Q
V (z = 0)−V(z = e)=
ε0Se
et nous chercherons à
généraliser la relation d’origine électrocinétique We =Q2
2C. L’énergie électrostatique du condensateur peut se mettre sous la
forme We =ε0E2Se
2, proportionnelle au volume de l’espace où règne ~E. L’énergie électrostatique apparaît donc ici comme
liée à la présence du champ, avec une densité volumique d’énergie donnée par la relation :
we =ε0
2~E2 We =
∫
R3we dτ (26.3)
26.2.2 Énergie électrostatique
Définition
L’expression établie ci-dessus n’a qu’une valeur indicative ; en effet, elle a été établie dans le cadre de l’étude d’un systèmetrès particulier. De plus, l’origine électrique de l’expression utilisée est une étude de transferts de puissance, dans un cadrenon statique (circulation de courants) pour lequel les résultats utilisés ne s’appliquent pas. Nous allons donc proposer, à titredocumentaire, une généralisation de cette relation dans le cadre plus général des équations de Maxwell.Considérons donc le problème de la constitution d’une certaine distribution statique de charges à partir des mêmes consti-tuants (mêmes charges) disposées dans un état initial qui servira d’origine des énergies, donc sans interaction : nous pren-drons les charges infiniment éloignées les unes des autres comme état initial.Ainsi, à partir de l’état initial caractérisé par ρi(M) = 0, Vi(M) = 0 et ~Ei(M) =~0 en tout point, nous chercherons à réaliserune certain état final, solution des équations de Maxwell (en régime statique) caractérisé par ρ f (M), V f (M) et ~E f (M) parune transformation réversible. Pour approcher ainsi ces charges, un opérateur devra fournir un certain travail. On définira :
DÉFINITION DE L’ÉNERGIE ÉLECTROSTATIQUE
On appelle énergie électrostatique d’une distribution statique de charges le travail réversible fourni parun opérateur qui constitue cette distribution de charges à partir d’un état initial où les charges sontinfiniment éloignées les unes des autres.
3L’étude des principes généraux de symétrie appliqués aux champs électromagnétiques sera rappelée ultérieurement.

206 Manuel de Physique
Lien avec la Thermodynamique
Dans le cas où d’autres interactions qu’électrostatiques sont à prendre en compte, nous choisirons de plus d’imposer à latransformation d’être isotherme. Le travail réversible isotherme reçu peut, dans le cadre thermodynamique, être identifié àune fonction d’état puisque : dU = T dS + δWr⇒ d(U −TS) = −SdT + δWr pour un travail réversible. En particulier, untravail réversible isotherme représente la variation de la fonction d’état U −TS (énergie libre de Gouy) et elle ne dépendpas de la transformation particulière choisie, ce qui donne un caractère universel à la définition proposée plus haut.
Énergie et charges
Une transformation réversible est formée d’une suite continue d’états d’équilibre, solutions des équations de Maxwell. Lecaractère linéaire de celles-ci permet d’affirmer que l’état intermédiaire de charge ρ(M) = λρ f (M), de potentiel V (M) =
λVf (M) et de champ ~E = λ~E f (M) est un tel état d’équilibre. L’opérateur a donc pour tâche de faire lentement varier λ de 0 à1, en compensant exactement les forces électriques pour assurer l’équilibre mécanique à chaque instant. Considérons alorsla variation de λ à λ + dλ ; la charge d2q = dλρ f (M)dτ doit être amenée de l’infini en M ; pendant ce trajet, elle subit laforce électrique donnée par d2~F = d2qλ~E f (P) –à des termes d’ordre supérieur près– et l’opérateur fournit à chaque instantla force exactement opposée, ainsi que le travail d3Wo = −λdλρ f (M)~E f (P) · d~Pdτ. Intégrant d’abord sur le parcours de
P de l’infini en M, et compte tenu que ~E =−gradV pour ce problème de régime permanent, on obtient∫ M
∞~E f (P) · d~P =
−V (M)⇒ d2Wo = λdλρ f (M)V f (M)dτ à condition de choisir conventionnellement un potentiel nul à l’infini4. Une seconde
intégration sur tout le volume chargé U mène à dWo =
∫
Uλdλρ f (M)V f (M)dτ et on en déduit enfin une première expression
du travail quasi-statique fourni par l’opérateur, sous la forme Wo =12
∫
Uρ f (M)V f (M)dτ.
Énergie et champ
L’expression de l’énergie électrostatique établie ci-dessus peut être réécrite sous la forme We =12
∫
Bρ(M)V (M)dτ où on
choisit conventionnellement d’étendre l’intégrale à une boule B de grand rayon R qui englobe le volume chargé U , puisque
dans le domaine extérieur à U la densité de charges ρ est nulle. On écrira encore We = ε012
∫
BV (M)div ~E(M)dτ. On peut
alors utiliser la définition de V pour écrire ~E =−−−→gradV puis la divergence d’un produit sous la forme div(
V~E)
=V div ~E−~E2 d’où encore We =
ε0
2
∫
B~E2(M)dτ +
ε0
2
∫
Bdiv
(
V (M)~E(M))
dτ ou, compte tenu du théorème d’Ostrogradski, We =
ε0
2
∫
B~E2(M)dτ +
ε0
2
∮
SV (M)~E(M) ·~ndS. Le flux à travers la sphère S de rayon R se comporte comme5 R2V (R)E(R). A
grande distance des charges, on doit observer un champ et un potentiel décroissant au moins comme pour une charge quasi-
ponctuelle, soit V (R) ∼ 1R
et E(R)∼ 1R2 ; cette seconde intégrale disparaît donc si l’intégrale est étendue à l’espace entier
et on écrira We =ε0
2
∫
R3~E2(M)dτ conformément au cas particulier cité plus haut.
26.3 Énergie électromagnétique
26.3.1 Identité de Poynting
Énergie magnétique
Nous ne disposons pas à ce stade des lois de l’induction électromagnétique qui permettraient le calcul de l’énergie magné-tique d’un système analogue au condensateur plan proposé plus haut –il s’agirait par exemple d’une bobine solénoïde– et
4Ici et dans la suite, nous ferons donc systématiquement l’hypothèse que le potentiel à une distance infinie des charges est nul. Toutefois, nous noteronsque cette hypothèse est parfois incompatible avec certains énoncés excessivement simplificateurs, qui traitent de distributions de charges s’étendant elles-mêmes jusqu’à l’infini ; on a vu que c’était le cas du condensateur plan sans effet de bord traité plus haut.
5Les expressions correspondantes ont été vues en première année, à savoir ~E =q
4πε0R~eR et V =
q4πε0R
pour une charge ponctuelle q. Nous montrerons
plus loin que, si la charge totale q de la distribution est nulle, la décroissance des champ et potentiel de cette distribution (dite multipolaire) avec R estencore plus rapide.

Lois de l’électromagnétisme 207
nous procéderons donc directement à un calcul général, conséquence des équations de Maxwell.
Identité de Poynting
Considérons l’équation de Maxwell-Ampère, écrite sous la forme1µ0
~E ·−→rot~B = ~j ·~E +ε0~E ·∂~E∂t
= ~j ·~E +∂we
∂t. D’autre part,
on a vu que div(
~E ∧~B)
= ~B ·−→rot~E−~E ·−→rot~B qui permet d’écrire ~j ·~E +∂we
∂t=
1µ0
~B ·−→rot~E−div ~R où on a choisi de définir6
le vecteur de Poynting ~R par la relation :
~R =~E ∧~B
µ0(26.4)
Enfin, l’équation de Maxwell-Faraday permet d’écrire1µ0
~B · −→rot~E = − 12µ0
∂~B2
∂t; on définira donc la densité volumique
d’énergie électromagnétique par la relation :
wem =ε0~E2
2+
~B2
2µ0(26.5)
où on identifie clairement un terme électrique et un terme magnétique, avec l’identité de Poynting :
div ~R+∂wem
∂t=−~j ·~E (26.6)
26.3.2 Transferts d’énergie
Cas de conservation
Considérons d’abord le cas des milieux vides7, dans lesquels ~j =~0. On a alors div ~R+∂wem
∂t= 0 évidemment semblable à
la loi de conservation de la charge électrique div ~j +∂ρ∂t
= 0, ce qui suggère une interprétation par analogie des différents
termes. C’est en retrouvant progressivement des cas classiques de transferts d’énergie que nous validerons l’interprétationaxiomatique qui est formulée ici :
DENSITÉ VOLUMIQUE D’ÉNERGIE
L’énergie électromagnétique est concentrée dans les régions de l’espace où règne soit un champ élec-
trique, soit un champ magnétique, avec la densité volumique wem =ε0~E2
2+
~B2
2µ0.
Cas de non-conservation
Le terme ~j ·~E n’est bien sûr pas toujours nul. Considérons par exemple le cas des milieux ohmiques pour lesquels ~j = γ~E
(situation purement électrique, à ~B =~0 et donc à vecteur de Poynting nul). On a alors∂wem
∂t=−γ~E2 < 0 et la diminution de
l’énergie volumique est bien entendue associée à l’effet Joule : l’énergie est perdue par le champ et transférée à la matière,sous forme thermique. De façon plus générale, nous admettrons que :
PUISSANCE TRANSFÉRÉE À LA MATIÈRE
La densité volumique de puissance perdue par le champ et transférée à la matière chargée lors de lacirculation de courants s’écrit pm = ~j ·~E.
6Le physicien britannique JOHN HENRY POYNTING (1852-1914) introduisit pour la première fois en 1884 le vecteur qui porte aujourd’hui son nom.7Les résultats établis dans cette section concernent aussi tous les milieux conservatifs, dans lesquels le produit scalaire ~j · ~E est nul, au moins en
moyenne temporelle.

208 Manuel de Physique
Forme intégrale
Comme toute équation aux divergences, l’identité de Poynting admet une interprétation intégrale par application du théo-
rème d’Ostrogradski à un volume V limité par une surface fermée S orientée vers l’extérieur,∮
S~R ·~ndS +
ddt
∫
Vwemdτ =
−∫
Vpmdτ. Les deux derniers termes admettent une interprétation immédiate. En effet, la puissance totale transférée par
le champ à la matière (par exemple sous forme d’effet Joule dans les milieux ohmiques) s’écrit Pm =
∫
Vpmdτ et l’énergie
électromagnétique contenue dans le volume V vaut Wem =∫
Vwemdτ. On peut alors réécrire l’équation ci-dessus sous forme
d’une loi de conservation globale de l’énergie, exprimant la diminution de l’énergie électromagnétique d’un volume fini
sous la forme d’une somme de deux termes, − ddt
Wem = Pm−∮
S~R ·~ndS. Le premier terme concerne les pertes matérielles
d’énergie, le second les pertes non matérielles ou transferts d’énergie associés au champ électromagnétique : on parle depuissance rayonnée.
Puissance rayonnée
La puissance rayonnée à travers une surface fermée S a été écrite comme le flux du vecteur de Poynting passant à traverscette surface ; nous admettrons enfin la généralisation de cette relation à une surface quelconque orientée, la puissance étantcomptée positivement dans le sens de l’orientation sous la forme :
Pr =∫
S~R ·~ndS (26.7)
Unités et exemples
Puisque Pr et Pm s’expriment en W, le vecteur de Poynting s’exprime en W ·m−2 et la puissance transférée à la matière pm
en W ·m−3. Puisque Wem s’exprime en J, la densité volumique correspondante s’exprime en J ·m−3 ou, ce qui revient aumême, en Pa.On peut retrouver des bilans énergétiques classiques dans divers cas statiques. Considérons par exemple un cylindre conduc-teur ohmique de rayon a, de longueur h et de conductivité γ, parcouru par un courant I réparti uniformément. On trouvealors aisément par application des équations de Maxwell en régime permanent, à l’intérieur du cylindre et en coordonnées
cylindriques, ~E =I
γπa2~ez, ~B =µ0Ir2πa2~eφ. La puissance transférée à la matière redonne évidemment la loi de l’effet Joule,
Pm =h
γπa2 I2 = R I2 en fonction de la résistance électrique R du cylindre. En régime permanent, cette perte est compen-
sée par un apport permanent rayonné à travers la surface du cylindre, issu du générateur, avec pour vecteur de Poynting,
~R(r = a) =− I2r2γπ2a4~er dont le flux entrant est bien sûr égal à Pm.
Considérons encore, toujours en régime statique, le cas du câble coaxial déjà présenté au chapitre précédent. En régimepermanent, les champs électrique et magnétique, solutions des équations de Maxwell dans le cadre géométrique imposé,
s’écrivent ~E =αr~er, ~B =
βr~eφ avec le lien entre les constantes α et β, la tension U entre les armatures du câble et le courant
I transporté par l’armature centrale donnés par les théorèmes de Gauss et d’Ampère, U = α lnR+ e
Ret I = 2π
βµ0
tandis
que les relations de passage permettent de retrouver les répartitions surfaciques des charges et des courants sur l’armature
centrale, σ = ε0αR
, ~js =β
µ0R~ez. On détermine aussi le vecteur de Poynting, ~R =
UI
2πr2 lnR+ e
R
~ez et on vérifie bien que son
flux à travers une section droite du câble est égal à la puissance transportée par celui-ci, P =
∫ R+e
r=R2π~R ·~ezr dr = UI.
27Ondes électromagnétiques
PIERRE SIMON, MARQUIS DE LAPLACE (1749–1827)
27.1 Ondes électromagnétiques dans le vide
27.1.1 La célérité de la lumière dans le vide
L’occultation des satellites de Jupiter
En 1676, l’astronome danois Ole Römer (1644-1710) constata que les satellites de Jupiter sont éclipsés à chaque révolutionpar la planète elle-même, au moment où ils passent dans son ombre. L’intervalle entre ces éclipses varie lentement au coursde l’année, ce que Römer expliqua en attribuant une vitesse finie à la propagation de la lumière.En considérant, pour simplifier, Jupiter comme immobile par rapport au Soleil (sa période de révolution est en fait de prèsde 12 ans), la distance que doit parcourir la lumière pour informer l’astronome de l’occultation des satellites varie de 2D ensix mois, où D est la distance de la terre au soleil. La plus grande variation observée de la période d’occultation des satellitesétant de 22 minutes, et la distance D ayant été mesurée par des mesures astronomiques de parallaxe, Römer fournit pour lavitesse c de la lumière l’estimation peu précise c' 2,14×108 m · s−1.
L’aberration des étoiles fixes
En 1728, l’astronome anglais James Bradley (1693-1762) découvrit le mouvement apparent annuel des étoiles sur la sphèrecéleste (ou aberration des étoiles), qu’il expliqua par la coexistence d’une vitesse non nulle u de la Terre sur son orbite etd’une vitesse de la lumière c.Considérons par exemple une étoile (fixe) placée dans la direction orthogonale au sens de déplacement instantané de laTerre, à la distance l de celle-ci. Pendant le temps l/c nécessaire à la lumière pour aller de l’étoile jusqu’à la Terre, unobservateur terrestre parcourt la distance ul/c (si u est la vitesse de déplacement de la Terre sur son orbite) et la directiond’observation apparente de l’étoile tourne de θ, avec tanθ ' θ ' u/c. Au cours d’une année, la direction de u tourne
210 Manuel de Physique
régulièrement ; la trajectoire apparente de l’étoile est donc un cercle de diamètre angulaire 2θ. De la mesure du diamètre dece cercle d’aberration et de celle de u on déduit la mesure de c.D’autres procédés, comme la méthode de la roue dentée, développée en 1849 par le physicien français Hippolyte Fizeau(1819-1896), permirent d’affiner progressivement la mesure de c' 3,00×108 m · s−1.
27.1.2 Les ondes de Maxwell
Célérité des ondes électromagnétiques
Les équations de Maxwell déjà présentées font naturellement apparaître une célérité caractéristique c, liée à des grandeursexclusivement statiques qui peuvent être déduites de mesures électrostatiques et magnétostatiques, ε0µ0c2 = 1. La coïn-cidence des valeurs théoriquement prévue pour c et expérimentalement prévue par Maxwell amenèrent celui-ci à prédirel’existence d’ondes électromagnétiques de célérité c dans tous les domaines de longueur d’onde, la lumière n’en constituantqu’un cas particulier. La théorie de Maxwell se présente donc comme la première théorie d’unification, offrant un cadrethéorique unique pour les phénomènes électriques, magnétiques et optiques.
Mise en évidence expérimentale
La vérification expérimentale de la théorie de Maxwell imposait de produire et de détecter par des méthodes purement élec-tromagnétiques des ondes. L’existence de ces ondes électromagnétiques, prévues par Maxwell dès 1867, ne fut confirméeexpérimentalement par le physicien allemand Heinrich Hertz (1857-1894) qu’en 1887. A cette occasion, Hertz mesura aussila vitesse de propagation de ces ondes et confirma leurs propriétés de polarisation, telles que nous les établirons plus loin.
27.1.3 Les équations de base
Les équations de Maxwell
Les équations de Maxwell, dans un milieu vide de charges, se présentent sous la forme d’un système couplé symétrique
pour les champs ~E (~r, t) et ~B(~r, t), div ~E (~r, t) = 0, div ~B(~r, t) = 0„ −→rot~E (~r, t) =− ∂∂t
~B(~r, t), −→rot~B(~r, t) =1c2
∂∂t
~E (~r, t).
Les équations de Poisson
Dans le vide et dans le cadre de la condition de Jauge de Lorentz div ~A(~r, t) +1c2
∂∂t
V (~r, t) = 0, les équations de Poisson
prennent la forme d’équations de d’Alembert, ∆~A(~r, t) =1c2
∂2
∂t2~A(~r, t) et ∆V (~r, t) =
1c2
∂2
∂t2 V (~r, t) et le potentiel V , comme
les trois composantes cartésiennes du potentiel vecteur ~A, foment ensemble un système de quatre grandeurs scalaires solu-
tions de l’équation de d’Alembert ∆ψ(~r, t) =1c2
∂2
∂t2 ψ(~r, t) qui sont donc, comme on l’a vu, des ondes de célérité c.
Les équations de propagation des champs
Le découplage des équations de Maxwell pour les champs ~E (~r, t) et ~B(~r, t) se fait en calculant le double rotationnel de
ces champs ; ainsi −→rot−→rot~E (~r, t) =−−→rot∂∂t
~B(~r, t) =− 1c2
∂2
∂t2~E (~r, t) mais, d’autre part on sait que −→rot−→rot~E (~r, t) =−∆~E (~r, t)
puisque div ~E (~r, t) = 0 ; on en déduit immédiatement l’équation de propagation du champ électrique :
∆~E (~r, t) =1c2
∂2
∂t2~E (~r, t) (27.1)
De la même façon, −→rot−→rot~B(~r, t) =1c2−→rot
∂∂t
~E (~r, t) = − 1c2
∂2
∂t2~B(~r, t) mais, d’autre part −→rot−→rot~B(~r, t) = −∆~B(~r, t) puisque
div ~B(~r, t) = 0 ; on en déduit immédiatement l’équation de propagation du champ magnétique :
∆~B(~r, t) =1c2
∂2
∂t2~B(~r, t) (27.2)
Ondes électromagnétiques 211
Les équations sont découplées mais les ondes électrique et magnétique ne sont pas indépendantes ; les champs ~E et ~B doiventcontinuer à vérifier les équations couplées de Maxwell ; on en déduira des relations de structure que doivent nécessairementvérifier les champs pour être des solutions ondulatoires valides du problème posé. De façon générale, on parlera doncsystématiquement d’ondes électromagnétiques, les deux aspects ~E et ~B ne pouvant être séparés.
ÉQUATIONS DE PROPAGATION DU CHAMP
Toutes les composantes du champ électromagnétique(
~E (~r, t) ,~B(~r, t))
sont solution, dans le vide, de
l’équation de propagation de d’Alembert à la célérité c =1√ε0µ0
.
27.1.4 Les ondes électromagnétiques
Ondes électromagnétiques (OÉM)
On appelle onde électromagnétique la donnée simultanée de deux grandeurs ~E (~r, t) et ~B(~r, t), solutions des équations deMaxwell dans le vide, qui se propagent, éventuellement avec dispersion, atténuation et déformation. Nous nous intéresseronsessentiellement à ces ondes décrites en coordonnées cartésiennes, donc sous la forme ~E = ~E(x,y,z, t) et ~B = ~B(x,y,z, t).Puisqu’en coordonnées cartésiennes (et en coordonnées cartésiennes seulement !), le laplacien vectoriel a pour projectionssur la base locale les laplaciens scalaires des coordonnées, chacune des six composantes Ex, Ey, Ez, Bx, By et Bz vérifie la
même équation de propagation,∂2ψ∂x2 +
∂2ψ∂y2 +
∂2ψ∂z2 =
1c2
∂2ψ∂t2 . Nous utiliserons cette notation dans la suite, ψ désignant une
composante quelconque des champs ~E et ~B.
OÉM planes (OP)
On parle d’onde plane ψ(z, t) pour une fonction d’une seule composante cartésienne x ; on a alors montré∂2ψ∂z2 =
1c2
∂2ψ∂t2
donc ψ(z, t) = ψ+(z−ct)+ψ−(z+ct) montrant ainsi que toute onde plane est la somme de deux ondes planes progressives(OPP) se propageant en sens inverse.
OPP monochromatiques (OPPM)
Dans le cas particulier d’une onde plane progressive ψ+(z−ct), le choix d’une fonction sinusoïdale pour la fonction ψ+ per-met de réécrire l’onde correspondante sous la forme ψ(z, t) = ψ0 exp(i(ωt− kz)) à condition que ω = ck, qui constitue la re-lation de dispersion des ondes de vitesse c. Plus généralement, on notera pour une onde électromagnétique plane progressive
dont la direction de propagation n’est pas forcément colinéaire à un axe de coordonnées, ~E (~r, t) = ~E0 exp(
i(
ωt−~k ·~r))
,
~B(~r, t) = ~B0 exp(
i(
ωt−~k ·~r))
. On peut alors définir la période T =2πω
de l’onde, sa fréquence ν =ω2π
, son vecteur d’onde
‖~k‖=ωc
, son nombre d’onde σ =ω
2πcet sa longueur d’onde λ =
2π‖~k‖
=1σ
, à partir de la pulsation ω, conventionnellement
choisie positive. La direction du vecteur d’onde~k porte le nom de direction de propagation.
27.2 Polarisation des ondes électromagnétiques
27.2.1 États de polarisation
Décomposition en OPPM
La notion d’onde électromagnétique plane progressive monochromatique présente un intérêt général puisque la décomposi-tion de Fourier des fonctions peut être étendue à quatre dimensions (trois d’espace plus le temps) sous la forme, par exemple
pour le champ électrique ~E (~r, t) =1
4π2
∫
R4~E0(~k,ω)exp
(
i(
ωt−~k ·~r))
d3~kdω. Faire cette décomposition, c’est considérer
toute onde électromagnétique comme une superposition d’ondes planes progressives et monochromatiques. On notera quece résultat n’est pas spécifique du vide, puisque elle ne suppose pas une équation de propagation particulière.
212 Manuel de Physique
Équation de dispersion
Nous montrerons, lors de l’étude de la propagation des ondes électromagnétiques dans le vide et dans divers milieux, quecelle-ci fait conformément à une certaine équation de dispersion, qui peut s’écrire sous la forme1 ω = ωm(~k), ne prenant quedes valeurs positives ; l’intégrale ci-dessus peut alors être ramenée à une somme sur toutes les directions de propagation,
sous la forme ~E (~r, t) =1
(2π)32
∫
R3~E0(~k,ω)exp
(
i(
ωm(~k)t−~k ·~r))
d3~k.
Dérivation des OPPM
Considérons un élément de la décomposition ci-dessus (c’est-à-dire une onde plane progressive monochromatique), écrit
sous la forme ~E = ~E0 exp(
i(
ωt−~k ·~r))
, ~B = ~B0 exp(
i(
ωt−~k ·~r))
. La vérification des équations de Maxwell passe par le
calcul de diverses dérivées partielles, dont∂∂t
~E = iω~E,∂∂t
~B = iω~B, et l’opérateur de dérivation temporelle s’écrit de façon
générique∂∂t
= iω. De la même façon, on peut écrire∂∂x
~E =−ikx~E,∂∂x
~B =−ikx~B et l’opérateur de dérivation spatiale s’écrit
de façon générique∂∂x
= −ikx, et tous les termes qui en découlent par permutation circulaire et combinaison linéaire ; en
particulier, le vecteur formel nabla prend la forme ~∇ =−i~k.
DÉRIVATION DES OPPMLes dérivées spatiales et temporelles d’une OPPM, écrites en coordonnées cartésiennes, prennent la
forme simple∂∂t
= iω et ~∇ = −i~k. En particulier,−−→grad f = −i~k f , div ~W = −i~k · ~W , −→rot~W = −i~k ∧ ~W ,
∆ f =−k2 f et ∆~W =−k2~W .
On évitera toutefois d’appliquer ces relations à des ondes qui ne sont pas des OPPM ; de plus, le changement de conventioncomplexe i→−i est possible ; si un énoncé l’impose, on doit le faire aussi dans ces notations.
Équations de Maxwell pour les OPPM
Compte tenu de ce qui précède, on peut écrire, pour une OPPM dans le vide, les équations de Maxwell~k ·~E = 0,~k ·~B = 0,~k∧~E = ω~B et~k∧~B = − ω
c2~E. On peut passer directement de ces équations complexes à l’interprétation géométrique pour
les champs réels puisque~k est supposé réel ; on en déduit :
STRUCTURE DES OPPM DANS LE VIDE
Les champs électromagnétiques associés aux ondes planes dans le vide vérifient les relations de structure
~u · ~E = 0, ~u ·~B = 0 et ~B =~uc∧ ~E si ~u est le vecteur unitaire de la direction de propagation de l’onde, qui
vérifie en outre la relation de dispersion ω = ck.
Polarisation des OPPM
Pour une direction de propagation donnée, la géométrie du trièdre (~u, ~E, ~B) est entièrement définie par la donnée de ladirection du vecteur ~E à un instant donné. Cette direction définit la direction de polarisation de l’onde électromagnétique.Dans le vide, la direction de propagation est toujours perpendiculaire à la direction de polarisation.On appellera OPPM polarisée rectilignement (notation OPPMPR ou VR) une OPPM dont le champ électrique garde unedirection constante. On appellera OPPM polarisée circulairement (notation OPPMPC ou VC) une OPPM dont le champélectrique tourne, en gardant une norme fixe ; l’extrémité de ce vecteur parcourt donc un cercle. Pour l’observateur quiregarde l’onde venir vers lui, si le champ électrique tourne dans le sens trigonométrique, l’onde est dite polarisée circulai-rement à gauche (OPPMPCG ou VCG) ; dans le cas contraire, elle est dite polarisée circulairement à droite (OPPMPCD ouVCD). De façon tout à fait analogue, on définira les OPPM polarisées elliptiquement (OPPMPE ou VE), avec les deux casparticuliers des OPPM polarisées elliptiquement à gauche (VEG) ou à droite (VED).
1Dans cette expression, la pulsation ωm dépend du milieu étudié, mais éventuellement aussi de divers paramètres, qui peuvent être extérieurs au champélectromagnétique (température, pression, etc.) ou liés à celui-ci (direction du vecteur d’onde, direction des champs ~E ou ~B, etc.).

