la mécanique de newton - freeboulant.nicolas.free.fr/cours/terminale s/cours...au bureau :...
TRANSCRIPT
La mécanique de Newton
Matériel et produits :Au bureau : installer le TP en salle info
Une table à coussin d'air + mobiles +générateur d'impulsions (au bureau)Feuilles de carbone pour la table à coussins d'airFeuilles A3Deux calles en bois de même taille pour incliner la table.Potence de fixation de la webcamUne potence avec poulieFicelle classique + scotch + ciseauxUne masse de 100g avec crochetFicelle1 briquetScotchUne paire de ciseauxRègle en bois de 1mOrdinateur + webcam

La mécanique de Newton1)Rappels et définitions
1.1)Notion de référentielEtape n°1:Avant de débuter tout traitement d'un mouvement il est nécessaire de définir le système étudié puis le référentiel d'étude.
Mouvement relatif de deux trains Description du mouvement d'un réflecteur de vélo dans trois référentiels différents.
Trois référentiels couramment utilisés dans le traitement des exercices :Le référentiel héliocentrique
(soleil occupant l'origine du repère. Les axes sont orientés vers trois étoiles condidérées comme fixes)
Le référentiel géocentrique(Terre occupant l'origine du repère. Les axes sont orientés vers trois étoiles condidérées comme fixes)
Le référentiel terrestre(Un point du laboratoire occupant l'origine du repère. Les axes sont orientés vers trois points fixes)
Mouvement de la lune dans le référentiel héliocentrique :
Mouvement de la lune dans le référentiel géocentrique :
Mouvement de la lune dans le référentiel terrestre :
Référentiel Galiléen :On appelle référentiel galiléen, un référentiel dans lequel le centre d'inertie d'un solide soumis à des forces qui se compensent est immobile (VG est un vecteur nul) ou décrit un mouvement rectiligne et uniforme (VG est un vecteur constant).
Mouvement d'un mobile autoporteur dans un référentiel Galiléen :
Mouvement d'un mobile autoporteur dans un référentiel non Galiléen :
Etape n°2 :Il faut fixer un repère temporel.

1.2)Vecteur position du centre d'inertie d'un solide.
La position du centre d'inertie M d'un solide peut être repérée par le vecteur OM (t). Les coordonnées de ce vecteur sont :
OM (t): { X t Y t Z t
}
1.3)Vecteur vitesse du centre d'inertie d'un solideLe vecteur vitesse du centre d'inertie d'un solide V Gt est la dérivée du vecteur position par le temps.Rappel : comment tracer un vecteur vitesse :
Pour l'exemple ci-contre :
V t 2 =M 1M 3t3−t1
pour une courte durée Δt=t3-t1
Or on a :M 1M 3 = OM 3 - OM 1 = ΔOM 2
V G =Δ OM Δt
On montre en mathématiques que le rapport Δ OM Δt ,
peut être assimilé lorsque Δt tend vers 0, à la dérivée par rapport au temps du vecteur position OM :
V G = lim (Δ OM Δt ) Δt → 0=
d OM dt
Définition :Dans un référentiel donné, le vecteur vitesse du centre d'inertie G d'un solide à un instant donné t est la dérivée par rapport au temps du vecteur position OM à cet instant.
V Gt = dOM dt = {
dX t dt
dY t dt
dZ t dt
} = { X t Y t Z t
}∥ V G t ∥ = X² t Y² t Z² t

