fusées à eau à dispositif de mesure embarqué...selon ayoub bensaïd (cité plus haut) et ses...
TRANSCRIPT
- 1 -
OLYMPIADES DE PHYSIQUE France XXIe édition
Année 2013-2014
Fusées à eau à dispositif de mesure embarqué
Elèves participants :
Célia Valette Vidal Alexandre Latappy Laure Shoonberg Louise Brahimi Killian
Avec LACLAVERIE Jean-Michel Professeur encadrant
Lycée Bernard Palissy- AGEN Académie de Bordeaux
Accéléromètre embarqué

- 2 -
Table des matières Résumé Partenaires Lycée labellisé « Espace » par
Introduction
A. Présentation historique des fusées
B. La propulsion à réaction
C. Fabrication d’une fusée à eau
D. Trajectoire, vitesse, accélération de la fusée
E. Etude de l’évolution de la pression de l’air dans la fusée
F. Accéléromètre embarqué
Conclusion Bibliographie
Annexe : Les lignes de Code Java (Processing) pour les mesures d’accélération
- 3 -
Résumé Le but de notre travail est d’abord de faire voler une fusée à eau et d’étudier sa trajectoire, sa vitesse et son accélération. Nous avons fabriqué plusieurs modèles de fusée, d’abord avec un seul moteur, puis une fusée plus complexe, de 2 mètres de haut avec deux boosters supplémentaires. Cette fusée est associée à un parachute, qui permet de récupérer un module de mesure. Nous avons essayé d’embarquer un système de mesure relié au sol par liaison radio : un microcontrôleur Arduino associé à un accéléromètre et un émetteur radio. Puis au laboratoire, des modèles de fusée sous pression plus faible permettent de décrire l’évolution de la pression de l’air dans la fusée et de la quantité d’eau en fonction du temps. Partenaires
Le 7 novembre 2013, le lycée vient d’obtenir le label « Espace » décerné par l’académie de Bordeaux et le CNES, grâce à notre projet et un projet mené il y a deux ans. Nous espérons grâce à cela pouvoir obtenir des réponses et un soutient pour pouvoir mieux décrire la phase d’accélération initiale et la comparer à celle d’un missile balistique ou d’une fusée Ariane ou Véga. Nous voulons contacter le groupe Herakles, qui est responsable de la fabrication d’une partie des moteurs d’Ariane. Introduction
Après les TPE en première S, et dans le cadre d’un atelier scientifique Physique-Musique, nous avons cherché un sujet qui pourrait nous permettre de se lancer dans l’aventure des Olympiades de physique.
Nous sommes fascinés par les fusées comme Ariane ou le lanceur européen Véga, capables d’envoyer dans l’espace des satellites. Pour ne pas détériorer les satellites, ces fusées ne dépassent jamais 5 fois l’accélération de la pesanteur 5g. Nous voulons essayer de faire un modélisation par une fusée à eau.
Les fusées à eau sont des systèmes mécaniques assez faciles à réaliser. Il ne faut pour cela que des bouteilles plastiques, du scotch et une pompe à vélo. Le coût est raisonnable. Les programmes de physique au lycée abordent la mécanique: Principe de l’inertie et troisième loi de Newton, études des forces, des vitesses et des trajectoires. Les conditions nous semblaient donc réunies pour tenter l’aventure.
Nous avons cependant rencontré de nombreuses difficultés et découvert que l’expérience est plus difficile à réaliser qu’il n’y paraît sur le papier. Nous avons voulu réaliser une fusée a plusieurs boosters et embarquant un système de mesure. Si les mesures au laboratoire d’accélération par exemple sont assez simples avec un ordinateur et un capteur, tout devient plus compliqué quand il faut embarquer le système dans une fusée : il doit donc être petit, léger, sans fil et transmettre les données au sol par radio ou les enregistrer.
Notre travail expérimental se divise en trois parties principales : -Réaliser la fusée -Réaliser le système de mesure autonome et portable -Réaliser un vol avec mesures réussies. Nous avons lu dans un TIPE sur les fusées à eau : « L'accélération maximale est
de l'ordre de la centaine de g (pendant une durée très courte, la phase de poussée
- 4 -
dure moins d'un dixième de seconde avec une tuyère standard). La vitesse maximale atteinte est de l'ordre de quelques dizaines de mètres par seconde. » (Ayoub Bensaïd, 2004, sur le site www.techno-challenge.org.) Nous voulions bien croire l’ordre de grandeur de la valeur de la vitesse maximale de la fusée, mais l’accélération nous semblait à priori surestimée. Il nous semblait impossible de fabriquer une fusée à eau accélérant plus qu’un avion de chasse. Et pourtant...
La pression dans notre fusée atteint 8 bars. Nous avons voulu aussi préparer une expérience sous plus faible pression au laboratoire, pour comprendre l’écoulement de l’eau lors de la poussée, et pouvoir vous présenter autre chose que des vidéos de nos vols.
Après une présentation de l’histoire des fusées, nous aborderons l’étude mécanique de notre fusée. Puis nous décrirons la fabrication et le vol de nos fusées en extérieur. La deuxième partie de notre travail concerne l’étude au laboratoire, la seule que le jury pourra voir en direct. Nous étudierons l’évolution de la pression de l’air dans la fusée, puis la vitesse et la trajectoire de notre système mécanique grâce à un fichier vidéo et au logiciel Latispro. Nous aborderons aussi l’étude de l’évolution de la quantité d’eau éjectée en fonction du temps.
Puis pour finir, nous présenterons notre système de mesure embarqué, et les résultats de nos expériences. Nous essayerons de répondre à la question: La fusée atteint-elle une accélération de l’ordre de la centaine de g au démarrage? Notre capteur embarqué résistera-t-il à une telle accélération ?
Dernière minute : Notre fusée bâtie sur le modèle d’Ariane 5 a explosé au
décollage. Il n’en reste rien, sauf des photos !! Nous avons rebâti dans l’urgence une fusée plus simple, ressemblant à un lanceur Véga.
A- Présentation historique des fusées
Avant de se lancer dans l’étude des fusées à eau, nous avons voulu en savoir un peu plus sur les fusées en général et sur leur histoire. Toutes les fusées éjectent de la matière pour se propulser.
Les premiers à avoir mis en place le principe de la fusée sont les chinois ; ils remplissaient d’une sorte de poudre à canon (mélange de soufre, de salpêtre et de charbon de bois) un bambou qu’il faisait ensuite brûler pour produire une explosion. Les chinois ont compris que le bambou pouvait se propulser de lui-même grâce à la poussée des gaz éjectés.
La physique de la fusée devient une science avec Isaac Newton (1642-1727). Il établit notamment le principe d’action-réaction.
A la fin du XVIIIème siècle et au début du XIXème siècle, la fusée est utilisée comme arme de guerre. Elles pesaient 12 kg environ, et leur portée était de 1 800 m. La théorie d’utiliser des carburants liquides pour améliorer la propulsion de la fusée fut étudiée par le russe Constantin Tsiolkovski vers 1898. Robert Goddard ingénieur et physicien américain réalisa le 16 mars 1926, à Auburn le lancement d’une fusée propulsée par un mélange d’essence et d’oxygène liquide. C’est la première fois qu’une fusée à propergol liquide est lancée.
- 5 -
Le 3 octobre 1942, est la date du premier vol réussi de la fusée allemande A4 (= missiles V2) qui parcouru 192 km et qui atteint une altitude de 85 km. Puis ce qui marqua les esprits fut l’exploit de la NASA en envoyant, à bord de la fusée Saturne V, 3 astronautes sur la Lune le 21 juillet 1969. La fusée Européenne Ariane 5, utilise aujourd’hui du propergol solide pour deux de ses moteurs et de l’hydrogène pour les autres. La réaction d’oxydoréduction entre le puissant oxydant qu’est le perchlorate et l’aluminium permet de propulser les booster au propergol : 3 KClO4 + 8 Al → 4 Al2O3 + 3 KCl On appelle propergol composite à perchlorate d'ammonium, ou PCPA, un matériau constitué d'une matrice macromoléculaire en polymère combustible comme liant, chargée de perchlorate d'ammonium NH4ClO4 comme oxydant, et d'aluminium pulvérulent comme combustible (Wikipédia) La conquête spatiale a été rendue possible grâce aux perfectionnements des fusées. Ces fusées ont fait rêver des générations d’élèves et nous font rêver aussi. Alors nous avons voulu nous aussi nous lancer dans l’aventure, avec des moyens à notre portée : les fusées à eau.
