gele5313 - chapitre 2 - academiepro.com · fonction peut etre une reprˆ esentation de divers...
TRANSCRIPT

Chapitre 2Modelisation
Le but de ce chapitre est d’apprendre a ecrire des fonctions de transfert pour differentstypes de systemes : electriques, mecaniques et electromecaniques. Pour appliquer ducontrole a un systeme, on doit etre en mesure de decrire son comportement de faconmathematique.
Pour modeliser ces systemes, on se sert de la transformee de Laplace. Ceci permet dedecrire le comportement des systemes et les analyser de facon assez simple.
On verra aussi comment lineariser des equations.
2.1 Transformee de Laplace
On commence par une petite revision de la transformee de Laplace. La transformeed’une fonction f (t) est :
L[f (t)] = F(s) =∫ ∞
0−f (t)e−stdt (2.1)
ou s = σ + jω.
La transformee inverse existe aussi,
L−1[F(s)] =1j2π
∫ σ+jω
σ−jωF(s)estds = f (t)u(t) (2.2)
ou
u(t) =
1 t > 00 t < 0
(2.3)
1

CHAPITRE 2. MODELISATION
Le tableau 2.1 montre quelques fonctions les plus utilisees. Une liste plus complete detransformees est disponible a la fin du chapitre.
Tableau 2.1 – Transformees de Laplace communes
Transformee f (t) F(s)
1 δ(t) 1
2 u(t)1s
3 tu(t)1
s2
4 tnu(t)n!
sn+1
5 e−atu(t)1s+ a
6 sin(ωt)u(t)ω
s2 +ω2
7 cos(ωt)u(t)s
s2 +ω2
Exemple 1
Calculer la transformee de Laplace de e−atu(t).
L{e−atu(t)} =∫ ∞
0−e−ate−stdt =
∫ ∞0−e−(s+a)tdt
=−1s+ a
e−(s+a)t∞0 =
−1s+ a
(0− 1)
=1s+ a
Proprietes
La transformee de Laplace a plusieurs proprietes interessantes qui rendent le calcul defonctions complexes plus simple. On note entre autre la linearite (pr.2), derivee (pr.7-9) etles theoremes de valeur finales et initiales (pr.11,12). Le tableau 2.2 montre ces proprietes.
Gabriel Cormier 2 GELE5313
CHAPITRE 2. MODELISATION
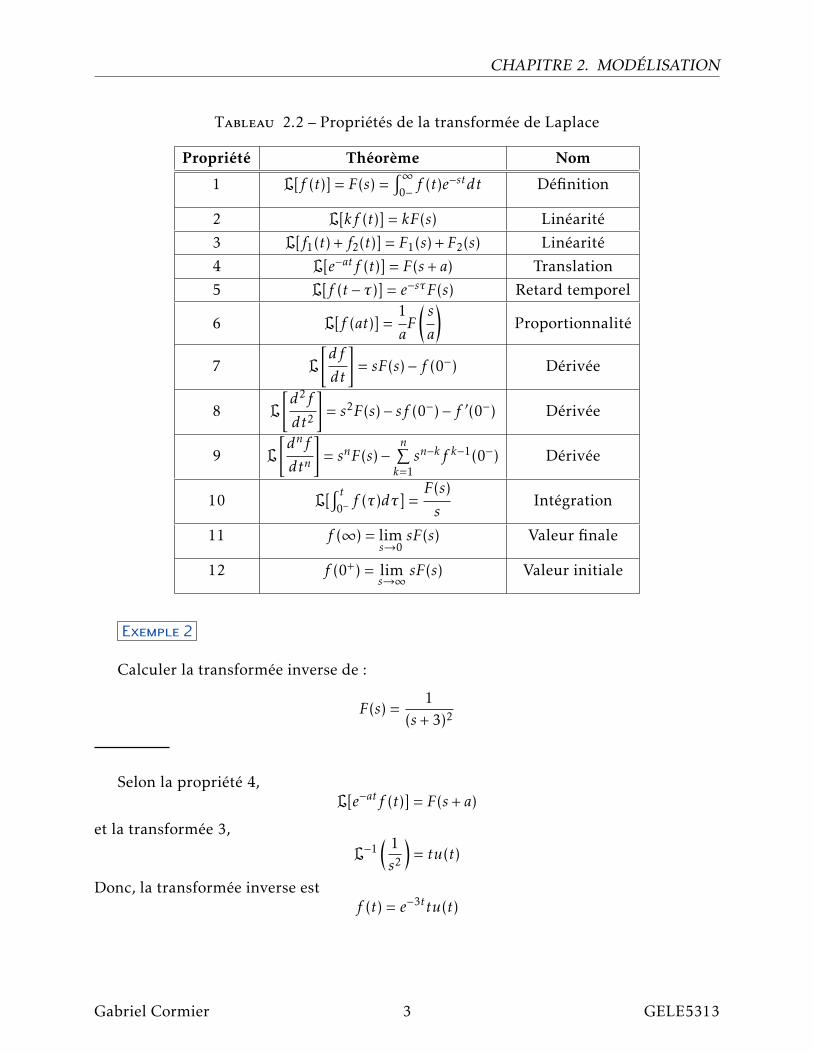
Tableau 2.2 – Proprietes de la transformee de Laplace
Propriete Theoreme Nom
1 L[f (t)] = F(s) =∫∞
0− f (t)e−stdt Definition
2 L[kf (t)] = kF(s) Linearite
3 L[f1(t) + f2(t)] = F1(s) +F2(s) Linearite
4 L[e−atf (t)] = F(s+ a) Translation
5 L[f (t − τ)] = e−sτF(s) Retard temporel
6 L[f (at)] =1aF
(s
a
)Proportionnalite
7 L
[df
dt
]= sF(s)− f (0−) Derivee
8 L
[d2f
dt2
]= s2F(s)− sf (0−)− f ′(0−) Derivee
9 L
[dnf
dtn
]= snF(s)−
n∑k=1sn−kf k−1(0−) Derivee
10 L[∫ t
0−f (τ)dτ] =
F(s)s
Integration
11 f (∞) = lims→0
sF(s) Valeur finale
12 f (0+) = lims→∞
sF(s) Valeur initiale
Exemple 2
Calculer la transformee inverse de :
F(s) =1
(s+ 3)2
Selon la propriete 4,L[e−atf (t)] = F(s+ a)
et la transformee 3,
L−1( 1s2
)= tu(t)
Donc, la transformee inverse estf (t) = e−3ttu(t)
Gabriel Cormier 3 GELE5313

CHAPITRE 2. MODELISATION
2.1.1 Expansion en fractions partielles
Pour des fonctions de transfert complexes, il peut etre difficile de trouver la trans-formee inverse. On se sert donc de l’expansion en fractions partielles. On utilisera desexemples pour demontrer les principes.