Exercice 1:Dans un repère (O, i , j , k ) lié au référentiel d'étude du mouvement le vecteur position
OM est caractérisé par ses coordonnées :
OM t : { X t Y t Z t
}1)Exprimer en fonction de X(t), Y(t)et Z(t) les coordonnées du vecteur vitesse V Gt .Les coordonnées du vecteur vitesse sont les dérivées par rapport au temps des coordonnées du vecteur position :
V Gt = {dX t dt
dY t dt
dZ t dt
}2)Application : Au cours du mouvement du centre d'inertie d'un solide, les coordonées du vecteur position sont données à chaque instant par les équations suivantes :
OM t : { X t =100tY t =7Z t=5t²
}Calculer les valeurs des coordonnées du vecteur vitesse du mobile M à la date t=10s.
V Gt = {dX t dt
dY t dt
dZ t dt
} = {d 100t
dtd 7dt
d 5t² dt
} = {1000
10t}
Vx(t)= X t =100 m.s-1
VY(t)= Y t =0 m.s-1
VZ(t)= Z t =10.t
V Gt=10 = { 1000
10x10} = {100
0100
}Vx(t=10)=100 m.s-1
VY(t=10)=0 m.s-1
VZ(t=10)=100 m.s-1
3)Calculer la valeur de la vitesse pour t=10s∥ V t=10∥ = X² t=10Y² t=10Z² t=10 = 100²0²100² =141m.s-1
1.4)Vecteur accélération du centre d'inertieDéfinition :L'accélération caractérise l'accroisement de la vitesse par unité de temps. Dans un référentiel donné l'accélération du centre d'inertie d'un solide, à un instant donné, est la dérivée par rapport au temps du vecteur vitesse V G :
aG t = d V t dt
= {dVxt dt
dVy t dt
dVz t dt
} = {d X t dt
d Y t dt
d Z t dt
} = { X t Y t Z t
}∥aG t ∥ = X² t Y² t Z² t

1.4)Comment tracer le vecteur accélération du centre d'inertie ?Représentation graphique de ΔV G
• Tracer le vecteur V 3
• Tracer le vecteur V 5
• Partir du point A4 et effectuer une translation de vecteur V 5 puis une translation de
vecteur - V 3
Selon la définition de l'accélération :
aG = d V t dt
= Δ V t Δt Δt→0
aG = Δ V t2τ
Le vecteur accélération aG est donc colinéaire au vecteur ΔV . La norme de aG est :
∥ aG∥ = ∥ ΔV t ∥Δt
= ∥ ΔV t ∥2τ
Exercice 2:1)Déterminer les mesures V3 et V5, des vecteurs vitesse instantannée du centre d'inertie aux points G3 et G5.
V3=G2G 42τ =
0,0432x0 ,06
V3=0,36m.s-1
V5=G4G 62τ =
0,0352x0 ,06
V5=0,29m.s-1
2)Construire, avec l'origine au point G4, le vecteur ΔV = V 5 - V 3 et déterminer à l'aide de l'échelle, la mesure ΔV du vecteur ΔV .Echelle : 1cm pour 0,1m.s-1

Sur la construction on mesure : ΔV=0,8cm soit ΔV=0,08m.s-1
3)Déterminer la mesure a4 du vecteur accélération du centre d'inertie au point G4 et construire le vecteur a4 . Echelle : 1cm pour 0,1m.s-2
L'accélération est calculée en appliquant la relation :a= ΔV2τ =
0,082x0 ,06 =0,67m.s-2
4)En déduire la valeur des coordonnées cartésiennes de a4 dans le repère (O, i , j ).
a4 : { a x=0a y=−0,67
}Application sur un exercice avec un mobile autoporteur tracé de ΔV et a
1.5)Accélération normale et accélération tangentielle
Lorsque la trajectoire du centre d'inertie d'un solide est curviligne ou circulaire, on définit un repère (O, N , T ) mobile lié au centre d'inertie du solide. Un tel repère est appelé repère de Frenet.
• T : désigne le vecteur unitaire porté par la tangente à la trajectoire qui est orienté dans le sens du mouvement.
• N : représnete le vecteur unitaire perpendiculaire à T
La projection du vecteur accélération a sur les axes du repère de Frenet donne :
• an =an n : accélération normale.• a t =at t : accélération tangentielle.
Avec a = an + a t = an n +at t
a t et V G sont de même sens
a t et V G sont de sens opposés
a t et V G sont perpendiculaires
a t et V G ont même direction et même sens
Le mouvement est accéléré.
Le mouvement est retardé.
Le mouvement est uniforme.
Le mouvement est rectiligne accelere