B- La propulsion à réaction
Au début de ce projet, nous étions des élèves de première S aux connaissances encore très limitées en physique. Mais nous avons voulu appliquer les notions de mécanique que nous connaissons au problème de la fusée à eau, d’abord au sol, puis en vol.
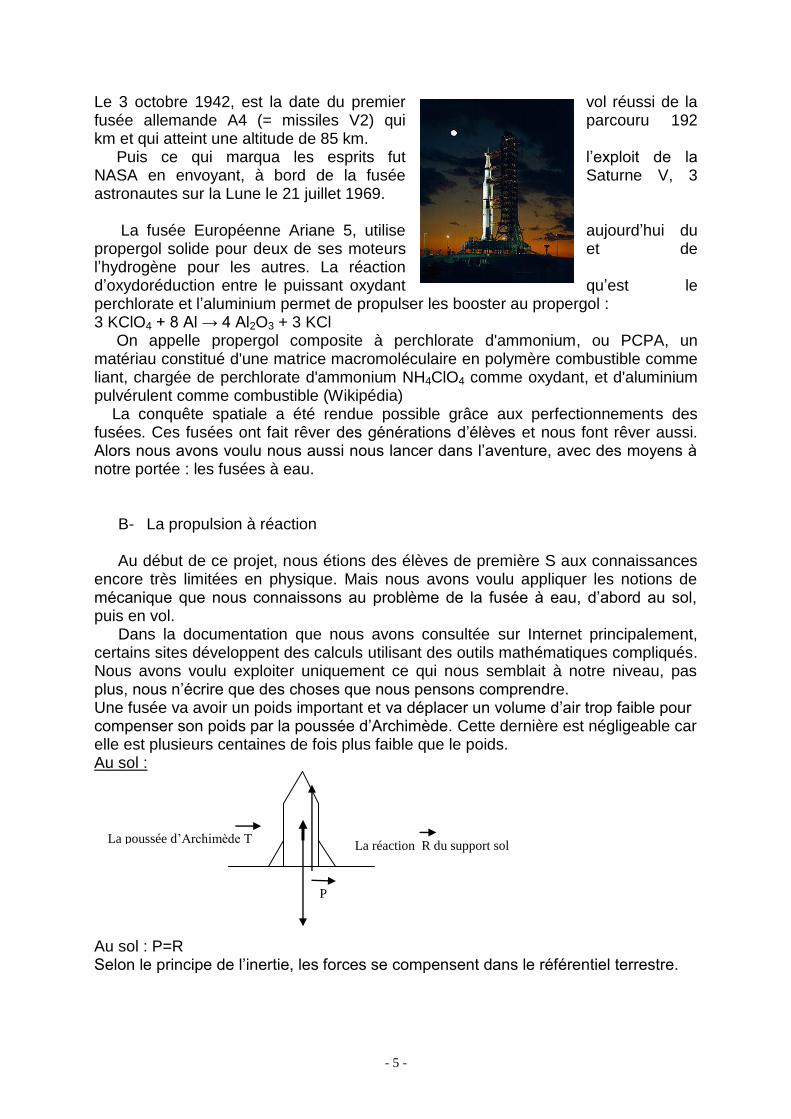
Dans la documentation que nous avons consultée sur Internet principalement, certains sites développent des calculs utilisant des outils mathématiques compliqués. Nous avons voulu exploiter uniquement ce qui nous semblait à notre niveau, pas plus, nous n’écrire que des choses que nous pensons comprendre. Une fusée va avoir un poids important et va déplacer un volume d’air trop faible pour compenser son poids par la poussée d’Archimède. Cette dernière est négligeable car elle est plusieurs centaines de fois plus faible que le poids. Au sol : Au sol : P=R Selon le principe de l’inertie, les forces se compensent dans le référentiel terrestre.
La réaction R du support sol
P
La poussée d’Archimède T
- 6 -
Au décollage, la réaction du support disparaît. Pour que la fusée s’élève elle doit être remplacé par une force de poussée exercé par les moteurs où l’éjection d’un fluide. C’est la propulsion à réaction. En vol :
On considère un mouvement vertical à une dimension selon l'axe Oz, et que l'écoulement du fluide éjecté sera aussi dirigé selon cet axe. En pratique, il est facile de réaliser des tirs verticaux pourvu que la base de lancement soit bien horizontale, et on observe alors sur des photographies que l'écoulement est effectivement très directif.
On peut séparer le mouvement en trois phases pour une fusée théorique portant 1,5L d’eau:
- Ejection de l’eau à une vitesse de l’ordre de 30 m/s1, avec un débit maximal de l’ordre de 15 L/s et forte accélération de la fusée pendant une durée de l’ordre de 30 ms.
- Ejection de l’air avec une petite accélération supplémentaire pendant une durée de l’ordre de 15 ms.
- Chute de la fusée. Lorsque la fusée est mise sous pression, elle se dilate un peu, comme un ballon
de baudruche. Elle emmagasine ainsi un peu d’énergie élastique qui sera restituée lors du décollage. Nous négligerons cela dans notre présentation théorique.
Lorsque la fusée se déplace à une vitesse non négligeable, elle est soumise à une force de frottement fluide exercé par l’air qui la ralentit, de norme f et à la force de poussée de norme F.
La force de frottement sera proportionnelle à la vitesse du système si elle est faible (de l’ordre de cm/s). Mais l’on aura f=kV² pour des grandes vitesses. C’est le cas au décollage.
Nous devons renoncer à essayer d’écrire les équations du mouvement. Elles sont compliquées en particulier car la masse du système est variable. La seconde loi de Newton :
Σ Fext = m a La fusée accélère car elle est poussée par l’eau, puis l’air, avec une intensité supérieure au poids, mais aussi parce que sa masse diminue. Il existe une période du mouvement où la force de poussée de l’eau est constante et pourtant l’accélération augmente. C’est à cause de la diminution de la masse du système. Selon Ayoub Bensaïd (cité plus haut) et ses collègues, l’accélération d’une fusée d’1,5 kg peut atteindre 165 m/s². Une grosse fusée est plus lourde qu’une petite. Elle peut produire une plus forte poussée, mais le poids qui augment avec la taille de l’engin annule presque le bénéfice de sa forte poussée. Elle sera d’autant plus importante que la quantité d’eau est importante. En effet, la troisième loi de Newton indique que l’eau éjectée vers le bas pousse la fusée vers le haut. Plus la pression de l’air intérieur sera forte, plus l’eau sera éjectée avec une grande force, car la force exercée par l’air intérieur sur l’eau est proportionnelle à sa pression.
1 Pour une fusée Ariane 5 la vitesse d’éjection des gaz est de l’ordre de 3000 m/s
-Si F› P+f = Accélération -Si F= P+f = Vitesse constante
-Si F‹ P+f = Ralentissement
- 7 -
Choisissons l’exemple d’une fusée à eau d’1,5L remplit pour ¼ d’eau et pour ¾ d’air sous 5 bars. V=1.5L R=8.31SI T=20°C PV=nRT meau = ρV = (¼*1.5)*1 = 3/8 kg nair = PV/RT = (5*105*1.5*10-3)/(8.31*293) = 0.23 mol Mair = 29 g/mol m = nM = 6.67g Pfusée = (mplastique+meau+mair)*g = (100+375+6.67)*9.81 = 4.72N La valeur de la poussé d’Archimède dépend de la masse volumique de l’air qui vaut 1.2Kg/m3. π = ρair*V*g = 1.2*1.5*10-3*9.81 = 0.018N P/ π = 261
La poussé d’Archimède est négligeable car elle est 261 fois moins intense que le poids. La force de poussée doit donc avoir une norme supérieure à 4.7N pour que la fusée décolle. L’eau est éjectée en dehors de la fusée = cause de la pression exercée par l’air intérieur sur l’eau. Donc la force qui propulse la fusée est celle de l’eau éjectée sur la fusée (3eme loi de Newton). C’est la propulsion à réaction.
Rapidement le poids de la fusée diminue car l’eau et l’air sont éjectés. Il devient égale à Pfusée2 = mplastique*g = 0.1*9.81 = 1N
Lorsque la bouteille est vide, elle n’est plus soumise qu’à une seule force importante : La pesanteur. La trajectoire devient alors parabolique avant l’ouverture du parachute, si l’ont néglige les frottements de l’air.
