génie electrique 0a-ett : bases...
TRANSCRIPT

2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 1
Génie Electrique
Module ET30A-ETT : Bases D’Electrotechnique
Génie Electrique
Alexandre LEREDDE

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Electrotechnique
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 2
Electrotechnique
Application des lois de la physique à la production, au traitement, au transport et
à l’utilisation de l’énergie électrique
• Application des lois de l’électricité : Lois de Kirchoff ( loi des mailles et loi
des nœud), loi d’Ohm,…
• Application des lois de la mécanique : principe fondamental de la
dynamique,…
• Application des lois de l’électromagnétisme : loi de Faraday, loi de Laplace,
loi de Lenz,…
• Autres domaines : thermodynamique, mécanique des fluides, chimie

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Application de l’Electrotechnique
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 3
Du W au GW
Alimentation
de batterie (1 à
100W)
Appareil
électroménager
(100 à 1kW)
Véhicule électrique
(qqkW à 10kW)
Production électrique
éolienne (qqkW à 10MW)
Production électrique
solaire (du MW à 500MW)
Centrale nucléaire
(qq100kW à 2GW)

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Représentation générale d’un signal
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 4
Composante alternative
t
t
Tout le signal
Signaux décomposables en deux termes
est la composante alternative (AC) (valeur moyenne nulle) ou ondulation
est la composante continue (DC) ou valeur moyenne
t
Tout le signal=+
𝑋𝑚𝑜𝑦 = 𝑋 = 𝑋 = 𝑥 𝑡 =1
𝑇 𝑥 𝑡 𝑑𝑡
𝑇
0
Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Grandeurs électriques continues
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 5
Alimentation continue : Alimentation avec des grandeurs considérées
constantes (ondulation nulle ou très faible)
Exemple de convertisseurs permettant d'obtenir une tension continue• Machines à courant continu
• Redresseurs
• Hacheurs
Grandeurs caractéristiques• Valeur moyenne = valeur efficace en continu

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Grandeurs électriques alternatives
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 6
Valeur efficace d’une grandeur
Exemple
Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Signal sinusoïdal
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 7
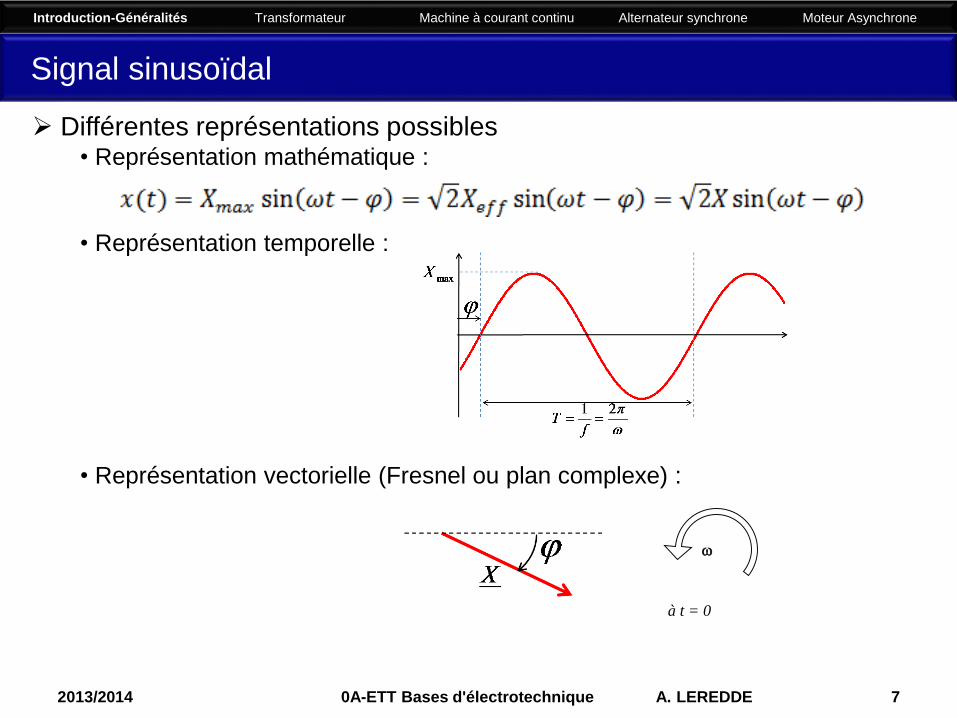
Différentes représentations possibles• Représentation mathématique :
• Représentation temporelle :
• Représentation vectorielle (Fresnel ou plan complexe) :
à t = 0

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Déphasage entre 2 signaux sinusoïdaux
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 8
y1
t
t20
2/1
1 2
y2
Représentation temporelle Représentation vectorielle
(Fresnel ou plan complexe)
Y1
1
2/1
2
Y2
O
Y3 = Y2 – Y1

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Exemple courant et tension aux bornes d’un dipôle
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 9
U
1
O
I
i/u = u - i
u
t
t0
i/u
i
Représentation temporelle Représentation vectorielle
(Fresnel ou plan complexe)
uj
u)( UeUωcos2U Ctu t
ij
i)( IeIωcos2I Cti t

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 10
Composants électriques : les sources d’énergie
Deux types de sources de tension distinctes
La Source de tension : impose la tension à ses bornes
La Source de courant : impose le courant qui la parcourt
Définies par la valeur moyenne en continu
Définies par la valeur efficace en alternatif
Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
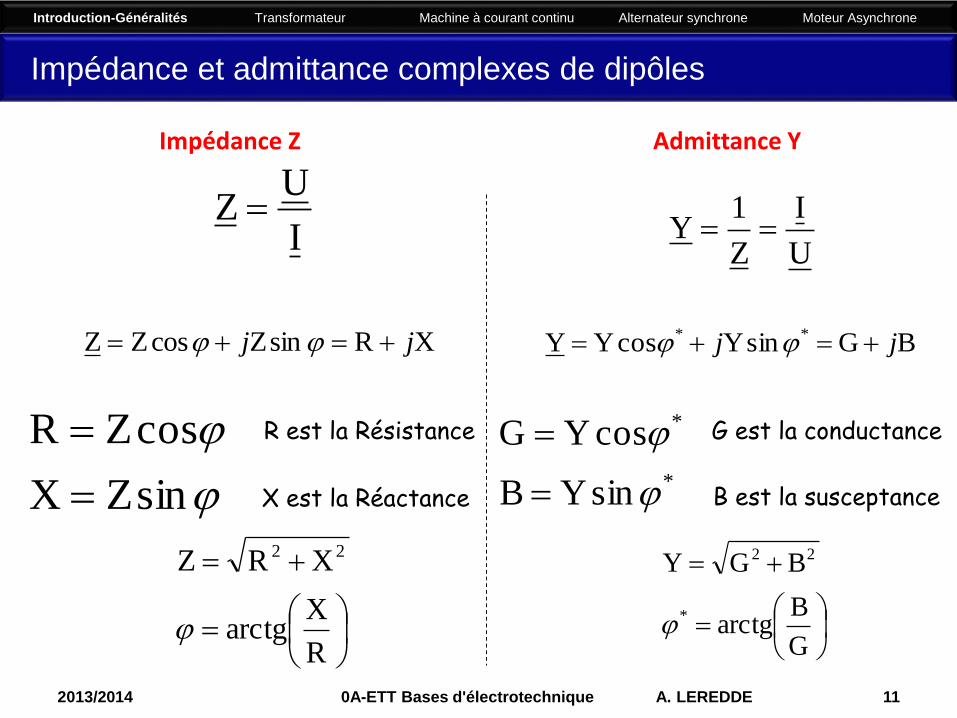
Impédance et admittance complexes de dipôles
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 11
I
UZ
XRsinZcosZZ jj
sinZX
cosZR
R
Xarctg
XRZ 22
R est la Résistance
X est la Réactance
Impédance Z Admittance Y
U
I
Z
1Y
BGsinYcosYY ** jj
*
*
sinYB
cosYG
G
Barctg
BGY
*
22
G est la conductance
B est la susceptance

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 12
La résistance (ou conducteur ohmique)
u
t
t
i/u = 0
i
U
1O
i = uI
Symbole de la résistance
Relation entre la tension et le courant
en temporelle
Relation entre la tension et le courant
en complexe
Représentation dans le plan complexe
𝑣(𝑡) = 𝑅𝑖(𝑡) 𝑉 = 𝑅𝐼
Caractéristiques de la résistance

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
L’inductance (ou bobine)
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 13
U
1O
I
= + 2π
u
t
t0
i/u =
i
2π
Relation entre l’inductance et la réactance
Caractéristiques de l’inductance et de la réactanceSymbole de
l'inductance ou la réactance
Relation entre la tension et le courant
en temporelle
Relation entre la tension et le courant
en complexe
Représentation dans le plan complexe
𝑣(𝑡) = 𝐿𝑑𝑖(𝑡)
𝑑𝑡 𝑉 = 𝑗𝐿𝜔𝐼 = 𝑗𝑋𝐼

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Le condensateur
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 14
U
1
O
I
= -2
πu
t
t0
i/u = -
i
2π
Caractéristiques du condensateur
Symbole du condensateur
Relation entre la tension et le courant
en temporelle
Relation entre la tension et le courant
en complexe
Représentation dans le plan complexe
𝑖(𝑡) = 𝐶𝑑𝑣(𝑡)
𝑑𝑡 𝑉 =
1
𝑗𝐶𝜔𝐼

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 15
Puissance électrique instantanée p(t)
p(t) = v(t).i(t)
Transfert d’énergie électrique
v
i
conducteur parfait
AMONT AVAL
sens positif pour p(t)
« Source »
S1
orientation G
« Utilisation »
S2
orientation R

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 16
Puissance électrique en continu
Pour un dipôle électrique avec une tension V à ses bornes et parcouru
par un courant I
Sa puissance électrique est donnée par le produit courant – tension
𝑃 = 𝑉𝐼

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Puissance électrique en alternatif (réseau monophasé)
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 17
Pour un dipôle électrique avec une tension à ses bornes et parcouru
par un courant déphasé d’un angle
Définitions des puissances :
• Puissance instantanée :
VI

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 18
i
t
i/u
u
t
t
P = (p)moy
+
p
Puissance électrique en alternatif (réseau monophasé)
Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 19
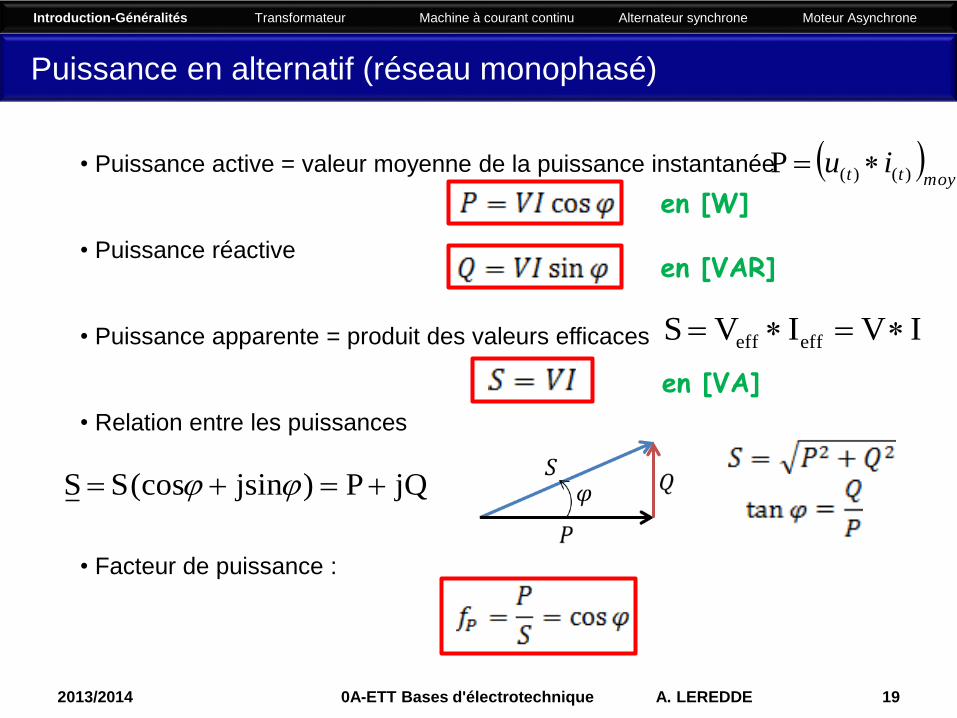
Puissance en alternatif (réseau monophasé)
• Puissance active = valeur moyenne de la puissance instantanée
• Puissance réactive
• Puissance apparente = produit des valeurs efficaces
• Relation entre les puissances
• Facteur de puissance :
moytt iu )()(P
IVIVS effeff
jQP)jsincos(SS
en [VA]
en [VAR]
en [W]

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 20
Composants électriques usuels
Résistance
• Uniquement de la puissance active absorbée
• Différentes formulations possibles
• Exemple

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 21
Composants électriques usuels
Inductance
• Uniquement de la puissance réactive absorbée
• Différentes formulations possibles
Condensateur
• Uniquement de la puissance réactive fournie
• Différentes formulations possibles

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Réseau triphasé
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 22
Avantages des réseaux triphasés :•Au niveau de la production : moins volumineux et moins cher
•Au niveau du transport : section de conducteur plus faible
•Au niveau de l’utilisation : deux niveaux de tensions différents
Réseau Triphasé
Deux types de tension :• Tension simple : Tension entre une phase et le neutre et notée
• Tension composée : Tension entre deux phases et notée
• Relation entre Tension simple et composée :
1L
2L
3L
N
NV1NV2
NV3
12U
23U 31U
iNV
ijU
jNiNij VVU

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Représentations des tensions
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 23
Différentes représentations possibles• Représentation temporelle
• Représentation mathématique

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Représentations des tensions
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 24
Différentes représentations possibles• Représentation vectorielle
Relation entre les tensions efficaces simple et composée :

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Puissance en alternatif (réseau triphasé)
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 25
: Déphasage entre une tension simple sur une phase et le courant de
la même phase
Expression en fonction de la tension simple ou composée
Définitions des puissances :• Puissance instantanée :
• Puissance active :
• Puissance réactive :
• Puissance apparente :
• Relation entre les puissances :
• Facteur de puissance :

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Couplage Etoile
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 26
Différentes possibilités pour coupler les enroulements d’une charge ou
d’un générateur
Couplage Etoile• Schéma de Câblage
• Caractéristiques du couplage Etoile
Tension efficace au bornes d’un enroulement :
Courant efficace dans un enroulement :

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Couplage Triangle
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 27
Couplage Triangle• Schéma de Câblage
• Caractéristiques du couplage Triangle :
Tension efficace aux bornes d’un enroulement :
Courant efficace dans un enroulement :
Au niveau des phases• Couplage Triangle : possibilité d’avoir un courant de phase plus important
• Couplage Etoile : possibilité d’avoir une tension entre phases plus importante

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 28
Lois de l’électricité : Loi des mailles
Enoncé : la somme des tensions dans une boucle de circuit est nulle
Exemple de circuit
Représentation vectorielle