1.6)Relation entre la somme vectorielle des forces appliquées à un solide et le vecteur accélération du centre d'inertie ?On décide d'étudier le mouvement d'un mobile autoporteur de masse m. A l'instant initial (to), le mobile autoporteur occupe la position A et sa vitesse est nulle.On suppose que le mouvement s'effectue sans frottements.Définir un référentiel et faites le bilan des forces s'exerçant sur le mobile autoporteur:Le système étudié est le mobile autoporteur. Le mouvement est étudié dans le référentiel terrestre supposé galiléen par approximation. L'origine du réféntiel est placé au centre d'inertie du solide pour t=0.
T : Tension du fil• Direction : horizontale• Sens : Vers la gauche• Point d'application : points d'accroche
du fil• Norme : m2g
P : Poids du mobile• Direction : verticale• Sens : Vers le bas• Point d'application : centre d'inertie• Norme : m1g
R : Réaction de la table. Pour déterminer les caractéristiques on applique la première loi de Newton lorsque le mobile est au repos.
• Direction : verticale• Sens : Vers le haut• Point d'application : point de contact
avec la table• Norme : m1g
Représenter sur le schéma les forces s'exerçant sur le mobile à t+ ΔVt
Manipulation 1 Manipulation 2 Manipulation 3Masse du mobile (g)
215 215 315
Force exercée (N)
0,3 0,5 0,5
Moyenne de l'accélération a=1,4m.s-2
Moyenne de l'accélération a=2,35m.s-2
Moyenne de l'accélération a=1,5m.s-2

Produit ma 0,215x1,4=0,3 0,215 x 2,35=0,5 0,315 x 1,5 = 0,5Questions :1)L'accélération du mobile autoporteur est-elle proportionnelle à la force exercée ?Pour la manipulation 1 s'il y a proportionnalité on a : a= K x F
k=aF =
1,40,3 =4,7
Pour la manipulation 2 s'il y a proportionnalité on a : a= K x F
k=aF =
2,350,5 =4,7
On en déduit donc qu'il y a proportionnalité entre l'accélération et la l'intensité de la force exercée sur le mobile.2)L'accélération dépend-t-elle de la masse du mobile ?Oui car on remarque que plus la masse du mobile est importante et plus la valeur de l'accélération est faible.3)Dans les trois cas calculer le produit m.a et comparez le avec l'intensité de la résultante des forces appliquées sur le mobile.Dans les trois cas le produits m x a est égal à l'intensité de la résultante des forces s'appliquant sur le mobile.
Définition : la 2ème loi de Newton :• Vu en 1ère : Dans un référentiel galiléen, si le vecteur vitesse V G du centre d’inertie
varie, la somme des forces qui s’exercent sur ce solide n’est pas nulle. Sa direction et son sens sont ceux de la variation de V G entre deux instants proches.
• Ennoncé complet de la 2ème loi de Newton : Dans un référentiel Galiléen, la somme ∑Fi des forces appliquées à un solide est égale au produit de la masse du solide
par l'accélération de son centre d'inertie G :∑Fi =m. aG
2)Rappels de la première et de la seconde loi de Newton2.1)Première loi de Newton
Définition :Dans un référentiel Galiléen, lorsqu'un solide est soumis à des forces qui se compensent (solide pseudo isolé), le vecteur vitesse V G de son centre d'inertie ne varie pas. (Il est soit à l'arrêt soit en translation rectiligne uniforme)
2.2)Troisième loi de NewtonDéfinition :Si un corps A exerce sur un corps B une action mécanique modélisée par la force FA/B, alors B exerce sur A une action mécanique modélisée par la force FB/A.Que les corps A et B soient au repos ou en mouvement, les forces d’interactions ont la même droite d’action et FA/B=- FB/A.
Exemple : la force d'intéraction gravitationnelle :