C- Fabrication d’une fusée à eau Nous avons fabriqué nos fusées à eau avec des moyens simples et peu coûteux :
bouteilles en plastique, scotch, carton et pompe à vélo. Notre source documentaire principale est : http://www.mini-modele.com/fusee_a_eau.php. La pression d'explosion des bouteilles en PET est de l'ordre de 10 bars2. Elles conviennent parfaitement pour notre expérience. Nous avons fabriqué et essayé ces fusées chez Alexandre, dans son jardin.
La principale difficulté technique consiste à relâcher la fusée sous pression de façon instantanée, et symétriquement afin que la bouteille parte bien vers le haut. Ce dernier point est même capital car les fusées à eau se révèlent rapidement des objets dangereux. Il faut absolument maîtriser le mieux possible le décollage pour prévoir le point d'impact. La solution adoptée doit permettre l'étanchéité de la liaison fusée-système de gonflage pendant la phase de pressurisation. Ainsi, le simple bouchon de liège utilisé couramment par les enfants ne permet pas de choisir le
2 Mais la notre a explosé à 7 ou 8 bars ! il a fallu en refaire une autre
pendant les vacances de Toussaint.
Eau
Air
5bar ¾ du volume
¼ du volume
- 8 -
moment (et donc la pression) ou la fusée va partir. Tout d’abord examinons la fabrication de la fusée. Avant la réalisation, nous
avons cherché des modèles de fusée à eau. Au final nous avons retenu le modèle de la fusée Ariane 5 notamment pour son aérodynamisme et la part de rêve qui accompagne cette fusée européenne. Avant d’entreprendre la réalisation de la fusée principale, nous avons essayé un premier prototype. Il pouvait voler jusqu'à 20 m d’altitude. C’était un premier test, que nous ne détaillerons pas ici.
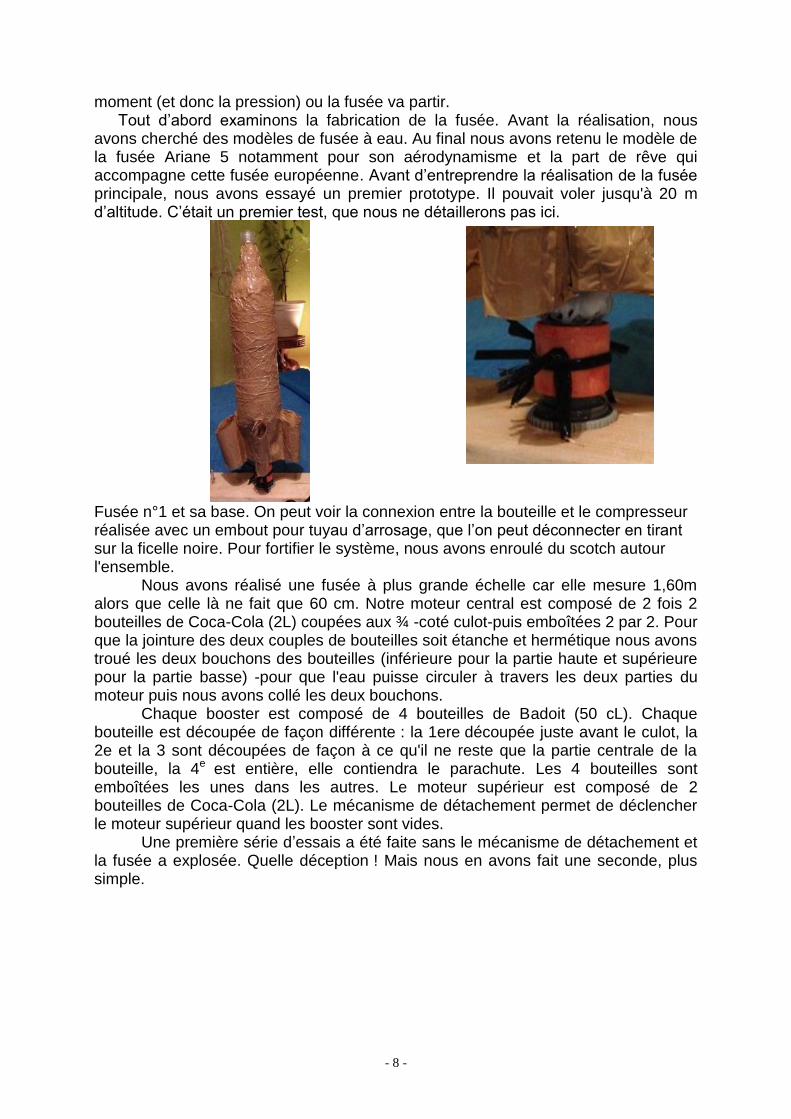
Fusée n°1 et sa base. On peut voir la connexion entre la bouteille et le compresseur réalisée avec un embout pour tuyau d’arrosage, que l’on peut déconnecter en tirant sur la ficelle noire. Pour fortifier le système, nous avons enroulé du scotch autour l'ensemble.
Nous avons réalisé une fusée à plus grande échelle car elle mesure 1,60m alors que celle là ne fait que 60 cm. Notre moteur central est composé de 2 fois 2 bouteilles de Coca-Cola (2L) coupées aux ¾ -coté culot-puis emboîtées 2 par 2. Pour que la jointure des deux couples de bouteilles soit étanche et hermétique nous avons troué les deux bouchons des bouteilles (inférieure pour la partie haute et supérieure pour la partie basse) -pour que l'eau puisse circuler à travers les deux parties du moteur puis nous avons collé les deux bouchons.
Chaque booster est composé de 4 bouteilles de Badoit (50 cL). Chaque bouteille est découpée de façon différente : la 1ere découpée juste avant le culot, la 2e et la 3 sont découpées de façon à ce qu'il ne reste que la partie centrale de la bouteille, la 4e est entière, elle contiendra le parachute. Les 4 bouteilles sont emboîtées les unes dans les autres. Le moteur supérieur est composé de 2 bouteilles de Coca-Cola (2L). Le mécanisme de détachement permet de déclencher le moteur supérieur quand les booster sont vides.
Une première série d’essais a été faite sans le mécanisme de détachement et la fusée a explosée. Quelle déception ! Mais nous en avons fait une seconde, plus simple.
- 9 -
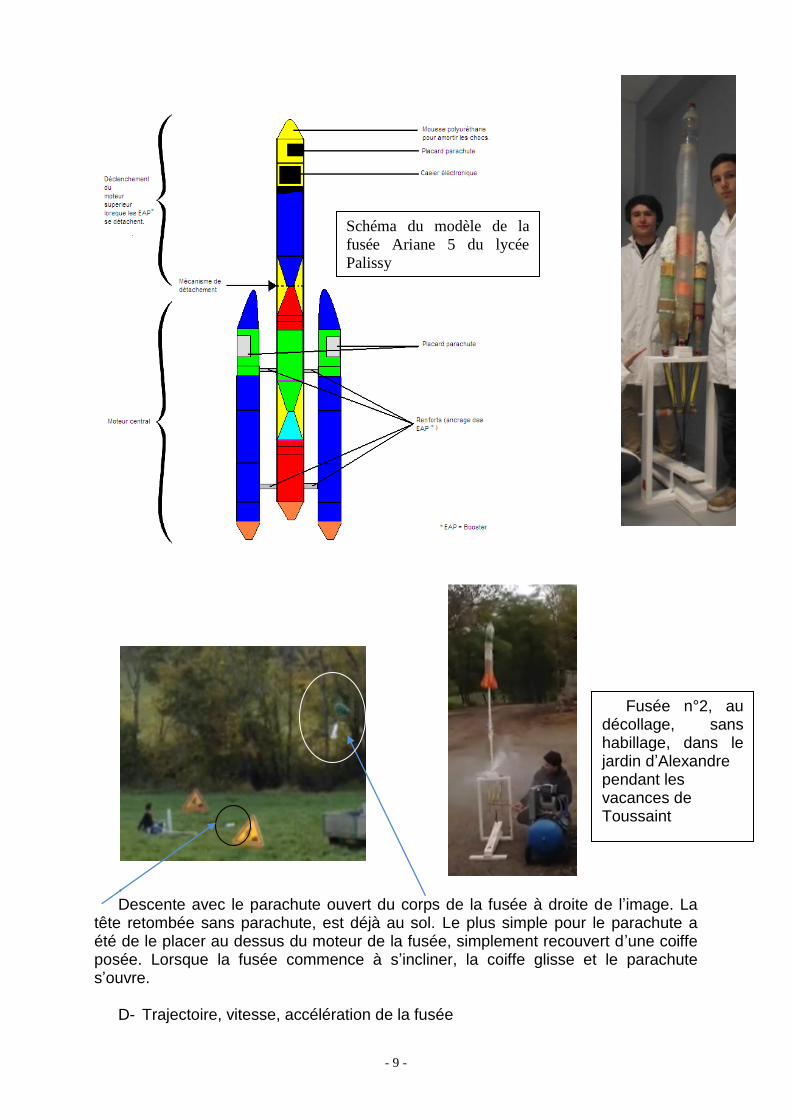
. Descente avec le parachute ouvert du corps de la fusée à droite de l’image. La
tête retombée sans parachute, est déjà au sol. Le plus simple pour le parachute a été de le placer au dessus du moteur de la fusée, simplement recouvert d’une coiffe posée. Lorsque la fusée commence à s’incliner, la coiffe glisse et le parachute s’ouvre.