Soit une fonction
F(s) =s3 + 2s2 + 6s+ 7
s2 + s+ 5Il n’existe pas de transformee inverse directe a cette fonction. Dans ce cas, il faut faire ladivision, si l’ordre du numerateur est plus grand que l’ordre du denominateur.
s+ 1
s2 + s+ 5)s3 + 2s2 + 6s+ 7− s3 − s2 − 5s
s2 + s+ 7− s2 − s − 5
2
On obtient donc :s3 + 2s2 + 6s+ 7
s2 + s+ 5= s+ 1 +
2s2 + s+ 5
La transformee inverse est :
f (t) =dδ(t)dt
+ δ(t) +L−1[ 2s2 + s+ 5
]Il reste cependant le troisieme terme a determiner. On utilisera l’expansion en fractionspartielles pour trouver
L−1[ 2s2 + s+ 5
]Il faut factoriser le denominateur en une somme de termes et ensuite trouver la trans-
formee inverse de chaque terme. Il y a trois differentes facon de faire, selon la valeur desracines : reelles et distinctes, reelles et repetees, ou complexes.
1. Racines reelles et distinctes.
Exemple :
F(s) =2
(s+ 1)(s+ 2)
Gabriel Cormier 4 GELE5313
CHAPITRE 2. MODELISATION
On peut ecrire :
F(s) =2
(s+ 1)(s+ 2)=
K1
(s+ 1)+
K2
(s+ 2)
Pour isoler K1, on multiplie chaque cote par (s+ 1). On obtient :
2(s+ 2)
= K1 +(s+ 1)K2
(s+ 2)
Si on prend s = −1,
K1 =2
(s+ 2)
s=−1
= 2
Pour trouver K2, on fait le meme processus, sauf qu’on multiplie par (s+ 2) cette fois.
K2 =2
(s+ 1)
s=−2
= −2
Donc,
F(s) =2s+ 1
+−2s+ 2
qui donne la transformee inverse suivante :
f (t) = (2e−t − 2e−2t)u(t)
Note : La fonction u(t) doit etre appliquee a toute transformee inverse. Cependant,pour alleger le texte, on n’ecrira plus le u(t).
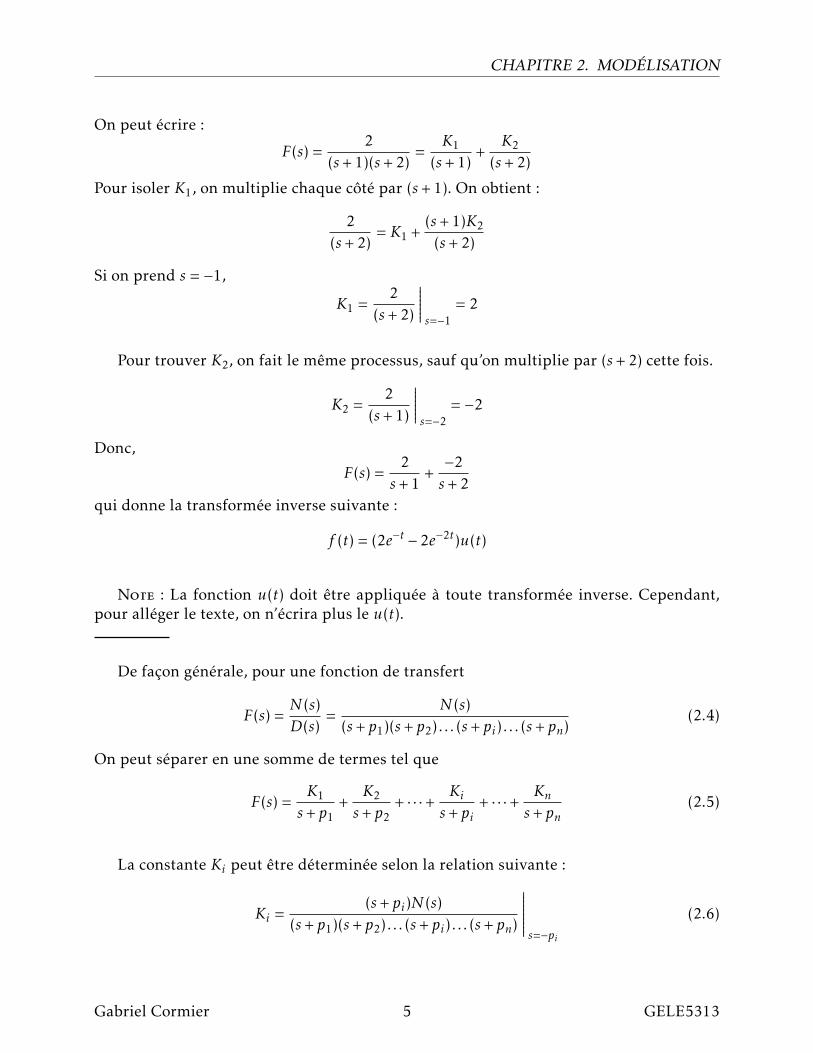
De facon generale, pour une fonction de transfert
F(s) =N (s)D(s)
=N (s)
(s+ p1)(s+ p2) . . . (s+ pi) . . . (s+ pn)(2.4)
On peut separer en une somme de termes tel que
F(s) =K1
s+ p1+
K2
s+ p2+ · · ·+ Ki
s+ pi+ · · ·+ Kn
s+ pn(2.5)
La constante Ki peut etre determinee selon la relation suivante :
Ki =(s+ pi)N (s)
(s+ p1)(s+ p2) . . . (s+ pi) . . . (s+ pn)
s=−pi
(2.6)
Gabriel Cormier 5 GELE5313

CHAPITRE 2. MODELISATION
2. Racines au denominateur reelles et repetees.
SoitF(s) =
2(s+ 1)(s+ 2)2
On peut trouver les termes selon
F(s) =2
(s+ 1)(s+ 2)2 =K1
s+ 1+
K2
(s+ 2)2 +K3
s+ 2
La constante K1 peut etre trouvee en utilisant la premiere methode montree plus haut(ce qui donne K1 = 2. Pour trouver K2, on multiplie par (s+ 2)2 :
2s+ 1
=K1
s+ 1(s+ 2)2 +K2 +K3(s+ 2) (*)
On evalue a s = −2,
K2 =2s+ 1
s=−2
= −2
Pour K3, on derive l’equation * par rapport a s,
−2(s+ 1)2 =
(s+ 2)s(s+ 1)2K1 +K3
De meme, si s = −2,
K3 =−2
(s+ 1)2
s=−2
= −2
De facon generale, pour une fonction du type :
F(s) =N (s)D(s)
=N (s)
(s+ p1)r(s+ p2) . . . (s+ pn)(2.7)
On divise la fonction de la maniere suivante,
F(s) =K1
(s+ p1)r+
K2
(s+ p1)r−1 + · · ·+ Kr(s+ p1)
+Kr+1
(s+ p2)r+ · · ·+ Kn
(s+ pn)(2.8)
On peut trouver les coefficients des racines repetees
Ki =1
(i − 1)!di−1F(s)dsi−1
s=−p1
(2.9)
ou i = 1,2, . . . r. Pour les autre coefficients, la technique 1 fonctionne.
Gabriel Cormier 6 GELE5313

CHAPITRE 2. MODELISATION
3. Racines complexes au denominateur.
Ici encore, on demontre a l’aide d’un exemple. Soit
F(s) =3
s(s2 + 2s+ 5)
On peut ecrire
F(s) =K1
s+K2s+K3
s2 + 2s+ 5Le coefficient K1 est obtenu de la facon habituelle ; K1 = 0.6. Pour K2 et K3, on multiplieles deux cotes par le denominateur, s(s2 + 2s+ 5). On obtient :
3 = K1(s2 + 2s+ 5) + (K2s+K3)s
= (K1 +K2)s2 + (2K1 +K3)s+ 5K1
On a donc trois equations,
K1 +K2 = 02K1 +K3 = 0
5K1 = 3
d’ou on trouve que K2 = −0.6 et K3 = −1.2.