• Direction : celle de la droite (AB)
• sens : vers le centre attracteur
• vers A pour la force FA/B
• vers B pour la force FB/A
• valeur :
G: constante de gravitation universelle
G =6,67.10-11 SI
F en N, m en kg et d en m
Application :La propulsion des avions
FA/B
FB/A
A
B
mB
mA
d
mA.m
B
d²GF
B/A= F
A/B =
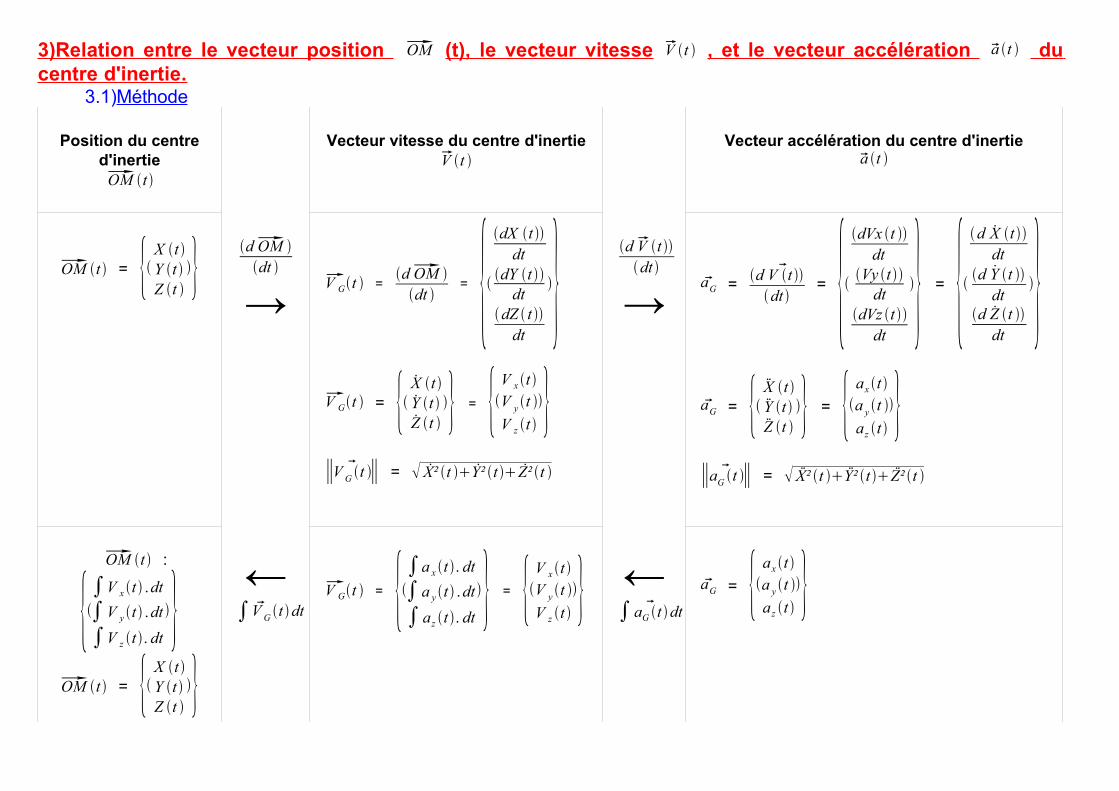
3)Relation entre le vecteur position OM (t), le vecteur vitesse V t , et le vecteur accélération a t du centre d'inertie.
3.1)Méthode
Position du centre d'inertieOM t
Vecteur vitesse du centre d'inertieV t
Vecteur accélération du centre d'inertiea t
OM t = { X t Y t Z t
} dOM dt
→V Gt =
dOM dt
= {dX t dt
dY t dt
dZ t dt
}V Gt = { X t
Y t Z t
} = {V x t V y t V z t
}∥ V G t ∥ = X² t Y² t Z² t
d V t dt
→aG = d V t
dt = {
dVx t dt
Vy t dt
dVz t dt
} = {d X t dt
d Y t dt
d Z t dt
}aG = { X t
Y t Z t
} = {ax t a y t az t
}∥ aG t ∥ = X² t Y² t Z² t
OM t :
{∫V x t .dt
∫V y t .dt
∫V z t . dt
}OM t = { X t
Y t Z t
}
←∫ V G t dt
V Gt = {∫a x t . dt∫ a y t .dt
∫ az t . dt} = {V x t
V y t V z t
} ←∫ aG t dt
aG = {ax t a y t az t
}