D- Trajectoire, vitesse, accélération de la fusée
Schéma du modèle de la
fusée Ariane 5 du lycée
Palissy
Fusée n°2, au décollage, sans habillage, dans le jardin d’Alexandre pendant les vacances de Toussaint
- 10 -
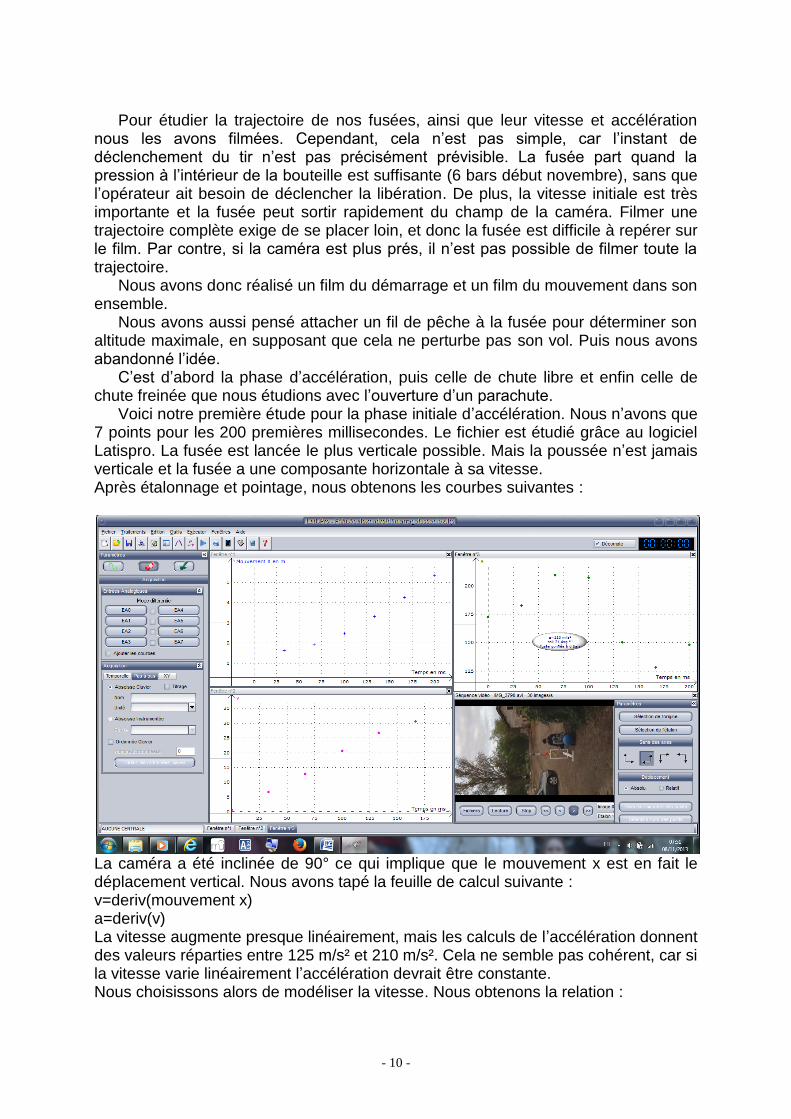
Pour étudier la trajectoire de nos fusées, ainsi que leur vitesse et accélération
nous les avons filmées. Cependant, cela n’est pas simple, car l’instant de déclenchement du tir n’est pas précisément prévisible. La fusée part quand la pression à l’intérieur de la bouteille est suffisante (6 bars début novembre), sans que l’opérateur ait besoin de déclencher la libération. De plus, la vitesse initiale est très importante et la fusée peut sortir rapidement du champ de la caméra. Filmer une trajectoire complète exige de se placer loin, et donc la fusée est difficile à repérer sur le film. Par contre, si la caméra est plus prés, il n’est pas possible de filmer toute la trajectoire.
Nous avons donc réalisé un film du démarrage et un film du mouvement dans son ensemble.
Nous avons aussi pensé attacher un fil de pêche à la fusée pour déterminer son altitude maximale, en supposant que cela ne perturbe pas son vol. Puis nous avons abandonné l’idée.
C’est d’abord la phase d’accélération, puis celle de chute libre et enfin celle de chute freinée que nous étudions avec l’ouverture d’un parachute.
Voici notre première étude pour la phase initiale d’accélération. Nous n’avons que 7 points pour les 200 premières millisecondes. Le fichier est étudié grâce au logiciel Latispro. La fusée est lancée le plus verticale possible. Mais la poussée n’est jamais verticale et la fusée a une composante horizontale à sa vitesse. Après étalonnage et pointage, nous obtenons les courbes suivantes :
La caméra a été inclinée de 90° ce qui implique que le mouvement x est en fait le déplacement vertical. Nous avons tapé la feuille de calcul suivante : v=deriv(mouvement x) a=deriv(v) La vitesse augmente presque linéairement, mais les calculs de l’accélération donnent des valeurs réparties entre 125 m/s² et 210 m/s². Cela ne semble pas cohérent, car si la vitesse varie linéairement l’accélération devrait être constante. Nous choisissons alors de modéliser la vitesse. Nous obtenons la relation :
- 11 -
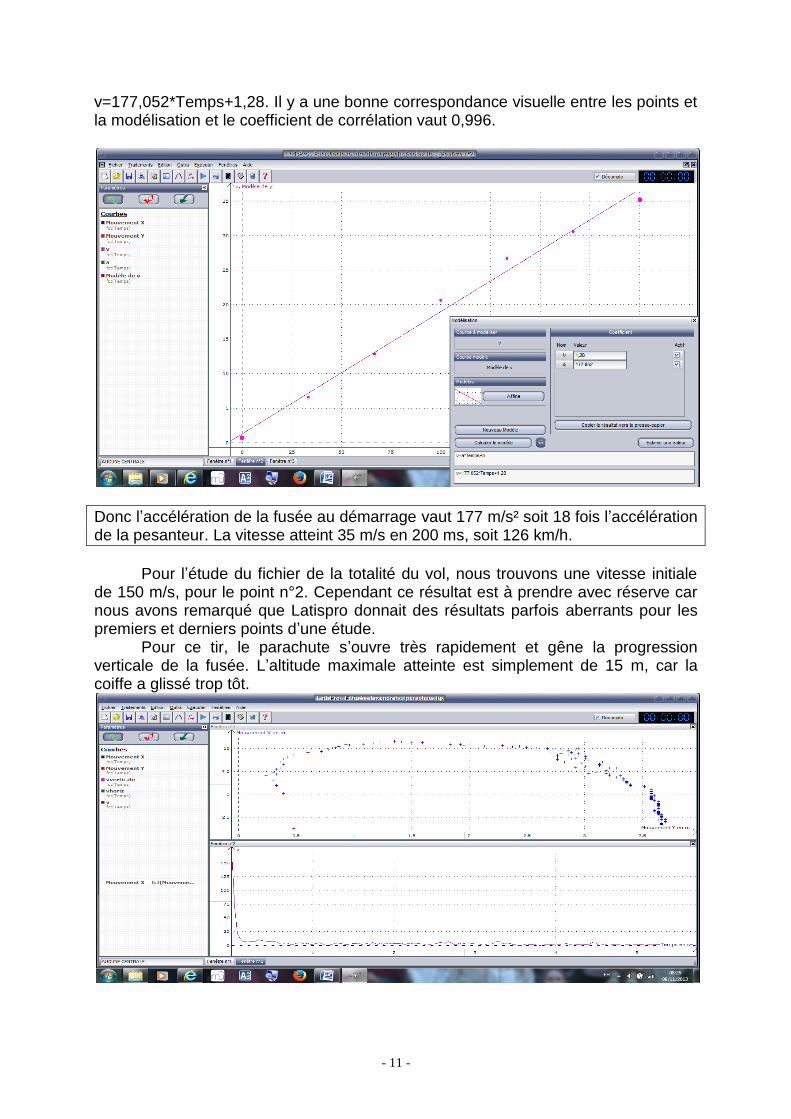
v=177,052*Temps+1,28. Il y a une bonne correspondance visuelle entre les points et la modélisation et le coefficient de corrélation vaut 0,996.
