filières microtechnique, Électronique automatisation ... · max. du moteur électrique...
TRANSCRIPT
Yverdon-les-Bains, le 21 septembre 2011
Département TIN
(Techniques industrielles)
Filières
Microtechnique,
Électronique – Automatisation Industrielle, et
Ingénierie de Gestion
Exercices et corrigés
Motorisation et Commande
des Machines
www.iai.heig-vd.ch
Bernard Schneider
Copyright © Bernard Schneider, 2009-2011

Motorisation et Commande des Machines HEIG-VD
2 Copyright © Bernard Schneider, 2009-2011
L’auteur remercie par avance toutes les personnes qui lui signaleront
des erreurs ou lui proposeront des améliorations.
Copyright © Bernard Schneider, 2009-2011
La copie de ce document, quelle qu’en soit la forme et le support, n’est pas autorisée sans l’accord formel de l’auteur. Par ailleurs,
celui-ci ne prend aucune responsabilité relative à des erreurs éventuelles du contenu, ni aux droits de reproduction de certaines des
images utilisées.
Toutes propositions d’améliorations et de corrections seront les bienvenues.
HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 3
Table des matières
Chapitre 1 Réducteurs et cinématique .......................................................................................................... 5
1.1 Étude d’un déplacement ..................................................................................................................... 5
1.2 Rapport de réduction .......................................................................................................................... 6
1.3 Réducteur pour l’entraînement de papier ........................................................................................... 7
1.4 Question de quadrants ........................................................................................................................ 7
1.5 Calcul d’un réducteur pour bande transporteuse ................................................................................ 8
1.6 Charge d’un moteur avec crémaillère ................................................................................................. 9
1.7 Rapport de réduction optimal ........................................................................................................... 10
Chapitre 2 Moteur DC ................................................................................................................................ 13
2.1 Vitesse d’un moteur DC à vide et en charge .................................................................................... 13
2.2 Caractérisation d’un moteur DC par 2 essais ................................................................................... 14
2.3 Rendement d’un moteur DC ............................................................................................................. 15
2.4 Allure du courant dans un moteur DC bloqué .................................................................................. 16
2.5 Vitesse et courant d’un petit moteur DC .......................................................................................... 20
2.6 Freinage d’urgence d’un moteur DC ................................................................................................ 22
Chapitre 3 Moteur synchrone ..................................................................................................................... 24
3.1 Moteur synchrone alimenté à fréquence constante........................................................................... 24
3.2 Moteur synchrone en régime nominal .............................................................................................. 24
3.3 Accélération d’un servomoteur « brushless » .................................................................................. 25
Chapitre 4 Moteur asynchrone ................................................................................................................... 26
4.1 Pôles et glissement d’un moteur asynchrone .................................................................................... 26
4.2 Couple et vitesse d’un moteur asynchrone ....................................................................................... 26
4.3 Moteur asynchrone utilisé à charge réduite ...................................................................................... 27
4.4 Moteur asynchrone en régime de freinage ....................................................................................... 28
4.5 Moteur asynchrone à 50 Hz et à 60 Hz ............................................................................................ 29
4.6 Microcentrale hydraulique ............................................................................................................... 30
4.7 Moteur asynchrone entraînant une pompe ....................................................................................... 31
4.8 Système de bobinage ........................................................................................................................ 32
Chapitre 5 Choix d’un entraînement .......................................................................................................... 36
5.1 Table tournante ................................................................................................................................. 36
5.2 Dimensionnement thermique d’un servomoteur .............................................................................. 37
5.3 Validation thermique pour un moteur .............................................................................................. 39
5.4 Calcul de productivité ...................................................................................................................... 40
5.5 Entraînement d’une tourelle ............................................................................................................. 41
Motorisation et Commande des Machines HEIG-VD
4 Copyright © Bernard Schneider, 2009-2011
5.6 Entraînement pour découpe de papier ............................................................................................. 43
5.7 Calcul d’une crémaillère pour moteur pas-à-pas ............................................................................. 47
Chapitre 6 Considérations d’énergie et de puissance ................................................................................ 49
6.1 Puissance d’alimentation et résistance de freinage .......................................................................... 49
6.2 Calcul de la résistance de freinage ................................................................................................... 50
Chapitre 7 Profils de mouvements ............................................................................................................ 54
7.1 Déplacement optimal avec profil vitesse triangulaire ...................................................................... 54
7.2 Déplacement optimal avec profil vitesse trapézoïdal ...................................................................... 55
7.3 Calcul du polynôme 3-4-5 – transition arrêt arrêt ....................................................................... 58
7.4 Calcul du polynôme 3-4-5 – transition arrêt vitesse fixe ............................................................ 63
7.5 Déplacement avec profil en polynôme 3-4-5 ................................................................................... 65
7.6 Déchargeur de cartons ..................................................................................................................... 66
7.7 Influence du profil de mouvement sur le choix d’un moteur .......................................................... 69
7.8 Influence du profil de mouvement sur l’échauffement d’un moteur ............................................... 70
Chapitre 8 Mouvements multiaxes ............................................................................................................ 73
8.1 Presse à découper une bande ........................................................................................................... 73
8.2 Presse à découper une bande – cadence plus lente .......................................................................... 75
8.3 Presse à découper une bande – bande moins épaisse ....................................................................... 76
8.4 Découpe de carton ........................................................................................................................... 77
8.5 Poinçonneuse à 2 axes ..................................................................................................................... 80
8.6 Découpeuse Laser à 2 axes .............................................................................................................. 81
8.7 Synchronisation d’un esclave sur un maître « réel » ....................................................................... 83
8.8 Synchronisation d’un esclave sur un maître « virtuel » ................................................................... 84
8.9 Couteau volant ................................................................................................................................. 84
8.10 Mise en phase d’un axe esclave sur un maître ................................................................................. 87
HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 5
Chapitre 1 Réducteurs et cinématique
1.1 Étude d’un déplacement
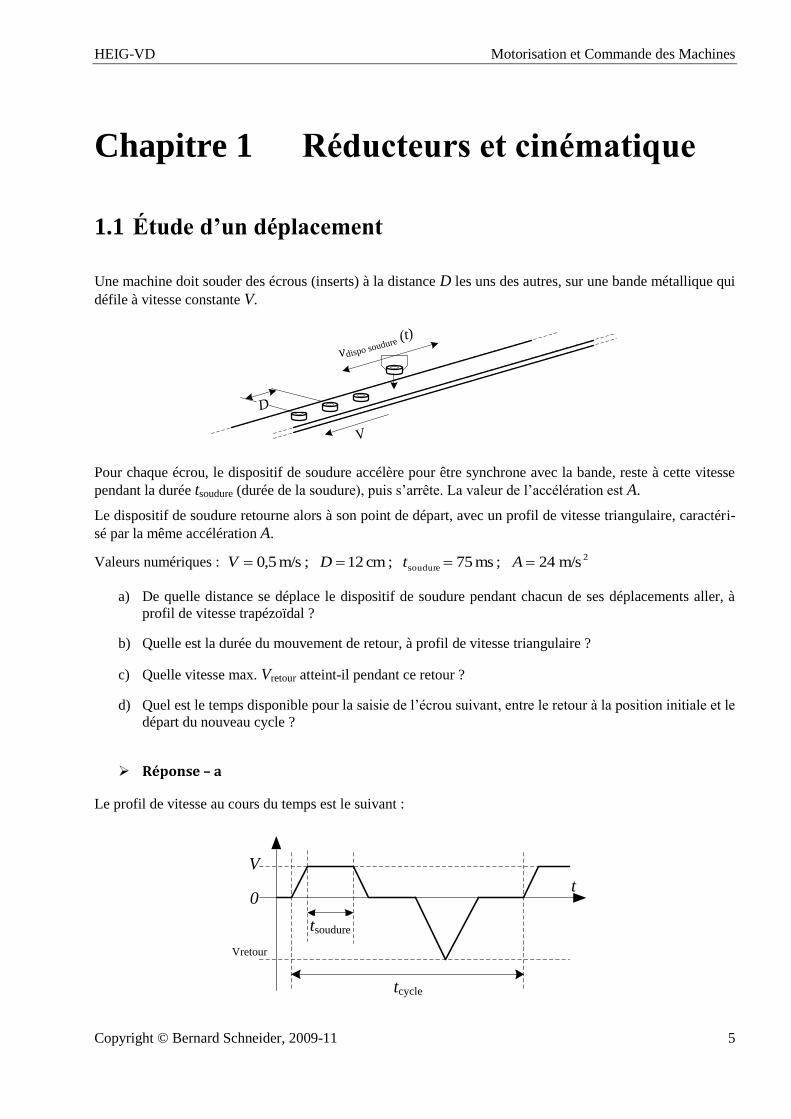
Une machine doit souder des écrous (inserts) à la distance D les uns des autres, sur une bande métallique qui
défile à vitesse constante V.
V
D
vdispo soudure (t)
Pour chaque écrou, le dispositif de soudure accélère pour être synchrone avec la bande, reste à cette vitesse
pendant la durée tsoudure (durée de la soudure), puis s’arrête. La valeur de l’accélération est A.
Le dispositif de soudure retourne alors à son point de départ, avec un profil de vitesse triangulaire, caractéri-
sé par la même accélération A.
Valeurs numériques : 2
soudure m/s24 ; ms 75 ; cm 12 ; m/s 5,0 AtDV
a) De quelle distance se déplace le dispositif de soudure pendant chacun de ses déplacements aller, à
profil de vitesse trapézoïdal ?
b) Quelle est la durée du mouvement de retour, à profil de vitesse triangulaire ?
c) Quelle vitesse max. Vretour atteint-il pendant ce retour ?
d) Quel est le temps disponible pour la saisie de l’écrou suivant, entre le retour à la position initiale et le
départ du nouveau cycle ?
Réponse – a
Le profil de vitesse au cours du temps est le suivant :
t
V
tsoudure
tcycle
0
Vretour

Motorisation et Commande des Machines HEIG-VD
6 Copyright © Bernard Schneider, 2009-2011
Durée de l’accélération et de la décélération :
Distance parcourue pendant le déplacement « aller » :
mm
Réponse – b
Au retour, la distance parcourue est identique, au signe près. C’est impératif, sinon, à la longue, le système
d’inserts sortirait de sa plage de travail.
Réponse – c
Au retour, le profil de vitesse est en triangle. Nous avons :
(
)
Nous en déduisons :
√
D’où la vitesse max. au retour :
Réponse – d
Le temps de cycle est donné par :
Si nous déduisons le temps nécessaire pour les déplacements « aller » et « retour », il reste à disposition :
( )
1.2 Rapport de réduction
Un moteur tourne à 1’450 min-1
et entraîne sa charge par l’intermédiaire d’une courroie crantée. Le pignon
sur le moteur compte 17 dents, celui sur la charge en compte 37.
Quelle sera la vitesse à vide de la charge ?

HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 7
Réponse
La vitesse de la charge se calcule en tenant compte du nombre de dents des pignons :
1.3 Réducteur pour l’entraînement de papier
On souhaite entraîner du papier à la vitesse de 190 m/min avec un cylindre de 20 cm de diamètre. La vitesse
max. du moteur électrique d’entraînement est de 3'200 tr/min. Quel réducteur proposez-vous ?
Réponse
302 1
3'200 10,58
M L
L M
Z N
Z N
On pourrait choisir un entraînement à vis sans fin, le pignon moteur ayant 11 dents ou plus.
On pourrait également choisir un réducteur à deux étages de 36 : 11 = 3,27 dents chacun, l’ensemble se
comportant comme un réducteur de 3,272 = 10,7.
On pourrait aller encore sur le site d’un fabriquant de réducteur pour faire son choix en fonction des
réducteurs préférentiels, afin de réduire les délais d’approvisionnement et les coûts.
1.4 Question de quadrants
Un moteur électrique doit équiper un convoyeur qui, toutes les 2 secondes, doit avancer de 50 cm. Expliquer
dans quel(s) quadrant(s) il fonctionnera ? Quelles conséquences faut-il en tirer pour le choix du réducteur et
de l’accouplement ?
Réponse
Le mouvement du convoyeur est mono directionnel. Par contre, il doit très souvent accélérer et freiner. Il est
peu judieux d’utiliser un frein mécanique car il s’usera trop rapidement. Donc, c’est le moteur qui devra
freiner la charge. Le couple fourni par le moteur sera donc positif à l’accélération, et négatif au freinage.
Ainsi, l’entraînement doit pouvoir fonctionner dans les 2 quadrants de droite (vitesse positive).
Le moteur supporte ce régime sans problème. Par contre, il faudra choisir un réducteur qui ne pose pas de
problèmes de jeux. Un système à courroie crantée pourrait faire l’affaire.

Motorisation et Commande des Machines HEIG-VD
8 Copyright © Bernard Schneider, 2009-2011
1.5 Calcul d’un réducteur pour bande transporteuse
Une bande transporteuse est entraînée par un moteur, par l’intermédiaire d’un réducteur (voir figure ci-
dessous). Les caractéristiques sont les suivantes :
Diamètre du tambour entraînant la bande : d = 250 mm
Vitesse de la bande : v = 75 m/min
Force de traction exercée par le tambour sur la bande : F = 2400 N
Rendement du réducteur : ηR = 80%
Vitesse nominale du moteur : NM nom = 1'455 tr/min
Rendement du moteur : ηM = 87%
a) Quel doit être le rapport du réducteur entre le moteur et le tambour ?
b) Quel est le couple que doit fournir le moteur ?
c) Quel est la puissance électrique absorbée par le moteur ?
Réponse – a
La vitesse du tambour est liée à celle de la bande transporteuse. Donc :
On en déduit le rapport de réduction :
1'455=15,24
95,5
mot
tamb
Ni
N
Réponse – b
Le couple que doit fournir le tambour est lié à la force exercée par la bande transporteuse. Donc :
300 Nm2
tamb
dT F
Tenant compte du rendement du réducteur, on en déduit le couple que doit fournir le moteur :
24,6 Nmtambmot
R
TT
i
M
bande
tambour

HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 9
Réponse – c
La puissance mécanique fournie par le moteur vaut :
1'45524,6 24,6 152,4 3'750 W
30méc mot motP T
Tenant compte du rendement du moteur, la puissance électrique qu’il consomme vaut :
3'7504'310 W
0,87
mécél
mot
PP
1.6 Charge d’un moteur avec crémaillère
La tête d’impression d’une imprimante à jet d’encre est mue horizontalement par un entraînement rotatif-
linéaire de type pignon – crémaillère. L’équipage mobile (tête et dispositif d’entraînement) pèse 800 g et doit
être accélérée à 25 m/s2. La crémaillère à un pas de 2,0 mm et le pignon d’entraînement compte 38 dents.
L’inertie du moteur est de 150 ∙ 10-6
kgm2.
a) Que vaut l’inertie équivalente de cette charge, rapportée au moteur.
b) Quel est le couple moteur nécessaire pour accélérer cette charge (hypothèses : frottements nuls).
Réponse – a
L’inertie de la charge, rapportée au moteur, se calcule par :
2 2
6 238 0,0020,8 117 10 kgm
2 2
ML équiv L
Z pJ m
A remarquer que cette inertie est proche de celle du moteur. Le rapport de réduction est donc proche de
l’idéal.
Réponse – b
L’accélération du moteur est donnée par :
22 225 2'067 rad/s
38 0,002mot
M
aZ p
Le couple moteur nécessaire pour accélérer la tête d’impression se calcule par :
6 6150 10 117 10 2'067 0,552 Nmmot mot L équiv motT J J

Motorisation et Commande des Machines HEIG-VD
10 Copyright © Bernard Schneider, 2009-2011
1.7 Rapport de réduction optimal
Un servomoteur de 4,9 Nm nominal peut tourner jusqu’à 4'500 tr/min. Son inertie Jmot = 6,3 kg∙cm2. Il en-
traîne une charge rotative à l’aide d’un réducteur à courroie crantée.
La charge doit constamment accélérer de 1’370 tr/min à 1’830 tr/min, puis revenir à 1'370 tr/min. Elle ne fait
donc qu’accélérer et freiner, à accélération constante. Son inertie est de 12,6 kg∙cm2. On suppose que tous les
frottements sont négligeables, donc que le couple transmis par le moteur ne sert qu’à accélérer et freiner la
charge, suivant son sens.
Est-ce que le moteur convient, et quel rapport de réduction choisir ?
Application réelle : Il s’agit d’une machine à découper des feuilles de papier aux formats A4, A5, et lon-
gueurs spéciales. Celles-ci, imprimées en continu mais pas encore découpées, avancent à vitesse constante.
Un ciseau rotatif découpe chaque page à la bonne longueur. Sa circonférence est légèrement supérieure à la
longueur d’une page. En réalité, pendant la découpe (env. 5% du tour), la vitesse tangentielle du ciseau rota-
tif doit être égale à celle du papier. Sur le reste du tour, il doit accélérer et freiner pour être prêt à couper la
page suivante au bon endroit. Pour ne pas trop compliquer cet exercice, on considère que la découpe est ins-
tantanée.
Réponse
Chaque rotation d’un tour correspond à un cycle de la machine (à une feuille découpée), donc à la rotation
d’un tour du couteau. Nous avons :
⏟
En convertissant les vitesses indiquées en [rad/s], nous obtenons :
( )
Comme le moteur est continuellement en train d’accélérer et de freiner, le couple d’accélération, identique au
couple de freinage (au signe près), ne doit pas dépasser le couple nominal du moteur.
1er
choix envisageable : Le moteur tourne exactement à sa vitesse max. de 4'500 tr/min lorsque la charge (le
ciseau rotatif) tourne à 1’830 tr/min. Le rapport de réduction ne doit en aucun cas dépasser :
On pourrait choisir des pignons pour obtenir un rapport proche de cette valeur limite, par exemple :
L’inertie totale, vue du moteur, sans compter le réducteur lui-même, vaut alors :
|
Lorsqu’on accélère la charge de 1'370 à 1’830 tr/min en ms, sont accélération vaut :
( )

HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 11
Tenant compte du rapport de réduction, l’accélération du moteur vaut:
Le couple d’accélération vaut donc :
|
Ce couple d’accélération étant requis en permanence pour accélérer et pour décélérer, il ne devrait pas
dépasser le couple nominal du moteur. Comme celui-ci vaut 4,9 Nm, nous pouvons conclure qu’avec ce
réducteur, le moteur ne convient pas. Essayons un autre rapport de réduction.
2ème
choix envisageable : On choisit le rapport de réduction optimal :
√
Concrètement, on choisit le rapport 24 : 17 = 1,41. On a ainsi :
|
Le couple d’accélération vaut donc :
|
Nous constatons qu’avec ce rapport de réduction, le couple d’accélération est inférieur de 6,5% au couple
nominal, et que le moteur convient.
Autres choix envisageables : Il est possible de déterminer dans quelle fourchette de valeurs le rapport de
réduction peut être choisi, de manière à ce que le couple d’accélération ne dépasse pas le couple nominal du
moteur.
Pour ce faire, déterminons analytiquement la valeur du couple d’accélération (du moteur) en fonction du
rapport de réduction i :
( )
(
)
Lorsque i est proche de zéro, la valeur de tend vers l’infini (effet du terme en 1/i). De même, lorsque i
tend vers l’infini, la valeur de tend aussi vers l’infini (effet du terme en i). Entre ces deux extrêmes, il
existe une valeur optimale « » pour laquelle la valeur de est minimale. Il s’agit de celle prise en
considération auparavant, comme 2ème
choix envisageable :
√
Pour déterminer dans quelle marge on peut choisir i autour de , sans dépasser la limite de couple du
moteur, il suffit de résoudre l’inéquation du 2ème
degré suivante :
(
)
Motorisation et Commande des Machines HEIG-VD
12 Copyright © Bernard Schneider, 2009-2011
On obtient, successivement :
(
)
Nous pouvons maintenant introduire les valeurs numériques :
⏟
√( )
Nous obtenons 2 valeurs limites :
{
L’inéquation est satisfaite pour toutes valeurs de i comprise entre ces 2 limites.
Choix final : Le choix final du rapport de réduction doit tenir compte des critères techniques suivants :
critère de vitesse, impératif : (sinon, la cadence ne sera pas atteinte à cause de la limite
de vitesse du moteur) ;
critère de couple, impératif : (sinon, la moteur
chauffera trop à cause du couple d’accélération, qui sera supérieur à sa limite de couple) ;
critère d’optimisation du couple, souhaitable (non impératif) : .
Dans cet exercice, le rapport de réduction optimum répond à tous les critères. Ce pourrait ne pas toujours être
le cas. Cela illustre le principe selon lequel les applications où les couples d’accélération et de freinage
prédominent (peu de frottements, peu de couple d’usinage), le moteur sera toujours le mieux utilisé lorsque
le rapport de réduction est choisi de manière à ce que l’inertie de la charge, vue du moteur, soit identique à
l’inertie du moteur.
Dans les limites calculées, nous pouvons choisir i librement, indépendamment de , tenant compte
d’autres contraintes comme la logistique (type de réducteur déjà utilisé sur une autre machine), le prix, ou le
maintien d’une réserve d’évolution de la machine vers, par exemple, des vitesses de production plus élevées.

HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 13
Chapitre 2 Moteur DC
2.1 Vitesse d’un moteur DC à vide et en charge
Un moteur DC à aimants permanents a comme caractéristiques :
kE = 50 V par 1000 tr/min
kT = 0,48 Nm/A
Ri = 0,9
Calculer la vitesse max. qu’il peut atteindre avec un variateur pouvant fournir au maximum 150 VDC :
a) lorsqu’il est à vide, en négligeant les pertes internes par frottement ;
b) lorsqu’il est chargé à son couple nominal de 5 Nm.
Réponse – a
A vide et en négligeant les frottements internes, couple et courant sont nuls :
00 A
0,48
emo
T
TI
k
Le variateur de tension peut fournir au max. 150 V. L’équation électrique du moteur est alors :
1000E i
NU k R I
Donc :
150 50 0,9 0 501000 1000
o oN N
' '
On en tire la vitesse à vide du moteur :
1000 1503 000 rpm
50o
'N '
Remarque : En utilisant kT, on obtient un résultat très proche, la différence étant due à la marge d’erreur sur
les coefficients kT et kE :
60 150 60312,5 2 984 rpm
2 0,48 2oN '
Réponse – b
En charge et en négligeant les frottements internes :
510,4 A
0,48
eC
T
TI
k

Motorisation et Commande des Machines HEIG-VD
14 Copyright © Bernard Schneider, 2009-2011
Le variateur de tension peut fournir au max. 150 V. L’équation électrique du moteur est alors :
charge charge50 50150 0,9 10,4 9,375
1000 1000
N N
' '
On en tire la vitesse en charge du moteur :
charge
1000 150 9,3752 812 rpm
50
'N '
Remarque : En utilisant kT, on obtient un résultat très proche, la différence étant due à la marge
d’erreur sur les coefficients kT et kE :
150 9,37560 60293,0 2 798 rpm
2 0,48 2cN '
2.2 Caractérisation d’un moteur DC par 2 essais
On souhaite caractériser un petit moteur DC à aimants permanents. Pour ce faire, on procède à 2 essais suc-
cessifs :
a) Le moteur est chargé, à l’arrêt, par un couple de 0,105 Nm. Il est alimenté par une source de 6,4 V,
et on mesure son courant Ia = 910 mA.
b) Le moteur à vide est alimenté par une source de 24 VDC. On mesure alors son courant Ib = 80 mA, et
sa vitesse qui vaut 1'940 tr/min.
Déterminer sa résistance Ra, sa constante de couple kT et sa constante de vitesse kE. Déterminer le couple de
frottement interne Tfrott.
Réponse – a
L’essai en charge à l’arrêt permet de déterminer les caractéristiques suivantes :
0,1050,115 Nm/A
0,91
aT
a
Tk
I
[ ] 0,115 Vs/radE SI Tk k
[ ] [ ]
1'000 2 1'000 20,115 12,08 V/1000 rpm
60 60E usuel E SIk k

HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 15
Réponse – b
L’essai à vide permet de confirmer ces résultats, et en particulier qu’en unités SI, :
[ ]
23,44 1'00012,08 V/1000rpm
1'940E usuelk
Le couple de frottement interne s’obtient directement à partir du courant :
0,115 0,08 0,0092 Nmfrott T aT k I
2.3 Rendement d’un moteur DC
Quel est le rendement du moteur de l’exercice précédent (2.2), lorsqu’il est alimenté à 24 VDC et chargé à
0,105 Nm, et en tenant compte du couple de frottement interne Tfrott ?
Réponse
A charge nominale, le couple électromagnétique doit compenser le couple à l’arbre et les frottements
internes. Donc :
0,105 0,009 0,114 NmemT
Le courant d’induit vaut alors :
La puissance électrique fournie vaut :
La vitesse vaut :
La puissance mécanique disponible vaut :
0,105 148 15,5 Wméc arbreP T
Le rendement du moteur vaut ainsi :
15,565%
23,8
méc
élec
P
P

Motorisation et Commande des Machines HEIG-VD
16 Copyright © Bernard Schneider, 2009-2011
La différence est dissipée sous forme thermique. On peut calculer séparément les pertes Joule et les pertes
par frottement :
22 7,03 0,99 6,9 WJouleP R I
0,0092 148 1,4 Wfrott frottP T
La somme de ces pertes est égale à la différence entre Pélec et Pméc , aux erreurs d’arrondis près.
2.4 Allure du courant dans un moteur DC bloqué
Un moteur (Maxon A-max 26/110209) est connecté soudainement à une alimentation de 12 V. Ses caracté-
ristiques sont les suivantes :
Ualim = 12 V
Inom = 629 mA
Ri = 7,41 Ω
Li = 0.77 mH
therm = 12,4 s
Tnom = 0,0157 Nm
Jmot = 1,3 · 10-6
kgm2
Inertie de la charge : Jcharge = 3,9 · 10-6
kgm2
a) Considérant que le moteur est bloqué mécaniquement, exprimer et représenter le courant en fonction
du temps.
b) Combien de temps peut-on maintenir ce moteur ainsi alimenté, avec son rotor bloqué, avant que sa
température interne dépasse sa température limite de fonctionnement ?
Courant établi, on libère soudainement le moteur de l’exercice précédent.
c) Déterminer les constantes kT et kE.
d) Exprimer et représenter sa vitesse en fonction du temps, en négligeant tous les frottements.
e) Exprimer et représenter cette même vitesse, mais en considérant qu’il y a en plus un frottement vis-
queux Bω = 6,8 · 10-6
Nm·s/rad.
Préalable mathématique
Dans le monde réel, plusieurs régimes transitoires peuvent être décrits par la solution d’une équation
différentielle d’ordre 1, de la forme :
( )
( )
Supposons que la solution de cette équation soit :
( ) ( ) ( )

HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 17
avec :
( )
( )
Montrons que la solution proposée satisfait l’équation différentielle.
La dérivée de ( ) est :
( )
( ) (
) ( )
En introduisant la solution ( ) et sa dérivée dans l’équation différentielle, nous obtenons pour son terme à
gauche du signe « = » :
( )
[ ( ) (
)]
[( ) (
)]
[ ( ) ]
En remplaçant et par leurs valeurs supposées, ce terme est nul. La solution proposée satisfait l’équation
différentielle est bien vérifiée. Comme il ne peut y avoir qu’une seule solution, nous avons trouvé LA
solution.
Dans tous les problèmes de régimes transitoires d’ordre 1, il convient donc de poser l’équation différentielle
sous la forme susmentionnée. La solution est alors immédiate.
Réponse – a
On part de l’équation électrique du moteur DC :
( )( ) ( )i
i i i E
di tU R i t L k t
dt
Comme la vitesse est nulle (rotor bloqué), la tension induite est également nulle. L’établissement du courant
dans ce moteur est du même type que dans une bobine (inductance et résistance en série). On peut donc en
conclure :
( ) 1 él
t
ii t I e
Avec :

Motorisation et Commande des Machines HEIG-VD
18 Copyright © Bernard Schneider, 2009-2011
Réponse – b
Le courant s’établit à une valeur I égale à 2,57 fois le courant nominal. Le moteur s’échauffera trop.
Si le moteur (avec rotor bloqué) était alimenté avec son courant nominal, sa température se stabiliserait à sa
valeur de fonctionnement admissible nominal .
En le connectant à une alimentation de 12 V, son courant atteint rapidement 2,57 fois son courant nominal.
En maintenant ce courant, ses pertes thermiques, qui se calculent par la formule 2
aath IRP , sont
63,657,2 2 plus importantes. Sa température interne, qui augmente exponentiellement, chercherait à
atteindre 6,63 fois sa température de fonctionnement normale. Autant dire qu’il finirait par se détruire.
L’évolution de la température interne répond à l’équation :
therm
t
et 1)(
On a calculé que nominal63,6 , et on cherche à savoir après combien de temps on atteint
nominal)( t . Il nous faut donc résoudre l’équation
therm
t
e 163,6 nominalnominal
On constate qu’il n’est même pas nécessaire de connaître la valeur de cet échauffement normal nominal . Il
suffit de savoir que cette valeur est définie. Elle est déterminée par le concepteur du moteur, mais pas
toujours publiée.
On en tire :
s0,24,12164,063,6
11ln
thermt
Réponse – c
On connait le couple et le courant nominal du moteur. On peut en tirer :
0,01570,0250 Nm/A
0,629
nomT
nom
Tk
I
Réponse – d
Les équations électrique et cinématique du moteur sont toutes deux des équations différentielles d’ordre 1
(l’accélération est la dérivée de la vitesse). En les combinant, nous obtenons normalement une équation
différentielle d’ordre 2. Elle pourrait se résoudre en passant, par exemple, par la transformée de Laplace.
Dans le cas des petits moteurs DC comme celui-ci, nous pouvons cependant négliger les phénomènes
transitoires du courant lorsque nous nous intéressons à l’évolution de la vitesse. Ce faisant, nous n’avons
qu’une équation différentielle d’ordre 1 à résoudre, dont la solution est :
( ) 1 méc
t
t e

HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 19
Dans cette équation :
12 481 rad/s
0,0250E T
U U
k k
61,3 3,9 10 7,4161,7 ms
0,0250 0,0250
tot iméc
T E
J R
k k
Cette constante de temps est appelée « constante de temps mécanique du moteur ». Nous remarquons qu’elle
est environ 600 fois plus grande que la constante de temps électrique. Cette grande différence est
caractéristique des petits moteurs DC. Lorsque cette différence peut être démontrée comme dans le cas
présent, l’hypothèse simplificatrice que nous avons faite, à savoir négliger les phénomènes transitoires du
courant, est parfaitement justifiée.
Réponse – e
Un frottement visqueux est linéaire, proportionnel à la vitesse. Il s’ajoute au couple d’accélération :
( )( ) ( ) ( ) ( ) ( )em acc frott tot T
d tT t T t T t J B t k i t
dt
Tenant compte du faite que E Tk k , l’équation électrique du moteur devient alors :
1 ( )( ) ( )i tot T
T
d tU R J B t k t
k dt
( )( ) 0tot i i
T
T T
J R B Rd tk t U
k dt k
La solution est :
( ) (
)
avec :
2 2 6
12 0,0250' 444 rad/s
0,0250 6,8 10 7,41
T
T i
U k
k B R
6
2 2 6
1,3 3,9 10 7,4157,1 ms
0,0250 6,8 10 7,41
tot iméc
T i
J R
k B R
La vitesse se stabilise à une vitesse un peu plus faible que si les frottements sont nuls.
La constante de temps mécanique est réduite proportionnellement. On peut justifier ce résultat par le fait que
la dérivée de la vitesse à l’instant t = 0 ne dépend pas des frottements. La constante de temps correspond à
l’instant où les asymptotes de l’exponentielle se croisent. Si l’asymptote horizontale est plus basse de x%, la
constante de temps est donc plus faible de x%.

Motorisation et Commande des Machines HEIG-VD
20 Copyright © Bernard Schneider, 2009-2011
2.5 Vitesse et courant d’un petit moteur DC
On considère un petit moteur DC à aimants permanents (type Maxon A-max 26/110211), caractérisé comme
suit :
Unom = 15 V
Inom = 338 mA
Ra = 25,8 Ω
La = 2,57 mH
KT = KE = 0,0467 Nm/A
Jm = 1,25 ∙ 10-6
kg∙m2
therm = 12,4 s
Il entraîne une charge inertielle pure, caractérisée par Jext = 8 ∙ Jm . On néglige tous les frottements.
Ce moteur est connecté soudainement à une alimentation de 15 V, et se met donc à tourner.
a) A quelle valeur sa vitesse se stabilisera-t-elle ?
b) Quelle est la valeur du courant consommé par le moteur, lorsque la vitesse est ainsi stabilisée ?
c) Après combien de temps le moteur atteint-il une vitesse égale ou supérieure à 2'000 tr/min ?
d) Quel est le rapport, à 5% près, entre le courant de pointe absorbé par le moteur au début du démar-
rage, et son courant nominal ?
Longtemps après que la vitesse se soit stabilisée, et en maintenant la tension d’alimentation constante, on
freine ce moteur avec un couple inconnu, mais rigoureusement constant. On constate que sa vitesse diminue,
et se stabilise à nouveau. On mesure alors un courant de 450 mA.
e) A quelle valeur la vitesse le moteur se stabilise-t-elle alors ?
f) Quelle est la valeur du couple constant qui freine le moteur ?
g) Pourquoi ne doit-on pas laisser trop longtemps le moteur fonctionner à ce régime ?
h) En supposant que le moteur était à température ambiante au démarrage, pendant combien de temps
peut-on le laisser fonctionner à ce régime sans risque ?
Réponse – a
A vitesse stabilisée, la tension induite et le courant sont constants. Comme, en plus, les frottements sont
supposés nuls, le couple électromagnétique est également nul. La vitesse se stabilise ainsi à :
15 321 rad/s
0,0467E
U
k
Réponse – b
A vide et en négligeant les frottements internes, couple et courant sont nuls :
00 A
0,48
emo
T
TI
k

HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 21
Réponse – c
La constante de temps électrique du moteur vaut :
32,57 1099 μs
25,8
iél
i
L
R
La constante de temps mécanique du moteur vaut :
6
2
1 8 1,25 10 25,8133 ms
0,0467
tot iméc
T E
J R
k k
Vu la grande différence entre ces 2 constantes de temps, on peut traiter séparément les régimes transitoires
de courant et de tension.
En radian/seconde, la vitesse de 2'000 tr/min correspond à :
2'000209 rad/s
30
L’équation de vitesse est donc :
0,133 209209 321 1 0,133 ln 1 140 ms
321
t
e t
Réponse – d
A la mise sous tension, le moteur est arrêté. Le courant croît exponentiellement à sa valeur de court-circuit,
avec une constante de temps égale à él . Au fur et à mesure que le moteur prend de la vitesse et que la
tension induite se soustrait de la tension d’alimentation, le courant décroit exponentiellement, avec une
constante de temps égale à méc .
La valeur max. du courant est donc sa valeur de court-circuit :
max
15581 mA
25,8i
UI
R
Réponse – e
Lorsque la vitesse s’est stabilisée, le courant est également constant. La vitesse se calcule par :
15 25,8 0,45' ' 72,6 rad/s
0,0467
i ii i E
E
U R IU R I k
k
Réponse – f
Le couple est proportionnel au courant, et on sait que celui-ci vaut 450 mA. Donc :
0,0467 0,45 0,021 Nmem T iT k I

Motorisation et Commande des Machines HEIG-VD
22 Copyright © Bernard Schneider, 2009-2011
Réponse – g
Le courant de 450 mA est de 33% supérieur au courant nominal. L’échauffement du moteur est
approximativement proportionnel au carré du courant. Si on maintenait ce courant trop longtemps,
l’échauffement serait ainsi 77% supérieur à l’échauffement normal, car 1,332 = 1,77. Il est probable que ceci
détruirait le moteur.
Réponse – h
La constante de temps thermique du moteur est beaucoup plus grande que les constantes de temps mécanique
et électriques. On peut donc considérer que l’échauffement du moteur est décrit par une équation
différentielle d’ordre 1, dont la solution est :
( ) 1 therm
t
t e
Comme le moteur est surchargé de 33% en courant, on a :
nominal 1,77
nominal est l’échauffement que le moteur supporte à coup sûr, et qui ne doit pas être dépassé. On calcule le
temps nécessaire pour atteindre cette température en situation de surcharge comme suit :
11,77 1 12,4 ln 1 10,3 s
1,77therm
t
nom nom e t
2.6 Freinage d’urgence d’un moteur DC
Une machine comporte un moteur DC à aimants permanents pour l’entraînement d’une table. Il est alimenté
par un servo amplificateur, dont la tension de sortie UDC varie entre -130 V et +130 V pendant le fonction-
nement normal de la machine.
Le moteur est du type PARVEX RS640E. Ses caractéristiques sont : Tnom = 13 Nm ; kT = 0,47 Nm/A ;
kE = 49,2 [V / 1'000 tr/min] ; Ra = 0,12 ; JM = 0,0083 kgm2.
Pour assurer l’arrêt d’urgence en cas de panne, et plutôt que d’ajouter un frein mécanique, on prévoit un
dispositif permettant de court-circuiter ce moteur. Ce procédé présente l’avantage de fonctionner même si le
servo amplificateur tombe en panne, ce qui améliore la sécurité de la machine.
Cependant, pour ne pas risquer d’endommager le réducteur (vis à bille), le couple de freinage ne doit en au-
cun cas excéder 3 fois le couple nominal du moteur. Pour limiter ce couple, on limite le courant de freinage
en ajoutant une résistance Rfrein dans le circuit d’urgence, comme représenté ci-dessous.
M R
f
UDC

HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 23
a) Quelle est la valeur max. à laquelle le moteur peut tourner pendant le fonctionnement normal de la
machine ?
b) Quelle est la valeur max. que le courant peut atteindre au moment du freinage ?
c) Quelle valeur ohmique proposez-vous pour la résistance Rfrein , et pourquoi ?
Réponse – a
La vitesse max. possible est atteinte lorsque le moteur est alimenté à 130 V, alors qu’il n’est pas chargé du
tout. Cette vitesse vaut :
max max
130 2'6431'000 2 '643 rpm 278 rad/s
49,2 30N N
Réponse – b
La donnée du problème précise que le couple ne doit en aucun cas dépasser le triple du couple nominal. Le
courant max. admissible vaut donc :
13 33 83,0 A
0,47
nomadmissible
T
TI
k
Réponse – c
Dans le pire des cas, le moteur est à vitesse max. lorsqu’il faut le freiner. On sait que cette vitesse correspond
à une tension induite égale à la tension max. d’alimentation, soit 130 V.
Lorsque le moteur est court-circuité par la résistance Rfrein, le courant n’est limité que par cette résistance, qui
est en série avec la résistance interne du moteur. On obtient donc :
max max 130 0,12 1,45
83
i i
adm frein i
i frein adm
U UI I R R
R R I
En admettant que les résistances de puissance qui conviennent à ce genre d’application sont spécifiées avec
une précision de ±10%, il convient de chercher dans le catalogue une résistance dont la valeur ohmique
nominale est supérieure à 1,6 Ω.