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 29
Lois de l’électricité : Loi des nœuds
Enoncé : ll n’y a pas d’accumulation de courant dans un nœud. Ainsi, la
somme des courants qui y entrent est égale à la somme des courants qui
en sortent
Exemple de nœud
Représentation vectorielle

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 30
Lois de l’électricité : Théorème de Boucherot
Pour la puissance active : La somme de la puissance active totale
absorbée par un ensemble de charges est égale à la somme des
puissances actives absorbées par chaque élément de cet ensemble
Pour la puissance réactive : La somme de la puissance réactive totale
absorbée par un ensemble de charges est égale à la somme des
puissances réactives absorbées par chaque élément de cet ensemble
Pas transposable à la puissance apparente
iT PP
iT QQ

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Un peu d’électromagnétisme ….
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 31
• Pour l’étude des machines électriques, on se limitera au 4 lois de
l’électromagnétisme suivantes :
• Les lois d’Ampère, Biot et Savart : « on peut créer un champ magnétique avec
du courant électrique »
• Utilisation de ce principe avec des bobines pour créer les
électroaimants
• Application pour certains inducteurs (excitation) des machines
électriques
• La loi de Laplace : « on peut déplacer des circuits électriques à l’aide d’un
courant et d’un champ magnétique »
𝐵
𝐼𝑑𝐿
𝑑𝐿
𝐹
𝐹 = 𝐼. 𝑑𝐿 ∧ 𝐵

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Un peu d’électromagnétisme ….
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 32
• La loi de Faraday : « Un circuit soumis à un flux magnétique variable est le
siège d’une force électrique variable »
• La loi de Lenz : « tout action sur un milieu se traduit par une réaction de celui-
ci ayant tendance à s’opposer à l’action, qui lui donne naissance »
𝑛𝑆
−𝑒 > 0
𝐵𝐴
𝐼
𝐵𝐵′
𝑛𝑆
𝑒
𝐵𝐴
𝐵𝑒 = −
𝑑𝜙
𝑑𝑡
𝐵

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Généralités
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 33
Modification de la forme de l’énergie électrique:• Possibilité de modifier l’amplitude
• Conservation de la fréquence
Similarité avec le réducteur dans les systèmes mécanique :• Entrée : Haute tension/ Courant faible comme Vitesse élevée/Petit
couple
• Sortie : Basse tension/ Fort Courant comme Petite vitesse/Fort Couple
Attention : Le transformateur ne fonctionne pas en régime continu (il ne conserve pas la valeur moyenne du signal)

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Utilisation du transformateur
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 34
Adapter le niveau de tension : un transformateur permet d’élever ou de
diminuer le niveau de tension entre l’entrée et la sortie
• Exemple : le transport de l’énergie électrique : 225kV (HT) ou 20kV (MT)
Utilisation : 400V (tension entre phases)
Isolation galvanique deux circuits électriques :• Pas de liaison électrique entre deux circuits électriques (pas les mêmes
masses)
• Changement de régime de neutre
• Alimentation flottante
Pour changer le nombre de phase :• Un système monophasé à un système diphasé
• Un système triphasé à un système hexaphasé ou dodécaphasé

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Caractéristiques d’un transformateur
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 35
Excellent rendement (95%).
Coût de fabrication modéré et très grande robustesse.
Le transformateur alimenté par une source de tension parfaite :• comportement au niveau du secondaire comme une source de tension
parfaite avec une légère chute de tension.
Courant absorbé à vide très faible voir négligeable (pertes à vide faible).
Possibilité d’avoir un courant d'appel assez important lors de la mise
sous tension.
Un transformateur est souvent caractérisé par sa puissance apparente
au secondaire :en monophasé :
en triphasé :

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Circuits d’un transformateur
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 36
Composé de deux circuits électriques relié par un circuit magnétique :
• Le circuit primaire (ou primaire) : Circuit d’entrée du transformateur : reçoit la
tension d’entrée
• Le circuit secondaire (ou secondaire) : Circuit de sortie du transformateur :
délivre la tension de sortie
Le circuit magnétique composé le plus souvent d'un empilement de tôle
magnétique :•Pour canaliser au mieux les lignes de champ, Perméabilité relative la plus
grande possible (transformateur parfait )

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Repérage et notation
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 37
Les bornes homologues repérés par un point :• Un courant entrant par le point crée un flux positif (sort par le point)
• Un flux sortant par le point crée un courant positif (rentre par le point)
Pour simplifier les schémas, on adopte les représentations suivantes :
Les grandeurs au primaire repérées avec l’indice 1 ou P et celle du
secondaire avec l’indice 2 ou S
Au niveau des conventions le primaire noté en convention récepteur et le
secondaire en convention générateur

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Le transformateur parfait
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 38
Un transformateur sans aucune perte• Uniquement une modification de la forme de l'énergie électrique (valeur
efficace)
Une transformation sans pertes veut dire que :
• La résistance des bobinages primaire et secondaire nulle (pas de pertes
joules)
• Pas d'hystérésis magnétique
• Pas de pertes par courant de Foucault
Lignes de champ parfaitement canalisés, Pas de fuite magnétique
Rendement d'un transformateur parfait étant proche de l'unité

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Magnétisation du transformateur
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 39
Fonctionnement à vide lors de la mise sous tension :• Tension sinusoïdale imposée aux bornes de l'enroulement primaire
• Circulation d'un courant car circuit électrique fermé
• Théorème d’ampère : création d'un flux magnétique variable dans le circuit
magnétique
• Loi de Faraday : création de forces électromotrices aux bornes des deux
enroulement.
• Au secondaire : tension sinusoïdale et de même fréquence que celle
appliquée au niveau du primaire.
• Loi de Lenz : au primaire la force électromotrice aura tendance à s'opposer à
l'évolution du courant primaire jusqu'à annuler celui-ci.
• Transformateur magnétisé : courant primaire nul

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Application de la loi de Faraday
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 40
Loi de Faraday : une variation du flux magnétique crée une force
électromotrice dans chaque bobinage :
Il est possible décrire pour chacun, la loi de Faraday :
• Pour le primaire :
• Pour le secondaire :
En écrivant l'égalité au niveau de la variation du flux :
le rapport de transformation : rapport entre la tension efficace au
secondaire et la tension efficace au primaire
Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Application du théorème d’Ampère
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 41
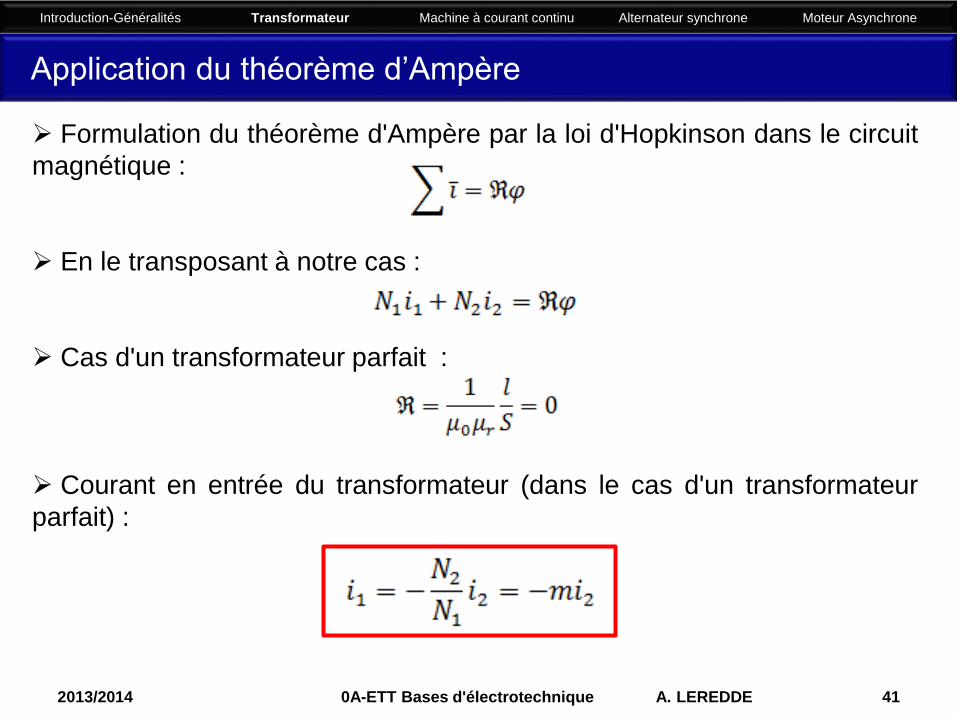
Formulation du théorème d'Ampère par la loi d'Hopkinson dans le circuit
magnétique :
En le transposant à notre cas :
Cas d'un transformateur parfait :
Courant en entrée du transformateur (dans le cas d'un transformateur
parfait) :

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Type de transformateur et schéma électrique
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 42
Type de transformateur en fonction du rapport de transformation :
• : transformateur élévateur
• : transformateur abaisseur
• : transformateur d'isolement
Le schéma électrique équivalent peut alors se représenter ainsi :

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Formule de Boucherot
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 43
Tension imposée par la source de tension au primaire :
Application de la loi de Faraday :
Intégration pour avoir le flux total :
Flux circulant dans le circuit magnétique :
L'induction magnétique :
Relation entre l'induction maximal et la valeur efficace de la tension :

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Permet de partager des spires entre le primaire et le secondaire
Pas d’isolation galvanique
Les avantages de l’autotransformateur• Diminution du nombre de spire pour réaliser la transformation (spire en
commun)
• Diminution de la masse de cuivre
• Diminution des coûts
Spire en commun parcouru par un courant réduit (application de la loi
des nœuds)
Circuit magnétique réduit
Possibilité d’avoir une tension réglable (ATV)
Les transformateur spéciaux : l’Autotransformateur
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 44

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Les transformateur spéciaux : le transformateur de potentiel
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 45
Transformateur utilisé pour mesurer des tensions élevés
Impossibilité de placer un voltmètre en haute tension
Pour mesurer cette tension, on utilise parfois un transformateur de
potentiel
Transformateur abaisseur où circule très peut de courant : impédance du
voltmètre très grande
Elément d’une chaine de mesure : construction très soignée

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Utilisé pour mesurer des courants élevés
Composé d’un enroulement au primaire et de plusieurs enroulements au
secondaire• Si on applique le théorème d’ampère :
• Si le transformateur est bien construit, la réluctance très faible alors :
Nécessité de court-circuiter le secondaire : le plus souvent par un
ampèremètre• Risque d’échauffement magnétique, Tension augmentant jusqu’au claquage
• Pas de conservation de la composante continue d’un signal
Le transformateur de courant
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 46

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Transformateur qui permet d’avoir plusieurs tensions isolées entre elles
Gain de place car un seul circuit magnétique pour plusieurs
enroulements
Possible surdimensionnement de l’enroulement primaire
Tension pour chaque secondaire :
Théorème d’Ampère :
Le courant au primaire du transformateur peut alors s’écrire :
Transformateur à plusieurs secondaires
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 47

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Transformateur à point milieu
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 48
Cas particulier du transformateur à plusieurs enroulements
Transformation d’une tension monophasé en un système diphasé
Transformateur qui peut être utilisé pour augmenter la puissance en
sortie :• Deux enroulement en série (doublement de la tension en sortie)
• Deux enroulement en parallèle (doublement du courant en sortie)
Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Le transformateur réel
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 49
Pertes dans les circuits électriques :• Echauffement des câbles au primaire et au secondaire
• Effets d’auto-induction (faible)
Pertes dans le circuit magnétique• Pertes par hystérésis
• Pertes par courant de Foucault
Différence par rapport au transformateur réel• Rendement inferieur à 100%
• Chute de tension au secondaire
• Déphasage différent entre le primaire et le secondaire
• Courant à vide au niveau du primaire

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Schéma équivalent général
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 50
Rendre compte des différentes imperfections du transformateur :
Imperfections magnétiques magnétisme, elles sont modélisées par deux
éléments :• : réactance magnétisante : perméabilité relative du matériau non infini
• : résistance des pertes fer : pertes magnétiques
Imperfections dues à l’électricité, elles sont modélisées par deux
éléments au niveau du primaire et du secondaire :• et : Réactances de fuite : lignes de champ vues par un seul enroulement
• et : résistances des enroulements : pertes Joules

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Schéma équivalent simplifié
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 51
Simplification possible :• Permutation de l’impédance avec l’impédance
• Passage au secondaire de l’impédance: résistance des pertes fer : pertes
magnétiques
• Regroupement des impédances de même nature

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Schéma équivalent de Kapp
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 52
Schéma équivalent simplifié sans les éléments au primaire :•Pas de modélisation des imperfections magnétiques
• Utile pour étudier la chute de tension
Hypothèse de Kapp : Quand le courant en charge est dix fois plus grand
que courant à vide

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Fonctionnement à vide
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 53
Transformateur sans charge : Courant faible pour la magnétisation du
matériau magnétique
La relation d’Hopkinson :
Aux pertes magnétiques près, courant appelé courant magnétisant
Déphasage entre la tension et le courant à vide
Pas de chute de tension
Détermination du rapport de transformation à partir du fonctionnement à
vide :

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Fonctionnement en charge
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 54
Impose la tension du secondaire à un récepteur
La relation d’Hopkinson :
Le courant primaire peut alors s’écrire :
En l’exprimant en fonction du rapport de transformation :
Le courant au primaire peut alors s’exprimer :
Présence d’un courant magnétisant : limite le courant participant au
fonctionnement du transformateur

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Chute de tension
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 55
Schéma équivalent de Kapp rappelé ci-dessous.
Loi des mailles au niveau du secondaire :
Loi des mailles dans le repère de Fresnel (diagramme de Kapp)

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Chute de tension
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 56
Définition de la chute de tension de tension dans un transformateur :
Approximation : Les tensions et en phase : Vecteurs colinéaires.
Si on zoom sur le diagramme de Kapp
On peut donc écrire la chute de tension :
En utilisant les formules trigonométriques il est aussi possible de dire :