Donc l’accélération de la fusée au démarrage vaut 177 m/s² soit 18 fois l’accélération de la pesanteur. La vitesse atteint 35 m/s en 200 ms, soit 126 km/h.
Pour l’étude du fichier de la totalité du vol, nous trouvons une vitesse initiale
de 150 m/s, pour le point n°2. Cependant ce résultat est à prendre avec réserve car nous avons remarqué que Latispro donnait des résultats parfois aberrants pour les premiers et derniers points d’une étude.
Pour ce tir, le parachute s’ouvre très rapidement et gêne la progression verticale de la fusée. L’altitude maximale atteinte est simplement de 15 m, car la coiffe a glissé trop tôt.
- 12 -
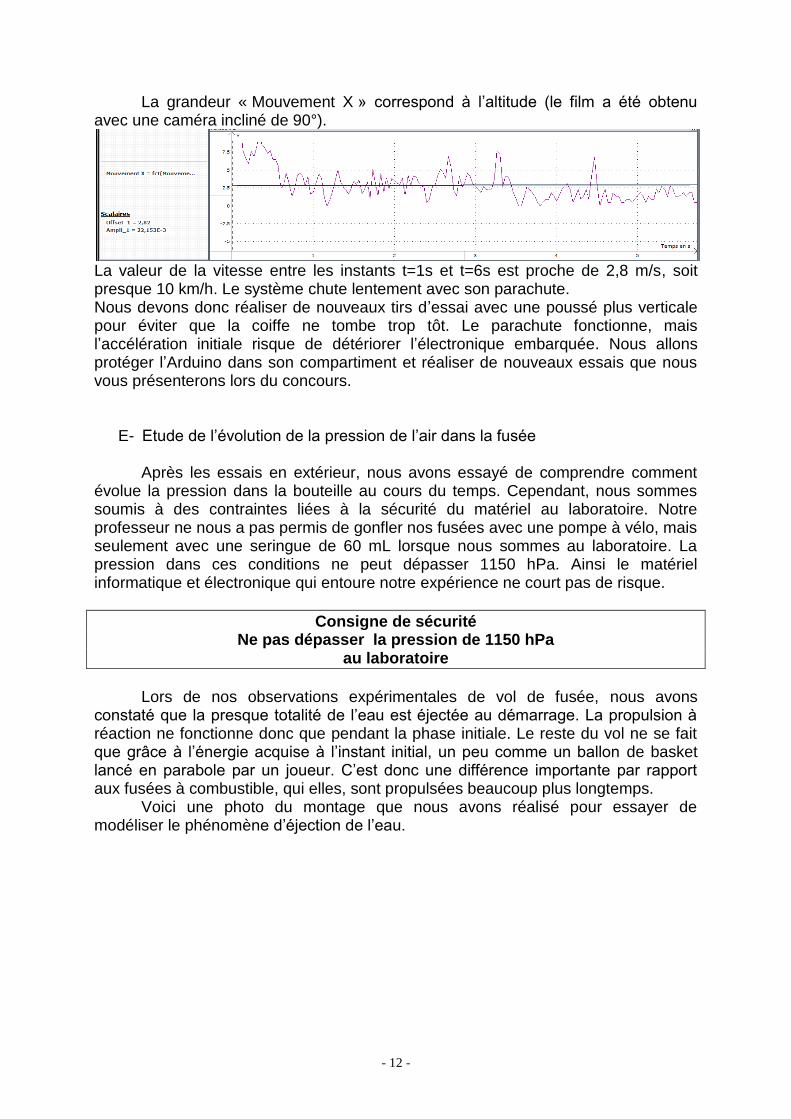
La grandeur « Mouvement X » correspond à l’altitude (le film a été obtenu avec une caméra incliné de 90°).
La valeur de la vitesse entre les instants t=1s et t=6s est proche de 2,8 m/s, soit presque 10 km/h. Le système chute lentement avec son parachute. Nous devons donc réaliser de nouveaux tirs d’essai avec une poussé plus verticale pour éviter que la coiffe ne tombe trop tôt. Le parachute fonctionne, mais l’accélération initiale risque de détériorer l’électronique embarquée. Nous allons protéger l’Arduino dans son compartiment et réaliser de nouveaux essais que nous vous présenterons lors du concours.
E- Etude de l’évolution de la pression de l’air dans la fusée Après les essais en extérieur, nous avons essayé de comprendre comment évolue la pression dans la bouteille au cours du temps. Cependant, nous sommes soumis à des contraintes liées à la sécurité du matériel au laboratoire. Notre professeur ne nous a pas permis de gonfler nos fusées avec une pompe à vélo, mais seulement avec une seringue de 60 mL lorsque nous sommes au laboratoire. La pression dans ces conditions ne peut dépasser 1150 hPa. Ainsi le matériel informatique et électronique qui entoure notre expérience ne court pas de risque.
Consigne de sécurité Ne pas dépasser la pression de 1150 hPa
au laboratoire
Lors de nos observations expérimentales de vol de fusée, nous avons
constaté que la presque totalité de l’eau est éjectée au démarrage. La propulsion à réaction ne fonctionne donc que pendant la phase initiale. Le reste du vol ne se fait que grâce à l’énergie acquise à l’instant initial, un peu comme un ballon de basket lancé en parabole par un joueur. C’est donc une différence importante par rapport aux fusées à combustible, qui elles, sont propulsées beaucoup plus longtemps.
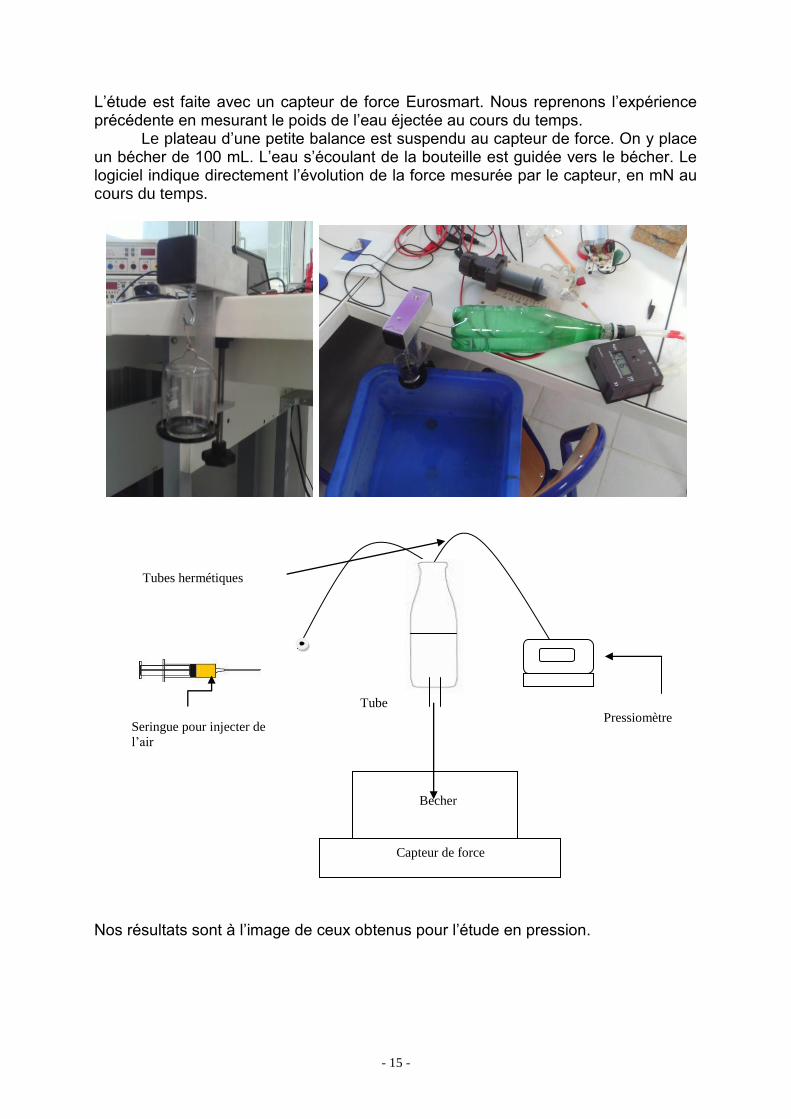
Voici une photo du montage que nous avons réalisé pour essayer de modéliser le phénomène d’éjection de l’eau.