Ondes électromagnétiques 213
OPPM polarisées en notation complexe
Considérons une onde du type ~E = ~E0 exp(i(ωt− kz)) où ~E0 = E0x~ex + E0y~ey. On vérifie immédiatement, par projectionssuccessives de la partie réelle, les états de polarisation ci-après :– Si ~E0 est réel ou, ce qui revient au même, si ses deux composantes E0x et E0y ont même phase (soit ~E0 = exp(iφ)~E ′0 où
~E ′0 ∈ R3), l’onde est polarisée rectilignement.– Si les composantes de ~E0 sont déphasées de π
2 , l’onde est polarisée elliptiquement, les grands axes de l’ellipse étant Oxet Oy ; en particulier, E0x = E1 et EOy = iE2 où E1 et E2 sont réels correspond à une vibration elliptique droite, tandis queE0x = E1 et EOy =−iE2 correspond à une vibration elliptique gauche.
– Si de plus les composantes de ~E0 sont déphasées deπ2
et de même norme, l’onde est polarisée circulairement.
– Enfin, si les deux composantes de ~E0 ont des modules et des arguments quelconques, la polarisation de l’onde est engénéral elliptique, avec des axes quelconques dans le plan Oxy.
27.2.2 Réalisation et détection d’ondes polarisées
Dispositifs polarisants
Les ondes électromagnétiques produites par des sources naturelles sont en général considérées comme non polarisées,c’est-à-dire formées d’une superposition aléatoire d’ondes de polarisations différentes. Ceci revient à dire que le vecteur ~Evarie aléatoirement en direction au cours de l’émission de l’onde électromagnétique. Certaines sources de lumière peuventêtre polarisées de façon précise, par construction du dispositif émetteur ; d’autre part, il existe des dispositifs polarisantspermettant d’imposer à une onde une polarisation particulière.On appelle polariseur une dispositif plan totalement transparent pour une direction particulière de polarisation (un axefixe du plan) et totalement opaque pour la direction orthogonale. Le dispositif polarisant le plus simple et donc le plusutilisé pour les applications industrielles (la photographie par exemple) est constitué des Polaroïds, dont la structure estassez complexe (il s’agit de lames constituées d’un grand nombre de petits cristaux noyés dans une lame de verre). Il existed’autres dispositifs polarisants, parfois plus complexes à mettre en œuvre. Ainsi, la réflexion sur une surface vitreuse polarisel’onde réfléchie, au moins en partie ; pour l’incidence particulière dite de Brewster, la polarisation de l’onde réfléchie esttotale.
Indice optique
L’étude2 de la propagation des ondes électromagnétique dans certains milieux matériels3 montre qu’on peut y remplacer ladonnée des champs ~E, ~B, ~j et ρ par l’étude de champs moyens ~Em et ~Bm qui se propagent selon des équations modifiées :
div Em = 0, div Bm = 0, −→rotEm = − ∂∂t
~Bm et −→rotBm =1εµ
∂∂t
~Bm. Ces champs sont moyennés sur des dimensions nettement
supérieures aux dimensions moléculaires ; la disparition des répartitions de charges et de courants (grandeurs à variation trèsrapide et en général inconnues) est compensée par le remplacement des grandeurs fondamentales ε0 et µ0 par la permittivitédu milieu ε et la permittivité du milieu µ.Ces deux grandeurs, caractéristiques de la nature microscopique du milieu étudié, dépendent éventuellement de la pulsationω de l’onde. De plus, dans tous les cas pratiques, on constate que µ' µ0 tandis que ε(ω) = εr(ω)ε0 où la permittivité relativeεr(ω) est un nombre sans dimension qui vérifie en général εr(ω)≥ 1.L’étude des ondes dans un tel milieu se fait alors comme dans le vide et on obtient des ondes se propageant à la vitesse
vφ =1√εµ
=cn
où on é défini l’indice optique du milieu par la relation n =√
εr(ω) ; puisque n dépend de ω ,un tel milieu
est en général dispersif.
Dispositifs biréfringents
La propagation de la lumière dans les matériaux cristallins transparents présente des propriétés particulières. Ces matériauxont en effet des propriétés optiques (valeur de l’indice) qui ne sont pas isotropes. Ainsi, une lame mince d’épaisseur e,orthogonale à la direction de propagation de la lumière Oz, formée d’un matériau biréfringent doit être considérée commeprésentant deux indices optiques différents selon que le champ électrique est polarisé rectilignement selon Ox ou Oy. Après
2Cette étude est développée de façon plus conséquente au chapitre suivant, dans la partie 28.2, à l’occasion de l’étude de la réfraction des ondesélectromagnétiques.
3On parle de milieux linéaires, homogènes et isotropes, non absorbants.
214 Manuel de Physique
la traversée de la lame, chacune deux composantes du champ électromagnétique présente donc un déphasage différent, selon
Ex = E0x exp
(
−iωvx
e
)
et Ey = E0y exp
(
−iωvt
e
)
, avec vx =cnx
et vy =cny
. L’axe correspondant à l’indice le plus faible est
dit axe rapide et l’autre axe lent ; ces deux axes (dits axes neutres de la lame) sont toujours orthogonaux.
Lames minces
Une lame mince telle que celle décrite ci-dessus apporte un déphasage ∆φ =ωc
e(nx−ny) =2πλ
e(nx−ny) où le terme
e(ny− ny) est la différence de marche liée à la biréfringence de la lame. On appelle lame demi-onde une lame telle que la
différence de phase ∆φ est égale à π (à 2π près) ; la différence de marche correspondante est donc égale àλ2
(à λ près).
On appelle lame quart-onde une lame telle que la différence de phase ∆φ est égale àπ2
(à π près) ; la différence de marche
correspondante est donc égale àλ4
(àλ2
près).
On vérifie alors immédiatement les propriétés suivantes :– L’effet d’une lame demi-onde sur un VR est une rotation du plan de polarisation d’un angle 2α, si α est l’angle formé par
la VR avec l’axe rapide.– L’effet d’une lame quart d’onde sur un VR est une polarisation elliptique ; en particulier, dans le cas où l’angle α formé
par la VR avec l’axe rapide est égalπ4
, on obtient une polarisation circulaire.
L’association d’un polariseur (rectiligne) P et d’une lame λ/4 dont les axes rapides sont disposés àπ4
de la direction de
polarisation de P forme donc un polariseur circulaire.
27.3 Énergie des ondes électromagnétiques
27.3.1 Grandeurs énergétiques pour les OPPM
Remarque préliminaire
Il est très important de remarquer que toutes les expressions énergétiques sont quadratiques, c’est-à-dire fondamentalementnon linéaires et par conséquent non susceptibles de s’appliquer aux grandeurs complexes. Tout calcul énergétique (demême d’ailleurs que toute interprétation physique, comme l’analyse de la polarisation par exemple) doit donc être effectuéaprès passage aux parties réelles. Il existe toutefois une exception. Considérons le calcul de deux grandeurs sinusoïdalesf (t) = f0 cos(ωt +ϕ) et g(t) = g0 cos(ωt +ψ) au moyen des grandeurs complexes associées f = f0 exp(i(ωt +ϕ)) etg = g0 exp(i(ωt +ψ)), on garde la possibilité de donner une interprétation du produit f (t)g(t) en termes complexes, au
moins en ce qui concerne la moyenne temporelle, puisque 〈 f (t)g(t)〉 =ω2π
∫ 2πω
0f (t)g(t)dt =
12
f0g0 cos(ϕ−ψ) peut se
calculer selon 〈 f (t)g(t)〉= 12
Re( f g∗).
Vecteur de Poynting et énergie électromagnétique
La première expression relative à l’énergie électromagnétique est le vecteur de Poynting ~R(~r, t) =~E (~r, t)∧~B(~r, t)
µ0dont le
flux à travers une surface quelconque (S) est la puissance électromagnétique rayonnée à travers cette surface. On utilise
aussi la notion d’excitation magnétique ~H définie par ~H =~Bµ0
de façon à utiliser un vecteur champ électrique (mesuré en
volt par mètre) et un vecteur excitation magnétique (mesuré en ampère par mètre) dont les unités sont semblables, leurproduit (le vecteur de Poynting) s’exprimant naturellement en watt par mètre carré, ~R(~r, t) = ~E (~r, t)∧ ~H (~r, t). La seconde
expression relative à l’énergie d’une onde est la densité volumique d’énergie, wem (~r, t) =ε0
2~E2 (~r, t)+
12µ0
~B2 (~r, t) ou encore
wem (~r, t) =ε0
2~E2 (~r, t)+
µ0
2~H2 (~r, t).

Ondes électromagnétiques 215
Étude énergétique d’une onde plane progressive
Considérons une onde plane progressive monochromatique se propageant dans le sens positif de l’axe Oz, à la pulsation ω
sous la forme ~E = E0~ex exp(i(ωt− kz)), ~H =E0
µ0c~ey exp(i(ωt− kz)) où la grandeur Z0 = µ0c = 377 Ω a la dimension d’une
impédance ; on l’appelle impédance caractéristique du vide.
On en déduirt le vecteur de Poynting moyen 〈~R〉 = 12µ0c|E0|2~ez =
12Z0|E0|2~ez, dirigé dans le sens de la propagation. On
calcule de la même façon la densité volumique d’énergie électromagnétique moyenne associée à cette onde ; la composante
électrique 〈we〉 =ε0
4|E0|2 =
14Z0c
|E0|2 et la composante magnétique 〈wm〉 =1
4µ0c2 |E0|2 =1
4Z0c|E0|2 sont égales ; il y a
équipartition de l’énergie entre les champs ~E et ~B, avec de plus 〈~R〉= 〈wem〉c~ez.Cette dernière expression est susceptible d’une interprétation physique. Considérons en effet une certaine section droite,d’aire S, perpendiculaire à la direction de propagation ; au cours de l’intervalle de temps dt, cette aire est traversée parl’énergie totale δW = Pdt = ~R ·~ezSdt qui correspond à la traversée de cette surface par l’énergie qui était disposée enarrière de la section droite, à une distance inférieure ou égale à vEdt, où on note vE la vitesse de transport de l’énergie. Laquantité d’énergie contenue dans ce volume dτ peut s’écrire également wemdτ = wemvEdtS et on en déduit que l’énergieélectromagnétique dans le vide se propage à la vitesse c.Les résultats ci-dessus ont été établis pour une onde plane progressive monochromatique (de pulsation ω) mais sont indé-pendants de cette pulsation ; on les généralise donc par linéarité à une onde plane progressive, non monochromatique :
TRANSPORT D’ÉNERGIE PAR UNE ONDE PLANE PROGRESSIVE
Une OPPM dans le vide est caractérisée par une impédance d’ondeEH
= µ0c = 377 Ω, l’énergie électro-
magnétique se déplaçant à la vitesse c (ou encore avec la relation moyenne ~R = wemc~u), avec équipartitionentre la forme électrique et la forme magnétique.
De la relation ‖~R‖=|E0|22Z0
, on déduit aussi qu’une onde dont l’amplitude du champ électrique est E0 = 1 V ·m−1 transporte
une puissance surfacique moyenne égale à ‖~R‖= 1,3×10−3 W ·m−2.
27.3.2 Ondes stationnaires (OS)
Onde incidente, onde réfléchie
Considérons à nouveau l’onde plane progressive monochromatique se propageant dans le sens positif de l’axe Oz, à la
pulsation ω, ~E = E0~ex exp(i(ωt− kz)), ~H =E0
µ0c~ey exp(i(ωt− kz)) ; considérons de plus un certain dispositif réfléchissant
placé sur l’axe de propagation et qui impose à partir du point O un champ électromagnétique réfléchi, de mêmes pulsation
et polarisation mais se propageant en sens inverse, de la forme ~E ′ = rE0~ex exp(i(ωt + kz)), ~H ′ = −rE0
Z0~ey exp(i(ωt + kz))
où on notera le changement de signe devant l’impédance du vide, du au changement de sens de propagation (~k 7→ −~k).
On peut caractériser le dispositif réfléchissant par le rapport Z =EH
qu’il impose au point (ici O) où il est disposé ; ce
rapport Z peut être qualifié d’impédance du dispositif réfléchissant. La donnée de ce coefficient est équivalente à celle des
coefficients de réflexion électrique r, Z = Z01+ r1− r
⇔ r =Z−Z0
Z +Z0.
Adaptation d’impédance
On peut alors exprimer le champ électromagnétique total dans la région de l’espace où se superposent le champ incident
et le champ réfléchi sous la forme Et = E0 exp(iωt)(exp(−ikz)+ r exp(ikz)), Ht =E0
Z0exp(iωt)(exp(−ikz)− r exp(ikz)),
ce qui permet encore d’expliciter en tout point l’impédance de l’onde (qui n’est pas constante puisque l’onde globale n’est
plus progressive) Z(z) = Z0exp(−ikz)+ r exp(ikz)exp(−ikz)− r exp(ikz)
. En particulier, si Z = Z0, r = 0 ; on parle d’adaptation d’impédance ;
l’onde totale est alors progressive dans un seul sens.

216 Manuel de Physique
Ondes stationnaires
Pour toute valeur de Z différente de Z0, les ondes sont complètement ou partiellement stationnaires, par superposition dedeux ondes progressives en sens inverse. Repassant aux parties réelles et posant r = |r|exp(iϕ), on aura pour expression del’onde totale Et = E0(1−|r|)exp(i(ωt− kz))+ |r|E0 exp(iωt)(exp(−ikz)+ exp(i(kz+ϕ))).Cette onde est bien la somme d’une onde progressive Re(E p
t ) = |E0|(1−|r|)cos(ωt− kz+ arg(E0)) et d’une onde station-
naire Re(Est ) = 2|E0||r|E0 cos
(
ωt +ϕ2
)
cos(
kz− ϕ2
)
.
Dans le cas d’adaptation d’impédance, l’onde n’est pas réfléchie et il n’y a pas d’onde stationnaire. Au contraire, un dis-positif qui annule le champ électrique (miroir métallique, cf. chapitre suivant) réalise Z = 0 donc r =−1 : il y a réflexiontotale de l’onde ; il y a seulement établissement d’une onde stationnaire.

28Réflexion et réfraction
PAUL ADRIEN MAURICE DIRAC (1902–1984)
28.1 Réflexion métallique
28.1.1 Matériaux conducteurs
Conduction électrique en régime variable
Nous considérons ici un milieu comportant un certain nombre de particules chargées mobiles en concentration volumiquen, de charge unitaire q, soumis aux effets du passage d’une onde électromagnétique plane progressive dont les champs
s’écrivent ~E = ~E0 exp[
i(
ωt−~k ·~r)]
et ~B = ~B0 exp[
i(
ωt−~k ·~r)]
où ~k, ~E0 et ~B0 sont trois vecteurs arbitraires, réels ou
complexes. Sous l’influence de cette onde, les particules chargées constituant le milieu acquièrent une certaine vitessequ’on peut, après un certain régime transitoire que nous ne considérerons pas ici, traiter dans la notation complexe du
régime sinusoïdal permanent, ~v =~v0 exp[
i(
ωt−~k ·~r)]
et cette vitesse peut être déterminée par application du principe
fondamental de la dynamique, sous la forme µ~a = ~f où ~a est l’accélération, ~f la densité volumique de forces exercées surces particules, et µ = nm est la masse volumique du milieu continu formé des particules chargées.La densité volumique de forces comprend des termes indépendants du passage de l’onde (forces de cohésion dans le milieusolide, forces de pression dans le milieu fluide, pesanteur, ...) mais aussi des termes liés à la mise en mouvement des chargessous l’effet du champ. Les premiers s’annulent en principe en permanence mutuellement dans la situation de repos dumilieu chargé qui préexistait au passage de l’onde, et nous supposerons ici qu’il en va toujours de même lorsque celle-ci sepropage. Nous ne tiendrons donc compte que des forces explicitement liées au passage de l’onde étudiées. En particulier,
on prendra en compte la densité volumique de force électromagnétique proprement dite ~fem = nq[
~E +~v∧~B]
et la densité
volumique de forces de frottement de type visqueux, liée à la mise en mouvement des porteurs de charge mobile (souvent, lesélectrons) par rapport au reste du milieu, ~fv =−nλ~v où λ est la constante de proportionnalité relative à une seule particule.