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Chute de tension
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 57
Chute de tension en fonction des éléments du schéma équivalent :
La tension efficace au secondaire peut donc s’écrire :
La caractéristique de sortie de ce transformateur peut se tracer ainsi :
Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Mise sous tension du transformateur
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 58
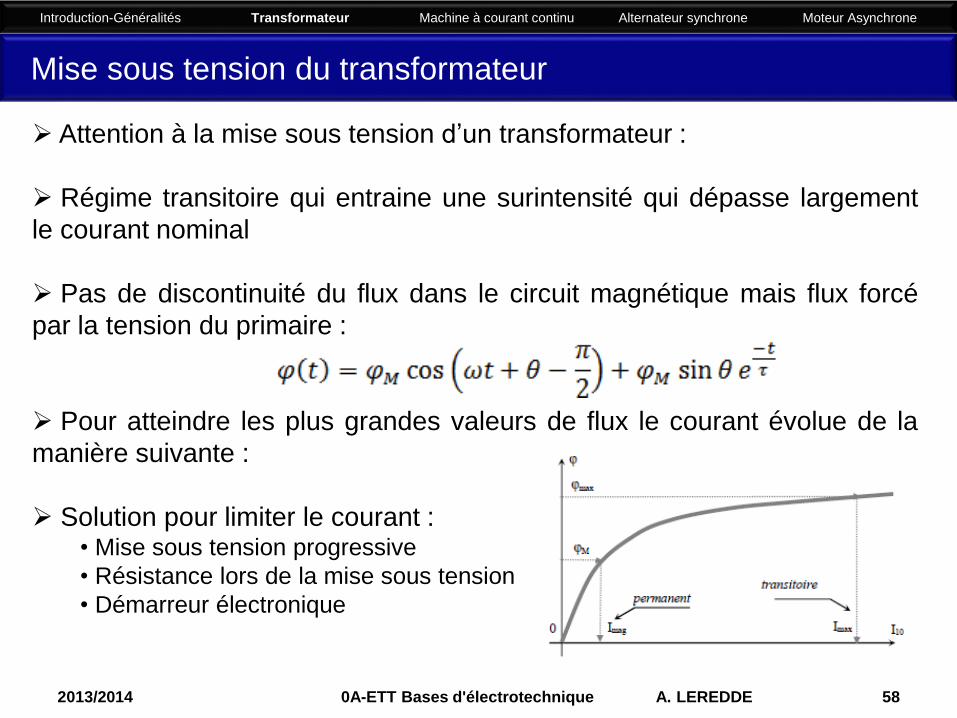
Attention à la mise sous tension d’un transformateur :
Régime transitoire qui entraine une surintensité qui dépasse largement
le courant nominal
Pas de discontinuité du flux dans le circuit magnétique mais flux forcé
par la tension du primaire :
Pour atteindre les plus grandes valeurs de flux le courant évolue de la
manière suivante :
Solution pour limiter le courant :• Mise sous tension progressive
• Résistance lors de la mise sous tension
• Démarreur électronique

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Puissance
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 59
Au niveau des puissances :• : puissance au primaire absorbée par le transformateur
• : puissance au secondaire fournit à la charge
Les différentes pertes dans le transformateur :• : pertes Joules dues à la résistance de l’enroulement primaire
• : pertes Joules dues à la résistance de l’enroulement secondaire
• : pertes fer ou magnétiques (courant de Foucault et Hystérésis)

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Rendement
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 60
Le rendement : le rapport entre la puissance d’entrée et de sortie
Possibilité de regrouper les pertes joules du primaire et du secondaire
sous un seul terme
L’arbre des puissances peut alors se simplifier comme ceci.
Expression possible du rendement

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Mesure du rendement : Méthode directe
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 61
Mesure directe avec de 2 Wattmètres de et
Méthode peu utilisable
Le rendement d’un transformateur étant proche de 1, difficile d’évaluer la
différence entre et , et l’incertitude de mesure.
Difficulté d’avoir une charge capable d’absorber le courant nominal.
Pas de localisation des pertes possible

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Méthode des pertes séparées : essai à vide
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 62
Essai réalisé sans charge et sous tension primaire nominale
Détermination des pertes fer lorsque la tension primaire est à sa valeur
nominale
La puissance absorbée sert uniquement à compenser les pertes fer et
les pertes Joule au primaire.
Courant absorbé à vide faible, les pertes joules au niveau du primaire
peuvent être négligées.

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Méthode des pertes séparées : essai en court circuit
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 63
Court-circuit du secondaire et Tension primaire réduite afin d’avoir le
courant secondaire au courant nominal
Essai réalisé sous tension réduite, car courant absorbé important (court-
circuit)
La puissance débitée au primaire correspond à la somme des pertes :
Pertes fer faibles car essai effectué sous tension réduite :
Possibilité d’approximer les pertes Joules :

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Méthode des pertes séparées : essai en charge
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 64
Mesure de la puissance en entrée ou en sortie
Arbre des puissances équivalent
Détermination du rendement :

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Détermination des éléments du schéma équivalent
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 65
Connaitre au mieux le comportement du transformateur
Les différentes mesures effectuées :
• Mesure de la tension efficace au primaire et au secondaire
• Mesure du courant efficace au primaire et au secondaire
• Mesure de la puissance active au primaire
Deux essais réalisés• Essai à vide (tension primaire à la valeur nominale) pour déterminer les
éléments situés au primaire
• Essai en court-circuit (courant secondaire à la valeur nominale) pour
déterminer les éléments situés au secondaire

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Détermination des éléments au primaire
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 66
Le rapport de transformation défini comme le rapport entre la tension
efficace au secondaire à vide par rapport à celle au primaire :
Pour l’essai à vide, la puissance active absorbée par le transformateur
correspond aux pertes magnétiques ou pertes fer :
Courant secondaire nul : Pas de puissance active ou réactive absorbée
par les éléments situés au secondaire
Avec un bilan de puissance on peut déterminer
Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Détermination des éléments au secondaire
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 67
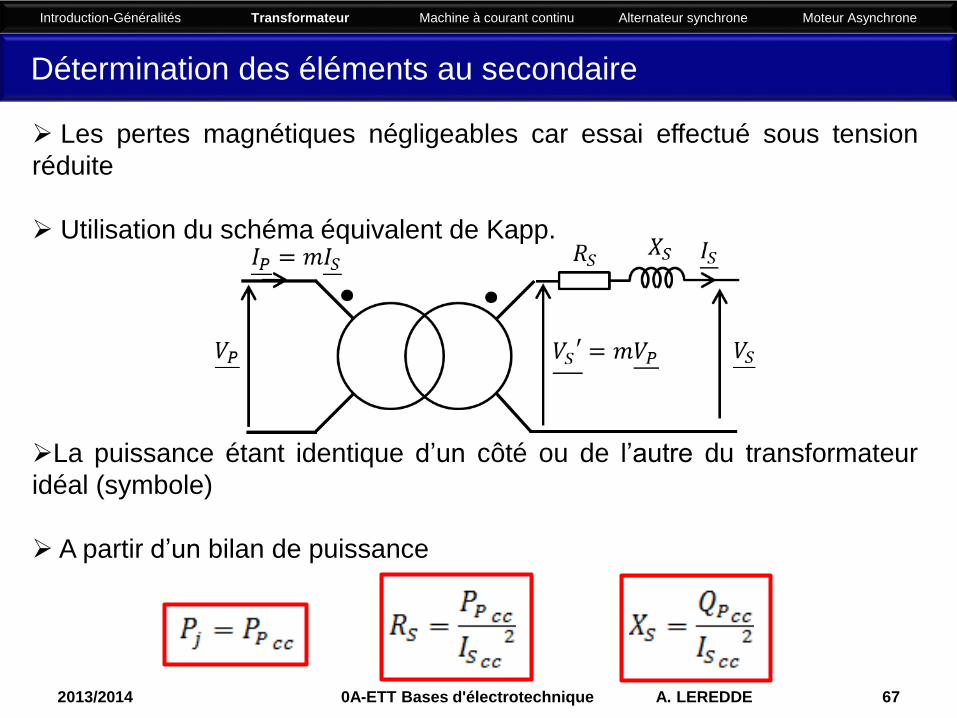
Les pertes magnétiques négligeables car essai effectué sous tension
réduite
Utilisation du schéma équivalent de Kapp.
La puissance étant identique d’un côté ou de l’autre du transformateur
idéal (symbole)
A partir d’un bilan de puissance

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
La conversion électromécanique
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 68
Conversion
Electromécanique
Energie
électrique
Energie
Mécanique
Mode Générateur (ou alternateur)
Mode Moteur
• La conversion électromécanique permet la conversion de l’énergie mécanique en
énergie électrique ou de l’énergie électrique en énergie mécanique : c’est une
conversion réversible
• Dans le cas des moteurs électriques, l’énergie mécanique est sous forme d’une
énergie en rotation. Selon le type de la machine, l’énergie peut être soit continue
soit alternative

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Les différents types de machines
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 69
Les Machines à Courant Continu
Cette machine possède des grandeurs électriques continues
Historiquement un des premiers moteurs qui a pu être asservie en couple et en vitesse :
moteur assez utilisé mais de plus en plus remplacé par les moteurs à courants alternatifs
Applications : Haute précision (robotique) Engin de levage (couple élevé au démarrage)
Les Machines Synchrones
• Grandeurs électriques alternatives :
• Conversion électromécanique avec un bon
rendement
• Fonctionnement en moteur plus complexe:
• Grâce à l’électronique de puissance,
utilisation plus fréquente
• Fonctionnement en générateur très
largement utilisé
Grandeurs électriques alternatives :
Fonctionnement en moteur assez simple :
Couplage sur le réseau assez simple. La
machine possède un couple non nul au
démarrage. Régulation de vitesse est bien
maitrisée
Fonctionnement en générateur sous
certaines conditions mais moins avantageux
que pour la machine synchrone
Les Machines Asynchrones

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Au niveau des puissances …
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 70
• La puissance absorbée est la puissance en entrée de la machine (absorbée par la
machine)
• Pour un fonctionnement en mode moteur : 𝑃𝑎𝑏𝑠 = 𝑃𝑒𝑙𝑒𝑐
• Pour un fonctionnement en mode générateur : 𝑃𝑎𝑏𝑠 = 𝑃𝑚𝑒𝑐𝑎
• La puissance utile est la puissance en sortie de la machine (disponible pour
l’utilisateur)
• Pour un fonctionnement en mode moteur : 𝑃𝑢 = 𝑃𝑚𝑒𝑐𝑎
• Pour un fonctionnement en mode générateur : 𝑃𝑢 = 𝑃𝑒𝑙𝑒𝑐
• La puissance électromagnétique est la puissance convertie : elle est à la fois de
type mécanique et électrique
• Le rendement de la machine est calculé en fonction de la puissance absorbée et
utile :
𝜂 =𝑃𝑢
𝑃𝑎𝑏𝑠

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Vocabulaire lié au machines électriques
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 71
• Stator :
• Partie statique (fixe) de la machine
• Rotor :
• Partie mobile de la machine, elle a une vitesse de rotation par rapport au
stator que l’on notera Ω (en rd/s) ou 𝑁 (en tr/min)
• Inducteur :
• L’inducteur a pour but de créer le champ magnétique qui permettra le
transfert d’énergie électrique entre le stator et le rotor
• Induit :
• L’induit est le siège de l’induction magnétique. Il est soumis au champ
inducteur

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Généralités sur La machine à courant continu (MCC)
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 72
Machines à courant
continu
Energie
électrique
(continu)
Energie
Mécanique
(rotation)
• La machine à courant continu est une machine largement répandue car elle à un
fonctionnement assez simple. Ces équations de fonctionnement le sont aussi.
• Les applications de la machine à courant continu sont assez variées :• Robotiques (précision)
• Asservissement de couple, vitesse et position
• Electroménager
• Véhicule électrique (automobile, train)
• Nécessite une alimentation électrique continue (les grandeurs importantes sont
continues : tension et courant)

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Création d’une force électromagnétique
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 73
𝐼
𝐼
𝐼
𝐸 𝐵 𝐹
• Pour créer une force électromagnétique, on applique la loi de Laplace :
• On place une barre métallique mobile sur deux
rails conducteurs fixes, le tout placé dans un
champ magnétique perpendiculaire au plan des
deux rails et de la barre
• Entre ces deux rails conducteurs, on applique
une tension
• Le circuit étant fermé, un courant circule dans le
circuit
• D’après la loi de Laplace, tout les éléments traversés par un courant
subissent des forces électromagnétiques Déplacement de la barre
métallique
• La force de Laplace est d’autant plus intense si l’intensité du courant et le
champ magnétique est intense
• Le sens de la force dépend du sens du courant et du sens du champ
magnétique (règle de la main droite) si on inverse le courant ou le champ
magnétique, la force est orientée dans l’autre sens

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Création d’une force électromotrice
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 74
𝑒 𝐵
𝑥 + 𝑑𝑥𝑥
𝑀 𝑁
𝑂𝑃
• Pour mettre en évidence, la création d’une force électromotrice, on reprend le
dispositif expérimental précédent :
• Pour voir la force électromotrice, on remplace la
source de tension par un voltmètre
• L’ensemble est toujours plongé dans un champ
magnétique constant et uniforme, perpendiculaire
au plan des rails et de la barre
• La surface MNOP est donc soumise à un flux magnétique 𝜙 qui est
perpendiculaire à celle-ci. De plus l’intensité de ce flux est égale à 𝜙 = 𝐵. 𝑆
• Lorsque l’on déplace le barreau, la surface MNOP est modifiée ce qui
entraine une variation du flux magnétique
• D’après la loi de Faraday, cette modification entraine la création d’une force
électromotrice entre M et P
V
𝑒 =𝑑𝜙
𝑑𝑡

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Constitution de la machine à courant continu
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 75
MCC
Ω𝑇𝑢
𝑈𝑎
𝑖𝑎
inducteurinduit
• Une machine à courant continu est
composée de deux parties :
• L’inducteur : il a pour but de créer un
champ magnétique constant.
L’inducteur est situé au stator de la
machine. Pour créer ce champ
magnétique, il y a deux solutions :
avec un aimant permanent ou avec un
bobinage (principe de l’électroaimant).
C’est la partie passive
• L’induit : c’est l’induit qui réalise la conversion électromécanique, l’induit est
situé au rotor de la machine. C’est la partie active de la machine
• Pour réaliser la conversion électromécanique, l’induit a besoin que l’inducteur
crée un champ magnétique

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Application à la MCC
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 76
• Création de la force magnétique : • Création de la force électromotrice :
• La force est maintenant un couple
électromagnétique que l’on note 𝑇𝑒𝑚
• Ce couple électromagnétique est
fonction du courant d’induit :
𝑇𝑒𝑚 = 𝐾𝑇 . 𝐼
• La force électromotrice est créée par
une variation de l’orientation de la
surface variation du flux
magnétique
• La fem sera proportionnel à la vitesse
de rotation :
𝐸 = 𝐾𝐸 . Ω
Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Application à la MCC
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 77
• Avec un fonctionnement en charge de la machine : couple et vitesse non nuls
pour la partie mécanique et tension et courant non nuls pour la partie électrique
• On aura à la fois la création d’un couple électromagnétique et d’une force
électromotrice
Ces deux phénomènes se superposeront
• La puissance électromagnétique peut s’écrire de deux manières :
• Si on regarde le côté électrique : 𝑃𝑒𝑚 = 𝐸. 𝐼𝑎 = 𝐾𝐸 . Ω. 𝐼𝑎
• Si on regarde le côté mécanique : 𝑃𝑒𝑚 = 𝑇𝑒𝑚. Ω = 𝐾𝑇 . 𝐼𝑎 . Ω
• On peut en déduire que 𝑲𝑬 = 𝑲𝑻 = 𝑲 et que 𝑷𝒆𝒎 = 𝑲.𝜴. 𝑰𝒂

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Schéma fonctionnel de la transformation électromécanique
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 78
Circuit électrique : Résistance (pertes) +
inductance
LAPLACE
FARADAY
Champ
magnétique
Courant
d’excitation
Arbre mécanique : Pertes mécanique +
Inertie
Courant
d’induitCouple
électromagnétique
𝑖𝑎𝑈𝑎
Tension
d’alimentation
𝐸
+
−
+
−
𝑇𝑒𝑚 = 𝐾. 𝑖𝑎
𝐸 = 𝐾.Ω Ω
Vitesse de
rotation
Force
Electromotrice Couple de
Charge
𝑇𝑒𝑚
𝑇𝑐ℎ
• Schéma fonctionnel qui permet de décrire le fonctionnement de la machine à
courant continu