La fonction de transfert devient
F(s) = 0.61s− 0.6
s+ 2s2 + 2s+ 5
La transformee inverse est
f (t) = 0.6− 0.6e−t(cos2t + 0.5sin2t)
= 0.6− 0.671e−t cos(2t − 26.57◦)
La demonstration de cette derniere equation est donnee en annexe.
On peut aussi faire ce type de probleme avec des nombres complexes :
F(s) =3
s(s2 + 2s+ 5)=
3s(s+ 1 + j2)(s+ 1− j2)
=K1
s+
K2
s+ 1 + j2+
K3
s+ 1− j2
On utilise la premiere technique pour resoudre, K1 = 0.6. Les autre coefficients sont
K2 =3
s(s+ 1− j2)
s=−1−j2
= −0.15(2 + j)
Gabriel Cormier 7 GELE5313

CHAPITRE 2. MODELISATION
Et K3 est le conjugue de K2, K3 = −0.15(2− j). La fonction devient
F(s) = 0.61s
+−0.15(2 + j)s+ 1 + j2
+−0.15(2− j)s+ 1− j2
Dans le domaine du temps, la fonction est
f (t) = 0.6− 0.15[(2 + j)e−(1+j2)t + (2− j)e−(1−j2)t
]= 0.6− 0.15e−t
[(2 + j)e−j2t + (2− j)ej2t
]Avec la relation d’Euler,
f (t) = 0.6− 0.15e−t[(2 + j)(cos(−2t) + j sin(−2t)) + (2− j)(cos(2t) + j sin(2t))]
= 0.6− 0.15e−t[(2 + j)(cos(2t)− j sin(2t)) + (2− j)(cos(2t) + j sin(2t))]
= 0.6− 0.15e−t(4cos2t + 2sin2t)
= 0.6− 0.6e−t(cos2t + 0.5sin2t)
= 0.6− 0.671e−t cos(2t − 26.57◦)
C’est la meme solution que celle obtenue plus haut.
Gabriel Cormier 8 GELE5313
CHAPITRE 2. MODELISATION
2.2 Fonction de transfert
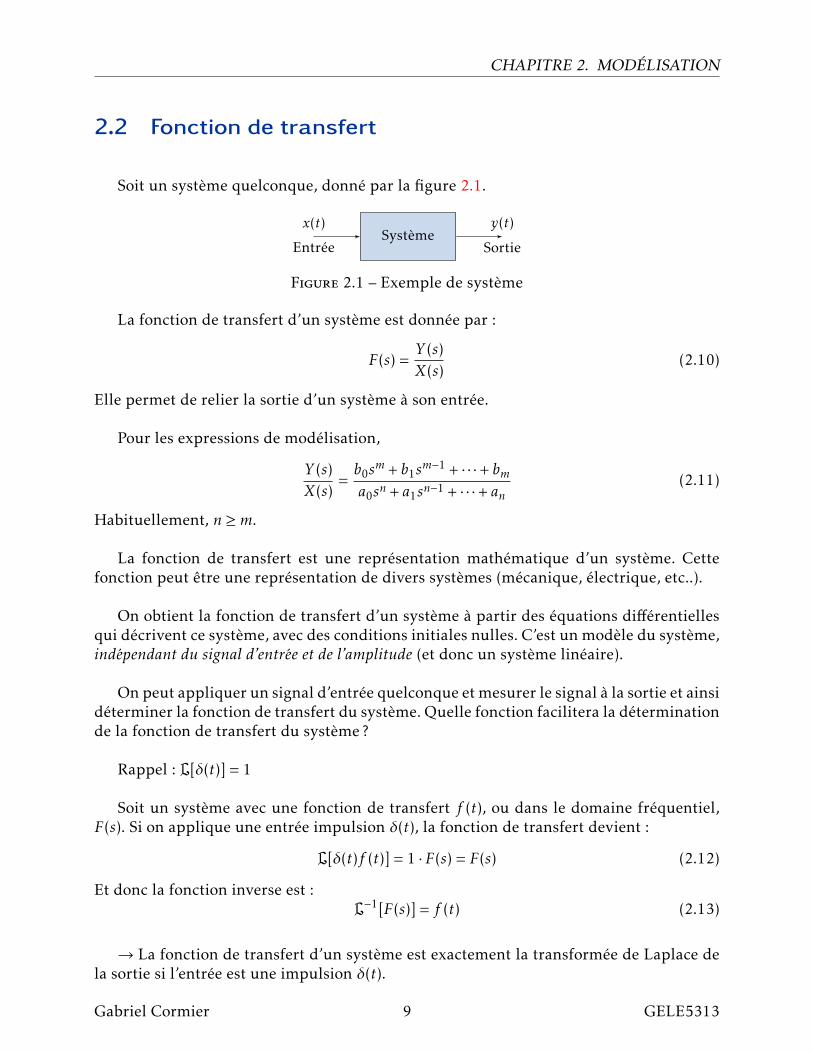
Soit un systeme quelconque, donne par la figure 2.1.
Systemex(t)
Entree
y(t)
Sortie
Figure 2.1 – Exemple de systeme
La fonction de transfert d’un systeme est donnee par :
F(s) =Y (s)X(s)
(2.10)
Elle permet de relier la sortie d’un systeme a son entree.
Pour les expressions de modelisation,
Y (s)X(s)
=b0s
m + b1sm−1 + · · ·+ bm
a0sn + a1sn−1 + · · ·+ an(2.11)
Habituellement, n ≥m.
La fonction de transfert est une representation mathematique d’un systeme. Cettefonction peut etre une representation de divers systemes (mecanique, electrique, etc..).
On obtient la fonction de transfert d’un systeme a partir des equations differentiellesqui decrivent ce systeme, avec des conditions initiales nulles. C’est un modele du systeme,independant du signal d’entree et de l’amplitude (et donc un systeme lineaire).
On peut appliquer un signal d’entree quelconque et mesurer le signal a la sortie et ainsideterminer la fonction de transfert du systeme. Quelle fonction facilitera la determinationde la fonction de transfert du systeme ?
Rappel : L[δ(t)] = 1
Soit un systeme avec une fonction de transfert f (t), ou dans le domaine frequentiel,F(s). Si on applique une entree impulsion δ(t), la fonction de transfert devient :
L[δ(t)f (t)] = 1 ·F(s) = F(s) (2.12)
Et donc la fonction inverse est :L−1[F(s)] = f (t) (2.13)
→ La fonction de transfert d’un systeme est exactement la transformee de Laplace dela sortie si l’entree est une impulsion δ(t).
Gabriel Cormier 9 GELE5313
CHAPITRE 2. MODELISATION
2.3 Modelisation des systemes
On se sert des fonctions de transfert pour modeliser les systemes electriques, meca-niques, et electromecaniques. Les lois physiques relatives a ces systemes seront utilisees,a l’aide de techniques d’analyse specialisees pour simplifier les calculs. On commenced’abord avec les systemes electriques.