218 Manuel de Physique
L’accélération prend dans cette équation la forme approchée1 ~a =∂∂t
~v. Dans de très nombreux cas, on peut encore négliger
dans cette équation le terme magnétique si le milieu où se propage l’onde est dépourvu de tout champ magnétique statique,donc si ~B désigne bien le seul champ dû à l’onde2. En effet, dans le cas où le champ magnétique est dû à l’onde, on peut apriori supposer que la relation E = cB qui était valable dans le vide, reste, même très approximativement, vérifiée dans lemilieu conducteur étudié. Le rapport des forces magnétiques et électriques est alors3 :
‖q~v∧~B‖‖qE‖ '
vc 1 (28.1)
L’équation différentielle ainsi simplifiée pour le mouvement des porteurs de charge m∂∂t
~v = q~E − λ~v admet alors pour
solution particulière le régime sinusoïdal~v =~v0 exp[
i(
ωt−~k ·~r)]
où~v0 =q
λ+ imω~E0 d’où on déduit ~j = nq~v où :
~j = γ(ω)~E γ(ω) =γ0
1+ i ωω0
(28.2)
faisant de tout milieu conducteur un milieu ohmique de conductivité γ(ω), avec la conductivité statique γ0 =nq2
λet la
pulsation de coupure ω0 =λm
.
Charge dans les milieux conducteurs
Toujours dans le cadre des régimes permanents sinusoïdaux4, la charge électrique vérifie l’équation ρ = ε0div ~E =ε0
γ(ω)div ~j
soit, compte tenu de l’équation de continuité, ρ(
1+ iωε0
γ(ω)
)
= 0. Comme on remarque que iωε0
γ(ω)comporte toujours
une partie imaginaire non nulle, ρ est forcément nul :
CHARGE DANS LES MILIEUX CONDUCTEURS
Sauf en régime transitoire, un conducteur ne peut pas comporter de charges volumiques. Si un tel milieuest chargé, il ne peut comporter de charges qu’en surface.
Effet Joule dans les conducteurs
On remarque que la conductivité γ(ω) est en général complexe, ce qui traduit un retard de phase à la mise en mouvementdes porteurs de charge par rapport au champ électrique. Ce retard est d’autant plus élevé que ωm est élevé, c’est-à-dire siles porteurs de charge sont lourds (inertes) ou si la fréquence est élevée (champ à variation rapide). Dans le cas d’un milieu
constitué de plusieurs types de charges, on pourra aisément généraliser l’expression ci-dessus, γ(ω) = ∑k
γ0k
1+ iω
ω0k
mais on
remarquera cependant que dans tous les cas Re(γ(ω)) = ∑k
γ0k
1+ω2
ω20k
> 0, ce qui permet de rendre compte de l’effet Joule
dans le milieu, puisque on montre que la densité volumique de puissance dissipée par cet effet s’écrit pm = Re(γ(ω))|~E|2.
1L’étude des équations dynamiques de la mécanique des fluides montre que l’accélération d’un pont d’un fluide ou d’un milieu continu s’écrit en fait
~a =∂∂t
~v+(
~v ·−−→grad)
~v, le second terme décrivant l’accélération des particules d’un fluide qui se déplacent le long d’une ligne de courant où la norme de la
vitesse n’est pas fixée (accélération convective). Ce terme est du second ordre en ~v et peut en général être négligé pour les écoulements de faible vitesse,ce que nous supposons ici.
2Si cette hypothèse n’est pas vérifiée, on peut cependant souvent ne tenir compte, dans l’expression de la force magnétique, que du terme proportionnelà ce champ statique.
3On notera l’importance de cette relation, qui permet, avec l’approximation déjà faite concernant l’expression de l’accélération, la linéarisation deéquations dynamiques des mouvements des charges dans n’importe quel milieu matériel. Lorsque la linéarisation, n’est pas possible, la propagation desondes électromagnétiques s’accompagne d’effets non linéaires : changements de fréquence, par exemple.
4L’étude des charges et courants en régime transitoire dans un milieu conducteur sera effectuée ultérieurement, à l’occasion de l’étude des régimesstatiques de champ dans les conducteurs

Réflexion et réfraction 219
La perte d’énergie électromagnétique par transfert à la matière est donc une propriété générale des milieux conducteurs, quise traduit en général par un affaiblissement progressif (parfois très rapide) de l’onde lors de sa propagation.
Classification des milieux conducteurs
Les plasmas sont des milieux conducteurs dans lesquels les interactions (modélisées ci-dessus par le coefficient de frotte-ment λ) entre particules chargées sont peu intenses, ce qui se traduit par la forme simplifiée :
Plasma : ~j = γ(ω)~E γ(ω) =nq2
imω(28.3)
On en déduit immédiatement que Re(γ) = 0, c’est-à-dire qu’en première approximation, le mouvement des électrons étanten permanence déphasé de π
2 par rapport au champ, il n’y a pas nécessairement transfert de puissance de l’onde à la matièrepar effet Joule. Les plasmas peuvent être transparents aux ondes ; on verra cependant que cette conclusion peut être invalidéeà basse fréquence, pour des raisons de compatibilité de l’expression de la conductivité avec les équations de Maxwell.Les métaux constituent le cas extrême exactement opposé aux plasmas ; du fait de la très forte densité de ces matériaux(solides ou liquides), les interactions entre conducteurs y sont très élevées, λ mω (sauf en très haute fréquence) ce quipermet de traiter l’expression de la conductivité sous la forme approchée :
Métal : ~j = γ0~E γ0 ∈ R+∗ (28.4)
CONDUCTIVITÉ DES MÉTAUX
La conductivité d’un métal est, à toute fréquence, constante et positive, ~j = γ0~E.
L’ordre de grandeur de cette conductivité peut donc être évalué par de simples mesures de résistance en régime permanent ;on trouve usuellement γ0 de l’ordre de 106 à 107 S ·m−1. La puissance dissipée par effet Joule dans l’unité de volume d’unmétal s’écrit donc pm = γ0|~E|2 > 0 et, du fait de cette dissipation, les métaux seront pratiquement toujours absorbants doncopaques et réfléchissants pour les ondes électromagnétiques (sauf dans le cas d’épaisseurs extrêmement faibles).Compte tenu de la valeur élevée de la conductivité des métaux courants, on pourra aussi, lors de l’étude du comportement
des ondes dans un métal, négliger le courant de déplacement ; en effet, ce dernier a pour ordre de grandeur ε0∂∂t
~E = ε0iω~E
avec ε0ω γ0 puisque la pulsation limite correspondant à cette approximation vaut ωl =γ0
ε0' 1018 Hz, valeur jamais
atteinte dans le domaine électromagnétique.
28.1.2 Effet Kelvin et métaux parfaits
Effet Kelvin et épaisseur de peau
Tous les métaux absorbent les ondes électromagnétiques, par effet Joule, sur des épaisseurs très faibles, surtout à hautesfréquences ; on pourra caractériser l’épaisseur caractéristique d’absorption à partir des équations de Maxwell-Ampère (sim-plifiée) −→rot~B = µ0γ0~E et de Maxwell-Faraday−→rot~E =−iω~B, écrites en régime sinusoïdal permanent de pulsation ω ; on endéduit−→rot−→rot~E =−iωµ0γ0~E et, comme dans un milieu neutre div ~E = 0, on obtient l’équation de Kelvin pour l’effet de peaudans les métaux :
∆~E = iωµ0γ0~E =
(1+ i
δ
)2~E avec δ =
√
2µ0γ0ω
(28.5)
où on a défini l’épaisseur de peau δ dans un métal de conductivité γ0 à la pulsation ω. La résolution de cette équation encoordonnées cartésiennes et dans le cas d’un problème unidimensionnel mène, pour une des composantes Ei exp(iωt) de ~E,
àd2Ei
dx2 =
(1+ i
δ
)2
Ei donc Ei(x) = αexp
(
−1+ iδ
x
)
+ βexp
(1+ i
δx
)
. L’interprétation des deux solutions ci-dessus est
identique, au sens de l’axe Ox près ; la première a pour partie réelle5 Re(Ei exp(iωt)) = αcos(
ωt− zδ
)
exp(
− zδ
)
. Ainsi,
5Choisir α ∈ R+ revient à décaler si nécessaire l’origine des temps.

220 Manuel de Physique
au fur et à mesure de sa propagation dans un milieu conducteur, l’onde s’atténue avec une distance caractéristique δ. Cerésultat se généralise de la manière suivante :
EFFET KELVIN
Dans un milieu conducteur de conductivité γ0, le champ électrique ~E et le courant volumique ~j restentconfinés sur de faibles épaisseurs de métal, au voisinage de la surface de celui-ci, sur une épaisseur de
l’ordre de quelques épaisseurs de peau, celle-ci étant donnée par δ =
√
2µ0γ0ω
.
Notons les ordres de grandeur pour un bon conducteur comme le Cuivre (γ0 = 5,7×106 S ·m−1) ; pour le courant industriel
(ω2π
= 50 Hz), l’épaisseur correspondante vaut δ = 3 cm. Ainsi, en courant industriel (50 Hz, épaisseur de peau de quelques
centimètres), on peut alléger la construction d’une ligne électrique de puissance en n’utilisant un matériau conducteurqu’en surface. Dans tous les cas, mais en particulier en haute fréquence, le passage du courant uniquement en surfaces’accompagne d’une augmentation de la puissance dissipée par effet Joule puisque la section ouverte au passage du courant
continu. Ainsi, en courants de haute fréquence,ω2π
= 1 MHz, δ = 0,2 mm. C’est l’effet de peau qui explique les limitations
techniques de la miniaturisation en haute fréquence, puisque la puissance thermique à évacuer augmente avec ω.
Les métaux parfaits
Pour simplifier l’étude des problèmes électromagnétiques en présence de métaux, on utilise donc souvent le modèle desmétaux parfaits, de conductivité γ0 infinie, dans lequel le champ électrique et le courant sont nuls sauf sur une très faibleépaisseur. On utilisera donc un modèle de courants surfaciques avec la discontinuité correspondante des champs.
MÉTAUX PARFAITS
On appelle métal parfait (ou conducteur parfait) un volume dans lequel ~E =~0, ~j =~0, ρ = 0. Le champ
magnétique y est donc forcément statique :∂∂t
~B =~0. La surface d’un tel métal parfait peut porter des
charges surfaciques σ et des courants surfaciques ~js.
On retiendra qu’il ne s’agit que d’une modélisation extrême et que, si un calcul précis impose le retour à une étude du métalréel (de conductivité finie), on devra abandonner les courants fictifs en surface et ne plus tenir compte que des courantsréels, volumiques.
28.1.3 Réflexion métallique
L’onde réfléchie
Lorsqu’une onde plane est envoyée vers un plan métallique parfait (ou une surface métallique assimilée localement à sonplan tangent), on observe une réflexion de l’onde ; en effet, l’onde ne pouvant se propager en profondeur dans le métal,l’énergie correspondante doit être renvoyée.Dans le cas simple où l’onde est polarisée rectilignement et envoyée en incidence normale, on choisit pour origine O le pointd’incidence de l’onde sur le métal, pour axe Oz la direction de propagation de l’onde incidente et pour axe Ox sa direction de
polarisation. On écrira le champ incident ~Ei = E0~ex exp [i(ωt− kz)], ~Bi =E0
c~ey exp [i(ωt− kz)] avec ω = ck puisque l’onde
incidente se propage dans le vide. D’autre part, dans le métal (considéré comme parfait), le champ est nul (à une composantestatique près, que nous ne considérerons pas ici) ; ~Em =~0 et ~Bm =~0. La discontinuité des champs est alors donnée par~Em−~E(z = 0−) =−~E(z = 0−) =
σε0
~ez et ~Bm−~B(z = 0−) =−~B(z = 0−) = µ0~js∧~ez en présence de courants et de charges
surfaciques. Ces équations ne sont pas compatibles avec les expressions du seul champ incident, impliquant donc l’existence
d’un champ réfléchi qui se propage nécessairement dans le vide et doit donc être de la forme ~Er = ~E ′0 exp[
i(
ωt−~k ·~r)]
,
~Br =~kω∧~E ′0 exp
[
i(
ωt−~k ·~r)]
avec encore ω = c‖~k‖ puisque, les relations de passage devant être satisfaites à tout instant,
la pulsation de l’onde réfléchie est forcément égale à celle de l’onde incidente. Les relations de passage prennent alors la
forme des conditions nécessaires E0~ex +~E ′0 exp(−ikxx− ikyy) =− σε0
~ez etE0
c~ey +
~kω∧~E ′0 exp(−ikxx− ikyy) =−µ0~js∧~ez et

Réflexion et réfraction 221
on obtient immédiatement, ces relations devant être vérifiées pour tous x et y, que kx = ky = 0 ; l’onde réfléchie se propagedonc le long de l’axe Oz, et nécessairement depuis le métal vers le vide, avec donc~k =−k~ez ; c’est la loi de Snell-Descartes
de la réflexion. Il vient alors ~E ′0 =−E0~ex σ = 0 ~js = 2E0
µ0c~ex.
RÉFLEXION MÉTALLIQUE EN INCIDENCE NORMALE
L’onde incidente crée, à la surface du métal, un courant surfacique harmonique. Celui-ci rayonne unchamp qui se propage selon les lois de Descartes, de façon à annuler le champ total à la surface dumiroir.
La réflexion métallique se fait avec conservation du module du champ électrique mais avec changement de signe (oudéphasage de π) ; suite de la décomposition de toute onde, quelle que soit sa polarisation, en superposition d’OPPMPR, laréflexion métallique sous incidence normale d’une onde quelconque est totale : l’amplitude du champ réfléchi est identiqueà celle du champ incident. On observe donc la formation d’une onde stationnaire en amont du miroir.
Incidence oblique
Dans le cas d’une onde en incidence oblique sur un métal parfait, la détermination de l’onde réfléchie est plus complexe àcause des diverses possibilités d’orientation du champ électrique et du champ magnétique incidents. En pratique, on effec-tue cette détermination de l’onde réfléchie en décomposant l’onde incidente en ses diverses polarisations, respectivementtangentielle et normale. Nous noterons simplement qu’il n’existe pas d’onde qui ne présente pas au moins une composanteélectromagnétique continue lors de la traversée d’une surface chargée6. L’existence de cette composante continue X impose
donc X0i exp[
i(
ωt−~ki ·~r)]
+X0r exp[
i(
ωt−~kr ·~r)]
= 0 pour tout~r appartenant au plan métallique. On en déduit immé-
diatement les lois de Descartes de la réflexion : les composantes tangentielles des vecteurs d’onde~k incident et réfléchi sont
égales. On écrit cette relation sous la forme ~N ∧~ki = ~N ∧~kr. Comme de plus ‖~ki‖= ‖~kr‖=ωc
, on obtient bien sûr l’égalité
des angles d’incidence et de réflexion (voir le schéma de la figure 28.1), sinθi = sinθr.
I
~N
~ki
~kr
métal
θr
θi
FIG. 28.1 – Réflexion métallique
Les courants de surface
Appliquant la relation de Maxwell-Ampère, il vient ~Er = −E0~ex exp [i(ωt + kz)] et ~Br =E0
c~ey exp [i(ωt + kz)] et, compte
tenu de la forme de l’onde incidente, on obtient ~E(z = 0−) =~0 et ~B(z = 0−) = 2E0
c~ey exp [iωt], ce qui montre l’existence
d’une densité surfacique de courants, colinéaire au champ électrique incident, ~js = 2E0
c~ex exp [iωt].
On peut considérer que l’arrivée de l’onde incidente sur le métal provoque la mise en mouvement des charges superficiellesdu conducteur ; ces charges mobiles sont à leur tour source du champ réfléchi.
6En effet, si le champ électrique tangentiel est nul ainsi que le champ magnétique normal, l’onde est forcément en incidence rasante, donc ne se propagepas vers le métal.

222 Manuel de Physique
Forces de pression de radiation
Considérons une surface chargée dS, les charges de densité surfacique σ et de vitesse~v transportent la densité surfacique decourants ~js = σ~v. Sous l’action d’un champ électrique extérieur (c’est-à-dire causé par d’autres charges que σ et d’autres
courants que ~js), la force de Lorentz exercée s’écrit d~F = σdS~E + σdS~v∧ ~B =(
σ~E +~js∧~B)
dS. Ainsi, le seul champ
électromagnétique incident exerce, sur les courants surfaciques qui prennent naissance sur le miroir, une force répartie en
surface, de la formed~FdS
= ~js∧~Bi, qu’on doit bien sûr calculer après être repassé aux parties réelles ; il vientd~FdS
= p~ez où
p = 2E0
µ0c2 cos2(ωt). On retiendra l’expression suivante (et sa généralisation, admise ici en incidence oblique) :
PRESSION DE RADIATION
En incidence normale, une onde électromagnétique qui transporte la densité volumique d’énergie élec-tromagnétique incidente wi
em exerce sur le métal sur lequel elle se réfléchit une force de pression, la forcepar unité de surface ayant pour valeur p = 2〈wi
em〉.En incidence oblique sous l’angle θ, la pression correspondante devient p = 2〈wi
em〉cos2 θ.
28.2 Réfraction
28.2.1 Milieux transparents
Charges et courants liés
Un milieu matériel transparent (nous traiterons ici des gaz, liquides et solides amorphes, donc de milieux isotropes) secomporte, lors du passage d’une onde, de manière différente du vide à cause de la mise en mouvement des charges liées à lamatière lors du passage de cette onde. On appelle ainsi charges liées et courants liés la partie des densités volumiques (ousurfaciques) de charge et de courant qui correspond aux électrons attachés aux molécules du matériau ; ces charges ne sontpas susceptibles de se déplacer sur de grandes distances (au contraire des charges libres qu’on rencontre dans les métauxpar exemple) et leur étude microscopique doit être menée de façon spécifique7. La présence de ces charges moléculairesse traduit aussi par des variations spatiales rapides des champs ~E et ~B au voisinage des noyaux atomiques par exemple ;ces variations sont difficilement observables et on choisit en général de n’étudier les champs électromagnétiques dans lesmilieux matériels que moyennés sur des dimensions supérieures aux dimensions atomiques, faisant ainsi disparaître cesvariations brutales au profit des seules grandeurs observables. Nous continuerons à noter ~E et ~B les champs ainsi moyennés.
Permittivité et perméabilité
Les équations de Maxwell peuvent toujours, après application d’une moyenne spatiale, se mettre sous la forme dite des
équations dans le vide, à savoir div ~B = 0, ε0div ~E = ρl +ρm,−→rot~E =− ∂∂t
~B et1µ0
−→rot~B =~jl +~jm +ε0∂∂t
~E où on a affecté d’un
indice m les grandeurs électriques liées à la matière (et qu’on ne peut en général ni contrôler, ni étudier expérimentalement)et d’un indice l les grandeurs libres (qui d’ailleurs seront souvent nulles dans ce qui suit : les milieux transparents sontneutres et isolants).Dans les milieux à comportement linéaire, la proportionnalité des effets (les charges et courants liés) aux causes (le champ
électromagnétique) permet de regrouper ces équations sous la forme div(
ε~E)
= ρl et−→rot
(1µ~B
)
=~jl +∂∂t
(
ε~E)
en fonction
de la permittivité diélectrique ε et de la perméabilité magnétique µ du milieu étudié. Dans la suite, nous étudierons desmilieux vides de charges et de courants libres et homogènes, avec des propriétés électriques indépendantes du temps ; dans
chaque milieu on peut alors écrire εdiv ~E = 0 et1µ−→rot~B = ε
∂∂t
~E où nous noterons aussi ε = ε0εr et µ = µ0µr, avec dans la
plupart des milieux étudiés µr ' 1 (on parle de milieux non magnétiques8) et εr ∈R avec même εr > 1 ; toutefois, εr dépenden général fortement de la fréquence de l’onde.
7L’étude de la géométrie des charges et courants liés, dits de polarisation et de magnétisation a été menée par Lorentz, menant à des équationsde Maxwell modifiées par leur prise en compte, dites équations de Maxwell-Lorentz. Ce que nous présentons ici n’est qu’un ensemble simplifié deconséquences des équations de Maxwell-Lorentz.
8La plupart des milieux magnétiques sont des métaux ou des oxydes métalliques, opaques.

Réflexion et réfraction 223
28.2.2 Indice optique
Milieux transparents non magnétiques
Dans un milieu transparent non magnétique, on réécrit les équations de Maxwell-Lorentz simplifiées sous la forme : div ~B =
0, εr(ω)div ~E = 0, −→rot~E =− ∂∂t
~B et −→rot~B =εr(ω)
c2
∂∂t
~E et une OPPM ne peut se propager dans ce milieu qu’à condition de
vérifier des relations de structure et de propagation qu’on écrit immédiatement~k · ~E = 0,~k ·~B = 0 avec ω2 =c2
εr(ω)‖~k‖2
avec donc une vitesse de phase et une équation de dispersion données par vφ =c
n(ω), n2(ω) = εr(ω) donc ck = ωn(ω). La
connaissance de n(ω) permet de déterminer l’ensemble des propriétés de dispersion dans le milieu étudié.
Enfin, l’équation de structure des ondes devient ici ~B =1vφ
~u∧~B si~u désigne le vecteur unitaire de la direction de propagation.
Relations de passage
Les relations de passage dérivant des équations de structure des champs électromagnétiques n’est pas modifiée par laprésence des charges et courants liés. Ainsi, la conservation du flux magnétique impose toujours la conservation de lacomposante normale de ~B, tandis que l’équation de Maxwell-Faraday impose encore la conservation de la composantetangentielle de ~E. Par contre, les équations aux sources sont par nature modifiées ; ainsi, l’équation de Maxwell-Gauss
est maintenant écrite : div(
ε~E)
= ρl et la relation de passage correspondante, en présence de charges libres entre (1)
et (2), s’écrit ε2~E2− ε1~E1 = σl~n1→2. Cette relation est en général peu utilisable en pratique. Par contre, dans le cas desmilieux non magnétiques et isolants électriques, la relation de Maxwell-Ampère écrite en l’absence de tout courant libre,−→rot~B =
εr(ω)
c2
∂∂t
~E, impose la conservation de la composante tangentielle du champ magnétique ; le champ ~B est alors
continu. Le cadre de l’optique des milieux transparents sans charges libres est donc en général bien décrit par ~B2 = ~B1 et
~n1→2∧(
~E2−~E1
)
=~0.
28.2.3 Lois de la réfraction
Relations de Descartes
La conservation du champ magnétique permet d’affirmer, comme dans le cas de l’étude de la réflexion métallique, laconservation de la composante tangentielle du vecteur d’onde lors de la traversée du dioptre (cf. fig. 28.2), ~N∧~ki = ~N∧~kr =~N ∧~kt .
~N
~ki
~kr
~kt
(1) (2)
θtθr
θi
FIG. 28.2 – Réflexion et réfraction
D’autre part, on a vu les expressions des indices optiques en fonction de la vitesse de phase ou de la permittivité diélectrique
relative n =cvφ
=√
εr, ce qui permet d’écrire respectivement ‖~ki‖= ‖~kr‖=ω
vφ1= n1k0 et ‖~kt‖=
ωvφ2
= n2k0 en fonction du