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Principe de fonctionnement : Mode moteur
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 79
Courant
d’induit𝑖𝑎
𝑈𝑎Tension
d’alimentation
+
−
Force
Electromotrice
Couple
électromagnétique
Couple de
charge
𝑇𝑒𝑚
𝑇𝑐ℎ
𝐸
+
−
Rotation du
rotor Ω
• On applique une tension d’induit (tension
d’alimentation)
• Cette tension fait circuler un courant car on a la
présence de composants électriques (voir
modélisation)
• Ce courant crée un couple moteur (couple
électromagnétique au pertes près)
• Si ce couple est supérieur au couple de charge (ou
couple résistant), le rotor se met en rotation
• Cette rotation vient créer une force électromotrice
qui vient s’opposer au courant (diminution) sans
pouvoir l’annuler (c’est-à-dire 𝑈𝑎 > 𝐸
Application de la loi de Lenz : les effets magnétiques
s’oppose à la cause qui leur a donné naissance

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Principe de fonctionnement : Mode générateur
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 80
Rotation
du rotorΩ
𝑇Couple
d’entrainement
+
−
Force
Electromotrice
Couple
électromagnétique
Tension
de charge
𝑇𝑚
𝑈𝑐ℎ
+
−
Courant
d’induit𝑖𝑎
𝐸
• Par l’intermédiaire du rotor, on applique un couple
d’entrainement (autre machine, éolienne,…)
• Ce couple entraine une rotation du rotor de la
machine
• Cette rotation va entrainer la création d’une force
électromotrice
• Si le circuit est fermé en sortie de la machine, on
aura une tension de charge aux bornes de la
machine et un courant prendra naissance
• Ce courant crée un couple électromagnétique qui
s’oppose au couple d’entrainement de la machine
Application de la loi de Lenz : les effets magnétiques
s’oppose à la cause qui leur a donné naissance

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Technologie de la MCC : Constitution d’une MCC
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 81
Pôle principal
Pôle auxiliaire
de commutation
Encoche
corne
Inducteur
Entrefer
• Vue générale de la machine à courant continu
Plan de coupe transversal

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Technologie de la MCC : L’inducteur
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 82
• Le stator est l’inducteur
• L’inducteur a pour rôle de créer le champ magnétique
• Le système inducteur est la partie passive de la machine. Il est composé de 2
éléments :
• L’excitation qui est la source du champ magnétique. L’excitation peut être faite soit
par un aimant permanent (excitation n’est pas réglable), soit par un bobinage jouant le
rôle d’électroaimant
• Le circuit magnétique qui a pour but de canaliser le champ magnétique. Il est
composé d’une partie fixe (matériau magnétique du stator) et d’une partie mobile
(matériau magnétique du rotor) et d’un entrefer qui doit être le plus petit possible (air
entre le rotor et le stator)
• Dans le cas d’une excitation avec un électroaimant, il y a différentes manières de
placer le bobinage : en parallèle avec l’induit, en série avec l’induit ou
indépendant de l’induit (dépend de la machine)

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Technologie de la MCC : L’inducteur
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 83
• L’excitation est importante car elle joue directement sur la constante 𝐾 qui relie le
couple au courant et la force électromotrice à la vitesse de rotation
• Si l’excitation est réalisée par un aimant permanent : le champ magnétique est
fixe et la constante 𝐾 ne varie pas
• Dans le cas d’une excitation avec un électroaimant, le champ magnétique est
fonction du courant circulant dans la bobine
• Deux parties sur la courbe : zone linéaire et une zone de saturation (phénomène
d’hystérésis)
Si l’électroaimant est en série avec l’induit , le
courant d’excitation dépend du point de
fonctionnement (fonctionnement à flux lié), si
l’électroaimant est en parallèle ou séparée
(fonctionnement à flux indépendant)
K (Wb)
Iex (A)

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Technologie de la MCC : L’induit
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 84
• Le rotor est l’induit
• L’induit est la partie active de la machine, c’est dans l’induit que se réalise la
conversion électromécanique
• L’induit est composé d’un ensemble de cadres conducteurs placé dans les
encoches du rotor
• L’entrée d’une spire est reliée à la sortie de la précédente sur une lame de cuivre
• Chaque cadre forme une spire qui est
embrassée par un champ magnétique créé par
l’inducteur
• Les différentes spires sont uniformément
réparties autour du rotor
• Lorsque qu’un courant circule dans la spire, il y a
création d’une force électromotrice qui entraine
la rotation du rotor de la machine
spire
lames

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Nécessité d’un collecteur
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 85
𝐵 𝐹
𝐹
𝑖𝑎
𝐼
• Si on prend le fonctionnement moteur et que l’on s’intéresse
uniquement au rotor
• La loi de Laplace dit que si un conducteur parcouru par un
courant est placé dans un champ magnétique alors il se crée
une force électromagnétique perpendiculaire au courant et au
champ magnétique
𝐵
𝐹
• Dans le premier cas le circuit électrique crée
un couple de force qui permet la rotation du
rotor de la machine
• le couple est dans ce cas maximal et non nul
(le rotor peut tourner sur son axe)
𝑂𝐴
Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Nécessité d’un collecteur
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 86
𝐵 𝐹
𝐹
𝑖𝑎
𝐼
𝐵
𝐹
𝐹
𝑖𝑎
𝐼
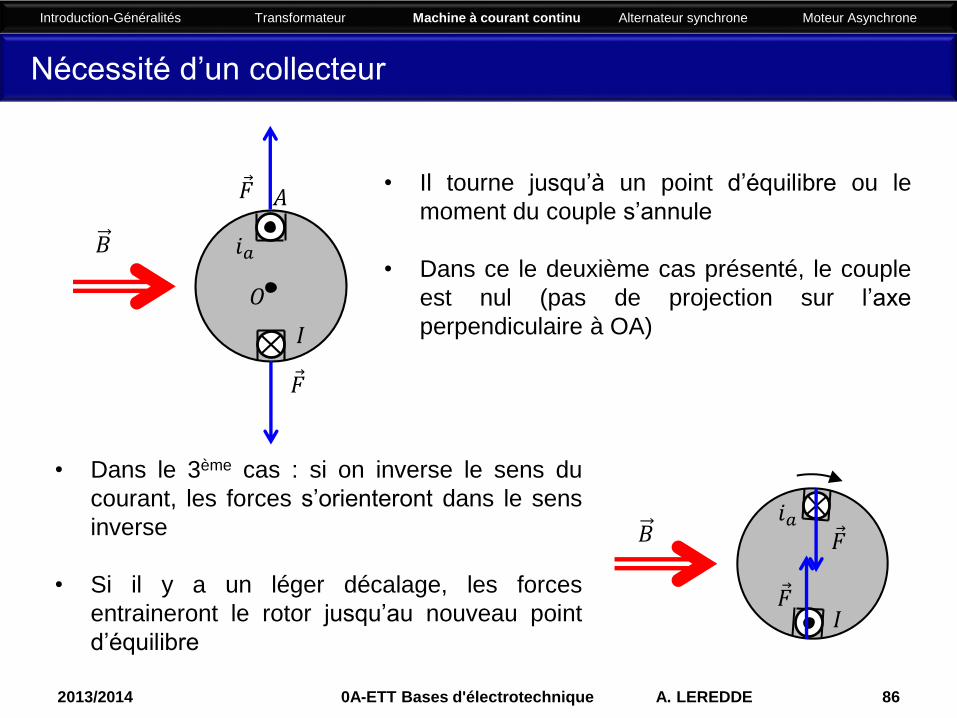
• Il tourne jusqu’à un point d’équilibre ou le
moment du couple s’annule
• Dans ce le deuxième cas présenté, le couple
est nul (pas de projection sur l’axe
perpendiculaire à OA)
𝑂
𝐴
• Dans le 3ème cas : si on inverse le sens du
courant, les forces s’orienteront dans le sens
inverse
• Si il y a un léger décalage, les forces
entraineront le rotor jusqu’au nouveau point
d’équilibre

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Technologie de la MCC : Les balais et le collecteur
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 87
• Pour faire fonctionner la machine à courant continu, il est nécessaire d’avoir un
contact électrique entre le rotor et le stator
• Le rotor étant en mouvement, ce contact ne peut pas être fait avec des câbles
électriques
• De plus, pour permettre un mouvement continu de la machine, il faut s’assurer que les
enroulements soient alimentés au meilleur instant (moment du couple maximum) et
dans le bon sens
• La solution est d’utiliser des balais (conducteur fixe) qui viennent frotter les lames
conductrices au rotor
• A chaque instant les balais sont en contact avec la spire qui permet d’avoir la force
électromagnétique la plus grande possible
balai
support
Alimentation électrique
• Un balai est composé d’un support qui permet le
contact entre le fil d’alimentation et un charbon qui
vient frotter sur les lames du collecteur

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
La réaction mécanique d’induit
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 88
Pôle principal
Pôle auxiliaire
de commutation
Encoche
corne
Inducteur
Entrefer
• La réaction magnétique d’induit est un phénomène parasite qui est du à
l’expression de loi de Lenz :
• Les courants circulant dans l’induit s’opposent, par leur effets aux phénomènes qui
leurs ont donnés naissance
• 1er effet de la loi de Lenz
• Apparition pour le mode générateur d’un couple électromagnétique et pour le mode
moteur, d’une force contre électromotrice
• 2eme effet de la loi de Lenz
• Naissance d’un champ parasite due
à la circulation de courant dans l’induit
venant atténuer le champ inducteur
• Solution pour contrer ce deuxième effet• Placement de pôles auxiliaires pour annuler
ce flux parasite
Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Schémas électriques équivalents
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 89
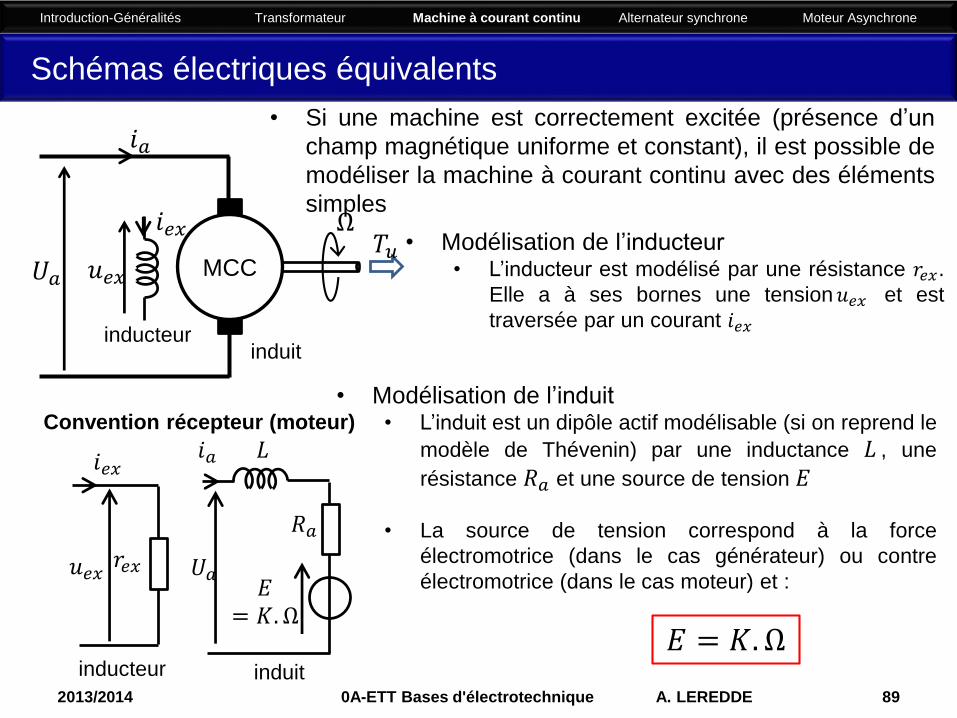
• Modélisation de l’inducteur• L’inducteur est modélisé par une résistance 𝑟𝑒𝑥.
Elle a à ses bornes une tension𝑢𝑒𝑥 et est
traversée par un courant 𝑖𝑒𝑥
MCC
Ω𝑇𝑢
𝑈𝑎
𝑖𝑎
inducteurinduit
𝑢𝑒𝑥
𝑖𝑒𝑥
• Si une machine est correctement excitée (présence d’un
champ magnétique uniforme et constant), il est possible de
modéliser la machine à courant continu avec des éléments
simples
• Modélisation de l’induit• L’induit est un dipôle actif modélisable (si on reprend le
modèle de Thévenin) par une inductance 𝐿 , une
résistance 𝑅𝑎 et une source de tension 𝐸
• La source de tension correspond à la force
électromotrice (dans le cas générateur) ou contre
électromotrice (dans le cas moteur) et :
𝐸 = 𝐾.Ω
𝑅𝑎
𝐿
𝐸= 𝐾.Ω
𝑈𝑎
𝑖𝑎
𝑟𝑒𝑥𝑢𝑒𝑥
𝑖𝑒𝑥
inducteur induit
Convention récepteur (moteur)

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Equation de fonctionnement : Equation électrique
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 90
𝐸 = 𝐾.Ω
𝑅𝑎𝐿
𝑈𝑎
𝑖𝑎
Convention récepteur (moteur)
• Pour l’étude de la machine à courant continu, on s’intéresse principalement à
l’induit. Dans la plupart des cas (excitation parallèle, séparé ou par aimant
permanent), on considère que l’excitation est établie et constante
• L’équation électrique peut alors s’écrire :
Où 𝑅𝑎 représente la résistance de l’induit,
𝐿 l’inductance de l’induit et E la force contre
électromotrice (moteur) ou électromotrice (générateur)
𝑈𝑎 = 𝐿𝑑𝑖𝑎𝑑𝑡
+ 𝑅𝑎𝑖𝑎 + 𝐸
• En régime permanent établi, cette équation peut se résoudre à :
𝑈𝑎 = 𝑅𝑎𝑖𝑎 + 𝐸
Puisque 𝑖𝑎 = 𝑐𝑠𝑡𝑒 alors 𝐿𝑑𝑖𝑎
𝑑𝑡= 0

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Equation de fonctionnement : Equation mécanique
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 91
Inertie 𝐽Frottements
𝑇𝑝 𝑇𝑐ℎ𝑇𝑒𝑚 = 𝐾𝑖𝑎
• Pour trouver l’équation mécanique de la machine à
courant continu on applique le principe fondamental
de la dynamique (PFD)
𝐽𝑑Ω
𝑑𝑡= 𝑇𝑒𝑚 − 𝑇𝑝 − 𝑇𝑐ℎ
• On peut aussi écrire cette équation en régime permanent établi
𝑇𝑒𝑚 = 𝑇𝑝 + 𝑇𝑐ℎ Puisque Ω = 𝑐𝑠𝑡𝑒 alors 𝐽𝑑Ω
𝑑𝑡= 0
Convention moteur
• Le couple 𝑇𝑝 représente le couple de frottement (entre le stator et le rotor); c’est
un couple résistant ((signe moins dans le PFD)
• Dans le cas moteur, le couple de charge 𝑇𝑐ℎ est souvent appelé couple utile 𝑇𝑢Mais 𝑇𝑢 = 𝑇𝑒𝑚 − 𝑇𝑝 donc 𝑇𝑢 = 𝑇𝑐ℎ n’est vrai qu’en régime permanent