2.3.1 Systemes electriques
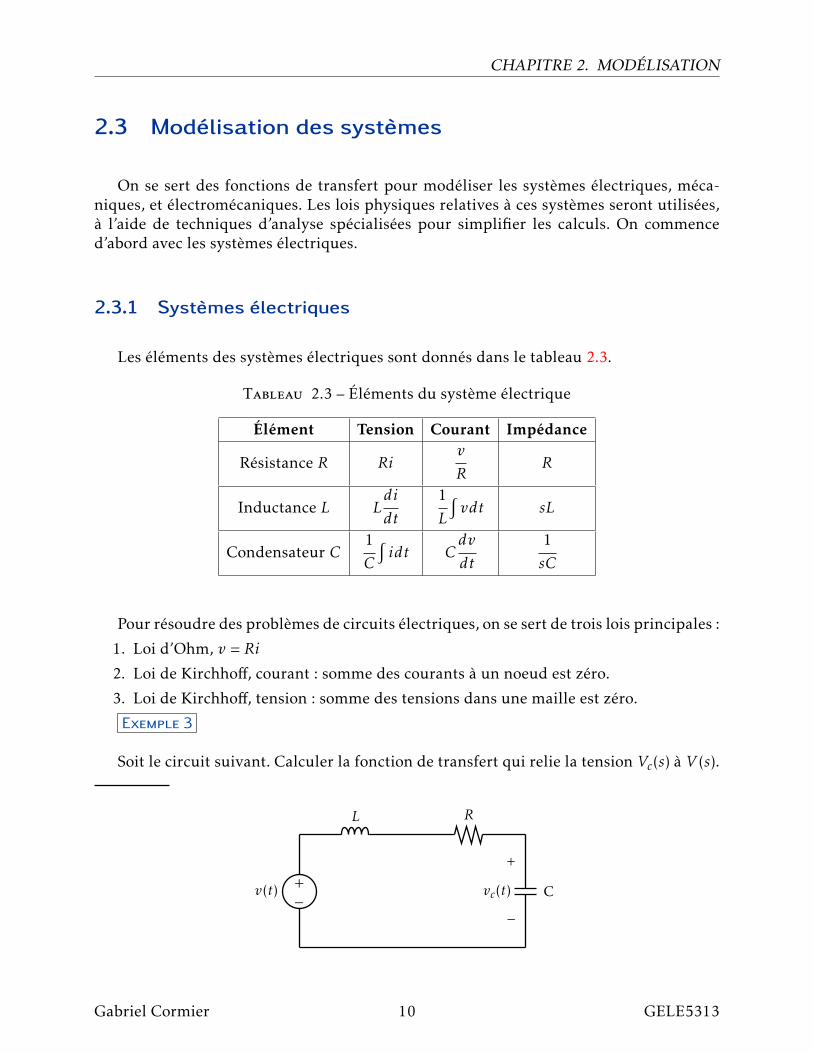
Les elements des systemes electriques sont donnes dans le tableau 2.3.
Tableau 2.3 – Elements du systeme electrique
Element Tension Courant Impedance
Resistance R Riv
RR
Inductance L Ldi
dt
1L
∫vdt sL
Condensateur C1C
∫idt C
dv
dt
1sC
Pour resoudre des problemes de circuits electriques, on se sert de trois lois principales :
1. Loi d’Ohm, v = Ri
2. Loi de Kirchhoff, courant : somme des courants a un noeud est zero.
3. Loi de Kirchhoff, tension : somme des tensions dans une maille est zero.
Exemple 3
Soit le circuit suivant. Calculer la fonction de transfert qui relie la tension Vc(s) a V (s).
+−v(t)
L R
C
+
−
vc(t)
Gabriel Cormier 10 GELE5313
CHAPITRE 2. MODELISATION
On utilise un diviseur de tension :
Vc(s) =
1sC
sL+R+1sC
V (s)
La fonction de transfert est :
Vc(s)V (s)
=
1sC
sL+R+1sC
=
1LC
s2 + sR
L+
1LC
On peut simplifier l’analyse de circuits en utilisant la methode des mailles ou desnoeuds.
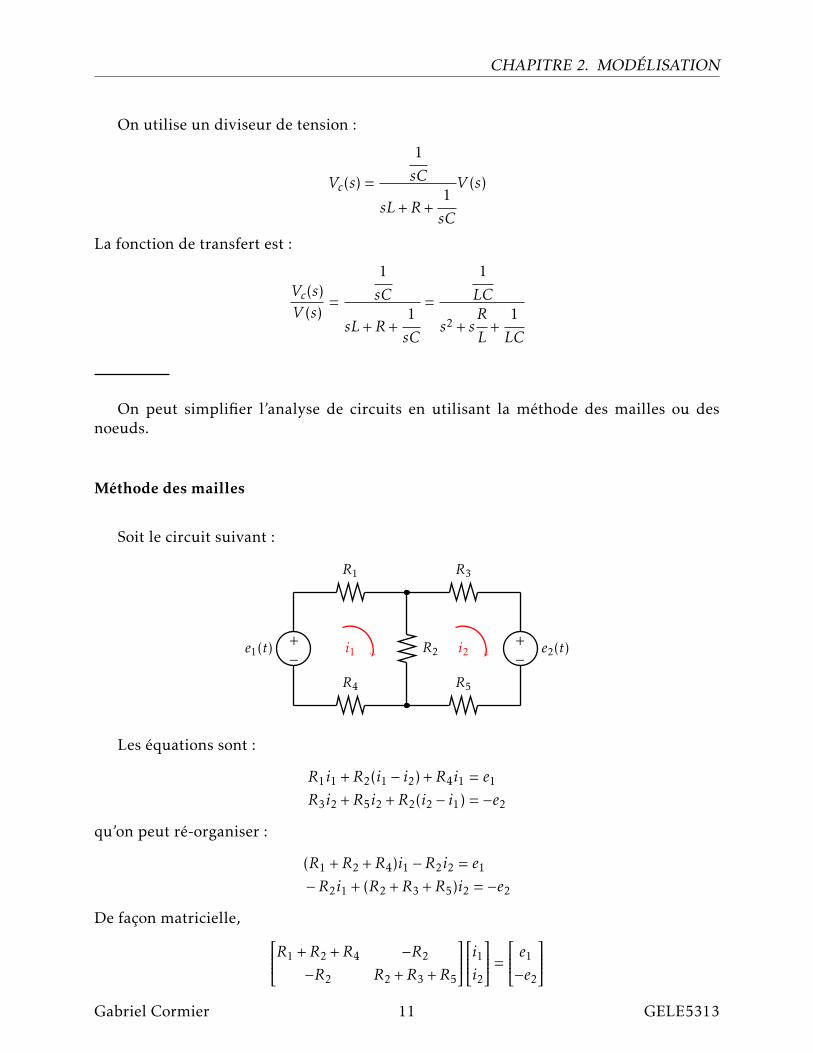
Methode des mailles
Soit le circuit suivant :
+−e1(t)
R1 R3
R4 R5
+− e2(t)R2i1 i2
Les equations sont :
R1i1 +R2(i1 − i2) +R4i1 = e1
R3i2 +R5i2 +R2(i2 − i1) = −e2
qu’on peut re-organiser :
(R1 +R2 +R4)i1 −R2i2 = e1
−R2i1 + (R2 +R3 +R5)i2 = −e2
De facon matricielle, R1 +R2 +R4 −R2
−R2 R2 +R3 +R5
i1i2 =
e1
−e2
Gabriel Cormier 11 GELE5313
CHAPITRE 2. MODELISATION
Si on analyse la derniere equation de plus pres, on remarque que l’element (1,1) de lamatrice des resistances est la somme dans elements contenus dans la maille 1. L’element(2,2) represente la somme des element de la maille 2. Les elements (1,2) et (2,1) sont leselements communs aux mailles 1 et 2, avec un signe negatif.