224 Manuel de Physique
vecteur d’onde k0 =ωc
dans le vide ; on retrouve évidemment les lois de relations de Descartes pour les angles d’incidence
θi, de réflexion θr et de réfraction θt , sous la forme n1 sinθi = n2 sinθt et θi = θr.
Relations de passage
Considérons le cas particulier d’une onde en incidence normale, polarisée rectilignement, dont le champ magnétique est écrit(en omettant les variations temporelles harmoniques) ~Bi = Bi~ex exp(−ik1z). On en déduit la forme nécessaire des champsmagnétiques réfléchi et transmis, ~Br = Br~ex exp(+ik1z) et ~Bt = Bt~ex exp(−ik2z), avec la relation de passage Bi + Br = Bt .
On détermine alors les champs électriques correspondants, ~Ei = − cn1
Bi~ey exp(−ik1z), ~Er =cn1
Br~ey exp(+ik1z) et ~Et =
cn2
Bt~ey exp(−ik2z) et la relation de passage pour le champ tangentiel s’écrit1n1
(Bi−Br) =1n2
Bt .
Relations de Fresnel
On déduit de ce qui précède les coefficients de réflexion et de transmission pour le champ magnétique, rB =Br
Bi=
n2−n1
n2 +n1,
tB =Bt
Bi=
2n2
n2 +n1.
On déduit aussi des expressions ci-dessus de Ei, Er et Et les coefficients de réflexion et de transmission pour le champ
magnétique, rE =−rB =n1−n2
n1 +n2et tE =
n1
n2tB =
2n1
n1 +n2.
Enfin, compte tenu de l’expression des vecteurs de Poynting moyens, 〈~R〉= 12µ0
Re(
~E ∧~B∗)
, on détermine les coefficients
de réflexion et de transmission en énergie, R = |rE rB|=(
n1−n2
n1 +n2
)2
et T = |tE tB|=4n1n2
(n1 +n2)2 avec la relation T +R = 1
qui traduit la conservation de l’énergie électromagnétique lors des phénomènes de réflexion et de réfraction sur un dioptre.Signalons que les calculs ci-dessus peuvent être repris en incidence non normale ; on constate alors que les divers coefficientsde réflexion et de transmission dépendent non seulement des indices et des angles d’incidence et de réfraction, mais ausside la polarisation de l’onde incidente.
29Les photons
ERWIN SCHRÖDINGER (1887-1961)
29.1 Physique quantique
29.1.1 Les photons
Les photons, particules de lumière
La pression de radiation présentée au chapitre précédent est effectivement une force exercée sur un miroir métallique lors-qu’une onde électromagnétique est réfléchie par une surface métallique. On peut aussi chercher à donner une interprétationcorpusculaire de la pression de radiation, par analogie avec la pression cinétique définie en Thermodynamique : la pressionde radiation est la résultante statistique des chocs des photons sur le miroir métallique.Rappelons ici que les photons sont les quanta des ondes électromagnétiques, introduits à la suite des travaux de Max Plancket Albert Einstein ; ce sont des particules de masse nulle, se déplaçant à la vitesse de la lumière c, et d’énergie individuelle
donnée par la relation de Planck-Einstein E = hν = hω (où on a posé h =h
2π) lorsqu’ils sont transportés par une onde
monochromatique de pulsation ω, h est la constante de Planck.
Effet photoélectrique
C’est l’étude de l’effet photoélectrique qui a amené Albert Einstein à proposer l’existence effective de particules dans uneonde lumineuse. Lorsqu’un métal est éclairé par une onde lumineuse de fréquence ν, on constate en effet une émissiond’électrons (qui peut par exemple être mise en évidence par la mesure du très faible courant correspondant). Ces électronssont émis avec une énergie cinétique individuelle que l’on peut mesurer, et qui ne dépend pas de l’intensité du flux lumineuxmais seulement de sa fréquence, avec la relation affine (d’origine expérimentale) Ec = h(ν− ν0) où la constante ν0 estcaractéristique du métal utilisé, tandis que la constante de Planck h est universelle :

226 Manuel de Physique
h = 6,6262×10−34 J · s (29.1)
Pour interpréter cette relation, Einstein proposa le modèle suivant : les interactions entre la matière (les électrons atomiquesdes couches superficielles du métal) et le rayonnement (les photons) sont des chocs entre particules individuelles, avecconservation de l’énergie mais anihilation des photons. La conservation de l’énergie au cours de ce choc peut être écrite ε+Ui = Ec +U f où ε est l’énergie des photons, en fonction des énergies potentielle initiale et finale des électrons ; la différenceU f −Ui peut s’interpréter comme l’énergie de liaison des électrons dans le métal, qu’on écrira U f −Ui = hν0. Ainsi, l’énergieε des photons est bien donnée par la loi de l’effet photoélectrique. D’autres expériences et développements théoriques (cf.plus loi la loi du rayonnement de Planck) ont confirmé cette interprétation corpusculaire des ondes électromagnétiques : onpeut considérer une O.É.M. comme un flux de photons, ayant pour énergie individuelle ε = hν = hω.
Pression de radiation
Le nombre n de photons par unité de volume dans une OPPM est alors défini par l’identification de l’énergie des pho-tons et de l’énergie transportée par l’onde, nhν = wem. Lorsque ces photons, de quantité de mouvement (ou impulsion)individuelle p heurtent, sous l’incidence θ, l’élément d’aire dS d’une paroi métallique, ils lui communiquent un transfertd’impulsion ∆~p = 2∆N pcosθ~n où ∆N est le nombre de photons qui heurtent dS, de normale ~n pendant la durée dt, soit,
∆N = ncdtdScosθ et la force de pression de radiation s’écrit donc d~F =∆~pdt
= 2ncpcos2 θdS~n.
L’identification des expressions ci-dessus de la pression de radiation impose la relation relativiste entre impulsion et énergiepour les photons :
ε = hν = hω p =εc
=hνc
= hk (29.2)
en fonction du vecteur d’onde k de l’onde associée à ces photons ; on pourra même écrire, ces deux vecteurs ayant àl’évidence même direction, ~p = h~k.
29.1.2 Énergie et impulsion quantiques
Fonction d’onde, énergie et impulsion
On sait, comme par exemple dans le cours de Physique atomique de première année, que toute particule peut être décritepar une fonction d’onde. Dans le cas d’une particule sans interaction, cette fonction d’onde se met sous la forme d’une onde
plane ψ(~r, t) = ψ0 exp[
i(
ωt−~k ·~r)]
avec donc une densité de probabilité de présence uniforme, et une vitesse de phase
constante (c’est la première loi de Newton, ou loi de l’inertie).Admettant la généralisation des relations de Planck-Einstein E = hω à toutes les particules, on peut, suivant les idées dufrançais Louis De Broglie (1892-1987) poser1 :
DUALITÉ ONDE-CORPUSCULE
Toute particule d’énergie E et de quantité de mouvement ~p est associée à une onde de pulsation ω et devecteur d’onde~k donnés par E = hω et p = hk.
On peut donc écrire comme ci-dessus des opérateurs d’énergie et de quantité de mouvement :
E =−i h∂∂t
~p = i h~∇ (29.3)
1On peut proposer une justification qualitative de ces relations dans un cadre non relativiste. Pour une particule libre (en l’absence de toute énergie
potentielle), on a alors E = Ec =12
mv2g où vg est la vitesse de groupe de l’onde associée à la particule, ce qui impose la relation de dispersion pour une
fonction d’onde de particule libre : hω =12
m
(dωdk
)2
. Cette relation s’intègre immédiatement en 2√
ω =
√
2 hkm
+C où la constante d’intégration C doit
être nulle, puisqu’à énergie et pulsation nulle, la particule ne doit plus se propager (k = 0). Il vient donc encore hk2 = 2mω⇒ E =h2k2
2met on retrouve la
relation de Louis de Broglie déjà établie pour les photons.

Les photons 227
Équation de Schrödinger
Les expressions ci-dessus mènent directement à l’équation établie par Erwin Schrödinger (1887-1861) dont on admet la
généralisation aux particules en interaction, la forme classique E =p2
2m+Ep devenant (c’est le principe de correspondance)
E =p2
2m+Ep, qu’on écrit habituellement−i h
∂∂t
ψ =− h2
2m∆ψ+Epψ.
29.1.3 Les conséquences de l’équation de Schrödinger
Principe de résolution
Résoudre l’équation de Schrödinger, c’est chercher une fonction Ψ(~r, t) solution de l’équation différentielle :
−i h∂∂t
Ψ(~r, t) =− h2
2m∆Ψ(~r, t)+Ep(~r)Ψ(~r, t) (29.4)
Cette solution est la fonction d’onde décrivant le comportement de la particule soumise à l’énergie potentielle E p(~r).
Densité de probabilité
L’interprétation de la fonction d’onde s’appuie sur l’analogie avec les ondes électromagnétiques : puisque dans ce cas le
nombre de particules par unité de volume est proportionnel à l’énergie volumique wem = ε0
~E2
2+
~B2
2µ0, donc au carré de
l’onde, on choisira d’interpréter la fonction d’onde en affirmant que la probabilité de présence de la particule étudiée dansl’élément de volume dτ est :
dP = |Ψ(~r, t)|2dτ (29.5)
En particulier, on peut écrire la condition de normalisation de la probabilité∫
R3|Ψ(~r, t)|2dτ = 1.
États stationnaires
Pour obtenir une probabilité de présence indépendante du temps, on cherchera une fonction d’onde dont le module nedépend pas du temps. Un cas particulier en est fourni par les états indépendants du temps donnés par une expression du
type Ψ(~r, t) = ϕ(~r)exp
(
iEt
h
)
qui, de plus, correspondent à une valeur définie de l’énergie puisque EΨ(~r, t) = EΨ(~r, t).
L’équation de Schrödinger se simplifie alors par la mise en facteur de cette exponentielle complexe :
Eϕ(~r) =− h2
2m∆ϕ(~r)+Ep(~r)ϕ(~r) (29.6)
La résolution de cette équation restant difficile dans les cas réels (potentiel newtonien électrostatique pour l’électron del’atome d’Hydrogène par exemple), nous nous contenterons de présenter l’interprétation physique de l’équation dans descas fortement simplifiés.
Quantification de l’énergie
Toutes les équations faisant intervenir un laplacien sont susceptibles d’aboutir à des solutions quantifiées par des nombresentiers (même en physique non quantique !) du fait de la nécessaire prise en compte des conditions aux limites. Nousretrouverons le même résultat en imposant des conditions aux limites spatiales à la particule étudiée ; celle-ci, de masse m,sera supposée astreinte à se déplacer sur le seul axe Ox entre x = 0 et x = a.Pour cela, nous supposerons que son énergie E est supérieure à la valeur de l’énergie potentielle dans l’intervalle « libre »(x ∈ [0;a]), soit Ep = 0, mais inférieure à cette énergie potentielle hors de cet intervalle, soit Ep = E ′ > E (cf. fig. 29.1).
La résolution de l’équation de Schrödinger se fait alors par intervalles ; si x ∈ [0;a], alorsd2ϕdx2 = −2mE
h2φ ; si x > a ou

228 Manuel de Physique
x
Ep
E ′
E
FIG. 29.1 – Puits de potentiel
x < 0, alorsd2ϕdx2 =
2m(E ′−E)
h2φ. Nous poserons dans la suite k =
√2mE
het k′ =
√
2m(E ′−E)
hpour écrire les solutions
de l’équation de Schrödinger, prenant en compte la nécessaire normalisation ; lorsque x < 0, ϕ(x) = ϕ− exp(k′x)
; lorsquex > a, ϕ(x) = ϕ+ exp
(−k′(x−a)
); enfin, lorsque x ∈ [0,a], ϕ(x) = ϕc cos(kx)+ϕs sin(kx). Enfin, le raccord par continuité
et dérivabilité2 de la probabilité de présence permet d’écrire ϕ− = ϕc et k′ϕ− = kϕs, ainsi que ϕ+ = ϕc cos(ka)+ϕc sin(ka)et −k′ϕ+ =−kϕc sin(ka)+ kϕs cos(ka).
On peut considérer ce système comme un ensemble de deux équations linéaires pour les deux grandeurs ϕc et ϕs, soitk′ϕc = kϕs et k′ (ϕc cos(ka)+ϕc sin(ka)) =−k (ϕc sin(ka)−ϕs cos(ka)). Imposant au déterminant de ce système d’être nul,on obtient une relation qui relie k et a, donc l’énergie de la particule et la dimension de la boîte qui la limite. Écrivantcette équation dans le cas d’un puits de potentiel de très grande hauteur (E ′ E donc k′ k) on peut écrire ϕc ϕs et
sin(ka)' 0 ce qui impose la quantification de l’énergie via un nombre entier n selon ka = nπ donc E = n2 h2
2ma2 .
On retrouve ce type de quantification par un nombre quantique principal dans tout problème de physique des particules avecune limitation spatiale imposée à la probabilité de présence des particules (états liés), comme pour l’atome d’Hydrogène.
L’atome d’Hydrogène
Bien que l’étude complète de l’atome d’Hydrogène dans le cadre de la résolution de l’équation de Schrödinger soit possible,elle est longue et nous nous contenterons d’une résolution qualitative, en cherchant l’équivalent d’une « trajectoire circu-laire » dans le plan équatorial z = 0, c’est-à-dire une fonction qui ne dépend que de la variable φ des coordonnées sphériques.
Ainsi, la fonction d’onde Ψ(r,θ,φ) = ϕ(φ)exp
(
iEt
h
)
doit vérifier l’équation− h2
2m1r2
d2ϕdφ2 −
e2
4πε0rϕ(φ) = Eϕ(φ).
Puisque r est une constante, on peut l’écrired2ϕdφ2 +K2ϕ(φ) = 0 à condition de poser K2 =
2mr2
h2
(e2
4πε0r+E
)
. La solution
de cette équation s’écrit ϕ(φ) = ϕ0 cos(Kφ+α) et on ne peut obtenir de solution périodique de période 2π (ou un sous-multiple de 2π) que si K est un entier.
Si on admet la généralisation à la mécanique quantique du résultat classique obtenu pour les trajectoires circulaires newto-
niennes connu sous le nom de théorème du Viriel, Ec =−Ep
2⇒ E =
Ep
2d’où on tire K2 =
2mr
h2
(e2
8πε0
)
=−2mr2
h2E.
On en déduit les quantifications de l’énergie et du rayon atomique pour l’atome d’Hydrogène, en fonction de la valeur
quantifiée de K, qui prend alors le nom de nombre quantique principal, rn = n2r1 avec r1 =8πε0 h2
2me2 = 52 pm et En =−Rn2
avec R =e2
8πε0r1= 13,6 eV.
2La continuité de la probabilité de présence est une exigence physique. La continuité des dérivées de la fonction d’onde l’est aussi, du fait de l’inter-prétation physique des dérivées de celle-ci, en termes de quantité de mouvement.

Les photons 229
29.2 Physique relativiste
29.2.1 Cinématique relativiste
Historique
Les résultats établis à propos des photons ci-dessus ne sont pas compatibles avec la mécanique classique ; en particulier,la relation entre énergie et impulsion des photons n’est pas quadratique (comme en mécanique classique), mais linéaire.De plus, la célérité de propagation des ondes électromagnétiques est une constante indépendante du référentiel galiléenparticulier choisi pour l’évaluer ; ceci contredit la loi classique de composition des vitesses.L’ensemble des résultats a amené la communauté scientifique à s’interroger, à partir de la fin du XIX ième siècle, sur leséventuelles modifications à apporter, soit aux équations de base de la Mécanique, soit aux équations de base de l’Électro-magnétisme (les équations de Maxwell), pour assurer leur compatibilité. Les premiers éléments de réponse furent apportéspar Albert Einstein avec la publication, en 1905, de la théorie de la relativité restreinte, affirmant le caractère exact dusystème d’équations de Maxwell et imposant donc une modification des bases de la mécanique. Signalons simplement que,lors d’un changement de référentiel galiléen, on doit tenir compte simultanément de translations d’espace (identiques aupremier ordre du développement seulement, à celles de la mécanique de Galilée) et de modifications du temps d’horloge.
Invariance de l’intervalle d’espace-temps
Considérons un rayon lumineux issu d’un point origine O à l’instant 0, et arrivant au point d’abscisse x à l’instant t, toutesces coordonnées étant mesurées dans le référentiel (K). On a alors x2−c2t2 = 0. Si le même événement d’arrivée est décritdans le référentiel (K ′) par l’abscisse x′ et l’instant t ′, on a aussi x′2− c2t ′2 = 0. Nous admettrons la généralisation de cettepropriété en affirmant que les transformations d’espace-temps qui accompagne le passage du référentiel (K) au référentiel(K′) doivent former des isométries pour la pseudo-norme x2 + y2 + z2 − c2t2. La recherche d’une telle transformation,linéaire (pour conserver le caractère rectiligne et uniforme du mouvement d’une particule libre par changement de référentielgaliléen), et qui redonne les transformations classiques par passage à la limite des basses vitesses a été effectuée par Poincaréet Lorentz.
Transformation spéciale de Lorentz
Considérons un référentiel (K ′) = (O′x′y′z′) qui se déplace, relativement au référentiel (K) = (Oxyz) à la vitesse ~V = V~ex.Le passage classique (galiléen) du référentiel (K) au référentiel (K ′) se fait par les transformations de Galilée, x′ = x−Vt,y′ = y, z′ = z et t ′ = t. La conservation des composantes y et z doit rester vérifiée dans le domaine relativiste ; on cherche
donc une transformation linéaire de la forme
[ct ′
x′
]
=
[Λ11 Λ12
Λ21 Λ22
][ctx
]
qui conserve la pseudo-norme c2t2− x2.
On vérifie aisément que la transformation spéciale de Lorentz
[Λ11 Λ12
Λ21 Λ22
]
=
[γ −γβ−γβ γ
]
où on a posé β =Vc
et
γ =1
√
1−β2avec donc |Λ| = γ2 (1−β2) = 1 est la seule qui soit compatible avec la conservation de la pseudo-norme
et qui redonne la transformation de Galilée par passage à la limite classique. Finalement, cette transformation de Lorentzs’écrit x′ = γ(x−βct), y′ = y, z′ = z et ct ′ = γ(ct−βx).
Composition des vitesses
Considérant par exemple une particule se déplaçant le long de l’axe (Ox) de la transformation, on obtient pour vitesse de
cette particule dans le référentiel (K ′) l’expression v′ =dx′
dtsoit v′ =
dx−βcdt
dt−β dxc
=v−βc1−β v
c
et on vérifie en particulier que,
si v =±c, v′ = v et la loi relativiste d’addition des vitesses n’est plus incompatible avec la conservation de la vitesse de lalumière par changement de référentiel galiléen.
29.2.2 Électromagnétisme relativiste
Quadrivecteurs
On appelle quadrivecteur toute collection de quatre grandeurs u0,u1,u2,u3 qui, lors d’un changement de référentiel ga-liléen, se transforme comme les quatre composantes x0 = ct,x1 = x,x2 = y,x3 = z du quadrivecteur d’espace-temps qui

230 Manuel de Physique
caractérise un événement. Ainsi, lors du passage du référentiel (K) au référentiel (K ′) évoqué ci-dessus, les composantesdu quadrivecteur changent selon x′0 = γ
(x0−βx1), x′1 = γ
(x2−βx0), x′2 = x2 et x′3 = x3.
Covariance des équations de Maxwell
On peut montrer que la conservation de la forme des équations de Maxwell par changement de référentiel galiléen (onparle de covariance du système d’équations) impose à certaines grandeurs électromagnétiques de s’écrire sous forme dequadrivecteurs. C’est en particulier le cas du quadrivecteur courant ( ji) = (ρc,~j) donc la quadridivergence est d’ailleurs
nulle, du fait de la conservation de la charge électrique (équation de continuité),1c
∂(ρc)∂t
+ div ~j = 0. C’est encore le cas
du quadrivecteur potentiel (Ai) =
(Vc
,~A
)
dont la quadridivergence est aussi nulle, dans le cadre de la jauge de Lorentz,
1c
∂(
Vc
)
∂t+div ~A = 0
Changement de référentiel pour le champ
Puisqu’on connaît la forme du changement de référentiel pour les potentiels, on peut en déduire celle du changementde référentiel pour les champs électrique et magnétique. Nous nous contenterons ici d’affirmer la forme de ces lois dechangement de référentiel :
E ′x = Ex E ′y = γ(Ey +βcBz) E ′z = γ(Ez−βcBy) (29.7)
pour le champ électrique dans (K ′), et :
B′x = Bx B′y = γ(By−βEz
c) B′z = γ(Bz +β
Ey
c) (29.8)
pour le champ magnétique dans (K ′). En particulier, la limite non relativiste de ces équations s’écrit ~B′= ~B et ~E ′= ~E +~V ∧~Bsi on note ~V la vitesse du référentiel (K ′) relativement au référentiel (K).
30Dispersion et guidage des ondes
WERNER HEISENBERG (1901–1976)
30.1 Dispersion des ondes
30.1.1 Cas de dispersion
Après l’étude des ondes électromagnétiques non dispersées se propageant dans le vide illimité, ce chapitre aborde l’étude dela dispersion des ondes électromagnétiques. Nous étudierons la dispersion des ondes se propageant dans le vide limité pardes parois métalliques : il s’agit des guides d’onde qui représentent l’équivalent des câbles (en Électronique) et des fibresoptiques (en Optique) dans les domaines du transport de la puissance et de l’information par ondes électromagnétiqueshyperfréquences1. On rencontre aussi de nombreux autres cas de dispersion, notamment dans le cas de la propagationd’ondes se propageant dans un milieu illimité mais différent du vide ; certains cas de dispersion sont présentés dans desdocuments annexes..
30.1.2 Étude de la dispersion
Équation de dispersion
Rappelons ici que l’étude de la dispersion est celle de la relation entre vecteur d’onde~k et pulsation ω, sous forme de la
relation de dispersion ω = ω(~k), d’où on déduit la vitesse de phase vφ et la vitesse de groupe vg de l’onde, vφ =ωkr
et
vg =dωdkr
en fonction de la partie réelle kr du vecteur d’onde, dirigé selon la direction de propagation de l’onde. La vitesse
de groupe s’identifie en général à la vitesse de l’énergie.
1Le domaine des hyperfréquences comporte l’étude de l’ensemble des ondes électromagnétiques de haute fréquence (supérieure à 109 Hz par exemple).