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Equation de fonctionnement : Equation en régime permanent
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 92
Frottements
𝑇𝑝 𝑇𝑐ℎ𝑇𝑒𝑚 = 𝐾𝑖𝑎
𝐸 = 𝐾.Ω
𝑅𝑎
𝑈𝑎
𝑖𝑎
Convention récepteur (moteur)
• En régime permanent, la machine peut
être modélisée par 4 équations
• Une équation électrique
• Une équation mécanique
• Et 2 équations permettant de relier les
grandeurs électriques et mécaniques
𝑈𝑎 = 𝑅𝑎𝑖𝑎 + 𝐸
𝑇𝑐ℎ = 𝑇𝑒𝑚 − 𝑇𝑝
𝑇𝑒𝑚 = 𝐾. 𝑖𝑎𝐸 = 𝐾.Ω

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Bilan des puissances : Puissance et couple électromagnétique
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 93
• Le couple électromagnétique
• Le couple électromagnétique 𝑇𝑒𝑚 correspond au couple appliqué par les forces de
Laplace sur le rotor. Ce couple est soit moteur (fonctionnement moteur) quand il
implique le déploiement d’une puissance mécanique, soit résistant (fonctionnement
générateur) quand il s’oppose à la rotation et implique la consommation d’une
puissance mécanique.
• Puissance électromagnétique
• La puissance électromagnétique est celle convertie, elle est à la fois mécanique et
électrique
• D’un point de vue mécanique, cette puissance peut s’écrire :
• D’un point de vue électrique , cette puissance peut s’écrire :
𝑃𝑒𝑚 = 𝑇𝑒𝑚Ω
𝑃𝑒𝑚 = 𝐸𝑖𝑎

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Bilan des puissances : Les pertes
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 94
• Pertes Joule
• Ce sont les pertes par échauffement dans les conducteurs de l’induit et de l’inducteur
• Pertes Joule induit (rotor)
• Pertes Joule inducteur (stator)
• Pertes mécaniques
• Ce sont les pertes dues aux imperfections des éléments mécaniques (frottement entre
le rotor et le stator)
• Perte fer• Ce sont les pertes dans le circuit magnétique (pertes par courant de Foucault et pertes
par hystérésis)
• Les pertes communes peuvent être déterminées par une mesure de la puissance
absorbée lorsque le moteur fonctionne à vide
𝑃𝐽𝑆 = 𝑢𝑒𝑥𝑖𝑒𝑥 = 𝑟𝑖𝑒𝑥2
𝑃𝐽𝑅 = 𝑅𝑎𝑖𝑎2
Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Arbre des puissances : Mode moteur
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 95
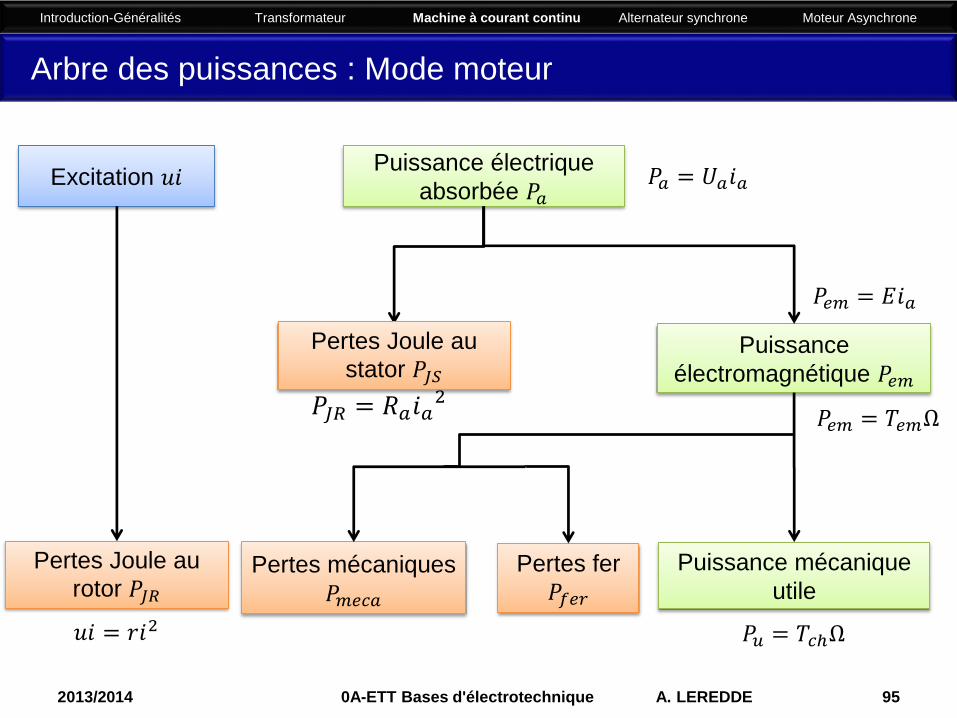
Puissance électrique
absorbée 𝑃𝑎
Puissance
électromagnétique 𝑃𝑒𝑚
Pertes fer
𝑃𝑓𝑒𝑟
Pertes mécaniques
𝑃𝑚𝑒𝑐𝑎
Pertes Joule au
rotor 𝑃𝐽𝑅
Excitation 𝑢𝑖 𝑃𝑎 = 𝑈𝑎𝑖𝑎
𝑢𝑖 = 𝑟𝑖2
Puissance mécanique
utile
Pertes Joule au
stator 𝑃𝐽𝑆
𝑃𝑒𝑚 = 𝐸𝑖𝑎
𝑃𝑒𝑚 = 𝑇𝑒𝑚Ω
𝑃𝑢 = 𝑇𝑐ℎΩ
𝑃𝐽𝑅 = 𝑅𝑎𝑖𝑎2

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Arbre des puissances : Mode générateur
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 96
Puissance mécanique
absorbée 𝑃𝑎
Puissance
électromagnétique 𝑃𝑒𝑚
Pertes fer
𝑃𝑓𝑒𝑟
Pertes mécaniques
𝑃𝑚𝑒𝑐𝑎
Pertes Joule au
rotor 𝑃𝐽𝑅
Excitation 𝑢𝑖 𝑃𝑎 = 𝑇Ω
𝑃𝑒𝑚 = 𝑇𝑒𝑚Ω
𝑢𝑖 = 𝑟𝑖2
Puissance électrique
utile 𝑃𝑢
Pertes Joule au
stator 𝑃𝐽𝑆
𝑃𝑒𝑚 = 𝐸𝑖𝑎
𝑃𝑢 = 𝑈𝑎𝑖𝑎𝑃𝐽𝑅 = 𝑅𝑎𝑖𝑎2

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Machine à Excitation séparée
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 97
• Il y a différentes manières d’alimenter l’excitation d’une machine à courant continu :
excitation séparée, parallèle et série
• L’alimentation séparée (ou indépendante ) est l’alimentation qui offre le plus de
liberté : l’inducteur et l’induit ne sont pas alimenté par la même source d’énergie
• Le courant d’excitation est indépendant des variations des autres grandeurs
électriques
• L’inconvénient de ce type d’alimentation est la nécessité d’avoir deux sources de
tension différentes
𝑅𝑎
𝐸𝑈𝑎
𝑖𝑎
𝑢𝑒𝑥𝑟𝑒𝑥
𝑖𝑒𝑥
inducteur induit
MCC𝑈𝑎
𝑖𝑎
inducteurinduit
𝑢𝑒𝑥
𝑖𝑒𝑥

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
• Pour l’alimentation parallèle, dérivation ou shunt, l’inducteur est mis en parallèle
avec l’induit de la machine
• Dans le cas d’une alimentation shunt, la bobine de l’inducteur est constituée de
nombreuses spires d’un fil fin
• Electriquement, on peut écrire que 𝑈𝑎 = 𝑢𝑒𝑥. Au niveau des courants , on a 𝑖𝑒𝑥 ≪𝑖𝑎
• Un réglage du courant d’excitation est possible en plaçant une résistance variable
(rhéostat) en série avec l’inducteur
Machine à Excitation parallèle (shunt)
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 98
𝑅𝑎
𝐸
𝑈𝑎 = 𝑢𝑒𝑥
𝑖𝑎
𝑟𝑒𝑥
𝑖𝑒𝑥
inducteur
induit
MCC𝑈𝑎
𝑖𝑎
inducteurinduit
𝑢𝑒𝑥
𝑖𝑒𝑥

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Machine à Excitation série
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 99
• Pour l’alimentation série, l’inducteur est mis en série avec l’induit de la machine
• Dans le cas d’une alimentation shunt, la bobine de l’inducteur est constituée de
peu de spires réalisées par un gros fil
• Electriquement, on peut écrire que 𝑖𝑎 = 𝑖𝑒𝑥. Au niveau des tensions , on a 𝑢𝑒𝑥 ≪ 𝑈𝑎
• Un réglage du courant d’excitation est possible en plaçant une résistance variable
(rhéostat) en parallèle avec l’inducteur
MCC𝑈𝑎
𝑖𝑎inducteur
induit
𝑢𝑒𝑥
𝑖𝑒𝑥
𝑅𝑎
𝐸𝑈𝑎
𝑖𝑎 = 𝑖𝑒𝑥𝑟𝑒𝑥inducteur
induit
𝑢𝑒𝑥
Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Lecture d’une plaque signalétique
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 100
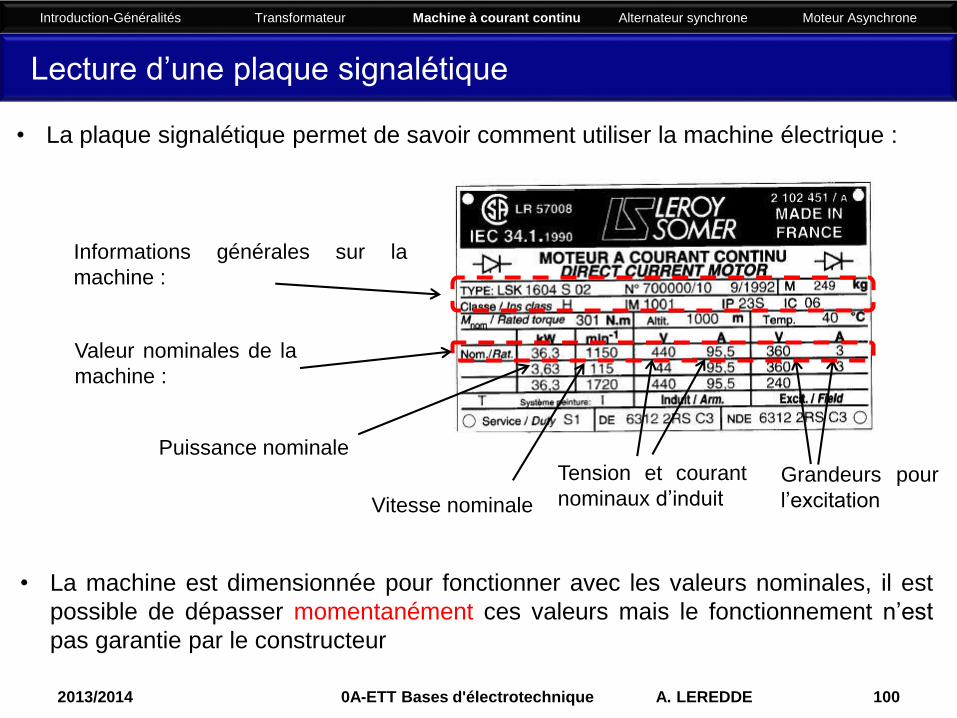
• La plaque signalétique permet de savoir comment utiliser la machine électrique :
Informations générales sur la
machine :
Valeur nominales de la
machine :
Tension et courant
nominaux d’induitGrandeurs pour
l’excitation
Puissance nominale
Vitesse nominale
• La machine est dimensionnée pour fonctionner avec les valeurs nominales, il est
possible de dépasser momentanément ces valeurs mais le fonctionnement n’est
pas garantie par le constructeur

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Machine à Excitation série : le moteur universel
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 101
• Le moteur universel est une utilisation particulière du moteur à excitation série
• Alimentation de l’induit et de l’inducteur en sinusoïdale ce qui entraine un courant
sinusoïdal
• Le couple moyen est non nul et permet d’entrainer le moteur à une vitesse non nulle
• Moteur très largement utilisé dans l’électroménager (seche-cheveux, aspirateur,
machine à laver) vitesse de rotation importante (> 3000tr/min)
MCC𝑈𝑎
𝑖𝑎inducteur
induit
𝑢𝑒𝑥
𝑖𝑒𝑥
ve
𝑇𝑒𝑚
𝑖𝑎
Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
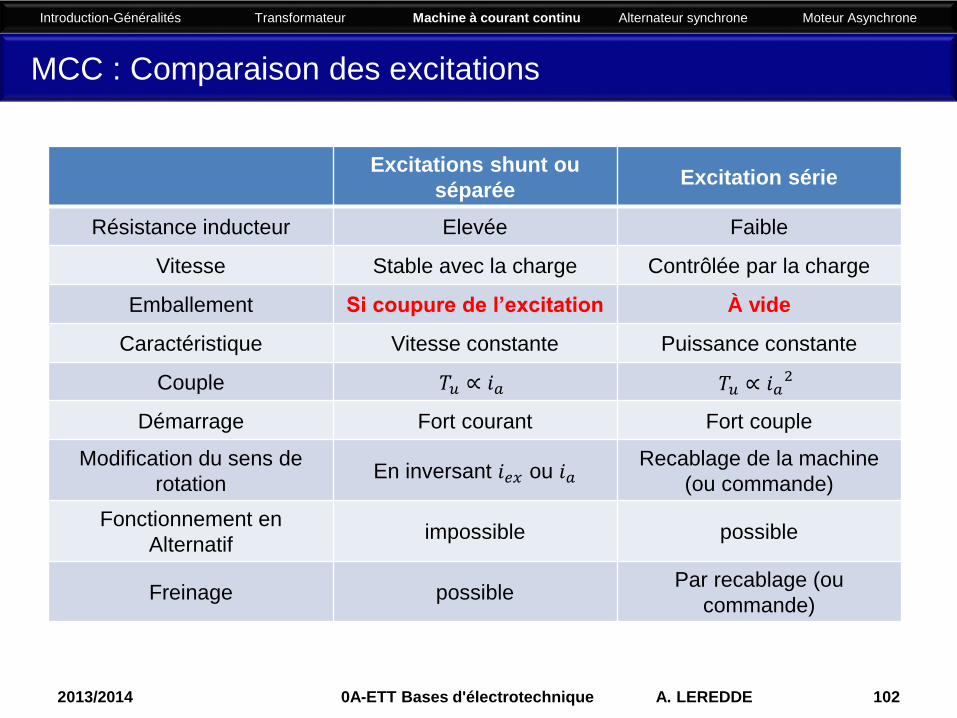
MCC : Comparaison des excitations
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 102
Excitations shunt ou
séparéeExcitation série
Résistance inducteur Elevée Faible
Vitesse Stable avec la charge Contrôlée par la charge
Emballement Si coupure de l’excitation À vide
Caractéristique Vitesse constante Puissance constante
Couple 𝑇𝑢 ∝ 𝑖𝑎 𝑇𝑢 ∝ 𝑖𝑎2
Démarrage Fort courant Fort couple
Modification du sens de
rotationEn inversant 𝑖𝑒𝑥 ou 𝑖𝑎
Recablage de la machine
(ou commande)
Fonctionnement en
Alternatifimpossible possible
Freinage possiblePar recablage (ou
commande)