Motorisation et Commande des Machines HEIG-VD
24 Copyright © Bernard Schneider, 2009-2011
Chapitre 3 Moteur synchrone
3.1 Moteur synchrone alimenté à fréquence constante
A quelle vitesse tourne un moteur synchrone alimenté en 50 Hz, équipé de 24 pôles ?
Réponse
Ce moteur a 12 paires de pôles. Il tourne donc 12 fois plus lentement qu’un moteur à 1 paire de pôles, soit à
n = 3'000 / 12 = 250 r/min.
3.2 Moteur synchrone en régime nominal
Un moteur synchrone de puissance nominale 22 kW est alimenté au réseau triphasé européen 400 V / 50 H),
et comporte 2 paires de pôles (p = 2). Son rendement est de 92% et son cos vaut 0,87. Déterminer sa vitesse
de rotation, son couple à l’arbre, sa puissance active et son courant de phase.
Réponse
Pour la vitesse de rotation, nous avons, à choix :
[ ]
[ ]
[ ]
Pour insister sur la différence, calculons également la pulsation de l’alimentation :
[ ] [ ]
La puissance nominale d’un moteur étant toujours donnée « à l’arbre », le couple nominal vaut :
( )
[ ]
La puissance électrique (active) consommée vaut :
( ) ( )
[ ]
Son courant de phase vaut :
( )
√ [ ]

HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 25
3.3 Accélération d’un servomoteur « brushless »
Un servomoteur synchrone à aimants permanents « AC brushless » a une constante de couple
kT = 1,02 Nm/Arms. Son courant nominal IN = 2,9 Arms. Son inertie JM = 3,3 kg·cm2. A vide, et sans dépas-
ser son couple nominal, combien de temps lui faut-il pour accélérer de 0 à 3'000 tr/min ?
Réponse
Le couple nominal de ce moteur vaut :
L’accélération est donnée par la loi de Newton :
La vitesse à atteindre vaut :
La durée de l’accélération vaut donc :
Motorisation et Commande des Machines HEIG-VD
26 Copyright © Bernard Schneider, 2009-2011
Chapitre 4 Moteur asynchrone
4.1 Pôles et glissement d’un moteur asynchrone
Un moteur asynchrone alimenté en 50 Hz tourne à 720 min-1
. Calculer le nombre de pôles et son glissement
(en % de la vitesse synchrone).
Quelle est la fréquence des courants induits dans son rotor ?
Réponse
Il faut d’abord chercher quelle vitesse synchrone est légèrement au-dessus de la vitesse 720 min-1
. Il s’agit de
la vitesse synchrone d’un moteur à 4 paires de pôles, qui est de 750 min-1
. Ce ne peut pas être un moteur à 3
paires de pôles, car sa vitesse synchrone de 1'000 min-1
serait beaucoup trop grande (on sait que le glissement
est de quelques pour cent, mais en aucun cas 33%).
Le glissement s est de 30 min-1
, soit 4,0%.
Les courants induits au rotor ont une fréquence égale à la différence de vitesse entre le champ tournant et le
rotor, soit 4% de la fréquence d’alimentation. Elle vaut donc 2 Hz.
4.2 Couple et vitesse d’un moteur asynchrone
Soit un moteur asynchrone de 22 kW, dont la vitesse nominale est de 1’420 min-1
. Son rendement est de
91%, et son facteur de puissance de 0,85. On l’alimente en triphasé 400 V – 50 Hz.
a) Quel est son glissement à charge nominale ?
b) Quel est son courant nominal ?
Réponse – a
Ce moteur a certainement 2 paires de pôles. Sa vitesse synchrone est de 1'500 min-1
. Le glissement à régime
nominal
vaut :
Nous pouvons aussi exprimer ce glissement en tr/min :

HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 27
Réponse – b
La puissance nominale de 22 kW est la puissance disponible à l’arbre. La puissance électrique nominale
vaut :
Son courant de phase vaut donc :
√ ( )
√
4.3 Moteur asynchrone utilisé à charge réduite
Le moteur de l’exercice 4.2, alimenté par le réseau triphasé 400 V – 50 Hz, entraîne une charge à vitesse
constante en lui transmettant un couple de 55 Nm.
a) A quelle vitesse tourne-t-il ?
b) En admettant que son rendement est le même à charge réduite qu’à pleine charge (91%), déterminer
la puissance active qu’il consomme.
c) En admettant que la puissance réactive est la même à charge réduite qu’à pleine charge (exercice ci-
dessus), déterminer son courant de phase et son facteur de puissance.
Réponse – a
Dans la zone de fonctionnement du moteur asynchrone (vitesse proche de la vitesse synchrone), le
glissement est proportionnel au couple fourni. Il faut donc déterminer le rapport entre le couple fourni
(55 Nm) et le couple nominal.
On en tire le glissement, exprimé en [tr/min] :
Réponse – b
A cette vitesse, la puissance mécanique délivrée vaut :
Tenant compte du rendement, la puissance électrique active consommée vaut :

Motorisation et Commande des Machines HEIG-VD
28 Copyright © Bernard Schneider, 2009-2011
Réponse – c
A régime nominal (22 kW à l’arbre), la puissance apparente peut être déterminée à partir de la puissance
active (exercice précédent). Nous avons :
( )
Nous en tirons la puissance réactive consommée à régime nominal :
√
√
A la puissance réduite indiquée, le moteur consomme :
Nous en déduisons la puissance apparente :
√ √
Nous en tirons le courant de phase et le facteur de puissance à charge réduite :
√
√
Nous remarquons que le facteur de puissance s’est fortement dégradé, et que le courant de phase a diminué
dans une proportion bien moindre que la réduction de charge.
4.4 Moteur asynchrone en régime de freinage
Le moteur de l’exercice 4.2 est utilisé pour un ascenseur. Quelle sera sa vitesse à la descente ?
Réponse
Dans l’ l’exercice 4.2, le moteur est utilisé à charge nominale, et convertit de l’énergie électrique en énergie
mécanique. A la descente, le moteur fonctionne dans l’autre sens, mais en frein (générateur). Il tournera donc
à une vitesse légèrement supérieure à sa vitesse synchrone. Comme le poids déplacé est supposé inchangé, le
glissement est identique, mais change de signe.
La vitesse du moteur vaut donc :
( )
HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 29
4.5 Moteur asynchrone à 50 Hz et à 60 Hz
La machine utilisant le moteur de l’ l’exercice 4.2 doit être exportée aux USA, et fonctionner sous 480 V /
60 Hz.
Comment fonctionnerait le moteur dans ces conditions ? Que faire ?
Réponse
La plupart des moteurs calculés pour 400 VAC / 50 Hz supportent également 480 VAC / 60 Hz. Il faut
cependant s’en assurer, et surtout vérifier que les spécifications écrites du fournisseur le garantissent
(homologation).
Si le moteur est connecté directement à l’alimentation (application tout ou rien), l’augmentation de fréquence
provoquera une augmentation de la vitesse synchrone à :
( ) ( ) ( )
( )
Le glissement restant à peu près inchangé (80 tr/min), sa vitesse avec le même couple serait donc de
1'720 tr/min. Même un transformateur 480 / 400 VAC ne changerait rien.
Le couple du moteur ne doit pas dépasser sa valeur nominale à 50 Hz. S’il entraîne par exemple un
ventilateur, il faudra compenser l’augmentation de la vitesse en modifiant le pas de l’hélice, de manière à ce
que le flux d’air reste le même. Si le moteur entraîne sa charge par un réducteur, il faudra modifier le rapport
de réduction pour que la vitesse de la charge n’augmente pas.
Si ces modifications mécaniques ne sont pas possibles, il faudra ajouter un variateur de fréquence pour
limiter la vitesse du moteur à 1’420 tr/min.
Si le moteur est utilisé avec un variateur de fréquence, il faudra vérifier que cet appareil est capable de
fonctionner sous 480 VAC (ce n’est pas toujours le cas). Sinon, il faudra le remplacer par un variateur qui
supporte cette tension, ou ajouter un transformateur 480 / 400 VAC. Le moteur ne verra aucune différence.
S’il y a plusieurs moteurs dans le même cas, on pourrait alimenter la machine par l’intermédiaire d’un
convertisseur de fréquence 60 / 50 Hz, qui adapterait également la tension. Cet appareil est assez coûteux,
mais au moins, il n’y aurait pas d’autres frais d’adaptation ni d’effets de surprise.

Motorisation et Commande des Machines HEIG-VD
30 Copyright © Bernard Schneider, 2009-2011
4.6 Microcentrale hydraulique
Dans une microcentrale électro-hydraulique, un moteur asynchrone est entraîné directement par la turbine
pour produire de l’énergie électrique. Avec un débit d’eau constant, la vitesse de turbine est de 392 tr/min.
Le moteur est connecté au réseau industriel 400 V à 50 Hz, triphasé.
a) Le champ tournant est-il plus grand, égal, ou plus petit que la vitesse de la turbine ?
b) Quel nombre de pôles est le plus favorable à votre avis ?
c) Quel est alors le glissement du moteur ?
d) Quelle est la puissance électrique fournie, sachant que l’on mesure un courant de phase Irms = 12,5 A,
et que le moteur est caractérisé par un facteur de puissance cosφ = 0,86 ?
e) Quelle est le couple mécanique fourni par la turbine au moteur, sachant que le rendement du moteur
est de 94%, et que la turbine tourne exactement à 392 rpm ?
Réponse – a
Le moteur tourne à la même vitesse que la turbine. Comme il fonctionne en générateur, il doit tourner plus
rapidement que le champ tournant. Donc, le champ tournant doit tourner plus lentement.
Réponse – b
392 tr/min correspond à 6,53 tr/s. S’il n’y avait pas de glissement, le nombre de paires de pôles idéal
vaudrait :
Comme il y a du glissement, et surtout comme le nombre de paires de pôles doit être un nombre entier, nous
avons le choix entre 7 et 8. Comme le champ tournant doit être plus lent que le rotor, nous devons choisir
p = 8. Ainsi, la vitesse du champ tournant vaut :
Réponse – c
Le glissement vaut :
Réponse – d
√

HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 31
Réponse – e
4.7 Moteur asynchrone entraînant une pompe
Un château d’eau est alimenté depuis une nappe phréatique. La différence de niveau est de 67 m. Le débit
doit pouvoir atteindre au minimum 55 m3 par heure.
Pour fournir ce débit, la pompe doit être entraînée à une vitesse de 690 tours par minute. Elle peut tourner
plus vite, mais sans dépasser 900 tours par minute. Son rendement est de 81%.
La pompe est entraînée directement, donc sans réducteur, par un moteur asynchrone, lui-même alimenté
directement par le réseau 400 V / 50 Hz / triphasé. Il est caractérisé comme suit :
Puissance et nombre de pôles : à déterminer
Rendement – identique pour tous les modèles : 92%
Facteur de puissance (cosφ) – identique pour tous les modèles : 0,84
Glissement à couple nominal – identique pour tous les modèles : 4,5%
a) Quel nombre de paires de pôles convient le mieux, et pourquoi ?
Valeurs possibles : 1, 2, 3 ou 4.
b) Suite à ce choix, quel est le débit de la pompe ?
Hypothèses simplificatrices :
Le débit de la pompe est proportionnel à sa vitesse.
On admet que le glissement du moteur est égal à son glissement nominal, même si le couple qu’il four-
nit n’est pas exactement égal à son couple nominal.
c) Quel doit être la puissance nominale du moteur ?
Valeurs possibles (normalisées) : 7,5 kW, 15 kW, 22 kW ou 37 kW
d) Dans ces conditions de fonctionnement, quel est le courant de phase du moteur ?
Réponse – a
Valeur min. :
60 1 60 50 1 0,045690 4,15
690M
f sN p
p
Valeur max. :
60 1 60 50 1 0,045900 3,18
900M
f sN p
p
On choisit la valeur entière 4p .

Motorisation et Commande des Machines HEIG-VD
32 Copyright © Bernard Schneider, 2009-2011
Réponse – b
Le débit de la pompe est proportionnel à sa vitesse, donc à la vitesse du moteur, qui est fixé par la fréquence
de son alimentation. Nous avons donc :
60 1 60 50 1 0,045716 rpm
4M
f sN
p
355 71657,1 m /h
690D
Réponse – c
Puissance utile (fournie par la pompe) :
/
57,1 1'0009,81 67 10'424 W
3'600utile
kg s
P D g h
Puissance fournie par le moteur à la pompe :
12'869 W utilearbre nom
pompe
PP P
On choisit :
15 kWnomP .
Réponse – d
Puissance électrique consommée :
13'988 W 3 cosarbreélectrique comp
moteur
PP U I
On en tire :
13'98824,0 A
3 cos 3 400 0,84
électrique
comp
PI
U
4.8 Système de bobinage
Une machine enroule du papier qui défile à la vitesse constante de 480 m/min. Le support vide du rouleau a
un diamètre de 30 cm. Le rouleau plein a un diamètre de 1,1 m.
Le rouleau est entraîné par un moteur et un réducteur. La vitesse du moteur est réglée en permanence pour
garantir la vitesse constante du papier, tout en tirant celui-ci avec une force de 400 N.
Le moteur est de type asynchrone à 2 paires de pôles. Le catalogue du fournisseur indique que les puissances
nominales (à l’arbre) suivantes sont disponibles, en [kW] : 1,1 – 2,2 – 4,0 – 7,5 – 15 – 22 – 37.

HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 33
La vitesse nominale de tous ces moteurs est de 1'450 tr/min. Grâce au variateur de fréquence, il peut fonc-
tionner jusqu’à 4 fois la vitesse nominale, avec une caractéristique « puissance constante » au-delà de sa
vitesse nominale.
Informations complémentaires :
Le couple nominal du moteur, calculé en fonction de sa puissance et de sa vitesse nominales, ne doit en
aucun cas être dépassé.
On suppose que le rendement du réducteur est de 90% et qu’il n’y a pas d’autres pertes par frottements.
Questions :
a) Quel est le plus petit des moteurs proposés qui permet d’entraîner ce cylindre sans dépasser ses ca-
ractéristiques nominales ?
b) Quel rapport de réduction proposez-vous ?
(Il y a plusieurs possibilités. Choisissez-en une et expliquez votre choix !)
c) Faut-il tenir du couple nécessaire pour décélérer le rouleau lorsqu’il se remplit ?
Réponse – a
Dans ce genre de problème, il est judicieux de commencer par des considérations d’énergie et de puissance.
La puissance utile peut être calculée au niveau du papier, en tenant compte de la vitesse en [m/s] :
Tenant compte du rendement du réducteur, la puissance que doit fournir le moteur vaut :
Remarque : Quel que soit le rapport de réduction i, il est facile de montrer que cette puissance est
indépendante de l’état de la bobine (plein ou vide). On le verra en résolvant la partie « b » de ce problème.
Donc : Un moteur asynchrone devrait particulièrement bien convenir vu sa capacité à fonctionner selon une
caractéristique de puissance constante au-delà de sa vitesse nominale. Sa puissance nominale devra être de
4 kW au moins. Une puissance nominale plus élevée pourrait aussi être choisie, par exemple pour satisfaire
des contraintes logistiques (type de moteur déjà utilisé sur une autre machine).
Réponse – b
Calculons d’abord la vitesse du rouleau et son couple d’entraînement lorsqu’il est vide :
Vérification :
Motorisation et Commande des Machines HEIG-VD
34 Copyright © Bernard Schneider, 2009-2011
Calculons maintenant la vitesse du rouleau et son couple d’entraînement lorsqu’il est plein :
Vérification :
Remarque : Le couple ainsi calculé est celui que doit fournir le réducteur au rouleau. Le rendement du
réducteur n’intervient donc pas encore à ce stade.
Cette application de bobinage ne nécessite pas d’entraînement à haute dynamique, car les accélérations et
décélérations sont faibles (plusieurs minutes nécessaires pour remplir une bobine). Pour cette raison, il ne
sert à rien de déterminer le rapport de réduction optimal. Par contre, considérant l’évolution de la vitesse et
du couple d’entraînement du rouleau depuis le début du processus où il est vide jusqu’au moment où il est
plein, le rapport de réduction doit être choisi en tenant compte de 2 critères :
1er
critère : Le couple que doit fournir le moteur ne doit jamais dépasser son couple nominal, en
tenant compte du rendement du réducteur.
2ème
critère : La vitesse du moteur doit être inférieure à sa vitesse max.
Nous en tirons :
Nous pouvons choisir librement la valeur de i entre ces 2 valeurs limites. Ce choix peut aussi tenir compte de
préférences. Par exemple :
On peut choisir sans trop réfléchir une valeur moyenne, comme .
On peut choisir une valeur élevée, comme . Dans ce cas, le couple max. que devra
fournir le moteur est plus faible (19,32 Nm). Cela laisse une marge de sécurité de 22% sur le couple, qui
donnerait la possibilité de plus remplir les bobines, ou de tirer plus fort sur le papier.
On peut choisir une valeur faible, comme . Dans ce cas, la vitesse max. du moteur
est plus faible (4'740 tr/min). Cela laisse une marge de sécurité de 22% sur la vitesse, qui donnerait la
possibilité d’augmenter la productivité (vitesse du papier plus élevée).
Réponse – c
Nous ne disposons que de très peu de données pour évaluer le couple nécessaire pour ralentir le rouleau
lorsqu’il se remplit. Toutefois, nous pouvons en faire une évaluation approximative.
Si nous admettons que le papier a une largeur de 1 mètre, nous pouvons évaluer l’inertie du rouleau lorsqu’il
est plein :
HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 35
kgm
2
Comme l’inertie dépend du rayon à la puissance 4, nous pouvons considérer que le couple de décélération
sera maximum lorsque le rouleau est plein. Nous devons donc évaluer encore la décélération lors du
remplissage de la dernière couche.
La dernière couche à une longueur de m. A la vitesse de 480 m/min, soit 8 m/s, il faut 0,43 s
pour la remplir.
Pendant ce laps de temps, la vitesse varie comme suit :
(
)
(
) m/min
Nous pouvons ainsi évaluer la décélération lors du remplissage de la dernière couche :
rad/s2
Le couple nécessaire pour décélérer le rouleau est maximum lorsque le rouleau est plein. Sa valeur max. vaut
ainsi, en valeur absolue :
Nm
Cette valeur est nettement inférieure aux couples d’entraînement du rouleau, calculés précédemment en
fonction de la tension sur le papier. Nous en concluons qu’il n’est pas nécessaire de tenir compte de l’effet
d’inertie du rouleau. Son couple de décélération peut être négligé.
Une raison supplémentaire réside aussi dans le signe de ce couple de décélération. En effet, comme le
rouleau doit ralentir, son couple de décélération peut être déduit du couple nécessaire à l’entraînement du
papier. Le fait de ne pas en tenir compte pour le dimensionnement du moteur fournit ainsi une (très petite)
marge de sécurité.