232 Manuel de Physique
Atténuation de l’onde
On a déjà vu qu’en présence d’une partie imaginaire du vecteur d’onde k =±(kr− iki), on observe une atténuation expo-nentielle de l’amplitude de l’onde (onde évanescente) exp(−i(kr− iki) z) = exp(−ikrz)exp(−kiz) où la distance caracté-
ristique d’atténuation de l’onde δ est donnée par δ =1ki
.
Remarquons que les parties réelle et imaginaire du vecteur d’onde doivent avoir des signes opposés pour rendre compted’une atténuation ; si on se place par exemple dans une situation telle que kr > 0 et ki > 0, on décrit une onde qui se propagedans le sens positif de l’axe de propagation, avec amplification de son amplitude.
30.1.3 Les guides d’ondes
Présentation
On rencontre le vocabulaire du guidage d’ondes dans toutes les situations où un dispositif assure le guidage d’une onde(quelle que soit sa nature) le long d’une trajectoire choisie par l’utilisateur. Dans le domaine des ondes acoustiques, unsimple tuyau est un guide pour les ondes sonores. Dans le domaine optique, une fibre optique guide les ondes lumineusesau voisinage de son axe par réfractions successives (fibres à saut d’indice) ou par réfraction progressive (fibres à gradientd’indice). En ce qui concerne les ondes électromagnétiques de haute fréquence, le guidage peut être assuré par réflexionsmétalliques successives sur deux miroirs placés en vis-à-vis ; c’est le guide d’ondes le plus simple qu’on puisse imaginer(cf. fig. 30.1).
a
FIG. 30.1 – Guidage d’onde entre deux miroirs
Pour assurer un guidage des ondes dans une direction unique, un guide d’onde sera aussi refermé latéralement, formantainsi une cavité bordée de conducteurs (traités dans la suite dans le cadre du modèle du conducteur parfait) dans toutes lesdirections sauf celle réservée à la propagation. Nous n’étudierons de façon générale dans la suite que des cavités à sectionrectangulaire.
Fréquence de coupure
L’onde électromagnétique qui se propage dans le vide intérieur à une telle cavité est la superpositions d’ondes incidenteset réfléchies ; ce n’est donc pas une onde plane et, bien que la propagation se fasse dans le vide, on s’attend en général àune dispersion des ondes. Notons cependant dès à présent que l’onde qui subit, sur la figure 30.1, des réflexions successivessur les limites haute et basse du guide, doit nécessairement correspondre, pour la seule direction verticale, à une ondestationnaire entre ces deux plans, de sorte que les réflexions successives ne mènent pas à des interférences destructives.Il est donc nécessaire que la longueur d’onde2 λ des ondes planes qui se réfléchissent successivement en haut et bas duguide vérifie une relation du type 2a = pλ, où p est un entier et a la distance entre les plans, de sorte que la différence dephase après un aller et retour reste multiple de 2π. On en déduit que la longueur d’onde λ est bornée supérieurement par
2a et donc que la pulsation de l’onde est bornée inférieurement ω > ωc =πca
, faisant apparaître une pulsation de coupure
2Ici et dans ce qui suit, conformément au vocabulaire déjà défini en optique, le terme ‘longueur d’onde’ désigne la période spatiale λ qu’aurait, dans levide, une onde de même fréquence : λ = 2π c
ω . Cette longueur d’onde ‘dans le vide’ est éventuellement différente des périodicités spatiales qu’on pourradéfinir pour l’onde dispersée de pulsation ω.
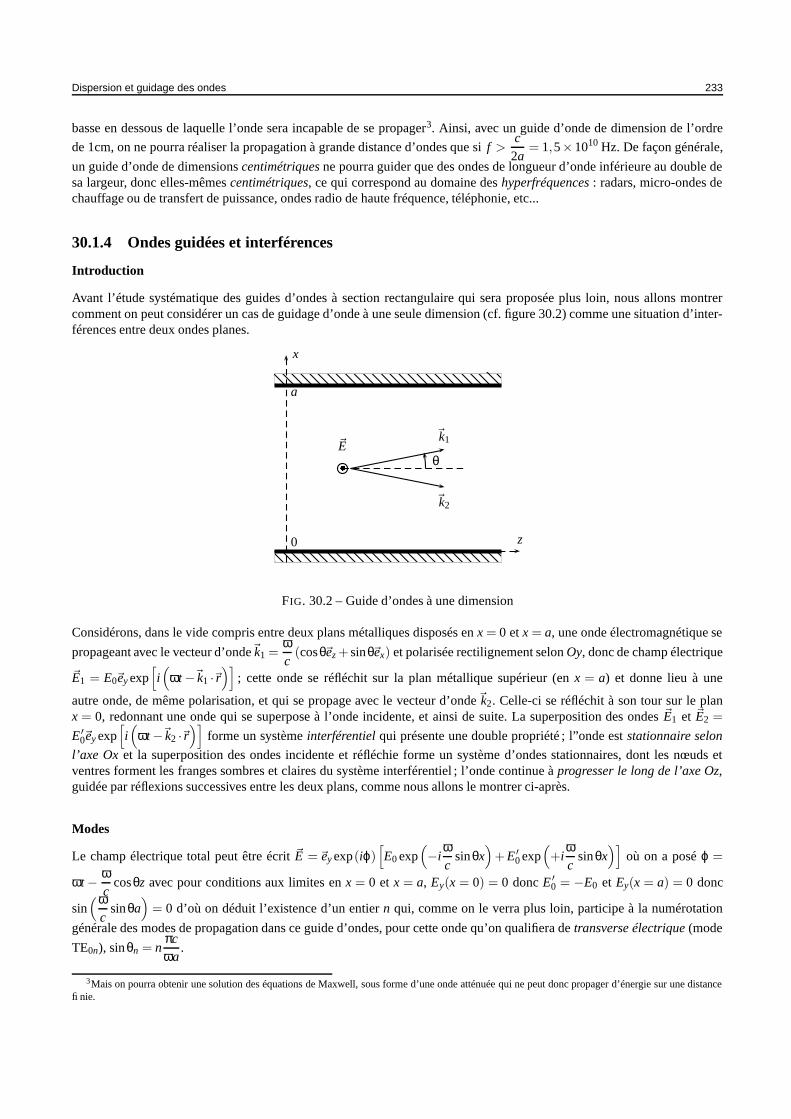
Dispersion et guidage des ondes 233
basse en dessous de laquelle l’onde sera incapable de se propager3. Ainsi, avec un guide d’onde de dimension de l’ordre
de 1cm, on ne pourra réaliser la propagation à grande distance d’ondes que si f >c
2a= 1,5×1010 Hz. De façon générale,
un guide d’onde de dimensions centimétriques ne pourra guider que des ondes de longueur d’onde inférieure au double desa largeur, donc elles-mêmes centimétriques, ce qui correspond au domaine des hyperfréquences : radars, micro-ondes dechauffage ou de transfert de puissance, ondes radio de haute fréquence, téléphonie, etc...
30.1.4 Ondes guidées et interférences
Introduction
Avant l’étude systématique des guides d’ondes à section rectangulaire qui sera proposée plus loin, nous allons montrercomment on peut considérer un cas de guidage d’onde à une seule dimension (cf. figure 30.2) comme une situation d’inter-férences entre deux ondes planes.
z
~Eθ
~k1
~k2
x
0
a
FIG. 30.2 – Guide d’ondes à une dimension
Considérons, dans le vide compris entre deux plans métalliques disposés en x = 0 et x = a, une onde électromagnétique se
propageant avec le vecteur d’onde~k1 =ωc
(cosθ~ez + sinθ~ex) et polarisée rectilignement selon Oy, donc de champ électrique
~E1 = E0~ey exp[
i(
ωt−~k1 ·~r)]
; cette onde se réfléchit sur la plan métallique supérieur (en x = a) et donne lieu à une
autre onde, de même polarisation, et qui se propage avec le vecteur d’onde~k2. Celle-ci se réfléchit à son tour sur le planx = 0, redonnant une onde qui se superpose à l’onde incidente, et ainsi de suite. La superposition des ondes ~E1 et ~E2 =
E ′0~ey exp[
i(
ωt−~k2 ·~r)]
forme un système interférentiel qui présente une double propriété ; l”onde est stationnaire selon
l’axe Ox et la superposition des ondes incidente et réfléchie forme un système d’ondes stationnaires, dont les nœuds etventres forment les franges sombres et claires du système interférentiel ; l’onde continue à progresser le long de l’axe Oz,guidée par réflexions successives entre les deux plans, comme nous allons le montrer ci-après.
Modes
Le champ électrique total peut être écrit ~E =~ey exp(iϕ)[
E0 exp(
−iωc
sinθx)
+E ′0 exp(
+iωc
sinθx)]
où on a posé ϕ =
ωt− ωc
cosθz avec pour conditions aux limites en x = 0 et x = a, Ey(x = 0) = 0 donc E ′0 = −E0 et Ey(x = a) = 0 donc
sin(ω
csinθa
)
= 0 d’où on déduit l’existence d’un entier n qui, comme on le verra plus loin, participe à la numérotation
générale des modes de propagation dans ce guide d’ondes, pour cette onde qu’on qualifiera de transverse électrique (mode
TE0n), sinθn = nπcωa
.
3Mais on pourra obtenir une solution des équations de Maxwell, sous forme d’une onde atténuée qui ne peut donc propager d’énergie sur une distancefinie.

234 Manuel de Physique
Équation de dispersion
Le champ électrique total de l’onde s’écrit donc ~E = 2E0 sinnπx
a~ey exp
[i(ωt− k′nz
)], où on a pour le vecteur d’onde k′ la
relation k′2 =ω2
c2 cos2 θn =ω2
c2
(
1− n2π2c2
ω2a2
)
qui prend encore la forme de l’équation de dispersion c2k′2 = ω2−ω2n avec
ωn =nπca
. On ne peut avoir de propagation que si k′2 > 0 donc si ω > ωn ; la pulsation ωn est une pulsation de coupure
basse, conformément à la prévision générale faite en introduction.
Franges et puissance transportée
Un calcul direct de champ magnétique peut être fait à partir de l’équation de Maxwell-Faraday, ~B =1−iω−→rot~E d’où on
déduit aisément Bx =−k′nω
2E0 sinnπxa
exp(iϕ) et Bz = − nπiaω
2E0 cosnπxa
exp(iϕ) ; le vecteur de Poynting comprend alors
deux composantes, Rx = −4E20nπ
µ0aωcos
nπxa
sinnπxa
cosϕsinϕ dont la moyenne est nulle (aller et retour de l’onde entre
les plans métalliques), et Rz =4E2
0 k′nµ0ω
sin2 nπxa
cos2 ϕ dont la moyenne décrit la propagation de l’énergie dans le sens du
guidage de l’onde, avec des variations spatiales de la puissance transportée (franges) qu’on écrira 〈Rz〉 = R0 sin2 nπxa
=
R0
(
1− cos2πnxa
)
et l’interfrange est ici égal àan
, ce qui correspond à n interfranges exactement entre les plans métalliques.
Le numéro de mode n est donc directement lié au nombre n−1 de franges sombres situées entre les franges sombres placéessur les plans métalliques. Sur la figure 30.3, on a représenté les oscillations de l’amplitude du champ électrique entre lesdeux miroirs pour les trois premiers modes.
n = 1 n = 2 n = 3
FIG. 30.3 – Modes transverses électriques
30.2 Étude générale d’un guide d’ondes
30.2.1 Modes d’un guide d’ondes rectangulaire
Présentation
Considérons un guide d’ondes à section rectangulaire, représenté en coupe sur la figure 30.4. La propagation dans l’es-pace intérieur d’une onde de pulsation ω, de vecteur d’onde k, sera décrite par le champ ~E = ~E0 (x,y)exp [i(ωt− kz)],~B = ~B0 (x,y)exp [i(ωt− kz)], où la recherche des modes de propagation de l’onde (non plane) guidée est la recherche dessolutions les plus générales des équations de Maxwell, de la forme ci-dessus.
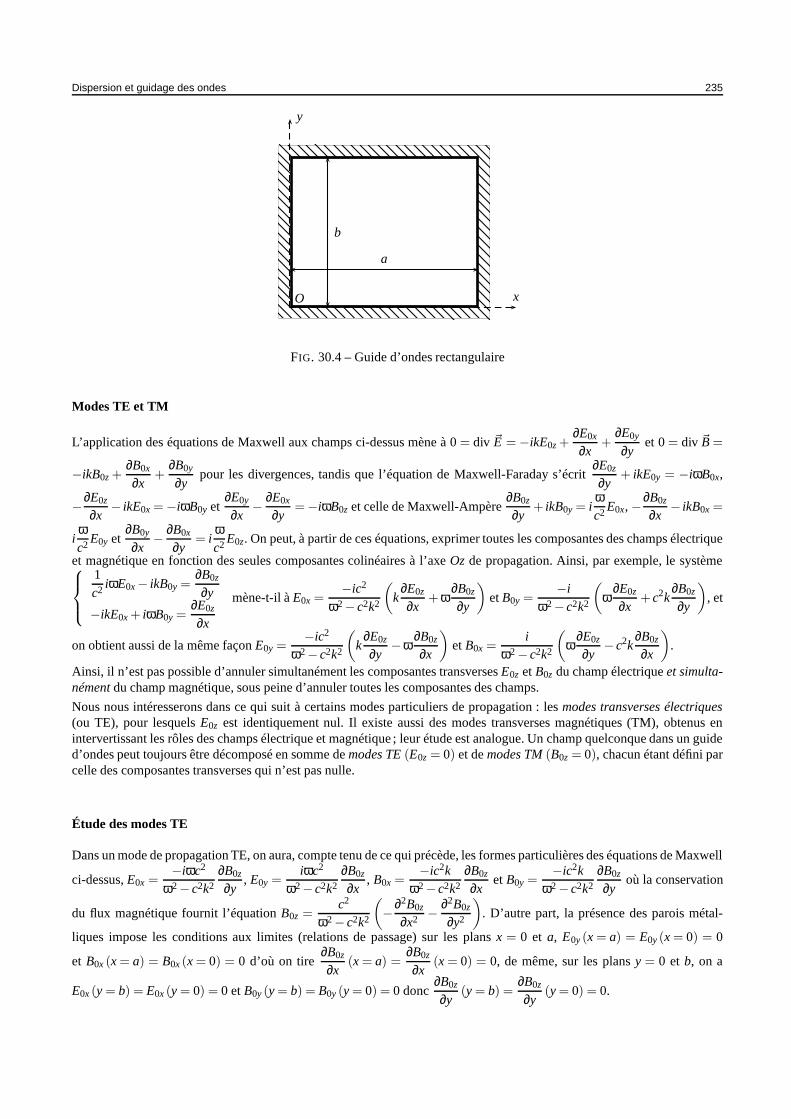
Dispersion et guidage des ondes 235
a
b
x
y
O
FIG. 30.4 – Guide d’ondes rectangulaire
Modes TE et TM
L’application des équations de Maxwell aux champs ci-dessus mène à 0 = div ~E =−ikE0z +∂E0x
∂x+
∂E0y
∂yet 0 = div ~B =
−ikB0z +∂B0x
∂x+
∂B0y
∂ypour les divergences, tandis que l’équation de Maxwell-Faraday s’écrit
∂E0z
∂y+ ikE0y = −iωB0x,
−∂E0z
∂x− ikE0x =−iωB0y et
∂E0y
∂x− ∂E0x
∂y=−iωB0z et celle de Maxwell-Ampère
∂B0z
∂y+ ikB0y = i
ωc2 E0x,−∂B0z
∂x− ikB0x =
iωc2 E0y et
∂B0y
∂x− ∂B0x
∂y= i
ωc2 E0z. On peut, à partir de ces équations, exprimer toutes les composantes des champs électrique
et magnétique en fonction des seules composantes colinéaires à l’axe Oz de propagation. Ainsi, par exemple, le système
1c2 iωE0x− ikB0y =
∂B0z
∂y
−ikE0x + iωB0y =∂E0z
∂x
mène-t-il à E0x =−ic2
ω2− c2k2
(
k∂E0z
∂x+ω
∂B0z
∂y
)
et B0y =−i
ω2− c2k2
(
ω∂E0z
∂x+ c2k
∂B0z
∂y
)
, et
on obtient aussi de la même façon E0y =−ic2
ω2− c2k2
(
k∂E0z
∂y−ω
∂B0z
∂x
)
et B0x =i
ω2− c2k2
(
ω∂E0z
∂y− c2k
∂B0z
∂x
)
.
Ainsi, il n’est pas possible d’annuler simultanément les composantes transverses E0z et B0z du champ électrique et simulta-nément du champ magnétique, sous peine d’annuler toutes les composantes des champs.
Nous nous intéresserons dans ce qui suit à certains modes particuliers de propagation : les modes transverses électriques(ou TE), pour lesquels E0z est identiquement nul. Il existe aussi des modes transverses magnétiques (TM), obtenus enintervertissant les rôles des champs électrique et magnétique ; leur étude est analogue. Un champ quelconque dans un guided’ondes peut toujours être décomposé en somme de modes TE (E0z = 0) et de modes TM (B0z = 0), chacun étant défini parcelle des composantes transverses qui n’est pas nulle.
Étude des modes TE
Dans un mode de propagation TE, on aura, compte tenu de ce qui précède, les formes particulières des équations de Maxwell
ci-dessus, E0x =−iωc2
ω2− c2k2
∂B0z
∂y, E0y =
iωc2
ω2− c2k2
∂B0z
∂x, B0x =
−ic2kω2− c2k2
∂B0z
∂xet B0y =
−ic2kω2− c2k2
∂B0z
∂yoù la conservation
du flux magnétique fournit l’équation B0z =c2
ω2− c2k2
(
−∂2B0z
∂x2 −∂2B0z
∂y2
)
. D’autre part, la présence des parois métal-
liques impose les conditions aux limites (relations de passage) sur les plans x = 0 et a, E0y (x = a) = E0y (x = 0) = 0
et B0x (x = a) = B0x (x = 0) = 0 d’où on tire∂B0z
∂x(x = a) =
∂B0z
∂x(x = 0) = 0, de même, sur les plans y = 0 et b, on a
E0x (y = b) = E0x (y = 0) = 0 et B0y (y = b) = B0y (y = 0) = 0 donc∂B0z
∂y(y = b) =
∂B0z
∂y(y = 0) = 0.

236 Manuel de Physique
Recherche des solutions des équations de propagation
Pour déterminer une base de l’ensemble des solutions de ces équations, on peut chercher B0z sous la forme f (x)g(y), menant
àω2
c2 − k2 =− f ′′
f− g′′
g, et les deux quotients f ′′/ f et g′′/g sont donc tous les deux constants. Compte tenu des conditions
aux limites sur les parois métalliques, les solutions exponentielles réelles sont exclues et ces deux constantes f ′′/ f et g′′/gseront négatives. On écrira donc f ′′/ f = −K2
x et g′′/g = −K2y , avec pour solution générale des équations de propagation
f (x) = f0 cos(Kxx+ϕ) et g(y) = g0 cos(Kyy+ψ), avec aussi les conditions aux limites en x = 0 et y = 0 qui imposent
ϕ = ψ = 0, tandis qu’en x = a et y = b on doit avoir f ′(a) = g′(b) = 0, d’où encore Kx = nπa
et Ky = mπb
où n et m sont
entiers. Enfin, la relation de dispersion pour ce mode (mode transverse électrique n,m (TEnm) s’écrit K2x +K2
y =ω2
c2 −k2 =
ω2mn
c2 =(nπ
a
)2+(mπ
b
)2.
MODES TRANSVERSES ÉLECTRIQUES
Dans un guide d’ondes, un mode transverse électrique est repéré par les deux entiers n≥ 0 et m≥ 0 (avec(n,m) 6= (0,0)), où le nombre d’annulations du champ électrique transverse entre x = 0 et x = a est égalà n−1, et le nombre d’annulations du champ électrique transverse entre y = 0 et y = b est égal à m−1.Pour ce mode, l’équation de dispersion s’écrit c2k2 = ω2−ω2
mn où la pulsation de coupure basse du mode
vaut ωmn = πc
√
n2
a2 +m2
b2 . Dans un tel mode, le champ magnétique a pour composante selon l’axe Oz du
guide Bz = N0z cos(nπx
a
)
cos(mπy
b
)
exp [i(ωt− kz)] ; les autres composantes des champs s’en déduisent.
On remarquera que la plus petite pulsation de coupure possible est atteinte lorsque m = 0 (mode TE0n). On pourrait biensûr proposer une étude analogue pour le mode transverse magnétique, avec le même type de relation de dispersion.
Étude du mode TE0n
On étudie en détail le mode TE0n ; les champs (réels) associés à ce mode valent alors ~E = E0 sin(πx
a
)
cos(ωt− kz)~uy et
~B = −E0
ω
[
k sin(πx
a
)
cos(ωt− kz)~ux +πa
cos(πx
a
)
sin(ωt− kz)~uz
]
, avec pour équation de dispersion ω2 = c2k2 +π2c2
a2 .
Les vitesses de phase et de groupe s’expriment alors selon vg = c
√
1− π2c2
a2ω2 < 1 et vφ =c2
vg.
On peut aussi déterminer le vecteur de Poynting moyen (en effectuant successivement les moyennes temporelles et spatiale
–entre x = 0 et x = a–), soit 〈~R〉 = k4µ0ω
E20~uz et on calcule de même la densité volumique d’énergie électromagnétique
moyenne 〈wem〉=E2
0
8
(
ε0 +1µ0
(k2
ω2 +π2c2
a2ω2
))
.
Compte tenu de la relation de dispersion, on trouve sans peine ~ve =〈~R〉〈wem〉
= vg~uz ; dans le guide d’ondes, l’énergie se
propage dans le sens de propagation du champ, à la vitesse de groupe.Par contre, le système est dispersif puisque vφ et vg dépendent de la fréquence du signal qu’on cherche à propager dans leguide ; les signaux polychromatiques seront donc déformés sauf dans le cas particulier où toutes les composantes de Fourierdu signal vérifient ω ω0, car alors on retrouve une situation de propagation sans dispersion (vφ ' vg ' c).
31Ondes et milieux transparents
HANNES ALFVÉN (1908—1995)
31.1 Ondes dans les milieux transparents
31.1.1 Le modèle de l’électron élastiquement lié
Les milieux transparents
Les ondes électromagnétiques sont susceptibles de se propager non seulement dans le vide, mais aussi dans de nombreuxmilieux matériels peu denses et amorphes : gaz, liquides, solides amorphe (comme le verre) avec des propriétés qui sontsemblables à celles qu’on observe dans le vide : maintien de la polarisation, vitesse de propagation un peu inférieure à c,avec un écart d’autant plus faible au comportement du vide que le milieu est moins dense. Le modèle développé ici présenteune introduction à l’étude des ondes électromagnétiques dans ces milieux qui présentent le point commun important d’êtreisolants, la répartition des charges et des courants suivant l’organisation moléculaire de la matière.Au contraire des métaux (déjà étudiés) et des plasmas (qui sont décrits plus bas), il n’existe pas dans ces matériaux d’élec-trons libres susceptibles d’être mis en mouvement sur une grande échelle. Toutefois, la mobilisation des électrons liés auxatomes et molécules du milieu n’est pas négligeable ; les déplacements de charges qui résultent du passage de l’onde sonteux-mêmes susceptibles de modifier l’onde électromagnétique elle-même et nous allons développer ici un modèle simplepour l’étude de la propagation des ondes électromagnétiques dans ces milieux.
Le modèle
Nous considérerons ici un milieu matériel dans lequel chaque atome (à raison de n atomes par unité de volume) possèdeun électron périphérique susceptible d’être mobilisé par le passage de l’onde, de champs ~E et ~B. Nous écrirons l’équation
du mouvement de cet électron, de masse m et de charge −e, sous la forme m∂~v∂t
= −e(
~E +~v∧~B)
+ ~fr + ~fa où la force
~fr désigne la force de rappel de l’électron vers le centre O de l’atome étudié et la force ~fa la force d’amortissement liée

238 Manuel de Physique
aux pertes d’énergie par rayonnement que subit toute charge électrique en mouvement non uniforme (ce rayonnement seraétudié ultérieurement)1.Le modèle prend le nom de modèle élastiquement lié en prenant pour force de rappel la forme simplifiée ~fr = −mω2
0~rcomme si on décrivait une force élastique de constate de raideur ke et de pulsation de résonance ω0 =
√
ke/m. Pour des
raisons de simplicité, on décrit encore la force d’amortissement dans un modèle de frottement fluide selon ~fa =−mτ~v où τ
est la durée caractéristique de l’amortissement du mouvement électronique sur sa trajectoire.
L’onde électromagnétique étudiée
L’onde étudiée prendra a priori la forme d’une OPPM, à savoir ~E = ~E0 exp [i(ωt− kz)] et ~B = ~B0 exp [i(ωt− kz)] puisquele caractère isotrope du milieu permet de choisir arbitrairement la direction de propagation de l’onde étudiée. Nous suppo-serons encore que l’amplitude du mouvement des électrons reste de l’ordre de grandeur des dimensions atomiques, ce quipermet de considérer les champs ~E et ~B comme quasiment uniformes sur l’ensemble du déplacement électronique ; dansl’expression ci-dessus, z désignera donc la coordonnée de l’atome, et sera considéré comme un paramètre constant pour
un électron donné. Enfin, l’équation de Maxwell-Faraday prend toujours la forme ~B =kω
~ez ∧ ~E pour cette OPPM ; si on
suppose encore que ‖~v‖ vφ =ωk
, on peut négliger la force magnétique due à l’onde devant la force électrique qui lui est
associée. Ainsi, l’équation du mouvement de l’électron s’écrit m∂~v∂t
=−e~E−mω20~r−
mτ~v.
Courants et charges liées
Dans le cadre du régime sinusoïdal permanent, on en déduit ~v = −iωem
~E
ω20−ω2 + i ω
τet la densité volumique de cou-
rants ~j = −ne~v correspondante s’écrit ~j = γ(ω)~E, avec pour conductivité complexe un passe-bande d’ordre 2, γ(ω) =ne2
miω
ω20−ω2 + i ω
τ. Par contre, la densité volumique de charges reste nulle2.
Permittivité complexe
L’équation de Maxwell-Ampère prend alors la forme particulière −→rot~B = µ0ε0
(
iω~E +γ(ω)
ε0
~E
)
que nous choisirons dans la
suite d’écrire sous la forme −→rot~B = µ0ε0εr(ω)∂~E∂t
avec εr(ω) = 1− iγ(ω)
ωε0, définissant la permittivité diélectrique complexe
équivalente, εr(ω), dans un milieu régi par le modèle de l’électron élastiquement lié. On adopte pour cette permittivité
complexe la notation εr(ω) = 1+ne2
mε0
1
ω20−ω2 + i ω
τ
3.
31.1.2 Ondes dans les milieux transparents
Indice optique
Les équations de propagation dans un milieu transparent peuvent, si ce milieu est bien décrit par le modèle ci-dessus (nouspoursuivrons dans ce qui suit avec un modèle à un seul électron), être décrites par analogie avec les équations dans le videen remplaçant simplement ε0 par ε0εr(ω) ; on posera donc n2(ω) = εr(ω) en choisissant pour indice optique du milieutransparent celle des deux solutions de cette équation qui présente une partie réelle positive. On en déduit immédiatement
l’équation de dispersion ω2 =k2
ε0µ0εr(ω)=
c2k2
n2(ω).
1Dans cette équation, conformément aux remarques déjà faites au chapitre précédent, on confond l’accélération des ions et des électrons avec la dérivée
partielle∂~vi
∂tou
∂~ve
∂tcorrespondante, ce qui revient à négliger l’accélération convective, donc à ne considérer que des mouvements de faible amplitude.
2On peut montrer ce résultat en adoptant la même démarche que celle qui a déjà conduit à la même propriété pour les métaux ; la démonstration en estidentique, basée sur l’existence d’une partie réelle non nulle pour la conductivité à toute fréquence.
3Pour un modèle à plusieurs électrons mobilisables, on trouverait de même εr(ω) = 1+∑k
ne2
mε0
1
ω2k −ω2 + i ω
τk
.