3.2)Etapes de la résolution d'un exercice en mécanique
• Définir précisément le système étudié.• Définir le référentiel d'étude ainsi que l'origine des temps.• Descriptions des forces s'exerçant sur le système• Projection des forces dans le repère choisi.• Application de l'une des lois de Newton
3.3)ApplicationUne automobile, en panne de moteur, assimilable à un solide en translation, a une masse M=1200kg. Elle est poussée par un véhicule de secours. Le démarage de l'automobile en panne sur une route rectiligne et horizontale commence par une phase d'accélération pendant laquelle le véhicule qui la pousse exerce une force constante Fprallèle au déplacement et dirigée vers l'avant.Dans cette question, on admettra qu'aucune force ne s'oppose à l'avancement de l'automobile. On propose d'étudier le mouvement du centre d'inertie G de l'automobile. A la date t=0, instant du démarrage, G se trouve à l'origine de l'axe O avec une vitesse nulle.1)Effectuer le bilan des forces extérieures agissant sur l'automobile et les représenter appliquées en G.Le système étudié est la voiture. Le référentiel choisi pour cette étude est le référentiel terrestre supposé galiléen par approximation.
F : Force u véhicule de secours• Direction : horizontale• Sens : Vers la droite• Point d'application : point de contact
des pare-chocs• Norme : F ∥F∥
P : Poids de la voiture• Direction : verticale• Sens : Vers le bas• Point d'application : centre d'inertie• Norme : mg
R : Réaction de la route. Pour déterminer les caractéristiques on applique la première loi de Newton lorsque le mobile est au repos.
• Direction : verticale• Sens : Vers le haut• Point d'application : point de contact
avec la route• Norme : mg
Coordonnées des vecteurs dans le repère (O, i , j )
F : {F0 } P : { 0−mg
} R : { 0mg
}2)L'automobile atteint une vitesse V=120km.h-1 après un parcours de 600m.
2.1)Etablir les coordonnées du vecteur accélération aG dans le repère choisi.Le vecteur accélaration a les coordonnées suivantes :

aG = { X t Y t
} = {ax t a y t }
Seconde loi de Newton : Dans un référentiel Galiléen, la somme ∑Fi des forces appliquées à un solide est égale au produit de la masse du solide par l'accélération de son centre d'inertie G :
∑Fi =m. aGDonc :
F + P + R =m. aG {F0 } + { 0−mg
} + { 0mg
} = m {ax t a y t }
On en déduit donc :
{a x t = Fma y t =0}
2.2)Etablir les coordonnées du vecteur vitesse V G t dans le repère choisi. En déduire une relation (1) entre V, F et t.
V Gt = {∫a x t .dt∫a y t .dt} = {∫
Fm.dt
∫0.dt} = { Fm x tcst1
cst2}
L'énnoncé donne pour t=0 V=0. On en déduit donc cst1=cst2=0
{V x t =Fm x t
V y t =0}
2.3)Etablir les coordonnées du vecteur position OG t dans le repère choisi. En déduire une relation (2) entre la position X(t) de la voiture, F et t.
OG t = {∫V x t .dt
∫V y t .dt} = {∫
Fmx t.dt
∫ 0.dt} = {12 . F
m. t²cst1
cst2}
Comme à t=0 la voiture occupe la position {00} on en déduit cst1=cst2=0
{ X t = 12 . Fm . t²
Y t =0}
2.4)Déterminer à l'aide des relations 1 et 2 l'intensité de la force F .
Relation 1 : V x t = Fm x t
Relation 2 : X t =12 . Fm . t²
Il faut convertir la vitesse de la voiture en m.s-1 : 120km.h-1=33m.s-1
Relation 1: 33 = F x t donc t=33,3 x m
F
Relation 2 : 600=12. F.t²
On en déduit :
600=33,3² xm
2F donc F=1108N
2.5)A l'aide du théorème de l'énergie cinétique vue en 1èreS, déterminer l'intensité F .

Dans un référentiel galiléen, la variation d'énergie cinétique d'un solide en translaion entre deux positions A et B, est égale à la somme des travaux des forces Fi appliquées à ce solide lors de son dé placement entre A et B.
Ec(B)-Ec(A)=∑WAB ( Fi )
12 m.VB² -
12 m.VA² =∑WAB ( Fi )
Déterminons les travaux effectués sur le déplaement de 600m.WAB ( P ) =0 car le poids est une force perpendiculaire au déplacement.WAB ( R ) =0 car la réaction de la route est une force perpendiculaire au déplacement (les frottements sont négligeables)WAB ( F ) =FxAB cos(α)= 600 x F avec α=0 car F etst colénéaire au vecteur déplacament cos(0)=1De plus lors du départ la vitesse est nulle donc :
12 m.VB² =WAB ( F )=600 x F
F= 1
2x600 m.(33,3)²=1108N