- 13 -
La bouteille est fixée sur un support et placée au fond d’un évier pour éviter les projections. Le fond est percé d’un petit trou bouché par une allumette. Le bouchon est remplacé par un bouchon de caoutchouc relié au pressionmètre et à la seringue. La bouteille est au trois quart remplie d’eau. Grâce à la seringue, nous augmentons la pression de l’air dans la bouteille. Le presionmètre est relié au logiciel d’acquisition Latispro pour étudier l’évolution de P en fonction du temps. A t=0, nous déclenchons l’acquisition informatique et nous retirons l’allumette. L’eau commence à s’écouler.
Lors de la première expérience, la pression dans la bouteille à l’instant t =0 est de 1130 mbar ou 1130 hPa
Pressiomètre
Tubes hermétiques
Seringue pour injecter de l’air Cure dents

- 14 -
Cependant le logiciel n’enregistre pas une pression, mais une tension, image de la pression. La constante de temps caractéristique de l’évolution est la même pour la tension et la pression qu’elle représente.
L’eau s’arrête de couler toute seule à la fin de l’expérience, sans qu’il soit nécessaire de reboucher le trou. La première partie de l’évolution (soit les 2/3) peut être modélisée par une courbe utilisant la fonction exponentielle et comparable à celle de la décharge d’un condensateur dans une résistance.
Le temps caractéristique est Tau = 3, 814 s. A t = Tau, la pression dans la bouteille ne vaut plus que 37% de la pression initiale.
Pour la seconde expérience, la pression dans la bouteille à l’instant t =0 est de 1100 mbar ou 1100 hPa
Les résultats confirment ceux de la première expérience. L’évolution de la
pression suit encore une loi utilisant la fonction exponentielle. La constante de temps est Tau = 3,985 s.
Pour la troisième expérience, la pression dans la bouteille à l’instant t = 0 est de 1050 mbar ou 1050 hPa La constante de temps est Tau = 4,129 s. On constate que le temps caractéristique de la durée d’éjection de l’eau augmente si la pression initiale diminue. La pression dans les fusées en extérieur étant de plusieurs bars, il est cohérent avec les résultats précédents, que le temps d’éjection soit très court. Ces résultats sous pression peu importante au laboratoire confirment ce que nous avons observé en extérieur. Nous n’avons pas les moyens de mesurer la vitesse d’éjection de l’eau, mais nous pouvons déterminer, au laboratoire, le débit de l’eau au cours du temps.
- 15 -
L’étude est faite avec un capteur de force Eurosmart. Nous reprenons l’expérience précédente en mesurant le poids de l’eau éjectée au cours du temps. Le plateau d’une petite balance est suspendu au capteur de force. On y place un bécher de 100 mL. L’eau s’écoulant de la bouteille est guidée vers le bécher. Le logiciel indique directement l’évolution de la force mesurée par le capteur, en mN au cours du temps.
Nos résultats sont à l’image de ceux obtenus pour l’étude en pression.
Pressiomètre
Tubes hermétiques
Seringue pour injecter de
l’air
Tube
Becher
Capteur de force

- 16 -
Pour une pression initiale Po= 1050 hPa, nous avons récupéré V=20 mL d’eau dans le bécher. L’évolution du poids de l’eau récupérée par le bécher suit une courbe modélisable par une fonction de la forme (1-exponentielle). Le temps Tau caractéristique vaut ici 3,58 s.
En 3,58 s, nous avons éjecté 63 % de l’eau soit 12,6 mL de masse 12,6 g, donc un débit massique moyen de 3,5 g/s.
Pour une seconde expérience avec une pression initiale Po=1068 hPa, on trouve Tau = 4,59 s. La quantité d’eau éjectée est plus importante V = 27 mL. Il faut plus longtemps. Le débit massique moyen est un peu plus élevé 3,7 g/s. Le débit massique de l’eau augmente avec la pression de l’air dans la bouteille. Même si nous ne savons pas mesurer la vitesse d’éjection, nous pouvons penser que la force de poussée augmente avec la pression de l’air dans la bouteille. Les expériences en extérieur le montrent. Si le bouchon adhère suffisamment au goulot de la bouteille, la pression augmente davantage et la bouteille va plus haut.
F- Accéléromètre embarqué
Quel est le meilleur moyen pour mesurer les variations de l’accélération de la fusée lors des phases d’éjection de l’eau puis de l’air ? La durée globale de ces phases est inférieure à 50 ms. Lors d’un film vidéo nous avons 24 images par seconde le plus souvent, soit une image toute les 42 ms. Seule une caméra rapide permettrait d’aborder la phase initiale d’accélération. Mais nous n’en avons pas. Alors nous choisissons un accéléromètre dont la fréquence des mesures est réglable informatiquement.
Un accéléromètre est un système qui mesure l’accélération. C’est un outil très commun dans les téléphones portables ou dans les jeux vidéos, pour repérer les mouvements. Ce module est relié à la plaque d’un microcontrôleur Arduino par l’intermédiaire d’une plaque de connexion Tinkerkit. Nous utilisons deux logiciels gratuits : Arduino et Processing 1.5.1. Arduino est le logiciel libre
permettant de programmer le microcontrôleur, et Processing permet de réaliser une interface graphique utilisant les données de l’accéléromètre. Ces données transitent par une liaison série.
- 17 -
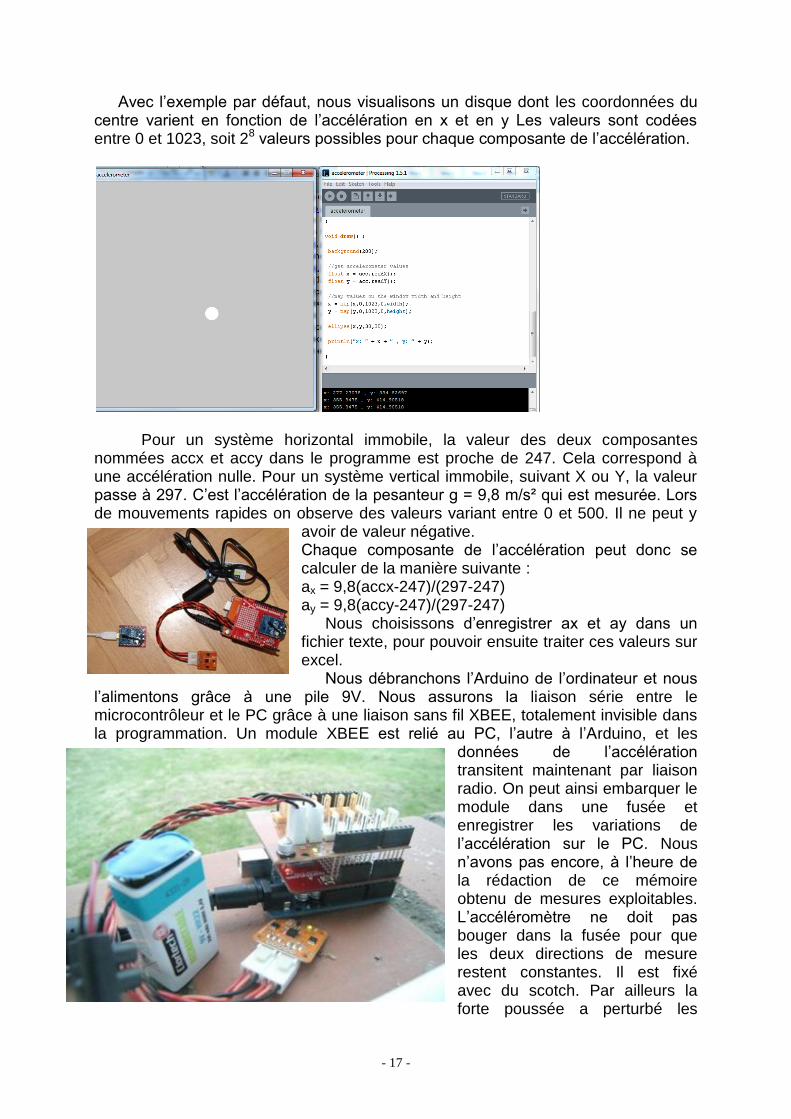
Avec l’exemple par défaut, nous visualisons un disque dont les coordonnées du centre varient en fonction de l’accélération en x et en y Les valeurs sont codées entre 0 et 1023, soit 28 valeurs possibles pour chaque composante de l’accélération.