Ondes et milieux transparents 239
Ainsi, l’équivalent de la célérité c dans le vide est la grandeur c/n(ω) dont on remarquera tout de même qu’elle est engénéral complexe. On remarquera que, loin de la résonance, le facteur d’amortissement iω/τ peut être négligé et la grandeur
n(ω) est réelle : le milieu est alors effectivement non absorbant et la vitesse de phase de l’onde est bien vφ =c
n(ω).
Structure et énergie des OPPM
Les équations de Maxwell montrent alors pour l’onde électromagnétique une structure semblable à celle des ondes dans le
vide,~ez ·~E0 = 0,~ez ·~B0 = 0, ~B0 =n(ω)
c~ez∧~E0 ; enfin, le transport d’énergie est caractérisé par le vecteur de Poynting moyen
〈~R〉= 12µ0
Re(
~E0∧~B∗0)
=c
2µ0Re(n(ω))
(
~E0 ·~E∗0)
~ez ; on voit à nouveau l’importance de l’étude de la partie réelle de n(ω).
Équation de dispersion
Étudions le comportement particulier de l’indice optique à suffisamment basse fréquence pour supposer que ω/τ ω20. La
permittivité complexe prend alors la forme équivalente réelle εr(ω) ' 1 +ne2
mε0
1
ω20−ω2
et le milieu est transparent, avec
pour expression de l’indice optique n(ω)'√
1+ne2
mε0
1
ω20−ω2
. Un développement au premier ordre (pour ω assez faible)
de cette expression peut être réécrit n(ω) '√
1+ne2
mε0ω20
(
1+ω2
ω20
)
'√
1+ne2
mε0ω20
(1+aω2) où le coefficient a peut
aisément être déterminé. Nous choisirons d’écrire cette expressions sous la forme classique (développement de Cauchy de
l’indice optique, dans le domaine de transparence normale) n(ω)' n0 +αλ2 où, selon l’usage optique, on a noté λ = 2πc/ω
la longueur d’onde adoptée, dans le vide, par une onde de pulsation ω.
31.2 Ondes dans un plasma
31.2.1 Les plasmas
Le modèle adopté
Un plasma est un milieu ionisé, en totalité ou en partie. Nous considérerons dans la suite un plasma peu dense, de manièreà négliger les interactions entre particules du milieu, constitué de n+ ions par unité de volume (charge +q, masse M) et den− électrons par unité de volume (charge−q, masse mM).Nous considérerons que les seules causes du déplacement de ces ions et de ces électrons résident dans le champ électro-magnétique qui règne dans le milieu ; compte tenu de la remarque déjà faite lors du chapitre précédent, on peut négliger laforce magnétique devant la force électrique tant que les particules du plasma restent non relativistes ; on écrira donc pour
les équations dynamiques du plasma4 m∂~ve
∂t=−q~E et M
∂~vi
∂t= +q~E
Puisque M m, on pourra toujours considérer que ‖~vi‖ ‖~ve‖ : la conduction est essentiellement le fait des électrons,
ce qui permet d’écrire ~j = −n−q~ve donc∂~j∂t
=n−q2
m~E tandis que la densité volumique de charge prend la forme ρ =
q(n+−n−) où, pour la même raison que ci-dessus, nous considérerons en général que n+ est une constante : la mobilitédes électrons est bien supérieure à celle des ions. Naturellement, le plasma reste un milieu globalement neutre et n+ est,en moyenne, égal à n− ; par contre, cette relation n’est pas forcément valable en chaque point et à chaque instant dans leplasma. On choisira donc de noter dans la suite n+ = n0 et n− = n0 +∆n, ce qui permet de réécrire la densité volumique de
charge ρ =−q∆n et, au premier ordre5, la densité volumique de courant donnée par∂~j∂t
=n0q2
m~E.
4Ici encore, on confond l’accélération des ions et des électrons avec la dérivée partielle ∂~vi∂t ou ∂~ve
∂t , évitant de traiter les mouvements de grande amplitudedes électrons (et les effets linéaires associés). Cette approximation impose de ne pas se placer au voisinage de la pulsation de résonance du mouvementdes électrons, qui sera établie plus loin sous le nom de pulsation de plasma ωp.
5Puisque les fluctuations ∆n sont des infiniment petits au même titre que ~ve ; ainsi, le produit ∆n~ve est un terme du second ordre, qui doit être négligéici.

240 Manuel de Physique
Exemples
La haute atmosphère (ionosphère) est ionisée par le rayonnement issu du Soleil et constitue un bon exemple de plasma. Tousles rayonnements électromagnétiques issus de la Terre interagissent potentiellement avec ce plasma, et il est donc nécessairede déterminer les conditions de cette interaction.En particulier, montrera qu’un tel plasma est opaque dans certains domaines de fréquence ; la couche ionosphérique agitalors comme un miroir disposé en haute altitude (50 km environ) qui guide les ondes électromagnétiques et leur permetd’atteindre, par réflexions multiples, des points situés hors de portée directe de l’émetteur.De même, les océans peuvent être décrits par un modèle électromagnétique proche de celui des plasmas. L’ensemble de lasurface de la Terre (qui contient surtout des océans) de la la haute atmosphère forme un guide d’ondes susceptible d’amenercertaines ondes de basse fréquence à faire plusieurs fois le tour de la Terre (ondes de Schuman).
Pulsation de plasma
Considérons le cas des oscillations propres du plasma, en l’absence de toute onde imposée de l’extérieur. Ces oscillations
sont solutions de l’équation de conservation de la charge électrique, qu’on écrira div∂~j∂t
= q∂2∆n∂t2 donc
n0q2
mdiv ~E =
−qn0q2
mε0∆n = q
∂2∆n∂t2 . On reconnaît une équation d’oscillation,
∂2∆n∂t2 +
n0q2
mε0∆n = 0 qui définit la pulsation de résonance
du plasma ou pulsation de plasma :
ω2p =
n0q2
mε0(31.1)
Ainsi, dans l’ionosphère, on adopte en général la valeur n0 = 1011 m−3 d’où une fréquence propre des oscillations de plasma
de l’ordre de grandeur deωp
2π= 2,8 MHz.
31.2.2 Équations constitutives des ondes dans un plasma
Les équations dynamiques
En présence d’une onde de champs ~E et ~B, mais aussi éventuellement d’un champ magnétique statique ~B0 (par exemplele champ magnétique terrestre), on doit modifier l’expression de la force de Lorentz subie par les électrons, −q~E →−q(
~E +~v∧[
~B+~B0
])
avec comme on l’a déjà dit ‖~v∧~B‖ ‖~E‖, et les équations du mouvement des électrons du plasma
deviennent ~j =−n0q~v doncm−n0q
∂~j∂t
=−q
[
~E +1−n0q
~j∧~B0
]
puisqu’on néglige la force magnétique due à l’onde –mais
pas celle due au champ statique– devant la force électrique.
La conductivité
Nous ne chercherons les solutions de cette équation que dans le cas du régime sinusoïdal permanent, la pulsation ω étanta priori différente de la pulsation des oscillations propres du plasma6. Sauf en 31.2.2 et 31.2.4, nous négligerons l’effet du
champ magnétique statique ~B0 en écrivantm−n0q
∂~j∂t
= −q~E donc ~j =n0q2
imω~E, qui peut prendre la forme ~j = γ(ω)~E déjà
citée au chapitre précédent ; nous choisirons plutôt d’écrire µ0~j =µ0n0q2
imω~E = −
ω2p
ω2 iωε0~E, en vue du développement de
l’équation de Maxwell-Ampère, avec µ0γ(ω) = − iωc2
ω2p
ω2 . Cette expression permet de regrouper le courants de conduction
et le courant de déplacement de l’équation de Maxwell-Ampère sous la forme factorisée µ0~j +1c2
∂~E∂t
=iωc2
(
1−ω2
p
ω2
)
.
6Cette pulsation propre ωp constitue, comme on pouvait s’y attendre, une pulsation de résonance. L’étude de la propagation d’une onde à une pulsationtrès voisine de la pulsation de plasma ne peut donc plus négliger les effets non linéaires et les collisions, compte tenu de la grande amplitude attendue pourles oscillations. Le modèle ci-dessus ne s’applique donc pas lorsque ω' ωp.

Ondes et milieux transparents 241
Cas d’un champ statique longitudinal
En présence du champ statique ~B0, cette équation devient µ0~j = µ0γ(ω)~E +γ(ω)
n0q~B0∧µ0~j ; nous nous placerons dans la suite
dans le cas où le champ est longitudinal, c’est-à-dire colinéaire à la direction de propagation des ondes électromagnétiques :
~k est colinéaire à ~B0. La résolution de ce système linéaire est simple :~x = a~y+b~uz∧~x
~x ·~uz = 0
⇒~uz∧~x = a~uz∧~y−b~x ; on en
déduit immédiatement ~x = a~y+b~uz∧~y
1+b2 ou, dans le cas qui nous intéresse, a = µ0γ(ω) = −iωc2
ω2p
ω2 , b =γ(ω)B0
n0q= −i
ωc
ω
où on a noté la pulsation associée au champ magnétique (pulsation cyclotron) ωc =qB0
mce qui permet d’écrire enfin
µ0~j =− iωc2
ω2p
ω2
1
1− ω2c
ω2
(
~E− iωc
ω~uz∧~E
)
que nous noterons dans la suite µ0~j =− iωc2
ω′2pω2
(
~E− iα~uz∧~E)
où ω′p > ωp.
31.2.3 Propagation d’ondes
Propagation en l’absence de champ statique
Nous revenons ici au cas où B0 = 0 donc ωc = 0 ou, si on préfère, ω′p = ωp et α = 0. L’équation de Maxwell-Ampère
devient, pour une OPPM, −i~k∧~B =iωc2
(
1−ω2
p
ω2
)
~E tandis que l’équation de Maxwell-Gauss devient ρ =−iε0~k ·~E = 0 et
(sauf si ω = ωp), le plasma reste localement neutre pour des petites oscillations, et les champs ~E et ~B sont transverses.
Fréquence de coupure
Les équations de Maxwell-Faraday et Maxwell-Ampère s’écrivent maintenant−i~k∧~B =iωc2
(1−ω2
p/ω2)~E et~k∧~E = ω~B
dont la comparaison mène directement à l’équation de dispersion c2k2 = ω2−ω2p. Cette équation de dispersion, dite de
Klein-Gordon est formellement identique à celle qui a été déterminée pour les guides d’onde ; on en déduit des propriétésanalogues pour la propagation, en particulier l’existence d’une fréquence de coupure basse, ω≥ ω p et les expressions des
vitesses de groupe et de phase vg = c√
1−ω2p/ω2 ≤ c et vφ = c2/vg.
Absorption
Pour ω < ωp, le milieu est absorbant (ou opaque) aux ondes électromagnétiques puisque la solution de l’équation de dis-persion devient complexe. On peut en particulier montrer l’existence d’une distance caractéristique d’atténuation δ donnée
par δ =1
|Im(k)| =c
√
ω2p−ω2
telle que les amplitudes des champs électrique et magnétique s’atténuent selon exp(−z/δ).
31.2.4 L’effet Faraday
Équation de dispersion en présence d’un champ statique
En présence d’un champ magnétique statique ~B0, on a vu que µ0~j =− iωc2
ω′2pω2
(
~E− iα~uz∧~E)
ce qui montre que~k ·~j reste
proportionnel à~k ·~E , donc que ces deux termes restent nuls (selon Maxwell-Gauss) : le plasma reste neutre. On peut déduire
des équations de Maxwell-Faraday et Maxwell-Ampère une équation de dispersion
(
k2− ω2
c2
)
~E =−ω′2pc2
(
~E− iα~uz∧~E)
.
Polarisation des solutions
En projection sur les axes Ox et Oy, l’équation de propagation impose respectivement Ex
(
k2−ω2−ω′2p
c2
)
+ iαω′2pc2 Ey = 0
et Ey
(
k2−ω2−ω′2p
c2
)
− iαω′2pc2 Ex = 0. Ce système d’équations n’admet d’autre solution que la solution triviale nulle que

242 Manuel de Physique
dans le cas où il est dégénéré. Écrivant ce système sous la forme uEx + ivEy = 0, −ivEx +uEy = 0, on obtient la condition
de dégénérescence, u2 = v2 donc u = ±v et les deux modes possibles de propagation, avec k2+ =
ω2−ω′2p (1+α)
c2 et k2− =
ω2−ω′2p (1−α)
c2 , correspondant aux polarisations u+ = v+ donc Ey = +iEx, et u− =−b− donc Ey =−iEx respectivement.
Ainsi, l’onde de vecteur d’onde k+ le plus élevé7, donc de vitesse de phase vφ+ la plus faible, est-elle polarisée circulairementà droite ; au contraire, l’onde de vecteur d’onde k− est polarisée circulairement à gauche.
L’effet Faraday
Considérons maintenant une onde de polarisation rectiligne ; on peut l’écrire ~E = E0~ux exp(i [ωt− kz]) avant son entrée dansle plasma (par exemple pour z < 0). A partir de l’entrée dans le plasma, on doit décomposer cette onde comme une somme
de deux ondes polarisées circulairement : ~E =E0
2(~ux + i~uy)exp
(
iω[
t− zvφ+
])
+E0
2(~ux− i~uy)exp
(
iω[
t− zvφ−
])
. Au
bout d’un parcours de longueur D, l’onde sort du plasma et les deux composantes circulaires ont acquis une différence de
phase donnée par ϕ = ωD
(1
vφ+
− 1vφ−
)
et, au choix d’une nouvelle origine des temps près, l’onde émergent du plasma
devient Ex = E0 exp(iωt ′)
cosϕ, Ey = −E0 exp(iωt ′)
sinϕ. Ainsi, le plan de polarisation de l’onde a tourné d’un angle ϕproportionnel à D et à l’intensité du champ magnétique ; c’est l’effet Faraday8.
31.2.5 Transport de l’énergie
Les conditions d’étude
Nous revenons ici à l’étude de la propagation des ondes en l’absence de tout champ statique. La structure des champs
électrique et magnétique, si l’onde peut se propager (ω > ωp) est alors ~E = E0~ux exp [i(ωt− kz)], ~B =kω
E0~uy exp [i(ωt− kz)]
où on a posé k =
√
ω2−ω2p
c. Ces champs s’accompagnent du passage d’un courant ~j =−i
ε0ω2p
ωE0~ux exp [i(ωt− kz)]. Dans
la suite, nous choisirons de considérer que E0 est réel, par choix de l’origine des temps.
Le vecteur de Poynting moyen s’écrit ici 〈~R〉= 12µ0
Re(
~E ∧~B∗)
=k
2µ0ωE2
0~uz. La puissance volumique perdue par le champ
s’écrit, en moyenne, 〈pm〉=12
Re(
~j ·~E∗)
soit, compte tenu du déphasage déjà cité de π/2 entre ces deux vecteurs, 〈pm〉= 0.
Densité et vitesse de l’énergie
Les densités volumiques électrique, magnétique et cinétique sont respectivement égales à 〈we〉 =ε0
4Re(
~E ·~E∗)
=ε0E2
0
4,
〈wm〉 =1
4µ0Re(
~B ·~B∗)
=k2E2
0
4ω2µ0et 〈wc〉 =
14
Re(n0m~v ·~v∗) =m
4n0q2 Re(
~j ·~j∗)
=ε0ω2
p
4ω2 E20 . On en déduit l’énergie volu-
mique totale associée à l’onde, qui s’écrit après simplifications 〈w〉= ε0E20
2.
L’interprétation de la vitesse de l’énergie se fait selon le schéma classique, ~ve =〈~R〉〈w〉 =
c2kω
~uz qu’on peut encore réécrire,
compte tenu des expressions de vφ =ωk
et de vg, sous la forme~ve = c
√
1−ω2
p
ω2~uz = vg~uz conformément au modèle général
d’interprétation de la vitesse de groupe.
7On suppose ici ωc > 0 ; ce résultat dépend du sens du champ magnétique et du signe des charges mobiles.8Les milieux possédant la possibilité de faire tourner le plan de polarisation d’une vibration rectiligne sont dits doués de pouvoir rotatoire ou d’activité
optique ; cette propriété est toujours associée à une anisotropie du milieu, mais l’origine de celle-ci peut être variée : anisotropie due à un champmagnétique statique longitudinal (effet Faraday) ; anisotropie due à un champ électrique statique transverse (effet Kerr) ; anisotropie due à la structuremoléculaire chirale des molécules emplissant le milieu.
32Rayonnement dipolaire électrique
JOHN WILLIAM STRUTT, LORD RAYLEIGH (1842—1919)
32.1 Les potentiels retardés
32.1.1 Les sources du champ dans le vide
Charges et courants
Les champs statiques sont créés par des charges et courants permanents. Dans la pratique, les systèmes macroscopiquessont globalement neutres et se comportent souvent en première approximation comme des dipôles électrostatiques. Demême, la plupart des distributions de courant peuvent être traitées en première approximation comme des dipôles magné-tostatiques ; il n’existe d’ailleurs pas d’équivalent magnétique des charges électriques. Comme les dipôles électrique oumagnétique statique sont les sources usuelles des champs statiques, des dipôles variables sont en général les sources desondes électromagnétiques.
Le système d’équations à résoudre
Les équations de base décrivant le rayonnement d’une onde par des charges variables (hors de toute approximation) portentle nom d’équations aux potentiels retardés et doivent être considérées comme la forme la plus générale de la solution deséquations de Maxwell. Nous écrirons dans la suite ces équations par l’intermédiaire des potentiels V et ~A, décrits dans le
cadre de la jauge de Lorentz, div ~A +1c2
∂V∂t
= 0. On a vu dans ce cas que les potentiels sont solutions des équations de
Poisson, ∆V (~r, t)− 1c2
∂V (~r, t)∂t
=− 1ε0
ρ(~r, t) et ∆~A(~r, t)− 1c2
∂~A(~r, t)∂t
=− 1ε0
~j (~r, t).