La forme generale est :
ΣZ
de m1
−ΣZ communs,m1,m2
· · ·−ΣZ communs,
m1,mn
...ΣZ
de m2. . .
ΣZ
de mn
i1i2...
in
=
Σsources dela maille 1
Σsources dela maille 2
...
Σsources dela maille n
(2.14)
On utilise les techniques de resolution matricielles pour resoudre le probleme et trou-ver la fonction de transfert voulue.
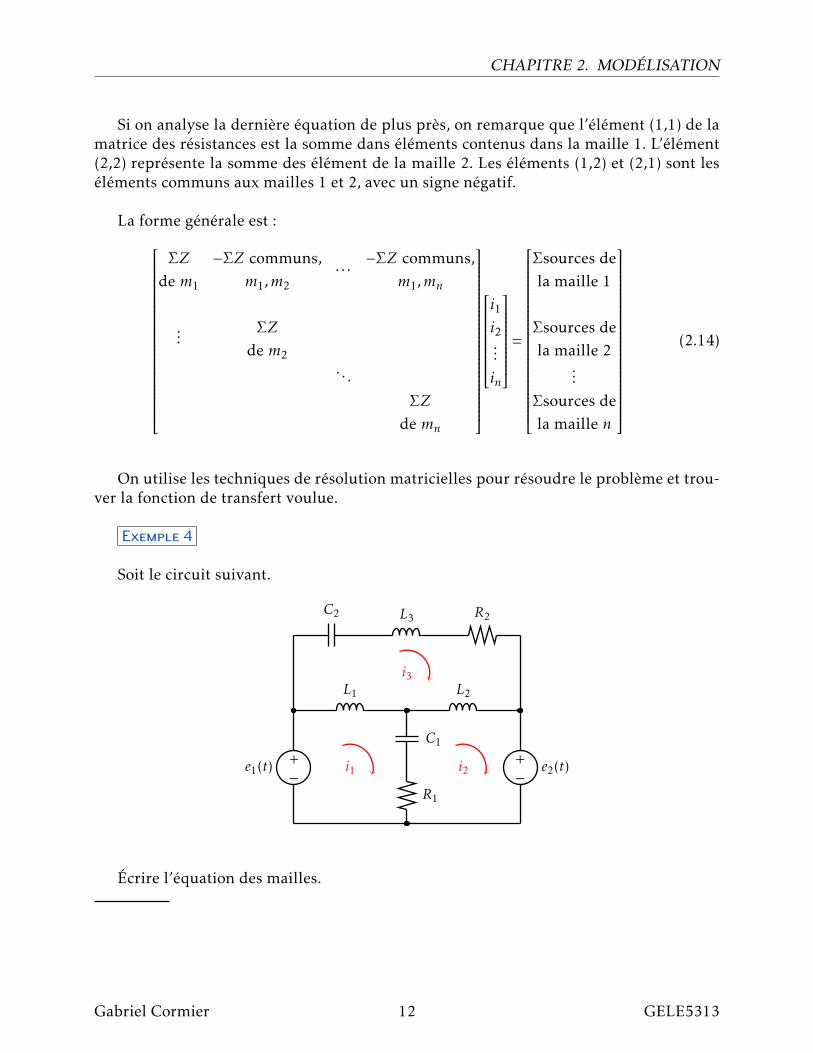
Exemple 4
Soit le circuit suivant.
+−e1(t)
C2 L3 R2
+− e2(t)
L1 L2
C1
R1
i1 i2
i3
Ecrire l’equation des mailles.
Gabriel Cormier 12 GELE5313
CHAPITRE 2. MODELISATION
Par inspection :sL1 + 1
sC1+R1 −(R1 + 1
sC1) −sL1
−(R1 + 1sC1
) sL2 + 1sC1
+R1 −sL2
−sL1 −sL21sC2
+R2 + s(L1 +L2 +L3)
i1i2i3
=
e1
−e2
0
On peut utiliser la methode des noeuds pour solutionner des circuits. La techniqued’analyse est la meme, sauf qu’on utilise les admittances au lieu des impedances.
ΣY
de m1
−ΣY communs,m1,m2
· · ·−ΣY communs,
m1,mn
...ΣY
de m2. . .
ΣY
de mn
v1
v2...
vn
=
Σsources dunoeud 1
Σsources dunoeud 2
...
Σsources dunoeud n
(2.15)
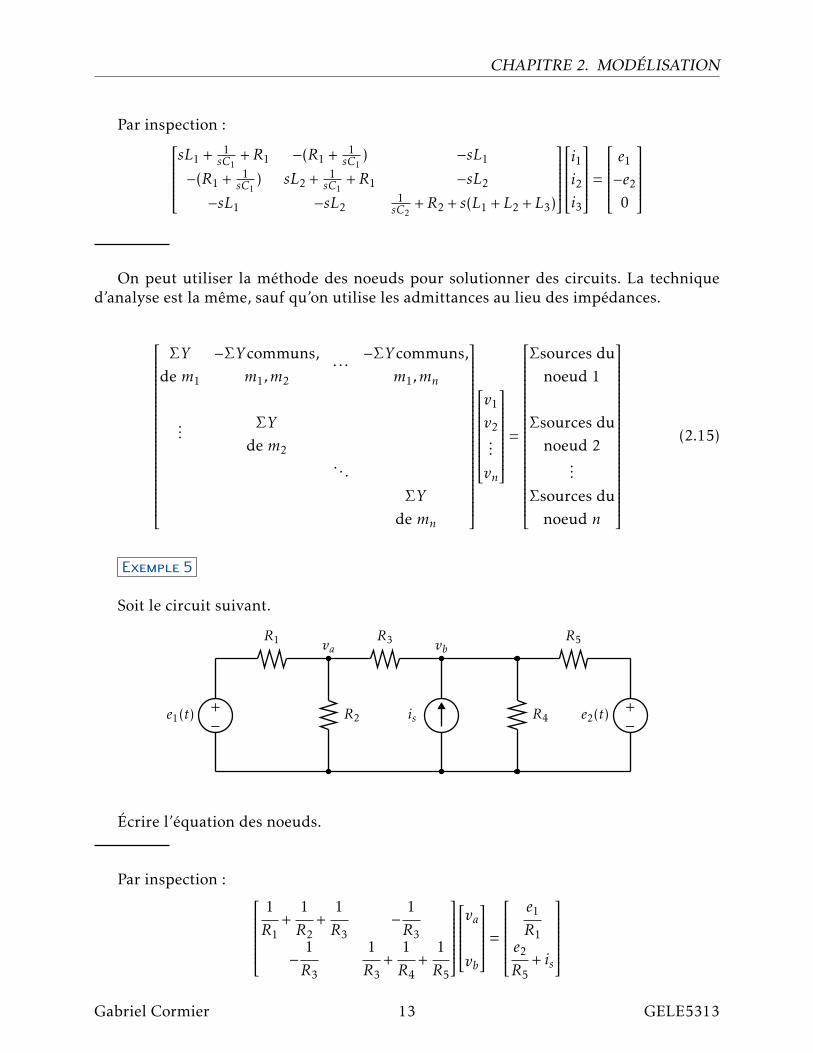
Exemple 5
Soit le circuit suivant.