Motorisation et Commande des Machines HEIG-VD
36 Copyright © Bernard Schneider, 2009-2011
Chapitre 5 Choix d’un entraînement
5.1 Table tournante
On doit entraîner la table d’un nouveau centre d’usinage avec un moteur électrique par l’intermédiaire d’un
réducteur. La table doit pivoter d’un huitième de tour en 120 ms, puis rester à l’arrêt pendant la fin du cycle
de travail de chaque pièce. Le profil de vitesse est triangulaire (accélération constante), ce qui signifie que la
vitesse du moteur augmente à accélération constante α pendant la moitié du temps, puis décroît à accéléra-
tion constante -α pendant l’autre moitié du temps. La machine doit produire à la cadence de 7'000 pièces à
l’heure. L’inertie des masses en rotation est de 0,28 kgm2.
On souhaite utiliser à cet effet un moteur DC à aimants permanents PARVEX RS640E. Ses caractéristiques
sont : Tnom = 13 Nm ; Tmax = 26 Nm ; kT = 0,47 Nm/A ; Ri = 0,12 ; JM = 0,0083 kgm2. Son servo amplifica-
teur peut lui fournir une tension max. de 130 V. On néglige ses frottements, ceux du réducteur et l’inertie de
celui-ci.
a) Quel rapport de réduction choisir ?
b) Quelle marge y a-t-il entre le couple efficace nécessaire et le couple nominal du moteur ?
Réponse – a
Il faut tout d’abord analyser le cycle de fonctionnement de la machine pour déterminer la vitesse max. et
l’accélération pendant les pivotements. Par soucis de simplicité, on choisit un profil de vitesse triangulaire
pendant les déplacements. Cela signifie que la vitesse passe linéairement de 0 à la vitesse max. pendant la
moitié des 120 ms, puis diminue linéairement jusqu’à 0 pendant la 2ème
moitié des 120 ms.
Pendant le pivotement, la table doit se déplacer d’un angle :
rad48
2
.
La surface du triangle de vitesse correspond à cet angle :
2
max pivotementt
Donc :
L’accélération vaut alors :
Le temps de cycle vaut :
3'6000,514 s
7 '000ct

HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 37
On essaie d’abord d’utiliser le rapport de réduction optimal, donc :
2
L
MLM
Z
ZJJ
Dans ce cas :
81,50083,0
28,0
M
L
M
L
J
J
Z
Z
On choisit le rapport de pignons 53 : 9 = 5,89.
Vérification :
Réponse – b
On ramène le cas de charge au moteur :
2kgm0164,028,053
90083,0
2
J
max
5313,1 77,1
9rad/sM
53218 1'285
9
2rad/sM
Le couple d’accélération vaut :
0,0164 1'285 21,1 NmM acc MT J
On peut maintenant calculer le couple efficace :
2
0,12 21,110,2 Nm
0,514M rmsT
La marge de sécurité est de :
%2113
2,1013
5.2 Dimensionnement thermique d’un servomoteur
D’après sa fiche technique, un moteur électrique a un couple nominal de 15 Nm. On cherche à motoriser un
axe d’une machine d’imprimerie, qui doit faire un mouvement de va et vient en 200 ms, et ce 2 fois par se-
conde.
Pendant le mouvement, le moteur fournit 24 Nm. Entre chaque mouvement, il ne fournit que 3 Nm.

Motorisation et Commande des Machines HEIG-VD
38 Copyright © Bernard Schneider, 2009-2011
a) Est-ce que ce moteur convient pour cette application ? On suppose pour simplifier que le courant ab-
sorbé par le moteur est directement proportionnel au couple fourni, et on ne considère que les
échauffements que ce courant provoque par effet Joule.
b) Quelle modification du cycle de charge proposeriez-vous pour que le moteur soit chargé exactement
à sa valeur nominale ?
c) Est-ce que la situation est différente si la surcharge ne durait que 2 minutes, répétitive toutes les 5
minutes ?
Réponse – a – calcul thermique du moteur proposé
Le couple r.m.s. fourni à l’arbre par le moteur pendant un cycle se calcule comme suit :
Nombre de cycles par seconde :
nc = 2
Temps de cycle :
1 10,5 s
2c
c
tn
Déplacement :
td =0,2 s Td = 24 Nm
Pause :
tp = Tc – td = 0,5 – 0,2 = 0,3 s Tp = 3 Nm
Couple efficace :
2 224 0,2 3 0,315,35 Nm
0,5rmsT
Ce couple représente 1,024 fois le couple nominal. Le moteur est donc légèrement surchargé.
La température qu’atteindra le moteur dépend de la puissance thermique moyenne qu’il doit dissiper. Tenant
compte de la durée de surcharge et du temps de cycle, celle-ci se calcule comme suit :
NthermNNrmsmoyenth PIRIRIRP 048104810241222
,,,
On constate qu’avec ce type de charge, le moteur sera surchargé thermiquement de ~5%. Dans la pratique,
on préférerait avoir plutôt une marge de sécurité avec 0,9rms nomT T , soit une marge de sécurité de ~20%
sur l’échauffement.
Réponse – b – propositions d’amélioration
Solution A (la plus mauvaise) : choisir un moteur de 17 Nm nominal. Ce moteur sera certainement plus gros
et aura une inertie plus élevée. A cause de la loi de Newton généralisée aux masses en rotation, le couple
nécessaire pour réaliser le mouvement voulu sera également plus élevé. Il est même possible que, en
choisissant le moteur plus gros, le problème ne soit toujours pas résolu.
HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 39
Solution B (la moins coûteuse) : modifier le cycle machine, en laissant plus de temps au moteur pour se
refroidir. On peut calculer que, si le moteur reste en « pause » pendant 0,45 s (au lieu de 0,3), on obtient un
couple Trms’ = 13,5 Nm, procurant ainsi la marge de 10% souhaitée.
2 224 0,2 3 0,45' 13,55 Nm
0,2 0,45rmsT
Cette solution diminue en effet la cadence de production de la machine à 1,54 pièces à la seconde au lieu de
2, soit une réduction de ~25%.
Solution C (la plus astucieuse, mais pas toujours possible) : réduire l’inertie des masses en mouvement. S’il
est en effet possible de gagner 12,5% sur ces inerties en optimisant leurs dimensions, ou en changeant de
matériau, mais sans trop dégrader leur rigidité, le couple nécessaire pendant la phase « déplacement » du
cycle diminuera d’autant, soit à 21 Nm. On obtiendrait
2 221 0,2 3 0,3" 13,5 Nm
0,2 0,45rmsT
On obtiendrait ainsi la marge de sécurité désirée sans dégrader la performance de la machine.
Réponse – c – situation avec un cycle de production beaucoup plus lent
Si le cycle est 600 fois plus lent, la situation deviendra probablement plus critique, car la durée de la charge à
Td se rapproche de la constante de temps thermique du moteur. En effet, si la surcharge dure aussi longtemps,
il est probable que la température du moteur aura le temps d’atteindre la même valeur que si cette surcharge
était permanente. Le moteur atteindrait donc sa température critique avant que la période à l’arrêt ne
commence.
5.3 Validation thermique pour un moteur
L’entraînement d’une machine de production est équipé d’un servomoteur DC à aimants permanents, de type
MT52V8-87 (fabrication SEM), et effectue des déplacements d’allure trapézoïdale.
Le moteur est caractérisé comme suit :
Tnom = 15 Nm
kT = 9,82 Nm/A
JM = 0,026 kgm2
Ra = 0,41 Ω
La = 2,0 mH
L’inertie de la charge vaut JL = 0,016 kgm2 ; les frottements nuls ; l’entraînement est direct (pas de réduc-
teur).
Les déplacements sont caractérisés comme suit :
ωmax = 42,7 rad/s
tdépl = 280 ms
tacc = tdéc = 90 ms
tcycle = 400 ms
a) Quelle est la valeur du couple pendant l’accélération ?
b) Le moteur proposé convient-il ? Justifiez la réponse.
Motorisation et Commande des Machines HEIG-VD
40 Copyright © Bernard Schneider, 2009-2011
Réponse – a
Le cycle de vitesse montre une rampe d’accélération constante (tacc), suivie d’une phase à vitesse constante
(tVmax), puis d’une rampe de décélération constante (tdéc), et finalement une période d’arrêt (tdarrêt). On
calcule :
ms 1009090280max décaccdéplV tttt
ms 120280400 déplcyclearrêt ttt
L’ : 2max rad/s 5,47409,0
7,42
acc
Mt
Comme il n’y a pas de réducteur ( 1i ), l’inertie totale rapportée au moteur, vaut :
2
2kgm 042,0 LM
LMtot JJ
i
JJJ
Ainsi, le couple d’accélération vaut :
Nm 93,195,474042,0 Mtotacc JT
Réponse – b
En supposant que la constante de temps thermique du moteur est beaucoup plus grande que le temps de cycle
de la machine, on peut calculer le couple r.m.s. pour ce moteur :
Nm 38,134,0
09,093,1909,093,1900 2222
max
22
cycle
arrêtdécaécVaccaccrms
t
ttTttTT
Cette valeur est de 11% inférieure au couple nominal du moteur, qui devrait donc convenir.
5.4 Calcul de productivité
Un moteur a un couple nominal de 0,6 Nm. Il est utilisé pour entraîner un dispositif de vissage, le cycle de
fonctionnement est le suivant:
Le démarrage dure 0,02 secondes et nécessite un couple de 1,2 Nm.
Le moteur fonctionne ensuite 0,5 secondes pour visser avec un couple de 0,5 Nm.
Puis il effectue le serrage pendant 0,2 secondes avec un couple de 1 Nm.
Il reste alors déclenché jusqu’au cycle suivant.
Combien de cycles peut-il effectuer en une heure sans surchauffer, en respectant une marge de sécurité de
10% ?

HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 41
Réponse
On utilise la relation permettant de calculer le couple efficace vue à l’exercice précédent :
2
1
1
n
i i
irms n
i
i
T t
T
t
, dans lequel Trms TN Nm.
Remarquons que le cycle comporte 4 phases. En plus des 3 fournies dans la donnée, il y a une 4ème
phase
pendant laquelle le moteur est déclenché et ne fournit aucun couple. Soit tc la durée du cycle, encore
inconnue, et qui nous permettra de calculer la cadence.
La durée de la 4ème
phase vaut :
On obtient successivement :
√
La cadence de production possible vaut alors :
5.5 Entraînement d’une tourelle
Une machine d’assemblage comporte 8 stations, disposées en cercle autour d’une tourelle verticale. Elles
sont réparties régulièrement, tous les 45 degrés. Les pièces traitées sont chargées sur la tourelle à la station
no 1, puis subissent diverses opérations aux stations 2 à 7, et sont finalement déchargées à la station no 8.
La tourelle qui tient ces pièces pivote autour de son axe, de station en station, en 68 ms. Elle reste alors à
l’arrêt pendant 132 ms pour permettre aux diverses opérations d’être effectuées. Le profil de déplacement est
du type « à accélération constante », ce qui signifie que la vitesse présente une allure triangulaire au cours du
temps, l’accélération et la décélération ayant même durée.
L’inertie de cette tourelle est de 0,45 kgm2. On suppose que tous les frottements sont négligeables. Par
contre, lorsque la tourelle est à l’arrêt, la tourelle subit un couple perturbateur provoqué par les divers usi-
nages, qui est estimé à 22 Nm.
La tourelle est entraînée par un moteur en prise directe (pas de réducteur), de fabrication ETEL, devant impé-
rativement être choisi parmi ceux qui figurent ci-dessous.
Motorisation et Commande des Machines HEIG-VD
42 Copyright © Bernard Schneider, 2009-2011
Type de moteur TMM… 0450-030 0450-050 0450-070 0450-100 0450-150
Couple nominal [Nm] 181 286 386 530 769
Inertie [kgm2] 0,16 0,26 0,37 0,53 0,80
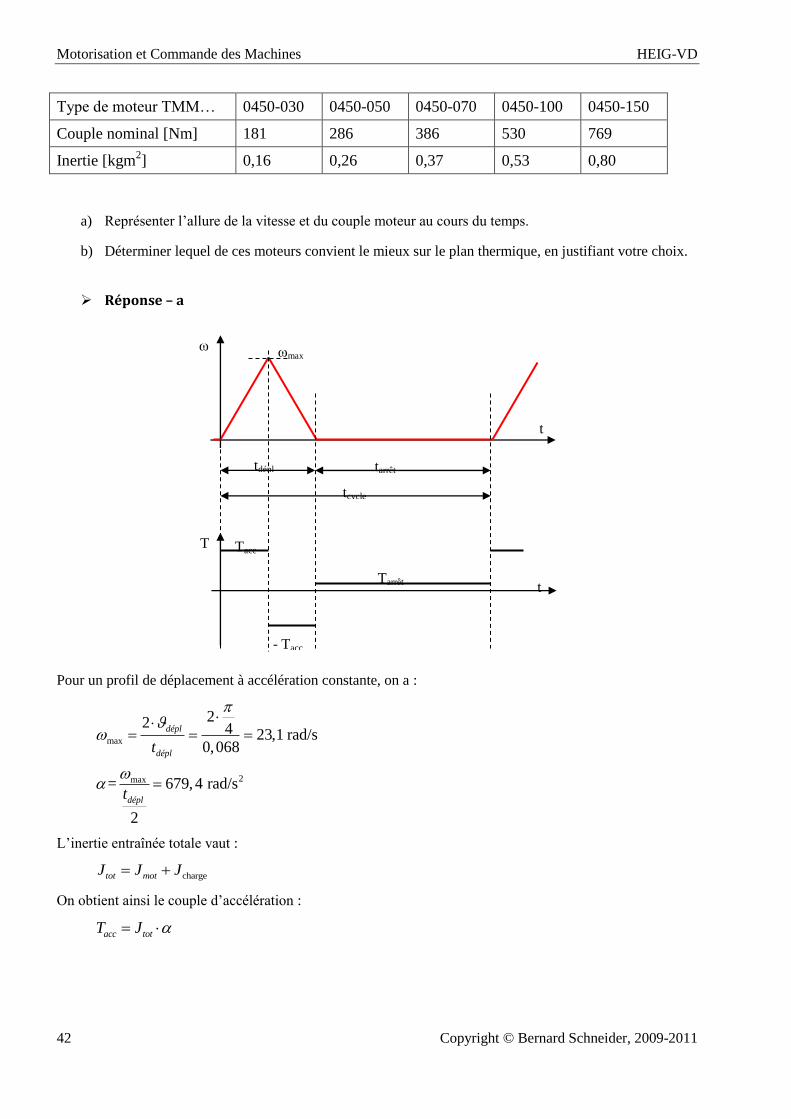
a) Représenter l’allure de la vitesse et du couple moteur au cours du temps.
b) Déterminer lequel de ces moteurs convient le mieux sur le plan thermique, en justifiant votre choix.
Réponse – a
Pour un profil de déplacement à accélération constante, on a :
max
2max
22 4 23,1 rad/s0,068
= 679,4 rad/s
2
dépl
dépl
dépl
t
t
L’inertie entraînée totale vaut :
chargetot motJ J J
On obtient ainsi le couple d’accélération :
acc totT J
ω
t
ωmax
tdépl tarrêt
tcycle
T
t
Tacc
- Tacc
Tarrêt

HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 43
Réponse – b
Tenant compte du couple perturbateur pendant la durée de l’arrêt, on peut calculer le couple r.m.s. pour
chacun des types de moteur :
2 2
acc dèpl arrêt arrêt
rms
cycle
T t T tT
t
On peut ainsi compléter le tableau pour chacun des moteurs disponibles :
Type de moteur TMM 0450-030 0450-050 0450-070 0450-100 0450-150
Couple nominal [Nm] 181 286 386 530 769
Inertie [kgm2] 0,16 0,26 0,37 0,53 0,80
Inertie totale [kgm2] 0,61 0,71 0,82 0,98 1,25
Couple d’acc. [Nm] 414,4 482,3 557,1 665,8 849,3
Couple r.m.s. [Nm] 242,3 281,8 325,3 388,6 495,5
Taux de charge 134% 99% 84% 73% 64%
Le moteur qui convient le mieux est le TMM 0450-070, qui sera chargé à 84%, laissant une marge de
sécurité de 16%.
Remarque : Au lieu de faire le calcul pour chaque moteur, on pourrait commencer par ne considérer que le
moteur dont l’inertie est proche de celle de la charge. L’absence de réducteur peut être en effet assimilé à un
réducteur de rapport 1, et on sait que la thermique du moteur est particulièrement favorable lorsque l’inertie
rapportée de la charge et celle du moteur sont égales.
5.6 Entraînement pour découpe de papier
On souhaite concevoir une machine pour couper en pages du papier pré imprimé livré en rouleau.
Le papier est déroulé et entraîné à vitesse constante. Il est amené entre 2 cylindres de coupe qui sont entraî-
nés à vitesse ajustable par un servomoteur (couplage direct, sans réducteur). L’allure de la vitesse de ces
cylindres comporte des corrections périodiques (1 par feuille découpée) comme le montre la figure ci-
dessous :
Motorisation et Commande des Machines HEIG-VD
44 Copyright © Bernard Schneider, 2009-2011
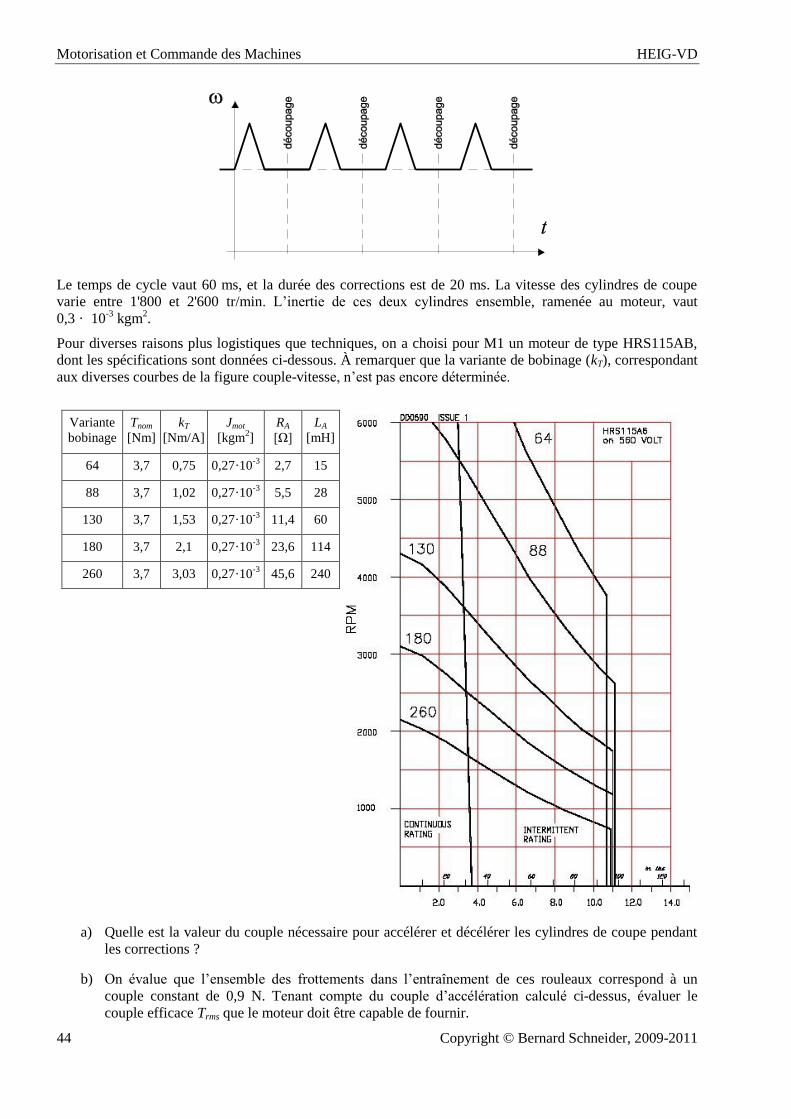
Le temps de cycle vaut 60 ms, et la durée des corrections est de 20 ms. La vitesse des cylindres de coupe
varie entre 1'800 et 2'600 tr/min. L’inertie de ces deux cylindres ensemble, ramenée au moteur, vaut
0,3 · 10-3
kgm2.
Pour diverses raisons plus logistiques que techniques, on a choisi pour M1 un moteur de type HRS115AB,
dont les spécifications sont données ci-dessous. À remarquer que la variante de bobinage (kT), correspondant
aux diverses courbes de la figure couple-vitesse, n’est pas encore déterminée.
Variante
bobinage
Tnom
[Nm]
kT
[Nm/A]
Jmot
[kgm2]
RA
[Ω]
LA
[mH]
64 3,7 0,75 0,27·10-3
2,7 15
88 3,7 1,02 0,27·10-3
5,5 28
130 3,7 1,53 0,27·10-3
11,4 60
180 3,7 2,1 0,27·10-3
23,6 114
260 3,7 3,03 0,27·10-3
45,6 240
a) Quelle est la valeur du couple nécessaire pour accélérer et décélérer les cylindres de coupe pendant
les corrections ?
b) On évalue que l’ensemble des frottements dans l’entraînement de ces rouleaux correspond à un
couple constant de 0,9 N. Tenant compte du couple d’accélération calculé ci-dessus, évaluer le
couple efficace Trms que le moteur doit être capable de fournir.

HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 45
c) Quelle est la marge de couple du moteur choisi, en [%] de son couple nominal ?
d) Reporter sur le diagramme couple-vitesse du moteur la zone de fonctionnement de ce moteur. (Il suf-
fit de reporter les points de fonctionnement pour lesquels le couple est positif.)
e) Choisir alors une variante de bobinage qui convienne, en supposant que l’alimentation dont on dis-
pose est exactement celle spécifiée par le fabricant du moteur (560 V – bus DC).
f) Pour le moteur choisi, que doit valoir le courant pour obtenir l’accélération nécessaire lors des cor-
rections ?
g) Pour des raisons de logistique et de stock, l’entreprise souhaiterait utiliser la variante « 64 » plutôt
que la variante choisie. Que deviendrait le courant d’accélération du moteur ?
Réponse – a
L’accélération se calcule comme suit :
Vitesse de départ :
1
1'800188,5 rad/s
30
Vitesse d’arrivée
2
2'600272,3 rad/s
30
Durée de l’accélération
110 ms
2acc déplt t
Accélération :
Le couple d’accélération se calcule comme suit :
4,77 Nmacc totT J
Réponse – b
En tenant compte du couple de traction sur le papier, le couple que doit fournir le moteur est le suivant :
Pendant l’accélération (10 ms) :
Pendant la décélération (10 ms) :
A vitesse constante (40 ms) :
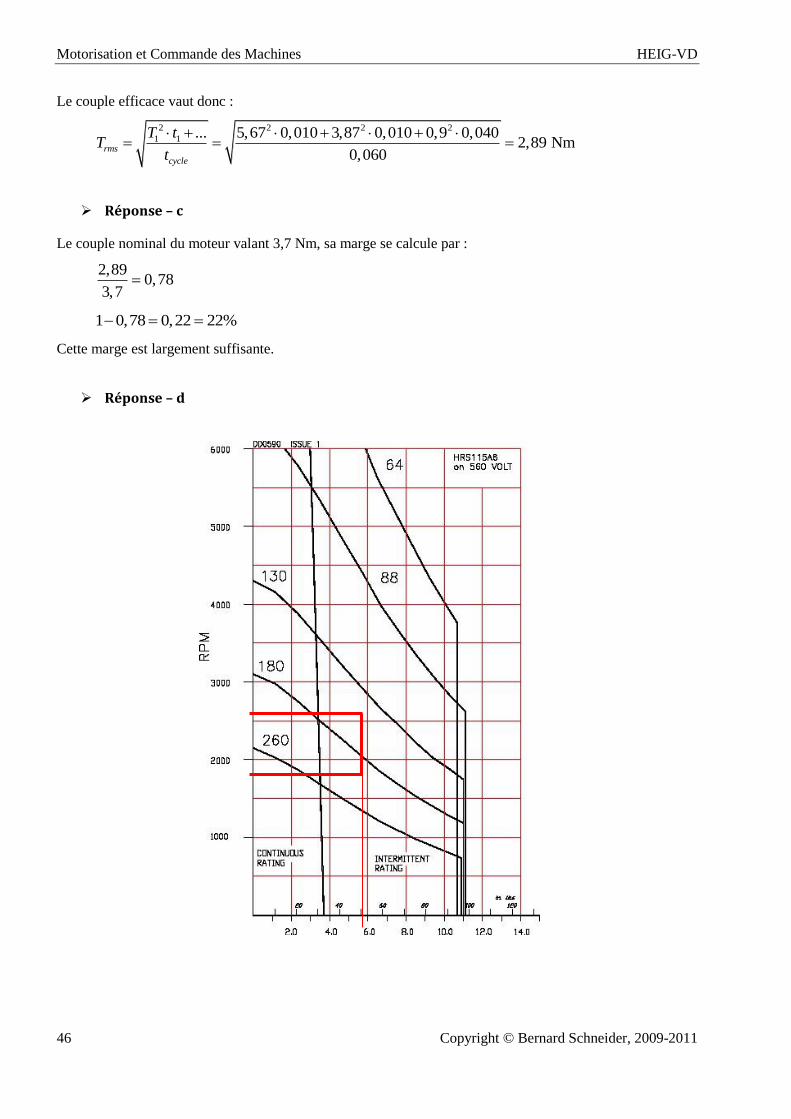
Motorisation et Commande des Machines HEIG-VD
46 Copyright © Bernard Schneider, 2009-2011
Le couple efficace vaut donc :
2 2 2 2
1 1 ... 5,67 0,010 3,87 0,010 0,9 0,0402,89 Nm
0,060rms
cycle
T tT
t
Réponse – c
Le couple nominal du moteur valant 3,7 Nm, sa marge se calcule par :
2,890,78
3,7
1 0,78 0,22 22%
Cette marge est largement suffisante.
Réponse – d
HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 47
Réponse – e
La variante de bobinage qui convient est donc HR115A6 – 130.
Réponse – f
Pour cette variante de bobinage, le courant moteur vaut :
1_ max 3,7 Amot
T
TI
k
Réponse – g
Avec la variante HR115A6 – 66, le courant d’accélération du moteur est plus que doublé :
1_ max 7,5 A
'mot
T
TI
k
5.7 Calcul d’une crémaillère pour moteur pas-à-pas
Un moteur pas à pas est équipé d’un pignon pour entrainer une crémaillère, dont les dents sont distantes de 5
mm les unes des autres. Le moteur compte 180 pas par tour.
On désire pouvoir positionner la charge mobile linéaire de millimètre en millimètre, aussi exactement que
possible.
Quel nombre de dents sur le pignon côté moteur proposez-vous, et pourquoi ?
Réponse
ZM est le nombre de dents du pignon moteur, la relation sur les vitesses donne :
MM
L
pZv
2
où M est exprimé en [rad/s]
On en tire XL , soit la distance de déplacement de la crémaillère :
2
ML M
Z pX
où M ’ du moteur en [rad].
Nous avons une contrainte provenant de la technologie de moteur utilisée : Le moteur ne peut s’arrêter que
sur un pas. Donc, pour passer d’un millimètre au millimètre suivant, il doit passer un nombre entier NP de
pas. Son déplacement angulaire vaut donc :
2 rad
180M PN

Motorisation et Commande des Machines HEIG-VD
48 Copyright © Bernard Schneider, 2009-2011
On obtient alors successivement :
2 180 0,001 180 36
2 180 180 0,005
M M P LL P M
L P P P
Z p Z p N XX N Z
N p N N
Comme NP ne peut être qu’un nombre entier, et qu’un pignon doit avoir au minimum une dizaine de dents,
nous pouvons retenir les solutions suivantes :
ZM = 12, 18 ou 36 dents.
Il s’agit alors de faire un compromis entre le diamètre du pignon (proportionnel au nombre de dents), et la
vitesse max. possible du mobile (inversement proportionnelle au nombre de dents).
S’il s’agit d’une application très dynamique, il serait judicieux de calculer le rapport de réduction optimal, et
de choisir le nombre de dents qui s’en rapproche le plus.
Par ailleurs, avec un nombre élevé de dents, la résolution des déplacements pourrait être plus fine que le
millimètre demandé.
HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 49
Chapitre 6 Considérations d’énergie et
de puissance
6.1 Puissance d’alimentation et résistance de freinage
Un servomoteur et sa charge sont caractérisés par :
Nmax = 3'000 tr/min
kT = 1 Nm/A
Jtot = 0,0032 kgm2
Le cycle de travail de ce moteur est le suivant :
Accélération de 0 à Nmax en 100 ms.
Vitesse constante pendant 300 ms, avec un couple de 4 Nm.
Freinage en 100 ms.
Arrêt pendant 500 ms, avec un couple de maintien de 2 Nm.
a) Calculer et représenter la vitesse, le couple et la puissance fournie par ce moteur pendant un cycle.
b) Représenter la puissance fournie par l’alimentation (réseau triphasé 400 V / 50 Hz).
c) Représenter la puissance de freinage que doit dissiper la résistance de freinage.
d) Quelle valeur ohmique doit avoir cette résistance, sachant que le seuil d’enclenchement
Useuil = 700 V ?
e) Dans quelles limites faut-il choisir la puissance nominale de cette résistance ?
Réponse – a
(Les représentations graphiques seront introduites dans une version ultérieure.)
( )
Réponse – b
(Les représentations graphiques seront introduites dans une version ultérieure.)
La puissance fournie par l’alimentation correspond, aux pertes près (que l’on peut négliger en première
approximation) à la partie de la courbe pour laquelle la puissance est positive.
Motorisation et Commande des Machines HEIG-VD
50 Copyright © Bernard Schneider, 2009-2011
Réponse – c
(Les représentations graphiques seront introduites dans une version ultérieure.)
La puissance que doit dissiper la résistance de freinage correspond, au signe près à la partie de la courbe pour
laquelle la puissance est négative.
Réponse – d
On choisira par exemple .
Réponse – e
A chaque freinage, la résistance de freinage doit dissiper l’énergie cinétique du système lancé à 3'000 tr/min :
Le système freine une fois à chaque cycle, soit une fois par seconde. La puissance moyenne que doit dissiper
la résistance de freinage est donc :
Il faudra choisir une résistance de freinage dont la puissance nominale soit supérieure à 158 W.
Par ailleurs, lorsqu’elle est activée, cette résistance dissipe une puissance de 3'158 W (voir réponse A).
Il conviendra de choisir une technologie de résistances présentant une constante de temps thermique très
élevée (beaucoup plus grande que le temps de cycle qui vaut 1 seconde), capable de supporter une puissance
de pointe env. 20 fois supérieure pendant quelques millisecondes. Dans ce cas, une puissance nominale de
200 W pourrait suffire. Le fournisseur de la résistance devrait pouvoir aider à déterminer si elle convient
pour ce type d’
6.2 Calcul de la résistance de freinage
Sur une machine de production, on doit réaliser des déplacements point-à-point linéaires d’une amplitude de
33 cm en 440 ms, une fois dans un sens, une fois dans l’autre sens. Le temps de cycle est de 1,6 s (pour un
aller-retour).
On utilise un réducteur de type pignon-crémaillère. La crémaillère a un pas de 2,5 mm. L’ensemble des
masses en mouvement linéaire présente une masse de 150 kg.
Le moteur est de type DC (courant continu). Sa vitesse max. est de 3'000 tr/min. Son inertie est de
0,72 ∙ 10-3
kgm2. Sa constante de couple est de 0,42 Nm/A.
Le convertisseur qui entraîne ce moteur est alimenté à partir d’un réseau triphasé 170 Vrms / 50 Hz par
l’intermédiaire d’un simple redresseur (donc incapable de restituer l’énergie de freinage au réseau triphasé).

HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 51
On admet que le profil de vitesse est du type à accélération constante (triangle isocèle). On néglige toutes
les pertes et frottements, ainsi que l’énergie absorbée par le condensateur du bus DC. Le bus DC du servo
amplificateur est équipé d’un condensateur de 470 μF. Sa résistance de freinage s’enclenche lorsque la ten-
sion du bus DC atteint 320 V.
a) Calculer la vitesse max. et l’accélération max. de la charge, pour un profil à accélération constante.
b) Quelle est la valeur optimum du nombre de dents du pignon ?
c) Quel doit être le nombre de dents du pignon pour que ce moteur puisse réaliser le déplacement sou-
haité sans dépasser sa vitesse max. ?
d) Quelle est alors la valeur du couple max. que le moteur doit pouvoir délivrer ?
e) Quelle est la valeur efficace (rms) de ce couple pendant la durée du déplacement ?
f) Tenant compte du fonctionnement cyclique et de la marge de sécurité de 10%, quelle est la valeur
minimum du couple nominal que doit offrir ce moteur ?
g) Quelle est la valeur ohmique de la résistance de freinage qui garantit que la tension du bus DC ne
dépasse pas sa valeur de seuil ?
h) Tenant compte que cette résistance a une tolérance de ±10%, et que l’on est limité aux valeurs nomi-
nales de la gamme E6 (10, 15, 22, 33, 47, 68) quelle valeur choisiriez-vous ?
i) Quelle doit être la puissance nominale de cette résistance, en admettant qu’un facteur de surcharge
impulsionnel de 20 est possible, garanti par le fabricant ?
Réponse – a
Pour un déplacement à accélération constante, on a :
Ces valeurs sont valables pour les deux sens de déplacement. Vu cette symétrie, il suffit de faire les calculs
pour un seul déplacement « aller ».
Réponse – b
Comme les frottements sont considérés comme négligeables, tout le couple que doit générer ce moteur est
utilisé pour accélérer et pour freiner. Il est donc justifié de déterminer le rapport de réduction optimum.
Pour un réducteur rotatif ↔ linéaire, nous avons :
Nous pouvons définir :
[ ]