Pour un système horizontal immobile, la valeur des deux composantes nommées accx et accy dans le programme est proche de 247. Cela correspond à une accélération nulle. Pour un système vertical immobile, suivant X ou Y, la valeur passe à 297. C’est l’accélération de la pesanteur g = 9,8 m/s² qui est mesurée. Lors de mouvements rapides on observe des valeurs variant entre 0 et 500. Il ne peut y
avoir de valeur négative. Chaque composante de l’accélération peut donc se calculer de la manière suivante : ax = 9,8(accx-247)/(297-247) ay = 9,8(accy-247)/(297-247)
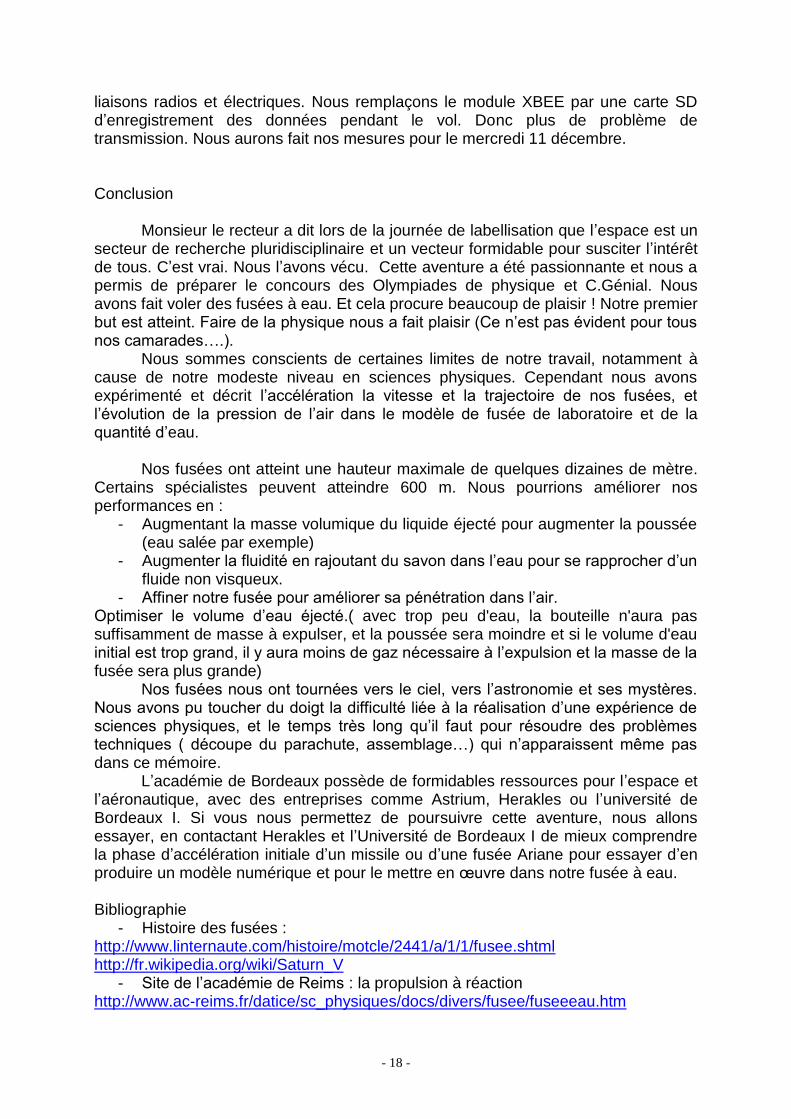
Nous choisissons d’enregistrer ax et ay dans un fichier texte, pour pouvoir ensuite traiter ces valeurs sur excel.
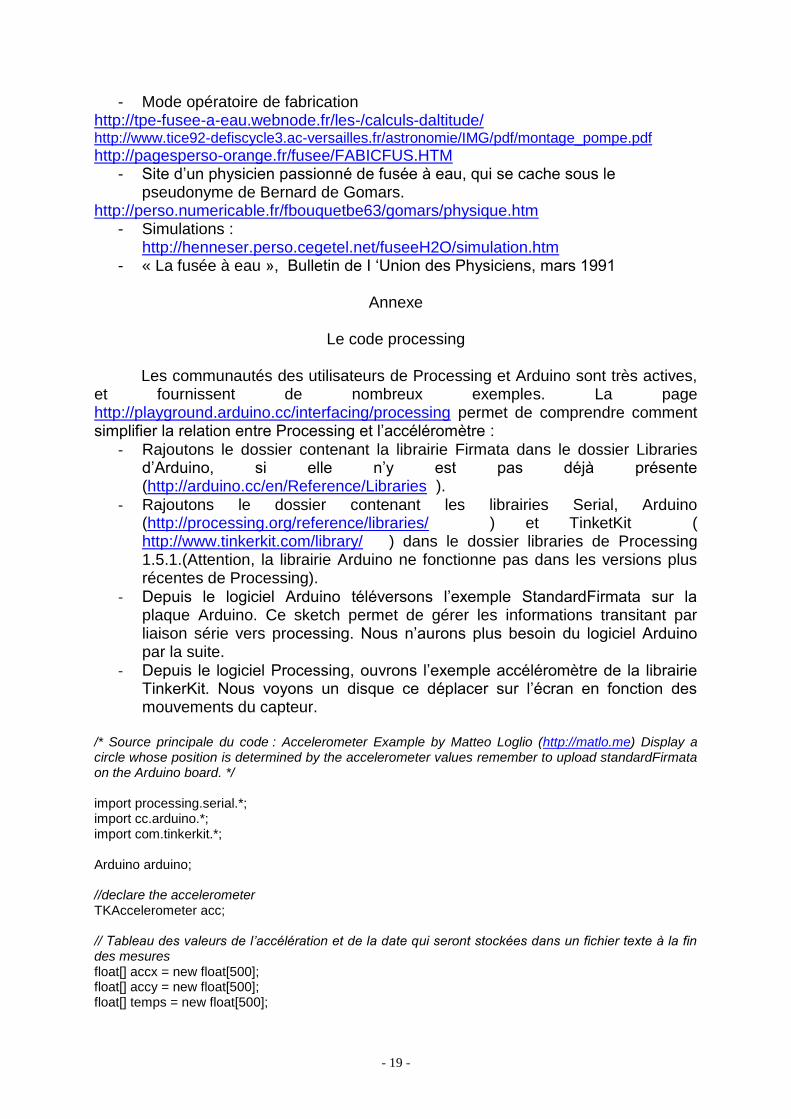
Nous débranchons l’Arduino de l’ordinateur et nous l’alimentons grâce à une pile 9V. Nous assurons la liaison série entre le microcontrôleur et le PC grâce à une liaison sans fil XBEE, totalement invisible dans la programmation. Un module XBEE est relié au PC, l’autre à l’Arduino, et les
données de l’accélération transitent maintenant par liaison radio. On peut ainsi embarquer le module dans une fusée et enregistrer les variations de l’accélération sur le PC. Nous n’avons pas encore, à l’heure de la rédaction de ce mémoire obtenu de mesures exploitables. L’accéléromètre ne doit pas bouger dans la fusée pour que les deux directions de mesure restent constantes. Il est fixé avec du scotch. Par ailleurs la forte poussée a perturbé les
- 18 -
liaisons radios et électriques. Nous remplaçons le module XBEE par une carte SD d’enregistrement des données pendant le vol. Donc plus de problème de transmission. Nous aurons fait nos mesures pour le mercredi 11 décembre. Conclusion
Monsieur le recteur a dit lors de la journée de labellisation que l’espace est un secteur de recherche pluridisciplinaire et un vecteur formidable pour susciter l’intérêt de tous. C’est vrai. Nous l’avons vécu. Cette aventure a été passionnante et nous a permis de préparer le concours des Olympiades de physique et C.Génial. Nous avons fait voler des fusées à eau. Et cela procure beaucoup de plaisir ! Notre premier but est atteint. Faire de la physique nous a fait plaisir (Ce n’est pas évident pour tous nos camarades….). Nous sommes conscients de certaines limites de notre travail, notamment à cause de notre modeste niveau en sciences physiques. Cependant nous avons expérimenté et décrit l’accélération la vitesse et la trajectoire de nos fusées, et l’évolution de la pression de l’air dans le modèle de fusée de laboratoire et de la quantité d’eau. Nos fusées ont atteint une hauteur maximale de quelques dizaines de mètre. Certains spécialistes peuvent atteindre 600 m. Nous pourrions améliorer nos performances en :
- Augmentant la masse volumique du liquide éjecté pour augmenter la poussée (eau salée par exemple)
- Augmenter la fluidité en rajoutant du savon dans l’eau pour se rapprocher d’un fluide non visqueux.