+−e1(t)
R1 R3 R5
+−e2(t)
va
R2 is
vb
R4
Ecrire l’equation des noeuds.
Par inspection : 1R1
+1R2
+1R3
−1R3
−1R3
1R3
+1R4
+1R5
va
vb
=
e1
R1e2
R5+ is
Gabriel Cormier 13 GELE5313

CHAPITRE 2. MODELISATION
2.3.2 Systemes mecaniques
Dans les systemes mecaniques, il y a deux types de mouvement : translation et rota-tion. On verra chacun de ces systemes separement. Pour resoudre, on utilise les lois deNewton : la somme des forces sur un corps est nulle (pour les systemes en translation) etla somme des moments est nulle (pour les systemes en rotation).
Les elements du systeme de translation sont presentes dans le tableau 2.4.
Tableau 2.4 – Elements du systeme de translation
Element Force : vitesse Force : deplacement Impedance
Ressort k f (t) = k∫ t
0v(τ)dτ f (t) = kx(t) k
Amortissement B f (t) = Bv(t) f (t) = Bdx(t)dt
sB
Masse M f (t) =Mdv(t)dt
f (t) =Md2x(t)
dt2s2M
Exemple 6
Soit le systeme suivant :
k
BM f
x
Ecrire l’equation qui relie la position X(s) a la force appliquee F(s).
La somme des forces est nulle : f − fM − fB − fk = 0. Si on substitue les impedances,
F(s) = s2MX(s) + sBX(s) + kX(s)
Et la fonction de transfert :X(s)F(s)
=1
s2M + sB+ k
Gabriel Cormier 14 GELE5313
CHAPITRE 2. MODELISATION
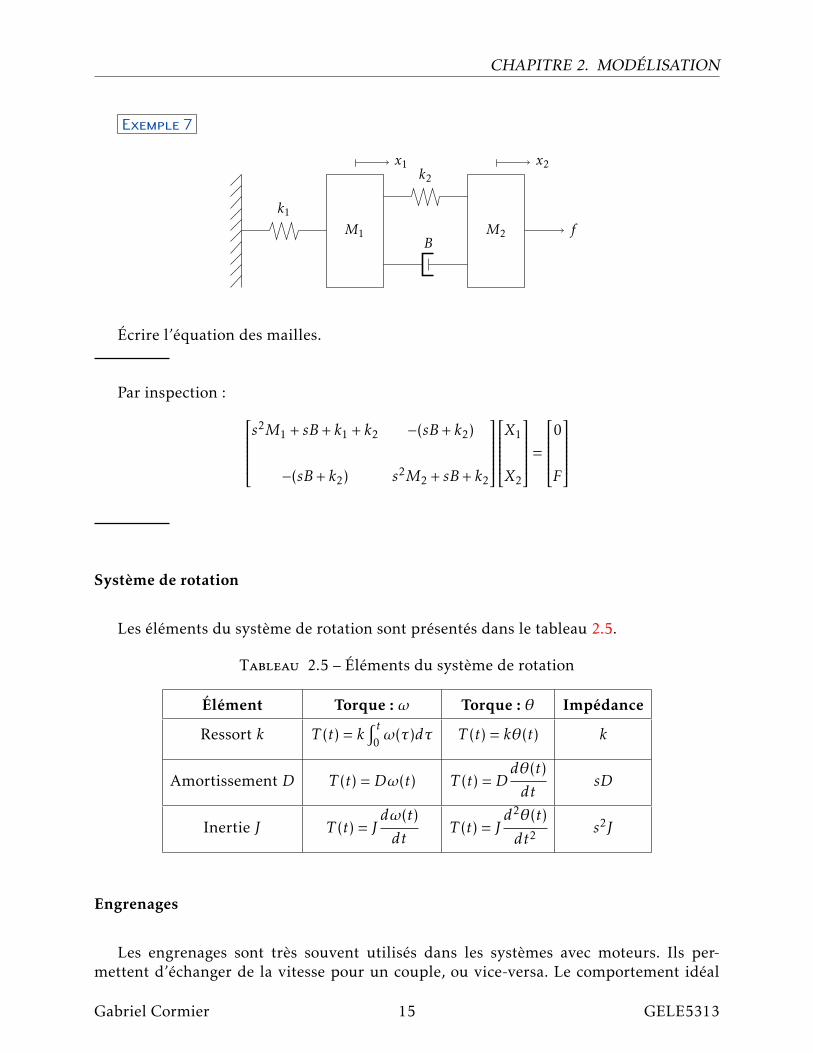
Exemple 7
k1
B
x1
M1
k2
M2 f
x2
Ecrire l’equation des mailles.
Par inspection : s2M1 + sB+ k1 + k2 −(sB+ k2)
−(sB+ k2) s2M2 + sB+ k2
X1
X2
=
0
F
Systeme de rotation
Les elements du systeme de rotation sont presentes dans le tableau 2.5.
Tableau 2.5 – Elements du systeme de rotation
Element Torque : ω Torque : θ Impedance
Ressort k T (t) = k∫ t
0ω(τ)dτ T (t) = kθ(t) k
Amortissement D T (t) =Dω(t) T (t) =Ddθ(t)dt
sD
Inertie J T (t) = Jdω(t)dt
T (t) = Jd2θ(t)
dt2s2J
Engrenages
Les engrenages sont tres souvent utilises dans les systemes avec moteurs. Ils per-mettent d’echanger de la vitesse pour un couple, ou vice-versa. Le comportement ideal
Gabriel Cormier 15 GELE5313
CHAPITRE 2. MODELISATION
d’engrenages est donne par la relation suivante :
θ2
θ1=r1r2
=N1
N2(2.16)
ou θ est le deplacement angulaire, r est le rayon de l’engrenage, et N est le nombre dedents de l’engrenage.
La relation entre les couples est :
T2
T1=θ1
θ2=N2
N1(2.17)
2.3.3 Systemes electromecaniques
Les systemes electromecaniques sont une combinaison des systemes mecaniques etelectriques, ou le couplage se fait par champ magnetique. On parle ici principalement desmoteurs.