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
MCC : Avantages, inconvénient et application
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 103
Avantage Inconvénients
Commande simple Présence d’un collecteur
Facilement réversible Cout de fabrication
Freinage dynamique Coût d’entretien
Peut démarrer en charge Concurrence
Stabilisation de la vitesse (excitation shunt) Moteur asynchrone
Stabilisation de la puissance (moteur série) Alternateur triphasé
• Quelques applications du moteur à courant continu
• Robotique : régulation de position et de vitesse
• Electroménager : utilisation du moteur universel
• Machine outil : moteur parallèle ou shunt car la vitesse est stable
• Traction/levage : moteur série car il possède un gros couple au démarrage

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Les Machines électriques
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 104
Machine
Electrique
Energie
électrique
Energie
Mécanique
(rotation)
Mode Générateur (ou alternateur)
Mode Moteur
• Les machines électriques permettent la conversion de l’énergie mécanique en
énergie électrique ou de l’énergie électrique en énergie mécanique : cette une
conversion réversible
• Les trois grands types de machines les plus couramment utilisées sont la machine
à courant continu, la machine synchrone et la machine asynchrone

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Vocabulaire
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 105
• Stator :
• Partie statique (fixe) de la machine
• Rotor :
• Partie mobile de la machine, elle a une vitesse de rotation par rapport au
stator que l’on notera Ω (en rd/s) ou 𝑁 (en tr/min)
• Inducteur :
• L’inducteur a pour but de créer le champ magnétique qui permettra le
transfert d’énergie électrique entre le stator et le rotor
• Induit :
• L’induit est le siège de l’induction magnétique. Il est soumis au champ
inducteur

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Rappel sur les lois de l’électromagnétisme
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 106
• Les loi d’Ampère, Biot et Savart :
• On peut créer un champ magnétique avec du courant électrique
• La loi de Laplace
• On peut déplacer des circuits électriques à l’aide d’un courant et d’un champ
magnétique
• La loi de Faraday
• Un circuit soumis à un flux magnétique variable est le siège d’une force
électromotrice
• La loi de Lenz
• Le sens du courant induit est tel que, par ses effets, il s’oppose toujours à la
cause qui lui a donné naissance

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Spires dans un champ tournant
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 107
0 𝑥
𝐵
𝛼
• On considère une bobine de 𝑁 spires placée dans
un champ d’induction magnétique tournant à la
vitesse angulaire Ω𝑡. On appelle 𝐵 la valeur du
champ d’induction magnétique :
• A tout instant on peut écrire l’angle entre le champ
d’induction magnétique et l’axe des spires
𝑂𝑥, 𝐵 = 𝛼 = Ω𝑡
• On peut aussi écrire le flux d’induction 𝜙 𝑡 à travers
la bobine (de section 𝑆):
𝜙 𝑡 = 𝑁𝐵𝑆 cosΩ𝑡
• La bobine sera alors le siège d’une force électromotrice 𝑒 induite vérifiant la loi
de Faraday
𝑒 𝑡 = −𝑑𝜙 𝑡
𝑑𝑡= 𝑁𝐵𝑆Ω sinΩ𝑡
• La force électromotrice est de forme sinusoïdale : 𝑒 𝑡 = 𝐸 2 sin𝜔𝑡
Avec E =𝐵
2𝑁𝑆Ω

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Spires dans un champ tournant
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 108
0𝑥
𝐵
𝛼
• Il est possible de mettre plusieurs bobinages dans un
même champ magnétique :• Si on décale ces bobines de telle sorte que deux à deux
leurs axes soient décalés de 120° (ou 2𝜋3 )
𝑂𝑦, 𝐵 = 𝛼 −2𝜋
3= Ω𝑡 −
2𝜋
3
𝑂𝑧, 𝐵 = 𝛼 −4𝜋
3= 𝛼 +
2𝜋
3= Ω𝑡 +
2𝜋
3
• On peut ainsi écrire les flux d’induction pour chaque
bobine:
𝜙1 𝑡 = 𝑁𝐵𝑆 cos Ω𝑡
𝜙2 𝑡 = 𝑁𝐵𝑆 cos Ω𝑡 −2𝜋
3
𝜙3 𝑡 = 𝑁𝐵𝑆 cos Ω𝑡 +2𝜋
3
1
2
3
𝑦
𝑧
• En prenant la phase 1 comme origine des phases, Il est possible d’écrire la force
électromotrice dans chaque phase :
𝑒1 𝑡 = 𝐸 2 cos 𝜔𝑡
𝑒2 𝑡 = 𝐸 2 cos 𝜔𝑡 −2𝜋
3
𝑒3 𝑡 = 𝐸 2 cos 𝜔𝑡 +2𝜋
3
Avec E =𝐵
2𝑁𝑆Ω
Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Théorème des champs tournants
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 109
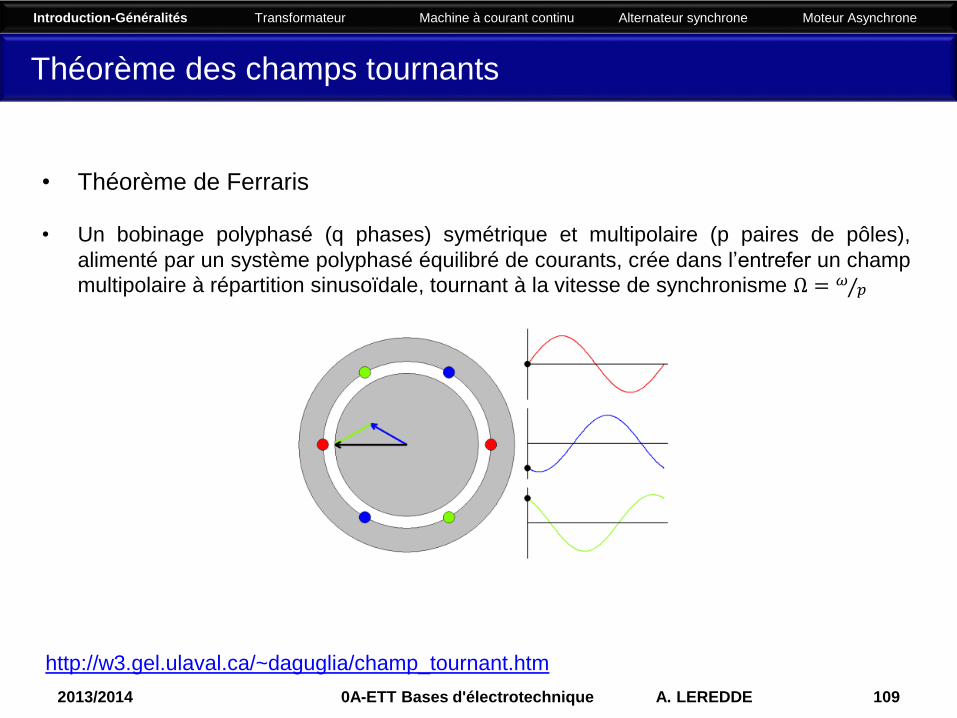
• Théorème de Ferraris
• Un bobinage polyphasé (q phases) symétrique et multipolaire (p paires de pôles),
alimenté par un système polyphasé équilibré de courants, crée dans l’entrefer un champ
multipolaire à répartition sinusoïdale, tournant à la vitesse de synchronisme Ω = 𝜔𝑝
http://w3.gel.ulaval.ca/~daguglia/champ_tournant.htm
Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Paire de Pôles
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 110
𝐵 𝑁
𝑆
𝐼
𝑁𝑜𝑟𝑑
𝑆𝑢𝑑
𝐵 𝑁
𝑆
𝐼
𝐵
𝑁
𝑆
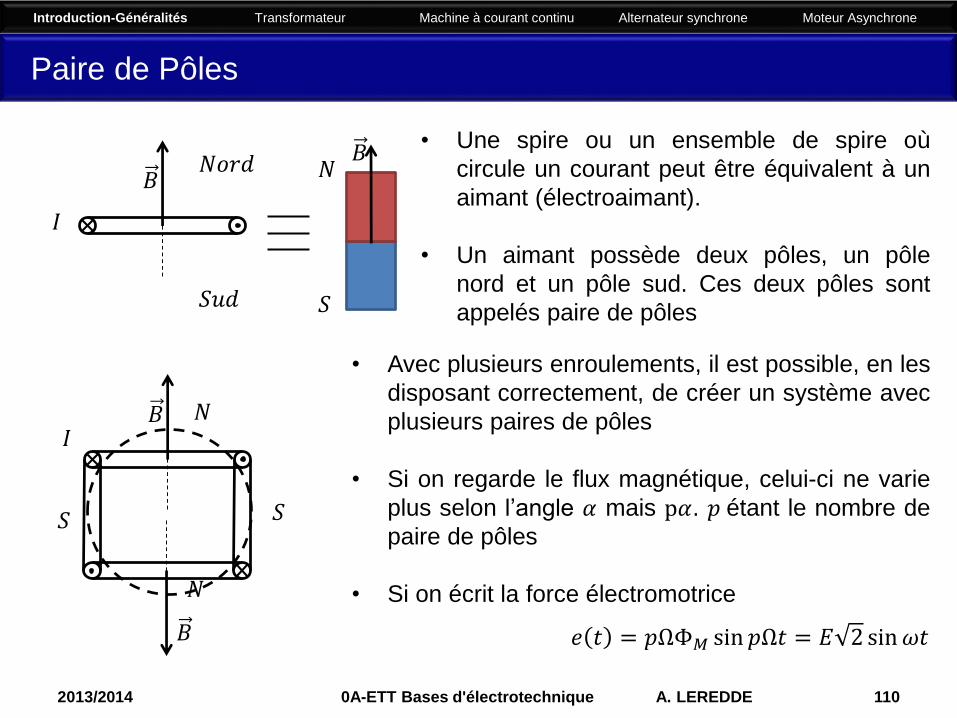
• Une spire ou un ensemble de spire où
circule un courant peut être équivalent à un
aimant (électroaimant).
• Un aimant possède deux pôles, un pôle
nord et un pôle sud. Ces deux pôles sont
appelés paire de pôles
𝐵
• Avec plusieurs enroulements, il est possible, en les
disposant correctement, de créer un système avec
plusieurs paires de pôles
• Si on regarde le flux magnétique, celui-ci ne varie
plus selon l’angle 𝛼 mais p𝛼. 𝑝 étant le nombre de
paire de pôles
• Si on écrit la force électromotrice
𝑒 𝑡 = 𝑝ΩΦ𝑀 sin 𝑝Ω𝑡 = 𝐸 2 sin𝜔𝑡

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Paire de Pôles
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 111
http://w3.gel.ulaval.ca/~daguglia/champ_tournant.htm

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
L’Alternateur Synchrone
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 112
• L’alternateur synchrone est une machine électrique tournante fonctionnant en
mode génératrice et produisant de l’énergie électrique alternative
• Conversion d’une puissance mécanique (sous forme de rotation) en une
puissance électrique (sous forme alternative)
• Conversion à haut rendement
• Spectre d’application très large : système embarqué (groupe électrogène,
automobiles, bateaux, avions,…), installation de puissance (barrages
hydroélectriques, centrales thermiques et nucléaires,..)
• Principe assez simple• Chaque phase est composée de p bobinages
• Le flux dans chaque bobine varie lorsque l’aimant
tourne
• Le flux est maximum lorsque l’aimant est dans l’axe
de la bobine
1
32
3
1
2

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Technologie de l’Alternateur : Le rotor
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 113
• Le rotor est l’inducteur• Il a un champ magnétique tournant et l’intensité de ce champ est constante
• Quand la machine fonctionne en alternateur, le rotor met en mouvement ce champ
magnétique
• Le rotor est soit constitué d’un aimant permanent (Brushless), soit constitué
d’un bobinage parcouru par un courant continu (rotor bobiné) appelé courant
inducteur ou courant d’excitation• Utilisation d’un collecteur (plus robuste et moins cher que pour la machine à courant
continu)
• Autre possibilité (Roue polaire Excitatrice + Diode Tournante)
• Collecteur plus simple que pour la MCC + Facilité pour redressé : Alternateur très
utilisé (alternateur de voiture)
• Avantage du rotor bobiné• Possibilité de contrôler la valeur de la force électromotrice qui dépend du courant
d’excitation (régulation lorsque la vitesse du moteur est variable)

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Technologie de l’Alternateur : Le stator
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 114
• Le stator est l’induit
• Les bobinages induits sont maintenus immobiles dans des encoches qui sont
creusées dans le stator : c’est le siège de la production électrique
• Le stator est au moins constitué de trois bobinages décalés l’un de l’autre de
±120°
• Ce décalage est fait telle que les tensions en sortie soit équilibrées
• Sur chaque phase, il y a au moins deux bobinages afin de créer au moins une paire
de pôles
• En augmentant le nombre de paire de pôles, ceci permet de profiter au maximum du
champ magnétique et ainsi d’augmenter le rendement de la conversion
• Synchronisme• Lors que l’alternateur est chargé, le stator est le siège de courant induit (courant
statorique). Ces courants à leur tour créent un champ magnétique statorique (loi de
Lenz). Le rotor, Le champ rotorique (inducteur) et le champ statorique tourne à la
même vitesse appelé vitesse de synchronisme 𝜔𝑆 (électrique) ou Ω𝑆 (mécanique)

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Schémas électriques équivalents
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 115
• Dans le cas où la machine est non saturé, il est possible de modéliser assez
simplement chaque phase de la machine
• Chaque phase peut être représentée par un modèle équivalent de Thévenin.
Modèle composé:
• Force Electromotrice induite par le champ tournant
• D’une réactance 𝑋𝑆 = 𝐿𝑆𝜔 appelée réactance synchrone qui représente les pertes
de flux magnétique et la réaction magnétique d’induit
• D’une résistance 𝑟𝑆 qui représente les pertes Joule
• Dans le cas de l’alternateur synchrone, ce modèle est appelé modèle de
Behn-Eschenburg
• Il est possible d’écrire la loi des mailles:
• Si on néglige la résistance
𝐸 𝑉
𝑟𝑆𝑋𝑆 𝑖
𝑐ℎ𝑎𝑟𝑔
𝑒
𝐸 = 𝑟𝑆 + 𝑗𝑋𝑆 𝐼 + 𝑉
𝐸 = 𝑗𝑋𝑆𝐼 + 𝑉