Motorisation et Commande des Machines HEIG-VD
52 Copyright © Bernard Schneider, 2009-2011
Attention : Contrairement au rapport de réduction rotatif-rotatif qui est un nombre sans dimension physique
(rapport de 2 nombres de dents), le rapport de réduction rotatif-linéaire i a la dimension de l’inverse d’une
longueur, en [m-1
].
La valeur optimum du rapport de réduction se calcule pour un réducteur rotatif-linéaire de la même façon
que pour un réducteur rotatif-rotatif. En effet, nous avons successivement :
( | ) (
) (
)
(
)
La valeur optimum du rapport de réduction s’obtient lorsque cette dérivée est nulle, soit lorsque :
√
[ ]
Dans le cas de cet exercice, le rapport de réduction optimum vaut :
√
[ ]
Tenant compte du pas p, le nombre de dents optimum du pignon vaut :
[ ]
Réponse – c
La vitesse max. que le moteur peut fournir vaut :
Partant de la relation du réducteur rotatif – linéaire, on obtient :
On ne peut pas choisir le rapport de réduction optimum. Par contre, on peut choisir de manière à s’en
écarter le moins possible. Posons donc :
Réponse – d
L’accélération max. au niveau du moteur vaut :
En rapportant la masse de la charge au moteur, l’inertie totale vaut :
(
)
[ ]
Le couple d’accélération que doit fournir le moteur est donc :
HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 53
Réponse – e
Le couple r.m.s. vaut :
√
Réponse – f
Pour garantir une marge de sécurité de 10%, le couple nominal du moteur doit être :
Réponse – g
La puissance mécanique max. récupérée par le moteur et le servo-amplificateur vaut (en valeur absolue) :
La tension de seuil valant 320 V, on obtient la valeur ohmique de la résistance de freinage par :
Réponse – h
Tenant compte des valeurs disponibles et de la tolérance de ±10%, nous choisissons .
Réponse – i
L’énergie cinétique qu’il faut détruire à chaque freinage vaut :
La puissance nominale de la résistance doit être supérieure à la puissance moyenne qu’il faut ainsi dissiper :
La valeur de cette puissance moyenne étant supérieure à 1/20 de , nous pouvons choisir n’importe
quelle valeur qui lui est supérieure, dans le catalogue du fournisseur. Ce pourrait être, par exemple, 280 W.
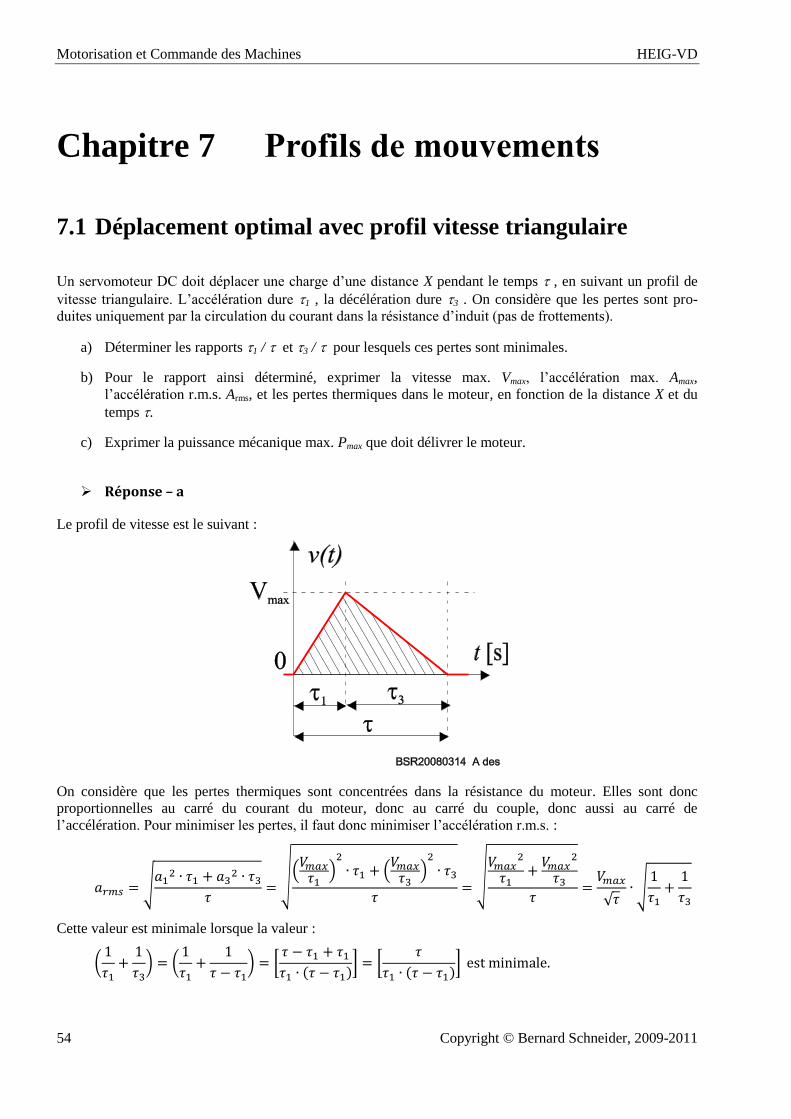
Motorisation et Commande des Machines HEIG-VD
54 Copyright © Bernard Schneider, 2009-2011
Chapitre 7 Profils de mouvements
7.1 Déplacement optimal avec profil vitesse triangulaire
Un servomoteur DC doit déplacer une charge d’une distance X pendant le temps , en suivant un profil de
vitesse triangulaire. L’accélération dure 1 , la décélération dure 3 . On considère que les pertes sont pro-
duites uniquement par la circulation du courant dans la résistance d’induit (pas de frottements).
a) Déterminer les rapports 1 / et 3 / pour lesquels ces pertes sont minimales.
b) Pour le rapport ainsi déterminé, exprimer la vitesse max. Vmax, l’accélération max. Amax,
l’accélération r.m.s. Arms, et les pertes thermiques dans le moteur, en fonction de la distance X et du
temps .
c) Exprimer la puissance mécanique max. Pmax que doit délivrer le moteur.
Réponse – a
Le profil de vitesse est le suivant :
On considère que les pertes thermiques sont concentrées dans la résistance du moteur. Elles sont donc
proportionnelles au carré du courant du moteur, donc au carré du couple, donc aussi au carré de
l’accélération. Pour minimiser les pertes, il faut donc minimiser l’accélération r.m.s. :
√
√(
)
(
)
√
√ √
Cette valeur est minimale lorsque la valeur :
(
) (
) [
( )
] [
( )]
HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 55
Comme τ est constant, il faut donc que la valeur de ( ) soit maximale. La valeur correspondante de
est celle pour laquelle la dérivée de cette valeur est nulle :
[ ( )]
( ) ( )
L’énergie dissipée est minimale lorsque le triangle de vitesse est isocèle (même durée pour l’accélération et
pour la décélération), donc :
Réponse – b
Pour ce profil de déplacement, la vitesse max. Vmax, l’accélération max. Amax, et l’accélération rms Arms
s’obtiennent facilement en considérant le diagramme de la vitesse au cours du temps :
L’énergie dissipée dans les bobinages du moteurs se calcule comme suit, successivement :
∫ ( )
∫ ( ( )
)
∫ ( )
[
( )
]
(
)
Réponse – c
La puissance mécanique que doit délivrer le moteur est donnée par :
( ) ( ) ( ) ( ) ( )
Sa valeur max. est atteinte lorsque la vitesse max. est atteinte. Nous avons donc :
7.2 Déplacement optimal avec profil vitesse trapézoïdal
Un servomoteur DC doit déplacer une charge d’une distance X pendant le temps , en suivant un profil de
vitesse trapézoïdal. L’accélération dure 1 , la phase à vitesse constante dure 2 , et la décélération dure 3. On
considère que les pertes sont produites uniquement par la circulation du courant dans la résistance d’induit
(pas de frottements).
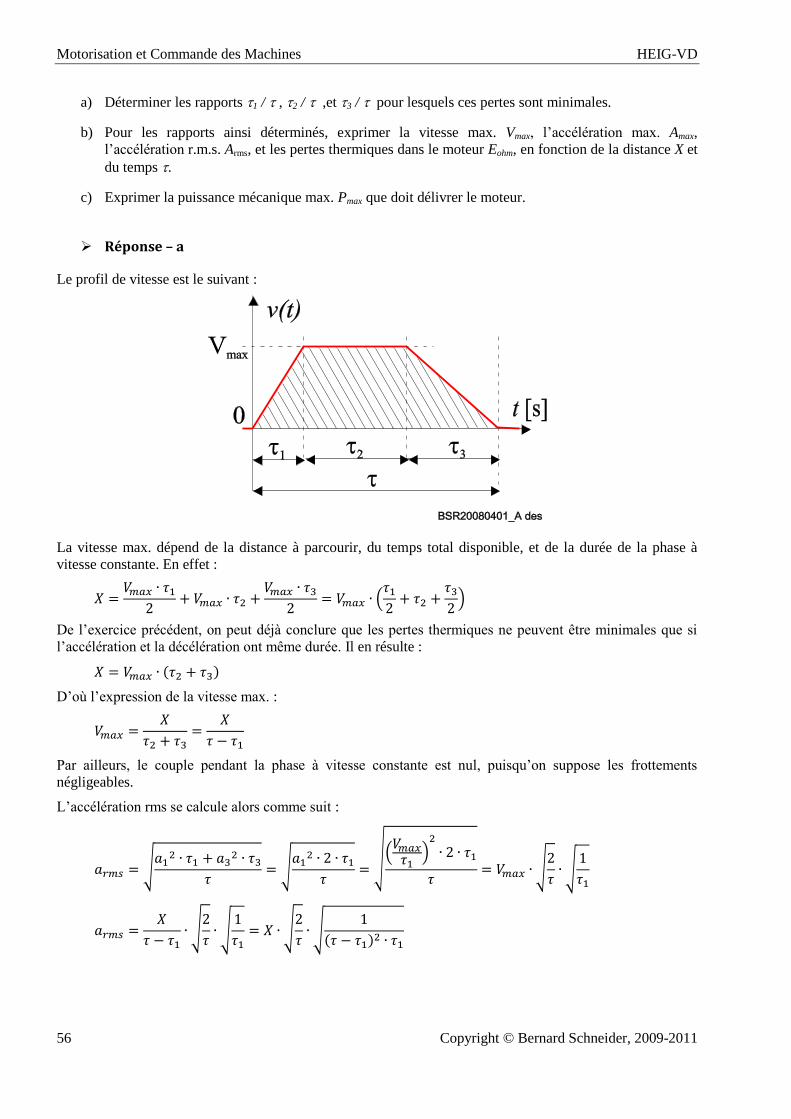
Motorisation et Commande des Machines HEIG-VD
56 Copyright © Bernard Schneider, 2009-2011
a) Déterminer les rapports 1 / , 2 / ,et 3 / pour lesquels ces pertes sont minimales.
b) Pour les rapports ainsi déterminés, exprimer la vitesse max. Vmax, l’accélération max. Amax,
l’accélération r.m.s. Arms, et les pertes thermiques dans le moteur Eohm, en fonction de la distance X et
du temps .
c) Exprimer la puissance mécanique max. Pmax que doit délivrer le moteur.
Réponse – a
Le profil de vitesse est le suivant :
La vitesse max. dépend de la distance à parcourir, du temps total disponible, et de la durée de la phase à
vitesse constante. En effet :
(
)
De l’exercice précédent, on peut déjà conclure que les pertes thermiques ne peuvent être minimales que si
l’accélération et la décélération ont même durée. Il en résulte :
( )
D’où l’expression de la vitesse max. :
Par ailleurs, le couple pendant la phase à vitesse constante est nul, puisqu’on suppose les frottements
négligeables.
L’accélération rms se calcule alors comme suit :
√
√
√(
)
√
√
√
√
√
√
( )

HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 57
Cette énergie est minimale lorsque ( ) est maximum. On trouve la valeur correspondante de 1 en
dérivant cette expression, puis en l’annulant :
[( )
]
(
)
Les valeurs de 1 qui annule ce polynôme du 2ème
degré sont :
√
√
La 2ème
solution n’est pas acceptable, car il en résulterait que 1 3 0 , et donc que l’accélération et la
décélération seraient infinies, ce qui n’est physiquement pas possible. On en conclu que l’énergie dissipée est
minimale lorsque le trapèze de vitesse est caractérisé par des durées identiques pour l’accélération, la phase à
vitesse constante, et pour la décélération, donc :
Réponse – b
Pour ce profil de déplacement, la vitesse max. Vmax, l’accélération max. Amax, et l’accélération rms Arms
s’obtiennent facilement en considérant le diagramme de la vitesse au cours du temps :
√
√
√
L’énergie dissipée dans les bobinages du moteurs se calcule comme suit, successivement :
∫ ( )
∫ ( ( )
)
∫ ( )
[
( )
]
(
)
Réponse – c
La puissance mécanique que doit délivrer le moteur atteint sa valeur max. lorsque la vitesse max. est atteinte,
juste à la fin de l’accélération. Nous avons donc :

Motorisation et Commande des Machines HEIG-VD
58 Copyright © Bernard Schneider, 2009-2011
7.3 Calcul du polynôme 3-4-5 – transition arrêt arrêt
On considère le polynôme du 5ème
degré suivant :
( )
a) Calculer les 6 coefficients pour que le déplacement correspondant ait une amplitude de 1 [m], que la
durée soit de 1 [s], et pour que la vitesse comme l’accélération soient nulles au démarrage comme à
l’arrivée.
b) Exprimer le polynôme qui correspondrait à un déplacement d’allure identique de X [m] en [s].
c) Pour le polynôme ainsi déterminé, exprimer la vitesse max. Vmax, l’accélération max. Amax, en fonc-
tion de la distance X et du temps .
d) Exprimer également l’accélération r.m.s. Arms, et les pertes thermiques dans le moteur, en fonction de
la distance X et du temps .
e) Exprimer la puissance mécanique max. Pmax que doit délivrer le moteur.
f) Comparer ces résultats avec ceux des lois de mouvement à accélération constante (exercice 7.1) et
bang-bang (exercice 7.2).
Réponse – a
Il convient, tout d’abord, de dériver par deux fois ce polynôme, pour obtenir la vitesse et l’accélération :
( )
( )
En exprimant les conditions limites au démarrage, soit pour , on obtient la valeur des 3 premiers
coefficients :
{
( )
( )
( )
{
En exprimant les conditions limites à l’arrivée, soit pour , on obtient 3 équations, qui permettent de
calculer les 3 derniers coefficients :
{
( )
( )
( )
On peut calculer en éliminant du système d’équations :
{ ( ) ( )
( ) ( ) {
Nous en tirons successivement :

HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 59
Les 6 coefficients sont ainsi déterminés. Pour ce déplacement, le polynôme est :
( )
Réponse – b
Pour un déplacement quelconque, on peut toujours choisir l’origine des positions et celle des temps de
manière à ce que les conditions limites au démarrage, soit pour 0t , soient les suivantes :
{
( )
( ) ( )
Il en résulte, comme pour la réponse A :
{
Pour les conditions limites deviennent :
{
( )
( )
( )
En procédant comme précédemment, on obtient en éliminant de ce système d’équations :
{ ( ) ( )
( ) ( )
Nous en tirons successivement :
{
Les 6 coefficients sont ainsi déterminés. Pour ce déplacement, le polynôme est :
( ) (
)
Remarquons qu’il aurait aussi été possible de partir directement des coefficients calculés pour la première
partie. En effet, dans le développement mathématique, rien n’imposait que l’unité de distance soit le mètre et
que l’unité de temps soit la seconde. Avec, par exemple, un déplacement de 1 km en 1 h, on aurait obtenu
exactement les mêmes coefficients pour )(tp , simplement en prenant le kilomètre et l’heure comme unités.
Il suffit donc de remplacer la distance de X [m] et le temps de [s] par un distance de 1 « toto » à réaliser en
un temps de 1 « titi » pour résoudre le problème. Nous avons ainsi :
[ ] [ ]
[ ] [ ]

Motorisation et Commande des Machines HEIG-VD
60 Copyright © Bernard Schneider, 2009-2011
En partant du polynôme obtenu pour le déplacement de 1 [m] en 1 [s], on peut, par analogie, poser :
[ ]( [ ]) [ ] [ ]
[ ]
On en déduit, successivement :
[ ]( [ ]) ( [ ]
)
( [ ]
)
( [ ]
)
[ ]( [ ]) [ ]( [ ]) [ ]( [ ]) [ ( [ ]
)
( [ ]
)
( [ ]
)
]
[ ]( [ ]) (
[ ]
[ ]
[ ]
)
Ce qui est bien le même résultat, obtenu de manière beaucoup plus simple.
Réponse – c
Pour calculer la vitesse max. Vmax, il faut commencer par dériver l’équation du profil ( ) pour obtenir ( ). Pour en trouver la valeur max., il faut dériver à nouveau ce résultat et chercher la ou les valeurs de t qui
annulent cette 2ème
dérivée.
( ) (
)
( ) ( )
(
)
( ) ( )
(
)
(
)
Cette accélération s’annule pour 3 valeurs de t, à savoir lorsque , ainsi que lorsque la parenthèse est
nulle. En résolvant cette équation du 2ème
degré, nous obtenons les 2 solutions manquantes :
√(
)
√
{
La 1ère
et la 3ème
solutions ne sont pas intéressantes, car elles correspondent au début, respectivement à la fin
du déplacement, lorsque la vitesse et l’accélération sont nulles. Par conséquent, la vitesse ne peut pas être
maximale à ces instants.
Avec la 2ème
solution, soit pour , nous pouvons calculer la valeur de la vitesse max. :
( )| ( ( )
( )
( )
)
( )

HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 61
De même, pour calculer l’accélération max. Amax, il faut commencer par en dériver l’expression analytique,
puis déterminer pour quelles valeurs de t cette dérivée s’annule. Nous obtenons successivement :
( )
(
)
(
)
√(
)
√
√
(
√
) {
Pour la 1ère
solution, nous avons :
( )|
[
( ) ]
Pour la 2ème
solution, nous avons :
( )|
[
( ) ]
Réponse – d
Le calcul de l’accélération r.m.s. ne peut se faire que par le calcul d’une intégrale :
√∫ ( )
Pour y parvenir, nous partons de l’expression calculée précédemment :
( ) (
)
(
)
Nous obtenons ensuite, successivement :
( )
(
) (
)
( )
(
)
∫ ( )
(
)
∫ ( )
(
)
∫ ( )
(
)
√
√
√

Motorisation et Commande des Machines HEIG-VD
62 Copyright © Bernard Schneider, 2009-2011
L’énergie dissipée dans les bobinages du moteurs se calcule comme suit, successivement :
( ) (
( )
)
Réponse – e
La puissance mécanique que doit délivrer le moteur est donnée par :
( ) ( ) ( ) ( ) ( )
Pour en calculer sa valeur max., il faut exprimer cette puissance en fonction des équations polynômiales, puis
la dériver, et enfin déterminer pour quelles valeurs de t cette dérivée s’annule. Nous pourrons alors calculer
la valeur Pmax. Pour y parvenir, nous partons des expressions calculées précédemment :
( ) (
)
(
)
( ) (
)
(
)
Nous obtenons successivement :
( ) ( ) ( ) [
(
)] [
(
)]
( )
(
)
( )
(
)
( )
(
)
Cette dérivée s’annule lorsque (solution double), ce qui correspond au début du déplacement. La loi de
déplacement polynômiale étant symétrique relativement à l’instant , nous pouvons nous attendre à
ce que cette dérivée s’annule également à la fin du déplacement, soit lorsque (solution double). Cette
hypothèse se vérifie en constant que :
(
) (
)
(
)
Au début comme à la fin du mouvement, la puissance est nulle. Pendant le déplacement, les instants
auxquels la puissance est maximale ou minimale correspondent aux valeurs qui annulent la dernière
parenthèse du 2ème
degré. Ces valeurs sont :
√( )
√
√
{
Pour la 1ère
solution, nous avons :
( )|

HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 63
Pour la 2ème
solution, nous avons :
( )|
Réponse – f
Le tableau ci-dessous résume tous ces résultats :
Vmax Amax Arms Eohm Pmax
Accélération
constante (triangle)
Bang-bang (trapèze)
Polynôme 3-4-5
7.4 Calcul du polynôme 3-4-5 – transition arrêt vitesse fixe
Un servomoteur DC doit effectuer plusieurs déplacements d’une charge, en suivant impérativement des pro-
fils en polynôme 3-4-5. On considère que les pertes sont produites uniquement par la circulation du courant
dans la résistance d’induit (pas de frottements).
L’un de ces déplacements consiste à partir d’une position arrêtée, pour parvenir à la vitesse 0V , après
avoir parcouru la distance X , en un temps t .
Déterminer les coefficients de ce polynôme.
Réponse
Si l’on considère que le déplacement commence à l’instant 0t , et que la position initiale est nulle, le
polynôme est de la forme :
2 3 4 5
0 1 2 3 4 5( )p t a a t a t a t a t a t .
On en tire la vitesse et l’accélération :
2 3 4
1 2 3 4 5
( )( ) 2 3 4 5
dp tv t a a t a t a t a t
dt
3
5
2
432 201262)(
)( tatataadt
tdvta

Motorisation et Commande des Machines HEIG-VD
64 Copyright © Bernard Schneider, 2009-2011
Conditions particulières au démarrage ( 0t ) :
(0) 0
(0) 0
(0) 0
p
v
a
Il en résulte, comme pour l’exercice précédent :
0
1
2
0
0
0
a
a
a
Pour tt , les conditions limites deviennent :
3 4 5
3 4 5
2 3 4
3 4 5
2 3
3 4 5
( )
( ) 3 4 5
( ) 6 12 20 0
p t a t a t a t X
v t a t a t a t V
a t a t a t a t
La 3ème
de ces équations donne :
2
3 45 3 43 2
6 12 3 3
20 10 5
a t a ta a a
t t t
En remplaçant dans les 2 premières équations, on obtient successivement :
3 4 5
3 4 3 42
2 3 4
3 4 3 42
3 3
10 5
3 33 4 5
10 5
a t a t a a t Xt t
a t a t a a t Vt t
3 4
3 4
2 3
3 4
3 31 1
10 5
33 4 3
2
t a t a X
a t a t V
3 4
3 4
2 3
3 4
0,7 0,4
1,5
t a t a X
a t a t V
De cette 2ème
équation, on tire :
2
34 33 3
1,5 1,5V a t Va a
t t t

HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 65
En remplaçant dans la 1ère
équation, on obtient successivement :
3 4 33 3
1,50,7 0,4
aVt a t X
t t
3 3
3 30,7 0,4 0,6t a t V t a X
3 3 3 3 3
0,4 0,4 10 4
0,7 0,6 0,1
X t V X t V X t Va
t t t t
On peut déterminer maintenant les 2 autres coefficients :
4 3 3 4 3 4
1,5 10 4 15 15 77
V X t V X V X t Va
t t t t t t
2
3 45 3 2 3 4
5 5 4 5 4 5 4 5
6 12 3 10 4 6 15 7
20 10 10
30 12 90 42 6 36 3
10 10 10 10
a t a t X t V X t Va
t t t t t
X V X V X V X t Va
t t t t t t t
La loi de ce mouvement est donc :
3 4 5
3 4 5
3 4 5
10 4 15 7 6 3( )
a a a
X t V X t V X t Vx t t t t
t t t
7.5 Déplacement avec profil en polynôme 3-4-5
Un servomoteur DC doit déplacer une charge de 60° en 120 ms, en suivant un profil en polynôme 3-4-5. On
considère que les pertes sont produites uniquement par la circulation du courant dans la résistance d’induit
(pas de frottements).
a) Exprimer la vitesse max. ωmax, l’accélération max. αmax, et l’accélération r.m.s. αrms.
b) De combien de temps pourrait-on raccourcir la durée du déplacement en optant pour un profil à ac-
célération constant, tout en maintenant identique les pertes ohmiques dissipées dans le moteur ?
c) Pour quelle raison ne peut-on pas vraiment profiter de ce gain de temps ?
Réponse – a
Si le profil de déplacement était à accélération constante, nous aurions :
[ ]
[ ]