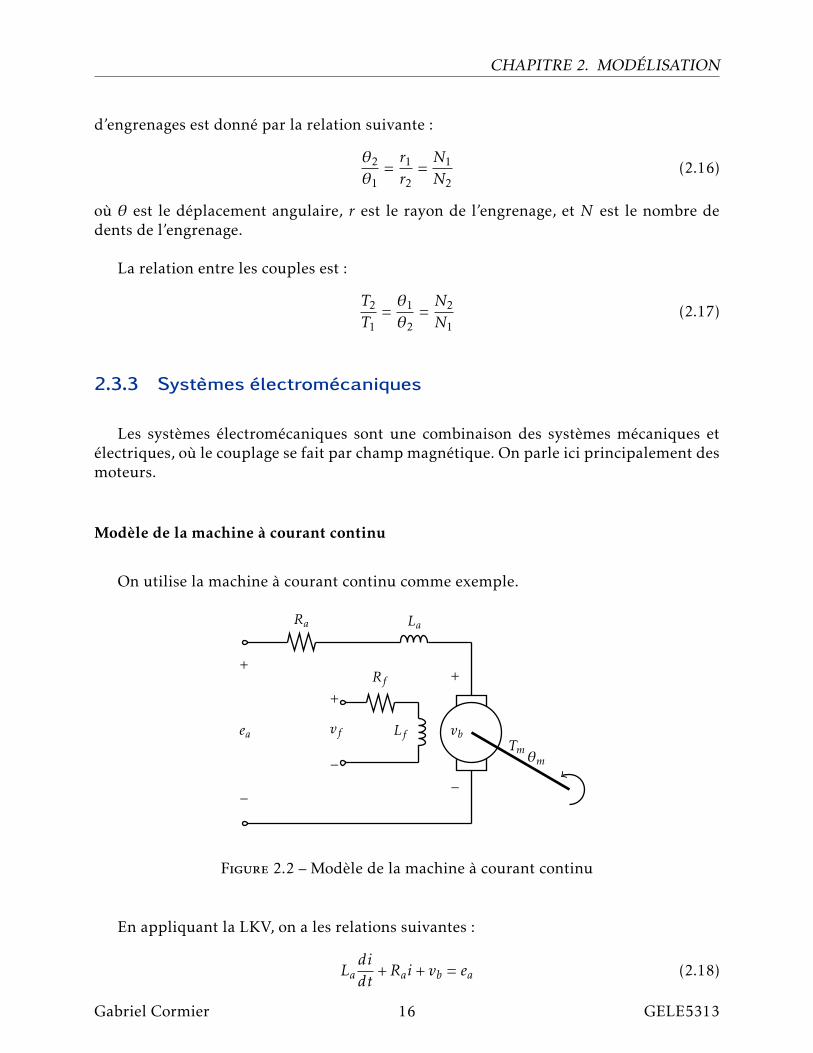
Modele de la machine a courant continu
On utilise la machine a courant continu comme exemple.
−
+
ea
Ra La
Rf
Lf
−
+
vf
−
+
vbTmθm
Figure 2.2 – Modele de la machine a courant continu
En appliquant la LKV, on a les relations suivantes :
Ladidt
+Rai + vb = ea (2.18)
Gabriel Cormier 16 GELE5313
CHAPITRE 2. MODELISATION
ou la tension vb est la force electromotive, qui est donnee par :
vb(t) = Kbdθm(t)dt
⇒ Vb(s) = sKbΘ(s) (2.19)
Le couple developpe par le moteur est proportionnel au courant de l’armature :
Tm(s) = KtIa(s) (2.20)
de facon generale, Kt = Kb.
Comme premiere etape, la relation entre la tension d’entree Ea et l’angle de sortieΘm(s)est :
(Ra + sLa)Tm(s)Kt
+ sKbΘm(s) = Ea(s) (2.21)
Du cote mecanique, le moteur possede une inertie Jm et un amortissement Dm, ce quidonne :
Tm(s) = (s2Jm + sDm)Θm(s) (2.22)
On peut combiner et simplifier pour obtenir :
Θm(s)Ea(s)
=Kt/(RaJm)
s[s+ 1
Jm
(Dm + KtKb
Ra
)] (2.23)
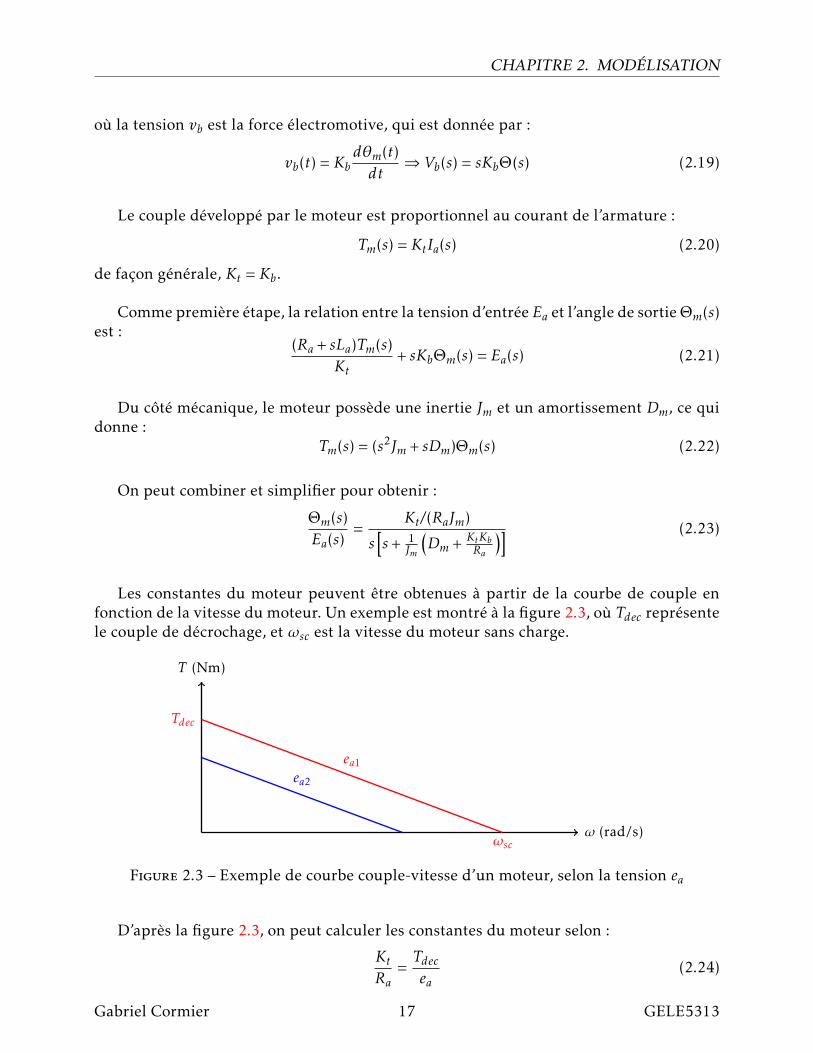
Les constantes du moteur peuvent etre obtenues a partir de la courbe de couple enfonction de la vitesse du moteur. Un exemple est montre a la figure 2.3, ou Tdec representele couple de decrochage, et ωsc est la vitesse du moteur sans charge.
ω (rad/s)
T (Nm)
Tdec
ωsc
ea1ea2
Figure 2.3 – Exemple de courbe couple-vitesse d’un moteur, selon la tension ea
D’apres la figure 2.3, on peut calculer les constantes du moteur selon :
KtRa
=Tdecea
(2.24)
Gabriel Cormier 17 GELE5313
CHAPITRE 2. MODELISATION
etKb =
eaωsc
(2.25)
2.4 Linearisation
Dans plusieurs systemes, le comportement de un ou plusieurs composantes n’est paslineaire. Toutes les methodes et techniques vues precedemment supposent que les sys-temes sont lineaires.
Que faire alors si certains composants non-lineaires sont presents dans le systeme ?
→ Pour appliquer les methodes vues ici, il faudra lineariser le systeme. Lorsqu’onlinearise un systeme, on le fait seulement pour une entree specifique.