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Détermination des grandeurs : Force électromotrice
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 116
• Rappel : La valeur efficace 𝐸 de la force électromotrice 𝐸 dépend de la géométrie
du bobinage, du nombre de spire, de l’intensité du champ électrique et de sa
vitesse de rotation
• Le flux magnétique étant proportionnel au courant inducteur et la fréquence
dépendant de la vitesse de rotation et du nombre de paire de pôles. La force
électromotrice peut s’exprimer :
• Détermination expérimentale de la valeur efficace (essais à vide)
𝐸 = 𝐾𝑁𝜙𝑓
𝐸 = 𝐾′𝑁𝐽 𝑝𝑛𝑆
𝐾 : Coefficient de Kapp
𝑁 : Nombre de conducteur d’une phase
𝜙 : le flux magnétique
𝑓 : fréquence des courants statoriques
𝐾′ : Coefficient de Kapp
𝑁 : Nombre de conducteur d’une phase
𝐽 : courant dans l’inducteur
𝑝 : Nombre de paire de pôles
𝑛𝑆: vitesse de rotation
𝐸 𝑉
𝑟𝑆𝑋𝑆
𝐼 = 0
𝑉

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Détermination des grandeurs : Caractéristique interne
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 117
𝐽 𝐴
𝐸 𝑉 𝑧𝑜𝑛𝑒 𝑑𝑒 𝑠𝑎𝑡𝑢𝑟𝑎𝑡𝑖𝑜𝑛
𝑧𝑜𝑛𝑒 𝑙𝑖𝑛é𝑎𝑖𝑟𝑒 𝑛𝑜𝑛 𝑠𝑎𝑡𝑢𝑟é
𝑝𝑜𝑖𝑛𝑡 𝑑𝑒𝑓𝑜𝑛𝑐𝑡𝑖𝑜𝑛𝑛𝑒𝑚𝑒𝑛𝑡
𝑛𝑜𝑚𝑖𝑛𝑎𝑙
• On a vu précédemment que la force
électromotrice dépend de la vitesse de rotation
et du courant qui circule dans l’inducteur
• Si on fixe la vitesse de rotation et que l’on fait
varier le courant dans l’inducteur, il est possible
de tracer la caractéristique interne de
l’alternateur
• Pour les faibles valeurs de 𝐽, la caractéristique est une droite : c’est la zone linéaire
• Lorsque 𝐽 augmente, le matériau magnétique se sature et la force électromotrice n’est
plus proportionnelle à l’excitation
• Si 𝐽 = 0, la fem n’est pas nulle ceci est dû au champ rémanent des pôles
(aimantation du matériau magnétique)
• La caractéristique interne permet de connaitre l’alternateur

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
La réactance synchrone
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 118
• La réactance synchrone se détermine par un essai en court-circuit
• En reprenant le modèle de Behn-Eschenburg, il est possible d’écrire la loi des
mailles : 𝐸 = 𝑟𝑆 + 𝑗𝑋𝑆 𝐼 + 𝑉
• En négligeant la résistance 𝑟𝑆 et en posant 𝑉 = 0 (essai en cours circuit)
cette relation devient 𝐸 = 𝑗𝑋𝑆𝐼𝑐𝑐
• Si on prend les modules de cette relation, on peut exprimer la réactance en
fonction de la force électromotrice et du courant de court-circuit :
𝐸 𝑉 = 0
𝑟𝑆𝑋𝑆
𝐼𝑐𝑐
𝐴
𝑋𝑆 =𝐸
𝐼𝑐𝑐
• Il est possible de déterminer la réactance
synchrone avec deux essais : A vide pour
mesurer la fem et en court-circuit pour
mesurer 𝐼𝑐𝑐

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
La réactance synchrone : Caractéristique en court-circuit
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 119
𝐽 𝐴
𝐼𝑐𝑐 𝐴
• Il est possible de tracer la caractéristique du
courant de court-circuit en fonction du courant
d’excitation (vitesse maintenue constante)
• Celle-ci reste tout le temps proportionnel à
𝐽 quelque soit sa valeur.
• Si on étudie plus en détail cette réactance en fonction de la force
électromotrice et du courant de court circuit, on remarque différents
comportements :
• Dans la zone non-saturé, les courbes 𝐸 𝑖 et 𝐼𝑐𝑐 𝑖 sont linéaires donc la
réactance synchrone est constance et égale à 𝑋𝑆 (régime nominal)
• Dans la zone saturé 𝐸 𝑖 s’infléchie mais 𝐼𝑐𝑐 𝑖 reste linéaire donc 𝑋𝑆 𝑖 va
dépendre du courant d’excitation mais celle-ci est inférieur à 𝑋𝑆
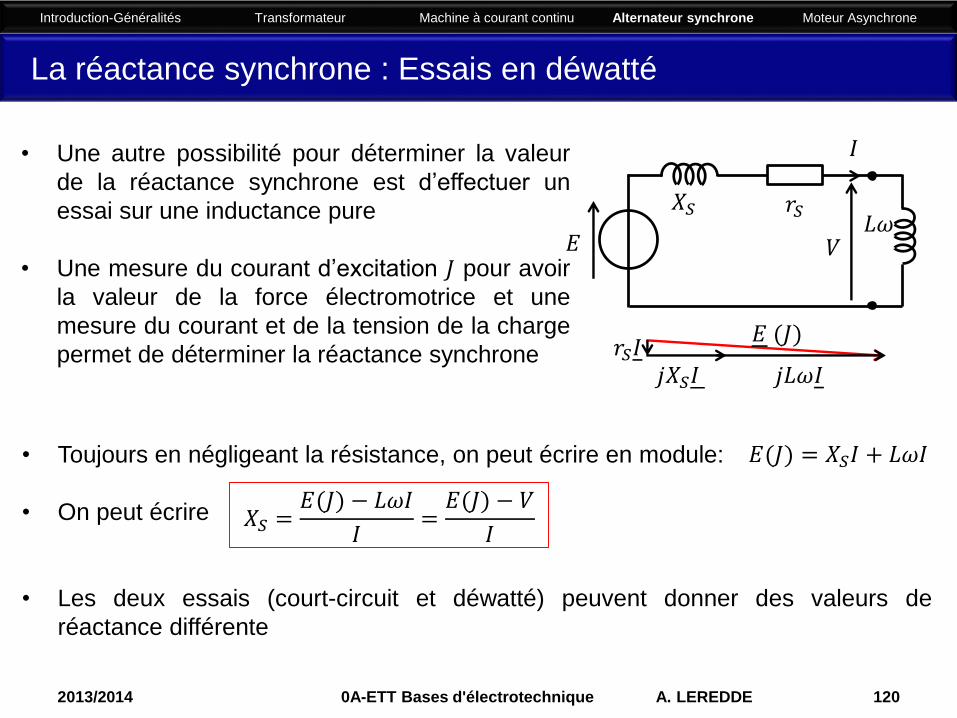
Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
La réactance synchrone : Essais en déwatté
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 120
𝐸 𝑉
𝑟𝑆𝑋𝑆
𝐼• Une autre possibilité pour déterminer la valeur
de la réactance synchrone est d’effectuer un
essai sur une inductance pure
• Une mesure du courant d’excitation 𝐽 pour avoir
la valeur de la force électromotrice et une
mesure du courant et de la tension de la charge
permet de déterminer la réactance synchrone
𝐿𝜔
𝐸 𝐽 𝑟𝑆𝐼
𝑗𝑋𝑆𝐼 𝑗𝐿𝜔𝐼
• Toujours en négligeant la résistance, on peut écrire en module:
• On peut écrire
• Les deux essais (court-circuit et déwatté) peuvent donner des valeurs de
réactance différente
𝐸 𝐽 = 𝑋𝑆𝐼 + 𝐿𝜔𝐼
𝑋𝑆 =𝐸 𝐽 − 𝐿𝜔𝐼
𝐼=
𝐸 𝐽 − 𝑉
𝐼

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Alternateur en charge : caractéristique externe
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 121
• La caractéristique externe permet d’étudier le comportement de l’alternateur avec
une charge donné : c’est la courbe 𝑉 𝐼
• Pour réaliser cette caractéristique, il faut une charge avec une impédance variable
où le facteur de puissance (cos𝜑) reste constant
• La vitesse de rotation et le courant d’excitation doivent aussi être constant
• Caractéristique est différente selon 3 cas : charge résistive, charge inductive, charge
capacitive
𝑉
𝐼𝐼𝑐𝑐
𝐸𝑉
𝑠𝑢𝑟𝑡𝑒𝑛𝑠𝑖𝑜𝑛cos𝜑 = 0cos𝜑 𝐴𝑅 𝑖𝑛𝑑𝑢𝑐𝑡𝑖𝑓 cos𝜑 𝐴𝑉 𝑐𝑎𝑝𝑎𝑐𝑖𝑡𝑖𝑓
• Cas charge résistive : la tension décroit
lorsque que le courant augmente
• Cas charge inductive : la décroissance de la
tension est plus prononcée
• Cas capacitif: la tension augmente puis
diminue jusqu’au point du courant de court-
circuit

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Alternateur en charge : Diagramme de Behn-Eschenburg
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 122
• Pour le tracer du diagramme de Behn-Eschenburg, on distingue 2 cas : Lorsque
𝑉 < 𝐸 et 𝑉 > 𝐸
𝑉
𝐼
𝑗𝑋𝑆𝐼𝐸𝑉
𝜓𝜑
𝛿
• Le cas 𝑉 > 𝐸 est atteint lorsque la
charge est très capacitive, il est
beaucoup plus rare• L’alternateur dans ce cas est dit sous-
excité
• Le cas le plus courant est le cas où 𝑉 < 𝐸, car il
correspond à une charge résistive ou inductive• L’alternateur dans ce cas est dit surexcité
• 𝛿 est appelé angle interne c’est le déphasage entre
la tension 𝑉 et la fem 𝐸
𝜓
𝑉
𝐼
𝑗𝑋𝑆𝐼
𝜑 𝐸
𝛿

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Bilan des puissances et Pertes : puissance et couple
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 123
• Puissance mécanique absorbée
• C’est la puissance que l’on veut convertir fournie par une autre source d’énergie par
l’intermédiaire de l’arbre du rotor
• Puissance électromagnétique
• La puissance électromagnétique est celle convertie, elle est à la fois mécanique et
électrique
• Puissance électrique utile• La puissance électrique utile est celle fournie en sortie de l’alternateur synchrone
• 𝑉 est la tension efficace simple (phase neutre) et 𝑈 la tension entre phases
• Puissance d’excitation
• C’est la puissance nécessaire pour pouvoir alimenter la machine
𝑃𝑎 = 𝑇𝑎Ω𝑆
𝑃𝑒𝑚 = 𝑇𝑒𝑚Ω𝑆 = 3𝐸𝐼 cos𝜓
𝑃𝑒𝑥𝑡 = 𝑢𝑖
𝑃𝑢 = 3𝑉𝐼 cos𝜑 = 3𝑈𝐼 cos𝜑

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Bilan des puissances et Pertes : Les pertes
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 124
• Pertes Joule
• Ce sont les pertes par échauffement dans les conducteurs de l’induit et de l’inducteur
• Pertes Joule statorique
• Pertes Joule rotorique
• Pertes mécaniques
• Ce sont les pertes dues aux imperfections des éléments mécaniques (frottement entre
le rotor et le stator)
• Perte fer• Ce sont les pertes dans le circuit magnétique (pertes par courant de Foucault et pertes
par hystérésis)
• Les pertes communes peuvent être déterminées par une mesure de la puissance
absorbé lorsque l’alternateur fonctionne à vide
𝑃𝐽𝑅 = 𝑢𝑖 = 𝑟𝑖2
𝑃𝐽𝑆 = 3𝑟𝑆𝐼2 =
3
2𝑅𝐼2

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Bilan des puissances et Pertes : Arbre des puissances
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 125
Puissance mécanique
absorbé 𝑃𝑎
Puissance
électromagnétique 𝑃𝑒𝑚
Pertes fer
𝑃𝑓𝑒𝑟
Pertes mécaniques
𝑃𝑚é𝑐𝑎
Pertes Joule au
rotor 𝑃𝐽𝑅
Excitation 𝑢𝑖 𝑇𝑎Ω𝑆
𝑇𝑒𝑚Ω𝑆
𝑢𝑖 = 𝑟𝑖2
Puissance électrique
utile 𝑃𝑢
Pertes Joule au
stator 𝑃𝐽𝑆
3𝐸𝐼 cos𝜓
3𝑉𝐼 cos𝜑 = 3𝑈𝐼 cos𝜑3𝑟𝑆𝐼2 =
3
2𝑅𝐼2

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Alternateur en production : Production autonome
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 126
• Vitesse non fixée (ex.: Alternateur de voiture)
• La puissance mécanique est fournie par la vitesse de rotation et de son couple
• Vitesse de rotation variable, mais la tension en sortie doit avoir une valeur efficace fixe
• Solution : Dispositif électronique qui asservit le courant d’excitation pour avoir une
valeur efficace de la tension constante
• Vitesse fixée (ex.: groupe électrogène ou réseau de bord)
• La vitesse de rotation est fixée par un moteur thermique
• En faisant varier le courant d’excitation, on fixe le couple moteur et la puissance
absorbée
• Remarque : pour fournir un courant d’excitation, il faut avoir une source d’énergie
électrique (deux solutions : soit une batterie externe, soit une excitatrice sur le moteur)