- Affiner notre fusée pour améliorer sa pénétration dans l’air. Optimiser le volume d’eau éjecté.( avec trop peu d'eau, la bouteille n'aura pas suffisamment de masse à expulser, et la poussée sera moindre et si le volume d'eau initial est trop grand, il y aura moins de gaz nécessaire à l’expulsion et la masse de la fusée sera plus grande)
Nos fusées nous ont tournées vers le ciel, vers l’astronomie et ses mystères. Nous avons pu toucher du doigt la difficulté liée à la réalisation d’une expérience de sciences physiques, et le temps très long qu’il faut pour résoudre des problèmes techniques ( découpe du parachute, assemblage…) qui n’apparaissent même pas dans ce mémoire. L’académie de Bordeaux possède de formidables ressources pour l’espace et l’aéronautique, avec des entreprises comme Astrium, Herakles ou l’université de Bordeaux I. Si vous nous permettez de poursuivre cette aventure, nous allons essayer, en contactant Herakles et l’Université de Bordeaux I de mieux comprendre la phase d’accélération initiale d’un missile ou d’une fusée Ariane pour essayer d’en produire un modèle numérique et pour le mettre en œuvre dans notre fusée à eau. Bibliographie
- Histoire des fusées : http://www.linternaute.com/histoire/motcle/2441/a/1/1/fusee.shtml http://fr.wikipedia.org/wiki/Saturn_V
- Site de l’académie de Reims : la propulsion à réaction http://www.ac-reims.fr/datice/sc_physiques/docs/divers/fusee/fuseeeau.htm
- 19 -
- Mode opératoire de fabrication http://tpe-fusee-a-eau.webnode.fr/les-/calculs-daltitude/ http://www.tice92-defiscycle3.ac-versailles.fr/astronomie/IMG/pdf/montage_pompe.pdf
http://pagesperso-orange.fr/fusee/FABICFUS.HTM - Site d’un physicien passionné de fusée à eau, qui se cache sous le
pseudonyme de Bernard de Gomars. http://perso.numericable.fr/fbouquetbe63/gomars/physique.htm
- Simulations : http://henneser.perso.cegetel.net/fuseeH2O/simulation.htm
- « La fusée à eau », Bulletin de I ‘Union des Physiciens, mars 1991
Annexe
Le code processing Les communautés des utilisateurs de Processing et Arduino sont très actives, et fournissent de nombreux exemples. La page http://playground.arduino.cc/interfacing/processing permet de comprendre comment simplifier la relation entre Processing et l’accéléromètre :
- Rajoutons le dossier contenant la librairie Firmata dans le dossier Libraries d’Arduino, si elle n’y est pas déjà présente (http://arduino.cc/en/Reference/Libraries ).
- Rajoutons le dossier contenant les librairies Serial, Arduino (http://processing.org/reference/libraries/ ) et TinketKit ( http://www.tinkerkit.com/library/ ) dans le dossier libraries de Processing 1.5.1.(Attention, la librairie Arduino ne fonctionne pas dans les versions plus récentes de Processing).
- Depuis le logiciel Arduino téléversons l’exemple StandardFirmata sur la plaque Arduino. Ce sketch permet de gérer les informations transitant par liaison série vers processing. Nous n’aurons plus besoin du logiciel Arduino par la suite.
- Depuis le logiciel Processing, ouvrons l’exemple accéléromètre de la librairie TinkerKit. Nous voyons un disque ce déplacer sur l’écran en fonction des mouvements du capteur.
/* Source principale du code : Accelerometer Example by Matteo Loglio (http://matlo.me) Display a circle whose position is determined by the accelerometer values remember to upload standardFirmata on the Arduino board. */ import processing.serial.*; import cc.arduino.*; import com.tinkerkit.*; Arduino arduino; //declare the accelerometer TKAccelerometer acc; // Tableau des valeurs de l’accélération et de la date qui seront stockées dans un fichier texte à la fin des mesures float[] accx = new float[500]; float[] accy = new float[500]; float[] temps = new float[500];
- 20 -
int i=0; PrintWriter output; void setup() { size(512,512); println(Arduino.list()); arduino = new Arduino(this, Arduino.list()[0], 57600); //for every tinkerkit component we have to pass the arduino and the port acc = new TKAccelerometer(arduino, TK.I0, TK.I1); //style noStroke(); fill(255); smooth(); //Création d’un fichier texte qui va contenir les données output = createWriter("acceleration.txt"); frameRate(100); // Nombre de mesures par seconde } void draw() { background(200); //get accelerometer values float x = acc.readX(); float y = acc.readY(); //map values on the window width and height x = map(x,0,1023,0,width); y = map(y,0,1023,0,height); ellipse(x,y,30,30); println("x: " + x + " , y: " + y); accx[i] = x; accy[i] = y; temps[i] = millis(); i=i+1; output.println("ax = " + x + " ay = " + y + " date = " + millis()); if (i>497){output.flush(); // Write the remaining data output.close(); // Finish the file exit();} // Stop the program } Code avec carte SD #include <SPI.h> #include <SD.h> // On the Ethernet Shield, CS is pin 4. Note that even if it's not // used as the CS pin, the hardware CS pin (10 on most Arduino boards, // 53 on the Mega) must be left as an output or the SD library

- 21 -
// functions will not work. const int chipSelect = 8; // include the TinkerKit library #include <TinkerKit.h> TKAccelerometer accelerometer(I0, I1); // creating the object 'accelerometer' that belongs to the 'TKAccelerometer' class // and giving the values to the desired input pins TKLed xLed(O0), yLed(O1); // creating the objects 'xLed' & 'yLed' that both belongs to the 'TKLed' class // and giving the values to the desired output pins int compteur=0; int xAxisValue = 0; // a variable to store theaccelerometer's x value int yAxisValue = 0; // a variable to store theaccele void setup() { // Open serial communications and wait for port to open: Serial.begin(9600); while (!Serial) { ; // wait for serial port to connect. Needed for Leonardo only } Serial.print("Initializing SD card..."); // make sure that the default chip select pin is set to // output, even if you don't use it: pinMode(8, OUTPUT); pinMode(10, OUTPUT); // see if the card is present and can be initialized: if (!SD.begin(chipSelect)) { Serial.println("Card failed, or not present"); // don't do anything more: return; } Serial.println("card initialized."); } void loop() { // make a string for assembling the data to log: compteur = compteur +1; // read the both joystick axis values: xAxisValue = accelerometer.readX(); yAxisValue = accelerometer.readY(); //Serial.println("Accelerometer X = " ); Serial.println(xAxisValue); //Serial.print(" Accelerometer Y = " ); Serial.println(yAxisValue); String dataString = "Accelerometer X = "; if (compteur<1000){ // open the file. note that only one file can be open at a time, // so you have to close this one before opening another.

- 22 -
File dataFile = SD.open("donnees.txt", FILE_WRITE); // if the file is available, write to it: if (dataFile) { dataFile.print("Acc X = "); dataFile.print(xAxisValue); dataFile.print(" Acc Y = "); dataFile.println(yAxisValue); dataFile.close(); } // if the file isn't open, pop up an error: else { Serial.println("error opening datalog.txt"); } Serial.println(compteur); // wait 10 milliseconds before the next loop //delay(500); } }