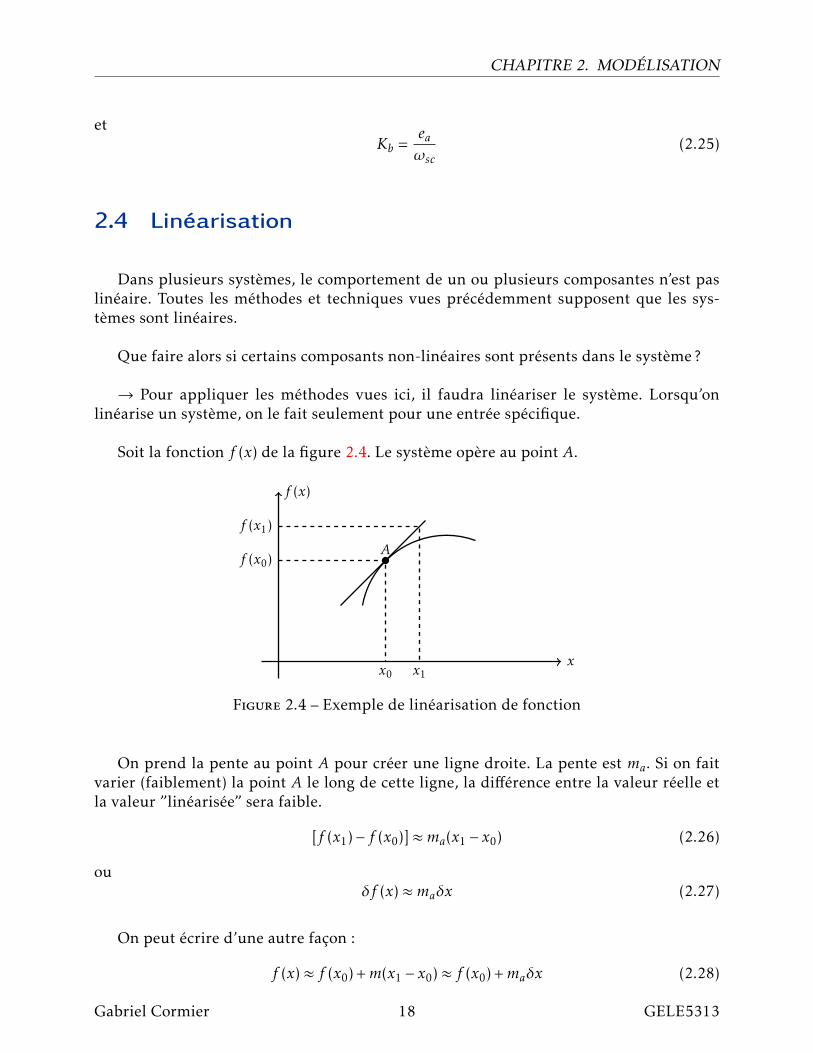
Soit la fonction f (x) de la figure 2.4. Le systeme opere au point A.
x
f (x)
f (x0)
x0
f (x1)
x1
A
Figure 2.4 – Exemple de linearisation de fonction
On prend la pente au point A pour creer une ligne droite. La pente est ma. Si on faitvarier (faiblement) la point A le long de cette ligne, la difference entre la valeur reelle etla valeur ”linearisee” sera faible.
[f (x1)− f (x0)] ≈ma(x1 − x0) (2.26)
ouδf (x) ≈maδx (2.27)
On peut ecrire d’une autre facon :
f (x) ≈ f (x0) +m(x1 − x0) ≈ f (x0) +maδx (2.28)
Gabriel Cormier 18 GELE5313

CHAPITRE 2. MODELISATION
Exemple 8
Lineariser f (x) = 5cosx au point x = π2 .
On prend la derivee de la fonction au point recherche pour trouver la pente.
d(5cosx)dx
x=π
2
= −5sinx
x=π
2
= −5
Au point recherche, f (x0) = 5cos(π2 ) = 0.
Donc,
f (x) ≈ f (x0) +maδx= 0− 5δx= −5δx
Sur la figure 2.5, on voit bien que la fonction ressemble a la ligne droite au pointrecherche.
−4 −3 −2 −1 0 1 2 3 4−6
−4
−2
0
2
4
6
pente = −5
π2
Temps
Am
pli
tud
e
Figure 2.5 – Fonction linearisee
On peut formaliser ce processus en utilisant une expansion en series de Taylor.
f (x) = f (x0) +x − x0
1!·df
dx
x=x0
+(x − x0)2
2!·d2f
dx2
x=x0
+ · · · (2.29)
Gabriel Cormier 19 GELE5313

CHAPITRE 2. MODELISATION
Si x varie peu de x0, on peut negliger les termes d’ordre superieur.
f (x)− f (x0) ≈ (x − x0) ·d2f
dx2
x=x0
(2.30)
δf (x) =mx=x0
δx (2.31)
Exemple 9
Lineariserd2x
dt2+ 2
dxdt
+ cosx = 0
au point x = π4 .
Le terme cosx rend l’equation non-lineaire.
On remplace x = δx+ π4 et on substitue.
d2(δx+ π4 )
dt2+ 2
d(δx+ π4 )
dt+ cos
(δx+
π4
)= 0
Mais,d(δx+ π
4 )dt
=dδxdt
etd2(δx+ π
4 )
dt2=d2δxdt
et on linearise le terme cos(δx+ π4 ) en utilisant une serie de Taylor :
cos(δx+
π4
)− cos
(π4
)=d cosxdx
x=π
4
δx = −sin(π
4
)δx
ce qui donne,
cos(δx+
π4
)= cos
(π4
)− sin
(π4
)δx
=
√2
2−√
22δx
Et l’equation linearisee est :
d2δx
dt2+ 2
dδxdt
+
√2
2δx = −
√2
2
Gabriel Cormier 20 GELE5313
CHAPITRE 2. MODELISATION
Annexe
Soit une transformee de Laplace de la forme :
G(s) =a+ jb
s+ (c+ jd)+
a− jds+ (c − jd)
(2.32)
La transformee inverse de cette fonction est :
g(t) = (a+ jb)e−(c+jd)t + (a− jb)e−(c−jd)t (2.33)
On peut developper cette equation :
g(t) = e−ct((a+ jb)e−jdt + (a− jb)ejdt
)(2.34)
oug(t) = e−ct
(ae−jdt + aejdt + jbe−jdt − jbejdt
)(2.35)
qu’on peut transformer a :
g(t) = e−ct[2a
(ejdt + e−jdt
2
)+ 2b
(ejdt − e−jdt
j2
)](2.36)
et a l’aide de la relation d’Euler,
g(t) = 2e−ct (acos(dt) + b sin(dt)) (2.37)
On peut factoriser l’equation precedente de la facon suivante :
g(t) = 2e−ct√
(a2 + b2)
a√(a2 + b2)
cos(dt) +b√
(a2 + b2)sin(dt)
(2.38)
Les termes devant les cosinus et sinus forment les equations d’un triangle de cote a et b etd’hypotenuse
√(a2 + b2). On definit :
cosφ =a√
(a2 + b2)et sinφ =
b√(a2 + b2)
(2.39)
On peut donc reduire l’equation 2.38 a :
g(t) = 2e−ct√
(a2 + b2)(cosφcos(dt) + sinφsin(dt)) (2.40)
Et a l’aide d’identites trigonometriques,
g(t) = 2e−ct√
(a2 + b2)(cos(dt −φ)) (2.41)
ou
φ = arctan(ba
)(2.42)
Gabriel Cormier 21 GELE5313