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Alternateur en production : production sur un réseau
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 127
• Il est aussi possible d’utiliser les alternateurs sur des réseaux électriques (ex.:
barrage sur un le réseau électrique EDF)• Le réseau va alors imposer la vitesse de rotation de l’alternateur (fréquence du réseau
est fixe (en Europe 50Hz)) et la valeur efficace de la tension en sortie de l’alternateur
(𝑉 • Il reste comme liberté pour l’utilisateur les paramètres du couple moteur (influence sur
l’angle 𝛿) et du courant d’excitation (influence sur la fem 𝐸)
• Le couple permet de régler la
production de puissance active et la
consommation de puissance
réactive
• Le courant d’excitation permet
de régler la puissance active
fournie par l’alternateur𝛿 𝑉
𝐼
𝑗𝑋𝑆𝐼
𝜑
𝐸𝑉
𝐼
𝑗𝑋𝑆𝐼
𝜑
𝐸𝛿
𝑉
𝑗𝑋𝑆𝐼
𝐸
𝜑𝛿
𝑉
𝑗𝑋𝑆𝐼𝐸
𝜑𝛿 𝐼
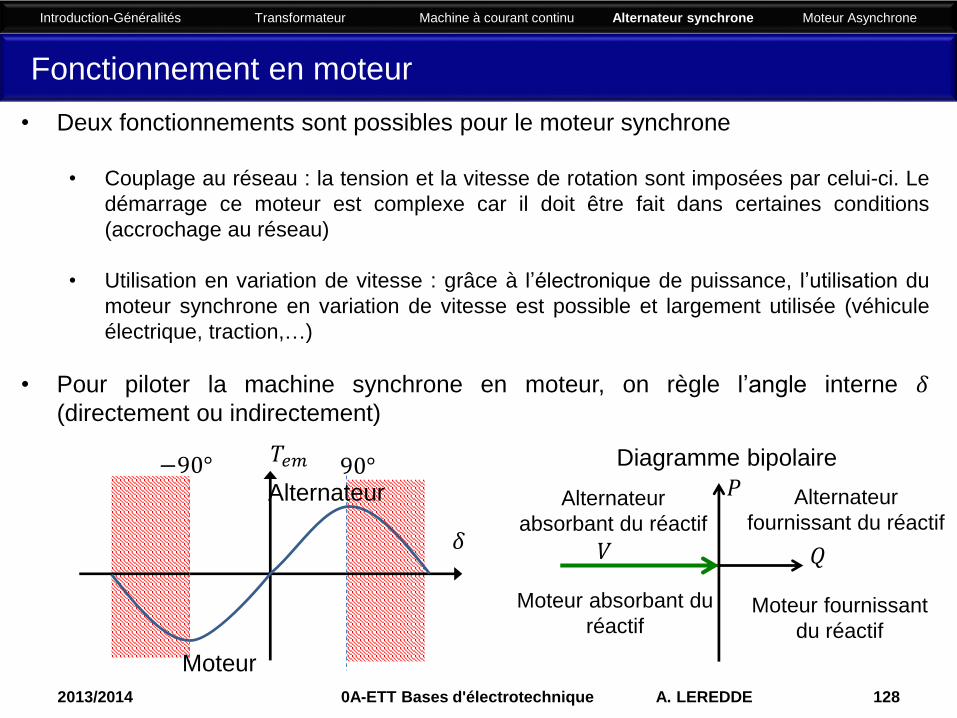
Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Fonctionnement en moteur
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 128
• Deux fonctionnements sont possibles pour le moteur synchrone
• Couplage au réseau : la tension et la vitesse de rotation sont imposées par celui-ci. Le
démarrage ce moteur est complexe car il doit être fait dans certaines conditions
(accrochage au réseau)
• Utilisation en variation de vitesse : grâce à l’électronique de puissance, l’utilisation du
moteur synchrone en variation de vitesse est possible et largement utilisée (véhicule
électrique, traction,…)
• Pour piloter la machine synchrone en moteur, on règle l’angle interne 𝛿(directement ou indirectement)
𝛿
𝑇𝑒𝑚
Moteur
Alternateur90°−90°
𝑉
Diagramme bipolaire
Alternateur
fournissant du réactifAlternateur
absorbant du réactif
Moteur absorbant du
réactifMoteur fournissant
du réactif
𝑄
𝑃

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Fonctionnement en moteur
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 129
Le diagramme bipolaire peut servir à déterminer le point de fonctionnement
lorsque la machine est couplée au réseau
• Si on connait le courant 𝐼 et le cos𝜑 :• On trace la chute de tension dans la réactance synchrone
• On peut tracer la fem et calculer le courant d’excitation
• On détermine la puissance active et réactive
𝑉 𝑄
𝑃
𝐼𝜑
0 𝑎
𝑏𝐸
𝑗𝑋𝑆𝐼
𝑄 =3𝑉
𝑋𝑆0𝑎𝑃 =
3𝑉
𝑋𝑆0𝑏
• Si on connait le courant d’excitation 𝐽 et
la puissance active :• On trace la droite d’equi-puissance et le
cercle d’équi-fem
• Il est alors possible de déterminer les
autres grandeurs
𝑉 𝑄
𝑃
𝐼𝜑
0 𝑎
𝑏𝐸
𝑗𝑋𝑆𝐼

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Le moteur asynchrone
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 130
• Le moteur asynchrone est une machine électrique tournante fonctionnant en
mode moteur et produisant de l’énergie électrique alternative
• Conversion d’une puissance électrique (sous forme alternative) en une
puissance mécanique (sous forme de rotation)
• Le moteur asynchrone peut être soit monophasé soit triphasé
• Moteur qui offre un bon rapport qualité prix, grâce entre autre à l’absence et de
collecteur. De plus contrairement au moteur synchrone celui-ci ne peut pas
décrocher lors de grosses variations de couple
• Principe• Chaque phase est composée de p bobinages
• Le rotor est constitué de bobinage court-circuité
entre eux
• Les bobinage du stator viennent créer un courant
dans les bobinages du stator
1
32
3
1
2

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Principe de Fonctionnement
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 131
𝐵 𝑑𝜙
𝑑𝑡> 0𝑑𝜙
𝑑𝑡< 0
Flux magnétique
Loi de Faraday
𝐼1 𝐼2
Force de Laplace
𝐵
𝑓1
𝑓2
𝐹
• L’inducteur crée un champ magnétique qui se
déplace de manière transversale• Ce champ mobile crée entre les conducteurs
une variation du flux magnétique
• Ces variations de flux créent des forces
électromotrices• Ces forces électromotrices induisent des
courants dans les barres conductrices
• En appliquant la loi de Laplace, on peut montrer
que des forces s’appliquent sur les barres
conductrices• Le champ étant le plus intense sur la barre du centre,
l’intensité de la force sera plus grande𝐹 > 𝑓1 + 𝑓2

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Technologie du moteur asynchrone : le stator
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 132
• Le stator est l’inducteur• Les bobinages sont maintenus immobiles dans des encoches qui sont creusées
dans le stator : c’est dans ces bobinages qu’est créé le champ magnétique inducteur
• Le stator est au moins constitué de trois bobinages décalés l’un de l’autre de
±120°
• Les courants courant qui traverse ces bobinages sont appelés courant statorique, il
sont eux aussi déphasés de ±120° l’un de l’autre
• Selon le théorème de Ferraris, ces courants créent un champ magnétique tournant
𝐵𝑆 à la pulsation 𝜔𝑆
• En jouant sur le bobinage, il est possible d’avoir plusieurs paires de pôles au niveau
des bobinages statoriques dans chaque phase. On note 𝑝 le nombre de paire de
pôles
• Synchronisme• Il ne faut pas confondre la vitesse de synchronisme Ω𝑆 (mécanique) et la pulsation
𝜔𝑆 (électrique) des courants statoriques. Le rotor tourne à la vitesse de
synchronisme uniquement lorsqu’il est à vide. A ce moment là, on peut écrire 𝜔𝑆 =𝑝Ω𝑆

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Technologie du moteur asynchrone : le rotor
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 133
• Le rotor est l’induit• Il existe différentes technologies au niveau du rotor : la plus utilisé est le rotor à cage
d’écureuil, mais il existe aussi des rotors bobinés
• Le rotor à cage d’écureuil• Le rotor à cage d’écureuil est constitué de lame conductrice fermé de chaque coté
par un anneau de court circuit
• Le rotor n’est pas connecté à une alimentation
• Il n’y pas de collecteur, ni de balais ce qui
est un avantage en terme de coût d’entretien
et d’usure
• Les courants rotoriques• Le rotor ne tournant pas à la vitesse du champ magnétique inducteur, les courants
dans l’induit sont variables et évoluent de manière sinusoïdale à une pulsation que
l’on notera 𝜔𝑅
• De plus les courant rotoriques vont créer à leur tour un champ tournant rotorique 𝐵𝑅
avec une pulsation 𝜔𝑅

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Le moteur asynchrone en fonctionnement : vitesse
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 134
• Les courants statoriques créent un champ tournant 𝐵𝑆 tournant à la vitesse
Ω𝑆 =𝜔𝑆
𝑝par rapport au stator
• De même les courants induits rotoriques créent un champ tournant 𝐵𝑅 tournant
à la vitesse Ω𝑅 =𝜔𝑅
𝑝par rapport au rotor
• Le moteur peut tourner car il existe un couple électromagnétique moyen non nul
entre les champs statorique et rotorique. L’Expression de ce couple est de la forme :
𝑇𝑒𝑚 𝑡 = 𝑘𝐵𝑆𝐵𝑅 sin 𝛼 𝑡 avec 𝛼 𝑡 l’angle entre 𝐵𝑆 𝑡 et 𝐵𝑅 𝑡
• Pour que le couple électromagnétique moyen soit fixe, il faut que l’angle entre les
deux champs soit fixes donc qu’ils tournent à la même vitesse par rapport au stator
• Il est possible d’écrire la relation entre la vitesse de rotation des champs
tournants et du rotor
• On appelle glissement 𝑔 le rapport entre l’écart des vitesses (statorique et
rotation du rotor) et de la vitesse statorique
Ω𝑆 = Ω𝑅+Ω
𝑔 =Ω𝑆 − Ω
Ω𝑆=
Ω𝑅
Ω𝑆=
𝜔𝑅
𝜔𝑆

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Fonctionnement en charge
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 135
• Il est possible de tracer la caractéristique mécanique de la machine
asynchrone.
• La caractéristique mécanique à la forme
suivante:
• Au démarrage la vitesse de rotation est
nulle, tant que le couple moteur est
supérieur au couple résistant, la vitesse de
rotation augmente et le couple moteur
évolue le long de la courbe
• Le point de fonctionnement est au
croisement des courbe du couple moteur
et du couple résistant
• Après le démarrage, si le couple résistant
est supérieur au couple moteur maximum,
il y a décrochage et la machine
asynchrone s’arrête
• Fonctionnement dans la zone linéaire qui permet d’écrire que :𝑇𝑚 = 𝑎. Ω + 𝑏
𝑇𝑚
ΩΩ Ω 𝑆Ω 𝑚𝑖𝑛

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Le moteur asynchrone en fonctionnement : comportement électrique
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 136
• Au démarrage, l’induit est en court-circuit et immobile
• Le flux magnétique ayant un temps de réponse plus rapide que les grandeurs
mécaniques, impose une force électromotrice et donc des courants induits et
inducteurs assez important. Ces courants diminuent lorsque la vitesse augmente
• Plusieurs solutions : démarrage étoile-triangle, utilisation de variateur de vitesse
• En régime stationnaire :
• Du fait de la réaction magnétique d’induit et de la présence d’un flux mutuel entre le
stator et le rotor, la machine a quelques similitudes avec le transformateur
• Lorsque la vitesse de rotation augmente, le glissement diminue et donc la force
électromotrice au rotor aussi; Les courants induits diminuent donc les courants
statoriques aussi.
• Plus le glissement est important, plus le courant consommé par le moteur est
intense

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Fonctionnement à vide
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 137
• Le glissement est nul si on considère qu’il n’y a pas de pertes mécaniques
• Ceci veut dire que le rotor se déplace à la même vitesse que le champ
magnétique statorique
• Les courants dans le rotor ont une fréquence nulle, ils sont continus
• En résumé 𝑔 = 0 donc 𝜔𝑅 = 0. Au niveau des vitesses de rotation :
Ω = Ω𝑆 =𝜔𝑆
𝑝
• Facteur de puissance :
• La modélisation de la machine asynchrone est constituée de résistance pour
modéliser les pertes Joule et de réactance pour modéliser les effets magnétiques
• Les pertes Joule étant normalement assez faible, les éléments sont surtout inductifs
ce qui entraine pour une utilisation vide un cos𝜑 de l’installation assez faible

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Bilan des puissances et Pertes : puissance et couple
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 138
• Puissance électrique absorbée
• C’est la puissance que l’on veut convertir, fournie par le réseau ou l’alimentation
électrique
• Puissance transmise à l’entrefer
• C’est la puissance transmise au rotor par le stator
• Puissance électromécanique• La puissance électromagnétique est celle convertie par le rotor de façon mécanique
• Puissance mécanique utile
• C’est la puissance que l’on a en sortie de la conversion sur l’arbre de transmision
𝑃𝑎 = 3𝑉𝐼 cos𝜑 = 3𝑈𝐼 cos𝜑
𝑃𝑒𝑚 = 𝑇𝑒𝑚Ω = 1 − 𝑔 𝑃𝑡𝑅
𝑃𝑡𝑅 = 𝑃𝑎 − 𝑃𝑠𝑡𝑎𝑡𝑜𝑟
𝑃𝑢 = 𝑇𝑚Ω

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Bilan des puissances et Pertes : Les pertes
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 139
• Pertes Joule
• Ce sont les pertes par échauffement dans les conducteurs de l’induit et de l’inducteur
• Pertes Joule statorique
• Pertes Joule rotorique
• Pertes mécaniques
• Ce sont les pertes dues aux imperfections des éléments mécaniques (frottement entre
le rotor et le stator)
• Pertes fer• Ce sont les pertes dans le circuit magnétique (pertes par courant de Foucault et pertes
par hystérésis)
• Les pertes communes peuvent être déterminées par une mesure de la puissance
absorbée lorsque l’alternateur fonctionne à vide
𝑃𝐽𝑅 = 𝑔𝑃𝑡𝑅
𝑃𝐽𝑆 = 3𝑟𝑆𝐼2 =
3
2𝑅𝐼2 R mesuré entre phase
Proportionnelle au glissement

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Bilan des puissances et Pertes : Arbre des puissances
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 140
Puissance électrique
absorbée 𝑃𝑎
Puissance transmise au
rotor 𝑃𝑡𝑅
Puissance
électromagnétique 𝑃𝑒𝑚
Pertes fer
𝑃𝑓𝑒𝑟
Pertes Joule au
stator 𝑃𝐽𝑆
Pertes Joule au
rotor 𝑃𝐽𝑆
3𝑉𝐼 cos𝜑 = 3𝑈𝐼 cos𝜑
3
2𝑅𝐼2
Pertes mécaniques
𝑃𝑚𝑒𝑐𝑎
𝑔𝑃𝑡𝑅
Puissance utile 𝑃𝑢 𝑇𝑚Ω
𝑇𝑒𝑚Ω = 1 − 𝑔 𝑃𝑡𝑅
Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
Génératrice Asynchrone
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 141
• Deux fonctionnements possibles :
• Si le couple électromagnétique s’oppose à la rotation du moteur : fonctionnement en
freinage
• Si le rotor tourne plus vite que le champ magnétique statorique : fonctionnement
hypersynchrone
• Avantages du fonctionnement hypersynchrone
• Rotor non alimenté, Fréquence et tension qui ne sont pas fonction de la vitesse de
rotation, supporte les variations de vitesse et de couple
• Inconvénients du fonctionnement hypersynchrone
• Production en site isolé impossible, Vitesse de rotation doit être supérieure à la vitesse
de synchronisme, N’agit pas sur le facteur de puissance, production électrique de
moyenne puissance

Introduction-Généralités Transformateur Alternateur synchroneMachine à courant continu Moteur Asynchrone
ΩΩ 𝑆
2Ω 𝑆
−Ω 𝑆
Caractéristique mécanique complète
2013/2014 0A-ETT Bases d'électrotechnique A. LEREDDE 142
• Trois modes de fonctionnement sont possibles
• Mode moteur
• Le rotor et le champ magnétique tourne dans le même sens : la puissance mécanique
est déployée et la puissance électrique absorbée
• Mode frein
• La vitesse et le couple sont opposés
• La puissance mécanique
et électrique sont absorbée
• Mode génératrice
• La vitesse et le couple sont opposée
• La puissance mécanique
est absorbée et la puissance électrique
est déployée