244 Manuel de Physique
32.1.2 Les potentiels retardés
Développement sphérique
Nous ne donnerons ici qu’une justification simplifiée de la solution la plus générale de ces équations. Considérons d’abordle cas du potentiel scalaire créé par une seule charge ponctuelle q, disposée au point mobile P. L’équation de Poisson
correspondante s’écrit, en tout point M différent de P, ∆V (~r, t) =1c2
∂2V (~r, t)∂t2 où la fonction V (~r, t) doit, de plus, respecter
la symétrie de la source du champ, c’est-à-dire avoir la symétrie sphérique autour de P. Utilisant à chaque instant des
coordonnées sphériques de centre P pour le point M, on écrira donc V (~r, t) = V (r, t) donc ∆V (~r, t) =1r2
∂∂r
(
r2 ∂V∂r
)
. On
cherchera alors, par analogie au potentiel scalaireq
4πε0rdes régimes statiques, une solution sous forme d’onde sphérique,
V (r, t) =ξ(r, t)
rdonc
∂2ξ(r, t)∂2r
=1c2
∂2ξ∂t2 . La solution de cette équation a été présentée depuis longtemps pour l’étude des
ondes planes, ξ(r, t) = ξ+(r−ct)+ξ−(r+ct), correspondant pour le potentiel à la somme de deux ondes sphériques, sous la
forme V (r, t) =ξ+(r− ct)+ξ−(r + ct)
rdans laquelle le second terme, qui se propage depuis M vers la source P n’a aucun
sens physique et doit être rejeté comme contraire à la causalité (l’onde se propage nécessairement depuis sa source et nonvers celle-ci).
On en conclut enfin la forme nécessaire de la solution de l’équation de Poisson, V (r, t) =ξ+(r− ct)
roù la fonction ξ+ est
déterminée par recherche des conditions aux limites.
Lien avec les charges, source du champ
En particulier, si on considère ce qui se passe pour des points M voisins de P, le potentiel doit tendre vers l’infini, c’est-à-direqu’il varie très rapidement avec la distance r lorsque r→ 0 ; les variations temporelles deviennent négligeables.Ainsi, l’équation différentielle écrite plus haut devient ∆V ' 0 comme en régime statique1. On doit donc obtenir, à courtedistance de la source P, un potentiel pratiquement équivalent à celui créé par une charge ponctuelle en régime statique,
V (r, t)∼r→0q(t)
4πε0rdonc ξ+(r−ct)∼r→0
q(t)4πε0
. On en déduit immédiatement que ξ+(−ct) =q(t)4πε0
; on a donc aussi, pour
une valeur quelconque de r, ξ+(t− ct) =q(t− r
c
)
4πε0c’est-à-dire que le potentiel correspondant, créé au point r et à l’instant
t par la charge disposée en P s’écrit :
V (r, t) =1
4πε0rq(
t− rc
)
(32.1)
est fonction de la valeur de la charge q qui créait ce potentiel à un instant antérieur de r/c, où r/c est précisément la duréenécessaire à l’interaction électromagnétique pour se propager de la source P au point M où on étudie l’effet, à la vitesse c.
Potentiels retardés
Compte tenu de la linéarité des équations de l’électromagnétisme, on en déduit que, si plusieurs charges mobiles sont lasource d’un potentiel scalaire électromagnétique, celui-ci prend la forme générale :
V (M, t) =1
4πε0
∫
P∈(D)
dq(P, t− PM
c
)
PM(32.2)
où la somme porte sur tous les points P de la distribution (D) des charges mobiles. Dans le cas d’une distribution volumique
par exemple, on écrira V (M, t) =1
4πε0
∫
P∈(D)
ρ(P, t− PM
c
)
PMdτ ; cette expression porte le nom de potentiel retardé ; nous
1On retrouvera ce résultat dans une étude exhaustive du champ rayonné par un dipôle oscillant, qui montrerait l’existence d’une zone statique, à courtedistance de l’émetteur, dans laquelle la structure des champs est analogue à celle des champs statiques.

Rayonnement dipolaire électrique 245
admettrons qu’il s’agit bien de la solution générale de l’équation de Poisson. Elle généralise immédiatement l’expression
obtenue en régime statique, V (M) =1
4πε0
∫
P∈(D)
ρ(P)
PMdτ en prenant en compte le retard des interactions électromagnétiques
du à leur propagation à la vitesse c. De la même façon, la résolution de l’équation de Poisson pour le potentiel vecteur mèneà la seconde équation des potentiels retardés, que nous écrirons directement dans la notation volumique :
~A(M, t) =µ0
4π
∫
P∈(D)
~j(P, t− PM
c
)
PMdτ (32.3)
32.2 Le rayonnement dipolaire électrique
32.2.1 L’approximation dipolaire
Définition
Nous nous placerons dans la suite dans le cadre de l’étude du rayonnement dipolaire électrique (ou DE), donc dans le casoù le champ est étudié à grande distance du volume (D) parcouru de charges en mouvement et donc de courants variables.Pour préciser la signification du terme « à grande distance », appelons a une dimension caractéristique du volume chargé(D) (par exemple un majorant de la distance OP à l’intérieur de ce volume). Cette approximation signifie que r = OM adonc PM ' OM pour tout point M de (D). Le volume émetteur prend le nom d’antenne émettrice et la dimension a est ladimension de l’antenne.
APPROXIMATION DIPOLAIRE
Dans l’approximation dipolaire, tous les points M où on étudie le champ sont situés à une distance del’antenne r grande devant la dimension a de celle-ci.
Le développement dipolaire
L’approximation présentée ci-dessus permet d’écrire l’équation des potentiels retardés pour le potentiel vecteur, à l’ordre
zéro du développement, ~ADE (M, t) =µ0
4π
∫
P∈(D)
~j(P, t− OM
c
)
OMdτ ou encore, en utilisant pour M des coordonnées sphériques
de centre M, ~ADE (M, t) =µ0
4πr
∫
P∈(D)
~j(
P, t− rc
)
dτ c’est-à-dire que le retard de propagation est considéré comme uniforme
pour tous les points du volume (D).Notons qu’il est possible d’écrire aussi cette somme dans le cadre des modélisations surfaciques et filiformes, à savoir~ADE (M, t) =
µ0
4πr
∫
P∈(D)
~is(
P, t− rc
)
dS dans le premier cas, et ~ADE (M, t) =µ0
4πr
∫
P∈(D)
I(
P, t− rc
)
d~r dans le second.
En particulier, on peut noter que pour une antenne filiforme fermée parcouru par un courant uniforme,∮
P∈(D)
I(
t− rc
)
d~r =
I(
t− rc
)∮
d~r = 0, ce qui exige de mener le développement à un ordre plus élevé pour obtenir un résultat non nul.
L’approximation dipolaire électrique peut donc être définie comme celle pour laquelle l’ordre zéro du développement (PM'OM) pour le potentiel vecteur donne un résultat non nul. Nous allons aussi montrer qu’une distribution de courants dipolaireélectrique est caractérisée par un potentiel vecteur lié au moment dipolaire électrique de la distribution, ce qui justifie bienévidemment le nom donné à cette approximation.
Le moment dipolaire
Une telle distribution, de faible extension, est classiquement décrite par son vecteur moment dipolaire électrique, qui estdéfini en régime statique par une somme étendue aux diverses particules chargées de la distribution, soit, selon le modèle

246 Manuel de Physique
choisi, ~p = ∑k
qk−−→OPk (modélisation discrète) ou ~p =
∫
P∈(D)
ρ(P)−→OPτ (modélisation continue). On généralise cette définition
au cas variable, en écrivant ~p(t) =∫
P∈(D)
ρ(P)−→OPdτ, dont la dérivée s’identifie à
d~p(t)dt
=∫
P∈(D)ρ(P)~v(P, t)dτ soit encore
d~p(t)dt
=
∫
P∈(D)
~j(P, t)dτ. Ainsi, le potentiel vecteur rayonné dans l’approximation dipolaire électrique est-il donné par
l’expression générale :
~ADE (M, t) =µ0
4πrd~pdt
(
t− rc
)
(32.4)
32.2.2 Zone de rayonnement
Définition
Nous considérerons d’abord ici le cas où la pulsation d’oscillation ω du dipôle émetteur est fixée ; ainsi, le potentiel vecteuret donc aussi le champ rayonné oscilleront-ils à la même pulsation ω.On appellera alors λ la longueur d’onde qui serait, dans le vide, associée à une OPPM de pulsation ω, λ = 2πc
ω .
Pour déterminer le potentiel vecteur rayonné, on a fait l’hypothèse r a. Cette hypothèse faite, il reste en général2 possiblede distinguer trois zones d’espace autour de l’émetteur du champ électromagnétique :– la zone de rayonnement, ou zone de Fraunhofer, correspondant à r λ ; c’est dans cette zone que se font les échanges
d’énergie entre l’antenne et le milieu extérieur ;– la zone statique, ou zone de Rayleigh, où r λ, ainsi définie compte tenu du raisonnement fait plus haut pour l’expression
approchée du potentiel au voisinage de la charge source ; dans cette zone, on montrera que la puissance rayonnée décroîtsimplement comme l’inverse de la distance r à l’émetteur.
– la zone intermédiaire, ou zone de Fresnel, où r reste du même ordre de grandeur que λ, et où la structure du champrayonné est en général difficile à interpréter ; dans cette zone, la densité de puissance est fluctuante.
Dans la suite, nous ne nous intéresserons qu’à la zone de rayonnement ; en effet, en l’absence d’approximation supplémen-taire, les expressions générales du champ sont compliquées, et leur usage peu fréquent.
ZONE DE RAYONNEMENT
L’approximation de zone de rayonnement consiste à étudier le champ rayonné à distance grande devantla longueur d’onde du champ rayonné (r λ).
On peut aussi considérer qu’il s’agit d’une approximation de haute fréquence, donnée par ω 2πcr .
Il importe de ne pas confondre les approximations r a et r λ, qui ne jouent pas le même rôle.
Approximation de zone de rayonnement
Nous ferons ici deux hypothèses supplémentaires. Tout d’abord, si la fréquence d’oscillation du dipôle émetteur est assezgrande, le potentiel vecteur ~ADE varie en fonction de la distance r au point émetteur O essentiellement du fait de la variation
de la dérivéed~pdt
(
t− rc
)
et non pas du fait du terme 1/r. En effet, la période spatiale de variation en fonction de r de d~pdt est
égale à λ, avec λ r. Plus généralement, on considérera régulièrement des termes du type f (r) =cos2π r
λr
, dont la dérivée
peut être écrited fdr
= −2πrλ
sin2πrλ− 1
r2 cos2πrλ
soitd fdr' −2π
rλsin2π
rλ
, ce qui revient bien à considérer 1/r comme
pratiquement constant. Le potentiel vecteur rayonné sera donc, dans ce qui suit, traité comme une fonction quasimentharmonique de r, modulée par le coefficient d’amortissement 1/r, à variation lente.
2Sauf si la dimension d’antenne est elle-même très supérieure à λ, auquel cas n’existe que la zone de rayonnement. Toutefois, ce cas sera traité à partcar les antennes dont la dimension est du même ordre de grandeur ou plus grande que λ ne peuvent être étudiées de façon complète qu’en prenant encompte de façon détaillée la répartition du courant dans le volume de l’antenne.
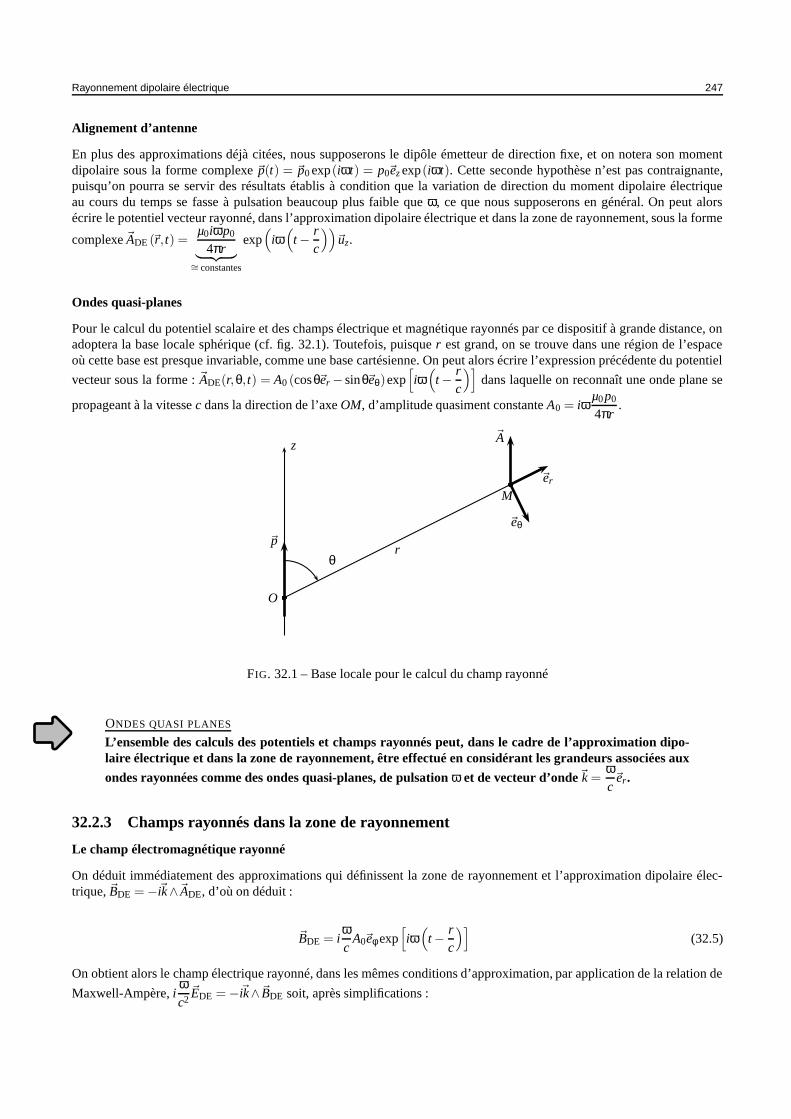
Rayonnement dipolaire électrique 247
Alignement d’antenne
En plus des approximations déjà citées, nous supposerons le dipôle émetteur de direction fixe, et on notera son momentdipolaire sous la forme complexe ~p(t) = ~p0 exp(iωt) = p0~ez exp(iωt). Cette seconde hypothèse n’est pas contraignante,puisqu’on pourra se servir des résultats établis à condition que la variation de direction du moment dipolaire électriqueau cours du temps se fasse à pulsation beaucoup plus faible que ω, ce que nous supposerons en général. On peut alorsécrire le potentiel vecteur rayonné, dans l’approximation dipolaire électrique et dans la zone de rayonnement, sous la forme
complexe ~ADE (~r, t) =µ0iωp0
4πr︸ ︷︷ ︸∼= constantes
exp(
iω(
t− rc
))
~uz.
Ondes quasi-planes
Pour le calcul du potentiel scalaire et des champs électrique et magnétique rayonnés par ce dispositif à grande distance, onadoptera la base locale sphérique (cf. fig. 32.1). Toutefois, puisque r est grand, on se trouve dans une région de l’espaceoù cette base est presque invariable, comme une base cartésienne. On peut alors écrire l’expression précédente du potentiel
vecteur sous la forme : ~ADE(r,θ, t) = A0 (cosθ~er− sinθ~eθ)exp[
iω(
t− rc
)]
dans laquelle on reconnaît une onde plane se
propageant à la vitesse c dans la direction de l’axe OM, d’amplitude quasiment constante A0 = iωµ0 p0
4πr.
O
M
θr
~er
~Az
~p
~eθ
FIG. 32.1 – Base locale pour le calcul du champ rayonné
ONDES QUASI PLANES
L’ensemble des calculs des potentiels et champs rayonnés peut, dans le cadre de l’approximation dipo-laire électrique et dans la zone de rayonnement, être effectué en considérant les grandeurs associées aux
ondes rayonnées comme des ondes quasi-planes, de pulsation ω et de vecteur d’onde~k =ωc~er.
32.2.3 Champs rayonnés dans la zone de rayonnement
Le champ électromagnétique rayonné
On déduit immédiatement des approximations qui définissent la zone de rayonnement et l’approximation dipolaire élec-trique, ~BDE =−i~k∧~ADE, d’où on déduit :
~BDE = iωc
A0~eφ exp[
iω(
t− rc
)]
(32.5)
On obtient alors le champ électrique rayonné, dans les mêmes conditions d’approximation, par application de la relation de
Maxwell-Ampère, iωc2
~EDE =−i~k∧~BDE soit, après simplifications :

248 Manuel de Physique
~EDE = iωA0~eθ exp[
iω(
t− rc
)]
(32.6)
On peut aussi remarquer la structure géométrique du champ, identique à celle d’une onde plane dans le vide illimité, puisque
~EDE = E0(r,θ)~eθ exp [i(ωt− kr)] et ~EDE =E0(r,θ)
c~eφ exp [i(ωt− kr)] avec donc pour amplitude complexe du champ rayonné
E0(r,θ) =−ω2 p0µ0
4πrsinθ.
Généralisation
On remarque dans ces expressions la présence du terme p0 sinθ qui n’est autre que ~p0∧~er.Compte tenu de la présence du terme−ω2, on peut réécrire les champs rayonnés ci-dessus en termes de dérivées secondes dumoment dipolaire électrique. On peut alors réécrire l’onde quasi plane rayonnée dans l’approximation dipolaire électriquesous une forme plus générale, indépendante de la pulsation3 et de la direction du moment dipolaire de l’antenne :
~BDE =µ0
4πrc~p(
t− rc
)
∧~er ~EDE =µ0
4πr~er ∧
[
~p(
t− rc
)
∧~er
]
(32.7)
32.2.4 Rayonnement et énergie
Puissance rayonnée
Les expressions (32.7) des champs rayonnés forment une expression réelle de ces champs, permettant directement le calculde grandeurs énergétiques. On remarquera tout d’abord que le champ rayonné n’est significatif que si la dérivée seconde
du moment dipolaire est non nulle, avecd2~pdt2 = ∑
k
qk~γk 6= 0 dans le cadre de la modélisation discrète, donc si les particules
chargées sont accélérées.
PROPRIÉTÉ
Toute particule chargée rayonne un champ électromagnétique si elle est accélérée. Ce champ est propor-tionnel à son accélération4.
Le vecteur de Poynting rayonné se calcule selon vecRDE =µ0
16π2r2c
(
~p(
t− rc
)
∧~er
)
∧(
~er∧(
~p(
t− rc
)
∧~er
))
. Pour cal-
culer ce terme, remarquons l’expression générale (~a∧~n)∧~a =(~a2)~n pout tout vecteur~a orthogonal à~n ; on a donc ici :
~RDE =µ0
16π2r2c
[
~p(
t− rc
)
∧~er
]2~er (32.8)
mais on peut aussi écrire, dans le système sphérique déjà choisi, ~RDE =µ0
16π2r2csin2 θp
(
t− rc
)
~er ce qui revient à remarquer
que si~n est unitaire,~a =~b∧~n⇒~b2 =~a2 sin2 (~a,~n).
Indicatrice d’émission
La puissance rayonnée par le dipôle ~p(t) à travers l’angle solide dΩ de sommet O et dirigé par ~er s’écrit (puisque la
section droite du cône est dS = r2dΩ) dP = ~RDE ·~erdS =µ0
16π2csin2 θp2
(
t− rc
)
dΩ. On appelle indicatrice d’émission
la représentation de la courbe d’équation polairedPdΩ
=µ0
16π2csin2 θp2
(
t− rc
)
qu’on peut bien sûr encore écrire sous la
3Il faut quand même bien sûr vérifier que la condition de zone de rayonnement, qui dépend de la pulsation, est vérifiée pour chacune des composantesharmoniques du moment dipolaire de l’antenne rayonnante.
4Cette accélération doit être déterminée relativement au référentiel galiléen dans lequel les équations de Maxwell s’expriment. Ceci pose évidemmentun problème bien connu en mécanique classique : tous les modèles atomiques ‘planétaires’ (à trajectoires électroniques circulaires ou elliptiques) sontinstables puisque l’électron qui parcourt cette trajectoire est accéléré, rayonne donc de l’énergie, et ne peut se maintenir dans un état stable. Seule laPhysique quantique permet de sortir de ce mauvais pas en proposant des modèles atomiques stationnaires, sur la base de l’équation de Schrödinger.