Motorisation et Commande des Machines HEIG-VD
66 Copyright © Bernard Schneider, 2009-2011
Pour déterminer ces valeurs avec un profil polynômial, il suffit d’utiliser les facteurs de proportionnalité vu
au cours et dans l’exercice 7.3 :
[ ]
[ ]
[ ]
Réponse – b
Si l’on remplace un déplacement à profil de vitesse en polynôme 3-4-5 trapézoïdal par un déplacement à
accélération constante, nous pouvons diminuer la durée du déplacement de manière à ce l’échauffement du
moteur reste inchangée. Il suffit de maintenir inchangée l’accélération r.m.s., en procédant comme suit :
[ ]
Or, pour un profil à accélération constante, nous avons :
(
)
Donc :
√
√
[ ]
Il est intéressant de relever que le rapport des durées de déplacement est exactement la racine carrée du
rapport des accélérations max. :
√
√
Réponse – c
Il est fort probable que le jerk illimité (saut infini de l’accélération) à l’arrivée en position provoquera des
oscillations dont la durée sera plus grande que les 2 ms économisée en changeant de profil.
7.6 Déchargeur de cartons
A la sortie d'une machine d'impression de carton ondulé, un manipulateur saisit les flancs coupés (les pages
de carton) pour les empiler. Équipé de ventouses, il aspire les flancs un à un lorsqu'ils sortent de la machine,
les déplace de côté sur une distance D, puis les relâche pour former une pile. Le manipulateur revient alors à
sa position initiale, dans le même laps de temps, pour aspirer le flanc suivant, et ainsi de suite.
L'entraînement est constitué d'un servomoteur, qui entraîne le manipulateur par un pignon et une crémaillère.
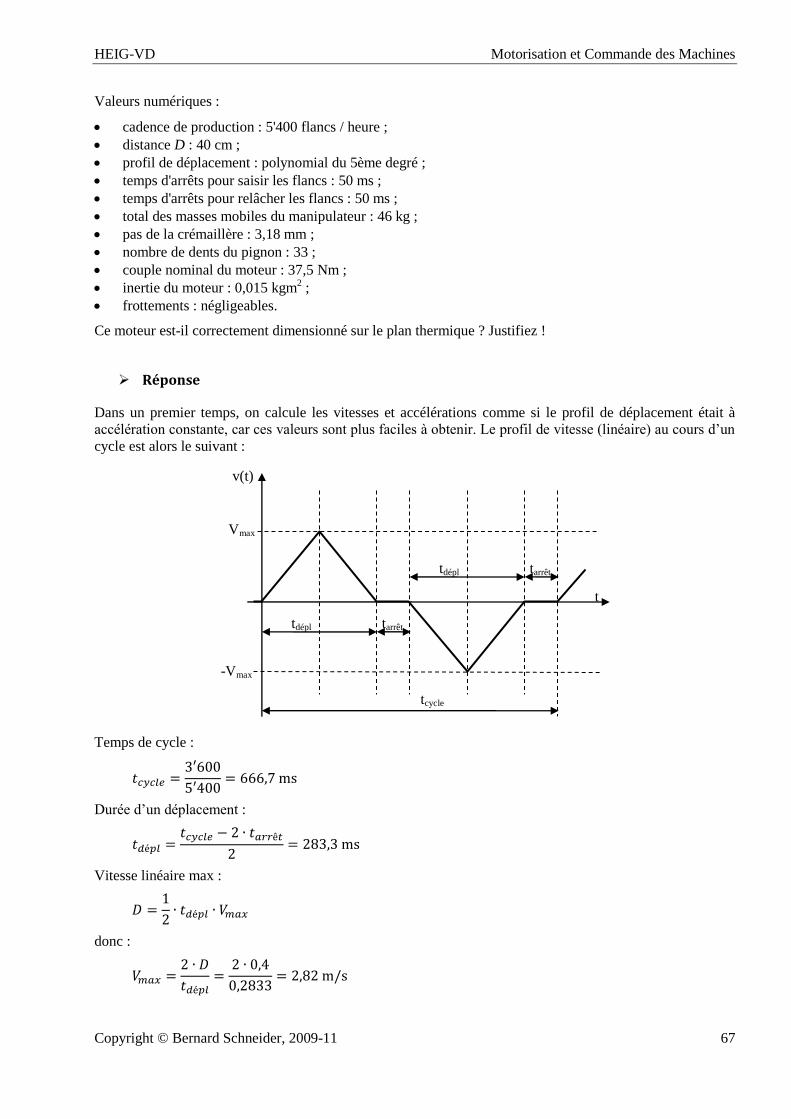
HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 67
Valeurs numériques :
cadence de production : 5'400 flancs / heure ;
distance D : 40 cm ;
profil de déplacement : polynomial du 5ème degré ;
temps d'arrêts pour saisir les flancs : 50 ms ;
temps d'arrêts pour relâcher les flancs : 50 ms ;
total des masses mobiles du manipulateur : 46 kg ;
pas de la crémaillère : 3,18 mm ;
nombre de dents du pignon : 33 ;
couple nominal du moteur : 37,5 Nm ;
inertie du moteur : 0,015 kgm2 ;
frottements : négligeables.
Ce moteur est-il correctement dimensionné sur le plan thermique ? Justifiez !
Réponse
Dans un premier temps, on calcule les vitesses et accélérations comme si le profil de déplacement était à
accélération constante, car ces valeurs sont plus faciles à obtenir. Le profil de vitesse (linéaire) au cours d’un
cycle est alors le suivant :
Temps de cycle :
Durée d’un déplacement :
Vitesse linéaire max :
donc :
v(t)
t
Vmax
-Vmax
tdépl
tdépl
tarrêt
tarrêt
tcycle

Motorisation et Commande des Machines HEIG-VD
68 Copyright © Bernard Schneider, 2009-2011
Accélération linéaire :
Comme le profil est à accélération constante, nous avons :
Connaissant le rapport de réduction, nous pouvons déterminer les valeurs angulaires.
Vitesse angulaire max :
Accélération angulaire :
Inertie totale rapportée au moteur :
(
)
(
)
Couple d’accélération :
Nous en tirons le couple rms sur l’entier du cycle :
√
Connaissant ces valeurs, nous pouvons en déduire celles qui correspondent au profil polynomial demandé, en
appliquant de simples règles de 3, à partir de la comparaison entre profils pour un déplacement « normalisé »
de 1 mètre en 1 seconde. Nous obtenons ainsi, successivement :
Ce couple rms. correspond à 84,5% du couple nominal. La marge, égale à 15,5%, peut être considérée
comme suffisante.
Pour être complet, il faudrait encore comparer encore la vitesse angulaire max. et le couple max. avec le
diagramme couple-vitesse définissant les limites de fonctionnement du moteur. Pour ce faire, nous obtenons
ces valeurs max. pour un profil polynomial comme suit :

HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 69
7.7 Influence du profil de mouvement sur le choix d’un mo-
teur
On considère l’entraînement de l’exercice 5.6. Toutefois, au lieu d’effectuer les corrections d’avance du pa-
pier avec un profil de vitesse « à accélération constante », on aimerait utiliser un profil en « polynôme 3-4-
5 ».
a) Quelle est alors l’accélération max. nécessaire ?
b) Montrer sur le diagramme couple-vitesse que le moteur que vous avez choisi à la question 2-B de de
l’exercice 5.6 convient malgré tout, ou au contraire qu’il est judicieux de choisir une autre variante
de bobinage.
Réponse – a
Sur la base des courbes correspondant au déplacement normalisé (1 mètre en 1 seconde), on obtient :
2
max
5,7812'105 rad/s
4
Réponse – b
Le couple max. fourni par le moteur pendant l’accélération vaut donc :
Pour le profil à accélération constante, on avait une différence de vitesse :
Avec le profil en polynôme 3-4-5, cette différence de vitesse devient :
La vitesse max. que doit atteindre le moteur est donc légèrement plus faible :
La différence entre les 2 profils est cependant négligeable pour le choix du bobinage du moteur.
La figure ci-dessous (courbe « arrondie », bleue) montre que, malgré l’augmentation importante du couple
max., le moteur choisi précédemment convient.
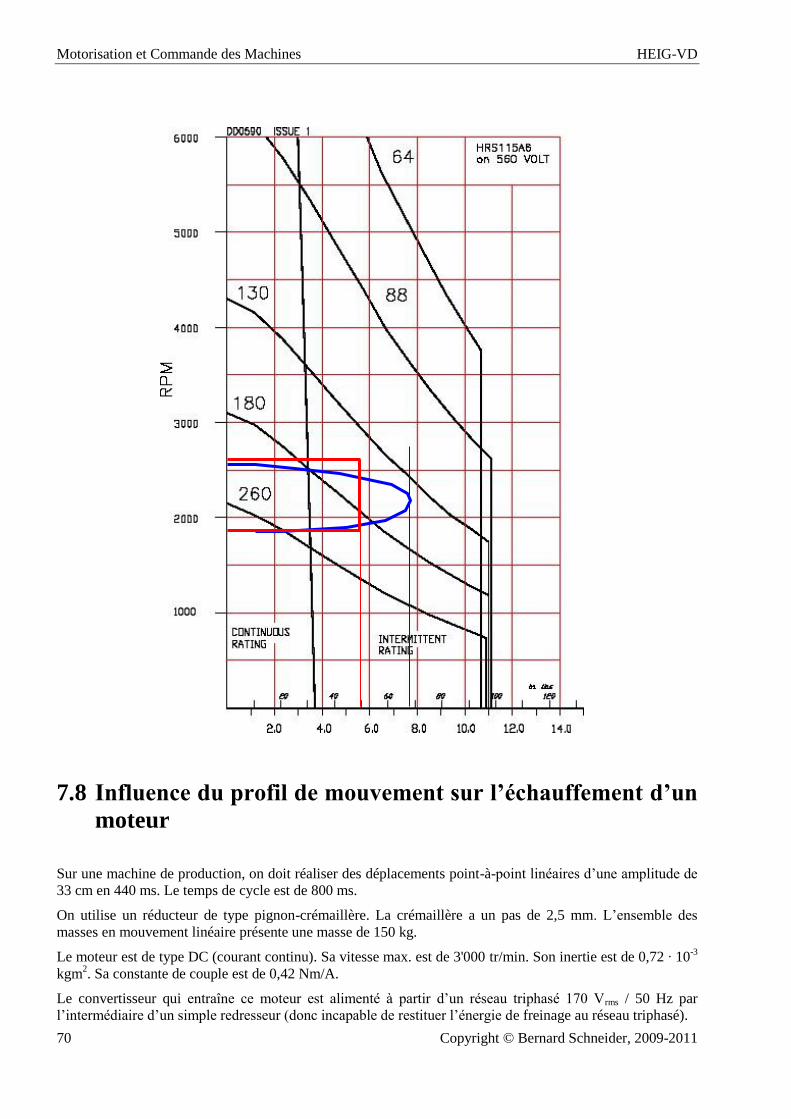
Motorisation et Commande des Machines HEIG-VD
70 Copyright © Bernard Schneider, 2009-2011
7.8 Influence du profil de mouvement sur l’échauffement d’un
moteur
Sur une machine de production, on doit réaliser des déplacements point-à-point linéaires d’une amplitude de
33 cm en 440 ms. Le temps de cycle est de 800 ms.
On utilise un réducteur de type pignon-crémaillère. La crémaillère a un pas de 2,5 mm. L’ensemble des
masses en mouvement linéaire présente une masse de 150 kg.
Le moteur est de type DC (courant continu). Sa vitesse max. est de 3'000 tr/min. Son inertie est de 0,72 ∙ 10-3
kgm2. Sa constante de couple est de 0,42 Nm/A.
Le convertisseur qui entraîne ce moteur est alimenté à partir d’un réseau triphasé 170 Vrms / 50 Hz par
l’intermédiaire d’un simple redresseur (donc incapable de restituer l’énergie de freinage au réseau triphasé).

HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 71
a) Calculer la vitesse max. et l’accélération max. pour un profil à accélération constante.
b) Calculer la vitesse max. et l’accélération max. pour un profil en polynôme 3-4-5.
Conseil : Pour ce 2ème
profil, il est plus facile de partir des valeurs obtenues avec le 1er profil, et
d’utiliser les valeurs max. indiqués dans les diapositives du cours pour un déplacement
normalisé, comme facteurs de proportionnalité.
c) Supposant que l’on utilise ce profil en polynôme 3-4-5, quel doit être le nombre de dents du pignon
pour que ce moteur puisse réaliser le déplacement souhaité sans dépasser sa vitesse max. ?
d) Quelle est alors la valeur du couple max. que le moteur doit pouvoir délivrer ?
e) Quelle est la valeur efficace (rms) de ce couple pendant la durée du déplacement ?
f) Tenant compte du fonctionnement cyclique et de la marge de sécurité de 10%, quelle est la valeur
minimum du couple nominal que doit offrir ce moteur ?
Réponse – a
Pour un déplacement à accélération constante, on a :
max
2 2 0,331,5 m/s
0,44dépl
XV
t
2
max 2 2
4 4 0,336,82 m/s
0,44dépl
XA
t
Réponse – b
Pour un déplacement à profil polynomial, on a :
max
1,881,5 1,41 m/s
2V
2
max
5,786,82 9,85 m/s
4A
Réponse – c
On part de la relation du réducteur 2
ML M
Z pv
, pour trouver :
maxmax
2 1,41 2 11,3
3'00020,0025
30
Mnom M
nom
VZ pV Z
p
On choisit :
12MZ
Réponse – d
L’accélération max. au niveau du moteur vaut :
22 29,85 2'063 rad/s
12 0,0025M L
M
aZ p

Motorisation et Commande des Machines HEIG-VD
72 Copyright © Bernard Schneider, 2009-2011
L’inertie de la charge, rapportée au moteur, vaut :
2 2
3 212 0,0025150 3,42 10 kgm
2 2
ML équiv L
Z pJ m
Le couple max. que doit fournir le moteur est donc :
3 30,72 10 3,42 10 2'063 8,54 NmM M L équiv MT J J
Réponse – e
Pour un profil polynomial, la relation entre valeur max. et valeur rms de l’accélération est connue. On en
déduit ainsi le couple efficace pendant la durée du déplacement :
max
4,14 4,148,54 6,12 Nm
5,78 5,78rmsT T
Réponse – f
Sur le cycle complet, le couple efficace doit être recalculé en tenant compte du temps d’arrêt à couple nul :
√
Ce moteur doit donc avoir un couple nominal supérieur à :
HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 73
Chapitre 8 Mouvements multiaxes
8.1 Presse à découper une bande
Une presse est utilisée pour découper des pièces dans une bande métallique fournie en rouleau. Elle doit
travailler à la cadence de 300 pièces par minute.
L’ouverture de la presse vaut 180°, ce qui signifie que la durée du déplacement de la bande métallique ne
doit pas dépasser la moitié du cycle.
La course de la presse est de 12 mm.
La bande est entraînée par un moteur de 6,7 Nm nominal, dont l’inertie vaut 0,73·10-3
kgm2, et la vitesse
max. vaut 3'000 tr/min.
Ce moteur entraîne la bande par l’intermédiaire d’un cylindre de diamètre 22 mm. Les inerties de ce cylindre
et de la bande, rapportées au moteur, sont estimées à 2,3·10-3
kgm2. L’accélération max. de la bande est de
24 m/s2, limite au-delà de laquelle l’adhérence du cylindre sur la bande ne serait plus suffisante.
a) Calculer la durée max. du déplacement de la bande.
b) Calculer la vitesse max. atteinte pendant le déplacement, en tenant compte de l’accélération max.
donnée plus haut.
c) Calculer la distance parcourue par la bande pendant ce déplacement.
d) Calculer le couple fourni par le moteur pendant l’accélération, en supposant les frottements négli-
geables.
e) Calculer le couple r.m.s. et la marge pour ce moteur.
f) Quelle est l’épaisseur max. du ruban.
Réponse – a
Temps de cycle :
Durée du déplacement :
Réponse – b
On suppose que le profil de déplacement est à accélération constante. Dans ce cas :

Motorisation et Commande des Machines HEIG-VD
74 Copyright © Bernard Schneider, 2009-2011
Cette vitesse ne peut être atteinte que si la vitesse limite du moteur (3'000 tr/min) n’est pas dépassée. Tenant
compte du diamètre du cylindre d’entraînement, cette vitesse du moteur correspond à la vitesse linéaire
suivante :
Comme on a , le profil est bien à accélération constante (triangle), et non en trapèze.
Réponse – c
Connaissant la vitesse peak et la durée du déplacement, on a, pour un déplacement à accélération constante :
Réponse – d
Connaissant l’accélération linéaire, on obtient l’accélération angulaire du moteur :
L’inertie totale vaut :
|
On en déduit le couple d’accélération :
Réponse – e
Le couple r.m.s. vaut :
√
Ce couple représente 70% du couple nominal. La marge de couple est donc de 30%.
Réponse – f
Lorsque l’excentrique est à la limite (gauche ou droite) de l’angle d’ouverture, la distance restante entre la
position de l’outil et sa position inférieure vaut :
[ (
)]
Il faut en déduire quelques dixièmes de milllimètre pour assurer que le poinçon dépasse bien de la tôle
lorsque l’outil est à sa position inférieur. Il faut aussi garder un jeu minimum entre l’outil et la surface
supérieure de la tôle, celle-ci pouvant être légèrement déformée, ou l’épaisseur de la tôle être un peu plus
élevée que sa valeur nominale.
On peut évaluer ces déductions à env. 20% de la hauteur libre. L’épaisseur nominale de la tôle doit donc être
inférieure à 4,8 mm.

HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 75
8.2 Presse à découper une bande – cadence plus lente
On considère la presse de l’exercice précédent. Reprendre les calculs de l’exercice précédent si la cadence
est diminuée à 60 pièces par minute.
Réponse – a
Temps de cycle :
Durée du déplacement :
Réponse – b
On suppose que le profil de déplacement est à accélération constante. Dans ce cas :
Cette fois, on constate que . Cette vitesse n’est pas réalisable. Cela signifie que le profil de
mouvement est d’allure trapézoïdale, la vitesse constante valant .
Réponse – c
La durée de l’accélération de 0 à vaut :
La durée de la décélération étant identique, et la durée totale du déplacement étant connue, la durée pendant
laquelle la vitesse est constante (plateau du trapèze) vaut :
La distance parcourue pendant ce déplacement vaut :
Réponse – d
Le couple d’accélération reste inchangé :

Motorisation et Commande des Machines HEIG-VD
76 Copyright © Bernard Schneider, 2009-2011
Réponse – e
Le couple r.m.s. vaut :
√
( )
Ce couple représente 53% du couple nominal. La marge de couple est donc de 47%.
Réponse – f
L’angle d’ouverture étant inchangé, l’épaisseur de la tôle est également limitée à 4,8 mm.
8.3 Presse à découper une bande – bande moins épaisse
On considère la presse des 2 exercices précédents. Elle est cependant utilisée pour découper de la bande de
2 mm d’épaisseur, et l’avance doit être impérativement de 10 mm. On suppose que les inerties restent iden-
tiques, et que les frottements sont toujours négligeables.
Déterminer quelle est la cadence max. possible.
Réponse
1ère étape : calcul de l’angle d’ouverture
En gardant la même marge que pour l’exercice 8.1 (20%), l’angle d’ouverture doit être tel que la hauteur
libre soit de 2,4 mm. On obtient donc :
(
)
( )
2ème étape : calcul de la durée du déplacement
Le déplacement max. qui pourrait être réalisé avec un déplacement à accélération constante (triangle), avant
de devoir passer par un profil trapézoïdal, est déterminé par :
Donc :
Comme on souhaite faire un déplacement plus petit (10 mm), le profil est certainement de type triangulaire,
et non trapézoïdal.
HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 77
On peut calculer la durée de ce déplacement comme suit :
(
)
√
3ème étape : Calcul de la cadence de production
Connaissant la durée du déplacement et l’angle d’ouverture, on obtient :
On en tire la cadence de production :
4ème étape : Vérification de la charge thermique du moteur
Le couple d’accélération est toujours le même que pour l’exercice 5.1, puisque l’accélération est toujours de
24 m/s2, et que l’inertie totale est inchangée. On calcule donc :
√
Ce couple représente 83% du couple nominal. La marge de couple est donc de 17%.
8.4 Découpe de carton
Dans une machine d’emballage, le carton est alimenté en rouleau. Il est déroulé, et passe sous une presse qui
le découpe en morceaux préformés en vue de réaliser des boîtes. La cadence de production est de 130 embal-
lages par minute. L’angle d’ouverture de la presse est de 240°.
L’amenée du carton est réalisée comme suit : Il passe entre 2 cylindres qui l’entraînent par adhérence. L’un
de ces cylindres est entraîné par un servomoteur, par l’intermédiaire d’un réducteur à courroie crantée. Le
moteur est alimenté par un amplificateur à découpage, lui-même alimenté depuis le réseau triphasé par un
redresseur (non réversible).
Lors de la découpe, le carton est à l’arrêt. Il est déplacé entre chaque découpe, le profil de déplacement du
carton étant « à accélération constante ». L’accélération du carton est fixée à .
Le moteur (type HRS142G6-260S de SEM Ltd.) a un couple nominal de 21 Nm et un couple max. de
60 Nm. Sa vitesse max. est de 2'700 tr/min. Son inertie vaut 0,0022 kgm2. Il est équipé d’un pignon pour
courroie crantée, de 13 dents.
On considère que le cylindre et le carton en mouvement ont une inertie de 0190 kgm2. Dans le cadre de cet
exercice, que tous les frottements sont négligeables, et que le rendement du réducteur est idéal.
a) De quelle distance le carton avance-t-il entre 2 découpes ?
b) Sachant que le diamètre des cylindres est de 4,0 cm, quel rapport faut-il choisir pour le réducteur à
courroie crantée ?
c) Quelle est la marge de couple dont dispose le moteur ?

Motorisation et Commande des Machines HEIG-VD
78 Copyright © Bernard Schneider, 2009-2011
d) Sachant que la résistance de freinage est activée lorsque , quelle valeur ohmique pro-
posez-vous pour la résistance de freinage ?
e) Quel rapport de réduction conviendrait si l’on souhaitait utiliser un profil polynomial 3-4-5, carton
sans modifier la cadence de production ni l’amplitude des déplacements alors ?
f) Que deviendraient alors le couple max. nécessaires et la marge de couple ?
Réponse – a
Le temps de cycle vaut :
Le déplacement n’est possible que lorsque le poinçon n’est pas engagé dans la matière, donc lorsque la
presse est dans son angle d’ouverture. Donc :
L’accélération étant connue, nous avons successivement :
Réponse – b
Vitesse nécessaire du cylindre :
Vitesse max. que le moteur peut atteindre :
Le rapport de réduction est limité à :
Le rapport de réduction optimum vaut :
√
Le rapport de réduction optimum ne convient pas pour ce moteur, car il devrait tourner à une vitesse trop
élevée. De ce fait, nous choisissons un système de pignons dont le rapport est légèrement inférieur à ,
restant ainsi dans la limite :

HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 79
Réponse – c
√
La marge de couple vaut donc :
Réponse – d
Au freinage à partir de la vitesse max., la puissance cinétique récupérée vaut :
La valeur ohmique de la résistance de freinage doit valoir :
Nous choisissons la valeur normalisée .
Réponse – e
En utilisant les valeurs comparatives pour un déplacement normalisé de 1 mètre en 1 seconde, nous
obtenons :
Nous choisissons :
Réponse – f
Pour calculer les valeurs limites avec un profil polynomial 3-4-5, le plus simple consiste à recalculer les
valeurs limites pour un profil à accélération constante, mais en tenant compte du nouveau rapport de
réduction. Ensuite, il suffira d’utiliser les valeurs comparatives pour un déplacement normalisé de 1 mètre en
1 seconde.
Motorisation et Commande des Machines HEIG-VD
80 Copyright © Bernard Schneider, 2009-2011
Nous obtenons successivement :
( )
Il s’agit de la valeur r.m.s. de l’accélération calculée sur la durée du déplacement.
( ) ( )
La valeur r.m.s. du couple calculée sur le cycle s’obtient par :
( ) √ ( )
La marge de couple vaut donc :
( )
Il est intéressant de constater que le profil polynomial 3-4-5 permet de moins solliciter thermiquement le
moteur. C’est dû au fait que, la vitesse peak nécessaire au niveau du cylindre étant un peu plus faible, il a été
possible de choisir un rapport de réduction plus proche du rapport optimum, tout en restant dans la limite de
vitesse du moteur.
Le couple max. nécessaire reste dans les limites de fonctionnement du moteur (29,9 Nm nécessaire, 60 Nm
possible pour le moteur).
Il conviendra par contre de vérifier que le servo amplificateur est capable de fournir le courant de pointe
correspondant.
8.5 Poinçonneuse à 2 axes
Une poinçonneuse permet la découpe de motifs divers dans une tôle. La découpe est réalisée par une presse,
équipée de poinçons et de contre-outils spécifiques pour chaque motif possible (ronds, carrés, fentes, etc.).
La tôle est entraînée selon 2 axes orthogonaux X et Y dans un plan horizontal, de manière à ce qu’elle soit
positionnée à l’endroit correct pour chaque découpe.
La poinçonneuse est caractérisée comme suit :
cadence en grignotage : 420 coups/minute
course de la presse : 12 mm
épaisseur max de la tôle : 5 mm (+ 1mm de marge)
pas de grignotage souhaité : 10 mm

HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 81
La motorisation de chacun des axes X et Y est la suivante :
réducteur : vis à bille, au pas de 24 mm (1 seul filet)
inertie de la vis et de la charge, rapportée au moteur : 6,4 · 10-3
kgm2
couple nominal du moteur : 14,3 Nm
inertie du moteur : 3,2 · 10-3
kgm2
vitesse max. du moteur : 2'000 tr/min
a) Calculer l’angle d’ouverture de la presse et la durée max. des déplacements de la tôle.
b) Représenter l’allure de la vitesse au cours du temps.
c) Calculer le couple r.m.s. La marge est-elle suffisante ?
d) Quel pourrait être le pas de grignotage pour un déplacement X-Y à 45° ?
e) Quelle devrait-être l’épaisseur de la tôle pour un pas (selon axe X) de 20 mm ?
Réponse
{Sera introduite dans une prochaine édition.}
8.6 Découpeuse Laser à 2 axes
La table X-Y de l’exercice précédent est utilisée pour positionner une tôle sous un faisceau de découpe au
Laser. La différence essentielle est que la tôle doit bouger en permanence lors de la découpe (contrairement à
la poinçonneuse, pour laquelle la découpe n’est possible qu’à l’arrêt de la tôle).
On souhaite faire une découpe d’un rectangle de longueur 150 mm (selon X) et de largeur 10 mm (selon Y),
les extrémités du rectangle étant arrondie (rayon 5 mm). Remarque : La longueur est mesurée entre les
centres des arrondis d’extrémités.
Ce genre de machine est soumis à deux contraintes importantes :
La vitesse de coupe dans les arrondis doit être telle que les limites d’accélération ne soient pas dépas-
sées. On suppose que le moteur est limité à 1,5 fois son couple nominal.
La tôle ne doit en aucun cas être arrêtée aux raccordements entre segments de droites et arcs de cercles,
faute de quoi le Laser produirait un trou beaucoup trop grand à ces endroits.
a) Représenter et calculer l’allure de la vitesse au cours du temps pour les 2 axes X et Y, en particulier
dans les arrondis.
b) Calculer les distances de ralentissement et d’accélération.
c) Calculer la durée de l’usinage pour une découpe. Hypothèse : On néglige le temps nécessaire pour
l’amorce et la fin de la découpe au Laser.
Réponse – a
Connaissant la vitesse max. que peut fournir le moteur, ainsi que les caractéristiques de la vis à bille, nous
pouvons calculer la vitesse linéaire max. des axes X et Y :
(
)

Motorisation et Commande des Machines HEIG-VD
82 Copyright © Bernard Schneider, 2009-2011
Théoriquement, lorsque la tôle se déplace selon un angle de 45º, la vitesse curviligne pourrait être √ fois
plus élevée. Cette possibilité n’est généralement pas utilisée afin d’assurer l’homogénéité de la découpe,
dans toutes les directions. La vitesse max. calculée plus haut est donc également la vitesse curviligne max.
Lorsque la trajectoire est en forme de cercle, il se produit une force centrifuge proportionnelle à la vitesse,
qui doit être contrée par les moteurs d’axes. Dans le pire des cas, seul un moteur doit contrer toute cette force
centrifuge. Il est donc nécessaire de déterminer d’abord quelle accélération max. les entraînements peuvent
provoquer. En fonction de cette valeur, il sera alors possible de déterminer la vitesse curviligne max. dans le
cercle, en fonction de son rayon.
Connaissant le couple max. que peut délivrer le moteur pendant les accélérations (1,5 fois le couple
nominal), ainsi que les caractéristiques de l’entraînement, nous pouvons calculer l’accélération max.
possible :
|
Lorsque la trajectoire parcourt un cercle de rayon R à vitesse constante Vs, la vitesse selon l’un des axes
(l’axe X par exemple), vaut :
( ) [ ( )]
En admettant qu’à l’instant , l’angle est nul, nous avons :
( )
Nous en tirons donc :
( ) { [ ( )] ( )
}
[ ( )]
La valeur max. de cette accélération est donc donnée par :
Pour un rayon de 5 mm, nous en déduisons donc :
√
{La représentation de la vitesse au cours du temps sera ajoutée dans une prochaine édition.}
Réponse – b
Après avoir terminé l’arc de cercle, et pour améliorer la productivité, la vitesse curviligne pourra augmenter
de la valeur ci-dessus à la valeur max., pour autant que le trajet rectiligne soit assez long. Avant d’aborder
l’arc de cercle suivant, la vitesse curviligne devra être progressivement réduit pour atteindre la valeur ci-
dessus. Ces accélérations et décélérations se faisant à 1,5 fois le couple nominal, nous pouvons en calculer
leur durée, ainsi que la distance parcourue pendant ces changements de vitesse.

HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 83
Réponse – c
La distance rectiligne est supérieure au double de la distance d’accélération. L’entraînement se déplace donc
à vitesse max. pendant un instant pour parcourir la différence. Nous avons ainsi :
Par ailleurs, le temps nécessaire à parcourir chacun des 2 arcs (un demi-cercle) vaut :
La durée totale pour l’usinage vaut donc :
A cette durée, il faudrait ajouter le temps nécessaire pour amorcer l’arc et pour l’interrompre, ceci se faisant
lorsque la trajectoire est déviée dans la partie de la tôle qui ne sera pas utilisée (la « chute »).
8.7 Synchronisation d’un esclave sur un maître « réel »
Un axe d’une machine (esclave) doit tourner à une vitesse synchronisée sur un axe d’une autre machine
(maître). La position de l’axe maître est réalisée par un capteur incrémental caractérisé comme suit :
Résolution : 16'000 points/tour
Précision : ±5 min. arc
Le dispositif de mesure et de traitement de l’information du capteur introduit un retard constant de 5 ms. On
suppose que la régulation de l’axe esclave est idéale, et n’introduit aucune erreur supplémentaire.
a) Représenter la vitesse du maître et celle de l’esclave au cours du temps, lorsque le maître accélère de
0 à 3'000 tr/min.
b) Faire de même pour variation de 1% de la vitesse de l’axe maître.
c) Quelle variation de vitesse (accélération) provoque un effet comparable à l’incertitude de mesure du
capteur ?
d) Que se passe-t-il lorsque l’axe maître tourne très lentement (par exemple, à 1 tr/min) ?
Réponse
{Sera introduite dans une prochaine édition.}
Motorisation et Commande des Machines HEIG-VD
84 Copyright © Bernard Schneider, 2009-2011
8.8 Synchronisation d’un esclave sur un maître « virtuel »
On suppose que l’on peut modifier les 2 machines de l’exercice précédent, de manière à ce que les 2 axes
concernés soient entraînés par la même commande. De ce manière, les régulateurs de position des 2 axes
reçoivent la même consigne de position, calculée cycliquement à 1 kHz.
a) Que deviennent les écarts entre les 2 axes, dans les situations de l’exercice précédent ?
b) Que se passe-t-il si la position des axes n’est pas échantillonnée simultanément (par exemple, s’il y a
un écart constant de 300 s) ?
c) Calculer la valeur max. de cet écart de synchronisation pour que l’erreur ne dépasse pas 0,1 degré
angulaire pour une vitesse de défilement de 1'000 tr/min.
Réponse
{Sera introduite dans une prochaine édition.}
8.9 Couteau volant
On considère une machine à découper des pages dans du papier introduit et imprimé en rouleau. Le papier
est ainsi entraîné à la vitesse constante de 100 m/min.
Le papier passe entre 2 rouleaux en acier, équipés de lames, tournant en sens opposés, pour y être découpé
un peu comme le feraient des ciseaux.
Ces 2 rouleaux sont entraînés par un servomoteur caractérisé comme suit :
Couple nominal : 9,8 Nm
Vitesse max. : 4'000 tr/min
Inertie du moteur : 0,75·10-3
kgm2
Entraînement : direct (pas de réducteur)
Les 2 cylindres sont caractérisés comme suit :
Dimensions : longueur 520 mm, diamètre 46,9 mm
Matirère : acier (ρ = 7,8 kg/dm3)
Angle de coupe : 15 degrés
a) Représenter et calculer la vitesse au cours du temps, pour un pas de coupe (longueur d’une page
après découpage) de 5 pouces.
b) Calculer l’inertie de la charge (attention : il y a 2 rouleaux !), en négligeant l’effet des pièces
d’accouplement au moteur.
c) Calculer la marge de couple du moteur. Montrer qu’elle est insuffisante.
d) Quelle vitesse de coupe peut-on atteindre pour un pas de coupe correspondant à A5 (14,85 cm), en
maintenant une marge de couple de 10% ?
e) Calculer le gain possible en introduisant un réducteur optimal entre le moteur et les rouleaux.
f) Voyez-vous d’autres manières d’augmenter la cadence de production ?

HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 85
Réponse – a
L’allure de la vitesse est similaire à la donnée de l’exercice 5.6 :
Pendant la coupe, la vitesse des cylindres à leur circonférence correspond exactement à vitesse du papier (en
m/s). Nous avons donc :
Le temps de cycle correspond à la durée de défilement d’une longueur de papier égale au pas de coupe :
La durée d’une découpe correspond à la rotation de cylindres de 15º, à la vitesse de coupe ωmin :
La durée du rattrapage de vitesse vaut donc :
L’angle à rattraper vaut :
( )
La variation de vitesse pendant le rattrapage est donné par :
Donc :
Nous en déduisons :
Cette vitesse est inférieure à la vitesse max. que peut fournir le moteur.
Nous disposons ainsi de toutes les informations relatives au diagramme temps-vitesse demandé.
Motorisation et Commande des Machines HEIG-VD
86 Copyright © Bernard Schneider, 2009-2011
Réponse – b
L’inertie de 2 cylindres homogènes est donnée par :
Réponse – c
L’accélération pendant la correction vaut :
L’inertie totale vaut :
Nous obtenons ainsi le couple d’accélération :
Nous ne disposons d’aucune information relative aux frottements, mais dans ce type d’application, nous
pouvons les supposer comme négligeables. Nous pouvons ainsi calculer le couple r.m.s. :
√
Le taux de charge thermique est donc de :
La marge de couple thermique vaut donc :
Réponse – d
En exécutant tous ces calculs avec, par exemple, une feuille MS Excel, en introduisant le pas de coupe, puis
en faisant une recherche « valeur cible », on obtient une vitesse de papier possible de 117 m/min pour
découper des feuilles A5 tout en maintenant une marge thermique de 10%.
Réponse – e
Comme les frottements sont négligeables, le rapport de réduction optimum d’un réducteur se calcule par :
√
Si l’on introduit ce réducteur optimum, et en admettant que celui-ci n’ait aucune influence significative
(inertie et frottement négligeables), l’inertie totale se trouve réduite à :
HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 87
Le couple d’accélération, et donc le couple r.m.s. baissent dans la même proportion. Nous obtenons alors :
La marge thermique passe alors :
En procédant avec le tableur MS Excel comme à la question « d », on constate que la vitesse du papier
pourrait être augmentée à 114 m/min, augmentant ainsi la productivité de 14%.
Réponse – f
Pour réduire la cadence, on pourrait chercher à réduire l’inertie des couteaux rotatifs. Il faut cependant y
parvenir sans en modifier leur rigidité, afin d’éviter les risques de déformation. Une structure hétérogène
pourrait être intéressante (combinaison d’acier et d’aluminium par exemple, ou de fibre de carbone).
Une autre possibilité serait de chercher parmi les nombreux fournisseurs de servomoteurs s’il en existe dont
le couple nominal et l’inertie seraient plus favorables.
8.10 Mise en phase d’un axe esclave sur un maître
Une machine comporte 2 axes. L’un tourne en permanence à la vitesse de 120 tr/min, et entraîne un pignon
de 229 dents. L’autre, qui entraîne un pignon de 309 dents, est à l’arrêt au début du cycle de production, et
doit pouvoir être accéléré et mis en phase avec le 1er axe, de manière à pouvoir engrainer les 2 pignons.
a) Sachant que le couple d’accélération du 2ème
moteur est de 5 Nm, et que la somme des inerties qu’il
entraîne est de 0,01 kgm2, calculer le temps minimum pour amener le 2
ème axe de l’arrêt à la vitesse
synchrone (profil « à accélération constante »).
b) Quel est l’angle parcouru alors par ce 2ème
axe ?
c) Quel est l’angle parcouru par l’axe maître pendant l’accélération de l’esclave ?
d) Que deviennent ces valeurs si l’axe esclave est accéléré selon un profil polynomial d’ordre 5 ?
e) Que deviennent ces valeurs si l’axe maître ne tourne qu’à 60 tr/min ?
f) Comment calculer la consigne de l’axe esclave si l’on souhaite que l’angle d’accélération de l’axe
esclave soit indépendant de la vitesse de l’axe maître ?
Réponse
{Sera introduite dans une prochaine édition.}

Motorisation et Commande des Machines HEIG-VD
88 Copyright © Bernard Schneider, 2009-2011