Rayonnement dipolaire électrique 249
formedPdΩ
∣∣∣∣θ=
dPdΩ
∣∣∣∣ π
2
sin2 θ. Cette expression est, au retard r/c près, indépendante de la distance r à laquelle on la calcule.
Ceci traduit la propagation sans atténuation de la puissance dans tout cône de sommet O.
xy
z
FIG. 32.2 – Indicatrice d’émission dans l’approximation DE
Cette indicatrice, portée sur la figure 32.2, montre que l’émission étudiée ici est maximale dans le plan équatorial del’antenne (plan orthogonal au moment dipolaire oscillant). Par contre, le tracé de l’indicatrice d’émission (ou diagramme derayonnement) est ici indépendant de ϕ : le rayonnement est invariant par rotation autour de la direction du moment dipolaire.On notera toutefois que d’autres antennes peuvent être constituées avec une géométrie spécifique, pour assurer un maximumd’émission dans une direction précise. On peut aussi utiliser un dispositif réfléchissant de forme adaptée (miroir parabolique)pour concentrer l’émission électromagnétique dans une direction précise (par exemple pour la focalisation des faisceauxhertziens de communication).
Puissance totale rayonnée
Le calcul de la puissance totale rayonnée par un dipôle oscillant se fait aisément dans le système de coordonnées sphériques
déjà cité sous la forme dP =µ0
16π2cp2(
t− rc
)
sin3 θdθdφ puisque dΩ = sinθdθdφ. On doit alors calculer les intégrales∫ 2π
0dφ = 2π et
∫ π
0sin3 θdθ =
43
pour expliciter la puissance totale rayonnée à la distance r et à l’instant t sous la forme :
P(r, t) =µ0
6πcp2(
t− rc
)
(32.9)
En particulier, dans le cas d’une source en mouvement harmonique de pulsation ω = 2πcλ et de moment dipolaire p0 cosωt,
on obtient pour puissance moyenne rayonnée l’expression 〈P〉= πµ0c3λ2 p2
0 qui montre la prédominance des courtes longueurs
d’onde. Ainsi, dans ce cadre5, on peut rendre compte de la couleur bleue du ciel, considéré comme un ensemble de moléculesdiffusant la lumière (spectre quasiment blanc) du Soleil dans toutes les directions d’observation (sauf visée directe duSoleil)6.
32.2.5 Cas d’une particule chargée unique
Rayonnement émis
Admettant que les relations précédentes s’appliquent (au moins dans le cas non relativiste) à une particule unique, de chargeq et d’accélération~γ, on écrira ~p = q~r⇒ ~p = q~γ, ce qui permet d’expliciter le rayonnement émis sous cette particule, dans
l’approximation dipolaire électrique, sous la forme ~EDE =q
4πε0~er ∧
(~γrc2 ∧~er
)
, ~BDE =1c~er ∧ ~EDE, où l’accélération est
calculée à l’instant t−d/c pour obtenir le champ rayonné à t, à la distance d de l’émetteur.
5On parle ici de diffusion incohérente, car les différentes molécules (O2,N2) diffusant la lumière solaire le font sans relation de phase entre elles, cequi permet de sommer simplement les puissances rayonnées par ces différents émetteurs.
6On pourra noter aussi que la lumière issue du ciel est toujours partiellement polarisée ; en effet, le champ électrique reçu par un observateur situé enM est dirigé par ~p∧−→PM, si P est la position de la particule émettrice ; mais le moment dipolaire de celle-ci est parallèle à sa cause, le champ électrique(provenant du soleil) qui éclaire la molécule. Ce champ est lui même transverse, donc orthogonal à la direction −→SP si S est la position du Soleil. On peutdonc affirmer que le champ électrique observé en M n’a pas de composante sur la droite orthogonale au plan défini par SMP.
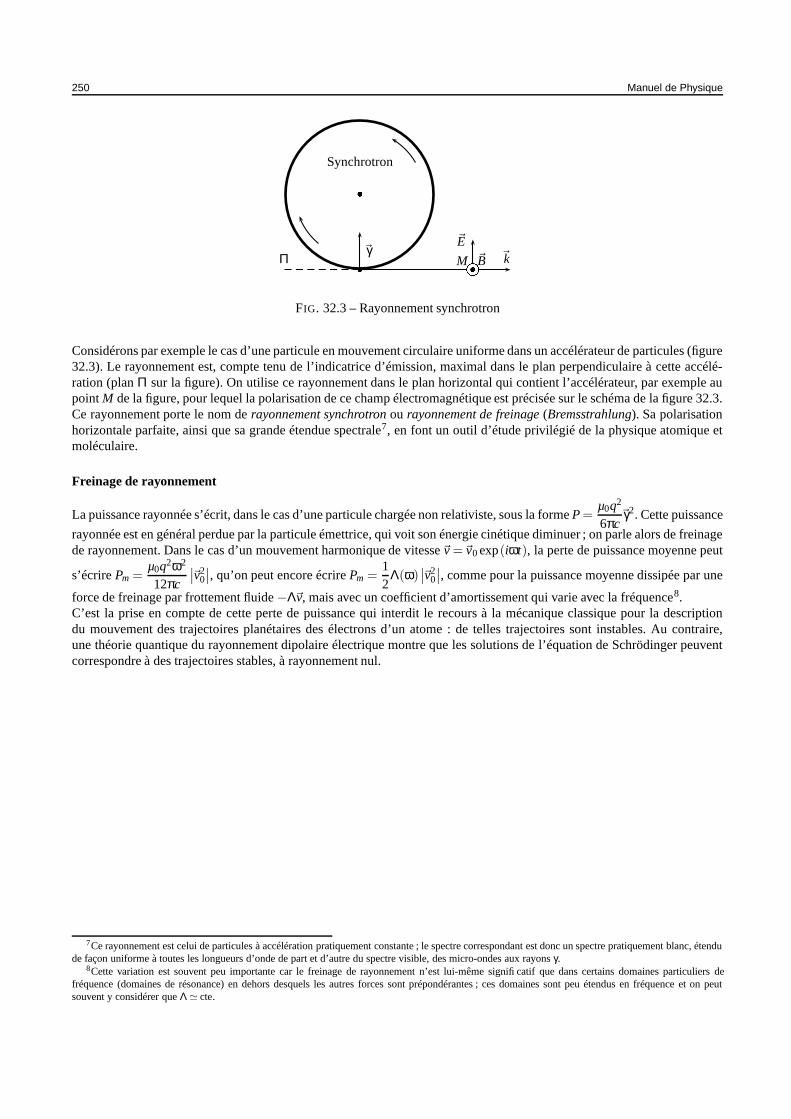
250 Manuel de Physique
~γ
Π
Synchrotron
~E~k ~BM
FIG. 32.3 – Rayonnement synchrotron
Considérons par exemple le cas d’une particule en mouvement circulaire uniforme dans un accélérateur de particules (figure32.3). Le rayonnement est, compte tenu de l’indicatrice d’émission, maximal dans le plan perpendiculaire à cette accélé-ration (plan Π sur la figure). On utilise ce rayonnement dans le plan horizontal qui contient l’accélérateur, par exemple aupoint M de la figure, pour lequel la polarisation de ce champ électromagnétique est précisée sur le schéma de la figure 32.3.Ce rayonnement porte le nom de rayonnement synchrotron ou rayonnement de freinage (Bremsstrahlung). Sa polarisationhorizontale parfaite, ainsi que sa grande étendue spectrale7, en font un outil d’étude privilégié de la physique atomique etmoléculaire.
Freinage de rayonnement
La puissance rayonnée s’écrit, dans le cas d’une particule chargée non relativiste, sous la forme P =µ0q2
6πc~γ2. Cette puissance
rayonnée est en général perdue par la particule émettrice, qui voit son énergie cinétique diminuer ; on parle alors de freinagede rayonnement. Dans le cas d’un mouvement harmonique de vitesse~v =~v0 exp(iωt), la perte de puissance moyenne peut
s’écrire Pm =µ0q2ω2
12πc
∣∣~v2
0
∣∣, qu’on peut encore écrire Pm =
12
Λ(ω)∣∣~v2
0
∣∣, comme pour la puissance moyenne dissipée par une
force de freinage par frottement fluide−Λ~v, mais avec un coefficient d’amortissement qui varie avec la fréquence8.C’est la prise en compte de cette perte de puissance qui interdit le recours à la mécanique classique pour la descriptiondu mouvement des trajectoires planétaires des électrons d’un atome : de telles trajectoires sont instables. Au contraire,une théorie quantique du rayonnement dipolaire électrique montre que les solutions de l’équation de Schrödinger peuventcorrespondre à des trajectoires stables, à rayonnement nul.
7Ce rayonnement est celui de particules à accélération pratiquement constante ; le spectre correspondant est donc un spectre pratiquement blanc, étendude façon uniforme à toutes les longueurs d’onde de part et d’autre du spectre visible, des micro-ondes aux rayons γ.
8Cette variation est souvent peu importante car le freinage de rayonnement n’est lui-même significatif que dans certains domaines particuliers defréquence (domaines de résonance) en dehors desquels les autres forces sont prépondérantes ; ces domaines sont peu étendus en fréquence et on peutsouvent y considérer que Λ' cte.
33Théorie du rayonnement
SIMÉON DENIS POISSON (1781–1840)
33.1 Les potentiels retardés
33.1.1 Les équations de Poisson
Le problème à résoudre
Ce chapitre complète les présentations qualitatives du chapitre précédent par des développements plus formels ; commeprécédemment, nous partirons de la résolution des équations de Poisson1 qui peuvent être écrites, dans le cadre de la Jaugede Lorentz, sous la forme :
∆V (~r, t)− 1c2
∂2V∂t2 =− 1
ε0ρ(~r, t) ∆~A(~r, t)− 1
c2
∂2~A∂t2 =−µ0~j(~r, t) (33.1)
où manifestement, il suffira de faire la transformationρε0→ µ0 jx pour, par exemple, passer de V à Ax. Nous ne nous intéres-
serons donc d’abord qu’au potentiel scalaire. Nous chercherons ici à donner l’expression générale, sous forme intégrale, despotentiels V (~r, t) et ~A(~r, t), solutions de ces équations, en fonction des grandeurs supposées connues ρ(~r, t) et ~j(~r, t) ; cetteforme générale porte le nom d’équations aux potentiels retardés. Compte tenu de la linéarité de l’équation de Poisson (33.1),on va d’abord résoudre cette équation pour une source ponctuelle, mais mobile, c’est-à-dire pour une densité volumique de
1Les travaux du mathématicien français SIMÉON DENIS POISSON (1781-1840) ont porté sur les intégrales définies, les applications des mathématiquesà la mécanique et à la théorie électromagnétique, et le calcul des probabilités. Son Traité de mécanique (1811, 1833) a été l’ouvrage de référence enmécanique pendant de nombreuses années. Le nom de Poisson est attaché à de nombreuses notions mathématiques et physiques (intégrale et équation dePoisson en théorie du potentiel, crochets de Poisson dans la théorie des équations différentielles, rapport de Poisson en élasticité et constante de Poissonen électricité).

252 Manuel de Physique
charges donnée par ρ(~r, t) = q0
∫ +∞
−∞δ(t− t0)δ(~r−~r0(t0))dt0 où~r0(t0) désigne la position de la charge source q0 à l’instant
t0, et δ désigne la distribution de Dirac. On peut encore réécrire cette expression sous la forme ρ(~r, t) = q0δ(~r−~r0(t)) quidésigne bien une charge volumique qui, à l’instant t, est nulle partout sauf au seul point~r0(t) où se trouve la particule.
La méthode de Fourier
Nous chercherons alors la solution V (~r, t) en utilisant sa décomposition de Fourier temporelle, que nous définirons ici par
V (~r,ω) =
∫ +∞
−∞V (~r, t)eiωt dt où la détermination de V permettra de revenir à V grâce à la forme réciproque (transformée de
Fourier inverse) V (~r, t) =1
2π
∫ +∞
−∞V (~r,ω)e−iωt dω.
33.1.2 Potentiel rayonné par une charge ponctuelle
Expression dans l’espace de Fourier
Déterminons la transformée de Fourier de la densité volumique de charges ρ, ρ(~r,ω) =
∫ +∞
t=−∞
∫ +∞
t0=−∞q0δ(t − t0)δ(~r−
~r0(t0))eiωt dt0 dt soit ρ(~r,ω) =
∫ +∞
t0=−∞q0δ(~r−~r0(t0))e
iωt0 dt0. Reportant ces expressions dans l’équation (33.1), on obtient
par identification ∆V (~r,ω)+ω2
c2 V (~r,ω) =−q0
ε0
∫ +∞
t0=−∞eiωt0δ(~r−~r0(t0))dt0. Considérons d’abord la résolution de l’équation
partielle ∆Vt0(~r,ω)+ω2
c2 Vt0(~r,ω) =−q0
ε0eiωt0 δ(~r−~r0(t0)) soit, en posant f (~r) = exp(−iωt0)Vt0(~r,ω)2, ∆ f (~r)+
ω2
c2 f (~r) =
−q0
ε0δ(~r−~r0(t0)) qu’on résout en prenant en compte la symétrie sphérique autour du point origine~r0(t0), f = f (R) avec
R = ‖~R‖ et ~R =~r−~r0(t0). Utilisant l’expression sphérique du Laplacien, il vient ∆k(r) =1r2
ddr
(r2 dkdr
) =1r
d2(r k(r))dr2 valable
partout sauf en r = 0, on obtient l’équation différentielle vérifiée si R 6= 0 par la fonction f ,d2
dR2 (R f (R)) +ω2
c2 f (R) = 0
dont la solution la plus générale est R f (R) = Aexp(
iωc
R)
+Bexp(
−iωc
R)
si A et B désignent les constantes d’intégration.
On remarque immédiatement la présence dans Vt0(~r,ω) = f (~r)exp(iωt0) d’ondes sphériques ; la première a pour expressionAR
exp
(
iω(t0 +Rc)
)
et correspond à une propagation dans le sens incompatible avec la causalité, depuis le point ~r où
étudie le potentiel f vers le point~r0(t0) où se trouve sa source ; nous ne conserverons donc que l’autre terme et écrirons
enfin Vt0,ω(R) =BR
exp
(
iω(
t0−Rc
))
. On en déduit la transformée de Fourier du potentiel V créé par une telle charge
ponctuelle, mais cette fois-ci mise en mouvement, V (~r,ω) =∫ +∞
t0=−∞
BR
exp
(
−iω(
t− t0 +Rc
))
dt0.
Résolution dans l’espace réel
L’expression de V permet de revenir à V (~r, t) =∫ +∞
t0=−∞
∫ +∞
ω=−∞
B2π‖~r−~r0(t0)‖
exp
(
−iω(
t− t0 +‖~r−~r0(t0)‖
c
))
dωdt0
où on reconnaît la transformée de Fourier d’une distribution de Dirac, puisque δ(t− t1) =1
2π
∫ +∞
−∞δt1(ω)exp(−iωt) dω
avec réciproquement δt1(ω) =
∫ +∞
−∞δ(t − t1)exp(iωt) dt = exp(iωt1) soit aussi δ(t − t1) =
12π
∫ +∞
−∞exp(−iω(t− t1)) dω
soit, dans le cas qui nous intéresse, V (~r, t) =
∫ +∞
t0=−∞
B2π‖~r−~r0(t0)‖
δ(
t− t0 +‖~r−~r0(t0)‖
c
)
dt0 d’où le potentiel scalaire
retardé créé par une charge ponctuelle q0, mobile au point~r0, V (~r, t) =B
2π∥∥∥∥~r−~r0
(
t− ‖~r−~r0‖c
)∥∥∥∥
.
2Ceci revient à considérer que la seule dépendance en temps de l’équation ci-dessus est exp (iωt0), c’est-à-dire à traiter f comme l’amplitude complexede Vt0(~r,ω), en régime harmonique forcé.

Théorie du rayonnement 253
À la limite statique de cette équation correspond le potentielq0
4πε0Rcréé par une charge ponctuelle q0 fixe au point~r0, d’où
la détermination de B et V (~r, t) =q0
4πε0
∥∥∥∥~r−~r0
(
t− ‖~r−~r0‖c
)∥∥∥∥
.
Les potentiels retardés
On remarque ci-dessus que l’instant t ′ = t− ‖~r−~r0‖c
où on détermine la charge, source du champ à l’instant t, précède t
d’une durée égale à celle nécessaire à la propagation, à la célérité c, de l’interaction électromagnétique du point source~r0 aupoint de calcul~r. Par linéarité des équations de Poisson, on en déduit enfin les expressions les plus générales, compatiblesavec la célérité limite c de propagation des interactions, des potentiels créés par une distribution quelconque, variable, decharges et de courants, qui portent le nom d’équations aux potentiels retardés :
V (~r, t) =1
4πε0
∫
~r0
ρ(
~r0, t− ‖~r−~r0)‖c
)
‖~r−~r0‖d3~r0 ~A(~r, t) =
µ0
4π
∫
~r0
~j(
~r0, t− ‖~r−~r0)‖c
)
‖~r−~r0‖d3~r0 (33.2)
33.1.3 Application : rayonnement et réflexion métallique
Position du problème
Considérons une OPPMPR envoyée depuis un demi-espace vide dans une direction de propagation normale à un planmétallique parfaitement conducteur (Oxy), selon la figure 33.1.
M
zO
~Ei
FIG. 33.1 – Réflexion métallique
Le champ électromagnétique de cette onde incidente a pour expression ~Ei = E0~ex exp [i(ωt− kz)], ~Bi =E0
c~ey exp [i(ωt− kz)]
où on a posé k =ωc
. On a déjà montré que ce champ incident donne naissance à un champ électromagnétique réfléchi donné
par ~Er =−E0~ex exp [i(ωt + kz)], ~Br =E0
c~ey exp [i(ωt + kz)] par l’intermédiaire de l’apparition de courants surfaciques sur la
surface du métal, donnés par la relation de passage~is =2E0
µ0cexp(iωt)~ex. Afin de préciser l’analyse physique de ce problème,
nous allons déterminer le champ rayonné par cette nappe de courants. Toutefois, puisqu’on souhaite connaître ce champrayonné à toute distance du plan qui porte les courants, nous ne ferons pas d’approximation dans ce calcul ; en particulier,on ne se placera pas dans l’approximation dipolaire électrique.Nous noterons aussi que le modèle d’onde plane n’est pas physiquement acceptable : une onde réelle a toujours une étenduefinie. Nous pourrons donc, lorsque cela sera nécessaire, prendre en compte une lente décroissance des champs et des courantssurfaciques à grande distance du point O, qu’on choisira comme centre de symétrie du faisceau électromagnétique incident.
Le potentiel rayonné
L’expression exacte du potentiel vecteur retardé rayonné en un point M de l’axe du faisceau par la nappe de courants
surfaciques s’écrit ~A(M, t) =µ0
4π
∫ ~is(t− PM
c
)
PMdS ou, en choisissant des coordonnées polaires pour le point P du plan
254 Manuel de Physique
(Oxy), ~A(M, t) =µ0
2
∫ ∞
r=0
~is
(
t−√
r2+z2
c
)
√r2 + z2
r dr. Nous ferons ici le changement de variable u2 = r2 +z2 qui mène à ~A(M, t) =
E0
c~ex
∫ ∞
u=|z|exp[
iω(
t− uc
)]
du qui s’intègre immédiatement en ~A(M, t) = iE0
ω~ex
[
exp[
iω(
t− uc
)]]∞
|z|.
La limite en u = +∞ ci-dessus n’existe pas ; toutefois, elle correspond à la prise en compte des courants rayonnants situés surla plan à grande distance de O, où on a déjà affirmé que ces courants sont négligeables ; négligeant le terme correspondant
dans l’intégrale, il vient donc ~A(M, t) =E0
iω~ex exp
[
iω(
t− |z|c
)]
.
Le potentiel scalaire rayonné est, lui nul ; on peut s’en convaincre en rappelant que les charges surfaciques sont ici nulles(σ = 0) ou, si on préfère, en écrivant la relation de jauge de Lorentz. Comme div ~A = 0, V est nécessairement nul à unegrandeur constante près, qui ne nous concerne pas ici.
Les champs rayonnés
Finalement,−−−→gradV = 0 et le champ électrique rayonné est donné par ~E =−∂~A∂t
=−E0~ex exp
[
iω(
t− |z|c
)]
.
Ainsi, dans le domaine z < 0, on reconnaît dans ce champ rayonné le champ réfléchi, ~E = ~Er donc aussi ~B = ~Br.Au contraire, dans le domaine z > 0, on reconnaît dans ce champ rayonné l’opposé du champ incident, ~E = −~Ei donc~B =−~Bi.Ainsi, la nappe de courants mise en mouvement par l’onde incidente a pour effet d’annuler tout champ dans le milieumétallique z > 0 (conformément aux relations de structure propres aux métaux parfaits), tout en renvoyant le champ réfléchidans le milieu vide situé avant le métal :
RÉFLEXION MÉTALLIQUE ET RAYONNEMENT
Lors de la réflexion métallique, l’onde incidente crée des mouvements de charges à la surface du miroir ;ces mouvements sont à l’origine d’une onde rayonnée, qui s’identifie à l’onde réfléchie devant le miroir,et annule l’onde incidente à l’intérieur du métal qui constitue le miroir.
33.2 Le champ rayonné par un dipôle oscillant
33.2.1 L’approximation dipolaire électrique
Le dipôle oscillant
L’approximation dipolaire électrique consiste à calculer le potentiel vecteur rayonné dans le cas où la dimension de l’émet-teur est suffisamment petite pour considérer que ‖~r−~r0)‖ ' r pour tout ~r0 contenu dans la distribution chargée, qui est
de petite dimension a et centrée autour de~r0 =~0. On obtient alors ~A(~r, t) =µ0
4πr
∫
~r0
~j(
~r0, t−rc
)
d3~r0 où l’intégrale peut
aussi être notée sous la forme∫
~r0
~j(
~r0, t−rc
)
d3~r0 =ddt
∫
~r0
ρ(
~r0, t−rc
)
~v(
~r0, t−rc
)
d3~r0 et nous la désignerons donc par
la notation∫
~r0
~j(
~r0, t−rc
)
d3~r0 =d~pdt
∣∣∣∣t− r
c
.
Le potentiel vecteur DE
L’expression du potentiel vecteur rayonné peut être écrite, dans l’approximation dipolaire électrique ~A(~r, t) =µ0
4πrd~pdt
∣∣∣∣t− r
c
;
l’approximation dipolaire électrique constitue le premier ordre d’un développement de la solution générale des équationsde Poisson ; elle est suffisante lorsque le vecteur moment dipolaire électrique de la distribution est non nul. Dans la suite,nous considérerons de plus que ce moment dipolaire électrique garde une direction constante3 et nous le noterons donc~p(t) = p(t)~ez et adopterons dans la suite des coordonnées sphériques d’axe~ez et de centre O confondu avec le dipôle, cause
du rayonnement. On peut alors écrire ~A(~r, t) =µ0
4πrp(
t− rc
)
~ez que nous noterons, en projection dans la base sphérique :
3Ou bien, ce qui revient au même, que sa direction de varie que lentement.

Théorie du rayonnement 255
~A(r,θ,ϕ, t) =µ0
4πrp(
t− rc
)
∣∣∣∣∣∣
cosθ−sinθ
0
∣∣∣∣∣∣
(33.3)
Le potentiel scalaire DE
Dans le cadre de la Jauge de Lorentz, on détermine le potentiel V en calculant div ~A =1r2
∂∂r
(r2Ar
)+
1r sinθ
∂∂θ
(sinθAθ) où
on remarque qu’on ne fait ici aucune approximation du type1r' cte puisqu’on veut obtenir une expression valable a priori
dans tous les domaines : zone statique, intermédiaire et de rayonnement.
Après calcul, il vient div ~A = − µ0
4πcosθ
p(t− r
c
)+ r
c p(t− r
c
)
r2 = − 1c2
∂V∂t
. Par intégration, on obtient le potentiel scalaire
dipolaire électrique à une constante4 près, V (r,θ) =1
4πε0cosθ
p(t− r
c
)+ r
c p(t− r
c
)
r2 .
33.2.2 Les champs rayonnés
Le champ magnétique
Le champ magnétique se déduit de ce qui précède, ~B = −→rot~A =1r
[∂(rAθ)
∂r− ∂Ar
∂θ
]
~eϕ soit encore ~B = B~eϕ où on a posé
Bϕ =µ0
4πsinθ
rc p(t− r
c
)− p
(t− r
c
)
r2 .
Le champ électrique
Le champ électrique se calcule à partir des deux potentiels ; on détermine d’abord− ∂~A∂t
=− µ0
4πrp(
t− rc
)
∣∣∣∣∣∣
cosθ−sinθ
0
∣∣∣∣∣∣
puis le
second terme −−−→gradV =1
4πε0r3
∣∣∣∣∣∣∣
cosθ(
r2
c2 p(t− r
c
)+2 r
c p(t− r
c
)+2p
(t− r
c
))
sinθ(
rc p(t− r
c
)+ p
(t− r
c
))
0
∣∣∣∣∣∣∣
et la somme des deux fournit le champ
électrique ~E =1
4πε0r3
∣∣∣∣∣∣∣
cosθ(2 r
c p(t− r
c
)+2p
(t− r
c
))
sinθ(
r2
c2 p(t− r
c
)+ r
c p(t− r
c
)+ p
(t− r
c
))
0
∣∣∣∣∣∣∣
.
La zone statique
Dans l’ensemble des termes ci-dessus, apparaissent des coefficients du typern
cn devant la dérivée n-ièmedn
dtn du moment
dipolaire, c’est-à-dire des termes du type ωn rn
cn =(
2πrλ
)n. L’approximation de zone statique (ou de zone de Rayleigh)
consiste à considérer que r λ ; on ne conserve alors dans les expressions ci-dessus que les termes d’ordre le plus bas en
n, à savoir ~Erλ =p(t− r
c
)
4πε0r3
∣∣∣∣∣∣
2cosθsinθ
0
∣∣∣∣∣∣
comme pour un dipôle électrique statique, et ~Brλ =−µ0 p(t− r
c
)
4πr2
∣∣∣∣∣∣
00
sinθ
∣∣∣∣∣∣
.
4Il s’agit d’une fonction constante au cours du temps, qui décrit un éventuel potentiel statique. Celui-ci n’est bien sûr pas exclu mais sans rapport avecle rayonnement et il ne nous intéresse pas ici.

256 Manuel de Physique
La zone de rayonnement
Dans la zone de rayonnement, on ne conserve que les termes d’ordre le plus élevé en n, ~Erλ =µ0
4πrp(
t− rc
)
∣∣∣∣∣∣
0sinθ
0
∣∣∣∣∣∣
et
~Brλ =µ0
4πrcp(
t− rc
)
∣∣∣∣∣∣
00
sinθ
∣∣∣∣∣∣
qui forment une onde quasi-plane, dont le vecteur de Poynting s’exprime immédiatement
selon ~Rrλ =µ0
16π2r2cp2(
t− rc
)
∣∣∣∣∣∣
sin2 θ00
∣∣∣∣∣∣
, colinéaire à la direction de propagation~k =ωc~er.